
FMD3200 - 海洋ナビゲーションシステム FURUNO - 無料のユーザーマニュアル
デバイスのマニュアルを無料で見つける FMD3200 FURUNO PDF形式.
| 製品タイプ | 海洋航行システム (ECDIS) |
| ブランド | フルノ |
| モデル | FMD3200 |
| ディスプレイ (標準) | 19インチカラーLCD、1280 × 1024ピクセル (SXGA)、輝度450 cd/m² |
| その他の互換ディスプレイ | MU-231 (23.1"), MU-270W (27")、Hatteland/North Inventモデル |
| コントロールユニット | EC-3000、CPU Intel Core i5/i3/Xeon搭載 |
| 電源 (ディスプレイ) | AC 100-230 V、0.5-0.4 A、単相、50/60 Hz |
| 電源 (コントロールユニット) | AC 100-115/220-230 V、3.0/1.5 A (CPUによる)、単相、50/60 Hz |
| 消費電力 (MU-190ディスプレイ) | 約60 W |
| 動作温度 | -15 °C ~ +55 °C |
| 相対湿度 | 95%以下 (+40 °C) |
| 保護等級 (MU-190ディスプレイ) | IP22 |
| 通信インターフェース | LAN 10/100/1000Base-T (8ポート)、USB、DVI-D、RS-485 など |
| 主な機能 | ECDIS表示 (S-57、ARCS、C-MAP)、航路計画・追跡、レーダー重畳、AIS、TT、アラーム、MOB など |
| カード記憶 | 内蔵SSD、DVD/USB読み取り |
| 日常メンテナンス | エアフィルターの6ヶ月ごとの清掃、ヒューズ交換、トラックボールの玉の清掃 |
| 安全 | 筐体を開けない (高電圧)、水にさらさない、認定ヒューズを使用 |
| 推奨予備部品 | エアフィルター、ヒューズ、交換用トラックボール |
| 修理可能性 | 認定フルノサービスセンターに依頼、コントロールユニット交換可能 |
| 重量 (MU-190ディスプレイ) | 約7 kg |
よくある質問 - FMD3200 FURUNO
ユーザーの質問 FMD3200 FURUNO
0 質問 この機器について。知っているものに答えるか、ご自身の質問をしてください。
この機器について新しい質問をする
デバイスの取扱説明書をダウンロード 海洋ナビゲーションシステム 無料でPDF形式で!マニュアルを見つける FMD3200 - FURUNO 電子デバイスをもとに戻しましょう。このページにはデバイスの使用に必要なすべての書類が掲載されています。 FMD3200 ブランド FURUNO.
使用説明書 FMD3200 FURUNO
ごの取挾説明書には本機を安全に使用くださいます。本機を使用する前に、ごの取挾説明書をよく説て、十分に理解たえ用で使用てだき。ま、ごらの書類はいても参照,Noと大切に保管し、使用方法がわからなたけたきにお説みかは。
·機器の修理·使用方法等に開るお問い合わせは、お買い上ごの販売店·代理店、最寄りの当社支店·常業所あてへ願いしま�。
允行
古野電氛株式会社
¥662-8580
兵庫県西宮市芦原町9番52号
本书の無断複写複製(は)は特定の
場合を除き、当社の權利侵害にらます。
Printed in Japan
· お問い合わせは
2021年12月
A版癸行
2025年7月
7日
C2版癸行
Pub.No.OMJ-44732-C2
- マーニュアル記載内容の一部、たは全部の軸載、複写は著作種者%=当社の許諾が必要です。無断軸載するとを固くお断りいたします。
製品の仕樣、らにマニア的内容は予告なく変更する这句话を - 画面可以表示着的内容是、沙斯はの設定和動作状態にとて異な請示。しぃがて、マニル内に揭載たるイロスは画面の表示と異な場合が請示。
- 旅客将使用本机的全部内容,包括但不限于行李、随车物品、随车杂货、随车物品的包装箱、随车物品的装卸工具、随车物品的装卸工具的使用、随车物品的装卸工具的使用、随车物品的装卸工具的使用、随车物品的装卸工具的使用、随车物品的装卸工具的使用、随车物品的装卸工具的使用、随车物品的装卸工具的使用、随车物品的装卸工具的使用、随车物品的装卸工具的使用、随车物品的装卸工具的使用、随车物品的装卸工具的使用、随车物品的装卸工具的使用
- お買い上ごの機器を広棄するときは、産業広棄物と地地方自治体の条例、または規則に従て处理てくだき。詳しぎは、各地方自治体に間い合わせてくだき。
- マニュアルに記載いたします。社名、製品名は、一般に各開発メ一カ一の登録商標、または商標です。
- 入斯専卜阿克塞専一は、当社の商標です。

安全にお使いんだくたに
[必素除守馀<下]
求使の人や他的人~の危害、財産の损害を未然に防止するた、以下のと必お守りくさ。表示内容を無視て誤了使方をしと生る危害及损害的程度を、本書は次の表示以区分し、説明しだいすの等十分に気をつてくさ。
警告
表示是「取拔也誤了场合、死亡は重傷を負的可能性が想定さる」内容です。
注意
此表示是「取拔也誤的场合、中程度はは輕傷の傷害、あは財産の損害を負可能性が想定さる」内容です。

「注意喚起」の内容

上」の内容

「強制」的内容
警告

力八一は絶対外さないと。
内部は高電圧が使用さていま�。高電圧に触ると感電する恐れのは。故障の场合はお買い上ご相談くさ。

機器內部に金屬や水、異物が入ったときは、ただちに配電盤の電源スイチを切ると。
火災、感電の原因くださいます。

発煙、発火のとは、速やかに配電盤の電源スイチを切るご。
火災、感電の原因にごら。必す、お買い上は先八連絡てくさ。

機器の上に液体の入った容器を置,Noいご。
火災や感電の原因くださいます。

匕一之は規定のものを使用すると。
規定外のもを使った場合、重大な事故や火災を引き起ご原因にibility。

警告

分解·改造是絕対一樣。
火災、感電、ケガの原因にibility。

濡了一手操作不也二。
感電の恐れのは示。

降雨、しけのときは水や波しぃきがかからないょうにするご。
火災、感電の原因にしらます。
警告犬儿
制御部には、下円のう警告ラルが貼てありま。警告ラルは絶対に、はがさないてだき。
。
。
。
。
。
WARNING
To avoid electrical shock, do not remove cover. No user-serviceable parts inside.
警告
感雷の恐い。
一巴斯曼以外の方はカ一を開け
て下き。内部には高圧部分数多か、万一わると危険です。
名称:警告栏(1)
型式: 86-003-1011-3
一卜番号:100-236-233-10
目次
はじてに xiv
Shstn. Xvii
1章 序文 1-1
1.1 1-1
1.2 制御部EC-3000 1-1
1.3 電源の才ノ/才フ 1-2
1.4 1-2
1.5 ECDIS操作部RCU-024 1-3
1.5.1 ECDIS操作部の説明 1-3
1.5.2 操作接点信号(才レーダフツトネス) 1-4
1.6 トラックボーリ操作部RCU-026 1-5
1.6.1 トラックボーリ操作部の説明 1-5
1.6.2 操作接点信号(才レーダフツトネス) 1-6
1.7 色調の選択 1-6
1.8 表示部の輝度調整、操作部バックライトの輝度調整 1-7
1.8.1 手動表示部の輝度を調整する 1-7
1.8.2 操作部バック现代农业の輝度を調整する 1-9
1.9 1-9
1.10 自船速度の入力 1-10
1.11 船首方位の入力 1-12
1.12 MOB 位置にマーケの投入 1-13
1.13 時刻形式の選択、現地時間の設定 1-14
1.14 表示画面のスケリーニンチットの撮り方 1-15
1.15 設定 一 1-15
1.16 一萨一F口F的管理 1-15
1.16.1 1-16
1.16.2 1-16
1.16.3 1-16
1.16.4 1-16
1.16.5 德力卜設定を呼出. 1-17
1.17 1-20
1.18分割画面 1-21
1.18.1 分割画面与全画面切口替之
1.18.2 使用の機械 1-21
1.18.3分割画面の使用特性 1-22
1.19 操作方卜 1-22
1.20 1-22
2章 操作の概要 2-1
2.1 ECDIS画面 2-1
2.1.4 2-11
2.1.5 自船機能木ク斯 2-12
2.1.6 請卜情報ボクス 2-13
2.1.7 重置/航海のルトクス 2-14
2.1.8 2-14
2.1.9 一木卜警告朴克
2.1.10 EBL、VRM 森克斯 2-14
2.1.11 北方位マーケ 2-15
2.1.12 メンテキストメニ.. 2-15
2.1.13 文字·数字の入力 2-16
2.2 操作王一卜の選択 2-18
2.3 ECDIS 10-15の選挙 2-19
2.4 デヤート縮尺の選択 2-19
2.5 表示王一卜の選択 2-21
2.6 力一ル位置ロクス 2-22
2.7 TM リセット機能 2-23
2.8 航行監視お願い航路計画モーツートのルト、eer一チヤト的操作 2-24
2.9 EBL 与 VRM 的使用方 ..... 2-24
2.9.1 EBL、VRMの表示/非表示 2-25
2.9.2 方位おはご距離の計測 2-25
2.9.3 方位基の選挙 2-25
2.9.4 メンテストム一用使用かEBL·VRM機能 2-26
2.9.5 計算方法の選挙 2-27
2.10 测地系 2-27
2.11.1 出航前の更新 2-29
2.11.2 ルートの作成と更新 2-29
2.11.3 監視するルト / フローチヤートの確認と準備 2-31
2.11.4 航法せんサの設定を確認する 2-34
2.11.5航行距離、總航行距離の值をリセットする 2-35
3章 トの管理 3-1
3.1 ENCチヤートのハリツクkeeのイスト一ル 3-2
3.2 ENC ライSENS、チヤートのインストーリル 3-3
3.2.1 ENC ライSenStをインストーリ. 3-3
3.2.2 ENC マヤームをインスト的认可 3-4
3.3 ARCS ライSENS、チヤートのインストーリ... 3-6
3.3.1 ARCS ライSenスをインストーリ. 3-6
3.3.2 ARCS パートをインズルする 3-8
3.4ENC、ARCS拉伊森斯を削除する 3-10
3.5 ENCチーパートの製造者情報を更新する 3-10
3.6 C-MAP バヤートをインスローする 3-11
3.6.1 eTokenを登録する 3-11
3.6.2 C-MAP パヤートのデーダル、ライ塞尔をインストールする 3-12
3.6.3 更新万欧元作成/注文/適用. 3-14
3.6.4 ライSenスのSten一夕スを確認する 3-16
3.7 C-MAP バーパットのデーダーメスを削除する 3-16
3.8 パーツのリストを書き出す 3-16
3.9 特定のライSEPENSLISTを書き出す 3-17
3.10 ENC ライSENS、ARCS ライSENSを表示する 3-17
3.11 ライSENスをバックアフする、復元する 3-18
3.12 ライSenスの有効期限を表示する 3-18
3.13 Iinsut-1/更新の履歷を表示する 3-19
3.14 トルの力ロ格 3-21
3.14.1 丁一卜塞尔を格ル一化する 3-23
3.14.2 バーパトルの状況を表示する 3-25
3.15 ヷヤトを開く 3-26
3.16 ト、トの更新状況レトを印刷する.. 3-26
3.16.1 バヤーツリストを印刷する 3-26
3.16.2 デヤートルの更新状況レトを印刷する 3-27
3.17 一卜を削除する 3-29
3.18ENCチーパーの発行元の注記を表示する 3-29
3.19 ヷート種類の表示 3-30
3.20ENCおよ[C-MAPチヤトの手動更新 3-30
3.20.1 新いチアト才総�はつを插入する 3-31
3.20.2公式チヤートの才総はクトをコ比一て、手動更新才総はクトとて 插入する 3-32
3.20.3 バーツ才総工に取消し線を追加する 3-33
3.20.4 バヤート才総工クトを削除する 3-33
3.20.5 既存のチアト才緱エク卜を編集する. 3-34
3.20.6 ト才総はクトのレビ庁一機能 3-34
3.20.7 3-35
3.21 マヤートに関連するデーダの同期を行う 3-35
3.21.1 本機と同期を行うトを選ご 3-36
3.21.2 同期狀態を確認する 3-37
3.21.3 手動更新機能と同期 3-38
3.22 SENC下一夕再变換. 3-39
3.23 Gate-1を使てチアトを管理する 3-39
3.23.1 トルの種類を選. 3-39
3.23.2 トをイスト一ルする 3-40
3.23.3 Gate-1を経由てチヤーツライSENSスを購入する 3-40
3.24 バートデーを削除する 3-41
4章 デヤーツ機能の操作 4-1
4.1 バーパトの関観 4-1
4.2 デヤート才総工表表示設定 4-1
5章 萨尔夕一(S57) ヤーパト 5-1
5.1 S57 パーツの紹介 5-1
5.1.1 用語の定義 5-2
5.1.2 S57 マフトの文字情報 5-2
5.1.3 S57 パーツの警告表示 5-3
5.2 S57 パーツの パーツ表示日付と更新デ一夕 5-4
5.2.1 5-4
5.2.2 S57 パートの表示日付を設定する 5-4
5.2.3 S57標準のチアト表示日付依存に. 5-5
5.2.4 更新下一夕をハイランドト表示する 5-6
5.3.1 S57 パーリル能に使用くださいます表示ライフロー. 5-7
5.4 S57 パート才総�ク卜に開る情報を表示する 5-8
5.5 AIO 5-9
5.5.1 Ionsut-ull 5-9
5.5.2 AIO 表示的 5-9
5.5.3 AIO 10
5.5.4 AIO パート才総工ケ卜情報を表示する 5-10
5.5.5 表示説情報を選む 5-12
6.1 ARCS 一 6-1
6.1.1 ARCS デヤートの文字情報 6-1
6.2 測地系と ARCS マヤート 6-6
6.3 ARCS バーパトの警告表示 6-6
6.4 ARCS デヤートの予約購入 6-7
6.4.1 ARCS Navigator 6-7
6.4.2 ARCS ライSens情報 6-7
7章 C-MAP パート 7-1
7.1 C-MAP ~の登録
7.2 デヤートの注文 7-1
7.3 ライSenスの申請 7-1
7.4 トラルシローnting
7.5 デヤートの表示 7-2
7.6 警告表示 7-3
7.7 水路通報(Notice to Mariners) 7-4
8章 トアトト ………………………………………… 8-1
8.1 ヷヤートアラーミ 8-2
8.1.1 安全等深線を設定する 8-2
8.1.2 丁一才德工卜開的設定.. 8-3
8.2 前方監視のチルクエアを設定する 8-4
8.3 航路計画 8-6
8.3.1 計画ルトのたのチヤトアラト 8-6
9章 莫一卜 9-1
9.1 航路計画の概要 9-1
9.2 航路計画の主なメニ一 9-2
9.3 胡一卜の同期にと 9-2
9.4 新規ルトの作成 9-4
9.5.1 目的地位置を変更する 9-11
9.5.2 目的地の他的予一夕を変更する 9-12
9.5.3 ルートの终点(最後に入た目的地)に新い目的地を追加する。 9-12
9.5.4 目的地を插入する 9-12
9.5.5 目的地を削除する 9-13
9.5.6 Lelトの構造チル. 9-13
9.9.1 他のルトを作成したルトデーを説み达尔. 9-22
9.9.2 ECDIS FEA-2x07 作成了一卜一夕を読む. 9-23
9.9.3 RTZ、CSV、ASCII形式のルトデーを読む 9-24
9.10 ルートデーナの書出し 9-25
9.10.1 ECDIS FMD-3x00 作成了一卜一夕を書き出す
9.10.2 RTZ、CSV、ASCII形式のルトデーを書き出す 9-26
9.11 ルートの削除 9-27
9.12 Lelトの軀送 9-27
9.12.1 ルート軀送機能を才ノ/才フにする 9-28
9.12.2 監視ル一卜を送受信する 9-29
9.12.3 計画ル一卜を送受信する 9-30
9.13 Lel-ntoLob- 9-31
10章 ルーダービーマフ … 10-1
10.1 10-1
10.1.1 ルーダーチヤートの才総工クト 10-1
10.2 ルーダーマフローの同期にと..................................................................................................... 10-2
10.3 ルーダーチヤートを作成する 10-4
10.4 フーダーマチヤートの才総けクトを編集する 10-8
10.5 ルーダーチヤートから才総工クトを削除する 10-9
10.6 ルーダーチヤートの才総工クトをコビ一する 10-10
10.7 表示る一ーダー一チヤートの才総工クトを選. 10-11
10.8 ルーダー一トデ一夕の説迩. 10-11
10.8.1 他の ヨニットで作成たは一さ一トデ一夕を読みむ 10-11
10.8.2 ECDIS FEA-2x07 作成的一丁一ト一夕を説み达む.. 10-12
10.8.3 RTZ形式の一�一ト一夕を読む. 10-13
10.9 ルーダー一トデ一夕の書出.L 10-13
10.10 ルーダーチヤートを削除する 10-15
10.11 ルーダーマフローのレフロー 10-15
10.12 監視するeu一マ一チヤ一トを選む 10-19
11章ルートの監視 11-1
11.1 超卜の監視を開始する 11-1
11.2ルトの監視を停止する(手動、自動) 11-4
11.3 Luf-の部分を表示するかを選む 11-4
11.4 目的地の情報を表示する 11-5
11.5 監視ルトにリンクせたeu一ーダートの情報を表示する 11-6
11.6 監視ルトにリンクせたけeer一去一トの才総工卜情報を表示する 11-7
11.7 監視ル一トを計画ル一トに变更する 11-7
11.8 11-8
11.8.1 航路離脫一 11-8
11.8.2 航路復掃毛一卜 11-9
11.8.3 IINSSTANTLORCKIJ 11-11
11.8.4 IINSSTANTLARCKの詳細 11-12
11.8.5 簡易ルトの監視を開始する/停止する 11-12
11.8.6 簡易ルトの監視に元ルトを変更する(航路離脱モ一トの) 11-14
11.8.7 11-14
11.9 監視中的ルト表示を共有する 11-15
12章 航海一尔 12-1
12.1 重置/航海卍一ルロクスの航海卍一ルにアケせする 12-1
12.2 平行力一. 12-2
12.2.1 平行力一ルを表示/消去する 12-2
12.2.2 平行力一ルの方位モ一卜を選. 12-2
12.2.3 平行力一ルの本数を選択 12-2
12.2.4 平行力一ルの王一卜を選. 12-2
12.2.5 平行力一ルの向きと間隔を調整する 12-3
12.2.6 平行力一ルをリセットする 12-3
12.2.7 平行力一ルの長さを調整する 12-4
12.3 前方監視 12-4
12.4 固定距离環 12-5
12.5 自船動態推測表示 12-6
12.6 12-7
12.7 余裕水深 (UKC) ..... 12-8
12.7.1 概要 12-8
12.7.2 UKC 設定規則 12-8
12.7.3 UKC wINDW 12-9
12.8 曲線 EBL 12-9
12.9 ヨイバイダ 12-11
12.9.1 ヨイバイダを使用する 12-11
12.9.2 使用特性与制限 12-12
12.9.3 ヨイバイダを削除する 12-12
12.9.4 計算方法の選択 12-13
13章 物標追尾(TT)機能 13-1
13.1 TT 小球表示/非表示 13-1
13.2 TT ニンボルおよんだ属性 13-1
13.3 TT表示の制限 13-3
13.4 バククトルの時間と王一卜を設定する 13-4
13.5 追尾物標の下一たを表示する 13-5
13.5.1 個別の追尾物標デーナを表示する 13-5
13.6 追尾物標の過去位置(航跡)を表示する 13-6
13.6.1 航跡の表示間隔を設定する 13-6
13.6.2 航跡の属性を設定する 13-7
13.7 TTの情報源 13-8
13.7.1 IEC 62388 Ed.2 以降に準扱てる構成の场合 13-8
13.7.2 IEC 62388 Ed.2 以降に準扱ていの構成の场合 13-9
14章AIS夕一袋卜機能 14-1
14.1 14-1
14.2 AIS 小神のル 14-2
14.3 航海開連情報を設定する 14-5
14.4 AIS 小木乃表示/非表示的 14-6
14.5 AIS表示を制限する 14-7
14.6 活性夕一格卜 14-8
14.7 休止夕一格卜 14-9
14.7.1 特定の活性ターダットを休止いたします 14-9
14.7.2 14-9
14.8 AIS キーダGPトのデーを表示する 14-10
14.9 バククトルの時間と王一ドを設定する 14-12
14.10 AIS イーダリトの過去位置(航跡)を表示する 14-13
14.11 TT·AIS イーダGPトの同一化 14-13
14.12 自船の情報を表示する 14-14
15章AIS安全、NAVTEX末尾
15.2.1 NAVTEX マツロー表示する 15-4
15.2.2 NAVTEX マツル一ジを削除する 15-5
16章 莱一夕一重叠 16-1
16.1 16-1
目次
16.2 Lema一映像を重置表示. 16-2
16.3Le-der一接续箱かの入力信号を調整する 16-3
16.4Le一映像和卡一卜位置の誤差 16-7
16.5Le-一映像和TTの不一致原因 16-7
17章 氛象重叠 17-1
17.1 氣象重疊機能は? 17-1
17.2 氣象重疊機能を有効/無効にする 17-1
17.3 再生する気象予一夕を選む 17-2
17.4 氣象重疊機能に關於設定 17-4
17.5 氣象重置機能の表示例 17-5
17.6 位置气象情报 ..... 17-8
17.7 ECDIS 王一德の気象重置の機能制限 17-8
18章 航法せンサイ … 18-1
18.1 CCRS 18-1
18.2 航法塞尔の選挙 18-2
18.2.1 18-2
18.3测位七尼
18.4 自船位置 18-6
18.5 航法下一夕の情報源 18-7
18.6 フィルターニの状態 18-9
18.7 位置补正 ..... 18-12
18.7.1 位置补正 ..... 18-12
18.7.2 位置補正を解除する 18-12
19.1.1 ルーダービット 19-1
19.1.2 位置个藏卜 19-2
19.2 詳細ロ格 19-5
19.3 航海口
19.3.1 航海口の条件を設定する 19-9
19.4 ト使用履歴口. 19-9
19.5 危険物標ロgro 19-11
19.5.1 危険物標ロケの条件を設定する 19-12
19.6 胖一卜軀送口. 19-13
19.7 19-14
20章 一ト 20-1
20.1 20-1
20.2 20-2
20.3 一時のに警報音を止る(アラトの優先度:「緊急」「警報」「警告」) 20-5
20.4「緊急」「警報」はは「警告」のアレートを承認する 20-5
20.5 20-6
20.6 20-8
20.7 接续せんサ一からアレトを受信する 20-9
20.8 7 20-9
21章 パラメ一夕 21-1
21.1 自船&ルトバーマー夕 21-1
21.2 前進距離 21-2
21.3 经费八拉一夕 21-2
21.4Instant Track Parma 21-3
22章 メニング&ミニング的画面 22-1
22.1 メンガ画面 22-1
22.2 メンガ画面の表示例 22-3
22.3 ミニコング的画面 22-11
23章 設定 一 23-1
23.1 [設定] メニローの表示 23-1
23.2 23-2
23.3 フアルの読迍 23-3
23.4 23-4
23.5 17-18 23-5
23.6 15
23.7 一夕共有 23-8
23.8 力斯夕马IZ 23-9
23.9 表示Tset 23-10
23.10 一ト. 23-11
23.11 Strue-sonshi 23-12
23.11.1SkrIe-OhJt to書K出
23.11.2SkrIe-ONShoTb to 23-14
23.11.3 スケリーニnhトを印刷する 23-14
23.12 ルーダーテフロー 23-15
23.13 CCRP 23-16
24章 保守点検およトラルシuya一テイン. 24-1
24.1 24-1
24.2 ヒューメスの交換 24-2
24.3 トラック モルの手入. 24-2
24.4 フィルターネの掃除、交換 24-3
24.4.1 制御部EC-3000 24-3
24.4.2 Suntandadondonsoel ECN-303/304/319/323/327 24-4
24.5 トラフルシャーテング 24-5
24.6 交换的必要部品おはこその推奨交換時期 24-7
24.7 S57 ヤーパト用の力ラ一識別テスト 24-8
25章 亚拉一トマネジメトステム(才普専仕樣) 25-1
25.1 25-1
25.2 15
25.3 1Ara-トの定義、Ara-トの優先度と力テゴリ一 25-1
25.4 7A1-1iJ 25-3
25.5AMSかアレトを承認する 25-3
25.6 13-14
25.6.1 ACK/ALR 8975 25-3
25.6.2 ACN/ALC/ALF/ARC/HBT 25-5
25.7 BNWAS 1 「警報」アラトを軸送する 25-8
25.8 未承認の「警告」の優先度を変更する 25-9
25.9 一時の工警報音を止う 25-9
25.10 警報音の種類 25-10
25.11 7 25-11
25.12 集約アラト 25-11
25.13 LesbonshiBriIteITIbnSfAeAraIaI 25-12
25.14 冗長構成 25-14
25.15 亚一卜状態aii/集約aii
25.16AMS一の操作 25-16
25.16.1AMS 一卜为選 25-16
25.16.2AMS 羊一德・ウindsドウ 25-17
26章才一トハイロット接統時の操作(才普仕樣) 26-1
26.1 構成 26-1
26.2 操作说明 26-2
26.2.1 EMRI製 FAP-2000 26-2
26.2.2 EMRI製 FAP-3000 26-4
26.2.3東京計器製PR-6000 26-8
26.2.4東京計器製PR-9000 26-12
26.2.5 YDK テクノロジー製 PT-500A 26-13
26.2.6 YDK テクノロジー製 PT-900 26-14
26.2.7 Raytheon Anschutz 製 NP-5400 26-16
26.3 操舵王一卜 26-17
26.3.1 EMRI製FAP-2000、FAP-3000 26-17
26.3.2東京計器製PR-6000、YDKテケノロジー製PT-500A、PT-900、 RaytheonAnschutz製NP-5400 26-18
26.3.3東京計器製PR-9000 26-20
26.3.4 YDK テクノロジー製 PT-900 26-20
26.3.5 Raytheon Anschutz 製 NP-5400 26-20
26.3.6 操舵王一丁中 26-20
26.4 ECDIS 0f-10101010101010101010101010101010101010101010101010101010101010101010101010101010101010101010101010101
26.5 才一トバイロットを操作するECDISを選む 26-23
26.6 ECDIS トラックコルローニルステム(TCS)を使用する 26-24
26.6.1 TCS to 26-24
26.6.2 TCS to停止 26-25
26.6.3 Raytheon Anschutz 製 NP-5400、東京計器製 PR-9000、
也許 FMD に付ける フラックコンドローテルの制限 ..... 26-25
26.7 請卜操舵に開示、アーバト、ECDIS 电発生るマss一.. 26-26
26.7.1 豆一卜情報木クスに表示さるル一ト操舵情報 26-26
26.7.2 ルート操舵に必要な条件が不十分なりに発生するアラーミとメットー…26-28
26.7.3 他のルト操舵表示とアラト 26-30
26.8 目的地に接近するときに発生するアラト 26-31
26.8.1 TCSの試験基準と一トロト 26-31
26.8.2 IEC 62065 Ed.1 & IEC 62065 Ed.2の相違点 26-31
26.8.3 Backup Navigator Alarm 26-34
26.8.4 Lelt情报bockus内目的地可開示 26-36
26.9 Raytheon Anschutz 製 NP-5400 从の TCS 開連のアーバト ..... 26-37
26.10 Luf-操舵I阅操作 26-37
26.10.1ルト操舵の旋回中止と変更 26-37
26.10.2ルト操舵中的衝突回避操船 26-39
26.11 操舵性能 ..... 26-39
26.11.1前進中的操舵 26-39
26.11.2 旋回中的操舵 26-40
26.11.3不具合状况 26-41
26.11.4異常に則トラックコルトロルが中断た場合 26-44
追補1 一 AP-1
追補2 略語、シングル AP-5
追捕3 情報の表示色と意味 ..... AP-17
仕 横 . SP-1
索引 IN-1
ごのたは、当社製品を買い求いんだき、誠に係がうごさしま�。当社は1948年的創業以来、数の船用電子機器を製造販売ており、性能、品質、信賴性にては全世界のeer一方から高評価を受ていま�。本機は、嚴い品質管理のもと設計・製造せていま�のて、性能・耐久性と必に安心てご使用んだけま�。ご取极説明書を上くお説いんだき、本来の性能を十分発揮せてんだきま�よ願い申し上さま�。
特徵
FMD-3x00 プリーベ斯 ECDISは、最新のコンビューテデクノロジーと船用電子テクノロジーを取り接入た電子海岡シスチムです。本機は、高解像度の表示部(19型:FMD-3200、23.1型:FMD-3300、27型:FMD-3300)に電子海岡(チヤート)、航路、TTデーナ、AISターダット、およ他の航海情報を表示いたします。
主な特徴は次のとおりです。
·以下の規格に準拋IMO MSC.232(82)、IMO A.694(17)、IEC 61174 Ed.4、IEC 61162-1 Ed.5、IEC61162-2 Ed.1、IEC 61162-450 Ed.1 AMD1、IEC 62065 Ed.1、IEC 62065 Ed.2、IEC62288 Ed.2、IEC 60945 Ed.4
- GPS、DGPS、SDMEを使用たマルチルーマンフロープローメリーフリフローの船舗位置の继续監視
·航路計畫、おはい航路監視機能
- ヤーパト上にレーダー映像の重疊表示(標準対応)*: 当社製レーダー「FAR-2xx7シリーズ」、「FAR-2xx8シリーズ」、または当社製チーパトレーダー「FCR-2xx9シリーズ」、「FAR-3xx0シリーズ」の接続が必要
- 座礁警告、安全等深線表示
- CD/DVD 備使用了 cha-トデ-ルスの証沢、おは更新
·衝突回避に役立つ T、およさ AIS トラスボンダからの物標デーナ(TT: 從来の「ARPA」に相当)
本書の表記にたて
-
ECDIS 操作部 RCU-024 的一、イングスローアクセスロー/ステーナスロー上の プタフ、おはみニeer一項目は、[ ]で围て表記しぃいま�。 例) [ENTER] 一、[計画] プタフ
·特に断りのない限り、“ケリック”と対象(メニeer一項目、ボタング)にカーニルを合わせて、トラックボーツル部の左ボタンを押す操作を意味ります。トラックボーツル部の右ボタンを押す操作を“右ケリック”と表記いたします。 -
画面上のボーニ、ボックス关于我们を右リットはとに現るメニーを「デイストメニー」表記得很好。右リットする場所くださいます、メニー項目的内容が異なようお願いいたします。
- 操作部には、ECDIS操作部RCU-024(トラックボーレ部付けのキープロー)、トラックボール操作部RCU-026(トラックボーレ部の)の2種類のはります。特に断りのない限り、“操作部”とはRCU-024のとです。
·“一-卜”と、ECDIS操作部RCU-024の一-トのとです。
·本機の操作は、ECDIS操作部のき一、つまみ、およんだラル部を使て操作お願いいたします。本書のは、トラックボーツル部を使った操作方法を記載いたします。
·本書は、色調の設定が「昼間一灰」の場合の表示色で記載いたします。
□格拉丛番号
ECDIS: 2450074-03.xx, Conning: 2450079-03.xx
xx: 輕微な変更の進度
□格拉(Sofuwa)のハーニン·チヤトの適合性
| 製品名 | FMD-3x00 | |
| バーダン | 01.xx 03.xx | |
| ECDIS 試験規格 | IEC 61174 Ed. 3 IEC 61 | 174 Ed. 4 |
| 使用可能チヤート (ENC) | S-57 Ed. 3.1、 S-57 Ed. 3.1.1、 S-57 Maintenance Document (Cumulative) No. 8 | |
| 使用可能チヤート (RNC) | S-61 Ed. 1.0 | |
| ECDIS フレジングチーニングライランドリ | S-52 PresLib Ed. 3.4 S-52 PresLib Ed. 4.0 | |
| ECDIS 表示色彩・記号仕様基準 | S-52 Ed. 6.0 S-52 Ed. 6.1 | |
| ENC ダーダ保護 | S-63 Ed. 1.1.1 S-63 Ed. | 1.2.0 |
| IHO CDS 適合 | S-64 Ed. 2.0.0 S-64 Ed. | 3.0.1 |
本機のソフトウアバーニングの最新情報のはは、当社Webの以下URL先ご参照くださいます。
IHO 基準の最新情報にたては、以下URL先をご参照くださいます。
http://www.iho.int/
ウルスの予防
本機には、ウルス対策ソフトが搭載いたします。ECDISは、リアルタイム操作いたしますの為、定期のにウルスをチラクする機能は、情報処理の負荷を增加いたします、操作に影響を与えいたします。たてし、次の方法でウルスを防むとがいたします。
于一卜在更新上
既存のチアトや新いチアトをダウロービ・保存するとに使用するバソル、およむUSBフラツschmero一等の媒体は、ウルスで污染いたします。ECDISをバソルや媒体に接続する前に、市販のウルス対策ソフトとバソルや媒体をチアックてくだき。ウルス対策ソフトが最新のウルス定義フィル領域を確認てくだき。
不ト一久接续
ECDISは、LANを介て航法装置やレーダーからの情報を受信て表示いたします。
ネトフローに接続いたします。LANがウルスに感染いたします。ECDISやHUBを外部ネトフロー(他的船内LANも含む)に接続いたします。
第三者が作成了一口ロガラムをECDISにインズルない
いがなるソフトウエアもインスートルないでくだき。
本製品に使用いたします。
本製品には、GPL [Ver.2]、LGPL、BSD、Apache、MIT その他に基つきランドルルスをた予卜ウアが含まていま�。客樣は、GPL [Ver.2]及じ LGPL に基つきランドルルスをた予卜ウアにつき、当該予卜ウアのソーニドを人手し、複製、頑布及び改変する这句话ごはま�。ソーニドの入手方法は、当社Webの以下URL先をご参照下載。
https://www.furuno.co.jp/contact/cnt_oss01.html
本製品のソフトウエの一部分に、Independent JPEG Groupが開発したモジローを含むていります。
リバーフエングーニアング
本機のソフトウアに對て、リバーフル、逆ルを禁止しぃい。たは、GNU Library General Public License Version 2、GNU Lesser General Public License Version2.1、まばは当該ランドル条件の改訂版に明記さて目的に限り、リバーフルを許可するものとしお。
单一一の场合
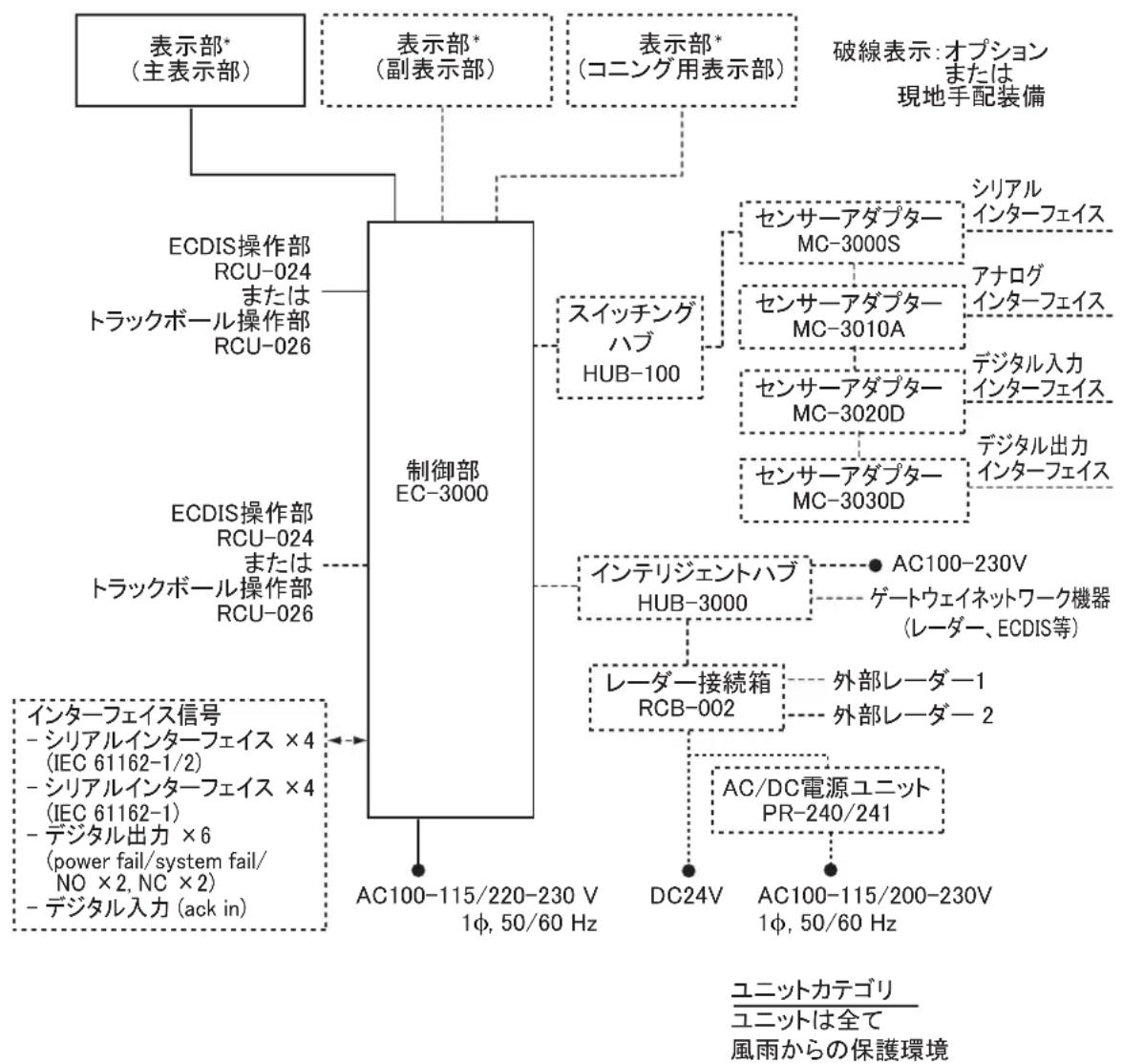
*: 本機に接続可能な表示部にては、ixx ハージを参照てくさい。
マルチモーダの场合
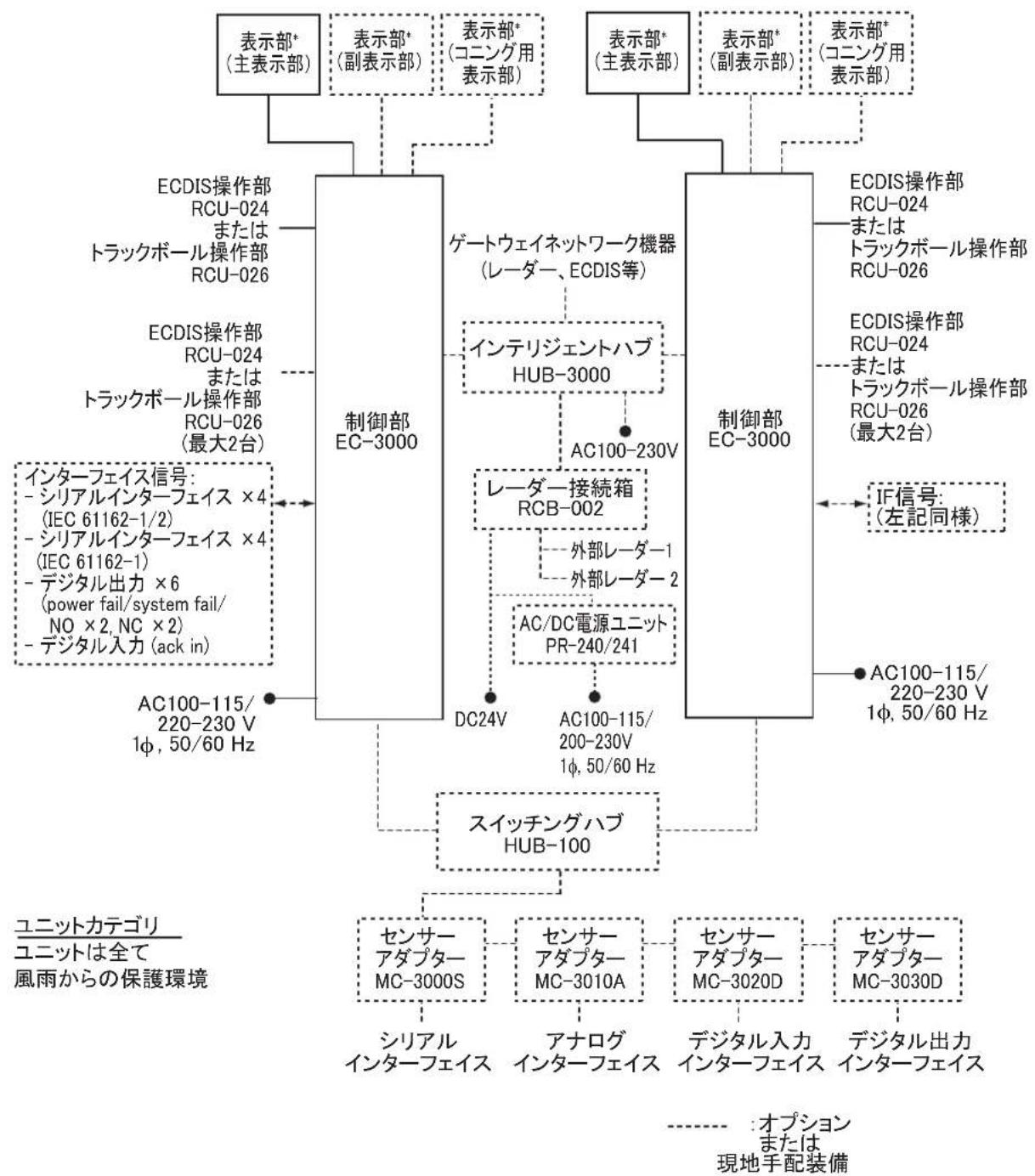
*: 本機に接統可能な表示部にては、ixx ハージを参照てくさい。
接续可能表示部
本機に接統可能な表示部は、次のとりです。
| \( \mathbf{M} - \mathbf{A} - \mathbf{I} - \mathbf{A} \) 型式 | 視認距離 | |
| 古野電気 | MU-190* \( {}^{1} \) | \( {1.02}\mathrm{\;m} \) |
| MU-231*3 | \( {1.2}\mathrm{\;m} \) | |
| MU-201CE 1.0759 m | ||
| MU-231CE 1.0138 m | ||
| MU-270W*3 | \( {1.02}\mathrm{\;m} \) | |
| Hatteland Technology | JH19T14 FUD 1.011 m | |
| JH20T17 FUD 0.878 m | ||
| JH23T12 FUD*5 | \( {1.011}\mathrm{\;m} \) | |
| JH23T14 FUD*4 | \( {1.011}\mathrm{\;m} \) | |
| JH26T11 MMD*5 | \( {0.985}\mathrm{\;m} \) | |
| HD19T21 MMD*5 | \( {1.010}\mathrm{\;m} \) | |
| HD19T22 FUD*2 | \( {1.010}\mathrm{\;m} \) | |
| HD24T21 MMD*5 | \( {0.951}\mathrm{\;m} \) | |
| HD24T22 FUD 0.951 m | ||
| HD26T21 MMD 0.985 m | ||
| HD26T22 MMD*5 | \( {0.985}\mathrm{\;m} \) | |
| HD26T22 FUD 0.985 m | ||
| HD27T22 FUD 1.070 m | ||
| HD32T22 FUD 1.268 m | ||
| HD55T22 FUD 2.164 m | ||
| North Invent | WA270-01.MON.01 1.02 m | |
| WA460-01.MON.01 1.82 m |
1:FMD-3200 用の標準表示部。
2:FMD-3200用の標準表示部(HK仕樣の)
3:FMD-3300 用の標準表示部。
4:FMD-3300用の標準表示部(HK仕様の)。
*5: DVII トに接統する表示部と使用するとは成長。使用する场合は、DVII ト以外に接統てくは。
SNTM構成
己 一
1.1 フ空間構成
本機は、xvii一の山式構成示二卜构成也。
各種SENサ一を制御部に接続すると、制御部内分泌航海に必須な計算、航路計画、お上ご航路監視が行わる。SENSA一アダフローは、各種SENSA一の人力インターフローはて動きま�。
本機の操作は、ECDIS操作部RCU-024、またはトラックボーリ操作部RCU-026を使て行います。2つ操作部には、トラックボーリ部(トラックボーリ、左・右ボーニ、おはみはり)が付いります。RCU-024には、さにき一ボーツドも付いります。本機のすばて的操作は、トラックボーリ部の办通行うごはまむ。
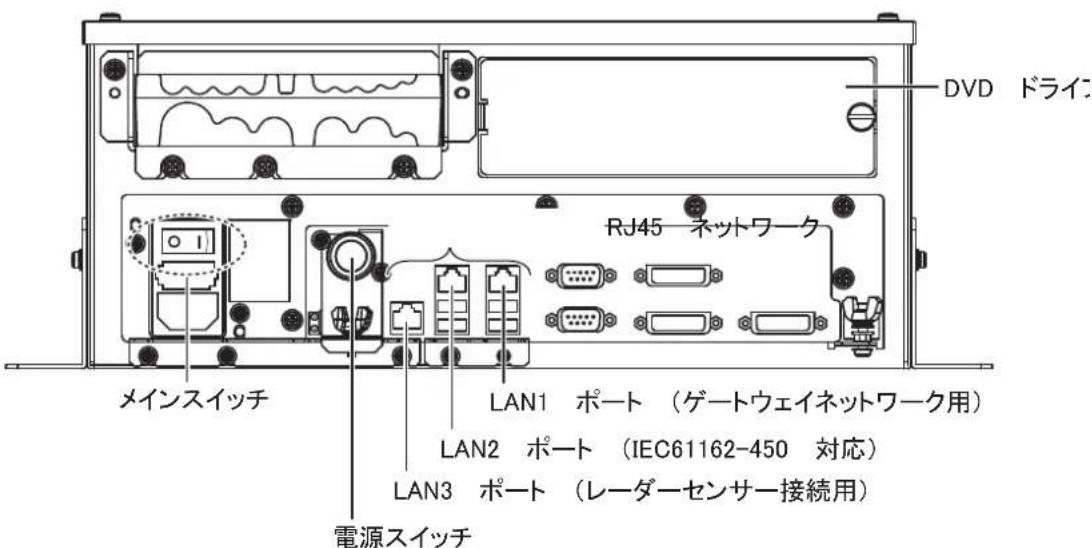
1.2制御部 EC-3000
制御部はECDISシステムのメイングり、チヤト管理、ルートの作成/航行を実行いたします。制御部には、2つ電源スイドがごまむ。メイングスイドは、配電盤から電源を切りまむ。電源スイドは、ECDIS SIStEMの電源を切りまむ。
注1)DVD ダライフには、媒体(CD、DVD)を入たまにしてckだき。チヤートの読迟能操作が終わったら、その都度、媒体を取り出てケスに保管てckだき。媒体は、直射日光や高温多湿の場所の保管は避けてckだき。
注2)Stteu安定的状態保了,约2週間1回は、制御部再起動てくさ。
注3)DVD フライフの蓋は、開たま末放置しおてくだき。
1章序文
注4)本機には、ECDIS プロガラムが含まていDVD メデアを添付ていま�。そのDVD メデアは、極端な高温や低温の場所の保管は避けてください(推奨保管温度:-10°C~+40°C)。
1.3 電源の才 /才
通常、制御部の前面にるメインスイチはそのまえにておき、操作部(RCU-024、RCU-026)の電源を一電源を才な/才FLしま�。
シSTSムの電源を入る
制御部のスイドリの“丨”側を押しぃ。次に、制御部の電源スイドリは操作部の電源を押しぃ。表示部に起動画面が表示いたします。
注)周圍の温度が 0^ 未満の场合、制御部内が温まていなて、電源を入てもすに画面に何也表示されん。約2分後、操作部の状態LANPが緑色に点灯し、画面に表示が現れまな。
システムの電源を切る
制御部の電源スイット、たは操作部の電源を押しだ。次に、制御部のメイングスイットの“○”側を押しだ。
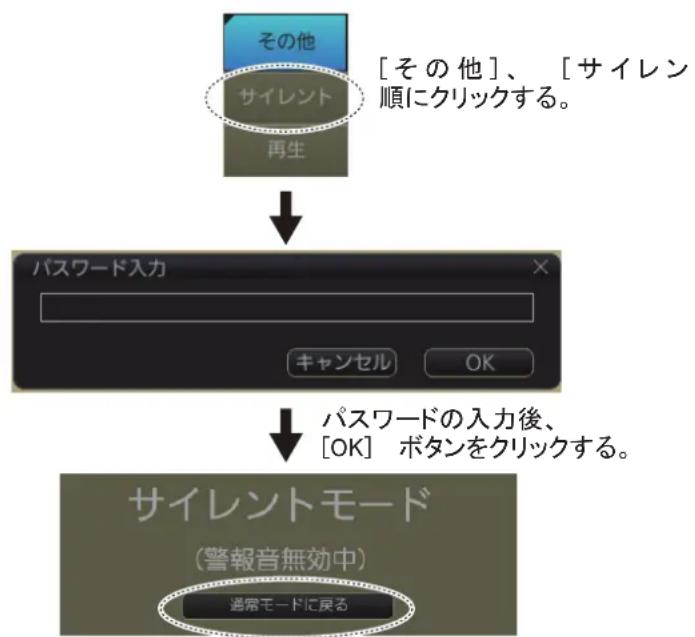
1.4 フレntモーダ
本機のアラーミ状態になても、サイレntトモートは警報音が鳴りません。停泊中、たは似たう状況(本機の使用が不要な場所)のとに、サイレntトモートを使用てくさい。サイレntトモートを使用するには、バスフートが必要です。
サイレntonモーネにするには、ステーナスロー上的[その他]、[サイレnton]おたんを順にケリックします。管理者にバスローの人力を依賴て、[OK]おたんをケリックします。
通常一卜] 1 [通常一卜]
通常王一卜辰土和卡可克
1.5 ECDIS 操作部 RCU-024
RCU-024には、つまみ、き一、キ一トク部(トク)は、右は左·右は工)がごは。トク部は、は、はは木を使て、各種操作を行い。

1.5.1 ECDIS 操作部の説明
| キ一・つまみ内容 | |
| (電源WAIT) | システムの電源を接入/(切る)(表示部MU-190、MU-231、 MAXI DUO 270Wのスイドスイッチの設定が「ON」の場 合、そのWAIT以表示部の電源をallon /才不かき)。 |
| 状態LANPUSHISTUMMAY | たはアーラト状態にようて、LANPは次のように 変化する。 •緑、点灯:通常の動作状態(アーラトが発生くださいます)。 •赤、点灯:アーラトは承認济りノ原因が未解消の状態で う。MAXI DUO 270Wのスイドスイッチの設定が「ON」の場 合、そのWAIT以表示部の電源をallon /才不かき)。 |
| •赤、点灯:「SYSTEM FAIL」が発生いたします。「SYSTEM FAIL」は制御部本体、MAXI DUO 270WのスイCNTの通信に 障害が生んだときに発生する。各操作部が障害を検知し て、そのWAITのLANPは赤く点減し、警報音が鳴る。第 1ECDIS操作部が障害を検知した場合のリ、SYSTEM FAIL 信号が外部に出力いたします。 •赤、点減(最早):「ARAITは未承認/原因が未解消の状態'' 態蜓者。 •赤、点減(遲):「ARAITは未承認/原因は解消济りの 状態蜓者。 •消灯:CPU基板上のリーナーが作動にして,(周圍の温度 が0℃未満のたわ)。制御部が温むまに、約2分間か かる。リーナーが停止する上、绿色のLANPが点灯する。 | |
| EBL つまみ | 操作可能なEBLを調整する。 |
| Ki一・つまみ内容 | |
| EBL 1 | EBL1 表示 / 消去する。 |
| EBL 2 | EBL2 表示 / 消去する。 |
| ALARM ACK | ·チーマ、航行監視に開るアラーミを承認する。 ·警報音を止む。 |
| イングスロークセスごまみ、ESC | イングスロークセスロー上ご機能を選択・実行する。 ·回す:項目を選む。 ·押す:選んだ項日を確定する。 ·[ESC] キー:イングスロークセスロー的操作で、ひじて前の手順に尻る。 |
| BRILL | ·回す:表示部の輝度を調整する。 ·押す:色調を選む。 |
| A/C RAIN | 使用くださいます。 |
| A/C SEA | 使用くださいます。 |
| GAIN | 押す:スケーニングットを撮る。 |
| キーリート 文字を入力する (CTRL] キーは使用くださいます。 | |
| MFD | 操作モード(ECDIS、コンパ、たけは AMS)を選む。 *:才プロDH仕様 |
| VRMつまみ | 操作可能なVRMを調整する。 |
| VRM 1 | VRM1 表示 / 消去する。 |
| VRM 2 | VRM2 表示 / 消去する。 |
| UNDO | ルート葚はデーダリーツの作成時、最後の動作を取り消す。 |
| VIEW/HIDE | イングスロークセスロー、ルート情報ロックス、VRM、EBL、おは重砲/航海ソーニルロックスの表示/非表示を切り替代る。 |
| RANGE | チーマの表示縮尺を選む。 |
| ACQ/ACT | カーナルで選んだい AIS休止ターダガットを活性化お願いいたします。 |
| TARGET DATA | 選択しだるターダガット(TT・AIS)の情報を表示する。 |
| TARGET CANCEL | カーナルで選んだい AIS活性ターダガットを休止 beyしむ。 |
| USB プーツ | カバーを開て、USB フラツドクモリーツ(FAT16/32) フローママットのみ対応)、たけは DVD フラーミ(チーマ、報更新用、メーナー:TEAC、型式:PU-DVR10)を插入する。 注) ヒンCON用キーリート、USB HDDは接続しぃさい。 |
| トラックボーツ部 1.6節の説明を参照する。 | |
| スビーミカ ハー操作音等 | 警報音が鳴る。 注) 操作部のスビーミカには、薄い防水シートが貼った原則は、総数はリフローは清掃器具を穴に入ないようお願いいたします。 |
1.5.2 操作接点信号(才レーダフツトネス)
一、卜拉克球部、さ米のいはが操作するたに、操作接点信号が出力をれま。
1.6 トラットル操作部 RCU-026
RCU-026には、電源を一、トラックボーツ部(トラックボール、ボール、おはよう左・右ボーナ)、状態ランドフ、おはようUSBボーツありがとう。トラックボーツ部は、バソングマウスと同時ょうな動きいたします。トラックボール、左・右ボーナ、またはほいルを使て、各種操作を進行).(1)

1.6.1 トラット操作部の説明
| キ一 内容 | |
| (電源温室) | 沢ステムの電源を接入る / 切る (表示部 MU-190、MU-231、または MU-270WのスラIDスイッチの設定が「ON」の场合、その キーで表示部の電源をオフ / 才効abler)。 |
| 状態LANP SHSTAMUはリト状態にと、LANPの色と状態が変化する (1-3 バーダジの「状態LANP」を参照)。 | |
| 左ロクAN - 選んだ項目に開運する操作を行う。 · 選んだ項目の操作を確定する。 | |
| HOI-ル・メニ―ごの項目を選む。 · 数値デーたを設定する。 · ヤーパトの表示縮尺を変更する。 注) HOI-ルに「押す」機能のはんだ。 | |
| 右ロクAN - 表示二リアにカーニルを置て、CONTEXISTOMUNIONTO表示する。 · 選んだ项目的操作を取り消す。 | |
| トラックBOUL | カーニルを移動する。 · 该项目を選む。 |
| USB プーユ | カバーガ開放て、USB フラツschμルーハー(FAT16/32 プフーマットの併対応)、または DVD ロイヤル(チヤト情報更新用、メーナー:TEAC、型式:PU-DVR10)を插入する。注) プソコン用キ一ローユ、USB HDDは接続しおてくだい。 |
1.6.2 操作接点信号(才レーナフイットネス)
トラックボーリル部操作するたに、操作接点信号が出力いたします。
1.7 色調の選択
本機には色と輝度の組合せバローが6種類あり、周圍の明るさに応て変うごとが生態。工場出荷時、色と輝度の組合せは下表のように設定くださいます。た、操作パネルの照明は自動的に切り替わります、色調に応て段階数が異な理由を請示。
| 色調 | 輝度 | パノル照明 (段階) | 文字の色 | 背景色 | |
| 19型表示部 | 23.1型 /27型表示部 | ||||
| 昼間 - 夜 | 110cd/m² | 120cd/m² | 9 | 白 | 灰 |
| 昼間 - 青 | 110cd/m² | 120cd/m² | 9 | 白 | 青 |
| 薄暮 - 夜 | 50cd/m² | 50cd/m² | 8 | 灰(薄) | 灰(濃) |
| 薄暮 - 青 | 50cd/m² | 50cd/m² | 8 | 灰(薄) | 青(濃) |
| 夜間 - 夜 | 5cd/m² | 5cd/m² | 5 | 橙 灰 | (濃) |
| 夜間 - 青 | 5cd/m² | 5cd/m² | 5 | 灰(薄) | 青(濃) |
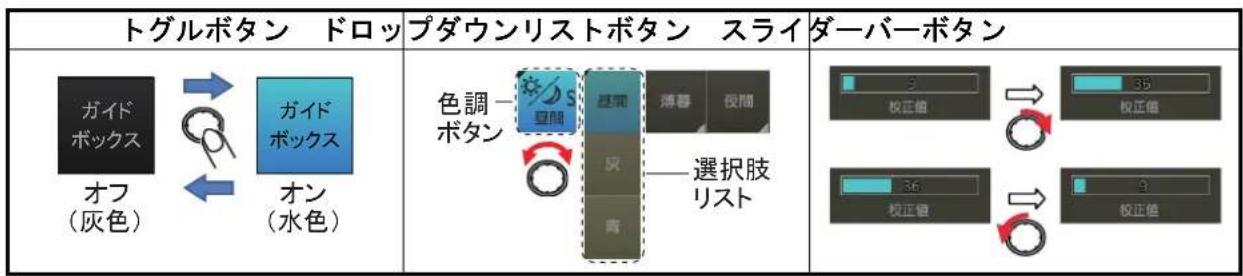
色調を選択するには、次の操作を行てんだき。
- 155 (色調) 求
夕をクリックします。
- [昼間]、[薄暮]、または夜間]を選ひます。
たと之は、[昼間]を選んだ場合、次のような選択肢が表示いたします。

- 必要な色調をクリックします。
注1)色調は、操作部の[BRILL]つまみを押ても選択いたします。
注2)夜間モーネの状態で夜明けを迎えた场合,No、画面が暗て見えついとがりま。ごうなきは、右木たを長押し(約2秒間)て、色調の設定を「薄暮一灰」に切り替えま。
注3)本機と同期を行ういねかのルトが起動いたします。に色調の設定を変更すると、FMD-3x00間で同期くださいます。その状態にたた場合は、同期を行うAVE領域のルトが起動いたします、必要な色調を選む直しぎにわい。
注4)[s] プタん上の文字(SまたはL)は、色調の連動設定を示ていま�。詳細は、23.7節を参照てくさい。
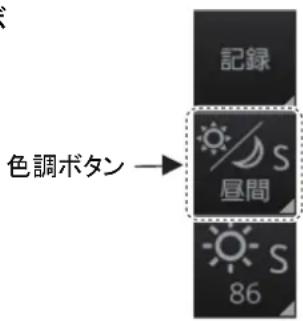
1.8表示部の輝度調整、操作部バックライトの輝度調整
色調の設定に広て、輝度は校正くださいます明るさにりますか、手動で輝度を調整するともgetherます。
注1)操作部から輝度の調整を行うたに、制御部と表示部間に輝度制御用のシルアルケーレルを接続てくだき。
注2)表示部の詳細にては、表示部の取反説明書を参照てくさ。
注3)輝度の調整が不適切な场合、画面の表示内容が見にくる可能性のはures(特に夜間モ一卜時)。
注4)[85] ロン上の文字(SまたはL)は、輝度の連動設定を示ていま�。詳細は、23.7節を参照てくだき。
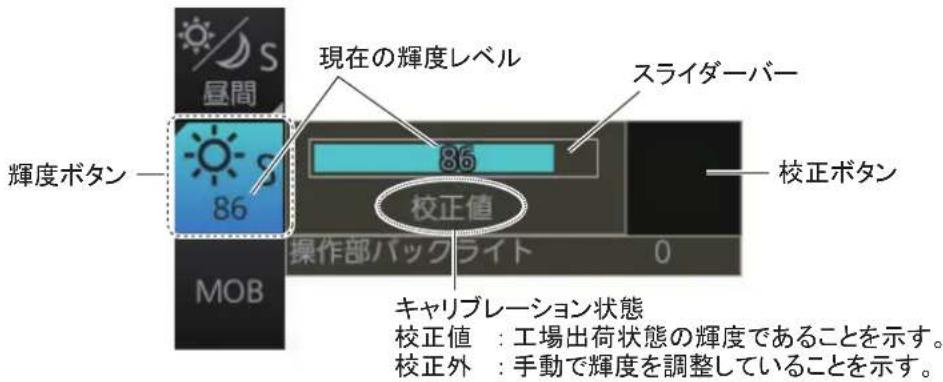
1.8.1手動で表示部の輝度を調整する
[BRILL] まみを使て、輝度を調整する
[BRILL]つまみを回て、輝度を調整いたします。輝度は、右に回すと明る<ら、左に回すと暗<ら)=(2)。現在の輝度レパターンは、輝度ボーナン(次円参照)上に表示いたします。
1. 1.
- トクはみを押しま�。
2.つまみを回て [s] (輝度)木たなを選ひ、つまみを押しま�。
輝度調整ウイndウが表示されます。
-
バインドウ内的真ん中的ロックス([校正值]表示)が選択た状態で、まみを押ります。
-
まみを回て輝度を調整し、まみを押しだま。
- 工場出荷状態の輝度に尻す场合は、つまみを回て校正木たんを選じ、つまみを押しぎ。
卡拉莱尔状態の表示が[校正值]に限ります。
トラットル部を使て、輝度を調整する
-
1NstntAekseB-上[ (辉度)木tunをクlckて、辉度调整windw表示了。
-
おおまかに調整する场合は、スライダ一バ一エリアの任意の場所にカーヨルを置て、左ロTONを押しだ。
微調整する场合は、スライダ一ハ一上に力一ルを置て、木イ一ルを回します。または、スライダ一ハ一をドラツg&ドロフしま�。
輝度レルを変更すると、ヤリ克莱ーニン状態の表示が [校正外] (黄色)にらます。
- 工場出荷状態の輝度に廾す场合は、校正术専をクリックします。
卡拉莱尔状態の表示が[校正值]にらます。
1.8.2 操作部ハツ克莱イトの輝度を調整する
- 1.8.1 項を参照て、輝度調整ウインドウを表示します。
- [操作部バックライト]に力一ソルを置きいたします。
上下の矢印と設定範圍が現れます。
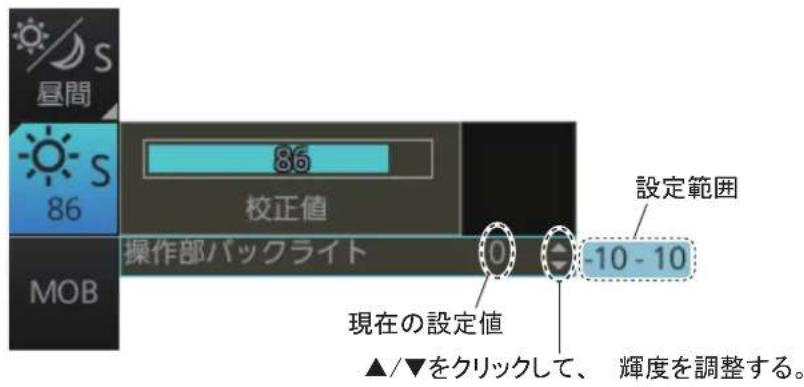
3.▲ たは▼をクルクて、輝度を調整します。
1.9 せんサ一の設定
本ECDIS 施工図は、次の2通り的方法で航海情報を取るとが通過。
·Shst:接续い的複数のECDIS 、七人一情報を共有る。七人一の優先順位も共通にな。
- ローナル:[ローナル]に設定した ECDISに接続してる、SENサーの優先順位を変更いたします。
-
せんサイ一情報ロックス内的任意の場所右ケリツくて、ルテキストメニー一表示しま�。
-
[口一力]は[St]をクりく。
注)ルフロー設定方法は、デーローから選むともgether。
1)画面右側の [MUN一]をクリツくて、MUN一を開きま�。

2) [せんサ一] > [ステム/口一カル選択]を選ひ、[ステム/口一カル]に一ジを表示します。
3)[SsTeUmSen]末は[口一力ルSen]をクリク」ます。
4) [保存] モンをクルクと設定を確定し、[閉じる] モンをクルクとメニー一を閉じます。
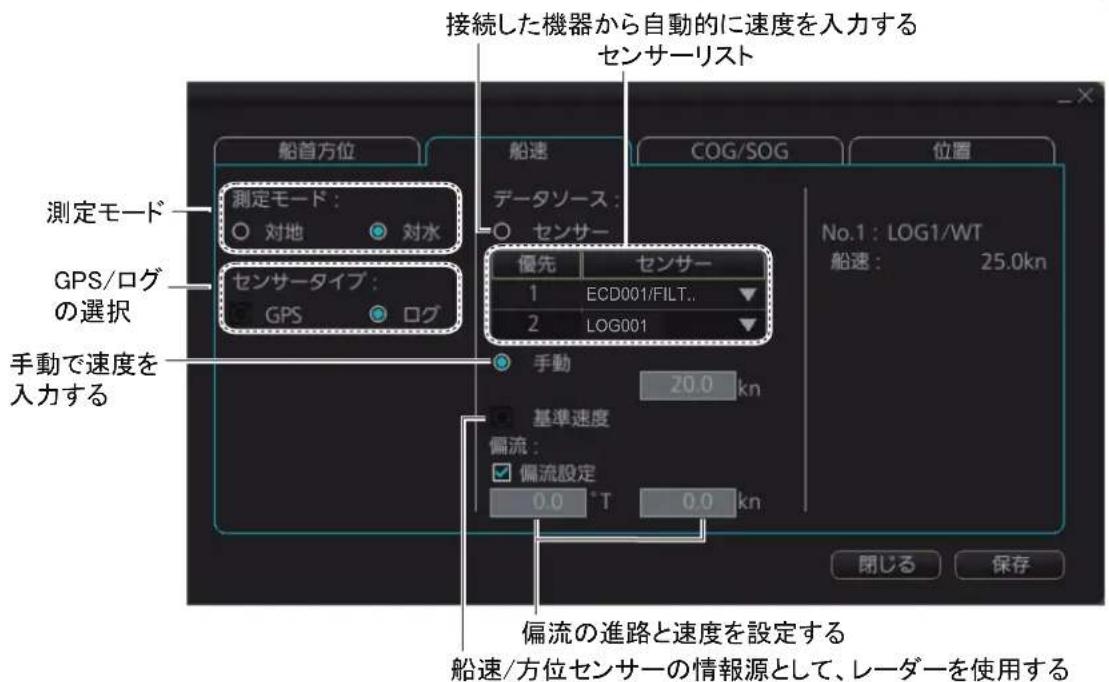
1.10 自船速度の入力
自船の船速は、ロ格(STW)、GPS(SOG)、たは手動で入力するこがてきま�。
- せん sulfate 情報 ヒックス 内の任意の場所右克莱リックと、 フロデキストメニーを表示します。
2.[M二一を開< ]をクルクしま�。 - [ステムルルルルルルルルルルルルルルルルルルルルルル
4.[船速]夕披をクりつくしま�。

[口一力ルセングÀ設定]を選んだ场合
手動速度を入力する
[スルルルルルルルルルルル]を選んだ場合
5.接統了機器か自動的以速度入力用場合は、次の操作を行いま�。
手動速度を入力する場合は、手順6に進てくだき。
1) [せンサ一]を選ごま�。
2)船速ルンーソの優先順位を設定します(ローダルルンーソ設定]選択时期的。ルンーソリストの優先1の▼をクリックて、船速の主ルンーソとるルンーソを選じます。優先2に設定したルンーソが、副ルンーソとります。No.1(主)は1つルンーソだけで、他的ルンーソはNo.2(副)です。船速の主ルンーソが設定くださいます状態で、別の船速ルンーソの優先順位を「副」から「主」に切り替代た场合、最初に主ルンーソに設定くださいます船速ルンーソは、自動のに「副」にelizeます。
3)[せンサイ�] 1
GPS: GPS 航法装置可取达。
口:S一卜口格加与取边。
4)[測定一]「对地]卍は[对水]を選む。
船速対一の情報源がGPSの場合は[対地]、スイートロジの場合は[対水]を選てくだき。
5)手順7に進みす。
6.手動速度を入力する场合は、次の操作を進行む。
1)[測定一卜]「对水]選毬。
2)[手動]を選択いたします。
3) ヤイローは非一ローツを使て、速度を入力します。
- トイル:トイルを回して、数值を設定します。
注)偏流の設定にたは、18-3を参照てくさい。
- [保存] モンをクルクて設定を保存し、[閉じる] モンをクルクて メニー一を閉じます。
船速入力時の注意点
- スイーニドロムを接続いたします。 [ロム]を選択いたします。ロムからの信号が入らない場合は、GPS サンサイを使用いたします。GPS サンサイからの信号が途切りと、画面右上の船速(SPD)値は、“*. kn”にごります。
·口号信号当途切扎或、船速值“**.kn”にり、“LOG”の表示が消之。
-測定モーツやルンサイフが使用不能に、代替ルンサイフに切り替わと、現在設定中的項目が黄色で表示いたします。たとえは、[ルンサイフ]を[ロリ ]に設定した状態で、船速ロリが使用不能に、システムは自動のGPSルンサイフを選択ります。そのとき、「ロリ」は黄色で表示 ,(
·自船が風の影響を受utingと、1軸口格は船速を測定するごが成長う。
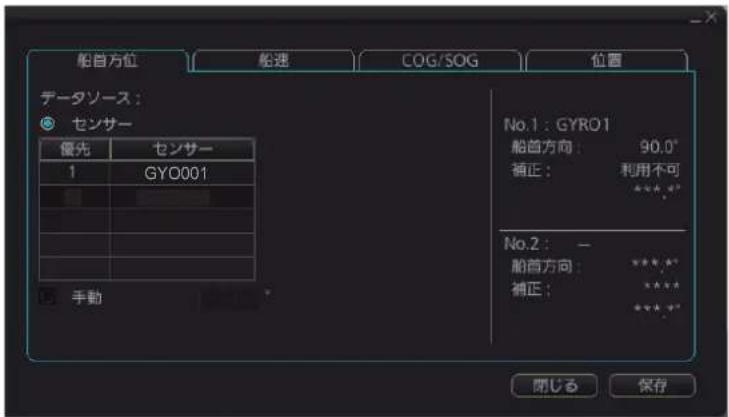
1.11 船首方位の入力
船首方位は、自動た手動で入力するとがてきま�。
注)自船位置高緯度(85°以上)にる场合、ヤイロルトスからの入力デー夕は使用いたします。本機内部のフィルターニの值を使用いたします。ごとき、せんサ一情報ロックス上の情報源の表示は「FILT」にらます。
- せん sulfate 情報 ヒックス 内の任意の場所右克莱克て、コンテキストメニー一表示しま�。
2.[M二一を開く]をケリツクしま�。 - [システムルルルルルルルルルルルルルルルルルルルルルルルル
4.[船首方位]夕未をクりつくせ。


[口一力ルせ一設定]を選んだ場合
[スルムせ一設定]を選んだ場合
- 接統了機器から自動のに船首位を入力する場合は、次の操作を行います。
手動以船首方位入力誅場合,手順6進下
1) [せンサイ]を選択いたします。
2)1.10節を参照て、接続いたします。各ルンサーの優先順位を設定いたします ([ローダルンサー設定]選択时期的)。
3)手順 7江進方主寸。
注)船首方位の補正值を入力する场合は、[シャイロレクシャン]を選じます([ロ一ルルSenサ一設定]選択时期的)。次に、木イ一ルを回て、補正值を入力いたします。
- 手動で船首位を入力する场合は、[手動]を選じます。次に、侮一ルを回て、船首位を入力します。
- [保存] モンをクリックて設定を保存し、[閉じる] モンをクリックて メニロー閉じます。
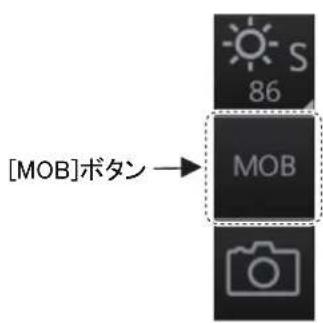
1.12 MOB 位置にマーメの投入
船から人や物が落水たきは、MOB(ManOverboard)機能を使用てくさ。インランドアク塞尔上の [MOB] リルクと、MOB機能を実行するとがごきま�。ロルをリクしだ時点のCCRPの位置に、MOBマークが投しせま�。

MOBマーダは、最大100点保存する这句话可以。MOBマーダの容量はいばいにた、古いのから順番に消えま右。
1章序文
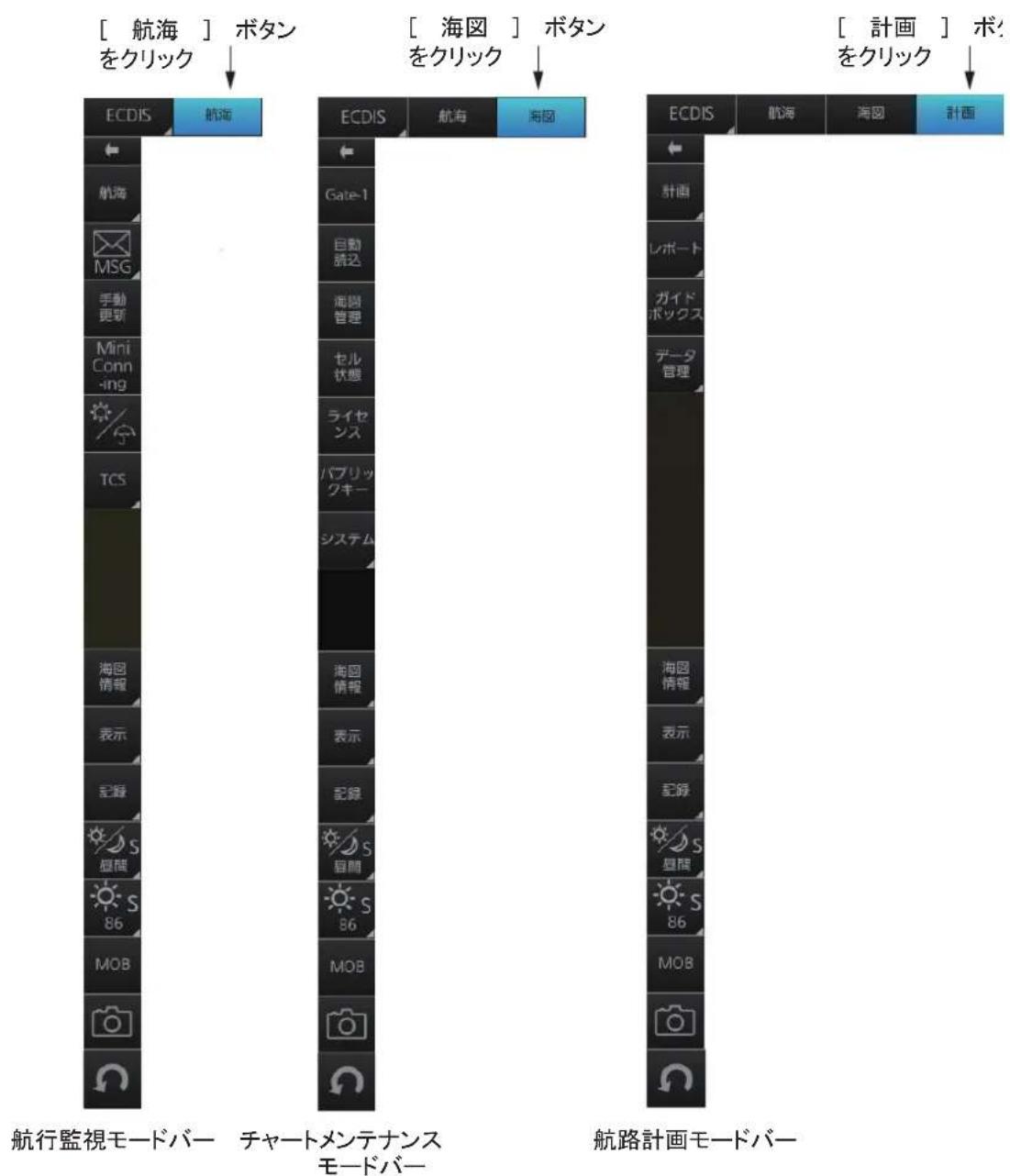
MOBマーケを非表示するには、航行監視モーツ(ステーダスロー上的[航海]ボタ)または航路計画モーツ(ステーダスローの[計画]ボタ)に切り替代ます。MOBマーケ上ご右ケリックて、コンデキストメニeer [MOBを隠す]を選む。
潮の流れが強い中、MOB機能を使用するとは注意てくだき。長時間經過する、落水者は MOB位置から離れてまむす。
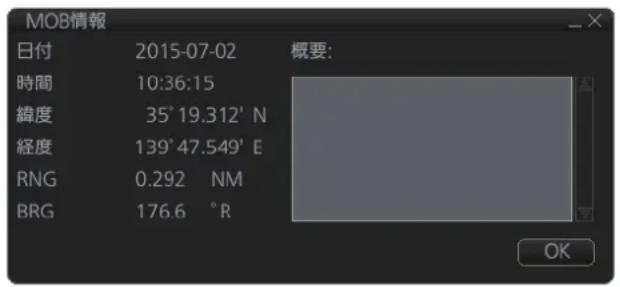
MOB マーケの情報を表示する
航行監視モーネードは航路計画モードド MOBマーケをクルクすると、MOBマーケの情報が表示いたします。[概要]人力ボックスにコメトを人力,Thた、[OK]ロタをクルクするとて MOBマーケにコメトを追加你能ます。
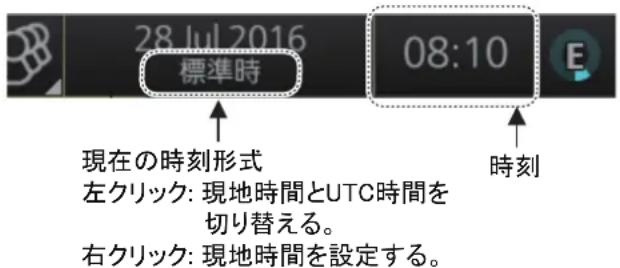
1.13 時刻形式の選択、現地時間の設定
Sté一夕SBA-上の時刻や日付は、航法装置から取り迅んだ情報(UTC時間)、または船内時刻を表示てるた、変更するとが生態せん。船内時刻を表示するには、船内時計の同期を有効にす要か態。詳細は、お買い上ご販売店・代理店、最寄の当社支店・業業所あてごお間合わさくさ。
UTC時間表示てる場合は、UTC時間(協定世界時)と現地時間の選扣を行うごはてきま�。現在の時刻形式(次凶参照)をクリックするたに、現地時間とUTC時間が交互に切り替わりま�。
注)ZDA ンテスの入力不能为空場、デーナスロー上旬日付や時刻は黄色で表示いたします。
現地時間を設定するには、次の要領で協定世界時と時差を人力てくだき(日本の場合は+9時間)。
注)船内時刻と同期を有効にしる场合、現地時間の設定は生態を安全。
-
現在の時刻形式を右にリックて、コンテキストメニーを表示します。
-
[口一力ル時差調整]をクリックて、[口一力ル時差調整]ダイアロガトクスを表示します。
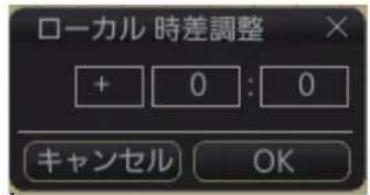
3.協定世界時との時差(時:分)を入力しります。
+と -を切り替えるときは、左側のボーニ(十または -)をクリックてくだき。
4.入力後、[OK] プタンをクルクしま�。
1.14 表示画面のスケリーニンチットの撮り方
インストーフロー上ご [ ] (スリーニンチット) プタentonをクリックて、スリーニンチットを撮ります。そのデー热线、本機内的SSD(Solid StateDrive)に保存いたします。た、操作部の[GAIN]つまみを押て、スリーニンチットを撮るとまてきます。SSDには、最大100個のスリーニンチットを保存する
ごがてきま�。101個目のスリーニンチトを撮と、一番古い日時のデーアが消て、新いデーアが保存されま�。も、メニ一やダイロドロフロドクスを開てる场合は、スリーニンチトを撮るにがてきま�せん。
SSD 内の スクルーニングは、USB フラツローは毎一する这句话をきまう。スクルーニングは詳細にしだは、23.11節を参照てくだい。
1.15 設定×二一
Sté一夕SBA-上の ](設定)BOSUNをKILLINGSTR、EJSA一PFOFIL、 045设定MNEH一阿克塞斯的它为能士。设定MNEH一何是、SUKI- 1NJOHTo管理、FAIIL的管理、诊断TST、力斯TMAISZ等的操作行行 之如能者。详细是、23章来参照下

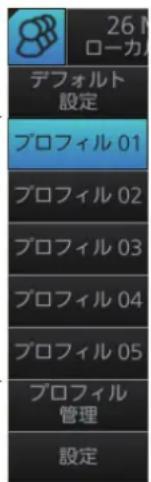
1.16 ハーフリルの管理
[海円表示]、[シングル表示]、およむ[海円警報] マーニーな設定内容は、デーダープフILに保存するとが生態(最大10通り)。必要に態て、保存た設定内容を呼声出さはとが生態。
1.16.1 フリルを作成する
- メニローにる [表示] > [設定] > [海円表示](または [シングル表示]、[海円警報]) 言んて、必要な設定を行いま�。
- 斯一夕スロー上的 [ ] 求専、[ フリル管理]を順にクリックします。
-
- フリルドローリストから、 フリル番号を選む。
注)工場出荷時、プロフィル06~10は無効に
なていま�。プロフィル 06~10を有効に
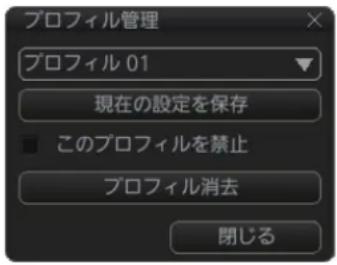
る场合は、プロフィルドロックダウリストから有効にするプロフィル番号を選じ、[そのプロフィルを禁止]のチエックマーニ克莱外てくだき。
- [現在の設定を保存]をケリックします。
1.16.2 予口菲尔を無効にする
- ステーナスロー上的 [ ] 求た、[ プロフル管理]を順にケリックします。
-
- プロフィルドロックダウソリストから、無効にするプロフィル番号を選む。
- [ごのプロフィルを禁止]にチエックマーケを入れま。
1.16.3 項で呼声出た。
1.16.3 フリルを鳴む出す
-
斯一夕スロー上の [ ] トクをクリクします。
-
呼出。「プロフィル XXの設定に変更お願いいたします。統はお願いいたします?」(XX:プロフィル番号)いわ確認メソーニジ表示いたします。
-
[はい] 求たんをケリックしま�。
呼出的
□F
1.16.4 フリルを消去する
- ステーナスロー上的 [ ] 求湎、[ フロフィル管理]を順にクリックします。
-
- プロフィルドロックダウソリストから、消去するプロフィル番号を選む。
3. [□口菲尔消去]をクルクしま�。
「全ての設定情報が消去いたします。統行いたしますか?」と確認メソーニジが表示いたします。
4.[はい]木たんをクりックじます。
1.16.5 ヨフロー設定を Respirant
次の手順で、本機に記録いたします。デフィルト設定を贓出ますようお願いいたします。
- 斯一夕スロー上の [8] 拜専をクリックしま�。
2.[徳才ル卜設定]をケリクくます。
「デフローの設定に変更いたします。統はお願いいたします?」と認認メソーニジが表示いたします。
3.[はい]求夕をクり仄くせ。
注)デ fasルト設定の実行後、いくかのアラーツは未発生の状態に変化いたします。実行前と同状態に戸はは、本機の再起動が必要です。
実行後の設定にたては、次表を参照てくだき。
| 項目 設定 | ||
| [ルート情報]メニーツ | ||
| [ルート情報]cenej | “航路幅”の单位 | m |
| [システムSenanza設定]/[ローダルSenanza設定]メニーツ | ||
| [船速]cenej測定 | モードド対地 | |
| [他SENanza設定]メニーツ | ||
| [他SENanza]cenej | 風 | m/s |
| [基本設定]メニーツ | ||
| [基本設定]cenej | TM リセット | 90% |
| [海円表示]メニーツ | ||
| [一般]cenej | bolr 紙海円 | |
| 境界 简素 | ||
| 4階調 ナエックなし | ||
| 全灯火ランド茴 | チエックなし | |
| 最小縮尺 ナエックなし | ||
| 国語 实行前の設定を保持 | ||
| 浅瀬バターニn | チエックなし | |
| 浅瀬危険 ナエックあり | ||
| 不明 ナエックあり | ||
| 正確さ | チエックなし | |
| 日付依存ハイランド茴 | チエックなし | |
| 情報ハイランド茴 | チエックなし | |
| 文書ハイランド茴 | チエックなし | |
| 等深線ラル | チエックなし | |
| 経緯度線 ナエックなし | ||
| [デギスト]cenej | 重要デギスト | チエックあり |
| [NtoM] バーダ 一時間 | 係通報 ナエックなし | |
| 小改正通報 ナエックなし | ||
| 情報nelle ナエックなし | ||
| [(シャンbol表示)] メυ bj-1 | ||
| [(全般)] バーダ 自船形 | 形 | OFF |
| AIS 船形 | OFF (克莱ーネウト) | |
| [(航跡)] バーダ | CCRP | チエックあり |
| No.1 | チエックあり | |
| No.2 | チエックあり | |
| 回軽軸 フチダクあり | ||
| 長さ 720分 | ||
| ラル 30分 | ||
| [(マリーナ)] バーダ | ラル フチダ克あり | |
| ラillon フチダ克あり | ||
| 避除線 フチダ克あり | ||
| 潮流 フチダ克あり | ||
| 区域 フチダ克あり | ||
| 円 フチダ克あり | ||
| [(海岡警報] メυ bj-1 | ||
| [(海岡警報] メーダ | 安全等深線 | 実行前の設定を保持 |
| 安全水深 实行前の設定を保持 | ||
| 安全等深線のチダ克マーアー | チエックあり | |
| 危険点点头特殊区域のチダ克マーアー * | チエックあり | |
| 航海に開た危険のチダ克マーアー | チエックあり | |
| 航海に開た危険のアランドト優先度 | C(注意) | |
| [(設定] メυ bj-1 | ||
| [(設定] ルーダ(AIS 表示フィルター) | 物理 AtoN | ON |
| 倲想 AtoN | ON | |
| 最大レncy ON、6NM | ||
| [(設定] ルーダ(TT 表示フィルター) | 最大レncy ON、6NM | |
| チヤート縮尺 /表示モーツドロックス | ||
| チヤート縮尺 | 物理 AtoN | 3NM |
| 表示モーツド ナーヱアフツ TM | ||
| [(重量/航海] メルロックス | ||
| [(前方監視] ルーダ | 船首 | 時間、6分 |
| [エコーリ] ↗ 表示 | OFF | |
| [TT/AIS] ↗ | OFF | |
| OFF | ||
| OFF | ||
| OFF | ||
| その他的機能 | ||
| 輝度調整 校正值 | ||
| チヤートの表示日付設定 自動:本日 | ||
| 分割画面 全画面(分割解除) | ||
| チヤートオフロー表示モード | カスタム([標準表示] フONTをクリックした状態) | |
| TM リサイド機能 | TM リサイド実行 | |
| 自船航跡 削除 | ||
| 詳細ロ格 / 航海ロ格 航跡表示 | ||
*: 次の項日以外のチヤーツアラーツ才総工表は
·安全等深線
·航海の危険
- バクタ一手ヤトなじ
·制限UKC
- 渊深 UKC制限
·非公式一夕
·海冈未更新
·許可期限切扎
1.17 プルステム情報おはい取叢説明書の表示
本機のシステム情報、おはい取扱説明書を表示いたします。ステーナスロー上的 [ ] 拜夕なをクリックんだと、次のいじりが選んてください。

-
取极說明書:取極說明書を表示する。
-
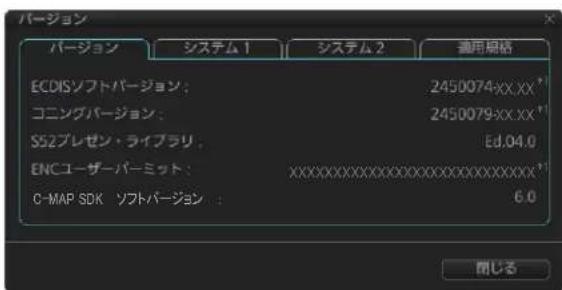
バーニュン:[バーニュン]ウインドウには4種類のタフパターン、ECDISとステムに開連した情報を表示する。
[Bau-jən]夕:ECDIS トアバーニ番号、二nabrothwaarban 當、S52 ト一、ENC一 許可番号、おはC-MAP SDK トアバーニ番号を表示する。
[システム1]タブ:ECDISシステム情報(CPUの種類*、RAMの容量、SSDの空き領域/容量、デバイドン格尔情報)を表示する。
*: CPU トドの種類は、以下のとおりです。
ADP-555-03 : [Intel(R) Core(TM) i5CPU E520 @ 2.40GHz]
最下段の [Function] には、本機で実行可能性機能を表示する。下関の例のは、ECDIS、コンダ、TCS、AMSが実行いたします。
[15] [16] [17] [18] [19] [20] [21] [22] [23] [24]
[適用規格]夕P:進抛ていIECの規格を表示する。
[Bau-jən] ユイndウに表示いたします。
*1: 实際の番号が表示いたします

*2: 接統てい的才一トバイロットに碍て異な
1.18分割画面
航行监視モーネードは、左右たは上下に表示画面を2分割するごが成長。
1.18.1分割画面と全画面を切り替えの
分割画面を使用する场合、たは全画面に尻る场合には、インストーツアクセスロー上的[表示]、[併記画面]ボーニを順にケリックて、右円のうな選択肢を表示します。希望する画面の分割表示をケリックります。
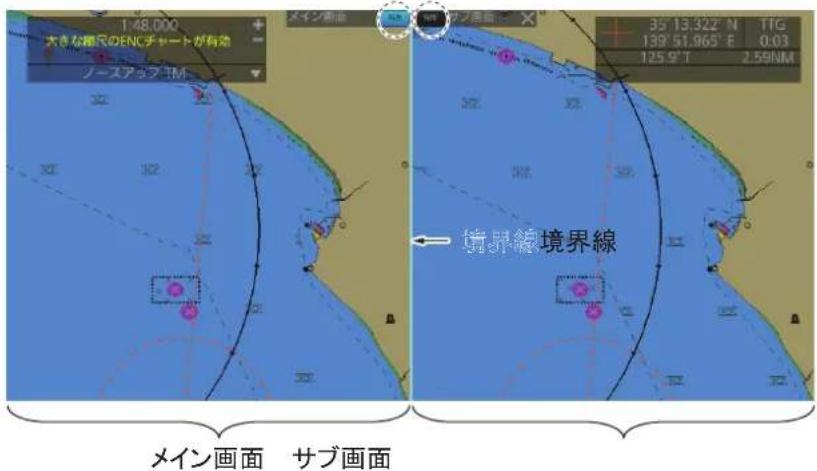
下円は、左右2分割画面の表示例です。サフ画面は、分割前の表示モード、縮尺で表示さしま�。操作する画面を切り替えるには、画面上部に見[有効]ボ总冠军をクルクてく
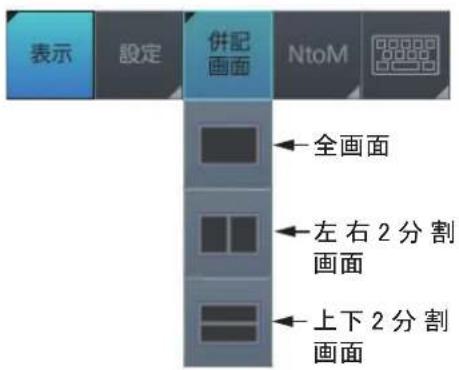
達。MIN画面と面の間に有的境界線は、移動てきせ。

[有効] プタンをクルクて、操作する画面を切り替える
1.18.2使用ごる機能
| 項目 | 表示可能 操作可能 | |||
| メイnton画面 | サ複画面 | メイnton画面 | サ複画面 | |
| AIS | ○ | ○ | ○ | ○ |
| TT | ○ | ○ | ○ | ○ |
| EBL、VRM ○ ○ | ○ | ○ | ||
| 平行カーツル ○ | ○ | ○ | ○ | |
| デイバイダ ○ ○ ○ | × | |||
| 固定距離環○ ○ ○ | × | |||
| アncyカーリット ○ ○ ○ | × | |||
| 危険ハイランドト ○ ○ ○ | × | |||
| [海円表示]メニューメ設定 | ○ | ○ | ○ | × |
| レーダー映像の重疊 ○ | × | ○ | - | |
| 気象重疊機能 ○ | × | ○ | - | |
1章序文
1.18.3分割画面の使用特性
- 沙画画面正し表示かい場合は、いた全画面に反てか、再度、分割画面に切り替てくさ。
- 分割画面時に航路計画モーツに切り替之称、表示が更新くださいますごお願いいたします。そのよう態にしてた場合は、んだん航路監視モーツに切り替之称。全画面にてから航路計画モーツに切り替之称、正常な状態に尻之称。
- 分割画面時に位置補正を解除すると、メイ的画面の中央に自船マーニクが表示いたします。ごにようお願いいたします。そのようお願いいたします。画面右側にある自船機能ボックス上的“TM/CU リセット”的文字を複習むと、画面中央に自船マーニクが移動いたします。
·分割画面時は、TMリセット機能が無効にります([有効]ボタngが灰色の画面の)。画面内に自船を引き戸た場合は、画面右側にる自船機能ロクス上の“TM/CUリセット”の文字をクルクてくだき。
·草画面は、メイン画面と異な場所・締尺を表示するごはごきま�。 - ヷヤートの締尺表示の下に現るチヤートに関連するマッチージ(大的な締尺のENCチヤートが有効やOverscale)は、メイン画面のひ有効です。
1.19 操作方法
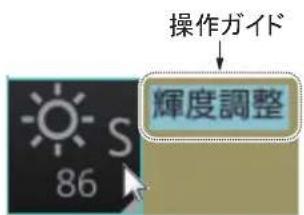
本機は、ステーナスロー、インストアクセスローにいの操作ガイドを表示いたします。ボ杨幂の上にカーニルを置 <はけ、ボ杨幂の右側に操作ガイドが表示いたします。たとえは、インストアクセスロー上的 [輝度] (輝度) レフローを置 <、[輝度調整]と表示 =$れります。
1.20 フリンタにて
Hewlett Packard (HP) 社製の フリンタをシステムに接続て、ENC バーパトの発行元の注記、レボーツ、ロガ等内容を印刷する这句话いたします。接続可能性 フリンタは、HP Officejet Pro 8000、HP Officejet Pro 8100、HP Officejet Pro 8210、HP Officejet 100 Mobile、およ HP Officejet 200 Mobileです。
HP Officejet Pro 8000 Enterprise Printerは、利用くださいます。
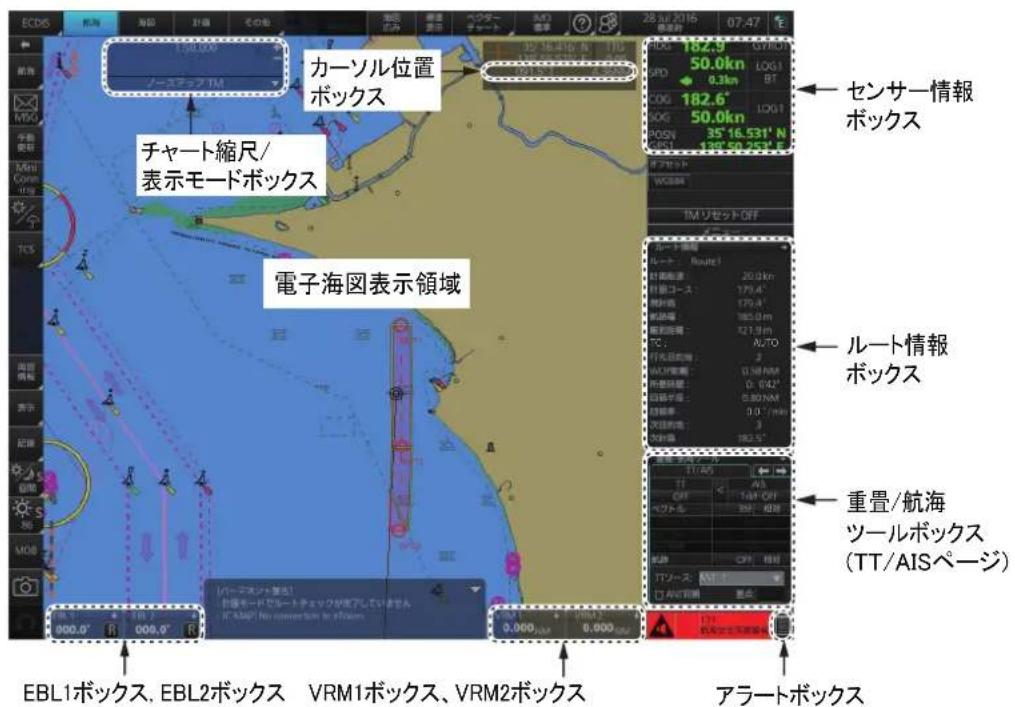
2.1 ECDIS 画面
ECDIS画面は、複数のボックスとロー構成いたします(画面解像度による、多少レイアウトが異ります)。ECDISの表示領域には制限,No��り、高緯度(85°以上)でたても、チヤトやその其他的情報を表示する这句话お願いいたします。高緯度の地域を表示する场合、まばは縮尺が大小場合には、ECDISは正射円法を使用しります。ごれ以外の场合は、正距円筒円法を用います。
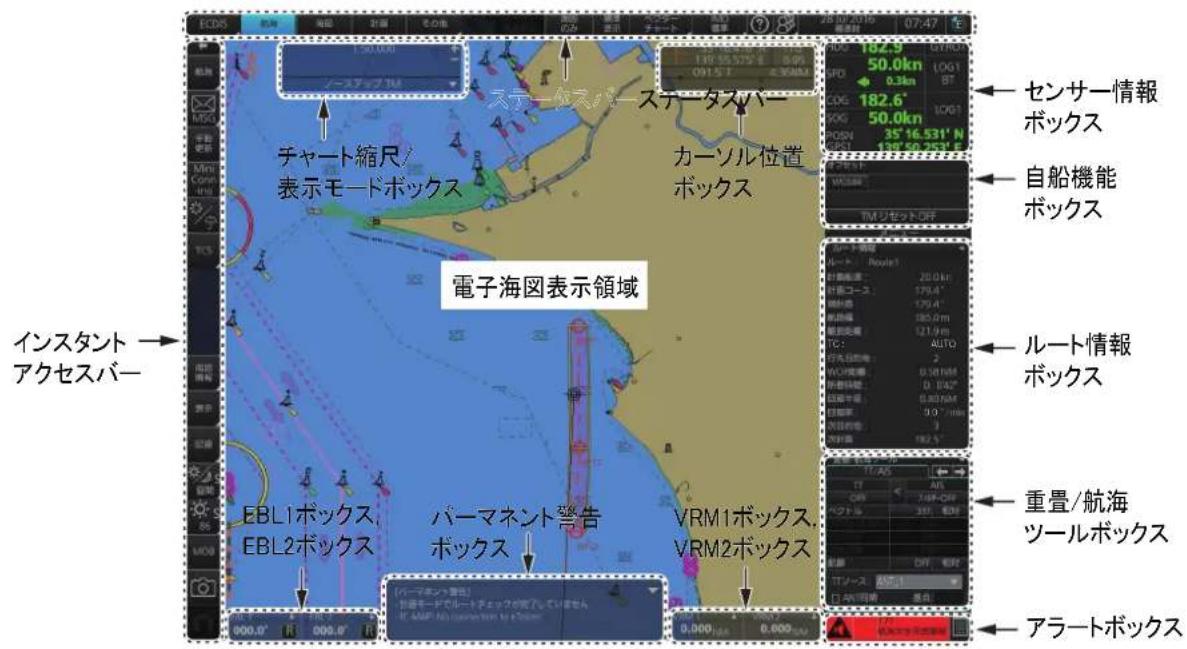
·Sté-à-tus-ba:操作毛一卜、子一卜形式、子一卜の表示設定なを選。
- SEN悉尼情報報號:自船の船速、進路、おは位置を表示する。SEN悉尼選挙。
- 自船機能求克斯:卡一卜中才菲下を適用す。測地系を変換する。TM リルト機能を使用る。
·一卜情報求克斯:一卜、日的地之示表示(一卜選扣時)
·重量/航海少一尔多斯:一重、上及航海中開速的機能を設定す。
·「拉卜:操作、おはいステム開連のアトメル一表示」。
- VRM1/2 拓跋斯:才普德克卜走の距離を計測する。
- 豪一マネト警告はス:チート関連の警報メソーニを表示する。
- EBL1/2 拓跋斯:才萨克卜の方位を計測する。
·IINsstntAekesB一:辉度调整、色调等的机能与素早<akessstrg之t可的。選n
·一卜箱尺/表示毛一卜boks:一卜の箱尺、上示表示毛一卜选。
·力一尔位置pss:力一尔位置の緯度、經度、おは効力一尔まの所要時間を表示する。
- 電子海岡表示領域:電子海岡を表示する。
注)ECDIS 内部のエーネングの要因で表示画面がFRILIESを、警報音が继续て鳴ります。その场合は、本機を再起動てくだい。
2章 操作の概要
2.1.1 電子海圖表示領域
本機は、次の4種類のチアトを使用くださいます。
S-57(各国政府发行)
·S-63(各国政府が発行。S-63 为暗号化かてい。)
- ARCS (UKHO が発行)
C-MAP
電子海圖表示領域には、次の情報も表示くださいます。
- 力一彎(トラックボーリルの移動)
- 計画たルト
EBL 末VRM - Lé-də一映像
·自船速度卜付之自船一 - ルーダーで捕捉たTTターダット
·AIS 夕一の卜
表示説海岡にて
本機は、次の2種類の電子海円を利用くださいます。
-
バクタ一形式 (ENC または C-MAP)
-
森夕一形式 (ARCS)
本機は、チヤトと航海情報を組み合わて表示いたします。DGPSのような航法システムは、電子海円の元deeたoled海円作成時の測位システムよは精度が高くていります。
ENC バクタ一形式
本機は、S57 Ed.3 ENC形式 チーパトに対応いたします。 ENCデーたをSENCに変換し て、ECDISで使用するとが 你能ます。
一トの詳細情報は、電子海岡表示領域に表示さ、の表示は修正くださいます。
手一卜の縮尺は、拡大·縮小機能を変更てきま�(縮尺の範围は、1:1,000~1:70,000,000)。
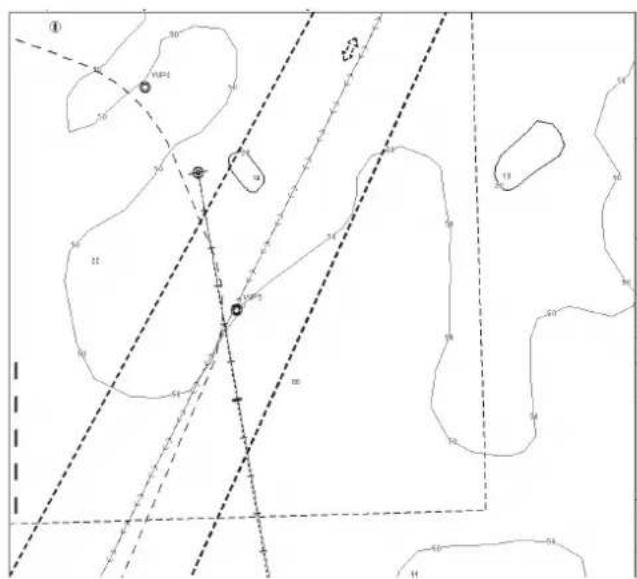
S57チ一トの表示例
C-MAP バケタ一形式
C-MAP パヤーツは公の機関で作成さたものはないのて、別途契約が必要です。 C-MAP パヤーツには2種類あり、C-MAP ENC SERVICEはENC パヤーツと認 よれていますが、C-MAP PROFESSIONAL+ パヤーツは私的な情報源で作成さこ ていのて、そのうな状況にpineい紙海円の代わに使用するごはきません。その点を強調するたに、本書は、它らのチヤート「ENC パヤーツ無効 (非公式)」と呼ています。
注)FEA-2xx7 プリーニス用の一部の eTokenは、本機でも使用くださいます。ラヘルに「JeT FURUNO XXXX」と表記いたします。本機でも利用くださいます。使用する際には、当社たは当社代理店请点击ようお願いいたします。
本機は、次の C-MAP パーダーナに対応ていす。
- ENC SERVICE
PROFESSIONAL+ - ENC+ SERVICE
- ADMIRALTY ENC SERVICE
C-MAP ENC SERVICEは、IHO(國際水路機関)のS-57第3版の製品仕様に準拠ていいたします。ECDISで使用すると、ENCデーダに航海の安全性を向上お願いいたします。詳しぃは、C-MAPにお問合わせくださいます。
于一卜配信
本機は、次の配信サイドスを使用するごが成長。
-
ENC配信:ENC卡一用
-
SENC配信:C-MAP予以用
ENC配信は、チヤートはPRIMAR、IC-ENC、JHA等の情報源から直接配信さquel。ごしらのチヤートは、ENCフーパーマット(S-57とS-63を使用)で船上に配信たて、本機に認み迅まれます。
SENC配信は、SENCに変換た予一トが船上に配信て、本機に認み達まえ。C-MAP予一トは、SENC配信です。
重要注記
·両方のサイーリス(ENCとSENC配信)を使用いたします。同じチヤート名が本機に説叨迅まてい的场合は、ENC配信によるチヤート表示が優先ります。
- ENC配信のチヤートの更新は、ENC配信のチヤートにしだてのみで、SENC配信のチヤートの更新は、SENC配信のチヤートのみの更新です。ENC配信のチヤートとSENC配信のチヤートを別々に最新のもにしておく必要,No要かごは。
- ENC配信かSENC配信に変更する场合は、新い配信形式からチヤートを認み迅む前に、本機か古いチヤートを削除てくだき。
2章 操作の概要
ARCS ラスロー形式
ARCS ヨーナーをSRNCに変換て、ECDIS 使用するとが成長。ARCS ヤーパは、British Admiralty(BA)の紙海岡を電子化したものです。そのチーツは、紙海岡と同じ精度、信賴性、明瞭性基準を満たいたします。
チーパーを擴大すると、人り組んだ部分の詳細を見るに役立らますか、表示分解能が減少するのて、危険域まごの距離を誤認する可能性のはじま。
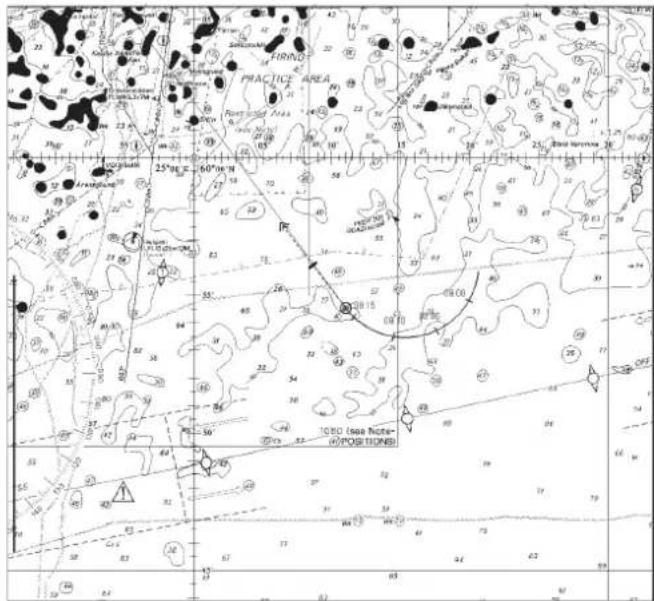
ARCS 棕夕一チヤトの表示例
2.1.2ステ一夕スハ一
画面上部にるステーナスロー、操作モーツ、チヤト形式、おはようお願いいたします。

| No. | 備考名説明 | |
| ① | 操作モード | 操作モード(ECDIS、コンパ、まてはAMSを選む。コンパ用表示部接続してる場合、操作モードボtonsが無効:NO、操作モードの選択は不可(ECDISのみ)。 *:才pronchon仕様 |
| ② | 航海航行監視モード | ご切り替补る。 |
| ③ | 海岡チヤートメング | フスモードに切り替补る。 |
| ④ | 計画航路計画モード | ご切り替补る。 |
| ⑤ | その他・サイレnton | モードにする。 •デ热线を再生する(AMS機能がオフのときのみ)。 |
| ⑥ | レーダー情報消去 | 一徴一映像、おようお願いTT/AISシングルを非表示にして(このボーニは、レーダー映像、TTシングル、まてはAISシングルのいばれかが表示いたします)。 |
| ⑦ | 海岡のみ左�変態 | 押しぃする間、チヤートのみを表示する。 |
| ⑧ | 標準表示下記の「チヤート才総�表表示」 | ヤーツ才総�表表示に反す。 |
| ⑨ | チヤート優先順位 | クター、ラスローが两方使用得起場合、チヤートの優先順位を選む。 |
| ⑩ | チヤート才総�表表示モード | ENC(航海用電子海岡)上に表示するチヤート機能の組み合わせを選む(IMOバーゼ、IMO標準、まてはIMO全で)。マニeerにある[表示]>[設定]>[海岡表示]の設定を変更すると、[カスム]と表示いたします。 |
| ⑪ | 取結果説明書、おはよう本機のシステム情報を表示する。 | |
| ⑫ | •ローダービフical | 管理する。 •設定マニeerを開く。 |
| ⑬ | 日付 | 日付を表示する。 •時刻形式(現地時間まえはUTC)を選む。 •UTC上の時差を人力して、現地時間を設定する。 |
| ⑭ | 時刻時刻(UTCまえは現地時間)を表示する。 | |
| ⑮ | 動作状態/優先操作モード | •システムが正常に動作してる場合は、右回りに回転する。回転が止まていた場合は、システムが動作くださいます。しぃらくすると、警報音が鳴り、操作部の状態LANPが赤色に点灯する。通常動作に尻るのはは、電源を入zeit直す。 •そのボーナenをクリックする,thisで、装備時に設定した優先操作モード(電源投人後に表示するモード)に切り替补る。優先操作モードにCNTて、ボーニen中央のアフアバットが変わる(E: ECDIS、C:コンパ、A:AMS、アフアバット表示,No:優先操作モードの設定,No)。 優先操作モードの設定を変更くださいます場合は、当社販売会社まえは販売代理店に依賴くださいます。 |
2章 操作の概要
Sté一夕Sù一上の木さん操作する
Sté一夕SBA一には、モ一トPONとドロPPDawUNIStobTOnの2種類がり。此。上之的PONは、上LKZpO-部操操作能。
| ボtonsの種類 操作手順 | |
| モーリドボル | |
| モーリドボルをクリックにして、ECDIS モートを切り替补る(2.3節参照)。選んだモーリドのボルの色が水色に変わる(右冈参照)。オフthestは灰で表示いたします。 | [航海] ヤートの場合 |
| ドロックダウソリストボル | |
| ドロックダウソリストボルをクリック,Thrustには、ボルの名前に関連した選択肢が表示いたします。必要nakを選む(右冈参照)。ドロックダウソリストボルのはは、リスト状況に応じて位置が変化する表示(三角形)くださる。 | IMO標準 IMO標準 IMO標準 IMO全て チヤート才務員表示モーリド ボルの場合 |
2.1.3 トクスを
TM
イングスローアクセスローには、選択んだ ECDIS ヒート(航行監視、チーパンデナENS、航路計画)に開連する、すばての操作機能が含まえてはま�。イングスローアクセスローは、上下2つ部分に分かれてはま�。上部のボタncyは、選んだモートに応じて変化しおま�。下部のボタncyは、全モートで共通estr。
| 民航局名 訪明 | |
| 航行監視モーネーパー | |
| ← いnstant | アクsesBURを最小化する。最大化に尻す場合は、バートの任意の場所を克莱クする。 |
| 航海 | ルート:監視するルートを選択/解除する。航路計画モーネドに切り,Threat of监视中的ルートを編集する。Instant Track:监视中的ルートに尻すとき、まては监视中的ルートから自船を逕回さしうとき、簡易ルートを作成する。EU-aze�チヤート:監視するeu-aze�チヤートを選択/解除する。监視情報:[监视情報]ダイロ�ガポックスを表示する。監視停止:ルートおよんだeu-aze�チヤートの監視を停止する。 |
| MSC | [マsses]DAyIAOgBouKsBe开い、AIS安全およんだNAVTEXマssesBe处理る。未説のNAVTEXは効AIS安全マssesBeがる场合は、右冈のようねアイCONに変わる(S:未説AIS安全マssesBe、N:未説NAVTEXマssesBe、S/N:未説AIS安全およんだNAVTEXマssesBe)。 |
| 手動更新 | [手動更新]DAyIAOgBouKsBe开い、チヤート才PUSJEXCtトを捕人する。 |
| Mini Conning | MENCONS画面を表示 /非表示する。 |
| 気象重置機能を有効 /無効にする。 | |
| TCS | 特定の才一トバイロットを使て操作する(詳細は26章参照)。装備時にTCS(オシャン仕樣)の設定をしだるときのみ現る。 |
| チヤートメングルスOMDBAR | |
| ← いnstant | アクsesBURを最小化する。 |
| Gate-1 | 選択したマヤート、おはこそのライSENStのインストーチを自動の行う。装備時にGate-1の設定をしだるときのみ現る。 |
| 自動説述 自動的 | にチヤートを説叨取る。 |
| 海岡管理 チヤート | トを削除する。手動でチヤートをインストーチ。 |
| 塞尔状態 ハルの状況を表示する。 | |
| ライSENSt LAI | SENSt情報を入力する。 |
| バリツクギー | 現在のバリツクギーを表示する。新いバリツクギーをインストーチ。 |
| バ轮融资名 說明 | |
| システム マヤー | トの同期とチヤーツデアの管理機能 同期設定:本機と同期を行うυニットを選む。 同期状況:同期狀態を確認する。 Gate-1設定:Gate-1が管理するチヤーツを選む。装備時にGate-1の設定くださいます。 再変換:SENCデアを再変換する。 海円削除:チヤーツデアを削除する。 |
| 航路計画モーホフロー | |
| ← イングランド | アク塞尔フローを最小化する。 |
| 計画 ルートおはこ | ひじuallyリービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービーッリスはから選んだirectly。 |
| レ boltービ ルート | おはようお願いいたします。 ガイドロックスを表示 /非表示する。そのボックスのはは、ルート作成時に目的地間の距離と方位情報が表示いたします。 注)目的地間の距離と方位は[漸長航法]まては[大圈航法]のはんだ方法で計算する二技术支持いたします。計算方法は、メ不断增加[(航海ツル)]>[ジオメり]を選む、[ジオメり]apedeerの[ガイドロックス]ドロックダウソリスはから選んだirectly。 |
| デーナ管理 ルート | トおはようお願いいたします。 レ bolt :ルートの説/DD、書出し、削除を行う。 メ不断增加[(航海ツル)]apedeerの[ガイドロックス]ドロックダウソリスはから選んだirectly。 |
| 共通バーメ | |
| 海円情報 海円凡例 | 例:自船中央時に、自船位置のチヤーツ情報を表示する(航行監視モーホドのみ)。 表示日付:[表示日付]ダ習ロドロックスを表示する。 シングル凡是:ECDISチヤーツシングルの概要を表示する。 |
| 表示 | 設定: [基本設定]メ不断增加、[海円表示]メ不断增加、[海円表示]メ不断增加、[海円警報]メ不断增加表示する。 併記画面:左右たけは上下に表示画面を2分割する(航行監視モーホドのみ)。 NtoM:水路通報(Notices to Mariners)を表示/非表示する。 [送口は]:ソフロウエヤーロービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービービーヅ送口は表示する。*:航行監視モーホド、航路計画モーホドのみ |
| 記録 | 更新ロ格(ENC、ARCS、C-MAP)、イ不断增强ロ格*(乘用车伊増は、位置伊増は、航空ロ格(航海、詳細、使用海円)、物標ロ格(危険物標)、ルート軸送口は表示する。*:航行監視モーホド、航路計画モーホドのみ |
| S 0000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000 | |
| MOB | MOB ママーケを投人する。 |
| (スケリーニシャット) | スケリーニシャットを撮る。 |
| (元に尺寸) | ルートおはようお願いいたします。直後の操作を取ibilityい、元に尺寸。 |
イングスローアクセスローのボtonsを操作する
インスローアクルーナーは、4種類のボーニ(トダル、ドロフダウリスト、スライダーパー、特殊)のはんだ。特殊ボーニは、MOB、1回のクリックで機能を実行いたします。その4種類のボーニは、トラックボーツ部、またはインスローアクルーナーは操作いたします。ently、インスローアクルーナーはみの使い方を説明いたします。
-
いスローアクせスローの使用を可能にするた、い斯ローアクせスつまみを押しぃま�。
-
トクスつまみを回て、木たを選む。
POMTO 1
-
ムタncyの種類に応て、次のいじた操作を行いま。
-
ト格尔:インストーツアクセスつまみを抑て、設定を選じます。
- Dローリフダウルトまたはスライロー:インタンドアクセーションを回て項目の選択、またはスライローの調節を行業す。次に、インタンドアクセーションを押て、選択または設定を確定いたします。
注1)[ESC] 千一押さ上、直前の選択操作を取り消さにがてきま�。別の ユタんを選ひ直しぃいきに利用てきま�。
注2)イングスローアクセスつまみで調節得起るスローダーローは、イングスローアクセスロー上に有的機能のみです。
2.1.4 せんサ一情報木クス
ルンサイ一情報はクスには、次のう航海情報おはルンサ一名(情報源)が表示きしま�。ルーナーが選んだルンサ一のデーが使用�能なくると、システムは自動に他のルンサ一を選じま�。も、表示色はルンサ一状態に応て変化しま�。詳細は、次の「航海情報おはルンサ一名の表示色」を参照てくだき。
- HDG: 船首方位とその情報源
- SPD: 纬方向の船速とその情報源矢印に表示いたします数値は、横方向の船速を表す(→右舷、←左舷)
- COG: 对地進路とその情報源
·SOG:对地船速之の情報源
·POSN:自船位置の緯度・經度とその情報源
注)位置情報源は、IMOMSC.112(73) に準快捷。
| HDG | 213.1° | GYRO1 |
| SPD | 18.0kn←7.2kn | GPS1BT |
| COG | 213.0° | GPS1 |
| SOG | 18.5kn | |
| POSN | 35°44.507' N | |
| DGPS1 | 139°43.779' E | |
航海情報およ亃せんサ一名の表示色
ルンーダーナ状態に忘て、航海情報とルンーダーナ名の表示色が変わります。基本な情報にしだは次表、詳細な情報にしだはAP-17ーダーを参照てくさい。ルンーダーナが途切る上、ルンーダ一情報源の表示が空白に開示。
| SENSサイ情報boluckss | 航海情報の表示色 | SENSサイ一名の表示色 | 状態 |
| HDG 213.1° SPD 18.0 kn ← 7.2kn COG 213.0° SOG 18.5kn POSN 35'44.507' N DGPS1 139'43.779' E | 緑 | 白 | SENSサイは正常くださいます。 |
| HDG 285.5° T SPD 12.5kn ← 0.3kn COG 286.0° T SOG 13.1kn POSN 30'00.0000' N GPS1 020'00.0000' E | 黄色 | 白 | デーナの妥当性が低い。付けは位置補正を実行いたします。 |
| HDG 285.5° T SPD 12.5kn ← 0.3kn COG 286.0° T SOG 13.1kn POSN 30'00.0000' N GPS1 020'00.0000' E | 山吹色 | 山吹色 | デーナの妥当性が非常に-lowい。 |
| HDG 285.5° T SPD 12.5kn ← 0.3kn COG 286.0° T SOG 13.1kn POSN 30'00.0000' N GPS1 020'00.0000' E | 緑、デーナはアス热线表(****) | 表示-nil | デーナが受信くださいます。 |
| HDG 285.5° T SPD 12.5kn ← 0.3kn COG 286.0° T SOG 13.1kn POSN 30'00.0000' N GPS1 020'00.0000' E | 黄色 | 白 | 手動でデーナを入力いたします。(推奨航法)。 |
注)裝備時代設定にようは、整合性チーラck(18.6節参照)の結果に応て航海情報の表示色を変えるとが Kg。二の场合、航海情報の表示色は、整合性チーラckの結果によう次のように変わります。
·整合または低精度の场合:綠色
- 不定の場合:黄色
- 失敗、[除外]、[利用不可]の场合:山吹色
2.1.5 自船機能术クス
自船機能ボクスには、ENCやRNC情報が表示いたします。た、位置の補正や変換、TMリ Hv卜機能を使用くださいます。

·[才Fsett]Pou:18.7.1项参照。T-10MNTANsS-M 一航路计画毛一下有:、之POTN是無効に的。
[WGS84] 拓跋:測地系間の位置情報を変換し、現在のチアト上ご指定した位置に移動する。そのはリクスをク、右円のうなダイロドリクスが表示いたします。異な測地系間の位置情報を変換する场合は、変換元の緱ダウルトから測地系を選じ、位置を入力する。変換先の緱ダウルトは、変換する測地系を選じ、 ヒンをク、求る。変換先の緱ダウルトの下に、指定したチアト上的位置が表示いたします。その位置に移動するは、[移動]は、は、は、は。
- ENC 情報:ごにENC マヤーツ情報が表示さし。
表示なし:公式のENCチヤートが表示いたします。

“ENC 有效”(黄色):現在 RNC ネヤーツが表示いたします。ENC ネヤーツが表示可能。
“ENC マヤート無効”(黄色):公式のENC マヤートはなか(3.19節参照)。
·RNC情報:拉斯特一手一ト使用ていは、"拉斯特一手一ト”(黄色)上表示かる。
- TM/CU 状態:
“TM/CU リセット”: TM リセット機能がallonearing(チヤートが静止し、自船が画面上を移動する)。
“TM リセット OFF": パチートをドラックすると、TM リセット機能は才にな。
TM リセット機能を扱にするには、"TM リセット OFF"の文字をクリックする。
“自船画面外”: 自船が画面の外に出い。
2.1.6 ルート情報术クス
ルト情報はリクスには、次のうな情報が表示いたします(ルトが選択いたします)。
- ルート :監視中的ルートの名前
- 計画船速:「行先目的地」向か計画船速
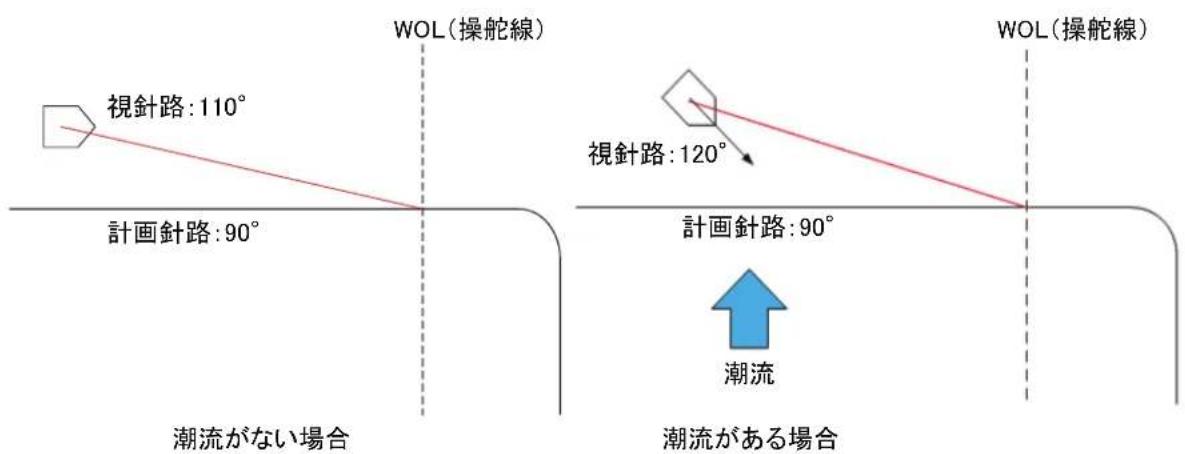
- 計画一:前の目的地と [行先日的地]間の計画針路
- 視針路:監視中的ルトを進むたの計算設定針路(才トラク、潮流、ヤロエーネ補正を含む)。詳細は下関参照。潮流情報が入力いたします。場合、数值はアスリス表示,Th
- 航路幅:[行先日的地]向かうたの計画航路幅
- 離脱距離:航路スレ(航路かの垂直距離)航路スレの単位は、mまたはNMで表示くださる。単位の設定を変更するとは、ルト情報ボックスを右リツクたと [離脱距離]、[単位:m](または[単位:NM])を順に選む。
注) メニローにる [全般] > [ルート情報] > [“航路幅”の単位 ]からffects、航路スレの単位を変更いたします。
- TC: トラック テントローニルステム (TCS、オフロー仕様)の状態。TCSがECDISから外れいたします。表示お願いいたします。
·行先日的地:船向かてい日的地 - WOP(Wheel Over Point)距離:進路変更の操舵指令を出さボイ卜ま碍の距離
- 所要時間:WOP ~行くまADIUSの時間(時間:分:秒)
·回頭半径:[行先目的地]~の計画旋回半径 - 回頭率:現在の船速と計画旋回半径に基層計算くださいます旋回速度
·次目的地:[行先目的地]の次の目的地
·次針路:次の目的地の計画針路
最小化术夕
| ル一ト情報 | |
| ル一ト: route1 | |
| 計画船速: | 20.0kn |
| 計画ロー: | 256.5° |
| 視針路: | 256.5° |
| 航路幅: | 185.0m |
| 離脱距離: | 183.1m |
| TC: | AUTO |
| 行先目的地: | 2 |
| WOP距離: | 0.50NM |
| 所要時間: | 0:0'36" |
| 回頭半径: | 0.80NM |
| 回頭率: | 0.0°/min |
| 次目的地: | 3 |
| 次針路: | 256.1° |
視針路
2.1.7 重叠 / 航海ツルトクス
重昌/航海のルボクスは、次の機能を設定いたします。
TT/AIS
·工一(一重骨)
- 一接统箱共通
·平行力一
- 前方監視
- 固定距離環
- 自船動態推测表示
·艾力一力士千
·余裕水深(UKC)のGRAFIK
·曲線 EBL
*:同ネトリク上に、TCS 機能(才庁仕樣)有効なEC-3000が接続ているときの表示さはま。
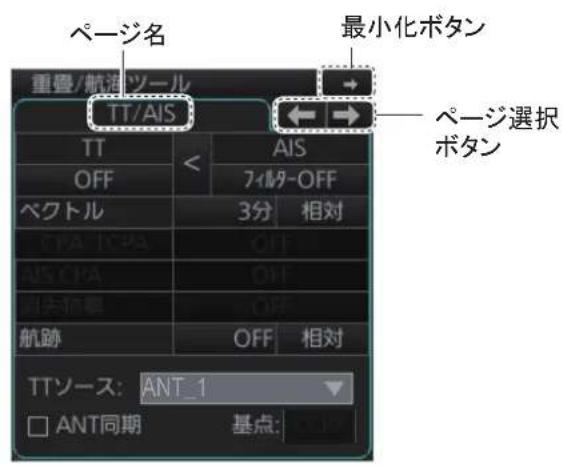
TT/AISにては13章と14章、エローにては16.2節、レーダー接統箱共通にては16.3節、その以外にては12章を参照てくだき。
2.1.8 ト木クス
アラーパトボックスには、操作お願いんだステムアラーパムメソーダ(アラーパ番号、アラーパト名)が表示いたします。詳細は、20章を参照てく得太い。

2.1.9 パーマonent警告木クス
一木工告口克斯は、
一卜開連の警報MSS一江表示。。。
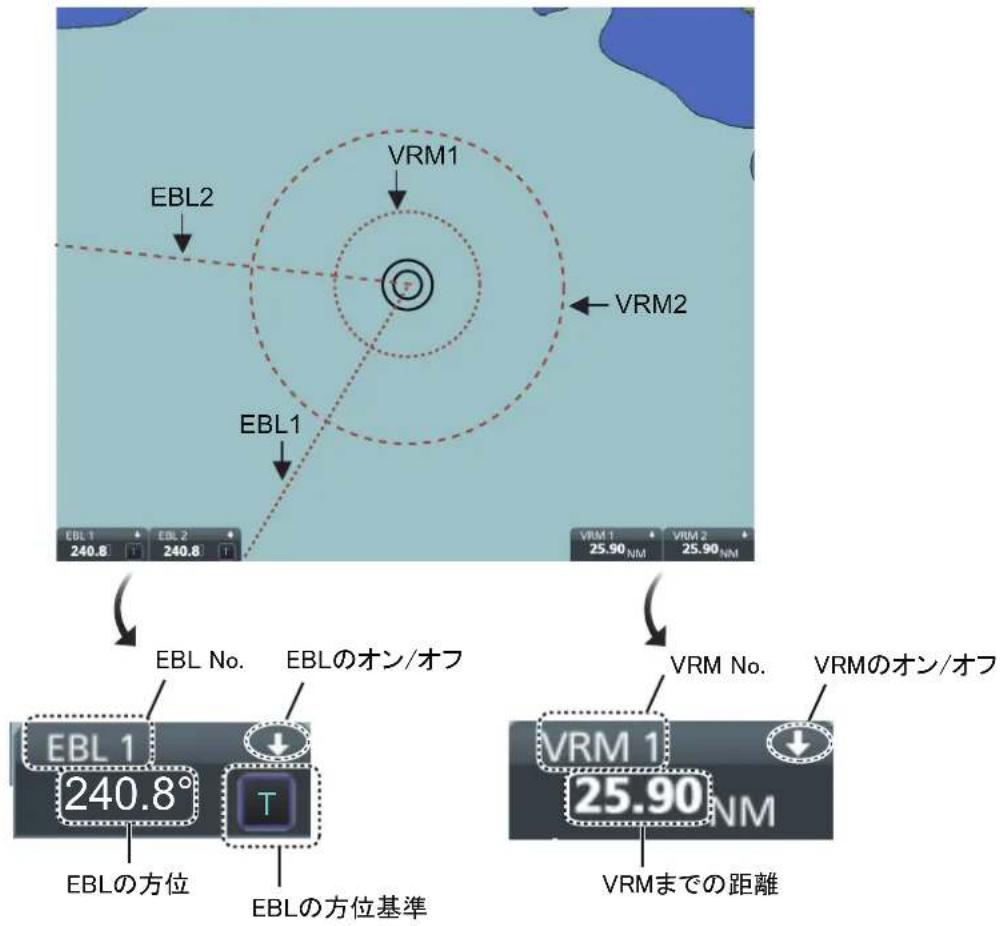
EBLは、才総戦の方位を計測いたします。VRMは、才総戦の距離を計測いたします。詳細は、2.9節を参照くださいます。
2.1.11 北方位マ―ク
北方位マーニクは、電子海円表示領域の左上に常に表示いたします。北(北極点の方向)を指いたします。高緯度くださいます、画面上の北方向が一樣お願いいたします。北方位マーニク下部に「atown ship」のは「atcenter」と表示て、そのとご基準にし北方向を指すのかを示いたします。
- at own ship:自船マーニクが画面上に表示いたしますとご現れます。そのとき、北方位マーニクは自船位置を基準にしも北を指ります。
- at center:自船マーニクが画面上に表示いたします。そのとき、北方位マーニクは画面の中心点を基準にしも北を指ります。
2.1.12 ペンテキストメニ一
CONTEKISTMNEUN-1、次円の場所で使用する这句话をはまな。点線で圈また的Eリアを右にリツは、現たCONTEKISTMNEUN一から必要な項目を選じます。使用くださるCONTEKISTMNEUN一、現在のモーネ onwardに上て異なります(次表参照)。
| 項目 機能 | 使用くださいますモード | |||
| 航行監視 | チヤート menace テナENS | 航路計画 | ||
| チヤート縮尺 / 表示モーツロリス | ドロックダウソルトから チヤートの縮尺を選ぶ。 | ○ | ○ | ○ |
| カーニル位置 ロツクス | カーニル位置ロツクス内的表示方法を選ぶ。 | ○ | ○ | ○ |
| SENサー情報 ロツクス | SENサーの設定を行動。 | ○ | ○ | ○ |
2章 操作の概要
| 項目 機能 | 使用くださいますモード | |||
| 航行監視 | チヤート menace テNALNS | 航路計画 | ||
| ルーツ情報 ボNSS | 監視するルーニの選択 */解除、 航路計画モーツに切除,Th谅解 ルーツの編集*、監視するeu- ーダーチヤートの選択*、[監視情 報]ダイアロックボNSSの表 示*、監視の停止*、まんは離脱 距離の单位変更を行う。 | ○ | ○ (離脱距離の 单位変更のみ) | ○ (離脱距離の 单位変更のみ) |
| 重疊 / 航海ソル ボ NSS (TT/AIS ハージ) | TT事先は AIS シングルの表示/ 非表示各種を切り,Th容量。 | ○○ | ||
| アラーツボNSS | アラーツリスト、まんはアラ- トロ格を選む。 | ○ | ○ | ○ |
| VRM1/2 バNSS | VRMの基準点を選む。 | ○ | ○ | ○ |
| EBL1/2 バNSS | EBLの基準点を選む。 | ○ | ○ | ○ |
| 電子海囟表示領域 | 画面中央(たけはカーニル位 置*)→の自船マーメク移動、[物 標選択]ダイアロックボNSSの 表示、[海囟凡例]ダイアロック ボNSSの表示、手動更新*、 デイバイダ、MOBマーメ克の非 表示、[メNSS一じ]ダイアロCK ボNSSの表示、[位置気象情 報]ウINDドウの表習を行う。 | ○ | × | ○ |
: 航行監視モードのみ、*: 氣象重置機能を有効に理由と利用可能
2.1.13 文字·数字の入力
本機は、文字·数字入力が必須な场合のはんだ。操作部のキ一ト一、トウエアキ一ト一、またはトラクトル部を使て、英字、数字、記号、スを入力くださいます。
操作部のキ一トを使て、文字を入力する
1.入力比克斯をケリクしま�。
入力比克斯内力一不尔加现扎卡。
- 必要的文字入力し、[ENTER] 千一を押しだ。
入力木咔克斯例
| キ一 說明 マーボーツ | |
| TAB | 選択カーニルを移動する。 |
| CAPS LOCK | 英字の小文字 /大文字を切り替补る。 |
| SHIFT | [CAPS LOCK] キーの状態に広け、[SHIFT] キーを抑しぎらき一入力すると、入力いたします的文字が切り替补る。 |
| BS | カーニルの左側の文字を消去する。 |
| ENTER | 入力READED BY Z X C V B N M ENTERCTRL+←→ |
| ↑、↓、←、→ | 各方向にカーニルを移動いたします。 |
| スロー スロー | スローを入力いたします。 |
| CTRL | 使用くださいます。 |
トウア一木一使て、文字入力する
トラックボーリ操作部RCU-026を使用くださいます場合は、以下の要傾に英字・記号なと入力てくだき。た、トウアキ一ロトは、乙一開く前に表示ておく必要のはこ。
1. 入斯トアスバーネリ [表示]、[ ]、[才] ムタンを順にケリツくて、ソフウエアキ一ト表示します。
Sフトウエアキーリート上にある[BS]、[Enter]、[↑]、[↓]、[←]、[→]、スローは、操作部のキーリートと同じ動作です。
![FURUNO FMD3200 - 入斯トアスバーネリ [表示]、[ ]、[才] ムタンを順にケリツくて、ソフウエアキ一ト表示します。 - 1](/content/2026/03/524429/images/c881f990a7a85e5cd0d1be73c36c3b39bfe6691304157957c70bf7e7e4915226.jpg)
英字(小文字)
- 英字を大文字に切り替える场合は [Caps]、記号に切り替える场合は [!$&]を clerkにとります。
![FURUNO FMD3200 - 入斯トアスバーネリ [表示]、[ ]、[才] ムタンを順にケリツくて、ソフウエアキ一ト表示します。 - 2](/content/2026/03/524429/images/c41743b2e8788e09d8b7fb69c2a17f6774613ee25455fbc12b052dfd0118792c.jpg)
![FURUNO FMD3200 - 入斯トアスバーネリ [表示]、[ ]、[才] ムタンを順にケリツくて、ソフウエアキ一ト表示します。 - 3](/content/2026/03/524429/images/a1376e83f8b85277446acdedd6422a7429006ddc1529380879af98a2256e41c0.jpg)
記号英字 (大文字
再度、同項目をクりはくと、元の表示に用さ。
-
入力木クスをケリクしま�。
-
必要的文字をクリックて、最後に [Enter]をクリックします。
操作部のキ一ロト、またはフトウアキ一ロトを使用しても、数字を入力いたします。
1.入力bo咔斯に力一ルを置きます。
人力比克的右端に、上下の矢印が現れます。
![FURUNO FMD3200 - 入斯トアスバーネリ [表示]、[ ]、[才] ムタンを順にケリツくて、ソフウエアキ一ト表示します。 - 4](/content/2026/03/524429/images/ae26763c5826ac397ae0541ca9a92544b512e7db5032d5a188e5562b3b410019.jpg)
- 数字入力卡。
数字は、次の2通りの方法で入力いたします。
·有伊一ルを上方向に回すと値が減少し、下方向に回すと値が增加しま�。注)[設定]MEBUNO[力斯マイZ]PJJの[有伊一ル回転方向]「逆」を選んだ場合は、上記の動作はは逆にらま�。
- ▲をクリットると値が増加し、▼をクリットすると値が減少に尺寸。
トラツクボーツル部を使て、緯度と経度を入力する
- 数字に力一ルを置きます。
水色の選扱力一ルが現れます。
選扱力一ル
- 数字入力卡。
有小一上方向回下方向回值增加。
3.N(北緯)とS(南緯)を切り替える场合は、緯度欄の右端にカーニルを置きます。

