
POWERGRADE 2D MCP1300 - Instrument de mesure électronique LEICA - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil POWERGRADE 2D MCP1300 LEICA au format PDF.

| Type de produit | Tableau de commande pour système de guidage de machine |
| Marque | Leica Geosystems |
| Modèle | MCP1300 |
| Dimensions (panneau de commande) | 12,5 x 18,0 x 3,7 cm |
| Poids (panneau de commande) | 0,5 kg |
| Dimensions (berceau MMB1300) | 12,4 x 15,2 x 4,4 cm |
| Poids (berceau MMB1300) | 0,320 kg |
| Alimentation | 24 V CC nominale (plage 10-30 V) via berceau |
| Consommation électrique | < 200 mA |
| Écran | Couleur LCD 10 cm (4") avec rétroéclairage |
| Clavier | 18 touches rétroéclairées |
| Interfaces | Infrarouge, 2×RS232, 2×MikroCAN, J1939 |
| Protection contre l'eau et la poussière | IP67 (panneau de commande) |
| Plage de température d'utilisation | -20 à +60 °C |
| Fonctions principales | Guidage 2D pour niveleuse et bulldozer, commande hydraulique automatique |
| Capteurs compatibles | Laser, ultrason (Tri-Sonic), GPS, pente, rotation, SP14 |
| Modes de référence | Sol, fil, rebord, laser |
| Assistant de calibrage | Intégré pour capteurs de pente et rotation |
| Fonction d'inversion | Inversion de dévers et échange de côtés |
| Garantie | Garantie internationale limitée Leica Geosystems |
| Entretien | Nettoyage avec chiffon doux et alcool pur, séchage à max 40°C |
| Sécurité | Conforme aux directives européennes, réservé à des spécialistes qualifiés |
| Informations générales | Certifié ISO 9001/ISO 14001 |
FOIRE AUX QUESTIONS - POWERGRADE 2D MCP1300 LEICA
Questions des utilisateurs sur POWERGRADE 2D MCP1300 LEICA
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Instrument de mesure électronique au format PDF gratuitement ! Retrouvez votre notice POWERGRADE 2D MCP1300 - LEICA et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil POWERGRADE 2D MCP1300 de la marque LEICA.
MODE D'EMPLOI POWERGRADE 2D MCP1300 LEICA
Manuel de l'utilisateur

Version 3.0
Nous vous adressons toutes nos félicitations pour l'acquisition du système de guidage de machine PowerGrade 2D. Le système PowerGrade 2D est un outil idéal pour accroître votre productivité dans le domaine des travaux de terrassement.
Le présent mode d'emploi contient des importantes recommandations de sécurité ainsi que des instructions concernant l'installation et l'utilisation du système. Reportez-vous au chapitre "4 Consignes de sécurité" pour de plus amples informations.
Nous vous recommandons de lire attentivement le manuel de l'utilisateur avant de mettre l'instrument sous tension.
Identification du produit
Pour travailler en toute sécurité, veuillez observer toutes les indications et consignes du mode d'emploi et du manuel de sécurité fournies par :
- le constructeur de la machine.
Le type et le numéro de série de vos produits sont indiqués sur l'étiquette de la base du matériel.
Inscrivez ces deux informations dans votre manuel et indiquez-les toujours lorsqu'il vous faut entrer en contact avec la représentation locale de Leica Geosystems ou un service après-vente/agréé.
Type: Tableau de commande du MCP1300 N° de série :
Type: Berceau MMB1300 N° de série :
Symboles
Les symboles utilisés dans ce manuel ont les significations suivantes :
| Type | Description |
| Danger | Indique l'imminence d'une situation périlleuse entrainant de graves blessures voire la mort si elle n'est pas évitée. |
| Avertissement | Indique une situation potentiellement périlleuse pouvant entrainer de graves blessures voire la mort si elle n'est pas évitée. |
| Attention | Indique une situation potentiellement périlleuse qui, si elle n'est pas évitée, peut entraîner des blessures légères à importantes et/ou causer des dommages matériels conséquents, des atteintes sensibles à l'environnement ou un préjudice financier important. |
| Paragraphes importants auxquels il convient de se référer en pratique car ils permettent au produit d'être utilisé de manière efficace et techniquement correcte. |
Validité de ce manuel
Le présent mode d'emploi s'applique au tableau de commande du MCP1300 et au volet 2D du tableau de commande du MPC1350.
Table des matières
| Dans ce manuel | Sujet | Page | |
| 1 | Aperçu global du produit | 6 | |
| 1.1 Description et caractéristiques du produit | 6 | ||
| 1.2 Premiers pas avec le système | 11 | ||
| 1.3 Touches de configuration de capteur | 13 | ||
| 2 | Utilisation | 16 | |
| 2.1 Contrôles avant la mise sous tension | 16 | ||
| 2.1.1 Meilleures performances avec systèmes de niveleuse | 18 | ||
| 2.1.2 Orientation du mât | 19 | ||
| 2.1.3 Pas d'articulation, de décalage de centre de cercle ou d'inclinaison de roue sur la niveleuse | 20 | ||
| 2.1.4 Désactivation de l'amortissement de la lame de niveleuse | 22 | ||
| 2.1.5 Pas de rotation de lame sur le bulldozer | 23 | ||
| 2.2 | Sélection de la source d'entrée | 24 | |
| 2.3 | Définir une cote de ↔férence | 27 | |
| 2.4 | Utilisation du capteur Tri-Sonic MUS1300 | 29 | |
| 2.4.1 Installation et mise en service du capteur Tri-Sonic | 33 | ||
| 2.4.2 Utilisation avec le capteur Tri-Sonic | 35 | ||
| 2.4.3 Fonction d'inversion | 39 | ||
| 2.5 | Utiliser le capteur laser | 41 | |
| 2.6 | Capteur SP14 | 43 | |
| 2.7 | Capteurs 3D | 45 | |
| 2.8 | Définir les valeurs de gain et de bande morte | 47 | |
| 2.9 Assistant de calibrage de capteur | 51 | ||
| 2.10 Configuration sur les machines | 58 | ||
3 Entretien et transport 60
3.1 Remarques générales 60 3.2 Transport 60 3.3 Stockage 60 3.4 Nettoyage et séchage 61
4 Consignes de sécurité 62
4.1 Informations générales 62 4.2 Utilisation prévue 62 4.3 Limites d'utilisation 63 4.4 Responsabilités 64 4.5 Risques liés à l'utilisation 65 4.6 Compatibilityélectromagnétique CEM 69 4.7 Étiquetage 71
5 Caractéristiques techniques 80
5.1 Caractéristiques techniques MCP1300 80 5.2 Conformité avec la réglementation nationale 87
6 Garantie internationale limitée, contrat de licence de logiciel 88
| 1 | Aperçu global du produit |
| 1.1 | Description et caractéristiques du produit |
| Informations générales | Des touches permettant d'entrée des informations entourent l'écran placé au centre du panneau de commande. Cet écran couleur LCD de derniere génération, d'une taille d'environ 9 cm (3,5"), s'utilise très bien en toutes conditions, même en cas de fort ensoleillement. |
| Son boîtier robuste (IP56) a étéOCUS pour les environnements les plus rudes. | |
| Alimentation electrique, communication | Le panneau de commande est alimenté depuis un berceau basé sur une solution par induction sophistiquée, les données étant transférées sans fil par infrarouge entre le berceau MMB1300 et le panneau de commande du MCP1300. Le MMB1300 sera appelé le "berceau" tout au long de ce manuel. |
Panneau de commande du MCP1300
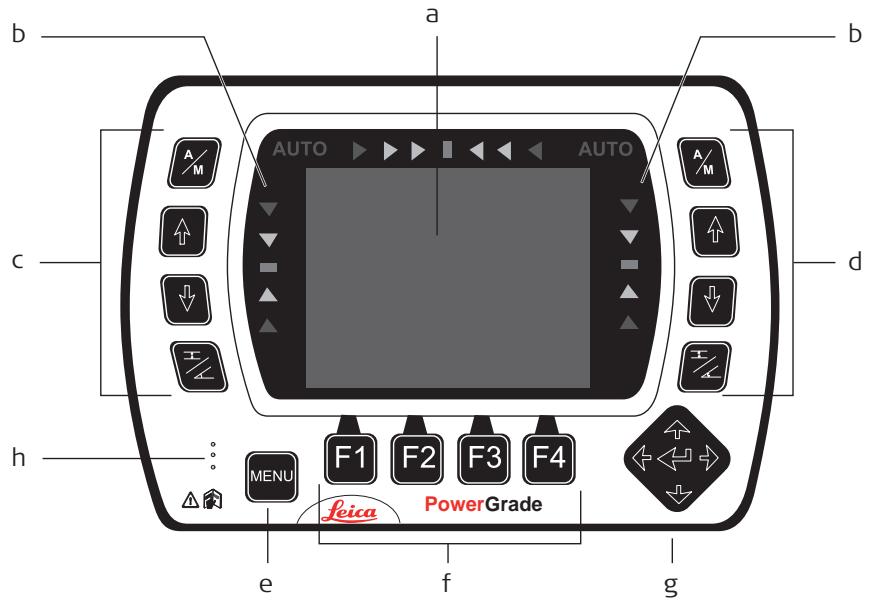
a) Affichage graphique b) LEDs d'indication de cote c) Configuration de capteurs - côté gauche d) Configuration de capteurs - côté droit
e) Touche de menu f) Touches de fonction g) Touche Entrée h) Haut-parleur

Avertissement
L'installation de ce produit sur des engins de génie civil est réservée à des spécialistes qualifiés ayant reçu une formation appropriée.

