
SMARTDRIVE COMPACT - Flottenmanagementsystem HONEYWELL - Kostenlose Bedienungsanleitung
Finden Sie kostenlos die Bedienungsanleitung des Geräts SMARTDRIVE COMPACT HONEYWELL als PDF.
| Produkttyp | Frequenzumrichter für Asynchronmotoren |
| Marke | HONEYWELL |
| Modell | SMARTDRIVE COMPACT |
| Abmessungen (BxHxT) | MI1 : 66x157x98 mm ; MI2 : 90x195x102 mm ; MI3 : 100x262.5x109 mm |
| Gewicht | 0,55 bis 0,99 kg je nach Größe |
| Versorgungsspannung | 208-240 V 1~ oder 380-480 V 3~, 50/60 Hz |
| Motorleistung | 0,25 bis 5,5 kW |
| Dauerausgangsstrom | 1,3 bis 12 A je nach Modell |
| Ausgangsfrequenz | 0-320 Hz |
| Steuerungsmethode | U/f mit Optimierung |
| Schnittstellen | E/A-Klemmen, Bedienfeld, Modbus RS485-Bus |
| Analogeingänge | 2 (0-10 V oder 0-20 mA) |
| Analogausgänge | 1 (0-20 mA) |
| Digitaleingänge | 6 (0-30 V) |
| Relaisausgänge | 2 (250 V AC/2 A) |
| Schutzfunktionen | Überstrom, Überspannung, Unterspannung, Übertemperatur, Erdschluss |
| Schutzart | IP20 |
| Betriebstemperatur | -10°C bis +50°C |
| Relative Luftfeuchtigkeit | 0 bis 95% ohne Kondensation |
| Maximale Höhe | 2000 m (Leistungsreduzierung über 1000 m) |
| Normen | EN61800-3, EN61800-5-1, UL508C |
| Zertifikate | CE, UL, cUL, CB |
| Wartung | Außenreinigung, Belüftung prüfen, Entladezeit von 5 Minuten nach Ausschalten |
| Sicherheit | Erdung zwingend erforderlich, nicht unter Spannung öffnen, Lüfterstopp abwarten |
| Reparierbarkeit | Ersatzteile über Honeywell-Kundendienst erhältlich |
Häufig gestellte Fragen - SMARTDRIVE COMPACT HONEYWELL
Benutzerfragen zu SMARTDRIVE COMPACT HONEYWELL
0 Frage zu diesem Gerät. Beantworten Sie die, die Sie kennen, oder stellen Sie Ihre eigene.
Eine neue Frage zu diesem Gerät stellen
Laden Sie die Anleitung für Ihr Flottenmanagementsystem kostenlos im PDF-Format! Finden Sie Ihr Handbuch SMARTDRIVE COMPACT - HONEYWELL und nehmen Sie Ihr elektronisches Gerät wieder in die Hand. Auf dieser Seite sind alle Dokumente veröffentlicht, die für die Verwendung Ihres Geräts notwendig sind. SMARTDRIVE COMPACT von der Marke HONEYWELL.
BEDIENUNGSANLEITUNG SMARTDRIVE COMPACT HONEYWELL
Quick Guide Schnellanleitung Guide Rapide

SmartDrive Compact
Konstant und Quadratisch
Moment Frequenzumrichter
für Elektrische Motoren
2.1 MONTAGE 25
2.2 VERKABELUNG UND ANSCHLUSSE 27
2.2.1 Netzanschlüsse 27
2.2.2 Steueranschlüsse 28
- STEUERKLEMMLEISTE UND KLEMMEN 29
- NAVIGATION & START 31
4.1 HAUPTMENÜ DES SMARTDRIVE COMPACT 31
4.2 INBETRIEBNAHME- UND ANLAUFASSISTENT 32
4.2.1 Inbetriebnahme 32
4.2.2 Anlaufassistent 32
4.2.3 Manuelle Überprüfung 35
5.BETRIEBDATEN UND PARAMETER 36
5.1 BETRIEBDATEN 36
5.2 PARAMETER ZUR SCHNELLKCONFIGURATION 37
5.3 SYSTEM-MENU-PARAMETER 39
- FEHLERSUCHE 41
- ALLGEMEINE DATEN 43
These Kurzanleitung enthalt die wichtigen Schritte für die einfache Installation und Einrichtung Ihr’s SmartDrive Compact-Frequenzumrichters. Lesen Sie vor der Inbetriebnahme des Umrichters das vollständige SmartDrive Compact Benutzerhandbuch, das dem Produkt als CD beliegt oder von der folgenden Website heruntergeladen werden kann: http://ecc.emea.honeywell.com/inverter
1. SICHERHEIT

DIE ELEKTKROINSTALLATION DARF NUR VON QUALIFI ZIERTEM FACHPERSONAL AUSGEFUHRT WERDEN

These Kurzanleitung enthalt deutlich hervorgehobene Warnungen, die ihrer persönlichen Sicherheit dienen und gleichzeitig die Beschäftigung des Produkts und der angeschlossenen Anwendungen verhindern sollen.
Lesen Sie diese Warnungen sorgfältig:

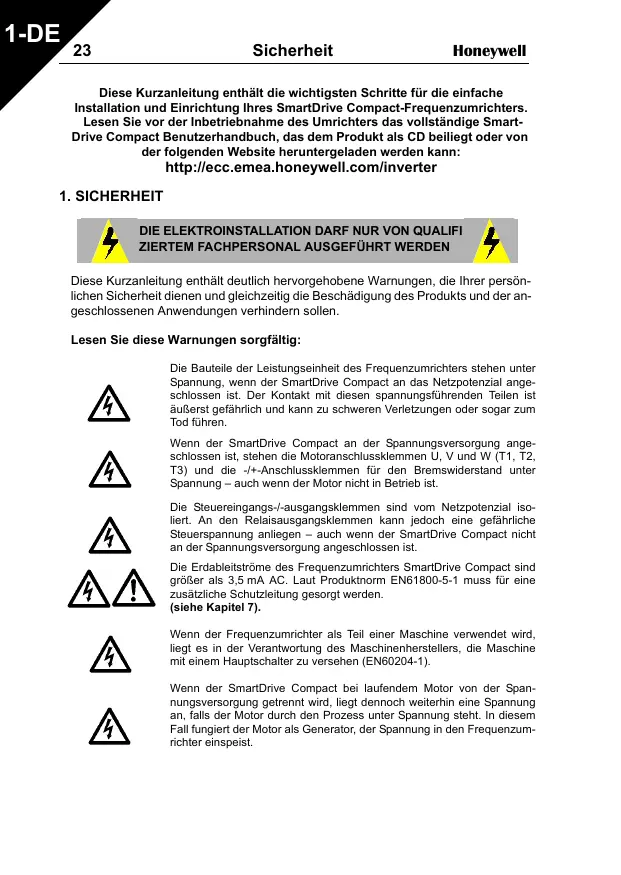
Die Bauteile der Leistungseinheit des Freqenzumrichters stehen unter Spannung, wenn der SmartDrive Compact an das Netzpotenzial angeschlossen ist. Der Kontakt mit diesen spannungsführenden Teilen ist außer gefährlich und kann zu schweren Verletzungen oder)sagar zum Tod führen.

Wenn der SmartDrive Compact an der Spannungsvorsorgung ange-schlossen ist, stehen die Motorschlussklemmen U, V und W (T1, T2, T3) und die - / + Anschlussklemmen fur den Bremswiderstand unter Spannung - auch wenn der Motor nicht in Betrieb ist.

Die Steuereingangs-/ausgangsklemmen sind vom Netzpontenial isoliert. An den Relaisausgangsklemmen kann noch eine gefährliche Steuerspannung anliegen - auch wenn der SmartDrive Compact nicht an der Spannungversorgung angeschlossen ist.

Die Erdableitstrome des Freqenzumrichters SmartDrive Compact sind länger als 3.5mA AC. Laut Produktnorm EN61800-5-1 muss für eine zusätzliche Schutzleitung gesorgt werden. (siehe Kapitel 7).

Wenn der Freqenzumrichter als Teil einer Maschine verwendet wird, liegt es in der Verantwortung des Maschinenherstellers, die Maschine mit einem Hauptschalter zu verstehen (EN60204-1).

Wenn der SmartDrive Compact bei laufendem Motor von der Spannungsvorsorgung getreten wird, liegt denialch weiterhin eine Spannung an, falls der Motor durch den Prozess unter Spannung stehen. In thisem Fall fungiert der Motor als Generator, der Spannung in den Freqenzumrichter einseist.

Warten Sie nach dem Abschalten der Stromversorgung, bis der Lüfter zum Stillstand gekommen ist und die Anzeugeleuchten auf dem Display erloschen sind. Warten Sie anschließend weitere fünf Minuten, bevor Sie mit den Arbeitsmen am SmartDrive Compact.

Der Motor kann nach einem Fehler automatisch gestartet werden, wenn die Funktion für den automatischen Neustart aktiviert wurde.
2. INSTALLATION
2.1 MONTAGE
Tabelle 1: SmartDrive Compact Größenklassen
| Produktcode | Größen- klasse | Abmessungen BxHxT [mm] |
| COMP230-P37-20 | MI1 | 66x157x98 |
| COMP230-P75-20 | ||
| COMP400-P55-20 | ||
| COMP400-P75-20 | ||
| COMP400-1P1-20 | ||
| COMP230-1P1-20 | MI2 | 90x195x102 |
| COMP230-1P5-20 | ||
| COMP400-1P5-20 | ||
| COMP400-2P2-20 | ||
| COMP230-2P2-20 | MI3 | 100x251x109 |
| COMP400-3P0-20 | ||
| COMP400-4P0-20 | ||
| COMP400-5P5-20 |
The SmartDrive Compact kann auf zwei verschiedene Arten an der Wand angebracht werden: entweder direkt mit Schrauben oder an einer Hutschiene.
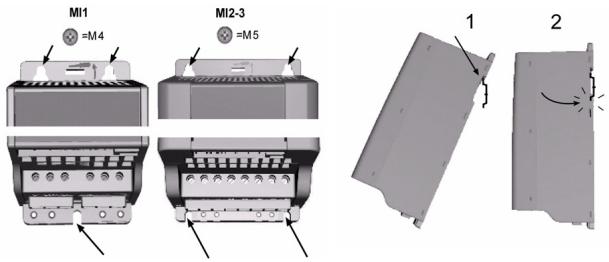
Abbildung 1: Schraubmontage (links) und Montage an einer Hutschiene (rechts)
ACHTUNG! Beachten Sie die Einbaumaße auf der Rückseite des Antriebs.
Lassen Sie über und unter dem SmartDrive Compact ausreichend Freiraum für die Kühlung: oben 100mm undarten 50mm !
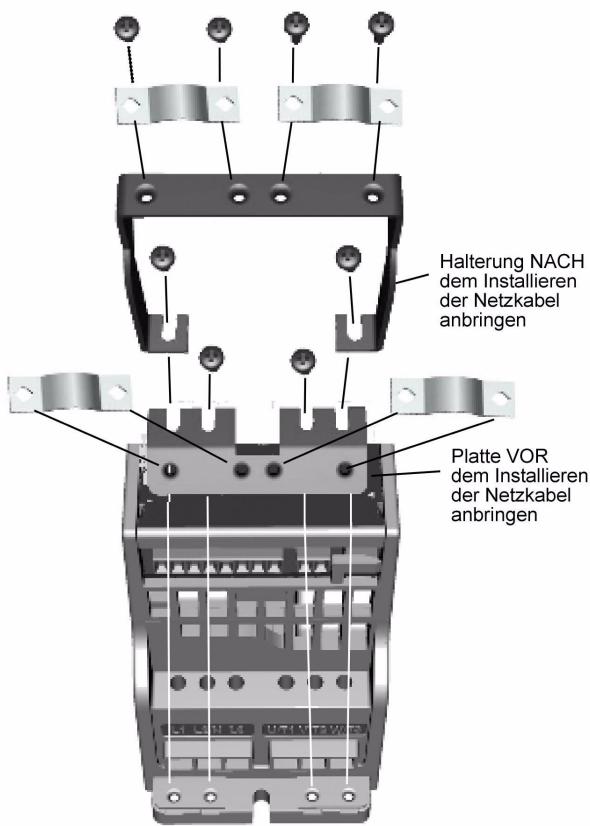
Abbildung 2: Montage von PE-Platte und Kabelhalterung
2.2 VERKABELUNG UND ANSCHLUSSE
2.2.1 Netzanschlüsse
Achtung! Die Netzkabel werden mit einem Anzugmoment von 0,5 - 0,6 Nm festgezogen.