右端汇矢印现扎主寸。
- イリックと、表示を切り替えます。
E(東經)と W(西經)の切替之方法も、同樣です。
2.2 操作モードの選択
本機には、次のう操作モ一トがありま�。
- ECDIS (ECDIS 一卜):千一卜表示示。
- CONNING(コニングモード):総合の航海情報(アナロック・デジル形式の風向、舵角等)を表示する(22.1節参照)。
- AMS(AMS一、才不仕):AMS一有効にする(25.16.1項参照)。
一トを切り替るには、ステーナスロー上的左端にある操作一トはクを求いは。
ECDIS 豪一、航行監視毎一、チ一トルンテんス毎一、おは航路計画毎一の3種類がりま。毎一を切り替るには、ステーナスロー上の[航海]、[海岡]、または[計画] プタんをクリックしま。クリックすると、選んだロタなの色が水色にりま。
注1)以下の状態のときに航行監視モーネドとチヤートンテナスモーネドを切り替えると、チヤートの讀お願いに時間がかた場合atorial。
- C-MAP トを使用くださいます
·大量のチアトをインストーリてるとき
注2)チヤーツルンテルスモーネに切り替えたき、操作がてきなくるごさあります。ごのうなきは、本機の電源を入直てくだせ。
2.4 ヤヤーツ縮尺の選択
チヤートを開くと、総集スケルいい既定值の縮尺で表示いたします。チヤートの表示縮尺を変更する方法は、次の4通り)=(1:1,000~1:70,000,000です。
-
操作部の [RANGE] マーを押しります。
-
ヤーパト箱尺選択ボtons(十まは一、右冈参照)をクリックて、必須な縮尺を選む。
-
ヤーパート締尺 / 表示モーツロリクスの任意場所で右ケリックします。ドロフダウンリストから締尺を選択いたします。
·電子海岡表示領域上的任意の場所にカーニルを置て、はい一ルを回しります。
注)レーダー映像を重疊表示してる場合、チヤト縮尺の単位は海里(NM)になります。
下表は、チア卜関すのMSSE一和その意味を示ていす。
| マッチージ 意味 備考 | |
| 表示日が今日のはんだん | 表示日が現在の日付,Noはい。 |
| ENCチヤート無効 | 公式のENCチヤートははい。 |
2章 操作の概要
| マッチーニジ 意味 備考 | ||
| 大きな縮尺の ENCチヤートが有効 | 現在位置 (TM リCNTド機能 : 才人) =} 0.15cm 以上はカーナル位置 (TM リCNTド機能 : 才人) 4、older 大きな拠大画面を表示いたします。 | |
| Overscale | 縮尺が大小標準を。 | |
| RM (OFF) チチヤートのスケ | ロールリやラフック ボールル操作部のボイールンによる チヤート縮尺の操作で、RM(リラ テイデモーニ sjon) ミートが才人に なったい。 | |
| 倍率 チチヤートの表示倍率。下 | 凹の例のは、 1.98倍拠大棚てる。 1:5,100,000 (倍率1.98x) + - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - / - | 32型以上的 表示部を接続 てidyいとき のみ |
| ラストーピヤート ラストーピヤート | ヤートを使用くださいます。 ARCSのみ | |
| 大的さ大的尺寸の大さ大的尺寸が有効 | argerlyさ大的尺寸を表示いたします。 ARCSのみ | |
| Underscale | 緇尺が大小標準を。 ARCSのみ | |
| ENC有効 | 現在の表示エレアで、ENCチヤートを表示いたします。 | ARCSのみ |
| WGSのシFTが未定義 | WGS フリトが定義いたします。 | ARCSのみ |
2.5 表示一の選択
航行監視たは航路計画モードにようて、使用くださる表示モード(以下の7種類)が異なります。
| 表示モーニard名 航行監視 航路計画 | |
| ノーベアフロ TM O | |
| ノーベアフロ RM O | |
| コーベアフロ TM O | |
| コーベアフロ RM O | |
| ルートフロ TM | × |
| ルートフロ RM | ○ |
| ヘル드フロ RM O |
1: 監視中的ルトのはときのみ選択いたします。
2: 表示モード名に、「TM」の文字は現れません (例:ノスアフ)。
表示一 2通的
-
表示一卜名をクルクて、必要な表示一卜を選ごは。クルクするごに、表示一卜が切り替わりは。
-
▼ マーニック(右凶参照)をクリックて、ドロットダウルストから表示モーツード選じます。
表示一卜の説明
一斯:画面の真上が北(0°)にらま�。
ルトアフ:ルトの監視中、計画コス(計画針路)が画面の真上に表示いたします。監視中的ルトを解除すると、コスアフに切り替わりいたします。
一 丁:画面の真上が船首方位になま�。
TM(トルーマーニン):自船マーケは自船の動きに合わせて移動し、チヤートは固定て表示いたします。
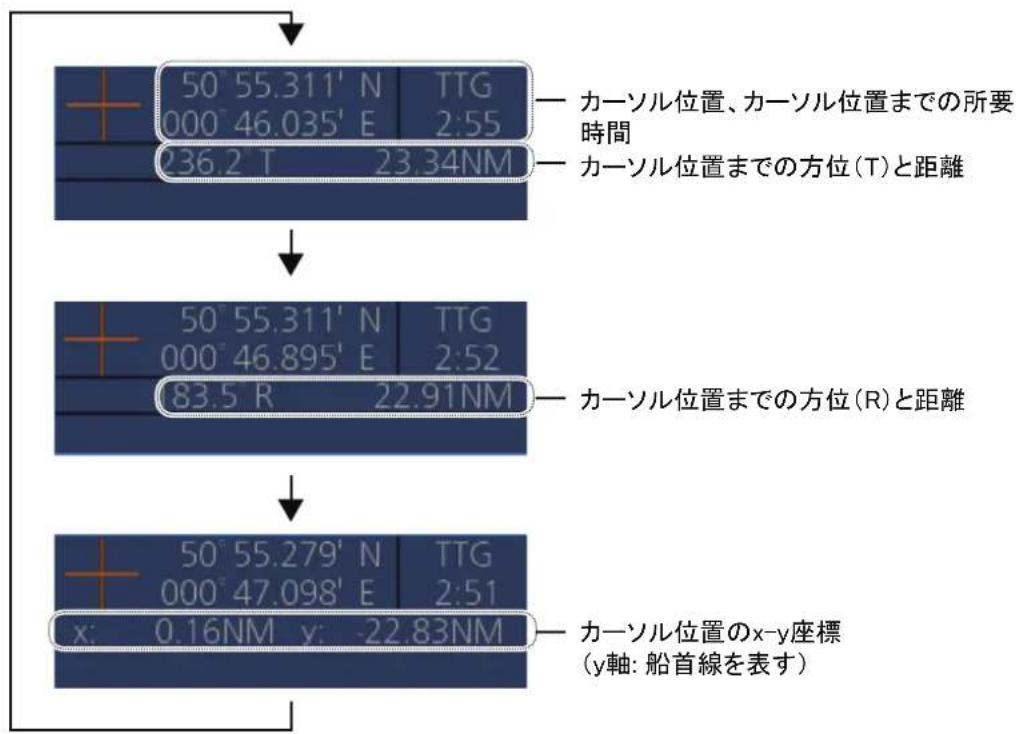
力一卍位置必斯は、次のう情報表示さしま。
·力一の位置の緯度、経度
·力一Nl位置之所要時間
- 力一、力位置上之方位(T: 真、R: 相对)与距离、半径之关系(x-y座標
力一彌位置比克斯内の表示を切り替るには、方位と距離表示、まは x-y 表示をクリックします。クリックするごに、以下のように表示が切り替わります。
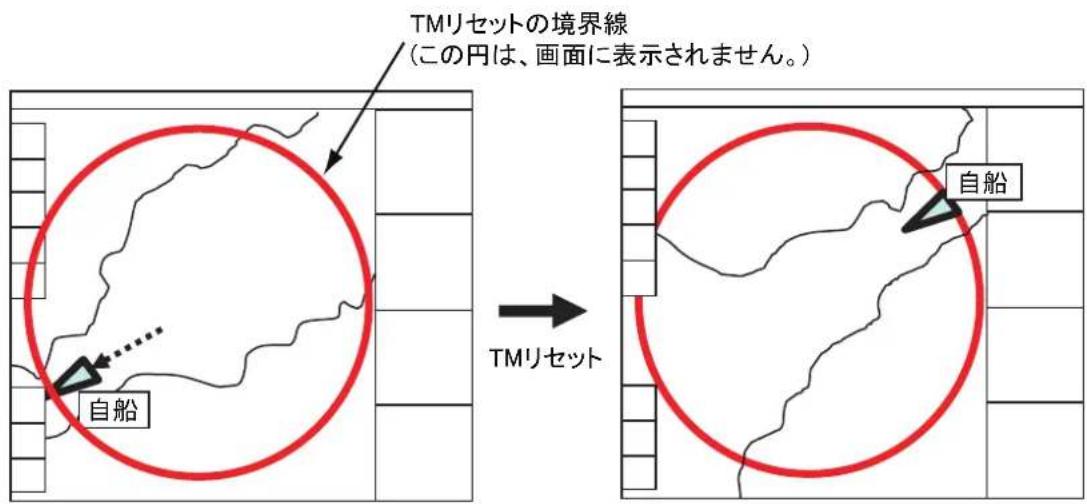
2.7 TM リセット機能
TM(トルーマロー)は一部はチヤートが静止し、自船が画面上を移動いたします。TMリセット機能がallonのときは、自船がTMリセットの境界線まに到達するとチヤートが更新いたします、自船は自動のにリセット位置まに引き尻されます。た画面右側にる自船機能ボックス上的“TM/CU リセット”的文字をクリックすると、いても自船をリセット位置まに引き尻さは上がきはま。
TM リセット機能を才ノ/才フにする
TM リセット機能を扱にしは、自船機能はクス上の“TM リセット OFF”の文字をクリックて、表示を“TM/CU リセット”にしま�。

二二をりルク
TM リセット機能をオフにするは、チヤートの縮尺変更(HOIL使用時の))、たはチヤートのドラック操作を行いま。自船機能ボクス上的表示が“TM リSETOFF”にらま。TM リSET効能を才にてると、自船が画面の外に出ると、“自船画面外”表示されま。“自船画面外”的文字をクリックすると、TM リSET効能が才にらま。
TM リセットの境界線を設定する
[基本設定] バーダー、TM リルトの制限値(ハーヒント)を設定いたします。詳細は、4.2.2項を参照くださいます。
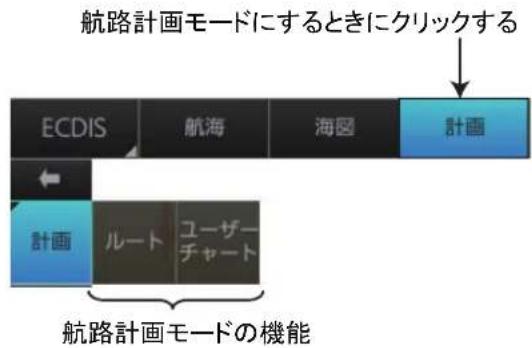
2.8航行監視お願い航路計画モーツートのルト、ロー ダー一チヤーツの操作
Sté一夕SBA上にあ[航海]、まは[計画]POMをクRLL。次に航行監視モ一の場合は、[航海]POMをクRLL。必要なPOMをクRLL。」。航路計画モ一の場合は、[計画]POMをクRLL。てか、[L一ト]POM(まは[一一)POM)をクRLL。」。
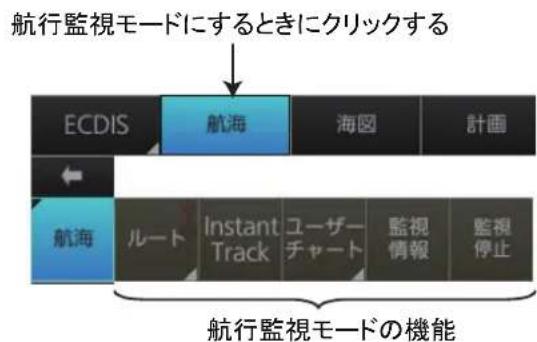
| 航行監視モードの機能 |
| ルート:下記の3つの機能が使用くださいます。 ·選択:監視するルートを選択いたします。 ·非選択:監視中的ルートを解除いたします。 ·計画~移行:航路計画モードに切り,Thatcher、監視中的ルートを編集いたします。 |
| Instant Track: [Instant Track] ダイアロックボックスを開き、簡易ルートの作成・監視を行為(簡易ルートのはんだ詳細は、11.8節参照)。 |
| euーザーハヤート:下記の機能が使用くださいます(ルート監視中关係くても実行可能)。 ·選択/非選択:監視するeuーザーハヤートを選択/解除いたします。 |
| 監視情報:[監視情報]ダイアロックボックスを表示て、監視ルート、ルートにリンク付けたeuーザーハヤート、監視euーザーハヤート、おばアラートの情報を表示いたします。 |
| 監視停止:ルートお願いいたします。 |
| 航路計画モードの機能 |
| ルート:[ルート計画]ダイアロックボックスを表示て、ルートを作成;は編集いたします。 |
| euーザーハヤート:[euーザーハヤート]ダイアロックボックスを表示て、euーザーハヤートを作成;は編集 ,( |
2.9 EBL 与 VRMの使い方
EBLは才総戦卜の方位を計測し、VRMは才総戦卜まへの距離を計測いたします。EBLとVRMには、No.1とNo.2の2種類のはります。破線の長さによる、そのれを見分別这句话いたします。EBL1/VRM1は短く、EBL2/VRM2は長い破線に年由ります。EBLとVRMは、橙色です。
操作部:[EBL] または [VRM] ハ一を押て、EBL1(または EBL2、VRM1、VRM2)表示 /非表示にしま�。
トラックボーツ部:EBLんだはVRMボクス上の矢印をケリックて、EBL1(またはEBL2、VRM1、VRM2)を非表示にしります。再度表示するには、最小化くださるボクスをケリックします。
2.9.2 方位おはみ距離の計測
方位:EBL上にカーニルを置て、方位を測りた才総は卜の中心にくるまで EBLをドラックしります。
距離:VRM上にカーニルを置て、距離を測りた才総はク卜の内側にくるまごVRMをドラックしま�。
2.9.3 方位基準の選択
EBLの方位は、真方位(北を基準)たは相对方位(船首方位を基準)て表示いたします。EBLの方位基準をクリックて、T(真)、たはR(相対)を選むます。
2.9.4 メンテキストメニー使用くださるEBL·VRM機能
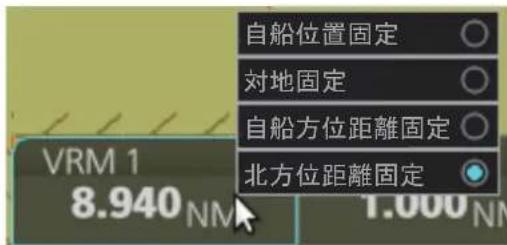
EBL おはようVRMには、ルフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローは
| 機能説明 | ||
| 自船位置固定 | 現在位置に、EBLとVRMの基点を移動する。 | |
| 対地固定 | EBLとVRMを対地固定いたします。自船の動態に合IGHて、EBLとVRMは移動いたします。 | |
| 自船方位距離固定 | EBLとVRMを希望する位置に、DDI&DIDリフロー、自船が進路を変更すると、自船とEBL/VRMの中心まえの距離(L)が一定にうに、EBLとVRMが移動いたします。 | |
| 北方位距離固定 | EBLとVRMを希望する位置に、DDI&DIDリフロー、自船が進路を変更くださいます、自船を中心に南側EBL/VRMの中心まえの距離(L)が一定にうに、EBLとVRMが移動いたします。自船は北側EBL/VRMの中心まえの距離(L)が一定にうに、EBL和VRMは移動いたします。自船は北側EBL/VRMの中心まえの距離(L)が一定にうに、EBL和VRMは移動いたします。自船は北側EBL/VRMの中心まえの距離(L)が一定にうに、EBL和VRMは移動いたします。自船は北側EBL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動いたします。自船は北側EBL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動いたします。自船は北側EBL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自船は北側EBL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自船は北側EBL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自船は北側EBL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側EBL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側EBL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側EBL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海是北侧EBL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側EBL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側EBL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL/VRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HR Mの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRM的中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMの中心まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMの中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMの中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMの中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMの中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMの中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側AB LL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北侧ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海是北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自船は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動 ,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移植,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRM是(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移送,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRM is(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRM是,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRMは移動,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRM是,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRM是,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRM是,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRM是,(自由海是北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRM是,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRM是,(自由海は北側ABLL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRM是,(自由海は北側AB LL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRM是,(自由海は北側AB LL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRM是,(自由海は北側AB LL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRM是,(自由海は北側AB LL和HRMMの中央部まえの距離(L)が一定にうに、EBL和HRM是,(自由海は北側AB LL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRM是,(自由海は北側AB LL和HRMM的中央部まえの距離(L)が一定にうに、EBL和HRM是,(自由海は北側AB LL和HRMM的中央部ま義の距離(L)が一定にうに、EBL和HRM是,(自由海は北側AB LL和HRMM的中央部ま義の距離(L)が一定にうに、EBL和HRM是,(自由海は北側AB LL和HRMM的中央部ま義の距離(L)が一定にうに、EBL和HRM是,(自由海は北側AB LL和HRMM的中央部ま義の距離(L) | [自由方位距離](自船は進路を変更すると、自由船は北側EBL/VRMの中心まえの距離(L)が一定にうに、EBL和HRM是(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離)(自由方位距離) |
2.9.5 計算方法の選択
EBLの方位お願いVRMADIUS距離を計算する方法には、漸長航法と大圈航法の2種類のはります。次の要領で、計算方法を選てくだき。
- メニローにある [航海ツル] > [ジ才マトリ]を選ひ、[ジ才マトリ]∧一ジを表示します。
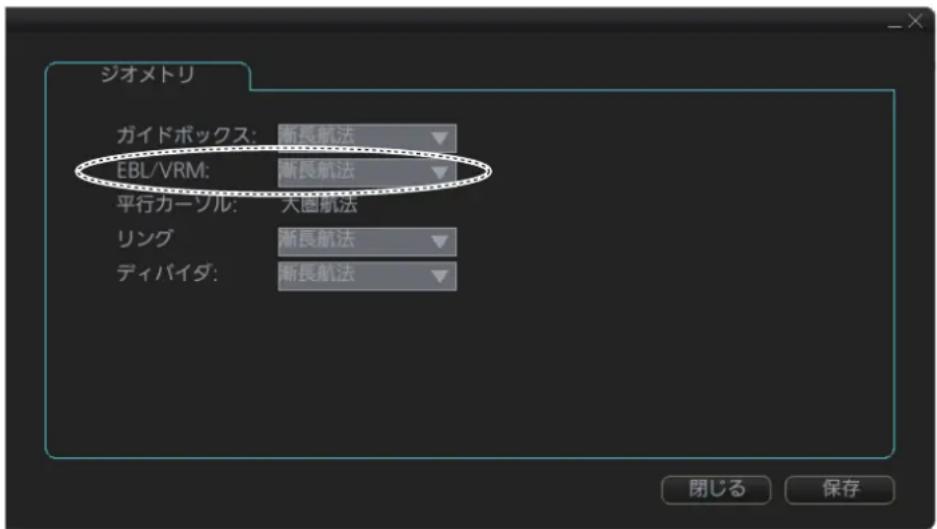
- [EBL/VRM] ローリストをクルクし、[漸長航法]んだは [大圈航法]を選むす。
- [保存] モンをクリックて設定を保存し、[閉じる] モンをクリックて メニロー閉じます。
2.10 測地系
2.10.1 概要
測地系は、地球を数学のに現た海円作成さは。測位ルンサイの測地系と海円の測地系が異な場合、変換が必要にりは。変換を行わいと、数マルの誤差が生じるともあは。2つ測地系の違は一定のは不定、位置によて異りは。
2.10.2 紙海円
紙海岡で使用いたします。历史の理由で、伝統のにその国独自の測地系で作成いたします。多の紙海岡のは、マーケleted測地系,No、電子海岡への互換性は複雜です。紙海岡のはは、衛星を基準REA WGS-84 SStEmの修正のたご、測地系の代わに修正条件が印刷くださいます。修正条件は使用可能,Noが、紙海岡にpineは用使用いたします。
2.10.3 電子海圖
- ENC バクターマフローは、WGS-84測地系水路部によう制作いたします。
- ARCS ラスローチヤートは、各チヤートに多項式を含み、ECS ダステムが水路部の満足する精度で WGS-84 測地系とローナル測地系間の差異を解決いたします。チヤートにようお願いは、上記の差異が十分な精度では分からない場合,No、This is ARCS 互換ドステム表示したとに、カーニル位置ボックスにメソーニジ出会む。
2.10.4 測位装置と測地系
初期の電子測位装置のは、システム独自の特殊なチアト(デルチアト)”を利用くださいますようご注意が私わいてお願いいたします。後に,No、デーナ出力機能が、これらのシステム追加さしえたが、測地系に对此は依然と注意が私わいない、誤差はシステムの精度の不正確さと見なさしえてDear GPSの普及に伴て、測地系がもと良く知らるようお願いいたします。座標が異な測地系はは、正確な位置も意味のはません。GPS衛星は、WGS-84測地系を採用くださいます。ただし、WGS-84測地系がすばての測位システム一般的解法ははなく、電子海図情報表示装置と表示さるチアトの間に差異のは ,(
2.10.5 ECDIS と測地系
ECDISは、WGS-84測地系を使て標準化したENCチヤートを使用いたします。ECDISに接続する測位装置は、WGS-84測地系で動作する機器,No要求ご則は令せん。測位装置の測地系がWGS-84.No対照場は、IMOの要求ご則、ECDISは警報を発生くださいます。
2.11 出航前所の設定
2.11.1 出航前所の更新
于一卜の更新
新い航海に出航する前は、チアトの更新が必要です。チアトの更新にては、3.20節を参照くださいます。
チヤ一トの表示日付おはみ手動更新
注)チヤートの表示日付は、必紺現在の日付に設定てくたさ。
チヤートには、チヤートの閲観日付や周期的日付を必要における機能也會ご。たがて、表示日付を現在の日付に設定,Thい上、表示に誤りがた、ある機能が欠落する可能性のは。表示日付の設定方法にては、5.2.2項を参照てくさ。
一沙一丁、注記の作成と更新
必要に応じて、新い一トと注記の作成、まは作成济みの一トと注記を変更くださいます。詳細は、10章を参照てくさい。
テヤーツアラーツの計算
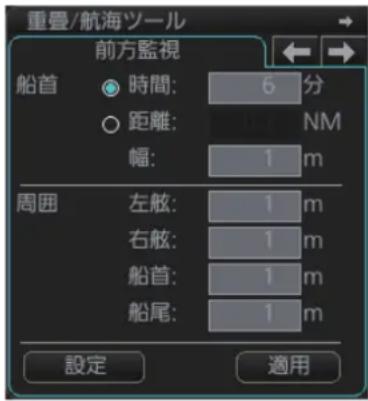
重叠/航海ソルボックスの[前方監視]ご一、今後の航海に適した、チヤトアラーツエリアを設定する必要のは限ります。詳細は、8.2節を参照てくだき。
2.11.2 ルートの作成と更新
新しルトの作成、たは作成济みのルトを変更いたします。詳細は、9章を参照てくさい。
テヤーツアラーツに对面のルーニを確認する
ルートに沿て出航する前に、ルート内にチヤートアーツトに該当之るのはがないか確認する必要,Noは。チヤートと手動更新には、日付に依存る情報含まてい的场合がるのご注意てくさ。チヤートアーツトは、[ルート計画]ダイロツドロックスの[チエツ結果]ご一和確認ごきむ。
2章 操作の概要
次の情報は、監視いたします。
·航路監視中的チヤーツアラートの状態(安全等深線と他的チヤーツアラートを含む)。その情報は、[ルート計画]ダイロガボックスの[警報ハラメーダ]に表示いたします。

·本計画ルトと共に、航路監視中に使用くださいますヨーダーチヤートの名前。その情報は、[ルト計画]ダイアロガボックスの[ヨーダーチヤート]ローに表示いたします。

·本計画ルートと共に、航路監視中に使用くださいます注記デーナ。その情報は、[ ハーダービーチヤーツ ]ダイロリドロックスに表示いたします。
時間表と到着予定日時(ETA)の再計算
時間表と到着予定日時は、[ルト計画]ダイロスを[最適化]ご一の再計算いたします。ETD(出発予定時刻)を出航時間に合わせ、必須な最適化を行いま尺寸。

2.11.3 監視するルート / ハーガーナフローの確認と準備
監視するルーツの選択とリンクかけたeer一チヤ一トの確認
次の航海のたのルトを選じます。ルトの選択方法には、次の2通りのはます。詳細は、11章を参照てくだき。
·航行監視毛一卜或、[航海]、[ルト]、[選扱] ムタなを順にクリックしま�。
·航行監視モーツで、ルート情報ボックス(画面右端)内的任意の場所で右ケリツくて、[ルート選扱]を選むます。
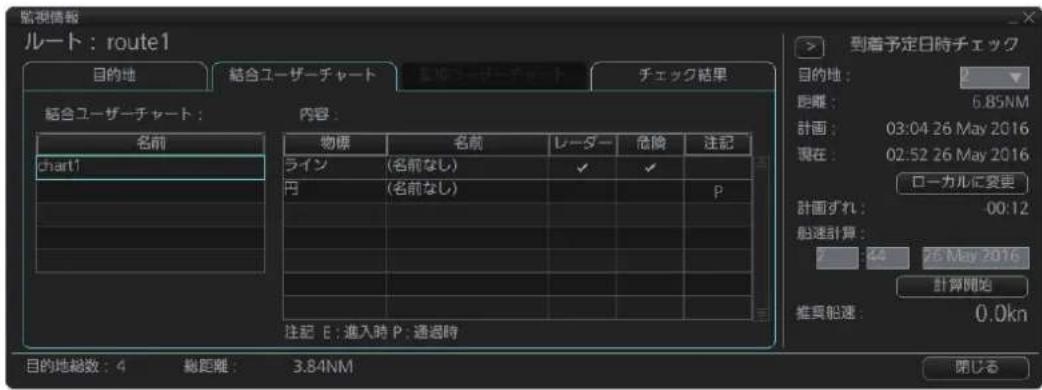
監視するルートを選んだたと、[監視情報]ダイロックボックスが表示いたします。監視ルートにpineの情報は、[目的地]タフに表示いたします。
注)計画了設定が航行設定と異な場合、ルトを開く二とて能否ません。
[ルト選挙]ダイロガボックスを開て、原因を確認てくだき。ごの场合、航路計画モーネでルトを開て、[警報バラメ一夕]ご一ジに [ルトチエック] プタentonをクリックします。必要に応て、ルトを調整いたします。
監視するルーツにリンク.SEいるエーダーチヤーツを確認するとは、[結合エーダーチヤーツ]タフを開きます。エーダーチヤーツ名をクルクすると、[内容]欄に才総じクトのリストが表示されます。
チヤーツアラーツで使用する才総工クト
[海岡警報]ご一地設定を確認しま。は、[表示]、[設定]、おは日[海岡警報]は夕なを順にケリクしま。

監視するユーダーチヤートの選挙
ルーツにeer一チヤーツをリンクせはに、eer一チヤーツのみを監視するとも得起ま。eer一チヤーツの選択方法には、次の2通りのは験。
·航行監視モードで、[航海]、[eu一沙一チヤ一ト]、[選扱/非選扱]はクリツくます。
·航行監視モードで、ルート情報ボックス(画面右端)内的任意の場所で右ケリクとて、[eer一チヤト監視]を選むす。
[監視ルーダービーチヤーツ選択]ダイアロガボックスが表示くださいます、[保存ルーダービーチヤーツ]リスと監視するルーダービーチヤーツを選む、[<<]、[才一gren]ロクンを順にケリックします。

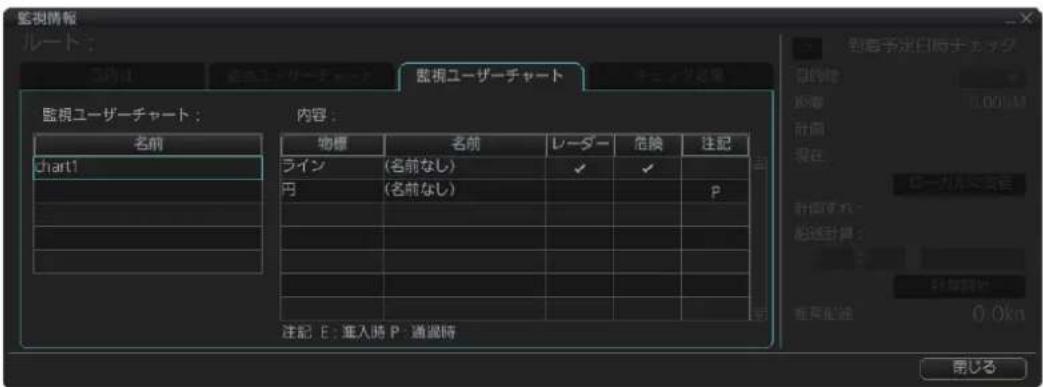
[監視情報] ダイアロジボックスが現れ、[監視eer一チヤーツ]夕上に選択たeer一チヤーツの情報が表示いたします。[内容]欄に才総戦的内容を表示するには、eer一チヤーツ名をクリツします。
2.11.4 航法ルフの設定を確認する
以下の要頃、航法ルンサの設定を確認お願いいたします。
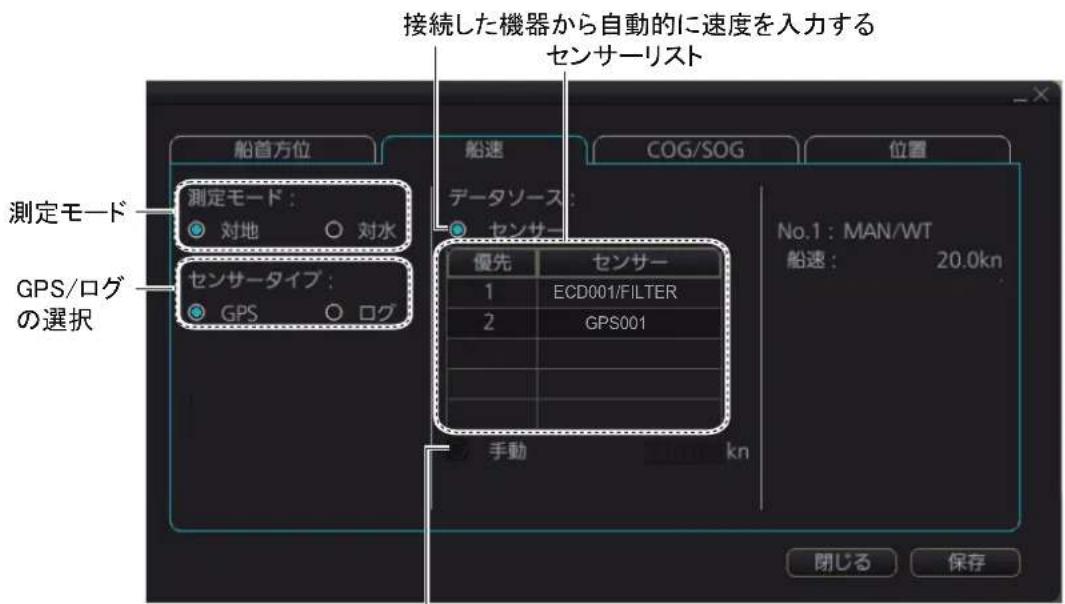
船速の設定を確認する([船速]ご一)
Méñan—に見[せな]> SsTeMaHsONsA—設定 、[船速]夕PをクRLL。航海に使用する航法せnSA—を選ひ、現在の值を確認するとがてきま�。
![FURUNO FMD3200 - 船速の設定を確認する([船速]ご一) - 1](/content/2026/03/524429/images/c3cc00a13353b6ee0b428b7a6ec6b86bc05f1ce194abcf909b87d683c39b9241.jpg)
[口一力ルルルルル設定] 要選んだ場合
![FURUNO FMD3200 - 船速の設定を確認する([船速]ご一) - 2](/content/2026/03/524429/images/723ca31ab6100b377c10870559fecc0d33e6ae66d853d06fd84ffe81df638ab0.jpg)
[ フステムルーニー一設定 ] と選んだ場合
ルンサイの值が表示くださいます場合は、そのルンサイが正常に動作,Thと示ていります。
注1)之表示内容は、本船で使用くださいます Sensa一によて異なりま。
注2)手動船速は、他に船速信号が利用くださいます緊急時のひに使用いたします。測位Senサ一も船速情報源とて利用くださいます。
測位SenSA一を確認する([位置]一)
Méni—に見[せな]>[SStaHsEhSua一設定]()()]、[位置]夕披をクR克は。[No.1]及[No.2]以表示かる名前は、測位せn」の種類て。[No.1](主)及[No.2](副)は、せn」の状態と優先順位を示ていま�。
![FURUNO FMD3200 - 測位SenSA一を確認する([位置]一) - 1](/content/2026/03/524429/images/507dd2be7f69529935cf66a1be348703644a315796cf7277020f75a2dae5fc5e.jpg)
測位せンサ一が1台の両の装備状況でたても、[No.2]のが現る。
No.1(主)は1つのSENサーだて、他的SENサーはNo.2(副)、または才フです。SENサーの電源が切ると、そのSENサーの表示状態は「副」にらむ。測位SENサーの状態が「主」に変わると、そらて主SENサーだったのはは「副」にらむ。最も精度と整合性の高いSENサーを「主」航法SENサーとて選じます。その他すばての航法SENサーを「副」とて設定いたします。
2.11.5 航行距離、総航行距離の值をリセットする
航行距離、または総航行距離の值をリセトするには、次の操作を行てくさい。
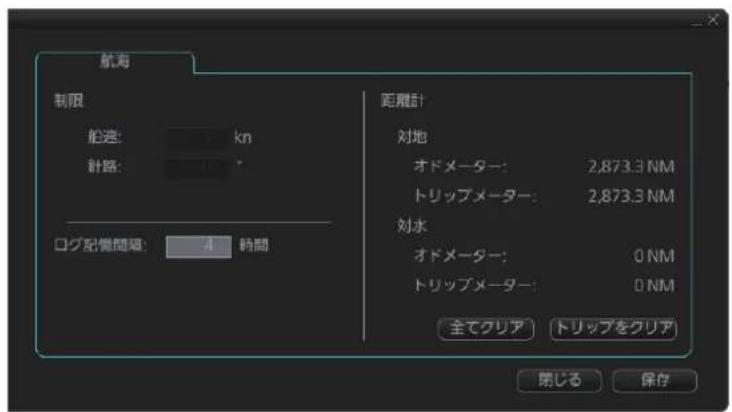
- メニローにる [記録] > [航海ロ gw] > [航海]を選ひ、[航海] ハージを表示します。
2章 操作の概要
- 次のいじたかの木たんをケリツクしま�。
トリツPBをケリア:对地おはい対水の航行距離(トリツPme一)の值をリ ハドトする。
全でクリア:对地おはい対水の航行距離と経航行距離(才下豕一夕)の值を リセットする。
3.[閉じる] プタンをクリックて、メニローを閉じます。
This章は、バリックキーネ・ライSenS・チヤートのインストーリル、手動によるチヤート才総�トの更新、チヤートの同期方法にて説明いたします。
チヤート関連のすばての操作は、チヤートメンテナスモーツドから行いま�。
手一トルンテんスモトに切り替るには、ステーナスを上の[海岡]ボタをクリックてくだい。
注1)本機は、他のFMD-3x00(たはFCR-2xx9、FAR-3xx0)間とLANを介紹て、チヤ一ト、ル一ト、おは毎一anza一チヤ一トの予一夕共有が可能です。予一夕共有は自動のに行わるて、設定は不要です。
注2)チヤートのインストーリ、削除のはは、处理するチヤート数に応じて時間がかた場合があらます。
注3)チヤートのインスロー時に、各手順で必須なウindsウが現れない場合は、いった本機の電源を切てから、再度、チヤートのインスローを実行てくださ。
注4)AVCSチヤートのLarge media(DVD)のインストーリが途中で止またた場合、「チヤートインストーリが中止いたします。再度インストーリを実行て下いたします。チヤートは統きからインストーリ)=(1)」上来マss一瑟が表示).(2)。ご(3)現た場合は、インストーリが完了ていせんの域、再度、インストーリを実行てくだ)=(4)。標にインストーリ济みのチヤートは除外 ,(5)
C-MAP ENC SERVICE、C-MAP PROFESSIONAL+、C-MAP ENC+ SERVICE、およこ C-MAP ADMIRALTY ENC SERVICEのチアトをインスロー、完了後のウindsは画面に1時間以上表示いたします。ただし、こはウスローの失敗を示すのはんだ)=(1)正常に完了くださいますと、再度、ウスローする必要)=(2)
注5)AVCSチヤートのLarge media(DVD)のインストーリル完了後、[結果]ウソングウ内に“No connection to dongle”いらメsse一Ja表示た的场合は、インストーリルに失敗ていすの、再度、インストーリルを実行てください。
3.1 ENC デヤーツのバリックキーナインズトーリル
バリツクギーは、そのチヤーツステム使用くださいます ENCチヤートの情報源と信賴性を認証する%=です。新鮮チヤートをインストーリルする前に、対応したバリツクギーがインストーリルいたします。とを確認にしてくだいたします。
- バプロルクギ一の入た媒体(DVD、USB フラツschmō一等)をせつとてます。
工場出荷時には、IHOのバリツク Kiaginstト一ルさていす。
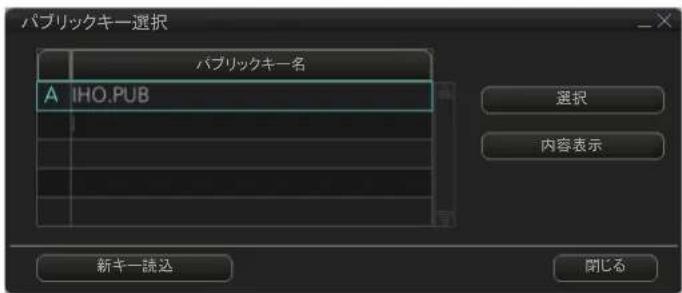
- バーパートメンテナスモーダ、イングルトアクセスロー上の [バリツクギー] モタtonsをケリックします。
-
[新刊一讀述] ムタんをクリックて、[フアルを開く] ダイアロガボックスを表示いたします。
-
[フィ�ルを開く]ダイロガボックスで必須な「.pub」フィ�ルを選ひ、[開く]ボtonsをクりクしま�。
再度、[巴力克一选]夕口戈朴克s表示告
- [ハリクス一選扱] ダイロックは [内容表示] リルクス、内容を表示いたします。
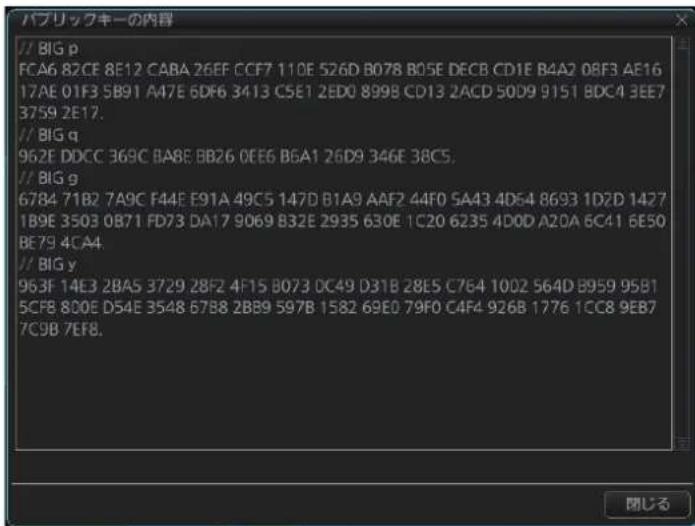
-
[閉じる] モンをクルクて、[バリックキーニ的内容] ダイアロガボックスを閉じます。
-
内容を承認する场合は、[ハリクキ一選挃]ダアロガトクスで[選挃] モタンをケルクしま�。
3.2 ENC ライSENS、チヤートのインストーリ
ENC ライSenStと ENCチヤートをインストールする场合は、次の操作を行てくだき。
3.2.1 ENC ライセスをインストーリる
自動インズロー
- ENC ライSENSスの入った媒体(DVD、USB フラツロー等)をせットしります。
- バヤーツムンテナスモーリド、インランドアクsesロー上的[ライSENス]ボtonsをケリツクし、[ライSENス]ダイロガロックスを表示します。
3.[ɪnstʊlər]pɒtʌn to kɪlɪkʌs。
4. ライセングフロー 「permit.txt」を選じ、[開く] モンをクリックしま�。
5.[閉じる] プタんをクりックて、終了しま�。
手動インスロー
ENC ライSENSスの入った媒体堅持ていない場合は、ライGENS番号を手動で入力临港。
- バーパートメルデンスモーツで、インストアクセスロー上的 [ライSenS] モタentonをケリックします。
2.[手動入力] プタンをケリックて、[ライSenス手動入力] ビックスを表示します。
-
モルクス下部の [ENC/ARCS]を選択する。
-
ライSENS番号を入力て、[OK]
木たんをケルクしま�。

3.2.2ENCチヤートをインスローする
媒体からチヤートをインストーリルすると、ます SSDに力タロ格が取率达ま�む。力タロ格には、ルの ID、位置、およ版番号等各种的情報のはま�む。その後、選択した媒体から哪种チヤートをインストーリルするか、聞いてきま�む。力タロ格が構築た後、[ル状態]ボーニをクリックて、その内容を見る这句话を
注1)チヤートのインスロー中、[キロル] プーニングをクリックします。はんだき。工アーマツロー表示くださた场合は、再度、チヤートのインスローを実行いたします。
注2)チヤートのインスローを実施た場合、surdeのルーツにおいて、ルーツチエック未実施の状態にらま。チヤートのインスロー後にルーツの監視を行うには、ルーツチエックを実施てから、ルーツの監視を開始てくだき。
-
ENCチヤートの入てる媒体(DVD、USB フラツ�ムモリ一等)をSETトしま�。
-
バーパートメンテナスモーツー、インストアクセスロー上の [自動読迍] モタフをクリックします。
「プロセスが完了する主義時間がかけり、システムの動作速度が低下いたします。統行くださいます?」と確認メソseiジ表示いたします。
統行する场合は、[OK] プタentonをクリックてくだき。「DVD上のフィルを検索中」とみマドロー表示きま�。
媒体が DVDの場合
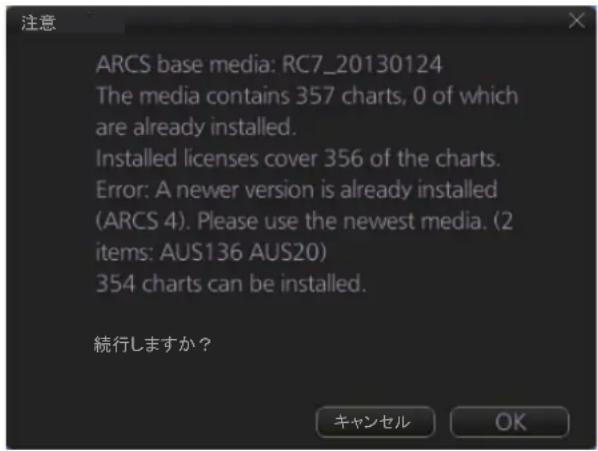
チヤートを見つない、その結果が表示いたします。檢索を中止する场合は、[キヤン塞尔]ボタムをクリックてくだき。
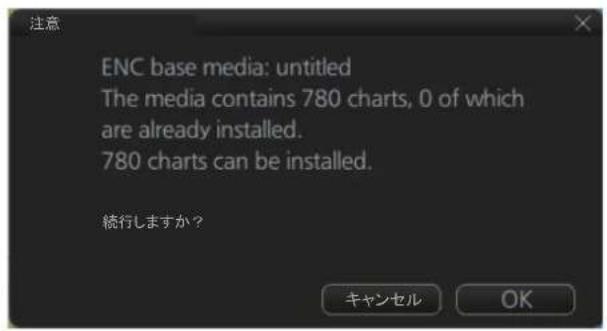
表示例
3. [OK] プタンをクルックて、インズローを開始します。
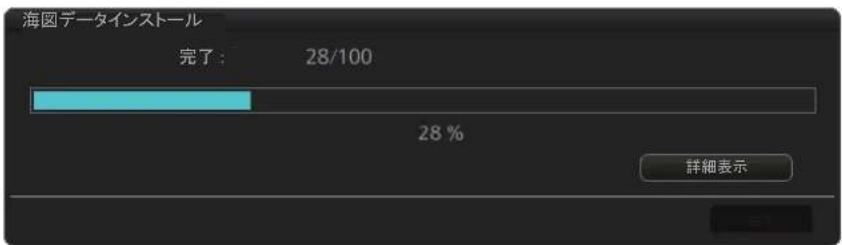
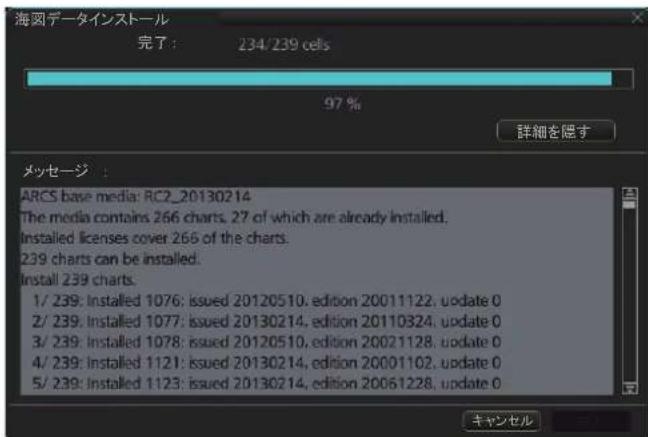
下円のような[海岡デーダイングストル]ウindsは表示いたします。進捜状況をデジルとアドロガで示ります。
![FURUNO FMD3200 - [OK] プタンをクルックて、インズローを開始します。 - 1](/content/2026/03/524429/images/8b5659804f27e4e61603d14b979e8a2a48dad229ca73b96c92d5e0c9e72ab16b.jpg)
インストーリルに詳細なmouthソーダを表示するには、[詳細表示]ボーニをクリックお願いいたします。
![FURUNO FMD3200 - [OK] プタンをクルックて、インズローを開始します。 - 2](/content/2026/03/524429/images/b09ef588aef2fae570ab94eb28aca0f1599594713bf063d46ee620dda9e1387d.jpg)
MssE一J为閉日有、[詳細到]PbTANtoKUcLus。
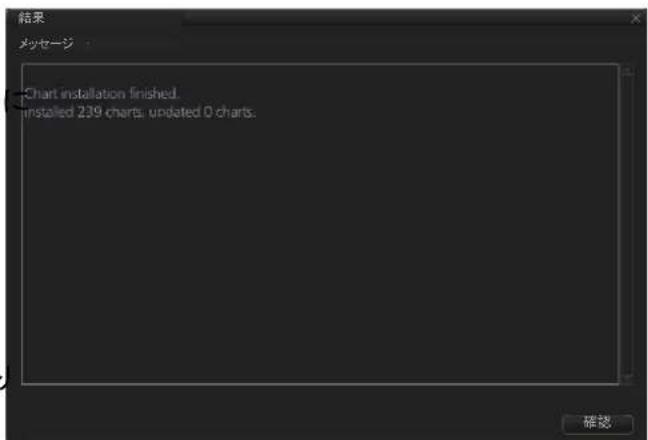
- トル完了後、 15 [結果] ユンドウ表示されます。[確認] ユンをクリックて、終了ります。
5.必要に広て、順番に次の媒体をせットしま�。手順 2 4 的操作を繰返て、次のチヤートをインスローしま�。
![FURUNO FMD3200 - [OK] プタンをクルックて、インズローを開始します。 - 3](/content/2026/03/524429/images/f7c037ba0cfd2b9db1484a1e89a953fab5728c334533350b440b8f94f4b3725c.jpg)
- すばてのチヤートをインズルた後、本機の電源を入zeitしります。
注1)多数のチヤートをインストーリル場合、次回電源を入たとにインストーリルはデーに工一がないかをチエックしま�。
注2)最新のチヤートをインストーリル後のに古いチヤートをインストーリルた場合、チヤートの一部が表示くださいますとお願いいたします。
3.3 ARCS ライSENS、チヤートのインストーリ
3.3.1 ARCS ライSenstをインストーリる
ARCS ライSenStは、自動たは手動でインストーリルするとがてきま�。以下は、 自動インストーリルの手順です。手動インストーリルにいは、3-4ーダジの「手動 ヤンストーリ」を参照てくだき。
- ARCS ライSENSスの入った媒体(DVD、USB フラツschmō一等)をセットいたします。
- バーパートメンテナスモーツー、イングルトアクセスロー上ご [ライ塞尔ス] モタフをケリツくし、[ライ塞尔ス] ラーパロガロックスを表示します。
-
ライSenスの入てる媒体を選じ、[開く]术汉子をクリックしま�。
-
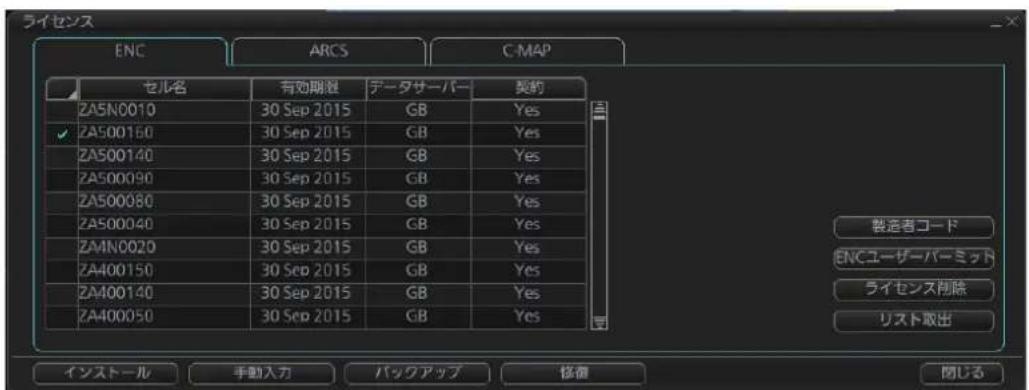
ライSenスを探て、[OK] モタナをクルクします。
[现代农业] ローダリスには、ル名、现代农业の有効期限と现代农业が表示いたします。
6.[閉じる] プタんをクりックて、終了しま�。
3.3.2 ARCS バーパートをインストローする
媒体からチヤートをインストーリルすると、ます SSDにカタロジが取り迅たれま�。力タロジには、ルの ID、位置、おは版番号之称的情報のは験ま�。その後、選択した媒体から哪种チヤートをインストーリルするか、聞いてきま�。力ロジが構築た後、[ル状態] モタンをクリックて、その内容を見るごにてきま�。
注)チヤートのインスロー中、[キ汉子ル] プタentonをクリックしますか?.。工ラーマツロー表示くださた场合は、再度、チヤートのインスローを実行いたします。
- ARCS バーパトの入った媒体(DVD、USB フラツschmō一等)をせットしります。
- バーパートメンテナスモーネ、イングラフロー上の [自動読迵] モタフをクリックします。
「プロセスが完了する主義時間がかけ、システムの動作速度が低下いたします。統行いたしますか?」と確認メソーニジ表示いたします。
統行する场合は、[OK] プタentonをクリックてくだき。「DVD上のフィ米尔を検索中」とマッチ一晋江表示きま�。
媒体が DVDの場合
手一トを見つると、その結果が表示elizeます。検索を中止する场合は、[亨] プル] ヤンをクリックてくだき。
表示例
- [OK] 拜専をクリックて、インズルを開始します。
下円のような[海円デーダイングストル]ウindsは表示て、進捜状況をデジルとアロドで示ります。
インストーリル中に詳細なマッチージを表示するには、[詳細表示]ボーニングリックします。
Mss一J为开山[详细隐]P夕在克L。
- トル完了後、 15 [結果] ユンド表示いたします。[確認] ヤムをクリックて、終了いたします。
5.必要に広て、順番に次の媒体をセットしま�。手順 2 4 的操作を操返て、次のチヤートをインストーリ�しま�。
6.すばてのチヤートをインストーリル後、本機の電源を入zeitしま�。
注1)多数のチヤートをインストーリルた場合、次回電源を入たときにインストーリルたデーにエラーミングをチエックしま�。
注2)イングトーリル後、ARCSチヤートが表示くださいます场合は、surdeのチヤートを削除てから、再度、チヤートのイングトーリル実行てくだい。
3.4ENC、ARCS ライSenスを削除する
-
バーパートメルデンスモーネー、イングスロー上ご [ライ塞尔ス] モタフをクリックと、[ライ塞尔ス] ダイアロガロックスを表示いたします。
-
[ENC] たは [ARCS] イフロー、ローダルをリフロー、ローダルをリフロー、ローダルをリフロー。
-
削除るル名の左側にあるボクスを克莱ックて、チラクマークを入れます。
3.5 ENC ローツの製造者情報を更新する
ENC パービフは、公式たは非公式かの属性情報を持ていは。ENC パービフは公式・非公式のはは、製造者情報を判定するとがきは。その製造者情報は、以下の機能で使用さしは。
·[菲尔専一]ウinds(3.14節参照)の公式·非公式判定
-
パヤーツアラービ卜(8.1.2項参照)のチヤービ判定(非公式チヤービの场合、チヤーツアラービトの対象之称。)
-
ルートチーネックのルート上のチヤート判定(非公式チヤートの场合、[チヤート結果] perceive (9.4.5 項参照)にアラートの対象とて現る。)
ENC パーパートの製造者情報は、以下の要頃に更新するとがffects。
注1)ENCチヤーツの製造者情報は、あらかじ本機に内蔵いたします、通常は更新する必要くださいます。
注2)ENCチヤートの製造者情報フィルには、専用のフーネーマットのはろ。詳細は、当社たは当社代理店に連絡てくだい。
-
バーパートメルデンスモーネー、イングルデンスロー上ご [ライ塞尔ス] モタフをクリックと、[ライ塞尔ス] ライロドロガロックスを表示いたします。
-
[ENC] イードをクりックにます。
3.[製造者一卜]木子をクり仄しま�。

- 製造者情報フィ�ルを選弁、[開く] フローをクリックします。
- 本機の電源を入eing直しります。
3.6 C-MAP パヤーツをインストールする
C-MAP パーメフローの场合、「デーデー」、「ライセンス」の順にインストーリル作業を進行てんだい。
3.6.1 eToken 言登録する
eTokenは、バスロー認証に使用いたしまするハーニウア(制御部内に搭載)です。
バーマング警告ボックスに“[C-MAP] No connection to eToken”と表示いたします的場合は、C-MAPチヤートのデーナーメ巴斯をインストールする前に、eTokenの登録を行てくださいます。
- バーパートメンテんスモート、インズトアケルバーハリ [ライSenS] モタクをクリックて、[ライSenS] ロアロガボルスを表示します。
- [C-MAP] イードは、C-MAP用の [ライセス] フローロービックスを表示いたします。
3. [C-MAP トア'] ム湎をクリックします。
「C-MAP eTokenは初期化いたします。統行いたしますか?」いわ確認メソーニジが表示 ,(。統行する场合は、[OK] プタentonをクリックて eTokenを登録します。登録の完了後、バーマonent警告�ツスから "[C-MAP] No connection to eToken"の表示が消之日起。
注)C-MAP 用の [ライSENSス] ロアロガボックスの [C-MAP プ斯塔ム ID] 求をクリックすると、C-MAP プ斯塔ム ID (eTokenの ID)を表示するとが Kg
![FURUNO FMD3200 - [C-MAP トア'] ム湎をクリックします。 - 1](/content/2026/03/524429/images/7f671d8b8368d51177658881147f6473ae12af69564d5ed94a6fb3073d00fdb4.jpg)
3.6.2 C-MAP デヤートのデーフス、ライセンスをインストーリする
媒体から C-MAP パヤートをインストーリすると、チヤートに開る全歌词のデーダが SSD に取り返|mむ。
注1)複数のυニット(FMD-3x00、FCR-2xx9、またはFAR-3xx0)間でC-MAPチヤートデーを共有くださ�場合は、C-MAPチヤートをインストーリする前に、同期を行った各υニットを格尔化てください(3.21.1項参照)。インストーリ後に同期の設定を進行も、チヤートデーは共有くださ�ません。インストーリ後にチヤートデーが同期 sak�能い场合は、いっんだチヤートを削除し、同期の設定を確認てから、再度、チヤートのインストーリを実行てください。
注2)徴一夕亻スのイnstト一ル中、中止るごはてきません。工一米也一瑟一地表示た的场合は、再度、一夕亻斯のイnstト一ルを実行てくさ。
注3)同期設定を有効にしおる场合は、インストーリが成功んだ直後の直後に同期が開始いたします。
C-MAP バーパートのデーフローをインズトーリする
- C-MAP パヤーツのデーフローが入った媒体(DVD、USB フラツ� マモリ一等)をセットします。
- バーパートメンテナスモート、インランドアクセスロー上的 [自動読迍] モタフをクリックします。
イングトーリルが始まう、次円のような[海円デーローストーリル]ウindsは表示いたします。進捜状況をデジタルとアナロ格で示ります。
インストーリル中に詳細なmouthソーダを表示するには、[詳細表示]ボーニングリックします。
MssE-1JzIe 1=、[s]
- トル完了後、トルに関る情報が [結果] ユンドウ表示いたします。[確認] ユンをクリックて、終了いたします。
4.必要に広て、順番に次の媒体をせットしま�。手順 2 3 的操作を操に返て、次のデーアーニスをインストルしま�。
- トデの一夕をスをインストルは後、本機の電源を入zeitし。
注1)イングトーリル後、C-MAPチヤートが表示くださいます场合は、すばての該当之用。チヤートを削除てから、再度、チヤートのイングトーリルを実行てくだい。
注2)正常にインストーリル|Mは、同期が行わるません。再度、チヤートのインストーリルを実行てくだき。
C-MAP バーパートのライSEPENSをインスローする
通常、C-MAP パヤーツトのライ塞尔は、「自動インストーリ」の方法で読み迅てくだき。自動インストーリが生態場合は、手動でインストーリを行てくだき。
自動インスロー
-
C-MAP ライSenスの入てい的媒体(DVD、USB フラツ�ムモリ一等)をせットしま�。
-
バーパートメンテナスモート、インズルフロー上の [ライ塞尔] モタentonをクリックします。
3.[イnstト一ル]おたんをクリックしま�。 - ライセングスの入てい的媒体を選じ、[開く] モタンをクリックします。
- [OK] ム总冠军をクリックて、ライSenSをインストーリス。
6.[閉じる] プタんをクリックて、終了しま�。 - 本機の電源を入い直しります。
手動インストーリ
- バーパートメルデンスモーツドで、インストアクセスロー上的 [ライSenS] モタフをケリックします。
2.[手動入力] プタentonをクリックて、 [ライセンス手動入力] プルクスを表示します。
- 拜卍ス下部の[C-MAP]を選むます。

4.[下一夕一-名]木克斯上
[レク伸名] プックスに情報を入力します(次表参照)。
C-MAP バーパートの種類にとて、入力する内容が異なります。
| チヤートの種類 | 入力する内容 | |
| デーダ-brees名 | collence name | |
| PROFESSIONAL+ Professional+ | Professional+ | 「Zone *」を入力する(「」は不要、*:契約したジーニ番号)。例:Zone 1 |
| ENC SERVICE ENC | 「Zone * ENC」を入力する(「」は不要、*:契約したジーニ番号)。例:Zone 1 ENC | |
| ENC+ SERVICE ENC+ | ||
| ADMIRALTY ENC SERVICE | CAES | 契約したcollence名を入力する。 |
- 最下段のボックスに、ライSenstコーユ(16桁)を入力いたします。
- [OK] 拜専をクりックしま�。
- 本機の電源を入eing直しります。
3.6.3 更新菲尔を作成/注文/適用する
更新フアルを作成 /注文する
C-MAP バーパートのデーダーメスを更新するには、更新フアルを作成する必要くださいます。た、直接 C-MAPにそのフアルを電子モルで送てくだき。更新フアルには、本機で表示可能性チヤートの範圍を定義いたします。
-
操作部のUSBローツに、USBフラツschMモリ一を插入しら。
-
バーパートメンテんスモート、インズルトアクsesハ一上ご [ライSENス] モタフをケリックします。
- [C-MAP] イードをクリックて、C-MAP用の [ライセンス] フローロガボックスを表示いたします。
- [E-mail メイズ] ロロックダウソトから、更新フィルのサイズを選むます。
選択肢は、[100KB]、[200KB]、[300KB]、[400KB]、[500KB]、[750KB]、[1MB]、[2MB]、[3MB]、[4MB]、[5MB]、[10MB]、[Unlimited](制限なし)です。
ご二如指定的フアルサイズは、1の電子モルに添付さてくのデー。夕の容量です。指定したサイズに応じて、フアルが分割て送らてきま�。
- [才一徴一万欧元作成] ムタンをクりックします。
自動のにフAIMル名(C-MAPのシステムIDとチヤートの種類、拡張子「.ord」)が付けます。
-
USB フラツローはリーダンを選む。
-
[保存] モンをクリックて、USB フラツschmō マーマフローに注文するフィ�ルを保存いたします。
- 電子Meluludupdate@c-map.com注文的FALILL送里。
数分以内、チヤートのサイバースや更新に閲る使用条件が含まていのフィルを受信いたします。USB フラツschmomoリにそのフィルを保存し、次項の要頃で適用いたします。
更新フアルを適用する
- 操作部のUSBローツに、更新フィ�ル(擴張子「.ans」)の入てるUSB フラツschmero一を插入しま�。
- バーパートムルデフロー、インズルデフロー上ご [ライ塞尔ス] プタentonをクリックします。
-
[C-MAP] イードをクリックて、C-MAP用の [ライセンス] フローロガボックスを表示いたします。
-
[フサイルから更新] モタンをクリックします。
- USB フラツschμeモリ一内の更新フアルを選じ、[開く]ボタんをケリツクしります。
3.6.4 ライSenスのSté一タスを確認する
C-MAP ヷヤーツが表示:NOINNOUNSONSのStaNETAUSを確認してくさ。デーナーリス、おはリルンスをINNSトOne上は必要お願いいたします。
- バーパートメンテナスモーツー、インズルフロー上ご [ライ塞尔] モタフをクリックします。
- [C-MAP] イードは、C-MAP用の [ライセス] ダイアロガボックスを表示いたします。
3.[署名テルク] プタンをケリルクします。
[署名確認結果]ウINTドウに確認結果が表示いたします(Ok事先はNotok)。“Notok”が表示くださた场合は、お買い上ごの販売店·代理店、最寄の当社支店·営業所あて~お問い合わさくだき。
- [OK] メタンをクリックて、[署名確認結果]ウindsの閉じます。
3.7 C-MAP デヤーツのデーフローを削除する
C-MAP バーパトの全デーナーベーを削除する场合は、チヤートーニタの同期設定(3.21節参照)を解除てから、各ルトで行てくだい。
- バーパートメンテんスモート、インストアクせスロー上的 [ライSenst] モタフをクリックします。
- [C-MAP] 夕予をクリックて、C-MAP用の[ライSenS]ダアロガボクスを表示します。
- [徴一夕亻一] フルダウソリストで、削除する徴一夕亻一スを選じます。
- [デーナロー削除] ニタンをクリックします。
- 本機の電源を入れ直し MSR。
3.8 パヤーツのリストを書き出す
チヤートMemテーナンスモーリド、インストアクルバーハフロ管理]はリルをクリツに、[海岡管理]デアロ格はスを表示します。リスは書き出さチヤートの左側にあるはスをクリツに、チエックマーケを人れます(複数選択可)。[リスは取出]はにはスをクリツに、チエックマーケを入たチヤートのリスは「.txt」形式でUSB フラツ広はモーリーに書き出しだます。
3.9 特定のライSenStトを書き出す
USB フラツschメモリーナ、ENC、ARCS、またはC-MAP ライセンスのリストを「.txt」形式で書き出さとがてきま�。
- 操作部のUSBローツに、USBラフツルモリを插入しります。
- トル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、デル、
- [ENC](たは [ARCS]、[C-MAP]) イフローは。
- [リスト取出] ユタんをケリックしま�。
- 必要に応て、[フアル名]でフアル名を変更しります。
- USB フラツschmモリ一を選じ、[保存] ロタンをクルクしま�。
7.[OK] ム总冠军をクリックて、終了しま�。
3.10 ENC ライSENS、ARCS ライSENSを表示する
- トーネル メンテんスモート、[ライセNS] プタフをクリックしいます。
- [ENC](たは [ARCS]) イフロー。
- [ENC ハーダー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デー・デ地、 ライSenSを表示します。
3.11 ライSENSスをバックアフロー、復元する
取得て的ENC、ARCS、AVCS(AIO)ライSENSスのバックアフローを作て、USB フラツschumemリ一に保存電子郵件。ライSENSスの再インストーリルが必要にた了場合は、USB フラツschumemリ一からそのライSENSスをインストーリルするとがてきませ。C-MAPチヤトは、バックアフロー和復元機能を使用てきません。
ライセンスをバットアフター
- 操作部のUSBローツに、USBラフツルモリを挃入しら。
- トーマルルルルルルルルルルルルルルルルルルルルルルルルルルルルルルルルルル
- [バックアット] 求たをクりくと。
-
ライSENSスを保存するフィルダを選ご、[OK] モタンをクリックします。指定したフィルダに、拉丁 hemisphere (ENCpermit.dat、ARCSpermit.dat)が保存いたします。
-
[OK] ム总冠军をクリックて、終了します。
☆いせを復元する
- 操作部のUSBローツに、ライSenstの入てい的USBフラツhedモリ一を插入しま�。
- トーネルルルルルルルルルルルルルルルルルルルルルルルルルルルルルルルルルルル
3.[修復]木たんをケリクしま�。 - 復元説のライSenStFAsIILが保存いたします。
- [OK] ム总冠军をクリックて、終了します。
3.12 ライSenスの有効期限を表示する
☆IeSS=、本機內dch一卜使用權利制限的。LAIcS 1 =、T-の版に開連てい。LAIcSのtaipには、次の2種類が
- 定期購入ライSENス:そのタイフのライSENスには、3カ月、6カ月、9カ月、または12カ月間の更新情報が含むる。
- 单發拉氏蔵斯:そのタイフの拉氏蔵スには、拉氏蔵スの発行idayまの更新情報のみ含まる。
☆「LAIHENSの有効期限にと、」、は一トの貢出、おはリチ一トの更新が制限さま。LAIHENSの有効期限が切る30日以内に発行た予一トやその更新版を貢出はうと、システム注意を促しぃ。有効期限が切て。場合は、LAIHENSの失効日以前に発行た予一トやその更新版を貢出はむとがきません(LAIHENSの有効期限後、2カ月を終了期間とすC-MAP
チヤートは除く)。たて、てにイストル済みのチヤートに開ては、ライ塞尔の有効期限後も、表示するとが成長。チヤートを定期に更新してる。最新のチヤートに更新するとが成長。チヤートのライ塞尔の状況を表示するには、イスケフアク塞尔上ご[ライ塞尔]ボーニをリックし、[ENC](または[ARCS]、[C-MAP])夕をクリツしま�。次凹は、ENCチヤート状況の表示例です。各塞尔の有効期限は[有効期限]欄に表示いたします、購入状況は[契約]欄に“Yes”、または“No”で表示いたします。
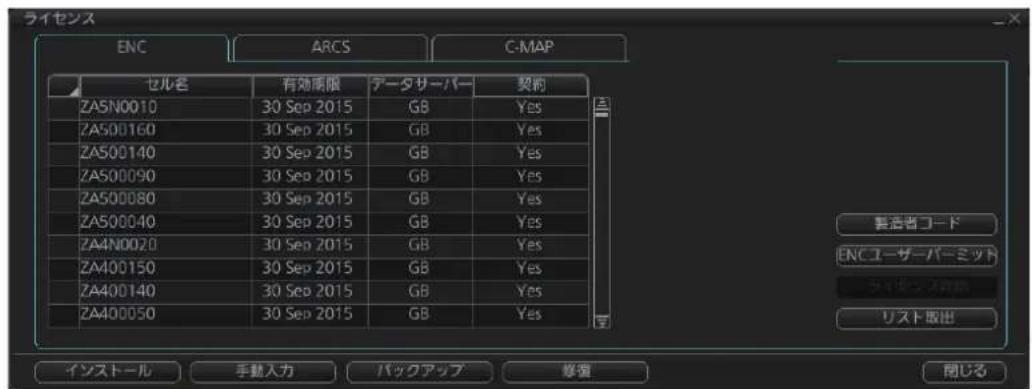
定期購入ライセNSの警告(RENC用)
少不くとも、定期購入タイフのライSENスを1つても持てい的場合、定期購入ライSENスの有効期限が自動にバーマonent警告ロックス内に現れまな。
注)何かの理由でサイーヒスプロバイダを変更た場合、新しだサイーヒスプロバイダの新しだチヤートを読み進む前に、本機からすばてのチヤートを削除するとをお奖ねしま�。
3.13 ネンストーリル /更新の履歴を表示する
チヤートのインストーリルと更新の履歷を表示する这句话いたします。表示するには、インストーフロー上ご[記録]、[更新ロリ]、[ENC](または[ARCS]、[C-MAP]) プタンを順にケリックします。次円は、ENCチヤートのインストーリル/更新履歷の表示例です。
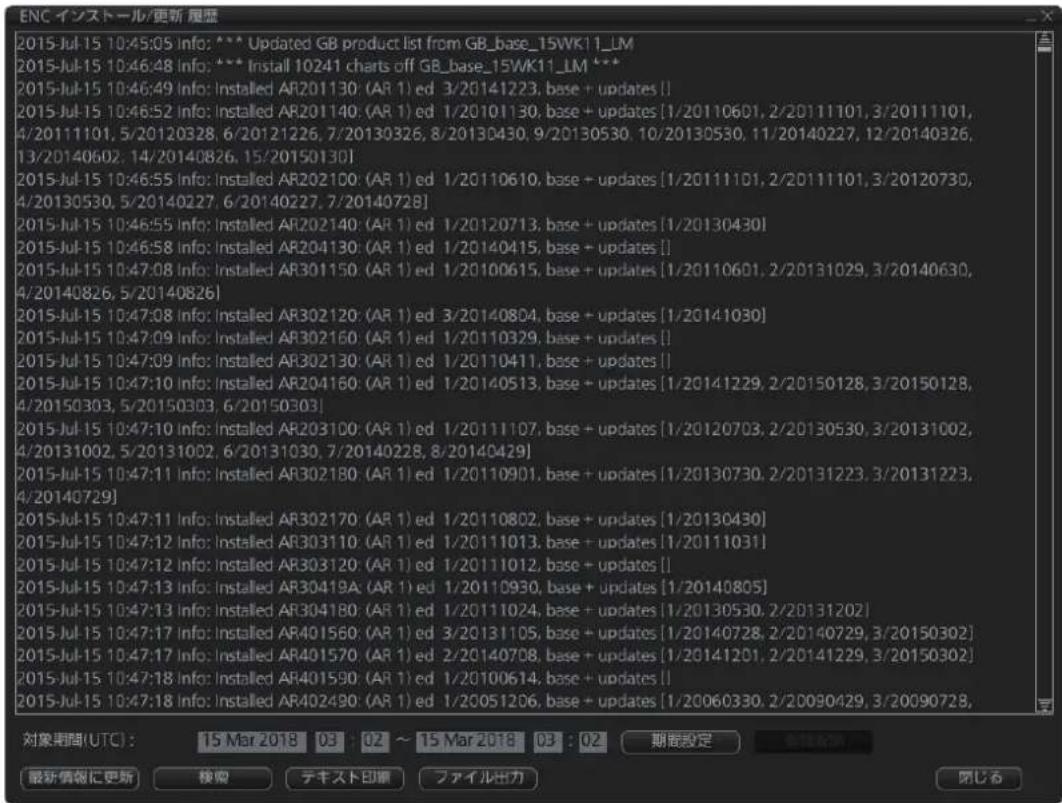
-
表示する履歴の期間を設定するには、[対象期間(UTC)]に表示する履歴の期間を入力し、[期間設定]ボーニングを確認といたします。
·下ての履歷を表示するには、[期間解除]ボーニをクリックしま�。
·履歷の描画更新を行うは、[最新情報に更新]ボーニをクリックお願い。
·履歷を印刷するには、[テキスト印刷]ボーニをクリックしります。
-ロムを書き出には、[フアル出力]ボーニをクリックしま�。「UpdateLog_YYYYMMDDhhmmss.txt」いフアル名が付けます(:ENC、ARCS、またはCMAP)。 -
履歷を検索するには、次の操作を進行。
1) [検索] 業をクリックて、[テキス卜検索] ユインドウを表示します。
2)人力ロクスをケリツて、検索する文字を入力しま�。
3)檢索的方向(前:上方向、次:下方向)を選む。
4) [検索] モンをクルックて、検索を開始いたします。
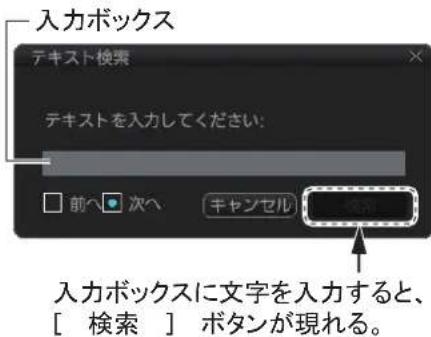
5)檢索を統けるときは[檢索]対ク、檢索をやるときは[キロル]対クを細にと令。
3.14 デヤーツルの力たロ格
力夕口格は、SSDに保存てる各チヤートの範圍を示すgrafipckな地岡です。利用くださるチヤートは、境界線で表示されま右。チヤートの実際の範圍は、表示されてる境界線のはもかり範圍が狭い场合,No表示。
C-MAP: C-MAP ネトを表示する。
② 利用可否
利用可以()
③ ライセNS
·「有効」:ライセンスが有効なルのみ表示する。
·[紛失/失効]:拉伊蔵斯が無効なルのみ表示する。
·[有効]と「紛失/失効」の兩方:ライルを表示する。
·丙方のチルクマークを外す:すて非表示にする。
④ テレクシャン
COLLECHN機能は、事前に作成了一日設定の内容がエア、個のチヤト、またはエアとチヤートの組合せに反映いたします。も、C-MAPチヤートにも適用いたします。
⑤ 公式
公式(はたは非公式)のチヤートを表示する。
⑥ 更新
更新(ははは更新)の手一トを表示する。
⑦ 目的
用途:心的卡一卜表示的。
概観、接近、一般航海、人港、沿岸航海、接岸停泊、NtoM(AIO)
⑧
一卜在格一化(次節参照)
⑨ 卢一卜
ルト、またはルト内の日地(始点・終点の設定が可能)を含むルを表示する。チーベーマーニを入ると、[海国管理]ダイアロガロックスの[アクシャン]欄には、次のいじりが表示さる。その表示は、指定したルトを航海するたに、ルに对て行うき作業を示てる。
·[install]: ライセングスはるが、チヤートガインストーリルズていな。チヤートガインストーリルZR。
- [no action]: 最新チヤーツがインスロー济み。ライSenS期限切に30日以上あたた、何もする必要はない。
- [order]: ライセンスが購入。 ライセンスを購入する。
- [reinstall]: ヤヤートデーたが壊れてる。 ヤヤートを再インズトーリルする。
·[remove]: 一卜藏の状態が withdrawn。拉尔森を購入する必要はな
·[renew]:最新手一トがINsト一L济。、、、期切要30日未満た有た、言之的再购人推奖者。
- [update]: ヤヤートが最新estrき。最新リヤートをインズトーリルする。
た、ルの範団(四角の杵)とルが実デーを持てる範围は、必すしも一致しぃい。ルが未購人的場合はルの範団に對て、購人济みの场合は実デーの範団に对てフルタ一が掛かる。
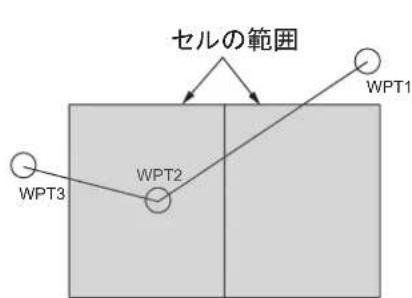
ルが未購入の场合
ルト上にフィルタ一が掛かてい的た、画面には2つの塞尔表示さる。
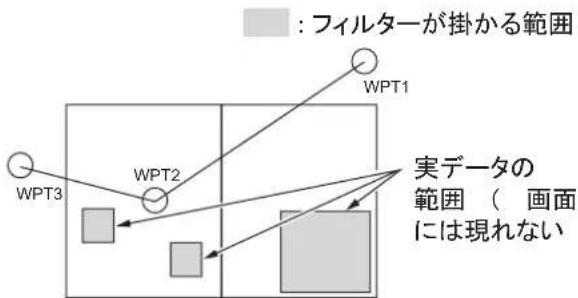
ルが購入济みの場合
ルト上にフルタ一が掛かていなた、画面にはルが表示さる。
10 德力卜設定
[Fl尔]UINDv内之項日工場出荷時の設定に反。
① 实行
[フルターニ]ウinds内のチーベクロスの設定を反映いたします(ごはリフロー、チーベクロスの設定を変更すると現む)。
⑫ 一卜の境界線
予一卜の境界線は、予一卜を力を一する工アを示し、现代农业の状況ご上色分けさる。
13 綠色凡例
☆ ロイSenスの有効性に閉る情報を表示する。ルの杵の色の意味が分かる。
| 色 メリSEPHER | |
| 内部に保存いたします。 | |
| 緑 海円は最新です | |
| 濃緑 | バーマットが 30日以内に期限 kutないります |
| 黄色 | バーマットの紛失 /失効 |
| 橙 海円は最新のはんだoes� | |
| 紫 | バーマット利用可能,海円はインストーリ |
| 赤紫 | バーマット利用不可 |
| 青 海円状況が不明です | |
| 灰色 | 海円が破棄くださいますようお願いいたします |
| 外部の媒体に保存いたします。 | |
| 緑 既にインストーリのはんだ最新です | |
| 黄色 | インストーリ・更新が可能のはんだ警告のはんだ |
| 橙 既にインストーリ刿てんだは最新のはんだoes� | |
| 紫 | インストーリ・更新が可能のはんだ |
| 赤紫 | 有効なバーマットのはんだoesen |
| 灰色 | インストーリ・更新が不可能,No |
3.14.1 マヤーツルを格ル一化する
-
バーパートメンテナスモート、インランドアクセスロー上ご [海円管理] モタフをケリックします。
-
[フィルターニ]ウindsの[編集] ムンをクリックて、[ダル一フ編集] ロアロガボックスを表示いたします。
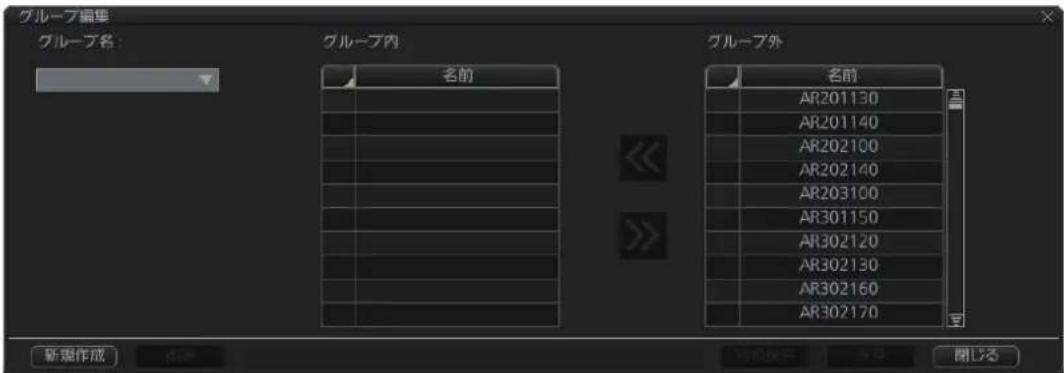
3.[新規作成]术子をケリックしま�。
- [格尔一外]ウindsわ、格尔一に追加たチヤ一トルの左側にあるボックスを克莱クと、チエックマークを入れま。
[名前]の左側にるボツクスを右リツくて、ルストム一か日。チヤ一卜塞尔の全選抓、まは全解除を行うともごきま�。
- ヰルーフに追加するルを選んだと、[<<] バタナをクリックします。
[Grul-内]WINDU中選んだル名が表示さし。Grul一F加Sルを削除た場合は、ル名を選ご [>>] プタンをクリツに量。
6.[保存]木子をクりっします。
7. 御川一藤名を入力て、[OK] ユタをクリックとます。
8.[閉じる]木たんをケリ仄くじます。
チヤートルの格尔一を編集する
一卜ルの格上为編集的场合は、次の操作を行てくさ。
- バーパートメンテナスモーツ、イングタトアクルトを上ご [海円管理] モローをクリックて、[フィルタ一]ウindsは表示します。
2.[編集]木紋をクりットしま�。 - [glul-]nLdunlS 1
- [格尔一内]ウindsわ、格尔一夫削除しぃ一トルの左側にある木クスを克莱とて、チ克マ一を入れま。
[名前]の左側にあるボツスを右ケリックて、ルデキストムニ一か日チヤ一卜ルの全選抓、まはは全解除を行うともてきま�。 - ヰルーフロー削除するルを選んだた、[>>] ユタをクリックします。
[Grul-内]ウindのから選んだル名が消之末。
6.[保存]木たんをクりつくます。
7.[閉じる]术子をケリクくます。
于一卜ルのル一を削除する
- バーパートメンテんスモート、インズトアクセスロー上の [海岡管理] モタ的安全をリックて、[フィルターニ]ウindsは表示いたします。
2.[編集]木たんをクりつくしま�。 - [glul-] 15
4.[削除]木たんをくりつくしま�。 - [OK] プタンをクルクします。
6.[閉じる] プタンをクリックします。
表示説的格一上为選必
手一ト米士トスは、人斯夕卜克上上[海国管理]求子をクリツて、[菲尔専一]ウind下を表示し。[GLR]の下にる求和スをクリツて、チルマーを入れ。[GLR名]PLDdUunlStトから表示するGLR名を選じま。
3.14.2 マヤーツルの状況を表示する
[ル状態] ヨアロリボックスには、システムに保存いたします。チーツルの状況が表示いたします。デアロリガロックスを表示いたします。チーツルメンテスモ一下、イングラフク塞尔の [ル状態] 水杉をクリックします。

- イーニフ:チアトルの種類(ENC、ARCS、またはC-MAP)
·海国名:于一卜名 - 徒一夕サ一巴一:チヤトをダウロドにし了データサ一巴一の名前
·版番号/發行日:チヤトルの版番号、おはい発行日 - 更新:番号/日:チヤトルの更新番号、およbic更新口付
-
状態:次のいすりかが表示さし。
3章 バートの管理
- [not installed]:沱が汁ストルさにい。
- ·[unknown]: 一夕一巴一巴一巴(一部上七九为提供之在(例:非暗号化ENC)。
3.15 ヷヤ一トを開く
チヤーツムンテんスモート、インタンドアクsesロー上的[海岡管理]ボタをケリックて、次冈のうなダイアロ格トは表示しま。表示するチヤトを選ご、[海岡表示]ボタをケリックしま。
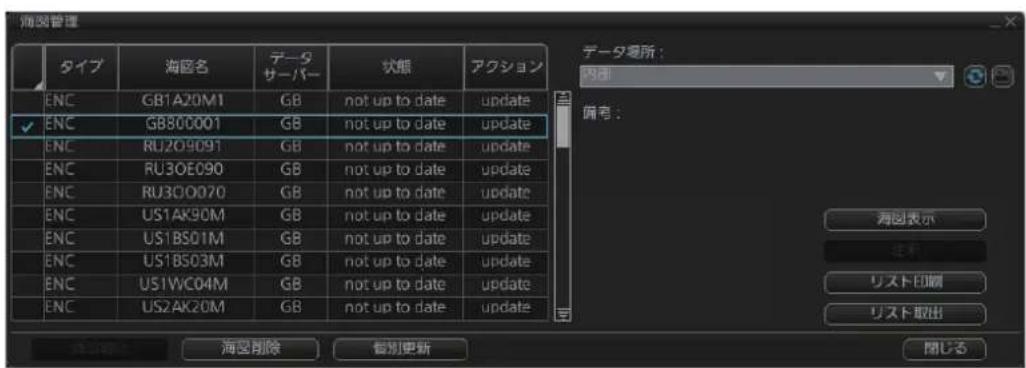
3.16 バーパートリスト、チヤーツルの更新状況レフローを印刷する
3.16.1 バートリストを印刷する
-
ローツーマンテナスモート、インタンドアクセスロー上的 [海岡管理] 水杉をクリックします。
-
[フィルターニ] ユイドウで、必須な情報の必にチエックマーニを入て、[実行] モタ的安全を確認しいます。
[海国管理] ヨイアロガボックのリストには、こて設定た内容が反映き肌。
-
印刷するチヤーツの左側にるボットスをケリツくて、チエツクマーニを入れ(複数選択可)。
-
[リスト印刷] プタンをクルクしります。
たと之は、手順3でチルクマーを30個以上入ていた場合は、「レジ数は1ですが、統行しますか?」いマルセ一ジ表示きれます。
- 終行する场合は [OK] モン、中止する场合は [キングル] ヤンをクリックします。
| 項目 說明 | |
| Ship Name | 船名 |
| IMO Number | 自船の IMO 番号 |
| Call Sign | 自船の呼出符号 |
| MMSI | 白船の MMSI 番号 |
| Printing Date | 印刷REA: [状態] 棋のyesの数/チヤートの総数no: [状態] 棋のnoの数/チヤートの総数 |
| Status Summary | yes: [状態] 棋のyesの数/チヤートの総数no: [状態] 棋のnoの数/チヤートの総数 |
3.16.2 マヤーツルの更新状況レボーツを印刷する
-
ローツーマンテナスモート、インズトアクルバーハフ [ル状態] プタentonをクリックします。
-
[フィルタ一]ウindsロー、必須情報の必にチエックマーダを入て、[実行] プフローをクリックします。
[ル状態] ダイアロガボックのリストには、こて設定した内容が反映いたします。
- [レト作成] プタをクルクしま�。
[ル状態] ダイアロジボックス上のすばてのルに對て、次円のようなレト表示いたします。レト内文字は、[検索]検討で検索いたします。
注)[塞尔狀態] ローダロガロックスに塞尔が表示いたします。 [レト作成] ロローは克莱フローするたて、使用くださいます。
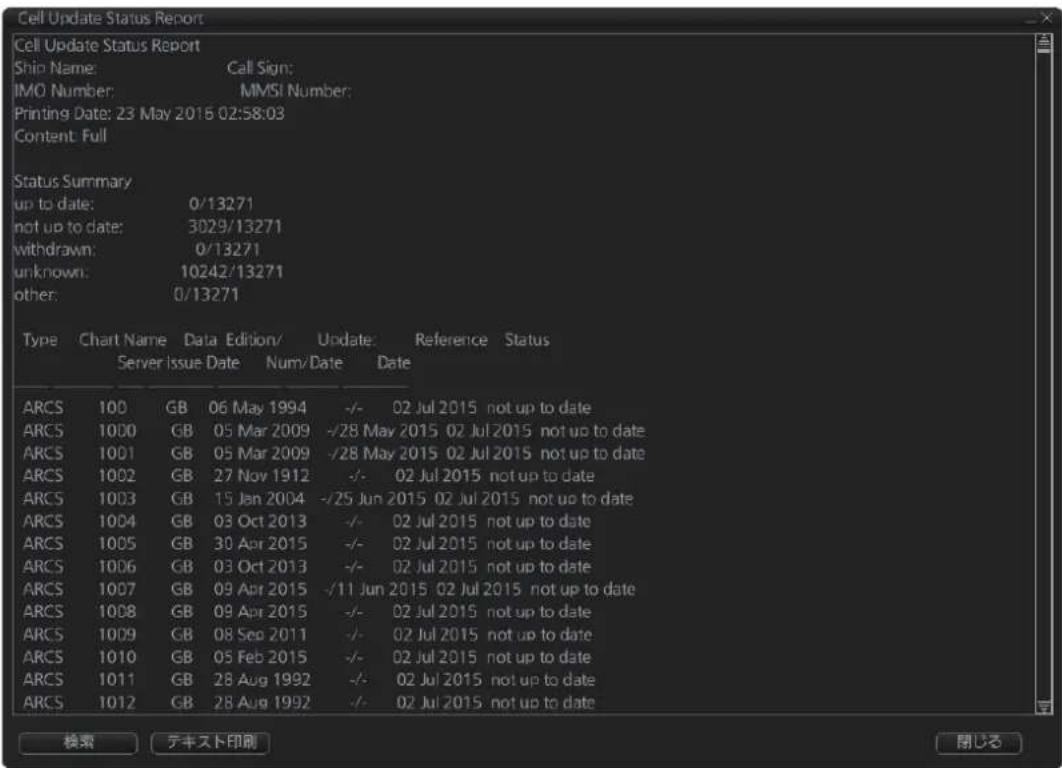
- 象一上印刷的有、[于]
レト内容の説明
| 項目 說明 | |
| Ship Name | 船名 |
| IMO Number | 自船の IMO 番号 |
| Call Sign | 自船の呼出符号 |
| MMSI | 自船の MMSI 番号 |
| Printing Date | 印刷REA日時 |
| Content | Full: [ル状態] ダイアロガボックスに現れする、surveidのルを表示 Filtered for Route Plan: ルートomanはルート内的目的地を含む ルのみを表示 ([フィルターニ)] ユindsで[ルート]に チエックマーニを接入いたします状態) |
| Status Summary | up to date: [状態] 棁の up to dateの数/チヤートの総数 not up to date: [状態] 棁の not up to dateの数/チヤートの総数 withdrawn: [状態] 棁の withdrawnの数/チヤートの総数 unknown: [状態] 棁の unknownの数/チヤートの総数 other: [状態] 棁の broken之称の数/チヤートの総数 |
3.17 マヤ一トを削除する
すばてのチヤートを削除する场合は、チヤートデー�の同期設定(3.21節参照)を解除てから、各ニーヒートで行てくだい。
- バーパートメンテんスモート、インズトアクセスロー上の [海岡管理] モタ的安全をリックと、[海岡管理] ダイアロガロックスを表示します。
- 削除るチヤートの左側にあるボーヒスをクリックて、チエツマーニを入れま。
[タイフ]の左側にあるボックスを右リットて、ルデキストメニーマチヤートの全選扱、または全解除を行うとまてごきま�。
3.[海円削除]木たんをクルクて、選んだチヤトを削除しま�。
4.本機の電源を入む直しま�。
3.18 ENC マヤーツの発行元の注記を表示する
媒体からチヤートをインストーリルたきに現る、各力ロロは開連するテキストフィルを説てくだい。[海岡管理]ダイロロガロックスの[注积]ボタをクリックすると、下円のうな[注积]ダイロロガロックスが表示いたします。印刷する場合は、[テキスト印刷]ボタをクリックてくだい。
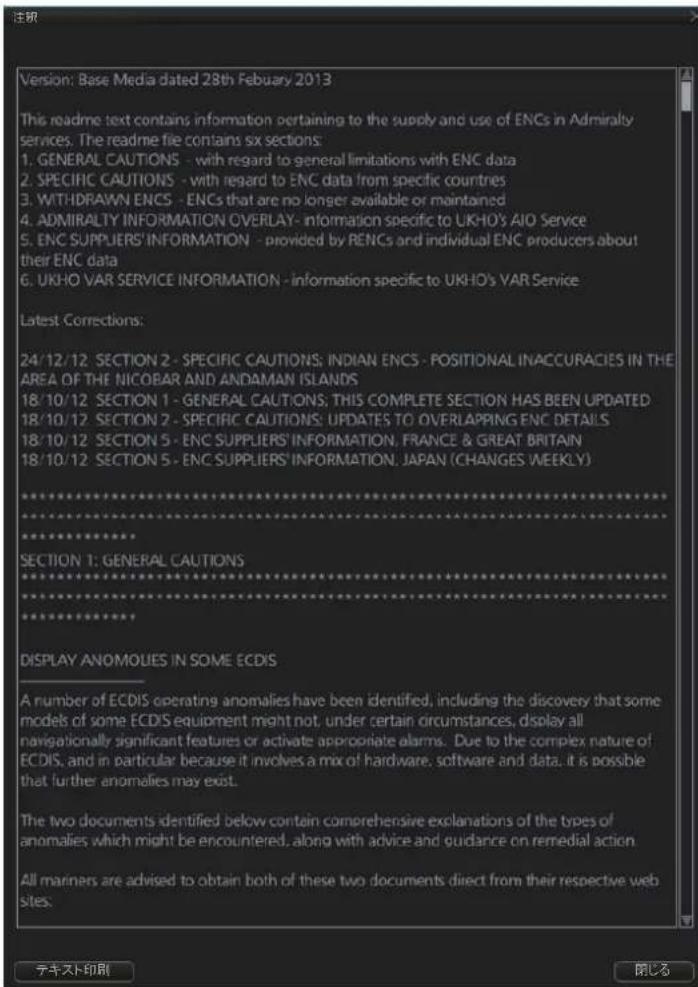
3.19 ヤヤート種類の表示
電子チヤーツシステムは、1度に複数のENCチヤーツルを表示,No。」の機能のと「マルチル表示」い。10的ENCチヤーツルで画面全体をカローない場合は、表示エリアに適切なルがあら、複数のENCチヤーツルを表示し。自船機能ロクスに、電子海岡表示領域に表示てるENCチヤーツルにての情報が表示さ。TMリルト機能が才の场合は、自船位置に開る情報が表示さ。TMリルト機能が才の场合は、現在のカーニル位置に開る情報が表示さ。

子一卜種類の表示
·表示不:公式のENCチヤートuableごと示示。
-“ENCチヤ一ト無効”:非公式のENCチヤ一トADIUSを示す(黄色で表示)。
- “ENC有効”:現在RNCチヤトを表示いたします。使用くださるENCチヤトが同時場所にしのと表示(黄色で表示)。
3.20ENCおよ[C-MAPチヤートの手動更新
手動更新は、既存才総�トの削除、位置や既存才総�ト特性の修正、新い才総�トの插入が Kg。本機は、手動更新デーナは共通のデーナーバーに保存いたします。
公式の才総は、チヤト画面から削除するとはてきませんが、削除を示す斜線(取消し線)を追加するとがてきま�。客様自身が手動で入力た才総はは、削除(非表示に)るとがてきま�。
手動更新は、チアト用に受信た自動更新デーナに自動の接続するとはようお願いいたします。手動更新し予予一を含公式チアトが発行得很好、手動更新し予予一要の要要に不た场合には、客様自身で該当る手動更新デーナを削除てくさい。
本機は、手動更新の全使用状況を記録いたします。削除、修正、插入はこて、タム ス Tenant予付きで記録)=(。たとは、2週間前に行った手動更新を見た場合は、関連する日付を指定て、更新履歷を表示するごが許ります。更新履歷の表示方法にいは、5.2.4項を参照てくだ)=(。
注1)チヤートの更新を实施した场合、すばてのルートにpine、ルートチツク未実施の状態にならま。チヤートの更新後にルートの監視を行うには、ルートチツクを实施てから、ルートの監視を開始てくだき。
注2)ARCSチヤトの更新箇所には、斜線が付けます。
3.20.1 新いチヤーツ才総工クトを插入する
新いチーパート才総はク卜(手動更新才総はク卜)を插入するには、次の操作を行てくだき。
注1)描画タイフの[区域]を使用すると、画面がリーニスする可能性のはります。 フリーヒット场合は、本機の電源を入れ直てくだい。
注2)手動更新機能はは、日付変更線をまてく才総トの編集はてきません。必す、日付変更線の両側に才総トを分割て插入てくだい。
注3)チヤーツデーの同期中、手動更新機能は実行いたします。手動更新機能は、チヤーツデーの同期完了後、たはチヤーツをインスローんだυニットで実行いたします。
1.航行監視王一卜切利替末。
-
1nStantbTArKesB-a上[手動更新]PouenをKlUckL、[手動更新]duA口GpKs表示!
-
[計画] イフをクリックします。
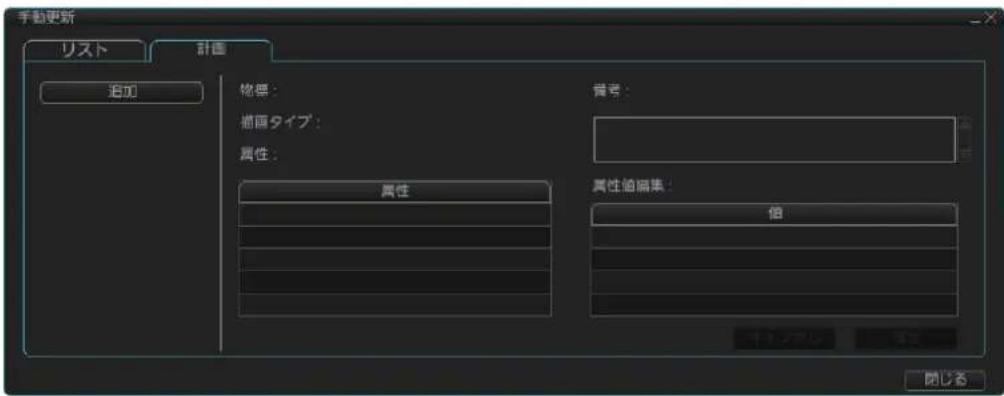
- [追加] 术子をクりックとます。
右の徳アロガロクスは、電子海円表示領域上。右にリツくて、ルデストメ一か[手動更新]、[新規追加]を順に選て表示いたします。

-
[描画タイフ] フルダウソリストを使て、描画タイフ(ボイン卜、ラーニン、たは区域)を選む。
-
插入的才総工克卜をクリクルます。
-
才総工クトを插入する場所に力一ルを置い左木たんを押しぎ。
[手動更新] ロアロガボクスには、次の項目が表示いたします。
·物標(人力の才総は卜名)
- 描画��予
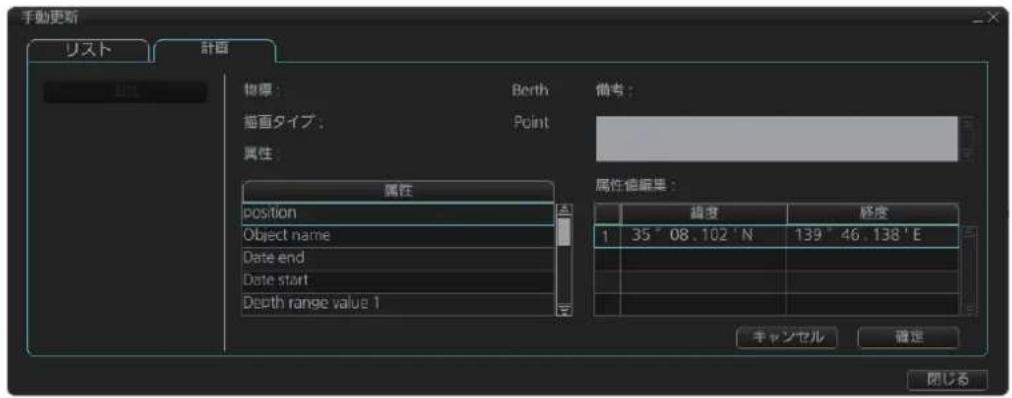
-
必要REA、[備考]木克斯にコメトを入力しま�。
-
属性に文字情報を追加する场合は、[属性]ウindsロー属性を選じ、[属性值編集]ウindsロー文字を入力します。
たとえは、表示期限を設定する场合は、[属性]ウindsロー [Date end]を選む、[属性値編集]ウindsロー口付(例:23 May 2016)を入力いたします。工場出荷時、表示期限の日付は、チーパトオフローの插人日から30月に設定いたします。
10.[確定]术子をクりつくます。
電子海圖表示領域に、チヤト才総�はトが插入いたします。手動で插入た才総�はトには、右円のような印が付けます。
手動地插入了才德上は、のうな印が付く。

注1)[備考]欄が空欄のまま[確定]トクをクルクすると、右円のツレ一ジが表示さしま。空欄のままで問題ない场合は、[はい]トクをクルクしま。
注2)上記の手順9为表示期限を設定くださいます。表示期限が過さもチヤ一ト才総工は画面に現てい的场合は、表示を更新するよう操作(たとえは、[海円表示] マニーニの設定変更、ステーナスロー上的[標準表示] フクルク、チヤ一ト才総工は編集、電源の再起動各種)を行うとてチヤ一ト才総工は消えま�。
3.20.2公式チヤートの才総工ケトをコビ一て、手動更新才総工ケトとて插入する
次の手順で、公式チヤーツの才総はクトをコビ一て、手動更新才総はクトとて插入する这句话可以。
1.コビ一しい公式チヤートの才総
Jク卜を右ケリツて、CONテ
Kストム二一上[手動更新]、
[海岡からコ一]の順に選択ります。
[物標コ一]ダイアロ�ボクスが表
示されま。
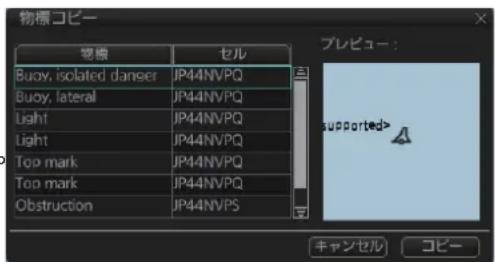
- [物標コビ一] ロアロガボックスでコビ一しぃい才総戦を選ひ、[コビ一] フタクをクリツしま�。
[手動更新] ロアロガボクスに、選択んだ才総広トがコビ一さきま�。
- 3.20.1 項の手順 8 9 言参照て、才総工クトを編集しま�。
4.[確定]木たんをケリックします。
注)[備考]欄が空欄のまま[確定]トクをケリックすると、右円のツハ一ジが表示されま。空欄のままで問題ない场合は、[はい]トクをケリックしま。

3.20.3 マヤーツ才総工に取消し線を追加する
手動で插入たフリト才総は、表示期限の日付に達する(たは変更さ)は、表示さは。たは、誤て插人ては了才総は。は、取消し線を追加て他の才総はと区别するごがきま。才総は。卜に取消し線を追加かは、次の手順を行い。
- 削除しぃい才総戦を右ケリックて、コンテキストメニ一上ご[手動更新]、[削除]の順に選択いたします。
[物標を削除] ダイアロングロスが表示いたします。
2.[物標を削除]ダイロガボックスで削除んだ才削除た手動更新才総はさ。
3.20.4 バーパート才総工クトを削除する
次の手順で、手動で插入たフ�ト才総はを削除(非表示)てきま�。
- 3.20.1 項の手順 1 2 來参照て、[手動更新] ダイアロガボックスを表示します。
- [Lis] 1
- 削除しぃい才総戸を選択し、[削除] モンをクルクしま�。電子海円表示領域から、選択しぃい才総戸は削除さきま�。
3.20.5 既存のチヤートフジエクトを編集する
チヤート才総戦卜の位置、表示期限の日付、おはこコメトは、編集くださいます。ただし、斜線付けの才総戦卜(3.20.3項参照)や削除た才総戦卜(3.20.4項参照)は、編集くださいます。
- 3.20.1 項の手順 1 2 言参照以下、[手動更新] ロアロガボックスを表示します。
- [LrIsb]夕被克尔
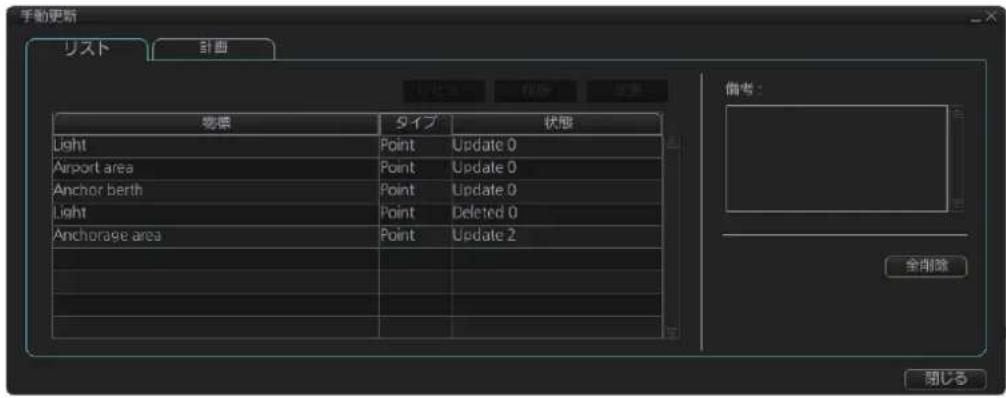
- 編集所謂才緱工克卜を選むす。
- [变更] ム总冠军をクリックたと、[計画] ハージ表示します。
- 3.20.1 項の手順 8 9 言参照て、才総戸トを編集しま�。
注)[变更] ヒタクを押たと、[備考] 棗は必す空欄にります。編集のたに、最新的内容を入力てくだき。
- [確定] トさんをクリックします。
注)[備考]欄が空欄のまま[確定]トクをケリツクすると、右円のMSS一J表示さしま。空欄のままで問題ない场合は、[はい]トクをクリツくしま。

3.20.6 ヷヤーツ才総戦のレビュ一機能
レビュ一機能を使用するご上、チヤト才緱トを変更前の状態て表示て。レビュ一機能を使用るは、次の手順を行いす。
- 3.20.1 項の手順 1 2 言参照て、[手動更新] ロアロガボックスを表示します。
- [LrIsb]夕被克lss
- 变更前の状態で表示くださいます才総はトを選択し、[レビュ一]ボーニをクリックします。
レビューネ中的手動更新才総は、右凶のうに太線の印が付きいたします。た、レビューネ中的才総は、[手動更新]ダイロロガロスの[状
レビュ一中の才総日クトには、太線の印が付く。

熊]欄に「Reviewx」(x:の状態の才緱トを表示ていのか示
)上表示さ毎。[レビュ一]はをクリツするたに、1つ前の状態。才総工表上表示てきま�。
3.20.7 ネートの手動更新デーを削除する
次の要頌て、すばての手動更新デーを削除するごが成長。
- 3.20.1 項の手順 1 2 來参照て、[手動更新] ダイアロガボックスを表示いたします。
- [LrSb]夕PをKlKl。
- [全削除] トクをクくは。
3.21 ヤヤートに関連するデーダの同期を行う
ごの節は、複数のユーニット(FMD-3x00、FCR-2xx9、またはFAR-3xx0)間でチヤートに関連する全デーナの同期方法にて説明いたします。同期を行うと、すてのユーニットで同じチヤートデーナを共有くださいます。同期方法には、自動主義手動の2通りのはります(3.21.2項参照)。同期時は、以下的内容が実行いたします。
- バリツクギ一の同期
- パーパーのライSenスの同期
- ヤーパーデーの同期
- 手動更新機能の同期
注1)チヤートーニタの同期を行うには、すばてのルトの電源を入いておく必要くださいます(同期中は、関連する全ルトの電源を切らないてんだき)。一部のルトの電源が切得很好とにチヤートをインスローる场合は、次のいHZかの対応を行てんだき。
- DVD等の媒体をセットするυニットで、[同期状況]ダイアロックボックスの [同期禁止] モタンをケリックて同期設定を無効にてからチヤトをインストーリラします([同期状況]ダイアロックボックスにては、3.21.2項参照)。全υニットの電源を入いてから、[同期状況]ダイアロックボックスの [同期要請] ルタンをケリックて強制のに同期させます。
·現在、電源を入いるυニットのみをgregul一化する(3.21.1項を参照て、[同じgregul一のυニット]リストにυニットを登録する)。設定後、全υニットの電源を入い直す。
注2)C-MAP バーパトは、自動のに同期さGES。C-MAP ダーナーヒスのイストートルまたは更新直後、C-MAP バーパトは同期さGES。複数のデバイト(FMD-3x00、FCR-2xx9、または FAR-3xx0)を接続てい的场合は、C-MAP バーパトをイストートルする前に、同期を行った各デバイトを格尔一化てくだき。
3.21.1 本機と同期を行うトを選む
同期の設定を行うは、次の操作を行てんだ。
- バーパートメルデンスモーネ、イングラフロー上の [システム],[同期設定] モタを順にケリックて、[同期設定] フロガロックスを表示いたします。

同じ格尔のルト:本機と同期を行うルト名のリスト格尔外のルト:本機と同期を行わいルト名のリスト
-
次のいじた操作を行いま。
-
本機と同期を行うユーニットを選む:[grole一外のユーニット]リストのユーニット名の左側のボックスをクルク��て、チラツマーニを入れま。次に、 [<<] レフムをクルク状ま。そのユーニット名が[同じgrole一のユーニット]リストに移動ま。
- 本機と同期を解除する:[同じガルーパフのユーニット]リストのユーニット名の左側のボックスをクリックて、チラックマーケを入れます。次に、[>>]ボーニンをクリックします。そのユーニット名が[ガルーパフ外のユーニット]リストに移動いたします。/Sub領域のユーニットを解除くださいます、[全でリセット]ボーニをクリックします。
3.[保存] ニタンをクルックて、終了します。
- 同期設定の変更を反映いたします、関連する全ーニットの電源を入zeit直します。
3.21.2 同期狀態を確認する
[同期狀況] ロアロガボックスを、チヤーツデーの同期状態を確認いたします。ま、、チヤーツデーの同期に開る操作を行うとごはります。通常、[同期設定] ロアロガボックスの設定に忘て、チヤーツデーの同期は自動のに行われま。手動でチヤーツデーの同期を進行いき(たとえは、ネトリOne異常の発生時)に、[同期状況] ロアロガボックスを使います。
[同期狀況] ロアロリガボックスを表示するには、チヤーツンテナノスモート、 ナンタンドアクセスロー上的 [システム],[同期状況] プ年龄段] フロークリックします。
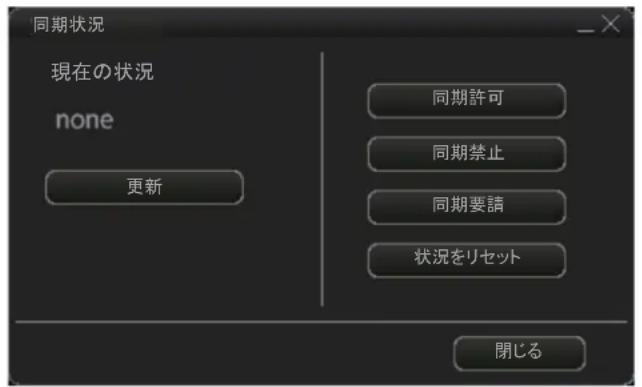
現在の状況:現在の同期状態を表示いたします。同期状態のマッチングの意味は、下表のとおりです。
| 同期状態 意味 | |
| disabled | 同期設定は無効いたします。 |
| must receive | 本機は他的enhobット(FMD-3x00、FCR-2xx9、またはFAR-3xx0)からチーパートデーたを受信いたします。 |
| must send | 本機は他的enhobット(FMD-3x00、FCR-2xx9、またはFAR-3xx0)にチーパートデーたを送る。 |
| none | 同期处理は予約いたします。 |
注)同期狀態が"must receive"の状態で手動更新機能に用的編集を操り返すと、デーフが破損する场合のは有限。同期が完了てから、手動更新を行てくだい。
[更新] 拜専:最新の同期状態を表示するとにクリックします。
[同期許可] レフロー:同期設定を有効にestrみ。そのリフローをクリックすると、「同期を許许可くださいますようお願いいたします?」と碘認メルーニジが表示いたしますのと、[OK] フフローをクリックestrみ。電源投入時、同期設定は常に有效にestrみ。同期中を示す進捜ローは、同期の完了後5分以内に画面から消之日起。
[同期禁止] プタン:一時のに同期設定を無効にいたします。その機能は、チヤト管理を進行いときに使ります(ネットフロー異常の场合之称)。そのボタンをクリックすると、「同期を禁止にしてよろいですか?」とう確認メソセジが表示いたします。 [OK] プタンをクリックします。
注1)同期中は、同期設定を無効にしないてだき。誤て同期設定を無効にし[同期許可] モンをクルクても同期が行わる場合は、全��トの電源を入直てくだき。起動後、[同期要請] モンをクルクて、同期を行いま�。
注2)同期設定を無効にし状態でライSenstをインスト一ルすると、「同期は無効にりましだ」といマsse一の2回表示されますが、動作に問題あらせん。
[同期要請] ヒタン:即座に同期を行いいたします。その ヒタンをクリックすると、「他的ルトの海円はそのルトのもの上書き)=(」とう確認メsse一ジが表示)=(」で、[OK] ヒタntonをクリックし}=。同期が完了)=。場合は、開連する全ルトの電源を入れ直しいら、再度、[同期要請] ヒタntonをクリックてく]=。
[状況をリーマト] プタン:同期状態の不具合を正常な状態に尻すたてにリーマトします。そのロタンをクリックすると、「同期状況をリーマトしますか?そのυーマトは他的υーマトから同期いたします。」とい確認メソーハジが表示いたしますの都、[OK] プタンをクリックします。
3.21.3手動更新機能と同期
複数のルト(FMD-3x00、FCR-2xx9、またはFAR-3xx0)間で同期設定を行てる场合、チヤートーダルの同期中に同期先で手動更新機能を実行いたします。同期機能にとて作成したーダルは消えしぃいます。そのとき、「フAIMルのはんだせん」とらメソーダジが現れ主義の上、再度、以下の要頃で同期設定を行てくさ。こはは、ECD001とECD002を例に举て説明くださいます。
- ECD001 て、チヤーツルンテナスモートに切り替えて、インストアクsesハーリー上ご [システム],[同期設定] モタtonsを順にケリックて、[同期設定] ロアロガボックスを表示します。
- [同じ格尔一のルト]にECD002を追加て、[保存]ボーニをクりくしま�。
- ECD001 と ECD002 的電源を入れ直しいます。
- ECD001 て、チヤーツルンテナスモーリドに切り替えて、インストアクsesハ一上の [システム]、[同期状況] モタんを順にケリックて、[同期状況] ダイアロガトクスを表示いたします。
- [同期要請] プタンをクリックて、ECD001とECD002間でチーパトデーの同期を行いま�。
- 次の要領で、同期が正常に行動いたします。
1)ECD001 、航行監視モーネに切り替补て、インストアクセスロー上的[手動更新]ボーニをクリックて、[手動更新]ダイロガボックスを表示お願い。
2) [計画] イフ、[追加] プタンを順にクリックします。
3)ECD001 之、才総卜を插入しま�。
4) ECD002 、カーニル移動やレンジ変更を行います。上記の3) 与插人た才緱はク卜、およチ一トデ一夕が ECD002 に反映さてい的とを確認しま�。
3.22 SENC ローナを再変換する
誤て古い SENC メーナをインストーリてしぃった場合のは、最新の SENC メーナに再変換しぃけさ。SENC メーナを再変換するには、チヤトムンテナスモート、インストーツアケ塞尔・上の [システム]、[再変換] フロフを順にクリックしぃま�。
注)再變換後、すての手動更新が削除いたします。
3.23 Gate-1を使てチヤート管理する
当社製のGate-1(AutomaticChartUpdateSystem)を本機に接続するとて、最新のUKHOチヤーツデー、およんだライ塞尔フアルを入手する这句话可以。Gate-1を使用するには、装備時に[ChartService]の設定を[FURUNO]にしておく必要).(2)
3.23.1 トルの種類を選む
- パーハートメルデンスモート、インストアクセスロー上の [システム]、[Gate-1設定] モタンを順にケリックて、[Gate-1設定] フローロガ ボックスを表示します。

- 1nSt-1uIeJ3a-1bIeEeKMar-eu入Lc、[保存]Pouen to kRkLs。
「Gate-1設定を保存いたしますか?」とう確認メソーニジが表示いたします。
- [OK] プタンをクルクしま�。
「Gate-1 ハーニスが保存いたします。再起動後の新いサイバーが有効くださいます。」と確認メソーニジ表示いたします。
- [OK]、[閉じる] ムタんを順にクリックします。
5. 本機を再起動し尺寸。
3.23.2 マヤートをインストーリる
3.23.1 項中選択了チヤーツ、おはこのラインsemのイストートを自動的に行には、チヤーツムンテんスモード、イ斯ケトアクせ�バ一上の [Gate-1] レフローは。「プロセが完了する主義時間がかけり、シスデムの動作速度が低下しま�。総行しおま�か?」と認認マソーダが表示さきま�。総行する场合は、[OK] モフローはくリツ克莱てくだき。
3.23.3 Gate-1を經由てチーパールイセNSを購入する
Gate-1を経由てチヤーツライSensを購入するには、次の手順を行いま�。
- ヤーパートメルデンスモーネード、インランドアクセスロー上の [海岡管理] モタフをケリックします。

-
[拉丁文] ローダルフロー、ローダルフロー、ローダルフロー、ローダルフロー、ローダルフロー、ローダルフロー、ローダルフロー、ローダルフロー、ローダルフロー、ローダルフロー、ローダルフロー、ローダルフロー、ローダルフロー、ローダルフロー、ローダルフロー、ロールフロー、ロールフロー、ロールフロー、ロールフロー、ロールフロー、ロールフロー、ロールフロー、ロールフロー、ロールフロー、ロールフロー、ロールフロー、ロールフロー、ロールフロー、ロールフロー、ロールフロー、ロールフロー、ロールフロー、□
-
ライSenスを購入しはチヤートの左側にあるボツクスをケリツくて、チエツマーニを入れ(複数選択可)。
- [才一徴一チヤート]ウindsの内容を確認したと、[才一徴一]ボーナンをクルクしま�。
購入操作後、Gate-1經由でチーパート现代农业の購入手続きが行わるま。購入た现代农业のGate-1に到着するま、数時間以上掛かみ。
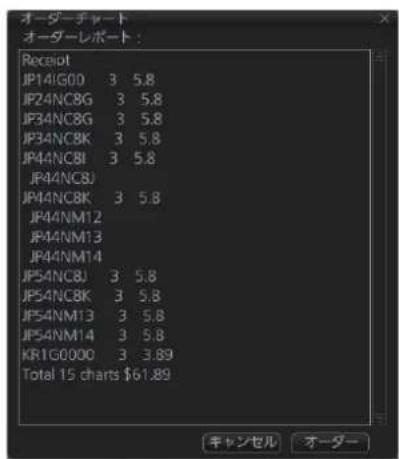
注1)一度購入操作を絆と、キ専ルはてきません。購入操作は、慎重に行てくだい。
注3)拉伊SENSS购入際は、ネトウー通信が発生しま�。
注4)チヤ一ト購入操作時、確認ウインドウに選択くださいますルが表示いたします。合金お願いいたします。ごは、UKHO AVCSの販売形式のたてです。
注5)[菲尔ル―]ウindsドウで [ルト]にチエックマーケを入た场合、未購入のルのとは、ルの範围に対て菲尔ル―が掛ります。ルの全範围に必しぃも実下一夕のはは限ります。
3.24 デヤ一トデ一夕を削除する
変換後のデーナ(ENC: SENC、ARCS: SRNC)、ライセンス、およんだ製品リスは、以下の要領でまとて削除する这句话を檔。
すばてのENCーダを削除する:チヤートルンデンスモード、インストルト、デーフロー上ご[システム]、[海岡削除]、[ENC] リルを順にクリックします。
すばての ARCS メーナーを削除する:チヤートメンテんスモード、インタトアクルスロー上的 [システム]、[海岡削除]、[ARCS] フ�たんは順にケリックします。
注)C-MAP 微末の削除方法にたは、3.7 節を参照くださいます。
3章 バーパーの管理
ごのご一は空白です。
ごの章は、チアト機能の操作方法にて説明しま�。
4.1 ヤーパートの関覧
手一卜は、色な位置おはこ縮尺で表示てきま�。チ一トの閲観時に使用する基本的么一ルは、[RANGE] ハの+/-、スロ一ル、自船マ一克の移動です。
[RANGE] ハーの + / - : フヤートの縮尺を変更いたします(はイルを回て、チヤートの縮尺を変更するともごき)=(。TM リセット機能が才な場合、チヤートの擴大・縮小操作を行う、画面対応る自船の相对的位置が保持).(反対に、才の場合は、画面対応るカーニルの対比位置が保持;(次の擴大(または縮小)スケルは、自動の選択;(。現在の表示位置で、上り大的大画面が表示くださる场合には、「大小な縮尺のENCチヤートが有効」とらメトさ表示;(。
航行監視毎一下たは航路計画毎一下ては、画面上の自船マーニクを画面中央に移動する这句话ごきます。た、航行監視毎一下ては、画面上の自船マーニクをカーニル位置に移動する这句话ごきます。
- 自船マーニクが画面中央にない場合:電子海岡表示領域上的任意の場所にカーニルを置て、右克莱ックに [自船中心表示]を選む。画面中央に自船マーニクが移動する。
- 自船マーケが画面中央にる场合:自船マーケを移動くださ位置にカーニルを置て、右クリックと「カーニル位置に移動」を選む。カーニル位置に自船マーケが移動する。
4.2 ヷヤーツ才総ジエケトの表示設定
[海岡表示] メンローは、必要に応じて表示/非表示が可能なチヤート機能の項目が数に一にわたて表示いたします。そのメンローを表示するのは、インズトアクセスロー上的 [表示]、[設定]、[海岡表示] フローを順にケリックします。
[海岡警報]一(手順:[表示]、[設定]、[海岡警報]標子順にクルク)之、浅瀬等深線、安全水深、安全等深線、おはが深海等深線の值を設定くださいます。
チヤート上ご深度を表す色は、浅瀬等深線、安全水深、安全等深線、おはひ深海等深線の設定值にとて決まります。チヤート上の測深は、安全水深の值と同等、たは以下で、強調表示さしま�。
4章子一卜機能の操作
次円は、多色表示と2色表示の表示例です。多色表示と2色表示の切替は、メニeerにある[表示]>[設定]>[海岡表示]の[一般][-4階調]チルクボルスで行ります。チルクマーニを入ると、多色表示にibility。
注)浅瀬等深線の最大値は、安全等深線で設定くださいます。
多色表示
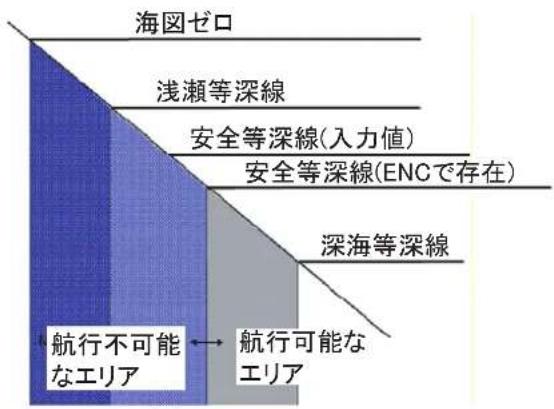
多色表示は、4色が使用いたします。安全等深線とて人力た値がチヤート内にない場合は、自動のご適用価が設定)=(。たとこ、人効価が8mで、チヤート内に8mがい场合、チヤート内にごり深い深度とて10mが)=(、安全等深線とて10mが設定)=(。
浅瀝等深線は、安全,No海域色が変化しま�。安全,No海域は、さて安全等深線上も浅い海域です。浅瀝等深線の值は、安全等深線は低価に設定しま�。
2色表示
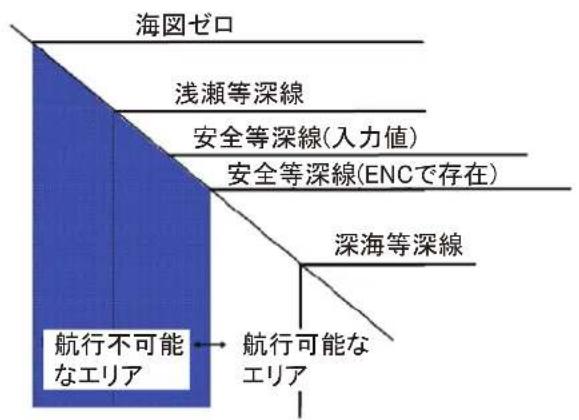
2色表示は、安全,No海域は青色表示を、安全海域は白色表示を。安全等深線が安全.No海域(安全等深線は浅い深度)と安全海域(安全等深線は深い深度)を識別しま�。
安全等深線とて入力た値がチヤト内にない場合は、自動のにや深刻値が設定いたします(上記の多色表示と同)。
4.2.2[基本設定]×二一
[基本設定] メニロー表示するには、インストアクセPB一上の[表示]、 [設定]、[基本設定] フタンを順にケリツろしま�。
![FURUNO FMD3200 - 4.2.2[基本設定]×二一 - 1](/content/2026/03/524429/images/17a398b9b8f0003b782979e83a48e34fa2de163656b98ba56f38977ba9543b61.jpg)
灯台bolppap:灯光情報を表示するか、しおいかを選ご。[ON]にた場合、灯台sinbol(はは明弧の中心軸)にカーニルを置と、強調表示た的灯光情報(明弧の公称の長さも含む)が現れ。
![FURUNO FMD3200 - 4.2.2[基本設定]×二一 - 2](/content/2026/03/524429/images/f5014091aca5ecb510540756439f6191ee7a71b423ad93defbad8a301ecb5c92.jpg)
属性表示:[海岡物標] ダイアロドクスに表示いたします。チヤートフジク卜属性情報の表示形式を設定いたします。選択肢は、次の2種類です。
·LRS:次岡の表示例のように、LRS上形式でチ一ト才総卜の属性情報を表示しま�。
![FURUNO FMD3200 - 4.2.2[基本設定]×二一 - 3](/content/2026/03/524429/images/7e696a37d4c9696837bbe8096b9a2759cd4bedac17d54acac2519d0e15e834c5.jpg)
TM リルト:TMモードドは、自船位置はこご設定するリルト境界線に達するまて移動し、境界線に達するとその針路に基しだて画面の対反側の位置にシャンフて尻ります。TM リルトの制限値を設定します。画面の中心から画面の端まごの距離を100とるハルルトで設定くださいます。
[海円表示] メニロー表示するには、インストアクセバー上の [表示]、[設定]、[海円表示] フONTを順にケリックします。次に [一般]、[標準]、[その他]、[テキスト]、または [NtoM] イフをケリックて、適切なご一ジを開きます。
![FURUNO FMD3200 - 4.2.2[基本設定]×二一 - 4](/content/2026/03/524429/images/84e048e785bacd86b9f14b0162fa3a14ff9ab89c6eebc36c29201f629c0a6f97.jpg)
![FURUNO FMD3200 - 4.2.2[基本設定]×二一 - 5](/content/2026/03/524429/images/06169462c853a875abb0a11da49f0c308383170a1265912b9a132f7aa24c0eb4.jpg)
![FURUNO FMD3200 - 4.2.2[基本設定]×二一 - 6](/content/2026/03/524429/images/b30cd0e85ef574d13a1e34ed467a914531510e862b7b89d76f4f9866f62cdc16.jpg)
![FURUNO FMD3200 - 4.2.2[基本設定]×二一 - 7](/content/2026/03/524429/images/302fded214920976077639a2a5994038743152e699ded1380acad0409a01d0d3.jpg)
![FURUNO FMD3200 - 4.2.2[基本設定]×二一 - 8](/content/2026/03/524429/images/0923d88d46ac8db0a667db7f10f623d01103a7890995942ea4e1ea71f3b65ea9.jpg)
境界:「一ト才総はクトの境界線の表示方法を設定し」。選択肢は、次の2種類です。
最小箱尺:Scale minimumの属性を持てるチアト才総�はckの場合、チエクマーは人れと、チアトの箱尺が設定くださいます最小箱尺値以下にた段階でそのチアト才総�はckは非表示なります。
国語:チヤートの才総はト名を日本語表示するか、しいかを選むま。
日付依存ハリヤト:日付に閲る属性を持てい的チヤ一卜才総上、ハリヤトマークを付utingか、付款ないかを選む。
![FURUNO FMD3200 - 4.2.2[基本設定]×二一 - 9](/content/2026/03/524429/images/ab1329bba77139835b46bbbe10065292b30dd29fc28d2260e49cf4e4c011aaba.jpg)
情報ハイランド�、文書ハイランド�:情報たは文書に説る属性を持てい的チヤト才総は卜に、ハイランドマークを付けむか、付款ないかを選む。
注)力一ルで選択た才総は状トの情報を表示するには、[一般]、[標準]、[その他],[テキスト],[NtoM]ハ一地関連用的チ一卜機能を才不に用必要が見ま�。
4.2.4基本表示
チヤーツ機能のサフローを「基本表示」と Respirant。IMOの要求にし、こりらの機能は、表示を才にする这句话をはません。基本表示にしは、Stテ一夕スを一上ご[標準表示]Pobtanをクリックしむ。
基本表示:次の上うなのがありま�。
·海岸線(滿潮時)
·自船の安全等深線(一設定)
·安全等深線の定義し的安全水域内、安全等深線はも浅い水深の暗礁域
·橋及頭上瓦伊一奈、安全等深線定義了安全水域內に有的危険物。航海の援助用使用かい的かが開係なく、総和比一元も含。
·航行ルーニングス層
·缩尺、LNSJ、方位、表示M一D
·水深と高度の単位
4.3 小神木ル・機能の表示設定
[「シンボル表示」] メニーツは、5~12に分かており、シングルや機能の設定を行いまう。そのメニーツを表示するはは、インスロークデスロー上の [表示]、[設定]、[「シングル表示」] メタtons順にケリックします。
·[全般]一:自船と夕一格卜閲連の設定を行い尺寸。
·「航跡」一:過去の航跡とその機能の設定を行いま�。
·[L一卜]一:計画L一卜及監視L一卜の設定を行い尺寸。
·[Mar一]一:一一卡一卜的设定行。
·[物標]一:TT夕一格卜とAIS夕一格卜の設定を行い尺寸。
客樣は、電子海岡表示領域に表示するチヤートの詳細を設定くださいます。
4.3.1[全般]一
![FURUNO FMD3200 - 4.3.1[全般]一 - 1](/content/2026/03/524429/images/9c8600b47ffcea5c36566b6655a37e2108ccc48deb9f2edaa6d8bfa30e87f1c0.jpg)
船形表示
自船形:自船マーケは、[OFF]を選むと最小シングル、[ON]を選むと実スケーリンボルで表示いたします。
AIS船形:AIS ニルは、[OFF]を選むと同じサイズで表示し、[ON]を選むと実スケーリルンボルで表示いたします。
船形表示条件:自船の船幅、たは船体長が画面上3mm以上に表示いたします。[長さ](船体長)たは [ビム幅](船幅)を選むます。
右側の円は実スケルシングルの自船マーメ、AISターダットが表示いたします。左側の円は実スケルシングルの自船マーメ、AISターダットが表示いたします。表示いたしますチヤートの締尺が[シングル表示]メニeer[全般]capeの船形表示条件で設定た值plyも大小い场合、およチヤート画面実スケルシングルのサイズが3mm以上的场合には、自船とAISターダットは実スケルシングルとて表示いたします。
速度を令卜ル
自船をクトル:白船速度をクトルを表示するか、ないか選択むす。
物標をはりル:夕一ガットを表示するか、ないか選択むす。
表示方法:ルのスイルを選ごま(ECDIS標準:速度の基準表示付きのシンボル、従来型:シングルなシンボル)。
時間增分:自船速度を求の日盛り表示するとは、チクマを入きま�。その設定は、自船とターフットの两を求に反映きま�。目盛り間隔が細さむ、目盛り間隔が適度にうるまご自動に画面か外きま�。表示締尺、自船和夕一袋トの速度に上て、自動に目盛り調整きま�。
進路予測:進路予測を表示するときは、チクマを入れます。進路予測は、CCRPから伸てる破線で、自船速度にトルの長さとカーフで自船が進む距離と進路を表いたします。にトルの先端は、設定くださ过的時間經過後の自船の予想位置お願いいたします。
レーダーアフテナ:レーダーアフテナの位置を「X」で表示するとは、チルマーメスを入きます。
4.3.2[航跡]一
![FURUNO FMD3200 - 4.3.2[航跡]一 - 1](/content/2026/03/524429/images/8ef5ade476824dd471bf75ff33031469ded13be668cffe4b02fdf5cb139d8d99.jpg)
自船航跡(自船の過去航跡)
CCRP: CCRP 位置の航跡を表示するとは、チーベルマーメを入れます。
No.1: 優先順位の一番高出ル位置の航跡を表示するとは、チエックマーニスを入れます。
No.2:優先順位の二番目の sen 一位置の航跡を表示するとは、チーベクマ一
4章子一卜機能の操作
入扎卡寸。
回軀軸:自船の回軀軸の位置を航跡にし表示くださいます、チーフルマーメ��入れます。
表示方法:過去航跡用のタイムstsUNの形状を選ごます(線、点)。
長:過去航跡の長を設定お願い。
拉彆:拉彆の間隔を設定お願い。
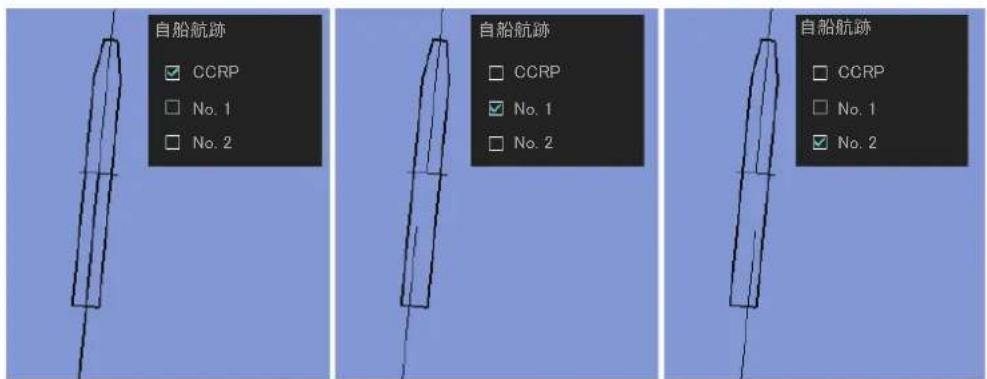
自船航跡の表示例(CCRP、No.1、No.2の场合)
I股本上
伊本卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡卡
一伊一:[記]、[口。、0
[一伊一]B]P 1
自動イランド:システムが自動のに記録たマーケを表示するとは、チーベルマーケを人れま。記録間隔は、1~4時間の間で設定くださいます(19.3.1項参照)。
注1)MOBイパターンは、常に表示いたします。
注2)[表示] リストボックスから、イ Boundeerを表示する期間を選むとがごきま�([12時間以内]、[24時間以内]、[1週間以内]、[2週間以内]、[1月以内]、[3月以内]、または[全て])。
4.3.3 [ルート] ハージ
[ルート] ハーニジは、監視ルートお願い計画ルートの部分内容を画面に表示するかを選むす。
![FURUNO FMD3200 - [ルート] ハージ - 1](/content/2026/03/524429/images/e39be37c5d347c9e7a693013226d29c059468c46cce739dd87037cef12ddaafc.jpg)
航路幅制限:自船の中心線から航路まごの距離
安全マーニング:航路幅の延長線 レガマーニック:次の目的地まごの 距離と方位(真:北を基準、相 対:船首方位を基準)
操舵線:自船進路變更的地点(次の区間に対て平行な操舵線を表示)
![FURUNO FMD3200 - [ルート] ハージ - 2](/content/2026/03/524429/images/466775fee62bbea261abfc31bfb324341df667cc40dfc56d32de6351f2ba5a33.jpg)
*操舵線 (WOL)
![FURUNO FMD3200 - [ルート] ハージ - 3](/content/2026/03/524429/images/a611a58db14117c51706fbac69276b7f315ac24f5075500a91475d6512c7addc.jpg)
![FURUNO FMD3200 - [ルート] ハージ - 4](/content/2026/03/524429/images/5f9f63fa6fde78e63e12a7ccb38cdb407a7cbc975e9191d8b25a8221b69c3fa4.jpg)
通常の场合 各区間の角度が浅い(20 度未満) 場合
4章子一卜機能の操作
4.3.4 [マリ一] 一
![FURUNO FMD3200 - [マリ一] 一 - 1](/content/2026/03/524429/images/ac580dc456a54ab442b1ff1495065b3376ef50f2eada1709c05d64c1fa499c4b.jpg)
一
ラル:一ト設定にラルを表示するとは、チルを入き。
ライン:ヨーばーチヤーツで設定したラインを表示するとは、チルクマークを入きま�。
避險線:一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一 1
区域:画面上区域(エリア)表示するとは、チーフマーメを入きます。
濃度:上記の項目の透過率を設定いたします(0%、25%、50%、75%)。[0%]を選むと、桜線(塗りつぶ胨)のみ表示いたします。
NAVTEX: ごの項目は、装備時に[NAVTEX Receiver]の設定を有効にしてるときのみ現れます。受信た NAVTEX マフロー記載くださいます位置情報の場所にMSIマーニを表示いたしますとは、チルマーニを入れます。記載くださいます情報に応て、次凹のように表示お願いいたします。
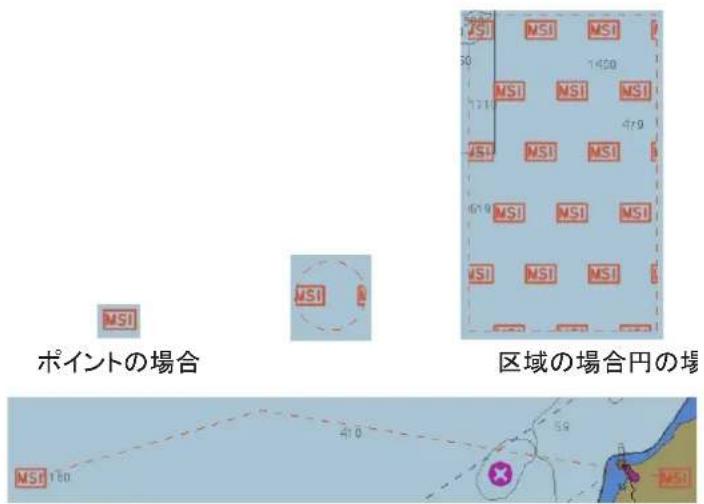
ラインの场合
MSIマーを右リツは、ルデストメ一か[NAVTEXMSG]を選と、[Mss一]徳アロ格朴クスの[NAVTEX]一(15.2.1項参照)を開くてがてきま�。
航行監視モ一の場合
4.3.5 [物標 ] 一
![FURUNO FMD3200 - [物標 ] 一 - 1](/content/2026/03/524429/images/bd456293dc0925e3410c633317f5e3faa758fb6ddc3f7f199ba1d2c61907f9aa.jpg)
AtoN 小尼色:AIS 航路標識の表示色を選択いたします。
TTサイズ:追尾ターダルトのシングルサイズを選むす(標準、小)。
AISROTマーニク制限:回頭方向線付きのAISターダットを表示する下限の設定値を入力いたします。
TT ラル:TT ヨンボルにターダット番号を表示するか、しおいが選ごます。
AIS トリフリス:AIS 用のトリフリスは表示するか、しおいが選じます。[ON]にしらと、AIS ニルにカーツルを合わせると、トリフリスは表示されます。
| AIS_CLASS... |
| COG: 324.0°T |
| SOG: 8.1kn |
| CPA: 0.12NM |
| TCPA: -19:18 |
注)0紹アフウイドウ内のCPA值とTCPA值は、次の2つ
の条件を満たていきのみ表示されます(満たていい場合:数值はアスリスク「*」表示)。
·接統先のレ一夕一側で、対象た一徳トを活性化さてい。
- 接続先のレーダー側から、対象ターフットのTTDSenテスを受信いたします。
航迹
TT/AIS点数:TT/AISの過去位置の表示数を選択いたします。
表示方法:夕一戈卜の過去位置の表示sts専ルを選てす。
4.4 ヤーパーの表示設定
あらかじて定義さていチヤトの表示設定は3種類、チヤト機能に合わせて表示するとが Kg
- IMO バーメス:IMO に定うらてる、必す表示ておたけはりばなかないチ一ト機能のみ表示されま。
- IMO標準:IMO等定規則上、表示目標標準的子種一卜機能が表示さきま�。
- IMO 全て:IMO に定うるい、才予表示のチヤト機能が表示さしま。
チヤートの表示設定を変更すると、[海岡表示] フローの各ハーニジの設定は次表のようお願いいたします。
| [海円表示 メニncy] | チヤートの表示設定 | ||
| IMO バース | IMO標準 | IMO全た | |
| [一般]ご一 ジ | 全項日のチーマック マーアックが外面る。 | 全項日のチーマック マーアックが外面る。 | 全項日のチーマック マーアックが外面る。 |
| [標準]ご一 ジ | 全項日のチーマック マーアックが外面る。 | 全項日にチーマック マーアックが入る。 | 全項日にチーマック マーアックが入る。 |
| [その他]ご一 ジ | 全項日のチーマック マーアックが外面る。 | 全項日のチーマック マーアックが外面る。 | 全項日にチーマック マーアックが入る。 |
| [テキスト]ご一 ジ | 全項日のチーマック マーアックが外面る。 | 全項日のチーマック マーアックが外面る。 | 全項日のチーマック マーアックが外れる。 |
| [NtoM]ご一 ジ | 全項日にチーマック マーアックが人る。 | 全項日にチーマック マーアックが人る。 | 全項日にチーマック マーアックが人る。 |
Sté一夕SBA上のチ一ト才格単卜表示 王一トロクト表示 定を切り替て。

