
VSE151 - Appareil de diagnostic industriel IFM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil VSE151 IFM au format PDF.

| Marque | IFM |
| Modèle | VSE151 |
| Type de produit | Appareil de diagnostic industriel |
| Alimentation | 24 V DC ±20 % |
| Fonctions principales | Surveillance vibratoire, diagnostic des vibrations, analyse de signaux dynamiques, surveillance de valeurs process |
| Entrées analogiques | 2 (IN1: 0/4…20 mA, IN2: 0/4…20 mA) |
| Entrées dynamiques | 4 (pour accéléromètres VSA, VSM, VSP ou IEPE) |
| Sorties | 1 sortie analogique/numérique (OU1) et 1 sortie numérique (OU2) |
| Interface de paramétrage | TCP/IP (via logiciel VES004) |
| Interface bus de terrain | EtherNet/IP avec 2 ports |
| Mémoire d'historique | Interne >850 000 valeurs, FIFO avec horloge temps réel |
| Compteurs | Jusqu'à 32 compteurs de durée de dépassement de seuils |
| Indicateurs LED | 4 LED pour capteurs, 1 LED système, LED NET et MOD pour EtherNet/IP |
| Protection | Classe de protection III (EN 61010), IP20 au niveau des bornes (montage en armoire IP54 requise) |
| Température de fonctionnement | Non spécifiée dans la notice (estimation : -25…+70 °C) |
| Montage | Sur rail DIN, vertical |
| Câblage capteur | Longueur max. 250 m, câble blindé requis |
| Entretien et nettoyage | Aucun entretien nécessaire ; nettoyer avec un chiffon en microfibre doux et sec après mise hors tension. |
| Réparabilité | Réparation uniquement par le fabricant |
| Sécurité | Réservé au personnel qualifié ; respecter les normes CEM ; protection contre les décharges électrostatiques (EN 61340-5-1) |
| Informations générales | Firmware mis à jour via VES004 ; paramétrage via VES004 et fichier EDS pour contrôleur EtherNet/IP ; homologations ODVA |
FOIRE AUX QUESTIONS - VSE151 IFM
Questions des utilisateurs sur VSE151 IFM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Appareil de diagnostic industriel au format PDF gratuitement ! Retrouvez votre notice VSE151 - IFM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil VSE151 de la marque IFM.
MODE D'EMPLOI VSE151 IFM
Notice d'utilisation
Electronique de diagnostic avec interface EtherNet/IP pour capteurs de vibrations
VSE151
Contenu
1 Consignes de sécurité.... 3
2 Remarques préliminaires 4
2.1 Symboles utilisés 4
2.2 Avertissements utilisés 4
3 Usage prévu 5
4 Fonctions de l'appareil 6
4.1 Description de la fonction 7
4.2 Firmware.... 7
5 Montage 9
5.1 Parasites....9
5.2 Câblage 9
5.3 Consignes de montage 9
6 Raccordement électrique 10
6.1 Technologie de raccordement.... 10
6.2 Schéma de branchement 10
6.3 Connexion Ethernet 11
7 Interface EtherNet/IP.... 12
7.1 Classes d'objet, messages, services EtherNet/IP 12
7.2 Modèle de données EtherNet/IP 12
7.3 Types de communication supportés 16
7.4 Classes d'objet CIP.... 17
7.4.1 Identity object (code de classe 0x01) 17
7.4.2 Message router object (code de classe 0x02)....18
7.4.3 Assembly object (code de classe 0x04) 18
7.4.4 Connection Manager object (code de classe 0x06)....18
7.4.5 Device Level ring object (code de classe 0x47).... 18
7.4.6 Quality of Service object (code de classe 0x48) 19
7.4.7 TCP/IP object (code de classe 0xF5) 20
7.4.8 Ethernet link object (code de classe 0xF6) 21
7.5 EtherNet/IP - Assembly instances.... 23
7.6 EtherNet/IP - types de connexion 24
7.6.1 EtherNet/IP - connexions définies dans le Standard EDS File. 24
7.7 Fonctions Ethernet/IP 24
7.7.1 Quality of Service (QoS) 25
7.7.2 Device Level Ring (DLR) 25
7.7.3 Address Conflict Detection (ACD) 25
7.8 Propriétés EtherNet/IP 25
7.9 Comportement en cas de modification du paramétrage 25
8 Etat de livraison 26
8.1 Etat de livraison général 26
8.2 Etat de livraison VSE151 - EtherNet/IP 26
8.3 Première mise en service 26
9 Paramétrage.... 27
10 Eléments de service et d'indication 28
10.1 LED pour capteurs et système 28
10.2 Etats de fonctionnement des LED d'état réseau (NET) et mode (MOD) 28
10.3 Test des LED après la mise sous tension de l'appareil 29
11 Maintenance, réparation et élimination 30
1 Consignes de sécurité
- L'appareil décrit ici est un composant à intégrer dans un système.
- L'installateur du système est responsable de la sécurité du système.
-
L'installateur du système est tenu d'effectuer une évaluation des risques et de rédiger, sur la base de cette dernière, une documentation conforme à toutes les exigences prescrites par la loi et par les normes et de la fournir à l'opérateur et à l'utilisateur du système. Cette documentation doit contenir toutes les informations et consignes de sécurité nécessaires à l'opérateur et à l'utilisateur et, le cas échéant, à tout personnel autorisé par l'installateur du système.
-
Lire ce document avant la mise en service du produit et le conserver pendant la durée d'utilisation du produit.
- Le produit doit être approprié pour les applications et conditions environnantes concernées sans aucune restriction d'utilisation.
- Utiliser le produit uniquement pour les applications pour lesquelles il a été prévu (→ Usage prévu).
- Un non-respect des consignes ou des données techniques peut provoquer des dommages matériels et/ou corporels.
- Le fabricant n'assume aucune responsabilité ni garantie pour les conséquences d'une mauvaise utilisation ou de modifications apportées au produit par l'utilisateur.
- Le montage, le raccordement électrique, la mise en service, le fonctionnement et l'entretien du produit doivent être effectués par du personnel qualifié et autorisé par le responsable de l'installation.
- Assurer une protection efficace des appareils et des câbles contre l'endommagement.
- La construction de l'appareil est conforme à la classe de protection III (EN61010) sauf l'espace autour des bornes. La protection contre le contact accidentel (protection contre le contact du doigt selon IP 20) pour le personnel lors de la manipulation de l'appareil n'est assurée qu'en cas de bornes complètement fixées. De ce fait, l'appareil doit toujours être installé dans une armoire électrique ayant une protection IP 54 minimum et dont l'ouverture n'est possible qu'à l'aide d'un outil.
