
LW2760 - équipements de mesure IFM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil LW2760 IFM au format PDF.

| Type de produit | Capteur de niveau électronique |
| Marque | IFM |
| Modèle | LW2760 |
| Technologie de mesure | Radar 80 GHz (FMCW) |
| Plage de mesure (hauteur de référence) | 0,2 à 15 m |
| Tension d'alimentation | 18...30 V DC (TBTS/TBTP) |
| Sorties | 1 sortie de commutation / IO-Link (OUT1), 1 sortie analogique 4-20 mA ou commutation (OUT2) |
| Angle d'émission | 10° |
| Matériau de l'antenne | PTFE |
| Raccordement électrique | Connecteur M12 à 4 broches |
| Montage | Raccords process : Tri-Clamp, G1, VARIVENT, à souder |
| Température de process (nettoyage NEP/SEP) | Jusqu'à 140 °C |
| Nettoyage et entretien | Nettoyer l'antenne régulièrement avec des produits appropriés. Vérifier et remplacer les joints si nécessaire. |
| Sécurité | Respecter les avertissements de brûlures (températures élevées) et de décharge électrique. Utiliser uniquement en zone non explosive. |
| Réparabilité | L'appareil ne peut pas être réparé. Pièces détachées (joints, adaptateurs) disponibles sur www.ifm.com. |
| Homologations | UE, TLPR, CISPR 11, 3A, EHEDG (selon montage) |
| Protection | Étanche et résistant à la pression (selon montage) |
| Utilisation prévue | Mesure continue sans contact du niveau de liquides dans cuves fermées (métal, béton). Applications agroalimentaires. |
FOIRE AUX QUESTIONS - LW2760 IFM
Questions des utilisateurs sur LW2760 IFM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre équipements de mesure au format PDF gratuitement ! Retrouvez votre notice LW2760 - IFM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil LW2760 de la marque IFM.
MODE D'EMPLOI LW2760 IFM
Notice d'utilisation
Capteur de niveau électronique
LW2760
Contenu
1 Remarques préliminaires 4
1.1 Symboles utilisés 4
1.2 Avertissements 4
2 Consignes de sécurité.... 5
3 Usage prévu 6
3.1 Applications 6
3.1.1 Exemples d'applications 6
3.2 Restrictions de l'application.... 7
4 Fonctions 9
4.1 Principe de mesure....9
4.1.1 Réflectivité, influence de la constante diélectrique 9
4.1.2 Mousse et turbulences 10
4.1.3 Influences des propriétés de la cuve et du montage 10
4.2 IO-Link 10
4.3 Sorties.... 10
4.3.1 Sortie analogique 10
4.3.2 Fonction de commutation 11
4.3.3 Etat défini en cas de défaut (mode d'alarme) 12
4.3.4 Fonction de simulation 13
4.3.5 Fonction d'amortissement.... 13
4.4 Comportement des sorties dans différents modes de fonctionnement 13
5 Montage 14
5.1 Position de montage 14
5.2 Inclinaison.... 15
5.3 Polarisation et orientation 15
5.4 Angle et largeur d'émission.... 15
5.5 Cuve à fond conique (trémie de vidange) 16
5.6 Cuves non métalliques 16
5.7 Exigence visant les manchons 16
5.8 Conseils pour les applications aseptiques.... 17
5.8.1 Remarques sur l'utilisation selon EHEDG 17
5.8.2 Remarques sur l'utilisation selon 3A®....18
5.9 Montage dans un taraudage 18
5.10 Préparation du montage 18
5.10.1 Retirer le capuchon de protection 18
5.10.2 Insérer le joint torique, graisser le filetage 19
5.10.3 Pré-monter le raccord à souder adaptateur.... 20
5.10.4 Préconisations en cas d'utilisation d'un raccord à souder 21
5.11 Monter l'appareil dans la cuve.... 22
5.11.1 Monter l'appareil avec un adaptateur Tri-Clamp 22
5.11.2 Monter l'appareil avec un raccord à souder.... 23
5.11.3 Monter l'appareil avec un adaptateur VARIVENT® 24
5.11.4 Monter l'appareil sur le raccord à souder 25
5.11.5 Monter l'appareil avec un raccord G1 25
6 Raccordement électrique 26
7 Paramétrage....27
7.1 Paramétrage via PC et maître IO-Link 27
7.2 Paramétrage pendant le fonctionnement. 28
7.3 Paramétrage via l'adaptateur Bluetooth 28
7.4 Paramètres réglables 28
7.5 Commandes de système.... 33
7.6 Exemple de paramétrage 33
8 Fonctionnement 35
8.1 Vérifier la fonction 35
8.1.1 Vérifier la qualité de détection.... 35
8.2 Message de diagnostic, cause, correction du défaut.... 35
9 Correction de défauts 37
9.1 Aide en cas d'indications de niveau erronées 37
9.1.1 Niveau trop élevé / trop bas 37
9.1.2 La valeur mesurée est bloquée 37
9.1.3 La valeur mesurée chute en cas de niveau dans la zone de l'antenne ..... 39
9.1.4 La valeur mesurée fluctue 40
9.1.5 La valeur mesurée est occasionnellement instable 40
9.1.6 La valeur mesurée est en retard lors de changements rapides de niveau....41
9.1.7 Valeur mesurée correcte à 0 % (4 mA), incorrecte à 100 % (20 mA) ..... 41
9.1.8 Valeur mesurée incorrecte en cas de niveau supérieur à 50 %....42
9.1.9 La valeur mesurée tombe à zéro dans la zone du fond de la cuve 42
9.1.10 La valeur mesurée se perd si la cuve est vide.... 43
9.1.11 Mode d'alarme quand le niveau est à proximité du fond de la cuve. 43
10 Maintenance, réparation et élimination 45
11 Réglage usine.... 46
12 Annexe 47
12.1 Homologations et attestations.... 47
1 Remarques préliminaires
Notice d'utilisation, données techniques, homologations et informations supplémentaires via le code QR sur l'appareil / l'emballage ou sur documentation.ifm.com.
1.1 Symboles utilisés
√ Condition préalable
Action à effectuer
Réaction, résultat
[...] Désignation d'une touche, d'un bouton ou d'un affichage
→ Référence

Remarque importante
Le non-respect peut aboutir à des dysfonctionnements ou perturbations

Information
Remarque supplémentaire
1.2 Avertissements
Les avertissements mettent en garde contre d'éventuels dommages corporels et matériels. Cela permet une utilisation sûre du produit. Les avertissements sont gradués comme suit :

AVERTISSEMENT
Avertissement de dommages corporels graves
Des blessures mortelles ou graves sont possibles si l'avertissement n'est pas respecté.

ATTENTION
Avertissement de dommages corporels légers à modérés
Des blessures légères à modérées sont possibles si l'avertissement n'est pas respecté.
INFORMATION IMPORTANTE
Avertissement sur les dommages matériels
Des dommages matériels sont possibles si l'avertissement n'est pas respecté.
2 Consignes de sécurité
- L'appareil décrit ici est un composant à intégrer dans un système.
- L'installateur du système est responsable de la sécurité du système.
-
L'installateur du système est tenu d'effectuer une évaluation des risques et de rédiger, sur la base de cette dernière, une documentation conforme à toutes les exigences prescrites par la loi et par les normes et de la fournir à l'opérateur et à l'utilisateur du système. Cette documentation doit contenir toutes les informations et consignes de sécurité nécessaires à l'opérateur et à l'utilisateur et, le cas échéant, à tout personnel autorisé par l'installateur du système.
-
Lire ce document avant la mise en service du produit et le conserver pendant la durée d'utilisation du produit.
- Le produit doit être approprié pour les applications et conditions environnantes concernées sans aucune restriction d'utilisation.
- Utiliser le produit uniquement pour les applications pour lesquelles il a été prévu (→ Usage prévu).
- Utiliser le produit uniquement pour les fluides admissibles (→ Données techniques).
- Un non-respect des consignes ou des données techniques peut provoquer des dommages matériels et/ou corporels.
- Le fabricant n'assume aucune responsabilité ni garantie pour les conséquences d'une mauvaise utilisation ou de modifications apportées au produit par l'utilisateur.
- Le montage, le raccordement électrique, la mise en service, le fonctionnement et l'entretien du produit doivent être effectués par du personnel qualifié et autorisé par le responsable de l'installation.
- Assurer une protection efficace des appareils et des câbles contre l'endommagement.
- L'appareil est notamment conforme aux normes TLPR et CISPR 11. Autres normes et spécifications : → Fiche technique.

Energie rayonnée par micro-ondes :
L'énergie rayonnée par l'appareil est considérablement inférieure à celle rayonnée par les micro-ondes des téléphones portables.
Energie rayonnée maximale : 2 mW.
Selon l'état actuel de la science, le fonctionnement de l'appareil peut être classifié comme sans risque pour la santé avec une utilisation correcte.

ATTENTION
En cas de hautes températures du process, certaines parties de l'appareil peuvent s'échauffer.
▷ Risque de brûlures
▶ Ne pas toucher l'appareil.
Protéger le boîtier contre le contact avec des matières inflammables et contre le contact non intentionnel.
Laisser refroidir l'appareil et l'adaptateur process avant de procéder à l'entretien.
3 Usage prévu
L'appareil surveille en continu et sans contact le niveau de liquides dans des cuves fermées en métal, en béton ou dans des structures de conteneur similaires.
Restrictions de l'application
Les matières en vrac sont détectées en fonction de leurs propriétés (cône de déversement, granulométrie, constante diélectrique, etc.).
Egalement nécessaire pour le montage et le fonctionnement :
- Matériel de montage (→ Accessoires)
Utiliser seulement des accessoires d'ifm electronic gmbh ! Le bon fonctionnement n'est pas assuré en cas d'utilisation de composants d'autres fabricants.
Accessoires disponibles : www.ifm.com.
3.1 Applications
La technologie de radar sans contact est idéale pour les applications du domaine agroalimentaire, car elle est sans entretien et permet une installation du haut vers le bas limitant le risque de fuites, sans influence des conditions du process telles que la densité, la viscosité, la température, la pression ou la valeur de pH.
L'appareil utilise la technologie innovante 80 GHz en combinaison avec le procédé FMCW et des algorithmes intelligents pour maximiser la précision et la fiabilité de la mesure, même dans de petits récipients ou des récipients exigeants se remplissant ou se vidant rapidement.
3.1.1 Exemples d'applications
Cuve de stockage :
Permet de surveiller l'intérieur de la cuve et assure un process de production optimal sans interruption.
Réservoir de mélange :
Assure le remplissage correct du réservoir à agitateur et le bon stockage de son contenu.

Remplissage par lots :
Optimise le process de remplissage par lots

L'appareil résiste aux routines usuelles de nettoyage NEP et SEP jusqu'à 140 °C.
Optimisation du stockage des produits de nettoyage.
3.2 Restrictions de l'application
- L'appareil n'est pas autorisé pour une utilisation dans les zones à risque d'explosion.
- L'appareil ne convient pas à certaines matières en vrac (par ex. grains de café) en raison de leur constante diélectrique souvent très faible.
- Le cas échéant, des matières en vrac présentant une constante diélectrique plus élevée (par ex. grains concassés, en raison de leur teneur en humidité plus élevée) peuvent être détectées. Voir Réflectivité, influence de la constante diélectrique
▶ Vérifier le fonctionnement correct sur l'application réelle.
Tenir compte de l'influence des cônes de déversement et des effets similaires.
L'appareil ne doit être installé que conformément aux dispositions nationales et internationales en vigueur en matière de radiotechnique et aux prescriptions légales (→ notice jointe). Pour le champ d'application de la directive 2014/53/UE, cela signifie que l'appareil est un appareil TLPR. Les appareils TLPR (Tank Level Probing Radar) sont des appareils destinés à mesurer le niveau uniquement dans un espace fermé (c'est-à-dire des cuves métalliques, des cuves en béton ou des structures de conteneur similaires constituées d'un matériau amortissant comparable).
- De préférence, utiliser dans une cuve métallique. En cas d'utilisation dans des cuves non conductrices :
– les effets défavorables d'interférences électromagnétiques d'autres appareils sont possibles (immunité aux parasites selon EN 61326-1).
- en cas de mauvaise position de montage, des effets défavorables dus à des échos parasites d'objets situés en dehors de la cuve à proximité de sa paroi sont possibles.