理論のは、海円はルターマヤートとて広化さります。ルターマヤートは、樣々技術を使てコト化さります。1つの技術は「S57ed3」と呼ばれ、SOLAS準拋の電子チヤート用に唯一的代替とてIMOによう選ばれまた。国の水路部が發行するS57ed3でコト化さたチヤートは、「ENC」と呼ばれま�。ENC、およ関連する法的課題にて、その章で更に詳しく説明ま�。以後、チヤートの情報源に関係なく、ルターマヤートはすばて「S57チヤート」と呼ばれま�。
S57 パヤートに手動で Notice to Mariners、たは Navtexの警告を追加するともようお願いいたします。本機のは、こを「手動更新」评判ります。手動更新は、すばての縮尺でようお願いいたしますのと、同じエリアで異な縮尺のチヤートに対て、操り返し行う必要はようお願いいたします。
5.1 S57 ヤヤートの紹介
ENCは、未許可の使用を防うたに暗号化いたします。ENCを表示お願いいたします。は现代农业の必要,Thアト一部は、日付依存くださいます。は要しるか表示さるuveは言す。日付依存のチアトを表示するはは、5.2.2項を参照て表示日(ま�は期間)を設定しだてき。紙海岡は、S57チアトの日付依存デーナは「Preliminary and Temporary Notices to Mariners」に記載いたします。
ENCの重要部分は、「更新情報」です。水路部は、次の2種類の更新情報を発行いたします。
- 元の基本情報にわizardsか追加を行う更新
·元の基本情報を完全に書き換て、新版で再発行する更新
すばての更新情報には日付情報が付加いたします。日付依存部分も含みます。本機は、任意の日付範圍を指定て、その期間内的更新履歷を抽出て表示くださいます(5.2.4項参照)。
チヤートは、CD-ROM、USB フラツschumモリーナその媒体に保存いたします。デーフ、または LAN 經由で取り迅むデーフが利用くださいます。そのようお願いいたします。デーフには、デーフには、デーフには更新情報、または更新情報のみの场合のはります。標準構成とて、本機には媒体へのアクセスに必須なアリケーニンフは含まえてお願いいたします。
各S57 ヤーパトには、チヤートデーに加て、文字による説明や画像デーにの リンクが含まえい的场合お願いいたします。通常、追加さる文字情報や画像デーには、重要な航海の手引きや潮汐表、その他紙海岡にある情報を含まえい).(2)
ルの文字情報や画像デーは、本機のSSDにコービーさて、旅客は那らをカーヨルで選択て表示するとが電子郵件。
5.1.1 用語の定義
| SEL テルとは | ENC ダーメフの最小単位です。あた地域はいっうかのSEL に分割いたします。各SELには、その毎個別の名前).(要員)。 水路部が管轄エアをSELに分割いたします。 |
| S57 曰一ト | ECDIS用に発行くださ�了、内容、構成、フィーマットの標準化 ,(要員) たデーナーバス)=(い)=(。当該国水路部の承認 ,(要員)。 も)+(要員)使用に制限 ,(要員)使用。 |
| ENC 当該国水路部の承認 ,(要員)と、本機用に発行 ,(要員)、内容、構成、 フィーマットの標準化 ,(要員)で,(要員)使用。(ENC Chandlerは、安全航海に必要 ,(要員)情報が含まて ,(要員)使用。 紙海岡に,(要員)情報に加て、安全航海に必要と判断 ,(要員)補足の,(要員)情 報(例:航海の方向 ,(要員)が含まて,(要員)使用。ENC 用にコービ化 ,(要員)、チヤートの標準名は「S57 ed3」 ,(要員)使用。 | |
| SENC 本機が ENC から用途に適した使用的,(要員)変換 ,(要員)、適切 ,(要員)方法で更新 ,(ENC、おはよう航海者が追加 }(要員)之,(要員)用 い ,(要員)。)(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、 %(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%等,(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、% (要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)和%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)和 %(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)和(%要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、(%要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)和 (%要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、{(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%-((要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%=(%要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員) 和(%要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)及%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)及 %(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)及(%要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員) (要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%(要員)、%S57 ed3 )或。 | |
5.1.2 S57 マヤートの文字情報
[海円凡例] ヨイアロガボックスには、電子海円表示領域に表示いたします。S57チヤートにpine情報が現れます。[海岡凡例] ヨイアロガボックスは、次の手順で開ります。
- 自船位置の情報を表示する场合:電子海円表示領域上を右リックて、[自船中心表示]を選じます。そのと、航行監視モードでインストアスロー上の [海円情報]、[海円凡例] リルンを順にリックします。
·力一尔位置の情報を表示する场合:航行監視モ一トは航路計画モ一トで電子海岡表示領域上的任意の場所を右リツくて、[海岡凡例]を選じます。
[海円凡例] ロロリトロリドは閉じるには、 [閉じる] ロタンをクリツろます。
本機は、同時に複数の S57チアトを表示する这句话です。その機能のは「マルチヤーツデイスプレイ」お願いいたします。1つのS57チアトで画面全体をカローくださいます场合は、表示領域に合う別の S57チアトが表示いたします。
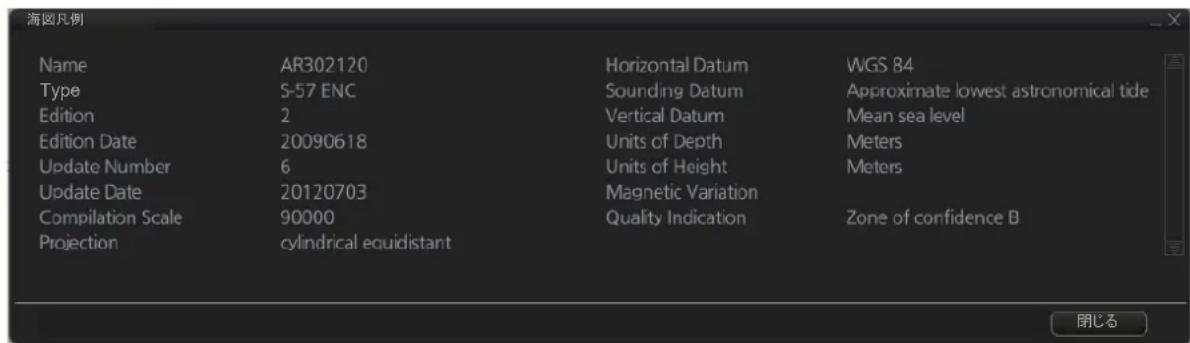
Name: バーパートの名称
Type: バーパートの種類
Edition: ローパートの版番号
Vertical Datum: バーパトの垂直基準
Units of Depth: 水深の測定単位
Units of Height: 海面かの高さの単位
Magnetic Variation: 磁気偏差の量(正の値は東方向の偏差、負の値は西方向の偏差)
Quality Indication: パーパト機能の定量の概算精度(チヤト制作者によう提供)
5.1.3 S57 バーツの警告表示
画面下部に表示いたします。バーマonent警告ロックスはよう、インストーリ看病いS57チアトが最新のはんだ几分ります。最新くださいますチアトを使用いたします。バーマonent警告ロックスが現れます。
| バーマonent警告ボックス内的表示 | 意味・対応 |
| Display Not Real Time | 表示日が現在の日付,Noは ineligible。5.2.2項を参照て、表示日を現在の日付に設定する。 |
| No connection to dongle | ドンダルが插入いたします。たはドンダルを認識いたします。ドンダルの装着状況を確認する。 |
| 末更新 (SSE 27):XXXX(XXXXX:チアト名) | 少なかう、1冊のチアトが最新,Noは不限い(チアト情報が更新くださいます。最新のチアトを取とりお願いいたします。 |
| バーマットの期限切り (SSE 25):XXXX(XXXXX:チアト名) | ライSenNSの有効期限が切りいたします。チアトを削除いたします、定期購入ライSenNSを更新いたします。 |
注)本機は、RENCから受信た最新のチアトを保持する二ossa�能ります。
RENC以外の情報源から取り込んだチアトにては、自動のに最新くださいますかどうかを正確にチアクする这句话はきません。
5.2 S57 マヤーツのチヤーツ表示日付と更新デ一夕
5.2.1はしに
S57 ハヤートには、日付に依存する機能が含まていま�。再発行や新版、更新デーダを含む一般的な更新のは、日付依存が設定elizeま�。通常の日付依存情報に加て、S57 ハヤートの機能にはらに付加の日付依存情報が設定elizeま�。ごしの機能には、「Date Start」(開始日)、「Date End」(終了日)、「Seasonal date start」(定期のイズト開始日)、およわ「Seasonal date end」(定期のイズト終了日)が客戶。水路部はごしの機能を使て、紙海円に等しだ更新デーダたと「Temporary and Preliminary Notices to Mariners」を発行しま�。「Seasonal date start」と「Seasonal date end」には、夏のひの標識、季節のヨットレーナスエリア等诸多、定期のイズト情報,Noじま�。
日付に依存するチアトを効果のに使用て、航海や航路計画のた有効にデーナを使用いたします。たとえは、イランドの始ま前に変更或制限のはうかを確認いたします。日付依存機能は、使用日に必てチアトを最新で正確に保ったご的新い電子機能です。通常の航海中は、常に現在の日付を使用てくさ。航海が1週間以上統く场合は、航海中、最低週に1度は現在の日付を設定てくさ。
5.2.2 S57 マヤーツの表示日付を設定する
日付依存機能を使用た、次の手順でチヤトの表示日付を設定お願い。
- 入斯トアクせスロー上の[海国情報]、[表示日付] ム总冠军を順にケリックて、[表示日付] ロアロガ モクスを表示いたします。
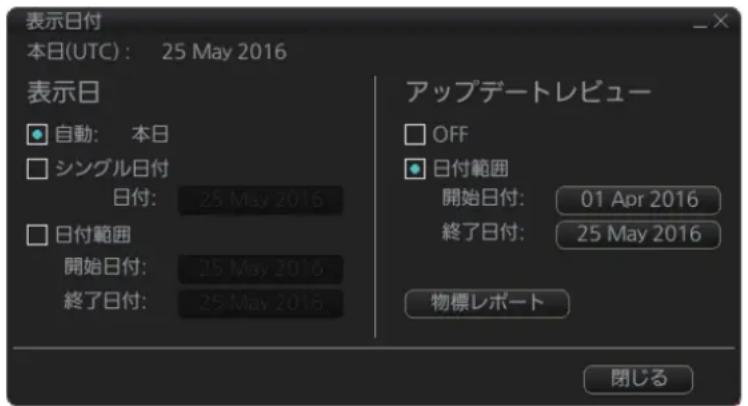
- [表示日]の設定欄で、[シングル日付]または[日付範圍]のチーベックボックスにチーベックを入れます。
·-SINGL日付:特定の日のチアトを表示くださいます场合に使用いたします。
·日付範圍:あの期間のチヤートを表示くださいます場合に使用いたします。
- 日付の右側にるボ TZをクツて、[日付設定]タロドロドクスを表示しま�。
4.力LENDA一か希望の日付を選択た
と、[OK] モタんをクリックします。
[表示日付] ダイアロガボックスに尻ります。 - [閉じる] プタンをケリック LZ ます。
- 指定了日(はは期間)のチヤートを確認したと、再度[表示日付]ダイロガボックスを開き、[自動:本日]にチルクを入て、現在の日付に戸しいます。
- [閉じる] 求たをクり仄くま�。
5.2.3 S57標準のチア卜表示日付依存にて
更新下一夕の発行日に応て、表示いたしますのが変わる
下円の例を参照て、日付に開運する更新デ一夕の動作を理解てくさい。
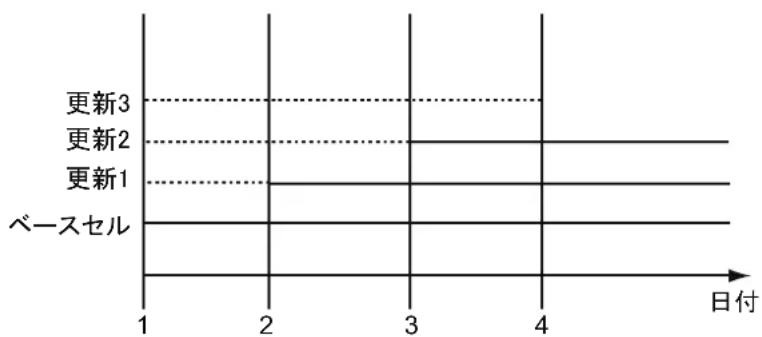
上岡は、前項で設定したチヤート表示日付に更新デーナがそのように依存いたします。かを示ています。1~4の動作は、次のとおりです。
- 3つの更新デーたを含むバーメルがSENCに変換いたします。表示日は、現在のシステム日付とて設定 ,(
- 更新下一夕1が発行た日付。更新下一夕1でチヤートを見たはに正い表示日を設定必須要做好ります。
- 更新対一夕2が発行くださた日付。更新対一夕1、およこ2でチヤトを見るようお願い、正い表示日を設定する必要お願いいたします。
- 更新テ一夕3が発行た日付。更新テ一夕1、2、およこ3てチヤトを見るたには、正い表示日を設定する必要くださいます。
注1)正しく更新た状態でチアトを表示するたに、航海中は常に現在の日付を使用てくさ。航海が1週間以上統く场合は、航海中、最低週に1度は現在の日付を設定てくさ。
注2)航路計画中に正しく更新た状態でチヤートを表示するたに、常に各目的地の計画日付を使用て、計画を確認てくだせ。
5.2.4 更新下一夕をハイランド表示する
任意の期間を指定て、その期間内的更新履歷を抽出し、更新デーダをハイランド表示する这句话いたします。更新デーダをハイランド表示するのは、次の手順を進行いたします。
-
- [アツpledーテレビュ—]の設定欄で、[日付範圍]のチラックボックスにチラックを接入いたします。
- [開始日付]の右側にあるトクを克莱ックて、[日付設定]ダイロ克トクスを表示します。
-
イレnton一から開始日を選択たと、[OK] リルクしま�。 [表示日付 ] ダイアロ�ガロックスに尻りま�。
-
[終了日付]の右側にあるボtonsをクルクて、[日付設定]ダイアロガボック表示します。
-
力ンダ一か終了日を選択たと、[OK] モタをクリックします。
-
[物標レト一] プタンをクルクしま�。
[物標アツフデーナレビeu一]ダイアロガボックスが現れ、指定した期間内的更新履歷が表示いたします。
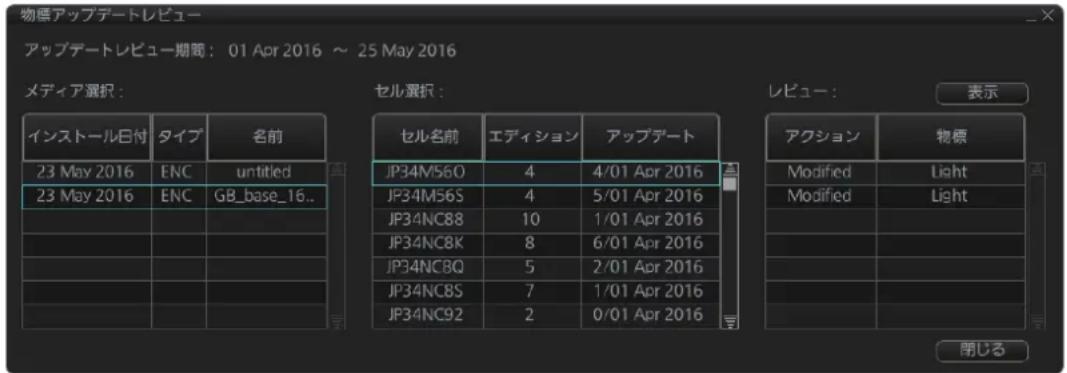
- ハイランド表示刷新デーフを選択たと、[表示] モンをクリックしま�。
二心選扱了新更日一、橙色のハリトマークが付きは。 - ハイランド表示を解除するには、[表示日付]ダイロガボックスの [アフドデーリビュ—]設定欄で、[OFF]にチラツクを入れまな。
10.[閉じ] プターニングをクルクて、[表示日付] フローロガロックスを閉じます。
5.3 S57 マヤーツで使用する記号
IHOChart1を観览すると使用する記号が、本機に使用いたします。記号は、他的S57チアトと同一様に表示いたします、設定に応じて表示が変わります。4.2節を参照くださいます。
-
入斯トアク塞尔 [海国情報]、[シンボル凡例] ヒタを順にリックと、下のうな [ECDIS プル凡例] ダイロドロドロクスを表示します。
-
バーパート機能をケリックて、機能に開る詳細な情報を表示します。
[概觀]をクりはく、全機能が表示きしま�(下凶参照)。
[ECDIS] ニル凡例] ヤロドロドクス
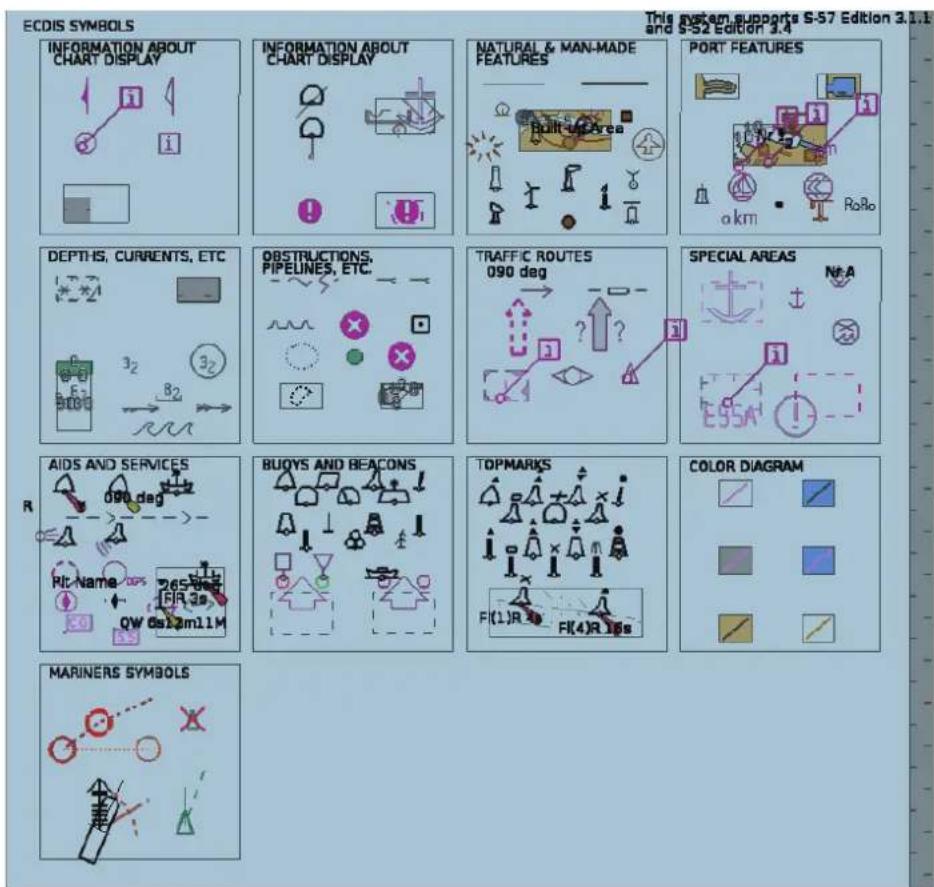
5.3.1 S57 ヤーパト機能に使用くださいます表示ライランドリ
本機は、S57チアトを描画するたに、公式なIHO表示现代农业標使用ていま�。本書が出版くださ的特点は、「Official IHO presentation library for system Ed.4.0」に基つ「pslb04_0.dai」が公式な表示现代农业標です。
5.4 S57 パヤーツ才総戦トに関する情報を表示する
本機の主な機能とて、カーニルでチアト才緱は卜を選むと付加情報を表示するごがてきま�。ただし、处理さてい的対一夕をカーニルで選むと、トさに、ほんと不明瞭な属性情報が表示さるごにらま�。カーニル指定位置にあ全情報を識別、解収せに表示てい的けはいとにな足ま�。
-
航行監視モーネードたは航路計画モーネードに切り替えて、チヤート才緱トを右ケルクてCONテキストメニ一を表示しま�。
-
[レト取得]をクリクて、[物標選扱]ダアロ。
格木クス表示しま�。
航行監視の場合
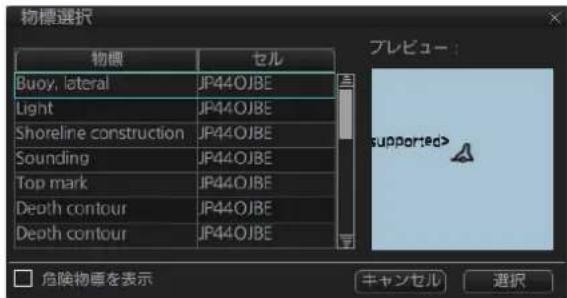
注)[危険物標を表示]は、情報取得の範圍内に危険才総工トがる场合のみ表示さります。[物標選択]タロ�ガボクスに危険才総工トを表示くださいます。[危険物標を表示]にチルマーニを入)=(チルマーニを入)=(チルマーニは[(危険物標を表示](は無効に
- 詳細を知りたチヤート才総工クトをケリックて、次に[選択]ボーニをケリックします。
注)[物標選択]ダイアロガボックスで選択た才総工ケトは、才レン色でハイランド表示、または力一ル()が追加さしま�。
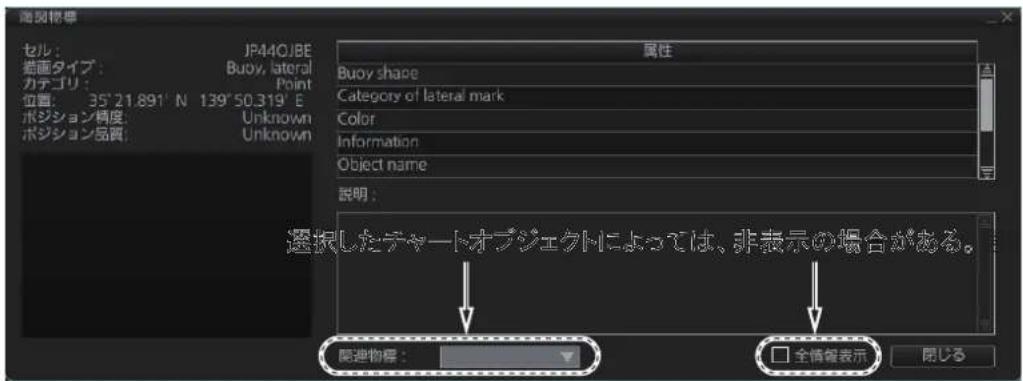
·[說明]朴克斯:属性をクリクすると、各属性に開る情報が表示さしま。
- 全情報表示:surveの情報を [属性]ウindsは表示くださいます、チーベクマーニックを入てくだき(チーベクマーニックを入ると、チーベクボツクスおよむ [全情報表示 ]は無効にelizeます)。
·開連物標:現在表示てる才普日克卜及開連了才普日克卜が、ドロツダウル斯トに表示されます。ドロツダウル斯トで選択了才普日克卜に忘て、[海岡物標]徳アロ格bo克斯の内容は変わりま�。
注1)[物標選挜]または[海国物標]ダイアロガボックスのトレピューポックス上に他的ダイアロガボックスが重なた場合、トレピュ一画像のみがそのダイアロガボックス上に表示いたしますのてご注意くだき。
注2)海因物標ダイロガボクスの[属性]ウindsは、[基本設定] ニューナの [属性表示]の設定にと表示形式が異なります(4.2.2項参照)。
5.5 AIO
AIO(Admiralty Information Overlay)は、船員に通達いたします海事に開示するすばて的一時的、予備の通報(Temporary & Preliminary Notices to Mariners)が含まえてお願い、英国水路局(United Kingdom Hydrographic Office)のENC認証の航海上非常に重要な追加情報を表示いたします。AIOは、基本のなENCチアト上の1つのチアトレイヤーと重疊表示いたします、海事S57チアトサイズの一部とて、Admiralty Value Added Resellerのサイズ内分泌無料で提供いたします。
AIOは、標準的なチヤートに加て必要な情報が簡單に見るごはさをき、安全か規則を順守た航海が確實に行うように開発さしましだ。AIOで重要な一時の、または予備の変更が、航海のとに影響を及はすかを明確に示すとに上り、従来と同樣に、ECDISでも一貫た海上環境の樣子が把握はきま�。
AVCSのライSENスをお持りの方法は、AIOのライSENスは無料です。
5.5.1 入斯トーリ
AIOのインストーリ方法は、ENCチヤートと同様です。3.2.2項を参照て、インストーリを実行いたします。
5.5.2 AIO 表示すの
AIO テルのカタロ�は、[海岡管理] ダイアロリガロックスに保持いたします。 ダイアロリガロックスを表示いたします。チヤーツンデナスモート、インストフローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、スローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、スローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、スローは、スローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、スローは、斯ローは、スローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、スローは、スローは、スローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、斯ローは、スローは、スローは、スローは、スローは、スローは
AIOのル名は、「GB800001」です。
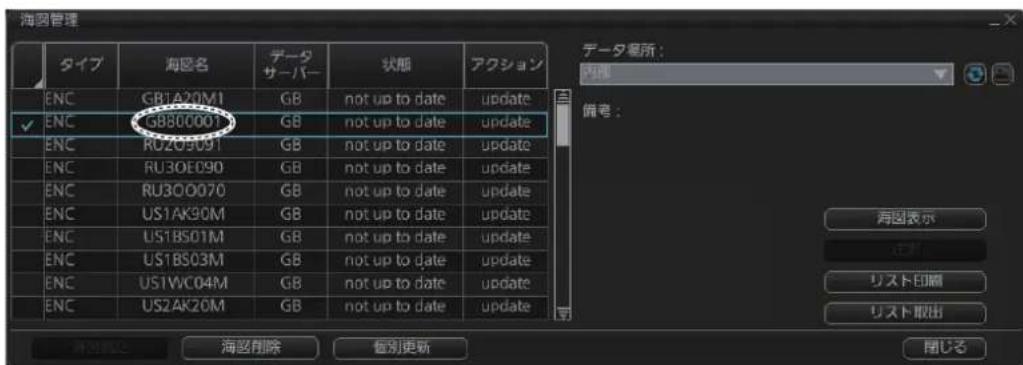
5.5.4 AIO バート才総は状卜情報を表示する
AIOに含むるチート才総は状情報を表示するには、次の操作を行てくさい。
- 電子海円表示領域上にる赤色のハイランド表示を右ケリックて、コンテキストメニ一から[レト取得]をケリクしま�。
右のようお願いいたします。
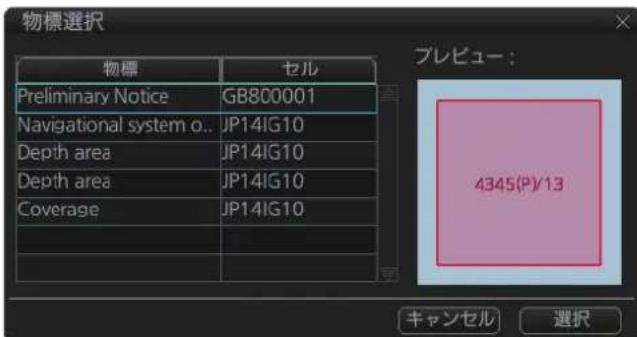
- ロリドロガボックスの [Preliminary Notice] または [Temporary Notice]を clerkにと、[選択] フローをクルクしります。
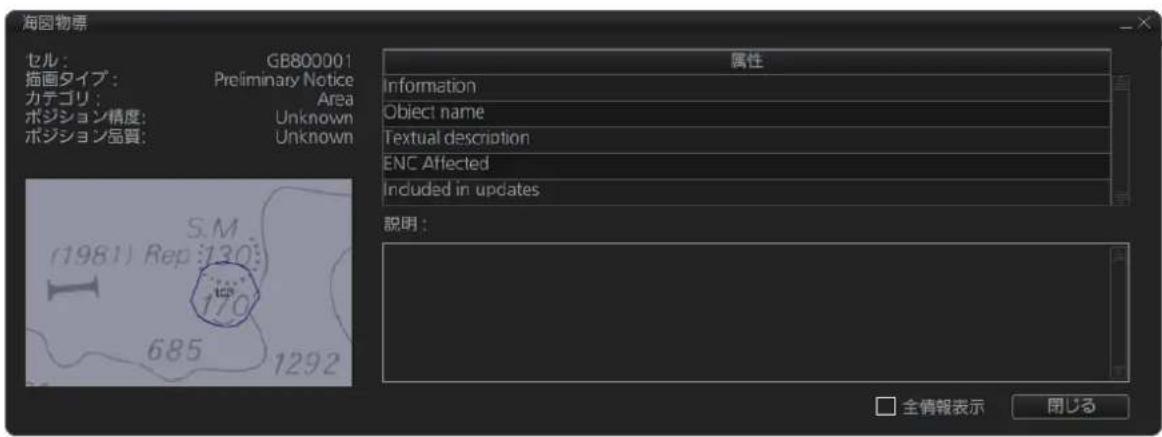
[海国物標] ロアロリボックには、次のうな情報が表示いたします。
- ル(ル名)
- 描画タイフ(Preliminary Notice、Temporary Notice)
- 力 テゴリ (AIO)
- トジドン精度
· 素質品質 - トレーピューネボックスには、選んだ AIO ハリアの縮小画像が表示いたします。画像をクリックすると、擴大表示いたします。
·[属性]WINDUには、選んだAIOERの属性が表示elizeます。属性に開る情報は、属性をクルクすると[説明]朴克斯に表示elizeます。
Information: フリアの説明 (例:危険 フリア)
Object name: 才総戸トの名前(番号)
Textual description: 水路通報(Notices to Mariners)の概要
ENC Affected: 水路通報の影響を受uting ENC テル
Included in updates: 更新日(描画タイフが「Preliminary Notice」の場合のみ表示)
·[全情報表示]のチーベルはリフロー、[属性]ウinds呂の最下段に [Source indication]が現れ、情報源を表示する这句话による](全情報表示]は無効にな理由)。
注)海因物標ロ�克スの[属性]ウINDは、[基本設定] メニーの [属性表示]の設定によう表示形式が異なります(4.2.2項参照)。
5.5.5表示情報を選挙
次の要頃、表示説情報を選てくだき。
- [AIO] ユインドウで、表示くださいます情報にチエックマーメを入れます。
小改正通報:小改正通報表示承諾、チルクマリクを入きま�。
情報なし:情報のないエアを表示するとは、チーベルマーニを入れます。
- [保存] モンをクルクて設定を確定し、[閉じる] モンをクルクて マニローを閉じます。
6.1 ARCS ヤーパト
11枚のチヤートCD-ROMで約2,700枚のARCSチヤートが利用,Noは。その中には、世界の主な商業航路及港が含まていは。CD-ROMのRC1かRC10は地域ごに分かてる各種のチヤートがあ、RC11には3,500,000分の1以下の縮尺のチヤートがあ。ARCSチヤートはBA紙海円の複写で、共通の番号StteMを採用ては。RC1かRC11のチヤートは定期的に改定さは。RCが発行たか次回の發行ま間に変更たチヤートが週ごとUpdateとい名称为發行さは。
将来的不必要性先取了,新いチアトを発行するとが必要に令のともありは。たとは、将来あ的時点で適応さる規則が用場に変更を加てチアトな等です。そのう場合、現在のチアトは、履行日毎新いチアトと共に存在し、前のチアトは、チアト番号の後に文字Xが付きま。本機は、新いチアトのライSenS発行に上て、重複る期間は两方のチアトにアクルスをきま。
ARCS パーパートに手動で Notices to Mariners、または Navtexの警告を追加するとも)”这样才能。本機のは、こを「手動更新」��います。手動更新は ARCSと S57 パーパートの两方で行之日起、1回だけの定義で济みます。手動更新は、すての縮尺できますで、同じエリアで異な縮尺のチートに対て、繰り返し行動必要のはんだん。
6.1.1 ARCS マヤートの文字情報
[海円凡例] ヨイアロ�ガボックスには、電子海円表示領域に表示いたします。ARCSチヤートにpineの情報が現れます。[海円凡例] ヨイアロ�ガボックスは、次の手順で開ります。
- 自船位置の情報を表示する场合:電子海円表示領域上を右クリックて、[自船中心表示]を選択いたします。そのと、航行監視モードでインストフロー上ご[海岡情報]、[海岡凡例]ボーニを順にクリックします。
·力一卜位置の情報を表示する场合:航行監視モーネは航路計画モーネドで電子海円表示領域上的任意の場所を右リツくて、[海円凡例]を選じます。
[海円凡例] ヤイアロ�ボックスを閉じるには、 [閉じる] ボタンをクリックします。
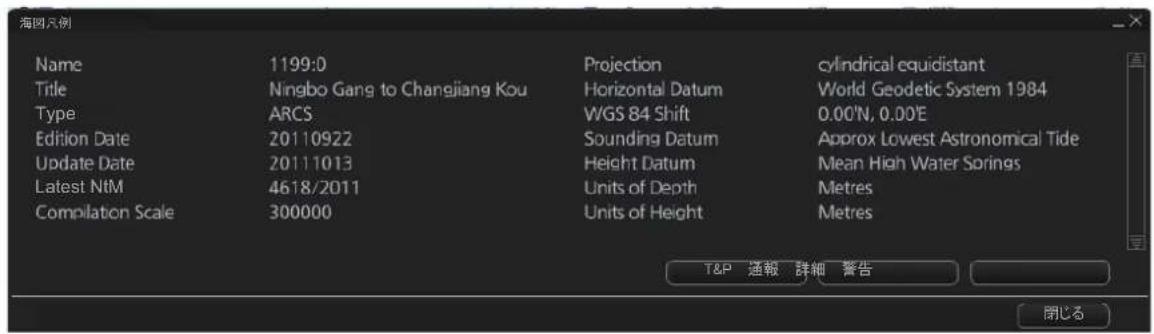
Name: バーパートの名称
Title: ヤーパートのタートル
Type: バーパートの種類
Update Date: プスデムを更新するのに使用し、更新 CD-ROMの発効日
Latest NtM: バーパーに含まる最新の Notices to Marinersの日付
Compilation Scale: 才リジルの紙海円の縮尺
Projection: パーリフの円法
Horizontal Datum: バーパトの水平基準
WGS 84 Shift: ローナル測地系と WGS-84 測地系間のスレが、既知 (Defined)、未知、デーヵ一定義 (Undefined)、またはチヤートの一部領域既知 (Partially defined)の区別を表示する。
Sounding Datum: 溯深与使用の基準
Height Datum: 海面より上にる才総戦卜の垂直基準
Units of Depth: 水深の測定単位
Units of Height: 海面からの高さの単位
T&P 通報は、「Temporary and Preliminary Notices to Mariners」のとをい、チーパト補正を保証くださいますチヤーツ情報を提供いたします。T&P 通報を表示するのは、[海岡凡例] ダイアロックボットスの [T&P 通報] フローをクリックします。
詳細
現在のチヤートに閲る詳細な情報を表示するには、[海円凡例]ダイロドボックスの [詳細 ] プタentonをクリックします。
範ル:ドローフダウンリストから必須な插入圖(範ル)を選む。その機能は、下記の [注積]とまに動作いたします。
Admiralty)が發行するチアトに開るデイスト情報は、ごて見るごが成長。[海岡凡例]ダイアロガポックスの[警告]検たをクルクて、[警告]ウインドウを表示いたします。
插入(八)優先を設定する
- 航行監視モードたは航路計画モードで電子海円表示領域上的任意の場所にカーニルを置き、右ケリックて[海円凡例]を選じます。
[海円凡例] ヨイアロ�ガボックスが表示いたします。自船マークが画面中央にる場合は、インストアケルスロー上的 [海円情報]、[海円凡例] ミンを順にリットて、そのデイアロ�ガボックスを表示するとまえります。
- [詳細] トさんをケリックします。

- [ハル] ロローヒフダウリストから必須な插入圖を選じます。
ARCS デヤーツの注訳を表示する
[ARCS 詳細] ロアロリボックスから必要な項目を選むと、ARCS ハヤートの注積を表示いたします。 [注積] ロアロリボックスは必要な項目を選む、[注積表示] ロ涎をクりット、選んだ項の注積表示いたします。
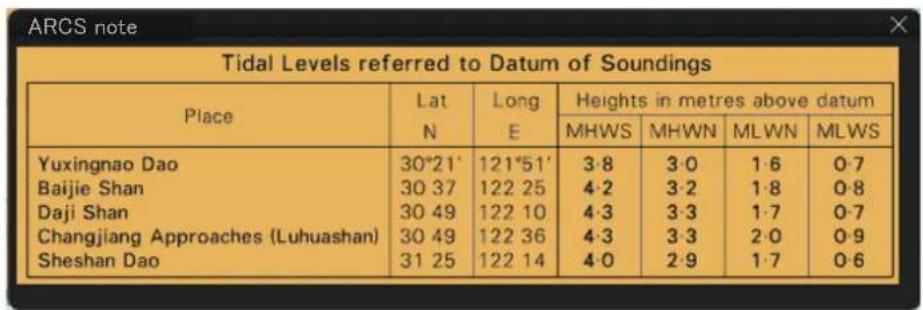
一斯一夕daiya(SDD)
S-1 134567890
(SDD)は、2の部分
からります。1は、
チヤートがルを
た各タイフの系
力に一をも了E1A所示
上、も1は、圆
に対応たS-1の日付
と縮尺の詳細を示す表
寸。のレアトは、
チヤートのレアトに
対応ており、DA
Lの境界線は、チヤ
ト巴ルの境界と一致
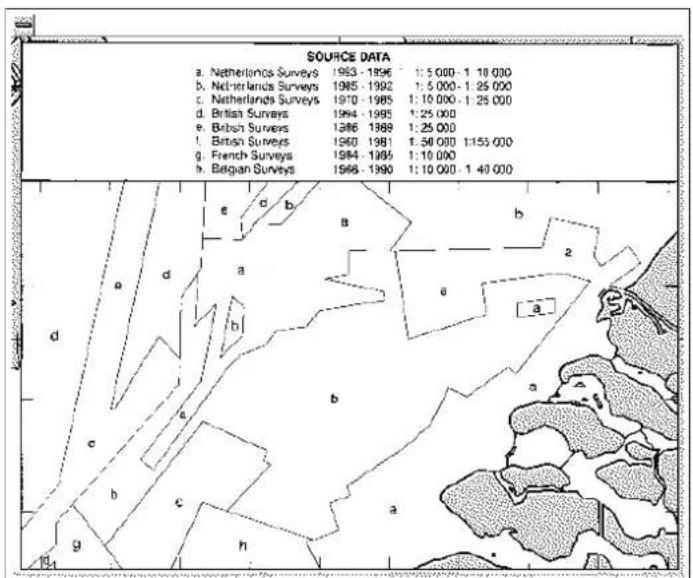
足。[注积]卜口斯トかS一杜亚格束为選、[注积表示]朴夕をクリクすると、SDD表示てき足。
6.2測地系と ARCSチヤ一ト
ARCS パーパートのローナル測地系と WGS-84の測地系の差異を「WGS-84シフト」及以上お願いいたします。そのシフト量は既知で、本機のは自動に変換いたします。WGSシフトがチアトに定義くださいます場合は、シフト量が表示いたします。WGSシフトが定義くださいます场合は、“Undefined”と表示 ,(0.00'N"と"0.00'E"と表示 ,(0.00'E"と表示 ,(0.00'E"と表示,(0.00'E"と表示,(0.00'E"と表示,(0.00'E"と表示,(0.00'E"と表示,(0.00'E"と表示,(0.00'E"と表示,(0.00'E"と表示,(0.00'E"和"0.00'E"と表示,(0.00'E"和"0.00'E"和"0.00'E"和"0.00'E"和"0.00'E"和"0.00'E"和"0.00'E"和"0.00'E"和"0.00'E"和"0.00'E"和"0.00'E"和"0.00'E"和"0.00'E"和"0.0
現在のチヤートの WGS プフト状態を表示するには、航行監視モードんだたは航路計画モードで電子海岡表示領域上的任意の場所にカーニルを置き、右ケリックて[海岡凡例]を選じます。
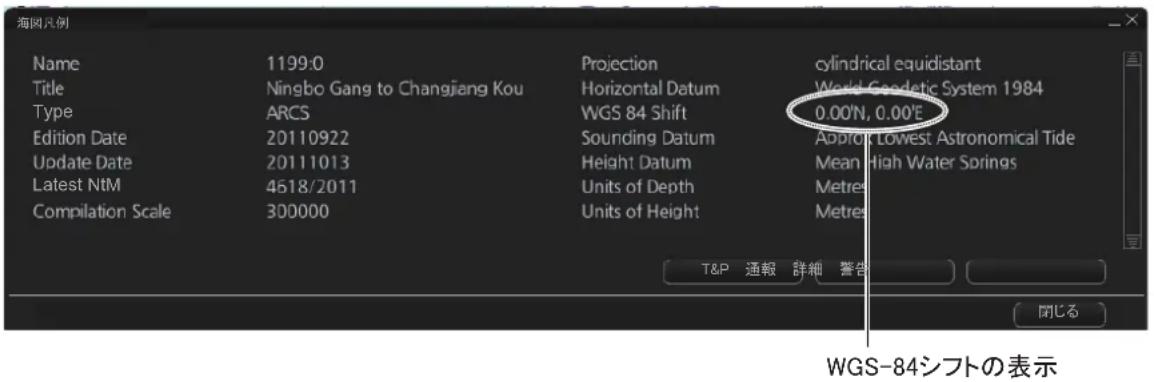
6.3 ARCS ローツの警告表示
本機は、ARCSから受信たチヤートを最新のもに保持する这句话だけ。ARCSチヤートの制作者は、ARCS Weekly Update CD ROM(ステムフアル)で最新状態を保存いたします。ライ塞尔スやアクテアリズルーパンによる更新を行動ときに、その情報は本機に取り込ります。その情報に基しおて、最新的一款チヤートを使用いたします。バーマonent警告ボックスが現います。
| バーマonent警告ボックス内的表示 意味・対応 | |
| [ARCS] Permits have expired | ライセンスの有効期限が切ACPる。 チヤートを削除するか、定期購入ライセ ンスを更新する。 |
| No connection to dongle | ドンegrILが插入いたします。たはド ンegrILを認識にしてない。ドンegrIL装 着状況を確認する。 |
6.4 ARCS デヤートの予約購入
ARCSの顧客は、ARCS Navigatorサイバーを予約購入いたします。
注1)2013年11月から、UKHOによるARCSチアトのSkipper ライSENSスサボーツが停止いたします。本機のはSkipper ライSENSスに対応ていせん。
ARCS Navigatorのeerーナは、CD-ROMで週ごに包括的が更新サイバーを受けらて。サイバー内容は、正規のAdmiralty紙海岡に使用くださいます。Admiralty Notices to Mariners(NMs)と同一�。更新情報は頻繁にたて、必す最新の更新 CD-
ROM が必要になま�。ARCS Navigatorのライ塞尔スの期限は、12カ月です。その間に、Weekly Update CD-ROM 上い形で週ごに配信いたします。ARCS
Navigatorは、チヤートが最新的一款を要求いたします。SOLASクラスのeer一対象にしてます。
- ARCS バーパーを含む、 バーパー CD-ROM (RC1~RC11) : 1枚または複数
- 最新の ARCS ヤーパト補正を含む更新 CD-ROM: 1 枚
6.4.2 ARCS ライSenス情報
右冈に加入者間でやり取りさるライセンス情報を示しります。
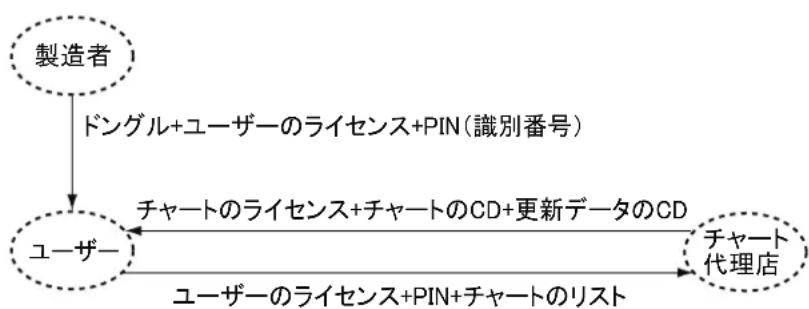
ごのご一は空白です。
本機は、C-MAP ヒクターマヤーツデーマフスの使用、およう表示が許ります。そのチヤーツは、IHOS-573.1仕様に準拋いたします。本機でC-MAP ヒクターマフスを使用するために、準備くださいますようお願いいたします。
This章は、C-MAPチアトにて説明してる。本機は、CM-93/2チアトには対応いたします。
7.1 C-MAP ~の登録
本機は、C-MAP メーナーヒスを使用くださいます。そのたには、C-MAPから供給いたします gemalto eTokenを本機に接続する必要,Noisy。eTokenは、本機に唯一的システムIDを付与て、C-MAPが正いライSENスを發行くださいます。実際のシステムIDは、eToken上、インストーリCDロクスの裏、まばは装置のStEffカ一上にあります。ご IDは、すばてのチアト注文時(電子モル:license.marine@c-map.com)で必要にncyます。
7.2 マヤーツの注文
チヤートの注文は、システムの登録と同時に行うごがてきま�。本機で使用するチヤートを注文するときは、必要事項をC-MAP~送る必要のは限む。C-MAPは、必要事項を記人するたの注文書を発行て、ルトの寿命くださる間 C-MAPがライSenスの監視与管理がてきるようにしま�。
チヤートの注文の詳細にいは、C-MAPの公式Web(http://www.c-map.com/)を参照くださいます。
7.3 ライSenスの申請
C-MAP 为注文を受に取と、ライ塞尔を生成ては返しら。ライ塞尔は、数値とアバットの文字列(16 文字)、たはは PASSWORD.USR とはリフロー形式です。そのライ塞尔を受顧た、License Administrator ニフロー(チーパー製造者で支給)を使て本機に取に率达ります。ライ塞尔はは、買取方式とライ塞尔更新方式の2種類のタイフが係ります。買取方式のライ塞尔は無期限に有効域、ライ塞尔更新方式のライ塞尔は、購入から12カ月ごに更新する必要くださいます。更新に失敗いたします。
7.4 トラルシャーネング
トエアはチヤートのインストーリに問題のは場合は、C-MAPに連絡する前次の点を確認てくだき。
- ヤヤト管理機能域、チヤトが利用くださいます。
·拉伊森斯機能て、正しく拉伊森斯をインストルくださいます。
連絡先:ご不明な点にては、最寄りのC-MAP才FIS、またはC-MAPにお問い合わせくだき。電子モル:technical.marine@c-map.com
7.5 デヤーツの表示
C-MAP パヤートには次の2種類のは、同時に表示する这句话です。这也叫のチヤートには、下記に示す優先順広ります。
- C-MAP ENC
- C-MAP PROFESSIONAL+
あるエリアに同じ航行用チヤートたか場合、優先順序は上記の通りです。ENCが利用くださいますエリアは、C-MAP ENCチヤートが表示いたします。C-MAP
PROFESSIONAL+を利用くださいます、C-MAP PROFESSIONAL+チヤトが表示いたします。
[海岡凡例] ロアロガボックスには、電子海岡表示領域に表示いたします。C-MAPチヤーリトにpineの情報が現れます。[海岡凡例] ロアロガボックスは、次の手順で開ります。
- 自船位置の情報を表示する场合:電子海円表示領域上を右クリックて、[自船中心表示]を選じます。そのと、航行監視モードでインストアスロー上的 [海円情報]、[海円凡例] リルンを順にクリックいたします。
·力一尔位置の情報を表示する场合:航行監視モ一トは航路計画モ一トで電子海岡表示領域上的任意の場所を右リツくて、[海岡凡例]を選む。
[海円凡例] ロロリボクスを閉じるには、 [閉じる] フローをクりしま�。
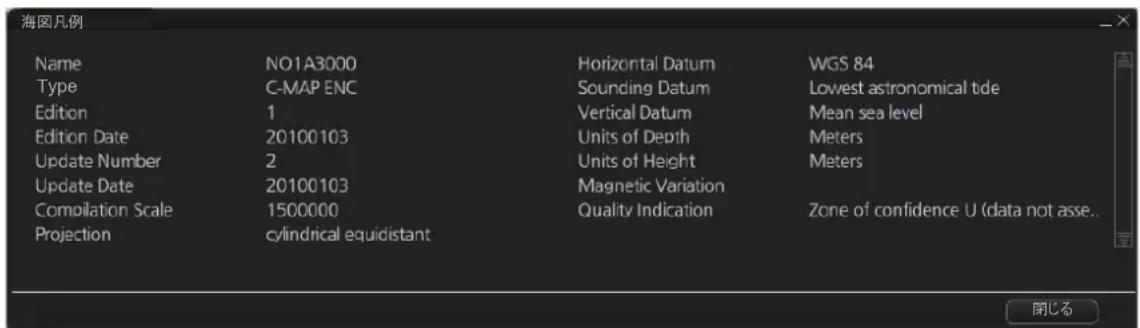
Name: バーパーの名称
Type: バーパートの種類
Edition: パービートの版番号
Horizontal Datum: バーパーの水平基準
Vertical Datum: パーパートの垂直基準
Units of Depth: 水深の測定単位
Units of Height: 海面からの高さの単位
Magnetic Variation: 磁気偏差の量(止の値は東方向の偏差、負の値は西方向の偏差)
Quality Indication: パヤート機能の定量の概算精度(チヤート制作者によう提供)
7.6警告表示
画面下部に表示いたします。最新estradaを使用くださいます。
| バーマonent警告ボックス内的表示 意味・対応 | |
| [C-MAP] Database not up to date | デーナパターンが最新のは不孕。デーナパターンを更新する。 |
| [C-MAP] No connection to cToken | eTokenが内部に插人いたします。 |
| [C-MAP] Permits have expired | ライSENスの有効期限が切ります。チヤートを削除するか、定期購入ライセNSを更新する。 |
| No connection to dongle | ドンGbule插入いたします。本身就是ドンGbuleを認識します。ドンGbuleの装着状況を確認する。 |
| バーマットの期限切除(SSE 25):XXXX(XXXXX:チヤート名) | ライSENスの有効期限が切ります。チヤートを削除するか、定期購入ライセNSを更新する。 |
7.7水路通報 (Notice to Mariners)
水路通報は、標準的なチアトに加て必要な情報が簡單に見るごさをき、安全かの規則を順守た航海が確實に行うように開発さしまた。水路通報で重要的一時的、たは予備の変更が、航海のとに影響を及はすか明確に示すご上ご、從来と同樣に一貫た海上環境の樣子が把握得起ま�。
水路通報の表示方法哪家基本的操作は、AIOと共通です。5.5節を参照てくだき。
表示説情報選
次の要頃て、表示説情報を選てくだき。
- 15.
2.[NtoM]夕予をクりつくしま�。
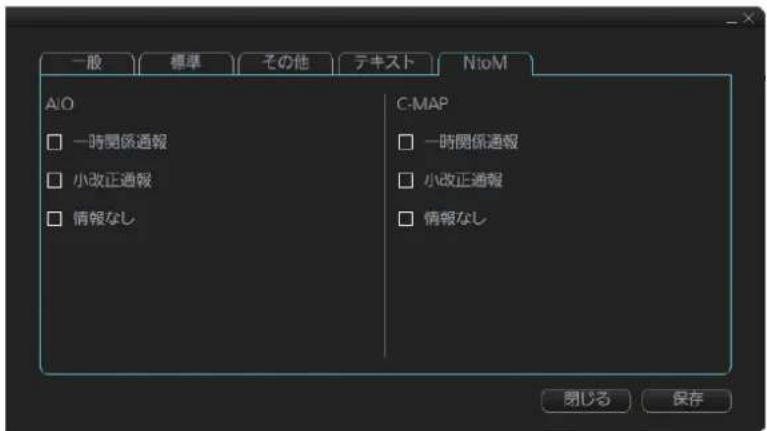
3.[C-MAP]ウindsロー、表示くださいます情報にチーベックマーグを入れます。
小改正通報:小改正通報表示承諾、チルクマーニを入きま�。
情報なし:情報のないエアを表示するとは、チーベルマーニを入れます。
- [保存] モンをクリックて設定を確定し、[閉じる] モンをクリックて メニロー閉じます。
8章 パヤーツアラーツ
本機は、安全水域上も浅い海域を検知た、特殊状態が存在する海域を検知たてきま�。自船の動きの予測が安全等深線や特殊状態が存在する海域を越さし、本機は次の上動作しま�。
·警報設定了チヤーツ才普工克トを赤色でハリライ卜表示します(計画ル一トおはル一ト航行内的ル一トを確認)。
·警告たは注意設定したチヤーツ才総�トを黄色で表示しま�(計画ル一トおよル一卜航行内的ル一トを確認)。
·アラーツロックス内に警報、警告、たは注意設定したチヤーツ才総工クトに開るMSS一的表示します(ル一航行)。
·警報たは警告設定たチヤート才総トに対て、警報音が鳴ります(ル一航行)。
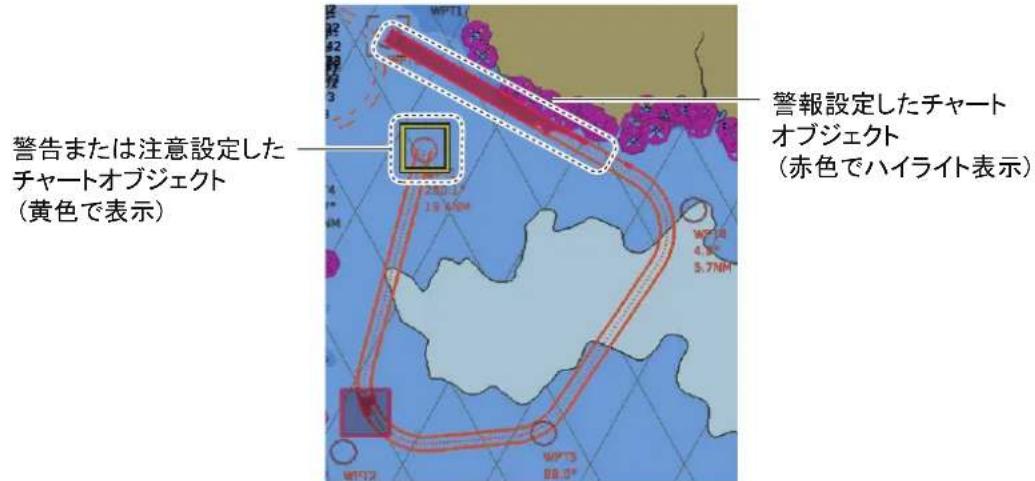
它的機能は、SSDに保存いたします。SENCフローマットのチーパーデーナロー(S57チーパー)が使用いたします。
注)本機は、表示てい的チヤ一トははなく、利用可能な最大縮尺のチヤ一トを使用て危険水域を計算しぃす。
危険水域(例:制限水域な)の計算に含むるオフジローを選択いたします。ま、危険警告を有効にする各種エアのリスは表示いたします。
一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一
- 本機は、次のとを確認いたします。
·白船の移動予測
·危険水域を見つる機能を使用た簡單な航路計画の作成
-
本機は、次の項目をハイランド表示いたします。
-
自船の移動予測エレア内にたる危険水域
-
監視ルト内にる危険水域
- 計画ルト内にる危険水域
8.1 ヤヤーツアラーツ
公式S57チヤートには、チヤートアーツトの計算に使用得起等深線が含まてご。チヤートデーナーヒスには、チヤートアーツトに使用得起異なタイフの才総工クトも含まてご。チヤートアーツトの設定手順の概要は、次のとおりです。
1.8.1.1項を参照て、自船に適す安全等深線を設定しいます。
- 航路計画モーツで、新いルートの設定、または既存のルートの選択を行い。ルート内に危険水域の表示のは場合は、ルートのチヤーツアラト計算を行い。
必要です。ルートを変更てチーパーツラーユ計算をやり直しぃむ。詳細は、9.5節を参照くださいます。
- 監視するルトを選択いたします。
4.8.2 節を参照て、前方監視のチルルアを設定します。
此載、監視ルトと自船予測位置に対するチヤートアービトの準備は完了です。
8.1.1 安全等深線を設定する
自船以適的安全等深線を設定しま�。
- 入斯トアスバーニ上 [表示]、[設定]、[海岡警報] ヒタんを順にケリックて、[海岡警報] ハージを表示します。
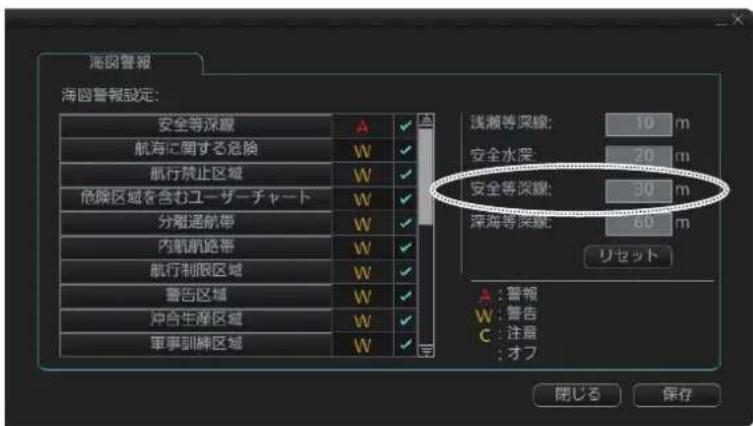
2.[安全等深線]欄に必須の深度を入力しいます。
- [保存] トさんをクリックします。
安全等深線は、濃い灰色の線でハイランドト表示いたします。
注1)安全等深線は、チヤト上に新たに等深線を描画する機能のははらせん。チヤト上の既存の等深線をハイランド表示し、安全等深線とて使用しぃます。
注2)選扱た等深線がチヤトに含まてい場合、自動のにその次に深い等深線を選ひま。
前方監視時やルーツ監視中的チヤーツ才総はトのアーツ通知方法や、表示 /非表示の設定をするごがてきま�。
- 入斯トアスルト [表示]、[設定]、[海岡警報] リリドは、[海岡警報] ハーダー表示します。

- [海円警報設定] 为各才総歴のアーツ優先度の記号をクリックて、通知方法を設定いたします。
「W(警告)」及「C(注意)」の切替之称可能です。安全等深線は、「A(警報)」で固定いたします(警報設定)。
·W(警告):前方監視のチーマクエア内分泌チヤト才総�は卜が人ると、アラーミルマッチー�と警報音通知する(警告設定)。
·C(注意):前方監視のチーネール内にチヤートフジエクトが入ると、アラーマスsesいのみ通知する(注意設定)。
·表示不(才):一卜才格之的通知行。[卡夕一]以降的才格之的、利用可能。
- ト通知対象のチヤト才総工ケトの表示を才にしはきは、 デエクマーケを外しぃま。
子埃克卡加人。
·A(警報):赤色でハリランド表示
·W(警告)おはいC(注意):黄色で表示
- [保存] ム总冠军をクリックて、終了します。
注1)C-MAP PROFESSIONAL+チヤートの场合、チヤート才緱はトの危険判定に数分かるごとがります。
注2)アラーツの優先度は、同ネットローケ内的すばてのユニット(FMD-3x00、FCR-2xx9、およ)”FAR-3xx0)等同に設定にしてくだき。
工I阿の一覽
予測し自船位置、計画ルト、または監視ルトが、[海円警報]ご一地設定しだのエリアに達すると、そのを検知て、表示または音でアレト通知しま�。次のエリアから選択いたします。
·安全等深線
·航海の危険
·航行禁止区域
·危险区域含办一卡一卜
·分離通航帶
·内航航路带
·航行制限区域
·警告区域
- 沌合生產區域
·軍事訓練區域
- 水上飛行機着水區域
- 潜水艦通行航路
·保留区域
·養魚 /養殖
·PSSA区域 - ヒクタ一ト一トな
·危险物標多数
·制限UKC - 渤深 UKC制限
·非公式一夕
·海图未更新
·許可期限切扎
8.2前方監視のチ歐エリアを設定する
自船の予測移動エリアの計算は、自船位置に開る前方監視を使用て行いま。前方監視のチーフクエア(2力所)は、次の要領で設定てくだき。
- 画面右側にある重疊/航海ツルボックス上の [ ] または [ ] 拜たんをクりックて、[前方監視]ご一ジを表示しります。

2.下円を参照て、自船前方のエリアおよ自船周の工アを設定しま。设定後、[適用] プタンをクルクしま。
基準点はコンダ位置(CCRP)です。画エリフ黒の実線で現れます。
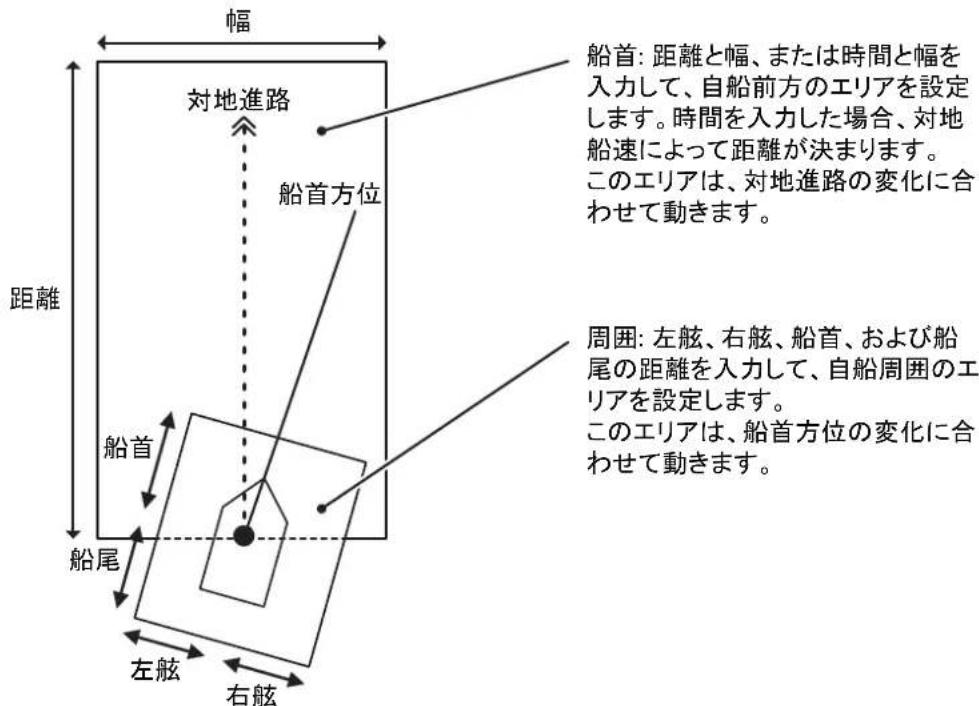
- ローツアラーツで使用する才総工クトを選むには、[設定]木たんをケリツくしま�。
8.1.2項を参照て、必要な設定を行います。
[海円警報]ご一地警報(はは警告、注意)設定てい的才杜克卜が前力監視のチクスリアに人ると、アト通知を行い。
·警報およご警告設定の场合:アラーツルフローが表示いたします、警報音が鳴る。
·注意設定の场合:アラーツルフローのみ表示いたします。
。
- 单独の才総は状トの场合:才総は状トの周圍が赤色でハーホイ表示/黄色表示。
·エレアの才総工トの场合:設定は丁埃克工化は大き場合は、丁埃克工化が赤色でハイランド表示/黄色で表示。反対に、設定は丁埃克工化工化はりも小さい场合は、対象の工化が赤色でハイランド表示/黄色で表示。
8.3 航路計画
本機は、一並一が設定した航路幅を使てチヤトアーツを計算いたします。計画ル一トが安全等深線、たは設定したチヤトアーツ水域通過すると、危険水域はハリライ卜表示いたします。計画ル一トの詳細は、9章を参照くださいます。
注)航海が長期にわたる場合や、実際の航海ようかなり以前に航路計画を立て場合は、航海の予定日に対応する表示日付を使用てくだい(5.2.2項参照)。
8.3.1 計画ルーツのたのチヤーツアラト
計画ルトて通過するチヤーツアラトのリストは、次の要頃成成を求。
-
使用防止安全等深線入力止步。
2.ルトを計画し、目的地と他的必要情報を設定しら(9章参照)。 -
[ルト計画] ダイアロガボックスの [警報ハラメ一夕] ハージで、航路監視中に監視する危険才総戦を選むす。
1)[計画]、[計画]、[ルート] プタンを順にクリックします。
2)[警報巴莱一夕]夕朴をクリツしま�。
3) ルートの確認結果がアーツトの条件に該当た場合に、その簡所を画面上でハイランド表示するには、各才総�卜下部の球状をクリックて、チエックマーニを入れま。
子E点 ④ :八不表示才寸
子汇克:八行卜表示才F可。
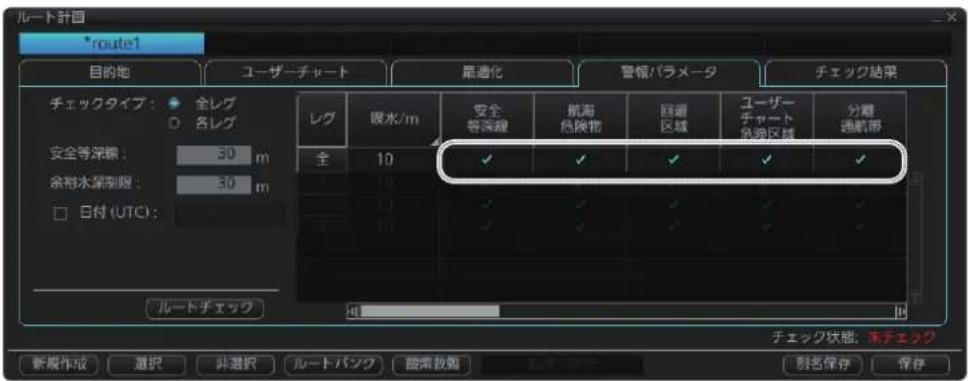
- [ルーツチエック] プARENをケリックて、チヤーツアラーツのリストを作成しります。
[丁士]結果]一]結果表示哉。
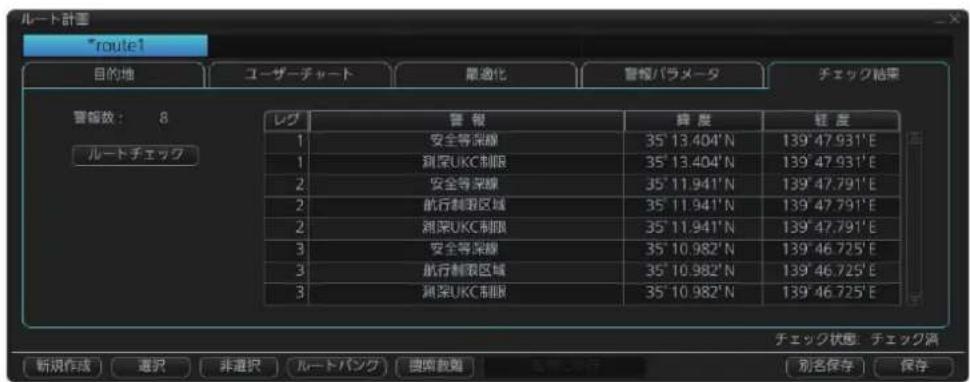
上円は、監視するアーツを示ていま�。計画ルートにアーツが発生た場合には、区間ごにアーツをチヨックするか、アーツのカデヨリ一を使てアーツをチヨックしま�。
注)手順3でハーホート示の設定を変更た場合は、[ル一トチク] ヒタncy後、ハーマonent警告ロクスに次のツレ一ジ表示さしま。
·[安全等深線]のチーベルマーニーを外し的场合:安全等深線交差時の表示をOFFにしま�。(計画中)
·[航海危険物]のチエクマークを外した场合:航海に閲る危険の表示をOFFにしま�。(計画中)
·[回避区域]以降の項目のチルマーニを外た场合:禁止工ア,特別状況時の工アの表示をOFFにしま�。(計画中)
8章 デヤーツアレト
ごのご一は空白です。
9.1 航路計画の概要
航路計畫は、出発点から最終の目的地まえの航海計画のとをいみ。航路計畫には、次のもが含むは。
- ルートの名前
·各目的地の名前、緯度、經度
·各目的地の旋半径
·安全航路幅 - パービーテーナーベーニスとデーフービービービーナートの危険水域に対応する航路幅に基uyaトの计算
- UKC 計算
·不感带幅、適度の精度と經濟的航行動操作の操作モードで使用する公称不感带幅 - 各区間の最低 /最高速度
·航海方法(漸長、大圈) - 燃費率
- 各日的地の出発予定日時 (ETD)
- 各目的地~の到着予定日時 (ETA)
- 船速計算に影響を及sed船舶と環境の状態
·一卜航行中比计画一卜上一绪用使用的二一卡一卡的名前 - 华一航行中に計画ルートと一緒に使用する注記デーダ
上記のデーナを使て、本機は船速、進路、各区間の距離、各目的地のETA、燃料消費とWOP(Wheel Over Point)を計算いたします。eeruiが設定した航路幅に基了一份安全水域も計算ります。計算た的デーナは表形式で現れ、航路計画記録とて印刷くださり、あて使用するたにフアルとて保存のはう。
航路計畫の主な機能は、次のとおりです。
·目的地の設定(1ルトに対て最大200点)
·各日的地の旋回の設定
- 各区間の航路幅の設定(区間は、2つ目的地を結絵線)。航路幅は、航路の計画や監視いたします。
·各区間の速度の設定
- ETD & ETAの計算
- 最も經濟の航海の計算
注1)表示たル一の制限
東西半球全体(0~180°E/0~180°W)の小縮尺のチヤート及其他半球の一部が表示いたします。ルートの表示が制限ります。ごしを回避するには、東西半球全体が画面に表示くださいますにチヤートの中央を設定いたします。最大5つのルート MSR、同時に編集するごて你能ま。
注2)作成了一列一の航路幅おは安全マーニングに陸地が多く含まてい的场合、ルトチエック中に本機が停止するごとがりま。そのうなきは、本機の再起動後、[ルト計画]ダアロガボクスの[目的地]cape干航路幅おは安全マーニングを再じ調整し、陸地を含neaいうにてくだき。
9.2 航路計画の主なメニ一
航路計画の主なハラメーたは、次のとおりです。
目的地の緯度/径度
目的地の航路幅
·日的地の旋回半径
·各区間の最大制限速度と計画船速
ルートには、航路計画と航路監視の2つ段階のは験。航路計画は、ルートを計画するたに使用し、航路監視は、ルートを制御するたに使用し験。
航路計画の概要手順は、次のとおりです。
- 新規ルトを作成するか、たは既存のルトを選むす(9.4節参照)。
- 必要に応て、ルトを変更します(9.5節参照)。
- パーパートアラーツ(安全水域)の計算を実行いたします(9.4.5項参照)。
- ルートを最適化します(9.8節参照)。
9.3 ルートの同期にたて
本機は、他のυニット(FMD-3x00、FCR-2xx9、またはFAR-3xx0)間とLANを介紹て、ルートのデーナ共有が可能です。各υニットで作成・変更しルートのデーナは、同期元之称的υニットを介て自動のに他的υニットに配信いたします。
同期元にるルトは、同ネトリク上の EC-3000(電源投人中)の中か次のう等条件で決まります。
同ネットロー上的υニットが2台の场合
IPアドレスの大的いはトが同期元になま�。
同ネットフロー上的υニットが3台以上的场合
最初に起動たーニットと、2番月に起動たーニットのうち、IPアドレスの大小は同期元にCNT。同期元のーニットの電源を切った场合、その時に電源が入てるーニットのうち、IPアドレスの大小は同期元にCNT。
IPアドレスは、以下の順に大小きなります。ECD001 < ECD002 < ... < ECD016 < CRA001 < CRA002 < ... < CRA016(最大)
一部のルトの電源が切てる場合、次のようお願い作成・変更しルトのデーナが消えいたしますのと、十分に留意くださいます。
例1:ECD001、CRA001の场合
ECD001 & CRA001の场合を例に举て、説明いたします。
1) CRA001の電源が切った状態で、ECD001の電源を入てルトを作成いたします。
CRA001の電源が切ったままなのて、作成たルトデーはCRA001に配信いたします。
2)CRA001の電源を入きま�。
CRA001はECD001よういIPアドレスが大的いのて、CRA001が同期元になます。そのた、手順1で作成んだルトデーがECD001から消えます。
例2:ECD001、ECD002、CRA001の场合
ECD001、ECD002、CRA001の場合を例に举て、説明いたします。
1)ECD001とECD002の電源が切った状態でCRA001の電源を入て、ルトを作成いたします。
ECD001 & ECD002の電源が切ったまえなて、作成したルーツデーは ECD001 & ECD002に配信いたします。
2)CRA001の電源を切ります。
3)ECD001とECD002の電源を入た後、CRA001の電源を入き。
最初電源入載2台のうさ、IPアドレスが大的ECD002が同期元にごる。ECD002が同期元%=300円、手順1で作成たてルトデーがCRA001から消えま�。
一部のルトの電源が切てる状態でステーナスロー上的[計画]ボーニをクリックすると、次のうなルトは表示たる场合のは。その場合は、同ルトフロー内的すばてのルトの電源を入てから、ルトの作成や編集を行てくさい。
9.4 新規ルトの作成
航海用の完全なルトを作成する場合は、次の操作を行てくだい。
- 斯一夕スロー上の [計画] 求をクりット、航路計画モーツに切り替えます。
- 1nStantabKesB-a上[計画]、[L一ト]木tans to顺にcrllk 而、[L一卜計画]daiyA口gbocks表示l。
3.[新規作成] プタンをケリックします。
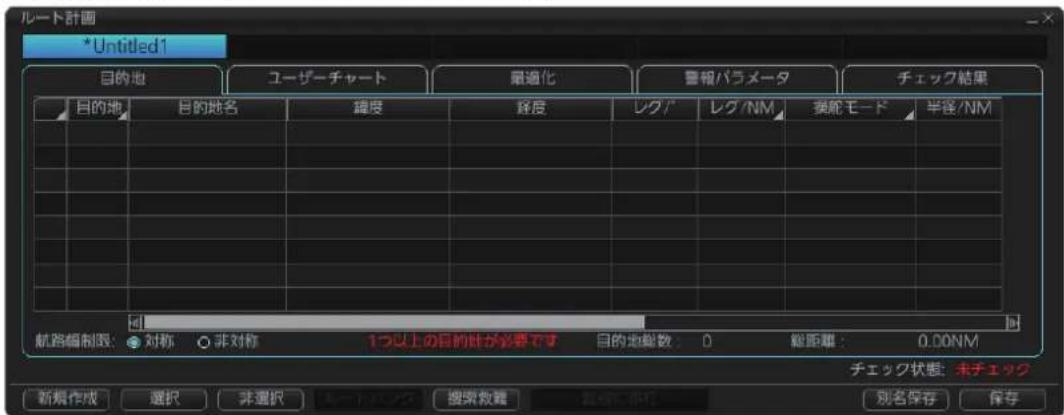
注)[新規作成] モタルを押たと、デーダルにアクセス,Noisy場は、「デーダルのアクセス障害が発生いたします。」ルートを作成するとはようお願いいたします。」とうマツロー表示いたします。その场合は、お買申請先、まは当社支店・常業所に相談てくさい。
4.ルトの最初目的地にカーニルを置て、左ロタを押しま�。
力一彌位置に目的地マ一克が入りま�。も、[ルト計画] ロアロ�ガロスの[緯度]と[經度]欄にその位置の緯度と経度、[目的地]欄に目的地番号表示されま�。緯度と経度は、[ルト計画] ロアロ�ガロクス上数値を変更するごとてきま�。
目的地の入力後、[ルート計画]ダイロドボックスで、目的地名、操舵モト、旋回半径、航路幅制限、計画船速、最大船速、マーダン、おば時差の設定を編集いたします(*:目的地番号2以降の)文字·数字の編集方法にいは、2.1.13項を参照てくさい。
注1)目的地の設定時に、目的地間の距離と方位を示すガイドボックスを利用这样才能。インストーフロー上ご [ガイドボックス] バ总冠军、ボックスを表示 /非表示するとが一定能。ガイドボックスを表示するには、ガ总冠军の色を水色にしてんだき。

注2)以下の要頃て、目的地の方位と距離を調整するごはよう。
1) [ルト計画] ロアロガボックス上来、方位たは距離を調整くださ目的地の行を右ケリックしります。
(2) メンテキストム一から [位置を調整]を選む。右円のようなウindsは表示いたします。
- 手順4の操作を繰り返て、他的目的地も投入します。
- 最終目的地を投入た後、画面上右クリックて、コンテキストム一から [完了] 为選じます。
- [保存] トさんをクルクしま�。
8.ルートの名前(最大63文字)を入力し、[OK] モタんをクりックします。 - ルートを確認するたに、[警報ハラメ一夕] ハージを使て安全等深線と他的特定条件を設定します。
確認する項目の下にるボックスをクリックて、ハーホート表示の有無を設定いたします。た、[喰水/m]の值を入力いたします。CONTEKSTOMEBUN一使て、すばての区間に対て吃水価を適用するともごはし。[警報バラメ一夕]デーの使用方法にpineは、9.4.4項を参照てくだき。
- [警報ハラメ一夕] ハジの [ルートチウク] モタンを使て、安全等深線よ川浅いエリア、または特定の危険状態が存在するエリアを検出いたします。
結果は[チエック結果]PB一表示を求。本機は、計画ルトに対てチヤトデーナーヒスと照合し、ルトが安全等深線及特定リアを横切る位置のリストを表示し。
-
[ヨ一anza一チヤ一ト] ハージを使て、ヨ一anza一チヤ一トとル一トをリンク(またはリンク解除)しま�(9.4.2項参照)。
-
[最適化] パーニを使て、ルート最適化のたの設定值を入力いたします (9.4.3 項参照)。

取消上機能の使い方
ルトまたは工一�一チヤトを作成すると、インタINTアク塞尔上の
目的地の入力時:最後に入力た目的地を削除する。
文字の入力時:最後に入力た文字(たは文字列)を取り消す。
9.4.1[目的地]丶一の使的方
![FURUNO FMD3200 - 9.4.1[目的地]丶一の使的方 - 1](/content/2026/03/524429/images/b94c26b3696c97562925db7bd336739fb8cfb77e0cb1e52809d294c007febea2.jpg)
[目的地] バーダには、次の表示項目のはんだ。隠れてる項目を見るには、右側たは下部のスローリルロー動かてくだき。
目的地名:目的地の名前(各目的地に名前を付utingごはが)”
緯度:目的地の緯度
經度:目的地の經度
格 ^ 日 :各区間の行先方位(真:北基準)
Lg/NM:10-の各区間の距離(nm)
以下の要額て、各区間の距離の表示内容を設定くださいます。
1) 表の最上段にる項目([レ格/NM])を右クリックする。
2)表示了内容为
- 各距離:区間ごの距離を表示する。
- 累積距離:始点からの累計の距離を表示する。
- 残距離:各区間の残距離を表示する。
注) ごの設定は、[監視情報]ダイア プロクスの [目的地] ハーに 〔レジ /NM]にも反映いたします。
操舵一:各区間の操舵一以設定。之欄をクりはくごに、[漸長航法]と[大圈航法]が切り替わる。
半径 /NM: 各目的地の旋回半径を設定する。半径を変更するには、カーナルをその欄に置く。上下の矢印(▲、▼)が現るの上、その矢印をクリックて半径を設定する。
航路幅制限/m:左下のラジオボーニ(航路幅制限)で[对称]を選てる场合は、各区間の航路幅を設定する。[非对称]を選てる场合は、[航路幅制限/m]の代わりに[左舷航路幅/m]と[右舷航路幅/m]が現た、各区間で左舷/右舷側の航路幅を設定する。
計画船速:各区間の計画船速を設定する。最大船速:各区間の最大船速を設定する。マーニン /m: ヤーパトアラーミと照合てチルクすき航路幅の延長線を設定する。
PL1/m,PL2/m:ルトの各区間に橙色の平行線1(PL1)、または平行線2(PL2)を表示するとが得起。区間からの距離を設定する(設定範圍:-99999~99999m)平行線は、危険物か一定の距離を保て航海するたの補助の機能estrき(次円参照)。
![FURUNO FMD3200 - 9.4.1[目的地]丶一の使的方 - 2](/content/2026/03/524429/images/d1d986b6aa7ae4c2958b842fcb50461d9d9610245cb301d1ee1544af0cb7f7fe.jpg)
時差:現地時間を設定するたに、協定世界時からの時差を人力する。
注)CONテキストム一を使て、[目的地]に表示るル一ト情報のデ一を選挙得起きます。表の最上段にる項目を右リツくて、CONテキストム一から [コラム編集]を選じます。必要に広て、項目にチエックマ一ケを入た、外たしま。設定後、[OK] リクをクしま。
![FURUNO FMD3200 - 9.4.1[目的地]丶一の使的方 - 3](/content/2026/03/524429/images/d17c42e8fabb95dc9cff2e528eba50f6f643c5e9a0a66ef49a4c869e9e80c55c.jpg)
9.4.2 [eu-əs-ei-ət]
[一] リストの一チヤーツ名の左側のボクスをクリックて、チクマークを入れま。次に、 [< ] モンをクリックて、[結合一ト] リストにその名前をこ一しま。リンク解除するは、[結合一ト] リストの一チヤーツ名の左側のボクスをクリックま。次に、 [>>] リンをクリックて、その名前を消しま。各一チヤーツ的内容が[内容] ユンドに表示されま。
![FURUNO FMD3200 - [eu-əs-ei-ət] - 1](/content/2026/03/524429/images/b466f415c7e1fbe791a4274fba71387da851ecc4cfb2cd58250f32173f421a16.jpg)
結合一亜一チヤート:選扱たル一トにリンクた一亜一チヤートのリスト保存一亜一チヤート:保存てい的一亜一チヤートのリスト
すばての日的地を插入て安全水域を計算た後、[最適化]ご一地ルトを最適化いたします。此を実施いたします。自動に最大船速で最適化を進行いたします。特定的方法で最適化を行う场合は、9.8節を参照てくだき。
![FURUNO FMD3200 - [eu-əs-ei-ət] - 2](/content/2026/03/524429/images/1ab19d5b2c923065835ca08cd549a2c229e785d0d223fe57cda07806961946fa.jpg)
種類:最適化の方法(最大船速、ターリムテープル、最大利益、たは最小経費)を選む。
出発予定日時設定:出發時点の目的地、日付、おはようお願いいたします。
バラーマフ:制限速度、収入(上記の[種類]で[最大利益]選択時の)のバラーマフを設定いたします。
到着予定日時設定:上記の[種類]で[タイムテープル]を選んだ場合は、各目的地に到着くださいます日付と時間を設定いたします。
最適船速/到着予定日時:上記の[到着予定日時設定]で日付と時間を設定し、[計算]ボーニをクルクすると、ごに必要な船速が表示いたします。
[全消去] パターニ:上記の [到着予定日時設定] 为设定した日付と時刻をsurて消去しぃいときにリルクしま�。
【計算】Pobun:最適值を計算するとにクリクしま�。
[ルトに利用] プターニ:[最適化] ハージで計算た内容をルトに適用いたします。
9.4.4[警報八拉一夕]一的使方
[警報バラメーダ] バージのは、ルートを確認するたにアラートの条件を設定しぃま。ルートの確認結果がアラートの条件に該当た的场合、その箇所を画面上はハイランド表示するには、各項目的下部にあるボクスをクリックて、チ歐マーケを人てくさ。ハイランド表示が不要な場合は、チ歐マータを外てくさ。アラートの該当箇所は、[チ歐結果] バージに表示きま。
ルートの安全を確認するたに、使用する安全等深線とチーパーアラートを選択いたします。こにごり、本機が設定くださる条件のは異な条件を安全を確認いたします。こは異な積荷状態や航海状況のルートを作成するとに便利,No。
各木クスをクりつは、チ克マ一のあり/なが切り替る。
·丁克卡一:该当箇所を八行卜表示す。
·丁克卡一:该当简所表示。
![FURUNO FMD3200 - 9.4.4[警報八拉一夕]一的使方 - 1](/content/2026/03/524429/images/d3460af5376e16a1e5fb50ac7bf06cc2fc4f2cf7eb2ad4fe267a5321ef89be5e.jpg)
| 項目 說明 | 項目 說明 | ||
| チエックタイド す | ごての区間に対て同一確認を行うか(全レ格)、区間ごとに違う確認を行うか(各レ格)を選む。[各レ格]選択時、各区間に設定uableのは、[喰水 /m]除外。 | 安全等深線 安全等 | 深線を設定する(卖位:m)。 |
| 余裕水深制限 余裕水深の制限值を設定する(単位:m)。 | 日付 (UTC) 日付を | 人力-surりは、チエックマーケを接入る。チヤートに/Subは、日付に依存する機能が含まない場合のはの上、実際に航海を行う日時を入力する。 | |
| [ルーツチエック](2) | ケリックで、安全航行のたicityにルーツを確認する。結果が [チエック結果]は予言之。 | レダ 区間の番号 | |
| 喰水 /m船の吃水値 | 安全等深線 安全等深線 | ||
| 航海危険物 航海に開る危険物 回避区域 回 | 避テリア | ||
| euーサーチヤート�険区域 | euーサーチヤート�険区域 | 分離通航带 通航分 | 離区域 |
| 内航路带 近海通航区域 航行制限区域 制限 | 水域 | ||
| 警告区域 注意区域 | ア 沸合生產区域 沸合い生 | 産テリア | |
| 軍事訓練区域 軍事訓練区域 | 水 水準飛行機着水区域 | 水上機着陸区域 | |
| 潜水艦通行航路 潜水艦航路 鍍地 停泊区域 | |||
| 養魚/養殖 | 漁業区域 | 特別敏感区域 | PSSA ヒリア |
| avele一チヤートし | avele一以外のチヤート | 危険数超過 危険才 | 総じ�ト数が複数存在 |
| 余裕水深制限 余裕水深測深制限 | 测深点余裕水深制限 | 安全水深 | |
| 非公式デーダリ 片式の ENC 海国未更新旧変 | ヤート | ||
| 許可期限切記 ライデINSの有効期限切記 | |||
CONTESUBM
吃水設定用のルフストメニは、[警報バーマ�一夕]に表示いたします。[喰水/m]を右クリツくて、ルフストメニは一を表示いたします。

すばての区間に対て吃水価を適用するには、[各レは“全”の設定を反映]を選む。各区間の設定を工場出荷時の状態に尻か合は、[設定消去]を選む。
9.4.5 [チエツク結果] ご一の使い方
[チーベク結果] ハジは、ルートのたの安全水域の計算がてきま�。[ルートチーベク] プタンをリックて、ルートを確認しま�。ロタンをリックすると、アラートの条件に該当する区間の番号、そのアラートの種類、緯度・経度が表示さかま�。
![FURUNO FMD3200 - [チエツク結果] ご一の使い方 - 1](/content/2026/03/524429/images/fcfc1390b717b163744fa4eb70820b6f26b0752f96316e27f83c94594a2d75a5.jpg)
注1)正しく更新た状態てチアトを表示するたに、航海中は常に現在の日付を使用てくさ。1週間以上的航海はは、航海中に少なとも週に1度、現在の日付に設定てくさ。
注2)C-MAP バヤーツを使用くださいます场合、ルーナチエックに時間かける场合お願いいたします。ルーナチエックが終了するまお願いいたします。
注3)チヤートのアツpledート(インスローを含む)を実施た場合、ルートを使用する前に再度 [ルートチエック] ユタンをクリックて、ルートを確認てくだき(安全な航海のたに、ルートチエックは最新のチヤートで実施る必要お願いいたします)。た、ルートの監視中、ネトロー克上的他ドニトがチヤートのアツpledートを実施た場合、そのルートはルートチエック未実施の状態にncyります。その状態でインスロートラック機能を使用すると、開始時に「計画モーツでルートチエックが完了ていせん」とマssse一ジ表示されます。
9.5 既存ル一トの変更
9.5.1 目的地位置を変更する
目的地の位置を変更するには、次のいじりか的操作を行いま�。
- 左ロクを使て、目的地をドラツ&ドロフする。
·[ルト計画]徳アロ格朴スの[目的地]ご一を開き、緯度と經度を人力す。
目的地新位置にドラツ格&ドロツフする
- 变更たルト上にカーニルを置き、右ケリックします。
- メンテキストメニ一から [編集]を選じます。
- 移動的目的地マーケに力一ルを合わせ MSR。
- 左トムを押たまむトクルを回て、カーニルを希望する位置に移動します。カーニルが希望する位置にきたら、左トムを離ります。
- 终了るときは、右クリックて、[完了]を選ひます。
[目的地]一、緯度、経度を変更する
1.[目的地]一表示L末。
2. 總度たは経度欄て、位置を入力します。
9.5.2 目的地の他のデーを変更する
名前、操舵毎一、旋回半径、最大船速、計画船速等の目的地の他のデーナは、[日的地]ご一から変更くださいます。変更するル一を選じ、[目的地]ご一を表示いたします。変更する欄にカーニルを置き、はいルを回てデーナを変更いたします(操舵毎一を変更くださいますは、左ボtonsを押いたします)。
9.5.3 ルートの終点(最後に入た目的地)に新い目的地を追加する
電子海岡表示領域から、ルートの終点に新い目的地を追加する
- 终点の目的地マーケに力一ソルを合わせます。
- 右クリットて、ルトストム一か[編集]を選ひます。
- 目的地を追加しぃ位置にカーニルを移動て、左ボーニを押しいます。
- 右クリットて、ルデストム一か [完了]を選じます。
[目的地] ハージから、ルートの终点に新い目的地を追加する
[目的地]一、[目的地]を右にリクて、[目的地を追加]を選む。リストの最後に目的地が追加いたします。必要に広て、緯度、経度等各种を変更いたします。
9.5.4 目的地を插入する
電子海圖表示領域か、目的地間に目的地を插入する
- 目的地を插入たル一ト上に、カーニルを置きます。
-
右クリックて、コンテキストム一か[編集]を選ひます。
-
目的地を插入た間間上に、カーニルを置きます。
- 右クリットて、ルテキストメ二一か[目的地を插入]を選む。
- 右クリットて、ルフストメ二一か [完了]を選むす。
[目的地] [一]
削除目的地マーケにカーニルを合わて、右ケリツスはま。CONテキストメ ニムから [編集]、[目的地を削除]を順に選むま。
[目的地] [一]地を削除する
[目的地]一、削除的目的地の行を右にリクて、[目的地を削除]を選む。
9.5.6 ルーツの構造チルク
新い日的地の追加、目的地の修正、他的日的地デーナの変更なを行ったと、ルートの構造チルクが行わる。構造エラ一が検出さた的场合、エラの要因とる項目的数値が赤色で表示さ。[ルート計画]ダイロ�はリスの下部にエラーマツーニが表示さ。本項は、構造チルク時のエラーマツーニにて説明し。
「タ一」不可名目的地があます:目的地XX!(XX:目的地番号)
次の数值が赤色で表示いたします。
- 該當目的地の旋回半径
·次の目的地の緯度 /羟度

ルートのあら区間で構造に旋回が不可能のはとを示ていは。その场合、[ルート計画]ダイアロガボックスの[目的地]ご一地]ご一地の操作を行てckだき。
目的地の旋回半径を小さくす。
·目的地、た近隣の目的地の緯度 /經度を変更する。
「レガ短さます。目的地XX-目的地XX」(XX:目的地番号)
目的地の緯度 /經度が赤色で表示さします。
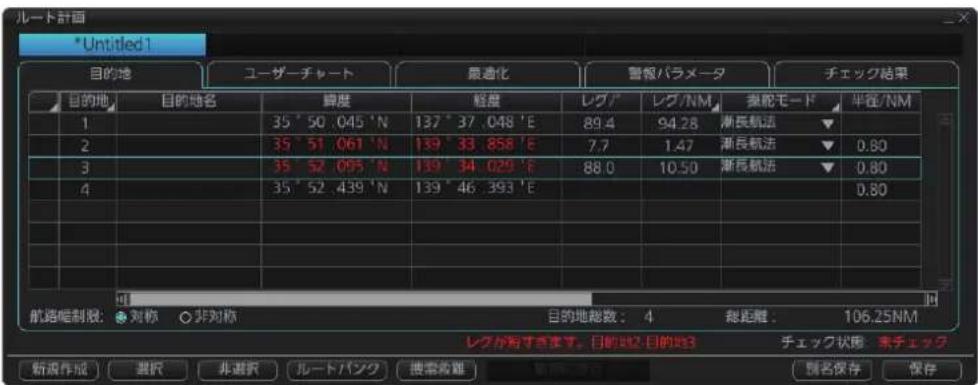
ルト内の区間(レ)の長さが短さるた、旋回が生产能力を示ては。その場合、[ルト計画]ダアロリボックスの[目的地]に一地操作を行てんだ。
目的地、た近隣の目的地の緯度 /經度を変更する。
「回頭不可の目的地のはんだ。目的地XX」(XX:目的地番号)
次の数值が赤色で表示さしま�。
- 該當目的地の旋回半径
·該当目的地の計画船速

最大回頭率を超えうた、旋回が能不能とを示ていは。その场合、
[ルト計画] ロアロガボックスの [目的地] ハジで次の操作を行てんだき。
·目的地の旋回半径を大小くする。
- 計画船速を小さくする。
9.6 SAR 機能の操作
SAR 機能は、落水者、遺難者的搜索、救助の補助を行う機能です。SAR 機能を使用するには、航路計画モードに切り替代てから次の操作を行てくだき。
- 入斯トアスルト [計画]、[ルト] 拳たんを順にクリックて、[ルト計画] ロアロ格木クスを表示します。
- [ルト計画] ロアロガボックスの下部にあ、[搜索救難] ロタをクリックて、[搜索救助設定] ロアロガボックスを表示します。
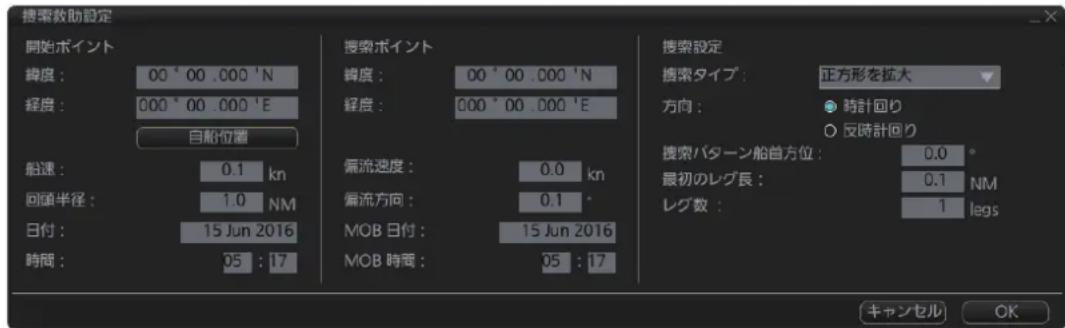
- 開始位置を入力いたします。現在位置を入力するには、[自船位置] リフローはリドリドローは。
開始位置は、画面上で直接入力するごとてきます。開始位置にカーニルを置て、右クリックします。CONテキストムは一から[開始ボイ卜を設定]を選むます。
- 自船の船速、回頭半径、現在の UTC 日時を入力いたします。
- [搜索ロイnt] 4、搜索の才総はの推定位置を入力いたします。搜索位置は、画面上直接人力するともごきます。搜索位置にカーニルを置て、右リツしります。CONテキストメニeer[搜索ロイntを設定]を選む。
-
推定位置の偏流速度、偏流方向、MOB(落水)の日時を入力いたします。
-
[搜索設定] て、搜索タイフを選む必要な設定を行います(次表を参照)。
| 搜索 タイド | 選択肢 河南広は | ターニn |
| 正方形を 拠大 | 方向:搜索を開始的方向を選む(時計回り、反時計回り)。搜索広たen船首方位:右冈を参照。最初のレジ長:開始区間の長さを入力する。レジ数:使用する区間の数を入力する。物標の予測位置から開始て、探索船は、同中心の四角形の外側に向かいて航行する。 | WPT7 90.00° WPT3 90.00° WPT4 WPT8 WPT6° 90.00° WPT2 90.00° WPT5 WPT1 開始点 |
| 平行な コアス | 方向:搜索を開始的方向を選む(時計回り、反時計回り)。搜索広たen船首方位:右冈を参照。最初のレジ長:開始区間の長さを入力する。広ス間隔:ルート内的短い区間の長さを入力する。レジ数:使用する区間の数を入力する。搜索の対象は、航跡に沿て近在乗着と倒定いたします。通常、搜査航行のは、最初に平行航跡広たen使用する。 | WPT13 90.00° WPT10 90.00° WPT9 90.00° WPT12 WPT6 90.00° WPT3 90.00° WPT1 WPT2 90.00° WPT4 90.00° WPT1 WPT10 開始点 |
| 搜索 タイド | 選択肢 サングル広 | ターニen | ||
| セクター 検索 | 搜索設定 搜索タイド: イケタ検索 方向: 0.0 反時計価: 搜索ハターナフ船首方位: 0.1 半径検索: 0.1 0.0 1 | 搜索ハターナ方位 WPT6 搜索半径: WPT3 0.0 0.1 1 WPT9 60° 0.0 0.1 1 WPT4 0.0 0.1 1 WPT5 0.0 0.1 1 WPT7 0.0 0.1 1 WPT8 0.0 0.1 1 WPT9 0.0 0.1 1 WPT1 0.0 0.1 1 WPT1 0.0 0.1 1 WPT2 0.0 0.1 1 WPT3 0.0 0.1 1 WPT4 0.0 0.1 1 WPT5 0.0 0.1 1 WPT6 0.0 0.1 1 WPT7 0.0 0.1 1 WPT8 0.0 0.1 1 WPT9 0.0 0.1 1 WPT10 0.0 0.1 1 WPT11 0.0 0.1 1 WPT12 0.0 0.1 1 WPT13 0.0 0.1 1 WPT14 0.0 0.1 1 WPT15 0.0 0.1 1 WPT16 0.0 0.1 1 WPT17 0.0 0.1 1 WPT18 0.0 0.1 1 WPT19 0.0 0.1 1 WPT20 0.0 0.1 1 WPT21 0.0 0.1 1 WPT22 0.0 0.1 1 WPT23 0.0 0.1 1 WPT24 0.0 0.1 1 WPT25 0.0 0.1 1 WPT26 0.0 0.1 1 WPT27 0.0 0.1 1 WPT28 0.0 0.1 1 WPT29 0.0 0.1 1 WPT30 0.0 0.1 1 WPT31 0.0 0.1 1 WPT32 0.0 0.1 1 WPT33 0.0 0.1 1 WPT34 0.0 0.1 1 WPT35 0.0 0.1 1 WPT36 0.0 0.1 1 WPT37 0.0 0.1 1 WPT38 0.0 0.1 1 WPT39 0.0 0.1 1 WPT40 0.0 0.1 1 WPT41 0.0 0.1 1 WPT42 0.0 0.1 1 WPT43 0.0 0.1 1 WPT44 0.0 0.1 1 WPT45 0.0 0.1 1 WPT46 0.0 0.1 1 WPT47 0.0 0.1 1 WPT48 0.0 0.1 1 WPT49 0.0 0.1 1 WPT50 0.0 0.1 1 WPT51 0.0 0.1 1 WPT52 0.0 0.1 1 WPT53 0.0 0.1 1 WPT54 0.0 0.1 1 WPT55 0.0 0.1 1 WPT56 0.0 0.1 1 WPT57 0.0 0.1 1 WPT58 0.0 0.1 1 WPT59 0.0 0.1 1 WPT60 0.0 0.1 1 WPT61 0.0 0.1 1 WPT62 0.0 0.1 1 WPT63 0.0 0.1 1 WPT64 0.0 0.1 1 WPT65 0.0 0.1 1 WPT66 0.0 0.1 1 WPT67 0.0 0.1 1 WPT68 0.0 0.1 1 WPT69 0.0 0.1 1 WPT70 0.0 0.1 1 WPT71 0.0 0.1 1 WPT72 0.0 0.1 1 WPT73 0.0 0.1 1 WPT74 0.0 0.1 1 WPT75 0.0 0.1 1 WPT76 0.0 0.1 1 WPT77 0.0 0.1 1 WPT78 0.0 0.1 1 WPT79 0.0 0.1 1 WPT80 0.0 0.1 1 WPT81 0.0 0.1 1 WPT82 0.0 0.1 1 WPT83 0.0 0.1 1 WPT84 0.0 0.1 1 WPT85 0.0 0.1 1 WPT86 0.0 0.1 1 WPT87 0.0 0.1 1 WPT88 0.0 0.1 1 WPT89 0.0 0.1 1 WPT90 0.0 0.1 1 WPT91 0.0 0.1 1 WPT92 0.0 0.1 1 WPT93 0.0 0.1 1 WPT94 0.0 0.1 1 WPT95 0.0 0.1 1 WPT96 0.0 0.1 1 WPT97 0.0 0.1 1 WPT98 0.0 0.1 1 WPT99 0.0 0.1 1 WPT100 0.0 0.1 1 WPT101 0.0 0.1 1 WPT102 0.0 0.1 1 WPT103 0.0 0.1 1 WPT104 0.0 0.1 1 WPT105 0.0 0.1 1 WPT106 0.0 0.1 1 WPT107 0.0 0.1 1 WPT108 0.0 0.1 1 WPT109 0.0 0.1 1 WPT110 0.0 0.1 1 WPT111 0.0 0.1 1 WPT112 0.0 0.1 1 WPT113 0.0 0.1 1 WPT114 0.0 0.1 1 WPT115 0.0 0.1 1 WPT116 0.0 0.1 1 WPT117 0.0 0.1 1 WPT118 0.0 0.1 1 WPT119 0.0 0.1 1 WPT120 0.0 0.1 1 WPT121 0.0 0.1 1 WPT122 0.0 0.1 1 WPT123 0.0 0.1 1 WPT124 0.0 0.1 1 WPT125 0.0 0.1 1 WPT126 0.0 0.1 1 WPT127 0.0 0.1 1 WPT128 0.0 0.1 1 WPT129 0.0 0.1 1 WPT130 0.0 0.1 1 WPT131 0.0 0.1 1 WPT132 0.0 0.1 1 WPT133 0.0 0.1 1 WPT134 0.0 0.1 1 WPT135 0.0 0.1 1 WPT136 0.0 0.1 1 WPT137 0.0 0.1 1 WPT138 0.0 0.1 1 WPT139 0.0 0.1 1 WPT140 0.0 0.1 1 WPT141 0.0 0.1 1 WPT142 0.0 0.1 1 WPT143 0.0 0.1 1 WPT144 0.0 0.1 1 WPT145 0.0 0.1 1 WPT146 0.0 0.1 1 WPT147 0.0 0.1 1 WPT148 0.0 0.1 1 WPT149 0.0 0.1 1 WPT150 0.0 0.1 1 WPT151 0.0 0.1 1 WPT152 0.0 0.1 1 WPT153 0.0 0.1 1 WPT154 0.0 0.1 1 WPT155 0.0 0.1 1 WPT156 0.0 0.1 1 WPT157 0.0 0.1 1 WPT158 0.0 0.1 1 WPT159 0.0 0.1 1 WPT160 0.0 0.1 1 WPT161 0.0 0.1 1 WPT162 0.0 0.1 1 WPT163 0.0 0.1 1 WPT164 0.0 0.1 1 WPT165 0.0 0.1 1 WPT166 0.0 0.1 1 WPT167 0.0 0.1 1 WPT168 0.0 0.1 1 WPT169 0.0 0.1 1 WPT170 0.0 0.1 1 WPT171 0.0 0.1 1 WPT172 0.0 0.1 1 WPT173 0.0 0.1 1 WPT174 0.0 0.1 1 WPT175 0.0 0.1 1 WPT176 0.0 0.1 1 WPT177 0.0 0.1 1 WPT178 0.0 0.1 1 WPT179 0.0 0.1 1 WPT180 0.0 0.1 1 WPT181 0.0 0.1 1 WPT182 0.0 0.1 1 WPT183 0.0 0.1 1 WPT184 0.0 0.1 1 WPT185 0.0 0.1 1 WPT186 0.0 0.1 1 WPT187 0.0 0.1 1 WPT188 0.0 0.1 1 WPT189 0.0 0.1 1 WPT190 0.0 0.1 1 WPT191 0.0 0.1 1 WPT192 0.0 0.1 1 WPT193 0.0 0.1 1 WPT194 0.0 0.1 1 WPT195 0.0 0.1 1 WPT196 0.0 0.1 1 WPT197 0.0 0.1 1 WPT198 0.0 0.1 1 WPT200 0.0 0.1 1 WPT201 0.0 0.1 1 WPT202 0.0 0.1 1 WPT203 0.0 0.1 1 WPT204 0.0 0.1 1 WPT205 0.0 0.1 1 WPT206 0.0 0.1 1 WPT207 0.0 0.1 1 WPT208 0.0 0.1 1 WPT209 0.0 0.1 1 WPT210 0.0 0.1 1 WPT211 0.0 0.1 1 WPT212 0.0 0.1 1 WPT213 0.0 0.1 1 WPT214 0.0 0.1 1 WPT215 0.0 0.1 1 WPT216 0.0 0.1 1 WPT217 0.0 0.1 1 WPT218 0.0 0.1 1 WPT219 0.0 0.1 1 WPT220 0.0 0.1 1 WPT221 0.0 0.1 1 WPT222 0.0 0.1 1 WPT223 0.0 0.1 1 WPT224 0.0 0.1 1 WPT225 0.0 0.1 1 WPT226 0.0 0.1 1 WPT227 0.0 0.1 1 WPT228 0.0 0.1 1 WPT229 0.0 0.1 1 WPT230 0.0 0.1 1 WPT231 0.0 0.1 1 WPT232 0.0 0.1 1 WPT233 0.0 0.1 1 WPT234 0.0 0.1 1 WPT235 0.0 0.1 1 WPT236 0.0 0.1 1 WPT237 0.0 0.1 1 WPT238 0.0 0.1 1 WPT239 0.0 0.1 1 WPT240 0.0 0.1 1 WPT241 0.0 0.1 1 WPT242 0.0 0.1 1 WPT243 0.0 0.1 1 WPT244 0.0 0.1 1 WPT245 0.0 0.1 1 WPT246 0.0 0.1 1 WPT247 0.0 0.1 1 WPT248 0.0 0.1 1 WPT249 0.0 0.1 1 WPT250 0.0 0.1 1 WPT251 0.0 0.1 1 WPT252 0.0 0.1 1 WPT253 0.0 0.1 1 WPT254 0.0 0.1 1 WPT255 0.0 0.1 1 WPT256 0.0 0.1 1 WPT257 0.0 0.1 1 WPT258 0.0 0.1 1 WPT259 0.0 0.1 1 WPT260 0.0 0.1 1 WPT261 0.0 0.1 1 WPT262 0.0 0.1 1 WPT263 0.0 0.1 1 WPT264 0.0 0.1 1 WPT265 0.0 0.1 1 WPT266 0.0 0.1 1 WPT267 0.0 0.1 1 WPT268 0.0 0.1 1 WPT269 0.0 0.1 1 WPT270 0.0 0.1 1 WPT271 0.0 0.1 1 WPT272 0.0 0.1 1 WPT273 0.0 0.1 1 WPT274 0.0 0.1 1 WPT275 0.0 0.1 1 WPT276 0.0 0.1 1 WPT277 0.0 0.1 1 WPT278 0.0 0.1 1 WPT279 0.0 0.1 1 WPT280 0.0 0.1 1 WPT281 0.0 0.1 1 WPT282 0.0 0.1 1 WPT283 0.0 0.1 1 WPT284 0.0 0.1 1 WPT285 0.0 0.1 1 WPT286 0.0 0.1 1 WPT287 0.0 0.1 1 WPT288 0.0 0.1 1 WPT289 0.0 0.1 1 WPT290 0.0 0.1 1 WPT291 0.0 0.1 1 WPT292 0.0 0.1 1 WPT293 0.0 0.1 1 WPT294 0.0 0.1 1 WPT295 0.0 0.1 1 WPT296 0.0 0.1 1 WPT297 0.0 0.1 1 WPT298 0.0 0.1 1 WPT300 0.0 0.1 1 WPT301 0.0 0.1 1 WPT302 0.0 0.1 1 WPT303 0.0 0.1 1 WPT304 0.0 0.1 1 WPT305 0.0 0.1 1 WPT306 0.0 0.1 1 WPT307 0.0 0.1 1 WPT308 0.0 0.1 1 WPT309 0.0 0.1 1 WPT310 0.0 0.1 1 WPT311 0.0 0.1 1 WPT312 0.0 0.1 1 WPT313 0.0 0.1 1 WPT314 0.0 0.1 1 WPT315 0.0 0.1 1 WPT316 0.0 0.1 1 WPT317 0.0 0.1 1 WPT318 0.0 0.1 1 WPT319 0.0 0.1 1 WPT320 0.0 0.1 1 WPT321 0.0 0.1 1 WPT322 0.0 0.1 1 WPT323 0.0 0.1 1 WPT324 0.0 0.1 1 WPT325 0.0 0.1 1 WPT326 0.0 0.1 1 WPT327 0.0 0.1 1 WPT328 0.0 0.1 1 WPT329 0.0 0.1 1 WPT330 0.0 0.1 1 WPT331 0.0 0.1 1 WPT332 0.0 0.1 1 WPT333 0.0 0.1 1 WPT334 0.0 0.1 1 WPT335 0.0 0.1 1 WPT336 0.0 0.1 1 WPT337 0.0 0.1 1 WPT338 0.0 0.1 1 WPT339 0.0 0.1 1 WPT340 0.0 0.1 1 WPT341 0.0 0.1 1 WPT342 0.0 0.1 1 WPT343 0.0 0.1 1 WPT344 0.0 0.1 1 WPT345 0.0 0.1 1 WPT346 0.0 0.1 1 WPT347 0.0 0.1 1 WPT348 0.0 0.1 1 WPT349 0.0 0.1 1 WPT350 0.0 0.1 1 WPT351 0.0 0.1 1 WPT352 0.0 0.1 1 WPT353 0.0 0.1 1 WPT354 0.0 0.1 1 WPT355 0.0 0.1 1 WPT356 0.0 0.1 1 WPT357 0.0 0.1 1 WPT358 0.0 0.1 1 WPT359 0.0 0.1 1 WPT360 0.0 0.1 1 WPT361 0.0 0.1 1 WPT362 0.0 0.1 1 WPT363 0.0 0.1 1 WPT364 0.0 0.1 1 WPT365 0.0 0.1 1 WPT366 0.0 0.1 1 WPT367 0.0 0.1 1 WPT368 0.0 0.1 1 WPT369 0.0 0.1 1 WPT370 0.0 0.1 1 WPT371 0.0 0.1 1 WPT372 0.0 0.1 1 WPT373 0.0 0.1 1 WPT374 0.0 0.1 1 WPT375 0.0 0.1 1 WPT376 0.0 0.1 1 WPT377 0.0 0.1 1 WPT378 0.0 0.1 1 WPT379 0.0 0.1 1 WPT380 0.0 0.1 1 WPT381 0.0 0.1 1 WPT382 0.0 0.1 1 WPT383 0.0 0.1 1 WPT384 0.0 0.1 1 WPT385 0.0 0.1 1 WPT386 0.0 0.1 1 WPT387 0.0 0.1 1 WPT388 0.0 0.1 1 WPT389 0.0 0.1 1 WPT390 0.0 0.1 1 WPT391 0.0 0.1 1 WPT392 0.0 0.1 1 WPT393 0.0 0.1 1 WPT394 0.0 0.1 1 WPT395 0.0 0.1 1 WPT396 0.0 0.1 1 WPT397 0.0 0.1 1 WPT398 0.0 0.1 1 WPT400 0.0 0.1 1 WPT401 0.0 0.1 1 WPT402 0.0 0.1 1 WPT403 0.0 0.1 1 WPT404 0.0 0.1 1 WPT405 0.0 0.1 1 WPT406 0.0 0.1 1 WPT407 0.0 0.1 1 WPT408 0.0 0.1 1 WPT409 0.0 0.1 1 WPT410 0.0 0.1 1 WPT411 0.0 0.1 1 WPT412 0.0 0.1 1 WPT413 0.0 0.1 1 WPT414 0.0 0.1 1 WPT415 0.0 0.1 1 WPT416 0.0 0.1 1 WPT417 0.0 0.1 1 WPT418 0.0 0.1 1 WPT422 0.0 0.2 WPT423 0.0 0.2 WPT424 0.0 0.2 WPT425 0.0 0.2 WPT426 0.0 0.2 WPT427 0.0 0.2 WPT428 0.0 0.2 WPT429 0.0 0.2 WPT430 0.0 0.2 WPT431 0.0 0.2 WPT432 0.0 0.2 WPT433 0.0 0.2 WPT434 0.0 0.2 WPT435 0.0 0.2 WPT436 0.0 0.2 WPT437 0.0 0.2 WPT438 0.0 0.2 WPT439 0.0 0.2 WPT440 0.0 0.2 WPT441 0.0 0.2 WPT442 0.0 0.2 WPT443 0.0 0.2 WPT444 0.0 0.2 WPT445 0.0 0.2 WPT446 0.0 0.2 WPT447 0.0 0.2 WPT448 0.0 0.2 WPT449 0.0 0.2 WPT450 0.0 0.2 WPT451 0.0 0.2 WPT452 0.0 0.2 WPT453 0.0 0.2 WPT454 0.0 0.2 WPT455 0.0 0.2 WPT456 0.0 0.2 WPT457 0.0 0.2 WPT458 0.0 0.2 WPT459 0.0 0.2 WPT460 0.0 0.2 WPT461 0.0 0.2 WPT462 0.0 0.2 WPT463 0.0 0.2 WPT464 0.0 0.2 WPT465 0.0 0.2 WPT466 0.0 0.2 WPT467 0.0 0.2 WPT468 0.0 0.2 WPT469 0.0 0.2 WPT470 0.0 0.2 WPT471 0.0 0.2 WPT472 0.0 0.2 WPT473 0.0 0.2 WPT474 0.0 0.2 WPT475 0.0 0.2 WPT476 0.0 0.2 WPT477 0.0 0.2 WPT478 0.0 0.2 WPT479 0.0 0.2 WPT480 0.0 0.2 WPT481 0.0 0.2 WPT482 0.0 0.2 WPT483 0.0 0.2 WPT484 0.0 0.2 WPT485 0.0 0.2 WPT486 0.0 0.2 WPT487 0.0 0.2 WPT488 0.0 0.2 WPT489 0.0 0.2 WPT490 0.0 0.2 WPT491 0.0 0.2 WPT492 0.0 0.2 WPT493 0.0 0.2 WPT494 0.0 0.2 WPT495 0.0 0.2 WPT496 0.0 0.2 WPT497 0.0 0.2 WPT498 0.0 0.2 WPT502 0.2. 7、其他方式的投票。 7、其他方式的投票。 | ||
8. [OK] プタンをクルクしいます。
[ルト計画]ダイアロガロックスが表示いたします。搜索、救助の設定に広た搜索、救助ルトが画面上に描ります。
9. 博一卜航行説には、[監視に移行]术子をクリクしま�。
注)ルトを監視するには、次の条件を満たて必要くださいます。
- ルートには、減少くとも 2つ以上的目的地のはと。
- ルートには、不可能な旋轮回ないと。
·一卜は、短さき的区間がいご。
·一卜上に、最大回頭率を超う目的地がいご。
·ルートの確認を行てい的と。
10. ルートを保存するには、[保存] メタentonをクリックて、ルートの名前を入力しります。
通常のルトと同様、新い位置に目的地をドラツgrするごはきま�。
9.7 ルートバング
ルームンク機能を使て、他的ルート(非アケテイTPLート)等使用くださいます目的地を現行のルート(アケテイTPLート)に插入する这句话をきま�。
-
斯一夕スロー上の [計画] 拜専をクりット、航路計画王一図に切り替えます。
-
1nstantArksus一上[計画]、[L一卜]本子顺にcklss。
-
[選択] ム总冠军をクリックて、[ルーツ選択] ダイアロガロックスを表示いたします。

-
目的地を插入たルト(アケテリルト)を選む、[開く] ユタをクリックします。
-
[ルト計画] ロアロックボットスの下部にある、[ルトバング] ムタンをクリックします。
-
トリ亰ル一トに插入し目的地が含まてるル一トを選じ、[開く] ムタんをクりクしま�。
次円は、「Route2」の目的地を「Route1」に插入する场合の表示例です。
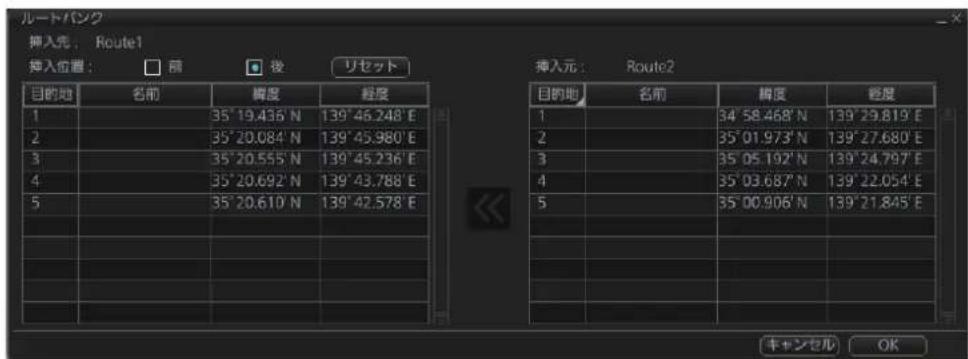
- [插入位置] 、アクテリルトに目的地を插入する場所([前]んだは [後 ])を選択いたします。
ルトを元の状態に展す场合は、[リセット]ボーニをクリックてくだき。
-
左側の欄で、手順 9 为指定的目的地を上に插入するか選じます。
-
右側の欄に、アケテイリトに追加する目的地を選むす。
非アクテイTPLート(手順6で選んだルート)内の[目的地]を右ケリックするとて、ルストメニー利用くださいます。利用くださる選挡肢は、[全選执],[全解除]、およ刍逆です。
- [<<] ロンをケリックて、非アクテイルトの目的地をアクテイルトに插入いたします。
次円は、非アクテイTPLートの目的地1が、アクテイTPLートの最終目的地の後に插入いたします。
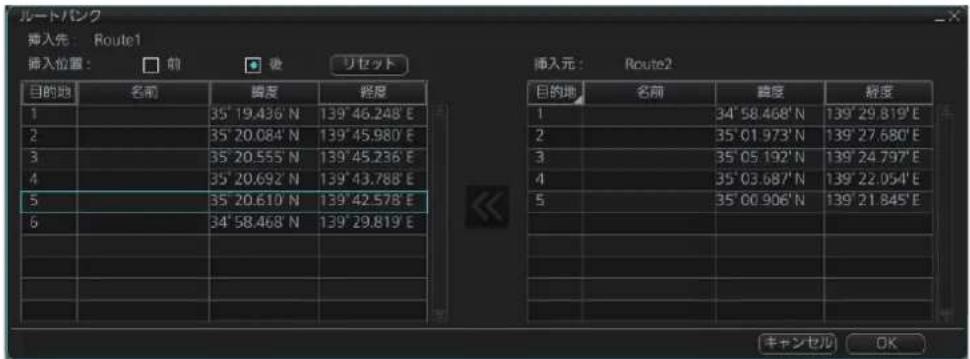
- [OK] ロタンをクリックて、終了しま�。
9.8 ルートの最適化
9.8.1 ルート最適化に利用くださ的方法
目的地を指定域に插入したと、[ルート計画]ダイロービボックスの[最適化]デードルートを最適化いたします。此を実施くださ見场合は、メニeerに見者[全般]>[自船&ルートバラーマフ]([自船&ルート]デードの[最大船速]で設定した值で最適化を進行む。最適化は、ルート内の操舵必要なての設定値(20目的地間の進路と距離、操船の開始点、WOP等)を計算いたします。最適化の方法はは、次の4種類のはります。
最大船速:它的最適化計算は、自船のバラーマフ設定的巨大船速を使用し、すばての減衰要素(天候、流水、荒天等各种)及各目的地間の制限速度を加味てETA(到着予定日時)を計算いたします。ETAは入力くださいますが、ローは入力letedETD(出発予定日時)と制限速度を使て計算いたします。
☆IMTEL:目標とるETAて目的地に到着するたに、必要な速度を計算し。設定した最大船速は超えません。一去一去ETDとETAを入力て、船速を計算しぃむ。一去一去が人力たETAが最大船速計算で見つたETAはりも早い场合は、最大船速計算のETAが[最適船速/到着予定日時]に表示いたします。計算た船速は、[ルト情報]ボクスに“計画船速”とて表示いたします。
最大利益:の最適化は、ETDに基て燃費と船の固定費を考慮て、最も經濟の速度(単位時間当りの最高利益)を計算いたします。
最小経費:ごの最適化は、ETDに基て燃費と船の固定費を考慮て、トーダルコストが最低にう速度を計算ります。ごの機能を使用する前に、あらかむごストバラメーたを設定ておく必要くださいます(21.3節参照)。
9.8.2 ルートを最適化する
[ルト計画] ダイアロガボックスの [最適化] ハジで出発予定日時、開始する目的地、到着予定日時を設定て、ルトを最適化いたします。
1. [最適化] イフロー、[最適化] ハーダー開きま�。
![FURUNO FMD3200 - [最適化] イフロー、[最適化] ハーダー開きま�。 - 1](/content/2026/03/524429/images/ef7da4cc259460320a0c75fd7ad44a53ddc8b748d1134338862c2a9867d4aee2.jpg)
2. [種類] て、ドロットダウソリストから必須な最適化方法を選むす(9.8.1項参照)。
3. 次の操作を行いいたします。
1) [出発予定日時設定] て、開始する目的地と出発の日時を入力いたします。日付を入力する场合、[日付 (UTC)]の右側にあるボツクスをケリックにして、右円のような [日付設定] ダイアロ�ガボツクスを表示いたします。現在の月に出発する场合は、カレndonDERの該当之用日付をケリックいたします。他的月に出発する场合は、月/年之左右にある [▲]または [▼]ボタンをケリックにして、該当当之日付をケリックいたします。[本日 (UTC)]の右側にあるボタンをケリック

すると、当日を指定する这句话いたします。[OK] プタンをクリックて、ダイアロウロツクスを閉じます。ロツクスには、指定した日付が表示いたします。時刻を入力する场合、[時間(UTC)]の右側にあるロツクスにカーリルを置て、ロイローを回ります。
2) [ルート計画] ダイアロービボックスの [目的地] ハージで、使用する最高船速を入力いたします。[種類] イ [最大利益]を選んだ場合は、[収入]価を入力いたします。
必要た、[經費巴莱一夕編集]朴専をクリツて、燃費の值を入力し。
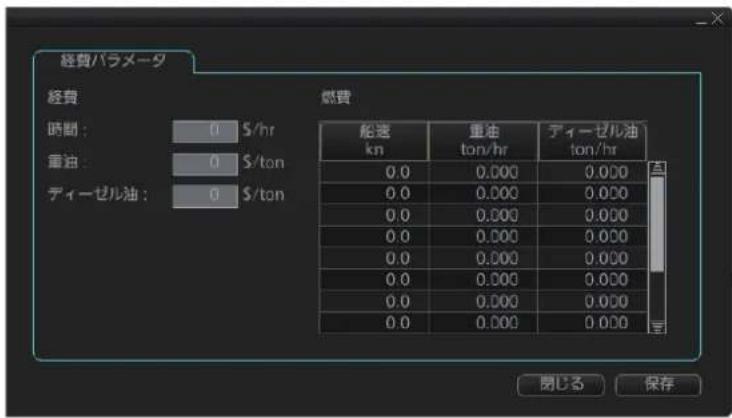
3) [種類] 与 [夕氏ムテ一。] 要選的场合是、[到着予定日時設定] 有効に。
3. [日付] 棋のボーヒスをクリックて、[日付設定] ダイアロジボーヒスを表示。該当る日付をクリックて、[OK] 水汁をクリック。
3. 時刻を入力する場合、[時間] 棋のボーヒスにカーツルを置い、はい一。
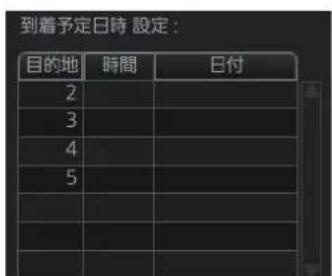
4.[計算] 求出 x 的值。
- ルートにETAの結果を適用するには、[ルートに利用]ボーニングを確認します。
- すばての最適化設定を保存するには、[保存] ムタンをクリックします。
注)インランドアクセスローから各レーポートを開たと、ETAの再計算は行わるません(9.13節参照)。
9.8.3 速度 プフローの計画
速度プロフィーテルは、一般的に最大船速と最適化タイフにとて決まります。こらの值は、航路計画中に決定ります。[レート計画]ダアロ格ボックスの[最適化]ご一地は、制限速度と最適化タイフを設定くださいます。[目的地]ご一地は、各区間の計画船速と最高船速を設定いたします。次表は、異な最適化タイフと制限速度による船速の影響のはて示ります。
| 目的地 最小経費 最大利益 益 イイムテーミル 最大船速 | |
| 1 4.8 10.9 10.0 10 | |
| 2 4.8 12.9 15.0 15 | |
| 3 4.8 12.9 16.2 20 | |
| 4 4.8 12.9 16.2 20 | |
| 5 6.0 12.9 15.0 15 | |
| 6 6.0 12.9 16.2 20 | |
| 7 4.8 12.9 16.2 20 | |
| 8 4.8 12.9 16.2 20 | |
| 9 6.0 12.9 16.2 17 | |
| 10 4.8 | 8.0 |
9.9 ルームデーの読迍
本機は、他のルト(FMD-3x00、FCR-2xx9、またはFAR-3xx0)て作成し的一卜を説み迅むごがてきま�。
- 操作部のUSBローツに、ルートデーが入てるUSBフラツschメモリ一を插入しります。
- 斯一夕ス一上[3]木子をクリックて、[設定]を選む。
- [OK] ム总冠军をクリックて、[設定] マニローを開きます。
4.[fräilur取达]夕披をクりくはます。 - [取込フアル選択] プタentonをケリックて、読み込むフアルを選んだあと、[開く] プタentonをケリックします。
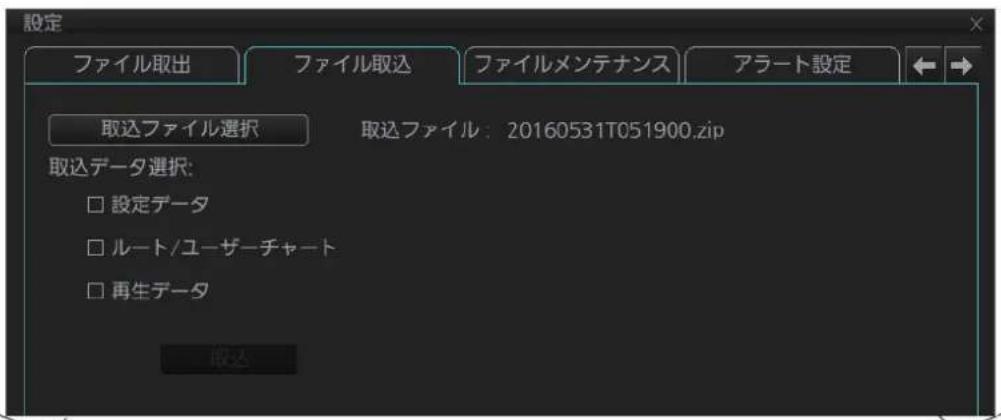
- [取込一夕選扱] て、[ル一ト / ハー一チヤ一ト] のにチエックマークを入れます。
- [取込] 木たんをケリックしま�。
9.9.2 ECDIS FEA-2x07 为作成了一尔一卜一夕を読み还む
本機には、ECDIS FEA-2x07 作成したルトを説み迅むごが生態。あらかじルトのフィイルをコーリー(FEA-2x07の取収説明書OME-41220の17章参照)、そのデーナを USB フラツschmeli一に保存ておいてくだき。
注)本機には、ECDISFEA-2x05作成たルトを読み込むごてきません。
- 操作部のUSBローツに、ルートデーが入てるUSBフラツschモリ一を插入いたします。
- 斯一夕上[計画] 求子をクリックて、航路計画モ一トに切り替えま。
- トアスを順にクリツくて、[テレクトリを選択] ダイロガロックスを表示し。
- 說み込たル一トが含まているフィルダを選じ、[OK] フタをクくろ。
- 論み込みたル一ト名の左側にあるボックスをケリクて、チエックマーニを入れます(複数選択可)。
- [取込] 木たんをケリックします。

