DS2603 - Contrôleur IFM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil DS2603 IFM au format PDF.

| Caractéristiques techniques | Capteur de distance laser, portée jusqu'à 4 m, précision ± 1 mm |
|---|---|
| Utilisation | Mesure de distance dans des applications industrielles, contrôle de positionnement |
| Maintenance et réparation | Vérifier régulièrement le fonctionnement, nettoyer le capteur avec un chiffon doux |
| Sécurité | Utiliser conformément aux instructions du fabricant, éviter l'exposition à des conditions extrêmes |
| Informations générales | Compatible avec divers systèmes de contrôle, interface de communication intégrée |
FOIRE AUX QUESTIONS - DS2603 IFM
Questions des utilisateurs sur DS2603 IFM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Contrôleur au format PDF gratuitement ! Retrouvez votre notice DS2603 - IFM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil DS2603 de la marque IFM.
MODE D'EMPLOI DS2603 IFM
Notice d'utilisation
ecomot200®
Contrôleur
FS-1 / FS-1N
FR
7390958 / 00 01 / 2013

1 Remarques préliminaires....4
1.1 Symboles utilisés....4
1.2 Avertissements utilisés ....4
2 Consignes de sécurité ....5
2.1 Remarques générales ....5
2.2 Cible....5
2.3 Raccordement électrique....5
2.4 Manipulation 6
2.5 Lieu de montage....6
2.6 Température du boîtier....6
2.7 Interventions sur l'appareil....6
3 Fonctionnement et caractéristiques....6
4 Eléments de service et d'indication ....9
4.1 Afficheur en mode stand-by....10
5 Montage....10
5.1 Montage de l'appareil 10
5.2 Montage des capteurs....11
6 Raccordement électrique.... 11
6.1 Raccordement des bornes 11
6.2 Alimentation en tension (power) 11
6.2.1 Alimentation AC 12
6.2.2 Alimentation DC....12
6.3 Entrées 12
6.3.1 Raccordement des capteurs (In1, 2)....12
6.3.2 Entrées reset (reset 1/2)....13
6.3.3 Technologie d'entrées typique F...-x 13
6.4 Sorties....14
6.4.1 Sorties de relais (Out 1/2)....14
6.4.2 Sorties transistor (Out 1/2)....14
6.5 Sorties supplémentaires pour appareils NAMUR (F...-xN) 14
6.5.1 Sorties de défaut 14
7 Topographie navigation/paramètres 15
7.1 Paramètres de système....16
7.1.1 FOx....16
7.1.2 SOx....16
7.1.3 FWx 17
7.1.4 NCx....18
7.1.5 EF1....18
7.1.6 MF1 18
7.1.7 DF1....19
7.1.8 DIM....19
7.1.9 VER....19
7.2 Paramètres d'application....20
7.2.1 SPx....20
7.2.2 HYx....20
7.2.3 STx 21
7.2.4 DTx....21
7.2.5 FTx 21
8 Programmation 22
8.1 Exemple de programmation DT1 (Delay Time, sortie 1) ......22
8.2 Remarques sur la programmation 23
8.2.1 Mode RUN....23
8.2.2 Fonction Time Out 23
8.2.3 Saisies numériques ....23
8.2.4 Factory Reset 24
8.2.5 Fonction KEY (verrouillage)....24
9 Mode de test....24
9.1 Activer le mode de test 24
9.2 Terminer le mode de test 24
9.3 Paramètres de test 25
10 Schéma d'encombrement....26
11 Données techniques ......26
11.1 Aperçu....26
12 Entretien, réparation et élimination....27
1 Remarques préliminaires
Ce document fait partie de l'appareil et fournit des informations sur l'utilisation correcte du produit.
Ce document s'adresse à des personnes compétentes. Ce sont des personnes qui sont capables - grâce à leur formation et expérience – d'appréhender des risques et d'éviter les dangers potentiels qui pourraient être causés par le fonctionnement ou la maintenance de l'appareil.
Lire ce document avant l'utilisation afin de vous familiariser avec les conditions environnementales, l'installation et le fonctionnement. Garder ce document pendant tout le temps d'emploi de l'appareil.
Respecter les avertissements et consignes de sécurité.
1.1 Symboles utilisés
▶ Action à faire
Retour d'information, résultat
[...] Désignation d'une touche, d'un bouton ou d'un affichage
→ Référence croisée

Remarque importante
Le non-respect peut aboutir à des dysfonctionnements ou perturbations.

Information
Remarque supplémentaire.
1.2 Avertissements utilisés

AVERTISSEMENT
Avertissement de dommages corporels graves.
Danger de mort ou de graves blessures irréversibles.

ATTENTION
Avertissement de dommages corporels.
Danger de blessures légères, réversibles.
REMARQUE
Avertissement de dommages matériels.
2 Consignes de sécurité
2.1 Remarques générales
Respecter les consignes de la notice d'utilisation. Le non-respect des consignes, l'emploi non conforme par rapport aux prescriptions, un montage ou une manipulation incorrects peuvent porter atteinte à la sécurité des personnes et des installations.
Le montage et le raccordement doivent être conformes aux normes nationales et internationales en vigueur. La personne qui installe l'appareil en est responsable.
2.2 Cible
L'appareil doit être monté, raccordé et mis en service par un électricien habilité.
2.3 Raccordement électrique
Mettre l'appareil hors tension en externe avant toute manipulation. Le cas échéant, mettre également hors tension les circuits de charge relais alimentés séparément.
S'assurer que la tension externe doit être générée et fournie selon les critères de la très basse tension de sécurité (TBTS) parce que cette tension est disponible sans plus de mesures de protection près des éléments de service et sur les bornes pour l'alimentation des générateurs d'impulsions raccordés.
Le câblage de tous les signaux associés au circuit TBTS de l'appareil doit également être conforme aux critères TBTS (très basse tension de sécurité, isolation électrique sûre des autres circuits).
Si la tension TBTS fournie en externe ou générée en interne est mise à la terre en externe, ceci est fait sous la responsabilité de l'utilisateur dans le cadre des règlements nationaux en vigueur relatifs à l'installation. Toutes les informations fournies dans cette notice d'utilisation sont relatives à l'appareil non mis à la terre par rapport à la tension TBTS.
Aucune tension externe ne doit être fournie aux bornes pour l'alimentation des générateurs d'impulsions. Il n'est pas permis de raccorder un générateur d'impulsions avec une consommation qui dépasse la valeur indiquée dans les données techniques.
Un interrupteur principal externe doit être installé pour l'appareil, permettant la mise hors tension de l'appareil et de tous les circuits associés. Cet interrupteur principal doit être affecté clairement à l'appareil.

