
CR3146 - Passerelle industrielle IFM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil CR3146 IFM au format PDF.
| Type de produit | Passerelle industrielle (passerelle mobileIoT) |
| Marque | IFM |
| Modèle | CR3146 |
| Alimentation | 8...32 V DC (borne 30) |
| Interfaces réseau mobile | 4G (LTE) avec fallback 2G/3G (GSM, UMTS, LTE) |
| Carte eSIM intégrée | Oui, profil eSIM préchargé, activation après enregistrement (jusqu'à 4h) |
| Fonctions principales | Transmission bidirectionnelle de données CAN via réseau mobile, modes temps réel, cloud logging et IoT, géolocalisation GNSS (GPS+GLONASS+Beidou), 3 entrées analogiques, 1 sortie TOR, accéléromètre 3 axes, gyroscope 3 axes |
| Modes de connexion | Temps réel, Cloud logging, IoT (combinaison) |
| GNSS | GPS, GLONASS, Beidou (2 simultanés), antenne interne, envoi automatique configurable |
| Entrées/sorties | 3 entrées analogiques (broches 4,5,6), 1 sortie TOR (broche 7), 1 entrée TOR (borne 15) |
| Interface CAN | 1 port CAN (CAN1_H, CAN1_L) via connecteur Micro Timer II 14 pôles |
| Prise USB | Micro-AB pour diagnostic et mise à jour firmware |
| Indice de protection | IP67K (avec capuchons de protection) |
| Montage | Position horizontale, connecteurs vers le bas, fixation par 2 vis M5x30 (couple 2,2 Nm) |
| Antenne | Antenne combinée (mobile/GNSS) avec vue dégagée, distance minimale de 0,2 m des personnes |
| LED indicateurs | LED ON (alimentation), LED STATUS (connexion réseau, CAN, GNSS, Bluetooth/WiFi) |
| Gestion d'énergie | Mode veille avec réveil cyclique, par borne 15, par accéléromètre, ou par message CAN |
| Entretien et nettoyage | Aucune maintenance, nettoyage avec chiffon sec, ne pas ouvrir |
| Sécurité | Cybersécurité : restreindre l'accès réseau ; ne pas utiliser à bord d'avions ; montage et raccordement par personnel qualifié |
| Réparabilité | Réparation uniquement par le fabricant ; aucune pièce détachée disponible pour l'utilisateur |
| Informations générales | Notice disponible sur www.ifm.com ; certificats sur code QR ; compatible avec mobileIoT Suite et ifm Maintenance Tool |
FOIRE AUX QUESTIONS - CR3146 IFM
Questions des utilisateurs sur CR3146 IFM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Passerelle industrielle au format PDF gratuitement ! Retrouvez votre notice CR3146 - IFM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil CR3146 de la marque IFM.
MODE D'EMPLOI CR3146 IFM
Notice d'utilisation
Passerelle mobileIoT
CR3146
Contenu
1 Remarques préliminaires 3
1.1 Symboles utilisés 3
1.2 Avertissements utilisés.... 3
2 Consignes de sécurité 4
2.1 Cybersécurité 4
2.2 Transport aérien.... 4
3 Usage prévu.... 5
4 Fonctions 6
4.1 Interface réseau mobile 6
4.2 Carte eSIM 6
4.3 Modes de connexion 6
4.3.1 Mode temps réel 7
4.3.2 Mode cloud logging 7
4.3.3 Mode IoT 7
4.4 Fonctions d'entrée/sortie 7
4.5 Accéléromètres et capteurs gyro 9
4.6 GNSS (Géolocalisation et navigation par système de satellites) 10
4.6.1 Envoi automatique des données GNSS à la plate-forme mobileIoT ..... 11
4.7 Gestion des énergies 12
4.8 Etat de l'appareil.... 13
4.9 Mode de compatibilité 14
5 Montage.... 16
5.1 Montage de l'antenne.... 16
6 Raccordement électrique 17
6.1 Connecteurs.... 17
6.1.1 Tension d'alimentation, interface CAN, entrées et sorties.... 17
6.1.2 Prise USB 17
7 Eléments de visualisation.... 18
7.1 LED ON 18
7.2 LED STATUS.... 18
7.3 Affichage des modes de fonctionnement 19
8 Mise en service 20
8.1 Composants requises.... 20
8.2 Raccorder l'appareil 20
8.3 Rétablissement des réglages usine (Factory-Reset) 20
9 Maintenance, entretien et élimination.... 22
Glossaire 23
1 Remarques préliminaires
Notice d'utilisation, données techniques, homologations et informations supplémentaires via le code QR sur l'appareil / l'emballage ou sur www.ifm.com.
1.1 Symboles utilisés
√ Condition préalable
Action à effectuer
Réaction, résultat
[...] Désignation d'une touche, d'un bouton ou d'un affichage
→ Référence

Remarque importante
Le non-respect peut aboutir à des dysfonctionnements ou perturbations

Information
Remarque supplémentaire
1.2 Avertissements utilisés

INFORMATION IMPORTANTE
Avertissement de dommages matériels

ATTENTION
Avertissement de dommages corporels
▷ Danger de blessures légères, réversibles.

