
ACCURAX G5 - Automatisation industrielle OMRON - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil ACCURAX G5 OMRON au format PDF.

| Type de produit | Servodriver (variateur de vitesse) pour automatisation industrielle |
| Marque | OMRON |
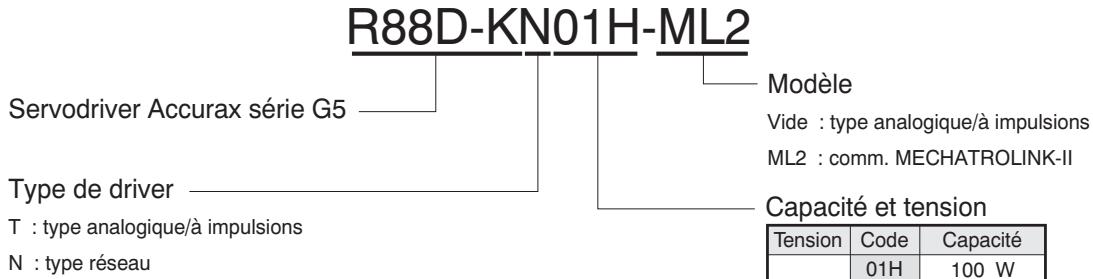
| Modèle | ACCURAX G5 (R88D-KN□/KT□) |
| Catégorie | Automatisation industrielle |
| Dimensions (approx.) | De 50 x 193,5 x 94 mm (100 W, 230 V) à 130 x 250 x 220 mm (5 kW, 400 V) |
| Poids (approx.) | De 0,8 kg à 4,7 kg selon modèle |
| Alimentation circuit principal | Monophasé ou triphasé 200-240 Vca (50/60 Hz) ou triphasé 380-480 Vca |
| Alimentation circuit de contrôle | 200-240 Vca (modèles 230 V) ou 24 Vcc ±15% (modèles 400 V) |
| Modes de contrôle | Position, vitesse, couple, boucle fermée totale (commutables) |
| Fréquence de réponse | 2 kHz |
| Rétroaction | Codeur série 20 bits (incrémental/absolu) |
| Communication | MECHATROLINK-II (10 Mbps, cycle 1-4 ms) ou entrées analogiques/impulsions |
| Fonctions de réglage | Auto-réglage en temps réel, détection d'inertie, anti-vibration, prédiction de couple, observateur de perturbations |
| Protections intégrées | Surintensité, surtension, sous-tension, surrégime, surcharge, erreur codeur, surchauffe |
| Sécurité fonctionnelle | Coupure de couple de sécurité (STO) conforme ISO13849-1 PL-d, IEC61800-5-2 SIL2, EN954-1 Cat.3 |
| Frein dynamique | Intégré, actif sur coupure alimentation, alarme, servo OFF ou dépassement de course |
| Entrées/sorties numériques | Jusqu'à 10 entrées multifonctions et 4 sorties (selon version) |
| Interface de configuration | USB mini-B (USB 2.0) avec logiciel CX-Drive |
| Affichage local | LED 2 ou 6 chiffres 7 segments (selon version), voyants d'état |
| Température de fonctionnement | 0 à +55 °C |
| Humidité de fonctionnement | 90% HR max. (sans condensation) |
| Résistance aux vibrations | 5,88 m/s² de 10 à 60 Hz (continu) |
| Résistance aux chocs | 19,6 m/s² max. |
| Entretien | Nettoyer avec un chiffon sec et non pelucheux. Ne pas utiliser de solvants. Vérifier périodiquement les connexions. |
| Pièces détachées et accessoires | Câbles de contrôle, connecteurs, résistances régénératives, filtres CEM, logiciel CX-Drive |
| Réparabilité | Confier toute réparation à un technicien qualifié. Contacter le support OMRON. |
FOIRE AUX QUESTIONS - ACCURAX G5 OMRON
Questions des utilisateurs sur ACCURAX G5 OMRON
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Automatisation industrielle au format PDF gratuitement ! Retrouvez votre notice ACCURAX G5 - OMRON et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil ACCURAX G5 de la marque OMRON.
MODE D'EMPLOI ACCURAX G5 OMRON
Servodrivers de taille compacte pour un contrôle d'axes précis. Bus
MECHATROLINK-II et sécurité intégrés.
- Modèles de servodrivers MECHATROLINK-II et analogiques/impulsions
- Sécurité conforme au niveau de performance D d'ISO13849-1
- Fréquence de réponse élevée de 2 kHz
- Codeur série haute résolution alimenté par codeur 20 bits pour une précision accrue
- Entrée codeur externe pour boucle fermée totale
- Réglage automatique en temps réel
- Algorithmes de réglage avancés (fonction anti-vibration, commande prédictive de couple, observateur de perturbations)
Puissances
• 230 Vc.a. monophasé 100 W à 1,5 kW (8,59 N·m)
• 400 Vc.a. triphasé, 600 W à 5 kW (28,7 Nm)

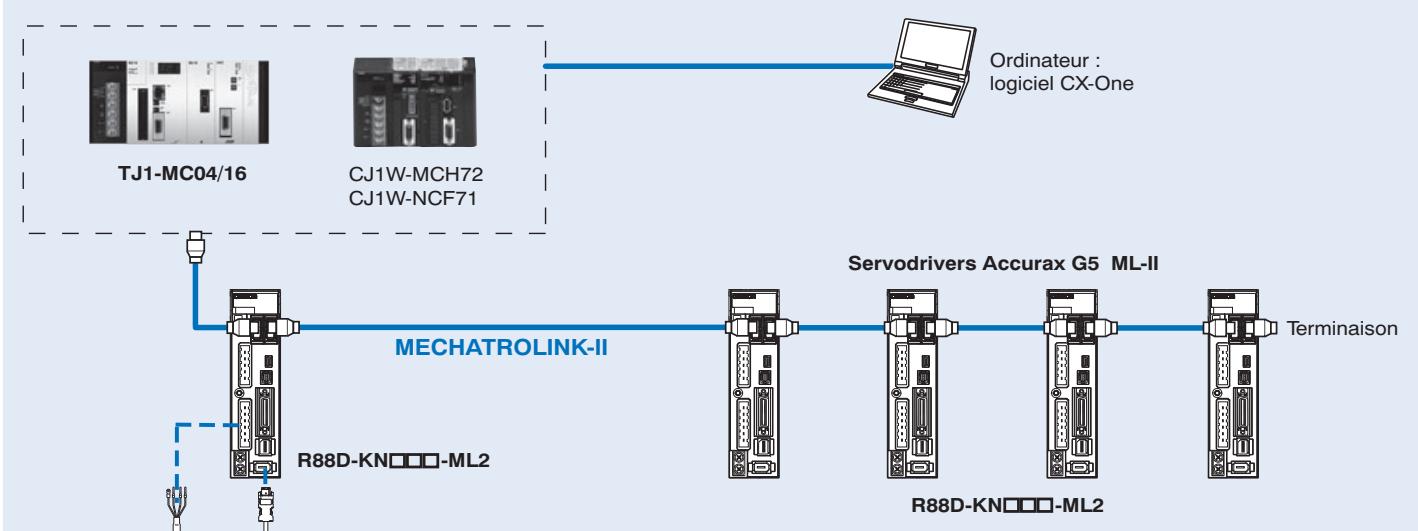
Configuration du système
Contrôle MECHATROLINK-II
flowchart
graph LR
A["TJ1-MC04/16"] --> B["MECHATROLINK-II"]
C["CJ1W-MCH72\nCJ1W-NCF71"] --> B
D["Ordinateur : logiciel CX-One"] --> B
B --> E["Servodrivers Accurax G5 ML-II"]
E --> F["Terminalaison"]
B --> G["R88D-KN□□□-ML2"]
E --> H["R88D-KN□□□-ML2"]
Câble d'alimentation Câble de codeur

Servomoteur
3 000 tr/min (50 W-5 W)
Servomoteur
2 000 tr/min (400 W-5 kW)
Servomoteur
1 000 tr/min (900 W-3 kW)
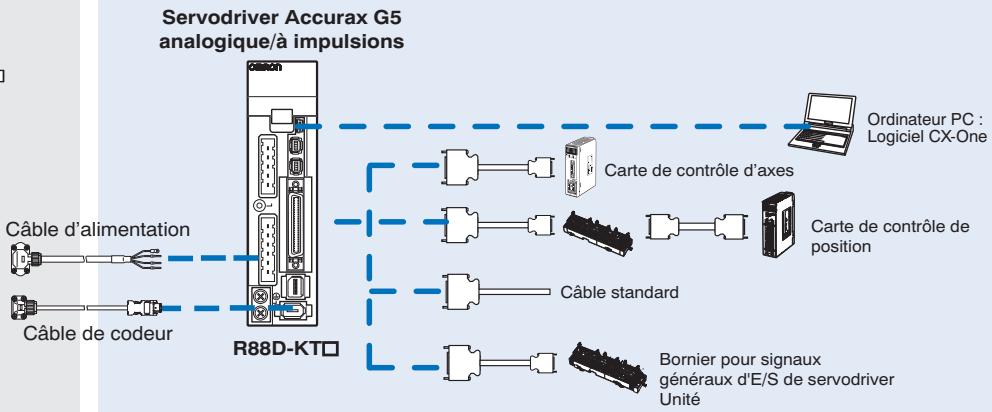
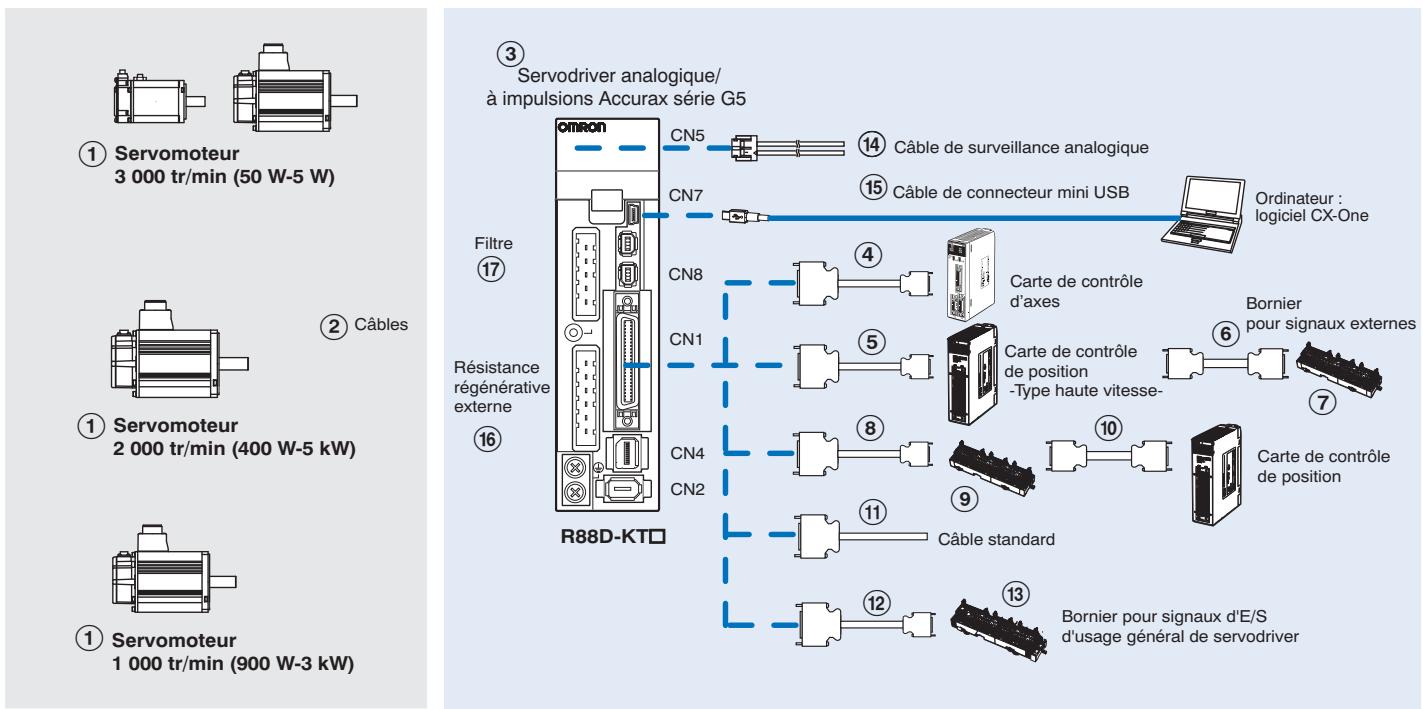
Commande analogique/à impulsions ouverte
flowchart
graph TD
A["Servodriver Accurax G5 analogique/à impulsions"] --> B["R88D-KTO"]
B --> C["Câble d'alimentation"]
B --> D["Câble de codeur"]
B --> E["Câble standard"]
B --> F["Bornier pour signaux généraux d'E/S de servodriver Unité"]
B --> G["Carte de contrôle d'axes"]
B --> H["Carte de contrôle de position"]
B --> I["Ordinateur PC : Logiciel CX-One"]
Servomoteur pris en charge
| Servomoteur rotatif Accurax G5 | Servodriver Accurax G5 | ||||||||
| Tension | Vitesse | Couple nominal | Capacité | Modèle | Modèle MECHATROLINK-II | Modèle analogique/impulsions | |||
| 230 V | 400 V | 230 V | 400 V | ||||||
 | 230 V | 3 000 min^-1 | 0,16 N·m | 50 W | R88M-K05030(H/T)-□ | R88D-KN01H-ML2 | - | R88D-KT01H | - |
| 0,32 N·m | 100 W | R88M-K10030(H/T)-□ | R88D-KN01H-ML2 | - | R88D-KT01H | - | |||
| 0,64 N·m | 200 W | R88M-K20030(H/T)-□ | R88D-KN02H-ML2 | - | R88D-KT02H | - | |||
| 1,3 N·m | 400 W | R88M-K40030(H/T)-□ | R88D-KN04H-ML2 | - | R88D-KT04H | - | |||
| 2,4 N·m | 750 W | R88M-K75030(H/T)-□ | R88D-KN08H-ML2 | - | R88D-KT08H | - | |||
 | 3,18 N·m | 1 000 W | R88M-K1K030(H/T)-□ | R88D-KN15H-ML2 | - | R88D-KT15H | - | ||
| 4,77 N·m | 1 500 W | R88M-K1K530(H/T)-□ | R88D-KN15H-ML2 | - | R88D-KT15H | - | |||
| 400 | 2,39 Nm | 750 W | R88M-K75030(F/C)-□ | - | R88D-KN10F-ML2 | - | R88D-KT10F | ||
| 3,18 N·m | 1 000 W | R88M-K1K030(F/C)-□ | - | R88D-KN15F-ML2 | - | R88D-KT15F | |||
| 4,77 N·m | 1 500 W | R88M-K1K530(F/C)-□ | - | R88D-KN15F-ML2 | - | R88D-KT15F | |||
| 6,37 N·m | 2 000 W | R88M-K2K030(F/C)-□ | - | R88D-KN20F-ML2 | - | R88D-KT20F | |||
| 9,55 Nm | 3 000 W | R88M-K3K030(F/C)-□ | - | R88D-KN30F-ML2 | - | R88D-KT30F | |||
| 12,7 N·m | 4 000 W | R88M-K4K030(F/C)-□ | - | R88D-KN50F-ML2 | - | R88D-KT50F | |||
| 15,9 N·m | 5 000 W | R88M-K5K030(F/C)-□ | - | R88D-KN50F-ML2 | - | R88D-KT50F | |||
| 230 V | 2 000 min^-1 | 4,77 N·m | 1 000 W | R88M-K1K020(H/T)-□ | R88D-KN10H-ML2 | - | R88D-KT10H | - | |
| 7,16 N·m | 1 500 W | R88M-K1K520(H/T)-□ | R88D-KN15H-ML2 | - | R88D-KT15H | - | |||
| 400 | 1,91 N·m | 400 W | R88M-K40020(F/C)-□ | - | R88D-KN06F-ML2 | - | R88D-KT06F | ||
| 2,86 N·m | 600 W | R88M-K60020(F/C)-□ | - | R88D-KN06F-ML2 | - | R88D-KT06F | |||
| 4,77 N·m | 1 000 W | R88M-K1K020(F/C)-□ | - | R88D-KN10F-ML2 | - | R88D-KT10F | |||
| 7,16 N·m | 1 500 W | R88M-K1K520(F/C)-□ | - | R88D-KN15F-ML2 | - | R88D-KT15F | |||
| 9,55 Nm | 2 000 W | R88M-K2K020(F/C)-□ | - | R88D-KN20F-ML2 | - | R88D-KT20F | |||
| 14,3 N·m | 3 000 W | R88M-K3K020(F/C)-□ | - | R88D-KN30F-ML2 | - | R88D-KT30F | |||
| 19,1 N·m | 4 000 W | R88M-K4K020(F/C)-□ | - | R88D-KN50F-ML2 | - | R88D-KT50F | |||
| 23,9 N·m | 5 000 W | R88M-K5K020(F/C)-□ | - | R88D-KN50F-ML2 | - | R88D-KT50F | |||
 | 230 V | 1 000 min^-1 | 8,59 N·m | 900 W | R88M-K90010(H/T)-□ | R88D-KN15H-ML2 | - | R88D-KT15H | - |
| 400 | 8,59 N·m | 900 W | R88M-K90010(F/C)-□ | R88D-KN15F-ML2 | - | R88D-KT15F | |||
| 19,1 N·m | 2 000 W | R88M-K2K010(F/C)-□ | R88D-KN30F-ML2 | - | R88D-KT30F | ||||
| 28,7 N·m | 3 000 W | R88M-K3K010(F/C)-□ | R88D-KN50F-ML2 | - | R88D-KT50F | ||||
Légende des références
Servodriver
Caractéristiques des servodrivers
Monophasé, 230 V
| Type de servodriver | R88D-K□ | 01H□ | 02H□ | 04H□ | 08H□ | 10H□ | 15H□ | |
| Servomoteur applicable | R88M-K□ | 05030(H/T)□ | 20030(H/T)□ | 40030(H/T)□ | 75030(H/T)□ | 1K020(H/T)□ | 1K030(H/T)□ | |
| 10030(H/T)□ | - | - | - | - | 1K530(H/T)□ | |||
| - | - | - | - | - | 1K520(H/T)□ | |||
| - | - | - | - | - | 90010(H/T)□ | |||
| Caractéristiques de base | Capacité moteur max. applicable W | 100 | 200 | 400 | 750 | 1 000 | 1 500 | |
| Courant de sortie continu A rms | 1,2 | 1,6 | 2,6 | 4,1 | 5,9 | 9,4 | ||
| Circuits d'alim. | Circuit principal | Monophasé/triphasé, 200 à 240 Vc.a. +10 à -15% (50/60 Hz) | ||||||
