
60982 - Decodificador digital Märklin - Manual de uso y guía de instrucciones gratis
Encuentra gratis el manual del aparato 60982 Märklin en formato PDF.

| Tipo de producto | Decodificador digital para locomotoras HO |
| Marca | Märklin |
| Modelo | 60982 |
| Categoría | Decodificador digital |
| Protocolos compatibles | mfx, DCC, fx (MM), analógico CA/CC |
| Corriente motor permanente máx. | ≤ 1,1 A |
| Corriente total salidas máx. | ≤ 1,6 A |
| Corriente salidas luz máx. | ≤ 250 mA |
| Corriente AUX 1-4 máx. (cada una) | ≤ 250 mA |
| Tensión máxima admisible | ≤ 40 V |
| Número de funciones físicas | 8 (Luces delanteras/traseras, AUX 1-4, motor) |
| Número de funciones lógicas | Retardo arranque/frenado, relación de maniobra, ABV |
| Direccionamiento DCC | Dirección corta (1-127), larga (1-10239), dirección de tracción |
| Direccionamiento fx (MM) | 1 dirección principal + 3 direcciones de enlace |
| Interfaz de programación | PoM (Programación en vía principal) y vía de programación |
| Actualización de firmware | Mediante CS2 (≥4.0), CS3 o programador 60971 |
| Dimensiones aprox. | 30 x 20 x 10 mm |
| Peso aprox. | 10 g |
| Seguridad | Protección contra cortocircuitos y sobrecargas en salidas |
| Mantenimiento | Verificar contactos, evitar humedad, soldaduras limpias |
| Piezas de repuesto disponibles | Casquillo E604180, bombilla E610080 (recambio) |
| Reparabilidad | Reparación por distribuidor Märklin o SAT (Alemania) |
| Garantía | Garantía legal y contractual según certificado |
| Eliminación | Reciclaje en punto limpio o tienda (RAEE) |
| Página del manual | Manual de 160 páginas disponible en varios idiomas |
Preguntas frecuentes - 60982 Märklin
Preguntas de los usuarios sobre 60982 Märklin
0 pregunta sobre este aparato. Responde a las que conoces o haz la tuya.
Hacer una nueva pregunta sobre este aparato
Descarga las instrucciones para tu Decodificador digital en formato PDF gratis! Encuentra tus instrucciones 60982 - Märklin y toma tu dispositivo electrónico nuevamente en la mano. En esta página están publicados todos los documentos necesarios para el uso de su dispositivo. 60982 de la marca Märklin.
MANUAL DE USUARIO 60982 Märklin
Set de decoder de retroequipamiento 60972
Set de decoder de retroequipamiento 60982
| Índice | Página |
| Uso previsto | 3 |
| Alcance de suministro | 3 |
| Advertencias de seguridad | 3 |
| Datos técnicos | 3 |
| Funciones | 3 |
| Montaje del decoder | 4 |
| Funcionamiento multiprotocolo | 7 |
| - Protocolo mfx | 9 |
| - Protocolo fx | 9 |
| - Protocolo DCC | 10 |
| Funciones físicas | 11 |
| Funciones lógicas | 11 |
| Funciones controlables | 11 |
| Tabla de variables CV para fx (MM) | 12 |
| Tabla de variables CV para DCC | 16 |
| Localización y solución de fallos | 20 |
| Eliminación | 20 |
| Garantía | 20 |
| Mis configuraciones de decoder personales | 21 |
Los decoders 60972/60982 se han concebido para la reconversión de las locomotoras H0 de Märklin/Trix.
¡No son idóneos para motores con bobina de excitación! Las locomotoras provistas de estos motores deben reconvertirse con los correspondientes kits de retroequipamiento de motores 60941, 60943 o 60944.
Alcance de suministro
1 decoder
1 platina con interfaz de 21 polos (solo en el 60972)
1 conector NEM de 8 polos (solo en el 60982)
1 placa soporte (solo en el 60972)
1 tornillo (solo en el 60972)
1 almohadilla adhesiva (solo en el 60982)
Instrucciones de montaje
Documento de garantía
Herramientas adicionales necesarias para el montaje: destornillador, pinzas y estación de soldadura para una potenica/temperatura de soldeo máx. de 30W/400° con punta fi na, estaño para soldadura en electrónica (∅ 0,5-1 mm), cordón de desoldeo o bomba de aspiración de desoldeo.
Advertencias de seguridad
- ¡ATENCIÓN! Incluye aristas cortantes propias de su funcionalidad.
- Realizar los trabajos de cableado y montaje siempre sin tensión eléctrica. Si esto no se respeta, pueden producirse peligrosas corrientes a través del cuerpo, provocando lesiones.
- Utilizar el decoder siempre con la tensión admisible (véanse Datos técnicos).

Existe peligro de sufrir quemaduras cutáneas durante el manejo del soldador
Datos técnicos
- Carga permanente en salida de motor ≤ 1,1 A
- Carga de salidas del luces ≤ 250 mA
- Carga AUX 1 – AUX 4 ≤ 250 mA, cada uno
• Carga AUX + luz (suma) ≤ 300 mA - Carga de motor o bien AUX 5/6 ≤ 1,1 A
- Carga total máx. (suma) ≤ 1,6 A
- Tensión máx. ≤ 40 V
- Protección contra cortocircuito y sobrecarga en las salidas de Luces de cabeza (LV), luces de cola (LH), AUX 1 – AUX 4 y en las salidas a motor.