2.4 Manipulation
Faire attention lors de la manipulation de l'appareil sous tension. En raison de la protection IP 20 ceci n'est permis que par du personnel habilité.
La construction de l'appareil est conforme à la classe de protection II, sauf l'espace autour des bornes. Lors de la manipulation de l'appareil, la protection contre le contact accidentel du personnel (protection contre le contact du doigt selon IP20) est assurée seulement si les bornes à vis sont complètement serrées.
2.5 Lieu de montage
Pour le fonctionnement correct l'appareil doit être installé dans un boîtier qui ne peut être ouvert qu'à l'aide d'un outil (protection IP40 ou supérieure) ou dans une armoire électrique fermée.
L'appareil est testé pour une énergie d'impact de 1 joule selon EN 61010.
2.6 Température du boîtier
L'appareil peut fonctionner dans une large plage de températures ambiantes selon la spécification technique fournie dans la notice. En raison de l'échauffement interne supplémentaire, de hautes températures sensibles peuvent se produire sur les éléments de service et les parois du boîtier lors du contact en ambiance chaude.
2.7 Interventions sur l'appareil
En cas de mauvais fonctionnement de l'appareil ou en cas de doute prendre contact avec le fabricant. Les interventions sur l'appareil peuvent avoir des conséquences graves pour la sécurité des personnes et des installations. Elles ne sont pas autorisées et aboutissent à une exclusion de responsabilité et de garantie.
3 Fonctionnement et caractéristiques
Le contrôleur FS-1 / FS-1N est un système d'évaluation des impulsions pour la surveillance de glissement/synchronisme. Il surveille la relation de la vitesse de rotation entre le côté entraînement (maître) et le côté mené (esclave).
Il reçoit les impulsions de 2 générateurs externes sur 2 voies d'entrée séparées et convertit la durée des périodes des impulsions en fréquence d'entrée.
Entre autres, l'appareil détermine la déviation en pourcentage entre les fréquences d'entrée, la compare avec le seuil de commutation réglé [glissement en %] et commute la sortie 1 selon la fonction de commutation choisie.
$$ \underset {6} {\text {glissement}} = \left(f _ {\mathrm{IN2}} - f _ {\mathrm{IN1}}\right) \div f _ {\mathrm{IN2}} \times 100 [ \% ] $$
flowchart
graph TD
A["Slave"] --> B["IN 1"]
B --> C["In 2"]
C --> D["Master"]
E["Monitor FS-1"] --> F["In 1 In 2"]
F --> G["Out 1 Out 2"]
H["IN 1 ≤ IN 2 IN 2"] --> I["③"]
J["②"] --> K["④"]
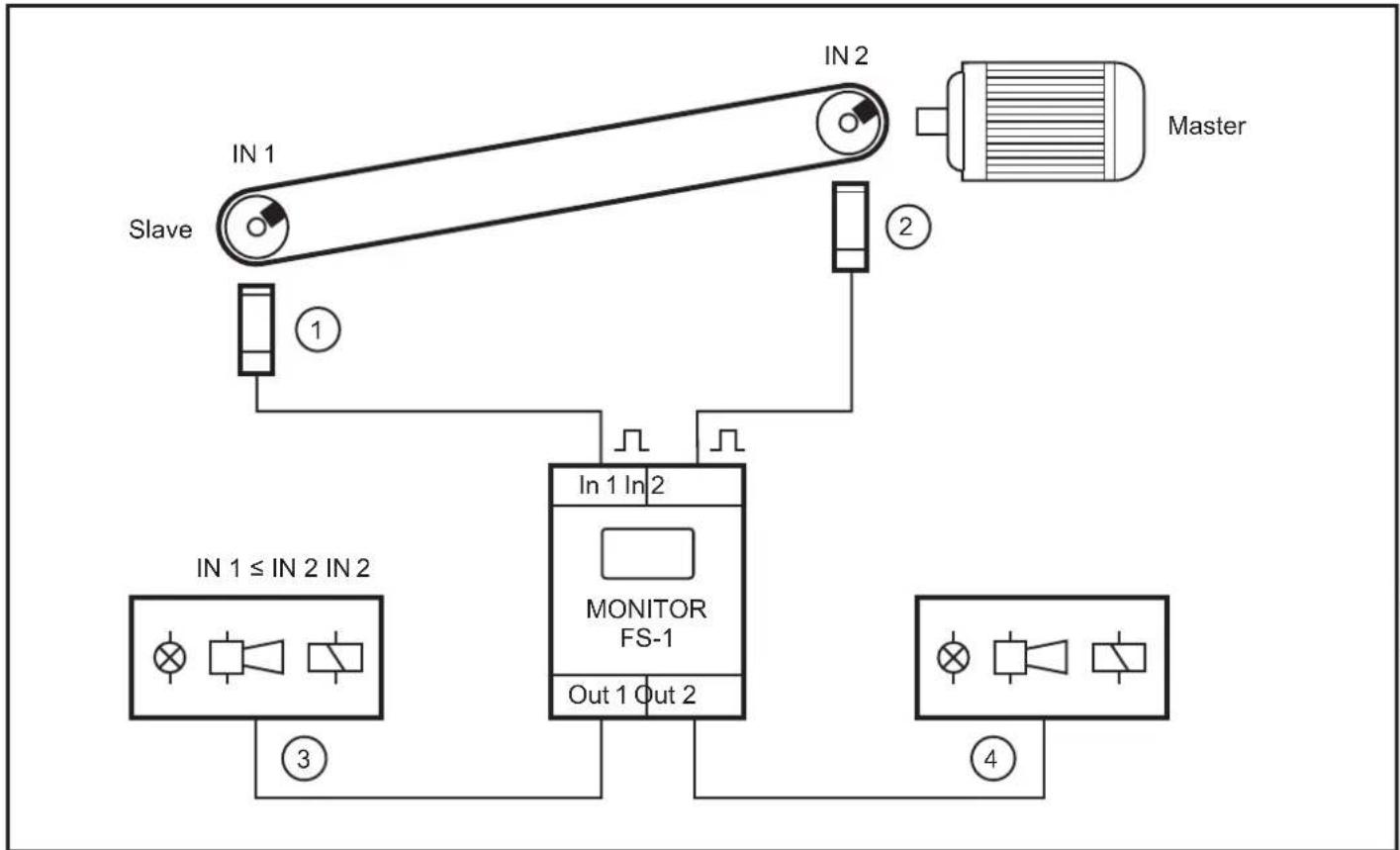
Exemple 1 : Surveillance du glissement/synchronisme sur un système de convoyage
1: Générateur d'impulsions côté mené (esclave)
2: Générateur d'impulsions entraînement (maître)
3: Sortie de commutation 1, signal glissement ou synchronisme (IN 1 ≤ IN 2)
4: Sortie de commutation 2, signal sousvitesse, survitesse ou plage de fonctionnement acceptable (IN 2)
En combinaison avec la fonction de contrôleur pour l'entraînement, l'appareil permet la surveillance de
- survitesse/sousvitesse, blocage, surcharge ou bourrage
- vitesses de rotation maximales ou minimales,
- gammes de glissement, de synchronisme et de fréquence définies.

L'affectation des impulsions aux voies d'entrée est prédéterminée.
IN 1 = côté mené (esclave)
IN 2 = entraînement (maître)
Le rapport de fréquence IN 1 ≤ IN 2 est évalué. Le rapport de fréquence IN 1 > IN 2 n'est pas évalué.
flowchart
graph TD
A["MasterSlave"] --> B["In 1 IN 2"]
B --> C["①"]
B --> D["②"]
B --> E["③"]
F["MONITOR FS-1"] --> G["Out 1 Out 2"]
H["IN 1 ≤ IN 2 IN 2"] --> I["③"]
J["④"] --> K["④"]
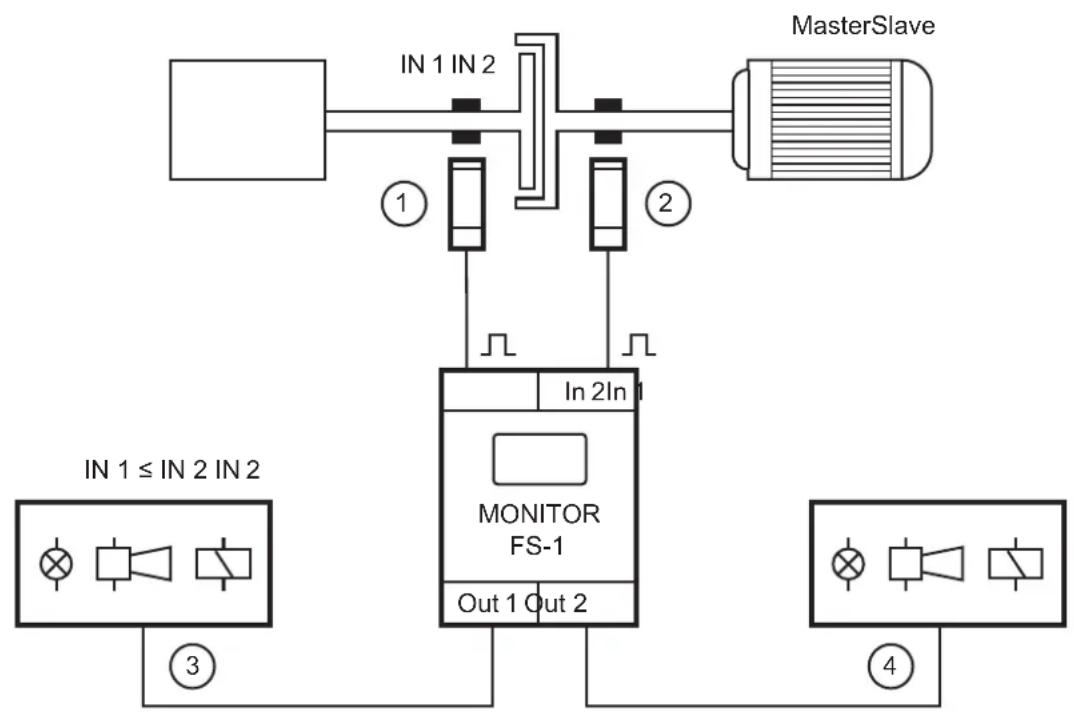
Exemple 2 : Surveillance du glissement/synchronisme sur un accouplement
1: Générateur d'impulsions côté mené (esclave)
2: Générateur d'impulsions entraînement (maître)
3: Sortie de commutation 1, signal glissement ou synchronisme (IN 1 ≤ IN 2)
4: Sortie de commutation 2, signal sousvitesse, survitesse ou plage de fonctionnement acceptable (IN 2)

