
FI-15000 - Variateur de fréquence MSW - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil FI-15000 MSW au format PDF.

| Caractéristiques | Détails |
|---|---|
| Type de produit | Groupe électrogène |
| Puissance maximale | 15 kVA |
| Type de moteur | Moteur diesel |
| Capacité du réservoir | Environ 25 litres |
| Autonomie | Jusqu'à 12 heures à pleine charge |
| Dimensions | Environ 1000 x 600 x 800 mm |
| Poids | Environ 200 kg |
| Niveau sonore | 75 dB(A) à 7 mètres |
| Utilisation recommandée | Chantiers, événements extérieurs, secours d'urgence |
| Maintenance | Vérification régulière de l'huile, nettoyage du filtre à air |
| Sécurité | Utiliser en extérieur pour éviter l'accumulation de monoxyde de carbone |
| Garantie | 2 ans |
FOIRE AUX QUESTIONS - FI-15000 MSW
Questions des utilisateurs sur FI-15000 MSW
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Variateur de fréquence au format PDF gratuitement ! Retrouvez votre notice FI-15000 - MSW et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil FI-15000 de la marque MSW.
MODE D'EMPLOI FI-15000 MSW
Fonctions générales et description du convertisseur de fréquence :
1) Classes de tension : L'appareil prend en charge trois classes de tension : monophasé 220V, triphasé 220V et triphasé 380V.
2) Mode de contrôle riche: en plus du contrôle vectoriel du capteur de vitesse il offre le contrôle vectoriel sans capteur et le contrôle scalaire U/f et le contrôle de séparation U/f.
3) Bus de champ riche : prise en charge des bus Modbus-RTU et CANlink.
4) De nombreux types d'encodeurs : prise en charge d'encodeur différentiel, d'encodeur à collecteur ouvert, le transformateur rotatif, etc.
5) Tout nouveau algorithme de contrôle vectoriel sans capteur.
Le nouveau système SVC (Sensorless Vector Control) offre une meilleure stabilité à basse vitesse, une capacité de charge plus élevée à basses fréquences et prend en charge le contrôle de couple SVC.
6) Un logiciel d'arrière-plan puissant : le téléchargement, les paramètres de téléchargement, l'oscilloscope en temps réel peuvent être réalisés sur le logiciel en arrière-plan.
| Fonction | Description |
| Protection du moteur contre la surchauffe | Lorsque la carte d'extension PC1 est sélectionnée, A13 peut recevoir le signal d'entrée du capteur de température du moteur (PT100, PT1000) pour réaliser une protection contre la surchauffe. |
| Limitation de courant rapide | Évitement d'un défaut de surintensité du convertisseur de fréquence |
| Commutateur moteur à deux positions | Deux jeux de paramètres moteur permettent la mise en œuvre d'un interrupteur moteur à deux positions. |
| Restauration des paramètres utilisateur | Les utilisateurs peuvent enregistrer ou restaurer leurs propres réglages de paramètres. |
| Précision des E/S analogiques | La précision de l'étalonnage des E/S post-usine (ou étalonnage ponctuel) peut être <20mv |
| Affichage des paramètres personnalisés | Les utilisateurs peuvent décider quels paramètres de fonction afficher. |
| Affichage des paramètres modifiés | L'utilisateur peut visualiser les paramètres de la fonction après modification. |
| Méthodes facultatives de gestion des erreurs | L'utilisateur peut sélectionner les modes de fonctionnement de l'onduleur après avoir confirmé certains défauts : arrêt roue libre, arrêt freinage, fonctionnement continu. Les utilisateurs peuvent également choisir la fréquence de fonctionnement continu. |
| Commutateur de paramètre PID | Deux jeux de paramètres PID peuvent être commutés par borne ou par variation. |
| Détection de perte de rétroaction PID | La valeur de détection de perte de rétroaction PID offre une protection pendant le fonctionnement PID. |
| Logique positive/négative DIDO | Les utilisateurs peuvent définir la logique positive / négative DIDO. |
| Délai de réponse DIDO | Les utilisateurs peuvent définir le délai de réponse DIDO. |
| Fonctionnement avec une courte coupure de courant | Le convertisseur de fréquence continue de fonctionner pendant une courte période en cas de coupure de courant momentanée ou de chute de tension. |
| Compte à rebours | Prise en charge du compte à rebours, 6500 minutes au maximum. |
Ouvrez l'emballage pour inspection.
-3
Lors de l'ouverture de la boîte, vérifiez soigneusement que le modèle indiqué sur la plaque signalétique et la valeur nominale du convertisseur de fréquence correspondent à la commande. L'emballage comprend l'appareil commandé, le certificat de qualification, le manuel d'utilisation et la carte de garantie.
En cas de dommages pendant le transport ou d'articles manquants, veuillez contacter notre société ou le fournisseur.
Chapitre 1 Informations et mesures de sécurité
Les mesures de sécurité de ce manuel sont divisées en deux catégories :

Danger - des blessures graves ou mortelles peuvent résulter de l'utilisation non conforme ;

Attention : blessures modérées ou légères et dommages matériels dus à un fonctionnement non conforme.
Veuillez lire attentivement ce chapitre avant d'installer, de déboguer et de maintenir le système et suivre les mesures de sécurité. La société n'est pas responsable des blessures ou des pertes causées par une opération non conforme.
1.1 Problèmes de sécurité
1.1.1 Avant l'installation :

Danger
- Si de l'eau a pénétré dans l'appareil, ou en cas d'un élément manquant ou endommagé constaté après ouverture de l'emballage, n'installez pas l'appareil !
- En cas d'incohérences entre la liste d'expédition et l'appareil, n'installez pas l'appareil !

Danger
• Veuillez déplacer l'équipement doucement, sinon il pourrait être endommagé !
- Si l'onduleur/convertisseur de fréquence est endommagé ou si des pièces manquent, ne l'utilisez pas ! Il y a un risque de blessure !
- Ne touchez pas les composants du système de commande avec les mains, il existe un risque de décharge électrostatique !
1.1.2 Lors de l'installation :

Danger
- Installez sur une surface non inflammable telle que le métal, et tenir à l'écart des matériaux inflammables, sinon un incendie peut se produire.
- Ne vissez pas les vis de fixation des éléments sans connaissance appropriée, notamment celles marquées en rouge !

Prudence
- N'insérez pas l'extrémité du câble ou la vis dans l'onduleur car cela pourrait l'endommager ! Installez l'onduleur dans un endroit où les vibrations sont faibles et protégez-le du soleil.
- Lorsque plus de deux convertisseurs de fréquence sont installés dans la même armoire, faites attention à leur position pour assurer un effet de dissipation thermique.
1.1.3 Lors de la connexion des fils - 6

Danger
• Respectez le mode d'emploi et engagez du personnel électrotechnique professionnel, sinon vous vous exposer a un danger!
- Le convertisseur de fréquence doit être séparé de l'alimentation électrique par un disjoncteur, sinon un incendie peut se produire !
• Avant de connecter, assurez-vous que l'état d'alimentation est réglé sur zéro, sinon il y a un risque de choc électrique !
- Veuillez vous assurer que le convertisseur est correctement mis à la terre conformément aux normes, sinon il y a un risque de choc électrique !

Danger
- Ne connectez pas l'alimentation d'entrée aux bornes de sortie (U, V, W) du convertisseur. Respectez les marquages sur les bornes des câbles et ne les raccordez pas de manière incorrecte, afin de ne pas endommager l'onduleur.
- Assurez-vous que tout le câblage est conforme aux exigences CEM (compatibilité électromagnétique) et aux normes locales de sécurité. Les sections transversales de tous les câbles doivent être celles suggérées dans le manuel, sinon un accident peut en résulter !
- Ne raccordez pas la résistance de freinage directement entre les bornes CC (+) (-), sinon un incendie pourrait se produire !
• Utilisez un seul câble blindé pour le codeur et assurez une mise à la terre fiable de la pince de blindage !
1.1.4 Avant la mise sous tension
Attention
- Vérifiez la conformité entre la classe de la tension d'alimentation d'entrée et la classe de la tension nominale du convertisseur de fréquence, le raccordement correct des bornes de l'alimentation d'entrée (R, S, T) et de sortie (U, V, W). Vérifiez qu'il n'y a pas de court-circuit dans le circuit périphérique connecté à l'onduleur et que les fils sont bien serrés, sinon l'onduleur peut être endommagé!
- Aucune partie du convertisseur de fréquence ne nécessite un test de tension car le produit a déjà été testé !
Danger
- Connectez le convertisseur de fréquence à l'alimentation électrique avec le couvercle fermé, sinon il y a un risque de choc électrique !
- Le câblage de tous les accessoires périphériques doit être conforme au manuel de l'utilisateur et les fils doivent être correctement connectés conformément à la méthode de connexion du circuit indiquée dans le manuel, sinon un accident peut se produire !
1.1.5 Après la mise sous tension
Danger
• N'ouvrez pas le couvercle après avoir allumé l'appareil, sinon il y a un risque de choc électrique !
- Ne touchez pas l'onduleur ni le circuit périphérique avec les mains mouillées, sinon un choc électrique pourrait en résulter !
- Ne touchez pas les bornes d'entrée ni de sortie du convertisseur de fréquence, sinon un choc électrique pourrait se produire !
- Lorsqu'il est allumé pour la première fois, le convertisseur détectera en toute sécurité la boucle d'alimentation externe - ne touchez pas les bornes des fils U, V, W de l'onduleur ni les bornes des fils du moteur, sinon un choc électrique pourrait en résulter !
1.1.6 Lors de l'utilisation de l'appareil
Attention
- Ne touchez pas le ventilateur de refroidissement ou les ouvertures de sortie pour vérifier la température, sinon vous risquez de vous brûler !
- Les non-professionnels ne doivent pas détecter le signal, sinon des blessures corporelles ou des dommages à l'appareil peuvent en résulter.
Danger
- Évitez que des objets ne tombent dans l'appareil pendant le fonctionnement du convertisseur de fréquence, sinon il pourrait être endommagé !
- Ne contrôlez pas l'onduleur en allumant ou en éteignant le contacteur, sinon il pourrait être endommagé !
1.1.7 Activités de maintenance
Danger
-7
- Ne réparez pas et n'entretenez pas l'appareil lorsqu'il est allumé, sinon vous risquez un choc électrique !
- Entretenez et réparez l'onduleur uniquement lorsque la tension de l'onduleur <CC36V après 2 minutes après la perte de la tension, sinon la charge électrique résiduelle sur le condensateur peut causer des blessures !
- Les personnes sans formation professionnelle ne doivent pas réparer ou entretenir le convertisseur de fréquence, sinon des blessures ou des dommages à l'équipement peuvent survenir.
- Après avoir remplacé le convertisseur de fréquence, effectuez un réglage de paramètres. Il faut insérer toutes les fiches avant de reconnecter l'appareil.
1.2 Mesures de précaution
1.2.1 Contrôle de l'isolement du moteur
Lorsque le moteur est utilisé pour la première fois, lorsque le moteur est réutilisé après une période de stockage prolongée et lors des contrôles réguliers du moteur, il est essentiel de vérifier l'isolement du moteur pour éviter d'endommager le convertisseur en raison d'une isolation inadéquate du bobinage du moteur. Lors du contrôle de l'isolement, déconnectez le câble moteur du convertisseur de fréquence. Nous suggérons de prévoir un testeur de tension tramegger 500V, la résistance d'isolement mesurée doit être ≥ 5MΩ.
1.2.2 Protection thermique du moteur
Si le moteur sélectionné ne correspond pas à la puissance nominale du convertisseur de fréquence, en particulier si sa puissance nominale est supérieure à celle du convertisseur de fréquence, les paramètres de protection du moteur pertinents doivent être adaptés ou un relais thermique installé en amont du moteur pour la protection.
1.2.3 Fonctionnement au-dessus de la fréquence du réseau
Le convertisseur de fréquence fournit une fréquence de sortie de 0 Hz \~ 3200 Hz. Si les utilisateurs doivent travailler à des fréquences supérieures à 50 Hz, la tolérance du dispositif mécanique doit être prise en compte.
1.2.4 Vibrations de l'appareil mécanique
À une certaine fréquence de sortie du convertisseur, il peut y avoir un point de résonance mécanique sur le dispositif de charge. Afin d'éviter ce phénomène le paramètre de fréquence de saut peut être réglé.
1.2.5 Informations sur l'échauffement et le bruit du moteur
La tension de sortie du convertisseur de fréquence est une onde PWM contenant certains harmoniques, de sorte que la température, le bruit et les vibrations du moteur augmenteront légèrement par rapport au fonctionnement à la fréquence du secteur.
1.2.6 Positionnement côté sortie de composants sensibles à la tension ou d'un condensateur de correction du facteur de puissance
La sortie du convertisseur de fréquence est une onde PMB. Si un condensateur de correction du facteur de puissance ou une résistance dépendante de la tension est installé du côté de la sortie pour se protéger contre la foudre, une surintensité temporaire ou même des dommages au convertisseur de fréquence peuvent facilement être provoqués. Veuillez ne pas utiliser.
1.2.7 Appareils de commutation, tels qu'un contacteur, pour les bornes d'entrée et de sortie du convertisseur de fréquence
Si un contacteur est installé entre l'alimentation et la borne d'entrée du convertisseur de fréquence, ce contacteur ne doit pas contrôler le démarrage et l'arrêt du convertisseur. Si ce contacteur est nécessaire pour commander le démarrage et l'arrêt du convertisseur, l'intervalle de temps ne doit pas être inférieur à une heure. Une charge et une décharge fréquentes raccoureciront facilement la durée de vie du condensateur du convertisseur. Si des dispositifs de commutation tels qu'un contacteur sont installés entre la borne de sortie et le moteur, assurez le fonctionnement du convertisseur de fréquence sans sortie, sinon le module peut être facilement endommagé.
1.2.8 Utilisation au-delà de la tension nominale
N'utilisez pas le convertisseur de fréquence de cette série au-delà de la plage de tension de fonctionnement autorisée dans le manuel, sinon l'appareil pourrait être endommagé. Si nécessaire, il convient d'utiliser un équipement d'augmentation ou d'abaissement de tension approprié pour la transformation de tension.
1.2.9 Passage d'une entrée triphasée à une entrée biphasée
Ne changez pas le convertisseur de fréquence triphasé en biphasé, sinon un défaut ou des dommages peuvent survenir.
1.2.10 Protection contre la foudre
Il y a un dispositif de protection dans le convertisseur de fréquence contre les surtensions causées par la foudre, de sorte qu'il a une certaine capacité d'auto-protection contre les décharges inductives. En cas de coups de foudre fréquents sur le site du client, une protection supplémentaire est requise en amont du convertisseur.
1.2.11 Hauteur et déclassement des valeurs nominales
Dans les régions avec une altitude de plus de 1000 m, l'effet de dissipation thermique du convertisseur de fréquence est plus faible en raison de l'amincissement de l'air, il est donc nécessaire de déclasser des valeurs nominales avant utilisation. Veuillez contacter notre entreprise pour une consultation.
1.2.12 Moteur adaptatif
1) Le moteur adaptatif standard est un moteur à induction asynchrone quadripolaire à cage d'écureuil. Sélectionnez le convertisseur de fréquence en fonction du courant nominal du moteur.
2) Le ventilateur de refroidissement et la broche du rotor du moteur à fréquence constante sont à connexion coaxiale. Si la vitesse de rotation diminue, l'effet de refroidissement du ventilateur diminuera, donc si le moteur surchauffe, installez un puissant ventilateur d'extraction ou remplacez le moteur par un moteur à fréquence variable.
3) Les paramètres standard du moteur adaptatif sont intégrés au convertisseur de fréquence. Il est nécessaire d'identifier les paramètres du moteur ou de modifier la valeur par défaut en fonction de la situation réelle pour qu'elle corresponde autant que possible à la valeur réelle, sinon la fonction et les performances de protection peuvent être affectées.
4) Un court-circuit dans le fil ou dans le moteur peut entraîner une alarme voire une explosion du convertisseur de fréquence. Il faut d'abord effectuer un test d'isolement pour les courts-circuits quand le moteur et le câblage sont installés pour la première fois. C'est également indispensable pour l'entretien quotidien. Lors de l'exécution du test, séparez complètement le convertisseur de la pièce à tester.
Chapitre 2. Information sur le produit
2.1 Marquage
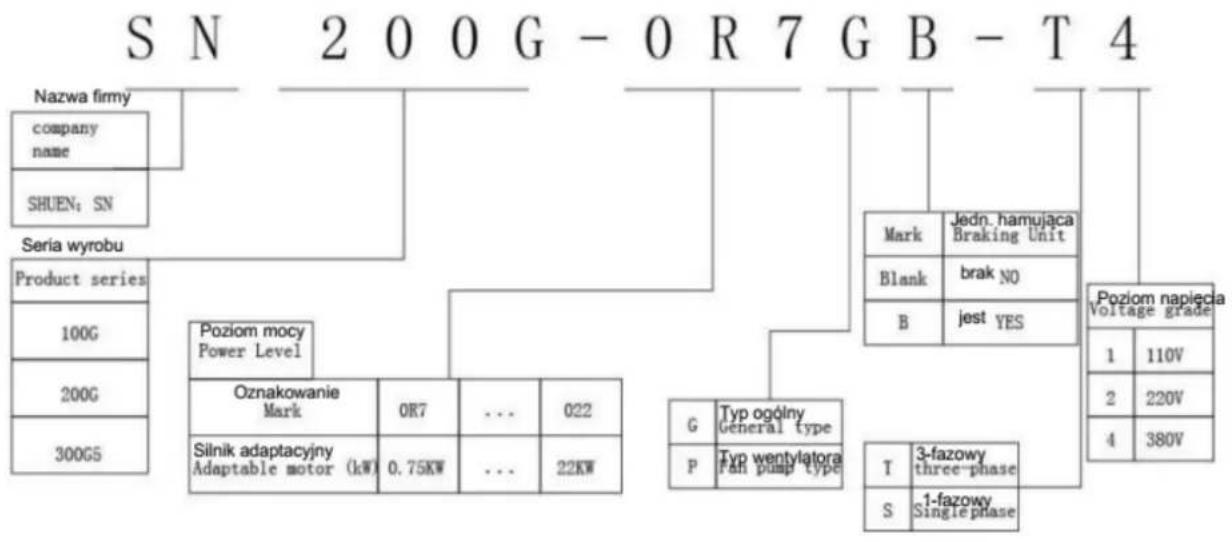
flowchart
graph TD
A["Nazwa firmy"] --> B["company name"]
A --> C["SHUEN: SN"]
D["Seria wyrobu"] --> E["Product series"]
D --> F["100G"]
D --> G["200G"]
D --> H["300G5"]
I["Mark"] --> J["Poziom mocy Power Level"]
K["Blank"] --> L["Oznakowanie Mark"]
M["B"] --> N["G"]
O["Typ ogólny General type"] --> P["P"]
Q["T"] --> R["S"]
S["3-fazowy three-phase"] --> T["I"]
U["1-fazowy Single phase"] --> V["S"]
W["Braking Unit"] --> X["Jedn. hamująca Braking Unit"]
Y["brak NO"] --> Z["Blank"]
AA["jest YES"] --> AB["B"]
2.2 Plaque signalétique
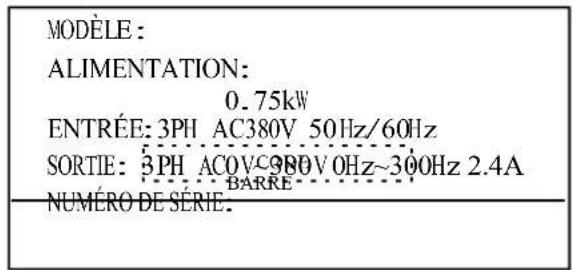
Fig. 2 - 2 Plaque signalétique
-9
2.3 Convertisseur de fréquence
Figure 2-1 Modèle et caractéristiques techniques du convertisseur de fréquence
| Modèle du convertisseur de fréquence | Puissance nominale (kVA) | Courant d'entrée (A) | Courant de sortie (A) | Moteur adaptatif | |
| kW | KM | ||||
| Alimentation triphasée : 380V, 50/60Hz | |||||
| 10061537 | 1.5 | 3.4 | 2.1 | 0.75 | 1 |
| 10061534 | 3.0 | 5.0 | 3.8 | 1.5 | 2 |
| 10061533 | 4.0 | 5.8 | 5.1 | 2.2 | 3 |
| 10061532 | 5.9 | 10.5 | 9.0 | 3.7 | 5 |
| 10061531 | 8.9 | 14.6 | 13.0 | 5.5 | 7.5 |
| 10061530 | 11.0 | 20.5 | 17.0 | 7.5 | 10 |
| 10061536 | 17.0 | 26.0 | 25.0 | 11.0 | 15 |
| 10061535 | 21.0 | 35.0 | 32.0 | 15.0 | 20 |
2.4 Spécifications
Tableau 2-2 Caractéristiques techniques du convertisseur de fréquence
| Position Valeurs | |||
| Fonctions de base | La fréquence la plus élevée | Contrôle vectoriel : 0~300HzContrôle U/f : 0~3200Hz | |
| Fréquence porteuse | 0.5kHz~16kHzRégulation automatique de la fréquence porteuse en fonction des caractéristiques de charge | ||
| Résolution de fréquence d'entrée | Paramètres des valeurs : 0.01HzParamètres de simulation : fréquence la plus élevée × 0,025 % | ||
| Mode de contrôle | SVCFVCControle U/f | ||
| Couple de démarrage | Type de machine G : 0.5Hz/150% (SVC); 0Hz/180% (FVC)Type de machine P : 0.5Hz/100% | ||
| Plage de réglage de vitesse | 1 : 100 (SVC) | 1 : 1000 (FVC) | |
| Précision de stabilisation de la vitesse | ±0.5% (SVC) | ±0.02% (FVC) | |
| Précision du contrôle du couple | ±5% (FVC) | ||
| Capacité de surcharge | Type de machine G : 150% du courant nominal à 60 s; 180% du courant nominal à 3sType de machine P : 120% du courant nominal à 60s; 150% du courant nominal à 3s | ||
| Renforcement du couple | Renforcement automatique du couple ; le couple manuel augmente de 0,1% ~ 30,0% | ||
| Courbe U/f | Trois possibilités : type linéaire ; type multipoints; courbe U/f de type de puissance N-ème(puissance 1.2, puissance 1.4, puissance 1.6, puissance 1.8, puissance 2) | ||
| Séparation U/f | 2 options : séparation complète, demi-séparation | ||
| Courbes d'accélération / de décélération | Méthode d'accélération / décélération linéaire ou courbe en S. Quatre types de temps d'accélération / décélération. Plage de tempsd'accélération / décélération : 0,0 ~ 6500,0 s | ||
| Freinage CC | Fréquence de freinage CC : 0,00 Hz ~ fréquence maximale ;temps de freinage : 0,0s ~ 36,0s d'action de freinage ; valeur du courant : 0,0% ~100,0% | ||
| Contrôle pas à pas | Plage de fréquence pas à pas : 0,00 Hz ~ 50,00 Hz;Temps d'accélération / décélération 0,0s ~ 6500,0s | ||
| API simple, vitesse à plusieurs étapes | Il réalise des vitesses de 16 étapes à l'aide de l'API intégré ou du terminal de commande. | ||
| PID intégré | Contrôle de processus facile à mettre en œuvre, système de contrôle en boucle fermée | ||
| Réglage automatique de la tension | Maintient la tension de sortie constante automatiquement en cas de changement detension dans le réseau | ||
| Surtension, surintensité, - contrôle de décrochage | Limitation automatique de courant / tension pendant le fonctionnement, empêchant les arrêts fréquents causés par surintensité et surtension | ||
| Fonction rapide de limitation de courant | Réduit l'erreur de surintensité, protège le fonctionnement normal du convertisseur. | ||
| Limitation et contrôle du couple | Le signe "Nawy" réduit le couple pendant le fonctionnement, empêcheles déclenchements fréquents de surintensité, le mode vectoriel enboucle fermée peut mettre en œuvre le contrôle du couple. | ||
| Position Valeurs | ||
| Fonctions individualisées | Performances parfaites | Mise en œuvre du contrôle moteur grâce à un contrôle vectoriel performant de courant |
| Fonctionne lors de courte perte de tension | La réduction de tension est compensée par l'énergie de retour de charge en cas de panne de courant temporaire, ce qui permet au convertisseur de fréquence de fonctionner en continu pendant une courte période. | |
| Limitation de courant rapide | Évite les erreurs fréquentes de surintensité de l'onduleur. | |
| Contrôle du temps | Fonction de contrôle du temps : réglage de l'heure dans la plage de 0,0 min 6500,0 min | |
| Commutateur multi-moteur | 2 jeux de paramètres moteurs permettent la commande de commutation de 2 moteurs | |
| Bus multithread | Prise en charge de deux types de bus de champ ponctuels : R S -4 8 5, C A N li n k | |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| Protection contre la surchauffe | Carte multifonction en option, l'entrée analogique A13 peut recevoir le signal du capteur de température du moteur (PT100, PT1000) | |
| Multi-encodeur | Il prend en charge divers encodeurs tels que l'encodeur différentiel, collecteur ouvert et transformateur rotatif | |
| Programmable par l'utilisateur | Une carte programmable par l'utilisateur en option permet un développement secondaire. | |
| Logiciel d'arrière-plan puissant | Prise en charge des paramètres de fonctionnement et d'un oscilloscope virtuel.Mise en place d'une surveillance graphique de l'état interne du convertisseur de fréquence via un oscilloscope virtuel. | |
| Bornes | Source des commandes | Un pupitre opérateur donné, un terminal de commande donné, un port de communication série donné. Plusieurs modes de commutation |
| Source de fréquence | 10 sources de fréquence : un chiffre donné, une tension analogique donnée, un courant analogique donné, une impulsion donnée, un port série donné. Plusieurs modes de commutation. | |
| Source auxiliaire de fréquence | 10 sources auxiliaires de fréquences. Mise en œuvre flexible de l'accord de fréquence auxiliaire et synthèse de fréquence | |
| Bornes d'entrée | Standard:5 bornes d'entrée numérique, dont 1 prend en charge une entrée d'impulsions à grande vitesse avec une fréquence de 100 Hz,2 bornes d'entrée analogique, dont 1 prend en charge l'entrée de tension 0 ~ 10 V, 1 prend en charge la tension 0 ~ 10 V ou l'entrée de courant 4 ~ 20 mAPossibilité d'extension par:5 bornes d'entrée numérique1 borne d'entrée analogique prenant en charge la tension 0 ~ 10V. | |
| Bornes de sortie | Standard:1 borne de sortie d'impulsions à grande vitesse (le collecteur ouvert est facultatif), prend en charge le signal de sortie carré de 0 ~ 100 kHz1 borne de sortie numérique1 borne de sortie relais1 borne de sortie analogique prend en charge l'entrée de courant 0 20 mA ou la tension 0 10 V.Possibilité d'extension par:1 borne de sortie numérique1 borne de sortie relais1 borne de sortie analogique prenant en charge l'entrée de courant 0 20 mA ou la tension 0 10 V. |
| Position | Valeurs | |
| Fonctionnement de l'écran d'affichage et du clavier | Écran d'affichage LED | Paramètres d'affichage |
| Verrouillage des touches et sélection des fonctions | Verrouillage partiel ou total des touches, définition de l'étendue des fonctions de certaines touches pour éviter les abus. | |
| Fonction de protection | Détection de court-circuit du moteur après la mise sous tension, protection de phase d'entrée/sortie par défaut, protection contre les surintensités, protection contre les surtensions, protection contre les sous-tensions, protection contre la surchauffe, protection contre les surcharges. | |
| Accessoires optionnels | Panneau opérateur LCD, unité de freinage, carte d'extension multifonctionnelle, carte d'extension IO (E/S), carte de communication RS485, carte de communication CANlink, carte PG avec entrée différentielle, carte PG du transformateur rotatif, carte PG avec entrée OC. | |
| Environnement de fonctionnement | Lieu d'utilisation | À l'intérieur sans lumière directe du soleil, poussière, gaz corrosifs, gaz combustibles, brouillard d'huile, vapeur d'eau, gouttes d'eau ou salinité. |
| Hauteur | < 1,000m | |
| Température ambiante | -10 ^ +40 ^ (à une température ambiante de 40 ^ 50 ^ , il faut l'abaisser pour pouvoir utiliser l'appareil) | |
| Humidité | <95% HR, pas de condensation | |
| Vibrations | < 5.9m/s (0.6g) | |
| Température de stockage | -20^ +60^ | |
2.5 Figure extérieure, dimensions des trous de montage
2.5.1 Figure extérieure
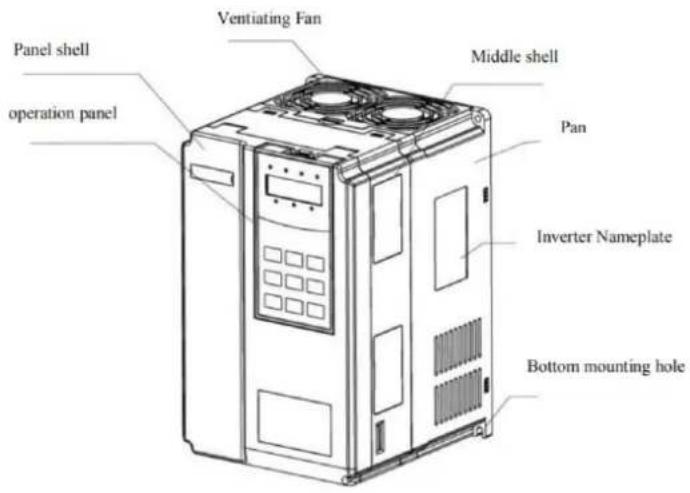
Fig. 2-3 Vue extérieure du VFD
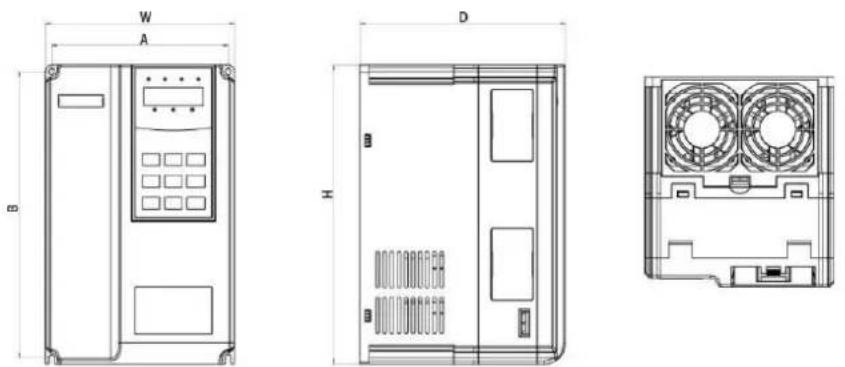
Figure 2-4 Schéma des dimensions extérieures et des éléments d'assemblage en plastique
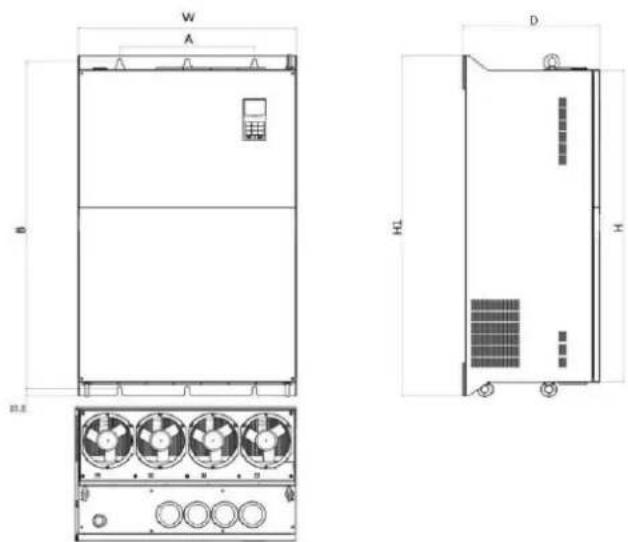
Figure 2-5 Schéma des dimensions extérieures et des éléments d'assemblage en métal
Les boitiers des modèles sont les suivants :
| Modèle | Type de boîtier |
| Monophasé 220V | |
| 0.4kW ~ 2.2kW | Boîtier en plastique |
| Triphasé 220V | |
| 0.4kW ~ 7.5kW | Boîtier en plastique |
| 11kW ~ 75kW | Boîtier en métal |
| Triphasé 380V | |
| 0.75kW ~ 15kW | Boîtier en plastique |
| 18.5kW ~ 400kW | Boîtier en métal |
2.5.2 À la figure 2-3 Dimensions des trous de montage (mm) du convertisseur de fréquence
| Modèle du convertiss eur de fréquence | Trou de montage (mm) | Dimension extérieure (mm) | Dia mètr e du trou | Poi ds (kg) | |||
| A | B | H | W | D | |||
| 10061537 | 114 | 172 | 186 | 125 | 159 | ø5.0 | 1.7 |
| 10061534 | |||||||
| 10061533 | |||||||
| 10061532 | 149 | 237 | 218 | 160 | 174 | ø5.0 | 3.2 |
| 10061531 | |||||||
| 10061530 | |||||||
| 10061536 | 190 | 305 | 322 | 208 | 192 | ø6.0 | 6.5 |
| 10061535 | |||||||
2.5.3 Dimensions extérieures du panneau d'écran d'affichage
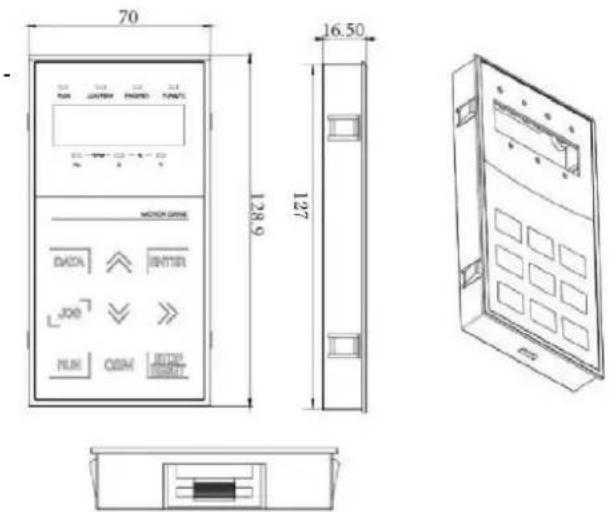
Figure 2-6 Dimensions extérieures du panneau d'écran d'affichage
Dimension des troues du panneau d'affichage :
Figure 2-7 Dimension des troues du panneau d'affichage :
2.5.4 Schéma coté du réacteur externe CC
Barre plate en aluminium
Figure 2-8 Schéma coté du réacteur externe CC
Remarque : Les éléments non standard peuvent être appariés s'il existe des exigences particulières.
Manière d'installation de l'inductance CC externe : lors de l'installation du convertisseur de fréquence, les utilisateurs doivent retirer le cavalier - barre de cuivre entre P1 et la borne de câblage de la boucle principale (+), connectez le presse-étoupe CC entre P1 et (+).
2.6 Accessoires optionnels
Tableau 2-6 Accessoires du convertisseur de fréquence
| Nom | Modèle | Fonction | Remarques |
| Unité extérieure de freinage | SNBU | 18,5 kW et plus l'unité de freinage externe | A partir de 75kW accepte une connexion multi-parallèle |
| Carte d'extension multifonction | IO-MINI-V03 | Ajoute une entrée à cinq chiffres et une entrée de tension analogique. AI3 est une valeur analogique isolée qui peut se connecter à PT100 et PT1000 ; une sortie relais, une sortie numérique et une sortie analogiquesortic de tension de RS485 / CAN | Convient aux modèles d'une puissance de 3,7 kW et plus |
| Carte d'extension I/O (entrée / sortie) | IO1 | Ajoute une entrée à trois chiffres | Convient à toute la série |
| Carte de communication MODBUS | RS485 | Avec carte de communication RS-485 isolante | Convient à toute la série |
| Carte d'extension de communication CANlink | CANLINK-V03 | Carte adaptateur de communication CANlink | Convient à toute la série |
| Carte interface encodeur différentiel | PG1 | Carte d'interface d'encodeur rotatif différentiel, adaptée à une source d'alimentation 5V | Convient à toute la série |
| Carte d'interface de transformateur rotatif | PG2 | Convient pour encodeur rotatif, Fréquence d'entraînement de 10 kHz, interface DB9 | Convient à toute la série |
| Carte interface codeur à collecteur ouvert | PG3 | Carte interface codeur à collecteur ouvertavec division de fréquence de sortie 1 : 1,adaptive pour source d'alimentation 15 V | Convient à toute la série |
| Panneau de commande LED | SNKE | Affichage LED et clavier opérateur | Convient à toute la série SN |
| Rallonge | SNCAB | Rallonge | En configuration standard, elle mesure 3 mètres de long |
2.7 Maintenance de routine du convertisseur de fréquence
2.7.1 Entretien de routine
L'influence de la température ambiante, de l'humidité, de la poussière et des vibrations entraîne le vieillissement des composants internes et des dysfonctionnements potentiels et raccourcit la durée de vie du convertisseur de fréquence. Par conséquent, une maintenance de routine, courante et régulière est essentielle.
Éléments d'inspection de routine :
1) en cas de changement anormal du son pendant que le moteur tourne
2) en cas de vibrations lorsque le moteur tourne
3) en cas de changement d'environnement du lieu d'installation du convertisseur de fréquence
4) en cas de fonctionnement anormal du ventilateur de refroidissement du convertisseur de fréquence
5) en cas de surchauffe du convertisseur de fréquence
2.7.2 Inspections régulières, contrôles réguliers :
1) Vérifiez et nettoyez régulièrement le conduit d'air.
2) Vérifiez qu'il n'y a pas de desserrage des vis.
3) Vérifiez qu'il n'y a pas de trace d'arc électrique sur les bornes des fils
2.7.3 Stockage du convertisseur de fréquence
Après l'achat du convertisseur de fréquence, les utilisateurs doivent en prendre soin pour le stockage temporaire et à long terme :
- Placez le dans l'emballage d'origine de notre société.
- Le stockage à long terme entraînera la détérioration du condensateur électrolytique. Assurez la mise sous tension pendant au moins 5 heures dans les 2 ans et utilisez un régulateur de tension pour augmenter progressivement la tension d'entrée jusqu'à la valeur nominale.
2.8 Garantie
La maintenance gratuite ne s'applique qu'au convertisseur de fréquence. Pour tout défaut ou dommage lors d'une utilisation normale, notre société est responsable de la réparation pendant 18 mois (à compter de la date de sortie d'usine du produit et de la date du code barre sur l'appareil). Une fois les 18 mois écoulés, des frais de réparation seront facturés. Même au cours des 18 premiers mois, des frais seront facturés pour : les dommages à l'équipement causés par la violation des instructions, les dommages dus à un incendie, une inondation, une tension incorrecte, etc., des dommages causés par l'utilisation du convertisseur de fréquence pour des applications anormales. Les frais de service correspondants seront facturés selon la tarification uniforme du fabricant. En cas d'accord contraire, le présent accord prévaut.
2.9 Conseils pour choisir le modèle des pièces de freinage
Le tableau 2-7 fournit les lignes directrices. Les utilisateurs peuvent choisir une valeur de résistance et une puissance différentes en fonction de la situation réelle (cependant, la valeur de résistance ne doit pas être inférieure à la valeur recommandée dans le tableau, la puissance peut être importante). Le choix de la résistance de freinage dépend de la puissance du moteur dans le système réel utilisé et est lié à l'inertie du système, au temps d'arrêt et à la charge d'énergie potentielle, les utilisateurs doivent donc choisir en fonction de la situation existante. Plus l'inertie du système est grande, plus le temps et la fréquence de freinage seront courts, donc la résistance de freinage doit avoir une puissance élevée et une valeur de résistance faible.
2.9.1 Choix de la valeur de résistance
Lors du freinage, la quasi-totalité de l'énergie récupérée du moteur est utilisée pour la résistance au freinage. Voici la formule : U * U / R = Pb
U - tension de freinage stable (varie selon le système, généralement 700 V)
Pb - force de freinage
2.9.2 Sélection de la puissance de la résistance de freinage
Théoriquement, la puissance de la résistance de freinage est cohérente avec la force de freinage.
Une réduction allant jusqu'à 70 % peut être appliquée.
La formule : 0,7 * Pr = Pb * D où
Pr - puissance de résistance; D - fréquence de freinage (participation à l'ensemble du processus lors de la récupération)
ascenseur - 20% \~ 30%,
dérouleur / enrouleur - 20 \~ 30%,
rotor - 50% \~ 60%
charge de freinage aléatoire - 5%
globalement 10%
Fig. 2-7 Sélection des freins en fonction du modèle
| Modèle du convertisseur de fréquence | Puissance recommandée | Valeur de résistance recommandée | Unité de freinage | Remarques |
| 10061537 | 150W | ≥ 300 | Intégré en standard | Pas d'indications précises |
| 10061534 | 150W | ≥ 220 | ||
| 10061533 | 250W | ≥ 200 | ||
| 10061532 | 300W | ≥ 130 | ||
| 10061531 | 400W | ≥ 90 | ||
| 10061530 | 500W | ≥ 65 | ||
| 10061536 | 800W | ≥ 43 | ||
| 10061535 | 1000W | ≥ 32 |
Chapitre 3 Installation mécanique et électrique
3.1 Installation mécanique
3.1.1 Environnement d'installation :
1) Température ambiante : La température ambiante a une grande influence sur la durée de vie du convertisseur de fréquence, c'est pourquoi la température ambiante pendant le fonctionnement du convertisseur de fréquence ne doit pas dépasser la plage (-10 \~ 50 °C).
2) Placez le convertisseur de fréquence sur une surface faiblement inflammable et laissez suffisamment d'espace autour pour que la chaleur se dissipe. Une grande quantité de chaleur est générée lorsque l'onduleur fonctionne. Installez verticalement sur le support de montage avec une vis.
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
3) Installez dans un endroit à faible vibration <0,6 G. N'exposez pas aux chocs.
4) Évitez l'installation dans un endroit exposé à la lumière directe du soleil, à l'humidité, aux gouttes d'eau, etc.
5) Évitez l'installation dans des endroits où il y a des gaz corrosifs, inflammables et explosifs dans l'air.
6) Évitez l'installation dans des endroits avec des taches d'huile, de la poussière et de la poussière métallique.
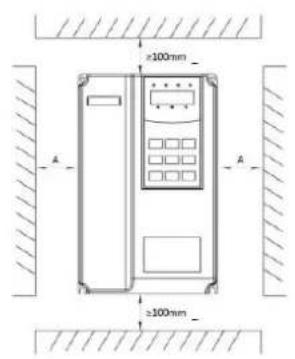
Montage par le haut et par le bas
Figure 3-1 Schéma d'installation du convertisseur de fréquence
Montage du corps : Cette dimension n'est pas à prendre en compte si la puissance du convertisseur fait ≤22kW. Au lieu de cela, elle doit faire > 50 mm si la puissance du convertisseur de fréquence fait > 22 kW.
Montage en haut et en bas : installez le panneau d'isolation thermique comme indiqué.
| Puissance | Dimensions d'installation | |
| B | A | |
| ≤15kW | ≥100mm | aucune exigence |
| 18.5kW - 30kW | ≥200mm | ≥50mm |
| ≥37kW | ≥300mm | ≥50mm |
3.1.2 Pour l'installation mécanique, la dissipation thermique est à prendre en compte. Considérez les soufflets :
1) Installez le convertisseur verticalement pour que la chaleur puisse se dissiper vers le haut, l'inversion est interdite. S'il y a plusieurs convertisseurs dans une armoire il est suggéré de les installer côte à côte. Dans les cas nécessitant un montage d'en haut et d'en bas,, installez un panneau d'isolation thermique comme illustré à la Figure 3-1.
2) L'espace d'installation est illustré à la Figure 3-1, en tenant compte de l'espace prévu pour la dissipation thermique du convertisseur. Tenez compte de la dissipation thermique des autres composants dans l'armoire.
3) Le support de montage doit être en matériaux ininflammables.
4) En cas de présence de poussière métallique, nous vous suggérons d'installer le radiateur à l'extérieur de l'armoire. L'espace dans une armoire entièrement scellée doit être aussi grand que possible.
3.1.3 Démontage et montage du couvercle inférieur
Le convertisseur de fréquence <18,5 kW a un boîtier en plastique. La figure 3-2, 3-3 montre le démontage du couvercle inférieur du boîtier en plastique. Extraire le clip du couvercle inférieur de l'intérieur à l'aide d'un outil.
Figure 3-2 Schéma de démontage du couvercle inférieur du boîtier en plastique
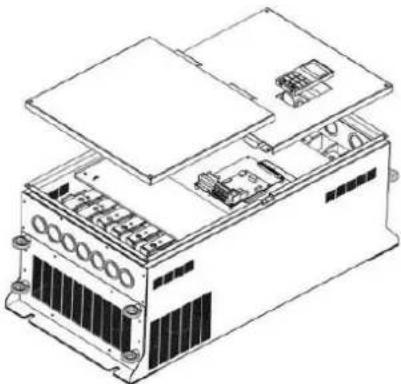
Figure 3-3 Schéma de démontage du couvercle inférieur du boîtier en tôle
Le convertisseur de fréquence >18,5 kW a un boîtier en tôle. La figure 3-3 montre le démontage du couvercle inférieur en métal. Desserrez la vis du couvercle inférieur avec un outil.
| Danger | |
| Lors du démontage de la plaque de protection inférieure, veillez à ce qu'elle ne tombe pas, causant des blessures ou des dommages à l'équipement. |
3.2 Installation électrique
3.2.1 Conseils pour le choix du modèle des éléments électriques périphériques.
Tableau 3.-1 Conseils pour le choix du modèle des éléments électriques périphériques pour le convertisseur de fréquence.
| Modèle du convertisseur de fréquence | (MCCB) A | Contacteur A recommandé | Fils du circuit principal côté entrée, mm^2 | Fils du circuit principal côté sortie, mm^2 | Fils de circuit de commande recommandés, mm^2 |
| 380V triphasé | |||||
| 10061537 10 10 2.5 2.5 1.0 | |||||
| 10061534 | 16 | 10 | 2.5 | 2.5 | 1.0 |
| 10061533 16 10 2.5 2.5 1.0 | |||||
| 10061532 | 25 | 16 | 4.0 | 4.0 | 1.0 |
| 10061531 | 32 | 25 | 4.0 | 4.0 | 1.0 |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| 10061530 | 40 | 32 | 4.0 | 4.0 | 1.0 |
| 10061536 | 63 | 40 | 4.0 | 4.0 | 1.0 |
| 10061535 | 63 | 40 | 6.0 | 6.0 | 1.0 |
3.2.2 Conseils concernant les éléments électriques périphériques.
Tableau 3.-2 Conseils concernant les éléments électriques périphériques pour le convertisseur de fréquence.
| Nom de la pièce | Lieu d'installation | Fonction |
| Commutateur d'air | Avant le circuit d'entrée | Panne de courant en cas de surintensité dans l'équipement en aval. |
| Contacteur | Du côté de l'entrée du commutateur d'air et du convertisseur | Démarrage / arrêt de l'alimentation du convertisseur. Évitez les marches/arrêts fréquents du convertisseur par le contacteur (<2 fois par minute) ou les démarrages directs. |
| Presse-étoupe d'entrée CA | Du côté entrée du convertisseur | Renforcement du coefficient de puissance côté entrée ; éliminez les harmoniques plus élevées du côté de l'entrée et évitez d'endommager l'équipement en raison de la distorsion de la forme d'onde de tension ; élimination du courant d'entrée déséquilibré causé par l'asymétrie entre les phases de puissance. |
| Filtre d'entrée CEM | Du côté entrée du convertisseur | Réduction de la conductivité externe et des perturbations du convertisseur ; réduire les perturbations de conduction de l'alimentation au lecteur, favorisant la capacité anti-interférence du convertisseur. |
| Presse-étoupe CC | Du côté de la barre CC du convertisseur | Renforcement du coefficient de puissance côté entrée ; augmentation de l'efficacité et la stabilité thermique de l'entraînement. Élimination l'influence des harmoniques plus élevées du côté entrée du convertisseur, réduction de la conductivité externe et des perturbations. |
| Presse-étoupe de sortie CA | Entre la sortie du convertisseur et le moteur. Installez près du convertisseur de fréquence | Le côté sortie du convertisseur contient des harmoniques beaucoup plus élevées. Si le moteur est éloigné du convertisseur, il y a beaucoup de capacité parasite dans le circuit. Certaines harmoniques peuvent provoquer des résonances dans le circuit qui endommagent les propriétés d'isolement du moteur et même le moteur, génèrent des courants de fuite élevés et provoquent des lancements fréquentes de protection du convertisseur. Si la distance entre le convertisseur et le moteur est généralement supérieure à 50 m, il est conseillé d'installer un presse-étoupe de sortie CA. |
3.2.3 Méthode de câblage
Schéma de câblage du convertisseur de fréquence
Figure 3-4 Schéma de câblage du convertisseur de fréquence
Attention :
1) © s'applique à la borne du circuit principal, ◦ s'applique à la borne de la boucle de régulation.
2) La résistance de freinage doit être sélectionnée en fonction des besoins de l'utilisateur, pour plus de détails, voir les directives de sélection du modèle de résistance de freinage.
3.2.4 Bornes et câblage du circuit principal
1) Description des bornes du circuit principal du convertisseur de fréquence monophasé
| Marquage de la borne | Nom | Description |
| L1, L2 | Borne d'entrée d'alimentation monophasée | Point d'alimentation monophasée 220V CA |
| (+), (-) | Bornes positives/négatives de la borne CC | Point d'entrée de la barre CC |
| (+), PB | Borne de connexion résistance de freinage | Raccordement de la résistance de freinage |
| U, V, W | Borne de sortie du convertisseur | Raccordement du moteur triphasé |
| PEA | Borne de terre | Borne de terre |
2) Description des bornes du circuit principal du convertisseur de fréquence triphasé
| Marquage de la borne | Nom | Description |
| R、S、T | Borne d'entrée d'alimentation triphasée | Point de connexion pour l'alimentation d'entrée CA triphasée |
| (+), (-) | Bornes positives/négatives de la borne CC | Point d'entrée de la barre CC et de l'unité de freinage |
| (+), PB | Borne de connexion résistance de freinage | Raccordement de la résistance de freinage |
| P1, (+) | Borne de raccordement du presse-étoupe | Point de raccordement du presse-étoupe externe CC |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| externe CC | ||
| U, V, W | Borne de sortie du convertisseur | Raccordement du moteur triphasé |
| PE | Borne de terre | Borne de terre |
Avertissements de câblage :
a) Puissance d'entrée L1, L2 ou R, S, T :
b) Le câblage côté entrée du convertisseur ne nécessite pas de séquence de phases. Mesures de sécurité concernant le câblage :
1 : (+) (-) Bornes de la barre CC : il y a une tension résiduelle sur la barre CC (+) (-) immédiatement après la mise hors tension. Attendez que le voyant CHARGE s'éteigne et la vérification que valeur baisse <36V, sinon il y a un risque de choc électrique.
2 : Lors de la sélection d'un élément de freinage externe, évitez l'inversion de polarité (+) (-), sinon cela pourrait endommager le convertisseur de fréquence ou même provoquer un incendie.
3 : La longueur du câble de l'unité de freinage ne doit pas dépasser 10 m. Une paire torsadée ou un câble double scellé doit être utilisé pour la connexion en parallèle. Ne connectez pas la résistance de freinage directement à la barre CC, sinon cela pourrait endommager le convertisseur de fréquence ou même provoquer un incendie.
c) Borne de raccordement (+), PB de résistance de freinage
Vérifiez le modèle de l'unité de freinage intégrée et la borne de raccordement de la résistance de freinage. La sélection du modèle de résistance de freinage doit correspondre à la valeur recommandée et la distance de câble doit être <5 m, sinon le convertisseur de fréquence peut être endommagé.
d) Borne de raccordement P1, (+) du presse-étoupe externe CC
Pour les convertisseurs de fréquence supérieurs à 220V37kW et 380V75kW, la bande de connexion entre les bornes P1 et (+) doit être retirée lors de l'installation du presse-étoupe CC à l'extérieur, et connectez le presse-étoupe CC entre les deux bornes.
e) U, V, W du côté sortie du convertisseur de fréquence : ne connectez pas de condensateur ou de parasurtenseur du côté sortie du convertisseur de fréquence, sinon cela entraînerait des lancements fréquents de protection ou pourrait même endommager le convertisseur. En raison de l'effet de la capacité dissipée, si le câble du moteur est trop long, il créera facilement une résonance électrique qui endommagera l'isolation du moteur ou créera un courant de fuite important et entraînera des lancements fréquents de protection du convertisseur. Si le câble moteur est > 100 m, un presse-étoupe d'entrée CA doit être installée.
f) Borne de terre PE \
Selon le modèle, le marquage de la borne de terre peut être différent, mais la signification est la même. Dans les descriptions ci-dessus, signifie que le marquage de la misse a terre correspond à PE ou .
Une mise à la terre fiable de la borne de terre doit être maintenue et la résistance du conducteur de terre doit être < 0,1 , sinon cela entraînera un fonctionnement incorrect ou même des dommages à l'équipement. N'utilisez pas la borne de mise à la terre PE ou ⏻ N ensemble sur le même fil de terre.
3.2.5 Borne de commande et câblage
1) La disposition des bornes du circuit de commande est la suivante :
(Remarque : il n'y a pas de bande de court-circuit entre CME et COM, OP et + 24V du convertisseur. Les utilisateurs choisissent le câblage CME et OP via J10, J9 respectivement).
| +10V | AI1 | AI2 | DI1 | DI2 | DI3 | DI4 | DI5 | COM | |||
| GND | GND | AO1 | CME | COM | DO1 | FM | +24V | OP | T/A | T/B | T/C |
Fig. 3-5 Schéma de la disposition des bornes du circuit de commande
2) Description fonctionnelle des bornes de commande
Tableau 3-3 Description fonctionnelle des bornes de commande du convertisseur de fréquence.
| Type | Symbole de la borne | Nom de la borne | Fonction |
| Alimentation | +10V-GND | Branchement de l'alimentation externe + 10V | Permet une alimentation externe + 10V, courant de sortie max. : 10mA. Couramment utilisé comme alimentation de fonctionnement du potentiomètre externe, la plage de valeurs de résistance du potentiomètre : 1 kΩ ~ 5 kΩ. |
| +24V-COM | Branchement de l'alimentation externe + 24V | Permet une alimentation externe + 24V, utilisé comme alimentation de fonctionnement pour la borne d'entrée/ sortie numérique et comme alimentation pour le capteur externe. Courant de sortie max. : 200mA. |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| OP | Borne d'entrée d'alimentation externe | Connectez +24 V ou COM via le cavalier J9 sur le panneau de commande. Si un signal externe est utilisé pour l'entrainement DI1 ~ DI5, l'OP doit être connecté à l'alimentation externe et le cavalier J9 doit être retiré. | |
| Entrée analogique | AI1-GND | Borne d'entrée analogique 1 | 1. Plage de la tension d'entrée : CC 0 V ~ 10 V.2. Impédance d'entrée : 22kΩ |
| AI2-GND | Borne d'entrée analogique 2 | 1. Plage d'entrée : CC 0V ~ 10V / 4mA ~ 20mA en fonction du cavalier J8 sur le panneau de commande2. Impédance d'entrée : 22kΩ pour l'entrée de tension, 500Ω pour l'entrée de courant. |
| Type | Symbole de la borne | Nom de la borne | Fonction |
| Entrée numérique | DI1- OP | Entrée numérique 1 | 1. Couplage optique isolé, compatible avec entrée bipolaire2. Impédance d'entrée : 2,4 kΩ3. Plage de tension pour l'entrée de niveau : 9 V ~ 30 V. |
| DI2- OP | Entrée numérique 2 | ||
| DI3- OP | Entrée numérique 3 | ||
| DI4- OP | Entrée numérique 4 | ||
| DI5- OP | Entrée rapide d'impulsion | Outre la fonction de DI1 ~ DI4, elle peut également servir comme canal d'entrée d'impulsions à grande vitesse. Fréquence d'entrée max. : 100 kHz | |
| Sortie analogique | AO1-GND | Sortie analogique 1 | Le cavalier J5 sur le panneau de commande détermine la tension ou le courant de sortie.Plage de la tension de sortie : 0 V ~ 10 V.Plage de courant de sortie : 0mA ~ 20mA |
| Sortie numérique | DO1-CME | Sortie numérique 1 | Couplage optique isolé, sortie bipolaire de type collecteur ouvertPlage de la tension de sortie : 0V ~ 24V; plage de courant de sortie : 0mA ~ 50mA Remarque : la sortie numérique CME et l'entrée numérique COM sont isolées en interne, mais le court-circuit CME et COM est fourni par le cavalier J10 sur le panneau de commande (DOI correspond à l'entraînement + 24 V par défaut). Si DOI nécessite une alimentation externe, retirez le cavalier J10. |
| FM- CME | Sortie rapide d'impulsion | Elle est limitée par le code de fonction F5-00 « Sélection de la sortie du terminal FM ».En tant que sortie d'impulsion rapide, la fréquence maximale est égale à 100 kHz.En tant que sortie à collecteur ouvert, il est conforme à la spécification DOI. | |
| Entrée relais | T/A-T/B | Borne normalement fermée | Capacité de contact :CA250V, 3A, COSr = 0,4 CC 30V, 1A |
| T/A-T/C | Borne normalement ouverte |
3) Description fonctionnelle des bornes auxiliaires
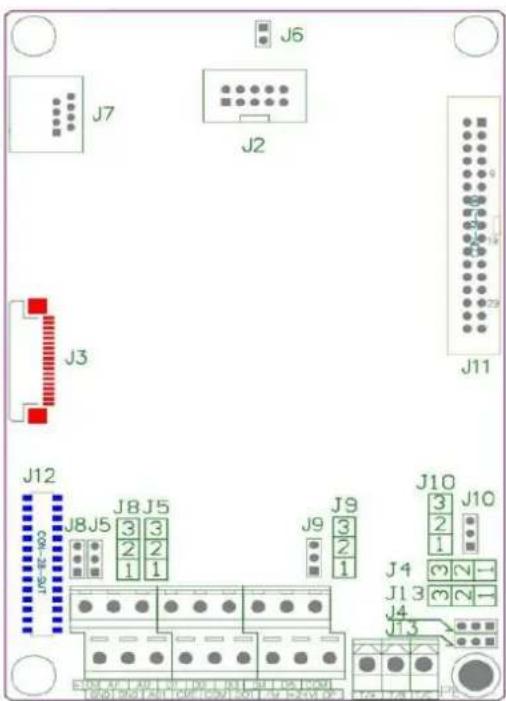
Figure 3-6 Schéma de l'emplacement des cavaliers et des bornes auxiliaires
Tableau 3-4 Description fonctionnelle des cavaliers et des bornes auxiliaires du convertisseur de fréquence.
| Marquage des cavaliers | Nom | Description | |
| Borne auxiliaire | J12 | Port des cartes d'extension multifonctions | Connecteur 28 fils pour cartes optionnelles (carte d'extension entrée / sortie, carte CPL, cartes diverses de bus etc.) |
| J3 | Port de la carte PG | Options : OC, transformateur rotatif différentiel, etc. | |
| J7 | Port clavier externe | Clavier externe | |
| Cavalier | J4 | Sélection du cavalier à connecter PE et GND | Sélectionnez si PE se connecte à GND. En cas de perturbations combinez PE avec GND pour renforcer la neutralisation perturbations. Connexion par défaut. (Comme le montre la figure 3-6, le court-circuit 1-2 est la connexion entre PE et GND, le court-circuit 2-3 est l'absence de connexion entre PE et GND) |
| J13 | Sélection du cavalier à connecter PE et COM | Sélectionnez si PE se connecte à CMD. En cas de perturbations, connectez PE avec COM pour renforcer la neutralisation des perturbations. Connexion par défaut. (Comme le montre la figure 3-6, le court-circuit 1-2 est la connexion entre PE et COM, le court-circuit 2-3 est l'absence de connexion entre PE et COM). | |
| J10 | Sélection du cavalier à connecter CME et COM | Sélectionnez si CME se connecte à CMD. Pas de connections par défaut. (Comme le montre la figure 3-6, le court-circuit 1-2 est la connexion entre CME et COM, le court-circuit 2-3 est l'absence de connexion entre CME et COM). | |
| J5 | Sélection de la sortie analogique AO1 | Décidez si la borne de sortie analogique AO1 est une sortie de tension ou de courant. Par défaut c'est la sortie de tension. (Comme le montre la figure 3-6, le court-circuit 1-2 c'est la sortie de tension, le court-circuit 2-3 c'est la sortie de courant). Plage de la tension de sortie : 0 V-10 V. Plage de courant de sortie : 0mA -20mA | |
| J8 | Sélection de l'entrée analogique AI2 | Décidez si la borne de sortie analogique AO1 est une sortie de tension ou de courant. Par défaut c'est la sortie de tension. (Comme le montre la figure 3-6, le court-circuit 1-2 c'est la sortie de tension, le court-circuit 2-3 c'est la sortie de courant) Plage de la tension de sortie : 0 V-10 V. Plage de courant de sortie : 0mA -20mA | |
| J9 | Sélection de la connexion du terminal OP | La borne OP se connecte au + 24V ou COM via le cavalier J9. Connexion + 24V par défaut. (Comme le montre la figure 3-6, le court-circuit 1-2 est une connexion OP et +24V, le court-circuit 2-3 est une connexion OP et COM). Si un signal externe est utilisé pour l'entrainement DI1 ~ DI5, connectez OP à l'alimentation externe et retirez le cavalier J9. | |
4) Description des connections des bornes de commande
a) Borne d'entrée analogique :
Un signal de tension analogique faible est facilement affecté par des perturbations externes. Le câble blindé est couramment utilisé et la longueur du câble est aussi courte que possible et ne doit pas dépasser 20 m, comme illustré à la Figure 3-7. Dans le cas où un signal analogique est gravement perturbé, installez un condensateur de filtrage ou un noyau de ferrite sur le côté de la source de signal analogique, comme illustré à la Figure 3-7.
