
RoboMaster EP Core - Robot éducatif DJI - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil RoboMaster EP Core DJI au format PDF.

| Caractéristiques | Détails |
|---|---|
| Type de produit | Robot éducatif et de recherche |
| Dimensions | 320 x 320 x 220 mm |
| Poids | 1.5 kg |
| Alimentation | Batterie LiPo 3S 11.1V, 5200 mAh |
| Autonomie | Environ 90 minutes |
| Connectivité | Wi-Fi, USB, Bluetooth |
| Capteurs | Capteurs de distance, caméras, gyroscope |
| Langages de programmation | Python, Scratch |
| Utilisation | Éducation, recherche, développement de compétences en robotique |
| Maintenance | Vérification régulière des connexions, mise à jour du firmware |
| Sécurité | Utiliser sous la supervision d'un adulte, éviter les environnements humides |
| Accessoires inclus | Manuel d'utilisation, câbles de connexion |
| Garantie | 1 an |
FOIRE AUX QUESTIONS - RoboMaster EP Core DJI
Questions des utilisateurs sur RoboMaster EP Core DJI
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Robot éducatif au format PDF gratuitement ! Retrouvez votre notice RoboMaster EP Core - DJI et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil RoboMaster EP Core de la marque DJI.
MODE D'EMPLOI RoboMaster EP Core DJI
ROBOMASTER EP Core
使用者手册 v1.0
2020.08

快速搜尋關鍵字
PDF 電子文件可以使用尋找功能搜尋關鍵字。例如在 Adobe Reader 中,Windows使用者使用快速鍵 Ctrl+F,而 Mac使用者則可使用 Command+F,即可搜尋關鍵字。

點選目錄轉跳
使用者可以透過目錄了解文件的內容結構,點選標題即可跳轉到對應頁面。

列印文件
本文件支援高品质列印。
閱讀提示
符號說明

禁止 重要注意事項 操作、使用提示:詞彙解釋、參考資訊
使用建議
機甲大師RoboMaster™ EP Core 為使用者提供了以下文件資料:
- 免責聲明與安全操作指南
2.快速入門指南
3.使用者手册
建議使用者使用《快速入門指南》首先核對物品清單,然後透過閱讀安裝說明對產品進行組裝並瞭解基本操作。如要獲得更多產品資訊和功能說明,請參考《使用者手冊》。使用前務必仔細閱讀《免責聲明與安全操作指南》了解安全注意事項和電池安全使用規範。
觀看影片
在App首頁進入「指導」頁面或前往DJI官方網站https://www.dji.com/robomaster-ep-core/video取得安裝影片,並配合本文的安裝說明,完成安裝。觀看其他教學影片瞭解使用方法。
閱讀程式模組手冊
機甲大師RoboMaster EP Core實驗室中的圖形化程式模組多達百餘個,善加利用即可實現PID控制、機器視覺等特有功能,請閱讀我們提供的《RoboMaster EP Core 程式模組手冊》,以獲得更多程式的知識。請前往DJI官方網站https://www.dji.com/robomaster-ep-core/downloads取得。
SDK使用說明
機器人開放 DJI 官方 SDK,包含各個內建模組和拓展模組的控制連接埠,以及影片流、音訊流的輸出連接埠。機器人支援 USB、WiFi、UART 等多種連接方式,使用者可根據平台連接埠選擇任意方式連接。
SDK極大地豐富了機器人的擴充性,提供了二次開發的可能性,更多使用詳情,請前往官網網站www.dji.com/robomaster-ep-core/downloads取得,也可前往網站 robomaster-dev.rtfd.io查看線上文件。
目錄
2
符號說明 2
使用建議 2
觀看影片 2
閱讀程式模組手冊 2
SDK使用說明 2
產品概述 5
简介 5
零組件名稱 5
6
準備 6
模組和功能 15
RoboMaster 應用程式使用指南 15
全向底盤 19
智慧控制台 23
相機 24
喇叭 24
智能電池 25
機器人LED指示燈說明 28
伺服 29
機械臂與機械爪 30
電源轉接模組 31
紅外線深度感應器 34
感應器轉接模組 39
拓展連桿 42
拓展前橋轉接 43
結構拓展零組件 43
機器人與第三方硬體平台 44
手把(選配) 46
驾驶 48
使用前檢查 48
開啟電源 48
連接機器人和RoboMaster App 48
使用RoboMasterApp操控 48
更多玩法 51
使用手把操控機器人 51
使用電腦控制 52
實驗室 53
附錄 57
參數 57
韌體升級 60
校準機器人 60
設定 PWM連接埠 61
使用S-Bus連接埠 62
自訂 UI 程式指導 64
售後保固資訊 64
產品概述
简介
RoboMaster S1 Education Expansion Set Core (EP Core) 是一套成熟的 STEAM 教育解决方案。它開放官方 SDK,配合高性能的機械配件,發展出豐富的軟硬體拓展性,配套完善的人工智慧與競賽課程以及全新赛事規則庫;讓老師輕鬆教,學生輕鬆學,為課堂帶來煥然一新的體驗,拓展未來教育的全新邊界。
零組件名稱
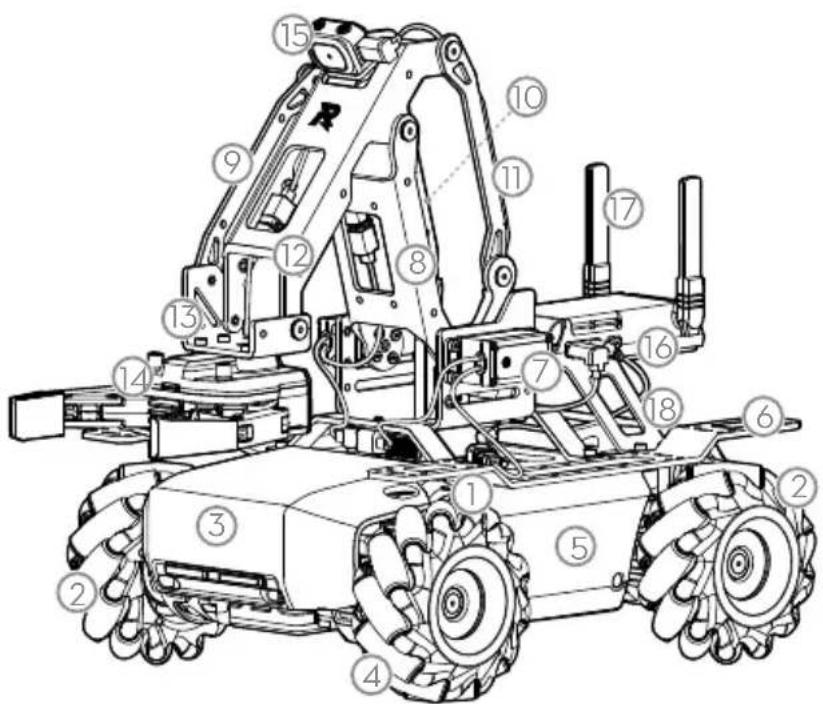
1.底盤主體
2.右旋麥克納姆輪
3.底盤前外殼(內置擊打檢測模組)
4. 左旋麥克納姆輪
5.底盤左外殼(內置擊打檢測模組)
6. 底盤拓展基板
7. 伺服
8. 機械臂一級臂
9. 機械臂 #1 連桿
- 機械臂 #2 連桿
- 機械臂 #3 連桿
- 機械臂二級臂
- 機械臂末端連接埠
- 機械爪
- 相機
- 智慧控制台
17.智慧控制台天線 - 底盤拓展尾板
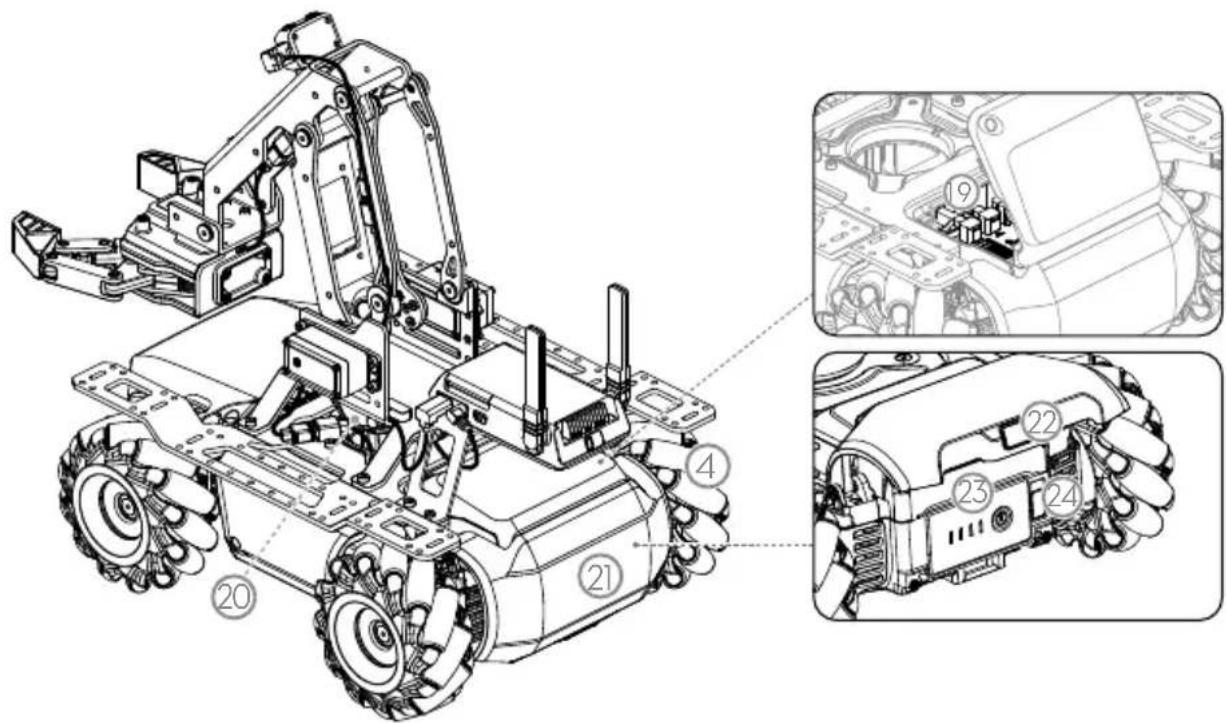
19.運轉控制器
20.喇叭
21. 底盤後外殼(內置擊打檢測模組)
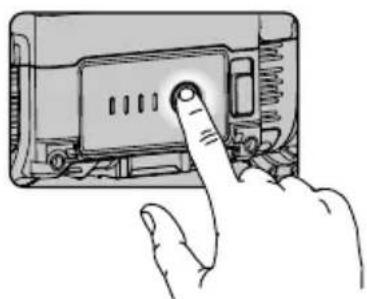
- 後外殼打開按鈕
- 智能電池
- 電池彈出按鈕
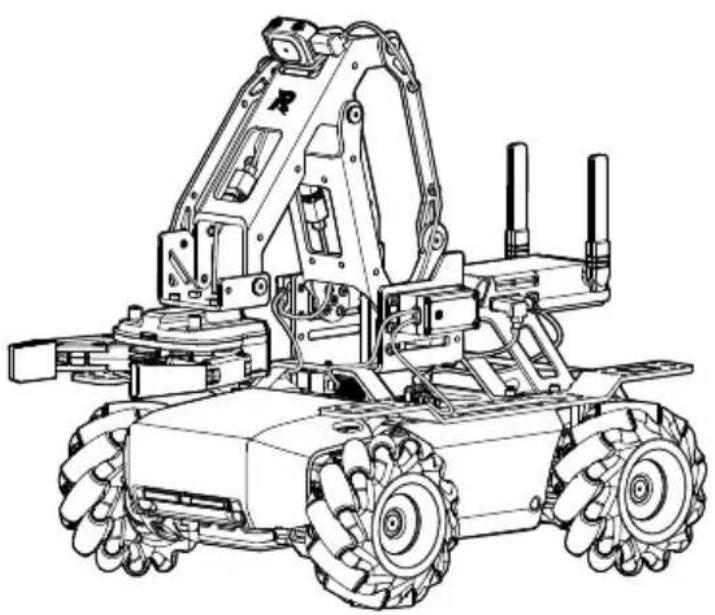
特點
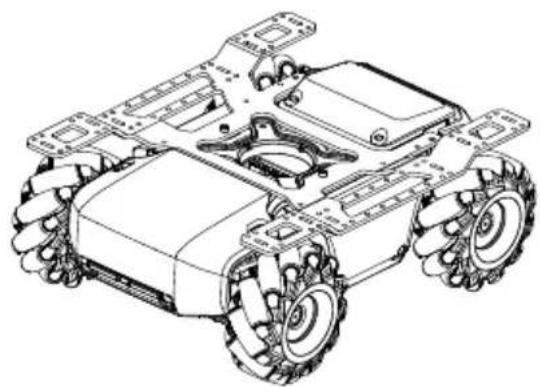
RoboMaster EP Core 使用麥克納姆輪全向底盤。全向底盤主要由底盤主體、外殼、四個麥克納姆輪、四個無刷馬達電控和底盤運轉控制器組成,可敏捷移動,配合影像傳輸系統提供第一人稱視角(FPV)操控體驗。機械臂在高性能伺服的驅動下靈活運動,透過控制機械爪實現抓取動作,給使用者帶來全新體驗。
機器人底盤拓展基板預留擴充孔,支援自由安裝配件,還配備了結構桿件,方便使用者在此基礎上拓展結構並進行靈活搭建。機器人兼容第三方結構體系,讓機甲和積木碰撞出美妙創意。
機器人開放 DJI 官方 SDK,支援超過 39 個程式感應器連接埠,兼容第三方開發硬體,延展出豐富的軟硬體拓展性。
準備
安装
詳見快速入門指南。
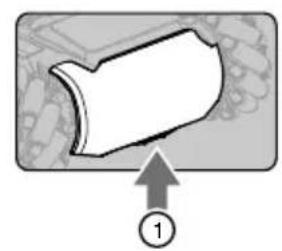
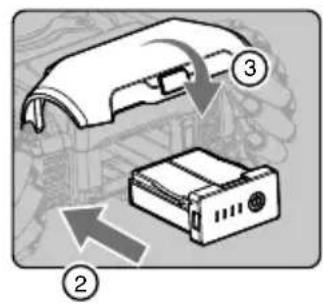
開啟電源
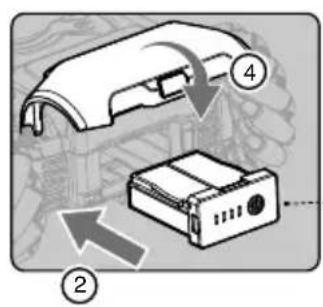
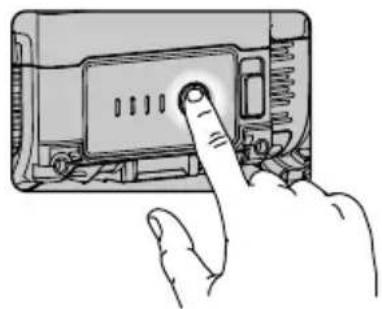
請按照以下步驟開啟電源:
-
按下後外殼打開按鈕,打開底盤後外殼。
-
安裝智能電池到電池盒。
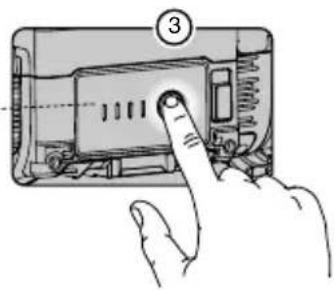
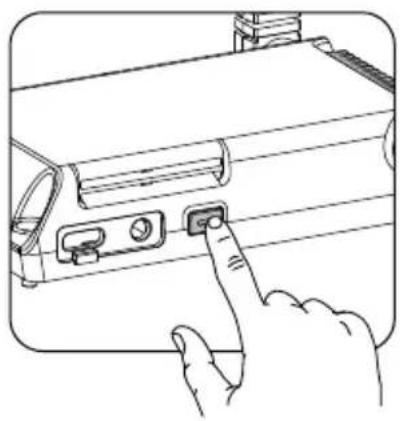
- 長按電源按鈕開啓電池。
4.關閉底盤後外殼。
下载和安装RoboMasterApp
A. 使用行動設備在軟體商店或掃描 QR 代碼下載並安裝 RoboMaster App。

B.使用者亦可使用電腦從DJI官網下載Windows版本或Mac版本的RoboMaster軟體,從而透過鍵盤滑鼠控制機器人。
Windows 版本:https://www.dji.com/robomaster_app
Mac 版本:https://www.dji.com/robomaster_app

使用者需要使用DJI帳號登入RoboMaster App。
- RoboMaster App 要求使用 iOS 10.0.2 及以上系統、Android 5.0 及以上系統、Windows 764 位及以上系統或 MacOS 10.13 及以上系統。
- RoboMaster App 需要使用蜂窝行動數據時,請聯繫您的行動設備數據提供商獲取最新的數據流量資訊。
使用RoboMasterApp連接機器人
控制機器人前需要與RoboMaster App建立連接,進入App連接頁面可看到直接連接和路由器兩個模式,請根據App提示操作。具體步驟請參考「連接」這一節。

使用RoboMasterApp初始化機器人
啟動
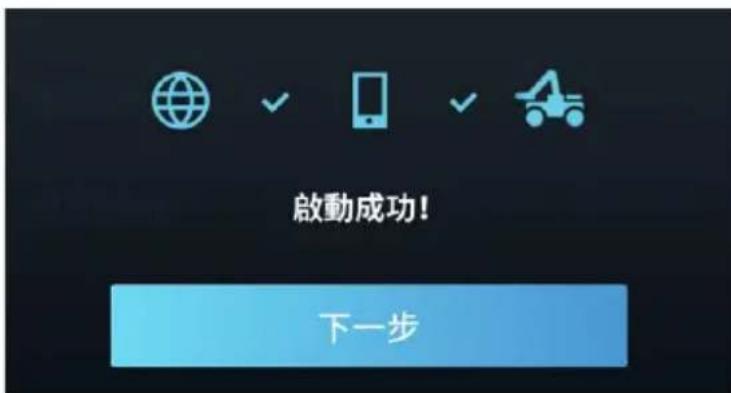
全新的機器人必須透過RoboMaster App啟動,請根據App提示操作。啟動時請確認行動設備已連線至網際網路。
1.開始啟動。