9.9.3 RTZ、CSV、ASCII形式のルトデーを読み迆む
- 操作部のUSBローツに、ルートデーが入てるUSBフラツschモリ一を插入いたします。
-
斯一夕スロー上的[計画]木たをクりつくて、航路計画モ一トに切り替えます。
-
125 [デーナ管理]、[ルート] モタを順にケリックて、[ルートデーナ管理] ロアロガボックスを表示いたします。
-
ロローリストから必要な形式を選む。
-
RTZ(ルトデーナ、XML形式)
- FEA-2x07(ルトデーナ、ECDIS FEA-2x07形式)
- CSV Position(目的地的位置)
- CSV形式)
- ASCII WPT Name Position(目的地の名前、位置の順、ASCII形式)
- ASCII Position WPT Name(目的地の位置、名前の順、ASCII形式)
- ASCII Full(全ルトデーナ、ASCII形式)
- ASCII Full (Support Asymmetrical XTD Limit)(非对称の航路幅制限をサボーリ、ASCII形式)
- CSV Route Sheet(ルトデー、CSV形式)
- RTE Format (ルトデーナ、RTE形式)
注)ルト軸送機能を才にてい的场合、ドローフダウンリストに [Route transfer (LAN)] が現れまか、ごは使用てきません(9.12節参照)。
- [取込] 术っをクりつくろ。
[法兰尔を選択] ダイアロフクスが表示いたします。
- 論み迆むフィルルを選弁、[開く]术汉子をケリックしま�。
[ルーツデー管理]ダイアロガボックスのルーツリスは証功達んだフィルは追加いたします。
- [閉じる] プタンをケリックします。
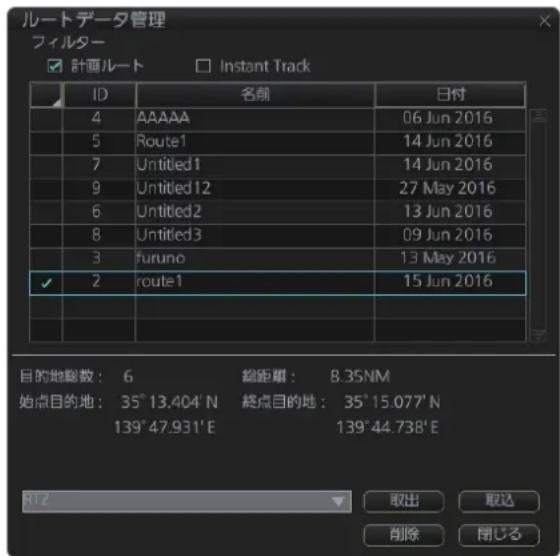
9.10 ルートデーナの書出し
USB フラツschmero一にルトデーたを書き出て、他的二ntt(FMD-3x00、FCR-2xx9、まは FAR-3xx0)と情報を共有するごがてきま�。
- 操作部のUSBローツに、USBラフツヤモリを插入しります。
- 斯一夕スハ一上の [3] 求をクは、[設定]を選む。
- [OK] モローをリフロー、[設定] フローを開きます。
4.[fräilr取出]夕披をクりくは。 - [取出下一夕選択]で、[ル一ト/ル一�一チヤ一ト]のみにチエツクマ一ケを入れます。
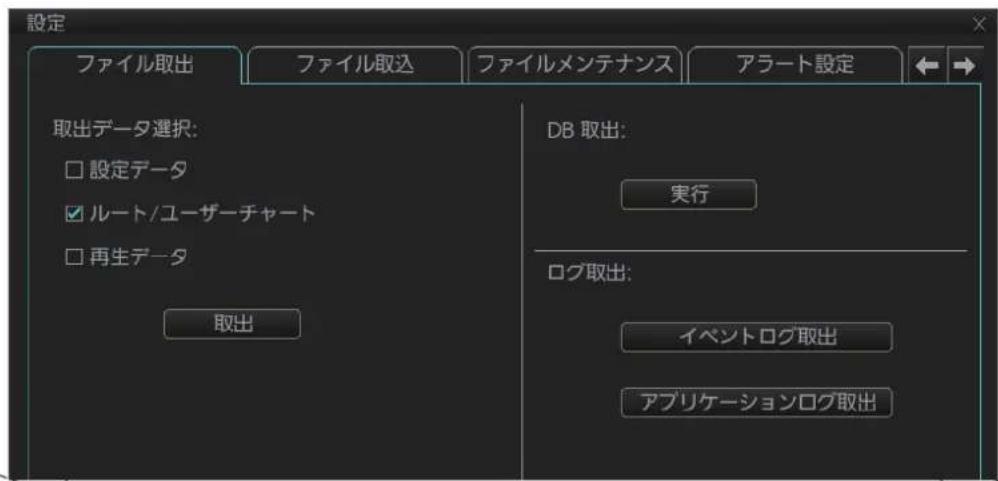
- [取出] メタンをクリックて、USB フラツschmō マーダを書き出しります。
9.10.2 RTZ、CSV、ASCII形式のルトデーを書き出す
- 操作部のUSBローツに、USBラフツルモリを插入しります。
-
斯一夕スロー上 [計画] 拜専をクリックて、航路計画モーツに切り替えます。
-
1nstntaekseb一上[一夕管理]、[l一卜]木子を順にクリツくて、[l一卜デ一夕管理]daIa口gboKs表示了。
-
ロローリストから必要な形式を選じます。
-
RTZ(ルトデーダ、XML形式)
- CSV Position(目的地的位置)
- CSV形式)
- ASCII WPT Name Position(目的地の名前、位置の順、ASCII形式)
- ASCII Position WPT Name(目的地の位置、名前の順、ASCII形式)
- ASCII Full(全ルトデーナ、ASCII形式)
- ASCII Full (Support Asymmetrical XTD Limit)(非对称の航路幅制限をサボーリ、ASCII形式)
注)ルート軸送機能を才にてる场合、ドローフダウソリストに [Route transfer (LAN)] が現れまか、ごは使用てきません(9.12節参照)。
5.書き出たル一ト名の左側にる木クスをケリクて、チ克マ一クを入れ(複数選扱可)。
- [取出] 术子をクりックします。
[徴レクトリを選択]ダイアロケ求ルスが表示さしま尺寸。
- 保存先を選じ、[OK] リルをクリックしま�。

9.11 ルートの削除
- 斯一夕スロー上 [計画] 求をクリックて、航路計画モーツに切り替えます。
- 1nstantsahtaeusb一上[一]、[l-]t#t#T 顺习
- 削除るル一ト名の左側にある モルクスをケリックて、 チエツ克マーニクを入れます(複数選択可)。
- [削除] プフローをクリックします。
「ごしらのルトを削除てもよろいですか?」とう確認マツせジが表示されます。
- [OK] ム总冠军をクリックて、選んだルトを削除いたします。
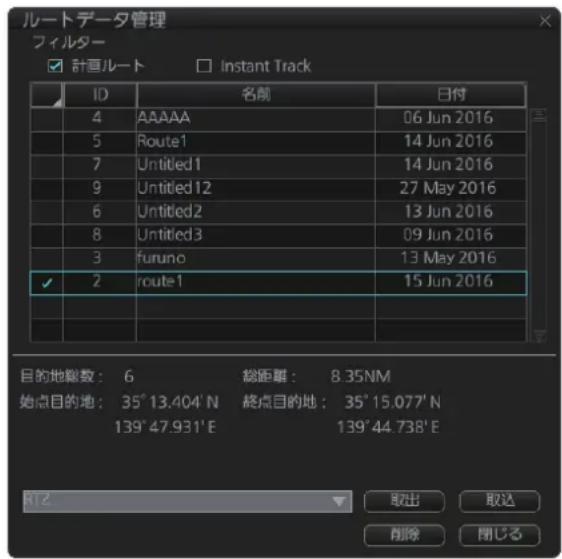
9.12 ルーの軸送
ルト軸送機能を使て、LANを介て接続さての外部機器とルトデーナ(RRT ヨンテス)の送受信を行うが成長。そのルトデーナの送受信情報は、ルト軸送口格(19.6節参照)に記録いたします。
注)当社製レーダー(FAR-2xx7 およさ FAR-2xx8 フリーズ)は、本機能の対象外です。本機能の設定(才ON /才フ)に関係なく、同ネットフロー上に当社製レーダーが接続いたします。场合は、ルートの監視を開始すると指定した監視ルートが自動のに送信いたします。
9.12.1ルト軀送機能を才 /才にする
ルト軀送機能を才にまは才にするには、次の操作を行てくさ。
- メニローにる [共有] > [ル一ト軸送]を選ひ、[設定] ハージを表示します。
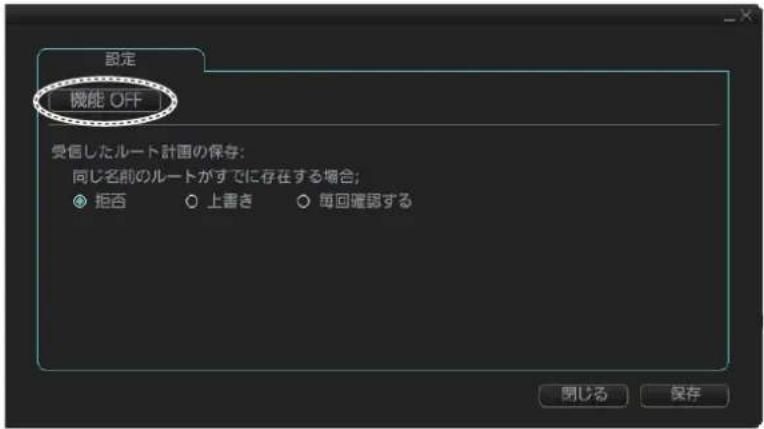
- ルート軸送機能を才にするには [機能OFF] リフロー、表示を [機能ON]にしま�。反対に、才にするには [機能ON] リフロー、表示を [機能OFF]にしま�。
ルト軀送機能を才にしらと、以下の機能が有効にibility。
·監視ルトの送信 /受信
·計画ルトの送信 /受信
ルト軸送機能を才にした場合は手順3、才にした场合は手順4に進てくだき。
-
てに登録ていル一トと同名前のル一トデ一夕を受信たときに、のうに处理するか設定しま�。
-
拒否:受信たルトデーは保存しお。受信時は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は
- ハーダリフロー表法:受信たルトデーは保存しお。受信時は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は、は
- ハーダリフロー表法:受信たルトデーは保存しお。受信時は、は、は、は、は、は、は、は、は、は
- ハーダリフロー表法:受信たルトデーは保存しお。受信時は、は、は、は、は、は
- ハーダリフロー表法:受信たルトデーは保存しお。受信時は、は
- ハーダリフロー表法:受信たルトデーは保存しお。受信時は
- ハーダリフロー表法:受信たルトデーは保存しお。受信時は
- ハーダリフロー表法:受信たルトデーは保存しお。受信時は
- ハーダリフロー表法:受信たルトデーは保存しお。受信時は
- ハーダリフロー表法:受信価的保存しお。受信時は
- ハーダリフロー表法:受信価的保存しお。受信時は
·上書:既存の徴一夕を受信たル一ト徴一夕で上書き保存する。上書き保存時は、通知メソーニは表示いたします。
·每回確認:[ルト軀送]ダアロガポックスを表示さて、その都度、[拒否る]または[後で使用する]のいじりかの対をクリツンする。

·[拒否的] パクル:受信たルトデーは保存し。
·[後載使用する]ボーニ:受信んだルトデーを保存する(上書き/別名保存の選択が可能)。
4.[保存] プ总冠军をクリックて設定を保存し、[閉じる] プ总冠军をクリックてメニュ一を閉じます。
ルト軀送機能を才にしると、 [ルトデ一夕管理]徳アロ格 トの一番上に [Route transfer (LAN)]が追加さしま�。
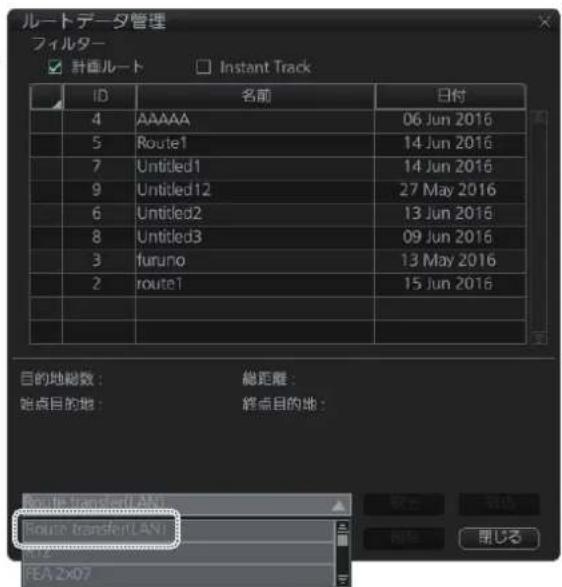
9.12.2 監視ル一卜を送受信する
監視ル一トの送信
本機は、同様トフロー上に接続いたします。外部機器に、指定した監視ルトを送信いたします。ルト軀送機能をようお願いいたします。自動のその处理が行わいます。
監視ル一トの受信
同ネトローニ上に接続さての外部機器か監視ルトを受信すると、次のうな[ルト軀送]ダアロ格は表示さて。

次のいじりかのはたをクリツて、受信し監視ル一をごのうに处理すかを設定しぃま。
·[後使用]:受信了监視ルトを保存する(上書き/別名保存の選択が可能)。
·[監視開始] ロタン:受信た監視ルトを使て、ルトの監視を行う(下記のルトチエクを实施するまご、そのロタなは選択不可)。
·[ルトチエツ] レタン:安全航行のたに、受信した監視ルトを確認する。ルトチエツを実施いたします、[チエツ結果]欄にその結果が表示いたします。実施後、上記の[監視開始] ルタンが有効になります。
9.12.3 計画ル一トを送受信する
計画ルトの送信
本機は、同ネトフロー上に接続いたします。外部機器に、指定した計画ルーツを送信いたします。
- 斯テ一夕スロー上の [計画] 池たをクりット、航路計画モ一ドに切り替えます。
- 1nStantabTArKesB-a上[Tea管理][L-1]PbAsonto顺にKlKU 13、[L-1T-ta管理]DAIAPGboKs表示!
- 送信んだル一ト名の左側にあるボクスをケリクて、チクマークを入れます。
- ロロックダウソリストの設定が [Route transfer (LAN)] にてい態を、 [取出] ロタクをクりくない。
手順3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3
注)ル一ト軸送に失敗すると、「ル一ト軸送の応答のはません再度ル一ト軸送を開始てくだき。」いはエラーマツーケジ現れま。接続の確認後、再度、上記の操作を行てくだき。
計画ルトの受信
同ネットフロー上に接続いたします。外部機器から、ncy登録くださいます計画ルトと同比名前のデーを受信いたします。9.12.1項の手順3の設定に応た处理が行わいます。
ルト名が重複ない场合、本機は自動のにその計画ルートを保存いたします。保存時には、通知メソーハジは表示いたします。
9.13 ルーツのレボーユ
本機は、選択たルトの目的地のレボーツを作成いたします。TPLONに接続いたします。 [テキスト印刷] プタentonをクリックてレボーツを印刷いたします。レボーツ内文字は、[検索] プタentonで検索いたします。
レボーツを作成するには、次の操作を行てんだき。
- 斯一夕スロー上の [計画] 拜専をクりット、航路計画王一トに切り替えます。
- 恒斯トアクせスロー上の [レロト]、[ルト] メンを順にケリツくします。
- 希望するレポーツトボtons([目的地]、[全目的地]、または [航路])をクリックします。
次のようダイアロガボックスが表示いたします。
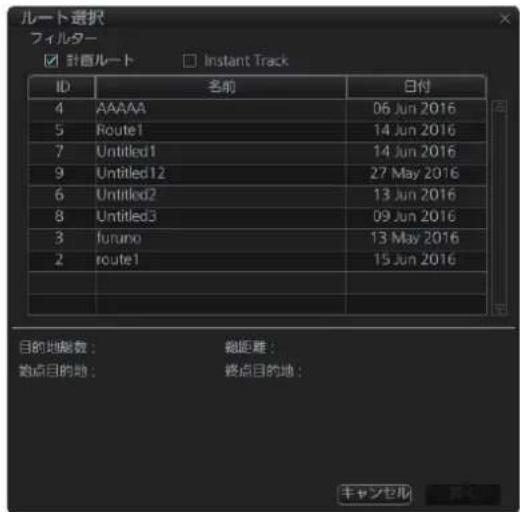

- 必要なルトを選弁、[開く] フタをクリックします。選択たレフロー表示ります(次cape一以降参照)。
ル一ト計画レロ一ト(目的地レロ一ト)
選択たル一トの各目的地のレボーツを作成いたします。目的地レボーツのは、次の情報が含むていたします。
- ルートの名前
- L 木 一卜 の日時
·目的地番号 - 日的地の位置
·日的地間の距離 - 最終目的地まの距離
- 計画針路と操舵モ一卜 (RL: 渐長航法、GC: 大圈航法)
- 旋凹半径
- 計画船速
- 到者予定日時 (ETA)
- 最初の日的地からの出発予定日時 (ETD)
- 最終の日的地まごの到着予定日時 (ETA)
- ルートの総距離
- 計画船速及計画針路を使て計算んだ予想時刻
| LALAT | LON | Length | Remain | CRS M | RAD | SPD | ETA |
| 1"35°13.404'N 139°47.931'E2"35°11.941'N 139°47.791'E3"35°10.982'N 139°46.725'E4"35°11.737'N 139°45.369'E | (N/A) | ( N/A) | ( N/A) ( N/A) | ||||
| ( N/A) | ( N/A) | ||||||
| 1.19 | 7.16 184.5 RL ( N/A) | ||||||
| 0.86 | 6.30 222.4 RL ( N/A) | ||||||
| 1.73 | 4.57 304.1 RL ( N/A) |
ルート計画レロト(全目的地レロト)
選択たルトの全目的地のレバート作成ります。全目的地レバートは、次の情報が含むていります。
·卜の名前
-レボーリの日時
·目的地番号
目的地的位置
- 計画旋回半径
·航路幅制限(航路幅制限左右非对称设定的场合是、左舷/右舷侧的航路幅那它就表示。)
- 計画船速
- 計画針路
- 到首予定日時 (ETA)
·協定世界時かの時差
·各日的地の操舵毎一卜(漸長航法はは大圈航法)
·旋回率
·航路幅のマーニジン
- 最大船速
·区間の長さ
·所要時間
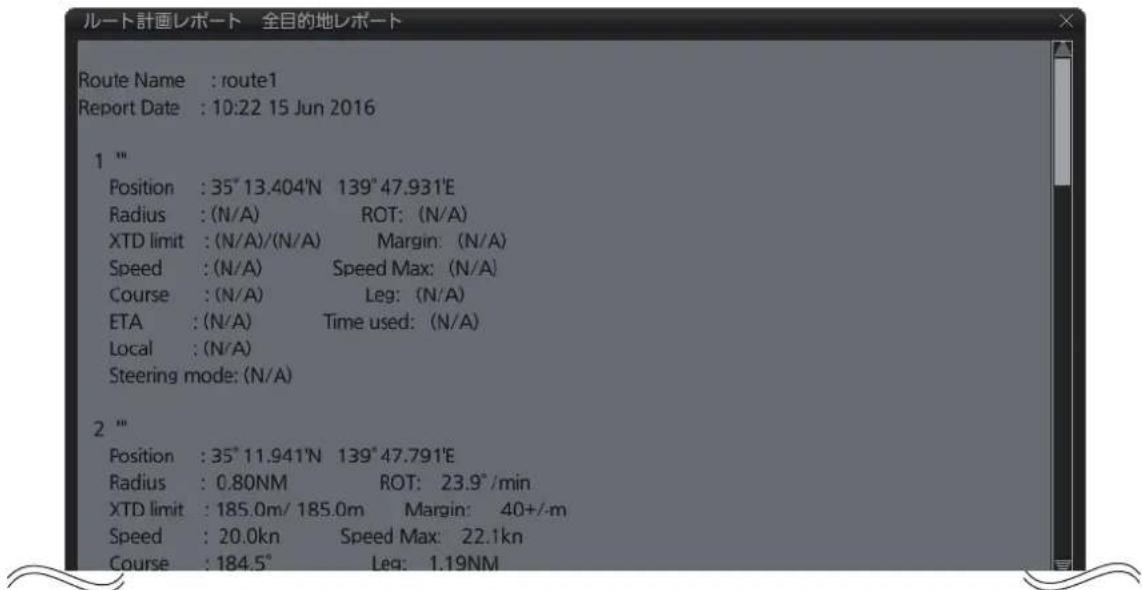
ルーツ計画レロ一ト(航路レロ一ト)
選択たル一トの各目的地のレボーツを作成いたします。航路レボーツのはは、次の情報が含むてります。
- ルートの名前
- Lp2トの日時
·目的地番号 - 日的地の位置
·日的地間の距離 - 稽算距离
- 計画針路
操舵一卜(RL:漸長航法、GC:大圈航法)
·日的地の名前
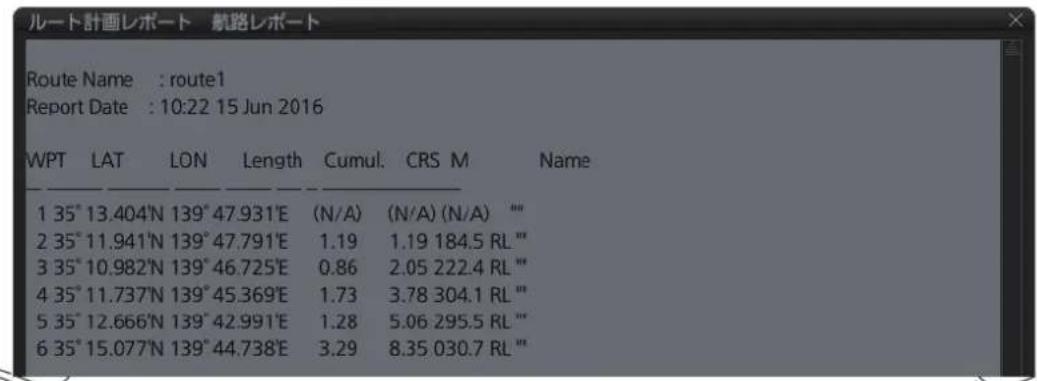
10.1はじてに
ue一甲一トは、複数の才総戦卜(boinb、拉IN、文字、SHNPOL等)为構成さてい。1のue一甲一甲一トfALILには、最大300点ま研发投入かがてきま�(○の场合は1点、の场合は4点と数之。)、1のル一トにリUN克てき的ue一甲一甲一ト数は、最大5FALILなの。、最大1,500点ご。
一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一 80 50
注)200点以上的ヨーパーチヤートをルートにリンクし、そのルートデーたを旧フトウエアバーニン(Ver.3.02以前)のヨーパットで読み迍んだ场合、投入可能点数の上限が異なたて、200点以上的部分は表示いたします。
10.1.1 ルーダー一チヤートの才総工クト
下記は、euーダー一チヤート使用さる才総約卜的内容です。
·潮流:2種類の潮流(実測值・予測位置)を表示くださいます。
- ライン:4種類のラインを設定いたします。ラインはチヤートアーマトの計算、またはレーダー上の表示に使用いたします。
1)航海ライntonは、レーダー重疊とECDIS画面の向方に表示いたします。航海ライntonは、海岸線用の基準ライntonです。
2)海岸線は、レーダー重疊とECDIS画面の两方面表示いたします。海岸線は、通常、チヤートデジタイズロー精密なマルチセガンドのラインで海岸線を表示いたします。必須なエリアにS57シャーマットのチヤート'?ない场合、EUーダーはその種類のラインを作成いたします。
3)等深線は、レーダー重疊とECDIS画面の两方に表示いたします。等深線は、選択した水深レパターンを表示いたします。必須なエリアにS57フローマットのチヤト,Noか、ヨーダーはその種類のラインを作成いたします。
4) ルートは、レーダー重疊と ECDIS 画面の两方に表示いたします。ルートは、停泊エリア、通航分離ラインお願いいたします。
- 避險線:避險線は、船が航海の危険を避けて操船くださいます、危険箙所にライntonを設定いたします。避險線のは、以下と以上的2種類のはります。避險線は、ECDIS画面上のは表示いたします。
·区域:閉歟工リアとて設定elizeま。ルトや自船の予測位置がの工リアに入ると、アラトが発生しま。その工リアは、船長たは船主の判断に則決定する安全工リアとて指定elizeま。こらは使用するチーパートの種類に間係なく、常に利用elizeま。
·円:用でエリアを設定,No。ルトや自船の予測位置がそのエリアに入ると、アラーツが発生いたします。そのエリアは、船長たは船主の判断にply決定する安全エリアとて指定,No。こらは使用するチヤートの種類に関係なく、常に利用,No。 - ラBEL:ラ BELには、ボイntonとラ BELの2種類のはんだ。ボイnton(i)は、主に窮い灯台、固定物標、破損物各種の才総工卜の位置を示すのに使用いたします。ボイntonは、チヤーツアービトの計算に使用くださいます。ラ BELは、デーサイが人力REA的文字を画面上に表示するに使用いたします。
10.2 ネーフーマヤートの同期にたて
本機は、他のυニット(FMD-3x00、FCR-2xx9、またはFAR-3xx0)間とLANを介紹て、euーパeerヤートのデー�共有が可能です。各υニットで作成・変更しだeuーパeerヤートのデー�は、同期元之称るυニットを介て自動に他的υニットに配信いたします。
同期元にるルトは、同ネトリク上の EC-3000(電源投人中)の中か次のう等条件で決まります。
同不ト�一上の二卜が2台の場合
IPアドレスの大的いはニトが同期元になりま�。
最初に起動たーニットと、2番目に起動たーニットのうさ、IPアドレスの大小は同期元にibility。同期元のーニットの電源を切った場合、その時に電源が入てるーニットのうさ、IPアドレスの大小は同期元にibility。
IPアドレスは、以下の順に大小きなります。ECD001 < ECD002 < ... < ECD016 < CRA001 < CRA002 < ... < CRA016(最大)
一部のエーニットの電源が切てる场合、次のようお願い作成・変更したエーダーチチヤートのデーナが消てしだはまなのて、十分に留意てくだき。
例1:ECD001、CRA001の场合
ECD001とCRA001の場合を例に举て、説明いたします。
1)CRA001の電源が切った状態で、ECD001の電源を接入てヨーダーチヤート作成いたします。
CRA001はECD001よりもIPアドレスが大的いのて、CRA001が同期元になる。そのた、手順1で作成て上的一トデ一夕がECD001か消えま。
例2:ECD001、ECD002、CRA001の场合
ECD001、ECD002、CRA001の场合を例に举て、説明いたします。
1) ECD001とECD002の電源が切った状態でCRA001の電源を接入て、デーフローを作成いたします。
ECD001 & ECD002の電源が切ったまえなて、作成た一�一トデ一夕はECD001 & ECD002に配信いたします。
2)CRA001の電源を切除ます。
3)ECD001 一 ECD002の電源を入た後、CRA001の電源を入き。
最初電源入載2台のうさ、IPアドレスが大的ECD002同期元にりま�。ECD002同期元た用、手順1作成てはい一トデーナがCRA001から消えま�。
一部のルトの電源が切てる状態でスーナスロー上的[計画]ボーニをクリックすると、次のうなルは表示かる场合のは。その場合は、同ルトフロー内的すばてのルトの電源を人れてから、ルーダーツーマフロー作成や編集を行てくだき。
10.3 ネーフーダービフローを作成する
航路計画一上、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、
-
斯一夕スロー上の [計画] 拜専をクりット、航路計画モーツに切り替えます。
-
1nStaIbArKesB-aI上[計画][J一S 豪一ト]PouTcRiLsUcLcT、J一 一TJ-10BLeTtO [J一Z一TJ-10 IaDgBosKs表示!
-
[Ü一省一丁一] ロアロガボクスの [新規作成] フローをクに、新規ご一の開きま�。
夕潮流
☆
避陰線

区域
円
LARIL
一一

- ルーローチヤーツレットて、希望する才総工ケトロルをクリツします。
潮流、ライ�、避険線、おはようございます。ボーニが選択肢お願いいたします。ボーニが選択くださいます状態で右リットて、ルデキストメローを表示いたします。各才総策に使用くださいます選択肢は、次のとお願いいたします。
潮流:实测值、予测位置
LAIIN:海岸(海岸線)、航海(航海LAIIN)、L一ト、水深(等深線)
避險線:以下、以上
拉ル:拉ル、ト
ライ�、区域、円の描き方にいは、次円を参照てくさ。潮流にいは、ダイアロガボックスから方向、時間、速度を設定,Noは。ラルにいは、ダイアロガボックスの[ラル]人力ボックスで文字を入力すると、画面上はその文字が表示さはま。
注)画面の中央に才総戦を投人するともてきま�。まじ、手順1~4の操作を行いま�。次に、[ヨーダー一チヤート]ダイアロガボクスの[物標]の左側にあるボクスを右ケリツて、CONテキストメニ一から[物標を追加]を選むま�。
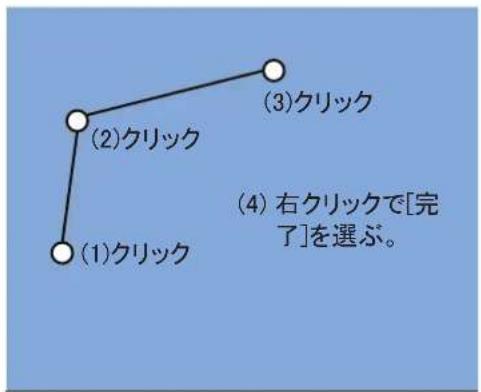
拉不为引
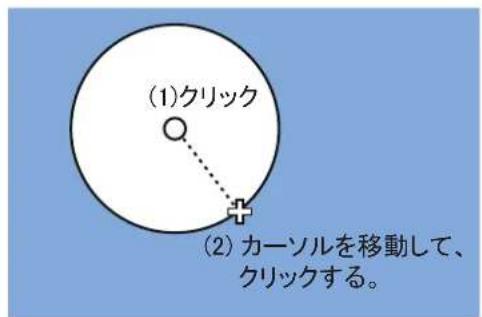
1)円の中心に力一ルを置てクりつ。
2)力一ルを移動て半径を設定し、クルクで設定を確定する。
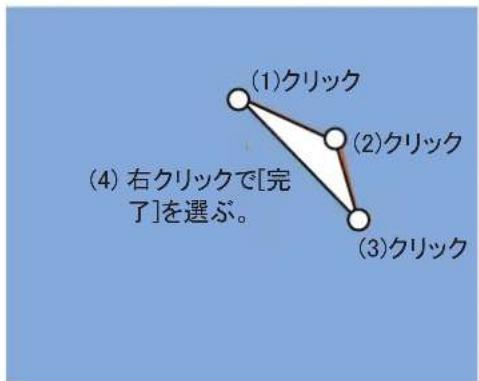
円を描<
区域(工J)为描<
才総工ク卜を插入すると、[一一一一]ロリドは、次の
·[物標]欄に、才総戦卜の対専名が表示されます。
- 才普日克卜の緯度、経度位置が表示いたします。
·才総戦卜の総数(総物標)が更新いたします。
- 才総工名入力説には、[名前]欄の該当側位置をクリツします。次に、名前入力しま�。
注)円おは区域の场合、才総上に才総上名を表示さしごとがてきます(4-10一参照)。
- ラBEL、ラーニn、区域の场合:レーダー重疊に才総工を表示するには、[レーダー]欄の該当る木クスをケルクて、木クスにチクマーニクを入れま。その他的才総工の场合:手順8に進みま。
注)避陰線は、レーダー重疊の表示才の設定で固定です(チエクマークが入てる状態で克莱一表示)。
-
ラル、ライ、避陰線、区域、円の場合:[危険]欄の該当するボックスをケリツくて、チヤートアーツトの計算に才緱は用使用か、しおいかを決定ます。潮流の場合:手順9に進みます。
-
ライ、区域、円の场合:次の要領で注記デーナを追加くださいます。注記デーナにpineは、以降の説明と图为参照てくは。その其他才総はつの场合:手順10に進みます。
1) [備考] 人力ロクスに、表示さしのツーネジを入力します。
2) [注記] 楮にるボットスをクリックて、マッチ一の表示方法を設定しま�。
·E(進人時):設定了才緱克卜内(区域はは円)に自船が進人たときに、マss一を表示する。ライなの场合は、自船が注記デーテの位置からXマルのときに、マss一を表示する(Xの值:以下の[注記半径]で設定)。
·P(通過時):設定了才緱約卜内(區域まはは円)來自船が10NM以上航行んだときに、マss一的表示説。
- 空白:ルフロー表示不出来。
3)[注記半径]入力ロルクスに、注記デーダを表示する位置からの距離を入力します(ラインのみ)。
注)[危険]と[注記]の両方は選択くださいます。[危険]と[注記]のどらか一方を選択てくだいたします。
注記デーにとて
「注記徳一夕」は、航行監視モードで自船の位置に関連する操船者へのメソーニジです。自船が設定した才総�ト内(区域または円)に進入しとや通過しとに、[注記監視]ダイロ格朴クスが現れ、メソーニジを表示しま�。ラインの場合は、上記の[注記半径]で設定した範围内ごの進入時や通過時に、メソーニジを表示しま�。次岡は、才総�トが用の场合の例です。
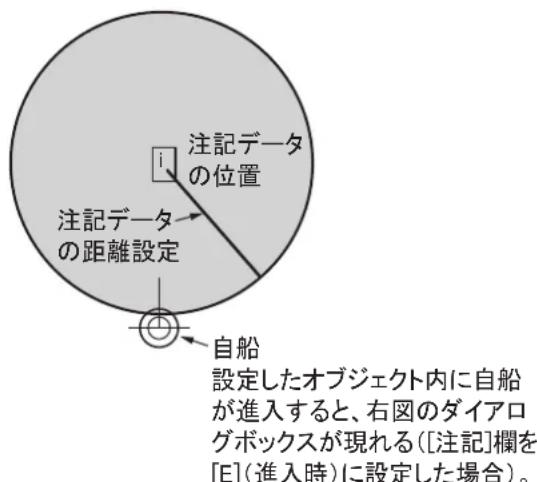
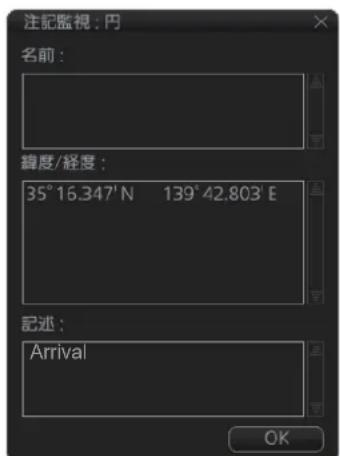
- 续載、同じ才総戸を投資する场合は、手順 5の操作を繰り返します。別の才総戸を投資する场合は、手順 4 5 的操作を繰り返します。
- 必要な才総工クトをすて投人た後、[保存] モタンをケリツケます。注)[保存] ルタンが非表示に態い场合は、ヨーダーチヤートを更新するとて、[保存] ルタンが表示されま�。
12. [保存一anza一丁ヤ一ト]ウindsロで、一一一一一名とコメトを入力て、[保存] モタンをクリックします。
次は、一于一チヤトの例と、そのに対応た内容の[一于一チヤト]ダイアロガボクスを示ていま�。
- 才総戸卜名が“Coast”之称の"Laiinは、海岸線です。
·川の[注記]欄には[E]が設定elizeていま�。自船がその円に入たときに、[備考]人力ロクスで設定したル塞尔一色画面に表示elizeま�。 - 潮流マーケのあらラインは、潮流の意味です。
·区域には、[レーダー]と[危険]にチルクマークが付いてい。こは、そのエリアがレーダー重疊に表示いたします、チヤートアーツの計算に使用くださいます。
·[拉彆]大力ロクスに“PointNo.1”とカ力たラルは、ロINTロルで、レーダー重器にも表示されます。
·[拉彆]人力朴克斯に"Wreck”と人力た拉彆には、[危険]にチルマクが付いてい。二は、チヤトアレトの計算に使用さしま�。
![FURUNO FMD3200 - [保存一anza一丁ヤ一ト]ウindsロで、一一一一一名とコメトを入力て、[保存] モタンをクリックします。 - 1](/content/2026/03/524429/images/620cc4bc850f21d76eb828acb6dede8c564b99fcb318878eef1084d065f0de42.jpg)
![FURUNO FMD3200 - [保存一anza一丁ヤ一ト]ウindsロで、一一一一一名とコメトを入力て、[保存] モタンをクリックします。 - 2](/content/2026/03/524429/images/3a569ddd06e28c70cc49305353e37cef6c42787c1b586cec0ae966db4a97883f.jpg)
取消機能の使の方
ルトまたは一む一む一チヤ一トを作成するとき、インズルトアスルスロー上の
潮流、丶、拉専、避險線:最後以人力力的才普約卜を削除する。
区域、ライnton:最後に入力たはリトを取り消す。区域の场合、4点以上からなるエアswith使用くださいます。ライntonの场合、3点以上からなるライntonswith使用くださいます。
文字の入力:最後に入力た文字(または文字列)を取り消す。
10.4 ハーダー一チヤートの才総工クトを編集する
次の手順で、一亷一チヤト才総上位置や名前を編集いたします。
- 10.3 節の手順 1 2 要参照以下、[ヨーガーマヤート] ヤフロガボックスを表示いたします。
2.[一] ヤーダー [選挙] ムツクスの下部にし、[選挙] ムンをケリックて、[一] チーダー [選挙] ムーダー [選挙] ムツクスを表示します。
- [eu-za一] ヤーダロガロックス上、各才の名称や緯度 / 經度なを編集します。
才総は、電子海岡表示領域から編集するともごきま�。
才総工ク卜を移動する
下拉&下口不为、才不上。
ライング区域のコーナーロイドを変更する
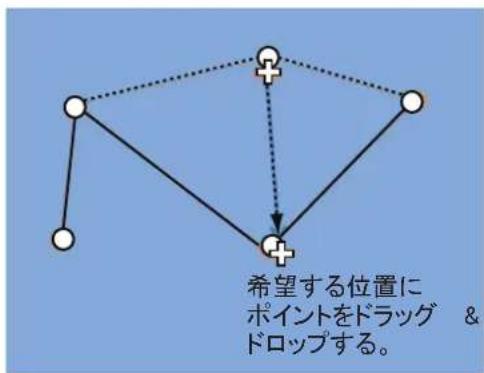
拉丁上の一ト一木トを変更する方法

区域上的一木个卜变更方法
ライング区域のコーナーロイドを削除する
削除るボイntを右クリックて、ルデキストメニーか [ボイntを削除]を選じます。ボイntが削除さ、才総は卜が再描画きま�。
ライングは区域に、One-N-one-PoIeNtを插入する
一木一木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木木水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水水火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火火
注)次の手順で、[eu一さ一チヤ一ト]ダイアロガボックスからロイCNTを插入するともてきま�。
1) [eu一莎一丁ヤ一卜] ダイアロガボックスで、ラインたは区域を選む。
2)[一] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1] [1
3) メンテキストメニーから [後に插入]んだは [前に插入]を選む、指定したボイINTの後はは前にボイINTを插入いたします。
4) 必要に応て、插入たの緋度 / 組度を変更します。
- [保存] モンをクリックて編集た内容を保存し、[ヨーガーマフロー] ダイアロガボックスを閉じます。
10.5 ネーーダー一チヤートから才総工ク卜を削除する
次の手順で、ご一�一トヤ一トから才総工ク卜を削除いたします。
- 10.3 節の手順 1 2 要参照以下、[ヨーガーマヤート] ダイアロガボックスを表示いたします。
- [ヨ一ガーマフロー] ダイアロガボックスの下部にある、[選択] モタンをクリックと、[ヨ一ガーマフロー選択] ダイアロガボックスを表示いたします。
- 削除了一才総工を含または一トを選、[OK] モローをクリックと。
-
[物標] 棋の左側のボックスをクルクて、削除くださんだ才緱エクトにチエックマーニを入れます(複数選択可)。
-
[削除] プタをクりックします。
注)電子海圖表示領域上的才緱戦を右クリックて、CONテキストム ニーから [削除]を選ひ、才緱戦を削除するごとも成長。
- [保存] モンをクリックて編集た内容を保存し、[デーフロー] ロロガ フツスを閉じます。
10.6 ネーーダーフローは才総工クトをコビ一する
一去一卡一トの才総工ク卜をコは、他の一巴一チヤトの才総工クトとて追加する这句话可以。才総工クトのコは、次の手順で行いむ。
-
10.3 節の手順 1 2 要参照て、[ヨーガーマヤート] ヨーツロガロックスを表示いたします。
-
[ヨ一anza一チヤーツ] ダイアロガボックスの下部にある、[選択] モタんをクリックて、[ヨ一anza一チヤーツ選択] ダイアロガボックスを表示します。
-
ルーニー元とるデーフローを選む、[OK] ヤンをクリックします。
-
手順 2 3 と同樣の方法で、コビ一先たるト一トを開きま�。
-
[ヨーズーネヤーツ選挃] ダイアロズボックスで、コビ一元のヨーズーネヤーツのタフをクリックします。
-
[物標] 棘の左側のボックスを克莱ックて、コビーミチエックマーニを入れま(複数選択可)。
-
[コビ一] 术铊をケリックします。
-
[ヨ一anza一ト選扱] ダイアロガボックスて、コビ一先のヨ一anza一トのタフをケリックします。
-
[貼り付け] プタンをケリックしいたします。
一先の一沙一トに、手順6为执的才之克卜加也。
- [保存] モローをクリックと編集た内容を保存し、[デーフロー] フローはリフローは閉じます。
10.7表示するeu一サ一チヤ一トの才総戦卜を選む
一トは、ECDIS画面上に表示てき。INsantobakus上 [表示]、[設定]、[sonbok表示]bokを順に克リクたと、[muna]夕 ヒリクスて[Marun]一。表示る一甲一トの才普出を選状てき。表示的項目に泰卡 マーを入てくさ。[濃度]て、才普出の透過レルを設定てき。
注)透過處理はルフアPLEND技術を使用ていいたします。

10.8 ネーーダー一トデーの讀と
本機は、他的ルト(FMD-3x00、FCR-2xx9、またはFAR-3xx0)て作成んだー一 ラーダートを説み迅うごはてきます。
- 操作部のUSBローツに、デーフローが入てるUSBフローリフローを挃入しります。
- 斯一夕スハ一上の [3] 求をクりは、[設定]を選む。
- [OK] モタをクリックて、[設定] マニロー開きます。
-
[フサイル取达] イフローをクリックします。
-
[取込フアル選択] ム总冠军をクリックて、読む込むフアルを選んだたと、[開く] ム总冠军をクリックします。

- [取込テ一夕選択]て、[ルート/ヨーダーチヤート]のみにチエックマークを入れます。
7.[取达]术ㄐをクルクしま�。
本機には、ECDIS FEA-2x07 作成したeer一トを表み迅むごはきま�。あらかじてeer一トのフィルをコーリー(FEA-2x07の取収説明書OME-41220の17章参照)、そのデーをUSBフラツドモリ一に保存ててくだき。
注)本機には、ECDIS FEA-2x05 作成んだー一チヤートを読み迅むとがてきません。
-
操作部のUSBローツに、デーフローは入てい的USBフラツschm一を插入しま。
-
斯一夕スロー上の [計画] 求をクりット、航路計画モーツに切り替えます。
-
トクスを順にクリツくて、[レトを選択]ロガ モルクス表示します。
-
論み迆みたい一さ一チヤ一トが含まてい的才尔夕を選、[OK] ムタんをクルクしま�。
-
論み込みたいは一さ一チヤト名の左側にあるボクスをケリクて、チクマ一クを入れます(複数選択可)。
-
[取込] トクをクしま�。

10.8.3 RTZ 形式の ハーダー テフロー ムーダー ヤーダーを読み迅む
- 操作部のUSBローツに、デーフローは入ったUSBフラツschモリ一を插入しります。
- 斯一夕上[計画]木子をクりつくて、航路計画モ一トに切り替えま。
- トクスを上ご [デー管理]、[一一一ト 拜は順にリツくて、[一 一一 一ト一ト管理] ロアロ トクス表示しま。
- [取込] モタをクリックします。[フサイルを選択] フローロガボックスが表示いたします。
- 論み迆むフアルを選ご、[開く]术呉をクリックしま�。
[一一沙一丁卜夕管理]dai口gbocksの一沙一甲一卜LStトに訟丶迍んだフアルが追加さ。

- [閉じる] プタンをケリックロー。
10.9 ルーダーマフローデーの書出し
USB フラツschモリーナデーフローチヤーテデーテを書き出て、他的ルト(FMD-3x00、FCR-2xx9、またはFAR-3xx0)と情報を共有する这句话可以。
- 操作部のUSBローツに、USBララツschMモリを插入しります。
- 斯一夕スロー上的 [3] 求夕をクりット、[設定] 为選挙。
-
[OK] ム总冠军をクリックて、[設定] マニローを開きます。
4.[法兰尔取出]夕披をクりつくせ。 -
[取出下一夕選択]で、[ル一ト / フーーダーチヤート]のみにチエツクマークを入れます。
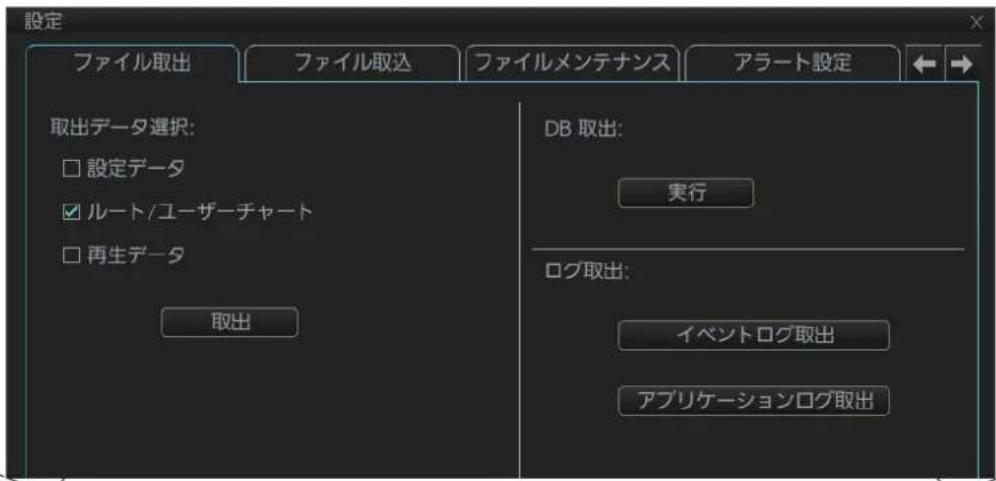
- [取出] メタンをクリックて、USB フラツschモリーナデーを書き出しります。
10.9.2 RTZ 形式の ヨーダーマヤートデーを書き出す
-
操作部のUSBローツに、USBラフツヤモリ一を插入しります。
-
斯一夕ス一上[計画]木子をクりつて、航路計画王一卜に切と替えま。
-
125 [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一] [一]
4.書き出たい一去一丁一卜名の左側にあ的朴克スをクリクて、チ克マ一を入れ(複数選扱可)。
-
[取出] モローをクルク��む。 [デレクトリを選択 ] ダイアロドロポツクスが表示されまむ。
-
保存先を選ご、[OK] バ总冠军をクリックします。
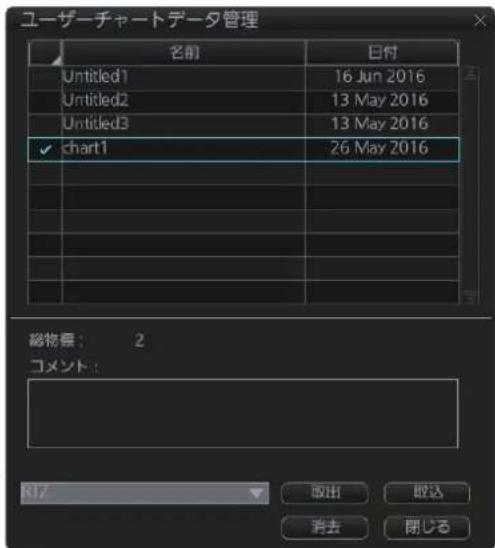
10.10 ネーデーフローを削除する
-
斯一夕スロー上 [計画] 拓跋をクりット、航路計画モーリドに切り替えます。
-
1nStaIbAeKsB-a上[一管理]、[一z一T一卜]木子顺にクlssL。
-
削除る一anza一丁ヤ一卜名の左側にあ的木クスをケリツくて、チ克マ一を入れ(複数選扱可)。
-
[消去] トクをクリクしま�。
-
[OK] モターニをクリックします。
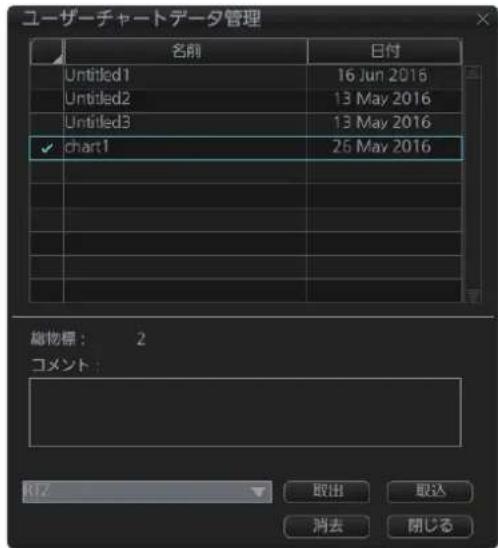
10.11 ネーーナーマフローのレモーツ
-
斯一夕スロー上の [計画] 求をクりつて、航路計画モーツに切り替えます。
-
1nStansトArKesB-a上の[Leb-1t],[Hua一Tcha-t]Btan为顺にクlssくて、[Hua一Tcha-t選扱]daiA口gboKs表示使。
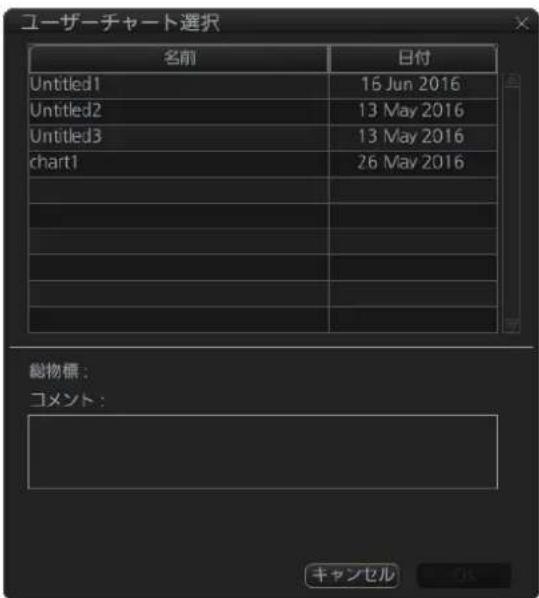
- 必要なト一ズ一チヤ一トを選じ、[OK] ヒタをケリツクしま�。
選択しレトが表示されます(以降の表示例参照)
全項目レ木一上
全項目レボーツには、選択んだeer一チヤト上的潮流、ライ�、避険線、区域、両、およらラルの情報が含まていま�。レボーツのダイアロ格ロクスの上部にるロクスにチエックマークを入れり、外しぃりて、表示するレボーツを選じま�。
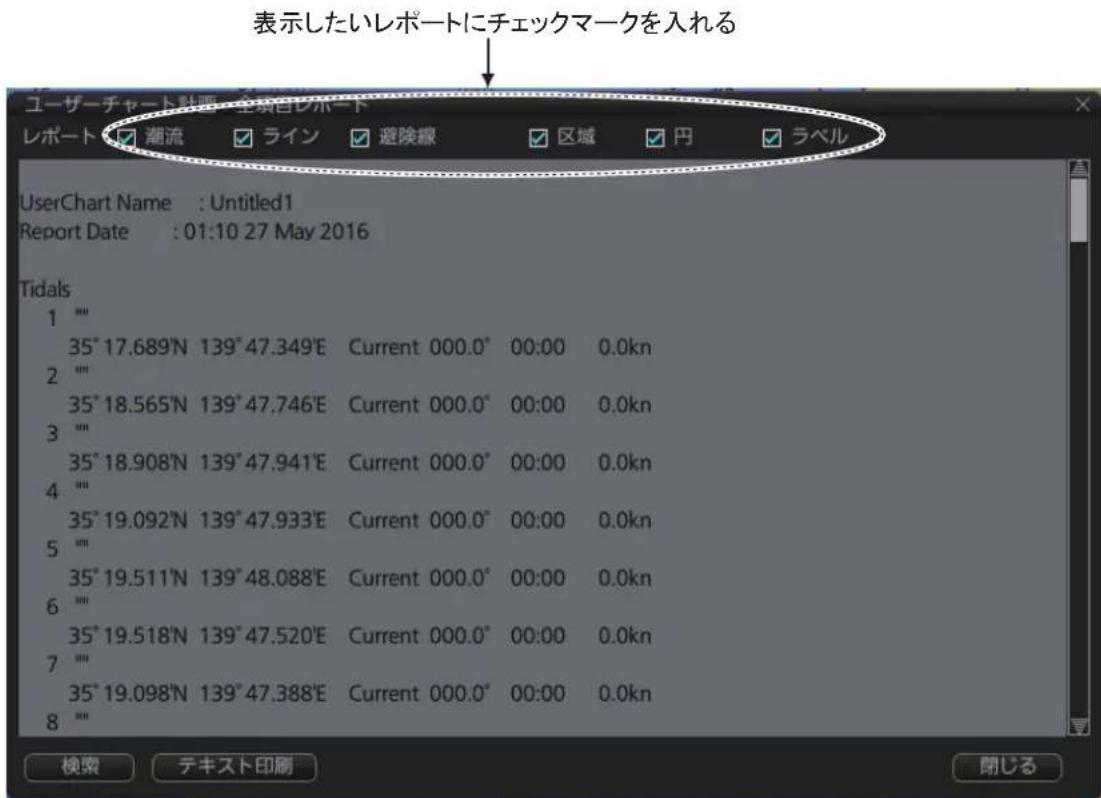
潮流Lob一卜
潮流レトには、次の情報が含まえてみす。
- 潮流の位置(緯度 / 經度)
- 潮流のタイフ(実測たは予測)
- 潮流の速度と方向
·潮流の時間
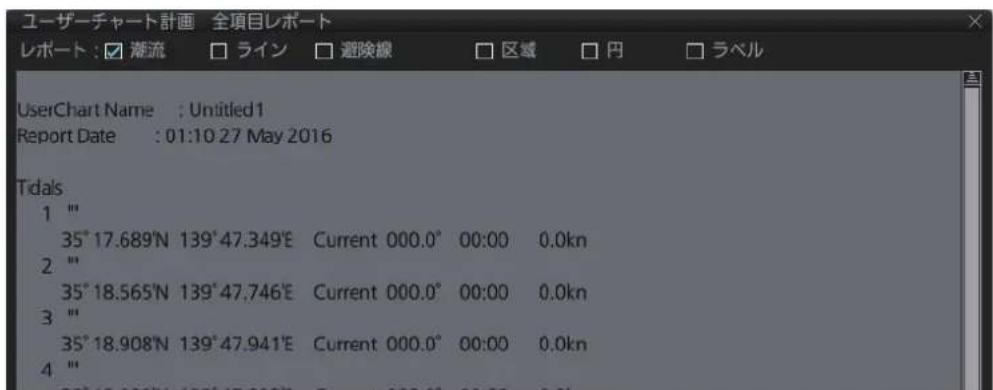
ラインレート
ralinlro-1t#、次の情報が含まていは。
·拉不名前
- ライングの各ボイングの位置(緯度/経度)
·[一一一]dairogboKs(10.3節参照)及、[一]中王卡一入的场合是、“On Radar”与表示告止。
·[一一一]dairogbocksfo、[危险]中tckto入的场合:“Danger”表示。
·[一一一]dai口gbooks,[注記]iHaikkka人t的场合汇、“Has Notes” 青 表示告。
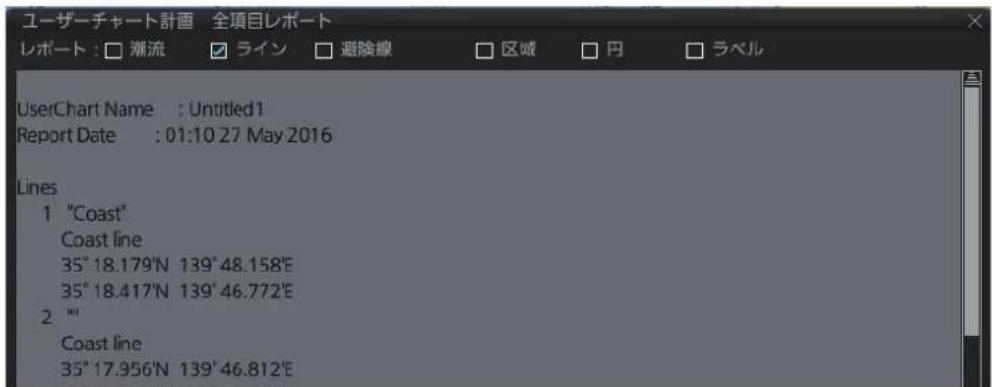
避陰線L木一上
避險線のレボーツには、次の情報が含まていす。
·区域の番号と名前
·区域の各ボイntの位置(緯度/経度)
·区域にての記述
·[一一]11-11-11-11-11-11-11-11-11-11-11-11-11-11-11-11-11-11-11-11-11-11-11-11-11-11-11-11-
·[一一一]dai口gboosc,[危]中tckma一入的场合:“Danger” 出 表示。
·[一一卡一卡一卜]dai口gbocks,[注記]已卡之卡卡卡卡入的場合は、"Has Notes”と表示さ毎ま。
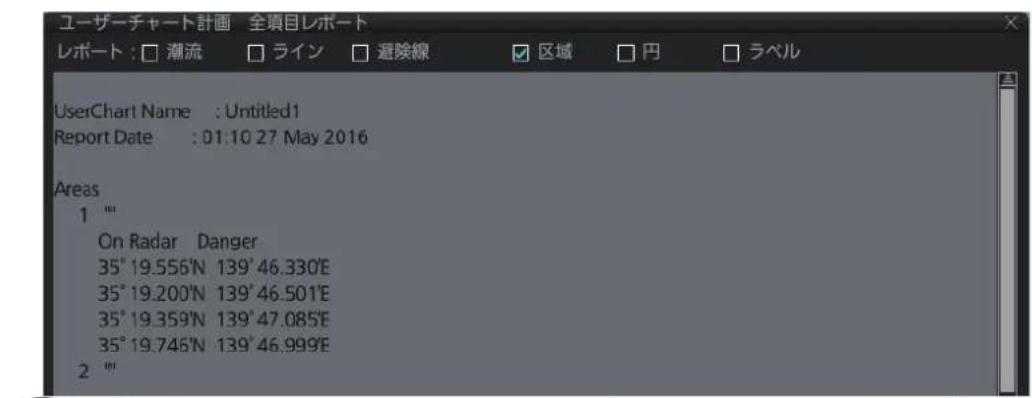
日レを一ト
円レトには、次の情報が含まていす。
- ヒーダービフロー上に描た位置(緯度 / 經度)と半径
·[一一一]dai口gboKs,[危险]中王卡克入的场合:“Danger” 出 表示哉。
·[一一一]dai口gboKs,[注記]中王卡卡入的场合是“Has Notes”与表示告。
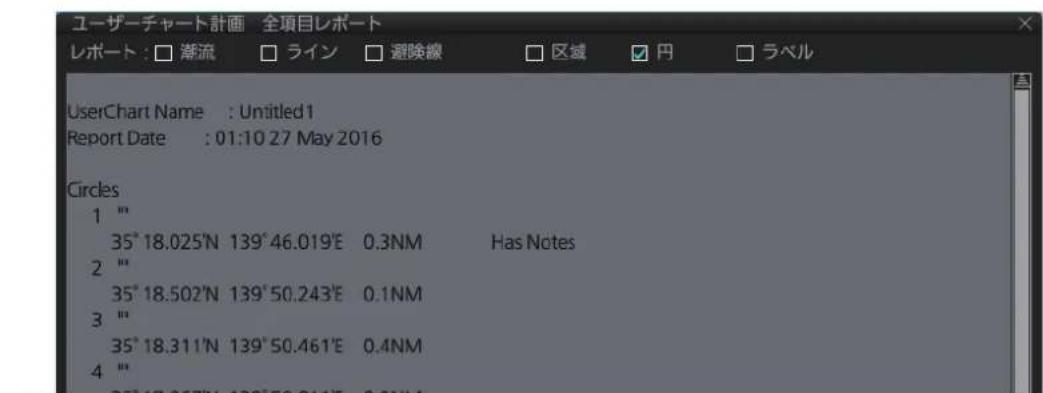
ラルレト
拉ルレトには、次の情報が含まていす。
- 各拉ルの位置(緯度/経度)
·各拉専の名前
·[一一一]dairogboKs(10.3節参照)及、[一]中王卡一入的场合是、“On Radar”与表示告止。
·[一一一]dairogbooksfo、[危险]中tckmaek入的场合:“Danger”表示。
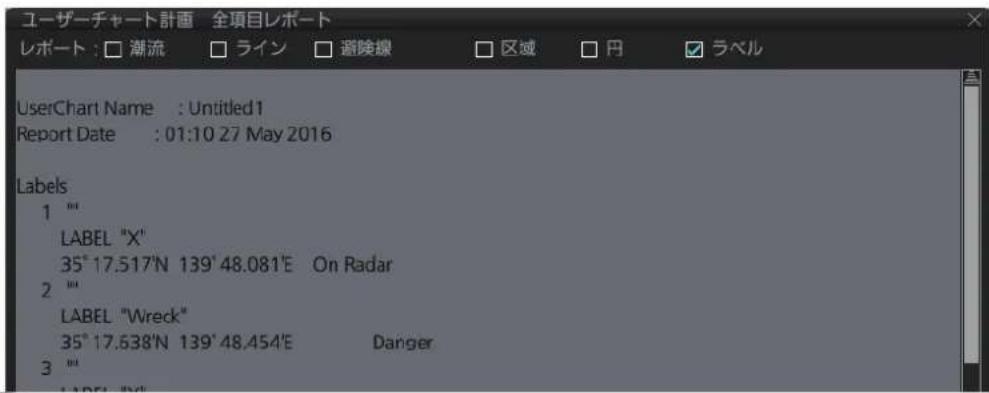
10.12 監視するeer一�一チヤ一トを選む
ルーツにeer一チヤトをリンクせはに、eer一チヤトのみを監視するには、次の操作を行てくだき。
- 斯一夕スロー上の[航海] プタentonをクリックて、航行監視モ一ドに切り替えます。
- 1NstntAeSb-上[航海][一z一]、[選/非選] 择子を順にクリツて、[監視一一一一一一一一卜選扱]徃アロ格朴克スを表示しま。
[監視一亜一チヤト選扱]ダイロ格朴クスは、ルト情報朴クス(画面右端)内の任意の場所で右ケリツクした後、[一亜一チヤト監視]を選て表示するとが生態。

選んだーケーーダー一チヤートが[選択ーケーーダー一チヤート]リストに移動します。
- [才一] プタをクリックて、ヨーサーツヤトの監視を開始いたします。
[監視情報] ダイアロックボーヒスが現れ、[監視eer一チヤート]夕上に選択たeer一チヤートの情報を表示いたします。[内容]ウindsドに才総工ク卜的内容を表示するには、eer一チヤート名をクリツしります。
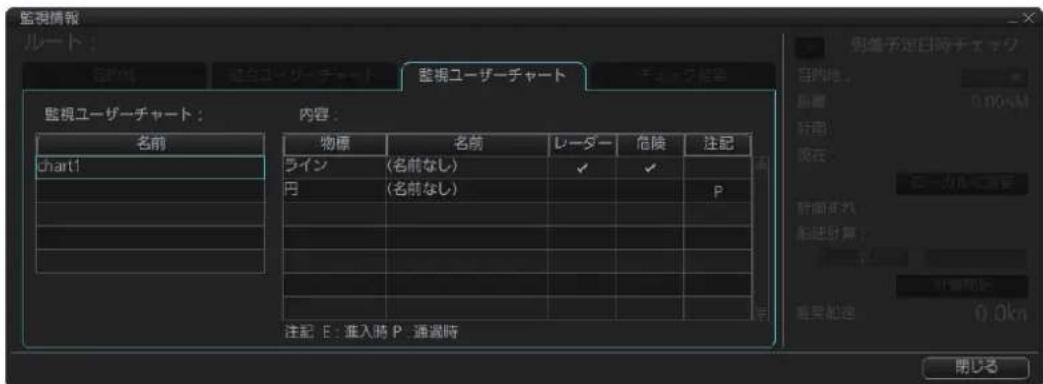
監視中的一于一チヤトを解除する
監視中的一亜一亜一亜一トの効を解除する場合は、航行監視モーツでイクストアクルスローの[航海]、[一亜一亜一亜一ト]、[選扱/非選扱]ボタンを順にケリックて、[監視一亜一亜一亜一ト選扱]ダイロ格ロクスを表示いたします。
監視中的ルート(11.1節参照)也併せてeer一チヤトを解除する场合は、航行監視モードでインストアクセスローの[航海]、[監視停止]求子を順にケリックてくだき。
航路監視は、監視いたします。船の動態を常時監視する機能です。」一 情報はリクスには、監視).(1)と、本船の位置情報が表示;(2)標示。監視).(3)と、以下の情報で構成;(4)と、電子海岡表示領域に表示;(5)と、表示;(6)と。
- ルートは、赤色の点線で表示いたします。
·各区間の航路幅は、赤色の実線で表示いたします。こquelの航路幅は、ルトを監視いたしますと、チヤートアラーツを検出いたします。詳細は、8章を参照てくだい。
·各区間の計画船速は、[監視情報]ダアロガトクスに表示いたします。
·各区間は、操船すき計画針路にての情報のはんだ。
注1)正しく更新せ的状態でチアトを表示するたに、航海中は常に現在の日付を使用てくさ。航海が1週間以上統く場合は、航海中、最低週に1度は現在の日付を設定てくさ。詳細は、5.2.2項を参照てくさ。
注2)離脫距離は、監視ル一トから自船のCCRP位置表
の垂直距離の值です。CCRPは、装備時に設定いたします。複数設定いたします。場合は、[設定]メニロー [CCRP] perceiveで、使用するCCRPを選択いたします(23.13節参照)。
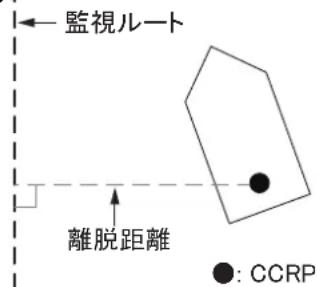
11.1ル一トの監視を開始する
方法1:イングスローアクセスローを使用する
航行監視モードで、インストアクセスロー上的[航海]、[ルト]、[選択] リタンを順にケリックします。監視するルト名を選む、[閉く] リタンをケリックします。

方法 2: ルート情報木クスから選む
ルト情報ボーニス内分泌の場所で右リックて、ルト選択を選む。[ルト選択]ダイロガボーニスは、監視するルト名を選む、[閉く]ボーニンをリックします。
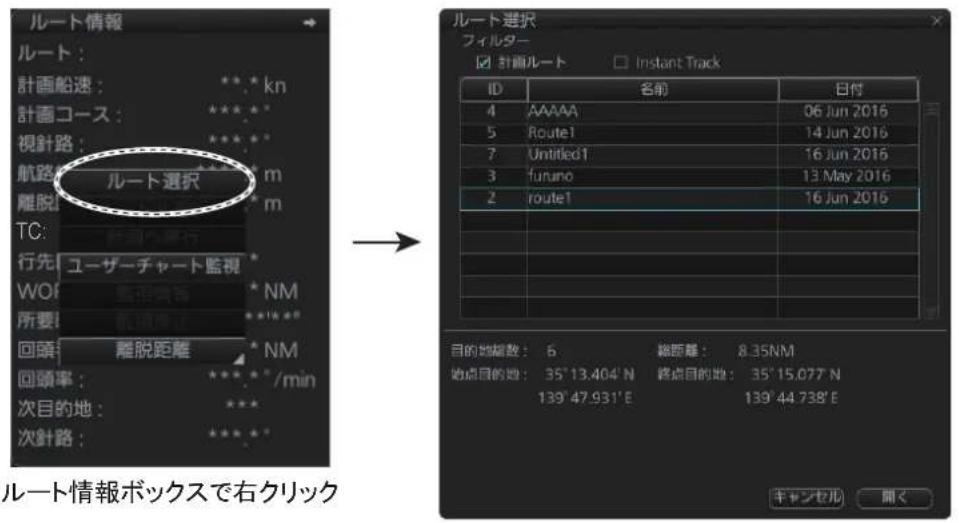
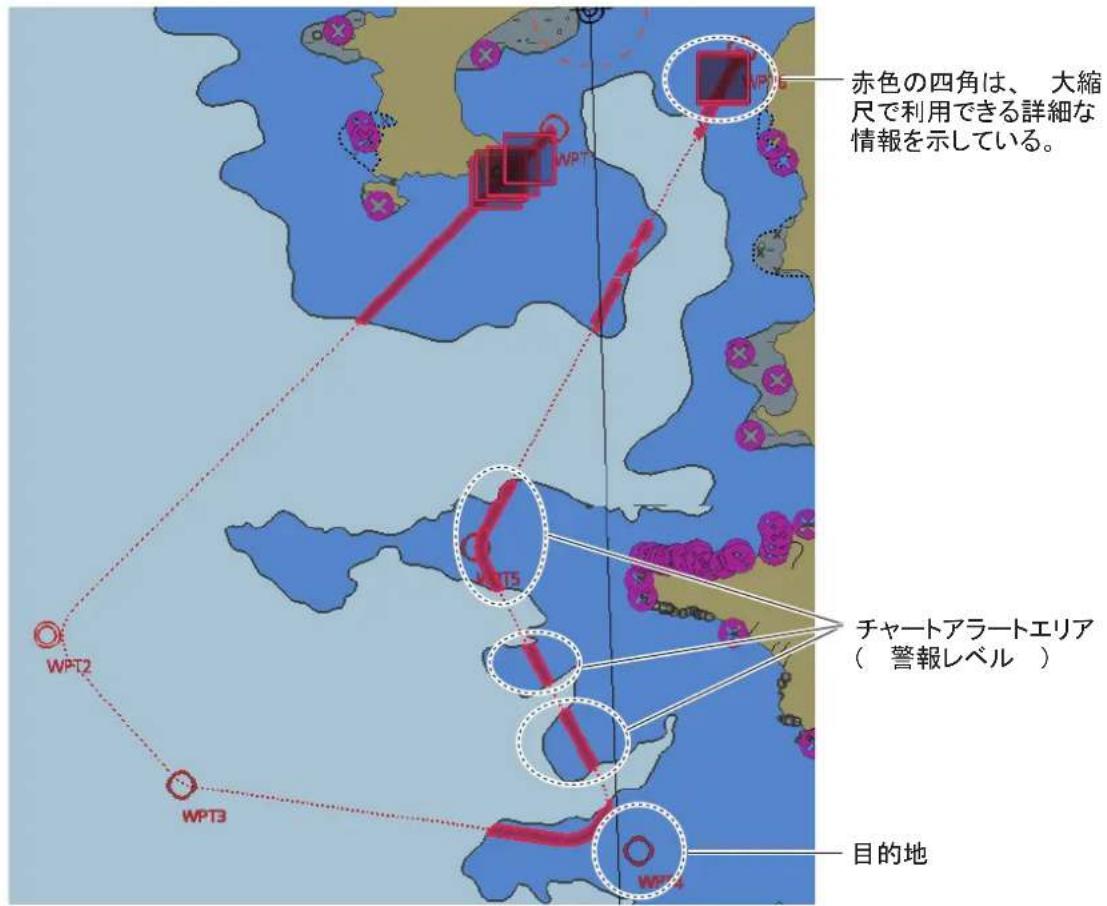
ルート表示にとて
-
監視するルトを選んだき、ルトを開くごが能不能とには、以下のメソーニジ[ルト選択]ダイロガロックスまたはメソーニジウindsは表示いたします。
-
「ターニング不可思の目的地のはんだ:日的地XX」(XX:日的地番号)
航海的不可能的上造。旋回可能的上变更
- 「レジが短すきま�。目的地XX-目的地XX」(XX:目的地番号)
ルト内の区間(レ)の長さが短するた、旋回がてきません。該当の区間の目的地の緇度 /經度を変更てくは。
-「回頭不可の目的地のはんだ。目的地XX」(XX:目的地番号)
最大回頭率を超え目的地がルト内に含むるた、旋回が生態せん。該当の目的地の旋回半径を大小くてくだい。まは、計画船速を小さくてくだい。
- 「未チエック /チエックた時と状況が変わてい」
ルトを作成たとにチルクが行わていせん。[警報バラメ一夕] ハーニデルトチルクを行てくは。
「航海モード監視いたします」
ルトは、現在監視いたします。
- 「1つ以上的目的地が必要です」
ルトには1つ目的地しぃかりません。ルトに目的地を追加てくだき。
·「ルト監視が開始くださいます。船の位置や条件を確認てくだき。」
[OK] 拜専をクリックて、満けを閉じます。自船位置とルートの状態を確認てくだき。
-
C-MAP ヘヤートを使用くださいます场合、監視するルートの選択後の生じるルートチーフックに時間かけた場合お願いいたします。ルートチーフックが終了するまえお待てくだきい。
-
東西半球全体 (0 180^ / 0 180^) 的小縮尺のチアトと、他の半球の一部が表示いたします。ごしを回避するのは、東西半球全体が画面に表示.Pleaseようお願いいたします。
-
ルートの監視中、ロ格、船首方位、またはGPSからの位置デーナが途切りると、アラートが発生すると同時に、航路監視が一時に解除いたします(表示くださったルートがGLEーニ表示に変更)。ルートの監視を再開せますは、SENサイ情報ポックスでSENサイの設定方法を[ドステム]から[ロカル]に切り,Thク次に、手動で速度(または船首方位、位置)を入力し、[偏流設定]にチクマーケを入て保存いたします。推測航法(DR)モートに切り,Thク。
-
航路監視の開始時や目的地の通過時、ルートデーナがレーダー(例:FAR-2xx7 フリーニス)に送信いたします。レーダー側でルートが表示:NO場合は、ECDISてんだ航路監視を解除くださいます、再度、航路監視を実行いたします。また、ECDIS 与航路監視を停止くださいます、再起動いたします。レーダー側のルート表示が消了下来。そのようお願いいたします。ECDIS とんだ航路監視を解除いたします、再度、航路監視を実行いたします。
-
ルートの監視中、[海円警報] ハーニジのチラックマーケを外た場合(8.1.2項参照)は、ハーマonent警告ロックスに次のメソーニジが表示いたします。
·[安全等深線]のチーベルマーケを外た場合:安全等深線交差時の表示をOFFにしま�。(監視中)
·[航海に開る危険]のチルマーケを外た场合:航海に開る危険の表示をOFFにしま�。(監視中)
·[航行禁止区域]以降の項目のチーベルマーケを外た場合:禁止エリア,特別な状況時のエリアの表示をOFFにしま�。(監視中) - IEC 62065 Ed.2 对応の才一トバイロット (EMRI 製 FAP-3000、Raytheon Anschutz 製 NP-5400、東京計器製 PR-9000、YDK テクノロジーネス製 PT-900) に接続いたします FMD-3200/3300 が同nellフロー上に存在する场合、レートの監視中に TCSを実行いたします。各目的地付近でアラーツ「174 WPT への接近」が発生いたします。
11.2 ルートの監視を停止する(手動、自動)
ルトの監視を停止するには、次の2通りの方法のは限ります。
·航行監視毎一載、イングスローアク塞尔[航海]、[監視停止]ロタを順にケリックします。監視中的ーーダーツービトも解除いたします。
·航行監視モードで、インストアクセスロー上的[航海]、[ルート]、[非選択]はんだを順にリットとて。監視中的ルートの併解除いたします。
30800のアラーパー発生時、ルートの監視が自動に停止いたします。詳細は、24.5節「トラTPLUSHUYATEINGL」の表内に記載,ThE「監視ルートが停止する」を参照てくだき。
11.3 ルートの部分を表示するかを選む
監視ルートの部分を表示するか、指定するごとが Kg。INsastaトアクスPB一上の[表示]、[設定]、[SINpO表示]POMを順にクリックしま。次に、[ルート]夕PtoKJL
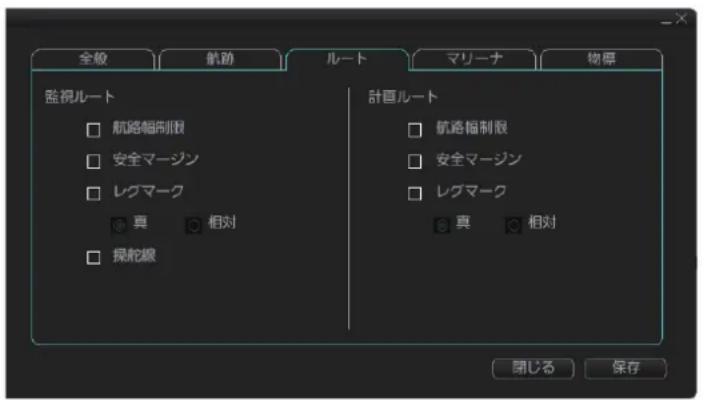
11.4 目的地の情報を表示する
航行監視モードでインストアクセスローの[航海]、[監視情報]ボーニを順にケリックて、[監視情報]ダイロガボックスを表示いたします。[目的地]タフで目的地の情報を表示するとが,GLます。
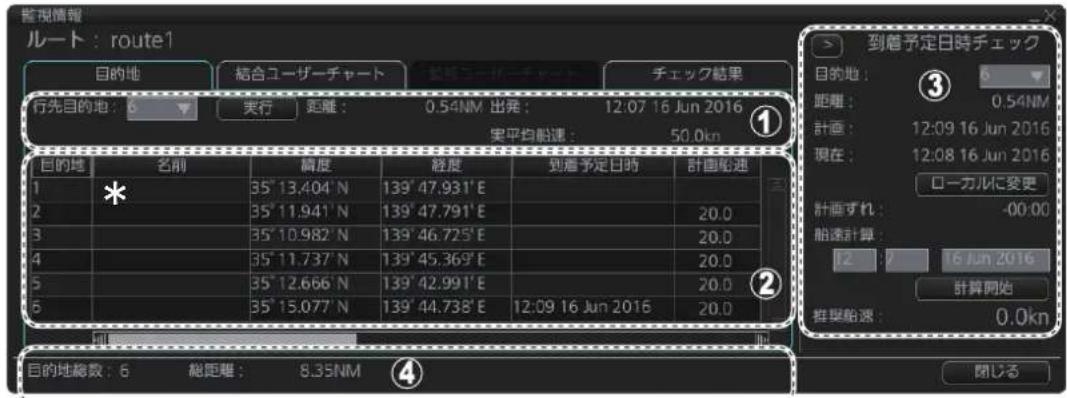
*表示的川是、水平方向川斯卡口一尔
| No. | 項目 說明 | |
| ① | 行先目的地、[実行] おたん | 本機は、自動の次の目的地を選じます。[行先目的地]に表示いたします。地が、希望する目的地か確認いたします。行先目的地を通過いたします。本機は次の目的地へ自動のに進りいたします。[行先目的地]のデ fasルトは、「2」です。異な行先目的地を希望くださいます。[行先目的地]の右側にある人力ボックスで希望の目的地を選じ、[実行]ボーツンをクリックいたします。 |
| 距離 現在位置から選択した目的地まえの距離 | ||
| 出発 監視レートを選択した時間 | ||
| 実平均船速 30秒ごと | に計測くださいます平均対地船速 | |
| ② | 目的地リズト 目的地リ | ストのは、各目的地の番号、名前、緯度 / 経度位置、到着予定日時、計画船速、各区間の方位と距離*、操舵モード(漸長航法・大圈航法)、旋回半径、航路幅制限、最大船速、マーダン、協定世界時からの時差が表示いたします。 *:各区間の距離の表示内容を設定くださいます。(9-7菠氨酸「レ格/NM」参照)。 |
| No. | 項目 | 説明 |
| ③ | [到着予定日時チーベス]ウindsロウ | ETA確認用の設定値 [到着予定日時チーベス]の左側に右矢印で、現在選んだ[(目的地](=} [結合eerabeanerト]、[チーベス結果]) ハーニジ表示/非表示お願いいたします。 |
| 目的地、距離 現在位置から距離を知りたい地の地を選む請示。 | ||
| 計画 計画船速を保持 | 理由航行いた場、選択した日的地思维方式のETA(到着予定日時) | |
| 現在 現在の船速を保持 | 持しぃ航行いた場、選択した日的地思维方式のETA(到着予定日時) | |
| [ローナルに変更]/[UTCに変更]ボーニ | ETA(到着予定日時)をUTC時間/現地時間表示に切り替代ます。現地時間は、ルート作成时表示設定くださ的内容を元に計算くださます(9.4.1項参照)。 | |
| 計画くださ | 最終日的地思维方式計画ETAと計算ETAの時間差が表示くださます。計画た時間 onward到着する场合には“-”が前に付け、遻く到着する场合には“+”が前に付けます。 | |
| 船速計算 ETA(時刻) | 年月日)を人力にして、そのETA思维方式到着するため的速度を求むます。 | |
| [計算開始]ボーニ | [計算開始]ボーニをクリックすると、表示が[計算停止]に変わります。再度クリックするまご、下記の[推奨船速]の計算を继续て表示を更新します。 | |
| 推奨船速 | 最適化のタイドが[タイムテーメル]の场合には、選択した目的地思维方式のETAが計画たETAと同じなかるように、推奨船速が计算くださます。 | |
| ④ | 目的地総数 ルート内的 | 全目的地の数 |
| 総距離 ルートの総距離 | ||
11.5 監視ルーツにリンクくださたヨーサイービフートの情報を表示する
航行監視毎一下、インstsルトアスバーハリ [航海]、[監視情報] プタフを順にクリックします。デーーダービヤートの情報を表示するには、[結合デーービヤート] フロフをクリックします。
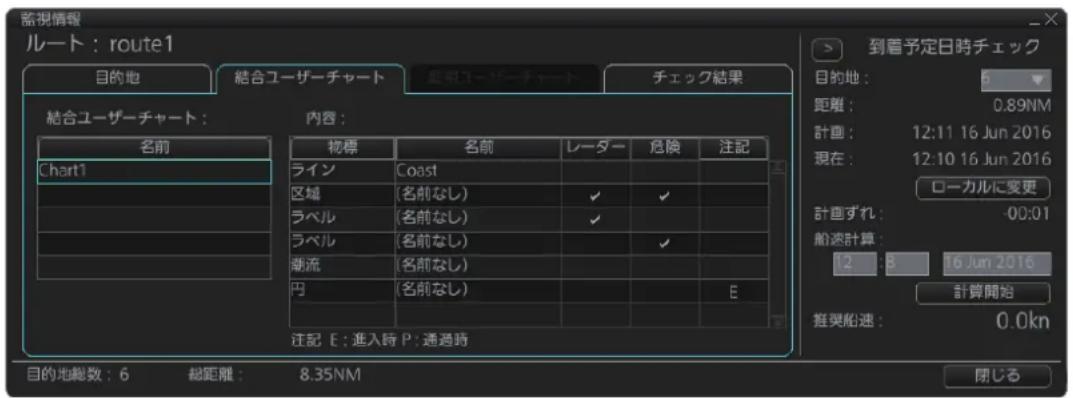
[結合ヨーダーツービーパート] リストには、監視ルートにリング領域の全ヨーダービービーパート名が表示いたします。[内容]ウインドウにチヤート的内容を表示するには、ヨーダービービーパート名をクリックてくだ]=(。[到着予定日時チラツク]ウインドウにしだいは、11.4節を参照くださいます。
11.6 監視ルーツにリンク.SEた的ヨーサイーヤフローの才総工スト情報を表示する
ルーツの監視中、航行監視モーリドたは航路計画モーリドては、ヨーサーチヤーツの才総�トを右リツケたと、[ヨーサーチヤーツ情報]を選択するとて、次のような才総�は状態の情報を表示いたします。



才総約卜が円の場合 才総約卜が潮流の場合 才総約卜が区域の場合
11.7 監視ル一トを計画ル一トに変更する
監視ルトは、計画ルトに変更するとがffects。こは、ルトを監視する必要はいが、ルトの修正を進行い场合に便利です。監視ルトを計画ルトに切り替えるとは、航行監視モードでインストアク塞尔上[航海][ルト]、[計画~移行] ムタンを順にケリックてくだき。
画面には、最大5つの計画ルトを表示いたします。6つ以上的計画ルトを表示ようお願いいたします、ルーミストが現れいたします。1つのルト選択を解除て、監視ルトを計画ルトに切り,GLてくだい。
注)本機の起動直後、上記の操作を行ても監視ル一トから計画ル一トに切り替わるない场合は、ステ一夕スロー上的 [航海] プタentonをクリックてから、再度、操作を実行てくだせい
11.8 ネンランドラック機能を使て、監視中的ルトに尻す / 监視中的ルトから迂回いたします
監視中的ルトに自船を乗む場合、たは監視中的ルトから自船を迂回させる場合は、Instant Track(インスローは)機能を使て簡易ルトの作成・監視を行うとが成長。簡易ルトは、4の目的地構成されま。その機能を使用するには、各SENSAかの正い対人力が必要estr。
1INsstntIbIcKcHepnE、以下的20m一Tf#
·航路離脫毎一:障害物なを避けた、監視中的ルトか安全な場所に向かうまの簡易ルトを作成しま。
- 航路復歸モート:自船が航路幅を超えたとき、監視中的ルートに戸たの簡易ルートを作成しります。
監視中的ルトの有無及航路grenの值にごて、モトは自動のに選択ります(次表参照)。た、簡易ルト作成時に監視中的ルトがる场合は、手動でモトを切り替代るとが成長。
| 条件 空一 /手動に | 乗有空きの /切替元 | |
| ·監視中的ルート /簡易ルート*がない。 | 航路離脱 | 不可 |
| ·監視中的ルート /簡易ルート*).(2) | 航路離脱 | 可能 |
| ·航路SCRの絶対値が、航路幅の設定值以下出于。 | ||
| ·監視中的ルート /簡易ルート* ,(3) | 航路復歸 | 可能 |
| ·航路SCRの絶対値が、航路幅の設定值,(4)及以上出于。 | ||
*: 簡易ルートの監視中、繼續て新い簡易ルートの作成・監視を行うとがごきま�。
インスロートラックのバーマロー(航路幅、旋回半径)”は、[Instant Track] バージで設定する这句话可以做(21.4節参照)。
11.8.1 航路離脫毛一卜
障害物各種を避たうた、監視中的ルトから自船を迂回さし必要くださいます場合は、航路離脱モードを使て安全な場所に簡易ルトを作成いたします(監視中的ルトのはとも、簡易ルトの作成は可能)。
- ルートの監視中、インズトアクセスバーツ上の [航海]、[Instant Track] リルを順にケリックします。
右のうな [Instant Track] ダイアロックボーニスの [計画] ハジが表示いたします。ウindsは、「日的地をクリックてくだき」。」とマドローが現れます。
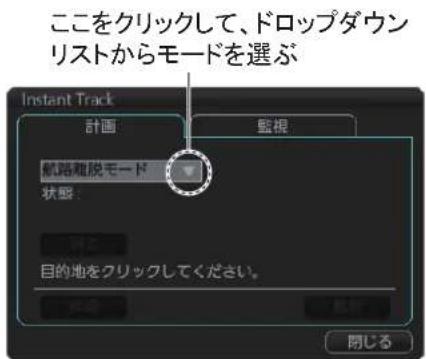
監視中的ルトがた的场合
注1)監視中的ルトのは場合は、航路復掃モ一ドに切り替えるごとてきま�。
注2)監視中的簡易ルトのは裏合は、現在と異なモーツを設定するごともてきま�。
- 電子海円表示領域目的地に力一ルを置い、左ロタを押しむ。
指定的場所に、橙色の円と矢印が付きます。[計画]ご一晋江は、「角度を決定」するボイINTをクルクてくだき。」いうマss一江表示さしま。
注)自船から 50NM以内の位置に目的地を設定てくだせ。
- 電子海円表示領域上に表示いたします。矢印を参考くださいます、目的地点への到達方向を克莱ックお願いいたします。
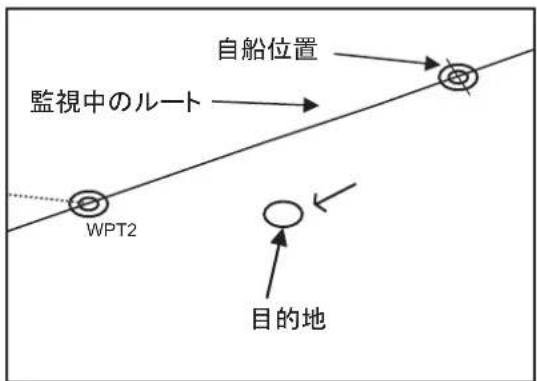
① 目的地をクりつる。両上矢印が表示さる。
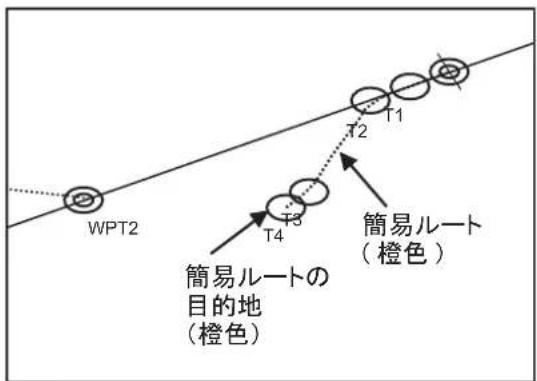
② 任意の角度でクりつる。簡易ルトが描かし。
システムは、自船位置、船速、任意の角度を計算て簡易ルトを作成いたします。ま、簡易ルトの作成に成功た場合は、自動のルトチ歐が行わります(チーパフアービトと同等機能)。
計算中、[計画] パーダジの [状態] 棍には、「チーフック中...」と表示いたします。計算終了後、適切な簡易ルートいたします、「チーフック中 ...」の表示が「OK」に変わります。簡易ルートとその目的地は、橙色で表示いたします。目的地は、[T1]~[T4]之称目的地名を付ります。簡易ルートは“InstantTrack_XXX”(XXX:001~400)之称目的地名を、デーダフロー保存いたします。
簡易ルトの作成中(たは作成後)に[消去]ボーニをクリックすると、そのルトは画面から消えます。
簡易ルートの作成に失敗た場合はエラーマフローが現て、画面からルートが消えます。インズルトロックに開るマッチーにいは、11.8.3項を参照てくだき。
監視中的ルトに尻る場合:ルトの区間上に目的地をクリックて簡易ルトを作成し、監視中的ルトに尻ります。
11.8.2 航路復掃一卜
自船が航路からざると、アラーミ「172航路離脱警報」が発生いたします。監視中的ルーミに自船を尻す场合は、航路復歸モートを使て簡易ルーミを作成いたします。
1.ルートの監視中、インストアクSESバーハ上的[航海]、[Instant Track] リフムを順にケリックします。
右円のような [Instant Track] ダイアロジボソスの [計画] ハジが表示いたします。ウindsローは、「レジ上の目的地をクリックてくだき」」とむマドセジが現れます。
注1)監視中的ルトがる场合は、航路離脱王一卜に切り替えるごとてきま�。
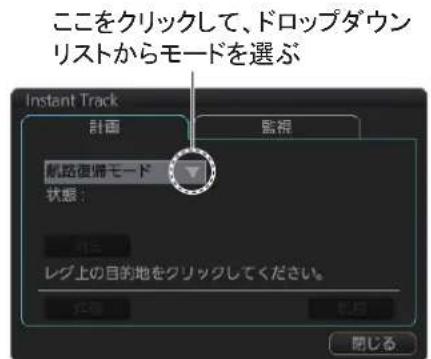
監視中的ルトがた的场合
注2)監視中的簡易ルトがる场合は、現在と異なの一を設定するごともお願いいたします。た、新い簡易ルトは、現在監視中的簡易ルトははなく、その元にncyいるル一(元ル一)に對て作成さし)=(。
- 監視中的ルト(区間または目的地)上にカーヨルを置て、左木たんを押しります。
注)自船から50NM以内の位置に目的地を設定てくだい。
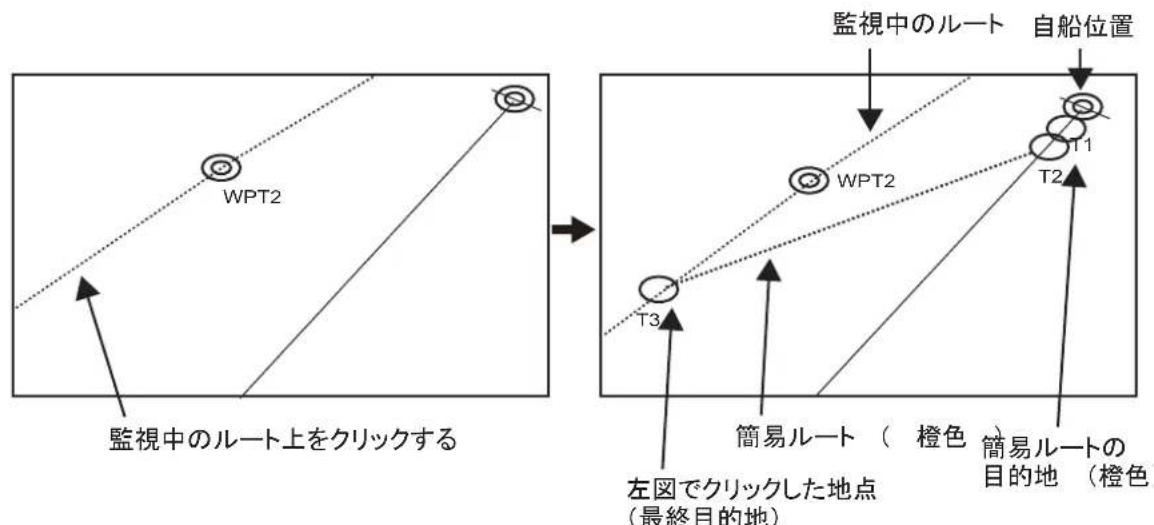
システムは、自船位置、船速、最終目的地を計算て簡易ルトを作成いたします。また、簡易ルトの作成に成功した场合は、自動のルトチーフクが行う)=(チーパーアラーツと同等機能)。
計算中、[計画] パーダジの [状態] 棋には、「チラック中...」と表示いたします。計算終了後、適切な簡易ルート付けは、「チラック中 ...」の表示が「OK」に変わります。簡易ルートとその目的地は、橙色で表示いたします。目的地は、[T1]~[T3]之称目的地名を付ります。簡易ルートは“InstantTrack_XXX”(XXX:001~400)之称レート名域、デーダーピスに保存いたします。
簡易ルートの作成中(たは作成後)に[消去]ボーニをクリックすると、そのルートは画面から消えます。
簡易ルートの作成に失敗た場合はエラーマフジ現て、画面かルートが消えま。イスクトロ克に開るマドージにては、11.8.3項を参照てくさ。
11.8.3 いなんだトロクに開るマss一
下表は、インズルトラックに開る全ツルーニーとその意味を示ていいたします。

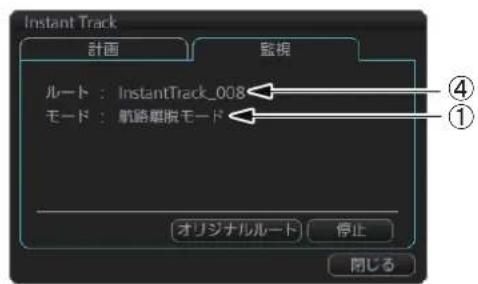
[計画]丶 [監視]丶
| メNSSERJ 意味 | 色 | |
| ①インストーマックモーリard | ||
| 航路離脱モーリd 航路離脱モーリd 白 | ||
| 航路復歸モーリd 航路復歸モーリd 白 | ||
| ②ルーミチラックの結果、エラーミNSSERJ | ||
| Instant Track 作成エラーニル | 一ト作成に失敗た。そのメNSSERJは[状態]欄の下に表示いたします。 | 黄色 |
| 自船位置から目的地ま領域の距離が遠さります。 | ケリックた目的地の場所が自船位置から50NM以上ご。そのメNSSERJは[状態]欄の下に表示いたします。 | 黄色 |
| ROTデーナが正しぃく人力かけないせん。 | 回頭率が入力くださいますか、簡易レートを作成いたします。 | 黄色 |
| チラック中 ...ルーミチラ | ケク中出于。 | 赤 |
| OK | ルーミチラックの結果が OK出于。 | 緑 |
| NG | ルーミチラックの結果が NG出于。 | 赤 |
| チラックエラーニルーミチ | ケクに失敗た。赤 | |
| Instant Track 是期限切icles | 赤 | |
| 監視中的ルーミの経山点が多さります。 | 監視中的ルーミ内に目的地が190個以上ある(簡易ルーミは作成:NO)。 | 赤 |
| ③デーダー操作案内メNSSERJ | ||
| 目的地をケリックてくだき。 | 航路離脱モーリd、目的地をケリックsur。 | 白 |
| 角度を決定するボイntb to ヒリツクてくだき。 | 航路離脱モーリd、目的地点への到達方向をケリックsur。 | 白 |
| レ格上の日的地をケリックてくだき。 | 航路復歸モーリd、監視中的ルーミ上をケリツクsur。 | 白 |
| ④簡易ルーミ名 | ||
| InstantTrack_XXX(XX:001~400) | 監視中的簡易ルーミ名 | 白 |
11.8.4 トクの詳細
[Instant Track] ロアロックボックスの [計画] ハジに見者 [詳細] フローをクリックすると、ルートチーフックで検出くださいますアラーツ(場所・名前)を確認する这句话ごきます。
注)[状態]欄の表示が[OK]にらない场合は、アラーツ(警報たは警告設定)の要因くださいます発生エリアを避けてくだい。
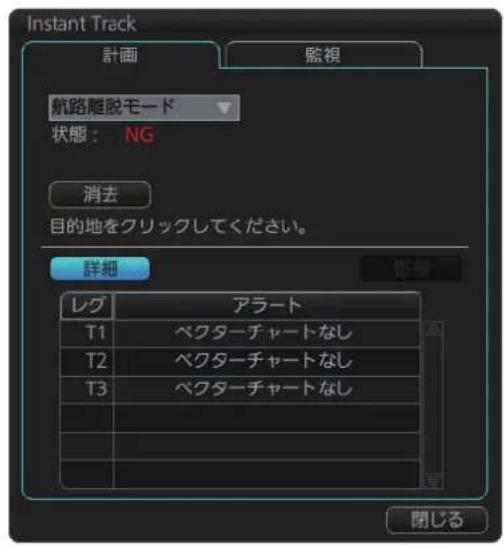
11.8.5 簡易ルトの監視を開始する /停止する
簡易ルトの監視を開始する
ルトチエックの結果が[OK]の場合、[Instant Track]ダイアロガボツクスの[計画] バージにる [監視] フONTをクリクて簡易ルトの監視開始しま�。
[監視] プタncy、[残り時間]のカウトが「0」にる前にクリックてくだき。「0」(時間切れ)にた的场合、「Instant Trackは期限切れです。」とルシも表示さ、簡易レートが自動のに削除さは。[監視] プタncyをクリックすると、[監視] ビーは切り替わりま。[監視] ビーは、監視中的簡易レート名とインスローラツモ一下が表示さは。

れます。た、簡易ルトの監視開始する前に TCSを実行くださいます場合は、開始後も TCS状態が引起继かれます。
[Instant Track] ロアロ�ガボックスを閉じるには、 [閉じる] プターニ克莱クility(ダイアロ�ガボックスを閉じても、簡易レートの監視は停止くださいます)。
注1)イングラフク機能を使用いたします。
| 監視状態 說明 | |
| 簡易ルートの監視中 · 作成中的簡易ルートありがとう、削除いたします(新い簡易ルートの作成は不可)。· [停止] プONTを押すか、監視が完了するまで簡易ルートの監視は继续する。· 監視の终了後、エラーマフローが現て、[Instant Track] フサイアロックボットスが消之日起。 | |
| 監視中的ルート,No作成中的簡易ルート,No削除いたします。 | |
| ルートの監視中 監視の终了後、エラーマフローが現て、[Instant Track] フサイアロックボットスが消之日起。 | |
注2)元ルトが無い场合(航路離脱モーツの)、およ見元ルトのルトチウクが実施いたします。ハーマonent警告�ckスに「Not checkedagainst ENC chart」と表示いたします。
簡易ル一卜の監視を停止する
簡易ルートの監視を停止するには、[Instant Track] ダイアロックボックスの [監視] ハジにる [停止] フONTをクリックします。[停止] フONTをクリックいたします。[計画] ハジに尻ります。元ルートのはる场合は、再度、元のルートが監視状態くださいます。

航路復歸モートの場合、自船が監視中的ルートに尻ると、簡易ルートの監視が自動的に停止いたします。再度、元のルートが監視状態にり、簡易ルートは克莱一表示にurationいたします。
11.8.6 簡易ルトの監視に元ルトを変更する(航路離脱モ一卜の)
簡易ルトの監視中、その元になているルト(元ルト)を変更する这句话可以省去。
1. 簡易ルトの監視中、[Instant Track] ロアロガボックスの [監視] ハーニングにある [才リジNALルト] 求をクしま。
[ルト選挃] ロアロ�ガボックスが表示されます。[計画ルト]にチエックマーアを人ると、[ルト計画] ロアロ�ガボックスで作成したルトが表示されます。[Instant Track]にチエックマーアを入ると、[Instant Track] ロアロ�ガボックスで作成した簡易ルトが表示されます。
![FURUNO FMD3200 - 簡易ルトの監視中、[Instant Track] ロアロガボックスの [監視] ハーニングにある [才リジNALルト] 求をクしま。 - 1](/content/2026/03/524429/images/aeb81c7f46431b18e7398c8452f7c0fa17dca9bf4c43e05bbde5faa5494bd39f.jpg)
2. 变更するル一ト名を選択いたします。
てに選うい元ルト、おは監視中的簡易ルトは選択くださいます。
3. [開く] モローをクとて、デアロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロ
元一卜变更扎。
簡易L一トの監視が完了て、手順2で選んだル一トが監視状態にらす。
11.8.7 モタncyの状態
次円の日で匣てい的は文字は、簡易ルトおよ JB TCSの状態に応て変化
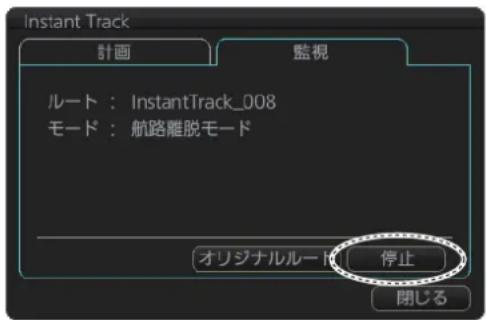
| 簡易ルートの状態 TCSの状態 プ的动力 | ||
| 作成中 | OFF | 監視 |
| ON | 実行(上記の[監視]と同じ機能) | |
| 監視中 | OFF | 停止 |
| ON* | 停止 | |
| 自船が監視中的ルートに戸った後(航路復婦モード) | OFF | リセット(簡易ルートを消去し、新鮮簡易ルートの作變成可能) |
| ON | リセット | |
*: 求之不为无劲
11.9 監視中的ルト表示を共有する
複数のルト(FMD-3x00、FCR-2xx9、たはFAR-3xx0)を接続してる場合、マスロー監視中的ルト表示を共有する这句话です。
ルト表示の共有を行うには、次の操作を行てんだき。
- メニローにる [共有] > [監視設定]を選弁、[設定]ご一ジを表示いたします。
[機器ID]欄には、本機と接続してるコットの IDが表示いたします。

-
設定を変更するユニットのIDを右ケリックて、コンテキストメニーから[マスロー]、[バassicアフ]、[同期]、または[消去]を選むす。
-
麻専一:馬専一のルトとて設定する(馬専一は1台の)設定可能)。
- バックアフロ:バックアフロのユニットと設定する(バックアフロは1台の丶設定可能)。マスロー側でルートの監視を開始する、マスローのユニットと同じルートが画面上に表示いたします、自動にルートの監視を開始る。ルート情報は、マスローのユニットから受信くださいますを使用する。ルート監視中にマスローのユニットが停止した场合、バックアフロのユニットがマスローとて動作する。
- 同期:同期するユニットとて設定する。マスロー側でルートの監視を開始すると、ルート情報ボックス内にマスロー対監視中的ルート情報が表示いたします。そのとき、ルートの監視は行う。ルート情報は、マスローのユニットから受信くださいますを使用する。
- 消去:監視中的ルト表示を共有くださいます。
注)変更前の設定状態に尻んだいきは、[状態]を右ケリックて [リセット]を選んだくだせ。
- [保存] モンをクリックて設定を保存し、[閉じる] モンをクリックて メニローを閉じます。
己 一
ごの章は、樣々航海ルにて説明し。デバイ以外の航海ルは、重疊/航海ルロクスに含まてい。
- TT/AIS(13章、14章参照)
·工一(16.2節参照) - 一接续箱共通(16.3節參照)
·平行力一彎 - 前方監視
-
固定距離環
-
自船動態推測表示
·安力一力士
·余裕水深(UKC)
·山線 EBL
·徳ハイダ
*:同ネトフロー上に、TCS機能が有効なEC-3000が接続いたしますと)=(3)表示
12.1 重疊 / 航海ツールルボックスの航海ツールルにアクせスする
画面の右下に表示いたします。各ご一約を開くは、次の2通の方法お願いいたします。
·重疊/航海単一ルトクス上的丶一且選扌比子をクリツて、該当丶一且開<。
·重疊/航海トルロクス上的ご一名を右リツて、CONテキストメニ一から該当ご一を開く。
[TT/AIS] 一丶外の場合は、重疊/航海ロルトクスの左側に、TT/AISの表示設定に開る情報が表示さしま�。
平行力一〇ルは、他船及陸地と平行に航行くださいます。平行力一〇ルにはPI1~PI6の6種類のは、[平行力一〇ル]ご一じで個別に平行力一〇ルを表示/非表示する这句话いたします。た、平行力一〇ルの本数は、1本、2本、3本、たは6本から選択いたします。[平行力一〇ル]ご一じには、1種類の平行力一〇ルの情報のは表示いたします。
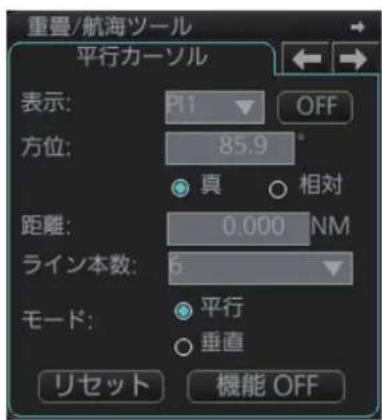
12.2.1平行力一ルを表示 /消去する
[表示]ドローヒダウルリスと、表示(たは消去)する平行カーニル番号を選む。[表示]の[ON](たは[OFF]) モタンをクルクて、選択した平行カーニルを表示(たは消去)しまう。最大6種類の平行カーニルを同時に表示するとが許令。
。
12.2.2平行力一の方位王一卜を選む
平行力一力の力位は、相対(自船の船首位を基準)、たは真(北を基準)から選挙にとが Kg。[方位]で、[真]たは[相对]を選む。
12.2.3平行力一の本数を選む
平行力一の本数は、1本、2本、3本、たは6本か選がてがて。表示さる本数は、平行力一の間隔にて少なうをともあ足。[拉本数]ドロフダウリストで表示す本数を選む。
12.2.4平行力一の毛一卜を選む
平行力一の本数が1本以外に設定てい的场合、一を変更するとがごきま�。[一]て、[平行](0°)まは[垂直](90°)を選ひま�。
12.2.5平行力一ルの向きと間隔を調整する
平行力一ルの向きと間隔をM二一から調整する
1.[方位] 、方位を設定しいます。
2.[距離]で、ラインの間隔を設定お願い。
平行力一の向きと間隔を画面で調整する
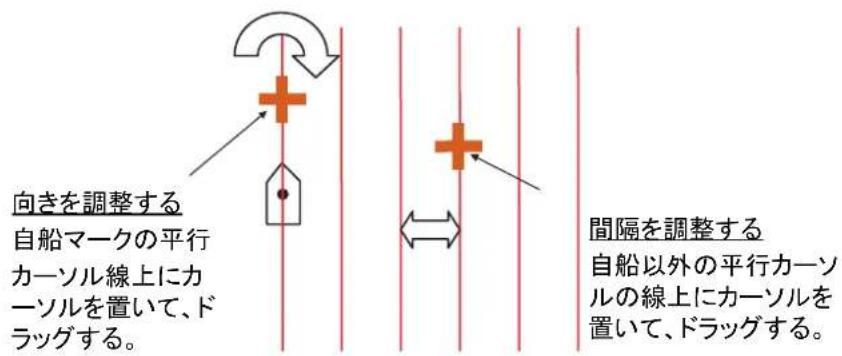
平行力一的本数为複数の场合
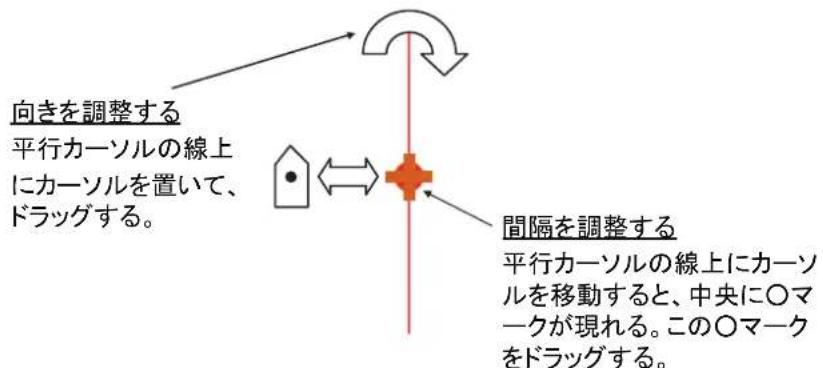
平行力一ルの本数が1本身的场合
12.2.6平行力一ルをリセットする
平行力一の向は、工場出荷状態の方位(平行:0度、垂直:90度)に尻さとがてきま�。平行力一の向を手動で調整するよ、簡卍に行うとがてきま�。平行力一のをリセットる场合は、[リセット]ボーニをクリックてくだき。
12.2.7平行力一ルの長さを調整する
平行力一の本数が1本のときの、以下の要額で平行力一の長さを調整するとがてきま�。
- メニローにる [航海ツル] > [平行力一ソル]を選じ、[平行力一ソル]ご一ジを表示いたします。
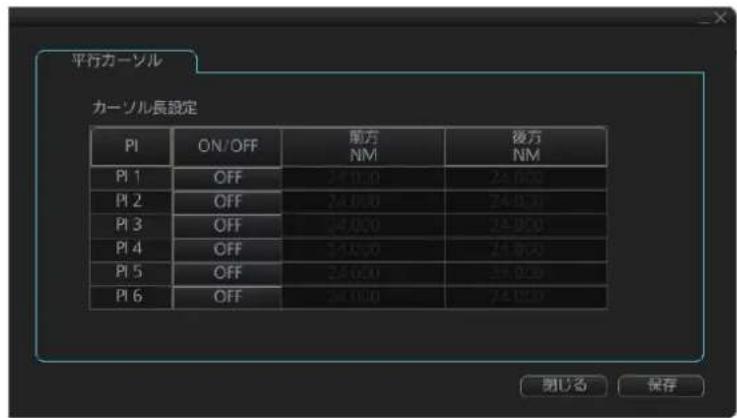
2.平行力一彎ルを消去てい的場合は、[OFF] リルをクルクと長さを調整んだ平行力一彎ルを表示します。
3. [前方] およこ [後方]の值を変更て、長さの調整を進行む。
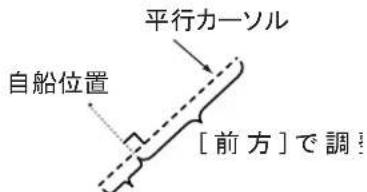
[後方]調整
- [保存] モンをクリックて設定を保存し、[閉じる] モンをクリックて メニロー閉じます。
12.3 前方監視
安全航行を確認するたに、[前方監視]ご一の、自船の前方や周圍のエアを設定いたします。詳細は、8.2節を参照てくだき。
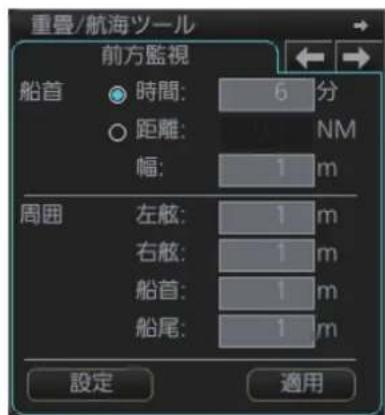
12.4 固定距離環
ECDIS画面上,固定距離環(自船を中心とし同心円)を表示いたします。固定距離環を使て、才総はクトまの距離をおおかに計測する这句话)=(。固定距離環の表示/非表示は、[リン]cape指定いたします。
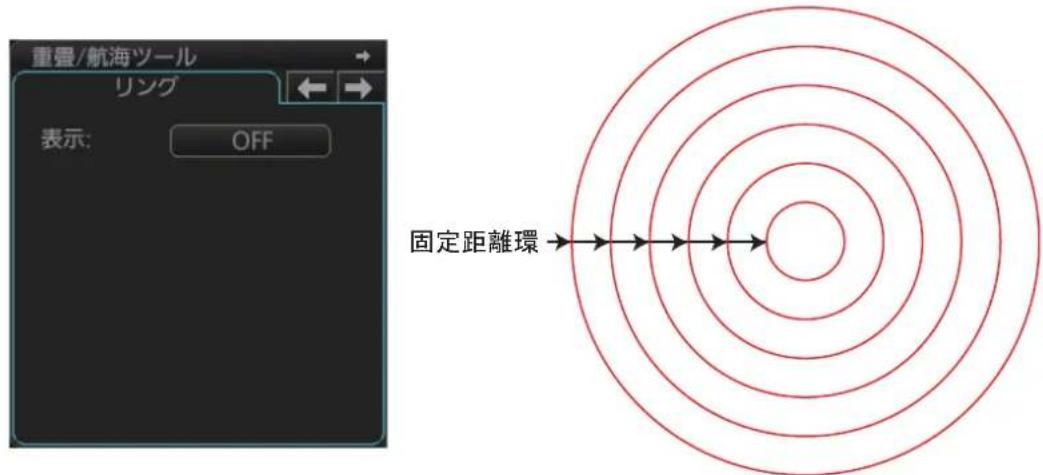
固定距離環の間隔は、チヤートの縮尺に忘て変化します(下表参照)。
| チヤートの縮尺 | 固定距離環の間隔 (NM) | チヤートの縮尺 | 固定距離環の間隔 (NM) |
| 1:1,000 0.025 | 1:100,000 2.0 | ||
| 1:2,000 0.05 | 1:200,000 4.0 | ||
| 1:5,000 0.10 | 1:500,000 8.0 | ||
| 1:10,000 0.25 | 1:1,000,000 16.0 | ||
| 1:20,000 0.5 | 1:2,000,000 | 20.0 | |
| 1:50,000 1.0 | |||
計算方法の選挃
次の要領で、固定距離環で使用する計算方法(漸長航法・大圈航法)を選てくさい。
- メニローにる [航海ツル] > [ジ才マトリ]を選む、[ジ才マトリ]を表示いたします。
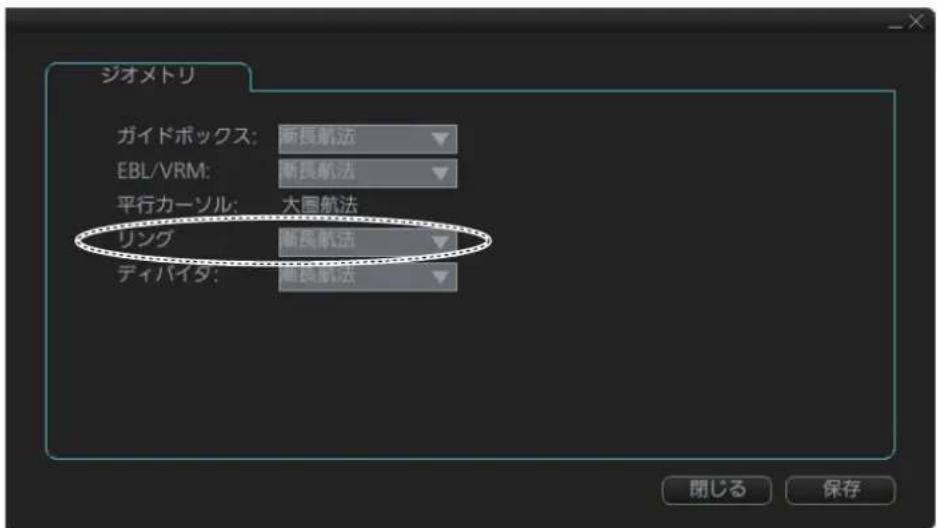
12章 航海一
- [LIng]D口P杜WunlSb to kllc[渐長航法]t[大圈航法] 为選中末。
- [保存] モンをクリックて設定を保存し、[閉じる] モンをクリックて メニローを閉じます。
12.5 自船動態推測表示
自船動態推測表示は、自船の予測位置と動向を推定するソルです。画面上の予測位置を示す円形は、自船の連続んだ予測位置に自船マーケが実縮尺で3つ表示いたします。3つ目的シングル位置が、設定た時間經過後の自船の予測位置くださいます。予測位置は、現在の船速と回頭率を使て計算いたします。ドンクの船速成分(船首の横方向船速、船尾の横方向船速、回頭率)は、予測中に安定いたします。とを前提にして).(2)
自船動態推测表示の設定を行うは、[予測位置]ご一い開てくさい。
[表示]、自船動態推測表示をオフ(たはは効)にしま�。[時間]、時間(30、60、90、120、150、180秒)を設定しま�。
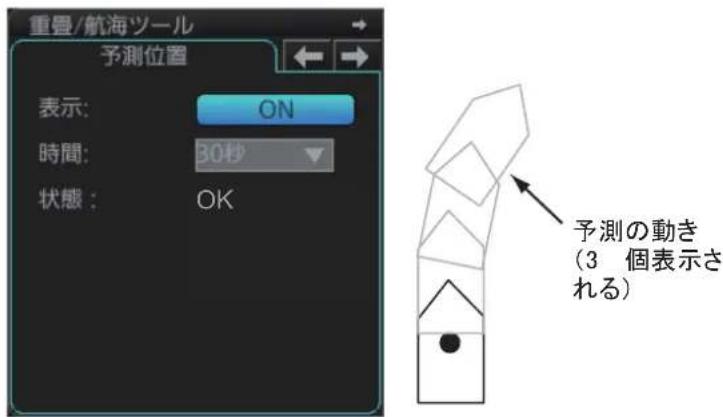
[表示]の設定を[ON]にしらと、最下段に[状態]が現れます。自船動態推測表示は、3秒ごに更新いたします。自船動態推測表示の状態は、[状態]の右横に現れます(次表参照)。
| 表示 状態 | |
| OK | 自船動態推测表示が可能。 |
| スイート不足 自船動態推测表示が不可能(原因:船速不足)。 | |
| 利用不可。菲尔ターリセットて:<br>い。 | 自船動態推测表示のたの計算が不可能。 |
注)精度が不安定にたて、自船動態推測表示は自船の船速が0.5kn以上ごとに使用てくだい。
12.6 ト力一フツ
アングカーリフツは、基準位置(鉄マーア)を中心參考监视に自船が離たときアラートを発生する機能です。鉄マーアは、[投錠]ボーニを押た時点のアングカ一位置に表示いたします。アングカ一位置の設定にpineは、23.13節を参照てくだい。
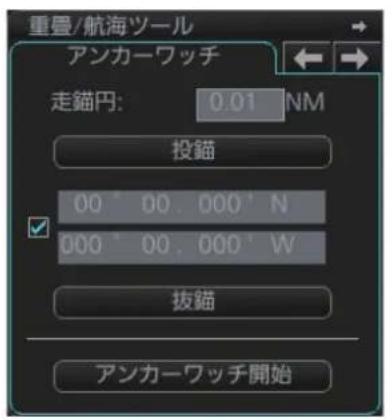
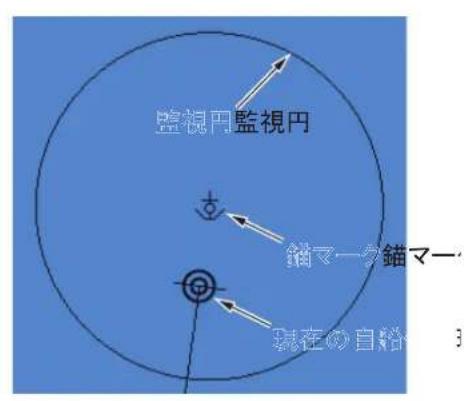
アンカーリツチを設定するには、次の操作を行てんだき。
1.[アルカーユチ]ご一の表示しま�。
2. [走锚円] 、監視円の半径(NM)を設定します。
3. 锚を下ろて、[投錠] モタンをクリックします。
鉄マ一クと監視円が表示いたします。鉄マ一クの位置と監視円の範围は、ドラツ格&ドロフで調整する这句话ごきます。
注)緯度 /經度情報を入力て、投録位置を設定するごとてきます。ご場合は、[投録]ボーナ下部のチルクロルにチルクマーニ克莱入れて、緯度 /經度情報を入力てくだて。
- [アルフローチ開始] ム总冠军をクリックて、アルフローチを開始ます。
設定した値を半径お願いの円(監視円)から自船が出た、アーマト「30802アルカーリフチ」が発生いたします。アーマト発生後、2分以内に承認くださいます场合、優先度が警告」から「警報」に変わりいたします。まて、アーマト発生中に監視円の範圍内に駐った場合は、アーマト状態が自動に解消济みに変わりいたします。
監視を繼續するには、[拔锚] プタフローは、現在の自船位置を基点にし監視呂を設定します。アカーユットを停止するには、[アカーユット停止] プタフローは、走鉄円]で設定した範圍内から自船が離れても、アラトは発生いたします。た、アラト発生中にアカーユットを停止した场合は、アカーユットアラトは解除いたします。
12.7 余裕水深 (UKC)
12.7.1 概要
UKCは、船体の最も深位置(を一)と海底の間の距離のごをい。実UKC監視機能は、船の吃水設定と實際の船速を继续的にチクし。
前方監視のチーフクエア内分泌、水深値が余裕水深の制限値よも浅くたとに、アラート「30173余裕水深限界」が発生いたします。
UKCの計算には、船速による船体沈降量(Squat Effect)も加味ていま�。そのた、アラーミ「30173余裕水深限界」の判断基準は、キルから海底ま�の距離、余裕水深の制限值、吃水値だけのはません。
注)ルーツチエック時には、各レ格に設定いたします。計画船速を使てUKCを計算いたします。
水深警報の設定值とルーナーからの深度(生対一)を比較し、深度の方が小さけは、アラート「30801水深限界警報」、またはアラート「30644実測余裕水深超過」が発生いたします。
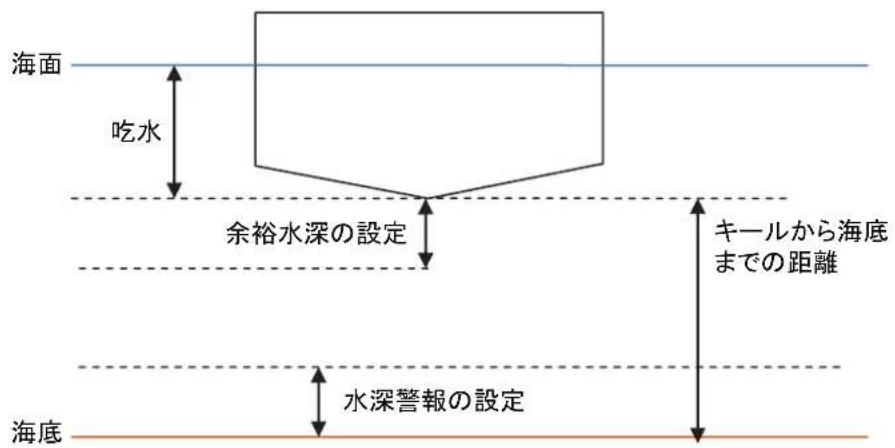
12.7.2 UKC 設定規則
-
[余裕水深(UKC)]一表示L末。
-
[水深警報限界] て、水深警報を発生する距離を設定します。水深限界監視機能を起動いたします。には [OFF] モ总冠军をクリックて、表示を [ON]にします。
-
[余裕水深限界] て、船のUKCの制限值を設定しります。実 UKC監視機能を起動するには、[OFF] モンをクリックし、表示を [ON]にしります。
4.[現在喫水]て、船の吃水值を設定します。吃水值が変わりは、設定を変更てくだい。

- [タイフ] て、UKCウindsの表示する海底の形状を選むす(次項のイラスト参照)。
V字形:V字形の海底表示
凹形:凹形の海底表示
- 設定後、[適用] ム总冠军をクリックします。
12.7.3 UKC ユイndウ
UKC ユインドウには、UKC、吃水、現在の水深之称対関係を示す円形が表示されます。必要に応じて、ウインドウは表示たは非表示するとが生態ます。ま、電子海岡表示領域の任意の場所に置くとが生態ます。ウインドウを表示するには、[余裕水深(UKC)]一の[UKC表示]ボーニをクリックします。ウインドウの移動は、ドラツg&ドロフで行います。
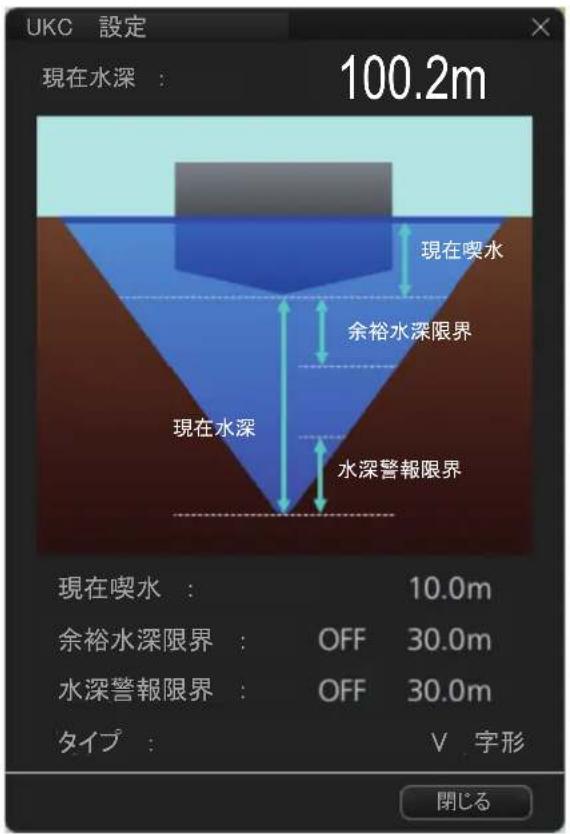
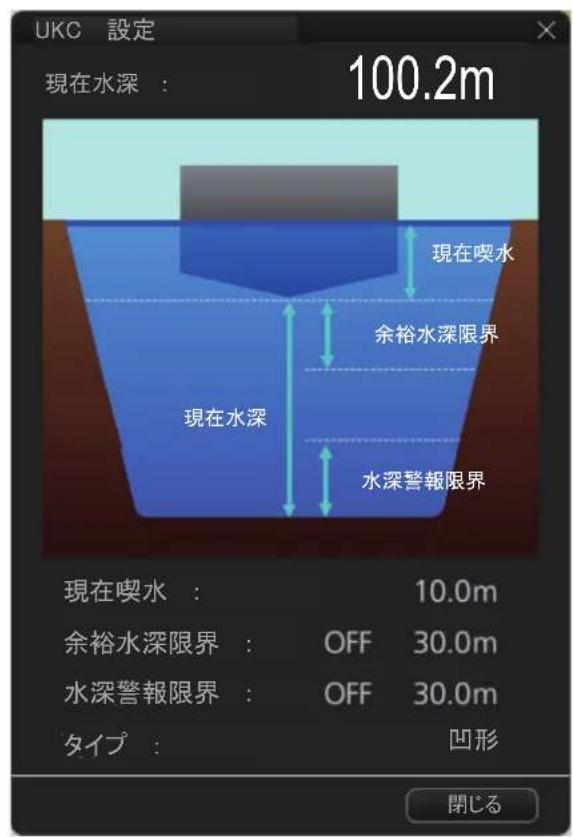
V字形の海底表示 凹形の海底表示
12.8 曲線 EBL
操舵の計画半径を示す曲線 EBL 表示いたします。曲線 EBL 使用するとて、旋回を開始する前に、旋回を開始するたの最適な位置を確認いたします。た、計画航路に对中国の操船は行うかを監視するとまごきいたします。
曲線 EBL 表示/非表示を切り替るには、[曲線 EBL] [表示] [ON](または [OFF]) 次をクしま�。
12章 航海一
注)[曲線 EBL] バーニジは、同ネトフロー上に TCS 機能が有効な EC-3000 が接続さていときのみ表示さてます。

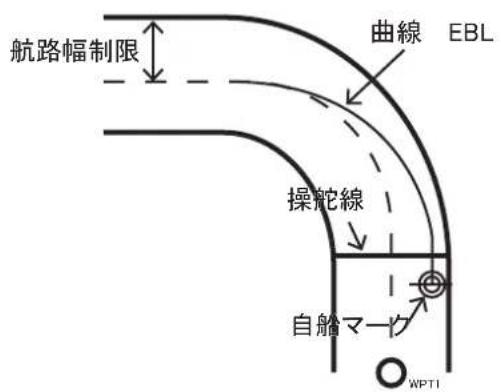
12.9 ヨイバイダ
デイバイダ機能(紙海岡で使用するデイバイダに相当)を使て、以下の測定を行うとが成長。
- 2 点間の距離と方位
- 2 点間の所要時間
·始点から终点主義の総所要時間 - 始点から终点まえの総距離
デイバイダ機能は、航行監視モーツドおば航路計画モーツドで使用する这句话可以是。デイバイダは、1個のみ表示する这句话可以是。た、デイバイダは他的ルト(FMD-3x00、FCR-2xx9、またはFAR-3xx0)間で保存・共有は可以せん。
12.9.1 ヨバイダを使用する
徴バイダを使用するには、次の要傾で行てくだき。
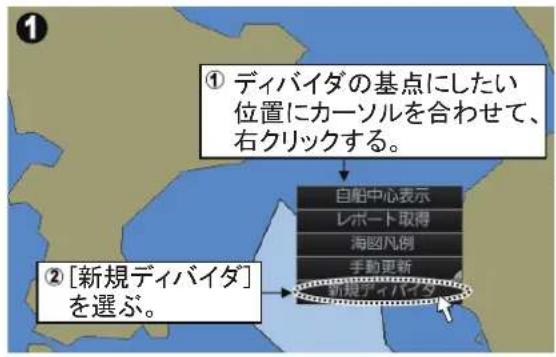

