
CMMB-AS-07 - Contrôleur Festo - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil CMMB-AS-07 Festo au format PDF.
| Type de produit | Contrôleur de moteur pour servomoteurs AC |
| Modèle | CMMB-AS-07 |
| Marque | Festo |
| Puissance nominale | 750 W |
| Alimentation | Monophasé 200-240 VAC ±10%, 50/60 Hz, 7 A (entraînement), 0,5 A (commande) |
| Dimensions (L x H x P) | Environ 60 x 180 x 150 mm (estimation) |
| Poids | Environ 1,5 kg (estimation) |
| Température de service | 0 °C à 40 °C |
| Humidité de service | 5 % à 95 % HR (sans condensation) |
| Degré de protection | IP20 |
| Fonctions principales | Contrôle de vitesse, couple, position, mode impulsions, mode maître-esclave, mise en référence, auto-réglage, communication RS232 |
| Entrées numériques | 7 entrées configurables (activation, réinitialisation, sélection de mode, etc.) |
| Sorties numériques | 5 sorties configurables (prêt, erreur, position atteinte, etc.) |
| Entrées analogiques | 2 entrées, résolution 12 bits, plage -10 V à +10 V |
| Interface de communication | RS232 (point à point ou multipoint) |
| Ventilateur | Remplaçable par l'utilisateur (12 VDC, 0,12 A, 40 x 40 x 10 mm) |
| Entretien et nettoyage | Nettoyer avec un chiffon sec ; couper l'alimentation et attendre 10 minutes avant intervention. Remplacement du ventilateur possible. |
| Sécurité | Protection TBTS, arrêt d'urgence via mot de commande, limitation de position, surveillance de température, protection I²t, masques d'erreur configurables |
| Pièces détachées et réparabilité | Ventilateur remplaçable ; batterie pour codeur multitour remplaçable ; résistance de freinage externe en option. Réparation par un électricien qualifié. |
| Informations générales | Certification UL pour États-Unis et Canada ; utilisation en armoire électrique ; compatibilité avec servomoteurs EMMB et câbles NEBM. |
FOIRE AUX QUESTIONS - CMMB-AS-07 Festo
Questions des utilisateurs sur CMMB-AS-07 Festo
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Contrôleur au format PDF gratuitement ! Retrouvez votre notice CMMB-AS-07 - Festo et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil CMMB-AS-07 de la marque Festo.
MODE D'EMPLOI CMMB-AS-07 Festo
Contrôleur de moteur
CMMB-AS-0x
FESTO
Description
Montage et installation
Pour contrôleur de
moteur CMMB-AS-0x
8189115
2023-01c
[8189119]
Identification des dangers et instructions pour les prévenir :

Danger
Dangers immédiats pouvant entraîner la mort ou des blessures graves

Avertissement
Dangers pouvant entraîner la mort ou des blessures graves

Attention
Dangers pouvant causer des blessures légères ou des dommages matériels graves
Autres symboles :

Note
Dommages matériels ou perte de fonction

Recommendations, conseils, reférences à d'autres documentations

Accessoires indispensables ou utiles

Informations sur une utilisation respectue de l'environnement
Désignations textuelles :
- Activités pouvant être réalisées dans n'importe quel ordre
- Activités à effectuer dans l'ordre indiqué
- Listes générales
Résultat d'une action/références à des informations plus détaillées
Historique des révisions
| Version | Chapitre | Date | Modification |
| 1.00 | Tous | 17/03/2017 | Première édition |
| 1.01 | 3.2.4, 6.2.1, 6.3.1 | 09/05/2017 | Figure 3-5, tableaux 6-7, 6-11 |
| 1.02 | 3.1.1, 3.2.2 | 18/07/2017 | Tableau 3-1, Tableau 3-2 |
| 1.03 | 6.4.1 | 25/10/2017 | Figure 6-2, texte |
| 1.04 | 2.1 | 13/04/2020 | Figure 2-2, tableaux 2-2, 2-3, 2-4. |
| 3.2.4 13/04/2020 | Tableau 3-4 : définition de X4, figure 3-5 | ||
| 4.3.2 13/04/2020 | Tableau 4-2 : paramètres du menu EASY | ||
| 6.1 | 13/04/2020 | Tableau 6-2 | |
| 9.4 13/04/2020 | Description ajoutée pour d4.01 | ||
| 9.5 | 13/04/2020 | Tableau 9-5 | |
| Chapitre 11 | 13/04/2020 | Nouveau chapitre | |
| 1.05 | 10.2 23/02/2021 | Mise à jour de l' ID de nœudAjout d' un signe négotif comme - | |
| 6.1 | 25/11/2022 | Tableau 6-2 |
Contenu
Chapitre 1 Sécurité et exigences d'utilisation du produit 1
1.1 Sécurité 1
1.1.1 Consignes de sécurité pour la mise en service, la réparation et la mise hors service............1
1.1.2 Protection contre les chocs électriques grâce à une très bassé tension de protection (TBTS).1
1.1.3 Usage normal 2
1.2 Conditions d'utilisation du produit 3
1.2.1 Conditions de transport et de stockage 3
1.2.2 Exigences techniques 3
1.2.3 Qualification des spécialistes (exigences envers le personnel). 3
1.2.4 Domaine d'application et certifications 3
Chapitre 2 Introduction 4
2.1Vue d'ensemble du produit 4
2.1.1 Contrôleur de moteur CMMB 4
2.1.2 Servomoteur EMMB 5
2.1.3 Cables NEBM 5
2.2Vue de I'appareil 7
Chapitre 3 Installation du contrôleur de moteur CMMB. 8
3.1 Installation mecanique 8
3.1.1 Exigences environnementales 8
3.1.2 Conditions de montage 8
3.2 Installation electrode 9
3.2.1Vue de face du contrôleur de moteur de la série CMMB 9
3.2.2 Connecteur d'alimentation (X2) 10
3.2.3 Port RS232 (X3) 10
3.2.4 Connecteur multifonction (X4) 11
3.3 Câblage du servosysteme CMMB 13
3.3.1 Sélection des fusibles, des résistances de freinage et des disjoncteurs 14
Chapitre 4 Configuration du contrôleur avec panneau LED 16
4.1 Fonctionnement du panneau 16
4.2 Structure et navigation du menu du panneau 17
4.3 Fonction Easy Use 18
4.3.1 Processus de configuration avec la fonction Easy Use 18
4.3.2 Organigramme et description du menu EASY 19
4.3.3 Organigramme et description du menu tunE 25
4.3.4 Mode JOG (F006) 28
4.3.5 Historique des erreurs (F007) 28
Chapitre 5 CMMB configurator, guide utiliseur 30
5.1 Prise en main 30
5.1.1 Langue 30
5.1.2 Ouvrir et enregistrer les fichiers de projet 30
5.1.3 Demarrage de la communication 31
5.1.4 ID de nœud et débit en bauds 31
5.1.5 Objects (ajouter, supprimer, aide) 31
5.2 Redemarrage sauvegarde Init 32
5.3 Mise à jour du micrologiciel 32
5.4 Configuration du contrôleur en lecture/écriture 33
5.4.1 Lire les parametes du contrôle 33
5.4.2 Ecrire les paramètres dans le contrôle 34
5.5 Fonctions I/O numériques 34
5.5.1 Entres numériques 35
5.5.2 Sorties numériques 38
5.5.3 Commutateur de rapport de transmission (expert uniquement) 39
5.5.4 Commutateur de gain (expert uniquement) 40
5.5.5 Capture rapide 42
5.6 Oscilloscope 43
5.7 Affichage des erreurs et historique des erreurs 44
Chapitre 6 Modes de fonctionnement et modes de commande. 48
6.1 Étapes générales pour démarrer un mode de commande 48
6.2 Mode vitesse (-3, 3) 53
6.2.1 Mode vitesse analogue 53
6.2.2 Mode vitesse DIN 55
6.3 Mode couple (4) 57
6.3.1 Mode couple analogue 57
6.4 Mode positionnement (1) 58
6.4.1 Mode tableau de position 59
6.5 Mode train d'impulsions (-4) 63
6.5.1 Mode maitre-esclave 65
6.6 Mode mise en reference (6) 66
Chapitre 7 Reglage de la commande du servosysteme 75
7.1 Auto-réglage 75
7.1.1 Paramètres d'auto réglage 76
7.1.2 Demarrage de I'auto-reglage 76
7.1.3 Problèmes lors de l'auto-reglage 77
7.1.4 Réglage après l'auto-reglage. 77
7.2 Reglage manuel 78
7.2.1 Réglage de la boucle de vitesse 78
7.2.2 Réglage de la boucle de position 81
7.3 Facteurs influençant les résultats du réglage 83
Chapitre 8 Alarmes et depannage. 85
Chapitre 9 Lieste des parametes du contrôleur de moteur de la série CMMB 87
9.1 F001 87
9.2 F002 89
9.3 F003 91
9.4 F004 94
9.5 F005 95
Chapitre 10 Communication 97
10.1 Câblage RS232 97
10.1.1 Connexion point a point 97
10.1.2 Connexion multipoint 97
10.2 Protocole de transport 97
10.2.1 Protocole point à point 98
10.2.2 Protocole multipoint 98
10.3 Protocole de données 98
10.3.1 Tetechargement (de I'hote vers I'escape) 99
10.3.2 Upload (de I'esclave vers I'hote) 99
10.4 Example de télégramme RS232 100
Chapitre 11 Annexe. 101
11.1 Codeurs multitours pris en charge par CMMB 101
11.1.1 Exigences matérielles 101
Pour l'utilisation d'un moteur EMMB avec codeur multitour, vous doivent utiliser l'adaptateur NEFM-REG6-K-0.5-B-REG6 avec un boîtier de batterie. La batterie mettra en mémoire tampon les révolutions multitours absolues. 101
Pour plus d'informations, lore le manuel de I'adaptateur NEFM. 101
11.1.2 Scenarios d'application 101
11.1.3 Avertissement et erreur 101
11.1.4 Definition de la position absolue 102
Chapitre 1 Sécurité et exigences d'utilisation du produit
1.1 Sécurité
1.1.1 Consignes de sécurité pour la mise en service, la réparation et la mise hors service

Avertissement
Danger d'électrocution
Si les câbles ne sont pas montés à la prise X2.
Si des cables de connexion sont débranchés lorsque l'appareil est sous tension.
Tout contact avec des pieces sous tension peut provoquer des blessures graves et entraîner la mort.
Le produit ne peut être utilisé que dans l'etat installé et lorsque toutes les protections ont été activées.
Avant de toucher des pieces sous tension pendant les travaux de maintenance, de réparation et de nettoyage, et après une longue interruption de service :
Mettez l'équipement électrique hors tension à l'aide de l'interrupteur principal et protégez-le contre toute remise sous tension.
Après avoir étéint l'appareil, laissez-le se décharger pendant au moins 10 minutes et vérifie que l'alimentation est coupée avant d'acceder au contrôleur. Assurez-vous que levoyant de charge à l'avant du contrôleur est étéint.

Note
Danger du à un mouvement inattendu du moteur ou de l'axe
Assurez-vous que le mouvement ne met personne en danger.
Effectuez une évaluation des risques conformément à la Directive machines.
- Sur la base de cette évaluation des risques, conceive le système de sécurité pour l'ensemble de la machine, en tenant compte de tous les composants intégrés. Cela concerne également les entrainements électriques.
Le contournement des équipements de sécurité est inadmissible.
1.1.2 Protection contre les chocs électriques grâce à une très basse tension de protection
(TBTS)

Avertissement
- Utilisez uniquement des circuits TBTS conformes à la norme CEI/EN 60204-1 (très basse tension de protection, TBTS) pour l'alimentation électrique. Respectez également les exigences générales pour les circuits TBTS spécifiées dans la norme CEI/EN 60204-1.
- Utilisez uniquement des sources d'alimentation qui garantissent une déconnexion électrique fiable de la tension de service conformément à la norme CEI/EN 60204-1.
La protection contre les chocs électriques (protection contre les contacts directs et indirects) est assurée conformément à la norme CEI/EN 60204-1 grâce à l'utilisation de circuits TBTS (équipement électrique des machines, prescriptions générales).
1.1.3 Usage normal
Le CMMB-AS-0x est destiné à
- Utilisation dans les armoires de commande pour l'alimentation des servomoteurs à courant alternatif et la régulation des couples (courant), de la vitesse de rotation et de la position.
Le CMMB-AS-0x est destiné à être installé dans des machines ou des systèmes automatisés et ne peut être utilisé que :
Lorsqu'il est en excellent etat technique
- Dans son etat d'origine sans modification non autorisee
- Dans les limites du produit définies par les données techniques
- En milieu industriel
Le produit est destiné à être utilisé dans des zones industriielles. En cas d'utilisation en dehors d'un environnement industriel, par exemple dans des zones commerciales et résidentielles mixtes, des mesures de suppression des interférences radio peuvent être nécessaires.

Note
En cas de dommages causés par une manipulation non autorisée ou une'utilisation autres que cette prévue, la garantie est annulée et le fabricant n'est pas responsable des dommages.
1.2 Conditions d'utilisation du produit
- Mettez cette documentation à la disposition de l'ingénieur de conception, de l'installateur et du personnel responsable de la mise en service de la machine ou du système dans lequel ce produit est utilisé.
Assurez-vous que les specifications de la documentation sont toujours respectées. Consultez également la documentation des autres composants et modules.
Pendre en considération les reglementations légales applicables à destination, ainsi que:
- Réglementations et normes
- Réglementation des organismes de contrôle et des assureurs
- Specifications nationales
1.2.1 Conditions de transport et de stockage
-
Pendant le transport et le stockage, protégez le produit des charges non autorisées telles que :
-
Charge mécanique
- Températures non autorisées
-Humidité -
Atmospheres agressives
-
Stockez et transportez le produit dans son emballage d'origine. L'emballage d'origine offre une protection suffisante contre les contraintes typiques.
1.2.2 Exigences techniques
Conditions generales pour une utilisation correcte et sure du produit, qui doivent etre respectees à tout moment :
- Respectez les conditions de raccordement et d'environnement spécifiées dans les données techniques du produit et de tous les composants raccordés.
Le respect des valeurs limites et des limites de charge est obligatoire afin de garantir le fonctionnement du produit conformément aux reglementations de sécurité en vigueur.
Respectez les instructions et les averissements de cette documentation.
1.2.3 Qualification des spécialistes (exigences envers le personnel)
Le produit ne peut être mis en service que par un électricien qualifié connaissant :
- l'installation et le fonctionnement des systèmes de contrôle électrique
les réglementations applicables pour l'exploitation des systèmes de sécurité - les réglementations applicables en matière de protection contre les accidents et de sécurité au travail
- la documentation du produit
1.2.4 Domaine d'application et certifications

Vous trouvrez les certificats ainsi que la déclaration de conformité pour ce produit à l'adresse www.festo.com/sp.
Le produit a ete certifie par Underwriters Laboratories Inc. (UL) pour les Etats-Unis et le Canada et est marqu e comme suit :

Chapitre 2 Introduction
2.1 Vue d'ensemble du produit
La gamme de contrôleurs de moteur CMMB se compose de quatre modèles de contrôleurs de moteur avec quatre puissances nominales différentes. Avec la gamme de servomoteurs EMMB, la gamme CMMB fournit une plate-forme de système d'asservissement à train d'impulsions avec une plage de puissance nominale de 100 à 750 W.
2.1.1 Contrôleur de moteur CMMB
Le contrôleur de moteur CMMB est disponible dans les modèles suivants :
Tableau 2-1 : type de modele
| Modèle | Puisance |
| CMMB-AS-01 | 100 W |
| CMMB-AS-02 | 200 W |
| CMMB-AS-04 | 400 W |
| CMMB-AS-07 | 750 W |
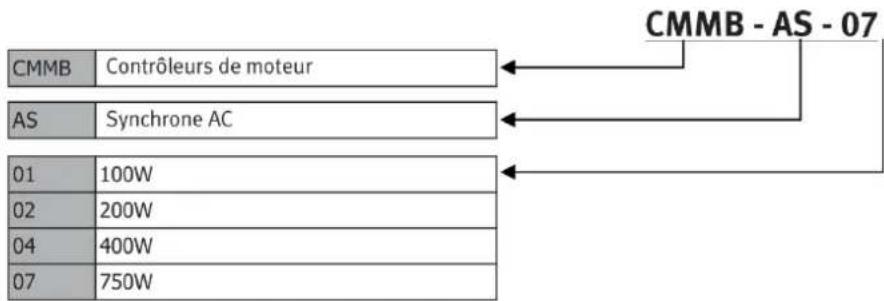
Figure 2-1: code de type contrôleur de moteur
2.1.2 Servomoteur EMMB
La gamme EMMB de servomoteurs AC hautes performances comprend des moteurs d'une puissance nominale de 100 à 750 W et est équipée de systèmes de retard de codeur absolu monotour 20 bits.
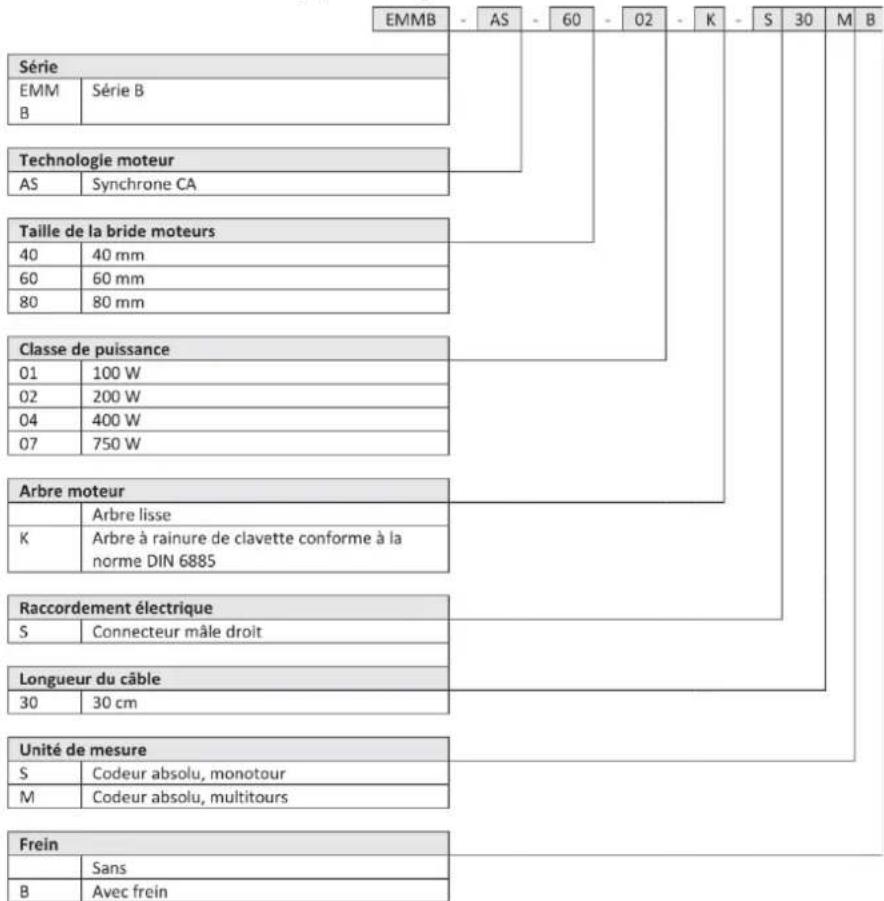
Figure 2-2: code de type servomoteur
2.1.3 Cables NEBM
Les câbles NEBM fournissant une connectivité plug and play entre le contrôleur de moteur et les servomoteurs et sont disponibles en quatre longueurs standard différentes.
Tableau 2-2: cable moteur
| Câble standard | |
| Longueur (unité : m) | Type |
| 2,5 | NEBM-H6G4-K-2.5-Q13N-LE4 |
| 5 | NEBM-H6G4-K-5-Q13N-LE4 |
| 7,5 | NEBM-H6G4-K-7.5-Q13N-LE4 |
| 10 | NEBM-H6G4-K-10-Q13N-LE4 |
| Câble couple (utilisable en chaîne porte-câbles) | |
| Longueur (unité : m) | Type |
| 2,5 | NEBM-H6G4-E-2.5-Q13N-LE4 |
| 5 | NEBM-H6G4-E-5-Q13N-LE4 |
| 7,5 | NEBM-H6G4-E-7.5-Q13N-LE4 |
| 10 | NEBM-H6G4-E-10-Q13N-LE4 |
| 15 | NEBM-H6G4-E-15-Q13N-LE4 |
| 20 | NEBM-H6G4-E-20-Q13N-LE4 |
| 25 | NEBM-H6G4-E-25-Q13N-LE4 |
Tableau 2-3 : cable codeur
| Câble standard | |
| Longueur (unité : m) | Type |
| 2,5 | NEBM-REG6-K-2.5-Q14N-REG6 |
| 5 | NEBM-REG6-K-5-Q14N-REG6 |
| 7,5 | NEBM-REG6-K-7.5-Q14N-REG6 |
| 10 | NEBM-REG6-K-10-Q14N-REG6 |
| Câble couple (utilisable en chaîne porte-câbles) | |
| Longueur (unité : m) | Type |
| 2,5 | NEBM-REG6-E-2.5-Q14N-REG6 |
| 5 | NEBM-REG6-E-5-Q14N-REG6 |
| 7,5 | NEBM-REG6-E-7.5-Q14N-REG6 |
| 10 | NEBM-REG6-E-10-Q14N-REG6 |
| 15 | NEBM-REG6-E-15-Q14N-REG6 |
| 20 | NEBM-REG6-E-20-Q14N-REG6 |
| 25 | NEBM-REG6-E-25-Q14N-REG6 |
Tableau 2-4:cable de frein
| Câble standard | |
| Longueur (unité : m) | Type |
| 2,5 | NEBM-H7G2-K-2.5-Q14N-LE2 |
| 5 | NEBM-H7G2-K-5-Q14N-LE2 |
| 7,5 | NEBM-H7G2-K-7.5-Q14N-LE2 |
| 10 | NEBM-H7G2- K-10-Q14N-LE2 |
| Câble couple (utilisable en chaîne porte-câbles) | |
| Longueur (unité : m) | Type |
| 2,5 | NEBM-H7G2-E-2.5-Q14N-LE2 |
| 5 | NEBM-H7G2-E-5-Q14N-LE2 |
| 7,5 | NEBM-H7G2-E-7.5-Q14N-LE2 |
| 10 | NEBM-H7G2-E-10-Q14N-LE2 |
| 15 | NEBM-H7G2-E-15-Q14N-LE2 |
| 20 | NEBM-H7G2-E-20-Q14N-LE2 |
| 25 | NEBM-H7G2-E-25-Q14N-LE2 |
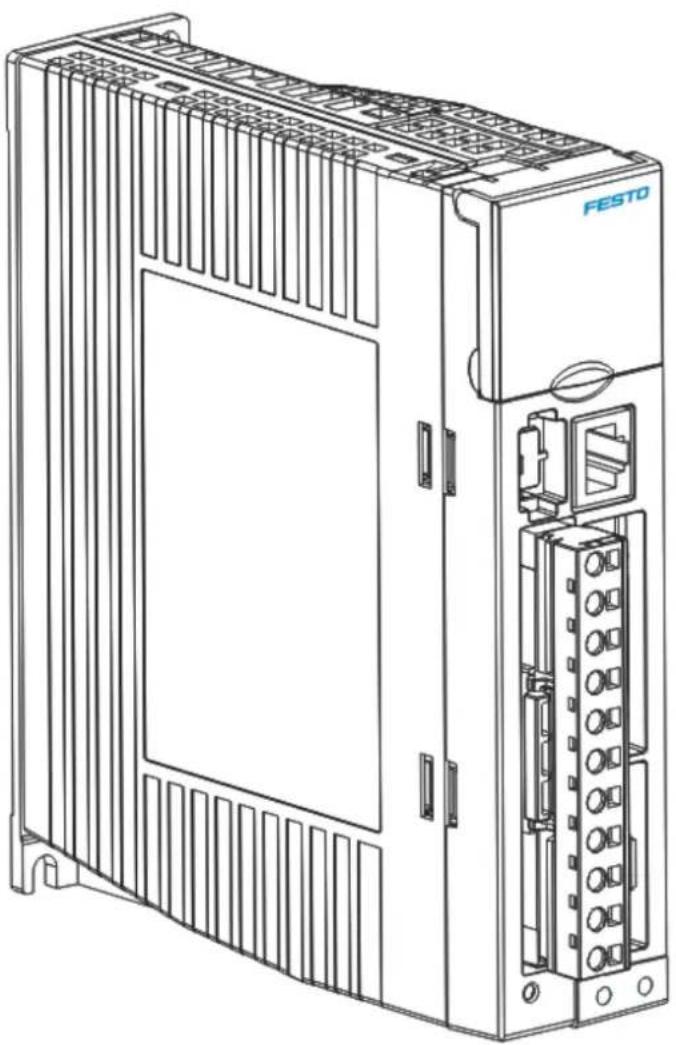
2.2 Vue de l'appareil

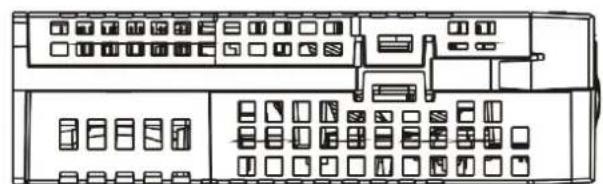
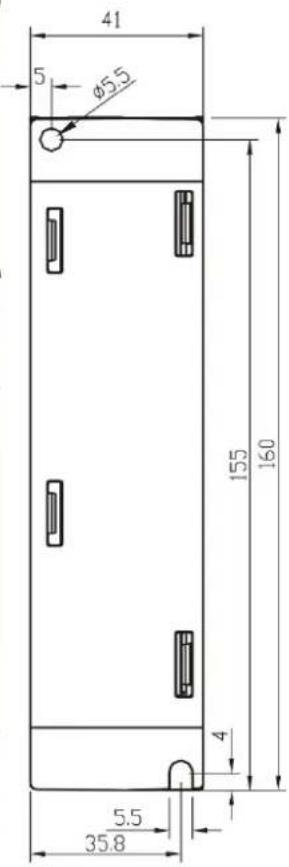
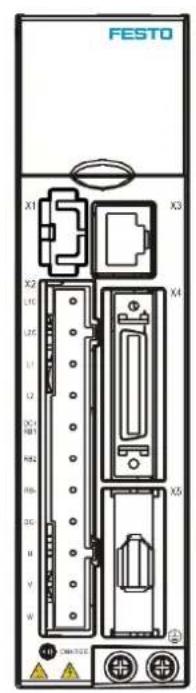
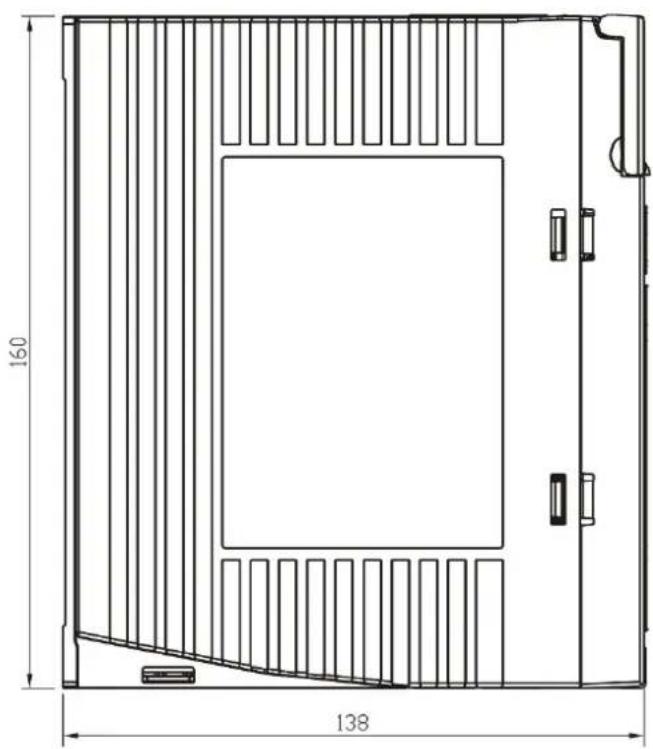
Figure 2-3: vue de l'appareil
Chapitre 3 Installation du contrôleur de moteur CMMB
3.1 Installation mécanique
3.1.1 Exigences environnementales
Tableau 3-1: exigences environnementales
| Environnement Exigence | |
| Température de service | 0 - 40 °C (pas de glace) |
| Humidité de service | 5 - 95 % HR (pas de condensation) |
| Température de stockage | -10 - 70 °C (pas de glace) |
| Humidité de stockage | 5 - 95 % HR (pas de condensation) |
| Exigence d'assemblage | Intérieur sans soleil, gaz corrosif, gaz ininflammable, pas de poussière. |
| Altitude | Moins de 2 000 m, déclassemment de puissance entre 1 000 m et 2 000 m |
| Vibration | Moins de 5,9 m/s², 10~60 Hz (ne pas utiliser au point de résonance) |
| Degré de protection IP20 |
3.1.2 Conditions de montage
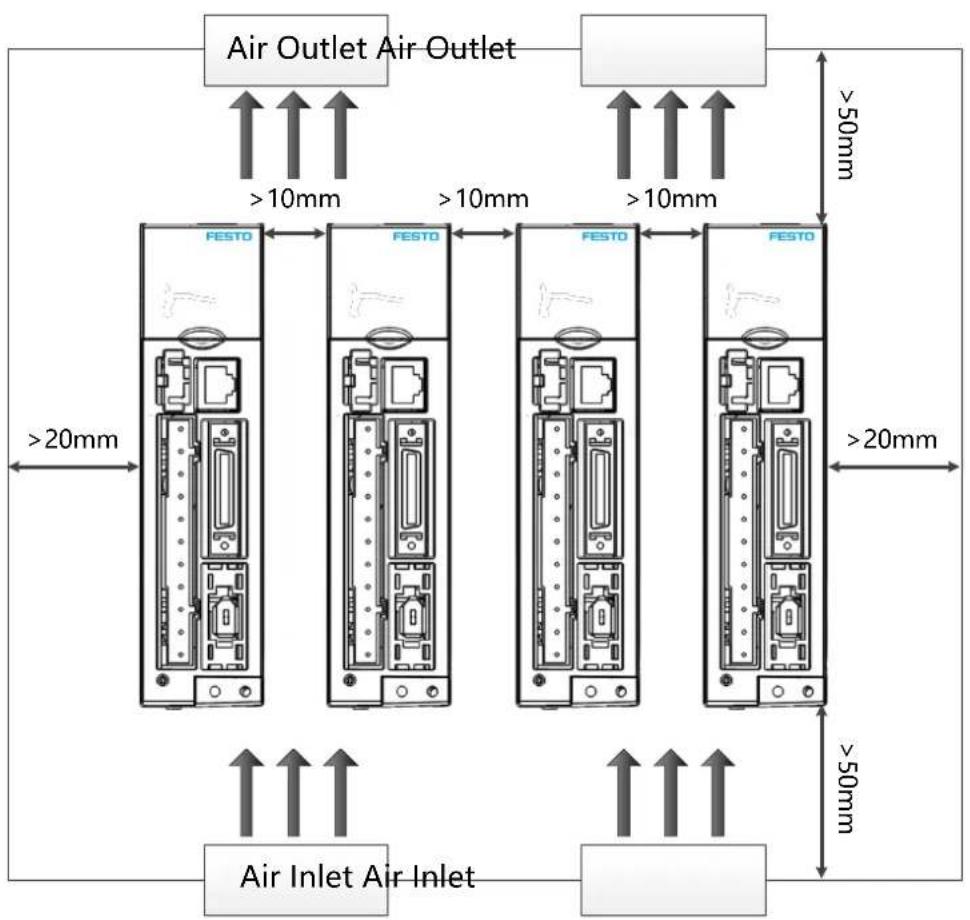

Figure 3-1: orientation de l'installation, distances et dégagements
Note
Le contrôleur de moteur doit être installé dans une armoire électrique qui fournit un environnement de niveau de pollution 2.
L'orientation de l'installation est verticalie pour fournir un flux d'air de convection suffisant a travers le boitier du contrôleur.
Respectez les distances et dégagements indiqués à la figure 3-1.
Assurez-vous que le contrôleur de moteur est solidement fixé avec deux vis M5.
N'insérez rien dans les ouvertures de ventilation du contrôleur.
Ne bloquez pas les ouvertures de ventilation du contrôleur.
Utilisez uniquement les pieces fournies/accessoires spécifiés par le fabricant.
La tôle de refroidissement du CMMB-AS-01, CMMB-AS-02 est refroidie par un flux de convection d'air naturel.
La tôle de refroidissement du CMMB-AS-04, CMMB-AS-07 est refroidie par un ventilateur interne.