AVERTISSEMENT
Avertissement de dommages corporels graves.
▷ Danger de mort ou de graves blessures irréversibles.
2 Consignes de sécurité
- L'appareil décrit ici est un composant à intégrer dans un système.
- L'installateur du système est responsable de la sécurité du système.
-
L'installateur du système est tenu d'effectuer une évaluation des risques et de rédiger, sur la base de cette dernière, une documentation conforme à toutes les exigences prescrites par la loi et par les normes et de la fournir à l'opérateur et à l'utilisateur du système. Cette documentation doit contenir toutes les informations et consignes de sécurité nécessaires à l'opérateur et à l'utilisateur et, le cas échéant, à tout personnel de service autorisé par l'installateur du système.
-
Lire ce document avant la mise en service du produit et le conserver pendant la durée d'utilisation du produit.
- Le produit doit être approprié pour les applications et conditions environnantes concernées sans aucune restriction d'utilisation.
- Utiliser le produit uniquement pour les applications pour lesquelles il a été prévu (→ Usage prévu).
- Un non-respect des consignes ou des données techniques peut provoquer des dommages matériels et/ou corporels.
- Le fabricant n'assume aucune responsabilité ni garantie pour les conséquences d'une mauvaise utilisation ou de modifications apportées au produit par l'utilisateur.
- Le montage, le raccordement électrique, la mise en service, la programmation, la configuration, l'utilisation et l'entretien du produit doivent être effectués par du personnel qualifié et autorisé pour la tâche concernée.
- Assurer une protection efficace des appareils et des câbles contre l'endommagement.
- Remplacer les appareils endommagés, car autrement les données techniques et la sécurité sont affectées.
2.1 Cybersécurité
INFORMATION IMPORTANTE
Fonctionnement de l'appareil dans un environnement réseau non protégé
▷ Un accès non autorisé en lecture et écriture est possible.
Une utilisation détournée du fonctionnement de l'appareil est possible.
▶ Vérifier et restreindre les possibilités d'accès à l'appareil.
2.2 Transport aérien
L'appareil ne doit pas être utilisé à bord d'avions.
L'utilisation à bord d'avions peut affecter les systèmes de navigation et de communication. La violation peut entraîner des effets juridiques contre le violateur.
3 Usage prévu
L'appareil transmet sans fil, les données CAN d'un véhicule ou d'une machine conformément aux normes GSM, UMTS et LTE. GPRS, EDGE et HSPA sont pris en charge.
En outre, la réception et la transmission de données de position GNSS sont possibles.
Interfaces disponibles: GSM, UMTS, LTE
FR
4 Fonctions
L'appareil permet l'accès aux données CAN dans différents modes de fonctionnement.
| Fonction CR3146 | |
| Pont CAN-CAN-Bluetooth/Wifi — | |
| Interface CAN-Bluetooth/WiFi — | |
| Antenne interne | |
| Réseau mobile 4G monde entier (uniquement pays certifiés) | |
| Mode temps réel • | |
| Mode cloud logging • | |
| Fonctions d'entrée/sortie 3/1 | |
| Accéléromètre • | |
| Capteur gyro • | |
| GNSS • | |
| Connexions CAN 1 | |
| ifm e-SIM • |
- = applicable
4.1 Interface réseau mobile
L'appareil est doté d'une interface réseau mobile pour la transmission de données.
L'appareil prend en charge le réseau mobile 4G. Pour une couverture réseau plus élevée, l'appareil dispose d'un système de basculement de sécurité (fallback) pour passer sur le réseau mobile 2G ou 3G.
L'appareil détecte le réseau mobile offrant la meilleure vitesse de transmission et passe automatiquement d'un réseau à l'autre. Les données peuvent être envoyées de manière bidirectionnelle dans le réseau via l'interface réseau mobile.
4.2 Carte eSIM
L'appareil est équipé d'une carte eSIM intégrée. A la livraison, la carte eSIM dispose d'un profil eSIM contenant tous les paramètres de communication essentiels.

A la livraison, la carte eSIM de l'appareil n'est pas activée. Après l'enregistrement de l'appareil, l'activation de la carte eSIM peut prendre 4 heures.
4.3 Modes de connexion
L'appareil peut être utilisé dans les modes de connexion suivants :
- Mode temps réel
- Mode cloud logging
- Mode IoT
Le mode de connexion est configuré comme suit :
| Objet Index Sous-index Type Par défaut Description | |||||
| DeviceMode 0x101 | 1 | 0x01 U8 0x03 | 0x00 = mode | cloud logging | |
Le nouveau mode configuré n'est pris en compte qu'après un redémarrage.
Lorsque le bit 7 est écrit, l'appareil redémarre.
4.3.1 Mode temps réel
En mode temps réel, des messages CAN sont transmis de manière bidirectionnelle.
L'appareil peut envoyer / recevoir des données process (par ex. des paramètres machine) via les interfaces CAN pendant le fonctionnement, à travers le réseau mobile et la plate-forme mobileIoT. Selon l'équipement, il peut transmettre les données du récepteur GNSS et des fonctions d'entrée / sortie et les transmettre via le bus CAN.
Les données sont transmises en continu et peuvent être évaluées quasiment en temps réel. Pour cette fonction, une connexion permanente doit être établie entre l'appareil et le logiciel d'applicatif ou la plate-forme mobileIoT.
Dans ce mode, une connexion en temps réel est aussi possible avec Codesys 2.3. Pour cela, un logiciel approprié et un contrat de données mobileIoT sont nécessaires.
Le mode temps réel peut être paramétré localement via un SDO ou par mobileIoT Suite dans les propriétés de la machine.
En mode temps réel, aucune donnée ni message n'est mémorisé sur la plate-forme mobileIoT.
4.3.2 Mode cloud logging
En mode cloud logging, les messages CAN sélectionnés sont envoyés au cloud pour leur traitement et leur sauvegarde. L'appareil fonctionne alors de manière autonome sans devoir être contrôlé par une application.
Les configurations pour ce mode sont effectuées dans la mobileIoT Suite, qui peut envoyer les données dans des messages CAN. Une configuration à distance OTA (Over the air) des appareils est réalisée via la mobileIoT Suite.
4.3.3 Mode IoT
Le mode IoT est une combinaison du mode temps réel et du mode cloud logging. Il est alors possible d'établir une connexion en temps réel avec le bus CAN et d'envoyer de manière autonome les données de position GNSS à la plate-forme mobileIoT. Dans ce mode, les métriques sont générées et envoyées par l'application du contrôleur. Le lien entre les données et l'application est configuré dans la mobileIoT Suite. Le code source correspondant est alors automatiquement généré et peut être chargé dans le programme de commande.
Aucune donnée n'est envoyée à la plate-forme mobileIoT lors d'une connexion en temps réel. Dès que la connexion en temps réel est terminée, les données sont à nouveau enregistrées et envoyées à la plate-forme mobileIoT.
4.4 Fonctions d'entrée/sortie
L'appareil dispose de fonctions d'entrée/sortie supplémentaires (3 entrées analogiques, 1 sortie TOR). Via la fonction d'entrée, il est par exemple possible de surveiller et d'enregistrer des informations sur l'état d'appareils ou de machines ainsi que sur les états de détecteurs ou commutateurs. Les données fournies par les fonctions d'entrée/sortie peuvent être visualisées ou transmises via le bus CAN.
Les fonctions d'entrée / sortie sont accessibles via les objets suivants :
| Objet Index Sous-index Type Par défaut Description | |||||
| Analog Input 1 0x5 | 46F 0x14 R32 | ro | — Broche 4 du | connecteur Micro Timer II à 14 pôlesValeur brute de la mesure de l'entrée analogique (Volt)Pas de filtre appliqué | |
| Analog Input 2 0x5 | 46F 0x15 R32 | ro | — Broche 5 du | connecteur Micro Timer II à 14 pôlesValeur brute de la mesure de l'entrée analogique (Volt)Pas de filtre appliqué | |
| Analog Input 3 0x5 | 46F 0x16 R32 | ro | — Broche 6 du | connecteur Micro Timer II à 14 pôlesValeur brute de la mesure de l'entrée analogique (Volt)Pas de filtre appliqué | |
| IO - Clamp 30 Voltage | 0x3333 0x67 R32 | ro | — Borne 30 | Valeur brute de la mesure de l'entrée analogique (Volt) | |
| IO - Clamp 15 Voltage | 0x3333 0x66 R32 | ro | — Borne 15 | Valeur brute de la mesure de l'entrée analogique (Volt) | |
| IO - Clamp 15 (ignition) State | 0x3333 0x01 U8 | ro | — Borne 15 | 0 = signal d'entrée Low (< 2,5 V)1 = signal d'entrée High (> 5,5 V) | |
| IO - Digital Output | 0x3333 0x0F U8 | rw | — Broche 7 du | connecteur Micro Timer II à 14 pôlesBit 0 : (0 = signal de sortie bas, 1 = signal de sortie haut)Bits 1...7 : réservé, mettre à 0 | |
| IO - Digital Output Status | 0x3333 0x10 U8 | ro | — Broche 7 du | connecteur Micro Timer II à 14 pôlesBit 0 : (0 = signal de sortie Erreur, 1 = signal de sortie OK)Bits 1...7 : réservé, mettre à 0 | |
| IO - Device Temperature | 0x3333 0x0E $16 | ro | — Température | de l'appareil en °C : | |
L'appareil peut envoyer ces données via l'interface CAN. La configuration est effectuée via les objets suivants :
| Objet Index Sous-index Type Par défaut Description | |||||
| DeviceMode 0x4001 0x02 U8 | rw | — Bit 0 : Mode | de compatibilité avec l'appareilCR3114 (cycle 1s)Bit 1 : Transmission de l'état de l'appareil par le bus CAN (cycle 1s)Bit 2 : Transmission des données GNSS complètes par le bus CAN (cycle 1s)Bit 3 : Transmission des données d'entrée/sortie par le bus CAN (cycle 1s)Bit 4 : Transmission des données d'accélération et de gyroscope par le bus CAN (cycle 100 ms) | ||
| IO BaseID 0x4005 | 0x07 U16 0x400 | Adresse de départ O | OB-ID pour la transmis-sion des données d'entrée/sortie (cycle 1s) | ||