AVERTISSEMENT
L'appareil n'est pas homologué pour des applications de sécurité concernant la protection des personnes.
Grâce à un raccordement électrique des sorties de deux ou plusieurs appareils pour un circuit redondant, ils peuvent être utilisés pour accomplir des tâches relatives à la sécurité. Les normes techniques en vigueur sont à respecter.
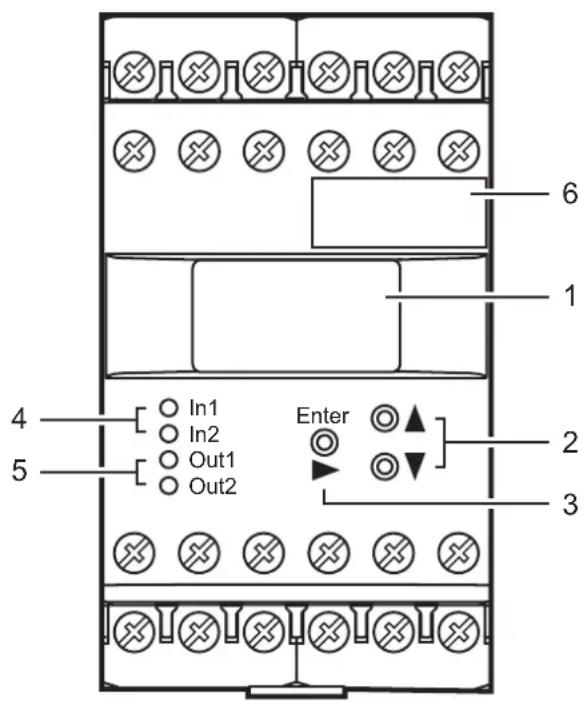
4 Eléments de service et d'indication
text_image
6 1 4 In1 In2 Out1 Out2 Enter 2 3 5
text_image
TST CH1CH2CH3RUNPRGKEY 0.0.0.0 RPM 1b 1c 1d1a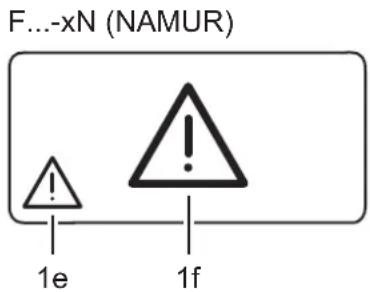
text_image
F...-xN (NAMUR) 1e 1fF...-xN = appareil avec entrée NAMUR
| 1 Affichage OLED | ||
| 1a Indicateurs pour des voies d'entrée et modes de fonctionnement | ||
| KEY | Verrouillage | |
| 1b Valeurs courantes et valeurs de paramètre (5 digits, numérique) | ||
| 1f Afficheur en mode stand-bySymbole pour rupture/court-circuit du câble du générateur d'impulsions (seulement F...-xN) | ||
| 2 Boutons [▲] et [▼] | ||
| Sélection de l'affichage des valeurs courantes, sélection des paramètres, réglage des valeurs de paramètre | ||
| 3 Bouton [Enter/►] | ||
| 4 LED In1/2 (jaunes) Impulsions d'entrée | ||
| 5 LED Out1/2 (vertes) Etat de commutation des sorties 1 et 2 | ||
4.1 Afficheur en mode stand-by
Si aucun bouton n'est appuyé pendant plus de 10 min, l'afficheur passe en mode stand-by. Les valeurs et les unités ne sont pas visibles.
Le mode stand-by est indiqué par le rectangle clignotant.

Même si aucune valeur ni unité ne sont visibles, l'appareil exécute sa fonction de surveillance et commute les sorties de relais et transistor selon les paramètres réglés.
L'afficheur est réactivé en appuyant sur un bouton quelconque.
5 Montage
5.1 Montage de l'appareil
▶ Monter l'appareil sur un rail DIN 35 mm.
▶ Laisser suffisamment d'espace en bas ou en haut de l'armoire électrique permettant ainsi une libre circulation de l'air pour éviter un échauffement excessif.
Lorsque plusieurs appareils sont montés côte à côte tenir compte de l'échauffement interne de tous les appareils. Les conditions environnantes de chaque appareil doivent être respectées.
5.2 Montage des capteurs
▶ Suivre les instructions de montage du fabricant.
6 Raccordement électrique
6.1 Raccordement des bornes
FR
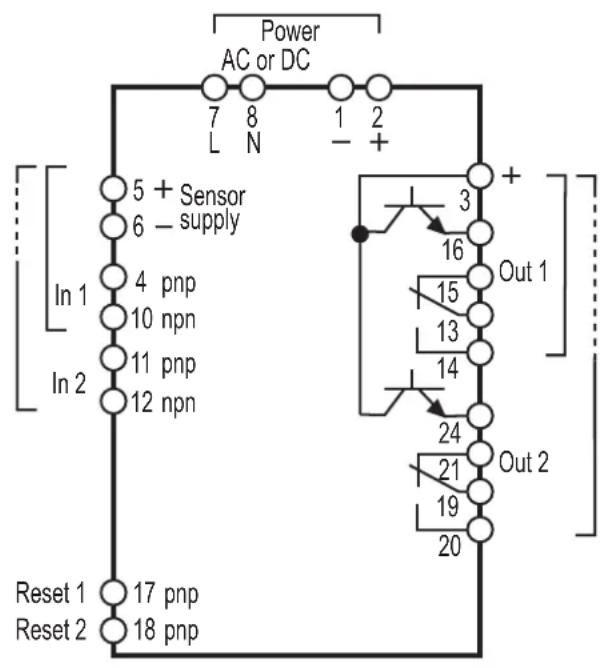
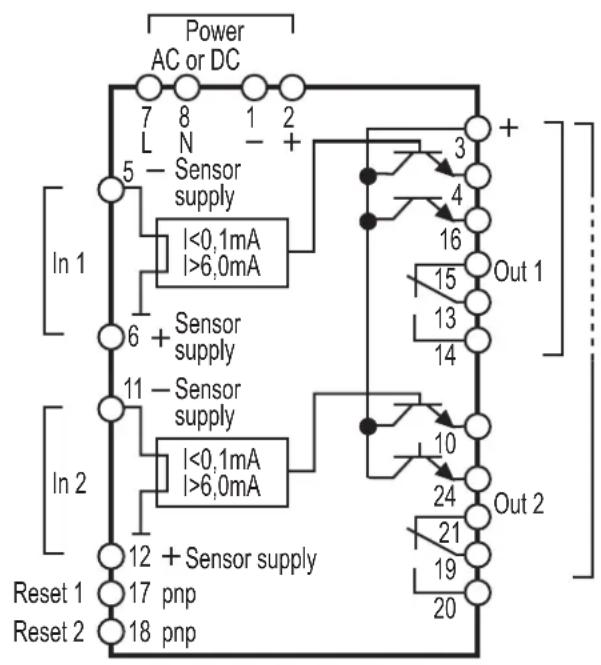
Contrôleur FS-1 Contrôleur FS-1N
flowchart
graph TD
A["AC or DC"] --> B["7 L N 8"]
A --> C["1 - 2 +"]
D["Sensor"] --> E["5 + Sensor"]
D --> F["6 - supply"]
G["In 1"] --> H["4 pnp"]
G --> I["10 npn"]
J["In 2"] --> K["11 pnp"]
J --> L["12 npn"]
M["Reset 1"] --> N["17 pnp"]
O["Reset 2"] --> P["18 pnp"]
Q["Out 1"] --> R["3"]
Q --> S["16"]
Q --> T["15"]
Q --> U["13"]
Q --> V["14"]
Q --> W["24"]
Q --> X["21"]
Q --> Y["19"]
Q --> Z["20"]
style A fill:#f9f,stroke:#333
style D fill:#ccf,stroke:#333
style G fill:#cfc,stroke:#333
style J fill:#fcc,stroke:#333
style M fill:#ffc,stroke:#333
style O fill:#fcc,stroke:#333
style Q fill:#fcc,stroke:#333
flowchart
graph TD
A["Power AC or DC"] --> B["Sensor supply"]
B --> C["In 1: I<0.1mA, I>6.0mA"]
B --> D["In 2: I<0.1mA, I>6.0mA"]
E["Reset 1: 17 pnp"] --> F["Sensor supply"]
G["Reset 2: 18 pnp"] --> H["Sensor supply"]
I["Out 1: 13-16"] --> J["Output 3"]
K["Out 2: 19-24"] --> L["Output 4"]
M["Input 5"] --> N["Sensor supply"]
O["Input 6"] --> P["Sensor supply"]
Q["Input 11"] --> R["Sensor supply"]
S["Input 12"] --> T["Sensor supply"]
U["Input 13"] --> V["Output 15"]
W["Input 14"] --> X["Output 16"]
Raccordement des bornes

