
DRS4W - 海上レーダー FURUNO - 無料のユーザーマニュアル
デバイスのマニュアルを無料で見つける DRS4W FURUNO PDF形式.

| ブランド | Furuno |
| モデル | DRS4W |
| カテゴリ | 海洋レーダー |
| 製品タイプ | パッチアレイアンテナレーダー |
| 寸法 (長さ x 高さ x 奥行き) | 488 x 220 mm |
| 重量 | 5.7 kg (1mケーブル含む) |
| 電源 | 12-24 VDC (10.8-31.2 V) |
| 消費電力 | 2.1 A (12 V) / 1.0 A (24 V);待機:0.8 A / 0.4 A |
| 送信周波数 | 9410 MHz ±30 MHz (Xバンド) |
| ピーク出力 | 4 kW |
| 表示距離 | 0.125 NM ~ 24 NM (14段階) |
| 最小探知距離 | 25 m |
| 距離分解能 | 25 m |
| 距離精度 | レンジの1% または 0.01 NM (いずれか大きい方) |
| 方位分解能 | 7.2° |
| 方位精度 | ±1° |
| アンテナ回転数 | 24 回転/分 |
| 水平ビーム幅 | 7.2° (3 dB) |
| 垂直ビーム幅 | 25° (3 dB) |
| アンテナ利得 | 20 dBi以上 |
| サイドローブ | -18 dB (±20° メインローブから);-20 dB それ以上 |
| 無線インターフェース | Wi-Fi IEEE 802.11b (2.4 GHz) |
| Wi-Fi受信距離 | 約5m (障害物なし);約2m (障害物あり) |
| 主な機能 | 雨雪抑制、干渉フィルター、ガードゾーン、ビデオズーム、中心移動、エコー色 |
| メンテナンスと清掃 | 柔らかい布と水で清掃;工業用洗剤や高圧洗浄機は使用しないでください |
| 安全 | 筐体を開けないでください;アンテナから安全距離を保ってください;電源にはサーキットブレーカーを使用してください |
| 交換部品と修理 | ヒューズ 5A (FGBO 250V 5A PBF);マグネトロン (約5000時間寿命);Furunoサポートに連絡してください |
| 一般情報 | 内蔵アンテナチップ;GP-1871F/1971F表示器への無線接続;地域の規制に従い無線局免許が必要です |
よくある質問 - DRS4W FURUNO
ユーザーの質問 DRS4W FURUNO
0 質問 この機器について。知っているものに答えるか、ご自身の質問をしてください。
この機器について新しい質問をする
デバイスの取扱説明書をダウンロード 海上レーダー 無料でPDF形式で!マニュアルを見つける DRS4W - FURUNO 電子デバイスをもとに戻しましょう。このページにはデバイスの使用に必要なすべての書類が掲載されています。 DRS4W ブランド FURUNO.
使用説明書 DRS4W FURUNO
この取扱説明書には本機を安全に使用していただくために必要な注意事項、使用方法が記載されています。本機を使用する前に、この取扱説明書をよく読んで、十分に理解したうえで使用してください。また、この書類はいつでも参照できるところに大切に保管し、使用方法がわからなくなったときにお読みください。

古野電気株式会社
重要なお知らせ
- マニュアル記載内容の一部または全部の転載、複写は著作権者である当社の許諾が必要です。無断転載することを固くお断りします。
- 製品の仕様ならびにマニュアルの内容は予告なく変更することがあります。
- 画面に表示される内容は、システムの設定や動作状態によって異なります。したがって、本書内に掲載してあるイラストは画面の表示と異なる場合があります。
- お客様がマニュアルの内容に従わずに本機または本ソフトウェアを取り扱われたり、または当社および当社指定の者以外の第三者により改造・変更されることに起因して生じる障害等については、当社は責任を負いかねますのでご了承ください。
- お買い上げの機器を廃棄するときは、産業廃棄物として地方自治体の条例または規則に従って処理してください。詳しくは、各地方自治体に問い合わせてください。
- マニュアルに記載されている社名、製品名は、一般に各開発メーカーの登録商標または商標です。
本機をご使用になる前に
本機は、電波を発射する無線設備です。この設備を使用する際には、電波法に従って総務省への無線局免許の申請が必要です。

所定の手続きを踏まずに使用した場合、電波法違反となり、行政処分の対象となります。
詳細は、当社ホームページをご覧ください。

[必ずお守りください] お使いになる人や他の人への危害、財産への損害を未然に防止するため、以下のことを必ずお守りください。表示内容を無視して誤った使い方をしたときに生じる危害や、損害の程度を本書では次の表示で区分し、説明していますので十分に気をつけてください。

警告
この表示は「取扱いを誤った場合、死亡または重傷を負う可能性が想定される」内容です。

注意
この表示は「取扱いを誤った場合、中程度または軽傷の傷害、あるいは財産への損害を負う可能性が想定される」内容です。

「注意喚起」の内容

「禁止」の内容

「強制」の内容


レーダーの作動中にアンテナ付近を至近距離で見ないこと。
送信電波を至近距離で受けると、人体、特に目に悪影響を与える恐れがあります。 放射電力密度が100W/m²、10W/m²になる距離は下表のとおりです。
| 100 W/m ^2 | 50 W/m ^2 | 10 W/m ^2 |
| N/A 0.0 | m N/A |

カバーは絶対外さないこと。
装備時にカバーを外す必要はありません。内部には高電圧が使用されています。高電圧に触れると感電する恐れがあります。故障の場合はお買い上げ先へご相談ください。

