
A2004 - Électronique de navigation marine SIMRAD - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil A2004 SIMRAD au format PDF.

| Type de produit | Écran et unité de commande de pilote automatique |
| Marque | Simrad |
| Modèle | A2004 |
| Dimensions (sans étrier) | 177 x 115 x 56 mm |
| Poids (sans accessoires) | 0,51 kg |
| Alimentation | 12 V (10,8 - 15,6 V) |
| Consommation électrique | 1,62 W (veille) / 2,97 W (rétroéclairage max) |
| Affichage | 4,1 pouces LCD TFT, 320 x 240 pixels, >600 nits |
| Montage | Tableau de bord ou étrier |
| Modes de pilotage | Veille, NFU, FU, AUTO, NoDrift, NAV, virages |
| Profils de travail | Jusqu'à 3 profils personnalisables (Normal, Haut, Bas) |
| Calculateurs compatibles | AC70, SG05 Pro |
| Interface propulseur | AD80, SD80 |
| Connectivité | NMEA 2000, port USB |
| Indice d'étanchéité | IPx7 |
| Température de fonctionnement | -25 °C à +65 °C |
| Nettoyage | Chiffon doux avec eau ou alcool isopropylique (50/50) |
| Sécurité | Ne remplace pas un navigateur humain ; vérifier régulièrement le cap |
| Garantie | Consulter le site www.navico.com/commercial |
| Mise à jour logicielle | Via clé USB sur port arrière |
| Nombre de pages du manuel | 94 pages (français) |
FOIRE AUX QUESTIONS - A2004 SIMRAD
Questions des utilisateurs sur A2004 SIMRAD
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Électronique de navigation marine au format PDF gratuitement ! Retrouvez votre notice A2004 - SIMRAD et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil A2004 de la marque SIMRAD.
MODE D'EMPLOI A2004 SIMRAD
Manuel de l'utilisateur
FRANÇAIS

Clause de non-responsabilité
Comme Navico améliore continuellement ce produit, nous nous réservons le droit d'y apporter des modifications, sans que pour autant celles-ci soient indiquées dans la présente version du manuel. Pour toute information complémentaire, veuillez consulter votre distributeur.
Le propriétaire est le seul responsable de l'installation et de l'utilisation du matériel et doit s'assurer qu'il ne provoque pas d'accidents, de blessures ou de dommages matériels. L'utilisateur de ce produit est l'unique responsable du respect des règles de sécurité de navigation.
NAVICO HOLDING AS. ET SES FILIALES, SUCCURSALES ET SOCIÉTÉS AFFILIÉES REJETTENT TOUTE RESPONSABILITÉ EN CAS DE MAUVAISE UTILISATION DE CE PRODUIT QUI SERAIT SUSCEPTIBLE DE PROVOQUER DES ACCIDENTS OU DES DOMMAGES, OU D'ENFREINDRE LA LOI.
Langue applicable : la présente déclaration, les manuels d'instructions, les modes d'emploi et toute autre information relative au produit (Documentation) peuvent être traduits dans ou ont été traduits à partir d'une autre langue (Traduction). En cas de conflits entre une traduction quelconque de la Documentation, la version anglaise de la Documentation fera foi.
Le présent manuel décrit la version du produit en cours au moment où ce document a été imprimé. Navico Holding AS. et ses filiales, succursales et sociétés affiliées se réservent le droit de modifier les spécifications sans préavis.
Marques
Navico ^® est une marque déposée de Navico Holding AS.
Simrad ^® est utilisé sous licence accordée par Kongsberg.
NMEA ^® et NMEA 2000 ^® sont des marques déposées de la National Marine Electronics Association.
Copyright
Le contrat de garantie est un document fourni indépendamment de cette notice. Pour toute demande relative à la garantie, veuillez consulter le site Web concernant votre appareil : www.navico.com/commercial.
Déclaration de conformité
Cet équipement est conforme :
- à la norme CE au titre de la directive CEM 2014/30/UE ;
- aux critères requis pour les appareils de niveau 2 de la norme de radiocommunications (compatibilité électromagnétique) 2008 ;
La déclaration de conformité applicable est disponible à la section relative au produit du site Web suivant : www.navico.com/commercial.
À propos de ce manuel
Ce manuel est un guide de référence pour le fonctionnement, la configuration et la mise en service d'un système de pilotage automatique avec l'unité de contrôle A2004.
Il est également supposé que l'utilisateur possède des connaissances de base de navigation, de la terminologie marine et des bonnes pratiques de marin.
Les sections de texte importantes qui exigent l'attention particulière du lecteur sont signalées comme suit :
→ Remarque : utilisé pour attirer l'attention du lecteur sur un commentaire ou une information importante.
Avertissement: utilisé pour avertir le personnel qu'il est nécessaire de procéder avec prudence pour éviter tout risque de blessure aux personnes et/ou de dommage aux équipements.
Version du manuel
Le présent manuel a été rédigé pour la version logicielle de 1.0. Le manuel est continuellement mis à jour afin de l'adapter aux
nouvelles versions du logiciel. Vous pouvez télécharger la dernière version disponible du manuel depuis www.navico.com/commercial.
Sommaire
9 Introduction
9 Manuals (Manuels)
10 Face avant et touches de l'appareil A2004
12 Page du pilote automatique
16 Principes de base
16 Sécurité d'utilisation du pilote automatique
16 Activation et désactivation de l'appareil
17 Prise de commande
17 Fonctionnement du système de menus
18 Paramétrage écran
19 Sélection du mode du pilotage automatique
20 Sélection du profil de travail
20 Utilisation des propulseurs
22 Sélecteur de système externe
23 Prise de contrôle externe sur EVC (SG05 PRO)
23 Utilisation du pilote automatique dans un système EVC
24 Modes de pilotage automatique
24 Sélecteur de système externe
24 Pilotage manuel
25 Modes automatiques
29 Mode NAV
32 Contrôle des performances de pilotage en modes automatiques
35 Profils WORK
35 Profils prédéfinis
35 Création d'un nouveau profil
36 Modifier les paramètres de profil
37 Configuration du logiciel
37 Paramètres système
38 Unités
39 Réseau
43 Configuration du calculateur de pilote automatique
44 Flux de travail de la configuration de l'installation
45 Paramétrage à quai
55 Paramétrages en mer
57 Paramètres configurables par l'utilisateur
65 Vérification de l'installation
65 Liste de contrôle
66 Réglages spécifiques du bateau
69 Alertes
69 Paramètres des alertes
69 Types de messages d'alerte
70 Indication d'alerte
71 Confirmation d'alertes
72 Boîtes de dialogue d'alerte
73 Liste des alertes et des actions correctives possibles
74 Maintenance
74 Maintenance préventive
74 Nettoyage de l'unité d'affichage
74 Vérification des connecteurs
74 Sauvegarde et restauration des données système
75 Mises à jour du logiciel
77 Structure des menus
77 Menus Paramètres
79 Caractéristiques techniques
81 Schémas dimensionnels
81 A2004 sans étrier
81 A2004 avec étrier
82 Données prises en charge
82 PGN NMEA 2000 (transmission)
82 PGN NMEA 2000 (réception)
84 Annexes
Liste des alarmes et des actions correctives possibles
1
Introduction
Le A2004 est à la fois un écran et une unité de commande de pilote automatique.
L'unité est utilisée en tant que contrôleur dans les systèmes de pilotage automatique incluant un Simrad AC70 ou un calculateur de pilote automatique SG05. Un propulseur peut être inclus dans le système de A2004 lorsque vous êtes connecté via une unité AD80 ou SD80.
Le système A2004 comprend plusieurs modules qui servent d'interface avec au moins trois autres unités et qui doivent être installés à différents endroits du bateau :
• Le système de pilotage du bateau
- Le système électrique du bateau (puissance d'entrée)
- Autre équipement à bord
Avant d'utiliser le système de pilotage automatique, tous les éléments doivent être installés et configurés conformément à la documentation fournie. Les étapes suivantes sont requises :
- Installation mécanique et câblage de tous les appareils.
Consultez la documentation spécifique pour tous les appareils - Configuration du logiciel du système. Reportez-vous à "Configuration du logiciel" à la page 37
- Mise en service et configuration du calculateur de pilote automatique. Reportez-vous à "Configuration du calculateur de pilote automatique" à la page 43
Manuals (Manuels)
La documentation suivante est disponible pour le système A2004 :
• A2004 Manuel d'utilisation - ce manuel
• Guide rapide de l'appareil A2004
• Guide d'installation de l'appareil A2004
• Gabarit de montage de l'appareil AP48/A2004
• Guide d'installation de l'appareil AC70
- Guide d'installation de l'appareil SG05
• Guide d'installation de la carte AD80
• Guide d'installation de la carte SD80
→ Remarque : La dernière version de tous les documents peut être téléchargée à partir du site Web du produit, à l'adresse www.navico.com/commercial.
Face avant et touches de l'appareil A2004
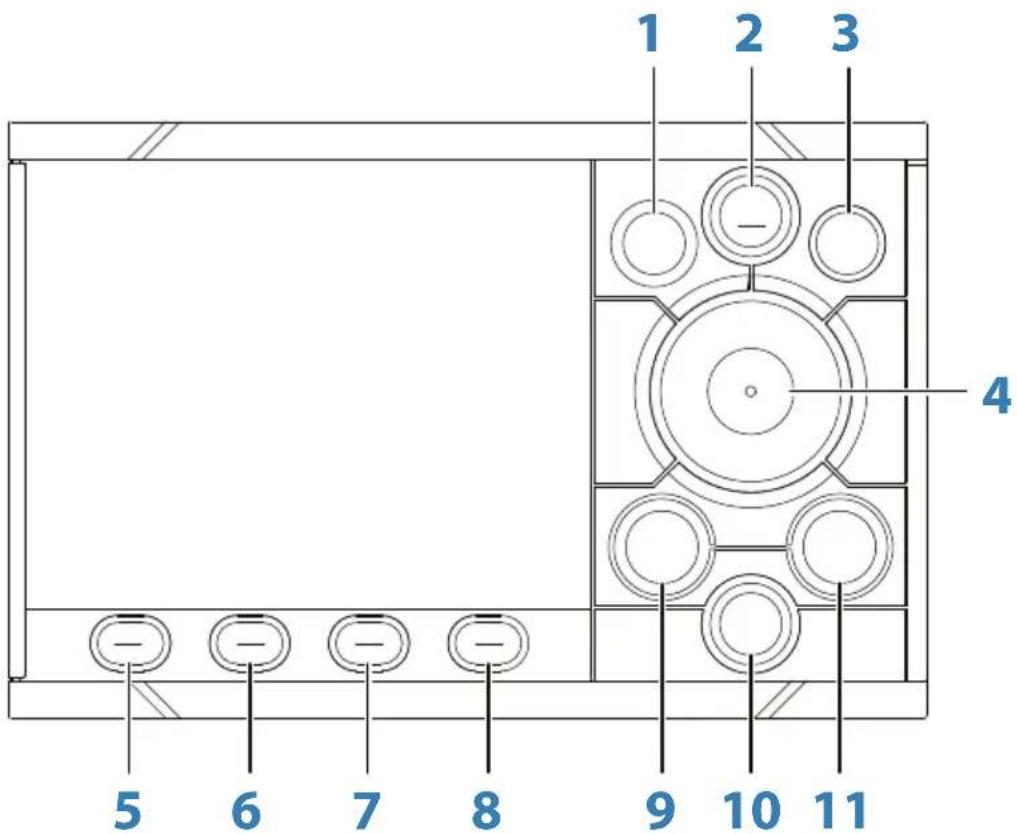
1 Touche Marche/arrêt
En tous modes : Appuyez sur cette touche pour afficher la boîte de dialogue Paramétrage de l'affichage. Appuyez brièvement à plusieurs reprises pour basculer entre les niveaux d'éclairage préréglés.
En mode Standby (veille) : Maintenez la touche enfoncée pour mettre en veille le système de pilotage automatique.
Appuyez à nouveau sur la touche pour réactiver le système.
2 Touche MENU
Appuyez une fois sur cette touche pour afficher le menu rapide.
Appuyez deux fois pour afficher le menu Paramètres.
3 Touche X
Appuyez pour revenir au niveau de menu précédent ou pour fermer une boîte de dialogue.
Maintenez la touche enfoncée pour quitter le système de menus et revenir à la page du dernier mode actif.
4 Bouton rotatif
Fonctionnement des menus et boîtes de dialogue :
- Tournez le bouton pour vous déplacer vers le haut et vers le bas dans les menus et boîtes de dialogue
• Tournez le bouton pour régler une valeur - Appuyez sur le bouton pour sélectionner une option de menu et accéder au niveau de menu suivant
En mode Standby (veille) et en mode NFU (direction assistée) : Appuyez sur le bouton pour activer le mode FU (Follow-up).
En mode FU : Tournez ce bouton pour définir l'angle de barre.
En modes automatiques : tournez le bouton pour modifier la consigne de cap/route, appuyez sur le bouton pour réactiver le mode automatique avec le cap/la route actuel(le) comme référence.
5 Touche STBY
Appuyez sur la touche pour activer le mode Standby (veille).
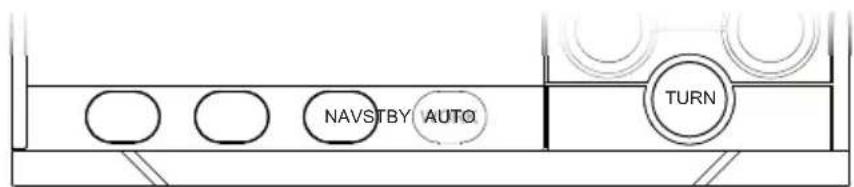
6 Touche AUTO
Appuyez sur cette touche pour activer le dernier mode actif (AUTO ou NoDrift) et pour afficher le menu contextuel du mode. Appuyez brièvement à plusieurs reprises sur la touche pour activer ou désactiver les options du menu contextuel.
7 Touche NAV
Appuyez sur cette touche pour passer en mode NAV (Navigation).
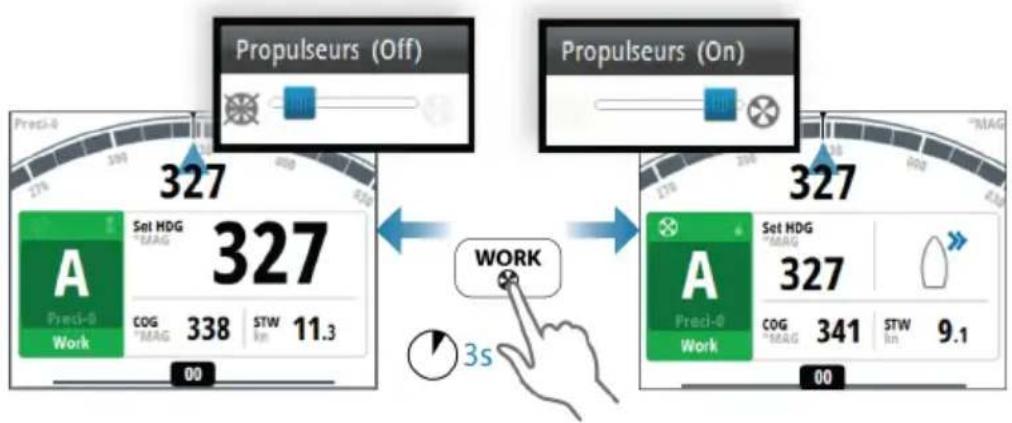
8 Touche WORK/Propulseur
Appuyez sur la touche pour afficher les options du profil WORK (Travail). Appuyez brièvement à plusieurs reprises sur la touche pour activer ou désactiver les options du profil WORK.
Maintenez la touche enfoncée pour activer ou désactiver le propulseur.
9,11 Touches < et > (bâbord et tribord)
En mode Standby et en mode FU : Appuyez sur cette touche pour activer le mode Non-Follow Up (NFU). En modes automatiques : Appuyez sur cette touche pour modifier la consigne de cap/route vers bâbord ou tribord.
10 Touche Turn (Virage)
Appuyez sur cette touche pour afficher la boîte de dialogue de virage.
Page du pilote automatique
La page du pilote automatique inclut les éléments suivants :
• A : Répétiteur de cap
• B : Fenêtre d'état
• C : Fenêtre d'informations sur le mode
D : Barre
• E : Menu rapide
- Pour l'afficher, appuyez sur la touche MENU, WORK/Propulseur ou TURN.
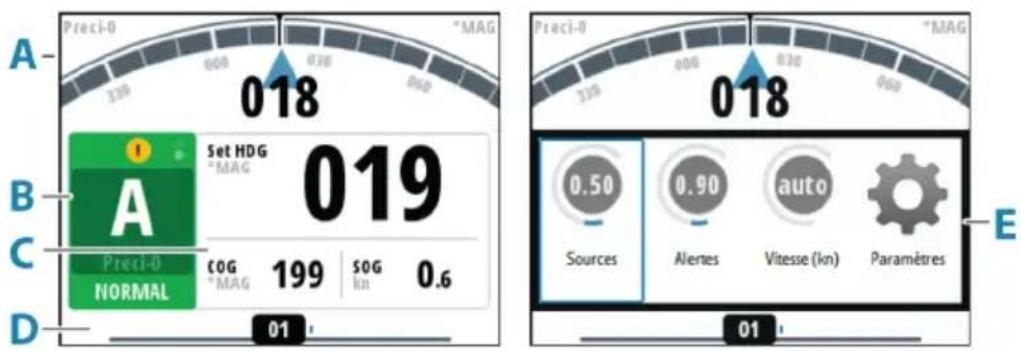
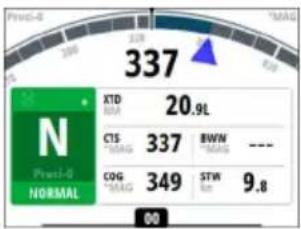
Répétiteur de cap
Tableau de bord comprenant la source de cap (A), l'unité de cap (vrai ou magnétique) (C), le cap en cours (B) et le réglage du cap (D).

gauge
| Position | Value | |--------|-------| | 1 | 110 | | 2 | 240 | | 3 | 270 | | 4 | 400 | | 5 | 253 |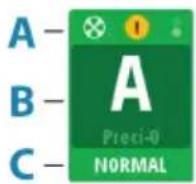
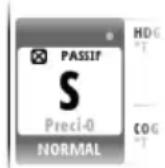
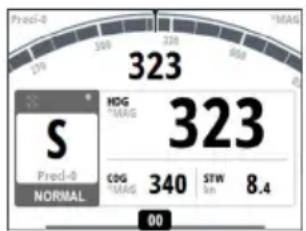
Fenêtre d'état
La fenêtre affiche les icônes d'état (A), le mode actif avec le pilotage de référence (B) et le profil actif (C).
Les abréviations de modes suivantes sont utilisées :
• S : Standby (veille)
• A: AUTO
- FU : Follow-up
• ND : NoDrift (sans dérive)
• NFU : Non-Follow Up
• N : NAV
• Icône de virage en S
Si le pilote automatique est géré depuis une autre unité de contrôle, l'icône passive s'affiche dans le champ d'indication de mode.
Si le pilote automatique est contrôlé par un sélecteur de système externe, l'indication de mode est remplacée comme indiqué ci-dessous.

