
O3D310 - Imprimante 3D IFM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil O3D310 IFM au format PDF.

| Type de produit | Capteur 3D à temps de vol (ToF) |
| Modèles compatibles | O3D300, O3D302, O3D310, O3D312 |
| Dimensions (L x H x P) | 95 x 82.6 x 73.3 mm (pour O3D310) |
| Poids | Environ 200 g |
| Alimentation électrique | 24 V DC via connecteur M12 à 8 broches (codage A) |
| Consommation électrique | Max. 6,6 A (protection contre les surtensions) |
| Interface Ethernet | Connecteur M12 à 4 broches (codage D) pour EtherNet/IP, PROFINET, TCP/IP |
| Entrée trigger | Broche 2 (M12 8 pôles), déclenchement par front montant/descendant |
| Sorties de commutation | 3 sorties numériques (broches 4,5,6) configurables (PNP/NPN) ; broche 4 également analogique (4-20 mA / 0-10 V) |
| Entrées de commutation | 2 entrées (broches 7,8) pour sélection d'application |
| Applications prises en charge | Contrôle de complétude, mesure de niveau, dimensionnement d'objets, pick and place, dépalettisation |
| Nombre d'applications mémorisables | Jusqu'à 32 |
| Logiciel de paramétrage | ifm Vision Assistant (téléchargement gratuit sur ifm.com) |
| Mise à jour du firmware | Via logiciel ifm Vision Assistant ; sauvegarder les paramètres avant mise à jour |
| Montage | 2 vis M5 (ou kit de montage optionnel) ; orienter l'appareil pour éviter la lumière ambiante > 8 klx |
| Température de surface | Ne pas dépasser ambiante +25 °C (selon CEI 61010-2-201) ; utiliser dissipateur thermique si nécessaire |
| Nettoyage | Chiffon propre non pelucheux et nettoyant pour vitres ; ne pas rayer la vitre avant |
| Remplacement de l'appareil | Exporter les paramètres avant remplacement, les importer dans le nouvel appareil |
| Homologations | Déclaration de conformité UE disponible sur ifm.com |
| Environnement d'utilisation | Intérieur, altitude ≤ 2000 m, humidité ≤ 90% sans condensation, degré de salissure 3 |
FOIRE AUX QUESTIONS - O3D310 IFM
Questions des utilisateurs sur O3D310 IFM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Imprimante 3D au format PDF gratuitement ! Retrouvez votre notice O3D310 - IFM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil O3D310 de la marque IFM.
MODE D'EMPLOI O3D310 IFM
Notice d'utilisation
Capteur 3D
O3D300
O3D302
O3D310
O3D312
FR
- Remarques préliminaires....4
1.1 Symboles utilisés .... 4
1.2 Avertissements utilisés 4
1.3 Open source information 5
- Consignes de sécurité ....6
2.1 Remarques générales 6
2.2 Cible 6
2.3 Raccordement électrique 6
2.4 Interventions sur l'appareil 6
- Fonctionnement et caractéristiques....7
- Fourniture 7
- Accessoires....7
- Montage 8
6.1 Sélectionner le lieu de montage 8
6.2 Préparer l'appareil pour la mise en service....9
6.2.1 Limites d'avertissement typiques pour O3D300 / O3D302....9
6.2.2 Limites d'avertissement typiques pour O3D310 / O3D312....10
6.2.3 Réduire la température de surface....10
6.3 Installer l'appareil 11
6.4 Accessoires de montage 11
- Raccordement électrique....12
7.1 Schéma de branchement 12
7.1.1 Broches 1 / 3 (24 V / GND)....13
7.1.2 Broche 2 (entrée trigger). 13
7.1.3 Broches 4 / 5 / 6 (sorties de commutation)....13
7.1.4 Broche 4 (sortie analogique)....14
7.1.5 Broches 7 / 8 (entrées de commutation).....14
7.2 Exemples de câblage 15
7.2.1 Déclencher la capture d'images avec un détecteur de proximité....15
7.2.2 Monter plusieurs appareils l'un à côté de l'autre....16
7.3 Sélection statique de l'application 17
7.4 Sélection de l'application activée par impulsion 18
- Eléments de visualisation ....19
- Mise en service 20
9.1 Paramétrer l'appareil....20
9.2 Détecter un objet 20
9.3 Transmettre les valeurs process....21
9.3.1 Transmettre les valeurs process du contrôle de complétude via EtherNet/IP .....21
9.3.2 Transmettre les valeurs process du contrôle de complétude via PROFINET. .....23
9.3.3 Transmettre les valeurs process du contrôle de complétude via TCP/IP....25
9.3.4 Transmettre les valeurs process du dimensionnement d'objets via EtherNet/IP .....26
9.3.5 Transmettre les valeurs process du dimensionnement d'objets via PROFINET .....28
9.3.6 Transmettre les valeurs process du dimensionnement d'objets via TCP/IP....30
9.3.7 Transmettre les valeurs process de la mesure de niveau via EtherNet/IP .....31
9.3.8 Transmettre les valeurs process de la mesure de niveau via PROFINET .....32
9.3.9 Transmettre les valeurs process de la mesure de niveau via TCP/IP .....33
9.3.10 Transmettre les valeurs process du Pick and Place du robot via EtherNet/IP .....34
9.3.11 Transmettre les valeurs process du Pick and Place du robot via PROFINET .....36
9.3.12 Transmettre les valeurs process du Pick and Place du robot via TCP/IP....38
9.3.13 Transmettre les valeurs process de la dépalettisation via EtherNet/IP .....39
9.3.14 Transmettre les valeurs process de la dépalettisation via PROFINET....41
9.3.15 Transmettre les valeurs process de la dépalettisation via TCP/IP 43
- Maintenance, réparation et élimination ..... 44
10.1 Nettoyage 44
10.2 Mettre à jour le firmware....44
10.3 Remplacer l'appareil....44
-
Homologations/normes 44
-
Schémas d'encombrement ..... 45
12.1 O3D302 / O3D312 45
12.2 O3D300 / O3D310 45
- Appendix 46
13.1 Process Interface 46
Microsoft ^® , Windows ^® , Windows Vista ^® , Windows 7 ^® , Windows 8 ^® , Windows 8.1 ^® et Windows 10 ^® sont des marques enregistrées de Microsoft Corporation.
Adobe ^® et Acrobat ^® sont des marques enregistrées d'Adobe Systems Inc.
Toutes les marques et raisons sociales utilisées sont soumises au copyright des sociétés respectives.
1. Remarques préliminaires
Ce document s'adresse à des personnes compétentes. Ce sont des personnes qui sont capables – grâce à leur formation et expérience – d'envisager les risques et d'éviter des dangers potentiels qui pourraient être causés par le fonctionnement ou la maintenance de l'appareil. Le document fournit des informations sur l'utilisation correcte de l'appareil.
Lire ce document avant l'utilisation afin de vous familiariser avec les conditions d'utilisation, l'installation et le fonctionnement. Garder ce document pendant tout le temps d'utilisation de l'appareil.
1.1 Symboles utilisés
▶ Action à faire
Retour d'information, résultat
[...] Désignation d'une touche, d'un bouton ou d'un affichage
→ Référence croisée
Remarque importante
Le non-respect peut aboutir à des dysfonctionnements ou perturbations.
Information
Remarque supplémentaire
1.2 Avertissements utilisés
ATTENTION
Avertissement de dommages matériels.
1.3 Open source information
2. Consignes de sécurité
2.1 Remarques générales
Cette notice fait partie de l'appareil. Elle fournit des textes et des figures pour l'utilisation correcte de l'appareil et doit être lue avant installation ou emploi.
Respecter les indications de cette notice. Le non-respect de ces consignes, une utilisation en dehors des conditions définies ci-dessous, une mauvaise installation ou utilisation peuvent avoir des conséquences graves pour la sécurité des personnes et des installations.
2.2 Cible
Cette notice s'adresse à des personnes considérées comme compétentes selon les directives CEM et basse tension. L'appareil doit être monté, raccordé et mis en service par un électricien habilité.
2.3 Raccordement électrique
Mettre l'appareil hors tension en prenant des mesures externes avant toutes manipulations.
Les bornes de raccordement ne doivent être alimentées que par les signaux indiqués dans les données techniques et sur l'étiquette de l'appareil et seuls les accessoires homologués d'ifm doivent être raccordés.
2.4 Interventions sur l'appareil
En cas de mauvais fonctionnement de l'appareil ou en cas de doute prendre contact avec le fabricant. Des interventions sur l'appareil peuvent avoir des conséquences graves pour la sécurité des personnes et des installations. Elles ne sont pas autorisées et aboutissent à une exclusion de responsabilité et de garantie.
3. Fonctionnement et caractéristiques
Le capteur 3D O3D3xx est un capteur optoélectronique qui mesure, selon le principe du temps de vol, point par point la distance entre le capteur et la surface la plus proche. Le capteur 3D O3D3xx illumine la scène avec une source lumineuse infrarouge interne et calcule la distance à l'aide de la lumière réfléchie par la surface.
A l'aide d'un traitement interne des données d'images, des valeurs process sont générées à partir des données et comparées avec des valeurs de seuils. Les valeurs de comparaison et de process sont liées aux sorties TOR. Ainsi, les applications suivantes peuvent être résolues :
- Contrôle de complétude
- Mesure de niveau
- Contrôle de distance
- Dimensionnement d'objets rectangulaires
• Tri d'objets rectangulaires
Les données mesurées et les données process peuvent être fournies via Ethernet et évaluées par l'utilisateur. Le capteur 3D O3D3xx est paramétré également via Ethernet.
Le capteur 3D O3D3xx ne doit être utilisé que sous les conditions environnantes indiquées dans la fiche technique.
La sécurité de l'appareil est conçue pour l'emploi selon les conditions environnantes suivantes :
• Utilisation à l'intérieur
• Altitudes jusqu'à 2000 m
- Humidité d'air relative jusqu'à 90 % au maximum, sans condensation
• Degré de salissure 3
En raison des exigences pour les émissions de parasites électromagnétiques, l'appareil est destiné à l'utilisation dans les environnements industriels. L'appareil n'est pas approprié pour l'utilisation dans les lieux de résidence.

L'appareil ne doit être utilisé que dans les conditions environnantes indiquées dans la fiche technique.
4. Fourniture
- Capteur 3D O3D3xx
- Notice succincte

La fiche technique et d'autre documentation (manuel du logiciel etc.) sont disponibles sur : www.ifm.com
5. Accessoires
Pour le fonctionnement de l'appareil les accessoires suivants sont nécessaires :
| Référence Description | |
| E11950 Câble d'alimentation pour caméra/capteur | |
| E11898 Câble avec connecteur M12 pour Industrial Ethernet | |

Le logiciel ifm Vision Assistant est disponible à titre gratuit sur : www.ifm.com
6. Montage
Le chapitre décrit ce qu'il faut connaître avant le montage et comment l'appareil doit être installé.
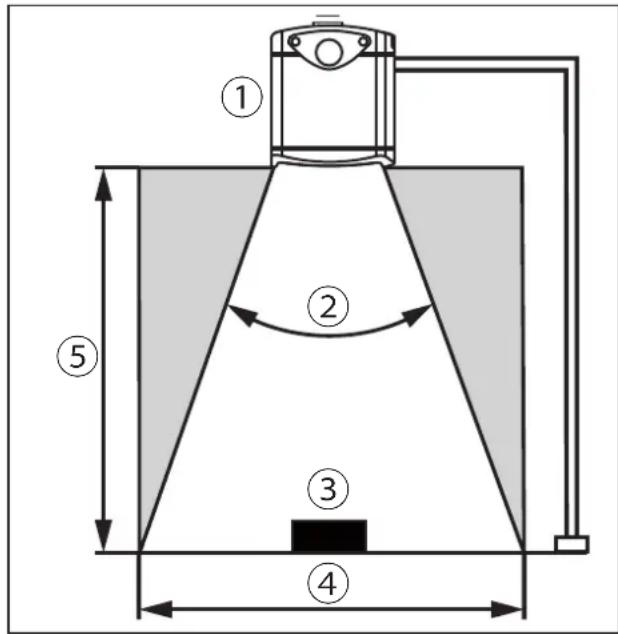
① Apparel
② Angle d'ouverture
③ Objet
④ Champ de vue
⑤ Distance entre l'appareil et l'objet
6.1 Sélectionner le lieu de montage
Observer les instructions suivantes pour la sélection du lieu de montage :
▶ L'objet ③ doit se trouver intégralement dans le champ de vue ④.
La taille du champ de vue dépend de la version de l'appareil et est indiquée dans la fiche technique. La taille du champ de vue dépend aussi de la distance entre l'appareil et l'objet ⑤ : Le champ de vue devient plus grand lorsque l'on augmente la distance.
▶ Prendre en considération les tolérances pour le positionnement de l'objet.
Pour définir la distance entre l'appareil et l'objet, prendre en considération l'étendue de mesure de l'appareil.
L'étendue de mesure est indiquée dans la fiche technique de l'appareil.
▶ Choisir une distance entre l'appareil et l'objet aussi petite que possible.
Avec une distance minimale, l'objet est détecté avec la résolution maximale.
▶ Eviter une forte lumière ambiante et les rayons solaires sur le lieu de montage.
Un niveau de lumière ambiante (ayant un spectre solaire) au-dessus de 8 klx cause des erreurs de mesure. En effet, uniquement la lumière infrarouge entre 800 et 900 nm est perturbante.
▶ Eviter les zones à forts encrassements comme lieu de montage.
Dans des zones à forts encrassements, l'objectif est souillé malgré une orientation vers le bas①.
▶ Eviter des vitres transparentes entre l'appareil et l'objet ③.
Les vitres transparentes réfléchissent une partie de la lumière, même si un plateau de verre très propre est utilisé.
Si les instructions ne sont pas respectées, des erreurs de mesure sont possibles.
6.2 Préparer l'appareil pour la mise en service
La température de surface de l'appareil dépend du mode de fonctionnement, de la sélection des paramètres et de la connexion thermique de l'appareil avec le support de montage.

