SR129 - Robot jouet AREXX - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil SR129 AREXX au format PDF.
| Type de produit | Robot footballeur à assembler (robot jouet) |
| Marque | AREXX |
| Modèle | SR129 |
| Tension d'alimentation | 3 V (2 piles LR03 de 1,5 V chacune, non fournies) |
| Consommation électrique | Environ 300 mA max. |
| Dimensions (hauteur x longueur) | 100 mm x 160 mm |
| Longueur du câble du contrôleur | 1,5 m |
| Fonctions principales | Robot footballeur pilotable via contrôleur filaire, déplacement multidirectionnel, mécanisme à engrenages et manivelles pour mouvement des jambes |
| Alimentation | 2 piles LR03 (AAA) 1,5 V (non incluses) |
| Moteurs | 2 moteurs électriques |
| Contrôleur | Filaire, avec deux boutons pour piloter les moteurs |
| Matériau du châssis | Plastique |
| Âge recommandé | À partir de 8 ans (sous surveillance d'un adulte pour le montage) |
| Assemblage requis | Oui, montage complet des pièces |
| Outils nécessaires | Petit marteau en plastique, tournevis, pince coupante ou pince plate, clé à fourche |
| Entretien et nettoyage | Respecter la polarité des piles ; garder les piles et le support secs ; retirer les piles en cas de non-utilisation prolongée ; nettoyer avec un chiffon doux et sec |
| Sécurité | Ne pas laisser de jeunes enfants manipuler les outils ou les petites pièces ; respecter la polarité des piles ; ne pas forcer les pièces lors du montage |
| Pièces détachées | Kit comprenant roues dentées, axes, engrenages, jambes, etc. ; réparable par démontage et remontage |
| Reparabilité | Modulaire, possibilité de remplacer des pièces individuellement |
| Informations générales | Notice disponible en ligne ; fabricant : Conrad ; respecter les consignes de recyclage DEEE |
| Garantie | Consulter les conditions du vendeur |
FOIRE AUX QUESTIONS - SR129 AREXX
Questions des utilisateurs sur SR129 AREXX
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Robot jouet au format PDF gratuitement ! Retrouvez votre notice SR129 - AREXX et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil SR129 de la marque AREXX.
MODE D'EMPLOI SR129 AREXX
Conrad sur INTERNET www.conrad.fr
NOTICE
Version 12/14
Robot footballeur Arexx
Code:000191636

Les apparéts électriques et Electroniques usages (DEEE) doivent être traités individuelle et conformément aux lois en vigueur en matière de traitement, de récuppération et de recyclage des apparéts.
Sutie a application de cette reglementation dans les Etats memore, les utilisateurs résistant au sein de l'Union europeenne neuert desormais ramener gratuiteles leurs appeareis electriques et Electroniques usages dans les centres de collecole prevus a cet effet.
En France, vous détaillant repondre également gratifiement cette ancien produit si vous envisagez d'acheter un produit nouvel similaire.
Si voitre apppeare eletrique ou Electronique usage compose des piles ou des accumulateurs, veillez les refiler en f'apparel et les déposer dans un centre de collecte.

Le décret reliatif aux batteries usagées impose au consommateur de déposer toutes les pôts et tous les accumulateurs usés dans un centre de collecte adapté (ordonnance relative à la collecte et le traitement des pôts usages), il est réCOMMENDÉ de ne pas les (iter aux ordurs menagériés !

Les pôles ou accumulateurs contenant des substances nocives sont marqués par le symbole indiqué où-contre signait l'interdiction de les jeter aux ordres menagériés.
Les désignations pour le métal lourd sont les suivantes : Cd = calimium, Hg = mercure. Pb = plomb. Vous pouvez déposer notamment vos piles ou accumulateurs usages dans les centres de collecte de votre commune, dans nos succulaires ou dans tous les points de vertie de piles ou d'accumulateurs !
Vourespeciezainsiiesordonnanceslegalesetconribuazaa protectionde'environnement!
Note de l'éditeur
Cette nolte est publique la societe Conrad, ZAC Englos les Geants Lieu-dit Rue du Hem, TGA 72001 SEQUEDIN,59458 Lorme CEDEXEFrance.
Tous droits réservés, y compris la traduction. Touto reproduction, quoi que sait le type (p.xx. photocopics microfils ou saisi dans des traitements de texte Electronique est coumée a une autorisation prétable corte de l'edinour.
Le contenu de ce maôde d'emploi peut no mas correspondir fidiclement aux initiales excessés mentionnés dans les autres éléments et paramètre l'aparoleil. Recrocuton, même parielle, interdite.
Cette noticse est conformire a I'atat du produit au moment de l'impression.
Données techniques et conditionnement coumils à modifications sans avisailable. Pour kout transgeneignement, contactez notre service technique au 0893-897-277.
© Copyright 2014 par Conrad. Imprintre on CEE. XXX/12-14/JV
Cette notice fait partie du produit. Elle contient des informations importantes concernant son utilisation. Tenez-en compte, même si vous transmettez le produit à un tiers.
Conserve cette notice pour tout report ultérieur!