Dans le cas des fluides suivants, des mesures erronées peuvent être causées par :
- Surfaces turbulentes ou moussantes.
-
Des fluides très hétérogènes, formant des couches séparées (par ex. une couche d'huile sur de l'eau).
-
Huiles, fluides à base d'huiles ou fluides similaires faiblement diélectriques en combinaison avec des interférences élevées (par ex. échos parasites provenant d'obstacles fixes proches ou du fond de la cuve Réflectivité, influence de la constante diélectrique ( 9)).
▶ Vérifier le fonctionnement correct sur l'application réelle.
▶ Installation dans une zone stable.
En cas de perte permanente de signal, l'appareil génère un message d'erreur et commute les sorties à un état défini.
4 Fonctions
4.1 Principe de mesure
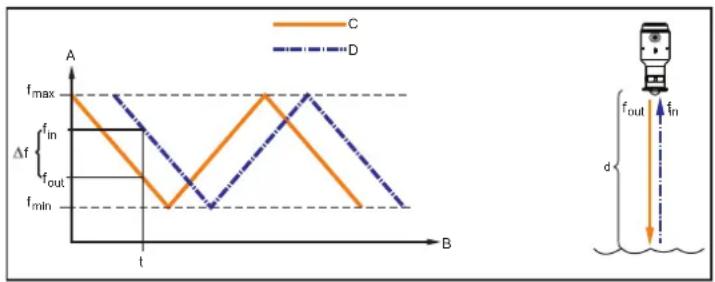
L'appareil fonctionne selon le procédé FMCW (FMCW = Frequency Modulated Continuous Wave). Des ondes électromagnétiques dans la gamme des GHz sont émises en direction du niveau à une fréquence changeant constamment. Comme l'émetteur modifie continuellement la fréquence du signal transmis, il y a une différence de fréquence entre le signal transmis et le signal réfléchi (→ Fig. Principe de mesure). La fréquence du signal réfléchi est soustraite à celle du signal transmis à ce moment-là, ce qui donne un signal basse fréquence proportionnel à la distance par rapport au niveau. Ce signal est ensuite traité pour obtenir des mesures de niveau rapides, fiables et très précises.
line
| Time | C | D | |------|-------|-------| | t | f_max | Δf | | t | f_in | f_out | | t | f_min | f_out | | t | f_out | f_in | | t | f_min | f_out | | B | f_out | f_in | | B | f_in | f_out | | B | f_min | f_out |f d = Distance
A : Fréquence (GHz)
B : Temps (s)
C : Signal émis
D : Signal réfléchi
Fig. 1: Principe de mesure
Grâce à la technologie 80 GHz utilisée, l'appareil génère un faisceau de signal très focalisé (angle d'émission d'environ 10°). Cela permet un domaine d'application plus large et un montage dans de petites cuves ou dans des espaces exigus (par ex. en présence d'éléments intégrés tels qu'agitateurs, serpentins de chauffage, etc.).
4.1.1 Réflectivité, influence de la constante diélectrique
La réflectivité du fluide influence fortement la taille du signal réfléchi (amplitude d'écho). La réflectivité, pour sa part, dépend directement de la constante diélectrique du fluide. Une constante diélectrique élevée augmente la réflectivité et donc directement la performance de la mesure de niveau. Cela a aussi une influence indirecte sur la portée maximale pouvant être atteinte par la mesure de niveau. Constante diélectrique minimale : → fiche technique
| Constante diélectrique (également : permittivité relative) de certains fluides | |
| Air (valeur de référence) 1 | |
| Eau ≈ 80 | |
| Eau salée ≈ 32 | |
| Eau déminéralisée ≈ 30 | |
| Décoction de bière ≈ 25 | |
| Vinaigre ≈ 24 | |
| Amidon de maïs ≈ 18 | |
| Farine de soja brute, 19 % d'humidité ≈ 18 | |
| Farine de soja brute sèche (test d'application recommandé) ≈ 3 | |
| Huile végétale (test d'application recommandé) ≈ 2 à 4 | |
| Céréales concassées (test d'application recommandé) ≈ 2 à 3 | |
| Malt (test d'application recommandé) ≈ 2 à 3 | |
| Lait écrémé en poudre (test d'application recommandé) | ≈ 2 |
| Grains de café (ne sont pas détectés avec fiabilité) | ≈ 1,5 |

Les fluides faiblement diélectriques (p.ex. huiles ou fluides à base d'huiles) sont en grande partie transparents pour les ondes radar, seule une petite partie du signal radar est reflétée par la surface du fluide. En cas de niveaux très bas de tels fluides, le fond de la cuve peut donc être erronément détecté comme niveau. Solution : réduire la hauteur de référence Paramètres réglables (→ 28)).
4.1.2 Mousse et turbulences
Les liquides moussants ou les turbulences peuvent entraîner des amplitudes d'écho faibles et divergentes. Les turbulences de surface ne posent normalement pas problème, à moins d'être excessives.
La mesure dans des applications moussantes dépend largement des propriétés de la mousse.
Lorsque la mousse est légère et aérée, le niveau effectif est mesuré. En cas de mousse lourde et dense, l'appareil peut mesurer la hauteur du côté supérieur de la mousse.
4.1.3 Influences des propriétés de la cuve et du montage
L'appareil doit être monté de manière qu'aucun objet tel que des serpentins de chauffage, des fils ou des agitateurs ne se trouve sur le chemin du signal radar. Ces objets peuvent causer des échos parasites qui influencent négativement la mesure et peuvent mener à des erreurs de mesure.
L'appareil dispose cependant de fonctions intégrées pour réduire l'influence des objets parasites dans le cas où de tels objets ne peuvent pas être entièrement évités. Les structures verticales et inclinées ne provoquent que des effets minimaux, car le signal radar est plutôt dispersé que renvoyé vers l'antenne.
4.2 IO-Link
Cet appareil dispose d'une interface de communication IO-Link. Son fonctionnement nécessite l'utilisation d'un maître IO-Link.
L'interface IO-Link permet l'accès direct aux données de process et de diagnostic et offre la possibilité de paramétrer l'appareil pendant le fonctionnement.
De plus, la communication est possible via un raccordement point-à-point avec un maître IO-Link USB.
Les IODD nécessaires pour la configuration de l'appareil, les informations détaillées concernant la structure des données process, les informations de diagnostic et les adresses des paramètres ainsi que toutes les informations nécessaires concernant le matériel et le logiciel IO-Link sont disponibles sur www.ifm.com.
4.3 Sorties
L'appareil génère des signaux de sortie selon le paramétrage. Deux sorties sont disponibles :
• OUT1 : Sortie de commutation / IO-Link
- OUT2 : Sortie analogique 4-20 mA ou sortie de commutation (paramétrable)
4.3.1 Sortie analogique
L'appareil fournit sur la sortie OUT2 soit un signal analogique proportionnel au niveau (selon NAMUR NE43, DIN IEC 60381-1), soit un signal de commutation. La sortie analogique peut être paramétrée.
- Le paramètre [ou2] = [I] règle la sortie OUT2 en tant que sortie analogique.
- Le paramètre [ASP2] détermine pour quelle valeur mesurée 4 mA sont fournis.
- Le paramètre [AEP2] détermine pour quelle valeur mesurée 20 mA sont fournis.
- Si [ASP2] est inférieur à [AEP2], la courbe est croissante, si [ASP2] est supérieur à [AEP2], la courbe est décroissante (→ Fig. Sortie analogique).
Distance minimale entre [ASP2] et [AEP2] = 20 % de la zone active
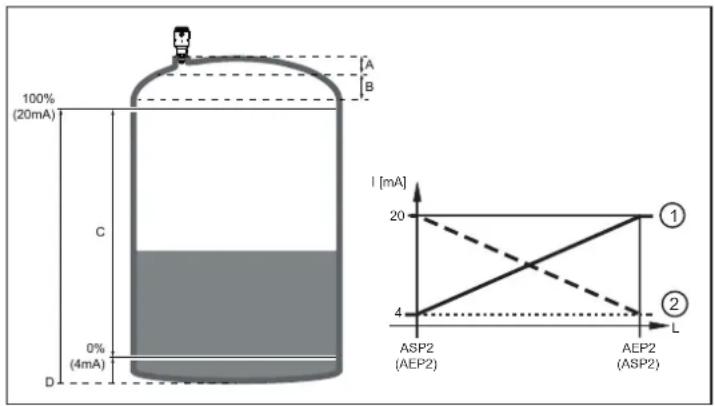
Fig. 2: Sortie analogique
A : Zone morte supérieure, paramétrable.
Paramètres réglables (→ / 28)
I : Courant
B : Zone à exactitude réduite L : Niveau
C : Zone de mesure recommandée 1 : Courbe croissante ([ASP2]<[AEP2])
D : Point zéro = point de référence 2 : Courbe décroissante ([ASP2] > [AEP2])
Pour l'évaluation du signal analogique, respecter les tolérances et les exactitudes ( fiche technique).
4.3.2 Fonction de commutation
Utilisant la sortie de commutation OUT1 (réglage usine), ou également OUT2 (peut être réglée), l'appareil signale que les seuils réglés sont atteints ou que le niveau est inférieur au seuil réglé. Les fonctions de commutation suivantes peuvent être sélectionnées :
- Fonction hystérésis / normalement ouvert ou normalement fermé (→ Fig. Mode 1 seuil et Fig. Mode 2 seuils)
- Fonction fenêtre / normalement ouvert ou normalement fermé (→ Fig. Fonction fenêtre)
La fonction hystérésis est réalisable en mode 1 seuil et en mode 2 seuils. Les deux modes sont tout aussi fonctionnels, seule la méthode de réglage est différente.
Les explications suivantes s'appliquent à la sortie OUT1.
Fonction hystérésis en mode 1 seuil :
▶ [SSC1 Config. Mode] doit être réglé sur [Single point].
▶ Le seuil d'enclenchement [SSC1 Param. SP1] est d'abord déterminé, puis l'hystérésis est définie à la distance souhaitée du seuil d'enclenchement [SSC1 Config. Hysteresis] (→ Fig. Mode un seuil).
La fonction normalement ouvert ou fermé est réglée via [SSC1 Config. Logic] :
Fonction hystérésis en mode 2 seuils :
▶ [SSC1 Config. Mode] doit être réglé sur [Two point].
Le seuil d'enclenchement est réglé avec [SSC1 Param. SP1] et le seuil de déclenchement est réglé avec [SSC1 Param. SP2] (→ Fig. Mode 2 seuils).
La fonction normalement ouvert ou fermé est réglée via [SSC1 Config. Logic] :
▶ [SSC1 Config. Mode] doit être réglé sur [Window].
La largeur de la fenêtre peut être réglée par la différence entre [SSC1 Param. SP1] et [SSC1 Param. SP2] (→ Fig. Fonction fenêtre).
La fonction normalement ouvert ou fermé est réglée via [SSC1 Config. Logic] : [no] = normally open (normalement ouvert) / [nc] = normally closed (normalement fermé).
Aux limites de la fenêtre, si souhaité, il est possible de régler une hystérésis avec [SSC1 Config. Hysteresis].
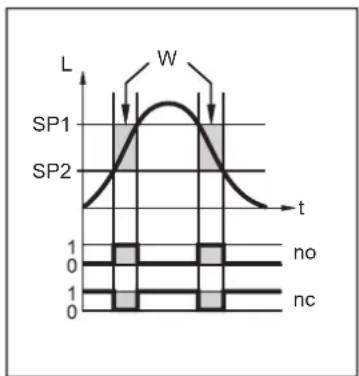
Fig. 5: Fonction fenêtre
Les seuils [SSCx Param. SPx] se rapportent toujours en valeur absolue au point zéro = point de référence (Fig. Sortie analogique). Les hystérésis [SSCx Config. Hysteresis] se rapportent toujours en valeur relative aux seuils.
Pour les sorties de commutation, une temporisation à l'enclenchement et au déclenchement de max. 60 s peut être réglée (par ex. pour des cycles de pompe très longs). La temporisation à l'enclenchement se rapporte alors toujours au seuil, et la temporisation au déclenchement se rapporte toujours à l'hystérésis.
4.3.3 Etat défini en cas de défaut (mode d'alarme)
Pour la sortie OUT2, un état en cas de défaut peut être défini.
Si un défaut de l'appareil est détecté ou si la qualité du signal tombe en dessous d'une valeur minimale, l'appareil passe en mode d'alarme et la sortie OUT2 passe à un état défini selon la recommandation NAMUR (NE43). Le comportement des sorties en cas de défaut est réglable à l'aide du paramètre [FOU2].
La transition vers le mode d'alarme peut être temporisée. Ceci peut être utile en cas d'erreurs de courte durée ou si par ex. une chute de signal (sous la valeur minimale) survient en raison de turbulences ou de formation de mousse. La temporisation est réglable (paramètre [Temporisation mode d'alarme]). La dernière valeur mesurée est figée pendant la temporisation. Si le signal de mesure est de nouveau reçu avec une intensité suffisante pendant la temporisation, l'appareil continue de fonctionner en mode normal. Si, par contre, il n'est pas reçu avec une intensité suffisante pendant la temporisation, l'appareil passe au mode d'alarme et la sortie OUT2 passe à l'état défini.
En cas de forte formation de mousse ou de fortes turbulences, envisager les possibilités de création d'une zone stable.
4.3.4 Fonction de simulation
La simulation de différents niveaux est possible pour la mise en service, les travaux de maintenance ou la limitation des perturbations. La durée de la simulation est sélectionnable (1 min...1 h). La simulation peut être démarrée et restera active jusqu'à ce qu'elle soit arrêtée manuellement ou que le temps réglé se soit écoulé. Pendant la simulation, les sorties se comportent selon les valeurs process simulées.
4.3.5 Fonction d'amortissement
En cas de niveau irrégulier (par ex. turbulences, mouvements de vagues), le comportement des sorties peut être amorti. Lors de l'amortissement, les valeurs de niveau déterminées à l'aide d'un filtre moyen sont lissées ; une courbe stable est générée.
L'amortissement est réglable à l'aide du paramètre [dAP].
[dAP] indique en secondes après quel temps 63% de la valeur finale sont atteints avec un saut soudain. Après 5 x [dAP] presque 100% sont atteints.
4.4 Comportement des sorties dans différents modes de fonctionnement
OUT1 OUT2\*
Initialisation OFF OFF
Mode de fonctionnement normal en fonction du niveau et des réglages [ou1] et [SSC1...]
en fonction du niveau et des réglages [ou2], [ASP2] et [AEP2]
Cas de défaut / mode d'alarme OFF < 3,6 mA si [FOU2] = [OFF]
$$
2 1 \mathrm{mA} \text { si } [ \text { FOU2 } ] = [ \text { On } ] $$
* Si sélection de la sortie analogique [ou2] = [I].
Avec sélection de la fonction de commutation : voir colonne OUT1
Compléments à la sortie analogique
Signal plein En cas de courbe croissante 20...20,5 mA
En cas de courbe décroissante 4...3,8 mA
Signal vide En cas de courbe croissante 4...3,8 mA
En cas de courbe décroissante 20...20,5 mA
5 Montage

ATTENTION
En cas de hautes températures du process, certaines parties de l'appareil peuvent s'échauffer.
Risque de brûlures
▶ Ne pas toucher l'appareil.
Protéger le boîtier contre le contact avec des matières inflammables et contre le contact non intentionnel.
Laisser refroidir l'appareil et l'adaptateur process avant de procéder à l'entretien.
▶ Veiller à ne pas rayer l'antenne ou autrement l'endommager.