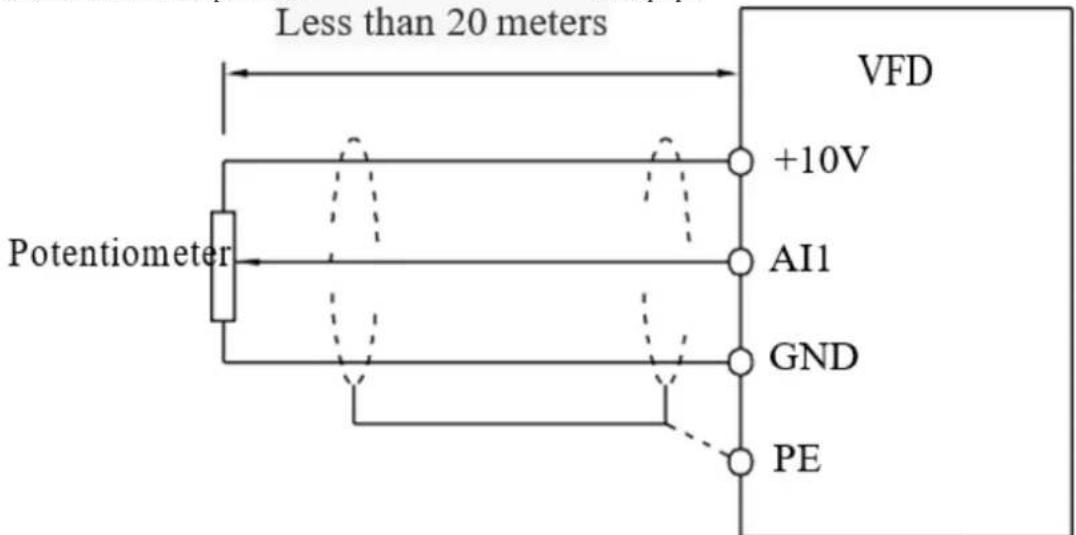
Figure 3-8 Treatment wiring diagram of analog input terminal
b) Borne d'entrée numérique : méthode de connexion de la borne DI
Un câble blindé est couramment utilisé, le plus court possible, qui ne doit pas dépasser 20 m. Si un entraînement actif est utilisé, les mesures d'égalisation nécessaires doivent être prises en cas de diaphonie de puissance. Il est suggéré de contrôler le contacteur.
Panneau de commande du convertisseur de fréquence
Figure 3-9 : Câblage
C'est le mode de câblage le plus répandu. Si vous utilisez une alimentation externe, tirez le cavalier J9 entre +24 V et OP, connectez le pôle positif de l'alimentation externe à l'OP et le pôle négatif de l'alimentation externe au CME.
Câblage de type source
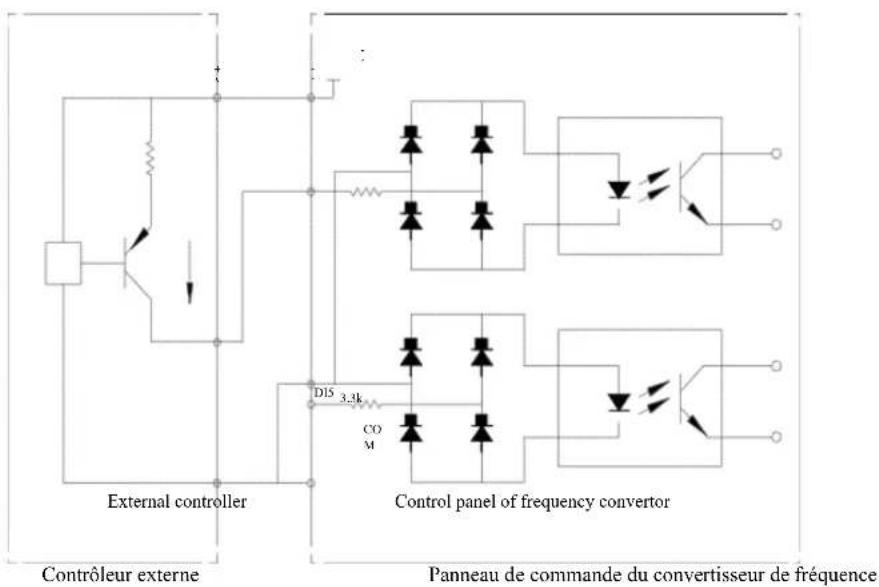
Figure 3-10 Câblage de type source
Ce type de câblage nécessite de court-circuiter l'OP avec un cavalier J9 vers COM, en connectant + 24V au port commun du contrôleur externe. Si une alimentation externe est utilisée, connectez le pôle négatif de l'alimentation externe à l'OP.
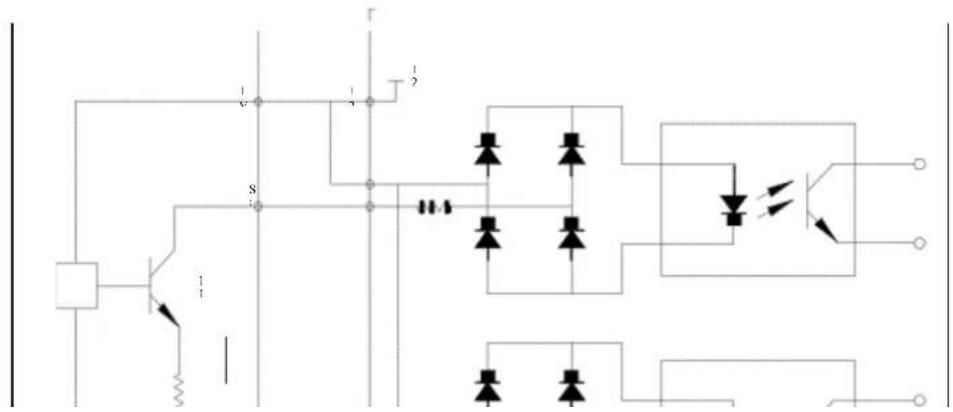
c) Borne de sortie numérique « DO »: Si la borne de sortie numérique a besoin d'un contrôle de relais, la diode d'absorption doit être installée des deux côtés de la bobine de relais, sinon l'alimentation CC 24V peut être endommagée.
Remarque : Veuillez installer la diode d'absorption correctement, comme illustré à la Figure 3-11. Sinon, tout signal provenant de la borne de sortie numérique endommagera immédiatement l'alimentation CC 24V.
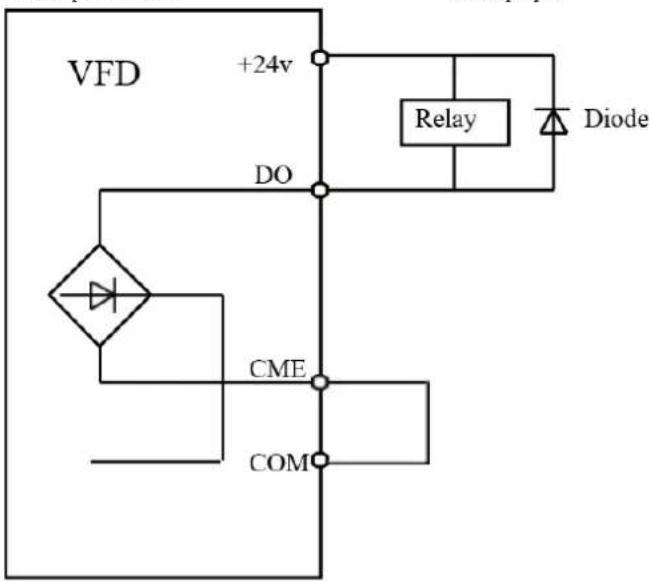
Figure 3-11 Schéma de connexion de la borne de sortie numérique
Chapitre 4 Fonctionnement et affichage
Chapitre 4. Fonctionnement et écran d'affichage
4.1 Présentation de l'interface utilisateur et de l'écran d'affichage
À l'aide du panneau de commande, vous pouvez modifier les paramètres de fonctionnement du convertisseur de fréquence, surveiller son état de fonctionnement et contrôler son fonctionnement (démarrage, arrêt), etc. L'apparence extérieure et le champ de fonction sont indiqués ci-dessous :
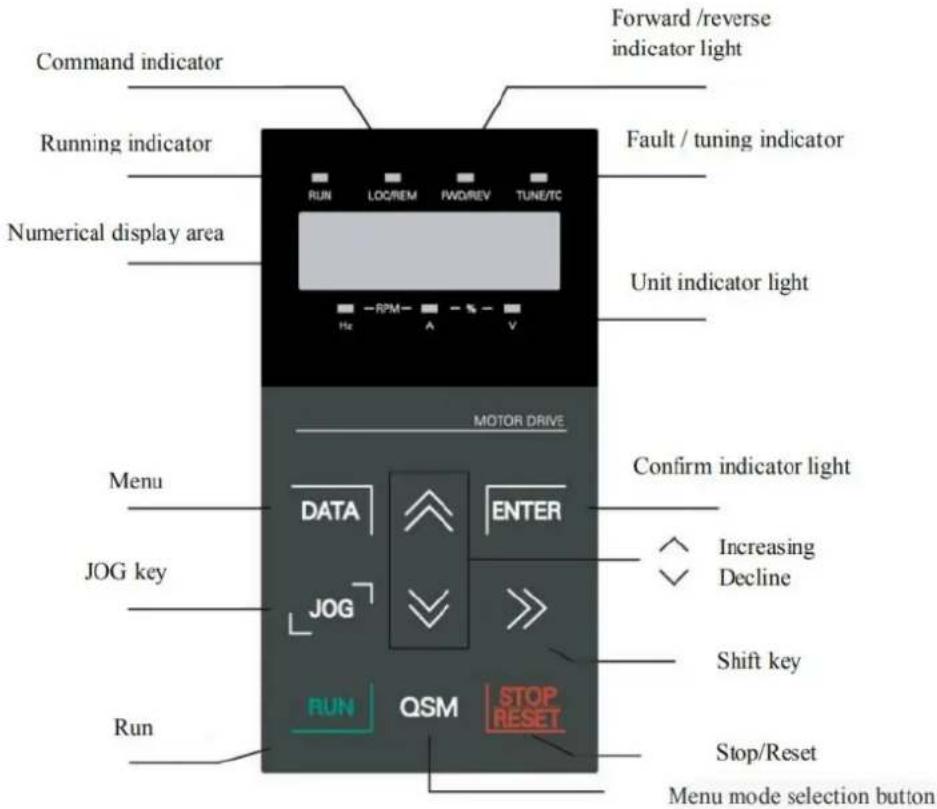
Figure 4-1 Schéma de principe du panneau de commande
1) Instructions concernant le voyant de fonctionnement :
RUN : le voyant éteint indique que le convertisseur est à l'arrêt. Une lumière fixe signifie que le convertisseur est en état de fonctionnement.
LOCAL / REMOTE : Voyant lumineux pour le fonctionnement du clavier, le fonctionnement des bornes et le fonctionnement à distance (contrôle de la communication). Le voyant éteint indique l'état du contrôle à partir du clavier. Le voyant allumé en continu indique le contrôle des bornes. Si le voyant clignote, cela signifie qu'il est en état de télécommande.
FWD / REV: Voyant d'inversion du sens de marche du moteur, le voyant allumé indique un état de fonctionnement normal.
TUNE / TC: Tuning / Contrôle de couple / Indicateur d'erreur. Lorsque le voyant est allumé en continu, cela signifie qu'il est en mode contrôle de couple. Un clignotement lent signifie que l'appareil est en phase de tuning. Un clignotement rapide signifie qu'il est en état d'erreur.
2) Voyant de l'unité : Hz : unité de fréquence, A : unité de courant, V : unité de tension, RMP (Hz + A) unité de vitesse (A + V).
3) Écran d'affichage numérique
L'écran d'affichage LED à 5 chiffres indique la fréquence de réglage, la fréquence de sortie, les types de données surveillées, les codes d'avertissement, etc.
4) Touches du clavier :
| Touche | Nom | Fonction |
| DATA | Clé de programmation | Entrez ou quittez le menu de premier niveau. |
| ENTER | La touche « Enter » | Accès au menu pas à pas, réglage de paramètres et leur validation |
| Touche d'augmentation de valeur | Augmentation des données ou réglage du code de fonction. | |
| Touche de diminution de valeur | Diminution des données ou réglage du code de fonction. | |
| Touche « Shift » | Vous pouvez faire défiler les paramètres à l'écran en mode d'arrêt ou de fonctionnement. Vous pouvez modifier le paramètre en appuyant sur ce bouton. | |
| RUN | Clé exécutive | Démarrage des opérations en mode de contrôle du clavier. |
| STOP/REST | Stop / Reset | En mode de fonctionnement, cette touche peut être utilisée pour arrêter l'exécution. En cas d'alarme de défaut, il peut être utilisé pour réinitialiser l'onduleur sans limitation de code P7-02. |
| QSM | Touche de sélection de mode | Commutateur de fonction basé sur PP-03 |
| JOG | Touche « Jog » (course d'essai) | Commutateur de fonction basé sur P7-01, source de commande ou commutation rapide de direction. |
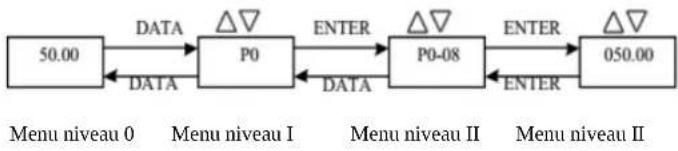
4.2 Méthodes de visualisation et de modification du code de fonction
Panneau d'opérateur - le convertisseur de fréquence dispose d'une structure de menu à trois niveaux pour le paramétrage et d'autres activités. Le menu à trois niveaux comprend : le groupe de paramètres de fonction (premier niveau) → le code de fonction (deuxième niveau) → le réglage du code de fonction (deuxième niveau). Le flux de fonctionnement est illustré à la figure 4-2.
Modification des valeurs des paramètres Sélection du paramètre de fonction Modification de la valeur du paramètre de fonction
flowchart
graph LR
A["50.00"] -->|DATA| B["P0"]
B -->|ENTER| C["P0-08"]
C -->|ENTER| D["050.00"]
A -->|DATA| B
B -->|DATA| C
C -->|ENTER| D
Figure 4-2 Schéma fonctionnel des menus à trois niveaux
Conseils : pour utiliser le menu de deuxième niveau, appuyez sur la touche DATA ou sur la touche ENTER pour entrer dans le menu de deuxième niveau. Appuyez sur ENTER pour enregistrer le paramètre défini et revenez au menu de deuxième niveau, puis passez automatiquement au code de fonction suivant ; en appuyant sur la touche SET, vous reviendrez directement aux menus de deuxième niveau sans enregistrer les paramètres et vous reviendrez au code de fonction précédent.
Exemple : Le code de fonction P3-02 a été modifié de 10,00 Hz à 15,00 Hz. (Le texte en gras indique le chiffre clignotant.)
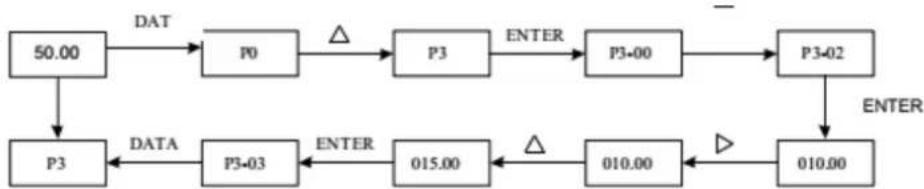
flowchart
graph TD
A["50.00"] -->|DAT| B["P0"]
B -->|Δ| C["P3"]
C -->|ENTER| D["P3-00"]
D --> E["P3-02"]
E -->|ENTER| F["010.00"]
F -->|Δ| G["015.00"]
G -->|DATA| H["P3"]
H --> I["P3-03"]
I -->|ENTER| J["015.00"]
DATA = DONNÉES
Dans l'état du menu de deuxième niveau, le code de fonction ne peut être modifié que si le chiffre du paramètre sur l'écran clignote. Causes possibles :
1) Ce code de fonction est un paramètre qui ne peut pas être modifié, tel qu'un paramètre détecté réel, un paramètre de sauvegarde d'opération, etc.
2) Le code de fonction ne peut pas être modifié dans l'état de fonctionnement de l'appareil et ne peut être modifié qu'après l'arrêt.
4.3 Mode d'affichage des paramètres
Le mode d'affichage des paramètres permet aux utilisateurs de visualiser les paramètres de fonctionnement avec différentes plages en fonction de la demande réelle. Il existe trois modes d'affichage des paramètres.
| Nom Description | |
| Mode des paramètres de fonctionnement | Affichage des paramètres de fonctionnement du convertisseur de fréquence en séquence, y compris le paramètre de fonctionnement P0 ~ PF, A0 ~ AF, U0 ~ UF |
| Mode des paramètres définis par l'utilisateur | Paramètres de fonctionnement définis par l'utilisateur (32 paramètres maximum), les utilisateurs peuvent valider les paramètres de fonctionnement à afficher par le groupe PE. |
| Mode de modification des paramètres par l'utilisateur | Les paramètres de fonctionnement ne correspondront pas aux réglages d'usine. |
Les paramètres de fonctionnement associés sont PP-02 et PP-03 comme ci-dessous :
| PP-02 | Propriétés du mode d'affichage des paramètres de la fonction | Réglage d'usine | 11 | |
| Plage de réglage | Unités | Sélection d'affichage de groupe U | ||
| 0 | Pas d'affichage | |||
| 1 | Affichage | |||
| Dizaines | Sélection d'affichage de groupe A | |||
| 0 | Pas d'affichage | |||
| 1 | Affichage | |||
| PP-03 | Sélection du mode d'affichage du paramètre défini | Réglage d'usine | 00 | |
| Plage de réglage | Unités | Sélection d'affichage des paramètres définis par l'utilisateur | ||
| 0 | Pas d'affichage | |||
| 1 | Affichage | |||
| Dizaines | Sélection d'affichage des paramètres définis par l'utilisateur | |||
| 0 | Pas d'affichage | |||
| 1 | Affichage | |||
Si le mode d'affichage des paramètres sélectionné (PP-03) est unique, l'affichage des paramètres individuels peut être basculé avec la touche QSM.
Le code du mode d'affichage pour chaque paramètre est le suivant :
| Mode d'affichage des paramètres | Écran d'affichage |
| Mode paramètres de fonctionnement | -6ASE |
| Mode des paramètres définis par l'utilisateur | -115FC |
| Mode des paramètres modifiés par l'utilisateur | --C-- |
Le mode de commutation est le suivant :
Paramètres de fonctionnement actuels : passez aux paramètres non standard.
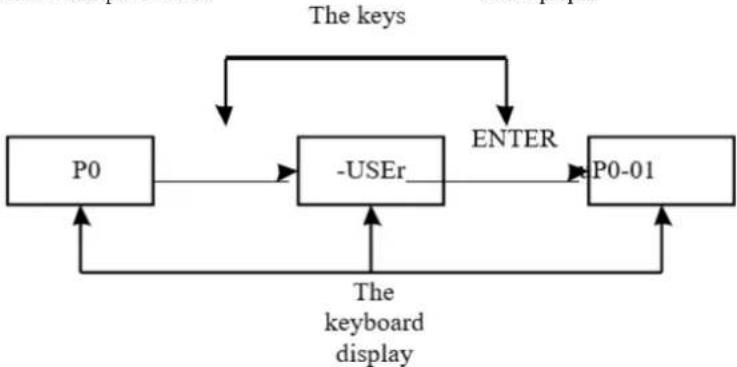
flowchart
graph TD
A["P0"] --> B["-USER"]
B --> C["P0-01"]
C --> B
B --> D["ENTER"]
D --> E["The keys"]
E --> A
F["The keyboard display"] --> A
4.4 Paramètres utilisateur personnalisés
L'objectif principal de la création d'un menu utilisateur personnalisé est de permettre aux utilisateurs d'afficher et de modifier plus facilement les paramètres couramment utilisés. Les paramètres du menu personnalisé sont affichés sous la forme « uP3-02 ». La fonction du paramètre P3-02 dans le menu personnalisé correspond à la modification des paramètres et des résultats de la programmation des conditions générales associées.
Par exemple, nous le définissons par exemple sur 30 ; si le menu affiche "NULL", cela signifie que l'utilisateur personnalise le menu. Un menu utilisateur personnalisé pour 16 paramètres couramment utilisés apparaît pour faciliter à l'utilisateur les réglages suivants :
P0-01 : Mode de contrôle
P0-02 : Sélection de la source de commande
P0-03 : Sélection de la source de fréquence dominante
P0-07 : Sélection de la source de fréquence
P0-08 : fréquence préréglée
P0-17 temps d'accélération
P0-18 : Temps d'arrêt
P3-00 : Réglage de la courbe U/f
P3-01 : Augmentation du couple
P4-00 : Sélection de la fonction de la borne DI1
P4-01 : sélection de la fonctions DI2
P4-02 : Sélection de la fonction de la borne DI3
P5-04 : sélection de la sortie DO1
P5-07 : Sélection de la sortie AO1
P6-00 : mode démarrage
P6-10 : mode arrêt
Les utilisateurs peuvent ajuster les paramètres à leurs propres besoins et les modifier.
4.5 La méthode de visualisation des paramètres d'état
En état d'arrêt ou de fonctionnement à l'aide de la touche Shift « ▷ » on peut afficher différent paramètres d'état. Le code de fonction P7-03 (paramètres de fonctionnement 1), P7-04 (paramètres de fonctionnement 2), P7-05 (paramètres) désactivation de l'affichage des paramètres, sélectionne si les paramètres doivent être affichés ou non avec un chiffre binaire.
Dans l'état d'arrêt, 16 paramètres au total, vous pouvez choisir d'afficher la condition d'arrêt, la fréquence de réglage, la tension du bus, l'état d'entrée DI, l'état de sortie DO, la tension d'entrée analogique AI1, la tension d'entrée analogique AI2, la tension d'entrée analogique AI3, la valeur actuelle du compteur, la valeur actuelle de la longueur, l'étape de fonctionnement de l'API, l'affichage de la vitesse de charge, le réglage PID, la fréquence d'impulsion d'entrée PULSE et trois paramètres de réserve. La commutation séquentielle successive montre les paramètres sélectionnés
A l'état de démarrage, l'état de cinq paramètres : fréquence de fonctionnement, fréquence préréglée, tension de la barre collective, sortie de tension, courant de sortie affiché par défaut ; les autres paramètres affichés sont : la puissance de sortie, le couple de sortie, l'état d'entrée DI, l'état de sortie DO, la tension d'entrée analogique AI1, la tension d'entrée analogique AI2, la tension d'entrée analogique AI3, l'état du compteur de courant, la longueur du courant, la vitesse linéaire, PID ; la rétroaction PID est affiché à l'aide du code de fonction P7-03, bit P7-04 (converti en binaire). La commutation séquentielle successive montre les paramètres sélectionnés.
4.6 Paramètres de mot de passe -
Le convertisseur de fréquence a une fonction de protection par mot de passe utilisateur, PP-00 est mis à zéro, c'est le mot de passe de l'utilisateur. Appuyez à nouveau sur DATE, et « - - - - » s'affichera. Le mot de passe utilisateur saisi doit être correct, il doit être saisi dans le menu normal, autrement il ne peut pas être saisi.
Si vous souhaitez annuler la fonction de protection par mot de passe, entrez simplement le mot de passe et modifiez le PP - 00 en 0.
4.7 Réglage automatique des paramètres du moteur
Avant de faire fonctionner le convertisseur de fréquence, sélectionnez le mode de contrôle vectoriel. Respectez les paramètres d'entrée exacts indiqués sur la plaque signalétique du moteur. Ce convertisseur de fréquence doit correspondre aux paramètres standards de la plaque signalétique du moteur. Il existe une forte relation entre la méthode de contrôle vectoriel et les paramètres du moteur. De bons paramètres de contrôle dépendent du réglage fin des paramètres de la machine.
Les étapes de réglage automatique des paramètres du moteur sont les suivantes :
Sélectionnez d'abord la source de commande (P0-02) pour le canal de commande du panneau opérateur. Ensuite, entrez les paramètres du moteur dans les entrées de paramètres appropriées (selon la sélection actuelle du moteur) :
| Sélection du moteur | Paramètre |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| Moteur 1 | P1-00 : sélection du type de moteur, P1-01 : puissance nominale du moteur, P1-02 : tension nominale du moteur, P1-03 : courant nominal du moteur, P1-04 : fréquence nominale du moteur, P1-05 : vitesse nominale du moteur. |
| Moteur 2 | A2-00 : type de moteur sélectionnable A2-01 : puissance nominale du moteur A2-02 : tension nominale du moteur A2-03 : courant nominal du moteur A2-04 : A2-05 : fréquence nominale du moteur, vitesse nominale du moteur. |
Avec le moteur complètement déchargé, veuillez sélectionner P1-37 (moteur 2 A2 \ à 37) et sélectionnez 2 (le moteur asynchrone termine le réglage), puis appuyez sur la touche RUN du panneau du clavier, l'onduleur calculera automatiquement les paramètres suivants:
| Sélection du moteur | Paramètre |
| Moteur 1 | P1-06 : résistance statorique de la machine synchrone, P1-07 : inductance de l'axe D de la machine synchrone, P1-08 : inductance de l'axe Q synchrone, P1-09 : inductance mutuelle du moteur asynchrone, P1-10 : courant de repos d'un moteur asynchrone. |
| Moteur 2 | A2-06 : Résistance du stator de la machine synchrone, A2-07 : Inductance de l'axe D de la machine synchrone, A2-08 : Inductance synchrone de l'axe Q, A1-09 : Inductance mutuelle du moteur asynchrone, A1-10 : courant de repos d'un moteur asynchrone. |
Les paramètres du moteur sont réglés automatiquement.
Si le moteur et la charge ne peuvent pas être complètement arrêtés, alors dans P1-37 (Moteur 2 A2-37) sélectionnez 1 (Machine asynchrone, réglage statique), puis appuyez sur la touche RUN sur le panneau du clavier.
Chapitre 5 Tableau des paramètres fonctionnels
PP-00 est défini sur une valeur non nulle, c'est-à-dire qu'un mot de passe de protection des paramètres est défini. En mode paramètres de fonctionnement et paramètres modifiés par l'utilisateur, le menu des paramètres n'est accessible qu'en saisissant le mot de passe correct. Pour annuler le mot de passe, réglez PP-00 sur 0. Dans ce cas, le menu des paramètres en mode paramètres modifiés par l'utilisateur n'est pas protégé par mot de passe. Le groupe P et le groupe A sont des paramètres de fonctionnement de base, le groupe U sont des paramètres de surveillance. Les symboles du tableau des fonctions sont les suivants :
« ★ » : indique que la valeur du paramètre définie ne peut pas être modifiée pendant que le convertisseur de fréquence fonctionne ;
« ☆ » : indique que la valeur définie du paramètre peut être modifiée pendant que le convertisseur de fréquence est à l'arrêt et en marche ;
« ● » : indique que la valeur de ce paramètre est effectivement mesurée et ne peut donc pas être modifiée ;
„*”: Indique que le paramètre est « réglé en usine » et ne peut être défini que par le fabricant et qu'il est interdit aux utilisateurs de le définir ici.
Tableau des paramètres de fonctionnement de base :
| Code | Nom | Réglages | Par défaut | Modificati on |
| Groupe fonctionnel de base P0 | ||||
| P0-00 | Type d'affichage G / P - | 1 : Type G (modèle à couple constant)2 : Type P (modèle avec ventilateur et pompe) | En fonction du type de machine | ● |
| P0-01 | Mode de contrôle du moteur 1 | 0 : Pas de contrôle du capteur de vitesse vectorielle (SVC)1 : Contrôle du capteur de vitesse vectorielle (FVC)2 : Contrôle U/f | 0 | ★ |
| P0-02 | Sélection de la source de commande | 0 : Canal CMD de commande du pupitre opérateur (diode LED éteinte)1 : Canal CMD de la borne (diode LED allumée)2 : Canal Cmd (diode LED clignote) | 0 | ☆ |
| P0-03 | Sélection de la source principale de fréquence X. | 0 : réglage numérique (consigne de fréquence P0-08, haut/bas modifiable, fonction de mémoire après coupure de courant)1 : réglage numérique (consigne de fréquence P0-08, haut/bas modifiable, pas de fonction de mémoire après coupure de courant)2 : AI13 : AI24 : AI35 : Réglage d'impulsion (DI5)6 : commande multi-états7 : API simple8 : PID9 : Paramètres de communication | 0 | ★ |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P0-04 | Sélection de la source auxiliaire de fréquence Y. | Comme P0-03 (comme sélection de la source principale de fréquence X) | 0 | ★ |
| P0-05 | Sélection de la plage de la source auxiliaire de fréquence superposée Y | 0 : En référence à la fréquence maximale1 : En référence à la source de fréquence X | 0 | ☆ |
| P0-06 | Sélection de la plage de la source auxiliaire de fréquence superposée Y | 0%~150% | 100% | ☆ |
| P0-07 | Sélection de la source de fréquence de superposée | Bits : Sélection de la source de fréquence 0 : Source principale de fréquence X1 : Résultat de l'opération principale et auxiliaire(La dépendance de l'action dépend du nombre décimal)2 : Commutateur pour la source de fréquence principale Xet la source de fréquence auxiliaire Y3 : Source principale de fréquence X, commutateur de résultat de l'opération principal et auxiliaire,4 : Source auxiliaire de fréquence Y, commutateur de résultat de l'opération principal et auxiliaireDécimal : la dépendance entre le fonctionnement des sources de fréquence principale et auxiliaire0 : Principale + auxiliaire1 : Principale - auxiliaire2 : De deux max.3 : De deux min. | 00 | ☆ |
| P0-08 | Fréquence préréglée | 0.00Hz~fréquence max. ( P0-10) | 50.00Hz | ☆ |
| P0-09 | Direction de fonctionnement | 1la même2opposée | 0 | ☆ |
| P0-10 | Fréquence max. | 50.00Hz~600.00Hz | 50.00Hz | ★ |
| Source de fréquence supérieure | 0 : réglage P0-121 : AI1 ; 2 : AI2 ; 3 : AI3; 4: réglage d'impulsion | |||
| P0-11 | 5 : Paramètres de communication | 0 | ★ | |
| P0-12 | Fréquence supérieure | Fréquence supérieure P0-14 ~ fréquence maximale P0-10 | 50.00Hz | ☆ |
| P0-13 | Décalage de fréquence supérieure | 0.00Hz~fréquence max. P0-10 | 0.00Hz | ☆ |
| P0-14 | Fréquence inférieure | 0.00Hz~fréquence supérieure P0-12 | 0.00Hz | ☆ |
| P0-15 | Fréquence porteuse | 0.5kHz~16.0kHz | type de machine | ☆ |
| P0-16 | La fréquence porteuse s'adapte à la température | 0 : non1 : oui | 1 | ☆ |
| P0-17 | Temps d'accélération 1 | 0.00s~65000s | type de machine | ☆ |
| P0-18 | Temps de décélération 1 | 0.00s~65000s | type de machine | ☆ |
| P0-19 | Unité de temps d'accélération / de décélération | 0 : 1s1 : 0.1s2 : 0.01s | 1 | ★ |
| P0-21 | La fréquence de polarisation de la source auxiliaire de la fréquence superposée | 0.00Hz~fréquence max. P0-10 | 0.00Hz | ☆ |
| P0-22 | Résolution de la commande de fréquence | 1 : 0.1Hz2 : 0.01Hz | 2 | ★ |
| P0-23 | Sélection de la mémoire de l'arrêt numérique de réglage de fréquence | 0 : pas de mémoire 1 : mémoire | 0 | ☆ |
| P0-24 | Sélection du moteur | 0 : Moteur 1, 1 : Moteur 2 | 0 | ★ |
| P0-25 | Fréquences de référence des temps d'accélération / décélération | 0 : Fréquence max. (P0-10)1 : Fréquence préréglée2 : 100Hz | 0 | ★ |
| P0-26 | Commande de fréquence standard dans la structure UP / DOWN | 0 : Fréquence de fonctionnement, 1 : Fréquence préréglée | 0 | ★ |
| Code | Nom | Réglages | Par défaut | Mififi-ti |
| Bits : la commande du panneaux d'opérateur lie la source de fréquence0 : Non liée1 : Fréquence numérique préréglée2 : AI13 : AI2 | 0000 | ☆ | ||
| P0-27 | Source de fréquence et la source de commande dans le lot | 4 : AI35 : Réglage PULSE (DI5)6 : Multivitesse (sélection de vitesse constante) |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| 7 : API simple8 : PID9 : Paramètres de communicationLes dizaines à l'écran d'affichage : la commande du terminal lie la source de la fréquenceLes centaines : la commande de communicationlie la source de la fréquenceLes milliers : l'action automatique lie la source de fréquence | ||||
| P0-28 | Type de carte d'extension de communication | 0 : Carte de communication Modbus1 : Réserve2 : Réserve3 : Carte de communication CANlink | 0 | ☆ |
| Groupe P1. Paramètres du moteur 1 | ||||
| P1-00 | Sélection du type de moteur | 0 : moteur asynchrone ordinaire1 : moteur asynchrone à fréquence variable | 0 | ★ |
| P1-01 | Puissance nominale du moteur | 0.1kW~1000.0kW | type de machine | ★ |
| P1-02 Tension nominale du moteur | 1V~400V | type de machine | ★ | |
| P1-03 | Courant nominal du moteur | 0.01A~655.35A (puissance de convertisseur <=55kW)0.1A~6553.5A (puissance de convertisseur >55kW) | type de machine | ★ |
| P1-04 | Fréquence nominale du moteur | 0.01Hz~fréquence max. | type de machine | ★ |
| P1-05 | Régimes nominaux du moteur | 1 tr/min ~ 65535 tr/min | type de machine | ★ |
| P1-06 | Résistance statorique d'un moteur asynchrone | 0.001Ω~65.535Ω (puissance de convertisseur <=55kW)0.0001Ω~6.5535Ω (puissance de convertisseur>55kW) | Réglage | ★ |
| P1-07 | Résistance rotorique d'un moteur asynchrone | 0.001Ω~65.535Ω (puissance de convertisseur <=55kW)0.0001Ω~6.5535Ω (puissance de convertisseur >55kW) | Réglage | ★ |
| P1-08 | Réactance de fuite inductive d'un moteur asynchrone | 0.01mH~655.35mH(puissance de convertisseur <=55kW)0.001mH~65.535mH(puissance de convertisseur >55kW) | Paramètre de réglage | ★ |
| P1-09 | Réactance mutuelle inductive d'un moteur asynchrone | 0.1mH~6553.5mH(puissance de convertisseur <=55kW)0.01mH~655.35mH(puissance de convertisseur >55kW) | Paramètre de réglage | ★ |
| P1-10 | Courant d'un moteur asynchrone sans charge | 0.01A~P1-03 (puissance de convertisseur <=55kW)0.1A~P1-03 (puissance de convertisseur >55kW) | Paramètre de réglage | ★ |
| Code | Nom | Réglages | Par défaut | Modificat ion | |
| P1-27 | Numéro de ligne du encodeur | 1~65535 | 1024 | ★ | |
| P1-28 | Type d'encodeur - | 0 : Encodeur incrémental ABZ 1 : Réserve2 : Transformateur rotatif | 0 | ★ | |
| P1-30 | Séquence de phase AB du encodeur incrémental ABZ | 0 : en avant1 : en arrière | 0 | ★ | |
| P1-34 | Nombre de paires de pôles d'un transformateur rotatif | 1~65535 | 1 | ★ | |
| P1-36 | Temps de détection de déconnexion PG en rétroaction de vitesse | 0.0 pas d'action0.1s~10.0s | 0.0 | ★ | |
| F1-37 | Sélection de réglage | 0 : Pas d'action1 : Tuning statique d'un moteur asynchrone2 : Réglage complet du moteur asynchrone | 0 | ★ | |
| Groupe P2 - Paramètres de contrôle vectoriel du premier moteur | |||||
| P2-00 | Gain proportionnel de boucle de vitesse 1 | 1~100 | 30 | ☆ | |
| P2-01 | Temps d'intégration de la boucle de vitesse 1 | 0.01s~10.00s | 0.50s | ☆ | |
| P2-02 | Fréquence de commutation 1 | 0.00 ~P2-05 | 5.00Hz | ☆ | |
| P2-03 | Gain proportionnel de boucle de vitesse 2 | 1~100 | 20 | ☆ | |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P2-04 | Temps d'intégration de la boucle de vitesse 2 | 0.01s ~ 10.00s | 1.00s | ☆ |
| P2-05 | Fréquence de commutation 2 | P2-02 ~ fréquence max. | 10.00Hz | ☆ |
| P2-06 | Gain de glissement de contrôle vectoriel | 50% ~ 200% | 100% | ☆ |
| P2-07 | Constante de temps pour le filtre de boucle de vitesse | 0.000s ~ 0.100s | 0.000s | ☆ |
| P2-08 | Contrôle vectoriel du gain d'excitation | 0 ~ 200 | 64 | ☆ |
| P2-09 | Source de limite supérieure en mode contrôle de vitesse | 0 : réglage du code de fonction P 2-10 1 : AI12 : AI23 : AI34 : réglage d'impulsion (PULSE)5 : réglage de communication6 : MIN (AI1, AI2)7 : MAX (AI1, AI2)L'échelle complète des options 1-7 correspond à P2-10 | 0 | ☆ |
| P2-10 | Réglage numérique du couple en mode contrôle de vitesse | 0.0% ~ 200.0% | 150.0% | ☆ |
| P2-13 | Gain proportionnel d'excitation | 0 ~ 60000 | 2000 | ☆ |
| P2-14 | Gain intégral d'excitation | 0 ~ 60000 | 1300 | ☆ |
| P2-15 | Gain proportionnel de contrôle de couple | 0 ~ 60000 | 2000 | ☆ |
| Code N | Nom Réglages Par défaut | Modification | ||
| P2-16 | Gain intégral pour le contrôle du couple | 0~ 60000 | 1300 | ☆ |
| Paramètres de contrôle U/f dans le groupe P3 | ||||
| P3-00 | Réglage de la courbe U/f | 0 : ligne droite U/f1 : ligne multi-points U/f2 : carré U/f3 : 1,2 puissance U/f4 : 1,4 puissance U/f6 : 1,6 puissance U/f8 : 1,8 puissance U/f9 : Réservé10 : Mode de séparation complète U/f11 : Mode de semi-séparation U/f | 0 | ★ |
| P3-01 | Augmentation du couple | 0.0% : (augmentation automatique du couple)0.1% ~ 30.0% | type de machine | ☆ |
| P3-02 | Fréquence d'augmentation du couple désactivée | 0.00Hz ~ fréquence max. | 50.00Hz | ★ |
| P3-03 | Point 1 de fréquence U/f | 0.00Hz ~ P3-05 | 0.00Hz | ★ |
| P3-04 | Point 1 de tension U/f | 0.0% ~ 100.0% | 0.0% | ★ |
| P3-05 | Point 2 de fréquence U/f | P3-03 ~ P3-07 | 0.00Hz | ★ |
| P3-06 | Point 2 de tension U/f | 0.0% ~ 100.0% | 0.0% | ★ |
| P3-07 | Point 3 de fréquence U/f | P3-05 Fréquence nominale du moteur (P1-04) | 0.00Hz | ★ |
| P3-08 | Point 3 de tension U/f | 0.0% ~ 100.0% | 0.0% | ★ |
| P3-09 | Gain de la compensation de glissement U/f | 0.0% ~ 200.0% | 0.0% | ☆ |
| P3-10 | Gain de surexcitation U/f | 0~ 200 | 64 | ☆ |
| P3-11 | Gain d'amortissement d'oscillations U/f | 0~ 100 | type de machine | ☆ |
| P3-13 | Source de tension isolée UF | 0 : paramètres numériques (P3-14) 1: AI12 : AI23 : AI34 : réglage d'impulsion (DI5)5 : Commande multi-états6 : API7 : PIDRéglage de communicationAttention : 100,0% correspond à la tension nominale du moteur | 0 | ☆ |
| P3-14 | Réglage numérique de la tension | 0V ~ tension nominale du moteur | 0V | ☆ |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| isolée UF | ||||
| P3-15 | Temps de montée de tension isolé UF | 0.0s~1000.0sRemarque : temps pour changer la tension de 0 V à la tension nominale du moteur | 0.0s | ☆ |
| Code | Nom | Réglages | Par défaut | Modifica-tion |
| Groupe P4. Bornes d'entrée. | ||||
| P4-00 | Sélection de la fonction de la borne DI1 | 0 : Pas de fonction1 : Marche avant (FWD)2 : Marche arrière (REV)3 : Contrôle de course à trois fils4 : Impulsion (course d'essai) en avant (FJOG) | 1 | ★ |
| P4-01 | Sélection de la fonction de la borne DI2 | 5 : Impulsion en arrière (RJOG)6 : EN HAUT7 : EN BAS8 : Arrêt roue libre9 : Remise à zéro d'un défaut (RESET) | 4 | ★ |
| P4-02 | Sélection de la fonction de la borne DI3 | 10 : Suspension de l'opération11 : Entrée normalement ouverte du défaut externe12 : Commande multi-états du terminal 113 : Commande multi-états du terminal 214 : Commande multi-états du terminal 315 : Commande multi-états du terminal 416 : Borne de sélection du temps d'accélération / décélération 117 : Borne de sélection du temps d'accélération / décélération 218 : Commutation de la source de fréquence19 : Effacez les paramètres HAUT / BAS (borne et clavier)20 : Borne pour commutation des commandes concernant la course | 9 | ★ |
| P4-03 | Sélection de la fonction de la borne DI4 | 12 | ★ | |
| P4-04 | Sélection de la fonction de la borne DI5 | 21 : Borne d'accélération / décélération22 : Pause PID23 : Réinitialisation de l'état du API24 : Coupure de la fréquence de swing25 : Entrée compteur26 : Remise à zéro du compteur | 13 | ★ |
| P4-05 | Sélection de la fonction de la borne DI6 | 27 : Entrée de comptage de longueur28 : Réinitialisation de la longueur29 : Contrôle de couple désactivé30 : entrée de fréquence d'impulsions (s'applique au DI5)31 : Réservé32 : Freinage rapide avec le courant continu33 : Entrée normalement fermée du défaut externe34 : Changement de fréquence activé35 : Négation du sens de fonctionnement du PID36 : Terminal externe 137 : Borne pour commutation des commandes de contrôle 2 | 0 | ★ |
| P4-06 | Sélection de la fonction de la borne DI7 | 38 : Pause d'intégration PID39 : Commutation de la source de fréquence X et de la fréquence préréglée40 : Commutation de la source de fréquence Y et de la fréquence préréglée | 0 | ★ |
| P4-07 | Sélection de la fonction de la borne DI8 | 0 | ★ | |
| P4-08 | - Sélection de la fonction de la borne DI9 | 41 : Sélection de la borne du moteur 142 : Sélection de la borne du moteur 243 : Commutation de paramètres PID44 : Erreur définie par l'utilisateur 145 : Erreur définie par l'utilisateur 2 | 0 | ★ |
| P4-09 | Sélection de la fonction de la borne DI10 | 46 : Interrupteur de contrôle de vitesse / contrôle de couple47 : Arrêt d'urgence48 : Borne d'arrêt externe 249 : Freinage ralenti avec le courant continu50 : Temps de travail effacé51-59 : Réservé | ||
| Code | Nom | Réglages | Par défaut | Modification |
| P4-10 | Temps de filtration DI | 0.000s~1.000s | 0.010s | ☆ |
| P4-11 | Mode de commande du terminal | 0 : deux fils 11 : deux fils 22 : trois fils 13 : trois fils 2 | 0 | ★ |
| P4-12 | Taux de changement des bornes IHAUT / BAS | 0.001Hz/s ~65.535Hz/s | 1.00Hz/s | ☆ |
| P4-13 | Valeur minimale de la courbe AII en entrée | 0.00V ~P4-15 | 0.00V | ☆ |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P4-14 | Réglage de la courbe AI1 en entrée | -100.0%~+100.0% | 0.0% | ☆ |
| P4-15 | Valeur maximale de la courbe AI1 en entrée. | P4-13~+10.00V | 10.00V | ☆ |
| P4-16 | Réglage de la courbe AI1 en entrée | -100.0%~+100.0% | 100.0% | ☆ |
| P4-17 | Temps de filtration AI1 | 0.00s~10.00s | 0.10s | ☆ |
| P4-18 | Valeur minimale de la courbe AI2 en entrée | 0.00V~P4-20 | 0.00V | ☆ |
| P4-19 | Réglage de la courbe AI2 en entrée | -100.0%~+100.0% | 0.0% | ☆ |
| P4-20 | Valeur maximale de la courbe AI2 en entrée. | P4-18~+10.00V | 10.00V | ☆ |
| P4-21 | Réglage de la courbe AI2 en entrée | -100.0%~+100.0% | 100.0% | ☆ |
| P4-22 | Temps de filtration AI2 | 0.00s~10.00s | 0.10s | ☆ |
| P4-23 | Valeur minimale de la courbe AI3 en entrée | -10.00V~P4-25 | -10.00V | ☆ |
| P4-24 | Réglage de la courbe AI3 en entrée | -100.0%~+100.0% | -100.0% | ☆ |
| P4-25 | Valeur maximal de la courbe AI3 en entrée. | P4-23~+10.00V | 10.00V | ☆ |
| P4-26 | Réglage de la courbe AI3 en entrée | -100.0%~+100.0% | 100.0% | ☆ |
| P4-27 | Temps de filtration AI3 | 0.00s~10.00s | 0.10s | ☆ |
| P4-28 | Valeur minimale en entrée d'impulsion | 0.00kHz~P4-30 | 0.00kHz | ☆ |
| P4-29 | Réglage de l'entrée d'impulsion pour une valcur minimale | -100.0%~100.0% | 0.0% | ☆ |
| P4-30 | Valeur maximale en entrée d'impulsion | P4-28~100.00kHz | 50.00kHz | ☆ |
| P4-31 | Réglage de l'entrée d'impulsion pour une valeur maximale | -100.0%~100.0% | 100.0% | ☆ |
| P4-32 | Temps de filtration d'IMPULSION | 0.00s~10.00s | 0.10s | ☆ |
| Chiffre des unités: sélection de la courbe AI1 | ||||
| 1 : courbe 1 (2 points, voir P4-13~P4-16) | ||||
| 2 : courbe 2 (2 points, voir P4-18~P4-21) | ||||
| 3 : courbe 3 (2 points, voir P4-23~P4-26) | 321 | ☆ | ||
| 4 : courbe 4 (4 points, voir A6-00~A6-07) | ||||
| 5 : courbe 5 (4 points, voir A6-08~A6-15) | ||||
| Dizaines : Sélection de la courbe AI2, comme ci-dessus | ||||
| Centaines : Sélection de la courbe AI2, idem | ||||
| Chiffre des unités : AI1 est en dessous du réglage d'entrée minimum 0 : il correspond à la valeur minimale d'entrée 1 : 0,0% | 000 | ☆ | ||
| P4-34 | AI est en dessous du réglage d'entrée minimale | Dizaines : AI2 est en dessous du réglage d'entrée minimale | ||
| AI3 est en dessous du réglage d'entrée minimale | ||||
| P4-35 | Temps de délai DI1 | 0.0s~3600.0s | 0.0s | ★ |
| P4-36 | Temps de délai DI2 | 0.0s~3600.0s | 0.0s | ★ |
| P4-37 | Temps de délai DI3 | 0.0s~3600.0s | 0.0s | ★ |
| Code | Nom | Réglages | Par défaut | Modification |
| P4-38 | Mode de fonctionnement de la borne 1 DI | 0 : actif haut | ||
| 1 : actif bas | ||||
| Chiffre des unités : DI1 Dizaines : DI2 Centaines : DI3 Milliers : DI4 Dizaines de milliers : DI15 | 00000 | ★ | ||
| P4-39 | Mode de fonctionnement de la borne 2 DI | 0 : actif haut | ||
| 1 : actif bas | ||||
| Chiffre des unités : DI6 Dizaines : DI7 Centaines : DI8 Milliers : DI9 Dizaines de milliers : DI10 | 00000 | ★ | ||
| Borne de sortie du groupe P5 | ||||
| P5-00 | Mode de fonctionnement de la sortie FM | 1 : sortie d'impulsions (FMP) | ☆ | |
| 2 : sortie numérique (FMR) 0 | ||||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P5-01 | Sélection de la fonction de sortie FMR | 0 : Pas de sortie1 : Fonctionnement du convertisseur de fréquence2 : Sortie de l'erreur (arrêt)3 : Sortie de détection de niveau de fréquence FDT14 : Fréquence atteinte | 0 | ☆ |
| P5-02 | Sélection de la fonction relais du panneau de commande (T / A-T / B-T / C) | 2 | ☆ | |
| P5-03 | Sélection de la fonction relais de la carte d'extension (T / A-T / B-T / C) | 5 : Fonctionnement à vitesse nulle (pas d'arrêt de la sortie)6 : Pré-alarme de surcharge moteur7 : Pré-alarme de surcharge de convertisseur | 0 | ☆ |
| P5-04 | Sélection de la fonction de sortie DO1 | 8 : La valeur de comptage a atteint la valeur définie9 : Point de consigne dépassé10 : Longueur atteinte11 : Cycle API terminé12 : Réglage de la durée totale de fonctionnement13 : Seuil de fréquence14 : Seuil de couple15 : Prêt au démarrage16 : AI1> AI217 : La limite supérieure de la fréquence a été atteinte18 : La limite inférieure de la fréquence a été atteinte19 : Sortie de chute de tension21 : Positionnement terminé (réservé)22 : Emplacement (réservé)23 : Fonctionnement à vitesse nulle 2 (sortie également OFF)24 : Réglage de la durée totale de démarrage25 : Sortie de détection de niveau de fréquence FDT226 : 1 à la fréquence de sortie27 : 2 à la fréquence de sortie28 : 1 au courant de sortie29 : 2 au courant de sortie30 : Timing (Chronométrage) à la sortie31 : L'entrée AI1 est dépassée32 : Exécution33 : Opération inverse34 : État de courant nul35 : Température du module atteinte36 : Limite de courant de sortie37 : Limite inférieure pour atteindre la fréquence (sortie d'arrêt)38 : Sortie d'alarme (suite)39 : Pré-alarme de surchauffe moteur40 : Dépassement du temps de fonctionnement | 1 | ☆ |
| P5-05 | Sélection de la sortie de la carte d'extension DO2 | 4 | ☆ |
| Code N | Nom Réglages | Par défaut | Modification | |
| P5-06 | Sélection de la fonction de sortie FMP | 0 : Fréquence de fonctionnement1 : Fréquence de réglage2 : Courant de sortie3 : Couple de sortie4 : Puissance de sortie5 : Tension de sortie6 : Entrée d'impulsion(100 % correspond à 100,0 kHz)7 : A11 | 0 | ☆ |
| P5-07 | Sélection de la fonction de sortie AO1 | 0 | ☆ |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P5-08 | Sélection de la fonction de sortie de la carte d'extension AO2 | 8 : AI29 : AI3 (carte d'extension)10 : Longueur11 : Valeur12 : Paramètres de communication13 : Vitesse moteur14 : Courant de sortie (100,0% c'est 1000,0 A)15 : Tension de sortie (100,0% c'est 1000,0 V)16 : Réservé | 1 | ☆ |
| P5-09 | La fréquence de sortie maximale du FMP | 0.01kHz~100.00kHz | 50.00kHz | ☆ |
| P5-10 | Coefficient de décalage du point zéro | -100.0%~+100.0% | 0.0% | ☆ |
| P5-11 | Gain AO1 | -10.00~+10.00 | 1.00 | ☆ |
| P5-12 | Coefficient de décalage du point zéro de la carte d'extension AO2 | -100.0%~+100.0% | 0.0% | ☆ |
| P5-13 | Gain de carte d'extension AO2 | -10.00~+10.00 | 1.00 | ☆ |
| P5-17 | Temps de retardement de sortie FMR | 0.0s ~3600.0s | 0.0s | ☆ |
| P5-18 | Temps de retardement de sortie RELAY1 | 0.0s ~3600.0s | 0.0s | ☆ |
| P5-19 | Temps de retardement de sortie RELAY2 | 0.0s ~3600.0s | 0.0s | ☆ |
| P5-20 | Temps de retardement de sortie DO1 | 0.0s ~3600.0s | 0.0s | ☆ |
| P5-21 | Temps de retardement de sortie DO2 | 0.0s ~3600.0s | 0.0s | ☆ |
| P5-22 | Sélectionne l'état correct de la borne de sortie DO | 0 : logique positive1 : logique négativeChiffre des unités : FMR Dizaines : RELAY 1Centaines : RELAY2 Milliers : DO1 Dizaines de milliers : DO2 | 00000 | ☆ |
| Marche / arrêt de la commande de groupe P6 | ||||
| P6-00 | Mode de démarrage | 0 : Démarrage direct1 : Redémarrage du suivi de la vitesse2 : Déclenchement de la pré-cxcitation ( moteur asynchrone CA) | 0 | ☆ |
| P6-01 | Mode suivi de vitesse | 0 : Démarrage à partir de la fréquence d'arrêt1 : Démarrage à partir la vitesse nulle2 : Démarrage à partir de la fréquence max. | 0 | ★ |
| P6-02 | Vitesse de suivi de rotation | 1~100 | 20 | ☆ |
| P6-03 | Fréquence de départ | 0.00Hz~10.00Hz | 0.00Hz | ☆ |
| Code | Nom | Réglages | Par défaut | Modification |
| P6-04 | Temps de maintien de la fréquence de démarrage | 0.0s~100.0s | 0.0s | ★ |
| P6-05 | Courant de freinage CC / démarrage du courant avant excitation | 0%~100% | 0% | ★ |
| P6-06 | Temps de démarrage du freinage avec courant continu / temps de excitation préliminaire | 0.0s~100.0s | 0.0s | ★ |
| P6-07 | Mode d'accélération / décélération | 1 : Accélération et de décélération linéaire2 : Accélération et décélération de la courbe S, A3 : Accélération et décélération de la courbe S, B | 0 | ★ |
| P6-08 | Temps du segment de début de la courbe S | 0.0%~ (100.0%-P6-09) | 30.0% | ★ |
| P6-09 | Temps du segment de fin de la courbe S | 0.0%~ (100.0%-P6-08) | 30.0% | ★ |
| P6-10 | Mode d'arrêt | 0 : freinage jusqu'à l'arrêt, 1: arrêt roue libre | 0 | ☆ |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P6-11 | Fréquence de départde freinage avec le courant continu | 0.00Hz~fréquence max. | 0.00Hz | ☆ |
| P6-12 | Temps de démarrage du freinage avec lecourant continu | 0.0s~100.0s | 0.0s | ☆ |
| P6-13 | Courant de freinage | 0%~100% | 0% | ☆ |
| P6-14 | Temps de freinage avec le courantcontinu | 0.0s~100.0s | 0.0s | ☆ |
| P6-15 | Le degré d'usure du frein | 0%~100% | 100% | ☆ |
| Clavier et écran d'affichage de groupe P7 | ||||
| P7-01 | Sélection de la fonction de la toucheJOG | 0 : Valeur JOG non valide1 : Commutation du canal CMD du pupitreopérateur et du canal CMD distant (CMDchannel clamp ou CMD channel)2 : Interrupteur de marche arrière3 : Impulsion en avant | 0 | ★ |
| P7-02 | Fonction de la touche STOP / RESET | 0 : Uniquement en mode clavier, la fonctiond'arrêt de la touche STOP / RES est active1 : dans n'importe quel mode de fonctionnement,la fonction STOP / RES est active | 1 | ☆ |
| P7-03 | Affichage des paramètresde fonctionnement1 | 0000 ~ FFFFBit00 : fréquence de fonctionnement 1Hz)Bit01 : fréquence préréglée (I1z)Bit02 : tension de la barre collective (V)Bit03 : tension de sortie (V)Bit04 : courant de sortie (A)Bit05 : Puissance de sortie (kW)Bit06 : couple de sortie (%)Bit07 : état de l'entrée DIBit08 : état de sortie DOBit09 : tension AI1 (V)Bit10 : tension AI2 (V)Bit11 : tension AI3 (V)Bit12 : valeur comptéeBit13 : valcur de longueurBit14 : affichage de la vitesse dechargementBit15 : valcur réglée du régulateur PID | 1F | ☆ |
| Code | Nom | Réglages | Par défaut | Modification |
| P7-04 | Affichage des paramètres de fonctionnement2 | 0000 ~ FFFF Bit00: Rétroaction PIDBit01 : degré APIBit02 : Fréquence d'impulsion à l'entrée d'impulsior (kHz) Bit03 : Fréquence de fonctionnement 2 (Hz)Bit04 : Temps de travail restantBit5 : tension AI1 avant correction [V]Bit6 : tension AI2 avant correction [V]Bit7 : tension AI3 avant correction [V]Bit8 : vitesse linéaireBit9 : temps écoulé depuis la mise sous tension de l'onduleur [h]Bit10 : temps écoulé depuis le démarrage de l'onduleur [min]Bit11 : fréquence d'impulsion préréglée (kHz)Bit12 : Valeur préréglée de communicationBit13 : Vitesse de rétroaction de l'encodeur (Hz)Bit14 : Affichage de la fréquence principale X (Hz)Bit15 : Affichage de la fréquence Y (Hz) | 0 | ☆ |
| P7-05 | Affichage des paramètres en état d'arrêt | 0000~ FFFFBit00 : fréquence préréglée (Hz)Bit01 : tension de la barre (V)Bit02 : État de l'entrée DIBit03 : État de sortie DOBit04 : Tension AI1 (V)Bit05 : Tension AI2 (V)Bit06 : Tension AI3 (V)Bit07 : Valeur du compteurBit08 : Valcur de longueurBit09 : phase APIBit10 : Vitesse de chargementBit11 : Configuration PIDBit12 : fréquence d'impulsion préréglée (kHz) | 33 | ☆ |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P7-06 | Multiplicateur de vitesse de charge affiché | 0.0001~6.5000 | 1.0000 | ☆ |
| P7-07 | Température du module de dissipation thermique de l'onduleur | 0.0°C~100.0°C | - | ● |
| P7-08 | Température du dissipateur thermique du redresseur en pont | 0.0°C~100.0°C | - | ● |
| P7-09 | Temps total de fonctionnement | 0h~65535h | - | ● |
| P7-10 | N° de produit | - | - | ● |
| P7-11 | N° de version du logiciel | - | - | ● |
| P7-12 | Nombre de décimales quand la vitesse de charge est affichée | 0:0 décimale1:1 décimale2:2 décimale3:3 décimale | 1 | ☆ |
| P7-13 | Temps total depuis la mise sous tension | 0h~65535h | - | ● |
| P7-14 | Consommation totale d'énergie | 0~65535KWh | - | ● |
| Fonctions auxiliaires - groupe P8 | ||||
| P8-00 | Fréquence d'impulsion | 0.00Hz~fréquence max. | 2.00Hz | ☆ |
| P8-01 | Temps d'accélération d'impulsion | 0.0s~6500.0s | 20.0s | ☆ |
| P8-02 | Temps de décélération d'impulsion | 0.0s~6500.0s | 20.0s | ☆ |
| Code | Nom | Réglages | Par défaut | Modification |
| P8-03 | Temps d'accélération 2 | 0.0s~6500.0s | type de machine | ☆ |
| P8-04 | Temps de décélération 2 | 0.0s~6500.0s | type de machine | ☆ |
| P8-05 | Temps d'accélération 3 | 0.0s~6500.0s | type de machine | ☆ |
| P8-06 | Temps de décélération 3 | 0.0s~6500.0s | type de machine | ☆ |
| P8-07 | Temps d'accélération 4 | 0.0s~6500.0s | type de machine | ☆ |
| P8-08 | Temps de décélération 4 | 0.0s~6500.0s | type de machine | ☆ |
| P8-09 | Fréquence de saut 1 | 0.00Hz~fréquence max. | 0.00Hz | ☆ |
| P8-10 | Fréquence de saut 2 | 0.00Hz~fréquence max. | 0.00Hz | ☆ |
| P8-11 | Plage de fréquence de saut | 0.00Hz~fréquence max. | 0.01Hz | ☆ |
| P8-12 | Temps entre le changement de direction de rotation | 0.0s~3000.0s | 0.0s | ☆ |
| P8-13 | Rotation inversée autorisée | 0 : autorisation 1 : interdiction | 0 | ☆ |
| P8-14 | Mode de fonctionnement avec une fréquence réglée inférieure à la limite inférieure | 0 : fonctionnement avec la fréquence limite inférieure1: arrêt2 : fonctionnement à vitesse nulle | 0 | ☆ |
| P8-15 | Équilibrage de charge | 0.00Hz~10.00Hz | 0.00Hz | ☆ |
| P8-16 | Seuil de temps total de commutation | 0h~65000h | 0h | ☆ |
| P8-17 | Seuil de temps total de fonctionnement | 0h~65000h | 0h | ☆ |
| P8-18 | Protection de démarrage | 0 : pas de protection 1 : protection | 0 | ☆ |
| P8-19 | Seuil de fréquence | 0.00Hz~fréquence max. | 50.00Hz | ☆ |
| P8-20 | Hystérésis seuil de fréquence | 0.0%~100.0% (niveau FDT1) | 5.0% | ☆ |
| P8-21 | Plage de détection autour de la fréquence réglée | 0.0%~100.0% (fréquence max.) | 0.0% | ☆ |
| P8-22 | Activité des seuils de fréquence en temps d'accélération/arrêt | 0 : inactif 1 : actif | 0 | ☆ |
| P8-25 | Fréquence de commutation entre le temps d'accélération 1 et le temps d'accélération 2 | 0.00Hz~fréquence max. | 0.00Hz | ☆ |
| P8-26 | Fréquence de commutation entre le temps d'arrêt 1 et le t emps d'arrêt 2 | 0.00Hz~fréquence max. | 0.00Hz | ☆ |
| P8-27 | Priorité élevée pour la commande jog depuis le terminal | 0 : actif1 : inactif | 0 | ☆ |
| P8-28 | Valeur de détection de fréquence | 0.00Hz~fréquence max. | 50.00Hz | ☆ |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P8-29 | Valeur d'hystérésis de détection de fréquence | 0.0% ~ 100.0% ( niveau FDT2) | 5.0% | ☆ |
| P8-30 | Toute valeur de détection de fréquence 1 | 0.00Hz ~ fréquence max. | 50.00Hz | ☆ |
| P8-31 | Toute largeur de détection de fréquence 1 | 0.0% ~ 100.0% (fréquence max.) | 0.0% | ☆ |
| P8-32 | Toute valeur de détection de fréquence 2 | 0.00Hz ~ fréquence max. | 50.00Hz | ☆ |
| P8-33 | Toute largeur de détection de fréquence 2 | 0.0% ~ 100.0% (fréquence max.) | 0.0% | ☆ |
| P8-34 | Seuil de détection de courant résiduel | 0.0% ~ 300.0%le courant nominal c'est 100,0% | 5.0% | ☆ |
| P8-35 | Temps de retard de détection de courant résiduel | 0.01s ~ 600.00s | 0.10s | ☆ |
| P8-36 | Limite de courant de sortie | 1.1(pas de détection)1.2~ 300.0% (courant nominal du moteur) | 200.0% | ☆ |
| Code | Nom | Réglages | Par défaut | Modification |
| P8-37 | Temps de retard de détection de seuil de courant résiduel | 0.00s ~ 600.00s | 0.00s | ☆ |
| P8-38 | Tout courant atteint 1 | 0.0% ~ 300.0% (courant nominal du moteur) | 100.0% | ☆ |
| P8-39 | Largeur de tout courant atteint 1 | 0.0% ~ 300.0% (courant nominal du moteur) | 0.0% | ☆ |
| P8-40 | Tout courant atteint 2 | 0.0% ~ 300.0% (courant nominal du moteur) | 100.0% | ☆ |
| P8-41 | Largeur de tout courant atteint 2 | 0.0% ~ 300.0% (courant nominal du moteur) | 0.0% | ☆ |
| P8-42 | Sélection de la fonction de minuterie | 0 : inactif 1 : actif | 0 | ☆ |
| P8-43 | Sélection du temps de fonctionnement de la minuterie | 0 : réglage P8-44 ; 1: AI1 ; 2 : AI2 ; 3 : AI3La plage de l'entrée analogique correspond à P8-44 | ☆ | |
| P8-44 | Temps de fonctionnement de la minuterie | 0.0Min~ 6500.0Min | 0.0Min | ☆ |
| P8-45 | Seuil inférieur de protection de la tension d'entrée AI1 | 0.00V ~ P8-46 | 3.10V | ☆ |
| P8-46 | Seuil supérieur de protection de la tension d'entrée AI1 | P8-45 ~10.00V | 6.80V | ☆ |
| P8-47 | Température du module atteinte | 0°C ~ 100°C | 75°C | ☆ |
| P8-48 | Contrôle du ventilateur | 0 : Uniquement lorsque l'onduleur fonctionne1 : Tout le temps | 0 | ☆ |