- 請根據 App 提示完成啟動。
馬達編址
首次使用時需要在 App 中進行馬達編址,請根據 App 提示完成編址。
1.開始馬達編址。

- 架起底盤,根據 App 提示,按編號逐個轉動萬向輪,直到四個萬向輪都完成轉動。


- 根據 App 提示,逐個測試萬向輪,直到四個萬向輪都測試完成。

- 編址完成。

更換新馬達也需要進行馬達編址操作,進入RoboMaster App,點擊設定->系統,選擇馬達編址選項。
外殼編址
首次使用時需要在App中進行外殼編址,請根據App提示完成編址。
1.開始外殼編址。

- 根據 App 提示,按編號逐個敲擊外殼,直到四個外殼都完成敲擊。

3. 編址完成。

更換新外殼也需要進行外殼編址操作,進入RoboMaster App,點擊設定->系統,選擇外殼編址選項。
機械臂接入
首次使用時需要在 App 中進行機械臂接入,請根據 App 提示完成接入。
1.開始接入機械臂。

2. 根據 App 提示,依次接入左側和右側伺服。

3. 校準機械臂。

機械爪接入
首次使用時需要在 App 中進行機械爪接入,請根據 App 提示完成接入。

伺服接入
使用時需確保連接至機器人的伺服編號各異,且編號範圍為1-3。若無法滿足上述要求,使用者需更改伺服編號。請根據App提示完成。
1. 開始接入伺服。

- 根據 App 提示,逐個接入伺服。

- 根據 App 提示,為伺服選擇編號,直至所有伺服都完成編址。


·伺服與伺服之間可透過串連方式連接。
·機械臂拆除後,機械臂上的兩個伺服可作為單獨的伺服獨立控制。
紅外線深度感應器接入(選配)
請根據 App 提示完成接入。如需使用多個紅外線深度感應器,使用者還需為紅外線深度感應器選擇不同的編號。
- 開始接入紅外線深度感應器。

- 根據 App 提示,逐個接入紅外線深度感應器。

- 根據 App 提示,為紅外線深度感應器選擇編號,直至所有紅外線深度感應器都完成編址。機器人支援接入多個紅外線深度感應器,使用者可根據需求進行編址。

感應器轉接模組接入
感應器轉接模組編號均預設設定為1。使用時需確保連接至機器人的感應器轉接模組編號各異。
否則,使用者需更改感應器轉接模組編號。請根據App提示完成。

模組和功能
RoboMaster 應用程式使用指南
RoboMaster 應用程式是為機甲大師系列產品量身打造的一款多平台互動客戶端軟體。它配置了多種操控方式,內置豐富教學資源,更有多種競技模式,帶來無窮樂趣。iOS、Android、Windows、Mac 等多平台跨平台使用;支援觸控螢幕、體感、專用手把、鍵盤和滑鼠操作等多種操控方式,程式無需配置環境,更有分享功能可輕鬆向好友傳遞程式。本節以 RoboMaster App 為例進行說明,具體介面以相應的平台展示為準。
RoboMaster App 首頁

- 個人帳戶
- 媒體庫
- 指南
4.公告 - 连接
- 機器人型號切换
- 設定
8.單機駕駛場景
9.多人竞技場景 - 實驗室
個人帳戶
點擊進入可登入和登出個人帳戶,修改使用者頭像和名稱。登入時請確認行動設備已連線至網際網路。
使用者可查看使用者駕駛里程、駕駛時間、執行代碼行數、程式時間、大師之路通關關卡數、定點射擊最高分等資訊。
點擊「查看大師榜」,還可查看全球「駕駛里程、駕駛時間、執行代碼行數、程式時間、定點射擊最高分」五個領域的前100名。
媒體庫
點擊進入可查看影片和照片。
指南
包括以下幾項:
a. 產品支援:點擊可跳轉到 DJI 產品支援頁面。
b.維修支援:點擊可跳轉到DJI維修支援頁面。
c. 說明書:點擊可跳轉到 DJI 下載頁面。
d. 視覺標籤:點擊可跳轉到 DJI 下載頁面。
e. 線上客服:點擊進入可聯繫線上客服。
f.使用者反饋:點擊進入可填寫您的意見反饋。
g. 教學影片:點擊可跳轉到 DJI 教學影片頁面。
h. 論壇:點擊可跳轉到 DJI 社區頁面。
連接
操控機器人需要與 App 建立連接,點擊進入可看到直接連接和路由器兩個模式。請根據您的需求進行連接。
直接連接模式
直接連接模式可進入單機駕駛場景和多人競技場景。
根據App提示,按照以下步驟進行連接:
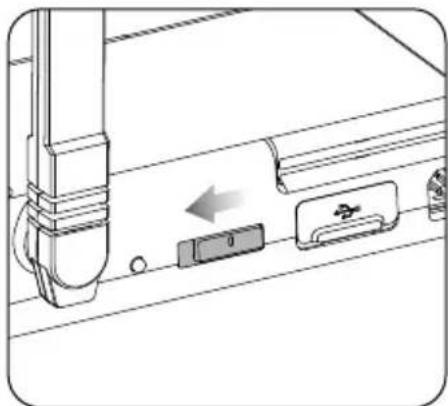
- 先切换智慧控制台上的模式開關到直接連接模式檔位,再開啟電源。
2.執行RoboMasterApp,根據提示進入行動設備系統網路設定中,選擇位於機身貼紙上對應的Wi-Fi名稱(RMEP-XXXXXX),輸入8位數密碼(初始密碼為12341234)。

- 等待機器人和 App 連接成功。聽到提示音之後返回 App,完成機器人與 App 的連接。
重設密碼
長按智慧控制台上的連接按鈕5秒,即可重設帳號和密碼。

路由器模式
路由器模式可進入單機駕駛場景或多人競技場景。
根據 App 提示,按照以下步驟進行連接:
- 先切換智慧控制台上的模式開關到路由器模式檔位,再開啟電源。
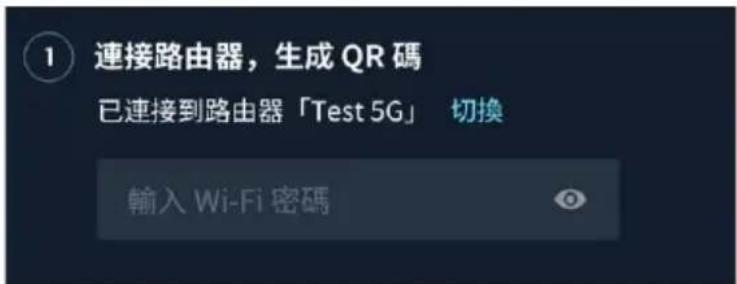
2.執行RoboMasterApp,根據提示接入局域網,輸入對應路由器Wi-Fi密碼可在App中生成QR代碼。
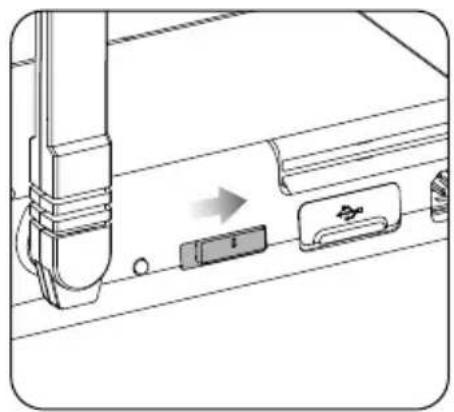
- 點擊智慧控制台上的連接按鈕之後,使用相機模組掃描QR代碼,等待連接成功。

設定
設定選項包括:機器人、拓展模組、連接、顯示、控制和系統六項。
機器人
可查看各個零組件狀態,當某一零組件異常時對應部位將顯示紅色,並在螢幕右側顯示出目前的異常資訊。
拓展模組
包括機械臂、機械爪、伺服、紅外線深度感應器、感應器轉接模組。可接入和顯示拓展模組。
連接
顯示連接狀態。
顯示
可設定LED顏色、FPV血量顯示、FPV畫面適應螢幕、錄影辨識率、抗閃爍和3D圖形品質。
控制
包括運動速度、控制方式、控制靈敏度、體感靈敏度和震動。
系統
包括以下設定:
機器人關機。
開啟程式節能。
查看 App 版本和設定 App 語言。
設定機器人語音語言並調整機器人音量。
進行軻體升級,查看已下載到App的軻體版本和機器人軻體版本。
進行外殼編址、馬達編址和機器人校準。
查看SD卡剩餘容量、進行SD卡格式化。
開啓GPS定位、DJI設備資訊、產品改進計劃,查看使用者隱私權協議。
單機駕駛場景
進入單機駕駛。可以透過直接連接模式或路由器模式進行連接。
多人竞技場景
進入多人競技。可以透過直接連接模式或路由器模式進行連接,若有多台機器人,請透過路由器模式進行連接。
實驗室
包括大師之路、我的程式和機甲學院三個項目。
大師之路:使用項目式課程,設定從簡單到困難的挑戰任務,幫助啟蒙程式思維、探究機器人知識、體驗人工智慧,零基礎使用者也能輕鬆入門。
我的程式:可以使用 Scratch 和 Python 兩種程式語言進行程式設計。
機甲學院:包含影片課程與程式指南。生動的影片課程重點介紹機器人原理,深入淺出闡述相關科學知識;程式指南則對各個模組進行詳盡解釋,幫您輕鬆進入程式世界。

在單機駕駛、多人競技或實驗室場景中,EP Core 無法使用發射器或雲台相關功能,建議連接發射器或雲台後再試。
全向底盤
底盤概述
底盤是基於麥克納姆輪的全向運動平台,可實現前行、橫移、斜行、旋轉及組合等多種運動方式。

嚴禁全速衝撞硬度較大的物體,如牆壁等。
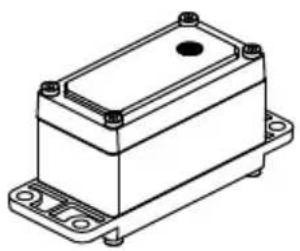
運轉控制器
概述
運轉控制器是底盤運動的核心模組,提供了豐富的外部模組連接埠,用來連接外殼、電池和馬達,同時內部整合運動控制算法、電源管理系統、馬達管理系統及底盤狀態管理系統等智慧程式,實現了敏捷的全向行動控制和複雜的數據互動。
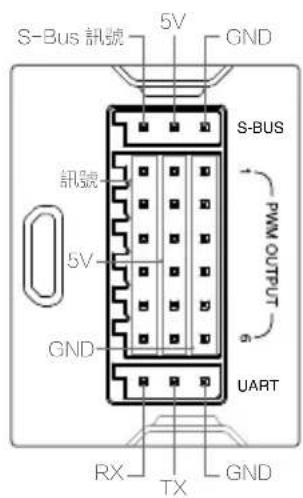
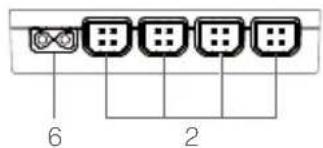
其連接埠如下圖所示:
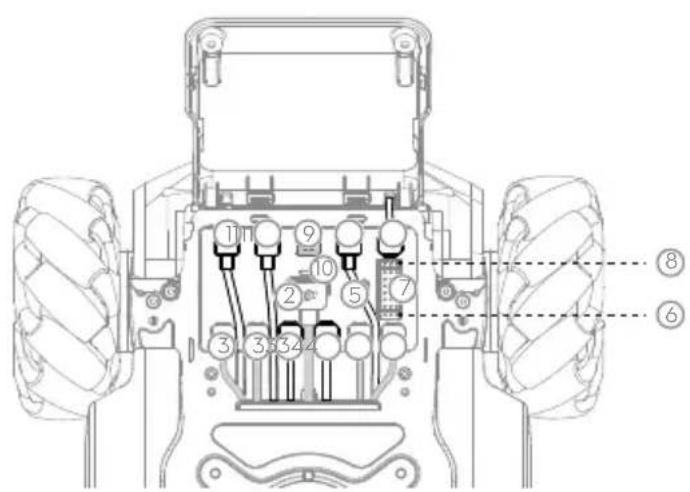
1. CAN BUS 連接埠
外殼連接埠,用於連接到外殼模組。
2. POWER連接埠
電源連接埠,用於連接到電源。注意:該連接埠包含電池連接部分,安裝連接後請盡量少插拔。
3.MBUS連接埠
馬達連接埠,用於馬達連接。
4. CAN BUS 連接埠
預留連接埠,用於連接到外殼模組。
5. Micro USB連接埠
支援SDKUSB RNDIS方式進行連接通訊。
6. UART連接埠
擴充連接埠,可在程式中使用,同時支援SDK連接。
7.PWM连接埠
運轉控制器支援使用PWM連接埠,透過Scratch或Python程式設定工作週期。
8. S-Bus 连接埠
控制訊號接收,用於連接支援SBUS協議的遙控器接收機。
9.M0連接埠
伺服、機械爪連接埠,用於連接到伺服、機械爪。
10. LED指示燈
用於指示目前運轉控制器的狀態。具體如下:
| LED指示燈運轉控制器狀態 | ||
| 藍燈緩慢閃爍 | 蓝 | 正常運作狀態 |
| 黃燈緩慢閃爍 | 黄 | 目前正在執行自主程式 |
| 綠燈快速閃爍 | 绿 | 機器人校準時,底盤某一側IMU校準成功 |
| 紅燈快速閃爍 | 紅 | 機器人校準時,底盤某一側IMU校準失敗 |
| 黃燈恆亮 | 黃 | 機器人校準時,底盤IMU正在校準 |
| 白燈恆亮 | 白 | 軋體升級中 |
| 紅綠藍交替閃爍 | 紅、綠、蓝 | 運轉控制器硬體錯誤,沒有姿態資訊輸入 |
| 紅燈緩慢閃爍 | 紅 | 停止模式,由以下情況一種或多種引起*: a.運動控制器與馬達斷開連接,或者運動控制器與馬達無法通訊 b.馬達硬體出現異常導致機器人無法運動 c.運轉控制器與智慧控制台無法通訊 d.運轉控制器姿態異常,如機器人翻車、倒置,且恢復正常的時間小於3秒 e.運轉控制器與電池無法通訊 |
- 機器人進入停止模式的異常原因,在App中都會有相應顯示,可以在設定->系統中查看。
·黑色線連接到黑色連接埠,橘色線連接到橘色連接埠,紅色線連接到紅色連接埠。
- 打開底盤後蓋時,請先將底盤後蓋向上提起再向後翻開,避免導致運轉控制器移位造成鬆動,影響運動性能。
- 使用前確保運轉控制器安裝牢固,底盤後蓋的螺絲已鎖緊,否則,運轉控制器鬆動可能會導致運動異常。
- 每次重新安裝運轉控制器後,請先確保運轉控制器安裝牢固,然後在 App 中根據提示進行校準,具體過程請參考「校準機器人」。
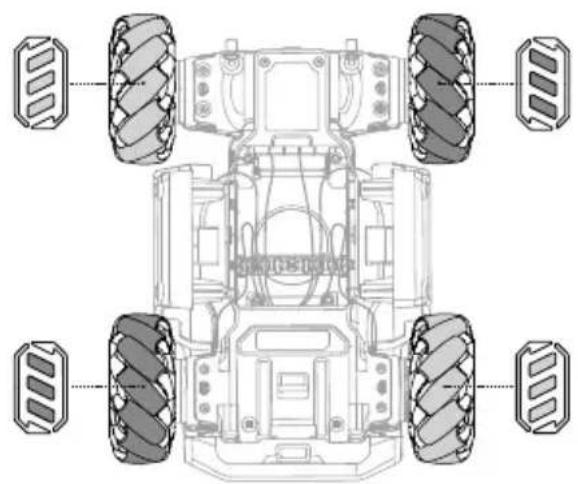
萬向輪
麥克納姆輪是常用的機器人全向底盤行動方案,麥克納姆輪分為左旋和右旋兩種,四輪底盤需成對使用。
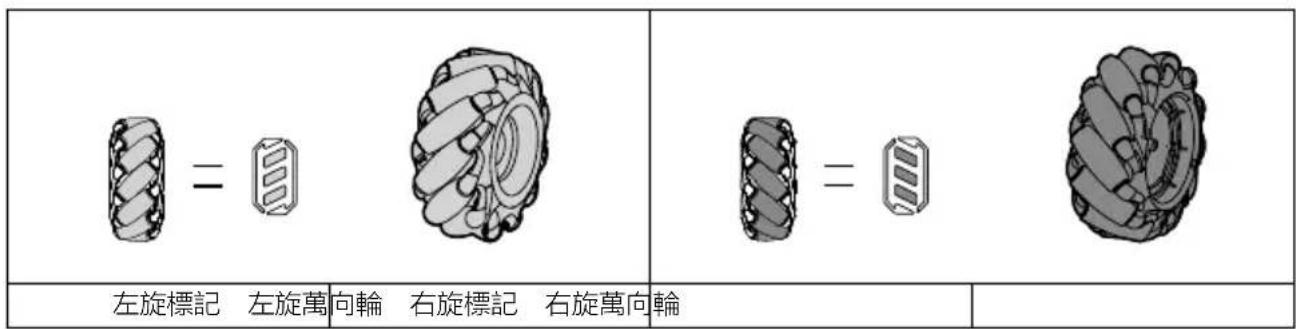
安装的時候,可以在底盤底部查看左旋或右旋標記,再相應的安裝左旋或右旋萬向輪。
馬達電控
機器人採用了M3508I無刷馬達電控,無刷馬達最大轉速為1000rpm。