Funciones
El decoder de locomotora mLD es un dispositivo con numerosas y amplias posibilidades de ajuste y adaptación para locomotoras. Está disponible una interfaz SUSI adicional (solo en el 60972). Los decoders son plenamente actualizables. El requisito para tal fin es disponer de la correspondiente unidad de control (Central Station CS2 60213/60214/60215 con la versión de software 4.0 o superior, CS3 60216/60226 y/o programador 60971).
Las funciones de ajuste y digitales pueden utilizarse únicamente en modo digital. Sin embargo, no existen idénticas posibilidades en todos los protocolos.
Las instrucciones describen el montaje y las opciones de ajuste de los decoders 60972/60982.
- Aptos para multiprotocolo (fx (MM), mfx, DCC y AC/DC).
- Reconocimiento automático del sistema. Para su manejo, se debe utilizar la dirección asignada en cuestión a este sistema.
- El retardo de aceleración y frenado se pueden configurar conindependencia uno del otro. Se puede asignar mediante el mapeo de funciones de cualquier tecla de función.
- Regulación variable del motor tanto en modo digital como en analógico.
- Soporta 6090, 60901, motores de corriente continua, motores senoidales y motores con inducido de campana. En los motores senoidales, es preciso configurar las variables CV 52 a 1 y CV 56 a 0 así como la CV 51 bien a 24 o a 0 (ver las tablas de variables CV). Además, deben mapear cada una de las variables Aux 3 y Aux 4 a Reposo (S) y Marcha (F) con la Central Station o el programador 60971.
- Para el mapeo de funciones, véase la ayuda integrada en la Central Station 60213/60214/60215/60216/60226 o encontrará una tabla detallada sobre el mapeo de funciones en Internet en: http://www.maerklin.de/de/service/technische-informationen
- Actualizable con CS2 60213/60214/60215 (versión de software 4.0 o superior), CS3 60216/60226 o con programador 60971.
- Programming on Main (PoM), o programación en la vía principal, esta programación debe ser soportada por la unidad de control. Consulte al respecto las instrucciones de empleo de su unidad de control.
• Marcha de maniobra ajustable - Detección de tramo de frenado/parada ante señal en modo digital
- Calibración automática de la locomotora con la variable CV7 (mfx, DCC, MM).
Montaje del decoder
Antes de su montaje, asegurarse de que la locomotora funcione perfectamente desde el punto de vista tanto mecánico como eléctrico. En su caso, se debe reparar la locomotora antes de readaptarla.
Vehículos sin interfaz
Desuelde en primer lugar los cables en los tomacorrientes (patines), en el motor y en el alumbrado/iluminación. Acto seguido, desmonte el antiguo decoder o conmutador. Posicione el nuevo decoder y suelde los cables conforme al esquema adjunto.
Si la iluminación/alumbrado se conectan directamente a masa del vehículo, recomendamos aislarla respecto a la masa del vehículo. Para ello, utilice el zócalo enchufe E604180 y la lámpara de incandescencia E610080. De este modo se logra que el alumbrado no parpadee.
Si el vehículo está equipado con alumbrado/iluminación de LEDs, es imprescindible montar resistencias previas. Las resistencias previas varían en función de la corriente y del tipo constructivo. Calcule los valores correctos para sus LEDs. En su caso, consulte a su distribuidor profesional.
Si desea iluminar su vehículo posteriormente con LEDs, debe interconectar los cátodos (-) de los LEDs a la salida de luz. ¡No olvidar la resistencia previa! Los ánodos (+) se deben conectar al conductor común (azul).
No está permitido conectar a masa del vehículo el conductor de retorno común (azul). El procedimiento para el decoder 60982 y
la platina de interfaz del set 60972 es idéntico.
No obstante, no olvide observar las advertencias correspondientes sobre los colores de los cables.
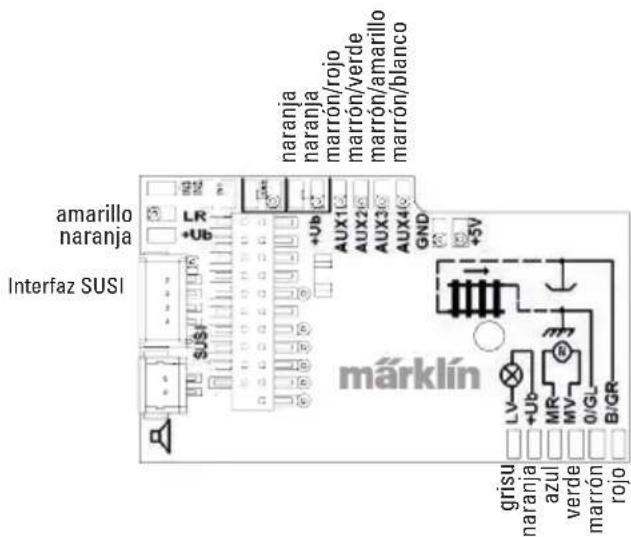
60982
Tenga presente que los colores de los cables del decoder cumplen la norma NEM. A continuación se presenta una comparativa con el esquema de colores de Märklin
gris Conexión de motor 2
negro Toma de corriente izquierda
blanco Alumbrado delantero
verde Aux 1 Salida física
azul Conductor común para alumbrado
amarillo Alumbrado de cola
rojo Toma de corriente derecha (patín central)
naranja Conexión de motor 1
violeta Aux 2 Salida física
azul Marca naranja IN1 (programador)
azul Marca amarilla IN2 (programador)
azul Marca negra GND Massa de decoder (programador)
violeta Marca amarilla Aux 3 salida física
violeta Marca blanca Aux 4 salida física
Terminales soldables arriba Terminales soldables abajo
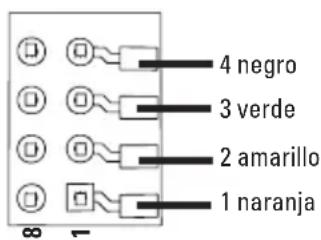
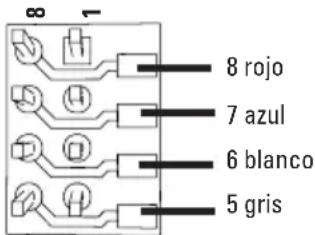
Vehículos con interfaz NEM de 8 polos.