Avertissement
Toute modification non autorisée d'un engin par le montage du produit peut en ALTERER le fonctionnement et la sécurité.
Mesure préventive
Observez les instructions fournies par le fabricant de l’engin. Si aucune instruction appropriée n’est disponible, renseignez-vous auprès du constructeur de la machine avant le montage du produit.
Touches

Touche Haut

Touche Bas
Touche Entre

Touche Auto/manuel

Touchede menu

Touché de sélection de capteur

Touches de fonction
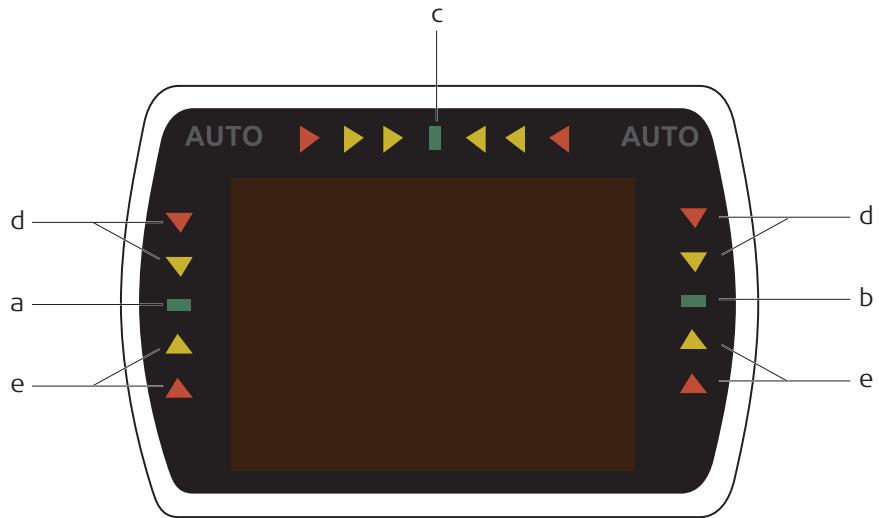
a) Indication "à la cote" - côté gauche b) Indication "à la cote" - côté droit c) Indication de décalage latéral
d) Au-dessus de la cote e) En dessous de la cote
Berceau MMB1300
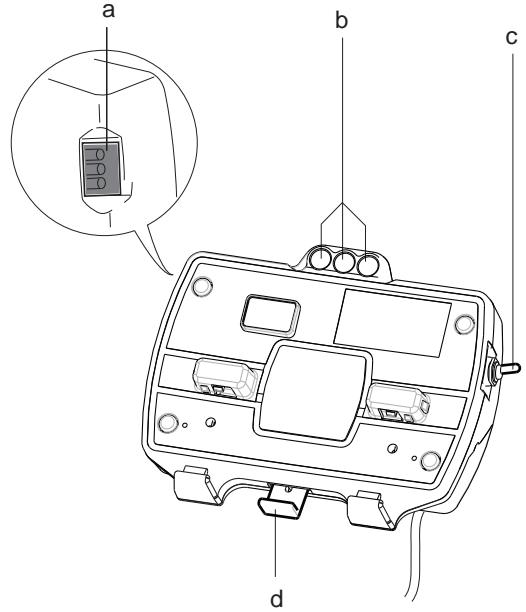
a) Indicateurs LED d'alimentation et de transfert de données b) Aimants de maintien c) Interrupteur marche/arrêt d) Languette de libération du panneau de commande
Démarrer le système
Procédez comme suit pour démarrer le système :
1. Insérez le panneau de commande dans le berceau.
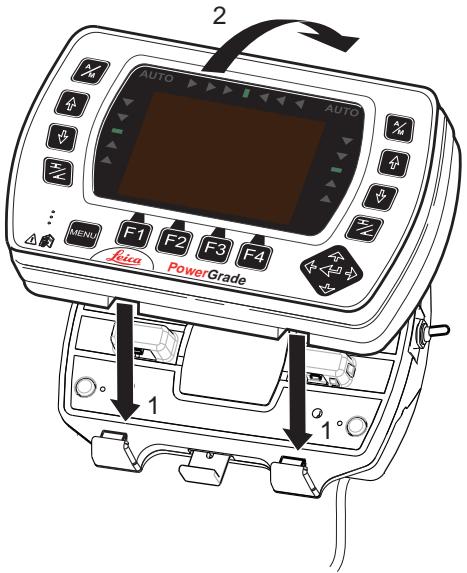
Pour rendre le panneau de commande solidaire du berceau :
- Placez le panneau de commande dans les crochets de la partie inférieure du support.
- Insérez alors le panneau de commande dans le berceau jusqu'au déclic.
2. Mettez le panneau de commande sous tension.
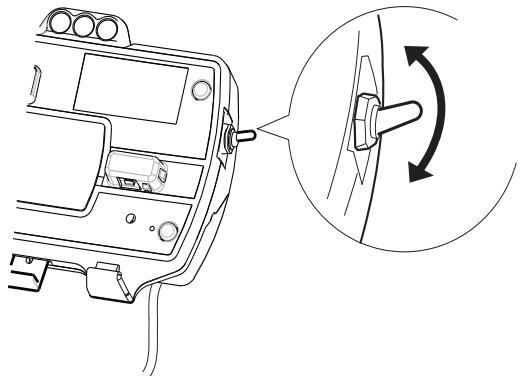
Pour permettre le système sous puissance ou hors tension, utilisez l'interrupteur situé sur le côté droit du berceau. Il s'agit de l'interrupteur principal de tout le système.

Retirer le panneau de commande coupe aussi l'alimentation électrique.
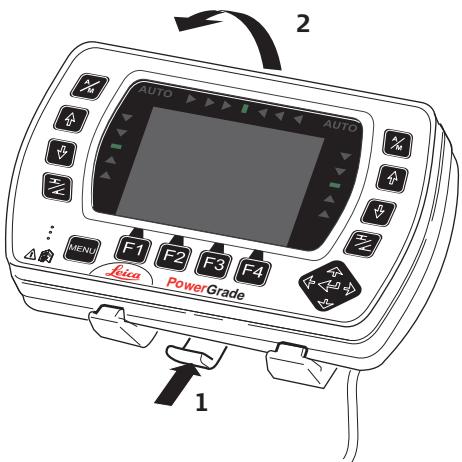

Pour dégager le panneau de commande, appuyez sur la languette de libération située à la base du berceau, ramenez le panneau vers vous puis relevez-le.
1.3
Touches de configuration de capteur
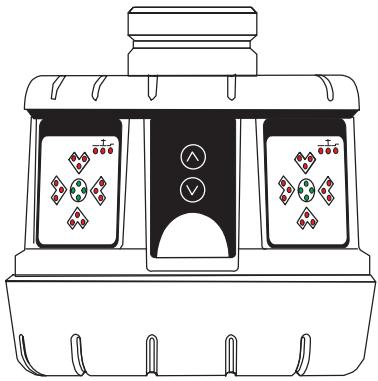
Touches de configuration de capteur
Les touches de configuration de capteur seront à CHOISIR le type de capteur à associer au système ainsi qu'au détector et à définir le point de référence pour ce capteur.
Les canaux hydrauliques de gauche et de droite possèdent quatre touches de configuration de capteur chacun :
À touche Auto/manuel, - touche Haut, - touche Bas, - touche de sélection de capteur.
Multi-interrupteur externe pour niveleuse
Le système peut aussi être doté d'un multi-interrupteur externe. Celui-ci possède trois touches : une touche auto/manuel (rouge) et un jeu de touches haut/bas (vertes). Ces touches ont les mêmes fonctions que leurs homologues du panneau de commande.
Interrupteur externe pour bulldozer

