
TAP961 - Contrôleur de température IFM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil TAP961 IFM au format PDF.

| Caractéristiques | Détails |
|---|---|
| Type de produit | Contrôleur de température |
| Plage de température | 0 à 100 °C |
| Précision | ± 0,5 °C |
| Alimentation | 24 V DC |
| Sortie | 0-10 V ou 4-20 mA |
| Dimensions | 75 x 75 x 35 mm |
| Installation | Montage sur rail DIN |
| Utilisation | Contrôle de la température dans des applications industrielles |
| Maintenance | Vérifier régulièrement les connexions et la calibration |
| Sécurité | Respecter les normes de sécurité électrique lors de l'installation |
| Garantie | 2 ans |
FOIRE AUX QUESTIONS - TAP961 IFM
Questions des utilisateurs sur TAP961 IFM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Contrôleur de température au format PDF gratuitement ! Retrouvez votre notice TAP961 - IFM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil TAP961 de la marque IFM.
MODE D'EMPLOI TAP961 IFM
Notice d'utilisation
Transmetteur de température
Profibus PA
efector6oo
TAPx61
Contenu
1 Remarque préliminaire 3 1.1 Symboles utilisés 3 2 Consignes de sécurité 3 3 Fonctionnement et caractéristiques 4 4 Fonction 4 5 Montage 5 6 Raccordement électrique 7 7 Mise en service 8 8 Paramétrage 9
8.1 Schéma bloc: Transmetteur de température avec profil Profibus PA 3.01.10 8.2 Physical Block (PB, bloc physique) 11 8.3 Analog Input Block (AlB, bloc entrée analogue) 12 8.4 Temperature Transducer Block (PTB, bloc transmetteur de température)..13 8.5 VIEW_1 Parameter (VIEW) 14 8.6 Paramétres d'installation et de maintenance (paramétres I&M) 15 8.7 Opérations de paramétrage typiques 15
8.7.1 Amortissement du signal de mesure 15 8.7.2 Saisie de l'unité de mesure pour la température 16 8.7.3 Surveillance min/max 16 8.7.4 Surveillance de la valeur de seuil 16 8.7.5 Simulation 17 8.7.6 Surveillance dérive / défaut 18 8.7.7 Backup du capteur / Commutation de redondance 18
9 Fonctionnement 19
9.1 Communication 19 9.2 Diagnostic et dépannage 21
10 Schema d'encombrement 24 11Données techniques 25
1.1 Symboles utilisés
Action à faire
Retour d'information, résultat
Désignation d'une touche, d'un bouton ou d'un affichage
Référence

Remarque importante
Le non-respect peut aboutir à des dysfonctionnements ou perturbations.
2 Consignes de sécurité
- Avant la mise en service de l'appareil, lire ce document. S'assurer que le produit est approprié pour l'application concernée sans aucune restriction d'utilisation.
- Le non-respect des consignes ou des données techniques peut provoquer des dommages matériels et/ou corporels.
- Dans toutes les applications, vérifier la compatibilité des matières du produit ( chapitre 11 Données techniques) avec les fluides sous pression à mesurer.
- Observer les remarques de la notice d'emploi ATEX pour une utilisation sûre dans des zones à risque d'explosion.

3 Fonctionnement et caractéristiques
L'appareil détecte la température du système dans l'installation, évalue les signaux de mesure et fournit les valeurs du process cycliquement via l'interface Profibus PA intégrée.
4 Fonction
- Durant le fonctionnement, l'appareil effectue des auto-tests. L'état diagnostique peut être vérifié cycliquement ou à la demande.
- L'appareil peut être paramétré. L'appareil supporte le profil Profibus PA "Temperature Transmitter", y compris l'extension pour "Installation and Maintenance" (I&M).
De plus, des paramètres spécifiques au fabricant sont implémentés.
- En mesurant avec deux éléments de mesure différents (NTC, PT) et thermiquement coupés, le capteur détecte automatiquement et très fiablement des dérivés et des defaults pendant la mesure de la température.
- La sensibilité et la réaction à des différents défauts peuvent être programmées. En cas de défaillance d'un des deux éléments de mesure, la mesure de la température peut être poursuivie avec le deuxième élément (fonction backup).
- En utilisant des éléments de mesure de très haute qualité, une mesure stable à long terme est atteinte.
Il faut respecter les consignes suivantes pour assurer une haute précision et stabilité à long terme du capteur quand il fonctionne pendant une longue période :
La sonde doit être insérée dans le fluide de mesure jusqu'au chanfrein pour l'étanchéité ( 10 Dimensions).
Les valeurs limites suivantes doivent être respectées :
| Etendue de mesure -25 ... +150°C -13 ... 302°F | ||
| Température de fonctionnement raccord process | -32 ... +170°C -25,6 ... 338°F | |
| Température de fonctionnement électronique -25 ... +70°C -13 ... 158°F | ||
| Température de stockage -40 ... +85°C -40 ... 185°F | ||
| Pression de service du fluide ≤ 50 bar | ≤ 725 PSI | |
| Nombre de cycles de température (135 K / 7 s) | < 3000 | |
Tenue à la température
Temps de fonctionnement maximum en fonction de la température du fluide
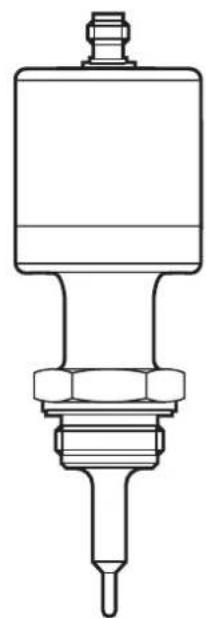
5 Montage

Assurez-vous avant le montage/démontage du capteur qu'il n'y ait pas de fluide en mouvement dans l'installation.
Tenez compte des dangers eventuels dus aux températures extremes de l'installation / du fluide.
L'adaptateur Aseptoflex permet le raccordement du capteur à différents raccords process. (Les adaptateurs sont à commander séparément comme accessoires).
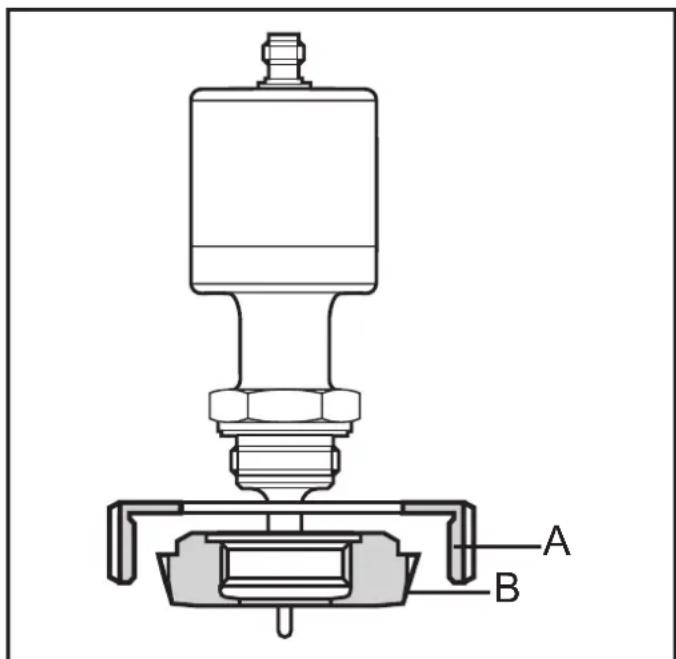
Montage
Monter l'adaptateur (B) sur l'appareil. Fixer l'appareil et l'adaptateur sur le raccord process à l'aide d'un écrou, d'une flasque de serrage ou similaire (A).
