
R2500 - Contrôleur Gossen Metrawatt - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil R2500 Gossen Metrawatt au format PDF.

| Type de produit | Régulateur compact et limiteur de température |
| Marque | Gossen Metrawatt |
| Modèle | R2500 |
| Dimensions du boîtier | 48 x 48 mm (encastrement) |
| Profondeur | Environ 100 mm (estimation) |
| Poids | Environ 200 g |
| Alimentation | 85 V CA ... 265 V CA, 48 Hz ... 62 Hz ou 20 ... 30 V CC |
| Puissance absorbée | Typique 1,5 W |
| Indice de protection | IP67 (face avant encastrée) |
| Types de régulateur | 2 positions, 3 positions, par paliers, action progressive, split-range |
| Entrée de mesure | Thermocouple (J, K, N, R, S, B, C, E, T, U), Pt100, Ni100, 0-50 mV, 0/4-20 mA, 0/2-10 V |
| Sorties | 2 transistors + 2 relais (A1), 2 transistors + 3 relais (A2) ou 1 continue + 1 transistor + 3 relais (A5) |
| Affichage | LED 4 digits pour valeur réelle, consigne, courant filament, taux de régulation |
| Fonctions principales | Auto-optimisation, programmateur 8 programmes x 12 segments, enregistreur de données, historique d'alarmes, rampes de consigne, compensation de perturbation |
| Entretien et nettoyage | Nettoyer avec un chiffon légèrement humide ; éviter solvants et abrasifs |
| Consignes de sécurité | Raccorder à un réseau protégé par fusible 16 A max ; prévoir un interrupteur de coupure ; ne pas utiliser en cas de détérioration visible |
| Pièces détachées et réparabilité | Réparation et pièces de rechange auprès de GMC-I Service GmbH (Allemagne) |
| Température ambiante | 0 °C ... +50 °C (utilisation), -25 °C ... +70 °C (stockage) |
| Humidité relative | 75 % (moyenne annuelle, sans condensation) |
| Normes | CEI 61010-1 / DIN EN 61010-1 / VDE 0411-1 ; CEM selon EN 61326 |
FOIRE AUX QUESTIONS - R2500 Gossen Metrawatt
Questions des utilisateurs sur R2500 Gossen Metrawatt
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Contrôleur au format PDF gratuitement ! Retrouvez votre notice R2500 - Gossen Metrawatt et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil R2500 de la marque Gossen Metrawatt.
MODE D'EMPLOI R2500 Gossen Metrawatt
Régulateur compact et limiteur de température
3-349-374-04
20/5.20

SOMMAIRE Page SOMMAIRE Page
Caractéristiques et consignes de sécurité ....4
Entretien 5
Service de réparation et de pièces de rechange ....5
Service produit – Division industrielle ....5
Identification de l'appareil 6
Montage mécanique / Préparation 8
Branchement électrique 8
Commande 10
Blocage de l'exploitation 11
Comportement lors de la connexion de la tension auxiliaire .....11
Schéma fonctionnel 12
Mode automatique / Arrêt 13
Commutation manuelle / automatique ....13
Configuration 14
Types de régulateur ....19
Commutation des jeux de paramètres 20
Fonctions de backup ....20
Comportement PI 20
Extra avancement au refroidissement 20
Configuration des sorties commutées et de la sortie continue .....21
Sorties à relais pour signaux de réglage ....21
Sortie de réglage de contacteurs 22
Refroidissement par eau 22
Configuration du régulateur avec sortie continue 22
Rampes de la valeur de consigne 23
Suppression de perturbations périodiques 23
Correction de mesures adaptative 24
Régulation à voie chauffante 25
Compensation de perturbation 26
Paramétrage 27
Programmateur 29
Saisie de programme 31
Optimisation manuelle 33
Auto-optimisation 37
Ajustages 38
Contrôle de valeur limite 39
Limiteur 39
Contrôle du courant de filament 40
Contrôle du circuit de chauffage 41
Historique des alarmes 42
Enregistreur de données 42
Messages d'erreur 43
Validation d'erreur 44
Masques d'erreur 45
Remplacement d'un régulateur R2400 par un régulateur R2500 ..... 47
Données techniques 49
Signification des symboles sur l'appareil Caractéristiques et consignes de sécurité

Marque de conformité UE
Isolation double ou renforcée
Attention danger!
Observer la documentation!
Prise à la terre de fonctionnement : sert à la mise à la terre à des fins fonctionnelles (n'est pas une fonction de sécurité)
Cet appareil ne doit pas être éliminé avec les ordures ménagères. Vous trouverez plus d'informations sur le marquage WEEE sur le site internet www.gossenmetrawatt.com en recherchant 'WEEE'.
Le régulateur R2500 est conçu et homologué conformément aux normes de sécurité CEI 61010-1 / DIN EN 61010-1 / VDE 0411-1.
La sécurité de l'utilisateur et de l'appareil est garantie uniquement en cas d'utilisation conforme.
Lisez attentivement et intégralement la notice d'instructions avant d'utiliser votre appareil. Il est impératif d'observer et de suivre toutes les instructions de cette notice. Tous les utilisateurs doivent avoir accès à la notice d'instructions.
Observer les consignes de sécurité suivantes :
- Raccordez l'appareil uniquement à un réseau selon la plage nominale d'utilisation (cf. schéma de connexion et plaque signalétique). Ce réseau doit être protégé par fusible à un courant nominal max. de 16 A
- Prévoir dans l'installation un interrupteur ou un disjoncteur à titre de dispositif de coupure.
Ne pas utiliser le régulateur
- en cas de détériorations externes visibles
- si ce dernier ne fonctionne pas parfaitement
- après un stockage de longue durée dans des conditions inappropriées (humidité, poussière, température par ex.).
Dans ces cas, mettez l'appareil hors service et sécurisez-le contre toute remise en service accidentelle.
Entretien
Boîtier
Le boîtier ne nécessite pas d'entretien particulier. Sa surface doit toujours être propre. Utilisez un tissu légèrement humide pour le nettoyage. Evitez d'employer des solvants, des produits de nettoyage ou abrasifs.
Réparation et remplacement de pièces
Seul un employé compétent, informé des risques liés à de telles opérations, est autorisé à procéder à une réparation ou à un remplacement de pièces, appareil ouvert et sous tension.
Reprise et élimination respectueuse de l'environnement
Cet appareil R2500 est un produit de Catégorie 9 selon la loi ElektroG (Instruments de surveillance et de contrôle).
Cet appareil est soumis à la directive WEEE. En outre, nous aimerions vous indiquer que vous trouvez la version actuelle sur notre site Internet www.gossenmetrawatt.com en introduisant le clé de recherche 'WEEE'.
Conformément à WEEE 2012/19/UE et ElektroG, nos appareils électriques et électroniques sont marqués du symbole ci-contre selon DIN EN 50419.
Ces appareils ne doivent pas être éliminés avec les ordures ménagères. Pour la reprise des vieux appareils, veuillez vous adresser à notre service de réparation et de pièces de rechange.

Service de réparation et de pièces de rechange
Veuillez vous adresser si besoin à
GMC-I Service GmbH
Service-Center
Beuthener Straße 41
90471 Nürnberg, Allemagne
Téléphone +49 911 817718-0
Télécopie +49 911 817718-253
E-mail service@gossenmetrawatt.com
www.gmci-service.com
Cette adresse n'est valable que pour l'Allemagne.
A l'étranger, nos agences et succursales dans votre pays sont à votre disposition.
Service produit – Division industrielle
Veuillez vous adresser si besoin à
Support produits Hotline – Division industrielle
Téléphone +49 911 8602-500
Télécopie +49 911 8602-340
E-mail support.industrie@gossenmetrawatt.com
Identification de l'appareil
| Caractéristique Code identif. | ||||
| Régulateur compact 48 x 48 mm, IP 67, avec auto-optimisation, valeur de consigne alternative et 2 alarmes, fonctions voie chauffante, enregistreur de données, historique d'alarmes, interface infrarouge | R2500 | |||
| Version de régulateur Sorties | ||||
| Régulateur à deux positions, à trois positions, par paliers 2 transistors, 2 relais A1 | ||||
| Régulateur à deux positions, à trois positions, par paliers 2 transistors, 3 relais A2 | ||||
| Régulateur à action progressive, régulateur à Split-Range, régulateur de commutation 1 continue, 1 transistor, 3 relais | A5 | |||
| Plages de mesure | ||||
| Entrée de mesure configurable | B1 | |||
| Thermocouple | Type J, L | 0 ... 900 °C / | 32 ... 1652 °F | |
| Type K, N | 0 ... 1300 °C / | 32 ... 2372 °F | ||
| Type R, S | 0 ... 1750 °C / | 32 ... 3182 °F | ||
| Type B | 0 ... 1800 °C / | 32 ... 3272 °F | ||
| Type C | 0 ... 2300 °C / | 32 ... 4172 °F | ||
| Type E | 0 ... 700 °C / | 32 ... 1292 °F | ||
| Type T | 0 ... 400 °C / | 32 ... 752 °F | ||
| Type U | 0 ... 600 °C / | 32 ... 1112 °F | ||
| Thermomètre à résistance électrique | Pt100 | -200 ... 600 °C / | -328 ... 1112 °F | |
| Ni100 | -50 ... 250 °C / | -58 ... 482 °F | ||
| Ohm 0 ... 340 Ω | ||||
| Linéaire | 0 ... 50 mV | |||
| Caractéristique | Code identif. |
| Entrée de mesure Signal normalisé, configurable | B2 |
| 0 / 2 ... 10 V ou 0 / 4 ... 20 mA | |
| Tension auxiliaire | |
| 85 V CA ... 265 V, 48 Hz ... 62 Hz C1 | |
| 20 ... 30 V CC C2 | |
| Options | |
| Contrôle du courant de filament E0 | |
| Interface de données RS485 E1 | |
| Configuration | |
| Réglage standard K0 | |
| Réglage spécifique client K9 | |
| Notice d'instructions | |
| Allemand L0 | |
| Anglais L1 | |
| Italien L2 | |
| Français L3 | |
| Sans L4 |
Montage mécanique / Préparation ⚠️
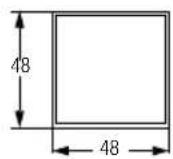
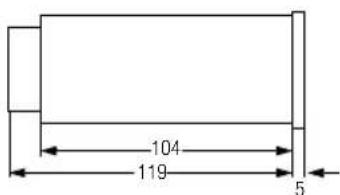
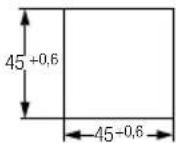
Figure 1, Dimensions du boîtier et découpe du panneau de commande
Le régulateur R2500 doit être encastré dans un panneau de commande. Le lieu de montage doit être dans la mesure du possible exempt de vibrations. Des vapeurs agressives ont une influence négative sur la durée de vie du régulateur. Pour la réalisation de tous travaux, il est impératif d'observer les directives selon VDE 0100. Seul un employé compétent, informé des risques liés à de telles opérations, est autorisé à procéder à des travaux sur l'appareil.
