
DI5029 - Capteur de vitesse IFM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil DI5029 IFM au format PDF.
| Type de produit | Capteur de vitesse inductif compact |
| Marque | IFM |
| Modèle | DI5029 |
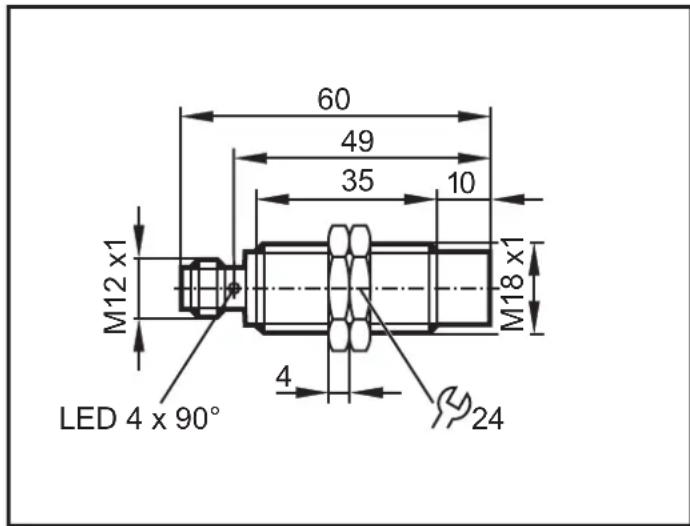
| Dimensions | 60 mm de longueur, filetage M18 x 1, diamètre 18 mm |
| Poids | Environ 100 g |
| Alimentation | 10…30 V DC, protection contre les inversions de polarité |
| Plage de mesure | 5…24000 impulsions/min |
| Sortie | PNP ou NPN programmable via IO-Link ; courant de sortie max. 200 mA |
| Mode de fonctionnement | SIO (sortie TOR) ou IO-Link |
| Fonctions principales | Détection sans contact de la vitesse rotative, commutation sur seuils (Single Point, Fenêtre), hystérésis réglable, temporisations, apprentissage (Teach), pré-diviseur, compensation d'arrière-plan |
| Indication LED | LED jaune : allumée dans la plage de mesure, clignotante en dehors ou en attente de données process |
| Raccordement | Connecteur M12 4 broches |
| Matériau du boîtier | Laiton nickelé, face active en polybutylène téréphtalate |
| Indice de protection | IP67 |
| Température de fonctionnement | -25…70 °C |
| Montage | Encastré ou non encastré dans le métal ; distances minimales selon notice |
| Entretien | Aucun entretien nécessaire ; garder la face active propre |
| Sécurité | Raccordement électrique par électricien qualifié ; respecter les normes nationales et internationales |
| Pièces détachées | Non prévues ; appareil non réparable |
| Informations générales | Notice et déclaration CE disponibles sur www.ifm.com ; IODD pour configuration IO-Link |
FOIRE AUX QUESTIONS - DI5029 IFM
Questions des utilisateurs sur DI5029 IFM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Capteur de vitesse au format PDF gratuitement ! Retrouvez votre notice DI5029 - IFM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil DI5029 de la marque IFM.
MODE D'EMPLOI DI5029 IFM
Contrôleur de vitesse compact M18 Modèle DC, IO-Link, avec connecteur
DI5029
DI5030
1 Remarques préliminaires....3
1.1 Symboles utilisés et avertissements....3
2 Consignes de sécurité ....4
3 Fonctionnement et caractéristiques....4
4 Diagrammes fonctionnels .... 4
4.1 Mode "Single Point" 4
4.2 Mode fenêtre ....5
5 Mode SIO....7
5.1 Fonction de commutation NO....7
5.2 Fonction de commutation normalement fermé....7
6 Mode IO-Link 7
6.1 Affichage LED 8
6.2 Paramètres de réglage via IO-Link....8
6.2.1 Plage de réglage et conditions pour le paramétrage.... 11
6.2.2 Temporisation de démarrage....12
6.2.3 Compensation de l'arrière-plan....12
6.2.4 Teach Offset....12
6.2.5 Pré-diviseur 12
6.3 Diagnostic et événements....13
7 Montage....14
7.1 Remarques sur le montage encastré ou non encastré dans le métal .....15
8 Raccordement électrique....16
8.1 Schéma de branchement .... 16
9 Fonctionnement....16
10 Schéma d'encombrement....17
1 Remarques préliminaires
Ce document s'applique à tous les appareils du type "contrôleur de vitesse compact" (référence : DI5029 et DI5030).
Ce document s'adresse à des personnes compétentes. Ce sont des personnes qui sont capables - grâce à leur formation et expérience – d'appréhender les risques et d'éviter les dangers potentiels qui pourraient être causés par le fonctionnement, l'installation ou la maintenance de l'appareil.
Lire ce document avant l'utilisation afin de vous familiariser avec les conditions d'utilisation, l'installation et le fonctionnement. Garder ce document pendant tout le temps d'emploi de l'appareil.

AVERTISSEMENT
Respecter les avertissements et consignes de sécurité ( 2 Consignes de sécurité).
FR
1.1 Symboles utilisés et avertissements
▶ Action à faire
→ Référence croisée

Information
Remarque supplémentaire.

Remarque importante
Le non-respect peut aboutir à des dysfonctionnements ou perturbations.

AVERTISSEMENT
Avertissement de dommages corporels graves.
Danger de mort ou de graves blessures irréversibles possibles.
2 Consignes de sécurité
L'appareil doit être raccordé par un électricien qualifié. Les règlements nationaux et internationaux relatifs à l'installation de matériels électriques doivent être respectés.
3 Fonctionnement et caractéristiques
Le contrôleur de vitesse inductif compact avec IO-Link détermine sans contact la fréquence [imp./min] avec laquelle le capteur détecte. L'appareil compare la valeur mesurée avec les seuils de commutation et commute les sorties de commutation selon la configuration. L'appareil peut être opéré en mode IO-Link ou en mode SIO (sortie TOR).