Suelde conforme al dibujo superior los cables a los ojales de soldeo correspondientes. Enchufe el conector en la interfaz, y observe el posicionamiento.
Para consejos sobre alumbrado véase decoder 60972.
Comparativa de los colores de los cables
| Designación | Color de cable | |
| NEM Márklin | ||
| Conexión de motor 2 gris azul | ||
| Tomacorriente 2 conductores vía izquierda Tomacorriente 3 conductores vía exterior | negro marrón | |
| Alumbrado de cabeza blanco gris | ||
| Aux 1 (salida física) verde marrón/rojo | ||
| Conductor común alumbrado/ iluminación | azul naranja | |
| Alumbrado de cola amarillo amarillo | ||
| Tomacorriente 2 conductores vía derecha Tomacorrientes 2 conductores vía centro | rojo rojo | |
| Conexión de motor 1 naranja verde | ||
| Aux 2 (salida física) violeta marrón / verde | ||
| IN1* (programador) azul / marca naranja | ||
| IN2 * (programador) azul / marca amarilla | ||
| GND* Masa de decoder (programador) | azul / marca negra | |
| Aux 3 (salida física) violeta / marca amarilla | ||
| Aux 4 (salida física) violeta / marca blanca | ||
* se utiliza actualmente solo para el programador
60972
Atornillar firmemente la placa soporte y soldar los cables a las conexiones de motor, patín y posibles funciones integradas.
Los colores de los cables cumplen el estándar de Märklin, véase la tabla comparativa con los colores de NEM.
El alumbrado con el conductor de retorno se realiza a través de la masa del vehículo, en parte puede producirse un parpadeo del alumbrado. Si esto no es deseable, debe aislarse el alumbrado. Recomendamos intercambiar la lámpara de incandescencia por el zócalo enchufe 604180 y la lámpara de incandescencia 610080. En tal caso, el conductor de retorno se conecta al cable naranja.
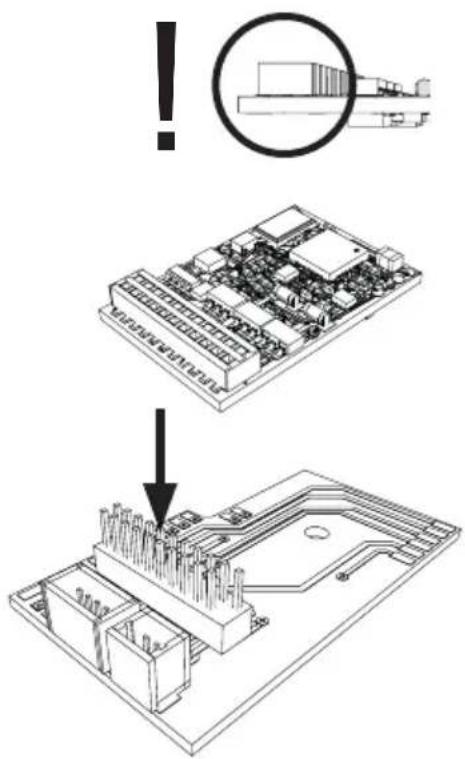
Enchufar el decoder y asegurar que se haya montado correctamente. Además, someter a una prueba más el modelo en miniatura sin carcasa sobre la vía de programación. Si el decoder funciona sin anomalías, se puede montar la carcasa.
Funcionamiento multiprotocolo
Modo analógico
El decoder se puede utilizar también en maquetas o tramos de vía analógicos. El decoder detecta la tensión alterna o continua analógica (AC/DC) de modo automático, adaptándose a la tensión de vía analógica. Están activas todas las funciones confi guradas en mfx o DCC para el funcionamiento en modo analógico (véase Modo digital).
Modo digital
Los decoders de locomotora mLD son decoders multiprotocolo. El decoder puede emplearse con los siguientes protocolos digitales: mfx, DCC, fx (MM).
El protocolo digital que brinda el mayor número de opciones es el protocolo digital de máximo valor. El orden de valor de los protocolos es descendente:
Prioridad 1: mfx
Prioridad 2: DCC
Prioridad 3: fx (MM)
Nota: Los protocolos digitales se pueden interferir mutuamente. Para asegurar un funcionamiento sin interferencias recomendamos desactivar los protocolos digitales no necesarios con la CV 50.
En la medida en que su central lo soporte, desactive en ésta también los protocolos digitales no necesarios.
Si se detectan dos o más protocolos digitales en la vía, el decoder acepta automáticamente el protocolo digital de mayor valor, p. ej., mfx/DCC, con lo cual el decoder aplica el protocolo digital
mfx (véase tabla anterior).
Nota: Tenga presente que no todas las funciones son posibles en todos los protocolos digitales. En mfx y DCC se pueden realizar algunas configuraciones de funciones que deben tener efecto en modo analógico.