Insérer l'appareil par l'avant dans la découpe et le fixer par l'arrière en haut et en bas à l'aide des deux fermoirs fournis.
Plusieurs appareils peuvent être juxtaposés sans entretoises latérales.
Une circulation d'air libre doit toujours être assurée en cas d'encastrement d'un ou plusieurs appareils. La température ambiante ne doit pas être supérieure à 50 °C au-dessous des appareils.
Lors de l'encastrement, prévoir une étanchéité entre régulateur et panneau de commande conformément à la classe de protection IP 67.
Branchement électrique
Éléments de connexion : bornes à vis pour toron 1,5 mm² ou cosses à deux conducteurs pour 2 × 0,75 mm²
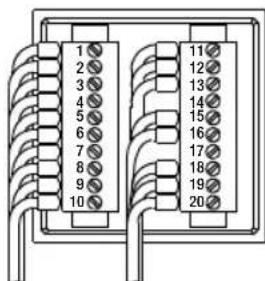
Figure 2, Position des contacts de raccordement
Attention: Le conducteur de protection (ou la terre de l'armoire électrique) doit être raccordé à la borne 18 pour guarantir l'antiparasitage.
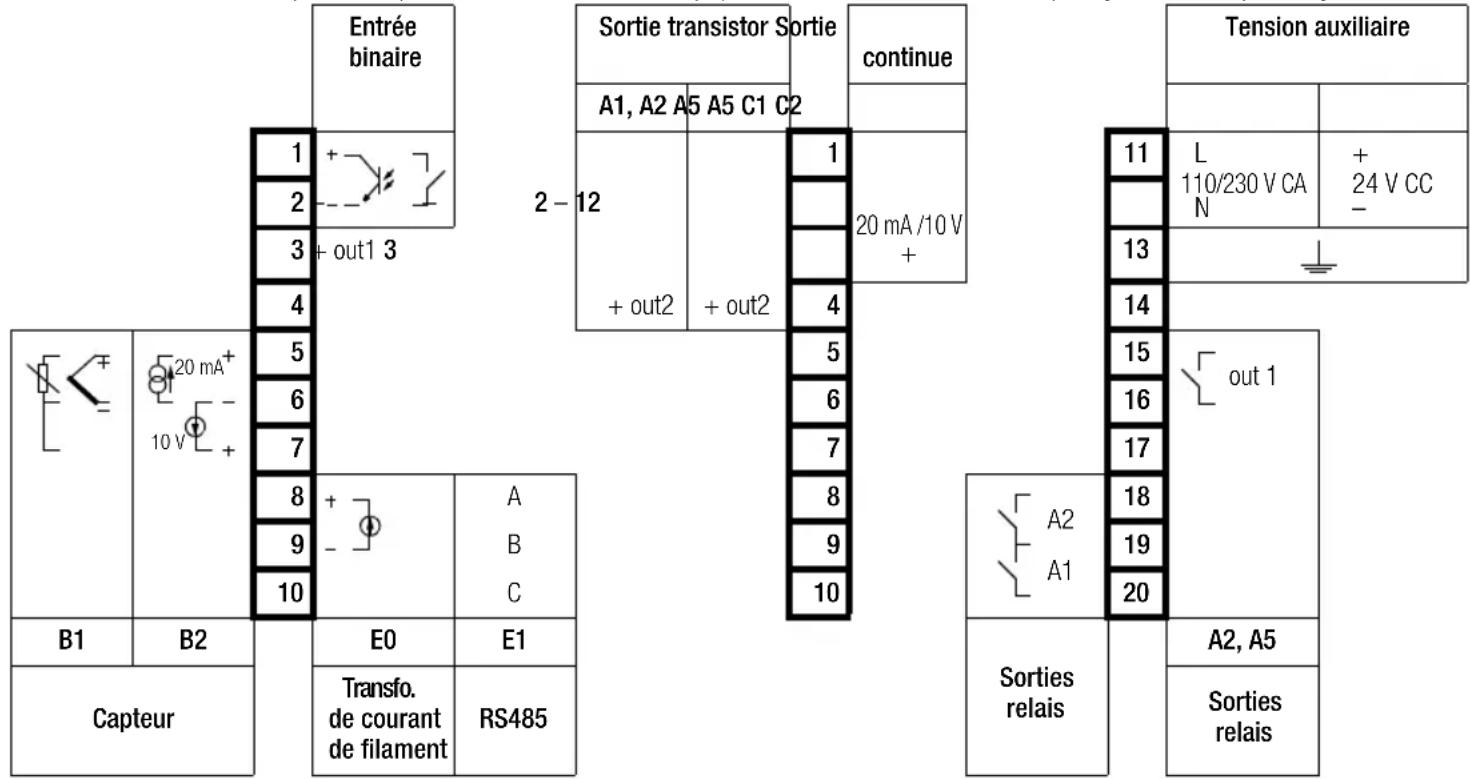
other
| Component | Label | Connection Type | Description | |---|---|---|---| | Entry Binaire | 1 | + - | + out1 3 | | Entry Binaire | 2 | + - | + out1 3 | | Entry Binaire | 3 | + - | + out1 3 | | Entry Binaire | 4 | + - | + out1 3 | | Entry Binaire | 5 | + - | + out1 3 | | Entry Binaire | 6 | + - | + out1 3 | | Entry Binaire | 7 | + - | + out1 3 | | Entry Binaire | 8 | + - | + out1 3 | | Entry Binaire | 9 | + - | + out1 3 | | Entry Binaire | 10 | + - | + out1 3 | | Sortie transistor Sortie Continue A1, A2 A5 A5 C1 C2 12 + out2 + out2 1 20 mA /10 V + 4 5 6 7 8 9 10 Sorties relais A2, A5 Sorties relais Tension auxiliaire L 110/230 V CA N + 24 V CC - out 1 11 13 14 15 16 17 18 19 20 B1 B2 Capteur E0 E1 Transfo. de courant de filament RS485Commande

Réglage de la valeur par le biais de la touche de défilement vers le haut et vers le bas
- Au niveau commande, la valeur de consigne est modifiable dans les limites des valeurs de consigne minimale et maximale.
- La configuration et les paramétrages peuvent être modifiés si le verrouillage par mot de passe n'est pas activé ou si le mot de passe correct a été entré.
- Pour éviter tout déréglage accidentel, la modification doit être confirmée en l'espace de 5 s en actionnant la touche
- La modification est annulée en actionnant la touche

Blocage de l'exploitation
Chaque paramètre et chaque configuration peuvent être modifiés en réglage standard (configuration PSEt = dEF). Les réglages suivants permettent d'empêcher toute modification.
Blocage de la valeur de consigne
La valeur de consigne ne peut être modifiée que dans la plage comprise entre les valeurs de consigne minimale et maximale. Il faut régler en conséquence les paramètres SPL et SPH.
Blocage des paramètres et des configurations
Après activation du mot de passe pour l'exploitation (configuration PASS et non diS), une modification n'est possible qu'après avoir entré le mot de passe correct. Il est toujours possible d'effectuer une modification via l'interface à infrarouges ou bus !
Blocage de l'optimisation automatique
Il est possible de bloquer séparément le lancement de l'optimisation automatique par les touches en réglant la configuration tunE = diS .
Il est toujours possible de lancer l'optimisation via l'interface à infrarouges ou bus !
Comportement lors de la connexion de la tension auxiliaire

flowchart
graph LR
A["Test de segment DEL\n0.8.8.0:\n:0.8.8.0:"] -->|1,5 s env.| B["Dimension\n0.6.8:\n:3.9"]
B -->|1,5 s env.| C["Codes\nA26.1:\n:0.8.E0:"] --> D["Valeur réelle\n0.8.23:\n:0.8.100:"]
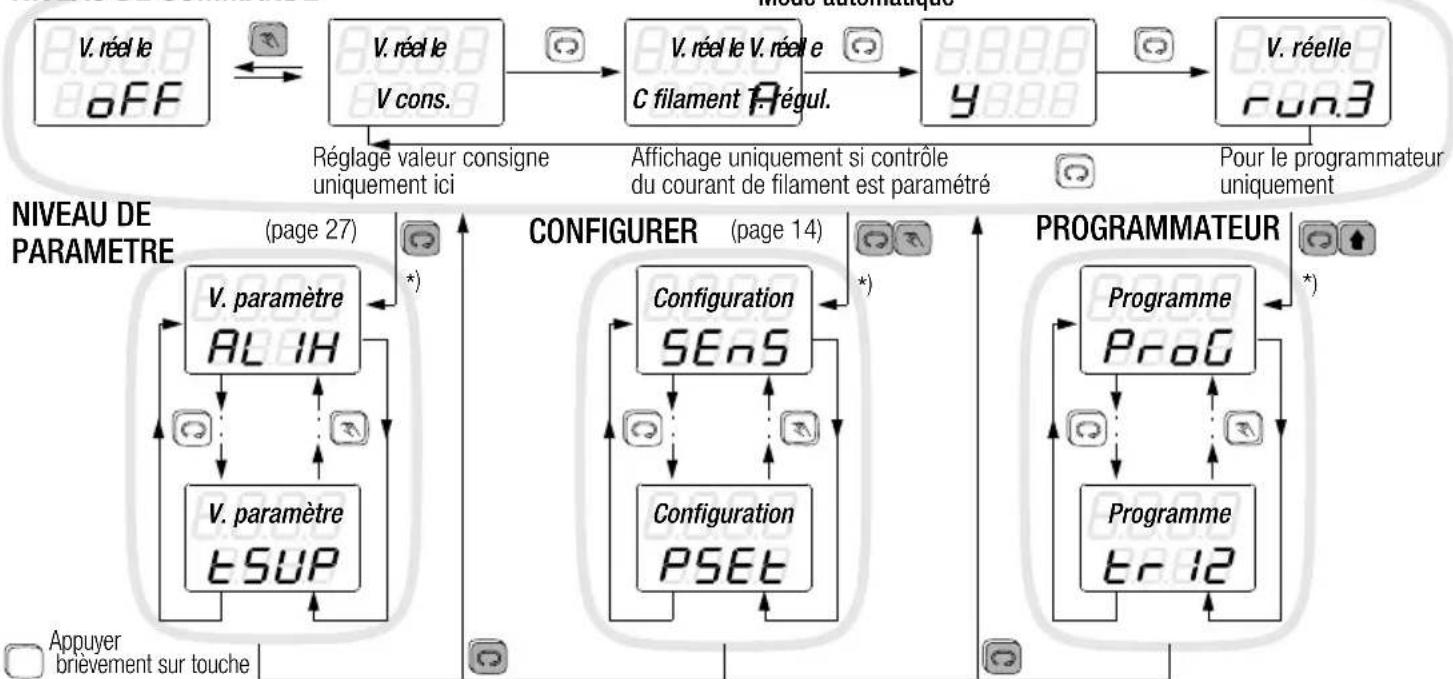
Schéma fonctionnel
NIVEAU DE COMMANDE
flowchart
graph TD
A["V. réel le OFF"] --> B["V. réel le V cons."]