·確保所有馬達與運轉控制器連線十分牢固。
·使用時若馬達無法正常轉動,請立刻斷電進行檢查。
·停止使用後的短時間內,馬達、馬達座及麥克納姆輪內部的溫度均較高,請勿用手直接接觸或進行零組件的拆裝,否則可能造成燙傷。
外殼
底盤外殼模組一共四塊,分別安裝於底盤前後左右四個方位,可保護內部結構。
每個外殼外觀都可以看到LED燈條,燈條的顏色可以在App中進行設定。
智慧控制台
智慧控制台集成了雙天線影像傳輸系統、遊戲系統、Scratch 程式系統等,進行控制算法運算。支援六大智慧模組,包括行人識別、線路識別、姿勢識別、視覺標籤識別、掌聲識別、機器人識別。
- microSD 卡插槽
最大支援64GB並且讀寫速度大於10MB/s的microSD卡。
- 相機連接埠
用於連接到相機模組。
- 喇叭連接埠
用於連接到喇叭模組。
- 自主程式按鈕
使用者所編寫的 Scratch 程式可被設定為自主程式,將自主程式直接裝載到機器人上,使用者直接按該按鈕即可觸發程式執行。
- 天線
使用時請將天線垂直立起,以獲得最佳的通訊效果。
6.副相機連接埠
預留連接埠,用於切換第二相機視角。
- CAN Bus 連接埠
用於連接到運動控制器。
- Micro USB 連接埠
用於連接到PC。
9.連接模式選擇開關
用於切換直接連接模式或路由器模式。
- 連接按键
連接按鈕在直接連接模式和路由器模式下有不同的作用。
直接連接模式:一旦使用者忘記Wi-Fi密碼,可長按該按鈕5秒重設Wi-Fi資訊。
路由器模式:當機器人需要掃描QR代碼加入組網時,需要先按下該按鈕。
·智慧控制台天線如有損壞將影響使用性能,請及時進行維修。
·請勿對天線進行撞擊、拉拽,避免損壞。
相機
相機模組採用1/4英吋感應器,拍攝像素為500萬,FOV為 120^ 。可準確記錄視線前方的景象,方便使用者以第一人稱視角進行控制。
如果相機成像模糊或有嚴重光暈,可能為油潰阻礙鏡頭成像,需要及時清潔。請使用專門的鏡頭清潔劑,確保清潔之後鏡頭上無殘留異物且不損壞鏡頭。

- 相機鏡頭
- 麦克風
- 相機連接埠
用於連接相機到智慧控制台上。
·切勿讓相機接觸到液體或浸入水中。
·切勿將相機存放於潮濕的場所。
·切勿用手指觸摸鏡頭,避免留下油潰影響成像畫質。安裝時需特別注意。
·請使用專門的鏡頭清潔劑和清潔布擦拭,確保清潔之後鏡頭上無殘留異物。
喇叭
喇叭可透過 2.5 ~mm 的音訊連接埠接入智慧控制台,額定功率為 2 ~W 。
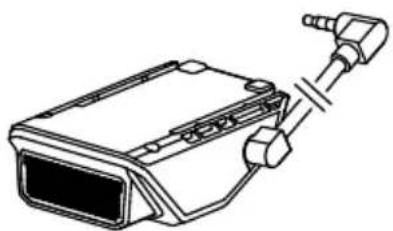
確保喇叭安装到位,不阻礙其他零組件運動。
智能電池
E 智能電池容量為 2400 mAh , 額定電壓為 10.8 ~V , 具有充放電管理功能。
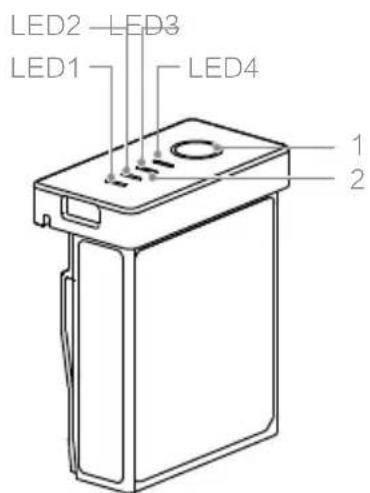
- 電源按鈕
- 電量指示燈
智能電池功能
- 電量顯示:電池隨附電量指示燈,可以顯示電池目前電池電量。
- 電池儲存自放電保護:電池電量大於 70% 時,在無任何操作情況下(包括查看電量等動作)存放10天後,電池可啟動自動放電功能,放電至 60% 電量,以保護電池。自動放電過程約1天時間,期間不會顯示任何LED燈指示,且可能會有輕微發熱,這是正常現象。
- 平衡功能:自動平衡電池內部電芯電壓,以保護電池。
- 過度充電保護:過度充電會嚴重損壞電池,當電池充飽電後,即會自動停止充電。
- 充電溫度保護:在電池溫度為 5^ 以下或 45^ 以上時充電會損壞電池,此時電池將不會啟動充電。
- 充電電流過大保護:大電流充電會嚴重損壞電池,因此若充電電流過大,電池會停止充電。
- 過度放電保護:過度放電會嚴重損壞電池。電池電芯放電至 2.5V 將會切斷輸出。單個電芯電壓低於 1V 时,電池將被鎖死,禁止再次充電,該電池無法繼續使用。因此請使用者千萬注意,切勿故意將電池嚴重過度放電,否則將承擔電池損壞的風險。
- 短路保護:在電池檢測到短路的情況下,會切斷輸出,以保護電池。
- 電芯損壞檢測:在電池檢測到電芯損壞或者電芯嚴重不平衡的情況下,會提示電池已經損壞。
- 休眠保護:當電池處於開啟狀態,如未連接任何用電裝置,則電池5分鐘後關閉輸出,同時進入關閉狀態,以保持電量。當電池電量低於 5% 時,電池會在6小時後自動進入休眠狀態,以防止過度放電。此時短按電池開關,電量指示燈不會亮,對電池進行充電即可喚醒。
- 通訊:可以透過電池上的通訊介面,即時獲得電池資訊,例如電壓、電量、電流等。

電池使用前請詳細閱讀並嚴格遵守DJI在使用者手冊、免責聲明和安全操作指南、電池上的要求。使用者將對電池的操作和使用負責。
充電
智能電池必須使用DJI官方充電器充電。打開充電器上的充電連接埠保護殼,插入電池到充電器上。使用電源線連接充電器到100~240V(50Hz/60Hz)交流電源上。
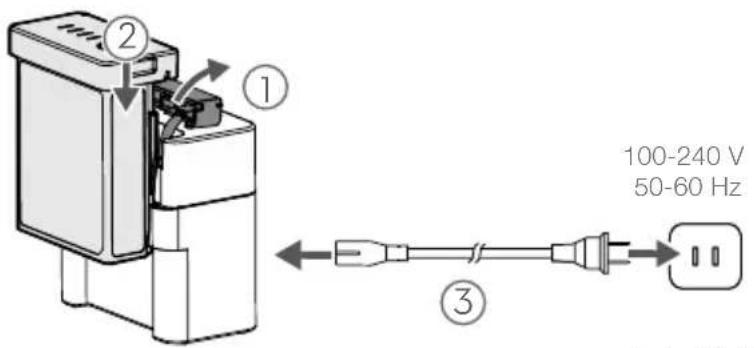
完全充飽電約需要1小時30分
*充電時間為實驗室環境下使用全新電池測得,僅供參考。

首次使用時,需要對電池進行充電以喚醒電池。
·每次使用之前,確保電池電量充足。
·不使用充電器時,請勿打開充電連接埠保護殼,以免金屬端點暴露在外。
電池(充電狀態)
| LED1LED2LED3LED4 | 目前電量 | |||
| -0%~50% | ||||
| -50%~75% | ||||
| -75%~100% | ||||
| 完全充飽電 | ||||
電池(充電保護)
| LED1LED2LED3LED4 | 顯示規則保護項目 | ||||
| ○ | ※ | ○ | ○ | LED2 每秒閃 2 次 | 充電電流過大 |
| ○ | ※ | ○ | ○ | LED2 每秒閃 3 次 | 充電短路 |
| ○ | ○ | ※ | ○ | LED3 每秒閃 2 次 | 過度充電導致電池電壓過高 |
| ○ | ○ | ※ | ○ | LED3 每秒閃 3 次 | 充電器電壓過高 |
| ○ | ○ | ○ | ※ | LED4 每秒閃 2 次 | 充電溫度過低 |
| ○ | ○ | ○ | ※ | LED4 每秒閃 3 次 | 充電溫度過高 |
排除故障情況(充電電流過大、充電短路、過度充電導致電池電壓過高、充電器電壓過高)後,自動取消LED燈保護提示,重新拔下再插上充電器以恢復充電。如發生充電溫度異常,等待充電溫度恢復正常之後,電池將會自動恢復充電,因此無需重新拔下再插上充電器。

智能電池必須使用DJI官方提供的專用充電器進行充電,對於使用非DJI官方提供的充電器進行充電所造成的一切後果,DJI概不負責。
安装
使用時,將後外殼蓋子打開,再將電池安裝到電池倉中。
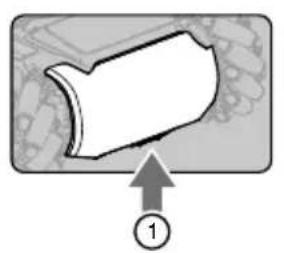
·確保電池安裝牢固。否則可能在使用過程中發生脫落,或者導致電源接觸不良及無法讀取電池資訊。
·將電池從電池倉上移除時,必須先按下電池彈出按鈕。
- 切勿使電池倉外部的金屬端點變形,否則電池可能無法插入或彈出。
使用
查看電量
短按電池電源按鈕,可查看目前電量。
電量指示燈可用於顯示電池放電過程中的電池電量,指示燈定義如下。
表示LED燈在指示過程中恆亮 表示LED燈在指示過程中有規律地亮起
表示LED燈熄滅
電量指示燈
| LED1LED2LED3LED4 | 目前電量 | |||
| 88%~100% | ||||
| 75%~88% | ||||
| 63%~75% | ||||
| 50%~62.5% | ||||
| 38%~50% | ||||
| 25%~38% | ||||
| 13%~25% | ||||
| 0%~13% | ||||
開啟/關閉電池
長按電池源按鈕2秒以上,開啓/關閉電池。
低溫使用注意事項
- 在低溫環境 (< 5^ C) 下使用電池時,電池內阻加大而電壓驅降,使得電量減少,從而縮短續航時間。使用電池前,請務必充飽電,即電芯電壓達到 4.2 ~V 。
- 在極度寒冷條件下,電池溫度可能無法達到可用的溫度,請增加保溫措施。
- 為了讓電池發揮最佳性能,建議將電池溫度保持在 20^ 以上。
機器人LED指示燈說明
機器人在底盤主體的四個外殼上和雲台兩側都有LED指示燈,既用於裝飾機器人,也用於指示目前機器人的狀態。

底盤LED指示燈,每個外殼均有1圈由多個LED組成的燈條。
LED指示燈說明
| 機器人狀態描述 底盤 LED 指示燈 | |
| 電源 | |
| 開啟電源,機器人正在啟動 藍燈恆亮 | |
| 關閉電源 目前顏色燈緩慢熄滅 | |
| 連接 | |
| 機器人正常,未連接 App | 白色呼吸燈 |
| 機器人和 App 正在連接 | 藍燈閃爍 |
| 機器人和 App 連接成功 | 目前顏色燈恆亮 |
| 軻體升級 | |
| 軻體正在升級 白燈恆亮 | |
| 軻體升級失敗 紅燈恆亮 | |
| 軻體升級成功 藍燈恆亮 | |