Tramo de frenado/parada ante señal fx (MM), mfx, DCC
En lo esencial, los módulos de frenado aplican una tensión continua a la vía. Si el decoder detecta tal tensión continua en la vía, decelera con el retardo ajustado.
Si el decoder detecta de nuevo un protocolo digital, acelera la velocidad ajustada.
Si se desea aplicar la detección automática de los tramos de frenado, recomendamos desactivar el modo de corriente continua (véase descripción de variables CV). En el modo DCC, configurar además el valor de la CV 27 a 16 o 32 (véase Tabla de variables CV).
Calibración automática para todos los protocolos
- Antes de la calibración, se debe seleccionar el tipo de motor (véase CV 52).
- La calibración automática de la locomotora se debe realizar en un circuito adecuado sin obstáculos (señales, pendientes, etc.). Recomendamos emplear un circuito ovalado con radios de más de 430 mm. La locomotora se acelera a la velocidad máxima y, de este modo, puede bascularse fuera de la vía en curvas de radio pequeño. Para la calibración automática de la loco, entre en la configuración de locomotora de la Central Station->CV->Info. En el campo Versión de firmware, sobrescriba el primer valor con 77. En los protocolos MM/DCC, introduzca directamente la CV7 en el modo configura-
ción. Sobreescriba el valor allí indicado con el número 77 y guárdelo en la locomotora.
Predefina una velocidad con el regulador de marcha.
Ahora, la locomotora arranca lentamente y acelera a la velocidad máxima, deteniéndose al cabo de poco tiempo. Acto seguido, la locomotora realiza varios intentos de arranque.
Cuando la locomotora alcanza definitivamente el reposo, la calibración ha finalizado.
No se debe intervenir en el circuito de vías durante toda la operación.
La calibración se puede interrumpir con Stop (Parada), girando el regulador de marcha (a 0) o cambiando el sentido de marcha, por lo cual después se debe repetir la operación. Si el resultado de la calibración no es satisfactorio, se debe repetir la calibración con otro tipo de motor. Es posible repetir varias veces esto. Si la marcha de calibración no ha arrojado el resultado deseado, se pueden adaptar manualmente algunos parámetros del motor. (Para MM/DCC véanse Tablas de CVs; mfx en lla configuración de locomotora de la Central Station->CV->Motor).
Los siguientes símbolos luminosos indican la marcha de calibración.
| Activada (Introducir el valor 77) | |
| Arranque de la marcha de medi-ción (nivel de marcha >1) | |
| Fin del viaje de medida | |
| Cancelación o avería |
Encontrará información detallada al respecto en Internet: http://www.maerklin.de/de/service/technische-informationen
Protocolo mfx
Direccionamiento
- No se requiere ninguna dirección, asignándose a cada decoder un código único e inequívoco (UID).
- El decoder inicia sesión automáticamente en una Central Station o Mobile Station con su UID.
Programación
- Las propiedades se pueden programar mediante la interfaz gráfica de la Central Station o bien, en parte, también con la Mobile Station.
- Es posible leer y programar múltiples veces todas las variables de configuración (CV).
- La programación puede realizarse bien en la vía principal o en la vía de programación.
- La configuración por defecto (configuración de fábrica) puede restablecerse.
- Mapeo de funciones: Las funciones se pueden asignar a cualesquiera teclas de función con ayuda de la Central Station 60212 (de modo limitado) o con la Central Station 60213/60214/60215/60216/60226 (véase Ayuda en la Central Station).
Encontrará más información en Internet: http://www.maerklin.de/de/service/technische-informationen
Protocolo fx (MM)
Direccionamiento
- 4 direcciones (una dirección principal y 3 direcciones sucesivas)
- Intervalo de direcciones:
1 - 255 en función de la unidad de control/central - La dirección principal se puede programar manualmente.
- Las direcciones sucesivas se pueden activar, desactivar y configurar y su programación puede ser manual o automática.
- Estas cuatro direcciones permiten controlar las 16 funciones.
Programación
- Las propiedades del decoder se pueden programar múltiples veces mediante la programación de las variables de configuración (CV). No es posible leer las CVs.
- El número y el valor de cada CV se introducen directamente.
- La programación de las CVs solo es posible en la vía de programación.
- La configuración por defecto (configuración de fábrica) puede restablecerse.
- 14 o bien 27 niveles de marcha programables
- Las cuatro primeras funciones y la luz se pueden controlar siempre mediante la dirección principal, pudiendo utilizarse funciones adicionales en función de las direcciones sucesivas.
- Todas las configuraciones del mapeo de funciones de la programación de mfx o DCC se aprovechan para fx (MM).
- Detección automática conforme a las direcciones adicionales o sucesivas activas. Se reconoce si la función está activada o
desactivada de nuevo permanentemente o si puede controlarse mediante una de las direcciones sucesivas. Este mapeo de funciones puede definirse solo en el protocolo mfx o DCC.
- Para información adicional, véase la Tabla de CVs del protocolo fx.
Protocolo DCC
Direccionamiento
- Dirección corta– Dirección larga – Dirección de tracción
- Intervalo direcciones:
1 - 127 dirección corta, dirección de tracción
1 - 10239 dirección larga
- Cada dirección puede programarse manualmente.
- La dirección corta o larga se selecciona mediante las CVs.
- Una dirección de tracción aplicada desactiva la dirección estándar.
Programación
- Las propiedades pueden modificarse múltiples veces mediante las variables de configuración (CVs).
- El número y el valor de cada CV se introducen directamente.
