MODE D'EMPLOI CPM2A OMRON
Réalisé en septembre 1999
Avis :
Les produits OMRON sont concus pour etre utilisés par un opérateur qualifié, en respectant des procédures appropriées et uniquement dans le cadre de ce qui est précisé dans ce document.
Dans ce manuel, les conventions suivantes permettent de spécifique et de classer les précautions. Toujours faire très attention aux informations qui sont données. Le non-respect des précautions stipulées peut blesser des personnes ou endommager des biens.
DANGER
Indique une situation dangereuse imminente qui, si elle n'est pas évitée peut entraîner des blessures graves ou mortelles.
! AVERTISSEMENT
Indique une situation potentiellement dangereuse qui, si elle n'est pas évitée, peut provoquer des blessures graves ou mortelles
Attention
Indique une situation potentiellement dangereuse qui, si elle n'est pas évitée, peut provoquer des blessures moins sérieues ou endommager des biens.
Références des produits OMRON
Dans ce manuel, tous les noms de produits OMRON sont écrits en majuscules. Le mot " unité" désigne une produit OMRON, que la désignation de ce produit apparaissée ou nom dans le texte.
L'abréviation "Ch," qui figure sur certains affichages et sur certains produits OMRON signifie souvent "word" ("mot") et, dans la documentation, il est souvent remplaced par l'abréviation "Wd".
L'abréviation "API" signifie Automate programmable industriel et n'est jamais utilisée comme abréviation d'un autre système, composant ou élément.
Aides visuelles
Les intitulés suivants apparaisent dans la colonne de gauche du manuel, pour vous aider à trouver différents types d'informations.
Rem. Désigne des informations particulièrement intéressantes pour utiliser le produit de façon pratique et efficace.
1, 2, 3... 1. Indique une ou des listedes de différents types, par exemple procédures, checklists, etc.
OMRON, 1999
Tous droits réservés. Aucune partie de cette publication ne peut être, stockée dans un système à mémoire ou transmise, sous aucune forme et paraucun moyen mécanique, électronique, photocopie, enregistrement sans l'accord écrit préalable d'OMRON.
L'utilisation des informations contenu ci-après ne peut engendrer aucune responsabilité. De plus, la mesure où OMRON travaille constamment à l'amélioration de ses produits de haute qualité, les informations contenues dans ce manuel sont soumises à changement sans avis préalable. Toutes les précautions ont été prises dans l'élaboration de ce manuel. Toutefois, OMRON ne peut être tenu responsable des erreurs ou omissions. Les dommages résultat de l'utilisation des informations contenues dans cette publication ne peuvent engendrer aucune responsabilité.
TABLE DES MATIERES
CONSEILS D'UTILISATION xi
1 Public visé xii
2 Conseils d'utilisation généraux xii
3 Conseils d'utilisation de sécurité xii
4 Conseils d'utilisation relatifs à l'environnement d'exploitation xiii
5 Conseils d'utilisation xiv
6 Directives communautaires xvi
CHAPITRE 1 Introduction 1
1-1 Caracteristiques et fonctions du CPM2A 2
1-2 Configurations de base du système 8
1-3 Structure et fonctionnement 10
1-4 Fonctions enumeratedes par leur usage 19
1-5 Comparison au CPM1A 22
1-6 Préparation pour le fonctionnement 29
CHAPITRE 2 Caracteristiques et composants des unités 31
2-1 Caracteristiques techniques 32
2-2 Composants 39
CHAPITRE 3 Installation et câblage 45
3-1 Conseils d'elaboration 46
3-2 Choix d'un site d'installation 47
3-3 Installation du CPM2A 48
3-4 Cablage et connexions 52
CHAPITRE 4 Utilisation de dispositifs de programmation 85
4-1 Utilisation d'une Console de programmation 86
4-2 Fonctionnement de la console de programmation 93
4-3 Example de programmation 117
CHAPITRE 5 Essais des programmes et Traitement des erreurs 125
5-1 Contrôles initiaux du système et procédure d'essay des programmes 126
5-2 Fonctions d'auto-diagnostic 127
5-3 Erreurs de fonctionnement de la console de programmation 131
5-4 Erreurs de programmation 131
5-5 Organigrammes de dépannage 133
5-6 Inspections de maintenance 141
5-7 Remplacement de la batterie 142
CHAPITRE 6 Unité d'extension de mémoire 145
6-1 Présentation 146
6-2 Caracteristiques techniques et nomenclature 147
6-3 Manipulation 149
TABLE DES MATIERES
Annexes
A Modèles standard 155
B Dimensions 159
Historique des révisions 165
A propos de ce manuel :
Le CPM2A est un automate programmable (API) compact et ultra rapide conçu pour exéçuter des opérations de pilotage sur des systèmes qui exigent de 10 à 120 points d'E/S par API. Deux manuels décrivent la préparation, le paramétrage et l'exploitation du système CPM2A: Le Guide d'installation du CPM2A (ce manuel) et le Manuel de programmation CPM1/CPM1A/CPM2A/CPM2C/SRM1(-V2). (Dans ce manuel, le Manuel de programmation CPM1/CPM1A/CPM2A/CPM2C/SRM1(-V2) est désigné par une appellation simple, à savoir Manuel de programmation.)
Ce manuel décrit la configuration du système et l'installation du CPM2A. Il donne aussi unelication de base des procédures opérateires des consoles de programmation. Pour faire connaissance avec le CPM2A, vous doivent d'abord dire ce manuel.
Le Manuel de programmation offre des descriptions détaillées des fonctions de programmation du CPM2A.
Veuillez dire manuel attentivement et s'assurer d'avoir bien compris les informations qu'il apporte avant de tenter d'installer et d'utiliser le CPM2A.
Le Chapitre 1 donne une brève description générale des étapes qui participent du développement d'un système CPM2A, déscrit les configurations possibles ainsi que les fonctions et caractéristiques spéciales du CPM2A.
Le Chapitre 2 contient les specifications techniques des Unités qui, ensemble, permettent de constituer un API CPM2A et décrit aussi les principaux éléments constitutifs et composants des Unités.
Le Chapitre 3 décrit les modalités d'installation et de câblage d'un API CPM2A.
Le Chapitre 4 décrit les fonctionnalités du logiciel de support SYSMAC, les modalités de raccordement de la console de programmation, et la façon de mener à bien les différentes opérations de programmation.
Le Chapitre 5 déscrit l'exécution d'un essai, ce que vous devez faire pour diagnostiquer et corriger les erreurs matérielles et logicielles qui peuvent survenir pendant que l'automate fonctionne.
Le Chapitre 6 décrit comment utiliser l'unité d'extension de mémoire CPM1-EMU01-V1. Appliquer fidèlement les conseils et les procédures d'utilisation de l'unité.
L'Annexe A contient des tableaux illustrant les Unités CPM2A et les produits connexes.
L'Annexe B donne les dimensions des Unités CPM2A.

AVERTISSEMENT :
Omettre de dire et comprendre les informations contrenues dans ce manuel peut entrainer la mort, des blessures corporelles, risque d'endommager le produit ou de le provoquer des pannes. Lire chaque chapitre, ainsi que les chapitres auxquels il est fait reference dans leur totalité et s'assurer d'une bonne comprhension des informations qui s'y sont continues avant la mise en œuvre des procédures ou fonctionnalités décrites.
CONSEILS D'UTILISATION
Cette section expose les précautions générales que vous doivent prendre pour utiliser l'automate calculable (API) et les dispositifs associés.
Les informations données dans cette partie sont importantes pour assurer une utilisation fiable et sans danger de l'automate programmable. Vous nevez dire cette section et comprendre les informations qui y sont exposées avant de tenter de paramétrer et d'utiliser un système API.
1 Public visé xii
2 Conseils d'utilisation généraux xii
3 Conseils d'utilisation de sécurité. xii
4 Conseils d'utilisation relatifs à l'environnement d'exploitation. xiii
5 Conseils d'utilisation xiv
6 Directives communautaires (CE) xvi
1 Public visé
Ce manuel est destiné aux personnes qui doivent aussi avoir des connaissances portant sur les systèmes électriques (ingénieur ou technician en électricité ou équivalent):
- Personnel charge d'installer des systèmes FA.
- Personnel charge de设计理念 des systèmes FA.
- Personnel charged de la gestion de sites et de systèmes FA.
2 Conseils d'utilisation généraux
L'utilisateur doit se servir du produit en conformité avec les spécifications de performances exposées dans les manuels d'exploitation.
Avant d'utiliser le produit dans des conditions non décrits dans le manuel ou de l'utiliser avec des systèmes de pilotage d'installations nucléaires, des chemins de fer, des vehicules, systèmes à combustion, équipements Médicaux, machines et apparciels pour le divertissement, équipements de sécurité ainsi qu'avac d'autres systèmes, machines et équipements qui peuvent exercer une forte influence sur la vie humaine et les biens s'ils sont utilisés incorrectement, veuilté calculer votre représentant OMRON.
Vérifier que les caractéristiques nominales et performances du produit sont suffisantes pour les systèmes, machines et équipements. Et ne pas oublier de munir les systèmes, machines et équipements de double mécanismes de sécurité.
Ce manuel donne des informations sur la programmation et l'utilisation de l'Unité. Vousdez absolument lorece manuel avant d'essayer d'utiliser l'unité, et conserver ce manuel à portée de la main pour, si nécessaire, vous y reporter pendant l'exploitation du système.
! AVERTISSEMENT
Il est extrémement important qu'un API et toutes les unités API soient utilisées pour la mise en œuvre prévue et dans les conditions spécifiées, en particulier lorsqu'il s'agit d'applications susceptibles d'affector directement ou indirectement la vie de l'homme. Avant d'utiliser un système d'API dans le cadre des applications mentionnées ci-dessus, vous doivent absolument consulter votre représentant OMRON
3 Conseils d'utilisation de sécurité
! AVENTISSEMENT
Ne jamais tenter de démonter une Unité pendant qu'elle est sous tension. Vous risqueriez une décharge électrique.
! AVENTISSEMENT
Ne jamais toucher des bornes ou borniers pendant que le système est sous tension. Vous risquieriez une décharge électrique.
! AVENTISSEMENT
Ne jamais tenter de démonter, de réparer ou de modifier une Unité quelconque. Toutte tentative de ce type d'opération peut provoquer un dysfonctionnement, un incendie ou être à l'origine d'une décharge électrique.
! AVENTISSEMENT
Prévoir des mesures de sécurité pour les circuits extérieurs (c'est-à-dire non dans l'automate calculable), y compris dans les articles suivants, afin d'assurer la sécurité du système si une anomalie intervient à la suite d'un dysfonctionnement de l'API ou d'un autre facteur externe affectant le fonctionnement de l'automate. Le non-respect de cet avertissement peut se traduire par des accidents graves.
- Des circuits d'arrêt d'urgence, des circuits à verrouillage réciproque, des limiteurs et des mesures de sécurité similaires doivent être mis en place sur tous les circuits de pilotage externes.
- L'API met toutes ses sorties à l'état OFF lorsque sa fonction de diagnostic intégrée déetecte une erreur ou bien à l'exécution d'une instruction d'alarme de défaillance grave (FALS). Pour se protéger contre ces erreurs, des mesures de sécurité externes doivent être prises pour assurer la sécurité du système.
- Les sorties de l'automate peuvent rester ON ou OFF du fait de l'encrassement ou du brûlage des reliais de sortie ou de la destruction des transistors de sortie. Pour se prémunir contre ce type de problèmes, des mesures de sécurité externes doivent être prises pour assurer la sécurité du système.
- Lorsque la sortie 24V continues (alimentation électrique de service de l'automate) est surcharge ou court-circuitée, il peut y avoir une baisse de tension et, par suite, les sorties passent à l'état OFF. Pour se prémunir contre ce type de problèmes, des mesures de sécurité externes doivent être prises pour assurer la sécurité du système.
! AVERTISSEMENT
Lorsque vous transférez des programmes à d'autres nœuds, ou lorsque vous modifiez la mémoire des E/S, il faut s'assurer de la sécurité du nœud de destination avant de faire le transfert. Le non-respect de cet averissement peut être à l'origine d'accidents graves.
Attention
Pour executer une édition en ligne, il faut d'abord s'assurer que cette opération n'aura pas d'effets néfastes par suite de l'allongement de la durée des cycles. Autrement, il se peut que les signaux d'entrée soient illisibles.
Attention
Serrer les vis du bornier de l'unité d'alimentation en courant alternatively en respectant le couple spécifique dans le manuel d'exploitation. Des vis mal serrées peuvent provoquer un brûlage ou un dysfonctionnement.
4 Conseils d'utilisation relatifs à l'environnement d'exploitation
Attention Ne pas utiliser le système de pilotage dans les endroits suivants :
Endroits recevant directement la luziere du soleil.
- Endroits représentant des températures ou une humidité à l'extérieur de la plage figurant dans les specifications.
- Endroits représentant de la condensation provoquée par de fortes variations de la température.
- Endroits soumis à des gaz corrosifs ou inflammbables.
- Endroits poussièreux (en particulier limaille de fer) ou contenant des sels.
Endroits exposés à l'eau, à l'huile ou à des produits chimiques.
- Endroits soumis à des chocs ou à des vibrations.
Attention
Vous doivent prendre des mesures de protection ad hoc et suffisantes lorsqu'you ne s'est pas installé des systèmes dans les endroits suivants :
Endroits presentant de I'electricite statique ou d'autres formes de bruits.
- Endroits soumis à des champs électromagnétiques puissants.
Endroits susceptibles d'être soumis à de la radioactivité.
Endroits proches d'alimentations electriques.
Attention
L'environnement opérate d'un système d'API peut affecter fortement sa longévité et sa fiabilité. Un environnement opérate hostile peut provoquer des dysfonctionnements, des défaillances et d'autres problèmes imprévisibles affectant le système d'API. Vérifier bien qu'à l'installation, l'environnement opérate est conforme aux conditions spécifiées et qu'il présente toujours les mêmes conditions pendant la vie du système.
5 Conseils d'utilisation
Lors de l'utilisation du système d'API, toujours suivre les conseils d'utilisation suivants.
! AVERTISSEMENT
Toujours observer ces conseils. Le non-respect des précautions enumeratedes ci-dessous peut être à l'origine de blessures sérieues ou même mortelles.
- Il faut toujours connecter le système à une terre de façon que la résistance de mise à la terre ne dépasse jamais 100 pendant l'installation des Unités. Si la terre désies pour la connexion ne convient pas, il y a risque de décharges electriques.
-
Toujoursmettre l'alimentationelectriquedeI'APIaI'etat OFFavant detenter de faire n'importe laquelle des opérations suivantes.Si vous ne mettez pas l'alimentationOFF,vous risquez de provoquer undysfonctionnement ou de subir une déchargeelectrique.
-
Montage ou démontage d'unités d'E/S, d'unités centrales, de mémoires à bande magnétique ou d'autres unités.
- Assemblage d'unités.
- Réglage des micro-interrupteurs ou d'autres boutons.
- Opérations de raccordement ou de câblage.
- Connexion ou déconnexion de connecteurs.
Attention
Le non-respect des précautions suivantes peut entraîner un fonctionnement défectueux de l'API ou du système, ou bien endommager l'API ou les unités du ou des API. Il faut toujours respecter les précautions indiquées.
- Des mesures doivent être prises par le client pour assurer la sécurité en présence de signaux manquants, incorrects ou anormaux provoqués par unerupture de lignes de transmission de signaux, par des coupures courtes du courant ou d'autres causes.
- Réaliser un circuit de commande et de contrôle de façon que l'alimentation des circuits d'E/S ne puisse pas semettre ON avant l'alimentation de l'unité. Si l'alimentation des circuits d'E/S passé ON avant l'alimentation de l'unité, le fonctionnement normal risque d'être interrompu provisoirement.
- Si vous passez du mode opérate Run ou MONITOR en mode PROGRAM, avec le bit de maintain IOM ON, la sortie va tener le statut le plus récent. Dans ce cas, il faut s'assurer que la charge externe ne dépasse pas la valeur figurant dans les specifications. (Si l'exploitation est arrêtée à la suite d'une erreur opérate (y compris des instructions FALS), les valeurs qui sont dans la mémoire interne de l'UC seront conservées, mais les sorties passent toutes à l'état OFF).
-
Toujours utiliser la tension d'alimentation spécifique dans le manuel d'exploitation. Une tension incorrecte peut provoquer un dysfonctionnement ou un brûlage.
-
Prendre les mesures appropriées pour s'assurer que l'alimentation du système est assurée à la tension et à la fréquence nominales spécifiées. Faire particulièrement attention si le réseau électrique est instable. Une alimentation électrique non conforme peut provoquer des dysfonctionsnements.
- Installer des disjoncteurs externes et prendre d'autres mesures de sécurité contre d'eventuels courts-circuits dans le câblage externe. Des mesures de sécurité insuffisantes contre les courts-circuits peuvent provoquer un brûlage.
- Ne jamais appliquer aux bornes d'entrée une tension supérieure à la tension nominale d'entrée. Une tension excessive peut provoquer un brûlage.
- Ne jamais appliquer de tension ni connecter de charges aux bornes de sortie qui soient au-delà de la capacité maximum de commutation. Une tension excessive peut provoquer un brûlage.
- Pendant les essais de tension de régime, vous ne devez débrancher la borne de terre fonctionnelle. Si vous ne respectez pas cette règle, le système peut être atteint d'un brûlage.
- Installer l'unité correctement, conformément aux indications données dans le manuel d'exploitation. Une installation incorrecte de l'unité peut provoquer un dysfonctionnement.
- S'assurer que toutes les vis de montage, des bornes et des connecteurs de câbles sont serrées au couple spécifique dans les manuels applicables. Un serrage avec un couple incorrect peut provoquer un dysfonctionnement.
- Pendant le câblage, s'assurer que les étiquettes sont bien en place au moment de l'expédition du CPM1 ou du CPM2A pour éviter l'introduction de morceaux de fils dans l'unité.
- Pour éviter l'introduction de morceaux de fils dans l'UC ne pas oublier de fixer les étiquettes fournies sur le CPM1A pour cabler l'UC du CPM1A.
- Lorsque le câblage est terminé, enlever l'étiquette pour assurer une bonne dissipation thermique. Le fait de ne pas enlever l'étiquette peut provoquer un dysfonctionnement.
- S'assurer que le câblage est fait conformément aux prescriptions du manuel d'exploitation ad hoc. Un mauvais câblage peut provoquer un brûlage.
- Pour faire le câblage, utiliser des bornes serties. Ne pas raccorder directement des fils nus à des bornes. Le raccordement de fils torronés nus peut provoquer un brûlage.
- Faire un double contrôle de tout le câblage avant demettre l'alimentation ON. Un câblage incorrect peut provoquer un brûlage.
- Vérifier que les borniers, les unités de mémoire, les cables d'extension et les autres pieces équipées de dispositifs de verrouillage sont bien fixés. Une mauvaise fixation peut provoquer des dysfonctionnements.
- Vérifier que les borniers et les connecteurs sont connectés dans la direction spécifique et que les polarités sont bien conformes. Toute anomalie peut provoquer un dysfonctionnement.
- Vérifier l'exécution du programme utilisé avant de le faire tournier sur l'automate. La non vérification du programme peut être à l'origine d'un fonctionnement imprévisible.
- S'assurer que le système ne sera pas perturbé avant de lancer une des opérations de la liste ci-dessous. Le non respect de cette règle peut être à l'origine d'un fonctionnement imprévisible.
- Changer le mode opératione de l'API.
Réglage/RAZ force d'un bit en mémoire.
-
Changer la valeur actuelle d'un mot quelconque ou de n'importe qu'elle valeur fixe en mémoire.
-
Reprendre l'exploitation uniquement après avoir transféré dans la nouvelle UC le contenu des zones DM et HR requis pour reprendre l'exploitation. Sans cette opération, le système risque de fonctionner de façon imprévisible.
- Ne pas exercer de tractions et ne pas plier les câbles au-delà des limites qu'ils peuvent naturellement supporter. Si vous ne respectez pas cette règle, il y a risque de rupture d'un ou de plusieurs câbles.
- Ne poser aucun objet sur les cables. La pose d'objets sur un cable peut provoquer unerupture de ce cable.
- Les piles ne doivent jamais être court-circuitées entre les bornes positives (+) et négatives (-), charges, démontees, chauffées ou jetées dans un feu.
- Lorsque vous remplacez des pieces, vérifier que les caractéristiques nominales des pieces neuves sont correctes. Une différence de ces caractéristiques peut provoquer un dysfonctionnement ou un brûlage.
- Avant de toucher l'unité, toucher d'abord un object métallique relié à la terre afin de décharger toute l'électricité statique qui a pu s'accumuler. Le non respect de cette règle peut provoquer un dysfonctionnement ou des dégats.
- Ne pas touche le cable de raccordement de l'unité d'extension des E/S lorsque le système est sous tension; ceci permet d'éviter les dysfonctionnements provoqués par l'électricité statique.
6 Directives communautaires
- Directives sur la CEM
- Directive sur les basses tensions
6-2 Concepts
Directives sur la CEM
Les apparèils OMRON qui sont en conformité avec les directives communautaires sont aussi conformes aux normes de la CEM connexes pour faciliter leur intégration dans d'autres dispositifs ou dans une machine. Les produits commercialisés ont fait l'objet d'un contrôle de conformité aux normes de la CEM (voir la note suivante). C'est au client qu'il appartiennent de s'assurer que les produits sont en conformité avec les normes du système qu'il utilise.
Les performances vis-à-vis des CEM des dispositifs OMRON qui sont en conformité avec les directives communautaires varient selon la configuration, le câblage et d'autres particularités de l'équipement, du tableau de commande sur lequel sont installés les dispositifs OMRON. Le client doit donc faire un contrôle final pour s'assurer que les dispositifs et l'ensemble de la machine sont en conformité avec les normes applicables à la CEM.
Rem. Les normes CEM (Compatibilité electromagnétique) applicables sont, comme suit :
EMS (Susceptibilité electromagnétique): EN61131-2
EMI (Interférences électromagnétiques) : EN50081-2
(Emission rayonnée : réglementation 10 m)
Directive sur les basses tensions
S'assurer toujours que les dispositifs fonctionnant à des tensions comprises entre 50 et 1.000V c.a. en alternatif et 75 à 1.500V c.c. sont en conformité avec les normes de sécurité requises pour l'automate. (EN61131-2).
Les API CPM2A sont conformes aux dispositifs des directives communautaires. Pour s'assurer que la machine ou le dispositif dans lequel est utilisé l'API CPM2A API est en conformité avec les directives communautaires, l'installation de l'autode doit être faite en respectant les indications suivantes :
1, 2, 3... 1. Le CPM2A API doit être installé avec un tableau de commande et de contrôle.
- Pour les alimentations courant continu utilisées pour les alimentations des communications et des E/S, il faut utiliser un isolement renforcé ou un double isolement.
- Les API CPM2A conformes aux directives communautaires doivent aussi être en conformité avec la Norme EN50081-2. Les caractéristiques de l'émission rayonnée (réglementation 10-m) peuvent varier selon la configuration du tableau de commande utilisé, des autres disposits raccordés à ce tableau, du câblage et d'autres facteurs. Il faut donc s'assurer que l'ensemble de la machine ou de l'équipement est conforme aux dispositions des directives communautaires.
6-4 Méthodes de réduction du bruit des sorties à relais
Les API CPM2A sont en conformité avec la norme EN50081-2 des directives sur la CEM. Toutefois, le bruit génééré par le basculement de l'API à l'état ON ou OFF à l'aide de la sortie à relais n'est peut être pas en conformité avec ces normes. Dans ce cas, un filtré anti-parasitage doit être relié au côté charge ou bien d'autres mesures spécifiques être mises en œuvre à l'extérieur de l'API.
Les contre-mesures prises pour être en conformité avec les normes variant en fonction des dispositifs qui sont du coût charge, du câblage de la configuration des machines, etc. Les exemples suivants décrivent des contre-mesures permettant de réduire le bruit général.
Contre-mesures
(Pour plus de détails, consulter EN50081-2).
Les contre-mesures sont inutiles si la fréquence de commutation de la charge pour tout le système - API inclus - est inférieure à 5 fois par minute.
Des contre-mesures sont obligatoires si la fréquence de commutation de la charge pour tout le système – API inclus – est 5 fois par minute ou plus.
Exemples de contre-mesures
Lors de la commutation d'une charge inductive, connecter un limiteur de tension, des diodes, etc. en parallèle avec la charge ou le contact, comme indiqué ci-dessous.
| Circuit | Courant | Caracteristique | Elément requis |
| Alt. | Cont. |
| Méthode CR | Oui | Oui | Si la charge est un relais ou un solénoïde, il y a un retard entre le moment de l'ouverture du circuit et le moment de la remise à zéro de la charge.Si la tension d'alimentation est comprise entre 24 et 48 V,mettre le limiteur de tension en parallèle avec la charge. Si la tension d'alimentation est entre 100 et 200 V,mettre le limiteur entre les contacts. | La capacité du condensateur doit être de 1 à 0,5 μF pour un courant de contact de 1 A et la résistance du composant résistif doit être de 0,5 à 1 Ω pour une tension de contact de 1 V.Toutefois, ces valeurs peuvent varier selon la charge et avec les caractéristiques du relais Ces valeurs doivent être choisisés à partir d'expérimentations en tenant compte du fait que la capacité supprime la décharge à étincelles lorsque les contacts sont séparés et que la résistance limite le courant qui circule dans la charge lorsque le circuit est à nouveau fermé.La résistance disruptive du condensateur doit être comprise entre 200 et 300 V. S'il s'agit d'un circuit en courant alternatif, il faut utiliser un condensateur sans polarité. |
| Méthode diode | Non | Oui | La diode connectée en parallèle avec la charge transforme l'énergie accumulée par la bobine en un courant, qui circule dans l'enroulement, afin d'être converti en chaleur par la résistance de la charge inductive.Le retard entre l'ouverture du circuit et la remise à zéro de la charge, qui est provoqué par cette méthode est plus long que celui obtenu par la méthode CR. | La valeur de la résistance disruptive inverse de la diode doit être au moins 10 fois plus grande que la valeur de la tension du circuit. Le courant direct de la diode doit être supérieur ou égal au courant de la charge.La valeur de la résistance disruptive inverse de la diode peut être deux ou trois fois plus grande que la tension d'alimentation si le limiteur de tension travaillée sur des circuits Electroniques représentant de faibles tensions de circuits. |
| Méthode varistor | Oui | Oui | La méthode de la résistance variable empêche l'imposition d'une haute tension entre les contacts grâce à la caractéristique de tension constante de la résistance variable. Il y a un retard entre l'ouverture du circuit et la remise à zéro de la charge i.Si la tension d'alimentation est entre 24 et 48 V,mettre la résistance variable en parallèle avec la charge. Si la tension d'alimentation est entre 100 et 200 V,mettre la résistance variable entre les contacts. | --- |
Les conditions de contrôle de l'immunité avec les E/S actuelles du CPM1AMAD01 sont, comme suit :
- Precision totale: +10%/-1%
- Mettre le noyau suivant sur chaque ligne, comme illustré ci-après.
Noyau recommende: 2643-002402
Ce chapitre déscrit les caractéristiques et fonctions spéciales du CPM2A, indique les configurations possibles du système et donne une idée des opérations nécessaires avant la mise en marche. Lire d'abord ce chapitre lors de l'utilisation du CPM2A pour la première fois.
Se référer au Manuel de programmation du CPM2A pour obtenir des détails sur la programmation.
1-1 Caracteristiques et fonctions du CPM2A. 2
1-1-1 Caracteristiques du CPM2A 2
1-1-2Vue generale des fonctions du CPM2A. 7
1-2 Configurations de base du système 8
1-2-1 Unité centrale autonome 8
1-2-2 Unité centrale et unité d'extension 8
1-3 Structure et fonctionnement 10
1-3-1 Structure de l'unité centrale 10
1-3-2 Modes de fonctionnement 11
1-3-3 Mode de fonctionnement à l'installation 12
1-3-4 Fonctionnement de l'API au démarrage 12
1-3-5 Fonctionnement cyclique et interruptions 14
1-4 Fonctions enumeratedes par leur usage. 19
1-5 Comparison au CPM1A 22
1-6 Préparation pour le fonctionnement 29
1-1 Caracteristiques et fonctions du CPM2A
1-1-1 Caracteristiques du CPM2A
Les API CPM2A représentent une diversité de caractéristiques dans une unité compacte, complenant le contrôle des impulsions synchronisées, les entrées d'interruption, les sorties d'impulsions, les réglages analogiques, et une fonction d'horloge. L'unité centrale du CPM2A est une unité autonome, qui peuttraiter une large gamme d'applications de contrôle par machine, et elle est idéale comme unité de contrôle incorporeée dans des équipements.
Tout le jeu de fonctions de communications fournit des communications avec des ordinateurs personnels, d'autres API OMRON et des terminaux programmables OMRON. Ces possibilités de communications permettent à l'utilisateur de conceivevoir un système de production distribuée de faible coût.
Port de périhérique
Les apparèils de programmation sont compatibles avec d'autres modéles de l'API OMRON. Ce port peut être utilisé aussi comme liaison à un micro-ordinateur ou pour des communications sans protocole.
Port RS-232C Ce port peut etre utilise comme liaison a un micro-ordinateur, communications sans protocole, de liaison API 1:1 ou de liaison NT 1:1.
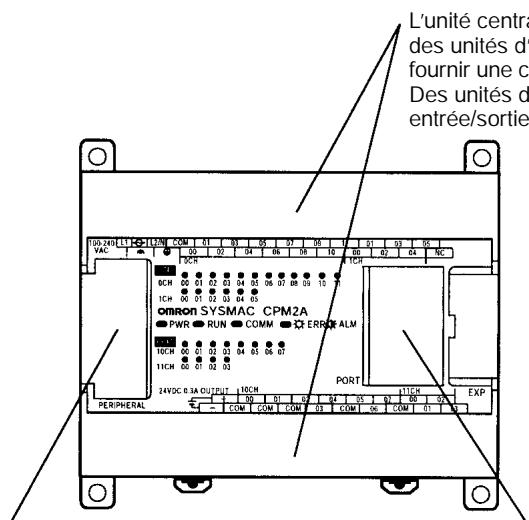
L'unité centrale contient 20, 30, 40 ou 60 points d'entrée/sortie, et des unités d'extension d'entrée/sortie peuvent être ajoutées pour fournir une capacité totale de jusqu'à 120 points d'entrée/sortie. Des unités d'entrée/sortie analogiques et des unités de liaison entrée/sortie CompoBus/S sont également connectables.
Fonctions de base
Variantes de I'unité de base
Unités d'entrée/sorting d'extension
Les API CPM2A sont des API d'une piece avec 20, 30, 40 ou 60 bornes entre-organisees. Il existe 3 types de sorties (sorties à relais, sorties à transistor NPN et sorties à transistor PNP) et 2 types d'alimentations (100/240 Vc.a. ou 24 Vc.c.).
Jusqu'à 3 unités d'entrée/sortie d'extension se connectent à l'unité centrale, pour porter la capacité d'entrée/sortie de l'API à un maximum de 120 points d'entrée/sortie. Il existe 3 types d'unités d'entrée/sortie : une unité d'entrée/sortie à 20 points, une unité d'entrée à 8 points et une unité de sortie à 8 points. La capacité maximale de 120 points d'entrée/sortie est atteinte en connectant trois unités d'entrée/sortie à 20 points à une unité centrale avec 60 bornes d'entrée/sortie incorporeées.
Unités d'entrée/sortinge analogiques
Jusqu'à 3 unités d'entrée/sortinge analogiques se connectent pour obtenir des entrées et des sorties analogiques. Chaque unité donne 2 entrées analogiques et 1 sortie analogue, de sorte que 6 entrées analogiques et 3 sorties analogiques sont obtenues en connectant 3 unités d'entrée/sortinge analogiques. (Un contrôle proportionnel au temps est réalisable en combinant les points d'entrée/ sortie analogiques avec les instructions PID (-) et PWM (-).)
- Le domaine d'entrée analogue peut être régle de 0 à 10 Vc.c., de 1 à 5 Vc.c. ou de 4 à 20 mA, avec une résolution de 1/256. (La fonction de détention à circuit ouvert peut être utilisée avec les réglages 1 à 5 Vc.c. et 4 à 20 mA.)
- Le domaine de sortie analogique peut être régle de 0 à 10 Vc.c., de -10 à +10 Vc.c. ou de 4 à 20 mA, avec une résolution de 1/256.
Unités de liaison entrée/sorting CompoBus/S
Des unités de liaison entrée/sortie CompoBus/S se connectent pour faire du CPM2A un apparéil esclave dans un réseau CompoBus/S. L'unité de liaison entrée/sortie a 8 bits à l'entrée (en interne) et 8 bits à la sortie (en interne).
Le réseau CompoBus/S fournit un contrôle réparti de l'unité centrale basé sur une configuration "API + API compact", ce qui est un progrès par rapport à l'ancien contrôle entrée/sortie réparti, basé sur une configuration "API + entrée/sortie distante". Le contrôle réparti de l'unité centrale rend les équipements modulaires, ce qui fait que les constructions peuvent être standardisées, que l'accès à des besoin spéciaux est possible et que en cas de panne les modules sont facilement replacable.

Appareils de programmation partagée
Les mêmes apparueils de programmation, comme les consoles de programmation et le logiciel de support, peuvent être utilisés pour les API C200H, C200HS, C200HX/HG/HE, CQM1, CPM1, CPM1A, CPM2C et SRM1 (-V2), de sorte que les ressources du programme en échelle existantes peuvent être utilisées avec succès.
Capacité de contrôle par moteur incorpore
Contrôle par impulsions synchronisées (sorties à transistor seulement)
Le contrôle par impulsions synchronisées fournit un moyen facile de synchroniser le fonctionnement d'un équipement péripérisque avec l'équipement principal. La fréquence des impulsions de sortie peut être contrôle sous la forme d'un multiple de la fréquence des impulsions d'entrée, ce qui permet de synchroniser la vitesse d'un équipement péripérisque (par exemple un convoyeur d'alimentation) sur la vitesse de l'équipement principal.
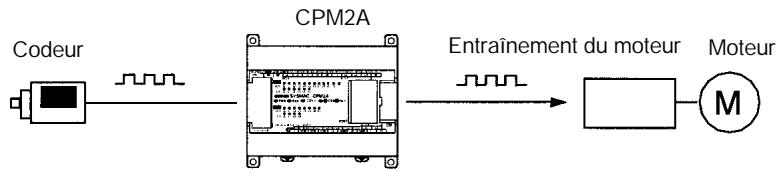
Les impulsions sortent à un multiple fixe de la féquence d'entrée.
| Compteurs et interruptions à grande vitesse | Le CPM2A a un total de cinq entrées compteurs à grande vitesse. Une entrée compteur à grande vitesse a une fréquence de réponse de 20 kHz/5 kHz et les quatre entrées d'interruption (en mode compteur) ont une fréquence de réponse de 2 kHz.Lé compteur à grande vitesse peut être utilisé dans n'importe lequel des quatre modes d'entrée : le mode à phase différentielle (5 kHz), le mode d'entrieute d'impulsions direction plus (20 kHz), le mode d'impulsions haut/bas (20 kHz), ou le mode à incrément (20 kHz). Les impulsions peuvent être déclenchées quand le comptage atteint une valeur préréglée ou tombe dans une gamme spécifique.Les impulsions d'interruption (mode compteur) peuvent être utilisées pour incrémenter les compteurs ou les décrémenter (2 kHz) et déclencher une interruption (en exécutant le programme d'interruption) quand le comptage atteint la valeur cible. |
| Contrôle de position facile avec des sorties à impulsions (Seulment sorties à transistor) | Les API CPM2A avec sorties à transistor ont deux sorties, qui peuvent produit des impulsions de 10 Hz à 10 kHz (sorties à une seule phase).Si elles sont utilisées comme sorties à une seule phase, il peut y avoir deux sorties avec une gamme de fréquence de 10 Hz à 10 kHz avec un rapport cyclique fixe, ou de 0,1 à 999,9 Hz avec un rapport cyclique variable (rapport cyclique de 0 à 100%).Si elles sont utilisées comme sorties à direction plus ou à impulsions haut/bas, il ne peut y avoir qu'une sortie seulement avec une gamme de fréquence de 10 Hz à 10 kHz. |
| Capacités d'entrée à grande vitesse pour commande de machines |
| Fonction d'entrée d'interruption à grande vitesse | Il y a quatre entrées utilisées pour les entrées d'interruption (partagées avec entrées à réponse rapide et entrées d'interruption en mode compteur) avec un signal d'entrée de largeur minimale de 50 μs et un temps de réponse de 0,3 ms. Quand une entrée d'interruption est activée, le programme principal s'arrête et le programme d'interruption est executé. |
| Fonction d'entrée à réponse rapide | Il y a quatre entrées utilisées comme entrées à réponse rapide (partagées avec des entrées d'interruption et des entrées d'interruption en mode compteur), qui peuvent dire de façon fiable des signaux d'entrée d'une largeur aussi courte que 50 μs. |
| Stabilisation du fonctionnement du filtré d'entrée | La constante de temps d'entrée pour toutes les entrées peut être régée à 1 ms, 2 ms, 3 ms, 5 ms, 10 ms, 20 ms, 40 ms ou 80 ms. On peut réduire les effets de parasitages en augmentant la constante de temps à l'entrée. |
| Autres fonctions |
| Interruptions de la temporisation | La temporisation peut être régée entre 0,5 et 319.968 ms, et elle peut être régée pour produit une interruption seulement (mode à un coup) ou des interruptions périodiques (mode à interruptions programmes). |
| Réglages analogiques | Sur l'unité centrale, deux des commandes peuvent être tourner pour changer les réglages analogiques (0 à 200 BCD) dans IR 250 et IR 251. Ces commandes peuvent être utilisées pour changer facilement ou faire le réglage fin des réglages de la machine, notamment le temps d'arrêt d'un convoyeur ou son débit d'alimentation. |
| Calendrier/horloge | L'horloge incorporee (precision de moins de 1 minute par mois) peut être lue dans le programme pour trouver l'année en cours, le mois, le jour, le jour de la semaine et l'heure. L'horloge peut être régée par un apparéil de programmation (notamment une console de programmation), ou bien l'heure se régle en arrondissant vers le haut ou vers le bas à la minute la plus proche. |
Temporisation à long terme
TIML (- - ) est une horloge à long terme qui accepte des valeurs prérégliées de jusqu'à 99.990 secondes (27 heures, 46 minutes, 30 secondes). En la combinant avec l'instruction de conversion SECONDES EN HEURES (HMS (- - ) ), l'horloge à long terme fournit une manière facile de contrôler le programme des équipements.
Contrôle PID analogue
L'instruction PID(--) peut être utilisé avec une unité d'entrée/sortinge analogue pour contrôler l'entrée/sortinge analogue.
Capacités complètes de communications
Liaison à un micro-ordinateur
Une liaison à un micro-ordinateur peut se faire à partir du port RS-232C ou du port de péripérisque de l'API. Un ordinateur personnel ou un terminal programmable connecté en mode liaison à un micro-ordinateur peut être utilisé pour des opérations telles que生存 ou écrire des données dans la mémoire d'entrée/sortie du PC, ou bien生存 ou changer le mode opérateire de l'API.
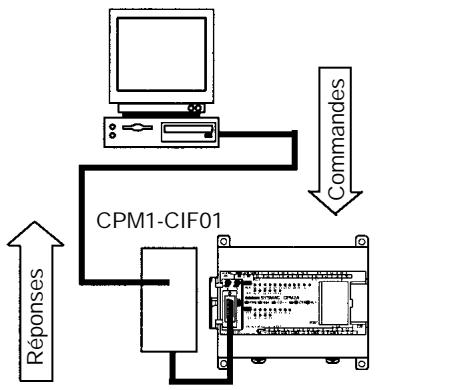
Communications de liaison à un micro-ordinateur 1:1
CPM2A (connexion à un port périphérique*)
*Il faut un adaptateur RS-232C pour se connecter au port de péripérisque RS-232C
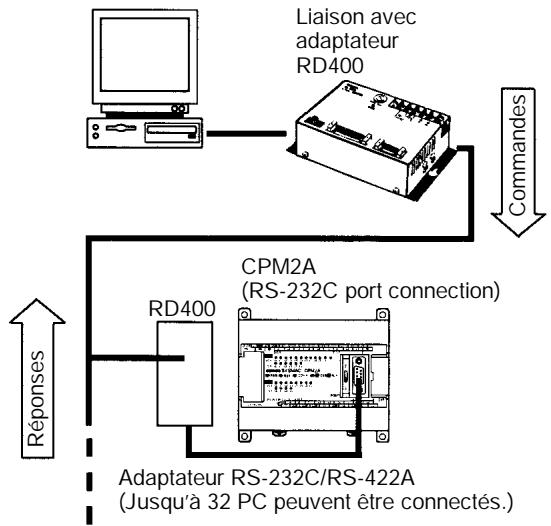
Communications de liaison à un micro-ordinateur 1:N
Les instructions TXD (48) et RXD (47) peuvent être utilisées en mode sans protocole pour échanger des données avec des appareils série standard. Par exemple, des données peuvent être reçues d'un lecteur de code barres ou transmises à une imprimante série. Les appareils série peuvent être connectés au port RS-232C ou au port de périphérique.
Entree de données venant d'un lecteur de code barres
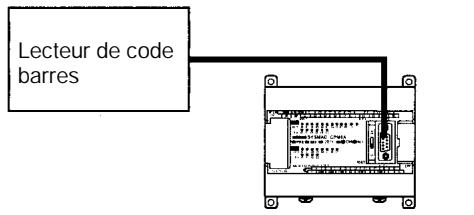
CPM2A (connexion port RS-232C*)
Sortie de données vers une imprimante série
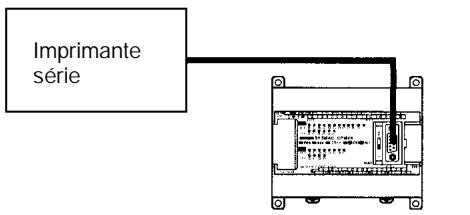
CPM2A (connexion port RS-232C *)
*Il faut un adaptateur RS-232C de type CPM1-CIF01pour se connecter au port de périphérique.
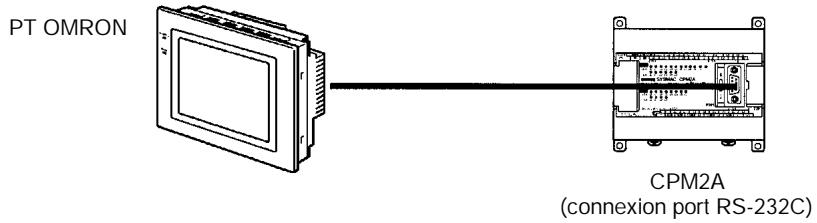
Communications à grande vitesse par liaison NT 1:1
Lors d'une liaison NT 1:1, un terminal programmable (PT) OMRON se connecte directement au CPM2A. Le PT doit être connecté au port RS-232C ; il ne peut pas être connecté au port de périhérique.
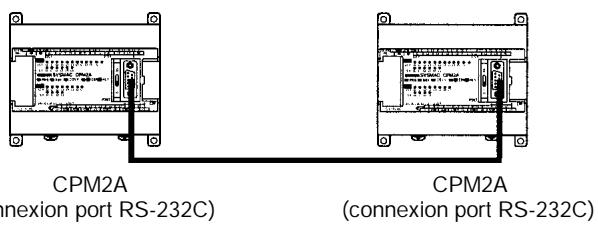
Liaison d'un API à un API
Un CPM2A peut être relié directement à un autre API CPM2A, CQM1, CPM1, CPM1A, CPM2C, SRM1(-V2) ou bien un API C200HS ou C200HX/HE/HG. La liaison API 1:1 permet des connexions en liaison de données automatique. L'API doit être connecté par le port RS-232C; il ne peut pas être connecté par le port de périhérique.
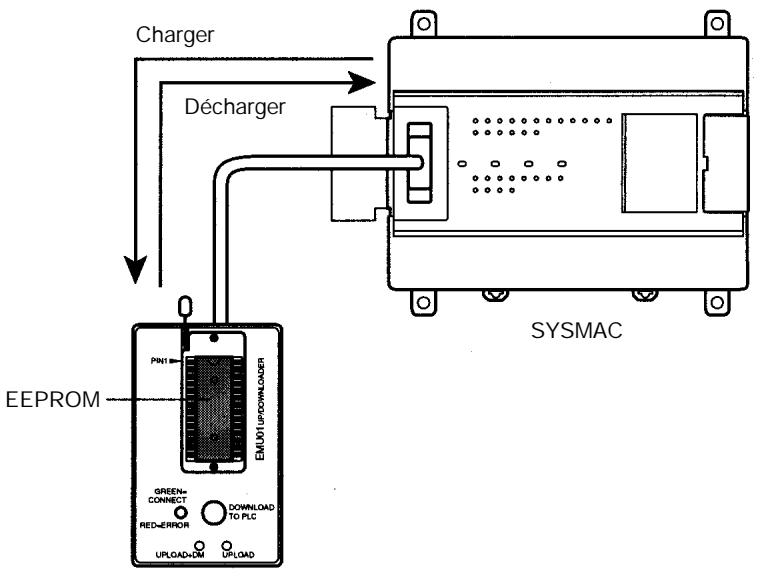
Unité d'extension de mémoire
L'unité d'extension de mémoire CPM1-EMU01-V1 est un chargeur de programme pour les PLC de taille réduite ou micro. Utiliser le CPM1-EMU01-V1 avec les PLC pour transférer les programmes simples de l'utilisateur sur site et la mémoire des données.
1-1-2 Vue générale des fonctions du CPM2A
| Fonction principale | Variantes/détails |
| Interruptions | Entrées d'interruption4 entrées, voir Rem. 1Temps de réponse : 0,3 ms |
| Interruptions d'horloge d'intervalles1 entréevaleur préréglée : 0,5 à 319.968 mspréciation : 0,1 ms | Interruptions programmesés |
| Interruption à un coup |
| Compteurs à grande vitesse | Compteur à grande vitesse1 entrée, voir Rem. 2Mode à phase différentielle (5 kHz)Mode d'entrée impulsions direction plus (20kHz)Mode d'entrée haut/bas (20 kHz)Mode incrémentiel (20 kHz) | Pas d'interruption |
| Interruption vérification comptage(Une interruption peut être produit si lecomptage égale la valeur régée ou si lecomptage se trouve dans une gammepréréglée) |
| Entrées d'interruption(mode comptage)4 entrées, voir Rem. 1Compteur incrémentant (2 kHz)Compteur décrémentant (2 kHz) | Pas d'interruption |
| Interruption de comptage |
| Sorties d'impulsions | 2 sorties :Sortie d'impulsions à une seule phase sans accélération/décélération (voir Rem. 3)10 Hz à 10 kHz2 sorties :sortie impulsions à rapport cyclique variable (voir Rem. 3)0,1 à 999,9 Hz, rapport cyclique de 0 à 100%1 sortie :sortie d'impulsions à accélération/décélération trapezoidale (voir Rem. 3)sortie impulsions direction plus, sortie impulsions haut/bas, 10 Hz à 10 KHz |
| Contrôle synchronisé desimpulsions | 1 point, voir Rem. 2 et 3Gamage de fréquence d'entrée : 10 à 500 Hz, 20 Hz à 1 kHz ou 300 Hz à 20 kHzGamage de fréquence de sortie : 10 Hz à 10 kHz |
| Sortie à réponse rapide | 4 entrées, voir Rem. 1.Largeur minimale du signal d'entrée : 50 μs |
| Réglages analogiques | 2 commandes (gammes de réglage : 0 à 200 BCD) |
| Constante de temps àl'entrée | Détermine la constante de temps à l'entrée pour toutes les entrées (réglages : 1, 2, 3, 5,10, 20, 40 ou 80 ms) |
| Calendrier/horloge | Indique année en cours, mois, jour de la semaine, heures, minute et seconde. |
| Fonctions des unitésd'extension | Fonctions des unités d'entrée/sortinge analogiquesDeux entrées analogiques:gamage d'entrée 0 à 10 V, 1 à 5 V ou 4 à 20 mAUne sortie analogue:gamme de sortie 0 à 10 V, -10 à 10 V ou 4 à 20 mA |
| Fonctions esclave CompoBus/SEchange 8 bits d'entrée et 8 bits de sortie avec l'unité maître |
Rem. 1. Ces quatre entrées sont partagées en entrées d'interruption, entrées d'interruption en mode comptage et entrées à réponse rapide, mais chaque entrée ne peut être utilisée que dans un seul but.
- Cette entree est partagee par le compteur a grande vitesse et des fonctions de controle synchronise des impulsions.
- Cette sortie est partagée par la sortie des impulsions et des fonctions de contrôle synchronisé des impulsions. Ces fonctions ne peuvent être utilisées qu'avac des sorties à transistor.
1-2 Configurations de base du système
1-2-1 Unité centrale autonome
UC à 20/30 points entree/sortie
UC à 40 points d'entrée/sorting
UC à 60 points d'entrée/sorting
| Nombre de points d'entrée/sortinge | Alimentation | Entrées | Sorties | Modèle |
| 20 points d'entrée/sortinge (12 entrées et 8 sorties) | 100 à 240 Vc.a. | 24 Vc.c. | Relais | CPM2A-20CDR-A |
| 24 Vc.c. | 24 Vc.c. | Relais | CPM2A-20CDR-D |
| 24 Vc.c. | Transistor NPN | CPM2A-20CDT-D |
| 24 Vc.c. | Transistor PNP | CPM2A-20CDT1-D |
| 30 points d'entrée/sortinge (18 entrées et 12 sorties) | 100 à 240 Vc.a. | 24 Vc.c. | Relais | CPM2A-30CDR-A |
| 24 Vc.c. | 24 Vc.c. | Relais | CPM2A-30CDR-D |
| 24 Vc.c. | Transistor NPN | CPM2A-30CDT-D |
| 24 Vc.c. | Transistor PNP | CPM2A-30CDT1-D |
| 40 points d'entrée/sortinge (24 entrées et 16 sorties) | 100 à 240 Vc.a. | 24 Vc.c. | Relais | CPM2A-40CDR-A |
| 24 Vc.c. | 24 Vc.c. | Relais | CPM2A-40CDR-D |
| 24 Vc.c. | Transistor NPN | CPM2A-40CDT-D |
| 24 Vc.c. | Transistor PNP | CPM2A-40CDT1-D |
| 60 points d'entrée/sortinge (36 entrées et 24 sorties) | 100 à 240 Vc.a. | 24 Vc.c. | Relais | CPM2A-60CDR-A |
| 24 Vc.c. | 24 Vc.c. | Relais | CPM2A-60CDR-D |
| 24 Vc.c. | Transistor NPN | CPM2A-60CDT-D |
| 24 Vc.c. | Transistor PNP | CPM2A-60CDT1-D |
1-2-2 Unité centrale et unité d'extension
Jusqu'à 3 unités d'extension peuvent être reliées au connecteur d'extension par des cables de connexion entrée/sortie d'extension. (Une seule unité d'extension peut être connectée si un adaptateur NT-AL001 est connecté au port RS-232C parce que l'alimentation 5 Vc.c. de l'unité centrale est limitée.)
Il existe trois modèles d'unités d'extension :
l'unité d'extension entrée/sortie, l'unité d'entrée/sortie analogique et l'unité d'entrée/sortie de liaison CompoBus/S.
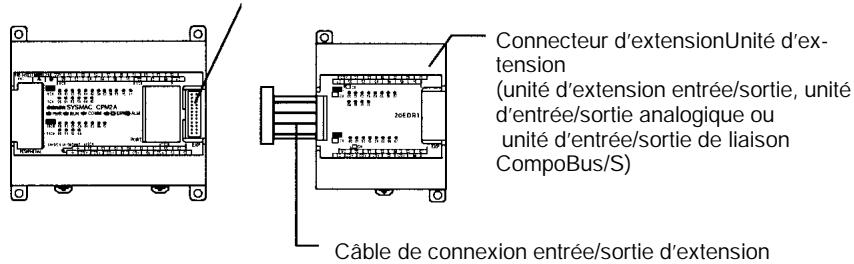
Connecteur d'extension
Un API avec 120 points d'entrée/sorting (le maximum) s'assemble en connectant trois unités entrée/sorting à une unité centrale avec 60 points d'entrée/sorting.
$$
\frac {\text {C P M 2 A - 6 0 C D R - A}}{(3 6 \text {e n t r e e s} , 2 4 \text {s o r t i e s})} \times 1 \text {U n i t e} + \frac {\text {C P M 1 A - 2 0 E D R 1}}{(1 2 \text {e n t r e e s} , 8 \text {s o r t i e s})} \times 3 \text {U n i t e s} = 7 2 \text {e n t r e e s}, 4 8 \text {s o r t i e s}
$$
Un API avec 6 entrées analogiques et 3 sorties analogiques (le maximum) s'assemble en connectant trois unités d'entrée/sortie analogiques. (Une seule unité d'entrée/sortie analogique peut être connectée si un adaptateur NT-AL001 est relié au port RS-232C de l'unité centrale.)
Des unités de liaison entrée/sortie CompoBus/S (unités esclaves) peuvent être connectées à une unité centrale. Des données d'entrée/sortie (8 entres et 8 sorties) sont transférées entre l'unité centrale et la zone affectée à l'esclave CompoBus/S. (Les données d'entrée/sortie échangées avec l'esclave sont des données internes ; il n'y a pas de bornes externes d'entrée/sortie.)
Rem. 1. Differents types d'unités d'extension peuvent être connectés en même temps. Par exemple, l'unité centrale peut être connectée à une unité d'extension entrée/sortinge, une unité analogique entrée/sortinge et une unité de liaison entrée/sortinge CompoBus/S.
- Si un adaptateur NT-AL001 est connecté au port RS-232C, une seule unité d'extension peut être connectée à l'unité centrale à cause des limitations d'alimentation.
Unités d'extension
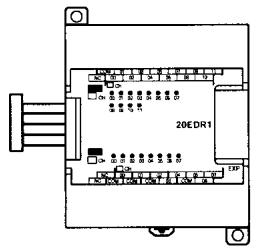
Unité d'entrée/sortie 20 points

