
VMB301 - Capteur industriel IFM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil VMB301 IFM au format PDF.

| Type de produit | Capteur industriel pour surveillance vibratoire et de température |
| Marque | IFM |
| Modèle | VMB301 |
| Alimentation | 18-30 V DC (TBTS/TBTP) |
| Interface de communication | CANopen (CiA DS-301) |
| Connecteur | M12, codage A, 5 pôles |
| Plage de mesure des vibrations | Jusqu'à 15 kHz (montage vissé) |
| Indicateurs d'usure | Déplacement (d-Peak2Peak), fatigue (v-RMS), choc (a-Peak), friction (a-RMS), facteur de crête (Crest), température de surface |
| Analyses intégrées | Analyse des déséquilibres, BearingScout™ (démodulation des roulements) |
| Résistance de terminaison CAN | 120 Ω intégrée, activable |
| Affichage LED | Multicolore selon CiA 303-3 ou mode IFM |
| Température de service | -40 à +85 °C (estimation) |
| Indice de protection | IP67 (estimation) |
| Matériau du boîtier | Acier inoxydable (estimation) |
| Montage | Vissé (M5), collé ou par aimant |
| Couple de serrage | 4,6 Nm |
| Entretien | Aucun entretien nécessaire |
| Nettoyage | Chiffon microfibre doux, sec et non traité chimiquement, appareil hors tension |
| Sécurité | Installation par personnel qualifié, respect des consignes de sécurité, mise hors tension avant raccordement |
| Réparabilité | Réparation uniquement par le fabricant |
| Élimination | Élimination écologique selon réglementations nationales |
FOIRE AUX QUESTIONS - VMB301 IFM
Questions des utilisateurs sur VMB301 IFM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Capteur industriel au format PDF gratuitement ! Retrouvez votre notice VMB301 - IFM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil VMB301 de la marque IFM.
MODE D'EMPLOI VMB301 IFM
Notice d'utilisation
Capteur pour la maintenance préventive conditionnelle avec interface CANopen
VMB301
1 Consignes de sécurité.... 4
2 Remarques préliminaires 5
2.1 Symboles utilisés 5
2.2 Avertissements 5
2.3 Notes légales 5
3 Usage prévu 6
4 Applications 7
5 Raccordement électrique 8
5.1 Schéma de branchement 8
6 Montage 9
6.1 Types de fixation.... 9
6.2 Vis....9
6.3 Collage 9
6.4 Aimant.... 10
7 Fonction 11
8 Interface CANopen 12
8.1 informations générales 12
8.2 Etats de fonctionnement CANopen 12
8.3 Première mise en service 12
8.4 Fonction CANopen 13
8.5 Modification du Node ID et du Bitrate 13
8.6 Mécanisme de communication de l'appareil 14
8.6.1 Objets de données process émetteurs (TPDO).... 14
8.6.2 Objets de données process récepteurs (RPDO) 16
8.7 Répertoire d'objets / configuration sortie 17
8.7.1 Paramétrage de la surveillance vibratoire 21
8.7.2 Configuration bus 21
8.7.3 Fonctions avancées des capteurs.... 22
8.7.4 Plage de type d'appareil standardisé (selon CIA 404)....24
8.8 Modifier des objets ou réinitialiser l'appareil (Reset) 27
8.9 Surveillance de l'appareil 28
8.9.1 Heartbeat 28
8.9.2 Auto-test MEMS 28
9 Description des valeurs caractéristiques de l'état 29
9.1 Décalage (d-Peak2Peak) 29
9.2 Fatigue (v-RMS) 29
9.3 Friction (a-RMS) 29
9.4 Choc (a-Peak).... 29
9.5 Facteur de crête (Crest) 30
9.6 Température de surface 30
9.7 Analyse des déséquilibres.... 30
9.7.1 Répertoire d'objets (analyse des déséquilibres) 31
10 Analyse des roulements (BearingScout™) 32
10.1 Répertoire d'objets (BearingScout™) 33
11 Utilisation des machines / compteur collectif de charge 34
11.1 Répertoire des objets (utilisation des machines / compteur collectif de charge) ..... 35
12 Mémoire de valeur maximale 36
12.1 Répertoire d'objets (mémoire des valeurs maximales) 36
13 Sélection des axes de mesure 37
14 Marquage 38
15 Eléments de service et d'indication 39
15.1 LED de l'appareil.... 39
16 Filtrage de signal.... 40
17 Lecture des données brutes d'accélération.... 43
18 Correction de défauts 45
19 Fichier EDS.... 46
20 Homologations/normes 47
21 Glossaire.... 48
22 Maintenance, réparation et élimination 50
1 Consignes de sécurité
- L'appareil décrit ici est un composant à intégrer dans un système.
- L'installateur du système est responsable de la sécurité du système.
-
L'installateur du système est tenu d'effectuer une évaluation des risques et de rédiger, sur la base de cette dernière, une documentation conforme à toutes les exigences prescrites par la loi et par les normes et de la fournir à l'opérateur et à l'utilisateur du système. Cette documentation doit contenir toutes les informations et consignes de sécurité nécessaires à l'opérateur et à l'utilisateur et, le cas échéant, à tout personnel de service autorisé par l'installateur du système.
-
Lire ce document avant la mise en service du produit et le conserver pendant la durée d'utilisation du produit.
- Le produit doit être approprié pour les applications et conditions environnantes concernées sans aucune restriction d'utilisation.
- Utiliser le produit uniquement pour les applications pour lesquelles il a été prévu (→ Usage prévu).
- Un non-respect des consignes ou des données techniques peut provoquer des dommages matériels et/ou corporels.
- Le fabricant n'assume aucune responsabilité ni garantie pour les conséquences d'une mauvaise utilisation ou de modifications apportées au produit par l'utilisateur.
- Le montage, le raccordement électrique, la mise en service, le fonctionnement et l'entretien du produit doivent être effectués par du personnel qualifié et autorisé par le responsable de l'installation.
- Assurer une protection efficace des appareils et des câbles contre l'endommagement.
2 Remarques préliminaires
Notice d'utilisation, données techniques, homologations et informations supplémentaires via le code QR sur l'appareil / l'emballage ou sur documentation.ifm.com.
2.1 Symboles utilisés
√ Condition préalable
Action à effectuer
Réaction, résultat
[...] Désignation d'une touche, d'un bouton ou d'un affichage
→ Référence

Remarque importante
Le non-respect peut aboutir à des dysfonctionnements ou perturbations

Information
Remarque supplémentaire
2.2 Avertissements
Les avertissements mettent en garde contre d'éventuels dommages corporels et matériels. Cela permet une utilisation sûre du produit. Les avertissements sont gradués comme suit :

AVERTISSEMENT
Avertissement de dommages corporels graves
Des blessures mortelles ou graves sont possibles si l'avertissement n'est pas respecté.

ATTENTION
Avertissement de dommages corporels légers à modérés
Des blessures légères à modérées sont possibles si l'avertissement n'est pas respecté.
INFORMATION IMPORTANTE
Avertissement sur les dommages matériels
Des dommages matériels sont possibles si l'avertissement n'est pas respecté.
2.3 Notes légales
© Tous droits réservés par ifm electronic gmbh. Cette notice ne peut être reproduite ou exploitée, même par extraits, sans l'accord d'ifm electronic gmbh.
Tous les noms de produits, les images, sociétés ou autres marques sont la propriété de leurs titulaires.
3 Usage prévu
- Surveillance de l'état des engins mobiles et des installations industrielles par la mesure des vibrations et de la température de surface, suivie du calcul intégré de différents indicateurs d'usure à partir des trois axes de mesure.
4 Applications
- Surveillance continue de l'état des composants rotatifs
(par ex. paliers à semelle, roulements, pompes à vide, moteurs d'entraînement, pompes centrifuges ou engrenages). - Surveillance continue de l'usure des éléments d'amortissement ou de suspension sur les engins mobiles.
- Enregistrement en temps réel des événements de collision ou de choc pour la détection des substances perturbatrices.
- Détection des déséquilibres sur les composants critiques
(par ex. canons à neige, faucheuses, installations de pulvérisation, groupes de ventilation).
5 Raccordement électrique
▶ Mettre l'installation hors tension.

L'appareil doit être raccordé par un électricien qualifié.
Respecter les réglementations nationales et internationales relatives à l'installation de matériel électrique.
Alimentation en tension selon TBTS, TBTP.
5.1 Schéma de branchement
| Connecteur M12, codage A, 5 pôles | |
| 2 15 3 4 | 1 : Screen (blindage CAN)2 : L+3 : L-4 : CAN_H5 : CAN_L |
Pour une connexion bus CAN quasiment exempte de perturbations, tenir compte des points suivants :
▶ Utiliser des câbles blindés homologués pour le bus CAN → www.ifm.com.
▶ Terminer les câbles avec une résistance terminale de 120 Ω.

▶ Utiliser un câble de raccordement blindé avec un blindage correctement raccordé.
▷ Un fonctionnement sans perturbation et sans influence électromagnétique est garanti.

Une inversion de la polarité électrique peut endommager la résistance de terminaison active 120 Ω.
6 Montage
6.1 Types de fixation
Le tableau suivant indique l'étendue de mesure transmissible de 3 types de montage différents.
| Type de fixation Gamme de fréquence | |
| Vissé jusqu'à environ 15 kHz | |
| Collage direct jusqu'à environ 8 kHz | |
| Aimant jusqu'à environ 3 kHz |
6.2 Vis
▶ Fixer l'appareil sur la surface de la machine à l'aide de la vis de montage M5 fournie.
▶ Si nécessaire, utiliser une vis 10-32x1" UNF (accessoire → documentation.ifm.com).
Utiliser un adhésif frein-filet pour renforcer la rigidité de la connexion.

La vis fournie est pré-revêtue avec un adhésif frein-filet. Si la vis est à nouveau desserrée, l'effet de celui-ci n'est plus assuré.
Monter le capteur uniquement dans une paroi de boîtier massive / un composant de machine sans couches intermédiaires élastiques.
L'appareil saisit la mesure dans trois axes, il faut donc tenir compte de l'orientation mécanique dans l'application concernée. Les axes de mesure du capteur sont représentés sur le boîtier du capteur.
▶ Veiller à une transmission sûre des vibrations (surfaces de contact exemptes de peinture, propres et lisses) et ne pas autoriser de couches intermédiaires élastiques (p. ex. tôles de protection).
Les adaptateurs de tout type ont une influence sur la mesure des vibrations. La masse, la forme et la rigidité de l'adaptateur influencent la réponse en fréquence de l'ensemble du système. Cela peut causer des résonances et des effets d'amortissement dans les différentes plages de fréquence.
Pour cette raison, un montage à vis est toujours préférable.
Dans les autres cas, utiliser les accessoires de montage testés d'ifm : → documentation.ifm.com.
Pour tous les types de fixation, serrer le capteur avec un couple de serrage prescrit par la fiche technique.
▶ Visser l'appareil avec un couple de serrage de 4,6 Nm.

Un couple de serrage trop faible peut entraîner un couplage trop faible du capteur avec la machine.
Un couple de serrage trop élevé peut endommager le capteur et la vis.

La mesure de la valeur process température nécessite un accouplement mécanique sûr du capteur.
▶ Veillez à effectuer un montage correct et direct.

▶ Facultativement, utiliser de la vaseline technique / des graisses de lubrification entre les points de contact.
6.3 Collage
Le collage est approprié pour les mesures temporaires ou si la surface n'est pas appropriée pour un montage vissé.
▶ Utiliser un adaptateur adhésif pour faciliter le remplacement du capteur.
▶ Fixer le capteur sur l'adaptateur adhésif.
▶ Fixer l'unité adaptateur/capteur sur la machine selon les instructions de la colle utilisée.
L'épaisseur de colle doit être aussi mince que possible.

En général, on utilise de la colle cyanoacrylate de méthyle (par exemple Loctite 454) ou de la colle époxy (par exemple Loctite EA 3450).