L'index et le sous-index précis sont fournis dans le fichier EDS correspondant.

Toutes les données disponibles dans chaque mode de l'appareil sont envoyées via l'interface CAN1.
Les données des fonctions d'entrée/sortie sont mappées sur les messages CAN suivants :
| COB-ID | Octet de dé-marrage | Longueur (octets) | Type Objet | |
| IO BaseID + 0x00 0 4 | R32 IO – Clamp | 30 Voltage | ||
| 4 4 R32 IO – Clamp | 15 Voltage | |||
| IO BaseID + 0x01 0 4 | R32 Analog Input | 1 | ||
| 4 2 S32 IO – Device Temperature | ||||
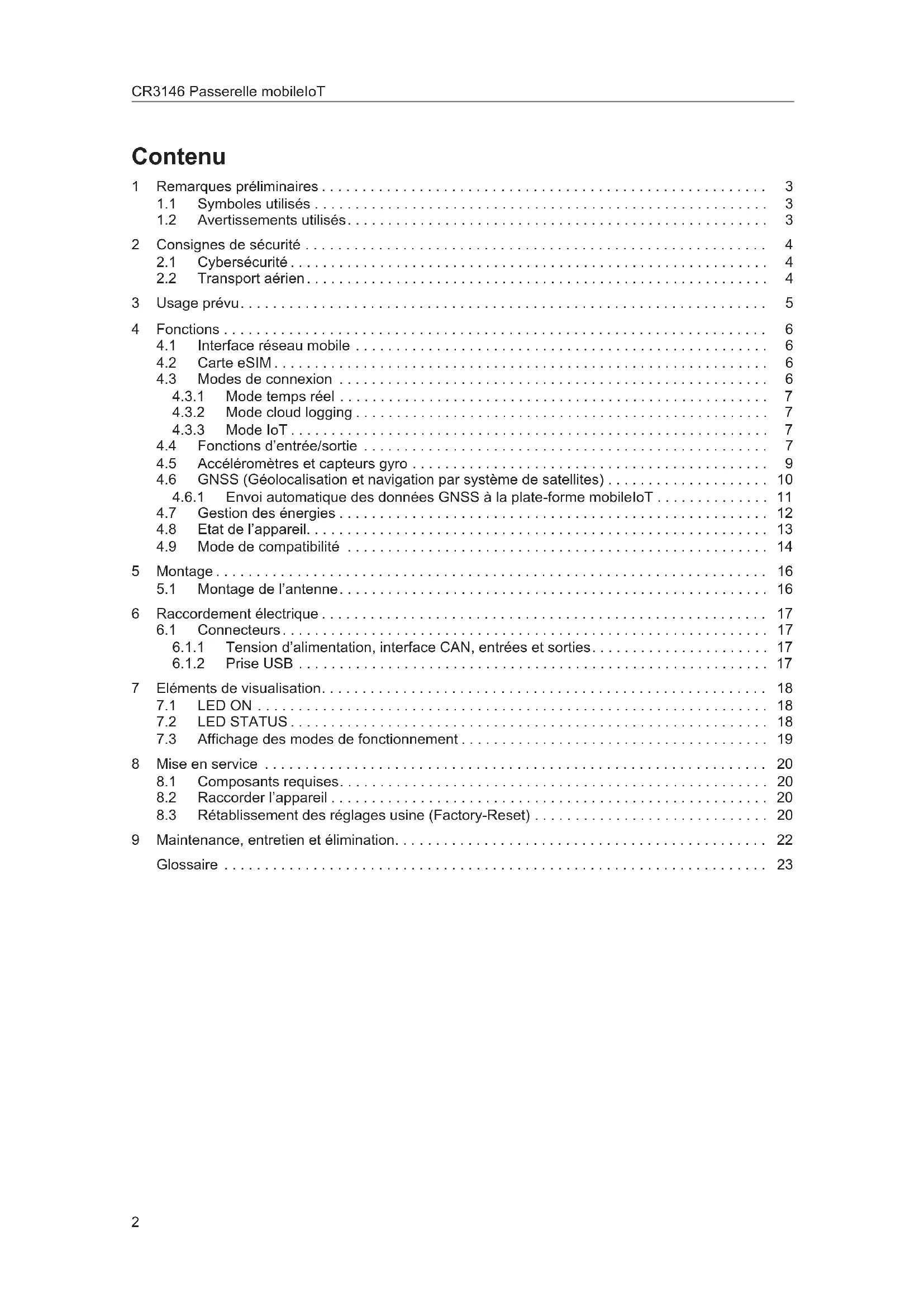
4.5 Accéléromètres et capteurs gyro
Les accéléromètres mesurent l'accélération dans la direction des axes X, Y et Z. Le capteur gyro à 3 axes détermine la vitesse angulaire dans l'axe X, l'axe Y et l'axe Z. Ces données sont évaluées et peuvent être transmises au système de contrôle-commande via bus CAN.
L'accès aux données des accéléromètres et capteurs gyro est effectué via les objets suivants :
| Objet Index Sous-index Type Par défaut Description | |||||
| Acceleration – X-Axis | 0x544D 0x00 | R32 | ro | — Accélération | actuelle axe X (unité : g) |
| Acceleration – Y-Axis | 0x544D 0x01 | R32 | ro | — Accélération | actuelle axe Y (unité : g) |
| Acceleration – Z-Axis | 0x544D 0x02 | R32 | ro | — Accélération | actuelle axe Z (unité : g) |
| Gyroscope – X - Axis | 0x544D 0x03 | R32 | ro | — Vitesse angulaire actuelle axe X (unité : °/ seconde) | |
| Gyroscope – Y - Axis | 0x544D 0x04 | R32 | ro | — Vitesse angulaire actuelle axe Y (unité : °/ seconde) | |
| Gyroscope – Z - Axis | 0x544D 0x05 | R32 | ro | — Vitesse angulaire actuelle axe Z (unité : °/ seconde) | |
L'appareil peut envoyer ces données via l'interface CAN. La configuration est effectuée via les objets suivants :
| Objet Index Sous-index Type Par défaut Description | |||||
| DeviceMode 0x4001 0x02 U8 | rw | — Bit 0 : Mode | de compatibilité avec l'appareilCR3114 (cycle 1s)Bit 1 : Transmission de l'état de l'appareil par le bus CAN (cycle 1s)Bit 2 : Transmission des données GNSS complètes par le bus CAN (cycle 1s)Bit 3 : Transmission des données d'entrée/ sortie par le bus CAN (cycle 1s)Bit 4 : Transmission des données d'accélération et de gyroscope par le bus CAN (cycle 100 ms) | ||
| Movement BaseID | 0x4005 0x05 U | 16 0x500 Adresse | départ O | OB-ID pour la transmis-sion des données d'accélération et de gyro (cycle 100 ms) | |

