
SMARTDRIVE COMPACT - Système de gestion de flotte HONEYWELL - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil SMARTDRIVE COMPACT HONEYWELL au format PDF.
| Type de produit | Convertisseur de fréquence pour moteurs asynchrones |
| Marque | HONEYWELL |
| Modèle | SMARTDRIVE COMPACT |
| Dimensions (LxHxP) | MI1 : 66x157x98 mm ; MI2 : 90x195x102 mm ; MI3 : 100x262.5x109 mm |
| Poids | 0,55 à 0,99 kg selon taille |
| Tension d'alimentation | 208-240 V 1~ ou 380-480 V 3~, 50/60 Hz |
| Puissance moteur | 0,25 à 5,5 kW |
| Courant de sortie permanent | 1,3 à 12 A selon modèle |
| Fréquence de sortie | 0-320 Hz |
| Méthode de contrôle | U/f avec optimisation |
| Interfaces | Bornier E/S, panneau opérateur, bus Modbus RS485 |
| Entrées analogiques | 2 (0-10 V ou 0-20 mA) |
| Sorties analogiques | 1 (0-20 mA) |
| Entrées logiques | 6 (0-30 V) |
| Sorties relais | 2 (250 Vca/2 A) |
| Protections | Surintensité, surtension, sous-tension, surchauffe, défaut de terre |
| Degré de protection | IP20 |
| Température de fonctionnement | -10°C à +50°C |
| Humidité relative | 0 à 95% sans condensation |
| Altitude maximale | 2000 m (déclassement au-dessus de 1000 m) |
| Normes | EN61800-3, EN61800-5-1, UL508C |
| Certifications | CE, UL, cUL, CB |
| Entretien | Nettoyage extérieur, vérifier ventilation, temps de décharge de 5 minutes après coupure |
| Sécurité | Mise à la terre obligatoire, ne pas ouvrir sous tension, attendre arrêt ventilateur |
| Réparabilité | Pièces détachées disponibles via service après-vente Honeywell |
FOIRE AUX QUESTIONS - SMARTDRIVE COMPACT HONEYWELL
Questions des utilisateurs sur SMARTDRIVE COMPACT HONEYWELL
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Système de gestion de flotte au format PDF gratuitement ! Retrouvez votre notice SMARTDRIVE COMPACT - HONEYWELL et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil SMARTDRIVE COMPACT de la marque HONEYWELL.
MODE D'EMPLOI SMARTDRIVE COMPACT HONEYWELL
Couple Constant et Variable
Convertisseur de fréquence
Pour Moteurs asynchrones
Sous réserve de modifications
2.2.1 Câblage de puissance 51 2.2.2 Câblage de commande 52
3. E/S ET BORNES DE COMMANDE 53 4. NAVIGATION ET DEMARRAGE 55
4.1 MENUS PRINCIPAUX DU SMARTDRIVE COMPACT 55 4.2 MISE EN SERVICE ET ASSISTANT DE DEMARRAGE 56
4.2.1 Étapes de mise en service 56 4.2.2 Assistant de démarrage 56 4.2.3 Test manuel 59
5. AFFICHAGE ET PARAMÈTRES 60
5.1 VALEURS DU MENU AFFICHAGE 60 5.2 PARAMÉTRES DE CONFIGURATION RAPIDE 61 5.3 PARAMÉTRES DU MENU SYSTÈME 63
- LOCALISATION DES DÉFAUTS 65
- CARACTERISTIQUES GENÉRALES 67
Ce Guide rapide comprend les étapes essentielles pour une installation et une configuration facile du convertisseur de fréquence SmartDrive Compact. Avant la mise en service de votre convertisseur de fréquence, lisez le Manuel utilisateur SmartDrive Compact disponible sur le CD-ROM avec votre produit ou téléchargeable sur : http://ecc.emea.honeywell.com/inverter

Seul un electricien qualifié est autorisé à procéder à l'installation électrique !

Ce Guide rapide contient des mises en garde clairement signalées, destinées à préserver votre sécurité personnelle ainsi qu'à éviter tout dommage accidentel susceptible d'affecter le produit ou les appareils qui lui sont reliés.