Montage de l'adaptateur aseptoflex
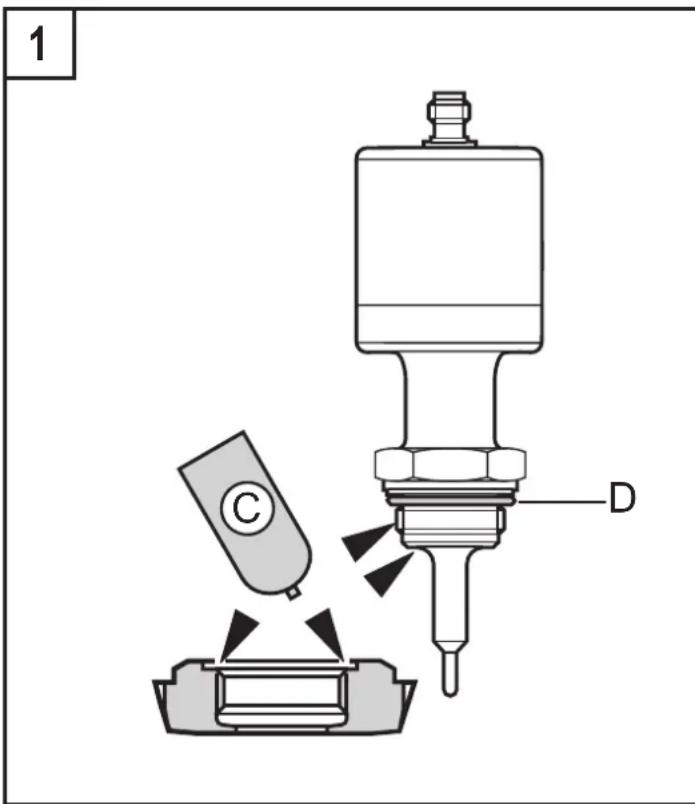
Graisser légèrement les filetages et les zones d'étanchéité du capteur et de l'adaptateur avec pâte lubrifiante (C).
La pâte doit être appropriée et homologuée pour l'application ainsi que compatible avec les élastomères utilisés.
Recommandation : pâte Klüber UH1 84-201 avec homologation USDA-H1 pour l'industrie agroalimentaire.
S'assurer que le joint torique (D) est bien positionné.
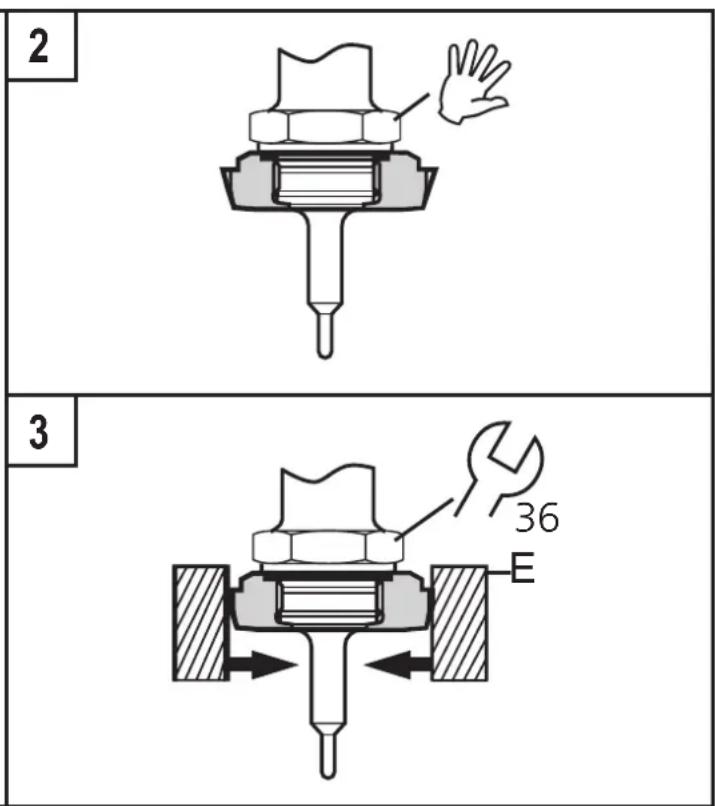
Visser l'appareil dans l'adaptateur à la main. Éviter des influences mécaniques sur les zones d'étanchéité. Serrer l'appareil + l'adaptateur dans un dispositif de serrage (E). Ne serrer le dispositif de serrage que légèrement pour éviter que l'adaptateur se déforme. Serrer l'appareil jusqu'à ce que vous sentiez la butée (ceci correspond à un couple de serrage max. de 25 Nm). Remarque : L'étanchéité peut être affectée si vous serrez trop fort.
REMARQUE: Une garantie pour un effet d'étanchéité stable à long terme et ainsi sans entretien, sans fentes, et aseptique du joint métallique (adaptation Aseptoflex) est seulement assumée pour l'appareil monté une seule fois.
Raccords à souder
Souder l'adaptateur avant de monter l'appareil. Procéder selon les instructions fournies avec l'adaptateur.
6 Raccordement électrique

L'appareil doit être monté par un électricien qualifié.
Les règlements nationaux et internationaux relatifs à l'installation de matériel électrique doivent être respectés.
Alimentation selon EN50178, TBTS, TBTP.
Pour un emploi dans les zones explosibles (zones Ex) : Suivre les exigences selon FISCO (Fieldbus Intrinsically Safe Concept). Pour plus de détails, voir la notice d'utilisation ATEX fournie séparément.
Raccorder l'appareil dans le réseau Profibus PA comme suit :
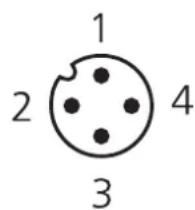
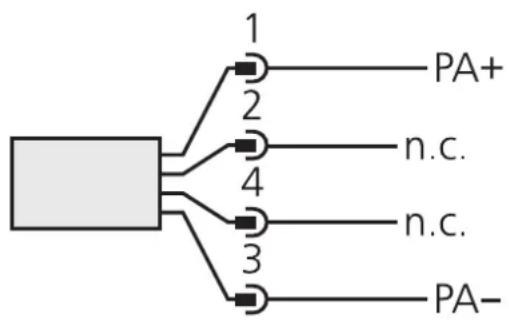
PA = câble Profibus deux fils ; n. c. = non raccordé
Le câble Profibus deux fils sert à l'alimentation en énergie ainsi qu'à la communication.
Valeurs de connexion au bus de terrain :
| Tension bus 9...32 V DC | |
| Tension bus dans les zones explosibles 9... | .24 V DC |
| Consommation nominale < 15,6 mA | |
| Consommation en cas de défaut < 21,8 mA |
- L'appareil est protégé contre l'inversion de polarité et fonctionne de manière fiable même si les connexions du bus de terrain sont inversées.