4 Diagrammes fonctionnels
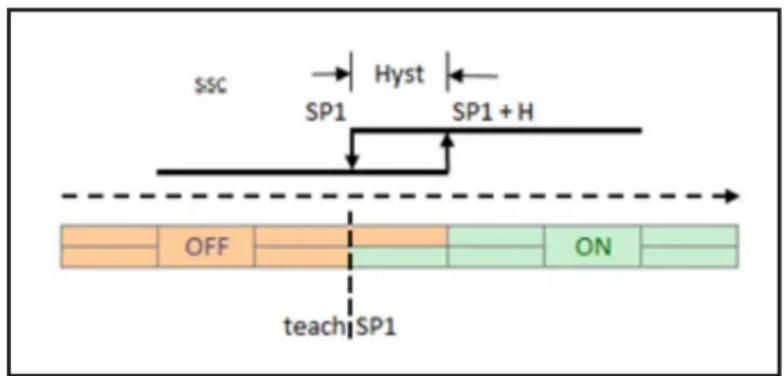
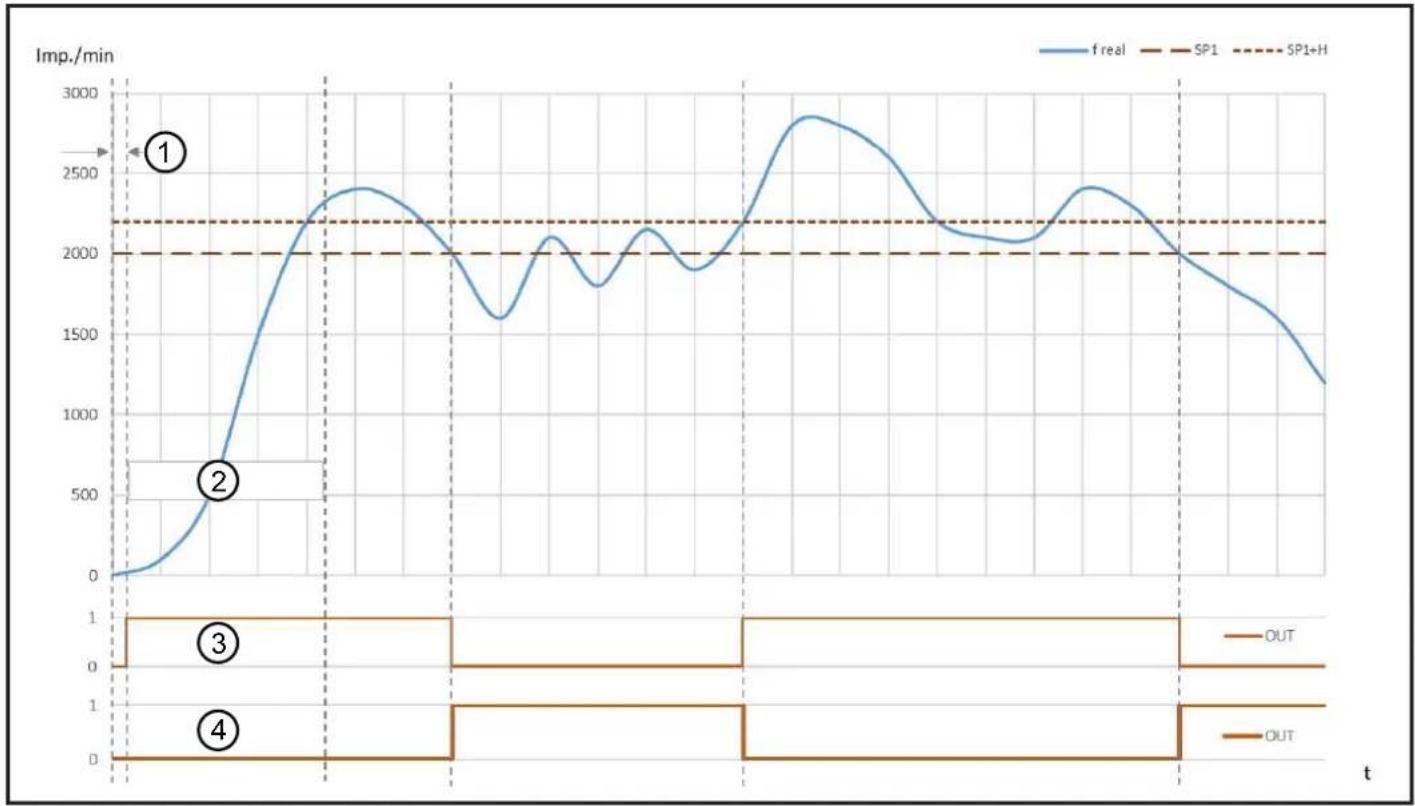
4.1 Mode "Single Point"
Normalement ouvert (A la commutation l'appareil passe à "1")
SP1 : seuil de déclenchement SP1+Hyst : seuil d'enclenchement
flowchart
graph TD
A["SSC"] --> B["OFF"]
B --> C["ON"]
C --> D["TEACH"]
D --> E["SP1"]
E --> F["SP1 + H"]
F --> G["Hyst"]
style A fill:#f9f,stroke:#333
style B fill:#ccf,stroke:#333
style C fill:#cfc,stroke:#333
style D fill:#fcc,stroke:#333
style E fill:#cff,stroke:#333
style F fill:#ffc,stroke:#333
style G fill:#fcc,stroke:#333
L'état de commutation "0" signale que la vitesse de rotation réglée n'est pas atteinte.