Unité d'entrée 8 points
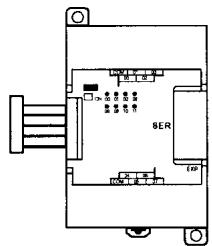
Unité d'entrée 8 points
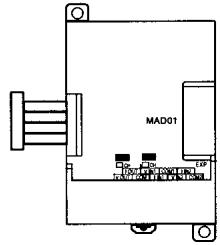
Unité d'entrée/sortie analogue
Unité de liaison entree/sortie CompoBus/S
| Unité | Nombre maxi. d'unités | Entrées | Sorties | Modèle |
| Unités d'extension entrée/sortinge | 20 points entrée/sortie 12 entres 8 sorties | 3 unités max.(voir Rem.) | 24 Vc.c. | Relais | CPM1A-20EDR1 |
| 24 Vc.c. | Transistors NPN | CPM1A-20EDT |
| 24 Vc.c. | Transistors PNP | CPM1A-20EDT1 |
| 8 entrés | 24 Vc.c. | --- | CPM1A-8ED |
| 8 sorties | --- | Relais | CPM1A-8ER |
| --- | Transistors NPN | CPM1A-8ET |
| --- | Transistors PNP | CPM1A-8ET1 |
| Unité d'entrée/sortinge analogiques2 entres analogiques (2 mots)1 sortinge analogue (1 mot) | 2 entrées analogiques | 1 sortie analogue | CPM1A-MAD01 |
| Unité d'entrée/sortinge de liaison CompoBus/S8 entrés et 8 sorties | 8 bits(entrées venant du maitre) | 8 bits(sorties vers le maitre) | CPM1A-SRT21 |
Rem. Une seule unité d'extension entrée/sortie peut être connectée lorsqu'un adaptateur NT-AL001 est connecté au port RS-232C de l'unité centrale
1-3 Structure et fonctionnement
1-3-1 Structure de l'unité centrale
Le schéma suivant indique la structure interne de l'unité centrale.
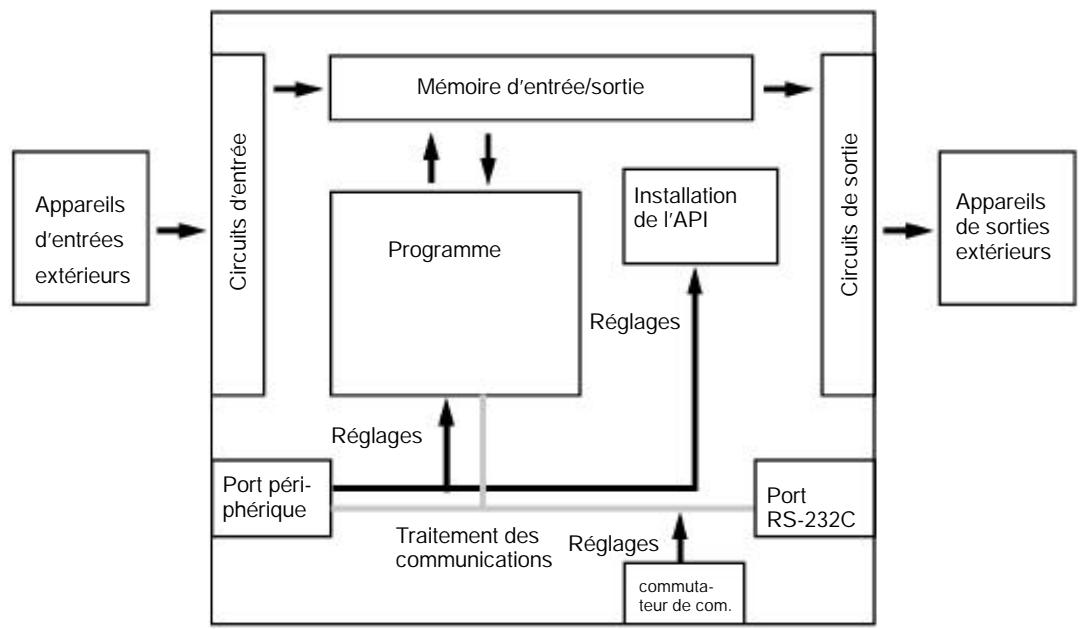
Mémoire d'entrée/sorting
Pendant l'exécution, le programme lit et écrit des données dans cette zone de mémoire. Une partie de la mémoire d'entrée-sortie contient les bits qui reflèvent l'état des entrées et sorties de l'API. Certaines parties de la mémoire d'entrée/ sortie sont vidées à la mise sous tension et d'autres parties sont conservées.
Rem. Se reporter au chapitre 3, Zones de mémoire dans le Manuel de programmation pour plus de détails sur la mémoire d'entrée/sorting.
Programme
Ceci est le programme écrit par l'utilisateur. Le CPM2A exécute le programme de façon cyclique. (Se reporter à 1-3-5 Fonctionnement cyclique et interruptions pour plus de détails.)
| Le programme peut être divisé en gros en deux parties : le "programme principal" qui est exécuté de façon cyclique et les "programmes d'interruptions" qui sont exécutés seulement quand l'interruption correspondante est produit. |
| Installation de l'API | L'installation de l'API contient divers paramètres de démarriage et de fonctionnement. Les paramètres d'installation de l'API peuvent seulement être changés à partir du logiciel de programmation: ils ne peuvent pas été changés à partir du programme.Certains paramètres sont accessibles seulement à la mise en marche de l'alimentation de l'API et d'autres sont accessibles régulièrement quand l'alimentation est en marche. Il faudra couper l'alimentation et puis la remettre en marche pour permettre un nouveau réglage si le paramètre est accessible seulement au moment où l'alimentation est mise en marche.Rem. Se reporter au chapitre 1 Installation de l'API dans le Manuel de programmation pour plus de détails. |
| Commutateur de communications | Le commutateur de communications déterminée si le port de péripérisque et le port RS-232C fonctionnement avec les réglages de communications normaux ou les réglages de communications à l'installation de l'API. |
| 1-3-2 Modes de fonctionnement |
| Les unités centrales CPM2A ont 3 modes de fonctionnement : PROGRAM (programme), MONITOR (surveillance) et RUN (marche). |
| Mode PROGRAM | Le programme ne peut pas été exécuté en mode PROGRAM. Ce mode est utilisé pour effectuer les opérations suivantes en préparation de l'exécution du programme :• changer les paramètres initiaux et de fonctionnement, tels que ceux dans l'in-stallation de l'API• écrire, transférer ou vérifier le programme• vérifier le câblage en imposant le réglage ou le nouveau réglage des bits d'en-trée/sortie |
| Mode MONITOR | En général, le mode MONITOR est utilisé pour déboguer le programme, tester le fonctionnement et faire des ajustements. Le programme est exécuté en mode MONITOR et les opérations suivantes peuvent être effectuees à partir d'un apparil de programmation :• "éditer" en ligne• surveiller la mémoire d'entrée/sortie en fonctionnement• imposer le réglage ou le nouveau réglage des bits d'entrée/sortie, changer les valeurs réglées et changer les valeurs actuelles pendant le fonctionnement. |
| Mode RUN | Le programme est exécuté à vitesse normale en mode RUN. Les opérations comme l'"edition" en ligne, l'imposition du réglage ou du nouveau réglage des bits d'entree/sortie, et le changement des valeurs réglées et des valeurs actuelles, ne peuvent s'effectuer en mode RUN, mais l'état des bits d'entree/sortie peut être surveillé. |
1-3-3 Mode de fonctionnement à l'installation
Le mode opératione du CPM2A quand l'alimentation est mise en marche dépend des réglages d'installation de l'API et du réglage du commutateur de mode de la console de programmation si une console de programmation y est connectée.
| Réglage de l'installation de l'API | Console de programmation connectée | Console de programmation non connectée |
| Mot | Bits | Réglage |
| DM6600 | 08 à 15 | 00 | Mode d'état déterminé par le réglage du commutateur de mode. | Le mode d'état est le mode RUN (voir Rem.) |
| 01 | Le mode d'installation est le même que le mode opératione avant que l'alimentation soit interrompue |
| 02 | Le mode d'installation est déterminé par les bits 00 à 07 |
| 00 à 07 | 00 | Mode PROGRAM |
| 01 | Mode MONITOR |
| 02 | Mode RUN |
Rem. Le réglage par défaut est 00. Avec ce réglage par défaut, le mode opératione de démarrage est déterminé par le réglage du commutateur de mode de la console de programmation si une console de programmation est connectée au port de péripérisque. Si une console de programmation n'est pas connectée, l'API se mettra automatiquement en mode RUN.
1-3-4 Fonctionnement de l'API au démarrage
Temps nécessaire à l'initialisation
Le temps nécessaire à l'initialisation du démarrage dépend de plusieurs facteurs, tels que les conditions de fonctionnement (comprenant la tension d'alimentation, la configuration du système et la température ambiente) et le contenu du programme.
Fonctionnement en cas de coupure de l'alimentation
Tension minimum d'alimentation
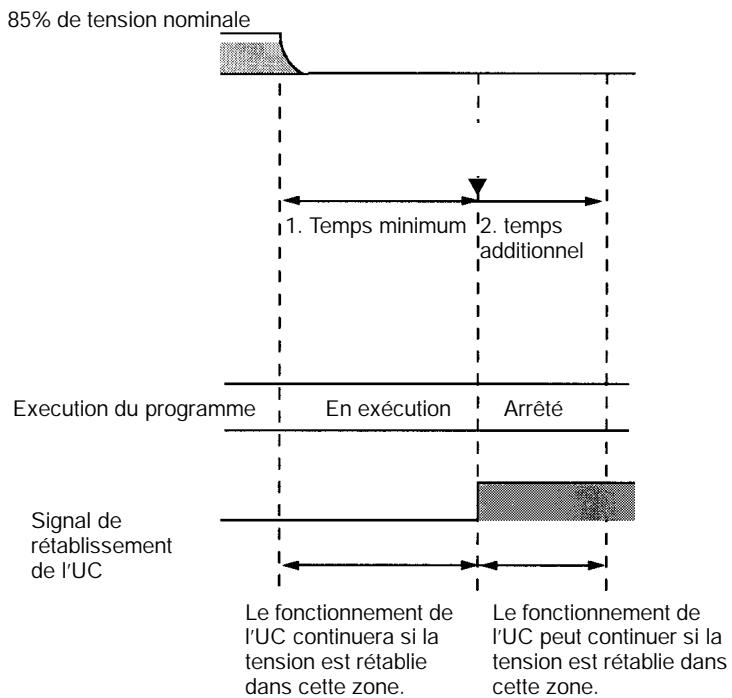
Le API s'arrête et toutes les sorties seront coupées si la tension d'alimentation tombe à moins de 85% de sa valeur nominale.
Interruption momentanée de l'alimentation
Une interruption d'alimentation ne sera pas détectée et le fonctionnement de l'unité centrale continues si l'interruption de l'alimentation dure moins de 10 ms pour une alimentation alternative (CA) ou 2 ms pour une alimentation continue (CC).
Une interruption d'alimentation peut être détectée ou non pour des interruptions légèrement plus longues que 10 ms pour une alimentation alternative ou 2 ms pour une alimentation continue.
Si une interruption d'alimentation est detectée, l'unité centrale cessera de fonctionner et toutes les sorties seront coupées.
Rétablissement automatique
Le fonctionnement redémarrera automatiquement si la tension d'alimentation revient à plus de 85% de la tension nominale.
Chronogramme du fonctionnement en cas de coupure de l'alimentation
Le temps de détention de l'interruption d'alimentation est le temps nécessaire à détacher une interruption d'alimentation après que la tension d'alimentation est tombée à moins de 85% de sa valeur nominale.
1, 2, 3... 1. Temps de détention minimum d'une interruption d'alimentation Les interruptions d'alimentation qui sont inférieures à 10 ms (alimentation alternative) ou à 2 ms (alimentation continue) ne seront pas détectées.
2. Temps additionnel indéterminé
Les interruptions d'alimentation qui sont seulement un peu plus longues que le temps d'interruption d'alimentation minimum peuvent ne pas etre détectees.
Rem. Lorsque la tension d'alimentation fluctue autour de 85% de la tension nominale de l'API, le fonctionnement de celui-ci peut s'arreter et redémarrer de façon répetée. Si l'arrêt et le démarriage repétés risquent de provoquent des problèmes pour le système contrôle, installer un circuit de protection tel qu'un circuit qui coupe l'alimentation de l'équipement sensible jusqu'à ce que la tension d'alimentation revienne à la valeur nominale.
1-3-5 Fonctionnement cyclique et interruptions
Fonctionnement de base de l'unité centrale
L'opération d'initialisation se fait quand l'alimentation est mise en marche. S'il n'y a pas d'erreurs d'initialisation, les opérations de surveillance, l'exécution du programme, le rafraîchissement des entrées/sorties et l'entretien des ports de communications sont effectuels de façon répétée (cycliquement).
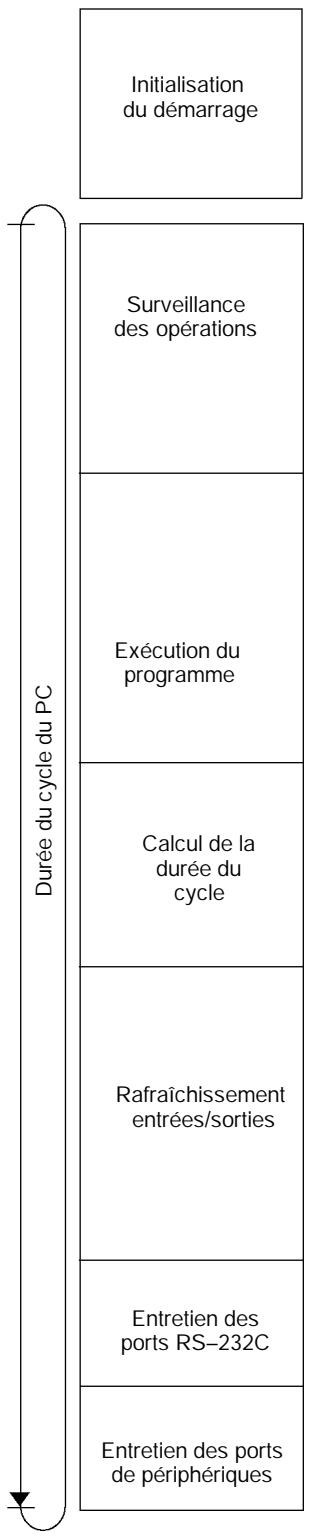
$ vérifier le matériel
S vérifier la mémoire
S litre les données de la mémoire flash (programme, données mémoire morte de gestion de données et réglage de la configuration de l'API).
S verifier s'il y a erreur de batterie
S prerégler le cycle d'horloge (maximum)
S vérifier la mémoire de programme
Srafraichir les bits pour fonction d'extension
$ executer le programme (se reporter au Manuel de programmation pour détails sur la durée du cycle et les temps de réponse des entrées/sorties)
$ attendre la durée du cycle minimum si une durée du cycle a été régée à l'installation de l'API (DM 6619).
S calculator la durée du cycle
$ lure les données d'entrée sur les bits d'entrée
S écrire les données de sortie sur les bits de sortie
$ effectuer le traitement des communications du port RS-232C (peut être changé dans DM 6616)
$ effectuer le traitement des communications du port de périhérique (peut être changé dans DM 6617)
La durée du cycle peut être lue à partir d'un appareil de programmation.
AR 14 contient la durée du cycle maximum et AR 15 contient la durée du cycle actuelle par multiples de 0,1 ms.
Exécution du programme en fonctionnement cyclique
La durée du cycle variera légèrement suivant l'opération effectue dans chaque cycle, de sorte que la durée du cycle calculée ne sera pas toujours la durée du cycle réelle.
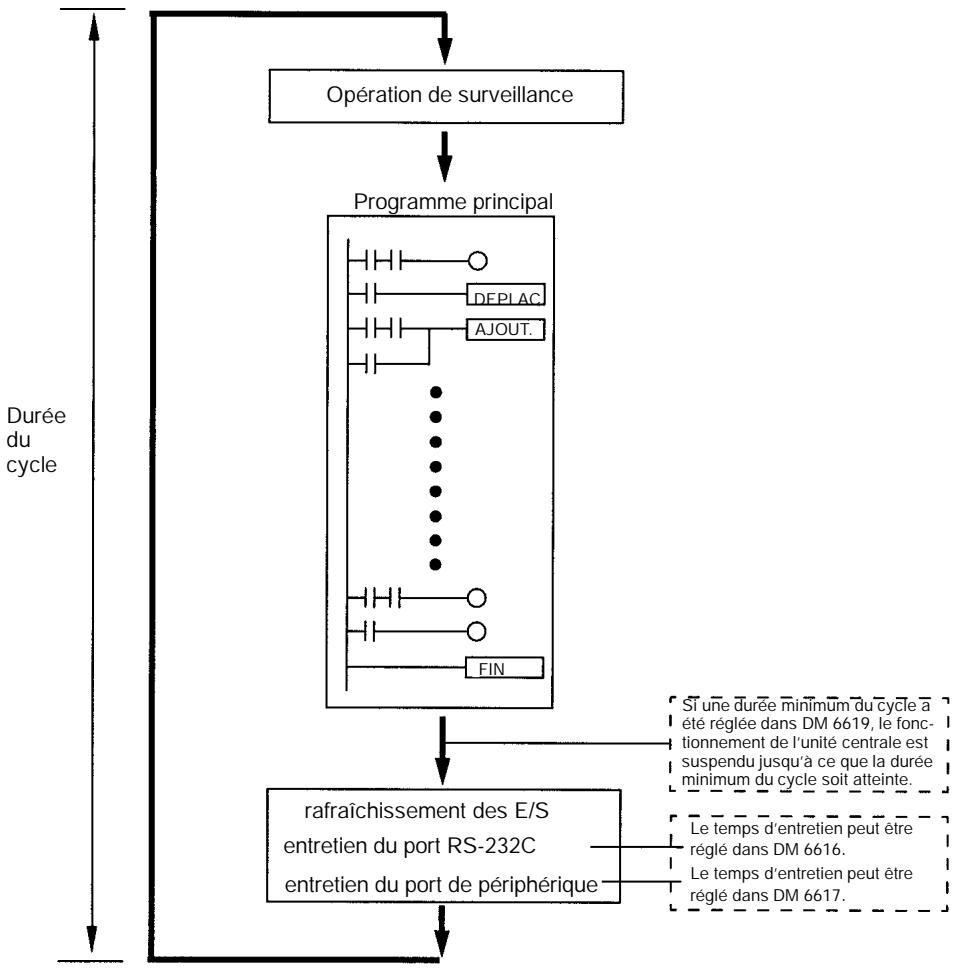
Le schéma suivant montre le fonctionnement cyclique du CPM2A quand le programme est executé normalement
Normalement, les résultats de l'exécution du programme sont transférés à la mémoire d'entrée/sortie juste après l'exécution du programme (pendant le rafraîchissement des entrées/sorties), mais IORF(97) peut être utilisé pour rafraîchir une gamme spécifique de mots d'entrée/sortie pendant l'exécution du programme. La gamme spécifique de mots d'entrée/sortie sera rafraîchie quand IORF(97) aura été exécuté.
La durée du cycle est la somme du temps nécessaire pour l'exécution du programme, le rafraîchissement des entrées/sorties et l'entretien du port de communications.
Une durée du cycle minimum (1 à 9.999 ms) peut être régée à l'installation de l'API. Quand une durée du cycle minimum a été régée, le fonctionnement de l'unité centrale est suspendu après l'exécution du programme jusqu'à ce que la durée du cycle minimum soit atteinte. Le fonctionnement de l'unité centrale ne sera pas suspendu si la durée du cycle réelle est plus longue que la durée du cycle minimum régée dans DM 6619.
Rem. Une erreur fatale se produit et le fonctionnement de l'API sera arrêté si la durée du cycle maximum a été régée à l'installation de l'API (DM 6618) et que la durée réelle du cycle dépasse ce réglage.
Les réglages par défaut pour l'entretien du port RS-232C et l'entretien du port de péripérisque sont de 5% de la durée du cycle, mais ces réglages peuvent être changés (entre 1% et 99% ) à l'installation de l'API. Le réglage du port RS-232C se trouve dans DM 6616 et le réglage du port de péripérisque se trouve dans DM 6617.
Se reporter à la Section 7 Fonctionnement et temps de traitement de l'API dans le Manuel de programmation pour plus de détails et les précautions à prendre pour la durée du cycle.
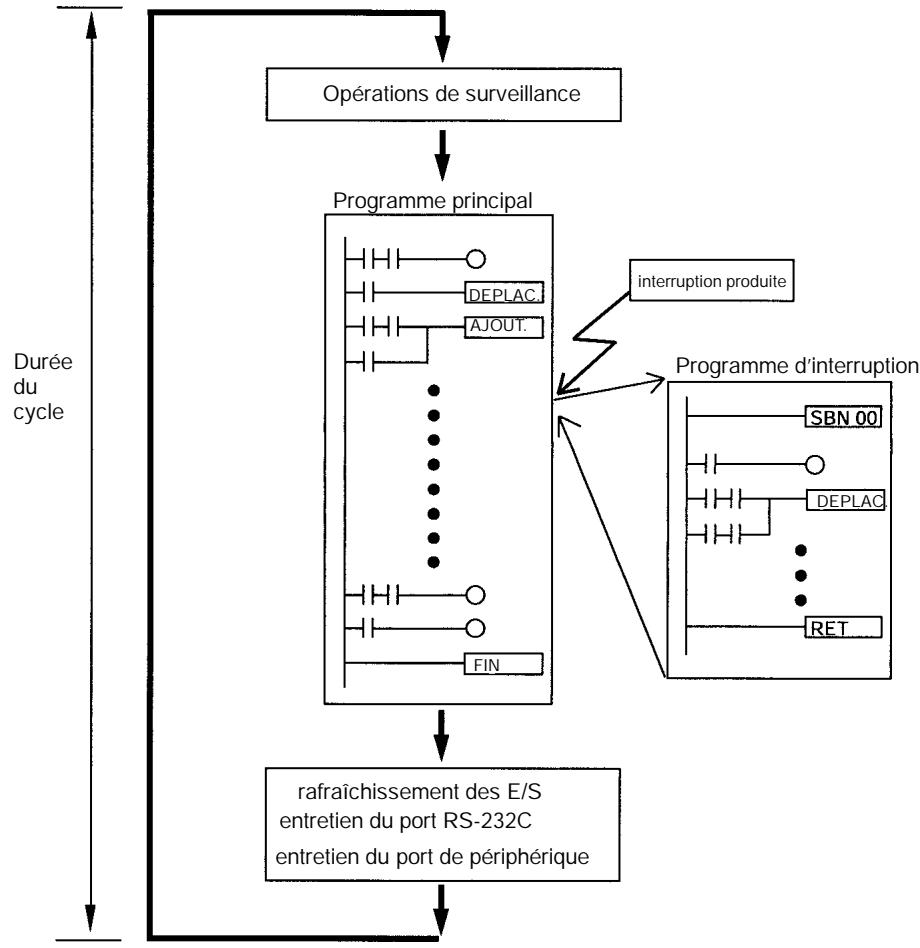
Exécution d'un programme d'interruption
Si une interruption est produit pendant l'exécution du programme principal, l'exécution du programme principal est interrompu immédiatement et le programme d'interruption est exécuté. Le schéma suivant montre le fonctionnement cyclique du CPM2A quand un programme d'interruption est exécuté.
Normalement, les résultats de l'exécution du programme d'interruption sont transférés à la mémoire d'entrée/sortie juste après l'exécution du programme (pendant le rafraîchissement des entrées/sorties), mais IORF(97) peut être utilisé pour rafraîchir une gamme spécifique de mots d'entrée/sortie pendant l'exécution du programme d'interruption. La gamme spécifique de mots d'entrée/sortie sera rafraîchie que quand IORF(97) sera exécuté.
La durée normale de cycle est étendue du temps nécessaire à l'exécution du programme d'interruption.
Se reporter à la Section 7 Fonctionnement et temps de traitement de l'API dans le Manuel de programmation pour plus de détails et les précautions à prendre pour la durée du cycle.
Rafraîchissement immédiat
IORF(97) peut être exécuté dans le programme pour rafraîchir une gamme spécifique de mots d'entrée/sorting. Les mots d'entrée/sorting seront rafraîchis quand IORF(97) sera exécuté.
IORF(97) peut être utilisé pour rafraîchir les entrées/sorties à partir du programme principal ou du programme d'interruption.
Quand IORF(97) est utilisé, la durée du cycle est étendue du temps nécessaire à rafraîchir les mots d'entrée/sortie spécifiés.
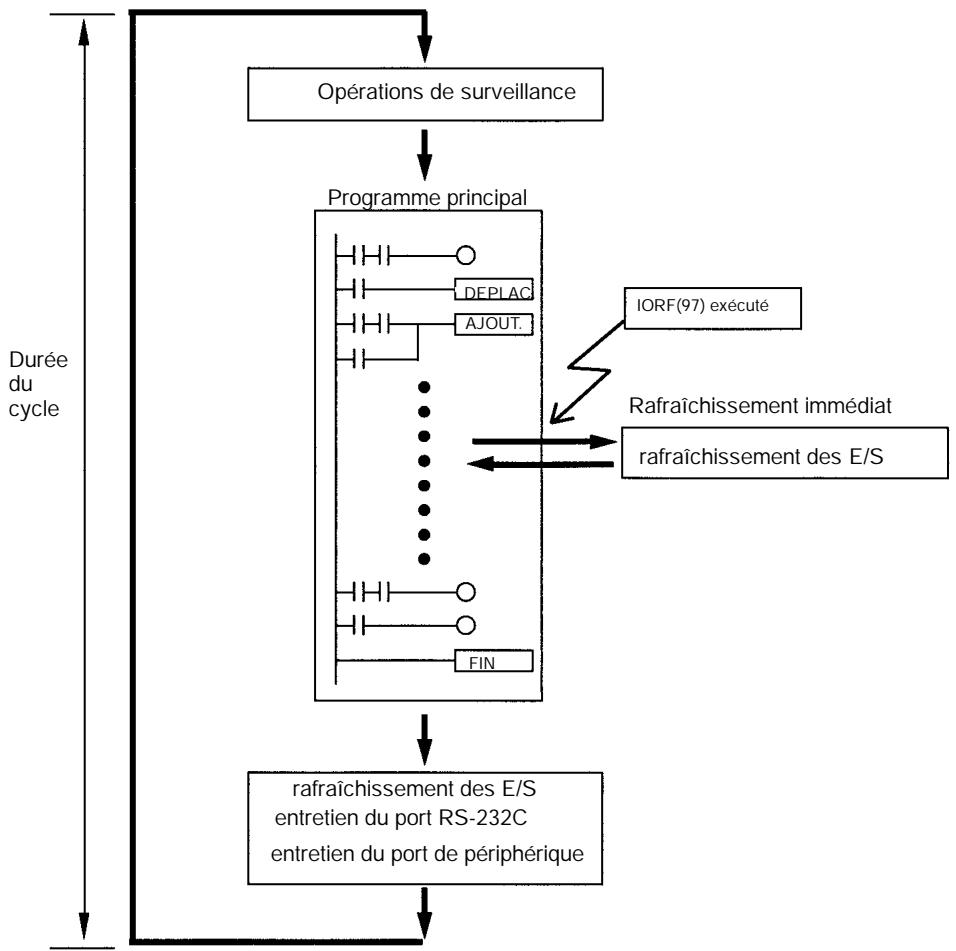
Attention
Bien que l'ORF (97) puisse être employé dans des sous-programmes d'interruption, s'assurer de l'intervalle entre les exécutions d'ORF (97). Si l'ORF (97) est exécuté trop fréquèment, une erreur fatale du système peut se produit (FALS 9F), arrêtant l'opération. L'intervalle entre les exécutions d'ORF (97) devrait être au moins de 1,3ms+ temps d'exécution total du sous-programme d'interruption.
1-4 Fonctions enumeratedes par leur usage
Fonctions de contrôle des machines
| Usage | Fonction | Se repor ter à |
| Recevoir des entrées de comptage à grande vitesse (par exemple, calculer une longueur ou position avec un codeur). | Fréquence maximum de comptage de 2 kHz (phase unique) | Utiliser entrée d'interruption (mode compteur) pour dire la valeur actuelle sans interruptions | * |
| Fréquence maximum de comptage de 5 kHz (phase différentielle) ou 20 Hz (phase unique) | Utiliser compteur grande vitesse pour dire la valeur actuelle sans interruptions. |
| Produire une impulsion basée sur un multiple d'une impulsion d'entrée pour synchroniser le contrôle d'une opération péripérique avec l'opération principale. | Synchronisation des impulsions |
| Le multiple pour l'opération péripérique (mettons la vitesse d'alimentation d'un outil) peut être changé pendant la marche en calculant le multiple d'une autre valeur d'entrée (mettons un codeur) dans l'opération péripérique. |
| Cette méthode peut être utilisée pour changer l'opération pour différents produits ou modèles sans arrêtier les équipements. |
| Multiplier la fréquence des impulsions d'entrée d'un compteur à grande vitesse par un multiplicitateur fixe, convertir la valeur en une valeur analogue et la sortir sous forme d'une valeur analogue. (Par exemple, synchroriser la vitesse d'un convoyeur d'alimentation avec la position de rotation de la piece principale (mettons un poseur d'étiquettes) mesurée par une entrée analogue. | Synchronisation des impulsions et fonction de sortie analogue |
| Recevoir de façon fiable des impulsions d'entrée avec un temps actif plus court que la durée du cycle (mettons les entrées d'un photomicrosenseur). | Fonction d'entrée à réponse rapide |
| Usage | Fonction | Se reporter à |
| Fonctions d'interruption | Exécuter une opération spécifique très vite quand une entrée est activée. (Par exemple, actionner un couteau quand une entrée d'interruption est reçue d'un interrupteur de proximité ou d'un interrupteur photoélectrique.) | Entée d'interruption (mode entrée d'interruption) | * |
| Compter les impulsions actives à l'entrée et exécuter une opération spécifique très vite quand le compteur atteint une valeur prérégée. (Par exemple, arrêter l'alimentation quand un nombre prérégé de pieces ont passé à travers le système.) | Entée d'interruption (mode comptage) |
| Exécuter une opération spécifique à une valeur de comptage prérégée. (Par exemple, couper une matière très précisé à une longueur donnée.) | Interruption sur le compteur à grande vitesse, produit quand le comptage attient la valeur prérégée. |
| Exécuter une opération spécifique quand le compteage est dans une gamme prérégée. (Par exemple, trier une matière très vite quand elle est dans une gamme de longueur donnée.) | Interruption sur le compteur à grande vitesse produit quand le compteage est dans la gamme régée. |
| Exécuter une opération spécifique quand une temporisation déclenchée. (Par exemple, arrêter un convoyeur à un moment très précis (independant de la durée du cycle) après avoir detecté la piece.) | Interruption d'une temporisation d'intervalle (mode à un coup) |
| Répéter une opération spécifique à des intervalles réguliers. (Par exemple, on peut surviller la vitesse d'un chargeur de toles en mesurant le signal d'entrée d'un codeur à des intervalles réguliers et en calculant la vitesse.) | Interruption d'une temporisation d'intervalle (mode à interruptions programmées) |
| Réaliser un positionnement simple en envoyant des impulsions à un entraineur à moteur qui accepte des entrées formées de trains d'impulsions. | Fonction de sortie d'impulsions |
| Utiliser un rapport cyclique variable pour réaliser un contrôle de température à affectation du temps. | Fonction de sortie d'impulsions à entrée analogue + rapport cyclique variable (PWM(--)) |
| Réglages facibles à faire et régles fins comme pour le rythme d'alimentation à faible vitesse si un convoyeur est temporalement arrêté. | Contrôles analogiques |
| Recevoir une entrée analogue et donner une sortie analogue. | Unité d'entrie/sortie analogue (Connector l'unité entrée-sortie analogue de l'unité centrale.) |
| Réduire le câblage, l'espace et la charge de l'API nécessaires en contrôlant les équipements avec quelques API à faible capacité dispersés près des équipements只得 qu'un API unique, grand et centralisé. (Créer une liaison entrée/sortie distante avec un maitre CompoBus/S et des esclaves CompoBus/S.) | Unité de liaison entrée/sortie analogue (Connector la liaison entrée/sortie CompoBus/S à l'unité centrale.) |
Fonctions de base
| Usage | Fonction | Se repor ter à |
| Régler la durée du cycle à un intervalle fixe. | Régler une durée du cycle minimum (fixe) à l'installation de l'API. | * |
| Arrêtier le fonctionnement de l'API si la durée du cycle dépasse un réglage minimum. | Régler une durée du cycle maximum (d'observation) à l'installation de l'API. |
| Maintenir toutes les sorties activées si le fonctionnement de l'API s'arrête. | Activer le bit de maintainen de l'IOM (SR 25212). |
| Garder le contenu de la mémoire d'entrée/sorting quand on démarre le fonctionnement | Activer le bit de maintainen de l'IOM (SR 25212). |
| Garder le contenu de la mémoire d'entrée/sorting quand on met l'API en marche. | Activer le bit de maintainen de l'IOM (SR 25212). et régler l'installation de l'API (DM 6601) de façon que l'état du bit de maintainen de l'IOM soit conservé au démarriage. |
| Eliminer l'effet du parasite et du bruit externe. | Régler une constante de temps d'entrée plus longue à l'installation de l'API. |
Fonctions de maintenance
| Usage | Fonction | Se reporter à |
| Enregistrer les données avec tampon hora. | Fonction horloge/calendrier | * |
| Etablit erreurs définies par l'utilisateur pour conditions d'entrée désirées. (On peut définit des erreurs fatales et non fatales) | FAL(06) définit les erreurs non fatales. (Le fonctionnement de l'API continue). FALS(07) définit les erreurs fatales. (le fonctionnement de l'API s'arrête) |
| Lire le nombre d'interruptions de l'alimentation. | Le nombre d'interruptions de l'alimentation est mis en mémoire dans AR 23. |
| Régler le mode de fonctionnement au démarrage. | Régler le mode de fonctionnement au démarrage dans l'installation de l'API (DM 6600). |
Fonctions de communications
| Usage | Fonction | Se reporter à |
| Lire et écrire les données de la mémoire d'entrée-sortie et changer le mode opérateur à partir d'un micro-ordinateur. | Communications de liaison à un micro-ordinateur (Régler le mode de communications liaison à un micro-ordinateur à l'installation de l'API.) | * |
| Connector à un apparilé série comme un lecteur de code barres ou une imprimante série. | Communications sans protocole (Régler le mode de communications sans protocole à l'installation de l'API.) |
| Effectuer une connexion à grande vitesse avec un terminal programmable OMRON. | Liaison NT 1:1 (Régler le mode de communications liaison NT 1:1 à l'installation de l'API.) |
| Effectuer une connexion de liaison de données API à API avec un autre CPM2A ou un CPM1A, un SRM1, un CQM1, ou un API C200HX/HG/HE. | Liaison API 1:1 (Régler le mode de communications liaison API 1:1 à l'installation de l'API.) |
| Usage | Fonction | Se reporter à |
| Connector une console de programmation. | Connector la console de programmation au port de péripérisque. (La position du commutateur de communications de l'unité centrale n'a pas d'effet sur cette connexion.) | Page 101 |
| Utilisation du logiciel de programmation SYSWIN. | L'ordinateur peut être connecté au port de péripérisque ou au port RS-232C.
(Les réglages de liaison à l'st installation de l'API sont utilisés quand le commutateur est en position OFF ; les réglages normaux des communications de liaison à un micro-ordinateur sont utilisés quand le commutateur de l'unité centrale est sur MARCHE.) | Page 92 |
| Surveiller les équipements avec un terminal programmable et programmer I'API par un appariel de programmation. | Le port RS-232C et le port de péripérisque peuvent être utilisés simultanément. | *
Page 101 |
1-5 Comparaison au CPM1A
| CPM2A | CPM1A |
| Jeu d'instructions | Instructions de base | 14 | Same as CPM2A. |
| Instructions spéciales | 105 instructions, 185 varianthes | 79 instructions, 139 varianthes |
| Temps d'exécution des instructions | Instructions de base | LD: 0,64 μs | LD: 1,72 μs |
| Instructions spéciales | MOV(21): 7,8 μs | MOV(21): 16,3 μs |
| Capacité du programme | 4.096 mots | 2.048 mots |
| Nombre maximum de points d'entrée/sortinge | Unité centrale autonome | 30, 40, ou 60 points | 10, 20, 30, ou 40 points |
| UC avec unités d'entrée/sortinge d'extension | 90, 100, ou 120 points max. | 90 ou 100 points max. |
| Unités d'extension | Nombre maximum d'unités | Un maximum de 3 unités peuvent être connectées à n'importe laquelle des unités centrales | Un maximum de 3 unités peuvent être connectées aux unités centrales à 30 points et à 40 points. |
| Modèles disponibles | Unités d'E/S d'extension, unité d'E/S analogique et unité de liaison d'E/S CompoBus/S | Id. que CPM2A. |
| CPM2A | CPM1A |
| Mémoire d'entrée/sorting | Bits d'entrée | IR 00000 à IR 00915 | Id. que CPM2A. |
| Bits de sortie | IR 01000 à IR 01915 | Id. que CPM2A. |
| Bits de travail | 928 bits:
IR 02000 à IR 04915,
IR 20000 à IR 22715 | 512 bits:
IR 20000 à IR 23115 |
| Zone SR (relais spécial) | 448 bits:
SR 22800 à SR 25515 | 384 bits:
SR 23200 à SR 25515 |
| Zone TR (relais-temporaire) | 8 bits: TR0 à TR7 | Id. que CPM2A. |
| Zone HR (relais de maintainen) | 320 bits:
HR 0000 à HR 1915 | Id. que CPM2A. |
| Zone AR (relais auxiliaire) | 384 bits:
AR 0000 à AR 2315 | 256 bits:
AR 0000 to AR 1515 |
| Zone LR (relais de liaison) | 256 bits:
LR 0000 à LR 1515 | Id. que CPM2A. |
| Zone temporisation/compteur | 256 bits:
TIM/CNT 0 à TIM/CNT 256 | 128 bits:
TIM/CNT 0 à TIM/CNT 127 |
| Zone DM (Mémoire de données) | Zone lecture/ écriture | 2.048 mots
(DM 0000 à DM 2047) | 1.024 mots
(DM 0000 à DM 1023) |
| Zone mémoire morte | 456 mots
(DM 6144 à DM 6599) | Id. que CPM2A. |
| Configuration PC | 56 mots
(DM 6600 à DM 6655) | Id. que CPM2A. |
| Sauvegarde de mémoire | Zone de programme, zone DM mémoire morte | Sauvegarde mémoire flash | Id. que CPM2A. |
| Zone DM lecture/écriture, zone HR, zone AR et compteurs | Sauvegarde interne de la batterie (5 ans de vie, replacable) | Sauvegarde condensateur (sauvegarde de 20 jours à 25°C) |
| Entrées d'interruption (mode entrées d'interruption) | 4 | Id. que CPM2A |
| Entrées d'interruption (mode compteur) | Mode compteurs | Compteur d'incrémentation, Compteur de dépréciement | Compteur de dépréciement |
| Liminé supérieure compteurs | 2 kHz | 1 kHz |
| SR 244 à SR 247 | Contient compteur PV. | Contient compteur PV -1. |
| Méthode(s) pour lire compteur PV (present value, valeur actuelle) | Lire SR 244 à SR 247, Exécuter PRV(62). (Compteur PV) | Lire SR 244 à SR 247; (Compteur PV-1) |
| Méthode(s) pour changer compteur PV | Exécuter INI(61). | Pas pris en charge. |
| Temporisation d'intervalle | Mode à un coup | Oui | Oui |
| Mode interruption programmée | Oui | Oui |
| Entrées à réponse rapide | Régler la fonction réponse rapide | Installation API | Installation API et INT(89) (Démasquer entree interruption.) |
| INT(89) (masquer) | Pas pris en charge (ignoré) | Pris en charge. |
| INT(89) (lire masque) | Lit l'état du masque | Lit le résultat du réglage du masque. |
| INT(89) (effacer) | Pas pris en charge (ignoré) | Pris en charge. |
| Largeur minimum des impulsions | 50 μs min. | 200 μs min. |
| CPM2A | CPM1A |
| Compteur à grande vitesse | Mode comptage | Mode phase différentielle(haut/bas)Mode impulsions direction plusMode impulsions haut/basMode incréementiel | Mode phase différentielle(haut/bas)Mode incréementiel |
| Fréquence maximum ducompteur | 5 kHz en mode phase différentielle(haut/bas)20 kHz en mode direction plusdes impulsions,mode impulsions haut/bas etmode incréementiel | 2,5 kHz en mode phase différentielle(haut/bas),5 KHz en mode incréementiel |
| Gamme PV des compteurs | -8.388.608 à 8.388.607 enphase différentielle(haut/bas),mode impulsions direction pluset mode impulsions haut/bas0 à 16.777.215 en modeincréementiel | -32.768 à 32.767 en modephase différentielle(haut/bas)0 à 65.535 en modeincréementiel |
| Vérifier quand la valeur cibled'enregistrement est égale àcelle du tableau | Mème direction, même SV paspossible | Mème direction, même SV paspossible |
| Méthode utilisée pour indiquerque la valeur cible est égale àcelle du tableau d'interruption | Comparaison de toutes lesvaleurs dans la table,quel quesoit leur ordre d'apparition dans le tableau | Comparaison dans l'ordred'apparition dans le tableau |
| Lire les résultats de lacomparaison des gamas | Vérifier AR 1100 à AR 1107 ouexécuter PRV(62). | Vérifier AR 1100 à AR 1107. |
| Lire les états | Vérifier AR 1108 (comparaisonen cours), vérifier AR 1109(compteur grande vitesse PVdépassement de capacité oucapacité non atteinte), ouexécuter PRV(62). | --- |
| Synchronisation des impulsions | Prise en charge. | Non pris en charge. |
| Contrôle sortiedes impulsions | Accélération/décélérationtrapézoidale | Pris en charge avec ACC(-).La fréquence initiale peut êtreréglée. | Non pris en charge. |
| Sortie PWM(-) | Prise en charge. | Non pris en charge. |
| Nombre de sorties d'impulsionssimultanées | 2 max. | 1 max. |
| Fréquence maximum | 10 kHz max. | 2 kHz max. |
| Fréquence minimum | 10 Hz | 20 Hz |
| Quantité de sorties d'impulsions | -16.777.215 à 16.777.215 | 0 à 16.777.215 |
| Contrôle de direction | Pris en charge. | Non pris en charge. |
| Position par rapport à positionsabsolues | Pris en charge. | Non pris en charge. |
| Etat des bits pendant que desimpulsions sont envoyées à alsortinge | Pas d'effet | Mis ON/OFF par sortied'impulsions |
| Lire PV | Lire SR 228 à SR 231 ouexécuter PRV(62) | Non pris en charge. |
| Rétablit PV | Pris en charge. | Non pris en charge. |
| Sorties d'état | Accéléant/ décalérantcapacité PV dépassée/capacité non atteinteRégler quantité d'impulsionsSortie impulsions terminéeEtat de la sortie des impulsions | Etat de la sortie des impulsions |
| Contrôles analogiques | 2 | 2 |
| Fonction d'horloge | Interne | Néant |
| Mots contenant des informations sur l'heure | AR 17 à AR 21 |
| Entrée/sortie analogique | Des unités entrée/sortie analogiques peuvent être connectées. | Id. que CPM2A |
| Communications CompoBus/S | Une unité de liaison E/S CompoBus/S peut être connectée pour fournir des fonctions esclave CompoBus/S. | Id. que CPM2A |
| Commutateur de communications | Ce commutateur déterminé si les communications sont commandées par les régles normaux ou par les régles d'installation d'un API. | Néant |
| Batterie | Batterie | Lithium | Néant (sauvegarde condensateur seulement) |
| Remplacement de la batterie | Possible | --- |
| Espérance de vie / durée de sauvegarde | Durée de vie de 5 ans à 25°C | Sauvegarde de 20 jours à 25°C |
| Détection des erreurs de la batterie | Prise en charge | --- |
| Communications (dans l'unité centrale) | Port de périhérique | Console de programmation (auto-détction) Bus de périhériques (auto-détction) Liaison à un micro-ordinateur (avec communications initiaies par un esclave) Pas de protocole. | Console de programmation (auto-détction) Bus de périhériques (auto-détction) Liaison à un micro-ordinateur Liaison API 1:1 Liaison NT 1:1 |
| Port RS-232C | Liaison à un micro-ordinateur Pas de protocole Liaison API 1:1 Liaison NT 1:1 | Néant |
| Constante de temps d'entrée | Peut être régée à 1, 2, 3, 5, 10, 20, 40, ou 80 ms (Par défaut : 10 ms) | Peut être régée à 1, 2, 4, 8, 16, 32, 64 ou 128 ms (Par défaut : 8 ms) |
Différences dans les yeux d'instructions
Instructions ajoutées au CPM2A
| Mnémonique | Nom |
| TXD(48) | TRANSMISSION |
| RXD(47) | RECEPTION |
| SCL(66) | MISE A L'ÉCHelle |
| SCL2(---) | MISE A L'ÉCHelle BINAIRE SIGNE EN BCD |
| SCL3(---) | MISE A L'ÉCHelle BCD EN BINAIRE SIGNE |
| SRCH(---) | RECHERCHE DES DONNEES |
| MAX(---) | TROUVER LE MAXIMUM |
| MIN(---) | TROUVER LE MINIMUM |
| SUM(---) | CALCUL DE SOMME |
| FCS(---) | CALCULER FCS (sesquence de vérification des trames) |
| HEX(---) | ASCII VERS HEXADECIMAL |
| AVG(---) | CALCUL DE SOMME |
| PWM(---) | IMPULSION AVEC RAPPORT CYCLIQUE VARIABLE |
| PID(---) | CONTROLLE PID |
| ZCP(---) | COMPARER DOMAINES DE SURFACE |
| ZCPL(---) | COMPARER DOMAINES DE DOUBLE SURFACE |
| NEG(---) | COMPLEMENT A 2 |
| ACC(---) | CONTROLLE D'ACCELERATION |
| STUP(---) | CHANGER INSTALLATION RS-232C |
| SYNC(---) | CONTROLLE SYNCHRONISE DES IMPULSIONS |
| BINL(58) | DOUBLE BCD VERS DOUBLE BINAIRE |
| BCDL(59) | DOUBLE BINAIRE VERS DOUBLE BCD |
| TMHH(---) | TEMPORISATION A TRES GRANDE VITESSE |
| TIML(---) | LONGUE TEMPERATURE |
| SEC(---) | HEURES EN SECONDES |
| HMS(---) | SECONDES EN HEURES |
Instructions avec specifications changées
| Mnémonique | Nom | CPM2A | CPM1A |
| INI(61) | CONTROLE MODE | Prend en charge le changement de la PV (present value, valeur actuelle) de l'entrée des interruptions (mode comptage).Prend en charge le changement de la PV de sortie des impulsions.Prend en charge le fonctionnement de l'arrêt du contrôle de synchronisation des impulsions. | Ne prend pas en charge ces fonctionsements. |
| PRV(62) | LECTURE PVCOMPTEUR AGRANDE VITESSE | Prend en charge la lecture de la PV d'entrée des interruptions (mode comptage).Prend en charge la lecture de la PV de sortie des impulsions. | Ne prend pas ces opérations en charge. |
| CTBL(63) | CHARGE DU TABLEAUDE COMPARAISON | Le comptage est comparé à toutes les valeurs cibles dans le tableau de comparaison des valeurs cibles. | Le comptage est comparé à chaque valeur cible dans l'ordre où elles apparaissent dans le tableau de comparaison des valeurs cibles. |
| PULS(65) | REGLER LESIMPULSIONS | Prend en charge les specifications absolues des impulsions, mais le système de coordonnées doit être réglié en coordonnées absolues. | Ne prend pas en charge la Specification absolue des impulsions. |
| INT(89) | CONTROLED'INTERRUPTION | Prend en charge une interruption de comptage pour incrémenter les compteurs. | Ne prend pas en charge cette fonction d'interruption. |
Avant d'utiliser un programme CPM1A contenant une ou plusieurs instructions du tableau ci-dessus, vérifier le programme pour être sur qu'il fonctionner a convenablement etmettreleprogramme en forme si nécessaire.Le CPM2A peut ne pas fonctionner convenablement si un programme CPM1A avec ces instructions est transféré et executé sans changement.
Affectations des codes de fonction ajoutés
Les trois instructions suivantes sont des codes de fonction affectés qui n'était pas utilisés dans le CPM1A.
| Instruction | CPM2A | CPM1A |
| RXD(47) | RECEPTION | Non affectée. (NOP(00)) |
| TXD(48) | TRANSMISSION |
| SCL(66) | MISE A L'ECHelle |
Différences dans la mémoire d'entrée/sortie
Différences en zone SR
Le tableau suivant montre les différences dans la zone SR (PV est l'abréviation de valeur actuelle.)
| Fonction | CPM2A | CPM1A |
| PV 0 de sortie des impulsions | SR 228 à SR 229 | Non pris en charge. |
| Bit de restauration de la PV 0 de sortie des impulsions | SR 230 à SR 231 |
| Pulse output 0 PV Reset Bit | SR 25204 |
| Bit de restauration de la PV 1 de sortie des impulsions | SR 25205 |
| Bit de restauration du port RS-232C | SR 25209 |
| Drapeau d'erreur batterie | SR 25308 |
| Changer réglage installation port RS-232C | SR 25312 |
Différences dans la zone AR
Le tableau suivant indique les différences dans la zone AR (registre d'adresse).
| Fonction | CPM2A | CPM1A |
| Données d'horloge et de calendrier | AR 17 à AR 21 | Non pris en charge. |
| Code d'erreur communications RS-232C | AR 0800 à AR 0803 |
| Drapeau d'erreur RS-232C | AR 0804 |
| Drapeau validation transmission RS-232C | AR 0805 |
| Drapeau réception terminée RS-232C | AR 0806 |
| Drapeau dépassement réception RS-232C | AR 0807 |
| Drapeau réception terminée port de pérophérique | AR 0814 |
| Drapeau dépassement réception port de pérophérique | AR 0815 |
| Compteur de réception RS-232C | AR 09 |
| Drapeau comparaison compteur à grande vitesse | AR 1108 |
| Drapeau capacité dépassée / non atteinte compteur à grande vitesse | AR 1109 |
| Etat de la sortie des impulsions 0 | AR 1111 |
| Drapeau capacité dépassée / non atteinte PV sortie des impulsions 0 | AR 1112 |
| Drapeau réglage quantité impulsions sortie des impulsions 0 | AR 1113 |
| Drapeau sortie terminée sortie des impulsions 0 | AR 1114 |
| Drapeau capacité dépassée / non atteinte PV sortie des impulsions 1 | AR 1212 |
| Drapeau réglage quantité impulsions sortie des impulsions 1 | AR 1213 |
| Drapeau sortie terminée sortie des impulsions 1 | AR 1214 |
| Etat sortie sortie des impulsions 1 | AR 1215 |
| Compteur alimentation coupée | AR 23 (voir Rem.) | AR 10 |
Rem. Les programmes du CPM1A qui utilisent AR 10 (le compteur alimentation coupée) ne peuvent pas etre utiliser dans le CPM2A sansmettre le programme en forme.Dans le CPM2A,le compteur alimentation coupee est en AR 23.
Différences dans la zone DM
Le tableau suivant montre les différences dans la zone DM (gestion de données) autres que l'installation de l'API.
| Fonction | CPM2A | CPM1A |
| Zone d'enregistrement des erreurs | DM 2000 à DM 2021 | DM 1000 à DM 1021 |
Rem. Les programmes du CPM1A qui utilisent la zone d'enregistrement des erreurs ne peuvent pas etre utiliser dans le CPM2A sansmettre le programme en forme pour changer l'emplacement de la zone d'enregistrement des erreurs.
Le tableau suivant presente les différences existant dans le Setup de l'API.
| Fonction | CPM2A | CPM1A |
| Régler temps d'entretien du port RS-232C | DM 6616 bits 00 à 07 | Non pris en charge |
| Activer temps d'entretien du port RS-232C | DM 6616 bits 08 à 15 |
| Système de coordonnées sortie impulsions 0 | DM 6629 bits 00 à 03 |
| Système de coordonnées sortie impulsions 1 | DM 6629 bits 04 à 07 |
| Sélecteur de réglages de communications RS-232C | DM 6645 bits 00 à 03 | Non pris en charge |
| Réglages du contrôle CTS du port RS-232C | DM 6645 bits 04 à 07 |
| Liaison API 1:1 des mots de liaison du port RS-232C | DM 6645 bits 08 à 11 |
| Mode de communications du port RS-232C | DM 6645 bits 12 à 15 |
| Vitesse en bauds du port RS-232C | DM 6646 bits 00 à 07 |
| Format de trame du port RS-232C | DM 6646 bits 08 à 15 |
| Retard de transmission du port RS-232C | DM 6647 |
| Nombre de noeuds de la liaison à l'micro-ordinateur du port RS-232C | DM 6648 bits 00 à 07 |
| Activation code de démarrage sans protocole du port RS-232C | DM 6648 bits 08 à 11 |
| Activation code de fin sans protocole du port RS-232C | DM 6648 bits 12 à 15 |
| Réglage code de démarrage sans protocole du port RS-232C | DM 6649 bits 00 à 07 |
| Réglage code de démarrage sans protocole du port RS-232C ou nombre d'octets reçus | DM 6649 bits 08 à 15 |
| Activation code de démarrage sans protocole du port de pérophérique | DM 6653 bits 08 à 11 |
| Activation code de fin sans protocole du port de pérophérique | DM 6653 bits 12 à 15 |
| Réglage code de démarrage sans protocole du port de pérophérique | DM 6654 bits 00 à 07 |
| Réglage code de fin sans protocole du port de pérophérique ou nombre d'octets reçus | DM 6654 bits 08 à 15 |
| Réglage détention d'erreurs de la batterie | DM 6655 bits 12 à 15 |
1-6 Préparation pour le fonctionnement
Pour installer un système CPM2A suivre les étapes enumeratedes ci-dessous.
1, 2, 3... 1. Conception du système
- Choisir une unité centrale CPM2A et des unités d'extension avec les spécifications nécessaires dans le système contrôle.
- Construire des circuits externes à sécurité intégrée, notamment des cir-cuits de verrouillage et des circuits de limitation.
Se reporter à 2-1 Spécifications et 3-1 Précautions dans la construction pour les détails.
2. Installation
- Installer l'unité centrale. (Montage en surface ou installation sur rail DIN)
- Installer l'unité (les unités) d'extension.
Se reporter à 3-3 Installation du CPM2A et à 3-4 Cablage et connexions pour les détails.
3. Câblage
- Câbler l'alimentation et les appareils d'entrée/sorting.
- Connecter les apparêils de communications si nécessaire.
- Connecter la console de programmation.
Se reporter à 3-4 Câblage et connexions pour les détails.
4. Réglages initiaux
- Couper le commutateur de communications de l'unité centrale, si nécessaire. (Quand ce commutateur est coupé, les communications avec des
appareils autres que la console de programmation sont commandées par les réglages à l'installation de l'API.)
- Connecter la console de programmation,mettre le commutateur de mode sur le mode PROGRAMME et allumer l'API.
- Vérifier les indicateurs LED (à diodes electroluminescentes) de l'unité centrale et l'affichage de la console de programmation.
Vider la mémoire de l'API. (tout remis à zéro)
- Faire les réglages d'installation de l'API.
Se reporter à 3-3 Installation du CPM2A pour les détails.
-
Créer un programme en échelle
-
Créer un programme en échelle pour contrôler le système.
Se reporter au Manuel de programmation pour les détails.
-
Ecrire le programme en échelle dans l'API
-
Ecrire le programme en échelle dans l'API avec la console de programmation ou transférer le programme à l'API à partir du logiciel de support.
Se reporter à la Section 4 Utilisation des apparêls de programmation, aux Manuels de fonctionnement du logiciel de support SYSMAC et au Manuel de l'utilisateur du CPT pour les détails.
-
Marched'essai
-
Vérifier le câblage entrée/sortie en mode PROGRAMME.
- Vérifier etmettre au point l'exécution du programme en mode SURVEILLANCE (monitor).
Se reporter à la Section 5 Marches d'essay et Traitément des erreurs pour les détails.
CHAPTER 2
Caracteristiques et composants des unités
Ce chapitre précère les caractéristiques techniques qui, ensemble, permettent de constituer un API CPM2A et désrit aussi les principaux éléments constitutifs et composants des unités.
2-1 Caracteristiques techniques 32
2-1-1 Caracteristiques generales des unités centrales 32
2-1-2 Caracteristiques 33
2-1-3 Caracteristiques des E/S 35
2-2 Composants 39
2-2-1 Composants de l'UC 39
2-2-2 Composants des unités d'extension des E/S 42
2-2-3 Composants de l'unité des E/S analogiques 43
2-2-4 Composants de la liaison CompoBus/S 43
2-1 Caractéristiques techniques
2-1-1 Caracteristiques generales des unités centrales
| Unités centrales avec 20 points d'E/S | Unités centrales avec 30 points d'E/S | Unités centrales avec 40 points d'E/S | Unités centrales avec 60 points d'E/S |
| Tension d'alimentation | Alternative | 100 à 240 V alternatifs, 50/60 Hz |
| Continue | 24 V continus |
| Plage de tension de travail | Alternatif | 85 à 264 V alternatifs |
| Continu | 20,4 à 26,4 V continus |
| Puisance consommée | Alternatif | 60 VA max. |
| Continu | 20 W max. |
| Courant de démarrage | Alternatif | 60 A max. |
| Continu | 20 A max. |
| Alimentation externe (alimentations alternatives seulement) | Tension d'alimentation | 24 V continus |
| Capacité en sortie | 300 mA : Utiliser seulement pour les dispositifs d'entrée. Ne pas utiliser pour des sorties.(Lorsque l'alimentation externe délivre une surintensité ou bien est en court circuit, la tension de l'alimentation externe faiblit et l'API s'arrête). |
| Résistance d'isolement | 20 MΩ min (à 500 V continus) entre les bornes alternatives externes et les bornes de protection par la terre |
| Résistance disruptive | 2.300 V alternatifs S50/60 Hz pendant une minute entre les bornes alternatives externes et les bornes de protection par la terre.Courant de fuite : 10 mA max. |
| Immunité aux bruits | 1,500 V crête à crête, largeur d'impulsionsnelles : 0,1 à 1 μs, temps de montée : 1 ns (via une simulation de bruits) |
| Résistance aux vibrations | 10 à 57 Hz, amplitude 0,075 mm, 57 à 150 Hz, accelération : 9,8 m/s² dans les directions X, Y et Z, pendant 80 minutes pour chacune(Coefficient de temps 8 minutes × facteur 10 = durée totale 80 minutes) |
| Résistance aux chocs | 147 m/s² trois fois, dans chacune des trois directions X, Y et Z |
| Température ambiente | Travail : 0° à 55°CStockage : -20° à 75°C |
| Humidité | 10% à 90% (sans condensation) |
| Atmosphère | Sans�除 un gaz corrosif |
| Taille des vis des bornes | M3 |
| Durée des interruptions | Alimentation alternative : 10 ms min.Alimentation continue : 2 ms min.(Une coupure du courant intervient lorsque la tension tombe en dessous de 85 % de sa valeur nominale pendant plus longtemps que la durée de l'interruption de courant). |
| Poids de l'UC | Courant alternatif | 650 g max. | 700 g max. | 800 g max. | 1.000 g max. |
| Courant continu | 550 g max. | 600 g max. | 700 g max. | 900 g max. |
| Poids des unités d'extension des E/S | Unités comptant 20 points d'E/S : 300 g max.Unités comptant 8 points de sortie : 250 g max.Unites comptant 8 points d'entrée : 200 g max.Unites d'E/S analogiques : 150 g max.Unites de liaison des E/S CompoBus/S : 200 g max. |
2-1-2 Caracteristiques
| Caracteristiques techniques |
| Méthode de contrôle | Méthode à programme mémorisé |
| Méthode de contrôle des E/S | Balayage cyclique avec sortie directe (Utiliser IORF(97) pour faire un rafraîchissement immédiat). |
| Langage de programmation | Diagramme à contact |
| Longueur des instructions | 1 pas par instruction, 1 à 5 mots par instruction |
| Instructions | Instructions de base : 14 Instructions spéciales : 105 instructions, 185 variations |
| Durée d'exécution | Instructions de base : 0,64 μs (instruction LD) Instructions spéciales : 7,8 μs (instruction MOV) |
| Capacité programme | 4 096 mots |
| Capacité maxi-male E/S | UC seulement | 20 points | 30 points | 40 points | 60 points |
| Avec des unités d'extension des E/S | 80 points max. | 90 points max. | 100 points max. | 120 points max. |
| Bits en entrée | IR 00000 à IR 00915 (Les bits non utilisés comme bits d'entrée peuvent être utilisés comme bits de travail). |
| Bits en sortie | IR 01000 à IR 01915 (Les mots non utilisés comme bits de sortie peuvent être utilisés comme bits de travail). |
| Bits de travail | 928 bits : IR 02000 à IR 04915 et IR 20000 à IR 22715 |
| Bits spécifique (zone SR) | 448 bits : SR 22800 à SR 25515 |
| Bits temporaires (zone TR) | 8 bits (TR0 à TR7) |
| Bits de maintainier (zone HR) | 320 bits : HR 0000 à HR 1915 (Mots HR 00 à HR 19) |
| Bits auxiliaires (zone AR) | 384 bits : AR 0000 à AR 2315 (Mots AR 00 à AR 23) |
| Bits de liaison (zone LR) | 256 bits : LR 0000 à LR 1515 (Mots LR 00 à LR 15) |
| Minuteries/Compteurs | 256 minuteries/compteurs (TIM/CNT 000 à TIM/CNT 255) Minuteries 1-ms : TMHH(-) Minuteries 10-ms : TIMH(15) Minuteries 100-ms : TIM Minuteries 1-s/10-s : TIML(-) Compteurs dépréciements : CNT Compteurs inversibles : CNTR(12) |
| Mémoire des données | Lecture/écriture : 2,048 mots (DM 0000 à DM 2047)* Lecture seulement : 456 mots (DM 6144 à DM 6599) PC Setup : 56 mots (DM 6600 à DM 6655) *Le journal des erreurs est dans les positions DM 2000 à DM 2021. |
| Gestion des interruptions | Interruptions externes : 4 (Partagées par les entrées d'interruptions externes (mode compteur) et les entrées à réponse rapide). |
| Interruptions de la minuterie des intervalles | 1 (Mode interruptions programmes mises ou mode interruption unique) |
| Compteur ultra rapide | Un compteur ultra rapide : 20 kHz, monophasé ou 5 kHz biphasé (méthode de comptage linéaire) Interruption compteur : 1 (comparaison valeur fixe ou comparaison intervalle fixe) |
| Entrées d'interruptions (mode Compteur) | Quatre entrées (partagées par les entrées des interruptions externes (mode compteur) et les entrées à réponse rapide) Interruptions compteur : 4 (partagées par les entrées des interruptions externes et les entrées à réponse rapide) |
| Caracteristiques techniques |
| Sortie impulsionnelle | Deux points sans accélération/décélération, 10 Hz à 10 kHz chacun, et pas de contrôle de la direction.Un point avec accélération/décélération trapézoidale, 10 Hz à 10 kHz et contrôle de la direction.Deux points avec sorties PWM.(Les sorties impulsionnelles peuvent s'utiliser uniquement avec des sorties transistorisées mais ne peuvent pas s'utiliser avec des sorties à relais). |
| Contrôle des impulsions synchronisées | Un point:On peut creator une sortie impulsionnelle en combinant le compteur ultra rapide et des sorties impulsionnelles et en multipliant par un facteur fixe la fréquence des impulsions d'entrée provenant du compteur ultra rapide.(Cette sortie peut seulement s'utiliser avec des sorties transistorisées mais elle ne peut pas s'utiliser avec des sorties à relais). |
| Entrées réponse rapide | Quatre points (Largeur d'implosion min : 50 μs max.) |
| Commandes analogiques | 2 commandes, plage de réglage : 0 à 200 |
| Constante de temps d'entrée (temps de réponse ON = temps de réponse OFF) | Peut être réglée pour tous les points d'entrée.(1 ms, 2 ms, 3 ms, 5 ms, 10 ms, 20 ms, 40 ms, ou 80 ms) |
| Fonction de l'horloge | Afficher l'année, le mois, le jour de la semaine, le jour, l'heure, la minute et la seconde.(Le cas échéant, alimentée par la pile). |
| Fonctions de communication | Port de péripérisque incorpore:Prend en charge les connexions de la console de programmation, la liaison micro-ordinateur, le bus des péripérisques, pas de protocole.Port RS-232C incorpore:Prend en charge la liaison micro-ordinateur, pas de protocole, liaison unité asservie 1:1, liaison unité maître 1:1 liaison unité maître ou connexions liaison 1 : 1 NT |
| Fonctions assurées par les unités d'extension | L'unité d'E/S analogiques offre 2 entrées analogiques et une sortie analogue.L'unité de liaison E/S CompoBus/S offre 8 entrées et 8 sorties en esclave de CompoBus/S. |
| Protection de la mémoire(Voir les Rem. 1 et 2). | Les zones HR et AR, le contenu du programme, la zone DM (lecture/éditure) et les valeurs des compteurs sont réservés pendant les coupures de courant. |
| Sauvegarde de la mémoire(Voir les Rem. 1 et 2). | Mémoire flash:Programme, zone DM en lecture seulement et Setup de l'APISauvegarde assurée par la pile:La zone DM (lecture/éditure), les zones HR et AR ainsi que les valeurs des compteurs sont sauvégardées par une pile. (A 25 °C, la pile a une durée de vie d'environ 5 ans). |
| Fonctions d'auto-diagnostic | Défaillance UC (chien de garde), erreur bus des E/S, erreur pile et défaillance mémoire. |
| Vérifications du programme | Pas d'instruction END, erreurs de programmation (vérifiées au démarrage d'une série d'exploitation) |
Rem. 1. Les zones DM, HR, AR et les valeurs des compteurs sont sauvégardées par la pile incorporee dans l'unité centrale. Si la pile est épuisée, le contenu de ces zones disparaît et les données reconnent leurs valeurs par défaut.
- Le contenu de la zone du programme, de la zone DM en lecture seulement (DM 6144 à DM 6599) et du Setup de l'API (DM 6600 à DM 6655) est conservé en mémoire flash. Le contenu de ces zones sera lu dans la mémoire flash à la mise sous tension suivante du système, même si la pile de sauvêgarde est épuisée.
Lorsque des données ont été modifiées dans une ou plusieurs de ces zones, il faut enregistrer les nouvelles valeurs en mémoire flash en mettant le système CPM2A en mode MONITOR ou en mode RUN ou bien en mettant le système hors tension puis à nouveau sous tension.
2-1-3 Caractéristiques des E/S
des entretes de l'UC
| Entrées | Caracteristiques techniques |
| Tension d'entrée | Toutes | 24 V continus +10%/_-15% |
| Impédance d'entrée | IN00000 à IN00001 | 2,7 kΩ |
| IN00002 à IN00006 | 3,9 kΩ |
| IN00007 et au-delà | 4,7 kΩ |
| Courant d'entrée | IN00000 à IN00001 | 8 mA, typique |
| IN00002 à IN00006 | 6 mA, typique |
| IN00007 et au-delà | 5 mA, typique |
| Tension/courant ON | IN00000 à IN00001 | 17 V continus min., 5 mA |
| IN00002 et au-delà | 14,4 V continus min., 3 mA |
| Tension/courant OFF | Toutes | 5,0 V continus max., 1 mA |
| Retard ON | Toutes | 1 à 80 ms max. Par défaut : 10 ms (Voir la Rem.). |
| Retard OFF | Toutes | 1 à 80 ms max. Par défaut : 10 ms (Voir la Rem.). |
| Configuration du circuit | IN00000 à IN00001 | LED d'entrée
10 000 pF
Circuits internes
COM
2,7 kΩ
680 Ω |
| IN00002 à IN00006 | LED d'entrée
750 Ω
Circuits internes
COM
3,9 kΩ |
| IN00007 et au-delà | LED d'entrée
750 Ω
Circuits internes
COM
4,7 kΩ |
Rem. Dans le Setup de l'API, la constante de temps en entrée peut être mise à 1, 2, 3, 5, 10, 20, 40, ou 80 ms.
Entrées de compteur ultra rapide
Comme il apparait dans le tableau suivant, les entrées IN00000 à IN00002 peuvent être utilisées comme entrées de compteur ultra rapide. La fréquence de comptage maximum est de 5kHz en mode phase différentielle et de 20kHz dans les autres modes.
| Entrée | Fonction |
| Mode phase différentiel | Mode Entrée impulsion plus direction | Mode entrée croissant/décroissant | Mode incrémentiel |
| IN00000 | Entrée impulsionnelle phase A | Entrée impulsionnelle | Incrémente l'entrée impulsionnelle | Incrémente l'entrée impulsionnelle |
| IN00001 | Entrée impulsionnelle phase B | Entrée direction | Déprémente l'entrée impulsionnelle | Entrée normale |
| IN00002 | Entrée impulsionnelle phase Z ou entrée RAZ externe (IN00002 peut s'utiliser comme entrée normale lorsqu'elle n'est pas utilisée comme entrée de compteur ultra rapide.) |
Les largeurs d'impulsions minimum des entrées IN00000 (Entrée phase A) et IN00001 (entrée phase B) sont, comme suit :
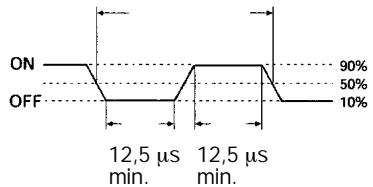
Mode entree impulsion plus direction, mode entree / ,mode incrémentiel
La largeur d'impulsion minimum de l'entrée IN00002 (entree phase Z) est :
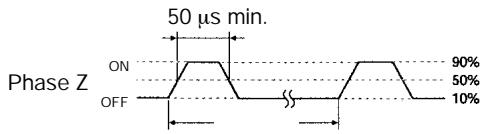
Entrées des interruptions
Les entrées IN00003 à IN00006 peuvent être utilisées comme entrées d'interruptions (mode entrée des interruptions ou mode compteur) et comme entrées à réponse rapide. La largeur d'impulsion minimum de ces entrées est de 50~ s .
Charactéristiques des entrées des unités d'extension des E/S
| Caracteristiques techniques |
| Tension d'entrée | 24 V continus +10%/_-15% |
| Impédance d'entrée | 4,7 kΩ |
| Courant d'entrée | 5 mA typique |
| Tension ON | 14,4 V continus min. |
| Tension OFF | 5.0 V continus max. |
| Retard ON | 1 à 80 ms max. Par défaut : 10 ms (Voir la Rem.). |
| Retard OFF | 1 à 80 ms max. Par défaut : 10 ms (Voir la Rem.). |
| Configuration du circuit | LED d'entrée
750 Ω
Circuits internes
COM
4,7 kΩ |
Rem. Dans le Setup de l'API, la constante de temps d'entrée peut être mise à 1, 2, 3, 5, 10, 20, 40 ou 80 ms.