Avertissement
En cas d'utilisation d'une résistance de freinage externe, prévoir un espace suffisant autour de la résistance de freinage car elle peut devenir très chaude. Aucun matériel inflammable ne doit toucher ou se couver à proximé de la résistance de freinage. Dans le cas contraire, il existe un risque d'incendie, notamment en cas de dysfonctionnement du hacheur de freinage.
3.2 Installation électrique
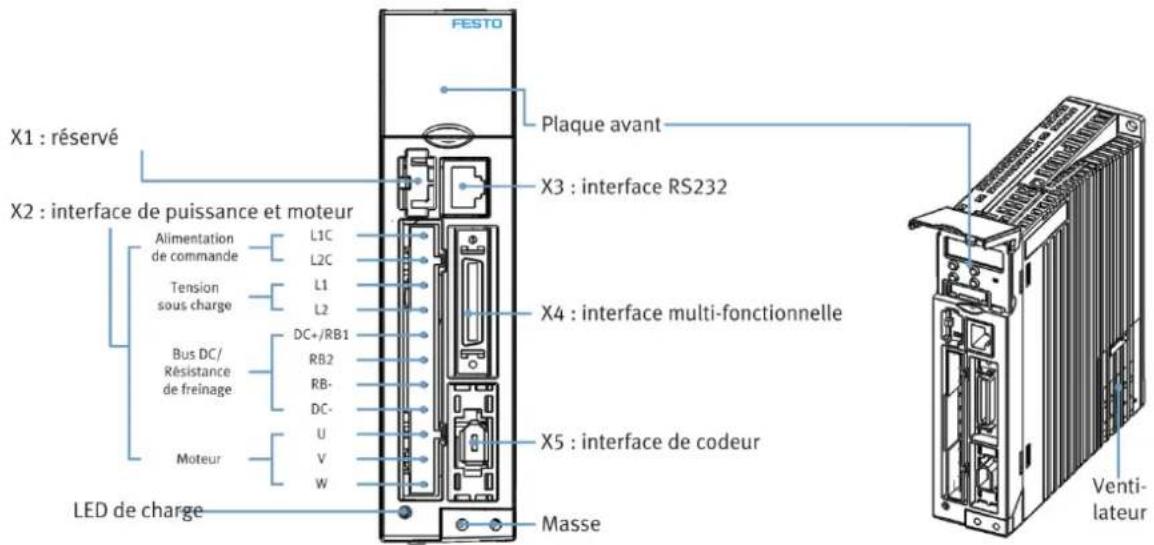
3.2.1 Vue de face du contrôleur de moteur de la série CMMB
Figure 3-2: vue de face
Le ventilateur du contrôleur est remplaçable. Si un ventilateur devient défectueux, ouvre le capot du ventilateur et remplacez-le par un ventilateur ayant les mêmes performances. Les exigences techniques pour le ventilateur sont les suivantes : Alimentation : 12 VDC, 0,12 A, taille : 40 x 40 x 10 mm
3.2.2 Connecteur d'alimentation (X2)
Tableau 3-2: connecteur d'alimentation
| L1C L2C L1 L2 DC+/RB1 RB2 RB-DC- U V W | Broche Fonction | |||
| L1C | Entrée de puissance de commande L/N Monophasé 200 - 240 VAC ± 10 % 50/60 Hz, 0,5 A Systèmes de mise à la terre de l'alimentation : TN-S, TN-C, TN-CS, TT (non mis à la terre par les angles). | |||
| L2C | ||||
| L1 | Entrée de puissance d'entrainment L/N Monophasé 200 - 240 VAC ±10 %, 50/60 Hz | |||
| L2 | 750 W à 7 A, 400 W à 4,5 A, 200 W à 3 A, 100 W à 1,5 A Systèmes de mise à la terre de l'alimentation : TN-S, TN-C, TN-CS, TT (non mis à la terre par les angles). | |||
| DC+ /RB1 | DC+ Bus DC+ | i Information Court-circuit DC+/RB1 et RB2 si besoin de la résistance de freinage interne du variateur (puissance : 10 W) → Note Il est interdit d'utiliser la résistance de freinage interne si la puissance moyenne de freinage est supérieure à 10 W. | ||
| RB1 | Entrée résistance de freinage externe | |||
| RB2 | Entrée résistance de freinage interne | |||
| RB- | Entrée résistance de freinage externe | |||
| DC- Bus DC- | ||||
| U/V/W | Sortie de puissance de phase U/V/W pour servomoteur | |||
Section de cable pour toutes les broches :
AWG 22 (0,32mm^2) a AWG 14 (2,1mm^2)
| X RX GND TX X X X | N° de broche | Définition | Fonction |
| 3 TX | Envoyer les données du contrôleur | ||
| 4 Terre Terre de signalisation | |||
| 6 RX | Recevoir les données du contrôleur | ||
| Autres NC Réservé | |||
3.2.4 Connecteur multifonction (X4)
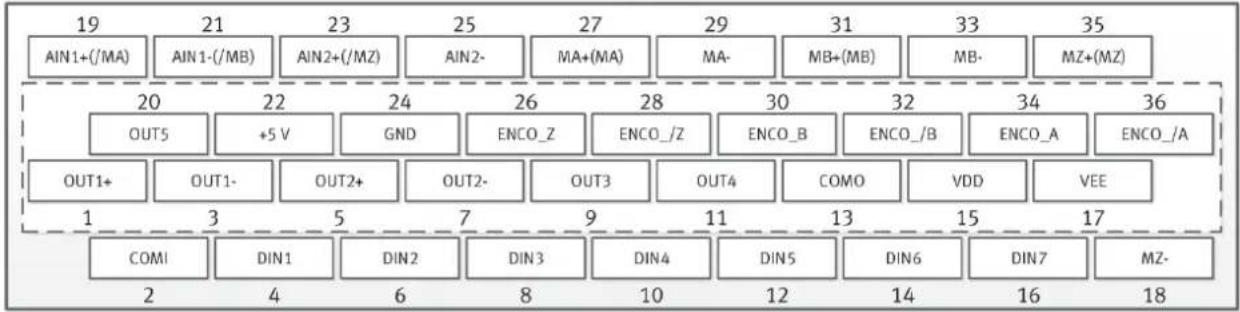
Figure 3-3: connecteur multifonction
Tableau 3-4 : définition de X4
| BROCHE Fonction | |
| DIN1-DIN7 | Entrée de signal numérique VinH (actif) : 12,5 VDC-30 VDC, VinL (inactif) : 0 VDC-5 VDC, fréquence d'entrée : < 1 KHz |
| COMI Broche commune d'entrée numérique | |
| OUT1+ / OUT1- | Sortie de signal numérique Courant de sortie maximal : 100 mA |
| OUT2+ / OUT2- | |
| OUT3 / OUT4 / OUT5 | Sortie de signal numérique Courant de sortie maximal : 20 mA |
| COMO Broche commune de sortie | numérique OUT3, 4, 5 |
| MA+ / MA- | Entrée d'impulsion Tension d'entrée : 3,3 V-24 V Fréquence maximale : 500 KHz |
| MB+ / MB- | |
| MZ+ / MZ- | |
| ENCO_A+ / ENCO_A- | Sortie codeur Tension : Voh = 3,4 V, Vol = 0,2 V Courant maximal : ±20 mA, fréquence maximale : 10 MHz |
| ENCO_B+ / ENCO_B- | |
| ENCO_Z+ / ENCO_Z- | L'ENCO_Z ± le signal se produit toujours ingère que le codeur à un seul tour croise 0. |
| AIN1+ / AIN1-AIN2+ / AIN2- | Entrée analogique Résolution : 12 bits, résistance d'entrée : 350 KΩ Largeur de bande analogique : 1 KHz, plage de tension d'entrée : -10 V +10 V |
| +5 V / GND | Sortie d'alimentation 5 VDC Courant maximal : 100 mA |
| VDD/VEE | Sortie d'alimentation 24 VDC Plage de tension : 24 VDC ± 20 %, courant maximal : 300 mA |
La figure suivant montre le câblage de X4 avec la fonction IO par défaut. Il est possible de définir davantage de fonctions IO avec le panneau numérique ou le logiciel PC. Veuillez vous reférer au chapitre 5.5 pour plus de détails concernant les fonctions IO.
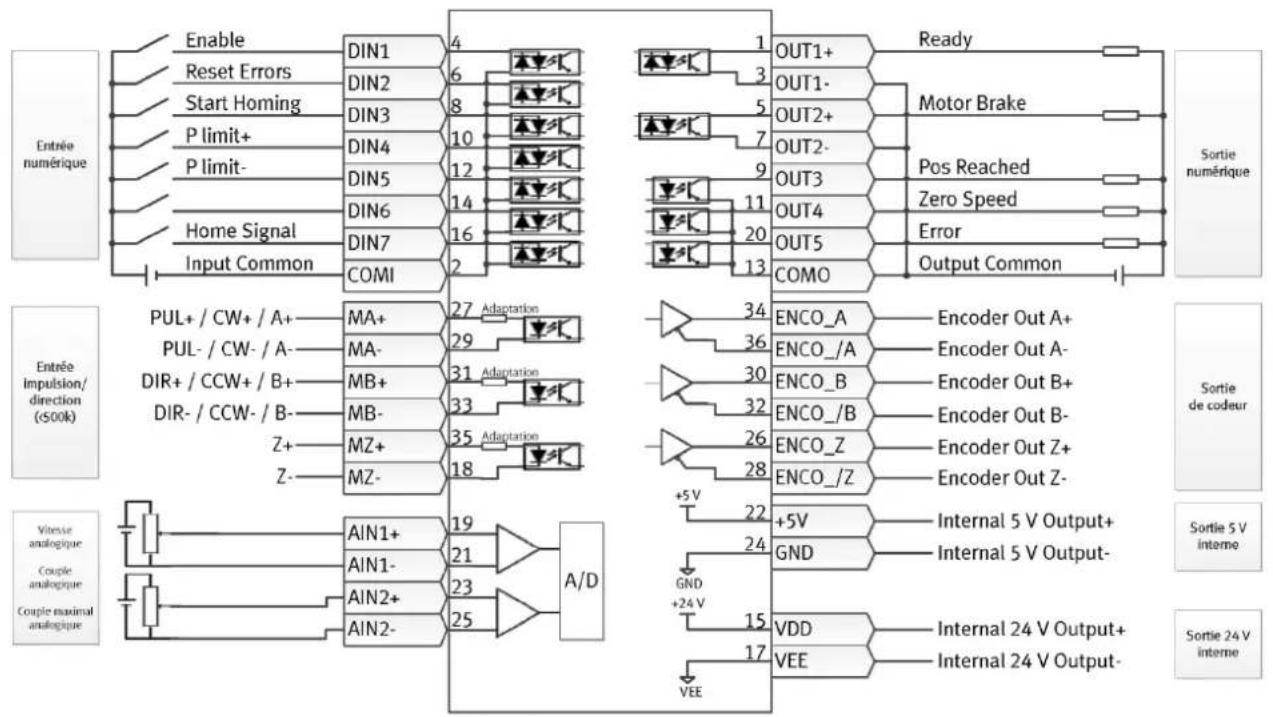
Figure 3-4: câblage X4 NPN des entrées et sorties numériques
La figure 3-4 montre le câblage NPN pour l'entrée et les sorties numériques. La figure 3-5 montre le câblage PNP.
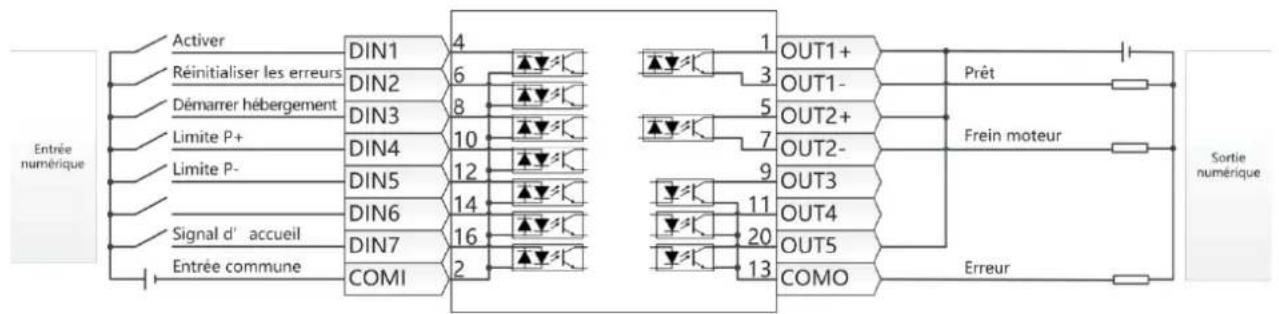
Figure 3-5: câblage X4 PNP des entrées et sorties numériques
Les contrôleurs de moteur de la série CMMB ne prennten pas en charge la sortie de commande directe du frein moteur. Nous suggérons d'utiliser la broche OUT1 ou OUT2 pour contrôler un relais qui est connecté au frein moteur. Le schéma de câblage est le suivant :
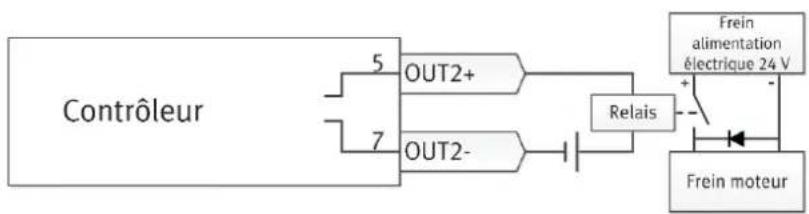
Figure 3-6: cablage du frein moteur
3.2.5 Entre codeur (X5)
Tableau 3-5: entree codeur
| /SD X GND | 6 5 4 3 2 1 | +5V | Alimentation 5 VDC pour le codeur |
| 2 | Terre | Terre de signalisation (+5 V) | |
| 5 SD Signal de 6 /SD Signal de Autre NC Réservé | données série | ||
| données série | |||
| autres NC Réservé |
3.3 Câblage du servosysteme CMMB
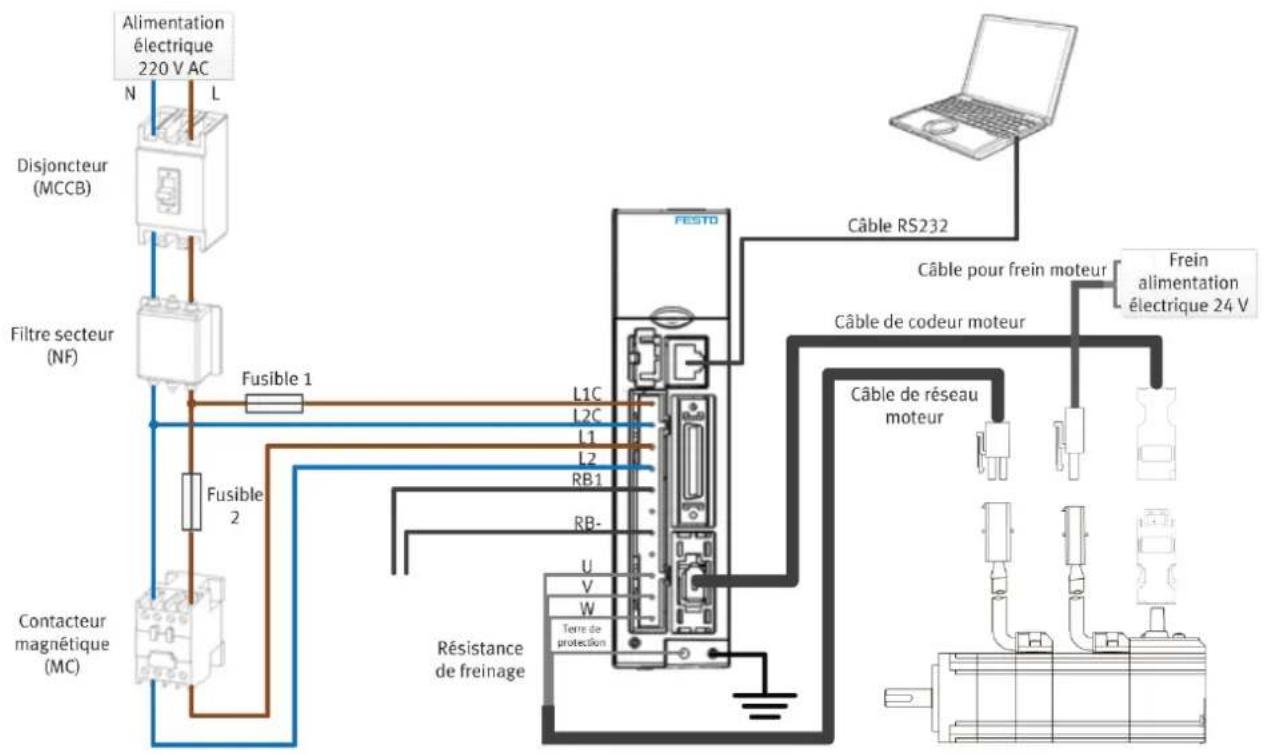

Figure 3-7: câblage du servosysteme CMMB
Avertissement
Danger d'électrocution
Avant d'effectuer des travaux d'installation ou de maintenance sur le contrôleur CMMB, coupez l'alimentation. ÀpRES avoir coupé l'alimentation, attendez au moins 10 minutes avant de toucher les contacts et assurez-vous que levoyant de charge sur le panneau avant du contrôleur est étéint.
N'ouvre jamais l'appareil pendant le fonctionnement. Gardez tous les capots et les portes de l'armoire de commande fermés pendant le fonctionnement.
Ne retirez jamais les dispositifs de sécurité et ne touche jamais les pieces et composants sous tension.
Raccordez correctement le conducteur de protection avant d'allumer le contrôleur.

Avertissement
Danger d'électrocution
Le contrôleur de moteur CMMB utilise la tension secteur pour l'alimentation logique. Meme lorsque l'alimentation du contrôleur est coupée et que le bus DC est décharge (le voyant de charge à l'avant est étéint), l'entrée d'alimentation de commande X2 : L1C/L2C peut encore avoir une tension secteur active.
Si la LED à l'avant du contrôleur de moteur est allumée, il faut s'attendre à une tension secteur sur X2 : L1C/L2C.

Note
Utilisez des cables NEBM (voir 2.1.3) pour connecter le contrôleur de moteur CMMB au servomoteur EMMB et connectez le fil PE du cable moteur NEBM à la vis PE gauche à l'avant du contrôleur de moteur.
Ne soumettez pas les cables NEBM ou les fils du connecteur X2 à des contraintes mécaniques. Respectez les normes et lois internationales et locales pour le câblage et l'installation des composants sous tension dans l'armoire électrique tels que les fusibles, les disjoncteurs et les contacteurs en relation avec l'alimentation secteur du contrôleur de moteur.
Afin de se conformer à la directive et aux normes CEM, utilisez des filtres RF appropriés pour l'installation de l'alimentation secteur du contrôleur de moteur.
3.3.1 Sélection des fusibles, des résistances de freinage et des disjoncteurs
Les fusibles, les résistances de freinage et les disjoncteurs doivent être selectionnés selon les specifications suivantes :
Tableau 3-6 : fusible recommandé
| Modèle | Spécification du fusible d'alimentation de commande (fusion1) | Spécification du fusible d'alimentation de l'entrainment (fusion2) |
| CMMB-AS-01 | 1,0 A/250 VAC | 3,5 A/250 VAC |
| CMMB-AS-02 | 1,0 A/250 VAC | 3,5 A/250 VAC |
| CMMB-AS-04 | 1,0 A/250 VAC | 7 A/250 VAC |
| CMMB-AS-07 | 1,0 A/250 VAC | 15 A/250 VAC |
Tableau 3-7: résistance de freinage recommende
| Modèle | Résistance [Ω] | Puissance [W] | Tension de tenue[VDC] |
| CMMB-AS-01 | 75 100 500 | ||
| CMMB-AS-02 | |||
| CMMB-AS-04 | |||
| CMMB-AS-07 |
Tableau 3-8: disjoncteur recommendé
| Modèle | Courant nominal[A] | Pôles [P] TensiOn[VAC] Type de version | |
| CMMB-AS-01 | 10 2 230 | C | |
| CMMB-AS-02 | |||
| CMMB-AS-04 | 16 2 | |||
| CMMB-AS-07 |
Chapitre 4 Configuration du contrôleur avec panneau LED
Une fois que le servosysteme a eté cable correctement et conformément aux normes en vigueur, le contrôleur de moteur peut être configuré pour l'application souhaitation.
Le contrôleur de moteur CMMB est doté d'un panneau LED sur le panneau avant. Il se compose d'un affichage LED à 5 chiffres et de quatre boutons. Ce panneau LED propose les fonctions générales suivantes :
- Affichage en temps réel des valeurs réelles sur l'écran LED. La valeur affichée peut être sélectionnée dans le menu F001, Real_Speed_RPM (d1.25) est affché comme affichage par défaut, pour les autres sélections, veillez consulter le chapitre 9 tableau 9-1.
- Affichage clignotant des informations d'erreur ou d'avertissement
- Affichage des paramètres du contrôleur et leur modification
- Configuration facile du contrôleur à l'aide des fonctions de menu spéciales EASY et tunE
Différentes fonctions et différents groupes de paramètres sont organisés dans une structure de menus. Les 4 boutons peuvent être utilisés pour naviguer dans cette structure de menu, sélectionner des paramètres individuels, modifier des valeurs et acceder à des fonctions spéciales.
4.1 Fonctionnement du panneau
Tableau 4-1: affichage du panneau
| MODE BUTTON SET BUT TOM MODE 1 2 3 4 5 Dot U P B UT TOM D ow n B UT TOM | |
| Article Fonction | |
| Point ① | N/A |
| Point ② | N/A |
| Point ③ | Lors du paramétrage : fait la distinction entre les données du groupe d'objets actuel et l'adresse de l'objet à l'intérieur du groupe.Lorsque les données internes 32 bits apparaissent à l'écran, l'écran affiche les 16 bits supérieurs des données 32 bits actuelles.Indique que les premières informations d'erreur dans l'historique des erreurs sont affichées lorsque l'enregistrement de l'historique des erreurs dans F007 apparait à l'écran. |
| Point ④ | Lors du réglage des paramètres et de l'affichage des données en temps réel, indique le format des données : données HEX lorsque le point 4 est ON et données DÉC lorsque le point 4 est OFF.Indique que les dernières informations d'erreur dans l'historique des erreurs sont affichées lorsque l'enregistrement de l'historique des erreurs dans F007 apparait à l'écran. |
| Point ⑤ | S'allume pour indiquer que les données ont été modifiées avec succès lors du réglage des paramètres.S'allume pour indiquer que des données internes sont affichées lorsque des données en temps réel apparaissant.L'étage de sortie du contrôleur est opérationnel lorsque le point 5 clignote. |
| MODE | Menu des fonctions de commutation.Lors du réglage des paramètres, appuyez brièvement pour changer le bit de réglage, appuyez et maintenez pour revenir au dernier menu. |
| ▲ | Augmente la valeur. |
| ▼ | Réduit la valeur. |
| DéFINIR | Entrer dans le menu. Vérifiez les valeurs des paramètres. Confirmez le réglage pour acceder à l'étape suivante. Lorsque les données internes 32 bits apparaissent à l'écran, appuyez et maintainez pour basculer haut/bas 16 bits. |
| Flash général | État d'erreur ou d'advertissement. Allumé pendant 1 s et étantpendant 1 s indique une erreur du contrôleur. Un clignotement continu (3 clignotements rapides consécutifs) indique que le contrôleur est dans un état d'advertissement. |
4.2 Structure et navigation du menu du panneau
L'organigramme suivant montre la structure principale du panneau. L'utilisateur peut selectionner des parametes individuels, modifier des valeurs et acceder à des fonctions spéciales à l'aide de cette sequence. Une liste de tous les parametes et valeurs accessibles se trouve au chapitre 9.
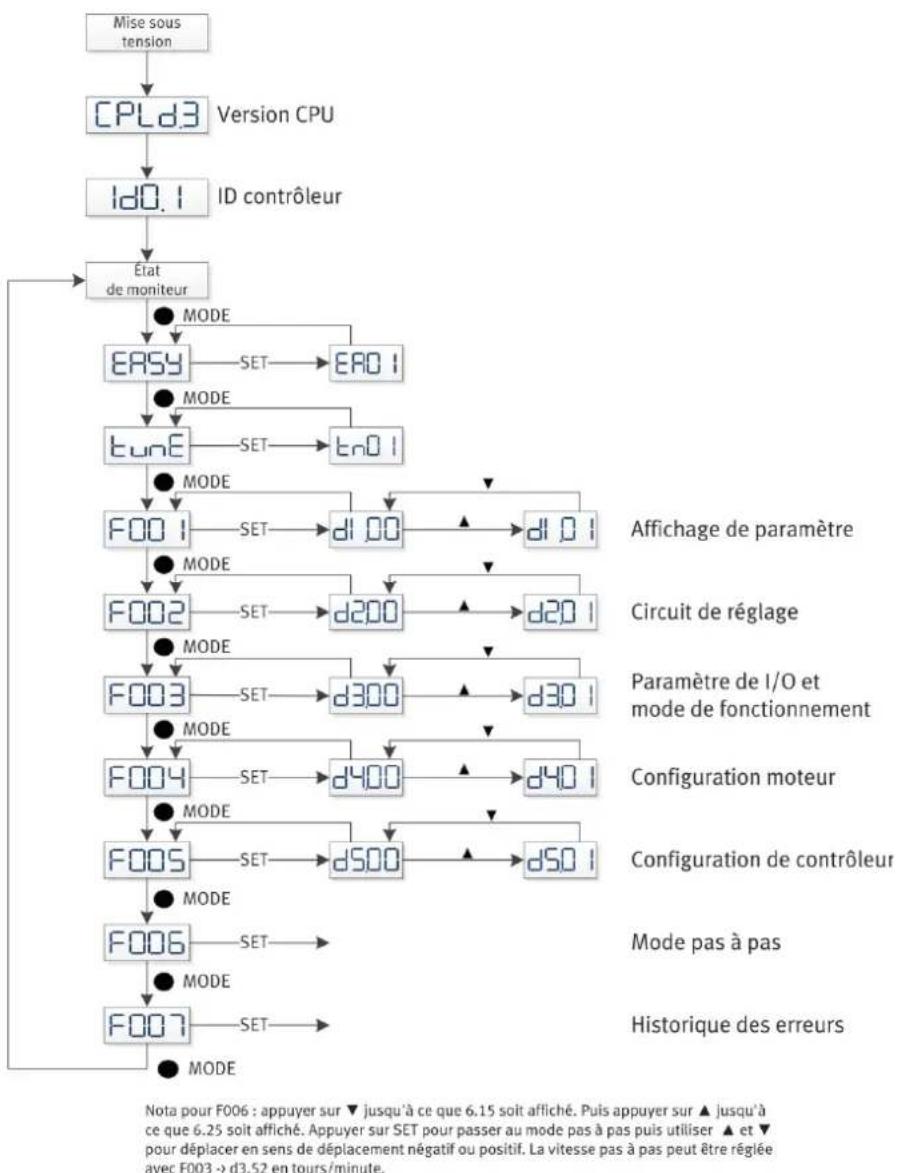
Figure 4-1: réglage des paramètres
4.3 Fonction Easy Use
La fonction Easy Use aide les utilisateurs à configurer le contrôleur de moteur CMMB pour les principaux types d'applications en très peu de temps. Le panneau LED guide l'utiliseur étape par étape à travers les réglages des quelques paramétres les plus importants afin de préparer le contrôleur pour l'application souhaitée. Les boucles d'asservissement du contrôleur de moteur sont préconfigurées avec des paramétres par défaut utiles qui convennent à de nombreuses applications telles quelles. Une fonction d'auto-réglage robuste peut être utilisée en plus pour identifier plus précisément le système mécanique appliqué. ÀpRES cela, l'utiliseur n'a qu'à ajuster les performances d'asservissement du contrôleur avec le paramètre de rigidity.
4.3.1 Processus de configuration avec la fonction Easy Use
Le processus de configuration du contrôleur de moteur CMMB avec la fonction Easy Use suit une Procedure simple.
Étape 1 : les paramètres du menu du panneau EASY doivent être accédés et confirmés, ou régés un par un. Le type de moteur reconnu automatiquement peut être confirmé, l'interface de commande doit être seLECTIONnée, les paramètres principaux liés à l'interface doivent être définis et les types d'application mécanique et de commande doivent être choisis. Ensuite, ces paramètres doivent être enregistrrés et le contrôleur doit être redémarré. À la suite de ces régages, le contrôleur est configuré pour un réglage I/O approprié et les paramètres de la boucle de servocommande sont régés sur les valeurs par défaut correspondantes. Le contrôleur est prét à l'emploi pour une large gamme d'applications standard et peut être testé.
Étape 2 : si les performances d'asservissement du contrôle doivent encore être améliorées, il faut acceder au menu du panneau tunE. À l'aide des fonctions de ce menu, le contrôle peut démarrer une course du moteur d'auto-reglage afin d'identifier les conditions de charge du moteur et de mesurer l'inertia. Àpres cela, le contrôle calculé le rapport d'inertia, qui est le rapport de l'inertia mesure et de l'inertia du moteur. En fonction du rapport d'inertia obtenu, le contrôle définit une valeur de rigidity appropriée pour le comportement d'asservissement. En utilisant le rapport d'inertia et la valeur de rigidity, le contrôle règle automatiquement les boucles d'asservissement.
Étape 3 : dans le menu tunE, la rigidité peut être ajustée (augmentée/diminuée) simplement à l'aide des boutons du panneau. Le réglage de la rigidité peut également être effectué pendant le test de l'application, pendant que le contrôleur est commandé via l'interface de commande sélectionnée. Àpres avoir trouvez la meilleure valeur de rigidité, les paramètres tunE doivent être enregistrés et le contrôleur est enfin prét à l'emploi. Si le réglage de la rigidité ne donne pas les performances requises, le logiciel PC « CMMB configurator » peut être utilisé pour une optimisation supplémentaire.
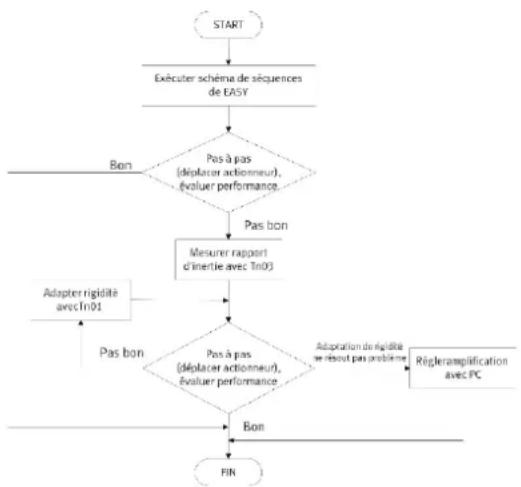
Figure 4-2 : organigramme de la fonction Easy Use
4.3.2 Organigramme et description du menu EASY
L'organigramme et le tableau suivants expliquent en détaill la procédure de réglage dans le menu EASY.
Figure 4-3: organigramme du menu EASY
Information
Le menu est quitté automatiquement s'il n'y a pas d'opération dans 30s, et les utilisateurs doivent recommencer. Les données saisies sont valables immédiatement, mais doivent être enregistrées via EA00.
Tableau 4-2 : paramètres du menu EASY
| LED Paramètre Description | Défaut | ||
| EA01 Type de moteur | Pour un nouveau contrôleur de moteur, le type de moteur défini est « 00 » et « 3030 » apparaît sur l'affichage LED. Si le nouveau contrôleur de moteur est connecté à un moteur valide, le type de moteur est automatiquement reconnu et enregistré. Le type de moteur enregistré dans le contrôleur et le type de moteur connecté sont comparés ultérieurement. S'ils sont différents, « FFFF » clignote sur l'affichage LED. L'utilisateur doit confirmer la valeur EA01, enregistrer les données du moteur et redémarrer le contrôleur pour éliminer cet état. Exemples de type de moteur, code moteur et valeur d'affichage EA01. Code moteur Type de moteur Affichage LED YY EMMB-AS-40-01... 5959 Y0 EMMB-AS-60-02... 3059 Y1 EMMB-AS-60-04... 3159 Y2 EMMB-AS-80-07... 3259 | / | |
| EA02 | Type de commande | Le type de commande affecte les paramètres de l'interface interne du contrôleur, le mode de fonctionnement initial après la mise sous tension et les paramètres par défaut des fonctions DIN et OUT (reportez-vous au tableau 4-3). 0 : mode train d'impulsions CW/CCW Mode de fonctionnement = -4 1 : mode train d'impulsions P/D Mode de fonctionnement = -4 2 : contrôle de phase A/B mode maître/esclave Mode de fonctionnement = -4 6 : mode vitesse analogique par AIN1 Mode de fonctionnement = -3 7 : mode vitesse analogique par AIN2 Mode de fonctionnement = -3 8 : communication 9 : mode tableau de position Mode de fonctionnement = 1 | 1 |
| EA03 | Numérique du facteur de vitesse | Utilisé lorsque EA02 est réalisé sur 0-2. Par défaut, l'écran affiche les valeurs au format decimal. Si le nombre est supérieur à 9999, l'affichage est au format hexadecimal. | 1000 |
| EA04 | Facteur de vitesse Dénominateur | 1000 | |
| EA05 | Facteur de vitesse analogique | Utilisé lorsque EA02 est réalisé sur 6 ou 7. La relation entre la tension d'entrée analogue et la vitesse du moteur, l'unité de mesure est tr/min/V. Pour une utilisation du contrôleur avec des moteurs EMMB-AS standard, la valeur maximale est de 374, la vitesse maximale est de 3740 tr/min/10 V/. Pour plus de détails, voir le chapitre 9.3 (d3.29). | 300 |
| EA06 | 1.Type de charge2.Application3.Capteur de fin de course4. Polarité de sortie d'alarme | La signification de chaque chiffre de l'affichage LED de croite à gauche.(1) Type de charge, influe sur la boucle de régulation.0: pas de charge1: entrainement par courroie2: vis à billes(2) Application, influence la boucle de régulation.0: P2P1: commande numérique2: mode maître/esclave(3) Capteur de fin de course.0: contrôleur par défaut1: supprimer la fonction de capteur de fin de course(4) Polarité de OUT50: contacts normalement fermés1: contacts normalement ouverts | 1001 avec micrologicielV00121011 avec micrologicielV0013 |
| EA07 | Méthode de mise en référence | Reportez-vous au chapitre 6.6 0 | |
| EA00 | Enregistrer les paramètres | Indiquez « 1 » pour enregistrer les paramètres de commande et du moteur.Indiquez « 2 » pour enregistrer les paramètres de commande et du moteur et redémarrer la servocommande.Indiquez « 3 » pour redémarrer la servocommande.Indiquez « 10 » pour initiaiser les paramètres de commande.Avis :Les utilisateurs doivent enregistrer les paramètres de commande et du moteur et redémarrer le contrôleur après avoir changé le type de moteur dans EA01.Apres avoir enregistré les paramètres, la servocommande définira les paramètres de la boucle de régulation en fonction du type de charge et de l'application. | / |
Suite à la définition du type de commande dans EA02, la configuration des I/O numériques du contrôleur est différente par défaut, en fonction du paramètre de type de commande, comme indiqué dans le tableau suivant :
Tableau 4-3 : paramétres par défaut liés à EA02
| Train d'impulsions | Tableau de position | Entrée analogue pour le contrôle de la vitesse | Contrôle via RS232 | ||||
| CW/CCW | P/D (par défaut) | A/B | Canal 1 Canal 2 | ||||
| EA02 0 | 1 2 9 6 7 8 | ||||||
| DIN1 | Activer | Activer | Activer | Activer | Activer | Activer | |
| DIN2 | Réinitialiser les erreurs | Réinitialiser les erreurs | Réinitialiser les erreurs | Réinitialiser les erreurs | Réinitialiser les erreurs | Réinitialiser les erreurs | |
| DIN3 | Lancer la mise en référence | Lancer la mise en référence | Lancer la mise en référence | Lancer la mise en référence | Lancer la mise en référence | Lancer la mise en référence | |
| DIN4 | P limit+ | P limit+ | P limit+ | PosTable Idx0 | P limit+ | P limit+ | P limit+ |
| DIN5 | P limit- | P limit- | P limit- | PosTable Idx1 | P limit- | P limit- | P limit- |
| DIN6 | Démarrer PosTable | ||||||
| DIN7 | Signal de référence | Signal de référence | Signal de référence | Signal de référence | Signal de référence | Signal de référence | Signal de ↔jure |
| OUT1 | Prêt | Prêt | Prêt | Prêt | Prêt | Prêt | Prêt |
| OUT2 | Frein moteur | Frein moteur | Frein moteur | Frein moteur | Frein moteur | Frein moteur | Frein moteur |
| OUT3 | Pos Reached | Pos Reached | Pos Reached | Pos Reached | Vitesse atteinte | Vitesse atteinte | Pos Reached |
| OUT4 | Vitesse zéro | Vitesse zéro | Vitesse zéro | PosTable actif | Vitesse zéro | Vitesse zéro | Vitesse zéro |
| OUT5 | Erreur | Erreur | Erreur | Erreur | Erreur | Erreur | Erreur |

Note
Soyez conscient du réglage différent (par défaut) de la configuration des I/O numériques après avoir défini le type de commande dans EA02 ou modifié un type de moteur. Lorsque les paramètres sont modifiés, une fonction active peut être affectée à des entrées numériques qui n'ont pas été utiliséesAAParavant en raison des nouveaux paramètres par défaut, et les signaux appliqués aux entrées numériques peuvent déclencher par inadvertance des fonctions DIN. Il est recommendé de partager aux réglages du menu EASY avec le connecteur X4 débranché ou l'alimentation débranchée des entrées numériques.
Il est fortement recommendé de Traitser le menu EASY avec l'entrée d'alimentation du variateur eteinte. Vérifiez à nouveau le câblage X4 avant d'activer l'entrée d'alimentation du variateur.