- Las CVs se pueden leer y programar múltiples veces (programación en la vía de programación).
- Las CVs se pueden programar libremente (programación en la vía principal PoM). La PoM es posible solo en las CVs identificadas en la tabla de CVs. La programación en la vía principal (PoM) debe ser soportada por su central (véanse instrucciones de empleo de su dispositivo).
-
Es posible restaurar la configuración por defecto (configuración de fábrica).
-
Pueden configurarse 14 o bien 28/126 niveles de marcha.
- Para el frenado automático recomendamos configurar en el modo DCC el valor de la CV 27 a 16 o 32 (véase página 20).
- Todas las funciones deben conmutarse de modo acorde al mapeo de funciones (véase descripción de CVs).
- Encontrará información adicional en la tabla de CVs para protocolo de DCC.
Se recomienda realizar las programaciones siempre en la vía de programación.
Funciones físicas
Cada una de estas funciones debe conectarse externamente a la platina. Por este motivo, se habla de funciones físicas. A cada salida física (AUX / Luces) se puede asignar un modo/efecto propio en funcionamiento en modo digital. Para ello están disponibles tres CVs para cada salida. Para cada salida se puede configurar siempre solo un modo/efecto. Encontrará una tabla detallada al respecto en Internet en:
Dado que estas funciones se ejecutan únicamente vía software, no se requiere una salida física para las mismas. Por este motivo, hablamos de una función lógica
Retardo de arranque/frenado
- Los tiempos de aceleración y frenado se pueden configurar uno independiente del otro.
- La desactivación de la función lógica de retardo de aceleración y frenado (ABV) se puede asignar a cualquier tecla de función mediante el mapeo de funciones.
Marcha de maniobra (RG)
- La marcha de maniobra provoca la reducción de la velocidad actual. Esto permite regular con mucho tacto la locomotora. La marcha de maniobra puede asignarse a cualquier tecla de función en el mfx y en el DCC mediante el mapeo de funciones. Para las configuraciones véase la tabla de CVs, página 19, CV 145 o bien para mfx en el menú de la Central Station.
| Funciones controlables |  |  |  |  T...00214, 00215 T...00214, 00215 | [0, 50, 50, 50] 00214, 00215 00214, 00215 |  |
| Señal de cabeza function/off Función f0 Función f0 Función f0 | ||||||
| Aux 1 f1 Función 1 Función * Función | f1 Función f1 | Función f1 | ||||
| Aux 2 f2 Función 2 Función * Función | f2 Función f2 | Función f2 | ||||
| Marcha de maniobra | f3 | Función 3 | Función * | Función f3 | Función f3 | Función f3 |
| Desactivar retardo arranque/frenado (ABV) | f4 | Función 4 | Función * | Función f4 | Función f4 | Función f4 |
| Aux 3 | — | — | Función * | Función f5 | Función f5 | Función f5 |
| Aux 4 | — | — | Función * | Función f6 | Función f6 | Función f6 |
* Los símbolos de función pueden no coincidir con los representados.
Funciones del decodificador y la configuración de CV
A continuación encontrará funciones y las CVs en forma de tabla. Mediante estas CVs puede modificar un gran número de parámetros y la asignación de funciones a las teclas de función.
Encontrará las variables CVs y sus aplicaciones para los protocolos fx (MM) y DCC en tablas aparte.
En el protocolo mfx podrá configurar dichas variables cómo-damente desde el display de la CS 2 (a partir de la versión de software 4.0) / CS 3. En su caso, usted o su distribuidor puede realizar una actualización de su Central Station 60213/60214/60215.
La tabla CV fx (MM)
| CV Significado Valores V.defecto Observación | ||||
| 1 Dirección 1 (dirección principal) | 1-255 (1 - 80)* | 78 | Esta dirección está siempre activa y no depende de la CV 49. | |
| 2 Velocidad mínima (Vmín) | 0-255 (1 - 80)* | 4 | Velocidad al nivel de marcha más bajo El valor debe ser menor que Vmáx, CV 5. | |
| 3 Retardo de arranque (AV) | 0-255 (1 - 80)* | 12 | El valor de CV multiplicado por 0,25 arroja el tiempo desde el reposo hasta la velocidad máxima. | |
| 4 Retardo de frenado (BV) | 0-255 (1 - 80)* | 12 | El valor de CV multiplicado por 0,25 arroja el tiempo de retardo de frenado | |
| 5 Velocidad máxima (Vmáx) | 0-255 (1 - 63)* {x4}* | 180 | Velocidad al nivel de marcha más alto El valor debe ser mayor que CV 2. | |
| 7 Viaje de calibración | 77 | Introducir el valor 77. El valor 77 no se alma-cena de modo permanente | ||
| 8 | Reset de decoder (configuración por defecto o de fábrica) | 8 | Este valor no se graba. | |
| 17 Dirección 3 (segunda dirección sucesiva) | 0-255 (1 - 80)* | 254 | Esta dirección puede desactivarse/activarse, en función de CV 49 | |
| 18 Dirección 4 (tercera dirección sucesiva) | 0-255 (1 - 80)* | 253 | Esta dirección puede desactivarse/activarse, en función de CV 49 | |
* () = Control Unit 6021 {} = Control Unit 6021, los valores introducidos se multiplican por x (factor).