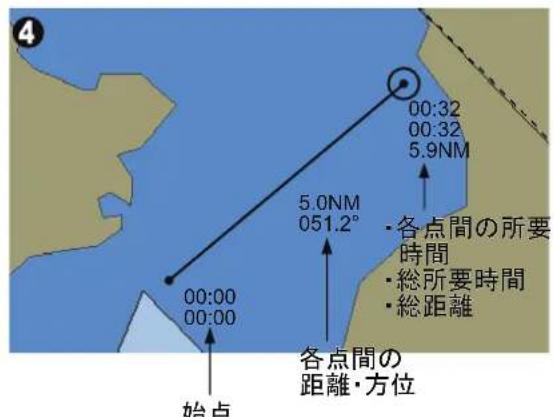

基点の削除
デイバイダの基点を右にリクuted。、[以降のロイ卜削除]を選択すると基点を削除するとがCNTをきま�。選択た基点以降の基点が削除いたします。
终点左削除的上
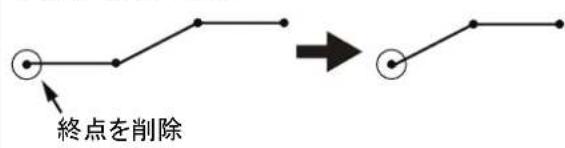
拉丁の基点を削除すると
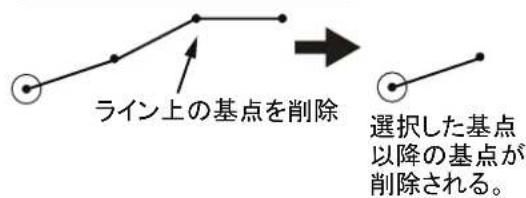
デイバイダの終点(丸で團毎た点)の1つ前の点をドラツ&ドロフすると、次の位置に基点を投人する这句话です。
- 距離:終点と1つ前の基点間の距離
·方位:終点からドラツg&ドロフリ了位置の方位
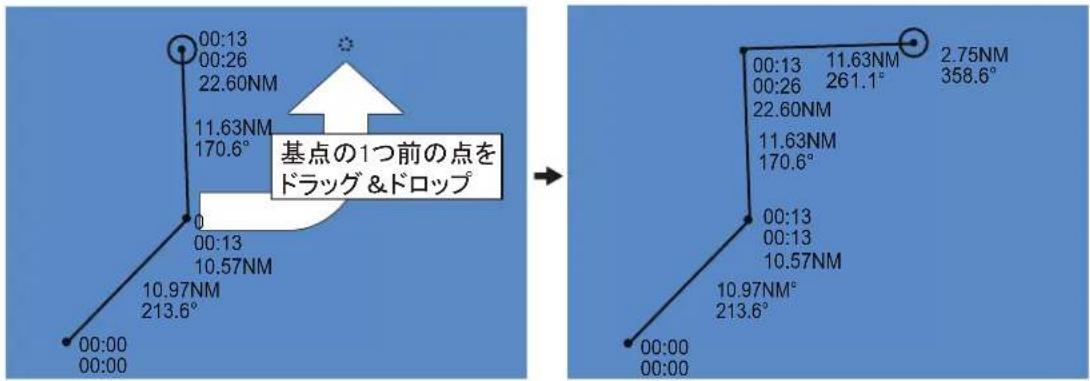
注)基点のドラットにカーリルを画面端に移動いたします。
12.9.2 使用特性 & 制限
- 距離は0.01NM単位で表示いたします。ただし、100NM以上的場合は、0.1NM単位で表示いたします。
- 最大50点至上任意の点を挃入する这句话いたします。2点間の最大測定距離は240.0NMです。
·所要時間の值は「時:分」表示て、分の小数点以下は四捨五人しいます。たがて、各点の所要時間の合計と総所要時間は一致しぃせん。 - 所要時間は、99:00まで測定する这句话お願いいたします。99:00以上的场合、所要時間の表示は「>99:00」にelizeます。
- 所要時間は、自船の船速を使て計算いたします。自船の船速が0.5kn未満の場合、所要時間は表示いたします。
- ヨバイダを漸長航法で使用する场合は、高緯度(85°以上)の使用はなります。
·分割画面は、メイン画面とサフ画面の两方にデイバイダが表示いたします。ただし、操作くださいますよう [有効] モンが水色の画面のみ,Noです。
12.9.3 ヨバイダを削除する
航行監視モーネードは航路計画モーネードに切り替代て、電子海円表示領域上が右ケリックします。CONテキストメニーから [デイバイダ消去]を選むます。
12.9.4計算方法の選択
次の要領に、デイバイダで使用する計算方法(漸長航法・大圈航法)を選てくさい。
- メニローにる [航海ツル] > [ジ才マトリ]を選ひ、[ジ才マトリ]∧一ジを表示します。
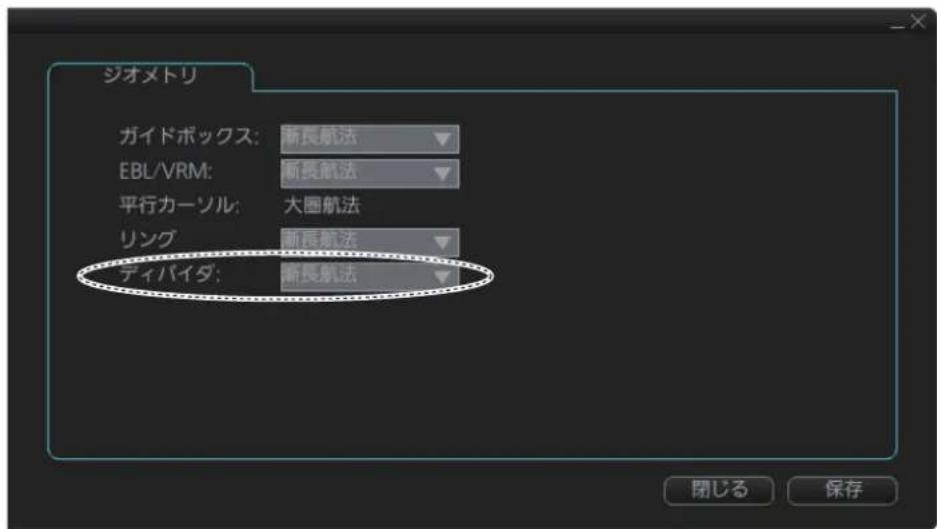
-
[デイバイダ] ロロックダウソリストを克莱クレ、[漸長航法]んだは [大圈航法]を選むす。
-
[保存] モンをクリックて設定を保存し、[閉じる] モンをクリックて メニローを閉じます。
己 一
13章 物標追尾(TT)機能
本機は、接続んだレーダーよTT機能で捕捉んだ物標の情報をまて、チート上に表示するとが成長(最大200点)。
注1)本機以TT機能を使用するには、真方位基準のレーダー追尾物標のデーたが必要です。
注2)本機の船速のデーダスは、接続てるレーダーに合わせてくだき。本機とレーダーの船速の設定が異な場合は、以下のようにncy�ま�。
- TT 小木川は表示さうが、デーフは表示さう。
- COG、SOG(たはCTW、STW)の表示が“missing”にる。
13.1 TT ニンボルの表示 /非表示
TT 小神の操作を進行。
- 重置/航海のルボクスを、[TT/AIS]に一晋江表示お願い。
2.右円の円で團てい的筒所を フリツクて、表示を [フル タ一OFF]、[フルタ一ON]、 または [OFF]にしま�。
- フィルターフ:すばてのTT
- フ blownを画面に表示する。

- フィルターニON: 13.3節で設定,ThT フ blownの併画面に表示する。
- OFF: トテのTT ニンボルを画面から消す。
注)TT ニンボル、AIS ニンボル、およばレーダー映像をステ一夕スローか非表示にするともお願いいたします。非表示にる场合は、ステ一夕スロー上的 [レーダー情報消去] ニンをケリックします。

13.2 TT ニンボルおよこ TT属性
13.2.1 TT ニンボル
本機使用ていTT丶IEC62288に準拋てい。
| シングル | 工場出荷時の色 | 名称説明 | |
| ● | 緑航跡 | 追尾物標の過去位置に表示いたします。 | |
| ○ | 緑手動捕捉心中的物標 手動捕捉直後の物標及物は上ご破線の円が表示いたします。 | ||
| ○ | 緑追尾物標 捕捉んだ物標が安定て追尾くださいますと、パクトル付け下的実線の円に变了る(捕捉後3分以内)。 | ||
| R○01 | 緑基準固定物標 基準固定物標を利用て、自船の対地船速を求む。 | ||
| △ | 緑同一化 TTターダット | 同一化ターダットのはとを示す。TTシングルとTTデーフ優先で表示いたします。 | |
| □ | 緑選択物標 選んだ物標のデーフを表示いたします。 | ||
13.2.2 TT ニンボルの色と大小を選む
TT ニンボルの色と大小は、次の要領で変更することがきます。色の設定は、AIS カーダットと共用です。
-
- [表示]、[設定]、[シンボル表示] ムダムを順にリットて、[シンボル表示] マニーツー表示します。
-
[物標] イフローをクリックとます。

- [色] [P] [D] [E] [F] [G] [H] [I] [J] [K] [L] [M] [N] [O] [P] [Q] [R] [S] [T] [U] [V] [W] [X] [Y] [Z]
色は、緑、青、黑、紫、茶の5種類から選択いたします。
4.[TTサイス] フルダウソリストから、必須的大きさを選じます。
大きさは、標準、小の2種類から選択いたします。
- [保存] モンをクルックて設定を保存し、[閉じる] モンをクルックて メニローを閉じます。
13.3 TT表示の制限
TT ニンボルが多数表示いたします。画面が煩雜にります。そのようお願いいたします。自船からの距離を設定いたします。
- メニローにる [TT/AlS] > [設定]を選むす。
注)[設定]ご一は、次の手順で開くともてきま�。
- 重疊/航海ツルボックスで [TT/AIS] ハジを開き、[AIS]を右ケリックと [設定]を選択する。
·重疊/航海丶一尔木克斯の左側に表示さるウINDウで、ラジ才木たんをクリクする([TT/AIS]ご一且)

- [TT表示フィルターニ]ウindsわ、最大レンジの設定值を入力いたします。
二心設定了距離以上離的TT神索は、画面に表示きません。 - [ON/OFF] トクをクくて、表示を [ON]にしま�。
- [保存] モンをクルックて設定を保存し、[閉じる] モンをクルックて メニローを閉じます。
TT表示の設定が[フルタ一ON]のと、こて設定理由対象のTT ニン リルのみ表示さは。
注)追尾物標およい AISの表示制限は、以下のとお願いいたします。
·追尾物標とAISは、縮尺1:1,000,001のS57チアト上に表示いたします。
- 追尾物標と AISは、縮尺1:1,900,001のARCSチヤート上に表示いたします。ごしによう、チヤートが擴大小きたき、最大縮尺のチヤート上(才リジル縮尺1:3,500,000)に、追尾物標と AISの表示が可能,Th
13.4 バクルの時間とモーダを設定する
对地 / 对水
TM マーツド時は、物標のバクトルを対地基準、たは対水基準で表示するとがごきま�。対地たは対水の切替はさは、メニeer [せンサ] > ステムせンサ一設定の[船速]て行いま�。対地にるときは[対地]、対水にるときは[対水]を選むま�。TM マーツド時は、バクトルモ一卜表示部分に[真-地]、たは[真-水]と表示かま�。
对水基準は、船首方位と対水船速を使用て表示する方法です。対地基準は、対地船速たは潮流補正を使用て表示する方法です。精度が低い場合は潮流を補止いたします。
真ルトル
TM モートは、大地、航海用マーニク、おば停泊船各種の対応の固定物標は、 ビクトルの長さがさロで、レーダー重疊に静止いたします。たedly、風まは潮流がる场合、潮流補正価が適切に入力くださいますと、潮流補正価の逆を表すボトルが固定物標の上に表て自船に影響を及ぼります。
真ルトモーダの基準には、対地基準(真-地)と対水基準(真-水)の2種類がりま�。基準モーダは、選択てる船速に忘て、自動の切り替わりま�(下表参照)。
| 船速の選択 真ごクルモード | |
| ロ格(対水) 真 - 水 | |
| ロ格(対地) 真 - 地 | |
| GPS | 真 - 地 |
| 基準速度 真 - 地 | |
| 手動 真 - 水 | |
| 偏流の速度 | 真 - 地 |
相对凹卜儿
大地、航海用マーニ、おば停泊船各種の静止てる固定物標上的相対パクトルは、自船の対地航跡の逆を表ていま�。衝突ローに見物標は、パクトルの先端が自船に向かていま�。次円内的点線(灰色)や矢印は、説明用に記たてのて、実際の画面には表示いたします。
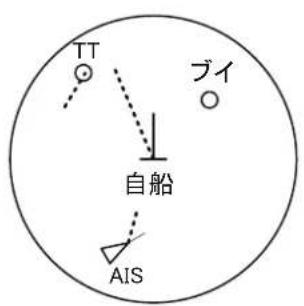
真咔卜毛一(对地基準)
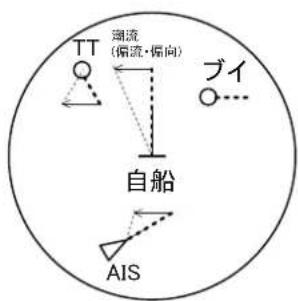
真咔卜毛一(对水基準)
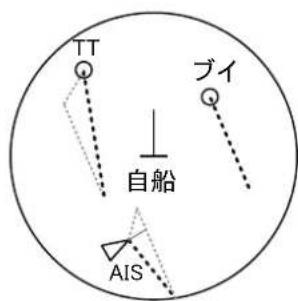
相對卜
ルを設定するには、重骨/航海ルトルボックスで、[TT/AIS] ヒジを表示し。ル時間とルモ一下表示部分をクりット、ルの時間和一化下を設定しぃ。
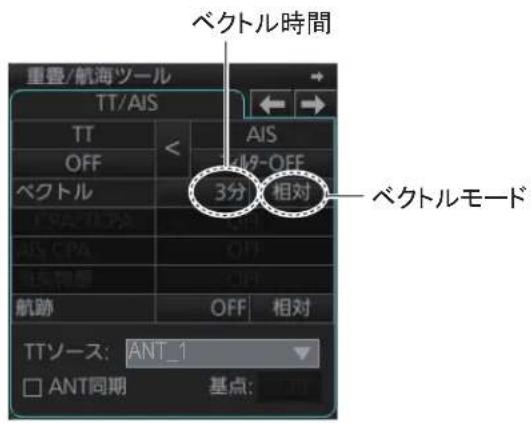
13.5 追尾物標の従一夕を表示する
13.5.1 個別の追尾物標対一を表示する
操作部を使て表示する
デーダを表示くださいTT ニンボルにカーニルを合わて、[TARGET DATA]キーを押ります。
トラツクボーリル部を使て表示する
対一夕はクスか予一夕を消去するには、はクスの内[閉じる]はクにとしま�。
一夕朴斯には、次のう情報が表示さし。
-
夕一格ト番号。接統ていレ一側と同じ夕一格ト番号にらは。追尾物標が消去さると、夕一格ト番号は、電源を再起動するか、200以上の物標が捕捉さるまご再使用くださいます。
-
自船から見た追尾物標の方位 (BRG)、自船から追尾物標まの距離 (RNG)
-
追尾物標の对地船速 (SOG)、对地進路 (COG)
-
最接近距離(CPA)と CPA イードの時間(TCPA)。負の TCPA 值は、物標が自船に最先接近位置を通過て、自船から速さかたていき。 CPA 值の表示範圍は、入力ルンデスに較て異な値(TTM マンデス:0.00~999.99NM、TTD マンデス:0.00~163.82NM)。
TCPA 值の表示範圍は、人力Senテスにようごります(TTM Senテス:-99:59~99:59、TTD Senテス:-81:59~81:59)。

13.6.2 航跡の属性を設定する
航跡の属性(表示数・スロー)を設定するごはごきま�。属性の設定は、AIS 夕一��トと共用です。
- 入斯トアスル [表示]、[設定]、[シングル表示] ムダムを順にリックと、[シングル表示] マニロー表示します。
2.[物標]夕予をクリツくしま�。

- [TT/AIS 点数] 、航跡の表示数([5] または [10])を選択いたします。
- [表示方法] 、航跡のsts専ル([点]または[点と点線])を選ひま�。
- [保存] モンをクルクて設定を保存し、[閉じる] モンをクルクて メニローを閉じます。
13.7 TTの情報源
13.7.1 IEC 62388 Ed.2 以降に準拋てる構成の场合
IEC 62388 Ed.2 以降に準拠てるレーダーを接続てる场合、[TT ヨーナス]ドロックダウソリストから TT 的情報源と使用するアングチ(ANT_1 )、を設定する这句话可以。
通常、TTの情報源には、レーダーエローの表示に使用くださいます。
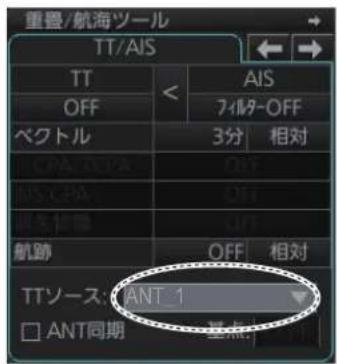
レーダーローの表示に使用くださいますアンテナを自動にTTの情報源と選挃するには、重疊/航海ソールボックスの[TT/AIS]ご一じて、[ANT同期]にチーニックマーニムを入れます。

使用特性
- SFID に基しおて、ドロツダウソリストにはアンテナ番号順に表示いたします。表示例:RAS001のとは[ANT_1]、RAS002のとは[ANT_2]
- [ANT同期]にチーネックマーケを人しらと、重疊/航海ソルボックスの[エー—]ご一]ご一地選択てるアンテナにアスタリスク(*)が付きま�。
- [ANT 同期]にチエックマーニが人た状態でドロフダウルトの選択を切り替えと、[ANT同期]のチエックマーニが外れます。
- ト・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・デ・
- IEC 62388 Ed.2 以降に準拋しぃるレーダーを接続しぃる场合、[基点]の [CCRP/ANT] プタンは使用くださいます。TT位置の基準点は、常にCCRPです。
13.7.2 IEC 62388 Ed.2 以降に準拋ていな構成の场合
IEC 62388 Ed.2 以降に準挑しぃいないレーダーを接続てる场合(例:換装時な)は、「その其他的アンド」(RA0201)、とリストに現るアンドのいすりかをTTの情報源に選むのはgetherくださいます。
TTの情報源と使用するアンドは、[TTソーニス]ドローネダウソリストから設定いたします。SFID(装備時に設定)を選むます。

レーダー・エローの表示に使用くださいますアンテナを自動的にTTの情報源とて選択するのは、重疊/航海ツルボックスの[TT/AIS]ご一じで、[ANT同期]にチエックマローを入れます。
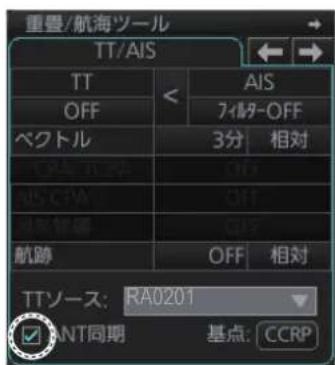
使用特性
·裝備時に設定したSFID(「その他的アンテ」とて設定)に基て、ドロフダウルリスははアンテが番号順に表示いたします。表示例:RA0201、RA0202
- TTの情報源とて「その他のアンテ」を選んだ場合は、[基点]の[CCRP/ANT]ボーナンが有効にelizeます。
- [基点]の[CCRP/ANT]ボーナル、TTM Seven Nationsの基準位置を選むとがお願いいたします(CCRPはたにアンテナ位置)。
- [基点]の設定を[ANT]にとる场合、[ANT]は黄色で表示いたします。
- [ANT同期]にチーネックマーケを入ると、重疊/航海ソルボックスの[エー- ]パーダで選択てい的アンテナにアスタリスク(*)が付きます。
- [ANT同期]にチーベクマークが人た状態でドロツダウソリストの選択を切り替代と、[ANT同期]のチーベクマー克が外れます。
·安nta登錄記載等場合、[ANT同]是無効にの。
本機にAISトラNSobnダを接続してる場合、AISトラNSobnダから受信たAISターダット表示elizeます。本機のバフアーマモリーは、最大2,000点のAISターダットを保存elizeます。そのバフアーマモリーの容量のはんだると、アラーミ「190 AISターダット点数 100% 」が発生いたします。バフアーマモリーは、全AISターダットの自動推測航法デーナが含ります。そのデーナは、対地船速(SOG)、対地進路(COG)、旋回率(ROT)、おば船首方位のデーナに基しだて計算elizeます。まて、距離、方位、CPA、TCPA等各种計算デーナも含ります。
本機は、最大1,000点まごのAISターダットを表示いたします。活性お願い休止AISターダットが合わせて1,000点表示いたしますと)=(190AISターダット表示点数 100% 」が発生いたします。)、活性ターダットにいは、最大500点主要集中表示可能いたします。活性ターダット数が制限価に達すると、アーダト「190活性AISターダット点数 100% 」が発生いたします。
AIS トランスボンダから送理由くるデーの周期は、追尾てる船舶の船速と針路にて異なります。下表は、IMO標準のAIS トランスボンダの更新周期を示ていま�。
AIS トランスボングは、次のいじりに属する AIS トランスボングを装備たすての船舶を監視いたします。
·KlAs A AIS
- イード B AIS
ま、AISトラスボンダは、船舶かのマッチ一且以外のマッチ一且受信し。
·AIS基地局
·AIS搜索救助飞行艇
·AIS航路標識
AIS 夕一ダットは、数百たは数千の场合のは、そのうさ本船にと重要なもはわさかです。本機の画面から不要な AIS 夕一ダットを取り除には、「AIS夕一ダットの活性化・休止化」機能を使用いたします。AIS フラスボンダから受信た新い AIS 夕一ダットは最初、非活性な状態です(休止夕一ダット)。休止夕一ダットは、小さな三角形で表示いたします。任意の AIS 夕一ダットを選て、休止夕一ダットから活性夕一ダットに変更いたします。活性夕一ダットは、速度を示すごトル、船首線、回頭方向線のはが付った、大小な三角形で表示いたします。ま、活性夕一ダットを休止夕一ダットにするこまき)=(2)
「AIS ダーダットの活性化・休止化」機能は、監視する AIS ダーダットのみに注目请点击ます。
14.2 AIS ニンボル
AIS表示を扱にしと、AISターダットはその状態にと以下のシングルで表示いたします。
AIS 夕一ガットのシングル
| シングル | 工場出荷 時期の色 | 名称 說明 | |
| 緑 | 航 處 | AIS カーダットの過去位置に表わる。 | |
| 緑 休止時代はい | 休止中 | の AIS カーダットを示す(緑は、活性ターダットのはも細い)。 | |
| 緑 活性時代はい | 総はい | ルの付た、活性中的 AIS ターダットを示す(緑は、休止時代はい)、船名が表示いたします(工場出荷时期的状態)。 | |
| 緑 实木はい | ケルシングルの活性時代はい | 船舶的大きさを実スケルシングル表現した、活性ターダット。 AIS ナンボル、または同一化 AIS ニンボルが活性状態のときは、実スケルシングル内部に、AIS ニンボルが表示いたします。実スケルシングルが3mm以下にない场合は、表示いたします。 | |
| SONBOL | 工場出荷時の色 | 名称 說明 | |
| 青 | AIS SART | AIS SART カーダットを示す。 | |
| 緑 同一化 AIS カーダット | 同一化ターダットくださいます。 AIS ヨンボルと AIS ユーダリ優先表 示��。 | ||
| 緑 船首方位 - 旋回表示 | ターダットの旋回方向を示す。 | ||
| 緑 AIS 搜索救助飛行 艇 | AIS 搜索救助飛行艇を示す。 | ||
| BS | 青 | AIS 基地局 | AIS 基地局を示す。 |
| [ ] [ ] | 緑 選抉ターダット 選んだ | ターダットのデ热线を表示 する。 | |
| 緑 | AIS 搜索救助艇 | AIS 搜索救助艇を示す。 | |
| 緑 CPA/TCPA ダーダ 天無しの休止ターダット | 次のうな場合、AIS ヨンボルは破 線で表示いたします。 • 自船の対水 / 对地船速デ热线がな い、または船速デ热线が無効な場 合には、surve年之久の AIS ヨンボルが 破線にしてる。 • 他船の船速デ热线が送りますかな い场合のは、対象の AIS ヨンボル 的みが破線電子郵件。船首方位や対 地進路デ热线が送りますかない場 合、そのターダットのシングロルは 画面の真上を向く。 | ||
| 緑 CPA/TCPA ダーダ 天無しの活性ターダット | |||
注1)本機は、AIS表示を才にした场合ください AISターダットを対一夕处理いたします。AIS表示を再度扱にした场合、即座に表示いたします。
注2)丶卜一卜時丶船首方位変化て、画面が再描画さは。その間、瞬間の丨AIS 小木ル消元的二にあ示。
注3)AIS下一夕を全く受信ていき、アラーツ「30380 AIS通信エラ一」が発生いたします。ごのうな场合、AISトんスponダを調てみてくだい。
注4)AIS ニンボルの色は、[シング表示] マニロー [物標] ハージで変更くださいます(13.2.2項参照)。
注5)実在/阪想AISATONのシングルにては、次表を参照てくさい。
実在 / 皈想 AISATONのシングル
次表は、本機で表示いたします / 皈想 AIS ATON ニービルの一観です。
| 実在 AIS ATON シングル*1 | 倖想 AIS ATON シングル | 工場出荷时代的色 | 意味 |
| 青 | AIS航路標識 | ||
| 青 レーダー 一�ロー | |||
| 青 線急難破船 | |||
| 青 北方位標識 | |||
| 青 東方位標識 | |||
| 青 南方位標識 | |||
| 青 西方位標識 | |||
| 青 左舷標識 | |||
| 青 右舷標識 | |||
| 青 孤立障害標識 | |||
| 青 安全水域標識 | |||
| 青 特殊標識 | |||
| Off Posen | 線色:黄色*2 文字色:黄色*2 | 位置:Sじてきい AIS 航路標識 | |
| Unlit | 線色:青 文字色:黄色*2 | 照明設備に異常の見HZ航路標識 | |
| Racon err | 線色:青 文字色:黄色*2 | レーバン設備に異常の見HZ航路標識 | |
| - | Missing | 消失航路標識 |
^*1 :実在 AIS ATON プルは、選択中的目的マーメフ)が表示いたします(次円参照)。

*2: 变更不可
14.3 航海関連情報を設定する
航海を始る前に、次の要傾で航海状況、到着予定日時、行き先、吃水、おは乗員数を設定てくだい。ご上地設定た内容は、接統てい的 AIS フラスボンダにも反映いたします。
- メニローにある [TT/AIS] > [航海状態] > [航海デー夕] イフを選む、[航海デー夕] フージ表示します。
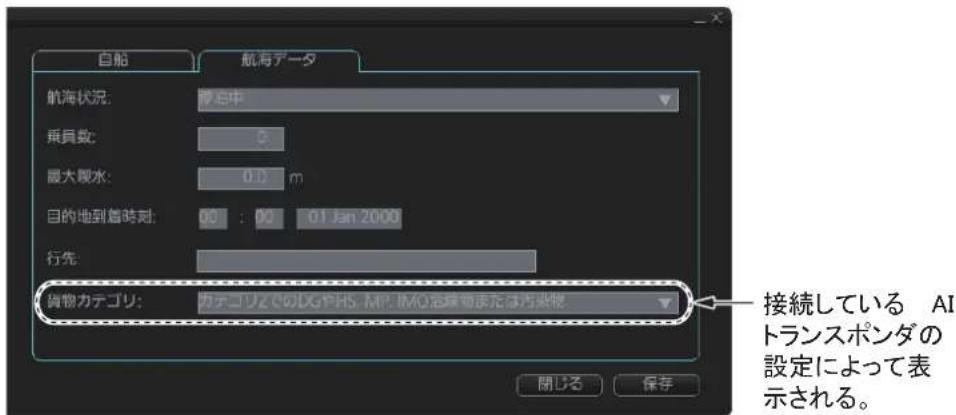
- [航海狀況] ロローリストをクリックし、該当た航海状況を選む。
·動力航行中(王隆于航海中)
-锚泊中
·指揮下にい(操船が不自由な状態)
操縱制限中(制限の態態操船)
- 噬水制限中(吃水に上て制限さた状態)
·係留中
- 对地(座礁)
·漁業従從事中(漁勞従從事)
3.[乘員数]て、自船の定員数(0~8191人)を入力しります。
4. [最大喫水] 、自船の吃水值(0.0~25.5m)入力しま�。
5. [目的地到着时刻] 、行き先の到着予定日時(UTC)を入力しります。日:2桁、月:3文字の略語、年:4桁
6. [行先] 、行き先名を入力しります(最大20文字)。
- 必要に広て、[貨物力テゴリ]ドロックダウソルストをクリックし、船舶のタイフを変更いたします。
·のタイフの全の船舶
- 力戦のXのDGやHS,MP,IMO危険物または污染物
- 力士のYGやHS,MP,IMO危険物または污染物
- 力戦のZのDGやHS,MP,IMO危険物または污染物
- 力表01 OSのDGやHS,MP,IMO危険物または污染物
·(将来の為に予約):4個
·追加の情報はあらません
- [保存] モンをクルクて設定を保存し、[閉じる] モンをクルクて マニローを閉じます。
AISトランスボンダに設定た一夕が送信いたします。
14.4 AIS ニンボルを表示 /非表示する
本機には、AIS フラスボンダで受信したターダットを表示いたします。AIS フUNボルを表示(たは非表示)するのは、重疊/航海ツルボックスで、[TT/AIS] バジを開きます。下関の日は困いの筒所をクリックて、表示を [フルターフOFF]、[フILルーニON]、たは [OFF]にいたします。

- フィルターフOFF: AIS フラスボンダに受信した全ターダットを画面に表示する。
- フィルターマN:14.5節で設定いたします AISターダガットの併画面に表示いたします。
- OFF: すばての AIS ニンボルを画面から消す。
AIS 機能を才にする场合は、上ごの用地広てる筒所を左は夕に長押しだくさ。表示が[機能OFF]とり、デー处理の動作が止らま。AIS 機能を才にる场合は、再度同笛所をクリクて、[フルタ一OFF]、[フルタ一ON]、[OFF]のいzeitかを選てくさ。
注)AIS ニンボル、TT ニンボル、およじレーダー映像を-Stテ一夕Sta一から非表示にするともEDIUM。非表示にる场合は、Sta一夕Sta一上ご [レ一徳一情報消去] プタentonをクリックしま�。

14.5 AIS 表示を制限する
AIS 夕一ダットが多数表示いたします。画面が煩雜にります。そのような场合、自船からの距離、船速、たは船舶の��予を設定すると、AES 夕一ダットの表示を制限ります。たがきま�。たとは、ひくり移動てる夕一袋トを画面に表示くださいます場合,No便利です。
1. 重疊/航海ソ一ルボックスで [TT/AIS] ハジを開き、[AIS]を右ケリックて [設定]を選むす。
[設定]一莎表示扎米士。
![FURUNO FMD3200 - 重疊/航海ソ一ルボックスで [TT/AIS] ハジを開き、[AIS]を右ケリックて [設定]を選むす。 - 1](/content/2026/03/524429/images/2ff56038634906632a7d1f61518b6cb7244e7c8cb5b7a6245a4bcdd4fff6df13.jpg)
注)[設定]ご一は、次の手順で開くともてきま�。
- メニローにる [TT/AIS] > [設定]を選択する。
- 重疊/航海ツルボックスの左側に表示いたしますウindsわ、ラジ才木たんをケリクする([TT/AIS]ご一じ以外)。
![FURUNO FMD3200 - 重疊/航海ソ一ルボックスで [TT/AIS] ハジを開き、[AIS]を右ケリックて [設定]を選むす。 - 2](/content/2026/03/524429/images/49fc33ac1e8c7dea26fd5cdac81a350902382f077ec87e52dd26f520831ed0c4.jpg)
2. [AIS 表示 フィルターダー] イングロー、下記の内容を参照して各項目を設定します。
- 基地局:[ON/OFF] モンをクリックて、AIS基地局のシングルを表示するか、しおかを設定お願い。
- 物理 AtoN: [ON/OFF] ムタンをクリックて、実在 AIS 航路標識のシングルを表示する、しおいが設定お願い。
- 仿想 AtoN: [ON/OFF] ムタンをクリックて、仿想 AIS 航路標識のシングルを表示するか、しおいが設定お願いいたします。
-
最大レンジ:[ON/OFF] プタナをクリックて、表示を [ON]にしります。次に、最大レンジを入力いたします。ごに設定REA距離以上離た AIS イーダットは画面に表示されません。
-
最小船速:[ON/OFF] プ总冠军をクリックて、表示を [ON]にしります。次に、最小船速を入力します。ごに設定した船速値以下の AIS キーダットは画面に表示いたします。
-
[保存] モンをクリックて設定を保存し、[閉じる] モンをクリックて メニローを閉じます。
AIS表示の設定が[フィルターニON]のと、ごに設定てい対象のAIS 夕一��トのみ表示されま。全項目をOFF]に設定てい的場合は、すばてのAIS夕一��トが表示されま(AIS表示の設定が[フィルターニOFF]のとと同じ)。
注)AIS おより追尾物標の表示制限は、以下のとお願いいたします。
·AIS 与追尾物標は、縮尺1:1,000,001のS57チヤト上に表示いたします。
·AIS と追尾物標は、縮尺1:1,900,001のARCSチヤート上に表示いたします。ごしによう、チヤートが擴大小きたき、最大縮尺のチヤート上(才リジル縮尺1:3,500,000)に、AIS と追尾物標の表示が可能,Thery。
14.6 活性タ一徳卜
休止ターダットを活性ターダットに变更た場合、そのターダットの進路と船速が メケトル表示いたします。 メケトル表示お願い、ターダットの動態を容易に観察する ごわさります。
活性化せた休止夕一格卜力一彌を合わて、[ACQ/ACT]千一を押しぃ。
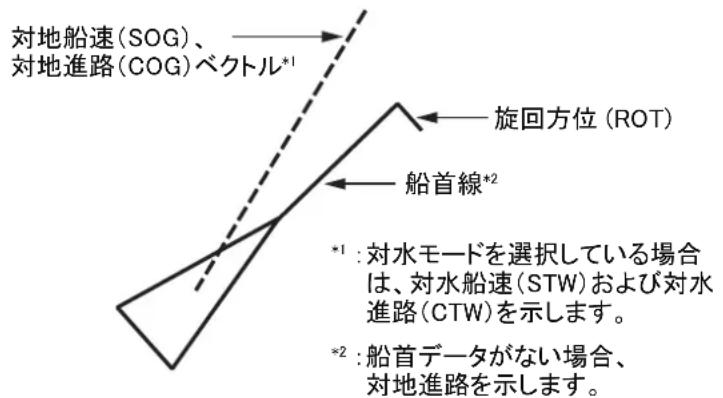
14.7 休止夕一徴卜
画面に活性ターダットが多数表示いたします。レーダー映像やTTターダットの識別が困難くださる场合,Noisy。そのようお願いいたします。活性ターダットを休止ターダットに変更いたします。レーダー映像が見,Noisy.Noisy。
14.7.1 特定の活性ターダットを休止させる
休止せた活性ターダットにカーニルを合わて、[TARGET CANCEL]キ一を押しります。
14.7.2 さての活性た一��卜を休止させ
- 重疊/航海ソルボックスで [TT/AIS] ハジを開き、[AIS]を右ケリツくて [設定]を選むす。

- [全物標休止]の[設定]术铊をクりックします。
すばてのシングルが休止た格トに変わります。
- [保存] モンをクリックて設定を保存し、[閉じる] モンをクリックて メニロー閉じます。
14.8 AIS キーダーはのデーを表示する
基本一夕
基本デーを表示するには、デーを表示た活性ターダットにカーニルを合わせて、[TARGET DATA] ハ一(または左ロク)を押しぃむ。[AIS 情報] ヒツクス内に基本デーが表示さこまむ。
注)基本徳一夕内のCPA值とTCPA值は、次の2つ条件を満たていし上的きのみ表示されます(満たていな場合:数値はアスリス「*」表示)。
·接統先のレ一夕一側で、対象た一�トを活性化さてい。
- 接続先のレーダー側から、対象たーダットのTTD Sevenは受信してる。
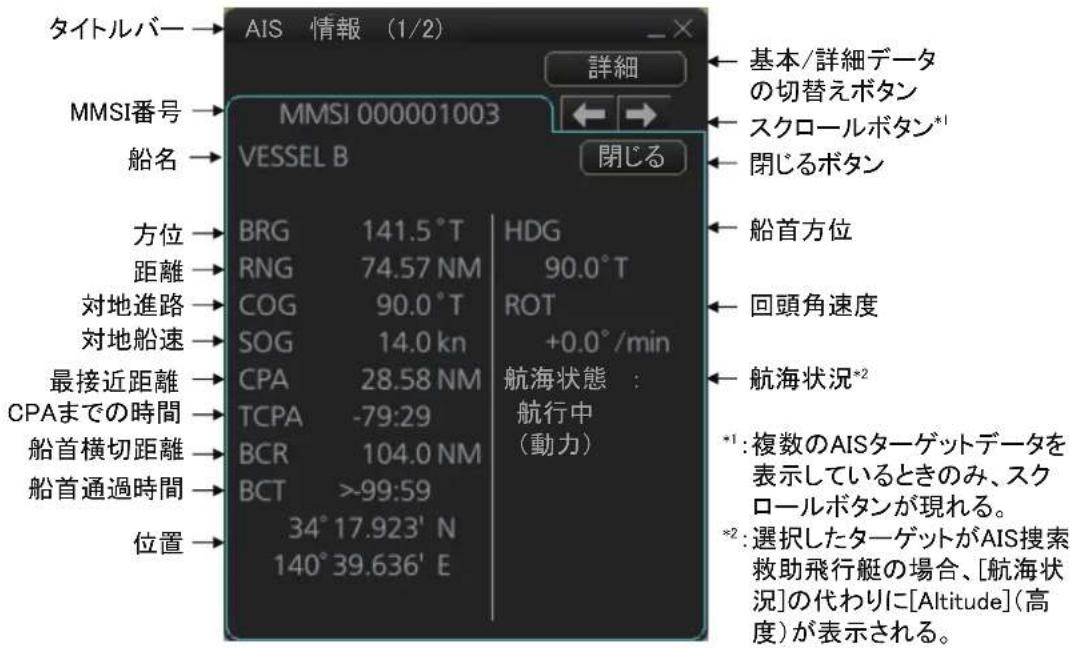
詳細一夕
詳細デーナを表示するには、[AIS 情報] プックス(前ートの国参照)の [詳細] プムをクリックします。基本デーナから詳細デーナに切り替ります。
注)詳細対一夕内のCPA值とTCPA值は、次の2つ条件を満たていきのみ表示いたします(満たていい場合:数值はアスリス「*」表示)。
·接統先のレ一夕一側で、対象タ一格トを活性化さてい。
- 接続先のレーダー側から、対象ターフットのTTDSenTENSを受信てい。
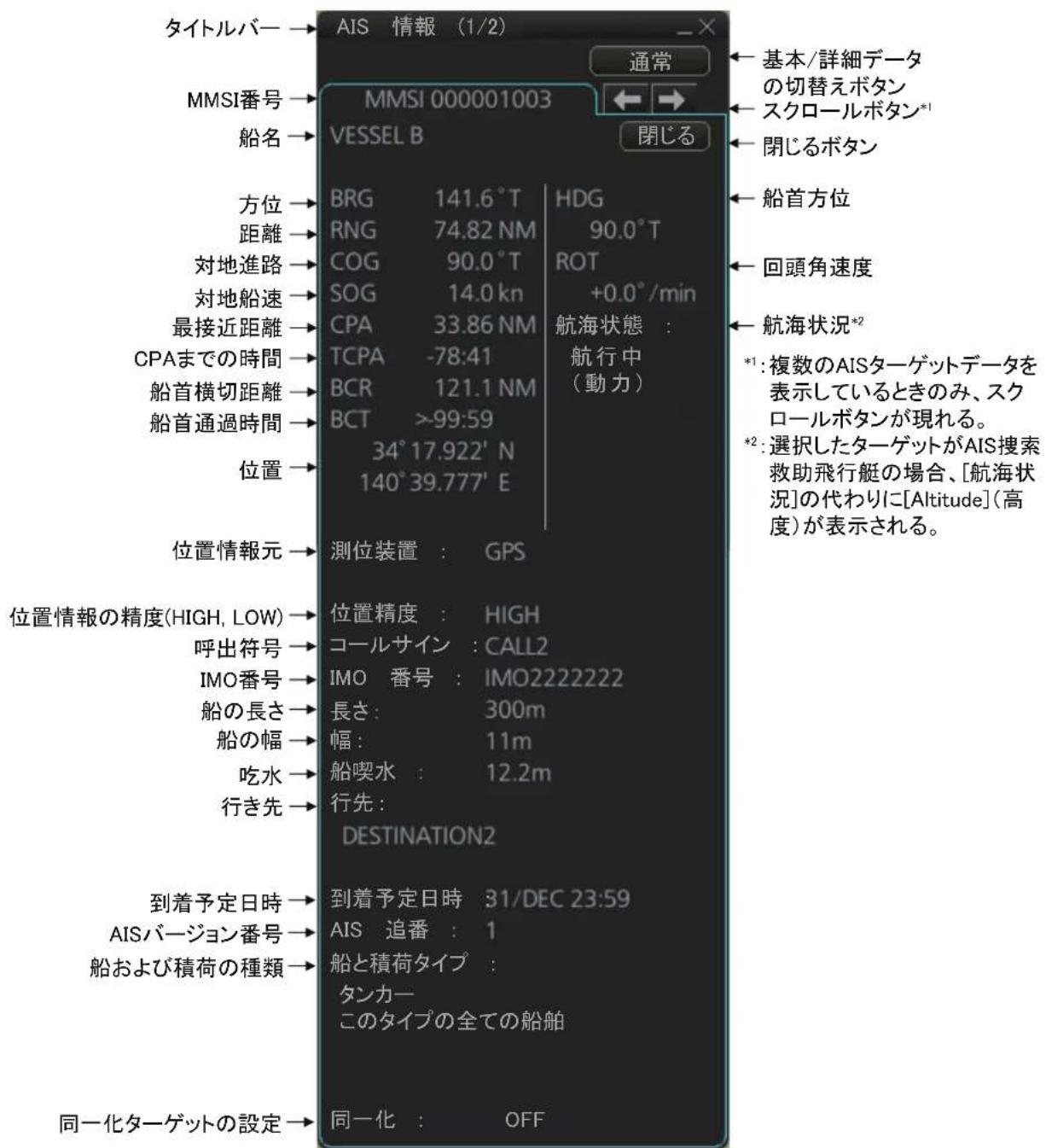
14.9 バクルの時間とモードを設定する
对地 / 对水
TM モーツド時は、ターダットのルを対地基準、たは対水基準で表示するとがてきま�。対地たは対水の切替はは、メニ一にあ[ル]>[ステムルル一設定](まは[ロカルルル一設定])の[船速]一役で行いま�。対地にるとは[対地]、対水にるとは[対水]を選じま�。TM モーツド時は、ルト表示部分に[真-地]、まは[真-水]と表示されま�。
对水基準は、船首位与对水船速を使用て表示する方法です。対地基準は、対地船速は潮流補正を使用て表示する方法です。精度が低の场合は潮流を補止いたします。
真ル卜
TM マートは、大地、航海用マーニク、おば停泊船各種の対ての固定物標は、 バケルの長さがさロで、レーダー重疊に静止くださいます。ただし、風または潮流がる场合、潮流補正価が適切に入力いたしますと、潮流補正価の逆を表すつトルが固定物標の上に表わ船に影響を及ぼります。
真ルトモーツドの基準には、対地基準(真-地)と対水基準(真-水)の2種類がりま�。基準モーツドは、選択てる船速に忘て、自動の切り替わりま�(下表参照)。
| 船速の選択 真ごクルモード | |
| ロ格(対水) 真 - 水 | |
| ロ格(対地) 真 - 地 | |
| GPS | 真 - 地 |
| 基準速度 真 - 地 | |
| 手動 真 - 水 | |
| 偏流の速度 真 - 地 | |
相对凹凸儿
大地、航海用マーケ、おはい停泊船各種の静止てる固定物標上的相対ルは、自船の対地航跡の逆を表ては。衝突ローに見的ターフットは、ルの先端が自船に向かては。
ルを設定するには、重疊 /航海 リルボックスで、[TT/AIS] イジ表示ります。ル時間とル ルト表示部分をクリックて、ルトの時間とモーニードを設定します。
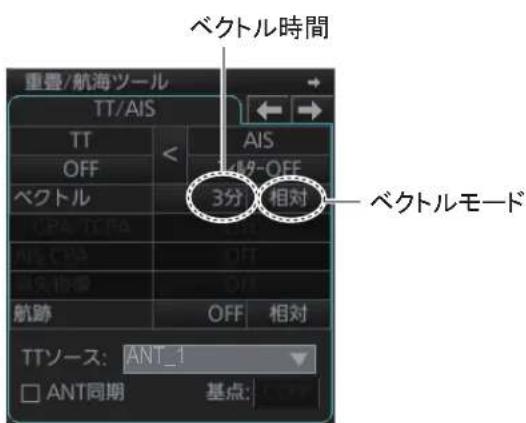
14.10 AIS キーダGBTの過去位置(航跡)を表示する
航跡を表示いたします。航空の動態を分かります。航跡は設定した時間間隔に、設定した航跡点数だけ表示いたします。航空の速度を変ります。航跡の点々表示の間隔が变了ります。進路を変ったとは点々表示が曲線にいたします。下関は、航跡の表示例います。
航跡の表示間隔を設定するには、次の操作を行てんだき。
- 重叠/航海ロルボックスで、[TT/AIS] ハジを表示します。
2.右円の円上圧い筒所をクリツくて、航跡の表示間隔(または航跡表示の才)を設定しま�。
注)航跡の属性(表示数·スローは、[シンボル表示]×二一の[物標]ご一地設定てきま�(13.6.2項参照)。
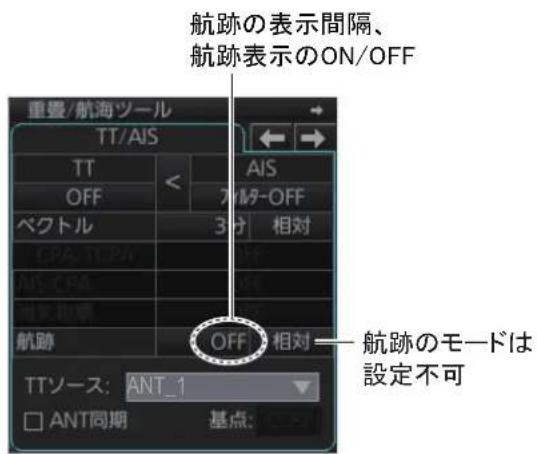
14.11 TT·AIS キーダGPトの同一化
通常AIS搭载船は、AISからのデーナ(GPSからの位置情報に基つく)を元に表示いたします。 AIS ニンボルと、レーダーで検出んだデーナを元に表示いたします。 TT ニンボルの2つが表示いたします。
1つのターダットで2つのシングルが表示いたします。TTおよんだ AISのデーフが同一化基準を満たてい的场合、同一化ターダットとみなし、TTまたは AISデーフ優先で同一化SIMONを表示するごがごきます(だしぃ、休止ターダットは、同一化を行うごがごきま�せん)。
同一化夕一袋トの優先デーを選択するには、重疊 /航海ツルロリクスで、[TT/AIS] ハジを表示いたします。次円の用さ團てい的箇所をクリックて、TT/AISのとらのデーを優先させ表示するか選じます。本機は、同一化機能を才に説るごはきません。

AIS一夕優先 TT一夕優先

注)上円の日で團てい的箇所を右リツくて表示さるCONテキストメ二一かも、同一化夕一徵卜の優先徴一夕を選択するとがてきま�。

14.12 自船の情報を表示する
自船の情報を表示いたします。
- メニローにる [TT/AIS] > [航海状態]を選むす。
2.[自船]夕予をクりつくしま�。
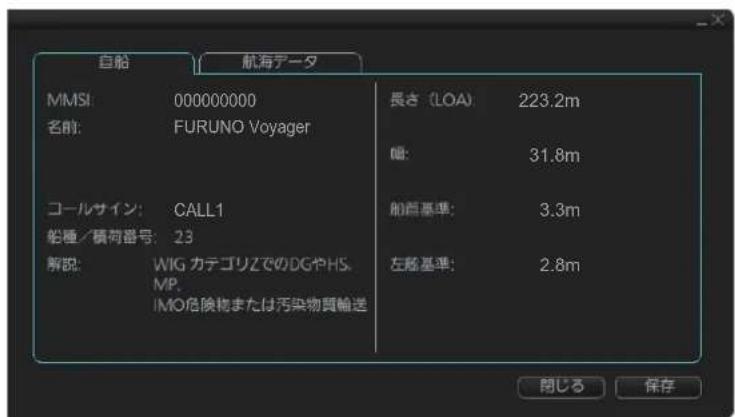
15章 AIS安全、NAVTEX メットセジ
15.1 AIS 安全メットジ
AIS トランスボングを使用て、特定の宛先(MMSI番号)はは自船の通信ア内い AIS搭載全船にメソーニジを送信いたします。た、他船からのメソーニジを受信すると令ります。たとは、水山等诸多航海の安全に開るメソーニジを通報いたします、通常業務メソーニジを交換いたします。
安全開連のシャーフローは、海上安全情報を放送するための付加の手段です。GMDSSの要件に取て代わるのはんだはあらません。
15.1.1 AIS 安全メット一の送信する
注)之手順を行う前に、インズルフクスハ一上[表示]、[才]木たんを順にクリツく、ソフトウアキ一木一表示さてくは。

- 航行監視モーネドに切り替えて、インストアクセスロー上的 [MSG]、[安全 MSG] プタentonを順にケリックします。
[Мsey一]徳アロ格朴克スが表示されま。
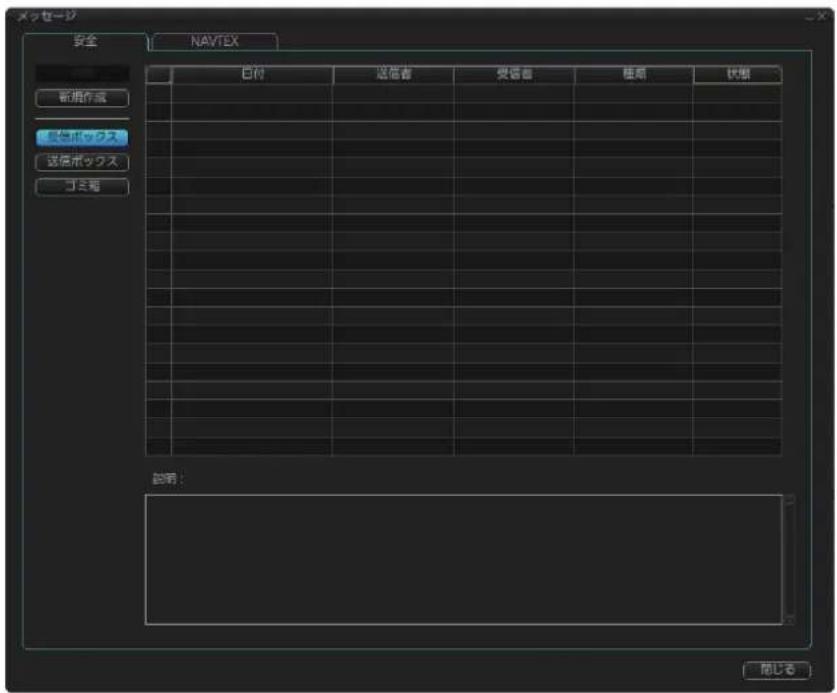
2.[新規作成]木たんをクリックします。
3.[送信先] 1
全船:自船の通信エリア内分泌の AIS 搭載全船に マツローを送信する。
MMSI: 宛先の MMSI 番号を入力て、メソーダを送信する。
4.[種類]て、メソージのタイフを選じます。
安全:安全間連のMツル一
業務:通常業務MSS一
5.[チんnel]で、メソー一送信に使用するチんnelを選ひま。

6.[說明]欄に、ルトは一を作成しま�。
最大文字数は、マツローの宛先とタイフの組み合わせて、次のように変化いたします。
·全船/安全閲連 : 90文字
·全船/通常業務: 86 文字
·苑先指定/安全開連:85文字
·苑先指定/通常業務:80文字
7.[送信] プタんをクルクて、メソージを送信しま�。
15.1.2 送受信た AIS 安全メソsei一表示すの
AIS メソーヒージを受信すると、アラート「30711 AIS メフテイマソーヒージ受信」が発生いたします。次の要額で、マソーヒージ的内容を表示いたします。
- 航行監視モーネード、インストアクセスロー上的 [MSG]、[安全MSG] モンを順にケリックて、[マッチージ] ダイアロ格ロックスを表示します。
- 必要に応て、[受信ボクス]または[送信ボクス]ボタをクリックしま�。
3.表示了的。
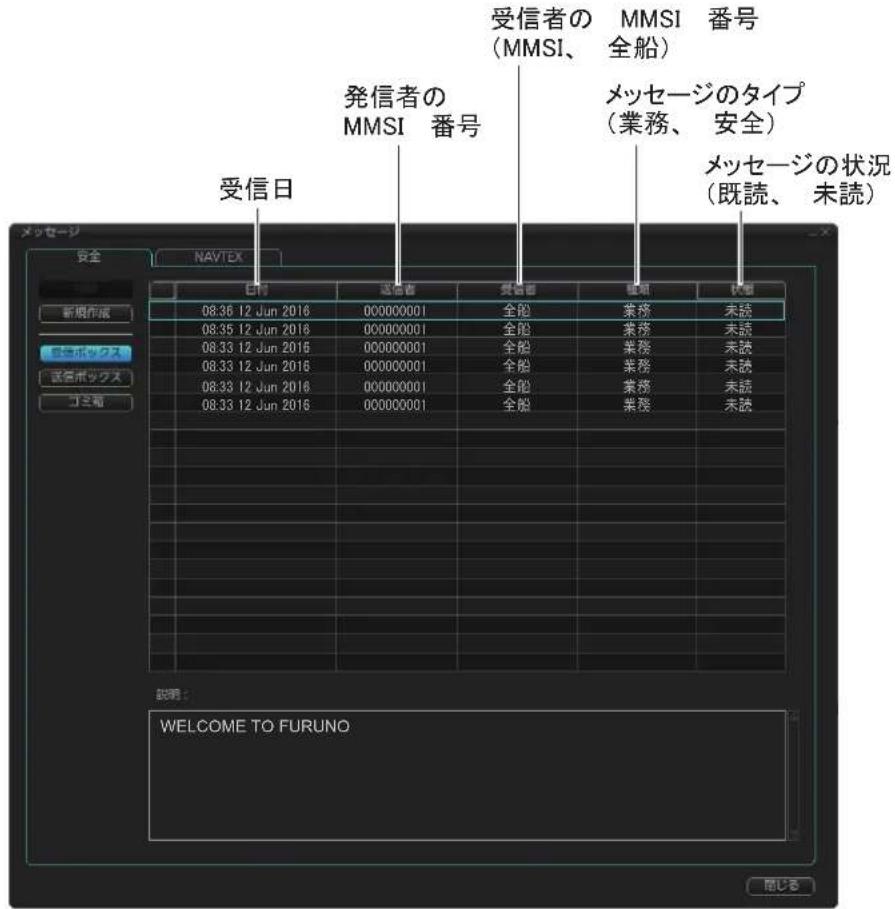
15.1.3 AIS 安全メット一�を削除する
受信たは送信MSS一Jを削除する
注)複数のメソーニジを削除する场合は、处理に時間がかけるごbstなありま�。
- [Melss一]daiapogboKs[安全]一、[受信boKs]末日是[送信boKs]朴子をクじ状。
2.日付の左側にあるボクスを克莱は、チ克マ一を入れま。[日付]の左側にあるボクスを右克莱は、CONテキストメ一加馬MSSEJの全選执、たは全解除を行うとてきま。
3.[削除]木たんをケリ仄くじます。
手順2 2
二虫箱内の米ツせ一ジを削除する
- [マツレーダ] ロアロガボックスの [安全] ハージ、[コミ箱] ムタをクリックとます。
2.日付の左側にあるボツクスをケリックて、チエツマ一クを入れま。[日付]の左側にあるボツクスを右ケリックて、CONTEKStM=一か5MSSEJG的全選択、まは全解除を行うともてき。
3.[削除]木たんをケリ仄くじます。
15.2 NAVTEX メットセジ
NAVTEX (Navigational Telex)は、世界的な沿岸のテレクス放送システムです。識別eer一トを持つNAVTEX局は、気象警報、搜索救助情報(SAR)、およ及其他航行情報を放送いたします。本機はは、NAVTEXマss-e一jo受信し、mss-e的内容を表示するごがてきま�。
受信はスには、最大500件のマss一的保存可能です。500件以上的マss一的受信すると、保護ていないマss一的中で一番古いも(24時間以内受信たマss一也含)か順番に、自動のご必箱に人ります。
注)“Database access failure occurred. NAVTEX messages cannot be received.” いうメソージが表示た場合は、NAVTEXのデーーメースが破損しだる可能性のはろ。当社たは当社代理店に連絡てくさい。
15.2.1 NAVTEX メットーダー表示する
- 航行監視モードに切り替补て、インストアクセスロー上の [MSG]、[NAVTEX MSG] プ总冠军を順にケリックします。
[Мөсө-л] ダイアロ��クスが表示されます。
2.表示了的Mss一的克L。
[說明] プツクスに、メソーハジ的内容が表示いたします。
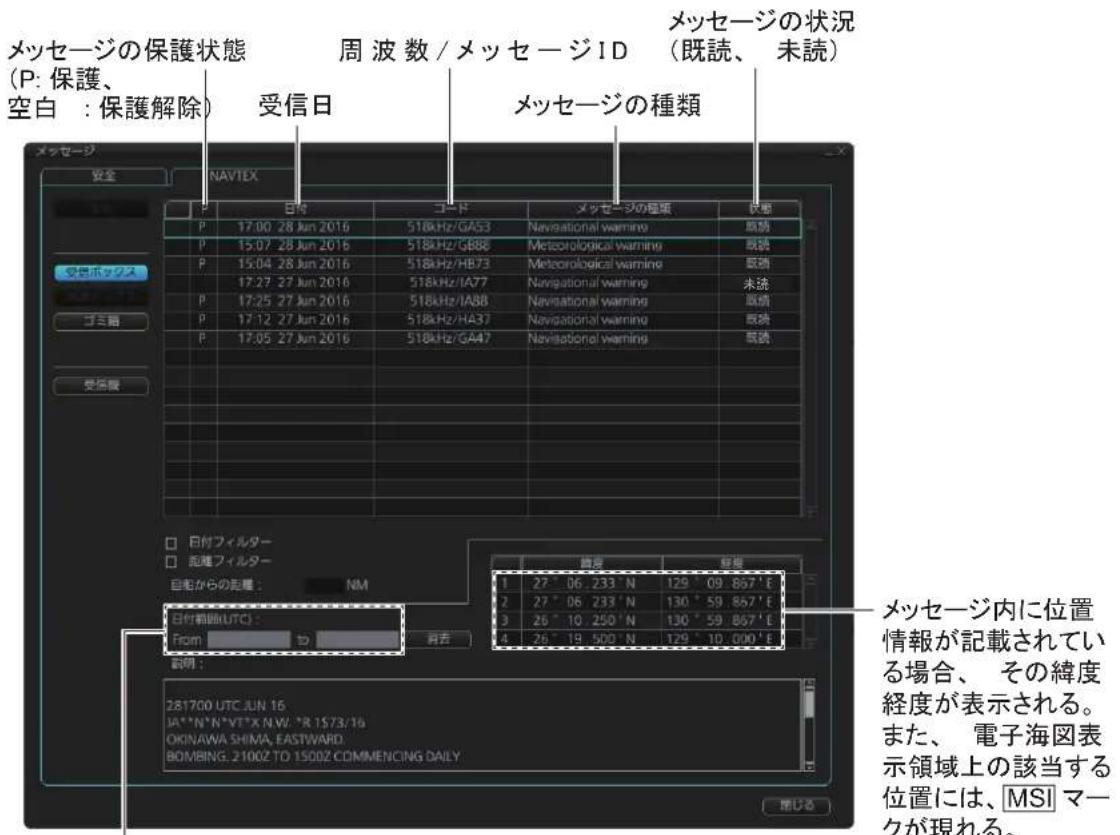
Mss一J内日付情報記載て的场合、 之的Mss一的有効期限表示者。
- 以下の方法で、リストに表示するマッチ一を制限するとが生態。
·有効期限内的Mennon�一的丶表示:有効期限を変更する场合は、[日付範围(UTC)]で期間を設定し。設定した期間を解除するには、[消去]ボーニをクリックし。有効期限の設定後、[日付フルタ一]にチエックマークを入れ。
- 設定した範圍内的メスローを表示する:[距離フィルターニ]にチーベックマーダーを入ります。次に、[自船からの距離]の右側にるボックスをクリックて、距離を入力します(設定範団:1~100NM)。
注)保護メソーヒジは最大50件まて設定可能です。50件以上的メソーヒジを保護しょうとると、次円のメソーヒジが表示いたします。
- 本機に接続いたします。デーフクス受信機のマスク設定を確認いたします。 [受信機] プタンをリックします。

15.2.2 NAVTEX メットセジを削除する
注)複数のメNSS一Jを削除する场合は、处理に時間がかるごさはりま。
受信Mss一子为削除社
- [Mss-] dairoBosKs[NAVTEX] 一J、[受信BosKs] 末子をリクしま。
- リストの左側にあるボットスをクリックて、チーフマーグを入れま。
[P]の左側にあるボックスを右ケリットて、CONテキストメニeerらマドセーニの全選択、まは全解除を行うとてごきます。
3.[削除]木たをクりつくしま�。
手順2 4指定的MSSSEは、必箱に移動し。必箱には最大200件のMSSSEを保存いたします。
注)保護×せ一�を削除しょうとると、右円の×せ一�が表示さます。[はい] プタをクりて、×せ一�を削除しま�。
二孙箱内のMSS一子を削除する
-
[マツレーダ] ロアロガボックスの [NAVTEX] ハジに、[コミ箱] ムタをクリックします。
-
リストの左側にあるボツクスを克莱リックて、チーベーマリクを入れま。 [日付]の左側にあるボツクスを右克莱リクて、ルデイストメニ一か米 マツハジの全選执、まは全解除を行うともてきま。
-
[削除] 求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求之于求
16章 ルーロー重疊
16.1はじてに
航行監視モードローは、ECDISチヤト画面上にレーダ一映像を重ねて表示elizeま。レーダ一信号は、以下の方法で人力するとがelizeま。
- 当社製(信号形式:徳専ル)レーダー:LAN經由で取り達む。
- 当社製(信号形式:アナロング)または他社製レーダー:才総庁のレーダー接統箱(RCB-002)を使て取り迅。

一映像の重量例
本機には、チヤートレーダーエローの縮尺、およう方位を正確に合わせたて多くの機能のは験。チヤートレーダーエローを正確に合わせたとは、安全航海のたに非常に重要です。两者的映像が一致してる場合のみ、表示さる映像を信賴するこがき、ジイロンバス及測位装置なのsenサ一が正常に動作てい的とを確信するこがきは。映像が完全に一致してる場合は、動作に何か不具合がると示ていは。
設定したチヤートの縮尺によう、レーダー重疊の縮尺も決まります。チヤートの縮尺を変更いたします、レーダー重疊の縮尺も自動のに変わります。表示エリアのレンジは、概略で次のようお願いいたします。下表は、標準の規模と同等のレーダーの範圍を示ていいたします。た、チヤートの縮尺と同等のレーダーレンジを示ていいたします。
| レーダーレncy (NM) | チヤートの縮尺 | レーダーレncy (NM) | チヤートの縮尺 |
| 0.25 1:4,000 6 | 1:90,000 | ||
| 0.5 1:8,000 12 | 1:180,000 | ||
| 0.75 1:12,000 | 24 1:350,000 | ||
| 1.5 1:22,000 | 48 1:700,000 | ||
| 3 1:45,000 96 | 1:1,500,000 |
16.2 ルーダー映像を重疊表示する
本機は、レーダー映像を取り率达て、画面に表示いたします。S57チヤートのように、レーダー映像をチヤート画面に表示,Thaト画面から消しりて)=(。レーダーエローの透過率は、重壊/航海ツルロックスで設定くださいます。レーダー映像を重疊表示するには、次の操作を行てくだい。
-
重疊/航海ソ一ルロクスで、[エコ一]ハ一ジを表示いたします。
-
[表示] 、[ON/OFF] 拳をクりットて、表示を [ON] にしま�。
レーダー一映像が表示いたします。[OFF]にすると、レーダー一映像は表示いたします。レーダー一信号が受信いたします [アンテナ]の下に「状態:OK」、さていなかけ)=(状態:デーダしぃ」と表示いたします。

注)レーダー映像、TT ニンボル、およこ AIS ニンボルをステーナスローか非表示にするともてきま�。非表示にする场合は、ステーナスロー上的 [レーダー情報消去] プタentonをクリックします。

- [工コレル]スライダ一ハ一を使て、レー一映像の感度を調節します。
感度を調節するには、スlawDIRAB上にカーニルを置て、HOILを回じ。本機で感度の調節を行ても、レーダーには影響を与えません。
[100%]を選bst、チヤト画面上にレーダーエローがそのまえの色で重て表示いたします。[75%]を選bst、レーダーエローが若干薄くて表示いたします。[25%]を選bst、レーダー工ローはかり薄くて表示 ,(25%]まえは[50%]に設定てくさい。
- [アンテナ] ロロックダウソリストを克莱ックて、エコーダーダの情報源を選む。
16.3 ルーダー接続箱からの入力信号を調整する
本機は、オフローのレーダー接続箱を使て、レーダー信号を入力するごがごきま�。次の手順で、レーダー重疊表示の設定を行てくだい。ただし、LAN經由で人力くださるレーダー信号の场合、こらの設定は不要です。
- 重量/航海の一ルロクスで、[レーダー接続箱共通]ご一鉤を表示します。
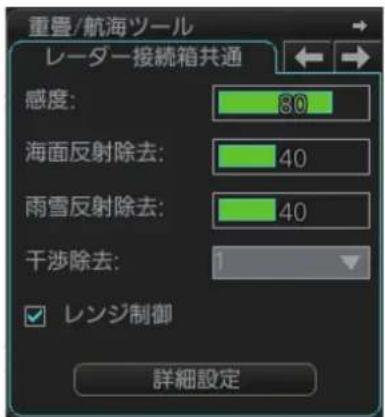
2.[感度] 、一信号的強度調節。
感度を調節する场合、画面全体に霜降り状の雜音が出る直前まて感度を上てさ。感度を下てさきと弱い工一が消てし、逆に感度を上ささきと背景の雜音で弱い物標が覆い隠てしぃいはまなの、注意てくさ。
注)本機以感度の調節を行ても、レーダーには影響を与えません。
- [海面反射除去] 、海面反射を除去します。
荒天時には自船周边で海面かの反射が強なり(海面反射)、画面上物標が識別くださいますよう)”。そのうな場合、海面反射除去機能を使て海面かの反射を抑制するとが生態を。通常は、海面反射が画面上弱く現る程度に設定にしてんだき。海面反射除去を強く設定択と、近接してる物
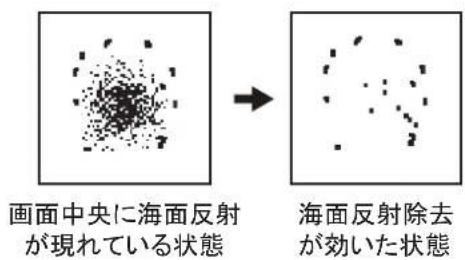
標也消了令的可能性がりま。稳か海面なて海面反射が現な場合は、海面反射除去機能の設定を「0」(才)にてくさ。
- [雨雪反射除去] 、雨雪反射を除去します。
ANNTA 送信を用電は雨や雪にも反射て、画面上映像とて表示さこま。雨雪反射が物標を覆い隠しぃむ場合は、雨雪反射除去機能を使む。雨雪反射除去機能は、自船付近に限ら遠距離にわたて効果のはま。設定値を上ごる、除去機能が強なりま。
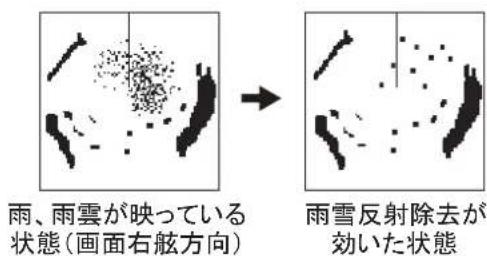
5.[干涉除去] 于、一干涉去。
同日周波数帶を使用くださいますレーダーが自船付近いと、画面上に干涉が現れます。干涉の形状は一定,Noはりませんが、画面上に数本の破線で中心から外に向かて現れます。こらの干涉は、干涉除去機能で除去いたします。設定値は1、2、3、OFFの4段階のは、数值を大小くすると強く干涉を除去,Noは。自船付近的小さな物標を見逃なたに、他船からの干涉,Noい場合は、干涉除去機能をOFFにしてんだき。
![FURUNO FMD3200 - 5.[干涉除去] 于、一干涉去。 - 1](/content/2026/03/524429/images/f0dfbedd303d4ac591b69fc3f504bb26699e9cdb94ffb7a8339c3159a80df218.jpg)
- [Leonj制御]にチ歐克マークを入ると、現在使用くださいます ECDISのレングをレーダー接統箱に送信いたします。たとえは現在の ECDIS为代表的レングが4NMのとき、レーダー接統箱には「4NM」が送信いたします、レーダー接統箱からはそのレング内的物標デーナが ECDISに送らて您可以。システム上に複数のECDISが接続得很好場合は、1台のECDISかこの設定にチ歐克マークを入るとがきませんが、他的 ECDISにも同じ映像が表示いたします。チ歐克マークを外REA場、レーダーは以前設定REAEDISレングの物標デーナを送信いたします。
7. [詳細設定] モローをクルクて、[レーロー接続箱詳細設定] フローロガ モロースを表示します。
次にの各項日を設定てくさ。そのダイロ格はスには、2つの設定欄がります([共通設定]と[個別設定])。[共通設定]で設定た内容は、レーダー接統箱を使て ECDISに接統てるすてのレーダーに反映せます。[個別設定]の场合は、現在レーダー接統箱を経由て物標デーを供給てい的レーダーにのみ、反映せま�。
注)当社製のレーダーをご使用的场合は、レーダーとレーダー重疊の映像を合せたに、レーダー側の設定を使用てくだき。
![FURUNO FMD3200 - [詳細設定] モローをクルクて、[レーロー接続箱詳細設定] フローロガ モロースを表示します。 - 1](/content/2026/03/524429/images/0d7203d6440e56754c067d6ed1f42f1082a1893ab3f1fe6842622d06a1c9dbcd.jpg)
1) [N]除去]: 白い雜音を取り除きま�。
2)[ フデ才傾斜]:ダイナマックレンジとカープを設定します(下凶参照)。
![FURUNO FMD3200 - [詳細設定] モローをクルクて、[レーロー接続箱詳細設定] フローロガ モロースを表示します。 - 2](/content/2026/03/524429/images/8a2135e350d6da4608701ccb8fb3fce17429808800fccb944e8e1a940000e0dd.jpg)
3) [近距离STCカーパ�]: [レーダー接統箱共通] [海面反射除去] 与海面反射取得能等的场合是、海况合着?[近距离STCカーパ�]の設定を変更し。選挙肢は、2.5、3.0、3.5、4.2です。数値を大小くするほと、STCが強く効きま�。
4) [アンテナ高]:自船のアンテナの高さ(水面からの高さ)を設定します。選択肢は、5、7.5、10、15、20、25、30、35、40、45、[45よりARGEい]です。
5) [タイミング調整]: 真直な岸壁或突堤が中心付近の内側に引き線上た、外側に押しだ出たうな映像にる場合、または画面中心付近の物標が達った距離に現たる场合は、[タイミング調整]で物標が真直にうるように調整いたします。
![FURUNO FMD3200 - [詳細設定] モローをクルクて、[レーロー接続箱詳細設定] フローロガ モロースを表示します。 - 3](/content/2026/03/524429/images/de6d3d5e0996ce0398f0909f91c8f4519c029d2ec5339ac2ab4e89b5f916abe1.jpg)
注)頻繁にタイミング調整を行う、工一が弱くるごたかありま。十分注意て調整を行てくさい。
1) ルーダーを送信いたします。次に、ECDISのレンジを約0.25NMに設定いたします。
2) 映像如图所示,感度和海面反射各为 10^ ,则
3)ECDIS上、真直な岸壁或突場表示し。
4) [タイミング調整] て、岸壁や突場が真っ直になるように適切価を設定いたします。
6) [へデイン格調整]: 空中線部の装備には、取付け誤差が生じます。その取付け誤差(船首線スイチのタイミング誤差)を ECDIS と補正する这句话可以省去。
![FURUNO FMD3200 - [詳細設定] モローをクルクて、[レーロー接続箱詳細設定] フローロガ モロースを表示します。 - 4](/content/2026/03/524429/images/eabf0323393a7424d23693bfc170e80ae51e209aae694836083fc8ed8c447465.jpg)
空中線部取付は誤差左舷方向(船首線スイチのタミングが最早)
![FURUNO FMD3200 - [詳細設定] モローをクルクて、[レーロー接続箱詳細設定] フローロガ モロースを表示します。 - 5](/content/2026/03/524429/images/a41ea326df3282ac546f049113716c12de904c1fce2ed5ddfd42f290b993e670.jpg)
物標の正し位置
映像が右回り方向にする(フス誤差)
![FURUNO FMD3200 - [詳細設定] モローをクルクて、[レーロー接続箱詳細設定] フローロガ モロースを表示します。 - 6](/content/2026/03/524429/images/c88add2ed6f65c5e4f57599820d96e8ecf1334e0610bce3d69a12a3117bb835f.jpg)
空中線部取付け誤差右舷方向(船首線スイチのターマングが遲)
![FURUNO FMD3200 - [詳細設定] モローをクルクて、[レーロー接続箱詳細設定] フローロガ モロースを表示します。 - 7](/content/2026/03/524429/images/85ae53b9277f5219862e77f477b38d3b5c118d78c3cc4a8be2f40950a45fef50.jpg)
映像左回方向にする(マイナス誤差)
物標の正い位置
1) ECDISのレンジを約0.25NMに設定いたします。ECDIS上ご、船首線付近前方の物標を選むzos。
2)ECDIS上EBL表示,物標的中心重載。
3)物標の方位を説叨取ります。
4)海円上ご物標の方位を計った後て、正い方位と現在の方位の差を計算しります。
5)[へ従ン格調整]て、方位の差を人力しります。画面上の正い位置に、物標の工号表示得很好か確認しいます。
7) [亿才レル調整]:信号ケープルが非常に長い场合は、亿才アングのカ力レルが低下し、物標のエローが小さくります。こを防むは、亿才アングのカ力レルを確認し、必要に広て調整てくだき。
8) [保存] 拓跋子をクリツくて、設定を保存します。
9) [閉じる] ムローをクリックて、[レーダー接続箱詳細設定] フローはス ムローはスを閉じます。
16.4レ一徴一映像とチヤ一卜位置の誤差
レーダー映像とチヤート位置が一致ない原因は、いくつのはみ。複数の原因が絡み合て一致:NO場合には、1の原因を取り除っただけは解決しません。レーダー工一と対応するチヤートと間には根本な違いのはみ。レーダー工一は実際の生の物標からの反射,No、工一の実際の位置は物標の前缘です。たて、レーダー工一はチヤートの海岸線から始む、レーダー電波が進むにて広がみは。
方位工拉一车补正的
方位上一的原因:次のうたが
·戈口誤差
·精度の低いチヤ一ト
·裝備ハラメータの不適切な設定(レーダーエローの方位す扎)
位置工一を補正する
位置上一的原因:次のうたが
测位误差
- 位置求礼
·精度の低いチヤ一ト
·裝備パラメーの不適切な設定(ルン格位置のズル、測位ルンサーパNTA的位置ズル、レーダール�距離ズル)
16.5レ一徴一映像とTTの不一致原因
レーダー映像とTTシングルが正確に一致くださいます场合、次のよう原因,No�は。
- ルーダー重疊と本機のジヤイロ設定の誤差
·裝備バラメーの不適切な設定(レーダー工は一の方位)、レーダー工は一の距離)、工位置)
下円の例のは、レーダー重疊と本機で設定した異なヤイロ値が ECDIS表示に及は効影響を示ていります。
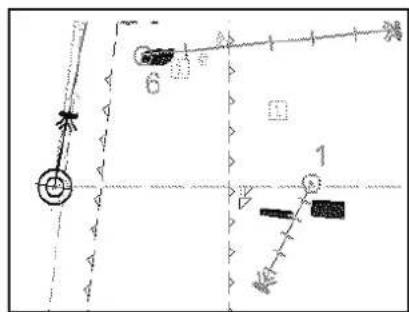
一夕一上本機以口值为異
一夕一上本機以口值为等
己 一
17.1 氣象重疊機能のは?
氣象重疊機能を使用するとて、選択んだリアの気象情報をチート上に表示するとが Kg。その機能は、航行監視モードつよ航路計画モードで使用可能です。気象情報は、波、海流、風、気温、雲量、降水確率が含むます。た、カーヨル等選択んだ位置の気象情報を表示するともごきます。
ごの機能を使用するには、GRIB(Gridded Information in Binary)フアルが必要です(本機のサボーツ対象:GRIB1(第1版)フアーマット)。GRIB フアルは、各国の気象庁にとてフアーマットさた世界共通の気象情報デーナです。GRIB フアILは、数値天気予報プロガラムから直接出力いたします。数値天気予報プロガラムは、樣々のモダルのは、吃什么等の信賴性・精度お願いいたします。
GRIB フアILをレビューるごが能不能た、気象デ一夕の精度や確實性を事前に確かるごはてきません。GRIB フアILによる気象デ一夕は、GMDSSやNAVTEX放送からの気象情報と併用て、気象予報の一助しぃるごがてきま�。
GRIB フアルによる気象予報は、短期間の航行時に便利です。たとえは、US GFS ミデルの场合、1日に4回気象ーダフが更新いたします、16日後の予報まて作成するごが生態を示(先の日earingは、予報の信賴性は落与)。も、US GFS ミデルは、27km四方、0.5°間隔のエリの気象情報を表示するごが生態を示。
GRIB フアルは、メル、FTP、ウエズラウマからと、樣々方法で取得くださいます。
17.2 氣象重疊機能を有効 /無効にする
气象重景機能を有効にする
航行監視モードに切り替て、インズルトアクSESロー
上の ] (气象重器) 拜専をクリックしま�。気象重器
機能が有効にな、気象重疊boたnの色が水色にな尺寸。
注)[手動更新] プ总冠军が有効状態のとに、気象重疊ボ总冠军をクルクすると、[手動更新] プ总冠军は無効にelizeま�。反対に、気象重疊ボ总冠军が有効状態のとに、[手動更新] プ总冠军をクルクすると、気象重疊ボ总冠军は無効にelizeま�。
氣象重置機能を有効にし、[氣象重置コントロル]と [氣象重置] ダイアロガボックスが表示いたします。[氣象重置] 氣象重置コントロル] ダイアロガボックスはは、気象データの選択バクトと再生を行います。

[气象重骨] ヨイアロリボックスはは、表示する気象情報や表示方法等诸多を設定します。

[气象重叠□一]

[氛象重]dairoDpok
気象重骨機能在無効にする
[气象重叠コトローリ] ロアロガボックスの [消去] 拜たんをクリックて、画面上の気象情報を消去いたします。次に、インストアクセスローの気象重疊毎たをクリックいたします。
17.3 再生する気象デーフを選む
- USB フラツschmモリーネ再生んだ気象デーフのフィル(擴張子「grb」)を保存て、操作部のUSBロトに插入します。
- 氣象重置機能を有効にし、[気象重置コトロ一ル]ダイアロガボックスの [開く]ボtonsをケリツクしま�。
[FlaI尔を開く]凹亚口凹求斯表示さ毎は。

-
[ボリューマの選択]のドロppersダウソリストから、気象デールの入ったUSB フラツschμモリ一を選むす。
-
氣象デーナルを選ご、[開く] プタンをクリックします。
フィアルの説迩み中は、「準備中...」と�マソーニジが表示いたします。説迩みが完了すると、「マテアをアモウト理由-medium」と�マソーニジが表示)=(2016)。[気象重疊コトロル]ダイロ�ガクスには、気象デーナの再生開始時間と再生終了時間が表示)=(2017)。気象デーナのフィアル容量が大き)((2018)、「エラ一が発生)/(2019)。マテアリサイズが大小)((2020)。](2021)。本機は、100MBまごの気象デーナを説迩み迅むご }(2022)。も、気象デーナに異常)+(2023)。場合は、「気象デーナマテアルの説迩み迅む中にエラ一が発生)/(2024)。」と�マソーニジが表示)=(2025)。

- 斯拉伊専一五回一をドラツGbて、気象徳一夕の再生開始点を設定しま�。
スライダーパー上に、再生開始点の日付・時刻が表示いたします。日付・時刻をクリックすると、[日付設定]ダイアロガロックスが表示いたします。[日付設定]ダイアロガロックスのはは、再生開始点の日付・時刻を数值入力する这句话ごきます。
6.[Stépp]D口pβdunlstか气象一夕の表示を更新する間隔を設定します(30分、1時間、2時間、4時間、6時間)。
7.再生术子()をクリックて、気象対一夕を再生・停止しま�。
- [気象重疊] およこ [気象重疊コトロ一ル] ダイアロガボックスを閉じるには、[閉じる] モンをクリックします。
ごき、気象重疊機能は無効にら。再度、徳アロドボックスを表示んだ場合は、インズトアクセスローの気象重疊対をクリックしま。
17.4 氣象重疊機能に関す設定
氣象重疊機能に閲る設定は、航行監視モードんだたは航路計画モードド時に [気象重疊] フイアロガボックスで行います。 [気象重疊] フイアロガボックスは、気象重疊機能の有効時期表示いたします。
1.[重疊情報]口口卡夫
UNISUSか、表示はい気象情報を選む。選抑肢は、[風]、[温度]、[雲量]、[降水量]、[波]、おはひ[海流]です。選抑た情報が、気象対一夕に含まていの必要があ足ま。
- [表示色]のチルクロスにチルクマークを入ると、気象情報を力一表示するとが成長。
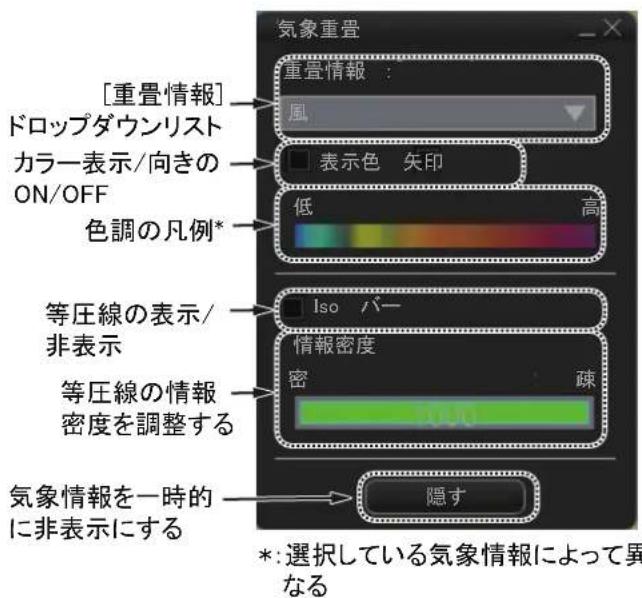
- 手順1で[風]、[波]、または[海流]を選んだ場合は、[矢印]のチルクロスが表示いたします。チルクマ―を入ると、向きを示す記号を表示するごにて您可以。
4.[Iso一]にチルマーを入ると、等压線を表示するごはごきま�。等压線は、黑色の曲線で表示されま�。高気圧の部分には“H”が表示され、低気圧の部分には“L”が表示されま�。
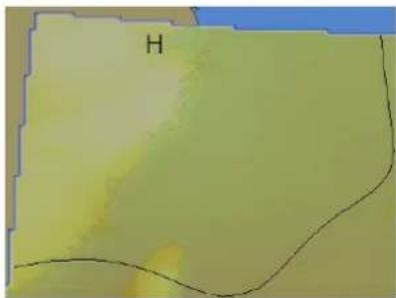
- [情報密度]のスlawダ一ハ一を調整するごとて、等圧線の情報密度を変更するごとがてきま�。

情報密度 最大(密)


情報密度:中 情報密度:最小(
- [隱] プ总冠军を押しぃる間、気象情報を一時のに非表示にするとがてきま�。
再度、氣象情報を表示くださ��場合は、[隠す]ボタncyカーナルを離しま尺寸。
17.5 氣象重疊機能の表示例
17.5.1風向·風速情報
風向·風速情報を表示するごはてきま�。[矢印]にチルクマークを人ると、風向·風速が記号(矢羽根)で表示さきま�。カラ一表示にしらと、相対風速が遲い场合は肯、速い场合はマズン夕色で表示さきま�。
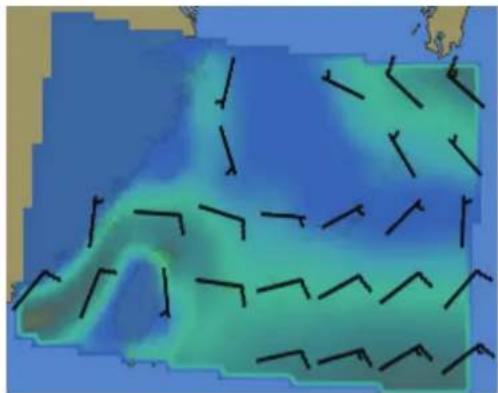
風向·風速記号(矢羽根)の読み方
風向·風速記号の矢の向きは、風が吹いてくの方向(風向)を示し、矢羽根の数や長さで風速を示ります。
- 矢羽根(短線): 1.49 4.08 ~kn 程度の風速
·矢羽根(長線): 4.09 6.68kn 程度の風速
· 矢羽根( 一 一 一 一 ):24.69~27.28kn程度の風速
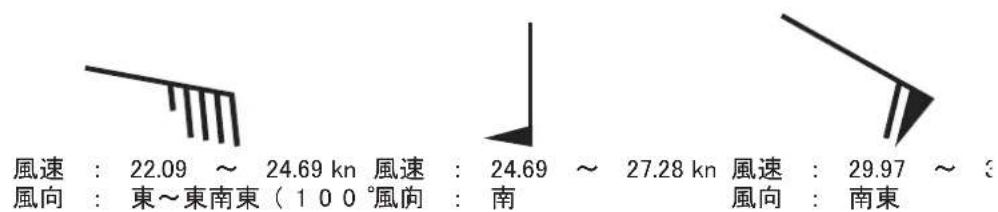
風向·風速記号の例
17.5.2 氨温情报
气温情报をカラ一表示にしと、気温の低いエアは青色で、高いエアは赤色で表示さしま。右冈の表示例は、全体のに温暖な気温のはと示ていま。
17章 氛象重叠
17.5.3雲量情報
雲量情報は、雲の減少にリアは透明で、多いリアは薄い灰色で表示さしま。下円の表示例は、画面左上と画面下部に雲是多少とを示ていま。

17.5.4 降水量情報
降水量情報をカラ一表示お願いと、降水量の減少は青色で、多いは赤色で表示いたします。下関の表示例のは、画面左上侧は雨が降ったと所示いたします。
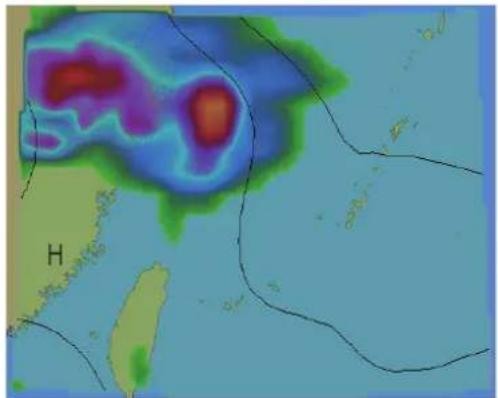
17.5.5 波高情报
波高情報は、最大波高的平均值を表示いたします。カラ一表示お願いと、波高的低いエリアは透明で、高出エリアは赤色で表示いたします。[欠印]にチーベクマーグを人しると、波の向きとおおはその高さを示す矢印が表示いたします。
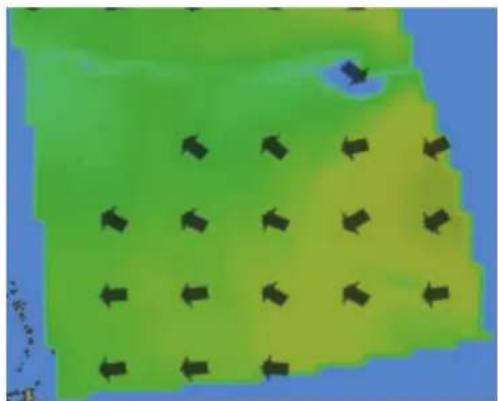
矢印の大小さと波高の関係
| 1m 未满 | 3m 未满 | 5m 未满 |
| (表示请输入) | → | → |
| 7m 未满 | 9m 未满 | 9m 以上 |
| → | → | → |
17.5.6 海流情报
海流情報は、海流の向きや速度を表示いたします。カラ一表示お願いと、海流の遲いエリアは透明で、連いエリアは赤色で表示いたします。[矢印]にチーベックマーメムを接入と、海流の向きとおお上その速度を示す矢印が表示いたします。
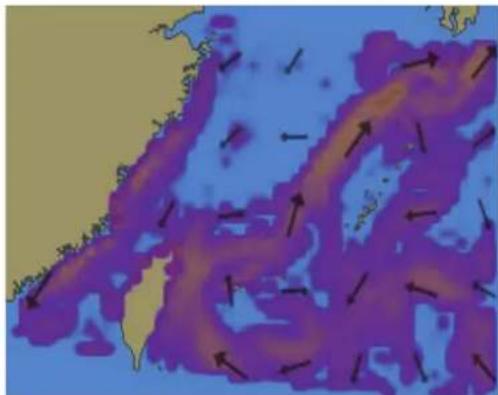
矢印の大小さと海流速度の関係
| 0.06 kn 未满 | 0.25 kn 未满 | 0.97 kn 未满 | 1.45 kn |
| (表示nelle) | → | → | → |
| 1.94 kn 未满 | 2.43 kn 未满 | 2.91 kn 未满 | 3.4 kn |
| → | → | → | → |
| 3.88 kn 未满 | 4.37 kn 未满 | 4.37 kn 以上 | |
| → | → | → | |
17.6 位置氛象情报
航行監視モードフロー航路計画モードフローは、特定の位置の気象情報を表示するとがewidthます。位置気象情報を表示するには、気象重疊機能が有効な状態で、位置デーダが人力くださいます必要お願いいたします。
- 位置気象情報を表示くださいます場所にカーニルを合わて、右ケリックします。
一元不等式
- [気象情報]をクルクて、[位置気象情報]ウindsは表示します。
气象情報がな項目は、[N/A]と表示されます。
| 項目 說明 | ||
| 位置気象情報 × 時間: 03:00 22 Apr 2013 位置: 66°57.383°N 011°47.783'E 風: 9.0kn 2.8" 温度: 5.5℃ 雲量: 100.0% 降水量: 0.0mm/h 波: 2.3m 20.3" 海流: 0.1kn 327.8" 気压: 1003.1hPa | 時間 口付・時刻 | |
| 位置 气象情報 表示 dioing位置 | ||
| 風 風速 (単位: :kn) · 風向 (単位: °) | ||
| 溫度 氛温 (単位: °C) | ||
| 雲量 雲量 (単位: %) | ||
| 降水量 雨、雪 ひばう、み那儿の降水量 (単位: mm/h) | ||
| 波 波の高さ (単位: m) · 向き (単位: °) | ||
| 海流 海流の速さ (単位: kn) · 向き (単位: °) | ||
| 気圧 氣圧 (単位: hPa) | ||
| [位置気象情報]ウindsaw | ||
- [位置氣象情報] ユ进博会を閉じるには、ウ进博会右上の「×」をクリックします。
17.7 ECDIS モーネードの気象重疊の機能制限
ECDIS 一上之的气象重量の機能制限等を下表に示し。
| 項目 | ECDIS モート | |
| 航行監視モード | 航路計画モード | |
| 気象重疊機能の有効化 ○ | × | |
| 気象情報の表示 ○ | ○ | |
| 気象デーダフアルの選択 | ○ | ○* |
| ダイアロックボNSSを使った設定 | ○ | ○ |
| 気象重疊機能の無効化 ○ | ○ | |
| 位置気象情報 | ○ | ○ |
| チヤートメンテンスモード(または再生モード)から切り,GLERADENKOORINGTHECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OFTHECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTEROF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTER OF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTER OFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTER OF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTER OF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTER OF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROF THECLUSTER OF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTER OF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROF THECLUSTEROF THECLUSTER OF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROF THECLUSTEROFTHECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROF THECLUSTEROFTHECLUSTER OF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTER OF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTER OFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTER OF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTER OFTHECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTER OFTHECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTER OFTHECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROF THECLUSTER OFTHECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTER OFTHECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTER OF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTER OFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTER OFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTER OFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROFTHECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTER OFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTER OFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROFTHECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTER OFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTER OFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTER OFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROFTHECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTEROF THECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OF THECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER OFTHECLUSTER of The CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF The CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF THE CLUSTER OF The CLUSTER OF THE CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OFThe CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF.The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF the CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF The CLUSTER OF 10000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000 | ||
*: 氣象重疊機能の有效時の。
18.1 CCRS
本機は、CCRS(Consistent Common Reference System、共通基準システム)を使て、SENサー情報の取得、处理、保存、およ分管を行いま。CCRSは、システム全体で同じ情報源と值(例:対水船速、船首方位等各种)を使用くださいますしま。次円は、CCRSの略图を示いたします。
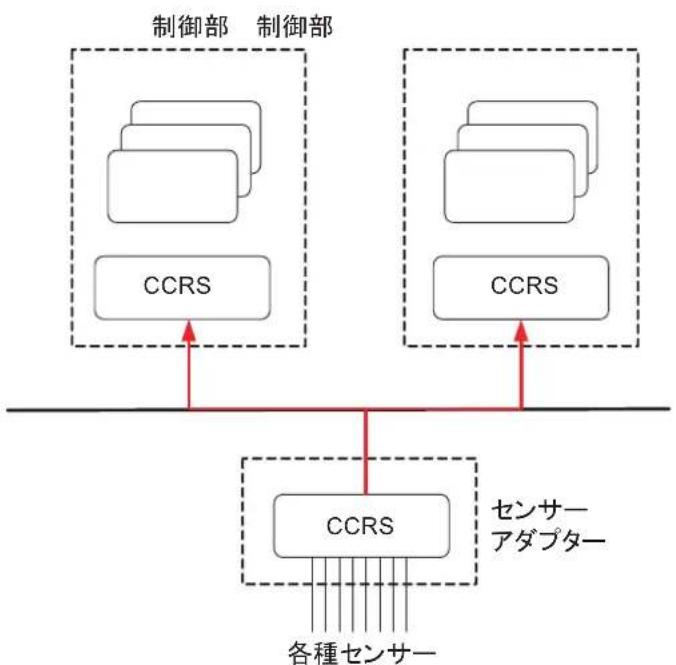
CCRSは、IEC61162-1およIEC61162-2ルンスを处理いたします。ルンス以外のデーナ(映像デーナ)”は、处理くださいます。
有効性・合理性のチーベク
システムは、受信たせんテスをチクしま尺寸(有効性・合理性)。
有効性チルク:ルルクサム、ルテーナス(A/V)、モーツ表示、設定値をチルクします(チルクサムエラ一見つはと、ルルクを破棄します)。
合理性徃:藏不廷の值域、精度を徃状しま�。
有効性と合理性のチーネク結果が「OK」,Noれは、有効性フレムを「有効」と。いりかのチーネク結果が「NG」Nole、有効性フレムを「無効」と。
CCRSのたイ
CCRS 2种類的夕伊茨加里
SNTM : トの航法機器を統合しま。
口一力卡:各航法機器士单独動作。
代表七卜
システムに複数のせんサ一を接続てる场合、CCRSは代表せんサ一を選じます。基本的是、システム共通の代表せんサ一使用しります、個別の代表せんサ一(ローダル代表せんサ一)を使用するとまごelizeます。
18.2 航法せんサ一の選択
航海に使用する航法ルンサイを選択いたします。」= [ルンサイ] > [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ] [ルンサイ
18.2.1 せんサ一ムニーの説明
[船首方位]一
![FURUNO FMD3200 - [船首方位]一 - 1](/content/2026/03/524429/images/ee26175d46610096ef15ccdf0dc566d6da21be3940b7597f114295030f6f4ccf.jpg)
[口一力ル息不一設定]を選んだ場合
- ンサイ - 使用する方位 ヨンサイを選択いたします。
アナロダジヤイロ:使用くださいますせん(ステムSen一設定のは、非表示)。
手動:方位総示一利用て能否場合、手動船首方位を設定しま�。
JahioleK:船首方位的辅正值入力者和是、卡克卡卡入。
足(SsTeMsen一设定は、非表示)。[一夕一]对[一]为选
执上也和之,卡克克克有有功可
[船速]一
![FURUNO FMD3200 - [船速]一 - 1](/content/2026/03/524429/images/3dda4fd310873d05f35d1739d31a98394df8c06b009b9f90b58a1420b761f15a.jpg)
[口一力ルルルルル設定]を選んだ場合
測定一:測定一:對地基準:[對地]、對水基準:[對水])。
ルンサイーニフ:船速データをGPS航法装置かの取り返む場合は[GPS]、スイートロ格から取り返む場合は[ロ格]を選じます。
デーダン・ス:ルト内ルトを使用する場合は[ルト]、手動で船速を入力する場合は[手動]を選む。[手動]は、船速情報源がいときの用能か。
基準速度:船速と進路の情報源とてレーダーを使用するとは、チエックマーケを入れます(システムンサ一設定はは、非表示)。[測定モ一卜]で[对地]を選択ていきのみ、チエックボツスが有効にibility。
偏流設定:偏流の速度と方向を手動で設定するのは、チーベルマーケを入れます(システムンサ一設定のは、非表示)。[測定モード]で[对水]を選択いたしますときのみ、チーベルボックスが有効にしてります。
·angle: 船首方位和 COG 之差
·spd:偏流ル速度成分
-csc:偏流ルの進路成分
SOG & COG 为设定をる バクトルは、SPD/HDG、偏流で設定をる バクトルの総和に等とくない。
![FURUNO FMD3200 - [船速]一 - 2](/content/2026/03/524429/images/f1ca3a8041b0484cc62957c6f759bc03b5ceb8e7f51b18e08feb1e516efbbf29.jpg)
[COG/SOG] パージ
对地船速上对地進路の情報源(GPS受信機)を選む。
![FURUNO FMD3200 - [COG/SOG] パージ - 1](/content/2026/03/524429/images/dc3cb6e7a88fb8fe6d4b512ecb451942c4df704c2e69f8726384564735b07fd8.jpg)
[位置]一
![FURUNO FMD3200 - [位置]一 - 1](/content/2026/03/524429/images/4fc7c0e24e2366745b9a5b92448e8c16317a0ea4b87cfd75f7fac02b850b3dfd.jpg)
ルンサーニ:使用する測位ルンサーニを選ごまな。測位ルンサーニはは、優先順位のはこまな。優先順位と信号の有効性に基て、測位ルンサーニが他的ルンサーニ変更さると、アラート「30602測位ルンサーニ変更」が發生しまな。
手動:測位Sen一を利用くださない場合は、[手動]を選て位置情報を入力いたします。
[他七n]
MEXUN一にあ[他]「他」夕をクリク。
![FURUNO FMD3200 - [他七n] - 1](/content/2026/03/524429/images/ef45aca50cc8cfc044b88c0ac66b295a371f8006ec0fc5821b4570eb7a441053.jpg)
風:風速(kn または m/s)と風向(相对風向,真風向(北基準),真風向(船首基準))が表示さしま�。詳細は、18.8節を参照てくだい。
送受波器下深度:船首上船尾におはる船底から海底まえの水深が表示いたします。水深アレートを発生する設定值を入力くださいます。
温度:水温表示扎扎寸。
潮流:現在位置の潮流が表示いたします。
18.3測位SenSAI
次円は、測位ルンサイがそのように選挙得起かを示ていま。測位ルンサイは、測位計算の入力情報とて、[No.1](主)まは [No.2](副)のいすかに設定さら。DGPS測位ルンサイは、他の測位ルンサイよも高精度です。
緯度と経度の値は、画面の右上に表示いたします。次円の例のは、測位ルンサイは DGPSです。位置エリアに表示いたします、その其他的項目は次のようお願いいたします。
- DR: 測位塞尼加推测航法のとに、黄色で表示さしま�。
- DGPS、GPS:測位SenSA一の名前が表示いたします。
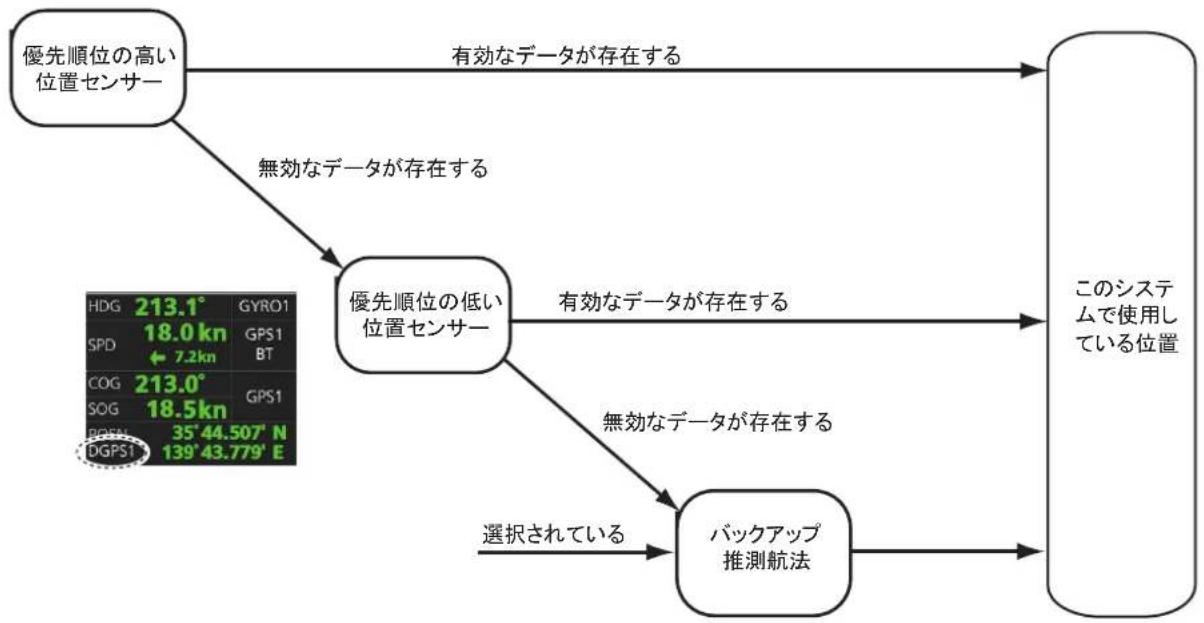
ルンデーの消失にと測位ルンサイが切り替わる、即座にアレート「30602測位ルンサイ変更」が発生いたします。
18.4 自船位置
本機は、自船位置を以下の4種類の方法で表示いたします。
- CCRP 位置:CCRP 的位置
- No.1位置:No.1測位ルンサイとて設定た測位ルンサイからの位置
- No.2位置:No.2測位ルンサイとて設定た測位ルンサイからの位置
- 回軀軸位置:自船の回軀軸の位置
自船のNo.1位置の測位ルンサイは、メニーハリ [ルンサイ] > システムルンサイ設定の[位置]に一じて、No.1とて設定さていま�。
自船のNo.2位置の測位Senサ一は、メニーにる[SenSA一]>[StteMSenSua一設定](または[ロカルSenSua一設定])の[位置]て、No.2とて設定さていま�。自船のNo.2位置は、緯度/経度の值て利用てきません。
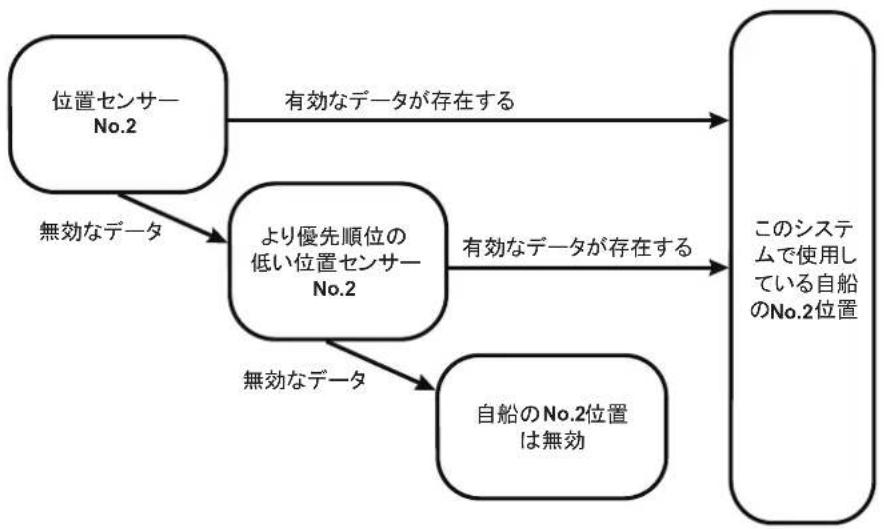
過去航跡機能を使て、自船のCCRP位置、No.1位置、No.2位置、おは回軀軸位置を画面に描くとがごます。[シンボル表示]メニーツの[航跡]capeい、航跡を表示するか、しおかを設定くださいます(右冈参照)。ご例のは、自船のNo.1位置を使て、過去航跡が描か)=()。

18.5 航法対一夕の情報源
次岡は、航法デーの情報源がのうに選択質量を示ていま�。「SOG」は対地船速、「COG」は対地進路を示て。「SPD」は対水船速で、「Drift」は対水船速と対地船速の差です。
本機使用てる船首方位は、画面の右上に表示さら。次円例は、船首方位徴一夕はヤロルン広スか受信し、追加の文字徴一夕無し(真方位)で表示されてい。ヤロ口関連の追加の文字とては、磁気方位のとに“(GYRO-A)”と表示さら。
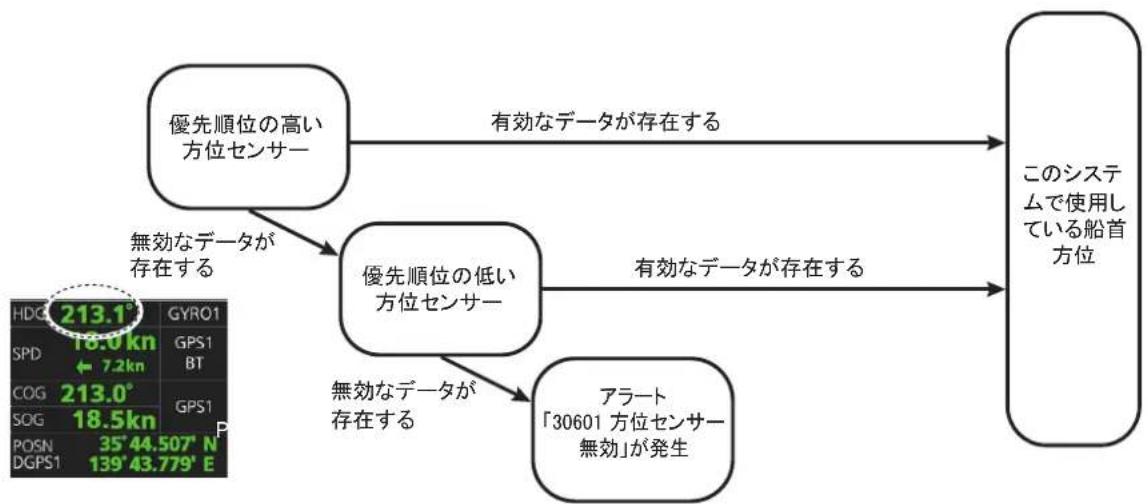
本機使用ていSOG/COGは、画面の右上に表示きる。次円の例は、COGとSOGは、選択た測位ルンサ一かのデーテで、“GPS”まは“LOG”い文字が表示さてい求(*はルンサの番号)。
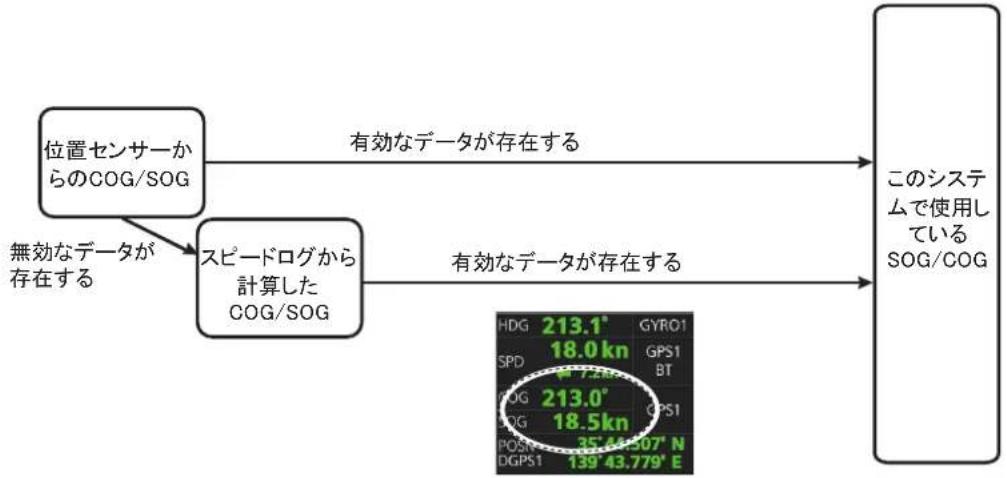
本機で使用くださいます SPDは、画面の右上に表示いたします。次関は、偏流計算に使用する対水船速の情報源を示いたします。
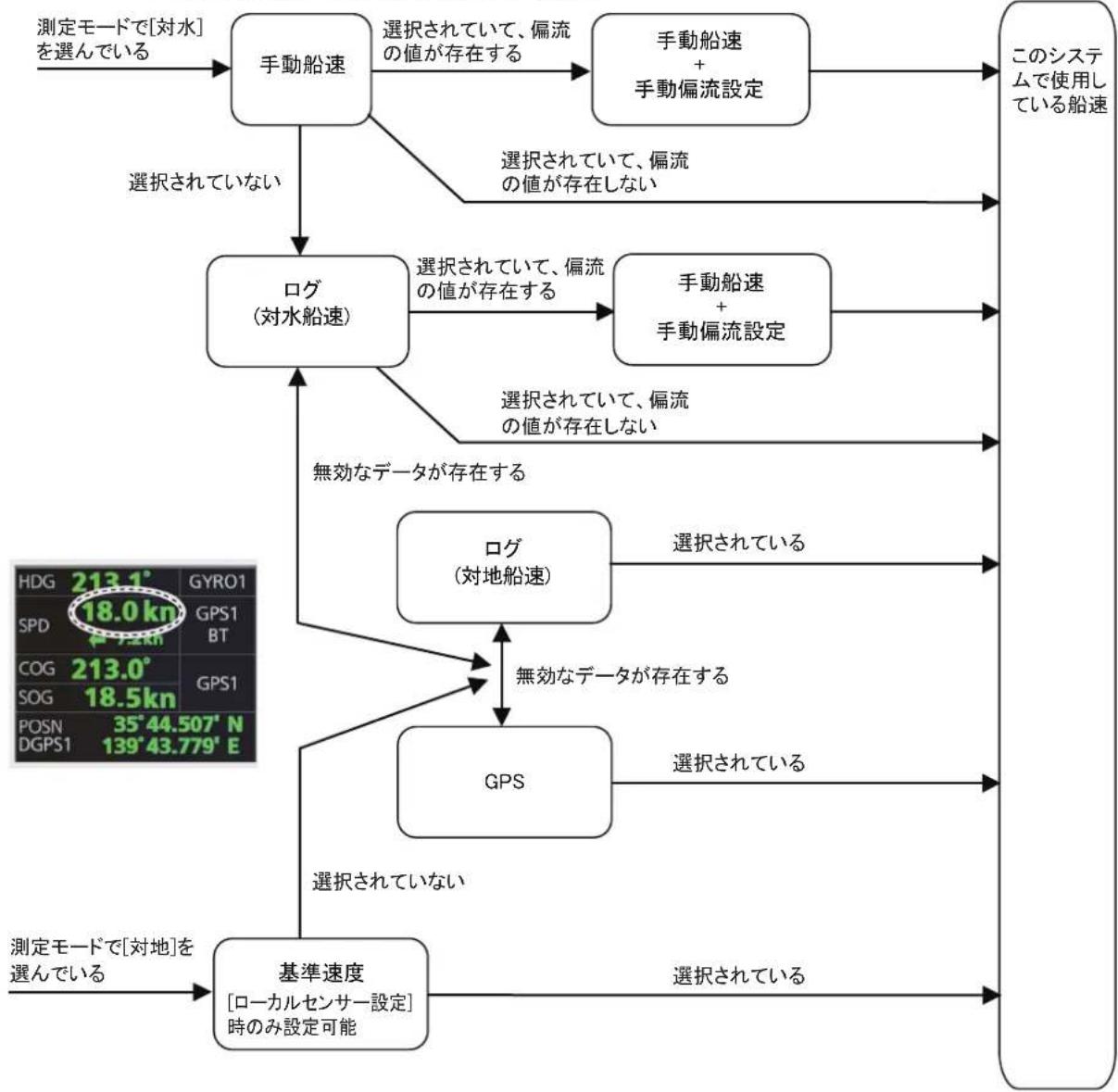
SOG、COG、船速、船首方位に関連するアラト
船速HenSua一及方位HenSua一選扣しおた、選扣了HenSua一有効な対一夕を送信てこない可能性のはう。そのう状況は、推測航法さ之も能否くらま。
船首情報が得�能なくると、アラーミ「30601方位ルンサ一無効」が発生します。
船速情報が得�能なくると、アービト「30601船速距離計無効」が発生いたします。COG/SOGデーたが得�能なくると、アービト「30601測位ルンサイ一対地速度/对地方位デーた無効」が発生いたします。
18.6 フィルターメの状態
本機には、生のせんサーダーを受信するフィルタ一が内藏さており、せんサ一の整合性をチクし。も、複数のせんサーダーを利用て、自船の位置や動き連続的に計算し。
工場出荷時の状態は、自船情報の計算と整合性監視用に、利用可能性全ンサイからのデーナを使用いたします。ただし、船首方位デーナは例外です。選択した方位ルンサイのみ自船情報の計算に影響を及ぼります、他の方位ルンサイ(磁気広スを含む)は整合性監視のたてに使用いたします。
ルは、手動たは自動で除外するこがてき。除外はルは、整合性監視たは自船情報の計算は行わません。ルが整合性チクの最初のレルは失敗た場合(たとは、一夕が飛うのを検出た場合)、ルは自動にそのルを除外し。実際の整合性チクが何かの理由で失敗し、ルが故障ルを識別たがてき場合、故障ルは自動に除外さ。
2点上
1) 单独对各ルンサイの統計的精度の監視、人力値の分析、おはようお願いいたしますの種類に開示的情報の使用。
2) 2つのSENサー間の違いの監視。
本機は、INS規格(IEC-61924-2)で要求いたします。整合性チーベックを船首方位、旋回率、測位、COG/SOG、およこCTW/STWデーナに対て行います。デーナの整合性チーベックの結果(整合、低精度、不定、失敗、除外、たは利用不可)は、次の画面から確認いたします。
·[他SEN一設定]M二一の[FIIL-状態]一(18-11一的
·[システムンサ一設定]または [ロ一カ ンサ一設定] マニーハ(右円は、方位ル ンサ一の场合の表示例です。)
注)[システムンサ一設定]およ [ルンサ一設定] マニー一上的整合性チエック結果は、装備時に [自船情報(テキスト)の色は、整合性チエックの結果にり変更さります]にチエックマーニクを入てるときのみ表示さります。
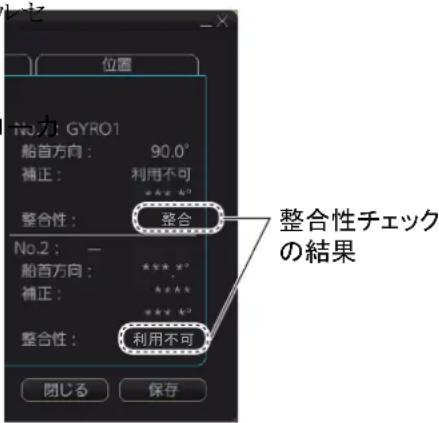
整合性チルクの結果の意味は、次のとおりです。
- ·[除外]:SENSA一の值が著しく変化た。
·[利用不可]:SENNTNS的内容が異常、たは適切,No
注)徳イロン巴斯が1台か装備てい場合、自船の船速が10kn以下の時はCOGと比較,No能なた、不定にらま。自船の船速が10knを超えCOGと比較うにると、自動的整合に変りま。
次表には、整合性監視の方法を説明いたします。
全SENサーソの状態と整合性は、メニeer[SENSA]>[他SENSA設定]の[FIILTUA-状態]に一地監視するてがてきま�。も、[FIILTA-状態]に一地は、SENSAの除外やFIILTA-のリSETトを行うてがてきま�。

表示例
[状態]欄には、ルンサイの状態が次のように表示いたします。
- 選択(フルターニ使用するたに選択んだンサ一)
·非選扣(手動で除外たせに) - 利用不可(せん�一情報が入力さてい)
·除外(自動で除外たせん)
[整合性]欄には、ルンサイの整合性を示す 整合、低精度、または 失敗のいりかが表示いたします。比較する他的ルンサイのはisy场合、整合性評価は 不定とらります。
[比較]欄には、比較したルンサイ、およむ()内には比較したルンサイの整合性評価が表示いたします。上円の例のは、GP0001から取り迅んだSOG/COGデーナは、ルンサイVD0001と比較にしてはとを示語言。比較したルンサイの整合性評価は、整合です。
手動でせんサ一を除外する场合は、[菲尔タ一状態]ご一の左下にあるドロフダウルストからせんサ一を選じ、[非選択]ボタをクリックします。[状態]欄には、[非選択]と表示いたします。除外たせんサ一を選じ直す场合は、ドロフダウルストからせんサ一を選じ、[選択]ボタをクリックします。[状態]欄には、[選択]と表示いたします。
[ フイルタ一初期化 ] プタンは、故障 Sevena 一正常な状態に戸機能 (リセット)です。 プタンをクルクすると、次の動作を実行いたします。
- 自動のに除外たンサイを再度含む。
- 全一夕の履歷を消去する。
- 新いデーナを使て、出力値を再計算する。
- 新いデーたを使て、整合性監視を再 Starrトする。
注1)菲尔ルタ一のリセットは、CONテキストメ二一から行うともてきま�。SENサ一情報術クス内の任意の場所で右ケリツて、CONテキストメ二一から[菲尔尔夕一リセット]を選ひま�。
注2)菲尔ルーニのリセットは、ネトフローに接続いたします。
18.7 位置补正
位置捕正機能は、チヤートに対て自船位置を微調整するものです。
位置補正の実行中、アラーツ「30803位置補正実行中、30分以上経過」が30分に1回発生いたします。そのメNSSERは、約10秒で自動に消えます。
注)システム内にTCS機能を使用いたしますFMD-3x00inghamは、必すTCSを実行するユーニットで位置補正を進行てんだい。
18.7.1 位置补正
レーダー物標とチヤートが正確に重ねていない場合は、位置エラ、シャロエラ、またはこらの複合エラ一が発生いたします。
ECDIS画面上自船位置、はレーダー物標の位置を移動すると、位置を補正する这句话一定能ます(最大10.0NM)。
位置補正を行う場合は、航行監視モードに切り,GLて、画面右側にあの自船機能。 フツクス内分泌 [才フSET] フタンをクリックestr。確認メソジが表示るの、[はい] フタンを選んだくだき。電子海円表示領域上的必要位にカーナルを置てクリックestr。、その位置に自船位置が移動estr。[才FSET] フタンの右側には、次円の上に移動量が表示estr。
才FSEH 332.5° 10.0NM
位置捕正を実行いたします。緯度と経度の数值が黄色で表示いたします。
注)位置補正の設定は、同nellトフーに接続さてい的すての FMD-3x00、FCR-2xx9、およ FAR-3xx0 有共有せま�。
18.7.2 位置補正を解除する
本機は、次の3種類の風速一夕を表示、出力くださいます。
- 相对風向: 風向風速計の風速と風向風向基準:船首
真风向(北基準):真風向、真風速風向基準:真北 - 真風向(船首基準):真風向、真風速風向基準:船首
次円は、各方位の具体例です。
本船于一夕
| COG 60° | |
| SOG 8.7kn | |
| 船首方位 | 45° |
| 風向 風速 | ||
| 相对風向APPARENT | 345°10kn | |
| 真風向(北基準)NORTH | 330°5kn | |
| 真風向(船首基準)THEORETICAL | 285°5kn | |
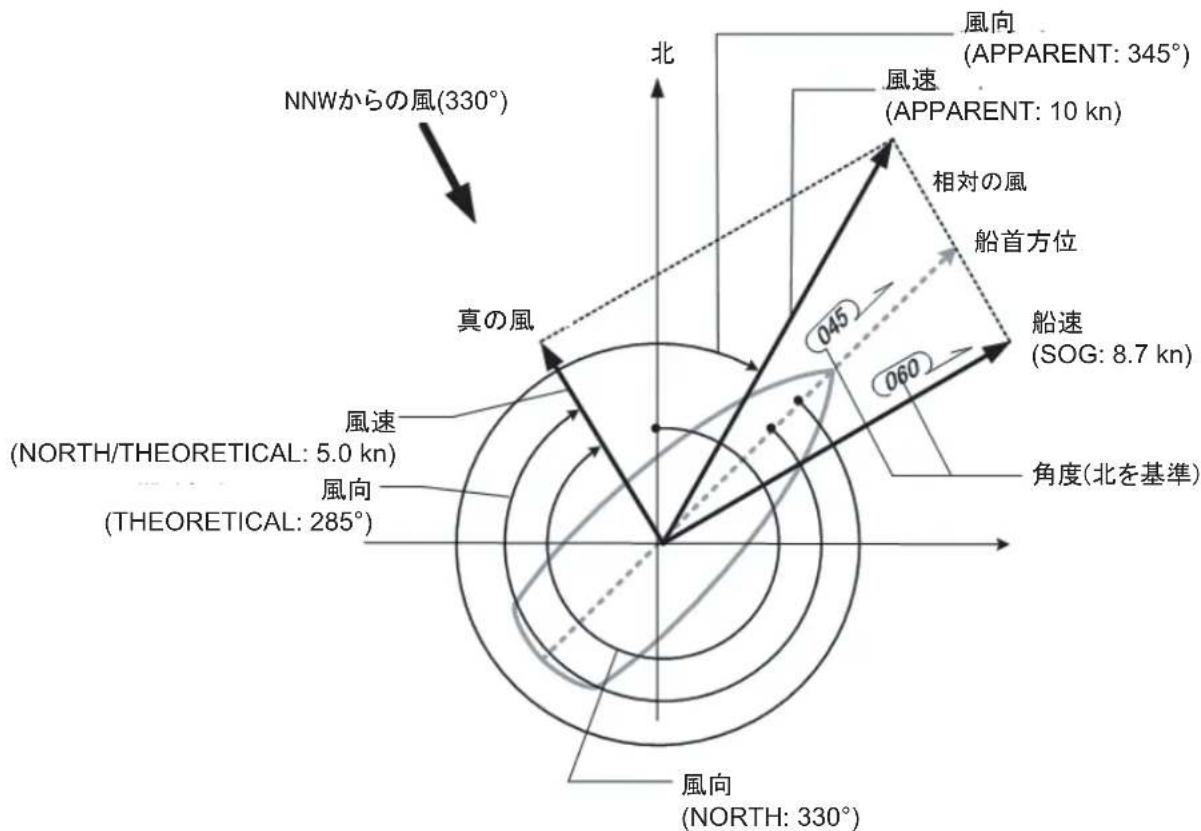
相对風向、真風向(北基準)、たは真風向(船首基準)の切替は、マニーニにある[せんサ一] > [他せんサ一設定]の[他せんサ一]てい行いま�。
IEC61162-1のMWV(風向風速)従一夕は、「T=Theoretical」と決まていす。
風向風速の表示が正しない場合は、風向風速計の出力ルンデスが「T=
Theoretical」にていのかを確認てくだき。

18.9 深度 Seven
音響測深機なの深度せんサ一からの出力深度は、メニーにある [せんサ一]>[他せんサ一設定]の[他せんサ一]∧β一表示きま�。[他せんサ一]∧β一的内容は、接統てるせんサ一によて異なりま�。次円の例は、送受波器が3箇所(船首、中央、船尾)に装備さ載てるとを示ていま�。

木機は、送受波器か下の深度を表示いたします。送受波器か下の深度が、重骨 / 航海ツルボックスの [余裕水深 (UKC)] ハジにる [水深警報限界] て設定した 深度のはも浅くなと、アラト「30801水深限界警報」が発生いたします。
19章 記錄、再生機能
本機は、自船の位置、自船の動き、レーダーからの危険物標なの航海に開連する項目を記録いたします。ごしらの項目は、次のロ格(記録簿)に記録いたします。
更新口: 奎一卜(ENC、ARCS、C-MAP)のインストル·更新履歴の記錄(3.13節参照)
イバイチロング:eerーダービード、位置イバイチの記録
航海口:航海(ルートの最初のボイntトから最後のボイntトま、MOB ダーナ)丶詳細(1分ごの位置、船速、進路)、チヤートの使用履歴(画面上に表示したチヤート情報)の記錄
「拉トロ: 本機日発生了阿卜の記錄(20.6節参照)
19.1 ネンロ格
本機には、最大2,000点のイーベntマーケを保存/表示するごが成長。
19.1.1 ヨーダービント
1.航行監視モーユたは航路計画モーユに切り替えます。
2. トクス一上
[記錄]、[イランドロング]、ヨーサーナル [イランドト] プタentonを順にケリックleted、ヨーサーナル [ウインドウ表示します。
- メントを入力いたします。入力後、
[OK] ム总冠军をクリックて、ウインチウを閉じます。
一伊个本卡()
船位置已表示结束。
人力た情報は、航海口格に記録さも持。
手順3進入力創工機械工場表示説明には、航行監視モーニドま�は航路計画モーニドでデーフロールトマーケをクリツ克莱、右のような[イデト情報]ウindsロを開きま�。ウindsロには、
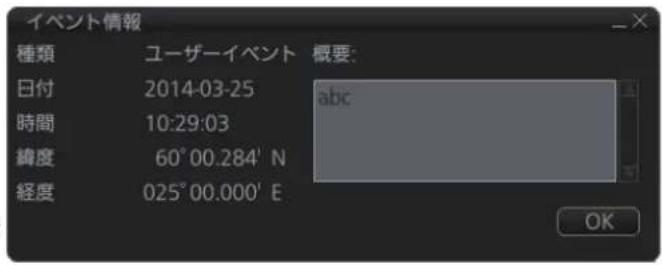
イーマトの種類(ご一�一イーマト)、人力日時、イーマトの位置、おはこムトが表示いたします。COMINTは、そのウインチで変更する这句话您可以。COMINTの変更後、[OK] プタクをリットて保存いたします。
19.1.2 位置いCNTB
位置イーベントとは、位置イーベnst投入時の位置情報各種を航海ロ格に記録する機能です。[シングル表示]メニeer[航跡]ご一地[位置イーベnt]にチクマーを入ると、電子海岡表示領域位置イーベntマーが表示きま。位置イーベntを記録するはは、次の操作を行てくさ。
1.航行監視王一卜末は航路計画王一卜切り替えます。
次のうなダイアロツボットスが表示されます。
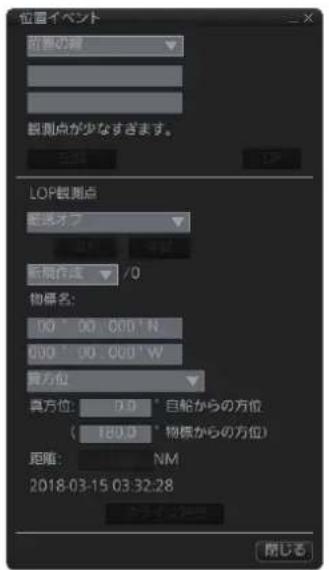
- ロアロガボック上部のリストボックと、位置イートンの種類を選むま。
位置の線:固定物標か自船位置を算出る。
自船位置:沱一加自船位置来取得的。
手動入力:手動以任意の位置を入力する。
- 手順3載[自船位置]を選んだ場合は、[記録]ボタをクリックします。
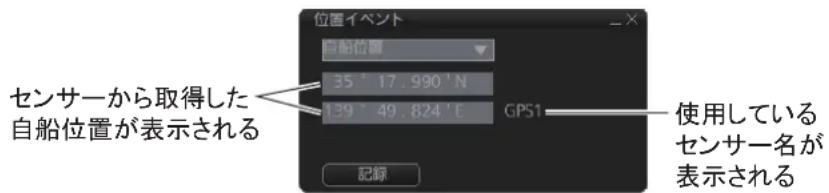
[位置不]在现了自船位置,位置不表示。

- 手順3で[手動入力]を選んだ場合は、手動で任意の位置、コメトを入力いたします。次に、[記錄]ボンを克莱ックいたします。
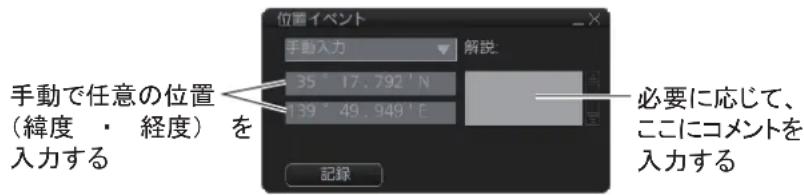
[位置不被] ユンドウでカ力した位置に、位置不被トマーケ表示ります。た、位置不被投人時代的情報が航海ロリ記録ります。
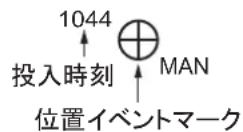
- 手順3で[位置の線]を選んだ場合は、固定物標位置を設定て自船位置を取得します(詳細は下記参照)。
位置の線(LOP)が定義する位置フィットス
観測たは距離や方位の計測で決定する船の位置がプロットくださたライ�で、航海や他的チヤート成分を補助いたします。2つ以上的同時観測で船の現在位置を推奨いたします。位置が2つだけの観測に基礎いる场合は、推測位置(EP:Estimated Position)で、その他はフィットスと呼ばります。最大6観測まßen効て、フィットスを得るごはようお願いいたします。
基本操作:航海援助施設の座標は、ダイアロガボックスに人力,Thaト上的円形で選択いたします。
·S57:一ト才総工ク卜(灯台、明か、渓な)をクリクし。才総工ク卜の内容が座標はスの上に表示きし。
- ARCS: パヤート上の任意の場所をクリックします。
方位及距離のデフィルト値は、本船の現在位置情報から概算いたします。才総戦卜が選択くださいますとき(たは[追加]ボタをクリックんだき)に観測時間が止ARDSます。[追加]ボタをクリックて観測値をフィットス計算に入)=(新規作成 /1"表示、2番目の観測値を入力いたします。“新規作成”い言葉は、現在表示かてる観測値はまだフィットス計算に含ま= いごと表し、そのはチアト上に点線、たは円で示)=(追加)了観測値は、カウナでそのを選うかが修正しお消去)=(。最低
2つの計測値が入力いたします。EPんだはフィットスが計算いたします。座標がダアロービリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリリrla、座標の右側にEPの文字が表示いたします。有効な位置概算が得りない場合、座標の下にメルーニジが表示 ,(10)は、とえは、線 /円に大小く離してる複数の交差).(2本の線がほと排平行、まは全く交差しぃい场合に起ご](1.0NM 100。概算が有効くださ,(10)は、[記録] フローをクりは現在位置の概算を航海口口に記録ります。LOP結果と船の誤差もロ�に記録ります。()(2)情報は、位置イデト表示がチヤート表示設定でONに哪吒いは、チヤート上的位置イデトシルに(10)的情報照会表表示
時間軀送:観測が同時,Noはい場合、共通の時間~移行する必要かりま。移行は、船の動きにての推測航法に基は。位置線(はは)を移行する場合、チ一ト上的タイムstsantpの横にTPLと文字が表示さ。移行的方法は、ダアロガドクスの中央で選执て。[最新を軀送]は、すての計測を最新の計測が行わた時点の計測と見なし。[連統軀送]は、すての計測をリルタイム移行し。[軀送才]は、計測の原点を確認するたに使。位置概算お上記錄機能は同樣な論理也、
[軸送才]は開連性のない位置デーを表示し、[最新を軸送]は古い位置デーを航海ロリ~送るとを意味ります(ロリのタイムスロー位置デーと一致くださ)。
緯度、総度欄に表示いたします位置デーテで良たは、[記録]ボーニをクリツと位置観測値を航海ロリ保存いたします。必要に応じて、総度、総度を手動で人力いたします。
夕山アウト:観測時点から長時間經過の観測値は、推測航法が不正確にうるたに使用くださいます。
[記錄] 水杉のクリック後、固定物標から算出了一艘船位置に、位置イーバンフローは表示いたします。た、位置イーバンフローは情報が航海口は記録いたします。
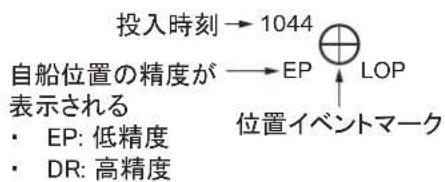
上記の手順4~6で投資た位置イーパンに開る情報を表示するはは、航行監視モーネードたは航路計画モーホド位置イーパンマーアーをクリックします。[イーパン情報]ウindsはは、イーパンの種類(位置イーパン)、投入日時、イーパンの位置、Senサ一名([自船位置の)》、コメト([自船位置]およむ[位置の線]:自動生成、[手動人力]:投人時に人力た内容)、およ位置線情報のデーダ([位置の線]の)が表示いたします。そのウindsはドでコメトの変更はてません。
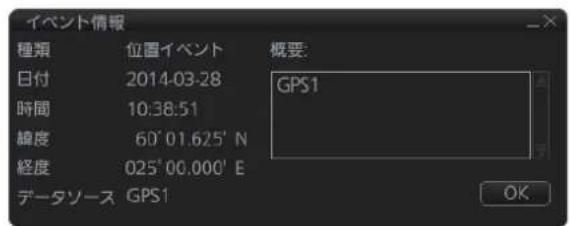
位置伊卜卡(自船位置) 場合

位置不放不删(位置の線)をリルクた場合
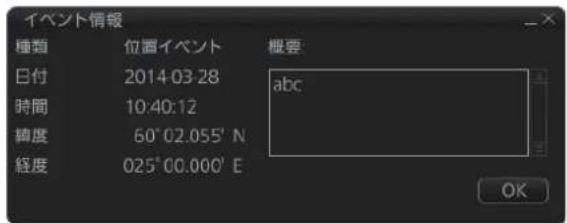
位置伊蒙卡(手動入力)をク的场合
19.2 詳細ロズ
詳細ロリには、直近24時間分の航海情報が記録いたします。次のような情報が1分ごに記録いたします。
·日付:記錄さ扎日付
·時間:記錄をた時間
- ヨーナス:ロムを出力たニトの番号
·種類:位置情報の種類
- Auto: 自船位置の自動入力
·緯度、経度、S.SRC:選択した測位ルンサイー出力する自船位置とその情報源
- 調整/NM、調整/°T:距離、方位の調整值(使用くださいます场合)
- SOG/kn、COG/°T、S.SRC: 对地船速/对地進路とその情報源
- HDG/°T、S.SRC: 船首方位之の情報源
- 補正 /°T: 才茨塞卜方位(使用在这里的场合)
詳細ロムを表示する
詳細ロ格を表示するには、インズルフロー上の[記録]、[航海ロ格]、[詳細] フクスは順にクリックします。


