
C200HW-MC402-E - Automates programmables OMRON - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil C200HW-MC402-E OMRON au format PDF.

| Type de produit | Carte de contrôle d'axes avancé |
| Marque | OMRON |
| Modèle | C200HW-MC402-E |
| Catégorie | Carte d'E/S spéciale C200H |
| Dimensions (H x L x P) | 130 x 34,5 x 100,5 mm |
| Poids | Environ 500 g |
| Alimentation | 5 Vc.c. (depuis le rack arrière) et 24 Vc.c. (alimentation externe) |
| Axes contrôlés | 4 axes réels et 4 axes virtuels |
| Méthode de contrôle | Boucle fermée avec codeur incrémental et PID |
| Cycle de boucle servo | 1,0 ms |
| Langage de programmation | BASIC de contrôle de mouvement multitâches |
| Logiciel de programmation | Motion Perfect (Windows 95/98/2000/NT4.0) |
| Communications série | RS-232C |
| Entrées numériques | Jusqu'à 16 entrées |
| Sorties numériques | Jusqu'à 8 sorties |
| Interpolation linéaire | Jusqu'à 4 axes |
| Interpolation en arc | Pour 2 axes quelconques |
| Synchronisation d'axes | Pour 2 axes quelconques |
| Profil de came électronique | Pour 2 axes quelconques |
| Entretien et nettoyage | Utiliser un chiffon doux et sec. Éviter les produits abrasifs et l'humidité. |
| Sécurité | Déconnecter l'alimentation avant toute manipulation. Respecter les précautions ESD. |
| Réparabilité | Contacter le support technique OMRON pour toute réparation. |
FOIRE AUX QUESTIONS - C200HW-MC402-E OMRON
Questions des utilisateurs sur C200HW-MC402-E OMRON
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Automates programmables au format PDF gratuitement ! Retrouvez votre notice C200HW-MC402-E - OMRON et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil C200HW-MC402-E de la marque OMRON.
MODE D'EMPLOI C200HW-MC402-E OMRON
Carte de contrôle d'axes
Contrôle multiaxes avancé parfaitement intuitif
- Contrôle avancé de 4 axes réels et de 4 axes virtuels par carte. Possibilité d'installer jusqu'à 16 cartes dans un API.
- Sorties analogiques pour le contrôle de position, de vitesse et de couple
- Développement et modification simplifiés avec le langage BASIC
- Programmation multitâches
- Un registre interne pour chaque axe
- Synchronisation d'axes et profils de cames électronique
- Logiciel Motion Perfect convivial pour la programmation et le déboguage. Fournit des fonctions variées de test et de surveillance comprenant un oscilloscope logiciel à 4 canaux.

Fonction
La carte de contrôle d'axes avancé assure un contrôle en boucle fermée de 4 axes maximum, programmé dans un langage multitâches de type BASIC et pris en charge par un logiciel performant. La carte fournit un ensemble complet de commandes, permettant la programmation aisée d'applications : scies sauteuses, couteaux rotatifs, synchronisation et profil de cames électroniques.