當在 App 設定中改變顏色時,底盤燈將統一改變顏色。
伺服
伺服概述
機器人的動力零組件,可透過程式連接埠進行自訂控制。側隙小、扭矩大、重複定位精確度高。除了作為伺服單元驅動機械臂外,還支援直流減速馬達模式,方便使用者搭建升降結構。
伺服為總線(RS485)模式,兼容PWM模式。當伺服作為機械臂驅動時,系統自動切換至總線模式。當伺服作為獨立伺服使用,可使用總線模式或PWM模式,系統根據輸入訊號自動切換。
伺服PWM連接埠說明
連接埠線序如下所示
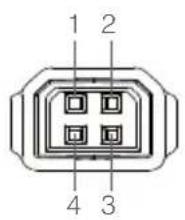
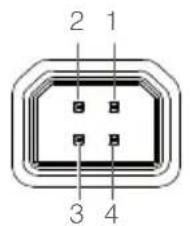
| 1 2 3 | 4 | ||
| 485A/PWM 4 | 35B VCC-12V GND | ||
伺服支援兩種控制模式:角度模式和速度模式。PWM訊號為50Hz,工作週期為 2.5% 12.5%
| 控制模式 | 工作週期 | 控制範圍 |
| 角度模式 | 2.5%~12.5% 0°~360° | |
| 速度模式 | 2.5%~7.5% 49rpm~0 | |
| 7.5%~12.5% 0~-49rpm |
伺服LED指示燈說明
LED指示燈用於指示目前伺服的狀態。具體如下:
| LED指示燈 | 伺服狀態 | |
| 綠燈恆亮 | 绿—— | 正常運作狀態 |
| 紅燈快速閃爍 | 紅…… | 自動檢測錯誤* |
| 綠黃交替閃爍 | 綠黃…… | 過載保護** |
| 紅黃交替閃爍 | 紅黃…… | 堵轉*** |
| 綠燈快速閃爍 | 綠…… | 目前模組在 App 中處於選定狀態 |
- 伺服開啟電源時會進行自動檢測。若出現自動檢測錯誤,建議使用者重新連接電源。若多次重新開啟電源無效,請聯繫 DJI 售後。
** 過載200毫秒後關閉輸出,3秒後自動恢復輸出。
**若伺服出現堵轉問題,請自行檢查目前操作是否有誤,並重新連接電源。
A·伺服運作時,請勿用身體部位接觸,否則可能導致受傷。
·使用時避免撞擊伺服,否則可能會影響伺服壽命或造成永久性損壞。
- 使用時若多次提示伺服過載,請立即停止操作,並檢查機械臂或伺服結構有無異常,操作是否得當。
·伺服安裝至機械臂時,使用者需謹慎使用程式連接埠,以免影響機械臂的限位結構。
- 若伺服使用 PWM 模式,其狀態無法透過上位機顯示,使用者可透過 LED 指示燈獲知目前狀態。
機械臂與機械爪
概述
機械臂支援FPV精準遙控,機械爪配合機械臂使用,使用者可在App中透過第一人稱視角操控機械臂和機械爪完成任務。
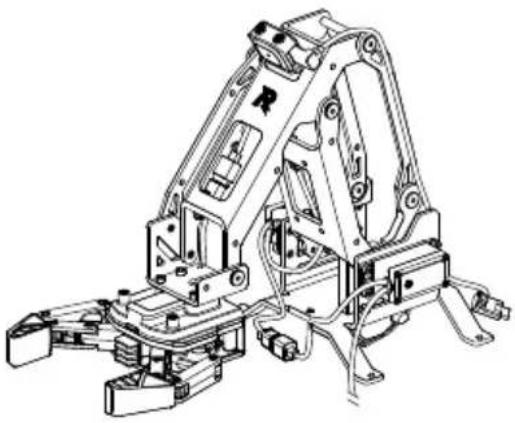
使用說明
當機械臂或機械爪處於運作狀態時,請盡量避免對其施加外力。
使用者可以控制機械臂的移動範圍、機械爪的開合距離。其中,機械臂的水平移動範圍為0-0.22公尺,垂直移動範圍為0-0.15公尺;機械爪的開合距離約為10毫米。
A·機械臂或機械爪運作時,請勿用身體部位接觸,否則容易導致受傷。
·請勿碰撞或損壞機械臂或機械爪,避免導致性能下降或伺服執行異常。
·及時清理水滴或其他異物,避免腐蝕結構表面。
機械爪PWM連接埠說明
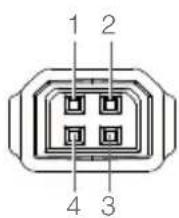
| 1 2 3 | 4 | ||
| 485A/PWM 485B VCC-12V GND | |||
機械爪支援力矩控制模式。PWM訊號為50Hz,工作週期為 2.5% 12.5% ,其中, 2.5% 7.5% 工作週期對應閉合力度[最大,0]; 7.5% 12.5% 工作週期對應開合力度[0,最大]。
電源轉接模組
電源轉接模組概述
電源轉接模組在為第三方開發硬體供電的同時,還提供連接埠拓展功能,方便使用者連接更多硬體,發揮創造力,靈活搭建設備。
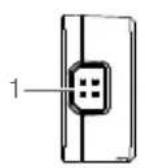
其連接埠如下圖所示:
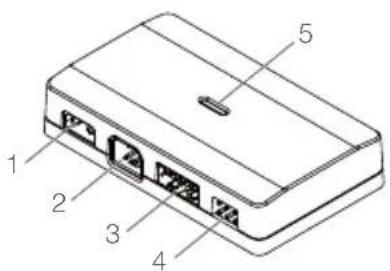
- 12V電源輸入連接埠
輸入電壓範圍為 9.6V 12.6V
- CAN BUS連接埠
與CANBUS連接線連接。
3.5V2A電源輸出連接埠
輸出電壓5V,最大支援2A電流輸出。
4.5V4A電源輸出連接埠
輸出電壓5V,最大支援4A電流輸出。
- LED指示燈
指示電源轉接模組狀態。
6.12V直流電源輸出連接埠
與12V電源輸入連接埠導通。
二路5V電源輸出連接埠總輸出電流最大支援4A。
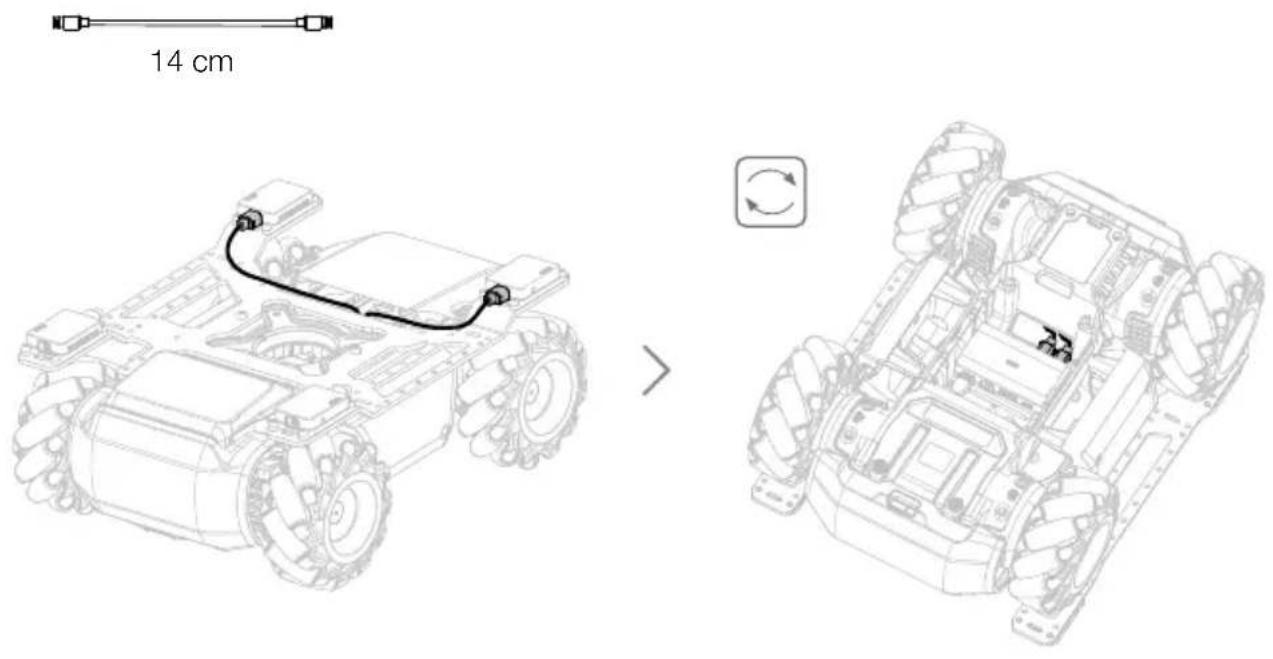
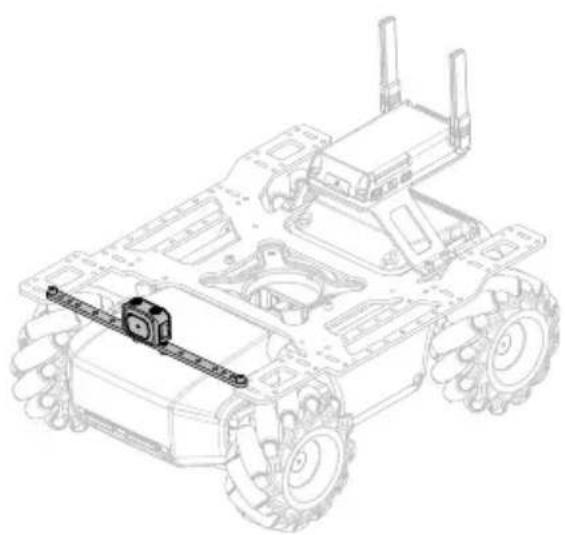
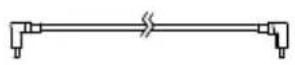
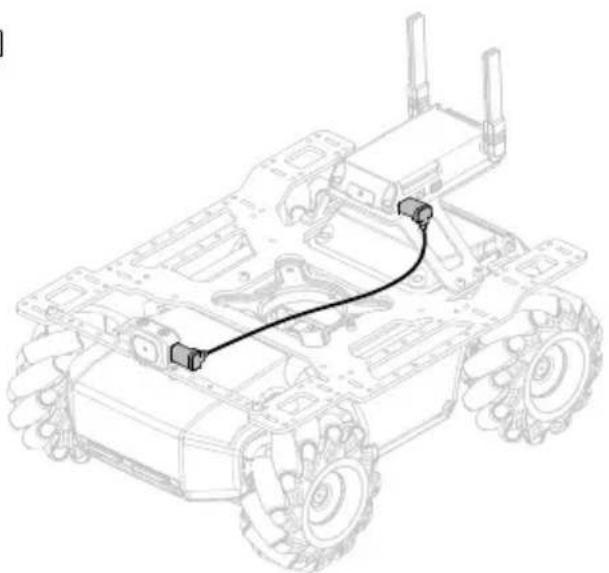
電源轉接模組安裝說明
- 拔出運轉控制器上的電源線。
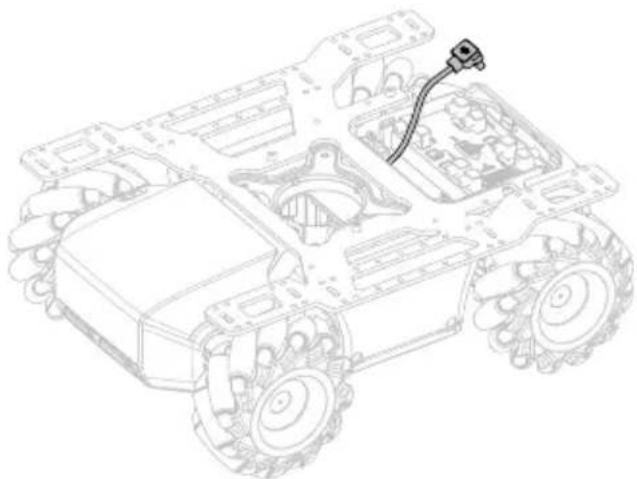
- 連接原電源線與 Y 型電源線。
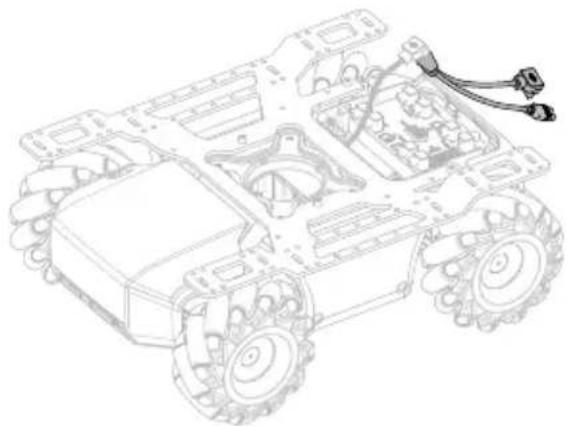
- 參考圖示連接 Y 型電源線至運轉控制器後,將原電源線放置於底盤上,Y 型電源線的 XT30 電源線穿過底盤中框直至底盤倉。
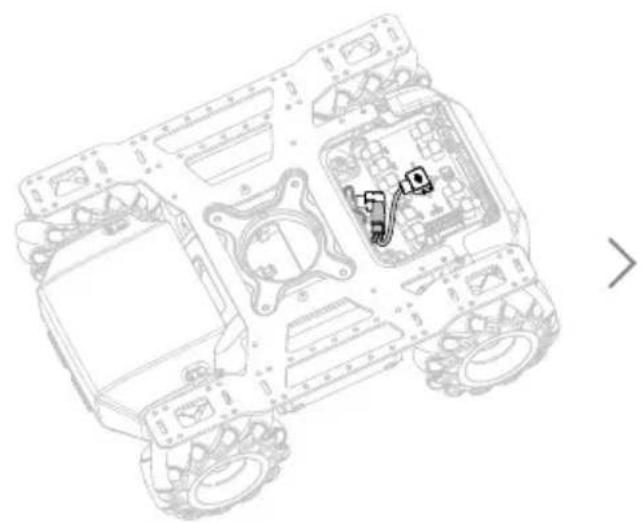
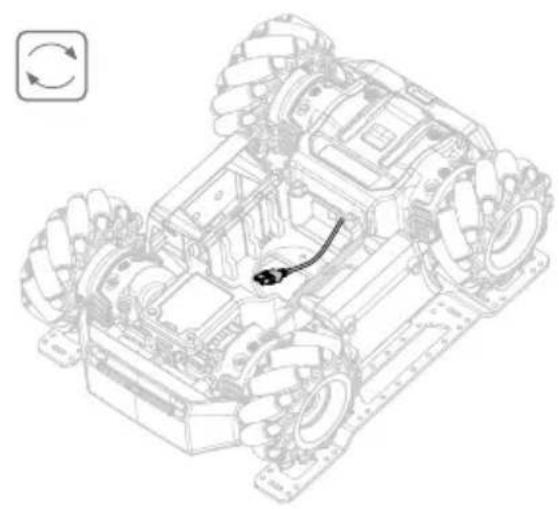
- 參考圖示將 12 ~cm 數據線 A 端連接至運轉控制器, B 端穿過底盤中框直至底盤倉。
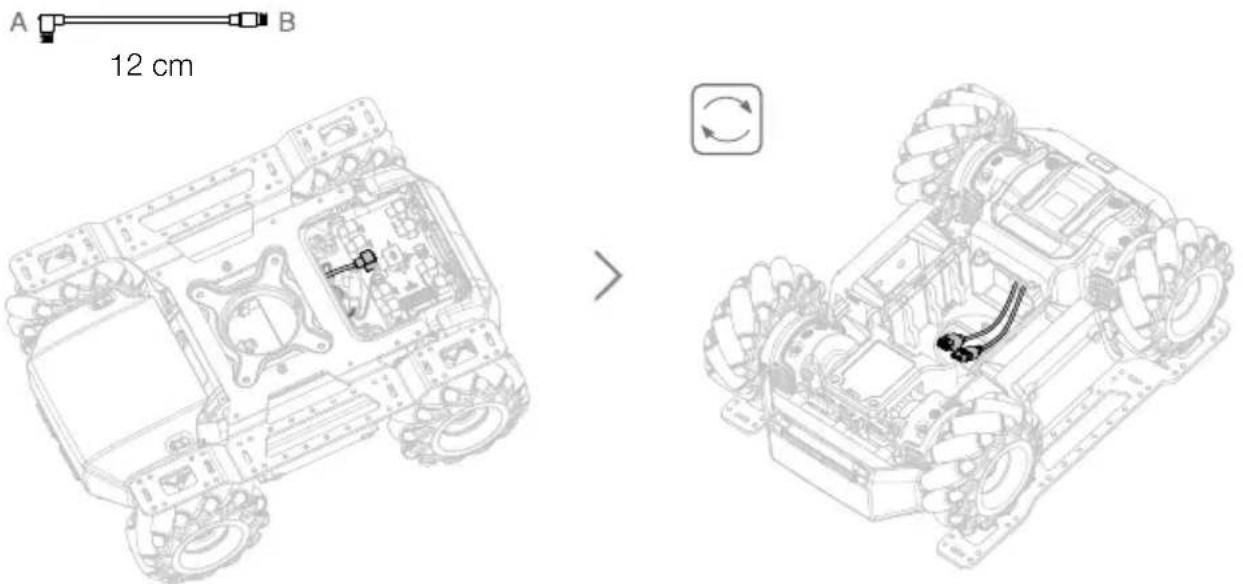
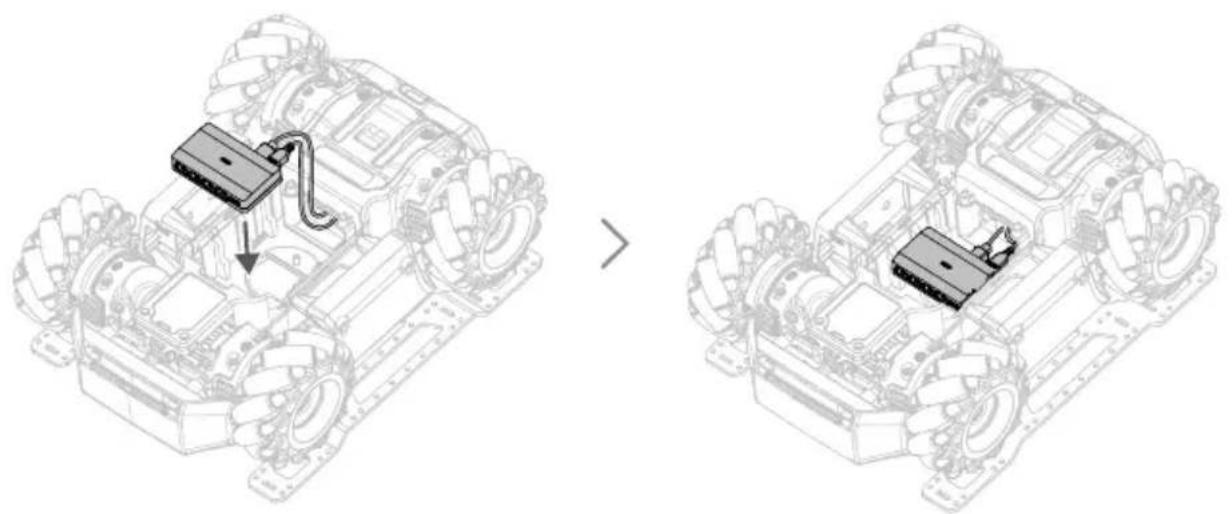
- 參考圖示,將底盤倉的 XT30 電源線、12cm 數據線 B 端分別接入電源轉接模組的 12V 電源輸入連接埠和 CAN BUS 連接埠,並將電源轉接模組固定於底盤倉。
電源轉接模組LED指示燈說明
LED指示燈用於指示電源轉接模組的狀態。具體如下:
| LED指示燈 | 電源轉接模組狀態 | |
| 白燈恆亮 | □ — | 電源輸入正常,5V輸出正常 |
| 紅燈恆亮 | □ — | 電源輸入正常,5V輸出電流過大或短路 |
| 熄滅 | ○ | 電源輸入異常 |
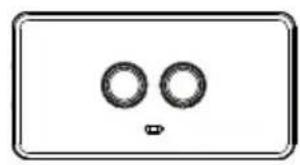
紅外線深度感應器
紅外線深度感應器概述
紅外線深度感應器透過檢測紅外線光在空氣中的飛行時間,計算出目標物體的距離。紅外線深度感應器由發射模組、接收模組和處理模組組成。發射模組發出一束經調製的近紅外線光,遇目標物體後反射。接收模組接收反射光線,進行光電轉換後將產生的電訊號輸送至處理模組進行解調,從而得到目標物體與感應器之間的距離。
紅外線深度感應器的視場角(FOV)為 20^ ,可測量視場中物體的距離。若視場中存在多個物體且距離各異,紅外線深度感應器的測量資料將介於最近距離物體與最遠距離物體的資料範圍內。實際測量資料與目標物體的大小百分比及反射率有關。使用者可透過實踐進一步了解紅外線深度感應器的用法。
紅外線深度感應器可在 0.1~10 公尺的測距範圍內實現測量誤差約為量程 5% 的高測量精確度。Scratch 程式平台亦新增對應程式模組,提供測距資訊,讓使用者在實現智慧避障及環境感知的同時,學習自動駕駛原理。

1. CAN BUS連接埠
可透過 CAN BUS 連接線連接至機器人。
2. 序列埠連接埠:
a)序列埠訊號支援3.3V電平。
b)輸入電源範圍 5V 12.6V
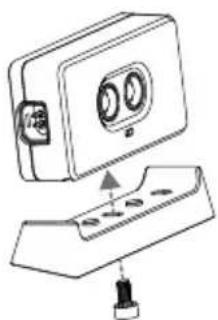
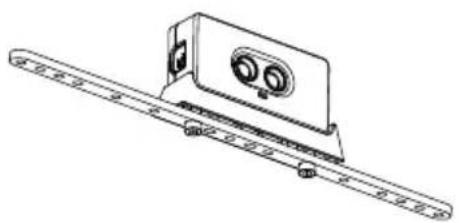
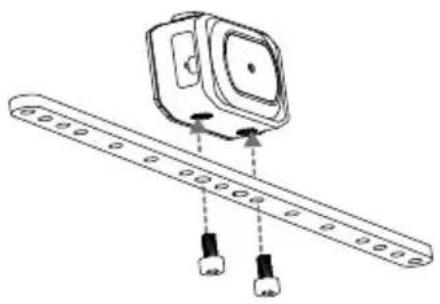
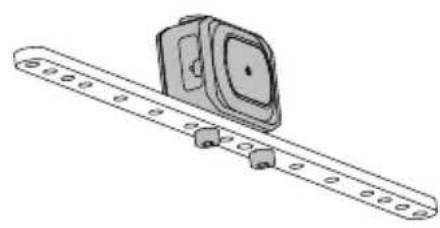
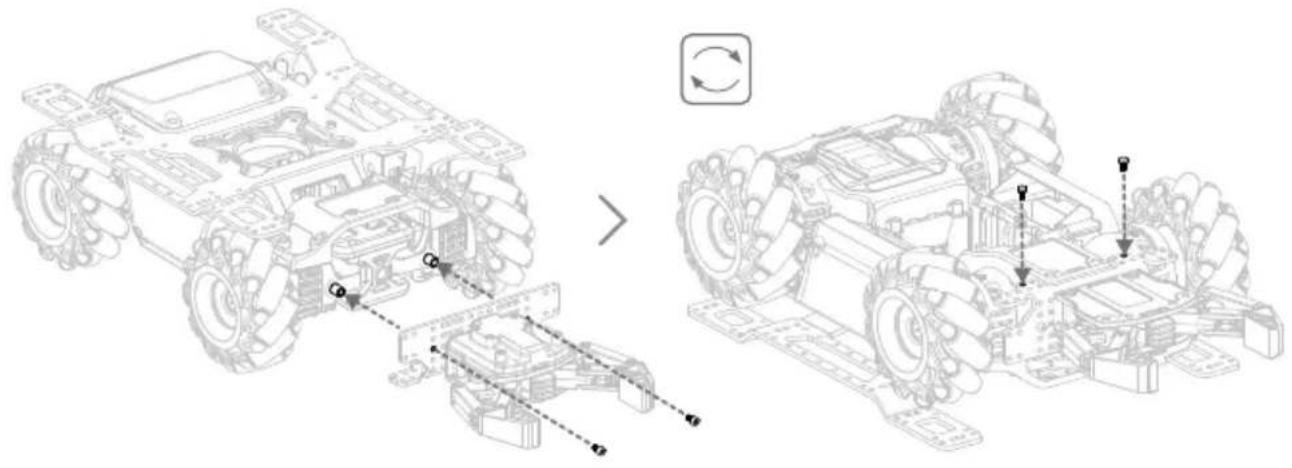
紅外線深度感應器安裝說明
紅外線深度感應器也可搭配紅外線深度感應器基座安裝於機器人底盤拓展基板上。基座若安裝於基板前方,需先固定於拓展連桿上。
紅外線深度感應器若需安裝於機器人後方,使用者需自行設計零件,將智慧控制台紅外線深度感應器放置於合理位置,同時需確保不影響其他零組件的安裝與連結。
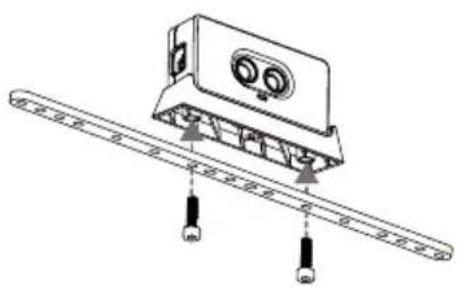
- 使用一顆 M3-C 螺絲將紅外線深度感應器固定於紅外線深度感應器基座上,組裝成紅外線深度感應器模組。