空中線部を高所に取付けるときは、必ず安全ベルトとヘルメットなどの安全器具を着用して作業してください。
レーダーマストから転落して、死亡する危険があります。

分解・改造は絶対にしないこと。
火災、感電、ケガの原因になります。

電源は、機器の定格電圧に適した電圧を利用してください。
定格電圧外の電圧を利用した場合、火災や機器の故障を引き起こす可能性があります。

警告警告

高所作業時の転落防止のため、空中線部の取付場所には、サービス用足場または踊り場を確保してください。

機器を装備する前には、必ず配電盤の電源を切ってください。
電源を入れたまま工事を行うと、感電や火災の事故が起こる恐れがあります。

接続ケーブルは、付属のものを使ってください。
規定外のものを使った場合、重大な事故や火災を引き起こす原因になります。

ヒューズは規定のものを使用すること。
規定外の容量を使った場合、重大な故障を引き起こす恐れがあります。

本機は航海に役立つ各種の情報を提供します。しかし、どのような場合でも人間によるワッチを怠らないようにしてください。
注意

アース(接地)は確実に取ってください。
接地が悪いと、他の機器から干渉を受けたり、他の機器に干渉を与えます。

次のコンパス安全距離を確保してください。
| 標準コンパス | 操舵コンパス |
| 1.45m 0.9 | 0m |
注意

本機の電源をON/OFFするために、ブレーカーなどの断路装置を経由して船内電源に接続してください。

タブレットなどの端末に接続し、技適認証の申請内容と異なる構成で使用した場合、電波法違反となります。タブレットなどの端末に接続して使用しないでください。

本機の清掃には、高圧洗浄機を使用しないこと。 本機は、巻末の仕様ページにある防水性能を有しています。しかし機器の清掃時に高圧洗浄機を使用すると機器内部に水が浸入し、故障の原因となる恐れがあります。
警告ラベル
空中線部には、下図のような警告ラベルが貼ってあります。警告ラベルは絶対にはがさないでください。また、汚れてメッセージなどが見えにくくなった場合は、お買い上げ先までご連絡ください。
| ⚠ WARNING ⚠️ | ⚠ 警告 ⚠️ |
| To avoid electrical shock,do not remove cover.No user-serviceable partsinside. | 感電の恐れあり。サービスマン以外の方はカバーを開けないで下さい。内部には高電圧部分が数多くあり、万一さわると危険です。 |
名前:警告ラベル(2)
型式:03-129-1001-3
コード番号:100-236-743
プログラム番号
• 0359329-01.**
**軽微な変更による進度
目次
はじめに……v
1章 操作....1
1.1 システムの概要....1
1.2 基本操作 1
1.3 送信の開始 / 停止....1
1.4 画面レイアウト....2
1.5 メニュー 2
1.6 同調初期化設定....3
1.7 輝度メニュー 3
1.8 雨雪反射の除去....3
1.9 レンジの設定 3
1.10 表示モードの切替え 4
1.11 他船や物標の距離・方位計測....4
1.11.1 [EBL·VRM] 4
1.11.2 EBL 基準 5
1.12 オフセンター 5
1.13 映像拡大 5
1.14 ガードゾーン警報を設定する....5
1.15 エコー色 6
1.16 方位目盛モード....6
1.17 設定の初期化 6
2章 保守点検およびトラブルシューティング....7
2.1 保守点検 ....7
2.2 ヒューズの交換....7
2.3 トラブルシューティング....8
2.4 エラーメッセージ 8
2.5 マグネットロンの交換 8
3章 装備 9
3.1 構成表....9
3.2 装備時の注意点....9
3.3 装備....11
3.4 装備後の設定 13
3.4.1 無線 LAN 連携の設定....13
3.4.2 船首線調整....14
3.4.3 送信停止区域の設定 15
3.4.4 同調の初期化 15
3.4.5 電源の切り方 15
追補 1 メニューツリー....AP-1
仕様 SP-1
パッキングリスト....A-1
外寸図 D-1
相互結線図....S-1
はじめに
このたびは、当社製品をお買い求めいただき、誠にありがとうございます。当社は1948年の創業以来、数々の舶用電子機器を製造販売しており、性能、品質、信頼性については全世界のユーザーの方々から高い評価を受けています。本機は、厳しい品質管理のもとで設計・製造されていますので、性能・耐久性ともに安心してご使用いただけます。この取扱説明書をよくお読みいただき、本来の性能を十分発揮させていただきますようお願い申し上げます。
特徵
- 指示器との接続不要、船内電源へ接続するだけで装備可能
- 下記の機能を搭載
・海面反射除去、ノイズ除去、干渉除去を自動で実施
・ガードゾーン警報:ガードゾーンに侵入/離脱するターゲットを検知
・映像拡大:物標が見やすいようにエコーを拡大表示
・オフセンター:見たい方向の表示エリアを広げる画面シフト
- 表示する距離範囲を 0.125NM から 24NM の 14 段階で切替え可能
- エコー色を [黄]、[緑]、[多色] から選択可能
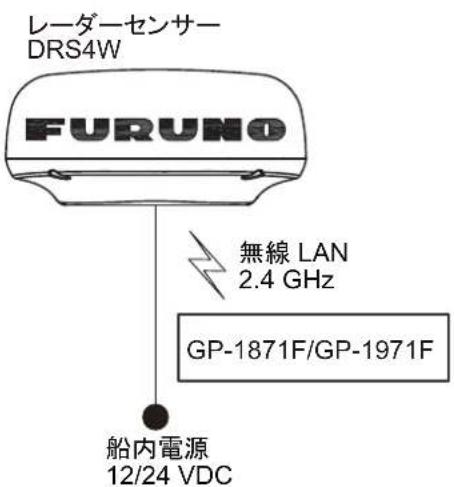
システム構成
1 章 操作
1.1 システムの概要
レーダーセンサー DRS4W はマイクロ波を発射し、マイクロ波の進行方向にある物標から反射された微小なエコーを検知します。DRS4W から物標までの距離はマイクロ波の発射からエコーを受信するまでに要した時間から計算されます。物標の方位はエコーを受信したアンテナ方位となります。
DRS4W はエコー情報を無線 LAN で GP-
1871F/GP-1971F へ送信します。GP-1871F/
GP-1971F では受信したエコー情報を表示したり、レーダー画面の調整ができます。

GP-1871F/GP-1971F
以下は DRS4W と接続する GP-1871F/GP-1971F の操作説明です。
1.2 基本操作
GP-1871F/GP-1971F 上で行うレーダーの基本的な操作は、下表の通りです。
| 操作 作動 | ||
| タップ |  | または閉じる。カーソル表示、メニュー表示ボタン操作、メニュー選択。 |
| ドラッグ(何かを選択して移動させる。) |  | カーソルを動かす。スライドバーを操作する。オフセンター画面にする。 |
| 操作 作動 | ||
| スワイプ(画面を指でなぞる。) |  | ・レイヤーメニューを表示する/隠す。・データボックスを表示する/隠す。 |
| ピンチイン、ピンチアウト |   | ・画面表示範囲を選択する。ピンチイン:縮小 ピンチアウト:拡大 |
| 2本指タップ 2本指 ダブルタップ |  | ・[ ジェスチャー機能 ]メニューで設定した動作。(GP-1871F/GP-1971Fの取扱 説明書参照) |
1.3 送信の開始 / 停止
画面左下にある送信 / 準備アイコンをタップし、送信状態と準備状態を切り替えます。
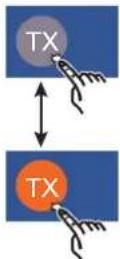
準備時(灰色)

送信時 (橙色)
送信 / 準備アイコ:
レーダーを使用しない時は、準備状態にしてください。
1.4 画面レイアウト
レーダー画面の概要と関連メニューは、下記の通りです。レーダー画面の左側に表示されるデータボックスを左右にスワイプする事により、データボックスを非表示/表示できます。
![[ホーム]ボタン (タップすると[設定]メニューを含む画面が表示されます。 [設定]メニューをタップした後、[レーダー]メニューを選択すると [基本設定]メニュー、[初期設定]メニュー、[工場設定]メニューが表示されます。) ホーム 緯度・経度 COG SOG (スワイプ) TX 16 NM HL レンジ 送信/準備アイコン 船首方位線(緑色の実線) ガードゾーン VRM EBL 自船アイコン 固定距離環 表示距離選択ボタン スライドバー 34°38.5498'N 135°16.2997'E レイヤーメニュー (スワイプ) 自船位置情報ボックス](/content/2026/03/563879/images/70b6c5796ee317cc88b6b8be83d9d572ffb3f7b056cfbd664a5c08bc8c8500e9.jpg)
1.5 メニュー
ポップアップメニュー
レーダーエコーが表示されていない部分をタップすると、ポップアップメニューが表示されます。
| メニュー項目 | 機能 |
| 新規ポイント | * 新規ポイントを追加する。 |
| 行き先に設定 | * 登録済みポイントを行き先に設定する。 |
| EBL・VRM | EBL の方位と VRM の距離を設定する。 |
| 自動雨雪 自動雨雪反射除去機能を使用する / しないを選択する。 | |
| 雨雪反射 雨雪反射除去機能の度合いを設定する。(1.8 節参照) | |
| 映像拡大 物標 | を拡大する。(オフ /低 / 高から選択) |
* 位置情報と船首情報の入力が必要
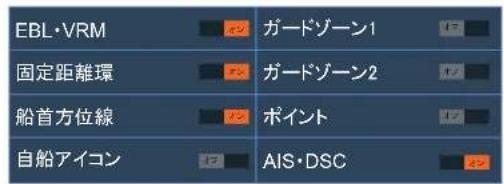
レイヤーメニュー
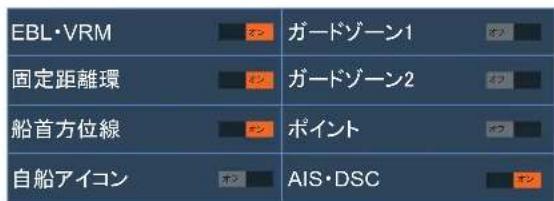
画面の下側を上方向にスワイプすると、下記のメニューが表示されます。
各項目をレーダー画面に表示する/表示しないを[オン]/[オフ]で選択します。
[基本設定]と[初期設定]
[ホーム] ボタンをタップし、[設定] メニューから [レーダー] メニューを選択すると [基本設定] メニューまたは [初期設定] メニューを選択できます。
基本設計
| メニュー項目 | 機能 |
| レーダーセンサー | 接続中のレーダーセンサー名を表示する。 |
| 背景色(昼) | [昼]モード選択時の背景色を[黒]、[濃紺]、[白]から選択する。 |
| 背景色(夜) | [夜]モード選択時の背景色を[黒]、[濃紺]から選択する。 |
| エコー色 レー | ダーエコーの色を[多色]、[緑]、[黄]から選択する。[多色]:受信エコーの強度により、赤→黄→緑色で表示します。 |
| スライドバー | スライドバーを表示するかしないかを選択する。 |
| 方位日盛モード | 方位日盛のモードを[相対と[真]から選択する。 |
| EBL 基準 | EBL 基準を[相対]と[真]から選択する。 |
D 3
初期設定
| メニュー項目 | 機能 |
| 同調初期設定 | 受信の同調を初期化するかしないかを選択する。 |
| ランダム送信 | 他船レーダーからの干渉エコーを受けにくくする。 |
| 使用時間 レー | ダー総通電時間を表示。 |
| 送信時間 レー | ダーの総送信時間を表示。 |
| 送信停止区域 | 電波を発射しない区域を設定する。 |
| 開始角度 送信 | 停止区域の開始角度を設定する。 |
| 角度幅 送信停 | 止区域の終了角度を設定する。 |
| 映像コントラスト | レーダーエコーの鮮明さを設定すする。 |
| アンテナ 船首線調整 | 空中線の取付け方位を補正する。 |
1.6 同調初期化設定
[同調初期設定] メニューで [オン] を選択し、レーダー画面に戻すと自動で同調初期化します。
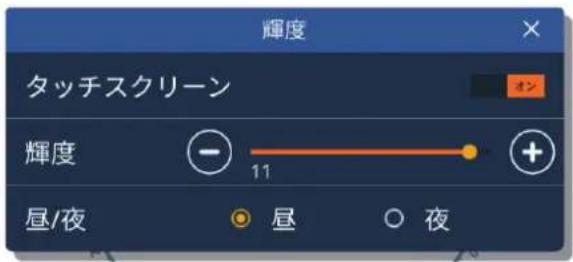
1.7 輝度メニュー
GP-1871F/GP-1971F の筐体横にある電源キーを押すと [輝度] メニューがポップアップします。[輝度] スライドバーをドラッグするか、一、+を押して輝度を調整します。[昼] モードと [夜] モードの切替えもこのメニューで行います。
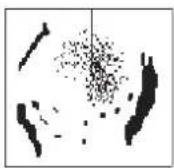
1.8 雨雪反射の除去
アンテナから送信される電波が雨や雪に反射して、画面上にエコー反応が表示されます(右図参照)。雨雪反射が物標を覆い隠してしまう場合は雨雪反射除去機能を利用してください。
雨雪反射除去機能はポップアップメニューで[自動雨雪]と[雨雪反射]から選択できます。[自動雨雪]:自動で雨雪反射レベルを設定します。[雨雪反射]:スライドバーで除去レベルを選択し、画面右上の[保存]をタップします。設定内容を反映しない場合は、画面左上の[キャンセル]をタップします。
1.9 レンジの設定
レンジの設定により、どの距離までの映像を見るか、選択します。設定したレンジによって、固定距離環の間隔と送信パルスの繰返し間隔が自動的に決められます。選択しているレンジは、画面左下に表示されます。
| レンジ | 0.125 0 | 25 0.5 | 0.75 1 | ||
| 間隔 | 0.0625 | 0.125 0. | 25 0.25 | 0.25 | |
| 本数 | 2 | 2 | 4 | 3 | 4 |
| レンジ | 1.5 2 | 3 | 4 | 6 | |
| 間隔 | 0.5 | 0.5 | 1 | 1 | 2 |
| 本数 | 3 | 4 | 3 | 4 | 3 |
| レンジ | 8 | 12 | 16 | 24 | |
| 間隔 | 2 | 3 | 4 | 6 | |
| 本数 | 4 | 4 | 4 | 4 |
・レンジ:表示しているレンジ・間隔:固
定距離環の間隔・本数:固定距離環の数
表示レンジを変更する場合は画面右側にある表示距離選択ボタンをタップ、もしくはスライドバーを調節してください。画面をピンチイン・ピンチアウトして、表示距離を変更することもできます。

