WTRRD1 - Robot jouet AREXX - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil WTRRD1 AREXX au format PDF.
| Type de produit | Kit de montage robot funambule (tightrope walking robot) |
| Marque | AREXX |
| Modèle | WTRRD1 |
| Hauteur | 140 mm |
| Longueur | 170 mm |
| Largeur | 85 mm |
| Alimentation | 3 V (2 piles LR03 1,5 V non fournies) |
| Consommation électrique | Environ 100 mA max. |
| Âge recommandé | Dès 8 ans (montage sous surveillance adulte pour moins de 14 ans) |
| Fonctions principales | Grimpe le long d'une corde comme un funambule |
| Type de moteur | Moteur à courant continu avec engrenages |
| Matériau | Plastique et composants métalliques |
| Outils inclus | Tournevis et clé plate double |
| Entretien et nettoyage | Essuyer avec un chiffon sec ; retirer les piles si inutilisé plus d'une semaine |
| Sécurité | Respecter la polarité des piles ; ne pas mouiller ; ne pas laisser les jeunes enfants sans surveillance lors du montage |
| Pièces détachées et réparabilité | Kit de montage avec toutes les pièces ; possibilité de démonter et remonter |
| Informations générales | Robot funambule AREXX WTRRD1, notice disponible en ligne |
FOIRE AUX QUESTIONS - WTRRD1 AREXX
Questions des utilisateurs sur WTRRD1 AREXX
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Robot jouet au format PDF gratuitement ! Retrouvez votre notice WTRRD1 - AREXX et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil WTRRD1 de la marque AREXX.
MODE D'EMPLOI WTRRD1 AREXX
Conrad sur INTERNET www.conrad.fr
NOTICE
Version 10/14
Robot funambule Arexx
Code : 00191623

Les appareils électriques et électroniques usagés (DEEE) doivent être traités individuellement et conformément aux lois en vigueur en matière de traitement, de récupération et de recyclage des appareils.
Suite à l'application de cette réglementation dans les Etats membres, les utilisateurs résidant au sein de l'Union européenne peuvent désormais ramener gratuitement leurs apparels électriques et électroniques usagés dans les centres de collecte prévus à cet effet.
En France, votre détaillant reprendra également gratuitement votre ancien produit si vous envisagez d'acheler un produit neuf similaire.
Si votre appareil électrique ou électronique usagé comporte des piles ou des accumulateurs, veuillez les retirer de l'appareil et les déposer dans un centre de collecte.

Le décret relatif aux batteries usagées impose au consommateur de déposer toutes les piles et tous les accumulateurs usés dans un centre de collecte adapté (ordonnance relative à la collecte et le traitement des piles usagées). Il est recommandé de ne pas les joter aux ordures ménagères !

Les piles ou accumulateurs contenant des substances nocives sont marqués par le symbole indiqué ci-contre signalant l'interdiction de les jeter aux ordures ménagères.
Les désignations pour le métal lourd sont les suivantes : Cd = cadmium, Hg = mercure, Pb = plomb. Vous pouvez déposer gratuitement vos piles ou accumulateurs usagés dans les centres de collecte de votre commune, dans nos succursales ou dans tous les points de vente de piles ou d'accumulateurs ! Vous respectez ainsi les ordonnances légales et contribuez à la protection de l'environnement !
Note de l'éditeur
Cette notice est une publication de la société Conrad, ZAC Englos les Géants Lieu-dit Rue du Hem, TSA 72001 SEQUEDIN, 59458 Lomme CEDEX/France.
Tous droits réservés, y compris la traduction. Toute reproduction, quel que soit le type (p.ex. photocopies, microfilms ou saisie dans des traitements de texte électronique) est soumise à une autorisation préalable écrite de l'éditeur.
Le contenu de ce mode d'emploi peut ne pas correspondre fidèlement aux intitulés exacts mentionnés dans les différents menus et paramètres de l'appareil.
Reproduction, même partielle, interdite.
Cette notice est conforme à l'état du produit au moment de l'impression.
Données techniques et conditionnement soumis à modifications sans avis préalable.
Pour tout renseignement, contactez notre service technique au 0892 897 777
© Copyright 2014 par Conrad. Imprimé en CEE. XXX/10-14/JV
Cette notice fait partie du produit. Elle contient des informations importantes concernant son utilisation. Tenez-en compte, même si vous transmettez le produit à un tiers.
Conservez cette notice pour tout report ultérieur !