La tabla CV fx (MM)
| CV Significado Valores V.defecto Observación | ||||
| 27 | Modo de frenado:Bit 0-3: siempre 0,Bit 4 : Tensión DC, polaridad opuesta al sentido de marchaBit 5 : Tensión DC, polaridad idéntica al sentido de marchaBit 6 - 7: siempre 0, | 0 - 48016320 | 48 | Frenado en función de sentido de marcha:- 16 respuesta DCC normal DCC- 32 respuesta DCC inversaFrenado independiente del sentido de marcha:- 48 : Comportamiento tipo fx/mfx |
| 29 | Configuración:Bit 0 : Invertir el comportamiento de sentido de la locomotora0 = Sentido normal,1 = Invertir sentidoBit 1 : Número de niveles de marcha, seminiveles 14 ó 270 = 14 niveles de marcha,1 = 27 niveles de marcha/seminivelesBit 2 : Desactivar/activar modo analógico0 = Desactivar modo analógico,1 = activar modo analógico | 0 - 76 | El comportamiento de sentido se refiere al sentido de la marcha y a las luces.El número de niveles y seminiveles de marcha dependen del aparato regulador de velocidad.Solo en modo digital o también en modo convencional. Durante el funcionamiento es posible el cambio al vuelo. | |
| 49 | Configuración ampliada:Bit 0 : Número de direcciones,Bit 1 : Número de direcciones,Bit 2 : Direcciónamiento sucesivo automático (0 = activado / 1= desactivado) | 0 - 75 | 0 = una | 1 = dos | 0 = tres | 1 = cuatro0 Dir. | 0 Dir. | 1 Dir. | 1Dir.0 = Sucesión auto. activa / 1 = Sucesión auto desactiva | |
La tabla CV fx (MM)
| CV S | gnificado Valores V.defecto Observación | |||
| 50 | Formatos alternativos:Bit 0 : Analógico AC desactivado = 0 / analó-gico AC activado = 1Bit 1 : Analógico DC desactivado = 0 / analó-gico DC activado = 1Bit 2: DCC desactivado = 0 /DCC activado = 1Bit 3 : mfx desactivado = 0 / mfx activado = 1 | 0 - 150 / 10 / 20 / 40 / 8 | 15 | Nota:fx (MM) no puede desactivarse por sí solo. |
| 51 | Bit 0: Motor invertido 1=activado, 0=desactivadoBit 1: Luz invertida 1=encendida, 0=apagadaBit 2: Vía invertida 1=activada, 0 desactivadaBit 3: Aux 3 (1=lógico, 0=sallida amplificada)Bit 4: Aux. 4 (1=lógica, 0=salida amplificada) | 0 / 10 / 20 / 40 / 80 / 16 | 0 | Los valores de los ajustes necesarios se deben sumar. |
| 52 | Tipo de motorAux: Salidas de función 5 y 6Motor - Softdrive SinusMotor - Sin regulación de velocidadMotor - Accionamiento de alta potencia C90Motor - Inducido de campanaMotor - Corriente continua DC blandoMotor - Corriente continua DC duroMotor - Corriente continua DC Ancho de vía 1 | 0 - 701234567 | 5 | Selección de un tipo de motor para configuración de parámetros adicionales de regulación del motoroSelección de salidas de función adicionales si se utiliza un decoderH0. Funcionamiento de las salidas de motor como salidas Aux adicionales, véase tabla aparte.1 |
| 53 | Regulación del motor: referencia de regulación | 0-255(0-63)*{x4}* | 10 | Vmáx absoluta para curva característica del motor |
| 54 | Regulación del motor: potencia de regulación K | 0-255 (0 - 63)*{x4}* | 20 | Componente de regulación proporcional K |
* () = Control Unit 6021 {} = Control Unit 6021, los valores introducidos se multiplican por x (factor).
1 Encontrará una tabla detallada para el mapeado de funciones en Internet en: http://www.maerklin.de/de/service/technische-informationen
La tabla CV fx (MM)
| CV S | gnificado Valores V.defecto Observación | |||
| 55 | Regulación del motor: parámetro de regulación I | 0-255 (0 - 63)*{x4}* | 15 | Componente de regulación integral I |
| 56 | Regulación del motor: influencia en la regulación | 0-255 (0 - 63)*{x4}* | 63 | 0 = PWM no regulado para Sinus(véase además CV 52 Tipo de motor) |
| 73 | Guardar diferentes estados:Bit 0: Guardar estados de funcionesBit 1: Guardar velocidadBit 2: Tras un reset arrancar con/sin el retardo de arranque programado con ABV | 0 - 70 / 10 / 20 / 4 | 7 | 0 = no guardar/ 1 = guardar0 = no guardar/ 2 = guardar0 = sin retardo arra/frena 4 = conretardo arra/frena. |
| 74 | Guardar diferentes estados:Bit 0: Guardar sentido de marcha | 0 - 1 1 | 0 = no guardar / 1 = guardar | |
| 75 | Dirección 2 (Primera dirección sucesiva) | 1 - 255(1 - 80)* | 79 | La dirección puede desactivarse/activarse en función de CV 49. |
| 76 | Amalógico DC: Tensión de arranque | 0-255 (1 - 63)*{x4}* | 12 | Nota para la CS1: (140)La CS1 indica el valor invertido. |
| 77 | Amalógico DC: Velocidad máxima | 0-255 (1 - 63)*{x4}* | 43 | |
| 78 | Amalógico AC: Tensión de arranque | 0-255 (1 - 63)*{x4}* | 15 | Nota para la CS1: (140)La CS1 indica el valor invertido. |
| 79 | Amalógico AC: Velocidad máxima | 0-255 (1 - 63)*{x4}* | 49 |
* () = Control Unit 6021 {} = Control Unit 6021, los valores introducidos se multiplican por x (factor).