1.10 表示モードの切替え
表示モードを変えることで、自船と他船または物標との位置関係などを、見ることができます。表示モードには、ヘッドアップとノースアップの2種類があります。画面左下の表示モードアイコンをタップして、ヘッドアップ(HU)とノースアップ(NU)を切替えます。
ヘッドアップ:船首線を常に真上に表示するモードです。他船または物標はブリッジから見たように表示されるので、狭路や混雑した海域で操船する場合に適しています。その反面、自船の旋回やヨーイングによって他船や物標の映像がふらつきます。
ノースアップ:真北が画面の真上(0°)になり、船首線は自船のコースの変化に応じて動きます。このモードでは、海図を見ているように固定物標が表示されます。自船が旋回したりヨーイングしても画面上の他船や物標はふらつかず、安定した映像が表示されます。
注)ノースアップを表示する為には船首方位信号が必要です。ノースアップモード時に船首方位信号が途切れると、自動的にヘッドアップモードに切替わります。船首方位信号を表示するには、方位センサーを復帰させてください。必要であれば、方位センサーが復帰したあとで表示モードを選択し直してください。
1.11 他船や物標の距離・方位計測
カーソルを使用して、自船から他船や物標までの距離と方位を計測する事ができます。
- 画面をタップしてカーソル(+)を表示します。
- カーソルを物標の中心に動かします。
- 画面右下にポップアップする方位/距離ボックスに、自船から物標までの方位と距離が表示されます。
数秒経過すると、方位/距離ボックスとカーソルは表示されなくなります。
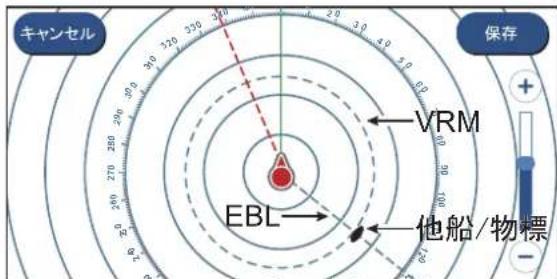
1.11.1 [EBL · VRM]
- レイヤーメニューを開き、[EBL・VRM]を[オン]にします。
- レイヤーメニューを閉じます。
- 画面上をタップして、ポップアップメニューを開きます。
- [EBL・VRM] をタップします。
- 方位を計測する場合は、EBL マーカーを物標の中心に、距離を計測する場合は、VRM マーカーを他船や物標の内側にドラッグします。距離と方位の両方を計測する場合は、EBL と VRM マーカーの交差する場所を他船や物標までドラッグします。
1章 操作
画面右下に表示される距離、または方位を読み取ります。
-
EBL や VRM の変更を保存するには、画面右上の [保存] ボタンをタップします。設定内容を反映しない場合、画面左上の [キャンセル] をタップします。
-
EBL または VRM を非表示にするには、レイヤーメニューを開き、[EBL・VRM] を [オフ] にします。
1.11.2 EBL 基準
EBL の数値は、[真](北を基準とした真方位)または [相対](船首方位を基準とした相対方位)で表示することができます。
注)真方位で表示するには、船首方位信号の入力が必要です。
1.12 オフセンター
自船位置を画面上の中心から移動させる事(オフセンター)で、レンジの切替えを行わずに見たい方向を表示できます。レーダー画面をドラッグする事により、自船位置をレーダー有効半径の75%以内の任意の位置に移動できます。自船位置を画面の中央に戻す場合、画面右上のボタンをタップします。
1.13 映像拡大
映像拡大機能を使って、物標が見やすいように拡大することができます。映像拡大には高、低の2段階のレベルがあります。
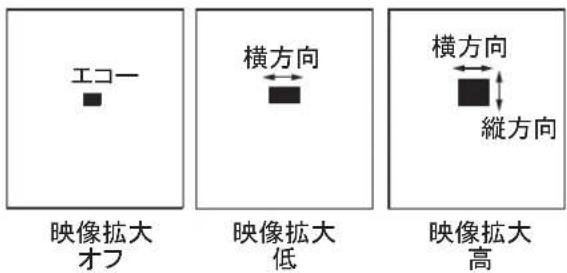
メニューを開き、アイコンをタップします。映像拡大メニューを選択します。低を選択した際には、物標が横方向に大きく映ります。高を選択した際には、物標が縦方向と横方向に大きく映ります。
注)映像拡大機能は、物標だけでなく海面反射、雨雪反射、およびレーダー干渉も拡大します。そのため、この機能を利用するときは、雨雪反射除去、および干渉除去を行ってください。
1.14 ガードゾーン警報を 設定する
ガードゾーン(他船や物標が侵入/離脱すると警報を発する領域)は2つ設定することができます。
- レイヤーメニューを表示します。
-
[ガードゾーン 1]、もしくは [ガードゾーン 2] をオンにします。
-
ガードゾーン上の点線をタップして、 ポップアップメニューを開きます。
-
[サイズ変更] をタップします。
ガードゾーンの四隅に、正方形のアイコンが現れます。
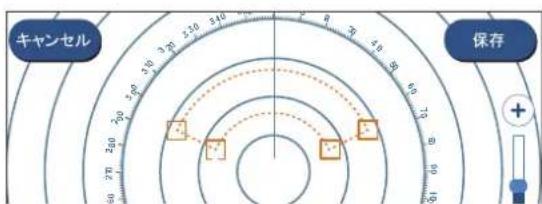
- 四隅のアイコンをドラッグして、ガードゾーンの範囲を設定します。
- ガードゾーンの範囲変更を保存するには、画面右上の [保存] ボタンをタップします。範囲変更を反映しない場合は、画面左上の [キャンセル] ボタンをタップします。
- ガードゾーン上の点線をタップし、 ポップアップメニューを開きます。
- [通知] をタップします。
- ガードゾーンの機能を選びます。
[オフ ]:ガードゾーン機能をオフにする。
[範囲内 ]:物標が設定したガードゾーンの範囲内に入ったときに警報音を鳴らし、メッセージを表示する。
[範囲外 ]:物標が設定したガードゾーンの範囲外に出たときに警報音を鳴らし、メッセージを表示する。
[範囲内] または [範囲外] を選択するとガードゾーン機能が有効になり、ガードゾーンを示す点線が実線に変わります。
- ポップアップメニュー以外の場所をタップし、メニューを閉じます。
手順9で選択した機能に応じて、設定範囲内に物標が入るまたは設定範囲外に物標が出ると警報音が鳴り、画面上の物標とエコートレイルが点滅します。また、画面上部にメッセージを点滅表示します。メッセージをタップすると、警報音とメッセージの点滅は止まりますが、メッセージの表示は消えません。エコートレイルを含む物標は設定範囲外に出る/設定範囲内に入る、またはガードゾーン機能を無効にするまで点滅し続けます。ガードゾーンを無効にするにはガードゾーンをタップし、[通知]メニューで [オフ ]を選択してください。
ガードゾーン機能を非表示にするには、レイヤーメニューを開き、[ガードゾーン1]または[ガードゾーン2]の設定を[オフ]にします。
注)ガードゾーン機能が無効の時のみ、 ガードゾーンを非表示にすることができます。
1.15 エコー色
エコーの色は黄、緑、多色から選択できます。多色はエコー強度の高いものから赤、黄、緑にエコーの色が変わります。エコー強度の高いものは赤、中程度のものは黄、弱いものは緑で表示されます。
1.16 方位目盛モード
[基本設定]の[方位目盛モード]メニューでは固定距離環上の方位目盛の動作を [真]と[相対]の2種類から選択可能です。表示モード(ヘッドアップ/ノースアップ)との組合わせにより動作の特徴が異なります。
ヘッドアップ/ノースアップ
[真]/[相対]:船首線を常に真上に表示。自船の動きに応じて方位日盛が回転する。
[相対]/[真]:方位目盛を固定。画面真上が常に0°になる。
- [基本設定] を開きます。
- [方位目盛モード] で [真]、または [相対] を選びます。
1.17 設定の初期化
レーダーの設定を初期化する場合、次の操作を行います。
- ホーム画面から [設定] - [レーダー] - [工場設定] の順に選択します。
- [工場設定に戻す] をタップします。 確認メッセージが表示されます。
- [はい] をタップします。
- 画面右上の [×] をタップします。
2 章 保守点検およびトラブルシューティング
警告

