
AP44 - Instrument de navigation marine SIMRAD - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil AP44 SIMRAD au format PDF.

| Type de produit | Commande et écran de pilote automatique pour navigation marine |
| Dimensions | 118 × 115 mm (4.64 × 4.52 pouces) |
| Poids | 0.32 kg (0.7 lb) |
| Alimentation | Via dorsale NMEA 2000 (13.5 V) - Consommation : 1.35 W (rétroéclairage éteint) à 2.16 W (max) |
| Affichage | Écran LCD-TFT 4.1 pouces (diagonale), résolution 320×240 pixels, rétroéclairage LED blanc (mode jour) ou couleur (mode nuit) |
| Fonctions principales | Modes de pilotage : Standby, AUTO, FU, Vent, No Drift, NAV, Gabarits de virages (C-turn, U-turn, spirale, zigzag, carré, lacets, DCT). Log journalier (Trip 1, Trip 2, Log), alarmes configurables, calibration des capteurs (vitesse, vent, profondeur, cap, barre), mise à jour logicielle via USB |
| Entretien et nettoyage | Nettoyer l’écran avec un chiffon doux et de l’eau, éviter les solvants. Vérification visuelle des connecteurs. Protéger des UV avec le cache fourni |
| Sécurité | Le pilote automatique ne remplace pas un navigateur. Ne pas utiliser dans les zones à fort trafic, visibilité réduite ou conditions extrêmes. Toujours vérifier le cap et la position |
| Indice de protection | IPx7 |
| Plage de température | Fonctionnement : -25°C à +65°C ; Stockage : -40°C à +85°C |
| Connectivité | NMEA 2000, port USB pour mises à jour |
| Compatibilité | Calculateurs NAC-2, NAC-3, AC12N, AC42N |
FOIRE AUX QUESTIONS - AP44 SIMRAD
Questions des utilisateurs sur AP44 SIMRAD
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Instrument de navigation marine au format PDF gratuitement ! Retrouvez votre notice AP44 - SIMRAD et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil AP44 de la marque SIMRAD.
MODE D'EMPLOI AP44 SIMRAD
Manuel de l'utilisateur
FRANÇAIS
Clause de non-responsabilité
Comme Navico améliore continuellement ce produit, nous nous réservons le droit d'y apporter des modifications, sans que pour autant celles-ci soient indiquées dans la présente version du manuel. Pour toute information complémentaire, veuillez consulter votre distributeur.
Le propriétaire est le seul responsable de l'installation et de l'utilisation du matériel et doit s'assurer qu'il ne provoque pas d'accidents, de blessures ou de dommages matériels. L'utilisateur de ce produit est l'unique responsable du respect des règles de sécurité maritime.
NAVICO HOLDING AS. ET SES FILIALES, SUCCURSALES ET SOCIÉTÉS AFFILIÉES REJETTENT TOUTE RESPONSABILITÉ EN CAS DE MAUVAISE UTILISATION DE CE PRODUIT QUI SERAIT SUSCEPTIBLE DE PROVOQUER DES ACCIDENTS OU DES DOMMAGES, OU D'ENFREINDRE LA LOI.
Le présent manuel décrit la version du produit en cours au moment où ce document a été imprimé. Navico Holding AS. et ses filiales, succursales et sociétés affiliées se réservent le droit de modifier les spécifications sans préavis.
Langue gouvernante
la présente déclaration, les manuels d'instructions, les modes d'emploi et toute autre information relative au produit (la documentation) pourraient être traduits ou ont été traduits à partir d'une autre langue (Traduction). Dans le cas de conflits entre une traduction quelconque de la Documentation, la version anglaise de la Documentation sera la seule version officielle de la Documentation.
Marques
Navico ^® est une marque déposée de Navico Holding AS.
Simrad ^® est utilisé sous licence accordée par Kongsberg.
NMEA ^® et NMEA 2000 ^® sont des marques déposées de la National Marine Electronics Association.
Copyright
Le contrat de garantie est un document fourni indépendamment de cette notice. Pour toute demande relative à la garantie, veuillez consulter le site Web concernant votre appareil ou système :
Déclaration de conformité
Europe
Nous, Navico, déclarons par la présente, sous notre responsabilité exclusive, que le produit est conforme :
- à la norme CE au titre de la directive CEM 2014/30/UE ;
États-Unis d'Amérique du Nord
Avertissement: Les changements apportés par l'utilisateur, non expressément approuvés par la partie responsable de la conformité, sont susceptibles d'annuler l'autorisation d'utilisation de l'appareil.
Australie et Nouvelle Zélande
Nous, Navico, déclarons par la présente, sous notre responsabilité exclusive, que le produit est conforme :
- aux critères requis pour les appareils de niveau 2 de la norme 2017 sur les communications radio (compatibilité électromagnétique) ;
Déclarations
Les déclarations de conformité correspondantes sont disponibles à l'adresse suivante :
À propos de ce manuel
Ce manuel est le guide servant de référence pour le fonctionnement de l'appareil. Il est supposé que tous les
équipements sont correctement installés et configurés et que le système est prêt à être utilisé.
Les images utilisées dans ce manuel d'utilisation peuvent ne pas correspondre exactement à l'écran de votre appareil.
Importantes conventions relatives au texte
Les sections de texte importantes qui exigent l'attention particulière du lecteur sont signalées comme suit :
→ Remarque : Utilisé pour attirer l'attention du lecteur sur un commentaire ou une information importante.
Avertissement: Utilisé pour avertir le personnel qu'il est nécessaire de procéder avec prudence pour éviter tout risque de blessure aux personnes et/ou de dommage aux équipements.
Version du manuel
Le présent manuel a été rédigé pour la version 2.1 du logiciel. Le manuel est continuellement mis à jour afin de l'adapter aux nouvelles versions du logiciel. Vous pouvez télécharger la dernière version disponible du manuel sur le site Web suivant :
Des versions traduites de ce manuel sont disponibles sur le site Web suivant :
10 Face avant et touches de l'appareil AP44
11 Page du pilote automatique
12 Principes de base
12 Sécurité d'utilisation du pilote automatique
12 Activation et désactivation de l'appareil
13 Fonctionnement du système de menus
14 Paramétrage écran
16 Modes de pilotage automatique
16 Sélection d'un mode de pilotage automatique
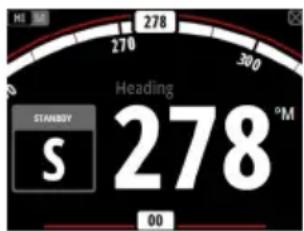
16 Mode Standby (Veille)
17 Mode AUTO (maintien de cap)
18 Mode Vent
19 Mode No Drift (Sans dérive)
20 Heading capture (Capture du cap)
21 Mode NAV
23 Pilotage par gabarit de virages
28 Utilisation du pilote automatique dans un système EVC
29 Log journalier
30 Alarmes
30 Indication d'alarme
31 Confirmation des alarmes
31 Activation du système d'alarme et de la sirène d'alarme
32 Historique d'alarmes
33 Configuration du logiciel
33 Calibration
39 Amortissement
39 Paramètres du pilote automatique
46 Paramètres système
52 Maintenance
52 Maintenance préventive
52 Nettoyage de l'unité d'affichage
52 Vérification des connecteurs
53 Mises à jour du logiciel
55 Arborescence de menu
57 Caractéristiques techniques
58 Schéma dimensionnel
59 Termes et abréviations
62 Données prises en charge
62 PGN NMEA 2000 (réception)
1
Introduction
Le AP44 est à la fois un écran et une unité de commande de pilote automatique.
L'appareil est compatible avec plusieurs calculateurs de pilote automatique Navico.
Le système AP44 comprend plusieurs modules qui servent d'interface avec au moins trois autres unités et qui doivent être installés à différents endroits du bateau :
• Le système de pilotage du bateau
• Le système électrique du bateau (puissance d'entrée)
- Autre équipement à bord
Avant d'utiliser le système de pilotage automatique, tous les éléments doivent être installés et configurés conformément à la documentation fournie. Les étapes suivantes sont requises :
- Installation mécanique et câblage de tous les appareils.
Consultez la documentation spécifique pour tous les appareils - Configuration du logiciel du système. Reportez-vous à la partie "Configuration du logiciel" à la page 33
- Mise en service et configuration du calculateur de pilote automatique. Consultez la documentation relative à l'installation et la mise en service pour votre calculateur de pilote automatique
Manuals (Manuels)
La documentation suivante est disponible pour le système AP44 :
- Manuel d'utilisation de l'appareil AP44 (Ce manuel)
• Guide d'installation de l'appareil AP44/IS42/Triton ^2
• Gabarit de montage de l'appareil AP44/IS42/Triton ^2
- Manuel de mise en service du calculateur du pilote automatique NAC-2/NAC-3
- Manuel d'installation de l'appareil AC12N/AC42N
→ Remarque : le dernier chiffre du numéro de référence correspond au code de révision du document. La dernière version de tous les documents peut être téléchargée à partir du site Web du produit, à l'adresse www.simrad-yachting.com.
Face avant et touches de l'appareil AP44
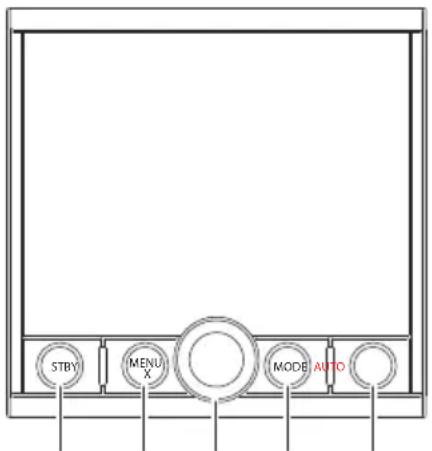
1 2 3 4 5
1 Touche STBY
Appuyez pour passer le pilote automatique en mode Standby.
2 Touche MENU/X
Si aucun menu n'est actif :
- Appuyez sur cette touche pour afficher le menu Paramètres.
- Maintenez la touche enfoncée pour afficher la boîte de dialogue de configuration d'affichage.
Fonctionnement des menus et boîtes de dialogue :
- Appuyez pour revenir au niveau de menu précédent ou pour fermer une boîte de dialogue
3 Bouton rotatif
Fonctionnement des menus et boîtes de dialogue :
- Tournez le bouton pour vous déplacer vers le haut et vers le bas dans les menus et boîtes de dialogue
- Tournez le bouton pour régler une valeur
- Appuyez sur le bouton pour sélectionner une option de menu et accéder au niveau de menu suivant
En mode FU :
- Tournez le bouton pour régler l'angle de barre
En mode AUTO, NoDrift et Vent :
- Tournez le bouton pour modifier le Réglage cap/cap défini/angle de vent défini
4 Touche MODE
Appuyez sur la touche pour afficher la liste Mode
5 Touche AUTO
Appuyez sur la touche pour activer le pilote automatique en mode AUTO
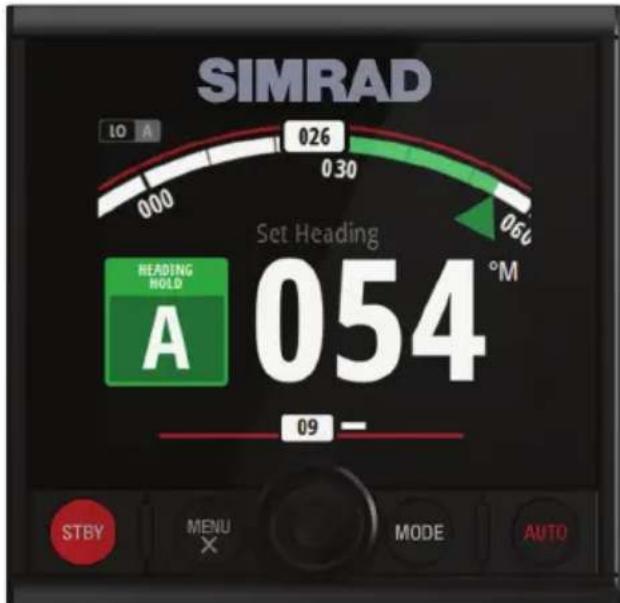
Page du pilote automatique
Le contenu de la page du pilote automatique varie si celui-ci est actif. Tous les modes comprennent :
• Profil (A)
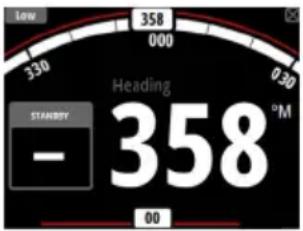
- Indicateur de cap, analogique et numérique (B)
- Indication du mode de pilotage automatique (C)
- Indicateur d'angle, analogique et numérique (D)