- Pour les appareils DC l'alimentation 24 V DC externe doit être générée et fournie selon les critères de la basse tension de sécurité (TBTS) parce que cette tension est disponible sans plus de mesures de protection près des éléments de service et sur les bornes pour l'alimentation des capteurs raccordés.
2 Remarques préliminaires
Notice d'utilisation, données techniques, homologations, accessoires et informations supplémentaires via le code QR sur l'appareil / l'emballage ou sur www.ifm.com.
2.1 Symboles utilisés
√ Condition préalable
Action à effectuer
Réaction, résultat
[...] Désignation d'une touche, d'un bouton ou d'un affichage
→ Référence

Remarque importante
Le non-respect peut aboutir à des dysfonctionnements ou perturbations

Information
Remarque supplémentaire
2.2 Avertissements utilisés

INFORMATION IMPORTANTE
Avertissement de dommages matériels

ATTENTION
Avertissement de dommages corporels
▷ Danger de blessures légères, réversibles.

AVERTISSEMENT
Avertissement de dommages corporels graves.
▷ Danger de mort ou de graves blessures irréversibles.
3 Usage prévu
L'appareil est conçu pour la surveillance de valeurs process, la surveillance vibratoire, le diagnostic des vibrations et l'analyse de signaux dynamiques.
4 Fonctions de l'appareil
L'électronique de diagnostic est dotée de
• 2 entrées analogiques
• 4 entrées dynamiques
• 1 sortie analogique ou numérique
• 1 sortie numérique
• 1 interface de paramétrage TCP/IP
- 2 ports EtherNet/IP
Entrée IN1 : connexion pour un signal d'impulsion (HTL).
Entrée IN2 : connexion pour un signal de courant analogique (4 à 20 mA).
Utilisation des entrées analogiques
- en tant que trigger d'une mesure (par ex. vitesse de rotation pour le diagnostic des vibrations)
- en tant que trigger d'un compteur
• pour la surveillance de valeurs process
Des accéléromètres de type VSA, VSM, VSP ou des capteurs qui répondent au standard IEPE peuvent être raccordés aux entrées dynamiques.
Utilisation des entrées dynamiques
- Surveillance vibratoire
• Diagnostic des vibrations - Analyse d'autres signaux dynamiques
Les entrées dynamiques peuvent également être utilisées comme une entrée analogique avec un signal courant analogique (4 à 20 mA).
Les sorties physiques peuvent être configurées en tant que 2 x TOR (no/nf) ou 1 x analogique (0/4 à 20 mA) et 1 x TOR (no/nf).
Utilisation des sorties
- alarmes où le temps de réponse est important (par ex. protection de machines, temps de réponse jusqu'à 1 ms)
- déclenchement des alarmes
- fourniture des valeurs analogiques mesurées de l'électronique de diagnostic
L'interface de paramétrage (TCP/IP) est utilisée pour la communication entre l'électronique de diagnostic et un PC (par ex. logiciel de paramétrage VES004).
Utilisation de l'interface de paramétrage
- Paramétrage de l'appareil
- Surveillance de données en ligne
- Lecture de la mémoire de l'historique
- Mise à jour du firmware
Les ports EtherNet/IP sont utilisés pour la communication entre l'électronique de diagnostic et un contrôleur PROFINET (par exemple API).
Fonctions de l'interface EtherNet/IP
- transmission des valeurs mesurées actuelles, seuils et états d'alarme de l'électronique de diagnostic à l'API
- lecture des valeurs actuelles du compteur de l'électronique de diagnostique
- écriture de vitesses de rotation et d'autres valeurs de l'API à l'électronique de diagnostic
- écriture de seuils de l'API à l'électronique de diagnostic
4.1 Description de la fonction
L'appareil permet de réaliser
- surveillance vibratoire (vibration globale en vitesse selon ISO)
- maintenance préventive conditionnelle (au moyen des caractéristiques vibratoires)
- protection de machines/surveillance des process (surveillance des caractéristiques vibratoires en temps réel avec un temps de réponse rapide jusqu'à 1 ms)
realisiert werden.
- surveillance jusqu'à 24 objets (indicateurs pour différents éléments des machines, caractéristiques vibratoires ou valeurs process)
- valeurs dynamiques dans le domaine temporel (par ex. v-RMS selon ISO)
- valeurs dynamiques dans le domaine fréquentiel FFT ou HFFT (par ex. déséquilibre ou roulement)
• valeurs process (signaux analogiques)
L'appareil a une mémoire de l'historique interne (> 850 000 valeurs) avec horloge temps réel et intervalles de mémorisation flexibles par objet. La mémoire est conçue comme mémoire tampon FIFO.
Jusqu'à 32 compteurs peuvent être configurés pour mesurer la durée du dépassement de seuils et/ou le temps de fonctionnement.
Les signaux sur les entrées sont mesurés et surveillés en continu selon les paramètres réglés.
En cas d'objets dans la gamme de fréquence (déséquilibre, roulement, ...) la surveillance est effectuée en mode multiplex.
En cas d'objets dans le domaine temporel (v-RMS, a-RMS et a-Peak) toutes les 4 entrées dynamiques sont surveillées simultanément et sans interruption.
Pour la mise en alerte les deux sorties OU1/2 peuvent être utilisées. Les états de l'objet correspondants par capteur sont également indiqués via les 4 LED pour capteurs.
La LED pour le système indique l'état de fonctionnement de l'appareil.
Le paramétrage des tâches de surveillance et la mise en alerte sont effectués via le logiciel VES004. Le logiciel permet de visualiser et d'enregistrer les valeurs mesurées actuelles, les spectres et les signaux temporels (données en ligne).
L'interface Ethernet de l'appareil permet la mise en réseau afin de visualiser les données (valeurs mesurées, états d'alarme,...) dans d'autres systèmes (par ex. SCADA, MES,...).
Via les ports EtherNet/IP, les données (par exemple valeurs mesurées, états d'alarme, seuils, vitesses de rotation, valeurs actuelles du compteur, etc.) sont échangées entre l'électronique de diagnostic et le contrôleur EtherNet/IP (par exemple API).
4.2 Firmware
▶ Recommandation : Installer/utiliser le firmware actuel pour pouvoir utiliser toutes les fonctions de l'appareil.
Le firmware ne peut être mis à jour que via le logiciel VES004. Le firmware ne peut être mis à jour que pour l'ensemble de l'appareil.

Firmware et logiciel → zone de téléchargement www.ifm.com
Description de tous les paramètres possibles du firmware et leur signification → manuel du logiciel VES004.