| Alimentation | Circuit de contrôle | Monophasé, 200 à 240 Vc.a., + 10 à -15% (50/60 Hz) | ||||||
| Méthode de contrôle | Entraîné par IGBT, méthode MLI à modulation sinusoidale | |||||||
| Rétroaction | Codeur série (incrémentiel/valeur absolue) | |||||||
| Conditions | Température de fonctionnement/stockage | 0 à +55°C/-20 à 65°C | ||||||
| Humidité de fonctionnement/stockage | 90% ou moins (sans condensation) | |||||||
| Altitude | 1 000 m maximum au-dessus du niveau de la mer | |||||||
| Résistance aux vibrations/chocs (max.) | 5,88 m/s^2 10-60 Hz (Un fonctionnement continu au point de résonance n'est pas autorisé) / 19,6 m/s^2 | |||||||
| Configuration | Monté sur base | |||||||
| Poids approx. kg | 0,8 | 1,1 | 1,6 | 1,8 | ||||
Triphasé, 400 V
| Type de servodriver | R88D-K□ | 06F-□ | 10F-□ | 15F-□ | 20F-□ | 30F-□ | 50F-□ | |
| Servomoteur applicable | R88M-K□ | 40020(F/C)-□ | 75030(F/C)-□ | 1K030(F/C)-□ | 2K030(F/C)-□ | 3K030(F/C)-□ | 4K030(F/C)-□ | |
| 60020(F/C)-□ | 1K020(F/C)-□ | 1K530(F/C)-□ | 2K020(F/C)-□ | 3K020(F/C)-□ | 5K030(F/C)-□ | |||
| - | - | 1K520(F/C)-□ | - | 2K010(F/C)-□ | 4K020(F/C)-□ | |||
| - | - | 90010(F/C)-□ | - | - | 5K020(F/C)-□ | |||
| - | - | - | - | 3K010(F/C)-□ | ||||
| Caractéristiques de base | Capacité moteur max. applicable kW | 0,6 | 1,0 | 1,5 | 2,0 | 3,0 | 5,0 | |
| Courant de sortie continu Arms | 2,9 | 4,7 | 6,7 | 9,4 | 16,5 | |||
| Circuits d'alim. | Circuit principal | Triphasé, 380 à 480 Vc.a. + 10 à -15% (50/60Hz) | ||||||
| Alimentation | Circuit de contrôle | 24 Vc. c. ±15% | ||||||
| Méthode de contrôle | Entraîné par IGBT, méthode MLI à modulation sinusoidale | |||||||
| Rétroaction | Codeur série (incrémentiel/valeur absolue) | |||||||
| Conditions | Température de fonctionnement/stockage | 0 à +55°C/-20 à +65°C | ||||||
| Humidité de fonctionnement/stockage | 90% ou moins (sans condensation) | |||||||
| Altitude | 1 000 m maximum au-dessus du niveau de la mer | |||||||
| Résistance aux vibrations/chocs | 5,88 m/s ^2 10-60 Hz (Un fonctionnement continu au point de résonance n'est pas autorisé) / 19,6 m/s ^2 | |||||||
| Configuration | Monté sur base | |||||||
| Poids approx. kg | 1,9 | 2,7 | 4,7 | |||||
Caractéristiques générales (pour servodrivers MECHATROLINK-II)
| Commutation du mode | Commande de position, commande de vélocité, commande de couple, commande de boucle fermée totale. | ||
| Performances | Caractéristiques de fréquence | 2 kHz | |
| Bride vitesse nulle | La commande de vélocité prédéterminée peut être bridée à zéro par l'entrée de bride de vitesse nulle. | ||
| paramétrage de temps du démarrage en douceur | 0 à 10 s (réglages distincts pour accélération, décélération) | ||
| Entrée commande | CommunicationMECHATROLINK-II | Commandes MECHATROLINK-II (Pour séquence, mouvement, paramétrage/référence des données, surveillance, réglage et autres commandes) | |
| Signal d'entrée de séquence | - Entrée multifonction x 8 par paramétrage (interdiction de progression/d'inversion, arrêt d'urgence, verrou externe, proximité d'origine, limite de couple de progression/d'inversion, entrée de surveillance générale). | ||
| Signal de sortie de séquence | Il est possible de sortir trois types de formes de signaux, dont : relâchement du frein, servo prêt, alarme servo, positionnement terminé, détection de vitesse de rotation du moteur, détection de limite de couple, détection de vitesse nulle, détection de coïncidence de vitesse, avertissement, statut de commande de position, détection de limite de vitesse, sortie d'alarme, statut de commande de vitesse. | ||
| Fonctions intégrées | CommunicationsUSB | Interface | Ordinateur PC/Connecteur mini-USB |
| Norme de communication | Conforme à la norme USB 2.0 | ||
| Fonction | Paramétrage et surveillance de statut | ||
| CommunicationsMECHATROLINK-II | Protocole de communications | MECHATROLINK-II | |
| Adresse de poste | 41H à 51 FH (nombre max. d'éléments asservis : 30) | ||
| Vitesse de transmission | 10 Mbps | ||
| Cycle de transmission | 1, 2 & 4 ms | ||
| Longueur des données | 17 bits et 32 bits | ||
| Détection d'inertie de charge automatique | Configuration automatique des paramètres moteur Un paramètre de configuration de rigidité. | ||
| Frein dynamique (DB) | Intégré. Fonctionne pendant la coupure de l'alimentation principale, alarme servo, servo OFF ou dépassement de course. | ||
| Traitement régénérateur | Résistance interne incluse dans les modèles de 600 W à 5 kW. Résistance régénérative montée en externe (option). | ||
| Fonction de prévention de dépassement (OT) | Arrêt DB, arrêt par décélération ou arrêt par inertie pendant le fonctionnement en mode P-OT, N-OT | ||
| Fonction de diviseur de codeur | Division optionnelle possible | ||
| Fonctions de protection | Courant excessif, surtension, sous-tension, surrégime, surcharge, erreur codeur, surchauffe... | ||
| Fonctions de surveillance analogique pour la supervision | Surveillance analogique de régime de moteur, référence de vitesse, référence de couple, erreur de suivi de commande, entrée analogique...Les signaux de surveillance à émettre et leur échelle peuvent être spécifiés par des paramètres. Nombre de canaux : 2 (Tension de sortie : ±10 Vc.c) | ||
| Panneau de commande | Fonctions d'affichage | Un affichage LED à 2 chiffres et 7 segments indique l'état d'entraînement, les codes d'alarme, les paramètres... | |
| Voyant d'état des communications MECHATROLINK-II (COM) | |||
| Interrupteurs | 2 x contacteurs tournants pour le paramétrage de l'adresse du nœud MECHATROLINK-II | ||
| Témoin de CHARGE | S'allume lorsque le circuit d'alimentation principal est sous tension. | ||
| Borne de sécurité | Fonctions | Fonction de coupure de couple de sécurité destinée à couper le courant du moteur et à l'arrêter. Signal de sortie pour fonction de surveillance de panne. | |
| Normes respectées | EN ISO13849-1:2008 (PL-d, niveau de performance d), IEC61800-5 -2:2007 (fonction STO, coupure de couple de sécurité), EN61508:2001 (niveau d'intégrité de sécurité 2, SIL2), EN954-1:1996 (CAT3). | ||
| Retour codeur externe | Signal série et codeur driver en ligne A-B-Z pour commande de boucle fermée totale | ||
Caractéristiques générales(pour servodrivers analogiques/à impulsion)
| Commutation du mode | 7 modes sélectionnables par paramètres : (1) commande de position, (2) commande de vélocité, (3) commande de couple, (4) commande de position/vélocité, (5) commande de position/couple, (6) commande de vélocité/couple et (7) commande de boucle fermée totale. | |||
| Commande de vitesse/couple | Performances | Caractéristiques de fréquence | 2 kHz | |
| Bride vitesse nulle | La commande de vélocité prédéterminée peut être bridée à zéro par l'entrée de bride de vitesse nulle. | |||
| Paramètres de temps du démarrage en douceur | 0 à 10 s (réglages distincts pour accélération, décélération) Courbe S d'accélération/décélération également disponible. | |||
| Signal d'entrée | Contrôle de la vitesse | Tension de référence de vitesse | 6 Vc.c à vitesse nominale : réglé lors de la livraison (l'échelle et la polarité peuvent être réglés lors du paramétrage) | |
| Limites de couple | 3 Vc.c. au couple nominal (le couple peut être séparément limité positivement ou négativement). | |||
| Commande de vitesse prédéterminée | La vitesse prédéterminée peut être sélectionnée parmi 8 réglages internes par des entrées numériques. | |||
| Contrôle de couple | Tension de référence de couple | 3 Vc.c au couple nominal : réglé lors de la livraison (l'échelle et la polarité peuvent être réglés lors du paramétrage) | ||
| Limite de vitesse | La limite de vitesse peut être paramétrée. | |||