S'assurer que l'appareil satisfait aux exigences suivantes :
La température de surface, pour les surfaces facilement accessibles, peut être au maximum supérieure de 25 °C à la température ambiante (selon CEI 61010-2-201).
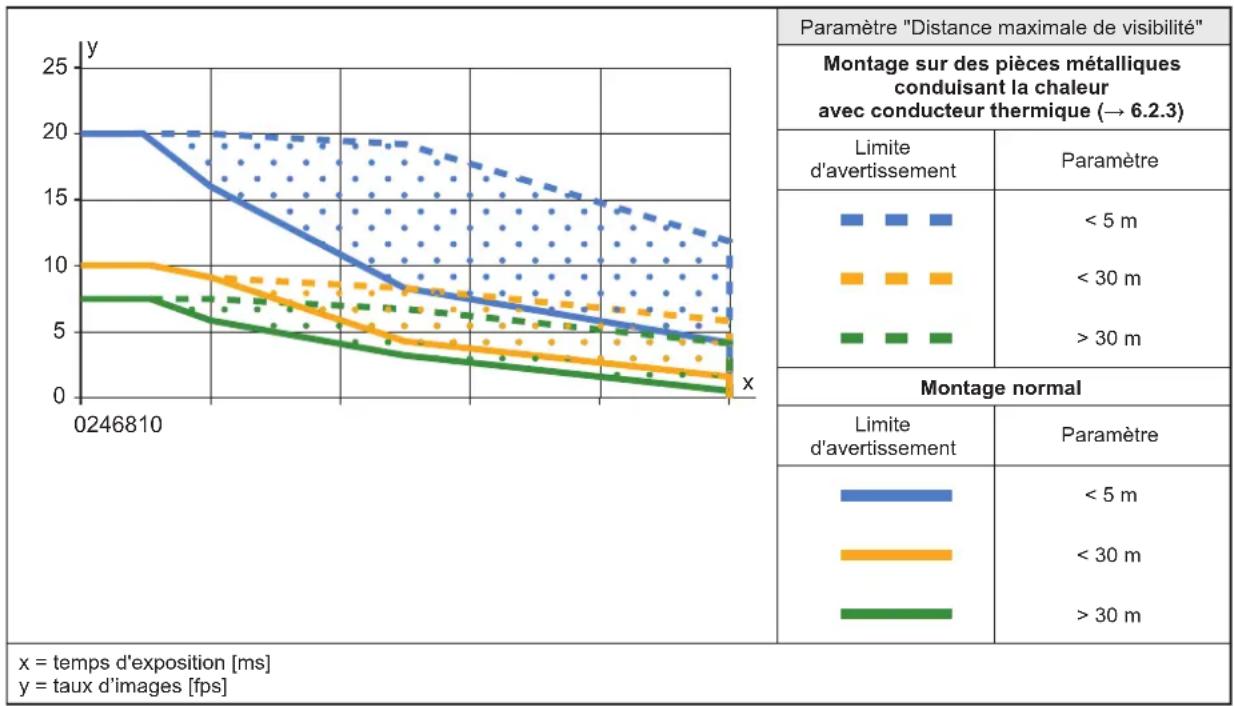
Les diagrammes suivants montrent les limites d'avertissement typiques auxquelles l'installateur peut se reporter.

Les diagrammes sont valables pour les modes d'exposition suivants :
- un temps d'exposition
- deux temps d'exposition
- trois temps d'exposition
Avec deux ou trois temps d'exposition, les limites d'avertissement typiques doivent être déterminées en faisant la somme des temps d'exposition. Les temps d'exposition sont indiqués dans le logiciel ifm Vision Assistant.
Respecter une des indications suivantes si les limites d'avertissement sont dépassées :
▶ Réduire la température de surface ( 6.2.3).
Monter une protection contre le contact sans diminuer la convection (circulation d'air).
La température de surface ne doit pas être augmentée une fois cette protection contre le contact installée.

Le paramètre "Distance maximale de visibilité" est réglé dans le logiciel ifm Vision Assistant. Les limites d'avertissement sont indiquées dans les diagrammes comme des lignes pointillées et continues.
Si l'appareil se trouve dans une des zones pointillées, la température de surface doit être réduite ( 6.2.3). Si la limite d'avertissement est dépassée malgré un montage évacuant la chaleur, une protection contre le contact peut être montée en plus.
Si les limites d'avertissement typiques ne sont pas atteintes en cas de montage normal, aucune mesure n'est nécessaire.
6.2.1 Limites d'avertissement typiques pour O3D300 / O3D302
line
| x_value | y_value | |---------|---------| | 0246810 | 20 | | | 10 | | | 5 | | | 0 |6.2.2 Limites d'avertissement typiques pour O3D310 / O3D312
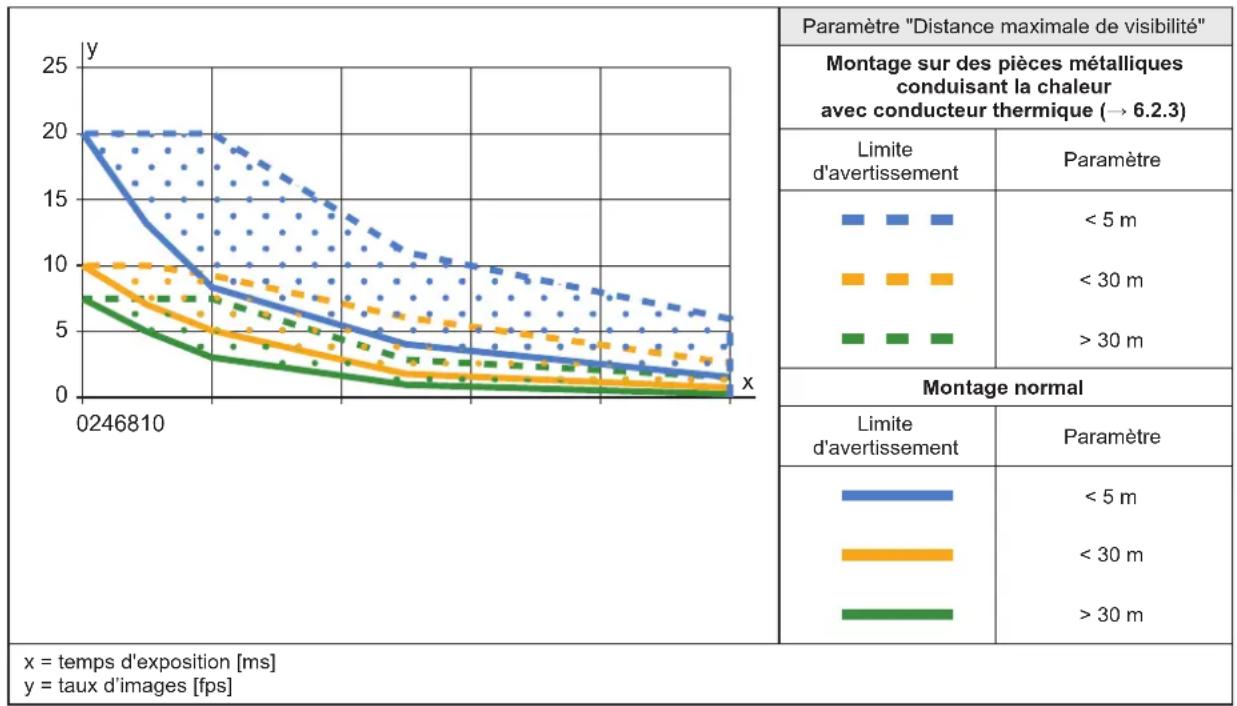
line
| x | y (Montage sur des pièces métalliques conduisant la chaleur avec conducteur thermique (→ 6.2.3)) | Paramètre "Distance maximale de visibilité" | |-------|----------------------------------------------------------------------------------|------------------------------------------| | 0246810 | 20.0 | < 5 m | | 0246810 | 10.0 | < 30 m | | 0246810 | 7.5 | > 30 m | | 0246810 | 5.0 | Montage normal | | 0246810 | 2.5 | Paramètre | | 0246810 | 1.0 | < 5 m | | 0246810 | 0.5 | < 30 m | | 0246810 | 0.25 | > 30 m |6.2.3 Réduire la température de surface
La température de surface peut être réduite par les mesures suivantes :
▶ Fixer l'appareil sur des pièces métalliques conduisant la chaleur.
La fixation de l'appareil sur une grande surface métallique augmente l'évacuation de la chaleur (par ex. aluminium).
▶ Utiliser un conducteur thermique en cas de montage sur des pièces métalliques.
L'effet conducteur de chaleur est augmenté par le conducteur thermique. Le conducteur thermique est disponible comme accessoire ( 6.4).
▶ Réduire toute entrave dans l'environnement de l'appareil et la densité d'objets.
Toute entrave dans l'environnement de l'appareil et une densité d'appareils augmentée peuvent avoir des effets négatifs sur la convection (mouvement de l'air).
▶ Monter un ou deux dissipateurs thermiques sur l'appareil.
Les dissipateurs thermiques augmentent la surface de l'appareil ce qui réduit la température de surface. Les dissipateurs thermiques sont disponibles comme accessoires ( 6.4).
Réduire le temps d'exposition, le taux d'images ou la distance maximale de visibilité.
Le mode de fonctionnement utilisé et les paramètres peuvent augmenter la température de surface.
6.3 Installer l'appareil
Respecter les instructions suivantes pour le montage de l'appareil :
Monter l'appareil avec 2 vis M5 ou le kit de montage.
Les dimensions des perçages pour les vis M5 sont indiquées dans la fiche technique.
Le kit de montage est disponible comme accessoire (→ 6.4).
▶ Utiliser des protections contre la traction pour tous les câbles raccordés à l'appareil.
Respecter les remarques suivantes pour le montage d'un appareil O3D300 et O3D310 :
Monter l'appareil de manière à permettre le réglage de la focale à l'aide d'un tournevis.
La position du réglage de la focale est indiquée dans le schéma d'encombrement (→ 12).

Lorsque l'appareil est utilisé en zone humide, l'écrou du câble avec connecteur M12 pour Industrial Ethernet (par ex. E11898) peut corroder. Pour l'utilisation permanente en zone humide utiliser un câble de raccordement avec un écrou en acier inox.
6.4 Accessoires de montage
Suivant le lieu et le type de montage, les accessoires de montage suivants peuvent être utilisés :
| Référence Description | |
| E3D301 Kit de montage Smart Camera | |
| E3D302 Dissipateur thermique Smart Camera | |
| E3D303 Conducteur thermique Smart Camera | |
| E3D304 2x dissipateur thermique Smart Camera | |

Informations sur les accessoires disponibles sur : www.ifm.com
7. Raccordement électrique
Respecter les remarques suivantes avant l'installation électrique.
ATTENTION
L'appareil doit être raccordé par un électricien qualifié. Respecter les données électriques de la fiche technique.
Appareil de la classe de protection III (CP III).
L'alimentation électrique ne doit s'effectuer que via des circuits TBTP.
L'alimentation électrique doit être conforme à UL 61010-1, chap. 9.4 - Limited Energy :
Le dispositif de limitation des surtensions doit désactiver un courant de 6,6 A en 120 s. Pour le dimensionnement du dispositif de limitation des surtensions, respecter les données techniques de l'appareil et du câblage.
L'isolation des circuits externes doit être conforme à UL 61010-2-201, fig. 102.
Pour des longueurs de câble > 30 m, utiliser une protection supplémentaire contre des tenues au choc selon CEI 6100-4-5.
Avant le raccordement électrique mettre l'installation hors tension.
Dans le champ d'application cULus :
Plage de température haute minimum du câble qui doit être raccordé au capteur : 70 °C.
7.1 Schéma de branchement
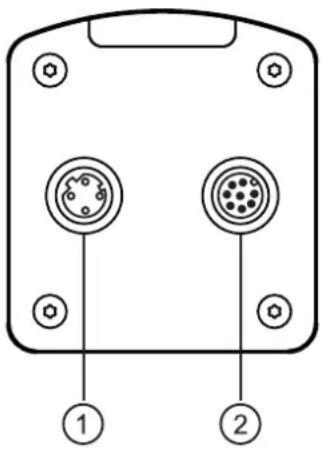 |  | |
| Connecteur femelle M12, codage D, 4 pôles | ||
 | 1 TD +2 RD +3 TD -4 RD -S Shield (blindage) | |
 | ||
| Connecteur mâle M12, codage A, 8 pôles | ||
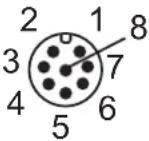 | 1 U+2 Entrée trigger3 GND4 Sortie de commutation 1 - (numérique ou analogique)5 Sortie de commutation 3 - Ready6 Sortie de commutation 2 - (TOR)7 Sortie de commutation 18 Sortie de commutation 2 | |
Protéger la prise de connexion Ethernet non utilisée avec un bouchon (E73004).
Couple de serrage 0,6...0,8 Nm.
Le comportement des entrées et sorties de commutation peut être réglé par le logiciel ifm Vision Assistant. Le réglage commutation PNP ou NPN est toujours valable pour toutes les entrées et sorties.
S'assurer du réglage correct pour l'installation des actionneurs et capteurs (par ex. barrages optoélectroniques pour le déclenchement).
Les sorties de commutation peuvent aussi être utilisées comme sorties impulsionnelles qui remettent leur signal de commutation à 0 après un temps réglable.
La sortie analogique fournit du courant / de la tension contre GND.
7.1.1 Broches 1 / 3 (24 V / GND)
La plage de tension admissible est indiquée dans la fiche technique de l'appareil.
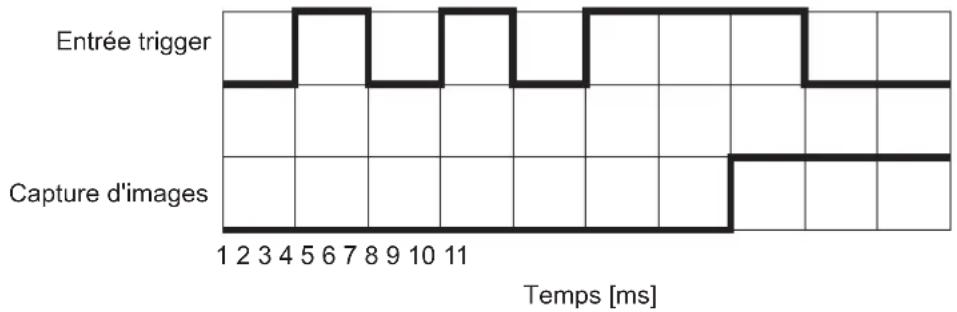
7.1.2 Broche 2 (entrée trigger)
La capture d'images de l'appareil peut être déclenchée avec un signal de commutation via l'entrée trigger.
Les fronts trigger suivants peuvent être utilisés :
- Le front descendant déclenche la capture d'images.
- Le front montant déclenche la capture d'images.
- Les fronts descendant et montant déclenchent la capture d'images.