1. Description du produit
Organisez vous propres championnats des robots footballeurs!
Le SOCCER ROBOT est un robot footballeur qui doit d'abord etre entierement assemblé.
Une fois le montage terminé, vous pourrez organiser将自己的 compétencerne de robots footballeurs. Un entraignement poussa sera cependant nécessaire, car il n'est pas si facile de pilotier ces petits robots aglies a six jambes... Le boilier de commande (contrôleur) possede deux boulons permittent de pilotier les deux moteurs. Ces deux moteurs dirigir le robot dans toutes des directions.
Voserezapidementconvanpu parles performancesdecerobot.Dans cette notice,tous les mouvements du robot seront detailles.
\section*{Caracteristiques techniques}:
Tension d'alimentation: 3 V (2 piles LR03 de 1,5 V chacune, non fournies)
Consommation electrique: Environ 300 mA max.
Hauteur:100mm
Longyear:160mm
Large:
Longueur de cable du contrôleur: 1,5 m

Attention
- Le retour du produit n'est plus possible une fois que le sachet en plastique contenant les composants et les éléments a ete ouvert.
- Lisez attentivement la notice d'utilisation avant de monter le robot.
- Manipulez les outils avec précaution.
- Ne procédé pas au montage en présence de jeunes enfants : ils risqueraient de se blesser avec les outils ou de porter des composants à la bouche.
- Respectez la polarité des piles.
- Veiléze à ce que les piles et le support restent secs. Si le robot est mouillé, enlevée les piles et essayez-le更好地 possible.
- Enlevez les piles si le robot n'est pas utilisé pendant plus d'une période.
2. Outils
Conseil : Lisez attentivement ce paragraphe avant de demarrer !
Afin d'évitier les erreurs de montage, respectez l'ordre des étapes décrites. Le robot fonctionnera parfaitement si vous suivez les étapes de montage dans l'ordre, en comparant le résultat avec la photo sur l'emballage.
Toutes les pieces s'emboitent parfaitemment, il n'est pas nécessaire de forcer.
Travailliez calmement et lisez cette notice dans son intégralité avant de commencer le montage.
Petit marteau en plastique Ensemble de tournevis Prince coupante ou pince plate


Utilisez un tourisme d'une talle adaptée

Pinces pour composants miniatures (150 mm).
2
Transmission de la puissance mécanique
Les engrenages, courrios, barres, manivelles et chaines peuvent transmettre de l'énergie. Quatre roues dentées transmettent la puissance de rotation du moteur depuis l'axe du moteur jusqu'à l'axe d'entrainment du robot. Cette transmission est appelée transmission à engrenages. Les forces sont transmises aux dents des roues. Trois modifications ont lieu simultanémement :
a. Inversion du sens de rotation
b. Ralentissement de la vitesse de rotation
c. Reinforcement de la force de rotation