| Carte de contrôle | Signal d'entrée | Impulsions avant | Type d'impulsions d'entrée | Signe + train d'impulsion, déplacement de phase 90^ impulsion biphasée (phase A + phase B) ou train d'impulsion marche avant/arrière |
| Fréquence d'impulsion d'entrée | 4 Mpps max. (200 Kpps max. à collecteur ouvert). | |||
| Mise à l'échelle d'impulsion de commande(Réducteur électronique) | Rapport de mise à l'échelle applicable : 1/1 000 - 1 000Toute valeur de 1-20^20 peut être sélectionnée pour le numérateur (résolution codeur) et le dénominateur (résolution d'impulsion de commande par révolution du moteur). La combinaison doit se situer dans la plage indiquée ci-dessus. | |||
| Commande de boucle fermée totale | Signal d'entrée | Impulsions avant | Type d'impulsions d'entrée | Signe + train d'impulsion, déplacement de phase 90^ impulsion biphasée (phase A + phase B) ou train d'impulsion marche avant/arrière |
| Fréquence d'impulsion d'entrée | 4 Mpps max. (200 Kpps max. à collectieur ouvert). | |||
| Mise à l'échelle d'impulsion de commande(Réducteur électronique) | Rapport de mise à l'échelle applicable : 1/1 000 - 1 000Toute valeur de 1-20^20 peut être sélectionnée pour le numérateur (résolution du codeur) et le dénominateur (résolution d'impulsion de commande). La combinaison doit se situer dans la plage indiquée ci-dessus. | |||
| Mise à l'échelle du codeur externe | Rapport de mise à l'échelle applicable : 1/20 - 160Toute valeur de 1-20^20 peut être sélectionnée pour le numérateur (résolution du codeur) et le dénominateur (résolution du codeur externe par révolution du moteur). La combinaison doit se situer dans la plage indiquée ci-dessus. | |||
| Signal d'E/S | Sortie de signal de position | Sortie Driver de ligne phase A, phase B, phase Z et sortie collecteur ouvert phase Z. | ||
| Signal d'entrée de séquence | - Entrée multifonction x 10 par paramétrage (servo ON, commutations de mode de commande, interdiction de progression/d'inversion, commutation de filtre de vibrations, commutation de gain, commutation de réducteur électronique, réinitialisation de compteur d'erreur, interdiction d'impulsion, réinitialisation d'alarme, sélection de vitesse interne, commutation de limite de couple, vitesse nulle, arrêt d'urgence, commutation de rapport d'inertie, signal de commande de vélocité/couple).- Entrée spéciale x 1 (SEN : capteur ON, demande de données ABS). | |||
| Signal de sortie de séquence | Il est possible de sortir quatre types de formes de signaux, dont : relâchement du frein, servo prêt, alarme servo, positionnement terminé, détection de vitesse de rotation du moteur, détection de limite de couple, détection de vitesse nulle, détection de coïncidence de vitesse, avertissement, statut de commande de position, détection de limite de vitesse, statut de commande de vitesse. | |||
| Fonctions intégrées | Communications USB | Interface | Ordinateur PC/Connecteur mini-USB | |
| Norme de communication | Conforme à la norme USB 2.0 | |||
| Fonction | Paramétrage et surveillance de statut | |||
| Détection d'inertie de charge automatique | Configuration automatique des paramètres moteur Un paramètre de configuration de rigidité. | |||
| Frein dynamique (DB) | Intégré. Fonctionne pendant la coupure de l'alimentation principale, alarme servo, servo OFF ou dépassement de course. | |||
| Traitement régénérateur | Résistance interne incluse dans les modèles de 600 W à 5 kW. Résistance régénérative montée en externe (option). | |||
| Fonction de prévention de dépassement (OT) | Arrêt DB, arrêt par décélération ou arrêt par inertie pendant le fonctionnement en mode P-OT, N-OT | |||
| Fonction de diviseur de codeur | Division optionnelle possible | |||
| Contrôle par réducteur électronique (Numérateur/Dénominateur) | Jusqu'à 4 numérateurs de réducteur électronique en combinaison avec les entrées. | |||
| Fonction de réglage de la vitesse interne | 8 vitesses peuvent être définies en interne | |||
| Fonctions de protection | Courant excessif, surtension, sous-tension, surrégime, surcharge, erreur codeur, surchauffe... | |||
| Fonctions de surveillance analogique pour la supervision | Surveillance analogique de régime de moteur, référence de vitesse, référence de couple, erreur de suivi de commande, entrée analogique...Les signaux de surveillance à émettre et leur échelle peuvent être spécifiés par des paramètres. Nombre de canaux : 2 (Tension de sortie : ±10 Vc.c) | |||
| Panneau de commande | Fonctions d'affichage | Un affichage LED à 6 chiffres et 7 segments indique l'état d'entraînement, les codes d'alarme, les paramètres... | ||
| Touches du panneau de l'opérateur | Utilisée pour définir/surveiller les paramètres et les conditions d'entraînement (5 touches). | |||
| Témoin de CHARGE | S'allume lorsque le circuit d'alimentation principal est sous tension. | |||
| Borne de sécurité | Fonctions | Fonction de coupure de couple de sécurité destinée à couper le courant du moteur et à l'arrêter. Signal de sortie pour fonction de surveillance de panne. | ||
| Normes respectées | EN ISO13849-1:2008 (PL-d, niveau de performance d), IEC61800-5 -2:2007 (fonction STO, coupure de couple de sécurité), EN61508:2001 (niveau d'intégrité de sécurité 2, SIL2), EN954-1:1996 (CAT3). | |||
| Retour codeur externe | Signal série et codeur driver en ligne A-B-Z pour commande de boucle fermée totale | |||
| Connecteur d'expansion | Bus série pour carte optionnelle | |||
Noms des éléments du servodriver
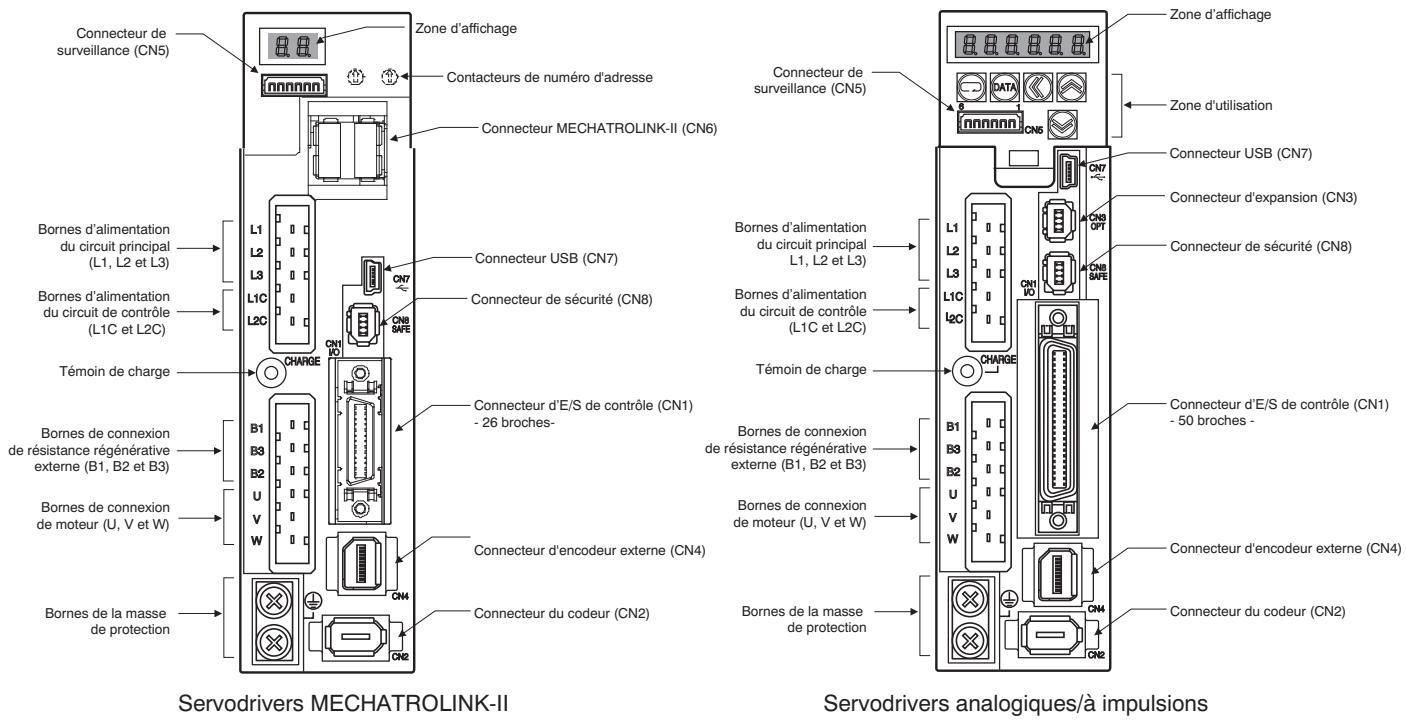
Remarque : Les images ci-dessus illustrent uniquement les modèles de servodrivers 230 V. Les servodrivers 400 V possèdent des bornes d'entrée d'alimentation c.c. pour le circuit de commande au lieu des bornes L1C et L2C.
Caractéristiques d'E/S
Caractéristiques des bornes (pour tous les drivers)
| Symbole | Nom | Fonction |
| L1 | Bornes d'entrée d'alimentation principale | Bornes d'entrée d'alimentation c.a. pour le circuit principalRemarque : pour les servodrivers monophasés, connectez l'entrée d'alimentation à L1 et L3. |
| L2 | ||
| L3 | ||
| L1C | Borne d'entrée d'alimentation de contrôle | Bornes d'entrée d'alimentation c.a. pour le circuit de contrôle (uniquement pour servodrivers 200 V monophasés/triphasés). |
| L2C | ||
| 24 V | Bornes d'entrée d'alimentation c.c. pour le circuit de contrôle (uniquement pour servodrivers 400 V triphasés). | |
| 0 V | ||
| B1 | Bornes de connexion de résistance de régénération externe | Servodrivers de moins de 750 W : aucune résistance interne n'est connectée. Laissez B2 et B3 ouverts. Connectez une résistance de régénération externe entre B1 et B2.Servodrivers de 750 W à 5 kW : court-circuit en B2 et B3 pour résistance de régénération interne. Si la résistance régénérative interne ne suffit pas, connectez une résistance de régénération externe entre B1 et B2 et retirez le câble entre B2 et B3. |
| B2 | ||
| B3 | ||
| U | Bornes de connexion du servomoteur | Bornes pour les sorties vers le servomoteur |
| V | ||
| W |
Signaux d'E/S (CN1) - Signaux d'entrée (pour servodrivers MECHATROLINK-II)
| N° broche | Nom du signal | Fonction | |
| 6 | I-COM | Pole ± pour alimentation c.c. externe. L'alimentation doit utiliser une tension de 12 V-24 V (±5%) | |
| 5 | E-STOP | Arrêt d'urgence | Le nom du signal indique le réglage en usine. La fonction peut être modifiée par paramétrage. |
| 7 | P-OT | Marche avant interdite | |
| 8 | N-OT | Marche arrière interdite | |
| 9 | DEC | Proximité d'origine | |
| 10 | EXT3 | Entrée de verrou externe 3 | |
| 11 | EXT2 | Entrée de verrou externe 2 | |
| 12 | EXT1 | Entrée de verrou externe 1 | |
| 13 | SI-MON0 | Entrée de surveillance générale 0 | |