Information
Les menus EASY et tunE sont initialement conçus pour être régés par bouton. Pour des raisons de sécurité, les menus EASY et tunE fournissant uniquement les paramètres EA00, EA01 et tn00 si l'un des cas suivants se produit, cas 1 : l'utilateur initialise les paramètres de n'importe qu'elle manière ; cas 2 : le type de moteur connecté au contrôleur est différent de celui confirmé dans EA01 ; cas 3 : le réglage du type de moteur a été modifié d'une autre manière que via EA01 (par exemple via un logiciel PC).
Une fois le type de moteur confirmé dans EA01, le contenu des entrées dans les menus obtient les valeurs par défaut et les menus récapuérent la fonction complète.
Les pages suivantes serontent quatre configurations de fonction d'I/O différentes basées sur différents paramètres de type de commande dans EA02 et des schémas de câblage typiques associés pour le connecteur d'I/O X4.
Configuration du mode train d'impulsions, types de commande 0, 1 ou 2 dans EA02 :
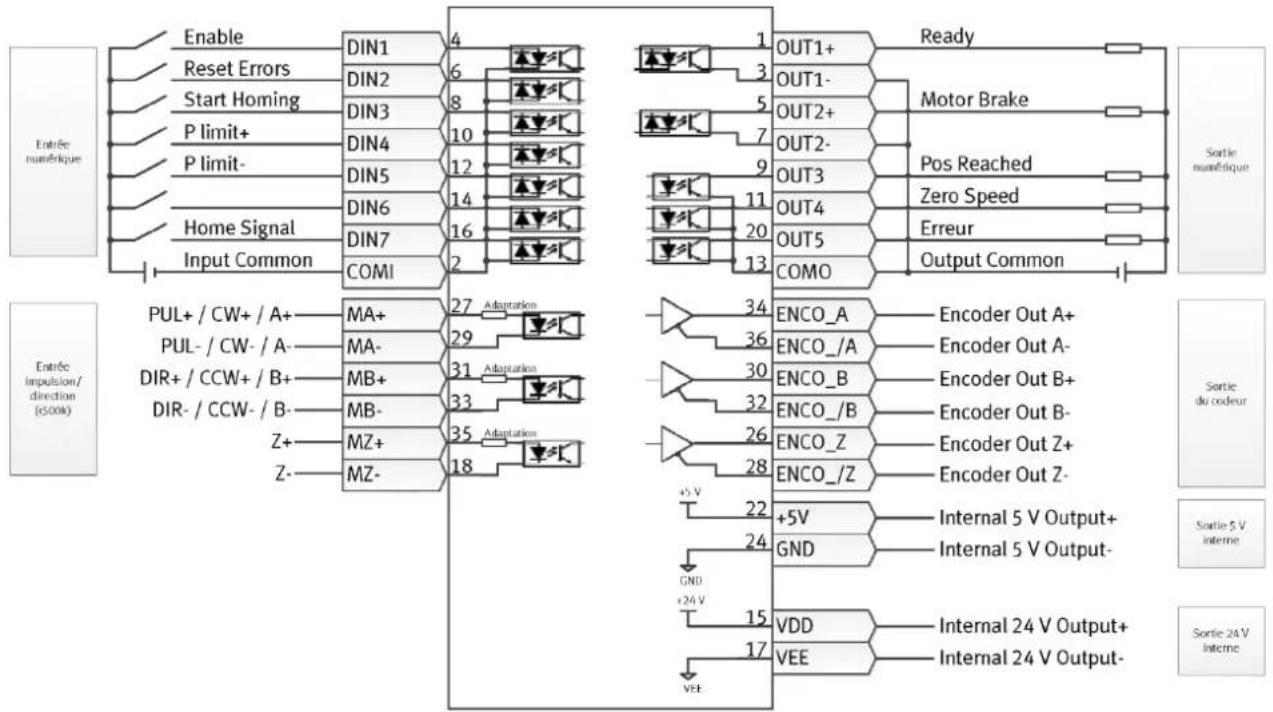
Figure 4-4: câblage X4 en mode train d'impulsions
Configuration du mode de commande analogue, types de commande 6 ou 7 dans EA02 :
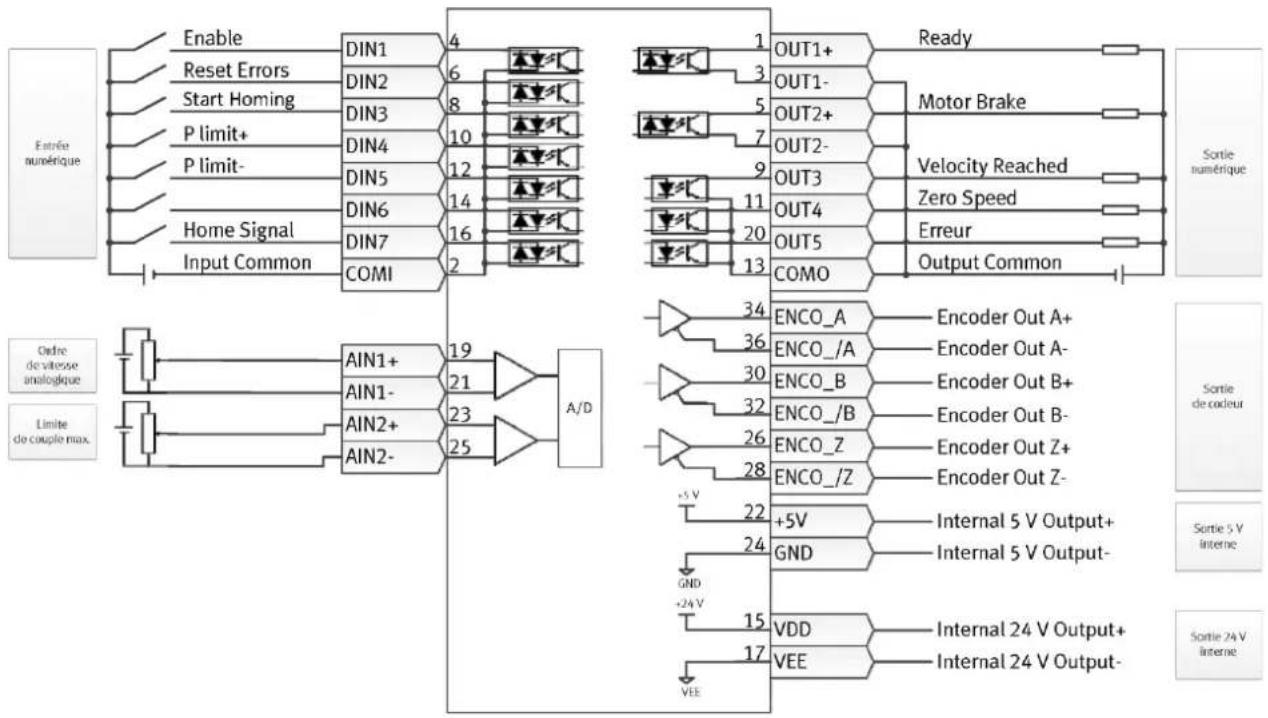
Figure 4-5: câblage X4 en mode de commande analogue
Mode tableau de position, type de commande 9 dans EA02 :
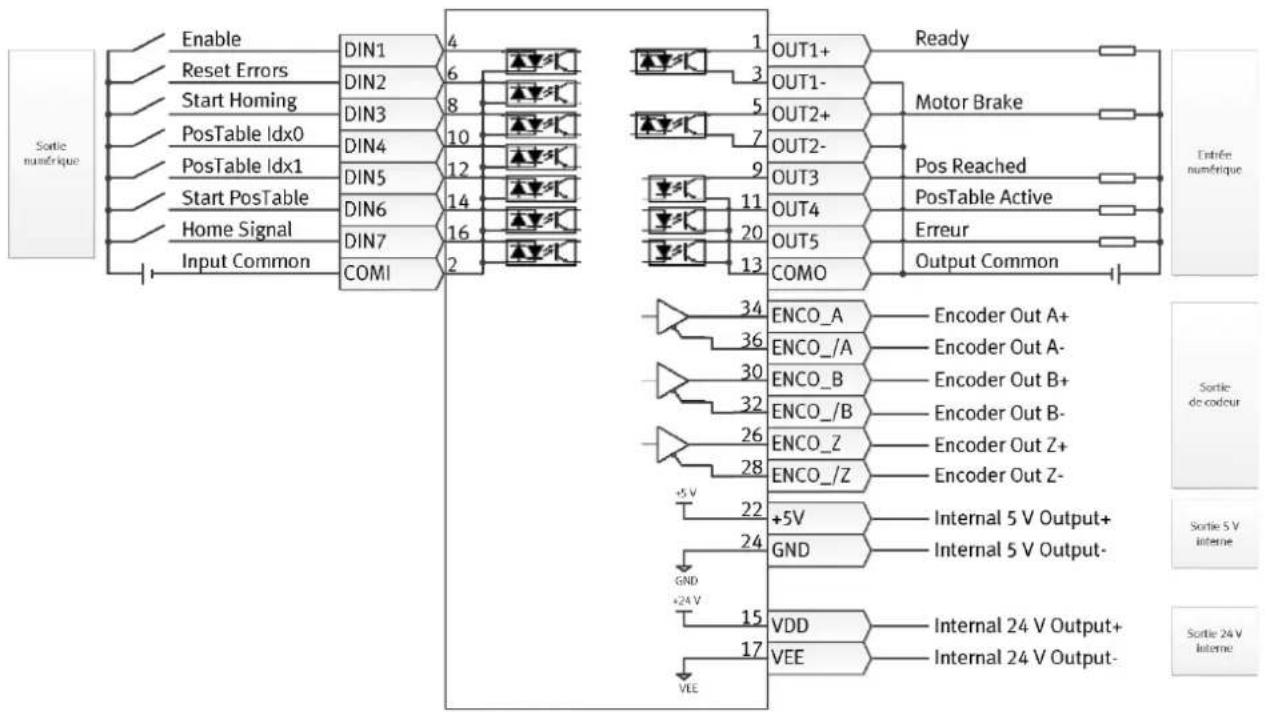
Figure 4-6: cablage X4 en mode tableau de position
Mode de commande RS232, type de commande 8 dans EA02 :
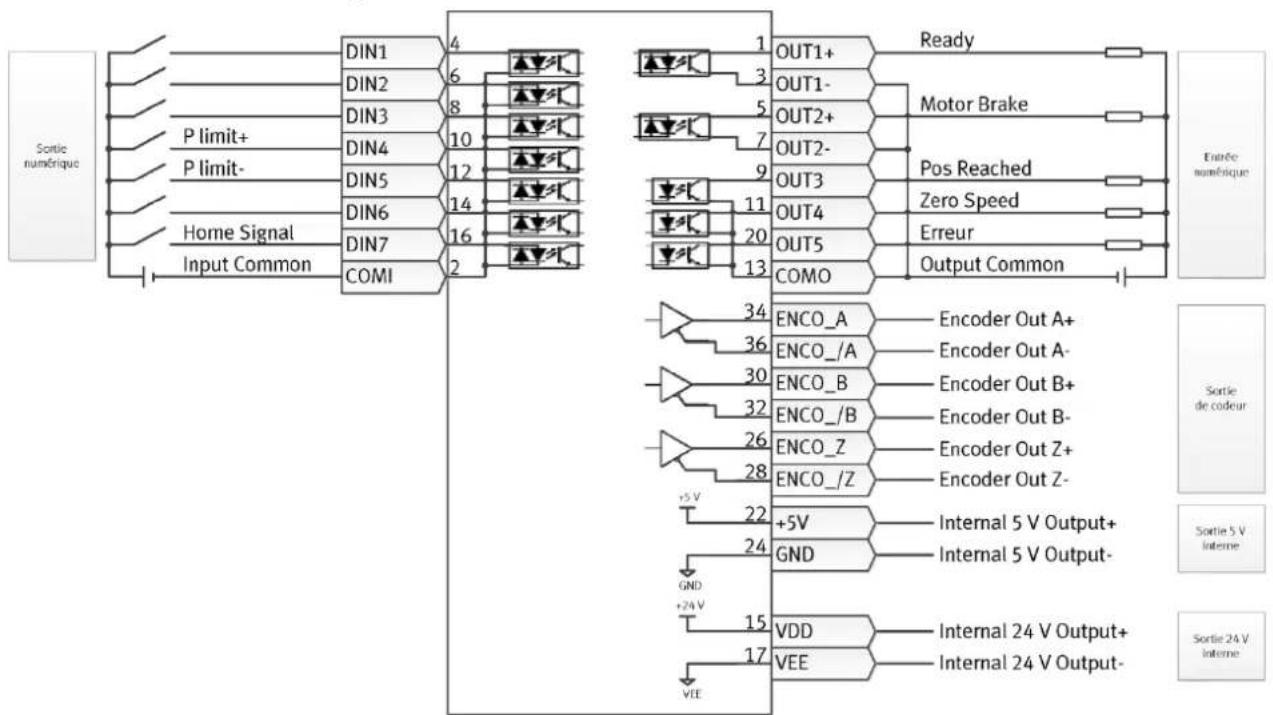
Figure 4-7: cablage X4 en mode de commande RS232
4.3.3 Organigramme et description du menu tunE
Le menu du panneau tunE comprend des paramètres et des fonctions d'auto-reglage avec mesure d'inertie et réglage de la boucle de servocommande via un seul paramètre, à savoir la rigidity.
Après avoir traité le menu EASY, le contrôleur définit par défaut la valeur de rigidity et le rapport d'inertie sur la base de valeurs estimées raisonnables en fonction du type de charge et des paramétres d'application dans EA06.
Si le rapport d'inertie est connu en fonction du système mécanique de la machine et de la charge utile, la valeur peut être saisie directement dans tn02 (voir tableau 4-4). Le rapport d'inertie n'a pas besoin d'être correct à 100% pour obtenir des performances d'asservissement raisonnables en ajustant uniquement la rigidité. Mais plus le rapport d'inertie est précis, plus l'algorithmme de réglage peut faire correspondre les différentes bouches de servocommande les uneux autres. C'est pourquoi il est fortement recommancé d'obtenir un résultat précis du rapport d'inertie au moyen d'une mesure d'inertie.
L'organigramme et le tableau suivants expliquent en detail la procedure de réglage dans le menu tunE.
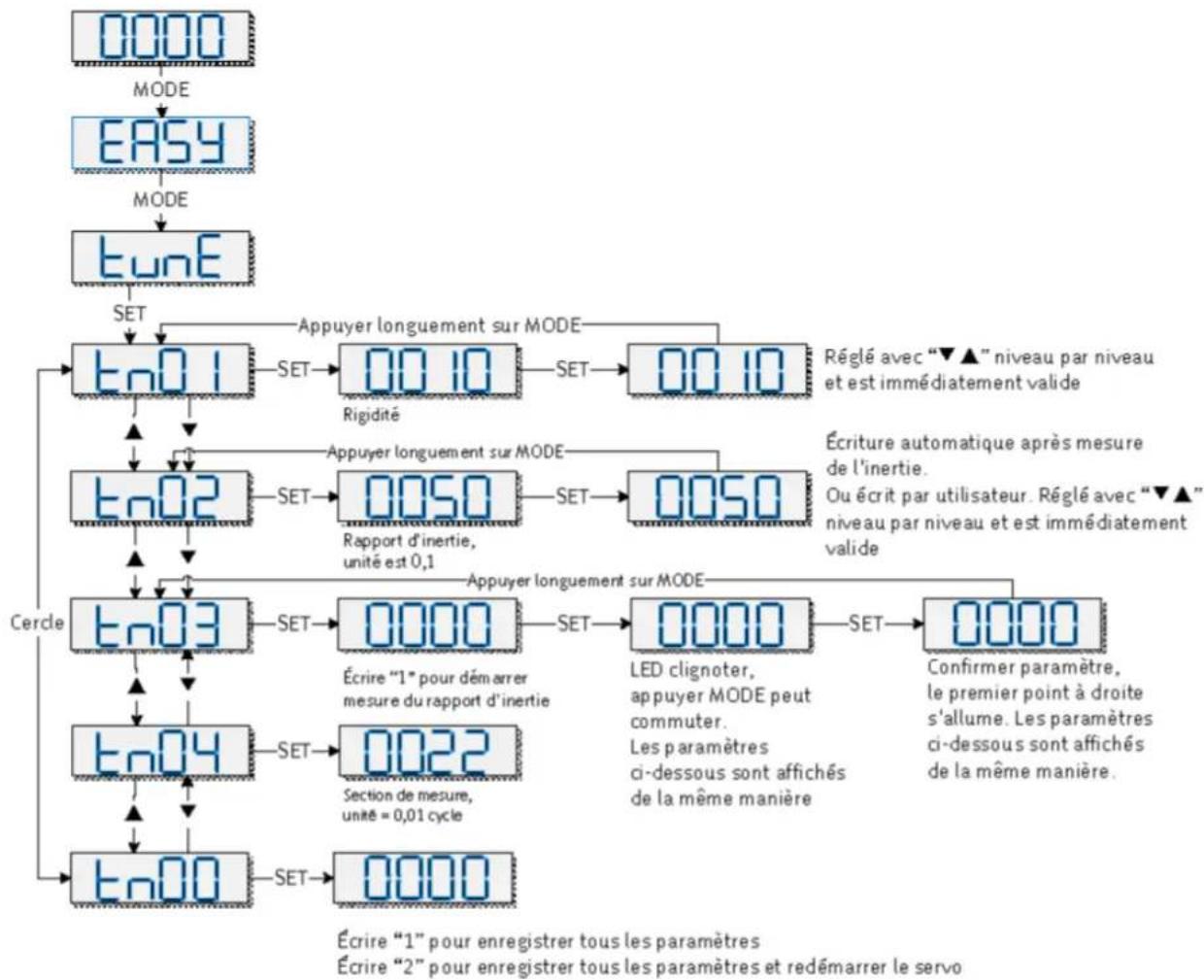
Figure 4-8: organigramme du menu tunE
Tableau 4-4 : paramètres tunE
| LED Paramètre Description | Défaut | ||
| tn01 Rigidité | Le niveau de rigidité de la commande de 0 à 31 déterminée la largeur de bande (BW) de la boucle de vitesse et de la boucle de position (voir tableau 4-5). Plus la valeur est grande, plus la rigidité est importante. Si ce paramètre est trop grand, le gain changera de façon excessive et la machine devendra instable.Lors du réglage de tn01 via les boutons haut et bas sur le panneau, les valeurs entrées sont valides immédiatement, afin d'assurer l'entrée de petites étapes de changement. | Courroie :10Vis :13 | |
| tn02 Inertia_Ratio | Rapport entre l'inertie totale et l'inertie du moteur (unité : 0,1) par exemple 30 représentée un rapport d'inertie de 3.Cette valeur est définié par défaut par la procédure EASY et est mesurée par la fonction de mesure d'inertie dans le menu tunE (tn03).Lors du réglage de tn02 par les boutons haut et bas du panneau, les données seront valides immédiatement, pour assurer l'entrée de petites étapes de changement. | Courroie :50Vis :30 | |
| tn03 Tuning_Method | L'écriture 1 lance la mesure d'inertie d'auto-réglage. Le contrôleur est activé et le moteur exécute un mouvement oscillant pendant moins de 1 s.Si le réglage est réussi, Tuning_Method indique une valeur de 1. L'inertie mesurée est utilisée pour déterminer Inertia_Ratio. La rigidité est régée de 4 à 12 selon le rapport d'inertie. Les paramètres de la boucle de régulation sont définis en fonction de la rigidité et de Inertia_Ratio.Si la mesure d'inertie échoue, Tuning_Method indique la raison de l'échec :0: le contrôleur n'a pas pu être activé pour une raison qualconque.-1: l'inertie ne peut pas être mesurée en raison d'un mouvement trop faible ou d'un courant trop faible.-2: le résultat d'inertie mesuré est en dehors de la plage valide.-3: la valeur Inertia_Ratio réalisante est supérieur à 250 (rapport d'inertie > 25). Ce résultat est possible, mais la boucle de régulation ne sera pas réalisée.-4: la valeur Inertia_Ratio réalisante est supérieur à 500 (rapport d'inertie > 50). C'est un résultat incertain.Dans les cas 0, -1, -2, -4, Inertia_Ratio est régé sur 30, dans le cas -3Inertia_Ratio est régé selon la mesure, la rigidité est régée sur 7-10Dans tous les cas d'échec, les paramètres de la boucle de régulation sont définis sur un Inertia_Ratio de 30 et les valeurs de rigidité définies. Pour que le Inertia_Ratio mesuré du cas -3 devienne effectif, la valeur de tn02 doit être confirmée par SET. | ||
| tn04 Safe_Dist | Distance de mesure d'inertie (unité : 0,01 tour), par exemple 22 représentée 0,22 tour moteur. Le maximum est de 0,4 tour. | 22 | |
| tn00 | Enregistrement des paramètres | Indiquez « 1 » pour enregistrer les paramètres de commande et du moteur. Indiquez « 2 » pour enregistrer les paramètres de commande et du moteur et redémarrer la servocommande.Indiquez « 3 » pour redémarrer la servocommande.Indiquez « 10 » pour initiaiser les paramètres de commande.Note : les utilisateurs doivent enregistrer les paramètres de commande et du moteur et redémarrer le contrôleur lors du changement de type de moteur. | |
L'algorithm de réglage automatique utilise le tableau suivant des paramètres de largeur de bande de la boucle de régulation par rapport à la valeur de rigidity :
Tableau 4-5: réglages de la rigidity et de la boucle de régulation
| Rigidité | Kpp/[0,01 Hz] | Kvp/[0,1 Hz] | Filtre de sortie [Hz] | Rigidité | Kpp/[0,01 Hz] | Kvp/[0,1 Hz] | Filtre de sortie [Hz] |
| 0 | 70 | 25 | 18 | 16 | 1945 | 700 | 464 |
| 1 | 98 | 35 | 24 | 17 | 2223 | 800 | 568 |
| 2 | 139 | 50 | 35 | 18 | 2500 | 900 | 568 |
| 3 | 195 | 70 | 49 | 19 | 2778 | 1000 | 733 |
| 4 | 264 | 95 | 66 | 20 | 3334 | 1200 | 733 |
| 5 | 334 | 120 | 83 | 21 | 3889 | 1400 | 1032 |
| 6 | 389 | 140 | 100 | 22 | 4723 | 1700 | 1032 |
| 7 | 473 | 170 | 118 | 23 | 5556 | 2000 | 1765 |
| 8 | 556 | 200 | 146 | 24 | 6389 | 2300 | 1765 |
| 9 | 639 | 230 | 164 | 25 | 7500 | 2700 | 1765 |
| 10 | 750 | 270 | 189 | 26 | 8612 | 3100 | 1765 |
| 11 | 889 | 320 | 222 | 27 | 9445 | 3400 | ∞ |
| 12 | 1056 | 380 | 268 | 28 | 10278 | 3700 | ∞ |
| 13 | 1250 | 450 | 340 | 29 | 11112 | 4000 | ∞ |
| 14 | 1500 | 540 | 360 | 30 | 12500 | 4500 | ∞ |
| 15 | 1667 | 600 | 392 | 31 | 13889 | 5000 | ∞ |

Information
Lorsque le réglage de la rigidité ou du rapport d'inertie donne une valeur Kvp supérieure à 4000, il n'est plus utile d'augmenter la rigidity

Note
La procédure EASY doit d'abord être executée et terminée avant que tunE puisse être utilisé. La mesure de l'inertie peut faire oscillator la machine, voirlez à être prét à couper immédiatement l'alimentation du contrôleur.
Prévoyez suffisamment d'espace mécanique pour l'oscillation du moteur lors de la mesure d'inertie afin d'éviter d'endommager la machine.

Information
Raisons de I'echec du réglage :
Cablage incorrect du servosysteme CMMB
La fonction DIN Pre_Enable est configurée mais pas active
- Trop de friction ou de force externe est appliquée à l'axe à régler
- Jeu trop important dans le chemin mécanique entre le moteur et la charge
- Le rapport d'inertia est trop grand
- Le chemin mécanique contient des composants trop souples (courroies ou accoulements très souples)
Pour plus d'informations sur le réglage, voir le chapitre 7
4.3.4 Mode JOG (F006)
Le mode JOG est destiné à être utilisé pour un test moteur executé par les boutons du panneau LED sans avoir besoin d'aucun autre signal de commande. Quels que soient les autres réglages Operation_Mode et de vitesse, en mode JOG, le contrôleur contrôle la rotation du moteur à la vitesse définie par Jog_RPM (d3.52) en mode vitesse instantanée (Operation_Mode=-3, voir chapitre 6.1).
Étapes du mode JOG :
Étape 1 : vérifie que tout le câblage est correct, la série EASY est terminée.
Étape 2: entrez l'adresse du panneau F003->d3.52, définissez Jog_RPM.
Étape 3: entrez dans le menu du panneau F006, l'adresse d6.40 apparait, appuyez plusieurs fois sur jusqu'à ce que d6.15 apparaisse, appuyez plusieurs fois sur jusqu'à ce que d6.25 apparaisse (il s'agit d'une procédure de sécurité pour garantir que les boutons et fonctionnent correctement et ne sont pas restés bloqués).
Étape 3 : appuyez sur SET et l'écran LED affiche « Jog »
Étape 4: appuyez et maintenez ▲ pour le sens positif ou ▼ pour le sens négatif. Le contrôleur s'activera automatiquement et l'arbre du moteur tournera à la vitesse Jog_RPM. Relâchez ▲ et ▼ pour arrêté l'arbre moteur.
Si aucune des touches ou n'a ete enfoncée pendant plus de 20 secondes a l'etape 4, le mode JOG s'arrertera et devra etre lance a nouveau a partir de I'etape 1.

Note
En mode JOG, les fonctions de capteur de fin de course configurées ne fonctionnent pas, les capteurs de fin de course seront ignorés.
Tenez compte du temps de reaction humain lors de la commande du moteur en mode JOG.
Utiliez des paramètres de vitesse lente pour le mode JOG, en particulier si la course du moteur est limitée par des blocages mécaniques.