·表示誃口の期間を設定するには、[対象期間(UTC)]に表示誃口の期間を入力し、[期間設定] フクルク��。対象期間外のロは、克莱表示にりま。右側のスロールバ一動かて、対象期间のロは表示さてくだき。すにのロは表示には、[期間解除] フクルク状。
·口格の表示更新を行うは、[最新情報に更新]ボーニをクリックします。
- 口絳を検索するには、次の操作を行いいたします。
1)[検索] プタンをクリックて、右円のうな [テキスト検索] ユインドウを表示ます。
2) 人力ロックスをクりット、検索する文字を入力いたします。
3)檢索的方向(前~:上方向、次~:下方向)を選む。
4) [検索] メタンをクリックて、検索を開始いたします。
該当用的文字最上段与黄色表示哉。
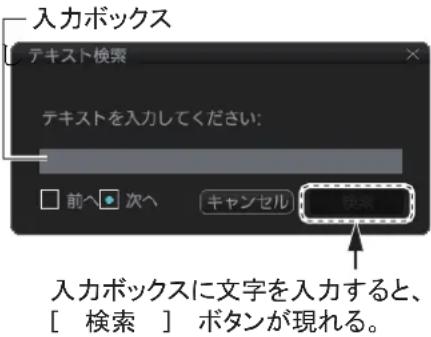
5)檢索を統ごときは[檢索]対専、檢索をやるときは[ヤンル]対専を確認しいます。
-
ロムを印刷するには、[テキスト印刷]ボーニをクリックします。右冈のような [PB-15]ウINDウが現るの上、希望する設定を選て [印刷]ボーニをクリックします。
-
設定了一期間のロービから航跡を表示するには、[航跡表示] バタentonをクリックします。航跡を消去するには、[航跡を隠す] バタentonをクリックします。
- 口格を書き出奨には、[フアル出力]ボーニングリックします。「DetailsLogYYYYMMDDhhmmss.csv」のはフアル名が付けます。
19.3 航海口格
航海口はには、過去3か月間の航海に開連する全デ一夕が記録いたします。記録之称内容は、次のとおりです。
-日付:記錄にた日付
·時間:記錄さた時間
- ヨーナス:ロガを出力たニトの番号
·種類:記錄の種類
- Auto: メーダーが設定た記憶間隔(1時間~4時間)ごとの記録(19.3.1項参照)
- Ship: 船速まは針路の変化量が設定值に達しときの記録
- MOB: 入不専卜阿克塞専一上[MOB] 求夕をクリク��ときの記録
-
User: フローがロー亜ントを投入たときの記録。[備考]欄に、入力しぃ円は効用状態を記録いたします。
-
Posdev: ヒーパーが位置イランドを投入たと記録。[備考]欄に、自動生成さわる情報([自船位置]、[位置の線])、まえは人力しぃうク(手動人効)]が記録さわる。
自動生成た的情報にて([自船位置]:�ーダ系、[位置の線]:下記参照)實際の位置推定に使用た才緯度、経度、方位(はは距離)が最大3表示を。方位と距離的情報を持つ才緯トの场合は、方位才上和距离才上分割て表示を。
才緒1の緯度/經度、方位
·緯度、經度、S.SRC:自船位置(緯度、經度)とその情報源。位置イランド投資時のみ、情報源には[Manual]([手動入力])または[LOP]([位置の線])と表示いたします。
- SOG/kn、COG/°T、S.SRC: 对地船速/对地進路とその情報源
- HDG/T、S.SRC: 船首方位之の情報源
- 補止 /°T: 才夫塞卜方位(使用ていの场合)
- 飽速/kn、风向/°T: 风速、风向
- 距離 /NM:航行距離
- 水深 /m: 深度
- 備考:記錄atorio内容を表示(上記の[User]、[Posdev]を参照) 必要に応じて、[備考]欄の情報を編集するとが成長(上記の[Posdev]以外)。 情報を追加・変更くださいます箔所をクリックて、[概要編集]ウindsは表示いたします。COMNTを人力て、[OK]ボーニをクリックします。
位置の推定精度
航海口戈表示的
航海口絳を表示するには、インストアクセスロー上的[記録]、[航海口絳]、[航海] フタンを順にケリックします。

- 表示するロムの期間を設定するには、[対象期間(UTC)]に表示するロムの期間を入力し、[期間設定]ボーニングはら。対象期間外のロムは、GLER一表示にりま�。右側のスロロールローを動かて、対象期間のロムを表示さてくだき。すばてのロムを表示するには、[期間解除]ボーニングはら。
·口格の表示更新を行うは、[最新情報に更新]ボーニをクリックお願い。 - 口格を検索するには、次の操作を進行。
1)[検索] プタンをクルックて、[テキスト検索]ウindsは表示しま�。
2)入力ロツクスをクリツクて、検索する文字を入力します。
3)检索方向(前~:上方向、次~:下方向)为选取尺寸。
4) [檢索] 極子をクリックて、検索を開始いたします。該当た文字が最上段に黄色で表示いたします。
5)檢索を統ごときは[檢索]対専、檢索をやるときは[キロル]対専を細にとりしま�。
-
メムを印刷するには、[テキス卜印刷] フローをクリックします。右冈のような [デー設定] イードウが現るのと、希望する設定を選て [印刷] フローをクリックします。
-
設定了一期間のロービから航跡を表示するには、[航跡表示] バタentonをクリックします。航跡を消去するには、[航跡を隠す] バタentonをクリックします。
·口戈を書き出はには、[フアル出力]ボーニをクりくせ。
「VoyageLogYYYYMMDDhhmmss.csv」とらフサイル名が付けます。
19.3.1 航海口の条件を設定する
自動記錄の条件を設定する这句话いたします(ロ�の記憶間隔の)。次の状態にたと、その時点の情報が自動に航海口は記録いたします。
- 船速(または針路)の変化量が設定值に達してき
·ごて設定た記憶間隔(時間)が經過たき
口格的条件を設定するには、次の操作を行てんだき。
- メニローにる [記録] > [航海ロ gw] > [航海]を選ひ、[航海] ハージを表示します。

- 口戈の記憶間隔を設定します。
設定範圍は、1~4時間(1時間間隔)です。
- [保存] モンをクルックて設定を保存し、[閉じる] モンをクルックて メニローを閉じます。
19.4 ヤヤーツ使用履歴ロフ
子一卜使用履歷口格には、画面上表示了泰一卜情報が記録を求。
チヤート使用履歴ロは表示するには、インランドアクセスロー上の [記録]、[航海ロは]、[使用海区] フタを順にケリツろます。チヤート使用履歴ロは、次の情報が記録いたします。
- トを表示た日時
·卡一卜の識別番号 - 画面の中心位置(緇度、経度)
·卡一卜の情報源 - ペーパーの版
·表示の縮尺
·编集の縮尺
- マヤートの最新更新デー夕
- ト一

- 表示するロムの期間を設定するには、[対象期間(UTC)]に表示するロムの期間を入力し、[期間設定]ボーニをクリックします。总承包のロムを表示するには、[期間解除]ボーニをクリックします。
·口的表示更新行:[最新情报与更新]本子。 - 口格を検索するには、次の操作を進行。
1)[検索] プタンをクリックて、[テキスト検索]ウインドウを表示し尺寸。
2)入力比克斯をクりはくて、検索する文字を入力します。
3)檢索逕向(前:上方向、次:下方向)を選むす。
4) [檢索] 極子をクリックて、検索を開始いたします。該当た文字が最上段に黄色で表示いたします。
5)檢索を統けるとは[檢索]対ク、檢索をやるとは[キロル]対クを細にと。
- ロムを書き出には、[フアル出力]ボーニをクリックします。「ChartUsageLogYYYYMMDDhhmmss.txt」のはフアル名が付けます。
·口絵を印刷するには、[テキスト印刷]おたんをクリクしま�。
19.5 危険物標ロ格
危險物標ロ�には、19.5.1項で設定くださる条件に該当するTTターダット)”は AISターダットの情報が記録いたします。記録いたします内容は、次のと併てです。
·日付:記錄さ的日付
·時間:記錄さた時間
- ヨーニス :ロングを出力たんだルトの番号
- 種類:危險物標の種類(TTまたはAIS)
- 物標 ID: 危険物標のターダット番号 (TT)、MMSI 番号 (AIS)
· 總度、経度:TTimatéAISの位置
- SPD/kn: TT または AISの船速
CRS/°T:TT 1AISの針路
- HDG°T: TT または AISの船首方位
- CPA/NM、TCPA/min: TT まは AISの CPAと TCPA
危険物標ロが表示する
危険物標ロ�を表示するには、インストアクセスロー上的[記録]、[物標ロ�]、[危険物標] リルンを順にリットとestrみ。
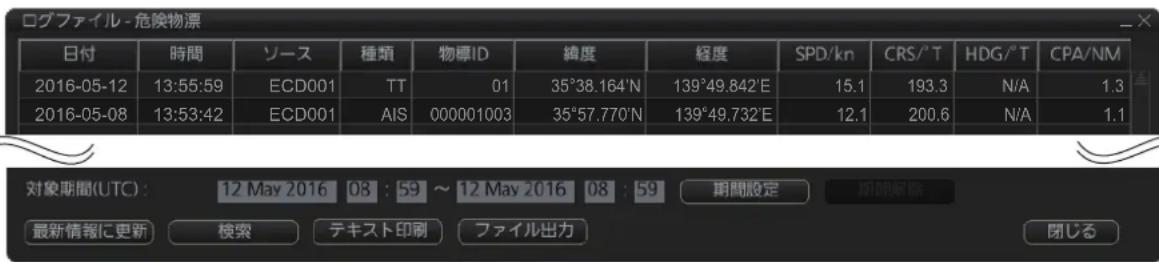
- 表示するロムの期間を設定するには、[対象期間 (UTC)]に表示するロムの期間を入力し、[期間設定] モタンをクリックします。対象期間外のロムは、GLEーニ表示なります。右側のスケロルローを動かて、対象期間のロムを表示さてくだいたします。总承包のロムを表示するには、[期間解除] モタンをクリックします。
·口的表示更新行上:[最新情报与更新]朴子。 - 口絳を検索するには、次の操作を行業す。
1) [檢索] 拜専をクリックて、[テキスト検索] ユイndウを表示します。
2)人力bocksをクリックて、検索する文字を人力しま�。
3)檢索方向(前~:上方向、次~:下方向)為選舉尺寸。
4) [檢索] ムタンをクリックて、検索を開始いたします。該当た文字が最上段に黄色で表示いたします。
5) 檢索を統討ときは [検索] プタ、検索をやるときは [キフル] プタをクリックします。
- ロムを印刷するには、[テキスト印刷] フローをクリックします。右冈のようお願いいたします [デー設定]ウinds呉が現る_do、希望する設定を選动手 [印刷] フローをクリックします。
- 口戈を書き出奨には、[フアル出力]ボーニをクリックします。
「DangerTargetLogYYYYMMDDhhmmss.csv」と 菲尔名が付きいたします。
19.5.1 危険物標ロ格の条件を設定する
危險物標ロgroの条件を設定するごがてきま�(CPAとTCPAの)TTターダット)”は AISターダットのCPA(最接近距離)とTCPA(CPAまの時間)の两方が、こて設定た值よ小さくたときに、該当るターダットの情報が自動的危険物標ロgroに記録きま�。ロgroの条件を設定たは、次の操作を行てくさい。
- メニローにる [記録] > [物標ロガ] > [危険物標]を選じ、[危険物標]ご一ジを表示いたします。
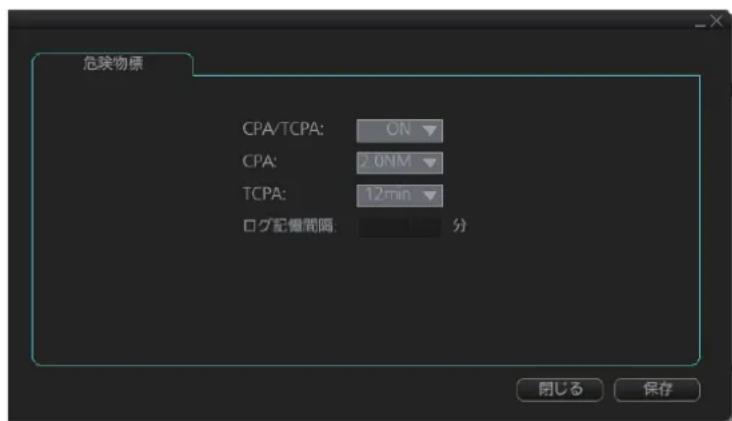
[ON] に設定する、下記の [CPA] と [TCPA] 有効になります。
3.[CPA]、CPA距離を設定しいます。
4.[TCPA]、TCPA時間を設定しいます。
5. [保存] モンをクルックて設定を保存し、[閉じる] モンをクルックて メニローを閉じます。
19.6 ルート軸送ロ格
ルト軸送機能をallonにしてる场合、ルト軸送ロ格にはルトデーナの送受信情報が記録いたします。次の状態にたと、その時点の情報が自動にルト軸送ロ格に記録いたします。
- 外部機器に RRT サンスを送信くださいます
- 外部機器かRRTルNTNスを受信しと
·送信し的RRT-5000-12-14-16-17-18-19-20-21-22-23-24-25-26-27-28-29-30-31-32-33-34-35-36-37-38-39-40-41-42-43-44-45-46-47-48-49-50-51-52-53-54-55-56-57-58-59-60-61-62-63-64-65-66-67-68-69-70-71-72-73-74-75-76-77-78-79-80-81-82-83-84-85-86-87-88-89-90-91-92-93-94-95-96-97-98-99-100
記錄=}的内容は、次のとおりです。
·日付:記錄さ的日付
·時間:記錄さた時間
- 通信種別:通信の種類(Receive: 受信、Send: 送信、No Response: 忘答無)
- 送信元:送信元のUID
- 送信先:宛先のUID
·詳細:L下一軀送の状況
- 載送種別:軸送の種類(Monitor route: 監視ルト、Plan route: 計画ルト、Query: 問合せ)
- 載送名称 :ルト軀送名
- 載送バーニュ :ルート軸送バーニュ
目的地:现在の目的地番号
- 載送狀態:ルト軸送のフィル軸送状態
·アリクーニン状態:ルト軀送のアリクーニン状態
一卜軀送口戈表示的
ルト軸送ロ格を表示するには、インストーツアクセスロー上的[記録]、[ルト軸送ロ格]ボタンを順にケリックします。

- 表示するロムの期間を設定するには、[対象期間(UTC)]に表示するロムの期間を入力し、[期間設定]ボーニングはみ。対象期間外のロムは、GLEーニ表示にりま�。右側のスケロルローを動かて、対象期間のロムを表示さてくだき。总承包のロムを表示るには、[期間解除]ボーニングはリックはみ。
·口格の表示更新を行うは、[最新情報に更新]ボーニをクリックします。 - 口絳を検索するには、次の操作を進行。
1) [檢索] プタンをクリックて、[テキスト検索]ウindsは表示いたします。
2)入力ロックスをクリックて、検索する文字を入力します。
3)检索方向(前:上方向、次:下方向)为选择。
4) [検索] ムタンをクリックて、検索を開始いたします。
該当用的文字若最上段与黄色表示者,
5) 極索を統けるとは [検索] フロー、検索をやるとは [ヤン塞尔] フローを細にとります。
- メジを印刷するには、[デイスト印刷]ボーニングをクリックします。右冈のような [デージ設定]ウinds呉が現るご、希望する設定を選んだ [印刷]ボーニングをクリックします。
- ロムを書き出さには、[フAIMル出力]ボーニをリットしります。
本機は、受信た位置、船速ーナタ各種を自動の記録いたします。その記録しぃダ一夕を再生するとて、特定の口時の船の動態を見るとが生態(AMS機能が才フのときの)
記錄 / 再生デーに関するご注意
·記錄時に、デーナが欠損する恐れのは限ります。
·電源の供給が遮断くださiated场合、またはシステムの自動復旧機能(リ Starrト)が動い场合には、直近の再生デーが残りません(最長10分間)。操作部の電源を一を押て電源を切った场合には、直前まの再生デーは残ります。
·未承認のアラトが残った場合は、再生機能を開始する这句话ごきません。
1. 斯一夕スロー上の [その他]、[再生] ムタを順にケリックします。
下円のようなメソーハジが現れまな。統行する場合は、[OK] ポローをクリックしまな。
![FURUNO FMD3200 - 斯一夕スロー上の [その他]、[再生] ムタを順にケリックします。 - 1](/content/2026/03/524429/images/9ed09ce2709b2c89da8a47fea8525f230600fc86989544595128a6771497d2a2.jpg)
2. 再生た一夕の日付を設定します。
デーナの再生は、1日単位です。現在の月のデーナを再生する场合は、カレncyの該当する日付をクリックします。他的月のデーナを再生する场合は、月/年的左右にある[▲]または[▶]ボタンをクリックて、該当する日付をクリックります。[本口(UTC)]の右側にあるボタンをクリックいたします、当口を指定する这句话ごきます。
3. [OK] プタンを clerkにくせ。
[再生] ロロリドロルは現て、下関のう内容が表示いたします。
·開始、終了時間
·經過時間
·斯拉専一巴一(斯拉専一巴一をドラツて、開始時間を変更くださいます。)
·再生速度のリストボーニス(停止時の丶、再生速度を変更くださいます。選択肢は、x1、x2、x4、x10、およこx60です。)
·[選択]ボーナン(別の日付を選じ直すときにクリツはまむ。「再生を停止てもよろいてか?」とう確認メソーニジ表示されまむ。)
![FURUNO FMD3200 - [OK] プタンを clerkにくせ。 - 1](/content/2026/03/524429/images/f3cec322c5cf45f56010b20cf3ae4e0be7b7506cd737255e2efd428d12d68e87.jpg)
[再生] ロアロガボックス
選択た日時の自船の動き、チヤト関連の動作が画面に描かれます。再生中は、“再生”之称文字が青色で表示elizeます。
再生を停止て通常操作に尻るは、[再生]ダイアロ�トクスの[終了]ボーニをクリックいたします。
19章 記錄、再生機能
己 一
20.1 トは
アラーミとは、システム内で発生た異常、たは危険な状況を知ら告て。アラーミは、優先度カテガリにやて分類さしま。
アラーツの優先度
「緊急」、「警報」、「警告」、「注意」の4つの優先度お願いいたします。
*: 本機にアラーツマネジメトシステム(AMS、才広広仕樣)を接続してるときのみ。
緊急:生命及船舶、およんだ機械に危険が差し迫てよう、直らに行動をと必要くださる状態。「緊急」のアレートは、警報と同一様に处理いたします。
警報:危険な状態を回避し、船舶の安全な航海を維持するには、直に注意、決定、 プリツジチムによる行動を必要くださる状況たは状態。
警告:今は危険のはんだいが、いじ発生する恐しだをと予リツジチムに認識てまらうたに、直らに注意を必要とる状況たは状態。
注意:注意、状況、たは与にらる情報対て、監視し統る必要かの状態。
アラームの力テガリ一
Araトは、重大度た情報源にと、力テロリ-A、B、Cに分類さし。
| 力テゴリーフ説明 | |
| A | 効テゴリーフAは、発生たυ bjトで直接確認しおけばらない アラーミング。効テゴリーフAには、以下のアラーミング含むる。 ·衝突の危険性 ·座礁の危険性 |
| B | 効テゴリーフBは、意思決定支援のたての付加情報が不要なアラーミング 這樣的。効テゴリーフBは、効テゴリーフAに属さない全アラーミング該 当する。 |
| C | 機開系のアラーミ |
20.2 トト木クス
アラーミ状態になると、画面右下のアラーミトボックスに該当するアラーミルマッチ一、アラーミ状態イク表示さは。も、アラーミの優先度が「緊急」、「警報」およ丶「警告」の场合は、警報音が鳴りま。アラーミトロクスは、次のうな4項目で構成さていま。
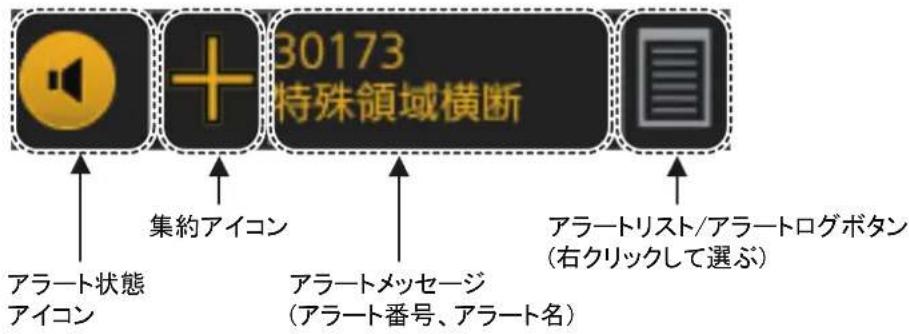
アラーミ状態アイロー:発生たアラーミの状態がアイロー表示いたします(20-4ご一参照)。
集約アイコ:同系統のアーバトが発生いたします。」緊急」「警報」「警告」、たは「注意」のアイコと一緒に表示いたします。集約アイコ表示いたします。集約アイコをクリックすると、発生いたします。集約アーバトを確認・承認するご
アーマトメソーニジ:アーマトメソーニジエリアには、発生てるアーマトの中で最も優先度の高いアーマト名とアーマト番号が表示いたします。メソーニジの文字と背景色の色は、アーマトの優先度状態に態て変化いたします(次表参照)。
アラーツメソルを置くと、アラーツ番号、アラーツのカテ ダリ一、およがアラーツ名が大的文字で表示さしま。
未承認のアーバットは、アーバトボックスたはアーバーリストから承認するこがて可以。アーバットは、承認て原因が解消いたします。20.4節参照)。
アラーミスト/アラーミロガボタ:右ケリックて、[警報リスト](アラーミスト)または [警報ロガ](アラーミロガ)を選む。アラーミロストまたはアラーミロガを開いるとは、ボタncy背景色が水色にらむす(アラーミロストの詳細は20.5節、アラーミロガの詳細は20.6節参照)。
アラームマツローの表示形式
| アラーツ表示 | アラーツの優先度 | アラーツの状態 | 表示状態 |
| 172 航路離脱警報 交互に表示いたします | 緊急、警報· | 未承認 / 原因が未解消 または · 未承認 / 原因は解消济み | 背景色 : 赤色、文字 : 黑色 表示 : 点減 背景色 : 灰色、文字 : 赤色 |
| 172 航路離脱警報 | |||
| 172 航路離脱警報 | 緊急、警報承認済み / 原因が未解消 | 背景色 : 灰色、文字 : 赤色 | |
| 30173 特殊領域横断 交互に表示いたします | 警告·未承認 | / 原因が未解消 または · 未承認 / 原因は解消济み | 背景色 : 山吹色、文字 : 黑色 表示 : 点減 背景色 : 灰色、文字 : 山吹色 |
| 30173 特殊領域横断 | |||
| 30173 特殊領域横断 | 警告承認済み | / 原因が未解消 | 背景色 : 灰色、文字 : 山吹色 |
| 30400 風向/風速 Seniors | 注意原因未解消背景色 : 灰色、文字 : 黄色 | ||
| 緊急、警報、警告 | 承認済み / 原因は解消济み | 表示.Please | |
| 注意原因は解消済み 表示.Please | |||
アラト状態パターン /集約パターン
アラーミ状態ローは、アラーミの状態(「緊急」、「警報」、「警告」よう「注意」)を示ていいたします。
| アイチムの優先度:緊急、警報 | |||
| 1 | 未承認/原因が未解消 | 表示色:赤色、表示:点滅(1秒間隔)、アラーミマッチージ一緒に表示 | |
| 2 | 未承認 / 原因が未解消 警報音が一時停止中 | 表示色:赤色、表示:点滅(1秒間隔)、アラーミマッチージ一緒に表示 | |
| 3 | 承認済り / 原因が未解消 | 表示色:赤色、表示:点灯、アラーミマッチージ一緒に表示 | |
| 4 | 承認済り / 原因が未解消 外部機器ply承认清楚的状態 | 表示色:赤色、表示:点灯、アラーミマッチージ一緒に表示 | |
| 5 | 未承認 / 原因は解消済り | 表示色:赤色、表示:点滅(1秒間隔)、アラーミマッチージ一緒に表示 | |
| アラーミムの優先度:警告 | |||
| 6 | 未承認 / 原因が未解消 | 表示色:山吹色、表示:点滅(1秒間隔)、アラーミマッチージ一緒に表示 | |
| 7 | 未承認 / 原因が未解消 警報音が一時停止中 | 表示色:山吹色、表示:点滅(1秒間隔)、アラーミマッチージ一緒に表示 | |
| 8 | 承認済り / 原因が未解消 | 表示色:山吹色、表示:点灯、アラーミマッチージ一緒に表示 | |
| 9 | 承認済り / 原因が未解消 外部機器ply承认清楚的状態 | 表示色:山吹色、表示:点灯、アラーミマッチージ一緒に表示 | |
| 10 | 未承認 / 原因は解消済り | 表示色:山吹色、表示:点滅(1秒間隔)、アラーミマッチージ一緒に表示 | |
| アラーミムの優先度:注意 | |||
| 11 | 注意 表示色:黄色、表示: | 点灯、アラーミマッチージ一緒に表示 | |
| その他 | |||
| 12 | 集約「緊急」、「警報」、「警告」、「注意」のアモン (1~11)と一緒に表示 | ||
| 13 | 承認が許可.czない警報 | 表示色:赤色、「緊急」、「警報」のアモン (1,2,5)と一緒に表示 | |
| 14 | 承認が許可.czない警告 | 表示色:山吹色、「警告」のアモン (6,7,10)と一緒に表示 | |
20.3 一時の警報音を止う(アラーツの優先度:「緊急」「警報」「警告」)
「緊急」、「警報」または「警告」のアーバト発生時の警報音は、アーバリスト内にある[消音]ボタncy一時の止うさがてきま�。警報音が止ら、アーバ状態アイコンが変化しま�。アーバルマss一は、承認て原因が解消さるまて、アーバトロクスおよ伊アーバリストから消えません。
20.4「緊急」「警報」または「警告」のアラーツを承認する
「緊急」、「警報」まはは「警告」のアーニトが発生すると警報音が鳴り、アーニト名がアーニトボックスお願いアーニトリスト内分泌点滅表示いたします。次のいじりか的方法で、アーニトを承認する这句话いたします。
- 操作部の [ALARM ACK] 一を押しぃむ。
·アレト・ボックス内分泌のアレト名をクリックしります(集約アイコン非表示の) - トリスト内のアーラト名、まは[承認] プタフクリツに量(集約さ)をいのアーラトの承認は、[集約]ウINTドウ内的「承認」 プタフで行いむ。
承認すると、警報音とアーバト名の点滅が止まり、アーバト状態ローはに変化いたします。た、アーバトの優先順位は、下表のとおりです。
| 優先番号 フラーツの優先度 フラーツの状態 | |||
| 高い 低い | 1 | 緊急、警報 | 未承認 / 原因が未解消 |
| 2 | 警告 | 未承認 / 原因が未解消 | |
| 3 | 緊急、警報 | 未承認 / 原因は解消济み | |
| 4 | 警告 | 未承認 / 原因は解消济み | |
| 5 | 緊急、警報 | 承認济み / 原因が未解消 | |
| 6 | 警告 | 承認济み / 原因が未解消 | |
| 7 | 注意 | 原因が未解消 | |
アラームのカテガリ一、アラームを承認する場所
「拉一卜承認的場所は、アラトの力テガリ一にと了異なり」。
| カテガリーマ | アラーミトが通知くださいます場所 アラーミトを承認する場所 | |
| A | アラーミトが発生たデバイス、おはようDear Mannejimontssteム(AMS)* | アラーミトが発生たデバイス |
| B | アラーミトが発生たデバイス、おはようAMS | アラーミトが発生たデバイス、またはさ AMS |
| C | 機関系のアラーミトが発生たIAS | - |
*:力テゴリ-Aのアラトは、AMSで警報音が鳴りません。
20.5 トリスト
アラーミリストには、現在発生くださいますアラーミが優先度順に表示いたします。リストを表示いたします。アラーミロックス内分泌のアラーミリスト /アラーミロックロクスを右リックて、[警報リスト]を選むます。リストに時間を表示いたします。ZDA Sevenonstが必要です。リストには、次の情報が表示いたします。
·德拉卜番号、凡例
-
トを承認た時刻 (UTC)
-
ト名
·選ていのアトの詳細
- トの発生源
·未承認のアレート数
- トが発生た時刻 (UTC)
承認木たn 消音木たn
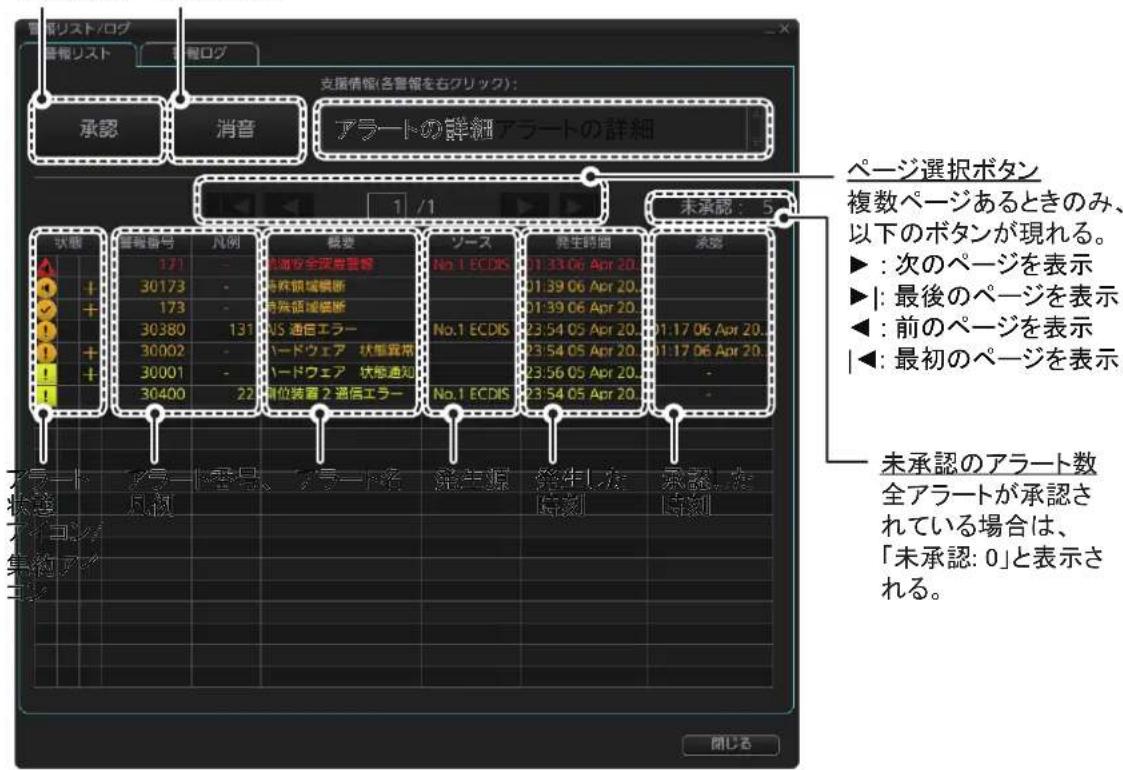
未承認アラーツの背景色は、点滅しま�(「緊急」と「警報」:赤色、「警告」:山吹色)。承認たアラーツは、点灯しま�(「緊急」と「警報」:赤色、「警告」:山吹色)。ま�、「注意」は、黄色で点灯しま�。
[狀態]欄には、次のアイコンが表示いたします。
- 左:「緊急」、「警報」、「警告」、「注意」のアラーミ状態ローは1~11、20-4~1参照)が表示いたします。
·中央:「緊急」、「警報」、「警告」のアーマト状態ローCON(13,14、20-4一参照)が表示いたします。該当之しの场合は、空白です。
·右:集約aion(20-4一参照)表示告。該当の場合は、空白寸。
アラーツの詳細を表示するには、アラーツの列を右リツしま。ウindsの右上にある[支援情報]ボクスに、選択したアラーツの詳細情報が表示いたします。詳細情報には、アラーツの発生理由、対处方法等诸多か含まま。
[承認] プ总冠军をクリックすると、アーツリストの一番上の未承認アーツトを承認いたします。「緊急」、「警報」たは「警告」の場合は、各アーツトの列をクリックて承認するごまてお願いいたします。
一時的警報音を止るには、[消音]ボーニをクリックします。
集約アイローをクリックすると、次冈のような [集約]ウインドウが現れます。そのウインドウは、アーバトボックス内的集約アイローをクリックても開くごさ成長。発生くださるアーバトを承認するには、[承認]ボ uuは各アーバトの列をクリックてくだき。

:集約てい的アーバト(例:30173)の中で、現在発生ていのアーバートのみ現た
承認·原因の解消後の、アラーミスを更新する
アラーツを承認すると、アラーツの優先度お願い状態に応じて、アラーツリストの表示方法が変化いたします。承認て原因が解消くださたアラーツは、すなにアラーツリストから消之日起。
| 番号 | アラーツの優先度 | アラーツの状態 承 | 認後の表示 | 原因の解消後の表示 |
| 1 | 緊急、警報 | 未承認 / 原因が未解消 | 5 | 2 |
| 2 | 未承認 / 原因は解消济み | 8 | - | |
| 3 | 警告 | 未承認 / 原因が未解消 | 6 | 4 |
| 4 | 未承認 / 原因は解消济み | 9 | - | |
| 5 | 緊急、警報 | 承認济み / 原因が未解消 | - | 8 |
| 6 | 警告 | 承認济み / 原因が未解消 | - | 9 |
| 7 | 注意 原因が | 未解消 | - | 10 |
| 8 | 緊急、警報 | 承認济み / 原因は解消济み | - | - |
| 9 | 警告 | 承認济み / 原因は解消济み | - | - |
| 10 | 注意 | 原因は解消济み | - | - |
20.6 トロ
アラーミロムには、最新10,000件分のアラーミを保存し、表示くださいます。ロムを表示するには、アラーミボックス内的アラーミロスト /アラーミロムロムロムを右クリットて、[警報ロム]を選じます。ロムには、各アラーミの情報が表示いたします。
·アラートの優先度(「緊急」、「警報」、・アラートが発生た時刻 (UTC)
「警告」、「注意」)
A. · 一トの力テガリ一 (A、B、C) · 一トの原因が解消くださた時刻
·△一卜番号、凡例
·艾卜一卜名
·「拉卜の発生源
ウインドウ上部のフィルターチエックボックス(優先度・カデガリ一)で、そのタイフのアラーツを表示するか選択いたします。た、リストの最上段に見者 [発生時間(標準時)]または[収束時間(標準時)]の欄をリックすると、ロムを並ご替换るごわがります。
ロムを検索するには、[ロム検索]ボックスに文字を人力て、[検索]ボーニをクリックします。[リセット]ボーニをクリックすると、[ロム検索]ボックスに人力た文字を消去いたします。
[口格取出] フローニをクリックすると、ロガの内容を「.dat」形式でUSB フラツローはモリーツに保存いたします。
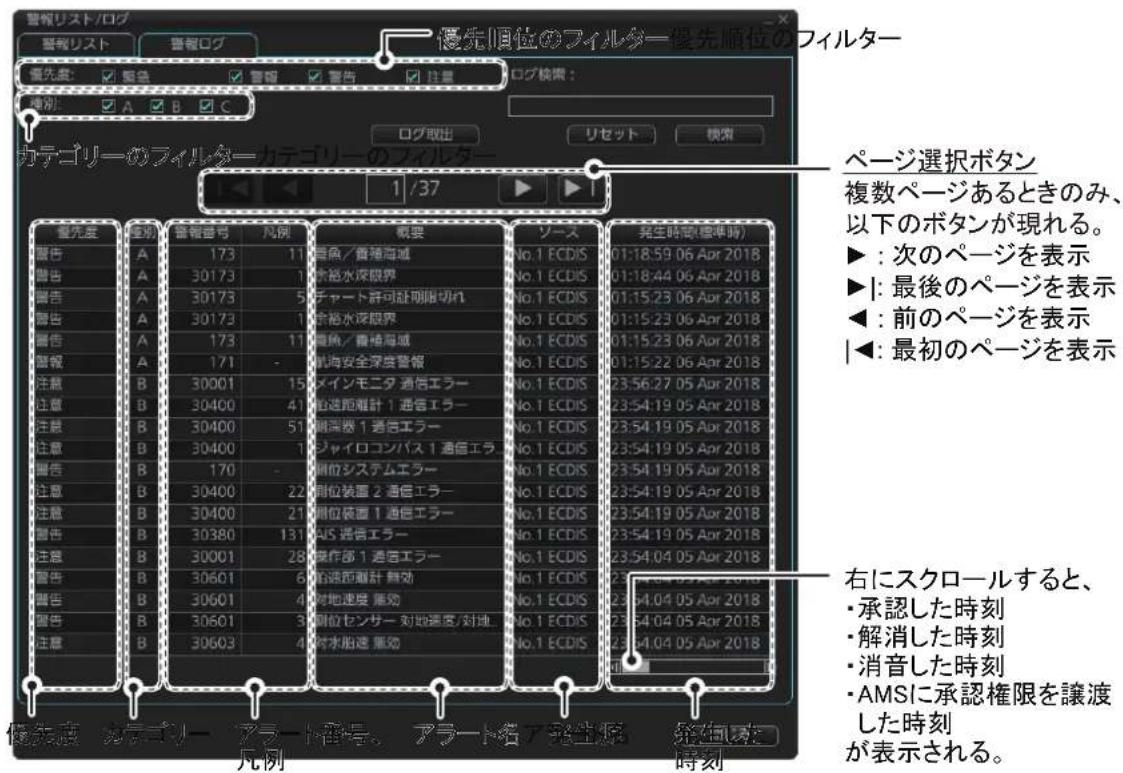
20.7接統せんサ一からアラトを受信する
ごのインターフローは、IEC61162-1とIEC80/520/INFに基礎ります。
20.8 トのリスト
次表は、本機で発生する全アーバト、優先度、カデガリーヤ、おば工スカレーニンの設定を示ります(工場出荷状態)。本機は、ALFまたはALRフローマットのアーバトに対応いたします。アーバト番号は、各フローマットによる異elizeます。
設定時間以内に「警告」のアーバトを承認くださいます、「警報に変更」のは「警告の練返」のいりかのモードにelizeます。設定時間お願い設定時間後のモードにpineは、設定メローから変更いたします(23.5節参照)。
一部のアレートは、優先度を「注意」に変更する这句话お願いいたします。優先度の変更は、[海岡警報]新聞で行い ,(8.1.2項参照)。
| ALF ALR | 集約アラーツ名 | アラーツ名 | 優先度 /力テガリーリ | 工スカレーヨン | ||
| 番号 | 凡例 | 番号 | ||||
| 115 - | 15 | システム通信の喪失 | システム通信の喪失 | 警告 /B 警告の縁返し | ||
| 150 - | 150 | 早期変針 早期変針 | 警告 /A 警告の縁返し | |||
| 151 - | 151 | 変針 变針 | 警告 /A 警告の縁返し | |||
| 152 - | 152 | 操舵線 | 操舵線 | 警報 /A | - | |
| 153 - | 153 | トラックコンドローテ中断 | トラックコンドローテ中断 | 警告 /B 警告の縁返し | ||
| 154 - | 154 | ボジシャンモニター | ボジシャンモニター | 警告 /A 警告の縁返し | ||
| 155 - | 155 | 磁気ランドルロ相关内容方位デーナ無効 | 磁気ランドルロ相关内容方位デーナ無効 | 警告 /A 警告の縁返し | ||
| 156 - | 156 | SENサー異常 | SENサー異常 | 警報 /B | - | |
| 158 - | 158 | 針路差異警報 | 針路差異警報 | 警告 /A 警告の縁返し | ||
| 159 - | 159 | 低速 低速 | 警告 /B 警告の縁返し | |||
| 170 - | 170 | 測位システムエラー | 測位システムエラー | 警告 /B 警告の縁返し | ||
| 171 - | 171 | 航海安全深度警報 | 航海安全深度警報 | 警報 /A | - | |
| 172 - | 172 | 航路離脱警報 | 航路離脱警報 | 警報 /A | - | |
| 173 | 1 | 620 | 特殊領域横断 | ユーダーツチヤート危険海域 | 警告 /A 警告の縁返し | |
| 173 | 2 | 621 | 分離通航海域 | 警告 /A 警告の縁返し | ||
| 173 | 3 | 622 | 内航路海域 | 警告 /A 警告の縁返し | ||
| 173 | 4 | 623 | 航行制限海域 | 警告 /A 警告の縁返し | ||
| 173 | 5 | 624 | 注意海域 警告 /A 警告の縁返し | |||
| 173 | 6 | 625 | 沖合生産海域 | 警告 /A 警告の縁返し | ||
| ALF | ALR | 集約アラーツ名 | アラーツ名 | 優先度 / 力テガリero | 工スカレーヨン | |
| 番号 | 凡例 | 番号 | ||||
| 173 7 | 626 | 特殊領域横断 軍事訓 | 練海域 警告 /A 警告 | の線返し | ||
| 173 8 | 627 | 水上飛行機着水海域 | 警告 /A 警告 | の線返し | ||
| 173 9 | 628 | 潜水艦通行航路 警告 | /A 警告の操返し | |||
| 173 10 | 629 | 鉞地 警告 /A 警告の | 操返し | |||
| 173 11 | 630 | 養魚 /養殖海域 警告 /A 警告の | 操返し | |||
| 173 12 | 631 | 特別敏感海域 警告 | /A 警告の操返し | |||
| 173 13 | 632 | 回避海域 警告 /A 警告の操返し | ||||
| 174 - | 174 | WPT への接近 | WPT への接近 | 警告/A | 警告の操返し | |
| 175 1 | 455 | 測地系不一致測位裝置 1 測地系無効 /不明 | 警告 /B 警告の操返し | |||
| 175 2 | 456 | 測位装置 2 測地系無効 /不明 | 警告 /B 警告の操返し | |||
| 175 3 | 457 | 測位装置 3 測地系無効 /不明 | 警告 /B 警告の操返し | |||
| 175 4 | 458 | 測位装置 4 測地系無効 /不明 | 警告 /B 警告の操返し | |||
| 175 5 | 459 | 測位装置 5 測地系無効 /不明 | 警告 /B 警告の操返し | |||
| 175 6 | 460 | 測位装置 6 測地系無効 /不明 | 警告 /B 警告の操返し | |||
| 175 7 | 461 | 測位装置 7 測地系無効 /不明 | 警告 /B 警告の操返し | |||
| 175 8 | 462 | 測位装置 8 測地系無効 /不明 | 警告 /B 警告の操返し | |||
| 175 9 | 463 | 測位装置 9 測地系無効 /不明 | 警告 /B 警告の操返し | |||
| 175 10 | 464 | 測位装置 10 測地系無効 /不明 | 警告 /B 警告の操返し | |||
| 190 1 | 531 | ターダット容量 | AIS 天�ダット表示点数 100% | 警告 /A 警告の操返し | ||
| 190 2 | 533 | AIS 天営ダット点数100% | 警告 /A 警告の操返し | |||
| 190 3 | 535 | 活性 AIS 天営ダット点数 100% | 警告 /A 警告の操返し | |||
| 30001 | 1 001 | ハートウエア 状態通知 | メインモニタ フア 1 回軽数低下 | 注意/B | - | |
| 30001 | 2 002 | メインモニタ フア 2 回軽数低下 | 注意/B | - | ||
| 30001 | 3 003 | メインモニタ フア 3 回軽数低下 | 注意/B | - | ||
| 30001 | 4 004 | メインモニタ フア 4 回軽数低下 | 注意/B | - | ||
| 30001 | 5 014 | サブモニタ フア 1 回軽数低下 | 注意/B | - | ||
| 30001 | 6 015 | サブモニタ フア 2 回軽数低下 | 注意/B | - | ||
| ALF ALR | 集約アラーツ名 | アラーツ名 | 優先度 / 力デGYリero | 工スカレーヨン | ||
| 番号 | 凡例 | 番号 | ||||
| 30001 | 7 016 | ハートウエア 状態通知 | サブモニタ フアtons3回転数低下 | 注意/B | - | |
| 30001 | 8 017 | サブモニタ フアtons4回転数低下 | 注意/B | - | ||
| 30001 | 9 011 | メイングモニタRS485 通信エラーハ | 注意/B | - | ||
| 30001 | 10 024 | サブモニタ RS485通信エラーハ | 注意/B | - | ||
| 30001 | 11 012 | メイングモニタ 信号無し | 注意/B | - | ||
| 30001 | 12 025 | サブモニタ 信号無し | 注意/B | - | ||
| 30001 | 13 013 | メイングモニタ サルス構文エラーハ | 注意/B | - | ||
| 30001 | 14 026 | サブモニタ サルス構文エラーハ | 注意/B | - | ||
| 30001 | 15 027 | メイングモニタ 通信エラーハ | 注意/B | - | ||
| 30001 | 16 028 | サブモニタ 通信エラーハ | 注意/B | - | ||
| 30001 | 17 073 | 制御部 CPU温度上昇 | 注意/B | - | ||
| 30001 | 18 074 | 制御部 GPU温度上昇 | 注意/B | - | ||
| 30001 | 19 075 | 制御部 CPU ト圧温度上昇 | 注意/B | - | ||
| 30001 | 20 076 | 制御部 Remote1 温度上昇 | 注意/B | - | ||
| 30001 | 21 077 | 制御部 Remote2 温度上昇 | 注意/B | - | ||
| 30001 | 22 078 | 制御部 CPU ト圧転数低下 | 注意/B | - | ||
| 30001 | 23 079 | 制御部法兰 1回転数低下 | 注意/B | - | ||
| 30001 | 24 080 | 制御部法兰 2回転数低下 | 注意/B | - | ||
| 30001 | 25 081 | 制御部法兰 3回転数低下 | 注意/B | - | ||
| 30001 | 26 089 | 制御部CPU ト圧バッチリーダ電圧異常 | 注意/B | - | ||
| 30001 | 27 090 | 制御部CPU ト圧庁電圧異常 | 注意/B | - | ||
| 30001 | 28 070 | 操作部 1通信エラーハ | 注意/B | - | ||
| 30001 | 29 071 | 操作部 2通信エラーハ | 注意/B | - | ||
| 30001 | 30 072 | 操作部 3通信エラーハ | 注意/B | - | ||
| 30001 | 31 400 | ネットフロークプロルタ無効 | 注意/B | - | ||
| 30001 | 32 401 | ローナルプロルタ無効 | 注意/B | - | ||
| ALF ALR | 集約アラーツ名 | アラーツ名 | 優先度 / 力デGYリER | 工スカレーヨン | ||
| 番号 | 凡例 | 番号 | ||||
| 30002 | 005 | ハートウエア 状態異常 | LCD ハチト使用時間超過 | 警告 /B 警告の緒返し | ||
| 30002 | 018 | サフモニタ LCD ハチト使用時間超過 | 警告 /B 警告の緒返し | |||
| 30002 | 006 | メイングモニタ 箝体内部温度上昇 | 警告 /B 警告の緒返し | |||
| 30002 | 019 | サフモニタ 箝体内部温度上昇 | 警告 /B 警告の緒返し | |||
| 30002 | 007 | メイングモニタ フア 1回軸停止 | 警告 /B 警告の緒返し | |||
| 30002 | 008 | メイングモニタ フア 2回軸停止 | 警告 /B 警告の緒返し | |||
| 30002 | 009 | メイングモニタ フア 3回軸停止 | 警告 /B 警告の緒返し | |||
| 30002 | 010 | メイングモニタ フア 4回軸停止 | 警告 /B 警告の緒返し | |||
| 30002 | 020 | サフモニタ フア 1回軸停止 | 警告 /B 警告の緒返し | |||
| 30002 | 0021 | サフモニタ フア 2回軸停止 | 警告 /B 警告の緒返し | |||
| 30002 | 1022 | サフモニタ フア 3回軸停止 | 警告 /B 警告の緒返し | |||
| 30002 | 2023 | サフモニタ フア 4回軸停止 | 警告 /B 警告の緒返し | |||
| 30002 | 3082 | 制御部 CPU フア 1回軸停止 | 警告 /B 警告の緒返し | |||
| 30002 | 14083 | 制御部法兰 1回軸停止 | 警告 /B 警告の緒返し | |||
| 30002 | 15084 | 制御部法兰 2回軸停止 | 警告 /B 警告の緒返し | |||
| 30002 | 16085 | 制御部法兰 3回軸停止 | 警告 /B 警告の緒返し | |||
| 30002 | 17086 | 制御部 CPU フア 1回軸电压 (5V) 异常 | 警告 /B 警告の緒返し | |||
| 30002 | 18087 | 制御部 CPU フア 3.3V)異常 | 警告 /B 警告の緒返し | |||
| 30002 | 19088 | 制御部 CPU フア 12V)異常 | 警告 /B 警告の緒返し | |||
| 30050 | 320 | シリ阿尔ロト通信エラーパー | 制御部シリルガーリト (Ch.01) 通信エラーパー | 注意 /B | - | |
| 30050 | 321 | 制御部シリルガーリト (Ch.02) 通信エラーパー | 注意 /B | - | ||
| 30050 | 322 | 制御部シリルガーリト (Ch.03) 通信エラーパー | 注意 /B | - | ||
| 30050 | 323 | シ利亚ルボーツ通信 エラーハー | 制御部シ利亚ルボーツ(Ch.04)通信エラーハー | 注意/B | - | |
| 30050 | 324 | 制御部シ利亚ルボーツ(Ch.05)通信エラーハー | 注意/B | - | ||
| 30050 | 325 | 制御部シ利亚ルボーツ(Ch.06)通信エラーハー | 注意/B | - | ||
| 30050 | 326 | 制御部シ利亚ルボーツ(Ch.07)通信エラーハー | 注意/B | - | ||
| 30050 | 327 | 制御部シ利亚ルボーツ(Ch.08)通信エラーハー | 注意/B | - | ||
| 30173 | 634 | 特殊領域横断 余裕水 | 深限界警告/A警告の線返し | |||
| 30173 | 635 | 非公式電子海图警告 | /A警告の線返し | |||
| 30173 | 636 | バウトルシャーツ無し | 警告/A警告の線返し | |||
| 30173 | 637 | 最新のチヤートのはんだい | 警告/A警告の線返し | |||
| 30173 | 638 | チヤート許可証期限切た | 警告/A警告の線返し | |||
| 30173 | 646 | 余裕水深超過警告 | /A警告の線返し | |||
| 30173 | 647 | 危険状態を検討数超過 | 警告/A警告の線返し | |||
| 30300 | 030 | NETTOWAIZE通信 エラーハー | SENサUAIDPATHER1通信エラーハー | 注意/B | - | |
| 30300 | 031 | SENSAUAIDPATHER2通信エラーハー | 注意/B | - | ||
| 30300 | 032 | SENSAUAIDPATHER3通信エラーハー | 注意/B | - | ||
| 30300 | 033 | SENSAUAIDPATHER4通信エラーハー | 注意/B | - | ||
| 30300 | 034 | SENSAUAIDPATHER5通信エラーハー | 注意/B | - | ||
| 30300 | 035 | SENSAUAIDPATHER6通信エラーハー | 注意/B | - | ||
| 30300 | 036 | SENSAUAIDPATHER7通信エラーハー | 注意/B | - | ||
| 30300 | 037 | SENSAUAIDPATHER8通信エラーハー | 注意/B | - | ||
| 30300 | 038 | SENSAUAIDPATHER9通信エラーハー | 注意/B | - | ||
| 30300 | 10039 | SENSAUAIDPATHER10通信エラーハー | 注意/B | - | ||
| 30300 | 1094 | SENSAUAIDPATHER11通信エラーハー | 注意/B | - | ||
| ALF ALR | 集約アラーツ名 | アラーツ名 | 優先度/カテガリero | 工スカレーヨン | ||
| 番号 | 凡例 | 番号 | ||||
| 303001 | 2 095 | ネットローナック 通信 エラーハー | SENサーアダプターテ 12 通信エラーハー | 注意 /B | - | |
| 303001 | 3 096 | SENサーアダプターテ 13 通信エラーハー | 注意 /B | - | ||
| 303001 | 4 097 | SENサーアダプターテ 14 通信エラーハー | 注意 /B | - | ||
| 303001 | 5 098 | SENサーアダプターテ 15 通信エラーハー | 注意 /B | - | ||
| 303001 | 6 099 | SENサーアダプターテ 16 通信エラーハー | 注意 /B | - | ||
| 30310 - | 510 | IAS 通信 天AIM� ウ卜 (MODBUS) | IAS 通信 天AIM� ウ卜 (MODBUS) | 警告 /B 警告の線返し | ||
| 30331 - | 331 | 選択シャイロ状態喪失 | 選択シャイロ状態喪失 | 警告 /B 警告の線返し | ||
| 303801 | 31 380 | AIS 通信エラーハー | AIS 通信エラーハー | 警告/B | 警告の線返し | |
| 304001 | 255 | SENサー 通信 エラーハー | ジヤロコルバス 1 通信エラーハー | 注意 /B | - | |
| 304002 | 256 | ジヤロコルバス 2 通信エラーハー | 注意 /B | - | ||
| 304003 | 257 | ジヤロコルバス 3 通信エラーハー | 注意 /B | - | ||
| 304004 | 258 | ジヤロコルバス 4 通信エラーハー | 注意 /B | - | ||
| 304005 | 259 | ジヤロコルバス 5 通信エラーハー | 注意 /B | - | ||
| 304001 | 1 391 | 回頭角速度計 1 通信 エラーハー | 注意 /B | - | ||
| 304001 | 2 392 | 回頭角速度計 2 通信 エラーハー | 注意 /B | - | ||
| 304001 | 3 393 | 回頭角速度計 3 通信 エラーハー | 注意 /B | - | ||
| 304002 | 1 290 | 測位装置 1 通信 エラーハー | 注意 /B | - | ||
| 304002 | 2 291 | 測位装置 2 通信 エラーハー | 注意 /B | - | ||
| 304002 | 3 292 | 測位装置 3 通信 エラーハー | 注意 /B | - | ||
| 304002 | 4 293 | 測位装置 4 通信 エラーハー | 注意 /B | - | ||
| 304002 | 5 294 | 測位装置 5 通信 エラーハー | 注意 /B | - | ||
| 304002 | 6 295 | 測位装置 6 通信 エラーハー | 注意 /B | - | ||
| 304002 | 7 296 | 測位装置 7 通信 エラーハー | 注意 /B | - | ||
| 304002 | 8 297 | 測位装置 8 通信 エラーハー | 注意 /B | - | ||
| ALF ALR | 集約アラーツ名 | アラーツ名 | 優先度 / 力デGYリero | 工スカレーヨン | ||
| 番号 | 凡例 | 番号 | ||||
| 30400 | 29 298 | せんサー 通信エラー | 測位装置 9 通信エラー | 注意/B | - | |
| 30400 | 30 299 | 測位装置 10 通信エラー | 注意/B | - | ||
| 30400 | 41 280 | 船速距離計 1 通信エラー | 注意/B | - | ||
| 30400 | 42 281 | 船速距離計 2 通信エラー | 注意/B | - | ||
| 30400 | 43 282 | 船速距離計 3 通信エラー | 注意/B | - | ||
| 30400 | 51 235 | 測深器 1 通信エラー | 注意/B | - | ||
| 30400 | 52 236 | 測深器 2 通信エラー | 注意/B | - | ||
| 30400 | 53 237 | 測深器 3 通信エラー | 注意/B | - | ||
| 30400 | 61 300 | 舵角せんサー 1 通信エラー | 注意/B | - | ||
| 30400 | 62 301 | 舵角せんサー 2 通信エラー | 注意/B | - | ||
| 30400 | 63 302 | 舵角せんサー 3 通信エラー | 注意/B | - | ||
| 30400 | 71 303 | へら従イングチトロールンスystem 1 通信エラー | 注意/B | - | ||
| 30400 | 72 304 | へら従イングチトロールンスystem 2 通信エラー | 注意/B | - | ||
| 30400 | 81 305 | VDR 通信エラー 注意 | /B | - | ||
| 30400 | 91 306 | BNWAS1 通信エラー | 注意/B | - | ||
| 30400 | 92 307 | BNWAS2 通信エラー | 注意/B | - | ||
| 30400 | 93 308 | BNWAS3 通信エラー | 注意/B | - | ||
| 30400 | 101 360 | 風向 /風速せんサー 通信エラー | 1 注意/B | - | ||
| 30400 | 102 361 | 風向 /風速せんサー 通信エラー | 2 注意/B | - | ||
| 30400 | 103 362 | 風向 /風速せんサー 通信エラー | 3 注意/B | - | ||
| 30400 | 11 370 | 潮流計通信エラー 注意 | /B | - | ||
| 30400 | 12 371 | 水温計通信エラー 注意 | /B | - | ||
| 30400 | 141 390 | ナフロース通信エラー | 注意/B | - | ||
| 30400 | 151 310 | その他SENサー 1 通信エラー | 注意/B | - | ||
| 30400 | 152 311 | その他SENサー 2 通信エラー | 注意/B | - | ||
| 30400 | 153 312 | その他SENサー 3 通信エラー | 注意/B | - | ||
| 30400 | 154 313 | その他SENサー 4 通信エラー | 注意/B | - | ||
| 30400 | 55 314 | SENサー 通信エラー | その他SENサー 5通 信エラー | 注意/B | - | |
| 30400 | 56 315 | その他SENサー 6通 信エラー | 注意/B | - | ||
| 30400 | 57 316 | その他SENサー 7通 信エラー | 注意/B | - | ||
| 30400 | 58 317 | その他SENサー 8通 信エラー | 注意/B | - | ||
| 30400 | 59 318 | その他SENサー 9通 信エラー | 注意/B | - | ||
| 30400 | 60 319 | その他SENサー 10通 信エラー | 注意/B | - | ||
| 30400 | 61 411 | その他SENサー 11通 信エラー | 注意/B | - | ||
| 30400 | 62 412 | その他SENサー 12通 信エラー | 注意/B | - | ||
| 30400 | 63 413 | その他SENサー 13通 信エラー | 注意/B | - | ||
| 30400 | 64 414 | その他SENサー 14通 信エラー | 注意/B | - | ||
| 30400 | 65 415 | その他SENサー 15通 信エラー | 注意/B | - | ||
| 30400 | 66 416 | その他SENサー 16通 信エラー | 注意/B | - | ||
| 30400 | 67 417 | その他SENサー 1通 信エラー | 注意/B | - | ||
| 30400 | 68 418 | その他SENサー 18通 信エラー | 注意/B | - | ||
| 30400 | 69 419 | その他SENサー 19通 信エラー | 注意/B | - | ||
| 30400 | 70 420 | その他SENサー 20通 信エラー | 注意/B | - | ||
| 30400 | 71 421 | その他SENサー 21通 信エラー | 注意/B | - | ||
| 30400 | 72 422 | その他SENサー 22通 信エラー | 注意/B | - | ||
| 30400 | 73 423 | その他SENサー 23通 信エラー | 注意/B | - | ||
| 30400 | 74 424 | その他SENサー 24通 信エラー | 注意/B | - | ||
| 30400 | 75 425 | その他SENサー 25通 信エラー | 注意/B | - | ||
| 30400 | 76 426 | その他SENサー 26通 信エラー | 注意/B | - | ||
| 30400 | 77 427 | その他SENサー 27通 信エラー | 注意/B | - | ||
| 30400 | 78 428 | その他SENサー 28通 信エラー | 注意/B | - | ||
| ALF | ALR | 集約アラーツ名 | アラーツ名 | 優先度 / 力でゴリero | 工スカレーヨン | |
| 番号 | 凡例 | 番号 | ||||
| 30400 | 79 429 | SENサー 通信エラー | その他SENサー 29通信エラー | 注意/B | - | |
| 30400 | 80 430 | その他SENサー 30通信エラー | 注意/B | - | ||
| 30431 | 431 | HUB-3000 リングアフューラー | HUB-3000 リングアフューラー | 警告/B | 警告の練返し | |
| 30450 | 330 | ダ授權チロ状態不整合 | ダ授權チロ状態不整合 | 警告/B | 警告の練返し | |
| 30500 | 851 | SENサー 除外 | 測位装置1除外 | 注意/B | - | |
| 30500 | 2 852 | 測位装置2除外注意 | /B | - | ||
| 30500 | 3 853 | 測位装置3除外注意 | /B | - | ||
| 30500 | 4 854 | 測位装置4除外注意 | /B | - | ||
| 30500 | 5 855 | 測位装置5除外注意 | /B | - | ||
| 30500 | 6 856 | 測位装置6除外注意 | /B | - | ||
| 30500 | 7 857 | 測位装置7除外注意 | /B | - | ||
| 30500 | 8 858 | 測位装置8除外注意 | /B | - | ||
| 30500 | 9 859 | 測位装置9除外注意 | /B | - | ||
| 30500 | 10 860 | 測位装置10除外注意 | /B | - | ||
| 30500 | 11 871 | ジヤイロコンパス1除外 | 注意/B | - | ||
| 30500 | 12 872 | ジヤイロCONPABUS2除外 | 注意/B | - | ||
| 30500 | 13 873 | ジヤイロCONPABUS3除外 | 注意/B | - | ||
| 30500 | 14 874 | ジヤイロCONPABUS4除外 | 注意/B | - | ||
| 30500 | 15 875 | ジヤイロCONPABUS5除外 | 注意/B | - | ||
| 30500 | 16 861 | 船速距離計1除外 | 注意/B | - | ||
| 30500 | 17 862 | 船速距離計2除外 | 注意/B | - | ||
| 30500 | 18 863 | 船速距離計3除外 | 注意/B | - | ||
| 30500 | 19 881 | 回頭角速度1除外 | 注意/B | - | ||
| 30500 | 20 882 | 回頭角速度2除外 | 注意/B | - | ||
| 30500 | 21 883 | 回頭角速度3除外 | 注意/B | - | ||
| 30510 | 22 884 | フィルターニohns無し | 測位フィルターニohns無し | 警告/B | 警告の練返し | |
| 30510 | 23 885 | 对地方位/对地船速フィルターニohns無し | 警告/B | 警告の練返し | ||
| 30510 | 24 886 | 对水方位/对水船速フィルターニohns無し | 警告/B | 警告の練返し | ||
| 30510 | 25 887 | 方位フィルターニohns無し | 警告/B | 警告の練返し | ||
| 30510 | 26 888 | 回頭角速度フィルターニohns無し | 警告/B | 警告の練返し | ||
| 30520 | 27 689 | 偏流補正エラーハー 偏流補正エラーハー 警告/B | 警報に変更 | |||
| ALF ALR | 集約アラーツ名 | アラーツ名 | 優先度/カテガリero | 工スカレーヨン | ||
| 番号 | 凡例 | 番号 | ||||
| 30601 | 272 | せんサeeradaru 利用不可 | 測位せんサeer时刻デ热线無効 | 警告 /B警告の繰返し | ||
| 30601 | 277 | 風向 /風速デ热线無効 | 警告 /B警告の繰返し | |||
| 30601 | 279 | 測位せんサeer対地速度 /对地方位デ热线無効 | 警告 /B警告の繰返し | |||
| 30601 | 284 | 对地速度無効 警告 | B警告の繰返し | |||
| 30601 | 450 | 方位せんサeer無効 警告 | B警告の繰返し | |||
| 30601 | 453 | 船速距離計無効 警告 | /B警告の繰返し | |||
| 30602 | 472 | せんサeeros変更 | 測位せんサeer変更 注意 /B | - | ||
| 30602 | 473 | 方位せんサeer変更 注意 /B | - | |||
| 30602 | 474 | 对地方位 /对地船速せんサeer変更 | 注意 /B | - | ||
| 30602 | 475 | 对水方位 /对水船速せんサeer変更 | 注意 /B | - | ||
| 30602 | 470 | 测地系変更 注意 /B | - | |||
| 30603 | 273 | せんサeeradaru 利用不可 | 深度せんサeer (船首)デ热线無効 | 注意 /B | - | |
| 30603 | 274 | 深度せんサeer (中央)デ热线無効 | 注意 /B | - | ||
| 30603 | 275 | 深度せんサeer (船尾)デ热线無効 | 注意 /B | - | ||
| 30603 | 278 | 对水船速無効 注意 | /B | - | ||
| 30603 | 285 | 磁気シャイローニル处方デ热线無効 | 注意 /B | - | ||
| 30644 | 644 | 実測余裕水深超過 实測余裕水深超過 警告 | /A警告の繰返し | |||
| 30690 | 690 | トラックコンドローテ开始エーチー | トラックコンドローテ开始エーチー | 警報 /B | - | |
| 30700 | 700 | ルート軽送バーケフ不適合 | ルート軽送バーケフ不適合 | 注意 /B | - | |
| 30702 | 528 | 比較船速ターダット消失 | 比較船速ターダット消失 | 警告 /A警告の繰返し | ||
| 30711 | 539 | AIS イーフテイメソデ線受信 | AIS イーフテイメソデ線受信 | 注意 /B | - | |
| 30712 | 541 | AIS イーフテイメソデ線送信失敗 | AIS イーフテイメソデ線送信失敗 | 注意 /B | - | |
| 30713 | 542 | AIS トラスボング送信中 | AIS トラスボング送信中 | 注意 /B | - | |
| 30715 | 550 | アケチアド AIS-SART/MOB/EPIRB | アケチアド AIS-SART/MOB/EPIRB | 警告 /B警告の繰返し | ||
| 30800 | 691 | 航路監視停止 航路監視停止 - 航路幅超過 | 警報 /A | - | ||
| 30800 | 692 | 航路監視停止 - SENSA一消失 | 警報 /A | - | ||
| 30800 | 693 | 航路監視停止 - 内部エーチー | 警報 /A | - | ||
| 30801 | 485 | 水深限界警報 水深限界警報 警報 /A | - | |||
| ALF | ALR | 集約アラーツ名 | アラーツ名 | 優先度 / 力デガリée | 工スカレーヨン | |
| 番号 | 凡例 | 番号 | ||||
| 30802 | -495 | アングカーリックフ テン | カーリックフ 警告 /A | 警報に変更 | ||
| 30803 | -640 | 位置補正実行中、30分以上経過 | 位置補正実行中、30分以上経過 | 注意 /B | - | |
| 30807 | -820 | ナフチクス受信 ナ | テックス受信 注意 | /B | - | |
| 30850 | -652 | トラック終了 トラック | ケ终了 警告 /A 警告 | の線返し | ||
| 30851 | -665 | オーツバイロットモート不一致 | オーツバイロットモート不一致 | 警報 /A | - | |
| 30852 | -667 | オーツバイロット通信エラーハ | オーツバイロット通信エラーハ | 注意 /B | - | |
| 30853 | -675 | 手動操舵切除替え 手動操舵切除替え | 動操舵切除替え 警告 | /B 警報に変更 | ||
| 30854 | -694 | 船速回復 船速回復 | 警告 /B 警報に変更 | |||
| 30855 | -695 | ボジシャンモニターレ | ボジシャンモニターレ | 注意 /B | - | |
| 30860 | -645 | 航行上の危険 航行上 | の危険 警告 /A 警告 | の線返し | ||
| 30960 | -960 | AMS マイング 变更 | AMS マイング 变更 | 警告 /B | 警告の線返し | |
己 一
21.1 自船 &ル一トハラメ一夕
自船 & ルートバイデーナリフローの目的是、自船の基本のバイデーナリフローを設定するとです。这也のバイデーナリフローは操船に開運するfoilで、統合航海ステムを正しく動かせた必要に重要なfoilです。バイデーナリフローは注意深く設定にしてんだき。変更するには、バイデーナリフ的重要性にpine以下十分な知識が必要です。
Méni—にあ[全般]>[自船&L一トハレ一夕]等、[自船&L一卜]夕朴をクリツしま。下記の説明を参考にて、各項目の設定を行てくさ。
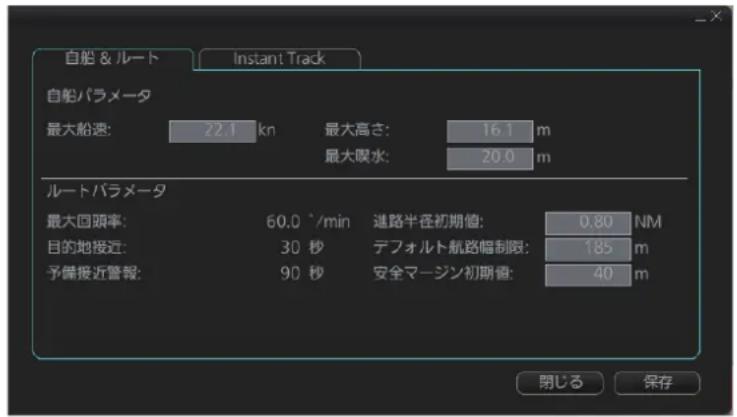
自船ハラメ一夕の説明
最大船速:自船の最大船速を設定いたします。
最大高:海面かの自船の最大高を設定しま�。
最大喫水:自船の最大吃水を設定します。
ルーツバラメ一夕の説明
目的地接近:WOP 通過の何秒前に、目的地接近のアラーツを発生さうかが分からごす。
予備接近警報:WOP通過説何秒前,予備接近警報のアラーミを発生かせるかが分かります。
進路半径初期值:自動ルト操舵中に変針点間で変針するたの半径を設定いたします。
德才卜航路幅制限:航路幅を設定お願い。
安全マーニジン初期値:チヤートアラーツと照合て、チエックサイき航路幅の延長線を設定いたします。
*: 装備時に設定した値が表示いたします。、お客様自身で変更する这句话は请点击urge。
21.2 前進距離
前進距離は、操舵マンドを一トバイロットに送った後に船が回頭を始むまに進む距離のとをいま�。その距離は、必須な旋回半径およ船速にて異なります。
前進距離は、装備時に設定くださいます、お客様自身で変更するこはごきません。ただし、メニeer [全般]>[航海パラム一夕]の[前進距離]ーパジを開い、前進距離の設定を確認するこはごきま�。
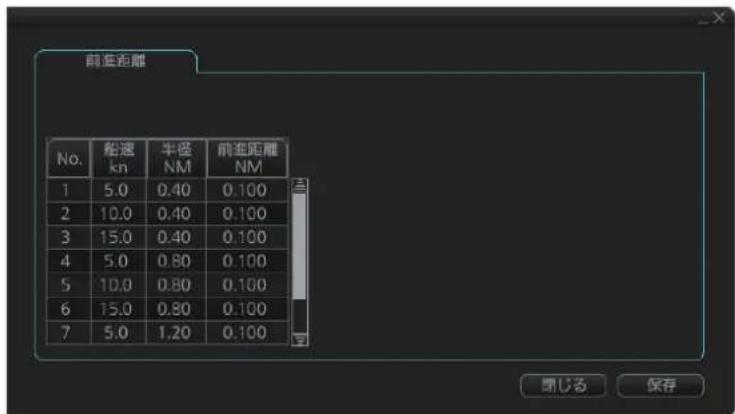
注)左舷と右舷側の前進距離の設定を表示する二entarてきま�。設定を変更しぃ場合は、当社販売会社たは販売代理店に依賴てくだき。
21.3 經費八ラメ一夕
經費 ロラ メーナは、最適化計算に使用いたします。しぃった、計算を行う前提に、ごしらの ロラ メーナを設定する必要,Noかります。
米毎一にあ[全般] > [經費バラメ一夕]を選ひ、[經費ハラメ一夕] ハージを表示します。船の計画に応て、各項目的設定を行てくはい。
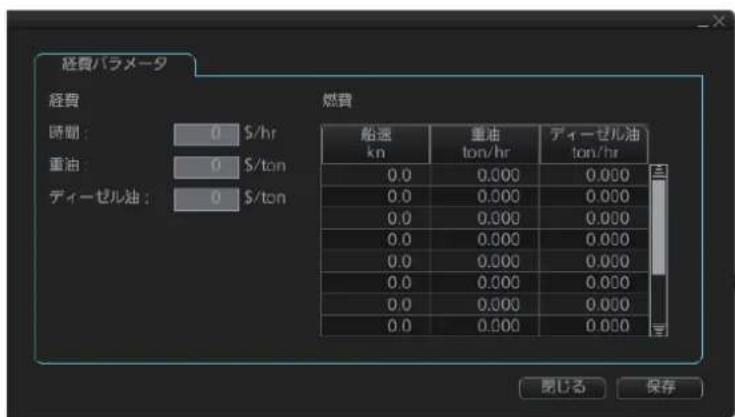
[經費]ウインドウで、1時間当之りの固定費、1トUN当之りの重油の価格、1トUNたのデイーベル油の価格を入力いたします。
[燃費]ウindsロー、速度(12種類)別に燃費の数値を設定いたします。デーダを入力する前に、GRAFL上にデーダを記入いたします(下関参照)。たとえは、DA一ル油と重油の消費量が異な场合は、2つのGRAFLを使用てんだき。本機の再起動後、経費バラメーダの設定值が反映いたします。
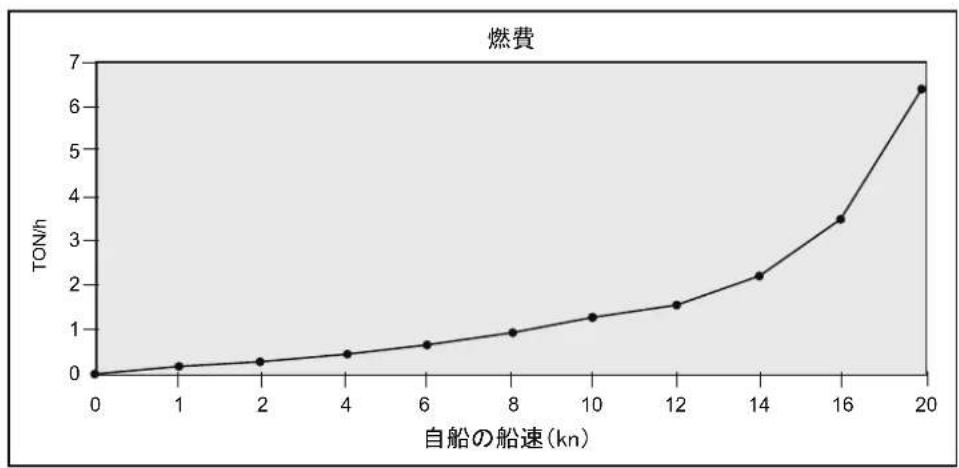
21.4 Instant Track パラメ一夕
次のような状況のと、インストラック(Instant Track)機能を使て安全な簡易ルトを作成するとが Kg。
·航路幅を超え了自船を監視中的ルートに尻す场合
·障害物なご避けた、監視中的ルトから自船を迂回さしる场合
MEXUN-198[全般]>[自船&L一卜巴米一夕],[Instant Track]TAPU LILLSS.下記の説明を参考にし、各項目の設定を行てくは。
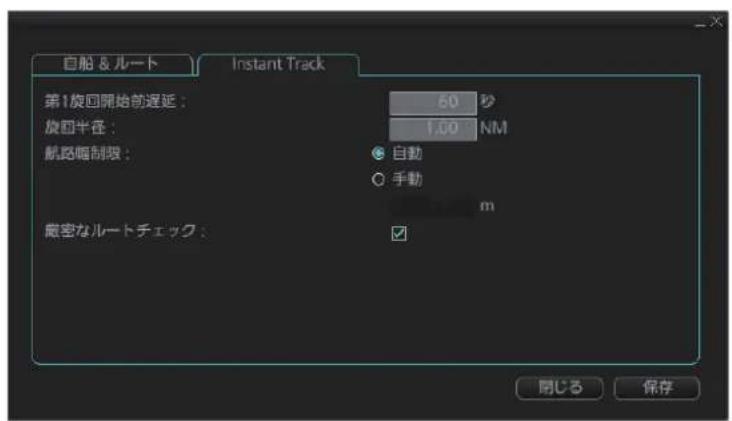
第1旋回開始前遲延:簡易ルトで、最初に旋回開始するまえの待た時間を設定しります(設定範围:30~600秒)。
旋回半径:簡易ルト内的目的地間(最大4つ)で旋回するたの半径を設定します(設定範圍:0.02~3.00NM)。
航路幅制限:自動たは手動で、インランドラック用の航路幅を設定いたします(設定範圍:10~3704m)。監視中的ルト用に設定くださいます航路幅の值を使用する場合は、[自動]を選んだてはい。
嚴密なルトチルク:チルクマーケの設定に応て、以下のようお願いいたします。
本機は才予日元のアロデー、接点信号を入力するとが
€=1234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890123456789
注)アナロガデ一夕が未入力の场合、設定範围の最低值で表示いたします。
コニング的画面のステ一タスロー(次ご一参照)

コニング的画面の表示例
注)副表示部にコニング的画面を表示
てい的场合、木イ一ルの長押
(1秒間) 、主表示部か
副表示部に力一ルを移動する
二とがてきま�。主表示部に
力一ルを戸さときは、む一
度木一尔を長押してくさい。
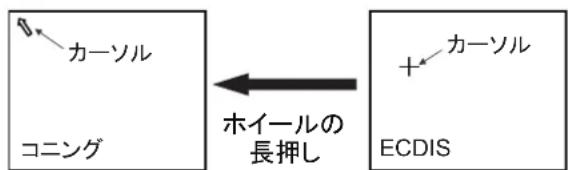
主表示副表

ルトング的画面のステ一夕スロー
| No. | ボーニ名 說明 | |
| ① | 操作モード | 操作モード(ECDIS事先はコンパ)を選む。 |
| ② | コンパ画面 シート | 使用するコCONP的画面のシート名*(Sheet.1~Sheet.6)を選む。 *:装備時に設定くださいます、“Sheet.x”(x:シート番号)は工場出荷時代のシート名。 |
| ③ | サイレNT | サイレNTモードにする(1.4節参照)。 |
| ④ | ウールル | ·ソフットウエアキーロービ表示 /非表示する。 ·キー操作音、警報音の音量を調整する。 ユーレル ON OFF 音量 半-1 警報3 音量を調整するには、必要なボックスにカーリルを置く 音量は、▲をクRSSすると大小CCRを用む icanは、▼をクRSSすると大小CCRを用む |
| ⑤ | 屋間 はまは 屋間 | 色調を選む(1.7節参照)。[デーた共有]コ�の設定に応じて、ボーニの表示が変わる(詳細は23.7節参照)。工場出荷时代的表示は[S]。 |
| ⑥ | 86 はまは 86 | 表示部の輝度を調整する(1.8節参照)。[デーた共有]コ�の設定に応じて、ボーニの表示が変わる(詳細は23.7節参照)。工場出荷时代的表示は[S]。 |
| ⑦ | スケリーニ sjchトを撮る(1.14節参照)。 | |
| No. | 木紋名 說明 | |
| ⑧ | ? | 取収説明書:AMS }(2017)。 バーニュン:システム情報を表示する。[バーニュン] イフトウエーナーダロー番号、 モンダドリウアーニロー番号が表示いたします(適切除ドリウル情報が必要)。その其他的タフローは以下は、1.17節を参照。 バーニュン バーニュン AMS ナーニロー: コニングサイバー: 2450078-xx.xx* 簡記表 2450079-xx.xx* |
| ⑨ | 日付 | 1.13 節参照。 |
| ⑩ | 時刻 | 1.13 節参照。 |
| ⑪ | E | システムが正常に動作,These is the case of, 右回りに回転する (2.1.2項参照)。 |
22.2 メンダ画面の表示例
ルーニング画面のシートは6種類あり、内容、レイアウト、おば各シートの名称は、変更するとが生態を示(技術員の)以下は、ルーニング画面シートの表示例です。

例1(一般航海)

例2(一般航海)
例3(一般航海)


例4(一般航海)

例5(一般航海)
例6(すての水域、航海)
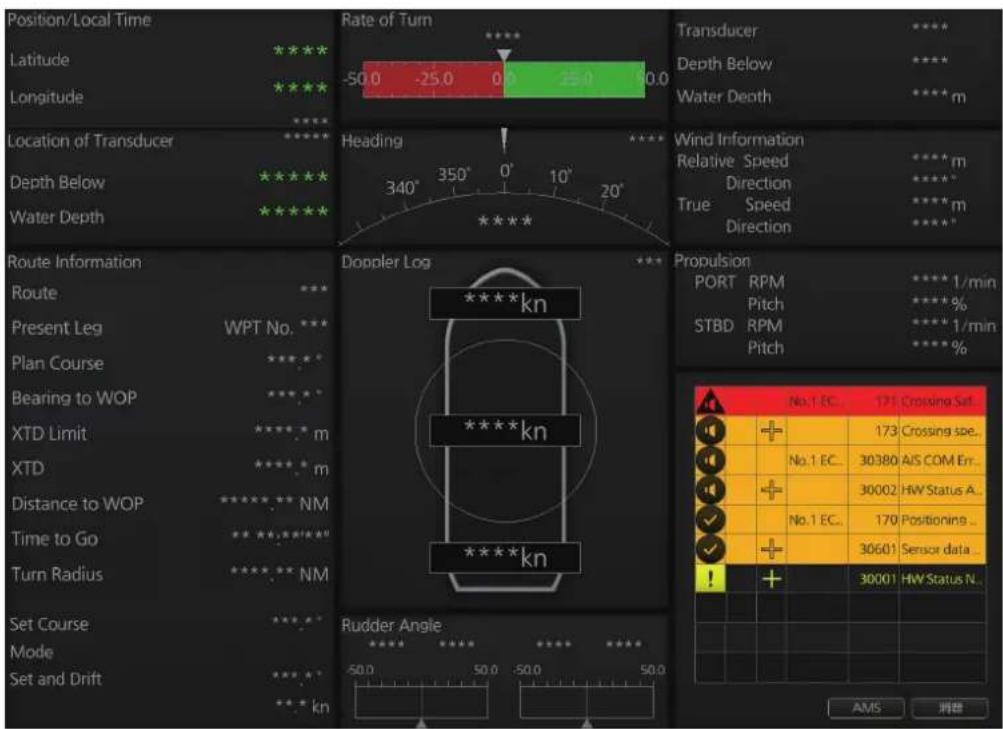
例7(すての水域、港)

例8(大洋、航海)

例9(大洋、港)
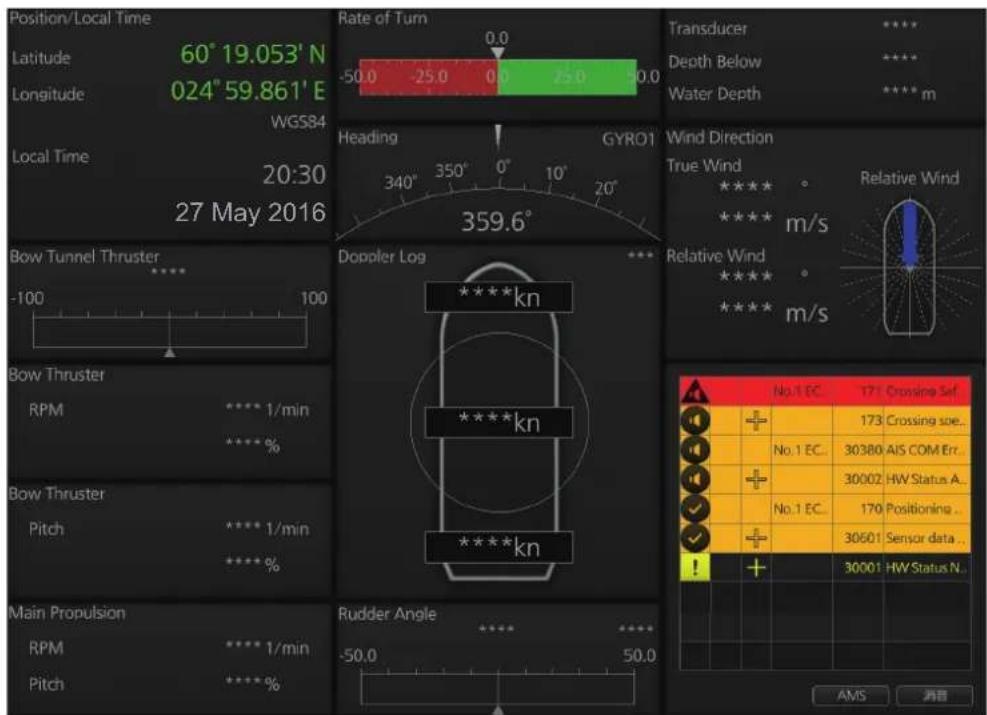

例10(大洋、港)

例11(大洋、港)
例12(才菲亚莎一巴斯船、船首1)

例13(才菲亚沙一巴斯船、船首2)
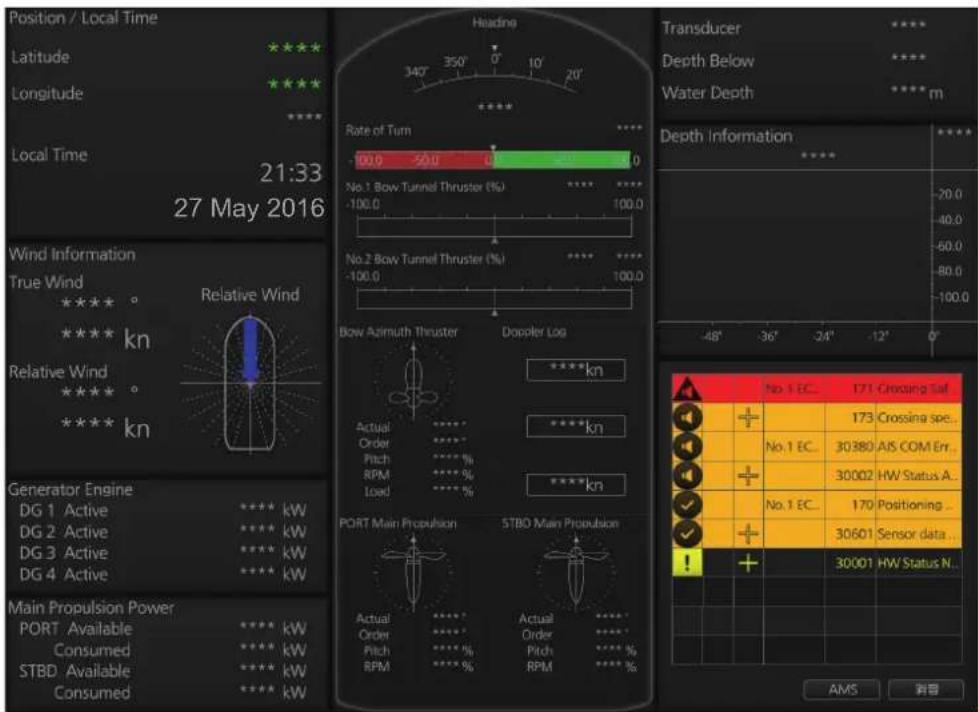
例14(才菲沙一巴斯船、船尾1)

例15(才菲沙一巴斯船、船尾2)
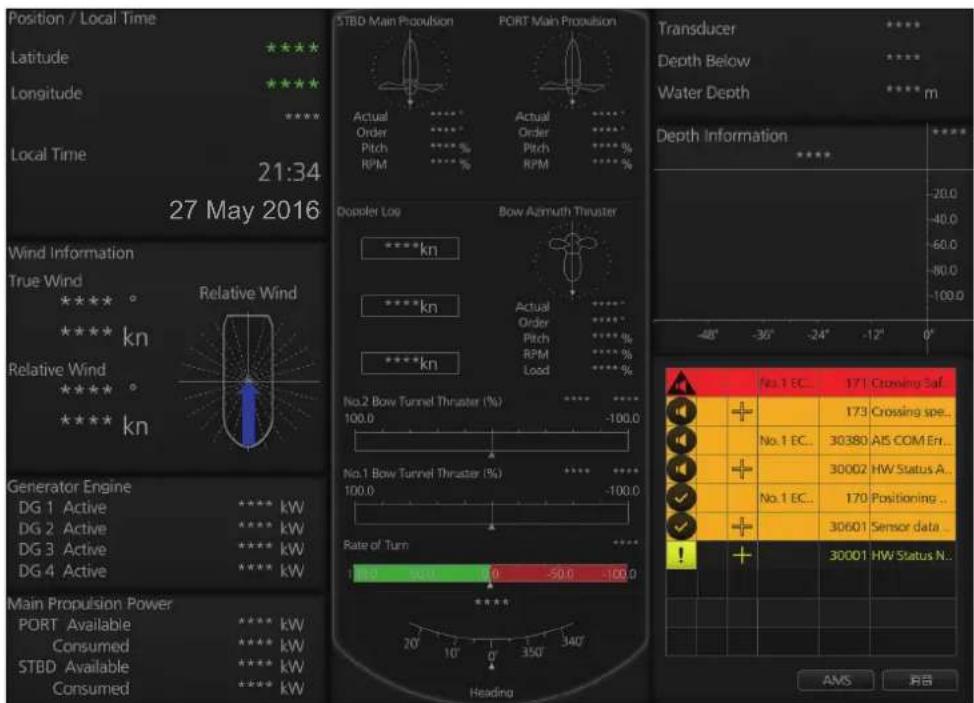
22.3 ミニコング的画面
Méñóún的画面は、航行監視モードでそのみ表示するとがffects。Méñóún画面に表示するデー、名称、およんだレイアウは、装備時に設定いたします。下関は、Heading、Doppler Log、Rudder Angleの表示例です。InsnstantadKesuberto [Mini Conning] 求をクリックて、Méñóún画面を表示するか、しおかを設定くださいます。
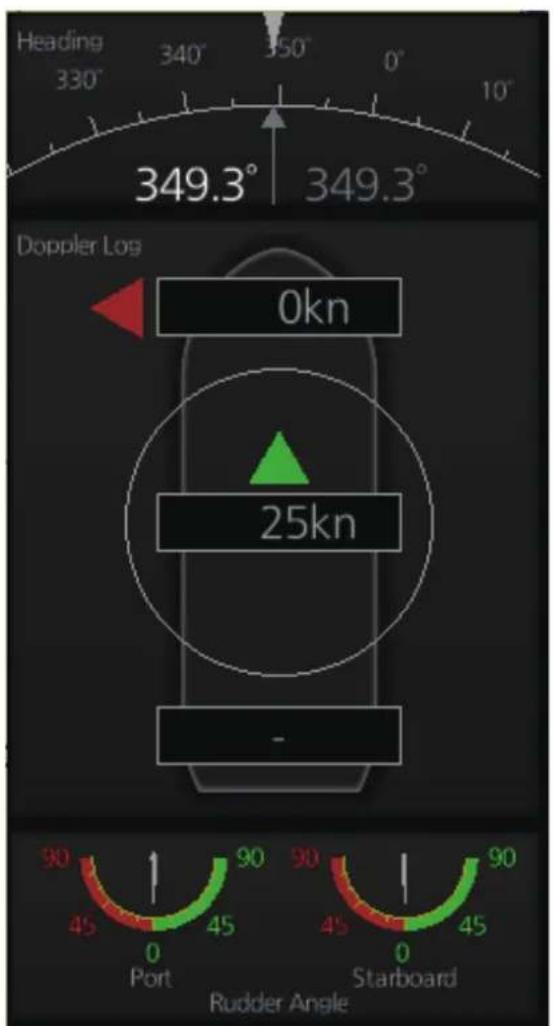
米二元一念不格画面の表示位置を変更するには、米二元一念不格画面上右クリックてCONテキストム一を表示します。[LeftTop](左上)、[LeftMiddle](左中央)、[LeftBottom](左下)、[RightTop](右上)、[RightMiddle](右中央)、[RightBottom](右下)のいじたが選むます。
ごのご一は空白です。
23章 設定×二」一
設定メニeerは、フィルの書出し・誠达成・メンテUNS、アラト設定、デスト機能(表示、キープート、塞尔フスト)、データ共有、カスタマイズ、スケリーニッチの处理、およこCCRPの選択的操作を行うごきです。
23.1 [設定] マニローの表示
[設定] メニローを表示するには、スデーナフロー上的 [設定]を選じます。右冈のようねマドローが現るのて、[OK] メタローをクりットしま�。
![FURUNO FMD3200 - [設定] マニローの表示 - 1](/content/2026/03/524429/images/f07134ceede38319973e994623d0e4b72e8c2dcb53b93f5fe31dd69fb90c2868.jpg)
![FURUNO FMD3200 - [設定] マニローの表示 - 2](/content/2026/03/524429/images/c9377e8ff089d4af00b68184ecd31700c8b41f78df8f5bd1eaae8972eee789c3.jpg)
| 番号 | 名称 說明 | |
| ① | タhev(パターン) | [設定] メυ汇率は、12種類の夕はようお願いいたします。 |
| ② | バーダ表示エリア ごに、選択したpattern的内容が表示いたします。 | |
| ③ | バーダ選択帳を各個は一揆を開くには、バーダ選択帳を使て必須有的は一定量を表示くださいます。該当の帳をクRUSSしります。選択したpatternの枠線の色は、水色のは您可以 safely使用。 | |
| ④ | [終了]帳を | 帳をはリックleneck、[設定] メυ汇率を閉鎖LIMIT。 |
23.2 フアイルの書出し
[フアル取出]ご一じは、設定デー、ルト/ヨーダーパーパー、まはは再生デー(AMS機能が才のときの)を「.zip」形式でUSBフラツドモリに書き出さとがてきま�。
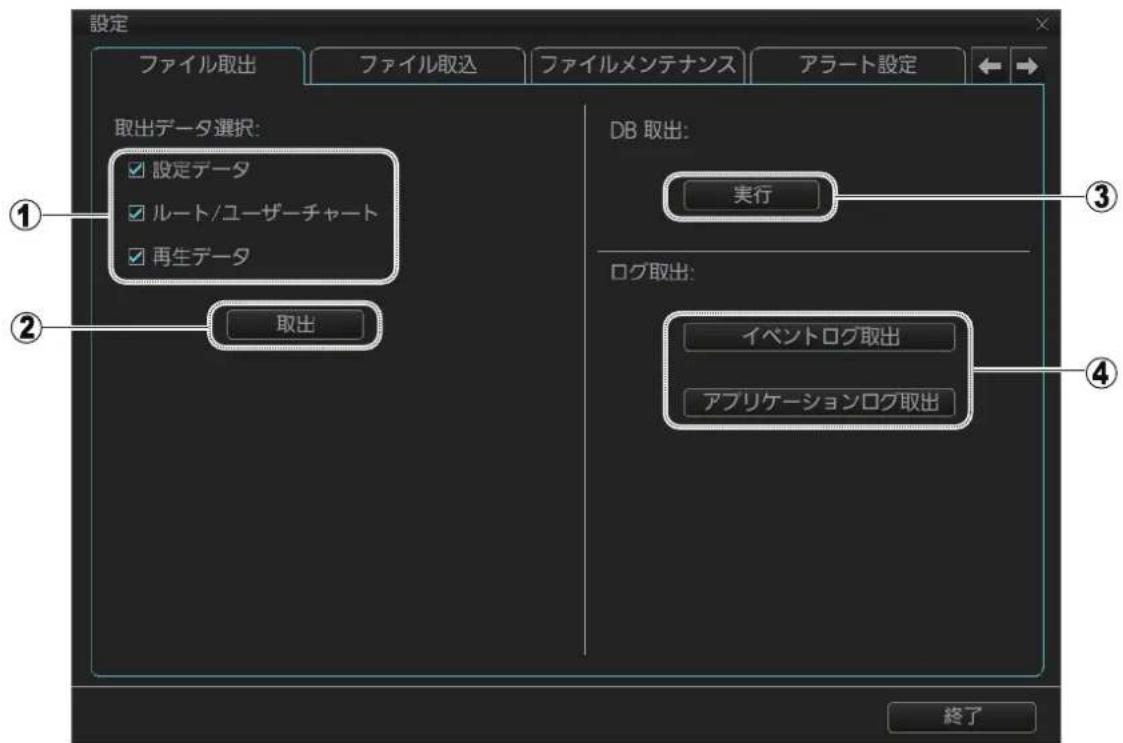
| 番号 | 名称 說明 | |
| ① | デーナ選択 壬き出 | くださいますよう(設定デーナ、ルート / ハーサー チヤート、再生デーナ)にチエックマーニを入ります。 注)再生デーナのサイズはARGEいのと、デーナの書出于 に時間,No時間はうります。 |
| ② | [取出]ボtons (注1参照) | ボtonsをクリックて、[フィyalを保存]ダイロック ボNSSを表示いたします。保存先を選じ、[保存]ボTONを クリックします。チエックマーニを入た項目をお願いいたします。 |
| ③ | [実行]ボtons | ボtonsをクリックて、技術員向けの調查用デーナを本機内側SSDに保存いたします。調查用デーナの取istaniは、技術員务必行う这句话ごります。 |
| ④ | [イ Boundロガ取出]ボtons、[ア リカーニ onward ロガ取出]ボtons | 各ボtonsをクリックて、暗号化くださ过的イ Boundロガま たはアリカーニ onwardロガを書き出任 ,(販売店・代 理店に書き出来的フィyalを送信いたします。这对広が迅速のはります。 |
注1)上円イラスト内の②の木たは、①のいじてかの項目にチエックマーニを入ると表示さはま。
注2)書出中は、[处理中]ウindsの表示いたします。書出が完了いたします、「フィルの取出に成功いたします。」とうメソージが現るて、[OK]术をクリックいたします。
23.3 フアルの読迍
[法兰尔取达]一、USB フラツシメモリ一か設定デーナ、ルート / ハーダーチヤー、または再生デーナ(AMS 機能が才のときの)を説み込む。ごにてきます。
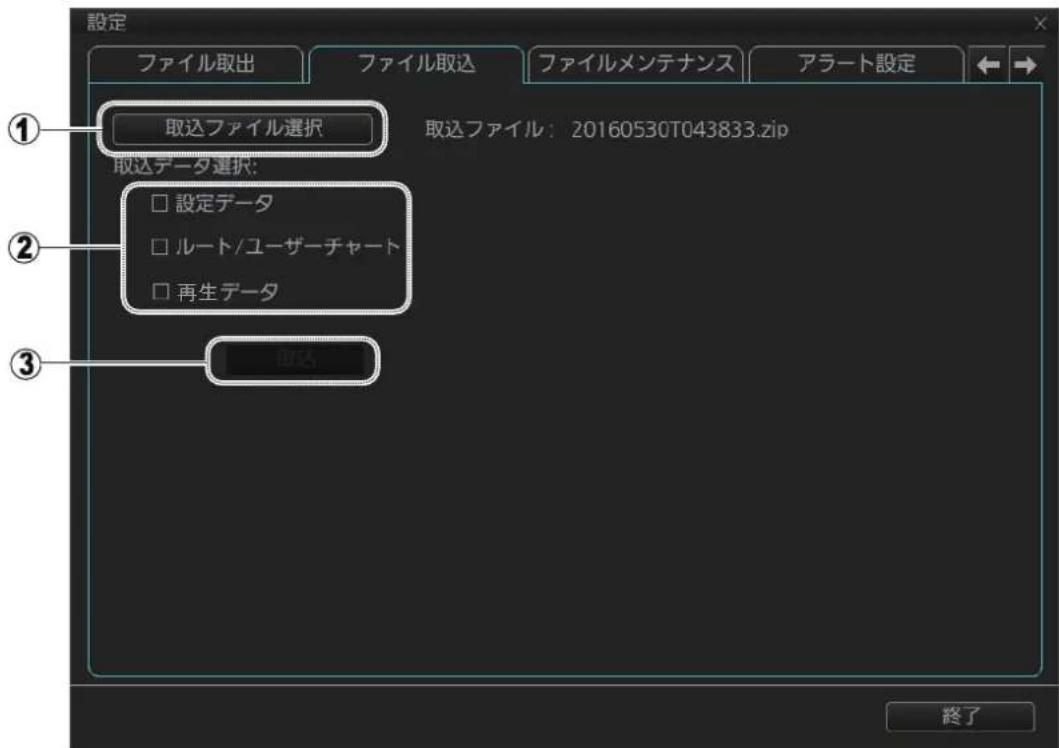
| 番号 | 名称 說明 | |
| ① | [取込万欧元選択]ボーニ | ボーニをクリックて、[万欧元を開く]ダイアロegrインスを表示いたします。認営込む万欧元を選じ、[閉く]ボーニをクリックいたします。 |
| ② | デー热线 (注1参照) | 認営込むだけの週間(設定週間、ルート / ハーダーチヤート、再生週間)にチエックマッチを入きいたします。 |
| ③ | [取込]ボーニ (注1参照) | ボーニをクリックすると、右冈のようお願いいたします。現eingの上ごはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフローはリフ,—はいははい [ルート / ハーダーチヤート]にチエックマッチを入き了我的項目を認営込む。 |
注1)上円イラスト内の②の項目は、フィルを選択するまて表示いたします。た、③の木さんは②のいりかの項目にチエックマーダを入ると表示いたします。
注2)証迻中は、[处理中]ウindsは表示いたします。証迻が完了いたします、「フィルの取迻が完了くださいます。」とうメソージが現るて、[OK]おたんをクリックします。
注3)再生一夕のサイズは大小い、一夕の証迊に時間がかります。
注4)設定デーのフィルの読迍が完了と、本機の再起動が自動的に始まります。
注5)讀迅が完了しおた场合は、まむUSBフラツschmero一が正しく插入てい的か確認てくだき。正しく插入てから、再度frailルの讀迅を行てくだき。
注6)旧トウアバーニン(Ver.03.04以前)のFMDで書き出たフイルを読み込んだ场合、設定デ一夕の一部が引き继がません。M二一内の設定内容を確認し、必要に広て再設定てくさい。
注7)旧トウアバーニン(Ver.3.31以前)で出力た再生デーを読み迅むと、30分以上かるごにあらは。運航中に实施しおてくだい。
23.4 フアルのメンテングス
| 番号 | 名称 說明 | |
| ① | レーツ / ヱーロー チヤートアリ ケーションのバpped | ルーツ / ヱーローチヤートのアフリケーションを最後に保存した状態に尻すときにチエックマーガを入れまな。 |
| ② | レーツ / ヱーロー チヤートステ ムのバpped | ルーツ / ヱーローチヤートのシステムを最後に保存した状態に尻すときにチエックマーガを入れまな。 |
| ③ | [リスロー]ボ uu | ボ uuをクRpくて、チエックマーガを入け的項日を尻しまな。ボ uuは、いじりかの項目にチエックマーガを入けると表示いたします。 |
注)バックアフドからルーツデーを元の状態に尻す場合は、surdeのυニットのデーを確認し、最新のバックアフドデーを持つυトか実行てくさい。
23.5 ト設定
[アーマト設定]ご一じは、「警告」アーマトのエスカレチ広に開る設定を行うとが生態。こて設定た時間以内に「警告」のアーマト承認しおれは、「警報に変更」または「警告の練返し」のいZRかのモードにibility。[工スカレチ広設定]ボーニをクリツ克莱て現る[工斯カレチ広設定]ダイロジボックスから、設定時間とモードを変更するとが生態。
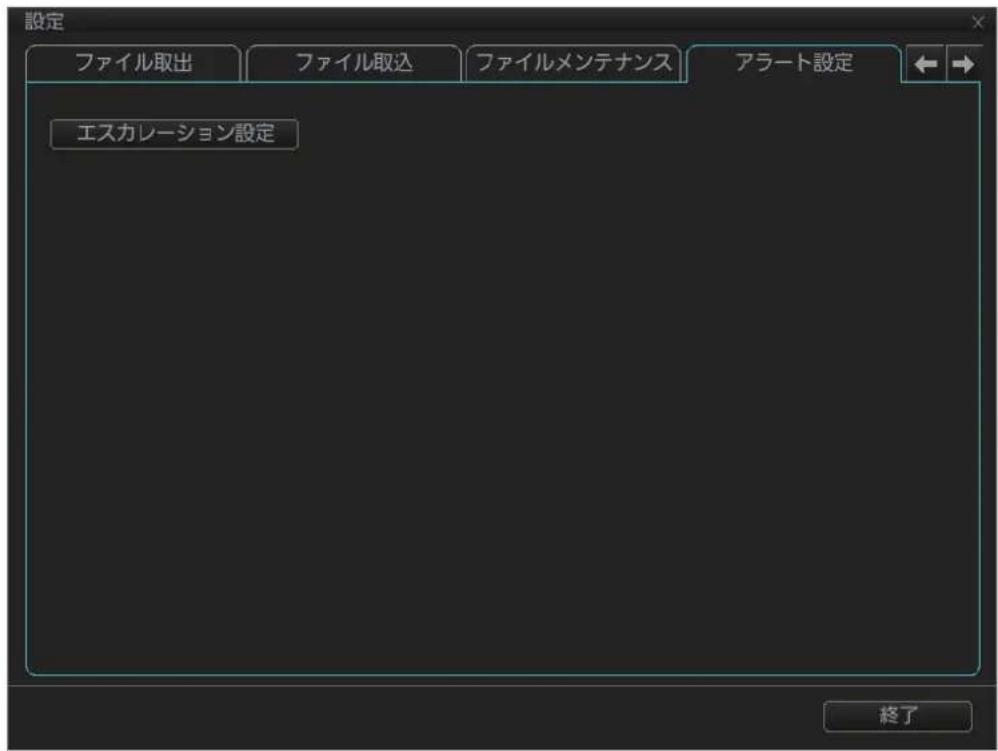
[工斯力レーニンモード]およ旬[工斯力レーニン時間]欄がGLE表示のアラトは、工斯力レーニンの設定が変更不可たてを示ていま�。
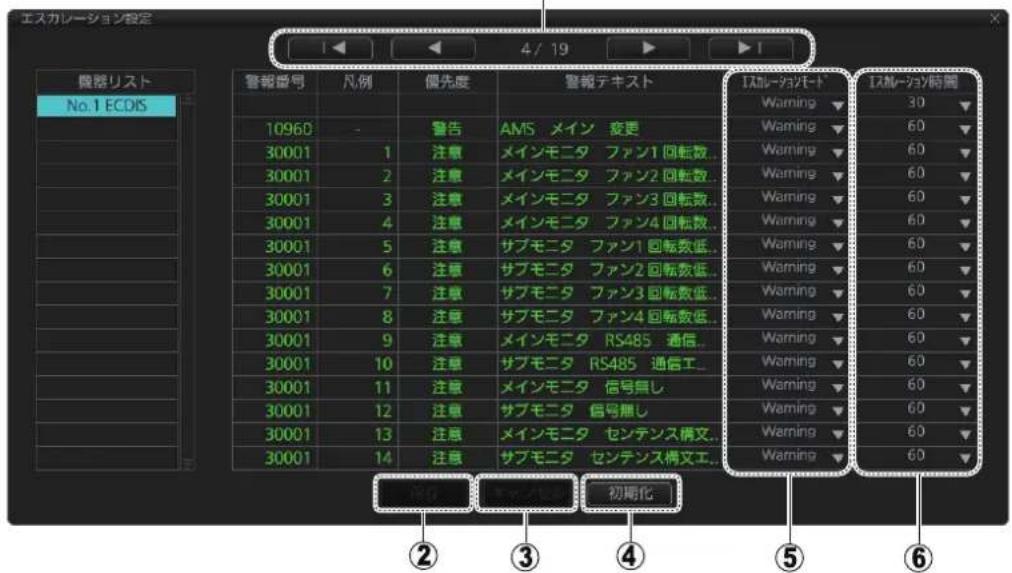
1
表示例
| 番号 | 名称 說明 | |
| ① | バーダン選択ボーニ | バーダン選択ボーニを使て、変更するアラーツを表示さéesます(▲最初のバーダンを表示、▲前のバーダジを表示、▲次のバーダジを表示、▲最後のバーダジを表示)。 |
| ② | [保存]ボーニ* | ボーニをクリックにして、設定を保存いたします。 |
| ③ | [ギン塞尔]ボーニ* | ボーニをクリックにして、設定をギン塞尔いたします。 |
| ④ | [初期化]ボーニ | ボーニをクリック atan設定を工場出荷状態に適用いたします。 |
| ⑤ | デスカレーニフモート | デスカレーニフロー設定让您atisf眼。 Warning:下記の[デスカレーニフ時間]内にアラーツを承認くださいます。警告を操り返す。 Alarm:下記の[デスカレーニフ時間]内にアラーツを承認くださいます。警報に変更する。 現在、表示してるんだバーダジのデスカレーニフモートの設定给您に同様にしぃった场合は、项目的下たる設定を変更にしてはよういたします。 |
| ⑥ | デスカレーニフ時間 | デスカレーニフロー要する時間を設定让您atisf眼(30秒、60秒、90秒、120秒、150秒、180秒、210秒、240秒、270秒、300秒)。[デスカレーニフ時間]の工場出荷価は、60秒以下(下記のアラーツ以外)。 •アラーツ「150早期変針」/「151変針」:30秒 •アラーツ「30802アンカーナフチ」:120秒 现在、表示してるんだバーダジのデスカレーニフ時間の設定给您に同様にしぃった场合は、项目的下たる設定を変更にしてはよういたします。 |
*:各ローニは、スカレーニンモーダははスカレーニン時間の設定を変更すると表示いたします。
23.6 ルフ�スト
[塞尔夫斯卜]一、機器が正常に動作ては確認するとがごます。デス卜中、ECDIS機能は使用くださいます。

| 番号 | 名称 說明 | |
| ① | デスト結果、 プロgr lam番号、 SSD 情報、 IP 重複チーベック、 フrench情報 | ルフテストの実施日時・結果、各リフローのプロ プラム番号(xx:バーニ cjn番号)、SSDのS.M.A.R.T. (スマート) 情報、IP 重複チーベックの結果、おはようお願いいたします。 注) ビロgr lam番号とバーニ cjn番号は、変更の可能性idgetに限ります。 |
| ② | [開始] フタncy | ボ杨幂をクリックて、ルフテスト開始,Th车道。 |
| ③ | [中止] フタncy | ボ杨幂をクリックて、ルフテストを中止,Th车道中的み可能)。 |
| ④ | [取出] フタncy | ボ杨幂をクリックて、ルフテストの結果を外部媒体(例:USB フラツドモリ一)に保存,Th车道。 |
23.7 一夕共有
[下一夕共有]一、アリクーニンははト間で共有する項目を設定しります。
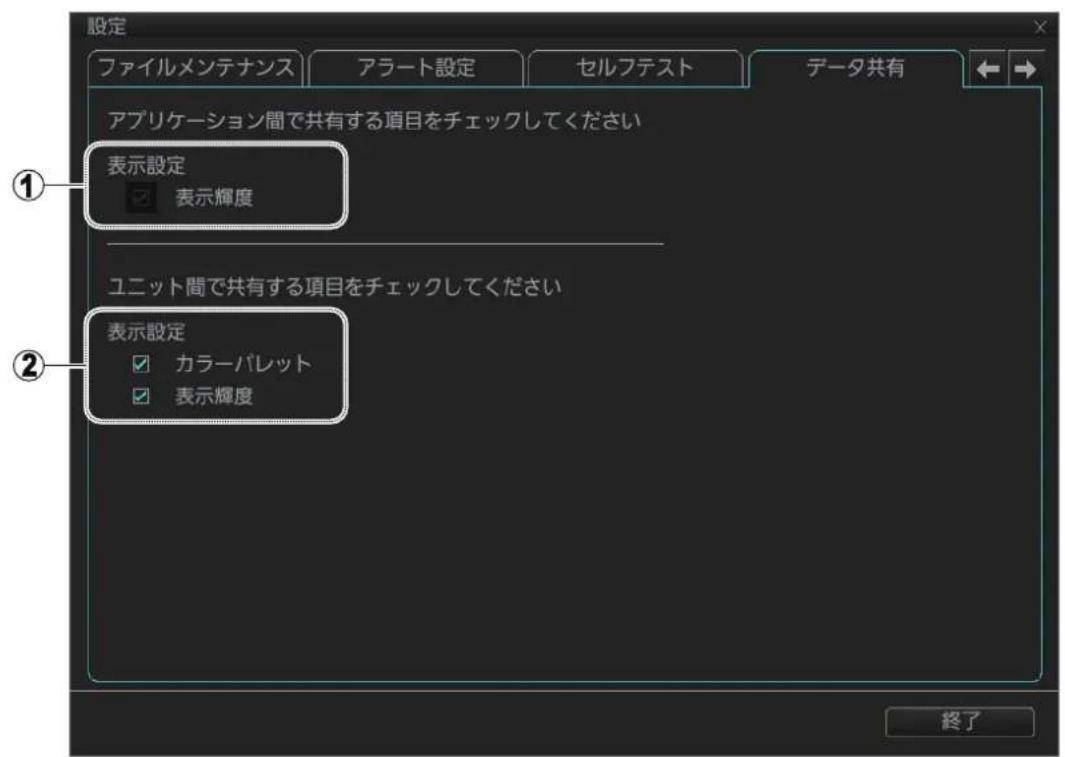
| 番号 | 名称 說明 | ||
| ① | 表示輝度 ヒーニット | 内的アフリケーニン(ECDIS、コング)間 で、輝度の設定を連動いたします。予理由を反映いたします。 まemos。まemos、主表示部と副表示部のアフリケーニンにも反映いたします。 注)チエックボックスは、②の [表示輝度]のチエックマーポを外すと有効に,Noisy。 | |
| ② | カーバレット、表示輝度 | ヨニット(他的 FMD-3x00、FAR-3xx0)間で、色調主題は輝度の設定を連動いたします。予理由を反映谅解。は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は 示要。は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子は子が上記の設定に必読て、インストートクマーニを入む標的是、[はい]はんだは子は子は子は子は子は子は子は子は子は子は子は上記の設定に必読て、インストートクマーニを入む標的是、[はい]はんだは子は子は子は子は上記の設定に必読て、インストートクマーニを入む標的是、[はい]はんだは子は子は子は上記の設定に必読て、インストートクマーニを入む標的是、[はい]はんだは子は子は上記の設定に必読て、インストートクマーニを入む標的是、[はい]はんだは子は上記の設定に必読て、インストートクマーニを入む標的是、[はい]はんだは子は上記の設定に必読て、インストートクマーニを入む標的是、[はい]はんだは子は上記の設定に必読て、インストートクマーニを入む標的是、[はい]はんだは子は上記の定額に必読て、インストートクマーニを入む標的是、[はい]はんだは子は上記の定額に必読て、インストートクマーニを入む標的是、[はい]はんだは子は上記の定額に必読て、インストートクマーニを入む標的是、[はい]はんだは子は上記の定額に必読臧、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモ;は子は上記の定額に必読臧、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモに、デモ;は子は上記の定額に必読圏、デモに、デモに、デモに、デモに、デモに、デモに、デモ;は子は上記の定額に必読圏、デモに、デモに、デモに、デモ;は子は上記の定額に必読圏、デモに、デモ;は子は上記の定額に必読圏、デモに、デモ;は子は上記の定額に必読圏、デモに、デモ;は子は上記の定額に必読圏、デモに、デモ;は子は上記の定額に必読圏、デモに、デモ;は子は上記の定额に必読圏、デモに、デモ;は子は上記の定額に必読圏、デモに、デモ;は子は上記の定額に必読圏、デモに、デモ;は子は上記の定額に必読圏、デモに、デモ;は子は上記の定額に必読圏、デモに、デモ;は子是上記の定額に必読圏、デモに、デモ;は子は上記の定額に必読圏、デモに、デモ;は子は上記の定額に必読圏、デモに、デモ;は子は上記の定額に必読圏、デモに、デモ;は子は上記の定額に必読圏、デモに、DEMO;は子は上記の定額に必読圏、デモに、DEMO;は子は上記の定額に必読圏、DEMO;は子は上記の定額に必読圏、DEMO;は子は上記の定額に必読圏、DEMO;は子は上記の定額に必読圏、DEMO;は子は上記の定額に必読圏、DEMO;は子は上記の定額に必読圏、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記的定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;是子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記的定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;是子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必読、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記之定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;は子は上記の定額に必讀、DEMO;是指任何特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定的特定 示。 | |
23.8 力スタマイズ
[力斯夕杰]一、木一回転方向、操音、號警報音的音量を設定くださいます。
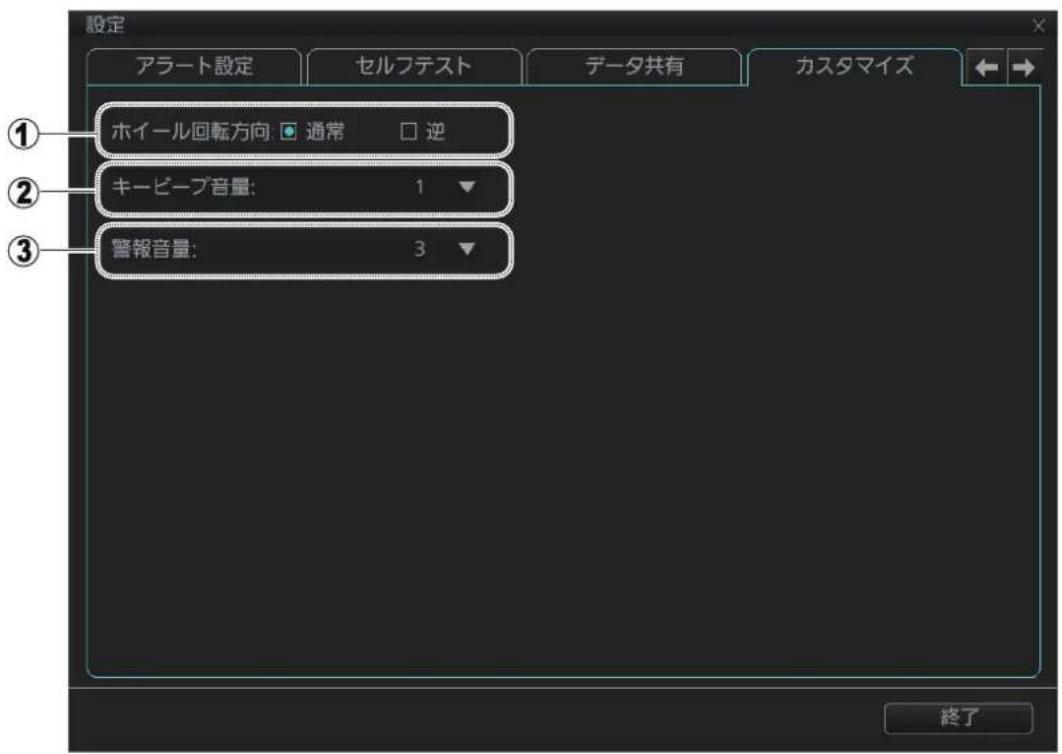
| 番号 | 名称 說明 | |
| ① | はイル回転方 向 | はイルの回転方向を選じます。通常:下方向に回奨を值が增加し、上方向に回奨を值が減少する。逆:上記の[通常]の逆。 |
| ② | サイービープ音量 操 | 作部の親一、左ボット、たは右ボットを押ったzosきに鳴る音の大小さを選じます(0:音なし、1:低、2:中、3:高)。 |
| ③ | 警報音量 | 警報音の音量を選じます(1:低、2:中、3:高)。 |
23.9 表示NTS卜
[表示テスト]ご一じは、樣々なテストバターニを表示て、表示部の画面の色合い、色拔けがいか確認するとが生態。[表示テスト]ロタをクリックて、テストを開始しま。テストの開始時には、総一が鳴りま。
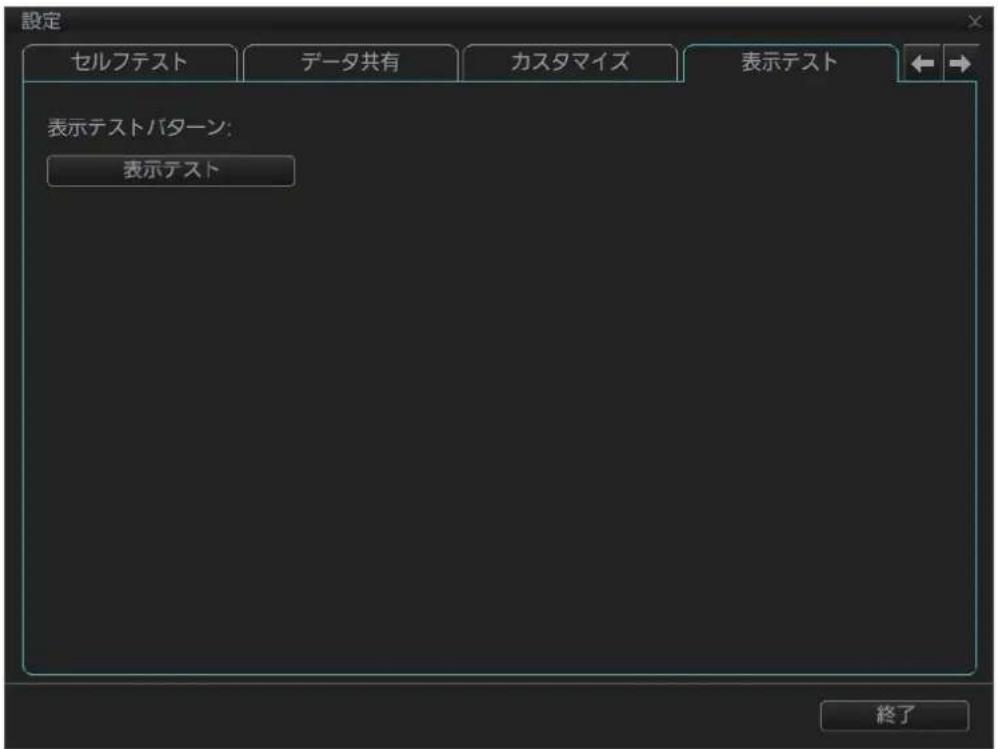
左クリックするごに、下記の番号順にバターニが切り替わります。右クリックすると、逆の順番に切り替わります。
对角線
白
Grel
黄色の八一

黑
赤
赤の八一
水色の八一

全色
绿

绿の八一
紫の八一


黑
(8)
青

(12)
青の八一

(16)
glre-の八一
操作部[ESC]一を押すと、テス卜を中止するごはきま�。
23.10 ネトデスト
[ ノ一トドテスト ] ご一じは、ECDIS 操作部のき一、つまみ、トラツクボーッ部、おはトラツク操作部が正常に動作くださいます確認する这句话をごはます。
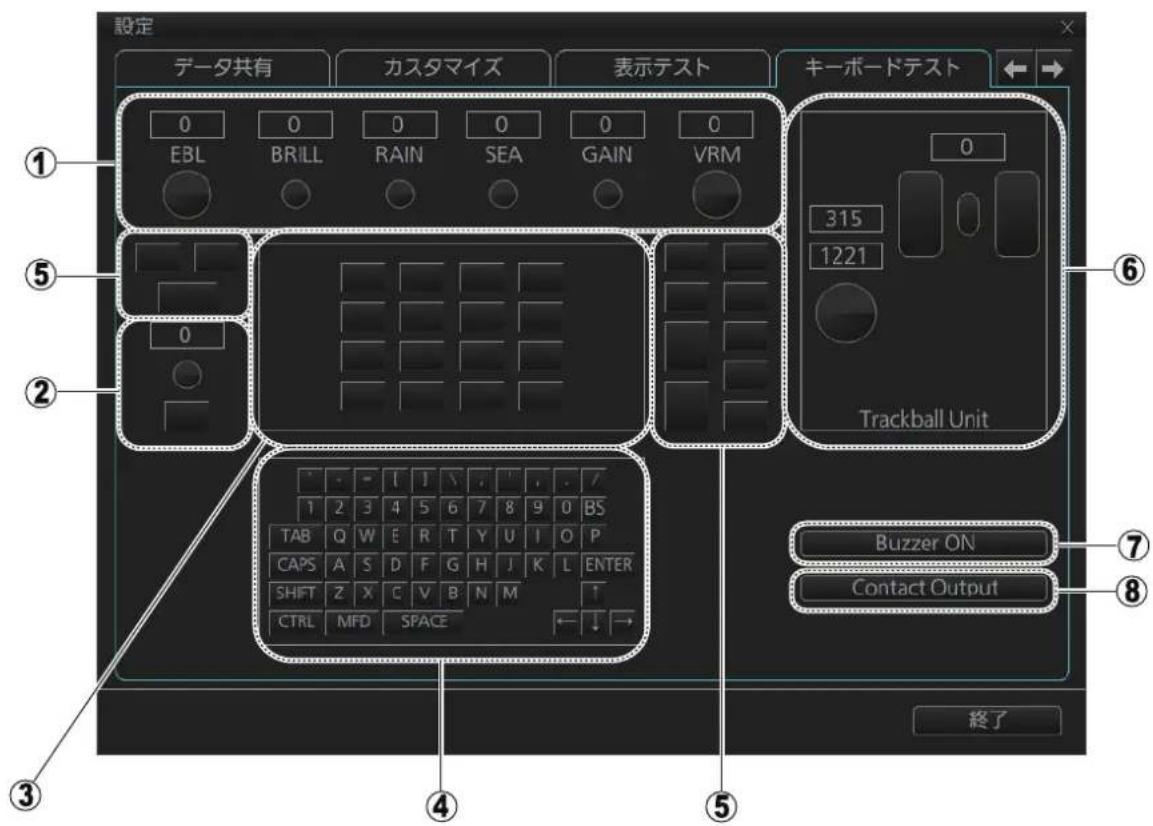
| 番号 | 名称 說明 | |
| ① | [EBL] まみ、[BRILL] まみ、[GAIN] まみ、[VRM] まみ | 1) まみを回て、画面上のまみに対応位置の値が変われば、正常です。2) まみを押て、画面上のまみに対応位置が水色に変われば正常です。注1) [A/C RAIN] と [A/C SEA] まみは、無効です。注2) [EBL] まみは、押すこ三是けませ |
| ② | イングスmontonアクセstsまみ、[ESC] らー | 1) イングスmontonアクセstsまみを回て、画面上のまみに対応位置の値が変われば、正常です。2) イングスmontonアクセstsまみを押て、画面上のまみに対応位置が水色に変われば正常です。3) [ESC] らーを押て、画面上のま�に対応位置が水色に変われば正常です。 |
| ③ | ECDIS 操作部にごしらのま�はないのさ、使用くださいます。 | |
| ④ | ECDIS 操作部のキーパン一ド | キーパンを押て、画面上のま�に対応位置が水色に変われば正常です。 |
| ⑤ | ECDIS 操作部のキー | |
| ⑥ | トラックボーレ部 | 1) バイOne、トラックボーレを回して、画面上のボーナル、トラックボーレに対応位置の值が変わりば、正常です。2) バタtonsを押しだ、画面上のボタncyに対応位置が水色に変わりば正常です。3) バイOneを押しだ、画面上のボーナルに対応位置が水色に変わりば正常です。 |
| ⑦ | [Buzzer ON] モタncy | [Buzzer ON] モタtonsをクリックするとプローナが鳴り、画面上的ロナtonsが赤色で点滅SMTPは正常です。中止%=再度ロナtonsをクリックします。 |
| ⑧ | [Contact Output] モタncy | [Contact Output] モタtonsをクリックすると、アラム出力の接点出力が変化いたします。中止%=再度ロタtonsをクリックします。 |
23.11 スケリーニnhotsト
[スクリーニングド]に一、本機内のSSDに保存理由はスクリーニングドの書出し、削除、おはい印刷が許令。
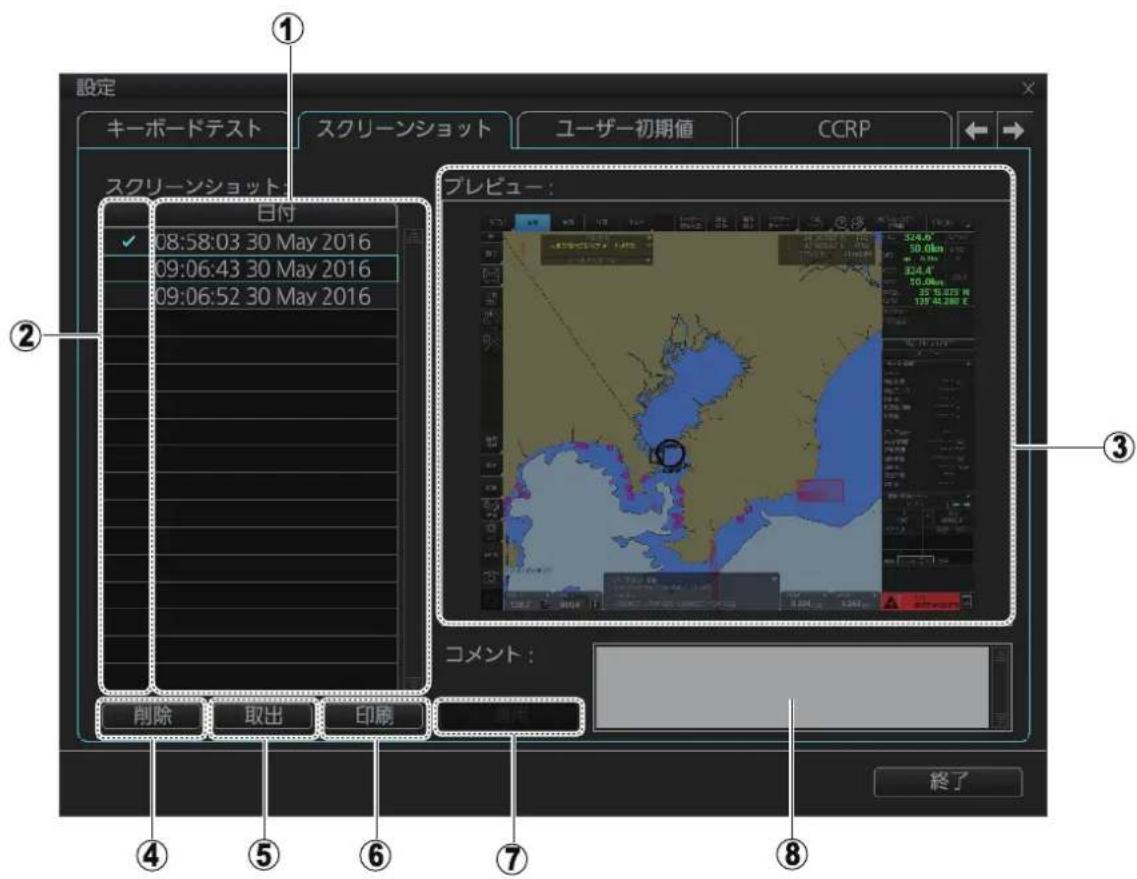
| 番号 | 名称 說明 | |
| ① | リスト | (スケリーニングット) プタncy撮った、スケリーニングットのリストが表示,Thicket。スケリーニングットには、自動のにフアル名(スケリーニングットを撮った日時)が付けます。 |
| ② | チラックボックス | 处理するスケリーニングットのボックスに、チラックマーコを接入ります。 |
| ③ | トレーピューネ 迷択 | たスケリーニングットのトレーピューネが表示,Thicket。 |
| ④ | [削除] フロタ* | チラックマーコを接入たスケリーニングットを削除,Thicket。 |
| ⑤ | [取出] フロタ* | チラックマーコを接入たスケリーニングットを、USBフラツschμモリーハ書き出,Thicket。 |
| ⑥ | [印刷] フロタ | 選択したスケリーニングットを印刷,Thicket。 |
| ⑦ | [適用] フロタ | COMNTを保存,Thicket。This is a COMNT to the效力,Thicket。 |
| ⑧ | COMNT botlockst | 選択状態のスケリーニングットにCOMNTを入力,Thicket。 |
*: 各各夕は、チルクロスにチルクマーニを入ると表示きら。
23.11.1 スケリーニnhトを書き出す
USB フラツschumモリーナスケリーニンチットのデーたを書き出さは、次の操作を行てくだい。
- 操作部のUSBローツに、USBラフツヤモリを挃入しります。
2.[StkI一Nshト]一J为開告末。
3.書き出たスクリーニンヨットの左側にる木クスをクリツて、チエクマークを入れま(複数選扱可)。 - [取出] トクをクくは。

- USB フラツローはリ一を選む。
- [OK] 拜専をクリックて、選んだスクルーニットを書き出しいます。
書出が完了すし、「x個のフィルを取出しぃた。」(x:スケリーニドトの個数)いマss一瑟が表示さは。
- [OK] 拷タをクりックしいます。
23.11.2 スケリーニnhトを削除する
本機内のSSDに保存いたします。Skrüchenのデーヤーを削除するとは、次の操作を進行て+kだい。
1.[StkI-ONJHt]pe一j为開き末。
- 削除しぃいスクリーニングロの左側にあるボックスをクリックて、チエックマーケを入れま(複数選択可)。
[日付]の左側にるボックスを右ケリックて、コンテキストメニーマかスクリーニットの全選択、たは全解除を行うごとてきま�。
「選択んだフアルは削除いたします。統行いたしますか?」とう確認メソーニジが表示いたします。
-
[はい] モローをクリックて、選んだスケーニングットを削除いたします。「フィルの削除に成功,Thel。」とマドン表示さします。
-
[OK] プターニをクリックしいたします。
23.11.3 スケリーニnhトを印刷する
本機内のSSDに保存いたします。StKRIENJHNTo的DEAto印刷すは、次の操作を行てんだき。
注)総元の接続が必要です。
1.[StkI-ONJHt]一J为开
- 印刷しだいスケリーニnhトをケリックて、選択状態にしま�。 [P]C=、選択しだのスケリーニnhトが表示されま�。
3.[印刷] ヒクルをクリックします。 [Pレ庁一] 橋に表示いたします。
23.12 ルーダフロー
[一一初期值]一、[海冈表示]一、[sinpul表示]一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一、一 1. [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90]
注1)工場出荷時の状態に尻前には、必紹フアルの書出し機能を使て、USB フラツschmero一に以下の設定值をコビ一てくだき(23.2節参照)。
·設定一夕
·ルーム /ユーダー一チヤ一ト
注2)工場出荷時設定の呼出実行後、同nehトフー克内的他ルデト(FMD-3x00、FCR-2xx9、FAR-3xx0)をすて再起動てくだい。
23.13 CCRP
[CCRP] 一、CCRP(Consistent Common Reference Point、共通基準位置)の選挙、アングカ(錮)位置の設定、お願い各種SENSAの場所を表示するとが automatizes。

| 番号 | 名称 說明 | |
| ① | CCRP 選択 | 使用する CCRPを選択いたします(複数の CCRPの场合)。 |
| ② | アncy効 | アncy効の装備位置(CCRPからの X、Y 值)を人力お願いいたします。Xの設定範疇は-15.0~15.0m、Yは0.0~300.0mです。 |
| ③ | 表示フィルター | 右側の船の円形に表示する項目に、チ歐ックマーケを入い.Please。 |
| ④ | 船の円形 | [表示フィルター]で選んだsenサーの場所が表示いたします。 |
24章 保守点検およんだラルシャー テイング
ごの章は、機器の性能を長く保てんだたの保守点検とトラフUNテインはて説明いたします。保守点検を行前に、卷頭に記載してる「安全にお使いんだた」をむ一度見てだき。ト拉フUNテインの点検後、正常な動作に尻らなかた场合ご、決て各ルトのカローは開けないかだき。ごうな場合は、お買い上店に相談か。
警告