| 14 | BTP-I | Broche de connexion pour la batterie de secours du codeur absolu. Ne pas connecter quand une batterie est raccordée au câble du encodeur (connecteur CN2). | |
| 15 | BTN-I | ||
| 17 | - | Bornes non utilisées. Ne pas connecter. | |
| 18 | - | ||
| 19 | - | ||
| 20 | - | ||
| 21 | - | ||
| 22 | - | ||
| 23 | - | ||
| 24 | - | ||
| - | PCL | Limite du couple en progression | La fonction des signaux d'entrée alloués aux broches 5 et 7 à 13 peut être modifiée par ces options de paramétrage. |
| NCL | Limite du couple en inversion | ||
| SI-MON1 | Entrée de surveillance générale 1 | ||
| SI-MON2 | Entrée de surveillance générale 2 | ||
| Coque | FG | Masse de blindage. Connecté à la masse de châssis si le câble blindé du câble de signaux d'E/S est raccordé à la coque du connecteur. | |
| 16 | GND | Masse de signal. Isolée avec alimentation (I-COM) pour le signal de contrôle dans le servodriver. | |
Signaux d'E/S (CN1) - Signaux de sortie (pour servodrivers MECHATROLINK-II)
| N° broche | Nom du signal | Fonction | |
| 1 | BRK-OFF+ | Signal de relâchement de frein externe | |
| 2 | BRK-OFF | ||
| 25 | S-RDY+ | Servo prêt : ON lorsqu'il n'y a pas d'alarme servo et que le circuit d'alimentation de contrôle/principal est ON | |
| 26 | /S-RDY- | ||
| 3 | ALM+ | Alarme servo : passe à OFF en cas de détection d'erreur | |
| 4 | ALM- | ||
| - | INP1 | Sortie de positionnement terminé 1 | La fonction des signaux de sortie alloués aux broches 1, 2, 25 et 26 peut être modifiée par ces options de paramétrage. |
| AT-SPEED | Vitesse atteinte | ||
| T_LIM | Limite de couple | ||
| ZSP | Vitesse nulle | ||
| V-COIN | Coïncidence de vitesse | ||
| INP2 | Sortie de positionnement terminé 2 | ||
| WARN1 | Avertissement 1 | ||
| WARN2 | Avertissement 2 | ||
| DEN | Proximité d'origine | ||
| V_LIM | Limite de vitesse | ||
Signaux d'E/S (CN1) - Signaux d'entrée (pour servodrivers analogiques/à impulsions)
| N° broche | Commutation du mode | Nom du signal | Fonction | |
| 1 | Position/Boucle fermée totale | +24 VCW | Entrée d'impulsion de référence pour driver en ligne et collecteur ouvert en fonction du paramétrage. | |
| 3 | +Sens horaire | Mode d'entrée :Signe +train d'impulsionsImpulsion d'inversion/de progression (impulsion CCW/CW)Impulsion biphasée (différentiel de phase 90°) | ||
| 4 | -Sens horaire | |||
| 2 | +24 VCW | |||
| 5 | +Sens antihoraire | |||
| 6 | -Sens antihoraire | |||
| 44 | +CWLD | Entrée d'impulsion de référence pour driver en ligne uniquement. | ||
| 45 | -CWLD | Mode entréeImpulsion d'inversion/de progression (impulsion CCW/CW) | ||
| 46 | +CCWLD | |||
| 47 | -CCWLD | |||
| 14 | Vitesse | REF | Entrée de référence de vitesse: ±10 V/vitesse nominale du moteur (le gain d'entrée peut être modifié à l'aide d'un paramètre). | |
| Couple | TREF1 | Entrée de référence de couple: ±10 V/couple nominal du moteur (le gain d'entrée peut être modifié à l'aide d'un paramètre). | ||
| VLIM | Entrée de limite de vitesse: ±10 V/vitesse nominale du moteur (le gain d'entrée peut être modifié à l'aide d'un paramètre). | |||
| 15 | - | AGND1 | Masse de signal analogique | |
| 16 | Couple | TREF2 | Entrée de référence de couple: ±10 V/couple nominal du moteur (le gain d'entrée peut être modifié à l'aide d'un paramètre). | |
| Position/vitesse Boucle fermée totale | PCL | Entrée de limite de couple de progression: ±10 V/couple nominal du moteur (le gain d'entrée peut être modifié à l'aide d'un paramètre). | ||
| 18 | NCL | Entrée de limite de couple d'inversion: ±10 V/couple nominal du moteur (le gain d'entrée peut être modifié à l'aide d'un paramètre). | ||
| 17 | - | AGND1 | Masse de signal analogique | |
| 7 | Communs | +24 VIN | Entrée d'alimentation de contrôle pour les signaux de séquence: les utilisateurs doivent fournir une alimentation +24 V (12 à 24 V). | |
| 29 | RUN | Servo ON: met le servo ON. | ||
| 26 | Position/Boucle fermée totale | DFSEL1 | Commutation de filtre de vibrations 1 | Active le filtre de vibrations conformément au paramétrage. |
| 27 | Communs | GSEL | Commutation de gain | Active la valeur de gain conformément au paramétrage. |
| 28 | Position/Boucle fermée totale | GESEL1 | Commutation de réducteur électronique 1 | Commute le numérateur du rapport du réducteur électronique. |
| Vitesse | VSEL3 | Sélection de vitesse interne 3 | Entrée de sélection du paramètre de vitesse désiré au cours d'une opération interne de vitesse.La sélection de vitesse combine cette entrée aux entrées VSEL1 et VSEL2. | |
| 30 | Position/Boucle fermée totale | ECRST | Entrée de réinitialisation de compteur d'erreur. | Réinitialise le compteur d'erreur de position. |
| Vitesse | VSEL2 | Sélection de vitesse interne 2 | Entrée de sélection du paramètre de vitesse désiré au cours d'une opération interne de vitesse.La sélection de vitesse combine cette entrée aux entrées VSEL1 et VSEL3. | |
| 31 | Communs | RESET | Entrée de réinitialisation de l'alarme | Déverrouille le statut de l'alarme. Le compteur d'erreur est réinitialisé lorsque l'alarme l'est également. |
| 32 | Position/Vitesse/Couple | TVSEL | Commutation de mode de contrôle | Position ↔ vitessePosition ↔ coupleCouple ↔ vitesseAutorise la commutation du mode de contrôle |
| 33 | Position | IPG | Entrée d'interdiction d'impulsion. Entrée numérique d'interdiction de l'impulsion de référence de position. | |
| Vitesse | VSEL1 | Sélection de vitesse interne 1 | Entrée de sélection du paramètre de vitesse désiré au cours d'une opération interne de vitesse.La sélection de vitesse combine cette entrée aux entrées VSEL2 et VSEL3. | |
| 8 | Commun | NOT | Marche arrière interdite | Dépassement de course interdit: arrête le servomoteur quand la pièce mobile dépasse la plage autorisée de déplacement. |
| 9 | POT | Marche avant interdite | ||
| 20 | Position/Vitesse/Couple | SEN | Entrée de capteur ON. Signal de demande de données initiales en cas d'utilisation d'un codeur absolu. | |
| 13 | SENGND | Masse de signal de capteur ON. | ||
| 42 | Communs | BAT (+) | Bornes de connexion de la batterie de secours lorsque l'alimentation du codeur absolu est interrompue. Ne pas connecter si un câble de batterie de secours du codeur absolu est utilisé. | |
| 43 | BATGND (-) | |||
| 50 | FG | Masse de châssis | ||
| - | - | TLSEL | Interrupteur de limite de couple | La fonction des signaux d'entrée alloués aux broches 8, 9 et 26 à 33 peut être modifiée par ces options de paramétrage. |
| DFSEL2 | Commutation de filtre de vibrations 2 | |||
| GESEL2 | Commutation de réducteur électronique 2 | |||
| VZERO | Vitesse nulle | |||
| VSIGN | Signal de commande de vitesse | |||
| TSIGN | Signal de commande de couple | |||
| E-STOP | Arrêt d'urgence | |||
| JSEL | Commutation de rapport d'inertie | |||
| 12 | - | Bornes non utilisées. Ne pas connecter. | ||
| 40 | - | |||
| 41 | - | |||
Signaux d'E/S (CN1) - Signaux de sortie (pour servodrivers analogiques/à impulsions)
| N° broche | Commutation du mode | Nom du signal | Fonction | |
| 21 | Position/ Boucle fermée totale | +A | Codeur phase A+ | Les signaux du codeur (ou les signaux d'échelle externe au cours d'une commande de fermeture complète) sont émis conformément au paramètre du numérateur de division du codeur.Il s'agit de la sortie driver en ligne (équivalent de R422). La fréquence maximale de sortie est de 4 Mbps.La phase Z est émise pour les signaux codeurs (ou les signaux d'échelle externe au cours de commande de fermeture complète). Il s'agit de la sortie driver en ligne (équivalent de R422). |
| 22 | -A | Codeur phase A- | ||
| 48 | +B | Codeur phase B+ | ||
| 49 | -B | Codeur phase B- | ||
| 23 | +Z | Codeur phase Z+ | ||
| 24 | -Z | Codeur phase Z- | ||
