
DFF3D - Sonar FURUNO - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil DFF3D FURUNO au format PDF.
| Type de produit | Sonar multifaisceau (Multi-beam sonar) |
| Marque | Furuno |
| Modèle | DFF-3D |
| Fréquence | 165 kHz |
| Puissance de sortie | 800 W |
| Profondeur minimale de détection | 3 m |
| Modes d'affichage | Multibea, Side scan, Coupe transversale, Historique 3D, Cartographie des fonds |
| Alimentation | DC 12-24 V, 1,4-0,7 A |
| Poids | 3,0 kg |
| Dimensions (approx.) | 290 x 200 x 80 mm |
| Température de fonctionnement (module) | -15 °C à +55 °C |
| Température de fonctionnement (transducteur) | -5 °C à +35 °C |
| Indice de protection | IP55 |
| Interface | LAN Ethernet 10/100Base-TX, entrée KP externe (option) |
| Angle de détection | 120° (60° bâbord et tribord) |
| Capteur de mouvement | Intégré dans le transducteur, compensation de roulis et tangage |
| Sécurité | Ne pas ouvrir ; haute tension interne ; utiliser fusible spécifié 5 A |
| Entretien | Nettoyer avec un chiffon doux sec ; vérifier câbles et connexions mensuellement |
| Pièces détachées | Fusible (FGBO-A 125V 5A), transducteurs (B54, SS54, TM54), kit KP, câbles LAN |
| Réparabilité | Réparation par technicien agréé uniquement ; ne pas démonter |
| Protection contre les interférences | Réduction des interférences avec autres sondeurs via réglages de fréquence et puissance |
FOIRE AUX QUESTIONS - DFF3D FURUNO
Questions des utilisateurs sur DFF3D FURUNO
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Sonar au format PDF gratuitement ! Retrouvez votre notice DFF3D - FURUNO et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil DFF3D de la marque FURUNO.
MODE D'EMPLOI DFF3D FURUNO
FURUNO
取扱説明書
マルチビームソナー
型式
DFF-3D
この取扱説明書には本機を安全に使用していただくために必要な注意事項、使用方法が記載されています。本機を使用する前に、この取扱説明書をよく読んで、十分に理解したうえで使用してください。また、この書類はいつでも参照できるところに大切に保管し、使用方法がわからなくなったときにお読みください。

古野電気株式会社
・機器の修理・使用方法等に関するお問い合わせは、お買い上げの販売店・代理店、最寄りの当社支店・営業所あてへお願いします。
発行
古野電気株式会社
〒662-8580
兵庫県西宮市芦原町9番52号
本書の無断複写複製(コピー)は特定の
場合を除き、当社の権利侵害になります。
Printed in Japan
・お問い合わせは
2016年 12月
A版発行
2024年9月26日
E3版発行
Pub. No. 0MJ-13520-E3
(YOTA) DFF-3D

0 0 0 1 9 1 4 2 8 1 4
重要なお知らせ
- マニュアル記載内容の一部または全部の転載、複写は著作権者である当社の許諾が必要です。無断転載することを固くお断りします。
● 製品の仕様ならびにマニュアルの内容は予告なく変更することがあります。 - 画面に表示される内容は、システムの設定や動作状態によって異なります。したがって、マニュアル内に掲載してあるイラストは画面の表示と異なる場合があります。
- お客様がマニュアルの内容に従わずに本機または本ソフトウェアを取り扱われたり、または当社および当社指定の者以外の第三者により改造・変更されることに起因して生じる障害等については、当社は責任を負いかねますのでご了承ください。
- お買い上げの機器を廃棄するときは、産業廃棄物として地方自治体の条例または規則に従って処理してください。詳しくは、各地方自治体に問い合わせてください。
- マニュアルに記載されている社名、製品名は、一般に各開発メーカーの登録商標または商標です。

安全にお使いいただくために
必ずお守りください
お使いになる人や他の人への危害、財産への損害を未然に防止するため、以下のことを必ずお守りください。表示内容を無視して誤った使い方をしたときに生じる危害や損害の程度を、本書では次の表示で区分し、説明していますので充分に気をつけてください。
警告
この表示は「取扱いを誤った場合、死亡または重傷を負う危険の可能性が想定される」内容です。
注意
この表示は「取扱いを誤った場合、中程度または軽傷の傷害、あるいは財産への損害を負う可能性が想定される」内容です。