Ne pas appliquer aux bornes d'entrée une tension supérieure à la tension nominale spécifique. Le non respect de cette règle peut endommager le produit ou provoquer un incendie.
des sorties de l'UC et des unités d'extension des E/S
Sorties à relais
| Caracteristiques techniques |
| 20CDR-j | 30CDR-j | 40CDR-j | 60CDR-j | 8ER | 20EDR1 |
| Capacité maximum de commutation | 2 A, 250 V alternatifs (cosφ = 1)2 A, 24 V continus(4 A/commun) |
| Capacité minimum de commutation | 10 mA, 5 V c.c. |
| Durée de vie utile du relais(Voir la Rem.). | Electrique : 150.000 opérations (24 V continus, charge résistive)100.000 opérations (240 V alternatifs charge inductive, cosφ = 0,4)Mécanique : 20.000.000 opérations |
| Retard ON | 15 ms max. |
| Retard OFF | 15 ms max. |
| Configuration du circuit | | LED de sortieCircuits internesCOM Maximum250 V c.a.: 2A24 V c.c.: 2A |
Rem. La durée de vie utile des contacts de sortie du relais données dans le tableau correspond aux conditions les plus défavorables. Le graphique suivant donne le résultat des essais de durée de vie (OMRON) effectués à une vitesse de commutation de 1.800 fois/heure.
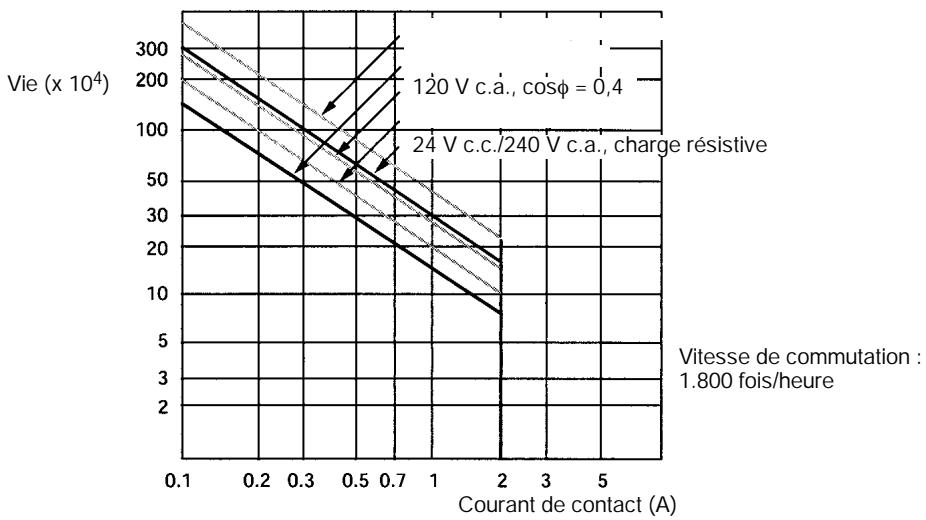
Sorties transistorées (NPN ou PNP)
| Article | Caracteristiques techniques |
| 20CDT-D20CDT1-D | 30CDT-D30CDT1-D | 40CDT-D40CDT1-D | 60CDT-D60CDT1-D | 8ET8ET1 | 20EDT20EDT1 |
| Capacité maximu m de commuta tion | OUT01000 et OUT01001 : 4,5 à 30 V continus, sortie/0,2 A (Voir Rem. 1.)OUT01002 et au-delà : 4,5 à 30 V continus, sortie/0,3 A | 24 V continus+10%/_-5%,sortie/0,3 A |
| Commun/0,8 AUnité/1,6 A(Voir Rem. 2.) | Commun/0,8 AUnité/3,2 A(Voir Rem. 2.) | Commun/0,8 AUnité/3,2 A(Voir Rem. 2.) | Commun/0,8 AUnité/4,8 A(Voir Rem. 2.) | Commun/0,9 AUnité/1,8 A(Voir Rem. 2.) | Commun/0,9 AUnité/1,8 A |
| Courant de fuite | 0,1 mA max. |
| Tension résiduel- le | 1,5 V max. |
| Retard ON | OUT01000 et OUT01001: 20 μs max.OUT01002 et au-delà : 0,1 ms max. | 0,1 ms max. |
| Retard OFF | OUT01000 et OUT01001: 40 μs max. pour 4,5 à 26,4 V, 10 à 100 mA0,1 ms max. pour 4,5 à 30 V, 10 à 200 mAOUT01002 et au-delà : 1 ms max. | 1 ms max.(24 Vcontinus+10%/_-5%,5 à 300 mA) |
| Fusible | 1 fusible en sortie (non replacable par l'utilisateur) | 1 fusible/commun(non replacablepar l'utilisateur) |
| Configur ation du circuit | Sorties NPNLED de sortieCircuits internesOUT24 V c.c.COM (-) | Sorties PNPLED de sortieCircuits internesOUT24 V c.c.COM (+)OUT |
Rem. 1. Lorsqu'on utilise OUT01000 ou OUT01001 comme entrée impulsionnelle, il faut connecter une résistance可以选择 pour que le courant de charge soit compris entre 0,01 and 0,1 A. Si le courant de charge est inférieur à 0,1 A, le temps de réponse ON - à - OFF sera plus bref et les impulsions ultra rapides (sorties transistorisées type source) ne seront pas fournies en sortie. Si le courant de charge est supérieur à 0,1 A, le transistor va dégager plus de chaleur et certains composants risquent d'être endommages.
- Le total pour OUT01000 à OUT01003 doit être de 0,8 A maximum. Toutefois, si la température ambiente est maintainue inférieure à 50^ , le système peut accepter une valeur de 0,9 A/commun.
Attention Ne jamais appliquer à une borne d'entrée une tension supérieure à la capacité de commutation maximum. Vous risqueriez d'endommager le produit ou de provoquer un incendie.
2-2 Composants
2-2-1 Composants de l'UC
UC avec 20 ou 30 bornes d'E/S
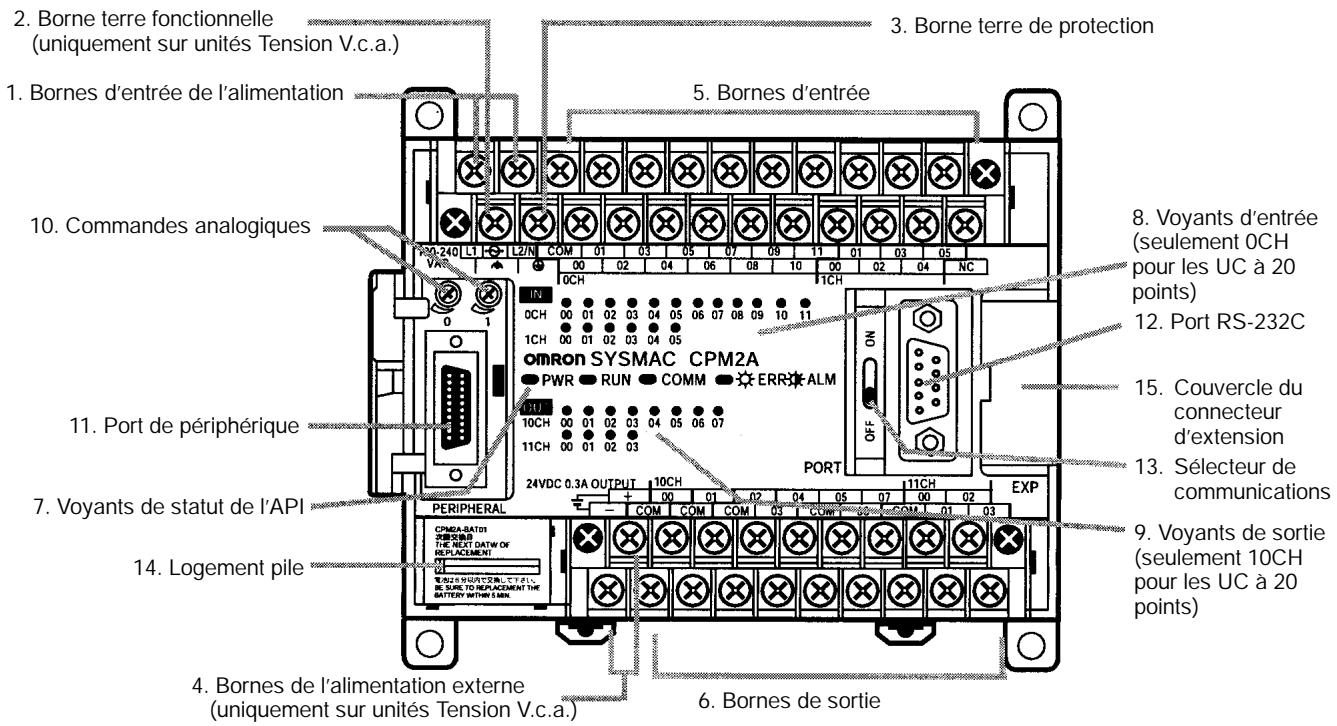
UC avec 40 bornes d'E/S
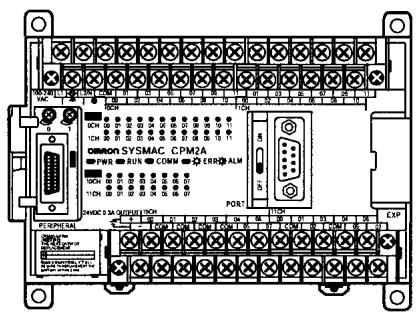
UC avec 60 bornes d'E/S
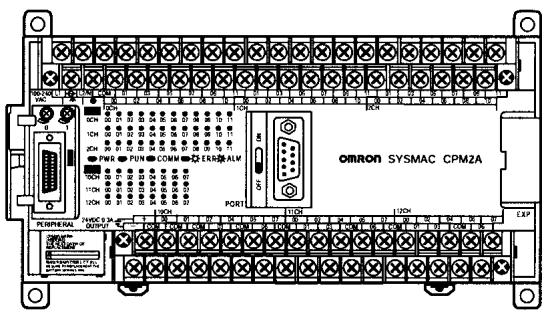
Descriptions des composants de l'UC
1, 2, 3... 1. Bornes d'entrée de l'alimentation électrique
L'alimentation (100 à 240 V alternatifs ou 24 V continu) doit être raccordée à ces bornes.
- Borne terre fonctionnelle (1全)
Mettre cette borne à la terre pour améliorer l'immunité aux bruits (uniquement pour les API de type CA) et diminuer le risque de chocs électriques.
- Borne terre de protection (12)
Cette borne doit être mise à la terre pour diminuer le risque de chocs électriques.
- Bornes de l'alimentation électrique externe
Les API CPM2A sont équipés de ces bornes de sortie 24 V (courant continu) qui leur permettent d'assurer l'alimentation électrique de dispositifs d'entrée (Uniquement pour les API de type CA).
- Bornes d'entrée
Elles connectent l'UC à des dispositifs d'entrée externes.
-
Elles connectent l'UC à des dispositifs de sortie externes.
-
Voyants de statut de l'API
Comme il apparait dans le tableau suivant, les voyants précisent le statut opératione de l'API.
| Indicateur | Statut | Signification |
| PWR (vert) | ON | L'API est alimenté. |
| OFF | L'API n'est pas alimenté. |
| RUN (vert) | ON | L'API travaille en mode RUN ou en mode MONITOR. |
| OFF | L'API est en mode PROGRAM ou une erreur fatale est intervenue. |
| COMM (jaune) | Cligno-te | Des données sont transférées par le port de périhérique ou par le port RS-232C. |
| OFF | Pas de transfert de données par le port périhérique ou par le port RS-232C. |
| ERR/ALARM (rouge) | ON | Une erreur fatale est intervenue. (L'API s'accrête). |
| Cligno-te | Une erreur non fatale est intervenue. (L'API continue à travailler). |
| OFF | Fonctionnement normal. |
- Voyants d'entrée
Les voyants d'entrée sont allumés lorsque la borne d'entrée correspondante est ON. Les voyants sont allumés pendant le rafraîchissement des E/S.
Lorsqu'une erreur fatale intervient, les voyants d'entrée sont modifiés, comme indiqué ci-dessous :
| Erreur fatale | Voyants d'entrée |
| Erreur UC, erreur bus d'E/S ou bien trop d'unités d'E/S | Se mettent OFF. |
| Erreur mémoire ou erreur FALS (erreur fatale système) | Les voyants changent selon le statut du signal d'entrée, mais le statut de l'entrée n'est pas actualisé en mémoire. |
Rem. a) Lorsque des entrées d'interruption sont utilisées en mode entrée d'interruption, l'indicateur peut rester êtrent même lorsque la condition d'entrée est satisfaite si I'entrée ne reste pas ON pendant assez longtemps.
b) Lorsque des compteurs ultra rapides sont utilisés, il se peut que le voyant d'entrée ne s'allume pas si l'impulsion d'entrée est trop rapide.
- Voyants de sortie
Les voyants de sortie s'allument lorsque la borne de sortie correspondante est ON. Les voyants restent allumés pendant le rafraîchissement des E/S. Avec de sorties impulsionnelles, levoyant reste allumé en continu pendant la sortie des impulsions.
- Commandes analogiques
Agir sur ces commandes pour changer les réglages analogiques (0 à 200) de IR 250 et de IR 251.
- Port de périhérique
Connecte l'API à un dispositif de programmation (y compris les consoles de programmation), à un micro-ordinateur ou à un dispositif externe standard.
- Port RS-232C
Connecte l'API à un dispositif de programmation (sauf une console de programmation), à un micro-ordinateur ; à un terminal programmable ou à un dispositif externe standard.
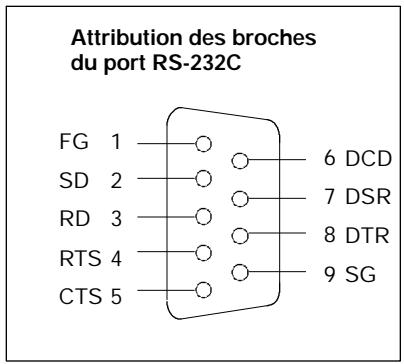
- Selecteur de communications
Cette commande permet de spécifique si le port de périphérique et le port RS-232C doivent utiliser les réglages de communication du PC Setup ou les réglages par défaut.
OFF

(Réglage usine : OFF)
| OFF | Le port de périphérique et le port RS-232C fonctionnellant selon les régles de communication définis dans le Setup de l'API. Ceci ne s'applique pas aux consoles de programmation connectées au port de périphérique. |
| ON | Le port de périphérique et le port RS-232C fonctionnellant selon les régles de communication standard. Ceci ne s'applique pas aux consoles de programmation connectées au port de périphérique. |
Rem. Le réglage de ce sélecteur est sans effet sur les communications lorsqu'une console de programmation est connectée au port de péripérisque. En revanche, il affecte le port RS-232C.
- Pile électrique
Cette pile assures la sauvégarde de la mémoire de l'UC ; elle est déjà active lors de la livraison du système.
- Connecteur d'extension
Connecte l'UC de l'API à une extension (Extension des E/S, unité d'E/S analogiques ou liaison E/S CompoBus/S). Trois unités d'extension peuvent être raccordées à l'UC.
Rem. Si un NT-AL001 est connecté au port RS-232C du CPM2A, vous ne pouvez pas connecter plus d'une unité d'extension à l'UC parce que le NT-AL001 tire son alimentation 5 V continus de l'UC.
2-2-2 Composants des unités d'extension des E/S
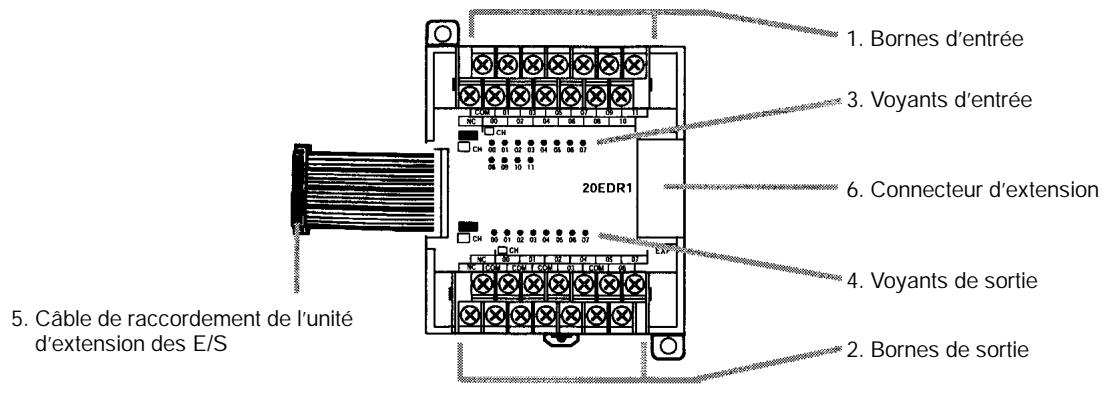
Unité d'extension des E/S avec 20 bornes d'E/S
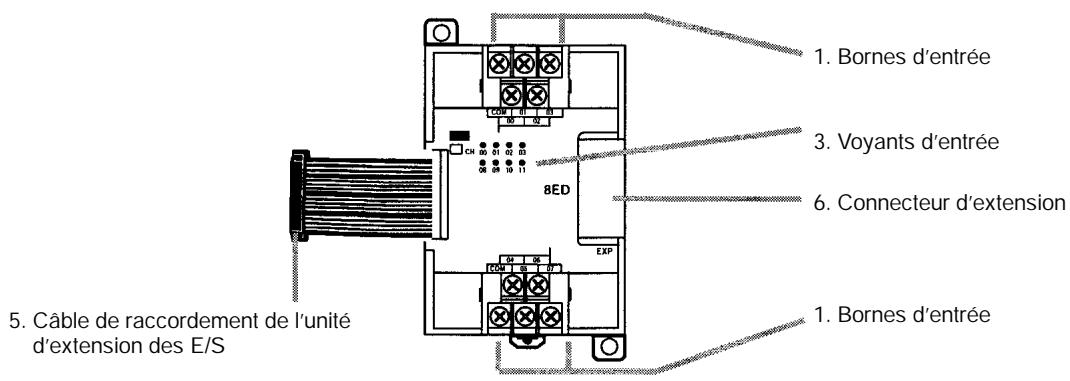
Unité d'extension des E/S avec 8 bornés d'entrée
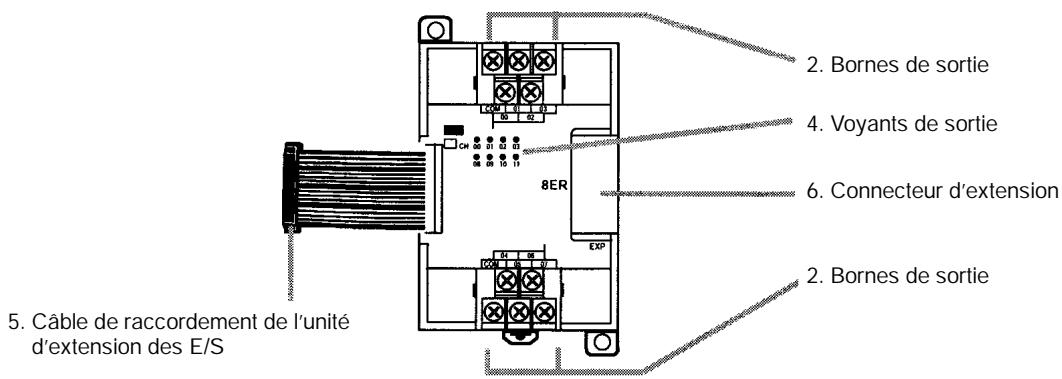
Unité d'extension des E/S avec 8 bornes de sortie
1, 2, 3... 1. Bornes d'entrée
Connectent l'UC à des dispositifs d'entrée externes.
- Bornes de sortie
Connectent l'UC à des dispositifs de sortie externes.
- Voyants d'entrée
Les voyants d'entrée sont allumés lorsque la borne d'entrée correspondante est ON.
- Voyants de sortie
Les voyants de sortie s'allument lorsque la borne de sortie correspondante est ON.
- Câble de raccordement des unités d'extension des E/S
Connecte l'unité d'extension des E/S au connecteur d'extension de l'UC de l'API ou à une autre unité d'extension.
Attention
Ne pas toucher un cable de raccordement de l'unité d'extension des E/S pendant qu'il est sous tension. Ainsi tout risque d'un dysfonctionnement provoqué par la présence d'électricité statique est évité.
- Connecteur d'extension
Se connectes à une autre unité d'extension (unité d'extension des E/S, unité des E/S analogiques ou unité de liaison CompoBus/S). Trois unités d'extension peuvent être connectées à une unité centrale.
2-2-3 Composants de l'unité des E/S analogiques
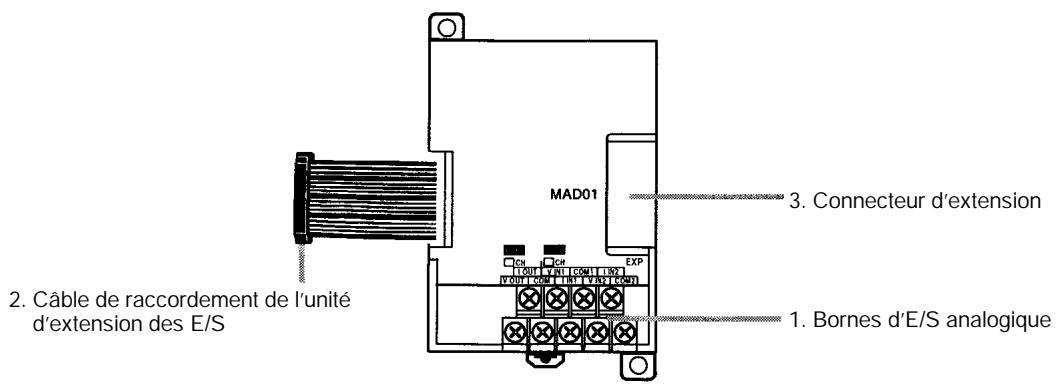
1, 2, 3... 1. Bornes des E/S analogue
Connecte l'unité à des dispositifs d'entrée analogiques et à des dispositifs de sortie analogiques.
2. Câble de raccordement de l'unité des d'extension des E/S
Connecte l'unité des E/S analogiques au connecteur d'extension de l'UC de l'API ou à une autre unité d'extension. Le cable est connecté à l'unité des E/S analogiques et ne peut pas être enlevé.
Attention
Ne pas toucher un cable de raccordement de l'unité d'extension des E/S pendant qu'il est sous tension. Ainsi tout risque d'un dysfonctionnement provoqué par la présence d'électricité statique est évité.
- Connecteur d'extension
Se connecte à une autre unité d'extension (unité d'extension des E/S, unité des E/S analogiques ou unité de liaison CompoBus/S). Trois unités d'extension peuvent être connectées à l'unité centrale.
2-2-4 Composants de la liaison CompoBus/S
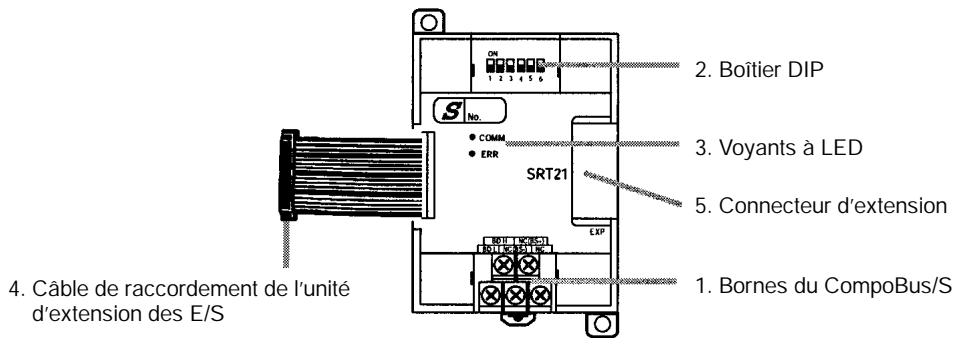
1, 2, 3... 1. Bornes de CompoBus/S
Ce sont la borne haute/basse de transmission de données de CompoBus/S, les bornes + / - de l'alimentation du système de transmission de données et les bornes NC. L'unité étant alimentée en interne, les bornes d'alimentation peuvent être utilisées comme des bornes de relayage.
2. Boittier DIP
Le boîtier DIP spécifique l'adresse du nœud de l'unité, spécifique le mode de communication et spécifique aussi si les sorties seront ou ne seront pas réarmées à la suite d'une erreur de communication.
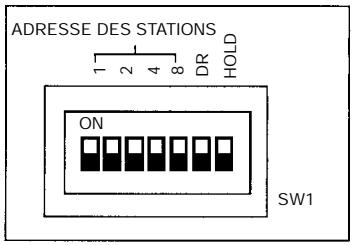
| Broche
s | Fonction |
| 1 à 4
(légendé
es 1, 2,
4 et 8) | Ces broches spécifique l'adresse du nœud de l'unité en utilisant les
broches du boîtier DIP comme des chiffres binaires. (1 = ON)
0: 0000 1: 0001 2: 0010 3: 0011
4: 0100 5: 0101 6: 0110 7: 0111
8: 1000 9: 1001 10: 1010 11: 1011
12: 1100 13: 1101 14: 1110 15: 1111 |
| DR | ON : Mode communication longue distance
OFF : Mode communication ultra rapide
(Voir la rem.). |
| HOLD | ON : Conserve les sorties lorsqu'une erreur de communication
intervient.
OFF : Réarme les sorties lorsqu'une erreur de communication
intervient . |
Rem. Le mode longue distance peut uniquement etre utilise quand le systeme est connecté à l'une des unités maître suivantes : C200HW-SRM21-V1, CQM1-SRM21-V1 ou SRM1-C01-V2.
3. Voyants LED
Ces voyants donnent le statut des communications CompoBus/S.
| Voyant | Statut | Signification |
| COMM
(jaune) | ON | Communication en cours. |
| OFF | Erreur de communication ou système arrêté. |
| ERR
(rouge) | ON | Une erreur de communication est intervenue. |
| OFF | Etat normal ou pas de communication. |
4. Câble de raccordement de l'unité d'extension des E/S
Connecte l'unité de liaison CompoBus/S au connecteur d'extension de l'unité centrale de l'API ou d'une autre unité d'extension.
Attention
Ne pas toucher un cable de raccordement de l'unité d'extension des E/S pendant qu'il est sous tension. Vous évitez ainsi tout risque d'un dysfonctionnement provoqué par la présence d'électricité statique.
5. Connecteur d'extension
Se connecte à une autre unité d'extension (unité d'extension des E/S, unité d'E/S analogiques ou unité de liaison CompoBus/S). Trois unités d'extension peuvent être connectées à l'unité centrale.
Ce chapitre donne des informations sur l'installation et le cablage d'un API CPM2A. Veiller à suivre les instructions et les précautions de ce chapitre en installing le CPM2A sur un panneau ou dans une armoire, en cablant l'alimentation ou en cablant les entrées/sorties.
3-1 Conseils d'elaboration 46
3-1-1 Câblage de l'alimentation 46
3-1-2 Tension d'alimentation 46
3-1-3 Circuits de verrouillage et de limitation 46
3-2 Choix d'un site d'installation 47
3-2-1 Conditions pour le site d'installation 47
3-2-2 Installation sur un panneau ou dans une armoire 47
3-3 Installation du CPM2A 48
3-3-1 Orientation du CPM2A 48
3-3-2 Installation du CPM2A 49
3-3-3 Connexion d'une unité entrée/sortie d'extension 51
3-4 Cablage et connexions 52
3-4-1 Conseils généaux pour le câblage 52
3-4-2 Enlevement du bornier 53
3-4-3 Cablage de la terre 54
3-4-4 Câblage de l'alimentation 54
3-4-5 Câblage d'entrée 55
3-4-6 Câblage de sortie 64
3-4-7 Connexions d'un appeareil de programmation 78
3-4-8 Connexions de liaison à un micro-ordinateur 80
3-4-9 Communications sans protocole 82
3-4-10 Connexions NT 82
3-4-11 Connexions INTER API 83
3-4-12 Connexions CompoBus/S 83
3-1 Conseils d'élaboration
Pour élaborer un système comprenant un CPM2A, il faut prendre les précautions suivantes.
3-1-1 Câblage de l'alimentation
Dépôt de l'alimentation du système du contrôle, du système CPM2A et du système CC d'entrée/sorting. Séparer les circuits de contrôle qui alimentent l'unité centrale des circuits principaux qui utilisent des protecteurs de circuits et des fusibles spéciaux.
3-1-2 Tension d'alimentation
Attention Utiliser les tensions d'alimentation indiquées à la Section 2 Spécifications et Composants des Unités. Ne pas respecter les spécifications pourrait provoquer un incendie.
Si la tension d'alimentation tombe au-dessous de 85% de la tension nominale, le CPM2A s'arrête et toutes les sorties seront coupées. Si une tension tropasse affecte les équipements, etc., prévoir un circuit de protection qui coupe les sorties jusqu'à ce que la tension d'alimentation revienne à sa valeur nominale.
Aux endroits où les conditions d'alimentation sont médiocres, prendre des mesures pour assurer que le courant soit fourni à la tension nominale. Bien respecter les précautions de sécurité, notamment prévoir des disjoncteurs pour empêcher les courts-circuit dans le cablage extérieur.
Pour faire l'une des opérations suivantes, couper l'alimentation de l'API. Il pourrait en résultat sinon une électrocution, des dégats aux apparciels ou un fonctionnement défectueux.
- Connecter les unités entree/sortie d'extension et les unités centrales.
- Assembler les unités.
- Connecter les cables et le câblage.
3-1-3 Circuits de verrouillage et de limitation
! AVERTISSEMENT
Des circuits d'arrêt d'urgence, des circuits de verrouillage, des circuits de limitation et des mesures de sécurité analogues doivent être prévus dans les circuits de contrôle externes (c'est-à-dire, pas dans le contrôleur programmable) pour assurer la sécurité dans le système si une anomalie se produit à cause d'un défaut de l'API ou d'un autre facteur externe qui affecte le fonctionnement de l'API. Ne pas prendre les mesures de sécurité qui convennent pourrait conduire à des accidents graves.
Le schéma suivant montre un exemple de circuit de verrouillage.
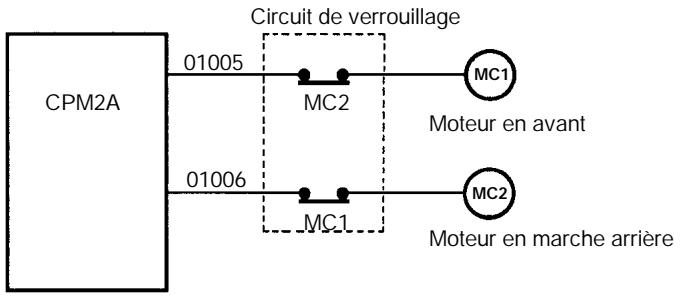
Dans le circuit de verrouillage ci-dessus, MC1 et MC2 ne peuvent pas'être activés en même temps, même si les sorties 01005 et 01006 du CPM2A sont activées toutes les deux (fonctionnement incorrect de l'API).
3-2 Choix d'un site d'installation
Le CPM2A résiste à des conditions difficiles et il est très fiable, mais si l'API est installé en un endroit favorable, sa sécurité et sa durée de vie seront optimisées.

S'assurer que le CPM2A est correctement installé, comme indiqué dans ce manuel. Ne pas le faire risque d'entrainer un fonctionnement défectueux de l'unité.
3-2-1 Conditions pour le site d'installation
Rem. Ne jamais installer le CPM2A dans une des conditions suivantes.
Endroits directement exposés au soleil.
Endroits exposés à une température inférieure à 0^ ou supérieure à 55^ .
Endroits exposés à une humidité au-dessous de 10% ou au-dessus de 90% .
- Endroits exposés à la condensation à la suite de changements brutaux de la température.
- Endroits exposés à des gaz corrosifs ou inflammables.
- Endroits exposés aux poussières (specialement les poussières de fer) ou aux sels.
- Endroits exposés à des chocs ou des vibrations.
Endroits exposés à l'eau, l'huile ou des produits chimiques.
S'assurer que les conditions d'installation sont conformes aux specifications générales du CPM2A. Se reporter à 2-1-1 Spécifications générales pour plus de détails.
Rem. Si on installe dans les endroits suivants, il faut prévoir un blindage ajustat :
Endroits exposés à l'électricité statique ou autres sources de bruit.
Endroits exposés à des champs electromagnétiques élevés.
Endroits susceptibles d'être exposés à des radiations.
- Endroits au voisinage de lignes électriques.
3-2-2 Installation sur un panneau ou dans une armoire
Quand le CPM2A s'installe sur un panneau ou dans une armoire, il faut tener compte du fonctionnement de l'API, de sa maintenance et des conditions ambiantes.
Surchauffe
Le domaine de température pour le CPM2A est de 0^ à 55^ . S'assurer qu'il y a une ventilation ajustée pour le refroidissement.
- Prévoir assez de place pour la circulation de l'air.
-
Ne pas installer le CPM2A au-dessus déquipements qui produit une grande quantité de chaleur, radiateurs, transformateurs ou grandes résistances.
-
Installer un ventilateur ou un système de refroidissement si la température ambiente dépasse 55^ .
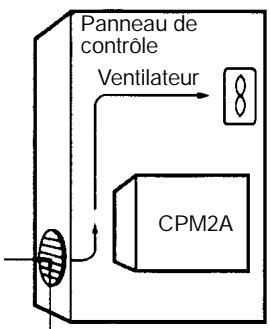
Ouverture d'entrée d'air
Bruit électrique
Les lignes électriques et les équipements à haute tension peuvent provoquer des parasites électriques dans l'API.
- Ne pas installer le CPM2A sur un panneau ou dans une armoire avec des équipements à haute tension.
- Prévoir au moins 200 mm entre le CPM2A et les lignes électriques les plus proches.
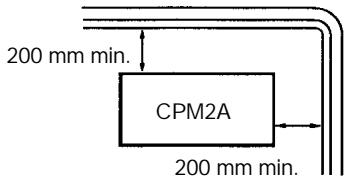
Accessibility
S'assurer que le CPM2A est accessible pour le service normal et la maintenance.
- Prévoir un chemin dégagé vers le CPM2A pour le service et la maintenance. Les équipements à haute tension et les lignes électriques peuvent être dangereux s'ilts sont dans le chemin pendant les opérations normales.
- Pour mistrs acceder à l'API, installer le panneau ou l'armoire à une hauteur de 3 à 5 pieds au-dessus du plancher.
3-3 Installation du CPM2A
Ce chapitre déscrit comment le CPM2A s'installe et comment les unités d'extension se connect. Se reporter à l'Annexe B pour les dimensions des unités données dans les schémas.
3-3-1 Orientation du CPM2A
Le CPM2A doit être installé dans la position indiquée ci-dessous pour assurer un refroidissement ajustat.
Correcte
Ne pas installer le CPMP2A dans l'une des deux positions suivantes.

3-3-2 Installation du CPM2A
Installation sur une surface
Le CPM2A peut être installé sur une surface horizontally ou un rail DIN.
Utiliser le modele suivant installer une unité centrale ou une unité d'extension CPM2A sur une surface verticale. (Utiliser des vis de M4 x 15).
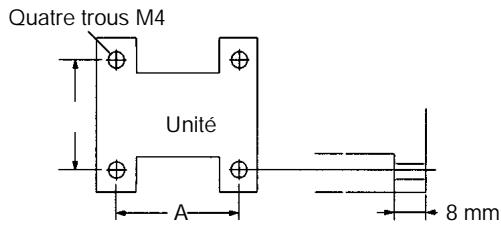
La largeur (A) entre les trous de montage dépend de l'unité.
| Unité | Largeur (A)
(tolérance: ±0,2 mm) |
| Unité centrale à 20/30 bornes d'entrée/sortingie | 120 mm |
| Unité centrale à 40 bornes d'entrée/sortingie | 140 mm |
| Unité centrale à 60 bornes d'entrée/sortingie | 185 mm |
| Unité entrée/sortingie d'extension à 20 bornes d'entrée/sortingie | 76 mm |
| Unité entrée/sortingie d'extension à 8 bornes d'entrée | 56 mm |
| Unité entrée/sortingie d'extension à 8 bornes d'entrée | 56 mm |
| Unité d'entrée/sortingie analogique | 56 mm |
| Unité d'entrée/sortingie analogique | 56 mm |
| Adaptateur RS-232C | 21 mm |
| Adaptateur RS-422 | 21 mm |
Si on installe une unité d'extension ou un adaptateur de communications à côté de l'unité centrale, compte 10 à 15 mm entre les unités.
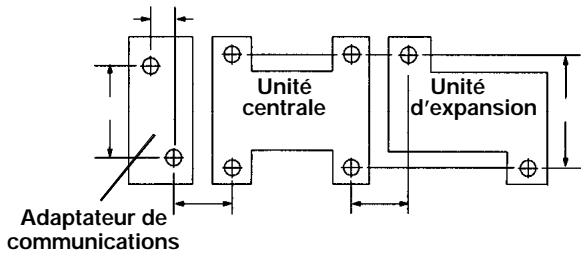
Installation sur un rail DIN
Le CPM2A peut être installé sur un rail DIN de 35 mm.
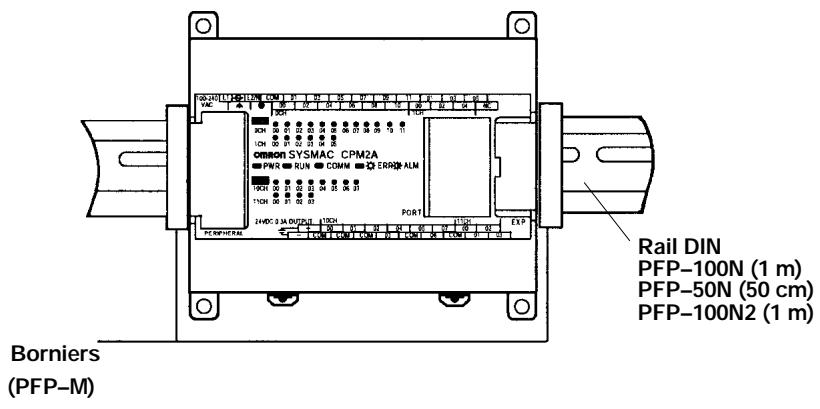
Installation
Abaisser le CPM2A de façon que le cran à l'arrière de l'API s'accroche au-dessus du rail DIN. Pousser l'API en avant jusqu'à ce que le verrouillage s'enclenche.
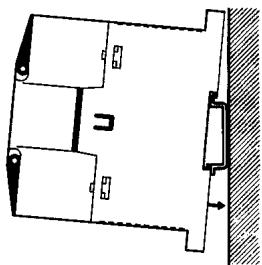
Retrait
Abaisser le verrouillage avec un tournevis à lame plate et faire pivoter l'API vers le haut pour l'enlever.
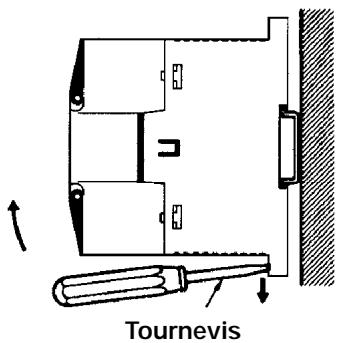
3-3-3 Connexion d'une unité entrée/sortie d'extension
Jusqu'à 3 unités entrée/sorting d'extension peuvent être connectées à une unité centrale CPM2A. Proceder de la façon suivante pour connecter une unité entrée/sorting d'extension.
1, 2, 3...
- Enlever le capot du connecteur de l'unité centrale ou de l'unité entrée/sortie d'extension. Utiliser un tournevis à lame plate pour enlever le capot du connecteur entrée/sortie d'extension.
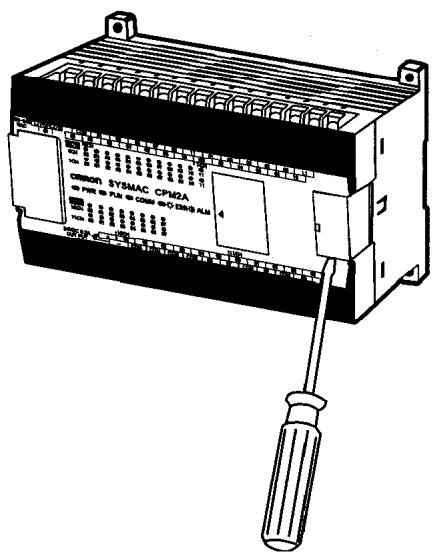
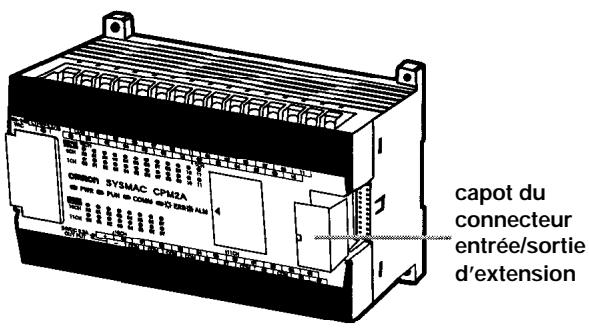
- Insérer le cable de connexion de l'unité entrée/sorting d'extension dans le connecteur de l'unité centrale ou de l'unité entrée/sorting d'extension.
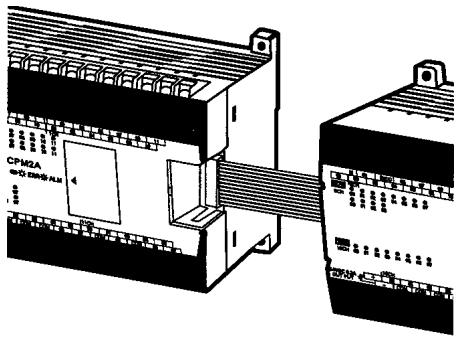
- Replacer le capot sur le connecteur de l'unité centrale ou de l'unité entrée/ sortie d'extension.
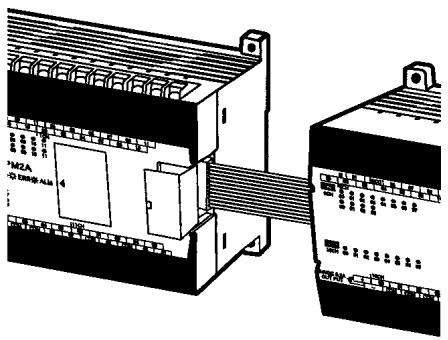
3-4 Câblage et connexions
Ce chapitre donne des informations de base sur le câblage de l'unité d'alimentation et des unités entrée/sorting d'extension et sur la connexion des appareils de programmation.
3-4-1 Conseils généraux pour le câblage

Laisser l'étiquette protective en place pendant qu'on cable. L'unité peut mal fonctionner si des brins de fil tombent à l'intérieur. Àpres avoir acheve le câblage, ne pas oublier d'enlever l'étiquette pour éviter la surchauffe.
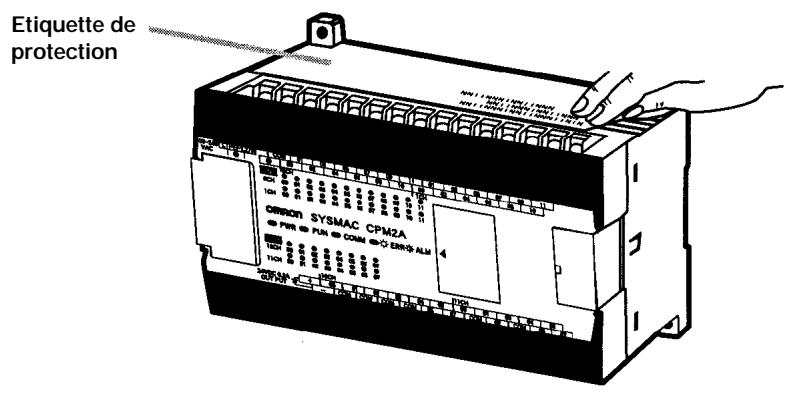
Parasite de ligne à l'E/S
Ne pas tirer les lignes d'entrée/sortie du CPM2A dans les mêmes chemins de cables ou conduites que les lignes électriques.
Chemins de cables suspendus
Laisser au moins 300 mm entre les cables électriques et le cablage d'entrée/sorting ou de contrôle, comme indiqué sur le schéma suivant.
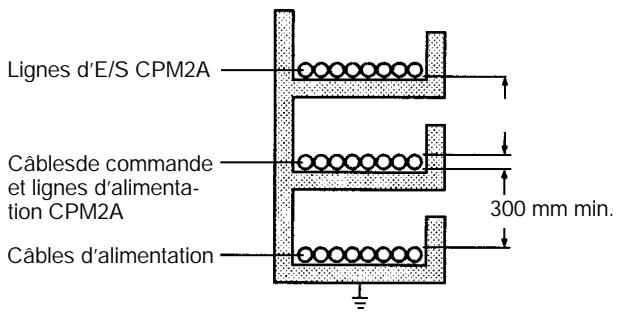
Chemins de cables dans le plancher
Laisser au moins 200 mm entre le câblage et le dessus du chemin, comme indiqué sur le schéma suivant.
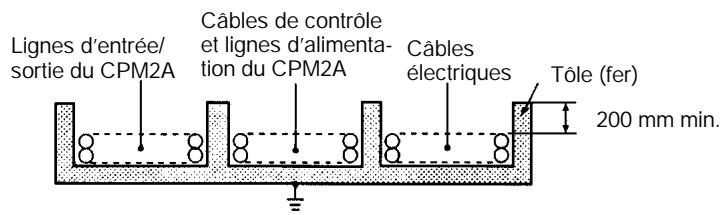
Conduites
Dépôt des lignes d'entree/sortie du CPM2A, les lignes d'alimentation et de contrôle et les cables électriques, comme indiqué sur le schéma suivant.
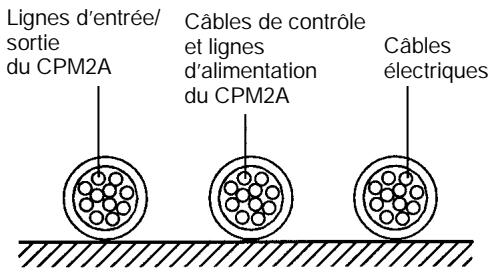
3-4-2 Enlèvement du bornier
On peut enlever les deux borniers de l'unité centrale CPM2A. Utiliser la procédure suivante.
Les deux borniers sur les unités entrée/sortie d'extension, les unités d'entrée/sortie analogiques et l'unité de liaison CompoBus/S ne peuvent pas été enlevées.
1, 2, 3... 4. Detacher les vis noires aux extrémités du bornier comme indiqué sur le schéma suivant.
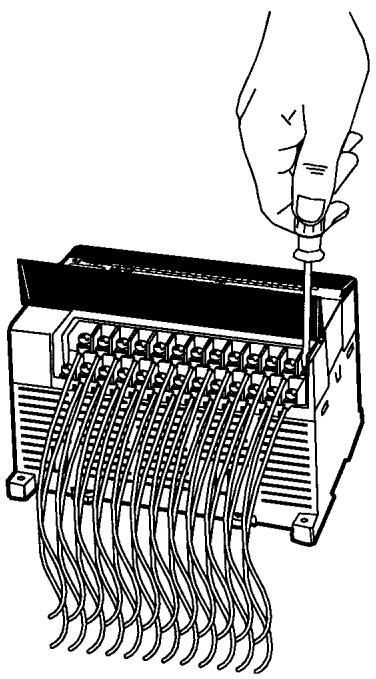

- Detacher les borniers de l'unité centrale.

3-4-3 Câblage de la terre
Mise à la terre
Prendre garde demettre la borne de masse a la terre par 100 au maximum pour proteger contre les chocs electriques et le fonctionnement incorrect du au bruit electrique. Prendre garde d'utiliser un fil d'au moins 1,25mm^2 pour la mise a la terre.
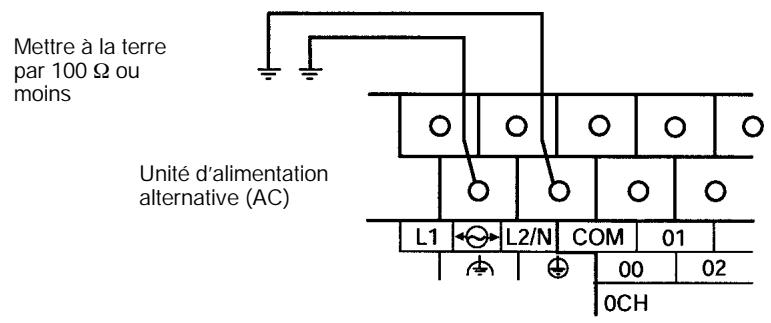
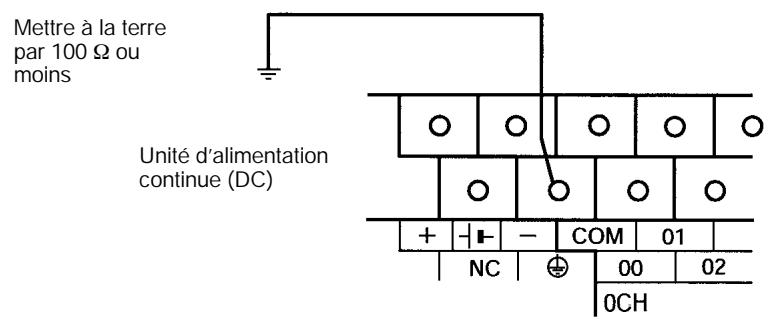
Rem. Toutjours déconneter la borne fonctionnelle de masse avant de faire un essai de résistance à la tension.
Bornes serties
Attention
Toujours employer des bornes serties pour les lignes de mise à la terre du CPM2A ou utiliser du fil rigide (au lieu de fil multibrins). Ne pas connecter de fils multibrins nus directement aux bornes. Des brins de fil détachés peuvent faire un court-circuit et provoquer un incendie.
Utiliser des bornes serties M3 et serrer les vis des bornes avec un couple de 0,5 N.m.