Lors de la mise à jour du firmware, le paramétrage et l'historique sont effacés de l'appareil. Tous les compteurs sont remis à zéro.
Les réglages d'IP de l'interface de configuration et de bus de terrain sont conservés.
▶ Recommandation : Créer une sauvegarde des paramètres avant la mise à jour du firmware.
5 Montage
Monter l'appareil dans une armoire électrique ayant une protection IP 54 minimum. Cela assure une protection contre le contact non intentionnel avec des tensions dangereuses et les influences atmosphériques.
L'armoire électrique doit être installée selon les règlements locaux et nationaux.
▶ Fixer l'appareil verticalement sur un rail DIN.
Laisser suffisamment d'espace de sources thermiques avoisinantes et en bas et en haut de l'armoire électrique permettant ainsi une libre circulation de l'air pour éviter un échauffement excessif.
Eviter tout encrassement (conducteur ou autre) lors du montage et du câblage.
Lorsque vous préparez la pose des câbles les conditions locales et les règlements correspondants sont décisifs. Les câbles peuvent, par exemple, être posés dans des chemins de câble ou sur des passages de câble.
Une distance minimale du câblage aux sources parasites (par exemple machines, dispositifs de soudage, câbles de puissance) est définie dans les règlements et normes en vigueur. Tenir compte de ces règlements et normes et les respecter pour la conception et l'installation d'un système.
Protéger les câbles bus contre les parasites électriques et magnétiques et toute sollicitation mécanique.
Respecter les règles pour la compatibilité électromagnétique (CEM) afin de réduire les risques mécaniques et les parasites.
5.1 Parasites
▶ Ne pas poser les câbles de signalisation en parallèle aux câbles d'alimentation.
Le cas échéant, utiliser des segments de séparation métalliques entre les câbles d'alimentation et les câbles de signalisation.
Lors de l'installation, serrer fermement tous les mécanismes de verrouillage des connecteurs (vis, écrous) afin de garantir un contact optimal du blindage avec la terre. Avant la première mise en service, la continuité électrique de faible résistance de la connexion à la terre ou du blindage des câbles doit être vérifiée.
5.2 Câblage
Câbles réseau/bus
▶ Poser les câbles réseau/bus dans des chemins de câble ou dans des faisceaux de câble séparés.
▶ Si possible, ne pas poser les câbles réseau/bus à côté des câbles de puissance.
▶ Respecter une distance minimale de 10 cm entre les câbles réseau/bus et les câbles de puissance.
5.3 Consignes de montage
Décharge électrostatique
L'appareil contient des composants qui peuvent être endommagés ou détruits par une décharge électrostatique.
Lors de l'utilisation de l'appareil prendre les mesures de sécurité nécessaires contre une décharge électrostatique selon EN 61340-5-1 et CEI 61340-5-1.
N'utiliser l'appareil que sur un rail relié à la terre afin de réduire des charges électrostatiques.
6 Raccordement électrique
Les règlements nationaux et internationaux relatifs à l'installation de matériel électrique doivent être respectés. Eviter le contact avec des tensions dangereuses.
▶ Mettre l'installation hors tension
Raccorder l'appareil, raccordement par bornier débrochable (prémonté).
Pour éviter un mauvais fonctionnement dû aux tensions parasites, le câble du capteur et le câble de charge doivent être installés séparément. Longueur maximale du câble de la sonde : 250 m.
▶ Utiliser un câble blindé pour le capteur.
Les sorties sont protégées contre les courts-circuits et peuvent être programmées soit en NF soit en NO.
De plus, un signal analogique peut être fourni à la sortie [OU 1] (0/4 à 20 mA) (par ex. valeurs d'accélération).
Lors du raccordement de l'appareil respecter les critères TBTS (très basse tension de sécurité, circuit séparé galvaniquement d'autres circuits, non relié à la terre) afin d'éviter des tensions dangereuses sur l'appareil ou le transfert de celles-ci dans l'appareil.
Si le circuit DC doit être mis à la terre (par ex. à cause de règlements nationaux), les critères TBTP doivent être respectés (très basse tension de sécurité, circuit séparé galvaniquement d'autres circuits).
Le capteur et l'alimentation de l'électronique de diagnostic ne sont pas isolés électriquement.
6.1 Technologie de raccordement
INFORMATION IMPORTANTE
Bornier non doté de connecteurs.
▷ Indice de protection IP 20 non garanti.
▶ Doter les bornes non utilisées de connecteurs.
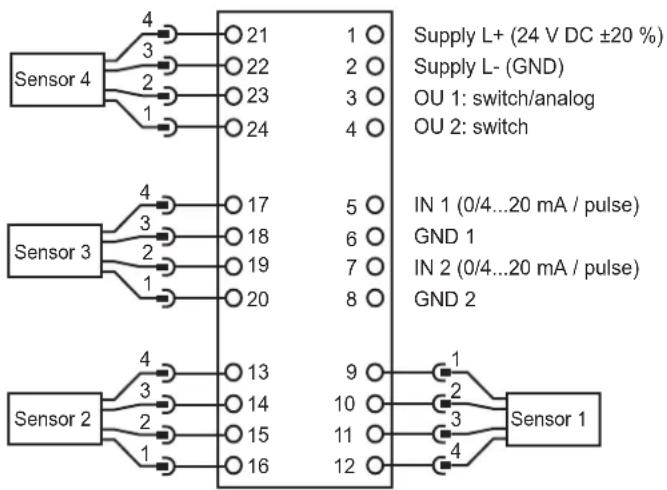
6.2 Schéma de branchement
flowchart
graph TD
A["Sensor 4"] -->|4| B["21"]
A -->|3| C["22"]
A -->|2| D["23"]
A -->|1| E["24"]
F["Sensor 3"] -->|4| G["17"]
F -->|3| H["18"]
F -->|2| I["19"]
F -->|1| J["20"]
K["Sensor 2"] -->|4| L["13"]
K -->|3| M["14"]
K -->|2| N["15"]
K -->|1| O["16"]
P["Sensor 1"] -->|1| Q["10"]
P -->|2| R["11"]
P -->|3| S["12"]
T["Supply L+ (24 V DC ±20 %)"] --> U["1"]
T --> V["2"]
T --> W["3"]
X["Supply L- (GND)"] --> Y["2"]
X --> Z["3"]
X --> AA["4"]
AB["OU 1: switch/analog"] --> AC["5"]
AD["OU 2: switch"] --> AE["6"]
AF["IN 1 (0/4...20 mA / pulse)"] --> AG["7"]
AH["GND 1"] --> AI["8"]
AJ["IN 2 (0/4...20 mA / pulse)"] --> AK["9"]
AL["GND 2"] --> AM["10"]
AN["Sensor 1"] --> AO["11"]
AN --> AP["12"]
Branchement des capteurs 1 à 4 (S1 à S4) selon l'appareil raccordé
| Capteur VSA IEPE/VSP 0 à 20 mA | |||||
| S1 S2 S3 S4 | |||||
| 09 16 20 | 24 BN : L+ (+ | 9 V) non raccordées (n.c.) non raccordées | (n.c.) | ||
| 10 15 19 | 23 WH : Signal IEPE + Signal | ||||
| 11 14 18 | 22 BU : GND | IEPE - GND | |||
| 12 13 17 | 21 BK : Test | non raccordées (n.c.) | non raccordées | (n.c.) | |
| Entrée capteur | Utilisation | ||
| S1...S4 | VSM | ||
| 9,16,20,24 | non raccordées (n.c.) | ||
| 10,15,19,23 | IEPE x | IEPE y | IEPE z |
| 11,14,18,22 | IEPE - | ||
| 12,13,17,21 | non raccordées (n.c.) | Test * | |
* L'autotest ne s'effectue que sur l'axe Z.