Toutes les données disponibles dans chaque mode de l'appareil sont envoyées via l'interface CAN1.

L'index et le sous-index précis sont fournis dans le fichier EDS correspondant.
Les données d'accélération et de gyroscope sont mappées sur les messages CAN suivants :
| COB-ID | Octet de dé-marrage | Longueur (octets) | Type Objet | |
| Movement BaseID + 0x00 | 0 4 R32 Acceleration – X -Axis | |||
| 4 4 R32 Acceleration – Y -Axis | ||||
| Movement BaseID + 0x01 | 0 4 R32 Acceleration – Z -Axis | |||
| 4 4 R32 Gyroscope – X - Axis | ||||
| Movement BaseID + 0x02 | 0 4 R32 Gyroscope – Y - Axis | |||
| 0 4 R32 Gyroscope – Z - Axis | ||||
4.6 GNSS (Géolocalisation et navigation par système de satellites)
L'appareil est doté d'un récepteur GNSS. L'appareil peut transmettre les données de position fournies par le récepteur GNSS via le bus CAN ou les envoyer par le réseau mobile.
L'appareil peut évaluer les signaux de satellites GPS, GLONASS et Beidou. Les données de deux systèmes de navigation peuvent être évaluées simultanément. Cela améliore la précision.
L'accès aux données GNSS est effectué via les objets suivants :
| Objet Index Sous-index Type Par défaut Description | |||||
| Positioning - Antenna Status | 0x3333 0x13 U8 | ro | — 0 = antenne | endommagée ou manquante1 = antenne OK | |
| Positioning - Position Data Valid | 0x3333 0x14 U8 | ro | — 0 = données | de position invalides (pas de détection de position)1 = données de position valides (détection de position) | |
| Positioning - Active Satellites | 0x5220 0x00 U8 | ro | — Nombre de satellites momentanément utilisés | ||
| Positioning – Mode (GNSS) | 0x5200 0x00 U8 | rw | — 0 = uniquement GPS1 = GPS + GLONASS2 = GPS + BEIDOU3 = GLONASS + BEIDOU | ||
| Positioning - Longitude | 0x5208 0x00 R32 | ro | — Longitude sous forme de nombre à virgule flottante 32 bits (décimale en degrés) | ||
| Positioning – Latitude | 0x5209 0x00 R32 | ro | — Degré de latitude en tant que nombre à vir-gule flottante 32 bits (décimal en degré) | ||
| Positioning - Altitude | 0x520A 0x00 R32 | ro | — Altitude au-dessus du niveau moyen de la mer en flottant 32 bits (en mm) | ||
| Positioning - Speed over Ground | 0x520B 0x00 R32 | ro | — Vitesse par rapport au sol en flottant 32 bits (en m/s) | ||
| Positioning - GPS Odometer | 0x520B 0x02 U32 | ro | — Distance totale basée sur le GNSS en nombre entier 32 bits non signé(100 mètres par bit) | ||
| Positioning - Trigger distance for GPS Odometer | 0x520B 0x03 R32 | ro | — Distance en mètres que l'appareil doit par-courir pour commencer le comptage kilométrique. | ||
| Positioning - Heading | 0x520C 0x00 R32 | ro | — Parcours par rapport au nord en flottant 32 bits (décimal en degré). | ||
| Logging – Current GNSS position | 0x5200 0xF0 U8 | rw | — Si la valeur de cet objet est différente de 0, l'enregistrement de la position GNSS actuelle de l'appareil démarre.Lorsque l'appareil n'a pas de point de référence GNSS, il attend un point de référence avant d'enregistrer la position.Le flag reste à la valeur écrite jusqu'à ce que la position soit enregistrée. Il est ensuite remis à 0. | ||
L'appareil peut envoyer ces données via l'interface CAN. La configuration est effectuée via les objets suivants :
| Objet Index Sous-index Type Par défaut Description | |||||
| DeviceMode 0x4001 0x02 U8 | rw | — Bit 0 : Mode | de compatibilité avec l'appareilCR3114 (cycle 1s)Bit 1 : Transmission de l'état de l'appareil par le bus CAN (cycle 1s)Bit 2 : Transmission des données GNSS complètes par le bus CAN (cycle 1s)Bit 3 : Transmission des données d'entrée/ sortie par le bus CAN (cycle 1s)Bit 4 : Transmission des données d'accélé- ration et de gyroscope par le bus CAN (cy- cle 100 ms) | ||
| Position BaseID 0x4005 0x06 U16 | 0x300 Adresse | de départ COB | -ID pour la transmis-sion des données GNSS (cycle 1s) | ||

Toutes les données disponibles dans chaque mode de l'appareil sont envoyées via l'interface CAN1.