Recommandation pour le câble bus :
Utiliser un câble 2 fils torsadé et blindé. - Respecter les caractéristiques suivantes en cas d'installation dans les zones explosibles selon le modèle FISCO :
| Résistance de la boucle (DC) 15...150 ohm | par kilomètre de cable |
| Inductance par longueur de cable 0,4...1 m | H par kilomètre de cable |
| Capacité par longueur de cable | 80...200 nF par kilomètre de cable |
- Pour une protection CEM maximale, p. ex. à proximité de variateurs de fréquence, il est recommandé de raccorder le boîtier et le blindage du câble via un conducteur d'équipotentialité.
- Pour les applications à risques d'explosions : Respecter les exigences des normes en vigueur pour les mesures de mise à la terre.
Notes supplémentaires pour la conception et la mise à la terre du réseau :
Une adresse de bus valable doit être affectée à l'appareil pour qu'il soit reconnu comme composant du réseau.
Il vous faut un logiciel de configuration du type maître Profibus classe 2 pour l'adressage.
Adressage du bus / adressage en ligne
L'appareil est installé dans un segment de bus actif.
- Établissez une liste des appareils actifs du segment de réseau avec votre programme de configuration. L'ordinateur nouvellement installé est programmé à l'adresse 126 dec en usine. Cette adresse ne sert qu'à la mise en service dans un réseau existant. Affectez une adresse valable entre 0 et 125 dec.

Un seul appareil non adressé peut être raccordé à un réseau actif. Si deux ou plus d'appareils avec l'adresse 126 dec définie lors de la livraison sont installés, des accès défectueux au bus peuvent se produire. Les appareils ne peuvent pas être mis en service correctement!
8 Paramétrage
Il vous faut un logiciel de configuration du type maître Profibus classe 2 pour le paramétrage.
- Exemple : SIMATIC® PDM (Process Device Manager de la société Siemens). Il vous faut également le fichier de description d'objet approprié pour accéder aux paramètres spécifiques au profil et au fabricant :
- Exemple : fichier Device Description (DD) pour SIMATIC® PDM.
Ce fichier est fourni sur CD-ROM. Il est également disponible sur le site web ifm http://www.ifm.com sous "Services" / "Download".

Des changements du paramétrage en marche affectent le mode de fonctionnement de l'installation.
S'assurer qu'il n'y a pas de mauvais fonctionnement dans l'installation.
Le schéma bloc et les tableaux sur les pages suivantes donnent un aperçu des paramètres disponibles et de leur signification.
Ils sont basés sur le profil Profibus PA "Temperature Transmitter", y compris l'extension pour "Installation and Maintenance" (I&M).
De plus, des paramètres spécifiques au fabricant pour des fonctions étendues et pour une manipulation plus facile sont disponibles.

8.1 Schéma bloc : transmetteur de température avec profil profibus PA 3.01
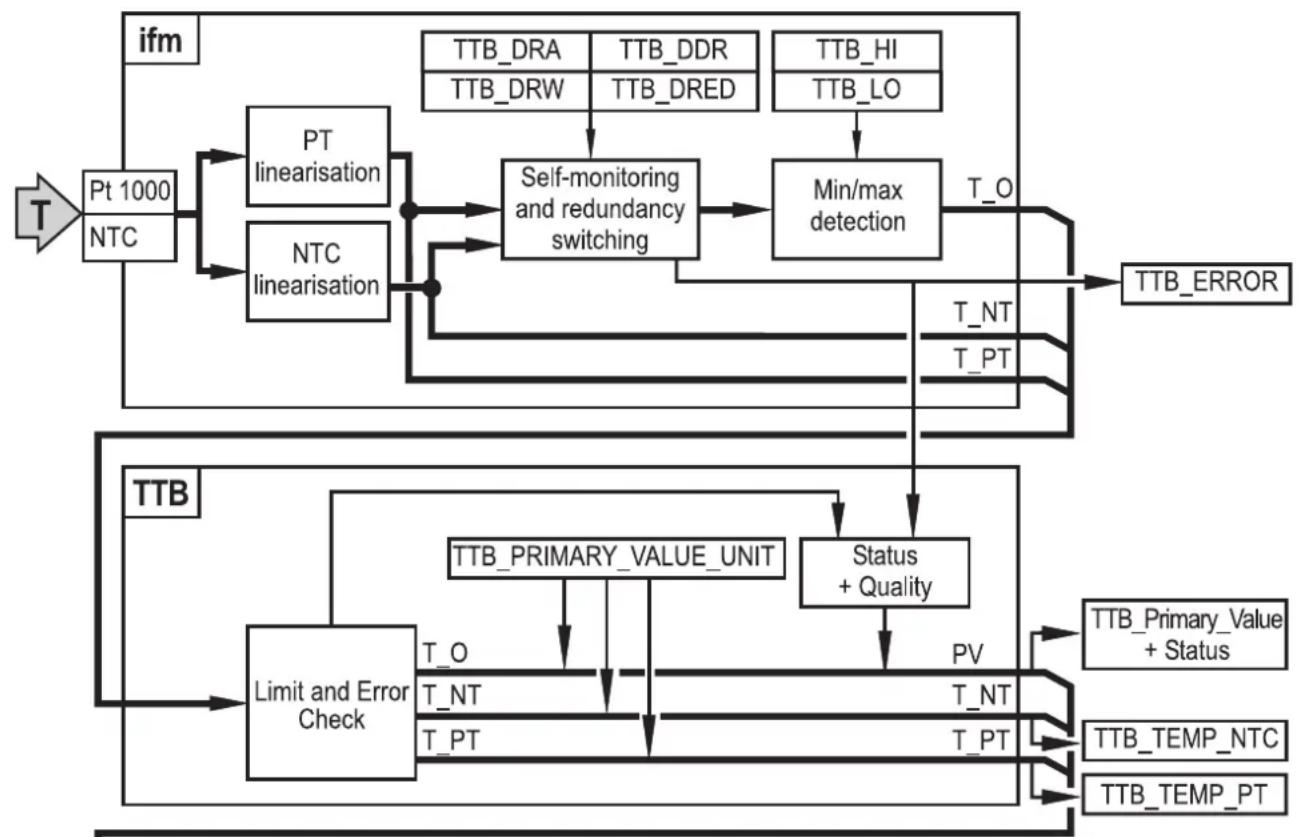
T = température du système
ifm = paramètres spécifiques au fabricant ifm electronic
TTB = Temperature Transducer Block (bloc transmetteur de température)
AIB = Analog Input Block (bloc entrée analogue)
8.2 Physical Block (PB, bloc physique)
| Paramètres Slot Index Default | Size | 1) | Data type | Read/Write | Stor.class | ||
| PB_BLOCK_OBJECT 0 16 - 20 DS-32 | 2) | R | C | ||||
| PB_ST_REV 0 17 - 2 Unsigned16 R N | |||||||
| PB_TAG_DESC | 0 | 18 | - | 32 | OctetString | R / W | S |
| PB_STRATEGY | 0 | 19 | 0 | 2 | Unsigned16 | R / W | S |
| PB_ALERT_KEY | 0 | 20 | 0 | 1 | Unsigned8 | R / W | S |