Unité de contrôle passive

Pilote automatique désactivé par sélecteur de système externe
Les icônes d'état disponibles sont affichées ci-dessous. Seules les icônes actives sont visibles.

Icône qui s'affiche lorsqu'un propulseur est installé. L'icône est grisée lorsque le propulseur est désactivé pour le pilotage.

Alerte active. Icône rouge pour une alarme, jaune pour un avertissement. Plus de détails dans la section "Alertes" à la page 69.
Indicateur d'image figée. Deux points s'affichent alternativement et lentement pour indiquer que l'écran est actif et que des informations des capteurs sont mises à jour.
Fenêtre d'informations sur le mode
La fenêtre affiche un contenu spécifique au mode et diffère selon le mode opérationnel. Reportez-vous à la section "Modes de pilotage automatique" à la page 24 pour en savoir plus.
Si le propulseur est disponible et activé, la fenêtre d'informations sur le mode sera fractionnée pour afficher les informations sur le propulseur.


Aucun propulseur disponible Propulseur en cours d'utilisation
→ Remarque : Si l'entrée de capteur est manquante, les nombres sont remplacés par des tirets.
Barre
Indicateur de position de la barre avec affichages numérique et analogique. L'indicateur de direction (A) est affiché lorsque le mouvement de la barre est commandé et que le capteur d'angle de barre est disponible.

Menus rapides
Le système comprend 3 menus rapides différents :

- Menu mode rapide, activé en appuyant sur la touche MENU. Reportez-vous à la section "Modes de pilotage automatique" à la page 24
- Menu rapide profil de travail, activé en appuyant sur la touche WORK/Propulseur. Voir "Sélection du profil de travail" à la page 20 et "Profils WORK" à la page 35
- Menu rapide manoeuvres, activé en appuyant sur la touche TURN. Reportez-vous à la section "Pilotage par gabarit de virages" à la page 28
2
Principes de base
Sécurité d'utilisation du pilote automatique
Avertissement: un pilote automatique est une aide précieuse à la navigation, mais NE PEUT remplacer un navigateur humain.
Avertissement: assurez-vous que le pilote automatique a été installé correctement et calibré avant son utilisation.
Ne pas utiliser le pilotage automatique :
- Dans des zones de trafic important ou dans des eaux étroites
- En cas de visibilité réduite ou de conditions de navigation extrêmes
- Dans les zones où l'utilisation d'un pilote automatique est interdite par la loi
Lors de l'utilisation d'un pilote automatique :
- Ne pas laisser la barre sans surveillance
- Ne pas placer de matériel ou d'équipement magnétique à proximité du compas utilisé dans le système de pilote automatique
• Vérifier à intervalles réguliers le cap et la position du bateau - Toujours basculer en mode Veille et réduire la vitesse en temps voulu pour éviter les situations dangereuses
Activation et désactivation de l'appareil
L'appareil reste allumé aussi longtemps que l'alimentation est connectée à la dorsale NMEA 2000. Il est possible de placer l'appareil en mode Sommeil. Reportez-vous à la section "Paramétrage écran" à la page 18.
Premier démarrage
Lors du premier démarrage de l'appareil et après le rétablissement des réglages d'usine, l'appareil affiche un assistant d'installation. Répondez aux invites de l'assistant d'installation pour sélectionner
certaines options d'installation fondamentales. Ces paramètres peuvent être modifiés ultérieurement et vous pouvez poursuivre la configuration comme indiqué dans la section "Configuration du logiciel" à la page 37.
Prise de commande
Au sein d'un système incluant plusieurs unités de contrôle et/ou unités distantes, une seule unité peut avoir le contrôle à la fois.
Toutes les autres unités sont passives. Une unité passive est indiquée par une icône passive dans le champ d'état de mode.
Si l'appareil A2004 est passif, le contrôle peut être obtenu en appuyant sur l'une des touches de mode.
Vous pouvez accéder au menu système, régler la luminosité et couper une alerte sonore sur une unité passive. Toutes les autres fonctions sont indisponibles.
Fonctionnement du système de menus
Tous les paramètres et la configuration de l'appareil sont disponibles à partir du menu Paramètres, que vous pouvez activer en appuyant deux fois sur la touche MENU.
- Tournez le bouton rotatif pour vous déplacer vers le haut et vers le bas dans les menus et dans les boîtes de dialogue
- Confirmez votre sélection en appuyant sur le bouton rotatif
- Revenez au niveau de menu précédent en appuyant sur la touche X
- Quittez le système du menu en appuyant sur et en maintenant la touche X
Modifier une valeur
- Appuyez sur le bouton rotatif pour activer le champ et le modifier.
- Le champ d'entrée devient bleu
- Tourner le bouton rotatif pour sélectionner une valeur prédéfinie ou incrémenter/réduire une valeur numérique
- Appuyez sur le bouton rotatif pour terminer l'édition du champ sélectionné
Champ sélectionné Champ en mode édition
→ Remarque : Vous pouvez à tout moment appuyer sur la touche X pour quitter une boîte de dialogue.
Paramétrage écran
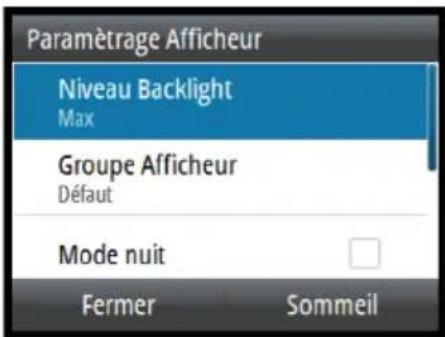
Le paramétrage de l'écran peut être réglé à tout moment à partir de la boîte de dialogue Paramétrage écran, accessible en appuyant sur la touche Marche/arrêt.
Vous disposez maintenant des options suivantes :
- Niveau Backlight : ajuste le niveau de rétroéclairage du minimum (10 %) au maximum (100 %) par incréments de 10 %.
- Lorsque le champ Niveau Backlight est actif, si vous appuyez plusieurs fois sur la touche Marche/arrêt, le niveau Backlight s'ajuste par décréments de 30 %.
- Groupe Afficheur : permet de définir à quel groupe de réseaux l'appareil appartient.
- Mode Nuit : active ou désactive la palette de couleurs du mode Nuit.
- Couleur Mode Nuit : permet de définir la palette de couleurs pour le mode Nuit.

- Inverser les couleurs du mode Jour : permet de passer l'arrière-plan noir des pages en blanc.
- Sommeil : le rétroéclairage de l'écran et des touches est éteint pour des raisons d'économie d'énergie.
→ Remarque : toutes les modifications apportées au paramétrage de l'écran s'appliquent à tous les appareils qui appartiennent au même Groupe Afficheur. Pour plus d'informations sur les groupes de réseaux, reportez-vous à la section "Groupes de réseaux" à la page 41.
→ Remarque : Le système bascule en mode Standby (Veille) lorsque le mode Sommeil est activé.
Sélection du mode du pilotage automatique
- Mode Veille et NAV : Appuyez sur la touche mode dédiée
- En mode AUTO ou NoDrift : Appuyez sur la touche AUTO
- Le dernier mode actif (AUTO ou NoDrift) est activé immédiatement et le menu du mode est affiché
- Répétez l'opération en appuyant sur la touche AUTO pour basculer entre les options du menu. La sélection s'efface et déclenche le changement de mode
- Mode virage : Appuyez sur la touche TURN lorsque le système est en mode AUTO, puis sélectionnez l'option virage à partir du menu rapide manœuvres
- Mode NFU (Non Follow Up) : Appuyez sur la touche bâbord ou tribord lorsque le système est en mode veille
- Mode FU (Follow Up) : appuyez sur le bouton rotatif lorsque le système est en mode Veille ou NFU
Voir plus de détails dans la section "Modes de pilotage automatique" à la page 24.
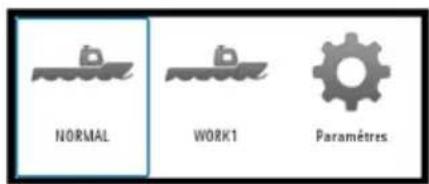
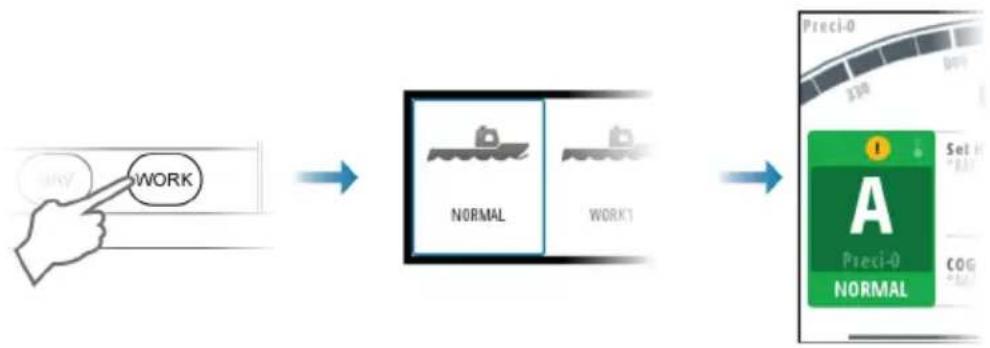
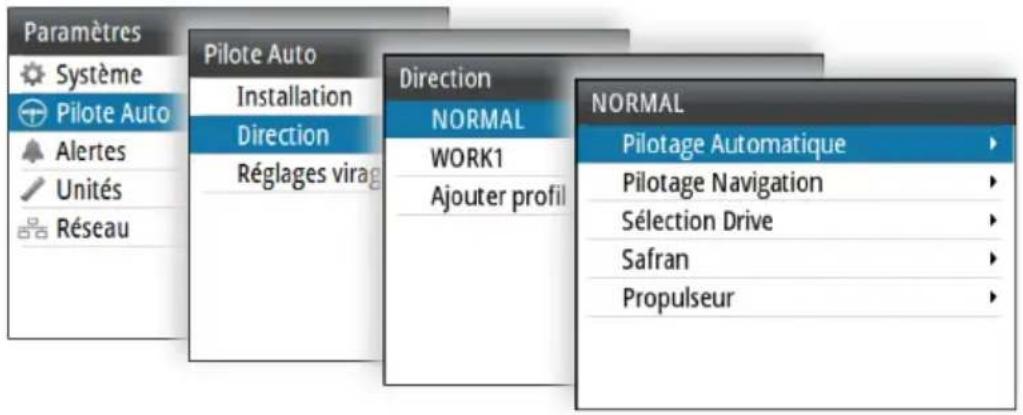
Sélection du profil de travail
Le pilote automatique peut être configuré avec 3 profils différents associés à différents modes de fonctionnement. Voir plus de détails dans la section "Profils WORK" à la page 35.
-
Appuyez sur la touche WORK pour afficher les options de profil de travail
-
Appuyez à nouveau sur la touche WORK ou utilisez le bouton rotatif pour sélectionner le profil préféré
- La sélection s'efface et déclenche le changement de profil de travail. Vous pouvez également confirmer votre sélection en appuyant sur le bouton rotatif.
Le nom du profil de travail utilisé s'affiche dans la fenêtre d'état du mode.
flowchart
graph LR
A["any"] --> B{WORK}
B --> C["NORMAL"]
C --> D["WORK1"]
D --> E["Preci-0"]
E --> F["NORMAL"]
style A fill:#f9f,stroke:#333
style B fill:#ccf,stroke:#333
style C fill:#cfc,stroke:#333
style D fill:#fcc,stroke:#333
style E fill:#cff,stroke:#333
style F fill:#ffc,stroke:#333
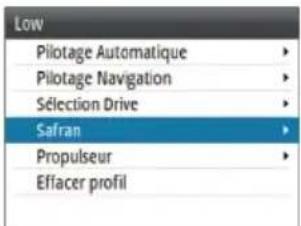
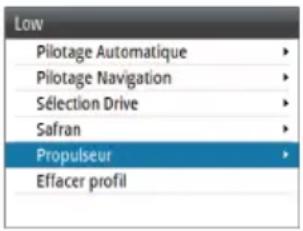
Utilisation des propulseurs
Un propulseur peut être connecté au système de pilotage automatique. Le propulseur peut être configuré pour différents profils WORK. Le profil WORK utilisé détermine alors si le bateau peut être contrôlé par la barre, par les propulseurs ou par les deux.
Paramètres du propulseur
Deux paramètres affectent l'utilisation des propulseurs par le pilote automatique :
• Vitesse d'inhibition du propulseur : Définie lors du paramétrage à quai
- Ce paramètre désactive les propulseurs lorsque la vitesse du bateau est supérieure à la limite de vitesse définie.
- Fonction Assistance propulseur : Définie lors de la configuration des propulseurs pour les profils WORK
- Activée : Les propulseurs seront automatiquement utilisés par le système de pilotage automatique. Si les propulseurs sont désactivés lorsque le bateau dépasse la vitesse d'inhibition, ils seront automatiquement réactivés lorsque la vitesse repasse sous la limite d'inhibition. - Désactivée : Vous devez activer manuellement les propulseurs.
Pour plus de détails, reportez-vous à la section "Paramètres configurables par l'utilisateur" à la page 57.
Activation et désactivation du propulseur
Vous pouvez activer et désactiver manuellement le propulseur en appuyant sur la touche WORK/Propulseur et en la maintenant enfoncée 3 secondes. Une fenêtre contextuelle avec un curseur s'affiche pour indiquer une modification de l'état du propulseur.
Présentation du propulseur
Lorsqu'un propulseur est installé et activé dans le profil WORK, l'icône d'état du propulseur et les informations du propulseur dans la fenêtre d'informations sur le mode s'affichent comme indiqué ci-dessous.

- Propulseur disponible pour le profil WORK actif, pas de poussée appliquée.

- Propulseur en cours d'utilisation. Direction de la poussée également affichée.