L'index et le sous-index précis sont fournis dans le fichier EDS correspondant.
Les données GNSS sont mappées sur les messages CAN suivants :
| COB-ID | Octet de dé-marrage | Longueur (octets) | Type Objet | |
| Position BaseID + 0x00 | 0 1 U8 Positioning - Position Data Valid | |||
| 1 1 U8 Positioning - Active Satellites | ||||
| 2 1 U8 Positioning – Mode (GNSS) | ||||
| Position BaseID + 0x01 | 0 4 R32 Positioning - Longitude | |||
| 4 4 R32 Positioning – Latitude | ||||
| Position BaseID + 0x02 | 0 4 R32 Positioning - Altitude | |||
| 0 4 R32 Positioning - Heading | ||||
| Position BaseID + 0x03 | 0 4 R32 Positioning - Speed over Ground | |||
| 4 4 R32 Positioning - GPS Odometer | ||||
4.6.1 Envoi automatique des données GNSS à la plate-forme mobileIoT
L'appareil peut détecter automatiquement la position GNSS et l'envoyer à la plate-forme mobileIoT.
La configuration est effectuée via les objets suivants :
| Objet Index Sous-index Type Par défaut Description | |||||
| GNSS-interval 0x4009 0x02 U32 | rw | 900 000 | Intervalle d'enregistrement de la position GNSS (en ms). Régler sur 0xFFFFFFF pour désactiver cette fonction. Valeur min. = 60 000 | ||
| GNSS-distance 0x4009 0x03 U32 | rw | 0xFFFFFFF | Distance entre la dernière position déterminée et la position actuelle (ligne droite). La distance minimale est de 3 mètres. | ||
| Logging - File Upload Period | 0x3333 0x1C | U16 0x01 Durée | en minutes. Après l'écoulement | de cette durée, le fichier enregistré est fermé et transmis au serveur.Mettre à 0 pour désactiver le délai. | |

Toutes les données disponibles dans chaque mode de l'appareil sont envoyées via l'interface CAN1.

L'index et le sous-index précis sont fournis dans le fichier EDS correspondant.
4.7 Gestion des énergies
Différents modes permettent de gérer la consommation d'énergie de l'appareil. En plus du mode standard, l'appareil dispose également d'un mode veille. Dans ce mode, certaines fonctions sont désactivées afin d'économiser de l'énergie. Certains événements font repasser l'appareil en mode standard.

Le mode veille ne permet pas la connexion au réseau mobile.
L'accès à la gestion d'énergie est effectué via les objets suivants :
| Objet Index Sous-index Type Par défaut Description | |||||
| Power Management - Deep Sleep Flag | 0x3333 0xF3 U8 | wo | — Lorsque ce | flag est activé, l'appareil ne peut sortir du mode veille que via la borne 30, la borne 15 ou le CAN1.L'appareil ne sort du mode veille ni de manière cyclique, ni par un événement de vibratoire.Utilisation par ex. pendant un transport► Définir ce flag avant le passage au mode veille. | |
| Power Management - Time to Sleep | 0x3333 0x08 U8 | wo | — Temps en se | secondes avant le passage en mode veille.L'appareil ne passe en mode veille que lorsque la borne 15 est à l'état bas et qu'aucun message CAN n'arrive à l'interface CAN correspondante.Un message CAN peut réveiller l'appareil.Si l'appareil à l'équipement adéquat, une modification du niveau de tension sur la borne 15 ou la détection d'une certaine ac-célération peut réveiller l'appareil.Avec ce réglage, des messages CAN sont envoyés lorsque la borne 15 est à l'état haut. | |
| Power Management - Sleep Timer Status | 0x3333 0x29 U8 | ro | — 0 : Minuterie | de veille désactivée1 : Minuterie de veille activéeL'objet peut être lu si la borne 15 est à l'état haut | |
| Power Management - Shutdown delay time | 0x3333 0x32 U16 | rw | — Temporisation | en secondesAprès avoir détecté l'arrêt (borne 15) et l'ar-rêt du CAN, l'appareil continue de fonction-ner pendant la durée définie, avant de pas-ser en mode veille. | |
| Power Management - Cyclic Wake-up Time | 0x3333 0x35 U32 | rw | — Temps en secondesAprès la durée de veille spécifiée, l'appareil se réveille automatiquement et passe au mode standard.Cette fonction n'est active qu'avec une valeur >0. | ||
| Power Management - Accel. Wake-up Force | 0x3333 0x36 R32 | rw | — Force en g | Si un accéléromètre détecte une accélération supérieure à cette valeur, l'appareil se réveille et passe au mode standard.Cette fonction n'est active qu'avec une valeur >0. | |
| Power Management - CAN sleep Time | 0x3333 0x41 U32 | rw | — Temps en millisecondesSi l'appareil ne reçoit pas de messages CAN dans le délai indiqué ici, il passe en mode veille.Cette fonction n'est active qu'avec une valeur >0. | ||
4.8 Etat de l'appareil
L'appareil peut envoyer ces données via l'interface CAN. La configuration est effectuée via les objets suivants :
| Objet Index Sous-index Type Par défaut Description | |||||
| DeviceMode 0x4001 0x02 U8 | rw | — Bit 0 : Mode | de compatibilité avec l'appareilCR3114 (cycle 1s)Bit 1 : Transmission de l'état de l'appareil par le bus CAN (cycle 1s)Bit 2 : Transmission des données GNSS complètes par le bus CAN (cycle 1s)Bit 3 : Transmission des données d'entrée/ sortie par le bus CAN (cycle 1s)Bit 4 : Transmission des données d'accélé- ration et de gyroscope par le bus CAN (cy- cle 100 ms) | ||
| Status BaseID 0x4005 0x05 U16 | 0x200 Adresse de départ COB- | D pour la transmis-sion de l'état de l'appareil (cycle 1s) | |||

Toutes les données disponibles dans chaque mode de l'appareil sont envoyées via l'interface CAN1.