B --> C["V. réel le V réel e C filament Régul."]
C --> D["γ"]
D --> E["V. réelle run3"]
F["Niveau de PARAMETRE"] --> G["V. paramètre AL IH"]
G --> H["V. paramètre tSUP"]
H --> I["Configuration SEN5"]
I --> J["Configuration PSET"]
J --> K["Programme ProG"]
K --> L["Programme tr 12"]
M["Appuyer brièvement sur touche"] --> N["*"]
O["Niveau de PARAMETRE"] --> P["*"]
Q["CONFIGURER"] --> R["*"]
S["PROGRAMMATEUR"] --> T["*"]
style A fill:#f9f,stroke:#333
style B fill:#f9f,stroke:#333
style C fill:#f9f,stroke:#333
style D fill:#f9f,stroke:#333
style E fill:#f9f,stroke:#333
style F fill:#f9f,stroke:#333
style G fill:#f9f,stroke:#333
style H fill:#f9f,stroke:#333
style I fill:#f9f,stroke:#333
style J fill:#f9f,stroke:#333
style K fill:#f9f,stroke:#333
style L fill:#f9f,stroke:#333
style M fill:#f9f,stroke:#333
style N fill:#f9f,stroke:#333
style O fill:#f9f,stroke:#333
style P fill:#f9f,stroke:#333
style Q fill:#f9f,stroke:#333
style R fill:#f9f,stroke:#333
style S fill:#f9f,stroke:#333
style T fill:#f9f,stroke:#333
Maintenir la touche appuyée, jusqu'à changement affichage
Maintenir 2 touches appuyées, jusqu'à changement affichage
* Si le mot de passe de commande est activé (configuration PASS = EnA), le mot de passe correct doit être entré pour modifier les valeurs. Sinon, -no- est affiché brièvement lors d'un essai demodification de valeurs.
Mode automatique / Arrêt
NIVEAU DE COMMANDE
— Pas de fonction d'alarme
— Pas de signalisation d'erreur
La configuration de la touche sur on/off permet de désactiver le régulateur en appuyant longuement sur la touche.
Commutation manuelle / automatique
- Fonction d'alarme et signalisation d'erreur comme en mode automatique.
- Sorties de réglage contrôlées non par la fonction Régulateur mais par les touches flèches.
- La commutation manuelle/automatique est réalisée sans à-coup dans les 2 sens.
– Régulateur PDPI: taux de régulation affiché en %. Modifications de valeur transmises immédiatement aux sorties de régulation. - Régulateur par paliers: en appuyant sur la touche Défilement vers le haut ou Défilement vers le bas, les sorties commutées sont pilotées « plus » ou « moins » directement.
NIVEAU DE COMMANDE
Mode manuel

Avec configuration de la touche sur manuel / automatique
Configuration
+ appuyer en même temps longuement
| Configuration | Affichage | Sélection Standard Remarque | |||
| Type de capteur | SEnS | EYPJ Type J EYPL L EYPR K EYPb B EYPS S EYPr R EYPn N EYPE E EYPL T EYPU U EYPC C EYP- - Pt 1 Pt100 n 1 Ni100 n 12 Ni120 rES - OHN Resistancé en Ω L n Tension en mV | Type J | pas avec signal normalisé | |
| Dimension | SEnS | 1°C, 1°F, 0 1°C, 0 1°F | 1°C | ||
| Valeur en entrée | SEnS | 0-20/4-20 dead / live zero | 0-20 avec sign. normal. uniqu. | ||
| Type de régulateur | Cout | NEAS Mesure uniquement PDB Actionneur QnOF Détecteur de seuils PdPI Régulateur à 2/3 positions, par paliers, split-range ProPElément proportionnel | PdPI cf. page 19 | ||
| Configuration Affichage | Sélection Standard Remarque | |||
| Avancement | tu 11 | di 5/EnA -/ Extra avancement au refroidissement | diS que pour régulat. 3 pos. | |
| Entrée binaire | In 1 | PHLEProgrammateur PausePrunProgrammateur Démarrage/ArrêtOFFpas de fonctionSP2Valeur consigne alternative activeLooPRégulateur MarcheHAndMode manuelEunE démarrer auto-optimisation9w t supprimer erreur valeur limiteFEFOCompensation perturbationSEUPDémarrage actifboo5 démarrer boostLoGGEnregistrement enregistreurdAr6Ecran sombreSEt2Comutation jeu de paramètresbRCHFonction backup | SP 2 | La fonction de l'entrée binaire a priorité sur la commande ou la configuration |
| Entrée binaire | In | SEATEntrée statiquedyndynamique, commutation par touche | StAt | |
| Configuration Affichage | Sélection Standard Remarque | |||
| Sortie commutée out1 | Out 1 | tr2Commande 2tr /Commande 1PHLtPause du programmePrunProgramme en coursoffpas de fonctionHERt ChauffeAugm. chauffe avec régul. paliersCoolRefroidissementAugm. refroid. avec régul. paliersH20Refroidissement par eauHcLoD imin. chauffe avec régul. paliersCcLoD imin. refroid. avec régul. paliersHotr Chauffe par voie chauffanteInduChauffage par inductionAL IL1ere valeur limite inférieure | HEAt | cf. page 21 |
| Sortie commutée out2 | Out2 | comme sortie commutée out1 | oFF | |
| Sélection sorties de commutation | Out | nor comme configuréECHSorties out1 et out2contre A1 et A2 interverties | nor cf. page 21 | |
| Sortie continue | Cont | oFF pas de fonctionHERt ChauffeCoolRefroidissementProc Grandeur régulation actuelleSP Valeur consigne actuelle | oFF | cf. page 21, 22 uniquement avec sortie continue disponible (code A5) |
| Sortie continue | Cont | 0-20/4-20 dead / live zero20-0/20-4 dead / live zero invers | 0-20 | |
| Configuration Affichage | Sélection | Standard Remarque | ||
| Alarme 1 | A 1 | noc / ncc Courant de repos / de travail | noc | cf. page 39 |
| Alarme 2 | A 2 | noc / ncc Courant de repos / de travail | noc | |
| Erreur de voie masque A1 | A 10 1 | DEF / 1 ... 3FFF | def | cf. page 45 |
| Erreur appareil masque A1 | A 102 | 0 ... 03FF | 0 | |
| Erreur de voie masque A2 | A20 1 | 0 ... 3FFF | 0 | |
| Erreur appareil masque A2 | A202 | 0 ... 03FF | 0 | |
| Alarme 1 | AL 1 | rEL / R65relatif / absolu | rEL | cf. page 39 |
| Alarme 1 | AL 1 | nSUP / SUP Suppr. démarrage Arrêt/Marche | nSUP | |
| Alarme 1 | AL 1 | nSto / Stor enreg. alarme marche/arrêt | nSto | |
| Alarme 2 | AL 2 | rEL / R65relatif / absolu | rEL | |
| Alarme 2 | AL 2 | nSUP / SUP suppr. alarme dém. marche/arrêt | nSUP | |
| Alarme 2 | AL 2 | nSto / Stor enreg. alarme marche/arrêt | nSto | |
| Limiteur | L 10 | no / YES | no cf. page | 39 |
| Contrôle circuit de chauffage | L6A | no / YES | no cf. page | 41 |
| Correction mesures adaptative | ANC | no / YES | no cf. page | 24 |
| Sortie de réglage contacteurs | rELA | no / YES | no cf. page | 22 |
| Comportement PI | P 1 | no / YES | no cf. page | 20 |
| Fonction touche manuelle | HFEY | oFF / HAnd | oFF cf. page | 13 |
| Début auto-optimisation | tunE | EnA / d, Senable / disable | EnA cf. page | 37 |
| Echelons de consignes | SP | rANPRampe de consignesSTEP Echelons de consignes, paramétrables avec SPuP, SPdn et t SP | rAMP que pour programmateur | |
| Démarrage actif | SEUP | no / YES | no cf. page | 25 |
GMC-I Messtechnik GmbH R2500-18
| Configuration | Affichage | Sélection | Standard | Remarque |
| Protocole de bus | Prot | r260 DIN 19244 E comme avec R2600Nod Modbusr2 /7 DIN 19244 E comme avec R0217hbth HB-Therm | r260 qu'avec interface bus | |
| Vitesse de transmission | bAud | 96 / 1929.6 pas avec protocole DIN | ||
| Adresse d'interface | Addr | 0 ... 255250 qu'avec interface bus | ||
| Enregistrement de données | LoG | no / YES no | ||
| Historique des alarmes | HIST | no / YES no | ||
| Programmateur | ProG | EnR / d, 5 enable / disable | dIS | |
| Mot de passe pour commande | PASS | EnR / d, 5 enable / disable | dIS voir pages 11 et 12 | |
| Configuration d'appareil,jeu de paramètres | PSET | Act garder configuration activedEF charger réglage standardGET /charger réglage utilisateur 1GET2 ...GET3 ...GET4 charger réglage utilisateur 4Put 1 Enreg. config. active commeréglage utilisateur 1Put2 ...Put3 ...Put4 Enreg. config. active commeréglage utilisateur 4 | Act | La configuration selonindication du client (K9)est mémorisée dans lesréglages utilisateur.Tous les réglages sontécrasés lors duchargement ! |
Types de régulateur
| Type de régulateur Utilisation | |
| Mesure (Cout = MEAS) | Cette configuration est destinée à une surveillance de température.Un contrôle de valeur limite peut être configuré, l'erreur de réglage n'est pas utilisée. |
| Actionneur (Cout = POW) | Commetype de régulateur = mesurerEn outre, le taux de régulation du régulateur est sorti avec le cycle de réglage. |
| Détecteur seuils (Cout = OnOF) | Sortie du taux de régulation maximal si la valeur réelle est < à la valeur de consigne actuelle.Sortie du taux de régulation minimal si la valeur réelle est > (à la valeur de consigne actuelle plus zone morte).Une hystérésis de commutation est réglable, une modification d'état est possible après chaque cycle de réglage.La durée de cycle de réglage est utilisée comme constante de temps pour un filtre d'entrée additionnel. |
| Régulateur PDPI et régulateur par paliers PDPI (Cout = PdPI) | L'algorithme de régulation PDPI assure une élimination rapide et sans oscillation.Le cycle de réglage est au moins aussi long que la valeur réglée.La zone morte supprime un passage de « chauffe » à « refroidissement » sans écart restant.La sélection de cestypes de régulateurs PDPI et PDPI par paliersdétermine le régulateur lui-même à l'aide de la configuration de départ. |
| Elément proportionnel (Cout = ProP) | La grandeur de réglage est proportionnelle à l'erreur de réglage, il est possible de définir une zone morte statique côté refroidissement.La durée de cycle de réglage est utilisée comme constante de temps pour un filtre d'entrée additionnel.Ce type de régulateur n'est pas destiné à la régulation car il n'a pas la dynamique nécessaire à une élimination sans oscillation. |
Commutation des jeux de paramètres
Lorsque l'entrée binaire est configurée sur la commutation du jeu de paramètres (SE12), il y a chargement du jeu de paramètres 2 à la fermeture du contact, et, à l'ouverture, du jeu de paramètres 1. La configuration active est écrasée chaque fois. La DEL W2 est allumée si le jeu de paramètres 2 est activé.