AVERTISSEMENT
Ne pas utiliser des bornes non raccordées et non indiquées, par ex. borne 9, comme bornes de dérivation.
6.2 Alimentation en tension (power)
▶ Voir l'étiquette pour l'alimentation en tension.
▶ Raccorder l'appareil seulement via une des bornes de tension possibles, c'est-à-dire bornes 7/8 (AC) ou bornes 1/2 (24 V DC).
▶ Installer le câble d'alimentation et le câble de signalisation séparément. Utiliser, le cas échéant, un câble blindé en fonction des conditions d'utilisation.
6.2.1 Alimentation AC
Protéger le câble d'alimentation AC selon la section utilisée avec max. 16 A. Si l'appareil est alimenté en AC, la basse tension fournie pour l'alimentation des capteurs satisfait aux critères TBTS selon EN 61010, catégorie de surtension II, degré de souillure 2.
6.2.2 Alimentation DC
▶ Respecter les critères TBTS (très basse tension de sécurité) pour une alimentation DC.
Protéger le câble d'alimentation DC L+ (borne 2) en externe avec un fusible 315 mA retardé (5 x 20 mm ou similaire).
Les bornes de l'alimentation DC sont directement reliées aux bornes de l'alimentation des capteurs.
6.3 Entrées
6.3.1 Raccordement des capteurs (In1, 2)
DC-PNP à FS-1 DC-NPN à FS-1 AC/DC sur FS-1
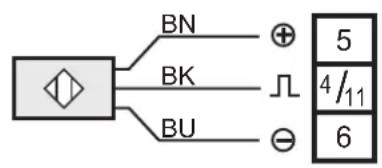
DC quadronorm à FS-1 NAMUR jusqu'à 25 V à FS-1
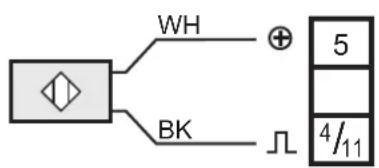
Raccordement des capteurs

Le raccordement de contacts de commutation mécaniques n'est pas recommandé car ils ont tendance à rebondir et produisent des impulsions erronées.
Les bornes 5 et 6 peuvent être utilisées pour l'alimentation des capteurs ou pour la commande des entrées reset (seulement F...-x).
6.3.2 Entrées reset (reset 1/2)
La temporisation de démarrage peut être déclenchée ou une erreur mémorisée peut être remise à zéro via les entrées reset (bornes 17/18).
Pour ce faire, appliquer la tension +24 V DC interne (borne 5) ou une tension +24 V DC externe via un contact qui se ferme sur borne 17 ou 18.
Reset pour la sortie 1 = borne 17
Reset pour la sortie 2 = borne 18
Lorsqu'une tension externe est utilisée, relier le point de référence négatif de cette tension à la borne 1.
Lorsque le contact s'ouvre (tension +24 V DC coupée) la temporisation de démarrage ou la remise à zéro de la mémoire est déclenchée.

Grâce à un signal +24 V DC permanent, la surveillance devient non effective, c'est-à-dire le même état que pendant la temporisation de démarrage est signalé. Si la tension n'est plus appliquée et la temporisation de démarrage réglée a écoulé, la fonction de surveillance est activée.
Remarque sur F...-xN :
La tension d'alimentation +24 V DC nécessaire pour les entrées reset n'est pas disponible sur le F...-xN. En général, elle doit être issue d'une source de tension externe. Le point de référence (GND) de l'alimentation externe doit être relié à la borne 1 du contrôleur; sinon, aucune commutation n'est possible.
6.3.3 Technologie d'entrées typique F...-x
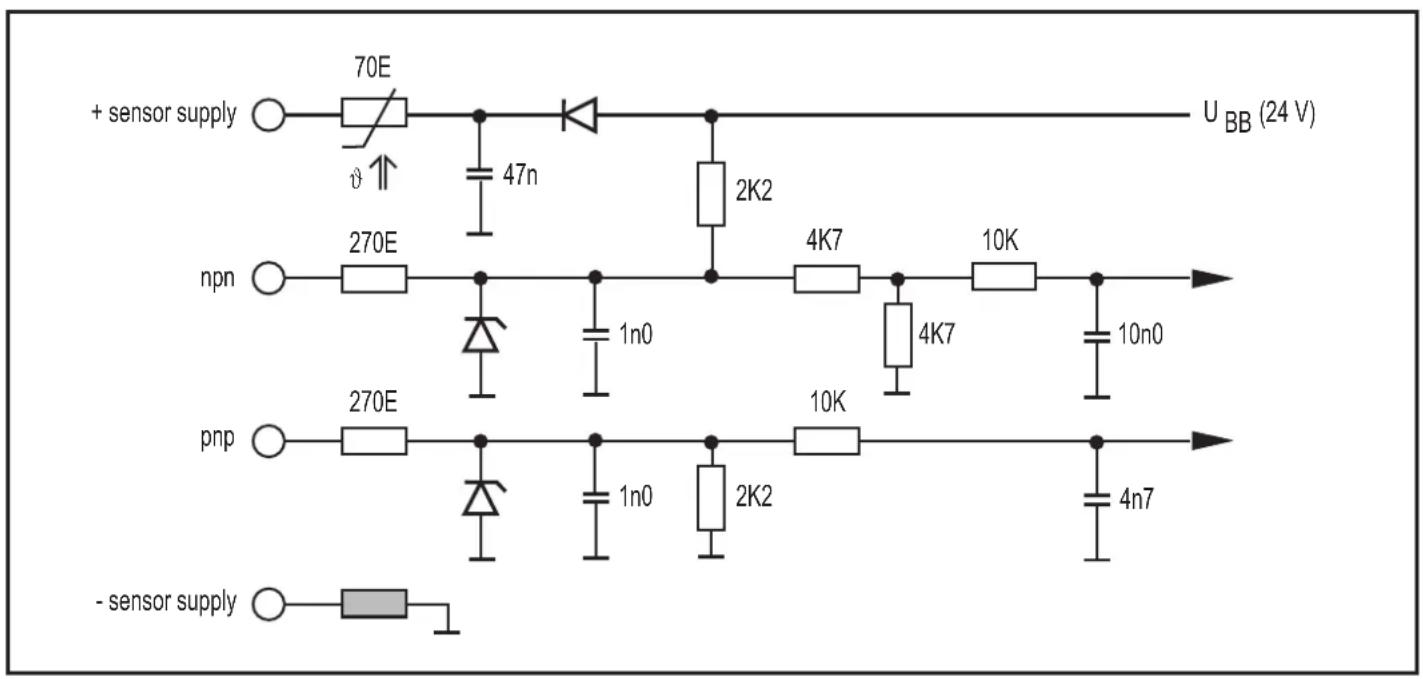
text_image
+ sensor supply 70E 47n 2K2 U BB (24 V) npn 270E 4K7 10K 10n0 pnp 270E 1n0 4K7 10K pnp 1n0 2K2 4n7 - sensor supply
6.4 Sorties
6.4.1 Sorties de relais (Out 1/2)
Pour éviter une usure excessive et respecter les normes CEM, les contacts doivent être déparasités lors de la commutation des charges selfiques.

AVERTISSEMENT
En cas d'alimentation AC de l'appareil (bornes 7/8), seul le conducteur de phase qui est utilisé pour l'alimentation en tension doit être utilisé pour commuter une tension AC via des sorties relais.