Lors du choix d'une colle appropriée, tenir toujours compte des conditions environnantes (par exemple la plage de température) en plus des matériaux.

Les conditions environnementales (par exemple la température ou les intempéries) peuvent avoir une influence sur le collage.
▶ Tenir compte des conditions environnementales lors du montage.
6.4 Aimant
L'utilisation d'aimants est uniquement conseillée pour les mesures temporaires et sur des surfaces magnétiques.
▶ Fixer le capteur sur l'aimant.
▶ Fixer l'unité aimant-capteur avec précaution sur la machine.

Une fixation imprudente peut entraîner une force g très élevée qui peut endommager le capteur.
7 Fonction
- Outre les indicateurs d'usure, l'appareil dispose de deux possibilités d'analyse en profondeur.
- une analyse intégrée des déséquilibres
- une analyse intégrée des roulements (BearingScout™)
Les deux valeurs caractéristiques d'analyse sont disponibles en tant qu'objets de données process (PDO).
- L'appareil supporte le mécanisme de surveillance [Heartbeat] et la fonction [Node Guarding].
- L'appareil propose des compteurs configurables individuellement pour les mises en marche et les collectifs de charge de la machine.
- L'appareil offre pour chaque indicateur d'usure (PDO) une mémoire de valeur maximale intégrée qui peut être lue comme objet de données de service (SDO).
La température de surface a une mémoire de valeur minimale supplémentaire comme SDO.
- L'appareil possède une résistance terminale intégrée de 120 Ω, celle-ci peut être activée si nécessaire.
- L'appareil prend en charge les objets Emergency. Le COB-ID de l'objet EMCY peut être configuré.
- Affichage de l'état de l'appareil et des erreurs par LED intégrée.
8 Interface CANopen
8.1 informations générales
Le profil de communication CANopen est basé sur la couche d'application CAN (CAL), une spécification de l'organisation CiA. CANopen est considéré comme un bus de terrain robuste avec des options de configuration très flexibles.
Il est utilisé dans de nombreuses applications différentes, qui toutes reposent sur des profils d'applications différents. CANopen contient un concept pour la configuration et la communication de données de temps réel, utilisant des messages synchrones et asynchrones. On distingue quatre types de messages (objets).
- Messages d'administration (Layer Management, Network Management et Identifier Distribution)
- Objets de données service (SDO)
- Objets de données process (PDO)
- Objets prédéfinis (Synchronisation, Time Stamp, Emergency)
Plus d'informations → http://www.can-cia.org.
8.2 Etats de fonctionnement CANopen
La norme CANopen CiA301 définit trois états de fonctionnement possibles pour les nœuds capteurs :
Pre-Operational
En état pré-opérationnel, aucun message PDO (données de process) n'est envoyé. L'état "Pre-Operational" s'utilise pour le paramétrage du capteur ou comme mode de veille.
Dans la configuration d'usine, l'appareil se signale au démarrage en mode pré-opérationnel sur le bus CAN avec le message BootUP [0x700+Node ID].
Operational
A l'état "Operational" tous les services de communication sont effectués. L'état "Operational" s'utilise pour l'échange des données process pendant le fonctionnement.
Stopped
A l'état « Stopped » seulement des messages NMT (gestion du réseau) sont possibles. Ainsi, des capteurs redondants ou défectueux peuvent être séparés presque complètement du bus.
Le maître ou le gestionnaire du réseau peut demander au capteur de changer d'état via des messages NMT.
8.3 Première mise en service
L'appareil dispose d'une interface CANopen standardisée selon CiA DS-301. Toutes les valeurs mesurées et tous les paramètres sont accessibles via le répertoire d'objets (RO). La configuration individuelle peut être sauvegardée dans la mémoire permanente interne.
L'appareil est livré avec l'adresse de nœud (ID de nœud) 42 et un débit binaire de 250 kbit/s.
▶ Configurer l'adresse du nœud (ID de nœud), le Bitrate et la résistance de terminaison du bus à l'aide d'un logiciel avant la mise en service initiale de l'appareil.

L'appareil possède une résistance de terminaison intégrée de 120 Ω pour la terminaison au début physique et à la fin physique du système de bus.
Il est désactivé en usine et peut être activé si nécessaire.
8.4 Fonction CANopen

Certaines abréviations (RPDO, TPDO, etc.) sont expliquées dans le glossaire à la fin du document.
Les fonctions CANopen suivantes sont disponibles :
- 5 objets de données process émetteurs et 1 objet de données process récepteurs (TPDO1...5, RPDO1) dans deux modes de fonctionnement possibles :
- interrogation individuelle via un télégramme Remote-Transmission-Request (RTR)
- Emission déclenchée par un événement (Event-Timer)
- Support de la transmission de données process synchronisée (SYNC)
- Messages d'erreur par objet emergency (EMCY) avec support :
– du registre d'erreurs général
– du registre d'état spécifique au fabricant
- de la liste d'erreurs
- Mécanisme de surveillance Heartbeat
- Indication d'états et d'erreurs par LED
- Outre la fonctionnalité CiA DS-301, d'autres caractéristiques spécifiques aux fabricants et aux profils existent :
- réglage de l'ID nœud et du Bitrate par une saisie dans le répertoire d'objets (SDO)
- configuration et lecture/écriture de données de fonctionnement via objets de données service (SDO)
8.5 Modification du Node ID et du Bitrate
L'appareil offre plusieurs possibilités de modification de l'ID nœud et du Bitrate.
Etat de livraison
• ID nœud 42
- Bitrate 250 kBit/s

Chaque ID nœud n'est attribué qu'une seule fois dans le réseau CANopen dans la plage de 1 à 127.
Si un Node ID est attribué plusieurs fois, des dysfonctionnements peuvent se produire dans le réseau CANopen.
Nombre maximal de participants dans le bus CAN : 127
Modification du Node ID et du Bitrate dans le répertoire d'objets
Le Node ID est saisi dans le répertoire d'objets dans les objets 0x20F0 et 0x20F1. Si les deux valeurs se correspondent, le réglage est mémorisé et devient actif après réinitialisation du logiciel de l'appareil.
Le Bitrate est saisi dans les objets 0x20F2 et 0x20F3. Si les deux valeurs se correspondent, le réglage est mémorisé et devient actif après réinitialisation du logiciel de l'appareil. Les valeurs suivantes peuvent être utilisées comme Bitrate :
| Valeur Bitrate | |
| 0 1 000 kbits/s | |
| 1 800 kbits/s | |
| 2 500 kbits/s | |
| 3 250 kbits/s | |
| 4 125 kbits/s | |
| 5 | - |
| 6 50 kbits/s | |
| 7 20 kbits/s |
Si un maître est utilisé dans le réseau CANopen pour la sauvegarde centralisée de paramètres, les valeurs modifiées pour Node ID (0x20F0 et 0x20F1) et Bitrate (0x20F2 et 0x20F3) doivent également être saisies dans le maître.
Sinon, les valeurs seront remises à chaque démarrage du réseau CANopen.
Modification de l'ID nœud et du Bitrate par LSS
A l'aide du Layer Setting Service (LSS), un consommateur LSS peut modifier l'ID nœud et le débit binaire de l'appareil (producteur LSS) via le bus CAN. Pour ce faire, le consommateur LSS met tous les producteurs LSS en mode configuration. Chaque producteur LSS peut être identifié sans équivoque via les données d'appareil (ID fournisseur, code produit, numéro de révision et numéro de série).
Pour changer le Bitrate, le consommateur LSS transmet le nouveau Bitrate en mode de configuration avec le service [Configure Timing Bit]. Le producteur LSS signale au consommateur LSS si le nouveau Bitrate est supporté. Ensuite, le consommateur LSS transmet via le service [Activate Bit Timing] le temps [Switch delay] après lequel le nouveau Bitrate doit être activé. Après l'activation, le consommateur LSS remet le producteur LSS en mode opérationnel.
Pour modifier l'ID nœud, le consommateur LSS transmet le nouvel ID nœud en mode de configuration. Le producteur LSS signale au consommateur LSS si le nouvel ID nœud est valable. Après la modification de l'ID nœud, le consommateur LSS remet le producteur LSS en mode opérationnel.
Le nouveau Bitrate et le nouvel ID nœud deviennent actifs après la réinitialisation du logiciel du producteur LSS.
8.6 Mécanisme de communication de l'appareil
CANopen définit les types de données jusqu'à une taille maximale de 64 bits (8 octets).
Le TPDO peut être vérifié à tout moment par transmission d'un message Remote Transmission Request (RTR).
Le service CANopen [SYNC] est utilisé (voir CiA 301, chapitre 7.2.5). Pour la transmission synchronisée, CANopen met à disposition l'objet SYNC avec lequel les TPDO sont envoyés après chaque « Nième » réception d'un télégramme SYNC.
Alternativement, les TPDO peuvent être envoyés en fonction d'un événement via l'Event Timer.
Au total, 5 TPDO et 1 RPDO sont disponibles. A la livraison, les 4 TPDO standard sont automatiquement activés.
Si le réseau CAN est configuré en conséquence, l'objet de données process peut être activé pour l'analyse déséquilibre. Cela suppose une entrée de vitesse, la vitesse peut être transmise comme RPDO ou paramétrée comme SDO.
8.6.1 Objets de données process émetteurs (TPDO)
Mise à l'échelle des valeurs process
Le capteur peut transmettre les valeurs process comme INT16 ou comme FLOAT32.
En outre, il est possible de paramétrer l'unité souhaitée pour la valeur process à transmettre (répertoire d'objets 0x6131 Al_Physical_unit_PV).
Pour obtenir les valeurs process réelles, les valeurs transmises au format INT16 doivent être mises à l'échelle dans les TPDO. Pour cela, la virgule doit être déplacée en fonction de la position décimale de l'unité souhaitée dans la valeur transmise (voir répertoire d'objets 0x6132 AI_Decimal_digits_PV).
Valeur process = valeur transmise (INT16) x 10 ^-(Decimal_digits)
Le tableau suivant contient les objets de données process émetteurs (TPDO) à la livraison.
| TPDO | Réglages pour mapping PDO | Répertoire d'objets : Illustré Index objet | Répertoire d'objets : Illustré Sous-index objet | Répertoire d'objets : Illustré Longueur de l'objet | Valeurs d'état caractéristiques | Unité |
| 1 ID nœud + 0x180 0x7130 0x | 02 0x10 Valeur process | Fatigue (v-RMS) | m/s | |||
| 0x6150 0x02 | 0x08 Etat fatigue | (v-RMS) | - | |||
| 0x7130 0x03 | 0x10 Valeur process choc | (a-Peak) | m/s^2 | |||
| 0x6150 0x03 | 0x08 Etat choc | (a-Peak) | - | |||
| 2 ID nœud + 0x280 0x7130 0x | 04 0x10 Valeur process | Friction a-RMS | m/s^2 | |||
| 0x6150 0x04 | 0x08 Etat friction | (a-RMS) | - | |||
| 0x7130 0x05 | 0x10 Valeur process | (Crest) | [-] | |||
| 0x6150 0x05 | 0x08 Etat (Crest) - | |||||
| 3 ID nœud + 0x380 0x7130 0x | 01 0x10 Valeur process | Déplacement (d-Peak2Peak) | m | |||
| 0x6150 0x01 | 0x08 Etat déplacement/ | décalage (d-Peak2Peak) | - | |||
| 0x7130 0x06 | 0x10 Valeur process tem- | pérature de surface | [°C] | |||
| 0x6150 0x06 | 0x08 Etat température de | surface | - | |||
| 4 ID nœud + 0x480 0x7130 0x | 08 0x10 Valeur process | BearingScoutTM | m/s^2 | |||
| 0x6150 0x08 | 0x08 Status | BearingScoutTM : | - | |||
| 5 Etat d'usine : désactivé | ||||||