| 19 | Z | Sortie du codeur phase Z | La phase Z est émise pour les signaux codeurs (ou les signaux d'échelle externe au cours de commande de fermeture complète). Sortie collecteur ouvert. | |
| 25 | ZCOM | Codeur phase Z commun | ||
| 11 | Communs | BKIR | Sortie signal de relâchement de frein | Signal de temporisation pour utilisation du frein électromagnétique sur un moteur. |
| 10 | BKIRCOM | |||
| 35 | READY | Servo prêt : ON s'il n'y a pas d'alarme de servo lorsque l'alimentation de contrôle/circuit principal passe à ON. | ||
| 34 | READYCOM | |||
| 37 | /ALM | Alarme servo : passe à OFF en cas de détection d'erreur. | ||
| 36 | ALMCOM | |||
| 39 | Vitesse/couple | TGON | Détection de vitesse de rotation du moteur. Cette sortie passe à ON lorsque la vitesse de rotation du moteur atteint la vitesse paramétrée. | |
| 39 | Position/ Boucle fermée totale | INP1 | Sortie de positionnement terminé 1 : passe à ON lorsque l'erreur de position est égale au paramètre déterminé. | |
| 38 | INP1COM | |||
| - | - | INP2 | Sortie de positionnement terminé 2 | La fonction des signaux de sortie alloués aux broches 11, 10, 34 à 39 peut être modifiée par ces options de paramétrage. |
| P-CMD | Statut de commande de position | |||
| ZSP | Vitesse nulle | |||
| WARN1 | Avertissement 1 | |||
| WARN2 | Avertissement 2 | |||
| ALM-ATB | Sortie d'alarme | |||
| VCMP | Sortie de conformité de vitesse | |||
| V-CMD | Statut de commande de vitesse | |||
| V-LIMIT | Détection de limite de vitesse | |||
| T-LIMIT | Détection de limite de couple | |||
Connecteur du codeur (CN2) - (pour tous les servodrivers)
| N° broche | Nom du signal | Fonction |
| 1 | E5V | Alimentation du codeur +5 V |
| 2 | E0V | Masse de l'alimentation du codeur |
| 3 | BAT+ | Batterie+ (utilisé uniquement avec un codeur absolu) |
| 4 | BAT- | Batterie- (utilisé uniquement avec un codeur absolu) |
| 5 | PS+ | Entrée de signal série codeur (+phase) |
| 6 | PS- | Entrée de signal série codeur (-phase) |
| Coque | FG | Masse de blindage |
Connecteur du codeur externe (CN4) - (pour tous les servodrivers)
| N° broche | Nom du signal | Fonction |
| 1 | E5V | Sortie alimentation de l'échelle externe Utiliser à 5,2 V +/-5% et à 250 mA ou moins. |
| 2 | E0V | Connecté à la masse de circuit de commande connectée au connecteur CN1. |
| 3 | PS | E/S de signal d'échelle externe (signal série). |
| 4 | /PS | |
| 5 | EXA | Entrée de signal d'échelle externe (signaux Phase A, B et Z). Exécute l'entrée et la sortie des signaux des phases A, B et Z. |
| 6 | /EXA | |
| 7 | EXB | |
| 8 | /EXB | |
| 9 | EXZ | |
| 10 | /EXZ | |
| Coque | FG | Masse de blindage |
Connecteur de surveillance (CN5) - (pour tous les servodrivers)
| N° broche | Nom du signal | Fonction |
| 1 | AM1 | Sortie surveillance analogique 1. Sortie du signal analogique de surveillance. Utilise les paramètres déterminés pour sélectionner la sortie à surveiller.Paramètre par défaut : vitesse de rotation du moteur 1 V/(1 000 tr/min). |
| 2 | AM2 | Sortie surveillance analogique 2. Sortie du signal analogique de surveillance. Utilise les paramètres déterminés pour sélectionner la sortie à surveiller.Paramètre par défaut : vitesse de rotation du moteur 1 V/(1 000 tr/min). |
| 3 | GND | Masse pour surveillances analogiques 1,2. |
| 4 | - | Bornes non utilisées. Ne pas connecter. |
| 5 | - | |
| 6 | - |
Connecteur USB (CN7) - (tous servodrivers)
| N° broche | Nom du signal | Fonction |
| 1 | VBUS | Borne de signal USB pour communication avec ordinateur. |
| 2 | D- | |
| 3 | D+ | Masse pour surveillances analogiques 1,2. |
| 4 | - | Non utilisée. Ne pas connecter. |
| 5 | GND | Masse de signal. |
Connecteur de sécurité (CN8) - (tous servodrivers)
| N° broche | Nom du signal | Fonction |
| 1 | - | Non utilisée. Ne pas connecter. |
| 2 | - | |
| 3 | SF1- | Entrée de sécurité 1 & 2. Cette entrée coupe les signaux d'entraînement du transistor de puissance dans le servodriver pour couper la sortie de courant vers le moteur. |
| 4 | SF1+ | |
| 5 | SF2- | |
| 6 | SF2+ | |
| 7 | EDM- | Un signal de surveillance est émis pour détecter une panne de la fonction de sécurité. |
| 8 | EDM+ | |
| Coque | FG | Masse de châssis. |
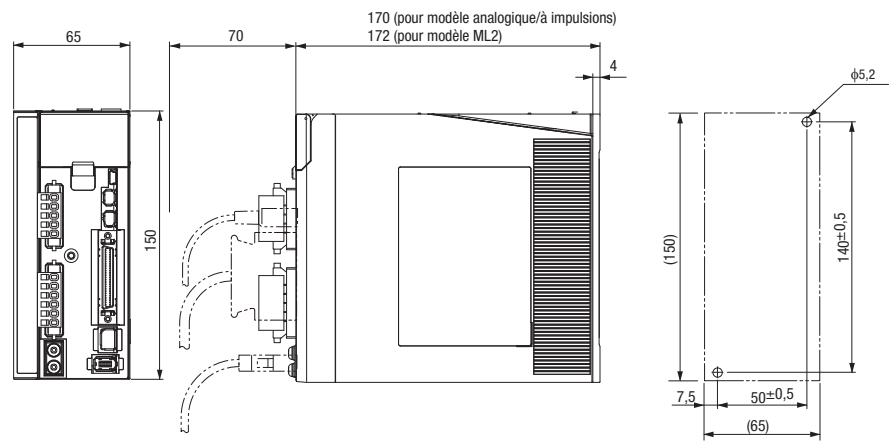
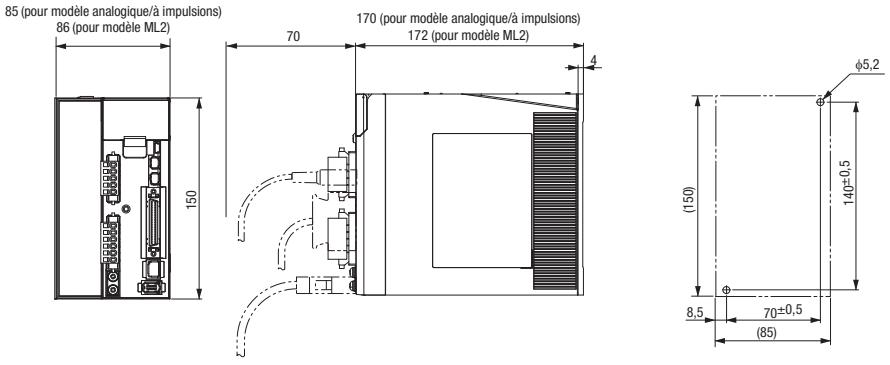
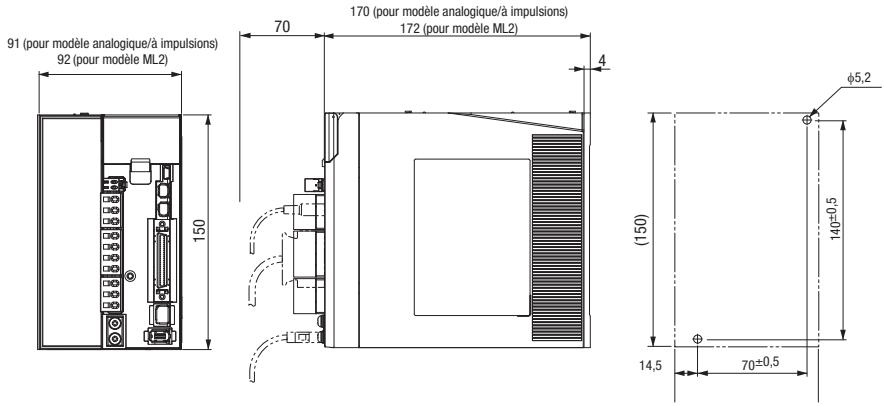
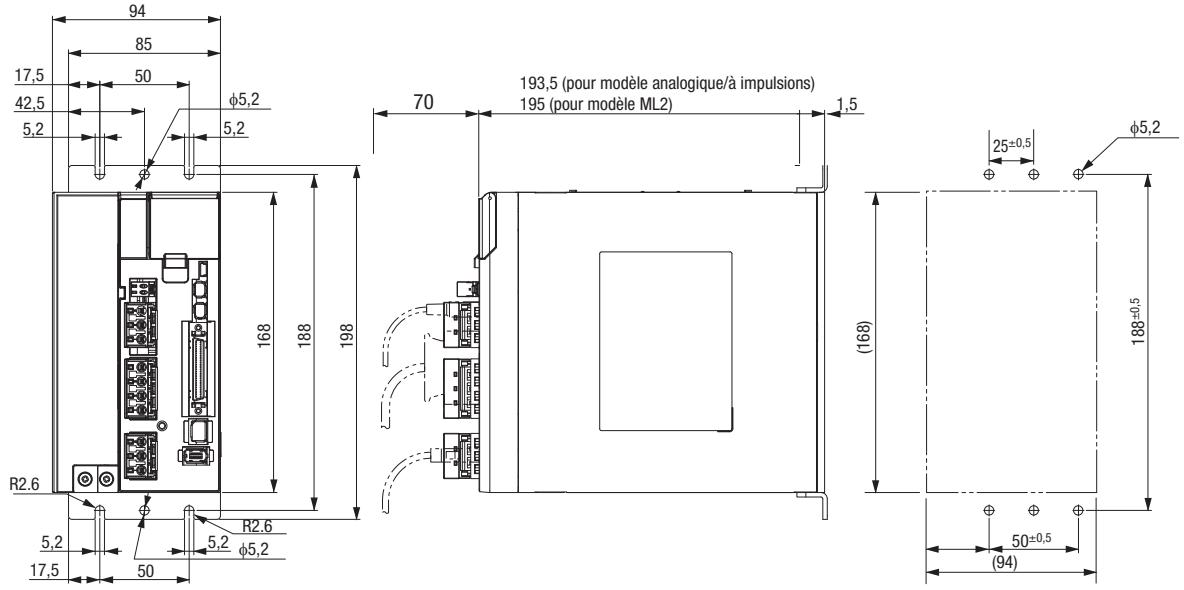
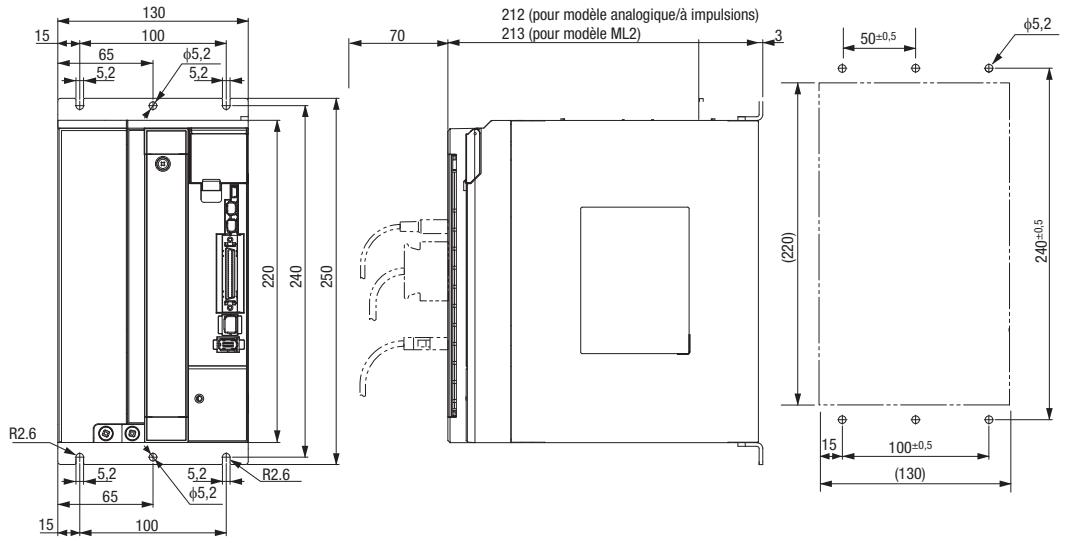
Servodrivers
R88D-KT01/02H, R88D-KN01/02H-ML2 (230 V, 100 - 200 W)
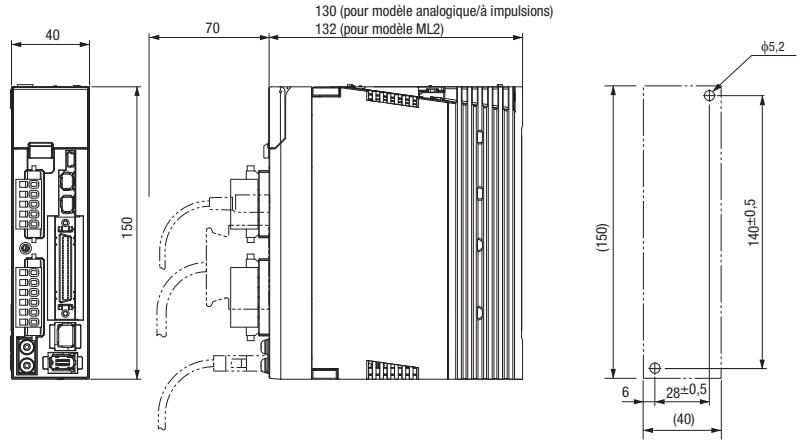
R88D-KT04H, R88D-KN04H-ML2 (230 V, 400 W)
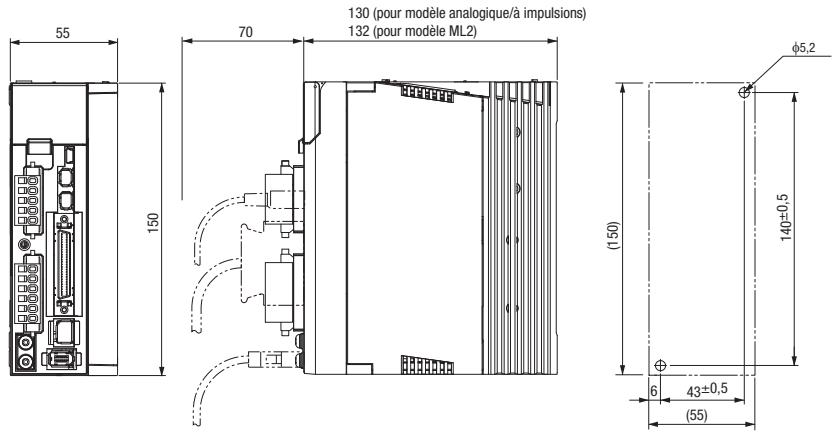
R88D-KT08H, R88D-KN08H-ML2 (230 V, 750 W)
R88D-KT10/15H, R88D-KN10/15H-ML2 (230 V, 1 - 1,5 kW)
R88D-KT06/10/15F, R88D-KN06/10/15F-ML2 (400 V, 600 W - 1,5 kW)
R88D-KT20F, R88D-KN20F-ML2 (400 V, 2 kW)
R88D-KT30/50F, R88D-KN30/50F-ML2 (400 V, 3 - 5 kW)
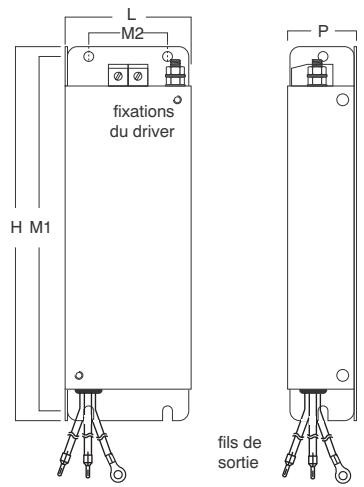
Filtres
| Modèle de filtre | Dimensions externes | Dimensions d'installation | |||
| H | L | P | M1 | M2 | |
| R88A-FIK102-RE | 190 | 42 | 44 | 180 | 20 |
| R88A-FIK104-RE | 190 | 57 | 30 | 180 | 30 |
| R88A-FIK107-RE | 190 | 64 | 35 | 180 | 40 |
| R88A-FIK114-RE | 190 | 86 | 35 | 180 | 60 |
| R88A-FIK304-RE | 190 | 86 | 40 | 180 | 60 |
| R88A-FIK306-RE | 245 | 94 | 40 | 235 | 60 |
| R88A-FIK312-RE | 290 | 130 | 45 | 280 | 100 |
Installation
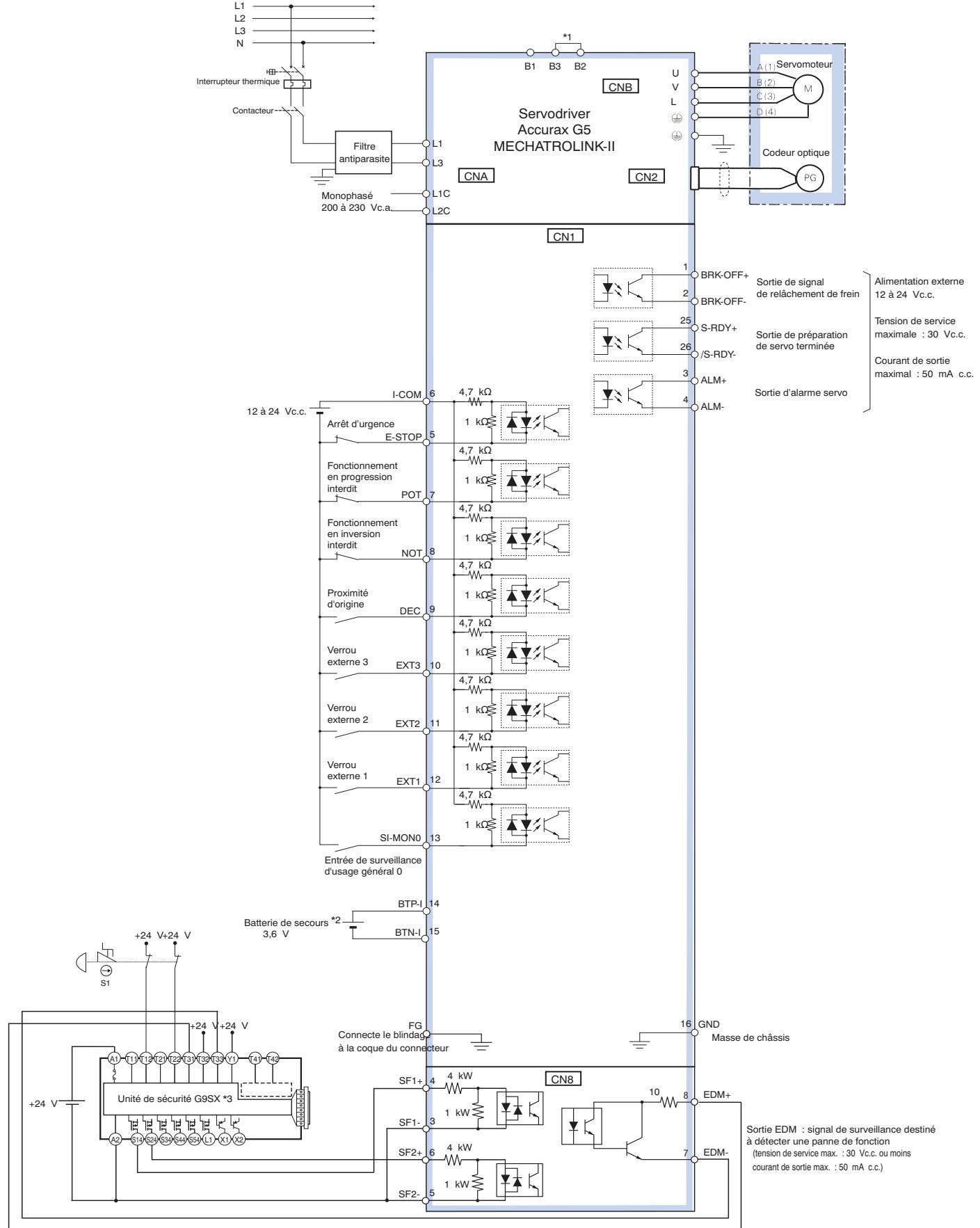
Monophasé, 230 Vc.c. (pour servodrivers MECHATROLINK-II)
flowchart
graph TD
A["Servodriver Accurax G5 MECHATROLINK-II"] --> B["CN1"]
A --> C["CN2"]
A --> D["CN3"]
A --> E["CN4"]
A --> F["CN5"]
A --> G["CN6"]
A --> H["CN7"]
A --> I["CN8"]
A --> J["CN9"]
A --> K["CN10"]
A --> L["CN11"]
A --> M["CN12"]
A --> N["CN13"]
A --> O["CN14"]
A --> P["CN15"]
A --> Q["CN16"]
A --> R["CN17"]
A --> S["CN18"]
A --> T["CN19"]
A --> U["CN20"]
A --> V["CN21"]
A --> W["CN22"]
A --> X["CN23"]
A --> Y["CN24"]
A --> Z["CN25"]
A --> AA["CN26"]
A --> AB["CN27"]
A --> AC["CN28"]
A --> AD["CN29"]
A --> AE["CN30"]
A --> AF["CN31"]
A --> AG["CN32"]
A --> AH["CN33"]
A --> AI["CN34"]
A --> AJ["CN35"]
A --> AK["CN36"]
A --> AL["CN37"]
A --> AM["CN38"]
A --> AN["CN39"]
A --> AO["CN40"]
A --> AP["CN41"]
A --> AQ["CN42"]
A --> AR["CN43"]
A --> AS["CN44"]
A --> AT["CN45"]
A --> AU["CN46"]
A --> AV["CN47"]
A --> AW["CN48"]
A --> AX["CN49"]
A --> AY["CN50"]
A --> AZ["CN51"]
A --> BA["CN52"]
A --> BB["CN53"]
A --> BC["CN54"]
A --> BD["CN55"]
A --> BE["CN56"]
A --> BF["CN57"]
A --> BG["CN58"]
A --> BH["CN59"]
A --> BI["CN60"]
A --> BJ["CN61"]
A --> BK["CN62"]
A --> BL["CN63"]
A --> BM["CN64"]
A --> BN["CN65"]
A --> BO["CN66"]
A --> BP["CN67"]
A --> BQ["CN68"]
A --> BR["CN69"]
A --> BS["CN70"]
A --> BT["CN71"]
A --> BU["CN72"]
A --> BV["CN73"]
A --> BW["CN74"]
A --> BX["CN75"]
A --> BY["CN76"]
A --> BZ["CN77"]
A --> CA["CN78"]
A --> CB["CN79"]
A --> CC["CN80"]
A --> CD["CN81"]
A --> CE["CN82"]
A --> CF["CN83"]
A --> CG["CN84"]
A --> CH["CN85"]
A --> CI["CN86"]
A --> CJ["CN87"]
A --> CK["CN88"]
A --> CL["CN89"]
A --> CM["CN90"]
*1 Pour les servodrivers à partir de 750 W, B2 et B3 sont court-circuités. Si la résistance régénérative interne ne suffit pas, retirez le câble entre B2 et B3 et connectez une résistance régénérative externe entre B1 et B2.
*2 Utilisez uniquement en présence d'un codeur absolu. Si une batterie de secours est connectée au connecteur d'E/S CN1, un câble du codeur avec batterie n'est pas nécessaire.
*3 Le schéma de câblage de l'exemple utilise une unité de sécurité G9SX. Si une unité de sécurité n'est pas utilisée, laissez le connecteur de dérivation de sécurité monté en usine installé dans le CN8.
Remarque : les fonctions d'entrée des broches 5 et 7 à 13 et les fonctions de sortie des broches 1, 2, 25 et 26 peuvent être modifiées par paramétrage.