| PB_TARGET_MODE | 0 | 21 | - | 1 | Unsigned8 | R / W | S |
| PB_MODE_BLK | 0 22 | - 3 | DS-37 | 2) | R | D/N/C | |
| PB_ALARM_SUM | 0 23 | 0,0,0,0 | 8 | DS-42 | 2) | R | D |
| PB_SOFTWARE_REVISION | 0 | 24 | - | 16 | VisibleString | R | C |
| PB-hardWARE_REVISION | 0 | 25 | - | 16 | VisibleString | R | C |
| PB_DEVICE_MAN_ID | 0 | 26 | 310d | 2 | Unsigned16 | R | C |
| PB_DEVICE_ID | 0 | 27 | 0A71h | 16 | VisibleString | R | C |
| PB_DEVICE_SER_NUM | 0 | 28 | - | 16 | VisibleString | R | C |
| PB_DIAGNOSIS | 0 29 | - 4 | OctetString | R D | |||
| PB_DIAGNOSIS_MASK | 0 | 31 | - | 4 | OctetString | R | C |
| PBFACTORY_RESET | 0 | 35 | - | 2 | Unsigned16 | R / W | S |
| PBIDENT_NR_SELECTOR | 0 | 40 | - | 1 | Unsigned8 | R / W | S |
| PB_FEATURE | 0 42 | - 8 | DS-68 | 2) | R | N | |
| PB_COND_STATUS_DIAG | 0 | 43 | - | 1 | Unsigned8 | R | S |
1) en bytes 2) = types de données assemblés selon la Specification Profibus "Profile for Process Control Devices" version 3.01 C = constant (constante) N = non-volatile (la valeur est mémoireisée de manière non volatile) S = static (la valeur est mémorisée de manière non volatile; si la valeur change, le compteur révision est incrémented) D = dynamic (valeur dynamique, p. ex. valeur mesurée)
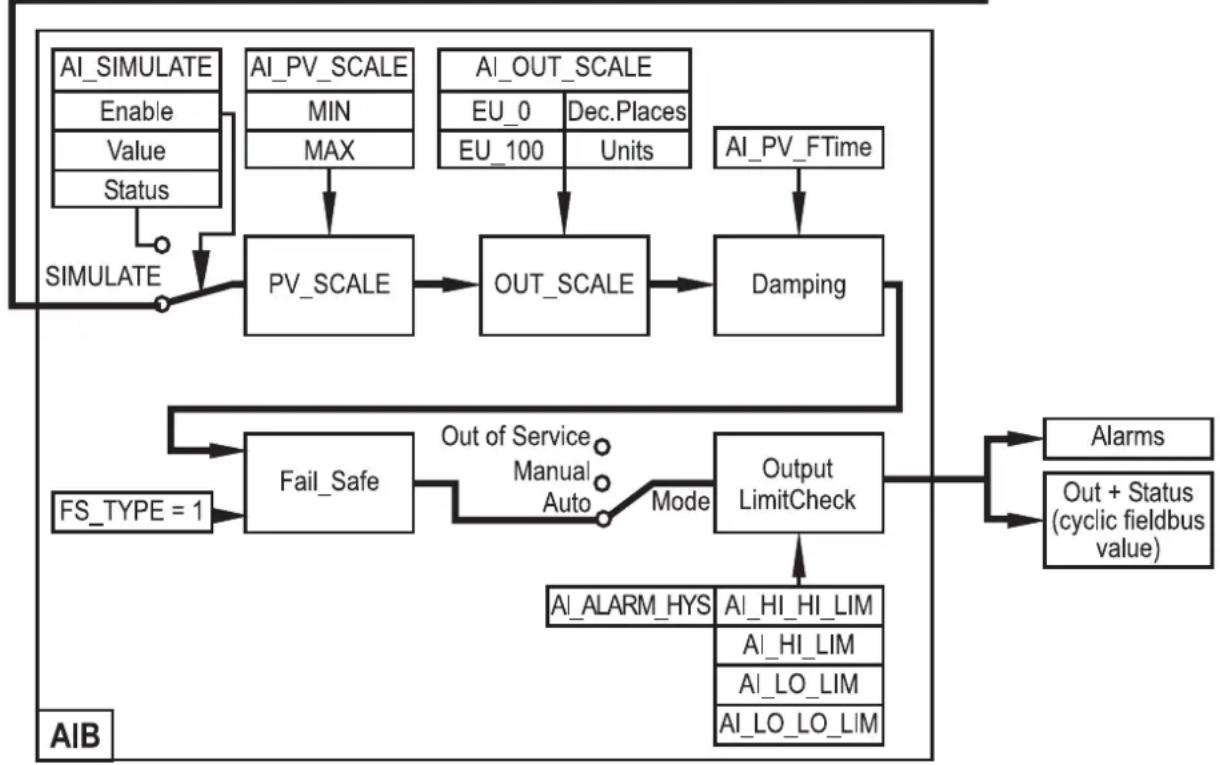
8.3 Analog Input Block (AIB, bloc entrée analogue)
| Paramètres Slot Index Default | Size | 1) | Data type | Read/Write | Stor.class | ||
| AI_BLOCK_OBJECT 1 16 - 20 | DS-32 | 2) | R | C | |||
| AI_ST_REV 1 17 - 2 Unsigned | 16 R N | ||||||
| AI_TAG_DESC | 1 | 18 | - | 32 | OctetString | R / W | S |
| AI_STRATEGY | 1 | 19 | 0 | 2 | Unsigned16 | R / W | S |
| AI_ALERT_KEY | 1 | 20 | 0 | 1 | Unsigned8 | R / W | S |
| AI_TARGET_MODE | 1 | 21 | - | 1 | Unsigned8 | R / W | S |
| AI_MODE_BLK | 1 22 | - 3 | DS-37 | 2) | R | D/N/C | |
| AI_ALARM_SUM | 1 23 | 0,0,0,0 | 8 | DS-42 | 2) | R | D |
| AI Batch | 1 24 | 0,0,0,0 | 10 DS-67 | 2) | R / W | S | |
| AI_OUT | 1 | 26 | - | 5 | 101 | R / W | D |
| AI_PV_SCALE | 1 27 | *) 8 | Array of float | R / W | S | ||
| AI_OUT_scale | 1 | 28 | *) | 11 | DS-362) | R / W | S |
| AI_LIN_TYPE | 1 | 29 | 0 | 1 | Unsigned8 | R / W | S |
| AI_CHANNEL | 1 30 | - | 2 Unsigned16 R | / W | S | ||
| AI_PV_FTIME | 1 | 32 | 0 | 4 | Float | R / W | S |
| AI_ALARM_HYS | 1 35 | 0,5%MEW | 4 | Float | R / W | S | |
| AI_HI_HI_LIM | 1 | 37 | MAX | 4 | Float | R / W | S |
| AI_HI_LIM | 1 | 39 | MAX | 4 | Float | R / W | S |
| AI_LO_LIM | 1 | 41 | MIN | 4 | Float | R / W | S |
| AI_LO_LO_LIM | 1 | 43 | MIN | 4 | Float | R / W | S |
| AI_HI_HI_ALM | 1 46 | 0 16 DS-39 | 2) | R | D | ||
| AI_HI_ALM | 1 47 | 0 16 DS-39 | 2) | R | D | ||
| AI_LO_ALM | 1 48 | 0 16 DS-39 | 2) | R | D | ||
| AI_LO_LO_ALM | 1 49 | 0 16 DS-39 | 2) | R | D | ||
| AI_SIMULATE | 1 | 50 | OFF | 6 | DS-502) | R / W | S |
1) en bytes ; 2) = types de données assemblés selon la Specification Profibus "Profile for Process Control Devices" version 3.01 *) valeur min / max selon l'étendue de mesure de l'appareil ; La valeur par défaut pour l'unité de mesure est °C (Al_OUT Scale_UNIT = 1001dec) C = constante (constante) N = non-volatile (la valeur est mémorisée de manière non volatile) S = statique (la valeur est mémorisée de manière non volatile ; si la valeur change, le compteur révision est incrémenté) D = dynamique (valeur dynamique, p. ex. valeur mesurée) MEW = valeur finale de l'étendue de mesure ; MAX = valeur maximale ; MIN = valeur minimale