Avant le montage et le démontage de l'appareil :
S'assurer que l'installation est hors pression. Toujours tenir compte des dangers éventuels dus aux températures extrêmes de l'installation et du fluide.
Avant l'installation de l'appareil, respecter les spécifications de montage ci-après.
5.1 Position de montage

L'appareil ne doit être installé que conformément aux dispositions nationales et internationales en vigueur en matière de radiotechnique et aux prescriptions légales (→ notice jointe). Pour le champ d'application de la directive 2014/53/UE, cela signifie que : l'appareil est un appareil TLPR. Les appareils TLPR (Tank Level Probing Radar) sont des appareils destinés à mesurer le niveau uniquement dans un espace fermé (c'est-à-dire des cuves métalliques, des cuves en béton ou des structures de conteneur similaires constituées d'un matériau amortissant comparable).
Lors du choix de la position de montage, respecter les éléments suivants :
- Pour une performance optimale, installer l'appareil à des endroits où le niveau est visible librement et sans obstacles.
- Si possible, monter à un endroit où peu ou pas de structures internes se trouvent à l'intérieur du faisceau du signal.
- Ne pas monter à proximité ou au-dessus du flux d'entrée ( Fig. Montage).
- Ne pas positionner l'appareil directement au-dessus d'une porte d'accès latérale.
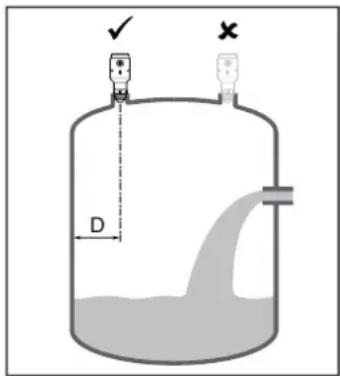
▶ Distance à la paroi (D) : D_min = 200 mm (8 inch).
▶ Recommendation : Moitié du rayon de la cuve.
Fig. 6: Montage
5.2 Inclinaison
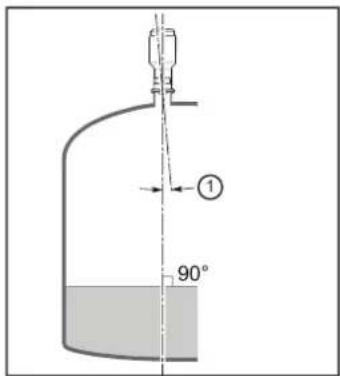
Fig. 7: Inclinaison
Monter l'appareil verticalement (90°) pour assurer un bon écho du niveau.
▶ Inclinaison maximale (1) : 3° (Fig. Inclinaison).
5.3 Polarisation et orientation
L'appareil émet des ondes électromagnétiques pour détecter le niveau. La polarisation correspond à la direction de la partie électrique de ces ondes électromagnétiques.
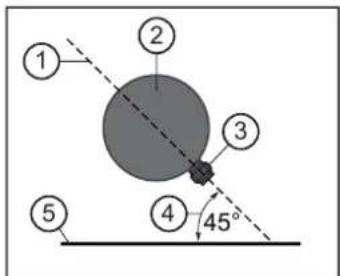
Fig. 8: Représentation de la polarisation vue de dessus
1 : Plan de polarisation
2 : Capteur de niveau LW2xxx en vue de dessus
3 : Connecteur électrique M12
4 : 45° = orientation optimale de l'appareil en cas de montage près de la paroi de la cuve.
5 : Paroi de la cuve

Une rotation du boîtier modifie la position de la polarisation et possiblement l'effet des échos parasites sur la valeur mesurée.
En cas d'objets parasites dans la cuve : Fonctionnement (→ ☐ 35), Correction de défauts (→ ☐ 37)
5.4 Angle et largeur d'émission
Monter l'appareil de manière que le moins possible de structures internes se trouvent dans le faisceau du signal.
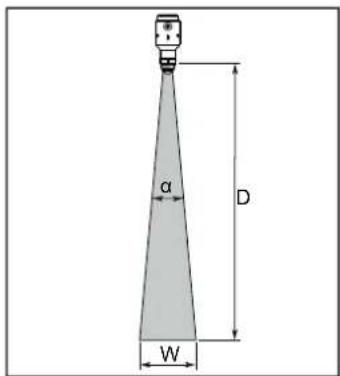
Fig. 9: Angle et largeur d'émission
Angle d'émission (α) : 10°
Largeur de faisceau (W) en fonction de la distance (D) :
| Distance (D) Largeur de faisceau (W) | |
| 2 m (6.6 ft.) 0,4 m (1.2 ft.) | |
| 4 m (13.1 ft.) 0,7 m (2.3 ft.) | |
| 6 m (19.7 ft.) 1,1 m (3.5 ft.) | |
| 8 m (26.2 ft.) 1,4 m (4.6 ft.) | |
| 10 m (32.8 ft.) 1,8 m (5.8 ft.) |

En cas de cuves non métalliques, le faisceau du signal peut traverser dans certaines circonstances la paroi latérale de la cuve. Cuves non métalliques (→ 16)
Pour le signal radar, ces matières sont largement transparentes. Les objets se trouvant à proximité en dehors de la cuve peuvent causer des échos radar parasites.
5.5 Cuve à fond conique (trémie de vidange)
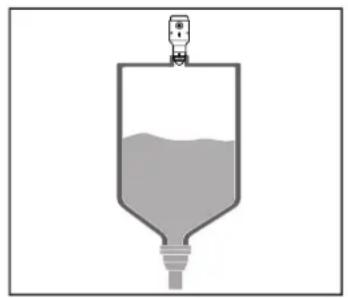
Pour les cuves à fond conique, il peut être avantageux de monter l'appareil au centre de la cuve, car la mesure est alors possible jusqu'au fond.

En cas de montage centré, notamment avec des couvercles bombés, il peut arriver dans certains cas que la cuve provoque des perturbations (résonances).
▶ Vérifier le fonctionnement correct sur l'application réelle
▶ Si possible, monter l'appareil de manière excentrée.
5.6 Cuves non métalliques

L'appareil ne peut être utilisé dans des cuves non métalliques que si les dispositions nationales et internationales en vigueur en matière de radiotechnique et les prescriptions légales sont respectées (→ notice jointe). En particulier, un amortissement suffisant doit être assuré, par exemple par le matériau du boîtier ou par des mesures supplémentaires appropriées.

Des objets sensibles à proximité en dehors de la cuve peuvent causer des échos parasites, car leur matière peut laisser passer les ondes radar dans une certaine mesure. Solution :
Selon les possibilités, positionner l'appareil pour que les objets à proximité de la cuve se trouvent en dehors du faisceau du signal.

En cas de montage dans des cuves non métalliques, des effets défavorables causés par les interférences électromagnétiques d'autres appareils sont possibles. Solution :
▶ Appliquer une plaque de blindage / un film métallique entre le capteur de niveau et les autres appareils électriques.
Montage complémentaire dans un tube métallique. Pour le choix du diamètre du tube, tenir compte de l'angle d'émission de l'appareil.
5.7 Exigence visant les manchons
Pour que les ondes radar puissent se diffuser sans parasites, respecter les dimensions des manchons indiquées (→ Fig. Dimensions des manchons et Tableau).
L'extrémité inférieure du manchon doit être arrondie pour éviter les réflexions parasites et pour faciliter le nettoyage.
L'intérieur du manchon doit être lisse (éviter les endroits avec mauvaise soudure, rouille ou dépôts).
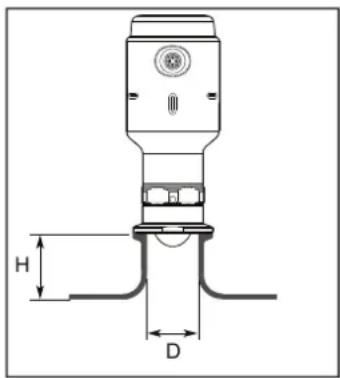
Fig. 10: Dimensions des manchons
Hauteur maximale du manchon (H) en fonction du diamètre du manchon (D) :
| Diamètre du manchon (D) Hauteur du manchon (H) | |
| 40 mm (1.5 in.) 150 mm (5.9 in.) | |
| 50 mm (2 in.) 200 mm (7.9 in.) | |
| 80 mm (3 in.) 300 mm (11.8 in.) | |
| 100 mm (4 in.) 400 mm (15.8 in.) | |
| 150 mm (6 in.) 600 mm (23.6 in.) | |
5.8 Conseils pour les applications aseptiques
L'appareil résiste aux routines usuelles de nettoyage NEP et SEP jusqu'à 140 °C.
Pour respecter la norme d'hygiène en vigueur ainsi que les lois et règlements en vigueur pour les produits agro-alimentaires et les boissons, s'assurer que :
- l'appareil est installé dans une cuve fermée.
– l'appareil est installé avec un adaptateur aseptique et un joint torique / joint d'étanchéité aseptique.
u Il est de la responsabilité de l'utilisateur de s'assurer que :
- les matières utilisées (Ò Fiche technique) conviennent aux fluides à détecter et aux process de nettoyage / désinfection.
- l'installation de l'appareil peut être vidangée et nettoyée.
- la connexion / le serrage entre l'appareil et le raccord process est compatible avec la pression dans la cuve et les fluides.
- un connecteur M12 avec une protection adaptée contre l'infiltration de souillure et d'humidité est utilisé pour l'application.
5.8.1 Remarques sur l'utilisation selon EHEDG

Si l'appareil est correctement installé, il est approprié pour le NEP (nettoyage en place).
u Prendre en compte les limites d'utilisation (résistance à la température et résistance de la matière) selon la fiche technique.
u S'assurer d'une intégration de l'appareil dans l'installation selon EHEDG.
u Utiliser une installation auto-vidant.
u Utiliser uniquement des adaptateurs process homologués EHEDG ayant des joints d'étanchéité spéciaux exigés par la norme EHEDG.

Le joint d'étanchéité de l'interface du système ne doit pas être en contact avec le point d'étanchéité du capteur.
u En cas d'éléments présents dans la cuve, ils doivent être installés de manière affleurante et permettre l'accès d'un jet de nettoyage direct. S'assurer que toutes les zones en contact avec la matière soient bien nettoyées.
u Installer bien visiblement les orifices de fuite.
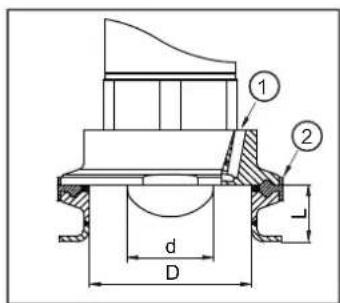
1 : Orifice de fuite
2 : Joint d'étanchéité
Pour éviter des zones mortes respecter les dimensions :
$$ L < (D - d). $$
$$ d = 2 5 \mathrm{mm} $$
5.8.2 Remarques sur l'utilisation selon 3A®
S'assurer d'une intégration du capteur dans l'installation selon 3A.
Utiliser uniquement des raccords avec homologation 3A et marqués avec le symbole 3A. Accessoires disponibles : www.ifm.com.
Le raccord process doit être muni d'un orifice de fuite. Ceci est assuré en cas d'utilisation de raccords avec homologation 3A.
▶ Installer bien visiblement les orifices de fuite.
Il est conseillé de choisir une position de montage où la sonde et le raccord process peuvent être nettoyés à l'aide d'une boule de pulvérisation.
En cas d'utilisation selon 3A, il faut respecter des prescriptions spécifiques pour le nettoyage et la maintenance.
L'utilisation n'est pas possible dans des installations qui doivent satisfaire aux critères du point E9.2 de la norme 3A, 63-04.
5.9 Montage dans un taraudage
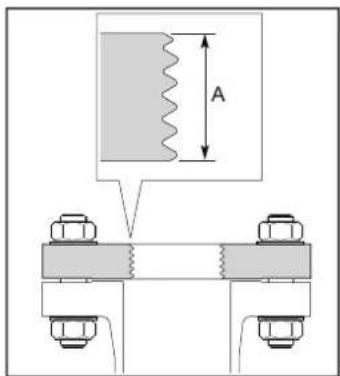
Fig. 11: Montage avec filetage
Exigences visant la longueur du filetage (A) du raccord process G1 sur la cuve :
| Longueurs de filetage nécessaires (A) | |
| A_ | 8 mm (0.32 in.) |
| A_ | 16 mm (0.63 in.) |
5.10 Préparation du montage
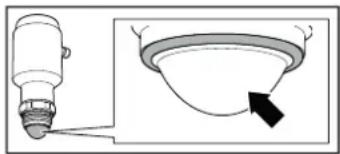
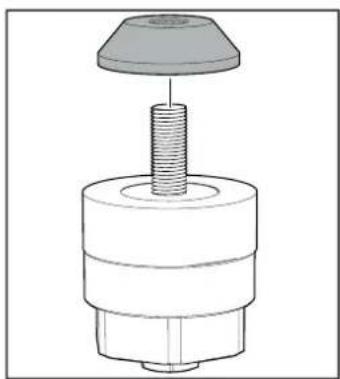
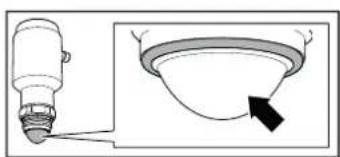
5.10.1 Retirer le capuchon de protection
Le capuchon de protection protège l'antenne contre les chocs pendant le transport et le stockage.
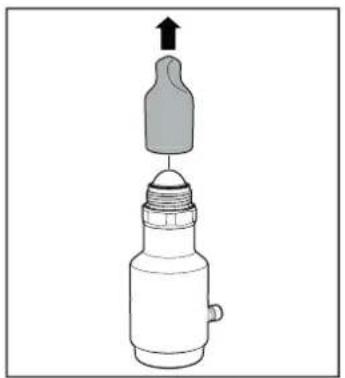
Avant l'installation, retirer prudemment le capuchon de protection.
▶ Veiller à ne pas rayer l'antenne ou autrement l'endommager.
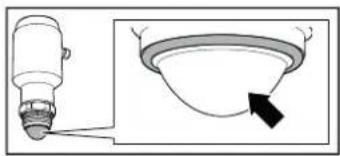
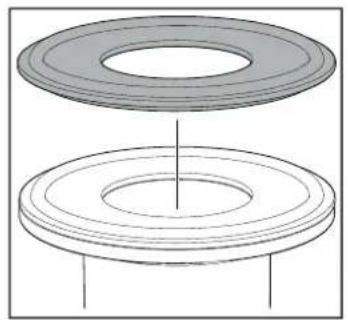
5.10.2 Insérer le joint torique, graisser le filetage

Le joint torique correspondant (EPDM) est fourni avec le raccord. D'autres joints toriques sont disponibles comme accessoires.
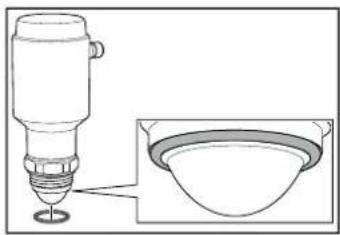
Insérer le joint torique dans la rainure de l'appareil.
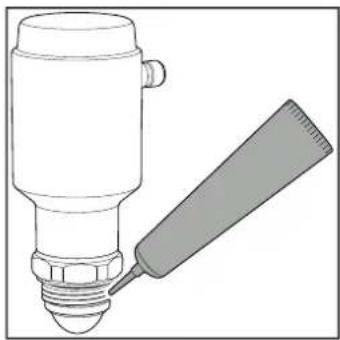
Graisser légèrement le filetage de l'appareil avec une pâte lubrifiante.