Pour plus d'informations, consultez la description des modes et la section "Termes et abréviations" à la page 59.
2
Principes de base
Sécurité d'utilisation du pilote automatique
Avertissement: un pilote automatique est une aide précieuse à la navigation, mais NE PEUT remplacer un navigateur humain.
Avertissement: assurez-vous que le pilote automatique a été installé correctement et calibré avant son utilisation.
Ne pas utiliser le pilotage automatique :
- Dans des zones de trafic important ou dans des eaux étroites
- En cas de visibilité réduite ou de conditions de navigation extrêmes
- Dans les zones où l'utilisation d'un pilote automatique est interdite par la loi
Lors de l'utilisation d'un pilote automatique :
- Ne pas laisser la barre sans surveillance
- Ne pas placer de matériel ou d'équipement magnétique à proximité du compas utilisé dans le système de pilote automatique
• Vérifier à intervalles réguliers le cap et la position du bateau - Toujours basculer en mode Veille et réduire la vitesse en temps voulu pour éviter les situations dangereuses
Activation et désactivation de l'appareil
L'appareil ne comporte pas de touche d'alimentation et il reste allumé aussi longtemps que l'alimentation est connectée à la dorsale réseau NMEA 2000.
Premier démarrage
Lors du premier démarrage de l'appareil et après le rétablissement des réglages d'usine, l'appareil affiche un assistant d'installation.
Répondez aux invites de l'assistant d'installation pour sélectionner certaines options d'installation fondamentales. Ces paramètres

peuvent être modifiés ultérieurement et vous pouvez poursuivre la configuration comme indiqué dans la section "Configuration du logiciel" à la page 33.
Mode Sommeil
En mode Sommeil, le rétroéclairage de l'écran et des touches est éteint pour des raisons d'économie d'énergie. Le système continue à fonctionner en arrière-plan.
Vous pouvez sélectionner le mode Sommeil dans la boîte de dialogue Paramétrage écran, accessible en maintenant la touche MENU enfoncée. Passez du mode Sommeil au fonctionnement normal en appuyant brièvement sur la touche MENU.
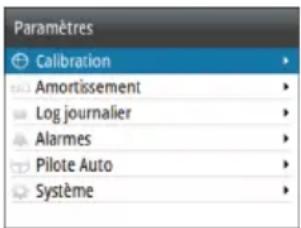
Fonctionnement du système de menus
Tous les paramètres et la configuration de l'appareil sont disponibles à partir du menu Paramètres, que vous pouvez activer en appuyant sur la touche MENU.
- Tournez le bouton rotatif pour vous déplacer vers le haut et vers le bas dans les menus et dans les boîtes de dialogue
- Confirmez votre sélection en appuyant sur le bouton rotatif
- Revenez au niveau de menu précédent en appuyant sur la touche MENU
Modification d'une valeur numérique
- Tournez le bouton rotatif pour sélectionner le champ d'entrée.
- Appuyez sur le bouton rotatif pour activer le champ et le modifier.
- Le chiffre de gauche commence à clignoter.
- Tournez le bouton rotatif pour régler la valeur du chiffre clignotant.
- Appuyez sur le bouton rotatif pour sélectionner le chiffre suivant.
- Répétez les étapes 3 et 4 jusqu'à ce que tous les chiffres soient définis.
- Appuyez sur le bouton rotatif pour terminer l'édition du champ sélectionné.
- Tournez le bouton rotatif pour sélectionner Annuler ou Sauver, puis appuyez sur le bouton rotatif pour confirmer votre sélection et fermer la boîte de dialogue.


Champ sélectionné Champ en mode édition
→ Remarque : Vous pouvez à tout moment appuyer sur la touche MENU pour quitter une boîte de dialogue sans enregistrer les entrées.
Paramétrage écran

Le paramétrage de l'écran peut être réglé à tout moment à partir de la boîte de dialogue Paramétrage écran, accessible en maintenant enfoncée la touche MENU.
Vous disposez maintenant des options suivantes :
- Niveau Backlight : ajuste le niveau de rétroéclairage du minimum (10 %) au maximum (100 %) par incréments de 10 %.
- Lorsque le champ Niveau Backlight est actif, si vous appuyez plusieurs fois sur la touche MENU, le niveau Backlight s'ajuste par décréments de 30 %.
- Groupe Afficheur : permet de définir à quel groupe de réseaux l'appareil appartient.
- Mode Nuit : active ou désactive la palette de couleurs du mode Nuit.
- Couleur Mode Nuit : permet de définir la palette de couleurs pour le mode Nuit.
- Inverser les couleurs du mode Jour : permet de passer l'arrière-plan blanc des pages en noir.
- Sommeil : le rétroéclairage de l'écran et des touches est éteint pour des raisons d'économie d'énergie.
→ Remarque : toutes les modifications apportées au paramétrage de l'écran s'appliquent à tous les appareils qui appartiennent au même Groupe Afficheur. Pour plus d'informations sur les groupes de réseaux, reportez-vous à la section "Groupes de réseaux" à la page 49.
3
Modes de pilotage automatique
Le pilote automatique dispose de plusieurs modes de navigation. Le nombre de modes et de fonctions compris dans ce mode dépend du calculateur du pilote automatique, du type de bateau et des entrées disponibles, comme expliqué dans la description des modes de pilotage suivants.
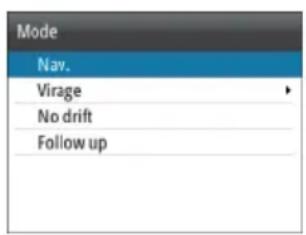
Sélection d'un mode de pilotage automatique
Vous pouvez sélectionner le mode STANDBY et le mode AUTO en appuyant respectivement sur les touches STBY et AUTO.
Vous pouvez sélectionner d'autres modes et fonctionnalités automatiques en choisissant l'option correspondante dans la liste Mode, accessible en appuyant sur la touche MODE.
Mode Standby (Veille)
Le mode Standby est utilisé lorsque vous pilotez le bateau à la barre.
- Vous pouvez basculer en mode Standby en appuyant sur la touche STBY.
→ Remarque : Si des données de capteur essentielles au fonctionnement du pilote automatique (par exemple le capteur d'angle de barre) sont perdues lorsque le pilote automatique fonctionne en mode automatique, le système bascule automatiquement en mode Standby.
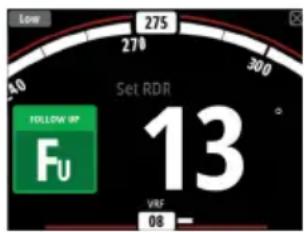
Mode Follow-up (FU)
En mode FU, vous pouvez tourner le bouton rotatif pour définir l'angle de la barre. La barre se rendra à l'angle demandé et s'arrêtera là.
- Vous pouvez passer au mode FU depuis n'importe quel mode en sélectionnant l'option Follow-up dans la liste Mode ou passer directement du mode Veille au mode FU en appuyant sur le bouton rotatif.
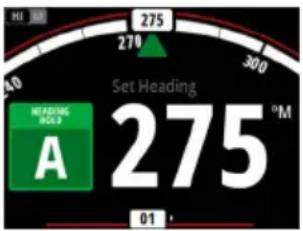
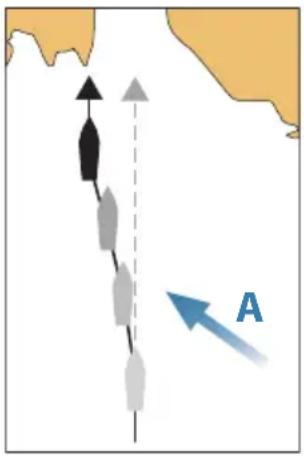
Mode AUTO (maintien de cap)
En mode AUTO, le pilote automatique émet les commandes de barre requises pour diriger le bateau automatiquement vers un cap prédéfini. Dans ce mode, le pilote automatique ne permet pas de compenser la dérive causée par le courant et/ou le vent (A).
- Basculez en mode AUTO en appuyant sur la touche AUTO. Lorsque ce mode est activé, le pilote automatique sélectionne le cap actuel du bateau comme cap prédéfini.
Changement du cap prédéfini en mode AUTO
Vous pouvez régler le cap en tournant le bouton rotatif.
Le cap change immédiatement. Le nouveau cap est maintenu tant qu'un nouveau cap n'est pas défini.
Virement de bord et empannage en mode AUTO
→ Remarque : disponible uniquement dans le cas où le type de bateau est configuré en tant que VOILIER.
Pour les virements de bord et les empannages en mode AUTO, vous utilisez le cap comme référence. Les opérations de virement de bord et d'empannage remplacent le cap défini à bâbord ou à tribord par un angle fixe.
Les paramètres de virement de bord sont définis dans le menu Paramétrages/À la voile : l'angle de virement définit l'angle du virement de bord, tandis que la durée du virement définit le taux de giration lors du virement de bord ou de l'empannage. Reportez-vous au chapitre "Paramètres du pilote automatique" à la page 39.
- Débutez un virement de bord ou un empannage en sélectionnant l'option Virement/Empannage dans la liste Mode.
- Le virage s'effectue lorsque la direction est sélectionnée dans la boîte de dialogue.
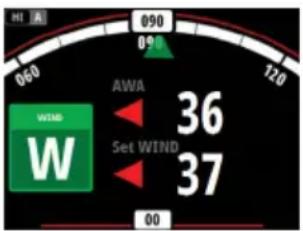
Mode Vent
→ Remarque : le mode Vent est disponible uniquement si le type de bateau est défini sur VOILIER. Il n'est pas possible d'activer le mode Vent si les informations sur le vent sont manquantes.
Lorsque le mode Vent est activé, le pilote automatique enregistre l'angle du vent actuel comme référence pour le pilotage et ajuste le cap du bateau pour conserver cet angle du vent.
Avant que le mode Vent puisse être activé, le système de pilote automatique doit fonctionner en mode AUTO et une valeur d'entrée correcte doit émaner de la girouette anémomètre.
- Basculez en mode Vent en sélectionnant l'option Vent dans la liste Mode.
Avertissement: en mode Vent, le pilote automatique prend un cap en fonction de l'angle de vent apparent ou vrai et non pas en fonction du cap compas. Tout écart de vent peut modifier le cap du bateau.
Virement de bord et empannage en mode Vent
Les virements de bord et empannages en mode Vent peuvent être exécutés en naviguant avec le vent vrai ou apparent en tant que référence. Dans les deux cas, l'angle du vent vrai doit être inférieur à 90 degrés (virement) ou supérieur à 120 degrés (empannage).
Les opérations de virement de bord et d'empannage reflètent immédiatement l'angle du vent défini sur le bord opposé.
Le taux de giration pendant le virement de bord ou l'empannage est défini par le paramètre Durée du virement dans le menu Paramétrages/À la voile. Reportez-vous au chapitre "Paramètres du pilote automatique" à la page 39.
- Débutez un virement de bord ou un empannage en sélectionnant l'option Virement/Empannage dans la liste Mode.
- Confirmez le virement ou l'empannage dans la boîte de dialogue.