8.4 Temperature Transducer Block (PTB, bloc transmetteur de température)
| Paramètres Slot Index Default | Size | 1) | Data type | Read/Write | Stor.class | ||
| TTB_BLOCK_OBJECT 1 70 - 20 DS-322) | R | C | |||||
| TTB_ST_REV 1 71 - 2 Unsigned16 | R | N | |||||
| TTB_TAG_DESC 1 72 - 32 OotString | R/W | S | |||||
| TTB_STRATEGY 1 73 0 | 2 Unsigned16 | R/W | S | ||||
| TTB_ALERT_KEY | 1 | 74 | 0 | 1 | Unsigned8 | R/W | S |
| TTB_TARGET_MODE | 1 75 - 1 | Unsigned8 | R/W | S | |||
| TTB_MODE_BLK | 1 | 76 | - | 3 | DS-372) | R | D/N/C |
| TTB_ALARM_SUM | 1 | 77 | 0,0,0,0 | 8 | DS-422) | R | D |
| TTBPRIMARY_VALUE | 1 78 - 5 DS-1012) | R | D | ||||
| TTBPRIMARY_VALUE_UNIT | 1 79 | 1001 2 | Unsigned16 | R / W | S | ||
| TTB_SECONDARY_VALUE_1 | 1 80 - 5 DS-1012) | R | D | ||||
| TTB_SENSORY_MEAS_TYPE | 1 | 82 | 220 | 1 | Unsigned8 | R/W | S |
| TTB_INPUT_RANGE | 1 | 83 | 250 | 1 | Unsigned8 | R/W | S |
| TTB_LIN_TYPE | 1 | 84 | 0 | 1 | Unsigned8 | R/W | S |
| TTB_BIAS_1 | 1 | 89 | 0 | 4 | Float | R/W | S |
| TTB_UPPER_SENSORY_LIMIT | 1 | 91 | -20000 | 4 | Float | R | N |
| TTB_LOWER_SENSORY_LIMIT | 1 | 92 | +20000 | 4 | Float | R | N |
| TTB_INPUT_FAULT_GEN | 1 | 94 | 0 | 1 | Unsigned8 | R | D |
| TTB_INPUT_FAULT_1 | 1 | 95 | 0 | 1 | Unsigned8 | R | D |
| TTB_SENSORY CONNECTION | 1 | 106 | 1 | 1 | Unsigned8 | R/W | S |
| TTB_COMP_WIRE_1 | 1 | 107 | 0 | 4 | Float | R/W | S |
| TTB_TEMP_NTC | 1 | 135 | 0 | 2 | Signed16 | R | D |
| TTB_TEMP_PT | 1 | 136 | 0 | 2 | Signed16 | R | D |
1) en bytes; 2) = types de données assemblés selon la Specification Profibus "Profile for Process Control Devices" version 3.01 C = constant (constante) N = non-volatile (la valeur est mémorisée de manière non volatile) S = static (la valeur est mémorisée de manière non volatile; si la valeur change, le compteur révision est incrémentede) D = dynamic (valeur dynamique, p. ex. valeur mesurée)
| Paramètres Slot Index Default | Size | 1) | Data type | Read/Write | Stor.class | ||
| TTB_MAX 1 150 20000 2 Signed16 R / W D | |||||||
| TTB_MIN 1 151 -20000 2 Signed16 R / W D | |||||||
| TTB_ERROR | 1 | 152 | 0 | 1 | Unsigned8 | R / W | S |
| TTB_DRV | 1 160 0 | 2 Signed16 R / W S | |||||
| TTB_DRA | 1 161 0 | 2 Signed16 R / W S | |||||
| TTB_DRED | 1 | 162 | 0 | 1 | Unsigned8 | R / W | S |
| TTB_DDR | 1 | 163 | 0 | 2 | Unsigned16 | R / W | S |
| TTB_COD1 | 1 | 159 | 1000 | 2 | Signed16 | R / W | S |
| TTB_COD2 | 1 | 164 | 1000 | 2 | Signed16 | R / W | S |
| TTB_SPEC | 1 | 165 | 0 | 1 | Unsigned8 | R / W | D |
1) en bytes ; si la valeur change, le compteur révision est incrémented) D = dynamic (valeur dynamique, p. ex. valeur mesurée)
| Paramètres Slot Index Default | Size | 1) | Data type | Read/Write | Stor.class | ||
| VIEW_1_PHYSICAL_BLOCK | 0 | 51 | - | 17 | OctetString | R | D/N/C |
| VIEW_1_TRANSDUCER_BLOCK | 1 | 254 | - | 18 | OctetString | R | D/N/C |
| VIEW_1_ANALOG_INPUT_BLOCK | 1 | 61 | - | 18 | OctetString | R | D/N/C |
1) en bytes ; 2) = types de données assemblés selon la Specification Profibus "Profile for Process Control Devices" version 3.01 C = constante N = non-volatile (la valeur est mémorisée de manière non volatile) S = static (la valeur est mémorisée de manière non volatile ; si la valeur change, le compétre révision est incrémentede) D = dynamic (valeur dynamique, p. ex. valeur mesurée)
8.6 Paramètres d'installation et de maintenance (paramètres i&m)
L'appareil soutient la fonctionnalité I&M suivante :
- I&M0, I&M1, I&M2 et PA_I&M0.