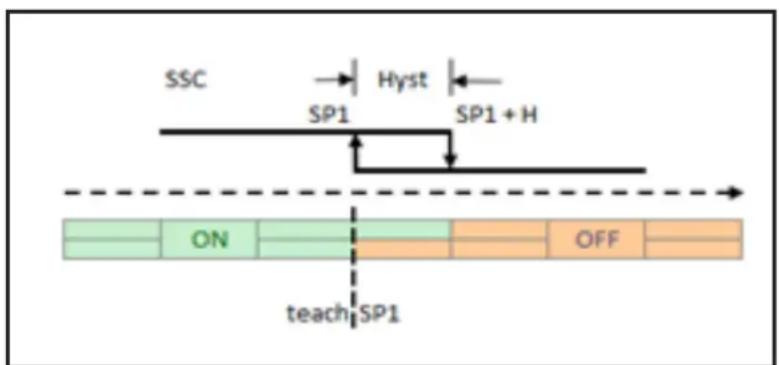
Normalement fermé (A la commutation l'appareil passe à "0")
SP1 : seuil d'enclenchement SP1+Hyst : seuil de déclenchement
flowchart
graph TD
A["SSC"] --> B["SP1"]
B --> C["Hyst"]
C --> D["SP1 + H"]
D --> E["OFF"]
E --> F["ON"]
F --> G["teach"]
G --> H["SP1"]
L'état de commutation "1" signale que la vitesse de rotation réglée est dépassée.
line
| t | f real | SP1 | SP1+H | | ---- | ------ | ---- | ----- | | ① | 0 | 2200 | 2200 | | ② | 500 | 2200 | 2200 | | ③ | 1600 | 2200 | 2200 | | ④ | 1600 | 2200 | 2200 |1: Retard à la disponibilité
2: Temporisation de démarrage
3: NO
4: NF
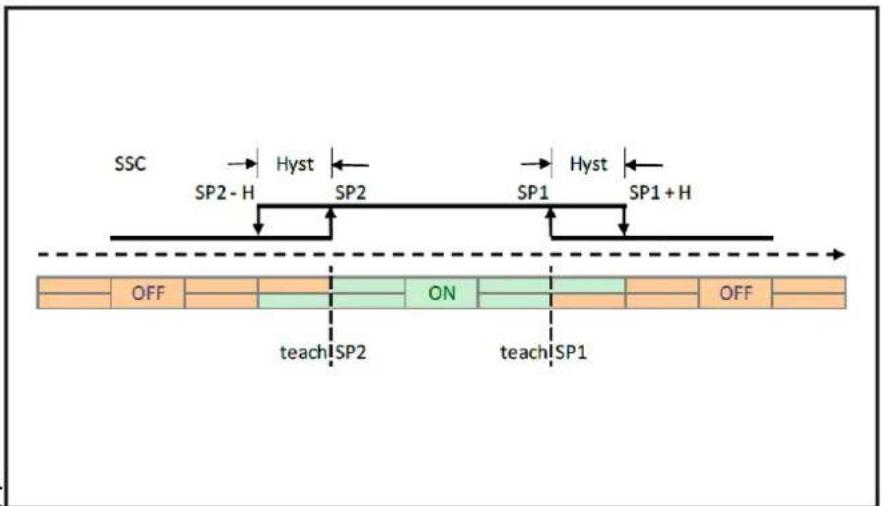
4.2 Mode fenêtre
Normalement ouvert (A la commutation l'appareil passe à "1")
SP1 : fenêtre seuil
d'enclenchement
SP1+Hyst : seuil de
déclenchement
SP2 : fenêtre seuil
d'enclenchement
SP2-Hyst : seuil de déclenchement
flowchart
graph TD
A["SSC"] --> B["SP2-H"]
B --> C["Hyst"]
C --> D["SP2"]
D --> E["SP1"]
E --> F["Hyst"]
F --> G["SP1+H"]
G --> H["OFF"]
H --> I["teachISP2"]
I --> J["ON"]
J --> K["teachISP1"]
K --> L["OFF"]
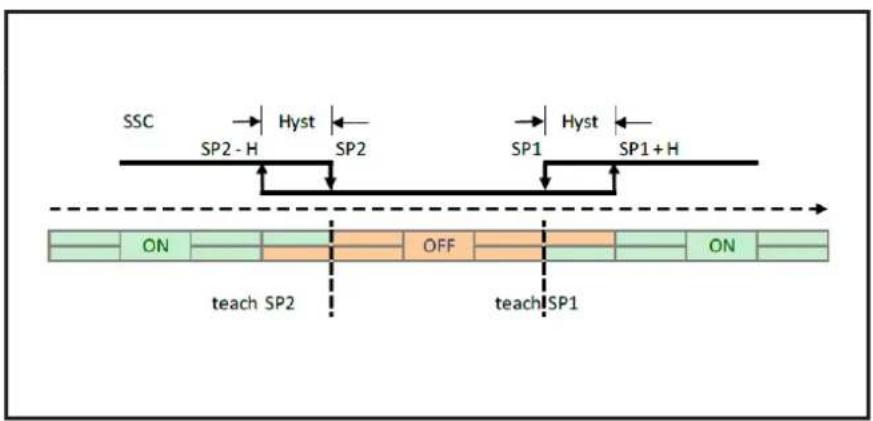
Normalement fermé (A la commutation l'appareil passe à "0")
SP1 : fenêtre seuil de déclenchement SP1+Hyst : seuil d'enclenchement SP2 : fenêtre seuil de déclenchement SP2-Hyst : seuil d'enclenchement
flowchart
graph TD
A["SSC"] --> B["SP2 - H"]
B --> C["Hyst"]
C --> D["SP2"]
D --> E["OFF"]
E --> F["SP1"]
F --> G["Hyst"]
G --> H["SP1 + H"]
H --> I["ON"]
I --> J["teach SP2"]
J --> K["OFF"]
K --> L["TEACH SP1"]
L --> M["ON"]
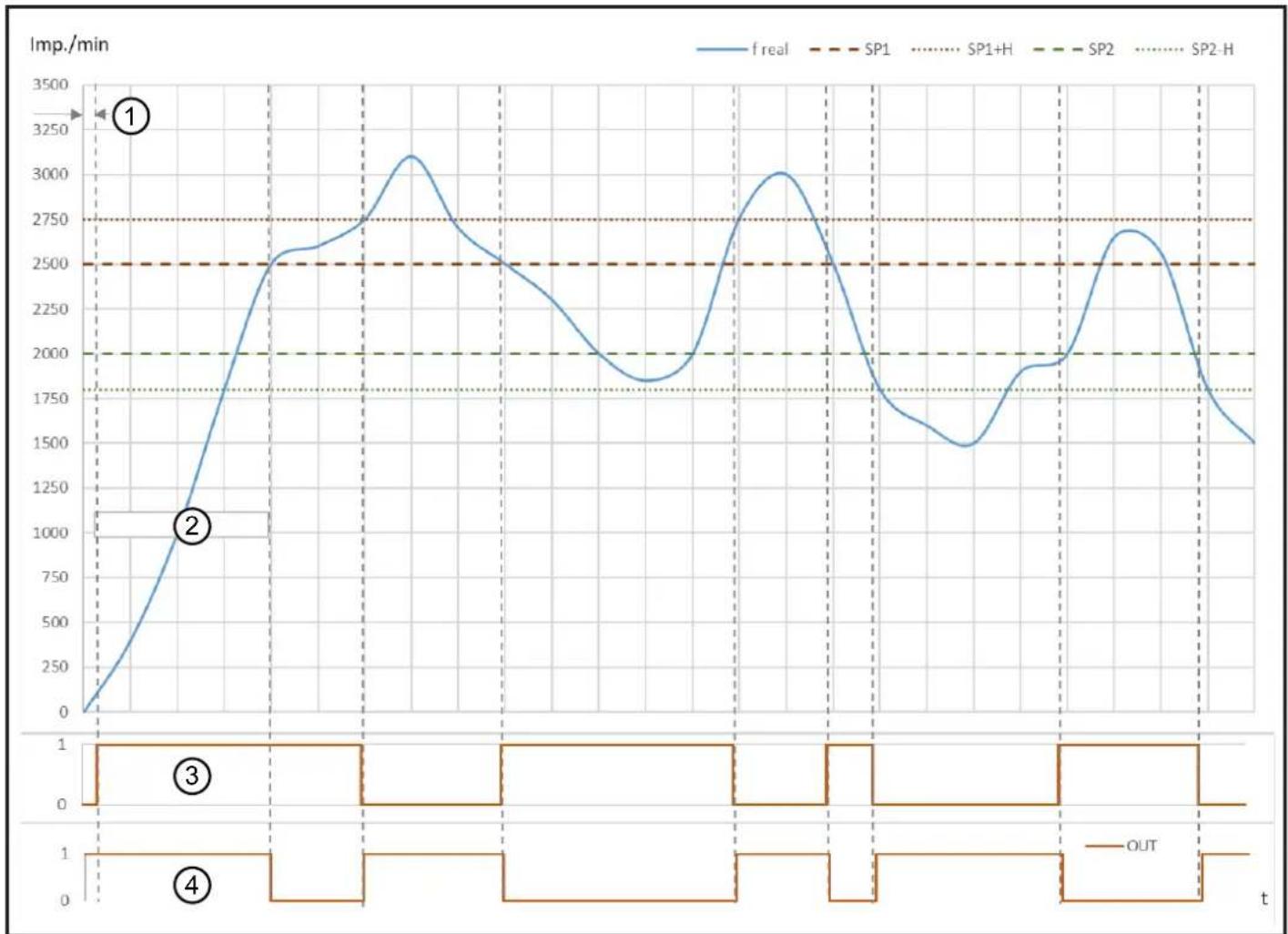
line
| t | f_real | SP1 | SP1+H | SP2 | SP2-H | | ---- | ------ | ---- | ----- | ---- | ----- | | 0 | 0 | 2500 | 2500 | 2000 | 2000 | | 1 | 1000 | 2500 | 2500 | 2000 | 2000 | | 2 | 2500 | 2500 | 2500 | 2000 | 2000 | | 3 | 3100 | 2500 | 2500 | 2000 | 2000 | | 4 | 1500 | 2500 | 2500 | 2000 | 2000 | | 5 | 2750 | 