Raccorder les deux câbles à la même borne d'un appareil d'évaluation approprié (par ex. VSExxx).

Borne 1 Supply L+ Si une entrée IEPE 24 V + 20 % est utilisée (Integrated Electronics Piezo Electric)

La masse GND de l'alimentation DC est directement raccordée à la masse GND de l'alimentation capteurs. De ce fait, les critères TBTS pour l'alimentation DC doivent être respectés.
Protéger l'alimentation en tension en externe (max. 2 A).
6.3 Connexion Ethernet
La prise RJ45 sert de connexion sur l'Ethernet.
7 Interface EtherNet/IP
7.1 Classes d'objet, messages, services EtherNet/IP
L'appareil supporte le Common Industrial Protocol (CIP) selon la spécification ODVA V3.20. EtherNet/IP™ utilise le Common Industrial Protocol en tant qu'Application Layer. Pour le Layer Network et Transport, IP et TCP ou UDP sont utilisés. CIP et EtherNet/IP™ sont standardisés par ODVA pour tous les fabricants. Le Common Industrial Protocol est un protocole orienté vers l'objet qui offre deux types de communication entre l'automate et les appareils.
7.2 Modèle de données EtherNet/IP
| Entrée (API) | ||||
| Source Type de données / | Ordre des octets/Unité | Taille des données | Utilisation | |
| Entrées dynamiques | ||||
| • Real ou DINT avec facteur• Big ou little endian | 4 octets Valeur | du signal raccordé à l'entrée dynamique (capteur 1 à 4), si elle a été paramétrée comme « entrée à courant continu ». | ||
| Entrées analogiques | ||||
| • Real ou DINT avec facteur• Big ou little endian | 4 octets Valeur | du signal raccordé à l'entrée analogique (IN1, IN2) | ||
| Entrées externes | ||||
| • Real ou DINT avec facteur• Big ou little endian | 4 octets Valeur | de l'entrée externe (Extern_xx) | ||
| Objets (domaine temporel, gamme de fréquence, surveillance de valeurs trop élevées/trop basses) | ||||
| Valeur • Real ou DINT avec facteur• Big ou little endian• Avec unité affichée (unité SI par défaut) | 4 octets Valeur | d'objet avec unité affichée | ||
| Etat Octet 1 octet Statut/état actuel de l'objet | 0 : OK1 : Pré-alarme2 : Alarme principale3 : Inactif4 : Défaut | |||
| Défaut Word 2 octets Codes d'erreur pour la des- | cription du défaut dans le statut de l'objet0x0000 :Aucun défaut0x0001 :Erreur interne0x0002 :Erreur de calcul0x0004 :Vitesse de rotation hors de la plage de fonctionnement0x0008 :Vitesse de rotation non stable0x0010 :Valeur d'apprentissage non valable0x0020 :Valeur de référence non valable (1)0x0040 :Valeur de référence non valable (2)0x0100 :Désactivé par pondération du signal0x0200 : Valeur de référence hors de la plage de fonctionnement0x1000 :Alarme alerte0x3000 :Pré-alarme et alarme principale.0x8000 :Objet inactif (à cause de la variante) | |||
| Vitesse de rotation • Real ou DINT avec facteur• Big ou little endian | 4 octets Trigger - vitesse de rotation | |||
| Valeur de référence • Real ou DINT avec facteur• Big ou little endian | 4 octets Trigger - valeur de référence | |||
| Pré-alarme • Real ou DINT avec facteur• Big ou little endian | 4 octets Seuil - pré-alarme (relative) | |||
| Alarme principale • Real ou DINT avec facteur• Big ou little endian | 4 octets Seuil - alarme principale (relative) | |||
| Valeur d'apprentissage • Real ou DINT avec facteur• Big ou little endian• Avec unité affichée (unité SI par défaut) | 4 octets Seuil - valeur d'apprentis-sage avec unité affichée pour les objets temporels et de fréquenceRemarque :Ce paramètre n'est pas utilisé pour les objets de surveillance de valeurs trop élevées/trop basses | |||
| Compteur | ||||
| • DINT• Big ou little endian | 4 octets Valeur du compteur (en secondes) | |||
| Historique | ||||
| Valeur historique • Real ou | DINT avec facteur• Big ou little endian• Avec unité affichée (unité SI par défaut) | 4 octets Entrée d'historique actuelle de l'objet avec unité affi-chée | ||
| Valeur moyenne de l'his-torique | • Real ou DINT avec facteur• Big ou little endian• Avec unité affichée (unité SI par défaut) | 4 octets Valeur moyenne de l'entrée d'historique actuelle de l'ob-jet avec unité affichée | ||
| Vitesse de rotation de l'historique | • Real ou DINT avec facteur• Big ou little endian | 4 octets Trigger -vitesse de rotation de l'entrée d'historique ac-tuelle de l'objet | ||
| Valeur de référence de l'historique | • Real ou DINT avec facteur• Big ou little endian | 4 octets Trigger - valeur de réfé-rence de l'entrée d'histo-rique actuelle de l'objet | ||
| Compteur d'entrée des valeurs de l'historique | • DINT• Big ou little endian | 4 octets Compteur des entrées d'historique reçues de l'obj-et | ||
| Alarmes (OUT1 / OUT2) | ||||
| • Float ou DINT avec facteur• Big ou little endian | 4 octets Paramétrage comme sortie alarme analogique : Valeur de la sortie alarme | |||
| Octet 1 octet Paramétrage comme sortie | alarme TOR :Etat de l'alarmeConfiguration comme nor-malement ferméPas d'alarme : 1Alarme : 0Configuration comme nor-malement ouvertPas d'alarme : 0Alarme : 1 | |||
| Octet 1 octet Etat de l'alarme | Configuration comme nor-malement ferméPas d'alarme : 1Alarme : 0Configuration comme nor-malement ouvertPas d'alarme : 0Alarme : 1 | |||
| Alarmes (IO1 - IO8) | ||||