- Propulseur manuellement désactivé.
- Propulseur indisponible (la vitesse du bateau est supérieure à la limite d'inhibition).
Sélecteur de système externe
Un sélecteur de système externe peut être utilisé pour contrôler le fonctionnement du pilote automatique.
Pilotage manuel
Lorsqu'un sélecteur de système externe est défini sur le pilotage manuel, le pilote automatique est désactivé. L'unité de contrôle affiche des informations comme en mode Veille. Il n'est pas possible de passer au mode FU, NFU ou à tout autre mode automatique. Les menus peuvent toutefois être utilisés, les alertes confirmées et l'éclairage ajusté.
Lorsque le pilote automatique est désactivé par un interrupteur externe, cela est indiqué sur l'écran du mode.
Fonctionnement du pilote automatique
Lorsque le sélecteur externe est défini sur le pilotage automatique, le pilote automatique passe directement en mode AUTO avec le cap actuel défini comme référence. Le pilote automatique peut ensuite être utilisé dans tous les modes opérationnels.

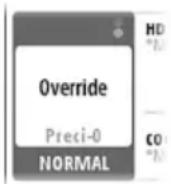
Prise de contrôle externe sur EVC (SG05 PRO)
Vous pouvez à tout moment, sans tenir compte du mode de pilotage automatique, prendre le contrôle manuel du pilotage au moyen de la barre. Le pilote automatique passera alors en mode Standby (Veille) et affichera Override (Prise de contrôle) pour indiquer que le pilotage s'effectue depuis la barre. Le pilotage automatique peut être repris en appuyant sur la touche AUTO ou WORK (Travail).
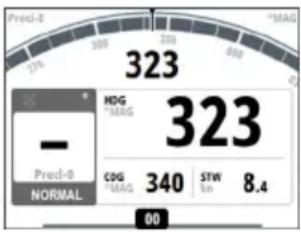
Utilisation du pilote automatique dans un système EVC
Lorsque le A2004 est connecté à un système EVC via le SG05, vous pouvez prendre le contrôle manuel de la barre, même si vous êtes en mode de pilotage automatique.
L'indicateur de mode est remplacé par un tiret indiquant la prise de contrôle sur EVC.
Si aucune commande de gouvernail n'est émise par le système EVC dans un laps de temps prédéfini, le système revient au contrôle du A2004 en mode Standby.
3
Modes de pilotage automatique
Le pilote automatique dispose de plusieurs modes de navigation. Le nombre de modes et de fonctions compris dans ce mode dépend du calculateur du pilote automatique, du type de bateau et des entrées disponibles, comme expliqué dans la description des modes de pilotage suivants.
Sélecteur de système externe
Un interrupteur externe peut être utilisé pour passer du pilotage manuel au pilotage automatique.
Les descriptions des modes figurant dans les pages suivantes supposent qu'un sélecteur de système externe a été ouvert pour le fonctionnement en pilote automatique ou qu'aucun sélecteur externe n'est installé.
Pilotage manuel
Mode Standby (Veille)
Le mode Standby est utilisé lorsque vous pilotez le bateau à la barre.
- Vous pouvez basculer en mode Standby en appuyant sur la touche STBY.
→ Remarque : si des données de capteur essentielles au fonctionnement du pilote automatique (par exemple le capteur d'angle de barre) sont perdues lorsque le pilote automatique fonctionne en mode automatique, le système bascule automatiquement en mode Standby.
En mode Non-Follow-Up, vous pouvez utiliser les touches bâbord et tribord du boîtier de commande pour contrôler la barre. La barre bouge tant que vous appuyez sur la touche.
- Sélectionnez le mode Non-Follow-Up en appuyant sur les touches bâbord ou tribord lorsque le pilote automatique est en mode Standby ou FU.

En mode FU, vous pouvez tourner le bouton rotatif pour ajuster l'angle de la barre défini.
La barre se rendra à l'angle demandé et s'arrêtera là.
- Basculer vers le mode FU depuis le mode Veille ou le mode NFU en appuyant sur le bouton rotatif.
Menus rapides en modes Veille, FU et NFU
Dans le menu rapide en modes Veille, NFU et FU, vous pouvez modifier les sources utilisées pour le pilotage, afficher les alertes actives et définir la vitesse manuelle.
- Activez le menu rapide en appuyant brièvement sur la touche MENU.
Modes automatiques
A2004 comporte deux modes automatiques :
- Le mode AUTO de pilotage automatique au compas permet de maintenir le bateau sur le cap prédéfini
- Le mode No Drift (Sans dérive) combine les informations de cap et de position et maintient le bateau sur une ligne droite.
Définition de la modification de cap pilote/cap pour les touches fléchées.
Par défaut, le cap pilote (AUTO) et le cap (No Drift [Sans dérive]) change de 1° chaque fois que vous appuyez sur la touche Bâbord ou Tribord. Vous pouvez modifier cet incrément à partir de la boîte de dialogue des paramètres relatifs aux virages. La boîte de dialogue s'active à partir du menu rapide Turn (Virage) et la boîte de dialogue Réglages du pilote automatique.
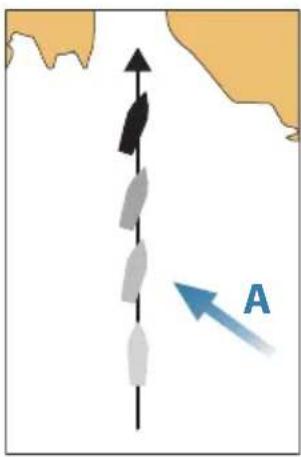
Mode AUTO (maintien de cap)
En mode AUTO, le pilote automatique émet les commandes de barre requises pour diriger le bateau automatiquement vers un cap prédéfini. Dans ce mode, le pilote automatique ne permet pas de compenser la dérive causée par le courant et/ou le vent (A).
- Basculez en mode AUTO en appuyant sur la touche AUTO. Appuyez à nouveau sur la touche pour mettre en surbrillance l'option Auto dans le menu contextuel
Lorsque ce mode est activé, le pilote automatique sélectionne le cap actuel du bateau comme cap prédéfini.
Changement du cap prédéfini en mode AUTO
Vous pouvez régler la consigne de cap en tournant le bouton rotatif ou en appuyant sur la touche Bâbord ou Tribord.
Le cap change immédiatement. Le nouveau cap est maintenu tant qu'un nouveau cap n'est pas défini.
Heading capture (Capture du cap)
Lorsque le bateau effectue un virage en mode AUTO, appuyez de nouveau instantanément sur la touche AUTO ou sur le bouton rotatif pour activer la fonction de capture du cap. Le virage est alors automatiquement annulé et le bateau continue sur le cap indiqué par le compas dès que vous appuyez sur la touche AUTO ou sur le bouton rotatif.
Changements temporaires de cap
Si vous devez contourner un obstacle lorsque vous utilisez le mode AUTO, vous pouvez appuyer sur la touche STBY (veille) et piloter manuellement le bateau jusqu'à ce que vous ayez passé l'obstacle.
Si vous appuyez à nouveau sur la touche AUTO dans les 3 minutes qui suivent, vous pouvez choisir de continuer à vous diriger vers le cap précédemment défini. Si vous n'agissez pas dans les 3 minutes qui suivent, le menu disparaît et le pilote automatique passe en mode AUTO en prenant le cap actuel comme ligne de cap.


Dans le menu rapide en mode AUTO vous pouvez modifier les paramètres de la barre et définir la vitesse manuelle.
- Activez le menu rapide en appuyant brièvement sur la touche MENU.
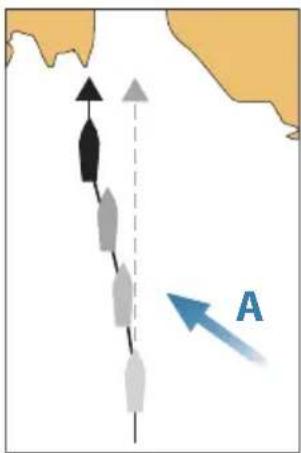
Mode No Drift (Sans dérive)
→ Remarque : Le mode NoDrift (Sans dérive) ne peut pas être sélectionné en l'absence d'informations de position GPS ou de cap.
Dans le mode NoDrift (Sans dérive), le bateau est dirigé le long d'une route calculée à partir de la position actuelle dans une direction définie par l'utilisateur. Si le bateau dérive en s'écartant de la ligne de la route en raison du courant et/ou du vent (A), il suit la ligne avec un angle de crabe.
- Basculez en mode NoDrift (Sans dérive) en appuyant sur la touche AUTO. Appuyez à nouveau sur la touche pour mettre en surbrillance l'option NoDrift (Sans dérive) dans le menu
Lorsque le mode est activé, le pilote automatique trace une route invisible à partir de la position du bateau, d'après la direction en cours.
Le pilote automatique utilise désormais les informations de position pour calculer la distance transversale et suivre automatiquement la route calculée.
Changement du cap actuel en mode NoDrift (Sans dérive)
Vous pouvez régler le cap actuel en tournant le bouton rotatif ou en appuyant sur la touche Bâbord ou Tribord.
Le cap change immédiatement. Le nouveau cap est maintenu tant qu'un nouveau cap n'est pas défini.
Contournement
Si vous devez contourner un obstacle lorsque vous utilisez le mode NoDrift (sans dérive), vous pouvez régler le pilotage automatique en mode Standby et piloter manuellement le bateau jusqu'à ce que vous ayez passé l'obstacle.
Si vous retournez au mode NoDrift (Sans dérive) dans les 60 secondes suivantes, vous pouvez choisir de reprendre la ligne de cap précédente.
Si vous ne répondez pas, la boîte de dialogue disparaît et le pilote automatique passe en mode NoDrift en prenant le cap actuel comme ligne de cap.

Menu rapide en mode NoDrift
Dans le menu rapide en mode NoDrift, vous pouvez modifier la réponse Trace, les paramètres de la barre et définir la vitesse manuelle.
- Activez le menu rapide en appuyant brièvement sur la touche MENU.
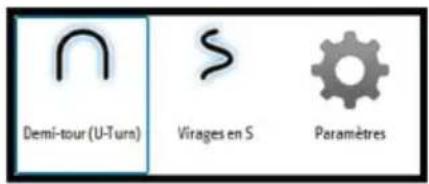
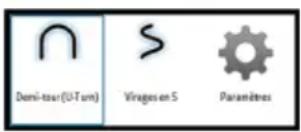
Pilotage par gabarit de virages
Les fonctions de virages/giration Demi-tour et en S peuvent être utilisées en mode AUTO et en mode NoDrift (sans dérive).
Amorçage et arrêt d'un virage
Pour amorcer le virage, appuyez sur la touche TURN afin d'ouvrir le menu rapide de virage, puis sélectionnez l'option de virage. Le virage est amorcé lorsque l'option de direction bâbord ou tribord est sélectionnée dans la boîte de dialogue de virage.
Pendant un virage, vous pouvez à tout moment appuyer sur la touche STBD pour revenir au mode Standby (veille) et reprendre le pilotage manuel.

Demi-tour (U-turn)
Change le cap actuel de 180° dans la direction opposée.
Le bateau va virer selon le taux de giration ou le rayon défini pour le profil actif. Reportez-vous au chapitre "Turn (Virage)" à la page 58.
Virage
Le bateau décrit une route sinueuse autour du cap principal.
Vous réglez l'angle de changement de cap et le rayon de virage par défaut dans la fenêtre Réglages virages, activée à partir du menu rapide manœuvres.
• Variables de virage :
- Changement de cap (C)
- Rayon de virage (D)

Au cours du virage, vous pouvez modifier le cap principal en tournant le bouton rotatif ou en appuyant sur les touches bâbord ou tribord.
→ Remarque : Le mode NAV nécessite la connexion au réseau d'un navigateur compatible.
Le mode NAV ne peut pas être sélectionné en l'absence d'information de cap ou si aucune information de pilotage n'est reçue du traceur de cartes externe.
En mode NAV, le système de pilote automatique utilise les informations de pilotage d'un navigateur externe pour diriger le bateau vers un waypoint spécifique ou le long d'une série de waypoints.
En mode NAV, le capteur de cap du pilote automatique est utilisé comme source de cap pour maintenir le bateau dans la bonne direction. Les informations de vitesse proviennent de la SOG ou du capteur de vitesse sélectionné. Les informations de pilotage reçues du navigateur externe modifient le cap actuel pour diriger le bateau vers le waypoint de destination.
Pour obtenir un pilotage de navigation satisfaisant, le système de pilote automatique doit obtenir une entrée valide du navigateur. Le pilotage automatique doit donc être testé et jugé satisfaisant avant que le mode NAV ne soit enclenché.
→ Remarque : Si le navigateur ne transmet pas de message d'information sur le cap vers le prochain waypoint, le pilote automatique met le cap sur l'écart de route (XTE) uniquement. Dans ce cas, vous devez rétablir le mode AUTO à chaque waypoint et régler manuellement le paramétrage route sur le cap correspondant au waypoint suivant, puis sélectionner à nouveau le mode NAV.
Avant d'entrer en mode NAV, le navigateur doit suivre un itinéraire ou se diriger vers un waypoint.
- Lancez le mode AUTO en appuyant sur la touche NAV.
- Confirmez votre choix dans la boîte de dialogue pour basculer en mode NAV
Virage en mode NAV
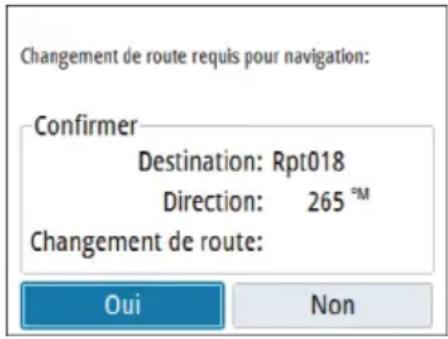
Lorsque votre bateau atteint un waypoint, le pilote automatique émet un avertissement sonore et affiche une boîte de dialogue contenant des informations sur le nouveau cap.
La modification automatique du changement de cap pour atteindre le prochain waypoint est limitée selon une valeur définie par l'utilisateur. Si le changement de cap dépasse cette limite définie, vous êtes invité à vérifier que le changement de cap à effectuer est acceptable.
- Si l'angle du changement de cap requis pour atteindre le prochain waypoint est inférieur à la limite de changement de cap configurée, le pilote automatique modifie automatiquement le
cap. La boîte de dialogue disparaît après 8 secondes à moins d'être fermée à l'aide de la touche X.
- Si le changement de cap nécessaire pour atteindre le prochain waypoint dépasse la limite configurée, vous êtes invité à vérifier que le changement de cap à effectuer est acceptable. Si le virage n'est pas accepté, le bateau poursuit sa route sur le cap actuel.
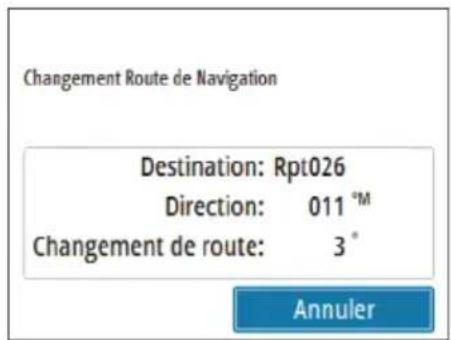
Changement de route inférieur à la limite définie
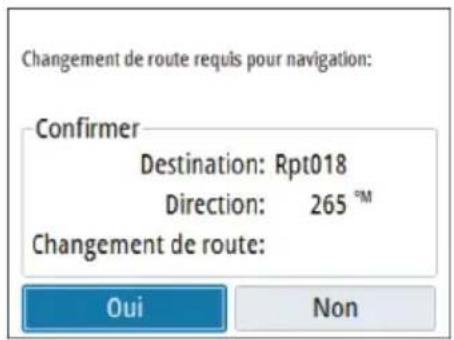
Changement de route supérieur à la limite définie
La limite de changement de route varie en fonction du calculateur du pilote automatique :
• AC70 : Limite Changement de cap
- SG05 PRO : Navigation change limit (Limite de changement de cap)
Reportez-vous au chapitre "Change Limit" à la page 62.
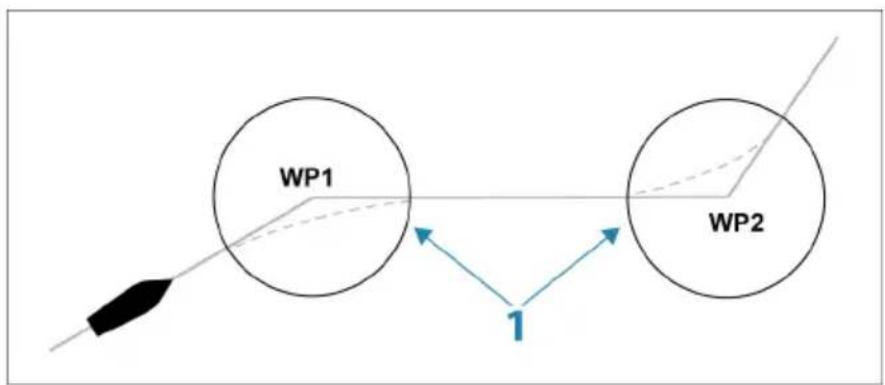
Cercle d'arrivée au waypoint
Le rayon d'arrivée (rayon) définit le point auquel un virage est amorcé lorsque vous naviguez sur une route.
Le rayon d'arrivée est défini dans votre traceur de cartes.
flowchart
graph TD
A["WP1"] --> B["WP2"]
B --> C["1"]
style A fill:#fff,stroke:#000
style B fill:#fff,stroke:#000
style C fill:#fff,stroke:#000
Le rayon d'arrivée (1) doit être adapté à la vitesse du bateau. Plus la vitesse est élevée, plus le rayon d'arrivée doit être grand. Le but est de faire en sorte que le pilote automatique initie le changement de cap au moment opportun afin d'exécuter un virage en douceur jusqu'au segment suivant.
Le tableau ci-dessous peut être utilisé pour sélectionner le rayon d'arrivée approprié lors de la création de la route.
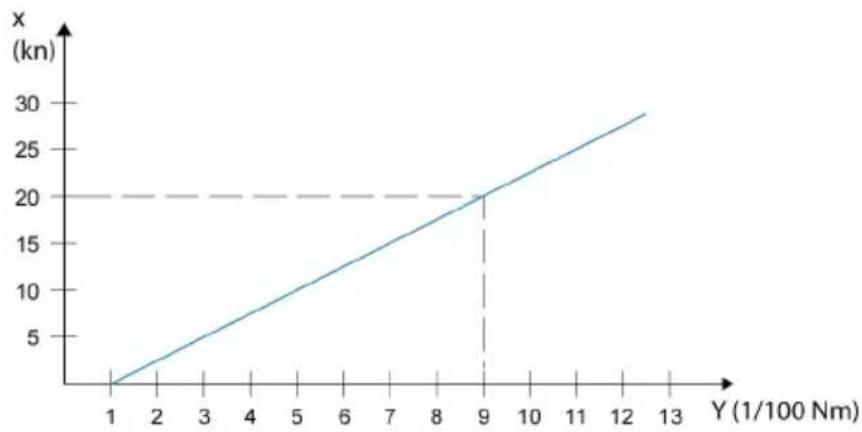
line
| Y (1/100 Nm) | x (kn) | | ------------ | ------ | | 1 | 0 | | 9 | 20 | | 13 | 30 |Axe des X = Vitesse du bateau en noeuds Axe des Y = Rayon d'arrivée, rayon en 1-100 Nm
Exemple : avec une vitesse de 20 nœuds, vous devez sélectionner un rayon de 0,09 Nm.
→ Remarque : La distance entre deux waypoints d'une route ne doit pas être inférieure au rayon d'arrivée.
Dans le menu rapide en mode NAV vous pouvez modifier la réponse de la navigation et définir la vitesse manuelle.
- Activez le menu rapide en appuyant brièvement sur la touche MENU.
Contrôle des performances de pilotage en modes automatiques
Le pilote automatique doit être configuré pendant l'installation.
Certains paramètres peuvent être réglés en cours de fonctionnement pour améliorer les performances de pilotage. Les paramètres sont disponibles dans les menus rapides, accessibles en appuyant sur la touche MENU.