Fonctions de backup
Si l'entrée binaire est configurée sur la fonction de backup (bACK), lorsque le contact est fermé, la valeur réelle actuelle est reprise comme valeur de consigne. La régulation est désactivée et la DEL „main“ est allumée. Avec le contact ouvert, la régulation s'opère selon la valeur de consigne reprise comme configurée.
Comportement PI
Le facteur différentiel pour le type de régulateur PDPI peut être atténué en activant le comportement PI (configuration : PI = YES) de façon que pratiquement aucune dérivation ne soit plus existante. Contrairement au pur régulateur PI, le comportement principal peut être paramétré sans oscillation.
Cette configuration est utile pour des systèmes asservis qui ont un temps mort réel.
Extra avancement au refroidissement
Pour les systèmes asservis pour lesquels le refroidissement possède un nettement meilleur ou plus mauvais contact thermique que le chauffage, il est possible d'améliorer le comportement de la régulation en un point de travail de froid en réglant la configuration tu II = EnA. Il est ainsi possible de régler la temporisation du refroidissement (paramètre tu II) indépendamment.
Pour le refroidissement par eau, le demi avancement est automatiquement utilisé pour le refroidissement si la configuration tu ll = diS est choisie.
Configuration des sorties commutées et de la sortie continue
Un régulateur de chauffe à 2 positions est configuré par défaut sur la sortie commutée out1 (sortie relais ou transistor selon la version).
Le comportement de régulation (chauffe ou refroidissement 2 positions, à commutation 3 positions, régulateur par paliers, régulateur à action progressive, régulateur à Split-Range) est défini par la configuration des sorties de réglage. Cf. tableau « Configurer » page 16.
- Les éléments de réglage pour Chauffe et Refroidissement sont sélectionnés indépendamment les uns des autres.
- Si une régulation à deux positions s'avère nécessaire, ne pas configurer simultanément les sorties chauffe et refroidissement pour ce régulateur.
- Il est possible de configurer les deux sorties commutées sur la même sortie de régulateur pour la commande séparée de plusieurs éléments de réglage par le biais d'une sortie de régulateur.
- Si une sortie continue et une sortie à commutation sont configurées simultanément pour la chauffe (ou le refroidissement), le comportement du canal est identique à celui d'un régulateur à action progressive et la sortie à commutation est inactive.
- Si, par accident, uniquement une sortie « inférieure » est configurée pour la chauffe (ou le refroidissement), cette sortie reste inactive.
- L'utilisateur peut combiner librement les réglages, indépendamment du type de régulateur.
Sorties à relais pour signaux de réglage
Si les signaux de réglage de deux sorties de relais sont requis, par ex. en cas de régulation trois positions ou par paliers, les sorties d'alarme peuvent être interverties avec les sorties de réglage.
En configurant Out = XCh (voir page 16), intervertir la fonction out1 avec A1 et out2 avec A2.
Sortie de réglage de contacteurs
Si une durée de cycle, nettement inférieure à celle utile à la durée de vie du contacteur, est obtenue en déterminant les paramètres de régulation, la configuration des sorties de réglage pour la commande du contacteur (rELA = YES) permet d'augmenter la durée de cycle jusqu'à limite de la régulation possible du système. Si le bit est défini avant le démarrage de l'auto-optimisation, la durée de cycle est réglée par l'auto-optimisation sur une valeur aussi élevée que possible.
Refroidissement par eau
Pour prendre en compte l'effet de refroidissement proportionnellement fort qui se produit lors de l'évaporation de l'eau, il est possible de sortir la variable réglante pour le refroidissement de manière modifiée en configurant la sortie commutée pour le refroidissement par eau. (Outx = H2O).
Configuration du régulateur avec sortie continue
La commutation entre sortie de courant sortie de tension est effectuée automatiquement à travers la charge.
Sortie continue = chauffe ou refroidissement
$$ \text { Cont } = \text { HEAt ou Cool } $$
La grandeur de réglage est sortie dans la plage 0 ... 100 % en fonction du type de régulateur.
Sortie continue = grandeur de régulation ou valeur de consigne
$$ \text { Cont } = \text { Proc ou SP } $$
Sortie de la valeur de régulation actuelle ou de la valeur de consigne momentanément valable.
Réglage de la sortie avec les paramètres rnL et rnH .
Rampes de la valeur de consigne
| Fonction | Les paramètres SPuP / SPdn provoquent une variation de température graduelle (ascendante / descendante) en degré par minute.Activation en cas de– commutation de la tension auxiliaire– modification de la valeur de consigne actuelle, activation de la valeur de consigne alternative– commutation de mode manuel sur mode automatique |
| Affichage de la valeurde consigne Affichage de la valeur ce consigne cible, et noValeurs limites | n de la valeur actuellement valable,avec unr dans le digit gauche.Les valeurs limites relativesse rapportent à la rampe et non à la valeur de consigne cible. C'est pourquoi en général undéclenchement d’alarme n’est pas généré. |
Suppression de perturbations périodiques
Si la valeur de mesure est recouverte par une forte vibration due, par ex., à un prélèvement cyclique d'énergie à partir du circuit de régulation, la grandeur de réglage peut varier entre ses valeurs extrêmes et le résultat risque d'être insatisfaisant.
Si la période est constante, cette vibration peut être filtrée en réglant la période dans le paramètre blocage de vibration tSUP. Ceci est obtenu en effectuant un filtrage bande étroite de la part de signal à la période définie et en retirant cette part du signal de mesure pour la régulation. Il n'en résulte aucune influence sur les valeurs réelles d'affichage.
Contrairement à la correction de mesures adaptative (cf. page 24), il est possible ici aussi de supprimer des vibrations dont les périodes sont supérieures à la demi-temporisation.
Des périodes comprises entre 0,3 et 25 s peuvent être définies. Le filtre est inactif en cas d'autres valeurs configurées.
Puisque ce filtre d'arrêt a une influence sur la dynamique de régulation, il est indispensable de déterminer les paramètres de régulation par l'intermédiaire d'une auto-optimisation ou une d'une optimisation manuelle avec activation du blocage de vibration.
Correction de mesures adaptative
En cas de perturbation périodique de la valeur réelle d'un circuit de régulation, la régulation peut être améliorée en activant la correction de mesures adaptative. La perturbation périodique est supprimée sans diminuer la capacité de réaction aux erreurs de réglage. Ceci est possible dans la mesure où la correction s'adapte à l'amplitude d'oscillation de la perturbation et si elle ne transmet que la valeur moyenne au régulateur.
L'adaptation de la correction à la perturbation est effectuée par rapport à la dynamique de régulation et n'exige aucun autre paramètre.
Les conditions requises pour une amélioration de la régulation sont les suivantes :
- l'amplitude d'oscillation de la perturbation est constante ou lentement variable,
— la période de l'oscillation est inférieure à la demi-temporisation du système (paramètre tu)
Comme la correction a une forte influence sur la détermination de la valeur réelle, la régulation peut aussi être altérée, par ex. si
— les écarts de mesure sont irréguliers,
— des « points aberrants » de mesure apparaissent,
— la variation n'est pas périodique,
— la perturbation est de type sonore.
Régulation à voie chauffante
En configurant la sortie commutée de chauffe sous forme de « hotrunner » (Outx = Hotr), la grandeur de réglage est sortie à synchronisation rapide, c.-à-d. que la durée de cycle de réglage est de 0,1 s indépendamment de la définition du paramètre durée de cycle de réglage.