本機のカバーは開けないこと。
高圧部分があり、触れると死に至る場合や重症を負う危険があります。
技術者の方へ
電源を切った後も2、3分はコンデンサなどに電気が残っていますので、注意してください。
2.1 保守点検
機器の性能を十分に発揮させるには、定期的な点検が必要です。3~6ヶ月に1度、次の表に従って点検してください。マストでの作業中は巻頭の「安全にお使いいただくために」に記載している内容を守ってください。
| 点検項目 保守の方法 | |
| ヒビ割れがないか、異物が付着していないか | お買い上げの販売店・代理店、最寄りの当社支店・営業所あてへお問い合わせください。異物(塩、油、塗料)が付着していると、電波の減衰や反射が起こり、感度が低下します。柔らかい布に水を湿らせて、軽く汚れを拭き取ってください。この際に市販の産業用クリーナーは使用しないでください。産業用クリーナーだとプラスチックの形状を変える事があります。 |
| 空中線部の取付ボルトやナットが潮風や雨にさらされて腐食していないか、または振動で緩んでいないか。 | 腐食したボルトやナットがあれば、交換してください。交換したあとは、接着剤を取付けボルトとナットの全体に塗布してください。 |
ご注意
塗料、防錆剤、接点復活剤などは有機溶剤を含んでいるので、機器の塗装部分や樹脂部品には使用しないでください。
機器の塗装部分や樹脂部品を劣化させることがあります。特に、樹脂のコネクタに使用すると破損する恐れがありますので絶対に使用しないでください。
2.2 ヒューズの交換
過電流から本機を保護するために、電源ケーブルにヒューズ(型式:FGBO 250V 5A PBF、コード番号:000-155-840-10)が付いています。電源が入らない場合、ヒューズに問題が無いかご確認ください。ヒューズを取り替えても電源が入らない場合は、お買い上げの販売店・代理店、最寄りの当社支店・営業所あてへお問い合わせください。
警告
ヒューズは規定のものを使用すること。
規定外のものを使った場合、重大な事故や火災を引き起こす原因になります。
2.3 トラブルシューティング
「故障かな」と思ったら、次の点検を行ってください。ただし、正常な動作に戻らなかった場合でも、決してカバーは開けないでください。このような場合は、お買い上げの販売店・代理店、最寄りの当社支店・営業所あてへお問い合わせください。
| 症状 対処 | |
| DRS4W の電源が入らない。 | ・下記の点を確認する。・DRS4W の電源ケーブルが船内電源に接続されているか。・電源ケーブルのコネクタが外れていないか。・DRS4W の電源ケーブルが損傷していないか。・DRS4W のヒューズが切れていないか。 |
| DRS4W の電源は人っているが、GP-1871F/GP-1971F の画面には何も表示されない。 | ・GP-1871F/GP-1971F の輝度を調節する。 |
| GP-1871F/GP-1971F の画面がフリーズする。 | ・GP-1871F/GP-1971F を再起動する。 |
| DRS4W のエコーが GP-1871F/GP-1971F 上で更新されない。 | ・GP-1871F/GP-1971F の[無線 LAN 設定]を確認する。・GP-1871F/GP-1971F で準備と送信を切り替える。・GP-1871F/GP-1971F を再起動する。 |
2.4 エラーメッセージ
何らかの問題が発生した場合、エラーメッセージがレーダー画面のポップアップウィンドウに表示されます。代表的なエラーメッセージは下表のとおりです。
| メッセージ チェックポイント | |
| レーダー信号がありません。 | レーダーの電源が入っているかどうか、無線 LAN の接続に問題が無いか確認してください。 |
| レーダーと接続していません。 | 無線 LAN の設定内容に問題が無いか、確認してください。 |
| レーダー作動エラー | レーダーからの船首パルスが検知できません。レーダーの状態を確認ください。 |
| レーダーからの映像信号が検知できません。レーダーセンサーの状態を確認ください。 | |
| ガードゾーンでターゲットを検知しました。 | 他船や物標がガードゾーンに侵入しました。 |
| 他船や物標がガードゾーンから離脱しました。 | |
2.5 マグネトロンの交換
マグネトロンの寿命は約5,000時間です。使用時間の経過によりマグネトロンが劣化すると、送信出力が低下し、遠方の物標が映らないなどの症状が出ます。このような症状が現れた場合は、お買い上げの販売店・代理店、最寄りの当社支店・営業所あてへお問い合わせください。
| 部品名 型式 コード番号 | |
| マグネットロン | E3571 000-126-646 |
3 章 装備
3.1 構成表
| 名称 型式 | コード番号 | 数量 備考 | ||
| 標準構成 | ||||
| 空中線部本体 | RSB-126-103 - 1 | |||
| 工事材料 | CP03-35800 00 | 0-024-974 1 | ケーブル組品、10 m | |
| CP03-35810 00 | 0-024-975 | ケーブル組品、15 m | ||
| CP03-35820 00 | 0-024-976 | ケーブル組品、20 m | ||
| CP03-35830 00 | 0-024-977 | ケーブル組品、30 m | ||
| CP03-35701 00 | 1-265-920 1 | -六角ボルト*(M10×25),4個-フラットワッシャー (M10 SUS304),4個-スプリングワッシャー (M10 SUS304),4個*取付台の厚みが6~10mmの場合に使用。 | ||
| 書類 | OMJ-36360 - 1 | 取扱説明書 | ||
| E32-01314 | - 1 | 型紙 | ||
| J32-01401 | - 1 | パスワード情報 | ||
| J32-01405 | - 1 | 使用上のご注意 | ||
| 予備品 | SP03-17801 | 001-265-910 1 | ヒューズ 5A、2個 | |
| オプション | ||||
| ラドーム取付台 | OP03-209 001 | 078-350 1 | セールポート用取付台 | |
| 起倒マスト防水キット | OP03-275 001 | 642-600 1 | マスト起倒時の防水性能:IPX2 | |
3.2 装備時の注意点
注意
- DRS4W には電源スイッチがありませんので、船内電源の回路ブレーカーなど DRS4W への電力供給を遮断できる装置に接続してください。
- 待機電力を消費しますので、使用しない場合は電源を遮断してください。
- 通電している状態ではマグネットロンの劣化が進みます。
- 塗料、防錆剤、接着剤などは有機溶剤を含みますので、機器の塗装部分や樹脂部品には使用しないでください。
装備位置
- DRS4W は 2.4GHz の無線 LAN を使用し、GP-1871F/1971F にレーダーエコー情報を送信しています。DRS4W、GP-1871F/1971F の 5m 以内に同帯域を使用する機器(Bluetooth® 機器や電子レンジなど)を設置しないでください。
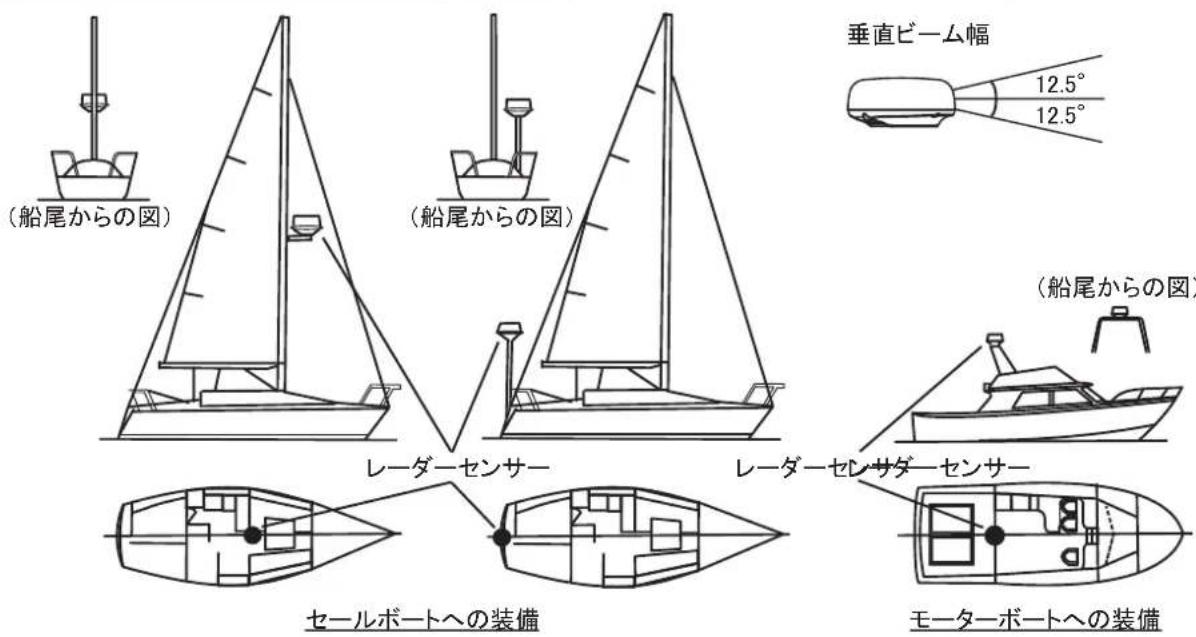
- 見晴らしが良く、船首方位に煙突やマストがない、共用マストやレーダーマストなどに装備してください。障害物があると電波の死角になり、映像が現れません。アンテナビーム幅、サイドローブレベル、方位分解能などのアンテナの性能が低下する可能性があり、また、偽像を表示する恐れがあります。アンテナの輻射幅より小さい径のマストであればわずかな死角で済みますが、空中線部と同じ高さに水平な遮断物があると、大きな死角になりますので、水平遮断物よりも高い位置に装備してください。
- 空中線部は筐体を水平にして保管・装備してください。上下を逆にして装備・保管すると空中線部内部への浸水が発生し、故障の原因になります。