Mettez l'interrupteur principal en position AUTO pour permettre la commande automatique sur tous les canaux sélectionnés du panneau de commande. Mettre l'interrupteur principal en position MAN place tous les canaux en commande manuelle, quelles que soient les selections effectuées sur le panneau de commande.
2.1 Contrôles avant la mise sous tension
État de la machine
Avant de mettre le système sous tension, vérifier l'état de la machine pour être sûr que sa configuration permette un fonctionnement correct.
| Contrôle et réglage | Quand ? | Pour savoir comment faire, voir ... |
| Mât perpendicular à la base des roues. | Pour les niveleuses sans capteur d'inclinaison de mât et pour les buldozers, chaque fois la lame change d'angle d'attaque. | "2.1.2 Orientation du mât" |
| Pas d'articulation ni de décalage de l'atéral de cercle sur la niveleuse. | Chaque fois que l'on doit utiliser un capteur d'élévation simple + un capteur de dévers sur une nive-leuse | "2.1.3 Pas d'articulation, de décalage de centre de cercle ou d'inclinaison de roue sur la niveleuse" |
| Désactivez le système d'amortissement de la lame de niveleuse. | Chaque fois que l'on souhaite utiliser des commandes automatiques sur une niveleuse. | "2.1.4 Désactivation de l'amortissement de la lame de niveleuse" |
| Lame de bulldozer à angle droit. | Chaque fois que l'on commence un travail avec un capteur d'élevation simple + capteur de dévers sur un bulldozer. | "2.1.5 Pas de rotation de lame sur le bulldozer" |
2.1.1
Conseil pour obtenir les importantes performances
Meilleures performances avec systèmes de niveleuse
La liste ci-dessous vous permet d'obtenir les valeurs résultats en cas d'utilisation d'un système de niveleuse.
Assurez-vous que le mât est perpendiculaire à la base des roues ou utilisez un capteur d'inclinaison de mât. - Maintenez le cercle centré sous le col de cygne. N'inclinez pas les roues. - N'articulez pas la machine. - Si possible, déplacez la machine dans une seule direction; ne tournez pas. - Si possible, réglez la rotation de la lame et laissez-la dans la même position. - Si possible, utilisez le capteur de pente en arrière, pas en avant.
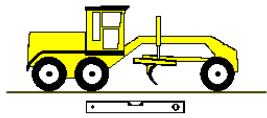
Orientation du mét
Pour les bulldozers et les niveleuses sans capteur d'inclinaison de mât, vous devez vous assurer que le mât se trouve à la position "mesurée" (la position du ou des mâts pendant la mesure).
Sur un bulldozer, cela signifie que le mât ne doit pas être incliné mécaniquement. Si, pour certaines raisons, le mât est incliné mécaniquement, vous devez effectuer une nouvelle mesure de mât.
Sur une niveleuse, la lame doit être rabattue en arrêté jusqu'en butée, si c'était la position de mesure d'origine.
2.1.3
Articulation, décalage de centre de cercle, inclinaison de roue
Pas d'articulation, de décalage de centre de cercle ou d'inclinaison de roue sur la niveleuse
En relation avec les systèmes de niveleuse qui s'appuient sur le capteur de dévers et sur un capteur d'élévation simple, vous devez assurer que la machine n'est pas articulée et que le cercle ne présente pas de décalage fatal. Les roues avant doivent être droites (pas inclinées).
Correct
Articulé
Centre de cercle décalé
Roue inclinee
L'inclinaison de roue provoque une erreur de lecture du capteur d'inclinaison principale. L'articulation et le décalage de centre de cercle empêchent une mesure de la rotation de la lame. En cas d'inclinaison des roues, de décalage du centre de cercle ou d'articulation, le dévers peut être imprécis.
2.1.4
Amortissement de lame désactivé
Désactivation de l'amortissement de la lame de niveleuse
Le fait d'utiliser un système d'amortissement de lame de niveleuse pendant une commande automatique de la lame par le système dégrade les performances de l'équipement. Assurez-vous que l'amortissement de la lame, si installé, est désactivé avant l'utilisation des commandes automatiques.
Pas de rotation de lame sur le bulldozer
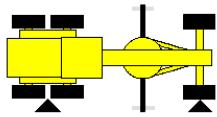
En relation avec les systèmes de bulldozer, utilisez un capteur de dévers, veillez à ce que la lame soit perpendiculaire à la machine (non tournée).
Lame de bulldozer perpendiculaire
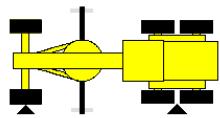
Lame de bulldozer tournée
L'utilisation d'une lame tournée peut aboutir à un dévers imprécis.
En cas de conduite sur une surface ayant un dévers de 0% et une pente longitudinale de 0%, la lame peut être tournée librement.
Plus le dévers et la pente longitudinale sont grands, plus l'erreur en relation avec une lame tournée sera grande.
2.2
Sélection du capteur
Sélection de la source d'entrée
- Pressez la touche de gauche ou de droite pour ouvrir le menu de sélection du capteur. L'écran suivant vous est présenté :
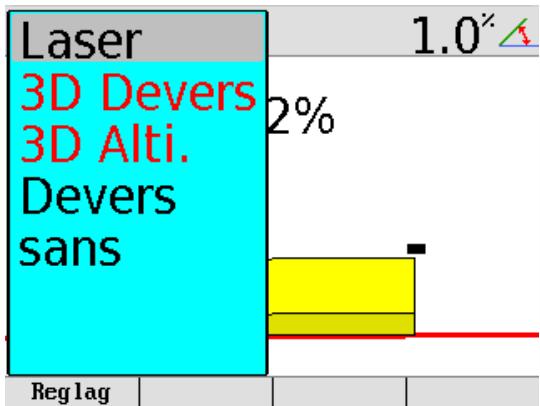
- Utilisez les touches / pour faire défiler les capteurs disponibles.
a) Si le capteur est connecté et actif, il apparait en noir. b) S'il est inactif ou non connecté, il apparait en rouge.
- Mettez en surbrillance le capteur que vous vous apprêtez à utiliser et quittez le menu de sélection du capteur en pressant ou
- Le capteur choisi est indiqué par une petite icône dans l'un des coins supérieurs de l'affiche et par une icône indiquant son positionnement effectif par rapport à la lame. Exemple :
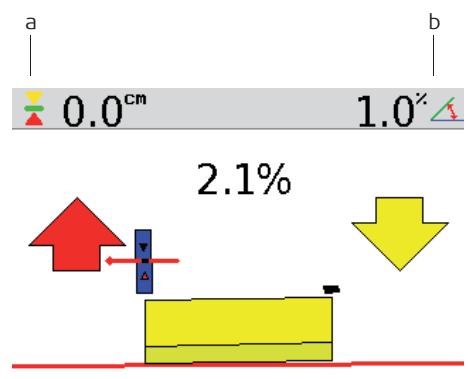
a) Indication du laser b) Pente transversale (dévers)
Un dévers est sélectionné sur le côté droit et un capteur laser sur le côté gauche.
Définir une cote de référence
Lorsqu'un capteur est sélectionné, le panneau de commande utilise automatiquement la dernière cote de référence en date définie pour ce capteur.
Deux méthodes permettent de changer la référence :
Mode manuel Mode de lecture
Utilisez les touches / pour augmenter ou réduire la cote de référence.
Presse simultanément les touches et pour entrer dans le mode de lecture. En mode de lecture, l'écran présente la valeur actuellement indiquée par le capteur sélectionné.
Presser à nouveau les deux touches simultanément permet de quitter le mode de lecture.
Ou pressez F1 ou F4 pour le mode de lecture.
L'écran repasse en noir.
En mode de lecture, les cotes figurent en vert en haut de l'écran.
Si les deux touches sont pressées et maintenues enfoncées durant plus de trois secondes, le panneau de commande enregistre la valeur actuellement présente par le capteur comme nouvelle cote de référence.
Pendant que vous maintenez ces touches enfoncées,
F1 passage de Lecture à 0.0. Une fois la nouvelle cote de référence définie, les valeurs représentées en haut de
Détection automatique du faisceau laser
Dans le cas des systèmes dotés d'un mât électrique MPM700, l'entrée dans le mode de lecture lance une recherche automatique du faisceau laser.
Si le faisceau est hors du champ du capteur laser, l'opérateur peut sélectionner la direction dans laquelle déplacer le mât pour recevoir à nouveau le faisceau en utilisant les touches
et . Le mât se déplace alors dans la direction retenue jusqu'à ce que le faisceau soit bien centré sur le capteur laser.
Si le mât atteint sa butée inférieure ou supérieure durant une telle recherche, il change automatiquement sa direction de déplacement et continue à rechercher le faisceau laser jusqu'à ce qu'il le trouve ou arrive à nouveau en bout de course.
Utilisation du capteur tri-sonic MUS1300
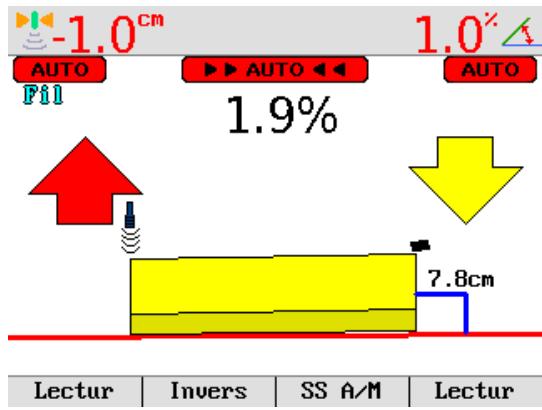
Le Tri-Sonic peut également mesurer la distance horizontalement jusqu'à un fil de sorte qu'il peut servir à commander les décalages latéraux sur une niveuse.
Procédez comme suit pour y parvenir :
- Placez la machine de façon que le Tri-Sonic soit au-dessus du sol, du rebord ou du fil en question. Le capteur a besoin de suivre un rebord ou un fil avant de pouvoir commander le décalage létal.
- Déplacez la lame jusqu'à la position de travail.
- Déplacez le Tri-Sonic jusqu'à une bonne hauteur de travail. Environ 60 cm au-dessus de la référence.
- Sélectionnez le Tri-Sonic du côté où ce capteur est placé sur la machine.
- Entrez dans le menu du Tri-Sonic. Pressez la touche Z puis la touche de fonction Réglage.
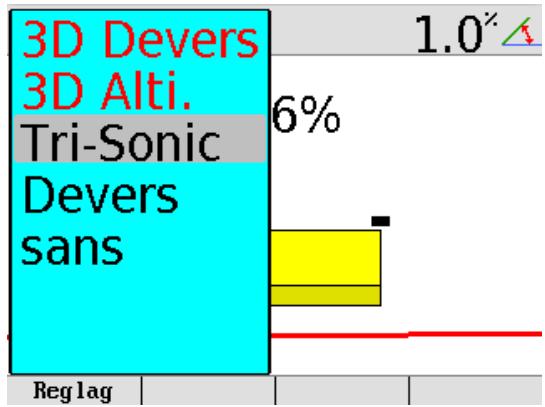
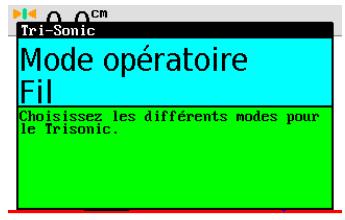
Sélectionnez parmi les différents modes :
Mode sol Mode rebord - Fil
Presse la touche (♀) ou (♂) pour passer d'un mode à l'autre. Une fois le mode sélectionné, presse la touche
Les écrans suivants apparaissent lorsque vous pressez les touches (♀) ou (♂) permettant de passer d'un écran à un autre.


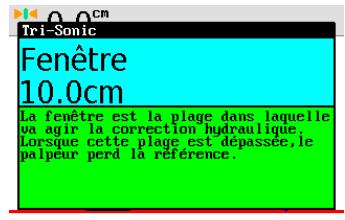

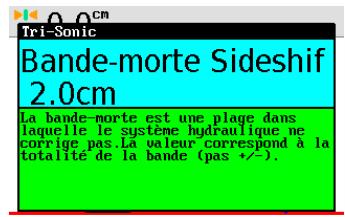

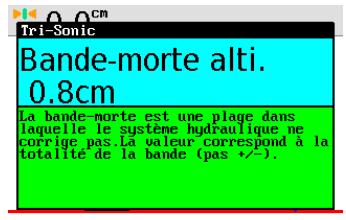


La fenêtre décrit la plage de travail du Tri-Sonic. Toute lecture extérieure à cette plage sera ignorée.
Le décalage létal ne fonctionne qu'en modes rebord et fil.
- Passez à l'option Coulissement et optez pour la valeur Oui.
- Pressez les deux touches et simultanément pour permettre au panneau de commande le mode de lecture.
- Vérifiez que la hauteur est d'environ 60 cm.
- ez-les enfoncées pendant trois secondes pour régler la cote de référence.
- Presse la touche de droite pour mettre la machine en mode auto.
- Pressez la touche de fonction A/M pour activer la commande automatique du décalage létal.