L'index et le sous-index précis sont fournis dans le fichier EDS correspondant.
Les données sur l'état de l'appareil sont mappées sur les messages CAN suivants :
| COB-ID | Octet de dé-marrage | Longueur (octets) | Type Objet | |
| Status BaseID + 0x00 | 0 1 U8 Etat du réseau | 0 : Non connecté1 : Enregistré dans le réseau domestique2 : Non enregistré, recherche de réseau3 : Enregistrement refusé par l'exploitant du réseau4 : Inconnu5 : Enregistré dans un réseau externe | ||
| Status BaseID + 0x00 | 1 1 U8 Qualité | du signal | 0 : -115 dBm ou moins1 : -111 dBm2...30 : Entre -110 et -54 dBm31 : -52 dBm ou moins99 : Inconnue | |
| 2 1 U8 Résultat | modem | 8 : Erreur fatale9 : Initialisation10 : Connexion Internet active11 : Connexion TCP serveur mobileIoT active | ||
| 3 1 U8 Mode réseau actuel | ||||
| 4 2 U16 Code d'erreur état machine | ||||
| 6 1 U8 Mode de connexion actuel | 0x00 : Mode cloud logging0x01 : réservé0x02 : Mode temps réel0x03 : Mode IoT | |||
| Status BaseID + 0x01 | 0 4 U32 Numéro d'erreur CMS | |||
| 0 4 U32 Numéro d'erreur CME | ||||
| Status BaseID + 0x02 | 0 4 U32 Heure de l'appareil (format Unix) | |||
| 4 4 U32 Temps de fonctionnement total en secondes | ||||
4.9 Mode de compatibilité
En mode de compatibilité, l'appareil transmet les données via le bus CAN de la même manière que l'appareil CR3114.
Les données sur le mode de compatibilité de l'appareil sont mappées sur les messages CAN suivants :
| COB-ID | Octet de dé-marrage | Longueur (octets) | Type Objet | |
| 0x180 + Node-ID 0 1 U8 Etat du réseau | 0 : Non connecté1 : Enregistré dans le réseau domestique2 : Non enregistré, recherche de réseau3 : Enregistrement refusé par l'exploitant du réseau4 : Inconnu5 : Enregistré dans un réseau externe | |||
| 0x180 + Node-ID 4 1 U8 Commande d'envoi pour transmission de fichier | ||||
| Status BaseID + 0x01 | 0 4 U32 Degré | de latitude GNSS | ||
| 0 4 U32 Degré | de longitude GNSS | |||
| Status BaseID + 0x02 | 0 4 U32 Réglage fixe sur 1 | |||
| 4 4 U32 Heure | de l'appareil (format Unix) | |||
FR
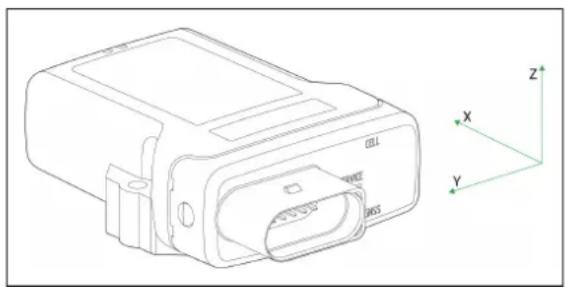
5 Montage

▶ Mettre l'installation hors tension avant le montage.

L'appareil peut être monté en position horizontale avec les connecteurs orientés vers le bas. Un montage avec les connecteurs orientés vers le haut n'est pas autorisé.
L'appareil doit être fixé avec l'arrière contre la surface de montage.
INFORMATION IMPORTANTE
Sollicitation par choc plus forte > IK07
Risque d'endommagement de l'appareil
L'indice de protection et la sécurité électrique peuvent être affectés.
En fonction des exigences de son application, l'installateur du système doit, le cas échéant, protéger l'appareil par des mesures externes.
Remplacer les appareils endommagés, car autrement les données techniques et la sécurité sont affectées.
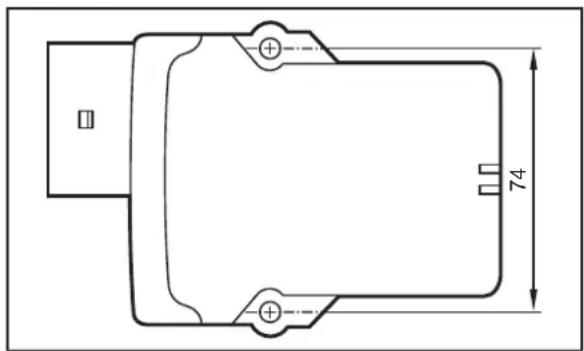
Fig. 1: Trous de montage
▶ Fixer l'appareil par 2 vis à tête cylindrique M5x30 sur une surface plane. Couple de serrage : 2,2 Nm
5.1 Montage de l'antenne
Lors de l'installation des antennes dans les véhicules, éviter d'être à proximité de réservoirs de carburant, de cuves contenant des matières explosibles ou de composants électroniques insuffisamment blindés (→ 2 Consignes de sécurité).
▶ Positionner l'antenne de manière à garantir une distance permanente d'au moins 0,2 m des personnes pendant le fonctionnement.
▶ Ne pas installer les antennes dans des constructions métalliques fermées, comme par ex. les cabines de conduite.
Pour réceptionner les signaux GPS sans perturbations, placer l'antenne GPS avec une vue dégagée du ciel.
▶ Prendre en compte les remarques du fabricant des antennes.