La tabla CV DCC
| CV Significado Valores V.defecto Observación | ||||
| 1 Dirección principal 1 - 127 3 | Dirección corta 1 – 127cuando CV29 / bit 5 = 0 | |||
| 2^PoM | Velocidad mínima (Vmín) 0 - 255 4 | El valor debe ser menor que Vmáx, CV 5.(véase CV 67) | ||
| 3^PoM | Retardo de arranque (AV) 0 - 255 12 | El valor de CV multiplicado por 0,9arroja el tiempo desde el reposo hasta la velocidad máxima. | ||
| 4^PoM | Retardo de frenado (BV) 0 - 255 12 | El valor de CV multiplicado por 0,9 arroja el tiempo desde la velocidad máxima hasta el reposo. | ||
| 5^PoM | Velocidad máxima (Vmáx) 0 - 255 180 | Velocidad al nivel de marcha más alto.El valor debe ser mayor que Vmín, CV 2.(véase además CV 94) | ||
| 7 | Viaje de calibraciónFabricante Número de versión (Versión de software) | Introducir el valor 77. El valor 77 no se almacena de modo permanente | ||
| 8 | Fabricante Identificativo / IDReset de decoder (Configuración por defecto o de fábrica) | –8 | 131 | Sólo lecturaEl valor no puede leerse |
| 13^PoM | Funciones F1 - F8 con señal de vía alternativa 0 - 255 1 | 0= Fcn. MM o Analógico Desactivada1=Fcn. MM o Analógico ActivadaBit 7-0 [ F8 F7 F6 F5 F4 F3 F2 F1 ] | ||
| 14^PoM | Funciones FL, F9 - F15 con señal de vía alternativa | 0 - 255 1 | 0= Fcn. MM o Analógico Desactivada1=Fcn. MM o Analógico Activada[Bit 7-0 F15 F14 F13 F12 F11 F10 F9 FL] | |
| 17 | Dirección ampliada, byte de mayor peso | 192 - 231 | 192 | Dirección larga - 10239 (128)Si CV29 / bit 5 = 1 |
| 18 | Dirección ampliada, byte de menor peso | 0 - 255 128 | ||
PoM debe ser soportada por la unidad de control
La tabla CV DCC
| CV Significado Valores V.defecto Observación | ||||
| 19 Dirección de tracción 0 - 255 0 | 1 - 127 = Dirección de tracción0 = sin tracción+128, bit 7 = Invertir sentido cuando haya tracción | |||
| 21^PoM | Funciones F1 - F8 en tracción 0 - 255 0 | 0 = Fcn. # solo para dirección de loco1 = Fcn. # también para dirección de tracciónBit 7-0 = [ F8 F7 F6 F5 F4 F3 F2 F1 ] | ||
| 22^PoM | Funciones FL, F9 - F15 si hay tracción 0 - 255 0 | 0 = Fcn. # solo para dirección de loco1 = Fcn. # también para dirección de tracciónBit 7-0 = [ F15 F14 F13 F12 F11 F10 F9 FL ] | ||
| 27^PoM | Modo de frenado:Bit 0 - 2 : siempre 0,Bit 3 : siempre 0,Bit 4 : Tensión DC, polaridad opuesta al sentido de marchaBit 5 : Tensión DC, polaridad idéntica al sentido de marchaBit 6 - 7 : siempre 0, | 0 - 4800 / 160 / 320 | 48 | Frenado en function del sentido de marcha:- 16 : comportamiento DC normal- 32 : comportamiento DC inversoFrenado independiente del sentido de marcha :- 48 : comportamiento fx/mfx |
| 29^PoM | Configuración :Bit 0 : Invertir el comportamiento de sentido de la locomotora0 = Sentido normal,1 =Invertir el sentidoBit 1 : Elegir niveles de marcha 14 ó 28/1280 = 14 niveles de marcha,1 = 28/128 niveles de marchaBit 2 : Desactivar/activar modo analógico0 = Analógico desactivado,1 = Analógico activadoBit 5 : Seleccionar dirección corta / larga0 = Dirección corta,1 = Dirección larga | 0 - 39010204032 | 6 | El comportamiento de sentido se refiere al sentido de marcha y a la luz. El número de niveles de marcha y el bit de luz dependen del aparato de regulación de velocidad.Como dirección de locomotora se utiliza bien la dirección principal corta o la dirección ampliada larga. |
PoM debe ser soportada por la unidad de control
La tabla CV DCC
| CV Significado Valores V.defecto Observación | ||||
| 31^PoM | Índice, byte de mayor peso 16 16 | Índice, byte de menor peso | ||
| 32^PoM | Índice, byte de menor peso 0 0 | |||
| 50^PoM | Formatos alternativos:Bit 0 : Analógico AC desact= 0 / Analógico AC act. = 1Bit 1 : Analógico DC desact. = 0 / Analógico DC act = 1Bit 2 : fx (MM) desact = 0 / fx (MM) act. = 1Bit 3 : mfx desact. = 0 / mfx act. = 1 | 0 - 150 / 10 / 20 / 40 / 8 | 15 | Nota:DCC no puede desactivarse a sí mismo. |
| 51^PoM | Bit 0: Motor invertido 1=activado, 0=desactivadoBit 1: Luz invertida 1=encendida, 0=apagadaBit 2: Vía invertida 1=activada, 0 desactivadaBit 3: Aux 3 (1=lógico, 0=sallida amplificada)Bit 4: Aux. 4 (1=lógica, 0=salida amplificada) | 0 / 10 / 20 / 40 / 80 / 16 | 0 | Los valores de los ajustes necesarios se deben sumar. |
| 52^PoM | Tipo de motor (Bit 0-4)Aux: Salidas de función 5 y 6Motor - Softdrive SinusMotor - Sin regulación de velocidadMotor - Accionamiento de alta potencia C90Motor - Inducido de campanaMotor - Corriente continua DC blandaMotor - Corriente continua DC duraMotor - Corriente continua DC Ancho de vía 1 | 0 - 701234567 | 5 | Selección de un tipo de motor para configuración de parámetros adicionales de regulación del motoroselección de salidas de función adicionales si se utiliza un decoderH0. Funcionamiento de las salidas de motor como salidas Aux adicionales, véase tabla aparte. |