Abbildung 3: Netzanschluss des SmartDrive Compact, Baugröse MI1
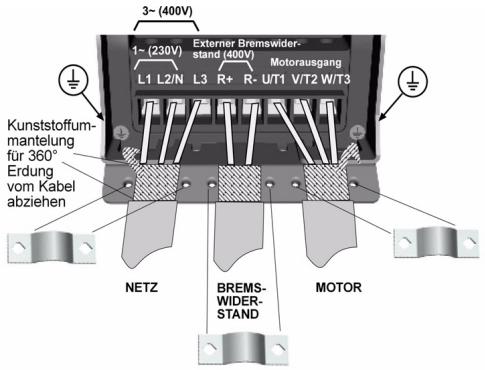
Abbildung 4: Netzanschluss des SmartDrive Compact, Baugröse MI2 bis MI3
2.2.2 Steueranschlussse

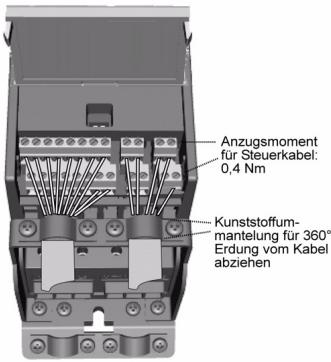
Abbildung 5: Öffnen der Abdeckung
Abbildung 6: Installieren der Steuerkabel. Siehe{nachste Seite.
3. STEUERKLEMMLEISTE UND KLEMMEN
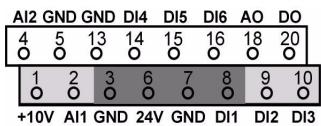
Tabelle 1: E/A-Standardkonfiguration und -verbindungen P) = Programmierbare Funktion, siehe Parameter in der Betriebsanleitung
| Anschluss-klemme | Signal | Werkseinstellung | Beschreibung | ||
| 1 | +10Vref | Sollspannung, Aus-gang | Maximallast 10 mA | ||
| 2 | AI1 | Analogsignal Eingang 1 | Frequenzsollwert P) | 0 bis +10 V Ri = 200 k Ω (min.) | |
| 3 | GND | E/A-Signmasse | |||
| 6 | 24Vout | 24 V-Ausgang für DI's | ±20%, max. Last 50 mA | ||
| 7 | GND | E/A-Signmasse | |||
| 8 | DI1 | Digitaleingang 1 | Start vorwärts P) | 0 bis +30 V Ri = 12 kΩ min | |
| 9 | DI2 | Digitaleingang 2 | Start rückwärts P) | ||
| 10 | DI3 | Digitaleingang 3 | Festdrehzahl B0 P) | ||
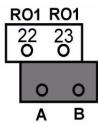
| A | A | RS485-Signal A | FB-Kommunikation | Modbus | |
| B | B | RS485-Signal B | FB-Kommunikation | Modbus | |
| 4 | AI2 | Analogsignal Eingang 2 | PI-Istwert P) | 0(4) - 20 mA, Ri = 200Ω | |
| 5 | GND | E/A-Signmasse | |||
| 13 | GND | E/A-Signmasse | |||
| 14 | DI4 | Digitaleingang 4 | Festdrehzahl B1 P) | 0 bis +30 V Ri = 12 kΩ min | |
| 15 | DI5 | Digitaleingang 5 | Fehlerquittierung P) | ||
| 16 | DI6 | Digitaleingang 6 | PI-Regler deaktiv. P) | ||
| 18 | AO | Analogsignalausgang | Ausgangsfrequency P) | 0(4) - 20 mA, RL = 500Ω | |
| 20 | DO | Digitalsignalausgang | Aktiv = READY P) | Offener Kollektor, max. Last 48 V/50 mA | |
| 22 | RO 11 | Relaisausgang 1 | Aktiv = RUN P) | Max. Schaltbürde: 250 VAC/2 A oder 250 VDC/0,4 A | |
| 23 | RO 12 | ||||
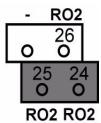
| 24 | RO 21 | Relaisausgang 2 | Aktiv = FAULT P) | Max. Schaltbürde: 250 VAC/2 A oder 250 VDC/0,4 A | |
| 25 | RO 22 | ||||
| 26 | RO 23 | ||||
SmartDrive Compact E/A-Klemmleiste:
4. NAVIGATION & START
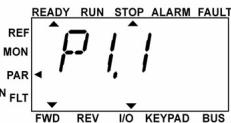
4.1 HAUPTMENÜ DES SMARTDRIVE COMPACT
Hier können Sie den Teutertafel-Sollwert- und die Schwerung von aktivem Steuerpilz anziegen.
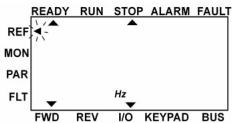
SOLLWERT-MENU