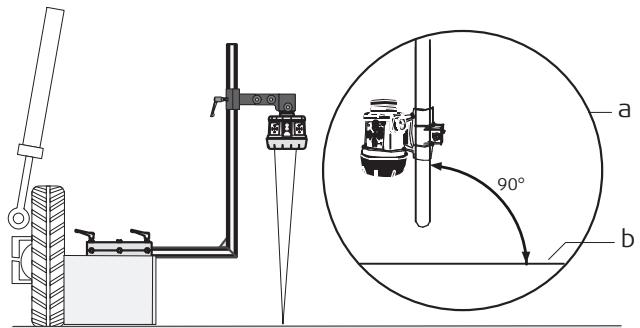
Installation et mise en service du capteur tri-sonic
Le Tri-Sonic peut être installé rapidement et facilement avec les outils les plus simples. Montez un support en un lieu approprié, réglable en hauteur et permettant un décalage latéral. Le Tri-Sonic pourrait ainsi être mis en place au-dessus de toute référence. Le support peut varier en fonction de la machine et de la référence.
En cas de différences de température marquées entre les environnements de stockage et de travail, laissez un début de 30 minutes au capteur pour qu'il s'adapte à l'environnement de travail avant de l'utiliser.
Durant un suivi (sol, cordure du caniveau), le Tri-Sonic doit se déplacer en direction longitudinale pour que les valeurs scannées puissent être moyennées.
Pour un fil et un rebord, le Tri-Sonic doit être placé à par rapport à la référence, la plaque de base étant orientée vers l'arrière de la machine.
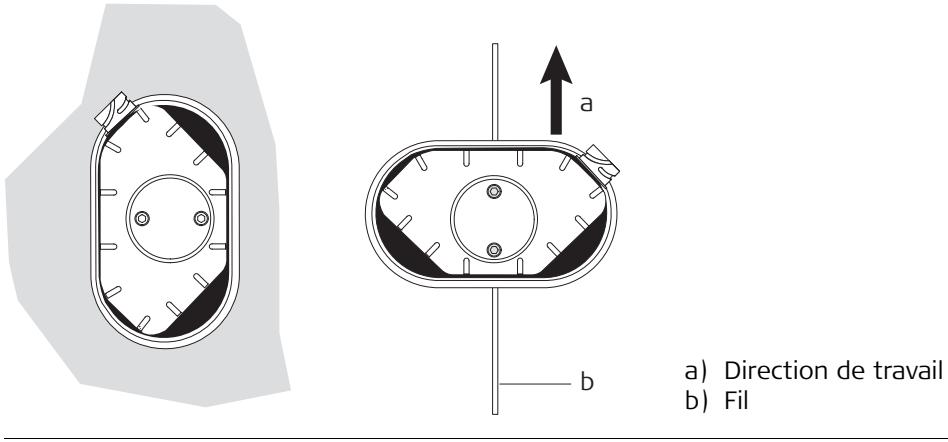
Détection de fil et de rebord
Pour détecter un fil, le Tri-Sonic doit être placé perpendiculairement au fil de référence. La commande automatique du décalage latéral du Tri-Sonic maintient le capteur en permanence au-dessus de la référence en utilisant le système hydraulique (section commandée par la troisième vanne) pour régler la position de la lame.
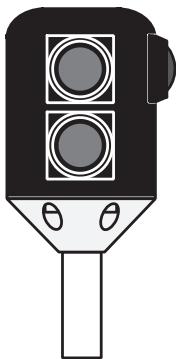
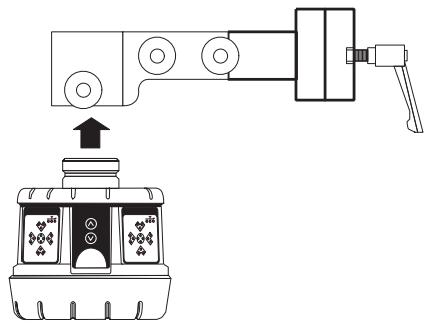
Utilisation normale
- Desserrer la vis de blocage sur le support.
- Insérez le pivot de centrage de la face supérieure du boîtier du capteur dans le support, à la verticale.
- Faites pivoter le capteur suivant le mode de détection requis (reportez-vous à la page précédente).
- Verrouillez le pivot de centrage du capteur avec la vis de blocage.
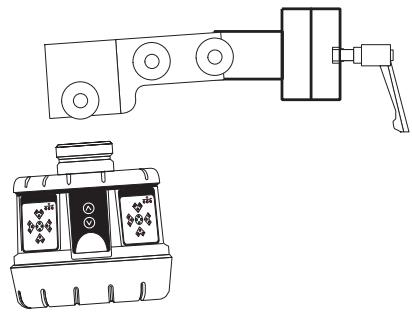
Utilisation pour des rebords
Pour détecter des rebords, il est nécessaire de faire pivoter le capteur vers le rebord, tel qu'indiqué sur la figure. Desserrez le bouton sur la console, faites pivoter celle-ci et resserrez à nouveau le bouton.
Des composants du système peuvent dépasser de la machine, ce qui peut conduire à des blessures corporelles et/ou à des dommages matériels.
Mesure préventive
Soyez prudents lors de l'utilisation afin de ne heurter aucune personne ni aucun objet proche de la zone de travail.
2.4.2
Souplesse du système MCP1300
Monter le Tri-Sonic
Plage de détection
Utilisation avec le capteur tri-sonic
Le système MCP1300 multifonctionnel et multitâche peut être utilisé dans un large éventail de combinaisons afin de répondre aux exigences les plus élevées.
Montez le Tri-Sonic à la hauteur requise pour une performance maximale en rapport avec la référence utilisée. La plage de détection présente les valeurs minimale et maximale possibles, partout où les dernières performances peuvent être obtenues.
| Référence | Plage de détention | Meilleure performance |
| Fil | 38-91 cm (15-36 inch) | 60 cm (24 inch) |
| Rebord | 38-91 cm (15-36 inch) | 60 cm (24 inch) |
| Référence au sol | 38-250 cm (15-99 inch) | 60 cm (24 inch) |
Référence au sol
Mise en place du Tri-Sonic
Lorsqu'un Tri-Sonic est mis en place au-dessus d'une référence (fil, bordure de caniveau ou passe précédente), la meilleure performance est obtenue lorsque le capteur est placé perpendiculaire à celle-ci (et non lorsqu'il est tourné ou appuyé contre elle).
Mise en place au-dessus d'une corniche de caniveau
Lorsque le capteur Tri-Sonic est mis en place au-dessus d'une cordure de caniveau, il est généralement recommandé d'utiliser le mode sol et de se servir de la surface plane du caniveau comme référence tel qu'indiqué ici.
Mise en place au-dessus d'une corniche
L'utilisation de la cordure du caniveau comme référence nécessite de prendre tout particulièrement soin de la distance qui le sépare du système MCP1300 et de la commande de celui-ci. À la différence d'un fil ou d'une surface plane, une cordure de caniveau peut poser des problèmes bien spécifiques. Il est conseillé de réserver ce mode à des opérateurs expérimentés.
Au-dessus de toute référence
Il est important de tourner et de mettre la lame de la niveleuse dans sa position de travail approximative avant de régler et d'ajuster le capteur Tri-Sonic, le bord de lame et la référence.
Réglage et utilisation
La fonction d'inversion permet à l'opérateur d'intervertir rapidement et facilement des capteurs, de faire faire demi-tour à la machine et de niveler dans la direction opposée en suivant la passe précédente.
Deux niveaux de fonction d'inversion sont disponibles :
- Niveau 1: inverser le dévers en changeant le signe de la pente transversale visée. Par exemple: +2,3% -> -2,3%.
- Niveau 2 : inverser le dévers en changeant le signe de la pente transversale visée et inverser le côté de la niveleuse commandé par le système à ultrasons.
Niveau 1
En pressant F2 / INVERSER, le dévers effectif est inversé.

La fonction INVERSER peut également être activée par pression simultanée des touches Haut sur les deux multi-interrupteurs externes.
Niveau 2
Exigences : deux capteurs Tri-Sonic doivent être raccordés et le système doit se couvrir en mode Niveleuse.
- Déplacez la niveleuse sur un sol horizontal plat.
- Réglez le niveau du versoir avec la machine.
- Sélectionnez la pente sur le côté gauche et le capteur ultrasons sur le côté droit. Choisissez le mode sol pour le Tri-Sonic.
- Réglez manuellement le dévers de la lame à la valeur requise.
- Réglez la hauteur pour le capteur ultrasons de droite en pressant la touche F4 / Lecture et en la maintenant enfoncée durant 2 secondes.
- Pressez F2 / Inverser et les capteurs changent de côté.
- Définissez la hauteur requise pour le capteur ultrasons de gauche en pressant la touche
F1 / Lecture et en la maintenant enfoncée pendant 2 secondes.
La machine est maintenant prête pour la passe finale.

Il est possible d'avoir des hauteurs et des paramètres de mode différents pour les deux capteurs Tri-Sonic.
Utiliser le capteur laser
Le capteur laser est utilisé pour mesurer l'élévation de la lame. Il y parvient en mesurant la distance séparant l'endroit où le faisceau laser atteint le capteur du centre de celui-ci.
Capteur laser et mât manuel
Lorsque le capteur laser détecte un faisceau laser, une ligne rouge en travers de l'icône du laser l'indique sur l'affichage.
Si le faisceau laser est perdu à un moment donné en mode auto, un signal sonore retentit et une croix rouge apparait avec un message précisant Faisceau laser perdu.
Procédez comme suit pour utiliser le capteur laser avec un mât manuel afin de commander l'élévation de la lame :
- Sélectionnez le capteur laser sur l'un des deux côtés.
- Placez le tranchant de la lame à la hauteur requise.
- Abaissez ou relevez le mât jusqu'à ce que le capteur laser détecte le faisceau laser. Continuez à déplacer le mât jusqu'à ce que la LED indicatrice du capteur laser présente une ligne verte.
- Pressez la touche gauche pour régler la machine en mode auto.
- Lorsque le panneau de commande est en mode auto, la machine élève/abaisse les cylindres hydrauliques afin que le faisceau laser soit toujours au centre du capteur laser.
Capteur laser et mâts électriques MPM700
Procédez comme suit pour utiliser le capteur laser avec un mât alimenté afin de commander l'élevation de la lame :
- Sélectionnez le capteur laser sur l'un des deux côtés.
- Placez le tranchant de la lame à la hauteur requise.
- Entrez dans le mode Lecture.
- Pressez la touche ou pour indiquer au mât la direction dans laquelle il doit commencer à chercher. Le mât se déplace alors dans la direction indiquée jusqu'à ce que le capteur laser détecte le faisceau laser et que celui-ci soit au centre du capteur.
- Pressez la touche pour régler la machine en mode automatique.
- Les touches et peuvent à prisent servir à déplacer le mât vers le haut ou le bas et à changer ainsi la référence en hauteur.
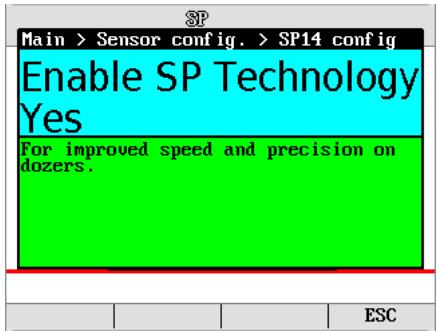
Capteur SP14
Le capteur SP est une nouvelle technologie en automatisation de machines. Il accroît la fluidité obtenue avec le GPS, PowerTracker et les capteurs laser de référence. De plus, le bulldozer peut être utilisé à une vitesse supérieure à celle d'un système dépourvu de la technologie SP.

Il est seulement possible d'utiliser la technologie SP sur des bulldozers avec le boîtier de commande MPC1350, en combinaison avec PowerBox ou PowerTracker.

La technologie SP DOIT être déactivée en cas d'utilisation du capteur SP14 avec un capteur laser ou à ultra-sons.
Activer le capteur SP14
Si le système est équipé d'un capteur SP14, il est recommandé qu'il soit actif en permanence. La fonction SP14 peut être activée ou désactivée en mode technique.
Bénéfices du résultat de l'utilisation du capteur SP14
Dans le cas d'un système avec GPS si la couverture GPS est médiocre.
Dans le cas d'un système avec PowerTracker e contact avec le prisme est perdu lors d'une interruption du faisceau laser.
2.7
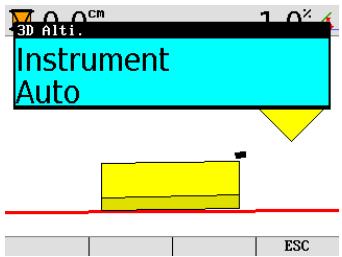
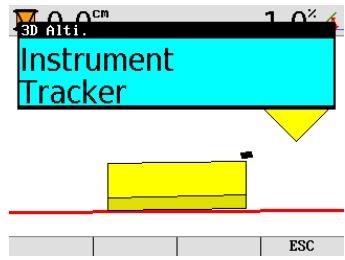
Comment régler le type de capteur 3D
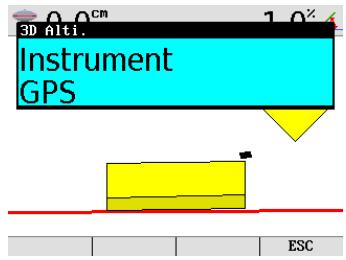
Capteurs 3D
Sélectionnez l'altitude 3D (pressez une fois la touche de gauche ou de droit (du capteur)), puis pressez la touche de fonction Réglage pour entrer dans le menu de réglage. Notez que le réglage ne concerne que le capteur actuellement sélectionné du côté gauche ou droit.
Si le système 3D est configuré pour indiquer le capteur actuellement utilisé, Sélectionnez AUTO. Dans le cas contraire, Sélectionnez TRACKER ou GPS dans le menu.
Une fois AUTO / GPS / TRACKER sélectionné, il est nécessaire de quitter ce menu pour que le changement prenne effet puis d'entrer à nouveau dans le menu pour régler les gains.
Les gains doivent être régles aussi bien pour le GPS que pour le Tracker. Si AUTO est sélectionné, le MCP1300 utilisera les gains définis dans les paramètres du Tracker et du GPS.
Utilisez la touche de flèche droite pour entrer les paramètres de gain.
Reportez-vous au paragraphe "2.8 Définir les valeurs de gain et de bande morte" pour la configuration des gains.
Pour sélectionner une pente en 3D, pressez la touche de gauche ou de droite (du capteur) une fois, puis pressez la touche de fonction Réglage pour entrer dans le menu de réglage.
Notez que le réglage ne concerne que le capteur actuellement sélectionné du côté gauche ou droit.
Définissez les gains pour la pente en 3D tel qu'indiqué au paragraphe "2.8 Définir les valeurs de gain et de bande morte".
2.8
Régler le gain et la bande morte
Définir les valeurs de gain et de bande morte
Procédez comme suit pour régler le gain et la bande morte pour chacun des capteurs :
- Pressez la touche de gauche ou de droite une fois, puis pressez la touche de fonction Réglage pour entrer dans le menu de réglage.
Notez que le réglage ne concerne que le capteur actuellement sélectionné du côté gauche ou droit.
- Utilisez la touche ou pour faire défilier les paramètres.
- Utilisez la touche ou pour modifier la valeur.
- Pressez la touche de menu pour quitter le menu de réglage.
Bande morte
La bande morte commande le mouvement fin de l'hydraulique de la machine. Les valeurs indiquées ne correspondent pas à des précisions mais uniquement à des vitesses du système hydraulique. Ces valeurs ne doivent pas être confondues avec la performance d'ensemble de la machine et/ou sa précision.