La pâte doit être autorisée pour l'application et compatible avec les élastomères utilisés.
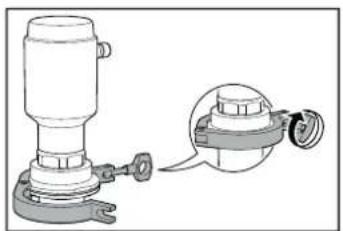
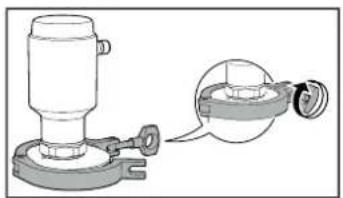
5.10.3 Pré-monter le raccord à souder adaptateur
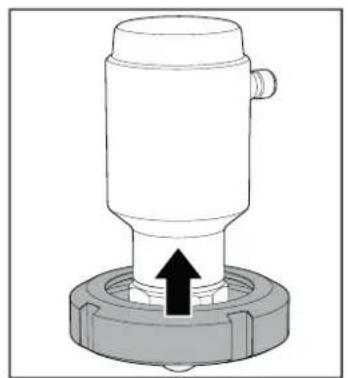
Glisser l'écrou par le côté inférieur de l'appareil.
S'assurer que le joint torique est installé dans la rainure de l'appareil.
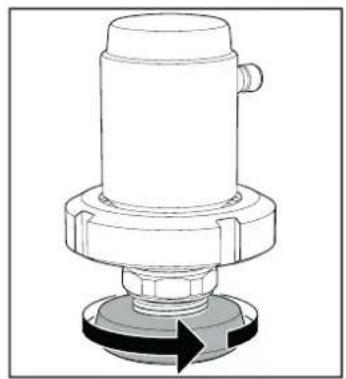
▶ Positionner l'adaptateur sur l'appareil et le serrer manuellement.
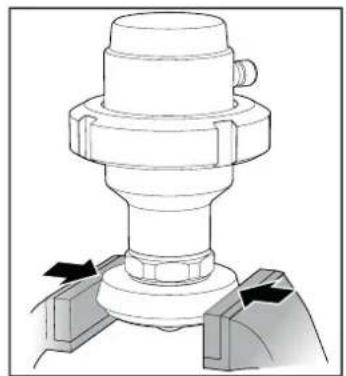
▶ Serrer l'appareil et l'adaptateur dans un étau.
Utiliser des mâchoires d'étau (économieurs) appropriées. Ne pas trop serrer l'étau, car cela peut endommager l'adaptateur.
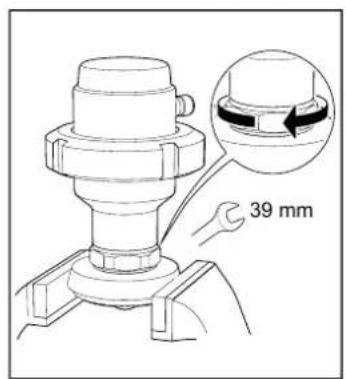
▶ Serrer fermement. Couple de serrage recommandé : 35 Nm.
Un serrage supplémentaire peut affecter l'étanchéité. Lorsque les zones de joint sont endommagées, remplacer le joint torique ou l'ensemble du raccord process.
5.10.4 Préconisations en cas d'utilisation d'un raccord à souder

En raison de leur orientation fixe, les raccords à souder limitent la possibilité de tourner l'appareil en cas d'échos parasites dans la cuve : La valeur mesurée est bloquée (→ 37)
Si possible : préférer les adaptateurs Clamp et les adaptateurs similaires qui peuvent être réorientés
Installer le bouchon à souder :
Le bouchon à souder absorbe la chaleur pendant la phase de soudage et peut éviter une déformation du raccord.

ATTENTION
Lors de la phase de soudage, le raccord et le bouchon à souder peuvent s'échauffer à plus de 65 °C (149 °F).
Risque de brûlures
Laisser refroidir les composants du kit et le raccord à souder avant le démontage.

▶ Visser manuellement le raccord à souder sur le bouchon à souder.
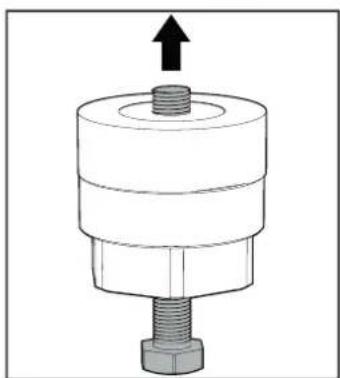
Insérer la vis de fixation à travers le bouchon à souder.
▶ Ne serrer l'écrou que manuellement.
Souder le raccord à souder dans la cuve :

Opération de soudage :
Pendant le soudage et la phase de refroidissement suivante, l'appareil ne doit pas être monté.
Lors du soudage, éviter une surchauffe du raccord et garantir des phases de refroidissement suffisantes.
▶ Le raccord ne doit pas se déformer lors du soudage.
Le chanfrein d'étanchéité du raccord ne doit pas être endommagé par des projections de soudure ou similaires. Avant de commencer le soudage, assurer une protection suffisante du chanfrein d'étanchéité.
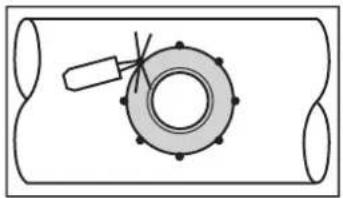
▶ Fixer le raccord avec une force de retenue suffisante en plusieurs points. Appliquer les points de fixation à distance égale en face l'un de l'autre.
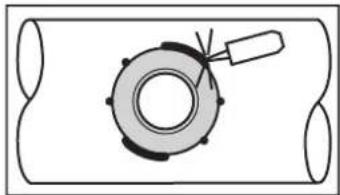
Appliquer les soudures entre les points de fixation en face l'un de l'autre. Respecter des pauses suffisantes entre les différentes sections pour éviter que le raccord devienne brûlant ou se déforme en raison d'une surchauffe.
Laisser refroidir le raccord et le bouchon à souder éventuellement utilisé.
▶ Si utilisé : retirer le bouchon à souder.
▶ Enlever des résidus du filetage.
5.11 Monter l'appareil dans la cuve
▶ Veiller à ne pas rayer l'antenne ou autrement l'endommager.
5.11.1 Monter l'appareil avec un adaptateur Tri-Clamp
S'assurer que le joint torique est installé dans la rainure de l'appareil.
Visser l'adaptateur Tri-Clamp sur l'appareil (sans illustration). Visser au couple de serrage recommandé (→ Notice de montage de l'adaptateur).
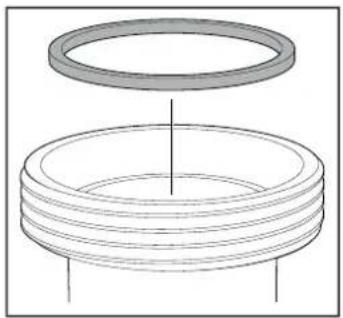
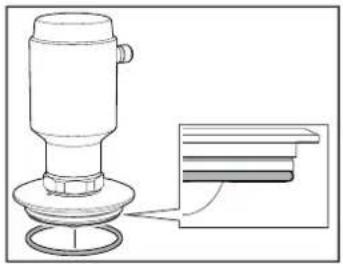
▶ Poser un joint approprié sur la flasque de la cuve.
Pour le choix du joint d'étanchéité Clamp, sélectionner le diamètre intérieur en fonction du diamètre intérieur de la flasque de la cuve. Le joint d'étanchéité doit être affleurant à l'intérieur avec le diamètre intérieur de la flasque de la cuve.
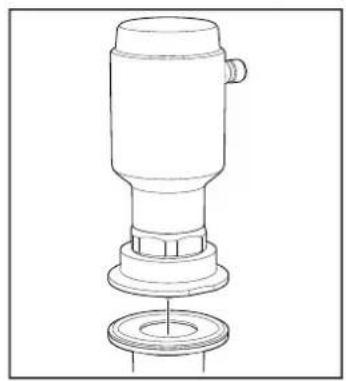
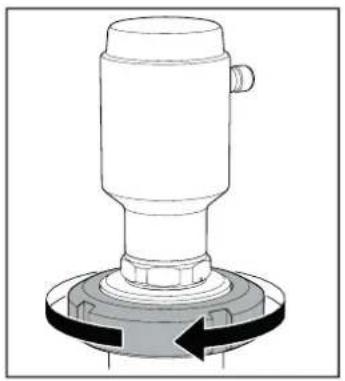
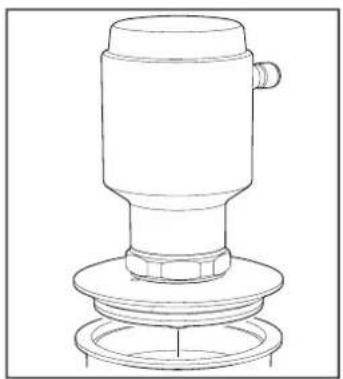
Placer l'appareil avec l'adaptateur Tri-Clamp monté sur le manchon de la cuve.
▶ Serrer la pince au couple de serrage recommandé (→ Notice de montage du fabricant).
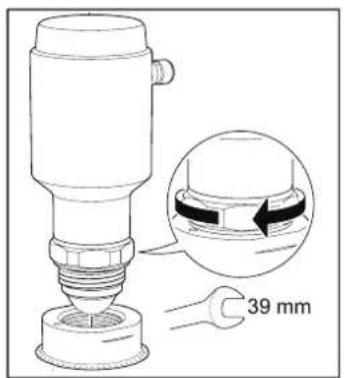
5.11.2 Monter l'appareil avec un raccord à souder
▶ Poser un joint approprié sur la flasque de la cuve.

Placer l'appareil avec le raccord à souder adaptateur monté sur le manchon de la cuve.
▶ Serrer l'écrou au couple de serrage recommandé (→ Notice de montage du fabricant).
5.11.3 Monter l'appareil avec un adaptateur VARIVENT®
S'assurer que le joint torique est installé dans la rainure de l'appareil.
Visser l'adaptateur VARIVENT sur l'appareil (sans illustration). Visser au couple de serrage recommandé (→ Notice de montage de l'adaptateur).
▶ Installer un joint d'étanchéité approprié sur le côté inférieur de l'adaptateur VARIVENT.
Placer l'appareil avec l'adaptateur VARIVENT monté sur le manchon de la cuve.
▶ Serrer la pince au couple de serrage recommandé (→ Notice de montage du fabricant).
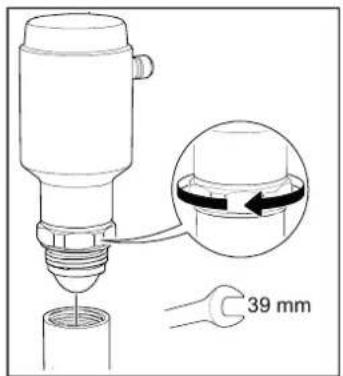
5.11.4 Monter l'appareil sur le raccord à souder
S'assurer que le joint torique est installé dans la rainure de l'appareil.
▶ Visser l'appareil dans le raccord à souder.
▶ Couple de serrage recommandé : 35 Nm.
5.11.5 Monter l'appareil avec un raccord G1

Uniquement pour les applications non aseptiques (par ex. applications utilités).
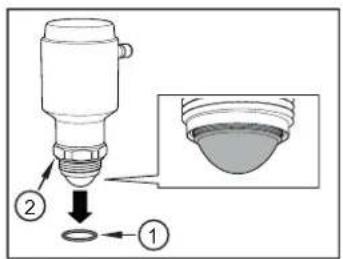
▶ Retirer le joint torique (1) de l'appareil avant le montage.
En raison de l'absence de contre-butée, le joint torique peut autrement se détacher de l'appareil et se retrouver dans le process. Dans ce cas, l'étanchéité de l'appareil est assurée par le joint plat à l'arrière (2) (non aseptique).
S'assurer que le joint plat à l'arrière (joint profilé) est installé sur l'appareil.
▶ Visser l'appareil dans l'adaptateur.
▶ Couple de serrage recommandé : 35 Nm.
6 Raccordement électrique

L'appareil doit être raccordé par un électricien qualifié.
Les règlements nationaux et internationaux relatifs à l'installation de matériel électrique doivent être respectés.
Tension d'alimentation TBTS, TBTP selon la fiche technique.
▶ Mettre l'installation hors tension.
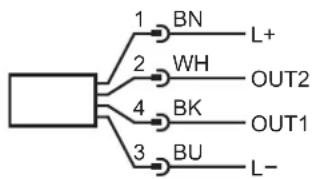
▶ Raccorder l'appareil comme suit :

Dans les applications marines (si une homologation de l'appareil est disponible), une protection supplémentaire contre les surtensions est nécessaire.