Le calibre de fil recommendé pour les fils rigides est de 0,4 à 1,2 mm (AWG26 à AWG18).
3-4-4 Câblage de l'alimentation
Alimentation 100 à 240 V c.a.
Câbler un circuit séparé pour l'alimentation du CPM2A de façon qu'il n'y ait pas de chute de tension à cause du surcourant qui passé quand d'autres équipements sont allumés.
Si on utilise plusieurs API CPM2A, il est recommendé deçâbler les API sur des circuits séparés pour éviter une chute de tension provenant du surcourant ou du fonctionnement incorrect du disjoncteur.
Utiliser des fils d'alimentation torsadés pour éviter le bruit provenant des lignes d'alimentation. Si on ajoute un transformateur d'isolement 1:1, cela réduit encore le bruit électrique.
Etant donné la possibilité de chutes de tension et le courant autorisé, prendre garde d'utiliser des lignes d'alimentation à gros fils.
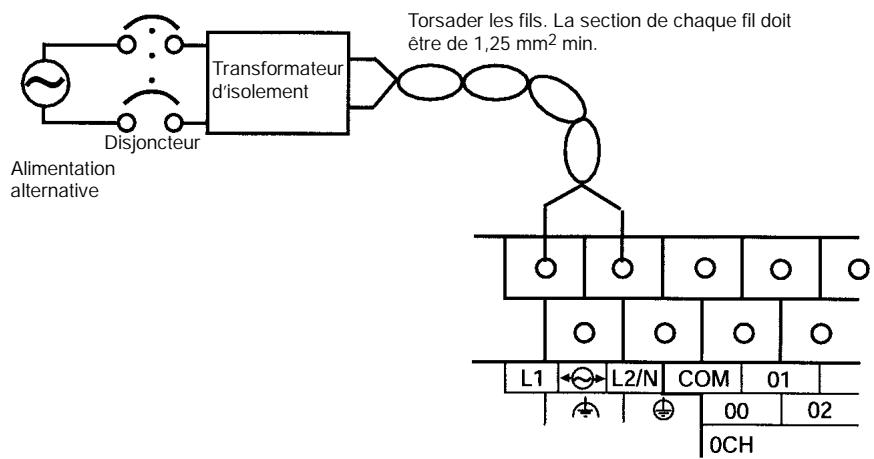
Rem. 1. Avant de connecter l'alimentation, s'assurer que l'unité centrale demande une alimentation alternative et non une alimentation continue. Les circuits internes de l'unité centrale seront endommagés si du courant alternatif est appliqué par erreur à une unité centrale qui demande une alimentation continue.
2. Les bornes d'entrée de l'alimentation sont au-dessus de l'unité centrale; les bornes au bas de l'unité centrale donnent une alimentation 24 V c.c. pour des appareils extérieurs. Les circuits internes de l'unité centrale seront endommagés si du courant alternatif est appliqué par erreur aux bornes de sortie de l'alimentation d'une unité centrale.

Attention
Serrer les vis de la plaque à bornes de l'alimentation alternative avec un couple de 0,5 N.m. Les vis non serrées peuvent provoquer un incendie ou un mauvais fonctionnement.
Bornes serties

Attention
Toujours utiliser des bornes serties pour les lignes d'alimentation du CPM2A. Ne pas connecter des fils multibrins directement aux bornes. Des brins de fil détachés peuvent faire un court-circuit et provoquer un incendie.
Utiliser des bornes serties M3 et serrer les vis des bornes avec un couple de 0,5 N.m.
Connector une borne en anneau à chaque vis de borne.
3-4-5 Câblage d'entrée
Cábler les entrées à l'unité centrale CPM2A et de l'unité entre/sortie d'extension comme indiqué sur les schémas suivants. Utiliser des bornes serties ou des fils rigides (pas de fils multibrins) pour se connecter à l'API. Les bornes de sortie de l'alimentation peuvent être utilisées avec des unités centrales à alimentation alternative.
Rem. Si les équipements doivent être conformes aux directives des CE (directives basse tension), utiliser une alimentation avec double isolation ou isolation renforcée.
Configuration d'entrée
Les schémas suivants indiquent les configurations d'entrée.
Rem. Se reporter au Chapitre 3 Zones de mémoire dans le Manuel de programmation pour détails sur l'affection des bits d'entrée dans les API CPM2A.
Les bornes 00 à 11 de "0CH" correspondent aux bits IR 00000 à IR 00011.
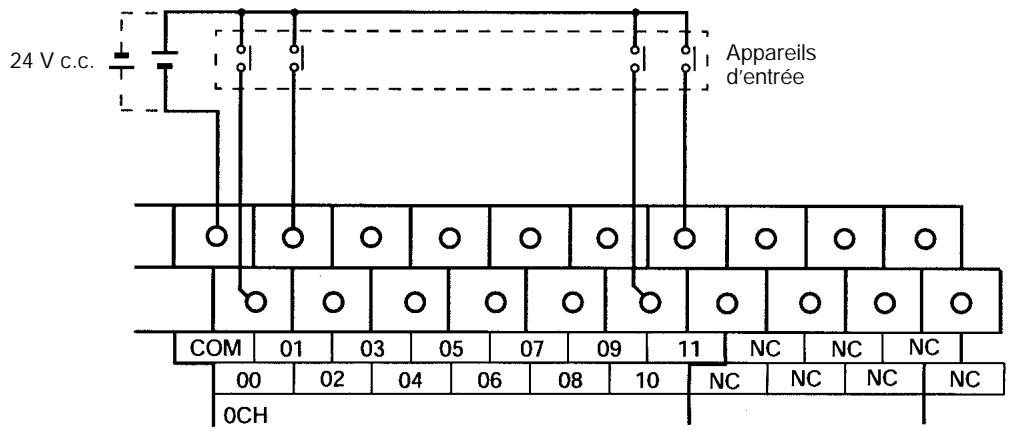
Les bornes 00 à 11 de "0CH" correspondent aux bits IR 00000 à IR 00011, les bornes 00 à 05 de "1CH" correspondent aux bits IR 00100 à IR 00105.
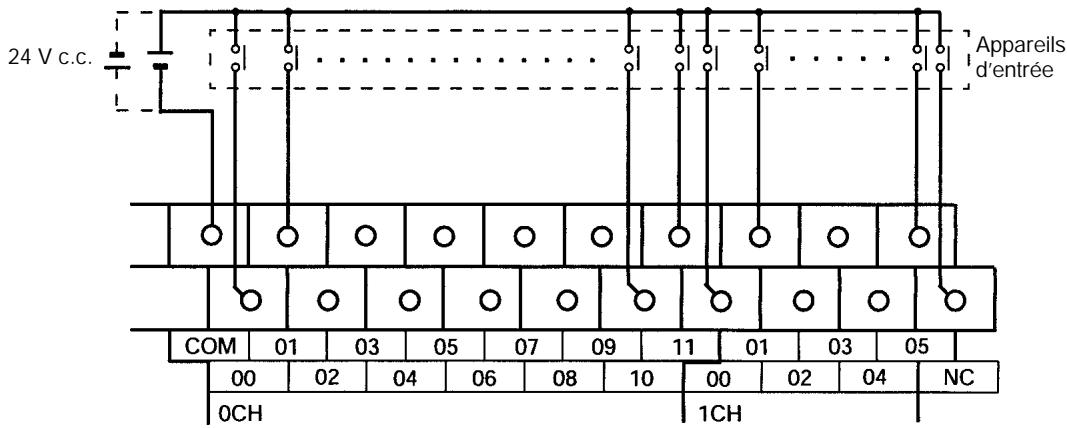
CPM2A-40CDR-j, CPM2A-40CDT-j, et CPM2A-40CDT1-j
Les bornes 00 à 11 de "0CH" correspondent aux bits IR 00000 à IR 00011, les bornes 00 à 11 de "1CH" correspondent aux bits IR 00100 à IR 00111.
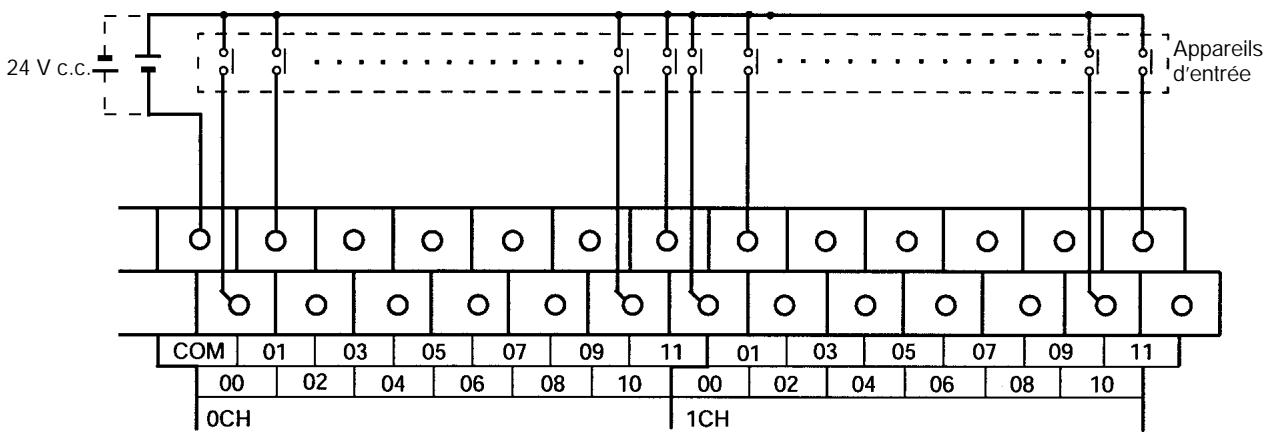
CPM2A-60CDR-j , CPM2A-60CDT-j , and CPM2A-60CDT1-j
Les bornes 00 à 11 de "0CH" correspondant aux bits IR 00000 à IR 00011, les bornes 00 à 11 de "1CH" correspondant aux bits IR 00100 à IR 00111, les bornes 00 à 11 de "2CH" correspondant aux bits IR 00200 à IR 00211.
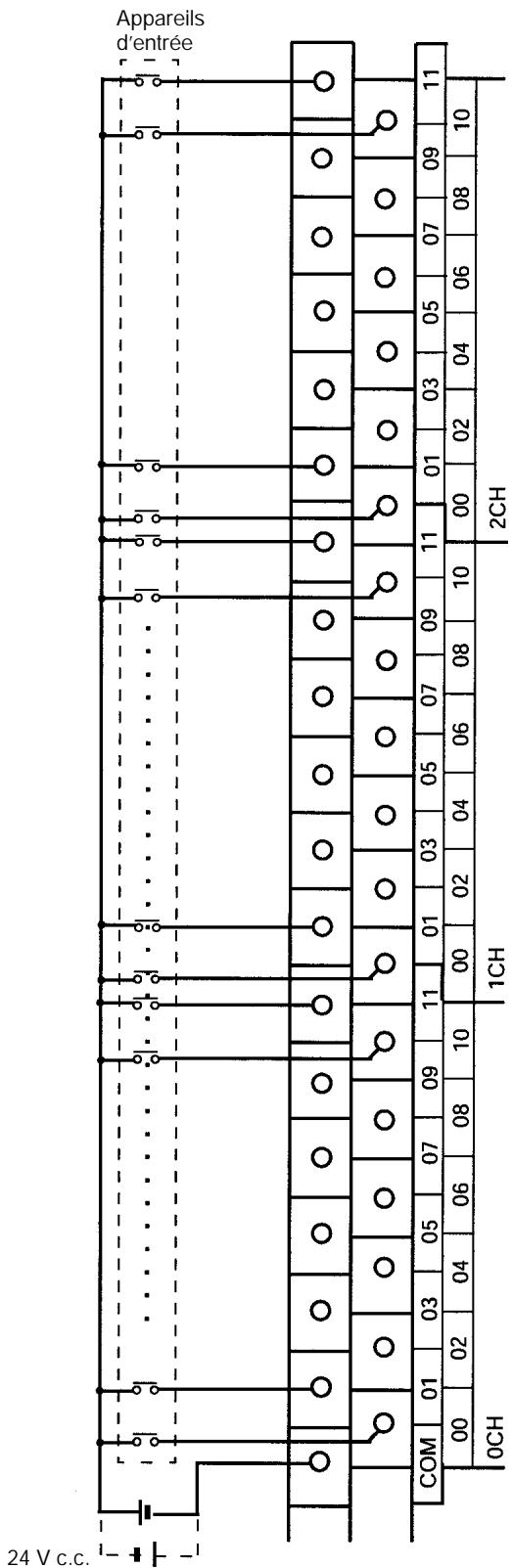
CPM1A-20EDR1, CPM1A-20EDT, et CPM1A-20EDT1
Les bornes 00 à 11 de "mCH" correspondent aux bits 00 à 11 du mot IR m.
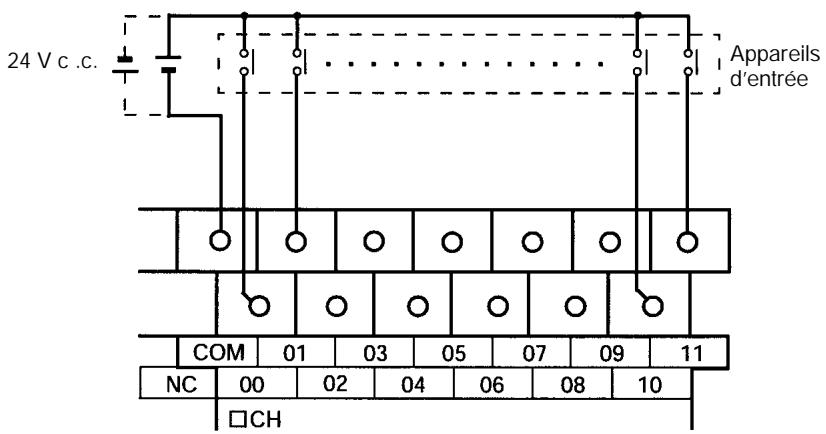
CPM1A-8ED
Les bornes 00 à 07 de "mCH" correspondent aux bits 00 à 07 du mot IR m.
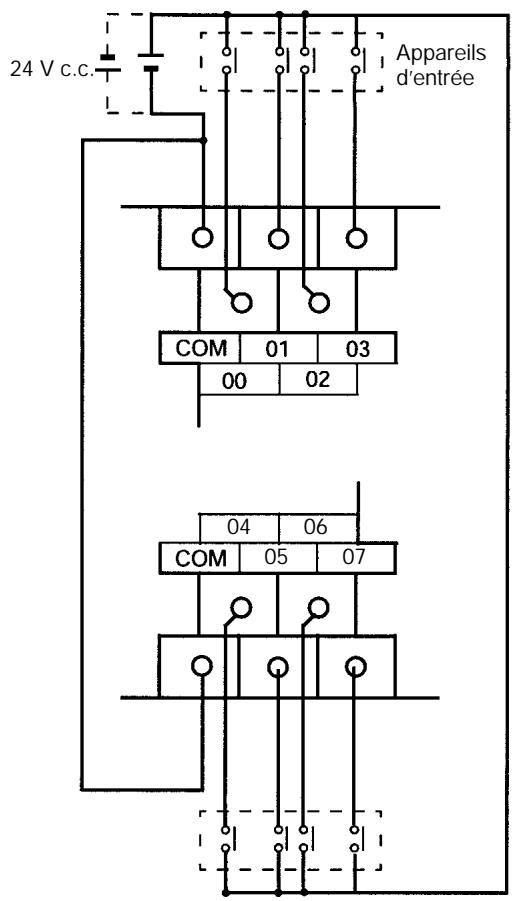
Rem. Bien que les multiples soient connectés en interne, ils doivent tous etre cablés.
Exemple de cablage d'entrée
Une unité centrale à alimentation alternative est représentée. Les unités centrales à alimentation continue n'ont pas de sorties d'alimentation.
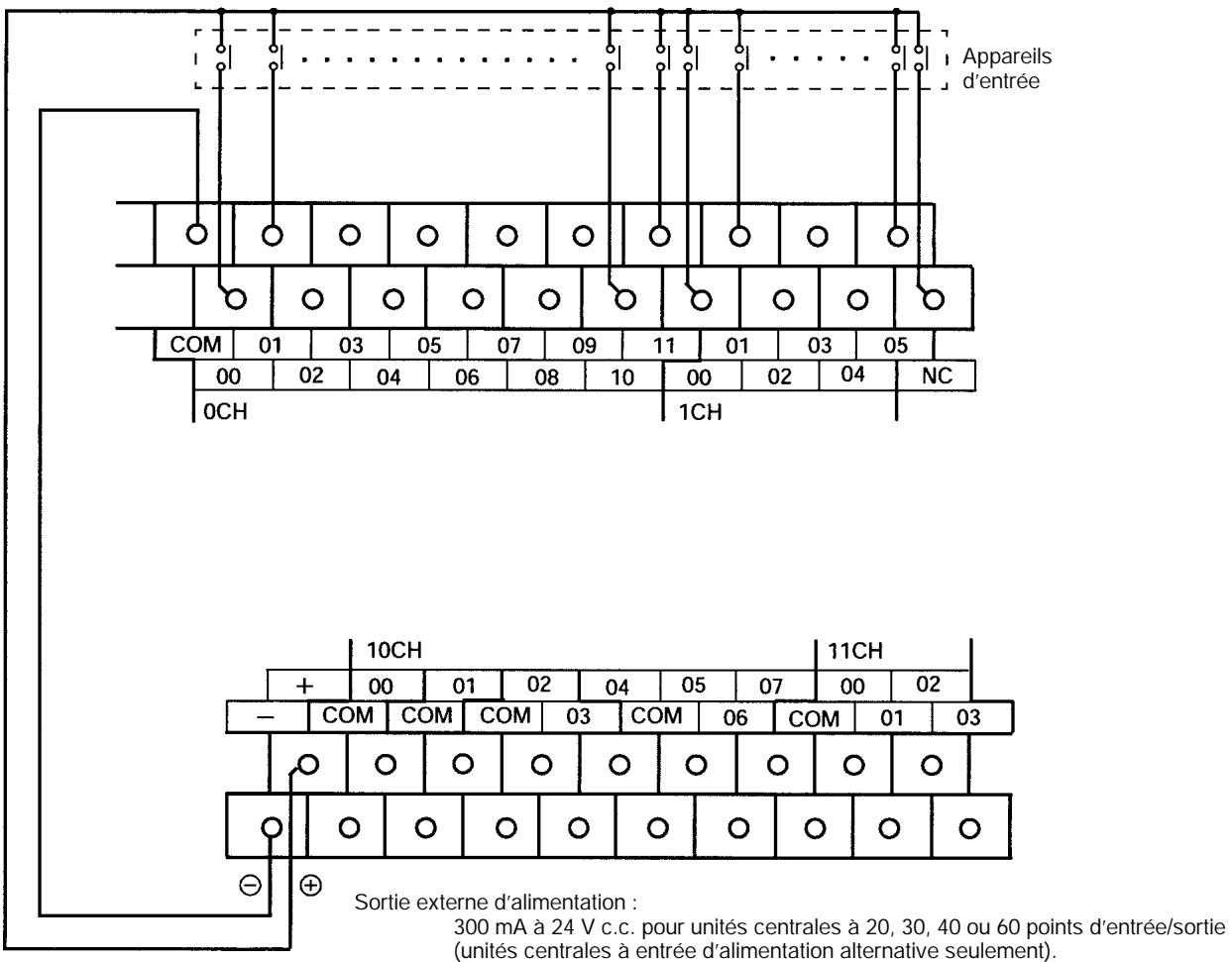
! AVERTISSEMENT
Si la sortie 24 V c.c. (alimentation de service de l'API) est surcharge ou court-circuitée, la tension peut tomber et provoquer la coupure des sorties. Il faut prévoir des mesures de sécurité extérieures pour assurer la sécurité dans le système. Ne pas prendre les mesures de sécurité adequates pourrait provoquer des accidents graves.
Le tableau suivant indique comment connecter différents appareils d'entrée.
Appareils d'entrée
| Appareil | Schéma du circuit |
| Sortie sur relais | 5 mA/12 mA | IN CPM2A
COM (+) |
| Collecteur ouvert
NPN | + 5 mA/12 mA 0 V | capteur
alimentation IN CPM2A
COM (+) |
| Sortie courant NPN | Circuit à
courant
constant 5 mA/12 mA 0 V | Utiliser la même alimentation pour l'entrée et le capteur. |
| Sortie courant PNP | + 5 mA/12 mA Sortie 0 V | capteur
alimentation IN CPM2A
COM (-) |
| Sortie tension | + Sortie 0 V | com (+)
IN CPM2A |
Rem. Ne pas utiliser le câblage suivant avec des apparéils à sortie tension :
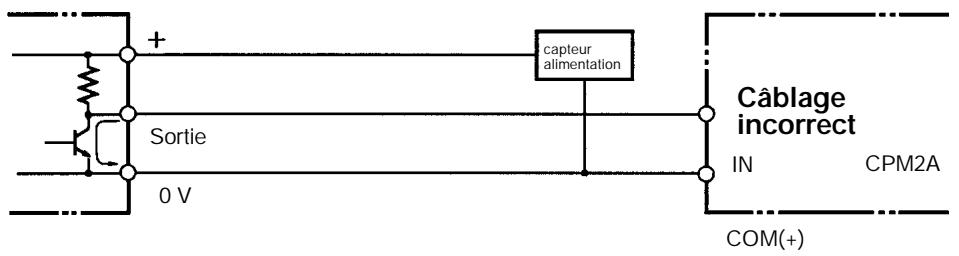
Entrées compteurs à grande vitesse
Utiliser IR 00000 à IR 00002 comme entrées de compteurs à grande vitesse Dans ces examples sont connectés des codeurs avec une sortie exter à collecteur ouvert à 24 V c.c.
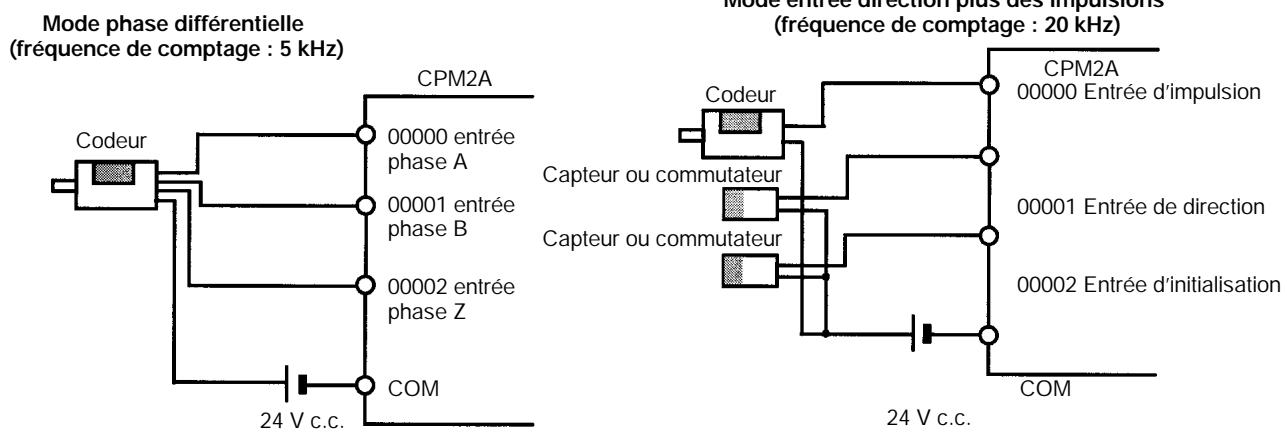
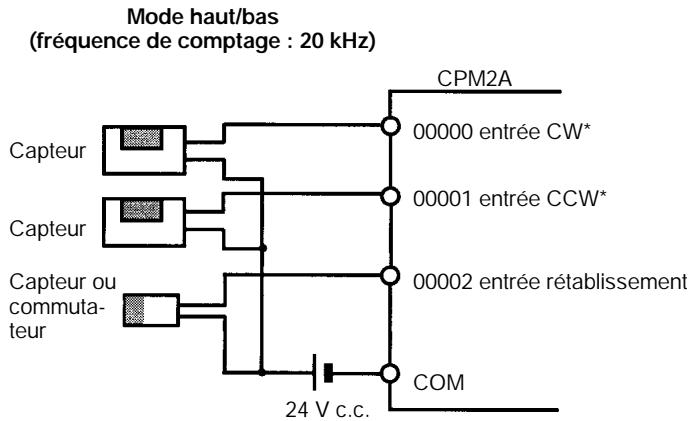
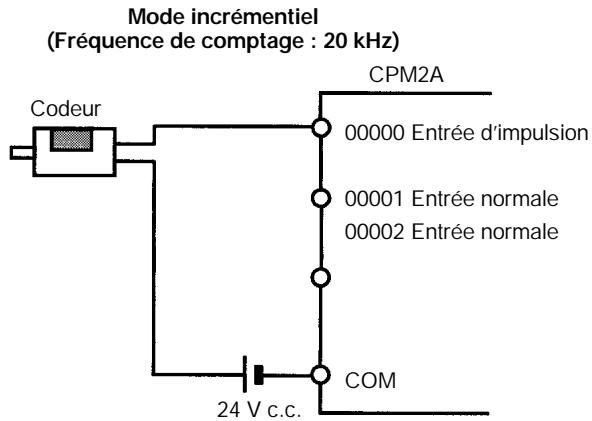
Rem. *CW虑 dire dans le sens des aiguilles d'une montre et CCW en sens inverse.
Utilisation de IR 00003 à IR 00006 comme entrées d'interruptions (mode comptage)
Dans ces exemple est connecté un codeur avec une sortie externe à collecteur ouvert à 24 V c.c.
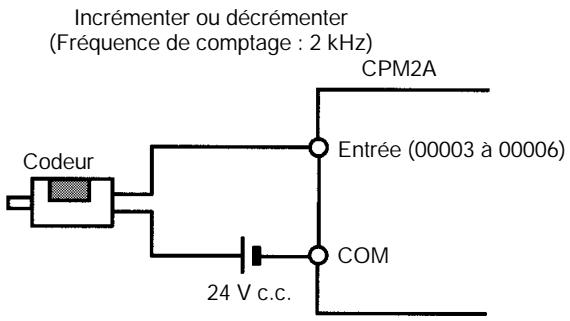
Réglages d'installation de l'API
Les bits d'entrée indiqués dans les tableaux suivants peuvent fonctionner comme entrées normales ou on peut leur assigner des fonctions spéciales à l'installation de l'API.
Les fonctions spéciales pour les bits d'entrée IR 00000 à IR 00002 sont régles dans DM 6642 :
| Adresse des bits | Réglage d'installation de l'API (DM 6642 bits 08 à 15) |
| 00 | 01 | 02, 03, ou 04 |
| IR 00000 | Utilisés comme entrées normales. | Utilisés comme entrées à grande vitesse. | Utilisés comme entrées pour contrôle synchronisé des impulsions. |
| IR 00001 |
| IR 00002 | Utilisé comme une entrée normale. |
Des fonctions spéciales pour les bits d'entrée IR 00003 à IR 00006 sont régles dans DM 6628 :
| Adresse des bits | Bits dans DM 6628 | Réglage d'installation de l'API (dans DM 6628) |
| 0 | 1 | 2 |
| IR 00003 | 00 à 03 | Utilisés comme entrées normales. | Utilisés comme entrées d'interruption. | Utilisés comme entrée à réponse rapide. |
| IR 00004 | 04 à 07 |
| IR 00005 | 08 à 11 |
| IR 00006 | 12 à 15 |
Exemples de connexion d'entrée du compteur à grande vitesse
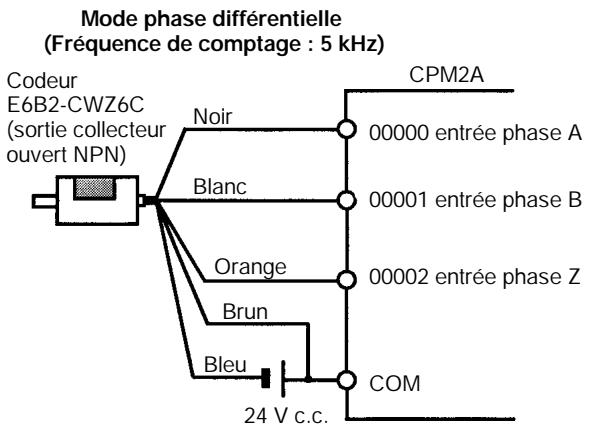
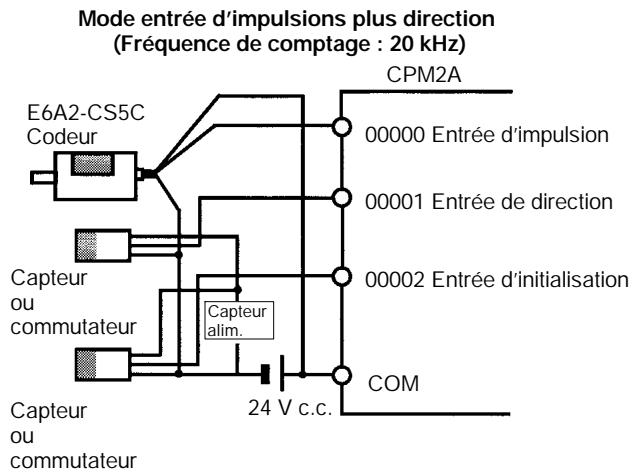
Courant de fuite
Un courant de fuite peut provoquer de fausses entrées si on utilise des capteurs à 2 fils (contacteurs de proximé ou contacteurs photoélectriques) ou des contacteurs de limite avec des LED (diodes électroluminescentes). Il ne se produit pas de fausses entrées si le courant de fuite est moindre que 1,0mA (2,5mA pour IN00000 à IN00002). Si le courant de fuite dépasse ces valeurs, insérer une résistance de drainage dans le circuit pour réduire l'impédance d'entrée, comme indiqué au schéma suivant.
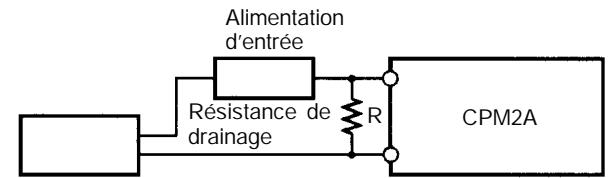
Capteur 2 fils, etc.
I: Courant de fuite de I'appareil (mA)
R: Resistance de drainage (kΩ)
W: Puisance nominale de la resistance de drainage (W)
L_C : Impedance d'entree du CPM2A (kΩ)
IC: Courant d'entree du CPM2A (mA)
E_C : Tension à vide du CPM2A (V) = 5,0 V

Les équations ci-dessus ont été tirées des équations suivantes :
$$
I \quad \begin{array}{c c} R & \frac {\text {T e n s i o n d e n t r e e (2 4)}}{\text {C o u r a n t d e n t r e e (I _ {C})}} \ \hline R & \frac {\text {T e n s i o n d e n t r e e (2 4)}}{\text {C o u r a n t d e n t r e e (I _ {C})}} \end{array} \quad \text {T e n s i o n O F F (E _ {C}: 5 . 0)}
$$
$$
\begin{array}{c c c c} W & \frac {\text {T e n s i o n d e n t r e e (2 4)}}{R} & \text {T e n s i o n d e n t r e e (2 4)} & \text {t o l e r a n c e (4)} \end{array}
$$
Se reporter aux specifications d'entrée/sortie 2-1-3 I/O pour détails sur les valeurs de LC , IC , et E_C .
L'impédance d'entrée, le courant d'entrée et la tension à vide peuvent varier en fonction de l'entrée utilisée (IN00000 à IN00002 ont des valeurs différentes).
Charges inductives
Si on connecte une charge inductive à une entrée, il faut connecter une diode en parallele avec la charge. La diode doit satisfaire aux conditions suivantes :
1, 2, 3... 1. Le claquage en crête inversée doit être d'au moins 3 fois la tension de charge.
2. Le courant redresse moyen doit etre de 1 A.
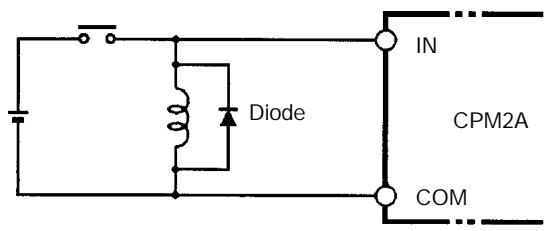
Bornes serties
Attention
Toujours employer des bornes serties pour les lignes d'entrée-sortie du CPM2A ou utiliser du fil rigide (au lieu de fil multibrins). Ne pas connecter de fils multibrins nus directement aux bornes. Des brins de fil détachés peuvent faire un court-circuit et provoquer un incendie.
Utiliser des bornes serties M3 et serrer les vis des bornes avec un couple de 0,5 N.m.

Le calibre de fil recommendé pour les fils rigides est de 0,4 à 1,2 mm (AWG26 à AWG18).
3-4-6 Câblage de sortie
Câblage de sortie reliais
Câbler les sorties sur l'unité centrale et l'unité entrée/sorting d'extension CPM2A comme indiqué sur les schémas suivants. Utiliser des bornes serties ou des fils rigides (pas de fil multibrins) pour se connecter à l'API. Les bornes de sortinge de l'alimentation peuvent etre utiliserles avec une unité centrale avec une alimentation alternative.
- Toujours utiliser un fil simple ou fixer des bornes serties si on utilise du fil multibrins.
- Ne pas dépasser la capacité de sortie ou le courant commun maximum. Se reporter aux Spécifications d'entrée/sortie 2-1-3 pour les détails.
| Poste | Sorties à relais | Sorties à transistor |
| Capacité de sortie | 2 A (250 VAC ou 24 VDC) | 01000 et 01001 : 200 mA (30 V c.c.)01002 et plus : 300 mA (30 V c.c.) |
| Capacité commune maximum | 4 A/commune | 0,8 A/commune |
Rem. Se reporter à la Section 3 Zones de mémoire dans le Manuel de programmation pour les détails sur l'affection des bits de sortie dans le CPM2A.
! AVERTISSEMENT
Les sorties de l'API peuvent rester activées ou coupées à cause de dépôts ou de brûlages aux reliats de sortie ou de destruction des transistors de sortie. Il faut prendre des mesures de sécurité extérieures pour assurer la sécurité dans le système. Ne pas prendre de mesures de sécurité pourrait provoquer des accidents graves.
Configurations de sortie
CPM2A-20CDR-j
Les bornes 00 à 07 de "10CH" correspondent à IR 01000 à IR 01007.
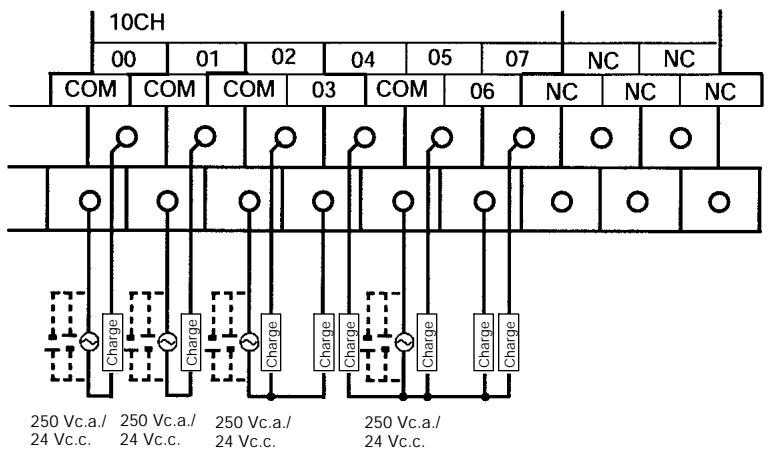
CPM2A-30CDR-j
Les bornes 00 à 07 de "10CH" correspondent à IR 01000 à IR 01007.
Les bornes 00 à 03 de "11CH" correspondent à IR 01100 à IR 01103.
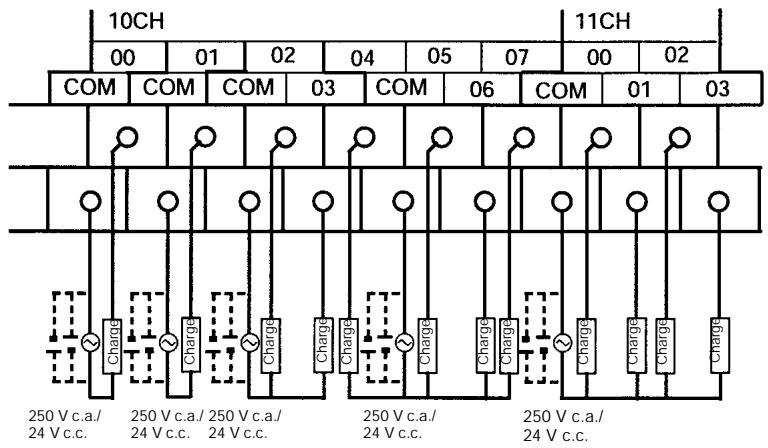
CPM2A-40CDR-j
Les bornes 00 à 07 de "10CH" correspondent à IR 01000 à IR 01007. Les bornes 00 à 03 de "11CH" correspondent à IR 01100 à IR 01103.

CPM2A-60CDR-j
Les bornes 00 à 07 de "10CH" correspondent à IR 01000 à IR 01007.
Les bornes 00 à 07 de "11CH" correspondent à IR 01100 à IR 01107.
Les bornes 00 à 07 de "12CH" correspondent à IR 01200 à IR 01207.
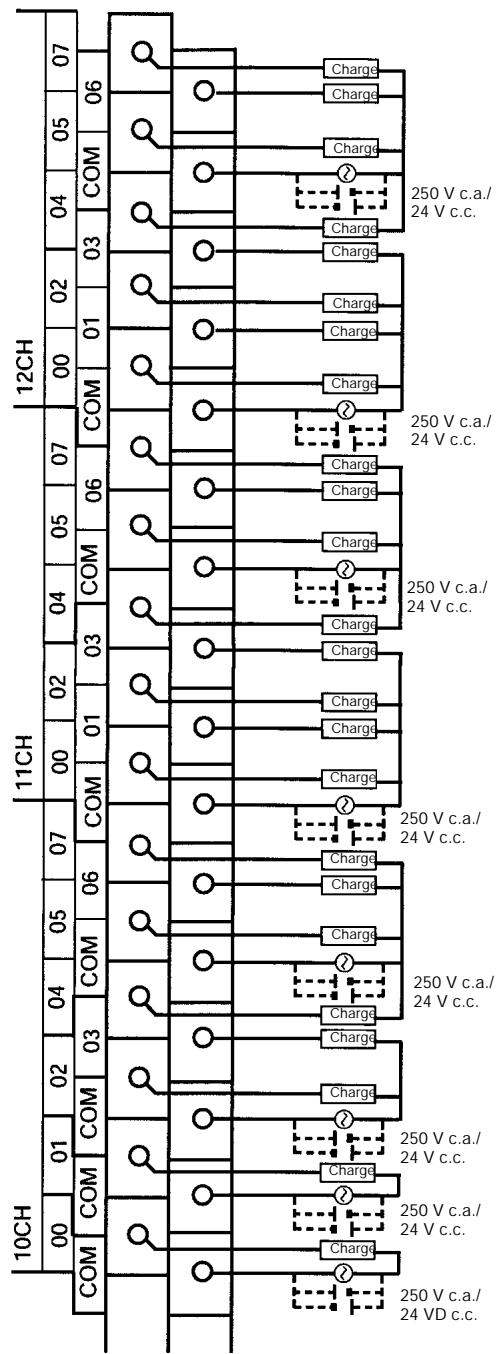
CPM1A-20EDR1
Les bornes 00 à 07 de "1nCH" correspondent aux bits 00 à 07 du mot IR 1n.
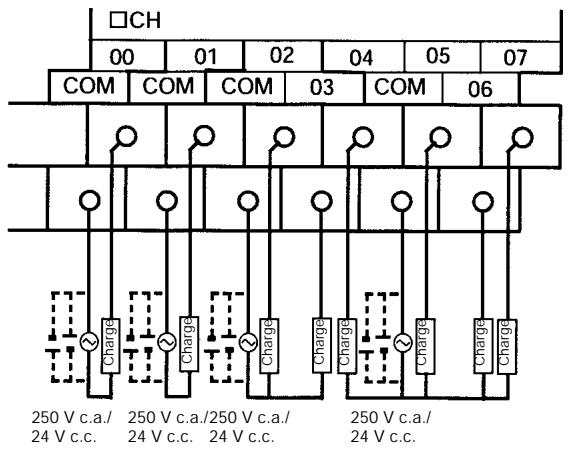
CPM1A-8ER
Les bornes 00 à 07 de "1nCH" correspondent aux bits 00 à 07 du mot IR 1n.
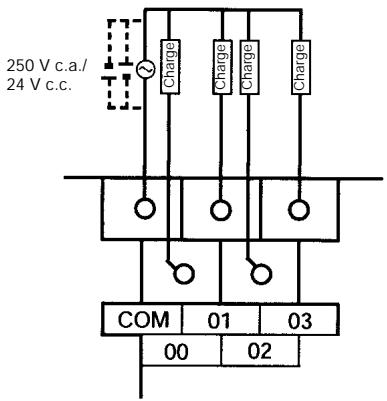
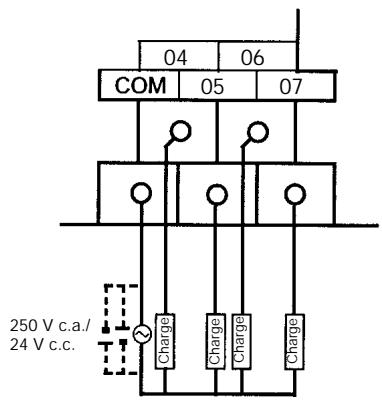
Câblage du transistor NPN
Cábler les sorties vers l'unité centrale et l'unité entrée/sorting d'extension CPM2A comme indiqué sur les schémas suivants.
- Toujours utiliser un fil simple ou fixer des bornes serties si on utilise du fil multibrins.
- Ne pas dépasser la capacité de sortie ou le courant commun maximum. Se reporter aux Spécifications d'entrée/sortie 2-1-3 pour les détails
| Poste | Spécification |
| Capacité de sortie | OUT01000 et OUT01001 : 200 mA (30 V c.c.)
OUT01002 et au-delà : 300 mA (30 V c.c.) |
| Capacité commune maximum | 0,8 A/commune |
Rem. Se reporter à la Section 3 Zones de mémoire dans le Manuel de programmation pour détails sur l'affection des bits de sortie dans les API CPM2A.
Attention
Contrôler la polarité de l'alimentation pour la charge avant demettre en marche. Si la polarité est inversée, la charge peut mal fonctionner ou des composants internes peuvent être endommagés.
Configurations de sortie
CPM2A-20CDT-D
Les bornes 00 à 07 de "10CH" correspondent à IR 01000 à IR 01007.
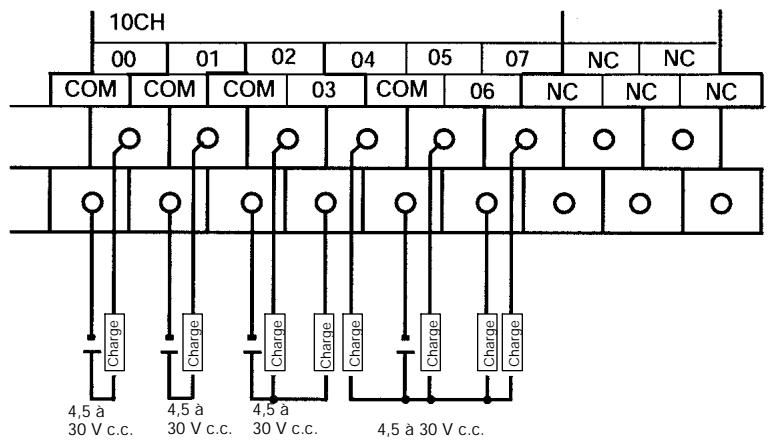
CPM2A-30CDT-D
Les bornes 00 à 07 de "10CH" correspondent à IR 01000 à IR 01007. Les bornes 00 à 03 de "11CH" correspondent à IR 01100 à IR 01103.
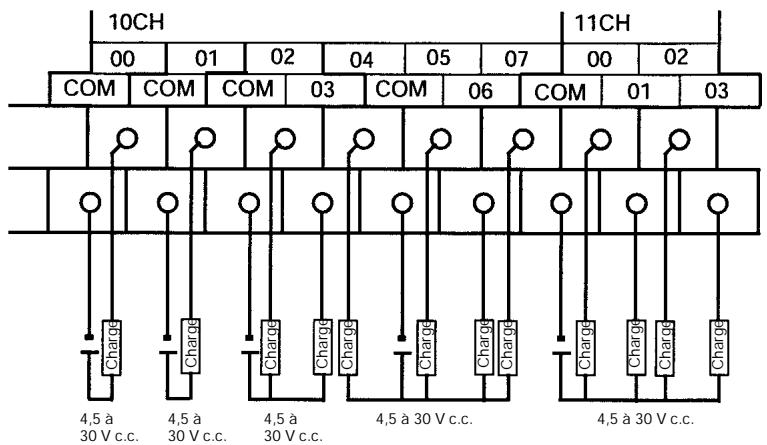
CPM2A-40CDT-D
Les bornes 00 à 07 de "10CH" correspondent à IR 01000 à IR 01007.
Les bornes 00 à 07 de "11CH" correspondent à IR 01100 à IR 01107.
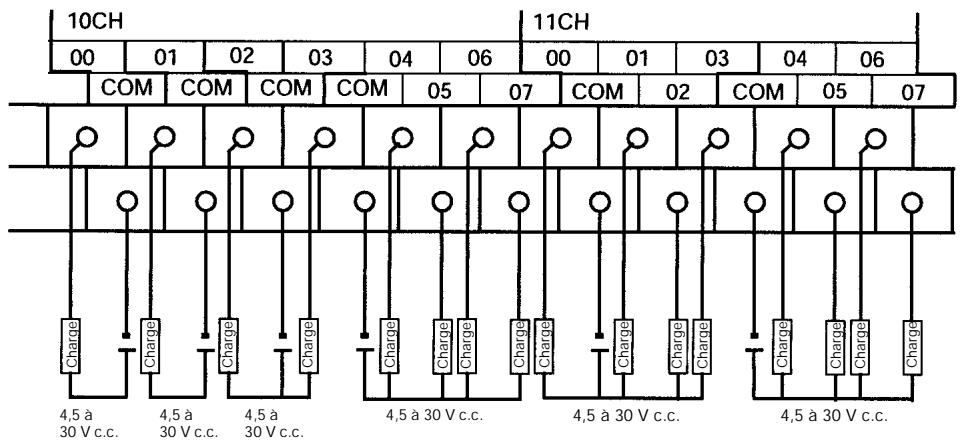
CPM2A-60CDT-D
Les bornes 00 à 07 de "10CH" correspondent à IR 01000 à IR 01007.
Les bornes 00 à 07 de "11CH" correspondent à IR 01100 à IR 01107.
Les bornes 00 à 07 de "12CH" correspondent à IR 01200 à IR 01207.
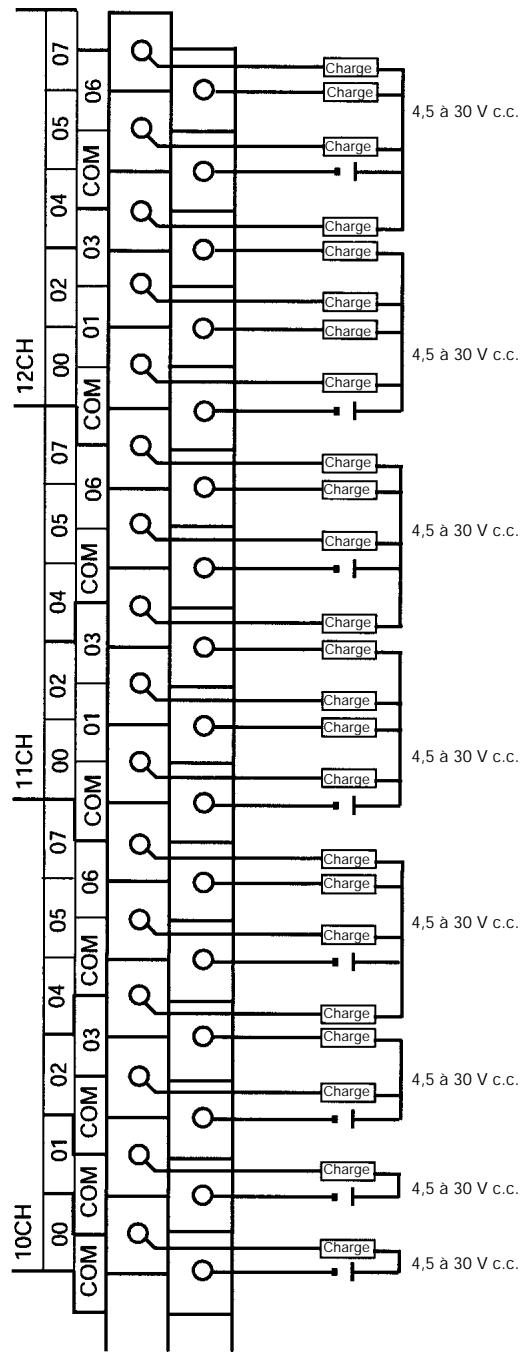
CPM1A-20EDT
Les bornes 00 à 07 de "1nCH" correspondent aux bits 00 à 07 du mot IR 1n.
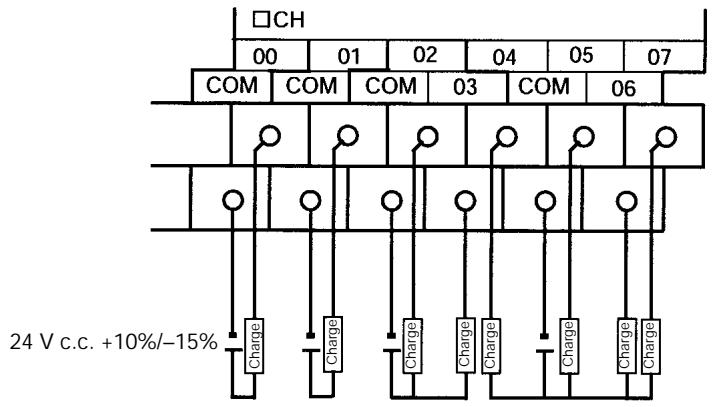
CPM1A-8ET
Les bornes 00 à 07 de "1nCH" correspondent aux bits 00 à 07 du mot IR 1n.
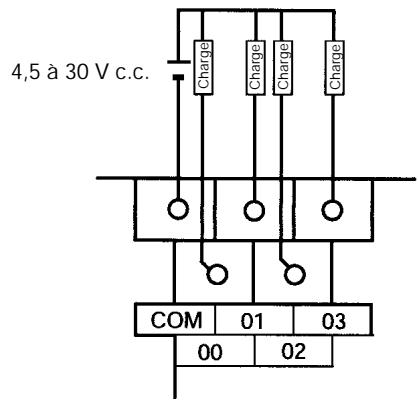
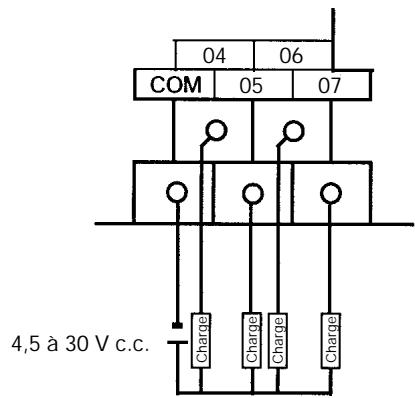
Câblage du transistor PNP
Cábler les sorties vers l'unité centrale et l'unité entrée/sortie d'extension du CPM2A comme indiqué sur les schémas suivants.
- Toujours utiliser un fil simple ou fixer des bornes serties si on utilise du fil multibrins.
- Ne pas dépasser la capacité de sortie ou le courant commun maximum. Se reporter aux Spécifications d'entrée/sortie 2-1-3 pour les détails.
| Poste | Spécification |
| Capacité de sortie | OUT01000 et OUT01001 : 200 mA (30 V c.c.)
OUT01002 et au-delà : 300 mA (30 V c.c.) |
| Capacité commune maximum | 0,8 A/commune |
Rem. Se reporter à la Section 3 Zones de mémoire dans le Manuel de programmation pour détails sur l'affection des bits de sortie dans les API CPM2A.
Attention
Contrôler deux fois la polarité de l'alimentation pour la charge avant demettre en marche. Si la polarité est inversée, la charge peut mal fonctionner ou des composants internes peuvent être endommages.
Configurations de sortie
CPM2A-20CDT-D
Les bornes 00 à 07 de "10CH" correspondent à IR 01000 à IR 01007.