Les paramètres suivants sont disponibles :
| Paramètres R/W Data type Remarks | |||
| IM_SERIAL_NUMBER R VisibleStrng[16] corr. to PB_DEVICE_SER_NUM | |||
| IM-hardWARE_REVISION | R Unsigned16 0xFFFF | ||
| IM_SOFTWARE_REVISION | R | Record of VisibleString[1] Unsigned08[3] | , V' 0xFF,0xFF,0xFF |
| IM_REV)cOUNTER R Unsigned16 corr. to PB.ST_REV | |||
| IM_PROFILE_ID | R Unsigned16 0x9700. | ||
| IM_PROFILE_SPECIFIC_TYPE | R | OctetString[2] | 0x0101 |
| IM_VERSION | R | Unsigned08[2] | 0x0101 |
| IMSupported | R | OctetString[2] | 0x0700 |
| PA_IM_VERSION | R | Unsigned08[2] | 0x0100 |
| PA_IM-hardWARE_REVISION | R VisibleString[16] | corr. to PB-hardWARE_REVISION | |
| PA_IM_SOFTWARE_REVISION | R VisibleString[16] | corr. to PB_SOFTWARE_REVISION | |
| PA_IM-supported | R | Unsigned08[2] | 0x0100 |
| IDENT_NUMBER | R Unsigned16 | ||
| IM_MANUFACTURER_ID | R Unsigned16 corr. to PB_DEVICE_MAN_ID | ||
| IM_ORDER_ID | R VisibleString[20] | ||
| IM_TAG_FUNCTION | R/W | VisibleString[32] | corr. to PB_TAG_DESC |
| IM_TAG_LOCATION | R/W | VisibleString[22] | |
| IM_DATE | R/W | VisibleString[16] | |
8.7.1 Amortissement du signal de mesure
AI_PV_FTime (Constante de temps du filtre de sortie)
Amortissement dans le bloc entrée analogique à l'aide d'une fonction PT1 à la fin du traitement du signal du capteur.
PV_FTime = constante temps du contrôle. Plage de réglage : 0,1...100 s par pas de 0,1 s.
8.7.2 Saisie de l'unité de mesure pour la température
L'unité de mesure définie par le paramètre TTBPRIMARY_VALUE_UNIT est la valeur de référence pour toutes les opérations internes.
Les unités suivantes sont réglables :
| Profibus-ID unité de mesure Explication | |
| 1001 °C degré Celsius | |
| 1002 °F degré Fahrenheit | |
| 1000 K Kelvin | |
| 1003 °R Rankine (T [°R] = T [°C] × 1,8 + 491,67) | |
Si l'unité est changée, tous les paramètres spécifiques à la température sont convertis et représentés dans la nouvelle unité.
Si l'unité de mesure change, la valeur de sortie TOR change également. Cela influence l'automate programmable en aval.
De plus, une unité de sortie séparée peut être déterminée lors de la mise à l'échelle de la sortie ( bloc entrée analogique, paramètre AI_OUT Scale).
8.7.3 Surveillance min/max
La valeur de température mesurée la plus haute et la plus basse sont mémorisées et peuvent être lues.
TTB_HI (affichage de la plus haute température mesurée). TTB_LO (affichage de la plus basse température mesurée).
Remise à zéro de la mémoire :
Appeler le paramètre, remplacer par "0".
8.7.4 Surveillance de la valeur de seuil
Dans le bloc entrée analogique, 4 valeurs de seuils pour avertissement / alarme et une hystérésis pour toutes les 4 valeurs (paramètre HYS) peuvent être réglées.
| Paramètres A | Avertissement / alarme | OUT Activation Désactivation | ||
| LO_LO_LIM | Seuil d'alarme bas 8D | hexa | OUT ≤ LO_LO_LIM | OUT > LO_LO_LIM+HYS |
| LO_LIM | Seuil d'avertissement bas | 89 hexa | OUT ≤ LO_LIM | OUT > LO_LIM+HYS |
| HI_LIM Seuil | d'avertissement haut | 8A hexa | OUT ≥ HI_LIM_OUT | < HI_LIM-HYS |
| HI_HI_LIM Seuil d'alarme haut 8E hexa | OUT ≥ HI_HI_LIM | OUT < HI_HI_LIM-HYS | ||
Un avertissement / une alarme active est également indiqué par le paramètre ALARM_SUM du bloc entrée analogique et par l'état cyclique de la valeur process.
8.7.5 Simulation
Après le paramétrage, vous pouvez tester la fonction de l'appareil en simulant la valeur de sortie ou la valeur d'entrée du bloc entrée analogique (OUT).
- Simulation de la valeur de sortie :
- Mettre le paramètre "Al_Target_Mode" du bloc entrée analogue à "MAN".
- Appeler le paramètre "Al_Out_Value" et saisir la valeur souhaitée.
- Terminer la simulation : Remettre le paramètre "Al_Target_Mode" du bloc entrée analogique à "AUTO".
Tant que "Al_Target_Mode" est mis à "MAN", l'état de la valeur mesurée OUT est UNCERTAIN/Simulated Value.
Simulation de la valeur d'entrée :
- Mettre le paramètre "Al_Simulation_Enable" du bloc entrée analogue à "ON".
- Appeler les paramètres "Al_Simulation_Value" "Al_Simulation_Status" et saisir la valeur souhaitée.
- Terminer la simulation : Remettre le paramètre "Al_Simulation_Enable" du bloc entrée analogique à "OFF".
Toutes les fonctions du bloc entrée analogique sont appliquées sur la valeur d'entrée simulée.
Tant que le paramètre "Al_Simulation_Enable" est mis à "ON", la valeur mesurée OUT peut avoir les états suivants :
| Etat Description | |
| UNCERTAIN/Simulated Value S | MULATE=ON, SIM_STATUS=GOOD |
| UNCERTAIN/Last usable value | SIMULATE=ON, SIM_STATUS=BAD, avant d'activer la simulation l'état OUT = GOOD |
| UNCERTAIN/Initial value | SIMULATE=ON, SIM_STATUS=BAD, avant d'activer la simulation aucun état OUT = GOOD n'était atteint (aucune valeur "last usable value" disponible) |
8.7.6 Surveillance dérive / défaut
Pour la surveillance dérive, le capteur compare les températures de deux éléments de mesure différents qui sont positionnés dans le bout de la sonde et qui sont thermiquement couplés. Normalement, ces températures devraient être identiques.
Due aux tolérances de production usuelles, une différence de température de max. 0,1 K peut aussi se produire avec des nouveaux éléments de mesure. Ceci n'affecte pas la fonction de la surveillance dérive.
S'il y a une dérive dans un ou dans les deux éléments de mesure, le capteur les détecte par une différence entre les deux températures mesurées. Le capteur compare la différence avec les seuils d'avertissement / d'alarme régles (drW, drA). Si les seuils sont dépassés, il génère des messages diagnostiques et attribue l'état correspondant à la valeur process.
En cas de grandes fluctuations de la température (par ex. quand versant un fluide chaud dans une cuve froide) il peut y avoir une brève différence entre les valeurs mesurées des deux éléments de mesure. Pour éviter un avertissement ou alarme de dérive dans ces cas, un temps de retard peut être réglé à l'aide du paramètre ddr.
8.7.7 Backup du capteur / commutation de redondance
Si une des deux voies de mesure de la température est en défaillance (par ex. court-circuit d'un des deux éléments de mesure), la température peut toujours être mesurée avec l'autre voie qui fonctionne encore (= backup du capteur). Par contre, une surveillance dérive n'est plus possible.