| Octet 1 octet Etat de l'alarme | Configuration comme nor-malement ferméPas d'alarme : 1Alarme : 0Configuration comme nor-malement ouvertPas d'alarme : 0Alarme : 1 | |||
| Général | ||||
| Variante Octet 1 octet Valeur de la variante active | (0 à 31) | |||
| Mode système Octet 1 octet Mode système actuel de | l'appareil0x00 :Reserved0x01 :Supervise (surveillance nor-male)0x02 :Setup (paramétrage)0x03 :Measure (spectre, données brutes)0x04 :Startup (le système dé-marre)0x05 :Auto-test (auto-test actif) | |||
| RésultatAuto-test | Octet 1 octet Schéma de bits | Bit1 - capteur 1Bit2 - capteur 2Bit3 - capteur 3Bit4 - capteur 4Remarque concernant l'évaluation0x00 :Capteurs OK0x01 :Capteur 1 échec auto-test0x02 :Capteur 2 échec auto-test0x04 :Capteur 3 échec auto-test0x08 :Capteur 4 échec auto-test0x0F :Capteurs 1 à 4 échec auto-test | ||
| Degré de remplissageactuel de la queue | Octet 1 octet Degré de remplissage | ac- | tuel de la communication in-terne de l'appareil | |
| Compteur de déborde-ment de la queue | • DINT• Big oulittle endian | 4 octets Compteur de débordementde la communication interne de l'appareil | ||
| Compteur d'erreurs checksum | • DINT• Big oulittle endian | 4 octets Compteur des erreurs desomme de contrôle de lacommunication interne del'appareil | ||
| Temps de rappel DINT 4 octets Lire l'heure de l'appareil | (UTC)Appareils PROFINET :U32 : 0x00ssmmhhAppareils EtherNetIP :U32 : 0x00hhmmssAppareils EtherCAT : U32 :0x00hhmmssAppareils MODBUS : U32 :0x00hhmmss | |||
| Espace réservé | ||||
| Octet xx octet Espace réservé pour la | transmission du bus de ter-rain | |||
| Sortie (API) | ||||
| Source Type de données / | Ordre des octets/Unité | Taille des données | Représentation sur le bus de terrain | |
| Entrées externes | ||||
| • Real ou DINT avec facteur• Big ou little endian | 4 octets Régler la valeur de l'entrée externe(Extern_xx) | |||
| Objets (domaine temporel, gamme de fréquence) | ||||
| Valeur d'apprentissage • Real ou DINT avec facteur• Big ou little endian• Avec unité affichée (unité SI par défaut) | 4 octets Seuil | - valeur d'apprentissage avec unité affichée pour les objets temporels et de fréquence, pour adapter les limites de dommages | ||
| Général | ||||
| Variante Octet 1 octet Régler la variante actuelle | (0 à 31) | |||
| Effectuer un auto-test Octet 1 octet Effectuer l'auto-test | RemarqueUn changement de valeur de 0 à ≠ 0 démarre l'auto-testAprès la finalisation de l'auto-test, l'appareil passe automatiquement au mode système « Surveillance » | |||
| Régler le temps DINT 4 octets Régler l'heure (toujours au | format UTC)Appareils PROFINET : U32 : 0x00ssmmhhAppareils EtherNet/IP : U32 : 0x00hhmmssAppareils EtherCAT : U32 : 0x00hhmmssAppareils MODBUS : U32 : 0x00hhmmss | |||
| Régler l'ID du compteur | Octet 1 octet Régler l'ID du compteur (1 à | 32) | ||
| Régler la valeur du compteur | • DINT• Big ou little endian | 4 octets Régler la valeur du compteur sélectionné avec l'ID (en secondes) | ||
| Espace réservé | ||||
| Octet xx octet Espace réservé pour la | transmission du bus de terrain | |||
| Demande Paramètre | |
| Explicit messaging Basé sur le principe request/response | (par ex. utilisation pour la configuration de l'appareil)Message Protocol : TCP |
| Implicit messaging | Basé sur le modèle producer/consumer(par ex. envoi cyclique de données I/O)Message Protocol : UDP |
7.4 Classes d'objet CIP
L'appareil supporte les classes d'objet CIP suivantes
| Class ID Objet | |
| 0x01 Identity | |
| 0x02 Message Router | |
| 0x04 Assembly | |
| 0x06 Connection Manager | |
| 0x47 Device Level Ring (DLR) | |
| 0x48 Quality of Service (QoS) | |
| 0xF5 TCP/IP Interface | |
| 0xF6 Ethernet Link |
7.4.1 Identity object (code de classe 0x01)
L'identity object est nécessité par tous les participants et fournit l'ID du participant et des informations générales sur le participant.
Attributs de la classe
| Attribut Nom Accès | Type de données | Valeur | |
| 1 Revision Get UINT 1 | |||
| 2 Max instance Get UINT 1 |
Attributs de l'instance
| Attribut Nom Accès | Type de données | Valeur / description | ||
| 1 Vendor ID Get UINT 322 (déc) | ||||
| 2 Product type Get UINT 43 | (Generic Device, keyable) | |||
| 3 Product Code Get UINT 151 | ||||
| 4 Revision | - Major Revision- Minor Revision | Get STRUCT of: | -USINT-USINT | par ex.11 |
| 5 Status Get Word Bit 0 - n.a. (Default Value = 0) | Bit 1 - n.a. (Default Value = 0)Bit 2 - n.a. (Default Value = 0)Bit 3 - n.a. (Default Value = 0)Bit 4...7- n.a. (Default Value = 0)Bit 8 - n.a. (Default Value = 0)Bit 9 - n.a. (Default Value = 0)Bit 10 - Major recoverable fault (Address conflict detection)Bit 11 - n.a. (Default Value = 0)Bit 12...15 n.a. (Default Value = 0) | |||
| 6 Serial number Get UDINT Défini dans le processus de fabrication | ||||
| 7 Product name Get STRING VSE151 | ||||
Services communs
| Code de service Classe Instance Nom de service | |||
| 0x01 oui oui Get_Attribute_All | |||
| 0x05 non oui Reset | |||
| 0x0E oui oui Get_Attribute_Single |
7.4.2 Message router object (code de classe 0x02)
Le Message router object met à disposition un accès avec lequel un client EtherNet/IP peut adresser un service à chaque classe d'objet ou instance. L'accès aux attributs de l'objet n'est pas supporté.