Information
Si la fonction d'entrée numérique Pre_Enable est configurée, le mode JOG nécessite l'activation de cette fonction soit par le signal DIN correct, soit par la simulation DIN, sinon le mode JOG provoquera une erreur de contrôle « Activation externe ».
4.3.5 Historique des erreurs (F007)
Le contrôle CMMB stocke les 8 dernières erreurs dans l'histoire des erreurs. Entrez dans le menu du panneau F007, appuyez sur SET, la valeur de Error_State(2601.00) (voir chapitre 5.7, tableau 5-7) sera affichée, si 0001 s'affiche, alors c'est une erreur étendue, appuyez sur SET pour afficher la valeur de Error_State2(2602.00) (voir chapitre 5.7, tableau 5-8).
Appuyez sur ou pour parcourir tout l'historique des erreurs. Sur l'affichage LED, de gauche à droite, le point 3 indique qu'il s'agit de la première erreur, le point 4 indique qu'il s'agit de la dernière erreur. Il y a un masque pour spécifique quelles erreurs seront stockées dans l'historique des erreurs, veuillez consulter le chapitre 5.5 pour plus de détails.
Tableau 4-6 : exemple de panneau F007
| Affichage LED F007 | Signification |
| 000.1 | La dernière erreur est une erreur étendue. Appuyez sur la touche « SET » pour voir la valeur Error_State 2(2602.00). |
| 02.00 | L'erreur la plus ancienne est l'erreur de poursuite. |
| 0100 | Il y a eu une erreur de résistance de hachage, ce n'est ni la première ni la dernière erreur. |
Chapitre 5 CMMB configurator, guide utiliseur
Ce chapitre contient des informations sur l'utilisation du logiciel PC CMMB Configurator.
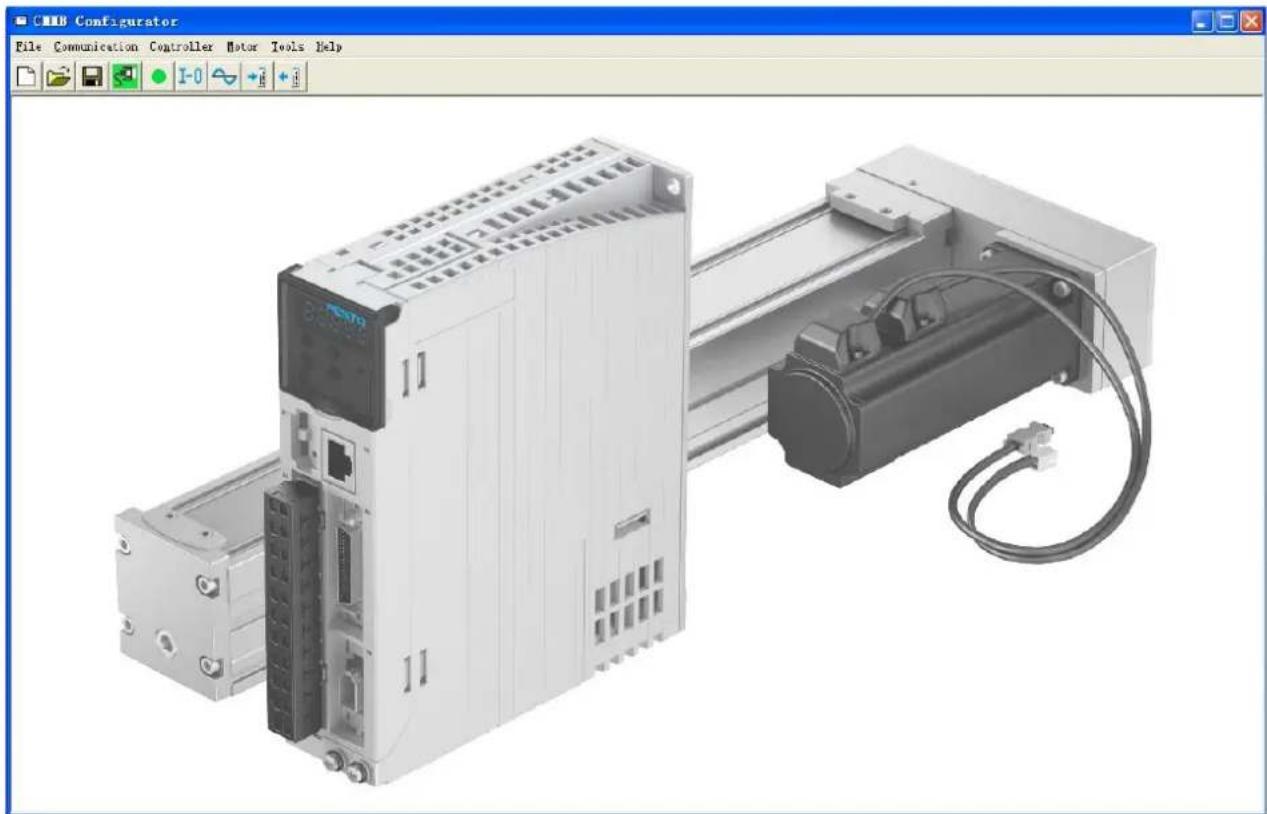
Figure 5-1: fenêtre principale de CMMB Configurator
5.1 Prise en main
5.1.1 Langue
La langue peut être commutée entre l'anglais et le chinois via l'élement de menu Tools->Language (Outils->Langue).
5.1.2 Ouvrir et enregistrer les fichiers de projet
Créer un nouveau fjichier de projet via l'élément de menu élément de menu File->New (Fichier->Nouveau), ou en cliquant sur le bouton
Ouvrir un projet existant via l'objet de menu File->Open (Fichier->Ouvrir), ou en cliquant sur le bouton et en selectionnant un fichier .kpjt.
Enregistrer un projet via l'objet de menu élément de menu File->Save (Fichier->Enregistrer), ou en cliquant sur le bouton et en enregistrant en tant que fichier .kpjt.

Information
Seules les fenêtres (liste d'objects, oscilloscope, etc.) sont enregistrées - les paramêtres dans le contrôleur ne peuvent pas être enregistrés de cette manière.
5.1.3 Demarrage de la communication
Cliquez sur l'objet de menu Communication->Communication settings (Communication->Paramétres de communication). La fenêtre suivante apparait :
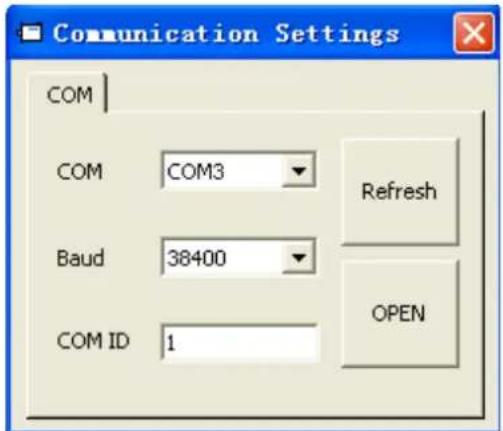
Figure 5-2: paramètres de communication
Selectionnez le bon port COM (s'il n'est pas affché, cliquez sur le bouton « Actualiser »), le début en bauds et l'ID COM (ID de nœud), puis cliquez sur le bouton « OUVRIR ».
Une fois la communication établie avec le contrôleur, la communication peut être ouverte ou fermée en cliquant sur le bouton
5.1.4 ID de nœud et débit en bauds
Si plusieurs contrôleurs sont utilisés dans une application, vous aurez peut-être besoin d'un ID de nœud différent pour différents contrôleurs afin de les désigner.
L'ID de nœud du contrôleur peut être modifié via l'élement de menu Controller->Controller Property (Contrôleur->Propriété du contrôleur).
Tableau 5-1 : ID de nœud et débit en bauds
| Adresse interne | Type | Nom | Valeur | Unité |
| 100B.00 | Uint8 | Node_ID | DÉC. | |
| 2FE0.00 | Uint16 | RS232_Baudrate | Baud |

Information
Le réglage de l'ID de nœud et du débit en bauds n'est activé qu'après l'enregistrement et le redémarrage.
5.1.5 Objects (ajouter, supprimer, aide)
Ouvrez n'importe qu'elle fenètre avec une liste d'objets, déplacez le pointeur de la souris sur l'objet et faites un cli c droit. La fenetre de selection suivante apparait :
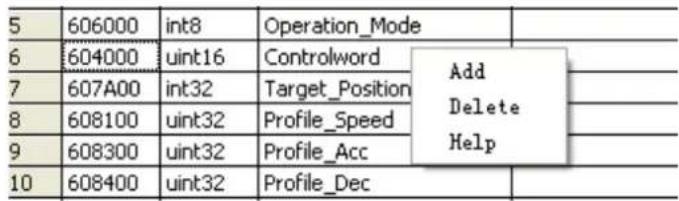
Figure 5-3: objet
Cliquez sur Ajouter et double-cliquez sur l'objet requis dans le Dictionnaire d'objets. L'objet selectionné est alors ajoute à la liste.
Cliquez sur Supprimer. L'objet selectionné est supprimé de la liste.
Cliquez sur Aide pour dire une description de I'objet selectionné dans le Dictionnaire d'objets.
5.2 Redémarrage sauvegarde Init
Cliquez sur Controller->Init Save Reboot (Contrôleur->Redémarrage sauvegarde Init). La fenêtre suivante apparait :

Figure 5-4: redémarrage sauvégarde Init
Cliquez sur l'élement correspondant pour terminer l'opération nécessaire.

Information
Après avoir terminé les paramètres de commande init, il faut cliquer sur les boutons Save Control Parameters (enregistrer les paramètres de commande) et Reboot (redémarrer) pour charger les paramètres de commande par défaut sur le contrôleur.
5.3 Mise à jour du micrologiciel
Un nouveau contrôleur de moteur est toujours livré avec la dernière version du micrologiciel. Si le micrologiciel doit être mis à jour pour une raison quelconque, chargez le nouveau micrologiciel via l'élement de menu Controller->Load Firmware (Contrôleur->Charger le micrologiciel).
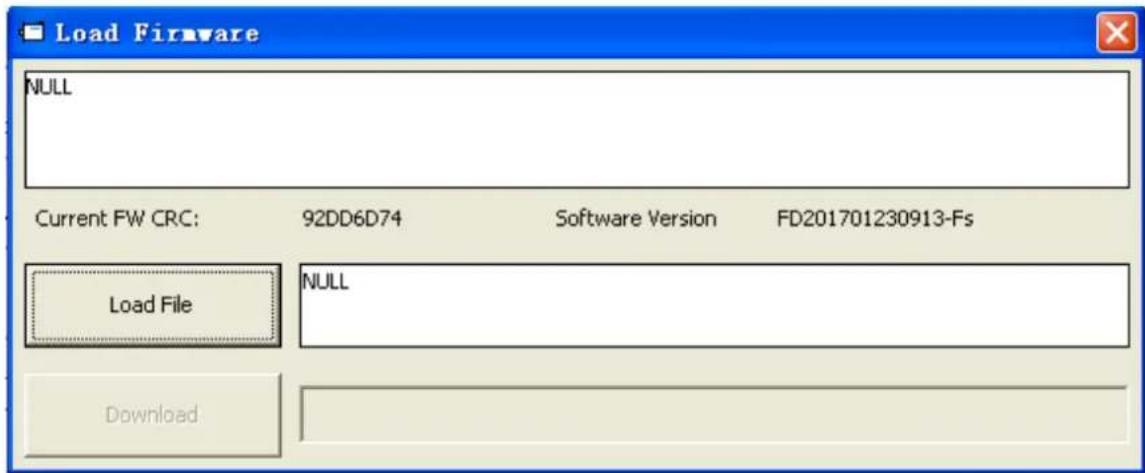
Figure 5-5: charger le micrologiciel
Cliquez sur Fichier de chargement pour selectionner le fichier du micrologiciel (.servo) puis cliquez sur Tetecharger pour commencer a charger le micrologiciel sur le contrôleur.

Information
Ne coupez pas l'alimentation et ne débranche pas le cable RS232 pendant le chargement du micrologiciel. Si le processus de téléchargement est interrompu, réinitialisez d'abord l'alimentation du contrôleur. Sélectionnez ensuite le fichier du micrologiciel et cliquez sur le bouton Téchéarger, puis démarrez la communication RS232.
5.4 Configuration du contrôleur en lecture/écriture
Cette fonction peut être utilisée pour生存/écrire plusieurs paramètres simultanément pour les grands lots de production, afin d'éviter de régler les paramètres du contrôleur un par un.
5.4.1 Lire les paramètres du contrôleur
Cliquez sur Tools->R/W Controller Configuration->Read Settings from Controller (Outils->Configuration du contrôleur R/W->Lire les paramètres du contrôleur) ou cliquez sur le bouton +. La fenêtre suivante apparait.
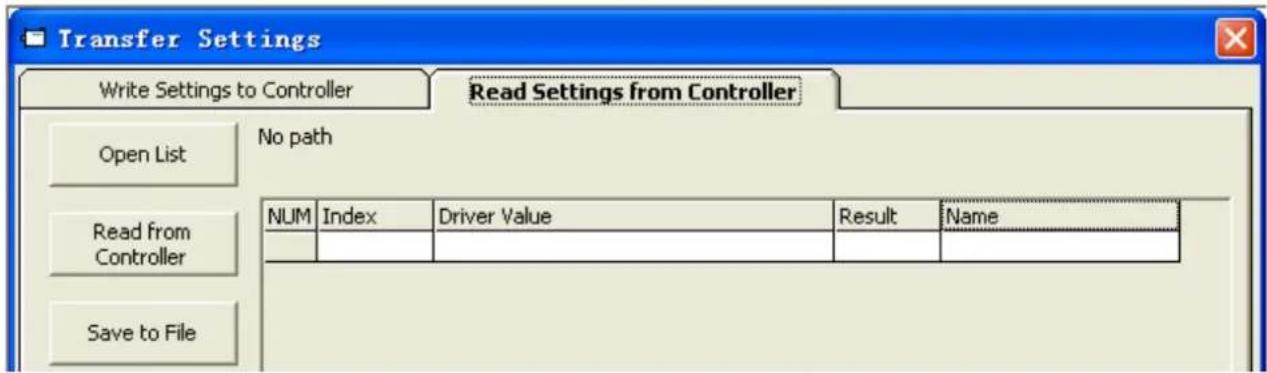
Figure 5-6: paramétres de transfert
Cliquez sur Ouvrir la liste pour sélectionner un filchier de liste de paramétres (.cdo). Le paramètre apparait dans la fenêtre. Cliquez sur Lire les paramétres du contrôleur pour obtenir la Valeur d'entrainment
et le Résultat, puis cliquez sur Enregistrer dans un fichier pour enregistrer les paramétres dans un fichier .cdi.

Information
Le fichier .cdo définit quels objets seront lus, mais si l'objet n'existe pas dans le contrôleur, le résultat sera « erreone » (affché en rouge).
5.4.2 Écrire les paramètres dans le contrôleur
Cliquez sur Tools->R/W Controller Configuration->Write Settings to Controller (Outils->Configuration du contrôleur R/W->Écrire les paramétres dans le contrôleur) ou cliquez sur le bouton. La fenêtre suivante apparait :

Information
Désactivez toujours le contrôleur avant d'émire les paramètres dans le CMMB, car certains objets ne peuvent pas été écrites avec succès si le contrôleur est activé.
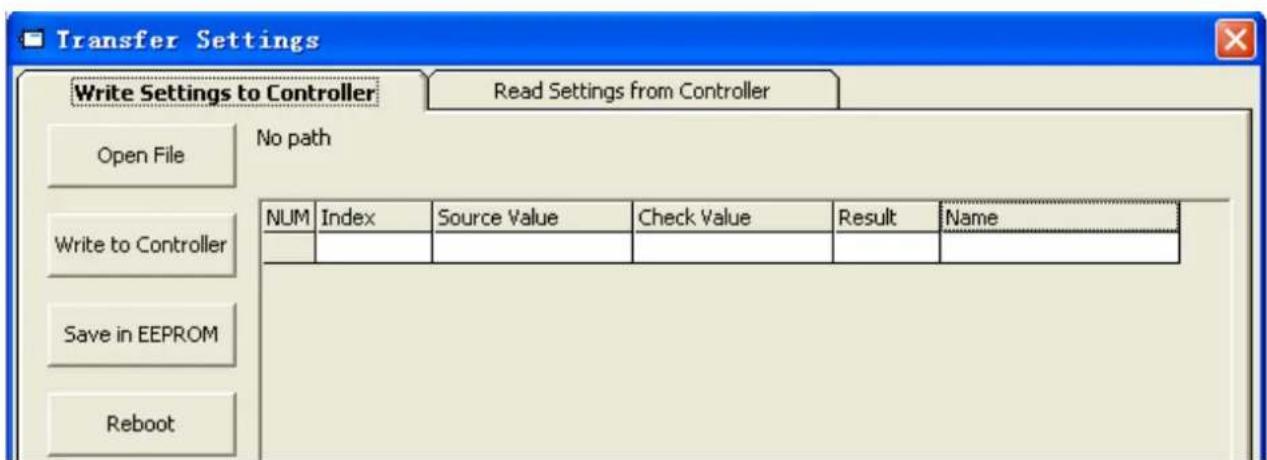
Figure 5-7 : paramètres de transfert
Cliquez sur Ouvrir fjchier pour selectionner un fjchier de parametrage (.cdi). Les reglages des parametes apparaisent dans la fenetre.
Le fichier.cdi contient des informations telles que l'adresse de l'objet, la valeur de l'objet et le résultat de lecture. Si le résultat de la lecture est « errone», « invalide » apparaitra immédiatement en rouge dans le champ Résultat.
Cliquez sur Écrire dans le contrôleur pour obtenir la Valeur de vérification et le Résultat. Le Résultat « erreé » signifie que la valeur n'a pas été écrite avec succès, probablement parce que l'objet n'este pas dans le contrôleur. Cliquez sur Enregistrer dans EEPROM et Redémarrer pour activer tous les paramètres.
5.5 Fonctions I/O numériques
Cliquez sur élément de menu Controller->Digital IO Functions (Contrôleur->Fonctions I/O numériques) ou cliquez sur le bouton I-0. La fenêtre suivante apparait. La fonction et la polarité sont affichées par défaut ici.
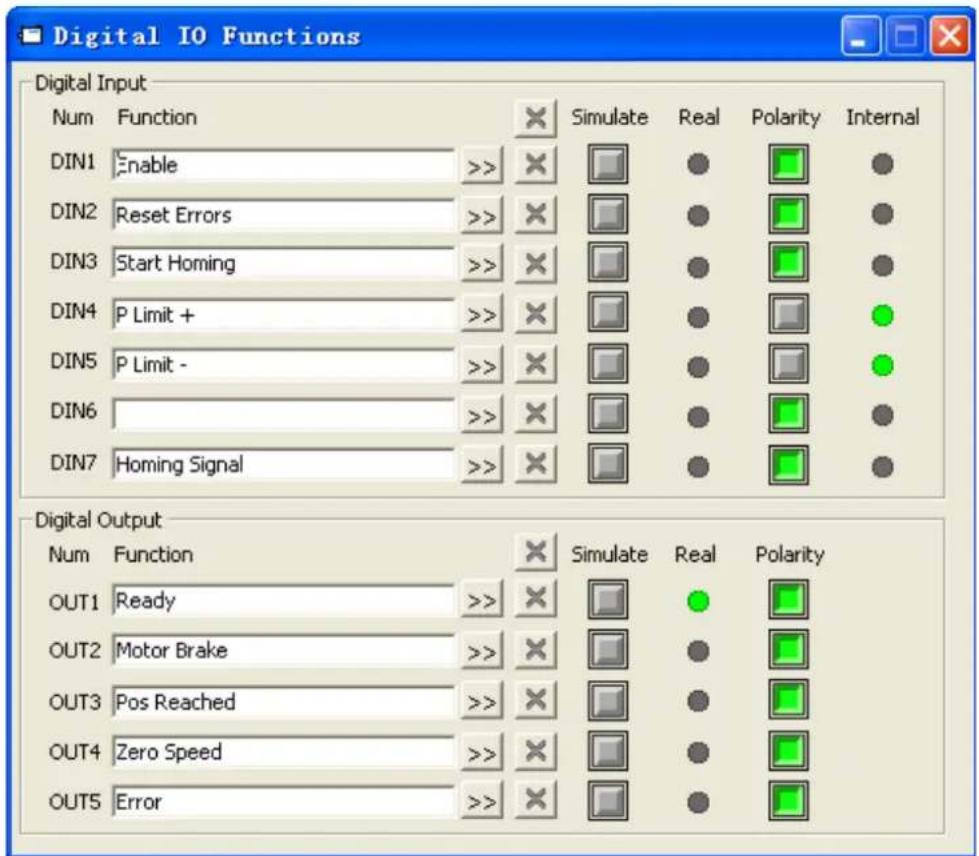
Figure 5-8: I/O numériques
5.5.1 Entrees numériques
Le contrôle de moteur CMMB fournit 7 entrées numériques. Les fonctions de ces entrées numériques peuvent être configurées. Les fonctions peuvent être définies via les paramètres d'usine ou les paramètres par défaut de l'application après avoir traité le menu de configuration facile (voir chapitre 4). Les fonctions des entrées numériques peuvent également être librement configurées.

Figure 5-9: entree numérique
Fonction : cliquez sur >> pour selectionner le reglage de la fonction DIN, cliquez sur << pour supprimer le reglage de la fonction DIN.
Reel: affiche I'etat reel du matériel d'entree numerie.
1 signifie « actif », l'etat logique de l'entrée numérique est 1.
0 signifie « inactif », l'etat logique de l'entrée numérique est 0.
Simuler: simule le signal matériel actif de l'entrée numérique.
1 signifie que l'entrée numérique est simulée comme « active», état logique 1.
0 signifieaucunimpactsurl'etatlogiquede l'entree numérique.
Polarité: inverse l'état logique de l'entrée numérique.
1 signifie que Interne est definite sur 1 par un signal « actif »
Interne : il s'agit du résultat de Simuler, Reel et Polarité via la formule logique :
Interne=(Réel OU Simulé) XOR (PAS Polarité)
1 signifie « actif », l'état logique de la fonction sélectionnée est 1.
0 signifie « inactif », l'état logique de la fonction sélectionnée est 0.

Information
- Plusieurs fonctions d'entrée numérique peuvent être sélectionnées pour une entrée numérique donnée. Si elles ne sont enaucun cas contradictoires, les fonctions d'entrée numérique sélectionnées sont gérées simultanément.
- Plusieurs fonctions d'entrée numérique modifié les variables de commande internes du contrôleur. Veuillez vous familiariser avec les informations du chapitre 6.1, en particulier concernant Controlword et le mode de fonctionnement (Operation_Mode), avant de modifier la configuration de toute fonction d'entrée numérique associée.
Le tableau suivant répertorie les fonctions d'entrée numérique :
Tableau 5-2: fonctions d'entrée numérique
| Fonction DIN Description | |
| Activer | Activation du contrôleur1 : activer le contrôleur (Controlword=Win_Controlword(2020.0F), valeur par défaut=0x2F)0 : désactiver le contrôleur (Controlword = 0x06) |
| Réinitialiser les erreurs | Définit le mot de commande pour réinitialiser les erreurs, front actif : 0 -> 1 |
| Operation Mode sel | Sélection du mode de fonctionnement1 : Operation_Mode=EL.Din_Mode1 (2020.0E), valeur par défaut = -30 : Operation_Mode=EL.Din_Mode0 (2020.0D), valeur par défaut = -4 |
| Kvi Off | 1 : boucle de régulation de la vitesse intégrant le gain OFF0 : le gain d'intégration de la boucle de régulation de vitesse a été définir Reportez-vous au chapitre 7 pour plus d'informations sur Kvi. |
| P limit+ | Entrée de capteur de fin de course de position positive/négative pour les capteurs de fin de course « normalement fermés »0 : la limite de position est active, la direction correspondante est bloquée |
| P limit- | |
| Signal de référence | Signal de commutation d'origine, pour la mise en référence |
| Invert Direction | Inverse le sens de la commande en mode vitesse et couple |
| Din Vel Index0 | Indice Din_Speed en mode vitesse DIN |
| Din Vel Index1 | |
| Din Vel Index2 | |
| Quick Stop | Définit le mot de commande pour démarrer l'arrêt rapide. Àprouès un arrêt rapide, le mot de commande doit être régé sur 0x06 avant 0x0F pour l'activation (si la fonction d'activation est configurée dans Din, il suffit de la réactiver) |
| Lancer la mise en référence | Lance la mise en référence. N'a de sens que si le contrôleur est activé. Le contrôleur revient au mode de fonctionnement précédent après la mise en ↔reference. |
| Activate Command | Active la commande de position. Contrôle le bit 4 du Controlword, par exemple Controlword=0x2F->0x3F |
| Multifonction0 | Commutateur de rapport de transmission (reportez-vous au chapitre 5.5.3 pour plus de détails) |
| Multifonction1 | |
| Multifonction2 | |
| Gain Switch 0 | Commutateur de gain de contrôle PI (reportez-vous au chapitre 5.5.4 pour plus de détails) |
| Gain Switch 1 | |
| Motor Error | 1 : provoque l'erreur du contrôleur « Température du moteur », Peut être utilisé pour surveiller la température du moteur au moyen d'un interrupteur de température externe ou d'un capteur PTC. La polarité doit être régée en fonction du type de capteur. |
| Fast_Capture1 | Capture rapide (reportez-vous au chapitre 5.5.5 pour plus de détails) |
| Fast_Capture2 | |
| Pre Enable | Pour des raisons de sécurité, Pre_Enable peut servir de signal pour indiquer si l'ensemble du système est prét ou non.1 : le contrôleur peut être activé0 : le contrôleur ne peut pas être activé |
| PosTable Cond0 | Condition du tableau de position pour le mode tableau de position |
| PosTable Cond1 | |
| Start PosTable Lancer la séquence du mode tableau de position | |
| PosTable Idx0 | Index de départ du tableau de position du mode tableau de position |
| PosTable Idx1 | |
| PosTable Idx2 | |
| Abort PosTable | Annuler la série du mode tableau de position |
5.5.2 Sorties numériques
Le contrôleur de moteur CMMB fournit 5 sorties numériques. Les fonctions de ces sorties numériques peuvent être configurées. Les fonctions peuvent être définies via les paramètres d'usine ou les paramètres par défaut de l'application après avoir traité le menu de configuration facile (voir chapitre 4). Les fonctions des sorties numériques peuvent également être librement configurées.

Figure 5-10: sortie numérique
Fonction : cliquez sur >> pour selectionner le réglage de la fonction OUT. Cliquez sur << pour supprimer le réglage de la fonction OUT.
Simuler: simule l'etat logique de la fonction de sortie numérique 1.
1 signifie que la fonction de sortie numérique est simulée en tant qu'etat logique 1
0 signifie aucun impact sur I'etat logique de la fonction de sortie numérique
Polarité: inverse l'état logique de la fonction de sortie numérique.
1 signifie que la sortie numérique physique Réelle est régée sur ON par l'état logique 1 de la fonction de sortie numérique
0 signifie que la sortie numérique physique Réelle est régée sur ON par l'état logique 0 de la fonction de sortie numérique
Réel : affiche l'objet réel de la sortie numérique. C'est le résultat de Simuler, Polarité et l'état logique de la fonction de sortie numérique sélectionnée via la formule logique : Réel=(Dout_Function_Status OU Simuler) XOR (PAS Polarité)
1 signifie sortie numérique est ON
0 signifie que la sortie numérique est OFF

Information
Plusieurs fonctions de sortie numérique peuvent être selectionnées pour une sortie numérique donnée. L'état résultat est la logique OU des fonctions de sortie numérique selectionnées.
Le tableau suivant répertorie les fonctions de sortie numérique :
Tableau 5-3 : fonctions de sortie numérique
| Fonction OUT | Description |
| Prêt | Le contrôleur est prét à être activé |
| Erreur | Erreur de contrôleur |
| Pos Reached | En mode positionnement, différence de position entre Pos_Actual et Pos_Target<Target_Pos Window(6067.00),durée>=Position Window_time(6068.00) |
| Vitesse zéro | |Speed_1ms(60F9.1A)|<=Zero_Speed Window(2010.18) et durée >=Zero_Speed_Time(60F9.14) |
| Frein moteur | Signal de commande du frein moteur. Par ce signal, un relais externe peut être commandé, par lequel le frein moteur est commandé. (voir chapitre 3.2.4). |
| Vitesse atteinte | |Speed_Error(60F9.1C)|<Target_Speed Window(60F9.0A) |
| Index codeur | La position du codeur est à l'intérieur d'une plage autour de la position de l'index. Cette plage est définie par Index Window(2030.00). |
| Limitation de vitesse | En mode couple, la vitesse réelle a atteint Max_Speed(607F.00) |
| Pilote acté | Contrôleur activé |
| Limite de position | La fonction de limite de position est active |
| Référence trouvée | Référence trouvée |
| Avertissement codeur | Avertissement codeur |
| PosTable actif | Mode tableau de position en cours d'exécution |
5.5.3 Commutateur de rapport de transmission (expert uniquement)

Information
Cette fonction est recommandée uniquement aux utilisateurs experimentés.
Il existe 8 groupes de paramètres de rapport de transmission qui peuvent être selectionnés via les entrées numériques. Le rapport de transmission n'est utilisé que pour le mode train d'impulsions (voir chapitre 6.5).
Tableau 5-4 : commutateur de rapport de transmission
| Adresse interne | Type | Nom | Valeur | Unité |
| 2508.01 | Int16 | Gear_Factor[0] | Déc. | |
| 2508.02 | Uint16 | Gear_Divider[0] | Déc. | |
| 2509.01 | Int16 | Gear_Factor[1] | Déc. | |
| 2509.02 | Uint16 | Gear_Divider[1] | Déc. | |
| 2509.03 | Int16 | Gear_Factor[2] | Déc. | |
| 2509.04 | Uint16 | Gear_Divider[2] | Déc. | |
| 2509.05 | Int16 | Gear_Factor[3] | Déc. | |
| 2509.06 | Uint16 | Gear_Divider[3] | Déc. | |
| 2509.07 | Int16 | Gear_Factor[4] | Déc. | |
| 2509.08 | Uint16 | Gear_Divider[4] | Déc. | |
| 2509.09 | Int16 | Gear_Factor[5] | Déc. | |
| 2509.0A | Uint16 | Gear_Divider[5] | Déc. | |
| 2509.0B | Int16 | Gear_Factor[6] | Déc. | |
| 2509.0C | Uint16 | Gear_Divider[6] | Déc. | |
| 2509.0D | Int16 | Gear_Factor[7] | Déc. | |
| 2509.0E | Uint16 | Gear_Divider[7] | Déc. |
Le rapport de transmission actuel est Gear_Factor[x], Gear_Divider[x], x étant le code BCD de
bit 0 : Multifonction0
bit 1: Multifonction1
bit 2: Multifonction2
Un bit qui n'est pas configuré sur un DIN est 0.
Example :

Figure 5-11 Example de commutateur de rapport de transmission Din
Multifunction 0 = 0 , Multifunction 1 = 1 , Multifunction 2 = 1 , donc x = 6 , le rapport de transmission actuel est Gear_Factor[6], Gear_Divider[6].
5.5.4 Commutateur de gain (expert uniquement)

Information
Cette fonction est recommandée uniquement aux utilisateurs experimentés, familiarisés avec les bases du réglage de la boucle de servocommande.
Il existe 4 groupes de paramètres de gain PI, où chaque groupe contient le gain proportionnel (Kvp) et intégral (Kvi) de la boucle de régulation de vitesse et le gain proportionnel (Kpp) de la boucle de régulation de position. Le contrôleur de moteur CMMB propose plusieurs méthodes pour sélectionner dynamiquement un groupe de paramètres de gain PI.
Tableau 5-5 : paramètres du groupe de réglage du gain PI
| Adresse interne | Type | Nom | Valeur | Unité |
| 60F9.01 | Uint16 | Kvp[0] | Déc., Hz | |
| 60F9.02 | Uint16 | Kvi[0] | Déc. | |
| 60FB.01 | Int16 | Kpp[0] | Déc. Hz | |
| 2340.04 | Uint16 | KVP[1] | Déc., Hz | |
| 2340.05 | Uint16 | Kvi[1] | Déc. | |
| 2340.06 | Int16 | Kpp[1] | Déc. Hz | |
| 2340.07 | Uint16 | KVP[2] | Déc., Hz | |
| 2340.08 | Uint16 | Kvi[2] | Déc. | |
| 2340.09 | Int16 | Kpp[2] | Déc. Hz | |
| 2340.0A | Uint16 | KVP[3] | Déc., Hz | |
| 2340.0B | Uint16 | Kvi[3] | Déc. | |
| 2340.0C | Int16 | Kpp[3] | Déc. Hz | |
| 60F9.28 | Uint8 | PIVMLine | Déc. | |
| 60F9.09 | Uint8 | PI_Switch | Déc. |
Les paramètres PI réels sont Kvp[x], Kvi[x], Kpp[x], x=PI_Connection.
Il existe 3 méthodes pour modifier PIVMLter.
Méthode 1 : la fonction Commutateur de gain 0 et/ou Commutateur de gain 1 est configurée sur DIN. PIVMLer est le code BCD de
bit 0 : commutateur de gain 0
bit 1 : commutateur de gain 1
Si un seul bit est configuré, l'autre bit est 0.
Example :

Figure 5-12: exemple de commutateur de gain Din
Gain Switch0=1, Gain Switch1= 0, puis PI_Pointer=1, les paramètres de gain PI valides sont Kvp[1], Kvi[1] et Kpp[1]
Méthode 2: si la méthode 1 n'est pas appliquée, réglez PI_Switch(6069.09) sur 1. Ensuite, pendant que le moteur tourne, réglez PIVMLter ti =0. Dès que Position atteinte ou Vitesse zéro, définitsez PIVMLter sur =1
Il s'agit de la fonction pour un système qui nécessite des réglages de gain PI différents pour la rotation et l'arrêt.