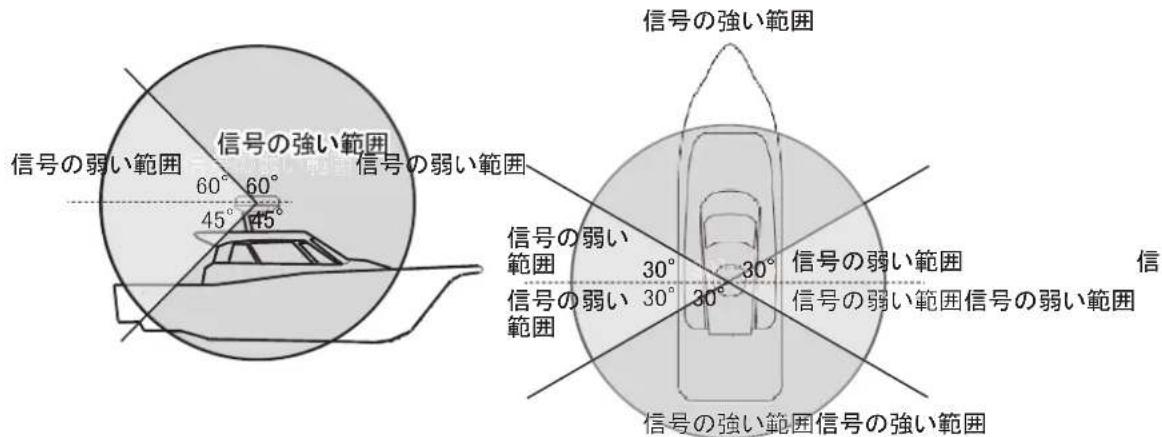
- 下記の「セールボート、モーターボートの装備位置」と「無線 LAN の信号強度と位置関係」のイラストに沿った場所に装備してください。
セールボート、モーターボートの装備位置セールボート、モーターボートの装備位置
無線LANの信号強度と位置関係無線LANの信号強度と位置関係
- ノイズを抑えるため、本機の電源ケーブルを他の電子機器のケーブルの近くに配線したり、平行に配線したりしないでください。
- 取付台に水が溜らないようにしてください。
- コンパス安全距離(iii ページ参照)を確保し、磁気コンパスに誤差が発生しないようにしてください。
3.3 装備
DRS4W を装備する前に装備位置が適切か、確認してください。船の形状によっては、GP-1871F/GP-1971F と DRS4W 間の接続が阻害される可能性があります。実際に装備する前に予定する位置で動作確認をしてください。
船内電源から DRS4W の電源を投入した後、 GP-1871F/GP-1917F の電源を投入し、
DRS4W と接続してください(システムの起動に関しては 3.4 節を参照してください)。接続完了後、表示レンジを変更し、DRS4W が GP-1871F/GP-1971F からの操作信号が受信される事を確認してください。動作しない場合は DRS4W の位置を動かし、装備に適した位置を見つけてください。下記を参照し、装備してください。
装備手順
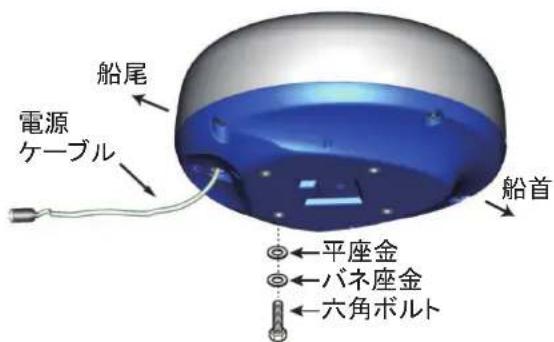
- DRS4W の底面から六角ボルト
(M10×20)、平座金、バネ座金各4個を取り外します。平座金とバネ座金は手順4でアンテナを取付ける際に使用しますので、保管してください。取付台の厚さが5mm以下であれば、六角ボルトも保管してください。
- 装備位置に支給の型紙を合わせて、
レーダーセンサーの取付け位置に 取付け穴(4 カ所)を開けます。 取付け穴は船首、船尾と平行でなければなりません。
-
船首マーク(△)が船首に向いた状態でアンテナ取付台に置きます。
-
ステップ1で取り外した六角ボルト *、 平座金、バネ座金を使い、アンテナ取
付台にレーダーセンサーを装備します。六角ボルトを締める際の締め付けトルクは19.6~24.5Nmに設定します。*使用するボルトの長さは下記の表を参照して、決定してください。
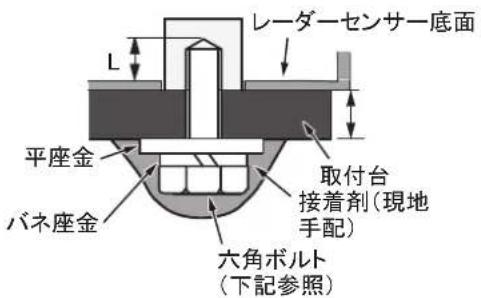
取付台の厚みと使用する六角ボルトのサイズに関して
| 取付台の厚み | 使用する六角ボルトのサイズ |
| 5 mm以下 | M10×20(支給、レドームに取付け済み) |
| 6~10 mm | M10×25(工事材料として支給) |
| 10 mm以上 現地手配 | |
注)六角ボルト・平座金の扱いに関して下記をご確認ください。
- 装備直前まで六角ボルト、平座金を外さないでください。
- 六角ボルト、平座金を外した後は、上下逆にしないでください。
- 六角ボルト、平座金を外して上下逆にすると、内部を損傷する可能性があります。
六角ボルトと平座金の位置関係とサイズ比較
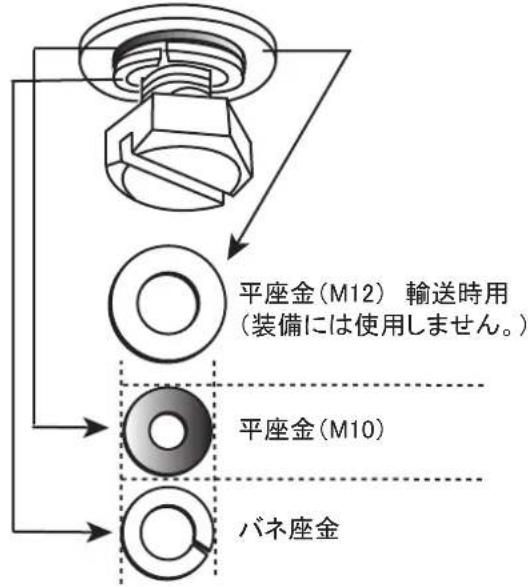
flowchart
graph TD
A["製造工件"] --> B["平座金(M12) 輸送時用\n(装備には使用しません。)"]
B --> C["平座金(M10)"]
C --> D["バネ座金"]
- DRS4W から出ている電源ケーブルに支給のケーブル組品を取り付けます。
- 電源ケーブルを繋げたケーブル組品を船内電源に接続します。
電源ケーブルの配線については、下記に注意してください。
- 風などにより、電源ケーブルのコネクタが船体に当たらないこと。
- 電源ケーブルのコネクタにかかる負荷が、電源ケーブルそのものにかかる負荷よりも大きくならないこと。
- 電源ケーブルをセールボートのマストに通す場合はケーブルがロープ、シート、ハリヤードなどに触れないこと。
- 電源ケーブルを船体に巻き付けないこと。
- 電源ケーブルのコネクタに張力がかからないよう、ケーブルを固定すること。張力が掛からないようにする為にはレーダーセンサー近くの電源ケーブルで輪を作り、
下図のようにその輪を束線バンドで縛ってください。
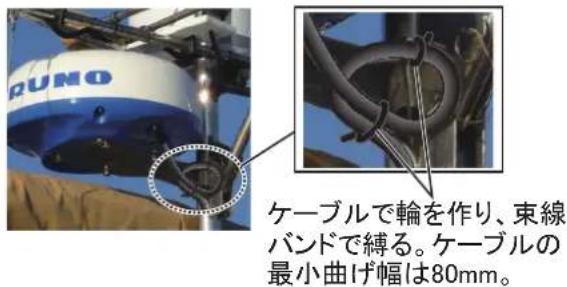
- 防水の為にコネクタ接続部を自己融着テープで巻くこと。
- 束線バンドを使用し、コネクタの接続部をマストなどに締め付けること。
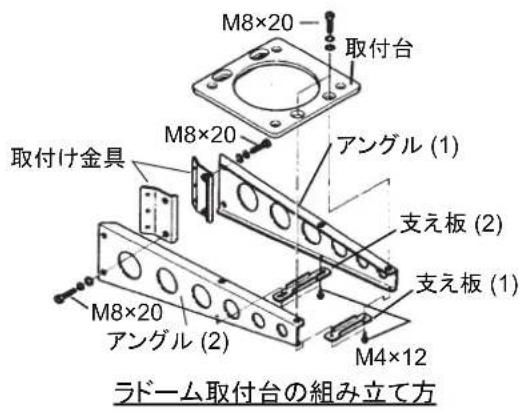
ラドーム取付台の組み立て方
オプションのラドーム取付台を使用すると、セールボートのマストにレーダーセンサーを取り付ける事ができます。
名称、型式:ラドーム取付台、OP03-209
コード番号:001-078-350
| 名称型式コード番号数量 | |||
| 取付台 | 03-018-9001-0 | 100-206-740-10 | 1 |
| 支え板(1) | 03-018-9005-0 | 100-206-780-10 | 1 |
| 支え板(2) | 03-018-9006-0 | 100-206-790-10 | 1 |
| アングル(1) | 03-028-9101-1 | 100-206-811-10 | 1 |
| アングル(2) | 03-028-9101-2 | 100-206-812-10 | 1 |
| 取付金具 | 03-028-9103-1 | 100-206-831-10 | 2 |
| 六角セムスB | M8×20SUS304 | 000-162-955-10 | 8 |
| 六角セムスB | M4×12SUS304 | 000-162-956-10 | 4 |
- 六角セムス M8×20 を使用し、取付け金具とアングル(1)と(2)を取付けます。
- 六角セムス M4×12 を使用し、アングル(1)と(2)、支え板(1)と(2)を取付けます。この時、アングル
3章 装備
(1) と (2) の間隔を調節できるように緩めに取り付けておきます。
- 取付台をアングルの上に置き、六角セムス M8×20 を使用して取付ける。ステップ2で取付けたアングル(1)と(2)、支え板(1)と(2)を締めます。
完成形
アングルをマストに取付ける
- マストに直径 6.5mm の取付け穴を 8カ所開けます。ステンレススチールのリベット(直径 6.4mm、現地手配)を使用してマストに取付け金具を取付けます。
- アングルに取付けたボルトを締めます。
- 六角ボルト(M10×25)を使用し、取付台にレーダーセンサーを取付けます。
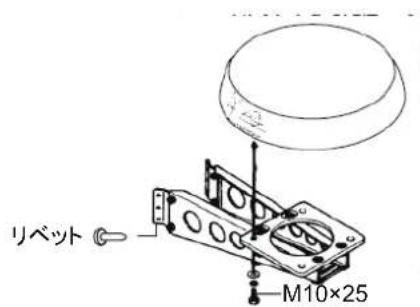
取付台への取付け方
3.4 装備後の設定
3.4.1 無線 LAN 連携の設定
- DRS4W を船内電源に接続し、通電します。
- GP-1871F/GP-1971F を起動後、[ホーム] ボタンをタップし、ホーム画面を開きます。