D'autres possibilités pour le déclenchement de l'appareil :
- Commande interfaces process (→ 13.2)
- Capture d'images continuelle avec taux d'images fixe

L'entrée trigger a une fonction anti-rebond intégrée. Selon l'installation électrique, cette fonction de l'entrée trigger n'est pas nécessaire.
La fonction anti-rebond intégrée évite le déclenchement d'un trigger par plusieurs courtes impulsions. L'impulsion doit durer au moins 2 ms pour être reconnue comme déclenchement.
7.1.3 Broches 4 / 5 / 6 (sorties de commutation)
Les sorties de commutation 1 à 3 fournissent les différents états de l'appareil. Outre l'état de l'appareil, les sorties de commutation peuvent aussi fournir les valeurs de référence nécessaires pour solutionner l'application.
Les spécifications électriques des sorties de commutation 1 à 3 sont indiquées dans la fiche technique.
Par défaut, la sortie de commutation 3 fournit l'état de l'appareil "Prêt pour le trigger".

"Sortie de commutation commutée" signifie que l'état de l'appareil correspondant s'est produit.
Selon le réglage, l'état de l'appareil peut avoir une des valeurs suivantes :
- "Prêt pour le trigger"
L'appareil signale qu'une nouvelle image peut être capturée. Les triggers ne peuvent être traités qu'avec cet état de l'appareil. Avec capture d'images continuelle, l'état de l'appareil "Prêt pour le trigger" n'est pas fourni. - "Capture d'images terminée"
L'appareil signale que la capture des images est terminée. L'état de l'appareil peut être utilisé pour la fonction cascade d'appareils. - "Evaluation finie"
L'appareil signale que le traitement des images est terminé. A ce moment, les sorties de commutation sont déjà mises à jour. Les données d'image sont transmises via Ethernet. - "Erreur"
L'appareil signale qu'une erreur interne s'est produite. Des informations détaillées sur l'erreur peuvent être demandées via Ethernet.
7.1.4 Broche 4 (sortie analogique)
La sortie de commutation 1 / sortie analogique peut être utilisée comme sortie de commutation ou sortie courant analogique (4-20 mA) / sortie tension analogique (0-10 V).
La sortie courant analogique permet une transmission plus fiable que la sortie tension analogique. La sortie courant analogique est indépendante de la longueur du câble et assure une meilleure qualité de signal vers le système de commande.
Dans le système de commande, le courant analogique est converti en tension analogique via une résistance de charge contre GND. La résistance de charge est sélectionnée selon les indications dans la fiche technique. Pour un développement de chaleur plus faible dans l'appareil, les résistances de charge à haute impédance sont à préférer aux résistances de charge à faible impédance.
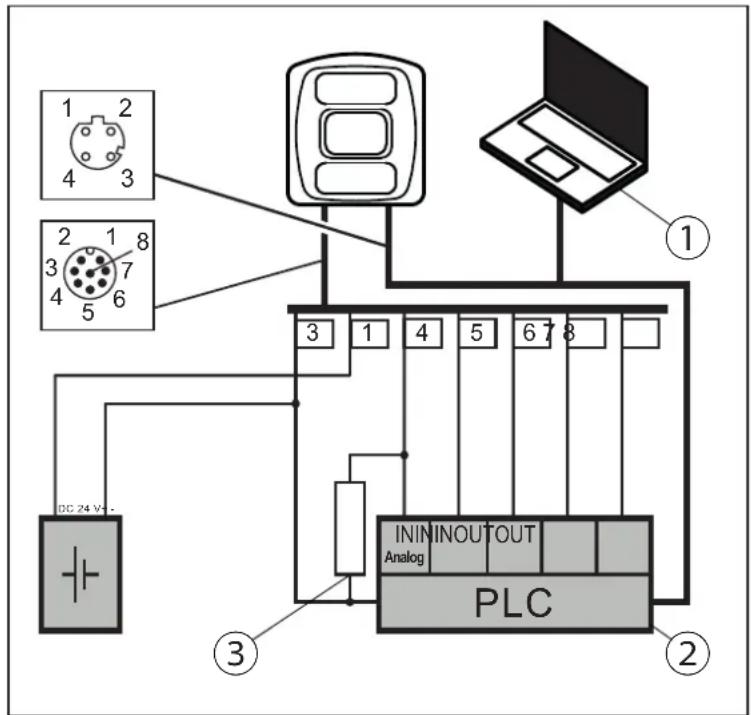
① PC portable (paramétrage)
② Système de commande (évaluation / déclenchement)
③ Résistance de charge
Avec le logiciel ifm Vision Assistant une valeur process peut être affectée à la valeur initiale (4 mA/0 V) et à la valeur finale (20 mA / 10 V) de la sortie analogique.
7.1.5 Broches 7 / 8 (entrées de commutation)
Les entrées de commutation offrent les fonctions suivantes :
- Sélectionner l'application active (→ 7.3)

Les différents paramétrages des fonctions sont indiqués dans le manuel du logiciel.