| P8-49 | Fréquence de reprise | Fréquence de veille (P8-51) ~ fréquence maximale (P0-10) | 0.00Hz | ☆ |
| P8-50 | Délai de reprise | 0.0s ~ 6500.0s | 0.0s | ☆ |
| P8-51 | Fréquence de veille | 0.00Hz~ fréquence de reprise (P8-49) | 0.00Hz | ☆ |
| P8-52 | Délai de transition en état de veille | 0.0s ~ 6500.0s | 0.0s | ☆ |
| P8-53 | Temps de fonctionnement total maximum | 0.0Min~ 6500.0Min | 0.0Min | ☆ |
| Groupe F09 : Erreurs et protection | ||||
| P9-00 | Sélection de la protection contre les surcharges du moteur | 0 : autorisation 1 : interdiction | 1 | ☆ |
| P9-01 | Gain de la protection contre les surcharges du moteur | 0.20 ~ 10.00 | 1.00 | ☆ |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P9-02 | Niveau de déclenchement de l'avertissement de surcharge moteur | 50%~100% | 80% | ☆ |
| P9-03 | Gain de la protection contre le décrochage | 0~100 | 0 | ☆ |
| P9-04 | Tension de protection contre le décrochage de surtension | 120%~150% | 130% | ☆ |
| P9-05 | Augmentation du décrochage de surintensité | 0~100 | 20 | ☆ |
| P9-06 | Courant de protection contre le décrochage de surintensité | 100%~200% | 150% | ☆ |
| P9-07 | Protection contre les courts-circuits à la terre | 0 : inactif 1 : actif | 1 | ☆ |
| P9-09 | Réinitialisation automatique d'erreur | 0~20 | 0 | ☆ |
| P9-10 | Fonctionnement de la sortie DO pendant la réinitialisation automatique de l'erreur | 0 : inactif 1 : actif | 0 | ☆ |
| P9-11 | Temps entre l'apparition de l'erreur et sa réinitialisation automatique | 0.1s~100.0s | 1.0s | ☆ |
| P9-12 | Protection contre la perte de phase à la sortie | 0 : autorisation 1 : interdiction | 1 | ☆ |
| P9-13 | Protection contre la perte de phase à la sortie | 0 : autorisation 1 : interdiction | 1 | ☆ |
| Code | Nom | Réglages | Par défaut | Modification |
| P9-14 | Première erreur | 0 : pas d'erreur1: réservé2: surintensité pendant l'accélération3: surintensité à l'arrêt4: surintensité à vitesse constante5: surtension pendant l'accélération6: surtension à l'arrêt7: surtension à vitesse constante8 : surcharge du tampon de résistance9 : chute de tension10 : surcharge du convertisseur11 : surcharge du moteur12 : Défaillance de la phase à l'entrée | — | ● |
| P9-15 | Deuxième erreur | 13 : Défaillance de la phase de sortie14 : surchauffe du module15 : erreur de périphériques externes16 : erreur de communication17: erreur de contacteur18 :erreur de mesure19 : erreur de réglage automatique du moteur20 : erreur encodeur/carte PG21 : erreur de lecture / enregistrement des paramètres22 : erreur matérielle du convertisseur23 : erreur matérielle du convertisseur24 : réservé25 : réservé | — | ● |
| P9-16 | Deuxième (dernière) erreur | 26 : Dépassement du temps total de fonctionnement27 : Erreur définie par l'utilisateur 128 : Erreur définie par l'utilisateur 229 : dépassement du temps total d'alimentation30 : la charge devient nulle31 : rupture de la rétroaction PID40 : Délai court de limite de courant41 : Échec de la commutation du moteur en marche42 : Écart de vitesse excessif43 : Vitesse du moteur excessive45 : Surchauffe du moteur51 : Erreur de position d'origine | — | ● |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P9-17 | Fréquence de la deuxième (dernière) erreur | — | — | ● |
| P9-18 | Courant de la deuxième (dernière) erreur | — | — | ● |
| P9-19 | Tension à la barre au deuxième (dernière) erreur | — | — | ● |
| P9-20 | État de la borne des entrées à la deuxième (dernière) erreur | — | — | ● |
| P9-21 | État de la borne des sorties à la deuxième (dernière) erreur | — | — | ● |
| P9-22 | État du convertisseur à la deuxième (dernière) erreur | — | — | ● |
| P9-23 | Temps de mise sous tension de l'onduleur à la deuxième (dernière) erreur | — | — | ● |
| P9-24 | Temps de fonctionnement de l'onduleur à la deuxième (dernière) erreur | — | — | ● |
| P9-27 | Fréquence de la deuxième erreur | — | — | ● |
| P9-28 | Courant de la deuxième erreur | — | — | ● |
| P9-29 | Tension à la barre au deuxième erreur | — | — | ● |
| P9-30 | État des entrées à la deuxième erreur | — | — | ● |
| P9-31 | État de la borne des sorties à la deuxième erreur | — | — | ● |
| P9-32 | État de l'onduleur à la deuxième erreur | — | — | ● |
| P9-33 | Temps de mise sous tension à la deuxième erreur | — | — | ● |
| P9-34 | Temps de fonctionnement à la deuxième erreur | — | — | ● |
| P9-37 | Fréquence de la première erreur | — | — | ● |
| P9-38 | Courant de la première erreur | — | — | ● |
| P9-39 | Tension à la barre à la première erreur | — | — | ● |
| P9-40 | Fréquence de la première erreur | — | — | ● |
| P9-41 | État des sorties à la première erreur | — | — | ● |
| P9-42 | État de l'onduleur à la première erreur | — | — | ● |
| P9-43 | Temps d'alimentation à la première erreur | — | — | ● |
| P9-44 | Temps de fonctionnement à la première erreur | — | — | ● |
| P9-47 | - Contre-mesures pour l'erreur de type 1 | Chiffre des unités : surcharge du moteur (11)0 : arrêt en roue libre1 : arrêt passage en mode d'arrêt2: continuation de fonctionnementDizaines : 12 : perte de phase à l'entrée 12)Chiffre des unités : 100 perte de la phase à la sortie(13)Milliers : erreur de périphériques externes (15)Dizaines de milliers : erreur de communication (16) | 00000 | ☆ |
| P9-48 | Contre-mesures pour l'erreur de type 2 | Chiffre des unités : erreur d'encodeur/cartePGG (20) 0 : Arrêt roue libre10 : Erreur du lecteur de code (21)0 : Arrêt roue libre1 : Arrêt, passage en mode stop100 : Réservé1000 : Surchauffe du moteur 2510000 : Dépassement du temps de fonctionnement (26) | 00000 | ☆ |
| Code | Nom | Réglages | Par défaut | Modification |
| P9-49 | Contre-mesures pour l'erreur 3 | Chiffre des unités : Erreur définie par l'utilisateur 1 (27)0 : Arrêt roue libre1 : Arrêt, passage en mode stop2 : Poursuite de fonctionnementCentaines : Dépassement du temps total de fonctionnement (29)Millics : la charge devient nulle (30)0 : Arrêt roue libre1 : Arrêt, passage en mode stop2 : continuation de fonctionnement à 7 % de la fréquence nominale du moteur et retour à la fréquence réglée lorsque le moteur récupère la chargeDizaines de milliers : perte de rétroaction par PID (31)0 : Arrêt roue libre1 : Arrêt, passage en mode stop2 : poursuite de fonctionnement | 00000 | ☆ |
| P9-50 | Contre-mesures pour l'erreur 4 | Chiffre des unités : Écart de vitesse excessif (42)0 : Arrêt roue libre1 : Arrêt, passage en mode stop2 : Poursuite de fonctionnementDizaines : Vitesse du moteur excessive (43)Centaines : Erreur de position d'origine (51) | 00000 | ☆ |
| P9-54 | Continuation à la fréquence sélectionnée en cas d'erreur | 0 : Fonctionnement à la fréquence de fonctionnement actuelle1 : Fonctionnement avec une fréquence définie2 : Fonctionnement à la limite supérieure de la fréquence3 : Fonctionnement à la limite inférieure de la fréquence4 : Fonctionnement à une fréquence anormale alternative | 0 | ☆ |
| P9-55 | Erreur de fréquence alternative | 60.0%~100.0% (100.0% Correspond à la fréquence max. P0-10) | 100.0% | ☆ |
| P9-56 | Type de capteur de température du moteur | 0 : pas de capteur de température1 : PT1002 : PT1000 | 0 | ☆ |
| P9-57 | Seuil de protection contre la surchauffe du moteur | 0°C~200°C | 110°C | ☆ |
| P9-58 | Seuil d'avertissement de surchauffe du moteur | 0°C~200°C | 90°C | ☆ |
| P9-59 | Sélection du mode de fonctionnement en cas de panne de courant momentanée | 0 : inactif1 : freinage2 : roue libre jusqu'à l'arrêt | 0 | ☆ |
| P9-60 | Réservé | P9-62~100.0% | 100.0% | ☆ |
| P9-61 | Temps de réponse en cas de panne de courant | 0.00s~100.00s | 0.50s | ☆ |
| P9-62 | La valeur du changement de tension pour la réaction après une panne de courant | 60.0%~100.0% (tension standard de la barre) | 80.0% | ☆ |
| P9-63 | Protection après la chute à zéro de la charge | 0 : inactif1 : actif | 0 | ☆ |
| P9-64 | Niveau détection de la chute de charge à zéro | 0.0~100.0% | 10.0% | ☆ |
| P9-65 | Temps de détection d'une chute de charge à zéro | 0.0~60.0s | 1.0s | ☆ |
| P9-67 | Seuil de détection de vitesse excessive | 0.0%~50.0% (fréquence max.) | 20.0% | ☆ |
| P9-68 | Temps de détection de vitesse excessive | 0.0s~60.0s | 5.0s | ☆ |
| P9-69 | Seuil de détection d'écart excessif de vitesse | 0.0%~50.0% (fréquence max.) | 20.0% | ☆ |
| P9-70 | Temps de détection d'écart excessif de vitesse | 0.0s~60.0s | 0.0s | ☆ |
| Groupe PA - Action PID | ||||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| PA-00 | Sélection de la source de valeur préréglée du régulateur PID | 0 : réglages PA-011 : AI1;2 : AI2;3 : AI34: entrée d'impulsion (DI5)5 : Paramètres de communication6 : contrôle en multi-étapes | 0 | ☆ |
| PA-01 | Valeurs préréglées PID | 0.0%~100.0% | 50.0% | ☆ |
| PA-02 | Source de signal de rétroaction PID | 0 : AI1; 1: AI2 ; 2 : AI3 ; 3 : AI1-AI24 : réglage d'impulsion (DI5)5 : Paramètres de communication6 : AI1+AI27 : MAX (|AI1|, |AI2|)8 : MIN (|AI1|, |AI2|) | 0 | ☆ |
| PA-03 | Sens de fonctionnement du PID | 0 : positif1 : négatif | 0 | ☆ |
| PA-04 | Plage de rétroaction PID | 0~65535 | 1000 | ☆ |
| PA-05 | Accru du segment proportionnel Kp1 | 0.0~100.0 | 20.0 | ☆ |
| PA-06 | Temps d'intégration Ti1 | 0.01s ~10.00s | 2.00s | ☆ |
| PA-07 | Temps de dérivatisation Td1 | 0.000s ~10.000s | 0.000s | ☆ |
| PA-08 | Fréquence de coupure pour fonctionnement inverse PID | 0.00~fréquence max. | 2.00Hz | ☆ |
| PA-09 | Limite d'écart PID | 0.0% ~100.0% | 0.0% | ☆ |
| PA-10 | Limite de dérivatisation PID | 0.00% ~100.00% | 0.10% | ☆ |
| PA-11 | Changement du temps PID | 0.00~650.00s | 0.00s | ☆ |
| PA-12 | Temps de filtrage de rétroaction PID | 0.00~60.00s | 0.00s | ☆ |
| PA-13 | Temps de filtre de sortie PID | 0.00~60.00s | 0.00s | ☆ |
| PA-14 | Réservé | - | - | ☆ |
| PA-15 | Coefficient du gain du segment proportionnel Kp2 | 0.0~100.0 | 20.0 | ☆ |
| PA-16 | Temps d'intégration Ti2 | 0.01s ~10.00s | 2.00s | ☆ |
| PA-17 | Temps de dérivatisation Td2 | 0.000s ~10.000s | 0.000s | ☆ |
| PA-18 | Conditions de commutation des paramètres PI | 0 : pas de commutation1 : avec commutateur des bornes DI2 : commutation automatique basée sur l'écart | 0 | ☆ |
| Code | Nom | Réglages | Par défaut | Modification |
| PA-19 | Écart de commutation des paramètres 1 | 0.0% ~PA-20 | 20.0% | ☆ |
| PA-20 | Écart de commutation des paramètres 2 | PA-19 ~100.0% | 80.0% | ☆ |
| PA-21 | Valeur PID initiale | 0.0% ~100.0% | 0.0% | ☆ |
| PA-22 | Temps d'abstention de valeur initiale PID | 0.00~650.00s | 0.00s | ☆ |
| PA-23 | Déviation max. entre les deux sorties PID en fonctionnement en avant | 0.00% ~100.00% | 1.00% | ☆ |
| PA-24 | Déviation max. entre les deux sorties PID en fonctionnement en arrière | 0.00% ~100.00% | 1.00% | ☆ |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| PA-25 | Propriétés du segment d'intégration PID | Chiffre des unités : séparation complète0 : Inactif1 : ActifDizaines : arrêt de l'intégration après atteinte de la valeur de consigne0 : continuation de fonctionnement avec intégration1 : arrêt de l'intégration | 00 | ☆ |
| PA-26 | Valeur de détection de la perte de rétroaction PID | 0.0%: aucune analyse de perte de rétroaction0.1%~100.0% | 0.0% | ☆ |
| PA-27 | Temps de détection de la perte de rétroaction PID | 0.0s~20.0s | 0.0s | ☆ |
| PA-28 | Fonctionnement PID après arrêt | 0 : désactivation PID après l'arrêt ;1 : fonctionnement PID après arrêt | 0 | ☆ |
| Groupe Pb : Fréquence d'oscillation, longueur et comptage | ||||
| Pb-00 | Mode de la fréquence d'oscillation | 0 : lié à la fréquence centrale1 : lié à la fréquence maximale | 0 | ☆ |
| Pb-01 | L'amplitude de la fréquence d'oscillation | 0.0%~100.0% | 0.0% | ☆ |
| Pb-02 | Saut de la fréquence d'oscillation | 0.0%~50.0% | 0.0% | ☆ |
| Pb-03 | Cycle de la fréquence d'oscillation | 0.1s~3000.0s | 10.0s | ☆ |
| Pb-04 | Coefficient de temps de montée de l'onde triangulaire | 0.1%~100.0% | 50.0% | ☆ |
| Pb-05 | Réglage de la longueur | 0m~65535m | 1000m | ☆ |
| Pb-06 | Longueur actuelle | 0m~65535m | 0m | ☆ |
| Pb-07 | Impulsions par mètre | 0.1~6553.5 | 100.0 | ☆ |
| Pb-08 | Réglage de la valeur du compteur | 1~65535 | 1000 | ☆ |
| Pb-09 | Valeur préréglée du compteur | 1~65535 | 1000 | ☆ |
| Groupe PC - Commandes multi-états et fonctions API | ||||
| PC-00 | Commande multi-états 0 | -100.0%~100.0% | 0.0% | ☆ |
| PC-01 | Commande multi-états 1 | -100.0%~100.0% | 0.0% | ☆ |
| PC-02 | Commande multi-états 2 | -100.0%~100.0% | 0.0% | ☆ |
| PC-03 | Commande multi-états 3 | -100.0%~100.0% | 0.0% | ☆ |
| PC-04 | Commande multi-états 4 | -100.0%~100.0% | 0.0% | ☆ |
| PC-05 | Commande multi-états 5 | -100.0%~100.0% | 0.0% | ☆ |
| PC-06 | Commande multi-états 6 | -100.0%~100.0% | 0.0% | ☆ |
| PC-07 | Commande multi-états 7 | -100.0%~100.0% | 0.0% | ☆ |
| PC-08 | Commande multi-états 8 | -100.0%~100.0% | 0.0% | ☆ |
| Code | Nom | Réglages | Par défaut | Modification |
| PC-09 | Commande multi-étapes 9 - | -100.0%~100.0% | 0.0% | ☆ |
| PC-10 | Commande multi-états 10 | -100.0%~100.0% | 0.0% | ☆ |
| PC-11 | Commande multi-états 11 | -100.0%~100.0% | 0.0% | ☆ |
| PC-12 | Commande multi-états 12 | -100.0%~100.0% | 0.0% | ☆ |
| PC-13 | Commande multi-états 13 | -100.0%~100.0% | 0.0% | ☆ |
| PC-14 | Commande multi-états 14 | -100.0%~100.0% | 0.0% | ☆ |
| PC-15 | Commande multi-états 15 | -100.0%~100.0% | 0.0% | ☆ |
| PC-16 | Mode de fonctionnement d'API simple | 0 : arrêt après un cycle1 : maintien de valeur après un cycle2 : répétition après un cycle complet | 0 | ☆ |
| PC-17 | Sélection de la mémoire après une panne de courant de l'API | Chiffre des unités : fonctionnement après une panne de courant 0 : pas de mémoire après une panne de courant1 : mémoire après une panne de courantDizaines : sélection de la mémoire après l'arrêt0 : pas de mémoire après arrêt1 : mémoire après arrêt | 00 | ☆ |
| PC-18 | Temps de fonctionnement d'API pour le point 0 | 0.0s (h) ~ 6553.5s (h) | 0.0s (h) | ☆ |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| PC-19 | Temps d'accélération et d'arrêt de l'API pour les points 0 | 0~3 | 0 | ☆ |
| PC-20 | Temps de fonctionnement d'API pour le point 1 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-21 | Temps d'accélération et d'arrêt de l'API pour les points 1 | 0~3 | 0 | ☆ |
| PC-22 | Temps de fonctionnement d'API pour le point 2 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-23 | Temps d'accélération et d'arrêt de l'API pour les points 2 | 0~3 | 0 | ☆ |
| PC-24 | Temps de fonctionnement d'API pour le point 3 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-25 | Temps d'accélération et d'arrêt de l'API pour les points 3 | 0~3 | 0 | ☆ |
| PC-26 | Temps de fonctionnement d'API pour le point 4 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-27 | Temps d'accélération et d'arrêt de l'API pour les points 4 | 0~3 | 0 | ☆ |
| PC-28 | Temps de fonctionnement d'API pour le point 5 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-29 | Temps d'accélération et d'arrêt de l'API pour les points 5 | 0~3 | 0 | ☆ |
| PC-30 | Temps de fonctionnement d'API pour le point 6 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-31 | Temps d'accélération et d'arrêt de l'API pour les points 6 | 0~3 | 0 | ☆ |
| PC-32 | Temps de fonctionnement d'API pour le point 7 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-33 | Temps d'accélération et d'arrêt de l'API pour les points 7 | 0~3 | 0 | ☆ |
| PC-34 | Temps de fonctionnement d'API pour le point 8 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-35 | Temps d'accélération et d'arrêt de l'API pour les points 8 | 0~3 | 0 | ☆ |
| Code | Nom | Réglages | Par défaut | Modification |
| PC-36 | Temps de fonctionnement d'API pour le point 9 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-37 | Temps d'accélération et d'arrêt de l'API pour les points 9 | 0~3 | 0 | ☆ |
| PC-38 | Temps de fonctionnement d'API pour le point 10 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-39 | Temps d'accélération et d'arrêt de l'API pour les points 10 | 0~3 | 0 | ☆ |
| PC-40 | Temps de fonctionnement d'API pour le point 11 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-41 | Temps d'accélération et d'arrêt de l'API pour les points 11 | 0~3 | 0 | ☆ |
| PC-42 | Temps de fonctionnement d'API pour le point 12 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-43 | Temps d'accélération et d'arrêt de l'API pour les points 12 | 0~3 | 0 | ☆ |
| PC-44 | Temps de fonctionnement d'API pour le point 13 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-45 | Temps d'accélération et d'arrêt de l'API pour les points 13 | 0~3 | 0 | ☆ |
| PC-46 | Temps de fonctionnement d'API pour le point 14 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-47 | Temps d'accélération et d'arrêt de l'API pour les points 14 | 0~3 | 0 | ☆ |
| PC-48 | Temps de fonctionnement d'API pour le point 15 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-49 | Temps d'accélération et d'arrêt de l'API pour les points 15 | 0~3 | 0 | ☆ |
| PC-50 | Unité de temps de fonctionnement API | 0 : s (seconde)1 : h (heure) | 0 | ☆ |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| PC-51 | Réglage de paramètres pour le point de référence 0 | 0 : code de fonction donné PC-001 : AI12 : AI23 : AI34 : réglage d'impulsion5 : PID6 : réglé par la fréquence préréglée (P010), modifié avec les boutons UP / DOWN | 0 | ☆ |
| Groupe Pd - Paramètres de communication | ||||
| Code | Nom | Réglages | Par défaut | Modification |
| Pd-00 | Vitesse de transmission | Chiffre des unités : MODBUS 0 :300BPS1 : 600BPS2 : 1200BPS3 : 2400BPS4 : 4800BPS5 : 9600BPS6 : 19200BPS7 : 38400BPS8 : 57600BPS9 : 115200BPSDizaines : réservéCentaines : réservéMilliers : Vitesse de transmission CANlink0 : 201 : 502 : 1003 : 1254 : 2505 : 5006 : 1M | 6005 | ☆ |
| Pd-01 | Format des données | 0 : pas de vérification, format <8, N, 2>1 : vérification de parité, format <8, E, 1>2 : vérification d'imparité, format <8, O, 1>3 : pas de vérification, format <8, N, 1> | 0 | ☆ |
| Pd-02 | Adresse locale | 1 247.0 : adresse de trame | 1 | ☆ |
| Pd-03 | Délai de réponse | 0ms~20ms | 2 | ☆ |
| Pd-04 | Temps de pause dans la communication | 0.0 (inactif), 0.1s ~ 60.0s | 0.0 | ☆ |
| Pd-05 | Sélection du format de transmission des données | Unité sur l'écran d'affichage : protocole MODBUS0 : protocole Modbus per sonnalisé1 : protocole Modbus standardDécimal à l'écran : réservé | 30 | ☆ |
| Pd-06 | Résolution pour la lecture des données en communication | 0 : 0.01A1 : 0.1A | 0 | ☆ |
| Groupe PE - Codes de fonction définis par l'utilisateur | ||||
| Code | Nom | Réglages | Par défaut | Modification |
| PE-00 | Code de fonction utilisateur 0 | P0-00 ~ PP-xxA0-00 ~ Ax-xxU0-xx~U0-xx | P0.10 | ☆ |
| PE-01 | Code de fonction utilisateur 1 | P0.02 | ☆ | |
| PE-02 | Code de fonction utilisateur 2 | P0.03 | ☆ | |
| PE-03 | Code de fonction utilisateur 3 | P0.07 | ☆ | |
| PE-04 | Code de fonction utilisateur 4 | P0.08 | ☆ | |
| PE-05 | Code de fonction utilisateur 5 | P0.17 | ☆ | |
| PE-06 | Code de fonction utilisateur 6 | P0.18 | ☆ | |
| PE-07 | Code de fonction utilisateur 7 | P3.00 | ☆ | |
| PE-08 | Code de fonction utilisateur 8 | P3.01 | ☆ | |
| PE-09 | Code de fonction utilisateur 9 | P4.00 | ☆ | |
| PE-10 | Code de fonction utilisateur 10 | P4.01 | ☆ | |
| PE-11 | Code de fonction utilisateur 11 | P4.02 | ☆ | |
| PE-12 | Code de fonction utilisateur 12 | P5.04 | ☆ | |
| PE-13 | Code de fonction utilisateur 13 | P5.07 | ☆ | |
| PE-14 | Code de fonction utilisateur 14 | P6.00 | ☆ | |
| PE-15 | Code de fonction utilisateur 15 | P6.10 | ☆ | |
| PE-16 | Code de fonction utilisateur 16 | P0.00 | ☆ | |
| PE-17 | Code de fonction utilisateur 17 | P0.00 | ☆ | |
| PE-18 | Code de fonction utilisateur 18 | P0.00 | ☆ | |
| PE-19 | Code de fonction utilisateur 19 | P0.00 | ☆ | |
| PE-20 | Code de fonction utilisateur 20 | P0.00 | ☆ | |
| PE-21 | Code de fonction utilisateur 21 | P0.00 | ☆ | |
| PE-22 | Code de fonction utilisateur 22 | P0.00 | ☆ | |
| PE-23 | Code de fonction utilisateur 23 | P0.00 | ☆ | |
| PE-24 | Code de fonction utilisateur 24 | P0.00 | ☆ | |
| PE-25 | Code de fonction utilisateur 25 | P0.00 | ☆ | |
| PE-26 | Code de fonction utilisateur 26 | P0.00 | ☆ | |
| PE-27 | Code de fonction utilisateur 27 | P0.00 | ☆ | |
| PE-28 | Code de fonction utilisateur 28 | P0.00 | ☆ | |
| PE-29 | Code de fonction utilisateur 29 | P0.00 | ☆ | |
| Groupe PP - Gestion des codes fonctions | ||||
| PP-00 | Mot de passe de l'utilisateur | 0~65535 | 0 | ☆ |
| PP-01 | Restaurez les paramètres par défaut | 0 : ne pas restaurer01 : restauration des réglages en plus des paramètres moteur02 : suppression des enregistrements04 : paramètres utilisatcur actuels de sauvegarde501 : Récupération des paramètres de sauvegarde utilisateur | 0 | ★ |
| PP-02 | Sélection des paramètres de fonction d'affichage | Chiffre des unités : sélection d'affichage de groupe U0 : pas d'affichage1 : affichageDizaines : sélection d'affichage de groupe A0 : pas d'affichage1 : affichage | 11 | ★ |
| PP-03 | Sélection d'affichage de groupe des paramètres définis par l'utilisateur | Bits : sélection d'affichage de groupe des paramètres définis par l'utilisateur0 : pas d'affichage 1 : affichageChiffre des unités : sélection d'affichage de groupe des paramètres définis par l'utilisateur0 : pas d'affichage 1 : affichage | 00 | ☆ |
| PP-04 | Modification du code fonction | 0 : peut être modifié1 : ne peut pas être modifié | 0 | ☆ |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| Groupe A0 Contrôle de couple et limites de paramètres | ||||
| A0-00 | Sélection contrôle vitesse /couple | 0 : contrôle de vitesse1 : contrôle de couple | 0 | ★ |
| A0-01 | Sélection de la source deréférencede contrôle de couple | 0 : réglages numériques (A0-03)1 : AI12 : AI23 : AI34 : réglage d'impulsion5 : Paramètres de communication6 : MIN (AI1, AI2)7 : MAX (AI1, AI2) (1-7 Option pleineéchelle,réglage numérique approprié A0-03) | 0 | ★ |
| A0-03 | Réglage numérique du coupleen mode contrôle de couple | -200.0% ~ 200.0% | 150.0% | ☆ |
| A0-05 | Fréquence maximale positivede réglage de couple | 0.00Hz ~ fréquence max. | 50.00Hz | ☆ |
| A0-06 | Fréquence maximale négativede réglage de couple | 0.00Hz ~ fréquence max. | 50.00Hz | ☆ |
| A0-07 | Temps d'accélération pourcontrôle du couple | 0.00s ~ 65000s | 0.00s | ☆ |
| A0-08 | Temps d'arrêt pourcontrôle du couple | 0.00s ~ 65000s | 0.00s | ☆ |
| Groupe A2 - Commande du deuxième moteur du groupe | ||||
| A2-00 | Sélection du type de moteur | 0 : Moteur ordinaire à induction1 : Moteurs à induction à fréquence variable | 0 | ★ |
| A2-01 | Puissance nominale du moteur | 0.1kW ~ 1000.0kW | type demachine | ★ |
| A2-02 | Tension nominale du moteur | 1V ~ 400V | type demachine | ★ |
| A2-03 | Courant nominal du moteur | 0.01A ~ 655.35A(puissance de convertisseur-55kW) 0.1A ~ 6553.5A(puissance de convertisseur >55kW) | type demachine | ★ |
| A2-04 | Fréquence nominale du moteur | 0.01Hz ~ fréquence max. | type demachine | ★ |
| A2-05 | Vitesse nominale du moteur | 1 tr/min ~ 65535 tr/min | type demachine | ★ |
| Code | Nom | Réglages | Par défaut | Modification |
| A2-06 | Résistance statorique d'un moteur asynchrone | 0.001 65.535 (puissance de convertisseur ≤ -55kW ) 0.0001 6.5535 (puissance de convertisseur >55kW ) | type de machine | ★ |
| A2-07 | Résistance rotorique d'un moteur asynchrone | 0.001 65.535 (puissance de convertisseur ≤ -55kW ) 0.0001 6.5535 (puissance de convertisseur >55kW ) | type de machine | ★ |
| A2-08 | Réactance inductive de fuite d'un moteur asynchrone | 0.01mH 655.35mH (puissance de convertisseur ≤ -55kW ) 0.001mH 65.535mH (puissance de convertisseur >55kW ) | type de machine | ★ |
| A2-09 | Réactance mutuelle inductive d'un moteur asynchrone | 0.1mH 6553.5mH (puissance de convertisseur ≤ -55kW ) 0.01mH 655.35mH (puissance de convertisseur >55kW ) | type de machine | ★ |
| A2-10 | Courant à vide d'un moteur asynchrone | 0.01A A2-03 (puissance de convertisseur ≤ -55kW ) 0.1A A2-03 (puissance de convertisseur >55kW ) | type de machine | ★ |
| A2-27 | Numéro de ligne du encodeur | 1 65535 | 1024 | ★ |
| A2-28 | Type d'encodeur | 0:0:Encodeur incremental ABZ 1:Réservé 2:Résolveur | 0 | ★ |
| A2-29 | Sélection de PG de rétroaction de vitesse | 0:PG locale 1:PG locale 2:entrée d'impulsion (DI5) | 0 | ★ |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| A2-30 | Séquence de phase AB du encodeur incrémental ABZ | 0 : en avant1 : en arrière | 0 | ★ |
| A2-34 | Nombre de paires de pôles d'un transformateur rotatif | 1~65535 | 1 | ★ |
| A2-36 | Temps de détection de déconnexion PG en rétroaction de vitesse | 0.0 pas d'action0.1s~10.0s | 0.0 | ★ |
| A2-37 | Sélection de réglage | 0 : Pas d'action1 : Tuning statique d'un moteur asynchrone2 : Réglage complet du moteur asynchrone | 0 | ★ |
| A2-38 | Gain proportionnel de boucle de vitesse 1 | 1~100 | 30 | ☆ |
| A2-39 | Temps d'intégration de la boucle de vitesse 1 | 0.01s~10.00s | 0.50s | ☆ |
| A2-40 | Fréquence de commutation 1 | 0.00~A2-43 | 5.00Hz | ☆ |
| A2-41 | Gain proportionnel de boucle de vitesse 2 | 1~100 | 20 | ☆ |
| A2-42 | Temps d'intégration de la boucle de vitesse 2 | 0.01s~10.00s | 1.00s | ☆ |
| A2-43 | Fréquence de commutation 2 | A2-40~ fréquence max. | 10.00Hz | ☆ |
| A2-44 | Gain de glissement de contrôle vectoriel | 50%~200% | 100% | ☆ |
| A2-45 | Constante de temps pour le filtre de boucle de vitesse | 0.000s~0.100s | 0.000s | ☆ |
| A2-46 | Contrôle vectoriel du gain d'excitation | 0~200 | 64 | ☆ |
| Code | Nom | Réglages | Par défaut | Modification |
| A2-47 | Source de limite supérieure en mode contrôle de vitesse | 0 : Réglage A2-481 : AI12 : AI23 : AI34 : Réglage d'impulsion5 : Paramètres de communication6 : MIN (AI1, AI2)7 : MAX (AI1, AI2)L'échelle complète des options 1-7 correspond aux réglages numériques de A2-48 | 0 | ☆ |
| A2-48 | Réglage numérique du couple en mode contrôle de vitesse | 0.0%~200.0% | 150.0% | ☆ |
| A2-51 | Gain proportionnel d'excitation | 0~20000 | 2000 | ☆ |
| A2-52 | Gain intégral d'excitation | 0~20000 | 1300 | ☆ |
| A2-53 | Gain proportionnel de contrôle de couple | 0~20000 | 2000 | ☆ |
| A2-54 | Gain d'intégration de réglage de couple | 0~20000 | 1300 | ☆ |
| A2-55 | Propriétés du segment d'intégration de la boucle de vitesse | Chiffre des unités : séparation d'intégration0 : autorisation1 : interdiction | 0 | ☆ |
| A2-61 | Mode de contrôle du moteur 2 | 0 : Pas de contrôle du capteur de vitesse vectorielle (SVC)1 : Contrôle du capt eur de vitesse vectorielle (FVC)2 : Contrôle U/f | 0 | ★ |
| A2-62 | Temps d'accélération / décélération du moteur 2 | 0 : identique au moteur 11 : Temps d'accélération / décélération 12 : Temps d'accélération / décélération 23 : Temps d'accélération / décélération 34 : Temps d'accélération / décélération 4 | 0 | ☆ |
| A2-63 | Augmentation du couple moteur 2 | 0.0% : augmentation automatique du couple0.1%~30.0% | type de machine | ☆ |
| A2-65 | Gain d'amortissement des oscillations moteur 2 | 0~100 | type de machine | ☆ |
| Groupe A5 Paramètres d'optimisation de contrôle | ||||
| A5-00 | Interrupteur du seuil supérieur de fréquence DPWM | 0.00Hz~15.00Hz | 12.00Hz | ☆ |
| A5-01 | Mode de modulation PWM | 0 : modulation asynchrone1 : modulation synchrone | 0 | ☆ |
| A5-02 | Sélection de mode de compensation de zone morte | 0 : pas de compensation1 : mode de compensation No 12 : mode de compensation No 2 | 1 | ☆ |
| A5-03 | Profondeur aléatoire PWM | 0 : interdiction1 ~10 profondeur aléatoire de la fréquence portcuse | 0 | ☆ |
| A5-04 | Limite de courant rapide | 0 : Inactif1 : Actif | 1 | ☆ |
| A5-05 | Détection continue de compensation | 0~100 | 5 | ☆ |
| A5-06 | Seuil de chute de tension | 60.0%~140.0% | 100.0% | ☆ |
| A5-07 | Optimisation SVC | 0 : pas d'optimisation1 : mode d'optimisation No 12 : mode d'optimisation No 2 | 1 | ☆ |
| A5-08 | Réglage du temps mort | 100%~200% | 150% | ☆ |
| Code | Nom | Réglages | Par défaut | Modification |
| Groupe A6 - Réglage de la courbe AI | ||||
| A6-00 | Valeur minimale de la courbe AI en entrée 4 | -10.00V~A6-02 | 0.00V | ☆ |
| A6-01 | Réglage de la valeur minimale de la courbe AI en entrée 4 | -100.0%~+100.0% | 0.0% | ☆ |
| A6-02 | Inflexion n°1 de la courbe AI à l'entrée 4 | A6-00~A6-04 | 3.00V | ☆ |
| A6-03 | Réglage de l'inflexion n°1 de la courbe AI à l'entrée 4 | -100.0%~+100.0% | 30.0% | ☆ |
| A6-04 | Inflexion n°2 de la courbe AI à l'entrée 4 | A6-02~A6-06 | 6.00V | ☆ |
| A6-05 | Réglage de l'inflexion n°2 de la courbe AI à l'entrée 4 | -100.0%~+100.0% | 60.0% | ☆ |
| A6-06 | Valeur maximale de la courbe AI en entrée 4 | A6-06~+10.00V | 10.00V | ☆ |
| A6-07 | Réglage de la valeur maximale de la courbe AI en entrée 4 | -100.0%~+100.0% | 100.0% | ☆ |
| A6-08 | Valeur minimale de la courbe AI en entrée 5 | -10.00V~A6-10 | -10.00V | ☆ |
| A6-09 | Réglage de la valeur minimale de la courbe AI en entrée 5 | -100.0%~+100.0% | -100.0% | ☆ |
| A6-10 | Inflexion n°1 de la courbe AI à l'entrée 5 | A6-08~A6-12 | -3.00V | ☆ |
| A6-11 | Réglage de l'inflexion n°1 de la courbe AI à l'entrée 5 | -100.0%~+100.0% | -30.0% | ☆ |
| A6-12 | Inflexion n°2 de la courbe AI à l'entrée 5 | A6-10~A6-14 | 3.00V | ☆ |
| A6-13 | Réglage de l'inflexion n°2 de la courbe AI à l'entrée 5 | -100.0%~+100.0% | 30.0% | ☆ |
| A6-14 | Valeur maximale de la courbe AI en entrée 5 | A6-12~+10.00V | 10.00V | ☆ |
| A6-15 | Réglage de la valeur maximale de la courbe AI en entrée 5 | -100.0%~+100.0% | 100.0% | ☆ |
| A6-24 | Saut pour AI1 | -100.0%~100.0% | 0.0% | ☆ |
| A6-25 | Plage de saut pour AI1 | 0.0%~100.0% | 0.5% | ☆ |
| A6-26 | Saut pour AI2 | -100.0%~100.0% | 0.0% | ☆ |
| A6-27 | Plage de saut pour AI2 | 0.0%~100.0% | 0.5% | ☆ |
| A6-28 | Saut pour AI3 | -100.0%~100.0% | 0.0% | ☆ |
| A6-29 | Plage de saut pour AI3 | 0.0%~100.0% | 0.5% | ☆ |
| A7-05 | Sortie marche/arrêt | Réglage binaireChiffre des unités : FMRChiffre des unités : relais1Centaines : DO | 1 | ☆ |
| A7-06 | Fréquence préréglée de la carte programmable | 0.00%~100.00% | 0.0% | ☆ |
| A7-07 | Couple préréglé de la carte programmable | -200.0%~200.0% | 0.0% | ☆ |
| A7-08 | Commande depuis la carte programmable | 0 : pas de commande1 : commande en avant2 : commande en arrière3 : impulsion en avant4 : impulsion en arrière5 : arrêt roue libre6 : arrêt par freinage7 : réinitialisation d'erreur | 0 | ☆ |
| A7-09 | Erreur de carte programmable | 0 : pas d'erreur80~89 : code d'erreur | 0 | ☆ |
| Groupe CA - Calibration AI AO | ||||
| CA-00 | Tension mesurée A11 n°1 | 0.500V~4.000V | calibrage | ☆ |
| CA-01 | Tension affichée A11 n°1 | 0.500V~4.000V | calibrage | ☆ |
| CA-02 | Tension mesurée A11 n° 2 | 6.000V~9.999V | calibrage | ☆ |
| CA-03 | Tension affichée A11 n° 2 | 6.000V~9.999V | calibrage | ☆ |
| CA-04 | Tension mesurée A12 n°1 | 0.500V~4.000V | calibrage | ☆ |
| CA-05 | Tension affichée A12 n°1 | 0.500V~4.000V | calibrage | ☆ |
| CA-06 | Tension mesurée A12 n° 2 | 6.000V~9.999V | calibrage | ☆ |
| CA-07 | Tension affichée A12 n° 2 | 6.000V~9.999V | calibrage | ☆ |
| CA-08 | Tension mesurée A13 n°1 | -9.999V~10.000V | calibrage | ☆ |
| CA-09 | Tension affichée A13 n° 1 | -9.999V~10.000V | calibrage | ☆ |
| CA-10 | Tension mesurée A13 n° 2 | -9.999V~10.000V | calibrage | ☆ |
| CA-11 | Tension affichée A13 n° 2 | -9.999V~10.000V | calibrage | ☆ |
| CA-12 | Tension ciblée AO1 n° 1 | 0.500V~4.000V | calibrage | ☆ |
| CA-13 | Tension mesurée AO1 n° 1 | 0.500V~4.000V | calibrage | ☆ |
| CA-14 | Tension ciblée AO1 n° 2 | 6.000V~9.999V | calibrage | ☆ |
| CA-15 | Tension mesurée AO1 n° 2 | 6.000V~9.999V | calibrage | ☆ |
| CA-16 | Tension ciblée AO2 n° 1 | 0.500V~4.000V | calibrage | ☆ |
| CA-17 | Tension mesurée AO2 n° 1 | 0.500V~4.000V | calibrage | ☆ |
| CA-18 | Tension ciblée AO2 n° 2 | 6.000V~9.999V | calibrage | ☆ |
| CA-19 | Tension mesurée AO2 n° 2 | 6.000V~9.999V | calibrage | ☆ |
| CA-20 | Courant mesurée A12 n° 1 | 0.000mA~20.000mA | calibrage | ☆ |
| CA-21 | Courant d'échantillonnage A12 | 0.000mA~20.000mA | calibrage | ☆ |
| CA-22 | Courant mesurée A12 n° 2 | 0.000mA~20.000mA | calibrage | ☆ |
| CA-23 | Courant d'échantillonnage A12 n°2 | 0.000mA~20.000mA | calibrage | ☆ |
| CA-24 | Courant idéal AO1 n° 1 | 0.000mA~20.000mA | calibrage | ☆ |
| CA-25 | Courant mesurée AO1 n° 1 | 0.000mA~20.000mA | calibrage | ☆ |
| CA-24 | Courant idéal AO1 2 | 0.000mA~20.000mA | calibrage | ☆ |
| CA-25 | Courant mesurée AO1 n° 2 | 0.000mA~20.000mA | calibrage | ☆ |
Tableau des paramètres de surveillance
| Code de fonction | Nom Unité min. | |
| Groupe U0. Paramètres de surveillance de base | ||
| U0-00 | Fréquence de fonctionnement (Hz) | 0.01Hz |
| U0-01 | Réglage de la fréquence (Hz) | 0.01Hz |
| U0-02 | Tension à la barre (V) | 0.1V |
| U0-03 | Tension de sortie (V) | 1V |
| U0-04 Courant de sortie (A) 0.01A | ||
| U0-05 | Puissance de sortie (kW) | 0.1kW |
| U0-06 | Couple de sortie (%) | 0.1% |
| U0-07 | État de l'entrée DI | 1 |
| U0-08 | État de sortie DO | 1 |
| U0-09 | Tension AI1 (V) | 0.01V |
| U0-10 | Tension AI2 (V) | 0.01V |
| U0-11 | Tension AI3 (V) | 0.01V |
| U0-12 | Comptage des valeurs | 1 |
| U0-13 | Valeur de longueur | 1 |
| U0-14 | Indicateur de vitesse de charge | 1 |
| U0-15 | Réglage PID | 1 |
| U0-16 Rétroaction PID | 1 | |
| U0-17 Étape API | 1 | |
| U0-18 | Fréquence d'impulsion d'entrée (Hz) | 0.01kHz |
| U0-19 | Vitesse de rétroaction (0,1 Hz) | 0.1Hz |
| U0-20 Vitesse surmultipliée 0.1Min | ||
| U0-21 | Tension AI1 avant calibration | 0.001V |
| U0-22 | Tension AI2 avant calibration | 0.001V |
| U0-23 | Tension AI3 avant calibration | 0.001V |
| U0-24 | Vitesse linéaire | 1m/Min |
| U0-25 Temps actuel d'alimentation 1Min | ||
| U0-26 | Temps actuel de fonctionnement | 0.1Min |
| U0-27 | Fréquence d'impulsion d'entrée | 1Hz |
| U0-28 | Paramètres de communication | 0.01% |
| U0-29 | Vitesse de rétroaction de l'encodeur | 0.01Hz |
| U0-30 | Affichage de la fréquence principale X | 0.01Hz |
| U0-31 | Affichage de la fréquence auxiliaire Y | 0.01Hz |
| U0-32 | Affichage de n'importe quelle valeur de l'adresse mémoire | 1 |
| U0-34 | Température du moteur | 1°C |
| U0-35 | Couple cible (%) | 0.1% |
| U0-36 | Emplacement de la rotation | 1 |
| U0-37 | Angle facteur de puissance | 0.1° |
| U0-39 Tension cible VF séparée 1V | ||
| U0-40 Tension cible VF séparée de sortie 1V | ||
| U0-41 | Visualisation de l'état de l'entrée DI | 1 |
| U0-42 | Visualisation de l'état de sortie DO | 1 |
| U0-43 | Visualisation du 1er état de fonctionnement DI (Fonction 01 - Fonction 40 ) | 1 |
| U0-44 | Visualisation du 2ème état de fonctionnement DI (Fonction 41 - Fonction 80 ) | 1 |
| U0-59 | Fréquence de réglage (%) | 0.01% |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| U0-60 | Fréquence de fonctionnement (%) | 0.01% |
| U0-61 | État du convertisseur de fréquence | 1 |
Chapitre 6 Description des paramètres
Groupe P0 : Groupe de fonctions de base
| P0-00 | Type d'affichage : GP | Réglages d'usine | S'applique au type de machine | |
| Plage de réglage | 1 | Type G (charge à couple constant) | ||
| 2 | Type P (charge sur ventilateur et pompe) | |||
Ce paramètre est uniquement destiné aux utilisateurs pour afficher le type de machine et il ne peut pas être modifié.
1 : charge de couple constante avec des paramètres nominaux spécifiés
2 : charge avec couple variable avec des paramètres nominaux spécifiés
(charge sur ventilateur et pompe)
| P0-01 | Mode de contrôle du moteur 1 | Réglages d'usine | 0 | |
| Plage de réglage | 0 | Pas de contrôle du capteur de vitesse vectorielle (SVC) | ||
| 1 | Contrôle du capteur de vitesse vectorielle (FVC) | |||
| 2 | Contrôle U/f | |||
0 : Pas de contrôle vectorielle du capteur de vitesse
1 : Le contrôle vectoriel du capteur de vitesse est un contrôle vectoriel en boucle fermée. Un encodeur doit être installé du côté moteur. Le convertisseur de fréquence doit être associé au même type de carte PG que l'encodeur. Convient aux applications de contrôle de vitesse ou de couple de précision. Un onduleur ne peut entraîner qu'un seul moteur, avec une charge telle que des machines à papier, des grues, des ascenseurs, etc.
2 : Le contrôle U / f convient lorsqu'il y a moins de demande de charge ou lorsqu'un convertisseur de fréquence entraîne plusieurs moteurs tels que des ventilateurs et des pompes. Un convertisseur peut être utilisé pour contrôler plusieurs moteurs.
Conseil : Lors de la sélection du mode de contrôle vectoriel, la procédure d'identification des paramètres du moteur est requise. Ce n'est qu'avec les paramètres exacts du moteur que le mode de contrôle vectoriel peut être utilisé. En ajustant les paramètres du régulateur de vitesse dans le code de fonction du groupe P2 (2 c'est le deuxième groupe), de meilleures performances peuvent être obtenues.
| P0-02 | Sélection de la source de commande | Réglage d'usine | 0 | |
| Plage de réglage | 0 | canal de commande du pupitre opérateur (diode LED éteinte) | ||
| 1 | canal de commande de la borne (diode LED allumée) | |||
| 2 | canal de commande (diode LED clignote) | |||
Sélectionnez le canal d'entrée pour la commande de contrôle du convertisseur.
Les commandes de contrôle du convertisseur incluent : démarrage, arrêt, avance, recul, saut, etc.. 0 : Canal de commande du terminal opérateur (« LOCAL / REMOT » n'est pas allumé) ;
Sur le panneau de commande, les touches RUN, STOP / RES contrôlent les commandes de démarrage. 1 : Canal de commande des bornes (voyants « LOCAL / REMOT » allumés) ;
Les bornes d'entrée multifonctions FWD, REV, JOG, JOG, etc. contrôlent la commande d'exécution.
2 : Canal de commande (« LOCAL / REMOT » clignote) la commande d'exécution est émise par l'ordinateur hôte en mode de communication.
Le choix de la carte de communication est optionnel (Modbus RTU, carte CANlink, carte de contrôle programmable par l'utilisateur etc.).
| P0-03 | Source principale de fréquence X | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Réglage numérique (consigne de fréquence P0-08, modification haut/bas, mémoire après coupure de courant) | ||
| 1 | Réglage numérique (consigne de fréquence P0-08, modification haut/bas, pas de mémoire après coupure de courant) | |||
| 2 | AI1 | |||
| 3 | AI2 | |||
| 4 | AI3 | |||
| 5 | Réglage d'impulsion PULSE (DI5) | |||
| 6 | commande multi-états | |||
| 7 | API | |||
| 8 | PID | |||
| 9 | Paramètres de communication | |||
Sélectionnez le canal d'entrée à une fréquence donnée du convertisseur. Il existe 10 principaux canaux de référence de fréquence : 0 : paramètres numériques (pas de mémoire après une panne de courant)
La valeur de référence de fréquence initiale est P0-08 « Référence de fréquence ». Avec les boutons ▲ ▼ (ou la borne d'entrée multifonction UP, DOWN) la valeur de fréquence définie peut être modifiée. Lorsque le convertisseur est mis sous tension après une panne de courant, la référence de fréquence revient à la valeur « fréquence définie numériquement » comme P0-08.
1 : paramètre numériques (mémoire après une panne de courant)
La valeur de référence de fréquence initiale est P0-08 « Référence de fréquence ». Avec les boutons ▲ ▼ sur le clavier (ou les bornes d'entrée multifonction UP, DOWN) la valeur de fréquence définie peut être modifiée.
Lorsque le convertisseur est mis sous tension après une coupure de courant, la fréquence réglée est la dernière fréquence réglée à l'aide des touches ▲, ▼ ou des bornes UP, DOWN, la correction est mémorisée.
Notez que P0-23 c'est « la sélection d'abaissement de la mémoire de fréquence numérique », P0-23 sert à sélectionner le couple d'arrêt d'entraînement, la valeur de correction ou la fréquence de mémoire. P0-23 est lié au temps d'arrêt et la mémoire de mise hors tension n'est pas liée. Faire attention à cela lors de l'utilisation.
2:All
3:AI2
4:AI3
Cela signifie que la fréquence est réglée via la borne d'entrée analogique. Le panneau de commande VFD fournit deux bornes d'entrée analogique (AI1, AI2), la carte d'extension E/S en option fournit une borne d'entrée analogique supplémentaire (AI3).
Parmi ceux-ci, AI1 est une entrée de tension de 0V \~ 10V, AI2 peut être une entrée de tension de 0V \~ 10V, AI2 peut également être une entrée de courant de 4mA \~ 20mA. Elle est sélectionné par le cavalier J8 du panneau de commande. AI3 est une entrée de tension - 10V \~ 10V.
L'utilisateur est libre de sélectionner la corrélation entre la tension d'entrée A11, A12, A13 et la fréquence cible. VFD fournit 5 groupes de corrélation entre les courbes, y compris 3 groupes de courbes de dépendance linéaire (concordance à 2 points), 2 groupes de n'importe quelle corrélation de courbe à 4 points. Les groupes d'utilisateurs peuvent être définis avec les codes de fonction de groupe P4 et A6.
5 : Impulsion donnée (DI5)
Le réglage de la fréquence est donné par une impulsion sur les bornes. Spécification du signal de référence d'impulsion : plage de tension 9V \~ 30V, plage de fréquence 0kHz \~ 100kHz. Une valeur de référence d'impulsion ne peut être saisie qu'à partir de la borne d'entrée multifonction DI5.
Les relations de la fréquence d'impulsion d'entrée de la borne DI5 correspondent au réglage, défini par P4-28 \~ P4-31. La corrélation entre deux points correspond à une ligne droite. Le réglage correct de l'entrée d'impulsions est de 100,0%, ce qui est un pourcentage de la fréquence maximale relative de P0-10.
6 : commande multi-états
Lors de la sélection du mode d'exécution de la commande multi-états, différents états doivent être entrés dans les bornes DI par composition numérique, correspondant à différentes fréquences de la valeur de consigne. Grace au VFD, plus de quatre terminaux de commande à plusieurs étapes, 16 terminaux à quatre états peuvent être configurés, le code de fonction PC peut correspondre à l'une des 16 « multi-directives ». La « multi-directive » est le pourcentage de la fréquence maximale P0-10.
Borne d'entrée numérique DI en tant que commande du bloc des bornes multifonction - doit être réglée sur le groupe P4 approprié. Pour plus de détails, voir le paramètre correspondant de la fonction de groupe P4.
7 : Pilote API simple
Lorsque la source de fréquence est un simple API, la fréquence de fonctionnement de l'onduleur peut être commutée pour fonctionner dans la plage de 1 à 16 de toutes commandes de fréquence. L'utilisateur peut régler le temps de maintien de 1 à 16 commandes de fréquence et le temps d'accélération et de décélération correspondant. Pour plus de détails, consultez les manuels des groupes de PC respectifs.
8 : PID
La sortie de contrôle PID est utilisée pour la fréquence de fonctionnement. Généralement appliqué aux processus de contrôle en boucle fermée sur site, tels que le contrôle en boucle fermée à pression constante, le contrôle en boucle fermée à tension constante et d'autres conditions.
Lors de l'utilisation du PID comme source de fréquence, réglez les paramètres « Fonction PID » du groupe PA.
9 : Paramètres de communication
La principale source de fréquence est l'ordinateur hôte en mode de communication.
VFD prend en charge deux types de communication : Modbus et CANlink. Les deux types de communication ne peuvent pas être utilisés.
Une carte de communication doit être installée pour utiliser la communication. Il existe deux types de cartes de communication VFD, les utilisateurs doivent sélectionner en fonction de leurs besoins et définir les paramètres corrects pour P0-28 « type de carte d'extension de communication ».
| P0-04 | Source auxiliaire de fréquence Y | Réglage d'usine | 0 | |
| Plage de réglage | Réglage numérique (consigne de fréquence P0-08, modification haut/bas, mémoire après coupure de courant) | |||
| Réglage numérique (consigne de fréquence P0-08, modification haut/bas, pas de mémoire après coupure de courant) | ||||
| AI1 | ||||
| AI2 | ||||
| AI3 | ||||
| Réglage d'impulsion (DI5) | ||||
| commande multi-états | ||||
| API | ||||
| PID | ||||
| Paramètres de communication | ||||
Lorsque la source de fréquence auxiliaire est utilisée comme canal indépendant de référence de fréquence (c'est-à-dire qu'elle fait passer la source de fréquence de X à Y), son utilisation est la même que pour la source de fréquence principale X. Reportez-vous à P0-03 pour les instructions d'utilisation.
Lorsqu'une source de fréquence auxiliaire est utilisée comme superposition donnée (c'est-à-dire une source de fréquence X + Y, un commutateur X à X + Y ou un commutateur Y à X + Y), veuillez noter que :
1) Lorsque la source de fréquence auxiliaire est une source de référence numérique, la fréquence préréglée (P0-08) ne fonctionne pas. L'utilisateur effectue le contrôle de la fréquence à l'aide des touches ▲, ▼ du clavier (ou des bornes multifonctions des entrées UP, DOWN). Réglez directement en fonction de la référence de fréquence principale.
2) Lorsque la source de fréquence auxiliaire est fournie par une entrée analogique (AI1, AI2, AI3) ou une entrée d'impulsion pour chronométrer, 100 % correspond au réglage de la plage d'entrée de la source de fréquence auxiliaire, qui peut être réglé avec P0-05 et P0-06.
3) Lorsque la source de fréquence est utilisée pour chronométrer l'entrée d'impulsion, elle est similaire aux données analogiques. Conseil : La sélection de la source de fréquence auxiliaire Y et la sélection de la source de fréquence principale X ne peuvent pas être réglées sur le même canal, c'est-à-dire lorsque P0-03 et P0-04 sont réglés sur la même valeur. De cette façon, vous pouvez facilement créer une confusion.
| P0-05 | Gamme de source Y de fréquence auxiliaire superposée | Réglage d'usine | 0 | |
| Plage de réglage | 0 | en référence à la fréquence maximale | ||
| 1 | en référence à la source de fréquence X | |||
| P0-06 | Gamme de source Y de fréquence auxiliaire superposée | Réglage d'usine | 0 | |
| Plage de réglage | 0%~150% | |||
Lorsque la sélection de la source de fréquence est « une superposition de fréquences » (c'est-à-dire que P0-07 est réglé sur 1, 3 ou 4), ces deux paramètres sont utilisés pour déterminer la plage de contrôle de la source de fréquence auxiliaire.