La transmission de données par objets de données process n'est possible qu'en état de fonctionnement « Operational ».
Les différents contenus TPDO sont présentés ci-dessous :
TPDO1
| Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 Octet 7 Octet 8 | |||||
| Fatigue (v-RMS)en [m/s] | Etat fatigue Choc (a-Peak)en [m/s ^2 ] | Etat choc - - | |||
| Index RO : 0x7130Sous-index : 0x02 | Index RO :0x6150Sous-index : 0x02 | Index RO : 0x7130Sous-index : 0x03 | Index RO :0x6150Sous-index :0x03 | - | - |
TPDO2
| Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 octet 7 Octet 8 | |||||
| Friction (a-RMS)en [m/s ^2 ] | Etat friction Crest en [-] Etat Crest - - | ||||
| Index RO : 0x7130Sous-index : 0x04 | Index RO :0x6150Sous-index : 0x04 | Index RO : 0x7130Sous-index : 0x05 | Index RO :0x6150Sous-index :0x05 | - | - |
TPDO3
| Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 octet 7 Octet 8 | |||||
| Déplacement(d-P2P) en [m] | Etat déplacement Température de surface en[°C] | Etat crest température de sur-face | - | - | |
| Index RO : 0x7130Sous-index : 0x01 | Index RO :0x6150Sous-index : 0x01 | Index RO : 0x7130Sous-index : 0x06 | Index RO :0x6150Sous-index :0x06 | - | - |
TPDO4
| Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 Octet 7 Octet 8 | ||||||
| Démodulation des roulements (BearingScoutTM) en [m/s2] | Etat BearingScoutTM | ---- | ||||
| Index RO : 0x7130 sous-index : 0x08 | Index RO : 0x6150 Sous-index : 0x08 | ---- | ||||
TPDO5
| Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 Octet 7 Octet 8 | ||||||
| - - - - - - - | ||||||
| - - - - - - - | ||||||
8.6.2 Objets de données process récepteurs (RPDO)
Le tableau suivant contient les objets de données process récepteurs (RPDO) à la livraison.
| RPDO | Réglages pour mapping PDO : COB | Répertoire d'objets : Index objet mappé | Répertoire d'objets : Sous-index objet mappé | Répertoire d'objets : Longueur d'objet map-pée | Valeur process Unité | |
| 1 | ID nœud + 0x200 | 0x2020 | 0x00 | 0x10 | Vitesse de la machine [120 à 30000] | tr/min |
Le tableau suivant présente l'attribution RPDO.
| Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 Octet 7 Octet 8 | ||||||
| Vitesse de la machine - - - - | ||||||
| Octet 1 Octet 2 Octet 3 Octet 4 Octet 5 Octet 6 Octet 7 Octet 8 | ||||||
| Index RO : 0x2020 - - - - - | ||||||