Réponse Trace
Indique dans quelle mesure le pilote automatique doit forcer le bateau à se diriger vers le segment actif.
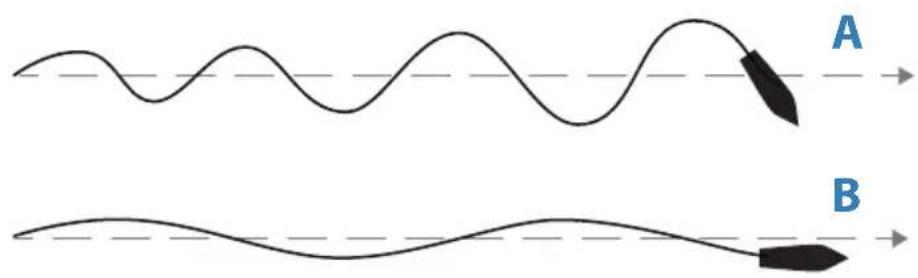
Gain de barre
Ce paramètre détermine le rapport entre la barre commandée et l'erreur de cap. Plus la valeur du gain de barre est élevée, plus la barre est appliquée. Si la valeur est trop basse, la compensation d'une erreur de cap prendra beaucoup de temps et le pilote automatique ne parviendra pas à maintenir le cap. Si la valeur est trop élevée, le pilote automatique a tendance à surcompenser et le pilotage est instable.
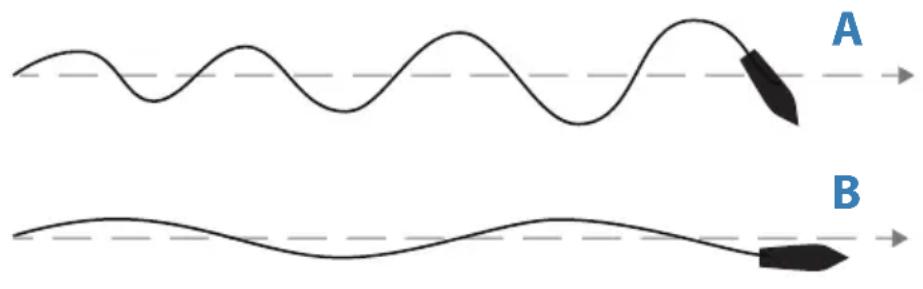
A La valeur définie est trop élevée. Le pilotage deviendra instable et le pilote automatique aura souvent tendance à sur-compenser.
B La valeur définie est trop basse. La compensation d'une erreur de cap prendra beaucoup de temps et le pilote automatique ne parviendra pas à maintenir le cap.
Contre Barre
La contre barre est la quantité de contrepoids de barre (opposée) appliquée pour arrêter le virage à la fin d'un changement de cap important. Les paramètres dépendent des caractéristiques du navire, de l'inertie, de la forme de la coque et de l'efficacité de la barre.
- Si le bateau dispose d'une bonne stabilité dynamique, une valeur relativement petite est suffisante.
- Un bateau instable nécessite une valeur élevée.
- Plus l'inertie du bateau est grande, plus la valeur requise est grande.
Augmenter la valeur de contre barre peut aboutir à une activité de barre plus élevée, même le long d'une route droite, en particulier en cas de fortes vagues.
Les virements de bord constituent les meilleurs moments pour vérifier le réglage de contre barre. Les figures illustrent les effets de différents réglages de Contre Barre.
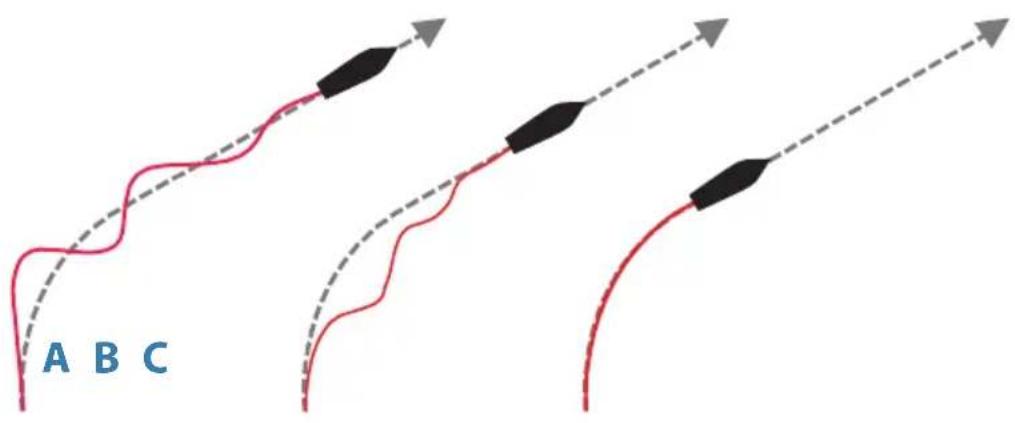
A Réglage trop faible de la contre barre = réponse excessive
B Réglage trop élevé de la contre barre = réponse lente et progressive
C Réglage correct de la contre barre = réponse idéale
Effectuez divers changements de cap et observez comment le bateau se comporte sur le nouveau cap. Commencez avec de petits changements de 10 à 20 degrés, puis passez à des changements plus importants de 60 à 90 degrés. Ajustez la valeur de contre barre pour obtenir la réponse optimale comme illustré sur la figure C.
→ Remarque : comme de nombreux bateaux réagissent différemment selon qu'ils effectuent un virage sur tribord ou bâbord (en raison du sens de rotation de l'hélice), effectuez le changement de cap dans les deux directions. Vous pouvez aboutir à un compromis du réglage de contre barre avec une légère sur-compensation d'un côté et une réponse progressive de l'autre.
4
Profils WORK
Un profil WORK est un ensemble de paramètres de pilotage. Vous pouvez modifier le profil WORK actif pour adapter les caractéristiques de pilotage automatique à diverses conditions de fonctionnement.
L'appareil A2004 propose plusieurs profils WORK prédéfinis selon le type de bateau sélectionné. Il est possible de définir jusqu'à 3 profils WORK dans le système.
À la mise en service et lors des réglages en mer, les paramètres du profil actif sont réglés pour optimiser les performances de pilotage.
Profils prédéfinis
Profil normal
C'est le profil par défaut qui est automatiquement attribué lorsque vous réglez votre type de navire sur Déplacement.
Il est recommandé d'utiliser le profil Normal comme profil général pour votre bateau. Il doit être actif pendant la mise en service de votre bateau, et tous les paramètres de configuration seront alors enregistrés dans ce profil.
Profils haut et bas
Les profils haut et bas sont automatiquement attribués lorsque vous configurez votre bateau sur Plannant.
Le système bascule automatiquement entre les profils haut et bas en fonction de la vitesse du bateau et de la vitesse de transition. Voir la section "Vitesse de transition" à la page 53.
Création d'un nouveau profil
De nouveaux profils peuvent être définis pour les modes de fonctionnement dans lesquels les paramètres de pilotage du bateau dévient des profils par défaut.
Vous pouvez avoir jusqu'à trois profils de travail dans le système de pilote automatique de A2004.
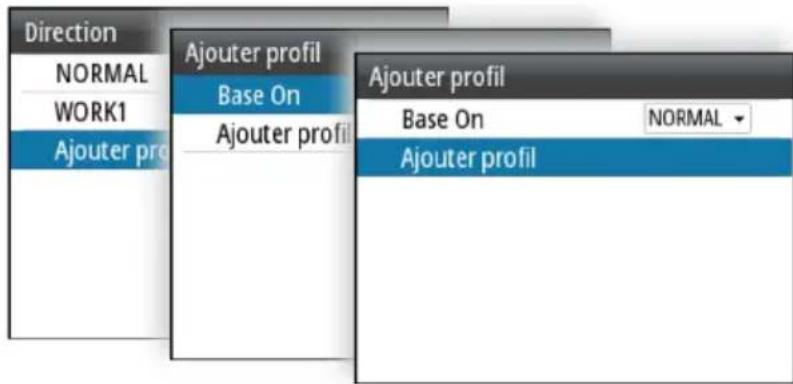
-
Appuyez sur la touche WORK/Propulseur (Travail/Propulseur) pour afficher le menu rapide Travail, puis sélectionnez l'option Paramètres
-
Sélectionnez l'option Add profile (Ajouter un profil)
-
Sélectionnez un profil de travail prédéfini correspondant aux conditions de travail
- Un nouveau profil doit être basé sur un profil existant ou un profil de travail prédéfini. Les paramètres du profil de travail que vous sélectionnez en tant que base seront copiés sur le nouveau profil et peuvent être modifiés ultérieurement
- Terminez la tâche en sélectionnant l'option Add Profile (Ajouter un profil)
Modifier les paramètres de profil
Vous pouvez modifier tous les profils et tous les profils créés par l'utilisateur peuvent être supprimés.
Les paramètres de chaque profil doivent être optimisés pour les performances de pilotage lors de la mise en service et l'essai en mer de votre système. Voir les détails dans la section "Paramètres configurables par l'utilisateur" à la page 57.
5
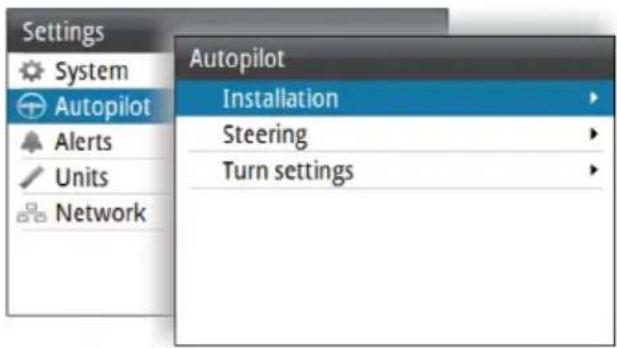
Configuration du logiciel
Avant d'utiliser le A2004, il faut configurer certains paramètres afin que le système fonctionne comme prévu.
Accédez aux options nécessaires dans le menu Paramètres, accessible à partir du menu rapide ou en appuyant deux fois sur la touche MENU.

→ Remarque : les paramètres suivants sont décrits dans d'autres sections de ce manuel :
"Configuration du calculateur de pilote automatique" à la page 43
"Alertes" à la page 69
Paramètres système
Langue
Permet de définir la langue utilisée pour les fenêtres, les menus et les boîtes de dialogue. Lorsque vous modifiez la langue, l'unité redémarre.
Bips de touche
Option permettant de contrôler le volume des bips chaque fois qu'une touche est actionnée.
Paramètre par défaut : Fort
Heure
Option permettant de contrôler le décalage des fuseaux horaires locaux ainsi que le format de date et heure.