→ Remarque : le pilote automatique ajoute provisoirement un cap de 5 degrés au nouveau bord pour permettre au bateau de reprendre de la vitesse. Au bout d'une courte période de temps, l'angle du vent revient à l'angle défini.
→ Remarque : si le virement ou l'empannage n'est pas confirmé, la boîte de dialogue disparaît au bout de 10 secondes et le virement ou l'empannage demandé n'est pas lancé.
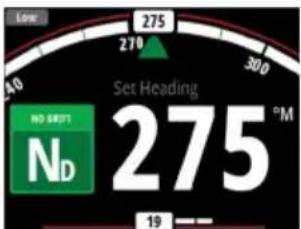
Mode No Drift (Sans dérive)
→ Remarque : Le mode NoDrift (Sans dérive) ne peut pas être sélectionné en l'absence d'informations de position GPS ou de cap.
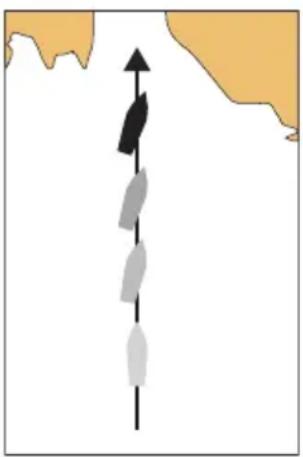
Dans le mode NoDrift (Sans dérive), le bateau est dirigé le long d'une route calculée à partir de la position actuelle dans une direction définie par l'utilisateur. Si le bateau dérive en s'écartant de la ligne de la route en raison du courant et/ou du vent (A), il suit la ligne avec un angle de crabe.
Avant que le mode NoDrift (Sans dérive) puisse être activé, le système de pilote automatique doit fonctionner en mode AUTO et disposer d'une entrée correcte du GPS et du capteur de cap.
- Basculez en mode NoDrift (Sans dérive) en sélectionnant l'option NoDrift (Sans dérive) dans la liste Mode.
- Le pilote automatique trace une ligne de cap invisible à partir de la position du bateau, d'après la direction en cours.
Le pilote automatique utilise désormais les informations de position pour calculer la distance transversale et suivre automatiquement la route calculée.
Changement du cap actuel en mode NoDrift (Sans dérive)
Vous pouvez régler le cap actuel en tournant le bouton rotatif.
Le cap change immédiatement. Le nouveau cap est maintenu tant qu'un nouveau cap n'est pas défini.
Contournement
→ Remarque : uniquement disponible pour les calculateurs de pilote automatique AC12N/AC42N.
Si vous devez contourner un obstacle lorsque vous utilisez le mode NoDrift (sans dérive), vous pouvez régler le pilotage automatique en mode Standby et piloter manuellement le bateau jusqu'à ce que vous ayez passé l'obstacle.
Si vous retournez au mode NoDrift dans les 60 secondes suivantes, vous pouvez choisir de reprendre la ligne de cap précédente.
Si vous ne répondez pas, la boîte de dialogue disparaît et le pilote automatique passe en mode NoDrift en prenant le cap actuel comme ligne de cap.
Heading capture (Capture du cap)
Lorsque le bateau effectue un virage en mode AUTO ou No Drift (Sans dérive), appuyez de nouveau instantanément sur la touche AUTO pour activer la fonction de capture du cap. Le virage est alors automatiquement annulé et le bateau continue sur le cap indiqué par le compas dès que vous appuyez sur la touche AUTO.
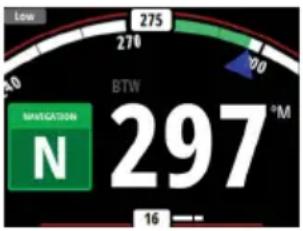
Mode NAV
→ Remarque : le mode NAV nécessite la connexion au réseau d'un traceur de cartes compatible.
Le mode NAV ne peut pas être sélectionné en l'absence d'information de cap ou si aucune information de pilotage n'est reçue du traceur de cartes externe.
Avertissement: le mode NAV ne doit être utilisé qu'en eaux ouvertes. Le mode Navigation ne doit pas être utilisé pendant la navigation à la voile, car les changements de cap peuvent entraîner des virements de bord ou des empannages intempestifs.
En mode NAV, le système de pilote automatique utilise les informations de pilotage d'un traceur de cartes externe pour diriger le bateau vers un waypoint spécifique ou le long d'une série de waypoints.
En mode NAV, le capteur de cap du pilote automatique est utilisé comme source de cap pour maintenir le bateau dans la bonne direction. Les informations de vitesse proviennent de la SOG ou du capteur de vitesse sélectionné. Les informations de pilotage reçues du traceur de cartes externe modifient le cap actuel pour diriger le bateau vers le waypoint de destination.
Pour obtenir un pilotage de navigation satisfaisant, le système de pilote automatique doit obtenir une entrée valide du traceur de cartes. Le pilotage automatique doit donc être testé et jugé satisfaisant avant que le mode NAV ne soit enclenché.
→ Remarque : si le traceur de cartes ne transmet pas de message d'information sur le cap vers le prochain waypoint, le pilote automatique met le cap sur l'écart de route (XTE) uniquement. Dans ce cas, vous devez rétablir le mode AUTO à chaque waypoint et régler manuellement le paramétrage route sur le cap correspondant au waypoint suivant, puis sélectionner à nouveau le mode NAV.
Avant d'entrer en mode NAV, le traceur de cartes doit suivre un itinéraire ou se diriger vers un waypoint.
- Passez en mode NAV en sélectionnant l'option NAV dans la liste Mode.
- Confirmez votre choix dans la boîte de dialogue pour basculer en mode NAV.

Virage en mode NAV
Lorsque votre bateau atteint un waypoint, le pilote automatique émet un avertissement sonore et affiche une boîte de dialogue contenant des informations sur le nouveau cap.
La modification automatique du changement de cap pour atteindre le prochain waypoint est limitée selon une valeur définie par l'utilisateur. Si le changement de cap dépasse cette limite définie, vous êtes invité à vérifier que le changement de cap à effectuer est acceptable.
- Si l'angle du changement de cap requis pour atteindre le prochain waypoint est inférieur à la limite de changement de cap configurée, le pilote automatique modifie automatiquement le cap. La boîte de dialogue disparaît après 8 secondes à moins d'être fermée à l'aide de la touche Pages.
- Si le changement de cap nécessaire pour atteindre le prochain waypoint dépasse la limite configurée, vous êtes invité à vérifier que le changement de cap à effectuer est acceptable. Si le virage n'est pas accepté, le bateau poursuit sa route sur le cap actuel.
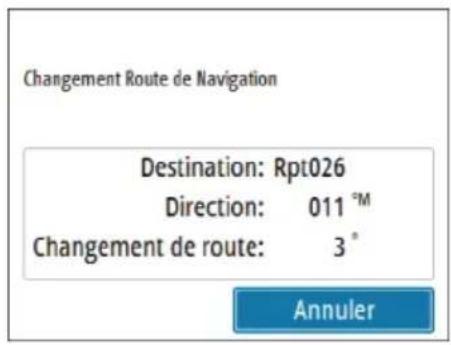
Changement de route inférieur à la limite définie

Changement de route supérieur à la limite définie
| Virage | |
| Rotation circulaire (C-turn) | |
| Demi-tour (U-Turn) | |
| Rotation en spirale | |
| Route en Zigzags | |
| Rotation en carré | |
| Route en lacets | |
| Ligne de sonde | |
| Gabarits Manoeuvre | |
| Continu... | |
| Rotation en spirale... | |
| Route en Zigzags... | |
| Rotation en carré... | |
| Route en lacets... | |
| Ligne de sonde... |
Pilotage par gabarit de virages
Le système comprend plusieurs fonctions de pilotage automatique en virages/giration lorsque le pilote est en mode AUTO.
→ Remarque : ces fonctions de virages/giration ne sont pas disponible si le type de bateau est configuré comme Voilier. Dans ce cas, elles sont remplacées par la fonction de virement/ empannage.
Variables de virage
À l'exception du demi-tour, tous les gabarits de virages disposent de paramètres que vous modifiez avant et pendant l'exécution du virage.
Les paramètres relatifs aux virages sont disponibles dans la boîte de dialogue Réglages du pilote automatique. Les variables sont décrites pour chaque option de gabarit de virages dans les pages suivantes.
Amorçage et arrêt d'un virage
→ Remarque : pour l'amorçage d'un virage DCT, consultez "Ligne de sonde (DCT)" à la page 25.
Pour amorcer le virage, sélectionnez l'option de virage dans la liste Mode, puis choisissez les options Bâbord et Tribord dans la boîte de dialogue de virage pour sélectionner la direction du virage.
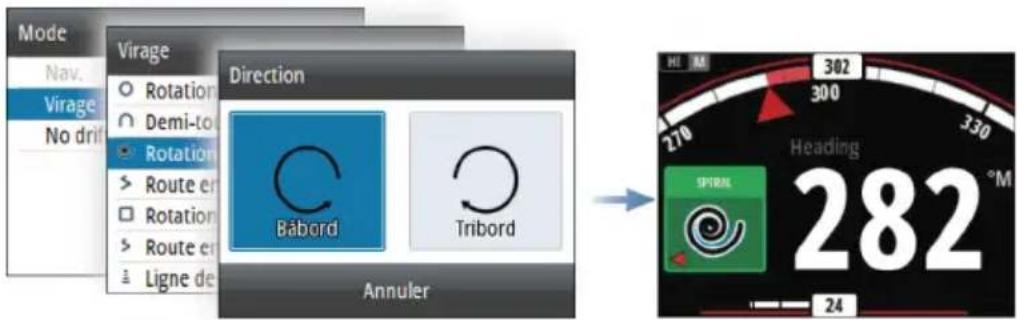
Pour arrêter le virage, vous pouvez à tout moment appuyer sur la touche STBY pour revenir au mode Veille et reprendre le pilotage manuel.
Rotation circulaire (virage continu)
Permet de faire faire un cercle au bateau.
• Variable de virage :
- Taux de giration. Si vous augmentez la valeur, le bateau exécute un cercle plus petit.
Demi-tour (U-turn)
Change le cap actuel de 180° dans la direction opposée.
Le taux de giration est identique aux paramètres Intensité du virage (NAC-2/NAC-3) et Limite de l'intensité (AC12N/AC42N) (consultez "Paramètres du pilote automatique" à la page 39). Le taux de giration ne peut pas être modifié pendant l'exécution du virage.
Rotation en spirale
Le bateau exécute une rotation en spirale avec un rayon décroissant ou croissant.
• Variables de virage :
- Rayon initial
- Changement/virage. Si cette valeur est configurée sur zéro, le bateau décrira des cercles. Une valeur négative entraîne un rayon décroissant et des valeurs positives un rayon croissant.
Route en Zigzags
Permet de faire faire des virages en zigzags au bateau.
Vous définissez le changement de cap initial avant d'entamer la manœuvre.
Lors de la réalisation du virage, vous pouvez modifier le cap principal en tournant le bouton rotatif (uniquement pour les calculateurs de pilote automatique AC12N/AC42N).
• Variables de virage :
- Changement de cap (A)
- Distance (B)

Rotation en carré
Le bateau décrit des virages à 90° après avoir progressé sur une distance prédéfinie.
Lors de la réalisation du virage, vous pouvez modifier le cap principal en tournant le bouton rotatif (uniquement pour les calculateurs de pilote automatique AC12N/AC42N).
• Variable de virage :
- Distance d'abat
Route en lacets
Le bateau décrit une route sinueuse autour du cap principal.
Vous pouvez définir le changement de cap avant d'entamer la manœuvre.
Lors de la réalisation du virage, vous pouvez modifier le cap principal en tournant le bouton rotatif (uniquement pour les calculateurs de pilote automatique AC12N/AC42N).
• Variables de virage :
- Changement de cap (C)
- Rayon de virage (D)