2500 | 2500 | 2000 | 2000 | | 6 | 3000 | 2500 | 2500 | 2000 | 2000 | | 7 | 2500 | 2500 | 2500 | 2000 | 2000 | | 8 | 1875 | 2500 | 2500 | 2000 | 2000 | | 9 | 1500 | 2500 | 2500 | 2000 | 2000 | | 10 | 1975 | 2500 | 2500 | 2000 | 2000 | | 11 | 2750 | 2500 | 2500 | 2000 | 2000 | | 12 | 3100 | 2500 | 2500 | 2000 | 2000 | | 13 | 2500 | 2500 | 2500 | 2000 | 2000 | | 14 | 1875 | 2500 | 2500 | 2000 | 2000 | | 15 | 1500 | 2500 | 2500 | 2000 | 2000 | | 16 | 1975 | 2500 | 2500 | 2000 | 2000 | | 17 | 2750 | 2500 | 2500 | 2000 | 2000 | | 18 | 3100 | 2500 | 2500 | 2000 | 2000 | | 19 | 2500 | 2500 | 2500 | 2000 | 2000 | | 20 | 1875 | 2500 | 2500 | 2000 | 2000 | | 21 | 1500 | 2500 | 2500 | 2000 | 2000 | | 22 | 1975 | 2500 | 2500 | 2000 | 2000 | | 23 | 2750 | 2500 | 2500 | 20OCT| OUT | | End | ~1575 | - | - | - | - |1: Retard à la disponibilité
2: Temporisation de démarrage
3: NO
4: NF
5 Mode SIO
Les LED jaunes indiquent l'état de commutation du capteur.
5.1 Fonction de commutation NO
| Sortie transistor LED | jaune | |
| Commutée (à l’état passant) | allumée vitesse de rotation > SP + Hy et pendant la temporisation de démarrage | |
| Non commutée (bloquée) éteinte vitesse de rotation < SP | ||
SP = seuil de commutation
Hy = hystérésis
5.2 Fonction de commutation normalement fermé
| Sortie transistor LED | jaune | |
| Non commutée (bloquée) éteinte vitesse de rotation > SP + Hy et pendant la temporisation de démarrage | ||
| Commutée (à l'état passant) | allumée vitesse de rotation < SP | |
SP = seuil de commutation
Hy = hystérésis
6 Mode IO-Link
IO-Link permet la configuration de paramètres internes, par ex. temporisation de démarrage et comportement de commutation (normalement fermé / normalement ouvert) ainsi que la lecture des valeurs mesurées en cours. De plus, IO-Link protège contre la perturbation des signaux et une perte des valeurs mesurées ainsi que contre une manipulation du capteur.