Information
Reportez-vous au tableau de la fonction OUT au chapitre 5.5.2 pour la définition de la position atteinte et de la vitesse nulle.
Méthode 3: si ni la méthode 1 ni la méthode 2 ne sont appliquées, la valeur PI Pointer peut être définie par l'utilisateur. Le réglage par défaut de 0 est fortement recommandé.
5.5.5 Capture rapide
La fonction Capture rapide est utilisé pour capturer la Position_Actual(6063.00) lorsque le front DIN associé se produit. Le temps de réponse est de 2 ms maximum.
Tableau 5-6 : objets de capture rapide
| Adresse interne | Type | Nom | Valeur | Unité |
| 2010.20 | Uint8 | Rising_Captured1 | Déc. | |
| 2010.21 | Uint8 | Falling_Captured1 | Déc. | |
| 2010.22 | Uint8 | Rising_Captured2 | Déc. | |
| 2010.23 | Uint8 | Falling_Captured2 | Déc. | |
| 2010.24 | Int32 | Rising_Capture_Position1 | Déc. | |
| 2010.25 | Int32 | Falling_Capture_Position1 | Déc. | |
| 2010.26 | Int32 | Rising_Capture_Position2 | Déc. | |
| 2010.27 | Int32 | Falling_Capture_Position2 | Déc. |
Lorsque la fonction DIN Fast_Capture1 est configurée sur DIN et qu'un front DIN montant se produit, Rising_Captured1 passé à 1. Au même moment, Pos_Acual est stocké dans Rising_Capture_Position1. Si un front DIN descendant se produit, Falling_Captured1 est défini sur 1. Au même moment, Pos_Acual est stocké dans Falling_Capture_Position1. Une fois que Rising_Captured1 ou Falling_Captured1 est passé à 1, l'utilisateur doit les réinitialiser à 0 pour la prochaine opération de capture, car tout autre front après le premier ne sera pas capturé.
Voir Fast_Capture1 concernant la fonction DIN Fast_Capture2.
5.6 Oscilloscope
La fonction oscilloscope sert à échantillonner la valeur des objets scélectionnés avec un cycle d'échantillonnage flexible (défini par Temps d'échantillonnage) et un nombre total d'échantillons flexible (défini par échantillons)
Pendant le fonctionnement, si les performances ne répondent pas aux exigences ou si tout autre comportement inattendu se produit, il est fortement conseilé d'utiliser la fonction oscilloscope pour effectuer l'analyse.
Cliquez sur Controller-->Scope (Contrôleur-->Oscilloscope) ou cliquez sur pour ouvrir la fenêtre de l'oscilloscope
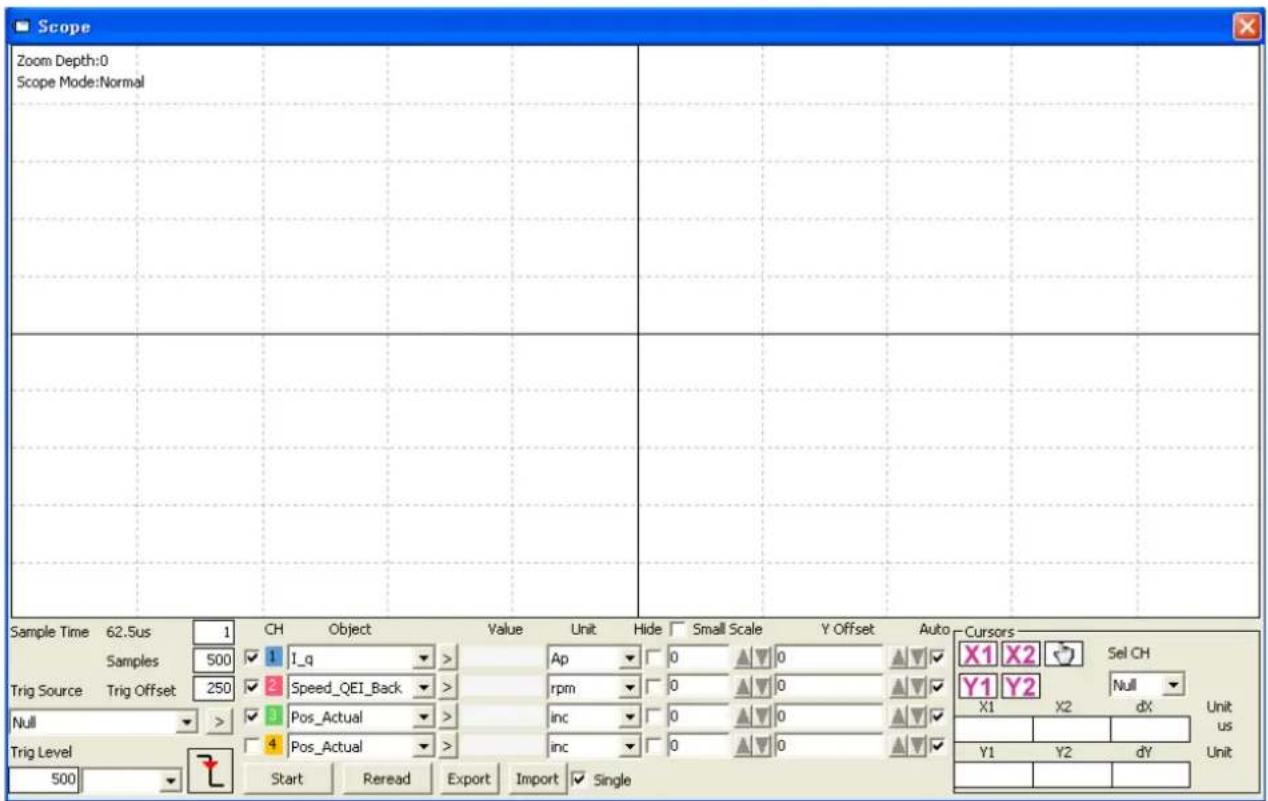
Figure 5-13: fenêtre de l'oscilloscope
Décalage de déclenchement : nombre d'échantillons avant que l'évenement déclencheur ne se produit.
Objet : des données de longueur maximale de 64 bits peuvent etre prises dans un échantillon, par exemple : 2 objets Int32 ou 4 objets Int16.
Simple: Single signifie échantillon pour un seul événement déclencheur. Single signifie échantillon en continu.
Agrandir/dézoomer l'oscillogramme: appuyez sur le bouton droit de la souris et faites glisser vers le coin inférieur droit/supérieur gauche. Un clic gauche de la souris sur active le mode de glissement horizontally, l'icone se transforme en et à l'intérieur de la zone d'affichage de l'oscillogramme, le curseur de la souris prend la forme d'un doigt. Un oscillogramme agrandi peut ensuite être déplace horizontally en appuyant sur le bouton gauche de la souris et en faisant glisser vers la gauche/droite. Un clic gauche de la souris sur ou toute action de zoom avant ou arrêté annule automatiquement le mode de glissement.
Curseurs : jusqu'à 4 curseurs d'oscilloscope peuvent être selectionnés en cliquant sur le bouton respectif :

Y1 Y2. Les curseurs de l'oscilloscope apparaissent sur l'oscillogramme. Sélectionnez une chaîne dans le menu déroulant Sel CH. Déplacez le pointeur de la souris vers le curseur de l'oscilloscope. Appuyez sur le bouton gauche de la souris et faites glisser le curseur de l'oscilloscope pour le déplacer. Une valeur d'exemple et les différences de X1, X2 et Y1, Y2 apparaissent dans les champs suivants :
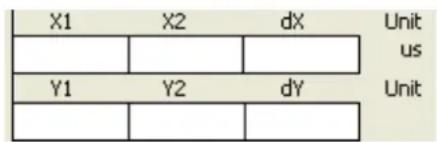
Figure 5-14: données du curseur
Exporter : exporte les données échantillonnées sous forme de fichier .scope.
Importer : imports un fichier .scope et affiche l'oscillogramme dans la fenetre de l'oscilloscope.
Relire : reli t les dernières données de l'oscilloscope du contrôleur et affiche l'oscillogramme dans la fenetre de l'oscilloscope.
Auto: si la case Auto est cochée, l'oscillogramme est mis à l'échelle automatiquement.
Si la case Auto n'est pas cochée, l'oscillogramme est mis à l'échelle par la valeur d'échelle et de décalage dans le champ suivant :

Figure 5-15: données d'échelle et de décalage
Il est possible d'augmenter la valeur d'échelle et de décalage en appuyant sur le bouton et de la réduire en appuyant sur le bouton. Si la case petite échelle est cochée, l'étape de changement de la valeur d'échelle est changée à 10 % comme avant.
Mode oscilloscope: sur le côté supérieur gauche de l'oscillogramme, le mode oscilloscope « Normal » ou « Import » est affché.
- Normal : tous les boutons sont actifs.
Figure 5-16: mode oscilloscope: normal
- Import: si l'oscillogramme est une importation à partir d'un fichier .scope, le mode oscilloscope sera « Import», dans ce mode le bouton Demarrer, relire sera inactif. Le mode « Import » peut être quitté en cliquant sur « Ici » sur l'indice.
Figure 5-17: mode oscilloscope: import
5.7 Affichage des erreurs et historique des erreurs
Erreur : cliquez sur Controller->Error Display (Contrôleur->Affichage des erreurs) ou cliquez sur le bouton (qui devient rouge en cas d'erreur). La fenêtre d'affichage des erreurs s'affiche. Elle affiche les dernières erreurs.
Tableau 5-7 : informations Error State(2601.00)
| Bit | Nom de l'erreur | Code d'erreur | Description |
| 0 | Erreur étendue | Reportez-vous à l'objet « Error_State 2 » (2602.00) | |
| 1 | Codeur non connecté | 0x7331 | Aucun codeur de communication connecté |
| 2 | Codeur interne | 0x7320 | Erreur de codeur interne |
| 3 | Codeur CRC | 0x7330 | Communication avec le codeur perturbée |
| 4 | Température du contrôleur | 0x4210 Température du dissipateur thermique trop élevé | |
| 5 | Surtension | 0x3210 | Surtension du bus DC |
| 6 | Sous-tension | 0x3220 | Sous-tension du bus DC |
| 7 | Surintensité | 0x2320 | Court-circuit étage de sortie ou moteur |
| 8 | Résistance de hachage | 0x7110 Surcharge, résistance du hacheur de freinage | |
| 9 | Erreur de poursuite | 0x8611 | Max. erreur de poursuite dépasse |
| 10 | Basse tension logique | 0x5112 | Tension d'alimentation logique trop basse |
| 11 | Moteur ou contrôleur IIt | 0x2350 Erreur | moteur ou étage de sortie IIt |
| 12 | Surfréquence | 0x8A80 | Fréquence d'entrée d'impulsions trop élevé |
| 13 | Température du moteur | 0x4310 Alarme | capteur température moteur |
| 14 | Informations sur le codeur | 0x7331 | Pas de codeur connecté ou pas de réponse de communication codeur |
| 15 | Données EEPROM | 0x6310 | Erreur de somme de contrôle EEPROM |
Tableau 5-8: informations Error_State2(2602.00)
| Bit | Nom de l'erreur | Code d'erreur | Description |
| 0 | Capteur de courant | 0x5210 | Décalage du signal du capteur de courant ou ondulation trop importante |
| 1 | Watchdog | 0x6010 | Exception de logiciel chien de garde |
| 2 | Mauvaise interruption | 0x6011 | Exception d'interruption invalide |
| 3 | MCU ID | 0x7400 | Mauvais type de MCU détecté |
| 4 | Configuration du moteur | 0x6320 | Pas de données moteur dans EEPROM/moteur jamais configuré |
| 5 | Réservé | ||
| 6 | Réservé | ||
| 7 | Réservé |
| 8 Activation externe 0x5443 | La fonction DIN « pre_enable » est configurée, mais le DIN est inactif lorsque le contrôleur est activé/va être activé | |
| 9 Limite positive 0x5442 | Limite de position positive (après mise en référence) – la limite de position ne provoque une erreur que lorsque Limit_Function (2010.19) est réglé sur 0. | |
| 10 Limite négative | 0x5441 | Limite de position négative (après mise en référence), la limite de position ne provoque une erreur que lorsque Limit_Function (2010.19) est réglé sur 0. |
| 11 SPI interne | 0x6012 | Erreur de micrologiciel interne dans la gestion SPI |
| 12 Réservé | ||
| 13 Sens de la boucle fermée | 0x8A81 | Sens différents entre le moteur et le codeur de position en fonctionnement en boucle fermée par un second codeur. |
| 14 Réservé | ||
| 15 Comptage maître | 0x7306 | Erreur de comptage du codeur maître |

Information
Il y a une case à cocher à côté de chaque élément d'erreur, tous sont cochés par défaut, signifie que la case peut être découvert, signifie que la case ne peut pas être découvert. Un élément non coché signifie que l'erreur associée sera ignorée. Le masque d'erreur peut également être définis dans Error_Mask(2605.01) et Error_Mask(2605.04) (voir tableau 5-9)
Historique des erreurs : cliquez sur l'element de menu Controller->Error History (Contrôleur>Historique des erreurs). La fenêtre avec la liste de l'histoire des erreurs s'affiche. Elle affiche les codes d'erreur des 8 dernières erreurs et respectivement la tension DCBUS, la vitesse, le courant, la température du contrôleur, le mode de fonctionnement et le temps de travail du contrôleur au moment où l'erreur s'est produit.
Il existe des paramètres de masque pour spécifique quelles erreurs seront stockées dans l'histoire des erreurs (voir tableau 5-9).
Tableau 5-9 Erreurs et masque d'historique des erreurs
| Adresse interne | Type | Nom | Signification (signification des bits, voir tableau 5-7 et tableau 5-8) | Défaut |
| 2605.01 | Uint16 | Error_Mask | Masque Error_State(2601.00). Bit = 0 signifie que l'erreur associée sera ignorée. | 0xFFFF |
| 2605.02 | Uint16 | Store_Mask_ON | Masque d'erreur pour Error_History of Error_State(2601.00) lorsque le contrôleur est activé. Bit = 0 signifie que l'erreur associée ne sera pas stockée dans Error_History | 0xFBFF |
| 2605.03 | Uint16 | Store_Mask_OFF | Masque d'erreur pour Error_History of Error-State(2601.00) lorsque le contrôleur n'est pas activé. Bit = 0 signifie que l'erreur associée ne sera pas stockée dans Error_History | 0x0000 |
| 2605.04 | Uint16 | Error_Mask2 | Masque Error_State2(2602.00). bit = 0 signifie que l'erreur associée sera ignorée | 0xFFFFFF |
| 2605.05 | Uint16 | Store_Mask_ON2 | Masque d'erreur pour Error_History of Error_State2(2602.00) lorsque le contrôleur est activé. Bit = 0 signifie que l'erreur associée ne sera pas stockée dans Error_History | 0xF1FF |
| 2605.06 | Uint16 | Store_Mask_OFF2 | Masque d'erreur pour Error_History of Error-State2(2602.00) lorsque le contrôleur n'est pas activé. Bit = 0 signifie que l'erreur associée ne sera pas stockée dans Error_History | 0x003F |
Chapitre 6 Modes de fonctionnement et modes de commande
Les paramètres du contrôleur peuvent être définis via le panneau de commande ou le port RS232 (par exemple avec le logiciel CMMB Configurator). Dans l'introduction suivante, l'adresse du panneau (si elle est disponible) et l'adresse interne seront affichées dans les tableaux d'objects.
6.1 Étapes générales pour démarrer un mode de commande
Étape 1 : câblage
Assurez-vous que le câblage nécessaire à l'application est correctement effectué (reportez-vous au chapitre 3).
Étape 2: configuration de la fonction IO
Voir le chapitre 5.5 concernant les significations de la fonction IO et la polarité.
Tableau 6-1 : fonction d'entrée numérique
| Adresse du panneau | Adresse interne | Type | Nom | Valeur (hex) : description |
| d3.01 | 2010.03 | Uint16 | Din1_Function | 0001: Enable0002: Reset Errors0004: Operation Mode sel0008: Kvi Off0010: P limit+0020: P limit-0040: Homing Signal0080: Invert Direction0100: Din Vel Index0020: Din Vel Index1100: Quick Stop2000: Start Homing4000: Activate Command |
| d3.02 | 2010.04 | Uint16 | Din2_Function | |
| d3.03 | 2010.05 | Uint16 | Din3_Function | |
| d3.04 | 2010.06 | Uint16 | Din4_Function | 8001: Din Vel Index28004: Multifunction08008: Multifunction18010: Multifunction28020: Gain Switch 08040: Gain Switch 18100: Motor Error8200: Pre Enable8400: Fast_Capture18800: Fast_Capture29001: PostTable Cond09002: PostTable Cond19004: Start PosTable9008: PostTable Idx09010: PostTable Idx19020: PostTable Idx29040: Abort PosTable |
| d3.05 | 2010.07 | Uint16 | Din5_Function | |
| d3.06 | 2010.08 | Uint16 | Din6_Function | |
| d3.07 | 2010.09 | Uint16 | Din7_Function |
Tableau 6-2 : fonction de sortie numérique
| Adresse du panneau | Adresse interne | Type | Nom | Valeur (hex) : description |
| d3.11 | 2010.0F | Uint16 | Dout1_Function | 0001: Ready 0002: Error 0004: Pos Reached 0008: Zero Speed 0010: Motor Brake 0020: Speed Reached 0040: Enc Index 0080: Speed Limit 0100: Driver Enabled 0200: Position Limit 0400: Home Found 8002: Enc Warning 9001: PosTable Active |
| d3.12 | 2010.10 | Uint16 | Dout2_Function | |
| d3.13 | 2010.11 | Uint16 | Dout3_Function | |
| d3.14 | 2010.12 | Uint16 | Dout4_Function | |
| d3.15 | 2010.13 | Uint16 | Dout5_Function |
Tableau 6-3 : paramètres de polarité
| Adresse du panneau | Adresse interne | Type | Nom | Description |
| d3.53 | 2010.01 | Uint16 | Din_Polarity | Bit 0: DIN1 Bit 1: DIN2 Bit 2: DIN3 ... Bit 6: DIN7 |
| d3.54 | 2010.0D | Unité16 | Dout_Polarity | Bit 0: OUT1 Bit 1: OUT2 Bit 2: OUT3 ... Bit 5: OUT6 |
Si la fonction Activer n'est pas configurée sur DIN, le contrôleur peut être activé automatiquement à la mise sous tension ou au redémarrage, avec le réglage suivant :
Tableau 6-4:Switch On Auto
| Adresse du panneau | Adresse interne | Type | Nom | Valeur |
| d3.10 | 2000.00 | Unité8 | Switch_On_Auto | 1 |

Note
Cette méthode n'est pas recommandée. Veuillez considérer tous les risques et les mesures de sécurité associées avant utilisation.
Étape 3 : définir les paramètres nécessaires
L'utilisateur peut acceder à une liste des paramètres de fonctionnement de base en cliquant sur Controller>Basic Operation (Contrôleur->Fonctionnement de base). Pour plus de paramètres, veuillez ajouter
selon l'introduction au chapitre 5.1.5. Les pages suivantes de ce chapitre presentent les parametes de fonctionnement. Reportez-vous au chapitre 7 concernant le réglage des performances.
Tableau 6-5 : paramètres commun
| Adresse du panneau | Adresse interne | Type Nom | Description | |
| 6083.00 | Uint32 | Profil_Acc | Accélération du profil, décalération du profil, pour Operation_Mode 1 et 3 | |
| 6084.00 | Uint32 | Profil_Dec | ||
| d2.24 | 6080.00 | Uint16 | Max_Speed_RPM | Vitesse maximale (unité : tr/min) |
| d3.16 | 2020.0D | Int8 | Din_Mode0 | Si la fonction de sélection du mode de fonctionnement est configurée sur DIN, Operation_Mode(6060.00)=Din_Mode0 lorsque Din/Internal=0 ; Operation_Mode=Pin_Mode1 lorsque Din/Internal=1 |
| d3.17 | 2020.0E | Int8 | Din_Mode1 | |
| 6073.00 | Uint16 | CMD_q_Max | Limite de courant de sortie | |
| 6040.00 | Uint16 Controlword | 0x0F/0x2F : activer le contrôleur pour Operation_Mode 3, -3, -4, 4 et pour le mode tableau de position 0x2F->0x3F : activer la commande de position absolue pour Operation_Mode 1 0x4F->0x5F : activer la commande de position relative pour Operation_Mode 1 0x0F->0x1F : démarrer la mise en reférence pour Operation_Mode 6 0x06->0x86 : réinitialiser l'erreur du contrôleur 0x06 : désactiver le contrôleur | ||
| 6060.00 | Int8 Operation_Mode | -3 : mode vitesse instantanée 3 : mode vitesse du profil 1 : mode positionnement -4 : mode train d'impulsions 4 : mode couple |

Information
Operation_Mode lui-même n'est pas enregistrable, cependant, il est défini conformément aux paramétres dans Command_Type (3041.02) ou EA02 dans le menu du panneau EASY à une valeur appropriée (voir tableau 4-2 pour EA02). Alternativement, Operation_Mode peut être configuré pour être régliable et/ou commutable par la fonction DIN Operate_Mode_Sel (voir tableau 5-2).
Étape 4 : enregistrer et redémarrer
Voir chapitre 5.
Étape 5 : démarrer le fonctionnement
Demarrer le fonctionnement via le logiciel DIN ou PC.

Information
La fonction DIN a la priorité la plus élevé - la valeur de l'objet ne peut plus être modifiée manuellement si elle est configurée dans DIN, par exemple si la fonction d'activation est configurée, Controlword(6040.00) ne peut pas être modifié manuellement via le logiciel PC.
6.2 Mode vitesse (-3, 3)
Il existe 2 types de mode vitesse : -3 et 3. La commande de vitesse peut être spécifiée via Target_Speed ou une entrée analogique (mode vitesse analogique), ou via une entrée numérique (mode vitesse DIN).
Tableau 6-6 : mode vitesse
| Adresse du panneau | Adresse interne | Type Nom | Description Valeur | ||
| 6060.00 | Int8 Operation_Mode | -3 : la commande de vitesse est spécifique directement par Target_Speed. Seule la boucle de régulation de la vitesse est active.3 : la commande de vitesse est spécifique par Target_Speed avec une accélération du profil et une décalération du profil.Les boucles de régulation de vitesse et de position sont actives. | -3 ou 3 | ||
| 60FF.00 | Int32 | Target_Speed | Vitesse cible | Défini par l'utilisateur | |
| 6040.00 | Uint16 | Controlword | Voir tableau 6-5 | 0x0F, 0x06 |
6.2.1 Mode vitesse analogue
La fenêtre d'objet de vitesse analogue dans le logiciel PC est accessible via le point de menu Controller>Control Modes->Analog Speed Mode (Contrôleur->Modes de commande->Mode vitesse analogue).
Tableau 6-7 : mode vitesse analogue
| Adresse du panneau | Adresse interne | Type Nom | Description Valeur | ||
| 2501.06 | Uint16 | ADC1_Buff[1] | Données réelles d'entrée AIN1 | Lecture seulement | |
| d1.13 | 2502.0F | Int16 | Analog1_out | AIN1 entrée valide ; signal d'entrée analogue1 (AIN1) tension d'entrée après filtre, volume mort et décalage | |
| 2501.07 | Uint16 | ADC2_Buff[1] | Données réelles d'entrée AIN2 | ||
| d1.14 | 2502.10 | Int16 | Analog2_out | AIN2 entrée valide ; signal d'entrée analogue2 (AIN2) tension d'entrée après filtre, volume mort et décalage | |
| d3.22 | 2502.01 | Uint16 | Analog1_Filter | Filtre AIN1 (unité : ms) | Défini par l'utilisateur |
| d3.23 | 2FF0.1D | Int16 | Analog1Dead_V | Volume mort AIN1 (unité : 0,01 V) | |
| d3.24 | 2FF0.1E | Int16 | Analog1 Offset_V | Décalage AIN1 (unité : 0,01 V) | |
| d3.25 | 2502.04 | Uint16 | Analog2_Filter | Filtre AIN2 (unité : ms) | |
| d3.26 | 2FF0.1F | Int16 | Analog2 Dead_V | Volume mort AIN2 (unité : 0,01 V) | |
| d3.27 | 2FF0.20 | Int16 | Analog2 Offset_V | Décalage AIN2 (unité : 0,01 V) | |
| 2502.0A | Int16 | Analog_Speed_Factor | Facteur de vitesse AIN | ||
| d3.28 | 2502.07 | Uint8 | Analog_Speed_Con | 0 : contrôle de vitesse analogue OFF, contrôle de vitesse via Target_Speed(60FF.00)1 : commande de vitesse via AIN12 : commande de vitesse via AIN2 | 0,1,2 |
| 2502.0D | Int16 | Analog_Dead_High | La valeur par défaut est 0, si ce n'est PAS 0, Analog_out>Analog_Dead_High est traité comme 0 | Défini par l'utilisateur | |
| 2502.0E | Int16 | Analog_Dead_Low | La valeur par défaut est 0, si ce n'est PAS 0, Analog_out<Analog_Dead_Low est traité comme 0 | ||
| d3.33 | 2FF0.22 | Int16 | Voltage_MaxT_Factor | Facteur MaxTorque AIN (unité : mNM/V) | Défini par l'utilisateur |
| d3.32 | 2502.09 | Uint8 | Analog_MaxT_Con | 0 : commande Analog_MaxTorque OFF1 : commande de couple max. via AIN12 : commande de couple max. via AIN2 | 0,1,2 |
Pour plus de commodité, certains nouveaux noms sont utilisés dans la formule. Définitions :
AIN1_in : tension d'entrée AIN1 après filtre et décalage
AIN2_in : tension d'entrée AIN2 après filtré et décalage
Analog_out : Analog1_out ou Analog2_out, selon le câblage et le réglage Analog_Speed_Con ; c'est le résultat de l'entrée réelle AIN, du contrôle, du décalage et du volume mort.
Résultat final :
Commande Analog_Speed ON :
Si Analog_out n'est pas limité par AnalogDead_High ou AnalogDead_Low :
Vitesse cible [tr/min] = Analog_out[V]*Analog_Speed_Factor[tr/min/V]; sinon vitesse cible[tr/min] = 0.
Commande Analog_MaxTorque ON :
Couple max[Nm]=Analog_out[V]*Analog_MaxT_Factor[Nm/V]
Exemple :
Réglage: Analog1_Dead=1V, Analog1 Offset=2V, Analog_Speed_Factor=100tr/min/V,
Analog_Speed_Con=1, AnalogDead_High=0V; AnalogDead_Low=0V;
Si la tension d'entrée AIN1 est de 5 V :
AIN1_in=5V-2V=3V, |AIN1_in| >Analog1_Dead, donc Analog1_out=3V-1V=2V;
Vitesse cible = 2^*100 = 200 tr/min.
Si la tension d'entrée AIN1 est de -5 V :
AIN1_in=-5V-2V=-7V, |AIN1_in|>Analog1_Dead, donc Analog1_out=-7V+1V=-6V;
Vitesse cible = -6^*100 = -600 tr/min.
6.2.2 Mode vitesse DIN
La fenêtre d'objet Din_Speed dans le logiciel PC est accessible à partir de l'élement de menu Controller->Control Modes->DIN Speed Mode (Contrôleur->Modes de commande->Mode vitesse DIN). Pour que le mode vitesse DIN soit disponible, au moins un des ce qui suit doit être configuré sur DIN : Din Vel Index0, Din Vel Index1, Din Vel Index2.
Tableau 6-8 : mode vitesse DIN
| Adresse du panneau | Adresse interne | Type Nom | Description Valeur | ||
| d3.18 | 2020.05 | Int32 | Din_Speed[0] | La commande de vitesse est spécifique via Din_Speed[x].x est le code BCD deBit 0 : Din Vel Index0Bit 1 : Din Vel Index1Bit 2 : Din Vel Index2Un bit non configuré signifie 0. | Défini par l'utilisateur |
| d3.19 | 2020.06 | Int32 | Din_Speed[1] | ||
| d3.20 | 2020.07 | Int32 | Din_Speed[2] | ||
| d3.21 | 2020.08 | Int32 | Din_Speed[3] | ||
| d3.44 | 2020.14 | Int32 | Din_Speed[4] | ||
| d3.45 | 2020.15 | Int32 | Din_Speed[5] | ||
| d3.46 | 2020.16 | Int32 | Din_Speed[6] | ||
| d3.47 | 2020.17 | Int32 | Din_Speed[7] |
Example :
Configuration I/O
Figure 6-1: exemple de vitesse DIN
Tableau 6-9 : exemple de vitesse DIN
| Adresse du panneau | Adresse interne | Type | Nom | Valeur | Unité |
| d3.17 | 2020.0E | Int8 | Din_Mode1 | -3 | |
| d3.20 | 2020.07 | Int32 | Din_Speed[2] | 500 | tr/min |
Din Vel Index0=0; Din Vel Index1=1; Din Vel Index2=0. Dès que DIN1 est actif, le contrôle fait tourner le moteur en mode vitesse (Operation_Mode=-3) à une vitesse de 500 tr/min s'il n'y a pas d'erreurs ou de limites inattendues.
6.3 Mode couple (4)
En mode couple, le contrôleur de moteur CMMB fait tourner le moteur avec une valeur de couple spécifiée.
Tableau 6-10 : mode couple
| Adresse du panneau | Adresse interne | Type Nom | Description Valeur | ||
| 6060.00 | Int8 | Operation_Mode | 4 | ||
| 6071.00 | Int16 Target_Torque% | Couple cible, pourcentage du couple nominal | Défini par l'utilisateur | ||
| 6040.00 | Uint16 | Controlword | Voir tableau 6-5 | 0x0F, 0x06 |
6.3.1 Mode couple analogue
En mode couple analogue, le contrôleur de moteur CMMB contrôle le couple moteur et/ou le couple maximal au moyen de la tension d'entrée analogue.
La fenêtre d'objet de couple analogique dans le logiciel PC est accessible via le point de menu Controller-Control Modes->Analog Torque Mode (Contrôleur->Modes de commande->Mode couple analogue).
Tableau 6-11: mode couple analogue
| Adresse du panneau | Adresse interne | Type Nom | Description Valeur | ||
| 2501.06 | Uint16 | ADC1_Buff[1] | Tension d'entrée réelle AIN1 | Lecture seulement | |
| d1.13 | 2502.0F | Int16 | Analog1_out | AIN1 entrée valide, signal d'entrée analogue1 (AIN1), tension d'entrée après filtre, volume mort et décalage | |
| 2501.07 | Uint16 | ADC2_Buff[1] | Données réelles d'entrée AIN2 | ||
| d1.14 | 2502.10 | Int16 | Analog2_out | AIN2 entrée valide, signal d'entrée analogue2 (AIN2), tension d'entrée après filtre, volume mort et décalage | |
| d3.22 | 2502.01 | Uint16 | Analog1_Filter | Filtre AIN1 (unité : ms) | Défini par l'utilisateur |
| d3.23 | 2FF0.1D | Int16 | Analog1Dead_V | Volume mort AIN1 (unité : 0,01 V) | |
| d3.24 | 2FF0.1E | Int16 | Analog1 Offset_V | Décalage AIN1 (unité : 0,01 V) | |
| d3.25 | 2502.04 | Uint16 | Analog2_Filter | Filtre AIN2 (unité : ms) | |
| d3.26 | 2FF0.1F | Int16 | Analog2 Dead_V | Volume mort AIN2 (unité : 0,01 V) | |
| d3.27 | 2FF0.20 | Int16 | Analog2 Offset_V | Décalage AIN2 (unité : 0,01 V) | |
| d3.31 | 2FF0.21 | Int16 | Voltage_Torque_Factor | Facteur de couple AIN (unité : mNM/V) | |
| d3.30 | 2502.08 | Uint8 | Analog_Torque_Con | 0 : Analog_Torque_control OFF, le couple cible est spécifique par Target_Torque% (6071.00)1 : régulation du couple via AIN12 : régulation du couple via AIN2 | 0, 1, 2 |
| d3.33 | 2FF0.22 | Int16 | Voltage_MaxT_Factor | Facteur MaxTorque AIN (unité : mNM/V) | Défini par l'utilisateur |
| d3.32 | 2502.09 | Uint8 | Analog_MaxT_Con | 0 : commande Analog_MaxTorque OFF1 : commande de couple max. via AIN1 ;2 : commande de couple max. via AIN2 | 0, 1, 2 |
Pour plus de commodité, certains nouveaux noms sont utilisés dans la formule. Les définitions sont les suivantes :
AIN1_in : tension d'entrée AIN1 après filtré et décalage.
AIN2_in : tension d'entrée AIN2 après filtré et décalage.
Analog_out : Analog1_out ou Analog2_out, selon le câblage et le réglage Analog_Torque_Con. C'est le résultat de l'entrée réelle AIN, du filtré, du décalage et du volume mort.
Résultat final :
Si commande Analog_Torque est ON, alors couple cible [Nm]=Analog_out[V]*Analog_Torque_Factor[Nm/V].
Si commande Analog_MaxTorque est ON, alors couple max.
[Nm]=Analog_out[V]*Analog_MaxT_Factor[Nm/V].
Exemple :
Reportez-vous au chapitre 6.2.1, « Mode vitesse analogue »
6.4 Mode positionnment (1)
En mode positionnement, le contrôleur de moteur CMMB déplace le moteur en position absolue ou relative. La commande de position/vitesse est spécifiée via Target_Position/Profile_Speed ou par tableau de position (mode tableau de position)
Tableau 6-12 : mode positionnement
| Adresse du panneau | Adresse interne | Type Nom | Description Valeur | ||
| 6060.00 | Int8 | Operation_Mode | 1 | ||
| 607A.00 | Int32 | Target_Position | Position cible absolue/relative | Défini par l'utilisateur | |
| 6081.00 | Int32 | Profile_Speed | Vitesse du profil pour le positionnement | Défini par l'utilisateur | |
| 6040.00 | Uint16 | Controlword | Voir tableau 6-5 | 0x2F->0x3F, | |
| 0x4F->0x5F, 0x0F, 0x06 |
6.4.1 Mode tableau de position
Le mode tableau de position est utilisé pour exécuter une série de positionnement avec jusqu'à
32 ordres en mode positionnement. Chaque ordre comprend des informations sur la position cible, la vitesse, l'accelération, la décelération, le prochain arrêt/démarrage de l'ordre, l'index du prochain ordre, la condition pour passer à l'index suivant, le nombre total de boucles, etc.
La fonction Start PosTable doit être configurée sur un DIN afin de prendre disponible le mode tableau de position. Les autres fonctions du tableau de position sont facultatives.
Tableau 6-13 : fonctions Din du mode tableau de position
| Nom | Description |
| PosTable Cond0 | Si Cond0 ON, Condition0 = PosTable Cond0 (voir introduction concernant Cond0 ON) |
| PosTable Cond1 | Si Cond1 ON, Condition1 = PosTable Cond1 (voir introduction concernant Cond1 ON) |
| Start PosTable | Lancer la série de positionnement |
| PosTable Idx0 | Indice d'entrée de la série de position, bit0 : PosTable Idx0 ; bit1 : PosTable Idx1 ; bit2 : PosTable Idx2. Un bit qui n'est pas configuré sur DIN signifie 0. |
| PosTable Idx1 | |
| PosTable Idx2 | |
| Abort PosTable | Annuler la série de positionnement |
Tableau 6-14 : fonctions OUT du mode tableau de position
| Nom | Description |
| PosTable Active | Mode tableau de position en cours d'exécution |
Dans le logiciel PC, cliquez sur I'elément de menu Controller->Control Modes->Position Table Mode (Contrôleur->Modes de commande->Mode tableau de position) afin d'entrée les réglages des paramètres du tableau de position.
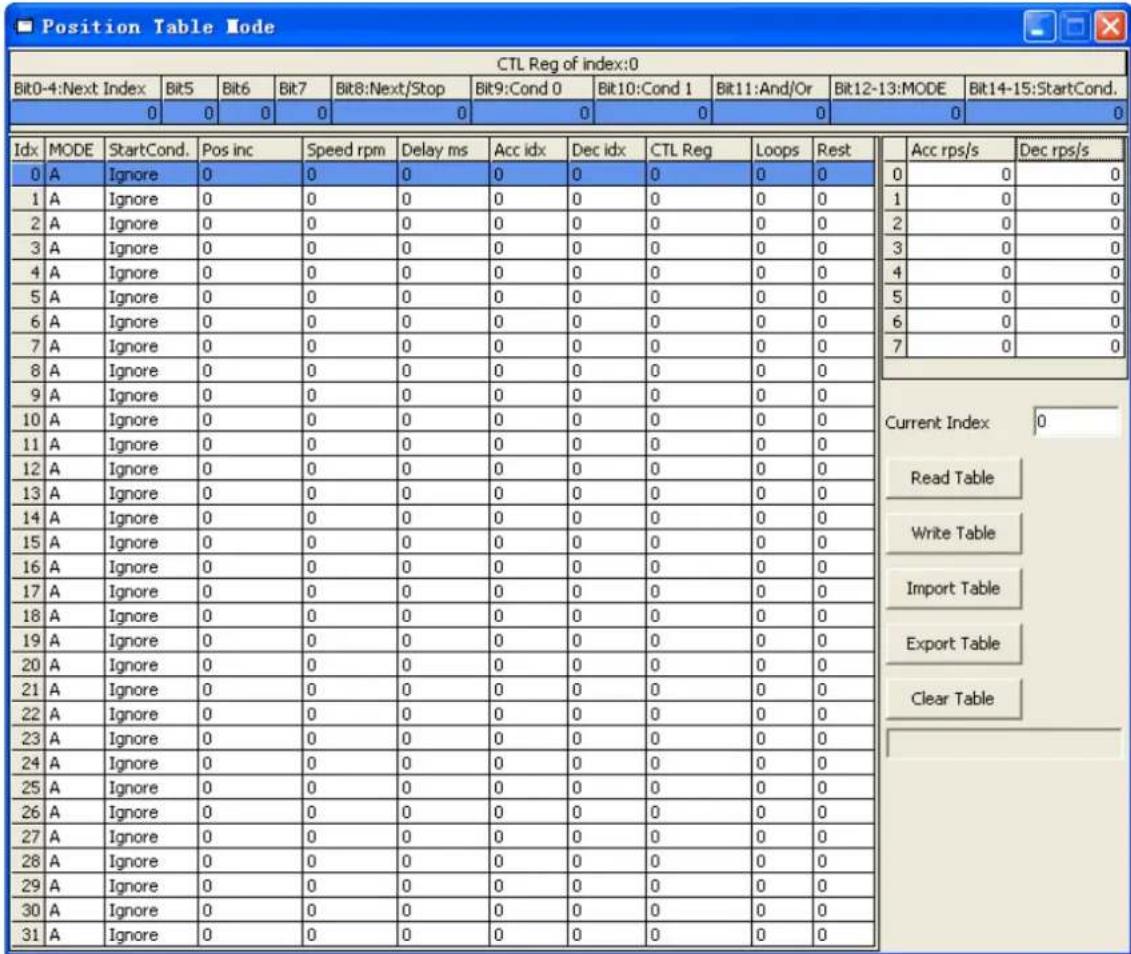
Figure 6-2: fenêtre du mode tableau de position
Le signal DIN Start PosTable (front montant) déclène l'ordre d'index d'entrée (specifié via la fonction DIN), mais l'exécution ou non de l'ordre dépend de la condition de démarrage (CTL reg bits14-15). Une fois qu'un ordre est terminé, il passée à l'index suivant (CTL reg bit0-4) ou s'arrête, selon Next / Stop (CTL reg bit 8), condition (CTL reg bits 9-11) et Loops. La fenêtre d'index actuelle affiche l'index de l'ordre en cours d'exécution.
Jusqu'à 32 ordres de commande de position peuvent être définis, et chaque ordre contient les éléments suivants :
Idx : index de I'ordre, plaque : 0-31
Posinc : commande de positionnement
Speed rpm : commande de vitesse pendant le positionnement
Delay ms : délambdavant de passer à l'index suivant (unité : ms).
Accidx, Dec idx : plage : 0-7, indice d'accelération du profil, décelération pendant le positionnement, la valeur acc/déc correspondante est définie dans les champs de plage suivants :
Figure 6-3: tableau d'accelération et de déceleration
| Acc rps/s | Dec rps/s | |
| 0 | 0 | 0 |
| 1 | 0 | 0 |
| 2 | 0 | 0 |
| 3 | 0 | 0 |
| 4 | 0 | 0 |
| 5 | 0 | 0 |
| 6 | 0 | 0 |
| 7 | 0 | 0 |
CTL Reg : contient les bits suivants :
Bits 0-4 : index suivant, definit l'index de l'ordre de commande de position suivante
Bits 5-7 : réserves
Bit 8: suivant/arrêt,
1 : suivant ; passer à l'ordre suivant si condition (voir bit9-11) = 1 et que la vérification des boucles est OK (voir Loops) une fois l'ordre de positionnement en cours terminé.
0: arrête; arrête après la fin de l'ordre de positionnement en cours
Bit9:Cond0 ON,
1: Cond0 ON; condition0 signifie etat logique de la fonction DIN PostTable Cond0.
0:Cond0 OFF
Bit 10:Cond1 ON,
1:Cond1 ON; condition1 = front montant de la fonction DIN PostTable Cond1.
0:Cond1 OFF
Bit 11: et/ou; uniquely si Cond0 et Cond1 ON,
Condition = Condition0 si seulement Cond0 est ON
Condition = Condition1 si seulement Cond1 est ON
Bits 12-13: MODE, mode de la commande de positionnement,
0 (A): Posinc est la position absolue.
1 (RN): Posinc est la position relative par rapport à la position cible actuelle.
2 (RA) : Posinc est la position relative par rapport à la position actuelle.
Bits 14-15: StartCond, condition de démarrage. Si cet ordre est déclenché par le signal Start PostTable, normalement le contrôle l'executera immidiatement, mais s'il y a un ordre de positionnement en cours :
0 (ignorer): ignorant.
1 (attendre) : executer cette commande après la fin de l'ordre en cours (sans déliai).
2 (interruption) : interrompre l'ordre en cours, exécuter cette commande immédiatement.
Pour plus de commodité, tout les bits CTL_Reg peuvent être définis dans les champs suivants :
| CTL Reg of index:2 | |||||||||
| Bit0-4:Next Index | Bit5 | Bit6 | Bit7 | Bit8:Next/Stop | Bit9:Cond 0 | Bit10:Cond 1 | Bit11:And/Or | Bit12-13:MODE | Bit14-15:StartCond. |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
Figure 6-4 : éditer CTL Reg
Loops : définit la limite de boucle pour l'ordre qui s'exécute en boucle ;
0: pas de limite,
≥ 1 : nombre max. d'exécutions de l'ordre dans une série de positionnement en cours. Si un ordre a déjà été exécuté autant de fois que le nombre de Loops, la série de positionnement s'arrête lors de la prochaine tentative de return à cet ordre.
Rest: affiche le nombre restant d'exécutions de l'ordre possibles dans la série de positionnement en cours, si Loops ≥ 1 ;
0 : plus d'exécution de cet ordre, si Loops ≥ 1,
≥ 1 : nombre restant d'executions possibles de cet ordre dans la sequence de positionnement en cours.
Les informations sur l'ordre de contrôle de position peuvent etre copiees dans une autre ligne. Faites un click drot sur une ligne selectionnee et la fenetre de selection suivante apparait :
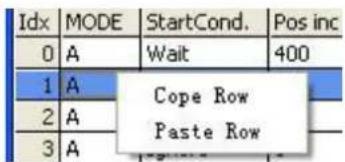
Figure 6-5: copie du tableau de position
Cliquez sur Copy row puis sur PasteRow dans une autre ligne selectionnée.
Lorsque le tableau de position est rempli, cliquez sur le bouton Write Table pour I'ecrire dans le contrôleur.
Démarrez le tableau via DIN avec la fonction Start PostTable. L'ordre d'index d'entrée est déclenché et la série de positionnement est démarrée (via la règle StartCond).
Le signal DIN AbortPosTable (front montant) ou l'effacement de la configuration de la fonction Start PosTable dans DIN interrupt une série de positionnement en cours après la fin de l'ordre en cours d'exécution.
La série de positionnement est interrompu immédiatement si une erreur se produit ou si le Operation_Mode est modifié.