Ligne de sonde (DCT)
Permet au pilote automatique de suivre une ligne de sonde.
→ Remarque : le gabarit de virage DCT est uniquement disponible si le système reçoit des informations correctes sur la profondeur.
Avertissement: n'utilisez le gabarit de virage DCT que si les fonds marins s'y prêtent. Ne l'utilisez jamais en cas de fonds rocheux où la profondeur peut varier considérablement sur des distances réduites.
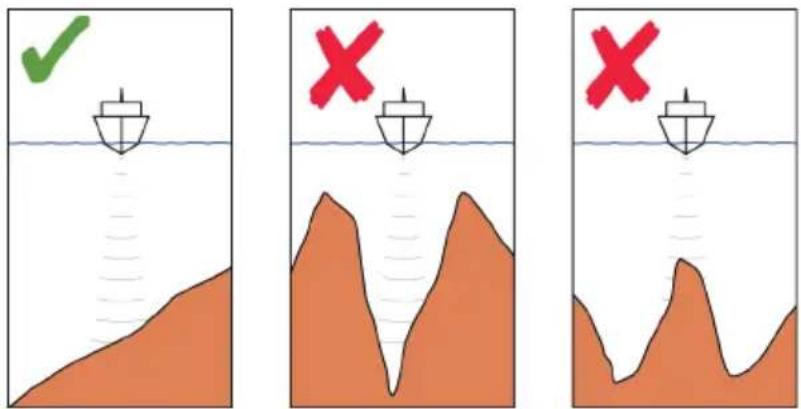
Pour amorcer un virage DCT :
- Vérifiez que vous disposez de la lecture de profondeur sur votre fenêtre ou sur un autre instrument de mesure de profondeur
- Manoeuvrez le bateau vers la profondeur à suivre et alignez-le à la ligne de sonde
- Activez le mode AUTO puis sélectionnez le suivi de ligne de sonde tout en surveillant la mesure de profondeur
- Sélectionnez l'option Bâbord ou Tribord dans la boîte de dialogue de virage pour lancer le pilotage de la ligne de sonde de façon à suivre la pente de fond à tribord ou bâbord
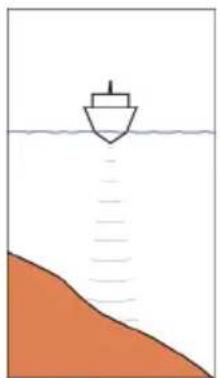
Option Bâbord (la profondeur diminue à bâbord)
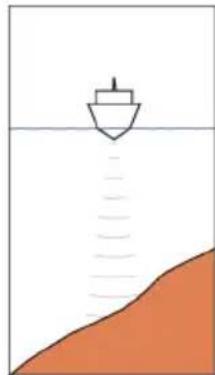
Option Tribord (la profondeur diminue à tribord)
• Variables de virage :
- Gain de profondeur. Ce paramètre détermine le rapport entre l'angle de commande et l'écart de la ligne de sonde sélectionnée. Plus la valeur du gain de profondeur est élevée, plus le safran sera appliqué. Si la valeur est trop faible, la compensation des décalages par rapport à la ligne de sonde prend beaucoup de temps et le pilote automatique ne parvient pas à maintenir le bateau sur la profondeur souhaitée. Si la valeur est trop élevée, le pilote automatique a tendance à surcompenser et le pilotage est instable.
- CCA. Le CCA est un angle ajouté au cap prédéfini ou déduit de celui-ci. Ce paramètre permet de faire serpenter le bateau autour de la profondeur de référence. Plus le CCA est élevé, plus les écarts seront importants. Si vous configurez le CCA à zéro, le bateau ne serpentera pas.
- Profondeur de réf. Il s'agit de la profondeur de référence pour la fonction DCT. Lorsque le DCT est lancé, le pilote automatique calcule la profondeur actuelle et la définit comme la profondeur de référence. La profondeur de référence peut être modifiée lorsque la fonction est en cours d'exécution.
→ Remarque : si les données sur la profondeur sont perdues alors que la fonction DCT est activée, le pilote automatique passe directement en mode AUTO.
Il est recommandé d'ACTIVER l'alarme Perte données de profondeur du pilote automatique lorsque vous utilisez la fonction DCT. Lorsque cette alarme est activée, elle se déclenche si les données sur la profondeur sont perdues lorsque la fonction DCT est activée.
Utilisation du pilote automatique dans un système EVC
Lorsque le AP44 est connecté à un système EVC, vous pouvez prendre le contrôle manuel de la barre, même si vous êtes en mode de pilotage automatique.
L'indicateur de mode est remplacé par un tiret indiquant la prise de contrôle sur EVC.
Si aucune commande de gouvernail n'est émise par le système EVC dans un laps de temps prédéfini, le système revient au contrôle du AP44 en mode Standby.
4
Log journalier
Le Log journalier est disponible dans le menu Paramètres.

Le Log journalier est une page temporaire. Il reste affiché à l'écran jusqu'à ce que vous appuyiez sur la touche STBY ou AUTO.
Il existe trois options de log disponibles :
- Trip 1 : enregistre la distance parcourue sur l'eau (entrée de log)
- Trip 2 : enregistre la distance parcourue grâce au GPS
- Log : indique la distance totale parcourue depuis l'installation du système ou depuis une restauration du système
→ Remarque : l'option Trip 1 nécessite la calibration correcte de la vitesse du bateau pour enregistrer précisément les données du trajet.
L'option Trip 2 nécessite la connexion au réseau d'un GPS compatible.
Vous pouvez démarrer, arrêter et réinitialiser le Log journalier actif dans le menu accessible en appuyant sur le bouton rotatif.
5
Alarmes
Le système vérifie continuellement les situations potentiellement dangereuses et les éventuelles défaillances du système pendant son fonctionnement. Le système d'alarme peut être activé si une ou plusieurs valeurs de paramètres d'alarme sont dépassées.
→ Remarque : si des données de capteur essentielles au fonctionnement du pilote automatique (par exemple le capteur d'angle de barre) sont perdues lorsque le pilote automatique fonctionne en mode automatique, le système bascule automatiquement en mode Standby.
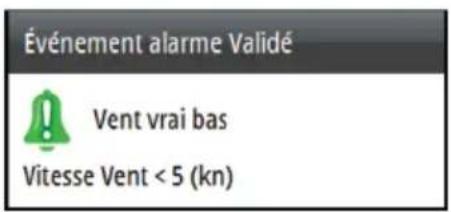
Indication d'alarme
Une situation d'alarme est signalée par une fenêtre d'alarme contextuelle. Si vous avez activé la sirène, une alarme sonore se déclenche après réception du message d'alarme.
Les alarmes individuelles sont affichées avec le nom de l'alarme comme titre, suivi des détails de l'alarme.
Si plusieurs alarmes sont activées au même moment, la fenêtre d'alarme contextuelle peut afficher 2 alarmes. Les alarmes apparaissent par ordre chronologique, avec l'alarme survenue en premier en haut de la liste. Les autres alarmes demeurent disponibles dans la boîte de dialogue Alarmes.
Type de messages
Les messages sont classés selon le degré d'influence que la situation constatée a sur votre bateau. Les codes couleur suivants sont utilisés :
| Couleur Importance | |
| Rouge Critique | |
| Orange Important | |
| Jaune Standard | |
| Bleu Avertissement | |
| Vert Avertissement de moindre | importance |
Confirmation des alarmes
Pour confirmer l'alarme la plus récente, appuyez sur le bouton rotatif.
Cette action supprime la notification d'alarme et coupe la tonalité d'alarme de tous les appareils qui appartiennent au même groupe d'alarmes. Un rappel apparaît à intervalles donnés tant que la cause de l'alarme existera.
→ Remarque : une alarme reçue d'un appareil non Navico du réseau doit être confirmée sur l'appareil générant l'alarme.
Activation du système d'alarme et de la sirène d'alarme
Vous pouvez activer le système d'alarme et la sirène d'alarme dans le menu Alarmes.
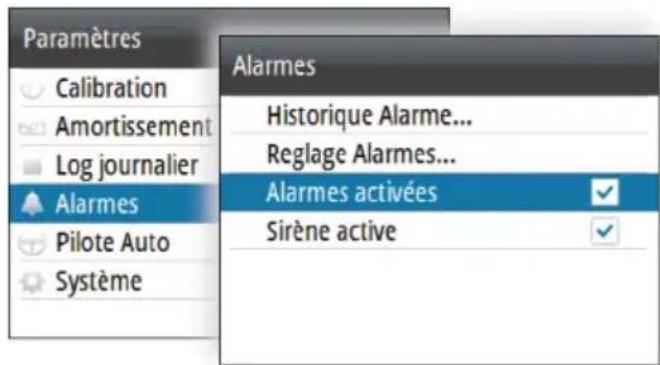
Réglages de l'alarme individuelle
Vous permet d'activer ou de désactiver l'alarme individuelle et de définir les limites de l'alarme dans la boîte de dialogue Alarmes.
- Appuyez sur le bouton rotatif pour afficher le menu à partir duquel vous pouvez activer ou désactiver l'alarme et définir la limite de l'alarme.