90°
Rotation vers la droite

40 dents

a. Inversion du sens de rotation
La première roue dentée tourne dans le sens des aiguilles d'une montre, et la deuxième dans l'autre sens. Une roue dentée inverse le sens de rotation.
b. Modification de la vitesse de rotation
La modification de la vitesse de rotation dépend du nombre de dents des roues. Prénons par exemple une roue à 10 dents et une à 40 dents. Alors que la première roue a effectué un tour complet, la deuxieme n'a fait qu'un quart de tour. Pour que la deuxieme roue effectue un tour complet, la première doit faire quatre tours. Ce fonctionnement fait baisser la vitesse de rotation.
c. Transmission de la force de rotation
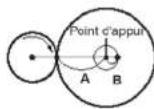
La transmission de la force de rotation est comparable au prince du levier. Imaginons une personne qui soulde une pierre à l'aide d'un levier.
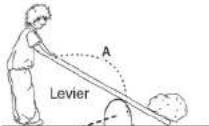
Point d
La personne qui baisse le levier doit exercer une force plus importante si la distance A est plus courte et/ou la distance B plus longue.
Rapport d'entrainment =
Vitesse de rotation du moteur
Vitesse de rotation de la première roue
Les engrenages du robot fonctionnel de la même manière. La force exerçée sur les dents des engrenages augmente à l'intérieur des roues.
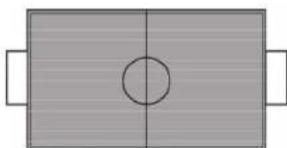
7. Le match de foot des robots
Vous trouverez ci-dessus des propositions de matches de foot.
Terrain
Une table de ping-pong peut servir de terrain de foot. Installez une protection tout autour de la table pour empêcher que la balle ne serte du terrain. Installez les buts au bord de la table. La taille des buts déterminé le niveau de difficulté du jeu. Utilisez une balle de ping-pong comme ballon.
Match
Formez deux equipments de 1 à 3 joueurs et essayez de marquer un maximum de buts.
Match multi-ballons
Formez des équipés de 1 à 3 joueurs et mettez en jeu autant de ballons que possible. Essayez de marquer un maximum de bulls dans le but de votre équipé.
8. Comment le robot footballeur se déplace-t-il?
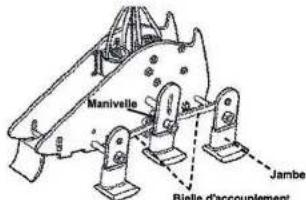
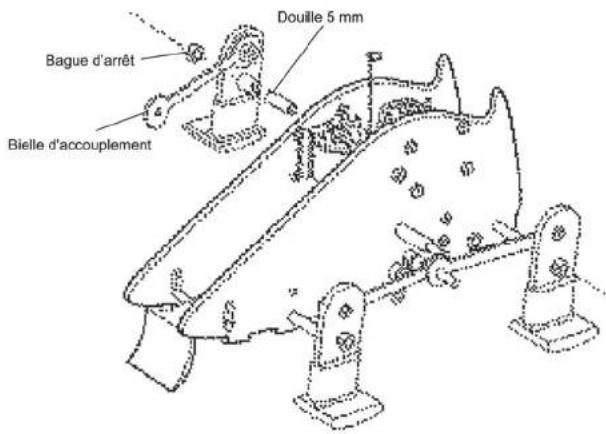
Mécanisme à manivelle
Les jambes du robot boughent en opposition. Ce mouvement est initie par le displacement de la manivelle. Une manivelle peut convertir un mouvement rotatif en un mouvement horizontal et vertical. Le dessin ci-contre illustre ce fonctionnement.
Si le robot ne fonctionne pas correctement (par exemple parce que les roues dentées ne sont pas correctement lbriquées lesunes dans les autres), et que l'erreur ne figure pas dans le tableau de la page precedente, recommencze toutes les étapes du montage. Demontez entiement le robot si nécessaire et reassemblez-le en regardant attentivement les dessins.
9. Mode de fonctionnement de la mécanique
La mécanique du robot se compose de deux parties essentielles. La première partie est constituée des engrençages qui transmettent la puissance de l'axe moteur à l'axe d'entrainment. Le deuxième élément transmet le mouvement de rotation de l'axe d'entrainment aux jambes du robot.
Découper ou détacher les éléments

Pour découper ou détacher les éléments, utilisez le cutter ou la pince coupante. Coupe ou détache soigneusement, le plus pris possible du bord.
ATTENTION: Ne découpez pas d' éléments dont vous n'avois pas besoin immédiatement.
Monter un axe

Soyez tres prudent lors du montage d'un axe (axe de moteur par exemple). Essayez d'abord d'insérer f'axe a la main, puis utilisez un petit marteau en plastique. Tapeze tres doucement et intercaze une petite lamelle de bois entre lo marteau et I'objet (olle servira de tampon), ain de ne rien endommager.
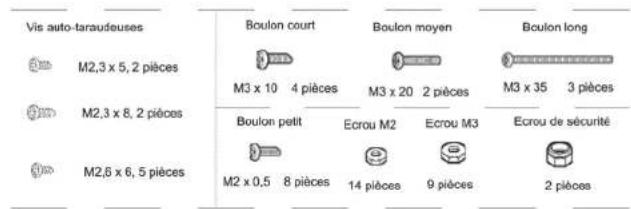
Vis auto-taraudeuses (Parker)