Lorsque P0-05 est utilisé pour définir la plage de fréquence auxiliaire de l'objet correspondant à la source, cela se fait sélectivement par rapport à la fréquence maximale, qui doit être relative à la source de fréquence principale X. Lors de la sélection par rapport à la source de fréquence principale, la source de fréquence auxiliaire est utilisée comme plage principale de fréquence des changements X.
| P0-07 | Sélection superposée de la source de fréquence | Réglage d'usine | 0 | |
| Plage de réglage | Bits | Sélection de la source de fréquence | ||
| 0 | Source principale de fréquence X | |||
| 1 | Résultat de l'opération principale et auxiliaire | |||
| 2 | Commutateur pour la source de fréquence principale X et la source de fréquence auxiliaire Y | |||
| 3 | Source principale de fréquence X, commutation de résultat de travail principal et auxiliaire | |||
| 4 | Source auxiliaire de fréquence Y, commutation de résultat de travail principal et auxiliaire | |||
| Dizaines | dépendance du fonctionnement des sources de fréquence principale et auxiliaire | |||
| 0 | Principale + auxiliaire | |||
| 1 | Principale - auxiliaire | |||
| 2 | De deux max. | |||
| 3 | De deux min. | |||
Avec ce paramètre, vous pouvez sélectionner le canal de référence de fréquence.
0 : Source principale de fréquence X
La fréquence principale X est utilisée comme fréquence cible.
1 : Résultat de travail de la source principale et auxiliaire comme fréquence cible.
Voir les instructions pour le code de fonction de relation des opérations principales et auxiliaires "Dizaines".
2 : Commutation pour la source de fréquence principale X et la source de fréquence auxiliaire Y. Lorsque la borne d'entrée multifonction 18 est inactive (commutateur de fréquence), la source de fréquence principale X est la fréquence cible.
Lorsque la borne d'entrée multifonction 18 (commutateur de fréquence) est active, la source de fréquence auxiliaire Y est la fréquence cible.
3 : Commutation de la source de fréquence principale X et résultat du fonctionnement principal et auxiliaire. Lorsque la borne d'entrée multifonction 18 est inactive (commutateur de fréquence), la source de fréquence principale X est la fréquence cible. Lorsque la borne d'entrée multifonction 18 est active (commutateur de fréquence), la fréquence cible est le résultat du fonctionnement principal et auxiliaire.
4. Commutation de la source de fréquence auxiliaire Y et résultat du fonctionnement principal et auxiliaire. Lorsque la borne d'entrée multifonction 18 est inactive (commutateur de fréquence), la source de fréquence auxiliaire Y est la fréquence cible. Lorsque la borne d'entrée multifonction 18 est active (commutateur de fréquence), la fréquence cible est le résultat du fonctionnement principal et auxiliaire.
Dizaines : Dépendance du fonctionnement des sources de fréquence principale et auxiliaire 0 : Source de fréquence principale X et la source de fréquence auxiliaire Y.
Comme fréquence cible, la somme de la fréquence principale X et de la fréquence auxiliaire Y est utilisée. La superposition de fréquence pour la fonction donnée est obtenue.
1 : Source de fréquence principale X - la source de fréquence auxiliaire Y.
Comme fréquence cible, la différence entre la source de fréquence principale X et la source de fréquence auxiliaire Y est utilisée
2 : MAX (source de fréquence principale X et la source de fréquence auxiliaire Y). La fréquence cible est la valeur absolue maximale de la fréquence principale X et de la fréquence auxiliaire Y.
3 : MIN (source de fréquence principale X et la source de fréquence auxiliaire Y). La fréquence cible est la valeur absolue minimale de la fréquence principale X et de la fréquence auxiliaire Y. De plus, lorsque la sélection de la source de fréquence provient du fonctionnement principal et auxiliaire, un décalage de fréquence peut être défini à l'aide de P0-21. Le décalage de fréquence superposé au fonctionnement principal et auxiliaire vous permet de répondre de manière flexible aux différents besoins.
4 : MIN (source de fréquence principale X et la source de fréquence auxiliaire Y). La fréquence cible est la valeur absolue minimale de la fréquence principale X et de la fréquence auxiliaire Y. De plus, lorsque la sélection de la source de fréquence provient du fonctionnement principal et auxiliaire, un décalage de fréquence peut être défini à l'aide de P0-21. Le décalage de fréquence superposé au fonctionnement principal et auxiliaire vous permet de répondre de manière flexible aux différents besoins.
| P0-08 | Fréquence préréglée | Réglage d'usine | 50.00Hz | ||
| Plage de réglage | 0,00 ~ fréquence max. (le mode de sélection de la source de fréquence avec réglage numérique fonctionne) | ||||
| P0-09 | Direction de fonctionnement | Réglage d'usine | 0 | ||
| Plage de réglage | 0 | Même direction | |||
| 1 | Direction opposée | ||||
En changeant le code de fonction, le câblage électrique ne peut pas être modifié et le changement de régime moteur peut être obtenu.
Conseil : Après l'initialisation du paramètre, le sens de marche du moteur revient à son état d'origine. Soyez prudent et utilisez-le à condition qu'après le débogage du système, il est strictement interdit de modifier la commande du moteur.
| P0-10 | Fréquence max. | Réglage d'usine | 50.00 Hz |
| Plage de réglage | 50.00Hz~600.00Hz | ||
Entrée analogique VFD, entrée d'impulsion (DI5), instructions à plusieurs étapes, etc., la source de fréquence est egale à 100,0% par rapport à l'échelle correspondante de P0-10.
La fréquence de sortie maximale VFD peut aller jusqu'à 3200 Hz. Pour tenir compte de la résolution de fréquence et de la plage d'entrée de fréquence pour les deux indicateurs, les décimales de la commande de fréquence peuvent être sélectionnées avec P0-22.
Lorsque P0-22 est réglé sur 1, la résolution de fréquence est de 0,1 Hz. Dans ce cas, P0-10 est défini dans la plage de 50,0 Hz à 3200,0 Hz ;
Lorsque P0-22 est réglé sur 2, la résolution de fréquence est de 0,1 Hz. Dans ce cas, P0-10 est défini dans la plage de 50,0 Hz à 600,00 Hz
| Source de fréquence principale | Réglage d'usine | 0 |
| 0 | Réglage P0-12 | ||
| 1 | A11 | ||
| P0-11 | Réglage d'usine | 2 | A12 |
| 3 | A13 | ||
| 4 | Réglage d'impulsion | ||
| 5 | Paramètres de communication |
Définir la source des hautes fréquences. La fréquence limite supérieure peut être réglée numériquement (P0-12), elle peut également être dérivée du canal d'entrée analogique. Lors du réglage de la limite supérieure de fréquence d'entrée analogique, le réglage de l'entrée analogique sur 100 % correspond à P0-12.
Par exemple, en adoptant un mode de contrôle de couple dans la plage de contrôle du bobinage pour éviter la casse de matière et l'apparition de phénomènes de « vitesse », une limitation de commande de fréquence analogique peut être utilisée. Lorsque l'onduleur fonctionne à la limite de fréquence supérieure, il maintient la fréquence plus élevée.
| P0-12 | Fréquence supérieure | Réglaged'usine | 50.00Hz | |
| Plageréglage | de | Fréquence supérieure P0-14 ~ fréquence maximale P0-10 | ||
| P0-13 | Compensationfréquence principale | de | Réglage d'usine | 0.00Hz |
| Plageréglage | de | 0.00Hz~fréquence maximale P0-10 | ||
Lorsque la fréquence limite supérieure est une consigne analogique ou d'impulsion, P0-13 est utilisé comme référence de compensation. Biais de fréquence et P0-11 définissent la fréquence de coupure haute superposée à la valeur définie comme fréquence de coupure haute finale.
| P0-14 | Fréquence inférieure | Réglaged'usine | 0.00Hz |
| Plageréglage | de 0.00Hz~fréquence supérieure P0-12 |
Lorsque la commande de fréquence est au dessous de la fréquence inférieure définie dans P0-14, l'onduleur peut s'arrêter ou abaisser la fréquence de coupure ou fonctionner à vitesse nulle. Le type de mode de fonctionnement à sélectionner (lors du réglage de la fréquence en dessous du mode de fonctionnement a fréquence inférieure) peut être défini par le paramètre P8-14.
| P0-15 | Fréquence porteuse | Réglage d'usine Dépend du type de machine |
| Plage réglage | de 0.5kHz~16.0kHz |
Cette fonction règle la fréquence porteuse de l'onduleur. En ajustant la fréquence porteuse, le bruit du moteur peut être réduit, le point de résonance du système mécanique peut être évité et le bruit de l'onduleur et le courant de fuite entre les conducteurs et la terre peuvent être réduits.
Lorsque la fréquence porteuse est faible, la composante des hautes harmonique du courant de sortie augmente, les pertes du moteur augmentent et la température du moteur augmente. Lorsque la fréquence porteuse est élevée, les pertes du moteur diminuent, la température du moteur diminue, mais les pertes de l'onduleur augmentent, la température de l'onduleur augmente et les perturbations augmentent.
Le réglage de la fréquence porteuse affectera les propriétés suivantes :
| Fréquence porteuse | croissance |
| Forme d'onde du courant de sortie | abaissement |
| Température du moteur | meilleur |
| Température de l'onduleur | abaissement |
| Courant de fuite | croissance |
| Perturbations externes | croissance |
| Forme d'onde du courant de sortie | croissance |
Les paramètres d'usine par défaut pour la fréquence porteuse sont différents pour différents onduleurs. Bien que les utilisateurs puissent les modifier, mais attention : si la valeur de la fréquence porteuse est supérieure au réglage d'usine, cela entraînera une élévation de la température du radiateur de l'onduleur. Dans ce cas, l'utilisateur doit baisser la valeur nominale de l'onduleur autrement il y a un risque de surchauffe.
| La fréquence porteuse s'adapte à la température | Réglage d'usine | 0 | |
| P0-16 | Plage de réglage | 0 : non | |
| 1 : oui |
Le contrôle de la température de la fréquence porteuse signifie que lorsque l'onduleur détecte que la température de son radiateur est élevée, il réduira automatiquement la fréquence porteuse pour réduire l'augmentation de la température de l'onduleur. Lorsque la température du
| P0-17 | Temps d'accélération 1 | Réglage d'usine | Dépend du type de machine |
| Plage de réglage | 0.00s~65000s | ||
| P0-18 | Temps de freinage 1 | Réglage d'usine | Dépend du type de machine |
| Plage de réglage | 0.00s~65000s | ||
Le temps d'accélération est le temps nécessaire à l'onduleur pour accélérer de la fréquence zéro à la fréquence de référence d'accélération et de freinage (P0-25). Voir t1 sur la figure 6-1. Le temps de freinage est le temps nécessaire à l'onduleur pour décélérer de la fréquence de référence d'accélération et de freinage (P0-25) à la fréquence zéro. Voir t2 sur la figure 6-1.
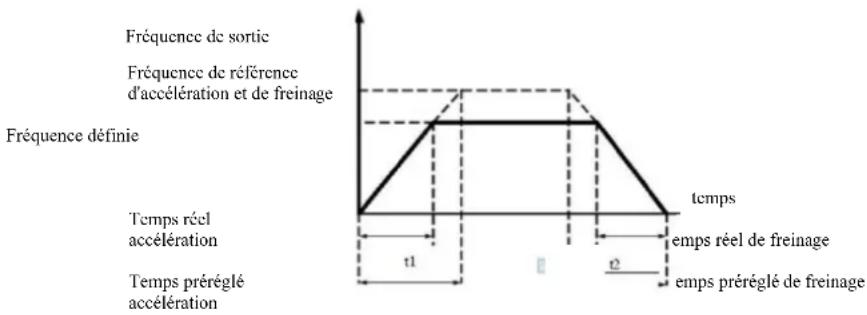
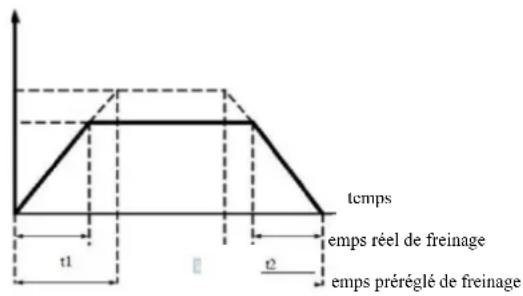
Figure 6-1 Schéma du temps d'accélération et de freinage
VFD fournit quatre groupes de temps d'accélération et de freinage. Les utilisateurs peuvent utiliser le commutateur numérique de la borne d'entrée DI. Les quatre groupes de temps d'accélération et de freinage définis par le code de fonction sont les suivants :
Premier groupe : P0-17, P0-18
Deuxième groupe : P8-03, P8-04
deuxième groupe : P8-05, P8-06
Quatrième groupe : P8-07, P8-08
| P0-19 | Unité de temps d'accélération/ de freinage | Réglage d'usine | 1 | |
| Plage de réglage | 0 | 1s | ||
| 1 | 0.1s | |||
| 2 | 0.01s | |||
Pour répondre aux besoins de tous les types d'objets, VFD propose trois types d'unités de temps d'accélération et de décélération, respectivement : 1 seconde, 0,1 seconde et 0,01 seconde.
Attention : Lors de la modification des paramètres de la fonction, les décimales du groupe 4 afficheront le temps d'accélération et de freinage modifié en fonction des changements de temps d'accélération et de décélération. Portez une attention particulière au processus de l'application.
| P0-21 | Biais de fréquence de la source de fréquence auxiliaire superposée | 0.0Hz | |
| Plage de réglage | 0.00Hz~fréquence max. F0-10 | ||
Le code de fonction n'est valide que lorsque la sélection de la source de fréquence est le calcul principal et auxiliaire.
Lorsque la source de fréquence est le calcul principal et auxiliaire, P0-21 est utilisé comme compensation de fréquence, utilisé comme résultat final du réglage de fréquence de superposition pour rendre le réglage de fréquence plus flexible.
| P0-22 | Résolution de commande de la fréquence | Réglage d'usine | 2 | |
| Plage de réglage | 1 | 0.1Hz | ||
| 2 | 0.01Hz | |||
Ce paramètre permet d'identifier toutes les résolutions des codes fonction dépendant de la fréquence.
Lorsque la résolution de fréquence est de 0,1 Hz, la fréquence de sortie maximale du VFD peut atteindre 3 200 Hz. Lorsque la résolution de fréquence est de 0,01 Hz, la fréquence de sortie maximale du VFD peut atteindre 600,00 Hz.
Attention : Lors de la modification des paramètres d'une fonction, toutes les décimales de fréquence associées à ces paramètres changeront. Les valeurs de fréquence de référence changeront également. Portez une attention particulière à cela lors du fonctionnement.
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P0-23 | Sélection numérique de la mémoire d'arrêt de fréquence | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Pas de mémoire | ||
| 1 | Avec la mémoire | |||
Cette fonction ne fonctionne que lorsque la source de fréquence est réglée sur des nombres.
« Pas de mémoire » signifie que la valeur de référence de fréquence numérique revient à P0-08 (référence de fréquence) lorsque l'onduleur est arrêté. La correction effectuée avec les touches ▲, ▼ ou les bornes UP, DOWN est annulée.
« Mémoire » signifie que lorsque l'onduleur est arrêté, la fréquence définie numériquement est réservée à la dernière fréquence d'arrêt définie. La correction effectuée avec les touches ▲, ▼ ou les bornes UP, DOWN reste valide.
| P0-24 | Sélection du moteur | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Moteur 1 | ||
| 1 | Motcur 2 | |||
Le VFD prend en charge l'application de deux moteurs avec division de calage. Pour deux moteurs, vous pouvez définir des paramètres à partir de la plaque signalétique du moteur, des paramètres de tuning indépendants, sélectionnez un mode de contrôle différent, définissez indépendamment les paramètres liés aux performances et autres.
Le groupe concerné de paramètres de la fonction du moteur 1 est le groupe P1 et le groupe P2. Le groupe concerné de paramètres de la fonction du moteur 2 est le groupe A2.
L'utilisateur peut sélectionner le moteur actuel via le code de fonction P0-24, ou démarrer le moteur via la borne DI. Lorsque la sélection du code de fonction et la sélection de la bornel sont en conflit, la borne a la priorité.
| P0-25 | Fréquences de référence des temps d'accélération / de freinage | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Fréquence maximale (P0-10) | ||
| 1 | Fréquence définie | |||
| 2 | 100Hz | |||
Le temps d'accélération et de freinage signifie le temps d'accélération et de freinage de la fréquence zéro à la fréquence définie P0-25. Figure 6-1 La figure montre le schéma du temps d'accélération et de freinage.
Lorsque P0-25 est réglé sur 1, le temps et la fréquence de décélération sont liés à ce réglage. Si la fréquence change fréquemment, l'accélération du moteur fluctue, cela doit être pris en compte lors de l'application.
| P0-26 | Commande de fréquence UP / DOWN(en haut / en bas) | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Fréquence de fonctionnement | ||
| 1 | Fréquence définie | |||
Ce paramètre n'est valable que lorsque la source de fréquence est réglée numériquement.
Lorsque le clavier est utilisé pour régler les bornes ▲, ▼ HAUT/ BAS, n'importe quelle manière de régler la correction de fréquence peut être adoptée. La fréquence cible augmente ou diminue en fonction de la fréquence de fonctionnement ou de fréquence réglée.
La différence entre les deux réglages est importante lorsque l'onduleur accélère et freine. C'est-à-dire que si la fréquence de fonctionnement et la fréquence cible de l'onduleur ne sont pas les mêmes, la différence entre les différents paramètres sélectionnés sera importante.
| P0-27 | Source de fréquence et source de commande associée dans l'ensemble | Réglage d'usine | 000 | |
| Plage de réglage | Bits | La commande du pupitre opérateur lie la source de fréquence | ||
| 0 | Pas de lien | |||
| 1 | La fréquence est réglée numériquement | |||
| 2 | AI1 | |||
| 3 | AI2 | |||
| 4 | AI3 | |||
| 5 | La fréquence est réglée numériquement | |||
| 6 | Commande multi-états | |||
| 7 | API simple | |||
| 8 | PID | |||
| 9 | Paramètres de communication | |||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| Dizaines | La commande de la borne lie la source de fréquence (0 9, identique au bit) | ||
| Centaines | La commande de communication lie la source de fréquence (0 9, identique au bit) |
Elle définit un ensemble de trois canaux de commandes de fonctionnement et neuf fréquences prédéfinies entre les canaux, facilite la mise en œuvre de la commutation synchrone.
Pour les fréquences ci-dessus, la signification du canal de fréquence est la même que pour la sélection de la source de fréquence principale X P0-03. Voir la description du code de fonction P0-03. Différents modes peuvent être associés au même canal de fréquence. Lorsque la source de commande de fréquence a une source associée, pendant la période de fonctionnement de la source de commande, la source de fréquence P0-03 \~ P0-07 cesse de fonctionner.
| P0-28 | Type de carte d'extension de communication | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Carte de communication Modbus | ||
| 1 | réserve | |||
| 2 | réserve | |||
| 3 | Carte de communication CANlink | |||
VFD assure deux types de communication. Cette communication nécessite une carte de communication optionnelle avant utilisation. Les deux types de communication ne peuvent pas être utilisés en même temps.
Ce paramètre permet de définir le type de la carte de communication optionnelle. Lorsque l'utilisateur remplace la carte de communication, les paramètres doivent être correctement réglés.
Groupe P1 : Paramètres du moteur 1
| P1-00 | Sélection du type de moteur | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Moteur asynchrone ordinaire | ||
| 1 | Moteur asynchrone à fréquence variable | |||
| P1-01 | Puissance nominale | Réglage d'usine | Dépend du type de machine | |
| Plage de réglage | 0.1kW~1000.0kW | |||
| P1-02 | Tension nominale | Réglage d'usine | Dépend du type de machine | |
| Plage de réglage | 1V~400V | |||
| P1-03 | Courant nominal | Réglage d'usine | Dépend du type de machine | |
| Plage de réglage | 0.01A~655.35A (puissance de l'onduleur <=55kW) 0.1A~6553.5A (puissance de l'onduleur >55kW) | |||
| P1-04 | Fréquence nominale | Réglage d'usine | Dépend du type de machine | |
| Plage de réglage | 0.01Hz~ fréquence maximale | |||
| P1-05 | Vitesse nominale | Réglage d'usine | Dépend du type de machine | |
| Plage de réglage | 1rpm~65535rpm | |||
Pour définir avec précision les paramètres appropriés conformément à la plaque signalétique du moteur, à la fois le contrôle U / f et le contrôle vectoriel, vous avez besoin du code de ces paramètres de la plaque signalétique du moteur.
Pour de meilleures performances de contrôle U/f ou vectoriel, vous avez besoin d'effectuer le tuning des paramètres, vous avez également besoin de la précision des résultats de contrôle et du réglage exact des paramètres de la plaque signalétique du moteur.
| P1- | Résistance statorique d'un moteur asynchrone | Réglage d'usine | Dépend du type de machine |
| Plage de réglage | 0.001Ω~30.000Ω | ||
| P1-07 | Résistance rotorique d'un moteur asynchrone | Réglage d'usine | Dépend du type de machine |
| Plage de réglage | 0.001Ω~65.535Ω(puissance de l'onduleur <=55kW)0.0001Ω~6.5535Ω (puissance de l'onduleur >55kW) | ||
| P1-08 | Réactance de fuite inductive d'un moteur asynchrone | Réglage d'usine | Dépend du type de machine |
| Plage de réglage | 0.01mH~655.35mH (puissance de l'onduleur <=55kW) | ||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| 0.001mH ~ 65.535mH (puissance de l'onduleur >55kW) | |||
| P1-09 | Réactance mutuelle inductive d'un moteur asynchrone | Réglage d'usine | Dépend du type de machine |
| Plage de réglage | 0.1mH ~ 6553.5mH (puissance de l'onduleur <=55kW) 0.01mH ~ 655.35mH (puissance de l'onduleur >55kW) ) | ||
| P1-10 | Courant d'un moteur asynchrone sans charge | Réglage d'usine | Dépend du type de machine |
| Plage de réglage 0.01A ~ | P1-03 (puissance de l'onduleur <=55kW) 0.1A ~ P1-03 (puissance de l'onduleur >55kW) | ||
P1-06 \~ P1-10 ce sont les paramètres du moteur asynchrone. Ces paramètres ne figurent généralement pas sur la plaque signalétique du moteur et sont réglés automatiquement pour passer par l'onduleur. Parmi ces paramètres « Tuning statique du moteur à induction » ne peut obtenir que trois paramètres P1-06 \~ P1-08. Mais vous pouvez obtenir ici le « tuning complet des moteurs asynchrones ». En plus des cinq paramètres, vous pouvez également obtenir la séquence de phase d'encodeur, les paramètres PI de la boucle de courant et autres.
| P1-27 | Numéro de ligne du encodeur | Réglage d'usine | 1024 |
| Plage de réglage | 1 ~ 65535 | ||
Réglage d'impulsions du codeur ABZ par tour.
Pour le contrôle vectoriel sans capteur, définissez le nombre correct d'impulsions d'encodeur, sinon le moteur ne fonctionnera pas correctement.
| P1-28 | Type d'encodeur | Réglage d'usine | 0 | |
| Plagedcréglage | 0 | Encodeur incrémental ABZ | ||
| 1 | Réserve | |||
| 2 | Transformateur rotatif | |||
VFD prend en charge de nombreux types d'encodeurs. Différents encodeurs doivent correspondre à différentes cartes PG. Choisissez la bonne carte PG. Après avoir installé la carte PG, réglez P1-28 de manière appropriée en fonction de la situation réelle, sinon l'onduleur pourrait ne pas fonctionner correctement.
| P1-30 | Séquence de phase AB du encodeur incrémental ABZ | Réglage d'usine | 0 | |
| Plagc de réglage | 0 | En avant | ||
| 1 | En arrière | |||
Ce code fonction n'est valable pour le codeur incrémental ABZ que lorsque P1-28 = 0. Pour régler la séquence de phase AB du signal du codeur incrémental ABZ.
| P1-34 | Nombre de paires de pôles d'un transformateur rotatif | Réglage d'usine | 1 |
| Plage de réglage | 1 ~ 65535 | ||
Résolveur - nombre de paires de pôles lors de l'utilisation d'un tel codeur, les paramètres du nombre de paires de pôles doivent être réglés correctement.
| P1-36 | Temps de détection de déconnexion PG et rétroaction de vitesse | Réglage d'usine | 0.0s |
| Plage de réglage | 0.0: no action 0.1s ~ 10.0s | ||
Il est utilisé pour définir le temps de détection d'erreur de déconnexion de l'encodeur, lorsqu'il est réglé sur 0,0 s, l'onduleur ne détectera pas l'erreur de déconnexion du codeur.
Lorsque l'onduleur détecte une erreur de déconnexion et qu'elle est plus longue que le temps défini P1-36, l'onduleur génère l'alarme ERR20.
| Sélection de réglage | Réglage d'usine | 0 | ||
| 0 | Ne fonctionne pas | |||
| 1 | Tuning statique d'un moteur asynchrone | |||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P1-37 | Plage de réglage | 2 | Tuning complet du moteur asynchrone |
0 : Ne fonctionne pas, le tuning est interdit.
1 : Le tuning statique d'un moteur asynchrone n'est pas facile sans charge, mais ce n'est pas un tuning complet. Avant d'effectuer un tuning statique asynchrone, définissez le type de moteur et la plaque signalétique du moteur P1-00 \~ P1-05. Dans le cas d'un tuning asynchrone statique de la machine, l'onduleur peut obtenir trois paramètres P1-06 \~ P1-08. Méthode de fonctionnement : définissez le code de fonction sur 1, puis appuyez sur la touche RUN, l'onduleur effectuera un tuning statique.
2 : Tuning complet de machine asynchrone. Pour assurer le contrôle dynamique de l'onduleur, sélectionnez le tuning complet, le moteur doit être séparé de la charge pour le maintenir en état sans charge.
Pendant le processus de tuning complet, l'onduleur effectuera un tuning statique, puis effectuera un temps de montée en puissance, accélérant P0-17 à 80 % de la fréquence nominale du moteur. Après la période de maintien, P0-18 va freiner en fonction du temps de freinage et arrêter le tuning avant de régler complètement la machine asynchrone. Outre la nécessité de définir le type de moteur et les paramètres à partir de la plaque signalétique du moteur P1-00 \~ P1-05, vous devez également définir le type correcte d'encodeur et les impulsions d'encodeur P1-27, P1-28. Réglage complet de la machine asynchrone : l'entraînement peut obtenir cinq paramètres moteur, P1-06 \~ P1-10, séquence de phases d'encodeur AB (P1-3) et P2-13 \~ P2-16 les paramètres PI de la boucle de courant de contrôle vectoriel.
Fin de tuning : Définissez le code de fonction sur 2, puis appuyez sur la touche RUN, l'onduleur effectuera un tuning.
Groupe P2 : Paramètres de contrôle vectoriel
Les codes de fonction du groupe P2 ne fonctionnent que pour le contrôle vectoriel, pas pour le contrôle U/f.
| P2-00 | Gain proportionnel de boucle de vitesse 1 | Réglage d'usine | 30 |
| Plage de réglage | 1~100 | ||
| P2-01 | Temps d'intégration de la boucle de vitesse 1 | Réglage d'usine | 0.50s |
| Plage de réglage | 0.01s~10.00s | ||
| P2-02 | Fréquence de commutation 1 | Réglage d'usine | 5.00Hz |
| Plage de réglage | 0.00~F2-05 | ||
| P2-03 | Gain proportionnel de boucle de vitesse 2 | Réglage d'usine | 15 |
| Plage de réglage | 0~100 | ||
| P2-04 | Temps d'intégration de la boucle de vitesse 2 | Réglage d'usine | 1.00s |
| Plage de réglage | 0.01s~10.00s | ||
| P2-05 | Fréquence de commutation 2 | Réglage d'usine | 10.00Hz |
| Plage de réglage | F2-02~Fréquence maximale de sortie | ||
L'onduleur fonctionne à différentes fréquences, différents paramètres PI de la boucle de vitesse peuvent être sélectionnés. Lorsque la fréquence de fonctionnement est inférieure à la fréquence de découpage 1 (P2-02), les paramètres de réglage PI de la boucle de vitesse sont P2-00 et P2-01. Lorsque la fréquence de fonctionnement est supérieure à la fréquence de découpage 2 PI, les paramètres de réglage PI de la boucle de vitesse sont P2-03 et P3-04. Les paramètres PI de la boucle de vitesse entre la fréquence de découpage 1 et la fréquence de découpage 2 ce sont deux groupes de paramètres de commutation linéaire PI.
Montré sur la figure 6-2 :
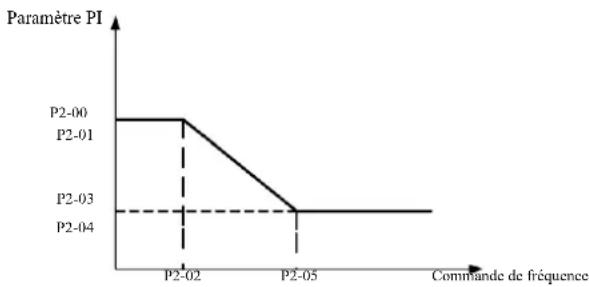
line
| Commande de fréquence | Paramètre PI | |---|---| | P2-00 | 1 | | P2-01 | 1 | | P2-03 | 0.5 | | P2-04 | 0.5 |Figure 6-2 Schéma de paramètres PI
En réglant le facteur proportionnel du régulateur de vitesse et le temps d'intégration, la caractéristique de réponse dynamique de la régulation vectorielle de vitesse peut être adaptée.
L'augmentation du gain proportionnel, raccourci du temps d'intégration peut accélérer la réponse dynamique de la boucle de vitesse. Cependant, un gain proportionnel trop élevé ou un temps d'intégration trop court peuvent faire vibrer la structure. Méthode de réglage recommandée :
Si les paramètres d'usine ne peuvent pas répondre aux exigences, il faut effectuer le tuning de la valeur du paramètre d'usine. Augmentez d'abord le gain proportionnel pour vous assurer que le système n'oscille pas ; puis raccourcissez le temps d'intégration. Le circuit a une caractéristique de réponse rapide et un petit dépassement.
Attention : Lorsque les paramètres PI sont réglés de manière incorrecte, cela peut entraîner un dépassement de vitesse important.
| P2-06 | Gain de glissement de contrôle vectoriel | Réglage d'usinc | 100% |
| Plage de réglage | 50% ~ 200% | ||
Contrôle vectoriel de vitesse sans capteur. Ce paramètre permet d'effectuer le réglage fin la vitesse constante du moteur : Lorsque la charge du moteur est faible, augmentez le paramètre de vitesse et vice versa.
Dans le cas d'une commande vectorielle par capteur de vitesse, ce paramètre peut également réguler la charge du courant de sortie de l'onduleur.
| P2-07 | Temps de filtration de la boucle de vitesse | Réglage d'usinc | 0.000s |
| Plage de réglage | 0.000s ~ 0.100s | ||
Commande de courant de sortie du couple du contrôleur de boucle de vitesse, paramètres de filtre de commande de couple en mode de contrôle vectoriel.
Ce paramètre n'a généralement pas besoin d'ajuster la variation de vitesse, qui pourrait être appropriée pour augmenter le temps de filtrage ; Cependant, si le moteur oscille, réduisez ce paramètre en conséquence.
La constante de temps du filtre de boucle de vitesse est petite, le couple de sortie du convertisseur peut être variable, mais la vitesse de réponse est rapide.
| P2-08 | Contrôle vectoriel | Réglage d'usine | 64 |
| Plage de réglage | 0 ~ 200 | ||
Lors du freinage, l'augmentation de la tension de la barre de commande due à une surexcitation peut être supprimée pour éviter un défaut de surtension. Plus les augmentations dues à la surexcitation sont importantes, plus l'amortissement est fort.
Dans des conditions de freinage par l'onduleur, la surpression s'accumule plus facilement et l'alarme retentit, et le contrôle de la surexcitation doit être ajusté. Mais si le gain de surexcitation est trop important, il conduira facilement à une augmentation du courant de sortie ; cela doit être équilibré dans l'application.
En cas de faible inertie, le délai de montée en tension du moteur n'intervient pas. Il est recommandé que le gain de surexcitation soit égal à 0 ; En cas de résistance de freinage dans cette situation, il est également suggéré de régler le gain de surexcitation à 0.
| P2-09 | Source de la limitation du couple en mode de contrôle de la vitesse | Réglage d'usine | 0 | |
| Plage de réglage | 0 | F2-10 | ||
| - 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Réglage d'impulsion | |||
| 5 | Paramètres de communication préférés | |||
| P2-10 | Réglage en mode de contrôle de limite de couple numérique | Réglage d'usine | 150.0% | |
| Plage de réglage | 0.0% ~200.0% | |||
En mode de contrôle de vitesse, la valeur maximaledu couple de sortiede l'onduleur est contrôlé par la source de limite de couple.
P2-09 permet de sélectionner la source pour régler le seuil de vitesse. Lorsque les paramètres de communication sont analogiques, d'impulsion, 100 % correspond au réglage correspondant de P2-10, P2-10 et à 100 % du couple nominal de l'onduleur.
| P2-13 | L'augmentation proportionnelle du contrôleur d'excitation | Réglage d'usine | 2000 |
| Plage de réglage | 0 ~ 20000 | ||
| P2-14 | Gain d'intégration de réglage de couple | Réglage d'usine | 1300 |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| Plage de réglage | 0~20000 | ||
| P2-15 | Gain proportionnel de contrôle de couple | Réglage d'usine | 2000 |
| Plage de réglage | 0~20000 | ||
| P2-16 | Gain intégral pour le contrôle du couple | Réglage d'usine | 1300 |
| Plage de réglage | 0~20000 | ||
Paramètres de contrôle de boucle de courant PI du contrôle vectoriel. Les paramètres de réglage complet dans une machine asynchrone ou synchrone seront automatiquement chargés après le réglage, ils n'ont généralement pas besoin d'être modifiés.
Il convient de rappeler que le régulateur d'intégration de boucle de courant règle directement le gain d'intégration au lieu d'utiliser le temps intégral comme dimension. Si le gain de boucle de courant PI est réglé trop haut, cela peut faire osciller toute la boucle de contrôle, donc lorsque l'oscillation de courant ou l'ondulation de couple est importante, elles peuvent être réduites manuellement ici pour obtenir un gain proportionnel ou un gain d'intégration PI.
Groupe P3 - Paramètres de contrôle U/f
Les codes de fonction ne fonctionnent qu'avec le contrôle U/f. Ils ne fonctionnent pas avec le contrôle vectoriel.
Le contrôle U / f convient aux ventilateurs, pompes et autres charges générales, ou à un onduleur avec plusieurs moteurs, ou à une puissance de l'onduleur et à une puissance de moteur d'applications assez différentes.
| P3-00 | Sélection de la courbe U/f | Réglage d'usine | 0 | |
| Plage de réglage | 0 | linéaire | ||
| 1 | multipoint | |||
| 2 | carrée | |||
| 3 | 1.2 carrée | |||
| 4 | 1.4 carrée | |||
| 6 | 1.6 carrée | |||
| 8 | 1.8 carrée | |||
| 9 | réservé | |||
| 10 | courbe U/f avec séparation complète | |||
| 11 | courbe U/f avec demi-séparation | |||
0 : Linéaire U/f Convient pour une charge normale avec un couple constant.
1 : Ligne U/f multipoint. Convient pour les machines de déshydratation, les centrifugeuses et autres charges spéciales. À ce stade, en définissant les paramètres P3-03 \~ P3-08, ils peuvent être obtenus sur n'importe quelle courbe U/f.
2 : Courbe carrée U/f Convient aux ventilateurs, pompes et autres charges centrifuges. 3 \~ 8 : Courbe U/f entre une droite, entre PF et un carré U/f.
10 : Courbe U/f avec séparation complète La fréquence de sortie et la tension de sortie de l'onduleur sont alors indépendantes l'une de l'autre. La fréquence de sortie est déterminée par la source de fréquence et la tension de sortie est déterminée par P3-13 (source de tension isolée U/f).
Le mode de séparation U/f complet est généralement utilisé dans le chauffage par induction, le convertisseur de puissance, le contrôle du couple moteur et d'autres applications.
11 : Courbe U/f avec demi-séparation
Dans ce cas, V et F sont proportionnels à la source de tension par réglage de P3-13, et la relation entre V et F s'applique également à la tension nominale du moteur du groupe P1 par rapport à la fréquence nominale.
Supposons que la source de tension d'entrée soit X (où X est 0-100 % de la valeur). La tension de sortie V F dans la relation entre l'onduleur et la fréquence est :
V / F = 2 * X * (tension nominale du moteur) / (fréquence nominale du moteur).
| P3-01 | Gain decouple | Réglage d'usinc | Selon le modèle |
| Plage de réglage | 0.0%~30% | ||
| P3-02 | Fréquenced'arrêt ducouple | Réglage d'usine | 50.001Hz |
| Plage de réglage | 0.00Hz~fréquence maximale de sortie | ||
Pour compenser les caractéristiques de couple à basse fréquence de commande U/f, la compensation de tension de sortie de l'onduleur doit être augmentée. Cependant, si le réglage du gain de couple est trop élevé, le moteur surchauffe et une surintensité de l'onduleur se produit.
Lorsque la charge est élevée et que le couple de démarrage du moteur est insuffisant, il est recommandé d'augmenter ce paramètre, il peut être légèrement diminué en cas d'augmentation. Lorsque le gain de couple est défini sur 0,0, l'onduleur augmente automatiquement le couple, à ce stade, le couple augmente en fonction de paramètres requis calculés automatiquement de la résistance statorique du moteur d'entraînement.
Au-dessus de cette fréquence définie, le gain de couple échouera. Voir les détails sur la figure 6-3.
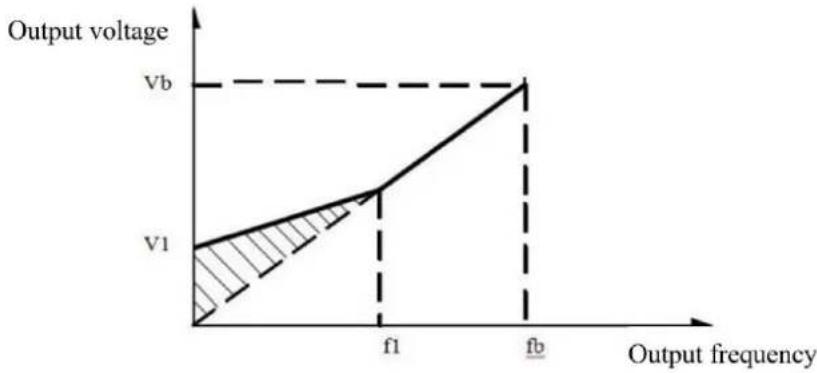
VI : Gain de tension de couple manuel
Vb Tension de sortie maximale
fl : Fréquence de coupure du gain manuel de couple fb : fréquence nominale de fonctionnement
Fig. 6-3 Schéma du gain manuel du couple
| P3-03 | Point 1 de fréquence U/f | Réglage d'usine 0.00Hz | |
| Plage de réglage | 0.00Hz~P3-05 | ||
| P3-04 | Point 1 de tension U/f | Réglage d'usine 0.0% | |
| Plage de réglage | 0.0%~100.0% | ||
| P3-05 | Point 2 de fréquence U/f | Réglage d'usine 0.00Hz | |
| Plage de réglage | P3-03~P3-07 | ||
| P3-06 | Point 2 de tension U/f | Réglage d'usine | 0.0% |
| Plage de réglage | 0.0%~100.0% | ||
| P3-07 | Point 3 de fréquence U/f | Réglage d'usine | 0.00Hz |
| Plage de réglage | P3-05 ~ fréquence nominale du moteur (P1-04)Remarque : La deuxième fréquence nominale du moteur est A2-04 | ||
| P3-08 | Point 3 de tension U/f | Réglage d'usine | 0.0% |
| Plage de réglage | 0.0%~100.0% | ||
P3-03 \~ P3-08 six paramètres qui définissent une courbe U/f multi-segments.
La caractéristique U/f multipoint doit être réglée en fonction de la courbe de charge du moteur. Sachez que la relation entre tension et fréquence doit être respectée en trois points : V1 < V2 < V3, F1 < F2 < F3.
La figure 6-4 montre un schéma d'une courbe U/f avec un réglage multipoint.
Un réglage trop élevé de la tension peut entraîner une surchauffe du moteur ou même une combustion à basse fréquence. L'entraînement peut trop décrocher ou activer la protection contre les surintensités.
| P3-09 | Gain de la compensation de glissement U/f | Réglage d'usine | 0 |
| Plage de réglage | 0%~200.0% | ||
Compensation de glissement U/f Peut être compensé dans le cas d'un moteur asynchrone lorsque la charge augmente l'écart de vitesse du moteur. Un régime moteur stable peut être obtenu lorsque la charge change.
Le gain de la compensation de glissement U/f est fixé à 100,0%, ce qui indique la compensation de la charge nominale par rapport au glissement nominal du moteur. Mais vous pouvez également faire vos propres calculs sur la base du glissement nominal du moteur, du groupe de fréquence nominale du moteur d'entraînement selon P1 et de la vitesse nominale.
Le gain de compensation de glissement U / f peut être ajusté en tr/min, généralement lorsque la charge nominale, la vitesse du moteur et la vitesse cible sont essentiellement les mêmes. Lorsque la vitesse du moteur et la valeur cible ne sont pas les mêmes, ajustez le gain en conséquence.
| P3-10 | Gain de surexcitation U/f | Réglage d'usine | |
| Plage de réglage | 0~200 | ||
Lors du freinage, l'augmentation de la tension de la barre de commande due à une surexcitation peut être supprimée pour éviter un défaut de surtension. Plus le gain de la surexcitation est importante, plus l'amortissement est fort.
Dans des conditions de freinage par l'onduleur, la surpression s'accumule plus facilement et l'alarme retentit, et le contrôle de la surexcitation doit être ajusté. Mais si le gain de surexcitation est trop important, il conduira facilement à une augmentation du courant de sortie ; cela doit être équilibré dans l'application.
En cas de faible inertie, le délai de montée en tension du moteur n'intervient pas. Il est recommandé que le gain de surexcitation soit égal à 0 ; En cas de résistance de freinage dans cette situation, il est également suggéré de régler le gain de surexcitation à 0.
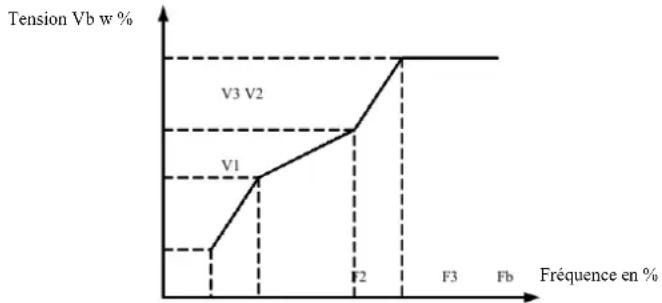
V1-V3 : Pourcentage de tension Multi-speed U/f du segment 1-3
F1-F3 : Pourcentage de fréquence Multi-speed U/f du segment 1-3
Vb : tension nominale du moteur
Fb : fréquence nominale de fonctionnement du moteur
Figure 6-4 Schéma de réglage de la courbe U/f multi-points
| P3-11 | Gain d'amortissement d'oscillations U/f | Réglage d'usine | Confirmation du modèle |
| Plage de réglage | 0~100 | ||
La méthode de sélection de gain est efficace pour amortir les oscillations. Sélectionnez un gain faible afin de ne pas nuire aux performances U/f. Quand le moteur n'oscille pas, sélectionnez le gain 0. Le gain ne doit être augmenté que lorsque le moteur oscille nettement, plus le gain est élevé, mieux est le résultat de l'amortissement d'oscillations. L'utilisation de la fonction d'amortissement d'oscillations nécessite que le courant nominal du moteur et le courant à vide soient strictement respectés, sinon l'effet d'amortissement U / f ne sera pas bon.
| P3-13 | Tension isolée U/f | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Réglage numérique (P3-14) | ||
| 1 AI1 | ||||
| 2 AI2 | ||||
| 3 AI3 | ||||
| 4 | Réglage d'impulsion (DI5) | |||
| 5 | Commandes multi-états | |||
| 6 | API simple | |||
| 7 PID | ||||
| 8 | Paramètres de communication | |||
| 100,0% correspond à la tension nominale du moteur (P1-02, A4-02, A5-02, A6-02) | ||||
| P3-14 | Réglage numérique De tension isolée U/f | Réglage d'usine | 0V | |
| Plage de réglage | 0V~tension nominale du moteur | |||
La séparation U/f est généralement utilisée dans les applications de chauffage par induction, de convertisseur de puissance et de contrôle de couple moteur.
Lors de la sélection du contrôle de séparation U/f, la tension de sortie peut être définie par le code de fonction P3-14, mais également de façon analogique, multi-flux, via API, PID ou par les paramètres de communication. Dans le cas d'un réglage non numérique, chaque réglage correspond à 100 % de la tension nominale du moteur lorsque le pourcentage en valeur absolue du réglage de la sortie analogique, etc. est négatif. Ainsi, il se définit comme point de consigne actif.
0 : Le réglage numérique de la tension (P3-14) est effectué directement par P3-14. 1 : AI1 2 : AI2 3 : AI3
Tension de la borne d'entrée analogique à déterminer.
-
Réglage d'impulsions (DI5) en réglant l'impulsion de tension sur les bornes. Spécification du signal de référence d'impulsion : plage de tension 9V \~ 30V, plage de fréquence 0kHz \~ 100kHz.
-
Dans le cas d'une instruction de tension à plusieurs étapes provenant de plusieurs sources, définissez le groupe P4 PC et définissez les paramètres de sorte que le signal donné corresponde à la tension de référence.
6. Pilote API simple
Lorsque la source de tension est un API simple, vous devez définir le jeu de paramètres PC pour déterminer la tension de sortie donnée.
7. PID
La boucle fermée génère la tension de sortie en fonction du régulateur PID. Voir les détails du groupe PA pour le PID.
- La communication fait référence à la tension fournie par l'ordinateur hôte en mode de communication. Lorsque les sources de tension 1 à 8 sont sélectionnées, 0 correspond à une tension de sortie de 100 % (0 V \~ tension nominale du moteur).
| P3-14 | Temps de montée de tension isolé U/f | Réglage d'usine | 0.0s |
| Plage de réglage | 0.0s~1000.0s | ||
Le temps de montée de séparation U/f fait référence à la variation de la tension de sortie de 0 V au temps requis de la tension nominale du moteur.
Ceci est illustré à la figure 6-5 :
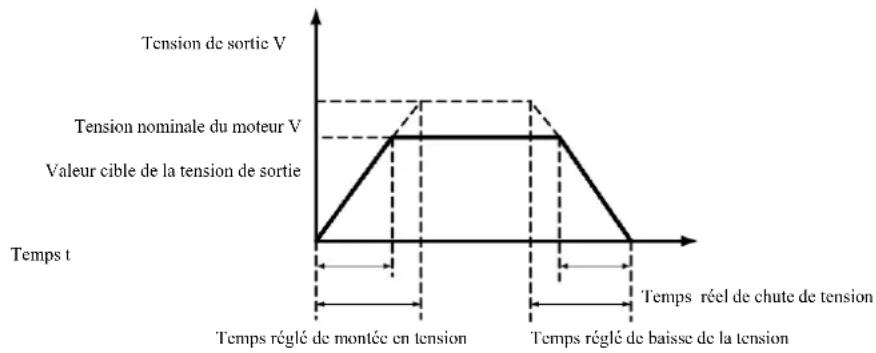
Figure 6-5 Schéma de séparation V / F
Groupe P4 - Bornes d'entrée
Cet onduleur de série est équipé en standard de cinq bornes d'entrée numériques multifonctionnelles (où DI5 peut être utilisé comme borne d'entrée d'impulsion rapide). Deux bornes d'entrée analogiques. Si votre système a besoin de plus de bornes d'entrée et de sortie, vous pouvez utiliser une carte d'extension multifonction entrée et sortie en option.
La carte d'extension entrée et sortie multifonction dispose de cinq bornes d'entrée numérique multifonction (DI6 DI10) et d'un connecteur d'entrée analogique (AI3).
| P4-00 | Sélection de la fonction des bornes DI1 | Réglage d'usine | 1 (fonctionnement) |
| P4-01 | Sélection de la fonction des bornes DI2 | Réglage d'usine | 4 (mouvement positif du point de retournement) |
| P4-02 | Sélection de la fonction des bornes DI3 | Réglage d'usine | 9 (réinitialisation d'erreur) |
| P4-03 | Sélection de la fonction des bornes DI4 | Réglage d'usine | 12 (multi speed 1) |
| P4-04 | Sélection de la fonction des bornes DI5 | Réglage d'usine | 13 (multi speed 2) |
| P4-05 | Sélection de la fonction des bornes DI6 | Réglage d'usine | 0 |
| P4-06 | Sélection de la fonction de la borne DI7w | Réglage d'usine | 0 |
| P4-07 | Sélection de la fonction des bornes DI8 | Réglage d'usine | 0 |
| P4-08 | Sélection de la fonction des bornes DI9 | Réglage d'usine | 0 |
| P4-09 | Sélection de la fonction des bornes DI10 | Réglage d'usine | 0 |
| Point de consigne | Fonction | Explication |
| 0 | Pas de fonction | La borne ne sera pas utilisé en mode « Pas de fonction » pour éviter un dysfonctionnement. |
| 1 | Direction en avant (FWD) | |
| 2 | Direction en arrière (REV) | Borne externe pour contrôler l'entraînement en avant et en arrière. |
| 3 | Commande à trois fils | Cette borne permet de définir le mode de fonctionnement de l'onduleur en mode commande 3 fils. Pour plus de détails, reportez-vous aux instructions du code de fonction P4-11 (« Mode des commandes des bornes »). |
| 4 | Impulsion en avant (FJOG) | JOG - impulsion en avant, JOG - impulsion en arrière. La fréquence d'impulsion et le temps d'accélération et de décélération en mode JOG s'appliquent aux codes de fonction P8-00, P8-01, P8-02. |
| 5 | Points de retournement (JOG) | |
| 6 | Borne EN HAUT (UP) | Via les bornes externes, les commandes sont données pour la modification de l'incrémentation et décrémentation de fréquence. La source de fréquence est réglée sur le point de consigne numérique, vous pouvez l'ajuster vers le haut et vers le bas pour régler la fréquence. |
| 7 | Borne EN BAS (DOWN) | |
| 8 | Rouc libre | L'onduleur verrouille la sortie puis arrête le processus de commande du moteur de l'onduleur. Il en est de même pour la roue libre P6-10. |
| 9 | Reset (RESET) | Fonction de réinitialisation des défauts de la borne avec la touche de fonction RESET du clavier. Cette fonction est utilisée pour réinitialiser les erreurs à distance |
| 10 | Fonctionnement en pause | L'onduleur est arrêté, mais tous les paramètres de fonctionnement sont sauvegardés en mémoire. Paramètres tels que API, paramètres Wobble, paramètres PID. Lorsque ce signal est retiré de la borne, l'entraînement revient à l'état dans lequel il se trouvait avant de s'arrêter. |
| 11 | Sortie normalement ouverte pour une erreur externe | Lorsque ce signal est envoyé à l'onduleur, l'onduleur signale l'erreur ERR15. Dépannage et protection contre les défauts selon le mode de fonctionnement (voir également les détails sur le code de fonction P9-47). |
| 12 | Borne Multi speed 1 | |
| 13 | Borne Multi speed 2 | 16 états de quatre bornes pour la vitesse ou 16 autres jeux d'instructions. Voir tableau 1 pour plus de détails. |
| 14 | Borne Multi speed 3 | |
| 15 | Borne Multi speed 4 | |
| 16 | Borne de sélection du temps de freinage 1 | Ces deux bornes ont quatre états, quatre options de temps d'accélération et de décélération, voir le tableau 2 pour plus de détails. |
| 17 | Borne de sélection du temps de freinage 2 | |
| 18 | Commutateur de source de fréquence | Commutation pour sélectionner une source de fréquence différente.Selon le code de la fonction de sélection de source de fréquence (P0-07), cette borne est utilisée pour basculer entre deux sources de fréquence. |
| 19 | Effacement de paramètres EN HAUT / BEN AS (borne, clavier) | Par rapport à une référence de fréquence numérique commandée, cette borne peut effacer les changements EN HAUT / EN BAS ou effectuer des changements EN HAUT / EN BAS afin que la fréquence donnée revienne à la valeur de consigne P0-08. |
| 20 | Commutation de la source de commande avec la borne | Lorsque la source de commande est définie comme contrôle avec la borne (P0-02 = 1), cette borne peut être commuté sur contrôle avec borne et le contrôle avec clavier.Lorsque la source de commande est définie comme contrôle avec la communication (P0-02 = 2), cette borne peut être commuté sur contrôle avec la communication et le contrôle avec clavier. |
| 21 | Verrouillage d'accélération et décelération | Assure que l'entraînement ne reçoit pas de signaux externes (sauf pour une commande d'arrêt) pour conserver la fréquence de sortie actuelle. |
| 22 | Fin du temps PID | PID est temporairement désactivé, l'onduleur conserve la fréquence de sortie actuelle, il n'y a plus de contrôle PID de la source de fréquence. |
| 23 | Réinitialisation de l'état du API | Pause de l'API dans le processus de mise en œuvre, vous pouvez restaurer l'onduleur via ce terminal à l'état initial de l'API simple. |
| 24 | Pause de fréquence d'oscillation | Entrainement à la sortie de fréquence centrale. Mise en pause de la fonction Wobble. |
| 25 | Entrée compteur | Borne d'entrée du compteur d'impulsions. |
| 26 | Remise à zéro du compteur État de réinitialisation du compteur. | |
| 27 | Entrée de la longueur de comptage | Borne d'entrée de comptage de longueur. |
| Point de consigne | Fonction | Explication |
| 28 | Réinitialisation de la longueur de comptage | Effacement de la longueur |
| 29 | Verrouillage du contrôle | Verrouillage du contrôle de couple d'entraînement, l'onduleur passe en mode de contrôle de |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| de couple | vitesse | |
| 30 | Entrée de fréquence d'impulsions (s'applique uniquement au D15) | DI5 agit comme une borne d'entrée d'impulsion. |
| 31 | Réservé Réservé | |
| 32 | Freinage avec le courant continu | Lorsque cette borne est active, l'onduleur passe directement à l'état de freinage avec le courant continu. |
| 33 | Entrée de signal de défaut externe normalement fermée | Lorsqu'une entrée normalement fermée signale un défaut externe à l'onduleur, l'onduleur signale ERR15 et un temps d'arrêt. |
| 34 | Le verrouillage du décalage de fréquence est activé | Si cette fonction est active, le convertisseur ne répondra pas au changement après le changement de fréquence jusqu'à ce que la borne devienne inactive. |
| 35 | Changement du sens de fonctionnement du PID | Lorsque cette borne est active, le sens de fonctionnement du PID change dans la direction opposée du sens réglé du PA-03 réglé |
| 36 | Arrêt par signal externe de la borne 1 | Lors de la commande à partir du clavier, cette borne permet d'arrêter l'onduleur, elle correspond à la touche STOP du clavier. |
| 37 | Commutation de la source de commande de la borne 2 | Pour basculer entre le contrôle avec les bornes et le contrôle avec la communication. Si la borne est sélectionnée comme source de commande, le système passe au contrôle effectif de la borne de communication et vice versa. |
| 38 | Suspension de fonctionnement du segment d'intégration PID | Lorsque cette borne est active, la régulation intégrale PID est suspendu, mais la proportion de la régulation PID et de la régulation de dérivatisation reste valable.39 |
| 39 | Commutation entre la source de fréquence X et de la fréquence préréglée | Lorsque la borne est activée, une source de fréquence X est disponible avec la fréquence réglée (P0-08) comme alternative. |
| 40 | Commutation entre la source de fréquence Y et de la fréquence préréglée | Lorsque la borne est activée, une source de fréquence Y est disponible avec la fréquence réglée (P0-08) comme alternative. |
| 41 | Sélection du moteur via la borne 1 | Ces deux états sur les deux bornes, deux jeux de paramètres du moteur peuvent être commutés. Voir Tableau 3 pour plus de détails. |
| 42 | Sélection du moteur via la borne 2 | |
| 43 | Commutation de paramètres PID | Lorsque cette borne est inactive dans des conditions de commutation de paramètre PID (PA-18 = 1), le paramètre PID PA-05 ~ PA-07, PA-15 sera utilisé lorsque cette borne est active ~ PA-17 ; |
| 44 | Erreur 1 définie par l'utilisateur | Lorsque les erreurs 1 et 2 définies par l'utilisateur sont actives, l'onduleur génère respectivement les alarmes ERR27 et ERR28, le convertisseur sélectionne l'opération de protection contre les défauts en fonction du traitement dans le mode de fonctionnement sélectionné P9-49. |
| 45 | Erreur 2 définie par l'utilisateur | |
| 46 | Commutation entre contrôle de vitesse et de couple | Entre le mode de contrôle de couple d'entraînement et le mode de contrôle de vitesse. La borne est inactive, le mode A0-00 (contrôle de vitesse/ contrôle de couple) défini dans l'entraînement est en marche, la borne est active, puis passe dans un autre mode. |
| 47 | Arrêt d'urgence | Lorsque cette borne est active, l'onduleur arrête l'entraînement le plus rapidement possible dans la limite actuellement définie. Cette fonction permet de remplir la condition selon laquelle l'entraînement doit être arrêté au plus vite lorsque le système est dans un état d'urgence. |
| 48 | Arrêt par signal externe de la borne 2 | Dans n'importe quel mode de contrôle (panneau de commande, contrôle par borne, contrôle de communication), cette borne peut être utilisée pour arrêter l'onduleur, alors le temps de freinage est un temps constant 4. |
| 49 | Arrêt avec freinage par courant continu | Lorsque cette borne est active, l'onduleur décélère pour arrêter la fréquence de démarrage du freinage par courant constant, puis passe en freinage par courant constant. |
| 50 | Suppression du temps de fonctionnement | Lorsque cette borne est active, le temps de fonctionnement donné de l'onduleur est cflaccé, cette fonction nécessite que le temps de fonctionnement (P8-42) soit défini et atteint (P8-53). |
Tableau 1 Description des fonctions de commande à plusieurs étapes
Avec une borne de commande à plus de quatre étapes on peut connecter 16 états. Chaque état correspond à 16 paramètres de commande, comme dans le tableau 1 :
| K4 | K3 | K2 | K1 | Jeu de commandes | Paramètres appropriés |
| OFF | OFF | OFF | OFF Instructions multi-étapes 0 PC-00 | ||
| OFF | OFF | OFF | ON | Instructions multi-étapes 1 | PC-01 |
| OFF | OFF | ON | OFF Instructions multi-étapes 2 PC-02 | ||
| OFF | OFF | ON | ON Instructions multi-étapes 3 PC-03 | ||
| OFF | ON | OFF | OFF | Instructions multi-étapes 4 | PC-04 |
| OFF | ON | OFF | ON | Instructions multi-étapes 5 | PC-05 |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| OFF | ON | ON | OFF | Instructions multi-étapes 6 | PC-06 |
| OFF | ON | ON | ON Instructions multi-étapes 7 PC-07 | ||
| ON | OFF | OFF | OFF Instructions multi-étapes 8 PC-08 | ||
| ON | OFF | OFF | ON | Instructions multi-étapes 9 | PC-09 |
| ON | OFF | ON | OFF | Instructions multi-étapes 10 | PC-10 |
| ON | OFF | ON | ON | Instructions multi-étapes 11 | PC-11 |
| ON | ON | OFF | OFF | Instructions multi-étapes 12 | PC-12 |
| ON | ON | OFF | ON | Instructions multi-étapes 13 | PC-13 |
| ON | ON | ON | OFF | Instructions multi-étapes 14 | PC-14 |
| ON | ON | ON | ON | Instructions multi-étapes 15 | PC-15 |
Lorsque la source de fréquence de la fonction multi-vitesses PC-00 \~ PC-15 est sélectionnée à 100,0%, cela correspond à la fréquence maximale de P0-10. En plus d'être utilisées pour les fonctions à plusieurs vitesses, les instructions à plusieurs étapes peuvent également être utilisées comme source de référence PID ou comme source de tension, ou de contrôle de séparation U/f, etc. pour répondre aux besoins de commutation de tâches.
Tableau 2 Fonctions des bornes pour la sélection du temps d'accélération et de décélération
| Borne 2 Borne 1 | Sélection du temps d'accélération et de décélération | répond | |
| OFF OFF | Temps d'accélération 1 | P0-17、P0-18 | |
| OFF | ON Temps d'accélération 1 | P8-03、P8-04 | |
| ON OFF | Temps d'accélération 3 | P8-05、P8-06 | |
| ON | ON | Temps d'accélération 4 | P8-07、P8-08 |
Tableau 3 Fonctions des bornes pour la sélection du moteur
| Borne 2 | Borne 1 | Sélection du moteur | Jeu de paramètres appropriés |
| OFF | OFF | Moteur 1 | Groupe P1, P2 |
| OFF | ON | Moteur 2 | Groupe A2. |
| P4-10 | Temps de filtration DI | Réglage d'usine | 0.010s | |
| Réglage | 0.000s~1.000s | |||
Réglage de l'état DI du temps de filtrage dans le logiciel de la borne. Si vous utilisez une borne d'entrée sujette au bruit causé par un dysfonctionnement de ce paramètre, vous pouvez augmenter ce paramètre pour augmenter la capacité anti-interférence. Bien que cela augmente le temps de filtrage, cela peut entraîner une réponse lente de la borne DI.
| P4-11 | Mode de commande de la borne | Réglage d'usine | 0 | ||
| Plage de réglage | 0 | Deux fils 1 | |||
| 1 | Deux fils 2 | ||||
| 2 | Trois fils 1 | ||||
| 3 | Trois fils 2 | ||||
0 : Mode deux fils 1 : Ce mode est le mode bilinéaire le plus couramment utilisé. Via les bornes DI1, DI2 détermine la marche avant et arrière du moteur.