Historique d'alarmes
La boîte de dialogue de l'historique des alarmes stocke les messages d'alarme jusqu'à ce qu'ils soient manuellement effacés.
Vous pouvez afficher les détails d'une alarme sélectionnée et effacer toutes les alarmes dans l'historique des alarmes en appuyant sur le bouton rotatif lorsque la boîte de dialogue de l'historique des alarmes est active.
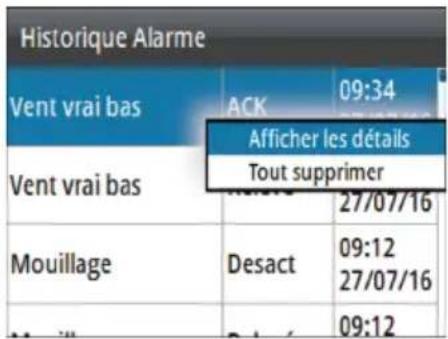
Options du menu Détails d'une alarme
6
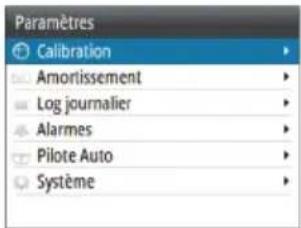
Configuration du logiciel
Avant d'utiliser le AP44, il faut configurer certains paramètres afin que le système fonctionne comme prévu. Accédez aux options nécessaires dans le menu Paramètres, accessible en appuyant sur la touche MENU.
→ Remarque : les paramètres suivants sont décrits dans d'autres
sections de ce manuel :
"Log journalier" à la page 29
"Alarmes" à la page 30
Calibration
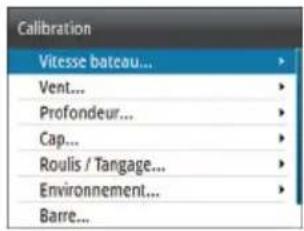
→ Remarque : une fois l'appareil configuré et avant de procéder à la calibration, assurez-vous que toutes les sources connectées au réseau sont sélectionnées et configurées. Reportez-vous au chapitre "Paramètres système" à la page 46.
Vitesse du bateau
La calibration de la vitesse est nécessaire pour compenser la forme de la coque et l'emplacement de la roue à aubes sur votre bateau. Pour une lecture précise de la vitesse et du log, il est essentiel que la roue à aubes soit calibrée.
Référence SOG
Cette option de calibration automatique utilise la vitesse de déplacement (SOG) transmise par votre GPS et compare la SOG moyenne avec la vitesse moyenne du bateau émanant du capteur de vitesse pendant la durée de la calibration.
→ Remarque : cette opération de calibration doit être faite par mer calme sans effet de vent ni courant de marée.
- Amenez le bateau jusqu'à la vitesse de croisière (plus de 5 nœuds), puis
• sélectionnez l'option Référence SOG.
Lorsque la calibration est terminée, l'échelle de Calibration vitesse bateau indique la valeur ajustée en pourcentage de la vitesse du bateau.
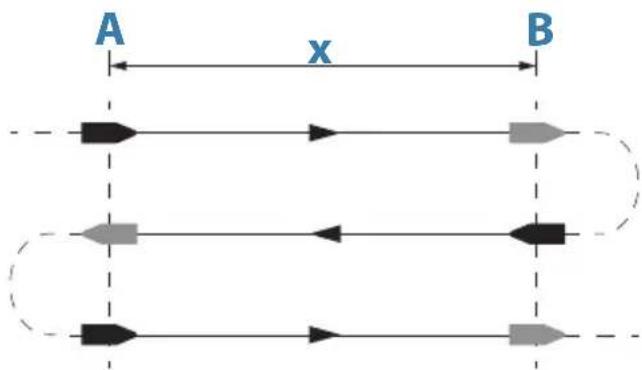
Référence Distance
Permet de calibrer le log à l'aide d'une référence de distance. Vous devrez effectuer une série d'essais consécutifs, au moteur et à vitesse constante, à un cap et à une distance donnés.
→ Remarque : la distance doit être supérieure à 0,5 NM. 1 NM serait la distance idéale.
Pour éliminer l'effet des conditions de marée, il est conseillé d'effectuer au moins deux tests, de préférence trois, sur le même parcours défini.
Sur l'illustration, A et B sont les marqueurs pour chaque essai. X est la distance réelle pour chaque essai.
- Entrez, en milles nautiques, la distance sur laquelle vous souhaitez calculer la référence de distance.
- Lorsque le bateau arrive à la position de départ prédéterminée pour le calcul de la référence de distance, démarrez le chronomètre de calibration.
- Lorsque le bateau passe par les marqueurs A et B à chaque essai, ordonnez au système de commencer la calibration, de l'arrêter et de l'achever.
flowchart
graph TD
A["A"] -->|x| B["B"]
A --> C["Black Arrow"]
B --> D["Gray Arrow"]
C --> E["Black Arrow"]
D --> F["Gray Arrow"]
E --> G["Black Arrow"]
Utiliser le SOG pour vitesse bateau
Si la vitesse du bateau n'est pas disponible à partir d'un capteur de roue à aubes, il est possible d'utiliser la vitesse fond (SOG) fournie
par un GPS. SOG sera affiché comme vitesse du bateau et utilisé dans les calculs de vent vrai et le log de vitesse.
Vent
Alignement de la girouette anémomètre
Fournit une calibration d'offset en degrés pour compenser tout défaut d'alignement mécanique entre la girouette anémomètre et l'axe central du bateau.
Pour vérifier l'erreur d'alignement de la girouette anémomètre, nous vous recommandons d'utiliser la méthode suivante qui implique un essai en mer à la voile :
- Effectuez un virement à tribord en naviguant au près et enregistrez l'angle du vent, puis répétez la procédure avec un virement à bâbord.
- Divisez la différence entre les deux nombres enregistrés et entrez cette valeur comme décalage de l'angle du vent.
Si l'angle du vent apparent tribord est supérieur à l'angle bâbord, divisez la différence par 2 et entrez la valeur obtenue comme valeur d'offset négative.
Si l'angle bâbord est supérieur à l'angle tribord, divisez la différence par 2 et entrez la valeur obtenue comme valeur de décalage positif.
Entrez l'offset dans le champ de calibration Alignement de la girouette anémomètre.
Profondeur
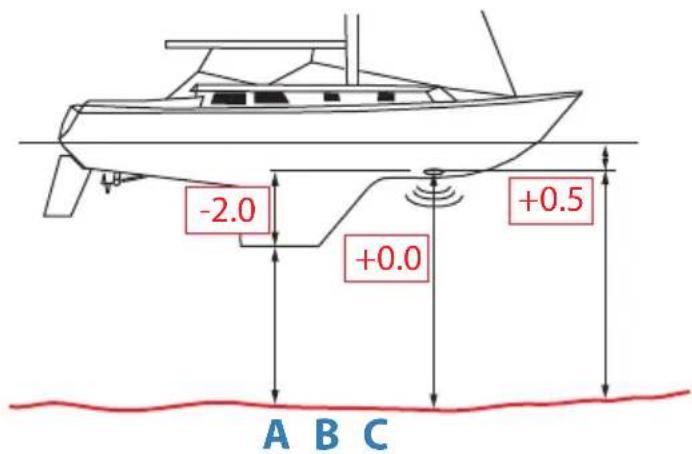
Offset de la profondeur
Les transducteurs mesurent toujours la profondeur comprise entre le transducteur et le fond. Par conséquent, les relevés de profondeur ne prennent pas en compte, dans leur calcul, la distance qui sépare la sonde du point le plus bas du bateau (par exemple, du bas de la quille, du gouvernail ou de l'hélice) dans l'eau ou de la sonde à la surface de l'eau.
- Pour la profondeur sous la quille (A) : définissez la distance entre la sonde et le fond de la quille. Sa valeur doit être négative. Par exemple, -2,0.
- Pour la profondeur sous la sonde (B) : aucun offset requis.
- Pour la profondeur sous la surface (ligne de flottaison) (C) : définissez la distance entre la sonde et la surface. Sa valeur doit être positive. Par exemple, +0,5.
Offset de la profondeur arrière
Cette option permet au système d'afficher deux relevés de profondeur.
La profondeur arrière doit être calibrée de la même manière que l'offset de la profondeur.
→ Remarque : la profondeur arrière est disponible uniquement lorsqu'un signal valide est reçu à partir d'un second appareil NMEA 2000 ou NMEA 0183 compatible.
Cap suivi
→ Remarque : tous les compas magnétiques doivent être calibrés pour assurer une bonne référence de cap. La calibration doit être effectuée sur le compas actif. Pour obtenir de bons résultats, la calibration doit être effectuée par mer calme et par vent et courant faibles.
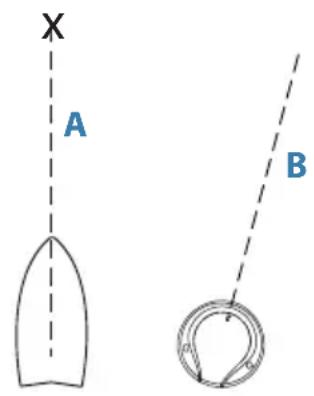
Offset
L'option Offset est utilisée pour compenser toute différence entre la ligne centrale du bateau (A) et la ligne de foi du compas (B).
- Trouvez le cap à partir de la position du bateau par rapport à un objet visible. Utilisez une carte ou un traceur de cartes.
- Barrez le bateau de manière à ce que la ligne centrale du bateau soit alignée avec la ligne de cap pointant vers l'objet.
- Changez le paramètre de décalage de manière à ce que la valeur de cap vers l'objet soit égale à celle du compas.
→ Remarque : assurez-vous que le cap du compas et le cap vers l'objet ont la même unité (M pour magnétique ou T pour vrai).
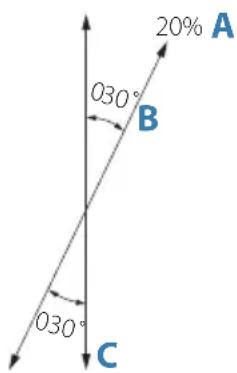
Calibration effectuée par l'utilisateur
→ Remarque : avant de commencer la calibration, assurez-vous que l'étendue d'eau libre autour du bateau est suffisante pour effectuer un virage complet.
L'option Calibrer est utilisée pour le démarrage manuel de la procédure de calibration du cap.
Au cours de cette calibration, le compas mesure l'ampleur et l'orientation du champ magnétique local.
L'illustration montre l'ampleur du champ local en pourcentage du champ magnétique terrestre (A), de la direction du champ local (B) par rapport à l'axe central du bateau (C).
Suivez les instructions à l'écran, et faites un cercle complet en 60-90 secondes environ. Continuez à tourner jusqu'à ce que le système indique la réussite de la manœuvre.
- Si le champ magnétique local est plus fort que celui de la terre (le champ local affiche plus de 100 %), il en résultera un échec de la calibration du compas.
- Si le champ local affiche plus de 30 %, il est possible que des objets magnétiques causent une interférence, et il faudra alors les chercher et les enlever. À défaut, orientez le compas vers un emplacement différent. L'angle de champ (local) vous guidera vers l'objet causant une interférence.
→ Remarque : dans certaines zones et à certaines latitudes élevées, l'interférence magnétique locale devient plus
importante et des erreurs de cap supérieures à ± 3 degrés doivent alors être acceptées.
Calibration automatique
Une option de calibration est disponible pour les compas et permet une calibration entièrement automatique.
Vous trouverez plus d'informations dans la documentation fournie avec votre compas.
Variation Magnétique
Définit la façon dont la variation magnétique est gérée par le système.
- Auto : reçoit les données de variation émanant d'une source réseau.
- Manuel : utilisé pour saisir manuellement une valeur pour la variation magnétique.
COG pour Cap
Si l'information de cap ne peut pas être donnée par un compas, il est possible d'utiliser le COG à l'aide d'un GPS. La valeur COG (cap par rapport au fond) sera alors utilisée dans les calculs de vent vrai.
→ Remarque : on ne peut pas utiliser le pilote automatique avec le COG. La COG ne peut pas être calculé à l'arrêt.
Tangage/Roulis
Si un capteur approprié est installé, le système permet de surveiller l'inclinaison du bateau. La valeur d'offset doit être saisie pour ajuster les relevés de sorte que lorsque le bateau est immobile au quai les valeurs de Tangage et de Roulis soient égales à 0.
Environnement
Si un capteur approprié est installé, le système surveille la température de l'eau, de l'air ainsi que la pression barométrique.
La valeur d'offset à entrer doit ajuster le relevé réalisé par le capteur pour correspondre à une source calibrée.
Barre
Lance la calibration automatique du capteur d'angle de barre. Cette procédure met en adéquation le mouvement physique de la barre avec la valeur d'angle de barre affichée à l'écran.
Suivez les instructions à l'écran pour procéder à la calibration de l'angle de barre.
Avancé
Cette option est utilisée pour appliquer manuellement un offset aux données des capteurs tiers affichés qui ne peuvent pas être calibrés par le AP44.
Amortissement
| Amortissement | |
| Cap | 1 sec |
| Vent Apparent | 4 sec |
| Vent vrai | 4 sec |
| Vitesse bateau | 4 sec |
| SOG | 1 sec |
| COG | 1 sec |
| Attitude Roll | 1 sec |
Si les données apparaissent de façon irrégulière ou trop sensible, un amortissement peut être appliqué pour que les informations apparaissent avec davantage de stabilité. Lorsque l'amortissement est désactivé, les données sont présentées sous forme brute, sans amortissement.
Paramètres du pilote automatique
Les paramètres du pilote automatique sont soit définis par l'utilisateur, soit définis pendant l'installation et la mise en service du système de pilote automatique.
- Les paramètres de l'utilisateur peuvent être modifiés pour différentes conditions de fonctionnement ou préférences utilisateur.
- Les paramètres d'installation sont définis lors de la mise en service du système de pilote automatique. Il n'est ensuite plus possible de modifier ces paramètres.
Les paramètres utilisateur et d'installation dépendent du calculateur de pilote automatique connecté au système.
Paramètres du calculateur de pilote automatique NAC-2/NAC-3

Paramètres du calculateur de pilote automatique AC12N/AC42N
Les sections suivantes décrivent les paramètres qui peuvent être modifiés par l'utilisateur. Les paramètres sont décrits par calculateur de pilote automatique.
Les paramètres d'installation sont disponibles dans la documentation fournie avec les calculateurs de pilote automatique.
→ Remarque : Pour les paramètres de gabarit de virage, consultez la section "Pilotage par gabarit de virages" à la page 23.
Calculateur du pilote automatique NAC-2/NAC-3
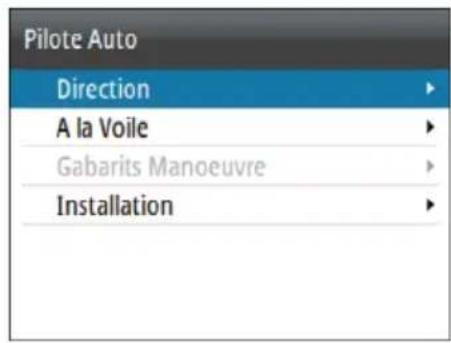