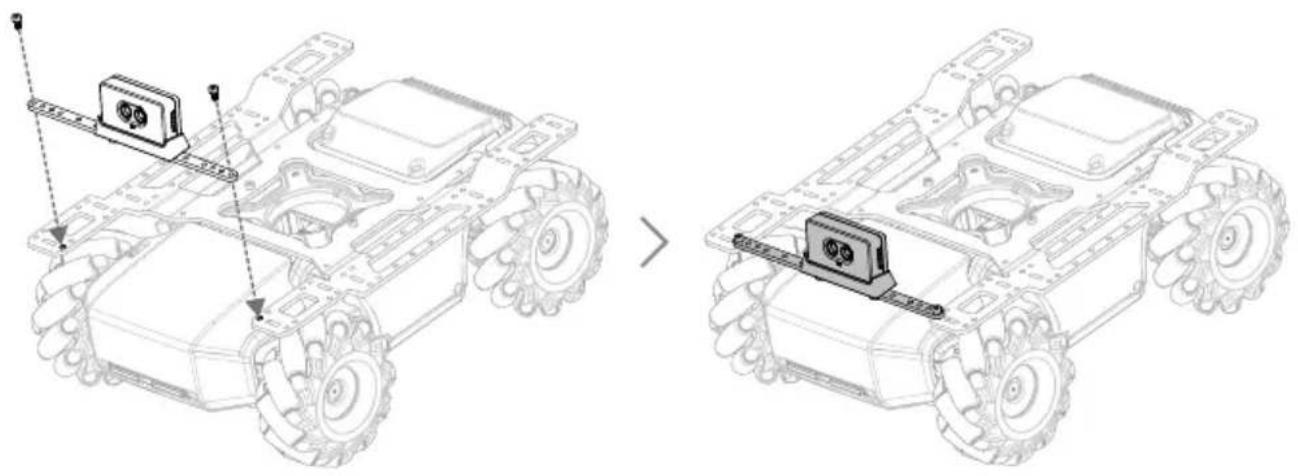
左側:
- 使用兩顆 M3-D 螺絲將模組固定於基板的左側,即底盤左外殼的上方。
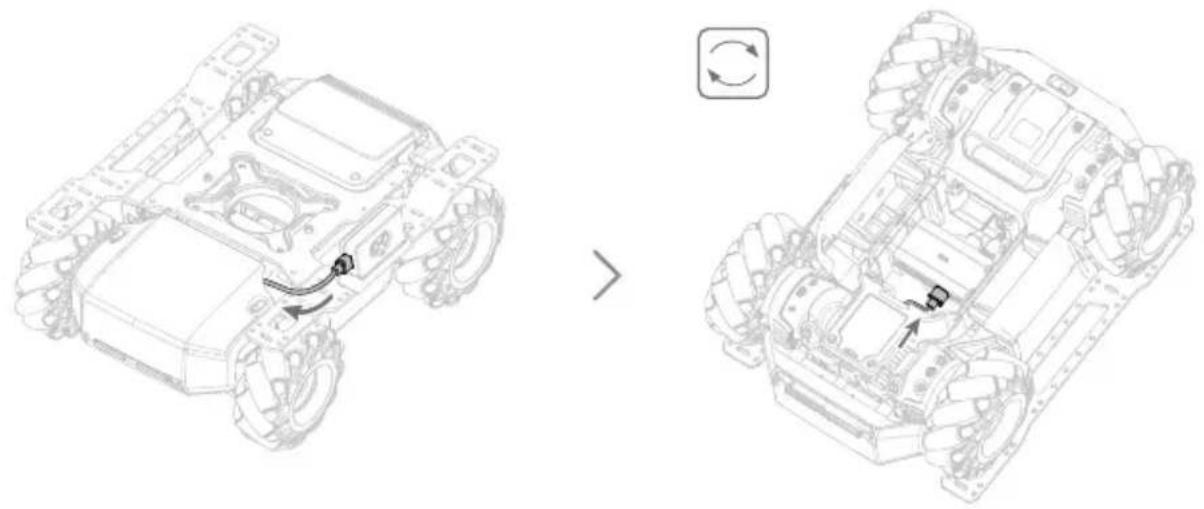
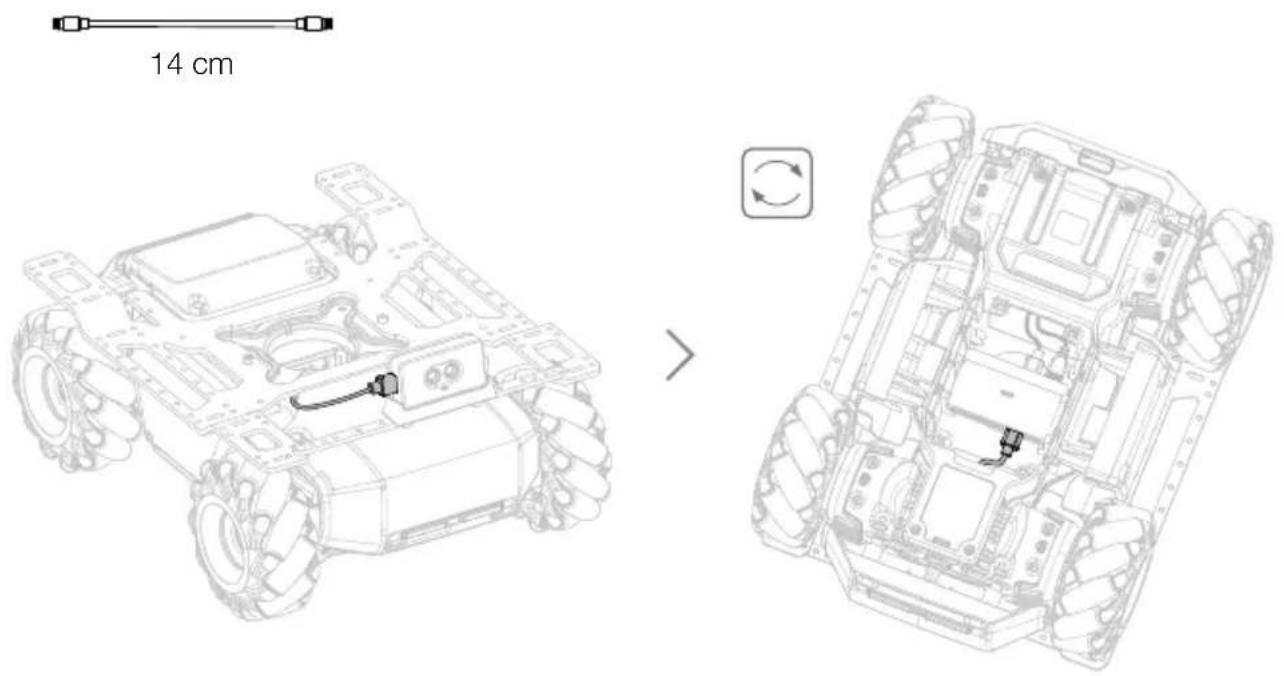
- 參考圖示使用 14cm 數據線連接模組與電源轉接模組。
14 cm
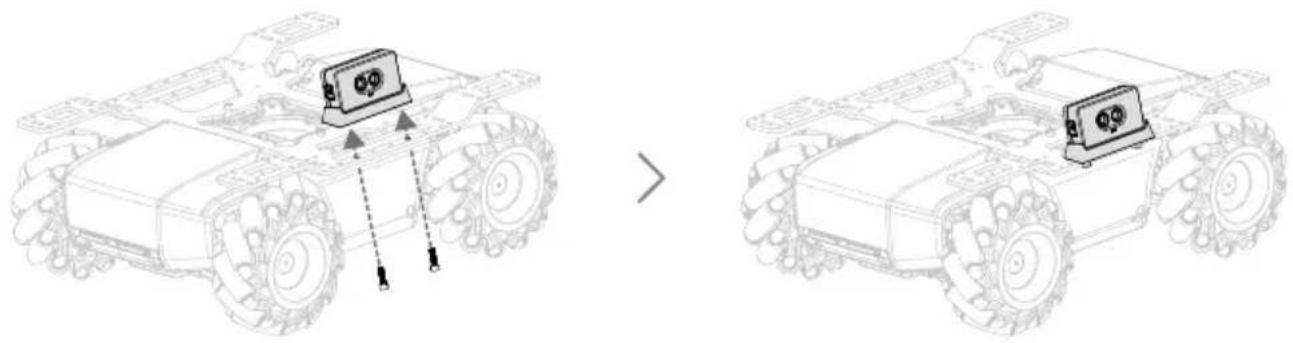
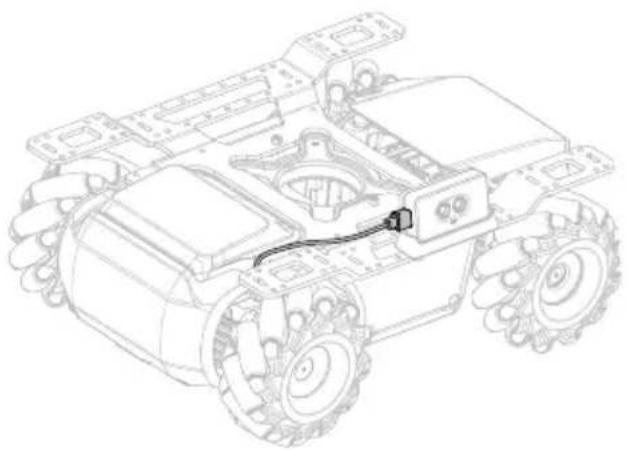
右側:
- 使用兩顆 M3-D 螺絲將模組固定於基板的右側,即底盤右外殼的上方。
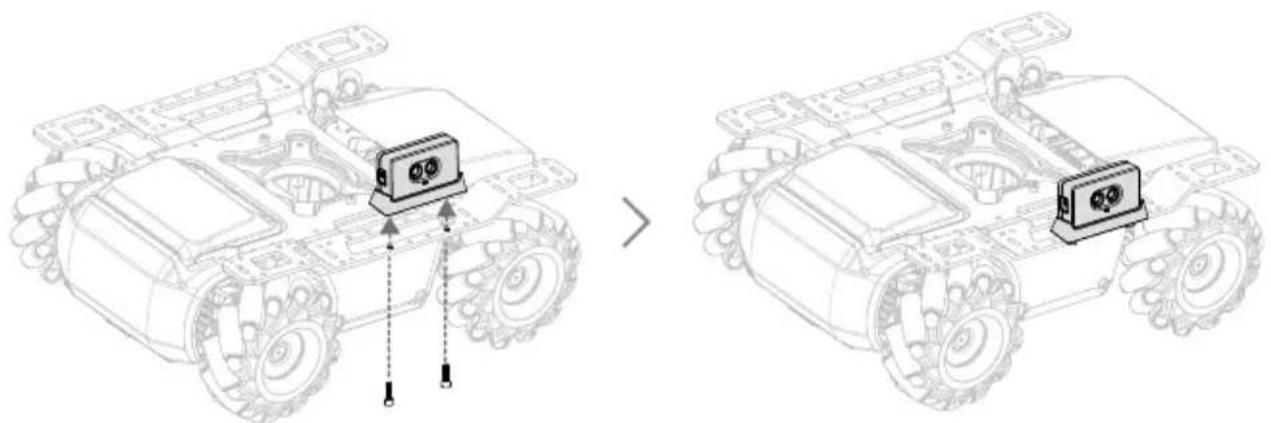
5.移除底盤右外殼的螺絲後,使用12cm數據線連接模組與右外殼。
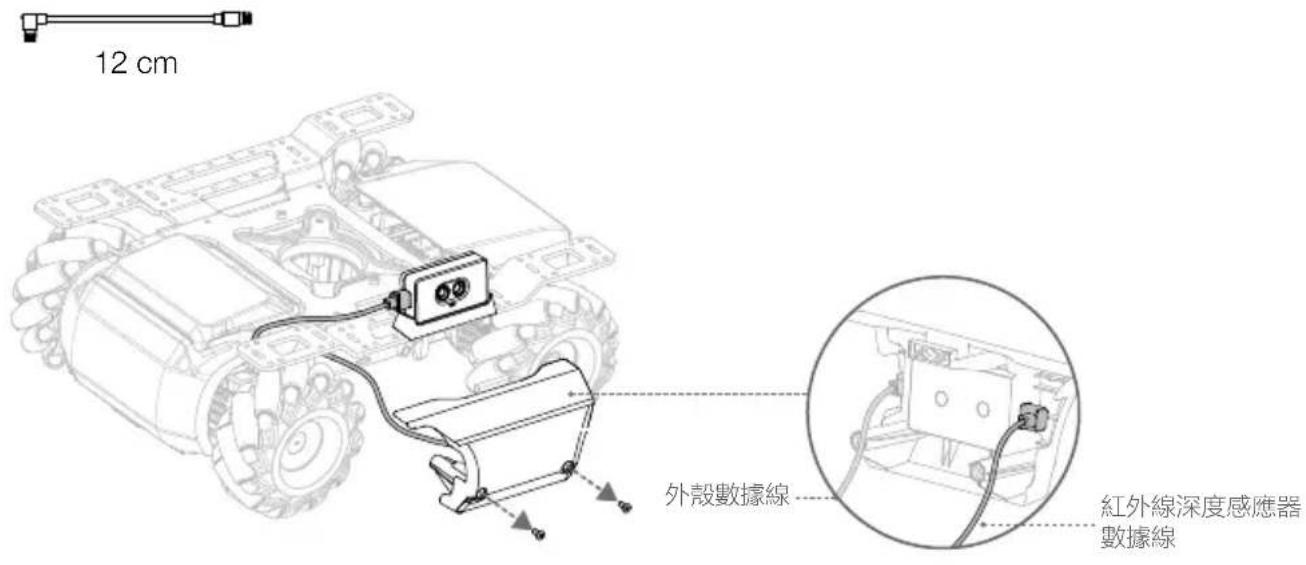
- 參考圖示布置數據線後,重新安裝右外殼。
前方:
- 使用兩顆 M3-D 螺絲將模組固定於拓展連桿上。
- 使用兩顆 M3-C 螺絲將拓展連桿固定於基板前方。
- 參考圖示使用 14cm 數據線連接模組與電源轉接模組。
序列埠協議使用說明
紅外線深度感應器不僅支援 CAN BUS 通訊,還支援明文序列埠協議,方便使用者在第三方平台上使用紅外線深度感應器。序列埠協議的連接埠配置參數如下所示:
| 屬性 參數 | |
| 波特率 | 115200 |
| 數據位 | 8 |
| 停止位 | 1 |
| 校驗位 | / |
透過序列埠發送明文字元串,可對紅外線深度感應器進行通訊。支援的控制命令:
| 描述 控制命令 | |
| 打開紅外線深度感應器 | “ir_distance_sensor measure on” |
| 關閉紅外線深度感應器 | “ir_distance SENSOR measure off” |
打開紅外線深度感應器後,感應器返回的數據格式如下:
"ir distance: 100", 其中 100 為感應器輸出的測量數據範例, 單位為 mm。
紅外線深度感應器LED指示燈說明
LED指示燈用於指示紅外線深度感應器的狀態。具體如下:
| LED指示燈 | 紅外線深度感應器狀態 | |
| 藍燈恆亮 | ● —— | 正常運作狀態 |
| 藍燈快速閃爍 | ● …… | 模組在 App 中處於選定狀態 |
使用場景
使用時需保證感應器不受干擾、未被遮擋,且鏡頭清晰無汗點。請避免在以下材料或場景中使用,否則測距精確度有可能下降甚至輸出失效:
a. 錢面或透明物體
b. 強吸光材質,如亞光純黑材質
c. 雨雾天氣
d. 强反射物, 如交通指示牌或反光带
e. 陽光直射
f.細小或低矮障礙物
A 紅外線深度感應器模組安裝於底盤基板上時,由於向上傾斜 10^ ,紅外線深度感應器無法探測地面。
感應器轉接模組
感應器轉接模組概述
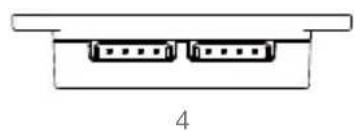
機器人提供四個感應器轉接模組,預設ID均為1。每個模組均有兩個感應器連接埠,可為第三方感應器供電,方便使用者將溫度、壓力、測距等感應器接入機器人,並在Scratch程式環境中獲取感應器數據資訊,為機器人帶來強大的感知能力。
其連接埠如下圖所示:

- CAN BUS 连接埠
與CANBUS連接線連接。
- LED指示燈
指示感應器轉接模組狀態。
- 程式按鈕
用於設定感應器轉接模組ID。
- 感應器連接埠
支援採集開關類訊號和模擬類訊號,輸入範圍為 0 3.3V
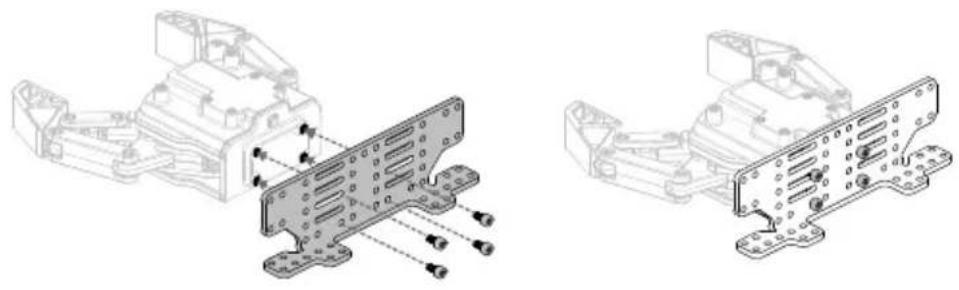
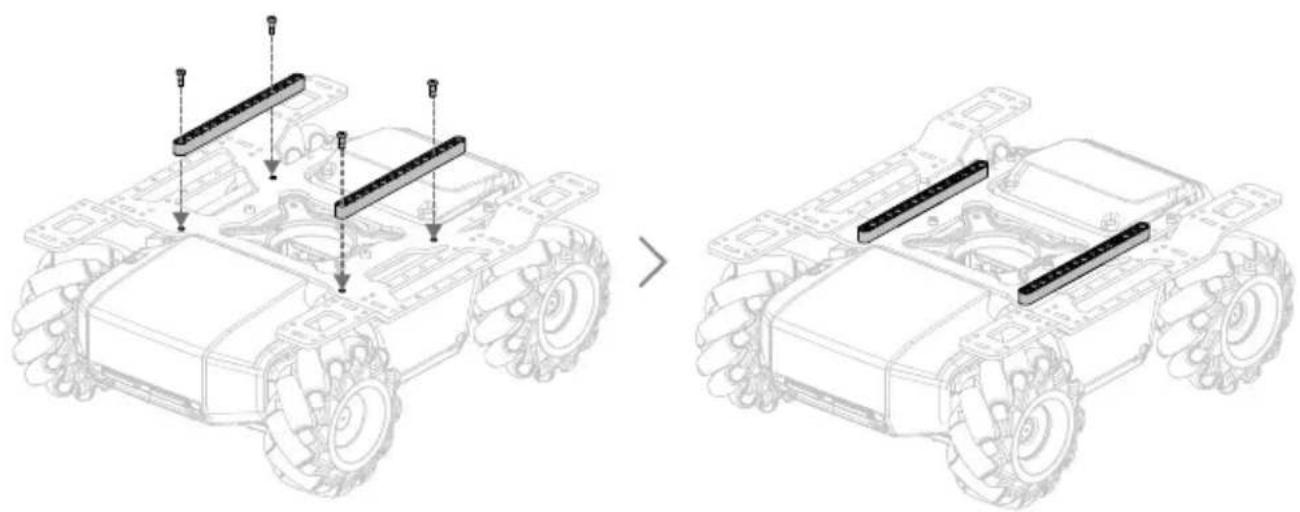
感應器轉接模組安裝說明
- 使用八顆M3-C螺絲將感應器轉接模組固定於底盤拓展基板後方的圖示位置。
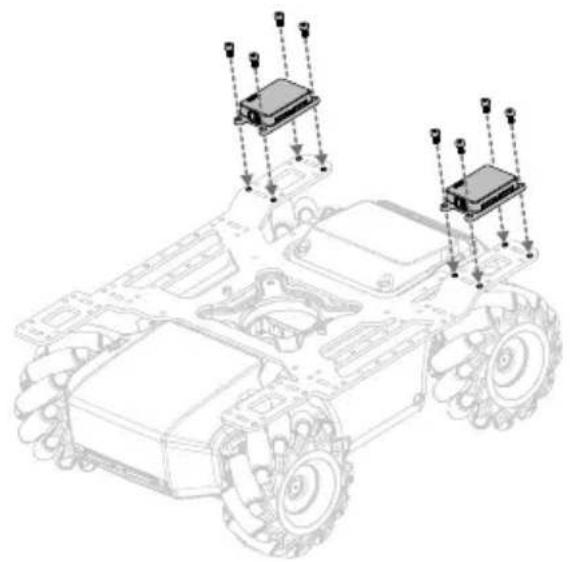
2.移除底盤左外殼和右外殼的螺絲後,使用12cm數據線連接應器轉接模組與外殼。
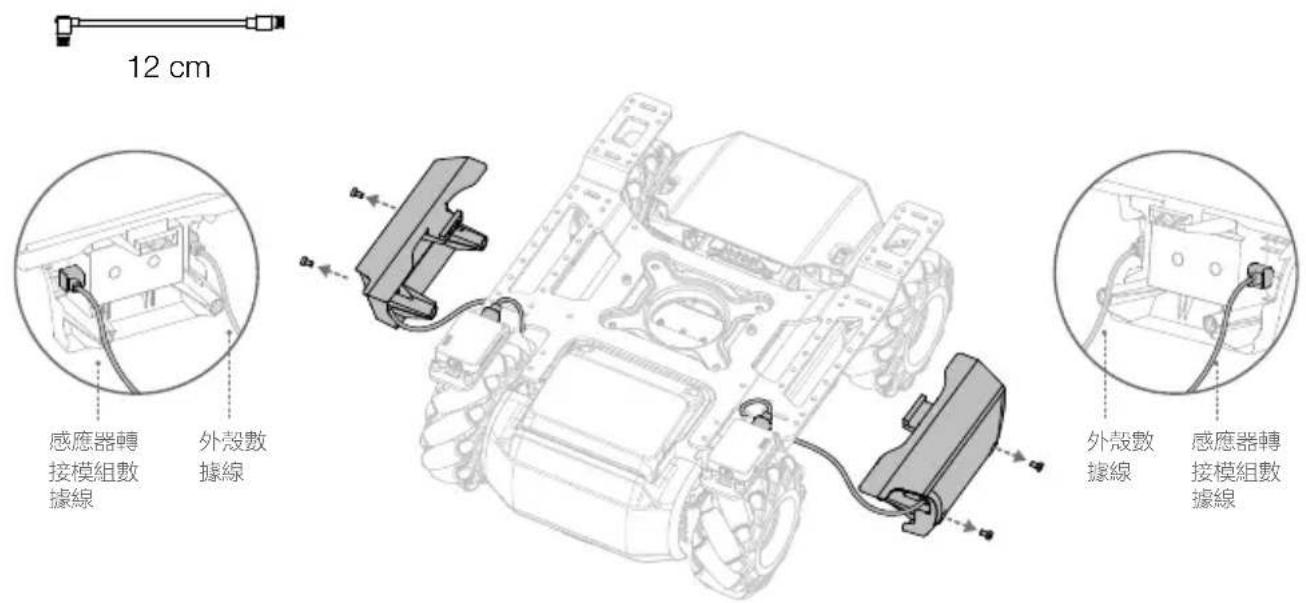
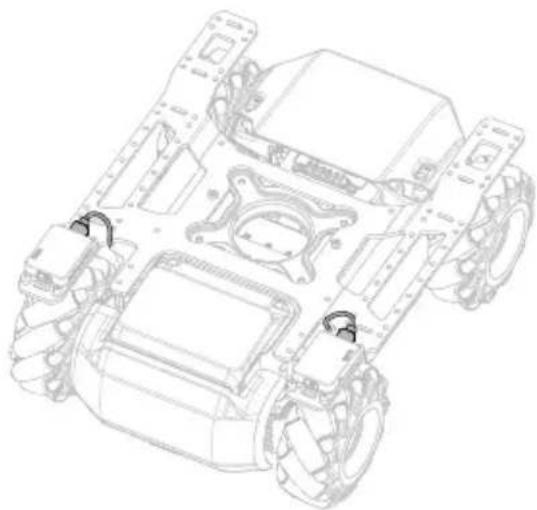
- 參考圖示布置數據線後,重新安裝外殼。
- 使用八顆M3-C螺絲將感應器轉接模組固定於基板前方的圖示位置。
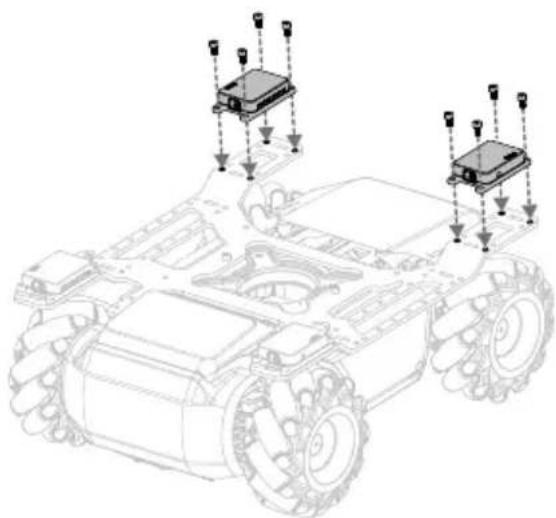
- 參考圖示,使用 14cm 數據線連接感應器轉接模組與電源轉接模組。
感應器轉接LED指示燈說明
LED指示燈用於指示感應器轉接模組的狀態。具體如下:
| LED指示燈 | 感應器轉接模組狀態 | |
| 白燈恆亮 | 目—— | 正常運作狀態 |
| 白燈快速閃爍 | 目…… | 模組處於正在編址狀態或在App中處於選定狀態 |
拓展連桿
拓展連桿安裝於底盤拓展基板上,可用於安裝紅外線深度感應器、相機等組件。下面以相機為例介紹安裝步驟。
- 使用兩顆M3-C螺絲將相機固定於拓展連桿的圖示位置。
- 使用兩顆M3-C螺絲將拓展連桿固定於機器人底盤前方的圖示位置。
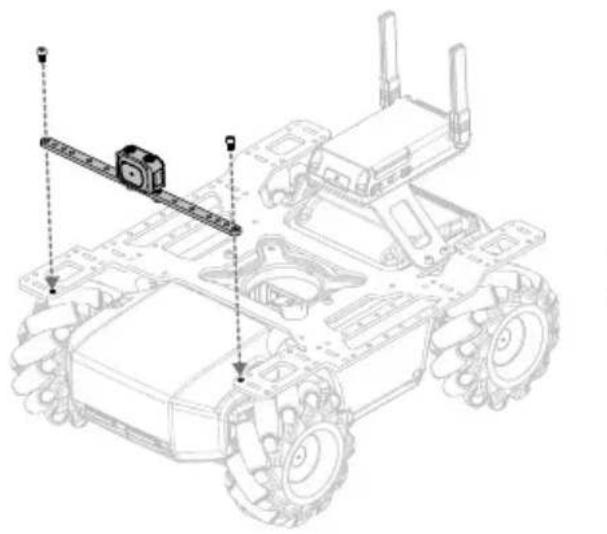
- 使用相機連接延長線連接相機與智慧控制台。
拓展前橋轉接
拓展前橋轉接安裝於機器人的底盤前方,可用於安裝機械爪、感應器等組件。下面以機械爪為例介紹安裝步驟。
- 使用四顆M3-C螺絲將機械爪固定於拓展前橋轉接的圖示位置。
- 使用四顆M3-C螺絲將拓展前橋轉接固定於機器人底盤前方的圖示位置。
結構拓展零組件
機器人兼容第三方結構拓展零組件。使用者可自由發揮,為機器人賦予更多創意和可能性。參考圖示,使用四顆M3-B螺絲將第三方結構桿件固定於底盤拓展基板。使用者可在此基礎上搭建第三方結構體系。
機器人與第三方硬體平台
機器人兼容第三方硬體平台。機器人透過電源轉接模組為第三方硬體平台供電;第三方平台透過使用SDK協議與機器人通訊。更多使用詳情,請前往網站obomaster-dev.rtfd.io查看線上文件。
第三方硬體平台與機器人的連接方式分為兩類:
a) UART連接
第三方硬體平台 Arduino™ 與電源轉接模組連接後,透過機器人運轉控制器上的 UART 連接埠與機器人進行連接通訊,如圖所示:
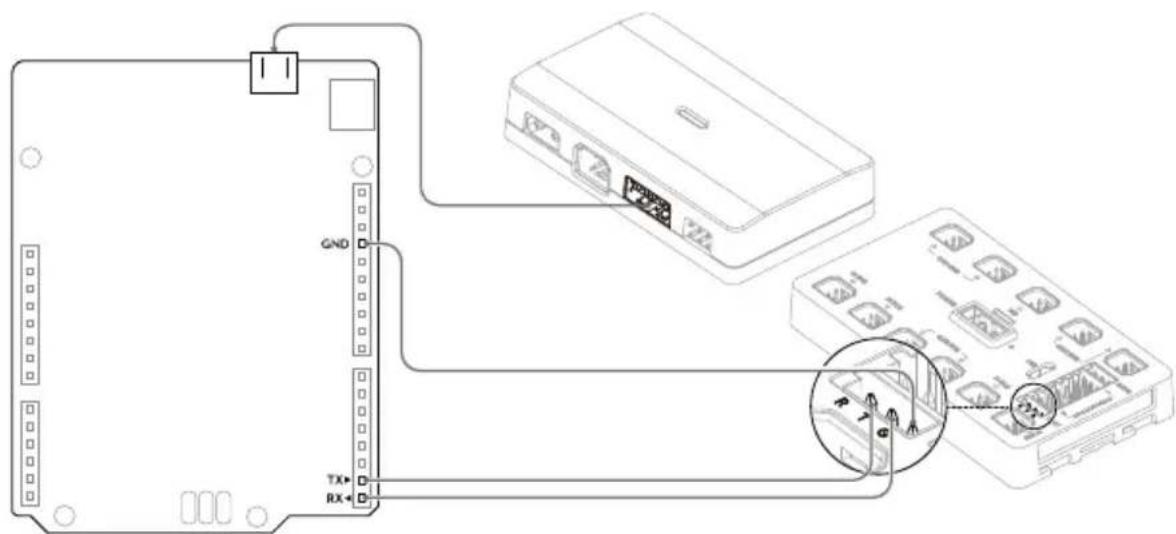
第三方硬體平台 Micro:bit™ 與電源轉接模組連接後,透過機器人運轉控制器上的 UART 連接埠與機器人進行連接通訊,如圖所示:

b) USB連接
第三方硬體平台 RASPBERRY PTM (樹莓派)與電源轉接模組連接後,透過機器人智慧控制台上的USB連接埠與機器人進行連接通訊,如圖所示:
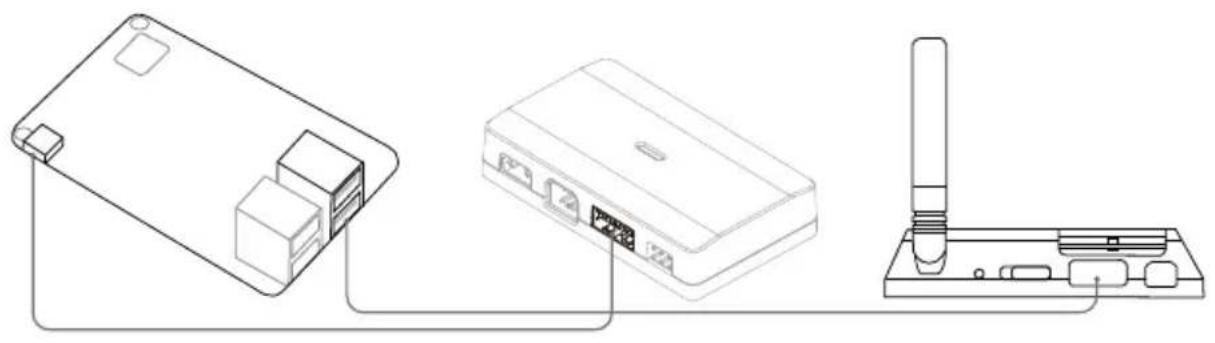
第三方硬體平台 Jetson Nano™ 與電源轉接模組連接後,透過機器人智慧控制台上的 USB 連接墊與機器人進行連接通訊,如圖所示:
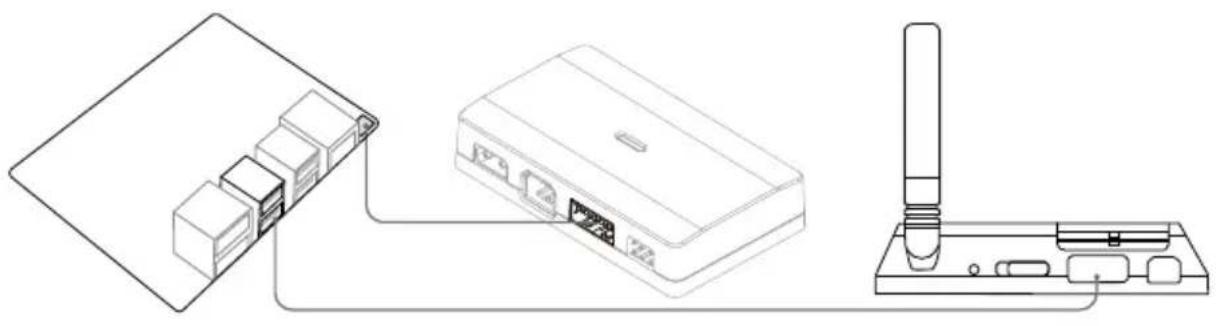
A 本產品未經上述品牌授權、贊助或者以其他方式認可,上述品牌產品與本產品的連接方式僅供參考。
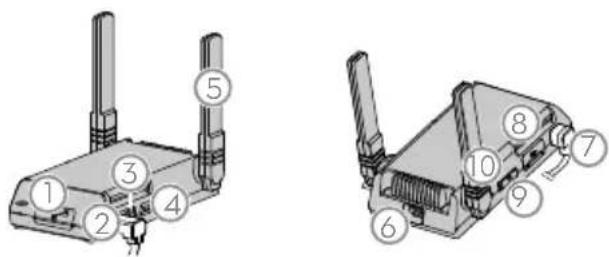
手把(選配)
简介
透過連接手把至執行RoboMaster App的行動設備,實現透過手把搖桿以及RoboMaster App同步控制機器人的移動,並完成各項操作。手把還支援外接滑鼠鍵盤,以獲得更佳的操作體驗。
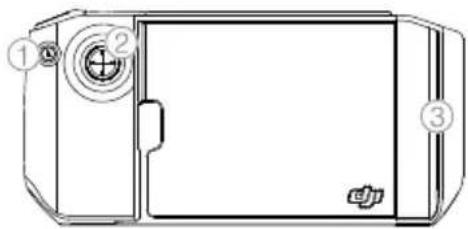