Le calibrage hydraulique automatique définit les valeurs de la plage d'insensibilité. Il convient de ne pas modifier ces dernières.
Valeurs par défaut :
| Capteur | Bulldozer | Niveleuse |
| GPS | 1,0 cm | 1,0 cm |
| Laser | 0,7 cm | 0,7 cm |
| Pente transversale (dévers) | 0,6 % | 0,3 % |
| Tracker | 0,5 cm | 0,5 cm |
| Décalage latéral | --- | 2,0 cm |
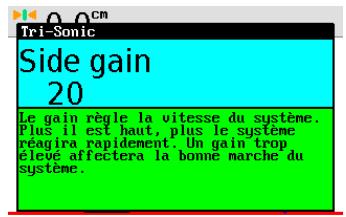
Gain
Il s'agit de la modulation des vitesses du système hydraulique pour chacun des capteurs.
Pour entrer dans les Gains, sélectionnez le bouton en bas à gauche ou en bas à droite pour accéder aux capteurs disponibles. Sélectionnez le capteur approprié puis la touche ou F4 (suivant qu'il s'agit du côté gauche ou droit) pour entrer dans le menu Réglage.
Le calibrage hydraulique automatique calcule les valeurs de gain optimales. Il est recommandé de ne pas changer ces valeurs.
Élevation :
Presse le bouton Test pour régler la valeur de façon qu'elle corresponde aux distances indiquées ci-dessous. Exemple : la lame doit bouger de 13 cm en 2 secondes pour le GPS.
| Capteur | Bulldozer | Niveleuse |
| Laser / Ultrasons / Tri-Sonic / GPS | 13 cm | 13 cm |
| Tracker | 7 cm | 7 cm |
Second laser pour le dévers :
Il doit être mesuré à 1,5 mètre du centre de la lame. Pressez le bouton Test pour régler la valeur de façon qu'elle corresponde aux distances indiquées ci-dessous. Exemple : la lame doit bouger de 8 cm en 2 secondes pour un capteur laser commandant l'inclinaison.
Laser:8cm.
Capteur de dévers en 2D et en 3D :
Il doit être mesuré à 1,5 mètre du centre de la lame. Pressez le bouton Test pour régler la valeur de façon qu'elle corresponde aux distances indiquées ci-dessous. Par exemple, la lame doit bouger de 8 cm en 2 secondes pour un dévers 3D sur le bulldozer.
| Capteur | Bulldozer | Niveleuse |
| Dévers en 2D et en 3D | 8 cm | 14 cm |
Décalage fatal (niveleuse uniquement) :
Entrez dans le menu de réglage du Tri-Sonic ou de l'altitude 3D. Pressez le bouton Test pour régler la valeur de façon qu'elle corresponde aux distances indiquées ci-dessous.
Décalage latéral 2D et 3D : 13 cm.
2.9
Entrez dans l'assistant de calibrage de capteur
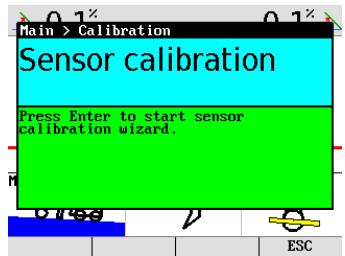
Assistant de calibrage de capteur
Afin de maintenir le bon calibrage des capteurs, l'assistant de calibrage de capteur doit être lancé périodiquement en raison de l'usure de la lame. Il doit aussi être exécuté lorsqu'un élément d'usure ou un pneu est remplacé sur une niveleuse, la pente longitudinale de la machine s'en trouvant affectée.
Pour réaliser cette opération, entrez dans l'assistant de calibrage : Menu -> Calibrage -> Calibrage du capteur
et suivez les instructions fournies sur l'écran.
Calibrage du capteur, étape 1
Sélectionnez le calibrage du capteur. Suivez les instructions fournies sur l'écran pour calibrer chacun des capteurs. L'exemple suivant concerne les niveleuses, mais le calibrage d'un capteur de bulldozer est similaire.
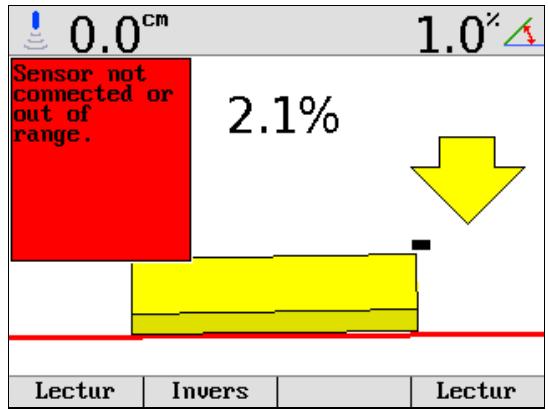
Écran d'avertissement
Un écran d'avertissement est présenté si un capteur n'est pas installé ou connecté.
Calibrage de capteur, étape 2
Garez la machine sur une surface plane, dure et horizontale, de préférence une route asphaltée ou toute autre surface semblable. Les déplacements de la machine s'en trouveront grandement facilités. Si la machine est déjà alignée correctement et est prête à être calibrée, sautez cette étape en pressant "Sauter" (F2). Sélectionnez "Suivant" pour démarrer le processus. Park machine on a flat, hard and level surface. Back Skip Next
Calibrage de capteur, étape 3
Redressez les roues avant et l'articulation de la machine. Cela assure des valeurs correctes pour le calibrage du capteur de pente longitudinale.
Sélectionnez "Suivant" lorsque c'est fait.

Calibrage de capteur, étape 4
Centrez la barre de liaison de la machine. Elle doit être régée en position centrée pour un calibrage correct du dévers.
Sélectionnez "Suivant" lorsque c'est fait.

Back
Skip
Next
Calibrage de capteur, étape 5
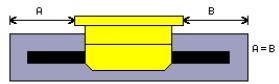
Centrez le décalage latéral de la lame, de façon à garantir que la distance de la base de la machine à la pointe de la lame est identique des deux côtés. C'est important pour les mesures de l'étape suivante.
Sélectionnez "Suivant" lorsque c'est fait.
BackSkip Next
Calibrage de capteur, étape 6
Faites pivoter la lame de façon que la distance entre la rotule et chacune de ses extrémités soit la même.
La parfaite perpendicularité entre la lame et l'axe longitudinal de la machine est ainsi garantie.
C'est important pour le calibrage correct du capteur de rotation. Sélectionnez "Suivant" lorsque c'est fait.