Information
Le tableau dans la fenêtre n'est pas automatiquement écrit dans le contrôleur. Il faut cliquer sur le bouton . Le tableau peut être lu à partir du contrôleur et dans la fenêtre
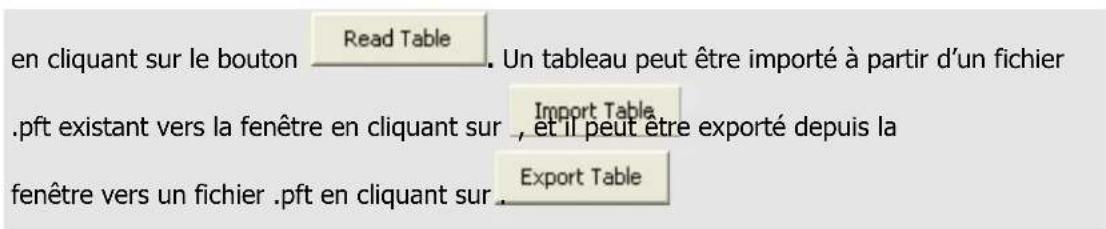
6.5 Mode train d'impulsions (-4)
En mode impulsion, la commande de vitesse cible est spécifiée via l'entrée d'impulsion avec rapport de transmission.
Tableau 6-15 : mode impulsion
| Adresse du panneau | Adresse interne | Type Nom | Description Valeur | ||
| 6060.00 | Int8 | Operation_Mode | -4 | ||
| d3.34 | 2508.01 | Int16 | Gear_Factor[0] | Gear_ratio=Gear_Factor/Gear_Divider | Défini par l'utilisateur |
| d3.35 | 2508.02 | Uint16 | Gear_Divider[0] | ||
| 6040.00 | Uint16 | Controlword | Voir tableau 6-5 | 0x0F, 0x06 | |
| d3.36 | 2508.03 | Uint8 | PD_CW | Mode train d'impulsions0: CW/CCW1: impulsion/direction2:A/B (codeur incrémental) | 0, 1, 2 |
| d3.37 | 2508.06 | Uint16 | PD_Filter | Filtre d'impulsion (ms) | Défini par l'utilisateur |
| d3.38 | 2508.08 | Uint16 | Frequencychecking | Liminé de fréquence (inc/ms), si le nombre d'impulsions (en 1 ms) est supérieur à Frequencychecking, une erreur de surfréquence se produit. |
Tableau 6-16 : schéma PD_CW
| Mode impulsion | En avant | En arrêté |
| P/D | PUL DIR | PUL DIR |
| CW/CCW | PUL DIR | PUL DIR |
| A/B | PUL DIR | PUL DIR |

Information
En l'avant signifie que le comptage de position positif est definite par défaut dans le sens CCW. Vous pouvez régler Invert_Dir(607E.00) sur 1 afin d'inverser le sens de rotation de l'arbre moteur.
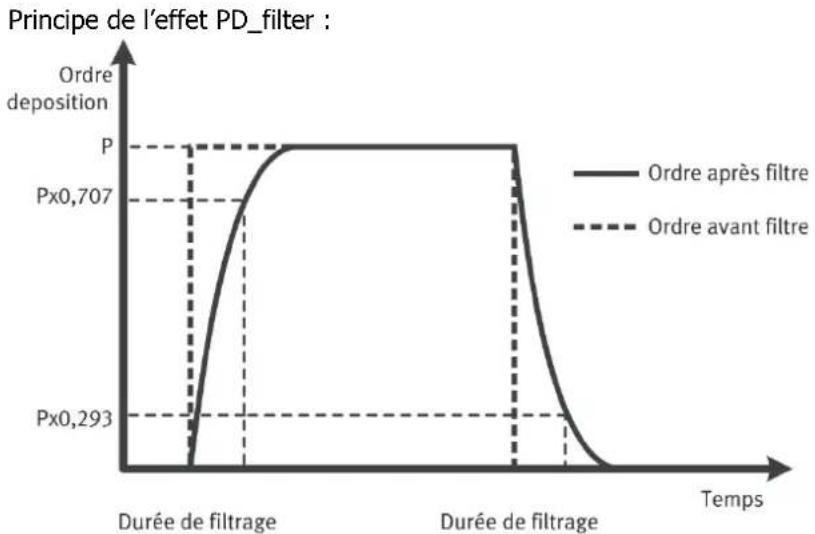
Figure 6-6: principé du filtré d'impulsions
6.5.1 Mode maitre-esclave
Le mode maître-esclave est un type de mode de train d'impulsions - PD_CW = 2. L'entrée d'impulsions pour le contrôleur esclave provient d'un codeur incremental externe ou de la sortie codeur du contrôleur maître. La résolution du signal de sortie du codeur (ENCO) du contrôleur maître est spécifiée via Encoder_Out_Res.
Tableau 6-17 : mode maitre-esclave
| Adresse du panneau | Adresse interne | Type Nom | Description Valeur | ||
| 2340.0F | Int32 | Encoder_Out_Res | Spécifiez le nombre d'impulsions de sortie du codeur pour 1 tour du codeur moteur | Défini par l'utilisateur |
Pour le réglage des paramètres du contrôleur esclave, veuillez vous reférer à l'introduction ci-dessus relative au mode impulsion.
Le câblage entre maitre et esclave se fait comme suit :
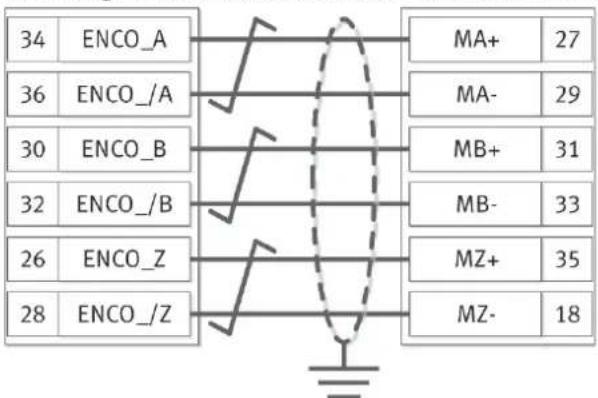
Figure 6-7: câblage maitre esdave (exampie : d'un contrôleur CMMB à un autre)
6.6 Mode mise en reférence (6)
Pour certaines applications, le système doit demarrer à partir de la même position à chaque fois après la mise sous tension. En mode referrerencement, l'utilisteur peut spécifier la position d'origine du système et une position zéro (de départ).
Cliquez sur l'objet de menu Controller->Control Modes->Homing definition (Contrôleur->Modes de commande->Définition de référencement), et la fenêtre suivante apparait :
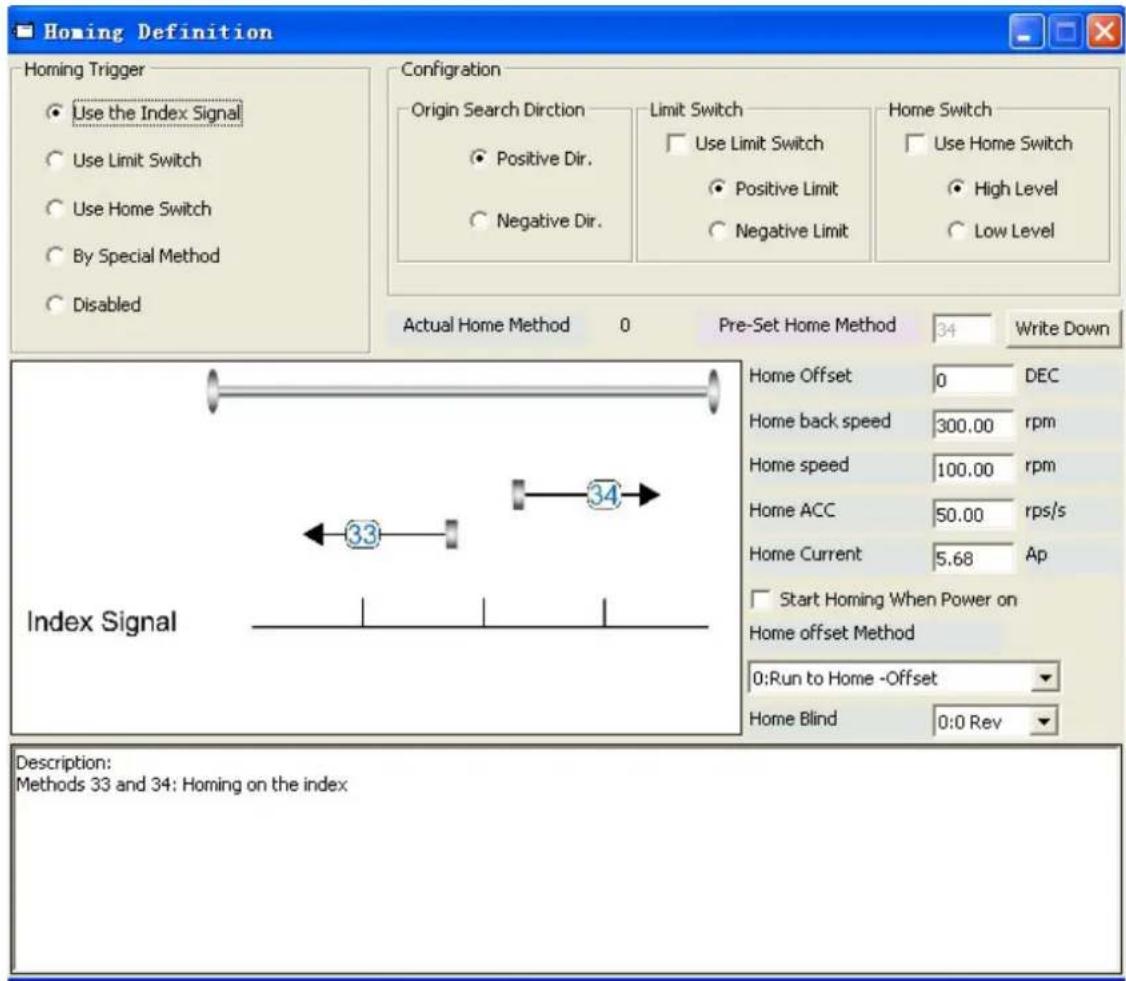
Figure 6-8: paramètres de mise en réference
Selectionnez un élément de déclenchement sous Homing Trigger (déclenchement de mise en référence). Les éléments associés apparaissent dans la zone de configuration. Sélectionnez un élément approprié en fonction de la conception mécanique et du câblage. La homing_method appropriée apparait alors dans le champ Pre-Set Home Method (Méthode de mise ne référence prédéfinie). Si Disabled (déactivé) est sélectionné dans le champ du déclencheur de mise en référence, vous entrez un nombre directement dans le champ Pre-Set Home Method (Méthode de mise en référence prédéfinie). Cliquez sur pour le définir sur le contrôleur. Le schéma correspondant de la méthode de mise en référence prédéfinie apparait dans la zone centrale.
Tous les objets du mode reférencement sont répertoriés dans le tableau suivant :
Tableau 6-18 : mode referrerencement
| Adresse du panneau | Adresse interne | Type Nom | Description Valeur | ||
| 607C.00 | Int32 Home Offset | Décalage de la position zéro par rapport à la position de base | Défini par l'utilisateur | ||
| 6098.00 | Int8 | Homing_Method | Voir figure 6-8 | ||
| 6099.01 | Uint32 | Homing_Speed_Switch | Vitesse de recherche du capteur de fin de course/du capteur de référence | ||
| 6099.02 | Uint32 | Homing_Speed_Zero | Vitesse pour trouver la position de base et la position zéro | ||
| 6099.03 | Uint8 | Homing_Power_On | 1 : démarrer la mise en référence après la mise sous tension ou le redémarrage et l'activation du premier contrôleur | 0,1 | |
| 609A.00 | Uint32 | Homing_Acceleration | Décelération et accélération du profilpendant la mise en référence | Défini par l'utilisateur | |
| 6099.04 | Int16 Homing_Current | Courant max. pendant la mise en référence | |||
| 6099.05 | Uint8 Home Offset_Mode | 0 : aller au point zéro de mise en référence. La position réelle sera 0.1 : aller au point de déclenchement de base. La position réelle sera -homing offset. | 0,1 | ||
| 6099.06 | Uint8 Home_N_Blind | Fenêtre aveugle position de base0 : 0 tr1 : 0,25 tr2 : 0,5 tr | 0,1,2 | ||
| 6060.00 | Int8 | Operation_Mode | 6 | ||
| 6040.00 | Uint16 | Controlword | Voir tableau 6-5 | 0x0F->0x1F,0x06 |

Note
Homing_Power_On=1 entraine le démarrage de la rotation du moteur dés que le contrôleur est activé après la mise sous tension ou le redémarrage. Tenez compte de tous les problèmes de sécurité avant de l'utiliser.
Home_N Blind :
Si la homing_method a besoin d'un signal de base (limite de position/commutateur d'origine) et d'un signal d'index, la fonction Home_N Blind peut éviter que le résultat d'origine soit différent avec la même mécanique, lorsque le signal d'index est très proche du signal d'origine. En réglant sur 1 avant le reférencement, le contrôleur détecte une fenêtre aveugle appropriée pour la mise en reférence automatique. Elle peut être utilisée pour s'assurer que les résultats de la mise en reférence sont toujours les mêmes. Pendant la mise en reférence, le signal d'index à l'intérieur de cette fenêtre aveugle est ignoré une fois le signal de reférence trouve. Home_N Blind (0 : 0 tr; 1 : 0,25 tr ; 2 : 0,5 tr) est défini par défaut sur 0. S'il est défini sur 1, il passse à 0 ou 2 après la mise en reférence en fonction de la position du signal d'index par
rapport au signal de mise en reférence. Ce paramètre nécessite être sauvé. En cas de changement de l'ensemble mécanique ou de remplacement du moteur, il suffit de le remettre à 1 pour la mise en reférence initiale.
Tableau 6-19 : presentation de Homing_Method
| Homing_ Method | Description Schématique | |
| 1 | Mise en référence avec capteur de fin de course négatif et impulsion d'index | Index Signal Negative Limit |
| 2 | Mise en référence avec capteur de fin de course positif et impulsion d'index | Index Signal Positive Limit |
| 3 | Mise en référence avec capteur de référence et impulsion d'index | Index Signal Home Signal |
| 4 | Mise en ↔reference avec capteur de ↔reference et impulsion d'index | Index Signal Home Signal |
| 5 | Mise en référence avec capteur de référence et impulsion d'index | Index Signal Home Signal |
| 6 | Mise en référence avec capteur de référence et impulsion d'index | Index Signal Home Signal |
| 7 | Mise en référence avec capteur de fin de course en position positive, capteur de référence et impulsion d'index | Index Signal Home Signal Positive Limit |
| 8 | Mise en référence avec capteur de fin de course en position positive, capteur de ↔reference et impulsion d'index | Index Signal Home Signal Positive Limit |
| 9 | Mise en référence avec capteur de fin de course en position positive, capteur de référence et impulsion d'index | Index Signal Home Signal Positive Limit |
| 10 | Mise en référence avec capteur de fin de course en position positive, capteur de référence et impulsion d'index | Index Signal Home Signal Positive Limit |
| 11 | Mise en ↔reference avec capteur de fin de course en position négative, capteur de ↔reference et impulsion d'index | Index Signal Home Signal Negative Limit |
| 12 | Mise en ↔reference avec capteur de fin de course en position négative, capteur de ↔reference et impulsion d'index | Index Signal Home Signal Negative Limit |
| 13 | Mise en référence avec capteur de fin de course en position négative, capteur de référence et impulsion d'index | Index Signal Home Signal Negative Limit |
| 14 | Mise en référence avec capteur de fin de course en position négative, capteur de référence et impulsion d'index | Index Signal Home Signal Negative Limit |
| 17 | Mise en ↔reference avec capteur de fin de course en position négative | Negative Limit |
| 18 | Mise en ↔reference avec capteur de fin de course en position positive | Positive Limit |
| 19 | Mise en référence avec capteur de référence | Home Signal |
| 20 | Mise en référence avec capteur de ↔ | Home Signal |
| 21 | Mise en ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ | Home Signal |
| 22 | Mise en ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ et ↔ | Home Signal |
| 24 | Mise en référence avec capteur de fin de course en position positive et capteur de référence | Home Signal Positive Limit |
| 25 | Mise en référence avec capteur de fin de course en position positive et capteur de ↔ | |
| 26 | Mise en ↔reference avec capteur de fin de course en position positive et capteur de ↔ | Home Signal Positive Limit |
| 27 | Mise en ↔reference avec capteur de fin de course en position négative et capteur de ↔ | Home Signal Negative Limit |
| 28 | Mise en ↔reference avec capteur de fin de course en position négative et capteur de ↔ | Home Signal Negative Limit |
| 29 | Mise en référence avec capteur de fin de course en position négative et capteur de référence | Home Signal Negative Limit |
| 30 | Mise en référence avec capteur de fin de course en position négative et capteur de référence | Home Signal Negative Limit |
| 33, 34 | Mise en référence avec impulsion d'index | Index Signal |
| 35 | Mise en référence à la position réelle | |
| -17, -18 | Mise en référence via limite mécanique | Negative Limit Positive Limit |
Chapitre 7 Réglage de la commande du servosysteme
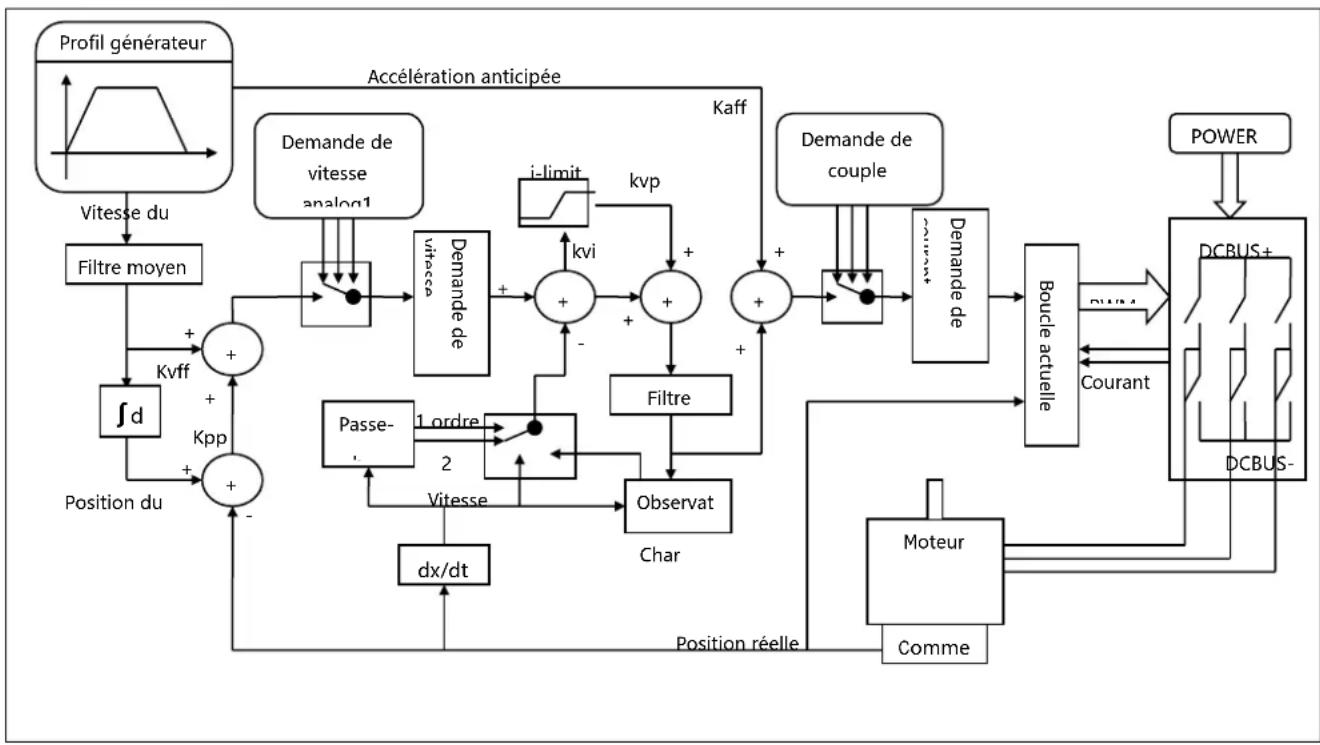
Figure 7-1: schéma fonctionnel de la commande du servosysteme
La figure 7.1 montre le schéma fonctionnel de la commande du servosysteme. On peut voir sur la figure que le servosysteme comprend généralement trois boucles de régulation : boucle de courant, boucle de vitesse et boucle de position.
Le processus de réglage d'un servosysteme permet de régler le gain de boucle et les filtres en fonction des caractéristiques mécaniques, et enfin d'empêcher l'ensemble du système d'osciller, de lui permettre de suivre rapidement les commandes et d'éliminer les bruits anormaux.
7.1 Auto-reglage
La fonction d'auto-reglage essaiera de stimuler le moteur et le système de charge par quelques mouvements, et de déterminer l'inertie de la charge. Si l'auto-reglage réussit, la rigidité sera régée automatiquement en fonction du rapport d'inertie.
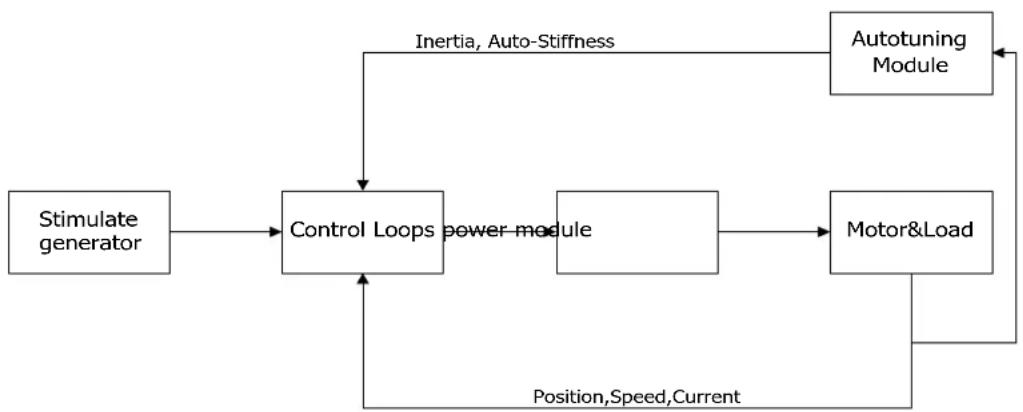
Figure 7-2: auto-reglage
Attention : l'auto-reglage fait oscillator le moteur pendant environ 1 seconde et la plage d'oscillation maximale est d'environ 0,5 tour : assurez-vous que votre système machine peut supporter cette oscillation.
7.1.1 Paramètres d'auto-reglage
Tableau 7-1 : paramètres de la fonction d'auto-reglage
| Adresse du panneau | Adresse interne | Nom Description | Défaut Plage | R : tire W : écrire S : enregistrer | ||
| tn01 3040.08 Stiffness | Plage: 0-31. Lien vers le tableau de rigidité. | 12 0-31 RWS | ||||
| tn02 3040.0B Inertia_Ratio | Inertia_Ratio=(J_Load+J_Motor)*10/J_Motor | 30 | 10-500 | RWS | ||
| tn03 | 3040.01 | Tuning_Method | L'écriture de 1 démarre le réglage et la mesure d'inertie. Si 1 apparaît après le réglage, le réglage a réussi. | RW | ||
| tn04 3040.06 Safe_Dist | Unité: 0,01 tour Ce paramètre indique l'amplitude de mouvement théorique lors de l'autoreglage. Le réglage de ce paramètre sur une valeur plus élevé réduit l'influence des perturbations et rend les résultats plus fiables, mais entraîne également une plus grande oscillation. | 22 0-40 RWS | ||||
7.1.2 Demarrage de I'auto-reglage
Via le panneau LED (voir chapitre 4.3) :
Ouvrez le menu tunE dans le panneau LED et allez à tn03.
Écrivez 1 à tn03. Le moteur oscille avec une faible amplitude, l'oscillation dure moins de 1 s.
Si tn03 reste à 1 après la fin de l'auto-reglage, l'auto-reglage a réussi. Sinon, il a échoué (voir 7.1.3).
Via logiciel PC :
Cliquez sur l'objet de menu CMMB Configurator Controller->Operation Modes->Auto-tuning (Contrôleur->Modes de fonctionnement->Auto-réglage)
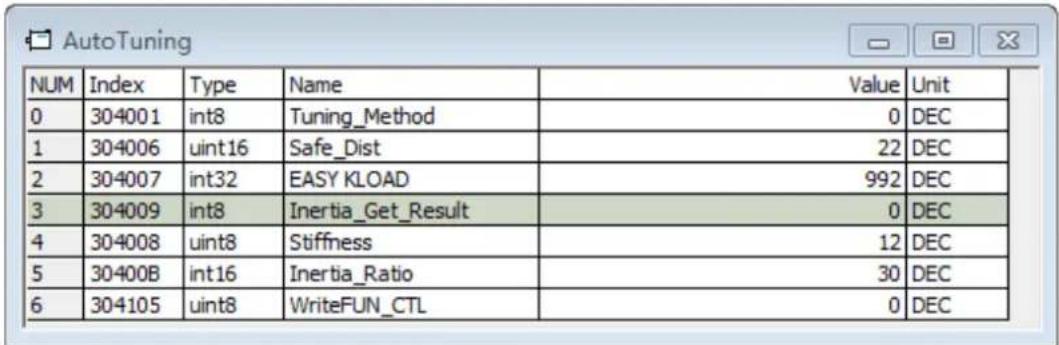
Figure 7-3: auto-reglage
Écrivez 1 dans TUN CTL (3041.05), puis écrivez 1 dans Tuning Method (3040.01). Le moteur oscille pendant moins de 1 s et les résultats apparaissent. Si Inertia_Get(Result(3040.09) = 1, le processus de réglage a pu obtenir un Inertia_Ratio(3040.0B) valide. Sinon, le processus de réglage a échoué, voir 7.1.3 pour des conseils. Écrivez à nouveau 1 dans Tuning_Method(3041.01) pour vérifier que le résultat Inertia_Ratio est reproducible. Sinon, augmentez Safe_Dist(3040.06) avec précaution pour obtenir des résultats plus précis. Si la machine tremble trop, réduire Safe_Dist pour réduire l'oscillation.
7.1.3 Problèmes lors de l'auto-reglage
Si le processus de réglage a échoué, le résultat d'erreur de tn03/Inertia_Get(Result(3040.09) indique la raison de l'éché :
0: le contrôleur n'a pas pu être activé pour une raison quelconque.
-1: l'inertie ne peut pas etre mesurée en raison d'un mouvement trop faible ou d'un courant trop faible.
-2: le résultat d'inertie mesure est en dehors de la plage valide.
-3: la valeur Inertia_Ratio résultat est supérieure à 250 (rapport d'inertie > 25). Ce résultat est possible, mais la boucle de régulation ne sera pas régée.
-4: la valeur Inertia_Ratio résultat est supérieure à 500 (rapport d'inertie > 50). C'est un résultat incertain.
Dans les cas 0, -1, -2, -4 Inertia_Ratio est régèle sur 30, dans le cas -3 Inertia_Ratio est régèle comme mesure, Stiffness est régèle sur 7-10
Dans tous les cas d'échec, les paramètres de la boucle de régulation sont définis sur un Inertia_Ratio de 30 et les valeurs de rigidity définies. Pour que l'Inertia_Ratio mesure du cas -3 devienne effectif, la valeur de tn02 doit être confirmée par SET ou l'Inertia_Ratio(3040.0 B) doit être écrit une fois.