Un bon signal est une condition préalable à une transmission de données stable. En cas de problèmes modifier la position de l'antenne ou de l'appareil.
6 Raccordement électrique
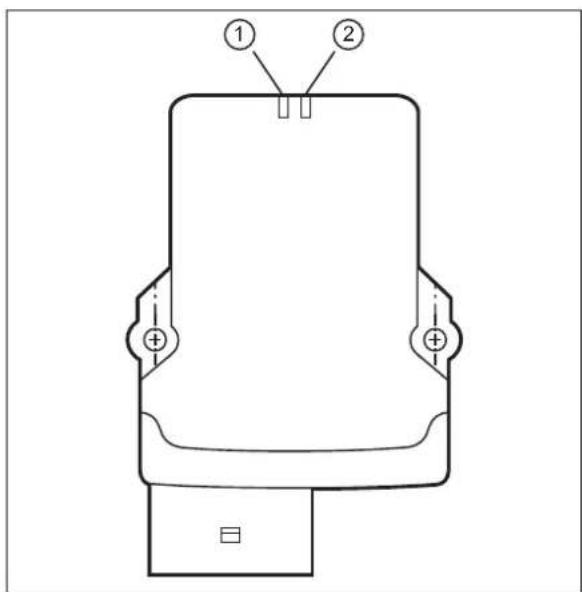
6.1 Connecteurs
1 : Connecteur Micro Timer II, 14 pôles (CAN, alimentation, entrées, sorties)
2:Prise USB (type Micro-AB)
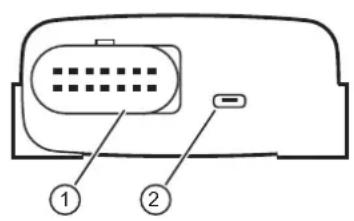
6.1.1 Tension d'alimentation, interface CAN, entrées et sorties
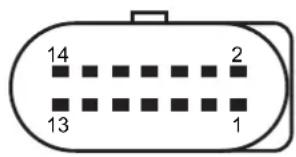
Fig. 2: Connecteur Micro Timer II, 14 pôles
1 : VCC / borne 30 (alimentation)
2 : non raccordé
3 : GND / borne 31 (alimentation)
4 : Entrée analogique 1
5 : Entrée analogique 2
6 : Entrée analogique 3
7 : Sortie TOR
8 : Entrée TOR / borne 15 (entrée, signal d'allumage)
9 : non utilisée
10 ; non utilisée
11 : non raccordé
12 : non utilisée
13 : CAN1_H (interface CAN 1 (haut) bidirectionnelle)
14 : CAN1_L (interface CAN 1 (bas) bidirectionnelle)
6.1.2 Prise USB
Les diagnostics et les actualisations du Bootloader et du firmware peuvent être effectués via la prise USB (Micro-AB).

L'indice de protection IP67K est assuré même sans câble USB raccordé.
Pour la protection contre les salissures, toujours placer les bouchons de protection correspondants sur la prise USB.
7 Eléments de visualisation
La LED ON indique l'état de l'alimentation en courant.
| Couleur Etat Signification | ||
| - éteinte Appareil désactivé ou | en mode veille | |
| vert allumée Appareil activé, tension sur la borne 30 dans la plage | autorisée | |
| rouge allumée Appareil activé, tension sur la borne 30 en dehors de la | plage autorisée ou appareil fonctionnant sur batterie | |
| vert clignotante Appareil en mode de diagnostic ou d’actualisation | ||
Tab. 1: LED ON
7.2 LED STATUS
La LED STATUS indique l'état de fonctionnement des connexions actives. Les différentes couleurs sont affichées selon la priorité, de 5 (basse) à 1 (haute). Si plusieurs états de fonctionnement sont parallèlement actifs, la LED STATUS affiche toujours la priorité la plus élevée.
| Couleur Etat | Connexion Priorité Signification | |||
| - éteinte -- Si la LED ON est aussi éteinte : | l'appareil est désactivé. | |||
| vert | allumée | Divers | - | Connecté au serveur mobileIoT d'ifm. |
| bleu allumée | Réseau mobile / | In-ternet | 1 | Non connecté au serveur IoT mobile d'ifm. |
| orange | allumée | CAN1 | 2 | Erreur de connexion. |
| rouge | allumée | CAN2 | 3 | Erreur de connexion. |
| magenta | allumée | GNSS | 4 | Pas de position / antenne détectée. |
| - | éteinte | Bluetooth / WiFi | 5 | Pas de connexion avec réseau / appareil. |
Tab. 2: LED STATUS
7.3 Affichage des modes de fonctionnement
| LED Etat Signification | ||
| ON Mise à jour de la configuration | tion réalisée via l'interface | CAN. |
| STATUS | ||
| ON Transfert de fichier actif en mode logging. Un message | CAN configuré est réceptionné (clignotement orange) et envoyé au portail de données mobileIoT d'ifm (clignote-ment bleu). | |
| STATUS | ||
| ON Transmission de données active en mode temps réel. | ||
| STATUS | ||
| ON Initialisation après la mise sous tension. | ||
| STATUS | ||
| ON Mise à jour de la configuration réalisée via le portail de | données mobileIoT d'ifm. | |
| STATUS | ||
| ON Mise à jour à distance du firmware réalisée via le portail | de données mobileIoT d'ifm. | |
| STATUS | ||
| ON Réinitialisation de l'appareil via l'interrupteur sur la prise | D-Sub (CAN1). | |
| STATUS | ||
| ON Réinitialisation (0x1011 0x64) de l'appareil via CAN | ||
| STATUS | ||
| ON Transmission de la position GPS et du message Keep | Alive. L'affichage varie selon l'intervalle d'interrogation configuré. | |
| STATUS | ||
Tab. 3: Modes de fonctionnement