Lisez attentivement ces mises en garde :

Les composants du module de puissance du convertisseur de fréquence sont sous tension lorsque le SmartDrive Compact est raccordé au réseau. Tout contact avec cette tension est extrêmement dangereux et peut provoquer des blessures graves, voire mortelles.

Les bornes U, V, W (T1, T2, T3) du moteur et les éventuelles bornes -/+ de la résistance de freinage sont sous tension lorsque le Smart-Drive Compact est raccordé au réseau, même si le moteur ne tourne pas.

Les bornes d'E/S de commande sont isolées du potentiel réseau. Les bornes des sorties relais peuvent cependant être alimentées en tension de commande dangereuse même lorsque le SmartDrive Compact est hors tension.

Le courant de fuite à la terre des convertisseurs de fréquence SmartDrive Compact dépasse 3,5 mA. c. a. Conformément à la norme EN61800-5-1, une connexion de terre de protection blinding doit être installée. Voir section 7!

Si le convertisseur de fréquence est intégré à une machine, il incombe au constructeur de la machine d'équiper cette d'un interrupteur principal (EN 60204-1).

Si le SmartDrive Compact est déconnecté du réseau lorsque le moteur tourne, il reste sous tension si le moteur est alimenté par le processus. Dans ce cas, le moteur fonctionne comme un générateur alimentant le convertisseur de fréquence.


Après sectionnement du convertisseur de fréquence du réseau, vous devez attendre l'arrêt du ventilateur et l'extinction des témoins de l'affichage. Patientez 5 minutes supplémentaires avant d'intervenir sur les raccordements du SmartDrive Compact.
Le moteur peut démarrer automatiquement après une situation de défaut si la fonction de redémarrage automatique est activée.
2.1 Installation mecanique
Tableau 1: Catégories de tailles mécaniques avec SmartDrive Compact
| Code produit | Taille mécanique | Dimensions LxHxP [mm] |
| COMP230-P37-20 | MI1 | 66x157x98 |
| COMP230-P75-20 | ||
| COMP400-P55-20 | ||
| COMP400-P75-20 | ||
| COMP400-1P1-20 | ||
| COMP230-1P1-20 | MI2 | 90x195x102 |
| COMP230-1P5-20 | ||
| COMP400-1P5-20 | ||
| COMP400-2P2-20 | ||
| COMP230-2P2-20 | MI3 | 100x251x109 |
| COMP400-3P0-20 | ||
| COMP400-4P0-20 | ||
| COMP400-5P5-20 |
Le SmartDrive Compact peut être installé sur un mur de deux façons : par vissage ou par montage sur un rail DIN.
Figure 1: Vissage (gauche) et montage sur rail DIN (droite)
REMARQUE! Reportez-vous aux dimensions de montage figurant au dos du variateur. Laissez de l'espace libre au-dessus (100 mm) et au-dessous (50 mm) du SmartDrive Compact pour le refroidissement!
Figure 2: Montage de la plaque PE et du support de câble
2.2.1 Câblage de puissance
Remarque! Le couple de serrage pour les cables de puissance est de 0,5-0,6Nm
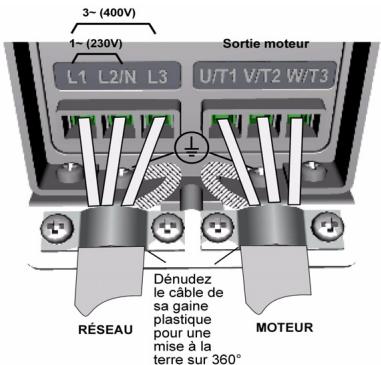
Figure 3: Raccordements de puissance SmartDrive Compact, MI1 Figure 4: Raccordements de puissance SmartDrive Compact, MI2 - MI3
2.2.2 Câblage de commande

Figure 5: Ouverture du capot Figure 6: Installation des câbles de commande. Voir page suivante!