Les IODD nécessaires pour la configuration d'un appareil IO-Link sont disponibles sur www.ifm.com/fr/io-link. Ils détaillent des informations concernant les outils de paramétrage et la structure des données process, des informations de diagnostic et les adresses des paramètres.

6.1 Affichage LED
| Etat Etat LED | |
| Dans l'étendue de mesure jaune (allumée en permanence) | |
| En dehors de l'étendue de mesure (UL) jaune (clignotante) 2 Hz taux d'impulsion 1:1 | |
| En dehors de l'étendue de mesure (OL) jaune (clignotante) 2 Hz taux d'impulsion 1:1 | |
| Après la mise sous tension en mode IO-Link => "NO DATA" (PDV = +32764)Si aucune valeur de données process n'est mesurée ou max. 120 s | jaune (clignotante) 2 Hz taux d'impulsion 1:1 |
6.2 Paramètres de réglage via IO-Link
| Paramètres Description | Plage de réglage | |
| Etiquette électronique spécifique application | Etiquette électronique spécifique application | max. 32 octetspar défaut = *** |
| P-n Polarité de sortie | des sorties de commutation | PNP / NPNpar défaut = PNP |
| SSC1 Param SP1 | Seuil de commutation 1 5...24000 imp./min | par défaut = 5 imp./min |
| SSC1 Param SP2 | Seuil de commutation 2 3...21600 imp./min | par défaut = 3 imp./min |
| SSC1 Config Logic | Logique seuil de commutation / State for target detected (Etat de la cible détectée) | NO / NFpar défaut = NO |
| SSC1 Config Mode | Mode seuil de commutation Single Point / Window / Two Point Mode (Un point de commutation / Fenêtre / Deux points de commutation)par défaut = Mode "Single Point" | |
| SSC1 Config Hyst | Hystérésis seuil de commutation | 10 % |
| SSC1Switch-On delay | Temporisation à l'enclenchement pour [SSC1] | 0...60000 ms (étapes de 100 ms) par défaut = 0 ms |
| SSC1Switch-Off delay | Temporisation au déclenchement pour [SSC1] | 0...60000 ms (étapes de 100 ms) par défaut = 0 ms |
| SSC2 Param SP1 Seuil de commutation 1 5...24000 imp./minpar défaut = 5 imp./min | ||
| SSC2 Param SP2 Seuil de commutation 2 3...21600 imp./minpar défaut = 3 imp./min | ||
| SSC2 Config Logic Logique seuil de commutation / State for target detected (Etat de la cible détectée) | NO / NFpar défaut = NO | |
| SSC2 Config Mode Mode seuil de commutation Single Point / Window / Two Point Mode (Un point de commutation / Fenêtre / Deux points de commutation)par défaut = Mode "Single Point" | ||
| SSC2 Config Hyst Hystérésis seuil de commutation 10 % | ||
| SSC2Switch-On delay | Temporisation à l'enclenchement pour [SSC2] | 0...60000 ms (étapes de 100 ms) par défaut = 0 ms |
| SSC2Switch-Off delay | Temporisation au déclenchement pour [SSC2] | 0...60000 ms (étapes de 100 ms) par défaut = 0 ms |
| PrSC Prédiviseur, diviseur pour calculer la vitesse de rotation réelle | 1...99par défaut = 1 | |
| TI Select Adresse le | SSC ou plusieurs SSC sur lesquels la commande d'apprentissage agit | SSC1 / SSC2par défaut = SSC1 |
| Teach SP1(Apprentissage) | Seuil de commutation apprentissage 1 | - |
| Teach SP2(Apprentissage) | Seuil de commutation apprentissage 2 | - |
| Teach offset* Sets an offset between setpoint and current process data value (Définit un offset entre le point de commutation et la valeur courante de la donnée) | 1...200%par défaut = 80% | |