flowchart
graph TD
A["Input"] --> B["1 BN"]
A --> C["2 WH"]
A --> D["3 BU"]
A --> E["4 BK"]
A --> F["OUT1"]
A --> G["OUT2"]
A --> H["L+"]
A --> I["L-"]
| Broche Couleur du fil conducteur | ||
| 1 : BN brun | ||
| 2 : WH blanc | ||
| 3 : BU bleu | ||
| 4 : BK noir | ||
| OUT1 : sortie de commutation ou IO-Link | ||
| OUT2 : sortie analogique ou sortie de commutation | ||
| Couleurs selon DIN EN 60947-5-2 | ||
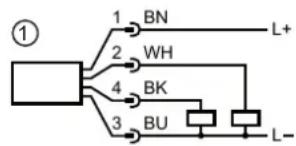
Exemples de circuits :
flowchart
graph TD
A["①"] --> B["1"]
A --> C["2"]
A --> D["4"]
A --> E["3"]
B --> F["BN"]
C --> G["WH"]
D --> H["BK"]
E --> I["BU"]
F --> J["L+"]
G --> K["L-"]
H --> L["LU"]
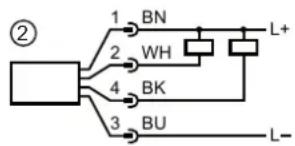
1 : 2 x commutation positive
2 : 2 x commutation négative
3 : 1 x commutation positive / 1 x analogique
4 : 1 x commutation négative / 1 x analogique
7 Paramétrage
Apporter des modifications aux paramètres pendant l'opération peut affecter le mode de fonctionnement de l'installation.
S'assurer qu'il n'y aura pas de mauvais fonctionnement ou situation dangereuse dans l'installation.
L'appareil est paramétré via l'interface IO-Link. Pour cela un maître IO-Link, un logiciel de paramétrage IO-Link (→ Accessoires) et un fichier correspondant de description de l'appareil (IODD) sont nécessaires.
▶ Toujours utiliser l'IODD le plus récent : www.ifm.com/fr
A l'état de livraison, l'appareil n'est pas opérationnel.
Pour la mise en service, le paramètre [Hauteur de référence] doit d'abord être réglé→ (Paramètres réglables). Sinon, l'appareil ne passe pas au mode de fonctionnement. Les autres réglages sont facultatifs et peuvent être effectués en fonction des besoins.
Après une remise aux réglages usine (bouton [Remise aux réglages usine]), l'appareil redémarre et se trouve de nouveau avec les paramètres intégrés lors de la livraison.
En cas de changement du fluide, il peut s'avérer nécessaire de modifier les réglages de l'appareil.
7.1 Paramétrage via PC et maître IO-Link
Préparer le PC, le logiciel et le maître. Respecter les → notices d'utilisation du logiciel / des appareils correspondants.
▶ Connecter l'appareil à l'interface USB IO-Link ou à un maître IO-Link de terrain.
Fig. 12: Connexion avec interface USB- IO-Link
Fig. 13: Connexion avec maître IO-Link pour applications de terrain
Avant le paramétrage, se familiariser avec tous les paramètres.
Lancer le logiciel de paramétrage et procéder au paramétrage.
▶ Vérifier si le paramétrage effectué a été accepté par l'appareil. Le cas échéant, effectuer une nouvelle lecture de l'appareil.
▶ Retirer l'interface USB IO-Link et mettre l'appareil en service. En cas d'utilisation d'un maître IO-Link de terrain (selon l'application), déconnecter l'appareil et le maître du PC et les connecter à l'environnement de terrain.
7.2 Paramétrage pendant le fonctionnement
S'assurer que l'appareil est raccordé à un API via un sous-ensemble (maître) compatible IO-Link.

flowchart
graph LR
A["Input Data"] --> B["Remote Display"]
B --> C["Server"]
C --> D["Monitor"]
Fig. 14: Exemple de connexion avec API
▶ Effectuer une lecture de l'appareil avec un logiciel IO-Link approprié (→ Respecter la notice d'utilisation du logiciel correspondant).
Procéder au paramétrage.

Avant le paramétrage, se familiariser avec tous les paramètres.
▶ Vérifier si le paramétrage effectué a été accepté par l'appareil. Le cas échéant, effectuer une nouvelle lecture de l'appareil.
▶ Vérifier le bon fonctionnement de l'appareil.
7.3 Paramétrage via l'adaptateur Bluetooth

L'utilisation d'un adaptateur Bluetooth (→ accessoire IO-Link) facilite le paramétrage de l'appareil, par exemple dans le cas de grandes cuves ou de lieux de montage inaccessibles.
La distance de paramétrage possible entre l'adaptateur Bluetooth et l'appareil à coupler dépend des conditions locales.
▶ Utilisation de l'adaptateur Bluetooth : → Notice d'utilisation de l'adaptateur Bluetooth.
7.4 Paramètres réglables

Les mots commençant par " ! Les paramètres marqués d'un « ! » (dans la colonne « Accès ») (par ex. [SSC1 Param. SP2]) ne sont actifs qu'après la sélection des paramètres assignés.
Les abréviations SSC1 et SSC2 ci-dessous s'appliquent aux octets de commutation (canaux de commutation) dans le flux de données process IO-Link. Les canaux de commutation sont attribués par les paramètres [ou1] ou [ou2] aux sorties physiques OUT1 ou OUT2
*) Selon la norme VDMA, la temporisation à l'enclenchement a toujours un effet sur le seuil d'enclenchement 1 (par ex. [SSC1 Param. SP1]), la temporisation au déclenchement toujours sur l'hystérésis ou le seuil d'enclenchement 2 (par ex. [SSC1 Param. SP2]), indépendamment de ce que la fonction normalement ouvert ou fermé est utilisée.
| Paramètre Options | Explication Accès | ||
| uni [m] = mètre | [inch] = pouce | Sélection de l’unité d’affichage. | |
| Hauteur de référence | Plage de réglage : 0,2 à 15 m | Distance entre l’appareil et le point zéro (→ Fig. Hauteur de référence).La hauteur de référence définit le point zéro. Le point zéro ne doit pas nécessairement correspondre au fond de la cuve.Régler une compensation de hauteur pour la cuve (→ Fig. Compensation de hauteur pour la cuve) | |
| Compensation de hauteur pour la cuve | Plage de réglage : -10 à 10 m Distance entre | le point zéro et le fond de la cuve(→ Fig. Compensation de hauteur pour la cuve). | |
| Zone morte supérieure | Plage de réglage : 0 à 10 m Sert à la suppressiion de l'écho parasite provenant par ex. des manchons de montage.► Vérifier les pics d'écho pour détecter les échos parasites à proximité du bord supérieur de la cuve. | ||
| Niveau négatif [Égal à zéro] = les niveaux négatifs (inférieurs à zéro) ne sont pas affichés [Autorisé] = les niveaux négatifs sont affichés. | Si la compensation de hauteur pour la cuve est>0, la valeur du niveau peut être négative. Ce paramètre détermine si les valeurs de niveau négatives sont affichées ou si elles doivent être zéro.![IMAGE]L'option [Autorisé] permet de détecter des échos parasites dans la compensation de hauteur (positive) pour la cuve qui peuvent mener à des erreurs de mesure. L'option [Egal à zéro] permet de supprimer ces échos parasites.![IMAGE]La valeur réglée ne fait pas partie du stockage de données. Elle n'est pas mémorisée dans le maître. | ||
| P-n [PnP] = commutation positive[nPn] = commutation négative | Polarité des sorties de commutation. | ||
| ou1 [SSC1] = configure OUT1 comme sortie de commutation. OUT1 est affectée à SSC1 (canal de commutation 1).[OFF] = sortie non commutée (haute impédance)* | Configuration de sortie pour OUT1.*) La communication IO-Link n'est pas affectée. | ||
| ou2 [I] = configure OUT2 comme sortie analogique 4...20 mA.[SSC1] = configure OUT1 comme sortie de commutation. OUT2 est affectée à SSC2 (canal de commutation 2)OUT1 est affectée à SSC1 (canal de commutation 1) | Configuration de sortie pour OUT2. | ||
| dS1 Plage de réglage : 0 à 60 s Temporisation de commutation pour SSC1 (canal de commutation 1).Le retard de commutation se comporte conformément à la norme VDMA*). | |||
| dr1 Plage de réglage : 0 à 60 s Temporisation au réarmement pour SSC1 (canal de commutation 1).La temporisation au déclenchement se comporte conformément à la norme VDMA*). | |||
| SSC1 Param. SP1 Plage de réglage : 0,005 à 15 m Point de commutation 1 pour SSC1 (canal de commutation 1).Uniquement disponible si SSC1 n'est pas désactivé.![IMAGE]Le seuil d'enclenchement 1 doit être inférieur ou égal à la hauteur de cuve ([Hauteur de référence] réglée. | ! | ||
| SSC1 Param. SP2 Plage de réglage : 0 à 14,995 m Point de commutation 2 pour SSC1 (canal de commutation 1).Uniquement disponible pour la fonction fenêtre et le mode deux points. | ! | ||
| SSC1 Config. Logic[ino] = contact à fermeture (normally open)[nc] = contact à ouverture (normally closed) | Logique de commutation pour SSC1 (canal de commutation 1). | ||
| SSC1 Config Mode[Deactivated] = comportement de commutation désactivé[Single point] = fonction d'hystérésis mode un point[Window] = fonction fenêtre[Two point] = fonction d'hystérésis mode deux points | Mode de commutation pour SSC1 (canal de commutation 1). | ||
| SSC1 Config Hysteresis | Plage de réglage 0 à 0,5 m Hystérésis de commutation pour SSC1 (canal de commutation 1).Uniquement disponible en mode point unique et avec la fonction fenêtre. | ! | |
| dS2 Plage de réglage : 0 à 60 s Retard de commutation pour SSC2 (canal de commutation 2).Le retard de commutation se comporte selon VDMA*) | |||
| dr2 Plage de réglage : 0 à 60 s Temporisation au réarmement pour SSC2 (canal de commutation 2).La temporisation au déclenchement se comporte selon VDMA*) | |||
| SSC2 Param. SP1 Plage de réglage : 0,005 à 15 m Point de commutation 1 pour SSC2 (canal de commutation 2).Uniquement disponible si SSC2 n'est pas désactivé. | ! | ||
| Le seuil d'enclenchement 1 doit être inférieur ou égal à la hauteur de cuve ([Hauteur de référence] réglée. | |||
| SSC2 Param. SP2 Plage de réglage : 0 à 14,995 m Point de commutation 2 pour SSC2 (canal de commutation 2).Uniquement disponible pour la fonction fenêtre et en mode deux points. | ! | ||
| SSC2 Config. Logic | [no] = contact à fermeture (normally open) [nc] = contact à ouverture (normally closed) | Logique de commutation pour SSC2 (canal de commutation 2). | |
| SSC2 Config. Mode | [Deactivated] = comportement de commutation désactivé[Single point] = fonction d'hystérésis mode un point[Window] = fonction fenêtre[Two point] = fonction d'hystérésis mode deux points | Mode de commutation pour SSC2 (canal de commutation 2). | |
| SSC2 Config. Hysteresis | Plage de réglage 0 à 0,5 m Hystérésis de commutation pour SSC2 (canal de commutation 2).Uniquement disponible en mode point unique et avec la fonction fenêtre. | ! | |
| ASP2 Plage de réglage : 0 à 14 m Point de départ analogique : | Valeur de mesure à laquelle 4 mA est émisPoint de menu visible uniquement si la sortie analogique est sélectionnée ([ou2] = [I]). | ! | |
| AEP2 Plage de réglage : 0,2 à 15 m Point final analogique : | Valeur de mesure à laquelle 20 mA est émisPoint de menu visible uniquement si la sortie analogique est sélectionnée ([ou2] = [I]). | ! | |
| FOU2 [On] = La sortie analogique commute en mode d'alarme sur une valeur > 21 mA.La sortie de commutation s'active en mode d'alarme.[OFF] = La sortie analogique commute en mode d'alarme sur une valeur < 3,6 mA.La sortie de commutation est désactivée en mode d'alarme | Comportement de OUT2 en mode d'alarme. | ||
| dAP Plage de réglage : 0 à 600 s Amortissement du signal de mesure (filtre). | |||
| S.Lvl Plage de réglage : 0 à 10 m Niveau à simuler en mode simulation. | La valeur réglée ne fait pas partie du stockage de données. Elle n'est pas mémorisée dans le maître. | ||
| S.Tim [60 min] fixe.Temporisation mode d'alarme | Durée de la simulation.Plage de réglage : 0 à 1000 s Après l'écoulement de cette durée, une mesure perdue est communiquée. Temporisation pour le passage à l'état défini avec [FOU2] :  Ajustez la temporisation en fonction de la fréquence de montée en niveau de l'application.Recommandation :Fréquence de niveau élevé = temporisation basseFréquence de niveau bas = temporisation élevée Ajustez la temporisation en fonction de la fréquence de montée en niveau de l'application.Recommandation :Fréquence de niveau élevé = temporisation basseFréquence de niveau bas = temporisation élevée | ||
| Seuil de détection Plage de réglage : 0 à 20000 mV Seuil de détection au-dessus duquel l'intensité du signal doit se situer pour être détectée comme un niveau. → (Fig. Seuil de détection). | |||
Explication de la hauteur de référence :
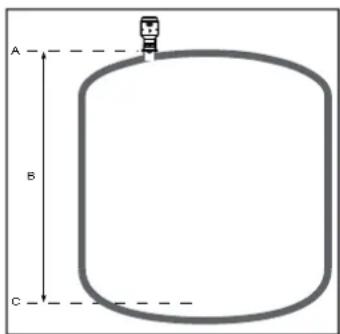
Fig. 15: Hauteur de référence
A : Point de référence de l'appareil (bord inférieur/chanfrein d'étanchéité du raccord process)
B : Hauteur de référence (zone de mesure)
C : Point zéro (fond de la cuve ou extrémité inférieure de la zone de mesure)

La hauteur de référence définit le point zéro et donc le point de référence pour la mesure du niveau.
Pour le réglage [Compensation de hauteur pour la cuve] = [0], la règle suivante s'applique :
- Les niveaux en dessous du point zéro ne sont pas détectés, la valeur process fournie est [0,0 m].
Explication de la compensation de hauteur pour la cuve :
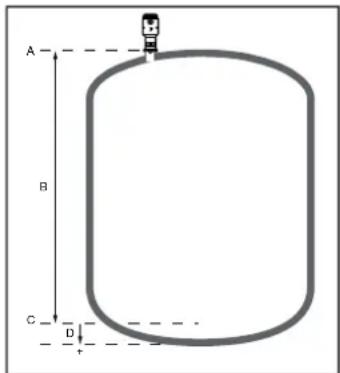
Fig. 16: Compensation de hauteur pour la cuve
A : Point de référence de l'appareil (bord inférieur/chanfrein d'étanchéité du raccord process)
B : Hauteur de référence (zone de mesure)
C : Point zéro (extrémité inférieure de la zone de mesure, le fond de la cuve est plus bas)
D : Compensation de hauteur pour la cuve