5. Moteurs
Introduction
De nombreux objets du quotidien fonctionnent avec des moteurs : système de vibrations d'un téléphone portable par exemple, ventilateur, hotte d'aspiration, sèche-cheveux, aspirateur, etc.
5.1 Développement de la technologie des moteurs

C'est le physicien anglais Michael Faraday qui a mis au point au début du 19 ^ème siècle le premier prototype de moteur électrique. Ce moteur était basé sur l'induction électromagnétique. On suppose que Faraday a découvert le mouvement de rotation par hasard, après avoir raccordé un générateur (un appareil produisant du courant) à une tension. Cette théorie est vraisemblable, dans la mesure où le générateur a été inventé avant le moteur.
A peu près à la même époque, le physicien américain Joseph Henry a développé lui aussi un moteur électrique. Faraday a cependant publié ses découvertes avant Henry, et est donc considéré comme l'inventeur du moteur électrique.
5.2 Principe de fonctionnement d'un moteur électrique
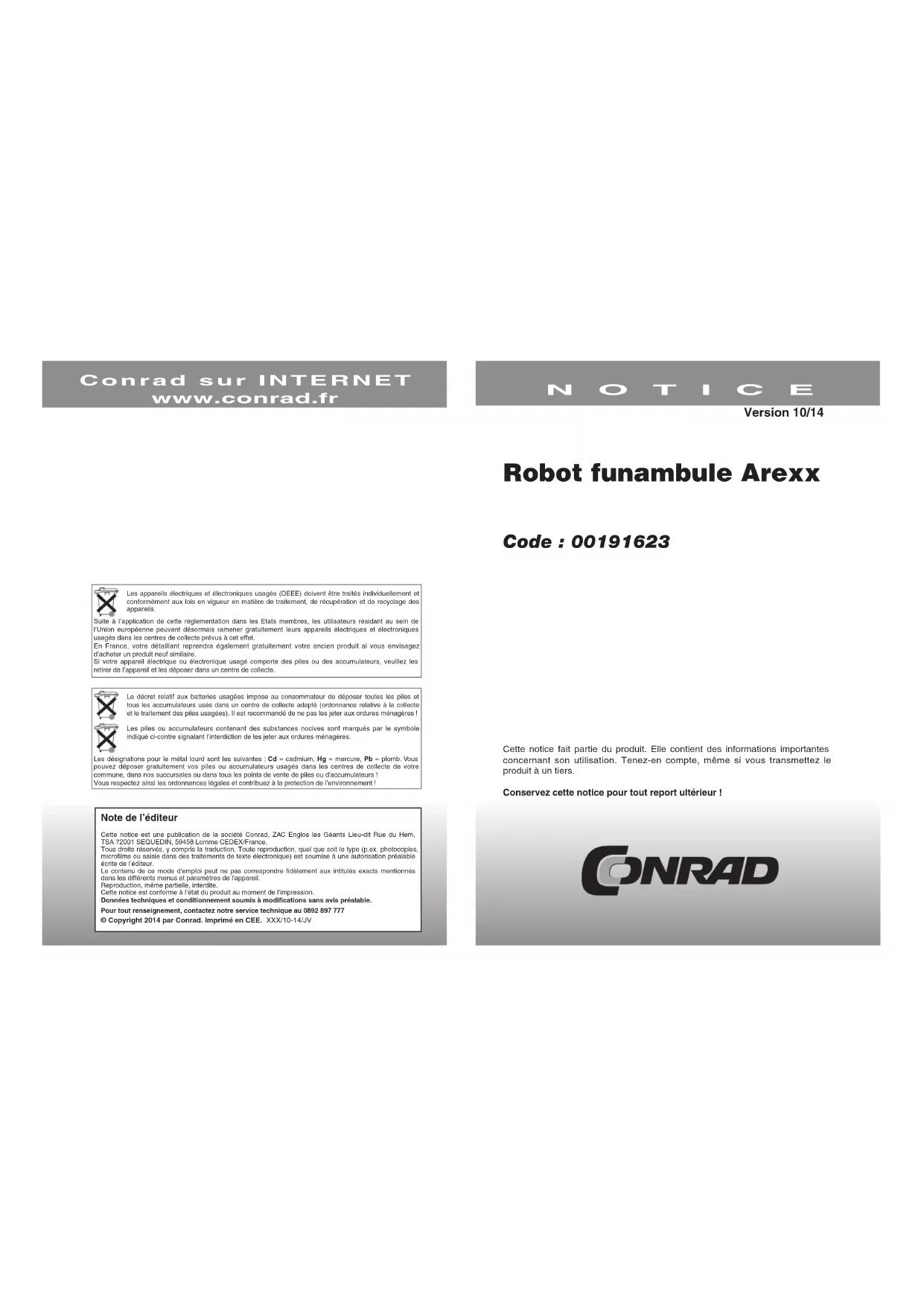
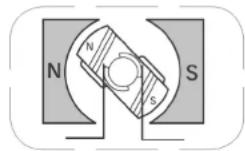
Pour tourner, les moteurs électriques utilisent deux types d'aimants : un aimant permanent et un aimant électrique qui n'est magnétique que lorsqu'une bobine conduit un courant.
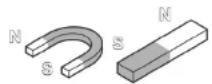
Les deux types d'aimants ont un pôle nord (N) et un pôle sud (S). Sur les aimants permanents, les pôles sont fixes, mais sur un aimant électrique, il est possible d'interverter les pôles en inversant le sens de circulation du courant dans la bobine. Les pôles opposés des aimants s'attirent alors que les pôles identiques se repoussent. Ces forces sont utilisées dans un moteur électrique.
Les moteurs à courant continu comme ceux du robot contiennent les éléments suivants : - un aimant permanent
- un axe rotatif avec un noyau de fer doux et des bobines.