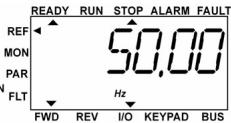
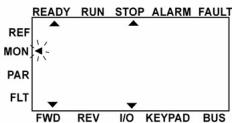
BETRIEBS-DATENMENU

Hier konnen Sie die Betriebs-daten anziegen.

PARAMETER-MENU

Hier können Sie die Parameter anziegen und bearbeiten.
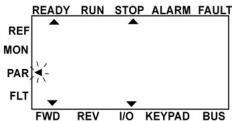

FEHLERMENU

Hier Kohnen Sie die aufgelten und anziegen.



Abbildung 1: Hauptmenu des SmartDrive Compact
4.2 INBETRIEBNAHME- UND ANLAUFASSISTENT
4.2.1 Inbetriebnahme
Tabelle 1: Inbetriebnahme
| 1. Lesen der Sicherheitsanweisungen auf Seite 1 | 6. Ausführten des Anlaufassistenten und Festeigten aller erfolderlichen Parameter |
| 2. Sicherern der Erdung und Überprüfen, ob ähnliche Kabel den Anforderungen entsprechen | 7. Durchführung eines Testlaufs ohne Motor (siehe Bedienungsanleitung unter http://ecc.emea.honeywell.com) |
| 3. Überprüufen von Qualität und Quantität der Kühlhuft | 8. Durchführung von lastfreien Tests möglich ohne Ankapplung des Motors an die Arbeits-maschine |
| 4. Überprüfen, dass sich alle Ein/Aus-Schalter in Aus-Stellung befinden | 9. Ankoppeln des Motors an die Arbeits-maschine und erneutes Durchführung des Testlaufes |
| 5. Anschließen des Antriebs an die Span-nungsversorgung | 10. Der honeywell 10 ist für den Einsatz bereit. |
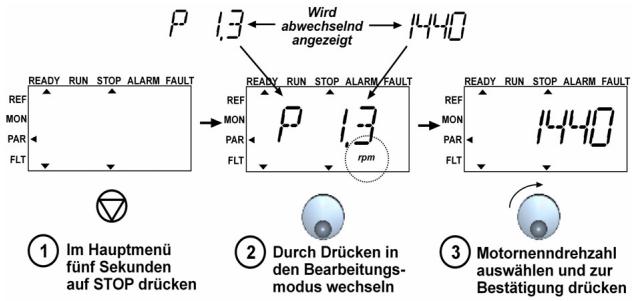
4.2.2 Anlaufassistent
Der SmartDrive Compact führt den Anlaufassistenten beim ersten Einschalten aus. Anschließlich konnen Sie den Assistenten ausfuhren, indem Sie im Hauptmenu fünf Sekunden auf STOP drücken. Die Vorgehensweise wird in den folgenden Abbildungen veranschaulicht.
ACHTUNG! Jedes Mal, wenn Sie den Anlaufas-sistenten ausführren, werden alle Parameter auf die werkseitig eingerichteten Grundeinstellungen zurückgesetzt.

STELLEN SIE MIT DEMSELBEN
VERFAHREN DEN MOTOR-
NENNSTROM PAR. 1.4 EIN

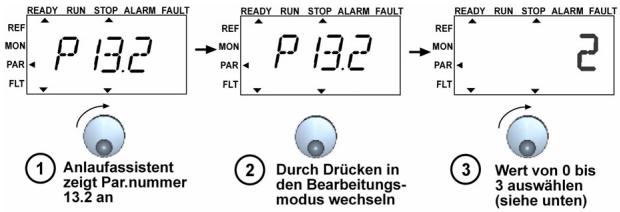
WÄHLEN SIE MIT PAR. 13.2 DIE ANTRIEBSEINSTELLUNGEN AUS (SIEHE NACHSTE SEITE)
Abbildung 2: SmartDrive Compact-Anlaufassistent
Optionen:
Beteiligte
Parameter:
| P1.1 | P1.2 | P1.7 | P1.15 | P2.1 | P2.2 | P2.3 | P3.1 | P3.2 | P3.3 | P4.2 | P4.3 | |
| 0 = Basis | 400 v* | 50 Hz | 1,1 * INMOT | 0= Nicht verw. | I/0 | 0= Ramppe | 0= Leer-ausl. | 0 Hz | 50 Hz | 0= Al1 0-10V | 3 s | 3 s |
| 1 = Pumpen-antrieb | 400 v* | 50 Hz | 1,1 * INMOT | 0= Nicht verw. | I/0 | 0= Ramppe | 1= Ramppe | 20 Hz | 50 Hz | 0= Al1 0-10V | 5 s | 5 s |
| 2 = Lüfter | 400 v* | 50 Hz | 1,1 * INMOT | 0= Nicht verw. | I/0 | 0= Ramppe | 0= Leer-ausl. | 20 Hz | 50 Hz | 0= Al1 0-10V | 20 s | 20 s |
| 3 = Förderer-antrieb | 400 v* | 50 Hz | 1,5 * INMOT | 1= Ver-wendet | I/0 | 0= Ramppe | 0= Leer-ausl. | 0 Hz | 50 Hz | 0= Al1 0-10V | 1 s | 1 s |
*Bei Antrieben mit 208V...230V
ist dieser Wert 230V
P1.1 Motor Un (V)
P1.2 Motor fn (Hz)
P1.7 Stromgrenze (A)
P1.15 Momenterhöhung
P2.1 Steuerplatz
P2.2 Startfunktion
P2.3 Stopfunktion
P3.1 Min. Frequenz
P3.2 Höchstfrequenz
P3.3 E/A-Sollwert
P4.2 Beschchl.zeit (s)
P4.3 Bremszeit (s)