Le comportement du capteur en cas de défaillance d'un élément de mesure est déterminé avec le paramètre drEd.
| drED | Comportement en cas de dérive | |
| OFF | La commutation de redondance n'est pas effectué. Toute erreur détectée aboutit à l'etat d'alarme. | drW dépasse: Quality = GOOD Diagn. Maintenance req. drA dépasse: Quality = BAD Diagn. Maintenance req. |
| ON | La commutation de redondance est effectué dans les cas suivants : 21: défaut partiel dans l'électronique 51 : interruption NTC 52 : court-circuit NTC 61: interruption Pt 1000 62: court-circuit Pt 1000 | drW dépasse: Quality = GOOD Diagn. Maintenance req. drA dépasse: Quality = BAD Diagn. Maintenance req. |
| Ondr | drW dépasse: Quality = GOOD Diagn. Maintenance req. drA dépasse: Quality = BAD Diagn. Measurement Error AIB passé en mode: Out of Service |

9.1 Communication
Pour la communication cyclique (Data_Exchange) vous avez besoin d'un maître Profibus classe 1 (p. ex. API).
Il vous faut également un fichier des données de l'appareil (GSD), p. ex. :
- ifm_0A71. GSD (fichier GSD spécifique à l'appareil). Ce fichier est fourni sur CD-ROM. Il est également disponible sur le site web ifm http://www.ifm.com sous "Services" / "Download". PA139700.gsd (fichier GSD universel disponible chez l'Organisation des utilisateurs Profibus). REMARQUE: Avant l'emploi du fichier GSD universel, l'ID de l'appareil doit être changé à 9700.
Pendant le fonctionnement, l'appareil transmet un télégramme de données cyclique. Il contient la valeur process respective (= pression actuelle du système) et le code d'état correspondant.
Le télégramme de données cyclique a la structure suivante :
| Byte no. | Données Accès Format des données | ||
| 0, 1, 2, 3 s | sortie du bloc entrée analogue (Variable OUT) | lecture | virgule flottante 32 bits (IEEE-754) |
| 4 sortie du | bloc entrée analogue (Variable OUT) | lecture | → tableau suivant |
| Status-Code [bin] Etat de l'application | areil Signification | |||||||
| 1 0 | 0 0 | 0 0 | X X | GOOD/OK | Tout est ok. | |||
| 1 0 | 0 0 | 1 0 | 0 1 | GOOD/advis. | Alarm/LO | Valeur mesurée ok,vertissement LO_LIM du bloc entréeanalogique actif. | ||
| 1 0 | 0 0 | 1 0 | 1 0 | GOOD/advis. | Alarm/HI | Valeur mesurée ok,vertissement HI_LIM du bloc entréeanalogique actif. | ||
| 1 0 | 0 0 | 1 1 | 0 1 | GOOD/active | crit.Alarm/LO | Valeur mesurée ok,alarme LO_LOLIM du bloc entréeanalogique actif. | ||
| 1 0 | 0 0 | 1 1 | 1 0 | GOOD/active | crit.Alarm/HI | Valeur mesurée ok,alarme HI_HLIM du bloc entréeanalogique actif. | ||
| 0 1 | 0 0 | 0 1 | XX UNCERTAIN/lastusable value | La dernière valeur valable est indiquée(mode Fail Safe): La valeur Primary_ Value fournie par le bloc transmetteur ou la valeur simulée dans le bloc entrée analogue a l'objet "BAD". | ||||
| 0 1 | 1 0 | 0 0 | XX UNCERTAIN/ | simulated value | Simulated Value: Simulation en bloc entrée analogue active ou mode du bloc entrée analogue = "MAN" (OUT peut être mis par l'utilisateur). | |||
| 0 1 | 0 0 | 1 1 | XX UNCERTAIN/ | Initial value | La valeur initiale est fournie parce que la valeur Primary_Value fournie par le bloc transmetteur ou la valeur simulée par le bloc entrée analogue a l'état "BAD" et aucune valeur de l'état "GOOD" n'était disponible depuis la remise à 0 ou la mise sous tension.Mode fail safe actif mais la dernière valeur utilisable ("last usable value")n'est pas disponible. | |||
| 0 0 | 0 1 | 1 1 | XX Bad/Out of Service | Erreur de système reconnaue. Pourplus d'informations voir les messagesdiagnostiques. | ||||
(x: n'importe quoi)
9.2 Diagnostic et dépannage
L'appareil a des routines de diagnostic étendues dans tous les blocs de traitement de signaux. Elles surveillent l'appareil lors de la mise sous tension (test Power On) et pendant le fonctionnement (en ligne).
Des messages diagnostiques sont affichés :
- Dans tout télégramme de données cyclique suite à la valeur mesurée.
- De plus, le bit EXT_DIAG est mis dans le télégramme de données cyclique. Ce bit lance l'échange d'un télégramme diagnostique pour le maître. Il correspond au code diagnostique standard Profibus (→ tableau suivant).
Le code diagnostique peut également être lu par un accès acyclique.
| Octet | Bit | Mnemonic Description Error | ||
| 1 0 | DIA_HW_ELECTR_Electronique défaut du matériel - | |||
| 1 4 | DIA_MEM_CHKSUM Erreur lors du test de sauvegarde - | |||
| 1 5 | DIA_MEASUREMENT Erreur / Détéciption des donnéesées mesurées | X | ||
| 2 3 | DIA_WARMSTART | Le démarge à chaud est effectué. | - | |
| 2 4 | DIA_COLDSTART | Le démarge à froid est effectué. | - | |
| 2 5 | DIA_MAINTAINANCE | Entretien nécessaire | X | |
| 2 7 | IDENTIFIER_VIOLATION | Actif si le numéro d'identification de l'échange de données cyclique, en cours, ne correspond pas à la valeur en bloc physique. | - | |
Si l'option Numéro de défaut est active (Error = X) le paramètre "Error" spécifique au fabricant peut être affiché. Les défauts suivants sont affichés ::
| Error [dec] | Type de defaulted | Elimination du defaulted |
| 0 | Aucun defaulted, aucune anomalie. | -/- |
| 10 | Défaut pendant l'auto-test de démarriage. | ► Mettre hors tension / sous tension. ► Remplacer l'appareil. |
| 20 | Défaut interne dans l'électronique du capteur. | ► Remplacer l'appareil. |
| 21 | Défaut partiel dans l'électronique du capteur, mesure toujours possible avec une voie. | ► Remplacer l'appareil. backups du capteur possible).1) |
| Error [dec] | Type de début Elimination du début | |
| 51 | Interruption élément de mesure 1 (NTC). | ► Remplacer l'appareil. (backup du capteur possible).1) |
| 52 | Court-circuit élément de mesure 1 (NTC). | ► Remplacer l'appareil. (backup du capteur possible).1) |
| 53 | Température de la sonde au-dessus de la plage de la température de fonctionnement (-32°C...170°C). | ► Réduire la température du fluide. |
| 54 | Température de la sonde en-dessous de la plage de la température de fonctionnement (-32°C...170°C). | ► Augmenter la température du fluide. |
| 59 | Tous les deux éléments de mesure sont défectueux. | ► Remplacer l'appareil. |
| 61 | Interruption de l'élement de mesure 2 (Pt 1000). | ► Remplacer l'appareil. (backup du capteur possible).1) |
| 62 | Court-circuit de l'élement de mesure 2 (Pt 1000). | ► Remplacer l'appareil. (backup du capteur possible).1) |
| 71 | Dérive détectée du capteur elle dépasse le niveau d'advertissement. Premiers signes de dérive détectés. | ► Prévoir le remplacement de l'appareil. ► Vérifier si le paramètre drW est correctement programmé. |
| 72 | Dérive détectée du capteur elle dépasse le niveau d'alarme. | ► Prévoir le remplacement de l'appareil. Mesure de la température possi-ble à une précision réduite. ► Vérifier si le paramètre drA est correctement programmé. |
| 91 | Tension d'alimentation interne en dehors de la plage de tension d'alimentation. | ► Mettre hors tension / sous tension. ► Remplacer l'appareil. |
| 92 | Température de fonctionnement de l'électronique hors de la plage spécifique. | ► Vérifier la température de la partie supérieure du capteur. ► Assurer que la plage spécifiée est respectée. |
À l'aide du paramètre du profil Profibus PA "PB_FACTORY_RESET" dans le bloc physique du capteur, un redémarrage du capteur peut être forcé.