Cette configuration permet aussi d'autoriser les fonctions circuit de démarrage et boost.
Circuit de démarrage
Le circuit de démarrage est autorisé par la configuration StUP = YES ou celle de l'entrée binaire si la configuration est la suivante : In1 = StUP.
Le circuit de démarrage est activé uniquement pour le type de régulateur = PDPI, aucun démarrage n'est effectué avec d'autres types de régulateur.
L'opération de démarrage est lancée si la valeur réelle après connexion de la tension auxiliaire (reset) ou à la fin de l'état « ouvert » est inférieure de plus de 2 °C à la valeur de consigne de démarrage,
ou si la valeur réelle descend à plus de 40 °C en dessous de la valeur de consigne de démarrage à la fin de l'opération de démarrage ou durant le temps de repos.
Le démarrage se poursuit jusqu'à ce que la valeur réelle dépasse la valeur de consigne de démarrage, moins 2 °C.
La grandeur de réglage est néanmoins limitée au taux de régulation de démarrage.
Le temps de repos est amorcé il est défini par la durée de repos.
Le régulateur règle la valeur de consigne de démarrage.
L'opération de démarrage prend fin à expiration du temps de repos.
Le régulateur vide alors la valeur de consigne actuellement valable.
Si la valeur de consigne actuellement valable est encore bien inférieure à la valeur de consigne de démarrage, c'est-à-dire que la condition pour la fin du démarrage n'est pas remplie, l'opération de démarrage ne prend pas fin. Un seuil de grandeurs de réglage avec taux de régulation maximal serait plus judicieux pour ce comportement.
Augmentation temporaire de la valeur de consigne (Boost)
L'augmentation temporaire de la valeur de consigne sert à libérer les buses d'outils encrassées de restes de matières « gelés » dans la régulation à voie chauffante par exemple.
Cette opération est déclenchée par le bit 3 de la fonction de régulation, lequel est défini par l'interface, le clavier ou l'entrée binaire. L'entrée binaire doit être configurée sur In1 = booS . Si l'entrée binaire n'est pas employée, l'augmentation de la valeur de consigne est activée ou coupée en appuyant longuement sur les simultanément. L'augmentation est terminée en effaçant ce bit ou bien automatiquement à expiration de la durée Boost maximale.
L'augmentation relative est mémorisée dans le paramètre augmentation de valeur de consigne, la durée maximale de l'augmentation dans le paramètre durée Boost.
L'augmentation agit uniquement sur la valeur de consigne ou sur la valeur de consigne alternative et non sur la valeur de consigne de démarrage ou la fonction rampe. La valeur de consigne est affichée et non l'augmentation par un b dans le chiffre de gauche.
Compensation de perturbation
Pour la configuration en tant que régulateur à commutation ou à action progressive (et non dans le cas de régulateur par paliers), la qualité de régulation en cas de variations de charge brusques peut être sensiblement améliorée par la compensation de perturbation si l'entrée binaire pour la compensation de perturbation est configurée comme suit : (In 1 = FEFO).
- à la fermeture du contact sur l'entrée binaire, le taux de régulation du régulateur est augmenté de la valeur Y FF,
- il est diminué de la même valeur à l'ouverture du contact.
— pas de fonction durant l'auto-optimisation.
Exemple : si le chauffage d'une machine a besoin en moyenne de 70 % de puissance calorifique pour la production, mais de 10 % seulement à l'arrêt, la différence est réglée sur YFF = 60 % et l'entrée binaire est activée uniquement pendant la production.
Paramétrage
appuyer longuement X1 = début plage de mesure, X2 = fin plage de mesure, MBU = X2 - X1
| Paramètre Affichage Plage Standard Remarques | ||||
| Valeur limite supérieure relais A1 | AL IH | oFF, 1 ... MBU/2oFF, X1 ... X2 | oFFoFF | relative (= config. standard)absolue |
| Valeur limite inférieure relais A1 | AL IL | |||
| Valeur limite supérieure relais A2 | AL2H | |||
| Valeur limite inférieure relais A2 | AL2L | |||
| Valeur de consigne alternative | SP 2 | SPL ... SP H | X1 | |
| Rampe valeurs cons. croissantes | SPuP | oFF, 1 ... MBU/2 par mn oFF | cf. page 23 | |
| Rampe valeurs cons. décroissantes | SPdn | oFF, 1 ... MBU/2 par mn oFF | ||
| V. cons. cour. filament (cf. ajustages) | RNP5 | Auto, oFF, 0.1 ... AH | oFF | pas avec régulateur par paliers ou interface-bus |
| Bande Chauffe | Pb I | 0 ... MBU/2 50 | ||
| Bande Refroidissement | Pb II | 0 ... MBU/2 50 régulateur 3 positions uniqu. | ||
| Zone morte | dbnd | 0 ... MBU/2 0 pas avec régulateur 2 pos. | ||
| Temporisation du système | tu | 0 ... 900 s | 50 s | |
| Temporisation du système refroidissement | tu II | 0 ... 900 s | 50 s | pour régulateur à trois positions uniquement si extra avancement a été configuré |
| Durée du cycle de sortie | tc | 0.1 ... 300 s | 1 s | |
| Durée de fonctionnement du moteur | ty | 1 ... 600 s | 60 s | régulateur par paliers uniquement |
| Hystérésis de commutation | HYSt | 0 ... MBU/2 4 | pour contrôle de valeurs limites et détecteur de seuils | |
| Valeur de consigne maximale | SP H | SPL ... X2 | X2 | Limite de l'entrée de valeur de consigne |
| Valeur de consigne minimale | SP L | X1 ... SP H | X1 | |
| Paramètre | Affichage | Plage | Standard | Remarques |
| Taux de régulation maximal | H | -100 ... 100 % 100 % | ||
| Taux de régulation minimal | L | -100 ... 100 % -100 % | ||
| Ajustage valeur réelle | -MBU/2 ... +MBU/2 0 | pas avec sign. normal. | ||
| Amplification valeur réelle | , | 0 ... 500 % 100 % | ||
| Position décimale | dP_nt | 0, 0.1, 0.02, 0.003 0 | qu'avec sign. normal. | |
| Fin plage mesure sign. normal. | H | L ... 9999 100 | ||
| Début plage mesure sign. normal. | L | -1999 ... H 0 | ||
| Taux régulation mode actionneur | S | -100 ... 100 % 0 | ||
| Taux régulation compens. perturbation | FF | -100 ... 100 % 0 cf. page 26 | ||
| Taux régulation erreur capteur | SE | -100 ... 100 % 0 cf. page 43 | ||
| Valeur de consigne de démarrage | ... | 0 | que pour régulateur à voie chauffante cf. page 25/26 | |
| Taux de régulation de démarrage | SU | -100 ... 100 % 10 | ||
| Durée de repos | t SU | 0 ... 300 s 0 | ||
| Boost (augm. valeur consigne) | 0 ... MBU/2 | 0 | ||
| Durée Boost | t b | 0 ... 60 s | 0 | |
| Blocage de vibration | oFF, 0,3 ... 25 s | oFF | cf. page 23 |
Programmateur
| Activation | au niveau de configuration avec ProG = EnA |
| Fonction | La valeur de consigne en cours est uniquement déterminée par le déroulement du programme.Huit programmes avec chacun 12 séquences (segments) sont enregistrés dans le régulateur et peuvent être sélectionnés.Les fonctions qui influencent la valeur de consigne comme la consigne alternative et les rampes de valeurs de consigne,de même que la commutation de démarrage et boost de la régulation pour canal chaud sont inactives. |
| Programme | Chacun des 12 segments du programme est défini par la durée du segment, la consigne ciblée et les pistes desynchronisation, la fin du programme peut être aussi définie entre le premier et le onzième segment. |
| Déroulement | StoPLe programme est achevé, stoppé ou (après un reset) pas encore démarré.Le régulateur et les sorties de réglages sont inactives, des erreurs de seuil relatives sont supprimées.La valeur de consigne momentanée est réglée sur la valeur réelle.Le programme recommence de nouveau après avoir été stoppé.run.XLe programme est lancé, automatiquement éventl. après un reset. (X remplace le segment en cours.)Le régulateur et les sorties de réglages sont actives, des erreurs de seuil relatives sont validées.Au lancement du programme, le segment 1 est toujours exécuté, la consigne de départ est égale à la valeur réelleau lancement.Le lancement et l'arrêt du programme est possible avec une entrée binaire In1 = Prun .Wt.Xcomme pour run.X.Si « Attendre l'obtention de la consigne » est configuré (avec WAt = YES ), le programme attendque l'écart de régulation ne soit plus que de 2 °C avant d'activer le segment suivant.hLt.X Le programme en cours est suspendu, la consigne momentanée est gelée. (X remplace le segment en cours.)La suspension du programme est possible avec une entrée binaire In1 = PhLt |
| Pistes de synchronisation | Deux pistes de synchronisation peuvent être activées pour la durée des segments. Elles peuvent être attribuées à des sortiescommutées libres avec Out... = tr... .Les états run ou hLt peuvent aussi être attribués à des sorties commutées libres avec Out... = Prun ou Out... = PhLt. |
| Paramètres derégulation | Les paramètres de régulation ne doivent ni ne peuvent être définis avec l'optimisation manuelle ou automatique si leprogrammateur est activé puisqu'une valeur de consigne constante est requise pour obtenir un résultat d'optimisationconvenable. Sélectionner dans ce cas ProG = diS. |
| Affichage | Les affichages sont complétés comme suit au niveau d'exploitation.Dans l'affichage de la valeur de consigne, la valeur de consigne momentanée s'affiche, le programme étant en cours. Destirets sont uniquement affichés si le programme est achevé puisqu'aucune consigne n'est active. La valeur de consigne ne peut pas être modifiée.Il existe en plus un affichage d'état permettant d'afficher l'état en cours dans l'écran du bas StoP, run.X, Wt.X ou hLt.X(X remplace le segment en cours). |
| Exploitation | Il est possible de commander le déroulement dans l'affichage d'état à l'aide des touches de flèche haut et bas s'il n'est pas configuré surentrées binaires. La modification doit être confirmée dans les 5 s avec la touche de manière à éviter une modification du réglage accidentelle. La modification sera rejetée en appuyant sur la touche [IMAGE] |
Saisie de programme
Appuyer simultanément et longtemps sur 📞 +
| Configuration Affichage Sélection Standard Remarque | ||||
| Sélection du programme | ProG | nr 1 charger le programme 1...nrB charger le programme 8Put I enregistrer programmeen cours sur programme 1...PutB enregistrer programmeen cours sur programme 8clr effacer le programme encours | nr 1 | |
| Comportement après reset | Ruto | StoP / run | StoP | s'applique aux 8 programmes |
| Attendre obtention consigne | BA, t | no / YES | no | s'applique aux 8 programmes |
| Type de segments | SEGS | rANP / STEP Rampes/seuils | rAMP | s'applique aux 8 programmes |
| Unité temps des segments | t, NE | -S / H- secondes / minutes | M-S | s'applique aux 8 programmes |
| Durée du segment 1 | NS I | 0:00 ... 99:59 | 0:00 | |
| Consigne ciblée segment 1 | SP I | SPL ... SPH | 0 °C | |
| Pistes synchro. segment 1 | tr I | ---- ... 21 | ---- | Les chiffres indiqués indiquent les pistes desynchronisation actives |
| Durée du segment 2 | NS2 | End fin de programme0:00 ... 99:59 | End | Si End est réglé, les entrées suivantes sontmasquées |
| Cons. ciblée pour segment 2 | SP2 | SPL ... SPH | 0 °C | |
| Pistes synchro. segment 2 | tr2 | ---- ... 21 | ---- | |
Profil de température-temps souhaité :
Programme en rapport :
| S e g | m | e | n | t | 1 | 2 |
| Durée MS 1...7 (HM 1...7) | 0:40 | 0:30 | 0:20 | 0:50 | 0.00 | 0:50 End |
| Consigne SP 1...6 100 100 180 1 | 80 120 120 — | |||||
| Pistes tr 1...6 ---1 ---1 ---- --2- -2- --2- — |
Optimisation manuelle
L'optimisation manuelle permet de déterminer les paramètres Pb I, Pb II tu et tc pour obtenir une dynamique de régulation optimale. Pour ce, on procède à un essai de démarrage ou de vibration.