Fonctions des bornes :
| Bornes | Point de consigne | Description |
| DI1 | 1 | Marche en avant (FWD) |
| DI2 | 2 | Marche en arrière (REV) |
Étant donné que DI1 et DI2 sont des bornes d'entrée multifonction DI1 \~ DI10, le niveau est effectif.
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
Figure 6-6 1 : Mode deux fils
1 : Mode deux fils
2 : Utilisez ce mode lorsque la borne active de la fonction DI1 et de la fonction DI2 permet la détermination de la direction.
Fonctions des bornes :
| Bornes | Réglage | Description |
| DI1 | 1 | Marche en avant (FWD) |
| DI2 | 2 | Marche en arrière (REV) |
Figure 6-7 Mode deux lignes 2
2 : Mode de contrôle trois fils
1 : Ce mode est activé à la borne DI3 ou par la commande de direction DI1, DI2
| Bornes | Point de consigne Description | |
| DI1 | 1 | Marche en avant (FWD) |
| DI2 | 2 | Marche en arrière (REV) |
| DI3 | 3 | Contrôle de mouvement à trois fils |
Lorsqu'un démarrage est requis la borne DI 3 doit d'abord être fermée sur les bords montants de DI1 ou DI2 pour obtenir une commande de moteur en avant ou en arrière.
Lorsqu'il est nécessaire de s'arrêter, déconnecter le signal de DI3. DI1, DI2, DI3 sont des bornes d'entrée multifonctionnelles DI1 \~ DI10, DI1, les impulsions DI2 sont efficaces et DI3 a un niveau efficace.
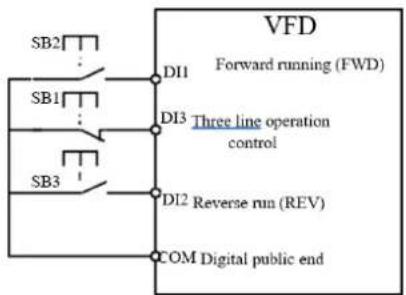
Fig. 6-8 Mode de commande à trois fils 1
Où : SB1 : bouton d'arrêt SB2 : bouton de marche « en avant » SB3 : bouton de marche « en arrière »
3 : Mode de contrôle trois fils
2 : Ce mode est activé par la borne DI 3, déclenché par la commande donnée par DI1, direction DI2 telle que sélectionnée.
Fonctions des bornes :
| Bornes | Point de consigne | Description |
| DI1 | 1 | Marche en avant (FWD) |
| DI2 | 2 | Marche en arrière (REV) |
| DI3 | 3 | Contrôle de mouvement à trois fils |
Lorsqu'un démarrage est requis, la borne DI 3 doit d'abord être fermée, l'impulsion du signal de marche du moteur DI1 augmente, l'état de direction de marche du moteur DI2.
Lorsqu'il est nécessaire de s'arrêter, déconnecter le signal de DI3. Parmi les borne, DI1, DI2, DI3 pour DI1 \~ DI10 c'est des bornes d'entrée multifonctionnelles, DI1 impulsion efficace, DI3, DI2 fonctionnent efficacement.
VFD
| Marche en avant (FWD) | ||
| K | Sens du mouvement | commande D13 3 lignes |
| 0 | En avant | Marche en arrière (REV) |
| 1 | En arrière (REV) | COM digital public end |
Fig. 6-9 Mode de commande à trois fils 2
Où : SB1 : bouton « stop », SB2 : bouton « mouvement ».
| P4-12 | UP / DOWN vitesse de changement | Réglage d'usine | 1.00Hz/s | |
| Réglage | 0.01Hz/s~65.535Hz/s | |||
Lors du réglage de la borne UP / DOWN en haut / en bas, ajustez la fréquence définie et la vitesse de changement de fréquence, qui correspond à la valeur de changement de fréquence par seconde.
Lorsque P0-22 (point décimal de fréquence) est égal à 2, la valeur est comprise entre 0,001 Hz/s et 65,535 Hz/s.
Lorsque P0-22 (point décimal de fréquence) est égal à 1, la valeur est comprise entre 0,01 Hz/s et 655,35 Hz/s.
| P4-13 | Valeur minimale de la courbe AI1 en entréeRéglage 0.00V~P4-15 | Réglage d'usine | 0.00V |
| P4-14 | Réglage de la courbe AI1 en entréeRéglage -100.00%~100.0% | Réglage d'usine | 0.0% |
| P4-15 | Valeur maximale de la courbe AI1 en entrée.Réglage P4-13~10.00V | Réglage d'usine | 10.00V |
| P4-16 | Réglage de la courbe AIIen entréeRéglage -100.00%~100.0% | Réglage d'usine | 100.0% |
| P4-17 | Temps de filtration AI1Réglage 0.00s~10.00s | Réglage d'usine | 0.10s |
Les codes de fonction ci-dessus sont utilisés pour définir la relation entre les paramètres de tension analogique d'entrée.
Lorsque la tension d'entrée analogique est supérieure à « l'entrée maximale » définie (P4-15), la tension analogique est calculée en fonction de « l'entrée maximale ». De même, lorsque la tension d'entrée analogique est inférieure à « l'entrée maximale » définie (P4-13), ... [texte incompréhensible - note du traducteur]
Lorsque l'entrée analogique est une entrée de courant, 1 mA est égal à 0,5 V.
Le temps de filtrage d'entrée A11 est utilisé pour définir le temps de filtrage lorsque le logiciel A11 est sensible aux interférences dans l'emplacement simulé. Le temps de filtrage doit être augmenté pour stabiliser la détection de la simulation. Cependant, plus le temps de filtrage pendant la simulation est long, plus le temps de réponse est lent. La méthode de réglage dépend de l'application.
Le réglage analogique 100,0% de la valeur nominale correspondante est différent pour différentes applications, veuillez vous référer à la description de chaque partie de l'application.
Voici un cas avec deux paramètres courants :
Selon les paramètres (fréquence, vitesse)
Selon les paramètres (fréquence, vitesse)
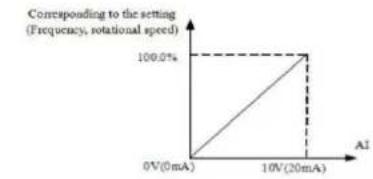
Figure 6-10 Relation entre la simulation et la valeur définie
| P4-18 | Valeur minimale de la courbe AI2 en entrée | Réglage d'usine | 0.00V | |
| Plage de réglage | 0.00V~P4-20 | |||
| P4-19 | Réglage de la courbe AI2 en entrée | Réglage d'usine | 0.0% | |
| Plage de réglage | -100.00%~100.0% | |||
| P4-20 | Valeur maximale de la courbe AI2 en entrée. | Réglage d'usine | 10.00V | |
| Plage de réglage | P4-18~10.00V | |||
| P4-21 | Réglage de la courbe AI2 en entrée | Réglage d'usine | 100.0% | |
| Plage de réglage | -100.00%~100.0% | |||
| P4-22 | Temps de filtration AI2 | Réglage d'usine | 0.10s | |
| Plage de réglage | 0.00s~10.00s | |||
Fonction et application de la courbe 2, voir la description de la courbe 1
| P4-23 | Valeur minimale de la courbe AI3 en entrée | Réglage d'usine | 0.00V | |
| Plage de réglage | 0.00s~P4-25 | |||
| P4-24 | Réglage de la courbe AI3 en entrée | Réglage d'usine | 0.0% | |
| Plage de réglage | -100.00%~100.0% | |||
| P4-25 | Valeur maximale de la courbe AI3 en entrée. | Réglage d'usine | 10.00V | |
| Plage de réglage | P4-23~10.00V | |||
| P4-26 | Réglage de la courbe AI3 en entrée | Réglage d'usine | 100.0% | |
| Plage de réglage | -100.00%~100.0% | |||
| P4-27 | Temps de filtration AI3 | Réglage d'usine | 0.10s | |
| Plage de réglage | 0.00s~10.00s | |||
Fonction et application de la courbe 3, voir la description de la courbe 1
| P4-28 | Impulsion d'entrée minimale | Réglage d'usine | 0.00kHz | |
| Plage de réglage | 0.00kHz~P4-30 | |||
| P4-29 | Conformité minimale de l'entrée d'impulsion | Réglage d'usine | 0.0% | |
| Plage de réglage | -100.00%~100.0% | |||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P4-30 | Impulsion d'entrée maximale | Réglage d'usine | 50.00kHz | |
| Plage de réglage | P4-28~50.00kHz | |||
| P4-31 | Conformité maximale de l'entrée d'impulsion | Réglage d'usine | 100.0% | |
| Plage de réglage | -100.00%~100.0% | |||
| P4-32 | Temps de filtrage de l'entrée d'impulsion | Réglage d'usine | 0.10s | |
| Plage de réglage | 0.00s~10.00s | |||
Figure 6-10 Relation entre la simulation et la valeur définie
L'impulsion du convertisseur de fréquence ne peut être introduit que via DI5. L'utilisation et la courbe de fonction de ce groupe est similaire
à la courbe 1, I voir note sur la courbe 1.
| P4-33 | Sélection de la courbe AI | Réglage d'usine | §21 | |
| Plage de réglage | Chiffre des unités | Sélection de la courbe AI | ||
| 1 | Courbe 1 (2 points, voir P4-13 ~ P4-16) | |||
| 2 | Courbe 2 (2 points, voir P4-18 ~ P4-21) | |||
| 3 | Courbe 3 (2 points, voir P4-23 ~ P4-26) | |||
| 4 | Courbe 4 (4 points, voir A6-00 ~ A6-07) | |||
| 5 | Courbe 5 (4 points, voir A6-08 ~ A6-15) | |||
| Dizaines | Sélection de la courbe AI2 (1 ~ 6, comme ci-dessus) | |||
| Centaines | Sélection de la courbe AI3 (1 ~ 6, comme ci-dessus) | |||
Les bits dix et cent du code de fonction sont utilisés pour sélectionner la courbe d'entrée analogique appropriée AI1, AI2, AI3. 3 des cinq types de courbe peuvent être sélectionnés.
La courbe 1, la courbe 2, la courbe 3 sont des courbes à 2 points définies avec le code de fonction de groupe P4, tandis que les courbes 4 et 5 sont des courbes à 4 points qui doivent être définies avec le code de fonction de groupe A8.
Cet onduleur standard fournit deux entrées analogiques. AI3 doit être configuré pour utiliser la carte d'extension E/S multifonctionnelle.
| P4-34 | AI est inférieur au réglage minimum de l'entrée | Réglage d'usine | 000 | ||
| Plage de réglage | Chiffre des unités | AI1 inférieur au réglage d'entrée minimum sélectionné | |||
| 0 | Réglage minimal de l'entrée correct | ||||
| 1 | 0.0% | ||||
| Dizaines | AI2 inférieur au réglage d'entrée minimum sélectionné (0 ~ 1, ci-dessus) | ||||
| Centaines | AI3 inférieur au réglage d'entrée minimum sélectionné (0 ~ 1, ci-dessus) | ||||
Ce code de fonction est utilisé pour le réglage lorsque la tension d'entrée analogique est inférieure à « l'entrée minimale » définie. Option 0.
L'unité de code de fonction Dizaines, Centaines correspond à l'entrée analogique AI1, AI2, AI3.
Si cette option est définie sur 1 et que l'entrée AE est inférieure au minimum, l'analogique est de 0,0%.
| P4-35 | Temps de délai DI1 | Réglage d'usine | 0.0s | |
| Réglage | 0.0s~3600.0s | |||
| P4-36 | Temps de délai DI2 | Réglage d'usine | 0.0s | |
| Réglage | 0.0s~3600.0s | |||
| P4-37 | Temps de délai DI3 | Réglage d'usine | 0.0s | |
| Réglage | 0.0s~3600.0s | |||
| P4-38 | Sélection du mode d'activité de la borne DI 1 | Réglage d'usine | 00000 | ||
| Plage de réglage | Chiffre des unités | Borne DI1 active | |||
| 0 | Actif haut | ||||
| 1 | Actif bas | ||||
| Dizaines | Borne DI2 active (0-1, comme ci-dessus) | ||||
| Centaines | Borne DI3 active (0-1, comme ci-dessus) | ||||
| Milliers | Borne DI4 active (0-1, comme ci-dessus) | ||||
| Dizaines de milliers | Borne DI5 active (0-1, comme ci-dessus) | ||||
| P4-39 | Sélection du mode d'activité de la borne DI 2 | Réglage d'usine | 00000 | ||
| Plage de réglage | Chiffre des unités | Borne DI6 active | |||
| 0 | Actif haut | ||||
| 1 | Actif bas | ||||
| Dizaines | Borne DI7 active (0-1, comme ci-dessus) | ||||
| Centaines | Borne DI8 active (0-1, comme ci-dessus) | ||||
| Milliers | Borne DI9 active (0-1, comme ci-dessus) | ||||
| Dizaines de milliers | Borne DI10 active (0-1, comme ci-dessus) | ||||
Règle la borne d'entrée numérique en mode actif. Après avoir sélectionné le mode actif haut, le terminal S correspondant et la communication COM communiquent efficacement. Après avoir sélectionné le mode actif bas, le terminal S correspondant et la communication COM sont inactifs, effectivement déconnectés.
Groupe P5 - bornes de sortie
Cet onduleur de série est livré en standard avec une borne de sortie analogique multifonctionnelle, une borne de sortie numérique multifonctionnelle, une borne de sortie de relais multifonctionnelle, une borne FM (sélectionnée comme borne de sortie d'impulsions à grande vitesse, peut également être sélectionnée comme borne de sortie à collecteur ouvert). Étant donné que la borne de sortie ne peut pas se connecter à l'application, une carte d'extension multifonction entrée/sortie en option est nécessaire.
Les bornes d'entrée et de sortie multifonctions de la carte d'extension comprennent une borne de sortie analogique multifonction (AO2), une borne de sortie relais multifonction (relais 2), une borne de sortie numérique multifonction (DO2).
| P5-00 | Sélection du mode de sortie de la borne FM | Réglage d'usine | 0 | ||
| Plage de réglage | 0 | Sortie d'impulsions (FMP) | |||
| 1 | Sortie numérique (FMR) 0 | ||||
Le terminal FM est une borne de multiplexage programmable qui peut être utilisé comme borne de sortie d'impulsions à grande vitesse (FMP). Elle peut également être utilisée comme borne de sortie à collecteur ouvert (FMR).
En tant que sortie d'impulsion FMP, la fréquence d'impulsion de sortie maximale est de 100 kHz, les fonctions liées au FMP peuvent être trouvées dans les instructions P5-06.
| P5-01 | Sélection de la fonction FMRI (borne de sortie à collecteur ouvert 1) | Réglage d'usine | 0 |
| P5-02 | Sélection de la fonction de sortie relais (T / A-T / B-T / C) | Réglage d'usine | 2 |
| P5-03 | Sélection de la fonction de sortie relais de la carte d'extension (P / A-P / B-P / C) | Réglage d'usine | 0 |
| P5-04 | Sélection de la fonction de sortie DO1 (borne de sortie à collecteur ouvert) | Réglage d'usine | 1 |
| P5-05 | Choix de la fonction de sortie de la carte d'extension DO2 | Réglage d'usine | 4 |
Cinq codes sont utilisés pour sélectionner les fonctions des cinq sorties numériques, c'est à dire T / A-T / B-T / C et P / A-P / B-P / C respectivement sur la carte de commande et le relais de la carte d'extension.
Les fonctions des bornes de sortie multifonctions sont les suivantes :
| Point de consigne | Fonction | Explication |
| 0 | Pas de signal à la sortie | La borne de sortie n'a pas de fonction |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| 1 | L'onduleur fonctionne | Ce qui indique que l'entraînement est en état de marche, le signal ON (MARCHE) de fréquence de sortie est envoyé (peut être égal à zéro). |
| 2 | Arrêt après erreur | Lorsque le convertisseur tombe en panne et est à l'arrêt, il envoie un signal ON. |
| 3 | Détection de fréquence à la sortie FDT1 | Veuillez vous reporter à la description de la fonction P8-19, P8-20. |
| 4 | Atteinte de la fréquence préréglée | Veuillez vous reporter à la description de la fonction P8-21. |
| 5 | Fonctionnement à vitesse nulle (sans arrêt de sortie) | L'onduleur fonctionne et la fréquence de sortie est sur 0, le signal de sortie est sur ON. Lorsque l'entraînement est éteint, le signal est éteint. |
| 6 | Avertissement de surcharge du moteur | Se produit avant la protection contre les surcharges du moteur, selon l'évaluation du seuil de pré-alarme de pré-surcharge, le signal de sortie du seuil de pré-alarme. Réglages des paramètres de surcharge du moteur, voir code de fonction P9-00 ~ P9-02. |
| 7 | Avertissement de surcharge de l'onduleur | 10 secondes plus tôt que l'onduleur soit en surcharge, le signal ON apparaîtra sur la sortie. |
| 8 | Détermination de la valeur préréglée du compteur | Lorsque le compteur atteint la valeur préréglée de PB-08, le signal ON apparaîtra à la sortie. |
| 9 | Atteinte de la valeur préréglée du compteur | Lorsque la valeur comptée atteint la valeur préréglée de PB-09, le signal ON apparaîtra à la sortie. |
| 10 | Longueur atteinte sur le compteur | En cas de détection que la longueur réelle dépasse la longueur définie PB-05, la sortie est activée. |
| 11 | Achèvement du cycle API | Après avoir exécuté un cycle par un API simple, la largeur d'impulsion de sortie est de 250 ms. |
| 12 | Atteinte du temps de fonctionnement cumulé | Lorsque le temps d'exécution cumulé dépasse le temps défini par le paramètre P8-17, le signal ON apparaîtra à la sortie. |
| 13 | Seuil de fréquence | Lorsque la fréquence définie dépasse le seuil supérieur ou inférieur et que la fréquence de sortie atteint le seuil supérieur ou inférieur, le signal de sortie ON s'active. |
| 14 | Seuil de couple | Lorsque l'entraînement est en mode de contrôle de vitesse, lorsque le couple de sortie atteint la valeur limite, l'onduleur passe en mode de protection contre le décrochage et envoie un signal ON. |
| 15 | Prêt au fonctionnement | Lorsque l'alimentation du circuit principal de l'onduleur et du circuit de commande s'est stabilisée et que le convertisseur de fréquence ne détecte aucune information d'erreur, l'entraînement est en état de fonctionnement et le signal « ON » est émis. |
| Point de consigne | Fonction Explication | |
| 16 A | 1>A12 | Lorsque la valeur de AI1 est supérieure à la valeur de AI2, le signal ON (MARCHE) apparaîtra en entrée et en sortie. |
| 17 | Atteinte de la limite supérieure de fréquence | Lorsque la fréquence de fonctionnement atteint la limite supérieure, le signal « ON » sera activé à la sortie. |
| 18 | Atteinte de la limite inférieure (pas de signal d'arrêt) | Lorsque la fréquence de fonctionnement atteint la limite inférieure, un signal ON est émis. A l'arrêt, le signal émis est « OFF ». |
| 19 | Tension de sortie trop faible | Lorsque l'onduleur est sous tension, le signal de sortie est « ON ». |
| 20 | Paramètres de communication | Voir protocole de communication. |
| 21 | Réservé | Réservé |
| 22 | Réservé - | Réservé |
| 23 | Fonctionnement à vitesse nulle 2 (sortie désactivée) | La fréquence de sortie de l'onduleur est 0, le signal de sortie est activé. Également à l'arrêt le signal est activé (« ON »). |
| 24 | Atteinte du temps cumulé d'alimentation | Lorsque le temps d'activation cumulé de l'onduleur (P7-13) P8-16 dépasse le temps défini, le signal de sortie est activé. |
| 25 | Détection du niveau de fréquence à la sortie FDT2 | Voir la description du code de fonction P8-28, P8-29. |
| 26 | Atteinte de la fréquence 1 | Voir la description du code de fonction P8-30, P8-31. |
| 27 | Atteinte de la fréquence 2 | Voir la description du code de fonction P8-32, P8-33. |
| 28 | Atteinte de la valeur de courant 1 | Voir la description du code de fonction P8-38, P8-39. |
| 29 | Atteinte de la valeur de courant 2 | Voir la description du code de fonction P8-40, P8-41. |
| 30 | Atteinte du temps de fonctionnement | Lorsque la fonction de l'horloge Select (P8-42) est active et que le temps de fonctionnement de l'onduleur est écoulé, le signal ON à la sortie apparaîtra. |
| 31 | Dépassement de la limite d'apparence du signal à l'entrée AI1 | Lorsque la valeur est supérieure à la valeur de l'entrée analogique AI1 P8-46 (valeur limite de la protection de l'entrée AI1) ou inférieure à la valeur de P8-45 (valeur limite de la protection de l'entrée AI1), le signal "ON" apparaîtra à la sortie. |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| 32 | Charge nulle | Lorsque l'onduleur est à l'état sans charge le signal « ON » apparaîtra à la sortie. |
| 33 | Fonctionnement en arrière | La marche arrière fonctionne, signal « ON » à la sortie. |
| 34 | Courant nul | Voir la description du code de fonction P8-28, P8-29. |
| 35 | Température du module trop haute | Lorsque la température du radiateur du module de l'onduleur (P7-07) atteint la température définie, c'est-à-dire la valeur du module (P8-47), le signal de sortie « ON » s'active. |
| 36 | Temps de déclenchement logiciel dépassé | Voir la description du code de fonction P8-36, P8-37. |
| 37 | Atteinte du seuil inférieur fréquence (signal de sortie après l'arrêt) | Lorsque la fréquence de fonctionnement atteint la limite inférieure, le signal « ON » apparaîtra à la sortie. A l'état arrêté, le signal est également activé. |
| 38 | Alarme à la sortie | Un signal d'alarme de l'onduleur sera émis lorsqu'une panne de l'onduleur se produit et que le mode de traitement ne peut pas continuer. |
| 39 | Alarme de surchauffe du moteur | Lorsque la température du moteur atteint P9-58 (seuil d'avertissement de surchauffe du moteur), la sortie s'active. (La température du moteur s'affiche sous la forme U0-34.) |
| 40 | Atteinte du temps de fonctionnement | Lorsque l'onduleur dépasse le temps de fonctionnement défini par le paramètre P8-53, le signal de sortie « ON » apparaît. |
| P5-06 | Sélection de la fonction de sortie FMP (bornes de sortie d'impulsions) | Réglage d'usine | 0 |
| P5-07 | Sélection de la fonction de sortie AO1 | Réglage d'usine | 0 |
| P5-08 | Sélection de la fonction de sortie AO2 | Réglage d'usine | 1 |
La plage de sortie de fréquence d'impulsion de la borne FMP est de 0,01 kHz \~ P5-09 (fréquence de sortie maximale FMP). P5-09 peut être réglé entre 0,01 kHz et 100,00 kHz.
La plage de sortie analogique AO1 et AO2 est de 0V \~ 10V ou 0mA \~ 20mA. La plage de la sortie impulsion ou de la sortie analogique, avec la relation correspondante de la fonction de mise à l'échelle, est donnée dans le tableau ci-dessous :
| Point de consigne | Fonction | Sortie d'impulsion ou analogique correspondant à 0,0% à 100,0% de la fonction |
| 0 | Fréquence de fonctionnement | 0~fréquence maximale de sortie |
| 1 | Fréquence préréglée | 0~fréquence maximale de sortie |
| 2 | Courant de sortie | 0 ~ 2 fois le courant nominal du moteur |
| 3 | Couple de sortie | 0 à 2 fois le couple nominal du moteur |
| 4 | Puissance de sortie | 0-2 fois la puissance nominale du moteur |
| 5 | Tension de sortie | 0 à 1,2 fois la tension nominale de l'onduleur |
| 6 | Entrée d'impulsion | 0.01kHz~100.00kHz |
| 7 | AI1 | 0V~10V |
| 8 | AI2 | 0V~10V (ou 0 ~ 20mA) |
| 9 | AI3 | 0V~10V |
| 10 | Longueur | 0 à la longueur maximale définie |
| 11 | Valeur du compteur | 0 au nombre maximal |
| 12 | Paramètres de communication | 0.0%~100.0% |
| 13 | Vitesse moteur | 0 ~ la fréquence de sortie maximale correspondant à la vitesse de rotation |
| 14 | Courant de sortie | 0.0A~1000.0A |
| 15 | Tension de sortie | 0.0V~1000.0V |
| P5-09 | La fréquence de sortie maximale du FMP | Réglage d'usine | 50.00kHz |
| Plage de réglage | 0.01kHz~100.00kHz | ||
Lorsque FM est sélectionné comme borne de sortie d'impulsions, le code de fonction est utilisé pour sélectionner la valeur maximale pour la sortie de fréquence d'impulsions.
| P5-10 | Coefficient de décalage du point zéro | Réglage d'usinc | 0.0% |
| Plage de réglage | -100.0%~+100.0% | ||
| P5-11 | Gain AO1 | Réglage d'usine | 1.00 |
| Plage de réglage | -10.00~-10.00 | ||
| P5-12 | Coefficient de décalage du point zéro de la carte d'extension AO2 | Réglage d'usinc | 0.00% |
| Plage de réglage | -100.0%~+100.0% | ||
| P5-13 | Gain de carte d'extension AO2 | Réglage d'usine | 1.00 |
| Plage de réglage | -10.00~-10.00 | ||
Les codes de fonction ci-dessus sont généralement utilisés pour polariser l'amplitude de sortie et corriger le biais zéro de la sortie analogique. Ils peuvent également être utilisés pour ajuster la courbe de sortie AO souhaitée.
Si le décalage du point zéro "b" représente un gain de valeur "k" et la puissance de sortie réelle Y, X représente la puissance de sortie standard, la sortie réelle est :
Y = kX b. où pour AO1, AO2 le coefficient de déviation zéro de 100 % correspond à 10 V (ou 20 mA). Ceci s'applique à la sortie standard sans polarité ni correction de gain. La sortie 0V \~ 10V (ou 0mA \~ 20mA) correspond à la taille de la sortie analogique.
Par exemple, si la sortie analogique a une fréquence de fonctionnement, à la fréquence 0 la sortie est de 8V, la fréquence est la fréquence de sortie maximale de 3V, le gain doit être réglé sur « -0,50 » et le décalage doit être « 80" % ».
| P5-17 | Temps de retardement de sortie FMR | Réglage d'usine | 0.0s |
| Plage de réglage | 0.0s~3600.0s | ||
| P5-18 | Temps de retardement de sortie RELAY1 | Réglage d'usine | 0.0s |
| Plage de réglage | 0.0s~3600.0s | ||
| P5-19 | Temps de retardement de sortie RELAY2 | Réglage d'usine | 0.0s |
| Plage de réglage | 0.0s~3600.0s | ||
| P5-20 | Temps de retardement de sortie DO1 | Réglage d'usine | 0.0s |
| Plage de réglage | 0.0s~3600.0s | ||
| P5-21 | Temps de retardement de sortie DO2 | Réglage d'usine | 0.0s |
| Plage de réglage | 0.0s~3600.0s | ||
Réglez les bornes de sortie FMR, RELAIS 1, RELAIS 2, DO1 et DO2 sur un état pour générer un changement réel du temps de retardement de sortie.
| P5-22 | État actif sur la sortie de la borne DO | Réglage d'usine | 0 | ||
| -Plage de réglage | Chiffre des unités | Sélection active FMR | |||
| 0 | Logique positive | ||||
| 1 | Inv | ||||
| Dizaines | Borne RELAY1 active (0-1, supra) | ||||
| Centaines | Borne RELAY2 active 2 (0-1, supra) | ||||
| Milliers | Borne DO1 active (0-1, supra) | ||||
| Dizaines de milliers | Borne DO2 activec (0-1, supra) | ||||
Déterminez la borne de sortie logique FMR, Relais 1, Relais 2, DO1 et DO2.
0 : la borne de sortie numérique à logique positive et la borne commune correspondante communiquent à l'état actif, se déconnectent à l'état inactif ;
1: La borne de sortie numérique à logique négative et la borne commune correspondante communiquent à l'état inactif, se déconnectent à l'état actif.
Groupe P6 - Commande de démarrage et d'arrêt
| Mode de démarrage | Réglage d'usine | 0 | ||
| 0 | Démarrage direct | |||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P6-00 | Plage de réglage | 1 | Redémarrer en mode suivi de vitesse |
| 2 | Pré-excitation (moteur à induction CA) |
0 : Démarrage direct
Lorsque le temps de freinage par courant CC est réglé sur 0, l'onduleur démarre à partir de la fréquence de démarrage. Lorsque le temps de freinage par courant CC est différent de 0, le freinage par courant CC se produit d'abord, puis il démarre à partir de la fréquence de démarrage. Utile pour les charges à faible inertie lors du démarrage d'un moteur qui pouvait déjà tourner.
1: redémarrez sous le mode de suivi de la vitesse et de la direction du moteur, puis suivez la fréquence de démarrage du moteur.
Le moteur tourne sans à-coups au démarrage. Puissance instantanée adaptée au redémarrage à forte inertie. Pour assurer un redémarrage correct en mode suivi de vitesse, les paramètres du groupe moteur F1 doivent être soigneusement réglés.
2 : Démarrage du moteur à induction par surexcitation, pour moteurs asynchrones uniquement, utilisé avant le démarrage du moteur pour créer d'abord un champ magnétique. Le courant de surexcitation et le temps de surexcitation sont les codes P6-05, P6-06.
Si le temps de surexcitation est réglé sur 0, l'onduleur annule le processus de surexcitation et démarre à partir de la fréquence de démarrage. Lorsque le temps de surexcitation n'est pas égal à 0, la surexcitation peut améliorer les caractéristiques de réponse dynamique du moteur.
| P6-01 | Mode suivi de vitesse | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Démarrage à partir de la fréquence d'arrêt | ||
| 1 | Démarrage à partir la vitesse nulle | |||
| 2 | Démarrage à partir de la fréquence maximale | |||
Pour terminer le processus de suivi de la vitesse le plus rapidement possible, sélectionnez le mode de suivi du régime moteur :
0 : Généralement utilisé pour suivre à partir de la fréquence qui s'est produite au moment de la panne de courant.
1 : Commencement du suivie vers le haut à partir de la fréquence zéro en cas de panne de courant prolongée.
2 : Suivi de la fréquence maximale, puissance de charge globale.
| P6-02 | Vitesse de suivi de vitesse | Réglage d'usine | 2 |
| Plage de réglage | 1~100 | ||
Lors du redémarrage en mode suivi de vitesse, sélectionnez la vitesse de suivi de vitesse. Plus le paramètre est grand, plus le suivi est rapide. Cependant, un réglage trop élevé peut entraîner des résultats de suivi peu fiables.
| P6-03 | Fréquence de départ | Réglage d'usine | 0 |
| Plage de réglage | 0.00Hz~10.00Hz | ||
| P6-04 | Temps de maintien de la fréquence de démarrage | Réglage d'usine | 0 |
| Plage de réglage | 0.0s~100.0s | ||
Pour garantir le couple moteur au démarrage, la fréquence de démarrage correcte doit être réglée. Afin d'établir le flux complet du moteur pendant le démarrage, la fréquence de démarrage doit être maintenue pendant un certain temps.
Commencez par la limite de fréquence inférieure P6-03. Cependant, lorsque la fréquence cible définie est inférieure à la fréquence de démarrage, l'onduleur ne démarre pas, il reste en mode de veille.
Dans le processus de commutation inverse, le temps de maintien de la fréquence de démarrage n'a aucun effet. Le temps de maintien de la fréquence de démarrage n'est pas inclus dans le temps d'accélération, mais est inclus dans le temps de fonctionnement de l'API simple.
Exemple 1 :
P0-03 = 0 La source de fréquence est numérique.
P0-08 = 2,00 Hz. La fréquence de consigne numérique est de 2,00 Hz. P6-03 5,00 Hz. La fréquence de démarrage est de 5,00 Hz.
P6-04 2,0 s. Le temps de maintien de la fréquence de démarrage est de 2,0 s. Pendant ce temps, l'onduleur est en veille et sa fréquence de sortie est de 0,00 Hz.
Exemple 2 :
P0-03 = 0. La source de fréquence est numérique
P0-08 = 10,00 Hz. La fréquence de consigne numérique est de 10,00 Hz. P6-03 5,00 Hz. La fréquence de démarrage est de 5,00 Hz
P6-04 2,0 s. Le temps de maintien de la fréquence de démarrage est de 2,0 s.
Pendant ce temps, l'entraînement accélère jusqu'à 5,00 Hz, continue pendant 2,0 secondes, puis accélère jusqu'à la fréquence définie de 10,00 Hz.
| P6-05 | Courant de freinage CC / courant d'excitation | Réglage | 0% |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| d'usine | |||
| Plage de réglage | 0%~100% | ||
| P6-06 | Temps de freinage initial CC / temps de surexcitation | Réglage d'usine | 0.0s |
| Plage de réglage | 0.0s~100.0s | ||
Le freinage avec courant continu (CC) est généralement utilisé pour arrêter et démarrer le moteur. L'excitation est utilisée pour créer le champ magnétique du moteur à induction, puis pour commencer à établir et à améliorer la vitesse de la réponse.
Le freinage par courant continu s'applique lorsque le mode de démarrage est un démarrage direct. Ensuite, après avoir réglé la fréquence, activez le démarrage de freinage CC, le temps de freinage CC après le démarrage, puis commencez le fonctionnement. Si le temps de freinage CC est réglé sur 0, il n'y a pas de démarrage direct après le freinage CC. Plus le courant de freinage CC augmente, plus la force de freinage est importante.
En mode de démarrage surexcité d'un moteur asynchrone, l'onduleur se règle sur un courant de champ magnétique prédéterminé après le temps de pré-magnétisation réglé avant le démarrage. Si le temps de pré-magnétisation est réglé sur 0, la surexcitation ne démarre pas directement.
Le courant de freinage CC/le courant de surexcitation c'est une valeur de pourcentage par rapport au courant nominal de l'onduleur.
| P6-07 | Mode d'accélération et de décélération | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Accélération et de décélération linéaire | ||
| 1 | Accélération et décélération selon la courbe S, A | |||
| 2 | Accélération et décélération selon la courbe S, B | |||
Sélection de la manière de modifier la fréquence d'entraînement au début et à la fin du processus.
0 : Accélération et de décélération linéaire Augmentation ou diminution linéaire de la fréquence de sortie.
Il existe quatre types de temps d'accélération et de décélération. Ils peuvent être sélectionnés par les bornes d'entrée numérique multifonctions (P4-00 \~ P4-08).
1 : Accélération et décélération selon la courbe S. A
La fréquence de sortie augmente ou diminue en fonction de la courbe S. La courbe S est utilisée pour les applications de démarrage ou d'arrêt progressif telles que les ascenseurs ou les bandes transporteuses. Les codes de fonction P6-08 et P6-09, dans cet ordre, spécifient le rapport des temps d'accélération et de décélération de la courbe S du segment de départ et du segment de fin.
2 : Accélération et décélération selon la courbe S, B
Pour l'accélération et la décélération le long d'une courbe S, B, le point d'inflexion de la courbe est toujours la fréquence nominale f du moteur. .Ceci est illustré à la figure 6-12. Fonction généralement utilisée pour les applications avec des vitesses bien supérieures à la fréquence nominale nécessitant une accélération et une décélération rapides.
Réglage de la fréquence au-dessus de la fréquence nominale - temps d'accélération et de décélération :
$$ t = \left(\frac {4}{9} \times \left(\frac {f}{f _ {b}}\right) ^ {2} + \frac {5}{9} \times T \right. $$
où f'est la fréquence de référence, fb est la fréquence nominale du moteur, T est le temps de la fréquence nominale du moteur fb
| P6-08 | Coefficient de temps de la section initiale de la courbe S. | Réglage d'usine | 30.0% |
| Plage de réglage | 0.0%~(100.0%-P6-09) | ||
| P6-08 | Coefficient de temps de la section initiale de la courbe S. | Réglage d'usine | 30.0% |
| Plage de réglage | 0.0%~(100.0%-P6-08) | ||
Les codes de fonction P6-08 et P6-09 sont définis. L'accélération et la décélération de la courbe S, A du segment de départ et l'heure de fin c'est le rapport des deux codes de fonction à respecter : P6-08 + P6-09≤100,0%.
La figure 6-11 t1 montre les paramètres définis par P6-08, pendant ce temps la pente de la fréquence de sortie augmente.
t2 est le temps défini par P6-09, pendant lequel la pente de la fréquence de sortie devient nulle. Dans le temps entre t1 et t2, la pente de la fréquence de sortie est constante, de sorte que cette intervalle est une accélération et une décélération linéaires.
Fréquence de sortie (Hz)
Fréquence préréglée f
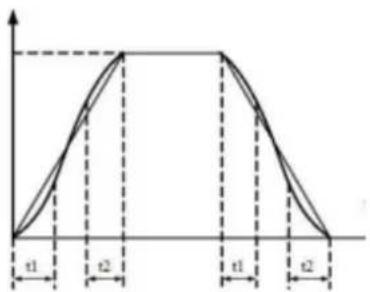
| P6-10 | Mode d'arrêt | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Décélération jusqu'à l'arrêt | ||
| 1 | Course libre | |||
0 : Arrêt de décelération. Lorsque la commande d'arrêt est correcte, l'onduleur réduit la fréquence de sortie en fonction du temps de décelération. Lorsque la fréquence baisse à zéro, l'arrête intervient.
1 : Roue libre jusqu'à l'arrêt Lorsqu'une commande d'arrêt valide est donnée, l'onduleur émet immédiatement un signal et le moteur s'arrête en roue libre en raison de l'inertie mécanique.
| P6-11 | Fréquence de départ de freinage avec le courant continu | Réglage d'usine | 0.00Hz |
| Plage de réglage | 0.00Hz ~ fréquence maximale | ||
| P6-12 | Temps de démarrage du freinage avec le courant continu | Réglage d'usine | 0.0s |
| Plage de réglage | 0.0s~36.0s | ||
| P6-13 | Courant de freinage | Réglage d'usine | 0% |
| Plage de réglage | 0%~100% | ||
| P6-14 | Temps de freinage avec le courant continu | Réglage d'usine | 0.0s |
| Plage de réglage | 0.0s~36.0s | ||
Fréquence de démarrage du freinage par courant continu : le processus d'arrêt démarre lorsque la fréquence de fonctionnement a suffisamment diminué pour démarrer le processus de freinage par courant continu.
Temps de démarrage de freinage par courant continu : la fréquence de fonctionnement est réduite à la fréquence de démarrage du freinage par courant continu, l'onduleur arrête la sortie pendant un certain temps avant de démarrer le processus de freinage. L'empêchement du déclenchement de freinage par courant constant à grande vitesse peut entraîner un défaut de surintensité.
Courant de freinage : le courant de freinage CC est le pourcentage du courant de sortie par rapport au courant nominal du moteur. Plus la valeur est élevée, plus l'effet de freinage par courant continu est important, et plus la chaleur du moteur et de l'onduleur est élevée.
Temps de freinage par courant constant - durée de maintien du courant de freinage. Lorsque cette valeur est égale à 0, le freinage par courant continu est annulé. Le schéma du processus de freinage par courant constant est illustré à la figure 6-13.
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
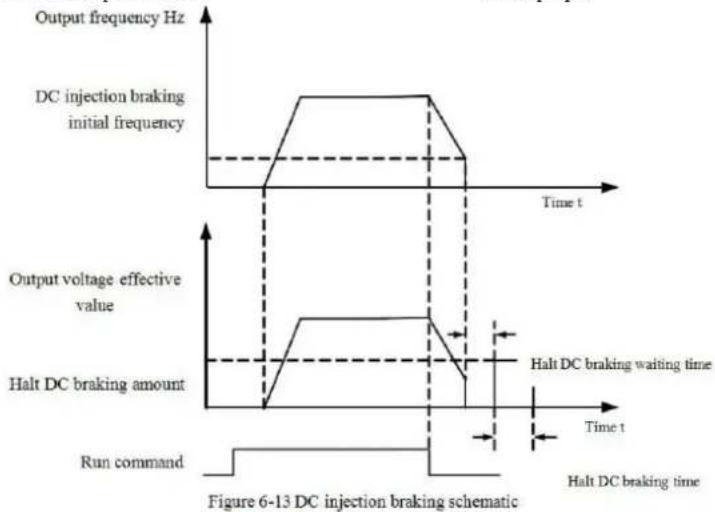
Figure 6-13 Schéma de principe du processus de freinage par courant constant
| P6-15 | Indicateur d'utilisation des freins | Réglage d'usine | 100% |
| Plage de réglage | 0%~100% | ||
Seule l'unité de freinage intégrée sera active.
Cycle de fonctionnement de l'unité de freinage. L'indicateur d'utilisation des freins est utilisé pour régler l'unité de freinage. Dans le cycle haute performance de l'unité de freinage, l'effet de freinage est fort, mais il y a une fluctuation de la tension sur la barre de l'onduleur lors du freinage.
Groupe P7 - Clavier et écran d'affichage
| P7-01 | Sélection de la fonction de la touche JOG | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Clavier JOG inactif | ||
| 1 | Canal de commande depuis le panneau de l'opérateur et le canal de commande à distance | |||
| 2 | Commutation de changement de direction | |||
| 3 | Impulsion (course d'essai) en avant | |||
| 4 | Impulsion (course d'essai) en arrière | |||
Touche JOG comme touche multifonction. Vous pouvez définir les fonctions de la touche JOG avec un code de fonction. Peut être actionné via un interrupteur à clé.
0 : La touche JOG n'a aucune fonction.
1 : Commandes à partir du clavier et passage à la télécommande. Indique la commande de commutation de la source de commande - le clavier (contrôle local) sera la source de commande et de contrôle actuelle. Si la source de commande actuelle est le clavier, cette fonction de touche est désactivée.
2 : Changement de direction avec la commande de fréquence de la touche JOG.
3 : Course d'essai en avant (FJOG sur clavier).
4 : Course d'essai en arrière (RJOG sur clavier).
| P7-02 | Fonctions de la touche STOP / RESET | Réglage d'usine | 1 | |
| Plage de réglage | 0 | La touche STOP / RES ne fonctionne qu'en mode clavier. | ||
| 1 | La fonction STOP / RES fonctionne dans n'importe quel mode de fonctionnement. | |||
Ces deux paramètres d'affichage permettent de régler les paramètres à afficher lorsque le convertisseur de fréquence est en état de fonctionnement. Jusqu'à 32 paramètres d'état de fonctionnement peuvent être affichés, ils sont affichés à partir du bit le plus bas de P7-03.
| P7-05 | Valeursaffichées lorsd'arrêt | Réglage d'usine | 0 | ||
| Plagede réglage | 0000~FFFF | 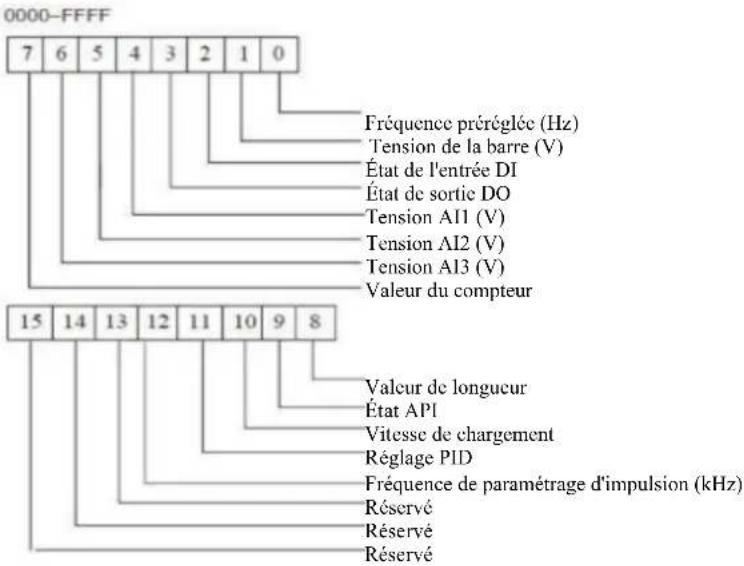 Si un paramètre doit être affiché pendant le fonctionnement, définissez le bit approprié sur 1 et définissezP7-0 5 sur l'équivalent hexadécimal de ce nombre binaire. Si un paramètre doit être affiché pendant le fonctionnement, définissez le bit approprié sur 1 et définissezP7-0 5 sur l'équivalent hexadécimal de ce nombre binaire. | |||
| P7-06 | Multiplicateur de vitesse de charge affiché | Réglage d'usine | 1.0000 |
| Plage de réglage | 0.0001~6.5000 | ||
Lorsque la vitesse de charge doit être affichée, ce paramètre assure la correspondance entre la fréquence de sortie et la vitesse de charge. Voir description P7-12.
| P7-07 | Température du module de dissipation thermique de l'onduleur | Réglage d'usine | 0 |
| Plage de réglage | 0.0^ 100.0^ | ||
Affichage de la température IGBT de l'onduleur.
Il existe des différences dans la protection contre la surchauffe entre les différents modèles du module IGBT de l'onduleur.
| P7-08 | Température du radiateur du redresseur | Réglage d'usine | 0 |
| Plage de réglage | 0.0^ 100.0^ | ||
Affichage de la température du redresseur.
Il existe des différences dans la valeur de la protection contre la surchauffe selon les différents modèles du redresseur.
| P7-09 | Temps total de fonctionnement | Réglage d'usine | 0h |
| Plage de réglage | 0h~65535h | ||
| P7-10 | N° de produit | Réglage d'usine | ||
| Plage de réglage | Numéro de produit de l'onduleur | |||
| P7-11 | Numéro de version de logiciel | Réglage d'usine | ||
| Plage de réglage | Numéro de version du logiciel du pupitre de commande. | |||
| P7-12 | Affichage de la vitesse de chargement en décimales | Réglage d'usine | 0 | |
| Plage de réglage | 0 | 0 décimale | ||
| 1 | 1 décimale | |||
| 2 | 2 décimale | |||
| 3 | 3 décimale | |||
Réglage de la vitesse de chargement avec décimales. L'exemple ci-dessous illustre le calcul de la vitesse de charge :
Si le multiplicateur de la vitesse de charge affichée 2.000 P7-06, la vitesse de charge P7-12 s'affiche avec 2 décimales. Lorsque la fréquence de fonctionnement de l'onduleur est de 40,00 Hz, la vitesse de charge est de 40,00 * 2 000 = 80,00 (affichage avec deux décimales).
Si l'onduleur est étcint, alors par exemple pour régler la fréquence de 50,00 Hz, la vitesse de charge à l'état d'arrêt est de 50,00 * 2 000 = 100,00 (affichée avec deux décimales).
| P7-13 | Temps cumulé d'alimentation | Réglage d'usine | 0h |
| Plage de réglage | 0h~65535h | ||
Réglage d'usine pour le temps cumulé d'alimentation.
Lorsque le temps cumulé d'alimentation (P8-17) est atteint, la sortie numérique multifonction (24) de l'onduleur génère un signal ON.
| P7-14 | Consommation totale d'énergie | Réglage d'usine | - |
| Plage de réglage | 0 c'est 65535 kWh | ||
Affiche la consommation électrique totale de l'entraînement jusqu'à présent.
Groupe P8 - Fonctions auxiliaires
| P8-00 | Fréquence d'impulsion | Réglage d'usine | 2.00Hz |
| Plage de réglage | 0.001Hz ~ fréquence maximale | ||
| P8-01 | Temps d'accélération d'impulsion | Réglage d'usine | 20.0s |
| Plage de réglage | 0.00s>6500.0s | ||
| P8-02 | Temps de décélération d'impulsion | Réglage d'usine | 20.0s |
| Plage de réglage | 0.00s>6500.0s | ||
Détermination d'impulsion, de la fréquence requise et du temps de décélération d'entraînement.
Pour le fonctionnement à impulsion, exécutez le mode de démarrage direct (P6-00 = 0). Le mode d'arrêt est réglé pour s'arrêter avec décélération (P6-10 = 0).
| P8-03 | Temps d'accélération 2 | Réglage d'usine | 20.0s |
| Plage de réglage | 0.0s~6500.0s | ||
| P8-04 | Temps de décélération 2 | Réglage d'usine | 20.0s |
| Plage de réglage | 0.0s~6500.0s | ||
| P8-05 | Temps d'accélération 3 | Réglage d'usine | 20.0s |
| Plage de réglage | 0.0s~6500.0s | ||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P8-06 | Temps de décelération 3 | Réglage d'usine | 20.0s |
| Plage de réglage | 0.0s~6500.0s | ||
| P8-07 | Temps d'accélération 4 | Réglage d'usine | 20.0s |
| Plage de réglage | 0.0s~6500.0s | ||
| P8-08 | Temps de décelération 4 | Réglage d'usine | 20.0s |
| Plage de réglage | 0.0s~6500.0s | ||
Le VFD fournit 4 séries de temps d'accélération et de décélération, P0-17 / P0-18, respectivement, et 3 séries de temps d'accélération et de décélération ci-dessus.
La quatrième série spécifie le temps de décélération exact, voir les instructions P0-17 et P0-18. Avec différentes combinaisons de la borne d'entrée numérique multifonction DI, vous pouvez basculer entre 4 séries de temps d'accélération et de décélération. Voir la description de chaque code de fonction P4-01 \~ P4-05.
| P8-09 | Fréquence ignorée1 | Réglaged'usine | 0.00Hz |
| Plage de réglage | 0.00Hz ~ fréquence maximale | ||
| P8-10 | Fréquence ignorée2 | Réglaged'usine | 0.00Hz |
| Plage de réglage | 0.00Hz ~ fréquence maximale | ||
| P8-11 | Plage de fréquencede saut | Réglaged'usinc | 0.00Hz |
| Plage de réglage | 0.00Hz ~ fréquence maximale | ||
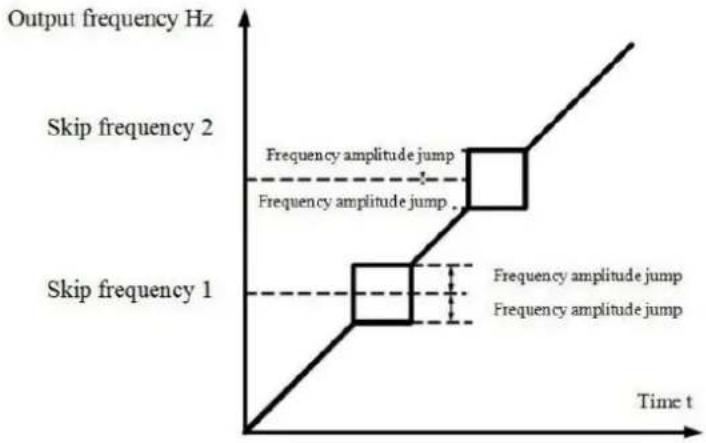
line
| Time t | Output frequency Hz | | ------ | ------------------- | | Start | 0 | | Mid | Jump | | End | Jump |Figure 6-14 Schéma de saut de fréquence
Lorsque la plage de fréquence de saut est dans la fréquence définie, la fréquence de fonctionnement réelle fonctionnera à la fréquence du prochain saut défini. Le réglage de la fréquence de saut permet à l'onduleur d'éviter le résonance mécanique dans la charge. Le VFD peut définir deux fréquences de saut. Lorsque les deux fréquences de saut sont réglées sur 0, la fonction de saut de fréquence est annulée. Voir Figure 6-14 pour le principe du saut de fréquence et le schema d'amplitude de saut de fréquence.
| P8-12 | Temps mort lors du changement de direction de fonctionnement | Réglage d'usine | 0.0s |
| Plage de réglage | 0.00s~3000.0s | ||
L'onduleur change le sens de fonctionnement, fréquence 0 Hz à la sortie au moment de la transition, voir figure 6-15 :
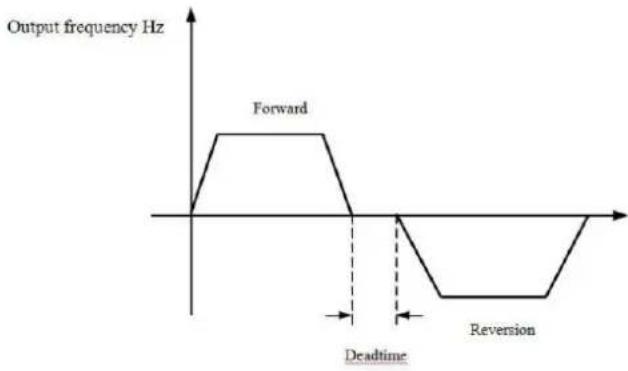
Fig. 6-15 Temps mort lors du changement de direction de fonctionnement
| P8-13 | Rotation inversée autorisée | Réglage d'usine | 0 | |
| Plage de réglage | 0 | autorisation | ||
| 1 | interdiction | |||
Après avoir configuré l'entraînement avec ce paramètre, le moteur peut tourner en marche arrière. Lorsque le moteur est inversé, P8-13 ne doit pas être réglé sur 1.
| P8-14 | La fréquence réglée est inférieure à la limite inférieure de fréquence de fonctionnement | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Fonctionnement avec la fréquence limite inférieure | ||
| 1 | Interruption | |||
| 2 | Fonctionnement à vitesse nulle | |||
Lorsque la fréquence réglée est inférieure à la fréquence minimale, ce paramètre peut être utilisé pour sélectionner le mode de fonctionnement de l'onduleur. Le VFD offre trois modes de fonctionnement pour répondre aux exigences de diverses applications.
| P8-15 | Contrôle du statisme | Réglage d'usine | 0.00Hz |
| Plage de réglage | 0.00Hz~10.00Hz | ||
Cette fonction est généralement utilisée pour répartir la charge d'entraînement de plusieurs moteurs.
Le contrôle du statisme signifie qu'à mesure que la charge augmente, la fréquence de sortie de l'onduleur diminue. Lorsque plusieurs moteurs avec la même charge sont entraînés, la charge sur la fréquence de sortie du moteur est réduite pour obtenir une charge uniforme sur les multiples moteurs. Ce paramètre est lié à la charge de sortie nominale de l'onduleur.
| P8-16 | Réglage du temps d'activation cumulé | Réglage d'usine | 0h |
| Plage de réglage | 0h~65000h | ||
Lorsque le temps d'activation cumulé (P7-13) P8-16 atteint le temps défini, la sortie numérique multifonction DO de l'onduleur envoie un signal « ON ». Les exemples suivants illustrent cela :
Exemple : en conjonction avec la fonction virtuelle DIDO, lorsque l'heure d'allumage réglée est atteinte, après avoir dépassé 100 heures, la sortie de l'onduleur donne une alarme de défaut. La programmation :
Programme : la fonction de borne virtuelle DI1 est réglée sur erreur définie par l'utilisateur 1 : A1-00 = 44 ; La borne virtuelle DI1 est active, réglée sur DO1virtuelle : A105 = 0000 ; fonction virtuelle DO1, le temps d'activation réglé : A1-11 = 24 ; mise en marche cumulée 100 heures réalisées : P8-16 = 100.
Lorsque la durée totale de marche est de 100 heures, la sortie de l'onduleur génère l'erreur Err24.
| P8-17 | Réglage du temps de travail cumulé | Réglage d'usine | 0h |
| Plage de réglage | 0h~65000h | ||
Il est utilisé pour régler le temps de fonctionnement de l'onduleur.
Lorsque le temps de fonctionnement total (P7-09) atteint le temps de fonctionnement défini, la sortie numérique multifonction DO de l'onduleur donne un signal « ON ».
| P8-18 | Sélection de protection | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Pas de protection | ||
| 1 | Protection | |||
Ce paramètre est lié à la fonction de sécurité de l'onduleur.
Lorsque ce paramètre est défini sur 1 (protection), alors si le temps d'entraînement est actif (par exemple, une commande de démarrage d'une borne avant la mise sous tension), l'onduleur ne répondra pas à la commande Démarrage. Il faut d'abord... [complètement incompréhensible - note du traducteur]
De plus, si le paramètre est défini sur 1, si la commande de réinitialisation d'erreur est en cours d'exécution, l'onduleur ne répondra pas à la commande. Vous devez d'abord émettre une commande pour supprimer l'état actif de protection.
| P8-19 | Valeur de détection de fréquence (FDT1) | Réglage d'usine | 50.00Hz |
| Plage de réglage | 0.00Hz ~ fréquence maximale | ||
| P8-20 | Valeur d'hystérésis de détection de fréquence (FDT1) | Réglage d'usine | 5.0% |
| Plage de réglage | 0.0% ~ 100.0% (FDT1 level) | ||
Lorsque la fréquence de fonctionnement est supérieure à la valeur de détection de fréquence, la sortie multifonctionnelle DO de l'onduleur envoie un signal « ON », et lorsque la fréquence est inférieure à la valeur de détection, la sortie « ON » est annulée une fois la fréquence spécifiée écoulée.
La Figure 6-16 montre un schéma de la fonctionnalité FDT.
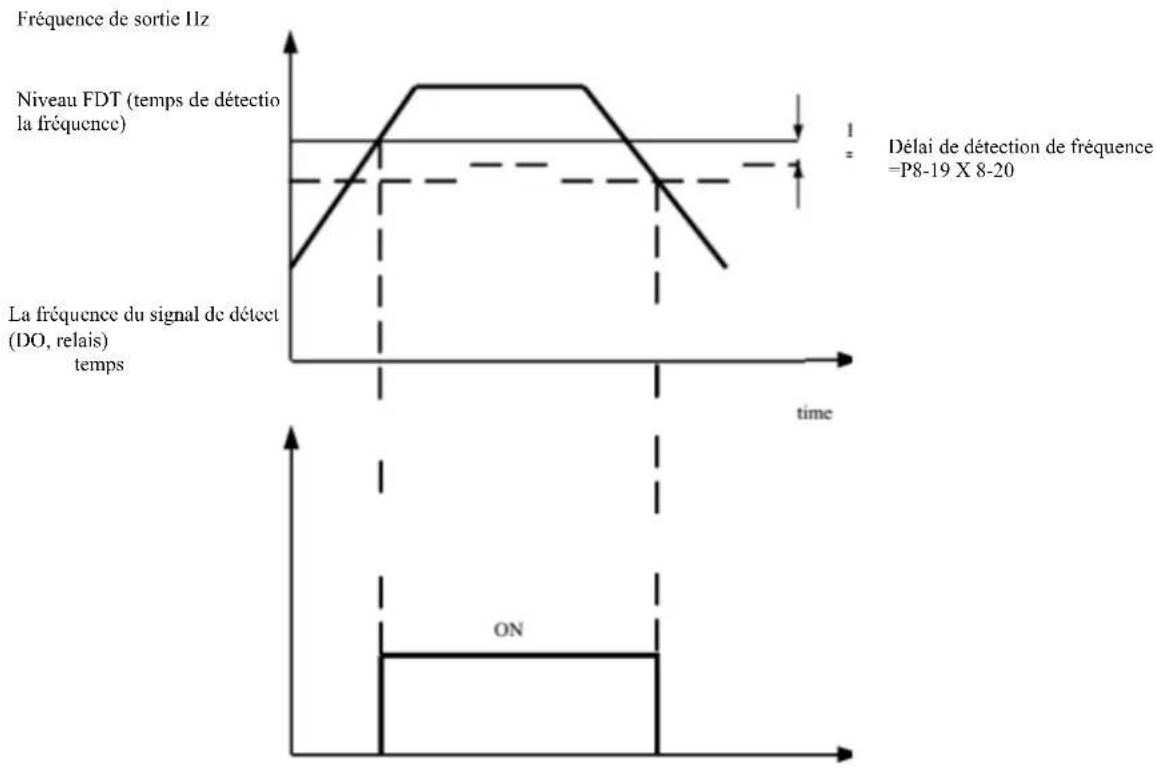
| P8-21 | Largeur de détection définie par | Réglage | 0.0% |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| la fréquence | d'usine | ||
| Plage de réglage | 0.0% à 100% (fréquence maximale) | ||
Si la fréquence de fonctionnement de l'onduleur se situe dans la plage de fréquence cible, la sortie numérique multifonctionnelle DO de l'onduleur émet un signal « ON ».
Ce paramètre permet de régler la plage de détection de la fréquence atteinte. Ce paramètre est un pourcentage de la fréquence maximale. Figure 6-17 montre un schéma de la détection de fréquence atteinte.