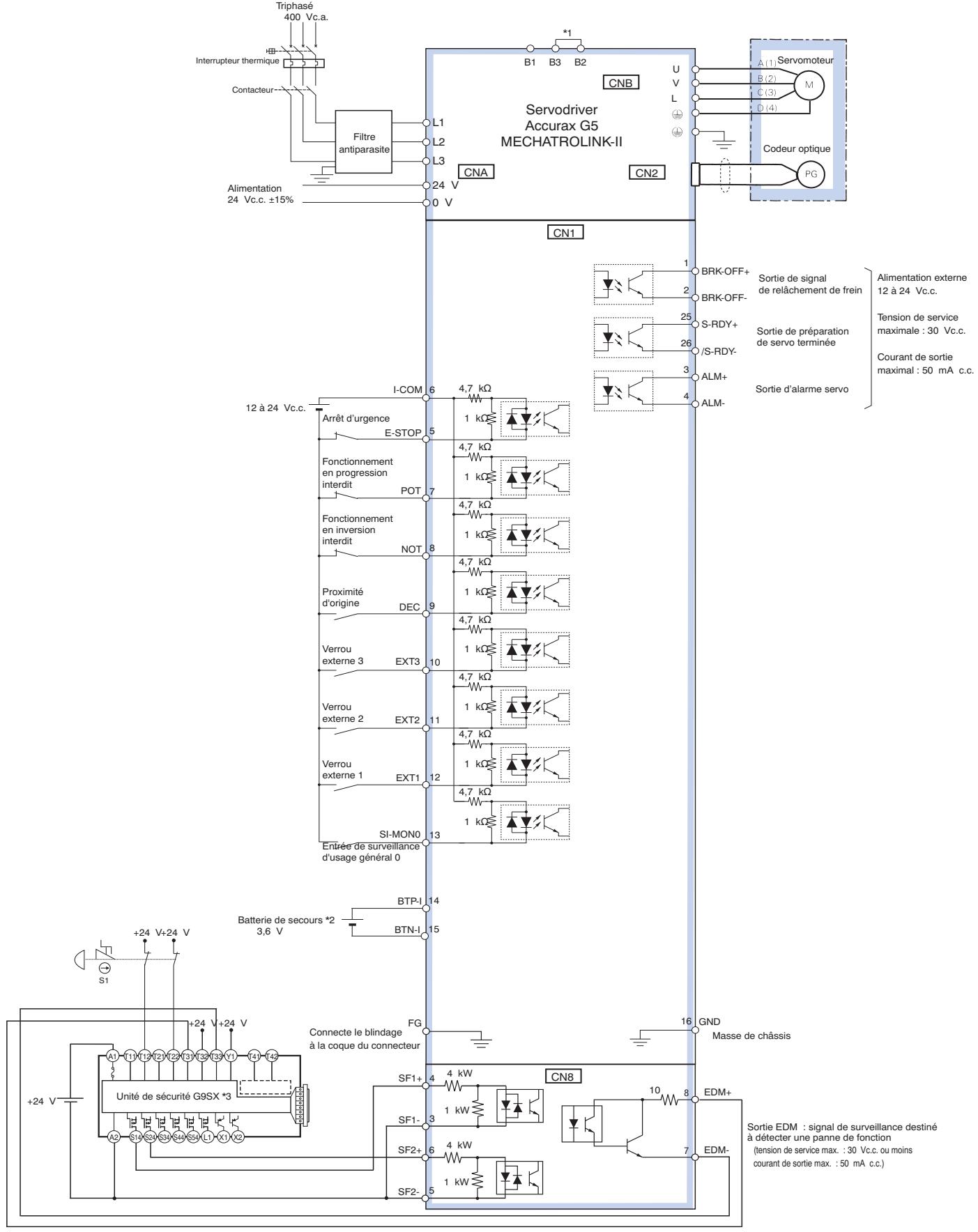
400 Vc.a. triphasé (pour servodrivers MECHATROLINK-II)
flowchart
graph TD
A["Servodriver Accurax G5 MECHATROLINK-II"] --> B["Servomoteur"]
A --> C["Codeur optique"]
B --> D["A(1) B(2) C(3) D(4)"]
C --> E["PG"]
D --> F["B1 B3 B2"]
E --> G["B1 B3 B2"]
F --> H["L1 L2 L3 24 V 0 V"]
G --> I["L1 L2 L3 24 V 0 V"]
H --> J["CNA"]
I --> K["CNA"]
J --> L["CNB"]
K --> M["CNB"]
L --> N["CN1"]
M --> O["CN1"]
N --> P["I-COM 6 4.7 kΩ"]
O --> Q["Arrêt d'urgence E-STOP 5 1 kΩ"]
P --> R["Fonctionnement en progression interdit 7 4.7 kΩ"]
Q --> S["Fonctionnement en inversion interdit 8 4.7 kΩ"]
R --> T["NOT 8 1 kΩ"]
S --> U["Proximité d'origine 9 4.7 kΩ"]
T --> V["DEC 9 1 kΩ"]
U --> W["Verrou externe 3 EXT3 10 4.7 kΩ"]
W --> X["Verrou externe 2 EXT2 11 4.7 kΩ"]
X --> Y["Verrou externe 1 EXT1 12 4.7 kΩ"]
Y --> Z["SI-MON0 13 1 kΩ"]
Z --> AA["Entrée de surveillance d'usage général 0"]
AA --> AB["BTP-I 14 16 GND"]
AB --> AC["BTN-I 15 16 Masse de châssis"]
AC --> AD["Connecte le blindage à la coque du connecteur"]
AD --> AE["SF1+ 4 kW CN8"]
AE --> AF["SF1- 3 kW"]
AF --> AG["SF2+ 6 kW"]
AG --> AH["SF2- 5 kW"]
AH --> AI["+24 V +24 V S1"]
AI --> AJ["+24 V +24 V Unité de sécurité G9SX *3"]
AJ --> AK["+24 V -"]
*1 Normalement B2 et B3 sont court-circuités. Si la résistance régénérative interne ne suffit pas, retirez le câble entre B2 et B3 et connectez une résistance régénérative externe entre B1 et B2.
*2 Utilisez uniquement en présence d'un codeur absolu. Si une batterie de secours est connectée au connecteur d'E/S CN1, un câble du codeur avec batterie n'est pas nécessaire.
*3 Le schéma de câblage de l'exemple utilise une unité de sécurité G9SX. Si une unité de sécurité n'est pas utilisée, laissez le connecteur de dérivation de sécurité monté en usine installé dans le CN8.
Remarque : les fonctions d'entrée des broches 5 et 7 à 13 et les fonctions de sortie des broches 1, 2, 25 et 26 peuvent être modifiées par paramétrage.
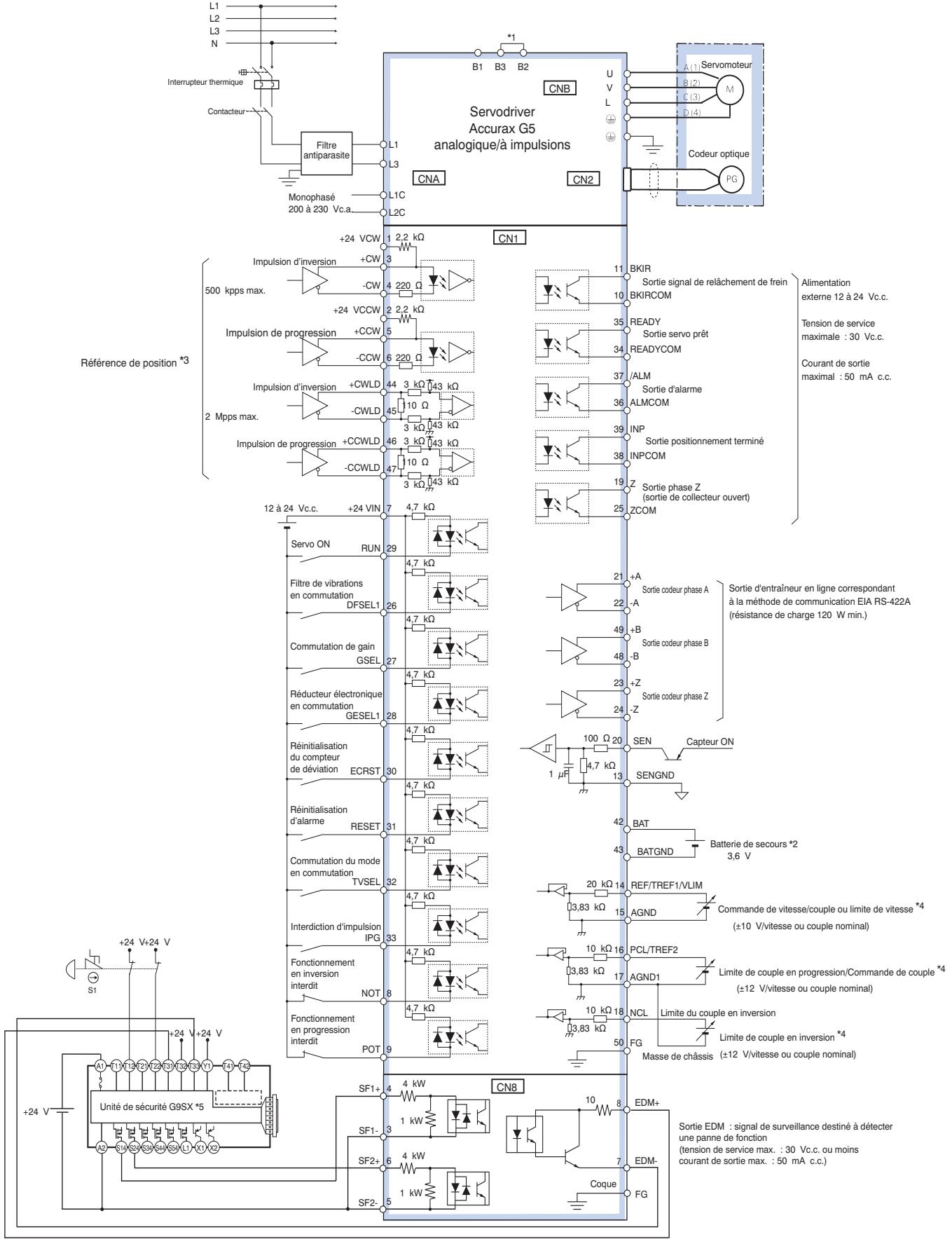
230 Vc.a. monophasé (pour servodrivers analogiques/à impulsion)
flowchart
graph TD
A["Servodriver Accurax G5 analogique/à impulsions"] --> B["Servomoteur"]
B --> C["Codeur optique"]
C --> D["PG"]
D --> E["CNB"]
E --> F["B1 B3 B2"]
F --> G["Interrupteur thermique"]
F --> H["Contacteur"]
F --> I["L1 L2 L3 N"]
I --> J["Filtre antiparasite"]
J --> K["Monophasé 200 à 230 Vc.a."]
K --> L["CNA"]
L --> M["CN1"]
M --> N["Impulsion d'inversion +CW"]
N --> O["+24 VCCW"]
O --> P["+24 VCCW max."]
P --> Q["Impulsion de progression +CWLD"]
Q --> R["Impulsion d'inversion +CWLD max."]
R --> S["Impulsion de progression +CCWLD"]
S --> T["Impulsion d'inversion +CCWLD max."]
T --> U["Impulsion de progression +CCWLD max."]
U --> V["Impulsion d'inversion +CCWLD max."]
V --> W["Impulsion d'inversion +CCWLD max."]
W --> X["Impulsion d'inversion +CCWLD max."]
X --> Y["Impulsion d'inversion +CCWLD max."]
Y --> Z["Impulsion d'inversion +CCWLD max."]
Z --> AA["Impulsion d'inversion +CCWLD max."]
AA --> AB["Impulsion d'inversion +CCWLD max."]
AB --> AC["Impulsion d'inversion +CCWLD max."]
AC --> AD["Impulsion d'inversion +CCWLD max."]
AD --> AE["Impulsion d'inversion +CCWLD max."]
AE --> AF["Impulsion d'inversion +CCWLD max."]
AF --> AG["Impulsion d'inversion +CCWLD max."]
AG --> AH["Impulsion d'inversion +CCWLD max."]
AH --> AI["Impulsion d'inversion +CCWLD max."]
AI --> AJ["Impulsion d'inversion +CCWLD max."]
AJ --> AK["Impulsion d'inversion +CCWLD max."]
AK --> AL["Impulsion d'inversion +CCWLD max."]
AL --> AM["Impulsion d'inversion +CCWLD max."]
AM --> AN["Impulsion d'inversion +CCWLD max."]
AN --> AO["Impulsion d'inversion +CCWLD max."]
AO --> AP["Impulsion d'inversion +CCWLD max."]
AP --> AQ["Impulsion d'inversion +CCWLD max."]
AQ --> AR["Impulsion d'inversion +CCWLD max."]
AR --> AS["Impulsion d'inversion +CCWLD max."]
AS --> AT["Impulsion d'inversion +CCWLD max."]
AT --> AU["Impulsion d'inversion +CCWLD max."]
AU --> AV["Impulsion d'inversion +CCWLD max."]
AV --> AW["Impulsion d'inversion +CCWLD max."]
AW --> AX["Impulsion d'inversion +CCWLD max."]
AX --> AY["Impulsion d'inversion +CCWLD max."]
AY --> AZ["Impulsion d'inversion +CCWLD max."]
AZ --> BA["Impulsion d'inversion +CCWLD max."]
BA --> BB["Impulsion d'inversion +CCWLD max."]
BB --> BC["Impulsion d'inversion +CCWLD max."]
BC --> BD["Impulsion d'inversion +CCWLD max."]
BD --> BE["Impulsion d'inversion +CCWLD max."]
BE --> BF["Impulsion d'inversion +CCWLD max."]
BF --> BG["Impulsion d'inversion +CCWLD max."]
BG --> BH["Impulsion d'inversion +CCWLD max."]
BH --> BI["Impulsion d'inversion +CCWLD max."]
BI --> BJ["Impulsion d'inversion +CCWLD max."]
BJ --> BK["Impulsion d'inversion +CCWLD max."]
BK --> BL["Impulsion d'inversion +CCWLD max."]
BL --> BM["Impulsion d'inversion +CCWLD max."]
BM --> BN["Impulsion d'inversion +CCWLD max."]
BN --> BO["Impulsion d'inversion +CCWLD max."]
BO --> BP["Impulsion d'inversion +CCWLD max."]
BP --> BQ["Impulsion d'inversion +CCWLD max."]
BQ --> BR["Impulsion d'inversion +CCWLD max."]
BR --> BS["Impulsion d'inversion +CCWLD max."]
*1 Pour les servodrivers à partir de 750 W, B2 et B3 sont court-circuités. Si la résistance régénérative interne ne suffit pas, retirez le câble entre B2 et B3 et connectez une résistance régénérative externe entre B1 et B2.
*2 Utilisez uniquement en présence d'un codeur absolu. Si une batterie de secours est connectée au connecteur d'E/S CN1, un câble du codeur avec batterie n'est pas nécessaire.
*3 Uniquement disponible en mode de contrôle de position.
*4 La fonction d'entrée dépend du mode de contrôle utilisé (contrôle de position, de vitesse ou de couple).
*5 Le schéma de câblage de l'exemple utilise une unité de sécurité G9SX. Si une unité de sécurité n'est pas utilisée, laissez le connecteur de dérivation de sécurité monté en usine installé dans le CN8.
Remarque : les fonctions d'entrée des broches 8, 9 et 26 à 33 et les fonctions de sortie des broches 10, 11, 34, 35, 38 et 39 peuvent être modifiées par paramétrage.