- ホーム画面から [設定] - [一般] メニューの順にタップ後、[無線 LAN] を選択すると、[無線 LAN 設定] メニューが表示されます。
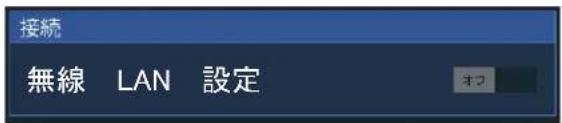
- [無線 LAN 設定] を [オン] にすると、 [ネットワーク] の下に検知された無線 LAN 機器が自動的にリストアップされます。
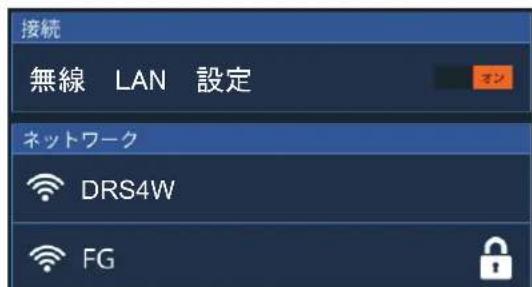
- リストから [DRS4W] を選択します。
- 同梱の [パスワード情報] (J32-01401-x、部品コード 000-195-153) に記載の
パスワード (PSK) を入力し、[実行]をタップします。
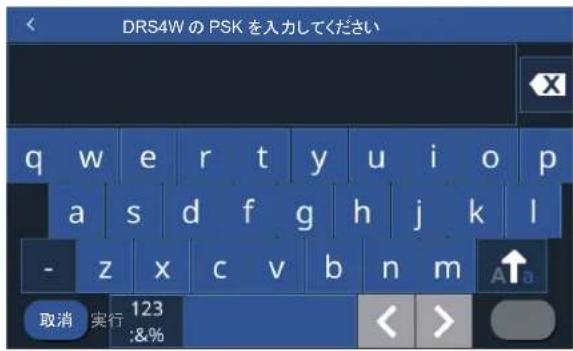
注)パスワード情報の用紙は無くさないように保管してください。
DRS4W と接続後、送信準備画面が表示されます。
DRS4W と接続できない場合、GP-1871F/GP-1971F の画面にエラーメッセージが表示されます。DRS4W 付近に障害物が無い事、GP-1871F/GP-1971F で無線 LAN が使用可能である事を確認してから [再接続] ボタンをタップして連携を取ってください。
送信準備時間(マグネットロンを温め、レーダーパルスを送信できるようにする)は約90秒です。送信準備が完了するまでの時間は画面に表示され、カウントダウンされます。送信準備完了後、スタンバイ状態になります。
3.4.2 船首線調整
空中線部を船首方向に正面になるように取り付けているため、真正面にある物標が船首線方向(0°)に映像として現れます。
しかし実際には空中線の装備による取付け誤差が生じます。この取付け誤差(船首線スイッチのタイミング誤差)を補正します。
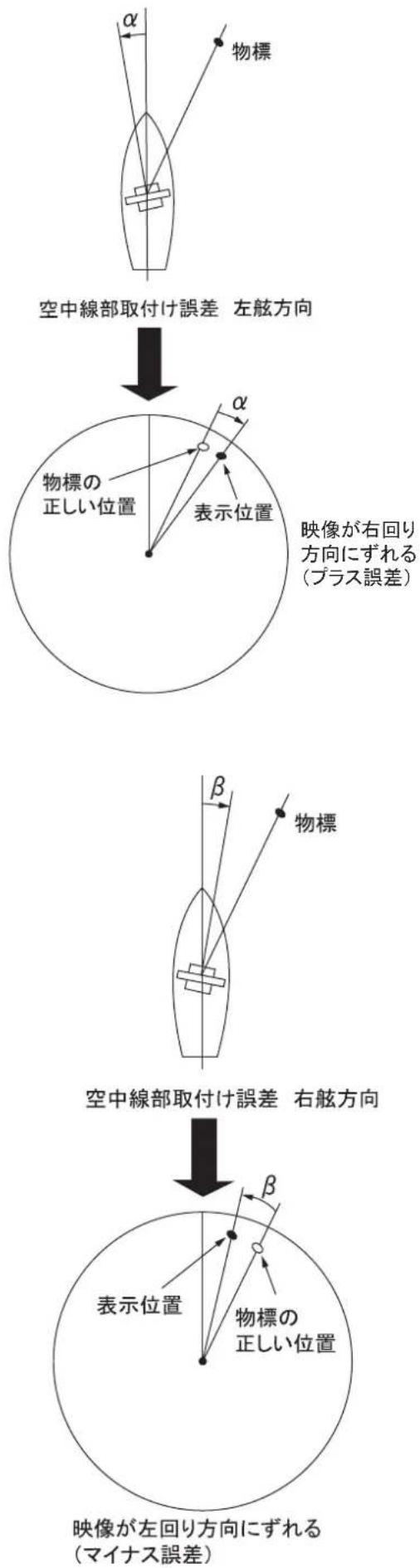
flowchart
graph TD
A["空中線部取付け誤差 左舷方向"] --> B["物標の正しい位置"]
B --> C["表示位置"]
C --> D["映像が右回り方向にずれる (プラス誤差)"]
E["空中線部取付け誤差 右舷方向"] --> F["物標"]
F --> G["表示位置"]
G --> H["映像が左回り方向にずれる (マイナス誤差)"]
3章 装備
- [設定] メニューから [レーダー] メニューを選択後、[船首線調整] を選択します。
- 0.125 から 0.25 海里の間で表示レンジを設定後、ヘッドアップモードにします。
- 目印になる物標を選んで、自船の船首を向けます。
- レーダー画面に表示されるスライドバーを使って船首線の方位を調整します。
- 物標エコーが画面の正しい位置に表示されていることを確認し、画面右上の[保存]をタップします。設定内容を反映しない場合は、画面左上の [キャンセル ]をタップします。
3.4.3 送信停止区域の設定
送信開始方位と終了方位を設定することにより、障害物がある範囲の送信を停止することができます。
- [レーダー] メニューの [初期設定] を選択します。
- [送信停止区域] メニューで [オン] を選択します。
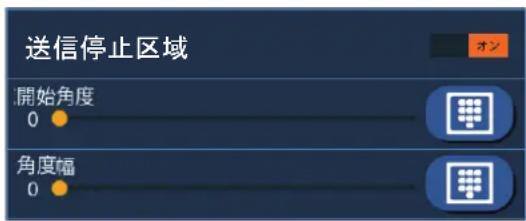
- [開始角度] メニューでスライドバーを操作し、送信停止区域の開始角度を設定します。
- [角度幅 ] メニューでスライドバーを操作し、送信停止区域の幅を設定します。
送信停止区域は点線で表示されます。
送信停止区域を解除するには [送信停止区域] メニューで [オフ] を選択します。
3.4.4 同調の初期化
同調を初期化するには、次の操作を行います。
- [設定] メニューから [レーダー] メニューを選択後、[初期設定] を選択します。
- [同調初期設定]で[オン]をタップします。
- 画面右上の [x] をタップして、メニューを閉じます。 メニューが閉じたときに、同調の初期化が実行されます。
3.4.5 電源の切り方
システムを終了する際は、GP-1871F/GP-
1971F 側で準備状態にしてから DRS4W を接続している船内電源を切ってください。
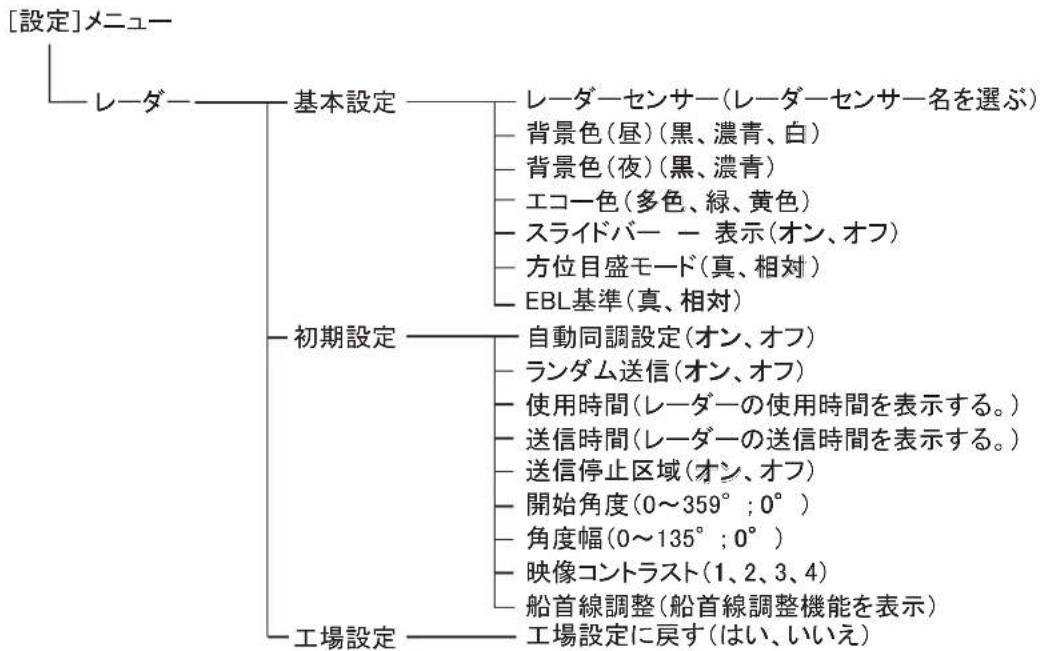
追補 1 メニューツリー
flowchart
graph TD
A["設定"]メニュー --> B["レーダー"]
B --> C["基本設定"]
C --> D["レーダーセンサー(レーダーセンサー名を選ぶ)"]
C --> E["背景色(昼)(黒、濃青、白)"]
C --> F["背景色(夜)(黒、濃青)"]
C --> G["エコー色(多色、緑、黄色)"]
C --> H["スライドバー - 表示(オン、オフ)"]
C --> I["方位目盛モード(真、相対)"]
C --> J["EBL基準(真、相対)"]
B --> K["初期設定"]
K --> L["自動同調設定(オン、オフ)"]
K --> M["ランダム送信(オン、オフ)"]
K --> N["使用時間(レーダーの使用時間を表示する。)"]
K --> O["送信時間(レーダーの送信時間を表示する。)"]
K --> P["送信停止区域(オン、オフ)"]
K --> Q["開始角度(0~359°;0°)"]
K --> R["角度幅(0~135°;0°)"]
K --> S["映像コントラスト(1、2、3、4)"]
K --> T["船首線調整(船首線調整機能を表示)"]
B --> U["工場設定"]
U --> V["工場設定に戻す(はい、いいえ)"]
[レーダー]メニュー以外については、GP-1871F/1971F装備要領書のメニューツリーをご参照ください。
レーダーセンサー DRS4W 仕様
1. 辐射器
(1) 型式 パッチアレイ方式
(2) 空中線長 34 cm
(3) 水平ビーム幅 7.2° (3 dB)
(4) 垂直ビーム幅 25° (3 dB)
(5) 感度 20 dBi 以上
(6) サイドローブ -18 dB(メインローブの±20° 未満)、-20 dB(メインローブの±20° 以上)
(7) 回転数 24 rpm