Les spécifications électriques de l'entrée de commutation 1 et de l'entrée de commutation 2 sont indiquées dans la fiche technique de l'appareil.
7.2 Exemples de câblage
Ci-dessous, des exemples de câblage de l'appareil sont montrés.
7.2.1 Déclencher la capture d'images avec un détecteur de proximité
L'appareil peut être déclenché de manière externe :
- via Ethernet
- via un détecteur de proximité, raccordé à l'entrée trigger
La figure suivante montre le câblage de l'appareil à un détecteur de proximité.
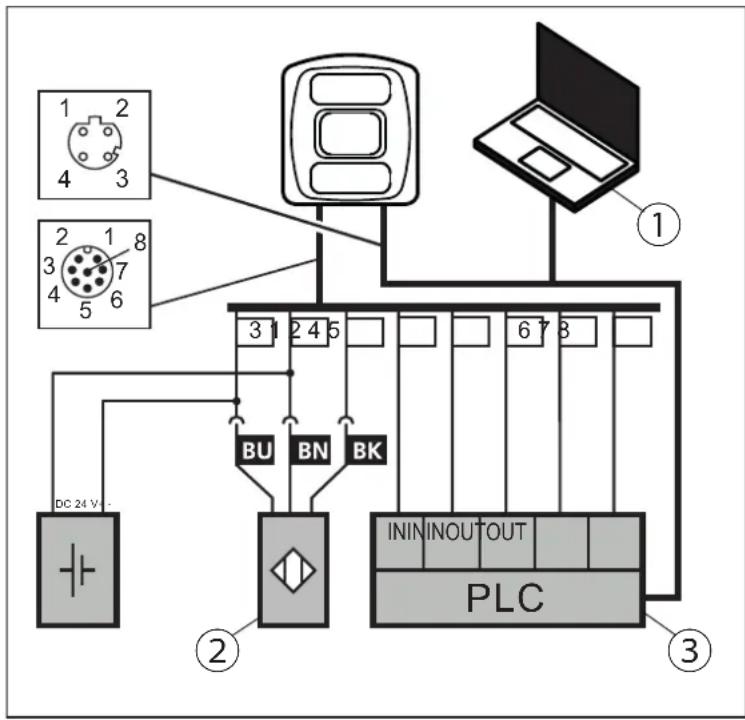
① PC portable (paramétrage)
② Détecteur de proximité
③ Système de commande (évaluation / déclenchement)
7.2.2 Monter plusieurs appareils l'un à côté de l'autre
Des appareils montés l'un à côté de l'autre peuvent causer des erreurs de mesure en cas d'exposition simultanée.
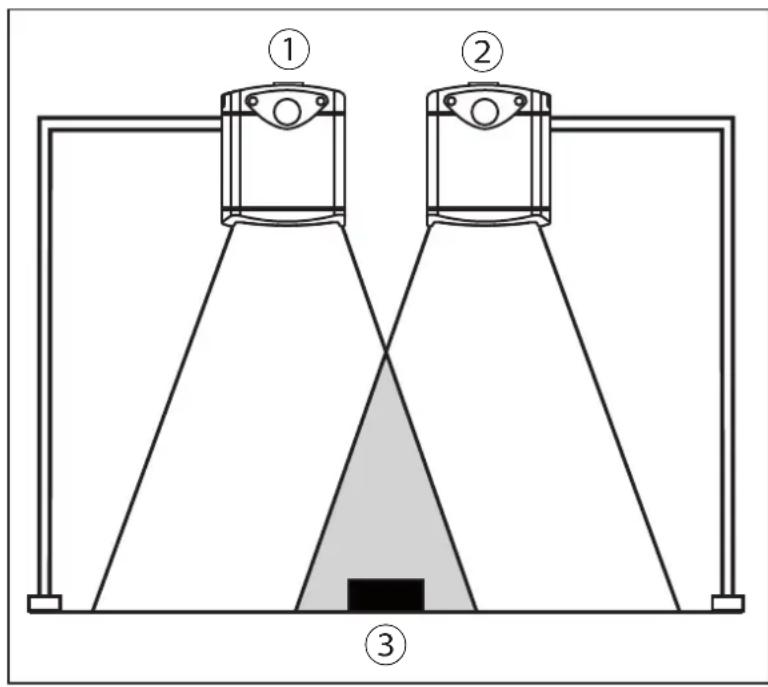
① Apparel
② Apparel
③ Objet
Il y a deux manières d'éviter les erreurs de mesure :
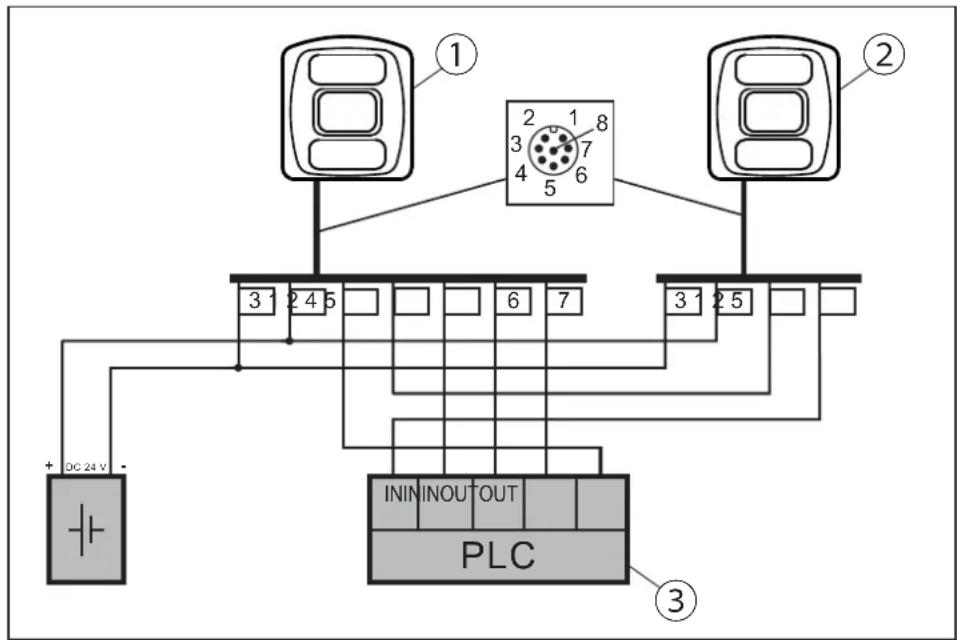
- Cascader les appareils via trigger matériel
Lors de cette fonction cascade, le système de commande déclenche la capture de l'appareil ① (voir fig. ci-dessous). Après la fin de la capture des images, l'appareil ① déclenche automatiquement l'appareil ②. En même temps, la broche 4 de l'appareil ① fournit l'état d'appareil "Capture d'images terminée". L'appareil ② signale la fin de la séquence au système de commande ③.
flowchart
graph TD
A["PLC"] --> B["ININ"]
B --> C["3125"]
B --> D["3124"]
B --> E["3123"]
B --> F["3122"]
B --> G["3121"]
B --> H["3120"]
B --> I["3119"]
B --> J["3118"]
B --> K["3117"]
B --> L["3116"]
B --> M["3115"]
B --> N["3114"]
B --> O["3113"]
B --> P["3112"]
B --> Q["3111"]
B --> R["3110"]
B --> S["3109"]
B --> T["3108"]
B --> U["3107"]
B --> V["3106"]
B --> W["3105"]
B --> X["3104"]
B --> Y["3103"]
B --> Z["3102"]
B --> AA["3101"]
B --> AB["3099"]
B --> AC["3098"]
B --> AD["3097"]
B --> AE["3096"]
B --> AF["3095"]
B --> AG["3094"]
B --> AH["3093"]
B --> AI["3092"]
B --> AJ["3091"]
B --> AK["3090"]
B --> AL["3089"]
B --> AM["3088"]
B --> AN["3087"]
B --> AO["3086"]
B --> AP["3085"]
B --> AQ["3084"]
B --> AR["3083"]
B --> AS["3082"]
B --> AT["3081"]
B --> AU["3080"]
B --> AV["3079"]
B --> AW["3078"]
B --> AX["3077"]
B --> AY["3076"]
B --> AZ["3075"]
B --> BA["3074"]
B --> BB["3073"]
B --> BC["3072"]
B --> BD["3071"]
B --> BE["3070"]
B --> BF["3069"]
B --> BG["3068"]
B --> BH["3067"]
B --> BI["3066"]
B --> BJ["3065"]
B --> BK["3064"]
B --> BL["3063"]
B --> BM["3062"]
B --> BN["3061"]
B --> BO["3060"]
B --> BP["3059"]
B --> BQ["3058"]
B --> BR["3057"]
B --> BS["3056"]
B --> BT["3055"]
B --> BU["3054"]
B --> BV["3053"]
B --> BW["3052"]
B --> BX["3051"]
B --> BY["3050"]
① Appareil
② Apparel
③ Système de commande (évaluation / déclenchement)
- Utiliser des canaux de fréquences différents.
Avec le logiciel ifm Vision Assistant un canal de fréquences individuel peut être affecté à chaque appareil. Les différents canaux de fréquences réduisent la présence d'erreurs de mesure.
Le logiciel ifm Vision Assistant est disponible à titre gratuit sur : www.ifm.com
7.3 Sélection statique de l'application
L'appareil permet de mémoriser jusqu'à 32 applications d'inspection différentes. Avec la configuration correspondante, les quatre premières applications peuvent être sélectionnées via les deux entrées de commutation.
| Entrée 2 Entrée | 1 N° de l'application | |
| 0 0 1 | ||
| 0 1 2 | ||
| 1 0 3 | ||
| 1 1 4 | ||
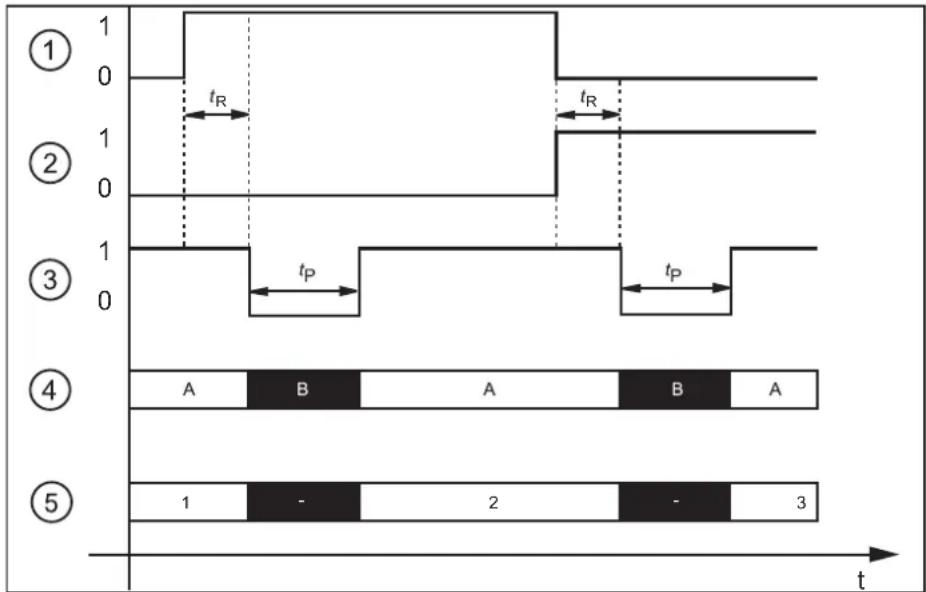
| 1 | Entrée de commutation 1 = 0 → 1 → 0 |
| 2 | Entrée de commutation 2 = 0 → 0 → 1 |
| 3 | Sortie READY |
| 4 | Entrée trigger |
| A : trigger possible | |
| B : trigger bloqué | |
| 5 | Numéro ID de l'application active |
Pour la sélection des applications, le temps de surveillance t_R et le temps de blocage du trigger t_P sont à considérer.
Temps de surveillance t _R : La sélection de l'application ne commence que si l'état des deux entrées de commutation reste stable pendant 20 ms après un changement d'état.
Temps de blocage du § : Pendant la sélection de l'application l'entrée trigger est bloquée. Le temps de blocage dépend :
- du nombre d'applications sur l'appareil
- du nombre de modèles dans l'application à activer
La figure ci-dessus montre la logique de sortie PNP (réglage par défaut). Le comportement de la logique de sortie PNP est à l'opposé de celui de la logique de sortie NPN :
- Logique de sortie PNP : En cas d'un signal haut (1), la tension est appliquée.
- Logique de sortie NPN : En cas d'un signal bas (0), la tension est appliquée.
Pour des informations plus détaillées sur la configuration de la sélection de l'application, voir le manuel du logiciel sur : www.ifm.com
7.4 Sélection de l'application activée par impulsion
Une sélection de l'application activée par impulsion est également possible.
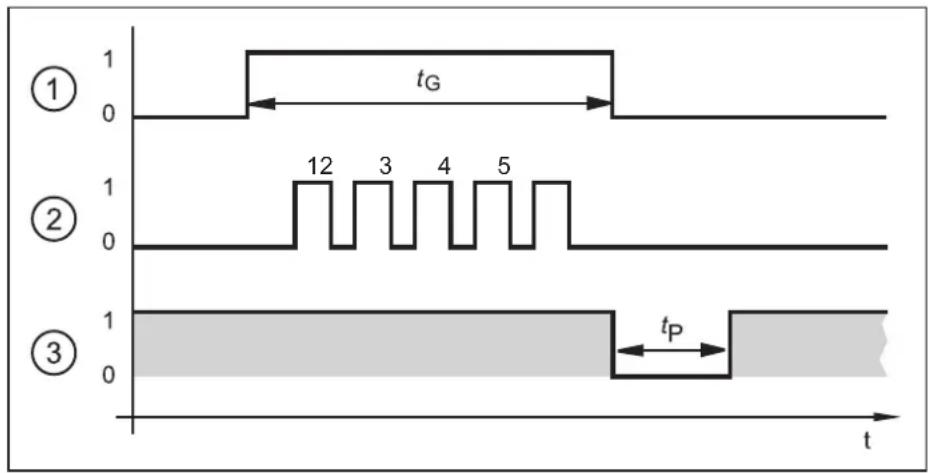
| 1 | Signal "fenêtre", entrée de commutation 1 = 0 1 0 ( t_G = signal actif) |
| 2 | Signal impulsion, entrée de commutation 2 ou entrée trigger = 0 5 impulsion → 0 |
| 3 | Sortie READY |
Si un signal actif est appliqué à l'entrée de commutation 1 (signal "fenêtre"), l'appareil compte les impulsions d'entrée et active l'application correspondante.
Nombre des impulsions = numéro ID de l'application.
L'entrée de commutation 2 ou l'entrée trigger de l'appareil peuvent être utilisées comme entrée impulsion.

La figure ci-dessus montre la logique de sortie PNP (réglage par défaut). Le comportement de la logique de sortie PNP est à l'opposé de celui de la logique de sortie NPN :
- Logique de sortie PNP : En cas d'un signal haut (1), la tension est appliquée.
- Logique de sortie NPN : En cas d'un signal bas (0), la tension est appliquée.
Pour des informations plus détaillées sur la configuration de la sélection de l'application, voir le manuel du logiciel sur : www.ifm.com
8. Eléments de visualisation
L'appareil signale l'état de fonctionnement actuel via les éléments de visualisation LED 1 - 4.
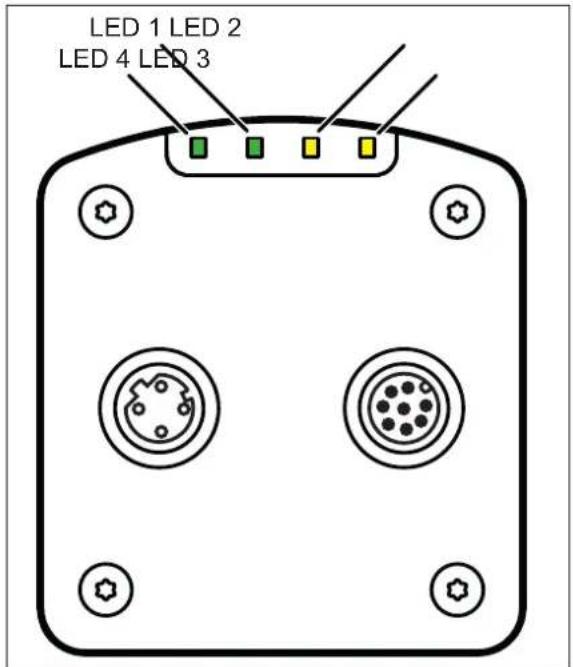
| LED 4 (Ethernet) | LED 1 (Power) | LED 2 (Out 1) | LED 3 (Out 2) | Description |
| Allumée L'appareil est opérationnel, tension d'alimentation appliquée | ||||
| Clignote à 0,5 Hz | L'appareil n'est pas paramétré ou le paramétrage n'a pas été chargé sur l'appareilOnOff | |||
| Clignote 2 x à 0,5 Hz | L'appareil est en mode de paramétrageOnOff | |||
| Allumée La sortie de commutation 1 est commutée | ||||
| Clignote à 8 Hz | La sortie de commutation 1 a un court-circuit | |||
| Allumée La sortie de commutation 2 est commutée | ||||
| Clignote à 8 Hz | La sortie de commutation 2 a un court-circuit | |||
| Allumée Ethernet est raccordé | ||||
| Clignote Ethernet transmet des données | ||||
| Eteinte Ethernet n'est pas raccordé | ||||
| Clignote à 8 Hz | Clignote à 8 Hz | L'appareil signale une erreur interne | ||
| Clignote à 2 Hz | Clignote à 2 Hz | L'appareil signale une erreur remédiable. Le message d'erreur peut être lu via Ethernet | ||
| Chenillard ⇒ | Appareil démarre | |||
| Chenillard ← | L'appareil exécute une mise à jour du firmware | |||
9. Mise en service
A la mise sous tension l'appareil est mis en service. Après 15 secondes, l'appareil se trouve en mode d'évaluation dans lequel les applications sauvegardées sont exécutées. Les éléments de visualisation signalent l'état de fonctionnement actuel ( 8).

Jusqu'à 32 applications peuvent être sauvegardées sur l'appareil. Il y a différentes possibilités pour activer une application :
• Logiciel ifm Vision Assistant
- Commande interfaces process
- Entrées de commutation 1 et 2
- Entrée de commutation 1 et entrée trigger
9.1 Paramétrer l'appareil
L'appareil est paramétré avec le logiciel ifm Vision Assistant (→ voir Manuel du logiciel).

L'utilisation du logiciel ifm Vision Assistant et des informations détaillées sur le principe de mesure de l'appareil sont décrits dans le manuel du logiciel.
Le logiciel ifm Vision Assistant est disponible à titre gratuit sur : www.ifm.com
Le manuel du logiciel est disponible sur : www.ifm.com
9.2 Détecter un objet
Ci-dessous, les conditions qui mènent à un haut taux de détection d'objets sont décrites.
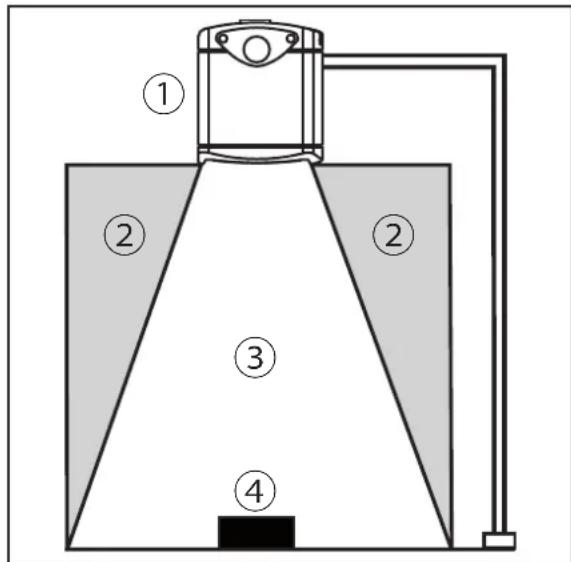
① Appareil
② Zone d'influence
③ Champ de vue
④ Objet
Un objet ④ est détecté de façon optimale, si les conditions suivantes sont satisfaites :
- L'objet est positionné dans le champ de vue③.
- L'objet à détecter est l'objet le plus proche visible par l'appareil ①.
- La zone d'influence ② est libre d'objets (entrave etc.).
- La vitre avant de l'appareil est libre de salissures.

Si ces conditions ne sont pas satisfaites, des erreurs de mesure sont possibles.
9.3 Transmettre les valeurs process
9.3.1 Transmettre les valeurs process du contrôle de complétude via EtherNet/IP
L'appareil peut transmettre les valeurs process à un API via le bus de terrain EtherNet/IP. Les valeurs process sont affichées dans le logiciel ifm Vision Assistant en tant qu'une chaîne de caractères comme suit :
Un seul bus de terrain ne peut être actif. Le bus de terrain peut être configuré (→ Manuel du logiciel).
Dans la chaîne de caractères les valeurs process sont séparées par un point-virgule. La chaîne de caractères est transmise à un API dans l'ordre affiché.