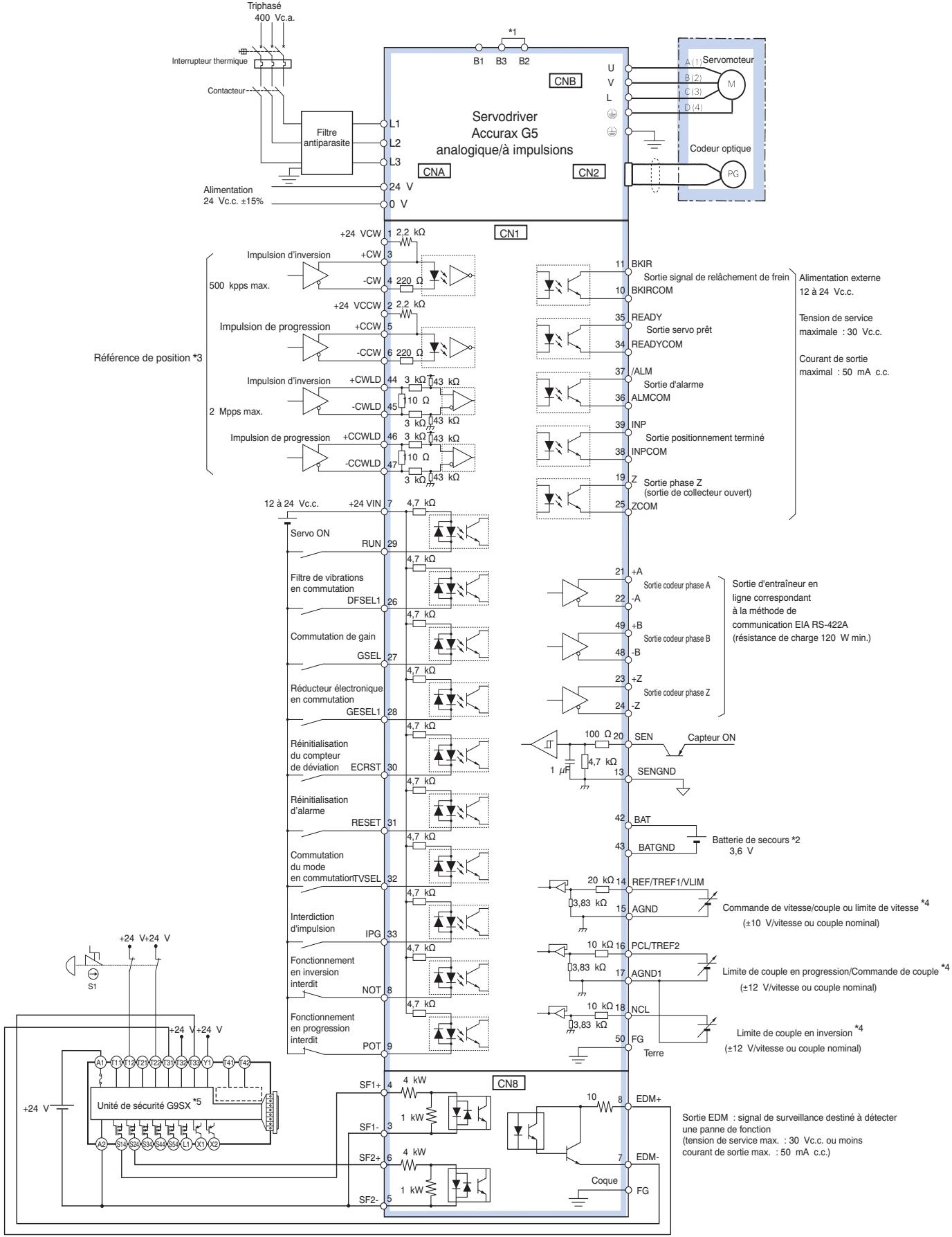
400 Vc.a. triphasé (pour servodrivers analogiques/à impulsion)
flowchart
graph TD
A["Servodriver Accurax G5 analogique/à impulsions"] --> B["Servomoteur"]
A --> C["Codeur optique"]
B --> D["A(1) Servomoteur"]
B --> E["B(2) M"]
B --> F["C(3) D(4)"]
B --> G["D(4)"]
B --> H["PG"]
A --> I["CNB"]
I --> J["CN1"]
J --> K["CN1"]
K --> L["CN1"]
L --> M["CN1"]
M --> N["Alimentation 24 Vc.c. ±15%"]
N --> O["Référence de position *3"]
O --> P["Impulsion d'inversion +CW"]
O --> Q["Impulsion d'inversion +CWLD"]
O --> R["Impulsion d'inversion +CCWLD"]
O --> S["Impulsion d'inversion +CCWLD"]
O --> T["Impulsion d'inversion +CCWLD"]
O --> U["Impulsion d'inversion +CCWLD"]
O --> V["Impulsion d'inversion +CCWLD"]
O --> W["Impulsion d'inversion +CCWLD"]
O --> X["Impulsion d'inversion +CCWLD"]
O --> Y["Impulsion d'inversion +CCWLD"]
O --> Z["Impulsion d'inversion +CCWLD"]
O --> AA["Impulsion d'inversion +CCWLD"]
O --> AB["Impulsion d'inversion +CCWLD"]
O --> AC["Impulsion d'inversion +CCWLD"]
O --> AD["Impulsion d'inversion +CCWLD"]
O --> AE["Impulsion d'inversion +CCWLD"]
O --> AF["Impulsion d'inversion +CCWLD"]
O --> AG["Impulsion d'inversion +CCWLD"]
O --> AH["Impulsion d'inversion +CCWLD"]
O --> AI["Impulsion d'inversion +CCWLD"]
O --> AJ["Impulsion d'inversion +CCWLD"]
O --> AK["Impulsion d'inversion +CCWLD"]
O --> AL["Impulsion d'inversion +CCWLD"]
O --> AM["Impulsion d'inversion +CCWLD"]
O --> AN["Impulsion d'inversion +CCWLD"]
O --> AO["Impulsion d'inversion +CCWLD"]
O --> AP["Impulsion d'inversion +CCWLD"]
O --> AQ["Impulsion d'inversion +CCWLD"]
O --> AR["Impulsion d'inversion +CCWLD"]
O --> AS["Impulsion d'inversion +CCWLD"]
O --> AT["Impulsion d'inversion +CCWLD"]
O --> AU["Impulsion d'inversion +CCWLD"]
O --> AV["Impulsion d'inversion +CCWLD"]
O --> AW["Impulsion d'inversion +CCWLD"]
O --> AX["Impulsion d'inversion +CCWLD"]
O --> AY["Impulsion d'inversion +CCWLD"]
O --> AZ["Impulsion d'inversion +CCWLD"]
O --> BA["Impulsion d'inversion +CCWLD"]
O --> BB["Impulsion d'inversion +CCWLD"]
O --> BC["Impulsion d'inversion +CCWLD"]
O --> BD["Impulsion d'inversion +CCWLD"]
O --> BE["Impulsion d'inversion +CCWLD"]
O --> BF["Impulsion d'inversion +CCWLD"]
O --> BG["Impulsion d'inversion +CCWLD"]
O --> BH["Impulsion d'inversion +CCWLD"]
O --> BI["Impulsion d'inversion +CCWLD"]
O --> BJ["Impulsion d'inversion +CCWLD"]
O --> BK["Impulsion d'inversion +CCWLD"]
O --> BL["Impulsion d'inversion +CCWLD"]
O --> BM["Impulsion d'inversion +CCWLD"]
O --> BN["Impulsion d'inversion +CCWLD"]
O --> BO["Impulsion d'inversion +CCWLD"]
O --> BP["Impulsion d'inversion +CCWLD"]
O --> BQ["Impulsion d'inversion +CCWLD"]
O --> BR["Impulsion d'inversion +CCWLD"]
O --> BS["Impulsion d'inversion +CCWLD"]
O --> BT["Impulsion d'inversion +CCWLD"]
O --> BU["Impulsion d'inversion +CCWLD"]
O --> BV["Impulsion d'inversion +CCWLD"]
O --> BW["Impulsion d'inversion +CCWLD"]
O --> BX["Impulsion d'inversion +CCWLD"]
O --> BY["Impulsion d'inversion +CCWLD"]
O --> BZ["Impulsion d'inversion +CCWLD"]
O --> CA["Impulsion d'inversion +CCWLD"]
O --> CB["Impulsion d'inversion +CCWLD"]
O --> CC["Impulsion d'inversion +CCWLD"]
O --> CD["Impulsion d'inversion +CCWLD"]
O --> CE["Impulsion d'inversion +CCWLD"]
O --> CF["Impulsion d'inversion +CCWLD"]
O --> CG["Impulsion d'inversion +CCWLD"]
O --> CH["Impulsion d'inversion +CCWLD"]
O --> CI["Impulsion d'inversion +CCWLD"]
O --> CJ["Impulsion d'inversion +CCWLD"]
O --> CK["Impulsion d'inversion +CCWLD"]
O --> CR["Impulsion d'inversion +CCWLD"]
O --> CS["Impulsion d'inversion +CCWLD"]
O --> CT["Impulsion d'inversion +CCWLD"]
O --> CU["Impulsion d'inversion +CCWLD"]
O --> CV["Impulsion d'inversion +CCWLD"]
O --> CW["Impulsion d'inversion +CCWLD"]
O --> CX["Impulsion d'inversion +CCWLD"]
O --> CY["Impulsion d'inversion +CCWLD"]
O --> CZ["Impulsion d'inversion +CCWLD"]
O --> DA["Impulsion d'inversion +CCWLD"]
O --> DB["Impulsion d'inversion +CCWLD"]
O --> DC["Impulsion d'inversion +CCWLD"]
O --> DD["Impulsion d'inversion +CCWLD"]
O --> DE["Impulsion d'inversion +CCWLD"]
O --> DF["Impulsion d'inversion +CCWLD"]
O --> DG["Impulsion d'inversion +CCWLD"]
O --> DH["Impulsion d'inversion +CCWLD"]
O --> DI["Impulsion d'inversion +CCWLD"]
O --> DJ["Impulsion d'inversion +CCWLD"]
O --> DK["Impulsion d'inversion +CCWLD"]
O --> DL["Impulsion d'inversion +CCWLD"]
O --> DV["Impulsion d'inversion +CCWLD"]
O --> DW["Impulsion d'inversion +CCWLD"]
*1 Normalement B2 et B3 sont court-circuités. Si la résistance régénérative interne ne suffit pas, retirez le câble entre B2 et B3 et connectez une résistance régénérative externe entre B1 et B2.
*2 Utilisez uniquement en présence d'un codeur absolu. Si une batterie de secours est connectée au connecteur d'E/S CN1, un câble du codeur avec batterie n'est pas nécessaire.
*3 Uniquement disponible en mode de contrôle de position.
*4 La fonction d'entrée dépend du mode de contrôle utilisé (contrôle de position, de vitesse ou de couple).
*5 Le schéma de câblage de l'exemple utilise une unité de sécurité G9SX. Si une unité de sécurité n'est pas utilisée, laissez le connecteur de dérivation de sécurité monté en usine installé dans le CN8.
Remarque : les fonctions d'entrée des broches 8, 9 et 26 à 33 et les fonctions de sortie des broches 10, 11, 34, 35, 38 et 39 peuvent être modifiées par paramétrage.
Références pour la commande
Configuration de référence d'Accurax série G5 MECHATROLINK-II
③ Servodriver Accurax série G5 MECHATROLINK-II
⑩ Contrôleurs d'axes MECHATROLINK-I
TJ1-MC04/16

CJ1W-MCH72
CJ1W-NCF71
Remarque : Les symboles ①②③④⑤... indiquent l'ordre de sélection recommandé pour les composants des servosystèmes G5
Servomoteurs, câbles d'alimentation et de codeur
Remarque : ①② Consultez le chapitre sur les servomoteurs Accurax G5 pour la sélection du servomoteur, des câbles moteur et des connecteurs
Servodrivers
| Symbole | Caractéristiques | Modèle de servodriver | 1 Servomoteurs rotatifs série G5 compatibles | |
| 3 | 230 Vc.a. monophasé | 100 W | R88D-KN01H-ML2 | R88M-K05030(H/T)-☐ |
| R88M-K10030(H/T)-☐ | ||||
| 200 W | R88D-KN02H-ML2 | R88M-K20030(H/T)-☐ | ||
| 400 W | R88D-KN04H-ML2 | R88M-K40030(H/T)-☐ | ||
| 750 W | R88D-KN08H-ML2 | R88M-K75030(H/T)-☐ | ||
| 1,0 kW | R88D-KN10H-ML2 | R88M-K1K020(H/T)-☐ | ||
| 1,5 kW | R88D-KN15H-ML2 | R88M-K1K030(H/T)-☐ | ||
| R88M-K1K530(H/T)-☐ | ||||
| R88M-K1K520(H/T)-☐ | ||||
| R88M-K90010(H/T)-☐ | ||||
| 400 Vc.a. triphasé | 600 W | R88D-KN06F-ML2 | R88M-K40020(F/C)-☐ | |
| R88M-K60020(F/C)-☐ | ||||
| 1,0 kW | R88D-KN10F-ML2 | R88M-K75030(F/C)-☐ | ||
| R88M-K1K020(F/C)-☐ | ||||
| 1,5 kW | R88D-KN15F-ML2 | R88M-K1K030(F/C)-☐ | ||
| R88M-K1K530(F/C)-☐ | ||||
| R88M-K1K520(F/C)-☐ | ||||
| R88M-K90010(F/C)-☐ | ||||
| 2,0 kW | R88D-KN20F-ML2 | R88M-K2K030(F/C)-☐ | ||
| R88M-K2K020(F/C)-☐ | ||||
| 3,0 kW | R88D-KN30F-ML2 | R88M-K3K030(F/C)-☐ | ||
| R88M-K3K020(F/C)-☐ | ||||
| R88M-K2K010(F/C)-☐ | ||||
| 5,0 kW | R88D-KN50F-ML2 | R88M-K4K030(F/C)-☐ | ||
| R88M-K5K030(F/C)-☐ | ||||
| R88M-K4K020(F/C)-☐ | ||||
| R88M-K5K020(F/C)-☐ | ||||
| R88M-K3K010(F/C)-☐ | ||||
Câbles de contrôle (pour CN1)
| Symbole | Description | Connector à | Modèle | |
| 16 | Kit connecteurs d'E/S (26 broches) | Pour E/S d'utilisation générale | - | R88A-CNW01C |
| 5 | Câble bornier | Pour E/S d'utilisation générale | 1 m | XW2Z-100J-B34 |
| 2 m | XW2Z-200J-B34 | |||
| 6 | Bornier (vis M3 et pour bornes à broches) | - | XW2B-20G4 | |
| Bornier (vis M3,5 et pour bornes arrondies/à fourche) | - | XW2B-20G5 | ||
| Bornier (vis M3 et pour bornes arrondies/à fourche) | - | XW2D-20G6 |
Surveillance analogique (pour CN5)
| Symbole | Nom | Modèle | |
| 7 | Câble de surveillance analogique | 1 m | R88A-CMK001S |
Câbles MECHATROLINK-II (pour CN6)
| Symbole | Caractéristiques | Longueur | Modèle |
| 8 | Résistance de terminaison MECHATROLINK-II | - | JEPMC-W6022-E |
| Câbles MECHATROLINK-II | 0,5 m | JEPMC-W6003-A5-E | |
| 1 m | JEPMC-W6003-01-E | ||
| 3 m | JEPMC-W6003-03-E | ||
| 5 m | JEPMC-W6003-05-E | ||
| 10 m | JEPMC-W6003-10-E | ||
| 20 m | JEPMC-W6003-20-E | ||
| 30 m | JEPMC-W6003-30-E |
Câble USB pour ordinateur PC (pour CN7)
| Symbole | Nom | Modèle | |
| 9 | Câble pour connecteur mini USB | 2 m | AX-CUSBM002-E |
Contrôleurs d'axe MECHATROLINK-II
| Symbole | Nom | Modèle |
| 10 | Contrôleur d'axes autonome Trajexia | TJ1-MC04 (4 axes) |
| TJ1-MC16 (16 axes) | ||
| Contrôleur d'axes Trajexia-API | CJ1W-MCH72 | |
| Carte de contrôle de position pour API CJ1 | CJ1W-NCF71 (16 axes) | |
| CJ1W-NC471 (4 axes) | ||
| CJ1W-NC271 (2 axes) | ||
| Carte de contrôle de position pour API CS1 | CS1W-NCF71 (16 axes) | |
| CS1W-NC471 (4 axes) | ||
| CS1W-NC271 (2 axes) |
Résistance régénérative externe
| Symbole | Modèle de résistance régénérative | Caractéristiques |
| 11 | R88A-RR08050S | 50 Ω, 80 W |
| R88A-RR080100S | 100 Ω, 80 W | |
| R88A-RR22047S | 47 Ω, 220 W | |
| R88A-RR50020S | 20 Ω, 500 W |
Filtres
| Symbole | Servodriver applicable | Modèle de filtre | Courant nominal | Courant de fuite | Tension nominale |
| 12 | R88D-KN01H-ML2, R88D-KN02H-ML2 | R88A-FIK102-RE | 2,4 A | 3,5 mA | 250 Vc.a. monophasé |
| R88D-KN04H-ML2 | R88A-FIK104-RE | 4,1 A | 3,5 mA | ||
| R88D-KN08H-ML2 | R88A-FIK107-RE | 6,6 A | 3,5 mA | ||
| R88D-KN10H-ML2, R88D-KN15H-ML2 | R88A-FIK114-RE | 14,2 A | 3,5 mA | ||
| R88D-KN06F-ML2, R88D-KN10F-ML2, R88D-KN15F-ML2 | R88A-FIK304-RE | 4 A | 0,3 mA / 32 mA^1 | 400 Vc.a. triphasé | |
| R88D-KN20F-ML2 | R88A-FIK306-RE | 6 A | 0,3 mA / 32 mA^1 | ||
| R88D-KN30F-ML2, R88D-KN50F-ML2 | R88A-FIK312-RE | 12,1 A | 0,3 mA / 32 mA^1 |
- Pic de courant de fuite temporaire pour le filtre lors de la mise en/hors fonction.