Les deux ensembles forment l'aimant électrique dans le rotor. A l'extrémité de l'axe se trouve le collecteur qui commande le sens du courant. De plus, le moteur contient des charbons qui établissent le contact électrique avec le collecteur.
4. Mode de fonctionnement de la mécanique
La mécanique du robot se compose de deux parties essentielles. La première partie est constituée des engrenages qui transmettent la puissance de l'axe moteur à l'axe d'entraînement. Le deuxième élément transmet le mouvement de rotation de l'axe d'entraînement aux bras du robot.
Transmission de la puissance mécanique
Les engrenages, courroies, barres, manivelles, ondes et chaînes peuvent transmettre de l'énergie. Quatre roues dentées transmettent la puissance de rotation du moteur depuis l'axe du moteur jusqu'à l'axe d'entraînement du robot. Cette transmission est appelée transmission à engrenages. Les forces sont transmises aux dents des roues. Trois modifications ont lieu simultanément :
a. Inversion du sens de rotation
b. Modification de la vitesse de rotation
c. Renforcement de la force de rotation
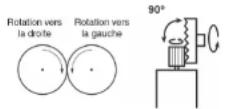
a. Inversion du sens de rotation
La première roue dentée tourne dans le sens des aiguilles d'une montre, et la deuxième dans l'autre sens. Une roue dentée inverse le sens de rotation.
b. Modification de la vitesse de rotation
La modification de la vitesse de rotation dépend du nombre de dents des roues. Prenons par exemple une roue à 10 dents et une à 40 dents. Alors que la première roue a effectué un tour complet, la deuxième n'a fait qu'un quart de tour. Pour que la deuxième roue effectue un tour complet, la première doit faire quatre tours. Ce fonctionnement fait baisser la vitesse de rotation.
Rapport d'entraînement = Vitesse de rotation du moteur
Vitesse de rotation de la dernière roue