| Rétablir les réglages en usine | Rétablissement des réglages d’usine | - |
| Temporisation de démarrage | Temporisation de démarrage 0...30 | 000 ms (étapes de 100 ms )par défaut = 15 ms |
*Teach offset = définit le seuil de commutation en fonction de la valeur de données process enregistrée
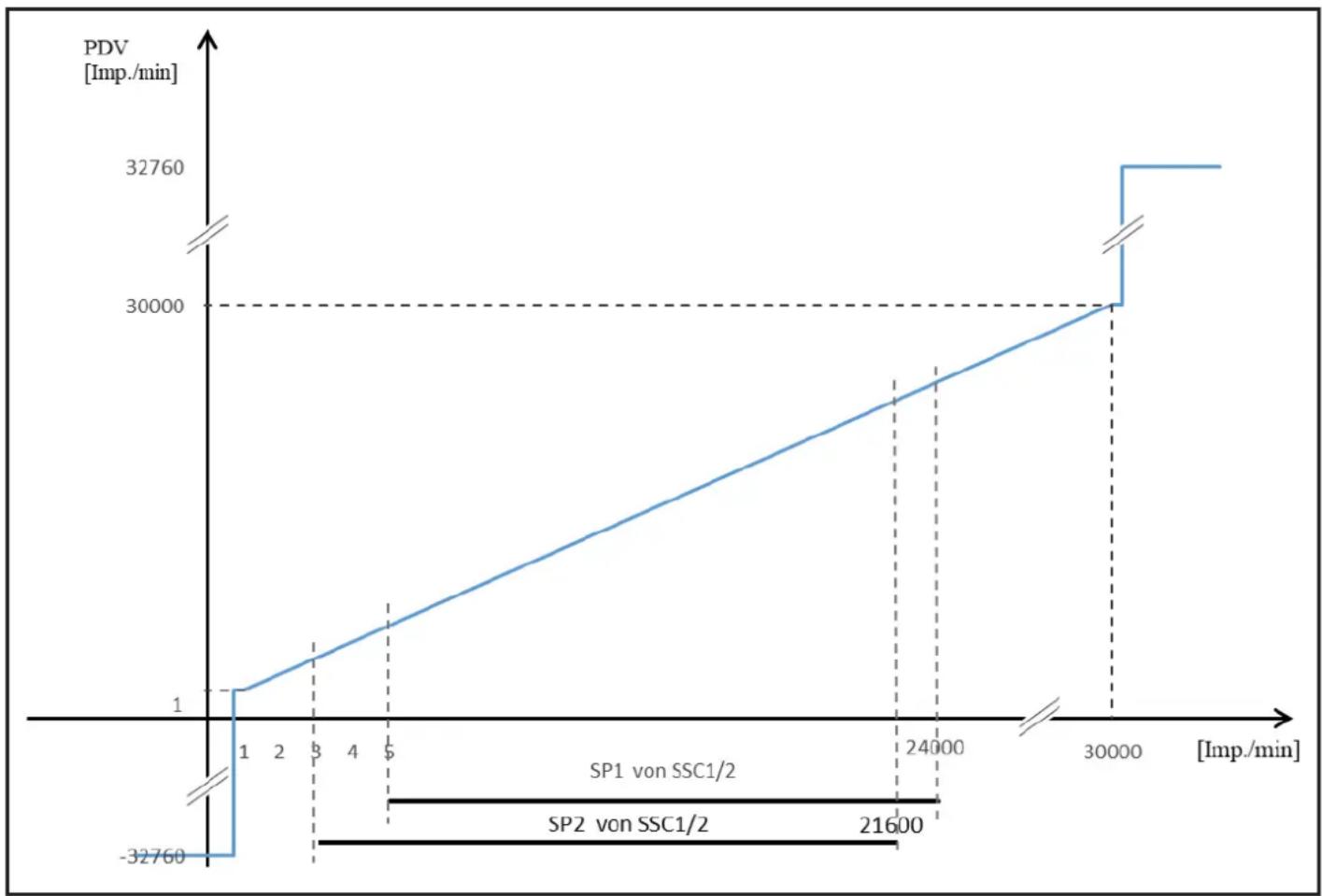
6.2.1 Plage de réglage et conditions pour le paramétrage
Pour le paramétrage correct de l'appareil la ligne de valeur ci-dessous doit être respectée.
Elle contient des informations importantes sur la plage de réglage et les conditions qui en résultent.
line
| Imp./min | PDV [Imp./min] | | -------- | -------------- | | 0 | 1 | | 1 | -32760 | | 2 | 1 | | 3 | 2 | | 4 | 4 | | 5 | 5 | | 24000 | 21600 | | 30000 | 30000 | | 32760 | 32760 |
line
| Timeframe | Max | Min | DF / DG | SP2-Hy | SP2 | SP1 | SP1+Hy | PDV (Process Data Value) | | :--- | :--- | :--- | :--- | :--- | :--- | :--- | :--- | :--- | | 19440 | 19440 | 1 | SP2-Hy | 3 | 3 | 5 | 7 | 30000 | | 21600 | 21600 | 3 | SP2-Hy | 3 | 3 | 5 | 7 | 1 | | 24000 | 24000 | 5 | SP1 | 3 | 3 | 5 | 7 | 1 | | 26400 | 26400 | 7 | SP1+Hy | 3 | 3 | 5 | 7 | 1 | The chart displays a horizontal timeline with labeled segments along the x-axis. The y-axis is unlabeled but corresponds to the time scale of the x-axis. The text 'PDV (Process Data Value)' appears in the right corner.6.2.2 Temporisation de démarrage
La temporisation de démarrage supprime les aléas de fonctionnement quand l'installation démarre et n'a pas encore atteint sa vitesse minimum. Après la mise sous tension elle n'est effective qu'une seule fois.
En cas de mise sous tension/hors tension régulière un couplage de l'alimentation en tension de l'entraînement et du contrôleur de vitesse permet que la temporisation de démarrage soit effective lors de chaque mise sous tension de l'installation ( 4 Diagrammes fonctionnels).
6.2.3 Compensation de l'arrière-plan
Avec cette fonction une détection éventuelle de l'arrière-plan par capteur peut être supprimée. Une détection de l'arrière-plan peut être possible lors du montage de l'appareil, par exemple. La compensation de l'arrière-plan permet de régler la portée de l'appareil pour que le capteur atteigne un état non amorti et puisse détecter l'objet.

Pendant l'exécution de la compensation de l'arrière-plan aucun objet ne doit se trouver dans la zone de détection désirée.
6.2.4 Teach Offset
Ce paramètre permet le réglage d'un offset entre la valeur de process apprise et la valeur du seuil qui en résulte.
Exemple : Teach Offset = 80 % / NO
Si un apprentissage est effectué pendant qu'un moteur tourne avec une vitesse de rotation de 3600 imp./min., le seuil de commutation est réglé à 2880 imp./min. Lors d'une sous-vitesse (< 2880 imp./min.) la sortie est désactivée.
6.2.5 Pré-diviseur
Le pré-diviseur est un diviseur pour calculer la vitesse de rotation réelle pour la valeur de données process (PDV). Il est utilisé lors de l'utilisation de plusieurs cames sur un axe.

La limite de mesure est réduite par ce diviseur.