Retour Réglages Usine
Option permettant de sélectionner les paramètres pour lesquels vous souhaitez rétablir la configuration d'usine.
Fichiers
Système de gestion des fichiers. Permet de parcourir le contenu de la mémoire interne et le contenu d'un appareil connecté au port USB de l'appareil.
À propos
Affiche les mentions de copyright, la version du logiciel et des informations techniques sur cette unité.
Paramètres avancés
Simulation
L'écran affiche des données simulées. Le simulateur permet de vous familiariser avec le fonctionnement de votre unité avant de l'utiliser en navigation.
Une fois activé, le mode simulation est indiqué sur l'écran.
Tension
Affiche la tension d'alimentation de l'appareil.
Enregistrement du pilote automatique
Disponible si un périphérique USB est connecté à l'unité.
Lorsqu'il est activé, les données du pilote automatique sont enregistrées sur une clé USB.
Unités
Permet de régler les unités de mesure pour différents types de données.
| Réseau | |
| Sources | |
| Liste des Appareils | |
| Diagnostics | |
| Groupes réseaux | |
| Amortissement | |
Réseau
Sources
Les sources de données fournissent des données en mode Live au système.
Lorsqu'un appareil est connecté à plusieurs sources qui fournissent les mêmes données, l'utilisateur peut choisir la source qu'il préfère. Avant de débuter la sélection des sources, assurez-vous que tous les appareils externes et la dorsale NMEA 2000 sont connectés et actifs.
- Sélection automatique : recherche toutes les sources connectées à l'appareil. Si plusieurs sources sont disponibles pour chaque type de données, la sélection s'effectue selon une liste interne de priorités. Cette option convient à la majorité des installations.
- Sélection manuelle d'une source : généralement, la sélection manuelle est requise uniquement lorsqu'il existe plusieurs sources pour les mêmes données et que la source automatiquement sélectionnée n'est pas celle souhaitée.
Liste des appareils
La liste des appareils répertorie les appareils qui fournissent des données. Il peut s'agir d'un module situé à l'intérieur de l'appareil, ou d'un appareil NMEA 2000 externe.
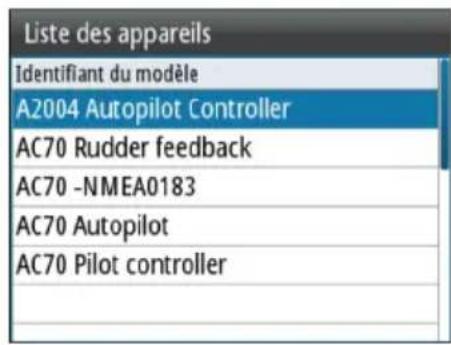
Si vous sélectionnez un appareil dans cette liste, des détails et des actions supplémentaires s'affichent :
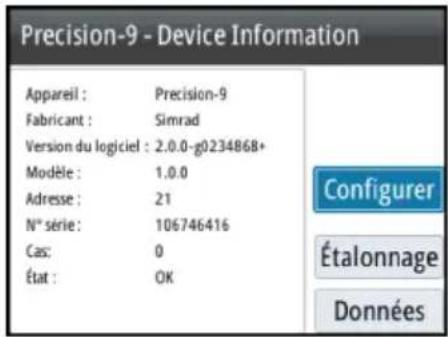
Tous les appareils permettent l'attribution d'un numéro d'instance par l'intermédiaire de l'option de configuration. Définissez des numéros d'instance uniques sur des appareils identiques du réseau pour permettre à l'appareil de les différencier. L'option Data (Données) affiche toutes les données émises par l'appareil.
Certains appareils affichent d'autres options qui leur sont spécifiques.
→ Remarque : la définition du numéro d'instance sur un produit tiers est généralement impossible.
Diagnostics
Fournit des informations utiles pour identifier un problème avec le réseau.
→ Remarque : les informations ci-après n'indiquent pas toujours un problème pouvant être résolu par une simple modification de la disposition du réseau ou des appareils connectés et de leurs activités sur le réseau. Néanmoins, les erreurs de réception et de transmission indiquent le plus souvent des problèmes du réseau physique, que vous pouvez résoudre en vérifiant les terminaisons, en réduisant la dorsale ou la longueur des dérivations, ou encore en diminuant le nombre de nœuds du réseau (périphériques).
État Bus
Indique simplement si le bus est alimenté, mais pas nécessairement s'il est connecté à des sources de données. Néanmoins, si le bus apparaît comme désactivé, mais qu'il est bien alimenté et rencontre un nombre d'erreurs croissant, il est possible que la topologie des câbles réseau ou des terminaisons soit incorrecte.
Rx Overflows (Débordements de récepteur)
L'appareil a reçu trop de messages dans sa mémoire tampon avant que l'application puisse les lire.
Rx Overruns (Dépassements de récepteur)
L'appareil a reçu trop de messages dans sa mémoire tampon avant que le pilote puisse les lire.
Erreurs Rx/Tx (réception/transmission)
Ces deux nombres augmentent en cas de messages d'erreur et diminuent en cas de réception correcte des messages.
Contrairement aux autres valeurs, ces chiffres ne sont pas cumulatifs. Lors d'un fonctionnement normal, ces chiffres doivent être à 0. Des valeurs supérieures à 96 indiquent un réseau fortement sujet aux erreurs. Si ces chiffres deviennent trop élevés pour un appareil donné, ce dernier sort automatiquement du réseau.
Messages Rx/Tx (réception/transmission)
Indique le trafic réel entrant et sortant de l'appareil.
Charge du bus
Une valeur élevée indique que le réseau est proche de sa capacité maximale. Certains appareils règlent automatiquement le taux de transmission si le trafic du réseau est élevé.
Erreurs Fast packet
Compteur cumulatif d'erreurs Fast packet. Il peut s'agir d'une trame manquée ou hors séquence, etc. Les PGN NMEA 2000 sont constitués de 32 trames maximum. Si une trame est manquée, le message entier est éliminé.
→ Remarque : Les erreurs de réception et de transmission indiquent le plus souvent des problèmes du réseau physique, que vous pouvez résoudre en vérifiant les terminaisons, en réduisant la dorsale ou la longueur des dérivations, ou encore en diminuant le nombre de nœuds du réseau (périphériques).
Groupes de réseaux
La fonction Groupe de réseaux permet de contrôler le réglage des paramètres, globalement ou par groupes d'appareils. La fonction est
utilisée sur les grands bateaux où plusieurs appareils sont connectés au réseau. Lorsque plusieurs unités sont affectées à un même groupe, la mise à jour d'un paramètre sur une unité est répercutée sur les autres membres du groupe.
| Amortissement | |
| Cap | 1 sec |
| Vitesse bateau | 4 sec |
| SOG | 1 sec |
| COG | 1 sec |
Amortissement
Si les données apparaissent de façon irrégulière ou trop sensible, un amortissement peut être appliqué pour que les informations apparaissent avec davantage de stabilité. Lorsque l'amortissement est désactivé, les données sont présentées sous forme brute, sans amortissement.
→ Remarque : les paramètres d'amortissement sont appliqués aux appareils appartenant au même groupe d'amortissement. Reportez-vous au chapitre "Groupes de réseaux" à la page 41.
6
Configuration du calculateur de pilote automatique
Une fois l'installation du pilote automatique terminée, la configuration du calculateur doit être effectuée. Une configuration incorrecte du pilote automatique peut aboutir à un mauvais fonctionnement de celui-ci.
La configuration du pilote automatique comporte deux étapes principales :
- Paramètres d'installation
- Y compris mise en service à quai et en mer. Voir "Paramétrage à quai" à la page 45 et "Paramétrages en mer" à la page 55
- Réglage des paramètres du profil du pilote automatique par l'utilisateur
- Réglage manuel selon les différentes conditions de fonctionnement et les préférences utilisateur. Reportez-vous à la section "Paramètres configurables par l'utilisateur" à la page 57
→ Remarque : les paramètres d'installation sont accessibles uniquement lorsque le pilote automatique est en mode Standby (Veille).
Avertissement: à la livraison du pilote automatique et après chaque réinitialisation du pilote automatique, les paramètres d'installation sont restaurés avec les valeurs préréglées en usine (valeurs par défaut). Une notification s'affiche et une configuration complète doit être effectuée. Sinon, le pilote automatique risque de ne pas fonctionner correctement.
Flux de travail de la configuration de l'installation
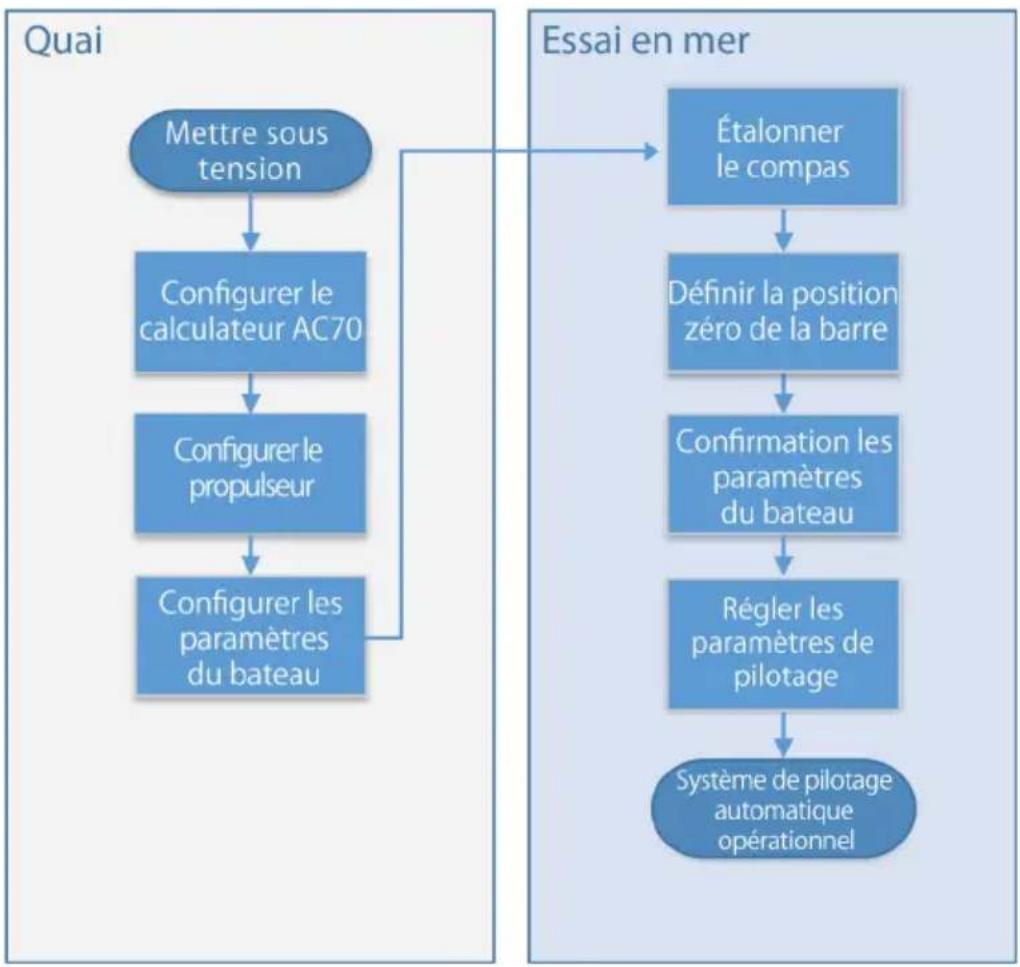
flowchart
graph TD
A["Mettre sous tension"] --> B["Configurer le calculateur AC70"]
B --> C["Configurer le propulseur"]
C --> D["Configurer les paramètres du bateau"]
E["Étalonner le compas"] --> F["Définir la position zéro de la barre"]
F --> G["Confirmation les paramètres du bateau"]
G --> H["Régler les paramètres de pilotage"]
H --> I["Système de pilotage automatique opérationnel"]
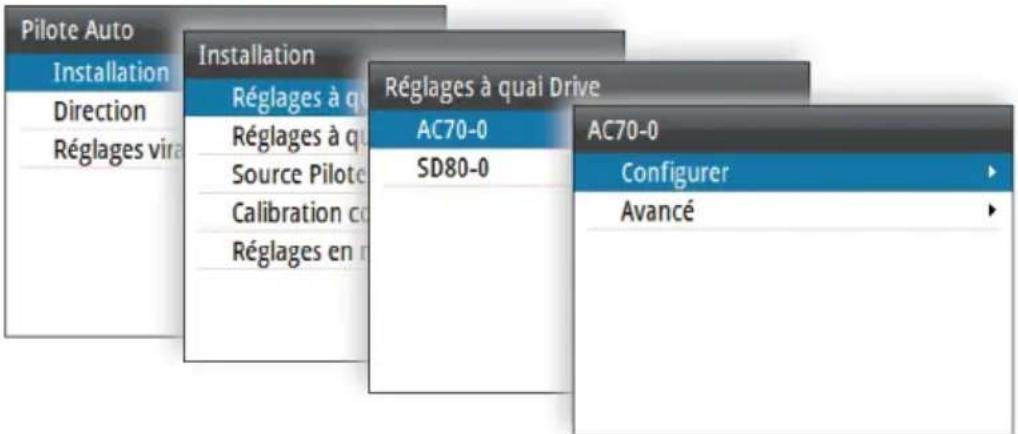
Paramétrage à quai
Configuration du système AC70
Méthode de commande
Utilisé pour régler la sortie de commande appropriée pour votre pilote.
Vous disposez maintenant des options suivantes :
- Solénoïde
Pour l'activation/la désactivation du pilotage des valves hydrauliques. Permet de régler une vitesse de barre fixe.
• Moteur réversible
Pour les pompes/moteurs à vitesse variable.
Drive Voltage (Tension de l'unité de puissance)
Tension nominale spécifiée pour votre pilote.
- Options : 12 V et 24 V.
→ Remarque : la sortie en 24 V est disponible uniquement avec une alimentation 24 V.
Le paramètre doit correspondre à la spécification des solénoïdes, de la pompe ou du moteur.
Avertissement: le choix d'un niveau de tension inapproprié pour votre pilote peut endommager le pilote et le calculateur du pilote automatique même si les circuits de protection sont activés.
Drive engage
Définit la manière dont est utilisée la sortie entraînement.
Vous disposez maintenant des options suivantes :
Si votre pilote/moteur/pompe a besoin de l'embrayage pour engager l'actionneur, il doit être connecté à la sortie « entraînement ». Permet de configurer la fonction « drive engage » en tant qu'embrayage. L'embrayage est activé lorsque le calculateur du pilote automatique contrôle la barre. En mode veille, l'embrayage est relâché pour permettre un pilotage manuel. Vérifiez les spécifications de votre pilote pour déterminer si l'embrayage est nécessaire ou non.
• Auto
Sortie activée lorsque le calérateur du pilote automatique est en mode Auto, NoDrift (Sans dérive) ou Navigation. Dans le cas d'un contrôle manuel de la barre (Veille, NFU et FU), la sortie n'est pas activée. Généralement utilisée pour basculer entre deux vitesses de barre sur une pompe qui fonctionne en continu. Elle est utilisée lorsque différentes vitesses de barre sont nécessaires pour un pilote automatique ou FU/NFU.
Capteur angle de barre
Utilisé pour la sélection du type d'angle de barre.
La liste déroulante contient toutes les unités de capteurs d'angle de barre compatibles connectées au réseau.
Étalonnage du capteur d'angle de barre virtuel
→ Remarque : disponible uniquement si un capteur d'angle de barre est installé et sélectionné comme source de la barre.
La calibration du capteur d'angle de barre détermine la direction du capteur d'angle de barre, la position centrale et les butées.
- Suivez les instructions à l'écran pour étalonner la barre.
Test de barre
Ce test de barre vérifie le sens de l'entraînement. Il détecte l'alimentation électrique minimale pour diriger la barre et réduire la vitesse de barre si elle dépasse la vitesse maximale souhaitée pour le fonctionnement en pilote automatique.
→ Remarque : si le bateau est doté d'une direction assistée, le moteur thermique ou électrique qui l'active doit être allumé avant le début de ce test.
- Exécutez le test de barre tel que décrit par les instructions qui s'affichent à l'écran.
- La barre doit amorcer un léger mouvement dans les 10 secondes, avant de se déplacer dans les deux sens.
L'échec du test déclenche une alarme.
Paramètres avancés du système AC70
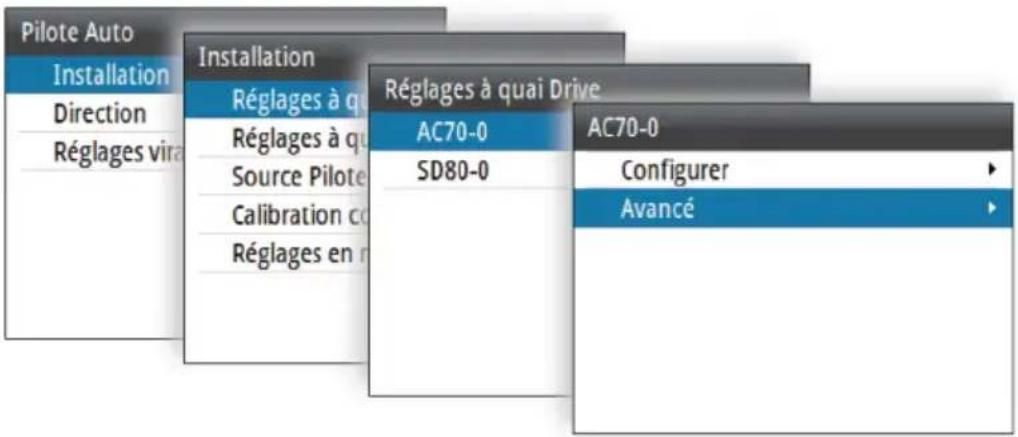
Barre Mini
Certains bateaux ont parfois tendance à ne pas réagir aux commandes de barre de faible amplitude lors d'un paramétrage de route, en raison d'un mouvement faible de la barre, de tourbillons/perturbations au niveau du gouvernail ou parce qu'il s'agit d'un bateau à propulsion par jet d'eau. En augmentant le paramètre Barre minimale, vous pouvez améliorer les performances de direction sur certains bateaux. Cela augmente toutefois l'activité de la barre.
→ Remarque : contentez-vous d'activer la fonction Barre Mini si celle-ci fournit de meilleures performances de direction sur une mer calme. Elle doit être définie une fois les paramètres de pilotage du pilote automatique optimisés/réglés.
Bande morte de barre
Empêche la barre de chasser sous l'effet du jeu mécanique au niveau du mécanisme de direction ou de la barre.
Vous disposez des options suivantes :
• Auto
(Recommandé).
La bande morte de barre est évolutive et constamment opérationnelle. Elle permet également d'optimiser la bande morte en fonction de la pression exercée sur la barre.
- Manuel
Si le réglage automatique ne s'effectue pas correctement en raison d'une vitesse de barre extrême et/ou d'un dépassement, cette fonction peut être réglée manuellement. Elle peut également être utilisée pour réduire l'activité de la barre. Les commandes de barre inférieures à la taille de la bande morte seront ignorées.
Trouvez la plus petite valeur possible qui empêche la barre de chasser continuellement. Une bande morte trop importante entraîne des erreurs de pilotage. Il est recommandé de vérifier la stabilité de la barre en mode Auto à la vitesse de croisière afin d'obtenir une pression sur la barre. (La légère oscillation observée à quai peut disparaître à la vitesse de croisière.)
Motor output (Sortie moteur)
Affiche la puissance nécessaire pour atteindre la vitesse de barre appropriée. Le relevé est obtenu par le test de barre.
La valeur définie automatiquement peut être supérieure ou inférieure.
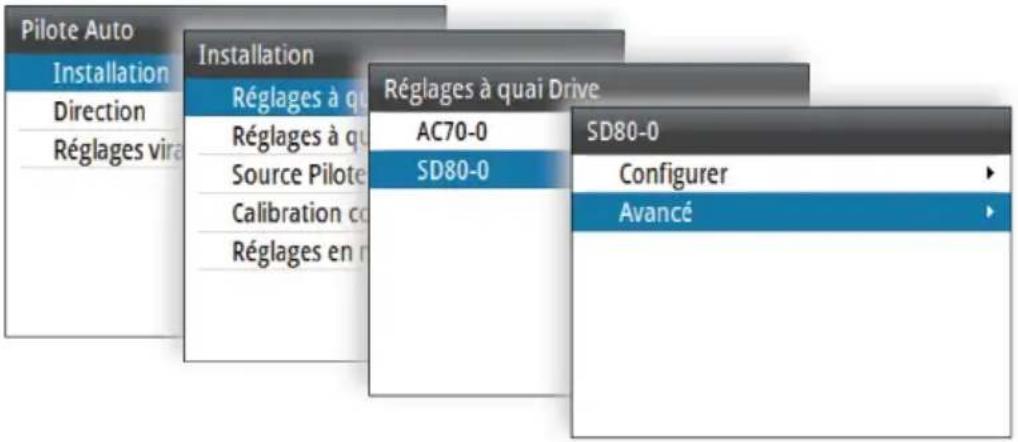
Configuration AD80/SD80
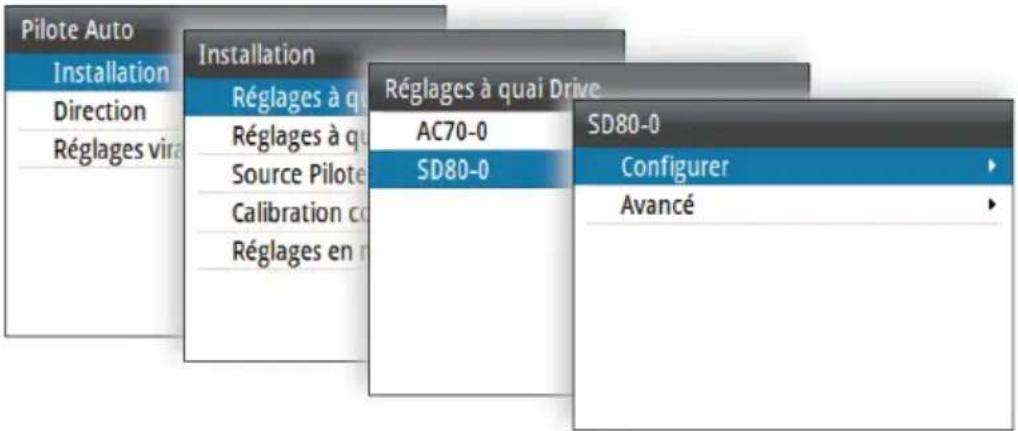
→ Remarque : Dans les systèmes A2004, les AD80 et SD80 peuvent uniquement être utilisés pour le contrôle du propulseur.
Méthode de commande
Utilisé pour régler la sortie de commande appropriée pour votre pilote.
Vous disposez maintenant des options suivantes :
- Solénoïde Pour l'activation/la désactivation du pilotage des valves hydrauliques. Permet de régler une vitesse de propulseur fixe.
- Moteur réversible Pour les pompes/moteurs à vitesse variable.
Drive Voltage (Tension de l'unité de puissance)
Tension nominale spécifiée pour votre pilote.
- Options : 12 V et 24 V.
→ Remarque : la sortie en 24 V est disponible uniquement avec une alimentation 24 V.
Le paramètre doit correspondre à la spécification des solénoïdes, de la pompe ou du moteur.
Avertissement: le choix d'un niveau de tension inapproprié pour votre pilote peut endommager le pilote et le calculateur du pilote automatique même si les circuits de protection sont activés.
Drive engage
Définit la manière dont est utilisée la sortie entraînement.
Vous disposez maintenant des options suivantes :
Si votre moteur/pompe de pilote est équipé d'un système d'embrayage, celui-ci doit être connecté à la sortie correspondante sur le calculateur pilote. Permet de configurer la fonction Drive engage (Entraînement de l'unité) en tant qu'embrayage. L'embrayage est activé lorsque le pilote automatique contrôle le propulseur. En mode veille, l'embrayage est relâché pour permettre un pilotage manuel. Vérifiez les spécifications de votre pilote pour déterminer si l'embrayage est nécessaire ou non.
• Auto
Sortie activée lorsque le calérateur du pilote automatique est en mode AUTO, NoDrift (Sans dérive) ou Navigation. Dans le cas d'un contrôle manuel du propulseur (Veille, NFU et FU), la sortie n'est pas activée. Généralement utilisée pour basculer entre deux vitesses de propulseur sur une pompe qui fonctionne en continu. Elle est utilisée lorsque différentes vitesses de propulseur sont nécessaires pour un pilote automatique ou FU/NFU.
Calibration du propulseur
Si un capteur de propulseur est disponible, il doit être calibré. Cette opération est nécessaire pour définir le signal correspondant à bâbord et tribord.
Paramètres avancés de la carte AD80/SD80
Sortie du signal du propulseur
→ Remarque : Ce paramètre n'est pas disponible pour les propulseurs contrôlés par solénoïde.
La sortie du signal du propulseur correspond à la portée totale du signal (en pourcentage) nécessaire pour réaliser une propulsion correcte.
Paramètres de transmission
Les paramètres de transmission (handshake) font référence aux bornes HS1 et HS2 sur la carte AD/SD.
Vous disposez maintenant des options suivantes :
- HS fixe
- L'interface de pilote automatique/mécanisme de direction avec des signaux de niveau fixe
- Le contact de sortie est fermé lorsque le pilote automatique demande le contrôle du gouvernail.
- L'entrée est fermée tant que le mécanisme de direction est disponible pour le contrôle du pilote automatique.
- Ignorer le Contournement
- Déblocage manuel à l'aide de la solution de repli en mode AUTO
- Lorsque le contact d'entrée est fermé, le pilote automatique donnera un avertissement de désactivation, confirmer le contact de sortie fermé et revenir au mode Veille
- Lorsque l'entrée s'ouvre, le contact de sortie s'ouvre et le pilote automatique revient en mode AUTO sur le cap actuel. Généralement utilisé pour le pilotage manuel avec joystick, avec bouton de désactivation sur le dessus.
- Ignorer la mise en Veille
- Déblocage manuel au mode veille
- Lorsque le contact d'entrée est fermé, le pilote automatique donnera un avertissement de désactivation, confirmer le contact de sortie fermé et verrouiller en mode Veille
- Lorsque l'entrée s'ouvre, le contact de sortie s'ouvre et le pilote automatique se déverrouille. Cette fonction est habituellement associée à des réglementations pour la désactivation automatique lorsque le pilotage manuel principal est utilisé.
Caractéristiques du bateau
Type bateau
Affecte les paramètres de pilotage ainsi que les fonctions de pilote automatique disponibles.
Longueur bateau
Utilisé par le système de pilote automatique pour calculer les paramètres de pilotage.
Vit. Croisière
Paramètre utilisé en l'absence d'information de vitesse disponible. Il est utilisé par le système de pilote automatique pour calculer les paramètres de pilotage.
Vitesse de transition
→ Remarque : Disponible uniquement si le type de bateau est configuré en tant que Planant.
La vitesse de transition est la vitesse à laquelle le système passe automatiquement du profil Basse vitesse au profil Haute vitesse.
Les profils permettent de tenir compte de la tendance des bateaux à présenter différentes caractéristiques de pilotage en fonction de la vitesse. Vous pouvez également définir vos propres préférences pour les performances de pilotage de votre bateau à basse et haute vitesse.
Il est recommandé de définir une valeur qui représente la vitesse à laquelle changent les caractéristiques de pilotage du bateau. Par exemple, il peut s'agir du seuil de plané (recommandé) ou de la vitesse à laquelle vous souhaitez que le pilote automatique change de comportement.
Une hystérésis de 2 nœuds permet d'éviter l'oscillation des paramètres haute/basse vitesse lorsque le bateau se déplace à la vitesse de transition ou à un niveau proche de cette vitesse.
Exemple
La vitesse de transition est réglée à 9 nœuds.
- Le système passe d'un profil Low (Bas) à un profil High (Haut) lorsque la vitesse passe à 10 nœuds (= vitesse de transition plus 1 nœud).
- Le système passe d'un profil High (Haut) à un profil Low (Bas) lorsque la vitesse descend à 8 nœuds (= vitesse de transition moins 1 nœud).
Vitesse d'inhibition du propulseur
Ce paramètre bloque le fonctionnement du propulseur lorsque le bateau dépasse une vitesse prédéfinie. Il s'agit d'une fonction de sécurité qui permet d'éviter aux propulseurs, notamment les propulseurs avec système de marche/arrêt électrique, de surchauffer lorsqu'ils sont hors de l'eau ou dans le cas, par exemple, d'un hydroglisseur ou d'une mer agitée.
→ Remarque : La limite d'inhibition du propulseur ne s'applique que lorsque la source de vitesse est le loch ou SOG (vitesse par rapport au fond) ; elle ne s'applique pas si la vitesse est définie manuellement.
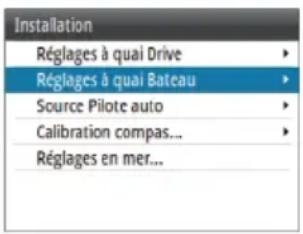
| Installation | |
| Réglages à quai Drive | ▶ |
| Réglages à quai Bateau | ▶ |
| Source Pilote auto | ▶ |
| Calibration compas... | ▶ |
| Réglages en mer... | |
Paramétrages en mer
un réglage en mer ne peut être effectué qu'une fois les paramétrages à quai terminés.
→ Remarque : Un réglage en mer doit toujours être effectué dans des conditions calmes, en eaux ouvertes et à une distance de sécurité de tout autre trafic.
Configuration du compas
Pour obtenir des performances optimales, le compas doit être calibré ; les offsets doivent être utilisés pour compenser.
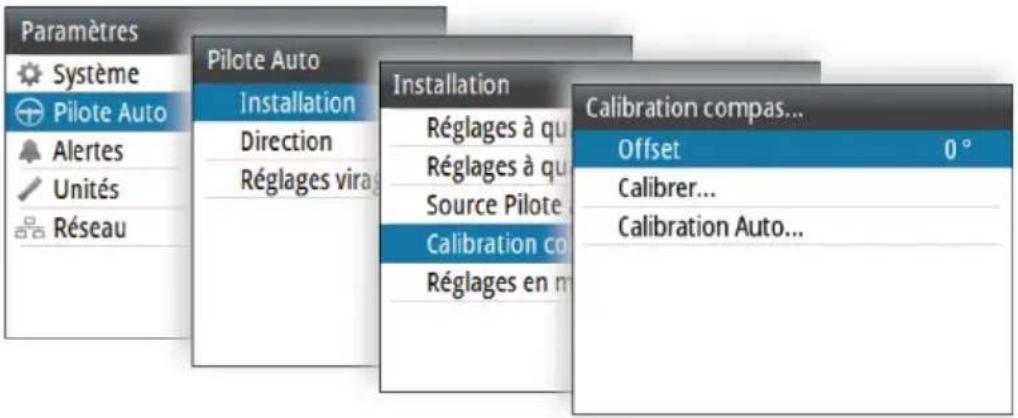
→ Remarque : pour obtenir de bons résultats, la configuration du compas doit être effectuée par mer calme et par vent et courant faibles. Assurez-vous que l'étendue d'eau libre autour du bateau est suffisante pour effectuer un virage complet.
Pour plus d'informations concernant votre appareil, consultez la documentation de votre capteur de cap.
Config Zéro Barre
Permet de corriger la position zéro de la barre détectée lors des paramétrages à quai si un léger décalage de la barre est nécessaire pour permettre au bateau de se diriger en ligne droite.
→ Remarque : le réglage de la position zéro de la barre doit toujours être effectué dans des conditions calmes, sans vent ni courant susceptible d'affecter le pilotage.
- Placez la barre à la position dans laquelle le bateau navigue en ligne droite, puis activez l'option Config Zéro Barre pour enregistrer le paramètre zéro de la barre.
→ Remarque : sur les bateaux à deux moteurs, vérifiez que le régime moteur est égal sur les deux moteurs de sorte que les deux hélices génèrent une poussée équivalente. Dans le cas contraire, la position zéro de la barre est peut-être mal configurée.
Réglage du pilote automatique
→ Remarque : Le réglage du pilote automatique doit être effectué séparément pour les profils de basse et haute vitesse. Les réglages automatiques et manuels doivent être tous deux effectués dans des conditions de mer calme à modérée.
Si vous avez correctement entré le type, la longueur et la vitesse de croisière du bateau, vous n'aurez sans doute pas à effectuer de réglages manuels ou automatiques supplémentaires.
Procédez comme suit pour vérifier que le pilotage est satisfaisant :
- Stabilisez le bateau sur un cap, puis sélectionnez le mode AUTO.
- Observez les commandes de maintien de cap et de la barre.
- Le pilote automatique doit maintenir le bateau sur le cap prédéfini dans une plage de variations de +/-1 degré en moyenne, par mer calme et vent faible.
- Effectuez de petits et de plus grands changements de cap sur bâbord et tribord et observez comment le bateau s'adapte à ces nouveaux caps.
- Le bateau doit avoir un minimum de dépassement. Voir "Gain de barre" à la page 33 et "Contre Barre" à la page 33.
Si le pilote automatique ne maintient pas le cap ou n'effectue pas les virages de manière satisfaisante, vous pouvez essayer la fonction Réglage Auto ou passer directement au réglage manuel.
→ Remarque : si le bateau est d'une longueur supérieure à 30 m/100 pi environ ou si sa vitesse de croisière est très élevée, il peut être impossible d'effectuer un réglage automatique. Il est alors suggéré de procéder à un réglage manuel.
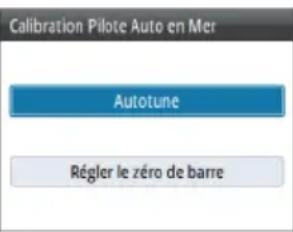
Réglage Auto
Lorsque vous réalisez un réglage automatique, le bateau effectue automatiquement une série de virages en S. En fonction du comportement du bateau, le pilote automatique définit automatiquement les paramètres de pilotage les plus importants (Gain et Contre Barre).
- Stabilisez le bateau sur un cap et réglez-le à une vitesse aussi proche que possible de la vitesse de croisière, puis activez la fonction Réglage automatique.
- Le pilote automatique passe maintenant en mode automatique et prend le contrôle du bateau.
→ Remarque : vous pouvez désactiver le réglage automatique à tout moment en appuyant sur la touche STBY du boîtier de commande du pilote automatique.
La procédure de réglage automatique dure environ 3 minutes. Une fois la procédure terminée, le pilote automatique passe automatiquement en mode Veille et la barre doit être contrôlée manuellement.
→ Remarque : tous les paramètres définis lors du réglage automatique peuvent être réglés manuellement. Pour des performances de pilotage optimales, il est recommandé d'ajuster manuellement les paramètres de pilotage après l'exécution du réglage automatique.
Paramètres configurables par l'utilisateur
Les paramètres de pilotage peuvent être configurés différemment entre les différents profils, en fonction des caractéristiques de pilotage du bateau et des préférences utilisateur.
Les paramètres initiaux sont automatiquement attribués lorsque vous sélectionnez le type de votre bateau. Au cours des paramétrages en mer, les paramètres sont réglés pour optimiser les performances de pilotage.
Les options répertoriées dans les pages suivantes sont disponibles et peuvent être définies manuellement pour tous les profils.
PILOTAGE AUTOMATIQUE
Turn (Virage)
Permet de sélectionner la manière dont vous souhaitez contrôler les virages du bateau : en définissant soit le taux de giration (Taux), soit le rayon.
• Taux : de 5°/minute à 720°/minute
• Rayon : de 10 m à 10 NM
- Le rayon minimal ne peut toutefois jamais être inférieur à la valeur correspondant à un taux de giration de 720°/minute à la vitesse de croisière définie.
Taux de Giration
Utilisé pour la configuration manuelle du taux de giration défini lors des paramétrages en mer (option Paramétrer taux de giration).
Adaptation
C'est une fonction qui ajuste en permanence les paramètres essentiels pour les performances de pilotage, notamment la vitesse, l'assiette, le tirant d'eau et les effets de la marée.
Lorsqu'ils sont activés, ces paramètres sont optimisés au cours du trajet en fonction de la position du bateau. Les paramètres sont stockés dans le profil de travail actif.
Gain de barre
Ce paramètre détermine le rapport entre la barre commandée et l'erreur de cap. Plus la valeur du gain de barre est élevée, plus la barre est appliquée. Si la valeur est trop basse, la compensation
d'une erreur de cap prendra beaucoup de temps et le pilote automatique ne parviendra pas à maintenir le cap. Si la valeur est trop élevée, le pilote automatique a tendance à surcompenser et le pilotage est instable.
A La valeur définie est trop élevée. Le pilotage deviendra instable et le pilote automatique aura souvent tendance à sur-compenser.
B La valeur définie est trop basse. La compensation d'une erreur de cap prendra beaucoup de temps et le pilote automatique ne parviendra pas à maintenir le cap.
Contre Barre
La contre barre est la quantité de contrepoids de barre (opposée) appliquée pour arrêter le virage à la fin d'un changement de cap important. Les paramètres dépendent des caractéristiques du navire, de l'inertie, de la forme de la coque et de l'efficacité de la barre.
- Si le bateau dispose d'une bonne stabilité dynamique, une valeur relativement petite est suffisante.
- Un bateau instable nécessite une valeur élevée.
- Plus l'inertie du bateau est grande, plus la valeur requise est grande.
Augmenter la valeur de contre barre peut aboutir à une activité de barre plus élevée, même le long d'une route droite, en particulier en cas de fortes vagues.
Les virements de bord constituent les meilleurs moments pour vérifier le réglage de contre barre. Les figures illustrent les effets de différents réglages de Contre Barre.