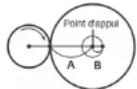
c. Transmission de la force de rotation
La transmission de la force de rotation est comparable au principe du levier. Imaginons une personne qui soulève une pierre à l'aide d'un levier.

La personne qui baisse le levier doit exercer une force plus importante si la distance A est plus courte et/ou la distance B plus longue.
Les engrenages du robot fonctionnent de la même manière. La force exercée sur les dents des engrenages augmente à l'intérieur des roues.
1. Description du produit
Le produit «Robot funambule» est un kit de montage ; le robot fildefériste doit d'abord être entièrement assemblé.
Ce robot est destiné à des débutants. Ce kit de construction fonctionnant avec des piles permet d'apprendre les bases de la mécanique et le déroulement séquentiel des mouvements du robot. Il convient aux enfants dès l'âge de 8 ans. Les outils utilisés sont simples, un tournevis et une clé plate double sont compris dans le kit.
Le montage des différents composants, l'assemblage et la compréhension des consignes contribuent au développement de la motricité fine, affinent la coordination oculomotrice et initient à la lecture d'un dessin technique. Une fois assemblé, le robot grimpe à la corde, comme un véritable funambule.
Caractéristiques techniques :
Tension d'alimentation : 3 V (2 piles LR03 de 1,5 V chacune, non fournies)
Consommation électrique : environ 100 mA max.
Hauteur : 140 mm
Longueur : 170 mm
Largeur : 85 mm

Attention
- Le retour du produit n'est plus possible une fois que le sachet en plastique contenant les composants et les éléments a été ouvert.
- Lisez attentivement la notice d'utilisation avant de monter le robot.
- Manipulez les outils avec précaution.
- Ne procédez pas au montage en présence de jeunes enfants : ils risqueraient de se blesser avec les outils ou de porter des composants à la bouche.
- Respectez la polarité des piles.
- Veillez à ce que les piles et le support restent secs. Si le robot est mouillé, enlevez les piles et essuyez-le le mieux possible.
- Enlevez les piles si le robot n'est pas utilisé pendant plus d'une semaine.
- Les enfants de moins de 14 ans doivent demander l'aide d'un adulte pour assembler le robot.
- Utilisez des piles neuves et ne mélangez pas les piles (usagées, neuves, rechargeables, etc.).
2. Informations générales sur le montage
Conseil : Lisez attentivement ce paragraphe avant de démarrer !
Afin d'éviter les erreurs de montage, respectez l'ordre des étapes décrites. Le robot fonctionnera parfaitement si vous suivez les étapes de montage dans l'ordre, en comparant le résultat avec la photo sur l'emballage.
Séparez les pièces au moment où vous en avez besoin uniquement. En effet, certaines pièces sont numérotées, mais le numéro ne figure pas sur la pièce elle-même. Toutes les pièces s'emboitent parfaitement, il n'est pas nécessaire de forcer. Travaillez calmement et lisez cette notice dans son intégralité avant de commencer le montage.
Petit marteau en plastique Ensemble de tournevis

Utilisez un tournevis d'une taille adaptée.
Cutter Pince coupante et pince plate


ATTENTION : Outil très tranchant ! Pinces pour composants miniatures (150 mm).
Découper ou détacher les éléments


Pour découper ou détacher les éléments, utilisez le cutter ou la pince coupante. Coupez ou détachez soigneusement, le plus près possible du bord.
ATTENTION : Ne découpez pas d'éléments dont vous n'avez pas besoin immédiatement.
Monter un axe