Si le point zéro ne coïncide pas avec le fond de la cuve, la distance entre le point zéro et le fond de la cuve (D) peut être saisie comme [Compensation de hauteur pour la cuve]. Dans la grande majorité des cas, la saisie de l'altitude de référence sera suffisante. Dans certains cas, il peut toutefois être avantageux de régler en plus une compensation de hauteur pour la cuve. Le capteur connaît ainsi la position du fond de la cuve et peut, dans certaines circonstances, mieux évaluer les échos de la cuve.
Saisir la distance entre le point zéro et le fond de la cuve (D) en tant que [Compensation de hauteur pour la cuve].
Si le fond de la cuve est plus bas que le point zéro souhaité, comme sur la fig. Compensation de hauteur pour la cuve :
Pour la compensation de hauteur pour la cuve, saisir une valeur > 0 (valeur positive). Si le réglage [Niveau négatif] = [Autorisé] n'est pas également sélectionné, ce qui suit s'applique :
Les réflexions parasites à l'intérieur de la compensation de hauteur pour la cuve (par ex. dues à des agitateurs, serpentins de chauffage, fond en cône ou bombé) sont supprimées.
Les niveaux à l'intérieur de la compensation de hauteur pour la cuve ne sont pas détectés, la valeur process fournie est constamment [0,0 m].
Si le paramètre [Niveau négatif] = [Autorisé] est également sélectionné, ce qui suit s'applique :
- Les niveaux négatifs (niveaux inférieurs à zéro) sont affichés.
- Les réflexions parasites dans la compensation de hauteur pour la cuve qui affectent la mesure et entraînent des erreurs de mesure sont détectées et, le cas échéant, communiquées après l'écoulement de la temporisation (voir le paramètre [Temporisation mode d'alarme]).
- Tenez compte des agitateurs et des objets situés dans la partie inférieure de la cuve qui peuvent provoquer des réflexions parasites.
Si le fond de la cuve est plus haut que le point zéro souhaité (par ex. si le fond de la cuve est incliné avec une zone d'évacuation) :
Pour la compensation de hauteur pour la cuve, saisir une valeur < 0 (valeur négative).
La compensation de hauteur pour la cuve sera ajouté à la valeur process affichée. Ainsi, l'affichage et les seuils de commutation se réfèrent au niveau réel (par ex. au point le plus bas de la cuve).

Une configuration erronée peut mener à des valeurs process erronées et à des messages d'erreur évitables.
S'assurer que les paramètres de la géométrie de la cuve ont été correctement saisis.
Explication de la zone morte supérieure / seuil de détection :
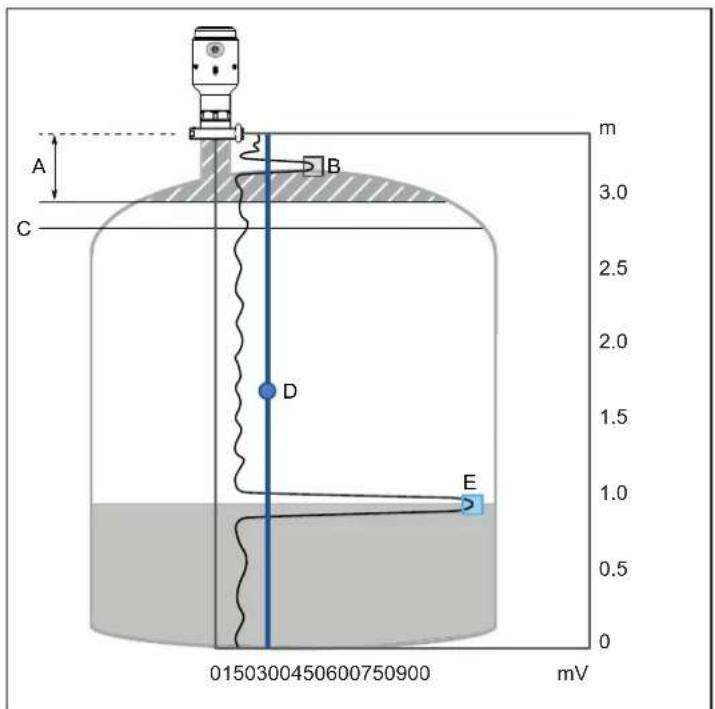
A : Zone morte supérieure
B : Echo parasite du montage
C : 100% (20 mA) de la plage analogique
D : Seuil de détection
E : Echo du niveau
Fig. 17: Zone morte supérieure / seuil de détection

Les manchons de montage ou d'autres objets à proximité de l'antenne peuvent causer des réflexions parasites. Avec le réglage d'une zone morte supérieure (A), ces réflexions peuvent être supprimées. Dans la zone morte supérieure, le niveau n'est pas détecté avec précision ou pas détecté du tout.
S'assurer que le niveau maximum est limité, par ex. en prévoyant un trop-plein ou une réduction de l'alimentation.

Le seuil de détection (D) "coupe" toutes les réflexions inférieures à la valeur seuil définie (dans la figure "Zone aveugle supérieure / Seuil de détection" à gauche de la ligne D marquée). Seules les réflexions qui dépassent la valeur seuil (dans la figure "Zone aveugle supérieure / Seuil de détection" à droite de la ligne marquée D) sont évaluées comme des échos de niveau potentiels et prises en compte dans la suite du calcul du niveau. lire les remarques
7.5 Commandes de système
| Start simulation Lancer le mode simulation. Le niveau réglé sous le paramètre [S.Lvl] est simulé. |
| Stop simulation Arrêter le mode simulation. |
| Remise aux réglages usine. Rétablir les réglages usine (tous les paramètres).En état de livraison, l'appareil n'est pas opérationnel. |
Pour plus d'informations, consulter la description IODD www.ifm.com ou les descriptions des paramètres spécifiques du contexte du logiciel de paramétrage utilisé.
7.6 Exemple de paramétrage
• L'appareil doit surveiller le niveau dans une cuve haute de 8 m.
• L'appareil est monté dans un manchon (hauteur du manchon : 150 mm).
- Il ne faut pas utiliser de compensation de hauteur pour la cuve.
- Le fluide est aqueux (bière ou lait).
• L'unité à utiliser est le [m]. - La sortie OUT2 doit être configurée comme sortie analogique.
Rétablir les réglages d'usine de l'appareil :
Effectuer la commande de système [Remise aux réglages usine].
Cela sert à éviter les mauvais réglages et à régler une situation de départ définie.
▶ Régler l'unité :
(Paramètre [uni] = [m]).
▶ Régler la hauteur de la cuve :
Paramètre [Hauteur de référence] = [8,15] m.

La hauteur du manchon doit être ajoutée à la hauteur de la cuve quand le manchon se trouve au point le plus haut de la cuve. Sinon, régler la distance exacte entre le point de référence de l'appareil (fig. hauteur de référence) et le fond de la cuve comme hauteur de référence.
Il est possible que le fond de la cuve soit déjà détecté comme niveau faible. Dans ce cas :
Réduire la hauteur de référence et régler une compensation de hauteur pour la cuve.
▶ Définir la zone morte supérieure :
Paramètre [Zone morte supérieure] = [200] mm.
Ce réglage sert à supprimer l'écho parasite du manchon de montage.
▶ Désactiver l'amortissement : Paramètre [dAP] = [0,0] s.

Pendant une phase de test, il peut être utile de détecter rapidement les changements de niveau.
▶ Réactiver si nécessaire.
▶ Régler la temporisation du mode d'alarme sur zéro : Paramètre [Temporisation du mode d'alarme] = [0] s.

Pendant une phase de test, il peut être utile de détecter rapidement les messages d'erreur et les sources d'erreur.
▶ Réactiver si nécessaire
Le cas échéant, régler la sensibilité (Paramètre [Seuil de détection]) en tenant compte des remarques suivantes : Vérifier la qualité de détection (→ ☐ 35)
▶ Configurer la sortie OUT2 comme sortie analogique : [ou2] = [I].
▶ Configurer la sortie analogique : utiliser [ASP2] et [AEP2].
▶ Configurer la sortie de commutation OUT1 : utiliser le paramètre [SSC1...].
8 Fonctionnement
8.1 Vérifier la fonction
Après la mise sous tension et le paramétrage nécessaire, l'appareil se trouve en mode de fonctionnement. Il exécute ses fonctions de mesure et d'évaluation et génère des signaux de sortie selon les paramètres réglés.
▶ Vérifier le bon fonctionnement de l'appareil.

Après la mise sous tension (ou après des changements de distance soudains), l'appareil se règle d'abord sur le niveau. Cet algorithme de régulation nécessite un certain temps et sert à assurer une mesure fiable. Après cette procédure, la valeur mesurée suit sans temporisation le niveau réel, tant que des valeurs mesurées stables sont continuellement présentes.
8.1.1 Vérifier la qualité de détection

Via la fonction de diagnostic [Pics d'écho], les échos radars effectifs de l'appareil peuvent être visualisés et évalués au moyen de la distance saisie et de l'intensité de signal saisie.
Ajuster éventuellement le seuil de détection avec le paramètre [Seuil de détection]. Pour ce faire, n'ajuster la valeur préréglée qu'avec précaution et par petites étapes. Nachfolgende Hinweise beachten.

Les turbulences, la mousse, les changements d'humidité de l'air (par ex. en raison d'une augmentation de la température du process) et la vapeur peuvent considérablement influencer l'intensité des échos radar. Il est recommandé de vérifier la qualité de détection dans des conditions de fonctionnement réelles, autrement les influences prévisibles doivent être prises en compte lors du choix du seuil de détection et la qualité de détection doit ultérieurement être vérifiée.