A Réglage trop faible de la contre barre = réponse excessive
B Réglage trop élevé de la contre barre = réponse lente et progressive
C Réglage correct de la contre barre = réponse idéale
Effectuez divers changements de cap et observez comment le bateau se comporte sur le nouveau cap. Commencez avec de petits changements de 10 à 20 degrés, puis passez à des changements plus importants de 60 à 90 degrés. Ajustez la valeur de contre barre pour obtenir la réponse optimale comme illustré sur la figure C.
→ Remarque : comme de nombreux bateaux réagissent différemment selon qu'ils effectuent un virage sur tribord ou bâbord (en raison du sens de rotation de l'hélice), effectuez le changement de cap dans les deux directions. Vous pouvez aboutir à un compromis du réglage de contre barre avec une légère sur-compensation d'un côté et une réponse progressive de l'autre.
Auto Trim
Définit la rapidité avec laquelle le pilote automatique va commander la barre pour compenser un écart de cap, par exemple lorsque des forces externes, comme le vent ou le courant, affectent le cap. Abaissez l'Auto Trim pour éliminer plus rapidement l'écart de cap.
→ Remarque : en mode VRF, ce paramètre contrôle la constante de temps de l'estimation de la barre. Une valeur inférieure accélère l'estimation de la barre ; celle-ci sera donc plus rapidement en phase avec les mouvements du bateau.
Off heading limit (Limite hors cap)
Définit la limite pour l'alarme hors cap.
Lorsque l'option d'alarme est activée, une alarme retentit si le cap réel dévie du cap défini d'une valeur supérieure à la limite sélectionnée.
Low speed limit (Limite de vitesse basse)
Définit la limite pour l'alerte de vitesse basse du bateau.
Une alarme retentit lorsque la vitesse du bateau passe sous une limite sélectionnée.