Si les sorties relais sont utilisées pour commuter des courants très faibles (par ex. entrées API), des résistances de contact importantes peuvent se produire. De ce fait, utiliser les sorties transistor.
6.4.2 Sorties transistor (Out 1/2)
Les sorties transistor nécessitent une alimentation +24 V DC externe sur la borne 3.
▶ Relier le point de référence (GND) de l'alimentation externe à la borne 1 du contrôleur. Sinon, aucune commutation n'est possible.
▶ Respecter les critères TBTS (très basse tension de sécurité) en cas d'alimentation DC des sorties transistor.
Protéger le câble d'alimentation DC L+ (borne 3) en externe avec un fusible 315 mA retardé (5 x 20 mm ou similaire).
6.5 Sorties supplémentaires pour appareils NAMUR (F...-xN)
6.5.1 Sorties de défaut
Les sorties de défaut (bornes 4/10) indiquent la présence d'un défaut du câble entre le contrôleur et le générateur d'impulsions correspondant (rupture du câble/court-circuit). En cas de défaut la sortie correspondante est bloquée.
Défaut du câble entrée 1 = borne 4
Défaut du câble entrée 2 = borne 10
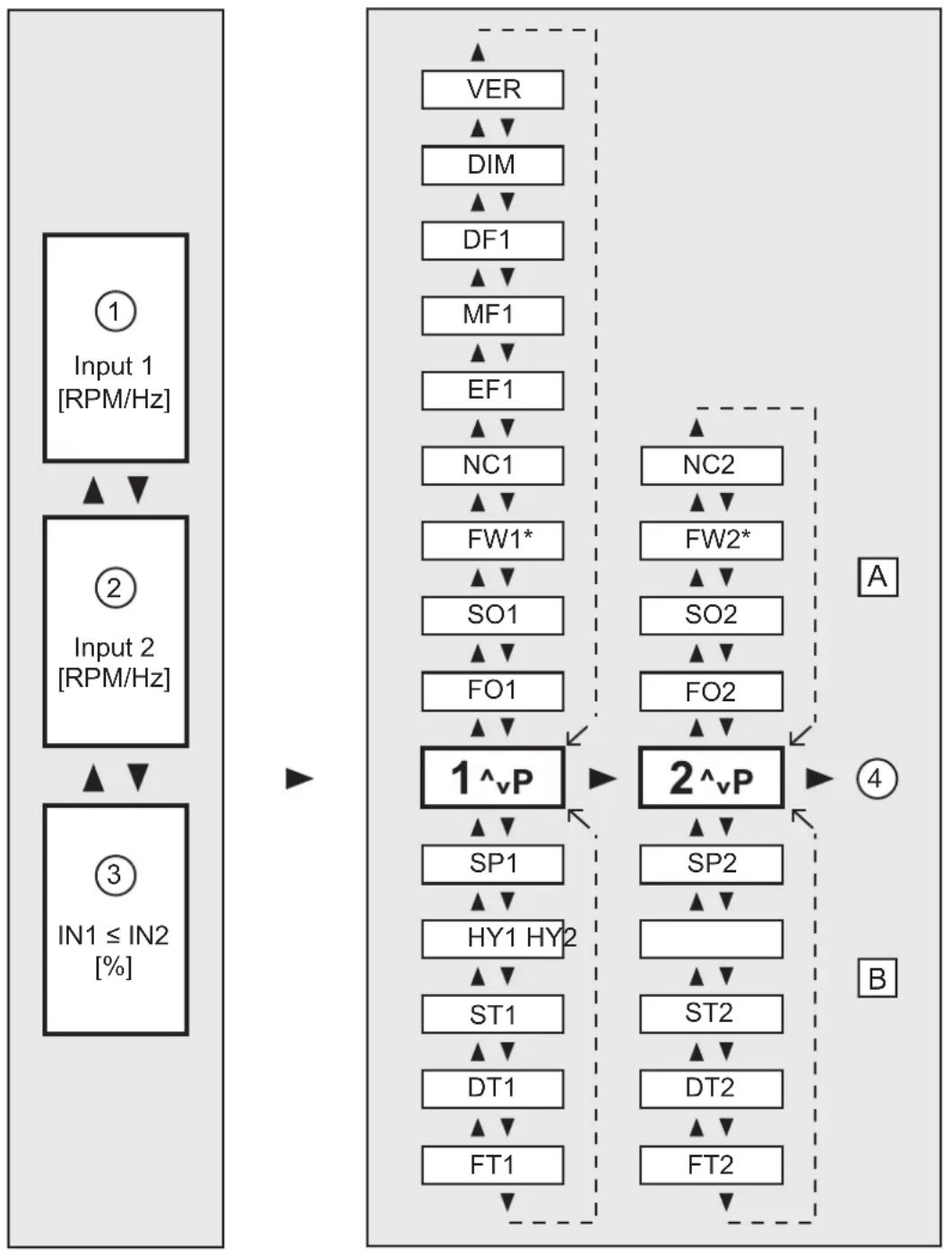
7 Topographie navigation/paramètres
Les boutons [▲] / [▼] et [Enter/▶] sont utilisés pour la navigation, la saisie de valeurs et la validation des paramètres indiqués sous forme de colonnes.
Mode RUN Plage de paramètres et mode PRG
flowchart
graph TD
subgraph_Input_1["Input 1 [RPM/Hz"]]
A1["①"]
A2["②"]
A3["③"]
A4["IN1 ≤ IN2 [%"]]
end
subgraph_Input_2["Input 2 [RPM/Hz"]]
B1["②"]
B2["③"]
end
subgraph_Output_A["Output"]
C1["VER"]
C2["DIM"]
C3["DF1"]
C4["MF1"]
C5["EF1"]
C6["NC1"]
C7["FW1*"]
C8["SO1"]
C9["FO1"]
C10["1^vP"]
C11["SP1"]
C12["HY1 HY2"]
C13["ST1"]
C14["DT1"]
C15["FT1"]
end
subgraph_Output_B["Output"]
D1["NC2"]
D2["FW2*"]
D3["SO2"]
D4["FO2"]
D5["2^vP"]
D6["SP2"]
D7["ST2"]
D8["DT2"]
D9["FT2"]
end
A1 --> A2
A2 --> A3
A3 --> A4
style Input_1 fill:#f9f,stroke:#333
style Input_2 fill:#f9f,stroke:#333
style Output_A fill:#ccf,stroke:#333
style Output_B fill:#ccf,stroke:#333
1: Affichage : valeur courante entrée 1 (esclave)
2: Affichage : valeur courante entrée 2 (maître)
A: Paramètres de système
B: Paramètres d'application
*) pour F...-xN
3: Affichage : glissement
4: Retour au mode RUN
A: Paramètres de système
B: Paramètres d'application
7.1 Paramètres de système
7.1.1 FOx
Function Output (fonction de commutation sorties 1/2)
| 1 Relais s'enclenche (transistor à l'état passant) lorsque la vitesse de rotation est inférieure au seuil de commutation SPx(= signal d'état OUT1 " synchronisme "; OUT2 " valeur présélectionnée entraînement ne pas atteinte ") | |
| 2 Relais se déclenche (transistor bloqué) lorsque la vitesse de rotation est inférieure au seuil de commutation SPx(= signal d'erreur OUT2 " sousvitesse entraînement "; ne pas utile pour OUT1) | |
| 3 Relais s'enclenche (transistor à l'état passant) lorsque la vitesse de rotation est supérieure au seuil de commutation SPx(= signal d'état OUT2 " vitesse de rotation entraînement atteinte "; ne pas utile pour OUT1) | |
| 4 Relais se déclenche (transistor bloqué) lorsque la vitesse de rotation est supérieure au seuil de commutation SPx(= signal d'erreur OUT1 " glissement "; OUT2 " survitesse entraînement ") | |
| 5 Relais est enclenché (transistor à l'état passant) dans une gamme de fréquence (gamme acceptable) | |
| 6 Relais est déclenché (sortie transistor bloquée) dans une gamme de fréquence.Avec les fonctions 5 et 6 en combinaison avec le paramètre HYx (hystérésis)une gamme de fréquence au-dessus et au-dessous du seuil de commutation SPxest définie.Les fonctions 5 et 6 ne sont pas utiles pour la sortie 1 (FO1) ! | |
| Valeurs 1...6 | |
| Réglage par défaut FO | 01 = 4 (sortie 1 ; message d'erreur " glissement "; recommandé) |
| FO2 = 2 (sortie 2 ; message d'erreur " sousvitesse entraînement ") | |
7.1.2 SOx
Store Output (fonction de mémorisation pour les sorties 1/2)
| Lorsque le paramètre est actif, la sortie correspondante ne change pas d'état automatiquement mais doit être réinitialisée. | |
| Valeurs 0 = inactif | |
| 1 = reset frontal ([Enter/►] > 3 s) | |
| 2 = reset frontal et externe | |
| Réglage par défaut 0 (inactif) | |
7.1.3 FWx
Fonction Wire Break Monitoring (surveillance du câble, seulement F...-xN)
| Comportement du relais en cas de défaut du câble ou court-circuit, fréquence d'entrée = 0 | ||
| Sortie 1 (surveillance glissement/synchronisme) | ||
| Si FW1 = inactif (0) FW1 = actif (1) | ||
| Glissement > seuil de commutation SPx | ||
| Avec fonctions de commutation 1 et 4 Relais déclenché Relais reste déclenché | ||
| Glissement < seuil de commutation SPx | ||
| Avec fonctions de commutation 1 et 4 Relais reste enclenché Relais se déclenche | ||
| Sortie 2 (entraînement : fréquence, vitesse de rotation) | ||
| Si FW2 = inactif (0) FW2 = actif (1) | ||
| Fréquence > seuil de commutation SPx | ||
| Avec fonctions de commutation 1 et 4 Relais s'enclenche Relais reste déclenché | ||
| Avec fonctions de commutation 2 et 3 Relais se déclenche Relais se déclenche | ||