CPM2A-30CDT1-D
Les bornes 00 à 07 de "10CH" correspondent à IR 01000 à IR 01007.
Les bornes 00 à 03 de "11CH" correspondent à IR 01100 à IR 01103.
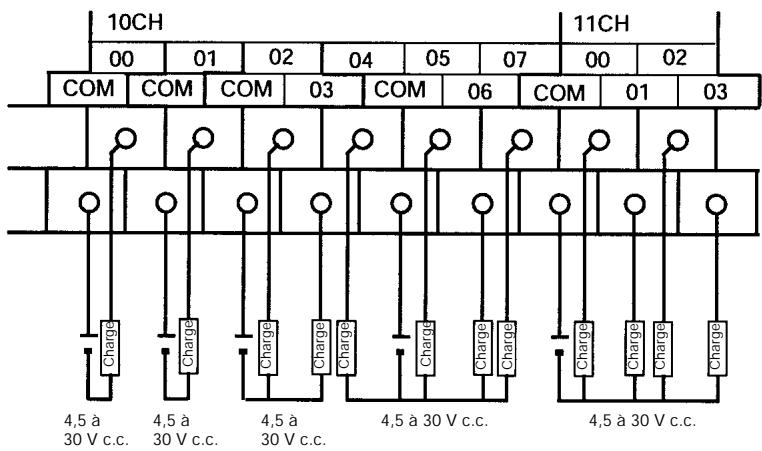
CPM2A-40CDT1-D
Les bornes 00 à 07 de "10CH" correspondent à IR 01000 à IR 01007.
Les bornes 00 à 07 de "11CH" correspondent à IR 01100 à IR 01107.
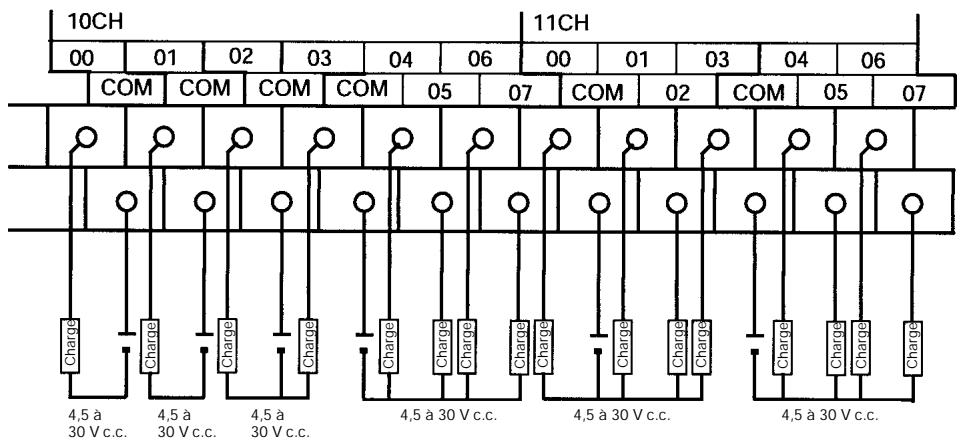
CPM2A-60CDT1-D
Les bornes 00 à 07 de "10CH" correspondent à IR 01000 à IR 01007.
Les bornes 00 à 07 de "11CH" correspondent à IR 01100 à IR 01107.
Les bornes 00 à 07 de "12CH" correspondent à IR 01200 à IR 01207.
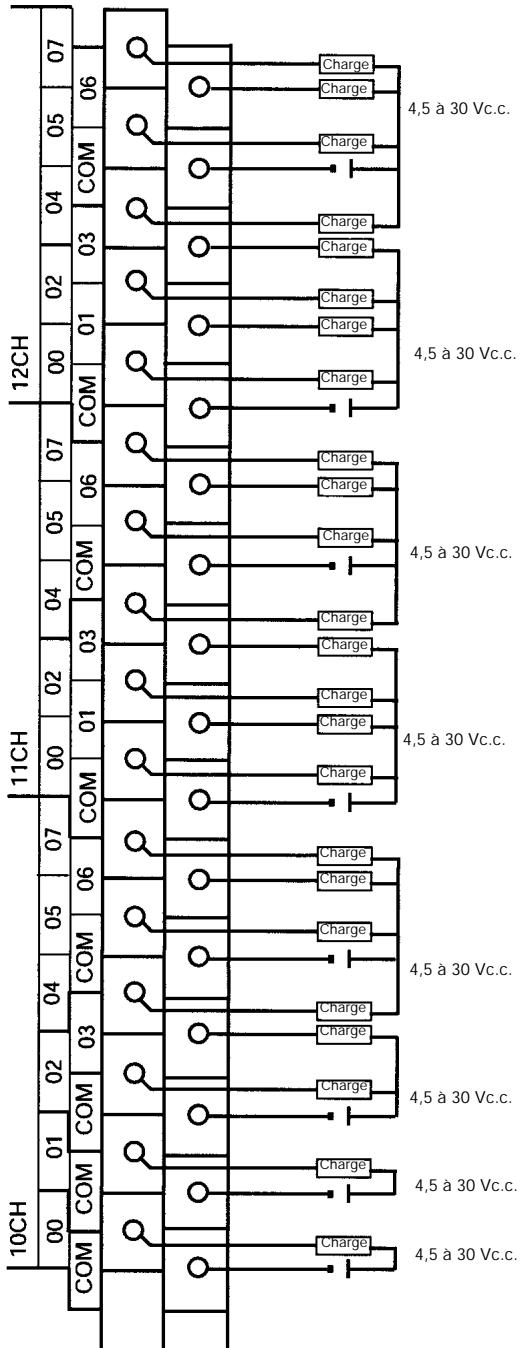
CPM1A-20EDT1
Les bornes 00 à 07 de "1nCH" correspondent aux bits 00 à 07 du mot IR 1n.
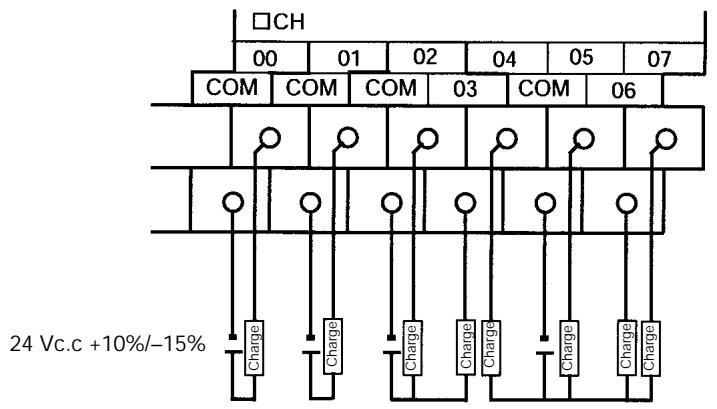
CPM1A-8ET1
Les bornes 00 à 07 de "1nCH" correspondent aux bits 00 à 07 du mot IR 1n.
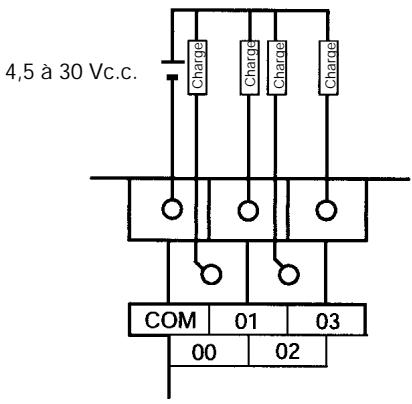
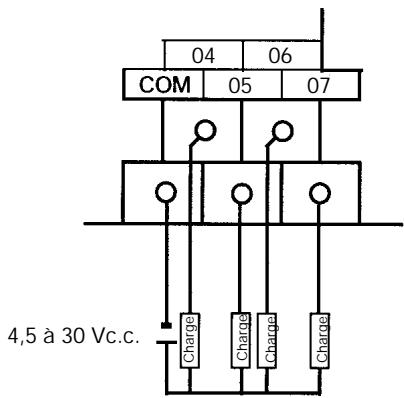
Utiliser des sorties d'impulsions
Le schémas ci-dessous présente des exemple d'applications de sorties transistorisées de type NPN utiliser les bits de sortie IR 01000 et IR 01001. Utiliser les instructions PULS(65), SPED(-), ACC(-), PWM(-), et SYNC(-) pour obtenir des sorties d'impulsions (à la place de sorties normales) à partir des bits de sortie IR 01000 et IR 01001.
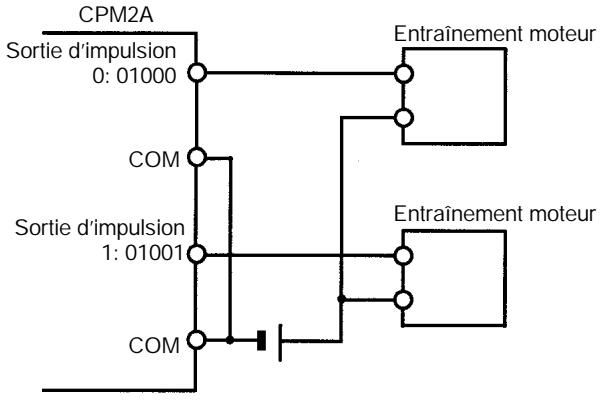
Sortie d'impulsion à phase unique (rapport cyclique fixe)
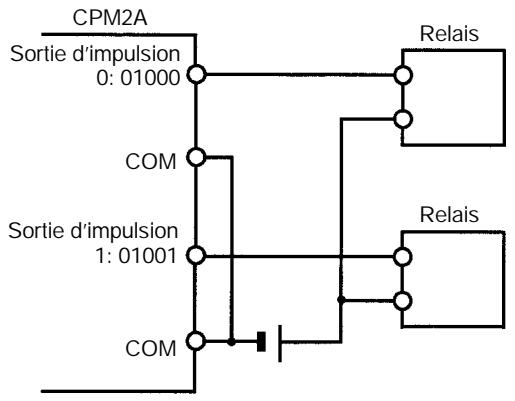
Sortie d'impulsion à phase unique (rapport cyclique variable)
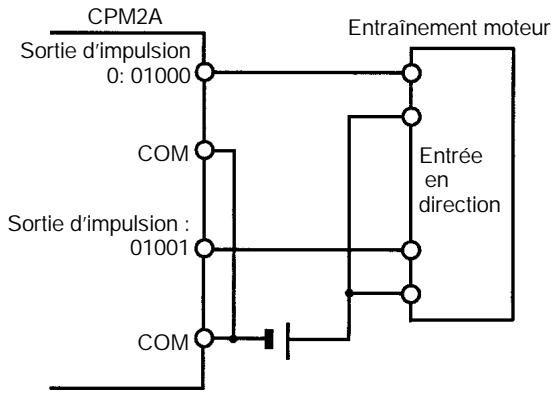
Sortie d'impulsion plus en direction
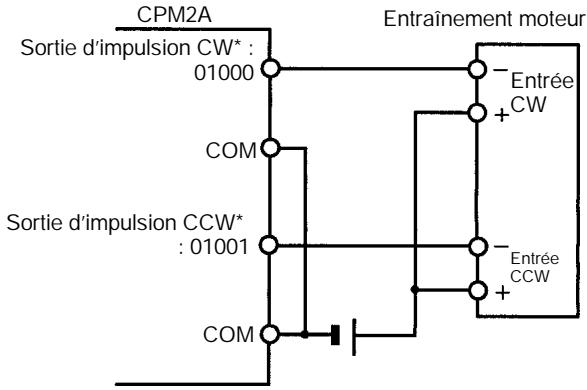
Sortie d'impulsion en incrémentation
Rem. *CW虑dire dans le sens des aiguilles d'une montre et CCW en sens inverse.
Conseils pour cablage de sortie
Respecter les précautions suivantes pour protégger les composants internes de l'API.
Protection contre courts-circuits en sortie
Les circuits de sortie ou internes pourraient etre endommagés si la charge connectee a une sortie etait court-circuitée. C'estpourquoi il est recommendé d'installer un fusible de protection dans chaque circuit de sortie.
Charges inductives
Lorsqu'une charge inductive est connectee à une entrée, il faut connecter une protection contre les surtensions ou une diode en parallele avec la charge.
Les composants de la protection contre les surtensions doivent avoir les valeurs suivantes :
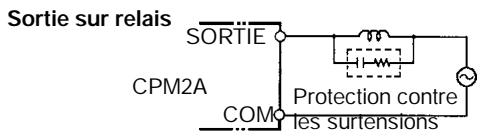
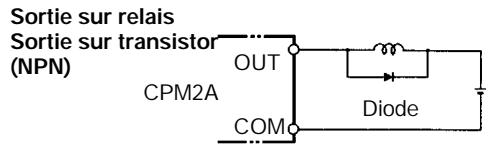
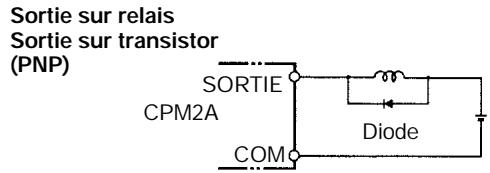
La diode doit satisfaire aux conditions suivantes :
La tension de claquage en crête inversée doit être d'au moins 3 fois la tension de charge.
Le courant redresse moyen doit etre de 1 A.
Considerations sur les a-coups de courant
Lorsque un circuit doit avoir une charge avec un fort à-coup de courant sur le modele de sortie à relatais ou de sortie à transistor, telle qu'une lampe à incandescence, amortir l'à-coup de courant comme indiqué ci-dessous.
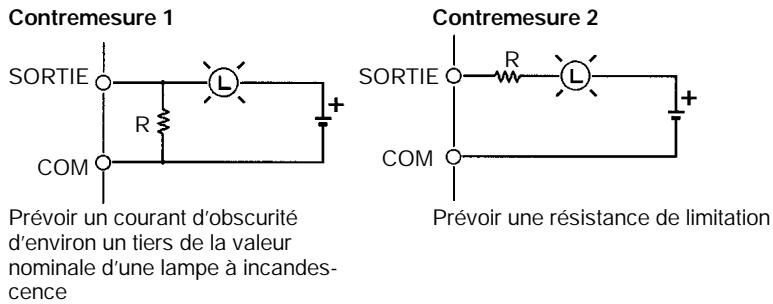
Insertion d'un fusible
Le CPM2A à sortie à transistor peut brûler si la charge est court-circuitée ; par conséquent, insérer un fusible de protection en série avec la charge.
Bornes serties
Attention
Toujours employer des bornes serties pour les lignes d'entrée-sortie du CPM2A ou utiliser du fil rigide (au lieu de fil multibrins). Ne pas connecter de fils multibrins nus directement aux bornes. Des brins de fil détachés peuvent faire un court-circuit et provoquer un incendie.
Utiliser des bornes serties M3 et serrer les vis des bornes avec un couple de 0,5 N S m.

Le calibre de fil recommendé pour les fils rigides est de 0,4 à 1,2 mm (AWG26 à AWG18).
3-4-7 Connexions d'un apparéil de programmation
L'unité centrale CPM2A peut être connectée à une console de programmation ou un micro-ordinateur exécutant un logiciel de programmation SYSWIN.
Console de programmation
L'unité centrale CPM2A peut être connectée à une console de programmation C200H-PRO27-E avec un cable de connexion standard C200H-CN222 (2 m) ou C200H-CN422 (4 m). L'unité centrale CPM2A peut également être connectée à un CQM1-PRO01-E. Un cable de connexion est fixé au CQM1-PRO01-E.
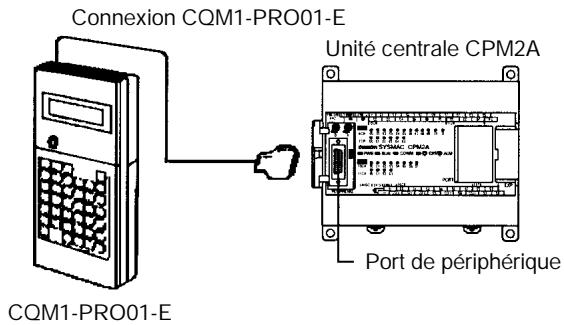
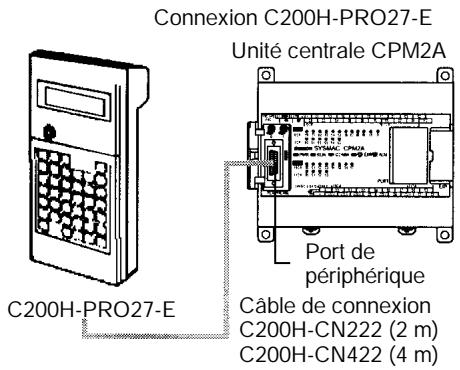
Connector la console de programmation au port de périphérique de l'unité centrale ; une console de programmation ne peut pas être connectée au port RS-232C. Le API va communiquer automatiquement avec la console de programmation en mode console de programmation, qu'elle que soit la méthode de communications可以选择 sur le commutateur de communications de l'unité centrale.
Logiciel de support
Un ordinateur personnel compatible peut être connecté au port de péripérisque de l'unité centrale ou au port RS-232C. Le port de péripérisque peut fonctionner en mode de bus de péripérisques ou en mode de liaison avec un micro-ordinateur. Le port RS-232C fonctionne seulement en mode de liaison avec un micro-ordinateur.
Le réglage du commutateur de communications de l'unité centrale détermine si le port RS-232C va fonctionner avec les réglages de communications à l'install
lation de l'API ou avec les réglages standard, comme indiqué au tableau suivant.
| Réglage des interrupteurs | Réglages de communications |
| Port de périphérique | Port RS-232C |
| ON | Réglages standard (Les réglages standard et les réglages par défaut de l'API sont des communications de liaison avec un micro-ordinateur à 9.600 bits/sec, avec1 bit de start, 7 bits de données, 2 bits de stop et parité paire). |
| OFF | Réglages d'installation de l'API dans DM 6650 et DM 6651 | Réglages d'installation de l'API dans DM 6645 et DM 6646 |
Se connecter au port de périphérique lors de la connexion au bus de périphériques de l'API. Le mode de communications sera Communications de liaison à un micro-ordinateur, mais le CPM2A passera automatiquement à Communications avec un bus de périphériques si le bus de périphériques a été choisi dans le calcul de support.
Connexion du port de périphérique
Un ordinateur personnel peut être connecté au port de périhérique de l'unité centrale par un adaptateur CQM1-CIF01 ou CPM1-CIF01RS-232C.
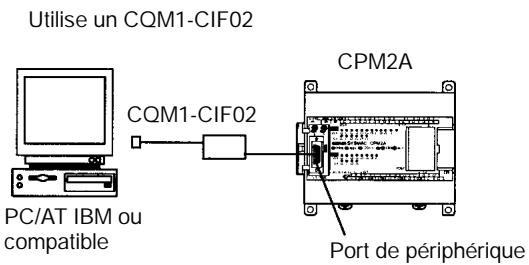
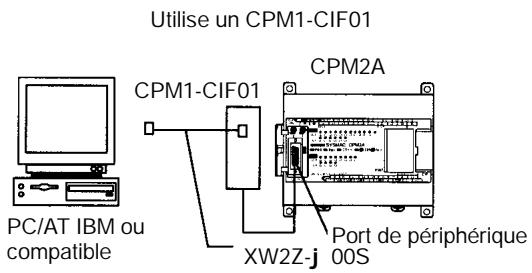
Un ordinateur personnel peut être connecté au port RS-232C de l'unité centrale par un cable de connexion XW2Z-j 00S ou XW2Z-j 00S-V.
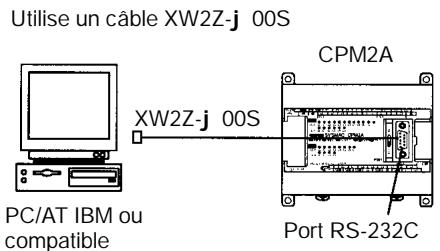
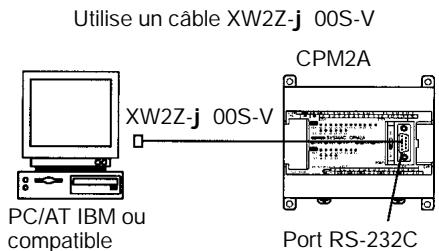
Rem. Les cables XW2Z-j 00S ont un connecteur à 25 broches D-Sub et les cables XW2Z-j 00S-V ont un connecteur à 9 broches D-Sub.
Cables et adaptateurs
| PortCPM2A | Longueur du câble | Numéro de modele | Commentaires |
| de pérophérique | 3,3 m | CQM1-CIF01 | pour un port série d'ordinateur à 25 broches |
| 3,3 m + 0,15 m | CPM1-CIF01 + XW2Z-S001 |
| RS-232C | 2 m | XW2Z-200S | pour un port série d'ordinateur à 25 broches |
| 5 m | XW2Z-500S |
| 2 m | XW2Z-200S-V | pour un port série d'ordinateur à 9 broches |
| 5 m | XW2Z-500S-V |
3-4-8 Connexions de liaison à un micro-ordinateur
Host Link (liaison à un micro-ordinateur) est un système de communications commande/réponse dans lequel les commandes sont transmises du micro-ordinateur et les réponses correspondantes sont renvoyées des API de destination. Les commandes Host Link peuvent être utilisées pour生存 et écrire des données dans les zones de données de l'API et pour生存 et écrire les réglages de l'API.
Connexion:RS-232C
L'unité centrale CPM2A peut être connectée à un ordinateur compatible ou à un terminal calculable par le port de périhérique ou le port RS-232C de l'unité centrale, comme indiqué dans les schémas suivants.
Connexion par le port de péripérisque
Connector au port de périphérique de l'unité centrale par un adaptateur RS-232C CQM1-CIF01 ou CPM1-CIF01.
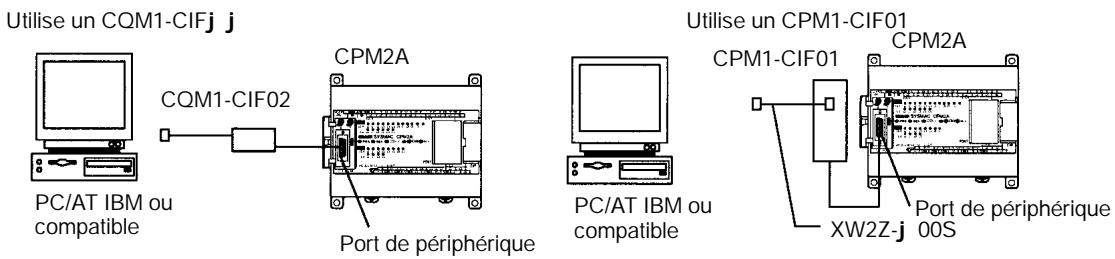
Connexion par le port RS-232C
Connector au port RS-232C de l'unité centrale par un cable de connexion XW2Z-j 00S ou XW2Z-j 00S-V.
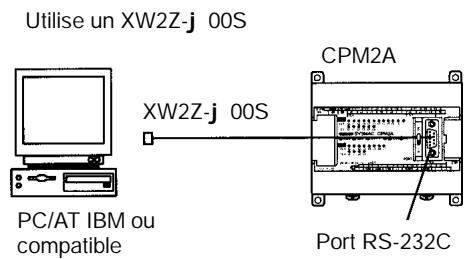
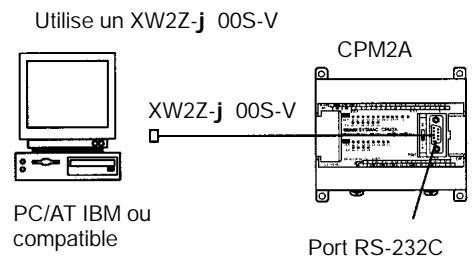
Rem. Les câbles XW2Z-j 00S ont un connecteur à 25 broches D-Sub et les câbles XW2Z-j 00S-V ont un connecteur à 9 broches D-Sub.
Cables et Adaptateurs
| Port CPM2A | Longueur du câble | Numéro de modele | Commentaires |
| Déperiphérique | 3,3 m | CQM1-CIF02 | pour un port série d'ordinateur à 25 broches |
| 3,3 m + 0,15 m | CPM1-CIF01 + XW2Z-S001 |
| RS-232C | 2 m | XW2Z-200S | pour un port série d'ordinateur à 25 broches |
| 5 m | XW2Z-500S |
| 2 m | XW2Z-200S-V | pour un port série d'ordinateur à 9 broches |
| 5 m | XW2Z-500S-V |
Communications
Quand les réglages de communications standard1 sont utilisés,mettre le commutateur de communications de l'unité centrale sur ON (marche). Mettre le commutateur sur OFF (arrêt) pour utiliser les réglages d'installation de l'API.
Rem. Les réglages standard sont : Host Link, 9.600 bits/s, données de 7 bits, 1 bit de start, 2 bits de stop et parité paire. Se reporter au Chapitre 1 Installation de l'API dans le Manuel de Programmation pour les détails sur les réglages.
Connexion: RS-422/RS-485
Jusqu'à 32 API OMRON, y compris les API CPM2A, peuvent être contrôlés à partir d'un micro-ordinateur. Les schémas suivants indiquent des configurations séparées pour le port RS-232C et pour le port de pérophérique, mais les deux ports peuvent être utilisés simultanément.
Connexionpar le port RS-232C
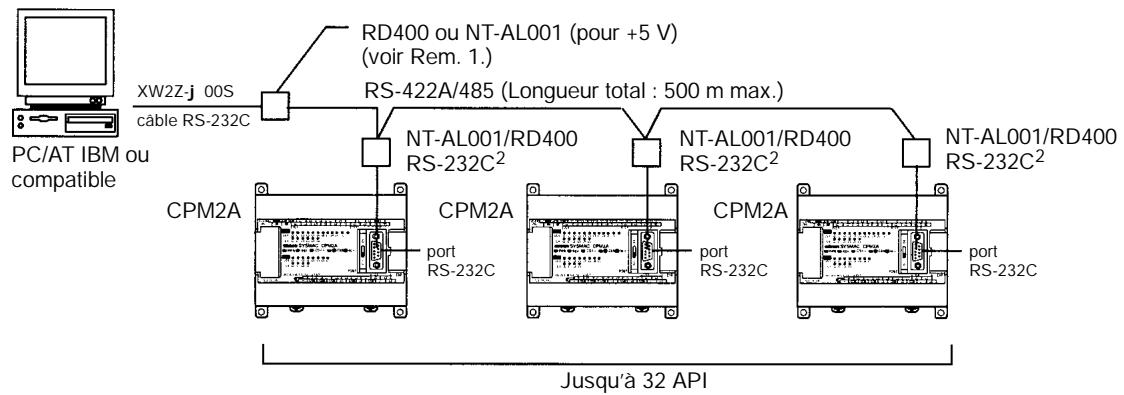
Connexion par le port de périphérique

Rem. 1. Le NT-AL0001 doit être alimenté extérieurment par 5 Vc.c..
Quand un NT-AL001 est connecté à un API CPM2A, la broche 6 du port RS-232C du CPM2A fournit +5 Vc.c. et une alimentation externe n'est pas nécessaire. Quand le NT-AL001 est connecté à un micro-ordinateur, il faut fournir 5 Vc.c. d'une alimentation extérieure. Si un NT-AL001 est connecté au port RS-232C du CPM2A, une seule unité d'extension peut être connec-tée à l'unité centrale parce que le NT-AL001 tire son alimentation à 5 Vc.c. de l'unité centrale. Le NT-AL0001 doit être alimenté extérieurement par 5 Vc.c..
- Utiliser un cable XW2Z-070T-1 (0,70 m) ou XW2Z-200T-1 (2 m) pour connecter le NT-AL001 au port RS-232C du CPM2A.
Cables et adaptateurs
| Dénomin
ation | Fonction | Numéro de
modèle |
| Adaptat
eur de
liaison | onversion
RS-232C/RS-422 | Pour connexion à
micro-ordinateur (peut être
connecté au CPM2A) | RD400 |
| Adaptat
eur
RS-422 | pour connexion au CPM2A
(peut être connecté à un
micro-ordinateur, mais
demande une alimentation
5 Vc.c. externe.) | NT-AL001 ou
RD 400 |
Les instructions TXD(48) et RXD(47) peuvent être utilisées en mode sans proto-cole pour échanger des données avec des appareils série standard. Par exemple, des données peuvent être reçues d'un lecteur de code barres ou transmises à une imprimante série. Les appareils série peuvent être connectés au port RS-232C ou au port de périphérique, comme indiqué aux schémas suivants.
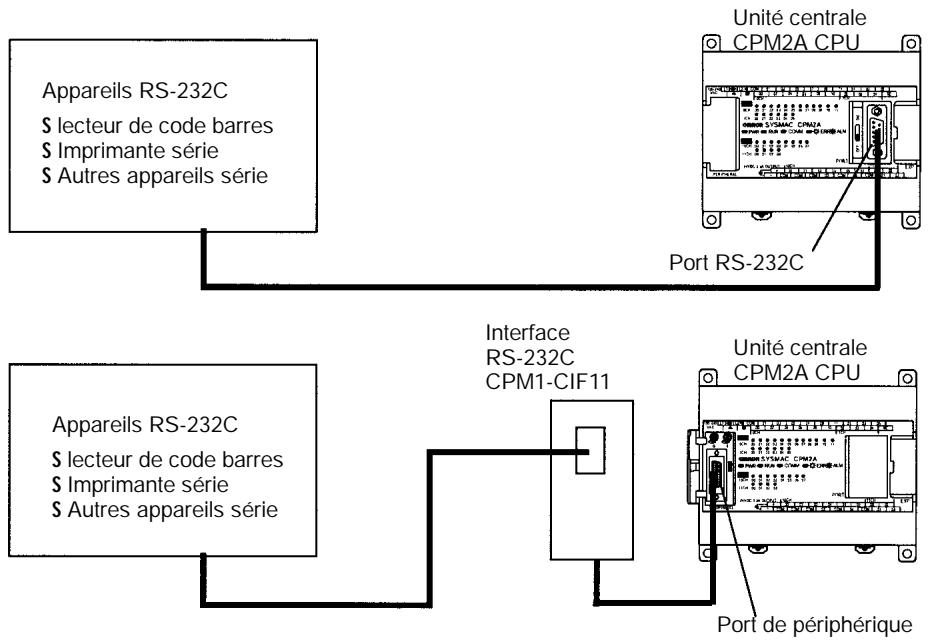
Rem. Mettre le commutateur de communications de l'unité centrale sur OFF (arrêt) pour utiliser les réglages à l'installation de l'API etmettre le mode de communications en mode sans protocole pour le port utilisé. Se reporter au Chapitre 1 Installation de I'API dans le Manuel de programmation pour plus de détails sur les réglages.
3-4-10 Connexions NT
Dans un liaison NT 1:1 un CPM2A peut être connecté directement à un terminal calculable. Le terminal calculable doit être connecté au port RS-232C; il ne peut pas être connecté au port de périphérique.
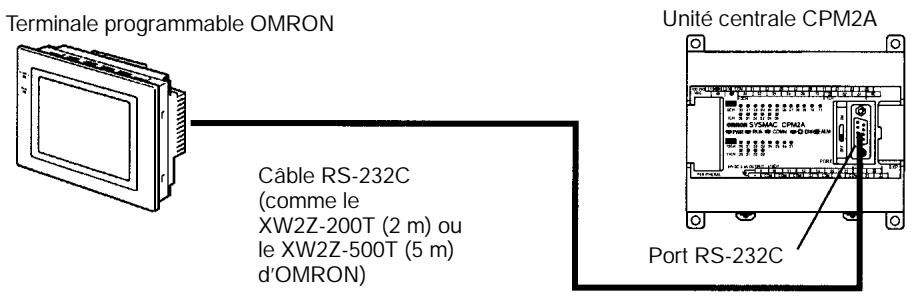
Rem. Mettre le commutateur de communications de l'unité centrale sur OFF (arrêt) pour utiliser les réglages à l'installation de l'API etmettre le mode de communications en mode Liaison NT 1:1 pour le port RS-232C. Se reporter au Chapitre 1 Installation de I'API dans le Manuel de programmation pour plus de détails sur les réglages.
3-4-11 Connexions INTER API
Un CPM2A peut être relié à un autre CPM2A, un CQM1, CPM1, CPM1A, CPM2C, SRM1 ou un API C200HS ou C200HX/HE/HG. L'API doit être connecté par le port RS-232C; il ne peut pas être connecté par le port de périphérique.
Dans une connexion 1:1, l'un des API est considéré à son installation comme le maître et l'autre comme l'esclave.
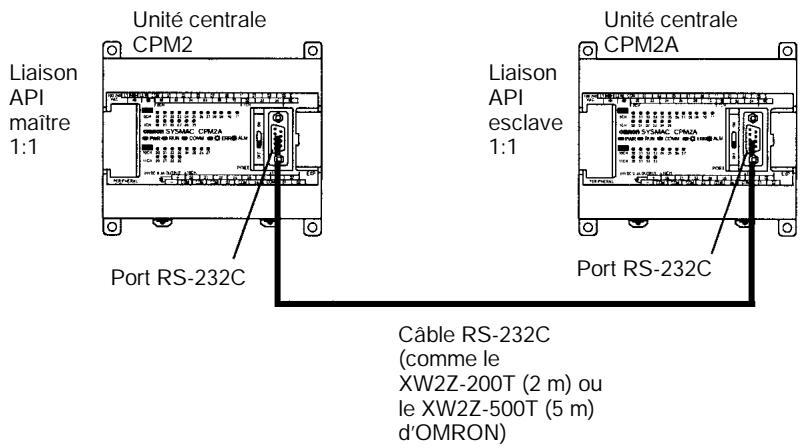
Rem. Mettre le commutateur de communications de l'unité centrale sur OFF (arrêt) pour utiliser les réglages à l'installation de l'API etmettre le mode de communications du port RS-232C en mode Liaison API 1:1 maître dans l'un des API et Liaison API 1:1 esclave dans l'autre API. Se reporter au Chapitre 1 Installation de l'API dans le Manuel de programmation pour plus de détails sur les réglages.
3-4-12 Connexions CompoBus/S
Une liaison entrée/sortinge CompoBus/S peut être utilisée pour creer une liaison entrée/sortingie (entretes/sorties distances) de 8 points d'entrée et 8 points de sortie avec une unité maître CompoBus/S ou un API SRM1 La connexion se fait par une unité de liaison d'entrée/sortinge CompoBus/S.
Du point de vue de l'unité centrale de CPM2A, la zone affectée à l'unité de liaison entrée/sorting CompoBus/S peut être traitée exactement comme la zone affectée à une unité d'entrée/sorting d'extension. La différence est que les bits ne sont pas des points d'entrée/sorting réels, mais des bits d'entrée/sorting dans l'unité maitre.
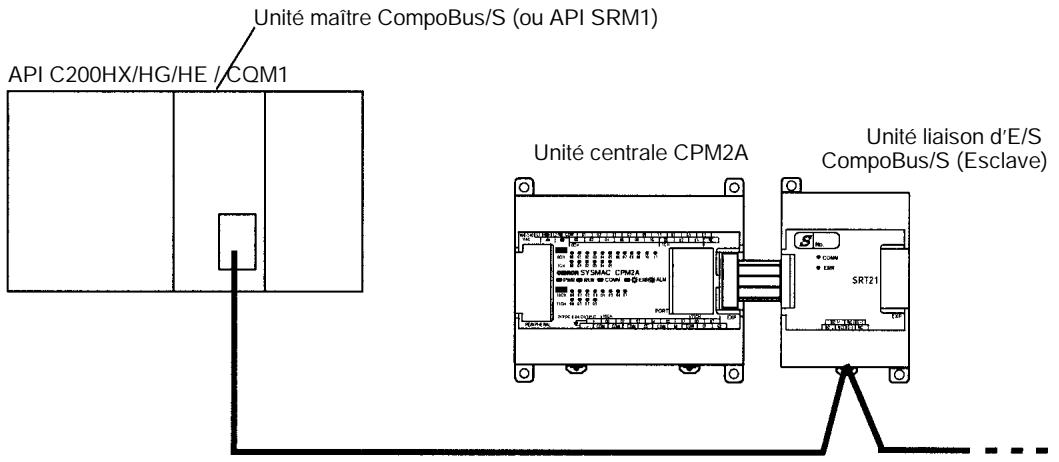
Cables
Utiliser un cable plat spécial ou un cable VCTF pour connecter les noeuds dans la liaison entrée/sorting CompoBus/S. (Les cables plats spéciaux et les cables VCTF ne peuvent pas etre combinés dans le même système).
| Dénomination | Caracteristiques techniques |
| Câble plat | câble plat à 4 conducteurs, 0,75 mm² |
| Câble VCTF | 2 conducteurs x 0,75 mm² |
CHAPTER 4
Utilisation de dispositifs de programmation
Pour plus de détails sur le raccordement des dispositifs de programmation et des ordinateurs personnels au système CPM2A, voir les paragraphs 3-4-7 Connexions de dispositifs de programmation et 4-3-3 Raccordement de la Console de programmation
4-1 Utilisation d'une Console de programmation 86
4-1-1 Consoles de programmation compatibles 86
4-1-2 Utilisation du selecteur de mode pour changer le mode du CPM2A 89
4-1-3 Raccordement de la console de programmation 90
4-1-4 Préparation du système 91
4-1-5 Entree du mot de passage 92
4-2 Fonctionnement de la console de programmation 93
4-2-1 Description générale 93
4-2-2 Effacement de la mémoire 94
4-2-3 Lecture/effacement des messages d'erreur 95
4-2-4 Fonctionnement du buzzer 96
4-2-5 Assignation de codes de fonction aux instructions d'expansion 96
4-2-6 Réglage et lecture d'une adresse en mémoire des programmes 97
4-2-7 Enrée ou édition de programmes 98
4-2-8 Recherche d'une instruction 101
4-2-9 Recherche d'un opérande binaire 101
4-2-10 Insertion et suppression d'instructions 102
4-2-11 Verificaton du programme 103
4-2-12 Surveillance des bits, des chiffres et des mots 104
4-2-13 Surveillance des différenciations 106
4-2-14 Surveillance de bits 107
4-2-15 Surveillance de série de 3 mots 107
4-2-16 Surveillance de valeurs decimales signées 108
4-2-17 Surveillance des valeurs décimales non signées 108
4-2-18 Modification des données de 3 mots 109
4-2-19 Modification des SV des minuteries et des compteurs 110
4-2-20 Modification des données hexadécimales/BCD 111
4-2-21 Modification des données binaires 112
4-2-22 Modification des valeurs decimales signées 113
4-2-23 Modification des valeurs decimales non signées 113
4-2-24 Réglage et remise à zéro forcés 114
4-2-25 Effacement réglage et remise à zéro forcés 115
4-2-26 Alternance de l'affichage entre Hex et ASCII 116
4-2-27 Affichage de la durée des cycles 116
4-2-28 Lecture et réglage de l'horloge 116
4-3 Example de programmation 117
4-3-1 Préparation du système 117
4-3-2 Example de programme 118
4-3-3 Procedures de programmation 119
4-3-4 Vérification du programme 122
4-3-5 Essai en mode MONITOR 123
4-1 Utilisation d'une Console de programmation
Ce paragraphe donne des informations sur le raccordement et l'utilisation d'une Console de programmation. Pour plus de détails sur les erreurs qui pouraient survenir pendant l'exploitation d'une Console de programmation, voir le paragraphe 5-3 Erreurs d'exploitation de la Console de programmation.
4-1-1 Consoles de programmation compatibles
Deux Consoles de programmation sont utilisables avec le système CPM2A : Ces consoles sont les apparèils CQM1-PRO01-E et C200H-PRO27-E. Les fonctions des touches de ces Consoles de programmation sont identiques.
Appuyer sur la touche MAJ et la maintainir en position basse pour entrer la dette qui est dans le coin supérieur gauche de la touche ou la fonction supérieur d'une touche qui a deux fonctions. Par exemple, la touche AR/HR du CQM1-PRO01-E AR/HR permet de spécifique la zone AR ou la zone HR; appuyer sur MAJ puis relâcher cette touche et appuyer ensuite sur la touche AR/HR pour spécifique la zone AR.
CQM1-PRO01-E
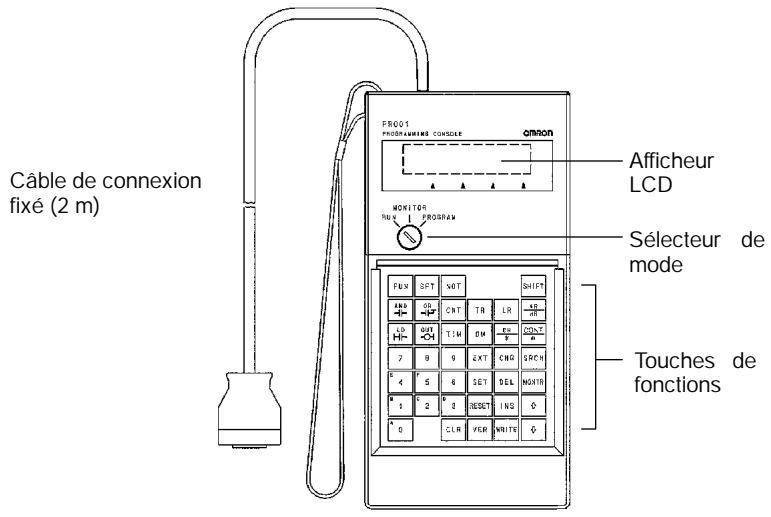
C200H-PRO27-E
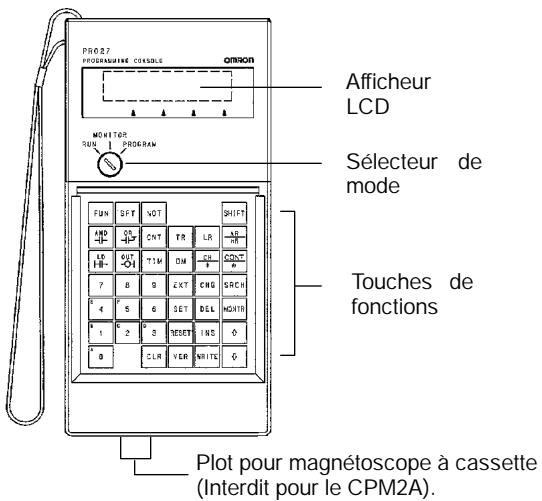
Cables de connexion
C200H-CN222 (2 m)
C200H-CN422(4m)
Différentes touches de fonction
Les touches suivantes ont des légendes différentes sur les systèmes CQM1-PRO01-E et C200H-PRO27-E ; toute fois, le fonctionnement des touches de chaque paire est identique.
| Touches CQM1-PRO01-E | Touches C200H-PRO27-E |
| AR
HR | HR |
| SET | PLAY
SET |
| RESET | REC
RESET |
Rem. Pour spécifique la zone AR, utiliser les touches MAJ + HR sur le C200H-PRO27-E et MAJ + AR/HR sur le CQM1-PRO01-E.
Un symbole MAJ s'affiche dans le coin supérieur droit de l'écran lorsque la touche MAJ est maintainue en position enforcée. Pour supprimer cette entrée, il suffit d'appuyer à nouveau sur la touche MAJ.

Sélecteur de mode
Le sélecteur de mode déterminé le mode de fonctionnement du CPM2A. Une touche peut être modifiée lorsque le sélecteur est sur RUN ou MONITOR, mais elle ne peut pas être modifiée lorsqu'il est sur PROGRAM.
Commande de contraste
Le contraste de l'affichage peut être régle en agissant sur la commande qui se trouve sur la droite de la Console de programmation.
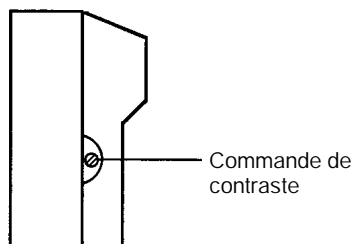
Volume du buzzer
Le volume du buzzer du C200H-PRO27-E peut être réglié en agissant sur le levier qui est sur la face latérale droite de la Console de programmation. Le volume du buzzer du CQM1-PRO01-E n'est pas régiable.
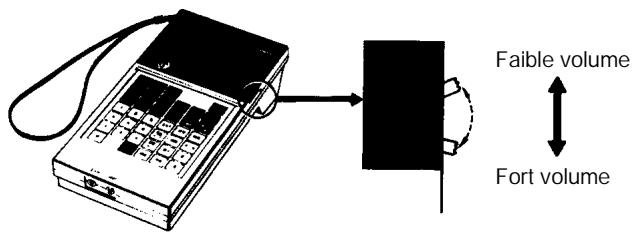
C200H-PRO27-E
Rem. Le volume du buzzer peut être activé ou désactivé en agissant sur certaines touches du clavier. Pour plus de détails, voir 4-4-4 Fonctionnement du buzzer.
- Le système CPM2Aonne automatique en mode RUN si une Console de programmation n'est pas raccordee au moment ou il est mis sous tension.
4-1-2 Utilisation du selecteur de mode pour changer le mode du CPM2A
Dès que la Console de programmation est raccordée, utiliser le/selecteur de mode pour modifier le mode de fonctionnement du CPM2A. Le mode (, ou ) apparaît à l'écran de la Console de programmation.
- Les touches sont inopérantes pendant que le mode est affiché à l'écran de la Console de programmation. Appuyer sur CLR pour effacer cet affichage et pour utiliser les touches.
- Quand la touche MAJ est enforcée pendant que le sélecteur de mode est tourné, l'affichage original reste sur l'écran de la Console de programmation et le mode n'est pas affché.
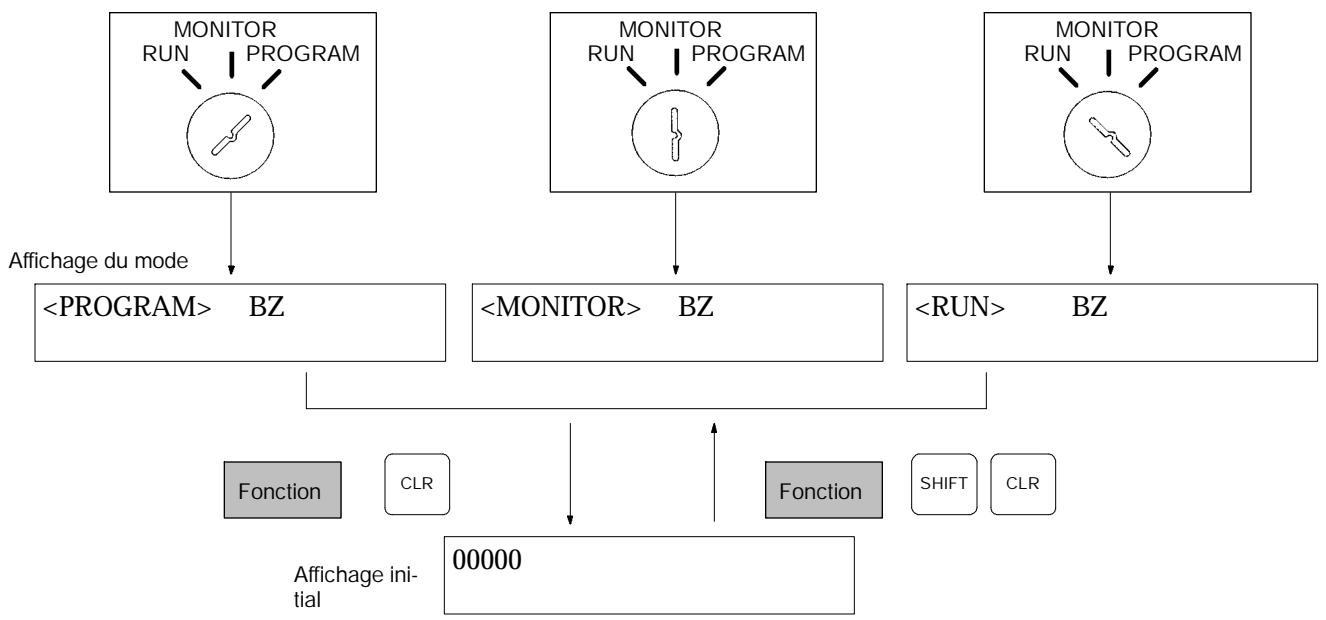
Modes de fonctionnement
Mode PROGRAM AUCUN LIEN AUCUN LIEN
Le programme du CPM2A ne s'exécute pas en mode PROGRAM. Utiliser le mode PROGRAM pour créé et éoperator le programme, effacer la mémoire et rechercher les erreurs du programme.
Mode MONITOR
Le programme du CPM2A s'exécute en mode MONITOR et le système traite les E/S de la même façon qu'en mode RUN. Utiliser le mode MONITOR pour tester les opérations système, par exemple surveillance du statut opérationnel du CPM2A, réglage force et remise à zéro force des bits E/S, modification de SV/PV des minutes et compteurs, modification des données mot et édition en ligne
Mode RUN
Ce mode est le mode de fonctionnement normal du CPM2A. Le statut opéra-toire du CPM2A peut être surveillé sur un dispositif de programmation, mais les bits ne peuvent pas etre forces ou remis a zero par forcage et les SV/PV des minuteries et des compteurs ne sont pas modifiables.

Vérifier le système de façon approfondie avant de changer le mode de fonctionnement de l'API pour éviter les accidents qui pouraient intervenir au premier démarrage du programme.

Ne jamais changer de modependant que vous appuyez sur une touche.
Mode de fonctionnement au démarrage
Le mode de fonctionnement du CPM2A lors de la mise sous tension (ON) dépend des régliages du Setup de l'API dans DM 6600 et du réglage du selecteur de mode de la Console de programmation si cette console est raccordée.
| Réglages du Setup de l'API (DM 6600) | Console de programmation connectée | Console de programmation non connectée |
| 0000 | Le mode au démarrage est déterminé par le réglage du/selecteur de mode. | Mode RUN si aucun dispositif de programmation n'est connecté. Mode PROGRAM si un autre dispositif de programmation est connecté. |
| 0100 | Le mode au démarrage est identique au mode de fonctionnement avant l'interruption de l'alimentation électrique. |
| 0200 | Mode PROGRAM |
| 0201 | Mode MONITOR |
| 0202 | Mode RUN |
Rem. Le réglage par défaut est 0000. Si une console de programmation n'est pas connectée, l'API se met automatiquement en mode RUN. S'assurer que l'API peut fonctionner sans risque avant de lemettre sous tension lorsqu'il n'est pas raccordé à une console de programmation.
4-1-3 Raccordement de la console de programmation
Raccorder le cable de connexion de la console de programmation au port de péripérisque du CPM2A. Voir l'illustration ci-dessous.
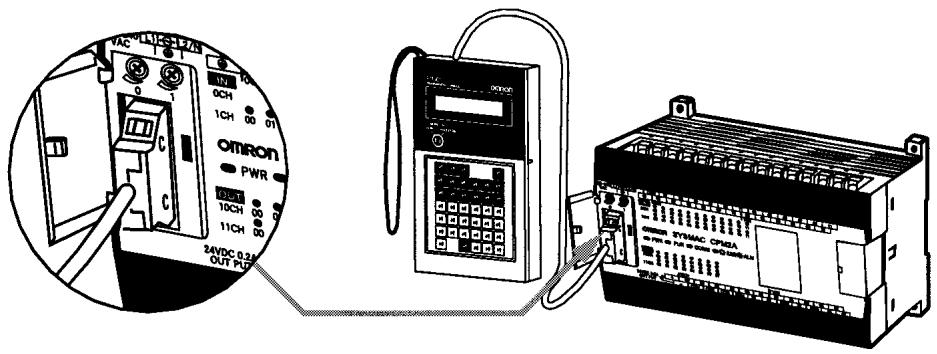
Installation sur un panneau
La console de programmation C200H-PRO27-E peut être montée sur un panneau de contrôle, comme il apparait à l'illustration suivante (Le support de montage C200H-ATT01 est vendu séparément).
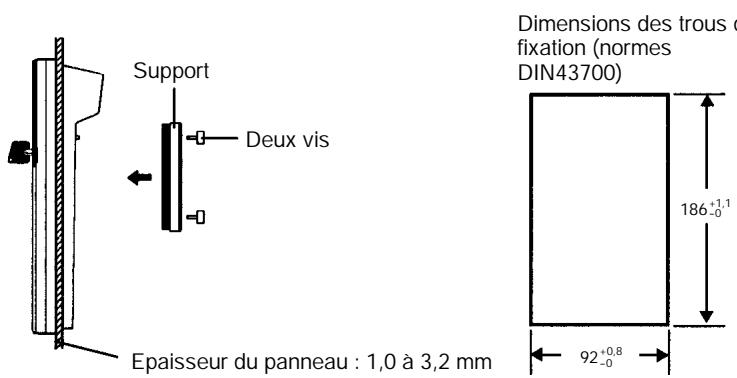
Au-dessus de la console de programmation, prévoir 80 mm au moins pour le connecteur du cable.
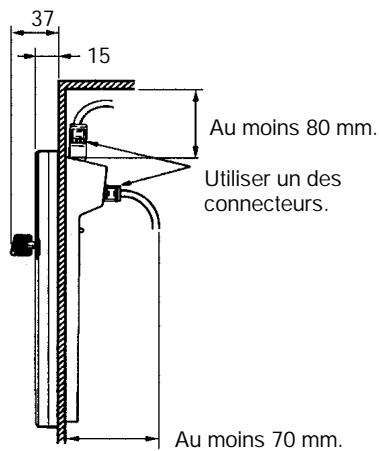
4-1-4 Préparation du système
Ce chapitre déscrit les procédures requisés pour commencer à utiliser la console de programmation (pour la première fois).
Attention
Toujours s'assurer que la console de programmation est en mode PROGRAM avant demettre l'API sous tension lorsqu'une console de programmation est connectee, sauf si vous souhaiter utiliser un autre mode pour une opération spécifique. Si la console de programmation est en mode RUN à la mise sous tension de l'API, le ou les programmes qui sont dans la mémoire des programmes sont exécutés, provoquant peut être la mise en route d'un système piloté par l'API.
Avant de procéder à l'entrée initiale du programme, exécuter les opérations décrites ci-dessous.
1, 2, 3... 1. Vérifier que l'API est désactisé.
- Connecter la console de programmation au port de périphérique de l'unité centrale (UC). Pour plus de détails, voir le paragraphe 4-3-3 Raccordement de la console de programmation.
(Le sélecteur de communication de l'UC n'attécte pas les communications avec la console de programmation.)
- Mettre le selecteur de mode à la position PROGRAM.
- Mettre l'API sous tension (ON).
- Entrer le mot de passer. Pour plus de détails, se reporter au paragraphe 4-3-5 Entrée du mot de passer.
- Effacer (effacer complètement – 'All Clear') la mémoire de l'API. Pour plus de détails, se reporter au paragraphe 4-4-2 Effacement de la mémoire.
- Lire et effacer toutes les erreurs et les messages. Pour plus de détails, se reporter au paragraphe 4-4-3 Lecture/Effacement des Message d'erreurs.
- Commencer la programmation...
4-1-5 Entrée du mot de passage
Pour acceder aux fonctions de programmation de l'API, vous devez d'abord entre le mot de passer. Le mot de passage permet d'éviter un accès non autorisé au programme.
L'API vous demande un mot de passer lorsqu'il est mis sous tension ou bien, s'il est déjà sous tension, lorsque la console de programmation a été connectée à l'API. Pour acceder au système lorsque le message "Password!" apparait, appuyer sur la touche CLR et ensuite sur MONTR. Ensuite, appuyer sur la touche CLR pour effacer l'affichage.
Si la console de programmation est raccordée à l'API et que ce dernier est déjà sous tension, le premier affichage qui apparait (voir ci-dessous) précise le mode dans lequel était l'API avant d'établit la connexion avec la console de programmation. Avant d'entrée le mot de passer, vérifier que l'API est bien en mode PROGRAM. Lorsque vous entrez le mot de passer, l'API se met dans le mode indiqué par le sélection de mode ; ensuite, il se met en marche si le mode sélectionné est RUN ou MONITOR. ÀpRES avoir entré le mot de passer, vous pouvez utiliser le sélection pourmettre le mode à RUN ou à MONITOR.
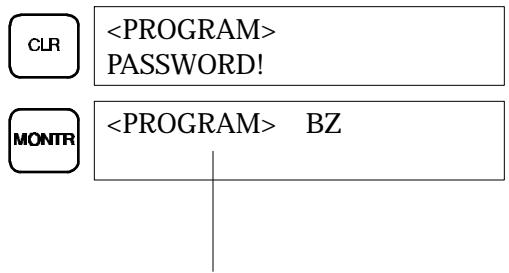
Indique le mode spécifique par le selecteur.
4-2 Fonctionnement de la console de programmation
4-2-1 Description générale
Le tableau suivant numéro les opérations de programmation et de surveillance exécutables à partir d'une console de programmation. Pour obtenir plus d'informations sur les procédures opérationnelles, consulter le reste de ce paragraphe.
| Dénomination | Fonction | Page |
| Effacement de la mémoire | Efface tout ou partie de la mémoire des programmes et les zones de données qui ne sont pas de type lecture seule, ainsi que le contenu de la mémoire de la console de programmation. | 94 |
| Lecture/effacement des messages d'erreur | Affiche et efface les messages d'erreur et affiche les messages d'instructionMESSAGE. | 95 |
| Fonctionnement du buzzer | Met en marche et arrêté le buzzer qui retentit lorsque vous appuyez sur une ou des touches de la console de programmation. | 96 |
| Assignment de codes de fonction aux instructions d'expansion | Lit ou change les codes de fonction assignés aux instructions d'expansion | 96 |
| Réglage d'une adresse en mémoire des programmes | Etablit l'adresse en mémoire des programmes spécifique pendant la lecture, l'écriture, l'insertion et la suppression de programmes. | 97 |
| Lecture d'une adresse en mémoire des programmes | Lit le contenu de la mémoire des programmes. Affiche le statut du bit courament affché en mode PROGRAM et en mode MONITOR. | 97 |
| Recherche d'une instruction | Trouve dans le programme les occurrences de l'instruction spécifique. | 101 |
| Recherche d'un opérande binaire | Trouve dans le programme les occurrences de l'opérande binaire spécifique. | 101 |
| Insertion et suppression d'instructions | Insère ou supprime des instructions dans le programme. | 102 |
| Entrée ou édition de programmes | Remplace le contenu courant de la mémoire des programmes, soit pour entrer un programme pour la première fois, soit pour modifier un programme qui existe déjà. | 98 |
| Vérification du programme | Recherche les erreurs de programmation et, lorsqu'elle en trouve, affiche l'adresse dans le programme et l'erreur correspondante. | 103 |
| Surveillance des bits, chiffres et mots | Surveillance le statut de (jusqu'à) 16 bits et mots, bien que 3 seulement puissant être simultanément sur l'affchage. | 104 |
| Surveillance des adresses multiples | Surveillance simultanément le statut de (jusqu'à) 6 bits et/ ou mots. | 105 |
| Surveillance des différenciations | Surveillance le statut de différenciation positif ou négatif d'un bit particulier. | 106 |
| Surveillance de bits | Surveillance le statut ON/OFF de 16 bits quelconques d'un mot. | 107 |
| Surveillance de série de 3 mots | Surveillance le statut de trois mots consécutifs. | 107 |
| Surveillance de valeur décimale signée | Convertit le contenu du mot spécifique de valeur hexadécimale signée (au deux formats complémentaires) en un affichage de valeur décimale signée. | 108 |
| Surveillance de valeur décimale non signée | Convertit la donnée hexadécimale d'un mot en un affichage de valeur décimale non signée. | 108 |
| Modification des données de 3 mots | Change le contenu d'un ou de plusieurs des 3 mots consécutifs affichés pendant l'opération Surveillance de série de 3 mots. | 109 |
| Changement SV1 minuterie, compteur | Change le SV d'une minuterie ou d'un compteur. | 110 |
| Changement SV2 minuterie, compteur | Fait le réglage fin du SV de la minuterie ou du compteur. | 110 |
| Modification de données hexadécimales, BCD | Change la valeur BCD ou hexadécimale du mot qui est surveillé. | 111 |
| Modification de données binaires | Change le statut des bits d'un mot lorsque ce mot est surveillé. | 112 |
| Modification de données décimales signées | Convertit la valeur décimale d'un mot surveillé en une donnée décimale signée, dans l'intervalle -32.768 à 32.767. Le contenu du mot spécifique est convertit automatiquement en une valeur hexadécimale signée (au deux formats complémentaires). | 113 |
| Modification de données décimales non signées | Convertit la valeur décimale d'un mot surveillé en une donnée décimale non signée, dans l'intervalle 0 à 65.535. La conversion en une donnée hexadécimale est faite automatiquement. | 113 |
| Réglage /remise à zéro forcés | Force les bits à la valeur ON (réglageforcé) ou OFF (RAZforcée). | 114 |
| Suppression réglage/RAZ forcés | Restaure le statut de tous les bits qui ont subi un réglage ou une RAZ forcé. | 115 |
| Alternance affichage Hex-ASCII | Fait alterner les affichages de données mots entre deux formes – données hexadécimales à 4 chiffres et ASCII. | 116 |
| Affichage de la durée des cycles | Affiche la durée moyenne courante du cycle. (durée du balayage). | 116 |
| Reading and setting the clock | Lit ou règle l'horloge interne. | 116 |
4-2-2 Effacement de la mémoire
Cette opération permet d'effacer tout ou partie de la Mémoire des programmes et des zones de données, ainsi que le contenu de la mémoire de la console de programmation. Cette opération est exclusivement autorisée en mode PRO-GRAM.
Avant de lancer la première exécution du programme ou lors de l'installation d'un nouveau programme, effacer toutes les zones de données.
Effacement complet de la mémoire
La procédure suivantepermitd'effacer toutelamémoire,ycomprisleprogramme,toutleszonesdedonnées,lesPVdescompteurs,la mémoire desdonnées ainsi que le Setup de l'API (DM 6600 à DM 6655).
1,2,3...
- Appuyer plusieurs fois sur la touche CLR pour obtenir l'affichage initial.
- Pour commencer l'opération, appuyer sur les touches SET, NOT et, enfin, sur RESET

- Pour effacer complètement la mémoire, appuyer sur la touche MONTR.

Attention
Le Setup de l'API (DM 6600 à DM 6655) sera effacé lors de l'exécution de cette opération.
Effacement partiel
Voussupporteznainmoinsconserverlesdonnéesenregistréesdansdeszones specifiéesou dansounapartiedela mémoire desprogrammes.Pourconserver lesdonnéesqui sont dansles zonesHR,TCouDM,appuyer surla touche ad hocaprésavoirappuyésurles touchesSET,NOTetRESET.Leszonesde donnéesqui sontencoresurl'affichageseronteffacéeslorsquevousappuériquesur la toucheMONTR.
La touche HR permet de spécifique à la fois les zones AR et les zones HR, la touche CNT permet de spécifique la totalité de la zone des minuteries et des comp-teurs ; enfin, la touche DM permet de spécifique la zone DM.
Une partie de la mémoire des programmes de la première adresse mémoire jusqu'à une adresse spécifique peuvent aussi être conservés. Àpres avoir
désigné les zones de données à conserver, spécifique la première adresse de la mémoire des programmes à effacer. Par exemple, entre 030 pour laisser les adresses 000 à 029 inchangées et effacer les adresses entre 030 et la fin de la mémoire des programmes.
A titre d'exemple, suiver la procédure ci-dessous qui permet de conserver la zone des minuteries et compteurs ainsi que le contenu des adresses de la mémoire des programmes compris entre 000 et 122 :
1, 2, 3... 1. Appuyer sur la touche CLR pour obtenir l'affichage initial.
- Appuyer sur les touches SET, NOT et, ensuite, sur la touche RESET pour lancer l'opération.
- Appuyer sur la touche CNT pour extraire la zone des minuteries/compteurs des zones de données affichées (Les PV des compteurs ne sont pas effacés).

- Appuyer sur 123 pour spécifique que 123 est l'adresse de début du programme.

- Appuyer sur la touche MONTR pour effacer les parties spécifiées de la mémoire.