| 53^PoM | Regulación del motor: referencia de regulación 0 - 255 40 | Vmáx absoluta para curva característica del motor | ||
| 54^PoM | Regulación del motor: potencia de regulación K 0 - 255 80 | Componente de regulación proporcional K | ||
| 55^PoM | Regulación del motor: parámetro de regulación I 0 - 255 60 Componente de regulación integral I | |||
| 56^PoM | Regulación del motor: influencia en la regulación 0 - 255 | 255 | 0 = PWM no regulado para Sinus (véase además CV 52 Tipo de motor) | |
PoM debe ser soportada por la unidad de control
La tabla CV DCC
| CV Significado Valores V.defecto Observación | ||||
| 66^PoM | Corrección de marcha adelante 0 - 255 128 | El valor de CV dividido por 128 arroja el factor por el cual se multiplica el nivel de marcha en marcha hacia adelante. | ||
| 67^PoM-94^PoM | Tabla de velocidades Nivel de marcha 1 (Vmín) hasta Tabla de velocidades Nivel de marcha 28 (Vmáx) | 0 - 255 | ||
| 95^PoM | Corrección de marcha atrás 0 - 255 128 | El valor de CV dividido por 128 arroja el factor por el cual se multiplica el nivel de marcha en marcha hacia atrás. | ||
| 145^PoM | Marcha de maniobra 0 - 128 128 | 128 = 50 % de nivel marcha , 64 = 25 % de nivel de marcha | ||
| 173^PoM | Guardar diferentes estados de funciones: Bit 0: Guardar estados de funciones Bit 1: Guardar velocidad Bit 2: Tras un reset, arrancar con/sin ABV Bit 3-7: siempre 0 | 7 | 7 | 0 = no guardar, Valor = guardar, Los distintos valores deben sumarse. |
| 174^PoM | Guardar diferentes estados: Bit 0 : guardar sentido de marcha Bit 1 - 7 : siempre 0 | 0 / 1 | 1 | 0 = no guardar 1 = guardar |
| 176^PoM | Vmín Analógico DC | 0 - 255 | 50 debe ser menor que CV 177 | |
| 177^PoM | Vmáx Analógico DC | 0 - 255 | 170 debe ser mayor que CV 176 | |
| 178^PoM | Vmín Analógico AC | 0 - 255 | 60 debe ser menor que CV 179 | |
| 179^PoM | Vmáx Analógico AC | 0 - 255 | 190 debe ser mayor que CV 178 | |
PoM debe ser soportada por la unidad de control
Solución de anomalías
En el funcionamiento con diferentes protocolos pueden producirse perturbaciones e interferencias mutuas. Se recomienda reducir el número de protocolos. Desactivar los protocolos que no se necesiten en el decoder de locomotora y, si es posible, también en la central.
La locomotora avanza a golpes y se atasca: comprobar la configuración de la CV de variante de motor y, en su caso, modificarla o ejecutar un reset a la configuración de fábrica.
La locomotora no circula en modo analógico: la detección automática de modo analógico está desactivada y debe reactivarse.
La locomotora (el decoder) no reacciona: inspeccionar el cableado y los puntos de soldadura y, en su caso, repasarlos. Asegurarse de que la interfaz del decoder haga un contacto firme y comprobar el sentido de montaje.
Modo mfx/DCC: las locomotoras que están ubicadas en la maqueta de trenes se ponen en marcha sin avisar al darlas de alta en el protocolo mfx: en estas locomotoras, desactivar la detección automática de Analógico.
La locomotora no emprende la marcha: la función Abrir puertas/Cerrar puertas está todavía activa. Salir de la función Cerrar puertas y tras finalizar el sonido, la locomotora arranca conforme al retardo de arranque/retardo de frenado configurado (ABV).
Eliminación

Indicaciones para la protección del medio ambiente: Los productos identificados con el contenedor de basura tachado no deben eliminarse como basura doméstica normal y corriente al final de la vida útil, sino que deben entregarse en un punto de recogida para reciclado de aparatos eléctricos y electrónicos. El símbolo
en el producto, las instrucciones de empleo o el embalaje hace referencia a este hecho. Los materiales son reaprovechables en función de la identificación que lleven. Ayúdenos a proteger el medio ambiente y cuidar los recursos, entregando este aparato gratuitamente en los centros de recogida o distribuidores correspondientes. Si tiene alguna pregunta al respecto, diríjase a la organización encargada de la eliminación de residuos en su localidad o a su distribuidor especializado.
www.maerklin.com/en/imprint.html
Garantía
Responsabilidad y garantía conforme al documento de garantía que se adjunta.
- Para reparaciones o recambios contacte con su proveedor Märklin especializado o