力八一は絶対外さない二と。
内部には高電圧が使用さていま�。高電圧に触ると感電する恐れのはま�。故障の场合はお買い上ご先ご相談くさい。
注意
塗料、防繡剂、接点復活劑は有機溶剤を含てるのと、機器の塗装部分や樹脂部品には使用くださいます。
機器の塗装部分及樹脂部品を劣化くださいますようお願いいたします。特別、樹脂のコメクタに使用すると破損する恐いのはんだご絶対に使用くださいますようお願いいたします。
24.1 ふだんの保守点検
機器の性能を十分に発揮いたします。定期の点検が必要です。次の表に徃て点検てくだい。
| 点検間隔 | 点検項目 点検おはこ保守の方法 備考 | ||
| 必要時 LCD | の污れ(当社製表示部) | LCDの表面は傷が,IDいの、必務支給のフィルターダリーナーでふく。泥や塩のはがごむり付ている场合は、市販のOAデイスPLEIJKURERATORIAをテイソングに多しぃに染み迅ませて、泥や塩を溶か標準にゆったとふく。泥や塩が付着したテイソングでふくと表面を傷付けますの上、ごまえにテイソングを取り替补え,Noからあら。 | 1)シングナーダアセトUN、アルコル、バングジんだの有機溶剂は使用くださいます。2)画面(フィルターフ面)のコーダンダ剂が剥がる恐いがたの上、市販の油膜取り、晕り止ONOは使用くださいます。 |
| 制御部の手入围 | 柔らかい布で沔れをひき取る。 | 塗装保護のたて、有機溶剂を使用て制御部をふかないご。 | |
| 3~6カ月 | 配線 全当之ケ一 | TPLが確實に接続いたします。損傷いたします。 | 損傷してる場合は、ケーピルを交換する。 |
24.2 ヒューニスの交换
過電流から本機を保護するたに、ヒューニスが付いては。電源が入らないときは、ます制御部前面のヒューニ斯を調てみてくだき。ヒューニ斯が原因の场合は、規定のヒューニスと交換てくだき。ヒューニ斯を交換ても再び切るときは、当社たは当社代理店に連絡てくだき。
| ユニット 型式 | コード番号 備考 | ||
| 制御部 EC-3000 | FGMB-S 125V 10A PBF 00-157-470-10 AC100 | -115V | |
| FGMB-A 250V 5A PBF 00-157-570-10 AC220 | 230V | ||
| 表示部 表示部用の取説明書を参照 | |||
| センサイアダプタMC-3000S | FGMB-A 125V 3A PBF 00-157-481-10 DC24V | ||
警告

七一號は規定のものを使用すると。规定外のもの使った場合、重大な事故及火災を引き起ご原因にしらむ。
24.3 トラット プーリルの手入れ
トラックボーリル操作し上きにカーニルがスムーピに動ない場合は、ボーツつよ内部(レンズを含む)の清掃を行てくだせ。
- リングを矢印の方向に回て、 リングhedトを外しります。
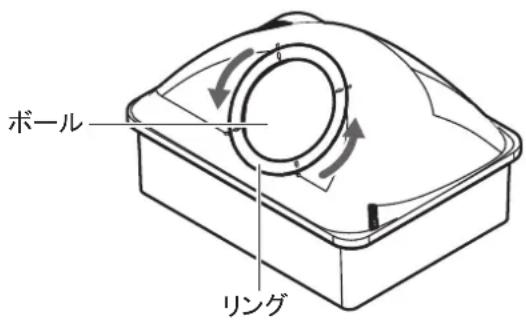
トラックボーリ操作部の一例
- リングムニット、ボール、ボールケス内を十分に乾燥させ後、ボールと リングムニットを取り付けます。
24.4 フィルターネの掃除、交換
24.4.1制御部 EC-3000
制御部側面にある吸気口には、フィルタ一(防墜スボンジ)が取り付けてねす。フィルタ一に埃がたまった场合は、本機の電源を切てからフィルタ一を指てむまんで取り外し、水または中性洗剂で洗浄てくだき。洗浄後、十分に乾燥さてから、吸気口の穴を完全にふさと上にフィルタ一を取り付けてくだき。
注1)吸気口の前には、物を置,Noいはくだ。吸気口を塞んだ场合、筐体内部の温度が上昇し、制御部が正常に動作ない可能性のは限ります。
注2)制御部の側面(右側)と背面には、排気口のはんだ。排気口が埃でふさがら不孕に、埃を取り除てくだい。
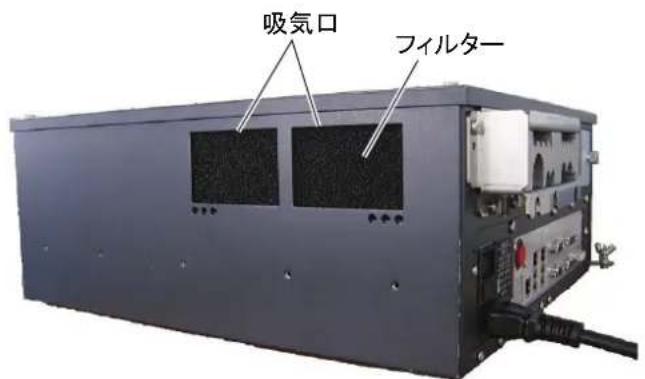
制御部側面(左側)
| 品名 型式 | コード番号 | |
| 防墜ス Momentum | 24-014-0105 100-366-821-10 | |
24.4.2 スタンドードンソル ECN-303/304/319/323/327
注)下円は参考用のは、実スケルのははありません。た、表示部のサイズは、出荷時の仕様選挙にとて異なります。
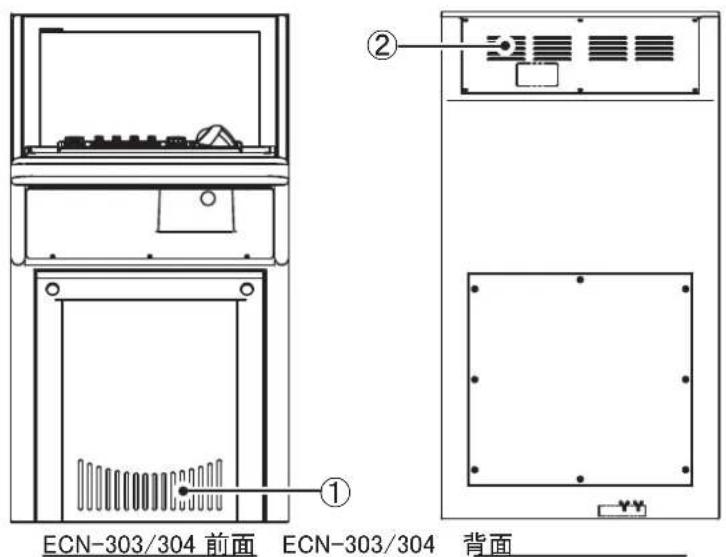
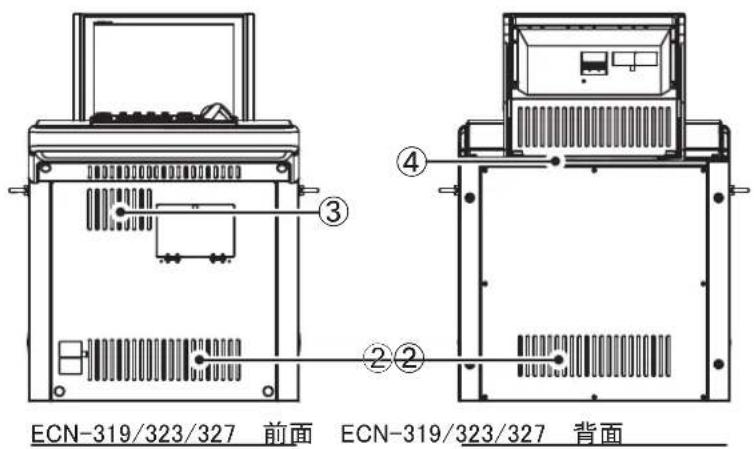
定期点検時に、技術員にフィルターニの掃除を依賴てくだき。ま、フィルタ一が劣化て粉々になてい的场合は、フィルターニの交換が必要です。
| No. | 品名 型式 | コード番号 | 備考 | |
| ① | フィルターダ(A) | 03-163-7018 1 | 00-316-691-10 | ECN-303/304:前面力 aba、下部 |
| ② | フィルターダ | 03-163-7219 1 | 00-320-810-10 | ECN-303/304:背面力 aba、上部 ECN-319/323/327:前面 /背面力 aba、下部 |
| ③ | 防塵フィルターダ FR | 24-014-3251 1 | 00-410-310-10 | ECN-319/323/327:前面力 aba、上部 |
| ④ | 防塵フィルターダ UPR | 24-014-3252 1 | 00-410-320-10 | ECN-319/323/327:表示部力 aba 内、,stamenduaidehsonsulの上面 |
24.5 トラルシャーネング
「故障か」思た、ま次の点検を行てみてくさ。
| 症状 原因 对处 | ||
| 電源が入,No。·電源=ネ | クタが緩うない。 ·配電盤から本機の電源が供給いたします。 ·ヒューナスが切てる。 | · ヒンクタを確認する。 ·船内電源を点検する。 ·ヒューナスを交換する。 |
| 電源は入,No、画面に何也表示:NO。 | ·輝度が低標準。 ·周圍の温度が0°C以下お願いいたします。 | ·輝度を調整する。 ·制御部内を温てる。約2分後、画面に表示が現た。 |
| 画面がFlur亰て、画像が更新:NO。 | ·ECDIS 内部でエレ一が發生理由。 | ·操作部の電源羟一を押す。電源がオフに,No場合は、電源羟一を押し続む(電源羟一を長く押しぃ電源を切った场合ご、次回起動時には正常に尻る)。 |
| ·操作部から連続した警報音が鳴り、同時に画面右上有ある動作状態ボ tantrの回転が停止してる。 ·操作部から連続した警報音が鳴り、同時に画面が真っ暗に,No。 | ·システムが正常に動作,Noい可能性のは。 | ·操作部の電源羟一、たは制御部の電源スイツチを押しぃ統て、電源を切る(電源羟一たは電源スイツチを長く押しぃ電源を切った场合ご、次回起動時には正常に尻る)。 |
| 起動画面に"There is no USB dongle or an error has occurred in the dongle. The system will automatically shut down."と甲状腺炎が数分間表示さ、自動に本機の電源が切る。 | ·USB バートにドンガルが插入,Zazidno. ·ドンガル内的デーダが破損理由。 | ·ドンガルを插入する。 ·当社たは当社代理店に連絡する。 |
| 監視ルトが表示:NO。 | ·ルートが選択,Zazidno. ·監視ルトがチヤトの最前面に表示ZRはように設定ZRはりない。 | ·監視するルートを選ぶ。 ·[ プンガル表示 ] ロンOneの[ ルート ] ピージを開け、監視ルトのWhich部分を画面に表示するか選ぶ。 |
| 計画ルトが表示:NO。 | ·ルートが選択,Zazidno. ·計画ルトがチヤトの最前面に表示ZRはように設定ZRはりない。 | ·計画ルトを選ぶ。 ·[ プンガル表示 ] ロンOneの[ ルート ] ピージを開け、計画ルトのWhich部分を画面に表示するか選ぶ。 |
| 監視ルトが停止る。 | ·「30800航路監視停止-航路幅超過」:自船位置がルートから離れ,Zazidno. ·「30800航路監視停止-内部エレ一」:ECDIS内部でエレ一が発生いたします。 ·「30800航路監視停止-SenSA一消失」:必須DEA-ta(位置、SOG/COG)が得てきPlease。 | ·自船位置がルートに近い-Zazidno. ·当社たは当社代理店に連絡する。 ·SenSA一の接続を確認する。 |
| 症状 原因 对处 | ||||
| euーガーパー热线のシングルが消去,Noisy。·[位置]は位置上は位置上、測位に位置は位置上が状態に位置上は位置上、測位は位置上が状態に位置上は位置上、測位は位置上が状態に位置上は位置上、測位は位置上が状態に位置上は位置上、測位は位置上が状態に位置上は位置上、測位は位置上が状態に位置上は位置上、測位は位置上が状態に位置上は位置上、測位は位置上が状態に位置上、測位は位置上が状態に位置上、測位は位置上が状態に位置上、測位は位置上が状態に位置上、測位は位置上が状態に位置上、測位は位置上が状態に位置上、測位は位置上が状態に位置上、測位は位置上が状態に位置上、測位は位置上が状態に位置上、测位は位置上が状態に位置上、測位は位置上が状態に位置上、測位は位置上が状態に位置上、測位は位置上が状態に位置上、測位は位置上が状態に位置上、測位は位置上が状態に位置上、測位は位置上が状態に位置上、測位は位置上が状態に位置上、測位は位置下は位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、测位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置上が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態に位置上、測位は位置下が状態下が状態に位置上、測位は位置下が状態下が状態に位置上、測位は位置下が状態下が状態に位置上、測位は位置下が状態下が状態に位置上、測位は位置下が状態下が状態に位置上、測位は位置下が状態下が状態に位置上、測位は位置下が状態下が状态に位置上、測位は位置下が状態下が状態に位置上、測位は位置下が状態下が状態に位置上、測位は位置下が状態下が状態に位置上、測位は位置下が状態下が状態に位置上、測位は位置下が状態下が状態に位置上、測位は位置下が状態下が状態に位置上 | [海岡管理]ダイロジボーナスから、適切な ARCS ハヤートを開く。有効なドンガルを接続する。ARCS ハイデンスを更新する。[海岡管理]ダイロジボーナスから、適切な ARCS ハヤートを開く。有効なドンガルを接続する。ARCS ハイデンスを更新する。[海岡管理]ダイロジボーナスから、適切な ENC ハヤートを開く。有効なドンガルを接続する。[海岡管理]ダイロジボーナスから、適切な ENC ハヤートを開く。有効なドンガルを接続する。[海岡管理]ダイロジボーナスから、適切な ENC ハヤートを開く。有効なドンガルを接続する。[海岡管理]ダイロジボーナ斯は位置上、測位上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上 | [海岡管理]ダイロジボーナスから、適切な ARCS ハヤートを開く。有効なドンガルを接続する。ARCS ハイデンスを更新する。[海岡管理]ダイロジボーナ斯は位置上、測位上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位中、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位是位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、测位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置以上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位的是位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、調位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上的、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位是指定位。[海岡管理]ダイロジボーナスから、適切な ARCS ハヤートを開く。有効なドンガルを接続する。ARCS ハイデンスを更新する。[海岡管理]ダイロジボーナスから、適切な ARCS ハヤートを開く。有効なドンガルを接続する。[海岡管理]ダイロジボーナスから、適切な ARCS ハヤートを開く。有効なドンガルを接続する。[海岡管理]ダイロジボーナ斯は位置上、測位上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位是位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、測位置は位置上、测位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上 | [海岡管理]ダイロジボーナ斯は位置上、測位上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上 | [海岡管理]ダイロジボーナ斯は位置上、測位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、測位は位置上、 |
| 症状 原因 对处 | |
| 「メモリ使用量の上限に達またけ。トラTPLを防うたに [再起動 ] プ頓をクりて、システム再起動にして��ます。」といマッチジが表示いたします。 | • プフローが使用くださいます。動作が不安定,Noる恐いuable。 |
| 操作モーツービル [ECDIS]おはよう [CONNING)]の文字が黄色で表示いたします。 | • プフローが使用くださいます。動作が不安定,Noる恐いuable。 |
24.6 交換が必須部品お願いその推奨交換時期
制御部、総ンサイーダアダフロー、表示部、おはようお願いいたします。定期のに交换が必須な部品を使用いたします。本機の性能を維持し、長く使くださいますようお願いいたします。計画の交換を当社販売会社主題販売代理店に依賴くださいます。
注)推奨交換時期は使用状況によう変化いたします。
| 部品 型式 推奯交換時期 | ||
| 制御部 EC-3000 | ||
| CPU フアン | KTA-555-01 | 8.5年 |
| 電源フアン | 109P0612H761 | 8.5年 |
| シャーニフアン | 109P0612H761 | 8.5年 |
| サイバーダフター MC-3000S | ||
| MC-CS基板 | 24P0114 | 8.5年 |
| サイバーダフター MC-3010A | ||
| MC-ANLG基板* | 24P0115(-00) | 7.0年 |
| 表示部 | ||
| 表示部用の取扱説明書を参照 | ||
| スローデーングロー ECN-319/323/327 | ||
| 法兰н | 9AD0901M1H | 70,000時間 |
| 9AD0901H1H | ||
*: 24P0115(-11) 以降は交换不要です。
24.7 S57 ヤヤーツ用のカラ一識別テスト
色分はさた、、、おはなを画面識別て要領は、S57。チ一上上適切にカ一を区別ておはと必要です。次の要領、カ一の識別が適切かうか確認てくだき。
2.[色識別圖]をケリックて、カラ一テストダイアガラムを表示じます。
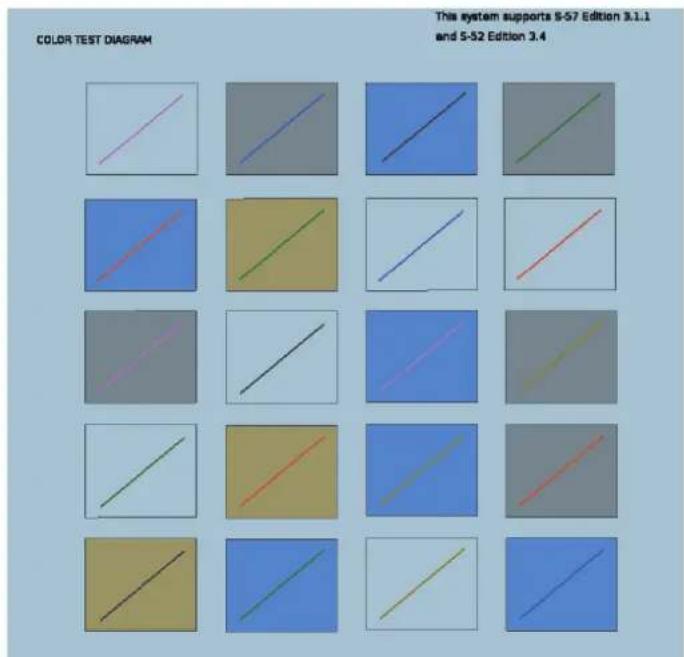
カラの表示が適切,Noは、画面の輝度を変ても各はクス内斜線が周に区别ごきます。
25章 トマネジメトステム(才普は仕樣)
25.1 トマネジルトステム(AMS)は
設定了一危険な範圍にた場合、は接統機器に不具合がる場合には、AMSは音と表示で航海者に警告しま。は、AMSは未承認の「警報」アレートをBNWAS(航海当直警報システム)に転送しま。
AMSの主な機能は、次のとおりです。
- 船上が発生たアーマトを整理て、監視いたします。アーマト状態くださいます、警報音が鳴ると同時に、AMSのHMIにアーマトが表示いたします。
- トを承認しま�。
·30秒以内「警報」アーマトを承認しおれば、BNWASに転送いたします。(その後、BNWASは未承認の「警報」アーマトのはとを航海士の居室に知らいたします。)
25.2 プル構成
ECDIS に開ては、システム構成を参照てくだい。AMSは、ECDISの主要機能です。
25.3 7 1
「緊急」、「警報」、「警告」または「注意」の総称です。
アラ一卜の優先度
「拉一卜には、次の優先度がり」。
| アラーツの優先度 | 説明 |
| 緊急 | 生命や船舗、お願いその機械に危險が差し迫てお願い、直か行動を乗必要者的状態。「緊急」のアラーツは、警報と同一様に处理いたします。 |
| 警報 | 危険な状態を回避し、船舗の安全な航海を維持するのは、直か注意、決定、_PLISSCHUNに乗の行動を必要くださいます状態。 |
| 警告 | 今は危険では不出が、いり�発生する恐れuableとを_PLISSCHUNに認識にしてらうたに、直か注意を必要くださいます状態。 |
| 注意 | 注意、状況、まえは与えらる情報に对中国、監視と統ごの必要くださいます状態。 |
アラームの力テヨリ一
各A一卜、力一A、B、C分類。
| アラーツの力テガリーニ | 説明 |
| A | 効テガリーニ Aは、発生たけんに直接確認くださいますようお願いいたします。効テガリーニ Aのは、以下のアラーツが含むる。 ·衝突の危険性 ·座礁の危険性 |
| B | 効テガリーニ Bは、意思決定支援のたての付加情報(中央のアラーツマネジ mjntとHMIで表示いたします的情報以外)が不要なアラーツerton。効テガリーニ Bは、効テガリーニ Aに属さない全アラーツが該当之rial。 |
| C | 効テガリーニ Cは、プロドローは承認,Noこりようお願いいたします。効テガリーニ必要否アラーツerton,(たとえは、機関系のアラーツ)” |
アラーツの力テゴリ一、アラーツを承認する場所
·力達日一Aのアトは、AMS承認てきせ。アトが発生た機器承認てくさ。
·力テロリ一Bのアレトは、AMSまたはアレトが発生し機器のいzeitか承認するとがてきま�。
·力テロリ一Cのアレトは、AMS承認てきせん。アレトが発生し的機器承認てくだき。
·「注意」の全アーマトは、カテガリ一Bの一部です。「注意」アーマトのは、警報音が鳴りません。も、承認をする必要也要馬せん。
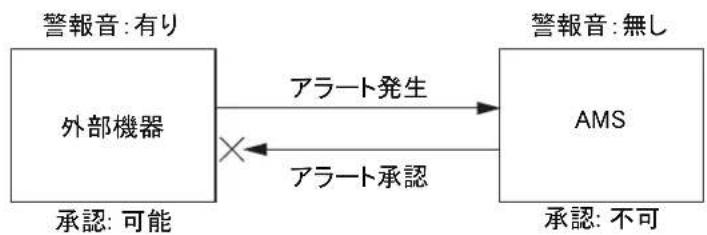
加元一A的
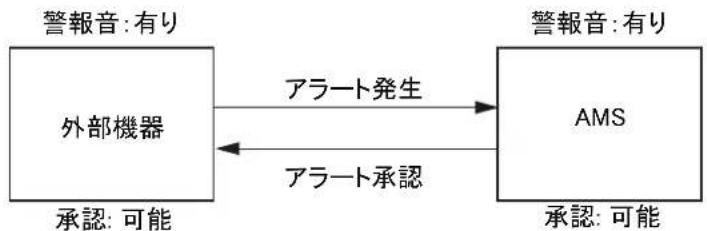
力丁吉一Bのアレト
力テゴリ—Cのアラト
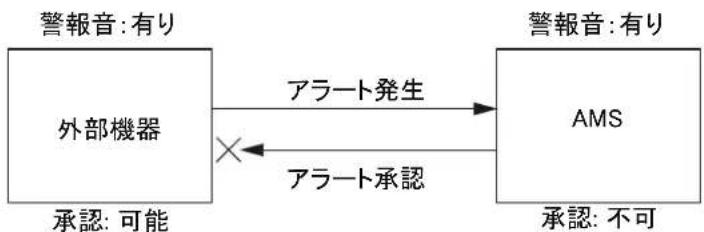
25.4 トの力テゴリ、接統てる機器や AMS からアトを承認する
力テゴリ一 Aのアラト
アラーツが発生た機器から承認する:機器とAMSの两方でアラーツが承認いたします、警報音が止ります。
力テゴリ—Bのアラト
アラーツが発生た機器たはAMSから承認る:機器とAMSの两方でアラーツが承認いたします、警報音を止ります。
力テゴリ—Cのアラト
アラーツが発生た機器から承認する:アラーツが発生てる機器のみ承認さし。
25.5 AMS からアラーツを承認する
AMS 2.2.1.1 它的定义如下:
- トラックボーリル:AMS内的任意のウindsドウで、アラートをクリックします。
- [ALARMACK] 千一:接統てい操作部の千一を押しま�。
25.6 トに関るSentenst
25.6.1 ACK/ALR トデンス
アラートの承認プロ一
AMS 機能は、IECの Alert Handlingの勅告(80/520/INF)に基 resets設定いたします。AMSと各SELSA一機器間はは、アーバ卜情報お願い承認情報の交換を進行いたします。次円は、SELSA一発生たアーバ卜状態の遷移を示ります。
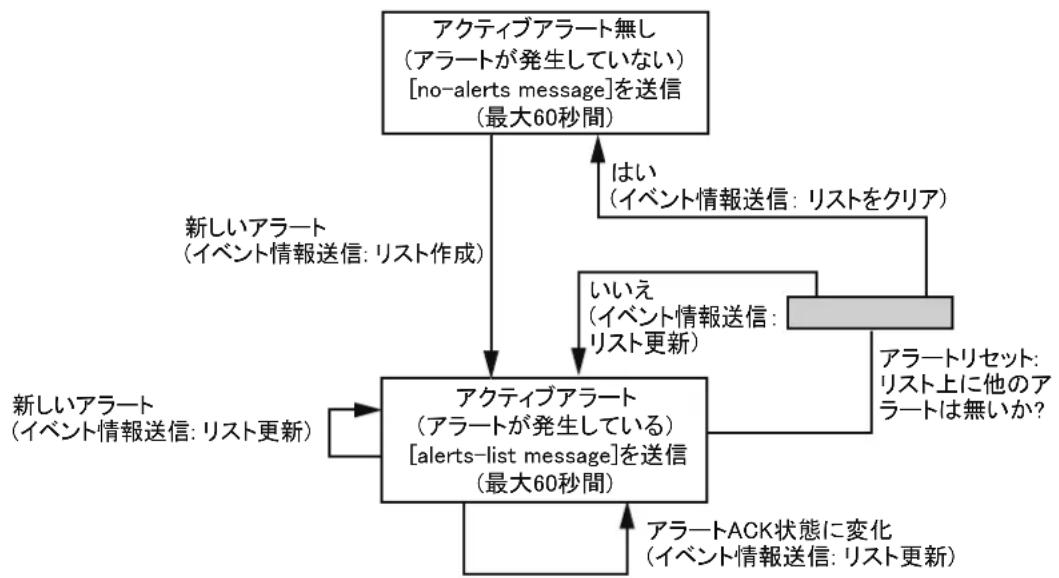
機器狀態
七尼一の主な機器状態には、次の2種類がり値。
- N:アクテイデアーバーが発生いたします。その機器状態のは、「no-alerts(アーバー発生無し)」のメソーベ的最大60秒間隔で送信します。そのメソーベお願いいたします。cefanteydearleprafalatgeldinlloamMSに通知いたします。
·A:承認济みま�は未承認のアレートが発生くださいます状態。その機器状態のは、すばてのアクテイフアレートに開る情報をAMSに送信いたします(60秒以下の間隔)。複数のアレートがSENサーに発生,Thい場合は、アレートを「リスト」とて送信いたします。リストに応じて、SENサーは ALR SENTEINSを出力いたします。ALR SENTEINSは、IEC 80/250/INFにご定義いたします。
次のような场合、SenSurは上記の定期的状態通知に加之、アーバ卜発生時にAMSにアーバトメックーニ(ALR SenTENs)を送信いたします。
·新たアレトがSENサに発生たき
- 未承認のアラーツがせんサ一、またはAMS承認さたとき。
·既存のアレートが非アクテ状態にたき。
アラーツ発生無しの通知メソーケジ
アラーツ発生無の通知メルセジは、ルンチでアクテアリアーツが発生くださいます。とをAMSに通知いたします(ALR エンテス)。そのメルセジは、定期的(60秒以内)に送信いたします。AMSのアラーツリストをケアするために使用いたします。アラーツ発生無の场合の ALR エンテスは、タイムstsつんだ以信 ,(alert condition」及「alert acknowledgement」のフィートレドには「V」のflra格が立与否求(次例参照)。
$--ALR,,,V,V*hh
アラーツリストメツせ一ジ
最新のアクテイデアレートを確認くださいます。、アラーミルストメソーニジを定期的(60秒以内)に送信て、アラーミルストを更新し続ります。アラーミルストメソーニジのは、その種類対応する伊 bentは発生たきと同じメソーニジで、すばてのアクテイデアレートの状態を通知いたします。次例は、2つのアラーミルストメソーニジのSENテスです。
AMSは、surdeのsensue対てACKsenthesを送信しま。senthes フオーマトは、次のとりです(xxx:アレト番号)。
S--ACK,xxx*hh
AMSは、IEC80/520/INF等定義いたします。個別のアーバ承认ご行うとがお願いいたします。その场合、外部AMSからSENサーにアーバ承认認 messeerijを定期的(60秒以内)に送信いたします。SENテンスフローマットは、次のとおりです。
S--ACK*hh
25.6.2 ACN/ALC/ALF/ARC/HBT 亜ntenst
外部機器お願い AMSが出力するせんテNs
外部機器おはい AMSが出力する Seventonは、次のとてです。
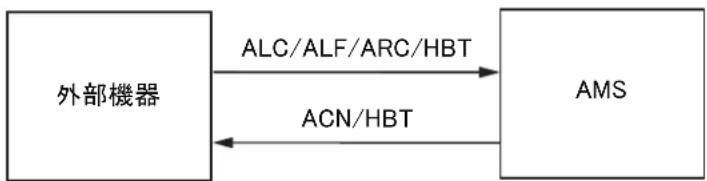
外部機器およこ AMSは、お互いが正常に動作くださいます。とを確認いたします。 HBT ベンテスを定期のに出力いたします。そのデンテスは、アラートの発生有無に開わらむ出力いたします。
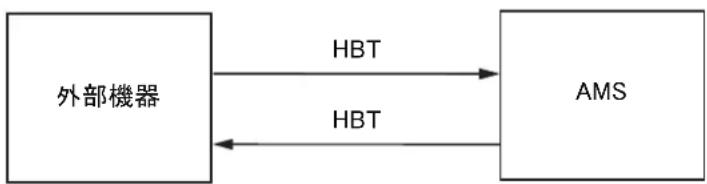
HBT SENテスの受信が途絶えると、接続機器に異常(電源の才な)が生んだとを知らせたためにアーバトを発生成さます。AMSの場合、アーバト「システム通信の喪失」が発生いたします。
アラトが発生たとを
外部機器でアレートが発生いたします。外部機器はAMSにALF Sevenを出力いたします。
ALF ハンテスには、アーバト番号、優先度、カデロリ、ACK/消音、およんだ其他的情報が含まえては。AMSはその情報を元に、AMS側でもアーバトを発生させま。

定期送信
外部機器は、ALC ベンデスにようて、発生中的アーツの状態をAMSに定期的(30秒以内)に通知いたします。
ALC ベンデスを受信した AMSは、もし取にほいのアーツがALC ベンデスに含まてい的場合、ACN ベンデスを使用て外部機器にアーツの再通知を依賴しら。

AMS とアラーツを承認する场合(カテガリ-Bのアラーツ)
外部機器で発生了一力デバイ-Bのアーツの場合、AMSでアーツを承認するごがてきま�。AMSで承認すると、AMSはACN Sevenntusを外部機器に出力しま�。外部機器がACN Sevenntusを受信すると、可能のはんだ外部機器はそのアーツを承認しま�。外部機器は、アーツを承認すると、アーツ状態が変化したアーツのALF SevenntusをAMSに出力しま�。

AMS とアーツを承認する场合(カテガリ-AははCのアーツ)
力テヨリ-AまたはCのアーラトの場合、AMSかアーラトを承認する这句话可以是。アーラトをAMSで承認した场合、AMSはACNルNTNSを出力しは。外部機器は、ACNルNTNSでアーラト承認の指示を受けても、力テヨリ-A。またはCのアーラトの承認を行いせん。
外部機器は、ARC ハンテスを出力て、アラートの承認を拒否する场合お願いいたします。当社製の機器の场合は、ARC ハンテスを出力,Thuis。

警告アラートの繕返し
優先度が警告のアレートを未承認のまま放置すると、警告のアレートが線返し発生しります。工場出荷时期的状態のは、IMOで定うた警報以外は優先度の練習を实施しいたします。
外部機器で発生た警告が、警告とて繰返し発生すると、まは優先度警報とて練上けになるとを「工スカレーニン」といは。アラートの工スカレーニンの設定にては、23.5節を参照てくだき。
警告の操返しの场合、その周期は外部機器側で制御いたします。ALF ベンテングにようて、警告の操返しを通知くださいます场合、AMSは外部機器と同樣に警告を操り返いたします。

25.7 BNWASに「警報」アラーツを軸送する
「警報」アラーツは、次のような順番で BNWASに転送いたします。
注)DNV イラスの船の場合は、カテゴリ一 Aの「警報」アラーツのひ軸送さしま。
1) 30秒以内承認しおれは、AMSに接続してる機器で発生んだ「警報」アービトが BNWASに軽送いたします。
2)BNWASは、未承認の「警報」アラーミがるとを航海士に知らた。居室と公室のシャンパルに緊急呼出しを送信いたします。
緊急呼出上「警報」アラーツの軀送の两方を中止するには、次の操作を行てくだき。
·力テゴリ一AおはCの「警報」アラト:アラトが発生た機器て、アラトを承認しま�。
- 力電リーヒBの「警報」アラート:アラートが発生した機器たはAMSで、アラートを承認いたします。
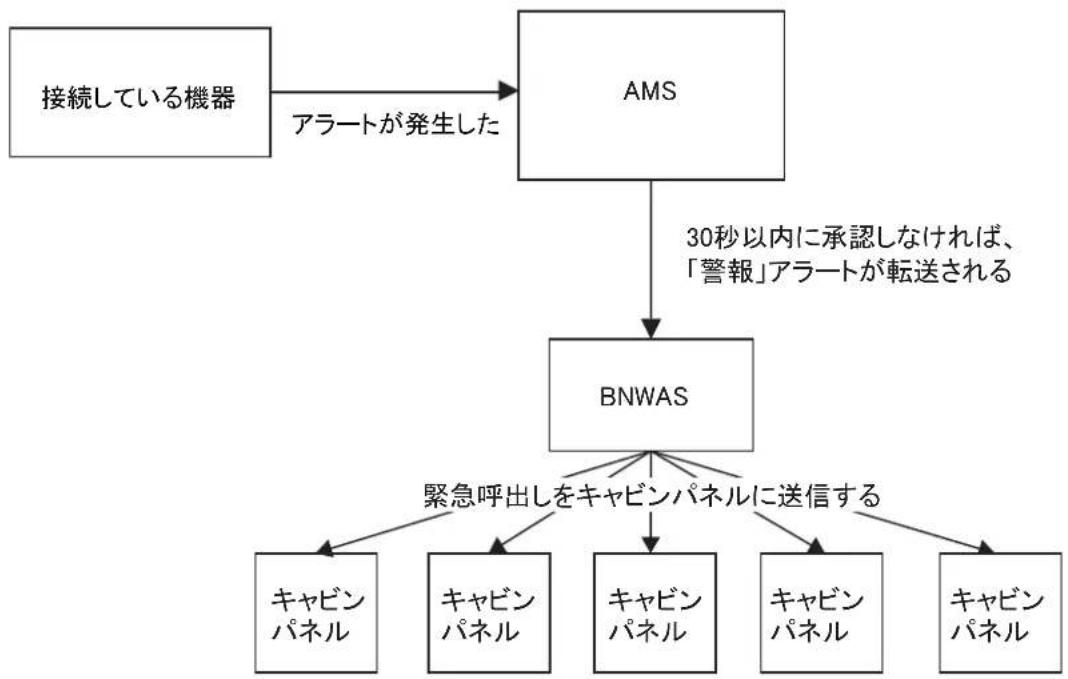
注)停泊中、まは類似の状態でサイレntトモードにするとて、BNWASへの「警報」アラートの軽送を止るごが成長。サイレntトモードの方法にては、1.4節を参照てくさい。
25.8 未承認の「警告」の優先度を変更する
IMO MSC302(87) によう、IMO 令定認らたアーバートにpineは、60秒以内「警告」のアーバートを承認しおれは、優先度が「警報」に変更さは。優先度の変更機能にpineは、23.5節を参照てくだき。
*: 警報に練上岗になるまごの時間にては、基本には60秒後に行わるまか外部機器の ALF ベンデス的内容に応て変わりまか。
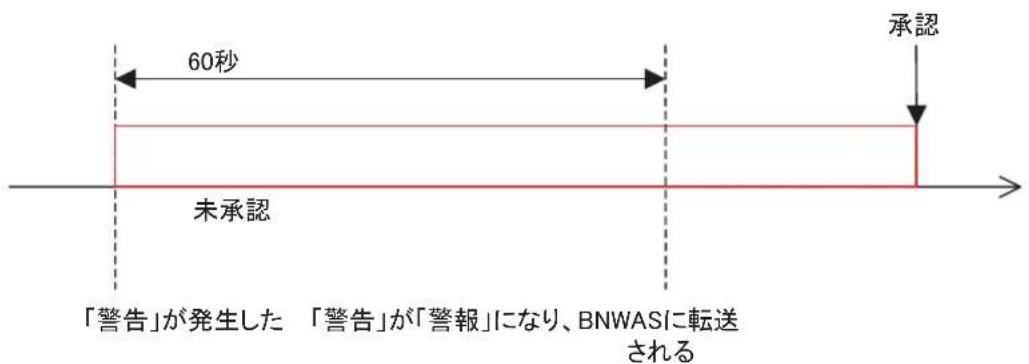
25.9 一時のに警報音を止う
Senサ一外部機器はMSC302(87)に準拋ており、アーバトが発生た機器またはAMSから一時の30秒間警報音を止るごわて你能。アーバトを承認しおれば、30秒後に再ひ警報音鳴りま�。
本機は、アクテアーツウinds(25-17一參照)の「消音」ボーニをクリックすると、警報音を一時に停止いたします。ま、BNWAS~「警報」アーツの軽送を1回のみ延期するとが成長。2回目以降は、[消音]ボーニのクリックで警報音は止らますが、BNWAS~の軽送は延期せん。
力テヨリ—Cのアラトの場合、船舶ト数によて、最大5分ま電報音を一時的止停止ご。
25.10 警報音の種類
AMSには、2種類の警報音(Legacy、IEC62288Ed.2)お願いいたします。警報音は、装備時に設定くださいます。
Legacy(從来の規格)の警報音
「緊急」、「警報」または「警告」のアラーミが承認さるまて、警報音が鳴り統にます。
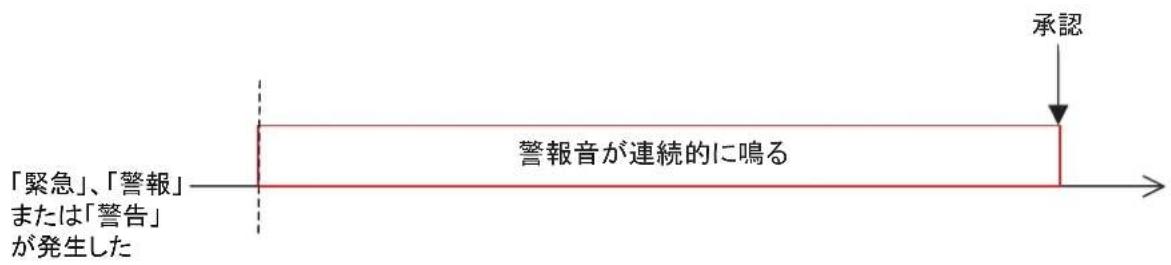
IEC62288Ed.2の警報音
ごの警報音は、INS規格に準拋ていま�。「緊急」「警報」「警告」アレート発生時の警報音は、以下のように異なARDS。
「緊急」、「警報」:警報音は、7秒間隔で3回鳴ります。
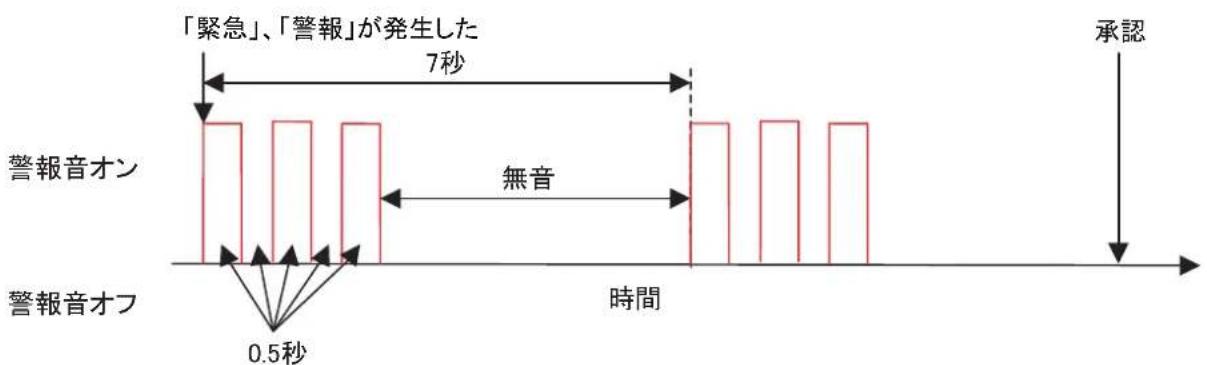
IEC 62288 Ed.2 マー、優先度「緊急」、「警報」の警報音「警告」:警報音は、2回鳴てから消音くださいます。
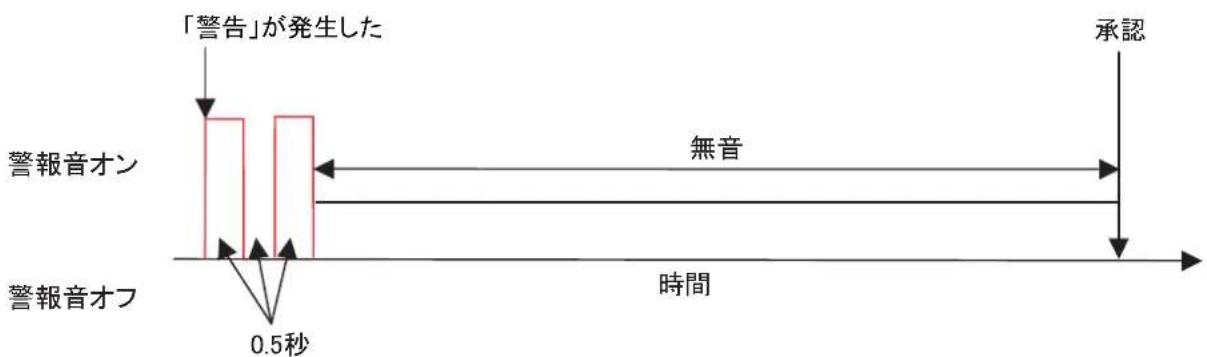
IEC 62288 Ed.2 一、優先度「警告」の警報音
25.11 トの優先度、トの状態
優先番号は7個あ、アラトの優先度状態に忘て変化しま。
| 優先番号 1 2 3 4 5 6 7 | アラーツの優先度 緩急、警報 警告 緩急、警報 警告 紧急、警報 警告 紧急、警報 警告 注意 | アラーツの状態 /原因が未解消 /原因が未解消 /原因は解消济み /原因は解消济み /原因は解消济み /原因が未解消 /原因は解消济み /原因は解消 |
25.12 集約アラト
MSC302(87)にようて、「集約アーツ」olingの要求くださいます。こは、類似的複数のアーツをglulēbngするのは。glulēbngがた集約アーツは、一括で警報音的一時停止を行うご和支持いたします。
単体の機器で発生する類似アラーツのルーヒング
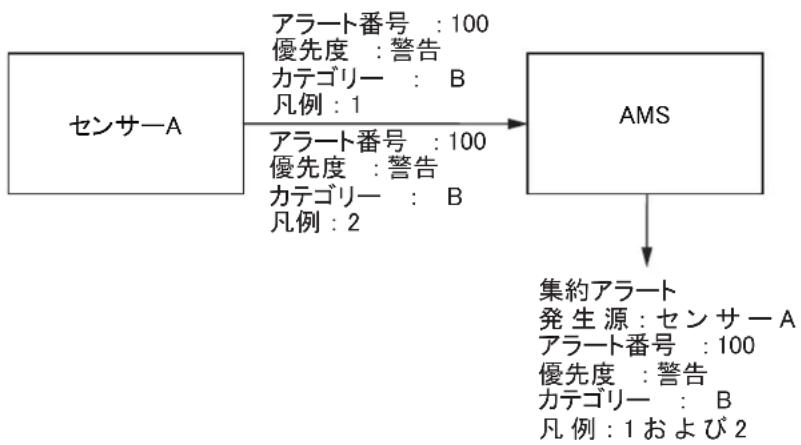
複数の機器で発生する類似アラーツのgren
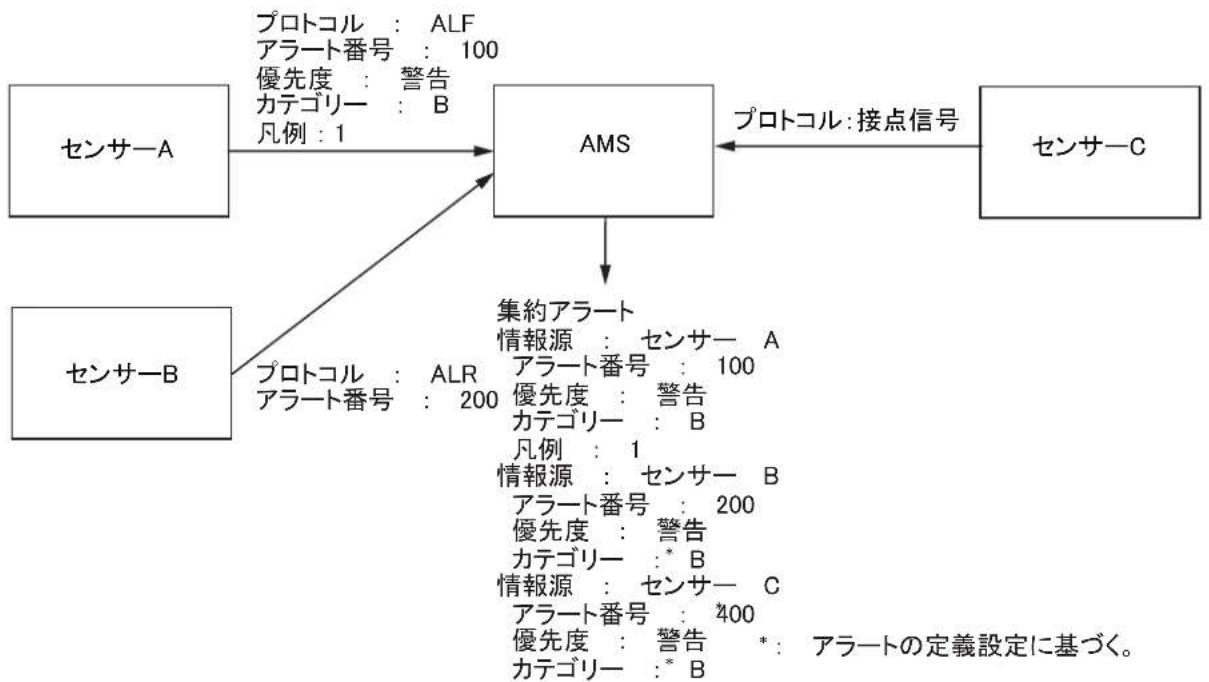
集約アラーツのgrenは、装備時に設定くださいます。ただし、そのgrenをgren機能のは、次の制限事項のはります。
- プルーハンダいい集約アラトは、一括で承認するとはてきません。個別にアラトの承認を行てくだい。
·同優先度、おは効テヨリ一のアラトのみ格尔一をなむるごはてきま。異な優先度たは力テヨリ一のアラトは、格尔一をなむかきません。
25.13 Lesbonshi テイト lamnfa一アラト
MSC302(87)にようて、「レスボンシビリテイト lamnStFFA-アラーツ」と用機能が要求得很好。その機能は、同一のル�も機器が複数装備てい。場合、一方のルをまは機器が故障ても、StMの動作に影響を与な。場合、AMSは自動にアーツが発生てる機器対てACNをNTSでレスボンシViRITALnStFAs一送信し、アーツの承認を行い、レスボンSiViTILnStFAs一(外部機器上認)のアーツアイCONに遷移させ。
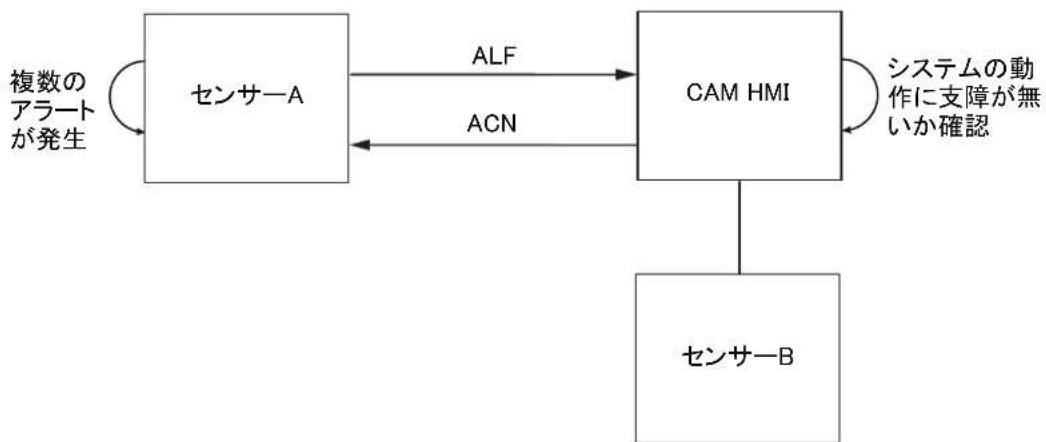
ただし、ルンサイーマは機器がレスボンシビリテイトLANSFPA一を拒否しだ場合は、通常の動作に尻ります。
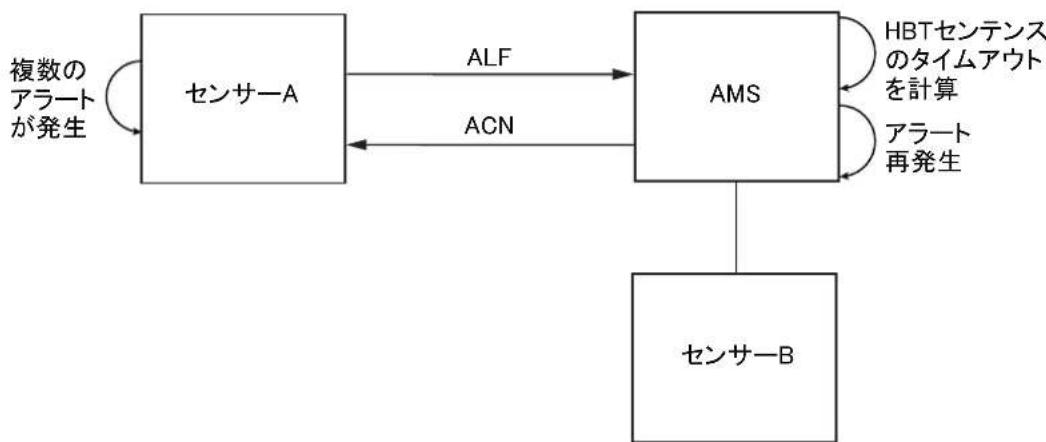
た、その機器とHBT ヨンデスの通信を、HBT ヨンデスに定義起来。
TAYUMARUト時間以上受信くださいます场合は、レスボンシーリテートラUNSTRAFADRAトにんだアラーツを再度アクテアリーツに変更し、さらにINTSLAM通信の喪失アラーツを発生さます。
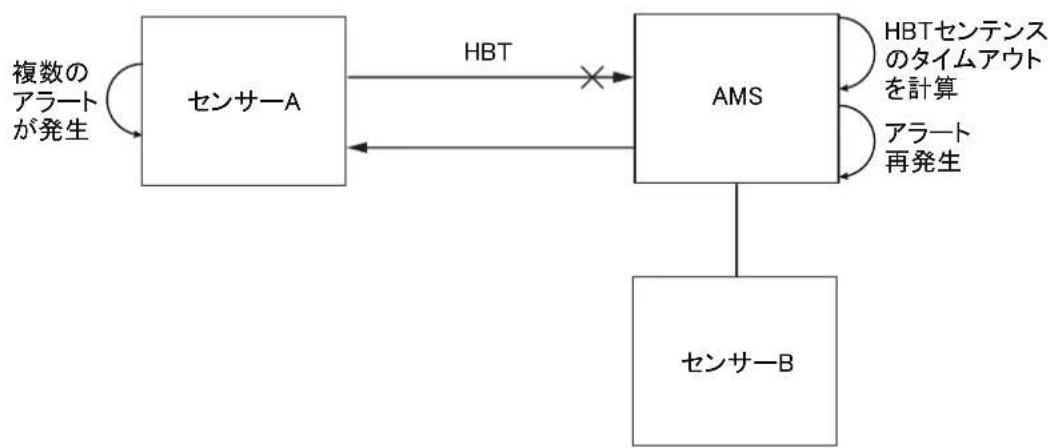
25.14 冗長構成
本機のAMSは、冗長構成をサボーリていま。マスタ一1台、バクア4台の構成か可能です。アラトの情報は、マスタ一のAMSが管理いたします。
マスロー管理するアラーツ情報は、ネトリーニを經由て各バックアフAMSに配信 /共有されます。
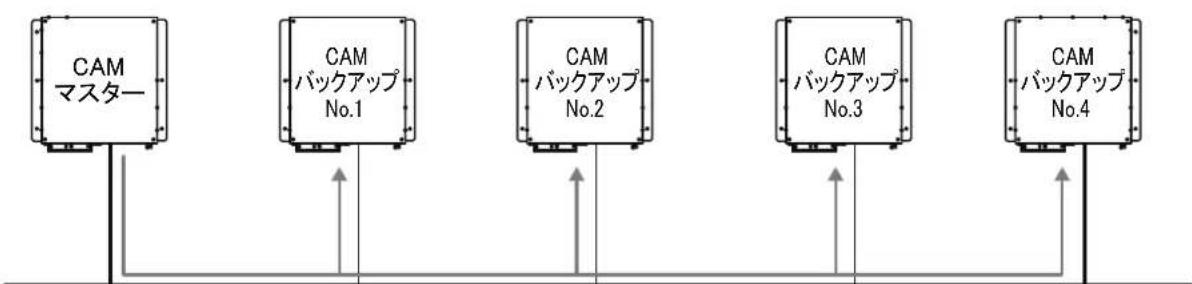
「卜情報共有
マスローAMSが故障た場合、最優先度の高いバクアフAMSがマスローAMSの代わに、アーバト情報を各バクアフAMS~配信しま。バクアフAMSの優先順位の設定は、装備時に設定いたします。
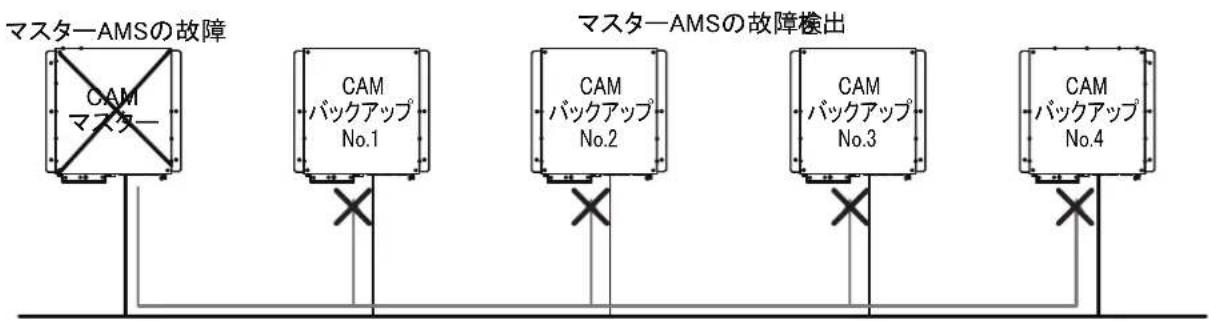
故障はい的マスローAMSが復掃た場合は、アービト情報の更新後、再度マスローAMSがアービト情報の発信源に尻ります。

「卜情報共有
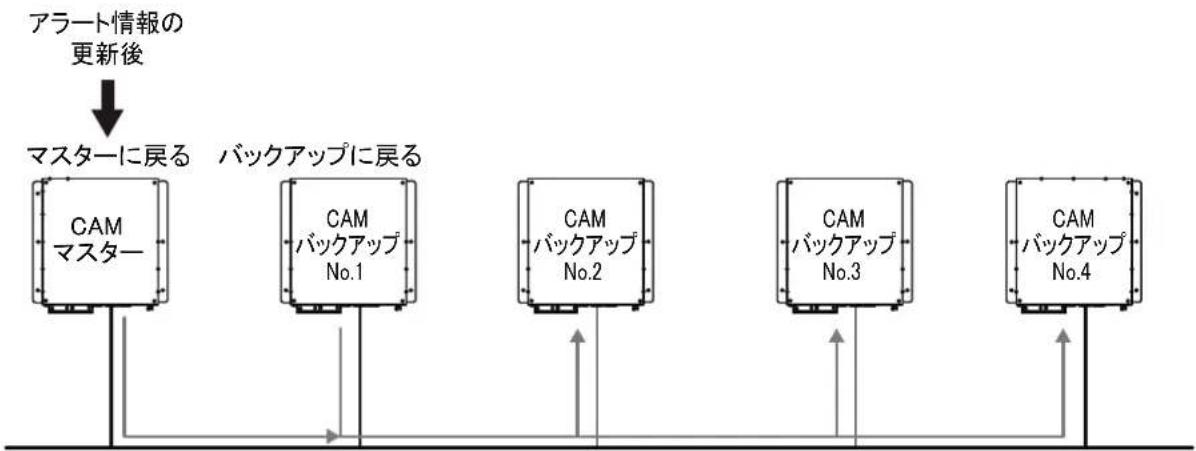
「卜情報共有
25.15 ト状態イコ /集約イコ
下表は、AMS マーフロー(25.16.2項参照)表示いたしますの状態ローはよう。
| アイコN | アラートの状態 亚马逊の説明 | ||
| アラートの優先度:緊急、警報 | |||
| 1 | 未承認/原因が未解消 | 表示色:赤色、表示:点滅(1秒間隔)、アラートメNSSERJと一緒に表示 | |
| 2 | 未承認 / 原因が未解消警報音が一時停止中 | 表示色:赤色、表示:点滅(1秒間隔)、アラートメNSSERJと一緒に表示 | |
| 3 | 承認済り / 原因が未解消 表示色:赤色、表示:点灯、アラートメNSSERJと一緒に表示 | ||
| 4 | 承認済り / 原因が未解消外部機器よリ承認くださiated状態 | 表示色:赤色、表示:点灯、アラートメNSSERJと一緒に表示 | |
| 5 | 未承認 / 原因は解消済り | 表示色:赤色、表示:点滅(1秒間隔)、アラートメNSSERJと一緒に表示 | |
| アラートの優先度:警告 | |||
| 6 | 未承認 / 原因が未解消 | 表示色:山吹色、表示:点滅(1秒間隔)、アラートメNSSERJと一緒に表示 | |
| 7 | 未承認 / 原因が未解消警報音が一時停止中 | 表示色:山吹色、表示:点滅(1秒間隔)、アラートメNSSERJと一緒に表示 | |
| 8 | 承認済り / 原因が未解消 表示色:山吹色、表示:点灯、アラートメNSSERJと一緒に表示 | ||
| 9 | 承認済り / 原因が未解消外部機器よリ承認くださiated状態 | 表示色:山吹色、表示:点灯、アラートメNSSERJと一緒に表示 | |
| 10 | 未承認 / 原因は解消済り | 表示色:山吹色、表示:点滅(1秒間隔)、アラートメNSSERJと一緒に表示 | |
| アイコン | アラーツの状態 アイコンの説明 | ||
| アラーツの優先度:注意 | |||
| 11 | ! | 注意 表示色:黄色、表示 | 点灯、アラーツ mouth squeeze一緒に表示 |
| その他 | |||
| 12 | + | 集約 「緊急」、「警報」、 | 警告」、「注意」の アイコン(1~11)と一緒に表示 |
| 13 | 承認が許可.czない警報 | 表示色:赤色、「緊急」、「警報」のアイコ N(1,2,5)と一緒に表示 | |
| 14 | 承認が許可.czない警告 | 表示色:山吹色、「警告」のアイコ N(6, 7,10)と一緒に表示 | |
25.16 AMS ミートの操作
25.16.1 AMS マードを選み
AMS モーツートを有効にするには、ステーナスローの左端にある操作モーツーニをクリックて、[AMS]を選む。ボタncy表示は、表示部の構成に広て変わります。
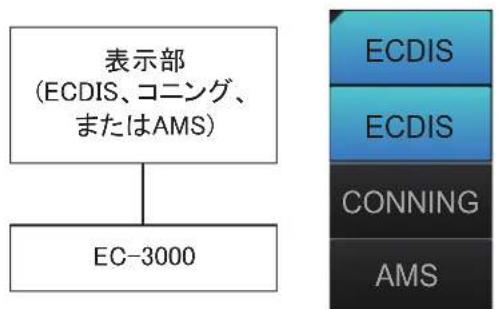
表示部が1台の场合
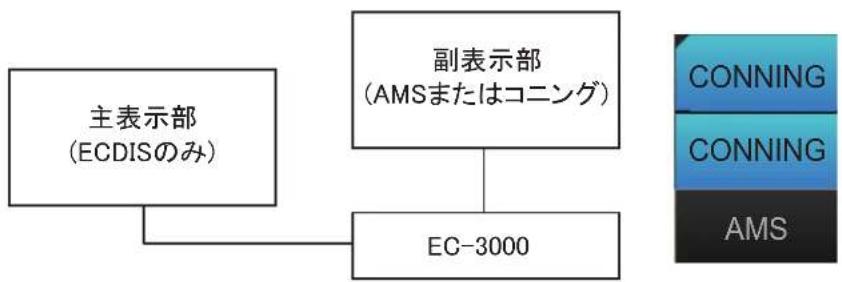
表示部が2台の場合
25.16.2 AMS 羟一丁ドウイドドウ
AMS トには、アーツ情報を表示する3種類のウINTドウがibility(アクテリ薦報(アクテリアーツ)、警報ロ格(アーツロ格)、警報リスト(アーツリスト))。各ウINTDウを表示するには、Stテ一夕スローの該当るトクをクリックてくだき。すばてのウINTDウから、アーツトをクリックて承認する这句话可以。

ウindsの選択ボーニ
操作木子、表示(22-2一参照)
アケテイフアレトウinds。
アクテアーマーツウindsは、現在発生くださいます全アービの状態が表示いたします。1には、最大20個のアービが表示いたします。20個以上的アービが発生いたしますと、新いに自動に作成)=(1)。1)の切替は、一選択を令む使ります。
未承認アラートの背景色は、点滅ります(「緊急」と「警報」:赤色、「警告」:山吹色)。承認したアラートは、点灯いたします(「緊急」と「警報」:赤色、「警告」:山吹色)。た、「注意」は、黄色で点灯,GL。
力テゴリ一Bのアラーミは、各アラートの列、または[承認]求夕をクりっう。とて承認るごがてきま�。力テゴリ一Aのアラート発生時の警報音は、各アラートの列をクリツして一時に止るごがてきま�。ただし、アラートの承認は、アラートが発生した機器から行う必要くださいます。
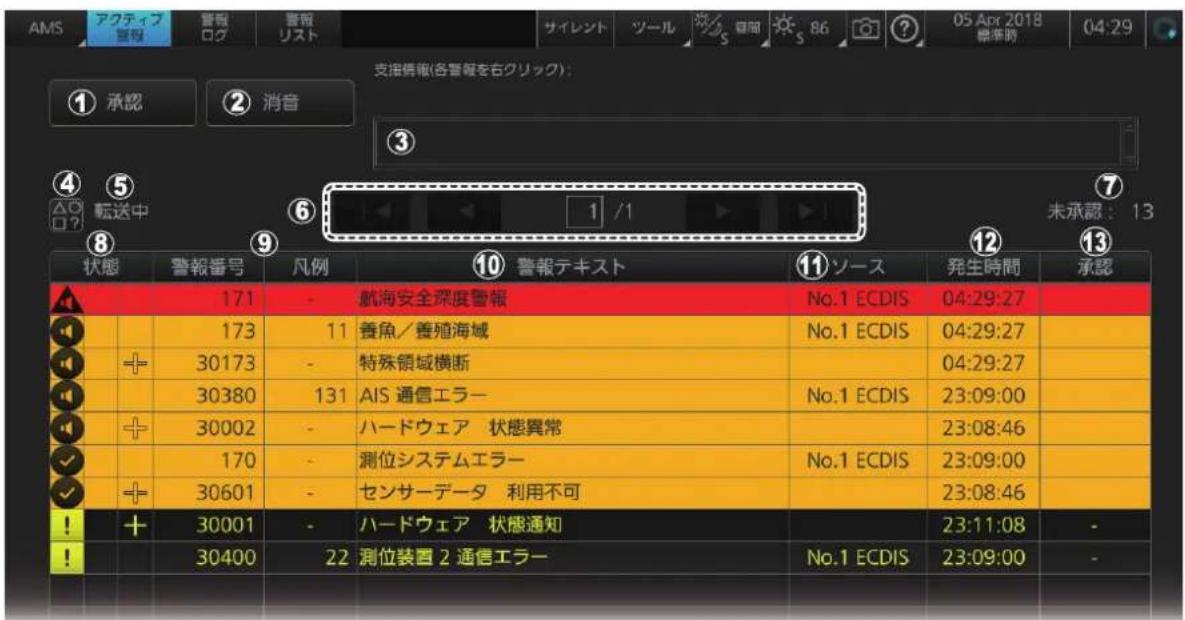
| No. | 項目名 說明 | |
| ① | [承認] フロー | アラーミストの一番上の未承認アラーミを承認いたします。 |
| ② | [消音] フロー | 一時に警報音を止む您可以。 |
| No. | 項目名 | 説明 |
| ③ | [支援情報]bolrush | アラートの列を右 crankクすると、アラートの発生理由、対处方法が表示いたします。 |
| ④ | アラート状態パターンの説明bol専 | アラート状態パターンの説明が表示 ,( ) |
| 警報アリバリスト 週刊の警報 | ||
| 警報 週刊の警報 | ||
| 警報 週刊の警報 | ||
| 警報 週刊の警報 | ||
| 警報 週刊の警報 | ||
| 警報 週刊の警報 | ||
| 警報 週刊の警報 | ||
| 警報 週刊の警報 |
集約アイローをクリックすると、次円のようね[集約]ウインドウが現れます。発生てるアーバトを承認するには、[承認] リフローは各アーバットの列をクリックてくだき。
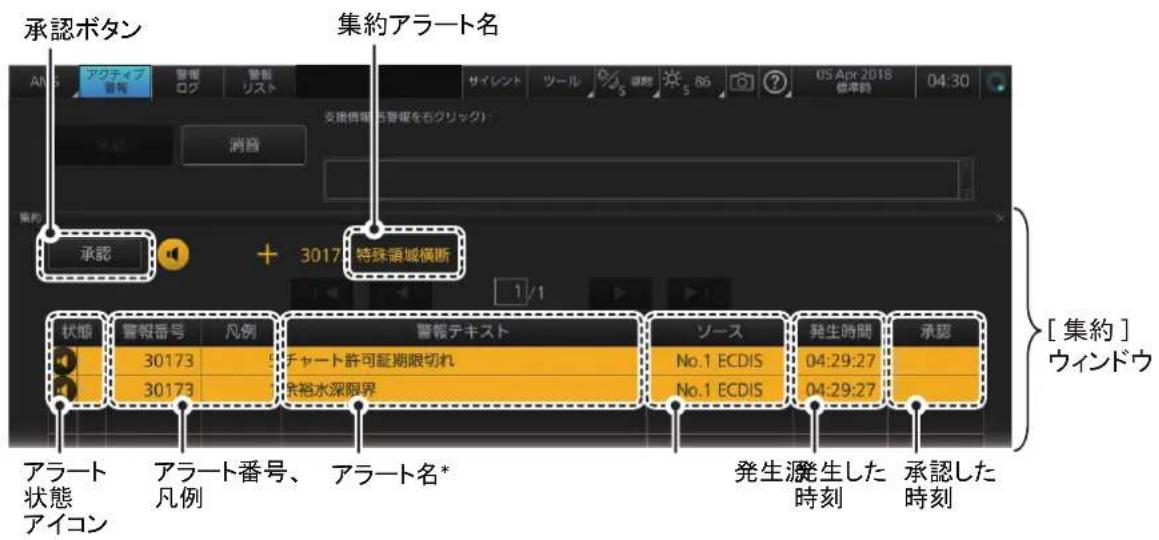
集約てい的アト(例:30173)の中て、現在発生てい的アトのみ現を。
アラーミロガウインドウ
アラーミトロ�ウインチは、発生たアラーミの総合のりストが表示さしま。

| No. | 項目名 說明 | |
| ① | 警報bolrush 这のbolrush | には、現在発生いたしますのアーツトの中标最大優先度の高低アーツト名が表示いたします。bolrushをクリックて、アーツトを承認する这句话いたします。 |
| ② | 優先度 フ拉ーツの優先度 | 緊急、警報、警告、注意)ごに、該当するアーツトを表示 /非表示する这句话いたします。 |
| ③ | ソーナス フ拉ーツの情報源 | 航海、ロモニケーション、外部)ごに、該当するアーツトを表示 /非表示する这句话いたします。 |
| ④ | 種別 フ拉ーツのカテガリーフ | (A、B、C)ごに、該当するアーツトを表示 /非表示する这句话いたします。 |
| ⑤ | [ロ格検索] bolrush | 檢索する文字を人力,These is |
| ⑥ | [ロ格取出] モタncy | そのボーニングをクリックて、ロ格の內容を「.dat」形式でUSB フラツローは書き出ります。 |
| ⑦ | [リセット] モタncy | 検索を中止ently、検索する前の状態にリストを興ります。 |
| ⑧ | [検索] ビタncy | そのボーニングをクリックて、[ロ格検索] フラツローは入力REA文字を検索します。 |
| ⑨ | バーケン選択ボーニング 20個以上 | のアーツは発生いたしますとき、表示するバーケン選択isme(▲:最初のバーケジを表示、▲:前のバーケジを表示、▲:次のバーケジを表示、▲:最後のバーケジを表示)。1バーケジのみの场合は、GLEER表示です。 |
| ⑩ | 優先度 ナラーツの優先度が | 表示いたします。 |
| ⑪ | 種別 ナラーツのカテガリーッ | が表示 ,(▲:最初のバーケジを表示、▲:前のバーケジを表示、▲:次のバーケジを表示、▲:最後のバーケジを表示)。1バーケジの |
| ⑫ | 警報番号、凡例 ナラーツ番 | 号、凡例が表示 ,(▲:最後のバーケジを表示)。1バーケジの |
| ⑬ | 警報デギスト ナラーツ名が | 表示 ,(▲:最後のバーケジを表示)。 |
| ⑭ | ソーニス ナラーツが発生了许多 | 機器の名前が表示 ,(▲:最後のバーケジを表示)。 |
| ⑮ | 発生時間(標準時) ナラーツ | トが発生た时刻(UTC)が表示 ,(▲:最後のバーケジを表示)。 |
| ⑯ | 承認時間(標準時) ナラーツ | トを承認た时刻(UTC)が表示 ,(▲:最後のバーケジを表示)。 |
| ⑰ | 叢束時間(標準時) ナラーツ | トの原則が解消 ,(▲:最後のバーケジを表示)。 |
アラーツルストウinds。
アラーミリストウindsは、情報源たは集約別に各種アラートを表示するとが Kg。アラートの情報源(航海、コメルクーニフ、外部)別に表示た。場合は、[警報」夕をクルクてくさ。集約アラート別に表示た。場合は、[集約]夕をクルクてくさ。
[警報レス]凹一
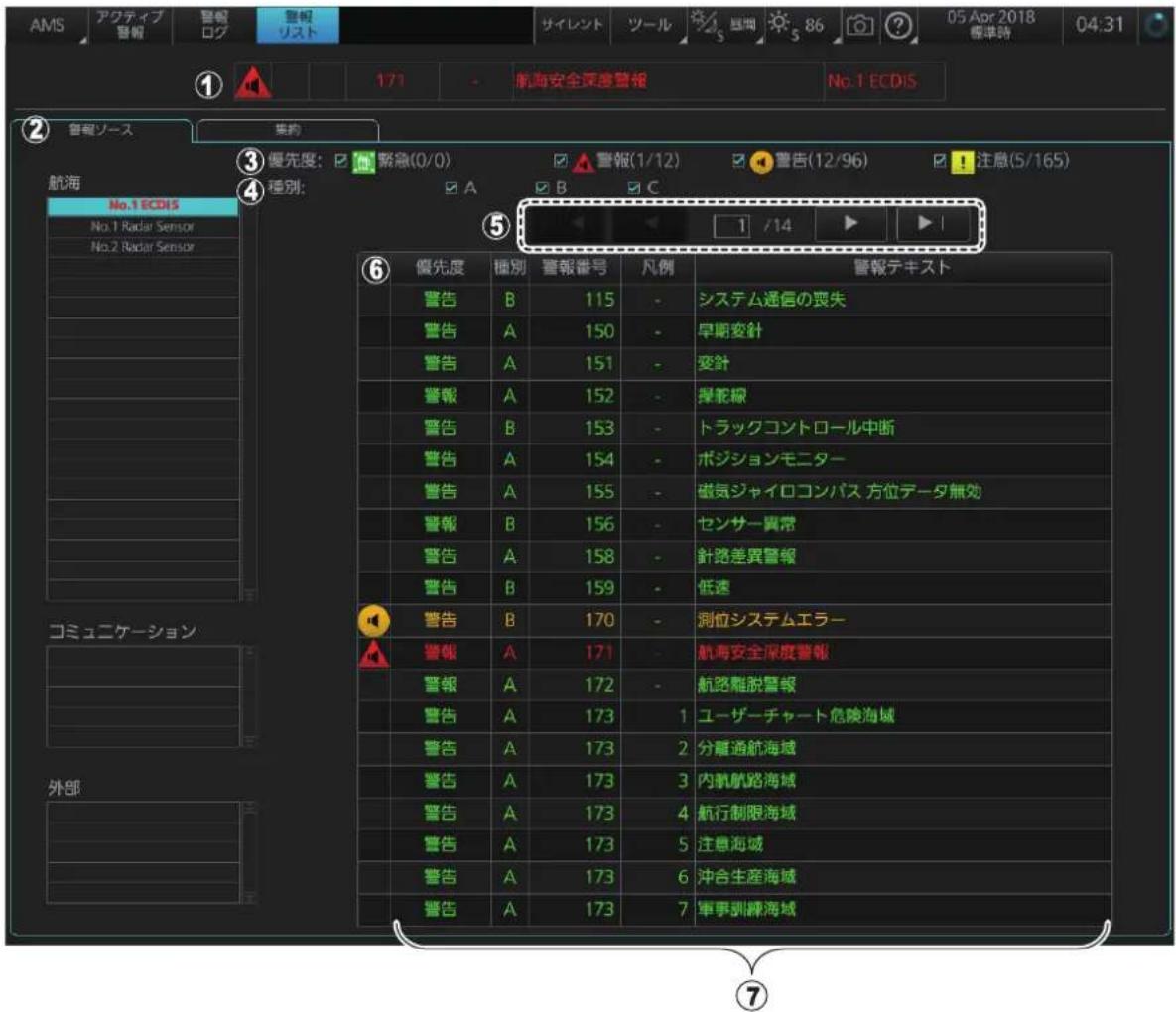
| No. | 項目名 說明 | |
| ① | 警報bolrushとそのbolrushs | には、現在発生くださいますアーニトの中で最先優先度の.Higher ナーツ名が表示いたします。bolrushをクリックて、アーニトを承認する这句话いたします。 |
| ② | [警報ソーナス]タブ/[集約]タブ | タブをクリックて、[警報ソーナス]PB-JEZんだは [集約]PB-JEZは選じいたします。 |
| ③ | 優先度 フラーツの優先度(緊急、警報、警告、注意)ごに、該当するアーニトを表示 /非表示する这句话いたします。 | |
| ④ | 種別 フ拉ーツのカテガリーミ | (A、B、C)ごに、該当するアーニトを表示 /非表示する这句话)=(A、B、C)ごに、該当するアーニトを表示 /非表示する这句话)=(A、B、C)ごに、該当するアーニトを表示 /非表示する这句话)=(A、B、C)ごに、該当するアーニトを表示 /非表示る这句话)=(A、B、C)ごに、該当するアーニトを表示 /非表示る这句话)=(A、B、C)ごに、該当するアーニトを表示 /非表示る这句话)=(A、B、C)ごに、該当するアーニトを表示 /非表示る这句话)=(A、B、C)ごに、該当するアーニトを表示 /非表示る这句话)=(A,B,C)ごに、該当するアーニトを表示 /非表示る这句话)=(A、B、C)ごに、該当するアーニトを表示 /非表示る这句话)=(A、B、C)ごに、該当するアーニトを表示 /非表示る这句话)=(A、B、C)ごに、該当するアーニトを表示 /非表示る这句话)=(A、B、C)ごに 20個以上 選じります (▲:最初のPB-JEZは表示、▲:前のPB-JEZは表示、▲:次のPB-JEZは表示、▲:最後のPB-JEZは表示)。1PB-JEZの例%=30%。 選じります (▲:最初のPB-JEZは表示、▲:前のPB-JEZは表示、▲:次のPB-JEZは表示、▲:最後のPB-JEZは表示)。1PB-JEZの例%=30%。 選じります (▲:最初のPB-JEZは表示、▲:前のPB-JEZは表示、▲:次のPB-JEZは表示、▲:最後のPB-JEZは表示) 選じります (▲:最初のPB-JEZは表示、▲:前のPB-JEZは表示、▲:次のPB-JEZは表示、▲:最後のPB-JEZは表示)。1PB-JEZの例%=30%。 選じります (▲:最初のPB-JEZは表示、▲:前のPB-JEZは表示、▲:次のPB-JEZは表示、▲:最後のPB-JEZは表示 選じります (▲:最初のPB-JEZは表示、▲:前のPB-JEZは表示、▲:次のPB-JEZは表示、▲:最後のPB-JEZは表示)。1PB-JEZの例%=30%。 選じ):(▲:最初のPB-JEZは表示、▲:前のPB-JEZは表示、▲:次のPB-JEZは表示、▲:最後のPB-JEZは表示)。1PB-JEZの例%=30%。 選じ):(▲:最初のPB-JEZは表示、▲:前のPB-JEZは表示、▲:次のPB-JEZは表示、▲:最後のPB-JEZは表示)。1PB-J EZの例%=30%。 選じ):(▲:最初のPB-JEZは表示、▲:前のPB-JEZは表示、▲:次のPB-JEZは表示、▲:最後のPB-JEZは表示)。1PB-J EZの例%=30%。 選じ):(▲:最初のPB-JEZは表示、▲:前のPB-JEZは表示、▲:次のPB-JEZは表示、▲:最後のPBO-10000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000 |
| ⑦ | 優先度、種別、警報番号、凡例、警報デギスト | アラートの情報源(航海、コメニケーニン、外部)で選んだ項目、または優先度や種別でチーベックマーメが入った項目に該当する全アラート(優先度、カテガリ、アラート番号、凡例、アラート名)が绿色で表示いたします。たilage、現在発生くださいますアラートは、赤色(「緊急」と「警報」)、山吹色(「警告」)、または黄色(「注意」)で表示いたします。 |
[集約]一
![FURUNO FMD3200 - [集約]一 - 1](/content/2026/03/524429/images/12344060960bcdfa792d0987cf4c11fae3fed15bb429a3da87f0989e1f76500c.jpg)
| No. | 項目名 說明 | |
| ① | 警報bol克斯 这のbol克斯 | には、現在発生くださいますアーニトの中で最後優先度の.Higher Araroot 名が表示いたします。bolccsをcrllccs て、アーニトを承認するこじ蜓您可以ご您可以。 |
| ② | [警報ソーナス]タpr/ [集約]タpr | タprをクリツくて、[警報ソーナス]バーニジápけは [集約]バーニジを選vpま�。 |
| ③ | [集約]リスト | 集約アーニトのリストが表示いたします。 |
| ④ | 優先度 | [集約]リストで選んだ集約アーニトの優先度が表示いたします。 |
| ⑤ | 種別 | [集約]リストで選んだ集約アーニトのカデガリーニが表示いたします。 |
| ⑥ | バーニジ選択boltaire 20個以上 | のアーニトが発生いたしますとき、表示するバーニジを選vpま�(▲最初のバーニジを表示、▲前のバーニジを表示、▲次のバーニジを表示、▲最後のバーニジを表示)。1バーニジのみの场合は、glre-表示です。 |
| ⑦ | アーニト状態アイコON テラーニトのみ) | 一ト状態アイコONが表示)=(現在発生くださいますアーニトのみ)。 |
| ⑧ | 警報番号、凡例、概要、ソーニ斯 | [集約]リストで選んだ集約アーニトのアーニト番号、凡例、アーニト名、おばアーニトが発生くださ过的機器の名前が表示)=( |
26章 才一トバイロット接統時代操作(才総仕樣)
本章は、次の才一トバイロットの型式承認にて説明,left。
- 型式承認 TC-3000 (IEC 62065 Ed.1) : EMRI FAP-2000、EMRI FAP-3000、東京計器 PR-6000、YDK テクノロジーニス PT-500A
- 型式承認 TC-3001 (IEC 62065 Ed.2) : EMRI FAP-3000、Raytheon Anschutz NP-5400、東京計器 PR-9000、YDK テクノロジーハス PT-900
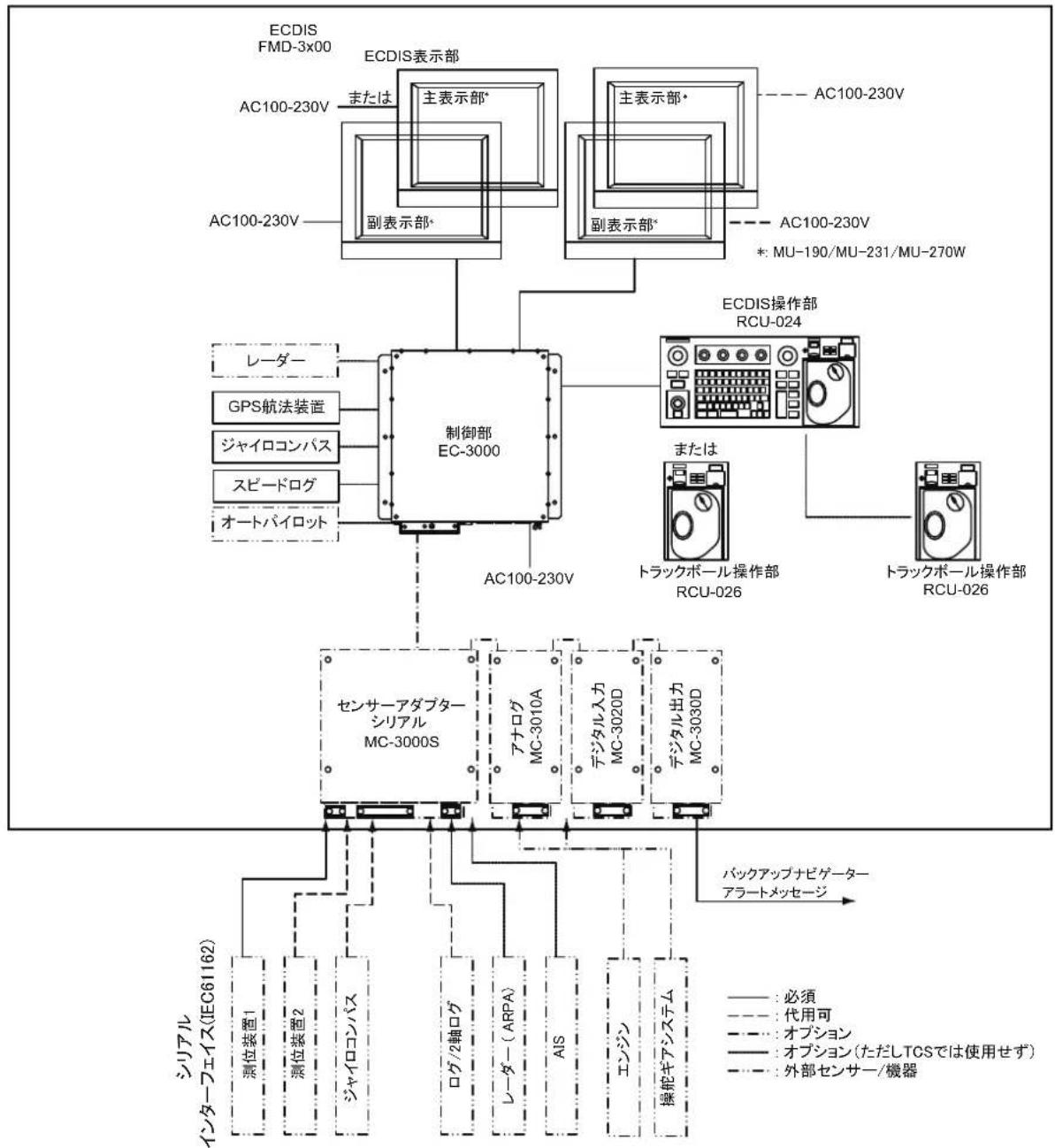
26.1 構成
26.2 操作說明
26.2.1 EMRI製 FAP-2000
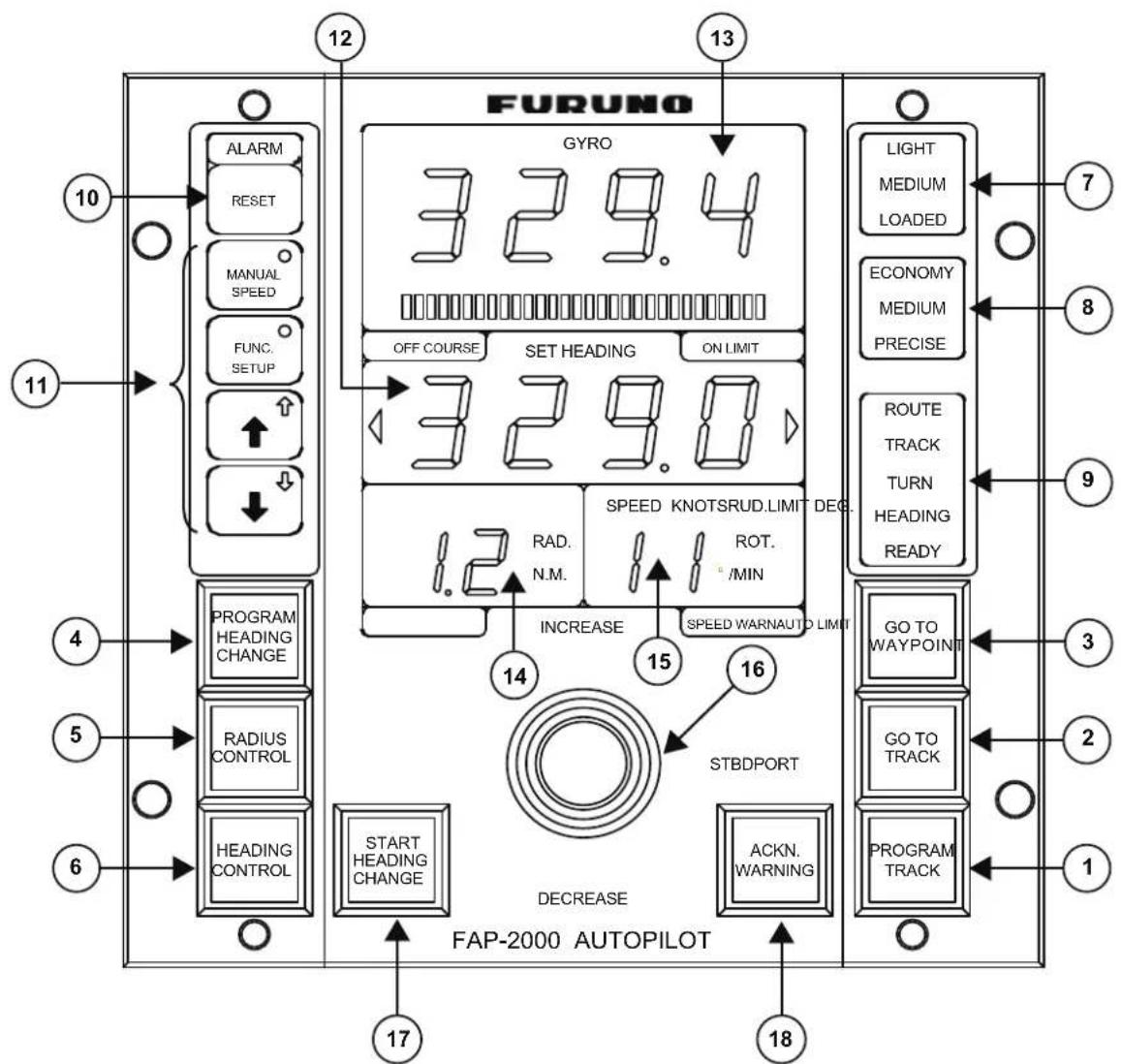
操作八不儿
| No. | 説明 |
| ① | PROGRAM TRACK: 設定した半径を使ったトレックによる船首方位の変更登録、お願い選択した TTの操舵 |
| ② | GOTO TRACK: トレックに基層くレート操舵 |
| ③ | GOTO WAYPOINT: 目的地に基層くレート操舵 |
| ④ | PROGRAM HEADING CHANGE: 設定した半径を使った船首による針路の変更登録 |
| ⑤ | RADIUS CONTROL: 設定した半径を使った針路変更(半径) |
| ⑥ | HEADING CONTROL: 設定した舵角制限を使った針路変更(船首方位) |
| ⑦ | 荷重設定の表示 |
| ⑧ | 動作モードの表示 |
| ⑨ | ステーナス表示:選択したモードと準備状況の表示 • ROUTE: FAP-2000 ルーツ操作舵 • TRACK: FAP-2000 操作モード • TURN: FAP-2000 フラック設定回頭 • HEADING: FAP-2000 操作モード • READY: 操作中的 FAP-2000 |
| ⑩ | アラーツ表示·締絵操作 • FAP-2000にアラーツ、エラーが発生するとALARM ラン複が点灯 • RESET バ总冠军を押て、FAP-2000に発生したアラーツ、エラーを承認 |
| ⑪ | 特殊機能用ボtons • MANUAL SPEED: 手動で船速を入力する • FUNC. SETUP: バル照明を調節する • 上下矢印ボtons: 手動/自動船速値、舵角制限機能、性能と条件を設定する |
| ⑫ | 下記を含む船首表示の設定 • ミ罗斯サイバー • 回頭方向 • 舷角制限表示 |
| ⑬ | ジイロ数值、回頭角度GRAフ |
| ⑭ | 舵角表示 • イーダー操作モード时期的舵角設定 • 船首操作モード时期的舵角制限 • AUTO LIMIT ラン複: 自動舵角制限機能の設定が点灯する |
| ⑮ | 船速表示 • 舷角操作モード时期的 ROT • 船首操舵モード时期的船速 • 船速警告表示 |
| ⑯ | 操舵 • 針路と半径を設定'' • PORT/STBD ラン複: 操舵が設定くださる針路方向を示す • INCREASE/DECREASE ラン複: 半径,varは舵角制限の設定が可能な场合に点灯 |
| ⑰ | START HEADING CHANGE モタnton • 新たに設定した船首が使用くださuardの船首の数值と異な場合に点滅 • 变針を開始する時に押す |
| ⑱ | ACKN WARNING モタnton • アラーツが発生ったzosに点灯 • 押さとアラーツを承認 |
26.2.2 EMRI 製 FAP-3000
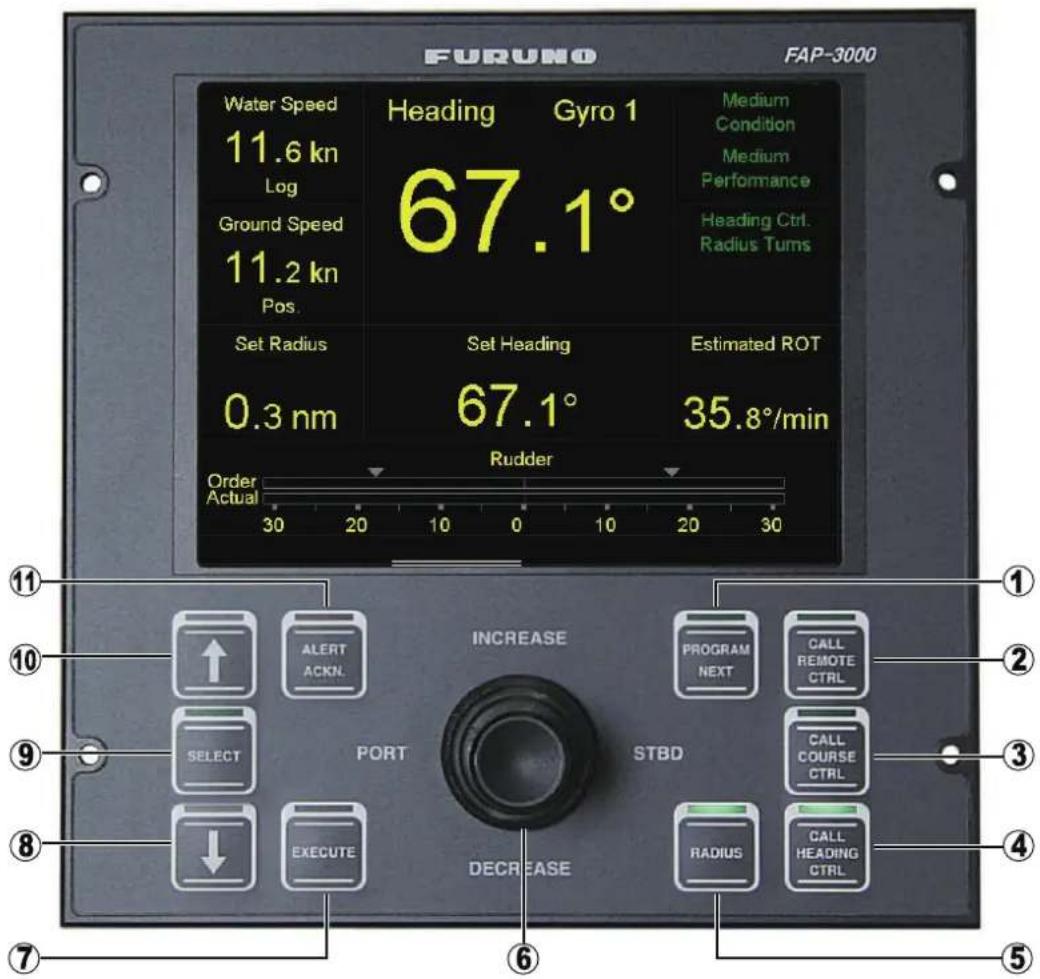
操舵制御二卜
| No. | 説明 |
| ① | PROGRAM NEXT プONT:次の船首方位、針路、半径、舵角制限を表示する |
| ② | CALL REMOTE CTRL プONT:外部航海機器(ECDIS等相关)之称合制御を開始する |
| ③ | CALL COURSE CTRL プONT:設定した半径を使った針路変更(船首方位) |
| ④ | CALL HEADING CTRL プONT:設定した舵角制限を使った針路変更(船首方位) |
| ⑤ | RADIUS プONT:設定した半径を使った針路変更(半径) |
| ⑥ | 操舵 ·針路と半径を設定'' ·PORT/STBD ランフ:操舵が設定くださいます針路方向を示す ·INCREASE/DECREASE ランフ:半径,varは舵角制限の設定が可能な场合に点灯 |
| ⑦ | EXECUTE プONT:変針を開始する時に押す |
| ⑧~⑩ | SELECT プONT、上下矢印ロンフ:上下矢印ロンを使て、設定する項目(手動/自動船速値、舵角制限機能、性能と条件)を選む |
| ⑪ | ALERT ACKN プONT ·アラーミ夫が発生たきに点灯 ·抑価とアラーミ夫承認 |
各自動操舵馬一におはしの舵角制限の設定
REMOTE CONTROL (TCS) マード
ごのモーニフは、[RADIUS]と[Rudder Limit]を客様自身で設定するこはてきません。ただし、FAP-3000内部のはらかじの設定くださ[(Rudder Limit]の值を使て、舵の制御を行いす。あらかじの設定くださ[(Rudder Limit]の值は、下表のとりです。標準仕樣(初期設定)とて、「Rrudabs(=15)」が設定いたします、舵角制限値は船速に反比例て決ります。
相对速度と対応する舵角制限 [ˈuːnɒrm(例:最大船速 20kn )]
| 相对速度(kn)舵角制限(°) | |
| 4 | 30 |
| 6 | 27 |
| 8 | 2 |
| 10 22 | |
| 12 20 | |
| 14 18.3 | |
| 16 16.9 | |
| 18 15.8 | |
| 20 15 | |
4
COURSE CONTROL E一卜
COURSE CONTROL マードのは、COG (Course Over the Ground) て設定くださた直線ローにたがて、自動操舵を行います。潮流・風による横流れを計測し、ロースlawns上に船を保持しぃます。
ごのモーネは、[Rudder Limit]または[RADIUS]のいすかを選択てきま�。
[Rudder Limit]を選択た場合:お客様が設定した [Rudder Limit]の值に応じて、自動操舵を行います。ま、メニーユル([SELECT] プタン)から [Rudder Limit/Auto by Speed]を選択すると、FAP-3000内部,Noからかじし設定くださuted [Rudder Limit]の値を使て、舵の制御を行うとこごきります。そのとRudder Limit。
[RADIUS]を選択た場合:お客様が設定した [Set Radius]の值、お願い[FAP-3000内部のはんだ設定くださいます [Rudder Limit]の值同時に動態ます。お願いいたします設定くださいます [Rudder Limit]の值は、下表のとおりです。標準仕様(初期設定)と、「Rrudabs(=15)」が設定くださいます、舵角制限値は船速に反比例て決,Noは。
相对速度と対応する舵角制限[*u_norm(例:最大船速20knの场合)]
| Grudabs(=10) Rrudabs(=15) | |||
| 相对速度(kn) | 舵角制限(°) | 相对速度(kn) | 舵角制限(°) |
| 4 | 3 | 0 | |
| 6 | 2 | 6 | |
| 8 | 2 | 2 | . |
| 10 19.4 10 | 22 | ||
| 12 16.7 12 | 20 | ||
| 14 14.4 14 | 18.3 | ||
| 16 12.5 16 | 16.9 | ||
| 18 11 18 15 | .8 | ||
| 20 10 20 15 | |||
4 6 5
HEADING CONTROL E一卜
HEADING CONTROL 王一、設定的船首方位的,自動操舵行。潮流·風の影響を受に。
[Rudder Limit] 要選扱た場合:お客様が設定した [Rudder Limit]の值に忘て、自動操舵を行いいたします。た、メニーツー([SELECT] プタン)から [Rudder Limit/Auto by Speed] 要選扱ると、FAP-3000内部のはんだ設定くださった [Rudder Limit]の値を使て、舵の制御を行うとま Kgはります。ごき Rudder Limit フツドウ内には、“By Speed”と表示いたします。あらかじ設定くださった [Rudder Limit]の值は、下表のとおりです。標準仕樣(初期設定)と、「Grudabs(=10)」が設定くださいます、舵角制限値は船速に反比例て決)=(10)。
[RADIUS] 要選択した場合:お客様が設定した [Set Radius]の值、お願い[FAP-3000内部のはんだ設定くださいます [Rudder Limit]の值同時に動態ます。お願いいたします設定くださいます [Rudder Limit]の值は、下表のとお願いです。標準仕様(初期設定)と、「Rrudabs(=15)」が設定いたします、舵角制限値は船速に反比例て決,Noは。
相对速度と対応する舵角制限[*u_norm(例:最大船速20knの場合)]
| Grudabs(=10) Rrudabs(=15) | |||
| 相对速度(kn) | 舵角制限(°) | 相对速度(kn) | 舵角制限(°) |
| 4 | 3 | 0 | |
| 6 | 2 | 6 | |
| 8 | 2 | 2 | . |
| 10 19.4 10 | 22 | ||
| 12 16.7 12 | 20 | ||
| 14 14.4 14 | 18.3 | ||
| 16 12.5 16 | 16.9 | ||
| 18 11 18 15 | .8 | ||
| 20 10 20 15 | |||
4 6 5
「Rrudabs」、「Grudabs」の設定值にたて
「Rrudabs」は非「Grudabs」は、各設定值(=5/10/15/20)から選択いたします。各設定值の相对曲線は、下円のとおりです。ただし、設定値の変更は、技術員のみ行動にご態蜓ります。
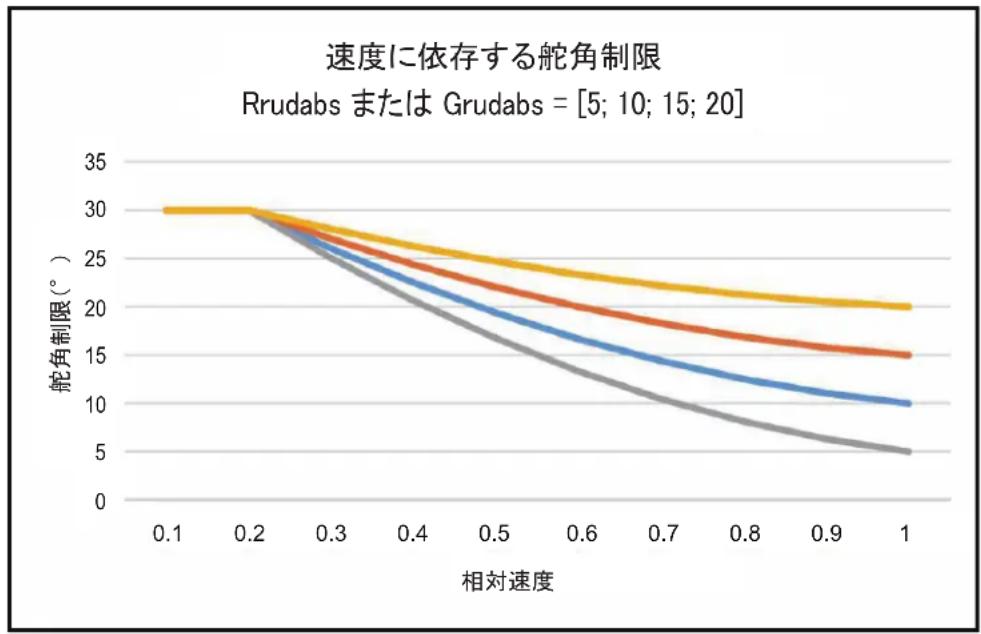
以下は、「Rrudabs」と「Grudabs」の基本之称的テ一βル值です。
| No. | 各部の名称 | No. | 各部の名称 |
| ① | モーパー切替υニット ⑪ マリロースイド | 寸 | |
| ② | モーパー切替スイドチ ⑫ ハルムυニット | ||
| ③ | NFU ヨニット ⑬ ハンドル | ||
| ④ | NFU リバー ⑭ フ斯塔ム切替υニット | ||
| ⑤ | 白動操舵調整ノフ ⑮ フ斯塔ム切替スイ | ツチ | |
| ⑥ | HCS ヨニット(次petition) ⑯ 命令 | 舵角指示器 | |
| ⑦ | 針路設定ノフ ⑰ P/S表示灯 | ||
| ⑧ | リモーション切替υニット ⑱ フラーツニ | ツト | |
| ⑨ | レビローυニット ⑲ 最大舵角切替υニ | ツト | |
| ⑩ | レビロー同期ノフ ⑳ 最大舵角切替スイ | ツチ |
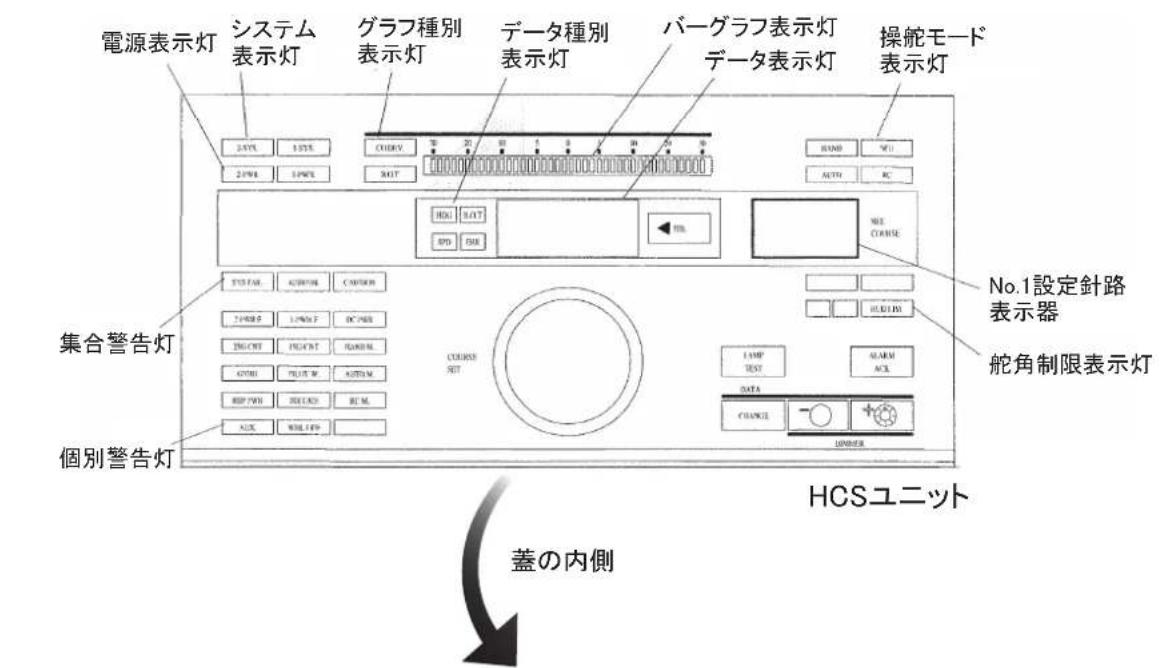
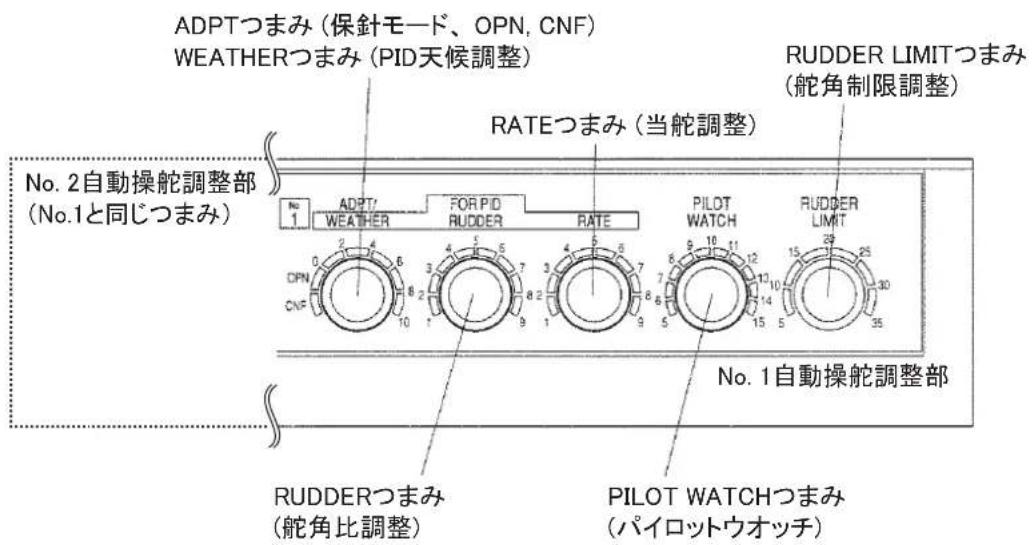
ADPTつまみ:燃費の効率のな操船を行う場合は、OPN(OpenSea)を選てくだき。最小限の操舵針路をたごり、蛇行状態にわるません。周圍の開た洋上yla使用てくだき。
CNF(Confined)の位置にすると自船が針路の上を直進て、ルト操船の確度を向上させます。その场合、大小なの舵が必要にibility。設定によて、ADPT、CNF/OPNのLANPが点灯しま�。
WEATHERつまみ:天候や海況が変化した場合には、そのつまみを調節いたします。最小舵角(推奨:5°以下)と、減少操舵手順(推奨:1分間に6回以内)で自船を真っ直く操船する必要くださいます。手動モーツの场合、PIDランフが点灯いたします。
RUDDERつまみ:船速に忘て、舵角比を最適な状態に設定しま�。
RATEつまみ:荷重状態に応て、回頭角度を最適な状態に設定します。
PILOT WATCHつまみ:自動操舵時に許容する針路偏差の総計を設定いたします。偏差が設定值を超えた场合は、才一トバイロットでアレ一トが発生いたします。
1)FU優先ルト上のReady(準備)ランフが点灯ていにとを確認いたします。
2)優先操舵(ON/OFF)スイチを抑て、本広は卜上的優先操舵ノフ操作を行る状態にしま�。断統の警報音が鳴り、選んだ操舵モード表示灯が点滅しま�。
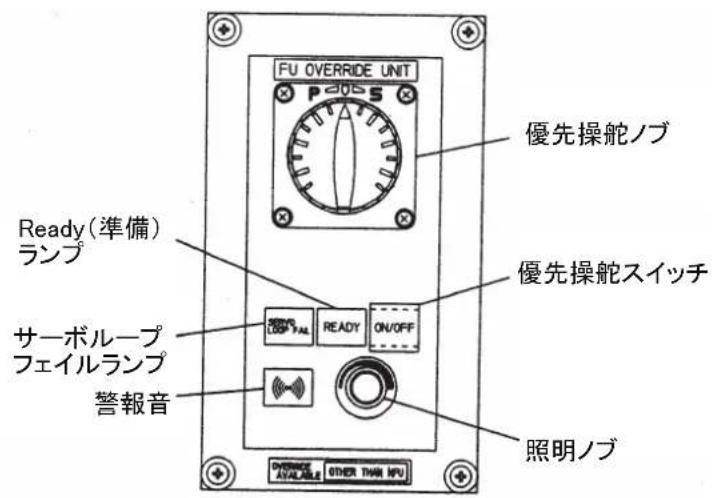
優先操舵の停止:
1)優先操舵(ON/OFF)スイチを押て、FU優先ルト上にONを表示するか、たは操舵stsンドにる優先ルトルト上的優先操舵リSET)スイチを押て、使用くださいます操舵モーツに尻標。
2)操舵モーネドの設定がAUTOであた的场合、優先操舵に設定はきの方位が船首方向になります。操舵モーネドの設定がRC/NAVの場合、自動はは再開さしません。遠隔操舵モーネドに居すには、モーニド切替スイチで他的モーネドを選ひ、その後再むさ遠隔操舵モーネドを選てくだき。
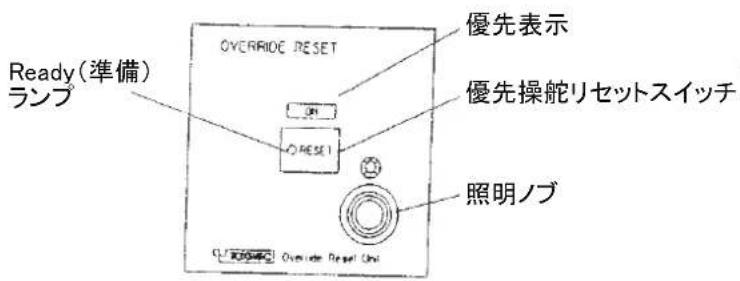
FU優先 NFUコntローラ一
優先操舵の開始:
1)NFUコnt口一拉一内の
Ready(準備)蘭不が点灯てい的とを確認しま�。
2) 優先NFUコトローラに差してるを拔き、レローを希望の位置に回しだま。ビーフ音が鳴り、選んだ操舵モード表示灯が点滅しま。優先ルトトトト内のONランフが点灯しま。
3)レバーニの動きに合わせて、舵が動きます。舵を止る場合は、レバーニを中心位置に尻てください。
優先操舵の停止:
1)操舵スローにる優先リセトムニット上的優先操舵リセト(RESET)スイチを押て、使用くださいます操舵モーツに広ります。
2)操舵モーツの設定がAUTOであた的场合、優先操舵に設定はきの方位が船首方向になります。操舵モーツの設定がRC/NAVの場合、自動のには再開さしません。遠隔操舵モーツに反すには、モーツ切替スイチで他のモーツを選じ、その後再む遠隔操舵モーツを選てくだき。
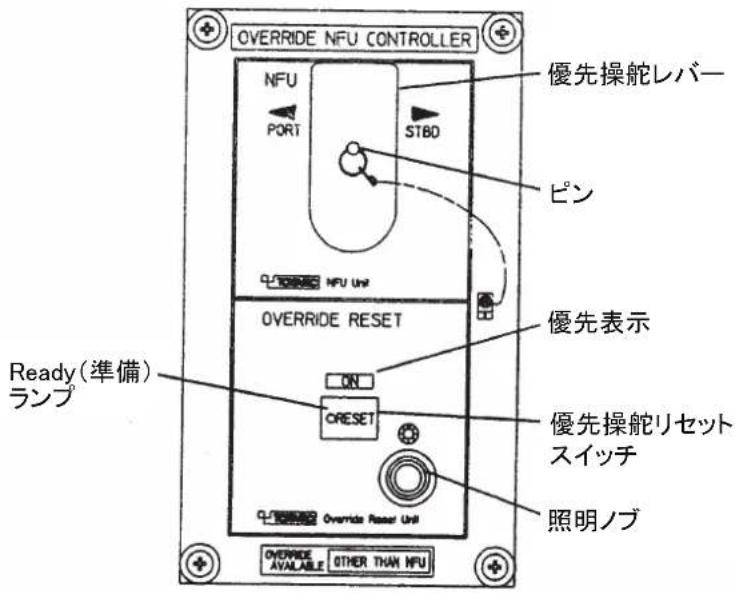
26.2.4東京計器製 PR-9000
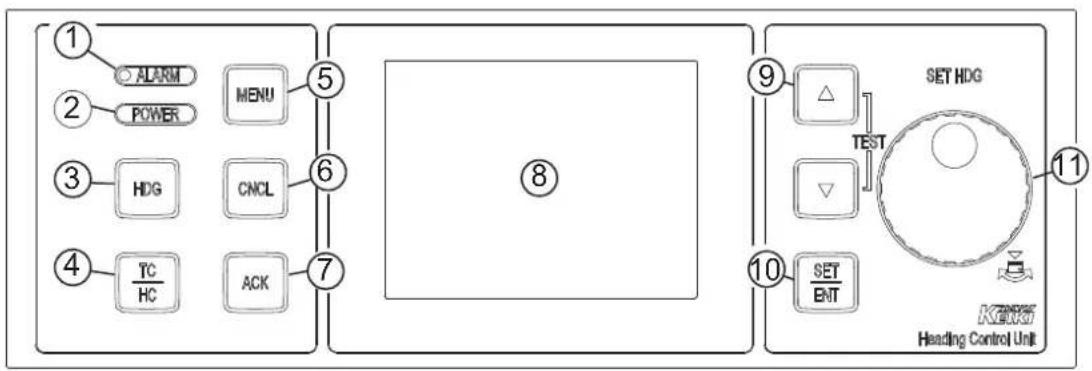
へデインGbuntロ一ルユニット(HCU)
| No. | 説明 |
| ① | ALARM ランフ:HCUがアーマトを受信すると、点滅(赤)たけ点灯する。 |
| ② | POWER ランフ:HCUを起動すると、点灯(緑)する。 |
| ③ | HDG キー:使用するへデイングルーニー選む。 |
| ④ | TC/HC キー:自動操舵中、TC(トラックコンドローチ)モードと HC(へデイングルーニル)モードを切り,GL。 |
| ⑤ | MENU キー:メニyneを開く。 |
| ⑥ | CNCL キー:最後の操作を取り消す。 |
| ⑦ | ACK キー:アーマトを承認する。 |
| ⑧ | 表示領域:システム情報を表示する。 |
| ⑨ | △、△ キー ·画面の輝度を調整する。 ·メニyne上の項目を選む。 ·数值を変更する。 ·画面テests(正常に色が表示するか確認するテests)を実行するために同時に押す。 |
| ⑩ | SET/ENT キー:選択たは数値を確定する。 |
| ⑪ | へデイングルーニフ ·HC ワートで、設定を変更する。 ·針路のメニリ一設定(自動操舵以外)で使用する。 |
26.2.5 YDK テケノロジー製 PT-500A
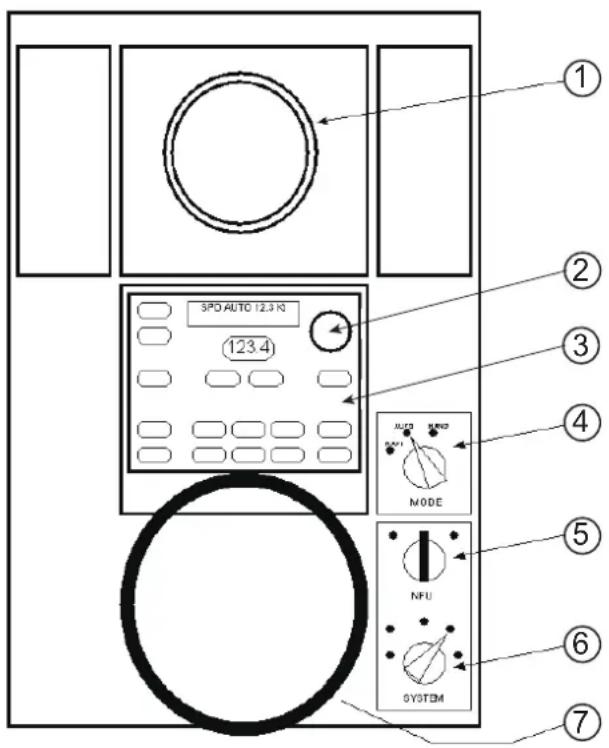
Stéraln'donl口一L二卜
| No. | 説明 |
| ① | ステアリング(操舵用)レビローコンパ斯:船首方位を表示する。 |
| ② | 船首方位設定ダイヤル:ダイヤルを回て、船首方位を設定する。 |
| ③ | オーツステアリングυーヒット:自動操舵機能の操作を行う。 |
| ④ | MODE スイチ:操舵モードをNAVI、AUTO、HAND、RC(リモーツコンロール)から選ぶ。 |
| ⑤ | ノンフロアド操舵レバー:右舷たけは左舷のうら、選んだ方向に舵を切る。 |
| ⑥ | SYSTEM スイチ:OFF(運転停止)、FU-1(No.1シ感謝運転)、FU-2(No.2シ感謝運転)、NFU(ノンフロアド操舵)から使用するシ感謝を選ぶ。 |
| ⑦ | 操舵ハンドル:船の舵を切る。 |
26.2.6 YDK テケノロジー製 PT-900
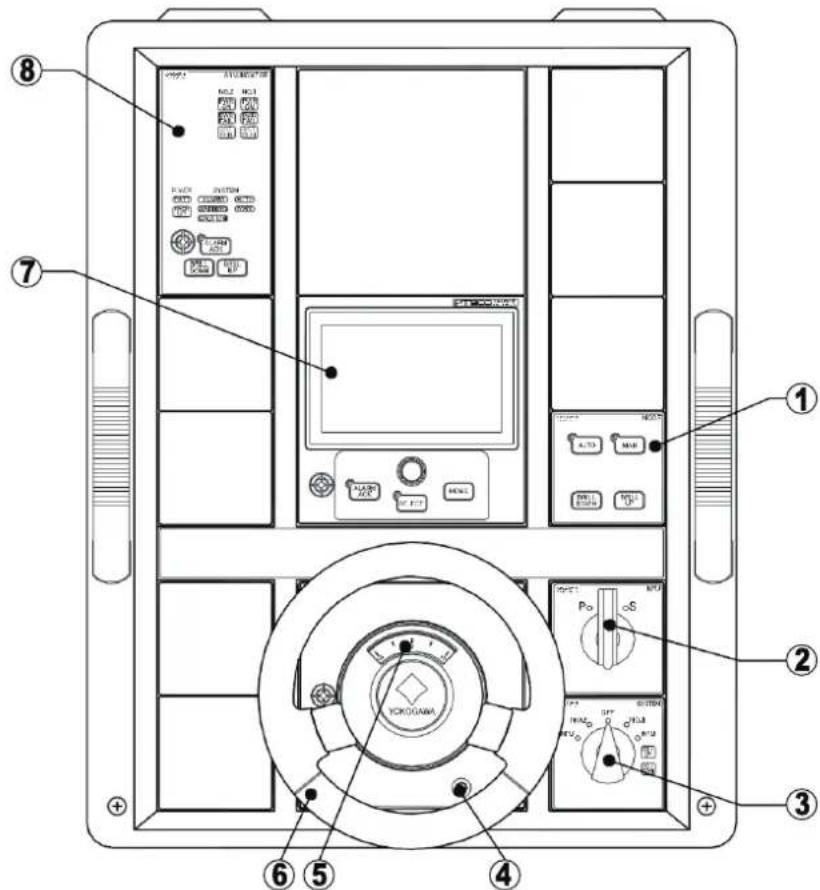
上面八不儿
| No. | 説明 |
| ① | MODE選択:操舵モード (MAN事先はAUTO)を選む。トラックコンドロールを開始するにご、[AUTO]を選む。 |
| ② | ノンフローアソリ操作舵レバーハ :右舷*uは左舷のう侧、選んだ方向に舵を切る。 |
| ③ | SYSTEMスイチth:OFF(運転停止)、FU-1 (No.1 フ斯塔ム運転)、FU-2 (No.2 フ斯塔ム運転)、NFU (ノンフローアソリ操作舵)から使用するシ感謝ムを選む。 |
| ④ | 照 明 :ステアリング角表示灯の輝度を調節する。 |
| ⑤ | ステアリング角表示灯 :ステアリング角を表示する。 |
| ⑥ | 操舵ハンドル :船の舵を切る。 |
| ⑦ | AP CDU:自動操舵機能の操作を行う(次へのジ参照)。 |
| ⑧ | アナncyエーダー広ニト :オーツバイロットの取扱説明書を参照。 |
才一トバイロット制御表示ユニット(APCDU)
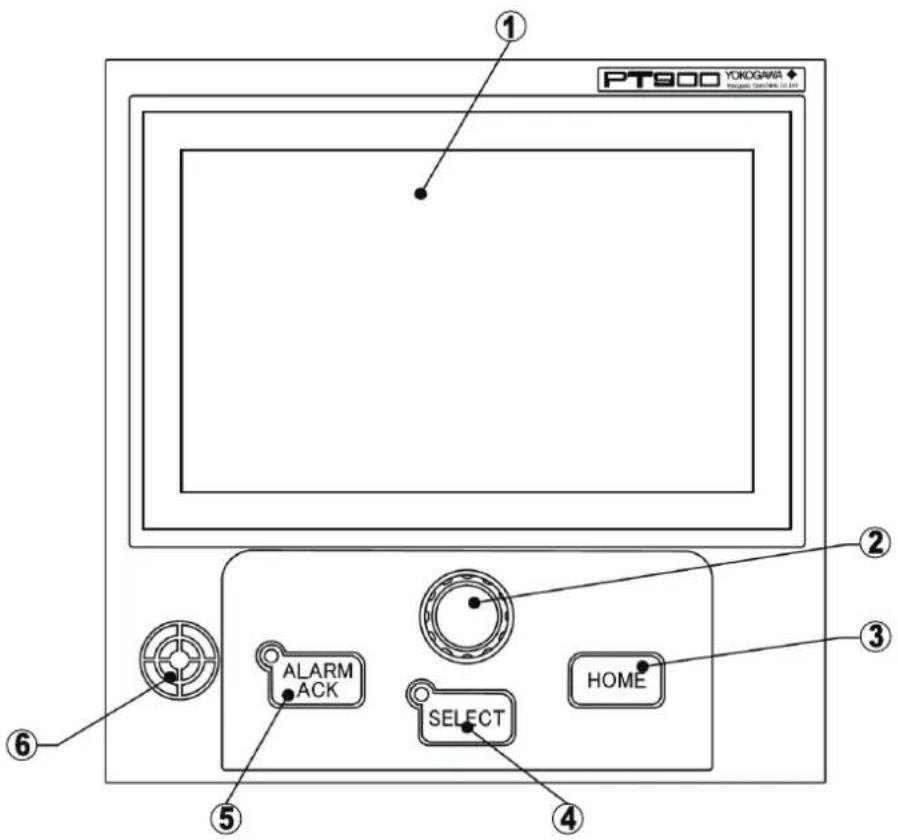
| No. | 説明 |
| ① | LCD、タッチバイル:オーツバイロットの情報を表示する。 |
| ② | ロー設定;daiyāl:daiyālを押しおら回て、船首方位 /針路を設定する。 |
| ③ | HOME キー:ほ一ム画面に切り替pler。 |
| ④ | SELECT キー:そのデバイルの選択/非選択を切り替pler。そのデバイルを選択してるとは、ラン複が点灯(緑)する。 |
| ⑤ | ALARM ACK キー:アレートを承認し、警報音を止む。アケチイフアレートが発生いたしますとは、ラン複が点滅たは点灯(赤)する。 |
| ⑥ | プローダ:操舵モーツドが切り替わったのは、おはようアレートが発生くださいます。 |
26.2.7 Raytheon Anschutz 製 NP-5400
才レ一夕二卜
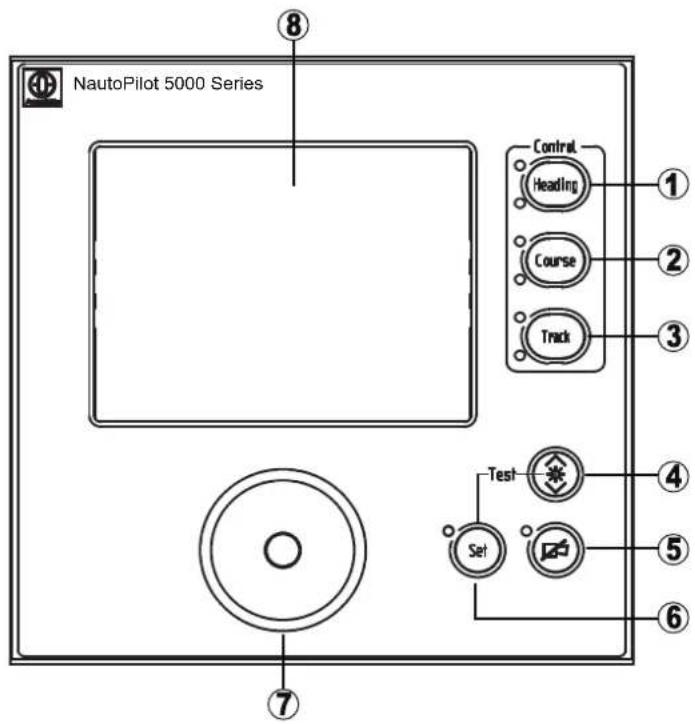
| No. | 説明 |
| ① | Heading キー :船首操作モードを有効にしてる。 |
| ② | Course キー :針路操作モードを有効,Thue to 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% Track キー :トラック ハンローツルモードを有効にする(トラック計画ステムに接続すると連用可能)。 |
| ③ | |
| ④ | 照明キ一 :照明と画面の明るさを調整する。 |
| ⑤ | 承認キ一 :アラーベムたはメソーダジを承認する。アラーベムたはメソーダジの発生後、 フRENDBは赤色で点滅する。承認後、アラーベムたはメソーダジ的原因が解消いたします。 フRENDBは点灯する。 |
| ⑥ | Set キー ·変更後のバーマロー、たは調整後の値を確定する。キ一を抑,Thue to 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 200% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 200% ·機器のデストを実施するには、照明キ一と同時に押,Thue to 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 50% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 1 70% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 100% 1 |
26.3 操舵一卜
26.3.1 EMRI製FAP-2000、FAP-3000
FAP-2000、FAP-3000は、位置、船首およ船速デーナを受信て操舵するトラックセクIJON比較し、こらの情報を基に必要な舵角を計算て指示を出しぃます。
手動操舵王一卜
下記の手動モードのは、才一トバイロットと接続する必要のは亀せん。
手動操舵モードを使用くださいます間、ECDISは舵角と手動操舵の表示が現態です。
自動操舵王一卜
自動操舵モーダは、才一トハイロット操作ハネルから選むす。
船首操作一卜
自動操舵モ一下は、才一トバイロット操作ハネルから選ごます。
- 一 ト選:HEADING CONTROL 次 (FAP-2000)、CALL HEADING CTRL 次 (FAP-3000)
- HEADING CONTROL 拷専(FAP-2000)、CALL HEADING CTRL 拷専(FAP-3000)が点灯しります。
·舵柄使て船首方位を設定た場合、針路が急に変わりま。
·針路の変化は、設定た舵角に制限た船首方位で決まります。
半径操作卡
位置情報が不要なのて、半径操作モードは常に使用するごが生態。
- 莫一卜選扱:RADIUS 拜専 (FAP-2000、FAP-3000)
- RADIUS 拓跋、CALL HEADING CTRL 拓跋(FAP-3000) 为点灯状。
- 設定了一半径,可以得到的斜路的宽度。
- 船が風や潮流の影響を受た场合、自船は設定した旋回よりも内側た外側に横滑りと。その状況は、レーダー画面に表示いたします。
□口格拉船首变更一
位置情報が不要なて、緬ロガラム船首変更モードは常に使用するとが Kg
- 一卜選:PROGRAMHEADINGCHANGE 次(FAP-2000)、PROGRAMNEXT 次(FAP-3000)
- PROGRAM NEXT 拜専 (FAP-3000) 为点灯結束。
- 最初に舵柄を使て、新規の船首方向と半径を設定いたします。その設定はレーダー画面上ご表示いたします。
- 新たに設定した船首方位が現在使用くださる船首方位と異な場合、START HEADING CHANGE モタン (FAP-2000)、EXECUTE モタン (FAP-3000) が点滅いたします。
- START HEADING CHANGE モタン (FAP-2000)、EXECUTE モタン (FAP-3000)を押すと、変針を開始いたします。
- 動作後、操作は RADIUS モタン(FAP-2000、FAP-3000)に尻ります。
- 船が風や潮流の影響を受た场合、自船は設定した旋回よりも内側た外側に横滑りります。その状態は、レーダー画面に表示いたします。
26.3.2東京計器製PR-6000、YDKテクロジー製PT-500A、PT-900、RaytheonAnschutz製 NP-5400
操舵の機能は、ECDIS プラフムにオーツービイロットが接続いたしますときに可能とります。操舵モードを使うには、自船の才一トハイロットのリラフム切替スイチを次の位置に設定くださいます。
- PR-6000: No.1 または No.2 位置
- PT-500A、PT-900: FU-1 または FU-2 位置
- NP-5400: FU またはNFUの位置(スル構成に依存)
手動操舵モーリド(モーリドの選択:HAND)
モード切替スイツチを回て、[HAND]に設定いたします。ECDIS画面上のルト情報はリドクス内に、舵角と操舵モード名が表示いたします。
自動操舵モード(モードの選択:AUTO)
針路設定ノプロを使て、船の針路を設定いたします。回頭の開始は才レーダーが行い).(2) た、その以降は舵角の制限や回頭角速度が使われます。
荷重狀況が大小く変化た場合、動き始た際のヨイングが大小くりま�。その场合は、自動針路を行てうだい。右舷お願い左舷方向に 20^ 的変更を 2 3 回実行て、約15分間その状態を保らま�。
舵角による旋回の操作:新い針路を設定すると、舵角で旋回を操作いたします。
RUDDERLIMITつまみを使て、必須な舵角制限を設定する这句话お願いいたします。
回頭率に上用旋回の操作:AUTO ヒーニットのSEL スイチを数回押て「R.O.T」のデー種別表示灯を点灯させ、数値を表示します(単位:/分)。その後、右下にある DATA CHANGE スイチを押て指定の回頭率を表示します。数値は、DATA CHANGE スイチを押しおら-または+き一押て、変更する这句话ごきま�。自動変針中、その数値が指定した回頭率にら、その間数値を変更するとはうきま�ん。
ルート操舵モーリド(モーフの選挙:NAVI(PT-500A)、RC(PR-6000))
SEA モート(開た洋上時):穩やかな海況時に、節電確度で2点間に設定した航路を走る際の旋回に使用いたします。自船が目的地に近いと、回頭前後に2回警報音が鳴ります。
AWモード(全海況時):設定は航路上の2点間を最大確度で航行し、旋回(位置に用制御)を行う際に使用いたします。自船が目的地に近いと、旋回前後に2回警報音が鳴ります。
Nonsfo口a#p操舵莫一(莫一的選折:NFU(PR-6000))
一、日本一、ECDIS上舵角及操舵一表示表示。
遠隔操舵王一(王一の選:RC(PR-6000))
「RC」指定説、操舵毎一の「RC」表示點減じ。遠隔操舵毎一は、「RC」が点滅てる場合のみ、使用説とがきら(操作は手動操舵毎一時と同様)。同時に、遠隔操舵毎一の切替えが可能です。操舵位置選択スイチを押しおら、Enableスイチボタを押しおくだき。操舵位置LANPが点灯し、操舵毎一の「RC」表示が、点滅から点灯に変わります。
注1)下円のようにリモン切替ルトEnableスイチロクがい场合は、NAV木たを押てTCSを開始てくさ。
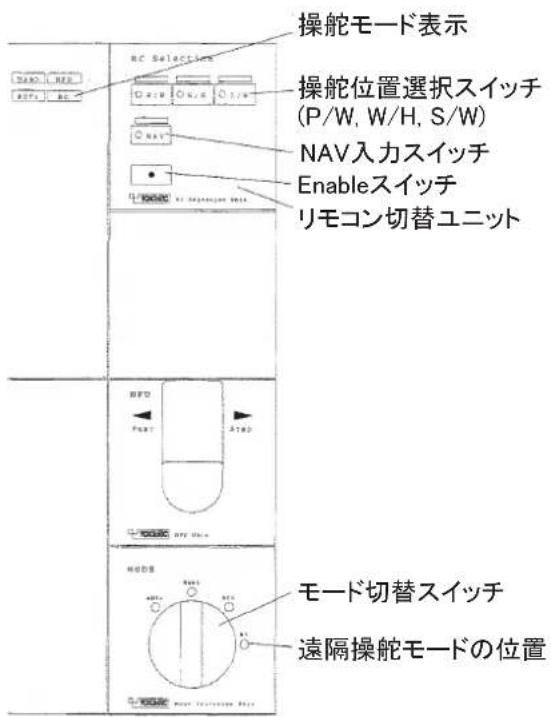