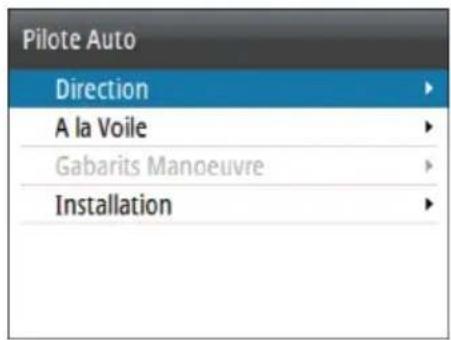
Direction (NAC-2/NAC-3)
Ces options permettent de changer manuellement les paramètres qui ont été définis lors de la mise en service du calculateur du pilote automatique. Pour plus d'informations, reportez-vous à la documentation du calculateur du pilote automatique.
- Taux de giration : intensité préférée pour les virages en degrés par minute.
- Gain : ce paramètre détermine le rapport entre la barre commandée et l'erreur de cap. Plus la valeur de la barre est
élevée, plus la pression sur la barre est forte. Si la valeur est trop basse, la compensation d'une erreur de cap prendra beaucoup de temps et le pilote automatique ne parviendra pas à maintenir le cap. Si la valeur est trop élevée, le pilote automatique a tendance à surcompenser et le pilotage est instable.
- Contre barre : rapport entre la modification d'une erreur de cap et la barre sur laquelle la pression est exercée. Plus la contre-barre est élevée, plus la réduction de la pression exercée sur la barre est rapide lorsque l'on approche du cap défini.
- Auto Trim : définit la force avec laquelle le pilote automatique va appuyer sur la barre pour compenser l'offset d'un cap constant, par exemple lorsque des forces externes, comme le vent ou le courant, affectent le cap. Abaissez l'Auto Trim pour éliminer plus rapidement l'offset d'un cap constant.
→ Remarque : en mode VRF, ce paramètre contrôle la constante de temps de l'estimation de la barre. Une valeur inférieure accélère l'estimation de la barre ; celle-ci sera donc plus rapidement en phase avec les mouvements du bateau.
- Initialisation barre : définit comment le système déplace la barre lors du passage de la direction assistée à un mode automatique.
- Centre : déplace la barre en position zéro.
- Réel : maintient l'offset de la barre.
- Limite Barre : détermine le mouvement maximal de la barre en degrés à partir de la position médiane que le pilote automatique peut imposer à la barre en mode automatique. La limite de barre n'est active qu'en pilotage automatique sur des routes droites, PAS lors des changements de cap. Cette limite de barre n'affecte pas le pilotage en mode Non-Follow-Up.
- Limite Écart de Cap : définit la limite pour l'alarme hors cap. Une alarme retentit lorsque le cap réel dévie du cap défini d'une valeur supérieure à la limite sélectionnée.
- Réponse Trace : définit la vitesse de réponse du pilote automatique après l'enregistrement d'une distance transversale.
- Angle d'approche piste : définit l'angle utilisé lorsque le bateau s'approche d'un segment. Ce paramètre est utilisé à la fois lorsque vous démarrez la navigation et lorsque vous appliquez un offset au tracé.
- Confirmation angle de changement de route : définit les limites de changement de cap jusqu'au prochain waypoint d'une route. Si le changement de cap dépasse cette limite définie, vous êtes invité à vérifier que le changement de cap à effectuer est acceptable.
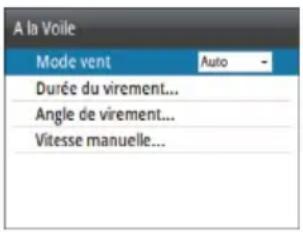
À la voile (NAC-2/NAC-3)
→ Remarque : les paramètres À la voile ne sont disponibles que dans le cas où le type de bateau est configuré comme Voilier.
- Mode Vent : sélectionnez la fonction de vent que le pilote automatique utilisera en mode Vent.
- Auto : Si l'angle du vent vrai est <°70 degrés : le mode Vent utilise l'angle du vent apparent. Si l'angle du vent vrai est ≥°70 degrés : le mode Vent utilise l'angle du vent vrai.
- Apparent
-
Vrai
-
Durée de virement : contrôle le taux de giration lorsque vous effectuez un virement de bord en mode Vent.
- Angle de virement : contrôle l'angle selon lequel vire le bateau, de 50 à 150 degrés en mode AUTO.
- Vitesse manuelle : si aucune donnée de vitesse du bateau ou de déplacement n'est disponible ou jugée fiable, vous avez la possibilité d'indiquer manuellement une valeur de vitesse qui devra être utilisée par le pilote automatique.
Calculateur du pilote automatique AC12N/AC42N


Réponse (AC12N/AC42N)
Le système AC12N/42N comprend trois ensembles différents de modes de pilotage : Haut, Bas et Vent. Le mode peut être sélectionné automatiquement ou manuellement.
La vitesse à laquelle le pilote automatique passe automatiquement de Bas à Haut (ou l'inverse) est déterminée par la vitesse de transition, définie lors de la mise en service du pilote automatique. Reportez-vous à la description détaillée dans la documentation du calculateur du pilote automatique.
Vous pouvez manuellement affiner le réglage de chacun des trois modes de réponse. Le niveau 4 est le niveau par défaut, avec des valeurs de paramètres déterminés par la fonction de réglage automatique. Si un réglage automatique n'est pas réalisé (non recommandé), les paramètres du niveau 4 adoptent les valeurs par défaut de l'usine.
- Un niveau de réponse bas réduit l'activité de la barre et assure un pilotage plus « en souplesse ».
- Un niveau de réponse élevé augmente l'activité du safran et offre un pilotage plus « serré ». Un niveau de réponse trop élevé provoque une marche « sinueuse » du bateau.
La réponse Vent est utilisée sur les voiliers.
- Augmentez la valeur du vent si la différence entre l'angle de vent défini et l'angle de vent vrai est trop grande.
- Diminuez la valeur du vent si l'angle du vent vrai dépasse par moments l'angle de vent défini ou si l'activité de la barre est trop élevée.
Le mode de performance est indiqué dans l'angle supérieur gauche de la page du pilote automatique.
• HI-A : mode de réponse haut défini automatiquement
- LO-A : mode de réponse bas défini automatiquement
• HI-M : mode de réponse haut défini manuellement
- LO-M : mode de réponse bas défini manuellement
→ Remarque : si aucune entrée de vitesse n'est disponible, le pilote automatique passe par défaut aux paramètres de pilotage LO lorsqu'il active un mode automatique. Il s'agit d'une fonction de sécurité qui évite le survivage.
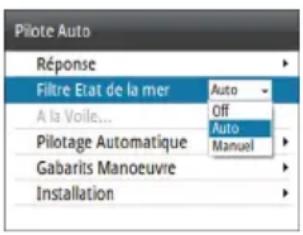
Filtre État de la mer (AC12N/AC42N)
Ce filtre permet de réduire la sensibilité du pilote automatique et l'activité du gouvernail par mer agitée.
- OFF : le filtre État de la mer est désactivé. Il s'agit du réglage par défaut.
- AUTO : réduit la sensibilité du pilote automatique et l'activité du gouvernail au moyen d'un processus adaptateur. La configuration AUTO est recommandée si vous souhaitez utiliser le filtre État de la mer.
- MANUEL : lié à la réponse de la barre dans les paramètres de contrôle décrits précédemment. Vous pouvez l'utiliser pour trouver manuellement le compromis optimal entre le maintien du cap et une activité réduite de la barre dans des conditions de mer forte mais stable.
À la voile (AC12N/AC42N)
→ Remarque : les paramètres À la voile ne sont disponibles que dans le cas où le type de bateau est configuré comme Voilier.
- Durée de virement : contrôle le taux de giration lorsque vous effectuez un virement de bord en mode Vent.
- Angle de virement : contrôle l'angle selon lequel vire le bateau, de 50 à 150 degrés en mode AUTO.
- Mode Vent : sélectionnez la fonction de vent que le pilote automatique utilisera en mode Vent.
- Auto :
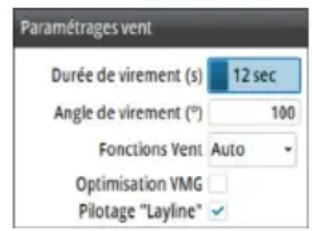
Si l'angle du vent apparent est ≤°60 degrés : le mode Vent utilise l'angle du vent apparent.
Si l'angle du vent apparent est >°60 degrés : le mode Vent utilise l'angle du vent vrai.
- Apparent
-
Vrai
-
Optimisation VMG : vous pouvez optimiser le VMG (Velocity Made Good) au vent. Cette fonction est active pendant 5 à 10 minutes après qu'un nouvel angle de vent a été défini et uniquement si vous naviguez par vent de travers.
- Pilotage "Layline" : lorsqu'il est activé, l'écart de route (XTE) du navigateur garde le bateau sur la ligne de tracé. Si l'écart de route du navigateur dépasse 0,15 mille nautique, le pilote automatique calcule la layline et le tracé vers le prochain waypoint.
Pilotage Automatique
Vitesse de transition...
| Haut | |
| Bas | |
| Barre Minimum... | |
| Angle Vent Minimum Tribord... | |
| Angle Vent Minimum Båbord... | |
| Navigation change limit... |
Pilotage automatique (AC12N/AC42N)
Cette option permet de changer manuellement les paramètres qui ont été définis lors de la mise en service du calculateur du pilote automatique. Pour plus d'informations sur les paramètres, reportez-vous à la documentation du calculateur du pilote automatique.
- Vitesse de transition : vitesse à laquelle le pilote change automatiquement les paramètres de navigation définis de Haut à Bas, ou inversement. Sur les bateaux à moteur, il est recommandé de définir la vitesse de transition pour représenter la vitesse à laquelle la coque commence à planer ou l'allure à laquelle vous passez de la vitesse lente à la vitesse de croisière. Sur les voiliers, la vitesse de transition doit être définie sur 3-4 nœuds pour assurer la meilleure réponse lors d'un virement de bord.
- Haut/Bas
- Gain : ce paramètre détermine le rapport entre la commande de barre et l'erreur de cap. Plus la valeur de la barre est élevée, plus la pression sur la barre est forte. Si la valeur est trop basse, la compensation d'une erreur de cap prendra beaucoup de temps et le pilote automatique ne parviendra pas à maintenir le cap. Si la valeur est trop élevée, le pilote automatique a tendance à surcompenser et le pilotage est instable.
- Contre barre : rapport entre la correction d'une erreur de cap et la pression exercée sur la barre. Plus la contre-barre est élevée, plus la réduction de la pression exercée sur la barre est rapide lorsque l'on approche du cap défini.
- Auto Trim : définit la force avec laquelle le pilote automatique va appuyer sur la barre pour compenser l'offset d'un cap constant, par exemple lorsque des forces externes, comme le vent ou le courant, affectent le cap. Abaissez l'Auto Trim pour éliminer plus rapidement l'offset d'un cap constant.
- Auto Trim : le taux de giration du bateau en degrés par minute.
- Barre Minimum : certains bateaux ont parfois tendance à ne pas réagir aux commandes de barre de faible amplitude lors d'un paramétrage de route, en raison d'un mouvement faible de la barre, d'une bande morte de barre ou de tourbillons/de perturbations au niveau du gouvernail ou parce qu'il s'agit d'un bateau à propulsion par jet d'eau. En réglant manuellement la fonction Barre Mini, vous pouvez améliorer les performances de direction sur certains bateaux. Cela augmente toutefois l'activité du gouvernail.
- Angle Vent Minimum Tribord : c'est l'angle minimal du vent apparent qui permet de maintenir les voiles bien gonflées et d'obtenir une poussée acceptable. Ce paramètre varie selon les bateaux. Le paramètre s'applique pour la fonction de prévention des virements de bord. Il s'applique également lorsque le pilote automatique fonctionne en mode WindNAV. Vous pouvez sélectionner des angles de vent minimum pour bâbord et tribord. La différence entre bâbord et tribord sera prise en compte lors du calcul de la Distance avant virement (DTT).
- Navigation change limit (Limite de changement de cap) : définit les limites de changement de cap jusqu'au prochain waypoint d'une route. Si le changement de cap dépasse cette limite définie, vous êtes invité à vérifier que le changement de cap à effectuer est acceptable.
Paramètres système
Réseau
| Réseau | |
| Sources | |
| Liste des Appareils | |
| Diagnostics | |
| Groupes... |
Sources
Les sources de données fournissent des données en mode Live au système.
Les données peuvent provenir de modules internes à l'appareil (par exemple un GPS interne ou une sonde) ou de modules externes connectés au réseau NMEA 2000 ou via NMEA 0183 s'il est disponible sur l'appareil.
Lorsqu'un appareil est connecté à plusieurs sources qui fournissent les mêmes données, l'utilisateur peut choisir la source qu'il préfère. Avant de débuter la sélection des sources, assurez-vous que tous les appareils externes et la dorsale NMEA 2000 sont connectés et actifs.
- Sélection automatique : recherche toutes les sources connectées à l'appareil. Si plusieurs sources sont disponibles pour chaque type de données, la sélection s'effectue selon une liste interne de priorités. Cette option convient à la majorité des installations.
- Sélection manuelle d'une source : généralement, la sélection manuelle est requise uniquement lorsqu'il existe plusieurs sources pour les mêmes données et que la source automatiquement sélectionnée n'est pas celle souhaitée.
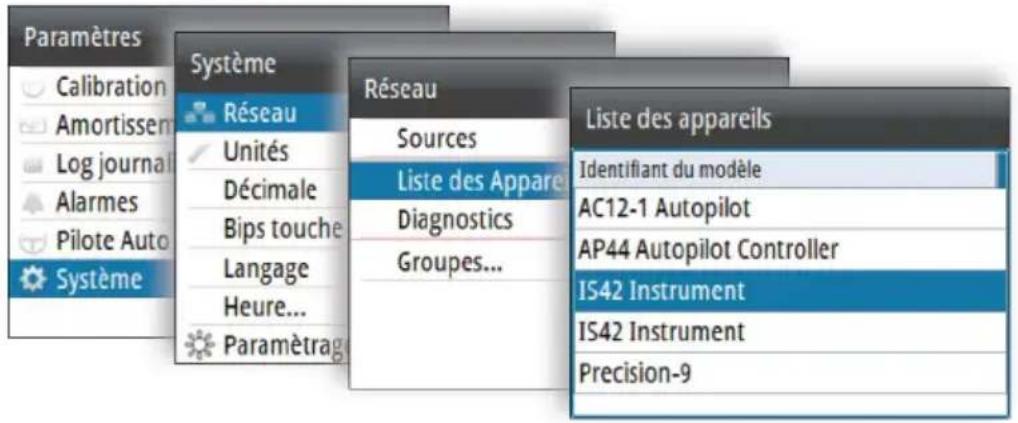
Liste des appareils
La liste des appareils répertorie les appareils qui fournissent des données. Il peut s'agir d'un module situé à l'intérieur de l'appareil, ou d'un appareil NMEA 2000 externe.