Veuillez noter les remarques suivantes concernant la transmission de la chaîne de caractères à un API :
- Les octets 0 à 7 font partie de la chaîne de caractères. Ils ne sont pas affichés dans le logiciel ifm Vision Assistant (voir la copie d'écran ci-dessus).
- Les points-virgules ";" contenus dans la chaîne de caractères ne sont pas transmis.
- Les valeurs flottantes sont converties en entiers de 16 bits.
- Toutes les valeurs numériques sont converties en entiers de 16 bits avant la transmission.
La chaîne de caractères se décompose comme suit :
| N° octet Données Codage | Valeur process | Unité Description Commentaire | ||||
| 0 2#0000_00001 2#0010_0000 | TOR | 1.5 | Mot de commande miroité | ● Bit 1.5 indique une commande trigger réussie | ||
| TOR | ||||||
| 2 2#0000_00003 2#0000_0000 | Décimal Identif Décimal | ant de | message synchrone / asynchrone | |||
| 4 30 Décimal5 0 | Décimal | 30 | Compteur de messages | ● L'appareil a reçu 30 messages● Incrémente de 1 pour chaque action (trigger, message envoyé, etc.) | ||
| 6 07 0 | Décimal | Réservé | ||||
| Décimal | ||||||
| 8 s9 t1011 | ASCIIASCIIara | ASCIIASCII | star | Chaîne de départ | ||
| 1213 | 00 | DécimalDécimal | 0 | Etats de tous les ROI (0 = mauvais, 1 = bon) | Affiche l'état du contrôle de complétude | |
| N° octet Données Codage | Valeur process | Unité Description Commentaire | ||
| 14 0 Décimal | 0 ID ROI | Les octets 14 et 15 sont utilisés par le suivi automatique de position si celui-ci est activé.0 = la position n'est pas suivie1 = la position est suivieToutes les données suivantes sont déplacées de 2 octets;c'est-à-dire, le 1er ID ROI commence par les octets 16 et 17. | ||
| 15 0 Décimal | ||||
| 16 0 Décimal | 0 Etat ROI | Etat ROI:0 = bon1 = plan de référence non appris2 = apprentissage échoué3 = plan de référence non valable4 = pas de pixels valables5 = plan de référence ne contient pas de pixels valables6 = état de dépassement7 = état de manque | ||
| 17 0 Décimal | ||||
| 18 0 Décimal | 0 mm Valeur ROI | |||
| 19 0 Décimal | ||||
| 20 1 Décimal | 1 ID ROI | |||
| 21 0 Décimal | ||||
| 22 7 Décimal | 7 Etat ROI | |||
| 23 0 Décimal | ||||
| 24 -67 Décimal | -67 mm Valeur ROI | |||
| 25 -1 Décimal | ||||
| 26 2 Décimal | 2 ID ROI | |||
| 27 0 Décimal | ||||
| 28 6 Décimal | 6 Etat ROI | |||
| 29 0 Décimal | ||||
| 30 14 Décimal | 14 mm Valeur ROI | |||
| 31 0 Décimal | ||||
| 32 3 Décimal | 3 ID ROI | |||
| 33 0 Décimal | ||||
| 34 0 Décimal | 0 Etat ROI | |||
| 35 0 Décimal | ||||
| 36 0 Décimal | 0 mm Valeur ROI | |||
| 37 0 Décimal | ||||
| 38 s | ASCII | stop | Chaîne de fin | |
| 39 t | ASCII | |||
| 40 o ASCII | ||||
| 41 p ASCII |

L'exécution erronée d'une commande aboutit à l'état suivant :
- Bit d'erreur = 1
• Le mot de commande miroité est affiché - Bit de message asynchrone = 0
- Identifiant de message asynchrone = 0
• Le compteur de messages incrémente de 1
9.3.2 Transmettre les valeurs process du contrôle de complétude via PROFINET.
L'appareil peut transmettre les valeurs process à un API via le bus de terrain PROFINET. Les valeurs process sont affichées dans le logiciel ifm Vision Assistant en tant qu'une chaîne de caractères comme suit :
Un seul bus de terrain ne peut être actif. Le bus de terrain peut être configuré (→ Manuel du logiciel).
Dans la chaîne de caractères les valeurs process sont séparées par un point-virgule. La chaîne de caractères est transmise à un API dans l'ordre affiché.

Veuillez noter les remarques suivantes concernant la transmission de la chaîne de caractères à un API :
- Les octets 0 à 7 font partie de la chaîne de caractères. Ils ne sont pas affichés dans le logiciel ifm Vision Assistant (voir la copie d'écran ci-dessus).
- Les points-virgules "; " contenus dans la chaîne de caractères ne sont pas transmis.
- Les valeurs flottantes sont converties en entiers de 16 bits.
- Toutes les valeurs numériques sont converties en entiers de 16 bits avant la transmission.
La chaîne de caractères se décompose comme suit :
| N° octet Données Codage | Valeur process | Unité Description Commentaire | ||||
| 0 2#0010_0000 | TOR | 0.5 | Mot de commande miroité | ● Bit 0.5 indique une commande trigger réussie | ||
| 1 2#0000_0000 | TOR | |||||
| 2 2#0000_0000 | Décimal Identif | ant de | message synchrone / asynchrone | |||
| 3 2#0000_0000 | Décimal | |||||
| 4 0 | Décimal | 30 | Compteur de messages | ● L'appareil a reçu 30 messages● Incrémente de 1 pour chaque action (trigger, message envoyé, etc.) | ||
| 5 30 | Décimal | |||||
| 6 0 | Décimal | Réservé | ||||
| 7 0 | Décimal | |||||
| 8 s | ASCII | star | Chaîne de départ | |||
| 9 t | ASCII | |||||
| 10 | a | ASCII | ||||
| 11 | r | ASCII | ||||
| 12 | 0 | Décimal | 0 | Etats de tous les ROI (0 = mauvais, 1 = bon) | Affiche l'état du contrôle de complétude | |
| 13 | 0 | Décimal | ||||
| N° octet Données Codage | Valeur process | Unité Description Commentaire | ||
| 14 0 Décimal | 0 ID ROI | Les octets 14 et 15 sont utilisés par le suivi automatique de position si celui-ci est activé.0 = la position n'est pas suivie1 = la position est suivieToutes les données suivantes sont déplacées de 2 octets;c'est-à-dire, le 1er ID ROI commence par les octets 16 et 17. | ||
| 15 0 Décimal | ||||
| 16 0 Décimal | 0 Etat ROI | Etat ROI:0 = bon1 = plan de référence non appris2 = apprentissage échoué3 = plan de référence non valable4 = pas de pixels valables5 = plan de référence ne contient pas de pixels valables6 = état de dépassement7 = état de manque | ||
| 17 0 Décimal | ||||
| 18 0 Décimal | 0 mm Valeur ROI | |||
| 19 0 Décimal | ||||
| 20 0 Décimal | 1 ID ROI | |||
| 21 1 Décimal | ||||
| 22 0 Décimal | 7 Etat ROI | |||
| 23 7 Décimal | ||||
| 24 -1 Décimal | -67 mm Valeur ROI | |||
| 25 -67 Décimal | ||||
| 26 0 Décimal | 2 ID ROI | |||
| 27 2 Décimal | ||||
| 28 0 Décimal | 6 Etat ROI | |||
| 29 6 Décimal | ||||
| 30 0 Décimal | 14 mm Valeur ROI | |||
| 31 14 Décimal | ||||
| 32 0 Décimal | 3 ID ROI | |||
| 33 3 Décimal | ||||
| 34 0 Décimal | 0 Etat ROI | |||
| 35 0 Décimal | ||||
| 36 0 Décimal | 0 mm Valeur ROI | |||
| 37 0 Décimal | ||||
| 38 s | ASCII | stop | Chaîne de fin | |
| 39 t | ASCII | |||
| 40 o ASCII | ||||
| 41 p ASCII |

L'exécution erronée d'une commande aboutit à l'état suivant :
- Bit d'erreur = 1
• Le mot de commande miroité est affiché - Bit de message asynchrone = 0
- Identifiant de message asynchrone = 0
• Le compteur de messages incrémente de 1
9.3.3 Transmettre les valeurs process du contrôle de complétude via TCP/IP
L'appareil peut transmettre les valeurs process à un API via le protocole TCP/IP. Les valeurs process sont affichées dans le logiciel ifm Vision Assistant en tant qu'une chaîne de caractères comme suit :
Dans la chaîne de caractères les valeurs process sont séparées par un point-virgule. La chaîne de caractères est transmise à un API dans l'ordre affiché.

Veuillez noter les remarques suivantes concernant la transmission de la chaîne de caractères à un API :
- Les points-virgules ";" contenus dans la chaîne de caractères ne sont pas transmis.
- Toutes les valeurs numériques sont converties en entiers de 16 bits avant la transmission.
La chaîne de caractères se décompose comme suit (type de données : ASCII) :
| Valeur process Unité Description | |
| star Chaîne de départ | |
| 0 Etats de tous les ROI (0 = mauvais, 1 = bon) | |
| 00 ID ROI0 Etat ROI+0.000 m Valeur ROI | |
| 01 ID ROI7 Etat ROI-0.068 m Valeur ROI | |
| 02 ID ROI6 Etat ROI+0.013 m Valeur ROI | |
| 03 ID ROI0 Etat ROI+0.001 m Valeur ROI | |
| stop Chaîne de fin | |
Etat ROI :
0 = bon
1 = plan de référence non appris
2 = apprentissage échoué
3 = plan de référence non valable
4 = pas de pixels valables
5 = plan de référence ne contient pas de pixels valables
6 = état de dépassement
7 = état de manque
9.3.4 Transmettre les valeurs process du dimensionnement d'objets via EtherNet/IP
L'appareil peut transmettre les valeurs process à un API via le bus de terrain EtherNet/IP. Les valeurs process sont affichées dans le logiciel ifm Vision Assistant en tant qu'une chaîne de caractères comme suit :
Un seul bus de terrain ne peut être actif. Le bus de terrain peut être configuré (→ Manuel du logiciel).
Dans la chaîne de caractères les valeurs process sont séparées par un point-virgule. La chaîne de caractères est transmise à un API dans l'ordre affiché.
Veuillez noter les remarques suivantes concernant la transmission de la chaîne de caractères à un API :
- La chaîne de caractères est configurable. Dans le logiciel ifm Vision Assistant on peut choisir quelles valeurs process doivent être transmises.
- Les octets 0 à 7 font partie de la chaîne de caractères. Ils ne sont pas affichés dans le logiciel ifm Vision Assistant (voir la copie d'écran ci-dessus).
- Les points-virgules ";" contenus dans la chaîne de caractères ne sont pas transmis.
- Les valeurs flottantes sont converties en entiers de 16 bits.
- Toutes les valeurs numériques sont converties en entiers de 16 bits avant la transmission.
La chaîne de caractères se décompose comme suit :
| N° octet Données Codage | Valeur process | Unité Description Commentaire | ||||
| 0 2#0000_00001 2#0010_0000 | TORTOR | 1.5 | Mot de commande miroité | ● Bit 1.5 indique une commande trigger réussie | ||
| 2 2#0000_00003 2#0000_0000 | TOR IdentifianteTOR | message synchrone /asynchrone | ||||
| 4 2#0000_00115 2#0000_0000 | TORTOR | 3 | Compteur de messages | ● L'appareil a reçu 3 messages● Incrémente de 1 pour chaque action (trigger, message envoyé, etc.) | ||
| 6 2#0000_00007 2#0000_0000 | TORTOR | Réservé | ||||
| 8 s9 t1011 | ASCIIASCIAAr | ASCIIASCI | star | Chaîne de départ | ||
| 1213 | 2#0000_00012#0000_0000 | TORTOR | 1 | Bit de résultat | 0 = aucune boîte trouvée1 = boîte trouvée | |
| 1415 | 1040 | DécimalDécimal | 104 | mm | Largeur | |
| 1617 | 880 | DécimalDécimal | 88 | mm | Hauteur | |
| 1819 | 1080 | DécimalDécimal | 109 | mm | Longueur | |
| N° octet Données Codage | Valeur process | Unité Description Commentaire | ||
| 20 21 Décimal21 0 Décimal | 21Coordonnée x | |||
| 22 -11 Décimal23 -1 Décimal | -11Coordonnée y | |||
| 24 -124 Décimal25 1 Décimal | 389Coordonnée z | |||
| 26 -98 Décimal27 0 Décimal | 158Angle de rotation | |||
| 28 97 Décimal29 0 Décimal | 97Qualité largeur | |||
| 30 93 Décimal31 0 Décimal | 94Qualité hauteur | |||
| 32 97 Décimal33 0 Décimal | 97Qualité longueur | |||
| 34 s35 t | ASCIIASCII | stop | ||
| 36 o ASCII37 p ASCII | Chaîne de fin |