Configuration du système
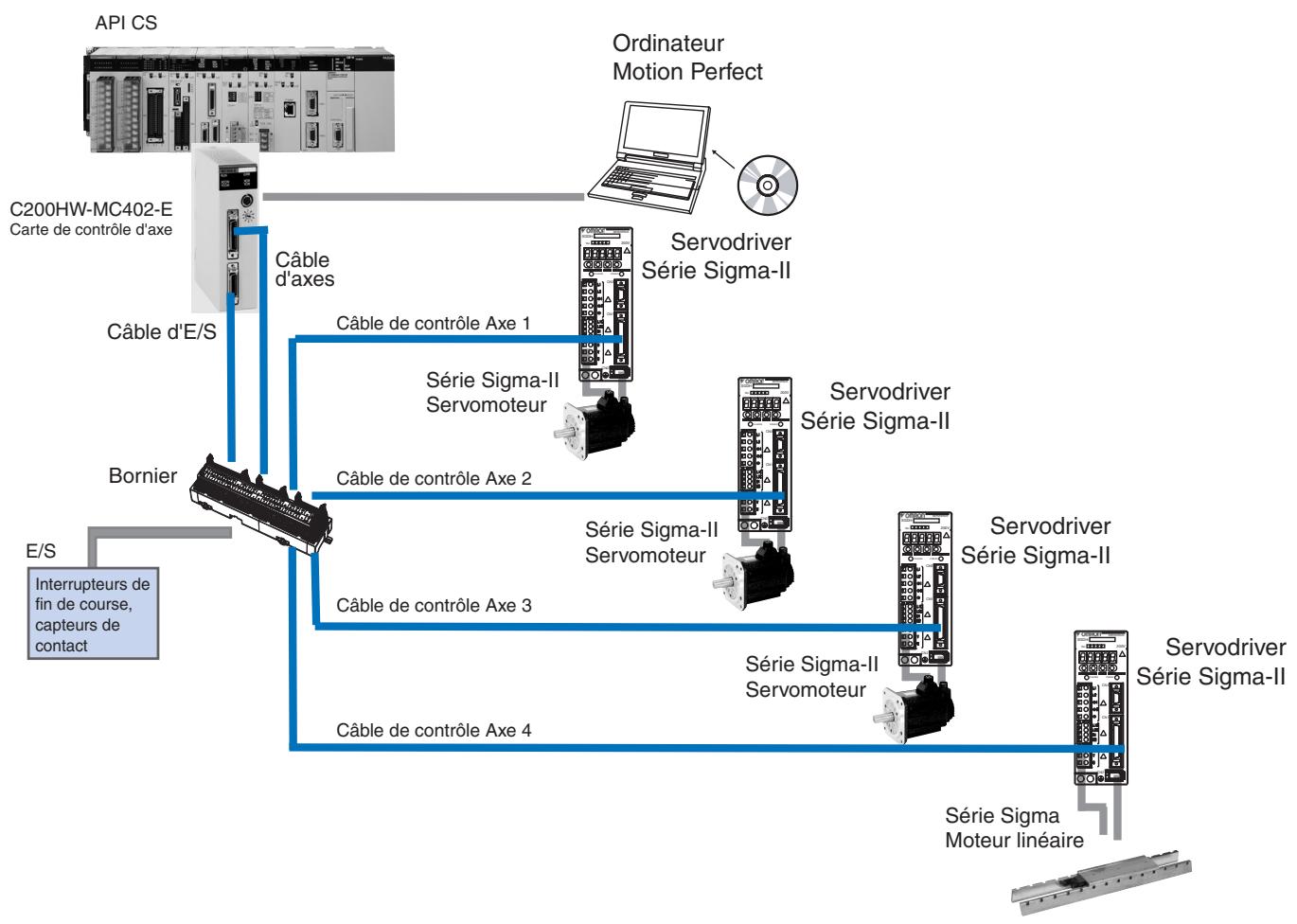
flowchart
graph TD
A["API CS"] --> B["C200HW-MC402-E Carte de contrôle d'axe"]
B --> C["Bornier"]
C --> D["Câble d'E/S"]
D --> E["Câble d'axes"]
E --> F["Câble de contrôle Axe 1"]
F --> G["Série Sigma-II Servomoteur"]
G --> H["Servodriver Série Sigma-II"]
H --> I["Série Sigma-II Servomoteur"]
I --> J["Servodriver Série Sigma-II"]
J --> K["Série Sigma Moteur linéaire"]
K --> L["Servodriver Série Sigma-II"]
L --> M["Série Sigma II Servomoteur"]
M --> N["Servodriver Série Sigma-II"]
N --> O["Série Sigma II Servomoteur"]
O --> P["Servodriver Série Sigma-II"]
P --> Q["Série Sigma II Servomoteur"]
Q --> R["Servodriver Série Sigma-II"]
R --> S["Série Sigma II Servomoteur"]
S --> T["Servodriver Série Sigma-II"]
T --> U["Série Sigma II Servomoteur"]
U --> V["Servodriver Série Sigma-II"]
V --> W["Série Sigma Moteur linéaire"]
W --> X["Servodriver Série Sigma-II"]
X --> Y["Série Sigma II Servomoteur"]
Y --> Z["Servodriver Série Sigma-II"]
Z --> AA["Série Sigma II Servomoteur"]
AA --> AB["Servodriver Série Sigma-II"]
AB --> AC["Série Sigma Moteur linéaire"]
AC --> AD["Servodriver Série Sigma-II"]
AD --> AE["Série Sigma II Servomoteur"]
AE --> AF["Servodriver Série Sigma-II"]
AF --> AG["Série Sigma Moteur linéaire"]
AG --> AH["Servodriver Série Sigma-II"]
AH --> AI["Série Sigma II Servomoteur"]
AI --> AJ["Servodriver Série Sigma-II"]
AJ --> AK["Série Sigma Moteur linéaire"]
AK --> AL["Servodriver Série Sigma-II"]
AL --> AM["Série Sigma II Servomoteur"]
AM --> AN["Servodriver Série Sigma-II"]
AN --> AO["Série Sigma Moteur linéaire"]
AO --> AP["Servodriver Série Sigma-II"]
AP --> AQ["Série Sigma Moteur linéaire"]
AQ --> AR["Servodriver Série Sigma-II"]
AR --> AS["Série Sigma Moteur linéaire"]
AS --> AT["Servodriver Série Sigma-II"]
AT --> AU["Série Sigma Moteur linéaire"]
AU --> AV["Servodriver Série Sigma-II"]
AV --> AW["Série Sigma Moteur linéaire"]
AW --> AX["Servodriver Série Sigma-II"]
AX --> AY["Série Sigma Moteur linéaire"]
AY --> AZ["Servodriver Série Sigma-II"]
AZ --> BA["Série Sigma Moteur linéaire"]
BA --> BB["Servodriver Série Sigma-II"]
BB --> BC["Série Sigma Moteur linéaire"]
BC --> BD["Servodriver Série Sigma-II"]
BD --> BE["Série Sigma Moteur linéaire"]