7.4.3 Assembly object (code de classe 0x04)
L'assembly object rassemble les attributs de plusieurs objets afin de permettre la transmission ou la réception de données de chaque objet via une connexion.
Attributs de la classe
| Attribut Nom Accès Type de données Valeur | |||
| 1 Revision Get UINT 2 | |||
| 2 Max instance | Get UINT 255 |
Attributs de l'instance
| Attribut Nom Accès Type de données Valeur | |||
| 3 Data | Get Array of Byte | Current Process data | of the correspondent Assembly instance |
Services communs
| Code de service Classe Instance Nom de service | ||
| 0x0E oui oui Get_Attribute_Single |
7.4.4 Connection Manager object (code de classe 0x06)
Le Connection Manager object trie et gère les ressources internes qui sont utilisées pour les E/S et les connexions « explicit messaging ». Forward Open/Close est supporté. L'accès aux attributs de l'objet n'est pas supporté.
7.4.5 Device Level ring object (code de classe 0x47)
Le Device Level ring object (DLR) constitue l'interface pour la configuration et les informations d'état du protocole DLR.
Attributs de la classe
| Attribut | Nom | Accès | Type de données | Valeur |
| 1 | Revision | Get | UINT 3 |
Attributs de l'instance
| Code de service Classe Instance | Nom de service | ||
| 0x01 oui oui Get_Attribute_All | |||
| 0x0E | oui oui Set_Attribute_Single |
7.4.6 Quality of Service object (code de classe 0x48)
Quality of Service (QoS) influence les flux de données pendant la transmission et les traite individuellement, normalement en leur donnant la priorité. QoS peut être utilisé pour garantir une largeur de bande pour la transmission des flux de données individuels. L'appareil utilise QoS en combinaison avec la priorisation.
Attributs de la classe
| Attribut Nom | Accès | Type de données | Valeur | |
| 1 Revision | Get UINT | 1 |
Remarque : DSCP - Differentiate Service Code Points
Attributs de l'instance
| Attribut Nom | Accès | Type de données | Valeur / description | |
| 4 | DSCP urgent | Get, Set | USINT | DSCP value for CIP transport class 0/1 Urgent priority message (default 55) |
| 5 | DSCP scheduled | Get, Set | USINT | DSCP value for CIP transport class 0/1 Scheduled priority message (default 47) |
| 6 | DSCP high | Get, Set | USINT | DSCP value for CIP transport class 0/1 High priority message (default 43) |
| 7 | DSCP low | Get, Set | USINT | DSCP value for CIP transport class 0/1 Low priority message (default 31) |
| Attribut Nom Accès | Type de données | Valeur / description | ||
| 8 DSCP explicit | Get, Set USINT DSCP value for CIP transport | class 0/1 Low | priority message (default 31) | |
Services communs
| Code de service Classe Instance Nom de service | |||
| 0x0E oui oui Get_Attribute_Single | |||
| 0x10 non oui Set_Attribute_Single |
7.4.7 TCP/IP object (code de classe 0xF5)
Le TCP/IP Interface object permet de configurer l'interface physique du réseau. Ceci inclut par exemple l'adresse IP, le masque de sous-réseau et l'adresse passerelle.
Attributs de la classe
| Attribut Nom | Accès Type de données | Valeur | ||
| 1 Revision | Get | UINT | 4 |
Attributs de l'instance
| Code de service Classe | Instance | Nom de service |
| 0x01 | oui | oui Get_Attribute_All |
| 0x0E | oui | oui Get_Attribute_Single |
| 0x10 | non | oui Set_Attribute_Single |
7.4.8 Ethernet link object (code de classe 0xF6)
L'Ethernet link object contient des informations d'état spécifiques de l'interface Ethernet (IEEE 802.3).
Attributs de la classe
| Attribut Nom | Accès | Type de données | Valeur | |
| 1 Revision Get | UINT 4 |
| Attribut Nom Accès | Type de données | Valeur | |
| 2 Max instance Get UINT 2 | |||
| 3 Number of instances Get UINT 2 |
Attributs de l'instance
| Code de service Classe Instance Nom de service | ||
| 0x0E oui oui Get_Attribute_Single | ||
| 0x10 non oui Set_Attribute_Single |
L'appareil dispose de plusieurs instances assembly pour les données process entrée et sortie dont chacune a une longueur différente.