| Fréquence < seuil de commutation SPx | ||
| Avec fonctions de commutation 1 et 4 Relais reste enclenché Relais se déclenche | ||
| Avec fonctions de commutation 2 et 3 Relais déclenché Relais reste déclenché | ||
| Fréquence dans la gamme fenêtre | ||
| Avec fonction de commutation 5 Relais se déclenche Relais se déclenche | ||
| Avec fonction de commutation 6 Relais s'enclenche Relais se déclenche | ||
| Valeurs 0 = inactif | ||
| 1 = actif | ||
| Réglage par défaut 0 | ||
7.1.4 NCx
Number of Cams (nombre des cames sur les entrées 1/2)
| Nombre des cames enregistré par tour. A partir de cette valeur le contrôleur calcule la vitesse de rotation (fréquence mesurée ÷ NCx = vitesse de rotation affichée en RPM ). En cas de mesures de fréquence NCx doit rester = 1. | |
| Valeurs 1...999 | |
| Réglage par défaut 1 | |
7.1.5 EF1
Enable Frequency (surveillance de glissement devient active au-dessus de EF1)
| Cette fonction est utilisée en tant que fonction indépendante du temps (cf STx).De préférence pour des applications où le côté mené peut bloquer pendant le démarrage (par ex. broyeur).La sortie 1 (surveillance glissement) est maintenue dans l'état " bon " jusqu'à ce que l'entraînement ait atteint la valeur EF1. | |
| Valeurs 0,1...1000,0 Hz ou | 1...60 000 RPM(Noter le paramètre DIM !) |
| Réglage par défaut 1 (RPM) | |
7.1.6 MF1
Multiplication Factor (multiplicateur)
| Avec les paramètres MF1 et DF1 on peut calculer le rapport de transmission ou le rapport de réduction entre l'arbre de rotation d'entraînement et de côté mené. | |
| Valeurs 1...10 000 (seulement nombres entiers) | |
| Réglage par défaut 1 | |
| Vitesse de rotation côté mené x (MF1 ÷ DF1) = vitesse de rotation entraînement | |
| Exemple transmission par courroie trapézoïdale : | |
| 1: côté mené 2: entraînement | 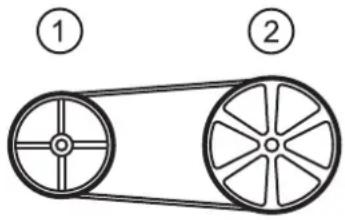 |
| 1800 RPM 1500 RPM | |
| DF1 = 1800 MF1 = 1500 | |
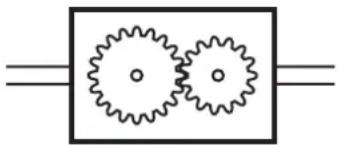
Exemple réducteur de vitesse :
| 1: côté mené 2: entraînement |
| 800 RPM 1000 RPM |
| DF1 = 800 MF1 = 1000 |
① ②
Division Factor (diviseur)
| Voir MF1 | |
| Valeurs 1...10 000 (seulement nombres entiers) | |
| Réglage par défaut 1 | |
FR
7.1.8 DIM
Dimension (format d'affichage)
| Affichage en Hz ou RPM (tours par minute).En cas de conversion, l'appareil convertit toutes les valeurs existantes en la nouvelle unité ! | |
| Valeurs 0 = RPM | |
| 1 = Hz | |
| Réglage par défaut 0 = RPM | |
7.1.9 VER
Software Version (version du logiciel)
Affichage possible de la version installée du logiciel (nombre 5 digits avec l'abréviation VCO)
7.2 Paramètres d'application
7.2.1 SPx
Switch Point (seuil de commutation pour les sorties 1/2)
| Valeur à laquelle la sortie respective change son état de commutation. SP1 = seuil de commutation sortie 1 (surveillance glissement/synchronisme) SP2 = seuil de commutation sortie 2 (surveillance vitesse de rotation d'entraînement) Les sorties commutent indépendamment l'une de l'autre. | |
| Valeurs SP1: 0,1...99,9% | (glissement) |
| SP2: 1...1000,0 Hz ou 1...60 000 RPM (Noter le paramètre DIM!) | |
| Réglage par défaut SP1 = | 5 [%] |
| SP2 = 500 [RPM] | |
7.2.2 HYx
Hystérésis (hystérésis pour sorties de commutation 1/2)
| La valeur de l'hystérésis détermine la distance du seuil de commutation bas au seuil de commutation SPx et empêche un rebondissement éventuel de la sortie de commutation respective.En liaison avec les fonctions de commutation 5 et 6 (FOx) une plage acceptable ou non acceptable peut être définie pour la sortie 2. (pas utile pour sortie 1)La plage d'utilisation (fenêtre) dans laquelle l'hystérésis est effective dans les deux directions est réglée à l'aide d'un seuil de commutation SP " fictif ". | ||
| SP = (SPmax + SPmin) ÷ 2HY = (SP - SPmin) ÷ SP x 100 [%] | 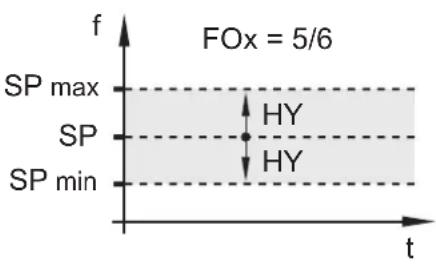 | |
| Valeurs 0,0...1000,0 % de | la valeur pour SPx | |
| Réglage par défaut HY1 = | 10,0 | |
| HY2 = 5,0 | ||
7.2.3 STx
Start-up Delay Time (temporisation de démarrage pour les sorties 1/2)
| Permet de supprimer des signaux de défaut lors du démarrage d'une machine. Après la mise sous tension de l'appareil ou absence du signal 24 V de l'entrée reset, la sortie correspondante se trouve à l'état bon pendant la temporisation réglée ici (= aucun défaut). | |
| Valeurs 0,0...1000,0 s | |
| Réglage par défaut 0,0 (sans temporisation de démarrage) | |
7.2.4 DTx
Delay Time (temporisation pour les sorties 1/2)
| Permet une commutation temporisée des sorties 1/2. La sortie correspondante necommute que si la valeur actuelle est supérieure ou inférieure au seuil de commutationpour une durée qui dépasse la temporisation réglée. | |
| Valeurs 0,0...1000,0 s | |
| Réglage par défaut 0,0 (aucune temporisation) | |
FR
7.2.5 FTx
Fleeting Time (fonction de passage pour les sorties 1/2)
| Lors d'un événement la sortie change d'état pendant le temps réglé afin de retourner ensuite à la position initiale. | |
| Valeurs 0,0...1000,0 s | |
| Réglage par défaut 0,0 (temps de passage inactif) | |
8 Programmation