6.3 Diagnostic et événements
| Code Nom Type Description | |||
| 20480 d / 50 00 h Défaut de matériel d'appareil (Défaut interne) | Erreur Echange | d'appareil | |
| 35856 d / 8C 10 h Plage de variables de processus dépassée. (Plage de valeurs process supérieure à la plage valide) | Avertissement | Données de processus incertainesNote: This event will not be transmitted via IO-Link.Event mechanism. it is only available by reading index 37 (DetailedDeviceStatus) or 545 (BitCoded_ActiveEvents)(Données de process incertaines.Cet état n'est pas transmis par le mécanisme de gestion des évènements via IO-LinkIl est disponible uniquement en lisant l'index 37 (DetailedDeviceStatus) ou 545 (BitCoded_ActiveEvents)) | |
| 35888 d / 8C 30 h Plage de variables de processus sous-dépassée. (Plage de valeur process inférieure à la plage valide) | Avertissement | Données de processus incertainesNote: This event will not be transmitted via IO-Link.Event mechanism. it is only available by reading index 37 (DetailedDeviceStatus) or 545 (BitCoded_ActiveEvents)(Données de process incertaines.Cet état n'est pas transmis par le mécanisme de gestion des évènements via IO-Link Il est disponible uniquement en lisant l'index 37 (DetailedDeviceStatus) ou 545 (BitCoded_ActiveEvents)) | |
| Code Nom Type D | Description | ||
| 36350 d / 8D FE h | Evénement de test 1 | Avertissement L'événement apparaît si on met l'index 2 sur une valeur de 240. L'événement disparaît si on met l'index 2 sur une valeur de 241 | |
| 36351 d / 8D FF h | Test event 2 (Evénement de test 2) | Avertissement L'événement apparaît si on met l'index 2 sur une valeur de 242. L'événement disparaît si on met l'index 2 sur une valeur de 243 | |
7 Montage
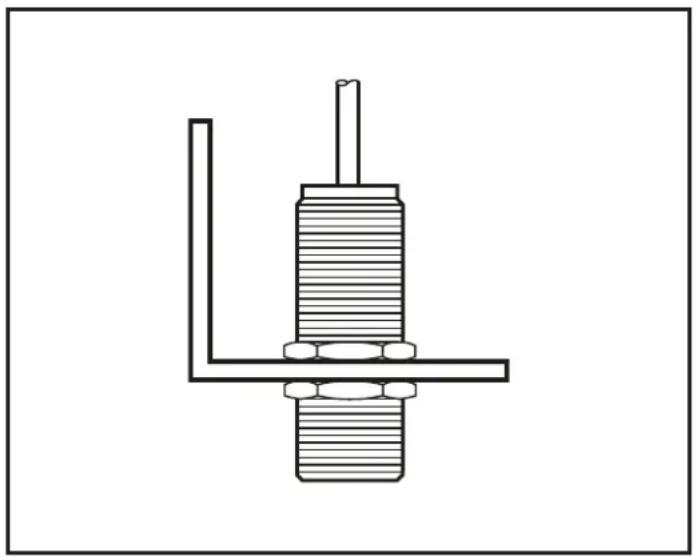
Principe de montage Spécifications de montage
▶ Fixer l'appareil à l'aide d'un dispositif de fixation et le protéger contre le desserrage à l'aide des écrous fournis.
▶ Respecter les spécifications de montage ci-dessus pour assurer un fonctionnement fiable.
7.1 Remarques sur le montage encastré ou non encastré dans le métal
Remarques sur le montage de détecteurs cylindriques
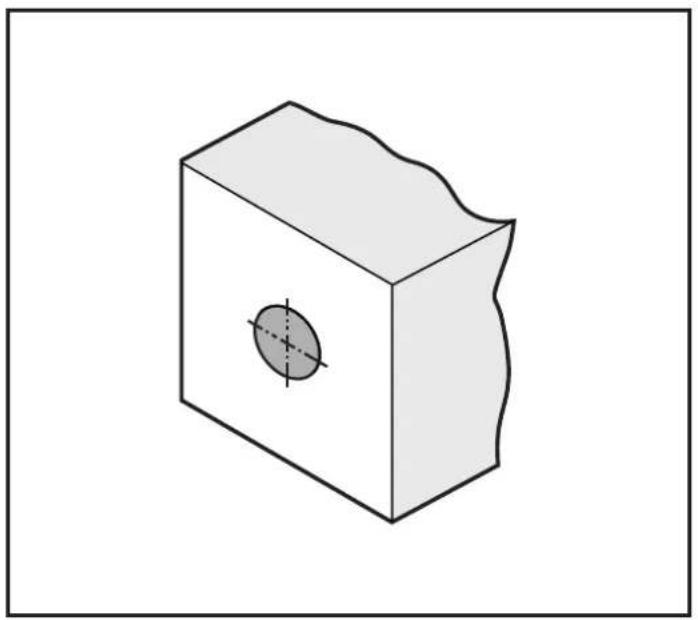
encastré non encastré
Distances minimales pour le montage d'appareils du même type (montage côte à côte)
S'applique aux détecteurs cylindriques et parallélépipédiques.
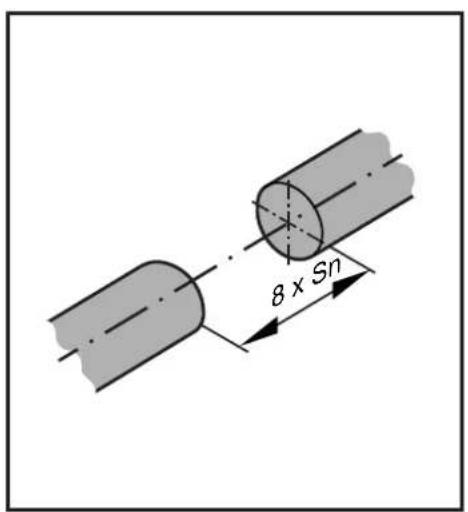
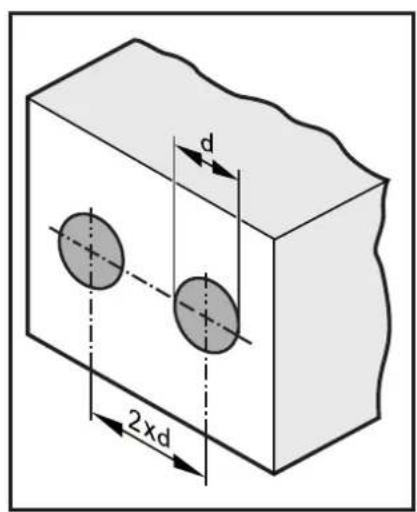
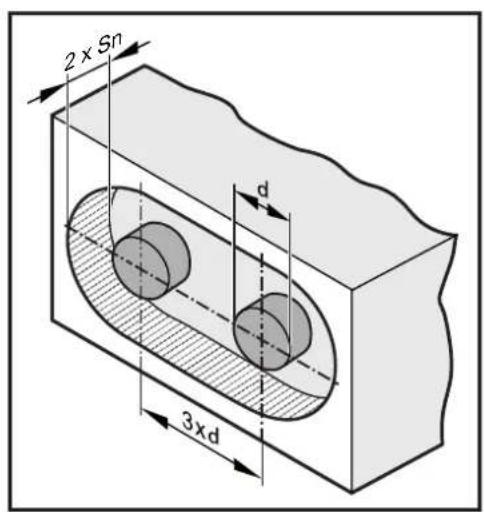
encastré non encastré

Le montage côte à côte n'est possible qu'en cas de fréquences d'oscillation différentes.