Recommandation : Utiliser les réglages d'usine dans la mesure du possible. Celle-ci tient déjà compte de telles influences.
8.2 Message de diagnostic, cause, correction du défaut
| Message de diagnostic Cause possible | Actions recommandées | |
| Défaut de matériel d'appareil Défaut de l'électronique • Redémarrer l'appareil. | • Si l'état persiste, remplacer l'appareil | |
| Défaut général de la tension d'alimentation. | Tension d'alimentation pendant le processus de démarrage < 18V. | Vérifier l'alimentation en tension. |
| Erreur du logiciel dans l'appareil. Erreur logicielle interne • Redémarrer l'appareil. | • Remettre l'appareil aux réglages usine et reconfigurer les réglages.• Si l'état persiste, remplacer l'appareil. | |
| Défaut de paramètre Erreur de configuration • Si une sortie analogique est utilisée, | vérifier les valeurs pour la zone supérieure et la zone inférieure.• Si une sortie TOR est utilisée, vérifier la valeur d'alarme de consigne.• Si l'état persiste, rétablir les réglages par défaut et reconfigurer l'appareil. | |
| Court-circuit Court-circuit de la sortie OUT | 1 ou OUT2. | Eliminer le court-circuit |
| Erreur de mémoire de l'appareil Paramètres défectueux (par ex. en raison d'une coupure de courant lors de l'écriture des données). | • Remettre l'appareil aux réglages usine, le redémarrer et le reconfigurer.• Si l'état persiste, remplacer l'appareil. | |
| Aucun signal de réflexion Pas d'indication | de niveau. Les raisons peuvent être diverses :• Pas d'écho de niveau valable dans la zone de mesure.• Configuration appareil incorrecte. | • Analyser les pics d'écho et vérifier la configuration de l'appareil, en particulier le seuil de détection.• Vérifier l'installation physique de l'appareil (par ex. contamination de l'antenne).• Envisager d'augmenter le paramètre [Temporisation mode d'alarme].• Rétablir les réglages par défaut, redémarrer et reconfigurer l'appareil.• Si l'état persiste, remplacer l'appareil. |
| Simulation active L'appareil est en mode simulation et ne fournit pas de données process effectives. | • Si ce comportement n'est pas souhaité, mettre fin au mode simulation.• Si l'état persiste, redémarrer l'appareil. | |
| Température au-dessus de la température admissible de l'appareil. | Température de l'électronique au-dessus de la plage de fonctionnement | • S'assurer que la température ambiante est dans la plage de fonctionnement.• Retirer les sources de chaleur.• Eliminer les causes.• Fournir un refroidissement. |
| Température en dessous de la température admissible de l'appareil. | Température de l'électronique en dessous de la plage de fonctionnement. | • S'assurer que la température ambiante est dans la plage de fonctionnement.• Isoler l'appareil. |
| Surtension dans l'alimentation principale. | Tension d'alimentation trop élevée. • S'assurer que la tension d'alimentation est entre 18 et 30 V. | |
| Sous-tension dans l'alimentation principale | Tension d'alimentation trop faible. • S'assurer que la tension d'alimentation est entre 18 et 30 V. | |
| Maintenance nécessaire – Nettoyage. Dépôts de produit sur l'antenne. • Nettoyer l'antenne. | ||
Pour plus d'informations, consulter la description IODD (www.ifm.com) ou les descriptions des paramètres spécifiques du contexte du logiciel de paramétrage utilisé.
9 Correction de défauts
9.1 Aide en cas d'indications de niveau erronées
9.1.1 Niveau trop élevé / trop bas
A : Niveau
B : Temps
C : Niveau effectif
D : Niveau mesuré
Causes possibles :
- Configuration erronée de la géométrie de la cuve.
Actions recommandées :
- S'assurer que les paramètres de géométrie de la cuve sont correctement configurés, en particulier la hauteur de référence.
- Analyser les pics d'écho et vérifier le seuil de détection.
- Rétablir les réglages par défaut et reconfigurer l'appareil.
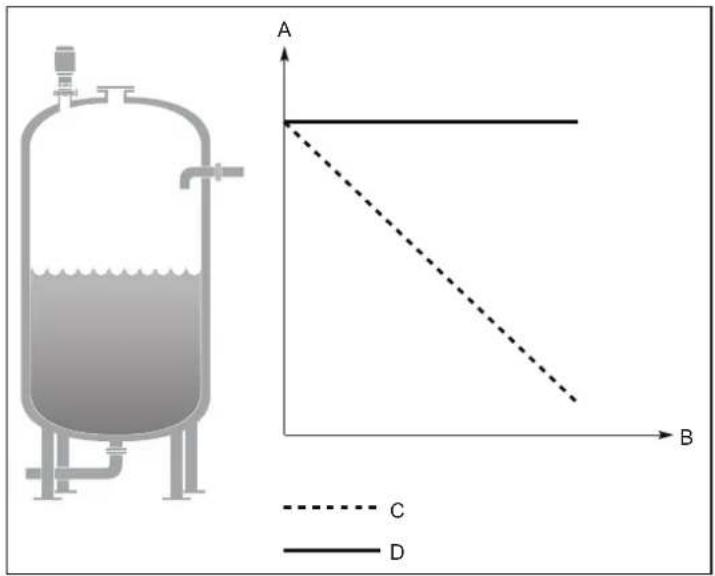
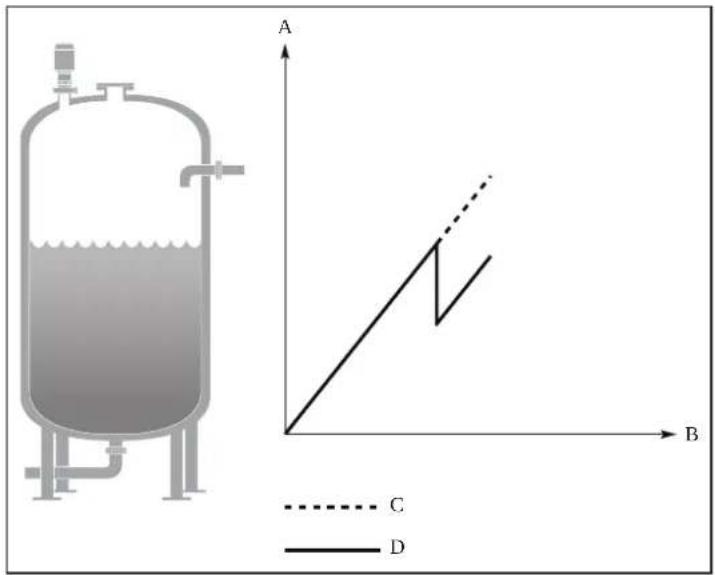
9.1.2 La valeur mesurée est bloquée
La valeur mesurée reste bloquée en cas de baisse de niveau et de niveau moyen :
A : Niveau
B : Temps
C : Niveau effectif
D : Niveau mesuré
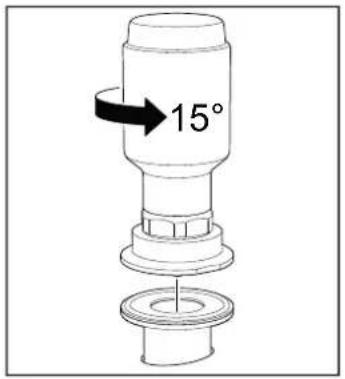
Causes possibles :
- Objets parasites dans la cuve.
Actions recommandées : - Analyser les pics d'écho et vérifier le seuil de détection.
- Si possible retirer l'objet parasite ou modifier la position de l'appareil.
- Tourner l'appareil par étapes d'environ 15 degrés. Polarisation et orientation (→ □ 15)
Après chaque étape, vérifier si les effets de l'écho parasite se restreignent. Pour cela, analyser les pics d'écho.
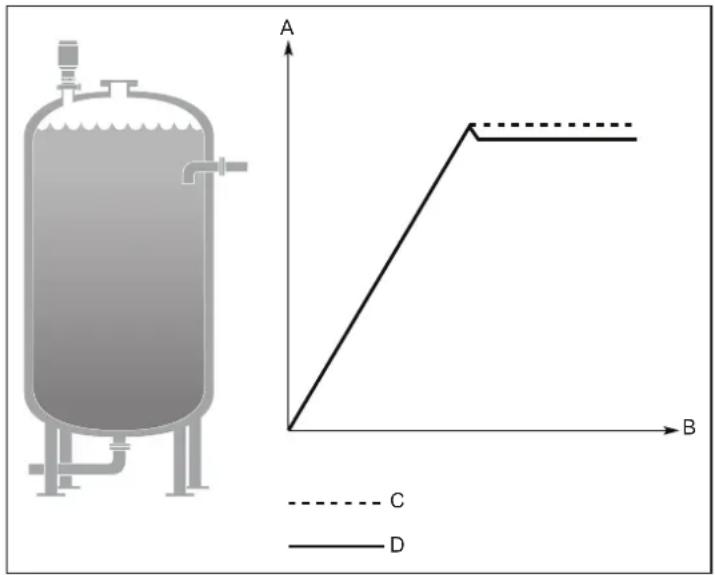
La valeur mesurée reste bloquée en cas de baisse de niveau et de niveau élevé :
A : Niveau
B : Temps
C : Niveau effectif
D : Niveau mesuré
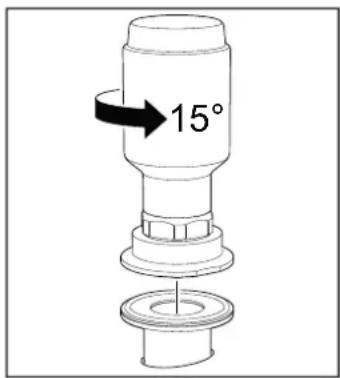
Causes possibles :
- Objet parasite à proximité de l'antenne.
Actions recommandées :
- Analyser les pics d'écho et vérifier le seuil de détection.
- Augmenter la zone morte supérieure.
- Si possible retirer l'objet parasite ou modifier la position de l'appareil.
- Tourner l'appareil par étapes d'environ 15 degrés.
9.1.3 La valeur mesurée chute en cas de niveau dans la zone de l'antenne
La valeur mesurée diminue à une valeur inférieure lorsque le niveau est à proximité de l'antenne :
A : Niveau
B : Temps
C : Niveau effectif
D : Niveau mesuré
Causes possibles :
- Le niveau se trouve dans la zone morte supérieure et un écho parasite est interprété comme étant le niveau.
Actions recommandées :
- Vérifier le réglage de la zone morte supérieure.
- Réduire le niveau maximal possible, par ex. en ajustant les seuils de commutation.
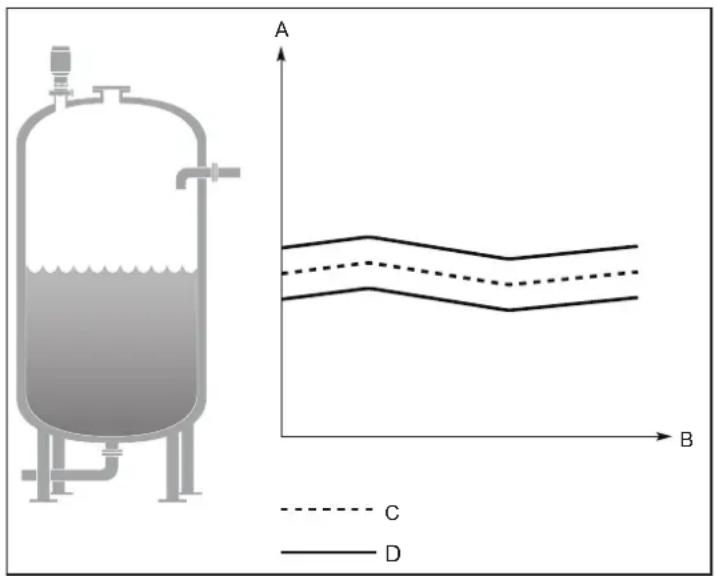
9.1.4 La valeur mesurée fluctue
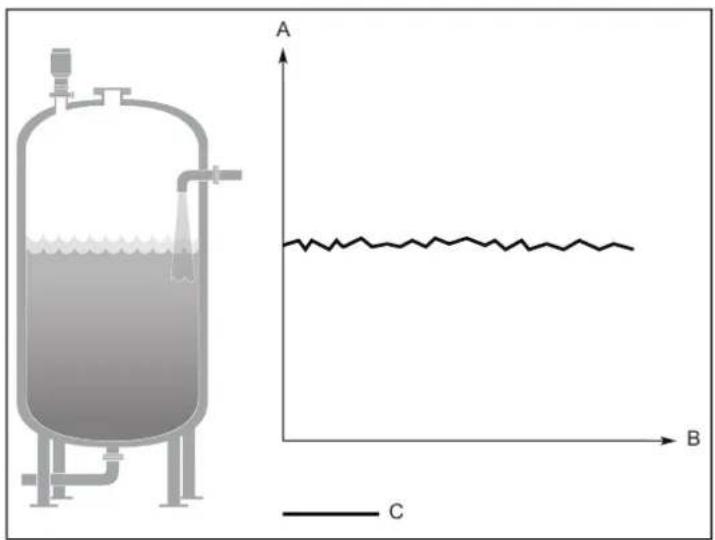
A : Niveau
B:Temps
C : Niveau effectif
Causes possibles :
• Excès de mousse ou turbulences.
Actions recommandées :
- En cas de conditions turbulentes avec des taux de niveau faibles, envisager d'augmenter la valeur d'amortissement (paramètre [dAP]).
- Supprimer ou atténuer les causes, par ex. prévoir un tuyau d'alimentation ou une réduction de l'alimentation.
9.1.5 La valeur mesurée est occasionnellement instable
A : Niveau
B : Temps
C : Niveau effectif
D : Niveau mesuré
Causes possibles :
- Le niveau se trouve à proximité d'un écho parasite supprimé.
Actions recommandées : - Si possible retirer l'objet parasite ou modifier la position de l'appareil.
9.1.6 La valeur mesurée est en retard lors de changements rapides de niveau
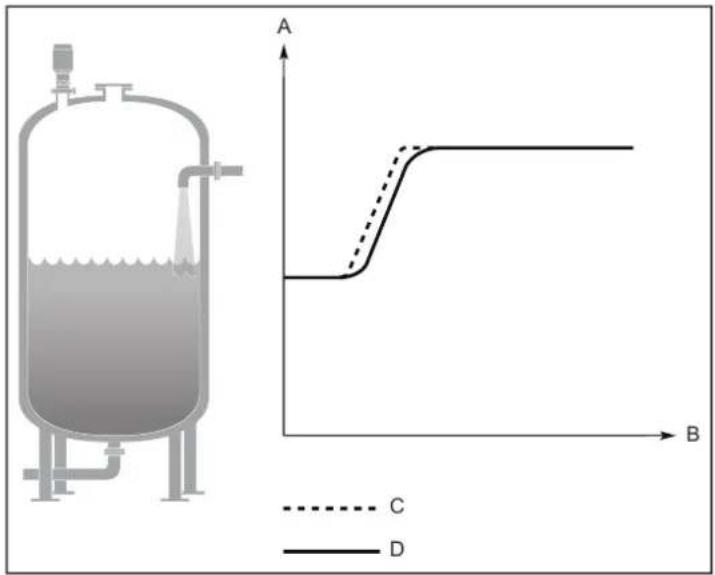
A : Niveau
B:Temps
C : Niveau effectif
D : Niveau mesuré
Causes possibles :
• L'amortissement (paramètre [dAP]) est réglé trop haut.
Actions recommandées :
• Réduire l'amortissement
- Si possible, réduire les taux de niveau élevés.
9.1.7 Valeur mesurée correcte à 0 % (4 mA), incorrecte à 100 % (20 mA)
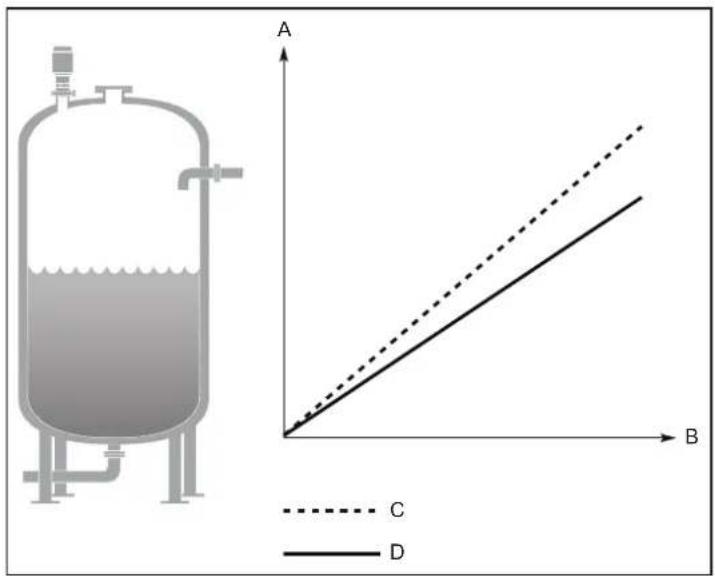
A : Niveau
B : Temps
C : Niveau effectif
D : Niveau mesuré
Causes possibles :
- Le point final analogique (paramètre [AEP2] n'est pas réglé correctement.
Actions recommandées :
• Corriger le paramètre [AEP2].
9.1.8 Valeur mesurée incorrecte en cas de niveau supérieur à 50 %
A : Niveau
B:Temps
C : Niveau effectif
D : Niveau mesuré
Causes possibles :
- Une forte réflexion multiple est erronément interprétée comme étant le niveau.
Actions recommandées : - Monter l'appareil à un autre emplacement.
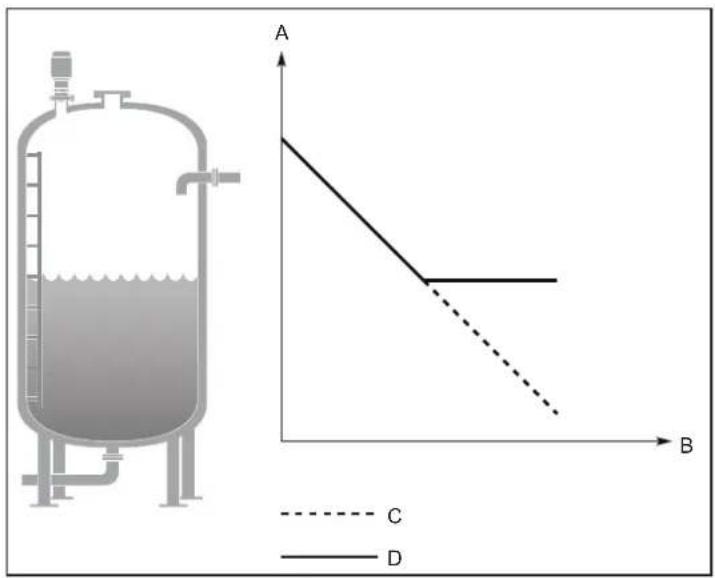
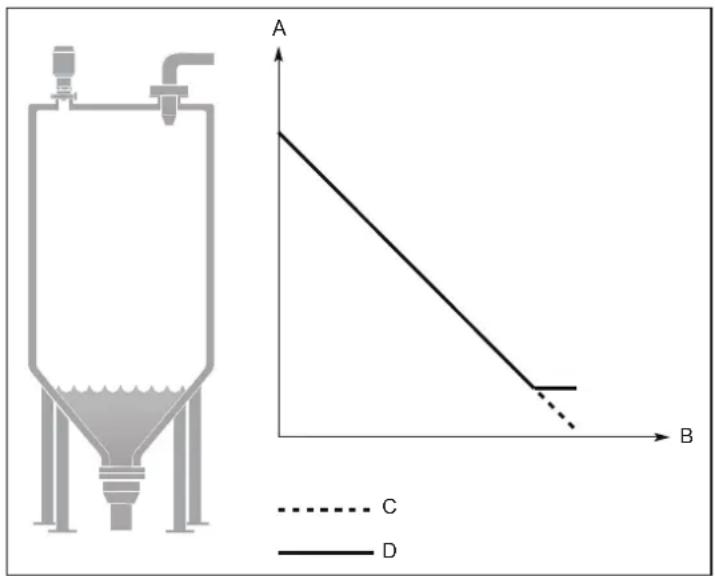
9.1.9 La valeur mesurée tombe à zéro dans la zone du fond de la cuve
La valeur mesurée tombe à zéro dans la zone du fond de la cuve :
A : Niveau
B : Temps
C : Niveau effectif
D : Niveau mesuré
Causes possibles :
- Un fort écho du fond de la cuve est erronément interprété comme étant le niveau.
Actions recommandées : - S'assurer que la hauteur de référence est correctement configurée.
- En cas de fluides très faiblement diélectriques : Réduire la hauteur de référence et régler une compensation de hauteur pour la cuve.
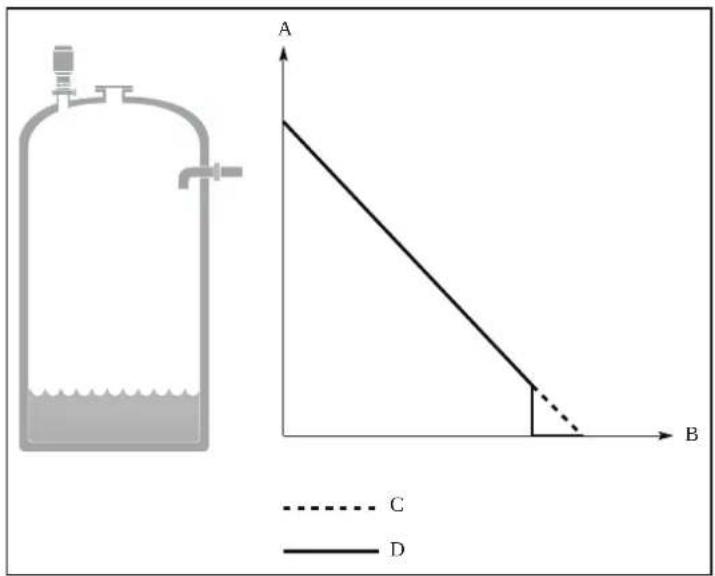
9.1.10 La valeur mesurée se perd si la cuve est vide
A : Niveau
B : Temps
C : Niveau effectif
D : Niveau mesuré
E : Mesure de niveau perdue
F : Porte d'accès de la cuve ouverte
Causes possibles :
- Si la porte de la cuve est ouverte vers l'intérieur, un écho parasite est généré et interprété comme étant le niveau. Après la fermeture de la porte, l'écho se perd et l'émetteur indique - mesure de niveau perdue -. Le message est supprimé quand la cuve se remplit.
Actions recommandées :
- Avant d'ouvrir la porte, couper l'alimentation en tension de l'appareil.
- Redémarrer l'appareil après la fermeture.
- Monter l'appareil à un autre emplacement.
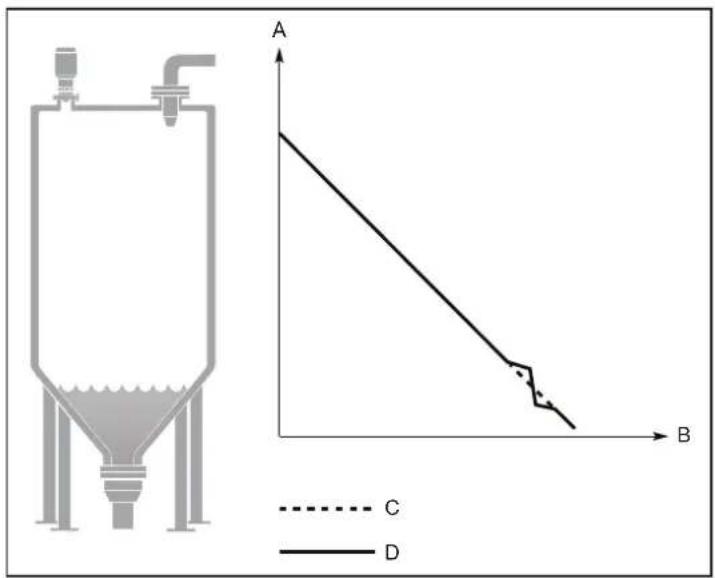
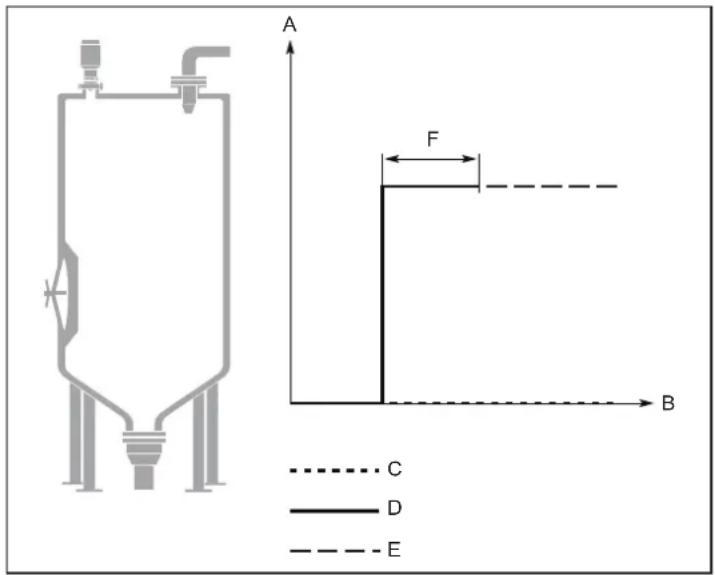
9.1.11 Mode d'alarme quand le niveau est à proximité du fond de la cuve
Passage au mode d'alarme lorsque le niveau se trouve à proximité du fond incliné de la cuve :
A : Niveau
B : Temps
C : Niveau effectif
D : Niveau mesuré
Fig. 18:
Causes possibles :
- Le signal radar est dispersé vers le côté par le fond incliné de la cuve.
Actions recommandées :
- S'assurer que les paramètres de géométrie de la cuve sont correctement configurés (en particulier la hauteur de référence et la compensation de hauteur pour la cuve).
10 Maintenance, réparation et élimination
L'appareil peut être dévissé de l'adaptateur à des fins de nettoyage.
▶ Vérifier et, le cas échéant, resserrer l'appareil et le raccord de montage à intervalles réguliers.
▶ Utiliser seulement des outils à méplat avec surface en plastique appropriés pour des surfaces en contact avec le fluide.
Nettoyer l'antenne (enveloppe PTFE) à intervalles réguliers et avec des produits appropriés afin d'éviter une souillure à long terme ou la formation de dépôts.
Lors du processus de nettoyage, s'assurer que les jonctions appareil/adaptateur ne sont pas souillées ou endommagées. Vérifier si la/les bague(s) d'étanchéité est/sont endommagée(s).
En cas d'endommagement des bagues d'étanchéité :
Remplacer des éléments endommagés. Accessoires disponibles : www.ifm.com/fr
L'appareil ne peut pas être réparé.
En cas de retour, s'assurer que l'appareil est exempt d'impuretés, en particulier de substances dangereuses et toxiques.
▶ Utiliser seulement des emballages appropriés pour le transport afin d'éviter l'endommagement de l'appareil.
S'assurer d'une élimination écologique de l'appareil après son usage selon les règlements nationaux en vigueur.
11 Réglage usine
| Paramètre Réglage usine Réglage utilisateur Accès | ||
| Etiquette électronique spécifique application | *** | |
| Function Tag *** | ||
| Location Tag *** | ||
| uni m | ||
| Hauteur de référence Valeur initiale | ||
| Compensation de hauteur pour la cuve | 0 (m) | |
| Zone morte supérieure 0 (m) | ||
| P-n PnP | ||
| out1/out2 SSC1 / I (4...20 mA) | ||
| dS1/dS2 0 (s) | ||
| dr1/dr2 0 (s) | ||
| SSCx* Param. SP1 0,2 (m) ! | ||
| SSCx* Param. SP2 0 (s) ! | ||
| SSC* Confic. Logic | no | |
| SSC* Confic. Mode | Single Point | |
| SSC* Confic. Hysteresis | 0,05 (m) | |
| ASP2 | 0 (m) | |
| AEP2 | 0,2 (m) ! | |
| FOU2 | OFF | |
| dAP | 2 (s) | |
| S.Lvl | 5 (m) | |
| S.Tim | 60 (min) | |
| Temporisation mode d'alarme | 180 (s) | |
| Seuil de détection | 100 (mV) |
^* x = 1 pour OUT1, 2 pour OUT2