L'appareil prend en charge la liaison PDO, ce qui permet d'échanger directement des données process (PDO) entre deux producteurs dans le modèle consommateur-producteur classique. L'échange de données est ainsi plus efficace et la charge du bus est minimisée.
La vitesse de la machine peut être écrite directement dans l'appareil en tant que RPDO par un autre producteur via l'affectation du COB-ID, ou de manière classique par un Consumer (Master) dans l'appareil.
En cas de vitesse statique ou semi-statique, la vitesse peut également être écrite comme SDO via l'index OV 0x2020.
8.7 Répertoire d'objets / configuration sortie
Communication CANopen (CiA 301)
| Index Sous-index | Nom (Objet) | Type Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet | ||
| 0x1000 0x00 | Type d'appareil u32 ro 0x00020194 - | ||||||
| 0x1001 0x00 | Registre d'erreurs u8 ro 0x00 facultatif | - | |||||
| 0x1003 0x00 | 0x01 | Nombre d'erreurs | u8 | rw | 20 | - | - |
| 0x02 | Champ d'erreurs prédéfini | u32 | ro | 0x00000000 | |||
| 0x03 | |||||||
| ... | |||||||
| 0x14 | |||||||
| 0x1005 0x00 | COB ID SYNC u32 rw | 0x00000080 | - oui | ||||
| 0x1008 0x00 | Nom de l'appareil fabricant | vSTR | ro VMB301 | -- | |||
| 0x1009 0x00 | Version du matériel fabricant | vSTR | ro Version ac-tuelle du ma-tériel | - | - | ||
| 0x100A | 0x00 Version du logiciel fabricant | vSTR | ro Version ac-tuelle du logi-ciel | - | - | ||
| 0x100C | 0x00 | Guard Time | u16 | rw | 0x000 | - | oui |
| 0x100D | 0x00 | Life time factor | u8 | rw | 0x00 | - | oui |
| 0x1010 0x01 | Paramètre | Sauvegarder | u32 rw | -- | |||
| 0x02 Sauvegarder les paramètres de communication | u32 rw | -- | |||||
| 0x03 Sauvegarder les paramètres d'application | u32 rw | -- | |||||
| 0x04 Sauvegarder les paramètres du fabricant | u32 rw | -- | |||||
| 0x1011 0x01 | Charger tous les paramètres par défaut | u32 rw | -- | ||||
| 0x02 Charger | les paramètres de communication par défaut | u32 rw | -- | ||||
| Index Sous-index | Nom (Objet) | Type Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet | ||
| 0x1011 0x03 | Paramètres d'ap- | plication par défaut charger | u32 rw -- | ||||
| 0x04 Charger les | para-mètres par défaut du fabricant | u32 rw -- | |||||
| 0x1014 0x00 | COB-ID EMCY | (message d'urgence COB-ID) | u32 ro ID | nceud + | 0x00000080 | - | - |
| 0x1015 0x00 | Temps d'inhibition | EMCYTemps d'inhibition entreMessages EMCY | u16 rw 0x | 0000 - oui | |||
| 0x1016 0x01 | Temps heartbeat | consommateur | u32 rw 0x | 00000000 - oui | |||
| 0x1017 0x00 | Intervalle heart- | beat producteur (différence tempo-relle entre des messages Heart-beat transmis en ms) | u16 rw 0x | 0000 - oui | |||
| 0x1018 0x01 | ID du fournisseur | u32 ro 0x0469666D | - | ||||
| 0x02 Code produit | u32 ro Code produit | de la variante de l'appareil | - | - | |||
| 0x03 Numéro de | révision | u32 ro Révision prin- | cipale et version actuelle du logiciel | - | - | ||
| 0x04 Numéro de | série u32 ro Numéro de | série de l'appareil | - | - | |||
| 0x1020 0x01 | Date de | configuration | u32 rw 0 | ||||
| 0x02 Temps de | confi-guration | u32 rw 0 | |||||
| 0x1200 0x01 | COB-ID client au serveur | u32 ro ID | nceud + | 0x600 | - | - | |
| 0x02 COB-ID client au serveur | u32 ro ID | nceud + | 0x580 | - | - | ||
| 0x03 ID nœud du client SDO | u8 rw -- | ||||||
| 0x1400 Paramètres de communication RP-DO | - | ||||||
| u32 rw ID nœud + | 0x200 | - oui | |||||
| u8 rw 254 | - oui | ||||||
| 0x1600 RPDO Mapping Parameter | - | ||||||
| 0x01 Mapping Entry 1 | 0x20200010 - oui | ||||||
| 0x02 Mapping Entry 2 | 0x0000 - oui | ||||||
| 0x03 Mapping Entry 3 | 0x0000 - oui | ||||||
| Index Sous-Index | Nom(Objet) | Type Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet | ||
| 0x1600 0x04 | Mapping Entry 4 | 0x0000 - oui | |||||
| 0x1800 TPDO | 1 Communication Parameter | ||||||
| 0x01 COB-ID u32 | rw NodeID + | 0x180 | - oui | ||||
| 0x02 Transmission Type | u8 rw 1 - oui | ||||||
| 0x03 Inhibit Time | (temps d'inhibi-tion) | u16 rw 0 - oui | |||||
| 0x04 Event Timer | u16 rw 10 - oui | ||||||
| 0x1801 TPDO | 2 Communication Parameter - | ||||||
| 0x01 COB-ID u32 | rw NodeID + | 0x280 | - oui | ||||
| 0x02 Transmission Type | u8 rw 1 - oui | ||||||
| 0x03 Inhibit Time | (temps d'inhibi-tion) | u16 rw 0 - oui | |||||
| 0x04 Event Timer | u16 rw 10 - oui | ||||||
| 0x1802 TPDO | 3 Communication Parameter - | ||||||
| 0x01 COB-ID u32 | rw NodeID + | 0x380 | - oui | ||||
| 0x02 Transmission Type | u8 rw 1 - oui | ||||||
| 0x03 Inhibit Time | (temps d'inhibi-tion) | u16 rw 0 - oui | |||||
| 0x04 Event Timer | u16 rw 10 - oui | ||||||
| 0x1803 TPDO | 4 Communication Parameter - | ||||||
| 0x01 COB-ID u32 | rw NodeID + | 0x480 | - oui | ||||
| 0x02 Transmission Type | u8 rw 1 - oui | ||||||
| 0x03 Inhibit Time | (temps d'inhibi-tion) | u16 rw 0 - oui | |||||
| 0x04 Event Timer | u16 rw 10 - oui | ||||||
| 0x1804 TPDO | 5 Communication Parameter - - | ||||||
| 0x01 COB-ID u32 | rw 0x80000000 - oui | ||||||
| 0x02 Transmission Type | u8 rw 1 - oui | ||||||
| 0x03 Inhibit Time | (temps d'inhibi-tion) | u16 rw 0 - oui | |||||
| 0x04 Event Timer | u16 rw 0 - oui | ||||||
| 0x1a00 TPDO | 1 Mapping Parameter | - | |||||
| 0x01 Mapping Entry 1 | u32 | 0x71300210 - oui | |||||
| 0x02 Mapping Entry 2 | u32 | 0x61500208 - oui | |||||
| 0x03 Mapping Entry 3 | u32 | 0x71300310 | oui | ||||
| 0x04 Mapping Entry 4 | u32 | 0x61500308 - oui | |||||
| 0x1a00 0x05 | Mapping Entry 5 u32 0x0000 - oui | ||||||
| 0x06 Mapping Entry 6 u32 0x0000 - oui | |||||||
| 0x07 Mapping Entry 7 u32 0x0000 oui | |||||||
| 0x08 Mapping Entry 8 u32 0x0000 oui | |||||||
| 0x1a01 TPDO | 2 Mapping Parameter | ||||||
| 0x01 Mapping Entry 1 u32 0x71300410 - oui | |||||||
| 0x02 Mapping Entry 2 u32 0x61500408 - oui | |||||||
| 0x03 Mapping Entry 3 u32 0x71300510 - oui | |||||||
| 0x04 Mapping Entry 4 u32 0x61500508 - oui | |||||||
| 0x05 Mapping Entry 5 u32 0x0000 - oui | |||||||
| 0x06 Mapping Entry 6 u32 0x0000 - oui | |||||||
| 0x07 Mapping Entry 7 u32 0x0000 - oui | |||||||
| 0x08 Mapping Entry 8 u32 0x0000 - oui | |||||||
| 0x1a02 TPDO | 3 Mapping Parameter - | ||||||
| 0x01 Mapping Entry 1 u32 0x71300110 - oui | |||||||
| 0x02 Mapping Entry 2 u32 0x61500108 - oui | |||||||
| 0x03 Mapping Entry 3 u32 0x71300610 - oui | |||||||
| 0x04 Mapping Entry 4 u32 0x61500608 - oui | |||||||
| 0x05 Mapping Entry 5 u32 0x0000 - oui | |||||||
| 0x06 Mapping Entry 6 u32 0x0000 - oui | |||||||
| 0x07 Mapping Entry 7 u32 0x0000 - oui | |||||||
| 0x08 Mapping Entry 8 u32 0x0000 - oui | |||||||
| 0x1a03 TPDO | 4 Mapping Parameter - | ||||||
| 0x01 Mapping Entry 1 u32 0x0000 - oui | |||||||
| 0x02 Mapping Entry 2 u32 0x0000 - oui | |||||||
| 0x03 Mapping Entry 3 u32 0x0000 - oui | |||||||
| 0x04 Mapping Entry 4 u32 0x0000 - oui | |||||||
| 0x05 Mapping Entry 5 u32 0x0000 - oui | |||||||
| 0x06 Mapping Entry 6 u32 0x0000 - oui | |||||||
| 0x07 Mapping Entry 7 u32 0x0000 oui | |||||||
| 0x08 Mapping Entry 8 u32 0x0000 oui | |||||||
| 0x1a04 TPDO | 5 Mapping Parameter | ||||||
| 0x01 Mapping Entry 1 u32 0x0000 - oui | |||||||
| 0x02 Mapping Entry 2 u32 0x0000 - oui | |||||||
| 0x03 Mapping Entry 3 u32 0x0000 - oui | |||||||
| 0x05 Mapping Entry 4 u32 0x0000 - oui | |||||||
| 0x06 Mapping Entry 5 u32 0x0000 - oui | |||||||
| 0x07 Mapping Entry 6 u32 0x0000 - oui | |||||||
| 0x08 Mapping Entry 7 u32 0x0000 oui | |||||||
| 0x1f51 Programm Control | |||||||
| 0x01 Programm Control u8 rw 1 - | |||||||
| Index Sous-index | Nom (Objet) | Type Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet |
| 0x1f80 0x00 NMT Startup u32 | w 0 - oui |
8.7.1 Paramétrage de la surveillance vibratoire
| Index Sous- | Index | Nom Objet | Type Accès | Valeur par défaut | PDO : Capacité de mappage | Sauvegarder la valeur de l'objet |
| 0x2020 0x00 | Vitesse de la ma-chine | u16 rww 3 | 000 En option | oui | ||
| 0x2040 0x00 | Filtre DC u8 rw 1 | (Passe-haut 10 Hz) | ||||
| 0x2041 0x00 | Filtre | Indicateurs d'ac-célération | u8 rw 0 (aucun | filtre) | oui | |
| 0x2042 0x00 | Filtre indicateur de vitesse | u8 rw 0 (passe-bas | 1000 Hz) | oui | ||
| 0c2043 0x00 | Filtre indicateur de déplacement | u8 rw 0 (passe-bas | 100 Hz) | oui | ||
| 0x2050 0x00 | Sélection | Axes de mesure Accélération | u8 rw 7 (axe xyz) oui | |||
| 0x2051 0x00 | Sélection | Axes de mesure Vitesse | u8 rw 7 (axe xyz) oui | |||
| 0x2052 0x00 | Sélection | axe de mesure Déplacement | u8 rw 3 (axe z) oui | |||
| 0x2053 0x00 | Sélection de l'axe de mesure d'ana-lyse | u8 rw 3 (axe z) oui | ||||
| 0x2054 Facteurs de fréquence des roule-ments | ||||||
| 0x01 Bague interne r32 | rw 0,0 | oui | ||||
| 0x02 de la bague ex-terne | r32 | rw 0,0 | oui | |||
| 0x03 Eléments roulants r32 | rw 0,0 | oui | ||||
8.7.2 Configuration bus
| Index Sous-index | Nom (Objet) | Type | Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet | |
| 0x20f0 | 0x00 | NodeID A | u8 | rw | 42 | Sauvegardé automatique-ment | |
| 0x20f1 0x00 | NodeID B | u8 rw 42 | |||||
| 0x20f2 0x00 | Débit de trans- | mission A | u8 | rw 3 | |||
| 0x20f3 0x00 | Débit de trans- | mission B | u8 | rw 3 | |||
| 0x20f4 0x00 | CAN | Résistance 120 Ω | u8 | rw 0 | |||
| Index Sous-index | Nom (Objet) | Type Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet | ||
| 0x20f5 0x00 | indicateur LED u8 | rw 0 Sauvegardé | automatiquement | ||||
8.7.3 Fonctions avancées des capteurs
| Index Sous-index | Nom (Objet) | Type Accès | Valeur par défaut | Capacité mapping-PDO | Sauvegarder la valeur de l'objet | |
| 0x4000 0x00 | Reset | Microcontrôleur | u8 wo 0 - | |||
| 0x4001 Identification | ||||||
| 0x01 Date d'installation Chaîne rw aa- | aa-mm-jj - | |||||
| 0x02u Lieu d'installation Chaîne rw | Lieu d'instal- | lation | - | |||
| 0x4002 Auto-test MEMS | ||||||
| 0x01 Activer | l'auto-test | u8 wo 0 - | ||||
| 0x02 Auto-test | Barre d'onglets | u8 ro 0xfc | - | |||
| 0x4003 Données d'accélération brutes | ||||||
| 0x01 Données brutes d'accélération | u8 rw 0 (axe xyz - toutes les 4s) | - | oui | |||
| 0x02 Enregistrement de données brutes | u8 wo 0 - | |||||
| 0x03 Données brutes Disponibilité | u8 ro 0 - | |||||
| 0x04 Données brutes Lire | DO ro - | - | ||||
| 0x4004 Utilisation des machines / compteur collectif de charge | ||||||
| 0x01 Valeur limite | Compteur collectif 1 | r32 | rw 0,004 m/s | - | oui | |
| 0x02 Valeur limite | Compteur collectif 2 | r32 | rw 0,012 m/s | - | oui | |
| 0x03 Compteur collectif 1 | u32 | ro | - | |||
| 0x04 Compteur collectif 2 | u32 | ro | - | |||
| 0x05 Reset | Compteur collectif 1 | u8 wo 1 - | ||||
| 0x06 Reset | Compteur collectif 2 | u8 wo 1 - | ||||
| 0x07 Valeur limite | des mises en marche de la machine | r32 | rw 0,004 m/s | - | oui | |
| 0x08 Mise en marché de la machine | u32 | ro | - | |||
| 0x09 Reset | Mise en marché de la machine | u8 wo 1 - | ||||
| 0x5c00 Déca | age de la mémoire de la valeur maximale (d-Peak2Peak) | |||||
| 0x01 Mémoire valeur maximum Déplacement (d-Peak2Peak) | r32 ro - | |||||
| 0x02 Réinitialisation de la décalage de la mémoire des valeurs maximales (d-Peak2Peak) | u8 wo 1 - | |||||
| 0x5sc01 Mémoire des valeurs maximales - fatigue (v-RMS) | ||||||
| 0x01 Mémoire valeur maximum Déplacement (d-Peak2Peak) | r32 ro - | |||||
| 0x02 Réinitialisation de la mémoire des valeurs maximales - décalage (d-Peak2Peak) | u8 wo 1 - | |||||
| 0x5sc01 Mémoire des valeurs maximales - fatigue (v-RMS) | ||||||
| 0x01 Mémoire de les valeurs maximales - fatigue (v-RMS) | r32 ro - | |||||
| 0x02 Réinitialisation de la mémoire des valeurs maximales - fatigue (v-RMS) | u8 wo 1 - | |||||
| 0x5sc02 Mémoire de la valeur maximale - choc (a-Peak) | ||||||
| 0x01 Mémoire de la valeur maximale - choc (a-Peak) | r32 ro - | |||||
| 0x02 Réinitialisation de la mémoire des valeurs maximales - choc (a-Peak) | u8 wo 1 - | |||||
| 0x5c03 Mémoire des valeurs maximales - friction (a-RMS) | ||||||
| 0x01 Mémoire de les valeurs maximales - friction (a-RMS) | r32 ro - | |||||
| 0x02 Réinitialisation de la mémoire des valeurs maximales - friction (a-RMS) | u8 wo 1 - | |||||
| 0x5c04 Mémoire des valeurs maximales - crest | ||||||
| 0x01 Mémoire des valeurs maximales - crest | r32 ro - | |||||
| 0x02 Reset | Mémoire des valeurs maximales - crest | u8 wo 1 - | ||||
| 0x5c05 Mémoire valeur maximum Température de surface | ||||||
| 0x01 Mémoire des valeurs maximales - température de surface | r32 ro - | |||||
| 0x02 Réinitialisation de la mémoire des valeurs maximales - température de surface | u8 wo 1 - | |||||
| 0x5c06 Mémoire valeur minimum Température de surface | ||||||
| 0x01 Mémoire des valeurs minimales - température de surface | r32 ro - | |||||
| 0x02 Réinitialisation de la mémoire des valeurs minimales - température de surface | u8 wo 1 - | |||||
| 0x5c07 Mémoire valeur maximum Analyse déséquilibre | ||||||
| 0x01 Mémoire valeur maximum Analyse déséquilibre | r32 ro - | |||||
| 0x02 Réinitialisation de la mémoire des valeurs maximales - analyse déséquilibre | u8 wo 1 - | |||||
| 0x5c08 Mémoire des valeurs maximales - roulement (BearingScoutTM) | ||||||
| 0x01 Mémoire des valeurs maximales - roulement (BearingScoutTM) | r32 ro - | |||||
| 0x02 Réinitialisation de la mémoire des valeurs maximales - roulement (BearingScoutTM) | u8 wo 1 - | |||||
8.7.4 Plage de type d'appareil standardisé (selon CIA 404)
| Index Sous-index | Nom (Objet) | Type Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet | |
| 0x6110 Al_Sensor_type | ||||||
| Index Sous-index | Nom (Objet) | Type Accès | Valeur par défaut | Capacité mapping PDO | Sauvegarder la valeur de l'objet | ||
| 0x01 AI_Sensor_type_Displacement (d-Peak2Peak) | u16 ro 10000 | - oui | |||||
| 0x02 AI_Sensor_type_Fatigue (v-RMS) | u16 ro 10001 | - oui | |||||
| 0x03 AI_Sensor_type_Impact (a-Peak) | u16 ro 10002 | - oui | |||||
| 0x04 AI_Sensor_type_Friction (a-RMS) | u16 ro 10002 | - oui | |||||
| 0x05 AI_Sensor_type_Crest | u16 ro 10003 | - oui | |||||
| 0x06 AI_Sensor_type_Surface tempera-ture | u16 ro 100 | - oui | |||||
| 0x07 AI_Sensor_type_Unbalance va-lue | u16 ro 10001 | - oui | |||||
| 0x08 AI_Sensor_type_BearingScout | u16 ro 10002 | - oui | |||||
| 0x6114 AI_ADC_sample_rate | |||||||
| 0x01 AI_ADC_sample_rate_Dis-placement (d-Peak2Peak) | u32 ro 0x14 | - oui | |||||
| 0x02 AI_ADC_sample_rate_Fa-tigue (v-RMS) | u32 ro 0x14 | - oui | |||||
| 0x03 AI_ADC_sample_rate_Im-pact (a-Peak) | u32 ro 0x14 | - oui | |||||
| 0x04 AI_ADC_sample_rate_Fric-tion (a-RMS) | u32 ro 0x14 | - oui | |||||
| 0x05 AI_ADC_sample_rate_Crest | u32 ro 0x14 | - oui | |||||
| 0x06 AI_ADC_sample_rate_Sur-face temperature | u32 ro 0x14 | - oui | |||||
| 0x07 AI_ADC_sample_rate_Unba-lance value | u32 ro 0x14 | - oui | |||||
| 0x08 AI_ADC_sample_rate_BearingScout | u32 ro 0x14 | - oui | |||||
| 0x6130 AI_PV_Float | |||||||
| 0x01 AI_PV_Displace-ment (d-Peak2Peak) | r32 ro - oui | ||||||
| 0x02 AI_PV_Fatigue (v-RMS) | r32 ro - oui | ||||||
| 0x03 AI_PV_Impact (a-Peak) | r32 ro - oui | ||||||
| 0x04 AI_PV_Friction (a-RMS) | r32 ro oui | ||||||
| 0x05 AI_PV_Crest r32 ro - oui | |||||||
| 0x06 AI_PV_Surface temperature | r32 ro - oui | ||||||
| 0x07 AI_PV_ | Unbalance value | r32 ro - oui | |||||
| 0x08 AI_PV_ | BearingScout | r32 ro - oui | |||||
| 0x6131 AI_Physical_unit_PV | |||||||
| 0x01 AI_Physi- | cal_unit_Displacement (d-Peak2Peak) | u32 rw 0x00 | 010000 - oui | ||||
| 0x02 AI_Physica | unit_Fatigue (v-RMS) | u32 rw 0x00 | 010300 - oui | ||||
| 0x03 AI_Physica | unit_Impact (a-Peak) | u32 rw 0x00 | 550000 - oui | ||||
| 0x04 AI_Physica | unit_Friction (a-RMS) | u32 rw 0x00 | 550000 - oui | ||||
| 0x05 AI_Physica | unit_Crest | u32 rw 0x00 | 000000 - oui | ||||
| 0x06 AI_Physica | unit_Surface temperature | u32 rw 0x00 | 2D0000 - oui | ||||
| 0x07 AI_Physica | unit_Unbalance value | u32 rw 0x00 | 010300 - oui | ||||
| 0x08 AI_Physica | Unit BearingScout | u32 rw 0x00 | 550000 - oui | ||||
| 0x6132 AI_Decimal_digits_PV | |||||||
| 0x01 AI_Decimal | digits_Displacement (d-Peak2Peak) | u8 ro 4 | - oui | ||||
| 0x02 AI_Decimal | digits_Fatigue (v-RMS) | u8 ro 4 | - oui | ||||
| 0x03 AI_Decimal | digits_Impact (a-Peak) | u8 ro 1 | - oui | ||||
| 0x04 AI_Decimal | digits_Friction (a-RMS) | u8 ro 1 | - oui | ||||
| 0x05 AI_Decimal | digits_Crest | u8 ro 1 | - oui | ||||
| 0x06 AI_Decimal | digits_Surface temperature | u8 ro 1 | - oui | ||||
| 0x07 AI_Decimal | digits_Unbalance value | u8 ro 4 | - oui | ||||
| 0x08 AI_Decimal_digits_BearingScout | u8 ro 4 - oui | ||||||
| 0x6150 AI_Status | |||||||
| 0x01 AI_Status_ | Displacement (d-Peak2Peak) | u8 ro - oui | |||||
| 0x02 AI_Status_ | Fatigue (v-RMS) | u8 ro - oui | |||||
| 0x03 AI_Status_ | Impact (a-Peak) | u8 ro - oui | |||||
| 0x04 AI_Status_ | Friction (a-RMS) | u8 ro - oui | |||||
| 0x05 AI_Status_Crest u8 ro - oui | |||||||
| 0x06 AI_Status_ | Surface temperature | u8 ro - oui | |||||
| 0x07 AI_Status_ | Unbalance value | u8 ro - oui | |||||
| 0x08 AI_Status_ | BearingScout | u8 ro - oui | |||||
| 0x7130 AI_PV_INT16 | |||||||
| 0x01 AI_PV_ | Displacement (d-Peak2Peak) | u16 ro - oui | |||||
| 0x02 AI_PV_ | Fatigue (v-RMS) | u16 ro - oui | |||||
| 0x03 AI_PV_Impact (a-Peak) | u16 ro - oui | ||||||
| 0x04 AI_PV_ | Friction (a-RMS) | u16 ro - oui | |||||
| 0x05 AI_PV_Crest u16 ro - oui | |||||||
| 0x06 AI_PV_ | Surface temperature | u16 ro - oui | |||||
| 0x07 AI_PV_ | Unbalance value | u16 ro - oui | |||||
| 0x08 AI_PV_ | BearingScout | u16 ro - oui | |||||
8.8 Modifier des objets ou réinitialiser l'appareil (Reset)
Des modifications aux objets dans le répertoire d'objets sont validées immédiatement.
La réinitialisation entraîne la perte des modifications. Pour éviter cela, les objets doivent être sauvegardés dans la mémoire rémanente interne (flash).
Tous les objets marqués [Sauvegarder la valeur de l'objet]: [oui] dans le répertoire d'objets sont mémorisés en permanence dans le flash de l'appareil. Grâce à l'écriture de la signature [save] (0x65766173) pour sauvegarder les objets (index RO 0x1010/0x01), tous les objets actuels du répertoire d'objets sont transmis dans la mémoire flash.
Remettre les objets aux réglages de base effectués en usine
▶ Ecrire la signature [load] (0x64616F6C) dans le répertoire d'objets (index 0x1011/0x01).
Les modifications seront validées après un reset.
Selon l'architecture du réseau CANopen, les objets peuvent également être mémorisés de façon centralisée dans un maître CANopen. Dans ce cas, les objets seront transmis à l'appareil lors du démarrage du système et les valeurs sauvegardées localement seront remplacées.
Remarque
Particularités des objets ID nœud (index 0x20F0 et 0x20F1) et Bitrate (index 0x20F2 et 0x20F3) :
- Les modifications apportées aux objets (ID nœud, bitrate) ne sont prises en compte qu'après une réinitialisation. Utiliser pour cela la réinitialisation du microcontrôleur (index OV 0x4000).
- Les objets (ID nœud, Bitrate) ne peuvent pas être transférés dans la flash via le répertoire d'objets (index 0x1010/0x01).
- Les objets (ID nœud, débit binaire) ne peuvent pas être réinitialisés aux réglages d'usine via l'annuaire d'objets (index 0x1011/0x01).
8.9 Surveillance de l'appareil
8.9.1 Heartbeat
Grâce à la fonctionnalité Heartbeat, l'activité d'un appareil dans le réseau CANopen peut être surveillée par le maître (consommateur). L'appareil (producteur) transmet, à intervalles réguliers, un message Heartbeat qui contient l'état de l'appareil.
Activer la fonction Heartbeat
▶ Saisir dans l'objet [Intervalle heartbeat producteur] (index 0x1017) une valeur supérieure à [0].
Cette valeur spécifie le temps entre deux signaux Heartbeat en millisecondes [ms].
▶ Désactiver la fonction Heartbeat avec la valeur [0].
Outre la fonction heartbeat du producteur, une fonction heartbeat du consommateur (index du répertoire d'objets 0x1016) est également prise en charge par l'appareil. On peut définir ici l'intervalle de temps attendu pour la réception d'un message Heartbeat du consommateur.
8.9.2 Auto-test MEMS
L'appareil possède un auto-test MEMS intégré qui excite artificiellement la cellule de mesure et évalue en interne la réponse à l'excitation. L'évaluation de l'auto-test ne fonctionne que si le capteur est en position de repos. Sinon, les suggestions de la machine et de l'auto-test artificiel se superposent.
Activer et lire l'auto-test
▶ Activer l'auto-test via l'objet (index 0x4002) auto-test MEMS dans le sous-index 1.
▶ Lire le résultat de l'auto-test via le sous-index 2.
9 Description des valeurs caractéristiques de l'état
9.1 Décalage (d-Peak2Peak)
La valeur d-Peak2Peak (amplitude absolue de vibration) mesure le décalage absolu en [mm] à l'endroit où le capteur est monté. La distance d'oscillation est un indicateur de stress matériel ou de déformation (par exemple des éléments de ressort ou d'amortissement).
L'amplitude absolue des vibrations peut également être utilisée pour la surveillance du process (par ex. la déviation dynamique d'un tapis roulant ou d'un tamis vibrant), mais elle n'est toujours disponible que pour un axe librement configurable.