Les vis avec un filage auto-taraudre fonctionnent comme des vis à bois, c'est-à-dire que la vis peutencer un trou en tournant et se fixe ainsi dans le matériel. C'est pourquol les vis de ce type ont un filage plus grand et une pointe plus affuette que les vis ordinaires. La pointe des vis auto-taraudues est evidence pour permettre le percement. Pour fixer ce type de vis de maniere optimale, proceedez comme suit :

1 Engagez la vis
2 Desserrez légarement la vis
3 Resserrez fermentéla vis
SI les vis sont desserées et resserrées trop réquement, le trou de vis s'élargit et la vis n'est plus maintenue correctement.
Boulons et ecrous

Dans un apparéel soumis à des mouvements et à des vibrations, les boulons et les écrous doivent être fixés solidement.
Pour évider les desserrages, il est possible d'ajouter un peu de vernis à ongles à la jonction entre la vis et l'écrou, après avoir sere la vis. Il sera ainsi toujours possible de desserrer facilement la vis en cas de besoin. N'utilise pas de colle (type Locklite): la vis sera alors fixée très soldement et ne pourrait plus être enlevée.
Les boulons se différencient par leur longueur et leur diamètre. Un écrou M3 x 20 par exemple a une longueur de 20mm et un diamètre de 3mm . Les écrous se différencient par leur diamètre: par exemple, un écrou M3 doit être utilisé avec un boulon de 3mm .
Serrage des écrous de sécurité
Le kit comprend une petite clé plate double, permettant de serrer les boulons et écrous solidement.
Voupsouvezegalementutiliserune pinceabec(oupincplate)(voirdessin).
5. Montage final
Câblage du moteur :
Lors du raccordement des cables, respectez les differents codages!

Respectez la polarité (+ et -) du cable de contrôleur :
A = + moteur arrête
B = - moteur arrêté
C = + moteur avant
D = - moteur avant

Mise en place des piles
Installez les piles dans le support, en respectant la polarite (+ et -). Insérez le support de piles dans le contrôle.
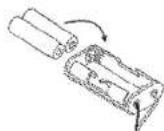
Pour finir, passes le cable à travers le support de cable.
- Recherche des erreurs
| Problème Vérifications | |
| Les moteurs ne tournent pas. - | Vérifie que les piles ne sont pas épisiées. - Vérifie la polarite (+ et-) des piles. - Vérifie le câblage du support de piles. - Vérifie le câblage des moteurs. |
| Les jambes ne bougent pas. - | Vérifie le module de transmission, notamment les écrous de sécurité (rosserrez-les si nécessaire). - Vérifie toutes les roues d'entiées. - Vérifie le montage des places látères. |
| Les déplacements ne correspondant pas aux ordres du contrôleur. | - Vérifie toutes les connexions de cables et leurs codages. - Vérifie l'assemblage du contrôleur. |
| Le robot se déplace de manière saccadée. | - Vérifie l'état de charge de chaque pile. - Vérifie que les roues d'entiées ont été montées correctement. |
Montage des jambes du milieu
Il yous faut :
1 chassis
2 iambes du milieu
2 anneaux en O
Montez les jambes du milieu comme indiqué sur le dessin ci-dessous.
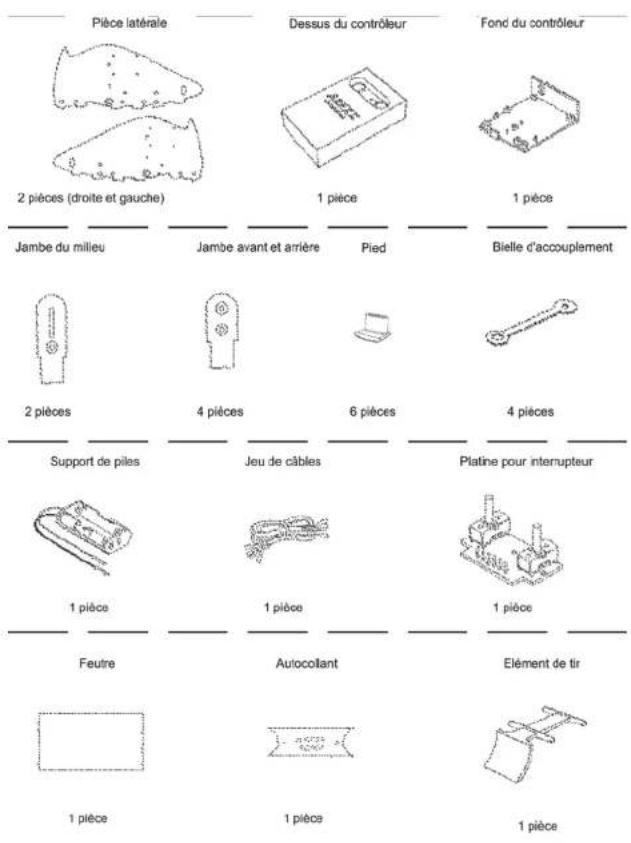
3. LiSTE des pieces
Avant de proceder au montage, verifiez que vous disposez de toutes les pieces suivantes:
Petite roue dento
Roue d'engrenage
Aveo