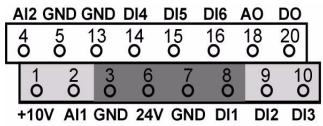
Tableau 1: Raccordements et configuration des E/S par défaut P) = fonction programmable, voir la section "Paramètres" du Manuel d'utilisation
| Borne | Signal | PréRéglage usine | Description | |
| 1 | +10 Vrel | Sortie référence | Charge maxi 10 mA | |
| 2 | AI1 | Signal analogue en 1 | Réf. de fréquence P) | 0 à +10 V Ri = 200 k Ω (min) |
| 3 | GND ● | Masse E/S | ||
| 6 | 24 Vout | Sortie de tension de commande | ±20 %, charge maxi 50 mA | |
| 7 | GND ● | Masse E/S | ||
| 8 | DI1 | DIN1 | Marche avant P) | 0 à +30 V Ri = 12 k Ω min |
| 9 | DI2 | DIN2 | Marche arrêté P) | |
| 10 | DI3 | DIN3 | Vitesse prérégée B0P) | |
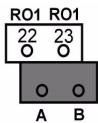
| A | A | Signal RS485 A | Communication sur le bus de terrain | Modbus |
| B | B | Signal RS485 B | Communication sur le bus de terrain | Modbus |
| 4 | AI2 | Signal analogue en 2 | Valeur réelle PI P) | 0(4) à 20 mA, Ri = 200 Ω |
| 5 | GND ● | Masse E/S | ||
| 13 | GND ● | Masse E/S | ||
| 14 | DI4 | DIN4 | Vitesse prérégée B1P) | 0 à +30 V Ri = 12 k Ω min |
| 15 | DI5 | DIN5 | Rémarmement défaut P) | |
| 16 | DI6 | DIN6 | Déactivation régula- teur PI P) | |
| 18 | AO | Sortie signal analogue | Fréquence de sortie P) | 0(4) à 20 mA, RL = 500 Ω |
| 20 | DO | Sortie signal logique | Active = READY P) | Collecteur ouvert, charge maxi 48 V/50 mA |
| 22 | RO 11 | Sortie relais 1 | Active = RUN P) | Charge de coupure maxi : 250 Vc.a./2 A ou 250 Vc.c./0,4 A |
| 23 | RO 12 | |||
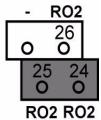
| 24 | RO 21 | Sortie relais 2 | Active = FAULT P) | Charge de coupure maxi : 250 Vc.a./2 A ou 250 Vc.c./0,4 A |
| 25 | RO 22 | |||
| 26 | RO 23 | |||
Bones d'E/S du SmartDrive Compact:
4.2.1 Étapes de mise en service
Tableau 1: Étapes de mise en service
| 1. Lisez les instructions de sécurité figurant page 1 | 6. Lancez l'Assistant de démarrage et définièsez les paramètres nécessaires |
| 2. Vérifie la mise à la terre et la conformité des câbles | 7. Procédez à un essai sans moteur, comme déscrit dans le Manuel d'utilisation (sur http://ecc.emea.honeywell.com) |
| 3. Vérifie la qualité et le volume d'air de refroidissement | 8. Procédez à des essais sans charge, si possible sans relier le moteur à la machine entrainée |
| 4. Vérifie que tous les interrupteurs Marche/Arrêt sont en position Arrêt (STOP) | 9. Reliez le moteur à la machine entrainée et procédez à un nouvel essai |
| 5. Connectez le variateur au réseau | 10. Le SmartDrive Compact est à présent prêt à être utilisé |
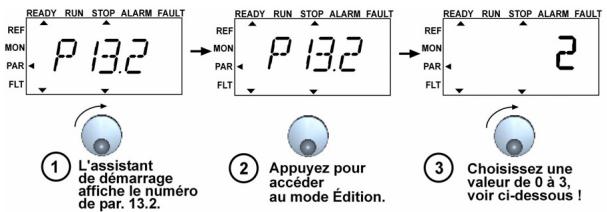
4.2.2 Assistant de démarrage
L'assistant de démarrage du SmartDrive Compact démarrera lors de la première mise en service. Il pourra être lancé ultérieurement en maintenant la touche Arrêt enfoncée pendant 5 secondes dans le menu principal. Les figures ci-après illustrent la procédure.