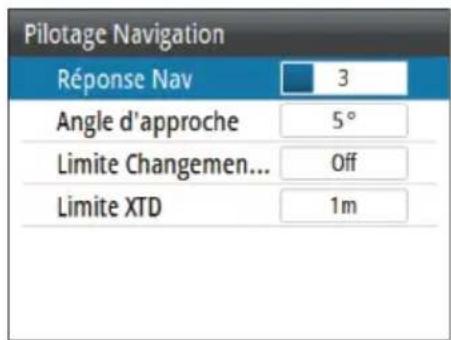
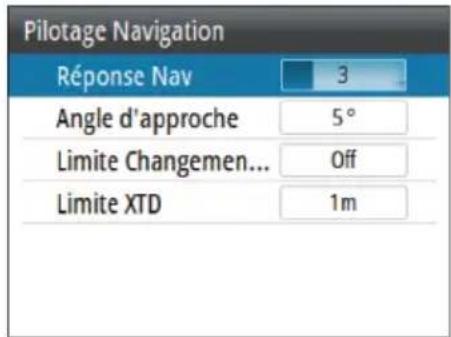
Pilotage Nav
Rep. Nav (Réponse de la navigation)
Indique dans quelle mesure le pilote automatique doit forcer le bateau à se diriger vers le segment actif.
Angle Appr.
Ce paramètre permet d'éviter une approche de la piste trop inclinée. L'approche de la piste à des plus petits angles est autorisée en fonction de la distance transversale (XTD) et du paramètre de réponse nav.
Ce paramètre est utilisé lorsque vous commencez à naviguer et à chaque fois que le pilote automatique rapproche le bateau de son itinéraire.
Change Limit
Définit la limite de changement de cap automatique vers le prochain waypoint dans un itinéraire lorsque le pilote automatique suit un itinéraire (mode NAV).
Si le changement de cap dépasse cette limite définie, vous êtes invité à vérifier que le changement de cap à effectuer est acceptable.
Limite XTD
Définit la distance de décalage acceptable du bateau par rapport à la trace. Si le bateau dépasse cette limite, une alarme est activée.
SÉLECTION GROUPE
Définit les moteurs devant être utilisés pour le profil de travail sélectionné.
Barre
Initialisation barre
Définit comment le système déplace la barre lors du passage du pilotage manuel (Veille, FU et NFU) à un mode automatique.
Vous disposez maintenant des options suivantes :
- Centre
Déplace la barre en position zéro
- Actuel
Maintient l'angle de la barre en supposant que l'angle de barre actuel correspond à l'assiette requise pour maintenir un cap stable.
Limite de barre
Permet de déterminer la plage dynamique de la barre avant que son mouvement ne soit restreint et que l'alarme ne soit déclenchée. En utilisation normale, il s'agit de limiter l'action de la barre liée aux écarts en mer.
→ Remarque : la limite de barre ne restreint pas outre mesure la portée de la barre, mais agit uniquement autour du point de consigne actuel.
Cette limite de barre n'affecte pas le pilotage en mode NFU (Direction assistée) ou FU.
THRUSTER (Propulseur)
Bande morte
Détermine le nombre de degrés dont le bateau doit dévier du cap prédéfini avant qu'une commande de propulseur soit émise. Lorsque le bateau dévie de son cap, le propulseur redresse sa trajectoire.
Une valeur plus élevée réduit l'activité du propulseur et allonge la durée de vie, notamment pour les propulseurs équipés de système marche/arrêt.
Assistance
Détermine comment les propulseurs sont utilisés par le pilote automatique.
Lorsque ce paramètre est défini sur ON (activé), les propulseurs sont automatiquement utilisés par le système de pilote automatique si la vitesse du bateau est inférieure à la limite d'inhibition. Si la vitesse du bateau est supérieure à la vitesse d'inhibition du propulseur, les propulseurs sont désactivés, mais ils sont automatiquement réactivés lorsque la vitesse descend sous la limite d'inhibition.
→ Remarque : La vitesse d'inhibition du propulseur est définie lors de l'installation et correspond à la vitesse maximum du bateau à laquelle le propulseur est autorisé à fonctionner.
Lorsque ce paramètre est défini sur OFF (désactivé), le propulseur doit être activé manuellement.
7
Vérification de l'installation
Lorsque toutes les unités du système de pilotage automatique sont installées, que l'équipement externe est connecté et que le logiciel est configuré conformément aux indications des chapitres précédents, il est recommandé de vérifier l'installation selon la liste de contrôle. Les réglages spécifiques du bateau doivent être notés dans les tableaux correspondants inclus dans ce chapitre.
Liste de contrôle
| Descriptif Référence | |
| Appareils montés et fixés conformément aux instructions | Instructions d'installation des appareils |
| Réseau alimenté et raccordé conformément aux instructions | Instructions de câblage des appareils |
| Sources sélectionnées "Configuration du logiciel" à la page 37 | |
| Bateau configuré | "Caractéristiques du bateau" à la page 53 |
| Pilote (AC70) configuré et étalonné | "Configuration du système AC70" à la page 45 |
| Propulseur (AD80/SD80) configuré et étalonné | "Configuration AD80/SD80" à la page 50 |
| Compas étalonné | "Configuration du compas" à la page 55 |
| Réglage en mer terminé (manuel ou automatique) | "Paramétrages en mer" à la page 55 |
| Profils définis et configurés | "Paramètres configurables par l'utilisateur" à la page 57 |
Réglages spécifiques du bateau
Taux de giration
| Paramètres | |
| Type bateau | |
| Longueur bateau | |
| Vit. Croisière | |
| Vitesse de transition | |
| Inhibition du propulseur |
Configuration du système AC70
| Paramètres | |
| Méthode de commande | |
| Drive Voltage (Tension de l'unité de puissance) | |
| Drive engage | |
| Capteur angle de barre | |
| Barre | |
| Minimum | |
| Mode Bande morte | |
| Bande morte (manuel) | |
| Sortie moteur | |
| Puissance de sortie minimale | |
| Puissance de sortie maximale |
Configuration AD80/SD80
| Paramètres | |
| Méthode de commande | |
| Drive Voltage (Tension de l'unité de puissance) | |
| Drive engage | |
| Sortie | |
| Minimum | |
| Bâbord maximum | |
| Tribord maximum | |
| Zéro | |
| Transmission 1 | |
| Transmission 2 |
Paramètres du profil
Les paramètres du profil peuvent être définis individuellement pour chaque profil (étiquetés 1, 2 et 3 dans le tableau ci-dessous).
| Paramètres 1 2 3 | |||
| Pilotage automatique | |||
| Type de manœuvre | |||
| Taux de Giration | |||
| Turn Radius (Rayon de virage) | |||
| Adaptation | |||
| Gain de barre | |||
| Contre Barre | |||
| Autotrim | |||
| Off heading limit (Limite hors cap) | |||
| Low speed limit (Limite de vitesse basse) | |||
| Pilotage Navigation | |||
| Rep. Nav (Réponse de la navigation) | |||
| Angle Appr. | |||
| Change Limit | |||
| Limite XTD | |||
| SÉLECTION GROUPE | |||
| Barre | |||
| THRUSTER (Propulseur) | |||
| Barre | |||
| Initialisation barre | |||
| Limite de barre | |||
| THRUSTER (Propulseur) | |||
| Bande morte | |||
| Assistance | |||
8
Alertes
Le système vérifie continuellement les situations potentiellement dangereuses et les éventuelles défaillances du système pendant son fonctionnement. Le système d'alertes est activé si une valeur de paramètre d'alerte est dépassée.
→ Remarque : si des données de capteur essentielles au fonctionnement du pilote automatique (par exemple le capteur d'angle de barre) sont perdues lorsque le pilote automatique fonctionne en mode automatique, le système bascule automatiquement en mode Standby.
Paramètres des alertes
La plupart des alertes de pilotes automatiques sont activés en fonction de limites d'alertes prédéfinies et ces limites peuvent être modifiées par l'utilisateur.
Les paramètres suivants sont définis par l'utilisateur et peuvent être configurés individuellement pour chaque profil. Consultez les détails dans la section "Paramètres configurables par l'utilisateur" à la page 57.
Angle de limite hors cap
Définit la limite pour l'alarme hors cap.
Lorsque l'option d'alarme est activée, une alarme retentit si le cap réel dévie du cap défini d'une valeur supérieure à la limite sélectionnée.
Low speed limit (Limite de vitesse basse)
Définit la limite pour l'alerte de vitesse basse du bateau.
Une alarme retentit lorsque la vitesse du bateau passe sous une limite sélectionnée.
Limite XTD
Définit la distance de décalage acceptable du bateau par rapport à la trace. Si le bateau dépasse cette limite, une alarme est activée.
Types de messages d'alerte
Il existe deux types de messages :
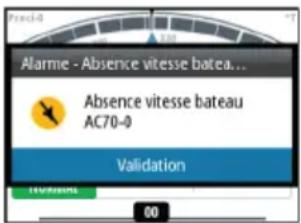
- Alarmes
- Générées lorsque des conditions susceptibles d'affecter gravement la capacité ou les performances du système sont détectées. Vous devez examiner en détails chaque message d'alarme afin de déterminer sa cause et ses effets
- Avertissements
- Vous inferment de conditions pouvant aboutir à une réponse système indésirable ou une éventuelle panne
Indication d'alerte
Lorsqu'une situation d'alerte se produit, une sirène retentit et l'icône d'alerte devient active. La boîte de dialogue de l'alerte affiche la cause de l'alerte, suivie du nom de l'appareil qui a généré l'alerte.
Les alertes individuelles sont affichées avec le nom de l'alerte comme titre, suivi des détails de l'alerte.
Si plusieurs alertes sont activées au même moment, la fenêtre d'alerte contextuelle peut afficher 2 alertes. Les alertes apparaissent par ordre chronologique, avec l'alerte survenue en premier en haut de la liste. Les autres alertes demeurent visibles dans la boîte de dialogue Alertes.
lcônes d'alerte
L'icône d'alerte restera dans la fenêtre d'état jusqu'à ce que l'alerte soit confirmée et corrigée.
Le tableau ci-après dresse la liste des icônes d'alerte et de leur comportement lorsque l'alerte est active, confirmée, transférée ou corrigée.
| Type Icône État Signification | |||
| Alarme |  | Actif, non confirmé et non coupé | • Texte descriptif• Signal sonore |
 | Actif, non confirmé et coupé | • Texte descriptif• Pas de signal sonore | |
 | Actif et confirmé | • Texte descriptif• Pas de signal sonore | |
 | Corrigée et non confirmée | • Texte descriptif• Pas de signal sonore | |
| Avertisse ment |  | Actif, non confirmé et non coupé | • Texte descriptif• Signal sonore |
 | Actif, non confirmé et coupé | • Texte descriptif• Pas de signal sonore | |
 | Actif et confirmé | • Texte descriptif• Pas de signal sonore | |
 | Corrigée et non confirmée | • Texte descriptif• Pas de signal sonore | |
L'alerte et les détails de l'alerte sont enregistrés dans la liste d'alertes. Voir la section "Boîtes de dialogue d'alerte" à la page 72.
Confirmation d'alertes
Il n'y a pas de temps limite pour l'alarme et le message d'alerte. Une alerte reste activée jusqu'à ce que vous la confirmiez ou que l'événement ayant déclenché l'alerte ait disparu.
Pour confirmer l'alerte la plus récente, appuyez sur le bouton rotatif.
Cette action supprime la notification d'alerte et coupe la tonalité d'alerte de tous les appareils qui appartiennent au même groupe d'alertes. Un rappel apparaît à intervalles donnés tant que la cause de l'alerte existera.
→ Remarque : Une alerte reçue d'un appareil non Navico du réseau doit être confirmée sur l'appareil générant l'alerte.
Boîtes de dialogue d'alerte
Le système comprend deux fenêtres d'alerte :
- Alertes actives
- Liste de tous les messages actifs
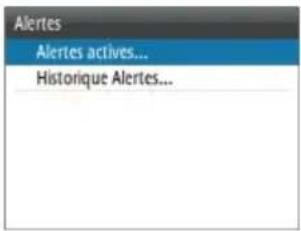
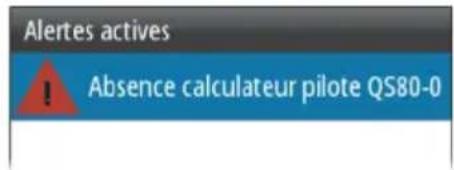
• Historique d'alertes
- Événements d'alerte, y compris le type d'alerte, l'état et l'heure/la date.

La boîte de dialogue de l'historique d'alertes stocke les messages d'alerte jusqu'à ce qu'ils soient manuellement effacés.
Appuyez sur le bouton rotatif pour afficher les détails de l'alerte sélectionnée. Appuyez sur la touche MENU pour effacer toutes les alertes de l'historique dans la boîte de dialogue correspondante.