4-2-3 Lecture/effacement des messages d'erreur
Cette opération permet d'afficher et d'effacer les messages d'erreur. Les messages d'erreurs non fatales et les messages d'instructions dans n'importe quel mode peuvent etre afficher et effacer ; toutefois, pour effacer les erreurs fatales, vous nevez obligatoirement etre en mode PROGRAM.
Avant d'entrée un nouveau programme, effacer les messages d'erreur qui sont en mémoire. Par hypothèse, les erreurs qui ont provoqué le lancement du ou des messages d'erreur sont supposés avoir déjà été corrigés. Si le buzzer retentit lors de tentative d'effacement du message d'erreur, supprimer la cause de l'erreur et effacer ensuite le message d'erreur. (Pour plus de détails sur la correction des erreurs, consulter le Chapitre 5 Essais et traitement des erreurs.)
Sequence de touches
Exécuter la procédure ci-dessous pour afficher puis effacer les messages.
1,2,3...
- Appuyer sur la touche CLR pour obtenir l'affichage initial.
- Appuyer sur la touche FUN puis sur MONTR pour commencer. Si aucun message n'apparait, vous obtenez l'affichage suivant :

Si le système affiche des messages, le message le plus sérieux va apparaitre après un appui sur la touche MONTR. Un nouvel appui sur MONTR efface ce message et affiche le deuxième message d'erreur (dans l'ordre de gravité). Appuyer encore plusieurs fois sur la touche MONTR jusqu'àu moment où tous les messages ont été effacés. Voici quelques exemples de messages d'erreur :
Une erreur mémoire :

Une erreur système :

Un message (affché avec MSG (46)):

Tous les messages sont effacés :

4-2-4 Fonctionnement du buzzer
Cette opération permet demettre en marche et d'arreter le buzzer qui retentit lorsque les touches de la console de programmation sont enforcées. Ce buzzer retentit aussi lorsqu'une erreur intervient pendant que l'API fonctionne. Ce réglage n'agit pas sur le fonctionnement du buzzer en présence d'erreurs.
Cette opération est autorisée dans tous les modes.
Sequence de touches
Exécuter la procédure pourmettre en marche/arrêté le buzzer des entrées par les touches.
1, 2, 3...
- Appuyer sur la touche CLR, SHIFT et, ensuite, sur la touche CLR pour appeler l'affichage du mode. Dans ce cas, l'API est en mode PROGRAM et le buzzer est actif.

- Appuyer sur la touche SHIFT puis sur la touche 1 pour arreter le buzzer.

- Appuyer sur la touche SHIFT et à nouveau sur la touche 1 pour remettre le buzzer en activités.

4-2-5 Assignation de codes de fonction aux instructions d'expansion
Cette fonction permet d'afficher ou de modifier les instructions d'expansion assignées aux codes de fonction des instructions d'expansion. Les assignations peuvent être affichées dans tous les modes; toutefois, pour les modifier, le système doit obligatoirement être en mode PROGRAM.
| Fonction | RUN | MONITOR | PROGRAM |
| Lire assignation | OK | OK | OK |
| Changer assignation | Non | Non | OK |
Avant d'entrée le programme, assigner des codes de fonction aux instructions d'expansion. Le système CPM2A ne fonctionnera pas normalement si les assignations ne sont pas correctes. Un seul code de fonction peut etre assigné à une instruction d'expansion
PC Setup ne doit pas conténir d'assignations d'instructions d'expansion définies par l'utilisateur. Mettre les bits 8 à 11 de DM 6602 à 1 etmettre l'API hors tension, puis à nouveau sous tension pour valider le nouveau réglage.
Se reporter à la page AUCUN LIEN le tableau dans lequel figurent les assignations par défaut des codes de fonction dans le système CPM2A.
1, 2, 3... 1. Appuyer sur la touche CLR pour appeler l'affichage initial.
2. Appuyer sur la touche EXT pour afficher l'assignation pour le premier code de fonction (17).
EXT
INST TBL READ
FUN017:ASFT
- Appuyer sur les touches flèche haute et flèche basse pour faire défiler les codes de fonction des instructions d'expansion.

INST TBL READ
FUN018:FUN
- Appuyer sur la touche CHG pour assigner une autre instruction d'expansion au code de fonction sélectionné.
CHG
INST TBL CHG?
FUN018:FUN ~????
- Appuyer sur les touches flèche haute et flèche basse pour faire défilier les instructions d'expansion qui peuvent être assignées au code de fonction sélectionné.

INST TBL CHG?
FUN018:FUN ~HEX
- Appuyer sur la touche WRITE pour assigner l'instruction affichée au code de fonction.
WRITE
INST TBL READ
FUN018:HEX
4-2-6 Réglage et lecture d'une adresse en mémoire des programmes
Cette fonction permet d'afficher l'adresse spécifiée en mémoire des programmes. Elle est autorisée dans tous les modes.
Lorsque un programme est entrée pour la première fois, il est habituellement enregistré dans la mémoire des programmes, à partir de l'adresse 000. Puisque cette adresse apparait lorsque l'affichage est effacé, il est inutile de la spécifier.
Lorsque un programme, qui commence à une adresse autre que 000, est entré ou si un programme, qui est déjà en mémoire, doit être modifié, spécifique l'adresse可以选择.
1, 2, 3... 1. Appuyer sur la touche CLR pour appeler l'affichage initial.
- Entrée l'adresse可以选择. Les zéros de début sont facultatifs.
00200
- Appuyer sur la touche flèche basse.

00200READ
LD 00000
Rem. Le statut ON/OFF de tout bit sélectionné apparait sur l'API si ce dernier est en mode RUN ou MONITOR.
- Appuyer sur les touches flèche haute ou flèche basse pour faire défiler le programme.
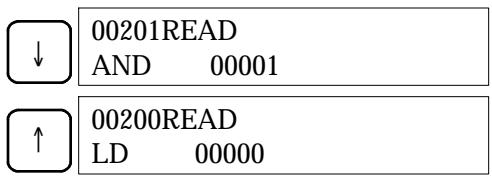
4-2-7 Entrée ou édition de programmes
Cette fonction permet d'entrée ou d'editor des programmes. Elle est uniquement autorisée en mode PROGRAM.
La même procédure est utilisé pour entrer un programme pour la première fois et pour modifier un programme existant. Dans l'un et l'autre cas, le contenu courant de la mémoire des programmes est remplaçé.
Pour illustrer le déroulement de cette fonction, entraîr le programme ci-dessous.
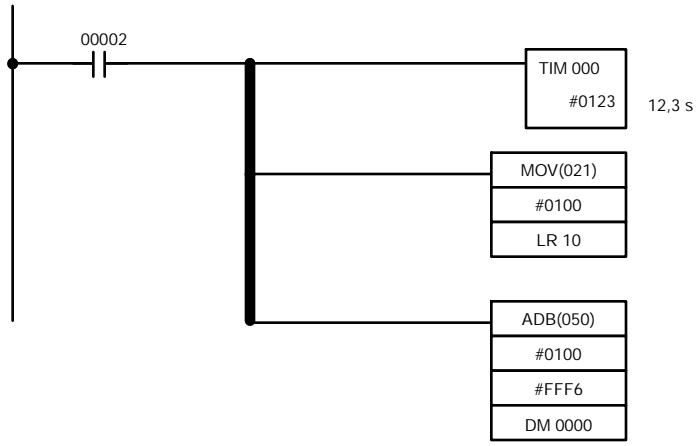
| Adresse | Instruction | Opérandes |
| 00200 | LD | IR | 00002 |
| 00201 | TIM | 000 |
| | #0123 |
| 00202 | MOV(021) | |
| | #0100 |
| | LR | 10 |
| 00203 | ADB(050) | |
| | #0100 |
| | #FFF6 |
| | DM 0000 |
1, 2, 3... 1. Appuyer sur la touche CLR pour appeler l'affichage initial.
- Spécifier l'adresse de début du programme.
- Entrer l'adresse à laquelle le programme débutera et appuyer sur la touche flèche)basse. Les zéros de début sont facultatifs.

- Entrer la première instruction et le premier opérande.

- Appuyer sur la touche WRITE pour enregistrer l'instruction en mémoire des programmes. L'adresse programme suivante apparait.

Si une erreur survient en entrant l'instruction, appuyer sur la touche flèche haute pour revenir à l'adresse programme précédente et entraîr l'instruction à nouveau. L'instruction erronée est replacée par l'instruction correcte.
- Entrer la deuxième instruction et le deuxième opéRATION. (Ici, il est inutil d'entre r le numéro de la minuterie, puisque ce numéro est 000.) Appuyer sur la touche WRITE pour écrire l'instruction en mémoire des programmes.

- Entrer le deuxième opération (123 pour indiquer 12,3 seconds) et appuyer sur la touche WRITE. L'adresse programme suivante apparait.

Si une erreur survient en entrant l'opérande, appuyer sur la touche flèche haute pour revenir à l'affichage de l'opérande erroné et entraîr l'opérande à nouveau.
Rem. a) Les entrées dans les compteurs se font de la même façon que dans les minutes mais appuyer sur la touche CNT au lieu d'appuyer sur TIM.
b) Les SV des minuteries et des compteurs sont entrés en BCD; en conséquence, il est inutile d'appuyer sur la touche CONT/#.
- Entrer la troisième instruction et ses opérandes. Entrer d'abord l'instruction en appuyant sur la touche FUN puis le code de fonction (ici, 21).

Pour entrer la version différenciee d'une instruction, appuyer sur la touche NOT après le code de fonction (FUN 21 NOT). Le symbole "@" s'affiche a coto des instructions différenciees. Appuyer a nouveau sur la touche NOT pour remettre l'instruction en forme non différenciee. Le symbole "@" dispa- rait.
Pour modifier une instruction déjà entrée, faire défiler le programme jusqu'à un moment où l'instruction à modifier s'affiche, et appuyer ensuite sur la touche NOT. Le symbole "@" doit s'afficher à côté de l'instruction.
- Appuyer sur la touche WRITE pour enregistrer l'instruction dans la mémoire des programmes. L'affichage d'entrée du premier opérande apparait.


Appuyer sur la touche WRITE pour enregistrer l'instruction dans la Mémoire des programmes. L'affichage d'entrée du deuxième opérande apparait.

Rem. Les opérandes de MOV(21) pouvant être des adresses de mots ; pour entrer une constante, appuyer sur la touche CONT/#.
- Ecriture d'une adresse de mot
- Entrer la deuxième opérande.

Appuyer sur la touche WRITE pour enregistrer l'instruction dans la Mémoire des programmes. L'adresse programme suivante apparait.

Rem. Lors de l'entrée d'une adresse de mot ou de bit de la zone IR, il est inutile d'appuyer sur les touches MAJ + CONT/# ou MAJ + CH/#.
- Entrer l'instruction suivante.

Appuyer sur la touche WRITE pour enregistrer l'instruction dans la mémoire des programmes.

- Ecriture d'un nombre décimal non signé
- Le premier opérande doit être entré sous forme d'un entier non signé.

Entrer la valeur de l'opérande, de 0 à 65535.

Rem. Si une erreur survient pendant l'entrée, appuyer sur la touche CLR pour revenir à l'état qui prévalait avant l'entrée. Ensuite, entre la valeur correcte.
- Restaurer l'affichage hexadécimal

Rem. Si l'entrée est en dehors de l'intervalle autorisé, le buzzer retentit et l'affichage hexadecimal n'apparait pas.

- Le deuxième opérande doit être entré en forme d'entier signé.

Entrer la valeur de l'opérande, entre -32.768 et 32.767. Utiliser la touche SET pour entrer un nombre positif et la touche RESET pour entrer un nombre négatif.

Rem. Si une erreur survient pendant l'entrée, appuyer sur la touche CLR pour revenir à l'état qui prévalait avant l'entrée. Ensuite, entre la valeur correcte.
- Restaurer l'affichage hexadecimal.
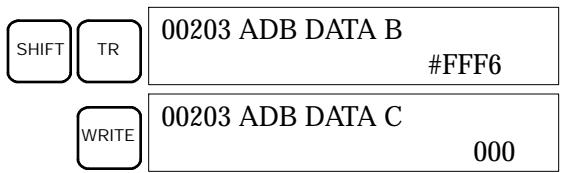
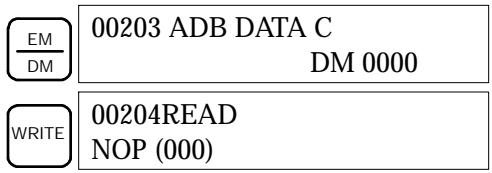
4-2-8 Recherche d'une instruction
Autorisé dans tous les modes, cette fonction permet de tracer, dans le programme, les occurrences de l'instruction spécifique.
Le statut ON/OFF des bits affichés apparaît si l'API est en mode RUN ou MONITOR.
1, 2, 3... 1. Appuyer sur la touche CLR pour appeler l'affichage initial.
- Entrer l'adresse à laquelle la recherche doit commencer et appuyer sur la touche flèche basse. Les zéros de début sont facultatifs.

- Entrer l'instruction que vous pouze trouver et appuyer sur la touche SRCH. Ici, la recherche porte sur OUT 01000.
Dans ce cas, la prochaine instruction OUT 01000 se trouve à l'adresse 200 ; voir ci-dessous.

- Appuyer sur la touche flèche basse pour afficher les opérandes de l'instruction ou sur SRCH pour chercher l'occurrence suivante de cette même instruction.
- La recherche continue jusqu'à détéction d'une instruction END ou jusqu'à la fin de la mémoire des programmes. Dans cet exemple, le système a trouvé une instruction END à l'adresse 397.

4-2-9 Recherche d'un opérande binaire
Cette fonction permet de tracer les occurrences de l'opérande spécifique dans le programme. Elle est autorisée dans tous les modes.
Le statut ON/OFF de n'importequel bit affiché est indiqué si l'API est en mode RUN ou MONITOR.
1, 2, 3... 1. Appuyer sur la touche CLR pour appeler l'affichage initial.
2. Entrer l'adresse de l'opérande. Les zéros de début sont facultatifs.

- Appuyer sur la touche SRCH pour commencer la recherche.

- Appuyer sur SRCH pour chercher l'occurrence suivante de l'opérande.

- La recherche continue jusqu'à détction d'une instruction END ou jusqu'à la fin de la mémoire des programmes. Dans cet exemple, le système a troué une instruction END.

4-2-10 Insertion et suppression d'instructions
Cette fonction permet d'insérer des instructions dans le programme ou de supprimer des instructions du programme. Elle est uniquement autorisée en mode PROGRAM.
Pour illustrer le déroulement de cette fonction, nous allons mettre une condition IR 00105 NO à l'adresse programme 00206 et supprimer la condition IR 00103 NO de l'adresse 00205 ; se reporter au schéma suivant.
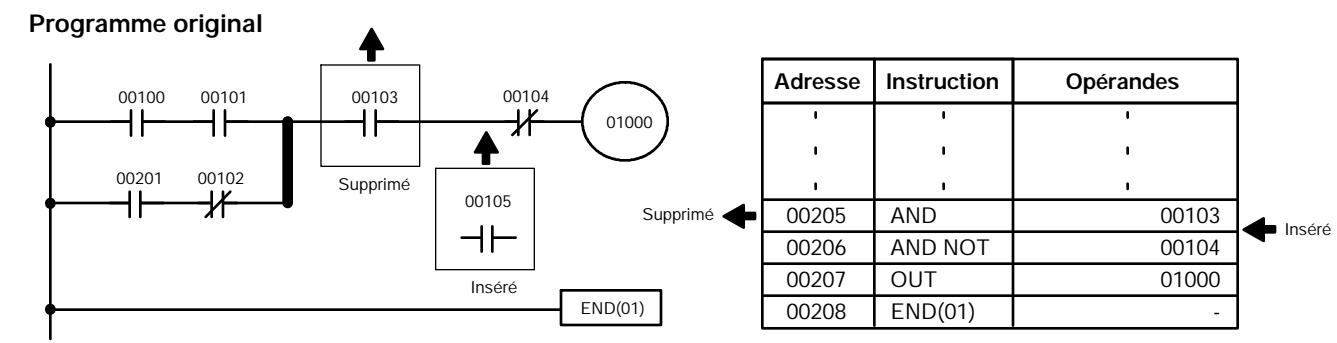
Insertion
Exécuter la procédure ci-dessous pourmettre la condition IR 00105 NO à l'adresse 00206.
1, 2, 3... 1. Appuyer sur la touche CLR pour appeler l'affichage initial.
2. Entrer l'adresse à laquelle vous pouzemettre la condition NO et appuyer sur la touche flèche basse. Les zéros de début sont facultatifs.

- Entrer la nouvelle instruction et appuyer sur la touche INS.

- Appuyer sur la touche flèche basse pour entrer la nouvelle instruction.

Rem. Pour les instructions nécessitant plus d'opérandes (par exemple, des valeurs spécifiées), entre les opérandes et appuyer ensuite sur la touche WRITE.
Suppression
Exécuter la procédure ci-dessous pour effacer la condition IR 00103 NO à l'adresse 00205.
1, 2, 3...
- Appuyer sur la touche CLR pour appeler l'affichage initial.
- Entrer l'adresse d'ou la condition NO sera supprimée et appuyer sur la touche flèche basse. Les zéros de début sont facultatifs.

- Appuyer sur la touche DEL.

- Appuyer sur la touche flèche haute pour effacer l'instruction spécifique. Si l'instruction a plus d'opérandes, les opérandes sont supprimés automatiquement avec l'instruction.

Après avoir exécuté les procédures d'insertion et de suppression, utiliser les touches flèche haute et flèche BASSE pour faire défiler le programme afin de vous assurer que les modifications intervenues ont été effectuees correctement ; se reporter au schéma suivant.
Programme corrigé
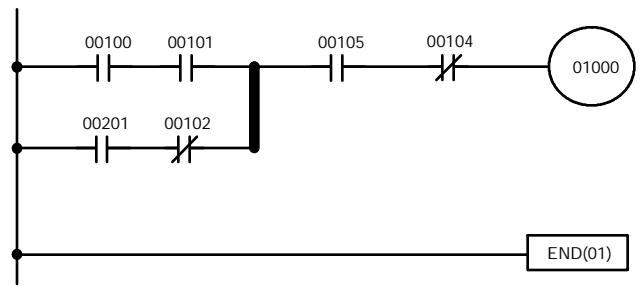
| Adresse | Instruction | Opérandes |
| 1 | 1 | 1 |
| 1 | 1 | 1 |
| 1 | 1 | 1 |
| 00205 | AND | 00105 |
| 00206 | AND NOT | 00104 |
| 00207 | OUT | 01000 |
| 00208 | END(01) | - |
4-2-11 Vérification du programme
Cette fonction effectue une recherche pour détecter d'eventuelles erreurs de programmation. Si elle détecte une ou plusieurs erreurs, elle affiche, pour chaque erreur, l'adresse programme et l'erreur. Cette fonction doit obligatoirement être faite en mode PROGRAMM.
- Appuyer sur la touche CLR pour appeler l'affichage initial.
- Appuyer sur la touche SRCH. Un message d'interrogation s'affiche pour vous demander le niveau de contrôle désiré.

- Entrer le niveau désiré (0, 1 ou 2). La vérification du programme commence lors de l'entrée du niveau désiré; le système affiche la première erreur détectée.

Rem. Pour plus de détails sur les niveaux de contrôle et sur les erreurs susceptibles d'être détectées pendant la vérification du programme, se reporter au paragraphe 5-4 Erreurs de programmation.
- Appuyer sur la touche SRCH pour continuer la recherche. Le système affiche l'erreur suivant. Appuyer à nouveau sur la touche SRCH pour poursuivre la recherche.
La recherche continue jusqu'à la détction d'une instruction END ou jusqu'à la fin de la mémoire des programmes. Lorsque le système détecte la fin de la mémoire des programmes, un affichagesemblable à celui qui estprésenté ci-dessous apparait :

00300NO END INST END
Sur détention d'une instruction END, le système vous présente un affichagesemblable à celui qui est illustré ci-dessous :

00310PROGCHK END (001)00.3KW
Si le système affiche des erreurs, editor le programme pour les corriger et refaire une nouvelle vérification. Continuer le contrôle jusqu'au moment où vous aurez corrige toutes les erreurs.
4-2-12 Surveillance des bits, des chiffres et des mots
Cette fonction permet de surveiller le statut de 16 bits et mots, bien que trois seulement puissant apparaître simultanément sur l'affichage. Cette fonction est autorisée dans tous les modes.
Lecture et surveillance du programme
Lorsque le système affiche une adresse programme, vous pouze prendre reconnaissance du statut du bit ou du mot logé à cette adresse. Pour cela, appuyer sur la touche MONTR.
1, 2, 3... 1. Appuyer sur la touche CLR pour appeler l'affichage initial.
2. Entrer l'adresse programme désirée et appuyer sur la touche flèche basse.

- Pour lancer la surveillance, appuyer sur la touche MONTR.

Lors de la surveillance du statut d'un bit, modifier ce statut en lançant une fonction "Force Set/Reset" (réglage/RAZ forcee). Pour plus de détails, se reporter au paragraphe 4-2-24 Réglage et RAZ forcee.
Lors de la surveillance du statut d'un mot, la valeur de ce mot peut être changée en lancant une fonction Modification de données hexadécimales/ BCD. Pour plus de détails, se reporter au paragraphe 4-2-21 Modification de données binaires.
- Appuyer sur la touche CLR pour arrêté la surveillance.
Surveillance des bits
1,2,3...
Exécuter la procédure ci-dessous pour surveiller le statut d'un bit particulier.
- Appuyer sur la touche CLR pour appeler l'affichage initial.
- Entrer l'adresse du bit désiré et appuyer sur la touche MONTR.
| SHIFT | CONT
# | B
1 | MONTR | 00001
^ ON |
Pour afficher le statut du bit précédent ou du suivant, appuyer sur la touche flèche haute (ou flèche basse)
La fonction Réglage/RAZ forcee permet de modifier le statut du bit affiché. Pour plus de détails, se reporter au paragraphe 4-2-24 Réglage et remise à zéro forces.
- Appuyer sur la touche CLR pour terminer la surveillance.
Surveillance des mots
1,2,3...
Exécuter la procédure ci-dessous pour surveiller le statut d'un mot particulier.
- Appuyer sur la touche CLR pour appeler l'affichage initial.
- Entrer l'adresse du mot désire.
| SHIFT | CH
*DM | *EM
LR | B
1 | 00000
CHANNEL LR 01 |
- Appuyer sur la touche MONTR pour lancer la surveillance.
Pour afficher le statut du mot précédent ou du mot suivant, appuyer sur la touche flèche haute ou flèche basse.
Le statut du mot affiché peut être modifié en langant une fonction Modification de données hexadécimales/BCD. Pour plus de détails, se reporter au paragraphe 4-2-21 Modification de données binaires.
- Appuyer sur la touche CLR pour terminer la surveillance.
Surveillance de plusieurs adresses
1,2,3...
Le statut de six bits et/ou mots peut être surveilé simultanément ; toute fois, le système peut seulement en présence trois sur l'affichage.
- Appuyer sur la touche CLR pour appeler l'affichage initial.
- Entrer l'adresse du premier bit ou mot et appuyer sur la touche MONTR.
- Refaire l'etape 2 jusqu'à 6 fois pour afficher les adresses à surveiller.
| SHIFT | CONT
# | B
1 | MONTR | 00001 T000
^ OFF 0100 |
| | EM
DM | MONTR | D000000001 T000
0000^ OFF 0100 |
Si la surveillanceporte sur 4 bits ou mots (ou davantage),les bits et les mots qui ne sont pas affichés peuvent etre mis a I'ecran en appuyant sur la touche MONTR.Lorsque seule la touche MONTR est enforcée,l'affichage se decale vers la droite.
Si plus de six bits et mots sont entrés, le système annule la surveillance du premier bit ou mot entre.
- Appuyer sur la touche CLR pour arrêter la surveillance du mot ou bit le plus à gauche et le faire disparaître de l'affichage.

- Appuyer sur les touches SHIFT + CLR pour clôturer complètement la surveillance.

Rem. Appuyer sur les touches SHIFT + CLR puis sur la touche CLR pour revenir à l'affichage initial de la console de programmation, sans modifier le statut de la fonction de surveillance de plusieurs adresses. A partir de l'affichage initial, appuyer sur SHIFT + MONTR pour revenir à la surveillance de plusieurs adresses. La surveillance peut être réservée pour 6 bits et mots.
4-2-13 Surveillance des différenciations
Cette fonction permet de surveiller le statut de la différenciation (positive ou négative) d'un bit particulier. Lorsqu'une différenciation positive ou négative est détectée, le système l'affiche et le buzzer retentit. Cette fonction est autorisée dans tous les modes.
1,2,3...
- Surveiller le statut du bit moyen en suivant la procédure décrite au paragraphe 4-2-12 Surveillance des bits, des chiffres et des mots. Si la surveillance porte sur 2 bits ou plus, le bit désiré doit être le plus à gauche sur l'affichage.
Dans ce cas, le système surveille le statut de la différenciation de LR 00.

- Pour spécifique la surveillance des différenciations positives, appuyer sur la touche SHIFT et, ensuite, sur la touche flèche haute. Les symboles “U@” apparaisent.
Pour spécifique la surveillance des différenciations négatives, appuyer sur la touche SHIFT et, ensuite, sur la touche flècheasse. Les symboles "D@" apparaissent.
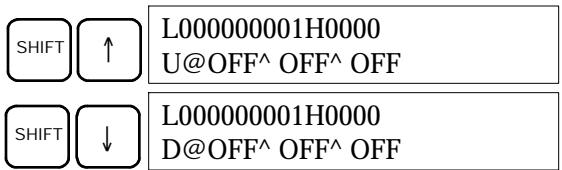
- Le buzzer retentit lorsque le bit spécifique passé de OFF à ON (différenciation positive) ou de ON à OFF (différenciation négative).

Rem. Le buzzer ne retentit pas s'il a été désactivé.
- Appuyer sur la touche CLR pour terminer la surveillance des différenciations, et revenir à l'affichage de la surveillance normale.

4-2-14 Surveillance de bits
Cette fonction permet de surveiller le statut ON/OFF de 16 bits d'un mot quelconque. Cette fonction est autorisée dans tous les modes.
1,2,3...
- Surveiller le statut du mot désiré en exécutant la procédure décrite en 4-2-12 Surveillance des bits, des chiffres et des mots. Si la surveillanceporte sur 2 mots ou plus, le mot désiré doit être le plus à gauche sur l'affichage.
c000 (Surveillance de mots) 0000
- Appuyer sur la touche SHIFT puis sur la touche MONTR pour lancer la surveillance binaire. Le statut ON/OFF des 16 bits du mot selectionné apparait dans le bas de l'affichage. 1 signifie que le bit est ON; 0 signifie qu'il est OFF.

Le statut des bits à réglage force est indiqué par la lecture "S". Le statut des bits à RAZ force est indiqué par la lecture "R". Voir ci-dessous.

Rem. a) Le statut des bits affichés peut être modifié. Pour plus de détails, se reporter au paragraphe 4-2-21 Surveillance des bits, des chiffres et des mots.
b) Vous pouvez appuyer sur la touche flèche haute ou flèche basse pour afficher le statut des bits du mot précédent ou du suivant.
- Appuyer sur la touche CLR pour clôturer la surveillance binaire et revenir à l'affichage de la surveillance normale.

4-2-15 Surveillance de série de 3 mots
Cette fonction permet de surveiller le statut de 3 mots consécutifs. Elle est autorisée dans tous les modes.
1,2,3...
- Surveiller le statut des 3 premiers mots en exécutant la procédure figurant au paragraphe 4-2-12 Surveillance des bits, des chiffres et des mots.
Si la surveillanceporte sur 2 mots ou plus,le premier mot désire doit etre le plus à gauche sur l'affichage.

- Appuyer sur la touche EXT pour lancer la surveillance 3 mots. Le système affiche le statut du mot sélectionné et des deux mots suivants. Voir ci-dessous. Dans cet exemple, DM 0000 est sélectionné.
EXT
c002 c001 c000
0123 4567 89AB
Utiliser les touches flèche haute et flèche basse pour décaler d'une adresse vers le haut ou vers le bas.
A ce stade, le statut des mots affichés peut aussi être changé. Pour plus de détails, se reporter au paragraphe 4-2-18 Modification des données de 3 mots.
- Appuyer sur la touche CLR pour terminer la surveillance de série de 3 mots et revenir à l'affichage de la surveillance normale. Le système va surveiller le mot le plus à droite de la surveillance de série de 3 mots.
CLR
c200
89AB
4-2-16 Surveillance de valeurs décimales signées
Cette fonction convertit le content du mot spécifique d'une valeur hexadécimale signée (aux deux formats complémentaires) en une valeur décimale signée, pour affichage. Cette fonction peut être executée pendant la surveillance des E/S, la surveillance de plusieurs adresses ou la surveillance de série de 3 mots.
1,2,3...
- Surveiller le mot que doit utiliser la surveillance décimale signée. Pendant une surveillance de plusieurs adresses, le système convertit le mot le plus à gauche.
(Surveillance de plusieurs adresses)
c000 cL0020000
FFF0 0000^ OFF
- Appuyer sur les touches SHIFT + TR pour afficher le mot le plus à gauche sous forme d'une valeur décimale signée.
s
TR
c200
-00016
A ce stade, le contenu du mot affiché peut être changé en procédant à l'entrée d'une valeur décimale signée. Pour plus de détails, se reporter au paragraphe 4-2-22 Modification des valeurs décimales signées.
- Appuyer sur la touche CLR ou sur les touches SHIFT + TR pour arreter l'affichage de la valeur décimale non signée, et revenir à la surveillance normale.
CLR
c200 cL0020000
FFF0 0000^ OFF
4-2-17 Surveillance des valeurs décimales non signées
Cette fonction permet de convertir la donnée hexadecimal d'un mot en une valeur décimale non signée, pour affichage. Cette fonction peut être executée pendant la surveillance des E/S, la surveillance de plusieurs adresses ou la surveillance de série de 3 mots.
1, 2, 3... 1. Surveiller le mot que la surveillance de valeurs décimales non signées doit utiliser. Pendant la surveillance de plusieurs adresses, le système convertit le mot le plus à gauche.
c200 cL0020000
FFF0 0000^ OFF
Surveillance de plusieurs adresses
- Appuyer sur les touches SHIFT + TR + NOT pour afficher le mot de gauche sous forme d'une valeur décimale non signée.

A ce stade, le contenu du mot affiché peut être modifié en procédant à l'entrée d'une valeur décimale non signée. Pour plus de détails, se reporter au paragraphe 4-2-23 Modification des valeurs décimales non signées.
- Appuyer sur la touche CLR ou sur les touches SHIFT + TR pour arreter l'affichage en forme de valeur décimale non signée et revenir à la surveillance normale.

4-2-18 Modification des données de 3 mots
Cette fonction permet de convertir le contenu d'un ou de plusieurs des 3 mots consécutifs affichés pendant la fonction surveillance de série de 3 mots. Cette fonction est uniquement autorisée en mode MONITOR ou en mode PROGRAM.
Attention
Avant de modifier le content de la mémoire des E/S, il faut s'assurer que les changements envisagés ne seront pas provoquer un fonctionnement intempestif ou dangereux de l'équipement. En particulier, faire très attention lors des changements de statut de bits de sortie. Le PC continuant à rafraîchir les bits d'E/S, même lorsqu'il est en mode PROGRAM, les dispositifs connectés aux points de sortie de l'unité centrale ou des unités d'E/S étendues peuvent se composer de façon erratique.
1, 2, 3... 1. Surveiller le statut des mots désirés en suivant la procédure exposée au paragraphe 4-2-15 3-Surveillance de mots.
(Surveillance de série de 3 mots)
D0002D0001D0000
0123456789AB
- Appuyer sur la touche CHG pour commencer la modification des données de 3 mots. Le curseur s'affiche alors a côté du contenu du mot le plus à gauche.

- Entrer la nouvelle valeur du mot le plus à gauche de l'affichage et appuyer sur la touche CHG pour faire d'autres modifications.
(Entrer la nouvelle valeur et, pour ne pas effectuer d'autres modifications, appuyer sur la touche WRITE pour enregistrer les modifications en mémoire).

- Entrer la nouvelle valeur souhaitation pour le deuxième mot affiché (celui du milieu) et appuyer sur la touche CHG pour ne pas modifier le mot de droite. (Dans l'exemple, il ne sera pas modifié).
| C2 | D3 | E4 | WRITE | D0002D0001D0000
0001 0234 89AB |
Rem. Si la touche CLR est enforcée avant d'appuyer sur WRITE, la fonction est annulée et l'affichage de surveillance de série de 3 mots revient, mais aucune modification n'est apportée à la mémoire des programmes.
4-2-19 Modification des SV des minuteries et des compteurs
Deux fonctions permettent de modifier le SV d'une minuteur ou d'un compteur. Elles sont uniquement autorisées en mode MONITOR et en mode PROGRAM. Le mode MONITOR est le seul mode qui permet de modifier un SV pendant l'exécution du programme.
Le SV d'une minuterie ou d'un compteur peut etre modifier en entrant une nouvelle valeur ou en incrémentant ou decrementant le SV courant.
Entrée d'une nouvelle constante SV
Cette fonction peut être utilisée pour entrer une nouvelle constante SV et pour effectuer la conversion d'un SV – de constante en désignation d'adresse de mot et vice versa. Les exemples suivants illustrent l'entrée d'une nouvelle constante SV et la conversion du SV, d'une constante en une adresse.
1, 2, 3... 1. Appuyer sur la touche CLR pour appeler l'affichage initial.
- Afficher la minuterie ou le compteur désire.

- Appuyer sur la touche flèche basse et ensuite sur la touche CHG.

- A ce stade, vous pouvez entrer la nouvelle constante ou convertir la constante SV en une désignation d'adresse de mot.
a) Pour entrer une nouvelle constante SV, entra la constante et appuyer sur la touche WRITE.

b) Pour convertir en une désignation d'adresse de mot, vous doivent accorder l'adresse du mot, et appuyer sur la touche WRITE.

Incrémentation et déprémentation d'une constante
Cette fonction permet d'incrementer ou de déprénter une constante SV.
Cette fonction est possible uniquement lorsque le SV a été entré comme une constante.
1, 2, 3... 1. Appuyer sur la touche CLR pour appeler l'affichage initial.
- Afficher la minuterie ou le compteur désire.

- Appuyer sur la touche flèche basse, sur CHG et ensuite sur la touche EXT.

La constante qui est à gauche est l'ancienne constante SV, celle qui est à droite deviendra la nouvelle constante SV, pendant l'étape 5.
- Appuyer sur la touche flèche haute ou flècheasse pour incrémenter ou déprémenter la constante qui est à droite. (Dans cet exemple, la valeur SV est incrémentede une fois).

- Appuyer deux fois sur la touche CLR pourmettre le SV de la minuterie à la nouvelle valeur.

4-2-20 Modification des données hexadécimales/BCD
Cette fonction permet de modifier la valeur hexadécimale ou BCD d'un mot surveilé à l'aide de la procédure décrite en 4-2-12 Surveillance des bits, des chiffres et des mots. Cette fonction est uniquement autorisée en mode MONITOR ou en mode PROGRAM.
Les mots SR 253 à SR 255 ne sont pas modifiables.
Attention
Avant de modifier le content de la mémoire des E/S, il faut s'assurer que les changements envisagés ne sont pas provoquer un fonctionnement intempestif ou dangereux de l'équipement. En particulier, faire très attention lors des changements de statut de bits de sortie. L'API continuant à rafraîchir les bits d'E/S, même lorsqu'il est en mode PROGRAM, les/dispositifs connectés aux points de sortie de l'unité centrale ou des unités d'E/S étendues peuvent se composer de façon erratique.
1, 2, 3...
- Surveiller le statut des mots désirés en suivant la procédure exposée au paragraphe 4-2-12 Surveillance de mots. Si deux mots ou plus sont surveillés, le mot youlu s'affiche à gauche.
(Surveillance de mots)
D0000 0119
- Appuyer sur la touche CHG pour commencer la conversion des données hexadécimales/BCD.

- Entrer le nouveau PV et appuyer sur la touche WRITE pour modifier le PV. La fonction se termine et l'affichage de surveillance normale réapparait lorsque la touche WRITE est enforcée.

4-2-21 Modification des données binaires
Cette fonction permet de changer le statut des bits d'un mot lorsque ce mot est surveillement à l'aide de la procédure décrite au paragraphe 4-2-14 Surveillance de bits. Elle est uniquement autorisée en mode MONITOR ou en mode PROGRAM.
Les bits SR 25300 à SR 25507 et les drapeaux des minuteries et des compteurs ne sont pas modifiables.
Attention
Avant de modifier le content de la mémoire des E/S, il faut s'assurer que les changements envisagés ne sont pas provoquer un fonctionnement intempestif ou dangereux de l'équipement. En particulier, faire très attention lors des changements de statut de bits de sortie. L'API continuant à rafraîchir les bits d'E/S, même lorsqu'il est en mode PROGRAM, les dispositifs connectés aux points de sortie de l'unité centrale ou des unités d'E/S étendues peuvent se composer de façon erratique.
1, 2, 3... 1. Surveiller le statut du mot désiré en suivant la procédure décrite au paragraphe 4-2-14 Surveillance de bits.
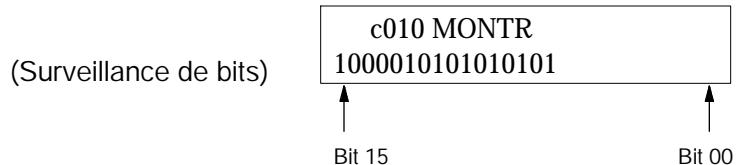
- Appuyer sur la touche CHG pour commencer la modification des données binaires.

Un curseur clignotant apparait au-dessus du bit 15. Le curseur indique le bit prét à être modifié.
- Pour déplacer le curseur et changer le statut des bits, vous dispose de trois séries de touches :
a) Utiliser les touches flèche haute et flèche basse pour déplacer le curseur vers la gauche ou vers la droite.

b) Utiliser les touches 1 et 0 pour changer le statut d'un bit afin de leMETTE ON ou OFF. Lorsqu'une de ces touches est enfoncée, le curseur se déplace d'un bit vers la droite.

c) Utiliser les touches SHIFT + SET et SHIFT + RESET pour faire un réglage force ou une remise à zéro force du statut d'un bit. Lorsqu'une de ces touches est enforcée, le curseur se déplace d'un bit vers la droite. Pour annuler un réglage force ou une remise à zéro force, appuyer sur la touche NOT.
Rem. Les bits de la zone DM ne peuvent pas faire l'objet d'un réglage ou d'une remise à zéroforcé.
- Appuyer sur la WRITE pour enregistrer les modifications en mémoire et revenir à la surveillance de bits.

4-2-22 Modification des valeurs décimales signées
Cette fonction permet de modifier la valeur décimale d'un mot surveille pour la convertir en une valeur décimale signée de l'intervalle -32 768 à 32 767.
Le contenu du mot spécifique est converti automatiquement en une valeur hexadécimale signée (en forme complément à deux).
Les mots SR 253 à SR 255 ne sont pas modifiables.
Attention
Avant de modifier le content de la mémoire des E/S, il faut s'assurer que les changements envisagés ne sont pas provoquer un fonctionnement intempestif ou dangereux de l'équipement. En particulier, faire très attention lors des changements de statut de bits de sortie. L'API continuant à rafraîchir les bits d'E/S, même lorsqu'il est en mode PROGRAM, les/dispositifs connectés aux points de sortie de l'unité centrale ou des unités d'E/S étendues peuvent se composer de façon erratique.
1, 2, 3... 1. Surveiller le statut (valeur décimale signée) du mot dont la valeur est à changer.
(Surveillance des valeurs décimales signées)

- Appuyer sur la touche CHG pour commencer la modification d'une donnée décimale.
CHG
PRES VAL?
D0200-00016
- Entrer le nouveau PV et appuyer sur la touche WRITE pour lancer la modification du PV. La fonction se termine. De plus, l'affichage de la surveillance des valeurs décimales signées réapparait lorsque vous appuyez sur la touche WRITE.
Le PV peut être mis à une valeur de l'intervalle -32 768 à 32 767. Utiliser la touche SET pour entrer un nombre positif et la touche RESET pour entrer un nombre négatif.

Si une erreur survient pendant l'entrée, appuyer sur la touche CLR pour restaurer le statut avant de faire l'entrée. Entrer maintainant la valeur correcte.
Le buzzer retentiera si la valeur saisie se trouve en dehors de la gamme déterminée, interdisant toute écriture.
4-2-23 Modification des valeurs décimales non signées
Cette fonction permet de modifier la valeur décimale d'un mot surveillé comme valeur décimale non signée, dans l'intervalle 0 à 65 535. Le système assure sa conversion automatique en une donnée hexadecimal.
Les mots SR 253 à SR 255 ne sont pas modifiables.
Attention Avant de modifier le contenu de la mémoire des E/S, il faut s'assurer que les changements envisagés ne sont pas provoquer un fonctionnement intempestif ou dangereux de l'équipement. En particulier, faire très attention lors des changements de statut de bits de sortie. L'API continuant à rafraîchir les bits d'E/S, même lorsqu'il est en mode PROGRAM, les dispositifs connectés aux points de sortie de l'unité centrale ou des unités d'E/S étendues peuvent se composer de façon erratique.
1, 2, 3... 1. Surveiller le statut (valeur décimale non signée) du mot dont vous pouze modifier la valeur.
(Surveillance des valeurs décimales non signées)
c200 65520
- Appuyer sur la touche CHG pour commencer la modification d'une donnée décimale.
CHG
PRES VAL?
c200 65520
- Entrer le nouveau PV et appuyer sur la touche WRITE pour modifier le PV. La fonction se termine et, dés que vous appuyez sur la touche WRITE, l'affichage de la surveillance des valeurs décimales non signées réapparait.
Le PV peut être mis à une valeur de l'intervalle 0 à 65 535.

Si une entrée erronnée a été faite, appuyer sur la touche CLR pour rétablit l'etat antérieur à la saisie, puis saisir la bonne entrée.
Le buzzer retentiera si la valeur saisie se trouve en dehors de la gamme déterminée, interdisant toute écriture.
4-2-24 Réglage et remise à zéro forces
Cette fonction permet de forcer des bits à passer à l'état ON (réglage force) ou à l'état OFF (remise à zéro forcee). Elle est particulièrement utile pendant la mise au point du programme et pendant le contrôle du cablage de sortie. Cette fonction est uniquement autorisée en mode MONITOR et en mode PROGRAM.
Attention Avant de modifier le contenu de la mémoire des E/S, il faut s'assurer que les changements envisagés ne sont pas provoquer un fonctionnement intempestif ou dangereux de l'équipement. En particulier, faire très attention lors des changements de statut de bits de sortie. L'API continuant à rafraîchir les bits d'E/S, même lorsqu'il est en mode PROGRAM, les/dispositifs connectés aux points de sortie de l'unité centrale ou des unités d'E/S étendues peuvent se composer de façon erratique.
1, 2, 3... 1. Surveiller le statut du bit désiré en suivant la procédure décrite au paragraphe 4-2-12 Surveillance des bits, des chiffres et des mots. Si vous
surveillance deux mots ou plus, le bit désiré doit être le plus à gauche sur l'affichage.
| (Surveillance de plusieurs adresses) | c200
65520 |
| 0000020000
^ OFF^ ON |
| (Surveillance de plusieurs adresses) | |
- Appuyer sur la touche SET pour force le bit à l'etat ON ou sur RESET pour le force à l'etat OFF.
SET
00000 20000
ON ON
Le curseur qui est dans le coin inférieur gauche de l'affichage indique que le réglage ou la remise à zéro force(e) est en cours. Le statut du bit reste à ON ou OFF tant que vous maintainez la touche en position basse ; le statut original se rétablit un cycle après la libération de la touche.
- Appuyer sur les touches SHIFT et SET ou sur SHIFT et RESET pour conserver le statut du bit après avoir laissé la touche revenir en position haute. Dans ce cas, le statut réglage force est indiqué par une dette "S" et la remise à zéro par une dette "R".
Pour remettre le bit dans son état original, appuyer sur la touche NOT ou executer une fonction de réglage force ou de RAZ forcee. Pour plus de détails, consulter le paragraphe 4-2-25 Effacement réglage et remise à zéro forcés.
Le statutforcé est également annulé dans les cas suivants:
a) Lorsque vous modifie le mode opératione de l'API (bien que le statut force ne soit pas effacé lorsque vous passez du mode PROGRAM au mode MONITOR si SR 25211 est ON).
b) Lorsque le PC s'arrête à la suite d'une erreur fatale.
c) Lorsque le PC s'arrête à la suite d'une coupure du courant électrique.
d) Lorsque le Réglage d'effacement force/ Opération de réinitialisation est effectué.
4-2-25 Effacement réglage et remise à zéro forcés
Cette fonction permet de modifier le statut de tous les bits qui ont fait l'objet d'un réglage force ou d'une RAZ force. Elle est uniquement autorisée en mode MONITOR et en mode PROGRAM.
Attention
Avant de modifier le content de la mémoire des E/S, il faut s'assurer que les changements envisagés ne sont pas provoquer un fonctionnement intempestif ou dangereux de l'équipement. En particulier, faire très attention lors des changements de statut de bits de sortie. L'API continuant à rafraîchir les bits d'E/S, même lorsqu'il est en mode PROGRAM, les dispositifs connectés aux points de sortie de l'unité centrale ou des unités d'E/S étendues peuvent se composer de façon erratique.
1, 2, 3... 1. Appuyer sur la touche CLR pour appeler l'affichage initial.
- Appuyer sur la touche SET et ensuite sur la touche RESET. Un message de confirmation s'affiche.

Rem. Si vous avez appuyé par inadvertance sur une touche qui ne convient pas, appuyer sur CLR pour recommencer la procédure à son début.
- Appuyer sur la touche NOT pour annuler le statut réglage forcé/RAZ forcée des bits de toutes les zones de données.
NOT
00000FORCE RELE END
4-2-26 Alternance de l'affichage entre Hex et ASCII
Cette fonction permet de faire alterner l'affichage des données mot entre deux formes – données hexadécimales 4 chiffres et ASCII. Cette fonction est autorisée dans tous les modes.
1, 2, 3... 1. Surveiller le statut du ou des motsCHOisis en suivant la procedure decrite au paragraphe 4-2-12 Surveillance des bits, des chiffres et des mots.
D0000D0001 41423031
(Surveillance de plusieurs adresses)
- Appuyer sur la touche TR pour obtenir l'affichage ASCII. Chaque fois que la touche TR est enforcée, l'affichage bascule de l'une à l'autre des deux formes prévues - valeurs hexadécimales et ASCII.

D0000 D0001 "AB" 3031

D0000D0001 41423031
4-2-27 Affichage de la durée des cycles
Cette fonction permet d'afficher la durée moyenne courante d'un cycle (temps de balayage). Elle est uniquement possible en RUN ou en mode MONITOR pendant l'exécution du programme.
1, 2, 3... 1. Appuyer sur la touche CLR pour appeler l'affichage initial.
- Appuyer sur la touche MONTR pour afficher la durée des cycles.

00000SCAN TIME 012.1MS
L'affichage "MS" indique que l'unité de mesure est "ms"
Si la touche MONTR est enforcée plusieurs fois, il se peut que le système affiche des valeurs différentes. Elles s'expliquent par les variations des conditions d'exécution du système.
4-2-28 Lecture et réglage de l'horloge
Cette fonction permet de consulter et de régler l'horloge de l'unité centrale. L'horloge peut être lue dans tous les modes mais son réglage est uniquement autorisé en mode MONITOR ou en mode PROGRAMM.
| Opération | RUN | MONITOR | PROGRAM |
| Lecture horloge | OK | OK | OK |
| Réglage horloge | Non | OK | OK |
1, 2, 3... 1. Appuyer sur la touche CLR pour appeler l'affichage initial.
2. Pour afficher la date et l'heure, appuyer sur la touche FUN, sur la touche SHIFT et, ensuite, sur la touche MONTR.
| FUN | SHIFT | MONTR | TIM 99-02-22
11:04:32 MON(1) |
- Appuyer sur la touche CHG pour modifier la date et/ou l'heure.
| CHG | TIM CHG?99-02罐2
11:04:32 MON(1) |
Le chiffre à modifier va clignoter. Si nécessaire, entraure une nouvelle valeur en utilisant les touches flèche haute et flèche basse ou les touches numériques. Appuyer sur la touche CHG pour déplacer le curseur et lemettre sur le chiffre suivant. Le tableau ci-après donne les intervalles de réglage de chaque valeur.
| Année | Mois | Jour | Heure | Minute | Seconde | Jour de laSEAINE |
| 00 à 99 | 01 à 12 | 01 à 31 | 00 à 23 | 00 à 59 | 00 to 59 | 0 à 6(DIM à SAM) |
- Appuyer sur la touche WRITE pour enregistrer la nouvelle valeur.
| WRITE | INST TBL READ
FUN018:HEX |
Appuyer sur la touche CLR pour revenir à l'affichage initial.
4-3 Exemple de programmation
Ce paragraphe illustrate les différentes fonctions que vous doivent exéçuter pour écrire un programme en utilisant la console de programmation.
4-3-1 Préparation du système
Lorsque vous écrivez un programme CPM2A pour la première fois, vous devez utiliser la méthode suivante.
1, 2, 3... 1. Mettre le selectiveur de mode de la console de programmation à la position PROGRAM etmettre ensuite le CPM2A sous tension.L'entree du mot de passé s'affiche sur la console de programmation.

密码
PASSWORD!
- Entrer le mot de passer en appuyant d'abord sur la touche CLR et ensuite sur MONTR.
- Effacer la mémoire du CPM2A en appuyant sur les touches CLR, SET, NOT, RESET et, ensuite, sur la touche MONTR. Si le système signale des erreurs mémoire, appuyer plusieurs fois sur la touche CLR.
| CLR | 00000 |
| SET | 00000MEMORY CLR?
HR CNT DM |
| RESET |
| MONTR | 00000MEMORY CLR
END HR CNT DM |
- Afficher et effacer les messages d'erreur en appuyant sur CLR, FUN et, ensuite, sur la touche MONTR. Appuyer plusieurs fois sur la touche MONTR, jusqu'au moment où tous les messages d'erreur ont disparu.
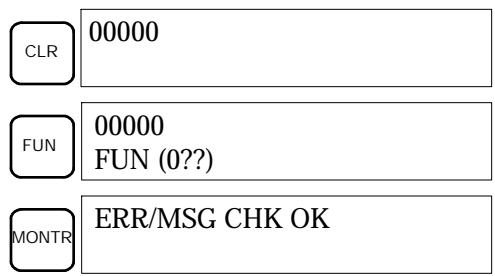
- Appuyer sur la touche CLR pour appeler l'affichage initial de la programmation. (adresse programme 00000). Maintenant, le nouveau programme peut etre ecrit.


Vérifier attentivement le système avant demettre en marche ou d'arrête le CPM2A avant d'éviter les incidents qui pouraient survenir lors du premier démarrage du programme.
4-3-2 Exemple de programme
Le programme suivant sera utilisé pour illustrer l'écriture d'un programme sur la console de programmation. Ce programme fait alterner la sortie IR 01000 ON/OFF (une seconde ON, une seconde OFF) dix fois après la mise à l'état ON de l'entrée IR 00000.
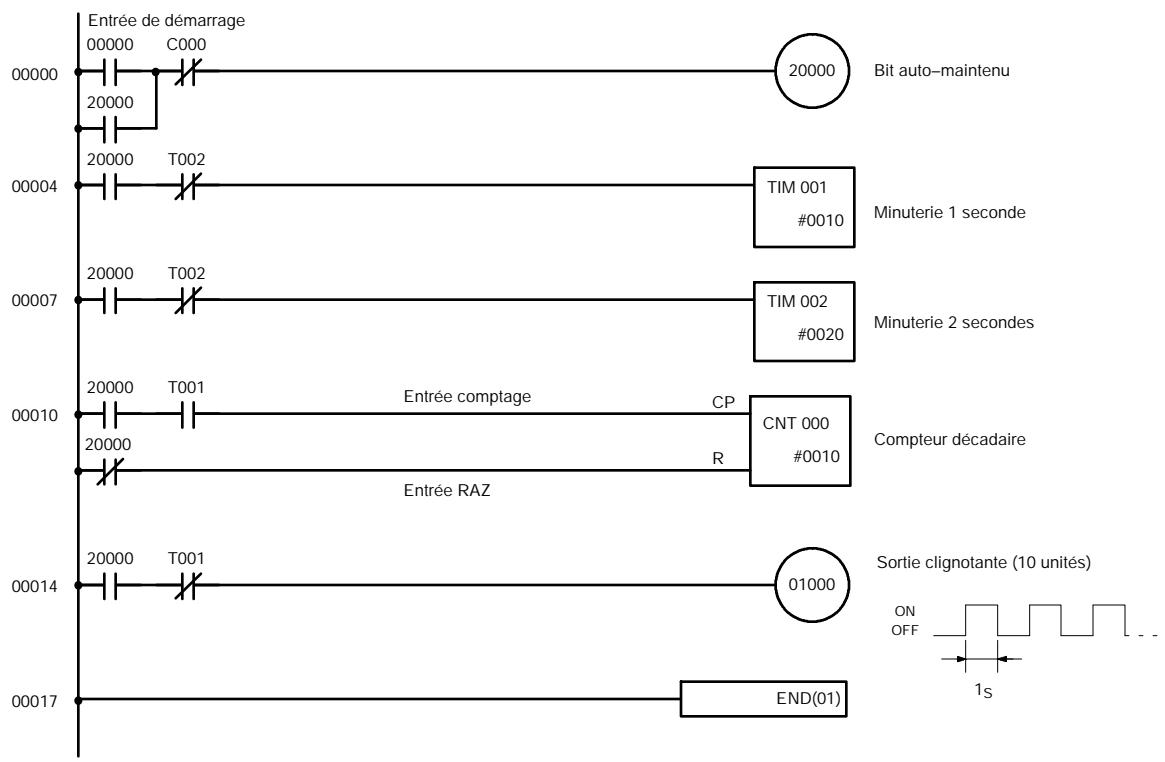
La liste des mnémotechniques de cet exemple de programme est représentée dans le tableau suivant. Les différentes étapes de l'entrée de ce programme sur une console de programmation sont décrites au paragraphe 4-3-3 Procedures de programmation.
| Adresse | Instruction | Donnée | Exemple du paragraphe 4-3-3
Procedures de programmation |
| 00000 | LD | | 00000 | (1) Bit auto-maintenu |
| 00001 | OR | | 20000 |
| 00002 | AND NOT | C | 000 |
| 00003 | OUT | | 20000 |
| 00004 | LD | | 20000 | (2) Minuterie 1 seconde |
| 00005 | AND NOT | T | 002 |
| 00006 | TIM | | 001 |
| | # | 0010 |
| 00007 | LD | | 20000 | (3) Minuterie 2 secondes |
| 00008 | AND NOT | T | 002 |
| 00009 | TIM | | 002 |
| | # | 0020 |
| 00010 | LD | | 20000 | (4) Compteur décembre (10) |
| 00011 | AND | T | 001 |
| 00012 | LD NOT | | 20000 |
| 00013 | CNT | | 000 |
| | # | 0010 |
| 00014 | LD | | 20000 | (5) Sortie clignotante (10 unités de comptage) |
| 00015 | AND NOT | T | 001 |
| 00016 | OUT | | 01000 |
| 00017 | END (01) | | --- | (6) Instruction END(01) |
4-3-3 Procedures de programmation
L'exemple va être écrit dans le CPM2A, conformément à la liste des mnémotechniques du paragraphe 4-3-2 Exemple de programme. La procédure commence par l'affichage initial. (Effacer la mémoire avant d'entrée un nouveau programme).
Rem. Si une erreur survient pendant l'entrée du programme, vous doivent consulter le paragraphe 5-3 Erreurs d'exploitation de la console de programmation concernant des informations sur la correction de cette faute. Se reporter aussi au Manuel d'utilisation du logiciel de support dans lequel vous trouverez des informations sur les erreurs qui apparaissent pendant l'utilisation du logiciel de support SSS ou SYSMAC-CPT.
(1) Entrée du bit auto-maintenu
1, 2, 3... 1. Entrer la condition normalement ouverte IR 00000. (L'entrée des zéros de début est facultative)
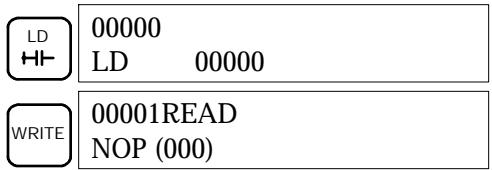
- Entrer la condition OR IR 20000.
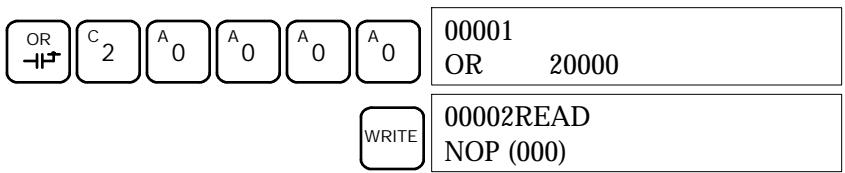
- Entrer la condition AND normalement fermée C000. (L'entrée des zéros de début est facultative).
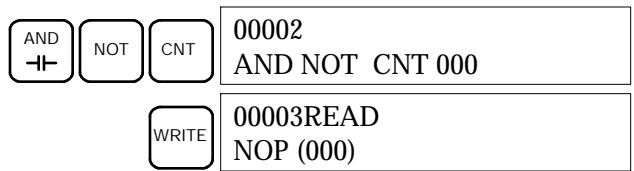
- Entrer l'instruction OUT IR 20000.
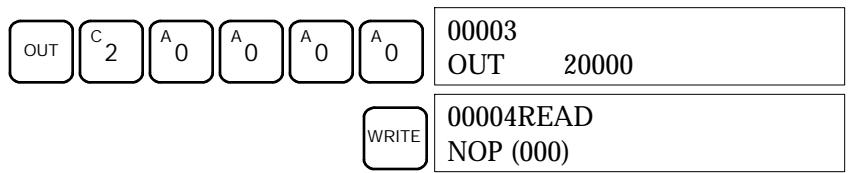
(2) Entrée de la miniterie une seconde
1, 2, 3... 1. Entrer la condition normalement ouverte IR 20000.
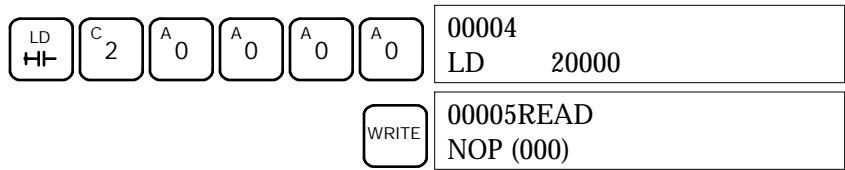
- Entrer la condition AND normalement fermée T002. (L'entrée des zéros de début est facultative).
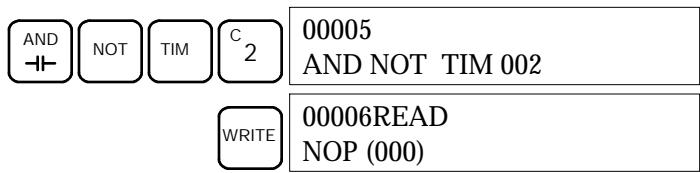
- Entrer la minuterie 1 seconde T001.
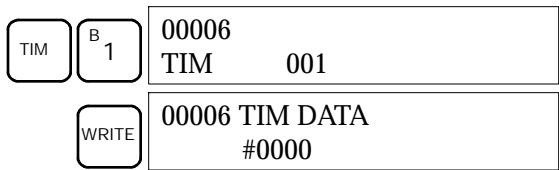
- Entrer le SV pour T001 (#0010 = 1.0 s).
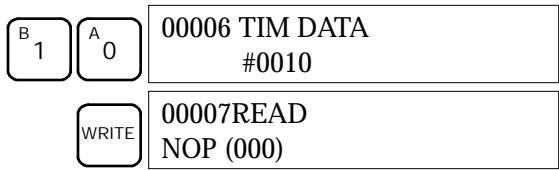
(3) Entrée de la minutesie 2 secondes
Voudevez faire les fonctions suivantes pour entrer la minuterie 2 secondes :
1, 2, 3... 1. Entrer la condition normalement ouverte IR 20000.
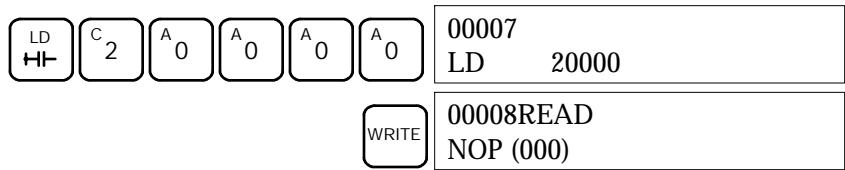
- Entrer la condition AND normalement fermée T002. (L'entrée des zéros de début est facultative).
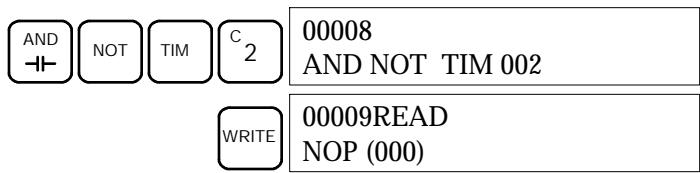
- Entrer la minuterie 2 secondes T002.
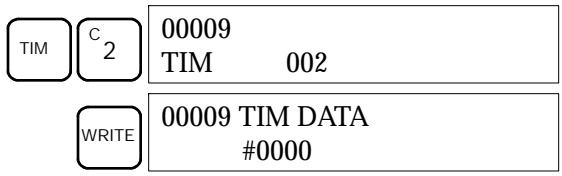
- Entre le SV pour T002 (#0020 = 2,0 s).
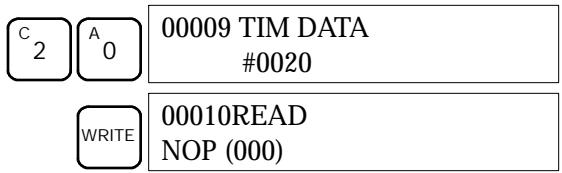
(4) Entrée du compteur décadaire
Voudevez faire les fonctions suivantes pour entrer le compteur decadaire.
1, 2, 3... 1. Entrer la condition normalement ouverte IR 20000.