BE --> BF["Servodriver Série Sigma-II"]
BF --> BG["Série Sigma Moteur linéaire"]
BG --> BH["Servodriver Série Sigma-II"]
BH --> BI["Série Sigma Moteur linéaire"]
BI --> BJ["Servodriver Série Sigma-II"]
BJ --> BK["Série Sigma Moteur linéaire"]
BK --> BL["Servodriver Série Sigma-II"]
BL --> BM["Série Sigma Moteur linéaire"]
BM --> BN["Servodriver Série Sigma-II"]
BN --> BO["Série Sigma Moteur linéaire"]
BO --> BP["Servodriver Série Sigma-II"]
BP --> BQ["Série Sigma Moteur linéaire"]
BQ --> BR["Servodriver Série Sigma-II"]
BR --> BS["Série Sigma Moteur linéaire"]
BS --> BT["Servodriver Série Sigma-II"]
BT --> BU["Série Sigma Moteur linéaire"]
BU --> BV["Servodriver Série Sigma-II"]
BV --> BW["Série Sigma Moteur linéaire"]
Caractéristiques techniques
| Modèle | C200HW-MC402-E | |
| Catégorie | Carte d'E/S spéciale C200H | |
| Signaux de sortie de contrôle | Analogiques | |
| Langage de programmation | Langage de contrôle de mouvement de type BASIC | |
| Caractéristiques de base | Tension d'alimentation | 5 Vc.c. (à partir du rack arrière). |
| 24 Vc.c. (alimentation externe) | ||
| Poids approx. | 500 g | |
| Dimensions extérieures | 130 x 34,5 x 100,5 mm (H x L x P) | |
| Caractéristiques fonctionnelles | Axes contrôlés | 4 axes réels4 axes virtuels |
| Méthode de contrôle | Boucle fermée avec codeur incrémental et PID et sorties de commande de vitesse | |
| Cycle de boucle servo | 1,0 ms | |
| Contrôle de vitesse | Contrôle de vitesse de maximum 4 axes. Fréquence d'entrée d'impulsion jusqu'à 1 MHz après la quadrature | |
| Unités de mesure | Définissables par l'utilisateur | |
| Contrôle d'axes | Interpolation linéaire | 4 axes |
| Interpolation en arc | Pour 2 axes quelconques | |
| Interpolation en hélice | Pour 3 axes quelconques | |
| Synchronisation des axes | Pour 2 axes quelconques | |
| Profil de came joint par des axes | Pour 2 axes quelconques | |
| Interruption d'enregistrement matérielle | 4 axes | |
| Courbes d'accélération/décélération | Courbe trapézoïdale ou en S | |
| Capacité de programmation de tâches | Nombre de tâches | Jusqu'à 5 tâches simultanément plus la tâche d'interface |
| Nombre de programmes | 14 | |
| Capacité de stockage des données | 251 (VR) + 16 000 (table) max. | |
| E/S externe | Entrée codeur | Entrées du récepteur de ligne pour 4 axes (1 MHz après la quadrature) |