L'exécution erronée d'une commande aboutit à l'état suivant :
- Bit d'erreur = 1
• Le mot de commande miroité est affiché - Bit de message asynchrone = 0
- Identifiant de message asynchrone = 0
• Le compteur de messages incrémente de 1
9.3.5 Transmettre les valeurs process du dimensionnement d'objets via PROFINET
L'appareil peut transmettre les valeurs process à un API via le bus de terrain PROFINET. Les valeurs process sont affichées dans le logiciel ifm Vision Assistant en tant qu'une chaîne de caractères comme suit :
Un seul bus de terrain ne peut être actif. Le bus de terrain peut être configuré (→ Manuel du logiciel).
Dans la chaîne de caractères les valeurs process sont séparées par un point-virgule. La chaîne de caractères est transmise à un API dans l'ordre affiché.
Veuillez noter les remarques suivantes concernant la transmission de la chaîne de caractères à un API :
- La chaîne de caractères est configurable. Dans le logiciel ifm Vision Assistant on peut choisir quelles valeurs process doivent être transmises.
- Les octets 0 à 7 font partie de la chaîne de caractères. Ils ne sont pas affichés dans le logiciel ifm Vision Assistant (voir la copie d'écran ci-dessus).
- Les points-virgules ";" contenus dans la chaîne de caractères ne sont pas transmis.
- Les valeurs flottantes sont converties en entiers de 16 bits.
- Toutes les valeurs numériques sont converties en entiers de 16 bits avant la transmission.
La chaîne de caractères se décompose comme suit :
| N° byte Données Codage | Valeur process | Unité Description Commentaire | ||||
| 0 2#0010_0000 | TOR | 0.5 | Mot de commande miroité | ● Bit 0.5 indique une commande trigger réussie | ||
| 1 2#0000_0000 | TOR | message synchrone / asynchrone | ||||
| 2 2#0000_0000 | TOR Identifiant de | |||||
| 3 2#0000_0000 | TOR | |||||
| 4 2#0000_0000 | TOR | 3 | Compteur de messages | ● L'appareil a reçu 3 messages● Incrémente de 1 pour chaque action (trigger, message envoyé, etc.) | ||
| 5 2#0000_0011 | TOR | |||||
| 6 2#0000_0000 | TOR | Réservé | ||||
| 7 2#0000_0000 | TOR | |||||
| 8 s | ASCII | star | Chaîne de départ | |||
| 9 t | ASCII | |||||
| 10 | a | ASCII | ||||
| 11 | r | ASCII | ||||
| 12 | 2#0000_0000 | TOR | 1 | Bit de résultat | 0 = aucune boîte trouvée1 = boîte trouvée | |
| 13 | 2#0000_0001 | TOR | ||||
| 14 | 0 | Décimal | 104 | mm | Largeur | |
| 15 | 104 | Décimal | ||||
| 16 | 0 | Décimal | 88 | mm | Hauteur | |
| 17 | 88 | Décimal | ||||
| 18 | 0 | Décimal | 109 | mm | Longueur | |
| 19 | 109 | Décimal | ||||
| N° byte Données | es Codage | Valeur process | Unité Description | Commentaire | |
| 20 0 Décimal21 21 Décimal | 21Coordonnée x | ||||
| 22 -1 Décimal23 -11 Décimal | -11Coordonnée y | ||||
| 24 1 Décimal25 -124 Décimal | 389Coordonnée z | ||||
| 26 0 Décimal27 -98 Décimal | 158Angle de rotation | ||||
| 28 0 Décimal29 97 Décimal | 97Qualité largeur | ||||
| 30 0 Décimal31 94 Décimal | 94Qualité hauteur | ||||
| 32 0 Décimal33 97 Décimal | 97Qualité longueur | ||||
| 34 s35 t | ASCIIASCII | stop | Chaîne de fin | ||
| 36 o ASCII37 p ASCII |

L'exécution erronée d'une commande aboutit à l'état suivant :
- Bit d'erreur = 1
• Le mot de commande miroité est affiché - Bit de message asynchrone = 0
- Identifiant de message asynchrone = 0
• Le compteur de messages incrémente de 1
9.3.6 Transmettre les valeurs process du dimensionnement d'objets via TCP/IP
L'appareil peut transmettre les valeurs process à un API via le protocole TCP/IP. On peut sélectionner dans le logiciel ifm Vision Assistant quelles valeurs process sont à transmettre. Les valeurs process sont affichées dans le logiciel ifm Vision Assistant en tant qu'une chaîne de caractères comme suit :
Dans la chaîne de caractères les valeurs process sont séparées par un point-virgule. La chaîne de caractères est transmise à un API dans l'ordre affiché.

Veuillez noter les remarques suivantes concernant la transmission de la chaîne de caractères à un API :
- Les points-virgules ";" contenus dans la chaîne de caractères ne sont pas transmis.
- Toutes les valeurs numériques sont converties en entiers de 16 bits avant la transmission.
La chaîne de caractères se décompose comme suit (type de données : ASCII) :
| Valeur process Unité Description | |
| star Chaîne de départ | |
| 1 Objet trouvé | |
| 0 104 m Largeur | |
| 0 088 m Hauteur | |
| 0 109 m Longueur | |
| +0 021 Coordonnée x | |
| -0 011 Coordonnée y | |
| +0 389 Coordonnée z | |
| 158 Angle de rotation | |
| 097 Qualité largeur | |
| 094 Qualité hauteur | |
| 097 Qualité longueur | |
| stop Chaîne de fin | |
9.3.7 Transmettre les valeurs process de la mesure de niveau via EtherNet/IP
L'appareil peut transmettre les valeurs process à un API via le bus de terrain EtherNet/IP. Les valeurs process sont affichées dans le logiciel ifm Vision Assistant en tant qu'une chaîne de caractères comme suit :
0070

Un seul bus de terrain ne peut être actif. Le bus de terrain peut être configuré (→ Manuel du logiciel).
La chaîne de caractères est transmise à un API dans l'ordre affiché.

Veuillez noter les remarques suivantes concernant la transmission de la chaîne de caractères à un API :
- Les octets 0 à 7 font partie de la chaîne de caractères. Ils ne sont pas affichés dans le logiciel ifm Vision Assistant (voir la copie d'écran ci-dessus).
- Les points-virgules "," contenus dans la chaîne de caractères ne sont pas transmis.
- Les valeurs flottantes sont converties en entiers de 16 bits.
- Toutes les valeurs numériques sont converties en entiers de 16 bits avant la transmission.
La chaîne de caractères se décompose comme suit :
0070
| N° octet Données Codage | Valeur process | Unité Description Commentaire | ||||
| 0 2#0000_00001 2#0010_0000 | TOR | 1.5 | Mot de commande miroité | Bit 1.5 indique une commande trigger réussie | ||
| 2 2#0000_00003 2#0000_0000 | Décimal | Identifiant de message synchrone / asynchrone | ||||
| 4 30 Décimal5 0 Décimal | 30 | Compteur de messages | L'appareil a reçu 30 messagesIncrémente de 1 pour chaque action (trigger, message envoyé, etc.) | |||
| 6 0 Décimal7 0 Décimal | Réservé | |||||
| 8 0 Décimal9 0 Décimal | 0 | Etats de tous les ROI (0 = mauvais, 1 = bon) | Affiche l'état de la mesure de niveau | |||
| 1011 | 0 Décimal0 Décimal | 0 | ID ROI | Etat ROI:0 = bon6 = état de dépassement7 = état de manque | ||
| 1213 | 7 Décimal0 Décimal | 7 | Etat ROI | |||
| 1415 | 0 Décimal0 Décimal | 0 | mm | Valeur ROI | ||

L'exécution erronée d'une commande aboutit à l'état suivant :
- Bit d'erreur = 1
- Le mot de commande miroité est affiché
- Bit de message asynchrone = 0
- Identifiant de message asynchrone = 0
- Le compteur de messages incrémente de 1
9.3.8 Transmettre les valeurs process de la mesure de niveau via PROFINET
L'appareil peut transmettre les valeurs process à un API via le bus de terrain PROFINET. Les valeurs process sont affichées dans le logiciel ifm Vision Assistant en tant qu'une chaîne de caractères comme suit :
0070
Un seul bus de terrain ne peut être actif. Le bus de terrain peut être configuré (→ Manuel du logiciel).
La chaîne de caractères est transmise à un API dans l'ordre affiché.
Veuillez noter les remarques suivantes concernant la transmission de la chaîne de caractères à un API :
- Les octets 0 à 7 font partie de la chaîne de caractères. Ils ne sont pas affichés dans le logiciel ifm Vision Assistant (voir la copie d'écran ci-dessus).
- Les points-virgules ";" contenus dans la chaîne de caractères ne sont pas transmis.
- Les valeurs flottantes sont converties en entiers de 16 bits.
- Toutes les valeurs numériques sont converties en entiers de 16 bits avant la transmission.
La chaîne de caractères se décompose comme suit :
0070
| N° byte Données | es Codage | Valeur process | Unité Description | Commentaire | ||
| 0 2#0010_0000 | TOR | 0.5 | Mot de commande miroité | Bit 0.5 indique une commande trigger réussie | ||
| 1 2#0000_0000 | TOR | |||||
| 2 2#0000_0000 | Décimal | Identifiant message synchrone / asynchrone | ||||
| 3 2#0000_0000 | Décimal | |||||
| 4 0 Décimal | 30 | Compteur de messages | L'appareil a reçu 30 messagesIncrémente de 1 pour chaque action (trigger, message envoyé, etc.) | |||
| 5 30 Décimal | ||||||
| 6 0 Décimal | Réservé | |||||
| 7 0 Décimal | ||||||
| 8 0 Décimal | 0 | Etats de tous les ROI (0 = mauvais, 1 = bon) | Affiche l'état de la mesure de niveau | |||
| 9 0 Décimal | ||||||
| 10 | 0 Décimal | 0 | ID ROI | Etat ROI:0 = bon6 = état de dépassement7 = état de manque | ||
| 11 | 0 Décimal | |||||
| 12 | 0 Décimal | 7 | Etat ROI | |||
| 13 | 7 Décimal | |||||
| 14 | 0 Décimal | 0 | mm | Valeur ROI | ||
| 15 | 0 Décimal |
L'exécution erronée d'une commande aboutit à l'état suivant :
- Bit d'erreur = 1
- Le mot de commande miroité est affiché
- Bit de message asynchrone = 0
- Identifiant de message asynchrone = 0
- Le compteur de messages incrémente de 1
9.3.9 Transmettre les valeurs process de la mesure de niveau via TCP/IP
L'appareil peut transmettre les valeurs process à un API via le protocole TCP/IP. Les valeurs process sont affichées dans le logiciel ifm Vision Assistant en tant qu'une chaîne de caractères comme suit :
star;0;00;7;+0.000;stop
Dans la chaîne de caractères les valeurs process sont séparées par un point-virgule. La chaîne de caractères est transmise à un API dans l'ordre affiché.

Veuillez noter les remarques suivantes concernant la transmission de la chaîne de caractères à un API :
- Les points-virgules "; " contenus dans la chaîne de caractères ne sont pas transmis.
- Toutes les valeurs numériques sont converties en entiers de 16 bits avant la transmission.
La chaîne de caractères se décompose comme suit (type de données : ASCII) :
star;0;00;7;+0.000;stop
| Valeur process Unité Description | |
| star Chaîne de départ | |
| 0 Etats de tous les ROI (0 = mauvais, 1 = bon) | |
| 00 ID ROI7 Etat ROI+0 000 m Valeur ROI | |
| stop Chaîne de fin | |
Etat ROI :
0 = bon
6 = état de dépassement
7 = état de manque
9.3.10 Transmettre les valeurs process du Pick and Place du robot via EtherNet/IP
L'appareil peut transmettre les valeurs process à un API via le bus de terrain EtherNet/IP.

Un seul bus de terrain ne peut être actif. Le bus de terrain peut être configuré (→ Manuel du logiciel).
Dans la chaîne de caractères les valeurs process sont séparées par un point-virgule. La chaîne de caractères est transmise à un API dans l'ordre affiché.

Veuillez noter les remarques suivantes concernant la transmission de la chaîne de caractères à un API :
- Les octets 0 à 7 font partie de la chaîne de caractères. Ils ne sont pas affichés dans le logiciel ifm Vision Assistant.
- Les octets 14 à 35 se répètent pour chaque objet réglé sous "Nombre d'objets" (10 répétitions maximales).
- Les points-virgules ";" contenus dans la chaîne de caractères ne sont pas transmis.
- Les valeurs flottantes sont converties en entiers de 16 bits avant la transmission.
- Toutes les valeurs numériques sont converties en entiers de 16 bits avant la transmission.
La chaîne de caractères se décompose comme suit :
| N° octet Données Codage | Valeur process | Unité Description Commentaire | ||||
| 0 2#0010_0000TOR1 2#0000_0000TOR | 0.5 | Mot de commande miroité | ● Bit 0.5 indique une commande trigger réussie | |||
| 2 2#0000_0000TOR Identifiant de3 2#0000_0000TOR | message synchrone / asynchrone | |||||
| 4 2#0000_0000TOR5 2#0000_0011TOR | 3 | Compteur de messages | ● L'appareil a reçu 3 messages● Incrémente de 1 pour chaque action (trigger, message envoyé, etc.) | |||
| 6 2#0000_0000TOR7 2#0000_0000TOR | Réservé | |||||
| 8 09 0 | Décimal | 0 | Erreur | Erreur :0 = aucune erreur1 = erreur non définie2 = aucun objet trouvé | ||
| Décimal | ||||||
| 1011 | 10 | DécimalDécimal | 01 | Nombre d'objets | Nombre des objets trouvés | |
| 1213 | 80 | DécimalDécimal | 08 | Nombre d'objets candidats | Nombre des objets candidatstrouvés et vérifiés | |
| 1415 | 10 | TOR | 1 | Objet trouvé | 0 = aucun objet trouvé1 = objet trouvé | |
| TOR | ||||||
| 1617 | 3380 | DécimalDécimal | 338 | mm | Largeur | La plus large dimension de la surface de l'objet. |
| 1819 | 1420 | DécimalDécimal | 142 | mm | Hauteur | La hauteur de l'objet par rapport à la platine de base. |
| 2021 | 4520 | DécimalDécimal | 452 | mm | Longueur | La plus longue dimension de la surface de l'objet. |
| 2223 | 750 | DécimalDécimal | 75 | Centre X | La coordonnée X du centre de la surface de l'objet (dans le système de coordonnées de l'utilisateur). | |
| N° octet Données Codage | Valeur process | Unité Description Commentaire | |||
| 24 -71 Décimal25 0 Décimal | -71 Centre Y | La coordonnée Y du centre de la surface de l'objet (dans le système de coordonnées de l'utilisateur). | |||
| 26 783 Décimal27 0 Décimal | 783 Centre Z | La coordonnée Z du centre de la surface de l'objet (dans le système de coordonnées de l'utilisateur). | |||
| 28 78 Décimal29 0 Décimal | 078 Angle de lacet | L'angle de lacet se situe entre l'axe x (système mondial de coordonnées) et le vecteur le long de la "longueur" de l'objet. | |||
| 30 0 Décimal31 0 Décimal | +000 Rotation X | Rotation autour de l'axe x de l'objet reconnu (dans le système de coordonnées de l'utilisateur). | |||
| 32 0 Décimal33 0 Décimal | +000 Rotation Y | Rotation autour de l'axe y de l'objet reconnu (dans le système de coordonnées de l'utilisateur). | |||
| 34 56 Décimal35 0 Décimal | +056 Rotation Z | Rotation autour de l'axe z de l'objet reconnu (dans le système de coordonnées de l'utilisateur). | |||

L'exécution erronée d'une commande aboutit à l'état suivant :
- Bit d'erreur = 1
• Le mot de commande miroité est affiché - Bit de message asynchrone = 0
- Identifiant de message asynchrone = 0
- Le compteur de messages incrémente de 1
9.3.11 Transmettre les valeurs process du Pick and Place du robot via PROFINET
L'appareil peut transmettre les valeurs process à un API via le bus de terrain PROFINET.