2 pieces

2 pieces

2 pieces

Roue plate
2 pieces

Moteur
2 pieces
Support moteur
vete
Rondelle elastique M2
Bagu danté
Tournevis coude 6 pans
Clé à fouche
M2 & M3


续表



2 pieces
2 pieces
10 pièces
6 pieces
1 piece
1 piece
Douille 6 mm
Douille 10mm
Doule 2
Axe 8
m
nneau en O
Rondelle etastique







4 pieces
6 ploces
2 pieces
2 pieces
6 péces
4 plices
Ballon
Axe de vissage de la jambo
Axe de vissage
épais
Axe de vissage fin
Axe 22 mm
Support de cable

1 piece

2 pioces

2 pieces

2 pieces

2 pieces

1 piece
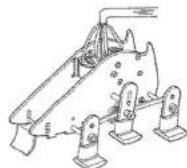
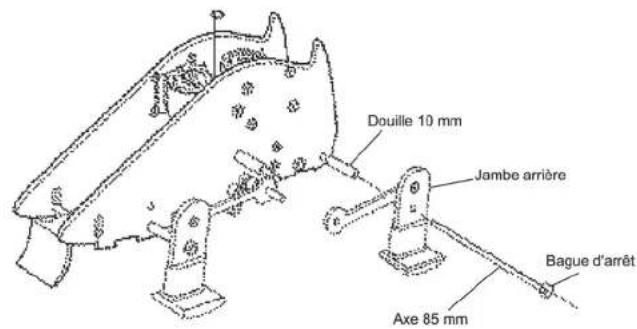
Montage des jambes arriré
Ilyoufaut:
1 chassls
2 jambes arriere montees
1axe85mm
2 douilles 10 mm
2 bagues d'arret
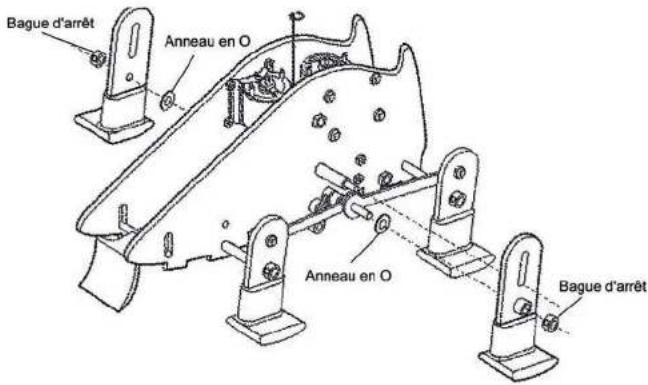
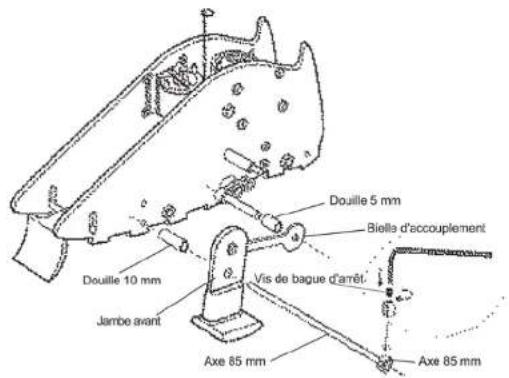
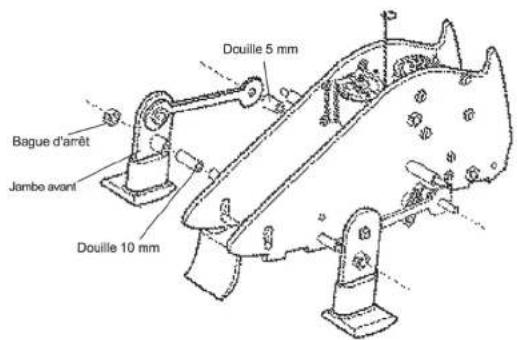
Montage des jambes avant
Iyoufaut:
1 chassls
2 jambes avant montées
1axe85mm
2 douilles
2 douilles 10mm
2 bagues d'arrêt
Fixez les jambes sur les cotés drot et gauche comme indiqué sur les dessins. Soyez très attentif en détails !
Le montage des jambes s'effectue de la meme facon sur le cote drot et sur le cote gauche.
14
4. Assemblage du robot footballeur
Montage du contrôle:
Il vous faut :
1 feutre noir
1 platine pour interrupteur
1jeudecables
1 fond du contrôleur
1 vls auto-taraudeuse 2.6 x 6 mm
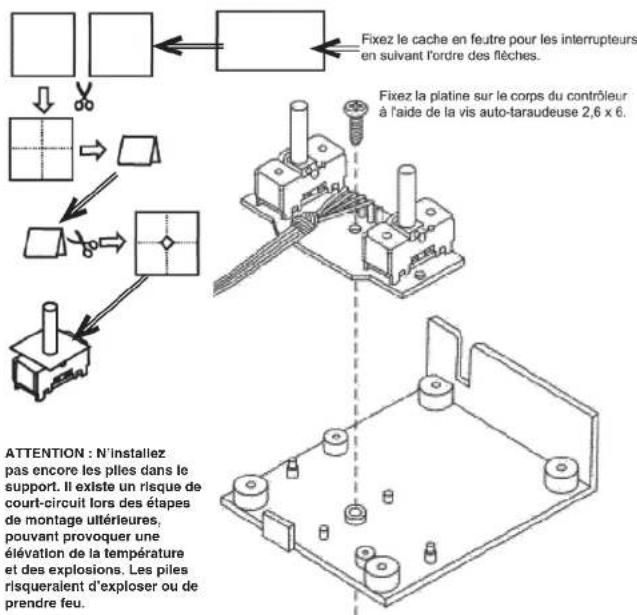
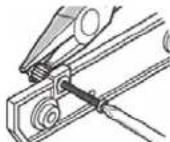
Raccordez les cables avec leurs cessions à l'emplacement qui convient sur la platine (A-D) (voir dessoll). Respectez le codage des cables et les lettres d'identification!