Soyez très prudent lors du montage d'un axe (axe de moteur par exemple). Essayez d'abord d'insérer l'axe à la main, puis utilisez un petit marteau en plastique. Tapez très doucement et intercalez une petite lamelle de bois entre le marteau et l'objet (elle servira de tampon), afin de ne rien endommager.
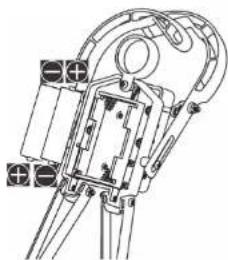
Etape 12 : Mise en place des piles
Insérez les piles dans le support, comme indiqué sur le dessin. La rotation du moteur dépend de la polarité des piles.
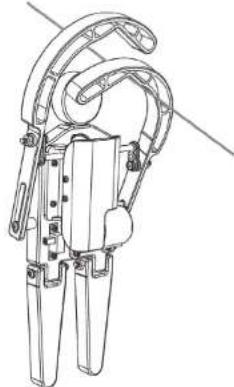
Dernière étape : Test de fonctionnement
Placez les bras du robot autour de la corde (voir dessin) et mettez l'interrupteur sur la position Marche.
Si le robot n'avance pas, vérifiez la polarité des piles.
Si le moteur ne toume pas, vérifiez :
- la charge des piles
- le câblage
- les engrenages.
La cause la plus vraisemblable est une erreur de montage des engrenages, ou des piles usagées.
Dans le pire des cas, il vous faudra démonter le robot et le remonter correctement.
Etape 9b : Montage de l'interrupteur

Il vous faut :
1 tronc (de l'étape 9a)
1 interrupteu
2 vis M2 x 5
Etape 10 : Montage final
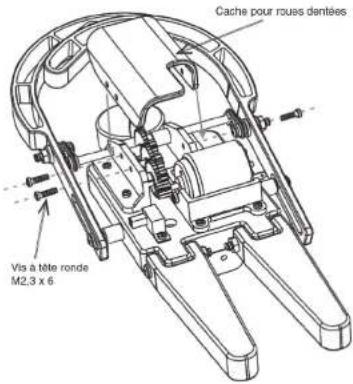
Il vous faut :
1 tronc (de l'étape 8)
1 cache pour roues dentées
3 vis à tête ronde M2,3 x 6
Montez le cache comme indiqué sur le dessin.
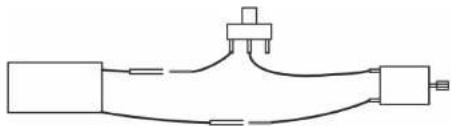
Etape 11 : Raccordement électrique
Effectuez le câblage comme indiqué sur le dessin.
Les vis avec un filetage auto-taraudeur fonctionnent comme des vis à bois, c'est-à-dire que la vis perce un trou en tournant et se fixe ainsi dans le matériau. C'est pourquoi les vis de ce type ont un filetage plus grand et une pointe plus affûtée que les vis ordinaires.
La pointe des vis auto-taraudeuses est évidée pour permettre le percement. Pour fixer ce type de vis de manière optimale, procédez comme suit :

1 Engagez la vis
2 Desserrez légèrement la vis
3 Resserrez fermement
Si les vis sont desserrées et resserrées trop fréquemment, le trou de vis s'élargit et la vis n'est plus fixée correctement.
Boulons et écrous

Dans un appareil soumis à des mouvements et à des vibrations, les boulons et les écrous doivent être fixés solidement.
Pour éviter les desserrages, il est possible d'ajouter un peu de vernis à ongles à la jonction entre la vis et l'écrou, après avoir serré la vis. Il sera ainsi toujours possible de desserrer facilement la vis en cas de besoin. Il est également possible d'utiliser du Locktite, mais la vis sera alors fixée très solidement et ne pourra plus être enlevée.
Les boulons se différencient par leur longueur et leur diamètre. Un écrou M3 x 20 par exemple a une longueur de 20 mm et un diamètre de 3 mm. Les écrous se différencient par leur diamètre : par exemple, un écrou M3 doit être utilisé avec un boulon de 3 mm.
Clé plate double