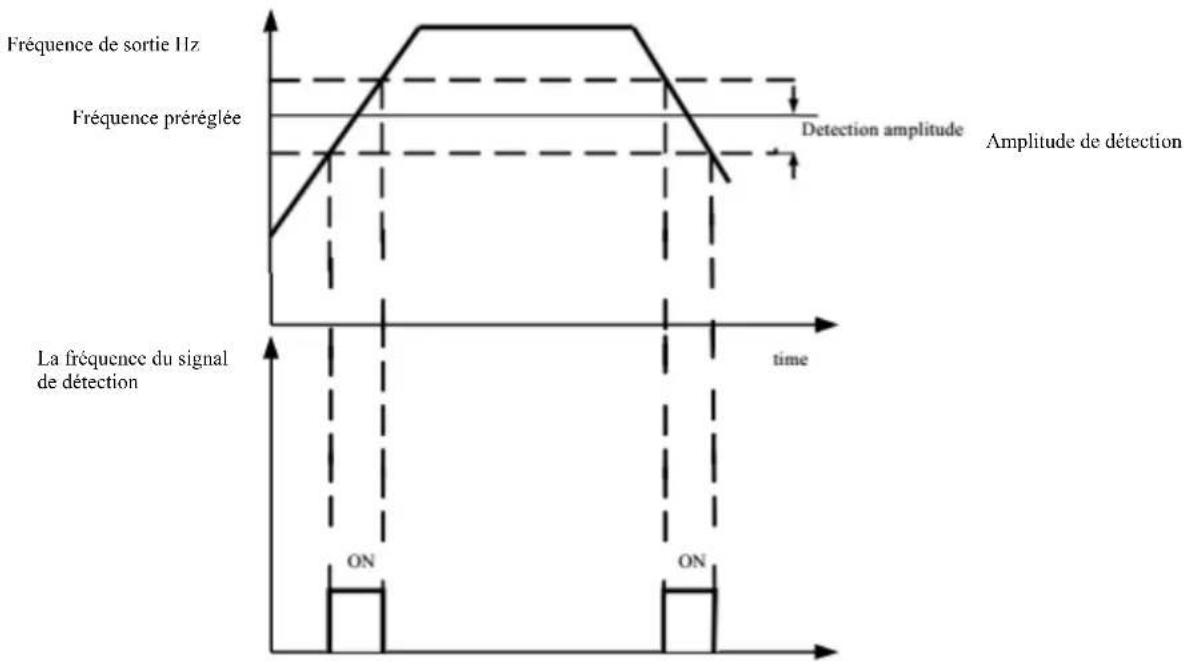
line
| Time | Frequency of sortie (Hz) | Detection Amplitude (dBm) | |------|--------------------------|---------------------------| | 0 | Low | 0 | | 1 | Medium | High | | 2 | High | Medium | | 3 | High | Low | | 4 | Low | 0 | | 5 | 0 | 0 |Figure 6-17 Schéma de la détection de l'amplitude de fréquence atteinte
| P8-22 | Processus d'accélération et de décélération. La fréquence des sauts, est-elle valide | Réglage d'usine | 0 |
| Plage de réglage | 0 : non1 : oui | ||
Le code de cette fonction permet de sélectionner, pendant l'accélération ou la décelération, si la fréquence de saut est valide. La fréquence est réglée comme valide lors du fonctionnement à une fréquence qui dépasse la plage lorsque la fréquence de fonctionnement réelle dépasse la limite de réglage de fréquence. La figure 6-18 montre un schéma de la fréquence des sauts dans le processus d'accélération et de décelération
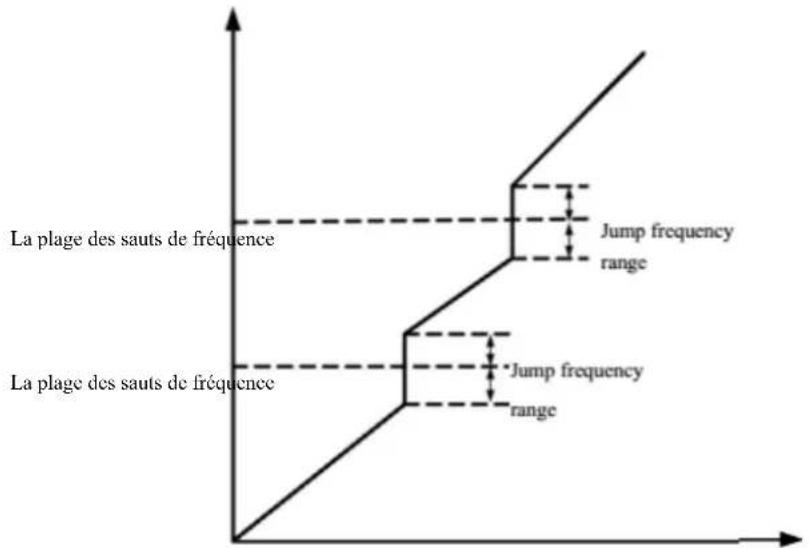
Fig. 6-18 Processus d'accélération et de décelération, fréquence effective de saut
| P8-25 | Temps d'accélération 1 et temps d'accélération 2, point de commutation de fréquence | Réglage d'usine | 0.001lz |
| Plage de réglage | 0.001lz ~ fréquence maximale | ||
| P8-26 | Temps de décélération 2 Temps de décélération 1point de commutation de fréquence | Réglage d'usine | 0.0 |
| Plage de réglage | 0,00 1lz à la fréquence maximale | ||
Sélectionnez cette fonction sur le moteur 1. Ne commutez pas via la borne DI lorsque la sélection du temps d'accélération / de décélération est active. Lorsque l'onduleur ne fonctionne pas dans la plage de fréquence de fonctionnement, [...] différents temps d'accélération/décélération via les bornes DI.
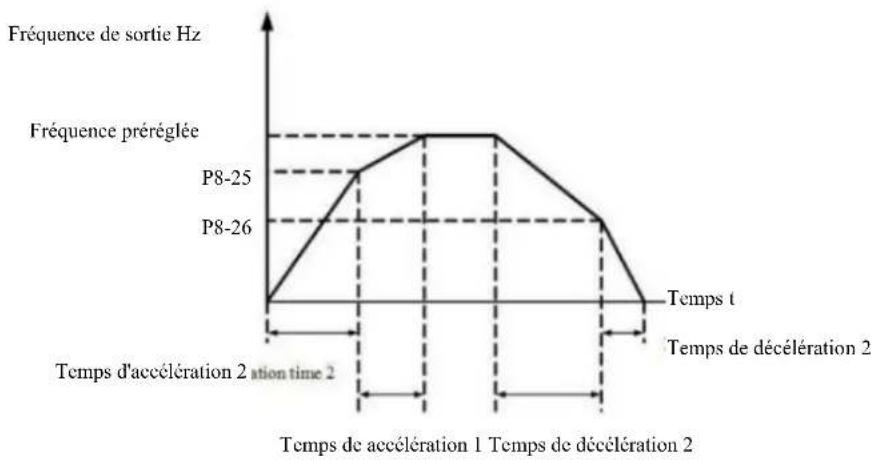
line
| Time Period | Frequency (Hz) | | :--- | :--- | | P8-25 | Fréquence préréglée | | P8-26 | Fréquence préréglée | | Temps d'accélération 1 ation time 2 | | | Temps d'accélération 2 ation time 2 | | | Temps de décelération 1 | | | Temps de décelération 2 | |Fig. 6-19 Schéma de commutation du temps d'accélération et de décélération
La figure 6-19 est un schéma de commutation du temps d'accélération et de décélération. Pendant l'accélération, si la fréquence de fonctionnement est inférieure à P8-25, le temps d'accélération 2 est sélectionné ; si la fréquence de fonctionnement est supérieure au temps d'accélération 1, P8-25 est sélectionné.
Pendant la décelération, si la fréquence de fonctionnement est supérieure à P8-26, le temps de décélération 1 est sélectionné, si la fréquence de fonctionnement est inférieure au temps de décélération 2, P8-26 est sélectionné.
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P8-27 | Priorité de la borne d'impulsion (jogging) | Réglage d'usine | 0 |
| Plage de réglage | 0 : inactif 1 : actif | ||
Avec ce paramètre, vous pouvez définir si la fonction de la borne d'impulsion a la priorité la plus élevée.
Lorsque la priorité de la borne d'impulsion est activée, si une commande est reçue de la borne pendant l'exécution, l'entraînement passe en mode d'impulsion à partir de la borne.
| P8-28 | Valeur de détection de fréquence (FDT2) | Réglage d'usine | 50.00Hz |
| Plage de réglage | 0.00Hz ~ fréquence maximale | ||
| P8-29 | Valeur d'hystérésis de détection de fréquence (FDT2) | Réglage d'usine | 5.0% |
| Plage de réglage | 0.0% ~ 100.0% (FDT2 level) | ||
Fonction de détection de fréquence FDT1 - Voir le code de fonction P8-19, P8-20
| P8-30 | Toute valeur atteinte 1 de détection de fréquence | Réglage d'usine | 50.00Hz |
| Plage de réglage | 0.00Hz ~ fréquence maximale | ||
| P8-31 | Toute plage atteinte 1 de détection de fréquence | Réglage d'usine | 0.0% |
| Plage de réglage | 0.0% à 100.0% (fréquence maximale) | ||
| P8-30 | Toute valeur atteinte 2 de détection de fréquence | Réglage d'usine | 50.00Hz |
| Plage de réglage | 0.00Hz ~ fréquence maximale | ||
| P8-31 | Toute plage atteinte 2 de détection de fréquence | Réglage d'usine | 0.0% |
| Plage de réglage | 0.0% à 100.0% (fréquence maximale) | ||
Pour la fréquence de sortie, lorsque l'onduleur détecte la plage d'amplitude positive et négative après avoir atteint une valeur de détection de fréquence, la sortie numérique multifonction de l'onduleur DO génère un signal « ON ».
La détection de fréquence VFD atteinte fournit deux ensembles de paramètres facultatif où la valeur de fréquence et la plage de détection de fréquence sont définies. La figure 6-20 montre un diagramme schématique de cette fonction.
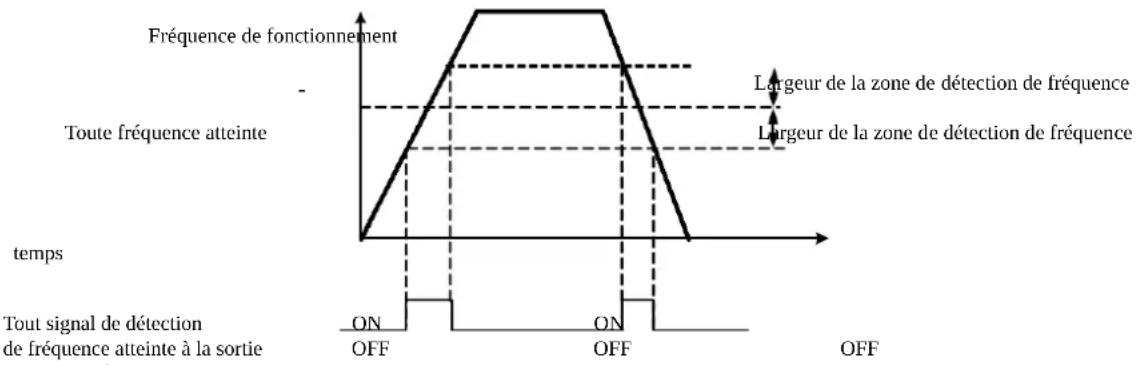
line
| temps | Fréquence de fonctionnement | |-------|------------------------------| | ON | Off | | ON | OFF | | OFF | Off |Fig. 6-20 Schéma de détection d'atteinte de n'importe quelle fréquence
| P8-34 | Niveau de détection de courant résiduel | Réglage d'usine | 5.0% |
| Plage de réglage | 0.0%~300.0% (courant nominal du moteur) | ||
| P8-35 | Retard de détection de courant résiduel | Réglage d'usine | 0.10s |
| Plage de réglage | 0.00s~600.00s | ||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
Lorsque le courant de sortie de l'onduleur est inférieur ou égal au niveau de détection de courant résiduel et dure plus longtemps que le délai de détection de courant résiduel, la sortie multifonction DO de l'onduleur enverra un signal « ON ». Voir figure 6-21 Détection de courant résiduel.
Courant de sortie
Niveau de détection de courant résiduel P8-34
Signal de détection de courant résiduel
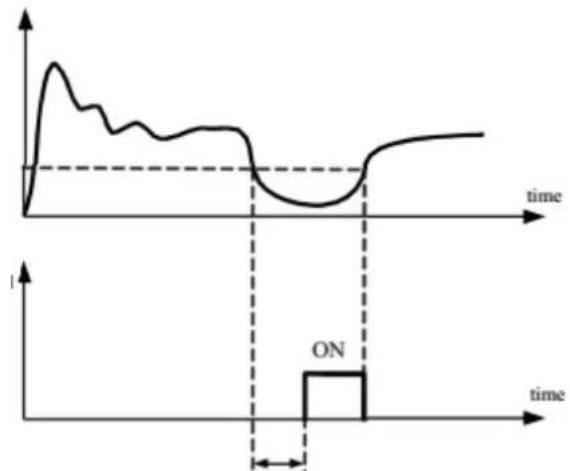
Temps de retard de détection de courant résiduel P8-35
Figure 6-21 Schéma de détection de courant résiduel
| P8-36 | Limite de courant de sortie | Réglage d'usine | 200.0% |
| Plage de réglage | 1.1% (pas de détection)1.2%~300.0% (courant nominal du moteur) | ||
| P8-37 | Retard de détection de limite de courant de sortie | Réglage d'usine | 0.00s |
| Plage de réglage | 0.00s~600.00s | ||
Lorsque le courant de sortie de l'onduleur est supérieur au point de détection et dépasse le délai de détection de surintensité du logiciel, la sortie de l'onduleur multifonction DO enverra un signal « ON ». Voir figure 6-22 Schéma de la fonction de limite de courant de sortie.
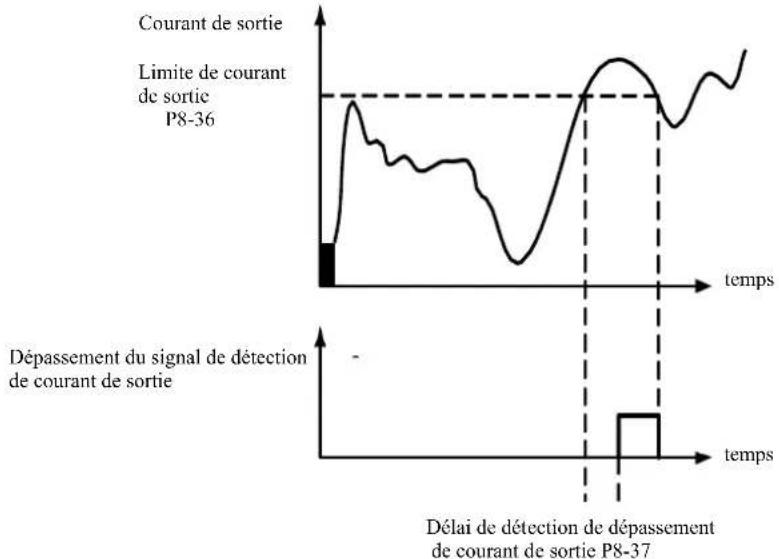
line
| Time Point | Value | | ---------- | ----- | | P8-36 | Limité de courant de sortie | | P8-37 | Dépassement du signal de détection de courant de sortie |Figure 6-22 Schéma de détection de limite de courant de sortie
| P8-38 | Tout courant atteint 1 | Réglage d'usine | 100.0% |
| Plage de réglage | 0.0%~300.0% (courant nominal du moteur) | ||
| P8-39 | Largeur de tout courant atteint 1 | Réglage d'usine | 0.0% |
| Plage de réglage | 0.0%~300.0% (courant nominal du moteur) | ||
| P8-40 | Tout courant atteint 2 | Réglage d'usine | 100.0% |
| Plage de réglage | 0.0%~300.0% (courant nominal du moteur) | ||
| Largeur de tout courant | Réglage d'usine | 0.0% | |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P8-41 | atteint 2 | ||
| Plage de réglage | 0.0%~300.0% (courant nominal du moteur) | ||
Lorsque le courant de sortie de l'onduleur atteint une largeur de détection positive ou négative définie, la sortie multifonctionnelle DO de l'onduleur enverra un signal « ON ».
VFD fournit deux ensembles de paramètres de largeur de détection pour atteindre n'importe quel courant. Voir le schéma fonctionnel de la figure 6-23.
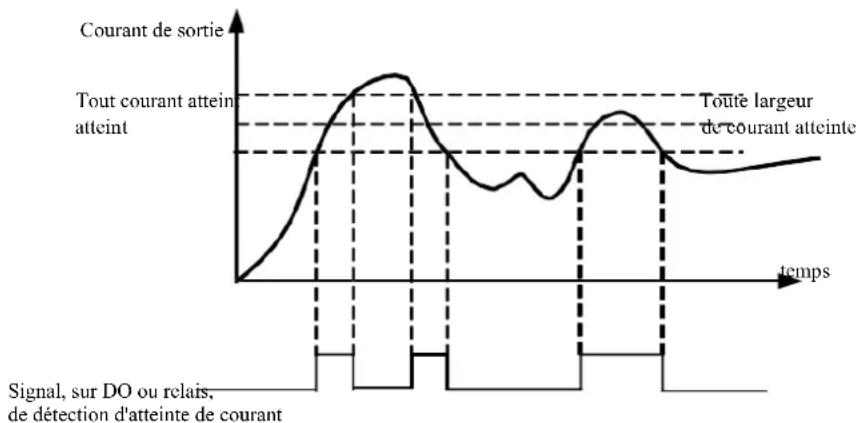
Figure 6-23 Schéma de détection de tout courant atteint
| P8-42 | Sélection de la fonction temporaire | Réglage d'usine | 0 | |
| Plage de réglage | 0 | 0 : inactif | ||
| 1 | actif | |||
| P8-43 | Sélection de course chronométrée (Timed Run) | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Réglage P8-44 | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| La plage de l'entrée analogique 100% correspond à P8-44 | ||||
| P8-44 | Course chronométrée (Timed Run) | Réglage d'usine | 0.0Min | |
| Plage de réglage | 0.0Min~6500.0Min | |||
Un ensemble de paramètres utilisés pour compléter le temps d'exécution d'entraînement.
Lorsque la fonction de minuterie P8-42 est active, l'onduleur démarre à partir du début du temps prédéfini. Lorsque le temps défini est écoulé, l'onduleur s'éteint automatiquement, tandis que l'entrée DO multifonction DO envoie un signal « ON ».
Chaque fois que le convertisseur est démarré, il décompte à partir de 0. Le temps d'exécution restant est affiché dans U0-20. Le temps de travail normal est défini avec les paramètres P8-43, P8-44 en minutes.
| P8-45 | Seuil inféricur de protection de la tension d'entrée A11 | Réglage d'usine | 3.10V |
| Plage de réglage | 0.00V~P8-46 | ||
| P8-46 | Seuil supérieur de protection de la tension d'entrée A11 | Réglage d'usine | 6.80V |
| Plage de réglage | P8-45~10.00V | ||
Lorsque la valeur de P8-46 est supérieure à celle de l'entrée analogique A11 et que P8-47 est inférieure à celle de l'entrée A11, la sortie multifonction DO de l'onduleur envoie le signal « Dépassement entrée A11 » ON.
| P8-47 | Température du module atteinte | Réglage d'usine | 75°C |
| Plage de réglage | 0.00V~P8-46 | ||
Lorsque le radiateur de l'onduleur atteint la température ci-dessus, le signal « ON » pour atteindre la température du module apparaît sur la sortie multifonction DO de l'onduleur.
| Contrôle du ventilateur de | Réglage | 0 |
Utilisé pour sélectionner le mode de fonctionnement du ventilateur de refroidissement.
Sélection 0. Le ventilateur fonctionne lorsque l'onduleur est en état de fonctionnement. Il s'arrête lorsque la température du radiateur est supérieure à 40 degrés.
Sélection 1. Après le démarrage, le ventilateur fonctionne tout le temps.
| P8-49 | Fréquence de reprise | Réglage d'usine | 0.00Hz |
| Plage de réglage | Fréquence de veille (P8-51) ~ fréquence maximale (P0-10) | ||
| P8-50 | Délai de reprise | Réglage d'usine | 0.0s |
| Plage de réglage | 0.0s~6500.0s | ||
| P8-51 | Fréquence de veille | Réglage d'usine | 0.00Hz |
| Plage de réglage | 0.00Hz~fréquence de reprise (P8-49) | ||
| P8-52 | Délai de transition en état de veille | Réglage d'usine | 0.0s |
| Plage de réglage | 0.0s~6500.0s | ||
Ce groupe est utilisé pour mettre en œuvre des systèmes d'approvisionnement en eau avec une fonction veille et vigilance.
L'onduleur fonctionne lorsque la fréquence réglée est inférieure ou égale à P8-51. Fréquence de veille, P8-52 : après un délai, l'entrainement passe en mode veille et s'éteint automatiquement. Si l'onduleur est en veille et qu'un ordre de marche a été émis, lorsque la fréquence réglée est supérieure ou égale à la fréquence de P8-49, P8-50, l'onduleur démarre après la temporisation.
En général, vous devez définir la fréquence de reprise et de veille comme supérieure ou égale. Si la fréquence de veille et de reprise est de 0,00 Hz, la fonction de veille et de reprise ne fonctionne pas.
Lorsque l'hibernation est activée, si la source de fréquence utilise PID et que le PID est en mode veille et que PA-28 affecte le code de fonction, veuillez sélectionner l'opération de désactivation lorsque PID (PA-28 = 1).
| P8-53 | Atteinte du fonctionnement | temps | deRéglage d'usine 0.0Min |
| Plage de réglage | 0.0Min~6500.0Min |
Lorsque le temps d'exécution est atteint après le démarrage, la sortie numérique multifonctionnelle DO de l'onduleur envoie le signal « Durée d'exécution atteinte ON (MARCHE) ».
Groupe P9. Erreurs et protection
| P9-00 | Sélection de la protection contre les surcharges du moteur | Réglage 1 d'usine |
| Plage de 0 réglage 1 | interdissection autorisation | |
| P9-01 | Gain de la protection contre les surcharges du moteur | Réglage 1.00 d'usine |
| Plage de réglage | 0.20~w10.00 |
P9-00 = 0: Sans protection contre les surcharges du moteur, il peut y avoir un risque de dommages dus à la surchauffe du moteur. Il est recommandé d'ajouter un relais thermique entre l'onduleur et le moteur ;
P9-00 = 1 : Le convertisseur de fréquence détermine si le moteur est en surcharge à partir de la courbe inverse de temps de la surcharge du moteur. Courbe de temps inverse de la protection contre les surcharges du moteur : 220% × (P9-01) × courant nominal du moteur. Si la charge reste à cette valeur pendant 1 minute, une alarme de surcharge moteur se déclenchera. ou 150% × (P9-01) × courant nominal du moteur. Si la charge reste à cette valeur pendant 60 minutes, une alarme de surcharge se déclenchera.
Le paramètre P9-01 doit être défini en fonction de la capacité de surcharge réelle. Si la valeur du paramètre est réglée trop haut, cela peut surchauffer le moteur et endommager l'onduleur en l'absence d'alarme !
| P9-02 | Niveau de déclenchementde l'avertissementde surcharge moteur | Réglage d'usine | 80% |
| Plage de réglage | 50%~100% |
Cette fonction est utilisée avant la fonction de protection contre les surcharges du moteur, elle envoie un signal d'avertissement via la sortie DO de l'onduleur au système de contrôle. Le coefficient d'avertissement est utilisé pour déterminer le niveau d'avertissement précoce de surcharge du moteur. Plus la valeur est élevée, plus le nombre d'avertissements préalables sera réduit.
Lorsque le courant de sortie cumulé de l'onduleur est supérieur aux courbes inverses de surcharge et le produit P9-02, la sortie multifonction DO de l'onduleur active le signal « Avertissement de surcharge du moteur ON (MARCHE)».
| P9-03 | Gain de la protection contre le décrochage | Réglage d'usine | 0 |
| Plage de réglage | 0 (pas de gain) ~ 100 | ||
| P9-04 | Tension de protection contre le décrochage de surtension | Réglage d'usine | 130 % |
| Plage de réglage | 120% ~ 150% (trois phases) | ||
Pendant la décélération, lorsque la tension de la barre CC dépasse la tension de protection contre les surtensions, l'onduleur maintient l'arrêt à la fréquence de fonctionnement actuelle et la tension chute jusqu'à ce que la barre continue de décélérer.
Le gain de protection anti-décrochage est réglable pendant la décélération. Il s'agit de la capacité de l'onduleur à supprimer les surtensions. Plus la valeur est élevée, plus la capacité de suppression des surtensions est forte. S'il n'y a pas de surtensions, le gain de protection est réglé au plus bas possible.
Sous une charge à faible inertie, le gain de protection doit être faible, sinon la réponse dynamique du système sera lente. Avec des charges inertielles élevées, cette valeur doit être élevée, sinon l'amortissement sera inefficace et une erreur de surtension peut se produire.
Lorsque le gain de protection de décrochage est réglé sur 0, cette fonction est désactivée.
| P9-05 | Amélioration de la protection contre les surcharges de surintensité | Réglage d'usine 20 | |
| Plage de réglage | 0~100 | ||
| P9-06 | Courant de protection contre le décrochage de surintensité | Réglage d'usine 150% | |
| Plage de réglage | 100%~200% | ||
Dans le processus de décélération de l'onduleur, lorsque le courant de sortie dépasse le courant de protection contre les surintensités, l'onduleur arrête le processus de décélération et il est alors maintenu à la fréquence de fonctionnement actuelle. Le courant de sortie chute puis la décélération continue.
Le gain de protection est utilisé pour réguler le processus d'accélération et de décélération et est lié à la capacité d'amortissement du courant de l'onduleur. Plus la valeur est élevée, plus la capacité est grande.
Sous une charge à faible inertie, le gain de protection doit être faible, sinon la réponse dynamique du système sera lente. Avec des charges inertielles élevées, cette valeur doit être élevée, sinon l'amortissement sera inefficace et une erreur de surtension peut se produire.
Lorsque le gain de protection de décrochage est réglé sur 0, cette fonction est désactivée.
| P9-07 | Protection contre les courts-circuits à la terre | Réglage d'usine | 1 | |
| Plage de réglage | 0 | fermée | ||
| 1 | ouvert e | |||
Allumez l'onduleur pour vérifier si le moteur est court-circuité à la terre.
Si cette fonction est active, vérifiez que la tension sur les bornes de sortie U, V, W de l'onduleur est maintenue.
| P9-09 | Réinitialisation automatique de l'erreur | Réglage d'usinc | 0 |
| Plage de réglage | 0~20 | ||
Définissions du nombre de réinitialisation automatique de l'onduleur. Lorsque ce nombre est dépassé, l'onduleur reste dans l'état d'erreur.
| P9-10 | Fonctionnement de la sortie DO pendantla réinitialisation automatique des | Réglaged'usine | 1 |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| erreurs | |||
| Plage de réglage | 0 : ne fonctionne pas 1 : fonctionne | ||
Si le convertisseur est configuré en réinitialisation automatique de l'erreur, alors c'est pendant la réinitialisation automatique de l'erreur, la sortie DO fonctionne si le code P9-10 est réglé sur 1.
| P9-11 | Temps entre l'apparition d'une erreur et sa réinitialisation automatique | Réglage d'usine | 1.0s |
| Plage de réglage | 0.1s~100.0s | ||
C'est le temps d'attente pour une réinitialisation automatique de l'erreur à partir du moment de l'alarme d'erreur par l'onduleur.
| P9-12 | Protection controlla perte de phase à la sortie | Réglage d'usine | 1 |
| Plage de réglage | 0 : interdiction1 : autorisation | ||
C'est un choix s'il doit y avoir une protection contre la perte de phase sur l'entrée.
Les convertisseurs de type G d'une capacité de 18,5 kW et plus ont une protection de phase à l'entrée. Les convertisseurs de type P d'une capacité de 18,5 kW et moins ne disposent pas d'une telle protection, quel que soit le réglage de P9-12 sur 0 ou 1.
| P9-13 | Protection contre la perte de phase à la sortie | Réglage d'usine | 1 |
| Plage de réglage | 0 : interdiction1 : autorisation | ||
Choix de la protection contre la perte de phase de sortie.
| P9-14 | Première erreur | 0~99 |
| P9-15 | Deuxième erreur | |
| P9-16 | Deuxième erreur (dernière) |
Enregistrement des trois dernières erreurs de l'onduleur. 0 ne signifie pas une erreur. Reportez-vous au chapitre 8 pour obtenir des conseils sur les causes possibles et les solutions pour chaque code d'erreur.
| P9-17 | Fréquence à la deuxième erreur | Fréquence de la dernière erreur |
| P9-18 | Courant à la deuxième erreur | Courant de la dernière erreur |
| P9-19 | Tension à la barre au deuxième erreur | Tension à la barre à la dernière erreur |
| P9-20 | État des entrées numériques à la deuxième erreur | État des entrées numériques à la dernière erreur L'ordre est le suivant :BIT9 BIT8 BIT7 BIT6 BIT5 BIT4 BIT3 BIT2 BIT1 BIT0DIO D19 D18 D17 D16 D15 D14 D13 D12 D11Lorsque les bornes d'entrée des deux N respectifs sont définies sur 1, OFF ou 0, l'état de toutes les DI est converti en affichage décimal. |
| P9-21 | État des sorties numériques à la deuxième erreur | État des bornes de sortie numérique à la dernière erreur. L'ordre est le suivant :BIT4 BIT3 BIT2 BIT1 BIT0DO2 DO1 REL2 REL1 FMPLorsque les bornes d'entrée des deux N respectifs sont réglées sur 1, OFF ou 0, l'état de toutes les DI est converti en affichage décimal .. |
| P9-22 | État de l'onduleur à la deuxième erreur | Réservé |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P9-23 | Temps de mise sous tension de l'onduleur à la deuxième erreur | Temps de mise sous tension de l'onduleur à la dernière erreur |
| P9-24 | Temps de fonctionnement de l'onduleur à la deuxième erreur | Temps de fonctionnement de l'onduleur à la dernière erreur |
| P9-27 | Fréquence de la deuxième erreur | Comme P9-17 ~ P9-24 |
| P9-28 | Courant de la deuxième erreur | |
| P9-29 | Tension de la barre à la deuxième erreur | |
| P9-30 | État des entrées à la deuxième erreur | |
| P9-31 | État des sorties à la deuxième erreur | |
| P9-32 | État de l'onduleur à la deuxième erreur | |
| P9-33 | Temps de mise sous tension à la deuxième erreur | |
| P9-34 | Temps de fonctionnement à la deuxième erreur | |
| P9-37 | État de l'onduleur à la première erreur | Comme P9-17 ~ P9-24 |
| P9-38 | Temps de mise sous tension à la première erreur | |
| P9-39 | Temps de fonctionnement à la première erreur | |
| P9-40 | Fréquence de la première erreur | |
| P9-41 | Courant de la première erreur | |
| P9-42 | Tension du bus à la première erreur | |
| P9-43 | État des sorties à la première erreur | |
| P9-44 | État des sorties à la première erreur |
| P9-47 | Contre-mesures pour l'erreur 1 | Réglage d'usine | 00000 | |
| Plage de réglage | Nombre de l'unité | Surcharge du moteur (Err11) | ||
| 0 | Arrêt roue libre | |||
| 1 | Arrêt en mode stop | |||
| 2 | Poursuite de fonctionnement | |||
| Dizaines | Phase d'entrée manquante (Err12) (même unité) | |||
| Centaines | Phase de sortie manquante (Err13) (même unité) | |||
| Millics | Erreur extérieure (Err15) (même unité) | |||
| Dizaines de millics | Erreur de communication (Err16) (même unité) | |||
| P9-48 | Contre-mesures pour l'erreur 2 | Réglage d'usine | 00000 | |
| Plage de réglage | Chiffre des unités | Erreur encodeur (Err20) | ||
| 0 | Arrêt roue libre | |||
| 1 | Commutation sur U/f, passage en mode stop | |||
| 2 | Commutation sur U/f, continuation de fonctionnement | |||
| Dizaines | Erreur du lecteur de code (Err21) | |||
| 0 | Arrêt roue libre | |||
| 1 | Arrêt, passage en mode stop | |||
| Centaines | Réservé | |||
| Milliers | Surchauffe du moteur (Err 25) (comme P9-47) | |||
| Dizaines de milliers | Dépassement du temps de fonctionnement (Err26) (comme P9-47) | |||
| Contre-mesures pour l'erreur 3 | Réglage d'usine | 00000 | ||
| Chiffre des unités | Erreur définie par l'utilisateur 1 (Err27) (comme P9-47) | |||
| Dizaines | Erreur définie par l'utilisateur 2 (Err28) (comme P9-47) | |||
| Centaines | Dépassement du temps total de fonctionnement (Err29) (comme P9- | |||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P9-49 | 47) | ||
| Plage | de | Milliers | |
| réglage | 0 | ||
| 1 | |||
| 2 | |||
| Dizaines de millics | |||
| Contre-mesures pour l'erreur 4 | |||
| Réglage d'usine |
| P9-50 | Chiffre des unités | Déviation de vitesse excessive (Err42) (avec P9-47 bits) | ||
| Plage réglage | de | Dizaines | Surrégime moteur (Err43) (avec bits P9-47) | |
| Centaines | Erreur de la position initiale (Err51) (avec bits P9-47) | |||
| Milliers | Erreur de la position initiale (Err52) (avec bits P9-47) | |||
| Dizaines de milliers | Réservé |
Lors de la sélection de « parking libre », l'onduleur affichera Err** et directement vers le bas.
Dans le cas de sélection « stop en mode d'arrêt » l'onduleur affiche A **. Appuyez sur « stop », après l'arrêt Err ** sera affiché.
Après la sélection de « continuez » : le convertisseur de fréquence continue de fonctionner et affiche A **, la fréquence de fonctionnement est réglée par P9-54.
| Continuation à la fréquence sélectionnée en cas d'erreur | Réglage d'usine | 0 | ||
| P9-54 | 0 | 0 : Fonctionnement à la fréquence de fonctionnement actuelle | ||
| 1 | 1 : Fonctionnement avec une fréquence définie | |||
| Plage de réglage | 2 | 2 : Fonctionnement à la limite supérieure de la fréquence | ||
| 3 | 3 : Fonctionnement à la limite inférieure de la fréquence | |||
| 4 | 4 : Fonctionnement à une fréquence anormale alternative | |||
| P9-55 | Erreur de fréquence alternative | Réglage d'usine | 100.0% | |
| Plage de réglage | 60.0%~100.0% | |||
Lorsque l'onduleur fonctionne en erreur et que le fonctionnement avec erreur continue, l'entraînement affiche A ** et fonctionne à la fréquence spécifiée dans P9-54.
Lorsqu'un fonctionnement de fréquence anormale alternatif est sélectionné, la valeur définie dans P9-55 est un pourcentage de la fréquence maximale.
| P9-56 | Type de capteur de température du moteur | Réglage d'usine | 0 | |
| Plage | de 0 | Sans capteur de température | ||
| réglage | 1 | PT100 | ||
| 2 | PT1000 | |||
| P9-57 | Seuil de protection contre la surchauffe du moteur | Réglage d'usine | 110°C | |
| Plage de réglage | 0°C~200°C | |||
| F9-58 | Seuil d'avertissement de surchauffe du moteur | Réglage d'usine | 90°C | |
| Plage de réglage | 0°C~200°C | |||
Le capteur qui signale la température du moteur doit être connecté à la carte d'extension multifonctionnelle, qui est optionnelle. L'entrée AI3 de la carte d'extension analogique peut être utilisée comme entrée pour le capteur de température du moteur, le signal du capteur de température du moteur, puis comme borne AI3 PGND.
L'entrée analogique VFD AI3 pour PT100 et PT1000 prend en charge deux types de capteurs de température de moteur, le capteur doit donc être réglé selon le type. Les valeurs de température du moteur sont affichées sur U0-34.
Lorsque la température du moteur dépasse le seuil de protection contre la surchauffe du moteur P9-57, l'onduleur donne une alarme de défaut, active la protection contre les défauts et suit le mode sélectionné.
Lorsque la température du moteur dépasse la valeur seuil P9-58, un avertissement de surchauffe du moteur est émis - la sortie numérique multifonction DO du convertisseur génère un signal « ON ».
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P9-59 | panne de courant momentanée | |||
| Plage de réglage | 0 | 0 : inactif | ||
| 1 | freinage | |||
| 2 | roue libre jusqu'à l'arrêt | |||
| P9-60 | Point de commutation de fréquence de freinage en cas de panne de courant soudaine | Réglage d'usine | 0.0% | |
| Plage de réglage | 0.0%~100.0% | |||
| P9-61 | Temps de réponse en cas de panne de courant | Réglage d'usine | 0.50s | |
| Plage de réglage | 0.00s~100.00s | |||
| P9-62 | La valeur du changement de tension pour la réaction après une panne de courant | Réglage d'usine | 80.0% | |
| Plage de réglage | 60,0% ~ 100,0% (tension de bus standard) | |||
Cette fonction signifie qu'en cas de panne de courant instantanée ou de chute de tension soudaine, l'onduleur réduit la vitesse de sortie en réduisant la compensation d'énergie de charge (tension de la barre CC de l'onduleur) pour maintenir l'entraînement.
Si P9-59 = 1 et qu'il y a une panne de courant ou une chute de tension soudaine, l'onduleur ralentit. Une fois la tension du bus rétablie, l'onduleur accélère jusqu'à la fréquence de fonctionnement normale définie. Le rétablissement de la tension du bus est basé sur la tension du bus normale P9-61 et prend plus de temps que le temps défini.
Si P9-59 = 2 et qu'il y a une panne de courant ou une chute de tension soudaine, l'onduleur ralentit jusqu'à l'arrêt.
Temps de réponse en cas tension de panne de courant, P9-61 sur la barre
La valeur de la variation de tension pour réaction après une panne de courant, P9-62
Fréquence de fonctionnement
Point de commutation de fréquence de freinage en cas de coupure de courant soudaine, P9-60
Fréquence de fonctionnement
Point de commutation de fréquence de freinage en cas de coûpure de courant soudaine, temps
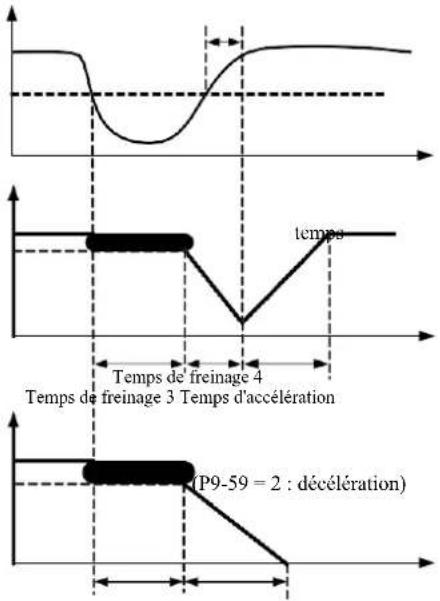
Temps de freinage 3 Temps de freinage 4
Figure 6-24 Schéma de fonctionnement lors d'une panne de courant soudaine
| P9-63 | Protection après la baisse de la charge à zéro | Réglage d'usine | 0 | |
| Plage de réglage | 0 | inactif | ||
| 1 | actif | |||
| P9-64 | Niveau de détection de la chute de charge à zéro | Réglage d'usine | 10.0% | |
| Plage de réglage | 0.0%~100.0% (courant nominal du moteur) | |||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| P9-65 | Temps de détection d'une chute de charge à zéro | Réglage d'usine | 1.0s | |
| Plage de réglage | 0.0s~60.0s | |||
Si la fonction de protection contre le manque de charge est activée, lorsque le courant de sortie de l'onduleur est inférieur au niveau de détection P9-64 et que la durée est supérieure au temps de détection de perte de charge P9-65, la fréquence de sortie est automatiquement réduite à 7 % de la fréquence nominale. Pendant que la protection contre le manque de charge est en vigueur et si la charge est restaurée l'onduleur revient automatiquement à la fréquence définie.
| P9-67 | Seuil de détection de vitesse excessive | Réglage d'usine | 15.0% | |
| Plage de réglage | 0.0% à 50.0% (fréquence maximale) | |||
| P9-68 | Temps de détection de vitesse excessive | Réglage d'usine | 2.0s | |
| Plage de réglage | 0.0s~60.0s | |||
Cette fonction n'est effective que lorsque l'onduleur fonctionne avec un contrôle vectoriel de vitesse.
Lorsque l'onduleur détecte que la vitesse réelle du moteur dépasse la fréquence définie, que la valeur de détection de survitesse P9-67 a été dépassée et que la durée est plus longue que le temps de détection de survitesse P9-68, l'onduleur génère une alarme d'erreur Err43, en fonction de l'erreur et le mode de protection.
| P9-69 | Seuil de détection d'écart excessif de vitesse | Réglage d'usine | 20.0% | |
| Plage de réglage | 0.0% à 50.0% (fréquence max.) | |||
| P9-70 | Temps de détection d'écart excessif de vitesse | Réglage d'usine | 2.0s | |
| Plage de réglage | 0.0s~60.0s | |||
Cette fonction n'est effective que lorsque l'onduleur fonctionne avec un contrôle vectoriel de vitesse.
Lorsque le convertisseur détecte la vitesse réelle du moteur et l'écart de fréquence défini, cet écart est supérieur à sa valeur de détection P9-69, et la durée est plus longue que le temps de détection de cet écart P9-70, l'onduleur génère une alarme d'erreur Err42 et suit le mode de protection contre les erreurs en fonctionnement.
Lorsque le temps de détection d'écart de vitesse est de 0,0 s, la détection d'erreur d'écart de vitesse ne fonctionne pas.
Groupe PA. Fonctionnement du contrôle PID
Le réglage PID est une méthode courante de contrôle de processus pour contrôler la différence d'amplitude entre le signal de rétroaction et le signal cible. Il s'agit d'un fonctionnement proportionnel, intégral, différentiel en ajustant la fréquence de sortie pour former un circuit en boucle fermée.
Convient au contrôle de débit, au contrôle de pression, de température et au contrôle de processus. Le schéma fonctionnel du processus de contrôle PID est illustré à la figure 6-25.
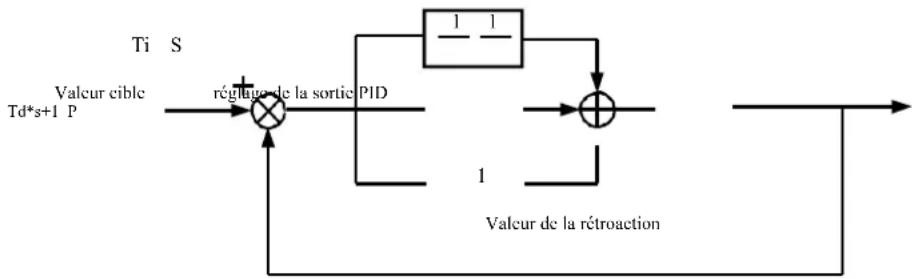
flowchart
graph TD
A["Valcuer cible Td*s+1 P"] --> B["×"]
B --> C["PID"]
C --> D["1"]
D --> E["×"]
E --> F["Valcuer de la rétroaction"]
F --> G["Output"]
H["Ti S"] --> I["+"]
I --> B
J["1"] --> E
Figure 6-25 Le schéma fonctionnel de base du processus de contrôle PID
| Sélection de la source de valeur préréglée du régulateur PID | Réglage d'usine | 0 | ||
| 0 | Réglages PA-01 | |||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| PA-00 | Plage de réglage | 1 | AI1 | |
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Impulsion (DI5) | |||
| 5 | Réglages de communication | |||
| 6 | Commandes à plusieurs étapes | |||
| PA-01 | Valeurs préréglées PID | Réglage d'usine | 50.0% | |
| Plage de réglage | 0.0%~100.0% | |||
Ce paramètre est utilisé pour sélectionner le contrôle PID cible pour le canal donné.
Le réglage de la valeur cible de réglage PID est une valeur relative, plage de réglage : 0,0% à 100,0%. L'amplitude relative de la rétroaction PID est la même valeur.
| PA-02 | Source de signal de rétroaction PID | Réglage d'usine | 0 | |
| Plage de réglage | 0 | AI1 | ||
| 1 | AI2 | |||
| 2 | AI3 | |||
| 3 | AI1 - AI2 | |||
| 4 | Réglages de communication (DI5) | |||
| 5 | Paramètres de communication | |||
| 6 | AI1+AI2 | |||
| 7 | MAX (|AI1|,|AI2|) | |||
| 8 | MIN (|AI1|,|AI2|) | |||
Ce paramètre est utilisé pour sélectionner le chemin du signal de rétroaction PID.
Le montant du rétroaction PID pour la valeur relative est réglable de 0,0% à 100,0%.
| PA-03 | Sens de fonctionnement du PID | Réglage d'usine | 0 | |
| Plage de réglage | 0 | positif | ||
| 1 | négatif | |||
0 : Lorsque le signal de rétroaction PID est inférieur à la valeur définie, la fréquence de sortie de l'onduleur augmente.
1 : Lorsque le signal de rétroaction PID est inférieur à la valeur définie, la fréquence de sortie de l'onduleur diminue.
Par exemple, le contrôle de tension d'enroulement nécessite que le contrôle PID fonctionne avec une sortie de 0 et le contrôle de tension le déroulement nécessite un contrôle PID avec la sortie 1.
| PA-04 | Plage de rétroaction PID | Réglage d'usine | 1000 |
| Plage de réglage | 0~65535 | ||
La plage de rétroaction PID est spécifiée en unités sans dimension pour l'écran d'affichage U0-15 et l'écran d'affichage de rétroaction PID U0-16.
La valeur de rétroaction PID définie de 100,0% correspond à la plage définie de rétroaction PA-04. Par exemple, si PA-40 est réglé sur 2000, alors lorsque le réglage PID est 100,0%, le PID affiché sur l'ecran d'affichage U0-15 est 2000.
| PA-05 | Accru du segment proportionnel Kpl | Réglage d'usine | 20.0 |
| Plage de réglage | 0.0~100.0 | ||
| PA-06 | Temps d'intégration Til | Réglage d'usine | 2.00s |
| Plage de réglage | 0.01s~10.00s | ||
| PA-07 | Temps de dérivatisation Td11 | Réglage d'usine | 0.000s |
| Plage de réglage | 0.00~10.000 | ||
Accru du segment proportionnel Kp1.
Il règle l'intensité de l'ensemble du contrôle PID. Plus Kp1 est grand, plus l'intensité est grande. 100,0. Ce paramètre indique que lorsque l'écart de la valeur de rétroaction PID et la valeur définie sont de 100,0%, l'amplitude de contrôle PID de la commande de fréquence de sortie est la fréquence maximale.
Temps d'intégration Til détermine l'intensité d'intégration du régulateur PID. Plus le temps d'intégration est court, plus le réglage est fort
et plus la valeur de déviation constante est corrigée rapidement.
Le temps de de dérivatisation Td1 du régulateur PID détermine le taux de variation de l'intensité de la commande de polarisation. Plus le temps de dérivatisation est long, plus la régulation est intense. La constante de temps de dérivatisation fait référence à la quantité de
| PA-08 | Fréquence de coupure pour fonctionnement inverse PID | Réglage d'usine | 2.00Hz |
| Plage de réglage | 0.00 ~ fréquence maximale | ||
Dans certains cas, uniquement lorsque la fréquence de sortie du PID est négative (c.-à-d. entraînement en arrière), PID peut contrôler la valeur donnée et la rétroaction [...] mais l'inversion haute fréquence n'est pas autorisée dans certains cas. PA-08 est utilisé pour déterminer la limitation d'inversion de fréquence.
| PA-09 | Limite d'écart PID | Réglage d'usinc | 0.01% |
| Plage de réglage | 0.0%~100.0% | ||
Lorsque l'écart PID et la valeur de rétroaction sont inférieurs à PA-09, le PID arrête le réglage. Ainsi, compte tenu du temps de sortie de rétroaction et de la déviation de fréquence, avec moins de stabilité et la variabilité, le contrôle en boucle fermée est très efficace dans certains cas.
| PA-10 | Limite de dérivatisation PID | Réglage d'usine | 0.10% |
| Plage de réglage | 0.00%~100.00% | ||
Régulateur PID. L'effet dérivé est plus sensible et peut faire osciller le système, donc en général le fonctionnement de la dérivée PID est limité à une zone relativement petite. PA-10 est utilisé pour définir la plage de dérivatisation PID.
| PA-11 | Changement du temps PID | Réglage d'usine | 0.00 s |
| Plage de réglage | 0.00s~650.00s | ||
La modification du temps PID signifie que la valeur de réglage PID passe de 0,0% du temps requis à 100,0%.
Lorsque le point de consigne PID est modifié, la valeur du point de consigne PID changera de manière linéaire dans le temps en fonction du changement donné, réduisant ainsi l'effet négatif du changement sur le système.
| PA-12 | Temps de filtrage de rétroaction PID | Réglage d'usine | 0.00 s |
| Plage de réglage | 0.00s~60.00s | ||
| PA-13 | Temps de filtre de sortie PID | Réglage d'usine | 0.00 s |
| Plage de réglage | 0.00s~60.00s | ||
PA-12 : Filtrage de rétroaction PID. Le filtre aide à réduire l'influence des interférences sur l'amplitude de la rétroaction, ce qui a un impact sur les performances de réponse du système en boucle fermée.
PA-13 : filtrage de fréquence de sortie PID. Le filtre réduit la fréquence de sortie de la mutation, ce qui affecte également les performances de réponse du système en boucle fermée.
| PA-15 | Coefficient du gain du segment proportionnel Kp2 | Réglage d'usine 20.0 | ||
| Plage de réglage | 0.0~100.0 | |||
| PA-16 | Temps d'intégration Ti2 | Réglage d'usine 200s | ||
| Plage de réglage | 0.01s~10.00s | |||
| PA-17 | Temps de dérivatisation Td 2 | Réglage d'usine 0.000s | ||
| Plage de réglage | 0.00~10.000 | |||
| PA-18 | Conditions de commutation des paramètres P1 | Réglage d'usine | 0 | |
| 0 | 0: pas de commutation | |||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| Plage deréglage | 1 | 1 : avec commutateur des bornes DI | ||
| 2 | 2 : commutation automatique basée sur l'écart | |||
| PA-19 | Commutation PID | Réglage d'usine 20.0% | ||
| Plage de réglage | 0.0%~PA-20 | |||
| PA-20 | Commutation PID | Réglage d'usine 80.0% | ||
| Plage de réglage | PA-19~100.0% | |||
Lors de la sélection de la commutation de borne multifonction DI, réglez la fonction de borne multifonction sur 43 (borne de commutation de paramètre PID). Sélectionnez le jeu de paramètres 1 (PA-05 \~ PA-07) lorsque la borne est inactive. Lorsque la borne est active, sélectionnez le jeu de paramètres 2 (PA-15 \~ PA-17).
Lorsque la commutation automatique entre la valeur de référence et l'écart de rétroaction est sélectionnée inférieure à la valeur absolue de l'écart PID PA-19 1, le paramètre PID est défini sur 1. Pour définir l'écart entre l'écart de référence et le retour PID supérieur à la valeur absolue de PA-20, sélectionnez le groupe de paramètres 2 pour le paramètre PID. Sur la base de l'écart entre la valeur de référence et la rétroaction, lors de la commutation entre l'écart 1 et l'écart 2, les paramètres PID sont une interpolation linéaire de deux ensembles de paramètres PID, comme illustré à la figure 6-26.
Paramètre PI
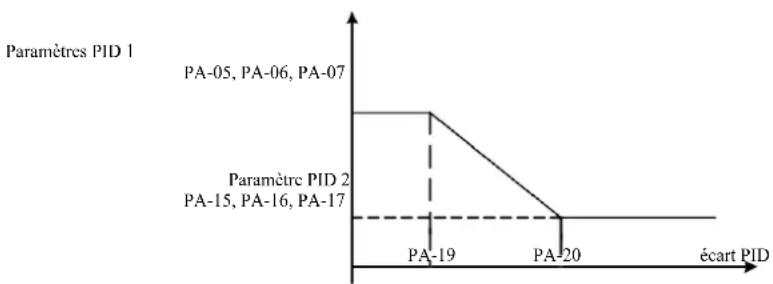
line
| Paramètres PID | Écart PID | Paramètre PID | |---|---|---| | PA-05 | 0 | - | | PA-06 | 0 | - | | PA-07 | 0 | - | | PA-15 | 0 | - | | PA-16 | 0 | - | | PA-17 | 0 | - | | PA-19 | 0 | - | | PA-20 | 0 | - | Paramètres PID 1 Paramètre PID 2 écart PIDFigure 6-26 Commutation des paramètres PID
| PA-21 | Valeur PID initiale | Réglage d'usine | 0.0% |
| Plage de réglage | 0.0%~100.0% | ||
| PA-22 | Temps de maintien de la valeur initiale PID | Réglage d'usine | 0.00s |
| Plage de réglage | 0.00s~650.00s | ||
Au démarrage de l'onduleur, la sortie PID est réglée sur la valeur initiale PA-21. La valeur de démarrage PID du PA-22 continue après le temps de maintien et le contrôle de boucle PID commence.
La figure 6-27 montre un schéma concernant la valeur initiale de la fonction PID.
Fréquence
Valeur
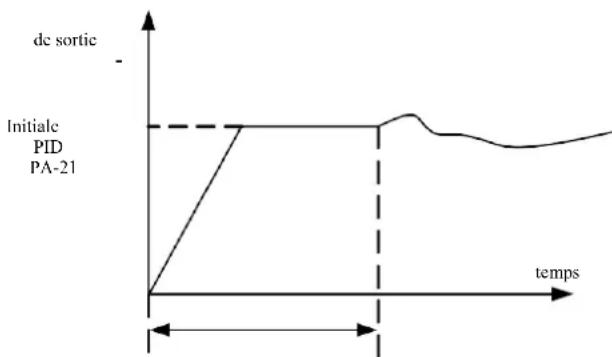
line
| temps | dc sortie | | ------ | --------- | | 0 | 0 | | Initialc | 0 | | PID | 0 | | PA-21 | 0 |Temps de maintien de la valeur initiale PID PA-22
Figure 6-27 Schéma de rétention de la valeur de départ PID
Cette fonction est utilisée pour limiter la différence d'ondulation entre les deux sorties PID (2 ms / ondulation) pour supprimer le changement rapidement afin que le fonctionnement de l'onduleur se stabilise.
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| PA-23 | Déviation max.entre les deuxsorties PID enfonctionnement en avant | Réglaged'usine | 1.00% |
| Plage de réglage | 0.00%~100.00% | ||
| PA-24 | Déviation max.entre les deuxsorties PID enfonctionnement en arrière | Réglaged'usine | 1.00% |
| Plage de réglage | 0.00%~100.00% | ||
PA-23 et PA-24 sont liés à la déviation maximale et à la valeur absolue (dans cet ordre) en cas de fonctionnement de sortie en avant et en arrière.
| PA-25 | Propriétés du segment d'intégration PID | Réglage d'usine | 00 | |
| Plage de réglage | Chiffre des unités | Intégration séparée | ||
| 0 | Inactif | |||
| 1 | Actif | |||
| Dizaines | Arrêt de l'intégration après atteinte sur la sortie de la valeur de consigne | |||
| 0 | Continuation de fonctionnement avec intégration | |||
| 1 | Arrêt de l'intégration | |||
Séparation des points :
Lorsque l'isolement intégral est actif et que la pause DI de la sortie numérique d'intégration multifonction (fonction 22) est active, seules les opérations PID proportionnelles et dérivées sont effectives.
Si une séparation intégrale inactive est sélectionnée, que le terminal multifonction DI soit actif ou non, la séparation intégrale est désactivée. Lorsque le signal de sortie PID atteint sa valeur maximale ou minimale, vous pouvez arrêter l'intégration. Si nous choisissons d'arrêter l'intégration, le calcul de l'intégration PID est arrêté à ce stade, ce qui peut aider à réduire le dépassement PID.
| PA-26 | Valeur de détectionde la perte de rétroactionPID | Réglaged'usine | 0.0% |
| Plage de réglage 0.0%: aucune analyse de perte de rétroaction | |||
| PA-27 | Temps de détection de laperte de rétroaction PID | Réglaged'usine | 1.0s |
| Plage de réglage | 0.0s~20.0s | ||
Ces codes de fonction sont utilisés pour déterminer si la rétroaction PID a été perdue.
Lorsque la rétroaction PID est inférieur à la valeur de détection de perte de rétroaction PA-26 et que cela prend plus de temps que le temps de détection de perte de rétroaction PID PA-27, l'onduleur signale Err31 et le processus de dépannage suit le mode sélectionné
| PA-28 | Fonctionnement PID après arrêt | Réglage d'usine | 0 | |
| Plage de réglage | 0 | 0 : désactivation PID après l'arrêt ; | ||
| 1 | 1 : fonctionnement PID après arrêt | |||
Sélection de l'état du PID au prochain arrêt, c'est-à-dire si le PID doit continuer à fonctionner. Dans la plupart des applications, après l'arrêt du fonctionnement, le PID devrait cesser de fonctionner.
Groupe PB : Fréquence d'oscillation, longueur et comptage
La fonction de traverse de l'onduleur est utilisée dans les industries du textile là où il est nécessaire d'effectuer une traverse et un bobinage. La fonction "Wobble" signifie que la fréquence de sortie de l'onduleur est réglée de sorte qu'il y ait une oscillation de haut en bas de la fréquence centrale dans la chronologie.
Comme le montre la figure 6-28 (l'amplitude du swing selon les réglages de PB-00 et PB-01), lorsque PB-01 est réglé sur 0, la fonction "Wobble" ne fonctionne pas.
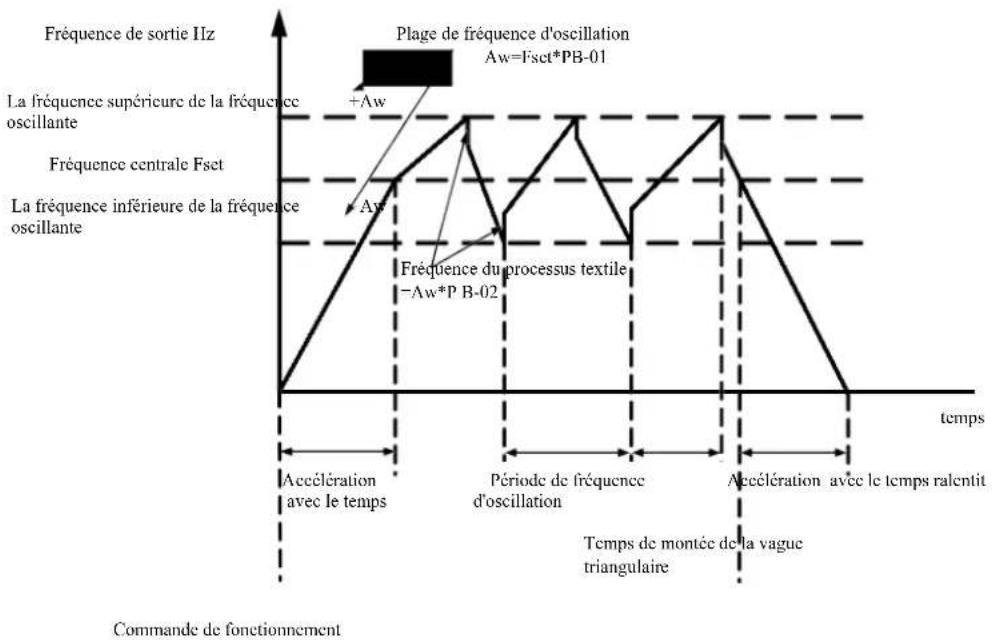
Figure 6-28 Schéma de fonctionnement de la fluctuation de fréquence
| PB-00 | Mode de la fréquence d'oscillation | Réglage d'usine | 0 | |
| Plage de réglage | 0 | 0 : lié à la fréquence centrale | ||
| 1 | 1 : lié à la fréquence maximale | |||
Ce paramètre est déterminé en référence à l'amplitude de l'oscillation.
0 : Par rapport à la fréquence centrale (source de fréquence P0-07), système à oscillation variable. Oscillation avec changement de fréquence centrale (fréquence réglée).
1 : lié à la fréquence maximale (P0-10), système à oscillation constante.
| PB-01 | L'amplitude de la fréquence d'oscillation | Réglage d'usine | 0.0% |
| Plage de réglage | 0.0%~100.0% | ||
| PB-02 | Saut de la fréquence d'oscillation | Réglage d'usine | 0.0% |
| Plage de réglage | 0.0%~50.0% | ||
Détermination de la valeur de l'oscillation et du saut de fréquence pour ce paramètre.
Lors du réglage de l'oscillation par rapport à la fréquence centrale (PB-00 = 0), oscillation AW = source de fréquence P0-07 × amplitude d'oscillation PB-01.
Lors du réglage de l'oscillation par rapport à la fréquence maximale (PB-00 = 1), l'oscillation maximale W = P0 - 10 × amplitude d'oscillation PB-01.
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
Amplitude des sauts de fréquence dans la traversée. La fréquence de saut reste en pourcentage de l'oscillation de fréquence, à savoir : fréquence de saut = oscillation AW × amplitude de la fréquence de saut PB-02. Si l'amplitude d'oscillation est liée à la fréquence centrale (PB-00 = 0), la fréquence de saut est une valeur variable. Si elle est liée à la fréquence maximale (PB-00 = 1), la fréquence de saut est une valeur fixe.
La fréquence d'oscillation de fonctionnement, la fréquence maximale et minimale sont liées.
| PB-03 | Cycle de la fréquence d'oscillation | Réglage d'usine | 10.0s |
| Plage de réglage | 0.0s~3000.0s | ||
| PB-04 | Coefficient de temps de montée de l'onde triangulaire | Réglage d'usine | 50.0% |
| Plage de réglage | 0.0%~100.0% | ||
Cycle de fréquence d'oscillation : la valeur temporelle d'un cycle d'oscillation complet.