AVERTISSEMENT
Si la programmation est effectuée pendant le fonctionnement, des tensions dangereuses au contact peuvent se produire. S'assurer qu'un électricien habilité effectue la programmation.

Une modification des paramètres pendant le fonctionnement, notamment une modification de la fonction de commutation et des seuils de commutation, peut mener à un mauvais fonctionnement de l'installation. De ce fait, la mettre hors service pendant l'opération de modification et vérifier ensuite le fonctionnement.
| Une programmation comporte 6 étapes : | |
| 1. Passage du mode RUN vers la plage de paramètres 1 ou 2 [Enter/▶] | |
| 2. Sélection du paramètre souhaité (FOx, SOx, NCx, etc.) [▲] / [▼] | |
| 3. Passage en mode PRG [Enter/▶] | |
| 4. Réglage ou modification de la valeur de paramètre [▲] / [▼] | |
| 5. Validation de la valeur de paramètre réglée [Enter/▶] > 3 s | |
| 6. Retour au mode RUN [Enter/▶] > 3 s | |
8.1 Exemple de programmation DT1 (Delay Time, sortie 1)
| Opération Affichage | |
| Passage du mode RUN vers la plage de paramètres (ici 1) | |
| ► Appuyer brièvement sur [Enter/►] une fois.> L'afficheur indique la première plage de paramètres. | CH1 RUN1 ^vP |
| Sélection du paramètre souhaité (ici DT1) | |
| ► Appuyer sur le bouton [▼] jusqu'à ce que le paramètre DT1 soit affiché avec la valeur actuellement réglée (ici valeur par défaut 0.0). | CH1 RUN0.0 DT1 |
| Passage en mode PRG | |
| ► Appuyer brièvement sur [Enter/►] une fois.> L'appareil est en mode de programmation.> Indicateur PRG visible, paramètre abrégé clignote. | CH1 RUNPRG0.0 DT1 |
| Réglage ou modification de la valeur de paramètre | |
| ► Appuyer sur les boutons [▲] / [▼] jusqu'à ce que la valeur de paramètre souhaitée soit affichée (→ 8.2.3 Saisies numériques). | CH1RUNPRG15.0 DT1 |
| Validation de la valeur de paramètre réglée | |
| ► Appuyer sur [Enter/►] jusqu'à ce que le paramètre abrégé ne clignote plus et l'indicateur PRG ait disparu.> La nouvelle valeur de paramètre est indiquée et est effective. | CH1RUN15.0 DT1 |
| Retour au mode RUN | |
| ► Appuyer sur [Enter/►] pendant env. 3 s ou attendre la fonction Time-Out (env. 15 s).> L'appareil est de nouveau en mode RUN, la valeur actuelle est indiquée. | CH1RUN1665 RPM |
8.2 Remarques sur la programmation
8.2.1 Mode RUN

Pendant la programmation l'appareil reste en mode RUN à l'interne (indiqué par l'indicateur RUN).
Jusqu'à la validation d'une nouvelle valeur par [Enter/▶] l'appareil exécute sa fonction de surveillance et commute les sorties de relais et transistor à la base des paramètres réglés.