Montage final du contrôleur :
Iyoufaut:
1 corps de contrôleur monté
1 support pour piles
2 vis auto-taraudeuses 2.3 x 8 mm
1 dessus du contrôleur
4 vis auto-taraudeuses 2.6 x 6 mm
1 autocollant
Montez le dessus du contrôleur comme indiqué sur le dessin ci-dessous.
Montez les differents éléments dans l'ordre des numeros.
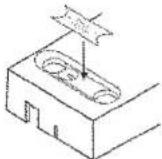
Collez l'autocollant.
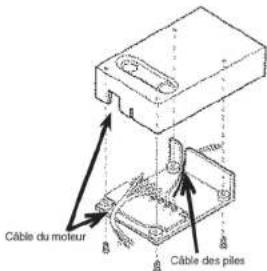
2) Raccordez le cable des piles avec sa cosse aux bornes + et - de la platine (voir dessin).
Noir = - (Blk)
Rouge = + (Red)
ATTENTION: Le cable des plies et le cable du moteur doit sortingr du boitier.
3) Fixez le corps à l'aide des 4 vis auto-taraudeuses 2,6 x 6 mm.
Fixez enfin le support pour piles à l'aide des 4 vis auto-taraudeuses 2,3 × 8 ~mm .
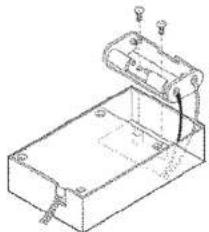
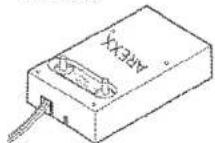
LE CONTROLEUR EST MAINTENANT TERMINE!
8
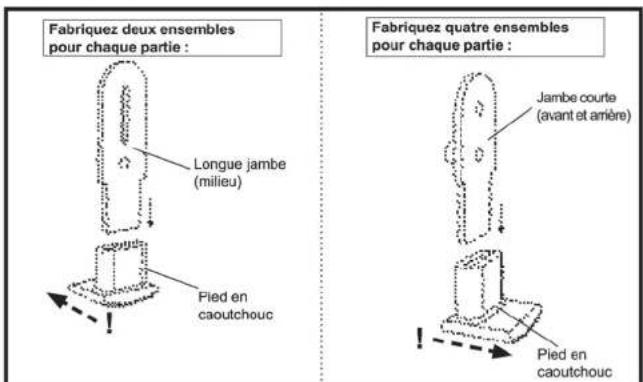
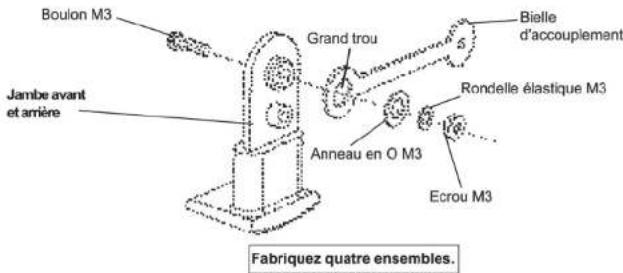
Montage des jambes
Ilyoufaut:
6 pleds en caoutchouc
2 longues jambes (milieu)