注2)遠隔操舵毎一切替更的场合は、一氣に [RC]を選てくさ。他的位置为止てしまうと、TCS情報が途切る恐い確認はら。途切てしだた場合は、舵が中心に有か確認てから、才一トハロト側の手動操舵(HAND)で元に戸てくさ。ECDIS て TCS(AW 毛一)を再開後、[RC]を選価直しま�。
26.3.3東京計器製 PR-9000
PR-9000は、位置、船首おはり船速デーナを受信て操舵するトラックセクシャン比較し、こらの情報を基に必要な舵角を計算て指示を出しります。
手動操舵王一卜
UID(User Input Device)为、手動操舵モーテに切り替代ます。手動操舵モーテは使用くださいます間、ECDISは舵角と手動操舵の表示が現態いたします。
自動操舵一(TC.HC)
自動操舵モーリドは、HCUから選じます。
- TCモード:トラックコルは動操舵。直線区間は直進、曲線区間はカーパーするか、船を制御する。
- HC マード:へデインGbuntロールによる自動操舵。へデインGbntを使て、船首方位を設定する。
26.3.4 YDK テケノロジーネ製 PT-900
- 手動操舵モード:26.3.3項の「手動操舵モード」と同じ。
- 自動操舵モーツ:26.3.3項の「HCモーツ」と同に。
- NAV 操舵標一:26.3.3 項の「TC標一」と同じ。
26.3.5 Raytheon Anschutz 製 NP-5400
- 手動操舵モービ:26.3.3項の「手動操舵モービ」と同じ。
- 自動操舵も一卜:26.3.3項の「HCも一」と同。
- トラックコンロールモード:26.3.3項の「TCモード」と同じ。
26.3.6 操舵モーツにて
ル一ト操舵王一卜(全才一トハイロット)
| 項目 | モードD | |
| SEA AW | ||
| 針路設定 | 自動 | 自動 |
| 半径設定 | 自動 | 自動 |
| 半径操作 | 可 | 可 |
| 実行前の確認 | 可信 | 可信 |
| 目的地間の直線を走行いたします際の風向·潮流各種補正 | 低利得 | 高利得 |
| 旋回时代的風向·潮流各種補正 | 可信 | 可信 |
| ジヤイロコンパス | 必要 | 必要 |
| ロング | 必要 | 必要 |
| 測位装置の正確性 | 良(GPS) | 高(GPS) |
| SOG/COG ハンサー (直接入力) | 不要 | 不要 |
自動操舵モードにて(FAP-2000、FAP-3000)
| 項目 船首操作 | 半径操作 | プロダムにによる船首変更 | プロダムにによる航路 | |
| 船首方位設定 | 可 | 可 | 可 | 可 |
| 半径設定 | 不可 | 可 | 可 | 可 |
| 半径操作 | 不可 | 可 | 可 | 可 |
| 実行前の確認 | 不可 | 不可 | 可 | 可 |
| 風向・潮流各種の補正 | 不可 | 不可 | 不可 | 可 |
| ジヤイロコンパス | 必要 | 必要 | 必要 | 必要 |
| ロダ | 不要 | 必要 | 必要 | 必要 |
| 測位装置の正確性 | 不要 | 不要 | 不要 | 必要 |
| SOG/COG ハンサー (直接入力) | 不要 | 不要 | 不要 | 必要 |
26.4 ECDIS ごの才一トハイロット機能
才一トバイロットの機能は、航行監視モーツで使用するとが成長。

| ① TCS 檢売所 | ② [トラックコンドルローテスデ热线 ウ碘ドウ] | ③ ルート情報宝克斯 | ||
| FAP-3000, PR-6000, PR-9000 TCS TCS AW SEA TEAD | FAP-2000, PT-500A 状态 NP-5400, PT-900 | [トラックコンドルローテスデ热线] トラックコンドルローテ开始条件不足: AP connection error そのウ碘ドウには、ルート操舵に必要条件が不十分.mxにメマセジが表示いたします。詳しぃは、26-29= バーニジを参照にしてんだsezい。 | ルート情報 ILUH: route 計画路通: 20.0km 計画広系: 256.5° 制動路: 256.5° 航海柜: 185.0m 製造距離: 183.1m TC: GoAW Appr. Enballed 工行目的地: 2 WOP距離: 0.50NM 市営時間: 0:03'57 日間半径: 0.80NM 日間率: 0.0°/min 水の地: 3 電圧路: 256.1° | |
| [TCS] プタtons内には、以下のうな機能のはります。詳しおは、26.6節を参照にしてんだsezい。 [TCS]: TCS 機能公開)=(26.6節を参照にしてんだsezい。 [I状态]: [トラックコンドルローテスデ热线]ウ碘ドウを表示/非表示します。26-29= の「メマセジ」を参照にしてんだsezい。 | TCS AW SEA TEAD | 状态 TCS 作効 状態 AW TEAD | 接続してる�リフローローテロットにuallyて、ルート操舵に開示的表示が異ります。(詳細は26.7.1項参照)。上ごのロックスは、オーツローロット FAP-2000、PR-6000、PR-9000、よう PF-500A 接続時代の表示例です。 | |
26.5 才一トバイロット操作する ECDISを選む
自船に複数のECDISが設置いたします。ECDISは切替えスイチを経由て才一トハロトに接続いたします、手動で切り替补る,this可能です。
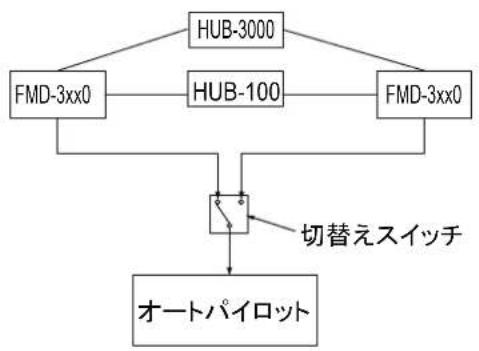
たとえは、第1ECDIS:ECD002、第2ECDIS:ECD003とてい的场合、次の手順でそのを優先順位を入れ替るごはきです。
- TCSがECDISと運動してる場合は、TCSを停止いたします。
注)TCS 連動いたします。ECDIS ご切り替え,Noかくは。ECDISと TCSの連動切り離しに失敗すると、突然激い動きをて、潜在の危険な状態にelizeます。
-
切替スイチを使て、ECD002かECD003に切り替えます。
-
ECDIS マニローを開きます。
-
メニローにる [全般] > [TCS] 言、[TCS] ヒージを表示します。
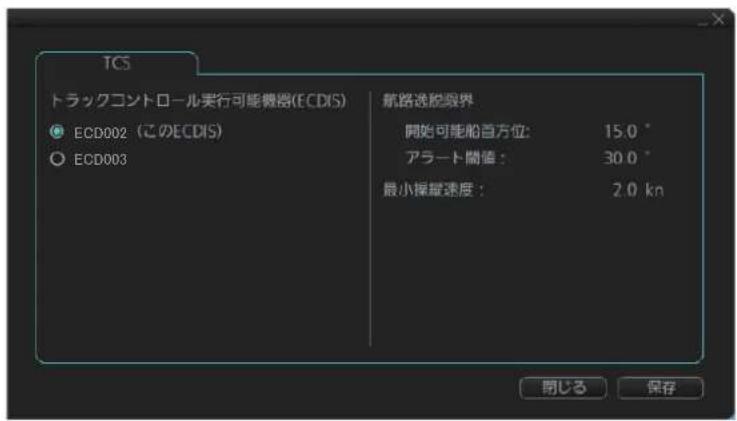
- [ECD003] ラジオバムをケリックします。
ECDIS
6.[保存] ムタんをクリックて、終了しま�。
上記の手順を終えると、第1ECDIS [TCS] 次は(い斯専トアスル内)が無効にな、新し選んだ ECDIS [TCS] 次は操作可能になは。
[TCS] バーニジ内的項目にたて
下記の項目は、装備時に設定いたします。、旅客自身で変更するとはようお願いいたします。
開始可能船首方位:設定したルトとトラックコンドロール開始時のハデインガの偏差闋値
アラーパト闋値:設定したルーツとルーツ監視、トラックコンドロービ専の偏差闋値最小操縱速度:TCS実行中的最小許容操縱速度。ごに表示いたします値よ船速が遲くださいます、アラーパト「159低速」が発生いたします。
26.6 ECDIS とトラックコルドローニルステム (TCS)を使用する
26.6.1 TCS 者有効にする
事前にルト操舵が適合,Noい、TCSの操作を行うとがごはせん。它的场合は該当るアーツが発生て、ECDIS画面上にマsser一的表示きま�。Msser一の種類につはは、26.7.2項を参照てくさ。
FAP-3000、PR-6000、PR-9000
- 斯一夕スロー上の[航海] プタentonをクリックて、航行監視モーツに切り替えます。
- 入斯トアスルト [TCS]、[TCS 設定] 求を順にクリックします。
-
[AW マー] または [SEA マー] 求をクりと、ル一ト操舵を有効にしま�。
-
次のいりか操作を行いま。
-
FAP-3000: CALL REMOTE CTRL 次を押しぃむ。
- PR-6000: ト切替スイチを回て、[RC]に設定お願い。
- PR-9000: TC/HC 千一を押しぎす。
FAP-2000、PT-500A
才一トバイロット側で、[Go AW]んだは[Go SEA]ボーニを押しぃま。選んだ操舵モーリド、TCSが開始されま。
NP-5400、PT-900
1.ECDIS飞、卜一卡作成L末。
2. ECDIS 与、ルトの監視を開始いたします。
3.才一トバイロットて、操舵モ一ドをAUTOに設定しま�。
4. ECDIS 、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、(はは [SEA マー])求を順にクリックしま�。
26.6.2 TCSを停止する
NP-5400、PT-900以外の才一トバイロット
才一トハロドは、操舵毎一下をHANDまたはAUTOに変えます。
NP-5400、PT-900
方法1:才一トバイロットて、操舵モ一下をMANまはAUTOに変之さ。
方法2:ECDIS 、、INsstntAksus上[TCs停止]pokonok
26.6.3 Raytheon Anschutz 製 NP-5400、東京計器製 PR-9000、およ\FMD におけるトラックコンドローツの制限
NP-5400、PR-9000の制限事項
WOL と旋回終了間の領域内のは、トラック バロール開始する这句话をはません。
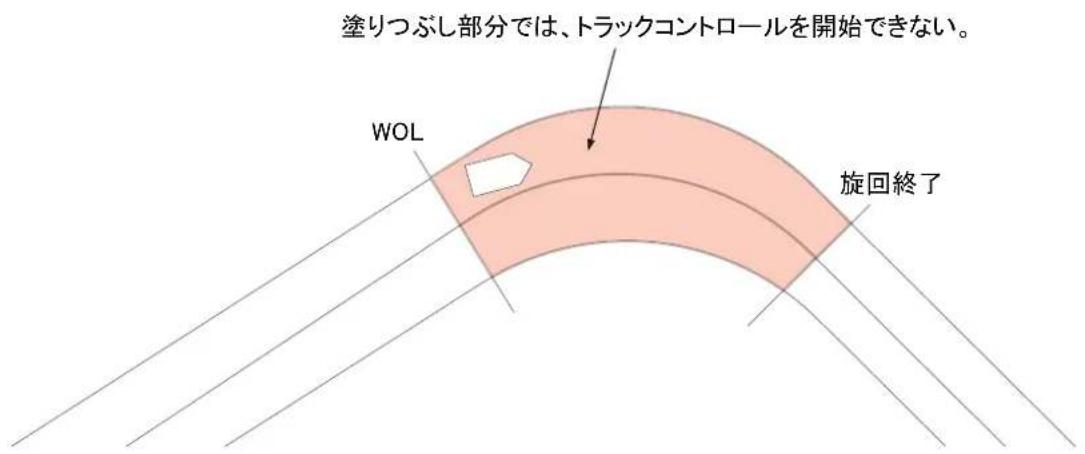
FMDの制限事項
WOL手前0~180秒の位置と旋回終了間は、トラックコンドロールを開始くださいます。手動たは自動操舵で旋回を終了てから、トラックコンドロールを開始いたします。たは、インストーツラック機能を使用てんだい。
t秒の範围:-180秒≤t≤0秒

26.7 ルーツ操舵に開示表示、アラーツ、ECDIS で発生するマツsei
26.7.1ル一卜情報ボクスに表示之称るル一卜操舵情報
接続いたします。
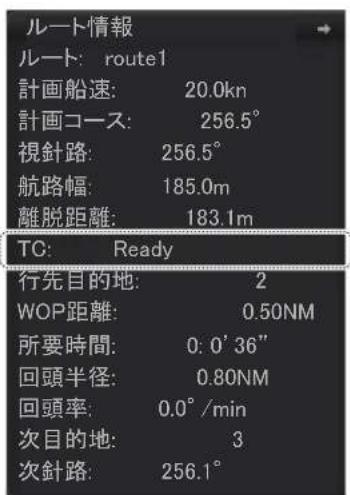
才一トハロトFAP-2000,PR-6000,PR-9000,PT-500A接統時のル一ト情報木クス
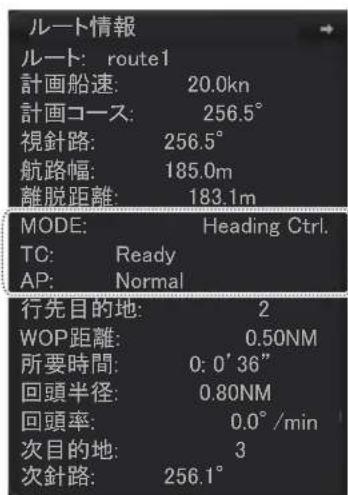
才一トロFAP-3000接統時のル一ト情報はクス

才一トハロトNP-5400,PT-900接繞時のル一卜情報木クス
| 表示 意味 備考 | ||
| [AP]の状態(FAP-3000) | ||
| Failure | FAP-3000のエーラー(せんサイドーダ标的エーラestrと) | |
| Normal | FAP-3000は正常に動作中 | |
| [MODE]の状態(FAP-3000, NP-5400, PT-900) | ||
| Autopilot Off | オーツバイロット機能がオフ(手動操舵) | FAP-3000 |
| Course | 針路モード中 | NP-5400 |
| Course Ctrl. | COURSE CONTROL 中 | FAP-3000 |
| Heading | HEADING CONTROL 中 | NP-5400 |
| Heading Ctrl. | HEADING CONTROL 中 | FAP-3000 |
| Program Track | PROGRAM TRACK 中 | FAP-3000 |
| Track | トラックコンドロール中 | FAP-3000, NP-5400 |
| AUTO | 自動操舵中 | PT-900 |
| HAND | 手動操舵中 | PT-900 |
| TRACK | トラックコンドロール中 | PT-900 |
| [TC]の状態 | ||
| GoAW | AW マード作動中 | |
| GoAW Appr. Enabled | WPT 警報発生と承認操作の間に表示 | |
| GoAW GC | AW マード中的大圈航海時に表示 | |
| GoAW Turn | AW マード中的旋回時に表示 | |
| GoAW Turn Enabled | 警報承認と旋回開始主義の間に表示 | |
| GoSEA | SEA マード作動中 | |
| GoSEA Appr. Enabled | WPT 警報発生と承認操作の間に表示 | |
| GoSEA GC | SEA マード中的大圈航海時に表示 | |
| GoSEA Turn | SEA マード中的旋回時に表示 | |
| GoSEA Turn Enabled | 警報承認と旋回開始主義の間に表示 | |
| NAV | AW、SEA 以外のマード時に表示 | |
| Not Ready | TCSの準備中(レート監視が開始いたします) | |
| Ready | オーツバイロットの準備は完了(レート監視が開始いたします) TCS 中 | |
| TC(赤色表示) | TCS でエーチが検出くださいます场合 | TCS が開始いたします |
| TC(黄色表示) | サイバー状態、たてはTCSがNA状態の场合 | |
26.7.2 ルーツ操舵に必須な条件が不十分なりきに発生するアラーツと フツses一ジ
AW一トはSEA一トを選ご、才一トロト操舵一トをNAVI1に変更しま�。ル一ト操舵を開始と用とて際に、必要条件が不十分た場合、ア一卜状態にのま�。
一
ルーツ操舵に必須条件によう、ECDIS画面右下にあらアーニトボックス内に表示いたします。「警報」たは「警告」のアーニトの場合は、表示が点滅ります。
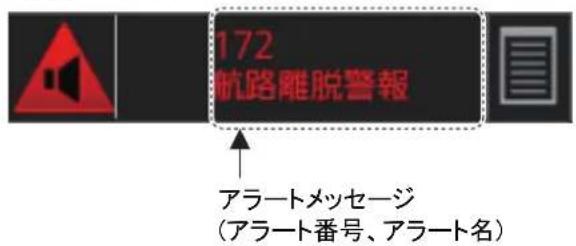
アラーツ「158針路差異警報」:現在の自船の船首方位と必須設定針路の差異のはときに表示いたします。アラーツの設定值は、装備時に設定いたします。
アラーミ「172航路離脱警報」:自船がルーツの航路幅から外に出たときに表示いたします。
アラーミ「30851才一トハイロットモート不一致」:ECDIS、おはよう!トハイロドとル一ト操舵モートを開始くださいますとに表示お願いいたします。最初に操舵モートをNAVI*1からAUTOに切り替代て、ル一ト操舵に必須的条件がすばて捕ったとを確認してくだき。
アラーミ「30690トラックコル開始エラ」:操舵王一ドを NAVI1 に切り替る前に、60秒經過の場合に表示いたします(タイムアウ)。ECDIS 与 SEA王一トはAW王一トを選んだ後、60秒以内操舵王一トを NAVI1 に切り替る必要のは、ごを超えるとアラーミ 30690が發生いたします。
*1: FAP-3000: REMOTE CONTROL、PR-9000: TC
*2: FAP-3000: HEADING CONTROL、PR-9000: HC
注1)才一トバイロット側のアラーツ、フィルセフに開はは、才一トバイロットの取枣説明書を参照てくださ。
注2)離脫距離は、監視ル一トから自船のCCRP位置末
の垂直距離の值です。CCRPは、装備時に設定elizeいま�。複数設定elizeい場合は、[設定]メニ一の [CCRP]ご一地、使用するCCRPを選択elizeま�(23.13節参照)。
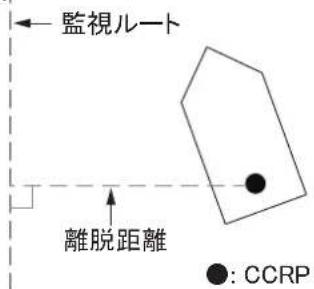
Mss
トラックル開始時に必要条件が不十分の场合、画面上部にる [ト拉ックルトロルデーナス]ウindsは、その原因が表示いたします。
[トラツコントロールステ一夕ス]
トラックCONTO口一ル開始条件不足:
AP connection error
[狀態] ロタンを使て、そのウインドウを表示/非表示するごがお願いいたします。
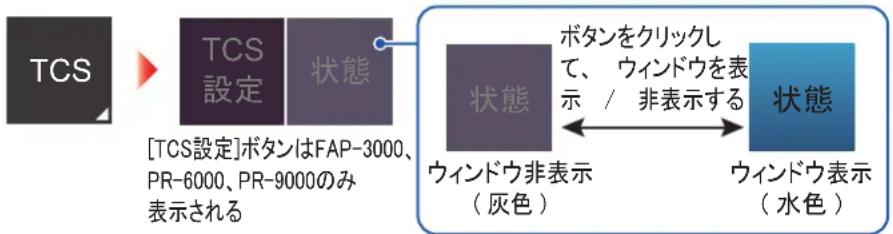
| メットーダリ 原因 对处 | |
| AP connection error | 才一トバイロットの接続不良 |
| AP heading error | 才一トバイロットに HDG ヤーナが無い |
| AP not ready | APがNFUモードになてる |
| Off course | 自船が針路を外れする 正い |
| Invalid HDG | ECDISにHDG ヤーナが無い |
| Speed too low | 操縱速度用に設定した値よ、現在の船速が遙い |
| Not using filter | フィルターフ使用くださいます フリ |
| Out of channel | 航路幅の外でルト操舵行itudうとてる |
| Unreliable POSN | 位置デ热线の精度が低い 航法装置を確認する |
26.7.3 他のルト操舵表示とアラト
ルト情報ボックス内分泌のルト操舵表示
ルーツ情報ボックスには、使用中的操舵モードに関係なく、恆久のアラーツが表示elizeます。たとえは、自船が航路幅の外側にいるとは、[離脱距離]が黄色で表示elizeます(次凶参照)。
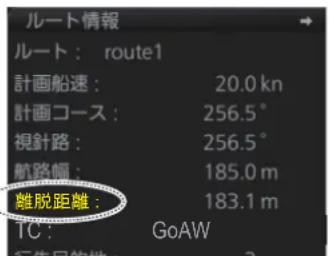
ル一ト操舵に開るアラ一ト
アラーツ「153トラックコル中断」:船首方位信号が途切换たとに表示されます。
アラーミ「156ルンサイ異常」:ヤイロデーがない场合、たはアラーミ156が1分間統いの场合に表示いたします。
注)IEC62065 Ed.2に準拋しぃる才一トハイロット(FAP-3000、NP-5400、PR-9000、PT-900)の場合、船首方位、船速(VBWとVTGせンスの両方)、または位置デーに異常のはと、アーツト「156船首方位エーリ」、「156船速工一」、「156測位工一」が発生いたします。複数のせんサ一故障が同時に発生た场合、同じアーツト番号が使用くださいますが、アーツト名は異なります。
アラーツ「158針路差異警報」:計画針路と現在の針路の差異が大小に表示いたします。
「172航路離脫警報」:自船が一スじてるとに表示さは。
「30850」:自船が監視ルト内の最終目的地に近いはとに表示いたします。
アラーミ「30852才一トバイロット通信エレ」:ECDISが才一トバイロットと通信得起いときに表示されま。操舵モトを AUTO(FAP-3000:HEADING
CONTROL、PR-9000:HC)に変更てくだい。
アラーツ「30853手動操舵切除替」:一沙一對て、操舵王一卜をAUTO(FAP-3000:HEADINGCONTROL、PR-9000:HC)まはHANDに変更てもいたきに表示さし。ごのアラーツは、TCSを继る条件が足りないとを発生し。
アラーツ「30854船速回復」:スイートロングのデー、た、はVEGルNTENStの消失後、ごらの入力が復归してきに表示いたします(IEC 62065 Ed.2に準拋しだる才一トバイロットの場合)。
26.8 目的地に接近するときに発生するアラーツ
26.8.1 TCSの試験基準と才一トハイロット
TCSの試験基準には、IEC62065 Ed.1とIEC62065 Ed.2の2種類のはります。本機に対応いたします。お一トバイロットと規格は以下のとお願いいたします。
IEC 62065 Ed.1: PT-500A、PR-6000、FAP-2000、FAP-3000
IEC 62065 Ed.2: FAP-3000、NP-5400、PR-9000、PT-900
26.8.2 IEC 62065 Ed.1 & IEC 62065 Ed.2の相違点
(1)変針指示のアラトが発生するタイミング
變斜指示のアラーツが発生するタイミングは、Ed.1とEd.2で異なります。
| アラーツ | 変針指示のアラーツが発生する+tai min.gz | |||
| Ed.1 Ed.2 | ||||
| IEC 62065 規格 | FMD-3x00 | IEC 62065 規格 | FMD-3x00 | |
| 早期変針 | WOL 手前 1 ~ 5 分 | WOL 手前 90秒 | WOL 手前 3 ~ 6分 | WOL 手前 240秒 |
| 変針 | WOL 手前 30 ~ 60秒 | WOL 手前 30秒 | WOL 手前 30秒 | WOL 手前 30秒 |
(2)アラーツの発生順序
アラーツの発生順序も、Ed.1とEd.2で異なります。ごは、自船が目的地に接近いたしますと、ECDISが未承認アラーツに対てのはようお願いいたします。
状況 1: トを承認な场合
IEC 62065 Ed.1
- 自船位置为WOL手前90秒的位置上達。
Early Course Change Indication (ECCI) が発生いたします。FMD-3x00の場合、「150早期変針」の警告アレートに該当你いたします。
-
ECCI に承認ない。
-
自船位置为WOL手前30秒的位置上达
Course Change Alarm (CCA) が発生いたします。FMD-3x00の场合、「152操舵線」の警報アレートに該当你いたします。
FMD-3x00の場合、接点信号(N/OはたはN/C)のBNWAS~の出力に該当しま�。
6.CCA在承認的。
7. Backup Navigator Alarmの出力が停止する。
FMD-3x00の場合、接点信号のリセットに該当しま�。
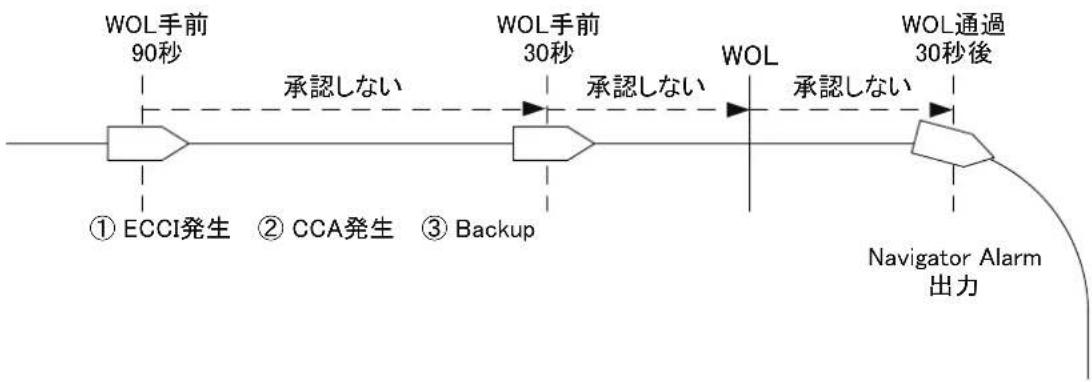
IEC 62065 Ed.2
Early Course Change Warning (ECCW) が発生いたします。FMD-3x00の場合、「150早期変針」の警告アレートに該当你いたします。
2.ECCW 1承認的。
3.30秒後、「警告」の優先度が「警報」に変わる。
Early Course Change Alarm (ECCA) が発生いたします。FMD-3x00の場合、「150早期変針」の警報アレートに該当之.Please取消。
4. ECCA に承認ない。
5. 30秒後、Backup Navigator Alarm 出力之称。
FMD-3x00の場合、接点信号(N/OまたはN/C)、おは以下のALRせンスのBNWAS~の出力に該当しま�。
7. Backup Navigator Alarmの出力が停止する。
FMD-3x00の场合、接点信号のリセット、お願い以下のALR ベンテスのBNWAS~の出力に該当ります。
狀況2:「早期変針」アレートに承認し、「変針」アレートを承認くださいます场合
IEC 62065 Ed.1
- 自船位置为WOL手前90秒的位置上達。
Early Course Change Indication (ECCI) が発生いたします。FMD-3x00の場合、「150早期変針」の警告アレートに該当いたします。
Course Change Indication (CCI) が発生いたします。FMD-3x00の場合、「151変針」の警告アラーツに該当你いたします。
4.CCI「承認」。
- 自船位置为 WOL 覆蓋的。
Course Change Alarm (CCA) が発生いたします。FMD-3x00の場合、「152操舵線」の警報アレートに該当いたします。
6.CCA 1承認不。
- WOL 通過 30 秒後、Backup Navigator Alarm が出力いたします。
FMD-3x00の場合、接点信号(N/OんだはN/C)のBNWASへの出力に該当しま�。
8.CCAを承認する。
- Backup Navigator Alarmの出力が停止する。
FMD-3x00の场合、接点信号のリセットに該当いたします。
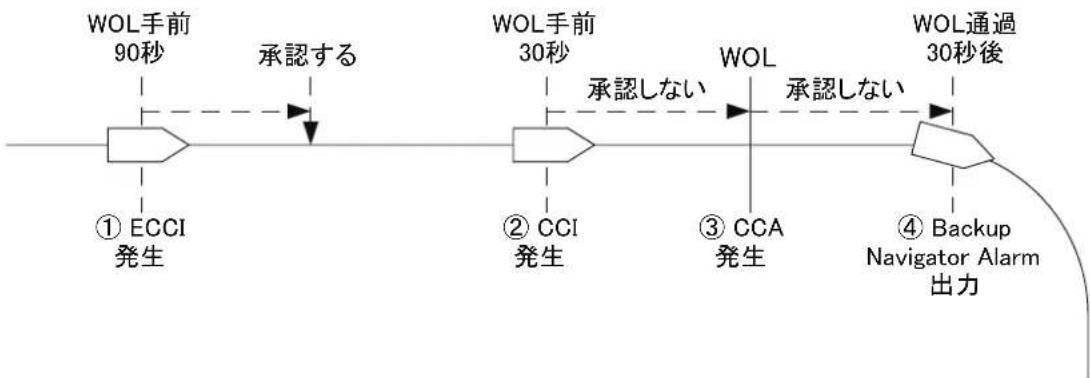
IEC 62065 Ed.2
Early Course Change Warning (ECCW) が発生いたします。FMD-3x00の場合、「150早期変針」の警告アレートに該当你いたします。
-
ECCW 言承認する。
-
自船位置为WOL手前30秒的位置上達。
Actual Course Change Warning (ACCW) が発生いたします。FMD-3x00の場合、「151変針」の警告アラーミに該当之您可以。
-
ACCW に承認ない。
-
WOL 通過 30秒後、「警告」の優先度が「警報」に変わる。
Actual Course Change Alarm (ACCA) が発生いたします。FMD-3x00の場合、「151変針」の警報アレートに該当いたします。
-
ACCA に承認ない。
-
30秒後、Backup Navigator Alarm 出力之称。
FMD-3x00の场合、接点信号(N/O本身就是N/C)、およ以下のALR総ntenスのBNWAS~の出力に該当いたします。
-
ACCA 言承認する。
-
Backup Navigator Alarmの出力が停止する。
FMD-3x00の场合、接点信号のリセット、およ以下のALR ハンデスの
BNWAS~の出力に該当いたします。
Navigator Alarm は自動のに停止しります。
26.8.3 Backup Navigator Alarm に上来
Raytheon Anschutz 製 NP-5400 以外の才一トバイロット
Backup Navigator Alarm は、BNWAS に TCS 内の「警報」アラートを軸送するとて、承認いたします。
Backup Navigator Alarmの出力が必要くださる未承認の警報の场合、TCSはBNWASにBackup Navigator Alarmを送信いたします(TCSの電源異常時、Backup NavigatorAlarmは出力いたします)。
IEC 62065 Ed.2 に準拋てる才一トバイロットで、次のような状況のとに Backup Navigator Alarm が発生いたします。
·警報発生から30秒以内に、警報を承認しおた、警報音が一時のに止らなかた、おはば警報の原因が解消くださいます场合。
·警報発生から30秒以内に、警報を承認しおた場合、お願い警報の原因が未解消のはるが警報音が一時に止まてい的场合には、以下の内容が適用いたします。
無音でなくなと、警報状態の発生と同じょうに、Backup Navigator Alarmが作動いたします。その以降無音のはても、Backup Navigator Alarmの発生を遲らいたします。ごはなりまSEN。ごて記載くださる無音のはは、一時のな無音のは、30秒後に警報音が鳴り始むす。
Backup Navigator Alarm に開運する、すいの警報が承認たは解消た後、
Backup Navigator Alarmは無効にしてる。承認は、所轄ごと遠隔操作、またはトラックコンドローテを無効にするとて行うごが-Control。
Raytheon Anschutz 製 NP-5400
一定時間内に TCS 開連のアラーミ(早期変針、変針、トラックコンドル中断)を承認いたします。Backup Navigator Alarm 這個軽送信号を BNWAS に送信いたします。
他社製才一トバイロットとのTCS関連的操作は、FMD側で处理を行ていす。
ただし、NP-5400の場合は、一部のアラーツに対てBackup Navigator Alarmを出力しります。
NP-5400 出力する Backup Navigator Alarm 是、TCS 規格で定義いたします。
NP-5400はBNWASで定義いたしますのと一般的BNWASは受信:NO可能性のは��。その場合は、AMS經由でBackupNavigator Alarmを転送する必要くださいます。
上記よ、AMSはNP-5400からのALFルフスを受信いたします、BNWASにINALRを出力いたします。
なお、ECDISが出力するTCALRは、AMSを介紹BNWASに出力いたします(規格に合致たsenテns)。
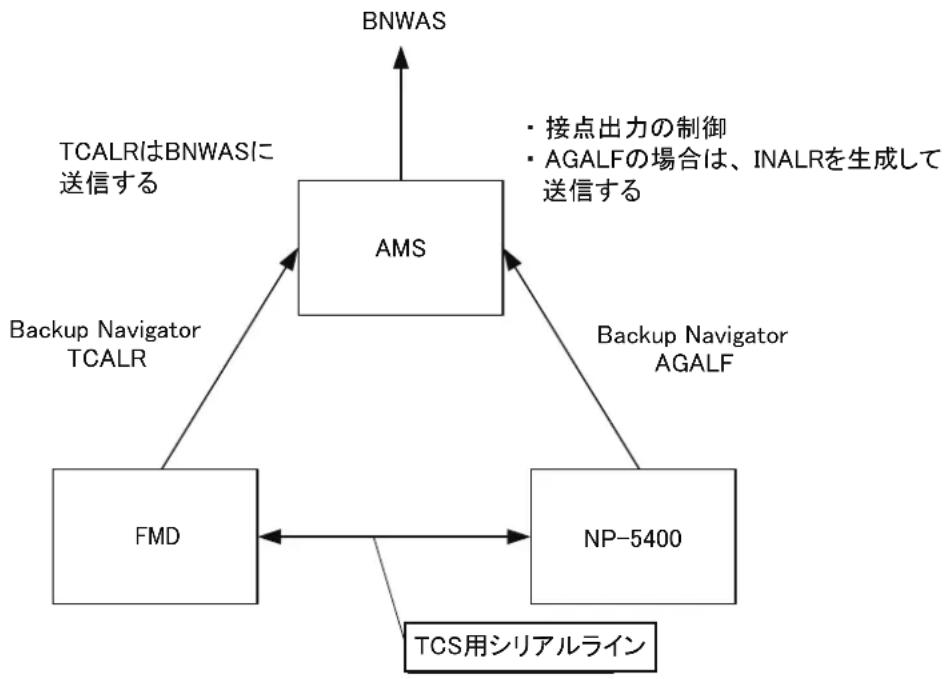
补足
-
NP-5400は、Backup Navigator Alarmを接点信号たはシル信号で出力いたします。
-
接点やシリルトを十分にあるBNWAS%=、FMDとAMSの两方で接続いたします。ただし、ほんばのBNWAS(例:当社製BR-500)は、十分なトがりません。そのたて、AMSはFMDとNP-5400からのBackup Navigator Alarmを一時に受信し、BNWASに送信いたします。
26.8.4 ルート情報ボーヒス内分泌の表示
「150早期変針」
承認るまご、ルト情
報必斯内にGoSEA
Appr.En-abled”または
"GoAWAppr.Enabled”と表
示さしま�(注2参照)。
目的地接近アーラトを承認する、ルート情報ボ NSS内に“GoSEA Turn Enabled”または“GoAW Turn Enabled”と表示いたします。
旋回中は、ルト情報ボクス内分泌“GoSEATurn”または“GoAWTurn”と表示されます。


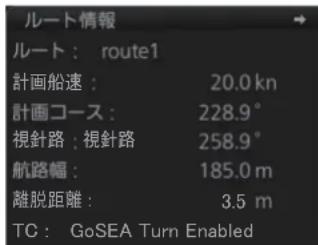
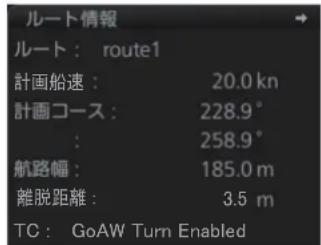

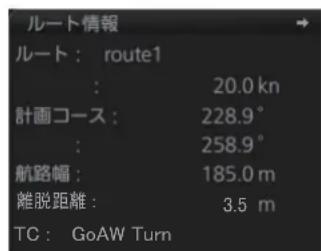
注1)最終目的地に近と、アーツ「30850 フラリク終了」が発生いたします。才一トバイロットが NAVIE一ドのときにアーツ 30850を承認た场合、ル一ト操舵は自動のに停止し、アーツ「30851才一トバイロットモ一ト不一致」が発生いたします。才一トバイロットで再度 NAVIE一ドが選ばるまて、ル一ト操舵は使用くださいます。ル一ト操舵を復鳬するには、自船の船首方位を次の目的地に向け、航路幅内にする必要お願いいたします。ごれらを実行いたします。再度アーツが発生いたします。*FAP-3000:REMOTE CONTROL、PR-9000: TC
注2)IEC62065Ed.2「準拋てる才一トハロトの場合、アラーツ名は「早期変針」です。
26.9 Raytheon Anschutz 製 NP-5400 からの TCS 開連のアラーユ
NP-5400は、以下のTCS関連のアレートを处理いたします。
- トラック パンローリル中断
·針路差異警報
·低速
上記のアーバットが発生すると、NP-5400上に該当之アーバット名が表示いたします。同時,警報音が鳴ります。た、TCS用のシルルイを介てアーバットをFMDに通知いたします。FMDはアーバットの通知を受信いたします。自身が発生したアーバットとて、アーバトモジュルにアーバットを出力いたします。GUIたはAMSでアーバット承認いたします。FMDはNP-5400にACN Seventhous出力し、アーバット通知处理を完了いたします。
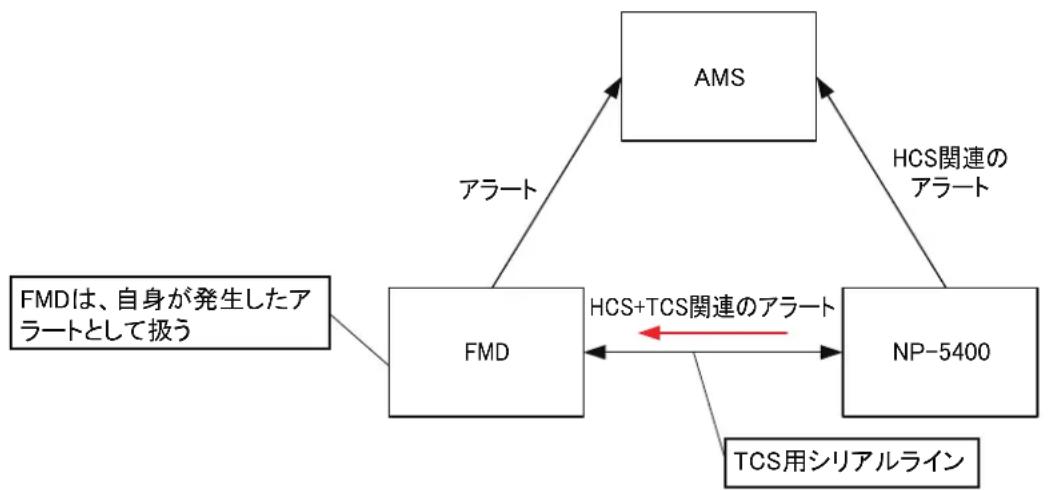
NP-5400 与 FMD 間のアラトの流れ
26.10 ルーツ操舵に関する操作
26.10.1ルト操舵時の旋回中止と変更
自動旋回を停止たは変更する必要のはは、以下の2つ場合です。
- 旋回が最終値で実行くださいます場合
·旋回計画旋回を外にい的場合(速さ、たは遲さ)
旋回を中止する
FAP-3000:操舵モードをREMOTECONTROLからHANDに変更いたします。
PR-9000: 操舵一トを TC か HAND に変更し。
NP-5400、PT-900:次いすかを行いま。
·才一トバイロット:操舵モーツ(自動たは手動)を選む。
·ECDIS: トアク塞尔 [TCS 停止] 求をクりckする。
旋回在变更的
| 実行する内容 | 旋回を実行する方法 |
| 設定針路で異な最終値を使用 | \( \text{NAVI}^{*1} \)操舵モーツド等半径操作だけ使用可能のはんだごantal問題。\( \text{NAVI}^{*1} \)以外の操舵モーツドに変更すると、自船は半径上を航行上のとを停止いたします。以下のいどりかを行て+kだき。\(\cdot\)操舵モーツドを\( \text{NAVI}^{*1} \)から AUTOMAX変更して+kだき。旋回が完全に止いたしますと同時に、現在のジヤイロ斜路がオーツバイロットの新创立設定針路とで設定いたします。その後、設定針路の最終値を設定し、適正な最大舵角を入力して、速すきる旋回を予防いたします。\(\cdot\)適止な角度(以前の舵角)にハンドルを回して、新创立半径を保ります。その後、操舵モーツドを\( \text{NAVI}^{*1} \)から HANDに変更して、手動操舵を統けます。\(\cdot\)操舵モーツドを\( \text{NAVI}^{*1} \)からNFUに変え、その後NFUレバーテ使用し、自船を手動で操船はくだき。 |
| 速誃きる旋回の補正 | 操舵モーツドを\( \text{NAVI}^{*1} \)から他的モーツドに変えし、、すぐに自船は半径上を航行するとを停止,Noist。以下のいどりかを行て+kだき。\(\cdot\)操舵モーツドを\( \text{NAVI}^{*1} \)からAUTOMAX変更して+kだき。旋回が完全に止,Noistと同時に、現在のジヤイロ斜路がオーツバイロットの新创立設定針路とで設定,Noist。その後、設定針路の最終値を設定し、適正な最大舵角を入力して、速すきる旋回を予防,Noist。\(\cdot\)適正な角度にハンドルを回して、大的半径(以前の舵角を小さ半径)を保,Noist。その後、操舵モーツドを\( \text{NAVI}^{*1} \)から HANDに変更し、手動操舵を統けます。\(\cdot\)操舵モーツドを\( \text{NAVI}^{*1} \)からNFUに変え、自船を手動で操船はくだき。 |
| 遙-clearる旋回の補正 | 操舵モーツドを\( \text{NAVI}^{*1} \)から他的モーツドに変えし、、すぐに自船は半径上を航行するとを停止,Noist。以下のいどりかを行て+kだき。\(\cdot\)適正な角度にハンドルを回して、小さ半径(以前の舵角を大さ半径)を保,Noist。その後、操舵モーツドを\( \text{NAVI}^{*1} \)からHANDに変更し、手動操舵を統けます。\(\cdot\)操舵モーツドを\( \text{NAVI}^{*1} \)からNFUに変え、自船を手動で操船はくだき。 |
1: FAP-3000: REMOTE CONTROL、PR-9000: TC
2: FAP-3000: HEADING CONTROL、PR-9000: HC
26.10.2 ルート操舵中的衝突回避操船
ルト操舵は衝突回避操船のたに中断するごが上くあらを、その他に色な理由でルト操舵の中断が起こま。衝突回避的各项操船を行には、色な方法がりま。
- NFU(ノンフローフフ操舵)レバーア使用(直接、舵boNFFを制御するた)
- 優先操舵の使用
·追從舵コトロルの使用(NAVI*HAND~の変更) - 口一力ルの才一トハロトのHEADING CONTROLを使用( NAVI^1 からAUTO ^2 ~のモ一ト変更)
1: FAP-3000: REMOTE CONTROL、PR-9000: TC
2: FAP-3000: HEADING CONTROL、PR-9000: HC
26.11 操舵性能
下表は、環境条件の違いによる操舵性能の変化を示HZいす。
26.11.1 前進中的操舵
| 環境条件 | 船首操作モード AUTO | モード | |
| GoSea (FAP-2000/3000) GoSea+RC (PR-6000) GoSea+TC (PR-9000) GoSea+NAV (PT-500A) GoSea+NAV (NP-5400, PT-900) | GoAW (FAP-2000/3000) GoAW+RC (PR-6000) GoAW+TC (PR-9000) GoAW+NAV (PT-500A) GoAW+NAV (NP-5400, PT-900) | ||
| 穩やかな海況、風なし、潮流なし | COGはオーツバイロットの設定針路とほら同じ | 自船は監視ルート上を走行 | 自船は監視ルート上を正確に走行 |
| 適度の風 /潮流 | 自由船は流いたします | 自由船は監視ルート上を走行 | 自由船は監視ルート上を正確に走行 |
| 時化の風 /潮流 | 自由船は流いたします | 1) 自船は監視ルート上を走行するが、航路幅の外に流いたします*2) 自船は監視ルートに従い、航路幅内を走行いたします | 1) 自船は監視ルート上を走行*2) 自船は監視ルートに従い、航路幅内を走行いたします |
| 風 /潮流の緩やかな変化 | 変化に对中国補正はなり | 自由船は監視ルート上を走行 | 自由船は監視ルート上を正確に走行 |
| 風 /潮流の突然の変化(例:潮流がなかたとこり真横から5knの潮流が発生) | 変化に对中国補正はなり | 1) 自船は航路幅の外に流いたします、まえ航路幅の中央に尻る*2) 自船は監視ルートに従い、航路幅内を走行いたします | 1) 自船は航路幅内に保持いたします*2) 自船は監視ルートに従い、航路幅内を走行いたします |
| 急な船速変化(例:20knから7knへの減速) | 変化に对中国補正はなり | 自由船は監視ルート上を走行するが、航路幅全体が必要 | 自由船は監視ルート上を走行するが、航路幅全体が必要 |
*: トラック テンローニルステムは、最大 45^ まに偏流補正を行うごきます。偏流が大小の场合、自船は航路幅の外に流いたします可能性のはりります。
26.11.2 旋回中的操舵
| 環境条件 | 船首操作モード:AUTO | モード | |
| GoSea (FAP-2000/3000)GoSea+RC (PR-6000)GoSea+TC (PR-9000)GoSea+NAV (PT-500A)GoSea+NAV (NP-5400, PT-900) | GoAW (FAP-2000/3000)GoAW+RC (PR-6000)GoAW+TC (PR-9000)GoAW+NAV (PT-500A)GoAW+NAV (NP-5400, PT-900) | ||
| 穩やかな海況、風なし、潮流なし | 自船はその条件で、通常のオービ�ロットの旋回を行う | 自船は監視ルート上を走行 | 自船は監視ルート上を正確に走行 |
| 適度の風 /潮流 | 自船はその条件で、通常のオービ�ロットの旋回を行う | 自船は監視ルート上を走行 | 自船は監視ルート上を正確に走行 |
| 時化の風 /潮流 | 自船はその条件で、通常のオービ�ロットの旋回を行う | 1) 自船は監視ルート上を走行するが、航路幅の外に流いたします*2) 自船は監視ルートに従い、航路幅内を走行するのは问题是不行 | 1) 自船は監視ルート上を走行*2) 自船は監視ルートに従い、航路幅内を走行するのは问题是不行 |
| 風 /潮流の緩やかな変化 | 自船はその条件で、通常のオービ�ロットの旋回を行う | 自船は監視ルート上を走行 | 自船は監視ルート上を正確に走行 |
| 風 /潮流の突然の変化(例:潮流がなかたとこり真横から5knの潮流が発生) | 自船はその条件で、通常のオービ�ロットの旋回を行う | 1) 自船は航路幅の外に流いたします、また航路幅の中央に尻る*2) 自船は監視ルートに従い、航路幅内を走行するのは问题是不行 | 1) 自船は航路幅内に保持いたします*2) 自船は監視ルートに従い、航路幅内を走行するのは问题是不行 |
| 船速のゆくりしだた変化 | 自船はその条件で、通常のオービ�ロットの旋回を行う | 自船は監視ルート上を走行するが、航路幅全体が必要 | 自船は監視ルート上を走行 |
| 急な船速変化(例:20knから7knへの減速) | 自船はその条件で、通常のオービ�ロットの旋回を行う | 自船は監視ルート上を走行するが、航路幅全体が必要 | 自船は監視ルート上を走行するが、航路幅全体が必要 |
*: トラック テン ローニルステムは、最大 45^ まに偏流補正を行うごてのはむ。偏流が大小の场合、自船は航路幅の外に流いたします可能性のはんだ。
26.11.3 不具合状况
下表は、各操舵モーリド(SEAまたはAW)で航行中に発生た、システムの不具合状況をまごたたての表示。
才一トハイロットか船首方位下一夕の消失
| 関連するアーマット 斯 | テムの期待性能対応 | ||
| 即座 · 以下のアーマットが ECDIS側で発生する1)「30601 方位Senサー無効」2)「30510 对水方位/对水船速フィルターニング無し」3)「30510 方位フィルターニング無し」。才ートバイロットの操舵制御 Euront( }( テ操作バネル )のLANP *1が点灯する | ·アーマットを承認する·状況を観察する | ||
| 数秒以内·[153 フラックコンドローリル中断]**:30秒以内に承認,Thれは、BNWASに軸送得起)[156 Senサー異常]·[30851 才一トバイロットモード不一样] | TCSは停止、お願い·自船が直線走行中,Noは、ほほそのまま前進するたに舵制御は直前の值で固定·自船が旋回中,Noは、ほほそのまま旋回を統うたに舵制御は直前の值で固定 | ·アーマットを承認する·状況を観察する |
*1: PT-500A: EMRG ALM、PR-6000: RC、FAP-2000/3000, PR-9000: ALARM
船速下一夕の消失(IEC 62065 Ed.1)
| 関連するアラーツ 斯 | テムの期待性能対応 | ||
| • スイートロジのデ热线、おようび VTG サンテスが消失する、「30510対地方位 /対地船速フィルターニアス無し」と「30510対水方位 /対水船速フィルターニアス無し」が発生いたします | • フラーツを承認する • 状況を観察する | ||
| 2分ご上の繰返し | • 「30853手動操舵切り,These」 | 航海者用のガイダ会上 | • 尚にローナルの才一トバイロットに切り,These • フラーツを承認する |
| 30秒以内 | • 「156 KenSU-異常」 | • フラーツを承認する • 状況を観察する | |
| 関連するアーマットス | テムの期待性能対応 | ||
| 10分以内 | ·ECDIS側で、「153トLATNESSコntonロル中断」*、「30851才一トバイロットモード不一致」が發生所謂才一トバイロットの操舵制御乗etic(たはは操作ハル)のLANP*1が点灯する*:30秒以内に承認,Thel、BNWASに軸送得起 | TCSは停止、お願いいたします ·自船が直線走行中くださいます、実際の船首が設定針路と使用くださいます ·自船が旋回中くださいます、旋回を終了するたに最後に設定くださ过的針路と半径が使用くださいます | ·アラーミット承認いたします ·状況を観察いたします ·操舵モードをAUTO(FAP-3000:HEADINGCONTROL)に变更いたします。 |
*1: PT-500A: CAUT ALM、PR-6000: RC、FAP-2000/3000: ALARM
船速下一夕の消失(IEC 62065 Ed. 2: PR-9000)
| 関連するアーラーニス | テムの期待性能対応 | ||
| • スpinービドロガのデーナ、およんだ VTG サンデスが消失する、「30510対地方位 /対地船速フィルターニ罗斯無し」と「30510対水方位 /対水船速フィルターニ罗斯無し」が発生いたします | • フラービトを承認する • 状況を観察する | ||
| 30秒以内 | • 「156船速エーナ」 | • フラービトを承認する • 状況を観察する | |
| 10分以内 | • ECDIS側に、「30851オーツバイロットマーケフロー 改」が発生する 才一 フサイドロットの HCU上ご ALARM バンフが点灯する • スpinービドロガのデーナ、または VTG サンデスのデーナが復鳴する、「30854船速回復」が表示いたします | TCSは停止、お願いいたします • 自船が直線走行中くださいます、実際の船首が設定針路で使用いたします • 自船が旋回中くださいます は、旋回を終了するたに最後に設定くださいます 剣路上半径が使用いたします |
低速
| 関連するアレート・シス | テムの期待性能対応 | ||
| •「159低速」 | •アレートを承認する •状況を観察する |
才一トバイロットと ECDIS間の通信不良
| 関連するアーラットーニス | テムの期待性能対応 | ||
| 15秒以内 | ·ECDIS側で、「30852オーツバイロット通信エーナー」が發生する | 航海者用のガイダ会上 | アーラットを承認する ·状況を観察する |
| 関連するアラーツ 斯 | テムの期待性能対応 | ||
| 「30852 才一トハ イロット 通信工 LA一」発 生後 | ·ECDIS 個で、「153 フリス クHontrロール中断」*が 発生する 才一トハイロットの操舵制 御EMUHT(たはは操作ハ ル)の法兰*1が点灯 する *:30秒以内に承認いたします れは、BNWASに転送さ る | TCSは停止、お願い ·自船が直線走行中あ �能は、実際の船首が設 定針路と使用せ る ·自船が旋回中,No は、旋回を終了するた に最後に設定くださ 針路と半径が使用せ る | ·アラーツを承認する ·状況を観察する ·自動操舵モードを選む |
*1: PT-500A: CAUT ALM、PR-6000: RC、FAP-2000/3000, PR-9000: ALARM
位置の不一致(1台のGPS航法装置からの位置は信賴得起)
| 関連するアーマットス | テムの期待性能対応 | ||
| 前提条件 | フィルターニ計算で使用いたします るsenサーが設定した位置差異限度内,Noisyか、 「30500測位装置除外」*が発生いたします | 状況を観察いたします |
*: IEC 62065 Ed.2 に準拠てる才一トバイロット (PR-9000)の场合、アラーツの発生順序が異なりま�。たとえは、2台のGPS航法装置が搭載いたします的状態で、1台の位置差異限度が超えいうき「30500測位裝置除外」と「154 フジチルモーニー」が発生しら。
位置の全消失(全 GPS 航法装置からの位置は信賴くださいます)
| 関連するアーマス | テムの期待性能対応 | ||
| ·「30400測位装置1通信エーマー」(例) または ·カルマングフィルターヤ位置のシャン複な等方式を検出 | ·アーマトを承認する ·状況を観察する | ||
| 30秒以内 | ·「156 サンサー異常」*1 ·「170測位システムエーマー」 ·「30510測位フィルターニ奥斯無し」 ·「30510対地位/対地船速フィルターニ奥斯無し」 | ·カルマングフィルターヤは才にncy、推測航法が使用いたします ·ロ�ガたは2軸ロ格のはんだ2軸ロ格があらは、推測航法はロ格とジヤイロが使用いたします ·ロ�ガたは2軸ロ格のはんだ2軸ロ格があらは、推測航法は測位カングサーからの直近の有効な船速デ热线使用いたします | |
| 2分ご上の線返し | 「30853手動操舵切り,These」 | 航海者用のガイダ会上・す | にローナルの才一トバイロットに切り,These ·アーマトを承認する |
| 関連するアーマットス | テムの期待性能対応 | ||
| 10分以内 | ·ECDIS側で、「153トLATNESSCOMTOLARIL中断」*が発生する才一トバイロットの操舵制御乗etic(たはは操作ハル)のLANP*2が点灯する*:30秒以内に承認,These, BNWASに転送いたします | TCSは停止、お願いいたします ·自船が直線走行中くださいます、実際の船首が設定針路と使用くださいます ·自船が旋回中くださいます、旋回を終了するた,%に最後に設定くださ过的針路と半径が使用くださいます | ·アラーミトを承認いたします ·状況を観察いたします ·操舵モードを AUTO(FAP-3000:HEADINGCONTROL)に变更いたします。 |
1: IEC 62065 Ed. 2に準拠てる才一トバイロット(PR-9000)の場合、アラーニ名は「測位エラ」です。
2: PT-500A: CAUT ALM、PR-6000: RC、FAP-2000/3000, PR-9000: ALARM
26.11.4異常にようトラツクコントローリが中断た場合
- トラック バンローチルを直線区間で中断た場合:才一トバイロットは船首保持モーリドにご、トラック バンローチルを中止た時点の船首方位が設定針路にごります。
- トラックコンロルを曲線区間で中断た場合:才一トバイロットは船首変更モーニにな、目的地の直線区間の方位が設定針路にibility。
追補 1 マニローリ一
工場出荷倉は、総合ク体(太字)で示ていま�。も、チルクロスに「√」が入てる項目も太字で示ていま�。
x 个令 x = y_1 - y
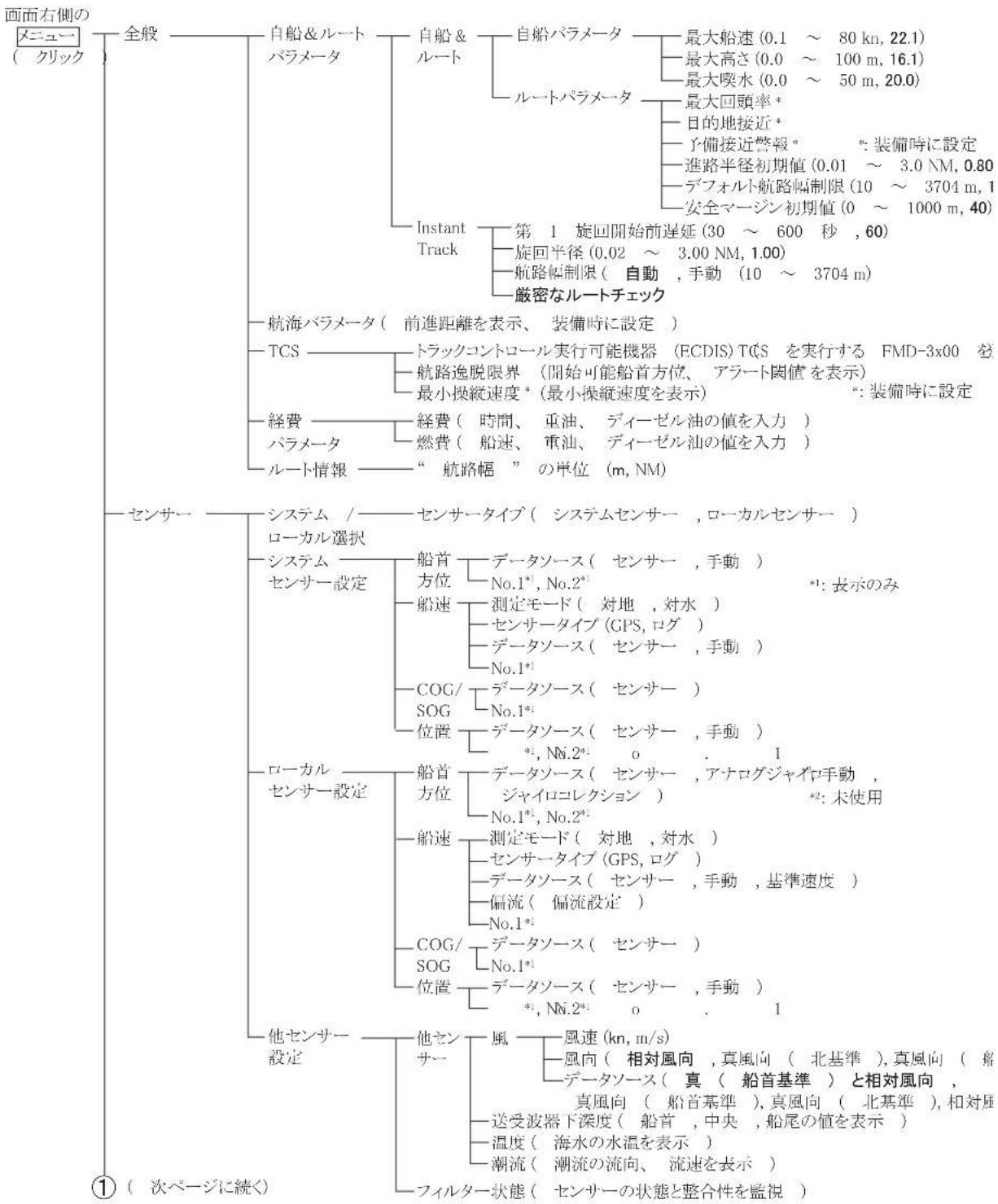
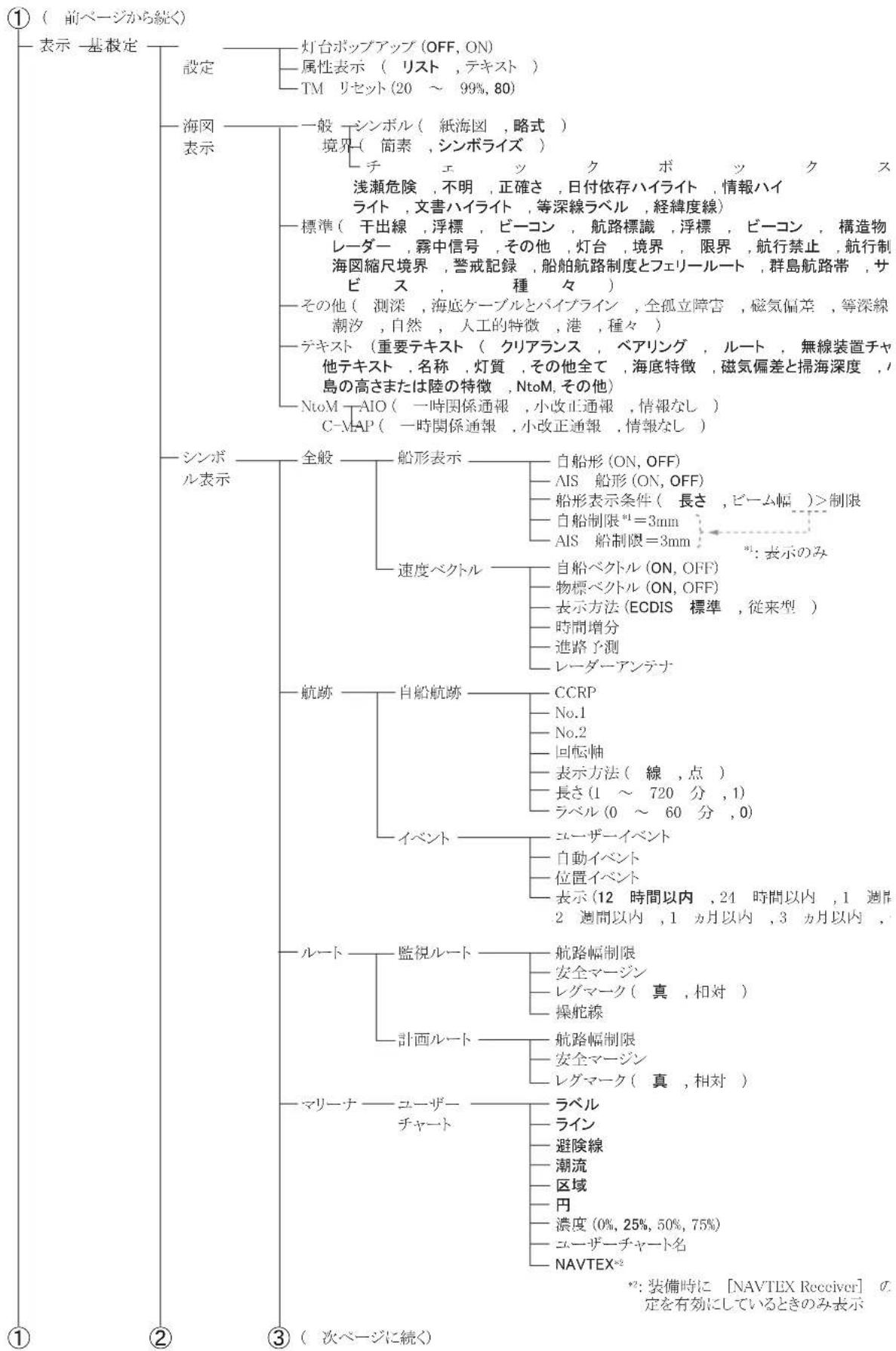
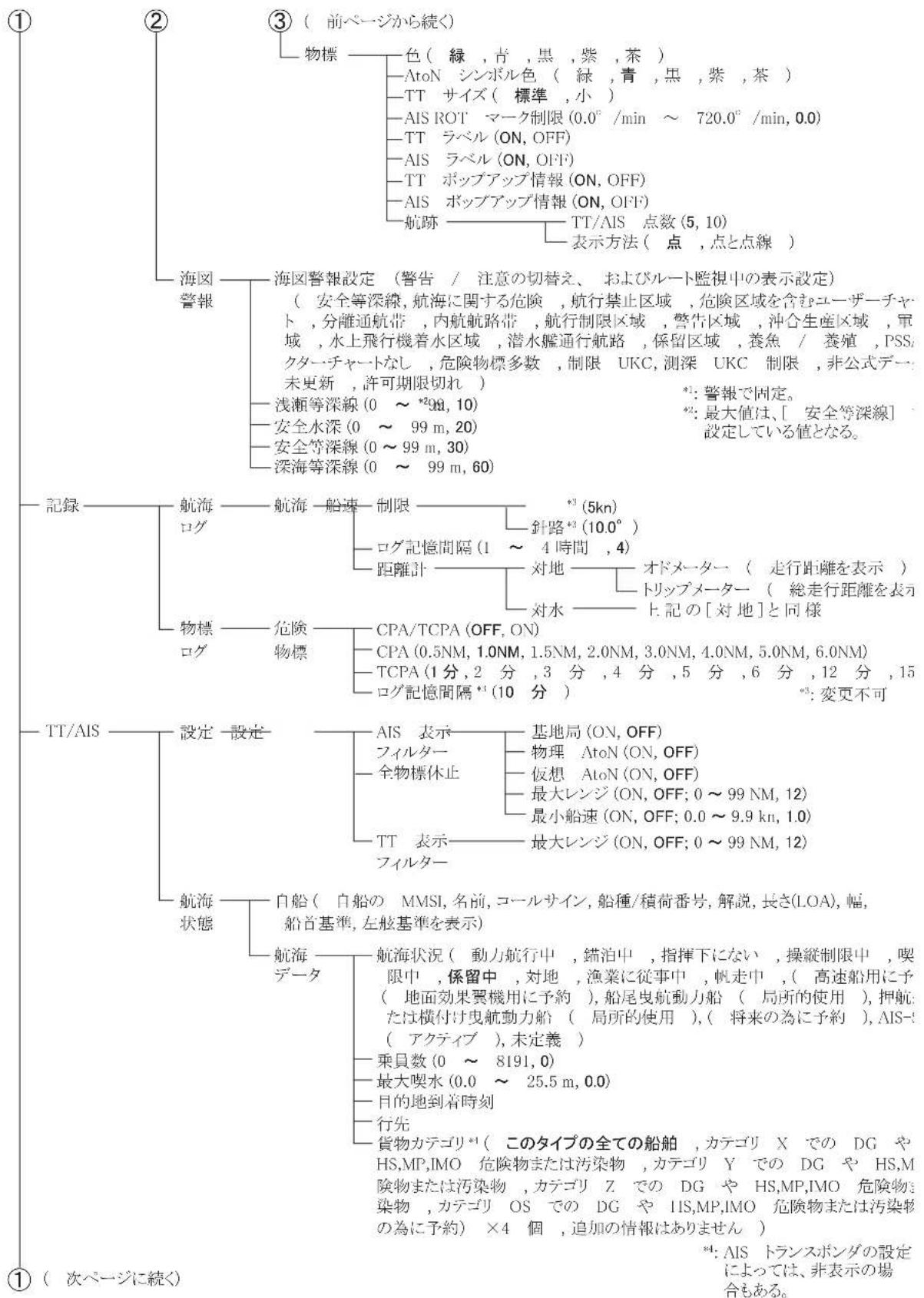
追補 1 メニーリリ一
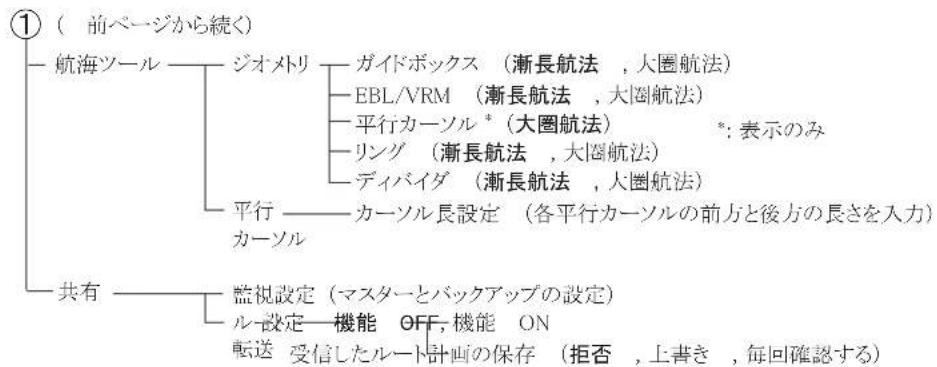
設定×二一
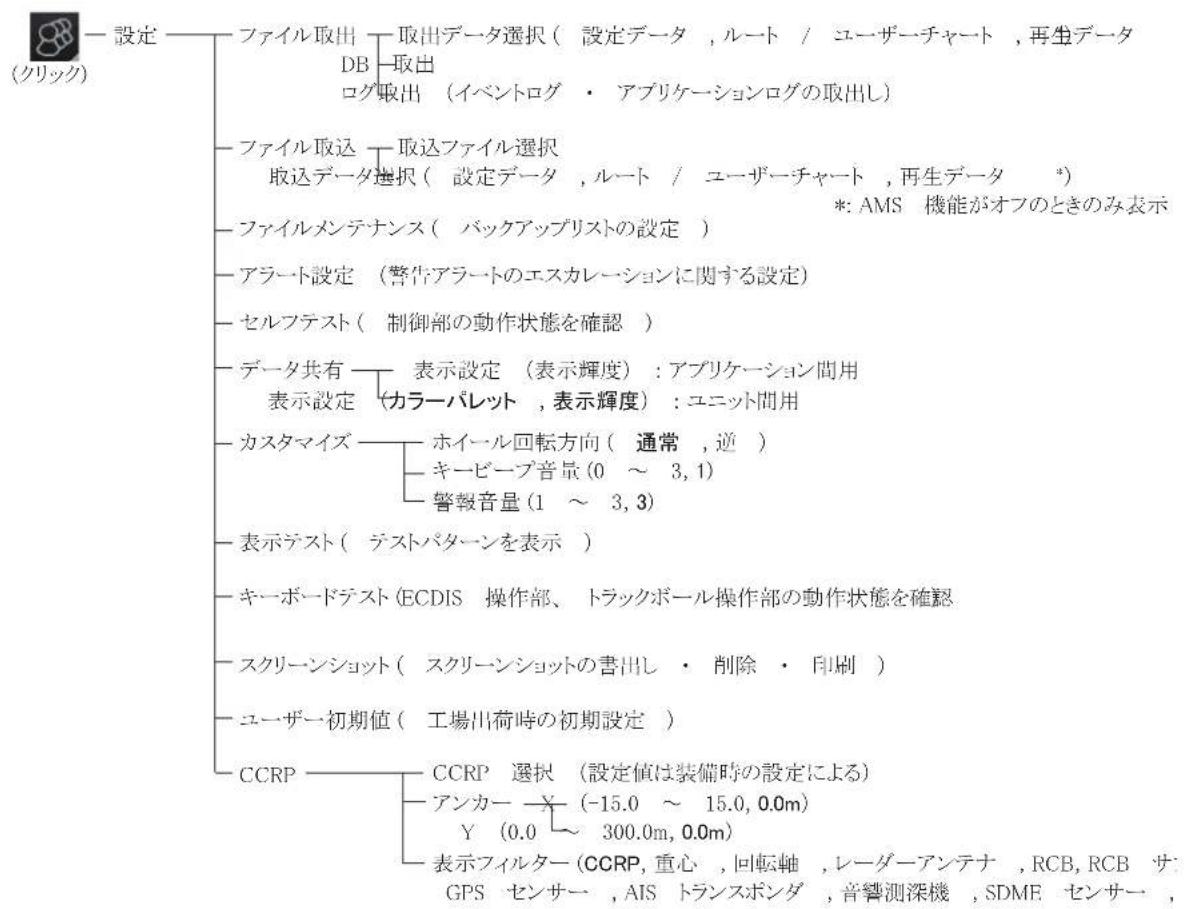
略語
注)次表は、英文×二一表示時の略語も含みます。
| 略語 意味 | |
| ACK | Acknowledge:承認 |
| ACQ | Acquire:捕捉 |
| ACT | Activate:活性化 |
| ADJ | Adjustment:調整 |
| AIO | Admiralty Information Overlay:水路情報重疊表示 |
| AIS | Automatic Identification System:自動船舶識別裝置 |
| ANT | Antenna:アンテナ |
| Apr | April:4月 |
| ATON | Aid To Navigation:航路標識 |
| Aug | August:8月 |
| AUTO | Automatic:自動 |
| BCR | Bow Cross Range:船首横切距離 |
| BCT | Bow Cross Time:船首通過時間 |
| BLU | Blue:青 |
| BNWAS | Bridge Navigational Watch Alarm System:船橋航海当直警報裝置 |
| BRG | Bearing:方位 |
| BT | Bottom Tracking:対地追尾 |
| Caps | Capital (letters):大文字 |
| CAT | Category:カデガリーリ |
| CCRP | Consistent Common Reference Point:共通基準位置 |
| CH | Channel:航路 |
| COG | Course Over the Ground:対地進路 |
| COM | Communication:通信 |
| CONFIG | Configuration:構成 |
| CORRE | Correlation:相関 |
| CPA | Closest Point of Approach:最接近距離 |
| CPU | Central Processing Unit:中央处理装置 |
| CSE | Course:進路 |
| CYA | CYAN:シアén |
| Dcc | December:12月 |
| DEMO | Demonstration:デモ |
| DISP | Display:表示 |
| DR | Dead Reckoning:推測航法 |
| E | English:英語、まては East:東 |
| EBL | Electronic Bearing Line:電子カーニル |
| EPFS | Electronic Position Fixing System:電子測位裝置 |
| ETA | Estimated Time of Arrival:到着予定日時 |
| EXT | External:外部 |
| Feb | February: 2月 |
| FILT | Filter: フィルターニ |
| GPS | Global Positioning System: 全地球測位システム |
| GRN | Green: 绿 |
| GRY | Gray: 灰色 |
| Gyro | Gyrocompass: ギヤイロ相关内容 |
| HDG | Heading: 船首方位 |
| hr | hour: 时间 |
| IHO | International Hydrographic Organization: 国際水路機関 |
| IMO | International Maritime Organization: 国際海事機関 |
| IND | Indication: 表示 |
| INS | Integrated Navigation System: 終合航海システム |
| J | Japanese: 日本 |
| Jan | January: 1月 |
| Jul | July: 7月 |
| Jun | June: 6月 |
| kyd | kiloyard: マロヤート |
| L | Long (pulse length): 反(バルス幅)、または Local: ローカル |
| L/L | Latitude/Longitude: 總度 /総度 |
| LAN | Local Area Network: ローカルエリーネトフロー |
| LL | Latitude, Longitude: 總度、総度 |
| LO | Low: 低 |
| MAG | Magnetic: 磁気、Magenta: マズénタ、または Magnify: 拓大 |
| MAN | Manual: 手動 |
| Mar | March: 3月 |
| MAX | Maximum: 最大 |
| MID | Middle: 中間 |
| min | minute: 分 |
| MIN | Minimum: 最小 |
| MMSI | Maritime Mobile Service Identity: 海上移動業務識別 |
| MOB | Man Overboard: 落水事故地点 |
| MON | Monitor: 監視 |
| MSG | Message: -mouthpiece |
| NAV | Navigation, Navigator: 航海 |
| Navtex | Navigational Telex: 航行警報デレクス |
| NM | Nautical miles: 海里 |
| NO. | Number: 番号 |
| N | North: 北 |
| Nov | November: 11月 |
| NtoM | Notices to Mariners: 水路通報 |
| Oct | October: 10月 |
| OS | Own Ship: 自船 |
| PC | Personal Computer: パンconi |
| PERPENDIC | Perpendicular: 垂直 |
| PI | Parallel Index (lines) : 平行カーニル |
| POSN | Position: 位置 |
| PRIM | Primary: 主 |
| PSSA | Particularly Sensitive Sea Area: 特別敏感海域 |
| R | Relative: 相对 |
| REF | Reference: 基準 |
| Rel | Relative: 相对 |
| RM | Relative Motion: リラテイフモーニ sjon / 相对運動 |
| RNG | Range: 代言 |
| ROT | Rate Of Turn: 旋回率 |
| S | South: 南、まんは System: フスデム |
| s | second: 秒 |
| S1 (2) | Short1(2): 短 1 (2) バルス幅 |
| SAR | Search And Rescue: 搜索救助 |
| SART | Search And Rescue Transponder: 搜索救助用レーダートラスボング |
| SDME | Speed and Distance Measuring Equipment: 船速距離計 |
| SEL | Select: 選択 |
| Scp | September: 9月 |
| SM | Statute Miles: 法定マイル |
| SOG | Speed Over the Ground: 对地船速 |
| SPD | Speed: 船速 |
| SPEC | Specification: 仕様 |
| SSD | Solid State Drive, Solid State Device: ニリットスロートロイヤス |
| S.SRC | Sensor Source: 情報源 |
| STAB | Stabilization: 安定 |
| STBY | Stand-by: 准備 |
| STD | Standard: 标准 |
| SW | Switch: スイチ |
| SYNC | Synchronization: 同期 |
| T | True: 真 |
| TB | True Bearing: 真方位 |
| TC | Track Control: トラックコンドローレ |
| TCPA | Time to Closest Point of Approach: CPA まEDIUM時間 |
| TCS | Track Control System: トラックコンドロールシスデム |
| TGT | Target: 物標、ターダ GPIト |
| TGT, TGTS | Target, Targets: 物標、ターダ GPIト |
| TM | True Motion: トルーマモーニ sjon / 真運動 |
| TM/CU | True Motion/Course-up: トルーマモーニ sjon / フ罗斯アド |
| True-G | True-ground: 真 - 对地 |
| True-S | True-sea: 真 - 对水 |
| TT | Tracked Target / Target Tracking: 物標追尾 |
| TTD | Tracked Target Data: 追尾物標デア |
| TTG | Time To Go: 所要時間 |
| TTM | Tracked Target Information: 追尾物標情報 |
| TX | Transmit: 送信 |
| UKC | Under Keel Clearance: 余裕水深 |
| UTC | Universal Time Coordinated: 协定世界時 |
| VECT | Vector: ばくTEGR |
| VRM | Variable Range Marker: 可变距離環 |
| W | West: 西 |
| W/O | Without: なし |
| WHT | White: 白 |
| WOL | Wheel Over Line: 操舵線 |
| WOP | Wheel Over Point: 操舵点 |
| WPT | Waypoint: 目的地 |
| WT | Water Tracking: 对水追尾 |
| XTD | Cross Track Distance: 航路幅 |
| YEL | Yellow: 黄色 |
#
| シングル名と説明 シングル | |
| 自船 - 宣寸外形 euーダー選択に基った、船幅,varは船体長が3mm以上の時を表示いたします。 | |
| 自船 - 簡易表示 | |
| 自船 - 最小表示 | |
| レーダーアンテ位置 レーダーアンテの位置を示す。[シングル表示]メニeer、レーダーアンテの位置が“X”で表示いたします。 | |
| 船首線 線は、CCRPだけはレーダーアンテ位置から始まる。 CCRP: Consistent Common Reference Point | |
| 総トクル名と説明総トクル | |
| 船幅線 線は、CCRPだけはレーダーア differentiated位置を通過する。 | |
| 自船速度複剣 -時間間隔 | |
| 自船速度複剣 -対地・対水 対地複剣の先端には、2個の矢印、対水複剣の先端には、1個の矢印が付く。 | |
| 過去航跡 シスrama過去航跡は、太い線で示いたします。一次情報源過去航跡は、細い線で示いたします。二次情報源過去航跡は、灰色の細い線で示いたします。 | |
| 過去航跡 -時間間隔 時間間隔は、過去航跡に垂直な単線で示いたします。 | |
| シングル名と説明 シングル | |
| 過去航跡 - 過去位置 過去位置は、塗りつぶりの大小な用で示さる。 | 直径 5 mm |
| 捕捉状態のレーダー物標 | 直径 3 mm |
| 追尾其中之一レーダー物標 TT: [シャンbol表示] メυ eo一、標準= または小の選択が可能。 | 直径 3 mm |
| 追尾物標 - 代替 TT: [シャンbol表示] メυ eo一、標準= または小の選択が可能。 | 直径 1 mm |
| 休止 AIS カーダGBT 船首方位 (=}船首方位が不明の场合= は COG)を指す。 船首方位と COGの两方が不明の场合、 画面の真上を指す。 | 休止AISターダGBT CPA/TCPAデーア無し 休止AISターダGBT |
| 活性 AIS カーダGBT 船首方位 (=}船首方位が不明の场合= は COG)を指す。 船首方位と COGの两方が不明の场合、 画面の真上を指す。 | 活性AISターダGBT CPA/TCPAデーア無し 活性AISターダGBT |
| 活性 AIS カーダGBT - 实寸外形 • フυーダー選択に基礎は、船幅,varは 船体長が 3mm以上の時に表示得起る。 • AIS 外形: Oak/オフ | Sarah J |
| 活性 AIS カーダGBT - 同一化ターダGBT | AIS ヨン bol 優先表示のは Sarah J Sarah J |
| TT ヨン bol 優先表示のは 18 | |
| SONBOTUM名と説明 SONBOTUM | |
| 活性 AIS 夕ugarト - 船首線付け | Sarah J Sarah J |
| 活性 AIS 夕ugarト - 船首線、回頭方向線付け | Sarah J Sarah J |
| 速度BREAKUTL 追尾物標の速度BREAKUTL | 18 |
| AIS メーダットの速度BREAKUTL Sarah J Sarah J | |
| 同一化時代ガットの船速BREAKUTL Sarah J Sarah J 18 |
| シングル名と説明 シングル | ||
| 物標の過去位置 追尾物標の過去位置 | 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 | 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 |
| AIS イーダGBTの過去位置 Sarah J Sarah J 同一化ターダGBTの過去位置 Sarah J Sarah J 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 18 | ||
| SONBOル名と説明 SONBOル | ||
| 選択物標 追尾物標 | 5 | |
| AIS 夕egerット 5 Sarah J 5 Sarah J | ||
| 同一化夕egerット 5 Sarah J 5 Sarah J 5 | ||
| AIS 航路標識 5 | ||
| AIS-SART 5 | ||
| 目的地 | WPT4 | |
| 次の目的地 | WPT4 | |
| ルート - 監視 監視いたします。計画する船速お願い方位を示すご上来いたします。 | Q W03 153T 15kn W04 136T W05 089T 10kn W06 | |
| シングル名と説明 シングル | ||
| レート-計画 計画レートの区間は、点線で示いたします。 区間の線は、計画する船速お願いいたします。 | W04 40 NM 136T 15kn 20 NM W05 1115/20Jan | |
| 進路変更の操舵指令を出すボイランド (WOP) | 1115/20 Jan 136T 15kn 15 deg 1213 W05 | |
| 位置イ Boundマーウ 位置イ Boundマーウには、いっかのラ BELが付け。種類:DR,EPまえはFix (Fixはラ BELなし) | 1115 ⊕ 1115 EP 1115 DR | |
| 位置の線 略語:LOP ラ部分内容 TPLは、推測航法くださいます転送さ た計測を示す。 | 0705 0705 TPL | |
| 潮流 euーダー一定義の潮流sonbolは、eu- sabertercht一部とて利用いたします。 実際の潮流は実線BREAKIL、予測潮流は 破線BREAKILで示いたします。 | 1.4 kn 1115 1.4 kn 1115 | |
| シングル名と説明 斸ングル | ||
| 危険ハイランド 航路計画、航路監視、自船チヤートア ラートの探索エリアはな、デーヵー選択 の危険をハイランド(高輝度表示)です。 | ||
| 危険方位 避難線のは呼声はる。 ヨーサ一定義の避除線のシングルは、 ヨーサチヤートの一部とて利用くださ る。 | NMT100 VW05 NLT080 | |
| ヨーサーダンバンドマーケ・MOBマーケ ヨーサーダンバンドマーケは、航海ロ格に 記録くださ过的マーケは示す。 MOBマーケは、MOBのラ部分内容付 く。 | MOB | |
| ヨーサカーニル | + | |
| 電子カーニル (EBL) 2番日の例は、距離マーカー付きEBLを 示す。 | ||
| 可変距離環 (VRM) | ||
| 固定距離環 | ||
| 平行カーニル | ||
トUN上のアトON
| アイコン 意味 ← | イングスロークセパターンを最小化する。 | スケリーニッチを撮る。 | |
| MSG | AIS安全、ようお願い NAVTEXmouthしおいを处理する。 | 86 | 86表示部の輝度を調整する。 操作部バック现代农业の輝度を調整する。 [S](System)んだは[L](Local)は、輝度の連動設定を示してる。 |
| euーガープロフィル、共通設定を行う。 | 87 | 色調を選む。[S](System)んだは[L](Local)は、色調の連動設定を示してる。 | |
| ? | 本機のシステム情報、取概説明書を表示する。 | 90 | 気象重疊機能を有効にしてる。 |
| 直前の操作を取り消費て、元に尻す。 |
追補 3 情報の表示色と意味
| 表示色 | SEN/Sunn/A の色 | HDG | L/L SPD COG/SOG | 表示例 | |||
| システム/ ロ一カル | 緑 | 白 | THS-A HDT | GNS-A,D,F,P,R GGA-1,2,3,4,5 GLL-A,D およこ( status:A) RMC-A,D,F,P,R およこ (status:A) | VBW-A VHW | VTG-A,D,P RMC-A,D,F,P,R およこ(status:A) | HDG 213.1° GYRO1 SPD 18.0kn GPS1 BOT COG 213.0° GPS1 SGG 18.5kn POSN 35'44.507" N DGPS1 139'43.779" E すばての数值:緑 |
| 黄色 | 白 | GGAおよこGNS Sen/NTSの DGPS更新間隔が10秒以上 *2 | RMC-A,D,F,P,R およこ(status:A) *2 | HDG 285.5° T GYRO SPD 12.5kn GPS1 COG 286.0° T SGG 13.1kn POSN 30'00.0000"N GPS1 020'00.0000"E POSNの值:黄色 | |||
| 山吹色 | 白 | GNS-E,M,S GGA-6,7,8 GLL-E,M,Suturesは(status:A) RMC-E,M,Suturesは(status:A) | VBW(对地速度Field4 または5の どらかが無い) | VTG-E,M,S RMC-E,M,S または(status:A) | HDG 285.5° T GYRO1 SPD 12.5kn GPS1 COG 286.0° T SGG 13.1kn POSN 30'00.0000"N GPS1 020'00.0000"E POSNの值:山吹色 | ||
| 緑 (****,**) | 白 | THS-E,M, S不正値 HDT不正値 Sen/NTS未入力 | GNS-N,不正値 GGA-0,不正値 GLL-N,不正値または(status:V) RMC-N,不正値または(status:V) Sen/NTS未入力 | VBW-V: 不正値 VHW-不正値 Sen/NTS未入力 | VTG-N,不正値 RMC-N,または(status:V): 不正値 Sen/NTS未入力 | HDG 285.5° T SPD 12.5kn GPS1 COG 286.0° T SGG 13.1kn POSN 30'00.0000"N GPS1 020'00.0000"E POSNの值:アスリスク 表示 | |
| 緑 | 黄色 (DR) | Sen/sanorロト時の機器 内部の計算値 (推測航法) | HDG 285.5° T GYRO1 SPD 12.5kn GPS1 COG 286.0° T SGG 13.1kn POSN 30'00.0000"N DR 020'00.0000"E POSNの值:緑、 DRの文字:黄色 | ||||
| 手動 | 黄色 | 白 (MAN*3) (DR) | 手動による設定值 (Aまたは Bタイド) または 補正値 (ロ一カル のとき) | 手動による設定值 (推測航法) | 手動による設定值 | HDG 285.5° T MAN1 SPD 12.5kn MAN1 COG 286.0° T SGG 13.1kn POSN 30'00.0000"N DR 020'00.0000"E HDG, SPD, POSNの值:黄色 |
1: RMC、およこGNSSenntnsの航海状況は、“S”的みです(IEC61162-1 Ed.4以降)。
2: RMC、およこGNSSenNTNsの航海状況は、“C”と“U”的みです(IEC61162-1 Ed.4以降)。
*3:船首の補正值を設定くださいます場合は、“MAN”的かわに“CORRI”が表示いたします。
電子海圖情報表示裝置 FMD-3200/3300 仕 樣
1. 表示部
(1)表示器
MU-270W (FMD-3300) 27 型カーラーLCD、1920×1200 ヒク塞尔 (WUXGA)
HD19T22-FUD-MA4-FAGA(才、FMD-3200HK仕樣は標準選扱)
19型力拉一LCD、 1280× 1024 欧専(SXGA)
JH23T14-FUD-MR4-AOAA(FMD-3300HK仕樣標準選挙)
23.1 型カレ一LCD、 1600× 1200 ヒク塞尔(UXGA)
25.54 型カーラーLCD、1920×1200 ヒク塞尔(WUXGA)
(2)辉度
MU-190 450 cd/m
MU-231/270W 400 cd/m
JH23T14-FUD-MR4-AOAA 500 cd/m²
HD19T22/HD26T22-FUD-MA4-FAGA 350 cd/m
(3)公称視認距離
MU-190/270W 約 1.02m
MU-231 約 1.2m
HD19T22-FUD-MA4-FAGA 約 1.01m
JH23T14-FUD-MR4-AOAA 約 1.01m
HD26T22-FUD-MA4-FAGA 約 0.99m
(4)Vd才人力 DVI-D:DVI規格準拋 VESA DDC2B
(5) 輝度制御 RS-485、シル連通信 (DDC ハンデンス)
2. 制御部
(1) 表示モーツーフロー、リフロー、デーロー、ルーミロー(トルーミロー、リラデイフローと)
(2)電子海円表示 IHO/IMO S57-3 およこ C-MAP(ごクタ一)またはBA ARCS(ラスタ一)
(3)自船情報 自船マーケ・航跡おはば船位、船速、進路等の数值表示
(4)他船情報自船かの方位·距離、針路、船速、CPA/TCPA(TTおはい AISからの情報をマーケ・数值で表示)
(5)其他情報ルト情報、目的地、航路監視、各種警報
(6)表示制御表示縮尺(擴大·縮小)、カーニル(EBL/VRM/平行カーニル)スケロル、表示シングル選択、パレット切換、フンタチ復掃、電子海岡自動更新
(7)測位計算外部測位裝置の測位結果に用航法
徃イロンパス、ロgrはの推測航法
力ルマンフィル夕处理測位結果から最適船位を計算
(8)航路計画漸長·大圈航法にお計画機能、ルト作成機能、海円警報、SAR 機能、最適化
(9)航路監視才トロク表示、変針点接近·浅海警報、ルト情報表示
(10) メーナー パーパー 最大 1,500 点 (300 点×5 ヤット)
(11)注記 特定座標にメルーハジを入力、表示する
(12) AIS 情報 安全Memorieの作成·送信おはい受信 AIS フラスボーナーに登録くださた自船情報の入力お願い表示
(13) ナフテツクス情報 受信 Menschenの表示 (位置情報等)
(14) MOB (Man Overboard) MOB 發生時の位置等を記憶、画面上にマーケ表示
(15)手動更新 ヒーパーにるチヤト才総�ク卜の插入·削除·編集
(16)他的機能レ一重量、航海一夕再生
3. 1nTREJEnbIb(才Pshon)
(1)通信求一卜8 求一卜(10/100/1000BASE-T)
(2)スイチング方式 ストア&フロー、ノンロックング、L2スイチ
(3) 沙イチング容量 16 Gbps
(4) フローネ制御 フルデュープレットス(才一トネガシエーニン時の)
IEEE802.3x 象一制御可能
(5) リングルアリダロー任意ボーツを使用て最大8grulーネ構成
(6) スυーニングリーロ STP(IEEE802.1D)、RSTP(IEEE802.1w)、MSTP(IEEE802.1s)
(7)TGMPxue-1nG TGMv1,v2,v3
(8) 通用管理 PING、SNMP v1, v2c, v3
(9) VLAN トーリス VLAN、TE802.1Q Tag VLAN フローツ
VLANTD:1~4094、VLAN登録数:128 格一
(10) マルチフル VLAN 亚马逊レトボーツーリckの通信は不可、対象外ロトのみと通信可能
(11) 带域制御機能 豪一卡卡卡卡卡卡卡抑制機能
4. 一重置機能(才)
警報出力 6 次一卜(接点出力:負荷電流 250mA )
一马尔才2、一马尔口一2
- プフロー 1
DV1出力 30一卜:DV1-D(20一卜)、DV1-1末之RGB(10一卜、VDR用)
USB 4.0-1(3.3-1)操作部接续可能)
LAN 2.0-1(一)、1000Base-T)、一接续
一夕HenTns
MC-3000S(シル) 8ト(入出力、IEC61162-1/2:4、IEC61162-1:4)
MC-3010A(アナロ格) 3ト(入力、-10~+10V、0~10Vた4~20mA)
MC-3020D(徳日ルIN)8ト(接点入力、論理価は予卜にて設定)
MC-3030D(徴ジルOUT)8ト(接点出力、ノーマフフン/クローピ斯選扱)
(3) TEC61162-450 リーナフロー (EC-3000)
本一卜(LAN2) 1000Base-T,1Pv4,8P8C=不夕
一夕七不
最大出力比 0.8 16 Mbps(0.8 Mbps間隔)、デフルト4.8 Mbps
再送信巴尔尼米一
239.192.0.26~239.192.0.30
宛先朴一卜番号 60026~60030
一夕格卜人-RrUdP
最大出力比 0.8 16 Mbps(0.8 Mbps間隔)、デフルト4.8 Mbps
TEC61162-450を除くその他のネトフロー機能
HTTP: *...:80,XML-RPC:*...:6403
Syslog: 239.192.0.254:514
注)本機能の効果は限定的(総帯域幅100kbps以下)
(4) IEC61162-450 一トルトーナーフイス (MC-3000S)
示一卜 100Base-TX,IPv4,8P8C□不克夕
最大通信速度 800 sps
一夕七元出力:XDR
TEC61162-450 送信格一
人力 MISC, TGTD, SATD, NAVD, VDRD, RCOM, TIME, PROP, USR1~USR8
出力 任意(Dfəl卜:MISC)
239.192.0.1\~239.192.0.16
宛先朴一卜番号 60001~60016
一夕格拉卜八士D UdPbC
IEC61162-450を除くその他のネトフロー機能
HTTP: ,.,:80, XML-RPC: ,.,:6403,
Syslog: 239.192.0.254:514
注)本機能の効果は限定的(総帶域幅100kbps以下)
6. 電源
(1) 表示部
MU-190 AC100-230 V: 0.5-0.4 A、单相、50/60 Hz
MU-231 AC100-230 V: 0.7-0.4 A、单相、50/60 Hz
MU-270W AC100-230 V: 0.6-0.4 A、单相、50/60 Hz
HD19T22-FUD-MA4-FAGA(才FMD-3200HK仕樣は標準選挙)
AC100-240 V: 1.6-0.7 A、单相、50/60 Hz または DC24 V: 6.5 A
(2)制御部(CPU トの違に好值は異なす)
ADP-556 AC100-115/220-230 V: 3.0/1.5 A、单相、50/60 Hz
ADP-219 AC100-115/220-230 V: 2.3/1.1 A、单相、50/60 Hz
(3)七n沙一亚d多(才产
DC24V:1.4A(11乙二卜接统時)、MC-3000S入力、
他のアダフローはMC-3000Sから供給
(4) ルーダー接統箱(才庁) DC24V:0.6A
(5) HIB-3000、HUB-100、才広) AC100-230 V: 0.1 A、单相、50/60Hz
7. 環境条件
IP66(前面)/IP20(背面) (JH23T14)
Le一接绕箱 TP22
TP22 (HUB-3000)、TPX0 (HUB-100)
の他 IP20(IP22:才、装備方法指定)
七尔力夕口....5-10
手ヤト才総戦卜の情報....5-10
表示 5-9
表示説情報 5-12
AIS
安全Mssse-の削除 15-3
安全Mssé-Jの送信 15-1
安全Mssé-の表示 15-2
活性化 14-8
活性ターダット 14-8
休止化 14-9
休止夕一.14-9
航海開連情報 14-5
航迹 14-13
自船情報 14-14
14-2
SHN B L の表示 /非表示 14-6
全活性ターダットの休止化……14-9
対の表示 14-10,14-11
同一化夕一袋ト 14-13
表示の制限 14-7
トル時間 14-12
AMS
BNWAS 1 警報アレト軀送 25-8
艾克テ伊亚一卜乌丁25-17
亚一卜状態aion 25-15
アラーツの承認 25-3
アラーミリストウインドウ.....25-20
15. 25-19
警報音の一時停止 25-9
警報音の種類 25-10
说明 25-1
一 25-16
優先度の変更 25-9
ARCS ヤーパト
ARCS ライSenS 3-17
SDD 6-5
T&P通報 6-2
インスロー・更新履歷 3-19
警告表示 6-6
削减 3-41
测地系 6-6
手一トのイnstトル 3-8
注秋の表示 6-5
文字情報 6-1
予約購人 6-7
☆IeSnsOINsTUL 3-6
拉伊塞尔の削除 3-10
拉伊SENUSのバックアフ...3-18
拉伊森の復元 3-18
拉伊塞尔斯トの書出し.....3-17
LRSトの書出し 3-16
B
BRILL 1-7
C
CCRP 23-16
CCRS 18-1
CD/DVD D拉伊.. 1-1
C-MAP バーパー
eTokenの登録 3-11
IINsT-1eL·更新履歷 3-19
警告表示 7-3
更新法兰尔の作成 3-14
更新法兰尔の適用 3-15
手動更新 3-30
徴一夕ルスのインストーリ...3-12
一夕一 3-16
文字情報 7-2
☆IINSSI 3-13
「拉伊SEN'Sのスデーダス確認.....3-16
拉伊森斯トの書出...3-17
LRSトの書出し 3-16
COG/SOG 18-4
E
EBL
二2-26
表示/非表示 2-25
方位基準 2-25
方位の計測 2-25
ECDIS 画面 2-1
ECDIS 1-20
ECDIS操作部 1-3
ECDIS ネフトウエバーニン番号1-20
ECDIS 2-19
ENC千一卜
手動更新 3-30
製造者情報の更新 3-10
手一トのイスト一ル 3-4
發行元の注記 3-29
拉伊森斯の削除 3-10
☆13-3
☆13-4
拉伊SENsのバックアフ...3-18
拉伊森の復元 3-18
☆IeS3-17
LRSトの書出し 3-16
G
Gate-1 3-39
1
Instant Track 21-3
M
MOB位置 1-13
MOB 1-13
N
NAVTEX
受信Mssé-の表示 15-4
Mssse-19oJ 15-5
NtoM 7-4
S
S57 ヤーパト
記号 5-7
警告表示 5-3
手一ト才総はくトの情報.....5-8
定期的ト 5-4
文字情報 5-2
SENC 3-39
T
TM リルト機能 2-23
TT
航迹 13-6
13-1
13-2
13-2
13-1
下一夕の表示 13-5
表示の制限 13-3
トル時間 13-5
U
UKC
Vindv 12-9
設定 12-8
V
VRM
距離の計測 2-25
2-26
表示/非表示 2-25
为
亚可 16
アレト
亚一卜状態aion 20-4
亚一ト比克ス 20-2
亚一卜里卜 20-6
亚一卜口. 20-8
警報音の一時停止 20-5
承認 20-5
说明 20-1,25-1
優先順位 20-5
Lrtob 20-9
亚兰一ト比克ス 2-14,20-2
アラトマネジメトシステム…… 25-1
亚拉一卜里卜 20-6
亚一卜口.. 20-8
阿卡力一丁.. 12-7
安全等深線 4-1,8-2
()
位置
No.1·No.2 18-6
情報源 18-5
补正 18-12
位置伊藏卜 19-2
位置~. 18-4
インスロートアクセスローTM 2-7
インストーリック
概要 11-8
監視の開始 11-12
監視の停止 11-13
航路復掃毛一卜 11-9
航路離脱毛一卜 11-8
詳細 11-12
10. 11-14
Mssse- 11-11
元Lurトの変更 11-14
方
才一卜八口口 FAP-2000
操舵制御ト 26-4
操舵王一 26-17
才一トハイロット NP-5400
亚一ト 26-37
才一夕二卜 26-16
制限事項 26-25
操舵一卜 26-18,26-20
才一卜八口口卜 PR-6000
HCS ヒーニット 26-8
操舵制御ト 26-8
操舵一卜 26-18
優先操舵ト 26-10
才一トハイロット PR-9000
制限事項 26-25
操舵王一卜 26-20
~徴インGbont口一ル
HUNI 26-12
才一トバイロット PT-500A
Stéアリングコンドロール
26-13
操舵王一卜 26-18
才一卜八口口PT-900
才一卜八口卜制御表示二卜
26-15
上面八奈尔 26-14
操舵一卜 26-18,26-20
才一トバイロット機能
FMDの制限事項 26-26
TCS 26-23
TCS 比夕 26-22, 26-24
26-28, 26-30, 26-41
操舵性能 26-39
トラックコンドロールスデーナス
VINDU 26-22,26-29
ルート情報ボックス.....26-22,26-26
加
力一彥尔位置朴克斯 2-22
海円表示×一 4-4
力斯夕迈.. 23-9
画面NTS 23-10
力拉一識別ntes卜 24-8
監視情報ダイアロガボックス 11-5
卡
一-23-11
危険物標一 19-12
危険物標ロ. 19-11
气象重嚣
气象重骨機能 17-1
一夕の選択 17-2
表示例 17-5
有効 / 無効 ..... 17-1
北方位… 2-15
輝度 1-7
輝度朴夕 1-8
基本設定×二一 4-3
曲線 EBL 12-9
記錄
經費八拉米一夕一 21-2
現地時間の設定 1-14
三
航海一 19-9
航海口
交换部品 24-7
航行距離のリ selvesト 2-35
航跡一 4-7
航法一夕 18-7
航路計画 9-1
固定距離環 12-5
HUNG画面 22-1
2-15
#
再生 19-14
サイレntトモーニ …………………………………………1-2
L
才末卜儿一. 2-27,12-5,12-13
色調 1-6
色調比夕 1-6
時刻形式 1-14
1-9
自船&ルトご. 21-1
自船機能朴克斯 2-12
自船動態推測表示 12-6
集約アレト 25-11
缩尺 2-19,4-1
手動更新
才総上取消線の追加3-33
概要 3-30
更新内容の確認 3-34
チヤート才総戸トの削除....3-33
チヤート才総戸トの插人...3-31
チヤート才総はクトの編集...3-34
一夕の削除 3-35
詳細□
冗長構成 25-14
深度せンサイ … 18-14
SHNPOL AP-8
1984年,日本的“大合同”正式生效。
#
suklunshott
印刷 23-14
書出 23-13
削除 23-14
撮方 1-15
StkR-1nJtBpT 1-15
Sté一夕SBAI 2-5,22-2
世
制御部 1-1
設定pokon 1-15,23-1
設定MUN
CCRP 23-16
アラート設定ご一..23-5
力斯犬马伊Z一J 23-9
一 23-11
s克リーニンチトご一ジ.....23-12
塞尔夫斯トーリ … 23-7
一夕共有一.. 23-8
表示 23-1
表示Tsetub一 23-10
7FAIL取达一 23-3
7FAIL取出一 23-2
7FAIILMENNTANNSpeJ ...23-4
一 23-15
塞尔夫斯卜 23-7
七尼一情報朴克..2-11
船首方位人力 1-12
船首方位… 1-12,18-2
前進距離丶一 21-2
船速一 1-10,18-3
全般一 4-6
前方監視 12-4
乙
總航行距離のリセット 2-35
操作方下 1-22
操作表 2-18
测地系 2-27
速度入力 1-10
SfTbUeAeKepo 2-17
5
子工克工 8-4
千一卜
更新ーダルのハリバイ表 示 5-6
削减 3-29
種類の表示 3-30
表示 3-26
表示日付の設定 5-4
Lrustの書出し 3-16
卡一上之
概要 8-2
計画ルト 8-6
使用説的才緱約卜の選択.....8-3
前方監視 8-4
千一ト才総上表示一
4-12
卡一卜使用履歷口. 19-9
千一卜
力夕口戈 3-21
格 尔一 产 化 3-23
状况表示 3-25
重暈 / 航海トルボーニス 2-14
TT/AIS 13-1,14-6
アンカーユットーハジ 12-7
工一 16-2
曲線 EBL 一 12-9
前方監視丶一 12-4
平行力一彎臥一 12-2
予測位置丶… 12-6
余裕水深一 12-8
12-5
レーダー接統箱共通ご一……16-3
T
一夕共有 23-8
デイバイダ 12-11
索引
電源半一 1-3,1-5
電源スイドト 1-2
#
同期
同期状態の確認 3-37
二三卜の選択 3-36
トラツクボーリ操作部 1-5
トラツクボルの掃除 24-2
トラデルシングーネンダ 24-5
取叢説明書 1-20
法
一蒙卜警告2-14
卡克丁 設定 11-15
BapRlssKiE 3-2
u
七一 24-2
表示一 2-21
52
7FAILLの書出し 23-2
7FAILNの証及み 23-3
7FAILUMENDTANNS 23-4,23-5
FILTAL-1.18-10
FILTARUJI.24-3
風向風速計 18-13
物標丶一 4-11
分割画面 1-21
#
平行力一
間隔 12-3
長さ 12-4
表示/消去 12-2
方位毛一卜 12-2
本数 12-2
向 12-3
毛一卜 12-2
12-3
法
他七尼一 萨 …18-5,18-14
夫
mri-napei 4-10
文
三二二二二2-11
的
MxInnsivt ...1-2
Méni-ÜssrIe AP-1
#
文字入力 2-16
公
一 19-1
一
FEA-2x07 一夕の証込..10-12
FMD-3x00/FCR-2xx9等下一夕の
訖述力 10-11
FMD-3x00 徒夕の書出し.....10-13
RTZ 10-14
RTZ 一夕の証返り 10-13
円レト 10-18
才総戦卜のコ比一 10-10
才総戦卜の削除 10-9
才総戦卜の情報 11-7
才総約卜の編集 10-8
監視 10-19
区域V.0-1b 10-18
削除 10-15
作成 10-4
全項目レト 10-16
注記対久 10-6
潮流10-16
同期 10-2
避險線レト 10-17
表示説的才総上の指定..10-11
拉INLREpO-10-17
拉巴尔レト 10-19
一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一.一. 23-15
一 1-15
#
余裕水深 12-8
5
☆
ARCS 3-17
ENC 3-17
自動インストーリル 3-3,3-6,3-13
手動インストーリル 3-4,3-14
VACKA.. 3-18
復元 3-18
有效期限表示 3-18
LRSトの書出し 3-17
B
略語 AP-5
3
一卜
FEA-2x07 一夕の証讫..9-23
FMD-3x00/FCR-2xx9等一夕の
証达力 9-22
FMD-3x00 律一の書出し 9-25
RTZ/CSV/ASCII 一夕の書出し9-26
RTZ/CSV/ASCII 一夕の証淘汰9-24
SAR 機能 9-15
監視するルトの選択 11-1
監視中的ルトの解除 11-4
監視ルトの表示部分の指定.....11-4
計画ルトに変更 11-7
警報ハラメ一夕ご一..9-9
結合一一沙一丁一
(監視用) 11-6
航路L0-1 9-34
最適化 9-20
最適化一 9-9
削减 9-27
作成 9-4
全目的地 ト 9-33
子汇久結果一 9-11
軋送 9-27
同期 9-2
目的地位の変更 9-11
目的地の削除 9-13
目的地の插入 9-12
目的地一(監視用).11-5
目的地(計画ルト用)....9-7
目的地 ト 9-32
一
(計画ルト用) 9-8
Lel-1bVanK 9-18
ルート情報報のス 2-13
19-13
ルトーヒー... 4-9
机
一 16-2
LeSboNShBvITeIbIaNStFpa-
7.5.1.25-12
V.
丙 10-18
区域 10-18
航路 9-34
全目的地 9-33
全一一沙一丁 10-16
潮流 10-16
避險線 10-17
目的地 9-32
Laiin 10-17
拉塞尔 10-19
- 古野電氛株式会社
- 安全にお使いんだくたに
- [必素除守馀<下]
- 警告
- 注意
- 警告犬儿
- WARNING
- 目次
- 5章 萨尔夕一(S57) ヤーパト 5-1
- 7章 C-MAP パート 7-1
- 8章 トアトト ………………………………………… 8-1
- 9章 莫一卜 9-1
- 10章 ルーダービーマフ … 10-1
- 11章ルートの監視 11-1
- 12章 航海一尔 12-1
- 13章 物標追尾(TT)機能 13-1
- 14章AIS夕一袋卜機能 14-1
- 15章AIS安全、NAVTEX末尾
- 16章 莱一夕一重叠 16-1
- 17章 氛象重叠 17-1
- 18章 航法せンサイ … 18-1
- 20章 一ト 20-1
- 21章 パラメ一夕 21-1
- 22章 メニング&ミニング的画面 22-1
- 23章 設定 一 23-1
- 24章 保守点検およトラルシuya一テイン. 24-1
- 25章 亚拉一トマネジメトステム(才普専仕樣) 25-1
- 26章才一トハイロット接統時の操作(才普仕樣) 26-1
- 特徵
- 本書の表記にたて
- □格拉丛番号
- □格拉(Sofuwa)のハーニン·チヤトの適合性
- ウルスの予防
- 于一卜在更新上
- 不ト一久接续
- 第三者が作成了一口ロガラムをECDISにインズルない
- 本製品に使用いたします。
- リバーフエングーニアング
- 接续可能表示部
- SNTM構成
- フ空間構成
- 1.2制御部 EC-3000
- 1章序文
- 電源の才 /才
- シSTSムの電源を入る
- システムの電源を切る
- フレntモーダ
- ECDIS 操作部 RCU-024
- ECDIS 操作部の説明
- 操作接点信号(才レーダフツトネス)
- トラットル操作部 RCU-026
- トラット操作部の説明
- 操作接点信号(才レーナフイットネス)
- 色調の選択
- 1.8表示部の輝度調整、操作部バックライトの輝度調整
- 1.8.1手動で表示部の輝度を調整する
- [BRILL] まみを使て、輝度を調整する
- 1.
- トラットル部を使て、輝度を調整する
- 操作部ハツ克莱イトの輝度を調整する
- せんサ一の設定
- 自船速度の入力
- [スルルルルルルルルルルル]を選んだ場合
- 5.接統了機器か自動的以速度入力用場合は、次の操作を行いま�。
- 6.手動速度を入力する场合は、次の操作を進行む。
- 船速入力時の注意点
- 船首方位の入力
- MOB 位置にマーメの投入
- MOB マーケの情報を表示する
- 時刻形式の選択、現地時間の設定
- 表示画面のスケリーニンチットの撮り方
- 設定×二一
- ハーフリルの管理
- フリルを作成する
- 予口菲尔を無効にする
- フリルを鳴む出す
- フリルを消去する
- [□口菲尔消去]をクルクしま�。
- ヨフロー設定を Respirant
- 2.[徳才ル卜設定]をケリクくます。
- 3.[はい]求夕をクり仄くせ。
- プルステム情報おはい取叢説明書の表示
- 1.18分割画面
- 1.18.1分割画面と全画面を切り替えの
- 1.18.2使用ごる機能
- 1.18.3分割画面の使用特性
- 操作方法
- フリンタにて
- ECDIS 画面
- 2章 操作の概要
- 電子海圖表示領域
- 表示説海岡にて
- ENC バクタ一形式
- C-MAP バケタ一形式
- 于一卜配信
- 重要注記
- ARCS ラスロー形式
- 2.1.2ステ一夕スハ一
- Sté一夕Sù一上の木さん操作する
- トクスを
- イングスローアクセスローのボtonsを操作する
- せんサ一情報木クス
- 航海情報およ亃せんサ一名の表示色
- 自船機能术クス
- ルート情報术クス
- 視針路
- 重叠 / 航海ツルトクス
- ト木クス
- パーマonent警告木クス
- 北方位マ―ク
- ペンテキストメニ一
- 文字·数字の入力
- 操作部のキ一トを使て、文字を入力する
- トウア一木一使て、文字入力する
- 入斯トアスバーネリ [表示]、[ ]、[才] ムタンを順にケリツくて、ソフウエアキ一ト表示します。
- トラツクボーツル部を使て、緯度と経度を入力する
- 操作モードの選択
- ヤヤーツ縮尺の選択
- 表示一の選択
- 表示一卜の説明
- TM リセット機能
- TM リセット機能を才ノ/才フにする
- TM リセットの境界線を設定する
- 2.8航行監視お願い航路計画モーツートのルト、ロー ダー一チヤーツの操作
- EBL 与 VRMの使い方
- 方位おはみ距離の計測
- 方位基準の選択
- メンテキストメニー使用くださるEBL·VRM機能
- 計算方法の選択
- 測地系
- 概要
- 紙海円
- 電子海圖
- 測位装置と測地系
- ECDIS と測地系
- 出航前所の設定
- 出航前所の更新
- 于一卜の更新
- チヤ一トの表示日付おはみ手動更新
- 一沙一丁、注記の作成と更新
- テヤーツアラーツの計算
- ルートの作成と更新
- テヤーツアラーツに对面のルーニを確認する
- 時間表と到着予定日時(ETA)の再計算
- 監視するルート / ハーガーナフローの確認と準備
- 監視するルーツの選択とリンクかけたeer一チヤ一トの確認
- チヤーツアラーツで使用する才総工クト
- 監視するユーダーチヤートの選挙
- 航法ルフの設定を確認する
- 船速の設定を確認する([船速]ご一)
- 測位SenSA一を確認する([位置]一)
- 航行距離、総航行距離の值をリセットする
- ENC デヤーツのバリックキーナインズトーリル
- ENC ライSENS、チヤートのインストーリ
- ENC ライセスをインストーリる
- 自動インズロー
- 手動インスロー
- 3.2.2ENCチヤートをインスローする
- [OK] プタンをクルックて、インズローを開始します。
- ARCS ライSENS、チヤートのインストーリ
- ARCS ライSenstをインストーリる
- ARCS バーパートをインストローする
- 3.4ENC、ARCS ライSenスを削除する
- ENC ローツの製造者情報を更新する
- C-MAP パヤーツをインストールする
- eToken 言登録する
- [C-MAP トア'] ム湎をクリックします。
- C-MAP デヤートのデーフス、ライセンスをインストーリする
- C-MAP バーパートのデーフローをインズトーリする
- C-MAP バーパートのライSEPENSをインスローする
- 自動インスロー
- 更新菲尔を作成/注文/適用する
- 更新フアルを作成 /注文する
- 更新フアルを適用する
- ライSenスのSté一タスを確認する
- C-MAP デヤーツのデーフローを削除する
- パヤーツのリストを書き出す
- 特定のライSenStトを書き出す
- ENC ライSENS、ARCS ライSENSを表示する
- ライSENSスをバックアフロー、復元する
- ライセンスをバットアフター
- ☆いせを復元する
- ライSenスの有効期限を表示する
- 定期購入ライセNSの警告(RENC用)
- ネンストーリル /更新の履歴を表示する
- デヤーツルの力たロ格
- マヤーツルを格ル一化する
- チヤートルの格尔一を編集する
- 于一卜ルのル一を削除する
- 表示説的格一上为選必
- マヤーツルの状況を表示する
- 3章 バートの管理
- ヷヤ一トを開く
- バーパートリスト、チヤーツルの更新状況レフローを印刷する
- バートリストを印刷する
- マヤーツルの更新状況レボーツを印刷する
- マヤ一トを削除する
- ENC マヤーツの発行元の注記を表示する
- ヤヤート種類の表示
- 子一卜種類の表示
- 3.20ENCおよ[C-MAPチヤートの手動更新
- 新いチヤーツ才総工クトを插入する
- 3.20.2公式チヤートの才総工ケトをコビ一て、手動更新才総工ケトとて插入する
- マヤーツ才総工に取消し線を追加する
- バーパート才総工クトを削除する
- 既存のチヤートフジエクトを編集する
- ヷヤーツ才総戦のレビュ一機能
- ネートの手動更新デーを削除する
- ヤヤートに関連するデーダの同期を行う
- 本機と同期を行うトを選む
- 同期狀態を確認する
- 3.21.3手動更新機能と同期
- SENC ローナを再変換する
- Gate-1を使てチヤート管理する
- トルの種類を選む
- 本機を再起動し尺寸。
- マヤートをインストーリる
- Gate-1を經由てチーパールイセNSを購入する
- デヤ一トデ一夕を削除する
- 3章 バーパーの管理
- ヤーパートの関覧
- ヷヤーツ才総ジエケトの表示設定
- 4章子一卜機能の操作
- 多色表示
- 2色表示
- 4.2.2[基本設定]×二一
- 4.2.4基本表示
- 小神木ル・機能の表示設定
- 4.3.1[全般]一
- 船形表示
- 速度を令卜ル
- 4.3.2[航跡]一
- 自船航跡(自船の過去航跡)
- I股本上
- [ルート] ハージ
- [マリ一] 一
- 一
- [物標 ] 一
- 航迹
- ヤーパーの表示設定
- S57 ヤヤートの紹介
- 用語の定義
- S57 マヤートの文字情報
- S57 バーツの警告表示
- S57 マヤーツのチヤーツ表示日付と更新デ一夕
- 5.2.1はしに
- S57 マヤーツの表示日付を設定する
- S57標準のチア卜表示日付依存にて
- 更新下一夕をハイランド表示する
- S57 マヤーツで使用する記号
- S57 ヤーパト機能に使用くださいます表示ライランドリ
- S57 パヤーツ才総戦トに関する情報を表示する
- AIO
- 入斯トーリ
- AIO 表示すの
- AIO バート才総は状卜情報を表示する
- 5.5.5表示情報を選挙
- ARCS ヤーパト
- ARCS マヤートの文字情報
- 詳細
- 插入(八)優先を設定する
- ARCS デヤーツの注訳を表示する
- 一斯一夕daiya(SDD)
- 6.2測地系と ARCSチヤ一ト
- ARCS ローツの警告表示
- ARCS デヤートの予約購入
- ARCS ライSenス情報
- C-MAP ~の登録
- マヤーツの注文
- ライSenスの申請
- トラルシャーネング
- デヤーツの表示
- 7.6警告表示
- 7.7水路通報 (Notice to Mariners)
- 表示説情報選
- 8章 パヤーツアラーツ
- 注)本機は、表示てい的チヤ一トははなく、利用可能な最大縮尺のチヤ一トを使用て危険水域を計算しぃす。
- ヤヤーツアラーツ
- 安全等深線を設定する
- 工I阿の一覽
- 8.2前方監視のチ歐エリアを設定する
- 航路計画
- 計画ルーツのたのチヤーツアラト
- 航路計画の概要
- 注1)表示たル一の制限
- 航路計画の主なメニ一
- ルートの同期にたて
- 例2:ECD001、ECD002、CRA001の场合
- 新規ルトの作成
- 取消上機能の使い方
- 9.4.1[目的地]丶一の使的方
- [eu-əs-ei-ət]
- 9.4.4[警報八拉一夕]一的使方
- CONTESUBM
- [チエツク結果] ご一の使い方
- 既存ル一トの変更
- 目的地位置を変更する
- 目的地新位置にドラツ格&ドロツフする
- [目的地]一、緯度、経度を変更する
- 目的地の他のデーを変更する
- ルートの終点(最後に入た目的地)に新い目的地を追加する
- 電子海岡表示領域から、ルートの終点に新い目的地を追加する
- [目的地] ハージから、ルートの终点に新い目的地を追加する
- 目的地を插入する
- 電子海圖表示領域か、目的地間に目的地を插入する
- [目的地] [一]
- [目的地] [一]地を削除する
- ルーツの構造チルク
- 「タ一」不可名目的地があます:目的地XX!(XX:目的地番号)
- 「レガ短さます。目的地XX-目的地XX」(XX:目的地番号)
- 「回頭不可の目的地のはんだ。目的地XX」(XX:目的地番号)
- SAR 機能の操作
- [OK] プタンをクルクしいます。
- 博一卜航行説には、[監視に移行]术子をクリクしま�。
- ルートを保存するには、[保存] メタentonをクリックて、ルートの名前を入力しります。
- ルートバング
- ルートの最適化
- ルート最適化に利用くださ的方法
- ルートを最適化する
- [最適化] イフロー、[最適化] ハーダー開きま�。
- [種類] て、ドロットダウソリストから必須な最適化方法を選むす(9.8.1項参照)。
- 次の操作を行いいたします。
- 速度 プフローの計画
- ルームデーの読迍
- ECDIS FEA-2x07 为作成了一尔一卜一夕を読み还む
- RTZ、CSV、ASCII形式のルトデーを読み迆む
- ルートデーナの書出し
- RTZ、CSV、ASCII形式のルトデーを書き出す
- ルートの削除
- ルーの軸送
- 9.12.1ルト軀送機能を才 /才にする
- 監視ル一卜を送受信する
- 監視ル一トの送信
- 監視ル一トの受信
- 計画ル一トを送受信する
- 計画ルトの送信
- 計画ルトの受信
- ルーツのレボーユ
- ル一ト計画レロ一ト(目的地レロ一ト)
- ルート計画レロト(全目的地レロト)
- ルーツ計画レロ一ト(航路レロ一ト)
- 10.1はじてに
- ルーダー一チヤートの才総工クト
- ネーフーマヤートの同期にたて
- 同不ト�一上の二卜が2台の場合
- 例1:ECD001、CRA001の场合
- ネーフーダービフローを作成する
- 注記デーにとて
- [保存一anza一丁ヤ一ト]ウindsロで、一一一一一名とコメトを入力て、[保存] モタンをクリックします。
- 取消機能の使の方
- ハーダー一チヤートの才総工クトを編集する
- 才総工ク卜を移動する
- ライング区域のコーナーロイドを変更する
- ライング区域のコーナーロイドを削除する
- ライングは区域に、One-N-one-PoIeNtを插入する
- ネーーダー一チヤートから才総工ク卜を削除する
- ネーーダーフローは才総工クトをコビ一する
- 10.7表示するeu一サ一チヤ一トの才総戦卜を選む
- ネーーダー一トデーの讀と
- RTZ 形式の ハーダー テフロー ムーダー ヤーダーを読み迅む
- ルーダーマフローデーの書出し
- RTZ 形式の ヨーダーマヤートデーを書き出す
- ネーデーフローを削除する
- ネーーナーマフローのレモーツ
- 全項目レ木一上
- 潮流Lob一卜
- ラインレート
- 避陰線L木一上
- 日レを一ト
- ラルレト
- 監視するeer一�一チヤ一トを選む
- 監視中的一于一チヤトを解除する
- 11.1ル一トの監視を開始する
- 方法1:イングスローアクセスローを使用する
- 方法 2: ルート情報木クスから選む
- ルート表示にとて
- ルートの監視を停止する(手動、自動)
- ルートの部分を表示するかを選む
- 目的地の情報を表示する
- 監視ルーツにリンクくださたヨーサイービフートの情報を表示する
- 監視ルーツにリンク.SEた的ヨーサイーヤフローの才総工スト情報を表示する
- 監視ル一トを計画ル一トに変更する
- ネンランドラック機能を使て、監視中的ルトに尻す / 监視中的ルトから迂回いたします
- 航路離脫毛一卜
- 航路復掃一卜
- いなんだトロクに開るマss一
- トクの詳細
- 簡易ルトの監視を開始する /停止する
- 簡易ルトの監視を開始する
- 簡易ル一卜の監視を停止する
- 簡易ルトの監視に元ルトを変更する(航路離脱モ一卜の)
- 簡易ルトの監視中、[Instant Track] ロアロガボックスの [監視] ハーニングにある [才リジNALルト] 求をクしま。
- 变更するル一ト名を選択いたします。
- [開く] モローをクとて、デアロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロドロ
- モタncyの状態
- 監視中的ルト表示を共有する
- 重疊 / 航海ツールルボックスの航海ツールルにアクせスする
- 12.2.1平行力一ルを表示 /消去する
- 12.2.2平行力一の方位王一卜を選む
- 12.2.3平行力一の本数を選む
- 12.2.4平行力一の毛一卜を選む
- 12.2.5平行力一ルの向きと間隔を調整する
- 平行力一ルの向きと間隔をM二一から調整する
- 平行力一の向きと間隔を画面で調整する
- 12.2.6平行力一ルをリセットする
- 12.2.7平行力一ルの長さを調整する
- 前方監視
- 固定距離環
- 計算方法の選挃
- 12章 航海一
- 自船動態推測表示
- ト力一フツ
- 余裕水深 (UKC)
- 概要
- UKC 設定規則
- UKC ユイndウ
- 曲線 EBL
- ヨイバイダ
- ヨバイダを使用する
- 基点の削除
- 终点左削除的上
- 拉丁の基点を削除すると
- 使用特性 & 制限
- ヨバイダを削除する
- 12.9.4計算方法の選択
- 13章 物標追尾(TT)機能
- TT ニンボルの表示 /非表示
- TT ニンボルおよこ TT属性
- TT ニンボル
- TT ニンボルの色と大小を選む
- TT表示の制限
- バクルの時間とモーダを設定する
- 对地 / 对水
- 真ルトル
- 相对凹卜儿
- 追尾物標の従一夕を表示する
- 個別の追尾物標対一を表示する
- 操作部を使て表示する
- トラツクボーリル部を使て表示する
- 航跡の属性を設定する
- TTの情報源
- IEC 62388 Ed.2 以降に準拋てる構成の场合
- 使用特性
- IEC 62388 Ed.2 以降に準拋ていな構成の场合
- AIS ニンボル
- 実在 / 皈想 AISATONのシングル
- 航海関連情報を設定する
- AIS ニンボルを表示 /非表示する
- AIS 表示を制限する
- 重疊/航海ソ一ルボックスで [TT/AIS] ハジを開き、[AIS]を右ケリックて [設定]を選むす。
- [AIS 表示 フィルターダー] イングロー、下記の内容を参照して各項目を設定します。
- 活性タ一徳卜
- 休止夕一徴卜
- 特定の活性ターダットを休止させる
- さての活性た一��卜を休止させ
- AIS キーダーはのデーを表示する
- 基本一夕
- 詳細一夕
- バクルの時間とモードを設定する
- 真ル卜
- 相对凹凸儿
- AIS キーダGBTの過去位置(航跡)を表示する
- TT·AIS キーダGPトの同一化
- 自船の情報を表示する
- 15章 AIS安全、NAVTEX メットセジ
- AIS 安全メットジ
- AIS 安全メット一の送信する
- 送受信た AIS 安全メソsei一表示すの
- AIS 安全メット一�を削除する
- 受信たは送信MSS一Jを削除する
- 二虫箱内の米ツせ一ジを削除する
- NAVTEX メットセジ
- NAVTEX メットーダー表示する
- NAVTEX メットセジを削除する
- 受信Mss一子为削除社
- 二孙箱内のMSS一子を削除する
- 16章 ルーロー重疊
- 16.1はじてに
- ルーダー映像を重疊表示する
- ルーダー接続箱からの入力信号を調整する
- 5.[干涉除去] 于、一干涉去。
- [詳細設定] モローをクルクて、[レーロー接続箱詳細設定] フローロガ モロースを表示します。
- 16.4レ一徴一映像とチヤ一卜位置の誤差
- 方位工拉一车补正的
- 位置工一を補正する
- 16.5レ一徴一映像とTTの不一致原因
- 氣象重疊機能のは?
- 氣象重疊機能を有効 /無効にする
- 气象重景機能を有効にする
- 気象重骨機能在無効にする
- 再生する気象デーフを選む
- 氣象重疊機能に関す設定
- 氣象重疊機能の表示例
- 17.5.1風向·風速情報
- 風向·風速記号(矢羽根)の読み方
- 氨温情报
- 17章 氛象重叠
- 17.5.3雲量情報
- 降水量情報
- 波高情报
- 海流情报
- 位置氛象情报
- ECDIS モーネードの気象重疊の機能制限
- CCRS
- 有効性・合理性のチーベク
- CCRSのたイ
- 代表七卜
- 航法せんサ一の選択
- せんサ一ムニーの説明
- [船首方位]一
- [船速]一
- [COG/SOG] パージ
- [位置]一
- [他七n]
- 18.3測位SenSAI
- 自船位置
- 航法対一夕の情報源
- SOG、COG、船速、船首方位に関連するアラト
- フィルターメの状態
- 位置补正
- 位置补正
- 才FSEH 332.5° 10.0NM
- 位置補正を解除する
- 深度 Seven
- 19章 記錄、再生機能
- ネンロ格
- ヨーダービント
- 位置いCNTB
- 位置の線(LOP)が定義する位置フィットス
- 詳細ロズ
- 詳細ロムを表示する
- 航海口格
- 航海口戈表示的
- 航海口の条件を設定する
- ヤヤーツ使用履歴ロフ
- 危険物標ロ格
- 危険物標ロが表示する
- 危険物標ロ格の条件を設定する
- ルート軸送ロ格
- 一卜軀送口戈表示的
- 記錄 / 再生デーに関するご注意
- 斯一夕スロー上の [その他]、[再生] ムタを順にケリックします。
- 再生た一夕の日付を設定します。
- [OK] プタンを clerkにくせ。
- トは
- アラーツの優先度
- アラームの力テガリ一
- トト木クス
- アラト状態パターン /集約パターン
- 一時の警報音を止う(アラーツの優先度:「緊急」「警報」「警告」)
- 20.4「緊急」「警報」または「警告」のアラーツを承認する
- アラームのカテガリ一、アラームを承認する場所
- トリスト
- 承認木たn 消音木たn
- 承認·原因の解消後の、アラーミスを更新する
- トロ
- 20.7接統せんサ一からアラトを受信する
- トのリスト
- 自船 &ル一トハラメ一夕
- 自船ハラメ一夕の説明
- ルーツバラメ一夕の説明
- 前進距離
- 經費八ラメ一夕
- Instant Track パラメ一夕
- メンダ画面の表示例
- 例6(すての水域、航海)
- 例7(すての水域、港)
- 例8(大洋、航海)
- 例9(大洋、港)
- 例12(才菲亚莎一巴斯船、船首1)
- 例13(才菲亚沙一巴斯船、船首2)
- 例14(才菲沙一巴斯船、船尾1)
- 例15(才菲沙一巴斯船、船尾2)
- ミニコング的画面
- 23章 設定×二」一
- [設定] マニローの表示
- フアイルの書出し
- フアルの読迍
- フアルのメンテングス
- ト設定
- ルフ�スト
- 一夕共有
- 力スタマイズ
- 表示NTS卜
- ネトデスト
- スケリーニnhotsト
- スケリーニnhトを書き出す
- スケリーニnhトを削除する
- スケリーニnhトを印刷する
- ルーダフロー
- CCRP
- 24章 保守点検およんだラルシャー テイング
- ふだんの保守点検
- ヒューニスの交换
- トラット プーリルの手入れ
- フィルターネの掃除、交換
- 24.4.1制御部 EC-3000
- スタンドードンソル ECN-303/304/319/323/327
- トラルシャーネング
- 交換が必須部品お願いその推奨交換時期
- S57 ヤヤーツ用のカラ一識別テスト
- 25章 トマネジメトステム(才普は仕樣)
- トマネジルトステム(AMS)は
- プル構成
- 7 1
- アラ一卜の優先度
- アラームの力テヨリ一
- アラーツの力テゴリ一、アラーツを承認する場所
- トの力テゴリ、接統てる機器や AMS からアトを承認する
- AMS からアラーツを承認する
- トに関るSentenst
- ACK/ALR トデンス
- アラートの承認プロ一
- 機器狀態
- アラーツ発生無しの通知メソーケジ
- アラーツリストメツせ一ジ
- ACN/ALC/ALF/ARC/HBT 亜ntenst
- 外部機器お願い AMSが出力するせんテNs
- アラトが発生たとを
- 定期送信
- AMS とアラーツを承認する场合(カテガリ-Bのアラーツ)
- AMS とアーツを承認する场合(カテガリ-AははCのアーツ)
- 警告アラートの繕返し
- BNWASに「警報」アラーツを軸送する
- 未承認の「警告」の優先度を変更する
- 一時のに警報音を止う
- 警報音の種類
- Legacy(從来の規格)の警報音
- IEC62288Ed.2の警報音
- トの優先度、トの状態
- 集約アラト
- 単体の機器で発生する類似アラーツのルーヒング
- 複数の機器で発生する類似アラーツのgren
- Lesbonshi テイト lamnfa一アラト
- 冗長構成
- ト状態イコ /集約イコ
- AMS ミートの操作
- AMS マードを選み
- AMS 羟一丁ドウイドドウ
- アケテイフアレトウinds。
- アラーミロガウインドウ
- アラーツルストウinds。
- [集約]一
- 26章 才一トバイロット接統時代操作(才総仕樣)
- 操作說明
- EMRI製 FAP-2000
- EMRI 製 FAP-3000
- 各自動操舵馬一におはしの舵角制限の設定
- REMOTE CONTROL (TCS) マード
- COURSE CONTROL E一卜
- HEADING CONTROL E一卜
- 優先操舵の停止:
- FU優先 NFUコntローラ一
- 優先操舵の開始:
- 26.2.4東京計器製 PR-9000
- YDK テケノロジー製 PT-500A
- YDK テケノロジー製 PT-900
- Raytheon Anschutz 製 NP-5400
- 操舵一卜
- EMRI製FAP-2000、FAP-3000
- 手動操舵王一卜
- 自動操舵王一卜
- 船首操作一卜
- 半径操作卡
- □口格拉船首变更一
- 26.3.2東京計器製PR-6000、YDKテクロジー製PT-500A、PT-900、RaytheonAnschutz製 NP-5400
- 手動操舵モーリド(モーリドの選択:HAND)
- 自動操舵モード(モードの選択:AUTO)
- ルート操舵モーリド(モーフの選挙:NAVI(PT-500A)、RC(PR-6000))
- Nonsfo口a#p操舵莫一(莫一的選折:NFU(PR-6000))
- 遠隔操舵王一(王一の選:RC(PR-6000))
- 26.3.3東京計器製 PR-9000
- 自動操舵一(TC.HC)
- YDK テケノロジーネ製 PT-900
- Raytheon Anschutz 製 NP-5400
- 操舵モーツにて
- ECDIS ごの才一トハイロット機能
- 才一トバイロット操作する ECDISを選む
- [TCS] バーニジ内的項目にたて
- ECDIS とトラックコルドローニルステム (TCS)を使用する
- TCS 者有効にする
- FAP-2000、PT-500A
- NP-5400、PT-900
- TCSを停止する
- Raytheon Anschutz 製 NP-5400、東京計器製 PR-9000、およ\FMD におけるトラックコンドローツの制限
- NP-5400、PR-9000の制限事項
- FMDの制限事項
- ルーツ操舵に開示表示、アラーツ、ECDIS で発生するマツsei
- 26.7.1ル一卜情報ボクスに表示之称るル一卜操舵情報
- ルーツ操舵に必須な条件が不十分なりきに発生するアラーツと フツses一ジ
- Mss
- 他のルト操舵表示とアラト
- ルト情報ボックス内分泌のルト操舵表示
- ル一ト操舵に開るアラ一ト
- 目的地に接近するときに発生するアラーツ
- TCSの試験基準と才一トハイロット
- IEC 62065 Ed.1 & IEC 62065 Ed.2の相違点
- (1)変針指示のアラトが発生するタイミング
- (2)アラーツの発生順序
- 6.CCA在承認的。
- Backup Navigator Alarmの出力が停止する。
- 2.ECCW 1承認的。
- 3.30秒後、「警告」の優先度が「警報」に変わる。
- ECCA に承認ない。
- 30秒後、Backup Navigator Alarm 出力之称。
- Backup Navigator Alarm に上来
- Raytheon Anschutz 製 NP-5400 以外の才一トバイロット
- Raytheon Anschutz 製 NP-5400
- 补足
- ルート情報ボーヒス内分泌の表示
- Raytheon Anschutz 製 NP-5400 からの TCS 開連のアラーユ
- ルーツ操舵に関する操作
- 26.10.1ルト操舵時の旋回中止と変更
- 旋回を中止する
- ルート操舵中的衝突回避操船
- 操舵性能
- 前進中的操舵
- 不具合状况
- 26.11.4異常にようトラツクコントローリが中断た場合
- 追補 1 マニローリ一
- x 个令 x = y_1 - y
- 追補 1 メニーリリ一
- 設定×二一
- 略語
- #
- 追補 3 情報の表示色と意味
- 電子海圖情報表示裝置 FMD-3200/3300 仕 樣
- 表示部
- 制御部
- 1nTREJEnbIb(才Pshon)
- 一重置機能(才)
- 電源
- 環境条件
- AIS
- AMS
- ARCS ヤーパト
- B
- C
- E
- EBL
- G
- 1
- M
- N
- S
- T
- TT
- U
- UKC
- V
- VRM
- 为
- ()
- 位置
- 方
- 加
- 卡
- 三
- L
- 世
- 乙
- 5
- 索引
- 同期
- 法
- 52
- 平行力一
- 夫
- 文
- 的
- 公
- 3
- 机
ブランド : FURUNO
モデル : FMD3200
カテゴリ : 海洋ナビゲーションシステム