Données process entrée
| Classe d'objet Assembly | instance no. | Octet | Description |
| 0x04 | 100 | 0 à 15 Input Assembly 16 Bytes | |
| 0x04 | 101 | 0 à 31 Input Assembly 32 Bytes | |
| 0x04 | 102 | 0 à 63 Input Assembly 64 Bytes | |
| 0x04 | 103 | 0 à 127 Input Assembly 128 Bytes | |
| 0x04 | 104 | 0 à 254 Input Assembly 255 Bytes_A | |
| 0x04 | 105 | 0 à 254 Input Assembly 255 Bytes_B | |
| 0x04 | 106 | 0 à 254 Input Assembly 255 Bytes_C | |
| 0x04 | 107 | 0 à 254 Input Assembly 255 Bytes_D |
Données process sortie
| Classe d'objet Assembly | instance no. | Octet | Description |
| 0x04 | 150 | 0 à 9Output Assembly 16Bytes | |
| 0x04 | 151 | 0 à 31Output Assembly 32Bytes | |
| 0x04 | 152 | 0 à 63Output Assembly 64Bytes | |
| 0x04 | 153 | 0 à 127Output Assembly 128Bytes | |
| 0x04 | 154 | 0 à 254Output Assembly 255Bytes |
7.6 EtherNet/IP - types de connexion
EtherNet/IP – Types de connexion
| Type de connexion Supporté par VSE151 Description | |
| Exclusive Owner oui Les connexions peuvent être configurées en tant que connexion point-à-point ou multicast par le scanner en direction Target to Originator. | |
| Input Only oui Les connexions peuvent être configurées en tant que connexion point-à-point ou multicast par le scanner en direction Target to Originator. | |
| Listen Only oui Les connexions ne peuvent être utilisées qu'en multicast. | |
7.6.1 EtherNet/IP - connexions définies dans le Standard EDS File
EtherNet/IP – Types de connexion
| Connexion n° Type | de connexion Entrée | Connexion n° | Type de connexion | |
| 1 Exclusive Owner | 100 150 Connexion avec | 16 Byte Input | et 16 Byte Output | |
| 2 Exclusive Owner | 101 151 Connexion avec | données entrée | 32 octets | et données sorties 32 octets |
| 3 Exclusive Owner | 102 152 Connexion avec | données entrée | 64 octets | et données sorties 64 octets |
| 4 Exclusive Owner | 103 153 Connexion avec | données entrée | 128 octets | et données sorties 128 octets |
| 5 Exclusive Owner | 104 154 Connexion avec | données entrée | 255 octets | et données sorties 255 octets |
| 6 Input Only | 100 - | Connexion avec 16 Byte Input | ||
| 7 Input Only | 101 - | Connexion avec 32 Byte Input | ||
| 8 Input Only | 102 - | Connexion avec 64 Byte Input | ||
| 9 Input Only | 103 - | Connexion avec 128 Byte Input | ||
| 10 | Input Only | 104 | - | Connexion avec 255 Byte Input |
| 11 | Input Only | 105 | - | Connexion avec 255 Byte Input |
| 12 | Input Only | 106 | - | Connexion avec 255 Byte Input |
| 13 | Input Only | 107 | - | Connexion avec 255 Byte Input |
| 14 | Listen Only 100 - | Connexion avec 16 Byte Input | ||
| 15 | Listen Only 101 - | Connexion avec 32 Byte Input | ||
| 16 | Listen Only 102 - | Connexion avec 64 Byte Input | ||
| 17 | Listen Only 103 - | Connexion avec 128 Byte Input | ||
| 18 | Listen Only 104 - | Connexion avec 255 Byte Input | ||
| 19 | Listen Only 105 - | Connexion avec 255 Byte Input | ||
| 20 | Listen Only 106 - | Connexion avec 255 Byte Input | ||
| 21 | Listen Only 107 - | Connexion avec 255 Byte Input | ||
7.7 Fonctions Ethernet/IP
Les fonctions EtherNet/IP ci-après sont supportées. Les autres fonctions n'étant pas indiquées ici NE SONT explicitement PAS supportées.
| Demande Paramètre | |
| Quality of Service oui | |
| Description Quality of Service | (QoS) influence les flux de données pendant la transmission et les traite individuellement, normalement en leur donnant la priorité. QoS peut être utilisé pour garantir une largeur de bande pour la transmission des flux de données individuels. L'appareil utilise QoS en combinaison avec la priorisation. |
7.7.2 Device Level Ring (DLR)
| Demande Paramètre | |
| Device Level Ring oui | |
| Description L'appareil supporte le | développement d'une topologie à 1 tampon en utilisant le protocole DLR. |
7.7.3 Address Conflict Detection (ACD)
| Demande Paramètre | |
| Address Conflict Detection (ACD) | oui |
| Description L'appareil supporte la | reconnaissance de conflits d'adresses IPv4. |
7.8 Propriétés EtherNet/IP
| Demande Paramètre | |
| Type d'appareil Adaptateur EtherNet/IP | |
| Débit de transmission 10/100 MBit/s (avec autonégociation) | |
| Temps de cycle minimum 5ms (RPI) | |
| Protocoles EtherNet/IP ACD, DLR, IGMP v2 | |
| Protocoles supplémentaires DHCP | |
| Format de transmission EtherNet/IP Little Endian | |
| Connexions I/O max. 10 (1 Assembly Input et Output par connexion) | |
| Taille de donnée max. 1024 octets (255 octets max. par Assembly) | |
| Fichier de description de l'appareil | ifm_VSE151.eds |
| Spécification | CIP Edition 3.20EIP Adaption of CIP 1.21 |
7.9 Comportement en cas de modification du paramétrage
L'écriture du paramétrage (même sans modification) ou une commutation du mode du système de l'électronique de diagnostic sur « setup » déclenchent une initialisation (redémarrage) du module bus de terrain.
La connexion de l'API (maître / contrôleur / superviseur) à l'électronique de diagnostic est interrompue. La programmation de l'API définit la manière d'agir en cas de perte de connexion. Le comportement des LED est décrit dans le chapitre « Eléments de service et d'indication ».
8 Etat de livraison
8.1 Etat de livraison général
| Demande Paramètre | |
| Paramétrage aucun | |
| Host Name aucun nom donné | |
| Adresse IP 192.168.0.1 | |
| Port TCP/IP 3321 | |
| Masque de sous-réseau 255.255.255.0 | |
| Default Gateway 192.168.0.244 | |
| Adresse MAC défini dans le processus de fabrication |
8.2 Etat de livraison VSE151 - EtherNet/IP
| Demande Paramètre | |
| Adresse IP aucune adresse IP affectée | |
| Masque de sous-réseau aucun masque de sous-réseau affecté | |
| Default Gateway aucune adresse passerelle par défaut affectée | |
| DHCP activé | |
| Adresses MAC définie dans le processus de fabrication |
8.3 Première mise en service
Affectation de l'adresse IP via le serveur DHCP
Aucune adresse IP valable n'est affectée. Donc, la communication IP n'est pas possible. L'appareil transmet des DHCP requêtes en permanence.
Deux cas sont possibles :
- Le serveur DHCP fournit une nouvelle adresse
• L'appareil adopte les nouveaux paramètres IP.
- Le serveur DHCP ne répond pas
- L'appareil transmet DHCP-Discover en permanence jusqu'à ce que des paramètres IP soient reçus.
Affectation de l'adresse IP via l'outil de paramétrage VES004
Une adresse IP statique peut être affectée à l'appareil via l'outil de paramétrage VES004.
9 Paramétrage
Le paramétrage de l'appareil s'effectue uniquement via le logiciel VES004. Tous les paramètres de l'application configurée sont groupés dans un paramétrage et transmis à l'appareil.
Vous trouverez une description précise de tous les paramètres et de toutes les possibilités de configuration dans le manuel du logiciel VES004.
Le paramétrage de l'appareil EtherNet/IP s'effectue via l'outil de configuration du contrôleur EtherNet/IP. Pour cela, intégrer le fichier EDS de l'appareil dans l'outil logiciel correspondant.