2. レーダー機能
(1) 送信周波数 9410 MHz ±30 MHz、PON
(2) 尖頭出力 4 kW
(3) 送受信切換 サーキュレータ方式
(4) 中間周波数 60 MHz
(5) 距離範囲、パルス幅と繰返周波数
| 距離範囲(NM) | パルス幅(μs) | 繰返周波数(Hz) |
| 0.125~0.5 0.08 | 約360 | |
| 0.75~2 | 0.3 | 約360 |
| 3~24 | 0.8 | 約360 |
(6) 最小探知範囲 25 m
(7) 距離分解能 25 m
(8) 距離精度 使用距離範囲の1%または0.01 NMのいずれか大きい値以下
(9) 方位分解能 7.2^
(10) 方位精度 ±1^
(11) 予熱時間 約 90 秒
3. インターフェイス
(1) 無線 LAN
IEEE802.11b
(2) 送信周波数 約 2.4 GHz
(3) 使用チャンネル 10 ch
(4) 受信可能距離 約 5 m (FRP 等の遮蔽物がある場合: 約 2 m)
4. 電源
DC12-24 V (10.8-31.2 V): 2.1-1.0 A (待機電力: 0.8-0.4 A)
5. 環境条件
(1) 使用温度範囲 -25^ +55^
(2) 相对湿度 95%以下 (+40℃)
(3) 保護等級 IP26
(4) 振動 IEC60945 Ed. 4
6. ユニットカラー
N9.5(上部)、PANTONE 2945C(下部)
| NAME | OUTLINE | DESCRIPTION/CODE No. | Q'TY | |
| ユニット UNIT | ||||
| レーダーセンサーRADAR SENSOR | 488  | 220 | RSB-126-103-J | 1 |
| 000-035-513-00 | ||||
| 予備品 SPARE PARTS | ||||
| 予備品SPARE PARTS |  | SP03-17801 | 1 | |
| 001-314-470-00 | ||||
| 工事材料 INSTALLATION MATERIALS | ||||
| 工事材料INSTALLATION MATERIALS |  | CP03-35701 | 1 | |
| 001-314-480-00 | ||||
| 図書 DOCUMENT | ||||
| パスワード情報PASSWORD INFO |  | J32-01401-* | 1 | |
| 000-195-153-1* | ||||
| 型紙TEMPLATE |  | E32-01314-* | 1 | |
| 000-178-948-1* | ||||
| 使用上のご注意NOTES ON USAGE |  | J32-01405-* | 1 | |
| 000-195-154-1* | ||||
| 取扱説明書(和)OPERATOR'S MANUAL (JP) |  | OMJ-36360-* | 1 | |
| 000-195-152-1* | ||||
| 技適認証要領APPLICATION GUIDE |  | J32-02005-* | 1 | |
| 000-197-937-1* | ||||
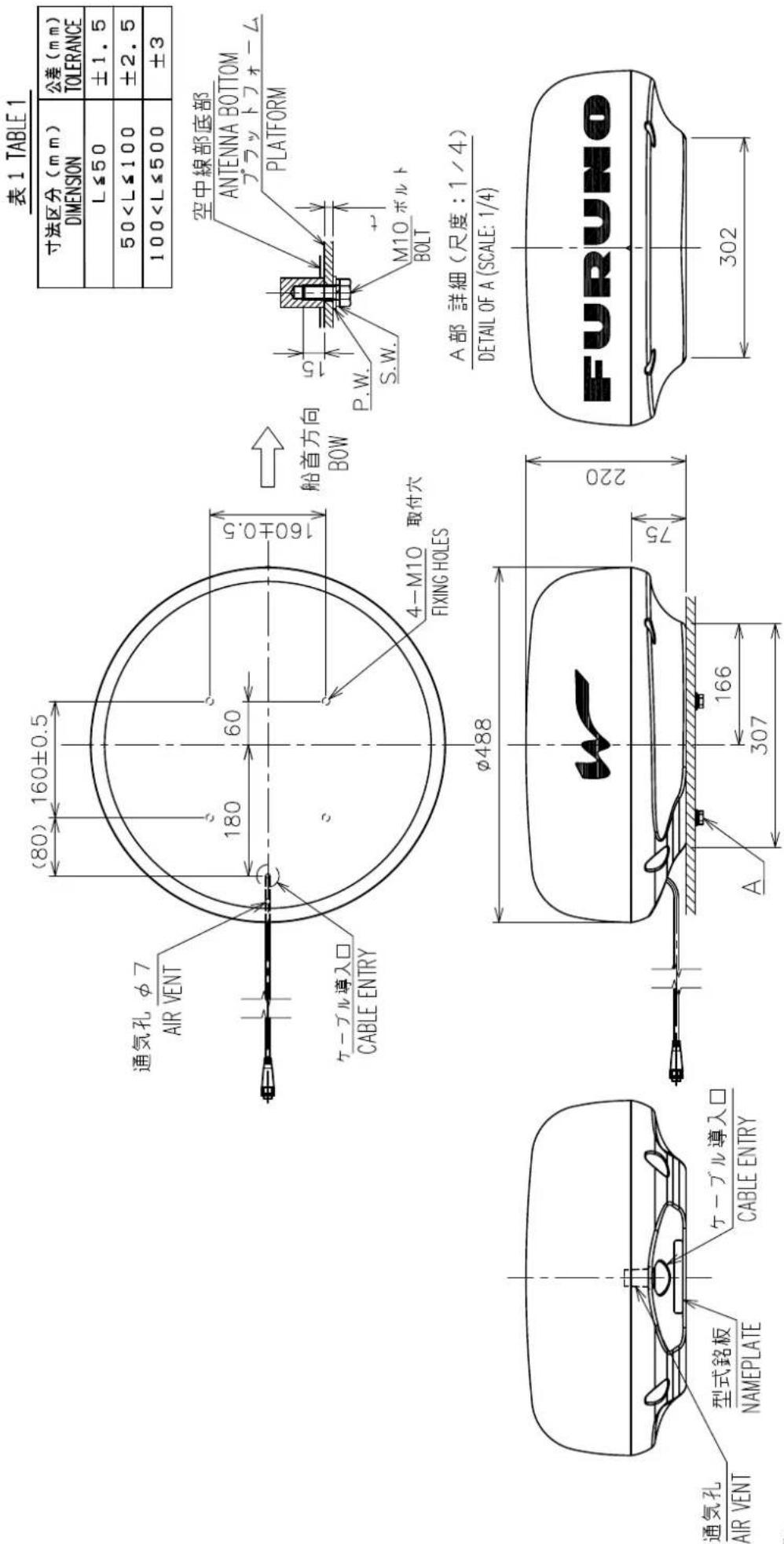
| 寸法区分(mm) DIMENSION | 公差(mm) TOLERANCE |
| L≤50 | ±1.5 |
| 50±2.5 | ±2.5 |
| 100±3 | ±3 |
A 部 詳細(尺度:1/4)
DETAIL OF A (SCALE: 1/4)
注 記
1)指定外の寸法公差は表1による。
2)取付用ネジはM10ボルトを使用のこと。ネジ長さは板厚(t)に応じ、
20 (t ≤ 5) または25 (5 < t ≤ 10) とする。
NOTE
TABLE 1 INDICATES TOLERANCE OF DIMENSIONS WHICH IS NOT SPECIFIED.
USE M10 BOLTS FOR FIXING THE UNIT. SCREW LENGTH SHOULD BE 20 (t≤5) OR 25 (5<t≤10). t: THICKNESS OF PLATFORM.
| DRAWN29/Jan/2014 T.YAMASAKI CHECKED29/Jan/2014 H.MAKI | TITLE RSB-126-103 | ||||
| 名称 レーダーセンサー | |||||
| APPROVED 30 / Jan / 201 | 4DRS#W. MAKI | 外寸図 | |||
| SCALE 1/8 | MASS 5.7 +100kg | 質量はケープル(1m)を含む。 MASS INCLUDES 1m CABLE. | NAME RADAR SENSOR | ||
| DWG.No. C36.36-G01-A | REF.No. 03-184-300G-1 | OUTLINE DRAWING | |||
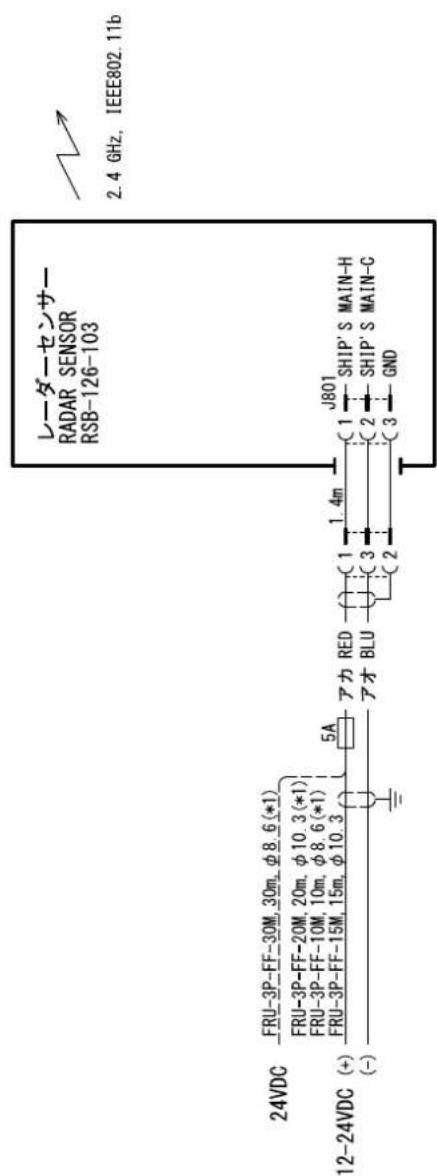
注記 * 1)オプション。 NOTE *1: OPTION.
| DRAWN20/Jan/2016 T. YAMASAKI | TITLE DRS4W | |||
| CHECKED20/Jan/2016 H. MAKI | 名称 レーダーセンサー | |||
| APPROVED20/Jan/2016 H. MAKI | 相互結線図 | |||
| SCALE | MASSkg | NAME RADAR SENSOR | ||
| DWG. No.C3636-C01-C | REF. No. 03-184-6011-1 | INTERCONNECTION DIAGRAM | ||
・機器の修理・使用方法等に関するお問い合わせは、お買い上げの販売店・代理店、最寄りの当社支店・営業所あてへお願いします。
発行
古野電気株式会社
〒662-8580
兵庫県西宮市芦原町9番52号
本書の無断複写複製(コピー)は特定の
場合を除き、当社の権利侵害になります。
Printed in Japan
・お問い合わせは
2018年 5月
A版発行
2023年 3月 7日 B版発行