「注意喚起」の内容

「禁止」の内容

「強制」の内容
(取扱い上の安全事項)
警告

カバーは絶対に外さないこと。
内部には高電圧が使用されています。高電圧に触れると感電する恐れがあります。故障の場合はお買い上げ先へご相談ください。

機器内部に金属や水、異物やが入ったときは、ただちに配電盤の電源スイッチを切ること。
火災、感電の原因になります。

発煙、発火のときは、速やかに配電盤の電源スイッチを切ること。
火災、感電の原因になります。必ず、お買い上げ先へ連絡してください。

分解・改造は絶対にしないこと。
火災、感電、ケガの原因になります。
警告

機器の上に液体の入った容器を置かないこと。
火災や感電の要因になります。

濡れた手で操作しないこと。
感電の恐れがあります。

異常を感じたときは、速やかに配電盤の電源スイッチを切ること。
使用中に機器が異常に熱くなったり、異常な音がするときは速やかに配電盤の電源スイッチを切り、お買い上げ先へ連絡してください。

ヒューズは規定のものを使用すること。
規定外のものを使った場合、重大な事故や火災を引き起こす原因になります。
(装備上の安全事項)
警告

技術員以外は、カバーを絶対に外さないこと。
内部には高電圧が使用されています。 高電圧に触れると感電する恐れがあります。

機器を装備する前に、必ず配電盤のスイッチを切っておくこと。
火災や感電の原因になります。

送受波器の装備位置に、浸水がないことを確認すること。
浸水して沈没する可能性があります。また、送受波器が振動で外れたり、脱落しないよう十分に注意して装備してください。機器の装備は、工事者が責任を負うことになります。

電源電圧は、機器の定格に合わせること。
電源定格は電源コネクタ上に指示してあります。この範囲を外れると、故障や火災の原因になります。
注意

送受波器ケーブルの取扱いは、以下の点に注意してください。
- 船内油(潤油、燃料油)に浸けないこと。
・船内作業によって破損する場所は避けること。
・ペンキを塗布しないこと。
ケーブルが腐食、破損すると故障の原因になります。
送受波器ケーブルの外被はクロロブレンゴム(または塩化ビニール)製であり、船舶用塗料等に含まれる有機溶剤(トルエン等)により、劣化する恐れがあります。