4 jambes courtes (avant et arrriere)
4 boulons M3 x 10mm
4 ecrous M3
4 rondelles elastiques M3
4 anneaux en O M3
4 bielles d'accouplement
Montez l'ensemble comme indiqué sur le dessin ci-dessous.
Fixation des parties laterales
Iyoufaut:
2 pièces latérales (drolte et gauche) prémontées
3 boulons M3 x 32 mm
5écrous M3
2 douilles 2
2 douilles 1
1 support de cable
1 element de tir
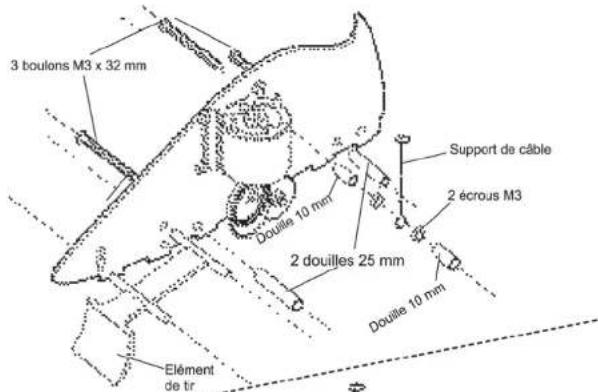
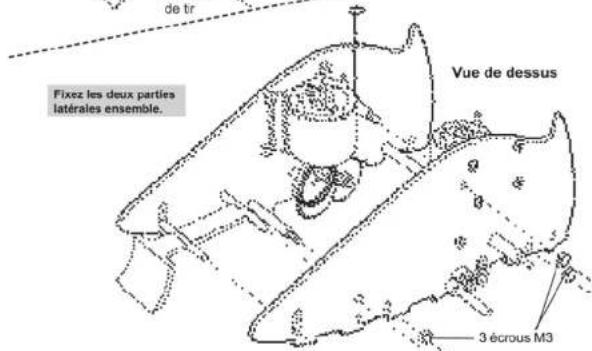
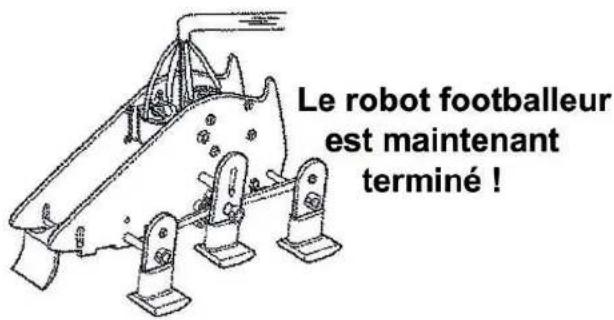
La partie principale est maintainant terminée;
desormais, elle sera désignée sous le terme "chassi."
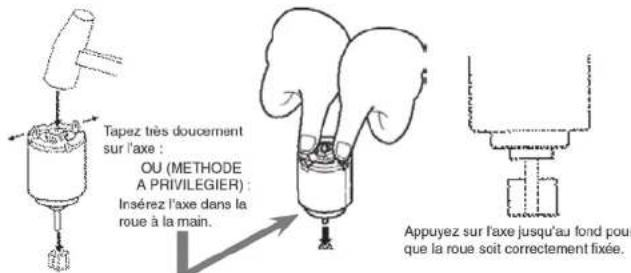
Montage du moteur
ll yous fault :
2 moteurs
2 petite roues dentées
2 supports pour moteur
2 vis auto-taraudeuses 2,3 x 5 mm
Montez les roues dentées des moteurs comme indiqué sur les dessins ci-dessous.
Fixez la roue dentée sur l'axe du moteur. Insérez (à la main de préférence) la roue dentée sur l'axe (voir dessin) ou tapes douchement sur l'axe du moteur avec un petit marteau en plastique.