- 重要なお知らせ
- 本機をご使用になる前に
- 警告
- 注意
- 「注意喚起」の内容
- 「禁止」の内容
- 「強制」の内容
- 警告警告
- 警告ラベル
- プログラム番号
- 目次
- はじめに……v
- 1章 操作....1
- 2章 保守点検およびトラブルシューティング....7
- 3章 装備 9
- 追補 1 メニューツリー....AP-1
- はじめに
- 特徵
- システム構成
- 章 操作
- システムの概要
- 基本操作
- 送信の開始 / 停止
- 画面レイアウト
- メニュー
- ポップアップメニュー
- レイヤーメニュー
- [基本設定]と[初期設定]
- 同調初期化設定
- 輝度メニュー
- 雨雪反射の除去
- レンジの設定
- 表示モードの切替え
- 他船や物標の距離・方位計測
- [EBL · VRM]
- 1章 操作
- EBL 基準
- オフセンター
- 映像拡大
- ガードゾーン警報を 設定する
- エコー色
- 方位目盛モード
- ヘッドアップ/ノースアップ
- 設定の初期化
- 章 保守点検およびトラブルシューティング
- 保守点検
- ご注意
- ヒューズの交換
- トラブルシューティング
- エラーメッセージ
- マグネトロンの交換
- 章 装備
- 構成表
- 装備時の注意点
- 装備位置
- 装備
- 装備手順
- ラドーム取付台の組み立て方
- 3章 装備
- アングルをマストに取付ける
- 装備後の設定
- 無線 LAN 連携の設定
- 船首線調整
- 送信停止区域の設定
- 同調の初期化
- 電源の切り方
- 追補 1 メニューツリー
- レーダーセンサー DRS4W 仕様
- 辐射器
- レーダー機能
- インターフェイス
- 電源
- 環境条件
- ユニットカラー
- 古野電気株式会社
ブランド : FURUNO
モデル : DRS4W
カテゴリ : 海上レーダー