REMARQUE! Le lancement de l'assistant de démarrage ramène à chaque fois tous les paramètres à leurs valeurs par défaut!
4 PROCEDEZ DE LA MEME FACON POUR LE PAR.1.4, COURANT NOMINAL MOTEUR PROCEEDZ A LA CONFIGURATION DU VARIATEUR, PAR. 13.2, VOIR PAGE SUIVANTE Figure 2: Assistant de démarrage du SmartDrive Compact
Sélections :
Paramètres affectés :
| P1.1 | P1.2 | P1.7 | P1.15 | P2.1 | P2.2 | P2.3 | P3.1 | P3.2 | P3.3 | P4.2 | P4.3 | |
| 0 = Base | 400V* | 50Hz | 1,1*INMOT | 0=Non utilisé | I/0 | 0=Rampe | 0=Roule libre | 0Hz | 50Hz | 0=Ai10-10V | 3s | 3s |
| 1 = Variateur de la pompe | 400V* | 50Hz | 1,1*INMOT | 0=Non utilisé | I/0 | 0=Rampe | 1=Rampe | 20Hz | 50Hz | 0=Ai10-10V | 5s | 5s |
| 2 = Ventilateurs | 400V* | 50Hz | 1,1*INMOT | 0=Non utilisé | I/0 | 0=Rampe | 0=Roule libre | 20Hz | 50Hz | 0=Ai10-10V | 20s | 20s |
| 3 = Variateur du convoyeur | 400V* | 50Hz | 1,5*INMOT | 1=Utilisé | I/0 | 0=Rampe | 0=Roule libre | 0Hz | 50Hz | 0=Ai10-10V | 1s | 1s |
Pour les variateurs de 208V...230V, cette valeur est 230V.
P1.1 Tension moteur (V) P1.2 Fréquence moteur (Hz) P1.7 Limite courant (A) P1.15 Surcouple P2.1 Source de commande P2.2 Mode Marche
P2.3 Mode Arrêt P3.1 Fréquence mini P3.2 Fréquence maxi P3.3 Récurrence E/S P4.2 Temps d'accélération (s) P4.3 Temps de décélération (s)
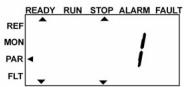
4. Appuyez pour confirmer la configuration du variateur Figure 3 : Configuration du variateur
4.2.3 Test manuel
- Maintenez la MOLETTE DE DÉPLACEMENT enfoncée pendant 5 secondes
- La source de commande bascule automatiquement en commande manuelle
- Utilisez les touches pour contrôler la vitesse
- Touches MARCHÉ et ARRÊT pour le contrôle
- Rendez-vous dans le menu de référence REF MOLETTE DE DÉPLACEMENT pour ajuster la vitesse
- Maintenez la MOLETTE DE DÉPACEMENT enfoncée pendant 5 secondes pour revenir au mode de commande à distance (E/S ou bus de terrain)
5. Affichage et paramètres
Remarque! Vous trouverez une liste complète des paramètres et leurs descriptifs dans le Manuel utilisateur SmartDrive Compact, disponible sur le CD livret avec le produit ou téléchargeable sur: http://ecc. emea. honeywell. com/inverter
5.1 Valeurs du MENU affichage
| Code | Signal d'affichage | Unité | ID | Description |
| M1.1 | Fréquence moteur | Hz | 1 | Fréquence fournie au moteur |
| M1.2 | Référence fréquence | Hz | 25 | |
| M1.3 | Vitesse moteur | rpm | 2 | Vitesse moteur calculée |
| M1.4 | Courant moteur | A | 3 | Courant moteur mesuré |
| M1.5 | Couple moteur | % | 4 | Couple nominal/réal calculé du moteur |
| M1.6 | Puisance moteur | % | 5 | Puisance nominale/réalle calculée du moteur |
| M1.7 | Tension moteur | V | 6 | Tension moteur |
| M1.8 | Tension bus c.c. | V | 7 | Tension bus c.c. mesurée |
| M1.9 | Température de l'appa-reil | °C° | 8 | Température du radiateur |
| M1.10 | Température du moteur | °C° | Température du moteur calculée | |
| M1.11 | Entrée analogue 1 | % | 13 | Valeur AI1 |
| M1.12 | Entrée analogue 2 | % | 14 | Valeur AI2 |
| M1.13 | Sortie analogue | % | 26 | AO1 |
| M1.14 | DIN1, DIN2, DIN3 | 15 | Statut des entrées logiques | |