En appuyant en permanence sur [Enter/▶] en mode RUN, la fonction de surveillance du contrôleur est désactivée. La désactivation est effective pendant l'appui sur le bouton.
8.2.2 Fonction Time Out
Si pendant la programmation aucun bouton n'est appuyé pendant env. 15 s, ceci est considéré comme un abandon.
Les modifications de paramètres non validées en appuyant sur [Enter/▶] sont rejetées. La valeur de paramètre réglée auparavant est récupérée et reste effective pour les fonctions de surveillance.
8.2.3 Saisies numériques
▶ Appuyer sur le bouton [▲] ou [▼] et le maintenir appuyé.
La décade inférieure devient active et est comptée ou décomptée en fonction de la sélection du bouton (par ex. 1, 2, 3, ...0). Ensuite vient la prochaine décade, etc.
Dès que le bouton est relâché, la décade active clignote. Elle est réglée en appuyant sur le bouton [▲] ou [▼] plusieurs fois. Ensuite la décade précédente clignote et peut être réglée.
8.2.4 Factory Reset
Les valeurs réglées à l'usine peuvent être récupérées en appuyant simultanément sur [▲] et [▼] pendant la mise sous tension. Toutes les valeurs de paramètre saisies sont perdues.
8.2.5 Fonction KEY (verrouillage)
L'appareil peut être verrouillé afin d'éviter une fausse programmation.
Après le verrouillage seulement l'affichage des valeurs courantes peut être sélectionné par les boutons [▲] et [▼]. La plage de paramètres et le mode PRG ne peuvent plus être sélectionnés.
| Verrouiller Déverrouiller | |
| ► Appuyer simultanément sur les boutons [▲] et [▼] et les maintenir appuyés.> L'indicateur KEY clignote.► Relâcher les boutons lorsque l'indicateur KEY est visible en permanence. | ► Appuyer simultanément sur les boutons [▲] et [▼] et les maintenir appuyés.> L'indicateur KEY clignote.► Relâcher les boutons lorsque l'indicateur KEY n'est plus visible. |
9 Mode de test
En mode de test le comportement de commutation du contrôleur peut être vérifié, réglé et mémorisé sans générateurs d'impulsions raccordés. Le contrôleur passe par une gamme de fréquence à définir au libre choix et commute les sorties selon la fonction de commutation sélectionnée et les seuils de commutation.
9.1 Activer le mode de test
▶ Mettre sous tension et appuyer en même temps sur [Enter/▶].
L'afficheur indique la plage de paramètres 11 et l'indicateur "TST".
En plus des paramètres de système et d'application, des paramètres pour la gamme de fréquence de test sont disponibles.
9.2 Terminer le mode de test
▶ Mettre l'appareil hors tension.
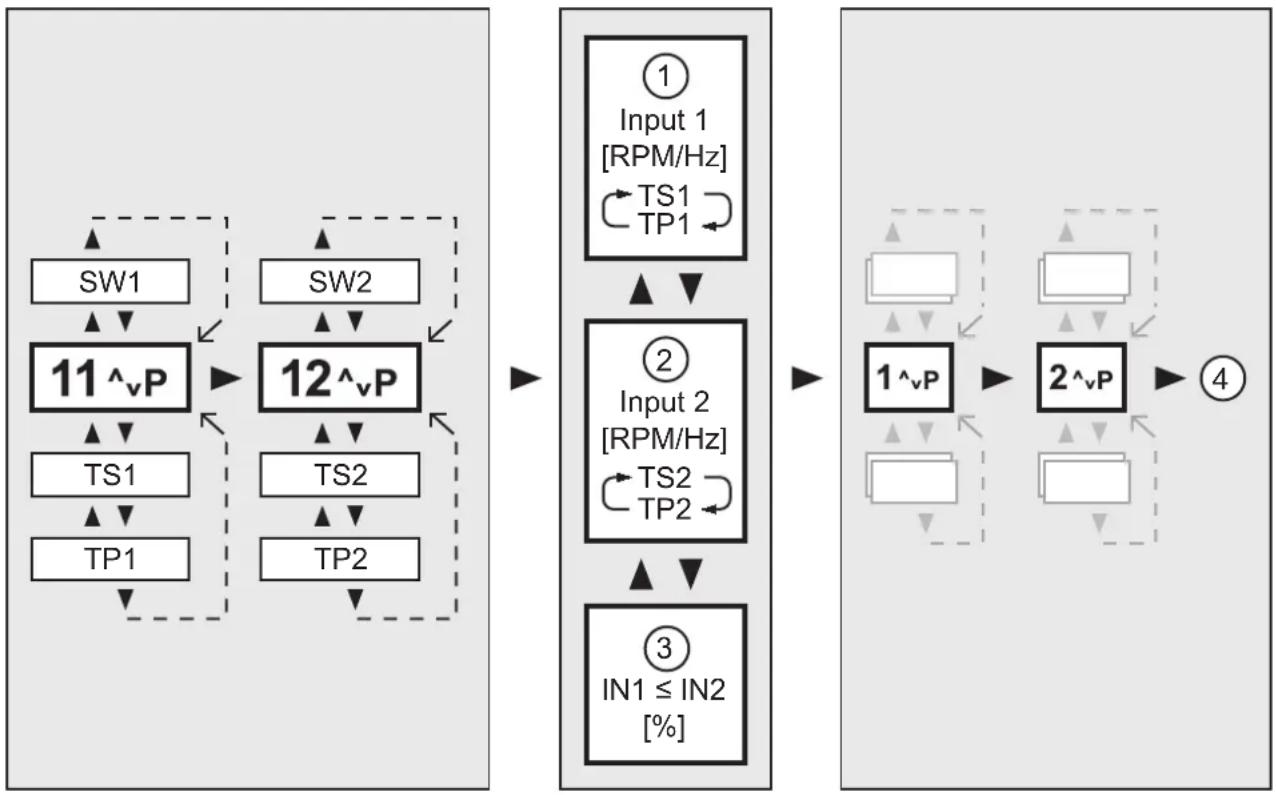
9.3 Paramètres de test
Paramètres de test Mode d'affichage Paramètres de système/d'application
flowchart
graph LR
subgraph_Input_1["Input 1 [RPM/Hz"]]
A1["SW1"] --> B1["11^vP"]
A2["SW2"] --> B2["12^vP"]
A3["TS1"] --> B3["TS1"]
A4["TP1"] --> B4["TP1"]
B1 --> C1["TS2"]
B2 --> C2["TP2"]
B3 --> C3["TS2"]
B4 --> C4["TP2"]
end
subgraph_Input_2["Input 2 [RPM/Hz"]]
D1["①"] --> E1["TS1 TP1"]
D2["②"] --> E2["TS2 TP2"]
D3["③ IN1 ≤ IN2 [%"]]
end
subgraph_Output_1["Output 1^vP"]
F1[" "] --> G1[" "]
F2[" "] --> G2[" "]
F3[" "] --> G3[" "]
F4[" "] --> G4[" "]
G1 --> H1[" "]
G2 --> H2[" "]
G3 --> H3[" "]
G4 --> H4[" "]
H1 --> I1[" "]
H2 --> I2[" "]
H3 --> I3[" "]
I1 --> J1[" "]
I2 --> J2[" "]
I3 --> J3[" "]
J1 --> K1[" "]
J2 --> K2[" "]
K1 --> L1[" "]
K2 --> L2[" "]
L1 --> M1[" "]
L2 --> M2[" "]
M1 --> N1[" "]
M2 --> N2[" "]
N1 --> O1[" "]
N2 --> O2[" "]
O1 --> P1[" "]
O2 --> P2[" "]
P1 --> Q1[" "]
P2 --> Q2[" "]
Q1 --> R1[" "]
Q2 --> R2[" "]
R1 --> S1[" "]
R2 --> S2[" "]
S1 --> T1[" "]
S2 --> T2[" "]
T1 --> U1[" "]
T2 --> U2[" "]
U1 --> V1[" "]
U2 --> V2[" "]
V1 --> W1[" "]
V2 --> W2[" "]
W1 --> X1[" "]
W2 --> X2[" "]
X1 --> Y1[" "]
X2 --> Y2[" "]
Y1 --> Z1[" "]
Y2 --> Z2[" "]
Z1 --> AA[" "]
Z2 --> AA[" "]
AA --> AB[" "]
end
subgraph_Output_3["Output 3^vP"]
AC1[" "] --> AD1[" "]
AD1 --> AE1[" "]
AD2[" "] --> AE2[" "]
AE1 --> AF1[" "]
AE2 --> AF2[" "]
AF1 --> AG1[" "]
AF2 --> AG2[" "]
AG1 --> AH1[" "]
AG2 --> AH2[" "]
AH1 --> AI1[" "]
AH2 --> AI2[" "]
AI1 --> AJ1[" "]
AI2 --> AJ2[" "]
AJ1 --> AK1[" "]
AJ2 --> AK2[" "]
AK1 --> AL1[" "]
AK2 --> AL2[" "]
AL1 --> AM1[" "]
AL2 --> AM2[" "]
AM1 --> AN1[" "]
AM2 --> AN2[" "]
AN1 --> AO1[" "]
AN2 --> AO2[" "]
AO1 --> AP1[" "]
AO2 --> AP2[" "]
AP1 --> AQ1[" "]
AP2 --> AQ2[" "]
AQ1 --> AR1[" "]
AQ2 --> AR2[" "]
AR1 --> AS1[" "]
AR2 --> AS2[" "]
AS1 --> AT1[" "]
AS2 --> AT2[" "]
AT1 --> AU[" "]
end
1: Fréquence de test entrée 1 (esclave)
2: Fréquence de test entrée 2 (maître)
3: Glissement
4: Retour aux paramètres de test
| SWx Sweep on input 1/2 | ||
| Vitesse de changement de la fréquence de test | ||
| Valeurs 1...5 (1 = rapide, 5 = lent) | ||
| Réglage par défaut 1 | ||
| TSx Test Start on input 1/2 | ||
| Valeur initiale de la fréquence de test | ||
| Valeurs 1...60000 RPM ou | 0,1...1000,0 Hz | |
| Réglage par défaut TS1 = | 500 RPM | |
| TS2 = 1000 RPM | ||
| TPx Test Stop on input 1/2 | ||
| Valeur finale de la fréquence de test | ||
| Valeurs 1...60000 RPM ou | 0,1...1000,0 Hz | |
| Réglage par défaut TP1 = | 1500 RPM | |
| TP2 = 1000 RPM | ||
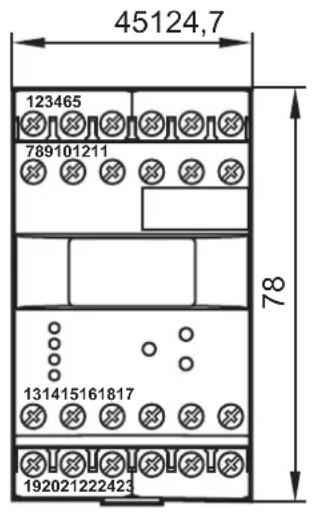
10 Schéma d'encombrement
text_image
45124,7 123465 789101211 78 131415161817 192021222423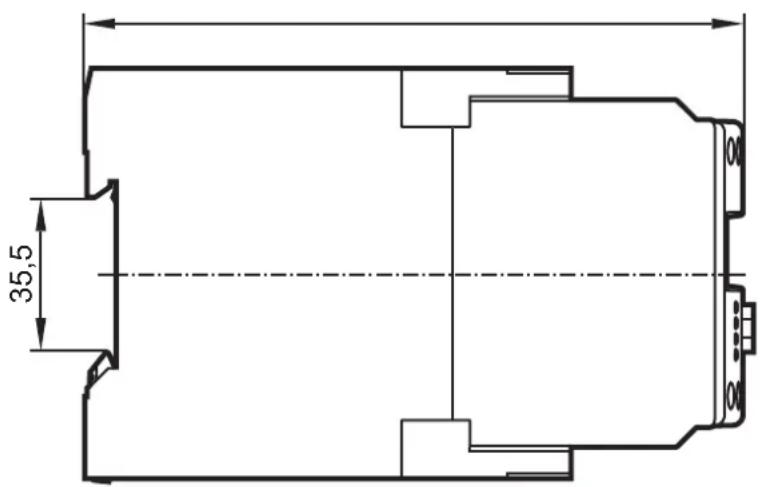
text_image
35,511 Données techniques
11.1 Aperçu
| Référence | DS2503 | DS2603 |
| Type de contrôleur | FS-1 | FS-1N |
| Tension d'alimentationGamme de fréquencePuissance absorbée | Voir l'étiquette | |
| Types de capteurs | PNP/NPN ; NAMUR | NAMUR (selon EN 50227) |
| Alimentation capteurs | 24 V DC | 8,2 V DC |
| Fréquence d'entrée | ≤ 5 kHz | ≤ 5 kHz |
| Sorties relais | 2 inverseurs ; libres de potentiel | |
| Courant de commutation | ≤ 6 A | ≤ 6 A |
| Tension de commutation | ≤ 250 V AC; B300, R300 | |
| Sorties transistor | commutation PNP ; alimentées en externe | |
| Courant de commutation | ≤ 15 mA ; protection courts-circuits | |
| Tension de commutation | 24 V DC (± 20 %) | |
| Protection boîtier/bornes | IP 50 / IP 20 | |
| Température ambiante | -40...60 °C | -40...60 °C |
| Température de stockage | -40...85 °C | -40...85 °C |
| Référence DS2503 DS2603 | ||
| Humidité relative maximale dans l'air 80 % | (31 °C)diminuant de façon linéaire jusqu'à 50 % (40 °C) | |
| Altitude de fonctionnement maximale 2000 | m au-dessus du niveau de la mer | |
| Raccordement 21 bornes à chambres jumelées ; 2 × 2,5 mm^2 (AWG 14) | ||
| Conditions d'essai cULus dimensions du boîtier pour l'essaid'échauffement : 200 × 200 × 150 mm | ||
Des fiches techniques sont disponibles sur :
www.ifm.com → Recherche d'une fiche technique → N° de commande

Les déclarations de conformité CE, homologations, etc. sont disponibles sur : www.ifm.com → Recherche d'une fiche technique → N° de commande → Plus de détails
12 Entretien, réparation et élimination
L'appareil est sans maintenance.
▶ Ne pas ouvrir l'appareil car il ne contient pas de composants à maintenir par l'utilisateur. L'appareil ne doit être réparé que par le fabricant.
S'assurer d'une élimination écologique de l'appareil après son usage selon les règlements nationaux en vigueur.