BackSkip Next
Calibrage de capteur, étape 7
Marquez les positions des roues sur le sol et placez la lame en douceur sur des blocs ou toute autre référence solide, vous assurant ainsi que la lame n'a pas pivoté et que le décalage latéral n'a subi aucun changement. Sélectionnez "Suivant" lorsque c'est fait.
Calibrage de capteur, étape 8
Le capteur de rotation procédera automatiquement au calibrage tout en recueillant des données de pente (longitudinale et transversale). Sélectionnez "Suivant" lorsque c'est fait.
Calibrage de capteur, étape 9
Faites faire un demi-tour à la machine et placez la lame en douceur sur les mêmes blocs ou la même référence que tout à l'heure, vous assurant ainsi que la lame n'a pas pivoté et que le décalage latéral n'a pas changé. Alignez les roues en utilisant les marques réalisées à l'étape précédente. C'est important pour la mesure correcte des valeurs de pente (longitudinale et transversale).
Sélectionnez "Suivant" lorsque c'est fait.
Calibrage de capteur, étape 10
Les capteurs de pente (longitudinale et transversale) vont être calibrés automatiquement.
Sélectionnez "Suivant" lorsque c'est fait.
Calibrage de capteur, étape 11
Le module de calibrage est à présent achevé.
Enregistrez les valeurs calibrées et quittez l'assistant en pressant "Enregistrer".
Pour quitter l'assistant sans enregistrer, pressez "Quitter".
Configuration sur une nivellesse
Configuration sur les machines
a) Panneau de commande du MCP1300, 764836 b) Berceau MMB1300, 764910 c) Multi-interrupteur externe, 764850 d) Capteur de dévers, 767439 e) Capteur de rotation, 767435 f) Récepteur laser, 760862 g) Mât électrique MPM700 / mât manuel, 760863/764847 h) Tracker ultrasons, 764031 i) Boîtier de jonction MJB1301 pour niveuse, 767438 j) Vanne hydraulique k) Batterie de la machine
Configuration sur un bulldozer
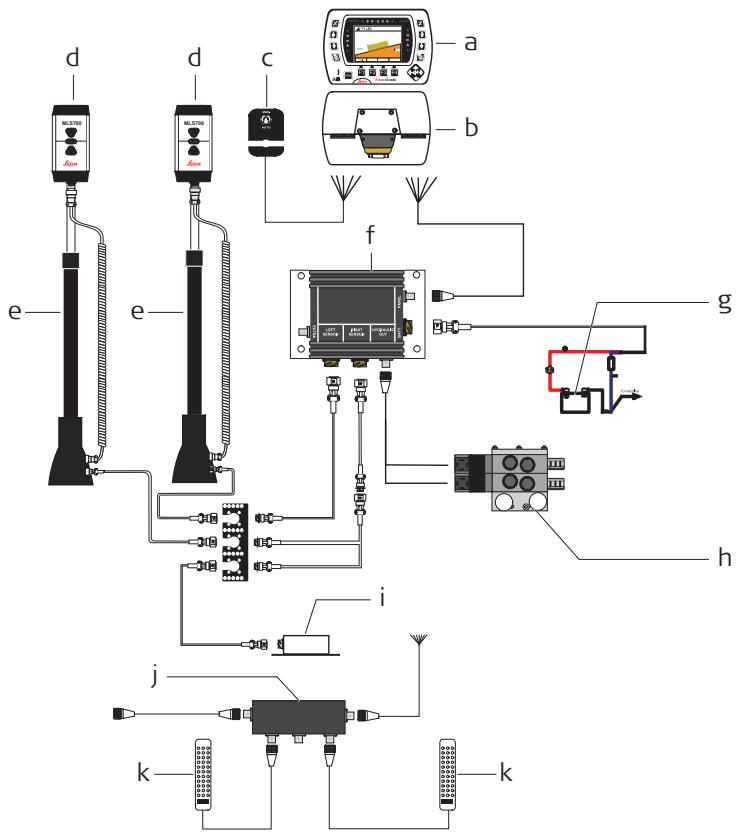
a) Panneau de commande du MCP1300, 764836 b) Berceau MMB1300, 764910 c) Interrupteur externe pour bulldozer, 764849 d) Récepteur laser, 760862 e) Matélectrique MPM700 / mat manuel, 760863/764847 f) Boîtier de jonction MJB1300 pour bulldozer, 767437 g) Batterie de la machine h) Vanne hydraulique i) Couteau de dévers, 767439 ou capteur SP14 782749 j) Boîtier de jonction distant, 764856 k) Affichage distant, 764841
| 3 | Entretien et transport |
| 3.1 | Remarques générales |
| Informations générales | L'entretien du système ne requiert qu'un minimum de temps. Les composants électroniques sont tous logés dans des boîtiers robustes qui les protègent contre tout dommage d'ordre mécanique. |
| Contrôles périodiques | Si un composant du MCP1300 subit un chic important, assurez-vous de son bon fonction-nement avant de reprendre le travail avec le système. |
| 3.2 | Transport |
| Transport sur le terrain | Lors du transport du matériel sur le terrain, assurez-vous toujours de transporter l'équipem-ent dans son coffret de transport d'origine. |
| Transport dans un véchicule automobile | Ne transportez jamais l'équipement dans un vehicule sans l'installer au préalable dans son coffret, il pourrait sinon être endommagé par des chocs ou des vibrations. Rangez-le toujours dans son étui avant le transport et voirlez à bien caler ce dernier. |
| Expédition | Utilisez l'emballage d'origine de Leica Geosystems, le coffret de transport et le carton d'expédition ou équivalent pour tout transport par train, avion ou bateau. Il sera ainsi protégé des chocs et des vibrations. |
| 3.3 | Stockage |
| Produit | Respectez les valeurs limites de température de stockage de l'équipement, particulièrement en été, s'il se trouve dans un vehicule. Reportez-vous aux caractéristiques techniques pour des informations relatives aux limites de température. |
Produit
- Enlevez la poussière en soufflant dessus.
- Utilisez un chiffon propre et doux, sans peluche, pour le nettoyage. Au besoin, imbibez légèrement le chiffon d'eau ou d'alcool pur. N'utilisez pas d'autres liquides qui pourraient attaquer les composants en polymère.
Câbles et connecteurs
Les connecteurs doivent être propres et secs. Soufflez sur les connecteurs pour déloger toute poussière pouvant s'y trouver.
Éléments embués
Séchez l'équipement à une température maximale de 40°C / 108°F et nettoyez-le. Ne rangez aucun élément tant qu'il n'est pas totalement sec.
4.1 Informations générales
Description Les instructions suivantes doivent permettre au responsable du produit et à son utilisateur effectif de prévoir et d'éviter les risques inhérents à l'utilisation du matériel.
Le responsable du produit doit s'assurer que tous les utilisateurs comprennent ces consignes et les respectent.
Utilisation autorisée
- Détermination de la position de la lame d'un bulldozer / d'une niveleuse ou du godet d'une pelle.
- Calcul de la distance entre la lame / le godet et un modèle de référence (surface, ligne ou point).
- Réglage automatique du système hydraulique d'un bulldozer ou d'une niveuse pour amener sa lame au contact du modèle de référence.
Utilisation à proscrire
- Utilisation de l'instrument sans instruction préalable.
- Utilisation en dehors des limites prévues.
- Désactivation des systèmes de sécurité.
- Suppression des messages d'avertissement de risque.
- Ouverture de l'équipement à l'aide d'outils, par exemple un tournevis, interdite sauf mention expresse pour certaines fonctions.
- Modification ou conversion de l'équipement.
- Utilisation de l'équipement après son détournement.
- Utilisation de produits endommagés ou présentant des défauts évidents.

Avertissement
- Utilisation avec des accessoires d'autres fabricants sans autorisation expresse préalable de Leica Geosystems.
- Non-respect des consignes de sécurité sur le lieu de travail en cas de travaux routiers, par exemple.
- Commande de machines, d'objets en mouvement ou application de contrôle similaire sans installations de contrôle et de sécurité supplémentaires.

Avertissement
Une utilisation non conforme peut entraîner des blessures, des dysfonctionnements et des dommages matériels.
Il incombe au responsable de l'équipement d'informer l'utilisateur des risques encourus et des moyens de prévention à sa disposition.
L'équipment ne doit pas être utilisé tant qu'une formation n'a pas été dispensée à l'opérateur.
4.3
Toute modification non autorisée d'un engin de génie civil par le montage ou l'installation du produit peut en ALTERER le fonctionnement et la sécurité.
Mesure préventive
Observez les instructions fournies par le fabricant de l'engin. Si aucune instruction appropriée n'est disponible, renseignez-vous auprès du fabricant de l'engin avant le montage ou l'installation du produit.
Limites d'utilisation
L'équipement est conçu pour fonctionner dans des environnements habitables en permanence et ne peut être utilisé dans des milieux agressifs ou susceptibles de provoquer des explosions.

Danger
Les autorités locales et des experts en matière de sécurité sont à consulter par le responsable de l'équipement avant tout travail dans des zones à risque, à proximité d'installations électriques ou dans tout autre cas similaire.
| 4.4 | Responsabilités |
| Fabricant du produit | Leica Geosystems AG, ci-après dénommé Leica Geosystems, est responsable de la fourniture du produit, incluant les notices techniques et les accessoires d'origine, en parfait état de fonctionnement. |
| Fabricants d'accessoires de marques autres que Leica Geosystems | Les fabricants d'accessoires de marques autres que Leica Geosystems faisant partie de l'équipement sont responsables de l'élaboration, de la mise en place et de la diffusion des concepts de sécurité relatifs à leurs produits et sont également responsables de l'efficacité de ces concepts en combinaison avec le matériel Leica Geosystems. |
| Personne en charge de l'équipement | La personne en charge de l'équipement se doit : • de comprendre les consignes de sécurité figurant sur le produit ainsi que les instructions du manuel d'utilisation • d'être familiarisée avec la réglementation locally en vigueur en matière de sécurité et de prévention des accidents • d'informer Leica Geosystems sans délais si l'équipement et l'application présente des défauts de sécurité. |
| Avertissement | Le responsable du produit doit s'assurer que l'équipement est utilisé conformément aux instructions. Cette personne est également responsable de la formation du personnel utilisant ce matériel et de la sécurité de l'équipement utilisé. |
| Avertissement | Toute modification non autorisée d'un engin par le montage du produit peut en ALTERER le fonctionnement et la sécurité. Mesure préventive Observe les instructions fournies par le fabricant de l'engin. Si aucune instruction appropriée n'est disponible, renseignez-vous auprès du fabricant de l'engin avant le montage du produit. |
| Avertissement | L'installation de ce produit sur des engins de génie civil est réservée à des spécialistes qualifiés ayant reçu une formation appropriée. |




Risques liés à l'utilisation
Seuls les ateliers agrés par Leica Geosystems sont autorisés à réparer ces produits.
L'installation du produit à proximité d'éléments de l'engin en mouvement peut endommager le produit.
Mesure préventive
Éloignez-vous le plus possible des éléments en mouvement et définissez une zone d’installation sûre.
Attention aux erreurs de pilotage si l'engin est défectueux à la suite d'une collision, d'autres endommagements ou de transformations de l'engin.
Mesure préventive
Effectuer régulièrement les mesures de contrôle et réglages sur l'engin tels que définis dans le manuel d'utilisation. Vérifier la construction et les niveaux au moyen d'outils appropriés, par exemple avec un niveau à bulle, un tachéomètre, avant et après des mesures importantes.
Pendant le pilotage de l'engin et la navigation, des accidents peuvent se produire : a) si l'opérateur ne fait pas attention à l'environnement (personnes, tranches, circulation, etc.), ou b) en cas de dysfonctionnements (... d'un élément du système, interférence, etc).
Mesure préventive
L'exploitant doit s'assurer que l'engin est mis en œuvre, piloté et surveillé par un utilisateur qualifié (par ex. conducteur). L'utilisateur doit être capable d'appliquer des mesures de secours, par exemple un arrêt d'urgence.

Avertissement
L'absence d'instruction ou une instruction incomplète peut donner lieu à une utilisation incorrecte ou non conforme de l'équipement, dont peuvent résulter des accidents aux conséquences graves sur les plans humain, matériel, financier et écologique.
Mesure préventive
Tous les utilisateurs doivent observer les consignes de sécurité définies par le fabricant ainsi que les instructions du responsable de l'équipement.

Attention
Prenez garde aux mesures erronées prises si le matériel est défectueux, s'il a été utilisé de manière non conforme, s'il a subi une chute, une modification, un long stockage ou un transport.
Mesure préventive
Exécutez périodiquement des mesures de test et effectuez les réglages de terrain indiqués dans le mode d'emploi, en particulier après une utilisation non conforme de l'instrument ou avant et après des travaux importants.

Danger
En raison du risque d'électrocution, il est très dangereux d'utiliser des cannes à prismes et des rallonges à proximité d'installations électriques telles que des câbles électriques ou des lignes de chemin de fer électrifiées.
Mesure préventive
Tenez-vous à distance des installations électriques. S'il est indispensable de travailler dans cet environnement, prenez d'abord contact avec les autorités responsables de la sécurité des installations électriques et suivez leurs instructions.





Lors d'applications dynamiques, il existe un risque d'accident si l'utilisateur ne prête pas une attention suffisante à son environnement (obstacles, fossés, circulation).
Mesure préventive
Le responsable du produit doit signaler aux utilisateurs tous les dangers existants.

Des mesures de sécurité inadaptées sur le lieu de travail peuvent conduire à des situations dangereuses, par exemple sur un chantier de construction, dans des installations industrielles ou relativement à la circulation routière.
Mesure préventive
Assurez-vous toujours que les mesures de sécurité ont été prises sur le lieu de travail. Observez les règlements régissant la prévention des accidents de même que le code de la route.

Le matériel peut être endommagé ou des personnes peuvent être blessées si les accessoires utilisés avec l'équipement sont incorrectement adaptés et que ce dernier subit des chocs mécaniques (tels que des effets de souffle ou des chutes).
Mesure préventive
Assurez-vous que les accessoires (par exemple le trépied, l'embase, les câbles de connexion) sont correctement adaptés, montés, fixés et verrouillés lors de l'installation du produit. Évitez d'exposer l'équipement à des chocs mécaniques.