Préparation
- La configuration complète (page 14) et le paramétrage (page 27) doivent être effectués en premier lieu pour l'utilisation du régulateur.
- Désactiver le programmateur, étant donné qu'une valeur de consigne constante est requise pour l'optimisation.
- Off / mode manuel (page 13) désactivent les éléments de réglage.
- Un enregistreur doit être raccordé au capteur et réglé conformément à la dynamique du système ainsi qu'à la valeur de consigne.
- Dans le cas d'un régulateur à trois positions ou à Split-Range, la durée de mise en circuit et hors circuit de la sortie commutée de chauffe ou de la sortie continue doit être enregistrée (avec un autre canal d'enregistreur par ex. ou un chronomètre).
- Configurer le détecteur de seuils (Cout = OnOF).
- Régler la durée du cycle de sortie sur minimum : tc = 0,1 .
- Désactiver la limite de taux de régulation si possible : YH = 100 .
- Diminuer (ou augmenter) la valeur de consigne pour que les pics et les creux ne prennent pas de valeurs non autorisées.
Exécution de l'essai de démarrage
- dbnd = MBU doit être réglé dans le cas d'un régulateur à trois positions ou à Split-Range (pas de réponse de la sortie commutée Refroidissement).
dbnd = 0 doit être réglé dans le cas d'un régulateur par paliers (réponse de la sortie commutée Refroidissement)
– Démarrage de l'enregistreur. - Activer les éléments de réglage avec mode automatique.
- Enregistrement de 2 pics et de 2 creux. Fin de l'essai de démarrage du régulateur à 2 positions, du régulateur à action progressive et du régulateur par paliers. Dans le cas du régulateur à 3 positions ou à Split-Range, continuer comme suit :
- régler dbnd = 0 pour provoquer d'autres vibrations avec sortie commutée Refroidissement active. Attendre deux pics et deux creux.
— enregistrer la durée de mise en service T_I et durée de mise hors service T_II de la sortie commutée Chauffe ou de la sortie continue du dernier générateur d'oscillations.
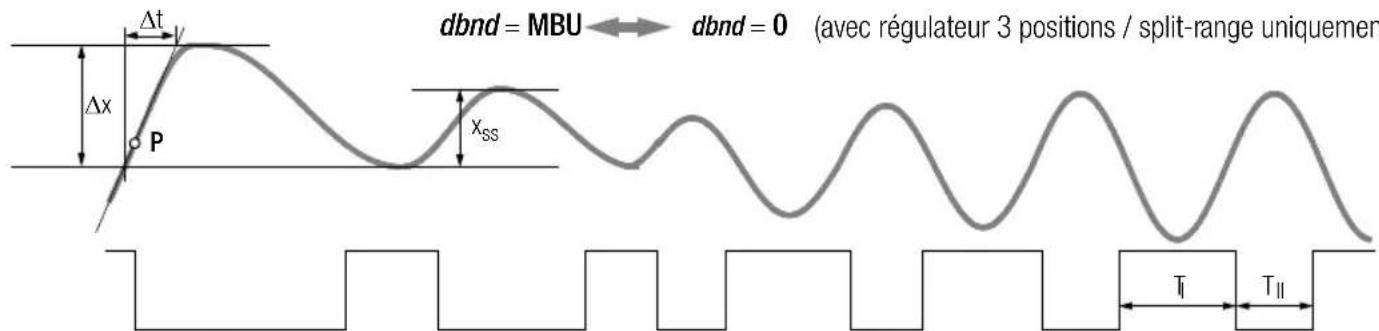
Analyse de l'essai de démarrage
- Appliquer la tangente à la courbe au point d'intersection P entre valeur réelle et valeur de consigne, ou au point de coupure de la sortie.
- Mesurer la différence de temps t .
- Mesurer l'amplitude d'oscillation x_ss , dans le cas du régulateur par paliers le pic x .
| Valeurs de paramètres | |||||
| tu 1,5 | • Δt | Δt - (tY/4) | |||
| tc tu / 12 tY/100 | |||||
| Pb I x | ss | 2 • xss | Δx / 2 | ||
| Pb II – Pb I | • (T1/TII) | - | Pb I • (T1/TII) | - | |
| Paramètre | Régulateur 2 pos. | Régulateur 3 pos. | Régul. action progr. | Régul. Split-Range | Régulateur paliers |
La plage proportionnelle doit être corrigée si une limite de taux de régulation a été définie
Y H positif : Pb I multiplié par 100 % / Y H
Y H négatif : Pb II multiplié par -100 % / Y H
Exécution de l'essai de vibration
Les paramètres de régulation peuvent être déterminés à partir d'une vibration continue s'il n'est pas possible de procéder à un essai de démarrage, par exemple si des circuits de régulation avoisinants ont une trop forte influence sur la valeur réelle ou, si une sortie commutée Refroidissement active s'avère nécessaire pour le maintien de la valeur réelle (point de fonctionnement Refroidissement) ou bien si une optimisation doit être effectuée directement sur la valeur de consigne pour des raisons définies.
Toutefois, les valeurs calculées de tu peuvent éventuellement être très imprécises.
- Préparation cf. ci-dessus. L'exécution est possible sans enregistreur si la valeur réelle est suivie à l'afficheur et si les temps sont mesurés au chronomètre.
- régler dbnd = 0 dans le cas d'un régulateur à trois positions, à Split-Range ou par paliers.
- activer les éléments de réglage avec automatique, démarrer éventuellement l'enregistreur. Enregistrer les oscillations de plusieurs générateurs jusqu'à ce qu'elles soient identiques.
- mesurer l' amplitude d'oscillation x
- enregistrer la durée de mise en service T_1 et la durée de mise hors service T_II de la sortie commutée Chauffe ou de la sortie continue des générateurs d'oscillations.

Analyse de l'essai de vibration
| Valeurs de paramètres | |||||
| tu^1) | 0,3 • ( T_I + T_II ) | 0 _I + T_II - 2tY | |||
| tc tu / 12 tY / 100 | |||||
| Pb I x | ss | _ss · T_II(T_I + T_II) | 2 • x_ss | 2_ss · T_II(T_I + T_II) • x | x_ss / 2 |
| Pb II – Pb I | • ( T_I / T_II ) | - | Pb I • ( T_I / T_II ) | - | |
| Paramètre | Régulateur 2 pos. | Régulateur 3 pos. | Régul. action progr. | Régul. Split-Range | Régulateur paliers |
1) Si l'un des temps T_I ou T_II est nettement supérieur à l'autre, il en résulte une valeur trop grande de tu.
Correction en cas de limite du taux de régulation
Y H positif : Pb I multiplié par 100 % / Y H
Y H négatif : Pb II multiplié par -100 % / Y H
Correction pour régulateur à action progressive si l'un des temps T_I ou T_II est inférieur à tY :
Pb I multiplié par si T · tYT_I· T_I est le plus petit, par si · tYT_II· T_II est le plus petit
La valeur de tu est dans ce cas très imprécise. Procéder à une ré-optimisation en mode régulation.
Mode régulation
L'exploitation en mode régulation commence à la fin de l'optimisation.
- avec type de régulateur (Cout), configurer l'algorithme de régulation.
- assigner la valeur requise à la valeur de consigne.
- la zone morte peut être augmentée à partir de dbnd = 0 en cas de régulateur à trois positions, à Split-Range ou à paliers si la commande des sorties commutées (ou d'une sortie continue) varie trop rapidement par suite d'une valeur réelle irrégulière par exemple.
Auto-optimisation
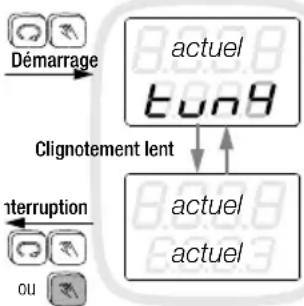
flowchart
graph TD
A["Démarrage"] --> B["actuel"]
C["tenh"] --> D["actuel"]
E["interruption"] --> F["OU"]
B --> G["Clignotement lent"]
D --> G
G --> H["actuel"]
L'auto--optimisation sert à la détermination d'une dynamique de régulation optimale, c'est-à-dire que les paramètres Pb I, Pb II, tu et tc sont définis.