1.自訂技能按鈕
2. 摇桿
3. 可伸縮行動設備夾
4. 射擊過熱冷卻按鈕
5. 發射按鈕
6. 電源按鈕
7. 充電連接埠 (Micro USB)
8. 行動設備連接埠(USB)
9.滑鼠連接埠(USB)
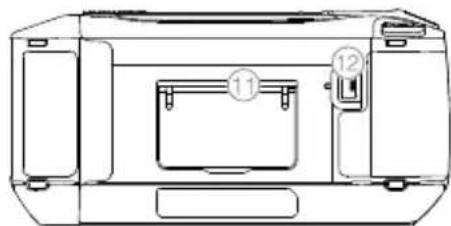
10. 畝態指示燈
11.手把支架
12. 隨機技能按鈕
行動設備連接埠和滑鼠連接埠不可混用。
充電
首次使用時,建議首先對手把進行充電。
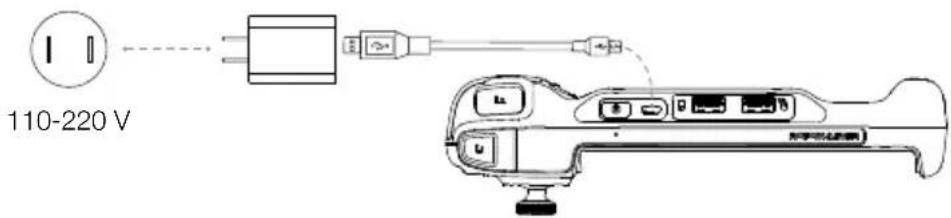
完全充飽約需2小時。
包装內不含USB充電器。
韌體升級
手把後續支援透過RoboMaster App進行軻體升級。當有新版本軻體時,若將手把連接至行動設備並執行RoboMaster App,App將會提示使用者進行升級,請根據提示完成軻體升級。

升級軀體正在下載時,請確保行動設備可以連接至互聯網。
狀態指示燈說明
透過手把狀態指示燈,可查看手把狀態以及剩餘電量,具體指示燈顏色及其釋義如下:
| 指示燈 描述 | |
| 綠燈緩慢閃爍 | 手把正在充電 |
| 紅燈快速閃爍 手把剩餘電量為0 | |
| 紅燈恆亮 | 手把剩餘電量為1%~29% |
| 黃燈恆亮 | 手把剩餘電量為30%~69% |
| 綠燈恆亮 | 手把剩餘電量為70%~100% |
| 藍燈恆亮 初始化狀態 |
参数
| 型號 | GD0MA |
| 內建電池 | 3.6 V, 2600 mAH, 1S1P |
| 續航時間* | 約2小時 |
| USB連接埠供電電流/電壓 | 500 mA/5 V |
| 運作環境溫度範圍 | -10℃至45℃ |
| 充電環境溫度範圍 | 0℃至45℃ |
| 充電時間* | 約2小時 |
- 結航時間為連接至 Android 系統設備測得。充電時間為使用 10 W USB 充電器,於 25^ C 下測得。所測的續航時間以及充電時間皆為實驗環境下測得,僅供參考。
駕駛
使用前檢查
每次使用前,進行檢查,確保以下各項:
1.運轉控制器上所有連線正確且牢固,防水蓋安裝牢固。
2.智慧控制台、發射器、相機、喇叭連線正確且牢固。
3. 智慧控制台已經裝好 microSD 卡,並調整智慧控制台天線到垂直角度。
4. 智能電池電量充足,且安裝到位。
開啟電源
長按電池電源按鈕2秒以上,開啓電源。
連接機器人和RoboMaster App
使用者可以透過單機駕駛場景進行練習,熟悉控制機器人向各個方向移動。
直接連接模式和路由器模式下都可以進入單機駕駛場景,請根據「連接」這一節的内容進行操作。
使用RoboMasterApp操控
選擇場所
請選擇寬闊的無人場地,推薦在穩定平整的地面(如水泥地、大理石地面、木地板、地毯等)使用,不平整的路面可能會損壞萬向輪或者馬達(如泥沙地)。切勿在積水路面及雨雪天氣的戶外使用。
進入單機駕駛場景
進入單機駕駛場景,頁面指南如下。
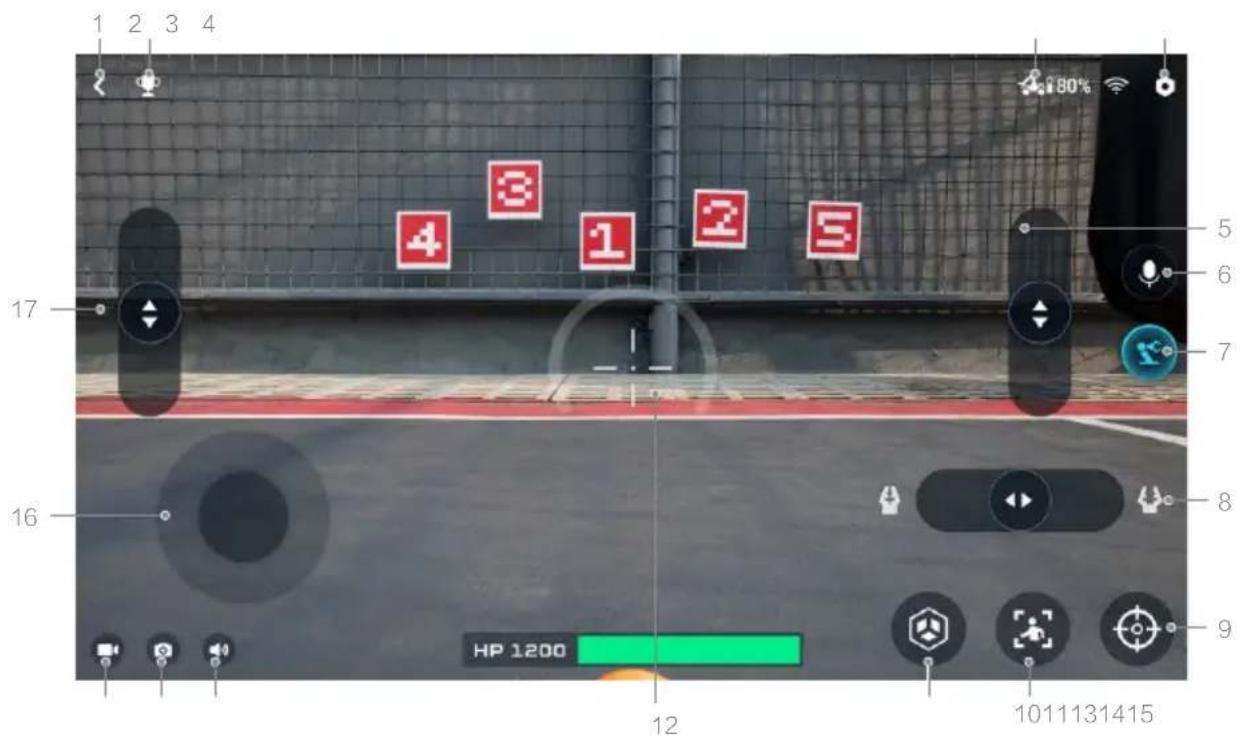
- 退出目前頁面。
- 點擊進入單人挑戰玩法。有定點射擊和移動射擊兩種挑戰玩法。
3.連接狀態,點擊可進入連接指南介面。 - 點擊進入設定頁面。
- 機械臂控制滑條,用於控制機械臂升降運動。
6.對講機按鈕,用於錄製和撥放音訊。 - 機械臂按鈕,用於FPV介面切換。
- 機械爪控制滑條,用於控制機械爪運動。
9.4倍镜放大按钮。 - 點擊可開啟行人跟隨功能。注意在以下場景使用會影響行人跟隨效果。
註:EP Core不支援此功能。
a. 被跟隨行人被長時間遮擋
b. 被跟隨行人處於機器人視線外
c. 被跟隨行人在運動時發生較大的姿態變化
d. 被跟隨行人在光照不均勻的場景中運動
e. 被跟随行人與周圍環境顏色或圖案非常相近
- 自訂技能按鈕,按下可執行自訂技能程式。
- 準星,用於瞄準目標。
13.聲音回傳按鈕,可以開啓或者關閉。 - 拍照按鈕,用於拍照。
15.錄影按鈕,用於錄影。 - 底盤控制按鈕,用於控制底盤運動。
- 機械臂控制滑條,用於控制機械臂伸縮運動。
操控機器人
FPV操作介面主要表現為操控機器人的底盤/機械臂/機械爪運動。
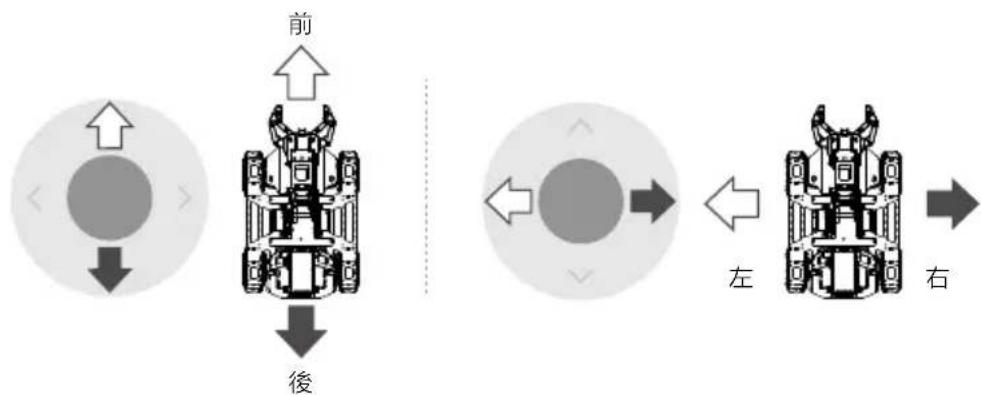
操控底盤
使用 App 介面左側的底盤控制按鈕,可以控制機器人向前、後、左、右運動。
操控機械臂
點擊 App 介面的機械臂按鈕,使用介面左右兩側的機械臂控制滑條,可以控制機械臂伸縮、升降運動。
操控機械爪
點擊App介面的機械臂按鈕,使用介面右下側的機械爪控制滑條,可以控制機械爪開合運動。
更多玩法
使用手把操控機器人
简介
機器人除了可以使用 App 進行控制,還支援以下控制方式:
- 使用 App 和手把。
- 使用 App、手把和滑鼠。
- 使用 App、手把和鍵鼠一體設備。
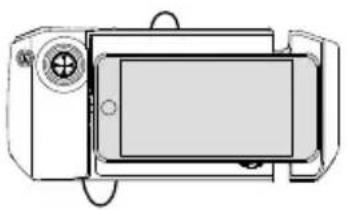
連接手把和行動設備
- 使用自備的 Micro USB 線,連接行動設備至手把的行動設備連接埠。
- 拉開行動設備夾,安裝行動設備,請將行動設備連線的一端向左。
- 短按一次電源按鈕開啓手把,長按可關閉手把。
手把基本操作
- 當手把連接至行動設備後,進入RoboMaster App,在FPV介面中,手把搖杆可用於控制機器人的前後左右運動。
- 當手把連接至行動設備後,進入RoboMaster App,在FPV介面中,顯示發射按鈕、自訂技能按鈕或隨機技能按鈕則均按下手把按鈕相應進行操作。
使用手把
機器人底盤控制需要使用手把,其它功能則可透過 App 進行操作。
| 搖桿方向 | 機器人方向 | 搖桿方向 | 機器人方向 |
使用手把摇桿可控制機器人的前後左右運動。
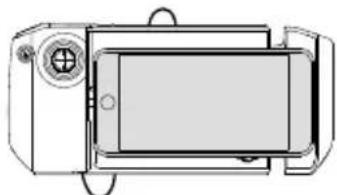
使用手把和滑鼠
將滑鼠連接至手把的滑鼠連接埠使用。機器人底盤控制需要使用手把,其它功能則可透過滑鼠或 App 進行操作。此時,滑鼠的優先級高於 App。
| 滑鼠動作 機器人 | 動作 |
| 單擊滑鼠右鍵 放大 | 目前畫面 |
| 移動滑鼠 控制底盤 |
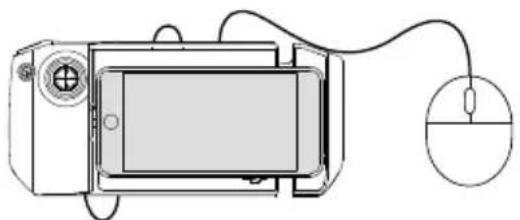
使用手把、滑鼠和鍵盤
需要使用無線鍵鼠一體的設備,將鍵鼠一體的無線模組連接至手把的滑鼠連接埠。機器人底盤控制需要使用手把或鍵盤,其它功能則可透過滑鼠或App進行操作。此時,滑鼠的優先級高於App。鍵盤僅能使用以下按鈕控制機器人。
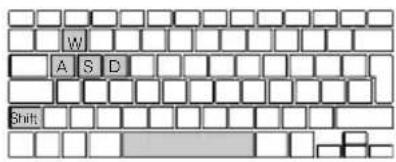
| 鍵盤動作 機器人方向 | |
| W | 向前移動 |
| A | 向左移動 |
| S | 向後移動 |
| D | 向右移動 |
| Shift / 空格 | 加速 |
| 滑鼠動作 機器人 | 動作 |
| 單擊滑鼠右鍵 放大 | 目前畫面 |
| 移動滑鼠 控制底盤 | |
支援雷柏和羅技大部分鍵鼠一體設備,推薦型號:
雷柏:8200P、9300P、1800、8100M
羅技:M310t、MK850
使用電腦控制
安裝RoboMasterWindows版本或Mac版本的應用軟體到電腦,透過滑鼠鍵盤控制機器人。
安装RoboMasterWindows/Mac版本
- 使用電腦從 DJI 官網下載 Windows 版本或 Mac 版本的 RoboMaster 軍體,從而透過鍵盤滑鼠控制機器人。
Windows 版本:https://www.dji.com/robomaster_app
Mac版本:https://www.dji.com/robomaster_app
2.執行安裝包,根據提示完成RoboMaster軟體安裝。
3. 執行 RoboMaster 軍體,進入首頁。RoboMaster Windows 版本或 Mac 版本功能與 RoboMaster App 類似。
使用滑鼠鍵盤控制
使用滑鼠和鍵盤控制機器人,相應控制動作如下圖所示。

按住空格键的同时,透過W、A、S、D鍵和滑鼠左右鍵控制機械臂和機械爪。
實驗室
RoboMaster App 實驗室中的圖形化程式模組多達百餘個,用好它們可以達成機器人的PID控制、機器視覺等特有功能。您還可以閱讀我們提供的《RoboMaster EP Core 程式模組指南》,獲得更多程式知識。
使用者在實驗室內可體驗有關 Scratch 程式的項目式關卡,使用者可在實驗室中,進入大師之路版塊,學習項目式課程。透過閱讀指導文件,獨立完成項目,保存並執行編寫程式,還可透過程式窗口查看代碼執行情況。
Scratch 程式
Scratch 程式平台新增拓展機構、感應器與轉接模組,具體包含機械臂、機械爪、紅外線深度感應器、感應器轉接模組、序列埠等配件連接埠。平台還具備底盤序列埠通訊功能,支援與第三方開發硬體平台通訊。
當使用者需要自行編寫程式時,請從實驗室 -> 我的程式進入 Scratch 程式介面。使用者在該介面內自行編寫保存並在機器人上執行 Scratch 程式。

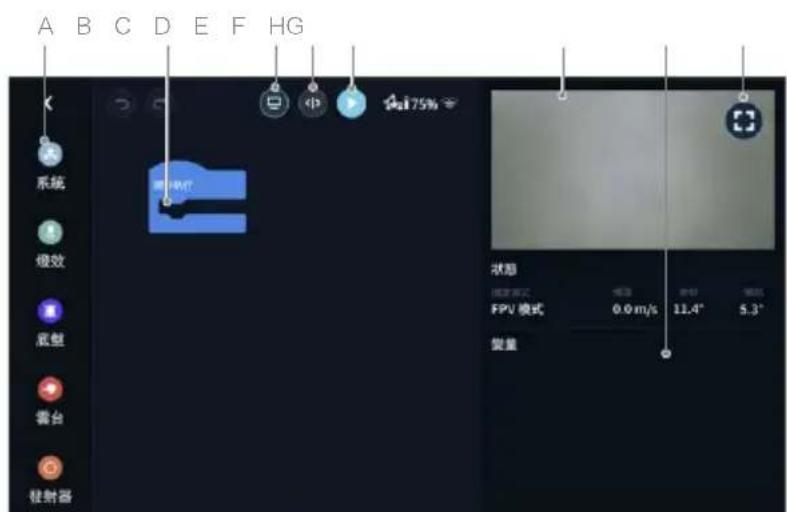
- Scratch 程式介面。
- Python 程式介面。
3.導入DSP文件。僅Android、Windows和Mac平台支援此功能。iOS平台可透過系統的AirDrop功能導入DSP文件。 - 雪空間。
- 程式名稱。
- 一旦程式被設定為普通程式,則沒有任何顯示,如果設定為自主程式或自訂技能,將在這裡相應顯示。
- 點擊可以彈出設定介面。可以將程式設定為普通程式、自訂技能或自主程式。進行雲備份、分享、重新命名和刪除操作。