Si la mise au rebut de l'équipement ne s'effectue pas dans les règles, les conséquences suivantes peuvent s'ensuivre :
- La combustion d'éléments en polymère produit un dégagement de gaz toxiques nocifs pour la santé.
- Il existe un risque d'explosion des batteries si elles sont endommagées ou exposées à de fortes températures : elles peuvent alors provoquer des brûlures, des intoxications, une corrosion ou libérer des substances polluantes.
- En vous débarrassant de l'équipement de manière irresponsable, vous pouze permettre à des personnes non habilitées de s'en servir en infraction avec les règlements en vigueur; elles courent ainsi, de même que des tiers, le risque de se blesser gravement et exposent l'environnement à un danger de libération de substances polluantes.
Mesure préventive
Ne vous débarrasssez pas du produit en le jetant avec les ordures ménagères. Débarrasssez-vous de l'équipement de manière appropriée et dans le respect des règlements en vigueur dans votre pays. Veillez toujours à empêcher l'accès au matériel à des personnes non habilitées.
Vous pouvez recevoir des informations spécifiques au produit et sur la gestion des déchets de la part du distributeur Leica Geosystems.


Compatibilité électromagnétique CEM
La compatibilité électromagnétique exprime la capacité de l'équipement à fonctionner normalement dans un environnement où rayonnement électromagnétique et décharges électrostatiques sont présents et sans perturber le fonctionnement d'autres équipements.
Un rayonnement électromagnétique peut perturber le fonctionnement d'autres équipements.
Bien que le matériel réponde rigoureusement aux normes et directives en vigueur, Leica Geosystems ne peut entièrement exclure la possibilité d'une éventuelle interférence avec d'autres instruments.
Des perturbations risquent d'être générées pour d'autres équipements si le matériel est utilisé en combinaison avec des accessoires d'autres fabricants tels que des ordinateurs de terrain, des PC, des talkies-walkies, des câbles spéciaux ou des batteries externes.
Mesure préventive
N'utilisez que l'équipement et les accessoires recommandés par Leica Geosystems. Ils satisfont aux exigences strictes stipulées par les normes et les directives lorsqu'ils sont utilisés en combinaison avec le produit. En cas d'utilisation d'ordinateurs et de talkies-walkies, prétez attention aux informations relatives à la compatibilité électromagnétique fournies par le constructeur.

Attention
Les perturbations dues au rayonnement électromagnétique peuvent entraîner des mesures erronées.
Bien que le produit satisfasse aux normes et règles strictes en vigueur en la matière, Leica Geosystems ne peut totalement exclure la possibilité que l'équipement puisse être perturbé par des rayonnements électromagnétiques très intenses, par exemple à proximité d'émetteurs radio, de talkies-walkies ou de générateurs dieselis.
Mesure préventive
Contrôlez la validité des résultats obtenus dans ces conditions.

Avertissement
Si l'équipement est utilisé avec des câbles de connexion dont une seule extrémité est raccordée (des câbles d'alimentation extérieure, d'interface, etc.), le rayonnement électromagnétique peut dépasser les tolérances fixées et perturber le bon fonctionnement d'autres appareils.
Mesure préventive
Les câbles de connexion (de l'équipement à la batterie externe, à l'ordinateur, etc.) doivent être raccordés à leurs deux extrémités durant l'utilisation du matériel.
Étiquetage du panneau de commande du MCP1300

TYPE: MCP1300
Power: 12-24V DC, 6A max.
Leica Geosystems AG
CH-9435 Heerbrugg
Fabriqué au Danemark
Étiquetage du berceau MMB1300

TYPE: MMB1300
Power: 12-24V DC, 6A max.
Leica Geosystems AG
CH-9435 Heerbrugg
Fabriqué au Danemark
Étiquetage du boîtier de jonction MJB1300
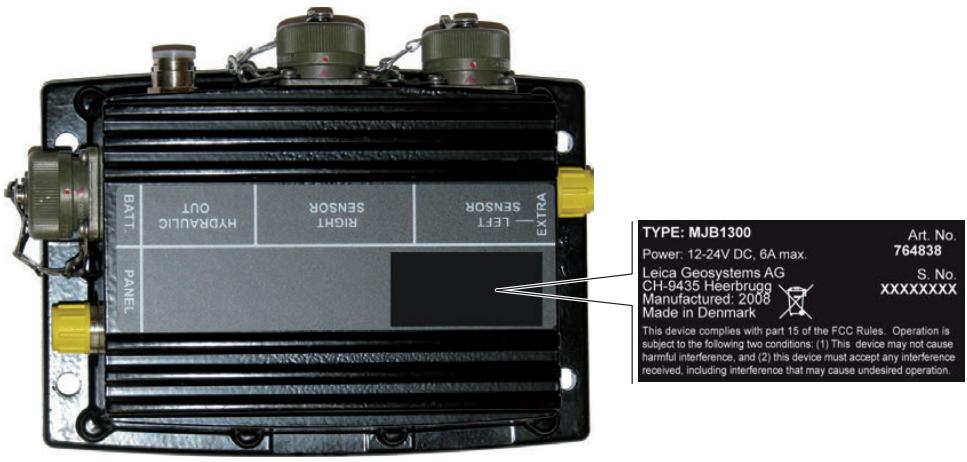
Étiquetage du boîtier de jonction MJB1301

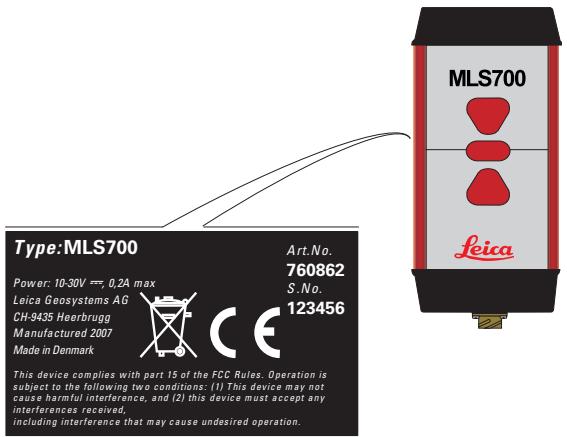
Étiquetage du récepteur laser MLS700
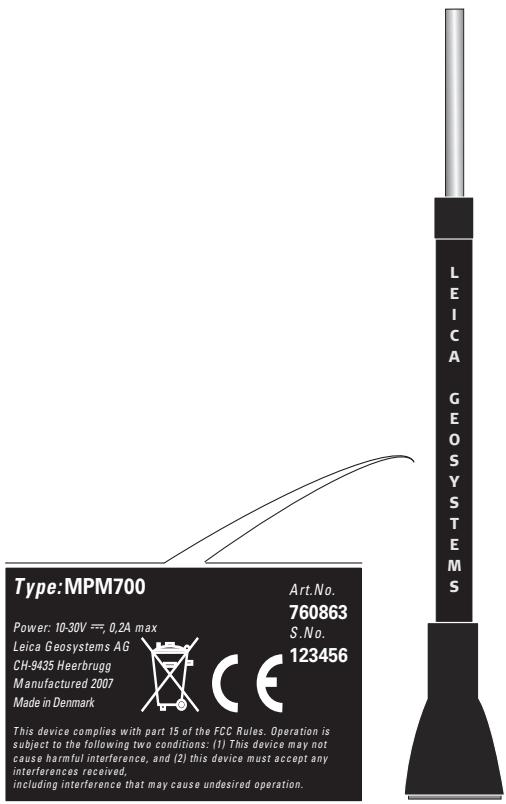

Type: MUS1300
Power: 11-30V, 0.5A max
Leica Geosystems AG
CH-9435 Heerbrugg
Fabriqué en Suisse
Patents: U. S.
5.327.345 4.733.355