Durch Drücken
Antreibseinstellung
en bestätigten
Abbildung 3: Antriebseinstellungen
4.2.3 Manuelle Überprüfung
-
Halten Sie das NAVIGATIONSRAD 5 Sekunden lang gedrückt
-
Steuerplatz schaltet automatisch auf manuelle Steuerung um
-
Regeln Sie die Drehzahl über die Tasten
-
Steuern über START und STOP
Wechseln Sie in das Referenzmenu REF -
Anpassen über das NAVIGATIONSRAD
-
Halten Sie das NAVIGATIONSRAD 5 Sekunden lang gedrück, um zur Fern steuerung zurrückzukehren (E/A oder Feldbus)
5. BETRIEBSDATEN UND PARAMETER
Achtung! Eine vollständige Parameterliste einschließlich dazugehöriger Beschreibungen finden Sie im SmartDrive Compact Benutzerhandbuch, das dem Produkt als CD beiliegt oder von der folgenden Website heruntergeladen werden kann: http://ecc.emea.honeywell.com/inverter
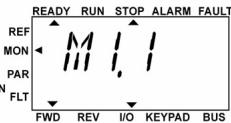
5.1 BETRIEBSDATEN
| Code | Signalbezeichnung | Einheit | ID | Beschreibung |
| M1.1 | Ausgangsfrequency | Hz | 1 | Frequenz zum Motor |
| M1.2 | Frequenzsollwert | Hz | 25 | |
| M1.3 | Motorwellendrehzahl | 1/min | 2 | Berechnete Motordrehzahl |
| M1.4 | Motorsstrom | A | 3 | Gemessener Motorsstrom |
| M1.5 | Motordrehzahl | % | 4 | Berechnetes aktuelles Drehmoment/Nen-ndrehmoment der Motorwelle |
| M1.6 | Motorleistung | % | 5 | Berechnete aktuelle Leistung/Nennleis-tung des Motors |
| M1.7 | Motorspannung | V | 6 | Motorspannung |
| M1.8 | DC-Zwischenkreis-spannung | V | 7 | Gemessene DC-Zwischenkreisspannung |
| M1.9 | Gerätetemperatur | C° | 8 | Kühlkepertemperatur |
| M1.10 | Motortemperatur | C° | Berechnete Motortemperatur | |
| M1.11 | Analogeingang 1 | % | 13 | AI1-Wert |
| M1.12 | Analogeingang 2 | % | 14 | AI2-Wert |
| M1.13 | Analogausgang | % | 26 | AO1 |
| M1.14 | DI1, DI2, DI3 | 15 | Status Digitaleingänge | |
| M1.15 | DI4, DI5, DI6 | 16 | Status Digitaleingänge | |
| M1.16 | RO1, RO2, DO | 17 | Status Relais-/Digitalausgang | |
| M1.17 | PI-Sollwert | % | 20 | In Prozent des maximalen Prozessssollw-erts |
| M1.18 | PI-Rückmeldung | % | 21 | In Prozent des maximalen Istwerts |
| M1.19 | PI-Fehlerwert | % | 22 | In Prozent des maximalen Fehlerwerts |
| M1.20 | PI-Ausgang | % | 23 | In Prozent des maximalen Ausgangswerts |
Tabelle 1: SmartDrive Compact-Betriebsdaten (Eine vollständige Parameterlste einschließlich dazugehöriger Beschreibungen finden Sie im SmartDrive Compact Benutzerhandbuch auf der Produkt-CD oder auf: http://ecc.emea.honeywell.com/inverter)
5.2 PARAMETER ZUR SCHNELLKONFIGURATION
| Code | Parameter | Min. | Max. | Einhe it | Werkeinst . | ID | Hinweis |
| P1.1 | Motornenns- pannung | 180 | 500 | V | 230 400 | 110 | Siehe Typenschild des Motors. |
| P1.2 | Motornennfre- quenz | 30 | 320 | Hz | 50,00 | 111 | Siehe Typenschild des Motors. |
| P1.3 | Motoren- ndrehzahl | 300 | 2000 0 | 1/ min | 1440 | 112 | Werkeinstellung gilt für 4-poligen Motor. |
| P1.4 | Motornennstro m | 0,2 x INeinh | 1,5 x INeinh. | A | INeinh. | 113 | Siehe Typenschild des Motors. |
| P1.5 | Leistungsfaktor des Motors (cos) (f) | 0,30 | 1,00 | 0,85 | 120 | Siehe Typenschild des Motors. | |
| P1.7 | Stromgrenze | 0,2 x INeinh | 2 x INeinh. | A | 1,5 x INeinh. | 107 | |
| P1.15 | Momenterhö- hung | 0 | 1 | 0 | 109 | 0 = Nicht verwendet 1 = Verwendet | |
| P2.1 | Steuerplatz | 1 | 3 | 1 | 125 | 1 = E/A-Klemmleiste 2 = Steuertafel 3 = Feldbus | |
| P2.2 | Startfunktion | 0 | 1 | 0 | 505 | 0 = Rampe 1 = Fliegender Start | |
| P2.3 | Stopfunktion | 0 | 1 | 0 | 506 | 0 = Leerauslauf 1 = Rampe | |
| P3.1 | Min. Freqenz | 0,00 | P3.2 | Hz | 0,00 | 101 | |
| P3.2 | Max. Freqenz | P3.1 | 320 | Hz | 50,00 | 102 | |
| P3.3 | E/A-Sollwert | 0 | 4 | 3 | 117 | 0 = Festdrehzahl 0 - 7 1 = Steuertafelsollwert 2 = Feldbussollwert | |
| 3 = A11 | |||||||
| 4 = A12 | |||||||
| P3.4 | Festdrehzahl 0 | 0,00 | P3.2 | Hz | 5,00 | 124 | Aktivierung über Digitaleingänge |
Table 2: Parameter zur Schnellkconfiguration (Eine vollständige Parameterlste einschließlich dazugehöriger Beschreibungen finden Sie im SmartDrive Compact Benutzerhandbuch auf der Produkt-CD oder auf: http://ecc.emea.honeywell.com/inverter)
| Code | Parameter | Min. | Max. | Einhe it | Werkeinst . | ID | Hinweis |
| P3.5 | Festdrehzahl 1 | 0,00 | P3.2 | Hz | 10,00 | 105 | Aktivierung über Digitaleingänge |
| P3.6 | Festdrehzahl 2 | 0,00 | P3.2 | Hz | 15,00 | 106 | Aktivierung über Digitaleingänge |