Installez les deux moteurs dans les deux supports pour moteur, comme indiqué sur le dessin ci-dessus.
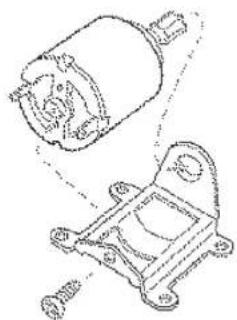
Fixez bien les moteurs à l'aide des vis auto-taraudées, 2.3 × 5 ~mm .
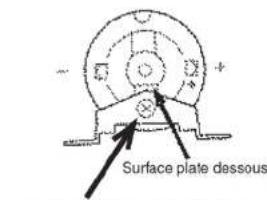
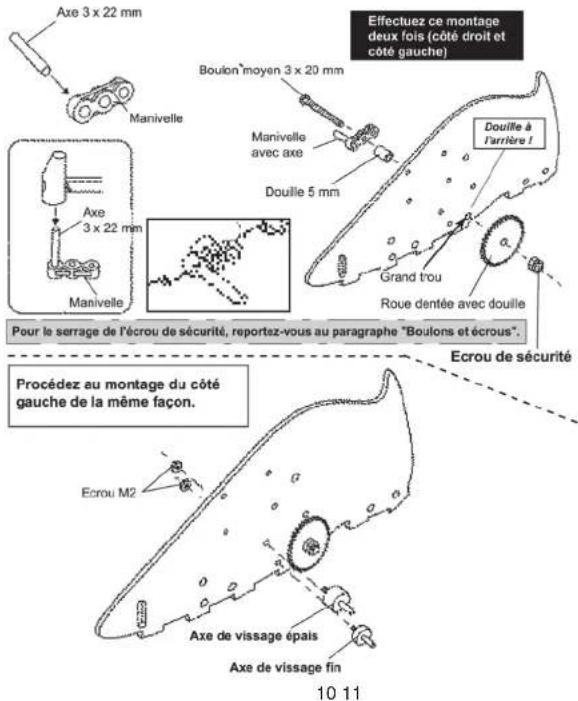
Montage des pieces laterales
Il yous faut :
2 pieces laterales
2 roues dentées avec douille
2 manivelles
2 axes 3 x 22 mm
2 douilles.
2 axes de vissage (epais)
2 axes de vissage (fins)
2 écrous de sécurité
6 boulons moyens M3 x 20
2écrous M2
ATTENION : L'écrou de sécurité doit être bien serré ! Utilissez une pince ou une clé à fourche adaptée.
Montage du module de transmission
Il vous faut :
2 pieces laterales (droite et gauche)
2 roues de transmission
2 roues plates
8 boulons M2
8 ecrous M2
8 rondelles elastiques M2
2 longs axes de vissage
2 anneaux en O M2
2 ecrous M2
Montez les roues dentées et le module de transmission comme indiqué sur le dessin ci-dessous. Montez les différentes pieces dans l'ordre des nombres.
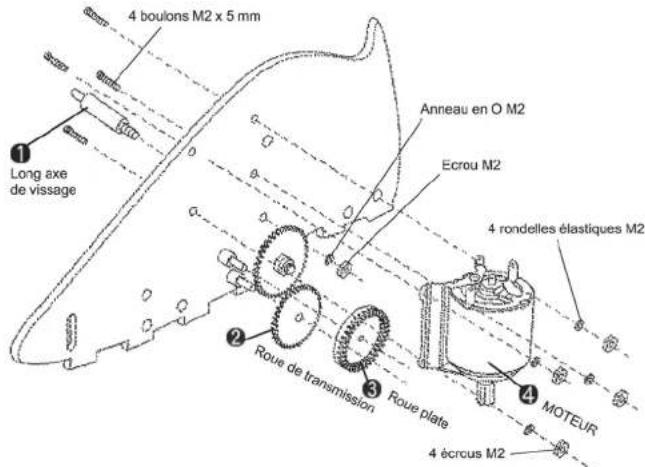
Procedez au montage du cote gauche de la même façon.