| M1.15 | DIN4, DIN5, DIN6 | 16 | Statut des entrées logiques | |
| M1.16 | RO1, RO2, DO | 17 | Statut des sorties reliés/logiques | |
| M1.17 | PI : reférence | % | 20 | En pourcentage de la reférence proces-sus maxi |
| M1.18 | PI : retour | % | 21 | En pourcentage de la valeur réelle maxi |
| M1.19 | PI : erreur PI | % | 22 | En pourcentage de la valeur d'erreur maxi |
| M1.20 | PT : sortie | % | 23 | En pourcentage de la valeur de sortie maxi |
Tableau 1 : Valeurs d'affichage du SmartDrive Compact (Vous trouverez une liste complète des paramètres et leurs descriptifs dans le Manuel utilisateur complet SmartDrive Compact disponible sur le CD du produit ou sur : http://ecc.emea.honeywell.com/inverter)
5.2 PARAMÈTRES DE CONFIGURATION RAPIDE
| Code | Paramètre | Min | Max | Unité | Préroglage | ID | Remarque |
| P1.1 | Tension nominale moteur | 180 | 500 | V | 230 400 | 110 | Vérifiez la plaque signalé-tique du moteur |
| P1.2 | Fréquence nomi-nale moteur | 30 | 320 | Hz | 50,00 | 111 | Vérifiez la plaque signalé-tique du moteur |
| P1.3 | Vitesse nominale moteur | 300 | 2000 0 | rpm | 1440 | 112 | Préroglage applicable pour moteur 4 pôles |
| P1.4 | Courant nominal moteur | 0,2 x INu- nité | 1,5 x INunité | A | INunité | 113 | Vérifiez la plaque signalé-tique du moteur |
| P1.5 | Cos moteur (°) | 0,30 | 1,00 | 0,85 | 120 | Vérifiez la plaque signalé-tique du moteur | |
| P1.7 | Courant maxi de sor-tie | 0,2 x INu- nité | 2 x INunité | A | 1,5 x INunité | 107 | |
| P1.15 | Optimisation U/f | 0 | 1 | 0 | 109 | 0 = Non utilisé 1 = Utilisé | |
| P2.1 | Source de cmde | 1 | 3 | 1 | 125 | 1 = Bornier d'E/S2 = Panneau opérateur3 = Bus de terrain | |
| P2.2 | Mode Marche | 0 | 1 | 0 | 505 | 0 = Demarrage sur rampe1 = Reprise au vol | |
| P2.3 | Mode Arrêt | 0 | 1 | 0 | 506 | 0 = Roue libre 1 = Arrêt sur rampe | |
| P3.1 | Fréquence mini | 0,00 | P3.2 | Hz | 0,00 | 101 | |
| P3.2 | Fréquence maxi | P3.1 | 320 | Hz | 50,00 | 102 | |
| P3.3 | Référence d'E/S | 0 | 4 | 3 | 117 | 0 = Vitesse prérogliées 0à 71 = Référence panneau2 = Référence bus de ter-rain | |
| 3 = AI1 | |||||||
| 4 = AI2 | |||||||
| P3.4 | Vitesse constante 0 | 0,00 | P3.2 | Hz | 5,00 | 124 | Activé par entréeslogiques |
Tableau 2 : Paramètres de configuration rapide (Vous trouverez une liste complète des paramètres et leurs descriptifs dans le Manuel utilisateur
| Code | Paramètre | Min | Max | Unité | Préroglage | ID | Remarque |
| P3.5 | Vitesse constante 1 | 0,00 | P3.2 | Hz | 10,00 | 105 | Activé par entréeslogiques |
| P3.6 | Vitesse constante 2 | 0,00 | P3.2 | Hz | 15,00 | 106 | Activé par entréeslogiques |
| P3.7 | Vitesse constante 3 | 0,00 | P3.2 | Hz | 20,00 | 126 | Activé par entréeslogiques |
| P4.2 | Temps d'accelération | 0,1 | 3000 | s | 1,0 | 103 | |
| P4.3 | Temps de décelération | 0,1 | 3000 | s | 1,0 | 104 | |
| P6.1 | AI1 : échelle | 0 | 3 | 0 | 379 | 0 = Tension 0 à 10 V1 = Tension 2 à 10 V | |
| P6.5 | AI2 : échelle | 2 | 3 | 3 | 390 | 2 = Courant 0 à 20 mA3 = Courant 4 à 20 mA | |
| P10.4 | Redémarrageautomatique | 0 | 1 | 0 | 731 | 0 = Non utilisé 1 = Utilisé | |