| P3.7 | Festdrehzahl 3 | 0,00 | P3.2 | Hz | 20,00 | 126 | Aktivierung über Digitaleingänge |
| P4.2 | Beschleuni-gungszeit | 0,1 | 3000 | s | 1,0 | 103 | |
| P4.3 | Bremsezeit | 0,1 | 3000 | s | 1,0 | 104 | |
| P6.1 | AI1-Signalbere-ich | 0 | 3 | 0 | 379 | 0 = Spannung 0...10 V1 = Spannung 2...10 V | |
| P6.5 | AI2-Signalbere-ich | 2 | 3 | 3 | 390 | 2 = Strom 0...20 mA3 = Strom 4...20 mA | |
| P10.4 | Automatischer Neustart | 0 | 1 | 0 | 731 | 0 = Nicht verwendent1 = Verwendet | |
| P13.1 | Parameter verbergen | 0 | 1 | 1 | 115 | 0 = Alle Parameter sich-tbar1 = Nur Schnelleinstel-lungsparameter anzei-gen |
Tabelle 2: Parameter zur Schnellkonfiguration (Eine vollständige Parameterlste einschließlich dazugehöriger Beschreibungen finden Sie im SmartDrive Compact Benutzerhandbuch auf der Produkt-CD oder auf: http://ecc.emea.honeywell.com/inverter)
5.3 System-Menu-Parameter
Tabelle 3: System-MENU-Parameter
| Code | Parameter | Min. | Max. | Werkeinst. | Hinweis |
| Softwareinformationen (Menu PAR -> S1) | |||||
| S1.1 | Software Package | ||||
| S1.2 | Power SW-Version | ||||
| S1.3 | SW-Version | ||||
| S1.4 | Firmware-Schnittstelle | ||||
| S1.5 | Applikations-ID | ||||
| S1.6 | Revision der Applikation | ||||
| S1.7 | Systembelastung | ||||
| Informationen zur RS485-Schnittstelle (Menu PAR -> S2) | |||||
| S2.1 | Kommunikationsstatus | Format: xx.yyy xx = 0 - 64 (Anzahl der Fehlermeldungen) yyy = 0 - 999 (Anzahl der korrekten Meldungen) | |||
| S2.2 | Feldbusprotokoll | 0 | 1 | 0 | 0 = FB deaktiviert 1 = Modbus |
| S2.3 | Slave-Adresse | 1 | 255 | ||
| S2.4 | Baudrate | 0 | 5 | 5 | 0=300, 1=600, 2=1200, 3=2400, 4=4800, 5=9600, |
| S2.5 | Anzahl der Stopbits | 0 | 1 | 1 | 0=1, 1=2 |
| S2.6 | Paritätstyp | 0 | 0 | 0 | 0 = Keine (gespeit) |
| S2.7 | Zeitüberschreitung Kom-munikation | 0 | 255 | 0 | 0 = Nicht verwendet, 1 = 1 Sekunde, 2 = 2 Sekunden usw. |
| S2.8 | Kommunikationsstatuszurücksetzen | 1 = Setzt Par. S2.1 zurück | |||
| Totalzähler (Menu PAR -> S3) | |||||
Tabelle 3: System-Menu-Parameter
| Code | Parameter | Min. | Max. | Werkeinst. | Hinweis |
| S3.1 | MWh-Zahler | 0 | 1 | 0 | |
| S3.2 | Betriebstage | 0 | 1 | 0 | |
| S3.3 | Betriebsstunden | 0 | 1 | 0 | |
| Benutzereinstellungen (Menu PAR > S4) | |||||
| S4.1 | Kontrast des Displays | 0 | 15 | 7 | Stellt den Kontrast des Displays ein |
| S4.2 | Werkeinstellungen wiederherstellen | 0 | 1 | 0 | 1 = Werkeinstellungen wiederherstellen |
6. FEHLERSUCHE
Tablela 1: Fehlercodes. Die detailierte Fehlerbeschreibung finden Sie in der Betriebsanleitung.
| Fehlercode | Fehlerbezeichnung | Schnelle Korrekturmassnahmen |
| 1 | Überstrom | -Belastung prüfen.-Motorgroße prüfen.-Kabel prüfen. |
| 2 | Überspannung | Bremszeit verlangern (P.4.3). |
| 3 | Erdschluss | Motorkabel und Motor prüfen. |
| 8 | Systemfehler | Fehler zurecksetzen und neu starten.Solle der Fehler erneut aufreten,wenden Sie sich an die TechnischenSupport. |
| 9 | Unterspannung | Im Falle eines kurzfristigen Spannung-sausfalls Fehler zurecksetzen undden Freqenzumrichter neu starten.Die Versorgungsspannung prüfen. |
| 13 | Frequenzumrichter, Untertemperatur | Umgebungskonditionen prüfen. |
| 14 | Frequenzumrichter, Übertemperatur | -Ungehinderten Kühluftstrom siches-tenen.-Umgebungstempoatur prüfen.-Sicherstellen, dass die Schaltfrequ-enz im Verhältnis zur Umgebungstem-paratur und zur Motorlast nichtzu hoch ist (P1.16). |
| 15 | Motor blockiert | -Motor prüfen.-Pumpen und Lüfter prüfen. |
| 16 | Motor, Übertemperatur | -Motorparameter prüfen (P1.1-P1.5).- Motorlast senken. |
| 17 | Motorunterbelastung | LUFTER: Riemen auf eventuelleRisse prüfenPUMPE: Pumpe auf Austrocknungs-prüfen |
| 22 | EEPROM-Prüfsummenfehler | Fehler zurecksetzen und neu starten.Solle der Fehler erneutaufreten, wenden Sie sich an dieTechnischen Support. |
| 25 | Fehler in der Mikroprozessor-Überwachung (Watchdog) | Fehler zurecksetzen und neu starten.Sollete der Fehler erneut auflreten, wenden Sie sich an die Technischen Support. |
| 34 | Interne Buskommunikation | Fehler zurecksetzen und neu starten.Sollete der Fehler erneut auflreten, wenden Sie sich an die Technischen Support. |
| 35 | Applikationsfehler | Fehler zurecksetzen und neu starten.Sollete der Fehler erneut auflreten, wenden Sie sich an die Technischen Support. |