8 Raccordement électrique
▶ Mettre l'installation hors tension.
▶ Raccorder l'appareil selon le schéma de branchement.
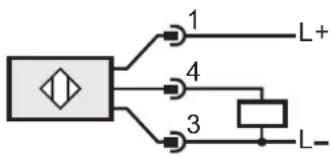
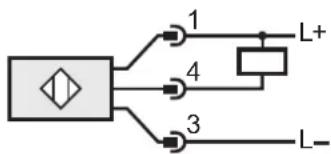
8.1 Schéma de branchement
flowchart
graph TD
A["Decision"] --> B["1"]
A --> C["4"]
A --> D["3"]
B --> E["L+"]
C --> F["L-"]
D --> G["L"]
flowchart
graph TD
A["Decision"] --> B["1"]
A --> C["4"]
A --> D["3"]
B --> E["L+"]
C --> F["L-"]
DI5029, DI5030
SIO : 4 Sortie de commutation PNP / NPN programmable via IO-Link
IO-Link : 4 Communication IO-Link
Réglage usine PNP / normalement ouvert
9 Fonctionnement
Le fonctionnement ne nécessite aucun entretien.
Respecter pour un bon fonctionnement :
Dégager la face active et l'espace libre de toute présence de dépôts métalliques ou de corps étrangers.
▶ Ne pas faire fonctionner des appareils à champ de grande intensité (par ex. portables) à proximité immédiate du contrôleur de vitesse de rotation.
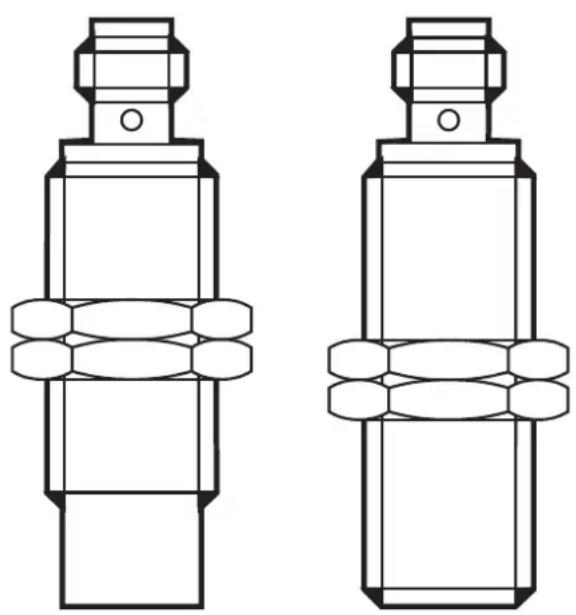
10 Schéma d'encombrement
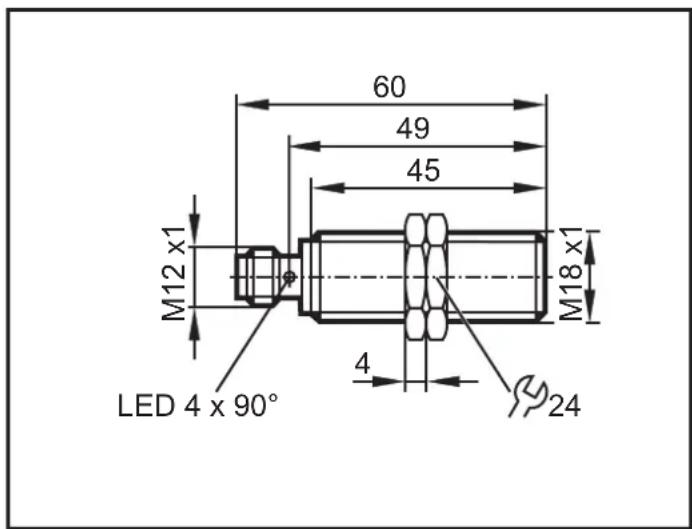
DI5029 DI5030
Dimensions [mm]
FR
Des fiches techniques et des déclarations de conformité CE sont disponibles sur: www.ifm.com



- Remarques préliminaires
- AVERTISSEMENT
- Symboles utilisés et avertissements
- Consignes de sécurité
- Fonctionnement et caractéristiques
- Diagrammes fonctionnels
- Mode "Single Point"
- Mode fenêtre
- Mode SIO
- Fonction de commutation NO
- Fonction de commutation normalement fermé
- Mode IO-Link
- Affichage LED
- Paramètres de réglage via IO-Link
- Plage de réglage et conditions pour le paramétrage
- Temporisation de démarrage
- Compensation de l'arrière-plan
- Teach Offset
- Pré-diviseur
- Montage
- Remarques sur le montage encastré ou non encastré dans le métal
- Raccordement électrique
- Schéma de branchement
- Fonctionnement
- Schéma d'encombrement
Marque : IFM
Modèle : DI5029
Catégorie : Capteur de vitesse