- Entrer la condition AND normalement ouverte T001. (L'entrée des zéros de début est facultative).
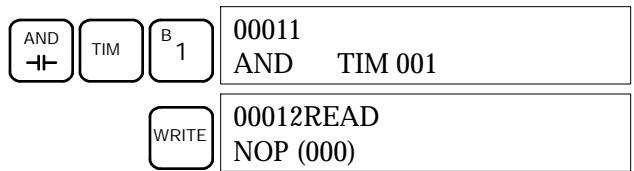
- Entrer la condition normalement fermée IR 20000.

- Entrer le compteur 000.

- Entrer le SV pour le compteur 000 (#0010 = 10 unités de comptage).
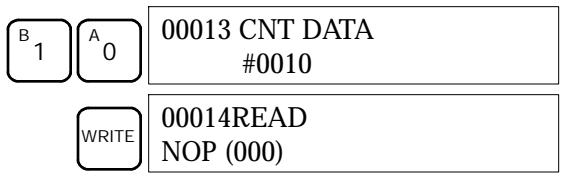
(5) Entre de la sortie clignotante
1, 2, 3... 1. Entrer la condition normalement ouverte IR 20000.
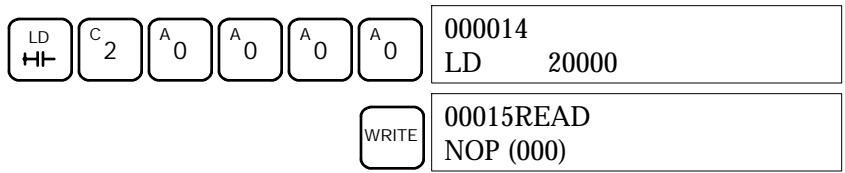
- Entrer la condition AND normalement fermée T001. (L'entrée des zéros de début est facultative).
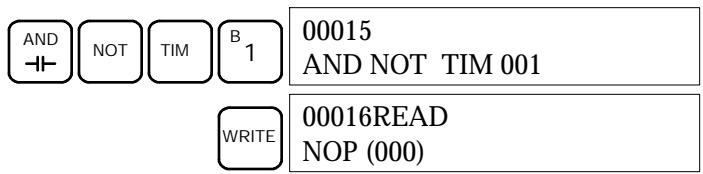
- Entrer l'instruction OUT IR 01000. (L'entrée des zéros de début est facultative).
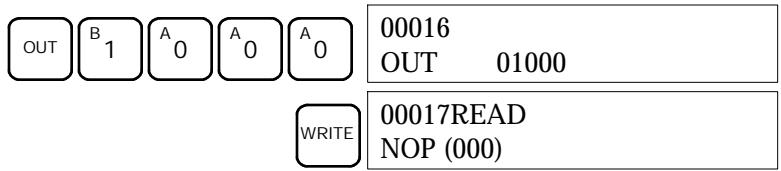
(6) Entre de l'instruction END(001)
Entrer END(01). (L'affichage présente trois chiffres dans le code de fonction, mais seulement les deux derniers sont entrés pour les API CPM2A.).
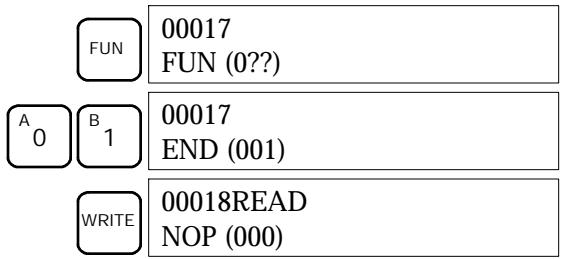
4-3-4 Vérification du programme
Vérifier la syntaxe du programme en mode PROGRAM pour s'assurer que le programme a été entree correctement.
1, 2, 3... 1. Appuyer sur la touche CLR pour appeler l'affichage initial.

- Appuyer sur la touche SRCH. Un message d'interrogation apparait, pour demander le niveau de verification à appliquer.

- Entrer le niveau可以选择 (0, 1 ou 2). La vérification du programme commence des l'entrée de ce niveau; la première erreur détectée est affichée. Si la vérification ne trouve aucune erreur, l'affichage suivant apparait.

Rem. Pour plus de détails sur les niveaux de vérification et sur les erreurs de programmation susceptibles d'être affichées pendant une vérification, se reporter au paragraphe 5-4 Erreurs de programmation.
- Appuyer sur la touche SRCH pour continuer la recherche. Le système affiche l'erreur suivant Appuyer à nouveau sur la touche SRCH pour continuer la recherche.
La recherche se poursuit jusqu'à détction d'une instruction END(01) ou jusqu'au moment où la recherche atteint la fin du programme.
Si le système affiche des erreurs, editor le programme pour les corriger et refaire une nouvelle vérification. Continuer la vérification jusqu'au moment où toutes les erreurs ont été corrigées.
4-3-5 Essai en mode MONITOR
Mettre le CPM2A en mode MONITOR et vérifier le fonctionnement du programme.
1, 2, 3... 1. Mettre le selecteur de mode de la console de programmation à la position MONITOR.
BZ
- Appuyer sur la touche CLR pour appeler l'affichage initial.

- Pour lancer le programme, procéder au réglage forcé du bit d'entrée de démarrage (IR 00000) sur la console de programmation.
Le curseur qui est dans le coin inférieur gauche de l'affichage indique que le réglage force est en cours. Le bit reste ON tant que vous maintainez la touche SET en position basse.
- Levoyant de sortie de la sortie IR 01000 clignote dix fois si le programme fonctionne normalement. Levoyant repasse à l'état OFF après dix clignotements d'une seconde.
Si levoyant de sortie ne clignote pas, il y a une erreur dans le programme. Dans ce cas, vérifier le programme et proceder au réglage force et à la RAZ forcee des bits pour vérifier le fonctionnement du système.
CHAPTER 5
Essais des programmes et Traitément des erreurs
Ce chapitre décrit les procédures d'essay des programmes de fonctionnement du CPM2A, les fonctions d'auto-diagnostic et le traitement des erreurs, pour identifier et corriger les erreurs du matériel et du logiciel qui peuvent se produit au cours du fonctionnement de l'API.
5-1 Contrôles initiaux du système et procédure d'essay des programmes 126
5-1-1 Contrôles initiaux du système 126
5-1-2 Précautions pour la mémoire flash 126
5-1-3 Procedure d'essai des programmes du CPM2A 127
5-2 Fonctions d'auto-diagnostic 127
5-2-1 Identification des erreurs 127
5-2-2 Erreurs definies par l'utilisateur 128
5-2-3 Erreurs non fatales 129
5-2-4 Erreurs fatales 130
5-2-5 Erreurs de communications 130
5-3 Erreurs de fonctionnement de la console de programmation 131
5-4 Erreurs de programmation 131
5-5 Organigrammes de dépannage 133
5-6 Inspections de maintenance 141
5-7 Remplacement de la batterie 142
5-1 Contrôles initiaux du système et procédure d'essay des programmes
5-1-1 Contrôles initiaux du système
Contrôler les point suivants après avoir installé et cable le CPM2A, mais avant d'effectuer un essai des programmes.
| Sujet | Points à contrôler |
| Alimentation et connexions entrée/sortinge | Le câblage est-il correct ?
Les bornes sont-elles bien serrées ?
Y a-t-il des courts-circuits entre les bornes serties ou les fils ?
Se reporter à 3-4 Câblage et connexions pour plus de détails. |
| Câbles de connexion | Les câbles sont-ils tous correctement connectés et bloqués ?
Se reporter à 3-4 Câblage et connexions pour plus de détails. |
| Etiquette de protection | L'étiquette de protection a-t-elle été enlevée ? |
Rem. 1. Toutjours vider la mémoire avant de commencer à programmerme le CPM2A. Bien qu'on ait vidé la mémoire avant d'expédier l'unité centrale, le contenu des zones DM, HR, AR et comptage peut changer pendant le transport. Se reporter au paragraphe 4-2-2 Effacement de la mémoire pour plus de détails sur la fonction Tout effacer.
- Se reporter au paragraphe 1-3-3 Mode opératione au démarrage pour déterminer dans quel mode le CPM2A va entre lors de la mise sous tension.
5-1-2 Précautions pour la mémoire flash
Prendre les précautions suivantes pour protégger la mémoire flash et assurer son fonctionnement correct.
1, 2, 3... 1. Si des changements sont faits dans la zone de mémoire morte DM (DM 6144 à DM 6599) ou celle d'installation de l'API (DM 6600 à DM 6655), le mode opératoire de l'API doit être changé pour écrire le nouveau contenu dans la mémoire flash. Si la batterie de sauvégarde est changée avant que les changements soient écrites dans la mémoire flash, ces changements seront perdus.
Ces changements peuvent être sauvégardés en commutant le CPM2A sur mode RUN (marche) ou MONITOR (surveillance) ou bien en coupant le CPM2A et en le remettant sous tension.
-
Si le contenu du programme, de la mémoire morte DM (DM 6144 à DM 6599) ou de l'installation de l'API (DM 6600 à DM 6655) a été changé, le traitement du démarrage prendra jusqu'à 1,200 ms de plus que d'habitude. Veiller à tener compte de ce retard initial s'il peut affecter les fonctions.
-
Si l'une des trois fonctions suivantes est effectuee en mode MONITOR ou RUN, la durée du cycle du CPM2A sera allongee de jusqu'à 1,200 ms et les interruptions seront neutralisées pendant que le programme ou l'installation de I'API sont écrasés.
-
Changements du programme par la fonction de correction en ligne
- Changements à la zone de mémoire morte DM (DM 6144 à DM 6599)
- Changements à l'installation de l'API (DM 6600 à DM 6655)
Une erreur "TEMPS DE LECTURE ECOULE" ne se produit pas pendant ces fonctions. Veiller à tener compte de ce retard dans les temps de réponse entrée/sortie du CPM2A en effectuant la correction en ligne.
5-1-3 Procedure d'essai des programmes du CPM2A
1, 2, 3... 1. Application de l'alimentation
a) Contrôler la tension d'alimentation et les connexions des bornes du CPM2A.
b) Contrôler la tension d'alimentation et les connexions des bornes des apparèils d'entrée/sorting.
c) Mettre l'alimentation sous tension et contrôle que levoyant "PWR" (alimentation)sallume.
d) Utiliser l'appareil de programmation pourmettre le CPM2A en mode PROGRAM.
2. Contrôle du cablage d'entrée/sortie
a) Le CPM2A étant en mode PROGRAM, contrôle le câblage de sortie en activant les bits de sortie par les fonctions de réglage force et de rétablissement force.
Se reporter à 4-2-24 Réglage et rétablissement forcés pour plus de détails.
b) Contrôler le cablage d'entrée par les voyants d'entrée du CPM2A ou les fonctions de surveillance d'un apparéil de programmation.
3. Essai des programmes
a) Utiliser un apparéil de programmation pourmettre le CPM2A en mode RUN ou MONITOR et contrôle que levoyant“RUN”sallume.
b) Contrôler la série des fonctions pour les réglages et rétablissements forcés, etc.
4. Débogage
Corriger toutes les erreurs de programmation qui sont détectées.
5. Sauvegarde du programme
a) Utiliser un apparéil de programmation pour écrire le programme sur une disquette de sauvégarde.
b) Imprimer une copie papier du programme au moyen d'une imprimante.
Rem. Se reporter au chapitre 4, Utilisation des appareils de programmation pour plus de détails sur le logiciel de support et les fonctions de la console de programmation.
5-2 Fonctions d'auto-diagnostic
Le CPM2A est équipé d'une quantité de fonctions d'auto-diagnostic pour aider à identifier et corriger les erreurs et réduire la durée d'inedisponibilité.
5-2-1 Identification des erreurs
Une erreur s'identifie par le message d'erreur affiché sur un apparéil de programmation, les drapeaux d'erreur dans les zones AR et SR, et la sortie de code d'erreur sur SR 253.
Erreurs fatales et non fatales
Les erreurs de l'API sont réparties en 2 catégories d'après leur gravité. L'état duvoyant ERR/ALM (allumé ou clignotant) indique quel type d'erreurs s'est produit.
ERR/ALM allumé (erreur fatale)
Les erreurs fatales sont des erreurs graves qui arrêtent le fonctionnement du CPM2A. Il y a deux façon de lancer le fonctionnement :
- Couper l'API et le remetre sous tension.
- Utiliser un apparéil de programmation pour commuter l'API en mode PROGRAM afin de dire et corriger l'erreur.
| ERR/ALM clignotant (erreur non fatale)
Les erreurs non fatales sont des erreurs moins graves qui n'arrêtent pas le fonctionnement du CPM2A. |
| Messages d'erreur | Quand une erreur est détectée, un message d'erreur correspondant est affché sur la console de programmation ou un autre apparéil de programmation connecté à l'API. |
| Drapeaux d'erreur | Quand une erreur du matériel est détectée, le drapeau d'erreur correspondant dans la zone AR ou SR apparait. |
| Codes d'erreur | Quand une erreur est détectée, un code hexadécimal à 2 chiffres spécifique est donné sur SR 25300 à SR 25307. Le code d'erreur et le moment de son apparition sont disponibles aussi à la zone d'inscription des erreurs. |
! AVERTISSEMENT
L'API va couper toutes les sorties si sa fonction d'auto-diagnostic déetecte une erreur quelconque ou si une instruction d'alarme de défaut grave (FALS) est exécutée. Des mesures de sécurité externes doivent être prises pour assurer la sécurité dans le système. Ne pas prendre les mesures de sécurité adéquates pourrait provoquer des accidents graves.
5-2-2 Erreurs définies par l'utilisateur
| Trois instructions peuvent être utilisées pour définir les erreurs ou les messages. FAL(06) cause une erreur non fatale, FAL(07) cause une erreur fatale et MSG(46) envoie un message à la console de programmation ou à l'ordinateur micro-ordinateur connecté à l'API. |
| ALARME DE DEFAULT - FALS(06) | FAL(06) est une instruction qui cause une erreur non fatale. Si une instruction FAL(06) est exécutée : |
| 1, 2, 3... |
| 1. Levoyant ERR/ALM sur l'unité centrale clignotera. L'API continuea à fonctionner. |
| 2. L'instruction FAL à 2 chiffres BCD (01 à 99) sera écrite dans SR 25300 à SR 25307. |
| Les nombres FAL peuvent être régliés arbitraiment pour indiquer des conditions particulières, mais le même nombre ne peut pas être utilisé à la fois comme nombre FAL et comme nombre FALS. |
| Pour supprimer une erreur FAL, corriger la cause de l'erreur et puis exécuter FAL 00 ou utiliser un apparéil de programmation pour supprimer l'erreur. |
| ALARME DE DEFAULT GRAVE - FALS(07) | FALS(07) est une instruction qui cause une erreur fatale. Si une instruction FALS(07) est exécutée : |
| 1, 2, 3... |
| 1. L'exécution du programme sera arrêtée et toutes les sorties seront coupées. |
| 2. Levoyant ERR/ALM sur l'unité centrale sera allumé. |
| 3. L'instruction FALS à 2 chiffres BCD (01 à 99) sera écrite dans SR 25300 à SR 25307. |
| Les nombres FALS peuvent être régliés arbitraiment pour indiquer des conditions particulières, mais le même nombre ne peut pas être utilisé à la fois comme nombre FAL et comme nombre FALS. |
| Pour supprimer une erreur FALS, utiliser un apparéil de programmation pour commuter l'API en mode PROGRAM, corriger la cause de l'erreur et puis supprimer l'erreur. |
| MESSAGE - MSG(46) | MSG(46) est utilisé pour afficher un message sur un apparéil de programmation connecté au CPM2A. Le message, qui peut avoir jusqu'à 16 caractères de longueur, est affché si l'état d'exécution de l'instruction est activé. |
5-2-3 Erreurs non fatales
Le fonctionnement de l'API et l'exécution du programme continues après qu'une ou plusieurs de ces erreurs se soient produites. Bien que le fonctionnement de l'API continue, corriger la cause de l'erreur et supprimer l'erreur aussi vite que possible.
Si l'une de ces erreurs se produit, les témoins POWER (alimentation) et RUN (marche) resteront allumés et levoyant ERR/ALM clignotera.
| Message | N° de FAL | Signification et réponse appropriée |
| SYS FAIL FAL** (** est 01 à 99 ou 9B.) | 01 à 99 | Une instruction FAL(06) a été exécutée dans le programme. Contrôler le nombre FAL pour déterminer les conditions qui provoquent l'exécution, corriger la cause et supprimer l'erreur. |
| 9B | Une erreur a été détectée au démarrage de l'API. Contrôler les drapeaux AR 1300 à AR 1302 et corriger suivant les instructions.AR 1300 activé : un réglage incorrect a été détecté au démarrage de l'API (DM 6600 à DM 6614) quand l'alimentation a été appliquée. Corriger les régles en mode PROGRAM et remettre l'alimentation sous tension.AR 1301 activé : un réglage incorrect a été détecté au démarrage de l'API (DM 6615 à DM 6644) quand on l'a mis en mode RUN ou MONITOR. Corriger les régles en mode PROGRAM et remettre en mode RUN ou MONITOR.AR 1302 activé : un réglage incorrect a été détecté au démarrage de l'API (DM 6645 à DM 6655). Corriger les régles et supprimer l'erreur. |
| SCAN TIME OVER | F8 | La durée du cycle a dépassé 100 ms. (SR 25309 sera activé).Ceci indique que la durée de cycle du programme est plus longue que ce qui est recommendé. Réduire la durée du cycle si c'est possible. (Le CPM2A peut être régle de façon que cette erreur ne soit pas détectée). |
| Erreur de batterie (pas de message) | F7 | Si la tension de la batterie de sauvegarde CPM2A-BAT01 est au-dessous du niveau minimum, levoyant ERR/ALM clignotera et SR 25308 sera activé.Remplacer la batterie. (Se reporter au paragraph 5-7 Remplacement de la batterie pour plus de détails). |
5-2-4 Erreurs fatales
Le fonctionnement de l'API et l'exécution du programme s'arrêtent et toutes les sorties de l'API sont désactivées si l'une quelconque de ces erreurs se produit. Le fonctionnement du CPM2A ne pourrait pas être redémarré avant que l'API ait été coupé et rallumé ou bien qu'un apparéil de programmation soit utilisé pour commuter l'API en mode PROGRAM et supprimer l'erreur fatale.
Tous les voyants de l'unité centrale seront éteints lors de l'erreur d'interruption de l'alimentation. Pour toutes les autres erreurs de fonctionnement fatales, les voyants POWER (alimentation) et ERR/ALM (erreur/alarme) seront allumés. Levoyant RUN (marche) sera éteint.
| Message | N° de FAL | Signification et réponse appropriée |
| Interruption de l'alimentation (pas de message) | Aucun | L'alimentation a été interrompue pendant plus de 10 ms (2 ms pour alimentations de type continu). Contrôler la tension d'alimentation et les lignes électriques. Essayer de l'alimenter de nouveau. |
| MEMORY ERR | F1 | AR 1308 activé : il y a une adresse de bit ou de mot non existante dans le programme d'utilisateur. Contrôler le programme et corriger les erreurs. |
| AR 1309 activé : une erreur s'est produit dans la mémoire flash. Remplacer l'unité centrale. |
| AR 1310 activé : une erreur sur le total de contrôle s'est produit dans la mémoire morte DM (DM 6144 à DM 6599). Contrôler et corriger les réglages dans la zone de mémoire morte DM. |
| AR 1311 activé : une erreur sur le total de contrôle s'est produit à l'installation de l'API. Initiliser l'installation de l'API et introduire de nouveau les réglages. |
| AR 1312 activé : une erreur sur le total de contrôle s'est produit dans le programme. Contrôler le programme et corriger toutes erreurs détectées. |
| AR 1313 activé : une erreur sur le total de contrôle s'est produit dans les données des instructions d'extension et tous les codes de fonctions ont été mis à leur valeur par défaut. Rétablit les instructions d'extension. |
| AR 1314 activé : des données n ont pas été maintainues dans une zone spécifique pour le maintien. Supprimer l'erreur, contrôler les données dans les zones spécifique pour le maintien et essayer de nouveau. |
| NO END INST | F0 | END(01) n'est pas écrit dans le programme. Ecrire END(01) à la fin du programme. |
| I/O BUS ERR | C0 | Une erreur s'est produit pendant le transfert de données entre l'unité centrale et l'unité entrée/sorting d'extension. Contrôler le cable de connexion de l'unité entrée/sorting d'extension. |
| I/O UNIT OVER | E1 | Trop d'unités d'extension ont été connectées. Contrôler la configuration des unités d'extension. |
| SYS FAIL FALS** (**) est 01 à 99 ou 9F.) | 01 à 99 | Une instruction FALS(07) a été exécutée dans le programme. Contrôler le numéro de FALS pour déterminer les conditions qui ont causé l'exécution, corriger la cause et supprimer l'erreur. |
| 9F | La durée du cycle a dépassé le réglage de la durée de cycle (d'observation) maximum (DM 6618). Contrôler la durée du cycle et ajuster le réglage de la durée de cycle maximum si nécessaire. |
5-2-5 Erreurs de communications
Levoyant COMM s'éteindra et AR 0812 s'allume si une erreur se produit dans les communications par le port de périphérique, ou c'est AR 0804 qui s'allume si une erreur se produit dans les communications par le port RS-232C. Contrôler les cables de connexion et redémarrer.
Aucun message ou codes d'erreur ne sont produits par cette erreur et levoyant ERR/ALM n'est pas affecté.
5-3 Erreurs de fonctionnement de la console de programmation
Les messages d'erreurs suivants peuvent apparaître quand des fonctions sont effectuées sur la console de programmation. Corriger l'erreur comme indiqué et continuer la fonction.
| Message | Signification et réponse appropriée |
| REPL ROM | Une tentative a été faite d'écrite dans une mémoire protégée en écriture. Mettre les bits 00 à 03 de DM 6602 à "0". |
| PROG OVER | L'instruction à la première adresse en mémoire n'est pas NOP(00). Effacer toutes les instructions inutilles après END(01). |
| ADDR OVER | Une adresse a été mise, qui est supérieure à la plus haute adresse de mémoire dans la mémoire de programme. Introduire une adresse plus petite. |
| SETDATA ERR | FALS 00 a été introduite et "00" ne peut pas être introduit. Réintroduire les données. |
| I/O NO. ERR | Une adresse de zone de données a été désignée, qui dépasse la limite de la zone de données, par exemple une adresse est trop grande. Confirmer les conditions pour l'instruction et réintroduire l'adresse. |
Rem. Se reporter au guide d'installation du logiciel de support pour les détails sur les erreurs qui peuvent apparaître lors de l'exploitation du logiciel de support SSS ou SYSMAC-CPT.
5-4 Erreurs de programmation
Ces erreurs dans la syntaxe du programme sont détectées si le programme est contrôle en utilisant la fonction Contrôle du programme.
Il existe trois niveaux de contrôle du programme. Le niveau désiré doit être désigné pour indiquer le type d'erreurs qui doit être détecté. Le tableau suivant fournit les types d'erreur, les affichages et les explications de toutes les erreurs de syntaxe. Contrôler les niveaux 0 pour les erreurs de types A, B et C; contrôler le niveau 1 pour les erreurs de types A et B; et contrôler le niveau 2 pour les erreurs de type A seulement.
| Type | Message | Signification et réponse appropriée |
| A | ????? | Le programme a été endommagé, créé un code de fonction qui n'este pas. Réintroduire le programme. |
| CIRCUIT ERR | Le nombre d'instructions LD (LD ou LD NOT) ne correspond pas au nombre d'instructions du bloc logique (OR LD ou AND LD). Contrôler le programme. |
| OPERAND ERR | Une constante saisie pour l'instruction ne se trouvess dans les valeurs définies. Changer la constante de sorte qu'elle se trouvess dans la gamme appropriée. |
| NO END INSTR | Il n'y a pas de END(01) dans le programme. Ecrire END(01) à la fin du programme. |
| LOCN ERR | Une instruction est à la mauvaise place dans le programme. Contrôler les conditions pour les instructions et corriger le programme. |
| JME UNDEFD | Une instruction JME(05) manque pour une instruction JMP(04). Corriger le numéro de branchement ou insérer l'instruction JME(05) ajusté. |
| DUPL | Le même numéro de branchement ou de sous-programme a été utilisé deux fois. Corriger le programme de façon que le même numéro soit utilisé une fois pour chacun. |
| SBN UNDEFD | Un SBN(92) n'a pas été programmé avec le même numéro de sous-programme qu'une instruction SBS(91) dans le programme. Corriger le programme. |
| STEP ERR | STEP(08) avec un numéro de chapitre et STEP(08) sans numéro de chapitre ont été utilisés de façon incorrecte. Contrôler les conditions de programmation de STEP(08) et corriger le programme. |
| B | IL-ILC ERR | IL(02) et ILC(03) ne sont pas utilisés en paires. Vérifier le programme avant de le lancer. |
| JMP-JME ERR | JMP(04) et JME(05) ne sont pas utilisés en paires. Avant de continuer, s'assurer que le programme est écrit comme on le désire. |
| SBN-RET ERR | RET(93) n'a pas été convenablement utilisé ou bien la relation entre SBN(92) et RET(93) n'est pas correcte. Corriger le programme. |
| C | COIL DUPL | Le même bit est contrôle (c'est-à-dire activé et/ou désactivé) par plus d'une instruction (par exemple OUT, OUT NOT, DIFU(13), DIFD(14), KEEP(11), SFT(10)). Cette erreur survient lorsque le même nombre est utilisé pour les instructions du temporisateur et du compteur. Bien que ce soit autorisé pour certaines instructions, contrôler les conditions des instructions pour confirmer que le programme est correct ou réécrit le programme de façon que chaque bit soit contrôle par une instruction seulement. |
| JMP UNDEFD | JME(05) a été utilisé sans JMP(04) avec le même numéro de branchement. Ajouter un JMP(04) avec le même numéro ou supprimer le JME(05) qui n'est pas utilisé. |
| SBS UNDEFD | Il existe un sous-programme qui n'est pas appelé par SBS(91). Programmer un appel de sous-programme à l'endroit convenable, ou supprimer le sous-programme s'il n'est pas nécessaire. |
5-5 Organigrammes de dépannage
Utiliser les organigrammes suivants pour dépanner les erreurs qui se produit au cours du fonctionnement.
Contrôle principal
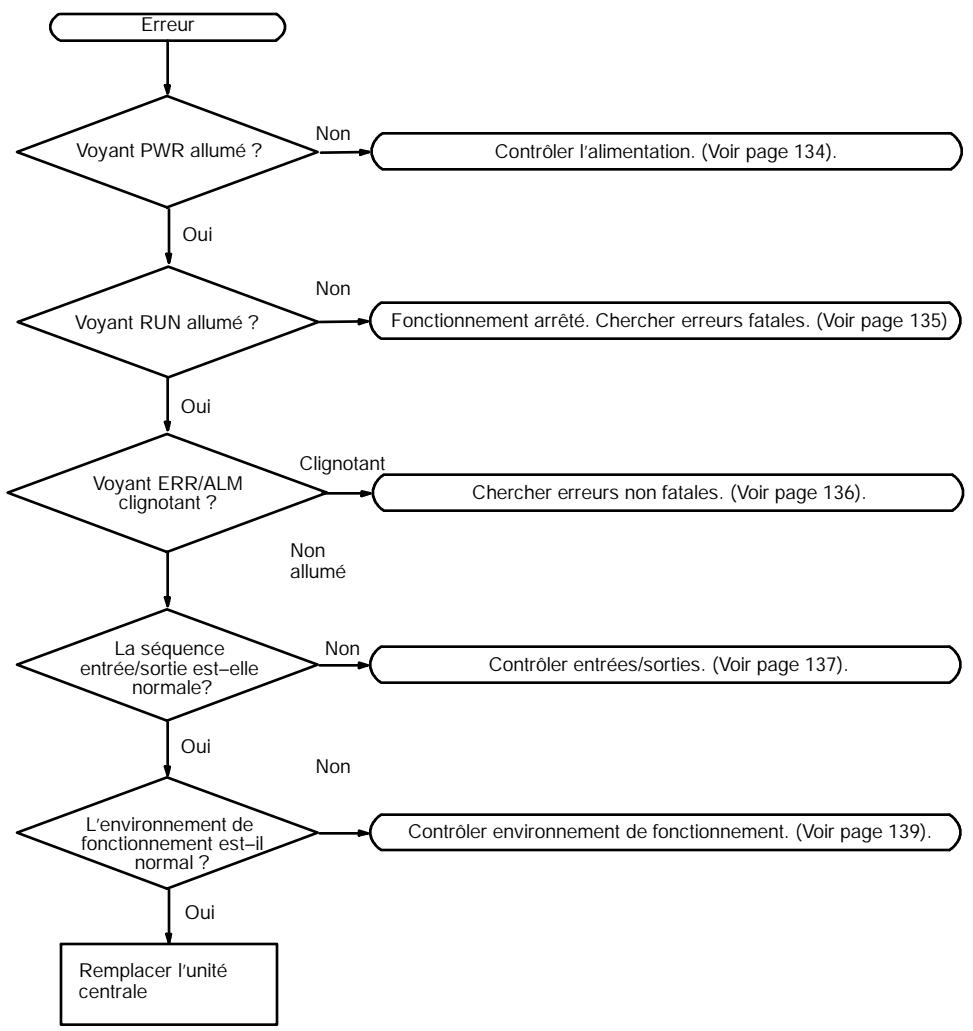
Contrôle de l'alimentation
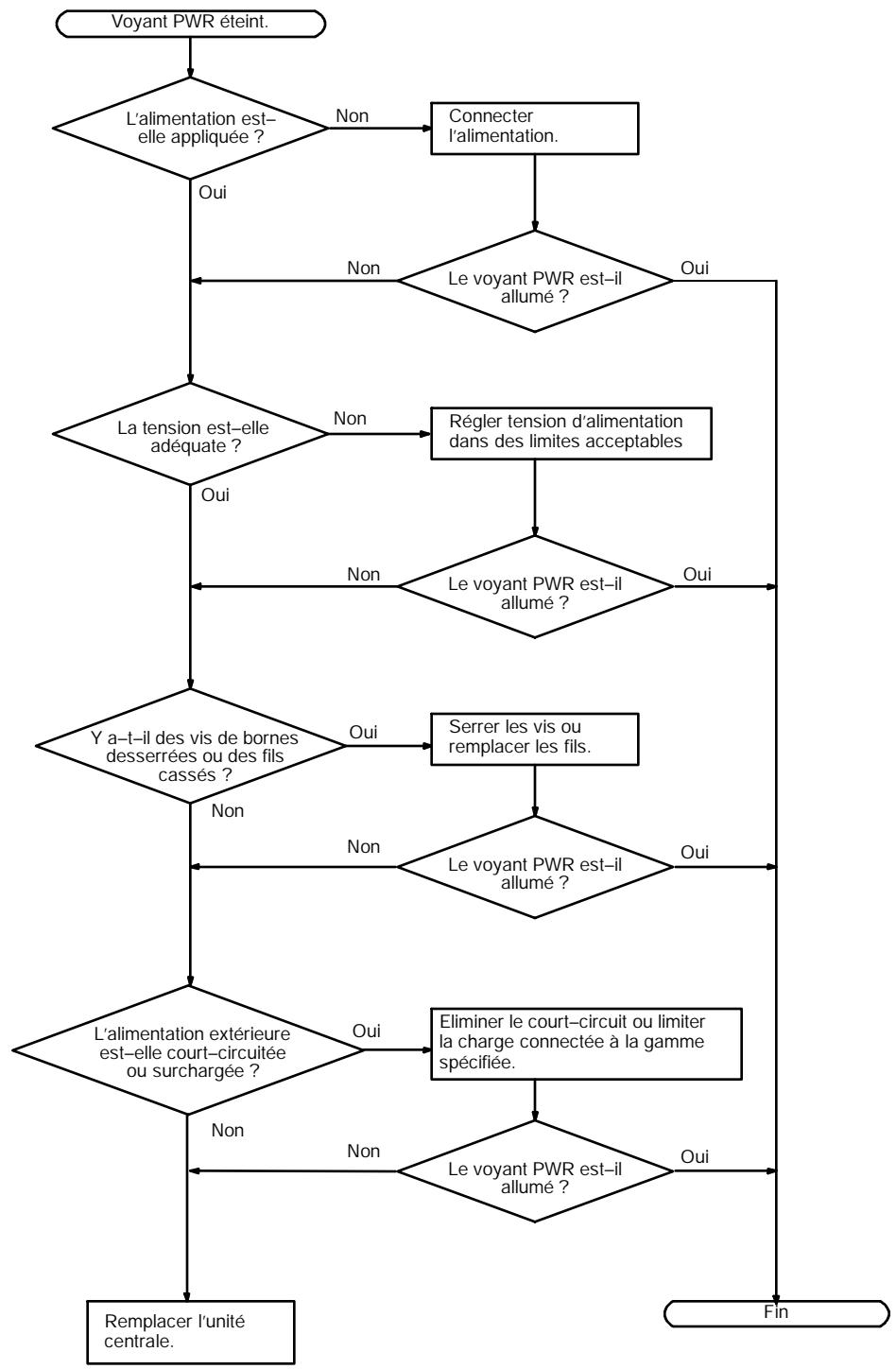
Contrôle d'erreur fatale
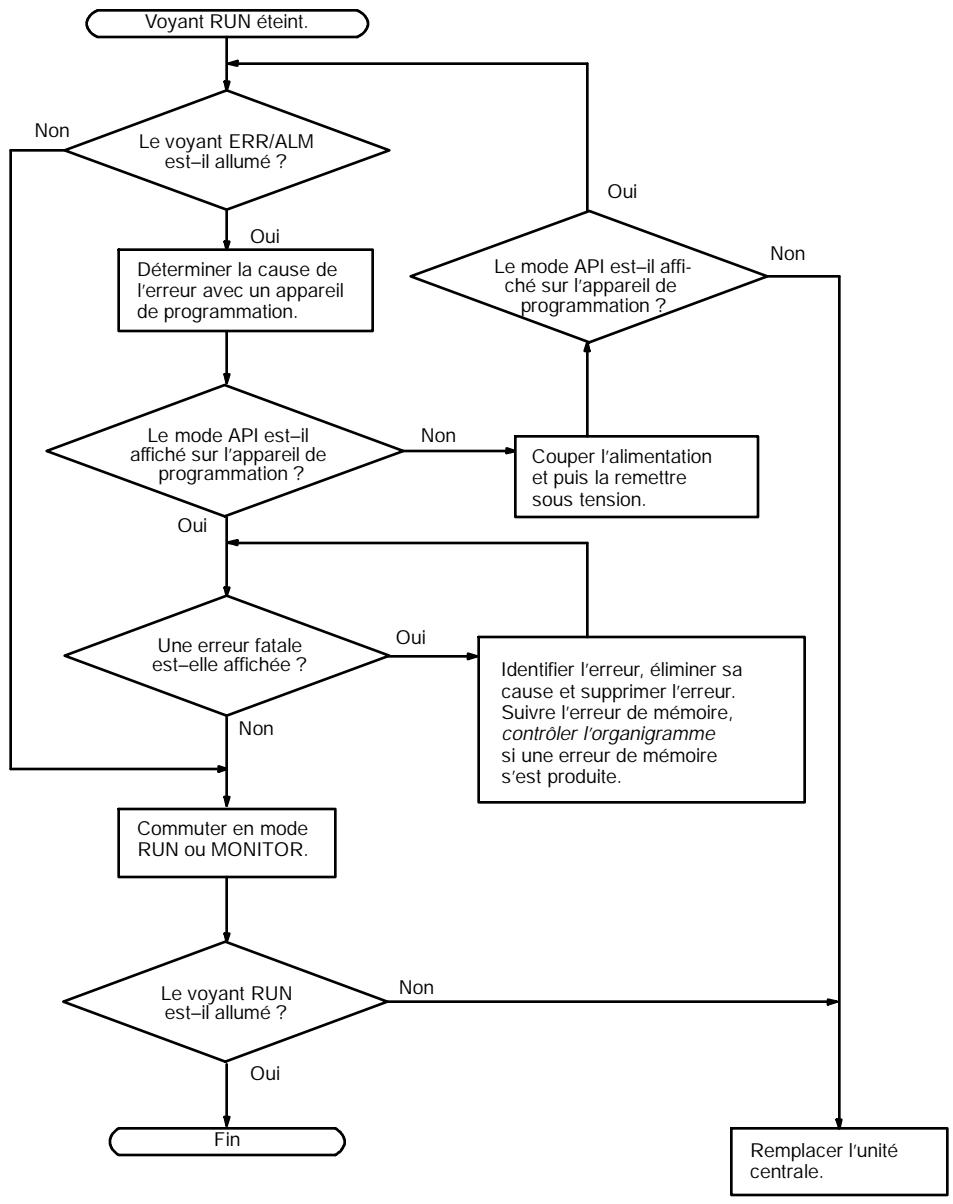
Contrôle d'erreur non fatale
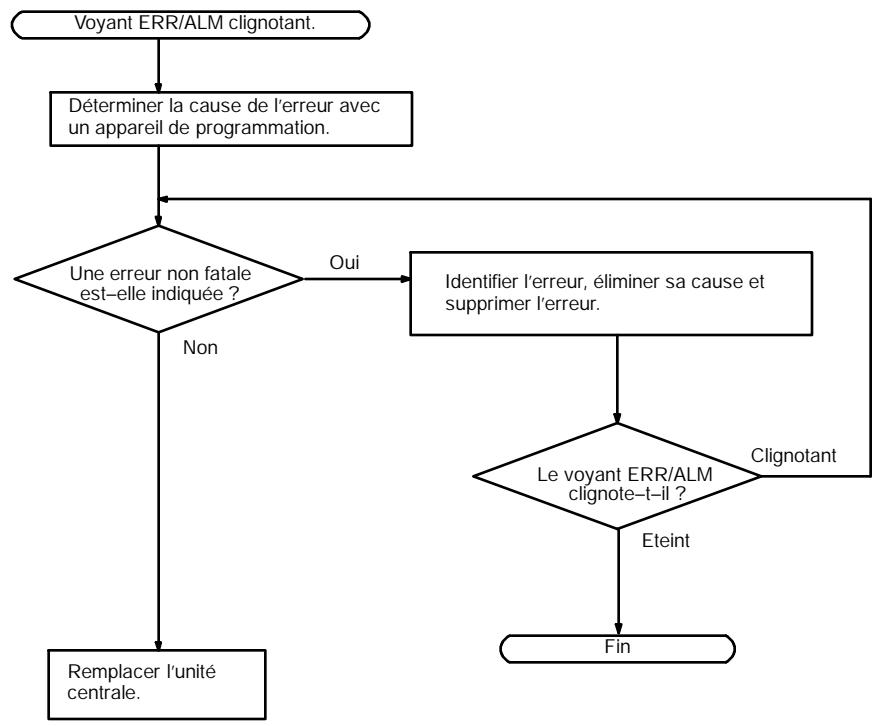
Contrôle d'entrée/sorting
L'organigramme du contrôle d'entrée/sortinge est basé sur la chapitre suivant du schéma en échelle.
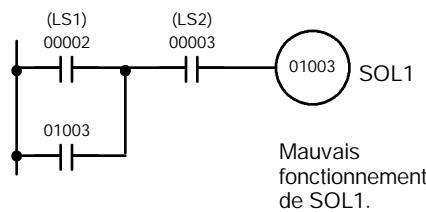
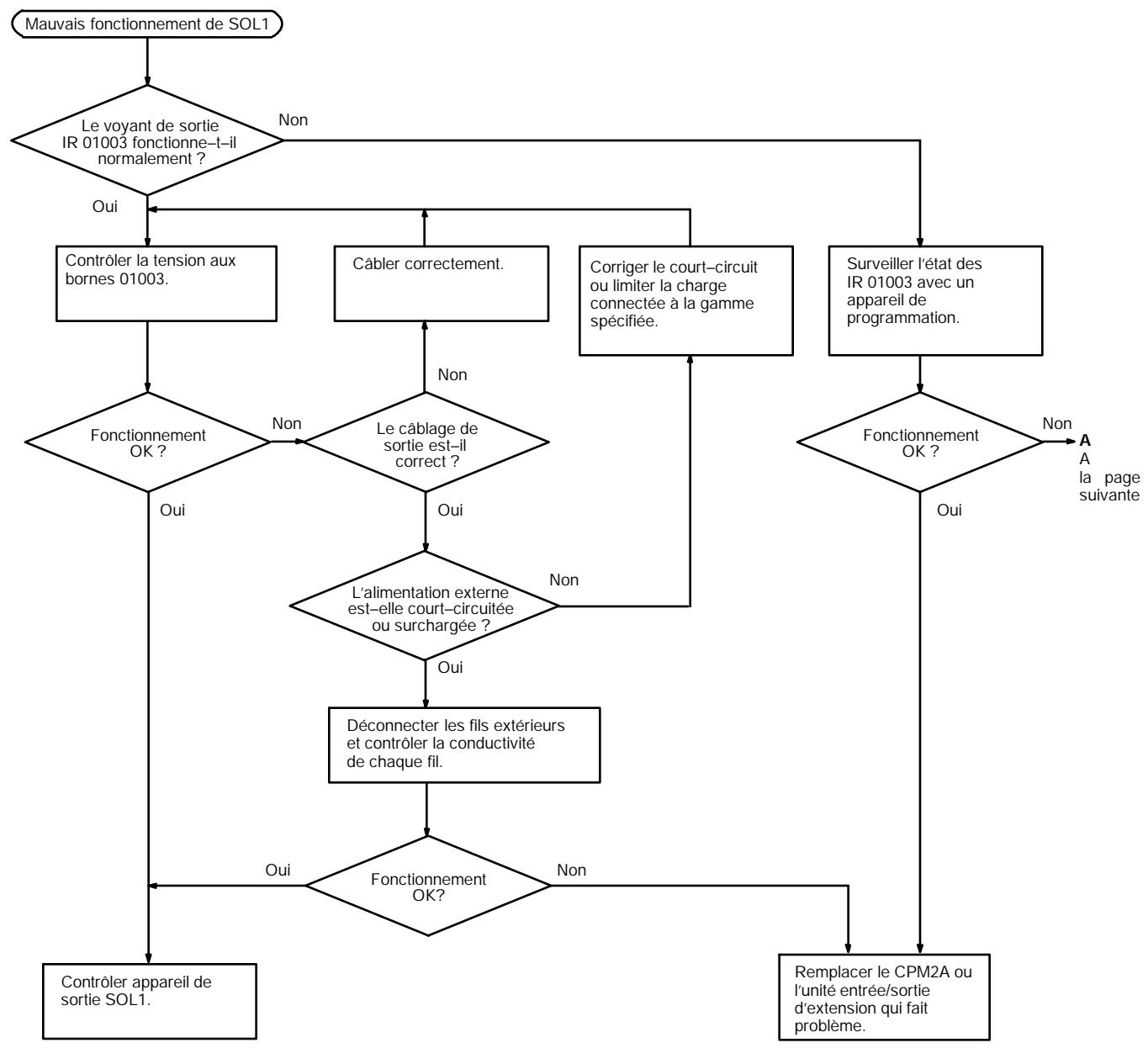
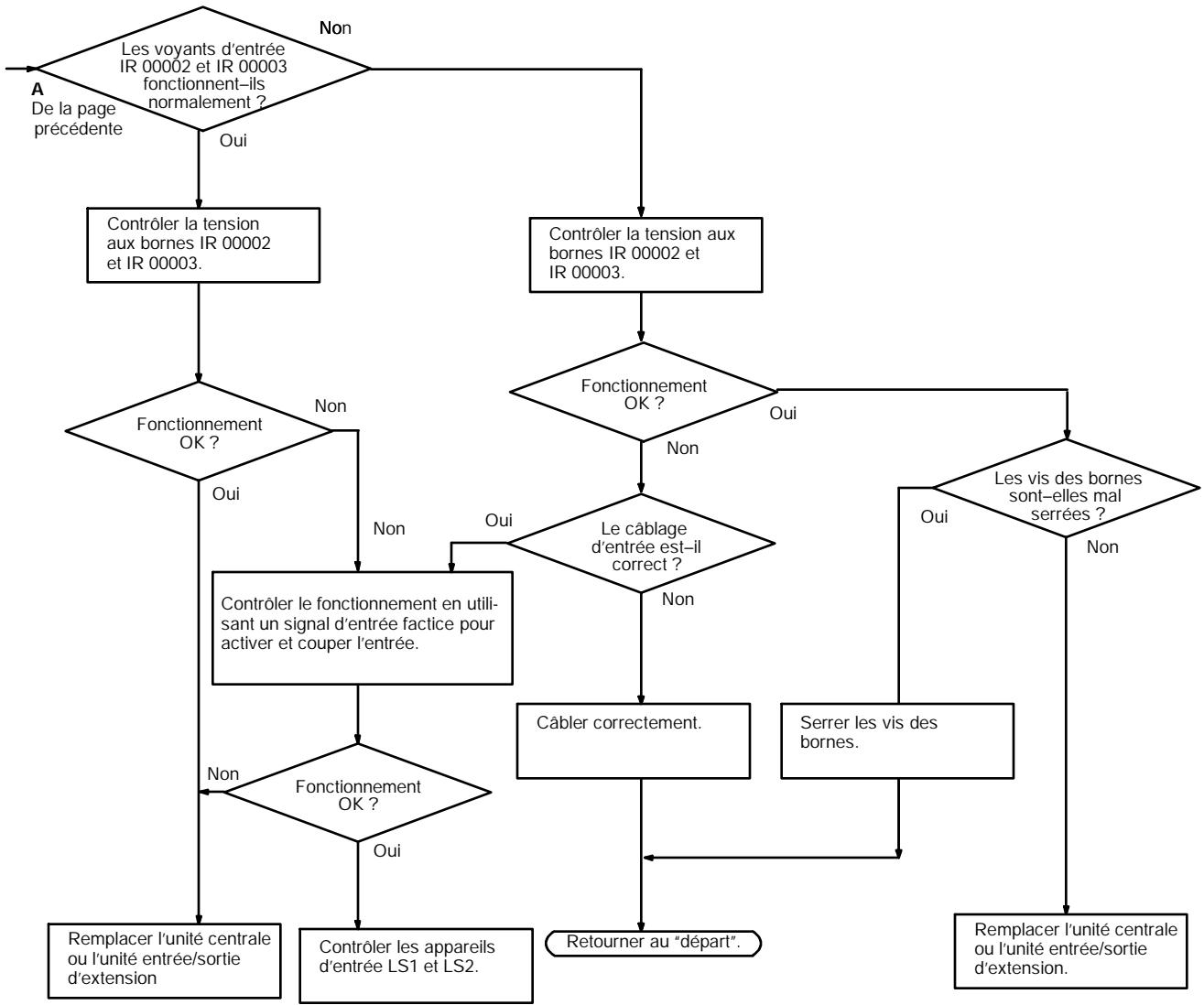
Contrôle des conditions d'environnement
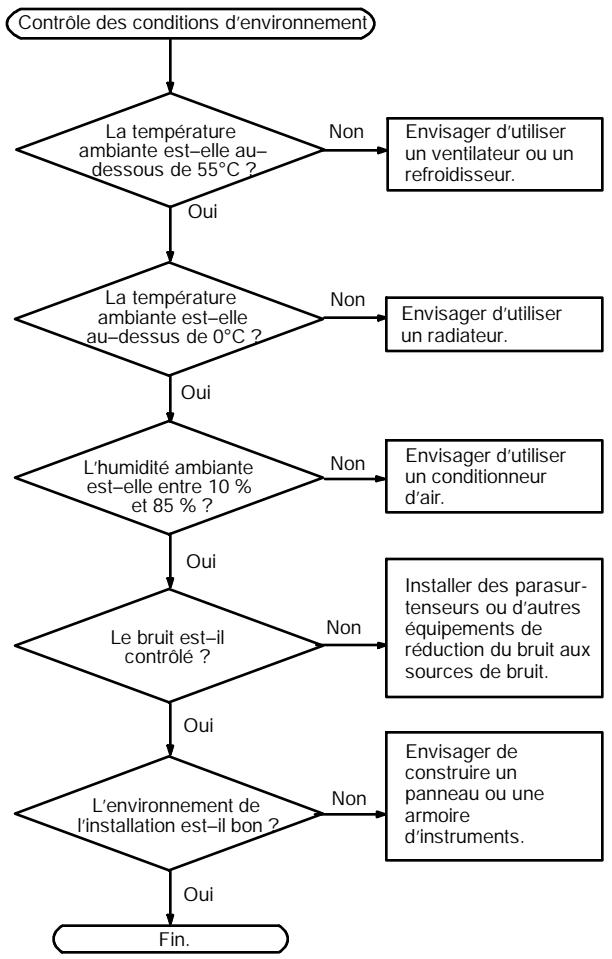
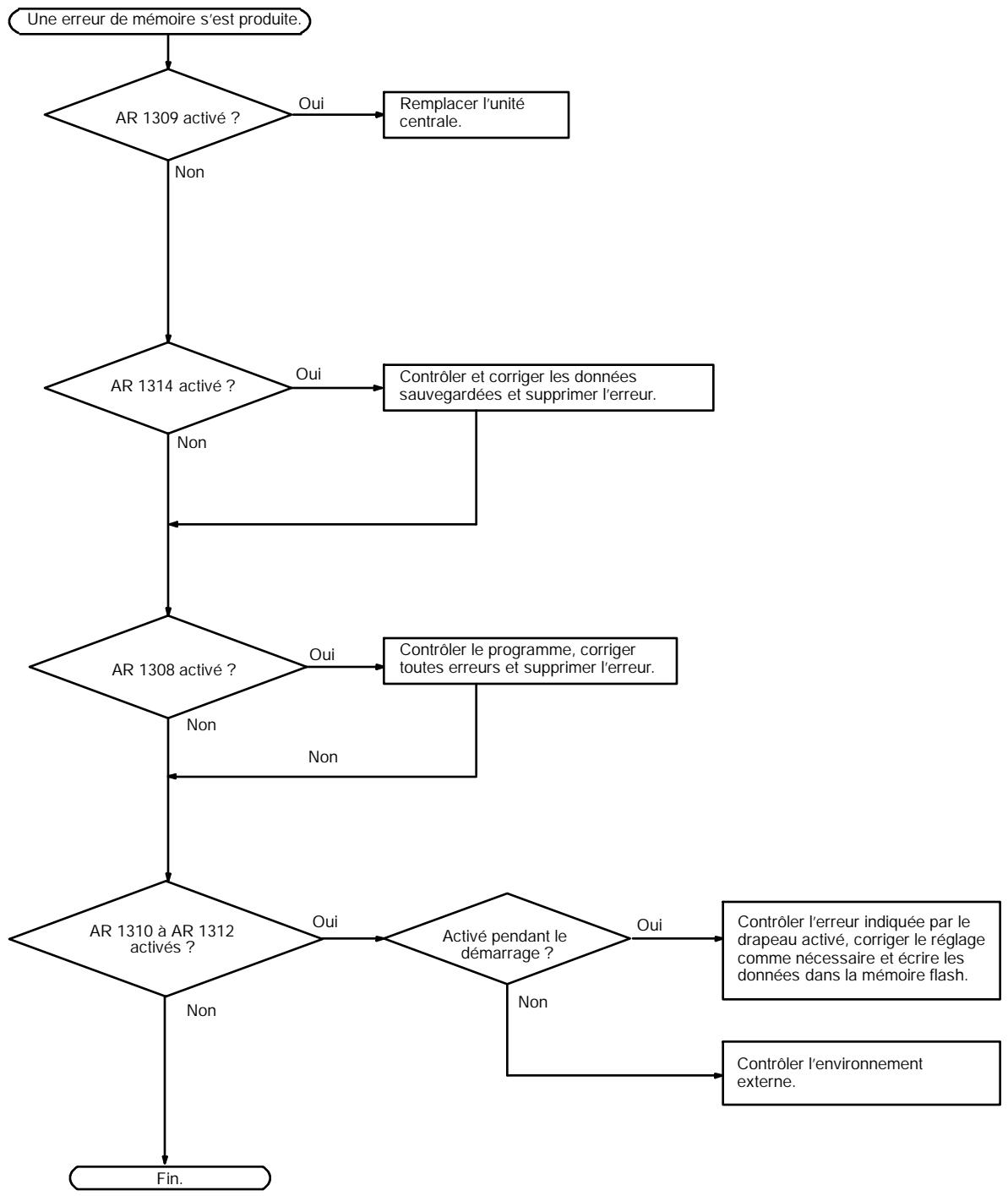
Contrôle d'erreur en mémoire
5-6 Inspections de maintenance
Pour que le système SYSMAC fonctionne dans les conditions optimums, ne pas manquer d'effectuer des inspections quotidiennes ou périodiques.
Sujets à inspector
Les principaux composants d'un système SYSMAC sont des semiconducteurs, et il contient peu de composants à durée de vie limite. Des conditions d'environnement médiocres peuvent conduire cependant à une dépréciation des composants électriques, ce qui fait qu'une maintenance régulière est nécessaire.
La période normale pour les contrôle de maintenance est de 6 mois à 1 an, mais des contrôle plus fréquents sont nécessaires si l'API fonctionne dans des conditions plus rudes.
Si les critères ne sont pas respectés, ajuster les paramètres dans les plages spécifiquees.
| Sujets à inspector | Détails | Critères | Remarques |
| Alimentation | Déterminer si la fluctuation de la tension aux bornes de l'alimentation est dans la limite des specifications. | Dans la gamme de variation de la tension (voir Rem.). | Testeur |
| Conditions d'environnement | La température ambiente à l'intérieur du panneau est-elle appropriée? | 0 à 55_C | Thermomètre |
| L'humidité ambiente à l'intérieur du panneau est-elle appropriée? | 10 % à 85 % RH sans condensation | Hygromètre |
| A-t-il accumulé de la saleté ou des poussières? | Aucun | Inspection visuelle |
| Alimentation entrée/sorting | La fluctuation de tension mesurée aux bornes d'entrée/sorting est-elle dans la gamme standard? | Chaque borne d'entrée/sorting doit être coforme aux specifications | Testeur |
| Etat de l'installation | Toutes les unités sont-elles parfaitement installées? | Rien n'est desserré | Tournevis cruciforme |
| Tous les cables de connexion et connecteurs sont-ils complètement insérés et bloqués? | Rien n'est desserré | Inspection visuelle |
| Y a-t-il des vis du câblage externe qui soient desserrées? | Rien n'est desserré | Tournevis cruciforme |
| Y a-t-il des cables externes qui soient effilés? | Pas d'anomalie externe | Inspection visuelle |
| Durée de service du produit | Contact relais de sortie | Au point de vue électrique :Charge résistive :300.000 opérationsCharge inductive :100.000 opérationsAu point de vue mécanique :10.000.000 opérations | --- |
| Batterie (CPM2A-BAT01) | 5 ans | --- |
Rem. Plage de variation de la tension d'alimentation.
| Alimentation | Gamme de fluctuation de tension autorisée |
| 100 à 240 V c.a. | 85 à 264 V c.a. |
| 24 V c.c. | 20,4 à 26,4 V c.c. |
Outils nécessaires
Outils standard (necessaires)
- Tournevis (cruciforme et à lame plate)
- Testeur de tension ou voltmetre digital
- Alcool industriel et chiffon de coton
Appareils de mesure (peuvent être nécessaires)
Synchoscope
- Oscilloscope cathodique
Thermomètre, hygromètre
Rem. Ne pas essayer de démonter, réparer ou modifier l'API de chaque façon que ce soit.
5-7 Remplacement de la batterie
Si l'alimentation n'a pas ete fourie a l'API pendant un certain temps, mettre l'alimentation en service pendant au moins 5 minutes avant de remplacer la batterie.
Couper l'alimentation de l'API avant de remplaçer la batterie.
Utiliser la procédure ci-dessous lors du remplacement de la batterie. Cette procédure doit être terminée en 5 minutes.
1, 2, 3... 1. Enlever le couvercle de la batterie avec un tournevis à lame plate.
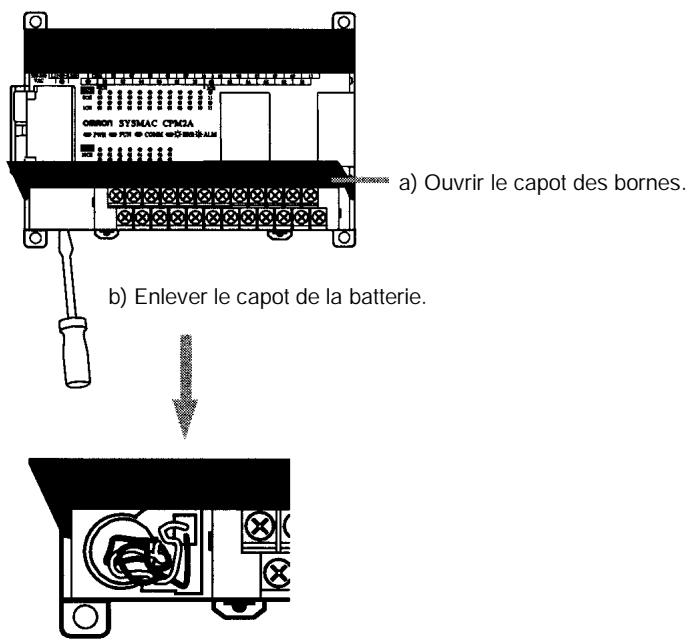
- Enlever la batterie.
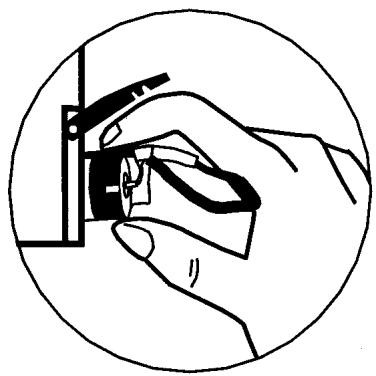
- Déconnecter le connecteur de la batterie.
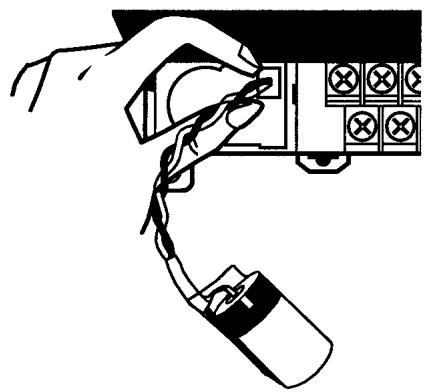
- Controller le connecteur de la batterie de remplacement.
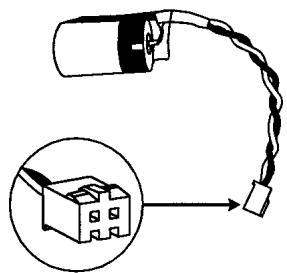
- Contrôler l'alignement de la languette du connecteur et enforcer le connecteur complètement.
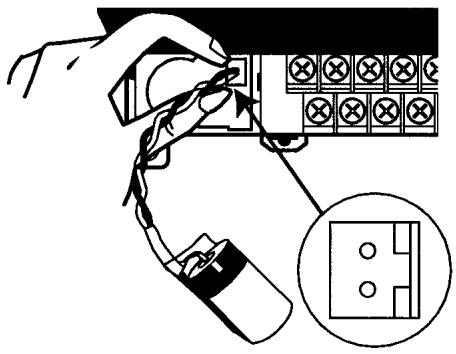
- Insérer la batterie dans le compartment, en s'assurant que le fil de la batterie fait face au connecteur du côte droit à l'intérieur du compartment.
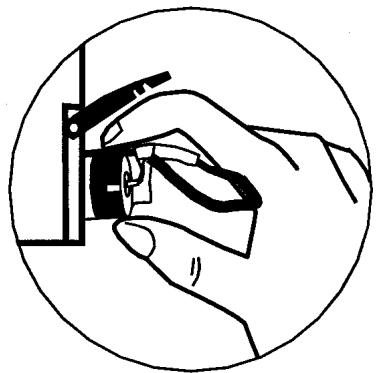
- Fermer le couvercle de la batterie.
CHAPTER 6
Unité d'extension de mémoire
Ce chapitre décrit l'utilisation de l'unité d'extension de mémoire CPM1-EMU01-V1. Suivre les conseils et procédures d'installation pour une'utilisation correcte de l'unité.
6-1 Présentation 146
6-1-1 Zones mémoire 146
6-1-2 Conseils d'utilisation 146
6-2 Caracteristiques techniques et nomenclature 147
6-2-1 Caracteristiques techniques 147
6-2-2 Nomenclature 148
6-3 Manipulation 149
6-3-1 Montage/demontage de l'EEPROM 149
6-3-2 Connexions a un API 150
6-3-3 Chargement de programmes 151
6-3-4 Dechargement de programmes 153
6-1 Présentation
L'unité d'extension de mémoire CPM1-EMU01-V1 est un chargeur de programme pour API de petite taille ou micro API. L'utilisation du CPM1-EMU01-V1 est possible pour le transfert simple sur site de programmes utilisateurs et de mémoire de données entre des API.
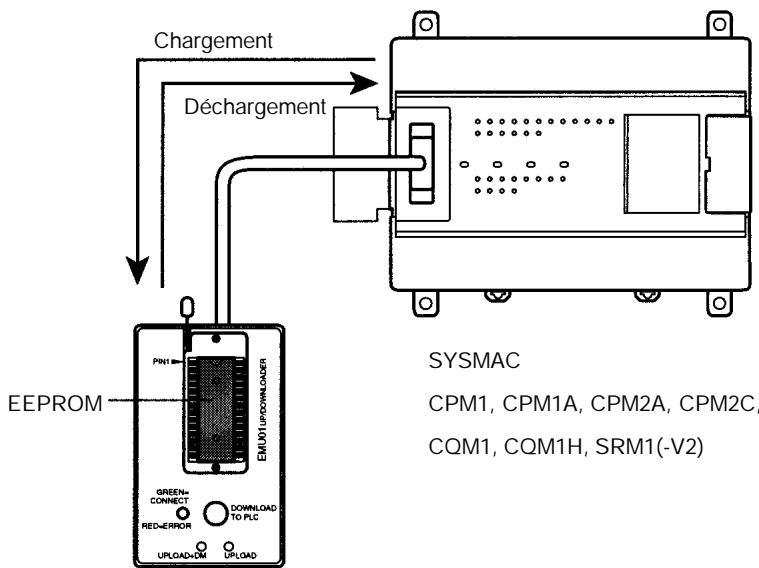
Unité d'extension de mémoire
Rem. Dans le bouton "DOWNLOAD TO PLC", "PLC" indique les API (Automates Programmables).
6-1-1 Zones mémoire
Les zones mémoire chargées ou déchargées varient avec le bouton utilisé comme montré dans le tableau suivant.
| Bouton | UPLOAD + DM (chargement+DM) | UPLOAD (chargement) | DOWNLOAD TO PLC (déchargement vers PLC) |
| Programme à contact et instructions d'extension | Lit de l'API vers l'EEPROM. | Lit de l'API vers l'EEPROM. | Tout le contenu de l'EEPROM écrit dans l'API. |
| DM 6144 à 6655 | Non affecté. |
Rem. Pour plus de détails sur la taille de programme, la zone DM et la validité des instructions d'extension, se réfééré au manuel de l'API concerné.
6-1-2 Conseils d'utilisation
- Ne pas essayer d'utiliser le CPM1-EMU01-V1 pour une autre application que celles décrites ici. Une utilisation incorrecte peut provoquer un dysfonctionnement.
- Ne pas essayer de charger ou décharger des données entre différents types d'API. Cela pourrait provoquer un dysfonctionnement.
- Ne pas décharger lorsque l'API est en mode RUN ou MONITOR. Si un déchargement est exécuté pendant que l'API est en marche, il basculera automatiquement en mode PROGRAM et les opérations seront stoppées.
-
Ne pas essayer de démonter, réparer ou modifier le CPM1-EMU01-V1. Tout tentative de ce genre peut provoquer un dysfonctionnement, la dégradation du produit (brûlage) ou un choc électrique.
-
Àprous un déchéargement, s'assurer de confirmer les informations du programme utilisé, des données et des instructions d'extension. Ne pas confirmer ces informations peut provoquer un fonctionnement défailleant.
- Avant de toucher l'EEPROM ou le CPM1-EMU01-V1, d'abord toucher un objet metallique relié à la masse pour décharger toute accumulation d'électricité statique. Oimettre ce déchargement peut provoquer un dysfonctionnement ou des dommages.
6-2 Caractéristiques techniques et nomenclature
6-2-1 Caractéristiques techniques
| Caracteristique |
| API supportées | CPM1, CPM1A, CPM2A, CPM2C, SRM1 (-V2), CQM1, CQM1H |
| Zones mémoire lecture/écriture | Programme utilisé: 15,2 Kmots max. Mémoire de données: DM 6144 à DM 6655 (DM à lecture seule et configuration de l'API) Instructions d'extension: 18 instructions |
| Connecteur | Connecteur compatible avec les API CPM1, CPM1A, CPM2A, SRM1 (-V2) et CQM1. Pour les API CPM2C et CQM1H, connecter via un cable de connexion CS1W-CN114 ou CPM2C-CN111. |
| Paramètres de communications | 1 bit de départ, 7 bits de données, parité paire, 2 bits d'arrêt, 9 .600 bps |
| EEPROM (Voir Rem. 1.) | EEPROM 256 Kbit ATMEL: AT28C256 |
| Consommation | 129 mA max. |
| Dimensions | Corps principal (ne comptenant pas les câbles et les connecteurs): 57 × 92 × 38 mm (L × H × P) |
| Poids | 200 g max. (sans l'EEPROM) |
Rem. 1. L'EEPROM doit être acheté séparément.
- Pour les caractéristiques générales, se référer au manuel de l'API concerne.
6-2-2 Nomenclature
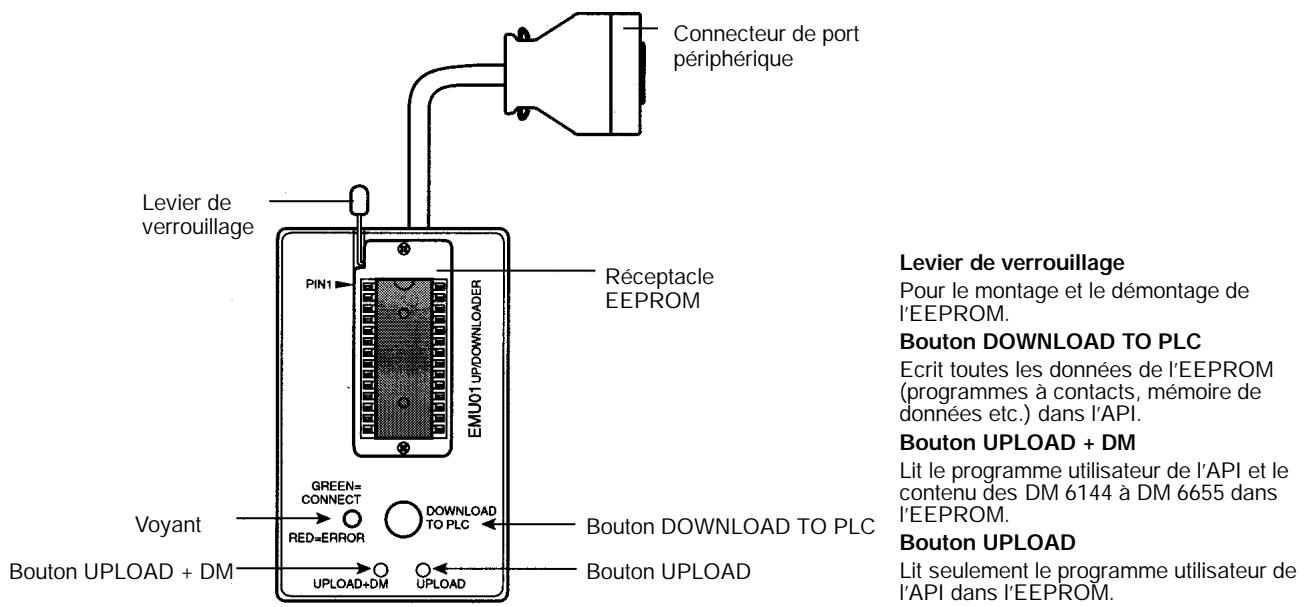
Rem. Dans le bouton "DOWNLOAD TO PLC", "PLC" indique les API (Automates Programmables).
Voyant LED
| CONNECT (vert) | ERR (rouge) | Signification |
| OFF | OFF | Non connecté à un API (alimentation coupée). |
| ON | OFF | Connecté à un API reconnu. |
| Clignotant | OFF | Chargement/déchéancement de données. |
| ON | Clignotant | Erreur de communication avec un micro-ordinateur, à renouveler par l'utilisateur. |
| OFF | ON | Modèle d'API et données d'EEPROM non compatibles. |
| OFF | Clignotant | L'une des erreurs suivantes s'est produit :
Un API non reconnu est connecté.
Erreur d'EEPROM (EEPROM nonprésent, défaut d'EEPROM ou pas de programme à décharger) ou erreur de total de contrôle. |
6-3 Manipulation
6-3-1 Montage/démontage de l'EEPROM
Attention Ne pas monter ou démonter l'EEPROM avec le CPM1-EMU01-V1 connecté à l'API. Cela pourrait endommager l'EEPROM.
Montage de I'EEPROM
1, 2, 3... 1. Lever le levier de verrouillage.
- Redresser les broches de l'EEPROM, l'aligner avec le réceptacle et l'enforcer dans le réceptacle, comme montré dans la figure suivante. Si l'EEPROM est plus petit, le placer au centre du réceptacle.
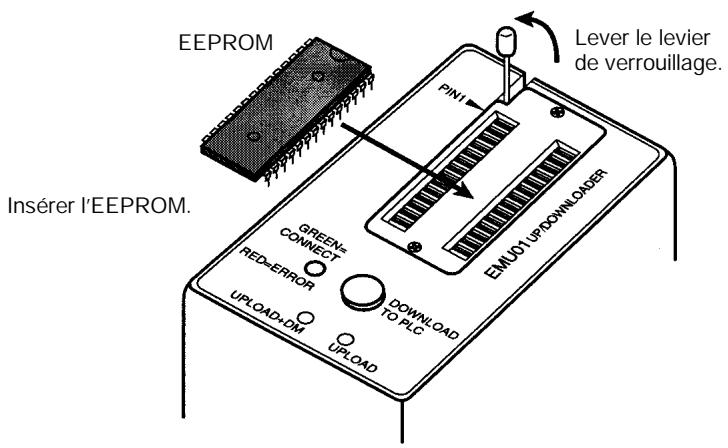
- Enforcer doucement l'EEPROM et abaiser le levier de verrouillage.
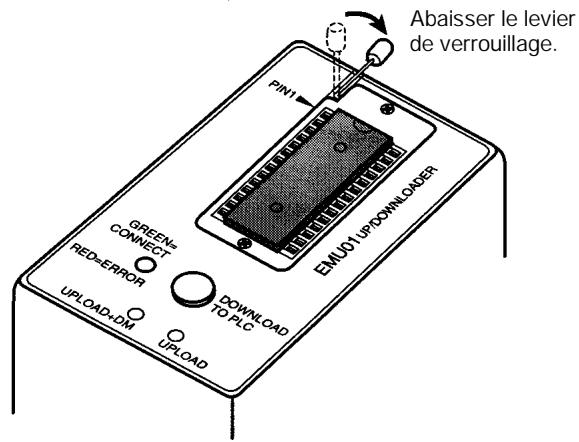
Démontage de l'EEPROM Lever le levier de verrouillage et détacher l'EEPROM.
6-3-2 Connexions à un API