Information
Raisons de l'éché de l'auto-reglage :
Cablage incorrect du servosysteme CMMB
La fonction DIN Pre_Enable est configurée mais pas active
- Trop de friction ou de force externe est appliquée à l'axe à régler
- Jeu trop important dans le chemin mécanique entre le moteur et la charge
- Le rapport d'inertie est trop grand
- Le chemin mécanique contient des composants trop souples (courroies ou accoulements souples)
Si aucune de ces raisons ne peut être rencontres, Safe_Dist peut être augmente afin de résoudre des problèmes. Si l'auto-reglage échoue toujours, il est conseilé d'exécuter un réglage manuel (voir chapitre 7.2).
7.1.4 Réglage après l'auto-reglage.
Après l'auto-réglage, la rigidité est réglée sur une valeur comprise entre 4 et 12. Plus le rapport d'inertie est élevé, plus la valeur de rigidité sera faible.
Tableau 7-2: réglages de la rigidity et de la boucle de régulation
| Rigidité | Kpp/[0,01 Hz] | Kvp/[0,1 Hz] | Filtre de sortie [Hz] |
| 0 | 70 | 25 | 18 |
| 1 | 98 | 35 | 24 |
| 2 | 139 | 50 | 35 |
| Rigidité | Kpp/[0,01 H z] | Kvp/[0,1 Hz] | Filtre de sortie [Hz] |
| 16 | 1945 | 700 | 464 |
| 17 | 2223 | 800 | 568 |
| 18 | 2500 | 900 | 568 |
| 3 | 195 | 70 | 49 |
| 4 | 264 | 95 | 66 |
| 5 | 334 | 120 | 83 |
| 6 | 389 | 140 | 100 |
| 7 | 473 | 170 | 118 |
| 8 | 556 | 200 | 146 |
| 9 | 639 | 230 | 164 |
| 10 | 750 | 270 | 189 |
| 11 | 889 | 320 | 222 |
| 12 | 1 056 | 380 | 268 |
| 13 | 1 250 | 450 | 340 |
| 14 | 1 500 | 540 | 360 |
| 15 | 1 667 | 600 | 392 |
| 19 | 2 778 | 1 000 | 733 |
| 20 | 3 334 | 1 200 | 733 |
| 21 | 3 889 | 1 400 | 1 032 |
| 22 | 4 723 | 1 700 | 1 032 |
| 23 | 5 556 | 2 000 | 1 765 |
| 24 | 6 389 | 2 300 | 1 765 |
| 25 | 7 500 | 2 700 | 1 765 |
| 26 | 8 612 | 3 100 | 1 765 |
| 27 | 9 445 | 3 400 | ∞ |
| 28 | 10 278 | 3 700 | ∞ |
| 29 | 11 112 | 4 000 | ∞ |
| 30 | 12 500 | 4 500 | ∞ |
| 31 | 13 889 | 5 000 | ∞ |
La rigidity doit être ajustée en fonction des besoin réels.
Si la réponse est trop lente augmenter la rigidité. Si l'oscillation ou le bruit augmente réduire la rigidité. Si la commande du contrôleur (par exemple API) est déraisonnable ou inappropriée pour la machine, certains filtres doivent être modifiés afin de réduire l'oscillation (voir chapitre 7.3 réglage manuel).

Information
Lorsque le réglage de rigidité ou le rapport d'inertie augmente Kvp à une valeur supérieure à 4000, il n'est plus utile d'augmenter la rigidité, et la largeur de bande sera diminuée si le rapport d'inertie est encore augmenté. Si vous modifiez la rigidité via la communication, WriteFUN_CTL(3041.05) doit d'abord être définir sur 1, puis redéfini sur 0 une fois la rigidité modifiée.
7.2 Réglage manuel
Si la fonction d'auto-reglage ne prend pas en charge l'application actuelle, ou si l'application presente un écart, des changements d'inertie ou une connexion trèsouple, le réglage manuel est le bon choix.
Le processus de réglage manuel utilise des mouvements de test. Faites correspondre le contrôleur à l'application actuelle sur la base de l'expérience avec l'application et d'une étendue donnée de données en modifiant les paramètres de gain de boucle et de filtré.
Étant donné que les paramètres de la boucle de courant sont calculés en interne sur la base des paramètres du moteur, il n'est normalement pas nécessaire de régler manuellement les paramètres de la boucle de courant.
7.2.1 Réglage de la boucle de vitesse
Étapes requises pour le réglage :
Assurer la limitation de la largeur de bande de la boucle de vitesse
La largeur de bande de la boucle de vitesse limite la largeur de bande de la boucle de position. L'ajustement de la largeur de bande de la boucle de vitesse est donc important.
La limitation de la largeur de bande de la boucle de vitesse peut etre jugee de plusieurs points de vue.
1) En fonction des oscillations et des bruits déteçés avec les doigs et les oreilles : cette méthode est basée sur l'expérience, mais elle est efficace. L'utilisateur peut écouter ou toucher la machine, tout en augmentant et en réduisant le kvp. Lorsqu'une valeur kvp maximale acceptable est trouvée, le réglage actuel peut être spécifique comme étant la largeur de bande maximale de la boucle de vitesse.
2) Selon l'imag de I'oscilloscope : l'utiliseur peut creer une commande de saut pour la commande de la vitesse et echantillonner la vitesse et le courant reels tout en modifiant le kvp. La courbe de vitesse correcte doit repondre rapidement à la commande sans oscillation ni bruit inhabituel.
Tableau 7-3 : liste des paramètres de la boucle de vitesse
| Adresse du panneau | Adresse interne | Nom Description | Défaut Plage | ||
| 60F901 | Kvp[0] | Gain proportionnel de la boucle de vitesse Peut être affchéé en Hz dans l'outil PC si le rapport d'inertie est correct. | / 1-32767 | ||
| d2.01 2FF00A Velocity_BW | La modification de ce paramètre modifier kvp[0] par le rapport d'inertie. | / 1-700 | |||
| 60F902 | Kvi[0] | Gain intégral de la boucle de vitesse | / | 0-1023 | |
| 60F907 | Kvi/32 | Gain intégral de la boucle de vitesse dans une unité de mesure plus petite | / 0-32767 | ||
| d2.02 2FF019 Kvi_Mix | L'écriture de ce paramètre définit kvi[0] sur 0 et la valeur est définitie sur kvi/32. | / 0-16384 | |||
| d2.05 60F905 Speed_Fb_N | Utilisé pour définir la largeur de bande du filtre de retour de vitesse Largeur de bande du filtre=100+Speed_Fb_N*20 | 25 0-45 | |||
| d2.06 60F906 Speed_Mode | Utilisé pour définir le mode de retour de vitesse 0 : 2e ordre FB LPF 1 :回头 direct de la vitesse initiale 2 :回头 de vitesse selon l'observateur de vitesse 4 :回头 de vitesse selon LPF du 1erordre 10 :回头 de vitesse selon LPF du 2e ordre et la commande de vitesse est filtrée par un LPF du 1erordre. Les deux filtres ont la même largeur de bande. 11 : la commande de vitesse est filtrée par un LPF du 1erordre 12 :回头 de vitesse selon observateur de vitesse, la commande de vitesse est filtrée par un LPF du 1erordre 14 :回头 de vitesse selon LPF du 1erordre et la commande de vitesse est filtrée par un LPF du 1erordre. Les deux filtres ont la même largeur de bande | 1 / | |||
| 60F915 | Output_Filter_N | Un filtre passac-bas de 1erordre dans la trajectoire avant de la boucle de vitesse | 1 1-127 | ||
| 60F908 | Kvi_Sum_Limit | Limite de sortie intégrale de la boucle de vitesse | / | 0-2^15 | |
Réglage du filtré de retard de vitesse
Le filtr de retard de vitesse peut réduire le bruit provenant de la boucle de retard, par exemple réduire le bruit de résolution du codeur. Le filtr de retard de vitesse peut être configuré comme 1^er et 2^e ordre via le Speed_Mode pour différentes applications. Le filtr de 1^er ordre réduit le bruit dans une moindre mesure, mais il entraîne également moins de déphasage, de sorte que le gain de la boucle de vitesse peut être régle plus haut. Le filtr de 2^e ordre réduit le bruit dans une plus grande mesure, mais il entraîne également un déphasage plus important, de sorte que le gain de la boucle de vitesse peut être limité.
Normalement, si la machine est rigide et légère, on peut utiliser le 1er filtr de retard ou désactiver le filtr de retard. Si la machine est soupé et lourde, on peut utiliser le filtr de 2^e ordre.
S'il y a trop de bruit de moteur lorsque le gain de la boucle de vitesse est ajusté, le paramètre du filtre de retard de la boucle de vitesse Speed_Fb_N peut être réduit en conséquence. Cependant, la largeur de bande du filtre de retard de la boucle de vitesse F doit être plus de deux fois supérieure à la largeur de bande de la boucle de vitesse. Sinon, cela peut provoquer des oscillations. Largeur de bande du filtre de retard de la boucle de vitesse F = Speed_Fb_N * 20 + 100 [Hz].
Réglage du filtré de sortie
Le filtré de sortie est un filtré de couple de 1^er ordre. Il peut réduire la boucle de régulation de la vitesse pour produces un couple à haute fréquence, ce qui peut stimuler la résonance globale du système.
L'utilisateur peut essayer d'ajuster Output_Filter_N de petit à grand afin de réduire le bruit.
La largeur de bande du filtre peut etre calculée a l'aide de la formule suivante.
$$ \frac {1}{2} \frac {\ln \left(1 - \frac {1}{\text {O u t p u t F i l t e r N}}\right)}{T s \pi}, T s = 6 2. 5 \mathrm {u s} $$
Calcul de la largeur de bande de la boucle de vitesse
Utilisez la formule suivante pour calculer la largeur de bande de la boucle de vitesse :
$$ k v p = \frac {1 . 8 5 3 3 5 8 0 8 0 1 0 ^ {5} J \pi^ {2} F b w}{\mathrm {I} _ {\text {M a x}} k t \text {e n c o d e r}} $$
kt constante de couple moteur, unité : Nm/Arms*100
J inertia, kg*m^2*10^6
Fbw largeur de bande de la boucle de vitesse, unité : Hz
Imax courant moteur max. I_max(6510.03) comme valeur DÉC
encoder résolution du codeur
Ajustement intégral du gain
Le gain intégral est utilisé pour éliminer l'erreur statique. Il peut augmenter le gain BASSE fréquence de la boucle de vitesse et un gain intégral accru peut réduire la réponse aux perturbations BASSE fréquence.
Normalement, si la machine presente des frottements importants, le gain intégral (kvi) doit être régèle sur une valeur plus élevé.
Si I'ensemble du système doit réagir rapidement, l'intégrale doit être régée sur une petite valeur ou même sur 0, et le commutateur de gain doit être utilisé.
Ajuster Kvi_sum_limit
Normalement, la valeur par défaut convient. Ce paramètre doit être ajusté si le système d'application a une grande force d'extension, ou doit être réduit si le courant de sortie est facilement sature et que le courant de sortie de saturation provoque une oscillation à basse fréquence.
7.2.2 Réglage de la boucle de position
Tableau 7-4 : liste des paramètres de la boucle de position
| Adresse du panneau | Adresse interne | Nom Description | Valeurs par défaut | Plage | |
| d2.07 60F | B.01 Kpp[0] | Gain proportionnel de la boucle de position. Utilisé pour définir la réponse de la boucle de position. | 10 0-32767 | ||
| unité : 0,01 Hz | |||||
| d2.08 2FF | 0.1A K_Velocity | % FF%o | 0 signifie pas d'anticipation, 1 000 signifie 100 % d'anticipation. | 1 000 0-4 | 000 |
| d2.09 2FF | 0.1B K_Acc | % FF%o | L'unité n'est correcte que si le rapport d'inertia est correctement régé.Si le rapport d'inertia est inconnu, définissez K_Acc_FF(60FB.03) à la place. | / 0-4 000 | |
| d2.26 60FF | B.05 Pos_Filter_N | La constante de temps de la demande de position LPF unité : millisecond | 1 1-255 | ||
| d2.25 2FF | 0.0E | Max_Following_Error_16 | Erreur maximale autorisée, Max_Following_Error (6065.00) = 100 * Max_Following_Error_16 | 5 242 / | |
Ajustement du gain proportionnel de la boucle de position
L'augmentation du gain proportionnel de la boucle de position peut améliorer la largeur de bande de la boucle de position, réduisant ainsi le temps de positionnement et l'erreur de poursuite, mais un réglage trop élevé entrainera du bruit ou même une oscillation. Il doit être régèle en fonction des conditions de charge. Kpp = 103 * Pc_Loop_BW, Pc_Loop_BW est la largeur de bande de la boucle de position. La largeur de bande de la boucle de position ne peut pas dépasser la largeur de bande de la boucle de vitesse. Largeur de bande de boucle de vitesse recommendée: Pc_Loop_BW<Vc_Loop_BW/4, Vc_Loop_BW.
Ajustement anticipé de la vitesse de la boucle de position
L'augmentation de l'anticipation de la vitesse de la boucle de position peut réduire l'erreur de poursuite de position, mais peut entraîner un dépassement accru. Si le signal de commande de position n'est pas régulier, la réduction de l'anticipation de la vitesse de la boucle de position peut réduire l'oscillation du moteur.
La fonction d'anticipation de la vitesse peut être traitée comme une opportunité pour le contrôleur de niveau supérieur (par exemple API) de contrôle directement la vitesse dans un mode de fonctionnement de positionnement. En fait, cette fonction dépensesera une partie de la capacité de réponse de la boucle de vitesse, donc si le réglage ne peut pas correspondre au gain proportionnel de la boucle de position et à la largeur de bande de la boucle de vitesse, le dépassement se produit.
En outre, la vitesse qui est anticipée par la boucle de vitesse peut ne pas etre fluide, et avec un signal de bruit à l'intérieur, une grande valeur de precompensation de vitesse amplifie etalement le bruit.
Anticipation de l'accelération de la boucle de position
Il n'est pas recommandé à l'utilisateur de régler ce paramètre. Si un gain de boucle de position très élevé est requis, l'anticipation de l'accelération K_Acc_FF peut être ajustée de manière appropriée pour améliorer les performances.
La fonction d'anticipation de l'accelération peut être traitée comme une opportunité pour le contrôleur de niveau supérieur (par exemple API) de contrôle directement le couple dans un mode de fonctionnement de positionnement. En fait, cette fonction dépensesera une partie de la capacité de réponse de la boucle de courant, donc si le réglage ne peut pas correspondre au gain proportionnel de la boucle de position et à la largeur de bande de la boucle de vitesse, le dépassement se produit.
En outre, l'acceleration qui est anticipée par la boucle de courant peut ne pas etre fluide, et avec un signal de bruit à l'intérieur, une grande valeur de precompensation d'acceleration amplifie etelement le bruit.
L'anticipation de l'accelération peut être calculée à l'aide de la formule suivante :
ACC % = 6746518 / K_Acc_FF EASY_KLOAD*100
ACC_% : le pourcentage qui sera utilisé pour l'anticipation de l'accélération.
K_Acc_FF(60FB.03): le facteur interne final pour le calcul de l'anticipation.
EASY_KLOAD(3040.07): le facteur de charge qui est calculé à partir de l'auto-réglage ou de l'entrée du bon rapport d'inertie.