Si vous sélectionnez un appareil dans cette liste, des détails et des actions supplémentaires s'affichent :
Tous les appareils permettent l'attribution d'un numéro d'instance par l'intermédiaire de l'option de configuration. Définissez des numéros d'instance uniques sur des appareils identiques du réseau pour permettre à l'appareil de les différencier. L'option de données affiche toutes les données émises par l'appareil. Certains appareils affichent d'autres options qui leur sont spécifiques.
→ Remarque : la définition du numéro d'instance sur un produit tiers est généralement impossible.
Diagnostics
L'onglet NMEA 2000 de la page de diagnostic peut fournir des informations utiles pour identifier un problème de réseau.
→ Remarque : Les informations ci-après n'indiquent pas toujours un problème pouvant être résolu par une simple modification de la disposition du réseau ou des appareils connectés et de leurs activités sur le réseau. Néanmoins, les erreurs de réception et de transmission indiquent le plus souvent des problèmes du réseau physique, que vous pouvez résoudre en vérifiant les terminaisons, en réduisant la dorsale ou la longueur des dérivations, ou encore en diminuant le nombre de nœuds du réseau (périphériques).
État Bus
Indique simplement si le bus est alimenté, mais pas nécessairement s'il est connecté à des sources de données. Néanmoins, si le bus apparaît comme désactivé, mais qu'il est bien alimenté et rencontre un nombre d'erreurs croissant, il est possible que la topologie des câbles réseau ou des terminaisons soit incorrecte.
Rx Overflows (Débordements de récepteur)
L'appareil a reçu trop de messages dans sa mémoire tampon avant que l'application puisse les lire.
Rx Overruns (Dépassements de récepteur)
L'appareil a reçu trop de messages dans sa mémoire tampon avant que le pilote puisse les lire.
Erreurs Rx/Tx (réception/transmission)
Ces deux nombres augmentent en cas de messages d'erreur et diminuent en cas de réception correcte des messages.
Contrairement aux autres valeurs, ces chiffres ne sont pas cumulatifs. Lors d'un fonctionnement normal, ces chiffres doivent être à 0. Des valeurs supérieures à 96 indiquent un réseau fortement sujet aux erreurs. Si ces chiffres deviennent trop élevés pour un appareil donné, ce dernier sort automatiquement du réseau.
Messages Rx/Tx (réception/transmission)
Indique le trafic réel entrant et sortant de l'appareil.
Charge du bus
Une valeur élevée indique que le réseau est proche de sa capacité maximale. Certains appareils règlent automatiquement le taux de transmission si le trafic du réseau est élevé.
Erreurs Fast packet
Compteur cumulatif d'erreurs Fast packet. Il peut s'agir d'une trame manquée ou hors séquence, etc. Les PGN NMEA 2000 sont constitués de 32 trames maximum. Si une trame est manquée, le message entier est éliminé.
→ Remarque : Les erreurs de réception et de transmission indiquent le plus souvent des problèmes du réseau physique, que vous pouvez résoudre en vérifiant les terminaisons, en réduisant la dorsale ou la longueur des dérivations, ou encore en diminuant le nombre de nœuds du réseau (périphériques).
Groupes de réseaux
La fonction Groupe de réseaux permet de contrôler le réglage des paramètres, globalement ou par groupes d'appareils. La fonction est
utilisée sur les grands bateaux où plusieurs appareils sont connectés au réseau. Lorsque plusieurs unités sont affectées à un même groupe, la mise à jour d'un paramètre sur une unité est répercutée sur les autres membres du groupe.
Unités
Permet de régler les unités de mesure pour différents types de données.
Décimale
Définit le nombre de décimales à utiliser pour la vitesse et la température de la mer.
Bips de touche
Option permettant de contrôler le volume des bips chaque fois qu'une touche est actionnée.
Paramètre par défaut : Fort
Langue
Permet de définir la langue utilisée pour les fenêtres, les menus et les boîtes de dialogue. Lorsque vous modifiez la langue, l'unité redémarre.
Heure
Option permettant de contrôler le décalage des fuseaux horaires locaux ainsi que le format de date et heure.
Paramétrage écran
Affiche la boîte de dialogue Paramétrage écran.
Vous disposez maintenant des options suivantes :
- Niveau Backlight : ajuste le niveau de rétroéclairage du minimum (10 %) au maximum (100 %) par incréments de 10 %.
- Lorsque le champ Niveau Backlight est actif, si vous appuyez plusieurs fois sur la touche du rétroéclairage, le niveau Backlight s'ajuste par décréments de 30 %.
- Groupe Afficheur : permet de définir à quel groupe de réseaux l'appareil appartient.
- Mode Nuit : active ou désactive la palette de couleurs du mode Nuit.
- Couleur Mode Nuit : permet de définir la palette de couleurs pour le mode Nuit.
- Inverser les couleurs du mode Jour : permet de passer l'arrière-plan blanc des pages en noir.
- Sommeil : le rétroéclairage de l'écran et des touches est éteint pour des raisons d'économie d'énergie.
Fichiers
Système de gestion des fichiers. Permet de parcourir le contenu de la mémoire interne et le contenu d'un appareil connecté au port USB de l'appareil.
Simulation
L'écran affiche des données simulées. Le simulateur permet de vous familiariser avec le fonctionnement de votre unité avant de l'utiliser en navigation.
Une fois activé, le mode simulation est indiqué sur l'écran.
Retour Réglages Usine
Option permettant de sélectionner les paramètres pour lesquels vous souhaitez rétablir la configuration d'usine.
Global reset
Réinitialise la sélection de la source sur tous les écrans connectés au réseau.
À propos
Affiche les mentions de copyright, la version du logiciel et des informations techniques sur cette unité.
7
Maintenance
Maintenance préventive
L'appareil ne contient aucun composant réparable sur site. Par conséquent, l'opérateur ne peut effectuer qu'un nombre très limité d'interventions de maintenance sur l'équipement.
Nous vous recommandons de toujours placer la protection solaire fournie si vous n'utilisez pas l'unité.
Nettoyage de l'unité d'affichage
Un chiffon de nettoyage approprié doit être utilisé pour nettoyer l'écran, chaque fois que possible. Utilisez une quantité d'eau abondante pour dissoudre et éliminer tout résidu de sel. Le sel cristallisé peut rayer le revêtement si vous utilisez un chiffon humide. Exercez le minimum de pression possible sur l'écran.
Si vous constatez des marques sur l'écran, n'utilisez pas un chiffon seul pour les éliminer. Humidifiez-le avec un mélange composé de moitié d'eau chaude et de moitié d'alcool isopropylique pour nettoyer l'écran. Évitez tout contact avec des produits nettoyants à base de solvants (acétone, white spirit, etc.) ou d'ammoniaque, car ils peuvent endommager la couche antireflet, le cadran en plastique ou les touches en caoutchouc.
Pour éviter toute détérioration du cadran en plastique par les rayons UV, nous vous recommandons de placer la protection solaire en cas de non-utilisation prolongée de l'unité.
Vérification des connecteurs
La vérification des connecteurs doit se limiter à une inspection visuelle.
Insérez les connecteurs dans leurs réceptacles. Si les connecteurs disposent d'un verrouillage, assurez-vous qu'ils sont correctement positionnés.
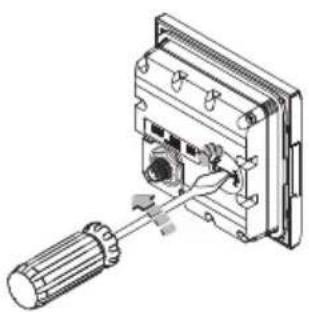
Mises à jour du logiciel
Un port USB se trouve à l'arrière de l'appareil AP44. Vous pouvez utiliser ce port pour les mises à jour logicielles.
Vous pouvez mettre à jour le logiciel de l'appareil AP44 et de tous les capteurs NMEA 2000 connectés au réseau à partir du AP44.
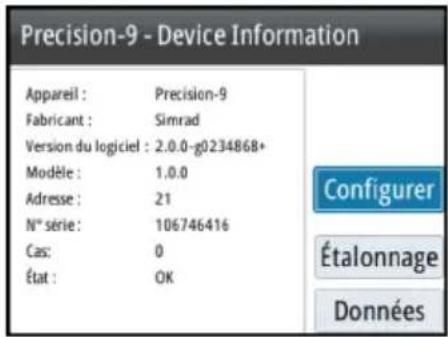
Vous pouvez vérifier la version du logiciel des différents appareils dans la boîte de dialogue À propos.
| A propos | |
| Produit | AP44 |
| Application | 1.0.54.3.10 |
| Plateforme | 21.0.34-g1fe7472 |
| Numero de serie | 011881# |
| Pack Langage | Standard |
| Up time | 1:09:19 hrs |
| Copyright 2016 Navico | |
La version du logiciel pour les capteurs NMEA 2000 connectés est disponible dans la Liste des appareils.
Vous trouverez la dernière version du logiciel sur notre site Web : www.simrad-yachting.com.
Mise à jour logicielle de l'appareil
- Téléchargez la dernière version du logiciel sur notre site Web www.simrad-yachting.com, puis enregistrez-la sur un périphérique USB.
- Insérez le périphérique USB dans l'appareil AP44 et redémarrez l'appareil AP44.
- La mise à niveau démarre automatiquement pour tous les appareils.
- Retirez le périphérique USB lorsque la mise à jour est terminée.
Avertissement: ne retirez pas le périphérique USB avant la fin de la mise à jour. Si vous le faites, vous risquez d'endommager l'appareil.
Mise à jour logicielle pour les appareils distants
- Téléchargez la dernière version du logiciel sur notre site Web www.simrad-yachting.com, puis enregistrez-la sur un périphérique USB.
- Insérez le périphérique USB dans l'appareil AP44.
- Démarrez l'Explorateur de fichiers et sélectionnez le fichier de mise à jour sur le périphérique USB.
- Démarrez la mise à jour à partir de la boîte de dialogue des détails du fichier.
- Retirez le périphérique USB lorsque la mise à jour est terminée.
8
Arborescence de menu
Le système comprend un menu Paramètres, accessible en appuyant sur la touche MENU. Le menu Paramètres donne accès aux paramètres relatifs aux capteurs, au bateau, au calculateur de pilote automatique et au système.
| Niveau 1 Niveau 2 | |
| Calibration Vitesse bateau... | |
| Vent... | |
| Profondeur... | |
| Cap suivi... | |
| Roulis/Tangage... | |
| Environnement... | |
| Barre... | |
| Avancé... | |
| Amortissement Cap | |
| Vent apparent | |
| Vent vrai | |
| Vitesse bateau | |
| SOG | |
| COG | |
| Attitude Roll (Roulis d'assiette) | |
| Attitude Pitch (Tangage d'assiette) | |
| Marée | |
| Log journalier Trip 1... | |
| Trip 2... | |
| Log... | |
| Alarmes Historique Alarme... | |
| Réglage Alarmes... | |
| Alarmes activées | |
| Sirène active | |
| Pilote automatique, NAC-2, NAC-3 et NAC-D* Reportez-vous au manuel de mise en service du NAC-2/ NAC-3 | Direction |
| À la voile | |
| Gabarits Manœuvre | |
| Installation * | |
| Système Réseau | |
| Unités | |
| Décimale | |
| Beeps touches | |
| Langage | |
| Heure | |
| Paramétrage écran... | |
| Jauges numériques | |
| Fichiers | |
| Simulation | |
| Retour Réglages Usine... | |
| Réinitialisation globale... | |
| À propos |
9
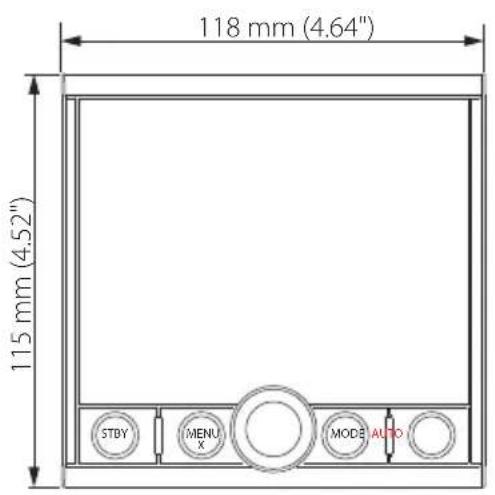
Caractéristiques techniques
| Dimensions Reportez-vous à la partie "Schéma dimensionnel" à la page 58 | |
| Poids 0,32 kg (0,7 lb) | |
| Consommation électrique (@13.5 V) | |
| Rétroéclairage OFF | 1.35 W (100 mA) |
| Rétroéclairage MAX | 2.16 W (160 mA) |
| Charge réseau 4 LEN | |
| Couleur Noir | |
| Affichage | |
| Taille | 4,1 pouces (en diagonale). Ratio 4:3 |
| Type Écran LCD-TFT transmissif. Rétroéclairage à LED blanc | |
| Résolution | 320 x 240 pixels |
| Éclairage | Blanc en mode journée. Rouge, vert, bleu ou blanc en mode nuit |
| Protection de l'environnement | |
| Indice d'étanchéité | IPx7 |
| Humidité | 100 % d'humidité relative |
| Température | |
| Fonctionnement | -25 °C à +65 °C (-13 °F à +149 °F) |
| Stockage | -40 °C à +85 °C (-40 °F à +185 °F) |
10
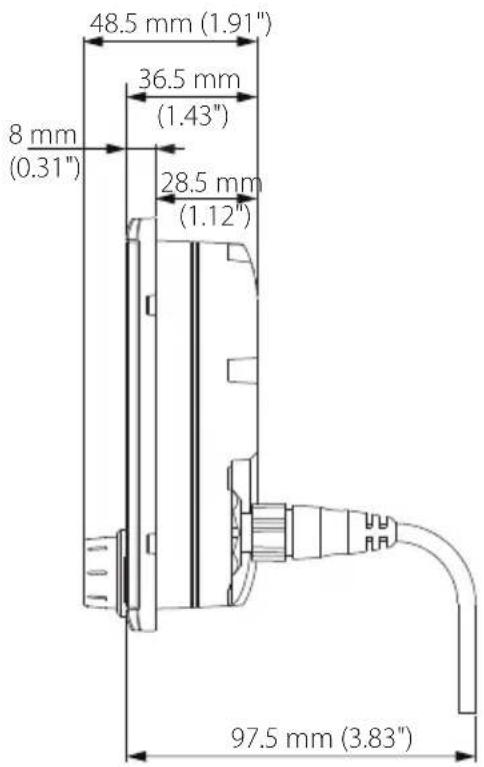
Schéma dimensionnel
Termes et abréviations
Cette liste affiche les termes et les abréviations utilisés sur les pages et boîtes de dialogue du système AP44.
| AIR TEMP Température de l'air | |
| AIS Automatic Identification System (Système d'identification automatique) | |
| AVG SPD Vitesse moyenne | |
| AWA Angle Vent Apparent | |
| AWS Vitesse Vent Apparent (AWS) | |
| BSPD Vitesse du bateau | |
| BTW Cap au waypoint | |
| BWW Bearing Waypoint To Waypoint (Cap de waypoint en waypoint) | |
| COG Course Over Ground (Cap par rapport au fond) | |
| CTS Course To Steer (Cap à suivre) | |
| DGPS GPS différentiel | |
| DTW Distance au prochain waypoint | |
| DSC (ASN) Digital Selective Calling (Appels sélectifs numériques) | |
| EPFS Electronic Position Fixing System (Système électronique de localisation de la position) | |
| EPIRB Emergency Position Indicating Radio Beacon (Balise radiophare maritime de position d'urgence) | |
| ETA Estimated Time Of Arrival (Heure d'arrivée prévue) | |
| ETW Heure estimée d'arrivée au prochain waypoint | |
| GLONASS Global Orbiting Navigation Satellite System (Système satellitaire de navigation orbitale mondiale) | |
| GMDSS Global Maritime Distress And Safety System (Système mondial de détresse et de sécurité en mer) | |
| GNSS Global Navigation Satellite System (Système mondial de positionnement par satellites) | |
| GPS Global Positioning System (Système mondial de positionnement) | |
| HDG Cap suivi | |
| Km Kilomètre | |
| KN Nœuds | |
| LL DIST Distance layline | |
| LL TIME Temps de layline | |
| m Mètres | |
| MAX SPD Vitesse maximale | |
| MIN Minimum | |
| MOB Homme à la mer | |
| NM Mille marin | |
| OPP HDG Cap sur bord opposé | |
| POS Position | |
| RM Mouvement relatif | |
| RNG Échelle | |
| ROT Taux de giration | |
| RTE Route | |
| SAR Recherche et sauvetage | |
| SOG Speed Over Ground (Vitesse par rapport au fond) | |
| SPD Vitesse | |
| STBD | Starboard (Tribord) |
| STW Speed Through Water (Route surface). | |
| TCPA | Time To Closest Point Of Approach (Temps au point d'approche le plus proche) |
| TGT Cible | |
| TIME LOC | Heure locale |
| TM | Mouvement vrai |
| TRK | Piste |
| TRK CRS | Suivi du parcours vers le prochain waypoint |
| TWA Angle du vent vrai |
| TWD Direction du vent vrai |
| TWS Vitesse du vent vrai |
| WOL Wheel Over Line (Changement de cap par rapport à une ligne) |
| WOP Wheel Over Point (Changement de cap par rapport à un point) |
| WPT Nom de waypoint |
| WPT BRG Cap au waypoint |
| WPT DIST Distance au waypoint |
| XTE Erreur transversale |
12
Données prises en charge
| 59904 Requête ISO |
| 60928 Demande d'adresse ISO |
| 126208 Fonction de groupe de commande ISO |
| 126996 Info produit |
| 127258 Variation magnétique |
PGN NMEA 2000 (réception)
| 59392 Confirmation ISO |
| 59904 Requête ISO |
| 60928 Demande d'adresse ISO |
| 126208 Fonction de groupe de commande ISO |
| 126992 Heure système |
| 126996 Info produit |
| 127237 Contrôle Heading/Track |
| 127245 Barre |
| 127250 Cap du bateau |
| 127251 Taux de giration |
| 127257 Attitude |
| 127258 Variation magnétique |
| 128259 Vitesse surface référencée |
| 128267 Profondeur de l'eau |
| 128275 Distance Loch |
| 129025 Mise à jour rapide de la position |
| 129026 Mise à jour rapide COG & SOG |
| 129029 Données de position GNSS |
| 129033 Date & Heure |
| 129283 | Erreur transversale |
| 129284 | Données de navigation |
| 129539 | Données de position GNSS |
| 129283 | Erreur transversale |
| 129284 | Données de navigation |
| 130074 | Service Route et WP - Liste WP - Nom et position WP |
| 130306 | Données vent |
| 130576 | État de petite embarcation |
| 130577 | Données de direction |
SIMRAD