Les paramètres marqués d'un « ! » (sous Accès) (par ex. [SSCx* Param. SP2]) ne sont actifs qu'après la sélection des paramètres assignés.
12 Annexe
12.1 Homologations et attestations
La déclaration de conformité UE, les homologations et les attestations spécifiques aux pays sont disponibles sur : documentation.ifm.com
Remarques pertinentes pour les homologations : → Notice jointe



- Contenu
- Remarques préliminaires
- Symboles utilisés
- Avertissements
- AVERTISSEMENT
- ATTENTION
- INFORMATION IMPORTANTE
- Consignes de sécurité
- Usage prévu
- Applications
- Exemples d'applications
- Restrictions de l'application
- Fonctions
- Principe de mesure
- Réflectivité, influence de la constante diélectrique
- Mousse et turbulences
- Influences des propriétés de la cuve et du montage
- IO-Link
- Sorties
- Sortie analogique
- Fonction de commutation
- Fonction hystérésis en mode 1 seuil :
- Fonction hystérésis en mode 2 seuils :
- Etat défini en cas de défaut (mode d'alarme)
- Fonction de simulation
- Fonction d'amortissement
- Comportement des sorties dans différents modes de fonctionnement
- OUT1 OUT2\*
- Compléments à la sortie analogique
- Montage
- Position de montage
- Inclinaison
- Polarisation et orientation
- Angle et largeur d'émission
- Cuve à fond conique (trémie de vidange)
- Cuves non métalliques
- Exigence visant les manchons
- Conseils pour les applications aseptiques
- Remarques sur l'utilisation selon EHEDG
- Remarques sur l'utilisation selon 3A®
- Montage dans un taraudage
- Préparation du montage
- Retirer le capuchon de protection
- Insérer le joint torique, graisser le filetage
- Pré-monter le raccord à souder adaptateur
- Préconisations en cas d'utilisation d'un raccord à souder
- Installer le bouchon à souder :
- Souder le raccord à souder dans la cuve :
- Opération de soudage :
- Monter l'appareil dans la cuve
- Monter l'appareil avec un adaptateur Tri-Clamp
- Monter l'appareil avec un raccord à souder
- Monter l'appareil avec un adaptateur VARIVENT®
- Monter l'appareil sur le raccord à souder
- Monter l'appareil avec un raccord G1
- Raccordement électrique
- Paramétrage
- Paramétrage via PC et maître IO-Link
- Paramétrage pendant le fonctionnement
- Paramétrage via l'adaptateur Bluetooth
- Paramètres réglables
- Explication de la hauteur de référence :
- Explication de la compensation de hauteur pour la cuve :
- Commandes de système
- Exemple de paramétrage
- Fonctionnement
- Vérifier la fonction
- Vérifier la qualité de détection
- Message de diagnostic, cause, correction du défaut
- Correction de défauts
- Aide en cas d'indications de niveau erronées
- Niveau trop élevé / trop bas
- Causes possibles :
- Actions recommandées :
- La valeur mesurée est bloquée
- La valeur mesurée chute en cas de niveau dans la zone de l'antenne
- La valeur mesurée fluctue
- La valeur mesurée est occasionnellement instable
- La valeur mesurée est en retard lors de changements rapides de niveau
- Valeur mesurée correcte à 0 % (4 mA), incorrecte à 100 % (20 mA)
- Valeur mesurée incorrecte en cas de niveau supérieur à 50 %
- La valeur mesurée tombe à zéro dans la zone du fond de la cuve
- La valeur mesurée se perd si la cuve est vide
- Mode d'alarme quand le niveau est à proximité du fond de la cuve
- Maintenance, réparation et élimination
- Annexe
- Homologations et attestations
Marque : IFM
Modèle : LW2760
Catégorie : équipements de mesure