Monter I'EEPROM au CPM1-EMU01-V1 à l'API.
CPM1-EMU01-V1
avant de connecter le

Ne pas déconneter le CPM1-EMU01-V1 de l'API lorsque levoyant est vert clignotant.
API CPM1, CPM1A, CPM2A, CQM1 et SRM1 (-V2)
Lors de la connexion à un CPM1, CPM1A, CPM2A, CQM1 ou SRM1 (-V2), insérer le connecteur dans le port périphérique en s'assurant que le connecteur est orienté correctement.
- Insérer le connecteur jusqu'à ce qu'il soit bien fixé en place.
- La connexion n'est pas possible vers le port RS-232C ou vers un autre port.
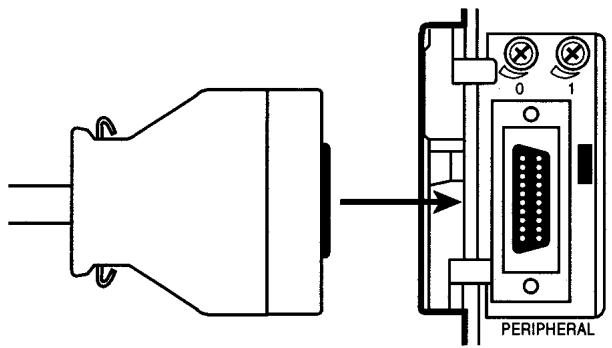
Connexion au CPM2A
API CPM2C et CQM1H
Lors de la connexion au CPM2C ou au CQM1H, connecter au port périphérique via le cable de connexion CPM2C-CN111 ou CS1W-CN114. Régler les sélecteurs sur le micro-interrupteur DIP de l'unité centrale comme suit :
| CPM2C | Sénécteur 1: ON (voir Rem.) |
| Sénécteur 2: ON |
| CQM1H | Sénécteur 5: ON (voir Rem.) |
| Sénécteur 7: ON |
Rem. Si le sélecteur 1 sur le CPM2C ou le sélecteur 5 sur le CQM1H est sur OFF, la connexion est always possible si le port pérophérique est défini aux valeurs par défaut.
Réglage des communications du port périphérique
Le port péripérisque doit être régle avec les paramètres de communication par défaut montrés ci-dessous.
Bit de départ : 1
Bits de données : 7
Bits d'arrêt : 2
Parité : Paire
Vitesse : 9.600 bps
Déconnexion
Presser les leviers en haut et en bas du connecteur pour déverrouiller le connecteur et tirer comme montré dans la figure suivante.

Rem. Ne pas essayer desterolir le connecteur en tirant sur le cable.
6-3-3 Chargement de programmes
Les programmes à contact et le contenu de la mémoire de données peuvent être chargés dans l'EEPROM en utilisant la méthode suivante. Les boutons utilisés détermineront si le contenu de la mémoire de données doit être chargeé ou non.
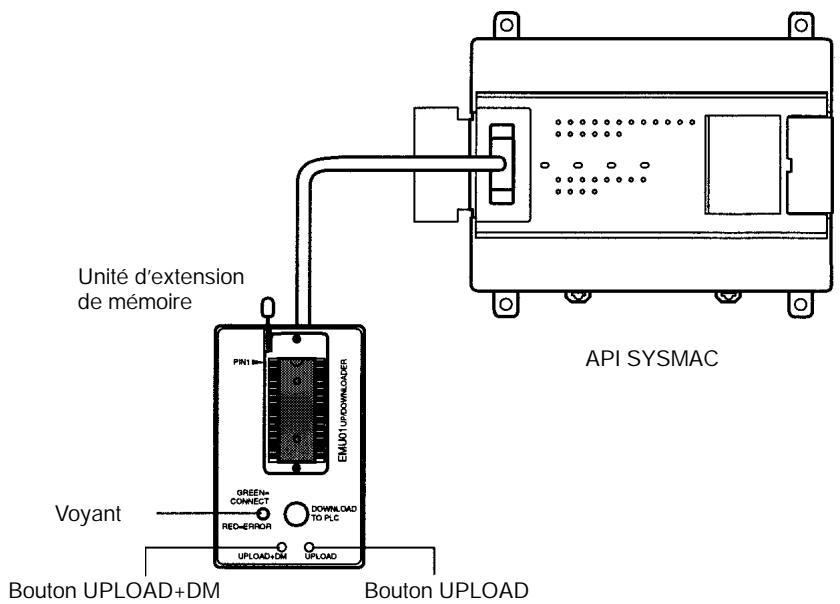
| Bouton | upload + DM
(chargement+DM) | Upload
(chargement) |
| Programme à contact et instructions d'extension | Lit de l'API vers l'EEPROM. | Lit de l'API vers l'EEPROM. |
| DM6144 à 6655 | Non affecté. |
Rem. Utiliser un tournevis cruciforme ou un autre outil avec un diamètre de 3.0 mm max. et une lame longue de 10 mm min. pour presser le bouton de chargement.

Le chargement est possible même si l'API est en mode RUN ou MONITOR.
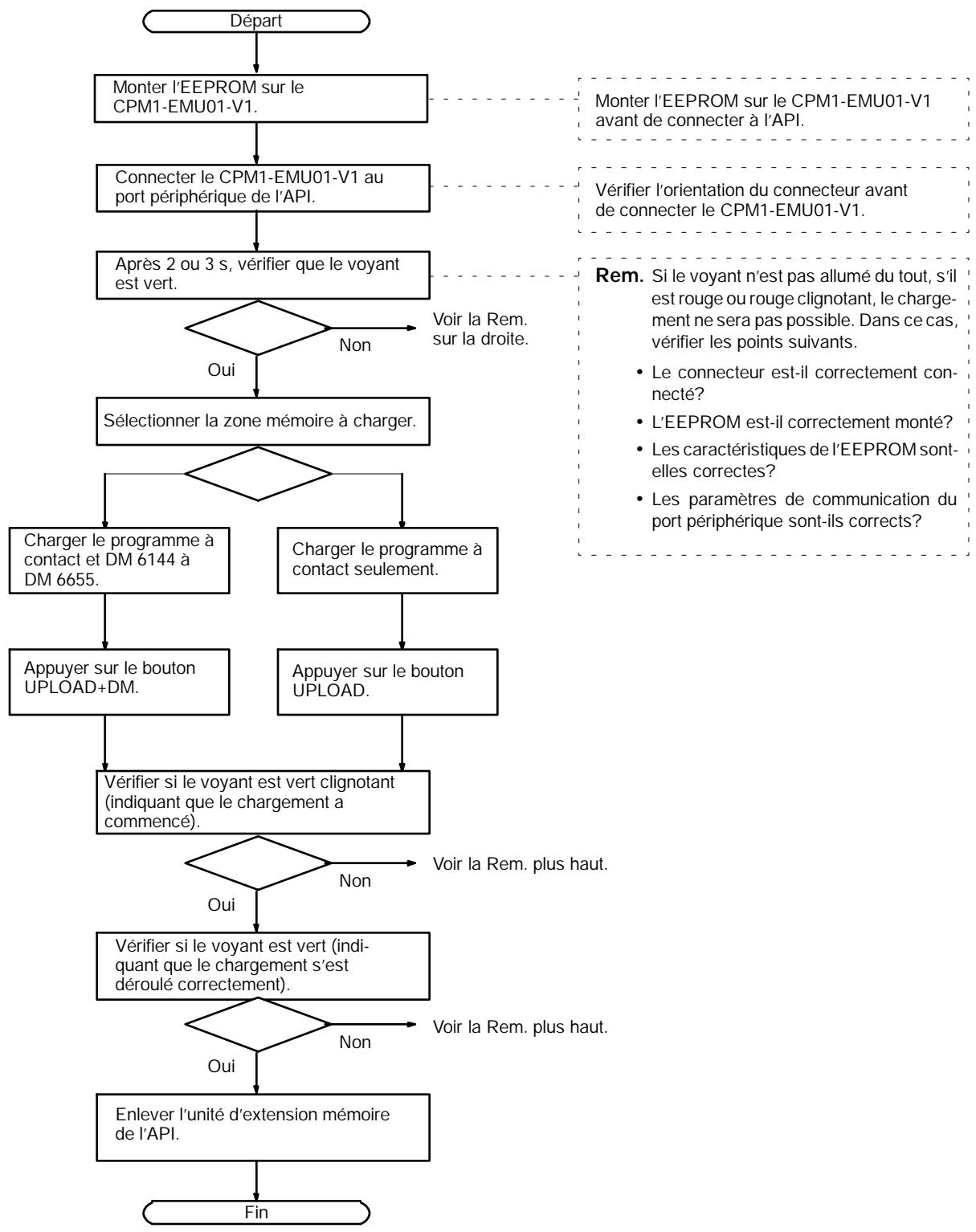
Procedure d'opération
6-3-4 Déchéancement de programmes
Les programmes à contacts et le contenu de la mémoire de données peuvent être déchargés de l'EEPROM vers l'API en utilisant la procédure données cédssous. Lors du déchargement, noter les points suivants.
Attention Si l'API est en mode RUN ou MONITOR lors du déchargement, il basculera automatiquement en mode PROGRAM et l'opération sera arrêté. Confirmer qu'aucun effet contraire ne survendra dans le système avant de décharger. Sans cela, un fonctionnement inatendu pourrait survenir.
Rem. 1. Si I'API est en mode RUN ou MONITOR, basculer le mode de l'API en mode PROGRAM.
2. Confirmer que le programme ou les autres données à décharger vers l'API sont compatibles avec l'API avant de décharger.
3. Pour le CQM1 ou le CQM1H, lors du déchargement de programmes utilisant des codes de fonction définis par l'utilisateur pour des instructions d'extension, s'assurer que le sélection 4 du micro-interrupteur de l'unité centrale est sur ON. Si ces programmes sont déchargés alors que le sélection est sur OFF, les affectations pour les instructions d'extension returneront à leurs réglages par défaut.
4. Lorsque le déchargement est terminé, s'assurer de confirmer le programme utilisé, les données et les instructions d'extension.
5. Lorsque le bouton DOWNLOAD TO PLC est enforcé, toutes les données de l'EEPROM (programmes à contact, mémoire de données etc.) sont écrites dans l'API.
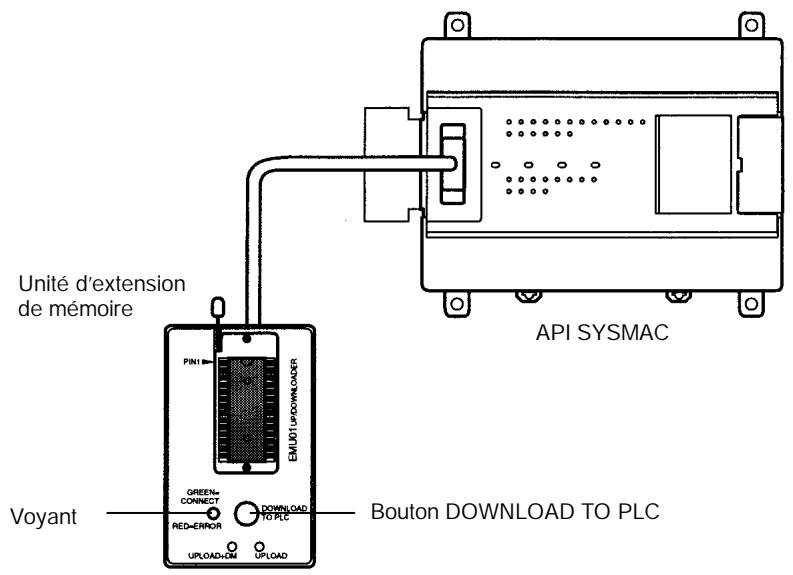
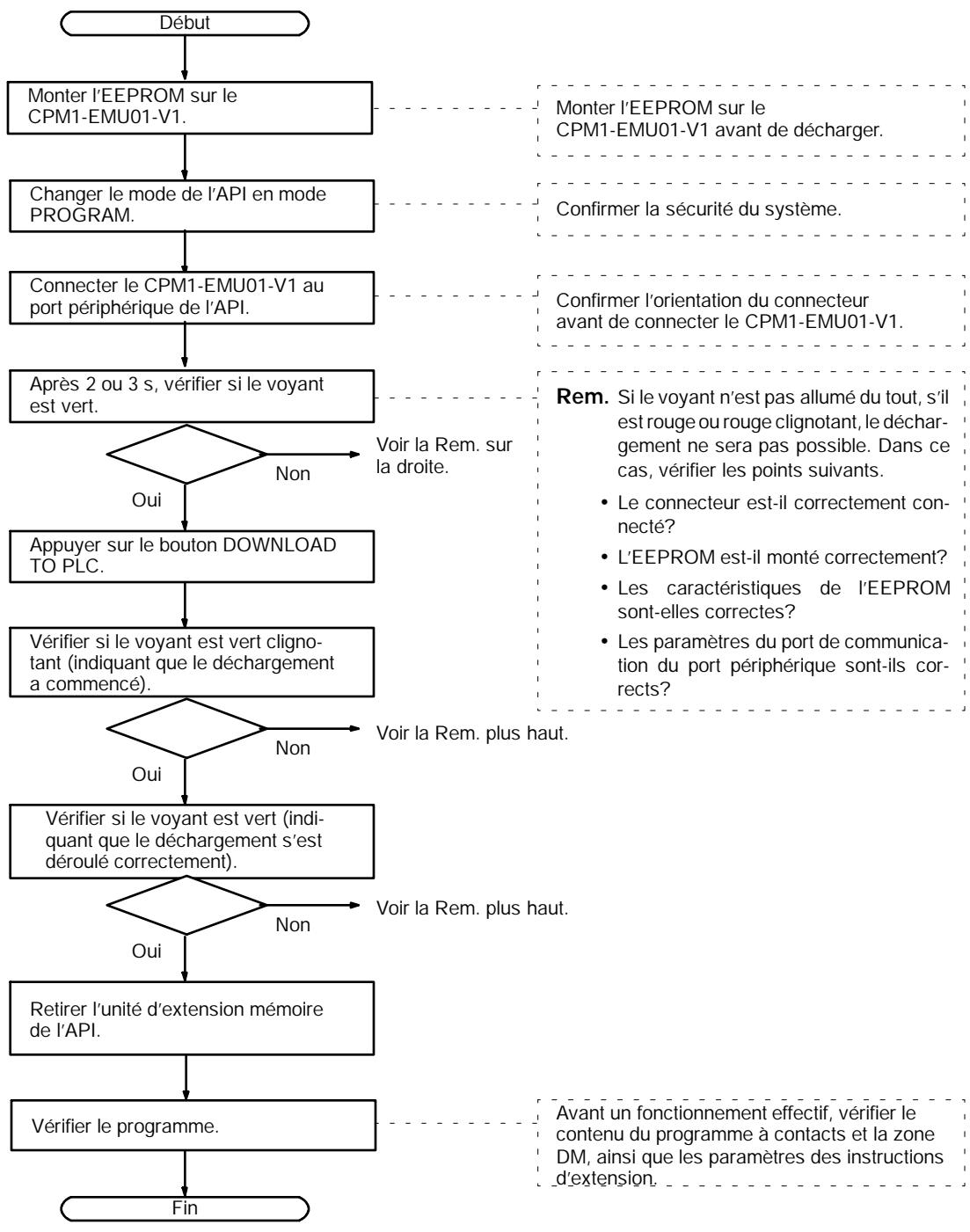
Procedure d'opération
Annexe A
Modèles standard
Unités centrales
| Description | Points d'entrée | Points de sortie | Alimentation | Numéro du modele |
| Sorties à relais | Sorties à transistors |
| NPN | PNP |
| UC avec 20 points d'E/S | 12 points | 8 points | ALT. | CPM2A-20CDR-A | --- | --- |
| CONT. | CPM2A-20CDR-D | CPM2A-20CDT-D | CPM2A-20CDT1-D |
| UC avec 30 points d'E/S | 18 points | 12 points | ALT. | CPM2A-30CDR-A | --- | --- |
| CONT. | CPM2A-30CDR-D | CPM2A-30CDT-D | CPM2A-30CDT1-D |
| UC avec 40 points d'E/S | 24 points | 16 points | ALT. | CPM2A-40CDR-A | --- | --- |
| CONT. | CPM2A-40CDR-D | CPM2A-40CDT-D | CPM2A-40CDT1-D |
| UC avec 60 points d'E/S | 36 points | 24 points | ALT. | CPM2A-60CDR-A | --- | --- |
| CONT. | CPM2A-60CDR-D | CPM2A-60CDT-D | CPM2A-60CDT1-D |
Unités d'extension des E/S
| Description | Points d'entrée | Points de sortie | Numéro du modele |
| Sortie à relais | Sortie à transistor |
| NPN | PNP |
| Unité d'extension des E/S avec 20 points d'E/S | 12 points | 8 points | CPM1A-20EDR1 | CPM1A-20EDT | CPM1A-20EDT1 |
| Unité d'extension des E/S avec 8 points d'entrée | 8 points | --- | CPM1A-8ED (pas de sorties) |
| Unité d'extension des E/S avec 8 points de sortie | --- | 8 points | CPM1A-8ER | CPM1A-8ET | CPM1A-8ET1 |
Unité d'E/S analogiques
| Description | Caracteristiques techniques | Numéro du modele |
| Unité d'E/S analogiques | 2 entrées analogiques et une sortie analogue | CPM1A-MAD01 |
Unité de liaison CompoBus/S
| Description | Caracteristiques techniques | Numéro du modele |
| Unité de liaison CompoBus/S | Travaille comme esclave de CompoBus/S et offre 8 entrées et 8 sorties à l'API du CPM1A ou du CPM2A. | CPM1A-SRT21 |
Interfaces et câbles de raccordement (Connexion 1 : 1)
| Port du CPM2A | Dénomination | Aspect | Numéro du modele | Commentaires | Longueur du câble |
| Periphérique | Interface RS-232C | | CQM1-CIF01 | Pour un port informatique série, type 25 broches | 3,3 m |
| CQM1-CIF02 | Pour un port informatique série, type 9 broches | 3,3 m |
| CPM1-CIF01(+ XW2Z-j 00S) | Pour un port informatique série, type 25 broches | 3,3 m (+ j m) |
| RS-232C | Câble RS-232C | | XW2Z-200S | Pour un port informatique série, type 25 broches | 2 m |
| XW2Z-500S | 5 m |
| XW2Z-200S-V | Pour un port informatique série, type 9 broches | 2 m |
| XW2Z-500S-V | 5 m |
Interfaces et câbles de raccordement (Connexions 1 : N)
| Dénomination | Aspect | Numéro du modele | Caracteristiques techniques |
| Interface RS-422 | | NT-AL001 | S'utilise pour convertir le port RS-232C du CPMA2 en un port RS-422A. Necessite une alimentation 5 V continus, 150 mA qui est assurée par la connexion au CPM2A. (Peut aussi se connecter à un ordinateur personnel; toute fois, pour faire ce raccordement, il faut disposer d'une alimentation externe 5 V continus). |
| Interface de liaison | | B500-AL004 | S'utilise pour convertir le port RS-232C d'un ordinateur personnel en un port RS-422A. (Peut aussi se connecter à un CPM2A). |
| Interface RS-422 | | CPM1-CIF11 | S'utilise pour convertir le port de péripérisque du CPM2A en un port RS-422A. |
| Câbles RS-232C(S'utilise avec le NT-AL001). | | XW2Z-070T-1 | S'utilise pour le port RS-232C du CPM2A qui peut se connecter à NT-AL001 (câble de 70 cm). |
| XW2Z-070T-1 | S'utilise pour le port RS-232C du CPM2A qui peut se connecter à NT-AL001 (câble de 2 m). |
Periphériques
| Dénomination | Aspect | Numéro du modèle | Caracteristique techniques |
| Console de programmation | | CQM1-PRO01-E | Câble de raccordement (2 m) fixe |
| C200H-PRO27-E | Tenu à la main, avec contre éclairage ; nécessite un cable de raccordement C200H-CN222 ou C200H-CN422, voir ci-dessous . |
| Câble de raccordement | | C200H-CN222 | Raccorde la console de programmation C200H au port de péripérisque (2 m) |
| C200H-CN422 | Raccorde la console de programmation C200H au port de péripérisque (4 m) |
| Unité d'extension mémoire | | CPM1-EMU01-V1 | Charge le programme à contact et les DM 6144 à DM 6655 de l'API vers l'EEPROM et décharge le programme à contact et les DM 6144 à DM 6655 de l'EEPROM vers l'API. |
| EEPROM | | EEROM-JD | 256 K bit |
Accessoires pour la maintenance
| Dénomination | Aspect | Numéro du modèle | Caractéristiques techniques |
| Pile de sauvegarde | | CPM2A-BAT01 | --- |
Annexe B Dimensions
Toutes les dimensions sont en millimètres.
Unités centrales du CPM2A-20CDj -j
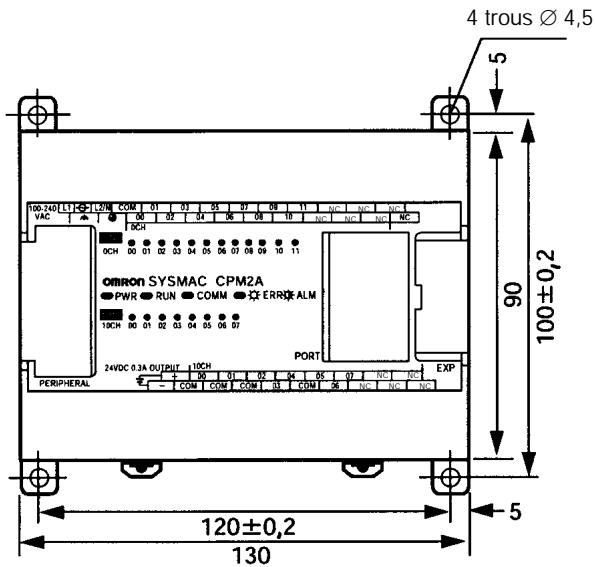
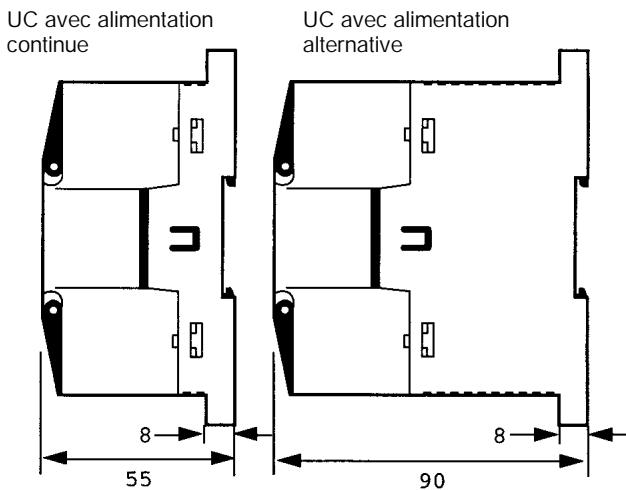
Unités centrales du CPM2A-30CDj -j
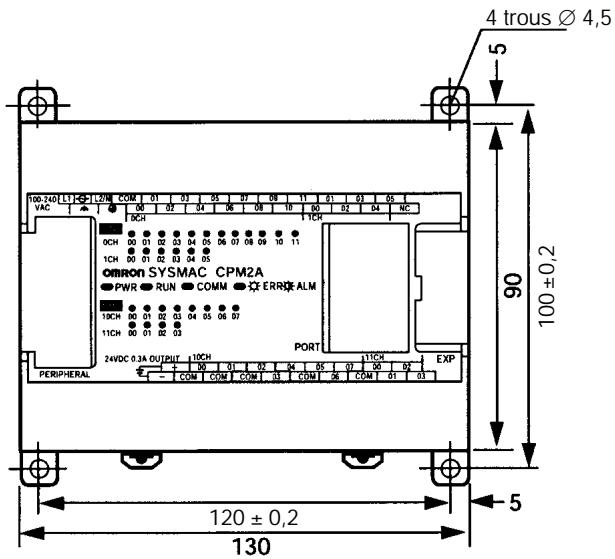
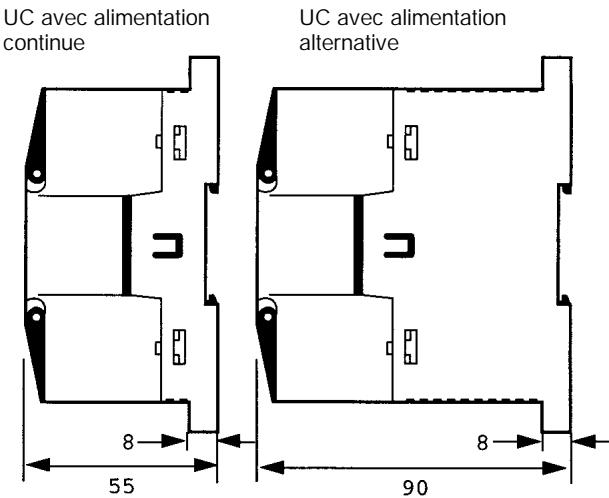
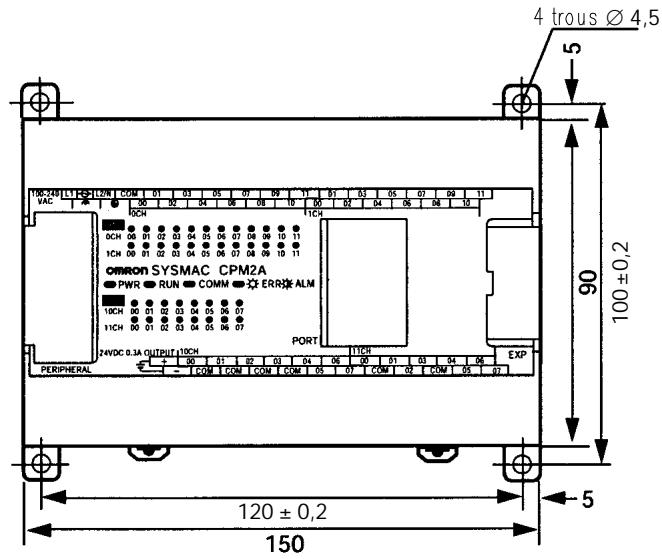
Unités centrales du CPM2A-40CDj -j
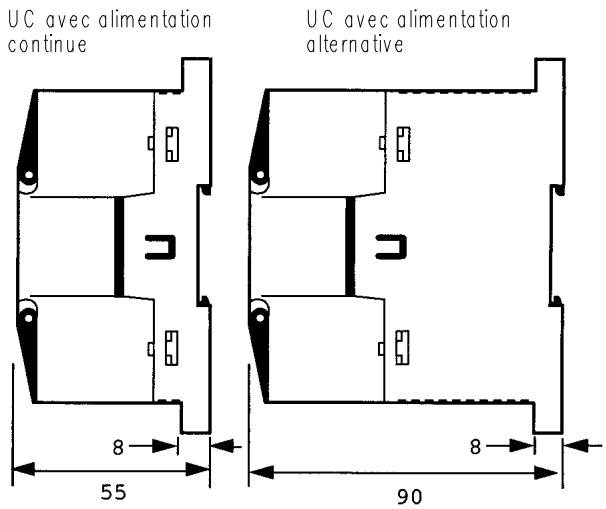
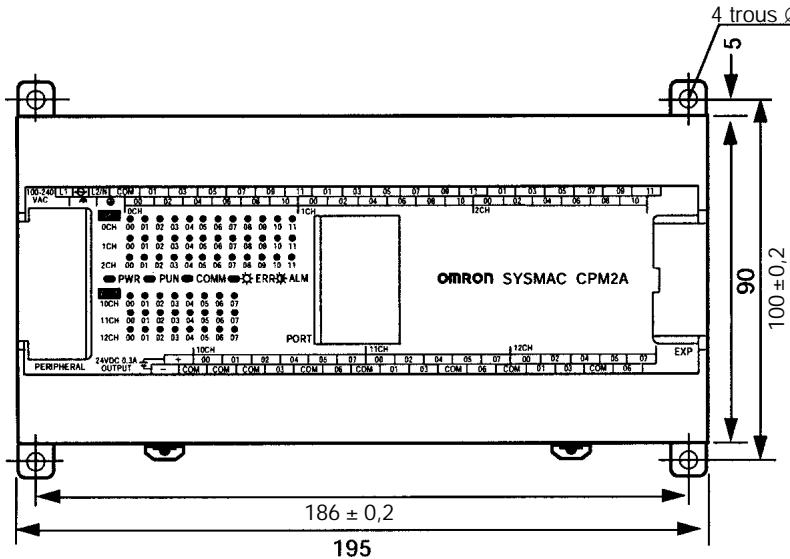
Unités centrales du CPM2A-60CDj -j
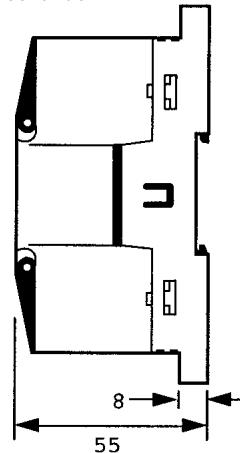
UC avec alimentation continue
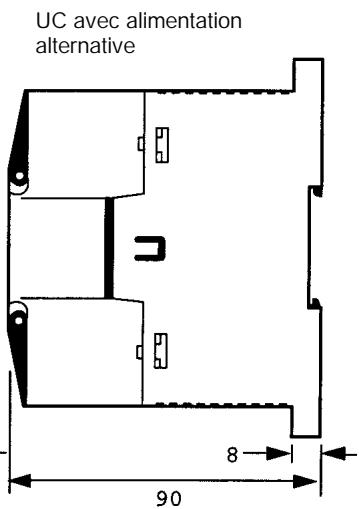
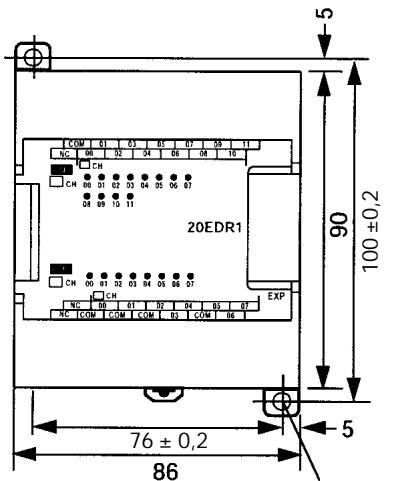
Unités d'extension des E/S du CPM1A-20EDj
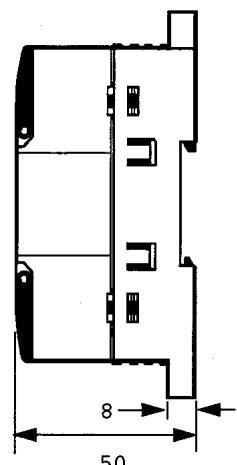
4 trous 4,5
Unités d'extension des E/S du CPM1A-8j j j
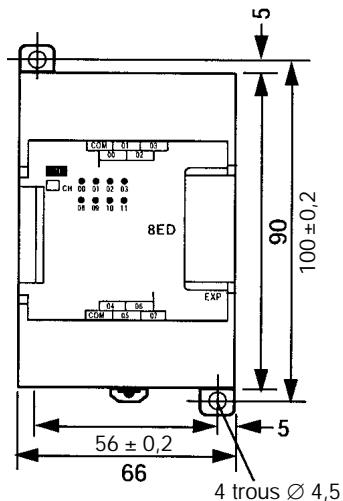
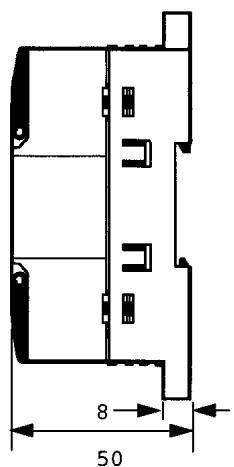
Unité des E/S analogiques du CPM1A-MAD01
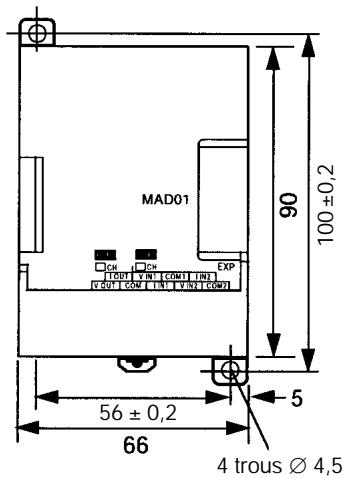
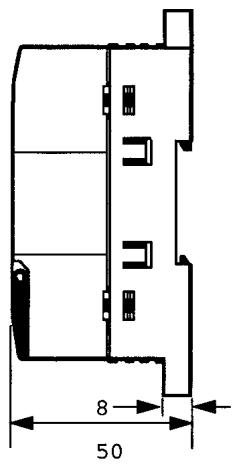
Unité de liaison CompoBus/S du CPM1A-SRT21
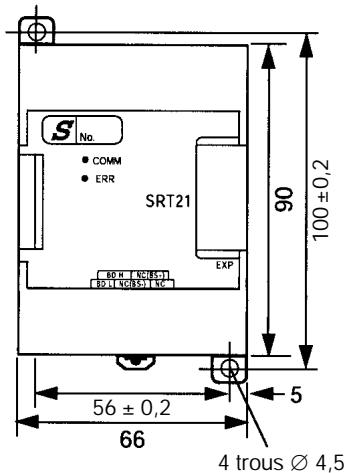
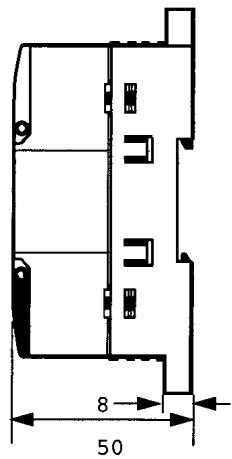
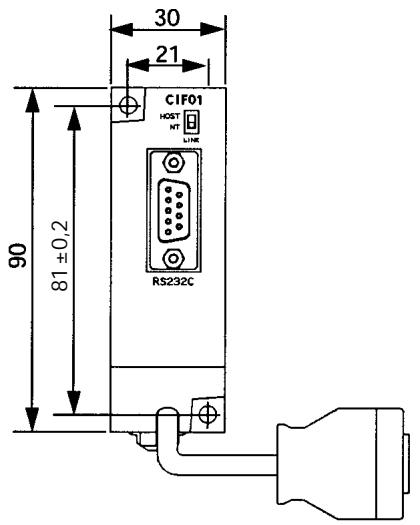
CPM1-CIF01
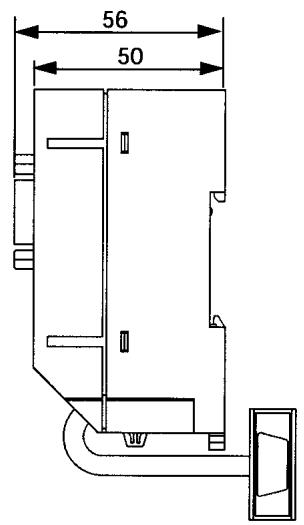
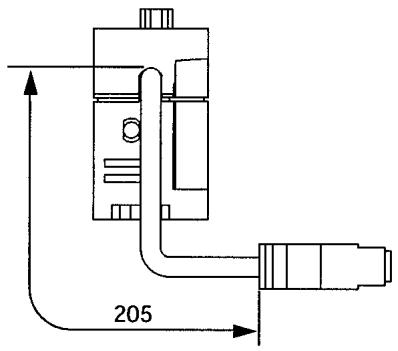
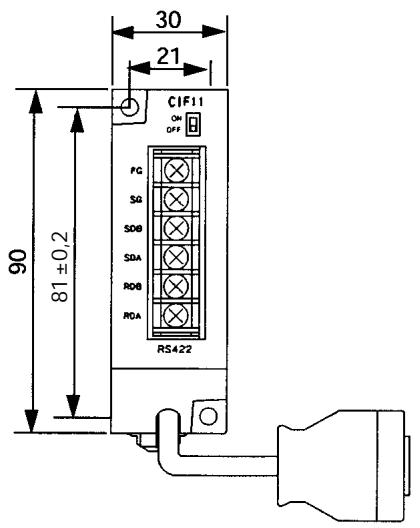
CPM1-CIF11
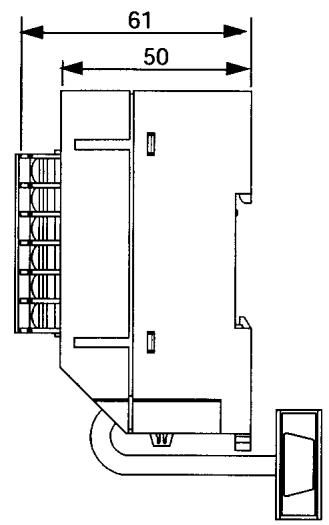
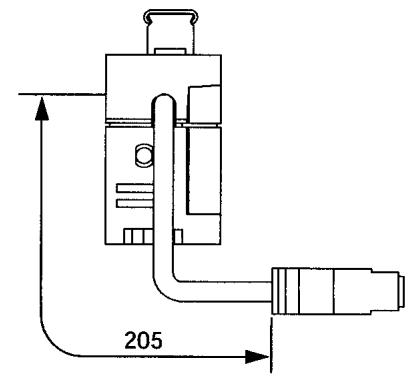
Dimensions avec dispositifs de programmation installés
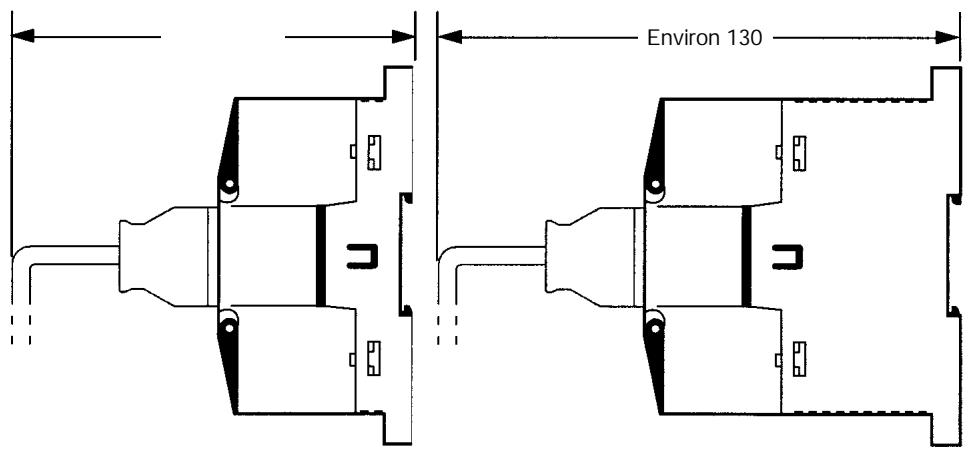
UC avec alimentation continue
UC avec alimentation alternative
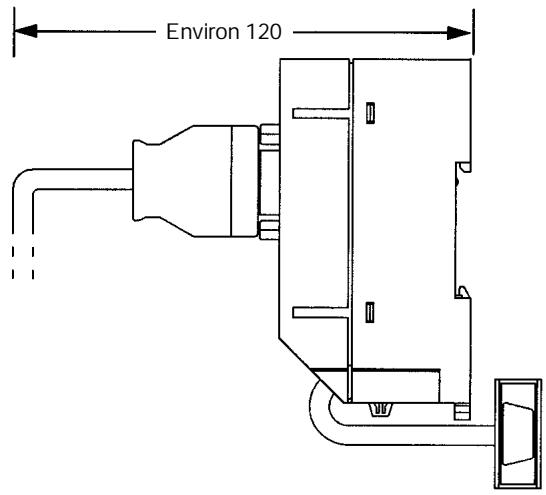
Adaptateur RS-232C de CPM1-CIF01
Historique des révisions
Un code de révision manuel est utilisé comme suffixe du numéro catalogue, sur la première page du manuel.
Le tableau suivant précise les modifications qui ont ete aportees au manuel lors de chaque revision. Les
numeros des pages revoient a la version precedente.
| Code de révision | Date | Contenu révisé |
| 1 | Avril 1999 | Production initale |
| 2 | September 1999 | Informations concernant les UC à 20 points sont ajoutés dans tous le manuel. Informations concernant l'Unité d'extension mémoire du CPM1-EMU01-V1 sont ajoutés dans tous le manuel. |

REGION SUD-OUEST
Buronc 2 - Inopole - Voie de La Découverte
B.P.221
31677 LABEGCEcedex
Tel. 05 61 39 89 00
Télécopie:0561399909
Site Web Omron : http://www.omron.fr
SIEGE SOCIAL
REGION ILE DE FRANCE
OMRON ELECTRONICS
BP 33
19, rue du Bois Galon
94121 FONTENAY-SOUS-BOIS cedex
Tél. 01 49 74 70 59 Télex 264 931F
Télécopie 01 48 76 27 95
REGION SUD-EST
OMRON ELECTRONICS
L'Atrium, Parc Saint-Exupé
1, rue du Colonel Chambonnet
69500BRON
Tel. 04 72 14 90 30
Telécopie 04 78 41 08 93
REGION OUEST
OMRON ELECTRONICS
Les Salorges 2
3, Bd Salvador Allende
44100 NANTES
Tel. 02 40 69 24 50
telecopie 02 40 73 67 98
REGION NORD-EST
OMRON ELECTRONICS
6, rue Gabriel Voisin
51100 REIMS
Tel.0326820016
Télécopie: 03 26 82 00 62
OMRON