8 Mise en service
Les composants suivants sont requis pour la configuration et la mise en service de l'appareil :
- Matériel
- CR3146
- antenne appropriée / antenne combinée pour navigation et téléphonie mobile
- câble de raccordement
- tension d'alimentation 8...32 V DC
- PC
- Pour une configuration supplémentaire (en option) :
interface CAN/PC (par ex. interface CAN/RS232-USB CANfox, référence : EC2112) et câble adaptateur pour CANfox (référence : EC2113)
Bus CAN résistances de terminaison (2 x 120 Ω)
- ifm mobileIoT Suite
Pour la connexion et l'activation de l'appareil, un accès à mobileIoT Suite est nécessaire. Vous obtiendrez les données d'accès auprès de votre interlocuteur local d'ifm. La documentation sur mobileIoT Suite et sur l'activation de l'appareil se trouve dans mobileIoT Suite.
Après l'activation de l'appareil, un contrat mobileIoT Data est conclu.
Après la réussite de l'enregistrement et de l'activation, l'appareil établit une connexion avec le portail de données mobileIoT d'ifm et permet un transfert bidirectionnel de données.
- Logiciel de configuration
- ifm Maintenance Tool
- Extension de configuration mobileIoT Device pour ifm Maintenance Tool
Les détails sur la configuration de l'appareil se trouvent dans la documentation d'ifm Maintenance Tool.
8.2 Raccorder l'appareil
▶ Equiper le bus CAN avec des résistances de terminaison de 120 Ω.
Raccorder l'interface CAN/PC à l'appareil à l'aide du câble adaptateur CAN et le raccorder au PC.
▶ Appliquer la tension d'alimentation.
Le tableau ci-après présente un aperçu de certains débits de transmission CAN en relation avec la longueur de câble :
| Débit de transmission CAN Longueur de câble bus CAN | |
| 800 kbits/s 50 m | |
| 500 kbits/s 100 m | |
| 250 kbits/s 250 m | |
| 125 kbits/s 500 m | |
| 50 kbits/s 1000 m |
Tab. 4: Débit de transmission CAN
8.3 Rétablissement des réglages usine (Factory-Reset)
Les variantes suivantes de réinitialisation peuvent être déclenchées via l'interface CAN :
| Fonction Index Sous-index | Description | ||
| Revert to Factory Configura-tion | 0x1011 0x01 La configuration de livraison est restaurée. Toutes les don-nées enregistrées sont supprimées. | ||
| Delete All Log Files 0x1011 0x62 | Toutes les données enregistrées sont supprimées. | ||
| Revert to Firmware Defaults Remote | 0x1011 0x63 La configuration standard du firmware actuel est rétablie.Toutes les données enregistrées sont supprimées.Les réglages CAN, WiFi, Bluetooth et réseau mobile ainsi que la configuration usine sont conservés. | ||
| Revert to Firmware Defaults plus Format Remote | 0x1011 0x64 La configuration par défaut du firmware actuel est restaurée.Toutes les données enregistrées et la configuration usine sont supprimées.Les réglages CAN, WiFi, Bluetooth et réseau mobile sont conservés. | ||
| Revert to Firmware Defaults Local | 0x1011 0x65 La configuration standard du firmware actuel est restaurée.Toutes les données et paramètres enregistrés seront suppri-més.La configuration usine est conservée. | ||
Pour réaliser le Factory Reset via l'interface CAN, un logiciel CANopen (par ex. Maintenance Tool) et une passerelle de communication (par ex. CANfox, réf. EC2112) sont nécessaires. Le logiciel CANopen écrit la valeur 0x64616F6C dans l'index objet CANopen 0x1011 pour déclencher la réinitialisation.
Dans l'exemple ci-après, le Factory Reset est représenté par le sous-index 0x65 (rétablissement de la configuration standard) :
▶ Raccorder le capteur à un PC Raccorder l'appareil (→ ☐ 20).
▶ Démarrer le logiciel CANopen.
▶ Avec le logiciel CANopen, écrire la valeur 0x64616F6C dans l'index objet 0x1011, sous-index 0x650.
Ecrire la valeur dans le répertoire objets de l'appareil.
▶ Attendre que l'appareil envoie le message de Boot Up de CANopen aux COB-ID 0x727 et 0x728.
Les réglages par défaut du firmware (objet 0x1011 0x65) sont restaurés sur l'appareil.
▷ La LED ON est allumée en vert.
▶ La LED STATUS est allumée en bleu.
▷ L'appareil a repris les valeurs par défaut du firmware (débit de transmission 250 kbit/s, Node ID 39, etc.).
9 Maintenance, entretien et élimination
L'appareil est sans maintenance.
En cas de mauvais fonctionnement de l'appareil prendre contact avec ifm.
▶ Ne pas ouvrir l'appareil. Aucune opération de maintenance ne peut être effectuée par l'utilisateur. L'appareil ne doit être réparé que par le fabricant.
Le nettoyage de l'appareil se fait au moyen d'un chiffon sec.
▶ Respecter la réglementation nationale en vigueur pour la destruction écologique de l'appareil.
Glossaire
Contrat de données mobileIoT
Contrat nécessaire pour la connexion mobile entre la passerelle mobileIoT et le serveur mobileIoT
Plate-forme mobileIoT
La solution complète de cloud inclut le backend (serveur mobileIoT), l'infrastructure, le frontend pour le portail d'administration des machines (mobileIoT Suite) et le portail de traitement des données (portail de données mobileIoT)
Portail de données mobileIoT
Portail qui traite / utilise les données
Serveur mobileIoT
Serveur cloud sur lequel les métriques sont stockées et avec lequel les passerelles mobileIoT établissent la connexion.
Suite mobileIoT
Portail d'administration des machines



- CONTENU
- 1 REMARQUES PRÉLIMINAIRES
- 1.1 SYMBOLES UTILISÉS
- 1.2 AVERTISSEMENTS UTILISÉS
- INFORMATION IMPORTANTE
- ATTENTION
- AVERTISSEMENT
- 2 CONSIGNES DE SÉCURITÉ
- 2.1 CYBERSÉCURITÉ
- 2.2 TRANSPORT AÉRIEN
- 3 USAGE PRÉVU
- 4 FONCTIONS
- 4.1 INTERFACE RÉSEAU MOBILE
- 4.2 CARTE ESIM
- 4.3 MODES DE CONNEXION
- 4.3.1 MODE TEMPS RÉEL
- 4.3.2 MODE CLOUD LOGGING
- 4.3.3 MODE IOT
- 4.4 FONCTIONS D'ENTRÉE/SORTIE
- 4.5 ACCÉLÉROMÈTRES ET CAPTEURS GYRO
- 4.6 GNSS (GÉOLOCALISATION ET NAVIGATION PAR SYSTÈME DE SATELLITES)
- 4.6.1 ENVOI AUTOMATIQUE DES DONNÉES GNSS À LA PLATE-FORME MOBILEIOT
- 4.7 GESTION DES ÉNERGIES
- 4.8 ETAT DE L'APPAREIL
- 4.9 MODE DE COMPATIBILITÉ
- 5 MONTAGE
- 5.1 MONTAGE DE L'ANTENNE
- 6 RACCORDEMENT ÉLECTRIQUE
- 6.1 CONNECTEURS
- 6.1.1 TENSION D'ALIMENTATION, INTERFACE CAN, ENTRÉES ET SORTIES
- 6.1.2 PRISE USB
- 7 ELÉMENTS DE VISUALISATION
- 7.2 LED STATUS
- 7.3 AFFICHAGE DES MODES DE FONCTIONNEMENT
- 8 MISE EN SERVICE
- 8.2 RACCORDER L'APPAREIL
- 8.3 RÉTABLISSEMENT DES RÉGLAGES USINE (FACTORY-RESET)
- 9 MAINTENANCE, ENTRETIEN ET ÉLIMINATION
- GLOSSAIRE
- CONTRAT DE DONNÉES MOBILEIOT
- PLATE-FORME MOBILEIOT
- PORTAIL DE DONNÉES MOBILEIOT
- SERVEUR MOBILEIOT
- SUITE MOBILEIOT
Marque : IFM
Modèle : CR3146
Catégorie : Passerelle industrielle