Préparation
- la configuration complète doit être effectuée avant le démarrage de l'auto-optimisation
- assigner la valeur requise à la valeur de consigne après l'optimisation.
Démarrage
- Le démarrage n'est possible que si l'exploitation de l'auto-optimisation est libérée (configuration : tunE = EnA )
- Appuyer brièvement et simultanément sur au niveau commande déclenche l'auto-optimisation. Elle ne peut pas être démarrée pour les types de régulation Actionneur ou Détecteur de seuils.
- tun1...tun9 clignotent et sont affichés à tous les niveaux durant le processus d'optimisation
- après exécution correcte de l'optimisation, le régulateur passe en mode automatique.
- Pour le régulateur à 3 positions, la réponse de la valeur limite supérieure active le refroidissement pour empêcher toute surchauffe. L'auto-optimisation effectue alors un essai d'oscillation sur la valeur de consigne.
Processus
- la valeur de consigne courante au démarrage reste valable ; elle ne peut plus être modifiée
- l'activation / désactivation de la valeur de consigne alternative n'a pas d'effet
- les rampes de valeur de consigne définies ne sont pas prises en compte
- un pic d'oscillation ne peut être évité au démarrage d'un point de fonctionnement (valeur réelle = environ valeur de consigne).
- il n'y a pas de limite de temps pour ce processus. L'auto-optimisation peut donc durer longtemps selon le système asservi.
Interruption
- l'optimisation peut être interrompue à tout moment avec Ⓞ (→ mode automatique) ou en passant en mode off / manuel avec
— le régulateur ne transmet plus de signal de régulation si une erreur survient durant l'optimisation. L'optimisation doit être interrompue avec
Autres informations concernant les messages d'erreur sur demande.
L'auto-optimisation est activée (réglage standard) à la livraison. Il est possible de bloquer le démarrage dans la configuration.
Ajustages
Correction thermocouple (paramètre CAL)
Cette valeur corrigée est paramétrée en °C / °F. La valeur corrigée affichée est additionnée à la valeur de température mesurée.
Equilibrage des circuits dans le cas du circuit de 2 conducteurs Pt 100 (paramètre CAL)
L'ajustage se fait manuellement à température de capteur connue :
CAL = température de capteur connue - température affichée
Correction d'un gradient de température (paramètre GAIN)
Si une valeur dérivée et non la valeur de température mesurée doit être affichée, le paramètre GAin est défini inégal à 100 % :
$$ G A i n = \frac {\text { température à afficher en } ^ {\circ} \mathrm{C} \cdot 100 \%}{\text { température mesurée en } ^ {\circ} \mathrm{C}} $$
Détermination de la valeur nominale du courant de filament (paramètre AMPS)
En réglant AMPS = Auto, la régulation est interrompue pour 1 s env., le chauffage activé, le courant de filament mesuré et enregistré comme valeur nominale. Le contrôle du courant de filament est activé automatiquement si la valeur n'est pas égale à zéro.
Contrôle de valeur limite

Suppression de démarrage La suppression d'alarme est active au démarrage (configuration ALx = SUP) jusqu'à ce que la température soit pour la première fois supérieure à la valeur limite inférieure. Pendant le refroidissement, la suppression est active jusqu'à ce que la valeur soit inférieure à la valeur limite supérieure. La suppression est active à la connexion de la tension auxiliaire, après modification de la valeur de consigne actuelle et activation de la valeur de consigne alternative ainsi qu'à la commutation Off → mode automatique.
Limiteur
Si un régulateur doit être déconnecté en cas de dépassement des valeurs limites supérieure ou inférieure dans le circuit de régulation, il convient de configurer le canal en tant que limiteur (LIM = YES). Le limiteur peut être associé à tous les types de régulateur.
_ Le limiteur réagit aux deuxième valeurs limites qui doivent être définies et configurées en fonction.
— Le régulateur est déconnecté en cas de dépassement d'une deuxième valeur limite. Le régulateur est de nouveau actif dès que l'erreur de valeur limite a disparu.
- L'enregistrement des alarmes doit être activé (configuration AL2 = Stor ) si le régulateur doit rester déconnecté en permanence après réponse du contrôle de valeur limite.
- Les erreurs de valeur limite doivent être supprimées pour la remise en service du régulateur. Pour ce faire, appuyer brièvement sur la touche et confirmer l'affichage Quit AL dans un laps de temps de 5 s avec
- Ceci est possible aussi par l'intermédiaire de l'entrée binaire à condition qu'elle soit configurée sur Supprimer erreur de valeur limite (In 1 = quit).
Contrôle du courant de filament
| Mesure du courant | Le courant de chauffage est détecté par un transformateur externe. Compatible avec R2400 avec GTZ 4121 pour courant alternatif ou triphasé . |
| Fonction | Une alarme est déclenchée si la valeur de consigne inférieure du courant, chauffage allumé (sortie de régulation active), est dépassée de plus de 20 % ou si le courant n'est pas « coupé », chauffage éteint. L'alarme n'est supprimée que si le courant de filament, sortie commutée Chauffe active, est assez élevé et si le courant ne passe pas, sortie commutée Chauffe inactive.La surveillance est active uniquement après configuration du chauffage à commutation, et non du régulateur à action progressive et par paliers. |
| Seuil Le seuil de contrôle défini par défaut est 20 %. | |
| Valeur consigne courant | |
| AMPS | Entrer le courant nominal de phase du chauffage pour ce paramètre. Pour le réglage automatique, chauffage allumé, placer AMPS sur Auto . Le courant mesuré courant est mémorisé. |
| Activation | Paramètre AMPS pas sur oFF. |
Contrôle du circuit de chauffage
- Fonction
- actif / inactif configurable avec la configuration LbA
- sans transformateur externe, sans paramètre additionnel
- suppose l'optimisation correcte des paramètres de régulation tu et Pb I!
Etant donné que l'auto-optimisation fournit d'autres résultats dans certains cas quand le contrôle du circuit de chauffage est actif, le contrôle du circuit de chauffage doit avoir été activé avant le démarrage de l'auto-optimisation.
- La valeur inférieure du paramètre tu doit être respectée en cas d'optimisation manuelle ou d'adaptation ultérieure des paramètres de régulation :
$$ \boldsymbol {t} \boldsymbol {u} = \text { minimal } = \frac {2 \cdot \boldsymbol {P b I}}{\Delta 9 / \Delta t} $$
/ t = augmentation de température maximale au démarrage
- le message d'erreur LE survient environ après 2 tu si le chauffage reste allumé à 100 % et si l'augmentation de température mesurée est trop faible
- la surveillance n'est pas active
si type de régulateur = détecteur de seuils, actionneur ou régulateur par paliers
durant l'auto-optimisation
en cas d'entrée de signal normalisé (code B2)
si la limite de taux de régulation Y H < 20 %
Historique des alarmes
- L'historique des alarmes contient 100 enregistrements d'état de défaut horodatés. Chaque fois qu'au moins un bit de l'état de défaut intégral se modifie, l'état de défaut est enregistré au complet et avec un horodatage actuel.
- L'enregistrement recommence au début après chaque reset de l'appareil, les données sont perdues en cas de coupure de la tension auxiliaire. L'enregistrement peut être activé dans la configuration avec HIST = YES ou via les interfaces.
- Les enregistrements les plus anciens sont effacés dès que la mémoire circulaire contient 100 enregistrements.
- La lecture des enregistrements n'est possible que via l'interface bus ou à infrarouges. Pour plus d'informations détaillées, consulter la description des interfaces.
Enregistreur de données
- L'enregistreur de données comprend dans chaque cas 3600 valeurs d'échantillonnage pour les valeurs réelles et les valeurs de réglage. Le cycle d'échantillonnage de l'enregistreur de données peut être configuré selon une plage comprise entre 0,1 et 300,0 secondes, ce qui donne une durée d'enregistrement comprise entre 0,1 et 300 heures (de 6 minutes à 12 jours).
- L'enregistrement doit être relancé dès le début après chaque reset de l'appareil, les données sont perdues en cas de coupure de la tension auxiliaire.
- L'enregistrement peut être lancé via l'entrée binaire en configurant LoGG = YES ou via l'interface.
- Les valeurs les plus anciennes sont effacées dès que la mémoire circulaire contient 3600 données d'échantillonnages.
- La lecture des enregistrements n'est possible que via l'interface bus ou à infrarouges. Pour plus d'informations détaillées, consulter la description des interfaces.