La valeur caractéristique d-Peak2Peak est indépendante du filtre DC paramétré et se situe toujours dans une plage comprise entre 1 et 100 Hz.
9.2 Fatigue (v-RMS)
La v-RMS (valeur effective de la vitesse de vibration) mesure l'énergie totale d'une machine tournante.
Les types de surcharge les plus fréquents (balourd, désalignement, desserrage) et donc la hausse de la valeur énergétique dans la machine se reflètent dans la v-RMS.
Une charge accrue peut endommager la machine à long terme par fatigue ou, dans des cas extrêmes, la détruire en peu de temps.
L'axe de mesure pour l'indicateur de vitesse v-RMS et la magnitude (combinaison de plusieurs axes) peuvent être librement paramétrés.

La magnitude correspond au signal cumulé de plusieurs axes (par exemple x, y et z). Magnitude = (x^2 + y^2 + z^2)

La v-RMS est mesurée selon la norme DIN ISO 20816-3 (mesure et évaluation de la vibration de machines).
L'a-RMS (valeur effective de l'accélération) détecte les frottements mécaniques des composants de machine.
Ces frottements sont typiquement une conséquence de l'usure (roulement défectueux, roues dentées usées, etc.) ou de problèmes de lubrification (impuretés dans la graisse, eau dans l'huile, etc.).
L'axe de mesure pour les indicateurs d'accélération et la magnitude (combinaison de plusieurs axes) peuvent être librement paramétrés.
9.4 Choc (a-Peak)
L'a-Peak surveille la valeur maximale de l'accélération.
Celui-ci peut être un indicateur de chocs. Les chocs peuvent être uniques (collision ou éléments perturbateurs) ou périodiques (par exemple en cas d'endommagement d'un roulement ou de friction de composants).
L'axe de mesure pour les indicateurs d'accélération et la magnitude (combinaison de plusieurs axes) peuvent être librement paramétrés.
9.5 Facteur de crête (Crest)
Le facteur crête est une valeur caractéristique de l'analyse de signaux. Il est défini comme le rapport entre la valeur maximale et la valeur effective (Peak/RMS).
Dans le cadre de la maintenance préventive conditionnelle, cette valeur caractérise l'état du roulement. Les signaux d'accélération à haute fréquence d'une courte durée d'impulsion dus à la détérioration d'un roulement génèrent des valeurs crêtes plus élevées que la valeur effective. Ce rapport peut être identifié dans le facteur crête et peut constituer un système d'alerte précoce en cas de début de détérioration de roulement.
L'axe de mesure pour les indicateurs d'accélération et la magnitude (combinaison de plusieurs axes) peuvent être librement paramétrés.

Le facteur crête baisse en cas de progression de la détérioration du roulement et devrait toujours être utilisé en combinaison avec une autre valeur caractéristique (par ex. l'a-RMS ou BearingScout ^TM ).
9.6 Température de surface
Une température de surface accrue apparaît sur des pièces tournantes suite à des frottements. Cette valeur caractéristique peut en outre être un indicateur de problèmes électriques dans l'unité d'entraînement. Une hausse de température indique l'ampleur de la perte énergétique et d'une usure accrue.
9.7 Analyse des déséquilibres
L'appareil peut mesurer de manière sélective en fréquence l'énergie vibratoire due à un déséquilibre accru sur un composant rotatif. Par rapport à l'indicateur d'usure à large bande (fatigue - v-RMS), les problèmes de déséquilibre peuvent être surveillés de manière très fiable et avec une faible influence des autres vibrations du process.
Ecrire l'information de vitesse nécessaire de la machine à surveiller dans l'appareil via la commande de la machine au moyen d'un RPDO dynamique (index 0x1400) ou comme SDO (index 0x2020).
Paramétrer l'axe de mesure pertinent pour la mesure du balourd (x, y ou z) via le SDO (index 0x2053).
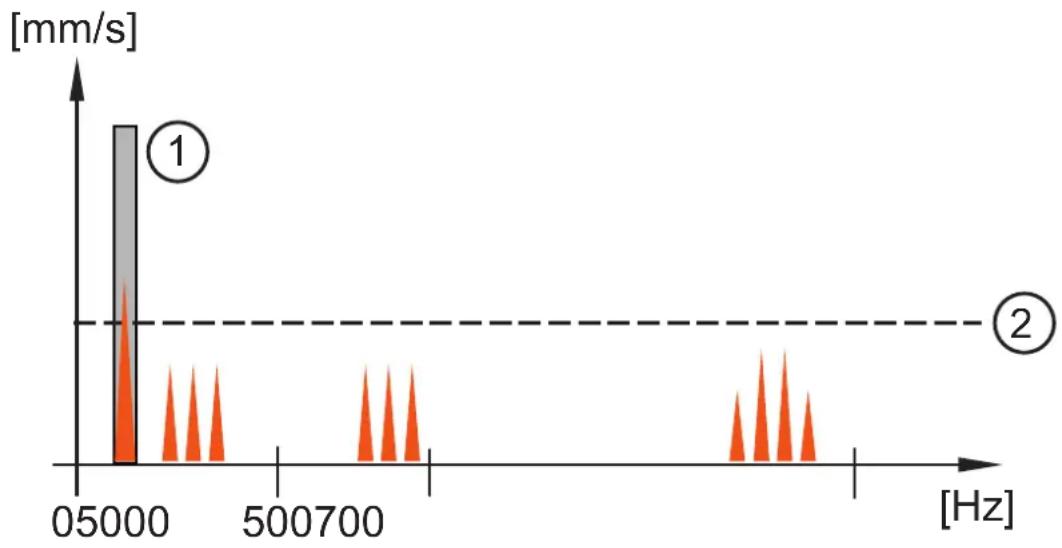
1 : Mesure du déséquilibre
2 : Seuil d'alarme

La valeur caractéristique du déséquilibre est actualisée toutes les 3 ms dans l'appareil.