| 50 | Analogeingang In < 4 mA (aus-gewähter Signalbereich 4 bis 20 mA) | Steuerkabeln prüfen |
| 53 | Feldbusfehler | - Installation prüfen.- Fails die Installation in Ordnung ist, wenden Sie sich an die Technischen Support. |
Tabelle 1: Fehlercodes. Die detailierte Fehlerbeschreibung finden Sie in der Betriebsanleitung.
- ALLGEMEINE DATEN
| Baugrößen und Gewicht | Baugröße | Höhe | Breite | Tiefe (mm) | Gewicht (kg) |
| MI1 | 156,5 | 65,5 | 98,5 | 0,55 | |
| MI2 | 195 | 90 | 101,5 | 0,70 | |
| MI3 | 262,5 | 100 | 108,5 | 0,99 | |
| Spannungsnetz | Der SmartDrive Compact kann nicht in eckgeerde-ten Netzen verwendet werden. | ||||
| Motor-anschluss | Ausgangss-pannung | 0 - Uin | |||
| Aus-gangsstrom | Dauernennstrom IN bei Umgebungstemperatur max.+50 °C, Überlast 1,5 x IN max. 1 min/10 min | ||||
| Umgebungs-bedingungen | Betriebsumgebungs-temperatur | -10 °C (kein Frost)...+50 °C: Nennbelastbarkeit IN | |||
| Lagerungstem-peratur | -40 °C...+70 °C | ||||
| Schutzart | IP20 | ||||
| Relative Luft-feuchigkeit | 0 bis 95 % RH, keine Kondensation, keine Korro-sion, kein Tropfwasser | ||||
| Aufstellung-shöhe | 100 % Belastbarkeit (keine Leistungsabminderung)bis max. 1000 m über NN; über 1000 m Leis-tungsabminderung von 1 % pro 100 m; max.2000 m | ||||
| EMV | Störfestigkeit | Erfüllt EN50082-1, -2, EN61800-3 | |||
| Storemission | Erfüllt die Anforderungen der ProduktnormEN61800-3 Kategorie C2 (Honeywell Klasse H:Anforderungen normaler Gebäudef Installationen)Kategorie C1 mit einem externem EMV-Filter (Hon-eywell Klasse C: für hochempfindliche Umgebungenvorgesehen) | ||||
| Normen | EMV: EN61800-3,Sicherheit: UL508C, EN61800-5 | ||||
| Zertifizierungenund Konformi-tätserklärungendes Herstellers | Sicherheit: CB, CE, UL, cUL,EMV: CE, CB, c-tick(Zulassungsdetails finden Sie auf dem Typenschild) | ||||
| Anforderungen an Kabel und Sicherungen380 - 500 V | Baugräge | Sicherung (A) | Netzkabel Cu (mm2) | Anschlusskabel min-max (mm2) | |
| Netz & Erdung | Steuerung & Relais | ||||
| MI1 | 6 | 3*1,5+1,5 | 1,5-4 | 0,5-1,5 | |
| MI2 | 10 | ||||
| MI3 | 20 | 3*2,5+2,5 | 1,5-6 | ||
| 208 - 240 V | MI1 | 10 | 2*1,5+1,5 | 1,5-4 | |
| MI2 | 20 | 2*2,5+2,5 | |||
| MI3 | 32 | 2*6+6 | 1,5-6 | ||
- Verwenden Sie Kabel mit einer Hitzebestandigkeit von mindestens +70^ .
- Die Sicherungen dienen auch als Kabelüberlastschutz.
- Diese Anweisungen geten zur Applikationen mit einem Motor und einer Kabel verbindung zwischen Frequenzumrichter und Motor.
Zur Erfüllung von EN61800-5-1 sollte der Schutzleiter mindestens 10mm^2 Cu oder 16mm^2 Al aufweisen. Alternativ kann auch ein zusätzlicher Schutzleiter mit mindestens derselben Große verwendet werden.
SmartDrive Compact-Leistungsdaten
| Eingangsspannung 208 – 240 V, 50/60 Hz, 1-phasige Baureihe | |||||
| Frequenzumrichterotyp | Nennbelastbarkeit | Motorwellen-leistung | Nenneingangs-strom | Baugröße | |
| 100 % Dau-erstrom IN [A] | 150 % Über-laststrom [A] | P [kW] | [A] | ||
| COMP230-P25-20 | 1,7 | 2,6 | 0,25 | 4,2 | MI1 |
| COMP230-P37-20 | 2,4 | 3,6 | 0,37 | 5,7 | MI1 |
| COMP230-P55-20 | 2,8 | 4,2 | 0,55 | 6,6 | MI1 |
| COMP230-P75-20 | 3,7 | 5,6 | 0,75 | 8,3 | MI1 |
| COMP230-1P1-20 | 4,8 | 7,2 | 1,1 | 11,2 | MI2 |
| COMP230-1P5-20 | 7,0 | 10,5 | 1,5 | 14,1 | MI2 |
| COMP230-2P2-20 | 9,6 | 14,4 | 2,2 | 15,8 | MI3 |
| Eingangsspannung 380 - 480 V, 50/60 Hz, 3-phasige Baurelle | |||||
| Frequenzumrichterotyp | Nennbelastbarkeit | Motorwellen-leistung | Nenneingangs-strom | Baugröße | |
| 100 % Dau-erstromIN [A] | 150 % Über-laststrom [A] | 380 - 480 VSpannungs-versorgungP [kW] | [A] | ||
| COMP400-P37-20 | 1,3 | 2,0 | 0,37 | 2,2 | M11 |
| COMP400-P55-20 | 1,9 | 2,9 | 0,55 | 2,8 | M11 |
| COMP400-P75-20 | 2,4 | 3,6 | 0,75 | 3,2 | M11 |
| COMP400-1P1-20 | 3,3 | 5,0 | 1,1 | 4,0 | M11 |
| COMP400-1P5-20 | 4,3 | 6,5 | 1,5 | 5,6 | M12 |
| COMP400-2P2-20 | 5,6 | 8,4 | 2,2 | 7,3 | M12 |
| COMP400-3P0-20 | 7,6 | 11,4 | 3,0 | 9,6 | M13 |
| COMP400-4P0-20 | 9,0 | 13,5 | 4,0 | 11,5 | M13 |
| COMP400-5P5-20 | 12,0 | 18,0 | 5,5 | 14,9 | M13 |
Hinweis: Die Eingangsstromwerte wurden mit 100-kVA-Versorgung über Transformer berechnet.
Index
- SECURITE 47
- INSTALLATION 49
2.1 INSTALLATION MECANIQUE 49
2.2 CÁBLAGE ET RACCORDEMENTS 51
3. E/S ET BORNES DE COMMANDE