10 Eléments de service et d'indication
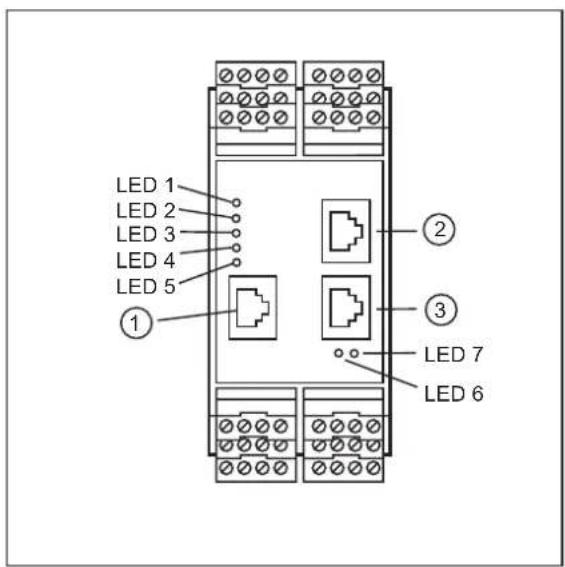
1 : Config : TCP/IP, adresse IP 192.168.0.1 (réglage usine), interface de paramétrage et de données (par ex. VES004)
2: IE 1: EtherNet/IP
3: IE 2: EtherNet/IP
10.1 LED pour capteurs et système
| LED 1 pour capteur 1... LED 4 pour capteur 4 | |
| verte allumée Capteur raccordé et paramétré | |
| verte clignote Capteur est paramétré | Type VSA : Capteur non raccordé ou défectueuxType IEPE : Capteur non raccordé |
| jaune allumée Alarme alerte | |
| rouge allumée Alarme défaut | |
| verte/jaune clignotent en alternance Opération Teach active | |
| jaune/rouge clignotent en alternance Aucun paramétrage chargé | |
| LED 5 pour le système | |
| verte allumée Système OK, | surveillance en cours |
| jaune allumée Système OK, | aucune surveillance en raison du paramétrage, autotest ou mode FFT |
| verte/jaune clignotent en alternance Surveillance | pas possible,paramétrage incorrect |
| verte/rouge clignotent en alternance Défaut du système | EEPROM défectueuse, autres étatsDéfaut dans le système, appareil limité dans son fonctionnement |
10.2 Etats de fonctionnement des LED d'état réseau (NET) et mode (MOD)
| Description Signification Couleur Etat Description | |||
| NET (LED 6) Etat du réseau Non utilisé éteinte L'appareil est désactivé | (aucune alimentation en tension) ou aucune adresse IP | ||
| Description Signification | Couleur Etat Description | |||
| NET (LED 6) Etat du réseau verte clignote | (env. 2 Hz) | Une adresse IP est configurée, il n'existe pas encore de connexion CIP et la connexion owner exclusive n'a pas de timeout | ||
| verte allumée | II y a au moins une connexion CIP et la connexion owner exclusive n'a pas de timeout | |||
| rouge allumée | ACD a détecte un conflit d'adresse IP | |||
| rouge clignote | (env. 2 Hz) | Connection Timeout. II y a un timeout d'une connexion owner exclusive | ||
| MOD (LED 7) Etat Ether | Net/IP Non utilisé éteinte | L'appareil est désactivé | (aucune alimentation en tension) | |
| verte allumée | L'appareil fonctionne sans erreur (fonctionnement normal) | |||
| verte clignote | (env. 2 Hz) | L'appareil n'est pas configuré | ||
| rouge allumée | II y a une erreur non corrigible | |||
| rouge clignote | II y a une erreur corrigible | |||
| orange clignote | L'image du firm ware est chargée dans la RAM | |||
| orange allumée | L'image du firm ware est écrite dans la mémoire flash | |||
| verte clignote | (env. 2 Hz) | L'image du firmware a été écrite correctement dans la mémoire flash | ||
| orange clignote | (env. 2 Hz) | Le paramétrage a été transmis avec succès | ||
10.3 Test des LED après la mise sous tension de l'appareil
Pour les LED réseau / état de mode, la séquence de commutation doit se produire après la mise sous tension de l'appareil pour tester les LED.
| Séquence de commutation NET | (LED 6) | MOD (LED 7) |
| 1 | orange pour env. 3 s | orange pour env. 3 s |
| 2 | éteinte | éteinte |
| 3 | éteinte | verte pour env. 0,25 s |
| 4 | éteinte | rouge pour env. 0,25 s |
| 5 | éteinte | orange pour env. 0,25 s |
| 6 | éteinte | éteinte |
| 7 | verte pour env. 0,25 s | éteinte |
| 8 | rouge pour env. 0,25 s | éteinte |
| 9 | orange pour env. 0,25 s | éteinte |
| 10 | état de fonctionnement actuel | état de fonctionnement actuel |
11 Maintenance, réparation et élimination
Cet appareil ne nécessite aucun entretien.
L'appareil ne doit être réparé que par le fabricant.
S'assurer d'une élimination écologique de l'appareil après son usage selon les règlements nationaux en vigueur.
Nettoyage :
▶ Mettre l'appareil hors tension.
Enlever les salissures avec un chiffon en microfibre doux, sec et non traité chimiquement.





- Contenu
- Consignes de sécurité
- Remarques préliminaires
- Symboles utilisés
- Avertissements utilisés
- INFORMATION IMPORTANTE
- ATTENTION
- AVERTISSEMENT
- Usage prévu
- Fonctions de l'appareil
- Description de la fonction
- L'appareil permet de réaliser
- Firmware
- Montage
- Parasites
- Câblage
- Consignes de montage
- Raccordement électrique
- Technologie de raccordement
- Schéma de branchement
- Connexion Ethernet
- Interface EtherNet/IP
- Classes d'objet, messages, services EtherNet/IP
- Modèle de données EtherNet/IP
- Classes d'objet CIP
- Identity object (code de classe 0x01)
- Message router object (code de classe 0x02)
- Assembly object (code de classe 0x04)
- Connection Manager object (code de classe 0x06)
- Device Level ring object (code de classe 0x47)
- Quality of Service object (code de classe 0x48)
- TCP/IP object (code de classe 0xF5)
- Ethernet link object (code de classe 0xF6)
- EtherNet/IP - types de connexion
- EtherNet/IP - connexions définies dans le Standard EDS File
- Fonctions Ethernet/IP
- Device Level Ring (DLR)
- Address Conflict Detection (ACD)
- Propriétés EtherNet/IP
- Comportement en cas de modification du paramétrage
- Etat de livraison
- Etat de livraison général
- Etat de livraison VSE151 - EtherNet/IP
- Première mise en service
- Paramétrage
- Eléments de service et d'indication
- LED pour capteurs et système
- Etats de fonctionnement des LED d'état réseau (NET) et mode (MOD)
- Test des LED après la mise sous tension de l'appareil
- Maintenance, réparation et élimination
Marque : IFM
Modèle : VSE151
Catégorie : Appareil de diagnostic industriel