Messages d'erreur
Réactions à la survenance d'une erreur :
- La sortie d'alarme A1 est active; la configuration définit son comportement (cf. page 17)
- La DEL A1 clignote à tous les niveaux, l'erreur n'est affichée qu'au niveau de la commande (l'affichage supérieur clignote)
- Liste d'exceptions et autres remarques dans le tableau suivant.
| Affichage Source d’erreur Réaction Mesure | ||||||
 | sensor error high | Rupture de capteur ou valeur réelle > fin plage de mesure | Régulateur Taux de régulation sorti | 1 | ||
| à 2, 3 pos. | YSE = -100/0/100% | YSE ≠ -100/0/100% | ||||
| -100/0/100% | Si régulateur état stationnaire : dernier taux régulation « plausible», si non : YSE | |||||
 | sensor error low | Inversion de polarité du capteur ou valeur réelle < début plage de mesure | par paliers Sorties de régulation inactives | |||
| Alarme | YSE | |||||
| Actionneur | pas de réaction d’erreur | |||||
 | current error Transformateur d’intensité : inversion de polarité, inapproprié ou défectueux | Comme alarme contrôle du courant de filament Continue à régler | 2 | |||
| Aff. cour. fil. | ||||||
 | no tune | L'auto-optimisation ne peut pas être démarrée (type régulateur « actionneur » ou « détecteur seuils ») | Pas de réaction d’erreur L'affichage erreur maintenu jusqu’à validation (cf. ci-dessous) | – | ||
 | tune error 2 | Perturbation du processus d’optimisation durant l’étape 1 ... 9 (étape 2 ici) | Sorties de régulation inactives L'auto-optimisation doit être interrompue avec les touches  | 3 | ||
| Régulateur Taux de régulation sorti | ||
| à 2, 3 pos. | YSE = -100/0/100% | YSE -100/0/100% |
| -100/0/100% | Si régulateur état stationnaire :dernier taux régulation« plausible», si non : YSE | |
| par paliers Sorties de régulation inactives | ||
| Alarme | YSE | |
| Actionneur | pas de réaction d'erreur | |
| Comme alarme contrôle du courant de filamentContinue à régler |
| Pas de réaction d’erreurL'affichage erreur maintenu jusqu’à validation (cf. ci-dessous) |
| Sorties de régulation inactivesL'auto-optimisation doit être interrompue avec les touches |
| Affichage Source d’erreur Réaction Mesure | ||||
| LE | loop error | Augmentation de température trop faible à 100 % de chauffage allumé | Sorties de régulation inactivesMessage d’erreur maintenu jusqu’à validation (cf. ci-dessous) | 4 |
| PE | parameter error | Paramètre non compris dans les limites admissibles | Sorties de régulation inactivesLe niveau de paramètre est bloqué | 5 |
| dE | digital error | Erreur détectée par contrôle de partie numérique | Sorties de régulation inactives 6 | |
| AE | analog error | Erreur matérielle détectée par contrôle de partie analogique | Sorties de régulation inactives 6 | |
Mesures
- Supprimer erreur de capteur.
- Vérifier transformateur d'intensité.
- Eviter toute perturbation pour ne pas altérer le processus d'optimisation, erreur de capteur par ex.
-
Fermeture du circuit de régulation : vérifier fonctionnement du capteur, des éléments de réglage et du chauffage.
Vérifier attribution capteur - chauffage (câblage).
Effectuer optimisation correcte des paramètres de régulation tu et Pb I -
Déclencher configuration standard et paramètres standard, puis reconfigurer et reparamétrer, ou charger la configuration définie par l'utilisateur
- Réparation par agence de service après-vente compétente
Validation d'erreur
Pour ce faire, appuyer brièvement sur la touche et confirmer l'affichage Quit AL dans un laps de temps de 5 s avec
Masques d'erreur
Dans la configuration d'usine (configuration A1M1 = def), la sortie relais A1 sort les alarmes relatives à la surveillance des valeurs limites 1 ainsi que toutes les autres erreurs (erreur de sonde, de courant de chauffe, ...) alors que la sortie relais A2 ne sort que les alarmes de la surveillance des valeurs limites 2.
Les messages d'erreur peuvent être alloués aux sorties A1 et A2 de manière ciblée à l'aide des masques d'erreur, voir les tableaux. Il faut pour cela additionner et saisir les valeurs en hexadécimal (l'outil pour PC Compact Config rend la configuration plus facile pour l'opérateur).
Masque d'erreur d'appareil (A1M2 et A2M2)
| Valeur Signification Affichage par défaut | ||
| 0002 Saturation courant de chauffage CE A1 | ||
| 0004 Erreur de soudure froide CJE A1 | ||
| 0010 Courant de chauffage non désactivé clignote A1 | ||
| 0020 Courant de chauffage trop faible clignote A1 | ||
| 0040 Courant de chauffage trop élevé clignote A1 | ||
| 0100 Erreur mémoire FE A1 | ||
| 0200 Erreur de paramètre | PE A1 |
Masque d'erreur de voie (A1M1 et A2M1)
| Valeur Signification Affichage par défaut | ||
| 0001 Rupture de capteur, entrée 2 SE H A1 | ||
| 0002 Inversion de polarité, entrée 2 SE L A1 | ||
| 0004 Erreur partie analogique AE A1 | ||
| 0008 rupture de capteur SE H A1 | ||
| 0010 inversion de polarité SE L A1 | ||
| 0020 1er franchissement limite inférieure clignote A1 | ||
| 0040 2e franchissement limite inférieure | A2 | |
| 0080 1er franchissement limite supérieure clignote A1 | ||
| 0100 2e franchissement limite supérieure | A2 | |
| 0200 Paramètre non valide lors de la saisie via l'interface | - | |
| 0800 Erreur circuit de chauffage | LE | A1 |
| 1000 Erreur au lancement de l'adaptation | no t | - |
| 2000 Erreur à l'adaptation ou abandon | tE X | A1 |
Remplacement d'un régulateur R2400 par un régulateur R2500
Remplacement concernant la caractéristique A
| R2400 R2500 | ||||
| Caractéristique | Sortie chauffe | Sortie refroidissement | Caractéristique | Configuration |
| A1 Transistor — A1 Out1 = HEAt Out2 = oFF | ||||
| A1 Relais — A2 Out1 = HEAt Out2 = oFF | ||||
| A1 | — | Transistor | A1 | Out1 = CooL Out2 = oFF |
| A1 — | Relais | A2 Out1 = CooL Out2 = oFF | ||
| A2, A4 | Transistor Transistor | A1 Out1 = HEAt Out2 = CooL | ||
| A2, A4 | Relais Transistor | A2 Out1 = HEAt Out2 = CooL | ||
| A2, A4 | Transistor | Relais | A2 | Out1 = CooL Out2 = HEAt Recâblage : 3 vers 4 et 17 vers 15 |
| A2, A4 | Relais | Relais | A2 | Out1 = HEAt Out2 = CooL Out = XCh Recâblage: 15 vers 20 16 vers 19 17 vers 18 19 vers 16 20 vers 15 |
| A3 continue | — A5 Out1 = oFF Cont = HEAt | |||
| A3 | — | continue | A5 | Out1 = oFF Cont = CooL |
| A3 | continue | Relais | A5 | Out1 = CooL Cont = HEAt Recâblage : 17 vers 15 |
| A3 Relais — A5 Out1 = HEAt Cont = Proc | ||||
| A3 — | Relais | A5 Out1 = CooL Cont = Proc | ||
| A3 Relais Relais | A5 Out1 = HEAt Out2 = CooL Out = XCh | Recâblage : 15 vers 20 16 vers 19 17 vers 18 19 vers 16 20 vers 15 | ||
- Avec la configuration en tant que régulateur par paliers (R2400 caractéristique A2, A4), la configuration de la sortie correspondante de R2500 n'est pas Outx = CooL mais Outx = HcLo
Remplacement se rapportant aux caractéristiques B et C :
- Les caractéristiques B1 et B2 sont identiques pour les deux appareils
- Les caractéristiques C1 et C2 de R2400 correspondent à la caractéristique C1 de R2500.
- La caractéristique C3 de R2400 n'est pas remplaçable.
- La caractéristique C4 de R2400 correspond à la caractéristique C2 de R2500.
Les fonctions suivantes ne peuvent pas être remplacées :
- Affichage de la répétition de position du régulateur par paliers (R2400 caractéristique A4) La fonction régulateur par paliers est disponible.
- Tension auxiliaire 24 V CA (R2400 caractéristique C3)
Il est impératif de procéder aux recâblages suivants :
- Les bornes de raccordement du R2400 peuvent être réutilisées car les schémas d'occupation sont identiques à quelques exceptions près. Desserrer les vis vernies qui se trouvent sur les deux fiches mâles, puis les retirer.
- La connexion doit être modifiée de la borne 13 à la borne 12 dans le cas d'une tension auxiliaire de 230 V CA (R2400 caractéristique C1)
- Cette connexion doit être modifiée si le signal de régulation refroidissement est sorti avec le relais. (cf. tableau page 47)
- Si les deux signaux de réglage sont sortis par relais, les connexions relais doivent être modifiées (voir tableau page 47).
Conversion des paramètres
Les bandes proportionnelles sont indiquées en unités de la grandeur de régulation pour le R2500, et non en pourcentage de la plage de mesure comme pour le R2400. Effectuer la conversion comme suit: Pb (R2500) = Pb (R2400) x MBU (R2400) / 100%

Attention!
Le conducteur de protection (ou la terre de l'armoire électrique) doit être raccordé à la borne 18 pour guarantir l'anti-parasitage.
Données techniques
| Conditions ambiantes | |
| Humidité relative en moyenne annuelle, pas de condensation | 75 % |
| Température ambiante Plage nominale d’utilisation | 0 °C ... + 50 °C |
| Plage de fonctionnement | 0 °C ... + 50 °C |
| Plage de stockage | -25 °C ... + 70 °C |
| Tension auxiliaire Plage nominale d'utilisation Puissance absorbée | |||
| Valeur nominale Tension Fréquence | |||
| 110 V CA230 V CA | 85 V ... 265 V CA | 48 Hz ... 62 Hz | typique 1,5 W |
| 24 V CC 20 V ... 30 V CC – | |||
| Sécurité électrique | |
| Classe de protection | II, appareil encastrable au sens de DIN EN 61010-1 Point 6.5.4 |
| Degré d'encrassement | 2, selon DIN EN 61010-1 Point 3.7.3.1 ou CEI 664 |
| Catégorie de mesure | II, selon DIN EN 61010 Annexe J ou CEI 664 |
| Tension de service | 300 V selon DIN EN 61010 |
| Emission de parasites CEM | EN 61326 |
| Résistance aux parasites CEM | EN 61326 |
Pour l'intégralité des données techniques, cf. fiche technique (3-349-377-04)
| Sortie relais Contact de service (contact de travail) sans potentiel, phase commune pour sortie commutée A1 et A2 | |
| Pouvoir de coupure 250 V CA/CC, 2 A, 500 VA / 50 W | |
| Durée de vie | >5 •105 manœuvres à charge nominale |
| Déparasitage | Prévoir élément RC ext. (100 Ω - 47 nF) sur contacteur |
GMC-I Messtechnik GmbH R2500-50
GMC-I Messtechnik GmbH R2500-51
Rédigé en Allemagne • Sous réserve de modifications • Vous trouverez une version PDF sur Internet

GOSSEN METRAWATT
90449 Nürnberg • Allemagne
Téléphone +49 911 8602-111
Télécopie +49 911 8602-777
E-Mail info@gossenmetrawatt.com
www.gossenmetrawatt.com