| P13.1 | Paramètres cachés | 0 | 1 | 1 | 115 | 0 = Tous les paramètres sont visibles1 = Seuls les paramètres de configuration rapide sont visibles |
Tableau 2: Paramètres de configuration risque (Vous trouverez une liste complète des paramètres et leurs DESCRIPTIFS dans le Manuel utilisat )
5.3 Paramètres du MENU système
Tableau 3 : Paramètres du menu système
| Code | Paramètre | Min | Max | Préréglage | Remarque |
| Informations logicielles (MENU PAR -> S1) | |||||
| S1.1 | Pack logiciel | ||||
| S1.2 | Version logiciel puis-sance | ||||
| S1.3 | Version logiciel | ||||
| S1.4 | Interface d'exploitation | ||||
| S1.5 | ID applicatif | ||||
| S1.6 | Version applicatif | ||||
| S1.7 | Charge système | ||||
| Informations RS485(MENU PAR -> S2) | |||||
| S2.1 | État communication | Format : xx.yyyxx = 0 à 64 (Nombre de messages d'erreur)yyy = 0 à 999 (Nombre de messages corrects) | |||
| S2.2 | Protopole du bus de ter-rain | 0 | 1 | 0 | 0 = Bus désactifé 1= Mod-bus |
| S2.3 | Adresse esclave | 1 | 255 | ||
| S2.4 | Débit en bauds | 0 | 5 | 5 | 0=300, 1=600, 2=1200,3=2400, 4=4800, 5=9600, |
| S2.5 | Bits d'arrêt | 0 | 1 | 1 | 0=1, 1=2 |
| S2.6 | Parité | 0 | 0 | 0 | 0= Aucun (verrouillé) |
| S2.7 | Tempo rupture commu-nication | 0 | 255 | 0 | 0= Non utilisé, 1= 1 sec-onde, 2= 2 secondes, etc. |
| S2.8 | Réinitialiser le statut decommunication | 1= Réinitialisation du par. S2.1 | |||
| Menu Compteurs (MENU PAR -> S3) | |||||
Tableau 3 : Paramètres du menu système
| Code | Paramètre | Min | Max | Préréglage | Remarque |
| S3.1 | Compteur MWh | 0 | 1 | 0 | |
| S3.2 | Jours de fonctionnement | 0 | 1 | 0 | |
| S3.3 | Heures de fonctionnement | 0 | 1 | 0 | |
| Réglages utilisateur (MENU PAR → S4) | |||||
| S4.1 | Contraste de l'écran | 0 | 15 | 7 | Rôle le contraste de l'écran |
| S4.2 | Restaurer les paramètres d'usine | 0 | 1 | 0 | 1= Restaure les paramètres d'usine par défaut |
6. Localisation des défauts
| Code de défaut | Intitulé du défaut | Mesures correctives rapides |
| 1 | Surintensité | -Vérifie la charge.-Vérifie la taillée du moteur.-Vérifie les cables. |
| 2 | Surtension | Augmentez le temps de décalération (P.4.3). |
| 3 | Défaut de terre | Vérifie le moteur et son cable. |
| 8 | Défaut système | Réarmez le défaut et redémarrez. Si le défaut se produit, contactez l'assistance technique. |
| 9 | Sous-tension | En cas de coupure réseau temporaire, réarmez le défaut et redémarrez le convertisseur de fréquence.Vérifie la tension réseau. |
| 13 | Sous-temperabilité convertisseur de fréquence | Vérifie les conditions ambiantes. |
| 14 | Surtempérature convertisseur de fréquence | -Vérifie que le flux d'air de refroidissement n'est pas bloqué.- Vérifie la températe ambiente.- Vérifie que la fréquence de découvertage n'est pas trop élevé par rapport à la températe ambiente et à la charge moteur. (P1.16). |
| 15 | Calage moteur | -Vérifie le moteur.- Vérifie la pompe et le ventilateur. |
| 16 | Surtempérature moteur | -Vérifie les paramètres du moteur (P1.1-P1.5)- Réduisez la charge moteur. |
| 17 | Sous-charge moteur | VENTILATERUR : vérifie que la cour-roi n'est pas endommagée.POMPE : vérifie que la pompe n'est pas désamorcée. |