Un seul bus de terrain ne peut être actif. Le bus de terrain peut être configuré (→ Manuel du logiciel).
Dans la chaîne de caractères les valeurs process sont séparées par un point-virgule. La chaîne de caractères est transmise à un API dans l'ordre affiché.

Veuillez noter les remarques suivantes concernant la transmission de la chaîne de caractères à un API :
- Les octets 0 à 7 font partie de la chaîne de caractères. Ils ne sont pas affichés dans le logiciel ifm Vision Assistant.
- Les octets 14 à 35 se répètent pour chaque objet réglé sous "Nombre d'objets" (10 répétitions maximales).
- Les points-virgules ";" contenus dans la chaîne de caractères ne sont pas transmis.
- Les valeurs flottantes sont converties en entiers de 16 bits avant la transmission.
- Toutes les valeurs numériques sont converties en entiers de 16 bits avant la transmission.
La chaîne de caractères se décompose comme suit :
| N° octet Données Codage | Valeur process | Unité Description Commentaire | ||||
| 0 2#0010_0000TOR1 2#0000_0000TOR | 0.5 | Mot de commande miroité | ● Bit 0.5 indique une commande trigger réussie | |||
| 2 2#0000_0000TOR Identifiant de3 2#0000_0000TOR | message synchrone / asynchrone | |||||
| 4 2#0000_0000TOR5 2#0000_0011TOR | 3 | Compteur de messages | ● L'appareil a reçu 3 messages● Incrémente de 1 pour chaque action (trigger, message envoyé, etc.) | |||
| 6 2#0000_0000TOR7 2#0000_0000TOR | Réservé | |||||
| 8 09 0 | Décimal | 0 | Erreur | Erreur :0 = aucune erreur1 = erreur non définie2 = aucun objet trouvé | ||
| Décimal | ||||||
| 1011 | 10 | DécimalDécimal | 01 | Nombre d'objets | Nombre des objets trouvés | |
| 1213 | 80 | DécimalDécimal | 08 | Nombre d'objets candidats | Nombre des objets candidatstrouvés et vérifiés | |
| 1415 | 10 | TORTOR | 1 | Objet trouvé | 0 = aucun objet trouvé1 = objet trouvé | |
| 1617 | 3380 | DécimalDécimal | 338 | mm | Largeur | La plus large dimension de la surface de l'objet. |
| 1819 | 1420 | DécimalDécimal | 142 | mm | Hauteur | La hauteur de l'objet par rapport à la platine de base. |
| 2021 | 4520 | DécimalDécimal | 452 | mm | Longueur | La plus longue dimension de la surface de l'objet. |
| 2223 | 750 | DécimalDécimal | 75 | Centre X | La coordonnée X du centre de la surface de l'objet (dans le système de coordonnées de l'utilisateur). | |
| N° octet Données Codage | Valeur process | Unité Description Commentaire | |||
| 24 -71 Décimal25 0 Décimal | -71 Centre Y | La coordonnée Y du centre de la surface de l'objet (dans le système de coordonnées de l'utilisateur). | |||
| 26 783 Décimal27 0 Décimal | 783 Centre Z | La coordonnée Z du centre de la surface de l'objet (dans le système de coordonnées de l'utilisateur). | |||
| 28 78 Décimal29 0 Décimal | 078 Angle de lacet | L'angle de lacet se situe entre l'axe x (système mondial de coordonnées) et le vecteur le long de la "longueur" de l'objet. | |||
| 30 0 Décimal31 0 Décimal | +000 Rotation X | Rotation autour de l'axe x de l'objet reconnu (dans le système de coordonnées de l'utilisateur). | |||
| 32 0 Décimal33 0 Décimal | +000 Rotation Y | Rotation autour de l'axe y de l'objet reconnu (dans le système de coordonnées de l'utilisateur). | |||
| 34 56 Décimal35 0 Décimal | +056 Rotation Z | Rotation autour de l'axe z de l'objet reconnu (dans le système de coordonnées de l'utilisateur). | |||

L'exécution erronée d'une commande aboutit à l'état suivant :
- Bit d'erreur = 1
• Le mot de commande miroité est affiché - Bit de message asynchrone = 0
- Identifiant de message asynchrone = 0
- Le compteur de messages incrémente de 1
9.3.12 Transmettre les valeurs process du Pick and Place du robot via TCP/IP
L'appareil peut transmettre les valeurs process à un API via le protocole TCP/IP. Les valeurs process sont affichées dans le logiciel ifm Vision Assistant en tant qu'une chaîne de caractères comme suit :
star;0;01;08;1;0.338;0.142;0.452;+0.075;-0.071; +0.783;078;+000 ;+000;+056;stop
Dans la chaîne de caractères les valeurs process sont séparées par un point-virgule. La chaîne de caractères est transmise à un API dans l'ordre affiché.

Veuillez noter les remarques suivantes concernant la transmission de la chaîne de caractères à un API :
- Les points-virgules ";" contenus dans la chaîne de caractères ne sont pas transmis.
- Les valeurs process "objet trouvé" jusqu'à "rotation Z" se répètent pour chaque objet réglé sous "Nombre d'objets" (10 répétitions maximales).
- Toutes les valeurs numériques sont converties en entiers de 16 bits avant la transmission.
La chaîne de caractères se décompose comme suit (type de données : ASCII) :
| Valeur process Unité Description | |
| star Chaîne de départ | |
| 0 Erreur | |
| 01 Nombre d'objets | |
| 08 Nombre d'objets candidats | |
| 1 | |
| 0 338 mm Largeur | |
| 0 142 mm Hauteur | |
| 0 452 mm Longueur | |
| +0 075 Centre X | |
| -0 071 Centre Y | |
| +0 783 Centre Z | |
| 078 | |
| +000 | |
| +000 | |
| +056 | |
| stop | |
9.3.13 Transmettre les valeurs process de la dépalettisation via EtherNet/IP
L'appareil peut transmettre les valeurs process à un API via le bus de terrain EtherNet/IP.

Un seul bus de terrain ne peut être actif. Le bus de terrain peut être configuré (→ Manuel du logiciel).
Dans la chaîne de caractères les valeurs process sont séparées par un point-virgule. La chaîne de caractères est transmise à un API dans l'ordre affiché.

Veuillez noter les remarques suivantes concernant la transmission de la chaîne de caractères à un API :
- Les octets 0 à 7 font partie de la chaîne de caractères. Ils ne sont pas affichés dans le logiciel ifm Vision Assistant.
- Les points-virgules ";" contenus dans la chaîne de caractères ne sont pas transmis.
- Les valeurs flottantes sont converties en entiers de 16 bits avant la transmission.
- Toutes les valeurs numériques sont converties en entiers de 16 bits avant la transmission.
La chaîne de caractères se décompose comme suit :
| N° octet Données Codage | Valeur process | Unité Description Commentaire | ||||
| 0 2#0010_0000 | TOR | 0.5 | Mot de commande miroité | ● Bit 0.5 indique une commande trigger réussie | ||
| 1 2#0000_0000 | TOR Identifiant de TOR | message synchrone / asynchrone | ||||
| 2 2#0000_0000 | TOR Identifiant de TOR | |||||
| 3 2#0000_0000 | TOR | |||||
| 4 2#0000_0000 | TOR | 3 | Compleur de messages | ● L'appareil a reçu 3 messages● Incrémente de 1 pour chaque action (trigger, message envoyé, etc.) | ||
| 5 2#0000_0011 | TOR | |||||
| 6 2#0000_0000 | TOR | Réservé | ||||
| 7 2#0000_0000 | TOR | |||||
| 8 1 | TOR | 1 | Objet trouvé | 0 = aucun objet trouvé | ||
| 9 0 | TOR | 1 = objet trouvé | ||||
| 10 | 200 | Décimal | 200 | mm | Largeur | La plus large dimension de la surface de l'objet. |
| 11 | 0 | Décimal | ||||
| 12 | 150 | Décimal | 150 | mm | Hauteur | La hauteur de l'objet par rapport à la platine de base. |
| 13 | 0 | Décimal | ||||
| 14 | 307 | Décimal | 307 | mm | Longueur | La plus longue dimension de la surface de l'objet. |
| 15 | 0 | Décimal | ||||
| 16 | 2 | Décimal | +2 | Centre X | La coordonnée X du centre de la surface de l'objet (dans le système de coordonnées de l'utilisateur). | |
| 17 | 0 | Décimal | ||||
| 18 | 10044 | Décimal | -10044 | Centre Y | La coordonnée Y du centre de la surface de l'objet (dans le système de coordonnées de l'utilisateur). | |
| 19 | 0 | Décimal | ||||
| 20 | 3100 | Décimal | +3100 | Centre Z | La coordonnée Z du centre de la surface de l'objet (dans le système de coordonnées de l'utilisateur). | |
| 21 | 0 | Décimal | ||||
| 22 | 170 | Décimal | +170 | Rotation X | Rotation autour de l'axe x de l'objet reconnu (dans le système de coordonnées de l'utilisateur). | |
| 23 | 0 | Décimal | ||||
| N° octet Données Codage | Valeur process | Unité Description Commentaire | |||
| 24 -133 Décimal25 0 Décimal | -133 Rotation Y | Rotation autour de l'axe y de l'objet reconnu (dans le système de coordonnées de l'utilisateur). | |||
| 26 -132 Décimal27 0 Décimal | -132 Rotation Z | Rotation autour de l'axe z de l'objet reconnu (dans le système de coordonnées de l'utilisateur). | |||
| 28 02 Décimal29 0 Décimal | 02 Plan actuel | Plan de palette actuel, commençant par "0". Un plan vide est identifié par "0". | |||
| 30 1 TOR31 0 TOR | 1 Intercalaire | Un intercalaire se trouve à un plan de palette :0 = aucun intercalaire détecté1 = intercalaire détecté | |||
| 32 098 Décimal33 0 Décimal | 098 Erreur | Erreur :0 = aucune erreur1 = erreur non définie2 = objet inattendu détectéAutres codes d'erreur :(→ 13.1.5). | |||
| 34 00 TOR35 0 TOR | 00 Sans collision | Dépalettisation sans collision0 : non1 : oui | |||
| 36 1 Décimal37 0 Décimal | 1 Qualité | Qualité de la reconnaissance d'objets entre 0 et 100. La valeur "100" représente la meilleure qualité possible. | |||

L'exécution erronée d'une commande aboutit à l'état suivant :
- Bit d'erreur = 1
- Le mot de commande miroité est affiché
- Bit de message asynchrone = 0
- Identifiant de message asynchrone = 0
- Le compteur de messages incrémente de 1
9.3.14 Transmettre les valeurs process de la dépalettisation via PROFINET
L'appareil peut transmettre les valeurs process à un API via le bus de terrain PROFINET.

Un seul bus de terrain ne peut être actif. Le bus de terrain peut être configuré (→ Manuel du logiciel).
Dans la chaîne de caractères les valeurs process sont séparées par un point-virgule. La chaîne de caractères est transmise à un API dans l'ordre affiché.