Coefficient de temps de montée de l'onde triangulaire PB-04 : L'onde triangulaire augmente en pourcentage avec le temps de cycle d'oscillation PB-03.
Temps de montée de l'onde triangulaire = cycle d'oscillation de fréquence PB-03 × coefficient de temps de montée de l'onde triangulaire PB-04, en secondes.
Temps de descente de l'onde triangulaire = cycle d'oscillation de fréquence PB-03 × coefficient de temps de montée de l'onde triangulaire PB-04, en secondes.
| PB-05 | Réglage de la longueur | Réglage d'usine | 1000m |
| Plage de réglage | 0m~65535m | ||
| PB-06 | Longueur actuelle | Réglage d'usine | 0m |
| Plage de réglage | 0m~65535m | ||
| PB-07 | Impulsions par mètre | Réglage d'usine | 100.0 |
| Plage de réglage | 0.1~6553.5 | ||
Les codes de fonction ci-dessus sont utilisés pour définir une longueur fixe.
À l'aide de la borne numérique multifonctionnelle, les informations sur la longueur sont collectées, le nombre de bornes à impulsions et le nombre d'impulsions par mètre de phase PB-07 sont vérifiés et la longueur réelle du PB-06 est calculée.
Lorsque la longueur réelle est supérieure à la longueur PB-05 définie, la sortie numérique multifonctionnelle DO transmettra le signal ON « Longueur atteinte ».
Lors du réglage de la longueur fixe, l'opération de mise à zéro de la longueur est effectuée via la borne multifonction DI (sélection de fonction DI 28). Voir P4-00 \~ P4-09.
Pour des applications spécifiques, il est nécessaire de régler la fonction de la borne d'entrée correspondante « entrée compteur de longueur » (fonction 27), pour une fréquence d'impulsion plus élevée, utilisez le port DI5.
| PB-08 | Réglage de la valeur du compteur | Réglage d'usine | 1000 |
| Plage de réglage | 1~65535 | ||
| PB-09 | Valcur préréglée du compteur | Réglage d'usine | 1000 |
| Plage de réglage | 1~65535 | ||
La borne d'entrée numérique multifonction collecte la valeur de comptage requise. L'application doit régler la fonction de borne d'entrée correspondante sur « entrée compteur » (fonction 25). Pour des fréquences d'impulsions plus élevées, le port D15 doit être utilisé.
Lorsque la valeur comptée atteint la valeur préréglée du compteur PB-08, la sortie numérique multifonction DO « atteint l'état préréglé » et envoie le signal ON, puis arrête le comptage.
Lorsque la valeur comptée atteint la valeur préréglée du compteur PB-09, la sortie numérique multifonctionnelle DO enverra le signal « ON » « atteinte de la valeur de comptage préréglée ». Le comptage continuera jusqu'à ce que le compteur soit arrêté.
La valeur préréglée du compteur PB-09 ne doit pas être supérieure à la valeur préréglée du compteur PB-08.
Comptage des impulsions
D15
Valeur préréglée
DOI
Relais de compteur défini
Figure 6-29 Réglage de la valeur du compteur et de la valeur préréglée
Groupe PC - Commandes multi-états et fonctions API
La commande multi-états VFD est plus courante que la fonction multi-vitesse habituelle. Outre la fonction multi-vitesses, elle peut également être utilisée comme source de tension U/f isolée et comme source du processus PID donné.
La fonction API simple est différente des fonctions VFD programmables par l'utilisateur. Un API simple ne peut être exécuté que comme une simple combinaison d'instructions de travail à plusieurs étapes. Pour des fonctions programmables par l'utilisateur plus larges et plus utiles, voir les instructions du groupe A7.
| Commande multi-états 0 | Réglage d'usine | 0.0% | |
| PC-00 | Plage de réglage | -100.0%~100.0% | |
| PC-01 | Commande multi-états 1 | Réglage d'usine | 0.0% |
| Plage de réglage | -100.0%~100.0% | ||
| PC-02 | Commande multi-états 2 | Réglage d'usine | 0.0% |
| Plage de réglage | -100.0%~100.0% | ||
| PC-03 | Commande multi-états 3 | Réglage d'usine | 0.0% |
| Plage de réglage | -100.0%~100.0% | ||
| PC-04 | Commande multi-états 4 | Réglage d'usine | 0.0% |
| Plage de réglage | -100.0%~100.0% | ||
| PC-05 | Commande multi-états 5 | Réglage d'usine | 0.0% |
| Plage de réglage | -100.0%~100.0% | ||
| PC-06 | Commande multi-états 6 | Réglage d'usine | 0.0% |
| Plage de réglage | -100.0%~100.0% | ||
| PC-07 | Commande multi-états 7 | Réglage d'usine | 0.0% |
| Plage de réglage | -100.0%~100.0% | ||
| PC-08 | Commande multi-états 8 | Réglage d'usine | 0.0% |
| Plage de réglage | -100.0%~100.0% | ||
| PC-09 | Commande multi-états 9 | Réglage d'usine | 0.0% |
| Plage de réglage | -100.0%~100.0% | ||
| PC-10 | Commande multi-états 10 | Réglage d'usine | 0.0Hz |
| Plage de réglage | -100.0%~100.0% | ||
| PC-11 | Commande multi-états 11 | Réglage d'usine | 0.0% |
| Plage de réglage | -100.0%~100.0% | ||
| PC-12 | Commande multi-états 12 | Réglage d'usine | 0.0% |
| Plage de réglage | -100.0%~100.0% | ||
| PC-13 | Commande multi-états 13 | Réglage d'usine | 0.0% |
| Plage de réglage | -100.0%~100.0% | ||
| PC-14 | Commande multi-états 14 | Réglage d'usine | 0.0% |
| Plage de réglage | -100.0%~100.0% | ||
| PC-15 | Commande multi-états 15 | Réglage d'usine | 0.0% |
| Plage de réglage | -100.0%~100.0% |
Dans ces trois applications, la valeur relative de la commande sans dimension à plusieurs étapes est comprise entre -100,0% et 100,0%.
Lorsque la source de fréquence est un pourcentage de la fréquence relative maximale, U/f est utilisé comme source de tension indépendante par rapport au pourcentage de la tension nominale du moteur et le PID est initialement donné en valeur relative.
Des instructions en plusieurs étapes sont nécessaires en fonction de l'état de la DI numérique multifonctionnelle et des options de commutation, voir les instructions spécifiques au groupe P4.
| PC-16 | Mode de fonctionnement d'API simple | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Arrêt après un cycle | ||
| 1 | Maintien de la valeur après un cycle | |||
| 2 | Répétition après avoir terminé un cycle complet | |||
Un API simple a deux rôles : il fonctionne en tant que source de fréquence ou en tant que source distincte de tension U/f.
La figure 6-30 est un schéma simplifié de l'API comme source de fréquence. Lorsque un API simple fonctionne comme source de fréquence, PC-00 \~ PC-15 définit la direction positive et négative, la direction négative signifie le fonctionnement de l'entrainement dans la direction opposée.
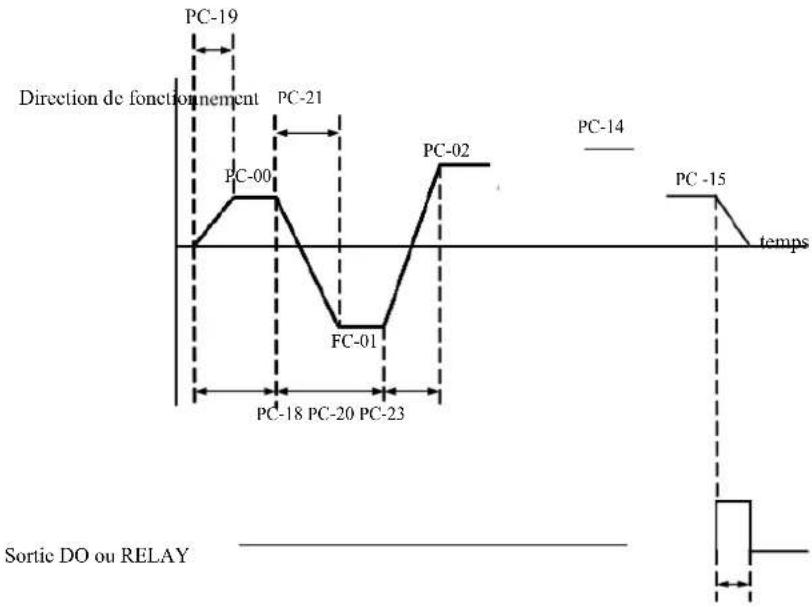
Impulsion 250 ms
Fig. 6-30 Schéma de principe d'un API simple
L'API fonctionne comme une source de fréquence de trois manières, en tant que source de tension, il n'y a pas de séparation U/f de ces trois manières :
0 : arrêt à la fin d'un seul passage ; à la fin d'un seul cycle, l'entraînement s'arrête automatiquement et une commande de redémarrage est donnée.
1 : en fin de cycle, la valeur de la translation finale est maintenue jusqu'à la fin d'un seul cycle, le maintien automatique de la fréquence et la direction du dernier segment intervient.
2 : Une fois le cycle d'entraînement terminé, le cycle suivant démarre automatiquement jusqu'à ce qu'une commande d'arrêt soit donnée.
| PC-17 | Sélection de la mémoire après une panne de courant de l'API simple | Réglage d'usine | 00 | |
| Plage de réglage | Chiffre des unités | Maintien d'état après une panne de courant | ||
| 0 | Pas de mémoire d'état après une panne de courant | |||
| 1 | Mémoire après une panne de courant | |||
| Dizaines | Rétention d'état après la commande STOP | |||
| 0 | Pas de mémoire après la commande STOP | |||
| 1 | Mémoire après arrêt | |||
Le maintien de l'état après la perte d'alimentation de l'API fait référence à la valeur avant la perte d'alimentation et à la fréquence de fonctionnement de l'API. Après la mise sous tension, la mémoire continuera. Si l'option pas de mémoire a été sélectionnée, la remise sous tension redémarre l'API.
La mémoire de l'API et la fréquence de fonctionnement de l'API après l'arrêt de l'entraînement sont enregistrées avant la phase d'arrêt, la phase suivante continuera la mémoire après le démarrage. Si l'option pas de mémoire a été sélectionnée, le redémarrage redémarre également l'API.
| PC-18 | Temps de fonctionnement d'un API simple, étape 0 | Réglage d'usine 0.0s (h) | |
| Plage de réglage | 0.0s (h) ~6553.5s (h) | ||
| PC-19 | Temps de décelération d'un API simple, étape 0 | Réglage d'usine | 0 |
| Plage de réglage | 0~3 | ||
| PC-20 | Temps de fonctionnement d'un API simple, étape 1 | Réglage d'usine 0.0s (h) | |
| Plage de réglage | 0.0s (h) ~6553.5s (h) | ||
| PC-21 | Temps de décelération d'un API simple, étape 1 | Réglage d'usine | 0 |
| Plage de réglage | 0~3 | ||
| PC-22 | Temps de fonctionnement d'un API simple, étape 2 | Réglage d'usine | 0.0s (h) |
| Plage de réglage | 0.0s (h) ~6553.5s (h) | ||
| PC-23 | Temps de décelération d'un API simple, étape 2 | Réglage d'usine | 0 |
| Plage de réglage 0~3 | |||
| PC-24 | Temps de fonctionnement d'un API simple, étape 3 | Réglage d'usine | 0.0s (h) |
| Plage de réglage | 0.0s (h) ~6553.5s (h) | ||
| PC-25 | Temps de décelération d'un API simple, étape 3 | Réglage d'usine | 0 |
| Plage de réglage | 0~3 | ||
| PC-26 | Temps de fonctionnement d'un API simple, étape 4 | Réglage d'usine 0.0s (h) | |
| Plage de réglage | 0.0s (h) ~6553.5s (h) | ||
| PC-27 | Temps de décelération d'un API simple, étape 4 | Réglage d'usine | 0 |
| Plage de réglage | 0~3 | ||
| PC-28 | Temps de fonctionnement d'un API simple, étape 5 | Réglage d'usine | 0.0s (h) |
| Plage de réglage | 0.0s (h) ~6553.5s (h) | ||
| PC-29 | Temps de décelération d'un API simple, étape 5 | Réglage d'usine | 0 |
| Plage de réglage | 0~3 | ||
| PC-30 | Temps de fonctionnement d'un API simple, étape 6 | Réglage d'usine | 0.0s (h) |
| Plage de réglage | 0.0s (h) ~6553.5s (h) | ||
| PC-31 | Temps de décelération d'un API simple, étape 6 | Réglage d'usine | 0 |
| Plage de réglage | 0~3 | ||
| PC-32 | Temps de fonctionnement d'un API simple, étape 7 | Réglage d'usine | 0.0s (h) |
| Plage de réglage | 0.0s (h) ~6553.5s (h) | ||
| PC-33 | Temps de décelération d'un API simple, étape 7 | Réglage d'usine | 0 |
| Plage de réglage | 0~3 | ||
| PC-34 | Temps de fonctionnement d'un API simple, étape 8 | Réglage d'usine | 0.0s (h) |
| Plage de réglage | 0.0s (h) ~6553.5s (h) | ||
| PC-35 | Temps de décelération d'un API simple, étape 8 | Réglage d'usine | 0 |
| Plage de réglage 0~3 | |||
| Temps de fonctionnement d'un API simple, | Réglage d'usine | 0.0s (h) | |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| PC-36 | étape 9 | |||
| Plage de réglage | 0.0s (h) ~6553.5s (h) | |||
| PC-37 | Temps de décélération d'un API simple, étape 9 | Réglage d'usine | 0 | |
| Plage de réglage | 0~3 | |||
| PC-38 | Temps de fonctionnement d'un API simple, étape 10 | Réglage d'usine | 0.0s (h) | |
| Plage de réglage | 0.0s (h) ~6553.5s (h) | |||
| PC-39 | Temps de décélération d'un API simple, étape 10 | Réglage d'usine | 0 | |
| Plage de réglage | 0~3 | |||
| PC-40 | Temps de fonctionnement d'un API simple, étape 11 | Réglage d'usine | 0.0s (h) | |
| Plage de réglage | 0.0s (h) ~6553.5s (h) | |||
| PC-41 | Temps de décélération d'un API simple, étape 11 | Réglage d'usine | 0 | |
| Plage de réglage 0~3 | ||||
| PC-42 | Temps de fonctionnement d'un API simple, étape 12 | Réglage d'usine | 0.0s (h) | |
| Plage de réglage | 0.0s (h) ~6553.5s (h) | |||
| PC-43 | Temps de décélération d'un API simple, étape 12 | Réglage d'usine | 0 | |
| Plage de réglage | 0~3 | |||
| PC-44 | Temps de fonctionnement d'un API simple, étape 13 | Réglage d'usine | 0.0s (h) | |
| Plage de réglage | 0.0s (h) ~6553.5s (h) | |||
| PC-45 | Temps de décélération d'un API simple, étape 13 | Réglage d'usine | 0 | |
| Plage de réglage | 0~3 | |||
| PC-46 | Temps de fonctionnement d'un API simple, étape 14 | Réglage d'usine | 0.0s (h) | |
| Plage de réglage | 0.0s (h) ~6553.5s (h) | |||
| PC-47 | Temps de décélération d'un API simple, étape 14 | Réglage d'usine | 0 | |
| Plage de réglage | 0~3 | |||
| PC-48 | Temps de fonctionnement d'un API simple, étape 15 | Réglage d'usine | 0.0s (h) | |
| Plage de réglage | 0.0s (h) ~6553.5s (h) | |||
| PC-49 | Temps de décélération d'un API simple, étape 15 | Réglage d'usine | 0 | |
| Plage de réglage | 0~3 | |||
| PC-50 | Unité de temps de fonctionnement d'un API simple | Réglage d'usine | 0 | |
| Plage de réglage | 0 | S (s) | ||
| 1 | h (h) | |||
| PC-5 | Instruction multi-étapes 0 dans un mode donné | Réglage d'usine | 0 | |
| Plage de réglage | 0 | Code de fonction donné FC-00 | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Impulsion | |||
| 5 | PID | |||
| 6 | A la fréquence donnée (P0-08), UPTOWN peut être édité | |||
Ce paramètre spécifie la commande multi-0 pour le canal donné.
Pour l'instruction 0 multi-étapes, PC-00 peut en outre être sélectionné, et il existe de nombreuses autres options vous permettant de choisir facilement entre plusieurs courtes instructions données dans d'autres modes commutables. Lorsque plusieurs sources de fréquence ou instructions sont aussi simples que les sources de fréquence API, vous pouvez facilement basculer entre elles pour réaliser la source de fréquence.
Paramètres de communication du groupe PD.
Voir le protocole VFD.
Groupe PE. Codes de fonction définis par l'utilisateur
| PE-00 | Code de fonction utilisateur 0 | Réglage d'usine | P0.00 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-01 | Code de fonction utilisateur 1 | Réglage d'usine | P0.02 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-02 | Code de fonction utilisateur 2 | Réglage d'usine | P0.03 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-03 | Code de fonction utilisateur 3 | Réglage d'usine | P0.07 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-04 | Code de fonction utilisateur 4 | Réglage d'usine | P0.08 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-05 | Code de fonction utilisateur 5 | Réglage d'usine | P0.17 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-06 | Code de fonction utilisateur 6 | Réglage d'usine | P0.18 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-07 | Code de fonction utilisateur 7 | Réglage d'usine | P3.00 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-08 | Code de fonction utilisateur 8 | Réglage d'usine | P3.01 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-09 | Code de fonction utilisateur 9 | Réglage d'usine | P4.00 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-10 | Code de fonction utilisateur 10 | Réglage d'usine | P4.01 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-11 | Code de fonction utilisateur 11 | Réglage d'usine | P4.02 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-12 | Code de fonction utilisateur 12 | Réglage d'usine | P5.04 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-13 | Code de fonction utilisateur 13 | Réglage d'usine | P5.07 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-14 | Code de fonction utilisateur 14 | Réglage d'usine | P6.00 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-15 | Code de fonction utilisateur 15 | Réglage d'usine | P6.10 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-16 | Code de fonction utilisateur 16 | Réglage d'usine | P0.00 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-17 | Code de fonction utilisateur 17 | Réglage d'usine | P0.00 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-18 | Code de fonction utilisateur 18 | Réglage d'usine | P0.00 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-19 | Code de fonction utilisateur 19 | Réglage d'usine | P0.00 | |
| Plage de réglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| Code de fonction utilisateur 20 | Réglage d'usine | P0.00 | ||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| PE-20 | Plage deréglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | ||
| PE-21 | Code de fonction utilisateur 21 | Réglage d'usine | P0.00 | |
| Plage deréglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-22 | Code de fonction utilisateur 22 | Réglage d'usine | P0.00 | |
| Plage deréglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-23 | Code de fonction utilisateur 23 | Réglage d'usine | P0.00 | |
| Plage deréglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-24 | Code de fonction utilisateur 24 | Réglage d'usine | P0.00 | |
| Plage deréglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-25 | Code de fonction utilisateur 25 | Réglage d'usine | P0.00 | |
| Plage deréglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-26 | Code de fonction utilisateur 26 | Réglage d'usine | P0.00 | |
| Plage deréglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-27 | Code de fonction utilisateur 27 | Réglage d'usine | P0.00 | |
| Plage deréglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-28 | Code de fonction utilisateur 28 | Réglage d'usine | P0.00 | |
| Plage deréglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-29 | Code de fonction utilisateur 29 | Réglage d'usine | P0.00 | |
| Plage deréglage | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
Ces codes de fonction sont des ensembles de paramètres personnalisés.
Les utilisateurs peuvent collecter tous les codes de fonction VFD et les sélections de paramètres requis dans un groupe PE en tant que paramètres définis par l'utilisateur pour visualisation et modification faciles.
Le groupe PE fournit jusqu'à 30 paramètres personnalisés. Si le paramètre affiché du groupe PE est P0.00, cela signifie que le code fonction utilisateur est vide. Après être entré dans le mode des paramètres personnalisés, les codes de fonction d'affichage PE-00 \~ PE-31 sont définis dans le même ordre que les codes de fonction du groupe PE. Passez à P0-00.
Groupe PP. Mot de passe de l'utilisateur
| PP-00 | Mot de passe de l'utilisateur | Réglage d'usine | |
| Plage de réglage | 0~65535 | ||
La définition d'un nombre différent de zéro dans PP-00 active la fonction de protection par mot de passe. La prochaine fois que vous entrez dans le menu, vous devez entrer le mot de passe correct, sinon vous ne pourrez pas visualiser ni modifier les paramètres de la fonction. Mémorisez le mot de passe défini par l'utilisateur.
En réglant PP-00 sur 00000, vous pouvez effacer le réglage du mot de passe de l'utilisateur. La fonction de protection par mot de passe ne fonctionnera alors pas.
| PP-01 | Restaurez les paramètres par défaut | Réglages d'usine | 0 | |
| Plage de réglage | 0 | Ne restaurez pas | ||
| 1 | Restauration des réglages d;usine en plus des paramètres moteur | |||
| 2 | Suppression des enregistrements | |||
| 4 | Paramètres utilisateur actuels de sauvegarde | |||
| 501 | Récupération des paramètres de sauvegarde utilisateur | |||
Lorsque PP-01 est défini sur 1, la plupart des paramètres de fonction de l'onduleur sont réinitialisés aux paramètres d'usine par défaut, mais les paramètres du moteur ne sont pas restaurés, tels que point décimal de référence de fréquence (P0-22), registre d'erreur, temps de fonctionnement total (P7-09 ), le temps de mise sous tension cumulé (P7-13) et la consommation électrique totale (P7-14).
2. Suppression des enregistrements
Efface les informations sur les erreurs de l'entraînement, le temps de fonctionnement total (P7-09), le temps de marche cumulé (P7-13), la consommation électrique totale (P7-14).
Fait référence aux paramètres de sauvegarde actuels définis par l'utilisateur. La valeur actuelle de tous les paramètres de la fonction de configuration est rechargée pour permettre à l'utilisateur d'ajuster plus facilement les paramètres après la récupération.
- Récupérez les paramètres de sauvegarde utilisateur qui ont été précédemment sauvegardés, restaurez la sauvegarde en définissant PP-01 pour les quatre paramètres de copie de sauvegarde.
| PP-02 | Propriétés du mode d'affichage des paramètres de la fonction | Réglages d'usine | 11 | |
| Plage de réglage | Chiffre des unités | Sélection d'affichage de groupe U | ||
| 0 | Pas d'affichage | |||
| 1 | Affichage | |||
| Dizaines | Sélection d'affichage de groupe A | |||
| 0 | Pas d'affichage | |||
| 1 | Affichage | |||
| PP-02 | Propriétés du mode d'affichage des paramètres de la fonction | Réglages d'usine | 11 | |
| Plage de réglage | Chiffre des unités | Sélection d'affichage de groupe U | ||
| 0 | Pas d'affichage | |||
| 1 | Affichage | |||
| Dizaines Sélection d'affichage de groupe A | ||||
| 0 | Pas d'affichage | |||
| 1 | Affichage | |||
Le réglage du mode d'affichage des paramètres est principalement utilisé pour visualiser les différents modes d'agencement des paramètres de fonction en fonction des besoins actuels de l'utilisateur. Il existe trois modes d'affichage des paramètres.
| Nom | Description |
| Mode des paramètres de fonction | Affichage séquentiel des paramètres de l'onduleur, groupes de paramètres P0 ~ PF, A0 ~ AF, U0 ~ UF en séquence |
| Mode des paramètres définis par l'utilisateur | Affichage personnalisé des paramètres de fonction ajustés (on peut ajuster jusqu'à 32 paramètres), le groupe d'utilisateurs FE définit la fonction du paramètre affiché |
| Mode de changement des paramètres par l'utilisateur | Passage à des paramètres incompatibles avec les paramètres de fonction réglés en usine. |
Lorsque le paramètre de sélection du mode d'affichage des caractères (PP-03) apparaît, vous pouvez, à ce moment, passer à d'autres paramètres avec la touche QSM, et la valeur par défaut est la seule fonction affichée.
Code pour chaque mode d'affichage des paramètres :
| Mode d'affichage des paramètres | Écran d'affichage |
| Mode des paramètres de fonction | -hASF |
| Mode des paramètres définis par l'utilisateur | -USEr |
| Mode de changement des paramètres par l'utilisateur | --F-- |
VFD propose deux modes d'affichage des paramètres personnalisés : paramètres définis par l'utilisateur et paramètres modifiables par l'utilisateur. Le jeu de paramètres personnalisés est utilisé pour définir les paramètres du groupe PE. Jusqu'à 32 paramètres peuvent être sélectionnés. Ces paramètres sont additionnés et les clients peuvent facilement déboguer.
Mode de paramètre défini par l'utilisateur : ajoutez le symbole u par défaut avant le code de fonction personnalisé, par exemple : P1-00, en mode paramètre défini par l'utilisateur, l'écran d'affichage permet aux utilisateurs de modifier les paramètres et uP1-00 permet aux utilisateurs et aux fabricants de modifier les paramètres d'usine. Les modifications apportées aux paramètres utilisateur aident les clients à examiner les modifications cumulatives des paramètres et à détecter les problèmes sur site.
L'utilisateur modifie le mode de paramétrage avant d'adapter le code fonction en ajoutant le symbole c par défaut.
Par exemple : pour modifier P1-00 en mode utilisateur, affichez-le sous la forme cP1-00.
| PP-04 | Modification du code de fonction | Réglages d'usine | 0 | |
| Plage de | 0 | pcut être modifiée | ||
| réglage | 1 | ne peut pas être modifiée | ||
Pour éviter le risque de modification incorrecte des paramètres de fonction, lorsque le code de fonction est mis à 0, tous les codes de fonction peuvent être modifiés ; lorsqu'il est réglé sur 1, tous les codes de fonction peuvent uniquement être visualisés et ne peuvent pas être modifiés.
Groupe A0 Contrôle de couple et limites de paramètres
| A0-00 | Sélection du mode de contrôle vitesse / couple | Réglages d'usine | 0 | |
| Plage de réglage | 0 | contrôle de vitesse | ||
| 1 | contrôle de couple | |||
Sélection du mode de contrôle de l'onduleur : contrôle de vitesse ou contrôle de couple
Les bornes numériques multifonctions DI VFD ont deux fonctions liées au contrôle de couple : contrôle de couple désactivé (Fonction 29) et une fonction pour basculer entre contrôle de vitesse et contrôle de couple (46). Ces deux bornes maintiennent la connexion A0-00 pour basculer entre le contrôle de vitesse et contrôle de couple.
Lorsque la borne du commutateur de contrôle de vitesse/couple est inactive, le mode de contrôle est déterminé par A0-00. Lorsque le commutateur de contrôle de vitesse / couple est actif, le mode de contrôle est la valeur de négation de A0-00.
Chaque fois que la borne d'interdiction de couple est active, l'onduleur contrôle la vitesse constante.
| A0-01 | Sélection de la source de réglage de contrôle de couple | Réglages d'usine | 0 | |
| Plage de réglage | 0 | réglages numériques (A0-03) | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | paramètres d'impulsion | |||
| 5 | paramètres de communication | |||
| 6 | MIN (AI1, AI2) | |||
| 7 | MAX (AI1, AI2) | |||
| A0-03 | Réglage numérique du couple en mode de contrôle de couple | Réglages d'usine | 0 | |
| Plage de réglage | -200.0%~200.0% | |||
Le réglage de couple A0-01 sert à la sélection de la source, il existe au total 8 modes de réglage de couple.
Réglage du couple avec une valeur relative qui correspond à 100,0% du couple nominal de l'onduleur. La plage de réglage -200,0% à 200,0%, indique que le couple maximum de l'onduleur est 2 fois plus grand que le couple nominal d'entraînement.
Lorsque le couple est réglé entre 1 et 7, la communication, l'entrée analogique, l'entrée d'impulsions 100 % correspond à A0-03.
| A0-05 | Fréquence maximale positive de réglage de couple | Réglages d'usine | 50.00Hz |
| Plage de réglage | 0.00Hz~fréquence maximale (P0-10) | ||
| A0-06 | Fréquence maximale négative de réglage de couple | Réglages d'usine | 50.00Hz |
| Plage de réglage | 0.00Hz~fréquence maximale (P0-10) | ||
Définit le contrôle de couple et la fréquence de fonctionnement maximale d'entraînement en avant ou en arrière.
Dans le contrôle du couple d'entraînement, si le couple de charge est inférieur au couple de sortie du moteur, la vitesse du moteur continuera d'augmenter. Pour éviter les accidents dans le système mécanique pendant la marche en roue libre, il doit être limité au couple maximal de contrôle du régime moteur.
| A0-07 | Temps d'accélération pour contrôle du couple | Réglages d'usine | 0.00s | |
| Plage de réglage | 0.00s~65000s | |||
| A0-08 | Temps d'arrêt pour contrôle du couple | Réglages d'usine | 0.00s | |
| Plage de réglage | 0.00s~65000s | |||
Mode de contrôle de couple. La différence entre le couple de sortie du moteur et le couple de charge détermine la vitesse et le taux de variation de la charge du moteur, il est donc possible de modifier rapidement la vitesse du moteur provoquant du bruit ou une contrainte mécanique excessive et d'autres problèmes. En réglant le temps d'accélération et de décélération, vous pouvez contrôler la vitesse du moteur en la modifiant progressivement.
Cependant, pour le couple, une réponse rapide est requise, le réglage du temps d'accélération et de décélération du contrôle de couple est de 0,00 s. Par exemple : deux moteurs connectés en permanence entraînent la même charge. Pour s'assurer que la charge est uniformément répartie, ils utilisent le mode de contrôle de vitesse et utilisent le commutateur de contrôle de couple de sortie réel pour régler le pilote pour le couple maître comme esclave. Le couple maître définit le couple comme esclave, cette fois le couple nécessaire pour suivre le temps rapide d'accélération et de décélération du contrôle de couple esclave par la machine principale est de 0,00s.
Groupe A2. Deuxième moteur.
VFD peut basculer entre les deux moteurs. Alignez les deux moteurs selon la plaque signalétique du moteur. Réglez séparément les paramètres du moteur comme il convient. Sélectionnez le contrôle U/f ou le contrôle vectoriel. Les paramètres de l'encodeur peuvent être réglés séparément par contrôle U/f ou contrôle vectoriel.
Le code fonction du groupe A2 correspond au moteur 2.
En même temps, tous les paramètres du groupe A2, définissant et utilisant le contenu, sont cohérents avec les paramètres du premier moteur et ne seront pas repris ici. L'utilisateur peut utiliser la description des paramètres liés au premier moteur.
| A2-00 | Sélection du type de moteur | Réglages d'usine | 0 | |
| Plage de réglage | 0 | 0 : Moteur ordinaire à induction | ||
| 1 | 1 : Moteurs à induction à fréquence variable | |||
| A2-01 | Puissance nominale | Réglages d'usine | Dépend du modèle | |
| Plage de réglage | 0.1kW~1000.0kW | |||
| A2-02 | Tension nominale | Réglages d'usine | Dépend du modèle | |
| Plage de réglage | 1V~400V | |||
| A2-03 | Courant nominal | Réglages d'usine | Dépend du modèle | |
| Plage de réglage | 0.01A~655.35A (puissance de convertisseur >55kW)0.1A~6553.5A (puissance de convertisseur >55kW) | |||
| A2-04 | Fréquence nominale | Réglages d'usine | Dépend du modèle | |
| Plage de réglage | 0.01Hz~ fréquence maximale | |||
| A2-05 | Vitesse nominale | Réglages d'usine | Dépend du modèle | |
| Plage de réglage | 1rpm~65535rpm | |||
| A2-06 | Résistance statorique d'un moteur à induction | Réglages d'usine | Dépend du modèle | |
| Plage de réglage - | 0.001Ω~65.535Ω (puissance de convertisseur <=55kW)0.0001Ω~6.5535Ω (puissance de convertisseur >55kW) | |||
| A2-07 | Résistance du rotor d'un moteur à induction | Réglages d'usine | Dépend du modèle | |
| Plage de réglage | 0.001Ω~65.535Ω(puissance de convertisseur >55kW)0.0001Ω~6.5535Ω(puissance de convertisseur >55kW) | |||
| A2-08 | Réactance inductive de fuite d'un moteur à induction | Réglages d'usine | Dépend du modèle | |
| Plage de réglage | 0.01mH~655.35mH (puissance de convertisseur >55kW)0.001mH~65.535mH (puissance de convertisseur >55kW) | |||
| A2-09 | Réactance mutuelle inductive d'un moteur à induction | Réglages d'usine | Dépend du modèle | |
| Plage de réglage | 0.1mH~6553.5mI(puissance de convertisseur >55kW)0.01mH~655.35mI | |||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| (puissance de convertisseur >55kW) | ||||
| A2-10 | Courant à vide d'un moteur à induction | Réglages d'usine | Dépend du modèle | |
| Plage de réglage | 0.01A~A2-03(puissance de convertisseur <=55kW)0.1A~A2-03 (puissance de convertisseur >55kW) | |||
| A2-27 | Numéro de ligne du encodeur | Réglages d'usine | 1024 | |
| Plage de réglage | 1~65535 | |||
| A2-28 | Sélection de rétroaction de vitesse | Réglages d'usine | 0 | |
| Plage de réglage | 0 | Encodeur incremental ABZ | ||
| 1 | Réservé | |||
| 2 | Transformateur rotatif | |||
| A2-29 | Sélection de PG de rétroaction de vitesse | Réglages d'usine | 0 | |
| Plage de réglage | 0 | PG locale | ||
| 1 | PG locale | |||
| 2 | Entrée d'impulsion (DI5) | |||
| A2-30 | Séquence de phase AB du encodeur incremental ABZ | Réglages d'usine | 0 | |
| Plage de réglage | 0 | En avant | ||
| 1 | En arrière | |||
| A2-34 | Nombre de paires de pôles d'un transformateur rotatif | Réglages d'usine | 1 | |
| Plage de réglage | 1~65535 | |||
| A2-36 | Temps de détection de déconnexion PG en rétroaction de vitesse | Réglages d'usine | 0.0s | |
| Plage de réglage | 0.0 : aucune action 0.1s~10.0s | |||
| A2-37 | Sélection de réglage | Réglages d'usine | 0 | |
| Plage de réglage | 0 | 0 : Pas d'action | ||
| 1 | 1 : Tuning statique d'un moteur asynchrone | |||
| 2 | 2 : Réglage complet du moteur asynchrone | |||
| A2-38 | Gain proportionnel de boucle de vitesse 1 | Réglages d'usine | 30 | |
| Plage de réglage | 1~100 | |||
| A2-39 | Temps d'intégration de la boucle de vitesse 1 | Réglages d'usine | 0.50s | |
| Plage de réglage | 0.01s~10.00s | |||
| A2-40 | Fréquence de commutation 1 | Réglages d'usine | 5.00Hz | |
| Plage de réglage | 0.00~A2-43 | |||
| A2-41 | Gain proportionnel de boucle de vitesse 2 | Réglages d'usine | 15 | |
| Plage de réglage | 0~100 | |||
| A2-42 | Temps d'intégration de la boucle de vitesse 2 | Réglages d'usine | 1.00s | |
| Plage de réglage | 0.01s~10.00s | |||
| A2-43 | Fréquence de commutation 2 | Réglages d'usine | 10.00Hz | |
| Plage de réglage | A2-40 ~ fréquence max. de sortie | |||
| A2-44 | Gain de glissement de contrôle vectoriel | Réglages d'usine | 100% | |
| Plage de réglage | 50%~200% | |||
| A2-45 | Constante de temps pour le filtre de boucle de vitesse | Réglages d'usine | 0.000s | |
| Plage de réglage | 0.000s~0.100s | |||
| A2-46 | Contrôle vectoriel du gain d'excitation | Réglages d'usine | 64 | |
| Plage de réglage | 0~200 | |||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| A2-47 | Source de limite supérieure en mode contrôle de vitesse | Réglages d'usine | 0 | |
| Plage de réglage | 0 | Réglage A2-48 | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Réglage d'impulsion | |||
| 5 | Paramètres de communication | |||
| 6 | MIN (AI1, AI2) | |||
| 7 | MAX (AI1, AI2) | |||
| A2-48 | Réglage numérique du couple en mode contrôle de vitesse | Réglages d'usine | 150.0% | |
| Plage de réglage | 0.0%~200.0% | |||
| A2-51 | Gain proportionnel d'excitation | Réglages d'usine | 2000 | |
| Plage de réglage | 0~20000 | |||
| A2-52 | Gain intégral d'excitation | Réglages d'usine | 1300 | |
| Plage de réglage | 0~20000 | |||
| A2-53 | Gain proportionnel de contrôle de couple | Réglages d'usine | 2000 | |
| Plage de réglage | 0~20000 | |||
| A2-54 | Gain d'intégration de réglage de couple | Réglages d'usine | 1300 | |
| Plage de réglage | 0~20000 | |||
| A2-55 | Propriétés du segment d'intégration de la boucle de vitesse | Réglages d'usine | 0 | |
| Plage de réglage | Chiffre des unités : séparation d'intégration0 : interdiction1 : autorisation | |||
| A2-61 | Mode de contrôle du moteur 2 | Réglages d'usine | 0 | |
| Plage de réglage | 0 | Pas de contrôle du capteur de vitesse vectorielle (SVC) | ||
| 1 | contrôle du capteur de vitesse vectorielle (FVC) | |||
| 2 | Contrôle U/f | |||
| A2-62 | Temps d'accélération / décelération du moteur 2 | Réglages d'usine | 0 | |
| Plage de réglage | 0 | 0 : identique au moteur 1 | ||
| 1 | 1 : Temps d'accélération / décelération 1 | |||
| 2 | 2 : Temps d'accélération / décelération 2 | |||
| 3 | 3 : Temps d'accélération / décelération 3 | |||
| 4 | 4 : Temps d'accélération / décelération 4 | |||
| A2-63 | Augmentation du couple moteur 2 | Réglages d'usine | Dépend du modèle | |
| Plage de réglage | 0,0% : augmentation automatique de couple 0,1% ~ 30,0% | |||
| A2-65 | Gain d'amortissement des oscillations moteur 2 | Réglages d'usine | Dépend du modèle | |
| Plage de réglage | 0~100 | |||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| A5-00 | Interrupteur du seuil supérieur de fréquence DPWM | Réglage d'usine | 12.00Hz |
| Plage de réglage | 0.00Hz~15Hz | ||
Uniquement valable pour le contrôle U/f. La perte de commutation avec une modulation continue en 7 étapes est importante, mais provoque un faible courant d'ondulation.
À l'inverse, le mode de débogage intermittent en 5 étapes a de faibles pertes de commutation et une ondulation de courant élevée, mais le moteur peut devenir instable à haute fréquence. Une modification est nécessaire.
Pour un fonctionnement instable de l'onduleur, voir le code de fonction P3-11, pour la perte de commutation et l'échauffement de l'onduleur, voir le code de fonction P0-15.
| A5-01 | Modulation PWM | Réglage d'usine | 0 | |
| Plage de réglage | 0 | modulation asynchrone | ||
| 1 | modulation synchrone | |||
Uniquement valable pour le contrôle U/f. La modulation synchrone signifie la conversion de la fréquence porteuse, lorsque la fréquence de sortie varie linéairement pour fournir un rapport inchangé (coefficient de porteuse), généralement lors de l'utilisation de fréquences de sortie plus élevées, en faveur de la qualité de la tension de sortie.
À une fréquence de sortie inférieure (100 Hz ou moins), la modulation synchrone n'est généralement pas nécessaire car le rapport entre la fréquence porteuse et la fréquence de sortie est relativement élevé, l'un des avantages les plus évidents de la modulation asynchrone.
La modulation synchrone ne fonctionne que lorsque la fréquence de fonctionnement est supérieure à 85 Hz et que le mode de modulation asynchrone est réglé en dessous de cette fréquence.
| A5-02 | Sélection de mode de compensation de zone morte | Réglage d'usine | 1 | |
| Plage de réglage | 0 | pas de compensation | ||
| 1 | mode de compensation n°1 | |||
| 2 | mode de compensation n°2 | |||
Généralement, il n'est pas nécessaire de modifier ce paramètre. Ce n'est que lorsque la qualité de la forme d'onde de la tension de sortie a des exigences particulières ou qu'il y a d'autres oscillations anormales du moteur, que vous pouvez essayer de choisir parmi différents modèles de compensation. Le mode 2 est recommandé pour la compensation de puissance élevée.
| A5-03 | Profondeur aléatoire PWM | Réglage d'usine | 0 | |
| Plage de réglage | 0 | interdiction | ||
| - 1~10 | profondeur aléatoire de la fréquence porteuse | |||
Le réglage du PWM aléatoire peut réduire le bruit monotone et dur du moteur et peut aider à réduire les interférences électromagnétiques externes.
Lorsque la profondeur aléatoire PWM est réglée sur 0, PWM aléatoire est inactif. Réglage du PWM aléatoire avec différentes profondeurs donnera des résultats différents.
| A5-04 | Limite de courant rapide | Réglage d'usine | 1 | |
| Plage de réglage | 0 | 0 : inactif | ||
| 1 | actif | |||
L'activation de la fonction de limite de courant rapide peut réduire l'erreur maximale de surintensité du convertisseur de fréquence qui peut se produire. L'onduleur assurera un fonctionnement ininterrompu. Si l'onduleur fonctionne pendant une longue période avec une limitation de courant rapide, il peut surchauffer et d'autres dommages peuvent survenir, ce n'est donc pas autorisé.
L'onduleur fonctionnera à une limite de courant rapide jusqu'à ce qu'une alarme d'erreur de limite Err40 se produise, indiquant que l'onduleur est surchargé et s'arrêtera.
| A5-05 | Détection continue de compensation | Réglages d'usine | 5 |
| Plage de réglage | 0~100 | ||
Un réglage trop élevé de la compensation de détection de courant dans la commande d'entraînement peut dégrader les performances. En principe, aucune modification n'est requise.
| A5-06 | Seuil de chute de tension | Réglages d'usine | 100% |
| Plage de réglage | 60.0%~140.0% | ||
Pour régler la valeur de tension de l'erreur de sous-tension Err09, différents niveaux de tension de 100,0 % de l'onduleur correspondent à différents points de tension, à savoir : 220V monophasé ou triphasé 220V : 200 V triphasé 380 V : 350 V.
| A5-07 | Optimisation SVC | Réglage d'usine | 1 | |
| Plage de réglage | 0 | pas d'optimisation | ||
| 1 | mode d'optimisation n°1 | |||
| 2 | mode d'optimisation n°2 | |||
Mode d'optimisation n°1 Exigences élevées en matière de linéarité du contrôle de couple. Mode d'optimisation n°2 Utilisez des exigences de stabilité à vitesse plus élevée.
| A5-08 | Réglage du temps mort | Réglage d'usinc | 150% |
| Plage de réglage | 100%~200% | ||
Groupe A6. Réglage de la courbe AI
| A6-00 | Valeur minimale de la courbe AI en entrée 4 | Réglage d'usine | 0.00V |
| Plage de réglage | -10.00V~A6-02 | ||
| A6-01 | Réglage de la valeur minimale de la courbe AI en entrée 4 | Réglage d'usine | 0.0% |
| Plage de réglage | -100.0%~100.0% | ||
| A6-02 | Inflexion n°1 de la courbe AI à l'entrée 4 | Réglage d'usine | 3.00V |
| Plage de réglage | A6-00~A6-04 | ||
| A6-03 | Réglage de l'inflexion n°1 de la courbe AI à l'entrée 4 | Réglage d'usine | 30.0% |
| Plage de réglage | -100.0%~100.0% | ||
| A6-04 | Inflexion n°2 de la courbe AI à l'entrée 4 | Réglage d'usine | 6.00V |
| Plage de réglage | A6-02~A6-06 | ||
| A6-05 | Réglage de l'inflexion n°2 de la courbe AI à l'entrée 4 | Réglage d'usine | 60.0% |
| Plage de réglage | -100.0%~100.0% | ||
| A6-06 | Valeur maximale de la courbe AI en entrée 4 | Réglage d'usine | 10.00V |
| Plage de réglage | A6-06~10.00V | ||
| A6-07 | Réglage de la valeur maximale de la courbe AI en entrée 4 | Réglage d'usine | 100.0% |
| Plage de réglage | -100.0%~100.0% | ||
| A6-08 | Valeur minimale de la courbe AI en entrée 5 | Réglage d'usine | 0.00V |
| Plage de réglage | -10.00V~A6-10 | ||
| A6-09 | Réglage de la valeur minimale de la courbe AI en entrée 5 | Réglage d'usine | |
| Plage de réglage | -100.0%~100.0% | ||
| A6-10 | Inflexion n°1 de la courbe AI à l'entrée 5 | Réglage d'usine | |
| Plage de réglage | A6-08~A6-12 | ||
| A6-11 | Réglage de l'inflexion n°1 de la courbe AI à l'entrée 5 | Réglage d'usine | |
| Plage de réglage | -100.0%~100.0% | ||
| Inflexion n°2 de la courbe AI à l'entrée 5 | Réglage 6.00V | ||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| A6-12 | d'usine | ||
| Plage de réglage | A6-10~A6-14 | ||
| A6-13 | Réglage de l'inflexion n°2 de la courbe AI à l'entrée 5 | Réglage d'usine | 60.0% |
| Plage de réglage | -100.0%~100.0% | ||
| A6-14 | Valeur maximale de la courbe AI en entrée 5 | Réglage d'usine | 10.00V |
| Plage de réglage | A6-14~10.00V | ||
| A6-15 | Réglage de la valeur maximale de la courbe AI en entrée 5 | Réglage d'usine | 100.0% |
| Plage de réglage | -100.0%~100.0% | ||
Les courbes 4 et 5 sont similaires à la courbe 1, mais la ligne de courbe 1 à 3 est une ligne droite, tandis que les courbes 4 et 5 sont des courbes à 4 points qui peuvent fournir une conformité plus flexible. Fig. 6-32 montre le schéma de câblage des courbes 4 et 5.
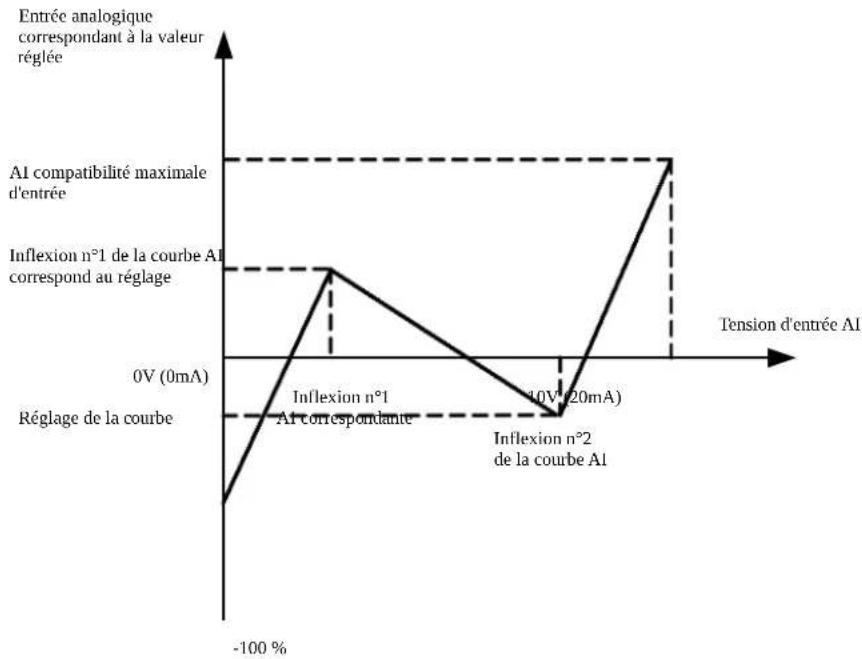
line
| Tension d'entrée AI | Inflation n°1 de la courbe AI correspond au réglage | Inflation n°2 de la courbe AI | | ------------------- | -------------------------------------------------- | ----------------------------- | | -100% | - | - | | 0V (0mA) | 0 | - | | 10V (20mA) | 0 | 0 | | >10V | 1 | 1 |Fig. 6-32. Schéma de connections des courbes 4 et 5
Lors de la détermination des courbes 4 et 5, il est à noter que la tension d'entrée minimale de la courbe, l'inflexion 1, l'inflexion 2 et l'inflexion maximale doivent augmenter successivement.
La sélection de la courbe AI P33 est utilisée pour déterminer comment sélectionner 5 courbes pour l'entrée analogique AI1 \~ AI3.
| A6-24 | Saut pour AI1 | Réglage d'usine 0.0% | |
| Plage de réglage | -100.0%~100.0% | ||
| A6-25 | Plage de saut pour AI1 | Réglage d'usine | |
| Plage de réglage | 0.0%~100.0% | ||
| A6-26 | Saut pour AI2 | Réglage d'usine | |
| Plage de réglage | -100.0%~100.0% | ||
| A6-27 | Plage de saut pour AI2 | Réglage d'usine | |
| Plage de réglage | 0.0%~100.0% | ||
| A6-28 | Saut pour AI3 | Réglage d'usine 0.0% | |
| Plage de réglage | -100.0%~100.0% | ||
| A6-29 | Plage de saut pour AI3 | Réglage d'usine 0.5% | |
| Plage de réglage | 0.0%~100.0% | ||
L'entrée analogique VFD AI1 \~ AI3, possède la fonction de dépassement du point de consigne.
La fonction de saut signifie que lorsque la consigne analogique saute en haut et en bas, à mesure que l'intervalle change, la valeur analogique correspondant à la consigne reste constante sur le saut.
Exemple : Lorsque la tension d'entrée analogique AI1 fluctue à 5,00 V, la plage d'oscillation est de 4,90 V à 5,10 V. La valeur d'entrée minimale pour AI1 est de 0,00 V, ce qui correspond à 0,0%, et la valeur d'entrée maximale est de 10,00 V, ce qui correspond à 100%, alors la tension AI1 est détectée dans la plage de 49,0% \~ 51,0%
Réglez le point de saut A11 A6-24 sur 50,0%, réglez l'amplitude de saut A11 A6-25 sur 1,0%, puis définissez la fonction de saut de l'entrée correspondante sur l'entrée A11 ci-dessus, ce qui donne le réglage A11 50,0%. Convertissez A11 sur une entrée stable pour éliminer les fluctuations.
Groupe A7. Fonctions programmables par l'utilisateur
Voir le manuel complémentaire « Carte de pilote programmable par l'utilisateur ».
Groupe CA. Calibrage des entrées / sorties analogiques
| AC-00 | Tension mesurée AI1 n° 1 | Réglage d'usine Calibrage | |
| Plage de réglage | 0.500V~4.000V | ||
| AC-01 | Tension affichée AI1 n° 1 | Réglage d'usine Calibrage | |
| Plage de réglage | 0.500V~4.000V | ||
| AC-02 | Tension mesurée AI1 n° 2 | Réglage d'usine Calibrage | |
| Plage de réglage | 6.000V~9.999V | ||
| AC-03 | Tension affichée AI1 n° 2 | Réglage d'usine Calibrage | |
| Plage de réglage | 6.000V~9.999V | ||
| AC-04 | Tension mesurée AI2 n° 1 | Réglage d'usine Calibrage | |
| Plage de réglage | 0.500V~4.000V | ||
| AC-05 | Tension affichée AI2 n° 1 | Réglage d'usine Calibrage | |
| Plage de réglage | 0.500V~4.000V | ||
| AC-06 | Tension mesurée AI2 n° 2 | Réglage d'usine | Calibrage |
| Plage de réglage | 6.000V~9.999V | ||
| AC-07 | Tension affichée AI2 n° 2 | Réglage d'usine | |
| Plage de réglage | -9.999V~10.000V | ||
| AC-08 | Tension mesurée AI3 n° 1 | Réglage d'usine | |
| Plage de réglage | -9.999V~10.000V | ||
| AC-09 | Tension affichée AI3 n° 1 | Réglage d'usine | |
| Plage de réglage_ | -9.999V~10.000V | ||
| AC-10 | Tension mesurée AI3 n° 2 | Réglage d'usine Calibrage | |
| Plage de réglage | -9.999V~10.000V | ||
| AC-11 | Tension affichée AI3 n° 2 | Réglage d'usine Calibrage | |
| Plage de réglage | -9.999V~10.000V | ||
Ce code de fonction est utilisé pour corriger l'entrée analogique Al pour éliminer l'effet du décalage et du gain d'entrée Al. Les paramètres de la fonction de groupe ont été calibrés et réinitialisés aux valeurs d'usine après calibrage. Habituellement, pas besoin de le corriger.
Pour mesurer la tension, vous pouvez, par exemple, utiliser un multimètre pour mesurer la tension réelle. La valeur de tension échantillonnée est affichée. Voir AI du groupe U0 avant correction de tension (U0-21, U0-22, U0 - 23).
Lors de la correction des deux valeurs de tension d'entrée sur chaque port d'entrée AI, utilisez un multimètre pour mesurer la valeur du groupe et lisez la valeur du groupe U0. Après avoir entré le code de fonction avec précision, l'onduleur corrigera automatiquement le décalage du zéro et le gain AI.
| AC-12 | Tension ciblée AO 1 n° 1 | Réglage d'usine Calibrage | |
| Plage de réglage | 0.500V~4.000V | ||
| AC-13 | Tension mesurée AO 1 n° 1 | Réglage d'usine Calibrage | |
| Plage de réglage | 0.500V~4.000V | ||
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| AC-14 | Tension ciblée AO1 n° 2 | Réglage d'usine Calibrage | |
| Plage de réglage | 6.000V~9.999V | ||
| AC-15 | Tension mesurée AO1 n° 2 | Réglage d'usine Calibrage | |
| Plage de réglage | 6.000V~9.999V | ||
| AC-16 | Tension ciblée AO2 n° 1 | Réglage d'usine Calibrage | |
| Plage de réglage | 0.500V~4.000V | ||
| AC-17 | Tension mesurée AO2 n° 1 | Réglage d'usine Calibrage | |
| Plage de réglage | 0.500V~4.000V | ||
| AC-18 | Tension ciblée AO2 n° 2 | Réglage d'usine Calibrage | |
| Plage de réglage | 6.000V~9.999V | ||
| AC-19 | Tension mesurée AO2 n° 2 | Réglage d'usine Calibrage | |
| Plage de réglage | 6.000V~9.999V | ||
Ce code de fonction est utilisé pour calibrer l'entrée analogique AO afin d'éliminer les effets de décalage et de gain de l'entrée AO. Les paramètres de la fonction de groupe ont été calibrés et remis aux valeurs d'usine après calibrage. Généralement, pas besoin de le corriger.
La tension cible fait référence à la valeur théorique de la tension de sortie de l'onduleur.
La tension mesurée fait référence à la valeur réelle de la tension de sortie mesurée avec un multimètre et d'autres instruments.
Groupe U0. Surveillance du fonctionnement de l'onduleur
Le groupe de paramètres U0 est utilisé pour surveiller les informations sur l'état de fonctionnement de l'onduleur. L'utilisateur peut visualiser l'écran pour faciliter le débogage sur site ou surveiller la valeur de paramètre définie sur le moniteur du PC. Dans ce cas, U0-00 \~ U0-31 est arrêté et les paramètres de surveillance P7-03 et P7-04 sont définis.
Veuillez vous référer au code de fonction du paramètre spécifique, au nom du paramètre et à son unité minimale dans le Tableau 6-1.
Tableau 6-1 Paramètres du groupe U0
| Code de fonction | Nom du paramètre | Unité |
| U0-00 | Fréquence de fonctionnement (Hz) | 0.01Hz |
| U0-01 | Réglage de la fréquence (Hz) | 0.01Hz |
| U0-02 | Tension à la barre (V) | 0.1V |
| U0-03 | Tension de sortie (V) | 1V |
| U0-04 | Courant de sortie (A) | 0.01A |
| U0-05 | Puissance de sortie (kW) | 0.1kW |
| U0-06 | Couple de sortie (%) | 0.1% |
| U0-07 | État de l'entrée DI | 1 |
| U0-08 | État de sortie DO | 1 |
| U0-09 | Tension AI1 (V) | 0.01V |
| U0-10 | Tension AI2 (V) | 0.01V |
| U0-11 | Tension AI3 (V) | 0.01V |
| U0-12 | Comptage des valeurs | 1 |
| U0-13 | Valeur de longueur | 1 |
| U0-14 | Indicateur de vitesse de charge | 1 |
| U0-15 | Réglage PID | 1 |
| U0-16 | Rétroaction PID | 1 |
| U0-17 | Étape API | 1 |
| U0-18 | Fréquence d'impulsion d'entrée (Hz) | 0.01kHz |
| U0-19 | Vitesse de rétroaction (0,1 Hz) | 0.1Hz |
| U0-20 | Temps de travail restant | 0.1Min |
| U0-21 | Tension AI1 avant calibration | 0.001V |
| U0-22 | Tension AI2 avant calibration | 0.001V |
| U0-23 | Tension AI3 avant calibration | 0.001V |
| U0-24 | Vitesse linéaire | 1m/Min |
| U0-25 | Temps actuel d'activation | 1Min |
| U0-26 | Temps actuel de fonctionnement | 0.1Min |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| U0-27 | Fréquence d'impulsion d'entrée | 1Hz |
| U0-28 | Paramètres de communication | 0.01% |
| U0-29 | Vitesse de rétroaction de l'encodeur | 0.01Hz |
| U0-30 | Affichage de la fréquence principale X | 0.01Hz |
| Code de fonction | Nom du paramètre Unité | |
| U0-31 | Affichage de la fréquence auxiliaire Y | 0.01Hz |
| U0-32 | Affichage de n'importe quelle valeur de l'adresse mémoire | 1 |
| U0-34 | Température du moteur | 1°C |
| U0-35 | Couple cible (%) | 0.1% |
| U0-36 | Emplacement de la rotation | 1 |
| U0-37 | Angle facteur de puissance | 0.1 |
| U0-39 | Tension cible U/f séparée | 1V |
| U0-40 | Tension de sortie U/f séparée | 1V |
| U0-41 | Visualisation de l'état de l'entrée DI | 1 |
| U0-42 | Visualisation de l'état de sortie DO | 1 |
| U0-43 | Visualisation du 1er état de fonctionnement DI (Fonction 01 - Fonction 40) | 1 |
| U0-44 | Visualisation du 2ème état de fonctionnement DI (Fonction 41 - Fonction 80) | 1 |
| U0-45 | Fréquence de réglage (%) | 0 |
| U0-59 | Fréquence de fonctionnement (%) | 0.01% |
| U0-60 | État du convertisseur de fréquence | 0.01% |
| U0-61 | Affichage de la fréquence auxiliaire Y | 1 |
| U0-62 | Affichage de n'importe quelle valeur de l'adresse mémoire | 1 |
Chapitre 7 CEM (compatibilité électromagnétique)
7.1 Définition
La compatibilité électromagnétique signifie que l'équipement électrique fonctionne dans un environnement d'interférence électromagnétique, mais ne perturbe pas l'environnement électromagnétique et remplit sa fonction de manière stable.
7.2 Conformité aux normes CEM
Selon les exigences de la norme nationale GB/T12668.3, le convertisseur de fréquence doit répondre aux exigences sous deux aspects : les interférences électromagnétiques et l'immunité aux interférences électromagnétiques.
Nos produits actuels répondent aux dernières normes internationales : IEC / EN61800-3 : 2004 (Systèmes d'entraînement électrique à vitesse variable Partie 3 : Exigences CEM et méthodes de test spécifiques), qui correspond à la norme nationale GB/T12668.3.
La norme IEC / EN61800-3 vérifie le convertisseur de fréquence principalement pour deux aspects : l'émission d'interférences électromagnétiques et l'immunité aux interférences électromagnétiques. L'interférence électromagnétique est testée pour les perturbations rayonnées, conduites et harmoniques émises par le convertisseur de fréquence (exigences pour le convertisseur de fréquence à usage civil). L'immunité aux interférences électromagnétiques est testée pour la résistance à la conduction, au rayonnement, aux surtensions, aux groupes d'impulsions changant rapidement, aux décharges électrostatiques et à l'immunité des bornes d'alimentation à faible courant (les tests spécifiques incluent : 1. test d'immunité aux creux, interruptions et changements de tension d'entrée ; 2. test d'immunité à l'encoche de commutation 3. test d'immunité d'entrée harmonique 4. test de variation de fréquence d'entrée 5. test de déséquilibre de tension d'entrée 6. test de fluctuation de tension d'entrée. Le test est effectué conformément aux exigences strictes de la norme IEC / EN61800-3 et nous vous demandons d'installer nos produits conformément aux instructions données au point 7.3, ils présentent une bonne compatibilité électromagnétique dans l'environnement industriel général.
7.3 Conseils concernant CEM
7.3.1 Influence des interférences harmoniques : les interférences harmoniques de l'alimentation électrique endommageront l'onduleur, il est donc recommandé d'installer des presse-étoupes d'entrée CA là où la qualité du réseau électrique est mauvaise.
7.3.2 Interférences électromagnétiques et précautions d'installation : Il existe deux types d'interférences électromagnétiques. Une de ces interférences est le bruit de l'onduleur dans le bruit électromagnétique environnant et l'autre sont les interférences produite par l'onduleur dans les périphériques.