2.1 Liste des pièces du kit
Avant de procéder au montage, vérifiez que vous disposez de toutes les pièces suivantes :
| Boulon court | Boulon intermédiaire | Boulon long | Ecrou | Ecrou de sécurité | |
| M2 x 8,8 pièces |  |  | |||
| M3 x 14,2 pièces | M3 x 24,2 pièces | M2,8 pièces | M3,4 pièces | ||
| Vis auto-taraudeuses : | |||||
| Pette à têteronde | Grosse à têteronde | A tête fraisée | A tête ronde avec rondelle | ||
| M2 x 5,2 pièces |  |  |  | ||
| Rouedentéemoteur, | Pette roued'engrenage, | Roue d'engrenagemoyenne, | Grande roued'engrenage, | Roue dentée avec axe, | |
| 1 pièce,8 dents |  |  | [XZCS] |  | |
| 1 pièce26 ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ## | |||||
| Douille encuivre, | Douille encuivre, | Manivelle, Moteur avccable, | Corde, Fil présoudé | ||
| 3 pièces,∅ 4 - 4 mm |  |  |  |  | |
| ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### ### #### | |||||
| Supportmoteur, | S ### urp.... il, | ### | Cach | ### | dentées, ### interrupteur avecfil, |
| 1 pièce 1 pièce 1 pièce 1 pièce 1 pièce 1 pièce | |||||
Bras,  [ZY8D] [ZY8D]  2 pièces 2 piè 2 pièces 2 piè   1 piè 1 piè | |||||
Etape 8 : Montage de la tête
Vis auto-taraudeuse avec rondelle M3
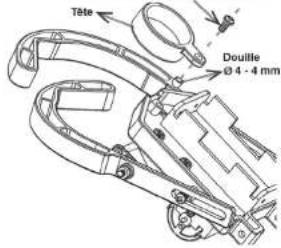
Il vous faut :
1 tronc (de l'étape 6)
1 tête
1 vis à tête ronde M3 x 10
1 douille ∅ 4 - 4 mm
Montez la tête comme indiqué sur le dessin.
Etape 9a : Montage des jambes
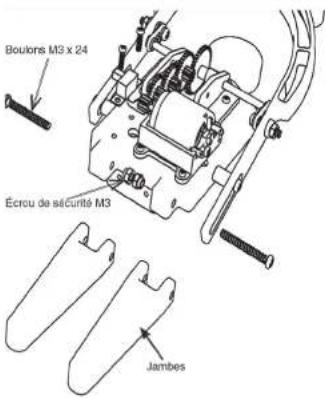
Il vous faut :
1 tronc (de l'étape 8)
2 jambes
2 boulons longs M3 x 24
2 écrous de sécurité M3
Montez les bras comme indiqué sur le dessin.
Montez les bras comme indiqué sur le dessin.
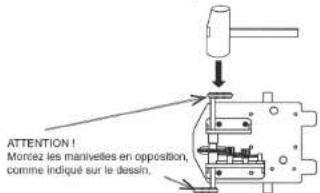
ATTENTION ! Montez les manivelles en opposition, comme indiqué sur le dessin.
Etape 7 : Montage du support de piles
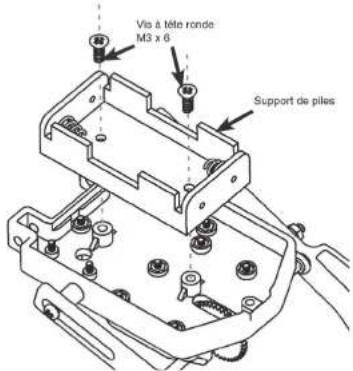
Il vous faut :
1 tronc (de l'étape 6)
1 support de piles
2 vis à tête ronde avec rondelle M3 x 6