Veuillez noter les remarques suivantes concernant la transmission de la chaîne de caractères à un API :
- Les octets 0 à 7 font partie de la chaîne de caractères. Ils ne sont pas affichés dans le logiciel ifm Vision Assistant.
- Les points-virgules ";" contenus dans la chaîne de caractères ne sont pas transmis.
- Les valeurs flottantes sont converties en entiers de 16 bits avant la transmission.
- Toutes les valeurs numériques sont converties en entiers de 16 bits avant la transmission.
La chaîne de caractères se décompose comme suit :
| N° octet Données Codage | Valeur process | Unité Description Commentaire | ||||
| 0 2#0010_0000 | TOR | 0.5 | Mot de commande miroité | ● Bit 0.5 indique une commande trigger réussie | ||
| 1 2#0000_0000 | TOR | message synchrone / asynchrone | ||||
| 2 2#0000_0000 | TOR Identifiant de | |||||
| 3 2#0000_0000 | TOR | |||||
| 4 2#0000_0000 | TOR | 3 | Compleur de messages | ● L'appareil a reçu 3 messages● Incrémente de 1 pour chaque action (trigger, message envoyé, etc.) | ||
| 5 2#0000_0011 | TOR | |||||
| 6 2#0000_0000 | TOR | Réservé | ||||
| 7 2#0000_0000 | TOR | |||||
| 8 1 | TOR | 1 | Objet trouvé | 0 = aucun objet trouvé | ||
| 9 0 | TOR | 1 = objet trouvé | ||||
| 10 | 200 | Décimal | 200 | mm | Largeur | La plus large dimension de la surface de l'objet. |
| 11 | 0 | Décimal | ||||
| 12 | 150 | Décimal | 150 | mm | Hauteur | La hauteur de l'objet par rapport à la platine de base. |
| 13 | 0 | Décimal | ||||
| 14 | 307 | Décimal | 307 | mm | Longueur | La plus longue dimension de la surface de l'objet. |
| 15 | 0 | Décimal | ||||
| 16 | 2 | Décimal | +2 | Centre X | La coordonnée X du centre de la surface de l'objet (dans le système de coordonnées de l'utilisateur). | |
| 17 | 0 | Décimal | ||||
| 18 | 10044 | Décimal | -10044 | Centre Y | La coordonnée Y du centre de la surface de l'objet (dans le système de coordonnées de l'utilisateur). | |
| 19 | 0 | Décimal | ||||
| 20 | 3100 | Décimal | +3100 | Centre Z | La coordonnée Z du centre de la surface de l'objet (dans le système de coordonnées de l'utilisateur). | |
| 21 | 0 | Décimal | ||||
| 22 | 170 | Décimal | +170 | Rotation X | Rotation autour de l'axe x de l'objet reconnu (dans le système de coordonnées de l'utilisateur). | |
| 23 | 0 | Décimal | ||||
| N° octet Données Codage | Valeur process | Unité Description Commentaire | |||
| 24 -133 Décimal25 0 Décimal | -133 Rotation Y | Rotation autour de l'axe y de l'objet reconnu (dans le système de coordonnées de l'utilisateur). | |||
| 26 -132 Décimal27 0 Décimal | -132 Rotation Z | Rotation autour de l'axe z de l'objet reconnu (dans le système de coordonnées de l'utilisateur). | |||
| 28 02 Décimal29 0 Décimal | 02 Plan actuel | Plan de palette actuel, commençant par "0". Un plan vide est identifié par "0". | |||
| 30 1 TOR31 0 TOR | 1 Intercalaire | Un intercalaire se trouve à un plan de palette :0 = aucun intercalaire détecté1 = intercalaire détecté | |||
| 32 098 Décimal33 0 Décimal | 098 Erreur | Erreur :0 = aucune erreur1 = erreur non définie2 = objet inattendu détectéAutres codes d'erreur :(→ 13.1.5). | |||
| 34 00 TOR35 0 TOR | 00 Sans collision | Dépalettisation sans collision0 : non1 : oui | |||
| 36 1 Décimal37 0 Décimal | 1 Qualité | Qualité de la reconnaissance d'objets entre 0 et 100. La valeur "100" représente la meilleure qualité possible. | |||

L'exécution erronée d'une commande aboutit à l'état suivant :
- Bit d'erreur = 1
- Le mot de commande miroité est affiché
- Bit de message asynchrone = 0
- Identifiant de message asynchrone = 0
- Le compteur de messages incrémente de 1
9.3.15 Transmettre les valeurs process de la dépalettisation via TCP/IP
L'appareil peut transmettre les valeurs process à un API via le protocole TCP/IP. Les valeurs process sont affichées dans le logiciel ifm Vision Assistant en tant qu'une chaîne de caractères comme suit :
star;1;0.200;0.150;0.307;+00.002;-10.044;
+03.100; +170; -133; -132; 02; 1; 098; 00; 1; stop
Dans la chaîne de caractères les valeurs process sont séparées par un point-virgule. La chaîne de caractères est transmise à un API dans l'ordre affiché.

Veuillez noter les remarques suivantes concernant la transmission de la chaîne de caractères à un API :
- Les points-virgules ";" contenus dans la chaîne de caractères ne sont pas transmis.
- Toutes les valeurs numériques sont converties en entiers de 16 bits avant la transmission.
La chaîne de caractères se décompose comme suit (type de données : ASCII) :
| Valeur process Unité Description | |
| star Chaîne de départ | |
| 1 | |
| 0 200 Largeur | |
| 0 150 Hauteur | |
| 0 307 Longueur | |
| +00 002 Centre X-10 044 Centre Y+03 100 Centre Z | |
| +170 Rotation X-133 Rotation Y-132 Rotation Z | |
| 02 Plan actuel | |
| 1 | |
| 098 Erreur | |
| 00 | |
| 1 | |
| stop | |
10. Maintenance, réparation et élimination
Respecter les instructions suivantes :
▶ Ne pas ouvrir l'appareil. A l'intérieur de l'appareil il n'y a pas de composants réparables par l'utilisateur. L'appareil ne doit être réparé que par le fabricant.
▶ Respecter la réglementation du pays en vigueur pour la destruction écologique de l'appareil.
10.1 Nettoyage
Observer les instructions suivantes avant le nettoyage de l'appareil :
▶ Utiliser un chiffon propre et sans peluches.
▶ Comme produit lessiviel, utiliser un nettoyant à vitres.
Si ces instructions ne sont pas respectées, des erreurs de mesure sur la vitre avant, causées par des rayures, sont possibles.
10.2 Mettre à jour le firmware
Le firmware de l'appareil peut être mis à jour avec le logiciel ifm Vision Assistant.
Les paramètres sauvegardés dans l'appareil sont perdus par la mise à jour du firmware. Avant la mise à jour du firmware, faire une copie de sauvegarde des paramètres.
Avant la mise à jour du firmware, exporter les paramètres.
▶ Après la mise à jour du firmware, importer les paramètres.
Les mises à jour du firmware sont disponibles sur : www.ifm.com
10.3 Remplacer l'appareil
Lors du remplacement d'un appareil les paramètres sont perdus. Avant le remplacement de l'appareil, faire une copie de sauvegarde des paramètres.
▶ Avant le remplacement, exporter les paramètres de l'appareil à remplacer.
▶ Après le remplacement, importer les paramètres dans le nouvel appareil.
Avec l'exportation et l'importation des paramètres il est possible d'équiper plusieurs appareils rapidement avec les mêmes paramètres.
11. Homologations/normes
La déclaration de conformité UE est disponible sur : www.ifm.com
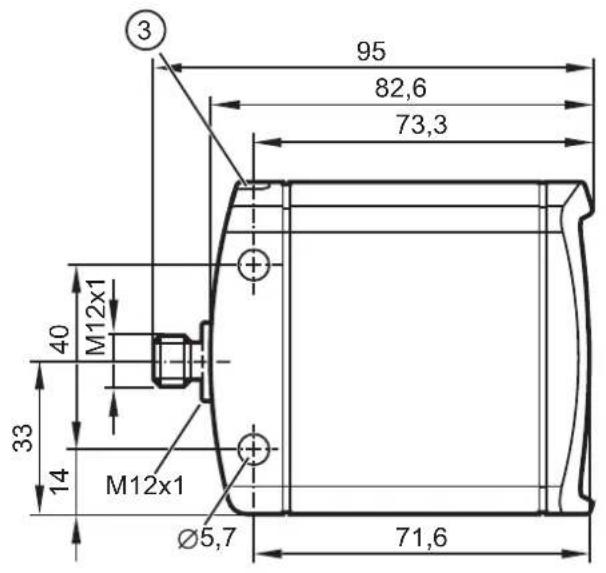
12. Schémas d'encombrement
12.1 O3D302 / O3D312
① Objectif
② Unité d'éclairage
③ LED 2 couleurs (jaune/verte)
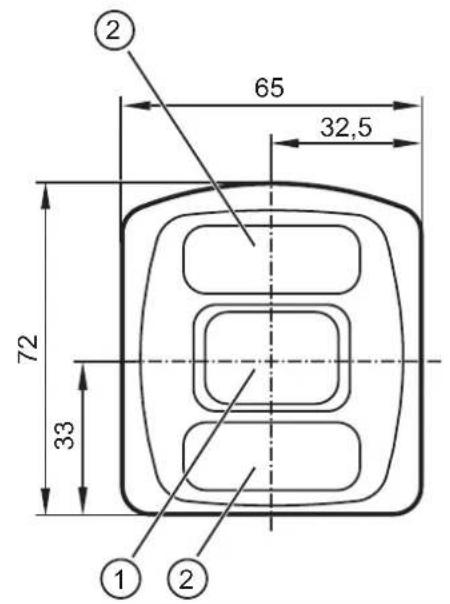
12.2 O3D300 / O3D310
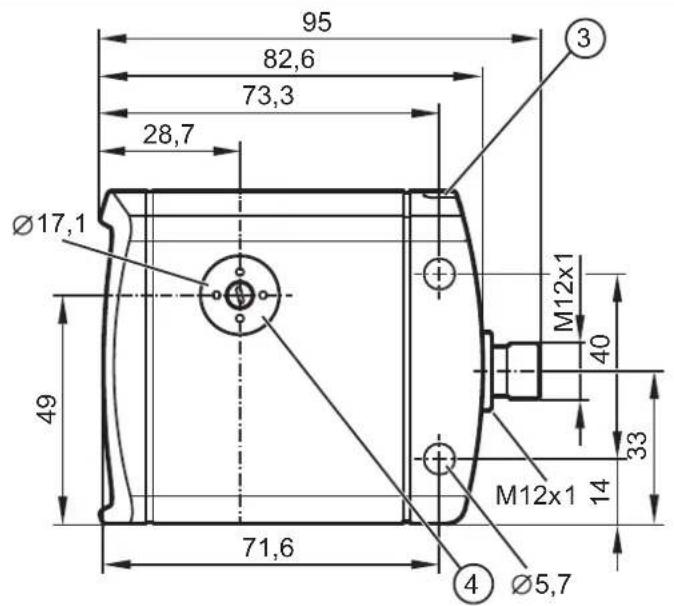
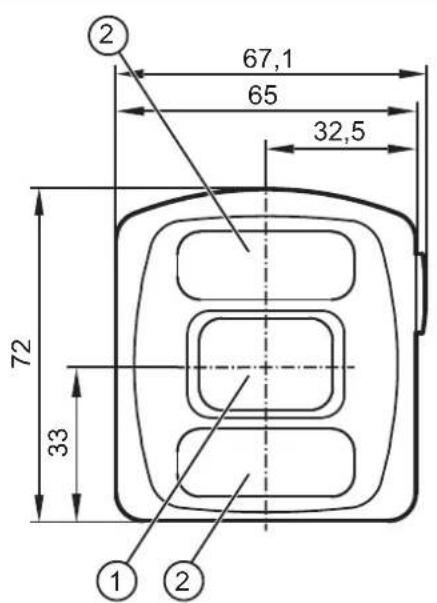
① Objectif
② Unité d'éclairage
③ LED 2 couleurs (jaune/verte)
④ Réglage de la focale
13. Appendix
13.1 Process Interface

- Remarques préliminaires
- Symboles utilisés
- Avertissements utilisés
- ATTENTION
- Open source information
- Consignes de sécurité
- Remarques générales
- Cible
- Raccordement électrique
- Interventions sur l'appareil
- Fonctionnement et caractéristiques
- Fourniture
- Accessoires
- Montage
- Sélectionner le lieu de montage
- Préparer l'appareil pour la mise en service
- Limites d'avertissement typiques pour O3D300 / O3D302
- Limites d'avertissement typiques pour O3D310 / O3D312
- Réduire la température de surface
- Installer l'appareil
- Accessoires de montage
- Raccordement électrique
- Schéma de branchement
- Broches 1 / 3 (24 V / GND)
- Broche 2 (entrée trigger)
- Broches 4 / 5 / 6 (sorties de commutation)
- Broche 4 (sortie analogique)
- Broches 7 / 8 (entrées de commutation)
- Exemples de câblage
- Déclencher la capture d'images avec un détecteur de proximité
- Monter plusieurs appareils l'un à côté de l'autre
- Sélection statique de l'application
- Sélection de l'application activée par impulsion
- Eléments de visualisation
- Mise en service
- Paramétrer l'appareil
- Détecter un objet
- Transmettre les valeurs process
- Transmettre les valeurs process du contrôle de complétude via EtherNet/IP
- Transmettre les valeurs process du contrôle de complétude via PROFINET.
- Transmettre les valeurs process du contrôle de complétude via TCP/IP
- Transmettre les valeurs process du dimensionnement d'objets via EtherNet/IP
- Transmettre les valeurs process du dimensionnement d'objets via PROFINET
- Transmettre les valeurs process du dimensionnement d'objets via TCP/IP
- Transmettre les valeurs process de la mesure de niveau via EtherNet/IP
- Transmettre les valeurs process de la mesure de niveau via PROFINET
- Transmettre les valeurs process de la mesure de niveau via TCP/IP
- Transmettre les valeurs process du Pick and Place du robot via EtherNet/IP
- Transmettre les valeurs process du Pick and Place du robot via PROFINET
- Transmettre les valeurs process du Pick and Place du robot via TCP/IP
- Transmettre les valeurs process de la dépalettisation via EtherNet/IP
- Transmettre les valeurs process de la dépalettisation via PROFINET
- Transmettre les valeurs process de la dépalettisation via TCP/IP
- Maintenance, réparation et élimination
- Nettoyage
- Mettre à jour le firmware
- Remplacer l'appareil
- Homologations/normes
- Schémas d'encombrement
- O3D302 / O3D312
- O3D300 / O3D310
- Appendix
- Process Interface
Marque : IFM
Modèle : O3D310
Catégorie : Imprimante 3D