Étiquetage du capteur SP14 SP
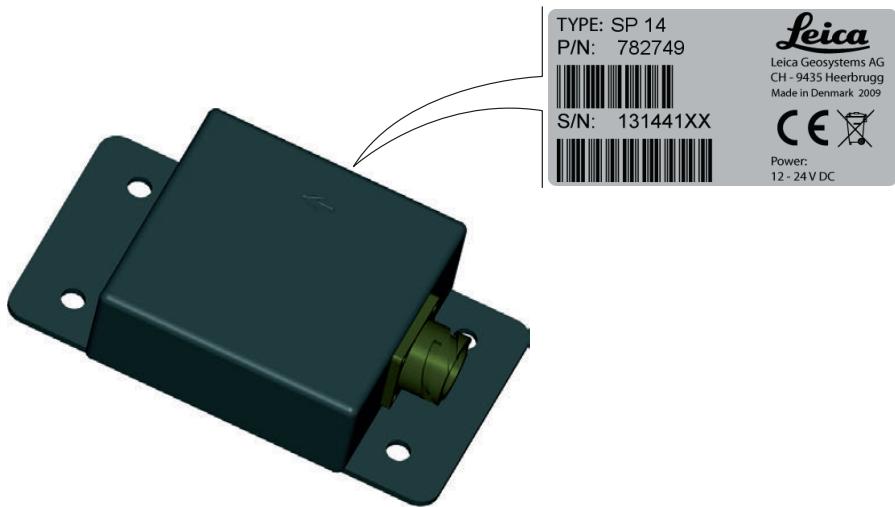
TYPE: SP 14
P/N: 782749
S/N: 131441XX
Leica Geosystems AG CH-9435 Heerbrugg
Caractéristiques techniques MCP1300
Le MCP1300 a été créé pour être branché sur des alimentations standard de véhicules à 24 V CC. Vérifiez à bien contrôler les connexions et la polarité.
| Paramètre | Spécification |
| Alimentation | Le MCP1300 est alimenté par le berceau MMB1300 |
| Consommation électrique | < 200 mA |
| Affichage graphique | Ecran couleur LCD de 10 cm (4") |
| Clavier | 18 touches, avec rétroéclairage |
| Interfaces | Infrarouge |
| Dimensions | 12,5 x 18,0 x 3,7 cm |
| Poids | 0,5 kg |
Berceau MMB1300
| Paramètre | Spécification |
| Plage de tension | 24 V CC (nom.) |
| Dimensions | 12,4 x 15,2 x 4,4 cm |
| Poids | 0,320 kg |
| Communication (infrarouge) | 1 Mbit |
| Sortie | 2 x RS232, RX, TX, 12V/2Amp, GND, 2 x MikroCAN et J1939 |
Boîtiers de junction MJB1300 et MJB1301
| Paramètre | Spécification |
| Plage de tension | 24 V CC (nom.)Tension nominale de 24 V CC,plage de 10 à 30 V< 0,5 A sans vanne ni capteur connecté |
| Consommation électrique | |
| Dimensions | MJB1300 : 13,8 x 18,3 x 6,4cmMJB1301 : 14,5 x 18,3 x 6,4cm |
| Poids | 2 kg |
| Paramètres de sortie hydraulique | Vannes proportionnelles, marche/arrêt etDanfoss |
| Interfaces MJB1300 | Batterie MILBerceau M12Vannes M12CAN A MILCAN B MILCAN A M12 |
| Interfaces MJB1301 | Batterie MILBerceau M12Vannes 2x M12CAN A 2x MILCAN B 2x MILCAN A M12Aux M12 |
| Fonction spéciale du MJB1301 | Capteur de pente longitudinalité intégré |
MUS1300 Tri-Sonic
| Paramètre | Spécification |
| Dimensions | 17,2 x 18,3 x 14 cm |
| Poids | 2,5 kg |
| Précision | ±0,125 cm @ 30,5 cm |
| Tension en entrée | de 11 à 30 V CC |
| Consommation électrique | 0,5 A max. |
Mât électrique MPM700
| Paramètre | Spécification |
| Plage de tension | 24 V CC (nom.)Tension nominale de 24 V CC,plage de 10 à 30 V |
| Consommation électricque | < 2,5 A |
| Hauteur du mât (déployé) | 2,9 m |
| Hauteur du mât (rétracté) | 1,7 m |
| Course du mât | 1,2 m |
| Vitesse de déploiement du mât | 85 mm par seconde |
| Répétabilité des positions | ±1 mm |
| Poids | 30 kg |
Māt manuel
| Paramètre | Spécification |
| Hauteur (déployé) | 3,257 m |
| Hauteur (rétracté) | 1,857 m |
| Course | 1,4 m |
| Echelle | Mètres/pouces |
| Poids | 14 kg |
Récepteur laser MLS700
| Paramètre | Spécification |
| Plage de tension | 24 V CC (nom.)Tension nominale de 24 V CC,plage de 11 à 30 V< 500 mA |
| Consommation électrique | |
| Dimensions | 28 x 12 x 7,2 cm (sans console de montage) |
| Poids | 2,5 kg (pince incluse) |
| Angle de détention | 360° |
| Plage de détention en hauteur | 190 mm |
| Plage de travail | Rayon de 300 m |
| Plage de réception du capteur | 18,5 cm |
| Type de laser requis | Laser rotatif (diodes laser infrarouges ouHeNe, visibles et invisibles) |
| Affichage à impulsions | 5 impulsions par seconde |
Capteur de dévers MSS1300
| Paramètre | Spécification |
| Plage de tension | 24 V CC (nom.)Tension nominale de 24 V CC,plage de 10 à 30 V< 0,25 A |
| Consommation électrique | |
| Dimensions | 15,3 x 8,7 x 3,9 cm |
| Poids | 0,855 kg |
| Précision du dévers | ±0,1 % dans une plage de ±25° |
| Plage de travail | ±80° |
| Interfaces | CAN MIL |
Capeur SP14
| Paramètre | Spécification |
| Plage de tension | 24 V CC (nom.)Tension nominale de 24 V CC,plage de 10 à 30 V |
| Consommation électrique | < 0,25 A |
| Dimensions | 15,3 x 8,7 x 3,9 cm |
| Poids | 0,855 kg |
| Précision du dévers | ±0,1 % dans une plage de ±25° |
| Plage de travail | ±80° |
| Interfaces | CAN MIL |
Capteur de rotation MRS1300
| Paramètre | Spécification |
| Plage de tension | 24 V CC (nom.)Tension nominale de 24 V CC,plage de 10 à 30 V |
| Consommation électrique | < 0,25 A |
| Dimensions | Ø16,0 x 22,6 x 5,9 cm |
| Poids | 1,56 kg |
| Plage de travail | 0-360° |
Spécifications environnementales
Température
| Type | Température d'utilisation [°C] | Température de stockage [°C] |
| Panneau de commande du MCP1300 | de -20 à +60 | de -30 à +70 |
| Berceau MMB1300 | de -20 à +60 | de -30 à +70 |
| Boîtier de jonction MJB1301 | de -20 à +60 | de -30 à +70 |
| Boîtier de jonction MJB1300 | de -20 à +60 | de -30 à +70 |
| Mât électrique MPM700 | de -20 à +60 | de -30 à +70 |
| Récepteur laser MLS700 | de -20 à +60 | de -30 à +70 |
| MUS1300 Tri-Sonic | de -20 à +65 | de -40 à +85 |
| Capteur SP SP14 | de -20 à +60 | de -40 à +80 |
| Capteur de dévers MSS1300 | de -20 à +60 | de -40 à +80 |
| Capteur de rotation MRS1300 | de -20 à +60 | de -40 à +80 |
Protection contre l'eau, la poussière et le sable
| Type | Protection |
| Panneau de commande du MCP1300 | IP67 |
| Berceau MMB1300 | IP54 |
| Boîtier de jonction MJB1301 | IP67 |
| Boîtier de jonction MJB1300 | IP67 |
| Mât électrique MPM700 | IP45 |
| Récepteur laser MLS700 | IP68 |
| MUS1300 Tri-Sonic | IP54 |
| Capeur SP SP14 | IP68 |
| Capeur de dévers MSS1300 | IP68 |
| Capeur de rotation MRS1300 | IP67 |
Humidité
| Type | Protection |
| Panneau de commande du MCP1300 | 95 % au maximum, sans condensation Les effets de la condensation sont à neutraliser par un séchage complet périodique de l'instrument. |
5.2
Conformité avec la réglementation nationale
Conformité avec la réglementation nationale

Leica Geosystems AG déclare par la présente que le panneau de commande du MCP1300 est conforme aux exigences essentielles et autres dispositions applicables des directives européennes. Pour la déclaration de conformité, veuillez contacter le distributeur Leica Geosystems.
| 6 | Garantie internationale limitée, contrat de licence de logiciel |
| Garantie internationale limitée | Ce produit est régi par les clauses de la Garantie internationale limitée que vous poubez télécharger depuis le site Internet de Leica Geosystems, http://www.leica-geosystems.com/internationalwarranty, ou demander auprès du distributeur local de produits Leica Geosystems. |
| La présente garantie est exclusive et remplace toutes garanties, dispositions expresses ou tacites de fait ou par application de loi, instructions légales ou autre, y compris les garanties, la valeur commerciale, l'adéquation du produit à un usage spécifique, les attestations de qualité et de non-violation, toutes expressément exclues par la présente. | |
| Contrat de licence de logiciel | Le présente produit intègre des logiciels préinstallés, qui vous sont livrés sur un support de données ou que vous pouze télécharger en ligne avec l'autorisation préalable de Leica Geosystems. De tels logiciels sont protégés par leur copyright comme par d'autres dispositions législatives, leur utilisation étant définie et règie par le contrat de licence de logiciel de Leica Geosystems couvrant des aspects tels que l'étendue de la licence, la garantie, les droits de propriété intellectuelle, les responsabilités et leurs limitations, l'exclusion d'autres assurances, la législation applicable ou la juridiction compétente sans se limiter à ceux-ci. Veuillez vous assurer de respecter pleinement et en permanence les modalités du contrat de licence de logiciel de Leica Geosystems. |
| Cette convention est fournie avec tous les produits et peut aussi être consultée et téléchargeée sur le site Internet de Leica Geosystems à l'adresse http://www.leica-geosystems.com/swlicense ou obtenue auprès du distributeur local de produits Leica Geosystems. |
Vous ne devez pas installer ou utiliser de logiciel avant d'avoir lu et accepté les modalités du contrat de licence de Leica Geosystems. L'installation ou l'utilisation d'un logiciel ou de l'un de ses composants équivaut à l'acceptation pleine et entière de toutes les modalités du contrat de licence. Si vous êtes en désaccord avec certaines modalités du contrat de licence ou avec sa totalité, vous ne pouvez ni télécharger, ni installer ni utiliser le logiciel et il vous faut returner le logiciel non utilisé avec la documentation l'accompagnant et la facture correspondante au distributeur auprès duquel l'acquisition du produit s'est effectuée et ce, dans un délai de dix (10) jours après l'achat pour obtenir un remboursement complet.
Total Quality Management: Notre engagement pour la satisfaction totale des clients.

ISO 9001/ISO 14001
Leica Geosystems AG, Heerbrugg, Suisse, a été certifiée comme étant dotée d'un système de qualité satisfaisant aux exigences des Normes Internationales relatives à la Gestion de la Qualité et aux Systèmes de Qualité (norme ISO 9001) et aux Systèmes de Gestion de l'Environnement (norme ISO 14001).
Vous pouvez obtenir de plus amples informations concernant notre programme TQM auprès du représentant Leica Geosystems le plus proche.
- Manuel de l'utilisateur
- Identification du produit
- Symboles
- Validité de ce manuel
- Entretien et transport 60
- Consignes de sécurité 62
- Caractéristiques techniques 80
- Garantie internationale limitée, contrat de licence de logiciel 88
- Panneau de commande du MCP1300
- Avertissement
- Mesure préventive
- Touches
- Démarrer le système
- Insérez le panneau de commande dans le berceau.
- Mettez le panneau de commande sous tension.
- 1.3
- Touches de configuration de capteur
- Contrôles avant la mise sous tension
- 2.1.1
- Meilleures performances avec systèmes de niveleuse
- Orientation du mét
- 2.1.3
- Désactivation de l'amortissement de la lame de niveleuse
- Pas de rotation de lame sur le bulldozer
- 2.2
- Sélection de la source d'entrée
- Définir une cote de référence
- Détection automatique du faisceau laser
- Utilisation du capteur tri-sonic MUS1300
- Installation et mise en service du capteur tri-sonic
- Détection de fil et de rebord
- Utilisation normale
- Utilisation pour des rebords
- 2.4.2
- Utilisation avec le capteur tri-sonic
- Référence au sol
- Mise en place au-dessus d'une corniche de caniveau
- Mise en place au-dessus d'une corniche
- Au-dessus de toute référence
- Réglage et utilisation
- Niveau 1
- Niveau 2
- Utiliser le capteur laser
- Capteur laser et mât manuel
- Capteur laser et mâts électriques MPM700
- Capteur SP14
- Activer le capteur SP14
- 2.7
- Capteurs 3D
- 2.8
- Définir les valeurs de gain et de bande morte
- Bande morte
- Gain
- Élevation :
- Second laser pour le dévers :
- Capteur de dévers en 2D et en 3D :
- Décalage fatal (niveleuse uniquement) :
- 2.9
- Assistant de calibrage de capteur
- Écran d'avertissement
- Calibrage de capteur, étape 2
- Configuration sur un bulldozer
- Produit
- Câbles et connecteurs
- Éléments embués
- Informations générales
- Utilisation autorisée
- Utilisation à proscrire
- 4.3
- Limites d'utilisation
- Danger
- Risques liés à l'utilisation
- Attention
- Compatibilité électromagnétique CEM
- Type: MUS1300
- Étiquetage du capteur SP14 SP
- Caractéristiques techniques MCP1300
- Berceau MMB1300
- Boîtiers de junction MJB1300 et MJB1301
- Capteur de rotation MRS1300
- Spécifications environnementales
- Humidité
- 5.2
- Conformité avec la réglementation nationale
Marque : LEICA
Modèle : POWERGRADE 2D MCP1300
Catégorie : Instrument de mesure électronique