L'axe de mesure pour la mesure du balourd doit être en direction de la vibration principale ; dans la plupart des cas, celle-ci est radiale à l'axe de l'arbre.

La vitesse de rotation au niveau du composant rotatif doit être supérieure à 120 tr/min.
9.7.1 Répertoire d'objets (analyse des déséquilibres)
| Index | Sous-index | Nom (Objet) | Type Accès | Valeur par défaut | Capacité mapping PDO | Possibilités de sélection | |
| 0x2020 0x00 | Vitesse de rotation de la machine / du composant | u16 rw 3000 tr/min En option | comme RP-DO | 120 à 30 000 U/min | |||
| 0x2053 0x00 | Axe de mesure de l'analyse | u8 rw Axe z - 1 : (axe x) | 2 : (axe y)3 : (axe z) | ||||
10 Analyse des roulements (BearingScout™)
L'appareil dispose d'une analyse des roulements intégrée par procédé de démodulation.
Paramétrer initialement l'axe de mesure concerné (x, y ou z) via le SDO (index 0x2053).
▶ Mettre à disposition l'information de vitesse nécessaire (index 0x2020) de la machine à surveiller sous forme de RPDO via la commande de la machine.
Paramétrer en option les facteurs de fréquence (BPFO – bague extérieure, BPFI – bague intérieure, BSF – éléments roulants) du roulement monté via un SDO (index 0x2054).
▷ La précision du résultat de mesure est améliorée lors d'une surveillance spécifique au roulement.

Si les facteurs de fréquence ne sont pas paramétrés dans l'appareil (une valeur inférieure à 0x2054 est 0), une valeur de roulement générique est formée par démodulation.
Dans ce cas, il n'est pas nécessaire d'entrer une vitesse de rotation de la machine.
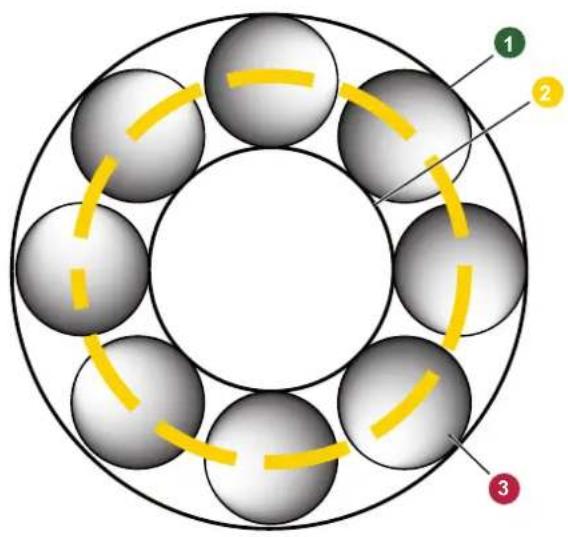
1 : Fréquence de défaut (bague externe) = BPFI (index 0x2054 / sous-index 0x02* vitesse (index 0x2020))
2 : Fréquence de défaut (bague interne) = BPFO (index 0x2054 / sous-index 0x01) * vitesse (index 0x2020)
3 : Fréquence de défaut (éléments roulants) = BSF (index 0x2054 / sous-index 0x03) * vitesse (index 0x2020)

L'axe de mesure pour le calcul de roulement doit être en direction de la vibration principale. Dans la plupart des cas, celle-ci est radiale à l'axe de l'arbre, directement au niveau de la position du roulement.

L'information sur la vitesse de rotation au niveau du roulement doit être prise en compte, à condition que les facteurs de fréquence soient paramétrés.

Pour une analyse de roulement à bande étroite, il est recommandé d'utiliser 2 fois la fréquence de dommage de l'élément roulant (BSF), car le contact de dommage sur les bagues intérieure et extérieure se produit deux fois par tour.
10.1 Répertoire d'objets (BearingScout™)
| Index | Sous-index | Nom (Objet) | Type Accès | Valeur par défaut | Capacité mapping PDO | Possibilités de sélection | |
| 0x2020 0x00 | Vitesse de r | rotation de la machine / du composant | u16 rww | 3000 tr/min | En option | comme RP-DO | 120 à 30 000 U/min |
| 0x2053 0x00 | Axe de mes | ure de l'analyse - mesure | u8 rw Axe z -- | ||||
| 0x2054 0x01 | Facteurs de | fréquence des roulements - bague intérieure | u32 rw 0,0 -- | ||||
| 0x02 Facteurs | urs de fréquence des roulements - bague extérieure | u32 rw 0,0 -- | |||||
| 0x03 Facteurs | urs de fréquence des roulements - éléments roulant | u32 rw 0,0 -- | |||||
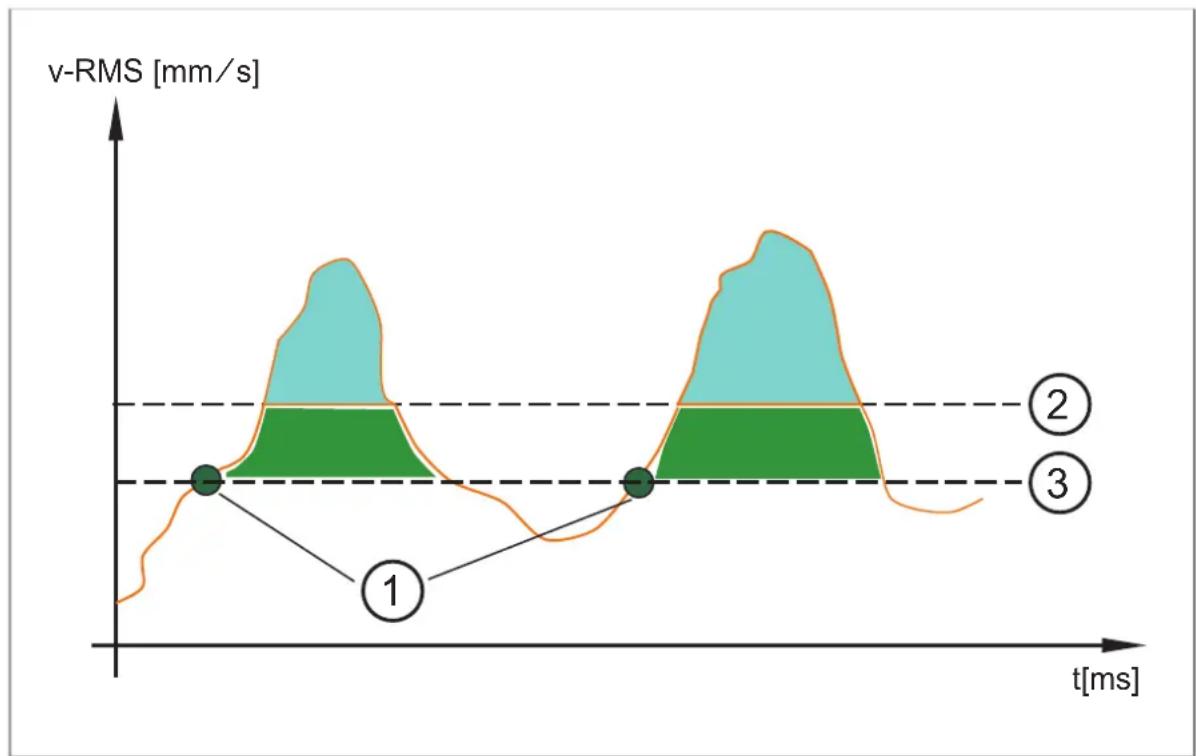
11 Utilisation des machines / compteur collectif de charge
L'appareil peut enregistrer l'utilisation de la machine sur la base de l'énergie vibratoire (v-RMS) via deux compteurs collectifs et surveille ainsi l'influence énergétique effective d'une machine / d'un composant.

L'axe de mesure sous-jacent est l'axe de la vitesse de vibration (index 0x2051).
Deux valeurs limites peuvent être définies via l'index 0x4004. En cas de dépassement de l'une des deux valeurs limites, le compteur correspondant cumule le temps sur la valeur limite en secondes.
Le compteur enregistre l'utilisation des machines / les indicateurs OEE.
Exemples
- la machine était principalement dans l'étape 1 du process (peu d'énergie vibratoire)
- la machine était principalement dans l'étape 2 du process (beaucoup d'énergie vibratoire)
- les heures d'utilisation d'une machine ou d'une partie de machine

Une conversion des unités (index 0x6131 sous-index 0x02) modifie automatiquement les unités des valeurs limites.

Une modification de l'axe de mesure v-RMS (index 0x2042) ou du filtre DC (index 0x2040) remet les compteurs à zéro. Une modification des valeurs limites réinitialise les compteurs concernés.
area
| t[ms] | v-RMS [mm/s] | |-------|--------------| | Start | Low | | Peak 1 | High | | Peak 2 | Medium | | End | Low |1 : Valeur limite - mises en marche machine (index 0x4004 / subindex 7)
2 : Valeur limite - compteur collectif 2 (index 0x4004 / subindex 02)
3 : Valeur limite - compteur collectif 1 (index 0x4004 / subindex 01)
11.1 Répertoire des objets (utilisation des machines / compteur collectif de charge)
| Index | Sous-index | Nom (Objet) | Type Accès | Valeur par défaut | Capacité mapping PDO | Possibilité de sélection |
| 0x4004 0x01 | Valeur limite - compteur collectif 1 | r32 rw 0,004 | m/s - | |||
| 0x02 Valeur limite - compteur collectif 2 | r32 rw 0,012 | m/s - | ||||
| 0x03 Compteur collectif 1 u32 ro - | ||||||
| 0x04 Compteur collectif 2 u32 ro - | ||||||
| 0x05 Remettre à zéro Compteur collectif 1 | u32 wo - 1 : | Re- | mettre à zéro | |||
| 0x06 Remettre à zéro Compteur collectif 2 | u32 wo - 1 : | Réinitia- | lisation | |||
| 0x07 Valeur limite - mises en marche machine | r32 rw 0,004 | m/s - | ||||
| 0x08 Compteur - mises en marche machine | u32 ro - | |||||
| 0x09 Compteur - mises en marche machine | u8 wo - 1 : | Réinitia- | lisation | |||
| 0x2051 0x00 | Réinitialisation des mises en marche machine | u8 rw 7 : (Axe xyz) - 1 : | (Axe x)2 :(Axe y)3 :(Axe xy)4 :(Axe z)5 :(Axe xz)6 :(Axe yz)7 :(Axe xyz) | |||
12 Mémoire de valeur maximale
L'appareil dispose d'une mémoire de valeur maximale pour chaque valeur process, celle-ci peut être lue comme SDO. La mémoire de valeur maximale peut être remise à zéro si nécessaire.

Si l'axe de mesure d'une valeur process est modifié en fonctionnement, la mémoire de valeur maximale est automatiquement remise à zéro.