| Relations du servodriver | Les signaux suivant sont fournis pour chaque axeEntrées : Signal d'alarme du driverSorties : Activation du driver (RUN ou SERVO ON)Réinitialisation de l'alarme du driverCommande SPEED | |
| Entrées numériques | Possibilité de câbler jusqu'à 16 entrées numériques pour contrôler les fonctions de la carte MC, à savoir : interrupteurs de fin de course, interrupteurs d'arrêt rapide et entrées de proximité. | |
| Sorties numériques | Possibilité de câbler jusqu'à 8 sorties numériques et de les utiliser pour la commutation en fonction de la position ou pour d'autres fonctions d'ordre général. | |
| Entrées d'enregistrement | Chaque axe dispose d'une entrée d'enregistrement qui peut servir à enregistrer la position actuelle des signaux du codeur dans le matériel. | |
| Communications série | RS-232C | Connexion à un ordinateur (Logiciel Motion Perfect) |
Logiciel Motion Perfect
| Modèle | Motion Perfect |
| Cartes MC prises en charge | C200HW-MC402-E, R88A-MCW151-E, R88A-MCW151-DRT-E |
| Ordinateur utilisable | Windows 95/98/2000/NT4.0 |
| Fonctions | Outil de programmation et de déboguage. Fonctions de test et de surveillance comprenant un oscilloscope logiciel à 4 canaux. |
Informations pour la commande
Carte de contrôle d'axes
| Nom | Modèle |
| Contrôleur d'axes avancé pour 4 axes | C200HW-MC402-E |
Câble série
| Nom | Modèle | |
| Câble de programmation. | 2 m | R88A-CCM002P4-E |
Bornier et câbles vers la carte de contrôle d'axes
| Description | Modèle | |
| Bornier pour la carte MC402 | - | R88A-TC04-E |
| Câble de contrôle de l’API (signaux d’E/S) | 1 m | R88A-CMX001S-E |
| Câble de contrôle de l’API (contrôle des axes) | 1 m | R88A-CMX001J1-E |
Câbles du servodriver série Sigma-II
| Description | Modèle | |
| Câble de connexion au servodriver, 1 axe. (obligatoirement 1 câble par servodriver) | 1 m | R88A-CMUK001J3-E2 |
Logiciel
| Caractéristiques techniques | Modèle |
| Logiciel Motion Perfect | CD MOTION TOOLS |
TOUTES LES DIMENSIONS INDIQUEES SONT EN MILLIMETRES.
Pour convertir les millimètres en pouces, multipliez par 0,03937. Pour convertir les grammes en onces, multipliez par 0,03527.
Marque : OMRON
Modèle : C200HW-MC402-E
Catégorie : Automates programmables