- Manuel de l'utilisateur
- Clause de non-responsabilité
- Langue gouvernante
- Marques
- Copyright
- Déclaration de conformité
- Europe
- États-Unis d'Amérique du Nord
- Australie et Nouvelle Zélande
- Déclarations
- À propos de ce manuel
- Importantes conventions relatives au texte
- Version du manuel
- Principes de base
- Modes de pilotage automatique
- Log journalier
- Alarmes
- Configuration du logiciel
- Maintenance
- Arborescence de menu
- Caractéristiques techniques
- Schéma dimensionnel
- Termes et abréviations
- Données prises en charge
- 1
- Introduction
- Manuals (Manuels)
- Face avant et touches de l'appareil AP44
- Touche STBY
- Touche MENU/X
- Bouton rotatif
- Touche MODE
- Touche AUTO
- Page du pilote automatique
- 2
- Principes de base
- Sécurité d'utilisation du pilote automatique
- Activation et désactivation de l'appareil
- Premier démarrage
- Mode Sommeil
- Fonctionnement du système de menus
- Modification d'une valeur numérique
- Paramétrage écran
- 3
- Modes de pilotage automatique
- Sélection d'un mode de pilotage automatique
- Mode Standby (Veille)
- Mode Follow-up (FU)
- Mode AUTO (maintien de cap)
- Changement du cap prédéfini en mode AUTO
- Virement de bord et empannage en mode AUTO
- Mode Vent
- Virement de bord et empannage en mode Vent
- Mode No Drift (Sans dérive)
- Changement du cap actuel en mode NoDrift (Sans dérive)
- Contournement
- Heading capture (Capture du cap)
- Mode NAV
- Virage en mode NAV
- Pilotage par gabarit de virages
- Variables de virage
- Amorçage et arrêt d'un virage
- Rotation circulaire (virage continu)
- Demi-tour (U-turn)
- Rotation en spirale
- Route en Zigzags
- Rotation en carré
- Route en lacets
- Ligne de sonde (DCT)
- Utilisation du pilote automatique dans un système EVC
- 4
- Log journalier
- 5
- Alarmes
- Indication d'alarme
- Type de messages
- Confirmation des alarmes
- Activation du système d'alarme et de la sirène d'alarme
- Réglages de l'alarme individuelle
- Historique d'alarmes
- 6
- Configuration du logiciel
- Calibration
- Vitesse du bateau
- Référence SOG
- Référence Distance
- Utiliser le SOG pour vitesse bateau
- Vent
- Alignement de la girouette anémomètre
- Profondeur
- Offset de la profondeur
- Offset de la profondeur arrière
- Cap suivi
- Offset
- Calibration effectuée par l'utilisateur
- Calibration automatique
- Variation Magnétique
- COG pour Cap
- Tangage/Roulis
- Environnement
- Barre
- Avancé
- Amortissement
- Paramètres du pilote automatique
- Calculateur du pilote automatique NAC-2/NAC-3
- Direction (NAC-2/NAC-3)
- À la voile (NAC-2/NAC-3)
- Calculateur du pilote automatique AC12N/AC42N
- Réponse (AC12N/AC42N)
- Filtre État de la mer (AC12N/AC42N)
- À la voile (AC12N/AC42N)
- Pilotage Automatique
- Vitesse de transition...
- Pilotage automatique (AC12N/AC42N)
- Paramètres système
- Réseau
- Sources
- Liste des appareils
- Diagnostics
- État Bus
- Rx Overflows (Débordements de récepteur)
- Rx Overruns (Dépassements de récepteur)
- Erreurs Rx/Tx (réception/transmission)
- Messages Rx/Tx (réception/transmission)
- Charge du bus
- Erreurs Fast packet
- Groupes de réseaux
- Unités
- Décimale
- Bips de touche
- Langue
- Heure
- Fichiers
- Simulation
- Retour Réglages Usine
- Global reset
- À propos
- 7
- Maintenance
- Maintenance préventive
- Nettoyage de l'unité d'affichage
- Vérification des connecteurs
- Mises à jour du logiciel
- Mise à jour logicielle de l'appareil
- Mise à jour logicielle pour les appareils distants
- 8
- Arborescence de menu
- 9
- Caractéristiques techniques
- 10
- Schéma dimensionnel
- Termes et abréviations
- 12
- Données prises en charge
- PGN NMEA 2000 (réception)
- SIMRAD
Marque : SIMRAD
Modèle : AP44
Catégorie : Instrument de navigation marine