La valeur process température a en outre une mémoire de valeur minimale.
12.1 Répertoire d'objets (mémoire des valeurs maximales)
| Index | Sous-index | Nom (Objet) | Type Accès | Valeur par défaut | Capacité mapping PDO |
| 0x5c00 0x01 | Mémoire des | valeurs maximales - décalage (d-Peak2Peak) | r32 ro - | ||
| 0x02 Réinitialisation - mémoire de la valeur maximale (d-Peak2Peak) | u8 wo 1 - | ||||
| 0x5c01 0x01 | Mémoire des | valeurs maximales - fatigue (v-RMS) | r32 ro - | ||
| 0x02 Réinitialisation - mémorisation de la valeur maximale (v-RMS) | u8 wo 1 - | ||||
| 0x5c02 0x01 | Mémoire de | la valeur maximale - choc (a-Peak) | r32 ro - | ||
| 0x02 Réinitialisation - mémorisation de la valeur maximale (a-Peak) | u8 wo 1 - | ||||
| 0x5c03 0x01 | Mémoire des | valeurs maximales - friction (a-RMS) | r32 ro 1 - | ||
| 0x02 Réinitialisation - mémorisation de la valeur maximale (a-RMS) | u8 wo 1 | ||||
| 0x5c04 0x01 | Mémoire des | valeurs maximales - crest | r32 ro 1 - | ||
| 0x02 Réinitialisation - mémorisation de la valeur maximale (crest) | u8 wo 1 | ||||
| 0x5c05 0x01 | Mémoire valeur maximum - température de surface | r32 ro 1 - | |||
| 0x02 Réinitialisation - mémoire des valeurs maximales température de surface | u8 wo 1 | ||||
| 0x5c06 0x01 | Mémoire valeur minimum - température de surface | r32 ro 1 - | |||
| 0x02 Réinitialisation - mémoire des valeurs minimales température de surface | u8 wo 1 | ||||
| 0x5c07 0x01 | Mémoire valeur maximum - Analyse déséquilibre | r32 ro 1 - | |||
| 0x02 Réinitialisation - mémoire des valeurs maximales analyse des déséquilibres | u8 wo 1 | ||||
| 0x5c08 0x01 | Mémoire valeur maximum - Analyse des roulements (BearingScout) | r32 ro 1 - | |||
| 0x02 Réinitialisation - mémoire des valeurs maximales BearingScout | u8 wo 1 | ||||
13 Sélection des axes de mesure
Les valeurs caractéristiques d'état sont calculées à partir d'un axe de mesure sélectionnable, cet axe de mesure peut être un axe de mesure unique (par exemple l'axe z) ou une combinaison de plusieurs axes de mesure (par exemple l'axe xyz).

La magnitude correspond au signal cumulé de plusieurs axes (par exemple x, y et z). Magnitude = (x^2 + y^2 + z^2)
| Index | Sous-index | Nom (Objet) | Type Accès | Valeur par défaut | Possibilités de choix | |
| 0x2050 0x00 | Sélection de | l'axe de mesure pour les caractéristiques d'accélération (a-Peak, a-RMS, Crest) | u8 rw 7 | 1 : (Axe x) | 2 : (Axe y)3 : (Axe xy)4 : (Axe z)5 : (Axe xz)6 : (Axe yz)7 : (Axe xyz) | |
| 0x2051 0x00 | Sélection de | l'axe de mesure pour les caractéristiques de vitesse (v-RMS) | u8 rw 7 | 1 : (Axe x) | 2 : (Axe y)3 : (Axe xy)4 : (Axe z)5 : (Axe xz)6 : (Axe yz)7 : (Axe xyz) | |
| 0x2052 0x00 | Sélection de | l'axe de mesure pour les caractéristiques vibratoires (d-Peak2Peak) | u8 rw 3 | 1 : (Axe x) | 2 : (Axe y)3 : (Axe z) | |
| 0x2053 0x00 | Sélection de | l'axe de mesure pour les caractéristiques vibratoires Analyse mesure (Déséquilibre, analyse, BearingScoutTM) | u8 rw 3 | 1 : (Axe x) | 2 : (Axe y)3 : (Axe z) | |
14 Marquage
Date d'installation (index 0x4001 / sous-index 0x01)
Saisie de la date d'installation. La date n'est pas restaurée après un remplacement de l'appareil.
Marquage de l'installation (index 0x4001 / sous-index 0x02)
texte à définir librement, décrit la fonction de l'appareil dans l'installation.
15 Eléments de service et d'indication
15.1 LED de l'appareil
L'appareil est pourvue d'une LED qui indique les écarts par rapport au fonctionnement normal par un changement de couleur.
Le comportement des LED a deux profils différents
• CiA 303-3 Comportement des LED
- Comportement des LED ifm
▶ Modifier le comportement des LED via l'index 0x20F5.
Comportement des LED selon CiA 303-3
| Description Action | ||
| allumée en vert L'appareil est raccordé à la tension d'alimentation, prêt à fonctionner et a l'état [Operational]. | ||
| clignote (rapidement) en vert L'appareil est en état [Pre-operational] | ||
| clignote (lentement) en vert L'appareil est en état [Status Stopped] | ||
| allumée en rouge Le contrôleur CAN est en mode Bus Off. Pas de communication possible, trop de trames d'erreur. | ||
| clignote (rapidement) en rouge Un [Guard-Event] ou [Heartbeat-Event] est apparu sur l'appareil. | ||
| clignote (lentement) en rouge au moins un des compteurs d'erreurs du contrôleur CAN a dépassé le seuil d'avertissement (trop de trames d'erreurs) | ||
Comportement des LED selon ifm
| Description Action | ||
| allumée en vert L'appareil est raccordé à la tension d'alimentation, prêt à fonctionner et a l'état [Pre-Operational]. | ||
| clignote (rapidement) en vert L'appareil est en état [Operational] | ||
| clignote (lentement) en vert L'appareil est en état [Stopped] | ||
| allumée en rouge Le contrôleur CAN est en mode Bus Off. Pas de communication possible, trop de frames d'erreur. | ||
| clignote (rapidement) en rouge Un [Guard-Event] ou [Heartbeat-Event] est apparu sur l'appareil. | ||
| clignote (lentement) en rouge au moins un des compteurs d'erreurs du contrôleur CAN a dépassé le seuil d'avertissement (trop de trames d'erreurs) | ||

L'appareil est livré avec le comportement des LED réglé en usine selon ifm.
16 Filtrage de signal
Filtrage pour le traitement interne du signal et calcul des valeurs process.
| Index Sous-index Description | Type Accès | ||||
| 0x2040 0x00 Type filtre DC | Filtre pour la composante continue (accélération statique) - pertinent pour le calcul de toutes les valeurs caractéristiques sauf le déplacement (d-Peak2Peak) | u8 rw 0 | Passe-haut 2 | Hz1 : Passe-haut 10 Hz2 : Passe-haut 20 Hz3 : Passe-haut 40 Hz | |
| 0x2041 0x00 Type accélération | Filtre pour les caractéristiques d'accélération (a-RMS, a-Peak, Crest) | u8 rw 0 | Non filtré | 1 : Passe-bas 1000 Hz2 : Passe-bas 2000 Hz3 : Passe-bas 3000 Hz4 : Passe-bas 5000 Hz5 : Passe-haut 1000 Hz6 : Passe-haut 2000 Hz7 : Passe-haut 3000 Hz8 : Passe-haut 5000 Hz9 : Passe-bande 500 à 1500 Hz10 : Passe-bande 1500 à 2500 Hz11 : Passe-bande 2500 à 5000 Hz | |
| 0x2042 0x00 Type vitesse | Filtre pour les valeurs caractéristiques de la vitesse (v-RMS) | u8 rw 0 | Passe-bas 10 | 00 Hz | |
| 0x2043 0x00 Type cours | Filtre pour l'oscillation (d-Peak2Peak).La valeur caractéristique d-Peak2Peak est fixe à 1 Hz, indépendamment du filtre DC choisi. | u8 rw 0 | Passe-bas 10 | 0 Hz | |
| 0x2054 0x01 Type facteurs de fréquence des roulements | u32 rw Bague intérieure | - par défaut : 0,0 | |||
| Configuration des facteurs de fréquence de déterioration du roulement monté (bague intérieure, bague extérieure et éléments anulants) | faut : 0,0 | ||||
| 0,0 | |||||

Si l'un des facteurs de fréquence des roulements (indice 2054) reste à la valeur par défaut [0], une valeur caractéristique générique du roulement BearingScout™ est créée.
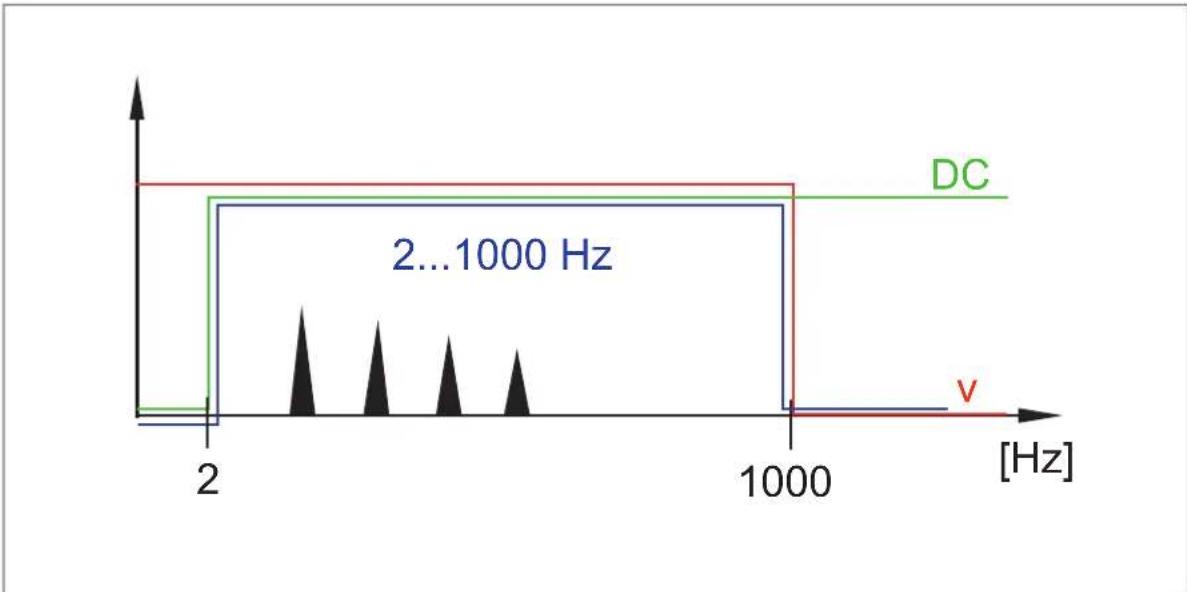
Exemple d'application 1 :
Filtre vitesse (v) - évaluation des composantes de signal entre 2 et 1000 Hz
Réglages :
Filtre DC : 2 Hz, passe-haut (fixe), filtre v : 1 kHz, passe-bas (fixe)
Défauts typiques dans cette plage :
Balourd, désalignement, desserrage, problèmes de courroie
line
| Frequency Range | Value | | --------------- | --------- | | 2 | 2...1000 Hz | | 1000 | 0 |Exemple d'application 2 :
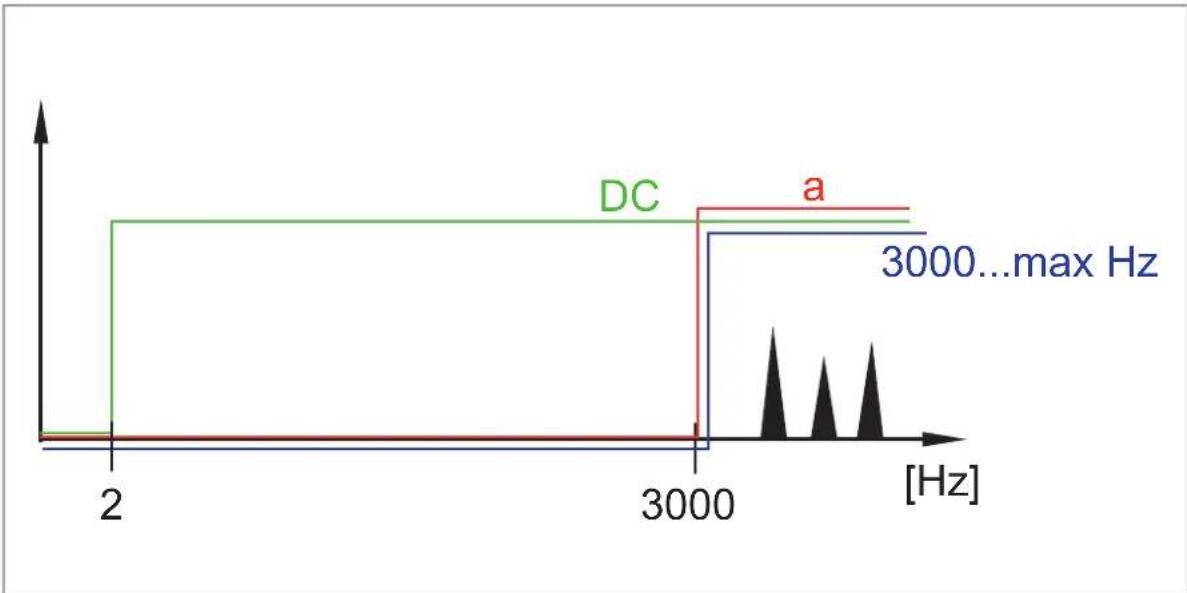
Filtre accélération (a) - évaluation des composantes de signal 3000 à 7500 Hz
Réglages :
Filtre DC : 10 Hz, filtre passe-haut (fixe), filtre passe-haut a : Bypass
Défauts typiques dans cette plage :
Dommages de roulement, fréquence d'engrènement, problèmes de lubrification, cavitation, frottement, chocs
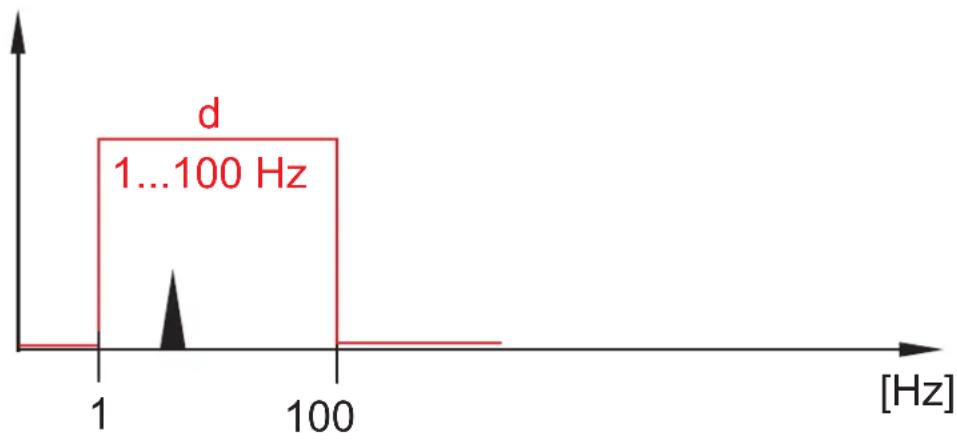
Exemple d'application 3 :
Filtre course (a) - évaluation des composantes de signal 1 à 100 Hz
Réglages :
Le filtre de décalage d-Peak2Peak n'est pas modifiable et est indépendant du filtre DC.
Défauts typiques dans cette plage :
Éléments d'amortissement, éléments de ressort, déviation, cribles vibrants
17 Lecture des données brutes d'accélération
L'appareil peut enregistrer les données d'accélération brutes, les stocker dans l'appareil et les lire via CANopen si nécessaire. Une analyse vibratoire plus approfondie peut être réalisée à l'aide des données brutes.