| 22 | EEPROM Erreur checksum | Réarmez le défaut et redémarrez. Si le défaut se produit, contactez l'assistance technique. |
Tableau 1: Codes de défaut : voir le Manuel d'utilisation pour les descriptifs détaillés.
Tableau 1: Codes de défaut : voir le Manuel d'utilisation pour les descriptifs détaillés.
| Code de défaut | Intitulé du début | Mesures correctives rapides |
| 25 | Défaut du chien de garde (watchdog) microcontrôleur | Réarmez le début et redémarrez. Si le début se produit, contactez l'assistance technique |
| 34 | Communication du bus interne | Réarmez le début et redémarrez. Si le début se produit, contactez l'assistance technique. |
| 35 | Défaut applicatif | Réarmez le début et redémarrez. Si le début se produit, contactez l'assistance technique. |
| 50 | Entrée analogique \( I_{in} \)< 4 mA (plage du signal séLECTIONnée 4 à 20 mA) | Vérifiez les câbles de commande. |
| 53 | Défaut de bus de terrain | - Vérifiez l'installation. - Si le début persiste malgré une installation correcte, contactez l'assistance technique |
7. Caractéristiques générales
| Dimensions et masse | Taille | Hauteur | Largeur | Profondeur (mm) | Masse (kg) |
| MI1 | 156,5 | 65,5 | 98,5 | 0,55 | |
| MI2 | 195 | 90 | 101,5 | 0,70 | |
| MI3 | 262,5 | 100 | 108,5 | 0,99 | |
| Réseau d'alienation | Le SmartDrive Compact ne peut pas être utilisé avec des réseaux reliés à la terre | ||||
| Raccorde-ments moteur | Tension de sortie | 0 - Uin | |||
| Courant de sor-tie | Courant permanent nominal IN à température ambiente + 50°C maxi, surcharge 1,5 x IN maxi 1 min/10 min | ||||
| Contraîntes d'environnement | Température ambiente en fonctionnement | - 10°C (sans givre)...+ 50°C : capacité de charge nomi-nale IN | |||
| Température de stockage | -40°C ...+70°C | ||||
| Dégré de protec-tion | IP20 | ||||
| Humidité relative | 0 à 95 %, sans condensation, sans corrosion, sans gouttes d'eau | ||||
| Altitude | 100 % de capacité de charge (sans déclassement) jusqu'à 1000 m 1 % de déclassement par tranche de 100 m au-dessus de 1000 m ; maxi 2000 m | ||||
| CEM | Immunité | Conforme aux normes EN50082-1, -2, EN61800-3 | |||
| Émissions | Conformé aux exigences de la catégorie C2 de la norme produit EN 61800-3 (Honeywell classe H: conforme aux exigences d'une installation normale en bâtiment).Catégorie C1 avec un filtre CEM exteme (Honeywell classe C: destinée aux environnements très sensibles). | ||||
| Normes | CEM : EN61800-3,Sécurité : UL508C, EN61800-5 | ||||
| Certificates et déclarations de conformité du fabricant | Sécurité : CB, CE, UL, cUL, CEM : CE, CB, c-tick(voir plaque signalétique pour plus de détails) | ||||
| Câbles et fusibles nécessaires380 - 500 V | Taille | Fusible(A) | Câbleréseau Cu(mm2) | Mini-maxi:câble de borne (mm2) | |
| Réseau etterre | Commande etrelais | ||||
| MI1 | 6 | 3*1.5+1.5 | 1.5-4 | 0.5-1.5 | |
| MI2 | 10 | ||||
| MI3 | 20 | 3*2.5+2.5 | 1.5-6 | ||
| 208 - 240V | MI1 | 10 | 2*1.5+1.5 | 1.5-4 | |
| MI2 | 20 | 2*2.5+2.5 | |||
| MI3 | 32 | 2*6+6 | 1.5-6 | ||
- Utilisez des câbles offrant une résistance thermique minimale de +70°C.