Précautions d'installation :
1) Les conducteurs de mise à la terre des produits électriques tels que les onduleurs doivent être correctement mis à la terre ;
2) Ne posez pas en parallèle les lignes d'alimentation d'entrée et de sortie de l'onduleur ou les lignes de signal à faible courant (telles que les circuits de commande) en parallèle. Si possible, posez-les verticalement;
3) Il est recommandé d'utiliser un fil blindé ou une ligne électrique dans un tuyau en acier comme ligne de sortie du convertisseur de fréquence, une mise à la terre fiable de la couche de blindage doit être assurée. Pour les équipements avec des interférences, il est suggéré d'utiliser un câble de commande à double torsade et d'assurer une mise à la terre du blindage fiable.
4) Si la longueur du câble moteur est supérieure à 100 m, installez un filtre de sortie ou un presse-étoupe électrique.
7.3.3 Méthodes de traitement des interférences générées par les dispositifs électromagnétiques périphériques de l'onduleur : En règle générale, l'effet électromagnétique sur un onduleur est causé par l'installation de plusieurs relais, contacteurs ou freins électromagnétiques à proximité de l'onduleur. Si l'onduleur tombe en panne à cause des interférences, les méthodes recommandées sont les suivantes :
1) Équipez l'appareil générant les interférences d'un parasurtenseur ;
2) Installez le filtre sur la borne d'entrée de l'onduleur selon les exigences du paragraphe 7.3.6 ;
3) La ligne de signal de commande et le fil du circuit de détection doivent être blindés et avoir une mise à la terre fiable.
7.3.4 Comment traiter les interférences générées par les périphériques de l'onduleur : il existe deux types de bruit, à savoir le bruit rayonné de l'onduleur et le bruit conduit de l'onduleur. Ces deux interférences conduisent à une induction électromagnétique ou électrostatique dans les appareils électriques périphériques et provoquent alors une défaillance des équipements. Compte tenu de ces différentes interférences, les solutions suivantes peuvent être envisagées :
1) Le signal des instruments, récepteurs et capteurs de mesure est généralement faible. S'ils se trouvent à proximité du convertisseur de fréquence ou dans la même armoire de commande, l'onduleur est sensible aux interférences et aux pannes. Il est suggéré d'adopter les solutions suivantes : placez l'onduleur le plus loin possible des sources d'interférences ; ne posez pas de câbles de signal ou d'alimentation en parallèle, ne les regroupez pas ; protégez la ligne de signal et la ligne d'alimentation pour assurer une mise à la terre fiable ; installez le noyau de ferrite
(couvrant la plage de fréquences 30 \~ 1000 MHz) du côté sortie du convertisseur de fréquence et
tournez 2 ou 3 fois dans le même sens. Dans les cas plus graves, des filtres de sortie CEM peuvent être installés ;
2) Les interférences par conduction se produiront lorsque les appareils en question ont la même puissance que l'onduleur. Si les interférences ne peuvent pas être éliminées par la méthode ci-dessus, installez un filtre CEM entre l'onduleur et l'alimentation (voir 7.3.6 pour la sélection du modèle);
3) Une mise à la terre indépendante des périphériques peut éliminer les interférences causées par le courant de fuite du conducteur de mise à la terre de l'onduleur.
7.3.5 Courant de fuite et procédure. Lors de l'utilisation d'un onduleur, il existe deux formes de courant de fuite : le courant de fuite à la terre et le courant de fuite entre les lignes.
1) Facteurs influençant le courant de fuite à la terre et solutions :
Il y a une capacité dissipée entre le conducteur et la terre. Plus la capacité de fuite est grande, plus le courant de fuite est important, donc réduisez la distance entre l'onduleur et le moteur pour réduire la capacité de fuite. Plus la fréquence porteuse est élevée, plus le courant de fuite est important, donc abaissez la fréquence porteuse pour réduire le courant de fuite. Cependant, la réduction de la fréquence porteuse augmentera le bruit du moteur. Notez qu'un moyen efficace de résoudre le problème de courant de fuite
c'est l'installation de presse-étoupe. Le courant de fuite augmente à mesure que le courant de boucle augmente, donc plus la puissance du moteur est élevée, plus le courant de fuite correspondant est important.
2) Facteurs influençant le courant de fuite entre les lignes et solution :
Il y a une capacité dissipée entre le câblage de sortie de l'onduleur. Si le courant du circuit contient des harmoniques plus élevées, il peut résonner et générer un courant de fuite. Si le relais thermique est utilisé pendant ce temps, il peut ne pas fonctionner correctement.
La solution est de réduire la fréquence porteuse ou d'installer un presse-étoupe de sortie. Lors de l'utilisation de l'onduleur, il est recommandé de ne pas installer de relais thermique entre l'onduleur et le moteur, mais d'utiliser la fonction de protection contre les surintensités de l'onduleur.
7.3.6 Précautions d'installation du filtre d'entrée CEM sur la borne d'entrée d'alimentation
1) Remarque : Veuillez respecter strictement la valeur nominale lorsque vous utilisez le filtre. Comme le filtre est un appareil électrique de classe I, le boîtier métallique du filtre doit avoir un bon contact avec le métal de l'armoire d'installation, et une bonne continuité électrique est requise, sinon il y a un risque de choc électrique et il peut également y avoir une influence sérieuse sur la CEM ;
2) Selon le test CEM, la borne PE du filtre et l'onduleur doivent être connectées à la même terre, sinon la CEM sera gravement affectée ;
3) Si possible, le filtre doit être installé près de la borne d'entrée d'alimentation de l'onduleur.
Chapitre 8 Diagnostic des erreurs et mesures correctives
8.1 Avertissements d'erreur et remèdes
Le convertisseur de fréquence dispose de 24 fonctions d'avertissement et de protection. Après qu'une erreur se soit produite, la fonction de sécurité commence à fonctionner et l'onduleur désactive la sortie. Le relais de défaut du convertisseur de fréquence commence à établir le contact et affiche le code de l'erreur sur l'écran d'affichage de l'onduleur. Avant que les utilisateurs ne demandent de l'aide, ils peuvent effectuer une analyse conformément aux instructions de ce chapitre pour rechercher la cause du défaut et trouver une solution. Si les raisons sont indiquées dans une case en pointillés, veuillez contacter le service et contacter directement le représentant du fabricant du convertisseur de fréquence ou directement notre société.
| Nom de l'erreur | Protection de l'onduleur |
| Erreur affichée | Err01 |
| Cause de l'erreur | 1.ourt-circuit dans le circuit de sortie de l'onduleur2.ils trop longs entre le moteur et l'onduleur3.urchauffe du module4.esserrage de l'enroulement interne de l'onduleur5.ysfonctionnement du panneau de commande principal6.ysfonctionnement du module pilote7.ysfonctionnement du module d'inversion |
| Solution | 1.orrigez le défaut du dispositif périphérique2.nstallez un presse-étoupe électrique ou un filtre de sortie3.érifiez si le conduit d'air n'est pas bouché et que le ventilateur fonctionne normalement, éliminez les irrégularités4.nsérez complètement tous les fils de connexion5.emandez de l'assistance technique6.emandez de l'assistance technique7.cmandez de l'assistance technique |
| Nom de l'erreur | Surintensité lors de l'accélération |
| Erreur affichée | Err02 |
| Cause de l'erreur | 1. Effet d'avalanche à la masse ou court-circuit du circuit de sortie de l'onduleur2. La méthode de contrôle est vectorielle et les paramètres n'ont pas été définis3. Temps d'accélération trop court4. Augmentation de couple manuelle ou courbe V/F incorrecte5. Basse tension6. Régime moteur démarré7. Charge de choc lors du processus d'accélération8. Ce modèle de l'onduleur a une faible classe de puissance |
| Solution | 1. orrigez le défaut du dispositif périphérique2. érifiez les paramètres du moteur3. ugmentez le temps d'accélération4. aramétrez le renforcement de couple manuel ou la courbe V/F5. justez la tension à la plage normale6. |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| émarrez le suivi de la vitesse ou redémarrez le moteur après l'arrêt7.upprimez la charge de choc8.électionnez un convertisseur de fréquence avec une classe de puissance supérieure |
| Nom de l'erreur Surin | ensité lors de l'accélération |
| Erreur affichée | Err03 |
| Cause de l'erreur | 1.ise à la terre ou court-circuit de la boucle de sortie de l'onduleur2.a méthode de contrôle est vectorielle et les paramètres n'ont pas été définis3.emps d'accélération trop court4.asse tension5.harge de choc lors de l'accélération6.ucune unité de freinage ou résistance de freinage n'est installée |
| Solution | 1.orrigez le défaut du dispositif périphérique2.érifiez les paramètres du moteur3.ugmentez le temps d'accélération4.justez la tension à la plage normale5.upprimez la charge de choc6.nstallez l'unité de freinage et la résistance de freinage |
| Nom de l'erreur | Surintensité à vitesse constante |
| Erreur affichée Err04 | |
| Cause de l'erreur | 1.asse ou court-circuit du circuit de sortie du convertisseur de fréquence2.a méthode de contrôle est vectorielle et les paramètres n'ont pas été définis3.asse tension4.harge de choc lors de l'accélération5.e modèle de l'onduleur a une faible classe de puissance |
| Solution | 1.orrigez le défaut du dispositif périphérique2.érifiez les paramètres du moteur3.justez la tension à la plage normale4.upprimez la charge de choc5.électionnez un convertisseur de fréquence avec une classe de puissance supérieure |
| Nom de l'erreur | Surintensité lors de l'accélération |
| Erreur affichée | Err05 |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| Cause de l'erreur | 1.asse tension d'entrée2.orce externe entraîne le moteur pendant l'accélération3.emps d'accélération trop court4.'unité de freinage et la résistance de freinage ne sont pas installées |
| Solution | 1.justez la tension à la plage normale2.limincz la force externe ou installez une résistance de freinage3.ugmentez le temps d'accélération4.stallez l'unité de freinage et la résistance de freinage |
| Nom de l'erreur | Surtension à la décélération |
| Erreur affichée | Err06 |
| Cause de l'erreur | 1. Haute tension d'entrée2. Force externe entraîne le moteur pendant la décélération3. Temps de décélération trop court4. L'unité de freinage et la résistance de freinage ne sont pas installées |
| Solution | 1.justez la tension à la plage normale2.liminez toute force externe ou installez une résistance de freinage3.ugmentez le temps de décélération4.nstallez l'unité de freinage et la résistance de freinage |
| Nom de l'erreur | Surtension à vitesse constante |
| Erreur affichée Err07 | |
| Cause de l'erreur | 1. aute tension d'entrée2. orce externe entraîne le moteur pendant la décélération |
| Solution | 1.justez la tension à la plage normale2.limínez toute force externe ou installez une résistance de freinage |
| Nom de l'erreur | Panne de courant de contrôle |
| Erreur affichée | Err08 |
| Cause de l'erreur | 1. Tension d'entrée n'est pas dans la plage spécifiée |
| Solution | 1. Ajustez la tension à la plage spécifiée |
| Nom de l'erreur | Tension trop basse |
| Erreur affichée | Err09 |
| Cause de l'erreur | 1.anne de courant momentanée2.a tension à la borne d'entrée de l'onduleur est en dehors de la plage spécifiée3.ension incorrecte à la barre collective4.ysfonctionnement du pont redresseur et du tampon de résistance5.ysfonctionnement du module pilote6.ysfonctionnement du panneau de commande |
| Solution | 1.éinitialisez l'erreur2.justez la tension à la plage normale3.emandez de l'assistance technique |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| 4.emandez de l'assistance technique5.emandez de l'assistance technique6.emandez de l'assistance technique |
| Nom de l'erreur | Surcharge de l'onduleur |
| Erreur affichée Err10 | |
| Cause de l'erreur | 1.harge excessive ou rotor bloqué2.e modèle de l'onduleur a une faible classe de puissance |
| Solution | 1.éduisez la charge, vérifiez le moteur et la machine2.électionnez un onduleur avec une classe de puissance supérieure |
| Nom de l'erreur | Surcharge du moteur |
| Erreur affichée | Err11 |
| Cause de l'erreur | 1.aramètre P9-01 de protection du moteur mal réglé2.harge excessive ou rotor bloqué3.e modèle de l'onduleur a une faible classe de puissance |
| Solution | 1.églez correctement le paramètre2.éduisez la charge, vérifiez le moteur et la machine3.électionnez un convertisseur de fréquence avec une classe de puissance supérieure |
| Nom de l'erreur | Phase d'entrée par défaut |
| Erreur affichée | Err12 |
| Cause de l'erreur | 1. uissance d'entrée triphasée anormale2. ysfonctionnement du module pilote3. ysfonctionnement de la protection contre la foudre4. ysfonctionnement du panneau de commande principal |
| Solution | 1. érifiez et corrigez les problèmes du circuit périphérique2. emandez de l'assistance technique3. emandez de l'assistance technique4. emandez de l'assistance technique |
| Nom de l'erreur | Phase de sortie par défaut |
| Erreur affichée Err13 | |
| Cause de l'erreur | 1. auvaise connexion entre l'onduleur et le moteur2. ortie triphasée de l'onduleur déséquilibrée pendant que le moteur tourne3. ysfonctionnement du module pilote4. odule incorrect |
| Solution | 1. orrigez le défaut du dispositif périphérique2. érifiez que le bobinage triphasé est correct et éliminez l'erreur |
3. emandez de l'assistance technique
4. emandez de l'assistance technique
Nom de l'erreur Surchauffe du module
Erreur affichée Err14
1. empérature ambiante trop haute
2. onduit d'air obstrué
3. entilateur défectueux
- hermistance du module défectueuse
5. odule convertisseur défectueux
1. éduisez la température ambiante
2. ettoyez le ventilateur
3. emplacez le ventilateur
4. emplacez la thermistance
5. emplacez le module du convertisseur
Solution
Nom de l'erreur Erreur des périphériques
Erreur affichée Err15
- ignal d'entrée d'erreur externe via la borne DI multifonction
2. ignal d'entrée d'erreur externe via la fonction entrée/sortie virtuelle
Solution
1. éinitialisez
2. éinitialisez
Nom de l'erreur Erreur de communication
Erreur affichée Err16
1. 'ordinateur hôte ne fonctionne pas correctement
2. igne de communication incorrecte
- arte d'extension de communication P0-28 mal réglée
4. églage incorrect du paramètre de communication du groupe PD
-
érifiez le câblage de l'ordinateur hôte
-
érifiez le câblage de la ligne de communication
-
éfinissez correctement le type de carte d'extension de communication
églez correctement les paramètres de communication
Nom de l'erreur Erreur de contacteur
Erreur affichée Err17
Cause de l'erreur 1. ysfonctionnement du module pilote et d'alimentation
2. ysfonctionnement du contacteur
Solution 1. emplacez le pilote ou le module d'alimentation
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| 2. emplacez le contacteur |
| Nom de l'erreur | Erreur de détection de courant |
| Erreur affichée Err18 | |
| Cause de l'erreur | 1.ysfonctionnement de l'appareil halla2.ysfonctionnement du module pilote |
| Solution | 1.emplacez l'appareil halla2.emplacez le module pilote |
| Nom de l'erreur | Erreur de réglage fin du moteur |
| Erreur affichée Err19 | |
| Cause de l'erreur | 1.e paramètre du moteur n'est pas défini conformément à la plaque signalétique2.a limite de temps pour détermination des paramètres dépassée |
| Solution | 1.églez les paramètres corrects du moteur en fonction de la plaque signalétique2.érifiez le câble entre l'onduleur et le moteur |
| Nom de l'erreur | Erreur de disque codé |
| Erreur affichée | Err20 |
| Cause de l'erreur | 1.e modèle d'encodeur ne correspond pas2.auvaise connexion de l'encodeur3.'encodeur est défectueux4.arte PG incorrecte |
| Solution | 1.éfinissez le modèle d'encodeur en fonction de la situation réelle2.éparez l'erreur de câblage3.changez l'encodeur4.changez la carte PG |
| Nom de l'erreur | Erreur de lecture et d'enregistrement EEPROM |
| Erreur affichée | Err21 |
| Cause de l'erreur | 1. Mémoire EEPROM défectueuse |
| Solution | 1. Changer le panneau de commande principal |
| Nom de l'erreur | Erreur matérielle de l'onduleur |
| Erreur affichée | Err22 |
| Cause de l'erreur | 1.résence de surtension2.résence de surintensité |
| Solution | 1.uivez les instructions de l'erreur de surtension2.uivez les instructions de l'erreur de surintensité |
| Nom de l'erreur | Court-circuit à la terre |
| Erreur affichée | Err23 |
| Cause de l'erreur | 1. Court-circuit du moteur à la terre |
| Solution | 1. Remplacez le câble ou le moteur |
| Nom de l'erreur | Erreur de temps de fonctionnement accumulé |
| Erreur affichée | Err26 |
| Cause de l'erreur | 1. Le temps de fonctionnement accumulé a atteint la valeur définie |
| Solution | 1. Utilisez la fonction d'initialisation des paramètres pour supprimer les informations enregistrées |
| Nom de l'erreur | Erreur 1 définie par l'utilisateur |
| Erreur affichée Err27 | |
| Cause de l'erreur | 1.ignal d'entrée de l'erreur 1 définie par l'utilisateur via la borne multifonction DI2.ignal d'entrée de l'erreur 1 définie par l'utilisateur via la fonction entrée/sortie virtuelle |
| Solution | 1.éinitialisez2.éinitialisez |
| Nom de l'erreur | Erreur 2 définie par l'utilisateur |
| Erreur affichée | Err28 |
| Cause de l'erreur | 1.ignal d'entrée de l'erreur 2 définie par l'utilisateur via la borne multifonction DI2.ignal d'entrée de l'erreur 2 définie par l'utilisateur via la fonction entrée/sortie virtuelle |
| Solution | 1.éinitialisez2.éinitialisez |
| Nom de l'erreur | Erreur d'atteint du temps accumulé d'activation |
| Erreur affichée | Err29 |
| Cause de l'erreur | 1. Le temps d'activation accumulé a atteint la valeur définie |
| Solution | 1. Utilisez la fonction d'initialisation des paramètres pour supprimer les informations enregistrées |
| Nom de l'erreur | Erreur de non-chargement |
| Erreur affichée Err30 | |
| Cause de l'erreur | 1. Le courant de fonctionnement du convertisseur de fréquence est <P9-64 |
| Solution | 1. Vérifiez que la charge n'est pas séparée et que les réglages des paramètres P9-64, P9-65 correspondent aux conditions réelles de fonctionnement. |
| Nom de l'erreur | Erreur de perte de rétroaction PID pendant le fonctionnement |
| Erreur affichée | Err31 |
| Cause de l'erreur | 1. Rétroaction PID est inférieur à la valeur définie de PA-26 |
| Solution | 1. Vérifiez le signal de rétroaction PID ou réglez PA-26 sur la valeur appropriée. |
| Nom de l'erreur | Erreur de surintensité cycle après cycle |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| Erreur affichée | Err40 |
| Cause de l'erreur | 1.harge excessive ou rotor bloqué2.e modèle de l'onduleur a une faible classe de puissance |
| Solution | 1.éduisez la charge, vérifiez le moteur et la machine2.électionnez un onduleur avec une classe de puissance supérieure |
| Nom de l'erreur | Erreur de commutateur de moteur pendant que l'onduleur fonctionne |
| Erreur affichée | Err41 |
| Cause de l'erreur | 1. Modifiez la sélection actuelle du moteur via la borne pendant que l'onduleur fonctionne |
| Solution | 1. Démarrez le moteur après l'arrêt de l'onduleur |
| Nom de l'erreur | Erreur de déviation de vitesse excessive |
| Erreur affichée | Err42 |
| Cause de l'erreur | 1.aramétrage incorrect de l'encodeur2.aramètres non identifiés3.éviation de vitesse trop importante, les réglages des paramètres P9-69, P9-60 sont irrationnels |
| Solution | 1.églez correctement les paramètres de l'encodeur2.ffectuez l'identification des paramètres3.églez les paramètres de détection de manière raisonnable en fonction de la situation réelle |
| Nom de l'erreur | Erreur de vitesse excessive du moteur |
| Erreur affichée | Err43 |
| Cause de l'erreur | 1.aramétrage incorrect de l'encodeur2.aramètres non identifiés3.es réglages des paramètres P9-69, P9-60 sont irrationnels |
| Solution | 1.églez correctement les paramètres de l'encodeur2.-ffectuez l'identification des paramètres3.églez les paramètres de détection de manière raisonnable en fonction de la situation réelle |
| Nom de l'erreur | Erreur de surchauffe du moteur |
| Erreur affichée | Err45 |
| Cause de l'erreur | 1.e câblage du capteur de température n'est pas bien serré2.a température du moteur est trop élevée |
| Solution | 1. Détectez le capteur de la température et corrigez le défaut2. Réduisez la fréquence porteuse ou utilisez d'autres mesures de dissipation thermique pour améliorer la dissipation thermique du moteur |
| Nom de l'erreur | Position de départ incorrecte |
| Erreur affichée | Err51 |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| Cause de l'erreur | 1. Le paramètre du moteur diffère considérablement de la valeur réelle |
| Solution | 1. Assurez-vous que les paramètres du moteur sont corrects, surtout si le réglage du courant nominal est petit. |
8.2 Erreurs fréquentes et leur résolution
Les erreurs suivantes peuvent se produire lors de l'utilisation de l'onduleur. Veuillez voir les méthodes simples suivantes pour les analyser :
Tableau 1-8. Erreurs courantes et procédures
| No | Description de l'erreur | Causes possibles | Solutions |
| 1 | Pas d'affichage à la mise sous tension | Absence de tension ou tension secteur trop faible ; panne du commutateur d'alimentation sur la carte de commande de l'onduleur ; pont redresseur endommagé; résistance tampon de l'onduleur endommagée ; dysfonctionnement du panneau de commande et du clavier ; fils débranchés entre le panneau de commande, la carte de commande et le clavier ; | Vérifiez la puissance d'entrée ; vérifiez la tension sur la barre commune ; retirez et réinsérez le câble plat ; contactez le fabricant pour obtenir de l'aide |
| 2 | Affichage HC (surchauffe) à la mise sous tension | Mauvais contact entre la carte pilote et le panneau de commande ; Les appareils associés sur le panneau de commande sont endommagés ; un court-circuit à la terre du moteur ou du câble du moteur ; erreur d'appareil halla ; tension secteur trop faible. | Retirez et réinsérez le câble plat ; contactez le fabricant pour obtenir de l'aide |
| 3 | Affichage “Err23” à la mise sous tension | Ventilateur endommagé ou bloqué ; court-circuit dans le câblage de la borne de commande périphérique. | Mesurez l'isolement entre le moteur et la ligne de sortie avec un testeur de tension tramegger ; contactez le fabricant pour obtenir de l'aide |
| 4 | Affichage normal à la mise sous tension, affichage « HC » après le fonctionnement et l'arrêt | Réglage de la fréquence porteuse trop élevé ; le ventilateur est endommagé ou le conduit d'air est bouché ; composants internes de l'onduleur sont endommagés (thermocouple ou autre). | Remplacez le ventilateur ; éliminez le court-circuit externe |
| 5 | Alarme fréquente Err14 (surchauffe) | Réglage de la fréquence porteuse trop élevé ; le ventilateur est endommagé ou le conduit d'air est bouché ; composants internes de l'onduleur sont endommagés (thermocouple ou autre). | Réduisez la fréquence porteuse (P0-15); remplacez le ventilateur, nettoyez le conduit d'air; contactez le fabricant pour obtenir de l'aide |
| 6 | Le moteur ne tourne pas après le démarrage de l'onduleur. | Moteur et câbles de moteur; mauvais réglage de paramètres de l'onduleur (paramètres du moteur) ; mauvais contact entre la carte de commande et le panneau de commande ; dysfonctionnement de la carte pilote | Vérifiez le câblage entre l'onduleur et le moteur ; remplacez le moteur ou éliminez un défaut mécanique ; vérifiez et réinitialisez les paramètres du moteur. |
| 7 | Borne DI non active | Réglages de paramètres incorrects ; erreur de signal externe ; Cavalier OP lâche et + 24V ; dysfonctionnement du panneau de commande. | Vérifiez et réinitialisez les paramètres du groupe P4 ; reconnectez la ligne de signal externe ; vérifiez les cavaliers OP et + 24V ; contactez le fabricant pour obtenir de l'aide. |
| 8 | Pas de renforcement de la vitesse du moteur avec contrôle vectoriel en boucle fermée | Erreur d'encodeur ; mauvaise connexion du câblage ou mauvais contact de l'encodeur ; défaillance de la carte PG ; dysfonctionnement du panneau de commande. | Remplacez le disque codé et vérifiez le câblage ; remplacez la carte PG ; recherchez de l'assistance technique. |
| 9 | Alarmes fréquentes de surtension et de surintensité | Réglage incorrect des paramètres du moteur ; mauvais temps d'accélération / décélération ; fluctuation de charge. | Réinitialisez les paramètres du moteur ou réglez le moteur ; réglez le temps d'accélération et de décélération ; contactez le fabricant pour obtenir de l'aide. |
| No | Description de l'erreur | Causes possibles | Solutions |
| 10 | Affichage Err17 à la mise sous tension (ou pendant le fonctionnement) | Le contacteur de démarrage progressif n'est pas fermé ; | Vérifiez que le câble du contacteur n'est pas desserré ; vérifiez le défaut du contacteur ; vérifiez qu'il n'y a pas de défaut sur l'alimentation 24V du contacteur ; demandez de l'aide au fabricant ; |
| 11 | Affichage « ____ »Après la mise sous tension | Les appareils associés sur le panneau de commande sont endommagés ; | Remplacez le panneau de commande ; |
Annexe A : Carte multifonction VFD-PC1
(S'applique aux machines d'une puissance de 3,7 kW et plus)
I. Avant-propos
La carte VFD-PCI est une carte d'extension multifonctionnelle émise par notre société, adaptée à cette série de convertisseurs de fréquence. Elle comprend les ressources suivantes :
| Position | Paramètres Description | |
| Terminal d'entrée | Entrée de signal numérique à 5 broches | |
| Entrée de signal de tension analogique à 1 broche | Prend en charge le signal d'entrée de tension à -10 V ~ 10 V. | |
| Terminal de sortie | Sortie relais de signal à 1 broche | |
| Sortie de signal numérique à 1 broche | ||
| Sortie de signal analogique à 1 broche | ||
| La communication | Interface de communication RS-485 | Prend en charge le protocole de communication Modbus-RTU (détails en Annexe I : VFD - protocole de communication Modbus) |
| Interface de communication CAN | Prend en charge le protocole de communication CANlink |
II. Installation mécanique et descriptions fonctionnelles des bornes de commande
- Méthode d'installation, descriptions fonctionnelles des bornes de commande et descriptions des cavaliers - voir Figure 1, Tableau 1 et Tableau 2 en Annexe 1
1) Installez après l'arrêt complet du convertisseur de fréquence ;
2) Alignez l'interface de la carte d'extension et le trou d'emplacement de la carte multifonction avec le panneau de commande du convertisseur de fréquence ;
3) Fixez avec une vis.
Annexe A : Figure 1 Manière d'installation de la carte multifonction
Annexe A : Descriptions fonctionnelles des bornes de commande
| Catégorie | Symbole de serrage | Nom de la borne | Description fonctionnelle |
| Alimentation | +24V-COM | Raccordement d'une alimentation externe +24V | Fournit une alimentation externe de +24 V, utilisée pour l'alimentation de la borne d'entrée et de sortie numérique, et l'alimentation du capteur externe ; courant max. : 200mA. |
| OP1 | Bornes d'entrée (numérique) d'alimentation | OP1 et « + 24V » sont reliés par le cavalier J8 en usine. En cas d'utilisation de l'alimentation externe OP1, connectez-vous à l'alimentation externe et retirez le cavalier J8. | |
| Entrée analogique | AI3-PGND | Borne d'entrée analogique 3 | Accepte l'entrée d'optoisolateur, l'entrée de tension différentielle et l'entrée de résistance de capteur de températurePlage de la tension d'entrée : CC -10V ~ 10VCapteur de température PT100, PT1000Utilisez interrupteur à molette S1 pour décider de la méthode de saisie, n'utilisez pas différentes fonctions en même temps. |
| Fonctions des bornes d'entrée numérique | DI6-OP1 | Entrée numérique 6 | 1. ptoisolateur : Compatible avec entrée bipolaire2. mpédance d'entrée : 2,4 kΩ3. lage de tension au niveau de l'entrée: 9 ~ 30V |
| DI7-OP1 | Entrée numérique 7 | ||
| DI8-OP1 | Entrée numérique 8 | ||
| DI9-OP1 | Entrée numérique 9 | ||
| DI10-OP1 | Entrée numérique 10 | ||
| Sortie analogique | AO2-GND | Sortie analogique 2 | 1. pécification de la tension de sortie : 0 V ~ 10 V.2. pécification du courant de sortie : 0mV ~ 20mV |
| Sortie numérique | DO2-CME | Sortie numérique 2 | Optoisolateur, plage de tension de sortie à collecteur ouvert bipolaire : 0V ~ 24V; plage de courant de sortie : 0 mA ~ 50 mA.Remarque : la sortie numérique CME1 et l'entrée numérique COM sont isolées en interne, la connexion J7 est une connexion par défaut.Si DO2 doit être alimenté par une source externe, le cavalier J7 doit être retiré. |
| Sortie relais (RELAY2) | PA-PB | Borne normalement fermée | Capacité des contacts de l'entraînement : CA250V, 3A, COSφ = ,4. CC 30 V, 1 A. |
| PA-PC | Borne normalement ouverte | ||
| Communication RS-485 | 485+/485- | Borne d'interface de communication | Bornes de signaux d'entrée et de sortie du protocole de communication Modbus-RTU, entrée isolée. |
| Communication CAN | CANII/CANL | Borne d'interface de communication | Borne d'entrée de communication CANlink, entrée isolée |
Annexe A : Tableau 2 Description des cavaliers
| Cavalier No Description | |
| J3 | Sélection de la sortie AO2 - tension, courant |
| J4 | Sélectionnez la résistance adaptée pour la borne CAN |
| J1 | Sélectionnez la résistance adaptée pour la borne RS485 |
| J7 | Sélectionnez la connexion CME1 |
| J8 | Sélectionnez la connexion OP1 |
| S1 | Sélection des fonctions AI3, PT100, PT1000 |
Annexe B : Instructions pour la carte d'extension IO (VFD-IO1) (carte entrées et sorties supplémentaires)
(S'applique aux machines de toutes les séries)
I. Avant-propos
La carte d'extension IO VFD-IO1 fournit une entrée DI à 3 broches.
II. Installation mécanique et descriptions fonctionnelles des bornes de commande
1. Méthode d'installation et descriptions fonctionnelles des bornes de câblage - voir figure 1 et tableau 1 en annexe 2.
1) Assemblez et démontez une fois le convertisseur de fréquence complètement éteint ;
2) Alignez l'interface de la carte d'extension et le trou d'emplacement de la carte d'extension entrée / sortie avec le panneau de commande de l'onduleur ;
3) Fixez la carte de communication avec la vis comme indiqué sur la figure 1.
Annexe B : Figure 1. Comment installer la carte d'extension VFD-IO1
Descriptions fonctionnelles des fils
Annexe B : Tableau 1 Descriptions fonctionnelles des bornes des fils
| Catégorie | Symbolc de serrage | Nom de la borne | Description fonctionnelle |
| Alimentation | + 24V-COM | Branchement de l'alimentation externe + 24V | Fournit une alimentation externe de +24 V, utilisée pour l'alimentation de fonctionnement de la borne d'entrée et de sortie numérique, et l'alimentation du capteur externe ; courant max. : 200mA. |
| OP2 | Bornes d'entrée (numérique) d'alimentation | Pas de raccordement d'usine de l'alimentation OP2, connectez à une alimentation externe selon les besoins. | |
| Fonctions des bornes d'entrée numérique | DI6-OP2 | Entrée numérique 6 | 1. ptoisolateur : Compatible avec entrée bipolaire2. mpédance d'entrée : DI6, DI7 : 3,3 kΩ, DI8: 2,4 kΩ3. lage de tension au niveau de l'entrée : 9 ~ 30V4. DI6, DI7 sont des bornes d'entrée communes, fréquence d'entrée <100 Hz ; DI8 est une entrée d'impulsion rapide, fréquence d'entrée max.<100kHz. |
| DI7-OP2 | Entrée numérique 7 | ||
| DI8-OP2 | Entrée numérique 8 |
Annexe C : Instructions de la carte d'extension pour l'encodeur
(S'applique à toutes les machines de la série)
I. Avant-propos
Le VFD est équipé d'une carte d'extension pour les encodeurs à usage général (carte PG). En tant qu'accessoire en option, elle est requise pour l'onduleur pour le contrôle vectoriel en boucle fermée. Sélectionnez la carte PG appropriée en fonction de la sortie de l'encodeur. Les modèles spécifiques sont les suivants :
| Accessoires optionnels | Description | Autres |
| VFD-PG1 | Entrée différentielle de la carte PG sans sortie de division de fréquence | Câblage de la borne |
| VFD-PG2 | Carte PG de transformateur rotatif | Prise de bus DB9 |
| VFD-PG3 | Entrée OC de la carte PG, sortie de division de fréquence 1: 1 | Câblage de la borne |
II. Installation mécanique et descriptions des fonctions des bornes de commande
- Méthode d'installation, aspect, spécification et définition du signal au niveau de la borne de câblage - voir figure 1 et tableau 1 en annexe C :
1) Installez et désinstallez la carte PG après l'arrêt complet du convertisseur de fréquence.
2) Connectez le cavalier J3 du panneau de commande avec la carte d'extension via le connecteur FFC à 18 broches (assurez-vous d'une bonne installation et d'un bon encliquetage).
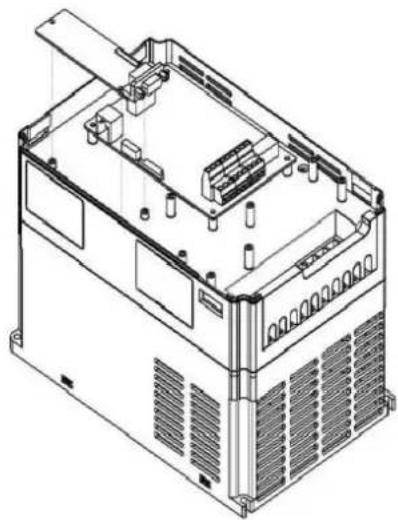
Annexe E : Figure 1. Manière d'installation de la carte d'extension pour l'encodeur
Paramètres de la carte d'extension d'encodeur et détermination des bornes de signal :
Annexe C : Tableau 1 Paramètres de la carte d'extension etdéfinition des bornes designaux
| Carte différentielle PG (VFD-PG1) | ||
| Paramètres VFD-PG1 | ||
| Interface utilisateur | embout chanfreiné | |
| Distance | 3.5mm | |
| Vis simple | ||
| Type plug-in ? | non | |
| Section de fil | 16-26AWG | |
| Vitesse maximale | 500kHz | |
| Amplitude différentielle du signal d'entrée | ≤7V | |
| Identification des fils de signaux VFD-PG1 VFD-PG1 | ||
| No Symbol | e | Description |
| 1 | A+ | signal positif à la sortie A+ de l'encodeur |
| 2 | A- | signal négatif à la sortie A- de l'encodeur |
| 3 | B+ | signal positif à la sortie B+ de l'encodeur |
| 4 | B- | signal négatif à la sortie B- de l'encodeur |
| 5 | Z+ | signal positif à la sortie Z+ de l'encodeur |
| 6 | Z- | signal négatif à la sortie A- de l'encodeur |
| 7 | 5V | fournit une alimentation externe 5V / 100mA |
| 8 | COM | terre |
| 9 | PE | borne de blindage |
| Carte PG du transformateur rotatif (VFD-PG2) | ||
| Paramètres de la carte VFD-PG2 | ||
| Interface utilisateur | contact femelle DB9 | |
| Type plug-in ? oui | ||
| Section de fil | >22AWG | |
| Coefficient de résolution | 12 bits | |
| Fréquence d'entraînement | 10kHz | |
| VRMS 7V | ||
| VP-P | 3.15±27% | |
| Borne VFD-PG2 | ||
| No | - Symbole | Description |
| 1 | EXC1 | Entraînement - du transformateur rotatif |
| 2 | EXC | Entraînement + du transformateur rotatif |
| 3 | SIN | Rétroaction SIN + du transformateur rotatif |
| 4 | SINLO | Rétroaction SIN - du transformateur rotatif |
| 5 | COS | Rétroaction COS + du transformateur rotatif |
| 6-8 | - | - |
| 9 | COSLO | Rétroaction COS - du transformateur rotatif |
Carte OC PG (VFD-PG3)
Paramètres de la carte VFD-PG3
| Interface utilisateur | embout chanfreiné |
| Distance | 3.5mm |
| Vis vis simple | |
| Type plug-in ? non | |
| Section de fil | 16-26AWG |
| Vitesse maximale | 100KHz |
| Borne VFD-PG3 |
No Symbole Description
| 1 | A | sortie codeur A, signal + |
| 2 | B | sortie codeur B, signal - |
| 3 | Z | le signal de sortie Z de l'encodeur |
| 4 | 15V | fournit une alimentation externe 15 V / 100mA |
| 5 | COM | terre |
| 6 | COM | terre |
| 7 | A1 | signal 1 : 1 sur la sortie de rétroaction A de la carte PG |
| 8 | B1 | signal 1 : 1 sur la sortie de rétroaction B de la carte PG |
| 9 | PE | borne de blindage |
Annexe D : Instructions pour la carte d'extension de communication CANlink (VFD-CAN1)
(pour toute la série)
- Avant-propos
La carte a été spécialement développée pour la fonction de communication CANlink de cette série de convertisseurs de fréquence.
II. Installation mécanique et descriptions des fonctions des bornes de commande
- Méthode d'installation annexe B : identique à la carte d'extension IO (VFD-IO1). Pour les descriptions des fonctions des bornes de câblage et les descriptions des cavaliers, voir la figure 1, le tableau 1 et le tableau 2 de l'annexe D.
Annexe D : Tableau 1 Description des fonctions de la borne de commande.
| Catégorie | Symbole de serrage | Nom de la borne | Description fonctionnelle |
| La communicationCAN (CN1) | CANH/CANL | Borne d'interface de communication | Borne d'entrée de communication CAN |
| COM | Masse d'alimentation de communication CAN |
Annexe D : Tableau 2 Description des cavaliers
| No du cavalier | Description |
| J2 | Choisissez la résistance qui correspond à la borne CAN. |
Attention :
Pour protéger le signal de communication des interférences externes, vous pouvez utiliser une paire torsadée comme câble de communication et évitez si possible d'utiliser des câbles en parallèle ;
Annexe E : Instructions de la carte d'extension de communication RS-485 (VFD-TX1)
I. Avant-propos
(pour toute la série)
La carte a été spécialement développée pour la fonction de communication 485 de cette série de convertisseurs de fréquence. Grâce au schéma d'isolation adopté, les paramètres électriques sont conformes aux normes internationales et les utilisateurs peuvent choisir en fonction de leurs besoins de contrôler le fonctionnement du convertisseur et de définir les paramètres via un port série distant ;
II. Installation mécanique et descriptions des fonctions des bornes de commande
- Méthode d'installation - voir annexe B : identique à la carte d'extension IO (VFD-IO1). Pour les descriptions fonctionnelles des bornes de câblage et la définition des connexions commutées, voir les tableaux 1 et 2 de l'annexe E :
Description fonctionnelle de la borne de commande :
Annexe E : Tableau 1
Description de la fonction de la borne de commande.
| Catégorie | Symbole de serrage | Nom de la borne | Description fonctionnelle |
| La communication 485 (CN1) | 485+/485- | Borne d'interface de communication | Borne d'entrée de communication 485, entrée d'isolement |
| CGND | Masse d'alimentation de communication 485 | Puissance isolée |
Description du cavalier :
Annexe E : Tableau 2 Description du
cavalier
| Cavalier No Description | |
| J1 | Choisissez la résistance qui correspond à la borne 485. |
Annexe F : Protocole de communication VFD-Modbus
Cette série d'onduleurs fournit une interface de communication RS232 / RS485 et prend en charge le protocole de communication Modbus. Les utilisateurs peuvent réaliser un contrôle centralisé par PC ou API, définir la commande de démarrage du convertisseur via un protocole de communication, modifier ou lire les paramètres du code de fonction, lire les conditions de fonctionnement et les informations d'erreur de l'onduleur, etc.
I. Contenu du protocole
Le protocole de communication série détermine le contenu des informations transmises et utilise le format de communication série, y compris le format d'interrogation (ou de diffusion) hôte, la méthode de codage hôte telle que le code de fonction d'opération requise, les données de transmission, la vérification d'erreur, etc.. La réponse esclave (dispositif subordonné) prend également la même structure et son contenu comprend la confirmation d'opération, le retour de données et la vérification d'erreur, etc. S'il y a une erreur lors de la réception d'informations par l'esclave ou échec d'exécution d'une action requise par le maître, l'esclave organise le message d'erreur comme une réponse retour au maître.
Mode application : Le commutateur de fréquence accède au réseau de contrôle PC/API de type « un seul maître et plusieurs esclaves » via le bus RS232 / RS485.
Structure du bus
(1) Type d'interface : interface matérielle RS232/RS485
(2) Mode de transmission : série asynchrone et semi-duplex. Quant au maître et à l'esclave, en même temps l'un peut uniquement envoyer les données et l'autre peut uniquement les recevoir. Pendant le processus de communication série asynchrone, les données sont transférées sous forme de message trame par trame.
(3) Structure topologique : système avec un maître et plusieurs esclaves. La plage de réglage de l'adresse esclave va de 1 à 247, et 0 est l'adresse pour la communication de diffusion. L'adresse esclave dans le réseau doit être unique.
Description du protocole
Le protocole de communication de cette série de commutateurs de fréquence est un protocole de communication série asynchrone Modbus maître-esclave et un seul appareil (hôte/maître) dans le réseau peut établir le protocole (appelé « requête/commande »). Les périphériques esclaves ne peuvent répondre à une "requête/commande" hôte qu'en fournissant des données ou en prenant les mesures appropriées en fonction de la « requête/commande » de l'hôte. Le hôte signifie un ordinateur personnel (PC), l'équipement de contrôle industriel ou automate programmable (API) etc. et esclave signifie convertisseur de fréquence de cette série. L'hôte peut non seulement communiquer avec un esclave spécifique séparément, mais également relayer les informations de diffusion à tous les esclaves subordonnés. Dans le cas d'une requête/commande maître accédée séparément, l'esclave doit renvoyer un message (appelé la réponse). Dans le cas de la diffusion des informations émises par le maître, l'esclave n'a pas besoin de répondre par un retour d'information au maître.
Structure des matériaux de communication : Le format des données de communication Modbus pour le convertisseur de frequency de cette série est le suivant :
En mode RTU, la transmission du message commence par une pause d'au moins 3,5 caractères. Temps variable de caractère à la vitesse de transmission du réseau est facile à réaliser (comme le montre la figure T1-T2-T3-T4 ci-dessous). Le premier champ envoyé est l'adresse de l'appareil.
Les caractères de transmission disponibles sont hexadécimaux 0 ... 9, A ... F. Le matériel réseau détecte en permanence le bus réseau, y compris la période d'arrêt. Après avoir reçu le premier champ (champ d'adresse), chaque appareil le décode pour déterminer s'il doit l'envoyer à son propre champ. Après le dernier caractère envoyé, un espace d'au moins 3,5 caractères marque la fin du message. Après la pause, un nouveau message commencera.
L'ensemble de la trame de données constituera un streaming continu. Si le temps de présence dépasse 1,5 caractère avant la fin de la trame, le dispositif de réception rafraîchira le message incomplet et fera supposition que l'octet suivant est le champ d'adresse du nouveau message. De même, si un nouveau message commence à être envoyé dans les 3,5 caractères du message précédent, l'appareil récepteur traitera cela comme un retard par rapport au message précédent et provoquera ensuite une erreur car la valeur finale du champ CRC peut être incorrecte.
Format de trame RTU
| En-tête de trame START | Temps 3,5 de caractère |
| Slave ADR | Adresse : 1~247 |
| Code CMD | 03 : lecture des paramètres esclaves ; 06 : enregistrement des paramètres esclaves |
| DATA (N-1) | Contenu des données : adresse de paramètre de code de fonction, nombre de paramètres de code de fonction, valeur des paramètres de code de fonction, etc. |
| DATA (N-2) | |
| ...... | |
| DATA0 | |
| CRC CIHK (octet plus ancien) | Valeur de détection : valeur CRC |
| CRC CHK (octet plus récent) | |
| END | Temps 3,5 de caractère |
CMD et DONNÉES
Code CMD : 03H, lecture de N mots (maximum 12 mots). Par exemple : L'adresse de démarrage F002 d'un convertisseur de fréquence avec l'adresse esclave 01 lit 2 valeurs consécutivement.
Message CMD hôte
| ADR 01H | |
| CMD 03H | |
| Adresse de début (octet plus ancien) | F0H |
| Adresse de début (octet plus récent) | 02H |
| N° de registre (octet plus ancien) | 00H |
| N° de registre (octet plus récent) | 02H |
| CRC CHK (octet plus ancien) | CRC CHK valeur à calculer |
| CRC CHK (octet plus récent) |
Message de réponse esclave
PD-05 est réglé à 0 :
| ADR 01H | |
| CMD 03H | |
| N° d'octet (octet plus ancien) | 00H |
| N° d'octet (octet plus récent) | 04H |
| Données F002H (octet plus ancien) | 00H |
| Données F002II (octet plus récent) | 00II |
| Données F003H (octet plus ancien) | 00H |
| Données F003H (octet plus récent) | 01H |
| CRC CHK (octet plus récent) | CRC CHK valeur à calculer |
| CRC CHK (octet plus ancien) |
FD-05 est réglé à 1 :
| ADR 01H | |
| CMD 03H | |
| No d'octet | 04H |
| Données F002H (octet plus ancien) | 00H |
| Données F002H (octet plus récent) | 00H |
| Données F003H (octet plus ancien) | 00H |
| Données F003H (octet plus récent) | 01H |
| CRC CHK (octet plus récent) | CRC CHK valeur à calculer |
| CRC CHK (octet plus ancien) |
Code CMD : 06H, faites un enregistrement Par exemple : saisissez 5000 (1388H) dans l'adresse F00AH du convertisseur de fréquence avec l'adresse esclave 02H.
| ADR 02H | |
| CMD 06H | |
| Adresse des données (octet plus ancien) | F0H |
| Adresse des données (octet plus récent) | 0AH |
| Contenu des données (octet plus ancien) | 1311 |
| Contenu des données (octet plus récent) | 8811 |
| CRC CHK (octet plus récent) | CRC CHK valeur à calculer |
| CRC CHK prioritaire |
Message de réponse esclave
| ADR 02H | |
| CMD 06H | |
| Adresse des données (octet plus ancien) | F0H |
| Adresse des données (octet plus récent) | 0AH |
| Contenu des données (octet plus ancien) | 13H |
| Contenu des données (octet plus récent) | 88H |
| CRC CHK (octet plus récent) | CRC CHK valeur à calculer |
| CRC CIJK (octet plus ancien) |
Méthode de vérification - Méthode de vérification CRC : Le CRC (contrôle de redondance cyclique) prend le format de trame RTU, et le message comprend le champ de détection d'erreur basé sur la méthode CRC. Le champ CRC détecte le contenu de l'intégralité du message. Le champ CRC a deux octets, dont une valeur système binaire de 16 bits. Le dispositif de transmission les calcule et les ajoute au message. Le dispositif récepteur recalcule le CRC du message reçu et le compare à la valeur du champ CRC reçu. Si les deux valeurs CRC ne sont pas égales, la transmission est invalide.
Le CRC sauvegarde d'abord 0xFFFF puis appelle un processus pour traiter les octets contigus de 8 bits dans le message et les valeurs dans le registre actuel. Seuls 8 bits de données dans chaque caractère sont valides pour le CRC, et le bit de démarrage, le bit d'arrêt et le bit de parité ne sont pas valides.
Dans le processus de génération de CRC, chaque octet de 8 bits est XORed avec un contenu de registre séparé. Enfin il se décale vers le bit de poids faible et le bit de poids fort est rempli avec la valeur 0. Le LSB est extrait pour la détection. Si LSB a la valeur 1, le registre sera XORed avec le point de consigne. Si LSB vaut 0, pas d'action. L'ensemble du processus est répété 8 fois. Après la fin du dernier bit (huitième bit), l'octet de 8 bits suivant sera XORed avec la valeur actuelle du registre lui-même. La valeur de fin dans le registre est la valeur CRC une fois que tous les octets du message ont été exécutés.
En ajoutant CRC à un message, ajoutez d'abord l'octet de poids faible, puis l'octet de poids fort. Calcul du CRC comme ci-dessous :
unsigned int crc_chk_value (unsigned char *data_value, unsigned char length) {
unsigned int crc_value=0xFFFF;
int i;
while (length--) {
crc_value^=*data_value++;
for (i=0;i<8;i++) {
if (crc_value&0x0001)
{
crc_value=(crc_value>>1)
}
else crc_value=crc_value>>1;
{
}
}
}
return (crc_value) ;
Définition de l'adresse du paramètre de communication
Cette section contient le contenu de la communication pour contrôler le fonctionnement du convertisseur de fréquence, réglages de l'état et les paramètres associés du convertisseur.
Lecture et enregistrement des paramètres du code fonction (certains codes fonction ne sont pas modifiables, peuvent être utilisés ou suivis par le fabriquant).
Règles de marquage de l'adresse du paramètre de code fonction :
La règle d'expression de l'adresse du paramètre avec le numéro de groupe et le marquage du numéro de code fonction qui est l'adresse du paramètre : octet de poids fort : P0 \~ PF (groupe P), A0 \~ AF (groupe A), 70 \~ 7F (groupe U); octet de poids faible : 00 \~ FF,
par exemple : P3-12, l'adresse est exprimée en P30C ;
Remarque : Groupe PF : ne lit pas ni ne modifie pas les paramètres. Groupe U : Lit uniquement mais ne modifie pas les paramètres.
Certains paramètres ne peuvent pas être modifiés pendant le fonctionnement de l'onduleur. Certains paramètres ne peuvent pas être modifiés quel que soit l'état de l'onduleur.
Lors de la modification des paramètres du code de fonction, vous devez également faire attention à la plage de paramètres, à l'unité et aux descriptions associées des paramètres.
De plus, si la mémoire EEPROM sera fréquemment enregistrée, cela raccourcira sa durée de vie. Ainsi, en mode communication, certains codes de fonctions n'ont pas besoin d'être stockés en EEPROM, il suffit de modifier la valeur dans la mémoire RAM.
S'il s'agit d'un paramètre de groupe P, la fonction peut être exécutée par changement de la valeur F plus élevée de l'adresse du code de fonction à 0. S'il s'agit d'un paramètre du groupe A, la fonction peut être exécutée par changement de l'ordre supérieur A de l'adresse du code de fonction à 4. L'adresse du code de fonction correspondant est exprimée comme suit : octet de poids fort : 00 \~ 0F (groupe P), 40 \~ 4F (groupe A); octet de poids faible : 00 \~ FF
Par exemple : le code de fonction P3-12 n'est pas sauvegardé dans l'EEPROM et l'adresse est exprimée en 030C ; le code de fonction A0-05 n'est pas sauvegardé dans l'EEPROM et l'adresse est exprimée en 4005 ; cette adresse peut être enregistrée et lue uniquement en RAM. L'adresse est inactive pendant la lecture. Pour tous les paramètres, vous pouvez également utiliser CMD 07H pour exécuter la fonction.
Certains paramètres ne peuvent pas être modifiés pendant le fonctionnement de l'onduleur. Certains paramètres ne peuvent pas être modifiés quel que soit l'état de l'onduleur. Lors de la modification des paramètres du code de fonction, vous devez également faire attention à la plage de paramètres, à l'unité et aux descriptions associées.
Paramètres d'arrêt / de fonctionnement :
| Adresse de paramètre | Description du paramètre |
| 1000 | * Paramètres de communication (-10000 ~ 10000) (format décimal) |
| 1001 Fréquence de fonctionnement | |
| 1002 Tension à la barre collective | |
| 1003 | Tension de sortie |
| 1004 Courant de sortie | |
| 1005 Puissance de sortie | |
| 1006 | Couple de sortie |
| 1007 Vitesse de fonctionnement | |
| 1008 | Caractère d'entrée DI |
| 1009 | Caractère de sortie DO |
| 100A | Tension AI1 |
| 100B | Tension AI2 |
| 100C Tension AI3 | |
| 100D | Entrée compteur |
| 100E | Entrée du compteur de longueur |
| 100F Vitesse de chargement | |
| 1010 | Paramètres PID |
| 1011 | Rétroaction PID |
| 1012 | Étape API |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| 1013 | Fréquence d'impulsion, unité 0,01 kHz |
| 1014 | Vitesse de rétroaction, unité 0,1 Hz |
| 1015 | Surplus du temps de fonctionnement |
| 1016 | Tension AI1 avant calibration |
| 1017 | Tension AI2 avant calibration |
| 1018 | Tension AI3 avant calibration |
| 1019 | Vitesse linéaire |
| 101A | Temps actuel d'alimentation |
| 101B | Temps actuel de fonctionnement |
| 101C | Fréquence d'impulsion, unité 1Hz |
| 101D | Réglages de communication |
| 101E | Vitesse réelle de rétroaction |
| 101F | Affichage de la fréquence principale X. |
| 1020 | Affichage de la fréquence auxiliaire Y. |
Attention :
La valeur de réglage de la communication est le pourcentage de la valeur relative, à savoir 10000 correspond à 100,00 %,
-10000 correspond à -100,00 %. Pour les données de fréquence, ce pourcentage est le pourcentage de la fréquence relativement la plus élevée (P0-10). Pour les données de dimension de couple, ce pourcentage est P2-10, A2-48, A3-48, A4-48 (la limite supérieure de couple correspond aux premier et deuxième moteurs, respectivement).
L'ordre des commandes à l'onduleur : (enregistrement seulement)
| Adresse du mot de contrôle Fonction du mot de contrôle | |
| 2000 | 0001 : fonctionnement en avant |
| 0002 : fonctionnement en arrière | |
| 0003 : impulsion en avant | |
| 0004 : impulsion en arrière | |
| 0005: arrêt roue libre | |
| 0006 : arrêt avec décélération | |
| 0007 : réinitialisation d'erreur | |
Lecture de l'état de l'onduleur : (lecture seulement)
| Adresse du mot d'état | Fonction du mot d'état |
| 3000 | 0001 : fonctionnement en avant |
| 0002 : fonctionnement en arrière | |
| 0003: arrêt |
Vérifiez le mot de passe de verrouillage des paramètres : (si retour à 8888H, vérifiez le mot de passe)
Adresse de mot de passe Contenu du mot de passe saisi
1F00 ****
| Adresse de la commande | Contenu de la commande |
| 2001 | BIT0 : Contrôle de sortie DO1BIT1 : Contrôle de sortie DO2BIT2 : Contrôle de sortie RELAY1BIT3 : RELAY2 contrôle de sortieBIT4 : Contrôle de sortie FMRBIT5 : VDO1BIT6 :VDO2 BIT7: VDO3BIT8 : |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| VDO4BIT9: VDO5 |
Pilotage de la sortie analogique AO1 : (enregistrement seulement)
| Adresse de la commande Contenu de la commande | |
| 2002 | 0~7FFF signifie 0%~100% |
Pilotage de la sortie analogique AO2 : (enregistrement seulement)
| Adresse de la commande | Contenu de la commande |
| 2003 | 0~7FFF signific 0%~100% |
Contrôle de sortie d'impulsion : (enregistrement seulement)
| Adresse de la commande | Contenu de la commande |
| 2004 | 0~7FFF signifie 0%~100% |
Description de l'erreur de l'onduleur
| Adresse d'erreur | Message d'erreur |
| 8000 | 0000 : pas d'erreur0001 : réservé0002 : surintensité lors de l'accélération0003 : surintensité lors de décélération0004 : surintensité à vitesse constante0005 : surtensionlors de l'accélération0006 : surtension lors de décélération0007 : surtension à vitesse constante0008 : surcharge de la résistance tampon0009 : tension trop basse000A : surcharge de l'onduleur000B : surcharge du moteur000CL : erreur de phase par défaut d'entrée000D : erreur de phase par défaut de sortie000E : surchauffe module000F : erreur périphérique externe0010 : erreur de communication0011 : erreur de communication0012 : erreur de détection de courant0013 : erreur de fonction de réglage du moteur0014 : erreur encodeur/carte PG0015 : erreur de lecture-enregistrement de paramètre0016 : erreur matérielle de l'onduleur0017 : erreur de court-circuit entre le moteur et la terre0018 : réservé0019 : réservé001A : temps d'exécution dépassé001B : erreur définie parl'utilisateur 1001C : erreur définie par l'utilisateur 2001D : délai de mise sous tension001E : pas de charge001F : perte de rétroaction PID pendant le |
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| fonctionnement0028: erreur de temporisation de limite de courant rapide0029 : erreur de commutation du moteur pendant le fonctionnement002A : écart de vitesse surdimensionné002B : surrégime du moteur002D : surchauffe moteur005A : encodeur - réglage du numéro de ligne incorrect005B : pas de connexion avec l'encodeur005C : erreur de position d'origine005E : erreur de rétroaction de vitesse |
| Adresse d'erreur de communication | Description fonctionnelle de l'erreur |
| 8001 | 0000 : pas d'erreur0001 : mot de passe erroné0002 : code de commande erroné0003 : Vérification CRC incorrecte0004 : adresse invalide0005 : paramètre invalide0006 : changement de paramètre invalide0007 : système bloqué0008 : EEPROM en fonctionnement |
Description des paramètres de communication du groupe PD
| Pd-00 | Vitesse de transmission | Réglage d'usine | 6005 |
| Plage de réglage | Unité : débit de transmission MODUBS0: 300BPS1:600BPS2:1200BPS3:2400BPS4:4800BPS5:9600BPS6:19200BPS7:38400BPS8:57600BPS9: 115200BPS | ||
Ce paramètre est utilisé pour définir le taux de transfert de données entre l'ordinateur hôte et l'onduleur. Notez que le débit en transmission de l'ordinateur hôte et du convertisseur de fréquence doit être cohérent. Sinon, la communication ne peut pas avoir lieu. Plus le débit en transmission est élevé, plus la vitesse de communication est rapide.
| Fd-01 | Format des données | Réglage d'usine | 0 |
| Plage de réglage | 0 : pas de vérification : format de données <8, N, 2>1 : vérification paire : format de données <8, N, 1>2 : vérification impaire : format de données <8, O, 1>3 : pas de vérification : format de données <8-N-1> | ||
Le format des données de l'ordinateur hôte et de l'onduleur doit être cohérent. Sinon, la communication ne peut pas avoir lieu.
| Pd-02 | Adresse locale | Réglage d'usine | 1 |
| Plage de réglage | 1 ~ 247.0 est une adresse de diffusion | ||
Si l'adresse locale est définie sur 0, qui est une adresse de diffusion, vous pouvez exécuter la fonction de diffusion de l'ordinateur hôte. L'adresse locale est unique (à l'exception de l'adresse de diffusion) et constitue la base de la communication point à point entre l'ordinateur hôte et le convertisseur de fréquence.
| Pd-03 | Délai de réponse | Réglage d'usine | 2ms |
| Plage de réglage | 0~20ms | ||
Délai de réponse : temps entre l'envoi des données par l'ordinateur hôte et la fin de réception des données par l'onduleur. Si le délai de réponse est inférieur au temps de traitement du système, le délai de réponse prend le temps de traitement du système. Si le délai de réponse est plus longue que le temps de traitement du système, vous devez attendre un délai une fois que le système a traité les données. Une fois le délai de réponse atteint, les données seront envoyées à l'ordinateur hôte.
Paramètres techniques de l'onduleur vectoriel haute performance
Avant-propos
| Pd-04 | Dépassement du temps de communication | Réglage d'usine | 0.0 s |
| Plage de réglage | 0.0 s (inactif) 0.1~60.0s | ||
Si le code de cette fonction est défini sur 0,0s, le paramètre de délai de communication est désactivé.
Si le code de cette fonction est réglé sur la valeur correcte, mais que le temps de pause entre une communication et la suivante dépasse la limite, le système génère une alarme d'erreur de communication (Err 16). Dans des conditions normales, la fonction est définie comme inactive. Si vous définissez des sous-paramètres dans le système de communication continue, vous pouvez surveiller son état.
| Pd-05 | Protocole de communication | Réglage d'usine | 0 |
| Plage de réglage | 0 : protocole Modbus personnalisé1 : protocole Modbus standard | ||
PD-05 = 1 : sélection du protocole Modbus standard.
PD-05 = 0 : lors de la lecture de la commande, le nombre d'octets renvoyés par l'esclave est supérieur d'un octet au protocole Modbus standard. Détails dans la « 5 structure des données de communication » du protocole.
| Pd-05 | Résolution pour la lecture des données en communication | Réglage d'usine | 0 |
| Plage de réglage | 0 : 0.01A1 : 0.1A | ||
Il est utilisé pour acquitter l'unité de la valeur du courant de sortie lorsque la communication lit le courant de sortie.