Liste des alertes et des actions correctives possibles
Pour obtenir une liste des alertes et des actions correctives, reportez-vous à la section "Annexes" à la page 84.
L'unité peut également afficher des alertes provenant d'autres unités connectées au système. Reportez-vous à la documentation spécifique de l'équipement concerné pour obtenir une description plus détaillée de ces alertes.
9
Maintenance
Maintenance préventive
L'appareil ne contient aucun composant réparable sur site. Par conséquent, l'opérateur ne peut effectuer qu'un nombre très limité d'interventions de maintenance sur l'équipement.
Nous vous recommandons de toujours placer la protection solaire fournie si vous n'utilisez pas l'unité.
Nettoyage de l'unité d'affichage
Un chiffon de nettoyage approprié doit être utilisé pour nettoyer l'écran, chaque fois que possible. Utilisez une quantité d'eau abondante pour dissoudre et éliminer tout résidu de sel. Le sel cristallisé peut rayer le revêtement si vous utilisez un chiffon humide. Exercez le minimum de pression possible sur l'écran.
Si vous constatez des marques sur l'écran, n'utilisez pas un chiffon seul pour les éliminer. Humidifiez-le avec un mélange composé de moitié d'eau chaude et de moitié d'alcool isopropylique pour nettoyer l'écran. Évitez tout contact avec des produits nettoyants à base de solvants (acétone, white spirit, etc.) ou d'ammoniaque, car ils peuvent endommager la couche antireflet, le cadran en plastique ou les touches en caoutchouc.
Pour éviter toute détérioration du cadran en plastique par les rayons UV, nous vous recommandons de placer la protection solaire en cas de non-utilisation prolongée de l'unité.
Vérification des connecteurs
La vérification des connecteurs doit se limiter à une inspection visuelle.
Insérez les connecteurs dans leur réceptacle. Si les connecteurs disposent d'un verrouillage, assurez-vous qu'ils sont correctement positionnés.
Sauvegarde et restauration des données système
Le système est doté d'une fonction de sauvegarde et de restauration permettant de sauvegarder et de restaurer les
paramètres systèmes ainsi que les fichiers de configuration du pilote automatique.
→ Remarque : Il est vivement recommandé de réaliser une sauvegarde une fois le système installé et configuré.
La sauvegarde et la restauration est lancée depuis l'option Fichiers lorsqu'une clé USB est insérée dans le port USB à l'arrière de l'appareil.
L'appareil sélectionnera automatiquement l'option d'importation ou d'exportation en fonction du type de fichier sélectionné.
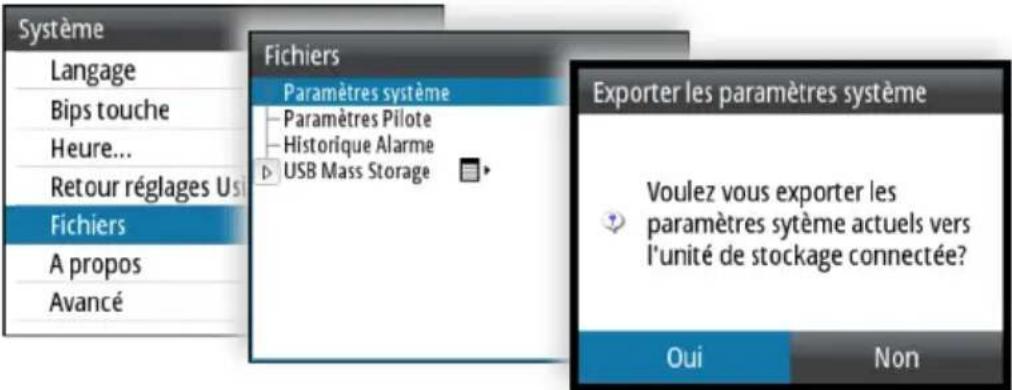
Mises à jour du logiciel
Un port USB se trouve à l'arrière de l'appareil A2004. Vous pouvez utiliser ce port pour les mises à jour logicielles.
Vous pouvez mettre à jour le logiciel de l'appareil et de tous les capteurs NMEA 2000 connectés au réseau à partir de l'appareil A2004.
Vous pouvez vérifier la version du logiciel des différents appareils dans la boîte de dialogue À propos. La version du logiciel pour les capteurs NMEA 2000 connectés est disponible dans la Liste des appareils.
-
Téléchargez la dernière version du logiciel sur notre site Web www.navico.com/commercial, puis enregistrez-la sur un périphérique USB.
-
Insérez le périphérique USB dans l'appareil A2004.
-
Démarrez l'Explorateur de fichiers et sélectionnez le fichier de mise à jour sur le périphérique USB.
-
Démarrez la mise à jour à partir de la boîte de dialogue des détails du fichier.
-
Retirez le périphérique USB lorsque la mise à jour est terminée.
10
Structure des menus
Menus Paramètres
Le système comprend un menu Paramètres, accessible en appuyant deux fois sur la touche MENU.
| Niveau 1 Niveau 2 Niveau 3 | ||
| Système > Langage | ||
| Beeps touches | ||
| Heure... | ||
| RetourRéglages Usine | ||
| Fichiers | ||
| À propos | ||
| Avancé > Simulation | ||
| Tension | ||
| Enregistrement Pilote Auto | ||
| Pilote automatique> | Installation > Réglages à quai Drive > | |
| Réglages à quai Bateau > | ||
| Source Pilote auto > | ||
| Calibration compas ... > | ||
| Réglages en mer ... | ||
| Pilotage « Profil 1 » > | ||
| « Profil 2 » > | ||
| « Profil 3 » > | ||
| Réglages virages > | Incrémentation de route | |
| Réglages virages en S > | ||
| Alertes > Alertesactives... | ||
| Historique des alertes... | ||
| Unités > Distance | ||
| Distance courte | ||
| Vitesse | ||
| Cap | ||
| Réseau > Sources > Sélection Auto | ||
| Compas pilote > | ||
| Navigation > | ||
| Position > | ||
| Vitesse bateau > | ||
| Profondeur > | ||
| Calculateur pilote automatique > | ||
| Liste des appareils | ||
| Diagnostics | ||
| Groupes de réseaux > | Affichage | |
| Unités | ||
| Amortissement | ||
| Amortissement > | Cap | |
| Vitesse bateau | ||
| SOG | ||
| COG | ||
11
Caractéristiques techniques
| Homologations Reportez-vous à "Déclaration de conformité" à la page 4 | |
| Dimensions Reportez-vous à "Schémas dimensionnels" à la page 81 | |
| Poids (sans accessoires) 0,51 kg (1,13 lb) | |
| Alimentation | |
| Tension d'alimentation | 12 V (10,8 V < tension d'alimentation < 15,6 V) |
| Connexion d'alimentation | Micro-C (CAN) |
| Rétroéclairage désactivé | 1,62 W (0,12 A à 13,5 V) |
| Rétroéclairage max. | 2,97 W (0,22 A à 13,5 V) |
| Charge réseau | 5 LEN (244 mA max.) |
| Couleur Noir | |
| Affichage | |
| Taille | 4,1 pouces (en diagonale). Ratio 4:3 |
| Type | Écran LCD-TFT transmissif |
| Résolution | 320 x 240 pixels |
| Angles de vue | 80° haut/bas, 80° gauche/droite |
| Luminosité | >600 nits |
| Palette de couleurs | Blanc en mode journée Rouge, vert, bleu, blanc ou jaune en mode nuit |
| Prise en charge de plusieurs contrôleurs | Oui |
| Calculateurs de pilote automatique compatibles | AC70, SG05 Pro |
| Interface du propulseur SD80, | AD80 |
| Options de montage Tableau de bord, étrier | |
| Méthode de mise à niveau du logiciel | USB |
| Niveau sonore de l'alarme 75 dB | |
| Protection de l'environnement | |
| Indice d'étanchéité | IPx7 |
| Humidité | 100 % d'humidité relative |
| Température | |
| Fonctionnement | De -25 °C à +65 °C (-13 °F à +149 °F) |
| Stockage | De -40 °C à +85 °C (-40 °F à +185 °F) |
12
Schémas dimensionnels
A2004 sans étrier
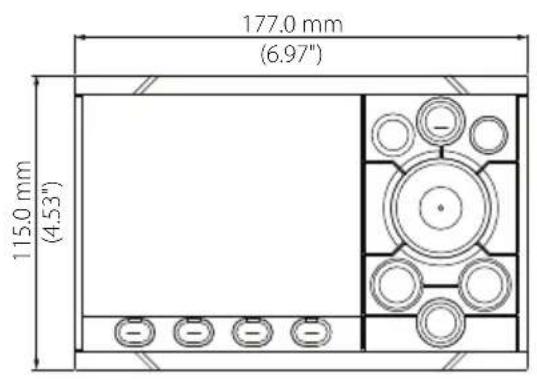
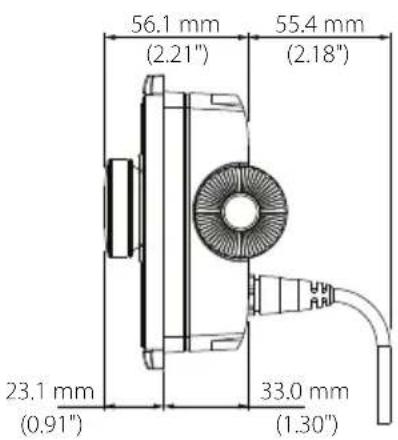
A2004 avec étrier
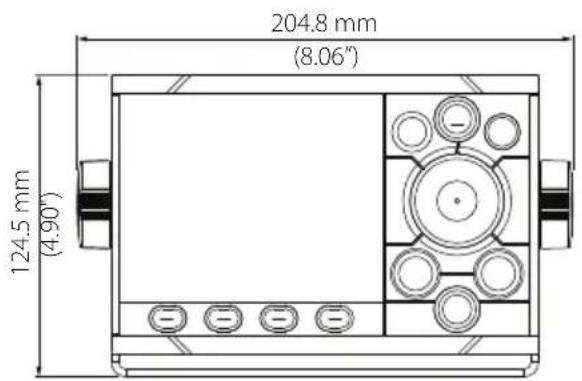
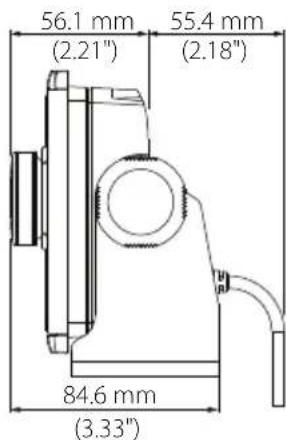
13
Données prises en charge
| 59904 Requête ISO |
| 60928 Demande d'adresse ISO |
| 126208 Fonction de groupe de commande ISO |
| 126996 Info produit |
| 127258 Variation magnétique |
PGN NMEA 2000 (réception)
| 59392 Confirmation ISO |
| 59904 Requête ISO |
| 60928 Demande d'adresse ISO |
| 126208 Fonction de groupe de commande ISO |
| 126992 Heure système |
| 126996 Info produit |
| 127237 Contrôle Heading/Track |
| 127245 Barre |
| 127250 Cap du bateau |
| 127251 Taux de giration |
| 127257 Attitude |
| 127258 Variation magnétique |
| 128259 Vitesse surface référencée |
| 128267 Profondeur de l'eau |
| 128275 Distance Loch |
| 129025 Mise à jour rapide de la position |
| 129026 Mise à jour rapide COG & SOG |
| 129029 Données de position GNSS |
| 129033 Date & Heure |
| 129283 | Erreur transversale |
| 129284 | Données de navigation |
| 129539 | Données de position GNSS |
| 129283 | Erreur transversale |
| 129284 | Données de navigation |
| 130074 | Service Route et WP - Liste WP - Nom et position WP |
| 130306 | Données vent |
| 130576 | État de petite embarcation |
| 130577 | Données de direction |
14
Annexes
Liste des alarmes et des actions correctives possibles
Autopilot alarms
- Manuel de l'utilisateur
- Clause de non-responsabilité
- Marques
- Copyright
- Déclaration de conformité
- À propos de ce manuel
- Version du manuel
- Sommaire
- Introduction
- Principes de base
- Modes de pilotage automatique
- Profils WORK
- Configuration du logiciel
- Configuration du calculateur de pilote automatique
- Vérification de l'installation
- Alertes
- Maintenance
- Structure des menus
- Caractéristiques techniques
- Schémas dimensionnels
- Données prises en charge
- Annexes
- 1
- Introduction
- Manuals (Manuels)
- Face avant et touches de l'appareil A2004
- Touche Marche/arrêt
- Touche MENU
- Touche X
- Bouton rotatif
- Touche STBY
- Touche AUTO
- Touche NAV
- Touche WORK/Propulseur
- 9,11 Touches < et > (bâbord et tribord)
- Touche Turn (Virage)
- Page du pilote automatique
- Répétiteur de cap
- Fenêtre d'état
- Fenêtre d'informations sur le mode
- Barre
- Menus rapides
- 2
- Principes de base
- Sécurité d'utilisation du pilote automatique
- Activation et désactivation de l'appareil
- Premier démarrage
- Prise de commande
- Fonctionnement du système de menus
- Modifier une valeur
- Paramétrage écran
- Sélection du mode du pilotage automatique
- Sélection du profil de travail
- Utilisation des propulseurs
- Paramètres du propulseur
- Activation et désactivation du propulseur
- Présentation du propulseur
- Sélecteur de système externe
- Pilotage manuel
- Fonctionnement du pilote automatique
- Prise de contrôle externe sur EVC (SG05 PRO)
- Utilisation du pilote automatique dans un système EVC
- 3
- Modes de pilotage automatique
- Mode Standby (Veille)
- Menus rapides en modes Veille, FU et NFU
- Modes automatiques
- Définition de la modification de cap pilote/cap pour les touches fléchées.
- Mode AUTO (maintien de cap)
- Changement du cap prédéfini en mode AUTO
- Heading capture (Capture du cap)
- Changements temporaires de cap
- Mode No Drift (Sans dérive)
- Changement du cap actuel en mode NoDrift (Sans dérive)
- Contournement
- Menu rapide en mode NoDrift
- Pilotage par gabarit de virages
- Amorçage et arrêt d'un virage
- Demi-tour (U-turn)
- Virage
- Virage en mode NAV
- Cercle d'arrivée au waypoint
- Contrôle des performances de pilotage en modes automatiques
- Réponse Trace
- Gain de barre
- Contre Barre
- 4
- Profils WORK
- Profils prédéfinis
- Profil normal
- Profils haut et bas
- Création d'un nouveau profil
- Modifier les paramètres de profil
- 5
- Configuration du logiciel
- Paramètres système
- Langue
- Bips de touche
- Heure
- Retour Réglages Usine
- Fichiers
- À propos
- Paramètres avancés
- Simulation
- Tension
- Enregistrement du pilote automatique
- Unités
- Réseau
- Sources
- Liste des appareils
- Diagnostics
- État Bus
- Rx Overflows (Débordements de récepteur)
- Rx Overruns (Dépassements de récepteur)
- Erreurs Rx/Tx (réception/transmission)
- Messages Rx/Tx (réception/transmission)
- Charge du bus
- Erreurs Fast packet
- Groupes de réseaux
- Amortissement
- 6
- Configuration du calculateur de pilote automatique
- Paramétrage à quai
- Configuration du système AC70
- Méthode de commande
- Drive Voltage (Tension de l'unité de puissance)
- Drive engage
- Capteur angle de barre
- Étalonnage du capteur d'angle de barre virtuel
- Test de barre
- Paramètres avancés du système AC70
- Barre Mini
- Bande morte de barre
- Motor output (Sortie moteur)
- Configuration AD80/SD80
- Calibration du propulseur
- Paramètres avancés de la carte AD80/SD80
- Sortie du signal du propulseur
- Paramètres de transmission
- - Ignorer la mise en Veille
- Caractéristiques du bateau
- Type bateau
- Longueur bateau
- Vit. Croisière
- Vitesse de transition
- Exemple
- Vitesse d'inhibition du propulseur
- Paramétrages en mer
- Configuration du compas
- Config Zéro Barre
- Réglage du pilote automatique
- Réglage Auto
- Paramètres configurables par l'utilisateur
- PILOTAGE AUTOMATIQUE
- Turn (Virage)
- Taux de Giration
- Adaptation
- Auto Trim
- Off heading limit (Limite hors cap)
- Low speed limit (Limite de vitesse basse)
- Pilotage Nav
- Rep. Nav (Réponse de la navigation)
- Angle Appr.
- Change Limit
- Limite XTD
- SÉLECTION GROUPE
- Initialisation barre
- - Actuel
- Limite de barre
- THRUSTER (Propulseur)
- Bande morte
- Assistance
- 7
- Vérification de l'installation
- Réglages spécifiques du bateau
- Paramètres du profil
- 8
- Alertes
- Paramètres des alertes
- Angle de limite hors cap
- Types de messages d'alerte
- - Alarmes
- - Avertissements
- Indication d'alerte
- lcônes d'alerte
- Confirmation d'alertes
- Boîtes de dialogue d'alerte
- Liste des alertes et des actions correctives possibles
- 9
- Maintenance
- Maintenance préventive
- Nettoyage de l'unité d'affichage
- Vérification des connecteurs
- Sauvegarde et restauration des données système
- Mises à jour du logiciel
- 10
- Structure des menus
- Menus Paramètres
- 11
- Caractéristiques techniques
- 12
- Schémas dimensionnels
- 13
- Données prises en charge
- PGN NMEA 2000 (réception)
- 14
- Annexes
- Liste des alarmes et des actions correctives possibles
Marque : SIMRAD
Modèle : A2004
Catégorie : Électronique de navigation marine