Montez le support de piles comme indiqué sur le dessin.
3. Assemblage du robot funambule
Avant de procéder au montage, vérifiez que vous disposez de toutes les pièces.
Etape 1 : Montage du module d'engrenages
Il vous faut :
1 petite roue d'engrenage
1 roue d'engrenage moyenne
1 grande roue d'engrenage
1 pièce latérale pour roue dentée 1
1 pièce latérale pour roue dentée 2
1 roue dentée avec axe
Assemblez le module d'engrenages comme indiqué sur le dessin ci-dessous.
Pièce latérale
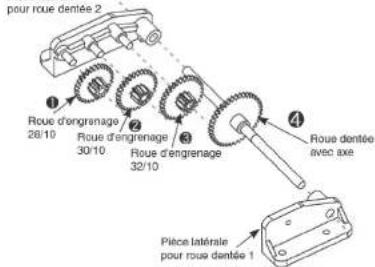
Montez les engrenages dans l'ordre des numéros.
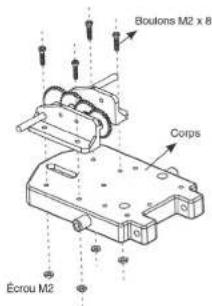
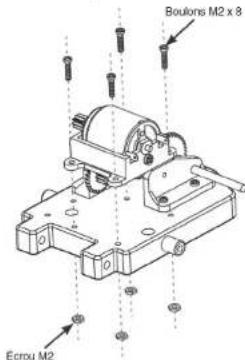
Etape 2 : Fixation du module d'engrenages
Il vous faut :
1 module d'engrenage (monté à l'étape 1)
1 corps
4 boulons M2 x 8
4 écrous M2
Montez le module d'engrenages comme indiqué sur le dessin.
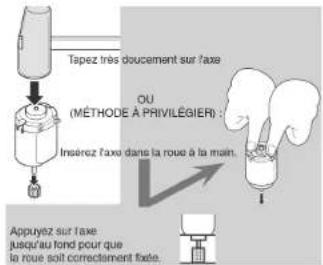
Etape 3 : Montage de l'engrenage moteur
Il vous faut :
1 engrenage moteur
1 moteur
Montez l'engrenage moteur comme indiqué sur les dessins ci-dessous.
Fixez la roue dentée sur l'axe du moteur. Insérez (à la main de préférence) la roue dentée sur l'axe (voir dessin) ou tapez doucement sur l'axe du moteur avec un petit marteau en plastique.
Etape 4 : Montage du moteur
Il vous faut :
1 moteur (de l'étape 3)
1 support de moteur
2 vis M2.3 x 6
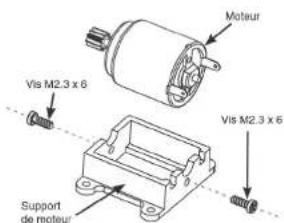
Insérez le moteur dans le support comme indiqué sur le dessin.
Etape 5 : Montage du support de moteur
Il vous faut
1 support de moteur (de l'étape 4)
Montez le support de moteur comme indiqué sur le dessin.
L'élément ainsi obtenu sera nommé à partir de maintenant «le tronc».
Etape 6 : Montage des bras
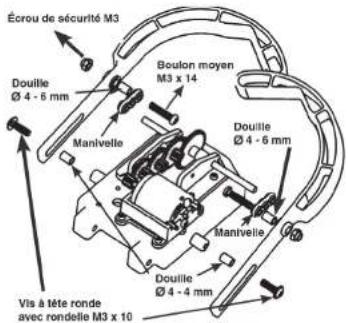
Il vous faut :
1 tronc (de l'étape 5)
2 bras
2 manivelles
2 douilles en cuivre ∅ 4 - 4 mm
2 douilles en cuivre ∅ 4 - 6 mm
2 ecrous moyens M3 x 14
2 écrous de sécurité M3
2 vis à tête ronde avec rondelle M3 x 10