Information
Plus K_Acc_FF est petit, plus l'anticipation de l'accelération est grande.
Filtre de lissage
Le filtr de lissage est un filtr à moyen mobile. Il filtr la commande de vitesse provenant du générateur de vitesse et rend les commandes de vitesse et de position plus fluides. En conséquence, la commande de vitesse sera retardée dans le contrôleur. Donc pour certaines applications comme la CNC, il est préféable de ne pas utiliser ce filtr et d'effectuer le lissage avec la commande CNC.
Le filtré de lissage peut réduire l'impact de la machine en lissant la commande. Le paramètre Pos_Filter_N définit la constante de temps de ce filtré en ms. Normalement, si le système de la machine oscille lorsqu'il démarre et s'arrête, un Pos_Filter_N plus grand est sugéré.
Filtre coupe-bande
Le filtrte coupe-bande peut supprimer la résonance en réduisant le gain autour de la fréquence de résonance.
Fréquence antirésonnante=Notch_N*10+100
Le réglage de Notch_On sur 1 active le filtré coupe-bande. Si la fréquence de résonance est inconnue, l'utilisateur peut définiir la valeur maximale de la commande de courant d2.14 petite, de sorte que l'amplitude de l'oscillation du système se situe dans une plage acceptable, puis essayer d'ajuster Notch_N et observer si la résonance disparait.
La fréquence de résonance peut être mesurée approximativement selon la courbe Iq lorsqu'une résonance se produit sur l'oscilloscope logiciel.
Tableau 7-5 : liste des filtres coupe-bande
| Adresse du panneau | Adresse interne | Nom | Description | Défaut | Plage |
| d2.03 60F | 9.03 Notch_N | N | Utilisé pour régler la fréquence du filtre coupe-bande interne pour éliminer la résonance mécanique généree lorsque le moteur entraîne la machine. La formule est F=Notch_N*10+100. Par exemple, si la fréquence de résonance mécanique F=500 Hz, le réglage du paramètre doit être de 40. | 45 0-90 | |
| d2.04 60F | 9.04 Notch_On | N | Utilisé pour activer ou désactiver le filtre coupe-bande. 0 : allumer le filtre coupe-bande 1 : Éteindre le filtre coupe-bande | 0 0-1 |
7.3 Facteurs influençant les résultats du réglage
La commande de contrôle est créé par le contrôleur de niveau supérieur (par exemple API) :
La commande de contrôle doit être fluide autant que possible et doit être correcte. Par exemple, la commande de contrôle ne doit pas créé les commandes d'accelération (à l'intérieur des commandes de
position) que le moteur ne peut pas fournir. De plus, la commande de contrôle doit respecter la limite de largeur de bande de la boucle de contrôle.
Conception de la machine :
Dans l'application actuelle, les performances sont normalement limitées par la machine. Des écarts entre les roues dentées, une connexionouple dans les courroies, des frottenments dans le rail, des résonances dans le système - tout cela peut influencer les performances de contrôle finale. Les performances de contrôle affectent les performances finale de la machine, ainsi que la précision, la réactivité et la stabilité.
Cependant, les performances finale de la machine ne sont pas seulement déterminées par les performances de contrôle.
Chapitre 8 Alarmes et dépannage
Les nombres de code d'alarme clignotent sur le panneau lorsque le contrôleur génére une alarme. Si vous avez besoin d'informations plus détaillées sur les erreurs et l'histoire des erreurs, veuillez connecter le contrôleur au PC via RS232 et reportez-vous au chapitre 5.7.
Tableau 8-1 : codes d'alarme de Error_State1
| Alarme | Nom | Raison | Dépannage |
| FFF.F | Mauvais modèle de moteur | Le type de moteur actuel est différent du type de moteur enregistré dans le contrôleur. | Méthode 1: accédez à EA01 via KEY, et confirmez le type de moteur, puis accédez à EA00, réglez 2.Méthode 2: accédez à EASY/MIT_TYPE (0x304101) via le logiciel PC, confirmez la valeur, puis enregistrez le paramètre. |
| 000.1 Erreur étendue | Des erreurs se produit dans Error_State2 | Appuyez sur la touche SET pour entrer Error_State2 (d1.16), mise le bit d'erreur, vérifie la signification de l'erreur dans le tableau 8-2. | |
| 000.2 | Codeur non connecté | Le câblage du codeur est incorrect ou déconnecté. | Utilisez un multimètre pour vérifier la connexion du cable de signal du codeur |
| 000.4 Codeur interne | Erreur de codeur interne ou le codeur est endommagé. | 1. Accédez à l'adresse du panneau d3.51 Encoder_OP par KEY et réglez 1.2. Essayez de réinitialiser l'erreur du contrôleur. Si l'erreur persiste, replacer le moteur. | |
| 000.8 | Codeur CRC | Erreur de codeur CRC | Assurez-vous que l'équipment est bien mis à la terre |
| 001.0 | Contrôleur Température | La température du module d'alimentation du contrôleur a atteint la valeur d'alarme. | Améliorer l'environnement de refroidissement du contrôleur. |
| 002.0 Surtension | La tension d'alimentation dépasse la plage de tension d'entrée autorisée En cas d'arrêt d'urgence, il n'y a pas de résistance de freinage externe ni de freinage. | Vérifiez si la tension d'alimentation est instable et si une résistance de freinage appropriée est connectée. | |
| 004.0 Sous-tension | L'entrée de tension d'alimentation est inférieure à la valeur d'alarme de protection basse tension. | Vérifiez si la tension d'alimentation est instable. | |
| 008.0 Surintensité | Le courant instantané dépasse la valeur de protection contre les surintensités. | Vérifiez le cable du moteur pour les courts-circuits.Remplacez le contrôleur. | |
| 010.0 Résistance de hachage | La résistance de freinage est surchargeée ou ses paramètres ne sont pas correctement réglicés. | Réglez la résistance et la puissance de la résistance de freinage externe via d5.04 et d5.05. | |
| 020.0 Erreur de poursuite | L'erreur de poursuite actuelle dépasse la valeur de réglage de Max_Following_Error.1. La rigidité de la boucle de régulation est trop petite.2.Le contrôleur et le moteur ensemble ne peuvent pas correspondre aux exigences de | Vérifiez et résolvez en fonction des raisons. | |
| l'application. 3. Max_Following_Error (d2.25) est trop petit. 4. Les paramètres d'anticipation ne sont pas réalisables. 5. Mauvais câblage du moteur. | |||
| 040.0 | Basse tension logique | La tension d'alimentation logique est trop faible. | Vérifiez si la tension d'alimentation logique est instable. |
| 080.0 | Moteur ou contrôleur IIit | Le frein n'est pas desserré lorsque l'arbre du moteur tourne Équipement de la machine coïncé ou frottement excessif. Le facteur de marche du moteur dépasse les performances nominales du moteur | Vérifier que la tension aux bornes du frein est correcte et que le frein est desserré lorsque le contrôleur est activé. Éliminez le problème de collage mécanique, ajoutez du lubrifiant. Réduire l'accélération ou l'inertie de la charge. |
| 100.0 | Surfréquence | La fréquence d'impulsion d'entrée externe est trop élevé. | Réduire la fréquence d'impulsion. Augmentez la valeur de FrequencyChecking (d3.38). |
| 200.0 | Température du moteur | La température du moteur dépasse la valeur spécifique. | Réduisez la température ambiente du moteur et améliorer les conditions de refroidissement ou réduisez l'accélération et la décélération ou réduisez la charge. |
| 400.0 | Informations sur le codeur | 1. La communication est incorrecte lorsque le codeur est initiaisé. 2. Le type de codeur est incorrect, par exemple un codeur inconnu est connecté. 3. Les données stockées dans le codeur sont erronées. 4. Le contrôleur ne peut pas prendre en charge le type de codeur actuel. | Vérifiez et résolvez selon les raisons. |
| 800.0 | Données EEPROM | Les données sont endommagées lors de la mise sous tension et les données sont lues à partir de l'EEPROM. | Les données sont endommagées lorsque les données sont lues à partir de l'EEPROM lors de la mise sous tension. |
Tableau 8-2: codes d'alarme de Error_State2 (etendu)
| Alarme | Nom | Raison | Dépannage |
| 000.1 | Capteur de courant | Décalage du signal du capteur de courant ou ondulation trop importante | Le circuit du capteur de courant est endommagé, veuillez contacter le fournisseur. |
| 000.2 | Watchdog | Exception de logiciel chien de garde | Veuillez contacter le fournisseur et essayer demettre à jour le micrologiciel. |
| 000.4 | Mauvaise interruption | Exception d'interruption invalide | Veuillez contacter le fournisseur et essayer demettre à jour le micrologiciel. |
| 000.8 | MCU ID | Mauvais type de MCU détecté | Veuillez contacter le fournisseur. |
| 001.0 | Configuration du moteur | Le type de moteur n'est pas reconnu automatiquement, aucune donnée moteur dans l'EEPROM/moteur jamais configuré | Installez un type de moteur correct sur le contrôleur et redémarrez. |
| 010.0 | Activation externe | La fonction DIN « pre_enable » est configurée, mais l'entrée est inactive lorsque | Résolvez selon la raison. |
| le contrôleur est activé ou doit être activé | |||
| 020.0 Limite positive | Limite de position positive (après mise en référence), la limite de position ne provoque une erreur que lorsque Limit_Function (2010.19) est régé sur 0. | Exclure la condition qui provoque le signal de limite | |
| 040.0 Limité négative | Limite de position négative (après mise en référence), la limite de position ne provoque une erreur que lorsque Limit_Function (2010.19) est définir sur 0. | Exclure la condition qui provoque le signal de limite | |
| 080.0 SPI interne | Erreur de micrologiciel interne dans la gestion SPI | Veuillez contacter le fournisseur. | |
| 200.0 Sens de la boucle fermée | Sens différent entre le moteur et le codeur de position | Changer le sens de comptage du codeur | |
| 800.0 Comptage maître | Erreur de comptage du codeur maître | Assurez-vous que la connexion à la terre et le blindage du codeur fonctionnement correctement. | |
Chapitre 9 List des paramètres du contrôleur de moteur de la série CMMB
9.1 F001
Ce menu du panneau contient toutes les valeurs du contrôle qui peuvent ettre affichees par I'affichage LED lorsqu'il est en mode surveillance (voir 4.2) et qu'aucune erreur ou avertissement n'est affché. Sur le panneau LED, selectionnee l'adresse du panneau de la valeur a afficher et appuyez sur SET. Avres avoir quitté le menu, la valeur selectionnée s'affiche. Pour rendre cette selection permanente, elle doit etre enregistrree via d2.00 dans F002.
Tableau 9-1-1: panneau F001
| Adresse du panneau | Adresse interne | Nom Description Défaut Plage | R/W/S | ||
| F001 2FF00408 Key_Adress_F001 | Valeur interne Valeur panneau 0 d1.00 2 d1.02 4 d1.04 ... Pour la signification de d1.xx, veuillesz vous reférer au tableau suivant 9-1-2 | 25 / RWS | |||
Tableau 9-1-2 : paramètre F001 du panneau
| Adresse du panneau | Adresse interne | Nom | Description | Défaut | Plage | RWS |
| d1.00 2FF | 00F20 Soft_V | Version_LED | Version du micrologiciel, affichage sur le panneau LED. | / | / R |
| d1.02 2FF | 01008 Motor | IIT_Rate | Affiche le taux d'uit réel et d'uit maximum du moteur. | 0 0-100 % R | |
| d1.04 2FF | 01108 Driver | IIT_Rate | Affiche le taux d'uit réel et d'uit max du contrôleur. | 0 0-100 % R | |
| d1.06 2FF | 01208 Chop_Power_Rate | Afficher le taux de puissance réelle et la puissance nominale du hacheur. | 0 0-100 % R | ||
| d1.08 60F | 70B10 Temp_Devic | température du contrôleur, unité : °C, / / R | |||
| d1.09 | 60F71210 | Real_DCBUS | Tension du bus DC, unité : V, / | / | R |
| d1.11 201 | 00A10 Din_Real | État de l'entrée physique Bit 0 : DIN 1 Bit 1 : DIN 2 Bit 2 : DIN 3 ... / / R | |||
| d1.12 201 | 01410 Dout_Real | Bit 0 : Dout 1 Bit 1 : Dout 2 Bit 2 : Dout 3 ... / / R | |||
| d1.13 2FF | 01610 AN_V1 | Tension de signal analogique 1, unité 0,01 V / / R | |||
| d1.14 2FF | 01710 AN_V2 | Tension de signal analogique 2, unité 0,01 V / / R | |||
| d1.15 | 26010010 | Error_State | Voir chapitre 5.7, tableau 5-7 | 0 | 0-65535 R |
| d1.16 | 26020010 | Error_State2 | Voir chapitre 5.7, tableau 5-8 | 0 | 0-65535 R |
| d1.17 | 60410010 | Mot d'état | Mot d'état du contrôleur / | / | R |
| d1.18 | 60610008 | Operation_Mode_Buff | Mode de fonctionnement en tampon | 0 | / |
| d1.19 | 60630020 | Pos_Actual | Position actuelle du moteur | 0 | -2^31-2^31-1 R |
| d1.20 | 60FB0820 | Pos_Error | Erreur de poursuite de position | 0 | -2^31-2^31-1 R |
| d1.21 250 | 80420 Gear_Master | Quantité d'impulsions d'entree avant l'engrenage électronique | 0 | -2^31-2^31-1 R | |
| d1.22 250 | 80520 Gear_Slave | Exécuter la quantité d'impulsions après l'engrenage électronique | 0 | -2^31-2^31-1 R | |
| d1.25 | 2FF01410 | Real_Speed_RPM | Vitesse réelle, unité : tr/min | 0 | 0-5000 R |
| d1.26 | 60F91910 | Real_Speed_RPM2 | Vitesse réelle, unité : 0,01 tr/min | 0 | -10-10 R |
| d1.28 60F | 60C10 CMD_q_Buff | Mémoire tampon de commande actuelle q | 0 | -2048-2047 R | |
| d1.29 2FF | 01800 I_q_Arms | Courant réel dans l'axe q, unité 0,1 Arms | 0 / R | ||
| d1.48 268 | 00010 Warning Word | mot d'état d'ajretissement du codeur : Bit 0 : avertissement de batterie Bit 1 : avertissement mixte Bit 2 : codeur occupe | 0 0-7 R | ||
| d1.49 304 | 40008 | Cur_IndexofTable | Plage: 0-31, index actuel dans le tableau de position | 0 0-31 R |
9.2 F002
Ce menu du panneau contient des paramètres pour les réglages de la boucle de régulation.
Controller->Panel Menu->Control Loop Setting(F002) (Contrôleur->Menu du panneau->Réglage de la boucle de régulation(F002))
Tableau 9-2: panneau F002
| Adresse du panneau | Adresse interne | Nom | Description | Défaut | Plage | RWS |
| d2.00 2FF00108 Store_Data | Paramètres de sauvégarde ou d'initialisation1 : enregistrer les paramètres de contrôle10 : initialiser les paramètres de contrôle | 0 0-255 | RW | |||
| d2.01 2FF00A10 Velocity_BW | Largeur de bande de la boucle de vitesse, unité : Hz. | / 1-700 | RWS | |||
| d2.02 2FF01910 Kvi_Mix | Gain intégral de la boucle de vitesse, en tant que combinaison de 32*Kvi(60F9.02) + Kvi/32(60F9.07). Lorsqu'il est écrit, il définit Kvi(60F9.02)=0 et la valeur passée à Kvi/32(60F9.07). | / 0-65535 | RWS | |||
| d2.03 60F90308 Notch_N | Fréquence du filtre coupe-bande BW=Notch_N*10+100[Hz] | 45 0-127 | RWS | |||
| d2.04 60F90408 | Notch_On | Activer le filtre coupe-bande | 0 | 0-1 | RWS | |
| d2.05 60F90508 Speed_Fb_N | Largeur de bande du filtre de retour de vitesse BW=Speed_Fb_N*20+100[Hz] | 25 0-45 | RWS | |||
| d2.06 60F90608 Speed_Mode | Par défaut : 0, signifie qu'un filtre passer-bas du 2e ordre est utilisé0 : 2e ordre FB LPF1 : pas de FB LPF2 : observateur FB4 : 1er ordre FB LPF10 : 2e LPF+SPD_CMD FT11 : SPD_CMD FT12 : SPD_CMD FT+observateur14 : 1er LPF+observateur | 1 0-255 | RWS | |||
| d2.07 60FB0110 Kpp | Kp de la boucle de position. Unité :0,01 Hz | 1000 | 0-32767 | RWS | ||
| d2.08 2FF01A10 K_Velocity_FF% | Anticipation de la boucle de position, unité : 0,1 % | 0 0-1500 | RWS | |||
| d2.09 2FF | 01B10 K_Acc | FF%o | Accélération vers l'avant de la boucle de position, unité : 0,1 % | 0 0-1500 | RWS | |
| d2.12 | 60F60110 | Kcp | Kp de la boucle de courant | / | 1-32767 | RWS |
| d2.13 | 60F60210 | Kci | Ki de la boucle de courant | / | 0-1000 | RWS |
| d2.14 2FF | 01C10 CMD_q | Max_Arms | Commande de courant maximum dans l'unité de l'axe q : 0,1 Arms | / 0-32767 | RWS | |
| d2.15 | 60F60310 | Speed_Limit_Factor | Un facteur de limitation de la vitesse maximale en mode couple | 10 0-1000 | RWS | |
| d2.16 607 | E0008 Invert_Dir | Inverser le mouvement 0 : CCW est une direction positive 1 : CW est une direction positive | 0 0 - 1 | RWS | ||
| d2.24 608 | 00010 Max_Speed_RPM | Unité de vitesse maximale du moteur : tr/min | 5000 | 0 - 15000 | RWS | |
| d2.25 2FF | 00E10 | Max_Following_Error_16 | Max_Following_Error= 100*Max_Following_Error_16 | 5242 | 1 - 32767 | RWS |
| d2.26 | 60FB0510 | Pos_Filter_N | Paramètre de filtre moyen | 1 | 1 - 255 | RWS |
| d2.27 | 20101810 | Zero_Speed Window | La fonction Dout Zero_Speed est active si la vitesse actuelle est inférieure ou égale à cette valeur unité : inc/ms | 0 0 - 655 | 35 RWS | |
9.3 F003
Ce menu du panneau contient des paramètres pour la configuration des fonctions I/O analogiques et numériques.
Controller->Panel Menu->F003 DI/DO & Operation Mode Setting(F003) (Contrôleur->Menu du panneau->F003 DI/DO et réglage du mode de fonctionnement (F003))
Tableau 9-3 : paramètres du panneau F003
| Adresse du panneau | Adresse interne | Nom | Description | Défaut | Plage | RWS |
| d3.00 2FF | 00108 Store_Data | Paramètres de sauvégarde ou d'initialisation1 : enregistrer les paramètres de contrôle10 : initiaiser les paramètres de contrôle | 0 0-255 | RW | ||
| d3.01 | 20100310 | Din1_Function | Voir chapitre 6.1, tableau 6-1 | 0x0001 | 0-65535 | RWS |
| d3.02 | 20100410 | Din2_Function | Voir chapitre 6.1, tableau 6-1 | 0x0002 | 0-65535 | RWS |
| d3.03 | 20100510 | Din3_Function | Voir chapitre 6.1, tableau 6-1 | 0x2000 | 0-65535 | RWS |
| d3.04 | 20100610 | Din4_Function | Voir chapitre 6.1, tableau 6-1 | 0x0010 | 0-65535 | RWS |
| d3.05 | 20100710 | Din5_Function | Voir chapitre 6.1, tableau 6-1 | 0x0020 | 0-65535 | RWS |
| d3.06 | 20100810 | Din6_Function | Voir chapitre 6.1, tableau 6-1 | 0 | 0-65535 | RWS |
| d3.07 | 20100910 | Din7_Function | Voir chapitre 6.1, tableau 6-1 | 0x0040 | 0-65535 | RWS |
| d3.10 2000 | 00008 Switch_On_Auto | 0 : aucune opération1 : activation automatique lors de la mise sous tension de la logique. Peut être régliquement si la fonction DIN activée n'est pas définie. | 0 0-255 | RWS | ||
| d3.11 | 20100F10 | Dout1_Function | Voir chapitre 6.1, tableau 6-2 | 0x0001 | 0-65535 | RWS |
| d3.12 | 20101010 | Dout2_Function | Voir chapitre 6.1, tableau 6-2 | 0x0010 | 0-65535 | RWS |
| d3.13 | 20101110 | Dout3_Function | Voir chapitre 6.1, tableau 6-2 | 0x0004 | 0-65535 | RWS |
| d3.14 | 20101210 | Dout4_Function | Voir chapitre 6.1, tableau 6-2 | 0x0008 | 0-65535 | RWS |
| d3.15 | 20101310 | Dout5_Function | Voir chapitre 6.1, tableau 6-2 | 0x0002 | 0-65535 | RWS |
| d3.16 2020 | 00D08 Din_Mode0 | Mode de fonctionnement canal 0 : sélection via le port d'entrée | -4 | -128-127 | RWS | |
| d3.17 2020 | 00E08 Din_Mode1 | Mode de fonctionnement canal 1 : sélection via le port d'entrée | -3 | -128-127 | RWS | |
| d3.18 2020 | 00910 Din_Speed0_RPM | Voir chapitre 6.2.2, tableau 6-8 unité : tr/min | 0 | -32768-32767 | RWS | |
| d3.19 2020 | 00A10 Din_Speed1_RPM | Voir chapitre 6.2.2, tableau 6-8 unité : tr/min | 0 | -32768-32767 | RWS | |
| d3.20 2020 | 00B10 Din_Speed2_RPM | Voir chapitre 6.2.2, tableau 6-8 unité : tr/min | 0 | -32768-32767 | RWS | |
| d3.21 2020 | 00C10 Din_Speed3_RPM | Voir chapitre 6.2.2, tableau 6-8 unité : tr/min | 0 | -32768-32767 | RWS | |
| d3.22 250 | 20110 Analog | 1_Filter | Paramètre de filtré du signal analogique 1 | 5 1-127 | RWS | |
| d3.23 | 2FF01D10 | Analog1_Dead_V | Unité : 0,01 V | 0 | -1000-1000 | RWS |
| d3.24 | 2FF01E10 | Analog1 Offset_V | Unité : 0,01 V | 0 | -1000-1000 | RWS |
| d3.25 250 | 20410 Analog | 2_Filter | Paramètre de filtré du signal analogique 2 | 5 1-127 | RWS | |
| d3.26 | 2FF01F10 | Analog2_Dead_V | Unité : 0,01 V | 0 | -1000-1000 | RWS |
| d3.27 | 2FF02010 | Analog2 Offset_V | Unité : 0,01 V | 0 | -1000-1000 | RWS |
| d3.28 | 25020708 | Analog_Speed_Con | Le signal analogue contrôle la vitesse, valable en mode de fonctionnement 3 ou -30 : contrôle de vitesse analogique OFF, contrôle de vitesse via Target_Speed(60FF.00)1 : vitesse contrôleée par AIN12 : vitesse contrôleée par AIN2 | 0 0-255 | RWS | |
| d3.29 304 | 10410 EASY | Analog_Speed | Facteur de vitesse analogique unité : tr/min/V | / | -32768-32767 | RWS |
| d3.30 | 25020808 | Analog_Torque_Con | Couple de commande de signal analogique, valide en mode de fonctionnement 40 : Analog_Torque_control OFF, le couple cible est spécifique par Target_Torque% (6071.00)1 : couple contrôleé par AIN12 : couple contrôleé par AIN2 | 0 0-255 | RWS | |
| d3.31 2FF | 02110 | Voltage_Torque_Factor | Facteur de couple analogue, unité : mNM/V | / | -32768-32767 | RWS |
| d3.32 | 25020908 | Analog_MaxT_Con | Couple max. de commande du signal analogique0 : non valide1 : couple max. contrôleé par AIN12 : couple max. contrôleé par AIN2 | 0 0-255 | RWS | |
| d3.33 | 2FF02210 | Voltage_MaxT_Factor | Facteur de couple max. analogue, unité : mNM/V | / | -32768-32767 | RWS |
| d3.34 250 | 80110 Gear_Factor0 | Numérique de l'engrenage électronique | 1000 | -32768-32767 | RWS | |
| d3.35 250 | 80210 Gear_Divider0 | Dénominateur de l'engrenage électronique | 1000 1-3 | 2767 RWS | ||
| d3.36 250 | 80308 PD_CW | Mode de contrôle d'impulsion0 : mode CW/CCW1 : mode de direction des impulsions2 : mode codeur incrémental | 1 0-255 | RWS | ||
| d3.37 250 | 80610 PD_Filter | Paramètre de filtré d'entrée d'impulsion | 3 0-255 | RWS | ||
| d3.38 250 | 80810 Frequency Check | Fréquence maximale de l'impulsion d'entrée, unité : impulsion/ms | 600 | 0-3000 | RWS | |
| d3.39 250 | 80910 | Target_Rach_Time_Window | Fenêtre de temps cible (vitesse de position) atteinte, unité : millisecond | 10 0-327 | 67 RWS | |
| d3.43 2020 | 00F10 Din_Control | Controlword | Le signal d'entrée « enable » contrôle le réglage du mot de commande | 0X2F 0-6 | 5535 RWS | |
| d3.44 2020 | 01820 Din_Speed4_RPM | Voir chapitre 6.2.2, tableau 6-8 unité : tr/min | 0 | -32768-32767 | RWS | |
| d3.45 2020 | 01920 Din_Speed5_RPM | Voir chapitre 6.2.2, tableau 6-8 unité : tr/min | 0 | -32768-32767 | RWS | |
| d3.46 2020 | 01A20 Din_Speed6_RPM | Voir chapitre 6.2.2, tableau 6-8 unité : tr/min | 0 | -32768-32767 | RWS | |
| d3.47 2020 | 01B20 Din_Speed7_RPM | Voir chapitre 6.2.2, tableau 6-8 unité : tr/min | 0 | -32768-32767 | RWS | |
| d3.48 304 | 50010 Enc COMM_State | Vérifier l'état de communication du codeur lorsque le codeur est initiaisé | 0 0-65535 | R | ||
| d3.49 304 | 60008 CPLD_Filter | Configurez le filtre dans le CPLD. Pour un signal de facteur de marche de 50 % :0 : 125ns1 : 156ns2 : 250ns3 : 313ns4 : 1 ms5 : 1,5 ms6 : 2 ms7 : 4 ms | 4 0-7 | RWS | ||
| d3.50 305 | 10110 Enc_AlM | Afficher l'état d'erreur complet du codeur Nikon. | 0 0-65535 | R | ||
| d3.51 269 | 00008 Encoder_DataRESET | 1 : effacer l'état de défaut du codeur.2 : dire l'état de défaut complet.3 : effacer l'état de défaut et les données MT. | 0 0-255 | RW | ||
| d3.52 2FF | 02310 Jog_RPM | Définissez la vitesse JOG. unité : tr/min, non enregistrable. | 30 | -32767-32768 | RW | |
| d3.53 | 20100110 | Din_Polarity | Définir la polarité du signal Din, 0 :normalement fermé ; 1 :normalement ouvertBit 0 : Din1Bit 1 : Din2Bit 2 : Din3... | 65535 0- | 65535 | RWS |
| d3.54 201 | 00D10 Dout_Polarity | Définir la polarité du signal Dout, 0 : normalement fermé ;1 : normalement ouvertBit 0 : Dout1Bit 1 : Dout2Bit 2 : Dout3... | 65535 0- | 65535 | RWS | |
9.4 F004
Ce menu du panneau contient les paramètres liés au moteur. Controller->Panel Menu->Motor Setting(F004) (Contrôleur->Menu du panneau->Réglage du moteur (F004))
Tableau 9-4: panneau F004
| Adresse du panneau | Adresse interne | Nom | Description | Défaut | Plage | RWS |
| d4.00 | 2FF00308 | Store_Motor_Data | Enregistrer les paramètres du moteur 1 : enregistrer les paramètres du moteur | 0 0-255 | RW | |
| d4.01 641 | 00110 Motor_Num | Code moteur Type de moteur LEDYY EMMB-AS-40-01 5959Y0 EMMB-AS-60-02 3059Y1 EMMB-AS-60-04 3159Y2 EMMB-AS-80-07 3259 | 0 0-65535 | RWS | ||
| d4.02 641 | 00208 Feedback_Type | Type de codeur Bit0 : vérification du cable UVWBit1 : Nikon multitoursBit2 : Nikon monotourBit4 : vérification du cable ABZBit5 : codeur écône en câblage | / | 0-255 R | ||
| d4.03 641 | 00508 Motor_Poles | Paires de pôles moteur unité : 2p | / | 0-255 R | ||
| d4.04 | 64100608 | Commu_Mode | Mode de commutation | / | 0-255 | R |
| d4.05 641 | 00710 Comm_Curr | Courant de commutation unité : déc | / | -2048-2047 | R | |
| d4.06 641 | 00810 Comm_Delay | Temps de commutation unité : millisecond | / | 0-32767 | R | |
| d4.07 641 | 00910 Motor_Iit_I | Courant de protection I²t moteur unité : 0,0707 Arms | / | 1-1500 | R | |
| d4.08 | 64100A10 | Motor_Iit_Filter | Constante de temps de protection I²t moteur unité : 0,256 s | 100 | 2-32767 | R |
| d4.09 | 64100B10 | Imax_Motor | Courant moteur maximal unité : 0,0707 Arms | / | 0-32767 | R |
| d4.10 | 64100C10 | L_Motor | Inductance de l'enroulement moteur unité : 0,1 mH | / | 1-32767 | R |
| d4.11 641 | 00D08 R_Motor | Résistance d'enroulement moteur de unité : 0,1 ohm | / | 0-32767 | R | |
| d4.12 641 | 00E10 Ke_Motor | Facteur EMF arrêté du moteur unité : 0,1 Vp/krpm | / | 0-32767 | R | |
| d4.13 641 | 00F10 Kt_Motor | Coefficient de couple du moteur unité : 0,01 Nm/Arms | / | 1-32767 | R | |
| d4.14 641 | 01010 Jr_Motor | Inertie du rotor unité : 0,01 kgcm² | / | 2-32767 | R | |
| d4.16 641 | 01210 Brake_Delay | temps de retard pour le frein moteur unité : millisecond | 150 | 0-32767 | R | |
| d4.18 | 64101610 | Motor_Using | Type de moteur actuellément utilisé | / | 0-65535 | R |
| d4.21 | 64100320 | FeedbackResolution | Pour les codeurs moteur EMMB, ce paramètre est always 65536. Pour le contrôle de position, le contrôleutilise 65536/rev comme résolution. Pour le contrôle de la vitesse, le contrôleutilise sa pleine résolution de 20 bits. | / 1-2^31-1 R | ||
| d4.22 | 64100420 | Feedback_Period | Vérification du codeur avec signal Z | / | 0-2^31-1 | R |
| d4.23 641 | 01510 Motor_BW | Largeur de bande de la boucle de contrôle du courant moteur | / 500-2500 R | |||
| d4.24 641 | 01710 Addition_Device | Indique si le moteur a un dispositif supplémentaire ; Bit 0 : frein moteur. Bit 0 = 0 : moteur sans frein Bit 0 = 1 : le moteur a un frein, le contrôleur continue à fonctionner pendant Brake_Delay(d4.16) ms avant que le frein ne se ferme complètement. | 0 0-65535 RW | |||
| d4.25 641 | 01A10 Gain_Factor | Le facteur de gain de la boucle de courant dépend du courant réel | 16 16-127 R |
9.5 F005
Ce menu du panneau contient divers paramètres du contrôleur.
Controller->Panel Menu->Controller Setting(F005) (Contrôleur->Menu du panneau->Réglage du contrôleur (F005))
Tableau 9-5: panneau F005
| Adresse du panneau | Adresse interne | Nom | Description | Défaut | Plage | RWS |
| d5.00 | 2FF00108 | Store_Data | Paramètres de sauvégarde ou d'initialisation1 : enregistrer les paramètres de contrôle10 : initiaiser les paramètres de contrôle | 0 0-255 | RW | |
| d5.01 | 100B0008 | Node_ID | ID du contrôleur | 1 | 0-255 | RWS |
| d5.02 2FE | 00010 RS232 | Baudrate | Débit en bauds du port série540 : 19200270 : 38400185 : 56000180 : 57600Efficace après le redémarrage | 270 | 0-65535 | RWS |
| d5.03 2FE | 10010 U2BRG | Débit en bauds du port série540 : 19200270 : 38400185 : 56000180 : 57600À effet immédiat, ne peut pas être enregistrré | 270 | 0-65535 | RWS |
| d5.04 60F70110 Chop_Resistor | Valeur de résistance de la résistance de freinage unité : ohms | 0 0-32767 RWS | |||
| d5.05 | 60F70210 | Chop_Power_Rated | Puisance nominale de la résistance de freinage unité : W | 0 0-32767 RWS | |
| d5.06 60F70310 Chop_Filter | Pour le calcul de la puissance de hachage. | 60 1-32767 RWS | |||
| d5.15 | 65100B08 | RS232_Loop_Enable | Contrôle des communications RS232 0 : 1 à 1 1 : 1 à N | 0 0-255RWS | |
| d5.16 2FFF0010 Réservé | |||||
Chapitre 10 Communication
Le contrôleur de moteur CMMB peut être commandé, configuré ou surveilé via une interface de communication RS232 (X3) à l'aide de la description d'interface et de protocole suivante.
10.1 Câblage RS232
Si le contrôleur de moteur doit être commandé par un contrôleur logique programmable (API) ou autres contrôleurs via une interface de communication RS485, un convertisseur RS485 vers RS232 doit être utilisé.
10.1.1 Connexion point à point
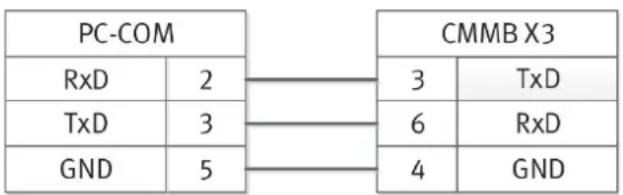
Figure 10-1: câblage de communication entre le PC (DSub 9 broches) et le contrôleur CMMB
10.1.2 Connexion multipoint
Le protocole de communication permet un fonctionnement en réseau avec un ordinateur hote fonctionnant comme maître et plusieurs contrôleurs CMBM fonctionnant comme esclaves de communication (RS232_Loop_Enable(d5.15) doit être définir sur 1, enregistrer et redémarrer le contrôleur après le réglage). Dans ce cas, le câblage RS232 doit avoir une structure en boucle comme suit :
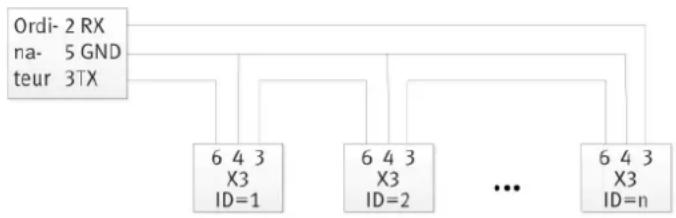
Figure 10-2: cablage de communication entre PC (DSub 9 broches) et plusieurs contrôleurs CMMB
10.2 Protocole de transport
La communication RS232 du contrôleur de moteur CMMB suit strictement le protocole maître/esclave. L'ordinateur hôte envoie des données au contrôleur CMMB. Le contrôleur vérifie les données relatives à la somme de contrôle et au numéro d'identification correct,TRAITE les données et renvoie une réponse. Les paramètres de communication par défaut pour le contrôleur de moteur CMMB sont les suivants :
Débit en bauds = 38400 bps
Bits de données = 8
Bits d'arret = 1
Pas de contrôle de parité
Le débit en bauds peut être modifié dans RS232 BaudRate(d5.02). ÀpRES avoir modifié la valeur, il est nécessaire d'enregistrer le paramètre et de redémarrer le système.
L'ID du contrôleeur peut être modifié dans Node ID (d5.01).
Le protocole de transport utilise un télégramme d'une longueur fixe de 10 octets.
| octet 0 | octet 1 ... octet 8 | octet 9 |
| ID | données | CHKS |
ID: le numero d'identification de l'esclave
CHKS:somme de contrôle du télégramme,CHKS = -SOMME(octet 0 .... octet 8)
10.2.1 Protocole point à point
Un hôte communique avec un contrôleur, RS232_Loop_Enable (d5.15) = 0)
L'hote envoie :
| octet 0 | octet 1 ... octet 8 | octet 9 |
| ID | données de l'hôte | CHKS |
L'esclave envoie/L'hote reçoit
| octet 0 | octet 1 ... octet 8 | octet 9 |
| ID | données esclave | CHKS |
Si l'esclave trouve son propre ID dans le télégramme hôte, il vérifie la valeur CHKS. Si la somme de contrôle ne correspond pas, l'esclave ne généra pas de réponse et le télégramme hôte sera rejeté.
10.2.2 Protocole multipoint
Un hote communique avec plusieurs contrôleurs, RS232_Loop_Enable(d5.15)=1
L'hote envoie :
| octet 0 | octet 1 ... octet 8 | octet 9 |
| ID | données de l'hôte | CHKS |
L'esclave envoie/L'hote reçoit (RS232_Loop_Enable(d5.15)=1) :
| octet 0 | octet 1 ... octet 8 | octet 9 |
| ID | données de l'hôte | CHKS |
| octet 0 | octet 1 ... octet 8 | octet 9 |
| ID | données esclave | CHKS |
Si l'hote envoie un télégramme avec un ID inutilisé, les données passeront la boucle RS232 mais aucune réponse d'esclave ne sera renvoyée.
L'esclave qui trouve son propre ID dans le télégramme hôte vérifie la valeur CHKS. Si la somme de contrôle ne correspond pas, l'esclave ne généra pas de réponse et le télégramme hôte sera rejeté par cet esclave.
10.3 Protocole de données
Le contenu de données du protocole de transport est le protocole de données. Il contient 8 octets. La définition du protocole de données RS232 du contrôleur de moteur CMMB est compatible avec le protocole CANopen SDO, et l'organisation interne des données est conforme à la norme CANopen. Tous les paramètres, valeurs et fonctions sont accessibles via une adresse 24 bits, constituée d'un index 16 bits et d'un sous-index 8 bits.
10.3.1 Télechargement (de l'hôte vers l'esclave)
Le téléchargement signifie que l'hote envoie une commande pour écrire des valeurs dans les objets de l'esclave, l'esclave génére un message d'erreur si la valeur est téléchargeé dans un objet inexistant.
L'hote envoie :
| octet 0 | octet 1 | octet 2 | octet 3 | octet 4 | octet 5 | octet 6 | octet 7 |
| CMD | INDEX | SOUS-INDEX | DONNÉES | ||||
CMD: spécifie la direction du transfert de données et la taille des données.
23 (hex) Envoie des données de 4 octets (les octets 4 à 7 contiennent 32 bits)
2b (hex) Envoie des données de 2 octets (les octets 4 et 5 contiennent 16 bits)
2f (hex) Envoie des données de 1 octet (l'octet 4 contient 8 bits)
INDEX : index dans le dictionnaire d'objets ou les données doivent etre envoyees
SOUS-INDEX : sous-index dans le dictionnaire d'objets ou les données doivent être envoyées
DONNÉES : valeur 8, 16 ou 32 bits
L'esclave répond :
| octet 0 | octet 1 | octet 2 | octet 3 | octet 4 | octet 5 | octet 6 | octet 7 |
| RES | INDEX | SOUS-INDEX | RÉSERVÉ | ||||
RES: affiche la réponse de l'esclave :
60(hex) Données envoyées avec succès
80(hex) Erreur, les octets 4 à 7 contiennent la cause de l'erreur
INDEX : valeur 16 bits, copie de l'index dans le télégramme hôte
SOUS-INDEX : valeur 8 bits, copie du sous-index dans le télégramme hôte
RÉSERVÉ : non utilisé
Upload signifie que le maître envoie une commande pour dire la valeur de l'objet à partir de l'esclave.
L'esclave
génére une erreur si un objet inexistant est demandé.
Le maitre envoie :
| octet 0 | octet 1 | octet 2 | octet 3 | octet 4 | octet 5 | octet 6 | octet 7 |
| CMD | INDEX | SOUS-INDEX | RÉSERVÉ | ||||
CMD: spécifie la direction du transfert de données
40(hex) tousjours
INDEX : valeur 16 bits, index dans le dictionnaire d'objects ou resident les données
demandees.
SOUS-INDEX : valeur 8 bits, index, sous-index dans le dictionnaire d'objets ou résident les données
demandées.
RÉSERVE: octets 4...7 non utilisés
L'esclave répond :
| octet 0 | octet 1 | octet 2 | octet 3 | octet 4 | octet 5 | octet 6 | octet 7 |
| RES | INDEX | SOUS-INDEX | DONNÉES | ||||
RES: affiche la réponse de l'esclave :
43(hex) les octets 4...7 contiennent des données 32 bits
4B(hex) les octets 4 et 5 contiennent des données 16 bits
4F(hex) l'octet 4 contient des données 8 bits
80(hex) erreur, les octets 4 à 7 contiennent la cause de l'erreur
INDEX : valeur 16 bits, copie de l'index dans le télégramme hôte
SOUS-INDEX : valeur 8 bits, copie du sous-index dans le télégramme hôte
DONNÉES : données ou cause de l'erreur, en fonction de RES
10.4 Exemple de télégramme RS232
Le tableau suivant montre l'exemple du télégramme RS232.
Tableau 10-1: exemple de télégramme RS232
| ID | R/W | Index | Sous-index | Données | Somme de contrôle | Signification |
| 01 | 2B | 40 60 | 00 | 2F 00 00 00 | 05 | Régler Controlword = 0x2F, activer le contrôleur |
| 01 | 2F | 60 60 | 00 | 06 00 00 00 | 0A | Définir Operation_Mode = 0x06 |
| 01 | 23 | 7A 60 | 00 | 50 C3 00 00 | EF | Définir Tearget_position = 50000 |
| 01 | 40 | 41 60 | 00 | 00 00 00 00 | 1E | Lire le mot d'etat |
Chapitre 11 Annexe
11.1 Codeurs multitours pris en charge par CMMB
Le CMMB peut prendre en charge les moteurs EMMB assorted avec un codeur mono/multitour.
Le codeur monotour peut fournir les informations d'angle absolu d'un tour et le codeur multitour peut en plus fournir 65536 revolutions absolues.

Information
Le codeur multitour ne peut<memoriser que 65536 revolutions. Si les 65536 rev. sont dépassées, exemple : 70000 révolutions déplacées et la position 4464 est affichée après le prochain redémarrage. 70000 - 65536 = 4464
11.1.1 Exigences matérielles
Pour l'utilisation d'un moteur EMMB avec codeur multitour, vous doivent utiliser l'adaptateur NEFM-REG6-K0.5-B-REG6 avec un boîtier de batterie. La batterie mettra en mémoire tampon les révolutions multitours absolues.
Pour plus d'informations, lore le manuel de l'adaptateur NEFM.
11.1.2 Scenarios d'application
Le codeur multitour est généralement utilisé dans le système qui n'est pas adapté pour effectuer l'action de mise en reférence ou si la mise en reférence prend trop de temps et est inefficace. Dans ce cas, le contrôle du servocontrôleur concernant le positionnement doit être effectué avec (ou en combinaison avec) la communication et/ou le tableau de position. Le train d'impulsions en tant qu'interface de commande ne peut pas à lui seul commander l'entrainment vers une position cible absolue désignée. Pour le CMMB, l'utilisation de codeurs multitours nécessite l'utilisation du logiciel PC ou d'autres méthodes de communication pour la configuration (pas d'adresses de panneau pour des valeurs importantes telles que Home Offset ou PosSHIFT).
11.1.3 Avertissement et erreur
11.1.3.1 Avertissement
Si la tension de la batterie est inférieure à environ 3,0 V (valeur typique), le codeur multitour génére un avertissement pour rappeler à l'utilisateur de changer la batterie. L'affichage LED CMMB clignote avec « 0001 » trois fois rapidement toutes les 10 secondes. L'avertissement sera effacé automatiquement lorsque la tension de la batterie redeviendra normale. Accès à l'objet 0x2680.00 pour obtenir les informations d'avertissement de batterie par communication.
Pour éviter la perte de données du codeur, la pile doit être remplaçée pendant que l'alimentation de contrôle pour la logique est fournie au contrôleur.
11.1.3.2 Erreur de connexion
Comme pour le codeur monotour, également pour un codeur multitour, le contrôleur CMMB génére l'erreur « Codeur non connecté » si le connecteur du codeur est déconnecté, si le cable du codeur est endommagé ou si la communication est perturbée par du bruit. L'affichage LED CMMB affiche l'erreur « 000.2 »
L'erreur peut être réinitialisée si la connexion est correcte et la perturbation éliminée.
11.1.3.3 Erreur multitour
Si la tension de la batterie est inférieure à environ 2,69 V ou la batterie est déconnectée, le codeur multitour génére une erreur interne pour rappeler à l'utilisateur que la position absolue n'est pas crédible. L'affichage LED CMMB affiche l'erreur « 000.4 » et cette erreur ne peut pas être réinitialisée par la réinitialisation d'erreur normale.
CMMB essaiera d'effacer cette erreur automatique dans les 2 conditions suivantes :
- Lorsqu'un codeur multitour est connecté à un nouveau contrôleur CMMB ou à un contrôleur CMMB auquel l'objet 0x6410.01 a été définir sur 0x3030.
- Lorsqu'un contrôle CMMB est connecté à un codeur multitour maintainant mais était lié à un codeur monotour avant.
Sinon, pour effacer l'erreur dans le codeur en interne d'abord, l'utilisateur doit régler l'objet 0x2690.00 sur 1 via le panneau LED d3.51 ou par communication (ex. CMMB Configurator).
Après cela, l'erreur du contrôle CMMB peut être réinitialisée par la réinitialisation d'erreur normale.

Note
Après une erreur multitour, la valeur de la position absolue n'est plus crédible et doit être définie à nouveau (voir Définition de la position absolue).
11.1.4 Définition de la position absolue
Les systèmes Equipés de moteurs à codeur multitour doivent définir la valeur de la position réelle sur une certaine position mécanique. Le contrôleur de moteur CMMB prend en charge deux manières pour cela :
-
Via mise en reférence, selon la méthode suivante :
-
Choisissez la bonne méthode de référencement et les paramètres de référencement associés, reportez-vous au chapitre 6.6
- Home Offset est la valeur importante : la position réelle sera définie sur (-Home Offset) au point de déclenchement de la mise en referencia
- Configurez les broches IO numériques associées pour le mode mise en reference
- Démarrez la mise en référence
- Une fois la mise en reférence terminée avec succès, stockez les paramètres du contrôleur
Après une mise en référence russe, le CMMB définit un paramètre interne Pos_Shift (objet 0x60FB.07) :
C