Connecteurs
| Caractéristiques | Modèle |
| Connecteur codeur externe (pour CN4) | R88A-CNK41L |
| Connecteur de signal d'E/S de sécurité (pour CN8) | R88A-CNK81S |
Logiciel PC
| Caractéristiques | Modèle |
| Utilitaire de configuration et de surveillance pour les servodrivers et variateurs (CX-drive version 1.91 ou supérieure) | CX-Drive |
Références pour la commande
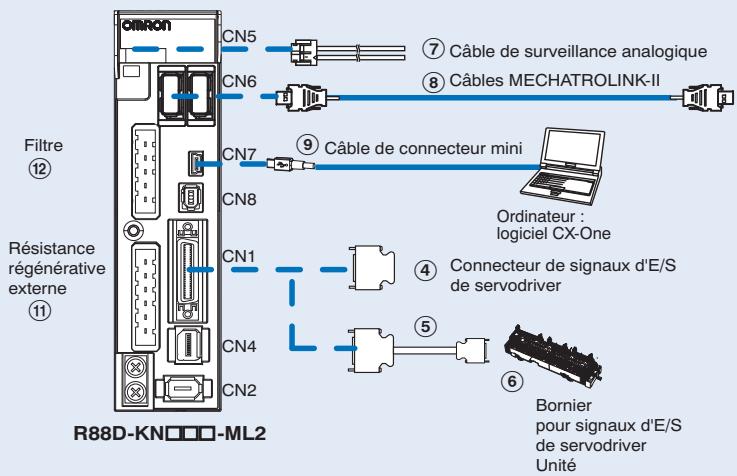
Configuration de référence d'Accurax série G5 analogique/à impulsions
flowchart
graph TD
A["Servomoteur 3000 tr/min (50 W-5 W)"] --> B["Câbles"]
C["Servomoteur 2000 tr/min (400 W-5 kW)"] --> D["Servomoteur 1000 tr/min (900 W-3 kW)"]
B --> E["Filtre"]
D --> E
E --> F["Résistance régénérative externe"]
F --> G["R88D-KTO"]
G --> H["Câble standard"]
G --> I["Câble standard"]
G --> J["Bornier pour signaux d'E/S d'usage général de servodriver"]
H --> K["Câble de contrôle d'axes"]
I --> L["Câble de contrôle de position -Type haute vitesse-"]
K --> M["Ordinateur : logiciel CX-One"]
L --> N["Bornier pour signaux externes"]
Remarque : Les symboles ①②③④⑤... indiquent l'ordre de sélection recommandé pour les composants des servosystèmes G5
Servomoteurs, câbles d'alimentation et de codeur
Remarque : ①② Consultez le chapitre sur les servomoteurs Accurax G5 pour la sélection du servomoteur, des câbles moteur et des connecteurs
Servodrivers
| Symbole | Caractéristiques | Modèle de servodriver | 1 Servomoteurs rotatifs Accurax série G5 compatibles | |
| 3 | 230 Vc.a. monophasé | 100 W | R88D-KT01H | R88M-K05030(H/T)-☐ |
| R88M-K10030(H/T)-☐ | ||||
| 200 W | R88D-KT02H | R88M-K20030(H/T)-☐ | ||
| 400 W | R88D-KT04H | R88M-K40030(H/T)-☐ | ||
| 750 W | R88D-KT08H | R88M-K75030(H/T)-☐ | ||
| 1,0 kW | R88D-KT10H | R88M-K1K020(H/T)-☐ | ||
| 1,5 kW | R88D-KT15H | R88M-K1K030(H/T)-☐ | ||
| R88M-K1K530(H/T)-☐ | ||||
| R88M-K1K520(H/T)-☐ | ||||
| R88M-K90010(H/T)-☐ | ||||
| 400 Vc.a. triphasé | 600 W | R88D-KT06F | R88M-K40020(F/C)-☐ | |
| R88M-K60020(F/C)-☐ | ||||
| 1,0 kW | R88D-KT10F | R88M-K75030(F/C)-☐ | ||
| R88M-K1K020(F/C)-☐ | ||||
| 1,5 kW | R88D-KT15F | R88M-K1K030(F/C)-☐ | ||
| R88M-K1K530(F/C)-☐ | ||||
| R88M-K1K520(F/C)-☐ | ||||
| R88M-K90010(F/C)-☐ | ||||
| 2,0 kW | R88D-KT20F | R88M-K2K030(F/C)-☐ | ||
| R88M-K2K020(F/C)-☐ | ||||
| 3,0 kW | R88D-KT30F | R88M-K3K030(F/C)-☐ | ||
| R88M-K3K020(F/C)-☐ | ||||
| R88M-K2K010(F/C)-☐ | ||||
| 5,0 kW | R88D-KT50F | R88M-K4K030(F/C)-☐ | ||
| R88M-K5K030(F/C)-☐ | ||||
| R88M-K4K020(F/C)-☐ | ||||
| R88M-K5K020(F/C)-☐ | ||||
| R88M-K3K010(F/C)-☐ | ||||
Câbles de contrôle (pour CN1)
| Symbole | Description | Connector à | Modèle | |
| 4 | Câble de contrôle(1 axe) | Cartes de contrôle d'axesCS1W-MC221CS1W-MC421 | 1 m | R88A-CPG001M1 |
| 2 m | R88A-CPG002M1 | |||
| 3 m | R88A-CPG003M1 | |||
| 5 m | R88A-CPG005M1 | |||
| Câble de contrôle(2 axes) | Cartes de contrôle d'axesCS1W-MC221CS1W-MC421 | 1 m | R88A-CPG001M2 | |
| 2 m | R88A-CPG002M2 | |||
| 3 m | R88A-CPG003M2 | |||
| 5 m | R88A-CPG005M2 | |||
| 5 | Câble de contrôle(sortie driver en ligne pour 1 axe) | Unités de contrôle de position (modèle haute vitesse)CJ1W-NC234CJ1W-NC434 | 1 m | XWZZ-100J-G9 |
| 5 m | XWZZ-500J-G9 | |||
| 10 m | XWZZ-10MJ-G9 | |||
| Câble de contrôle(sortie collecteur ouvert pour 1 axe) | Unités de contrôle de position (modèle haute vitesse)CJ1W-NC214CJ1W-NC414 | 1 m | XWZZ-100J-G13 | |
| 3 m | XWZZ-300J-G13 | |||
| Câble de contrôle(sortie driver en ligne pour 2 axes) | Unités de contrôle de position (modèle haute vitesse)CJ1W-NC234CJ1W-NC434 | 1 m | XWZZ-100J-G1 | |
| 5 m | XWZZ-500J-G1 | |||
| 10 m | XWZZ-10MJ-G1 | |||
| Câble de contrôle(sortie collecteur ouvert pour 2 axes) | Unités de contrôle de position (modèle haute vitesse)CJ1W-NC214CJ1W-NC414 | 1 m | XWZZ-100J-G5 | |
| 3 m | XWZZ-300J-G5 | |||
| 6 | Câble bornier pour signaux externes(pour commun des entrées, entrées de fonctionnement avant/arrière interdites, entrée d'arrêt d'urgence, entrée de proximité d'origine et entrée d'interruption) | Unités de contrôle de position (modèle haute vitesse)CJ1W-NC234CJ1W-NC434CJ1W-NC214CJ1W-NC414 | 0,5 m | XWZZ-C50X |
| 1 m | XWZZ-100X | |||
| 2 m | XWZZ-200X | |||
| 3 m | XWZZ-300X | |||
| 5 m | XWZZ-500X | |||
| 10 m | XWZZ-010X | |||
| 7 | Bornier pour signaux externes (vis M3, bornes à broches) | - | XW2B-20G4 | |
| Bornier pour signaux externes (vis M3,5, bornes arrondies/à fourche) | - | XW2B-20G5 | ||
| Bornier pour signaux externes (vis M3, bornes arrondies/à fourche) | - | XW2D-20G6 | ||
| 8 | Câble de l'unité de relais de servo au servodriver | CS1W-NC1□3, CJ1W-NC1□3, C200HW-NC113, CS1W-NC2□3/4□3, CJ1W-NC2□3/4□3, C200HW-NC213/413, CQM1H-PLB21 ou CQM1-CPU43 | 1 m | XWZZ-100J-B25 |
| 2 m | XWZZ-200J-B25 | |||
| CJ1M-CPU21/22/23 | 1 m | XWZZ-100J-B31 | ||
| 2 m | XWZZ-200J-B31 | |||
| 9 | Unité de relais de servo | Unités de contrôle de positionCS1W-NC1□3, CJ1W-NC1□3 ou C200HW-NC113 | - | XW2B-20J6-1B (1 axe) |
| Unités de contrôle de positionCS1W-NC2□3/4□3, CJ1W-NC2□3/4□3 ou C200HW-NC213/413 | - | XW2B-40J6-2B (2 axes) | ||
| CQM1H-PLB21 ou CQM1-CPU43 | - | XW2B-20J6-3B (1 axe) | ||
| CJ1M-CPU21/22/23 | - | XW2B-20J6-8A (1 axe)XW2B-40J6-9A (2 axes) | ||
| 10 | Carte de contrôle de positioncâble de connexion | CQM1H-PLB21 | 0,5 m | XWZZ-050J-A3 |
| 1 m | XWZZ-100J-A3 | |||
| CS1W-NC113 ou C200HW-NC113 | 0,5 m | XWZZ-050J-A6 | ||
| 1 m | XWZZ-100J-A6 | |||
| CS1W-NC213/413 ou C200HW-NC213/413 | 0,5 m | XWZZ-050J-A7 | ||
| 1 m | XWZZ-100J-A7 | |||
| CS1W-NC133 | 0,5 m | XWZZ-050J-A10 | ||
| 1 m | XWZZ-100J-A10 | |||
| CS1W-NC233/433 | 0,5 m | XWZZ-050J-A11 | ||
| 1 m | XWZZ-100J-A11 | |||
| CJ1W-NC113 | 0,5 m | XWZZ-050J-A14 | ||
| 1 m | XWZZ-100J-A14 | |||
| CJ1W-NC213/413 | 0,5 m | XWZZ-050J-A15 | ||
| 1 m | XWZZ-100J-A15 | |||
| CJ1W-NC133 | 0,5 m | XWZZ-050J-A18 | ||
| 1 m | XWZZ-100J-A18 | |||
| CJ1W-NC233/433 | 0,5 m | XWZZ-050J-A19 | ||
| 1 m | XWZZ-100J-A19 | |||
| CJ1M-CPU21/22/23 | 0,5 m | XWZZ-050J-A33 | ||
| 1 m | XWZZ-100J-A33 | |||
| 11 | Câble standard | Pour les contrôleurs standard | 1 m | R88A-CPG001S |
| 2 m | R88A-CPG002S | |||
| 12 | Câble bornier | Pour les contrôleurs standard | 1 m | XWZZ-100J-B24 |
| 2 m | XWZZ-200J-B24 | |||
| 13 | Bornier (vis M3 et pour bornes à broches) | - | XW2B-50G4 | |
| Bornier (vis M3,5 et pour bornes arrondies/à fourche) | - | XW2B-50G5 | ||
| Bornier (vis M3 et pour bornes arrondies/à fourche) | - | XW2D-50G6 |
Surveillance analogique (pour CN5)
| Symbole | Nom | Modèle | |
| 14 | Câble de surveillance analogique | 1 m | R88A-CMK001S |
Câble USB pour ordinateur PC (pour CN7)
| Symbole | Nom | Modèle | |
| 15 | Câble pour connecteur mini USB | 2 | AX-CUSBM002-E |
Résistance régénérative externe
| Symbole | Modèle de résistance régénérative | Caractéristiques |
| 16 | R88A-RR08050S | 50 Ω, 80 W |
| R88A-RR080100S | 100 Ω, 80 W | |
| R88A-RR22047S | 47 Ω, 220 W | |
| R88A-RR50020S | 20 Ω, 500 W |
Filtres
| Symbole | Servodriver applicable | Modèle de filtre | Courant nominal | Courant de fuite | Tension nominale |
| 17 | R88D-KT01H, R88D-KT02H | R88A-FIK102-RE | 2,4 A | 3,5 mA | 250 Vc.a. monophasé |
| R88D-KT04H | R88A-FIK104-RE | 4,1 A | 3,5 mA | ||
| R88D-KT08H | R88A-FIK107-RE | 6,6 A | 3,5 mA | ||
| R88D-KT10H, R88D-KT15H | R88A-FIK114-RE | 14,2 A | 3,5 mA | ||
| R88D-KT06F, R88D-KT10F, R88D-KT15F | R88A-FIK304-RE | 4 A | 0,3 mA / 32 mA^1 | 400 Vc.a. triphasé | |
| R88D-KT20F | R88A-FIK306-RE | 6 A | 0,3 mA / 32 mA^1 | ||
| R88D-KT30F, R88D-KT50F | R88A-FIK312-RE | 12,1 A | 0,3 mA / 32 mA^1 |
- Pic de courant de fuite temporaire pour le filtre lors de la mise en/hors fonction.
Connecteurs
| Caractéristiques | Modèle |
| Kit connecteurs d'E/S 50 broches (pour CN1) | R88A-CNU11C |
| Connecteur codeur externe (pour CN4) | R88A-CNK41L |
| Connecteur de signal d'E/S de sécurité (pour CN8) | R88A-CNK81S |
Logiciel PC
| Caractéristiques | Modèle |
| Utilitaire de configuration et de surveillance pour les servodrivers et variateurs (CX-drive version 1.90 ou supérieure) | CX-Drive |
TOUTES LES DIMENSIONS SONT INDIQUÉES EN MILLIMÈTRES.
Pour convertir les millimètres en pouces, multipliez par 0,03937. Pour convertir les grammes en onces, multipliez par 0,03527.
- Servodrivers de taille compacte pour un contrôle d'axes précis. Bus
- MECHATROLINK-II et sécurité intégrés.
- Puissances
- Configuration du système
- Légende des références
- Servodriver
- Caractéristiques des servodrivers
- Caractéristiques d'E/S
- Servodrivers
- Installation
- Références pour la commande
- Configuration de référence d'Accurax série G5 MECHATROLINK-II
- Servomoteurs, câbles d'alimentation et de codeur
- Configuration de référence d'Accurax série G5 analogique/à impulsions
Marque : OMRON
Modèle : ACCURAX G5
Catégorie : Automatisation industrielle