Les codes reset suivants sont disponibles :
- Reset Code [dec] 1 = remise au réglage usine
- Le capteur redémarre et charge ses réglages par défaut pour les paramètres statiques et non volatiles (static, non-volatile).
- Les paramètres dynamiques sont réinitialisés.
- Le réglage des adresses n'est pas changé.
- Reset Code [dec] 2506 = démarche à chaud
- Le capteur est redémarré. Tous les paramètres statiques et non volatiles sont mis à la première valeur réglée. Les paramètres dynamiques sont réinitialisés.
- Le réglage des adresses n'est pas changé.
- Reset Code [dec] 2712 = reset d'adresse
- L'adresse bus de l'appareil est immédiatement remise à 126 dec. Remarque : L'échange cyclique, en cours, de données est perturbé !
10 Schéma d'encombrement
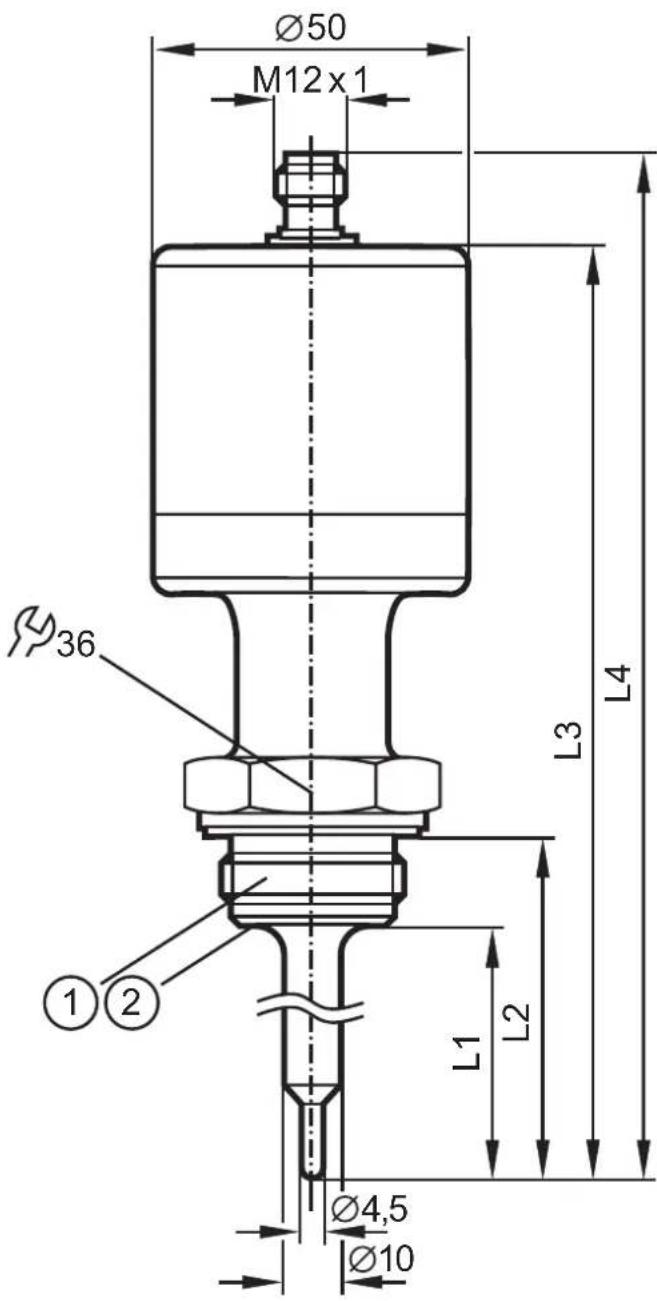
Dimensions en mm
1: Chanfrein d'étanchéité Aseptoflex 2: Filetage Aseptoflex
| TAP161 TAP961 | ||
| L1 100 40 | ||
| L2 114,5 54,5 | ||
| L3 208,1 148,1 | ||
| L4 223 163 |
11 Données techniques
| Etendue de mesure [°C / °F] | -25...150 / -13...302 |
| Tension d'alimentation | |
| - si utilisé en dehors de la zone explosible [V] | 9...32 DC |
| - si utilisé au sein de la zone explosible [V] | 9...24 DC |
| Consommation [mA] | < 15,6 |
| Courant de fuite max. [mA] | < 21,8 |
| Protection contre les courants de surcharge | |
| désactivant, peut être remise par power cycle | |
| Protection contre l'inversion de polarité | |
| fonctionnement correct également en cas d'inversion de polarité | |
| Chien de garde intégré | |
| Temps de cycle mesure [ms] | < 600 |
| Retard à la disponibilité [s] | 35 |
| Precision (bout de la sonde insérée dans le fluide jusqu'àux chanfreins métalliques d'étanchéité) | |
| - Surveillance dérive [K] | ± 0,2 (-10...100°C); ± 0,3 (-25...10/100...150°C) |
| - Valeur process [K] | ± 0,2 (-10...100°C); ± 0,3 (-25...10/100...150°C) |
| Résolution | |
| - Surveillance dérive [K] | 0,05 |
| - Valeur process [K] | 0,05 |
| Matières boîtier | inox (1.4404 / 316L); ULTEM; Viton |
| Matières en contact avec le fluide | inox (1.4404 / 316L) |
| Etat de surface Ra: | < 0,6 |
| Température ambiente (température de fonctionnement électronique) [°C] | -25...70 |
| Température du fluide (température de fonctionnement raccord process) [°C] | -32...170 |
| Température de stockage [°C] | -40 ... 85 |
| Tenue en pression [bar] | 50 |
| Indice de protection | IP 68, IP 69K |
| Protection | III |
| Tenue aux chocs [g] | 50 (DIN / IEC 68-2-27, 11ms) |
| Tenue aux vibrations [g] | 20 (DIN / IEC 68-2-6, 10 - 2000 Hz) |
| CEM EN 61000-4-2 ESD (décharges électro.) : | 4 kV CD / 8 kV AD |
| EN 61000-4-3 HF (champs électro.) : | 10 V/m |
| EN 61000-4-4 Burst: | 2 kV |
| EN 61000-4-6 HF (perturb. conduite) : | 10 V |
Informations supplémentaires sur notre site web à www.ifm.com → Select your country → Fiche technique :