Logiciel d'analyse recommandé :
VES004 (version V2.37.00 ou supérieure) → Accessoires sur documentation.ifm.com
Les données brutes peuvent être lues via une commande SDO et les réglages suivants peuvent être effectués :
| Index Sous-index Description Type Accès | |||||
| 0x4003 0x01 Source de données | brutesParamétrage de la longueur d'enregistrement et des axes de mesure | u8 rw 0 : (Axe xyz- | xyz- | each-4s)1 : (Axe x -4s)2: (Axe y -4s)3 : (Axe z -4s)4 : (Axe x -12s)5 : (Axe y -12s)6 : (Axe z -12s) | |
| 0x02 Enregistrer des données brutesDéclencheur pour enregistrer des données brutes | u8 wo 1 : Enregistrer des | données brutes | |||
| 0x03 Données brutes disponiblesSignale la présence de données brutes dans la mémoire | u8 ro 0 : Aucune donnée | brute disponible1 : Données brutes disponibles | |||
| 0x04 Lire des données brutesLecture de données brutes | Domaine Transmission des | données brutes par blocs | |||
Le bloc de données brutes possède une longueur d'enregistrement paramétrable (4 s ou 12 s) et un taux d'échantillonnage d'environ 16 kSample (la valeur exacte est contenue dans l'en-tête des données brutes). Chaque échantillon a une largeur de 16 bits et est transmis au format « signed Integer ».
Chaque bloc de données brutes comporte un en-tête de fichier de données qui contient des informations supplémentaires au moment de l'enregistrement des données brutes. L'en-tête et a une longueur totale de 124 octets et est structuré comme suit :
| Paramètre Description | |
| Code produit, numéro de série et Vendor ID Données de l'article de l'appareil | |
| Longueur des données brutes Longueur des données brutes en octets | |
| Mise à l'échelle des données brutes Le facteur de mise à l'échelle pour normer le format signed Integer à une ac-célération gravitationnelle de 1g (calcul manuel requis). | |
| Fréquence d'échantillonnage données brutes | Fréquence d'échantillonnage de l'enregistrement de données brutes en hertz [Hz] |
| Source de déclenchement des données brutes | Source du déclencheur de données brutes (par exemple commande de sys-tème, PDout, événement interne) |
| Source de données brutes | Axe de mesure des données brutes |
| valeurs process | Toutes les valeurs process au moment de l'enregistrement en x,y et z, ainsi que de la magnitude (par exemple v-RMS (z), v-RMS (x), température de surface...) |
| Température interne de l'appareil | Température interne de l'appareil |
| Analyse des déséquilibres | Valeur du calcul de balourd au moment de l'enregistrement (si paramétré) |
| BearingScoutTM (valeur caractéristique de rou-lement) | Valeur du calcul de roulement au moment de l'enregistrement (si paramétré) |
| Vitesse de rotation de la machine (index 0x2020) | Valeur paramétrable de la vitesse de rotation au moment de l'enregistrement (si paramétré) |
| Temps delta Temps delta entre la lecture et l'en | registrement des données brutes |

Les appareils VMB fournissent une zone de mémoire indépendamment de la méthode d'enregistrement de données brutes. L'appareil ne conserve qu'un enregistrement de données brutes à la fois. Chaque enregistrement de données brutes efface l'enregistrement précédent.
18 Correction de défauts
Les codes d'erreur suivants génèrent un message d'urgence sur le bus CAN. Le code d'erreur correspondant peut être lu dans le registre des erreurs (index 0x1003 / sous-index 0x01... 0x20). Les erreurs sont écrites dans le registre des erreurs via un principe FIFO.
Si une erreur survient, l'annuaire d'objets (index 0x1001) est actualisé.
Le temps de blocage entre deux messages d'urgence peut être déterminé par le temps Inhibit EMYC de l'objet (index 0x1015). L'indication se fait en étapes de 100 µs.
| Code d'erreur Description Causes possibles : | |
| 0x1000 Erreur générale L'appareil se trouve dans un état défectueux | |
| 0x3120 Tension d'alimentation trop basse La tension d'alimentation de l'appareil ne correspond pas aux données de la fiche technique | |
| 0x3110 Tension d'alimentation trop élevée La tension d'alimentation de l'appareil ne correspond pas aux données de la fiche technique | |
| 0x4220 Température de l'appareil trop basse L'appareil est utilisé en dehors de la plage de température ambiante indiquée sur la fiche technique. | |
| 0x4210 Température de l'appareil trop élevée L'appareil est utilisé en dehors de la plage de température ambiante indiquée sur la fiche technique. | |
| 0x8130 Erreur de heartbeat ou de note guarding L'appareil n'est plus accessible sur le réseau | |
| 0x8210 Erreur de protocole PDO ou RPDO a une longueur de données non autorisée |
19 Fichier EDS
Le fichier EDS sert de modèle pour les différentes configurations d'un type d'appareil. Un fichier DCF est généré à partir du fichier EDS. Ce fichier contient les configurations de l'appareil, les valeurs des objets, l'ID de nœud et le Bitrate.
Pour la configuration du réseau CANopen et des appareils, des outils de configuration CANopen sont disponibles.
Les fichiers EDS sont disponibles sur le site web d'ifm : documentation.ifm.com
Contenu du fichier EDS :
- Fonctions de communication et objets (selon le profil CANopen DS-301)
- Objets spécifiques au fabricant

L'installation du fichier EDS dépend de l'outil de configuration.
Pour plus d'informations, contacter le fabricant du système de contrôle-commande.
20 Homologations/normes
Pour les homologations et les normes, les informations suivantes sont disponibles :
- Normes d'essai et réglementations : documentation.ifm.com
- Déclaration de conformité UE et homologations : documentation.ifm.com
- Notes relatives aux homologations : Notice d'emballage de l'appareil et documentation.ifm.com
21 Glossaire
CAN
Controller Area Network (système bus pour les engins mobiles)
CANopen
Protocole réseau basé sur CAN sur le niveau application avec une interface de communication ouverte (répertoire objets).
CiA
CAN in Automation e.V., organisation regroupant des fabricants et utilisateurs en Allemagne/Erlangen, organe de définition et contrôle pour CAN et des protocoles réseaux basés sur CAN.
COB
Objet de communication CANopen (PDO, SDO, EMCY, ...)
EDS
Fiche technique électronique
EMCY
L'objet d'urgence contient un message d'alarme avec lequel l'appareil signale une erreur.
Heartbeat
Surveillance cyclique paramétrable parmi les participants réseau. Contrairement au « Node Guarding » le maître NMT supérieur n'est pas nécessaire.
LSS
Procédure de réglage de paramètres fondamentaux d'appareils
NMT
Gestion du réseau
Id Noeud
Numéro unique d'un participant dans le réseau CANopen
Objet
Terme générique pour les données/messages interchangeables à l'intérieur du réseau CANopen
PDO
Le Process Data Object transmet des données process en temps réel dans le réseau CANopen, par ex. la vitesse de rotation d'un moteur. Les PDO ont un niveau de priorité plus haut que les SDO ; contrairement aux SDO ils sont transférés sans confirmation. Les PDO consistent en un message CAN avec identifiant et des données utiles jusqu'à 8 octets.
Mapping PDO
Décrit les données applications qui sont transférées avec un PDO.
RPDO
Objet de données process reçu par l'appareil.
Crest Factor
Rapport entre les valeurs de crête et les valeurs efficaces. Valeur informative sur le caractère de pointe d'un signal, par exemple l'accélération.
SDO
Le SDO atteint de façon ciblée le répertoire objets d'un participant réseau (lire/écrire). Un SDO peut consister en plusieurs messages CAN. La transmission de messages individuels est confirmée par le participant adressé. Utilisant les SDO, les appareils peuvent être configurés et paramétrés.
SYNC
Le télégramme SYNC déclenche la transmission de données process.
TPDO
Objet de données process transmis par l'appareil.
BearingScout™ :
Analyse des roulements à l'aide de méthodes de démodulation.
22 Maintenance, réparation et élimination
Cet appareil ne nécessite aucun entretien.
L'appareil ne doit être réparé que par le fabricant.
S'assurer d'une élimination écologique de l'appareil après son usage selon les règlements nationaux en vigueur.
Nettoyage :
▶ Mettre l'appareil hors tension.
Enlever les salissures avec un chiffon en microfibre doux, sec et non traité chimiquement.