8.點擊 ④ 可創建新程式。
A. 程式模組
B. 程式窗口
C. 點開可以看到右側 FPV 介面
D. 將 Scratch 程式轉換為 Python 程式碼
E. 點擊執行該程式
F.FPV窗口
G.狀態資訊
H.全螢幕按鈕
EP Core無法執行發射器或雲台相關程式,建議連接發射器或雲台後再試。
六大智慧模組說明
使用者可以在實驗室 -> 我的程式 -> Scratch 程式中創建新程式,編寫智慧模組程式,當裝配為自訂程式之後,可以在 FPV 介面點擊自訂技能按鈕以執行程式。具體的程式實例請參考《RoboMaster EP Core 程式模組手冊》的「智慧」章節。
注意在以下場景中智慧模組使用將受到影響:
a. 被識別目標部分或全部被遮擋
b. 環境特別暗(光照小於 300 lux)或者特別亮(光照大於 10,000 lux)時
C. 被識別目標處於逆光場景中
d. 被識別目標處於光照強度不均勻的場景中
e. 被識別目標與周圍環境顏色或圖案非常相近
行人識別
編寫程式檢測行人,並觸發相應的反饋。
線路識別
編寫程式自訂線路並讓機器人識別線路完成巡線,主要用於移動射擊挑戰中。支援識別紅色、綠色和藍色線。
姿勢識別
編寫程式識別特定的人體姿勢(雙手倒V、正V、拍照手勢),從而執行特定的功能。
掌聲識別
編寫程式可以有效識別 2 ~m 之內的掌聲,支援連續兩次掌聲、連續三次掌聲兩種模式。
機器人識別
編寫程式檢測其它機器人,並觸發相應的反饋。
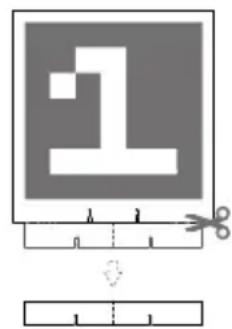
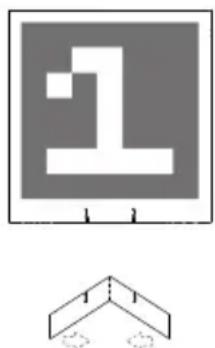
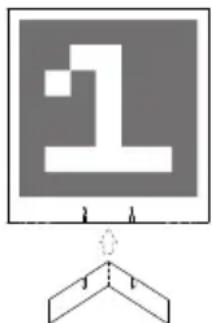
視覺標籤識別
機器人成功識別視覺標籤之後,可以執行特定的動作。
目前僅可識別官方定義的視覺標籤(標籤的大小為 15cm × 15cm ),由 7 × 7 像素塊構成,主要包括數字、字母、部分特殊符號,有效識別距離大約 m 。請根據視覺標籤包裝上的指南進行安裝。
① 234
O
O

O
切勿遮擋紅色或藍色等標識顏色區域,否則將影響識別。
如需要使用更多的視覺標籤,您可以在 App 中點擊 按鈕進入指南頁面,選擇視覺標籤,下載並列印標籤。
視覺標籤識別目前僅支援紅色和藍色標籤,不能識別其它顏色標籤。
自主程式
使用者所編寫的程式可被設定為自主程式,當該程式被裝載到機器人之後:
- 如果機器人與App未連接,則可以透過智慧控制台上的自主程式按鈕來觸發執行該程式。執行程式期間再次按下按鈕可中止程式執行。
- 如果機器人連接 App,則以下情況可以透過按下自主程式按鈕來觸發程式執行:
(1)在 App 首頁
(2)在實驗室中
以下情況不能觸發自主程式執行:
(1)打開了設定頁面
自訂技能
使用者所編寫的程式也可被設定為自訂技能,結合FPV介面的自訂技能按鈕,使用者可使用自訂技能。
Python 程式
在Scratch程式介面,可以將目前Scratch程式轉化成Python程式碼並調出顯示台進行閱覽,幫助玩家快速入門Python程式。
在Python程式介面,允許玩家基於Python3.6.6版本的基礎語法完成Python程式,並可以參考官方提供的《RoboMaster EP Core 程式模組手冊》,調用機器人提供的程式介面去編寫自己的Python程式,同時生成的Python程式可被装配成自主程式或者自訂技能。
機器人的多機通訊連接埠讓多台機器人透過Python程式互相通訊,實現多機即時互動。機器人支援程式自訂UI系統,透過Python編寫虛擬控件,自由設定交互介面,拓展無限應用可能。
附錄
參數
| 機器人 | |||
| 全機尺寸(長×寬×高)390×245×330 mm | |||
| 重量 | 約3.3kg | ||
| 底盤運動速度範圍 | 0.8m/s | ||
| 底盤最大旋轉速度 | 600°/s | ||
| M3508I無刷馬達 | |||
| 無刷馬達最大轉速1000rpm | |||
| 無刷馬達最大扭矩 | 0.25 N*m | ||
| 最大輸出功率 | 19W | ||
| 運作環境溫度 | -10至40℃ | ||
| 驅動方式 | FOC | ||
| 控制方式 速度閉環 | |||
| 保護方式 | 電壓過大保護 過熱保護 緩慢啟動保護 短路保護 芯片與感應器異常檢測保護 | ||
| 智慧控制台 | |||
| 影像傳輸延遲[1] | 直接連接模式80-100ms 路由器模式100ms-120ms(無干擾、無遮擋環境下測得) | ||
| 即時影像傳輸品質 | 720p@30fps | ||
| 即時影像傳輸最大資料傳輸速率 | 6 Mbps | ||
| 頻段 | 2.4 GHz, 5.1 GHz[2], 5.8 GHz | ||
| 發射功率 (EIRP) | 2.400-2.4835 GHz FCC: ≤30 dBm SRRC: ≤20 dBm CE: ≤19 dBm MIC: ≤20 dBm | 5.150-5.250 GHz FCC: ≤30 dBm SRRC: ≤23 dBm CE: ≤20 dBm MIC: ≤23 dBm | 5.725-5.850 GHz FCC: ≤30 dBm SRRC: ≤30 dBm CE: ≤14 dBm |
| 運作模式 直接連接模式,路由器模式 | |||
| 傳輸距離[3] | 直接連接模式 FCC: 2.4 GHz 140m, 5.8 GHz 90m CE: 2.4 GHz 130m, 5.8 GHz 70m SRRC: 2.4 GHz 130m, 5.8 GHz 90m MIC: 2.4 GHz 130m 路由器模式 FCC: 2.4 GHz 190m, 5.8 GHz 300m CE: 2.4 GHz 180m, 5.8 GHz 70m SRRC: 2.4 GHz 180m, 5.8 GHz 300m MIC: 2.4 GHz 180m | ||
| 傳輸標準 | IEEE802.11a/b/g/n |
| 相機 | |
| 感應器 | CMOS 1/4";有效像素 5MP |
| FOV 120° | |
| 照片最大解析度 | 2560 x 1440 |
| 錄影解析度 | FHD: 1920x1080 30p HD: 1280x720 30p |
| 影片最大資料傳輸速率 | 16 Mbps |
| 照片格式 | JPEG |
| 影片格式 | MP4 |
| 支援的記憶卡類型 | Micro SD 卡,最大支援 64 GB |
| 使用環境 | -10 至 40°C |
| 智能電池 | |
| 容量 | 2400 mAh |
| 充電限制電壓 12.6 V | |
| 充電標準電壓 | 10.8 V |
| 電池類型 LiPo 3S | |
| 能量 | 25.92 Wh |
| 續航 | 85 分鐘(在平整路面以 0.8m/s 均速行駛測得) |
| 全機待機續航 | 約 100 分鐘 [5] |
| 電池整體重量 169 g | |
| 運作環境溫度 | -10°C-40°C |
| 充電環境溫度 | 5°C至 40°C |
| 最大充電功率 | 29 W |
| 充電器 | |
| 輸入 | 100-240 V, 50-60 Hz, 1 A |
| 輸出 | 電池連接埠:12.6 V==0.8 A或12.6 V=2.2 A |
| 電壓 | 12.6 V |
| 額定功率 | 28 W |
| 應用程式 | |
| iOS iOS 10.0.2 | 或更高版本 |
| Android Android 5.0 | 或更高版本 |
| 其它 | |
| 推薦路由器型號 | TP-Link TL-WDR8600;TP-Link TL-WDR5640(中國) TP-Link Archer C7;NETGEAR X6S(海外) |
| 推薦路由器戶外供電方案 與路由器輸入功率匹配的筆記型電腦行動電源 | |
| 機械臂 | |
| 移動範圍 | 0-0.22 m (水平); 0-0.15 m (垂直) |
| 軸數 | 2 |
| 機械爪 | |
| 開合距離 | 約 10 cm |
| 伺服 | |
| 重量 | 約 70 g |
| 主體尺寸 | 44.2 × 22.6 × 28.6 mm |
| 傳動比 | 512 |
| 額定扭矩 | 1.2 N·m |
| 額定轉速 | 40±2 rpm |
| 運作模式 角度模式、速度模式 | |
| 紅外線深度感應器 | |
| 探測範圍 | 0.1-10 m |
| 探測 FOV 20° | |
| 測量精確度 | 5% |
| 電源轉接模組 | |
| 通訊連接埠 | CAN BUS × 5 |
| 輸入 | TX30 连接埠: 12 V |
| 輸出 | USB Type-C連接埠: 5 V, 2 A 排針連接埠: 5 V, 4 A TX30 连接埠: 12 V, 5 A |
| 感應器轉接模組 | |
| 連接埠類型 | IO輸入、AD輸入 |
| 連接埠數量 | 2 |
[1]:在無干擾、無遮擋環境下測得;行動設備、路由器、機器人之間的距離均小於1公尺;行動設備型號為iPhoneX,Android設備測試結果可能存在一定誤差。
[2]:使用5.1GHz時需遵循當地法規,部分地區無法在室外使用該頻段。
[3]:在無干擾、無遮擋環境下測得;直接連接模式測試使用的行動設備為第六代iPad(2018年發布),手持時未遮擋天線;路由器模式測試使用的路由器型號:FCC:TP-Link Archer C9;SRRC:TP-Link WDR8600;CE:TP-Link Archer C7;MIC:WSR-1160DHP3。
[4]:室外或其它紅外線強烈的環境下,紅外線功能使用會受影響。
[5]:使用全新電池在實驗室環境下測得,僅供參考。
[6]:適用於反射率 10% -90% 的物體表面。
軻體升級
使用者可以在設定 -> 系統 -> 韓體升級中查看是否需要進行韌體升級,如果有新韌體版本,請使用RoboMaster App對機器人進行韌體升級。
- 確保機器人所有模組連接正常,電源已開啓並且電量至少在 50% 以上。
2.進入App->系統->軻體升級,根據提示進行軻體升級。下載軻體包時App需連接網際網路。 - 升級過程會有語音播報升級進度,請耐心等待升級完成。

· 韓體中包含智能電池韌體,如有多塊電池,務必確保對所有電池進行韌體升級。
·確保電量至少在 50% 以上。
·在升級過程中可能會出現如下狀況:狀態指示燈異常閃爍或機器人自行重啓,以上均屬正常現象,請耐心等待軸體升級完成。
·軆體升級完成後,與App可能斷開連接,請重新連接。
- 如果提示 RoboMaster App 版本過低,請升級 App 版本。
·進行多人競技時,請確保所有機器人均使用同一軻體版本。
校準機器人
一旦機器人出現以下情況,請在App中校準機器人:
a.使用過程中,控制機器人原地旋轉,機器人實際的旋轉中心嚴重偏離機器人的中心點
b. 機器人靜置在水平面期間,無法控制底盤,App 提示進入翻車保護
C. 首次安装或者完成重新固定底盤運轉控制器
具體校準步驟如下:
1.進入RoboMaster App,點擊設定->系統,選擇機器人校準選項。
2. 根據 App 提示的步驟一步一步校準。

設定 PWM 連接埠
PWM(Pulse Width Modulation)即脈衝寬度控制,用於控制某一周期內高電平的持續時間,設定的數值越大,在某一周期內高電平的持續時間越長。運轉控制器的 PWM 連接埠預設輸出訊號的工作週期為 7.5% ,基礎頻率為 50Hz 。主要用於設定 LED 燒條亮滅和控制伺服轉動。
LED燈條:在任一PWM連接埠外接LED燈條,透過設定PWM輸出百分比來控制其亮滅切換。PWM輸出百分比範圍為 0% 100% ,0意味著燈最暗,100意味著燈最亮。
伺服:在任一PWM口上外接伺服,透過設定PWM輸出百分比來控制其轉動。以控制脈衝頻率為 50Hz 的伺服為例,其控制周期為 20ms ,可調節角度 -90^ 90^ 對應的高電平脈寬為 0.5ms 2.5ms ,因此伺服工作週期的控制範圍為 0.5/20 2.5/20 ,即 2.5% 12.5% 。使用者可以根據自己所需的旋轉角度設定伺服PWM的輸出百分比。
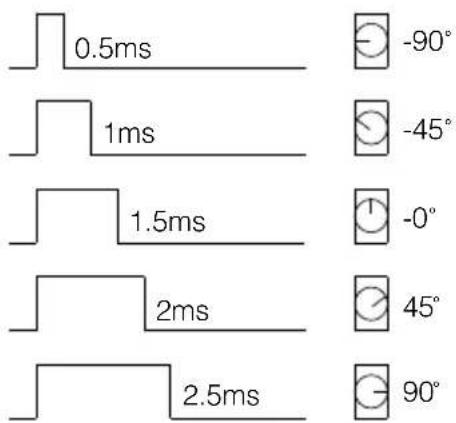
脈衝寬度 伺服角度
每次自訂技能程式或Python程式執行結束後,PWM連接埠輸出訊號將會恢復預設設定,即頻率为 50Hz ,工作週期為 7.5% 。
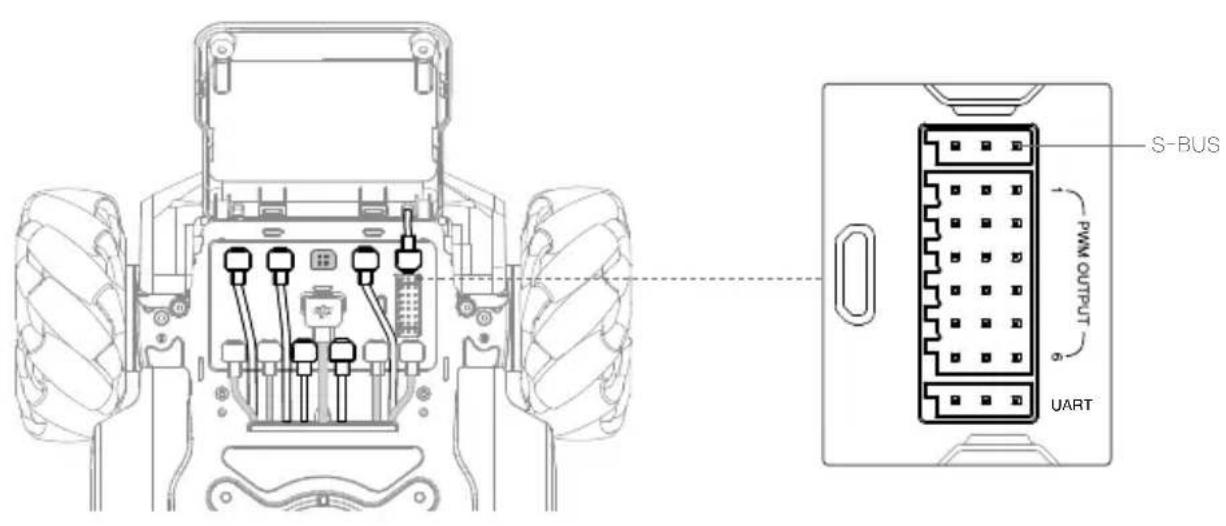
使用S-Bus連接埠
運用運轉控制器S-Bus連接埠,您可以使用其他支援S-Bus協議的遙控器對機器人進行控制。請自行準備接收器(推薦接收器型號:R6303SB)和遙控器。
連線
使用3-pin伺服線來連接運轉控制器的S-Bus連接埠到接收器的S-Bus連接埠。
使用
使用之前請確保遙控器與接收器已完成配對,具體配對方法請參考您接收器的說明書。
運轉控制器 S-Bus 連接埠的控制頻道對應關係如下。請按照遙控器的說明書指示,完成制定接收器與遙控器的頻道
| S-Bus 連接 埠控制頻道 | 自由模式 | 推薦遥控器頻道 | ||
| 遙控器頻道 | 偏移量 畸態 | |||
| 頻道1 | 底盤左右動作 | 搖桿頻道 | 左右 | |
| 頻道2 | 底盤前後動作 | +672 1024 -672 | 前後 | |
| 頻道4 | 底盤航向控制 | 左轉右轉 | ||
| 頻道5 | 底盤動作速度控制,有三檔快中慢 | 三段開關頻道 | 快 | |
| 中 | ||||
| 慢 | ||||
| 頻道6 | 自由模式 | 開關頻道 -100 | 自由模式 | |
| 頻道7 | 底盤放鬆開關,有兩個狀態:底盤打開輸出底盤關閉輸出,呈放鬆狀態 | 二段開關頻道 +100 -100 | 打開 | |
| 關閉 | ||||
自訂 UI 程式指導
自訂 UI 系統拓展了程式的輸入和輸出方式。自訂 UI 系統可以與 UI 控件交互,實現輸入目的;也可以將程式的處理資訊透過 UI 控件輸出,實現輸出目的。自訂 UI 控件由使用者編寫而成。
使用者可以在RoboMaster App中編寫Python程式,調用自訂UI系統的相關連接埠,生成UI控件,綁定控件的事件回調。在RoboMaster App中的實驗室完成程式的編寫和調試後,儲存為自訂技能,在單機駕駛或多人競技模式中調用。更多使用詳情,請前往官網網站www.dji.com/robomaster-ep-core/downloads取得,也可前往網站robomaster-dev.rtfd.io查看線上文件。
售後保固資訊
請瀏覽 DJI 官網 https://www.dji.com/support 以下頁面以了解最新的售後保固資訊:

WeChat掃描 DJI售後
内容如有更新,恕不另行通知。
您可以在DJI官方網站查詢最新版《使用者手冊》
www.dji.com/robomaster-ep-core/downloads
如果您對說明書有任何疑問或建議,請透過以下電子郵件地址與我們聯絡:DocSupport@dji.com。