送受波器が空中にあるときは、電源を入れないでください。
故障の原因になります。

通電中は、動揺センサーのコネクタを抜き差ししないでください。
故障の原因になります。

次のコンパス安全距離を確保してください。 コンパス安全距離を確保しないと、安全な操船ができない場合があります。
| 標準コンパス | 操舵コンパス | |
| DFF-3D | 1.25m | 0.80m |
目次
はじめに……vi
システム構成……vii
1章 装備....1-1
1.1 構成表.... 1-1
1.2 本体の取付け....1-2
1.3 送受波器の取付け....1-3
2章 結線....2-1
2.1 接地 2-1
2.2 送受波器ケーブル....2-2
2.3 外部 KP ケーブル 2-5
2.4 LAN ケーブル 2-10
3章 初期設定....3-1
3.1 DIP スイッチについて 3-1
3.2 動作の確認(LED 表示).... 3-3
3.3 NavNet TZtouch の初期設定....3-4
4章 表示画面 4-1
4.1 メニューの概要 4-1
4.1.1 送信と停止の切替え....4-1
4.1.2 背景色の設定....4-2
4.1.3 海底シフト範囲の設定 4-2
4.1.4 送信レートの設定....4-3
4.2 表示画面の概要 4-4
4.3 マルチ魚探....4-6
4.3.1 送信と停止の切替え....4-6
4.3.2 シングルビーム/トリプルビームの切替え....4-6
4.3.3 送信ビーム角度の設定 .... 4-6
4.3.4 送信ビーム幅の設定....4-7
4.3.5 画像送り速度の変更....4-7
4.3.6 深度 / 周波数ボックスの表示 / 非表示....4-7
4.3.7 ポイント、イベントマークの登録、ポイント航行 4-7
4.4 サイドスキャン 4-9
4.4.1 送信と停止の切替え....4-9
4.4.2 エコー色の変更 4-9
4.4.3 深度 / 周波数ボックスの表示 / 非表示 4-9
4.4.4 ポイント、イベントマークの登録、ポイント航行 4-10
4.5 断面 4-11
4.5.1 送信と停止の切替え....4-11
4.5.2 グリッドの表示 / 非表示.....4-11
4.5.3 拡大表示 4-11
4.5.4 エコースムージング(距離)....4-12
4.5.5 エコースムージング(時間)....4-12
4.5.6 音速の補正 4-13
4.5.7 深度 / 周波数ボックスの表示 / 非表示.... 4-13
4.5.8 ポイント、イベントマークの登録 4-14
4.6 3D履歷....4-14
4.6.1 送信と停止の切替え....4-15
4.6.2 視点位置の移動、拡大 / 縮小 4-15
4.6.3 魚群情報の表示 4-15
4.6.4 履歴送りの停止 4-15
4.6.5 魚群検出レベル 4-16
4.6.6 海底エコー補正 4-16
4.6.7 ノイズフィルター 4-17
4.6.8 海底地形陰影表示 4-17
4.6.9 画像送り速度の変更....4-17
4.6.10 深度 / 色别表示 4-18
4.6.11 深度 / 周波数ボックスの表示 / 非表示.... 4-22
4.6.12 ポイント、イベントマークの登録、ポイント航行 4-23
4.7 海底マッピング 4-24
4.7.1 海底マッピング機能の設定 4-25
4.7.2 海底マッピング機能の使用方法....4-25