4. NAVIGATION ET DEMARRAGE
4.1 MENUS PRINCIPAUX DU SMARTDRIVE COMPACT
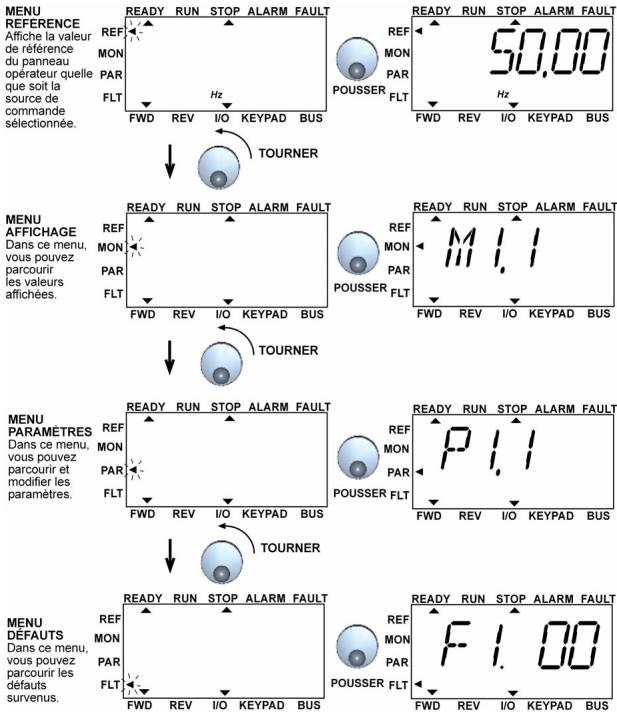
Figure 1: Menu principal du SmartDrive Compact