- Les fusibles font également office de protection contre la surcharge des câbles.
- Ces consignes s'appliquent uniquement lorsqu'un seul moteur est raccordé au convertisseur de fréquence.
- Pour être en conformité avec la norme EN61800-5-1, le conducteur de protection doit être au moins de type 10mm2 Cu ou 16mm Al. Une autre possibilité est d'utiliser un conducteur de protection supplémentaire, d'une section au moins égale à celle du conducteur original.
SmartDrive Compact - Tensions d'alimentation
| Tension d'alimentation 208-240 V, 50/60 Hz, série 1~ | |||||
| Type de convertisseur de fréquence | Capacité de charge nominale en sortie | Puisance moteur | Courant d'entrée nominal | Taille mécanique | |
| Courant per-manent 100 % IN [A] | Courant de sur-charge 150 % [A] | P [kW] | [A] | ||
| COMP230-P25-20 | 1,7 | 2,6 | 0,25 | 4,2 | MI1 |
| COMP230-P37-20 | 2,4 | 3,6 | 0,37 | 5,7 | MI1 |
| COMP230-P55-20 | 2,8 | 4,2 | 0,55 | 6,6 | MI1 |
| COMP230-P75-20 | 3,7 | 5,6 | 0,75 | 8,3 | MI1 |
| COMP230-1P1-20 | 4,8 | 7,2 | 1,1 | 11,2 | MI2 |
| COMP230-1P5-20 | 7,0 | 10,5 | 1,5 | 14,1 | MI2 |
| COMP230-2P2-20 | 9,6 | 14,4 | 2,2 | 15,8 | MI3 |
| Tension d'alimentation 380-480 V, 50/60 Hz, série 3~ | |||||
| Type de convertisseur de fréquence | Capacité de charge nominaleen sortie | Puisance àmoteur | Courantd'entréenominal | Taillemécanique | |
| Courant perma-nent 100 %IN [A] | Courant de sur-charge 150 %[A] | Alimenta-tion 380-480VP [kW] | [A] | ||
| COMP400-P37-20 | 1,3 | 2,0 | 0,37 | 2,2 | MI1 |
| COMP400-P55-20 | 1,9 | 2,9 | 0,55 | 2,8 | MI1 |
| COMP400-P75-20 | 2,4 | 3,6 | 0,75 | 3,2 | MI1 |
| COMP400-1P1-20 | 3,3 | 5,0 | 1,1 | 4,0 | MI1 |
| COMP400-1P5-20 | 4,3 | 6,5 | 1,5 | 5,6 | MI2 |
| COMP400-2P2-20 | 5,6 | 8,4 | 2,2 | 7,3 | MI2 |
| COMP400-3P0-20 | 7,6 | 11,4 | 3,0 | 9,6 | MI3 |
| COMP400-4P0-20 | 9,0 | 13,5 | 4,0 | 11,5 | MI3 |
| COMP400-5P5-20 | 12,0 | 18,0 | 5,5 | 14,9 | MI3 |
Remarque : les courants d'entrée sont des valeurs calculées pour une alimentation par transformateur de ligne de 100 kVA.