4.7.3 深度 / 色別表示の設定 4-26
4.7.4 深度 / 色別表示の変更・消去 4-27
4.7.5 海底マップの削除 4-28
4.7.6 海底マップの書出し / 読込み 4-29
5章 保守点検およびトラブルシューティング....5-1
5.1 普段の保守点検 5-1
5.2 ヒューズの交換 5-2
5.3 設定の初期化....5-2
追補 1 メニューツリー ......AP-1
追補 2 送受波器 B54/SS54 の取付け(参考).....AP-3
追補 3 送受波器 TM54 の取付け(参考).....AP-8
仕様 SP-1
パッキングリスト ...... A-1
外寸図 D-1
相互結線図 S-1
索引 IN-1
このたびは、当社製品をお買い求めいただき、誠にありがとうございます。当社は1948年の創業以来、数々の舶用電子機器を製造販売しており、性能、品質、信頼性については全世界のユーザーの方々から高い評価を受けています。本機は、厳しい品質管理のもとで設計・製造されていますので、性能・耐久性ともに安心してご使用いただけます。この取扱説明書をよくお読みいただき、本来の性能を充分に発揮させていただきますようお願い申し上げます。
特徵
DFF-3D は、海中や海底の映像を高精度で表示するマルチビームソナーです。本機を NavNet TZtouch/NavNet TZtouch2/NavNet TZtouch3 と接続することで、海中の状況についての情報を LAN 経由で提供します。本機の主な特徴は次のとおりです。
- 送信ビームは左右方向 120^ で探知し、高精度の海中映像を表示します。
- 動揺センサーを送受波器に内蔵し、動揺補正を行うことで安定した映像を提供します。
干渉の低減措置
他船から干渉軽減に関する申し入れがあった場合、①広帯域魚群探知機→②複数周波数を用いる魚群探知機→③単一周波数を用いる魚群探知機の順に、使用周波数の変更や送波音圧レベル軽減の措置を取ってください。なお本機は、③単一周波数に相当します。
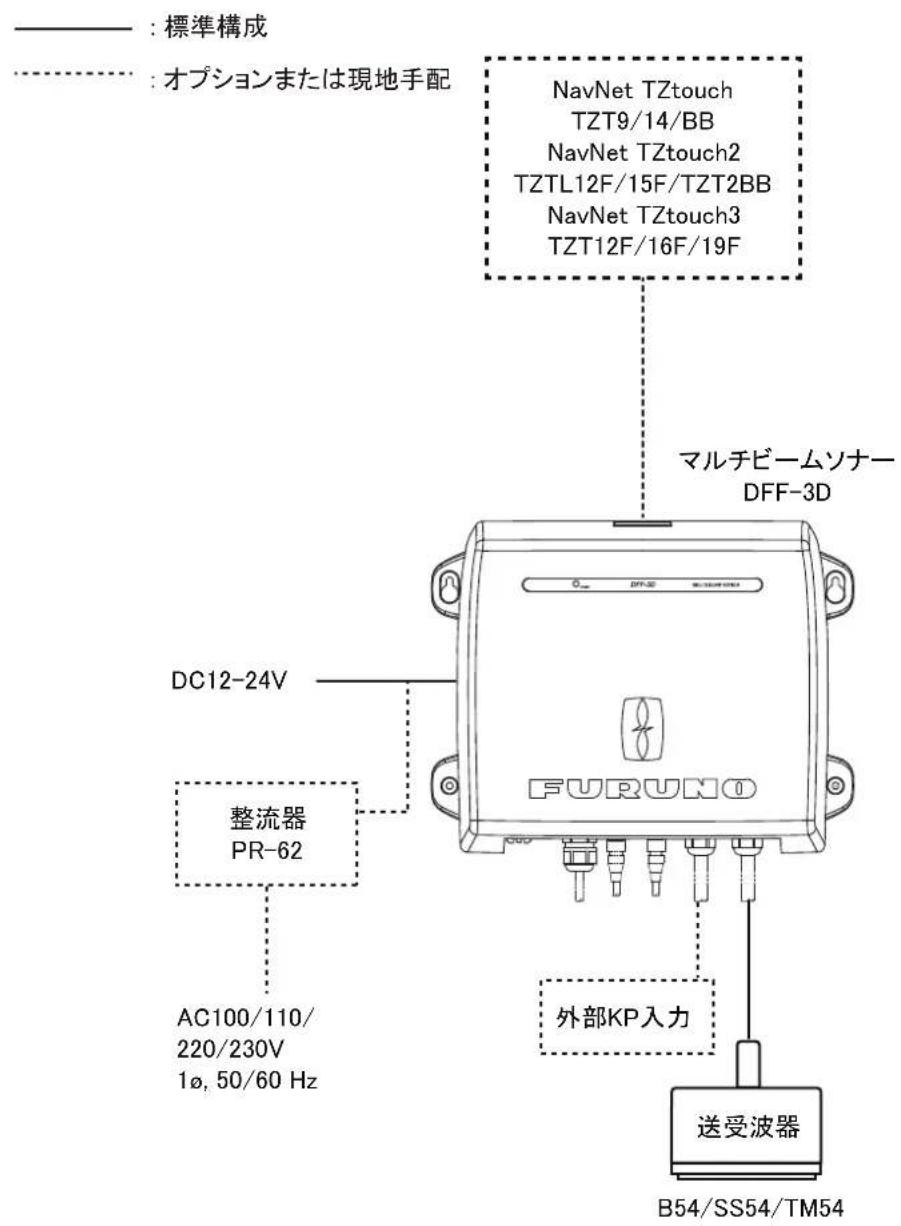
システム構成
このページは空白です。
1.1 構成表
標準構成
| 名称 型式 | コード番号 | 数量 備考 | ||
| マルチビームソナー | DFF-3D - 1 | |||
| 送受波器 | B54 - 1 | いずれかを選択B54:貫通型(砲金製)SS54:貫通型(ステンレス製)TM54:トランサム型 | ||
| SS54 - | ||||
| TM54 - | ||||
| 予備品 | SP02-05601 0 | 01-033-740 1 | ヒューズ | |
| 工事材料 | CP02-09400 | 000-029-992 1 | - 電源ケーブル (3.5 m)- LAN ケーブル (5 m)- タッピンネジ- 導電性テープ |
オプション
| 名称 | 型式 | コード番号 | 備考 |
| 外部KP用キット | OP02-86 001-205-780 | ||
| ケーブル組品 | MOD-Z072-020+ | 001-167-880-10 | 2m、HUB-101用 |
| MOD-Z072-100+ | 001-167-900-10 | 10m、HUB-101用 | |
| 整流器 | PR-62 | 000-013-484 | AC100V用 |
| 000-013-485 | AC110V用 | ||
| 000-013-486 | AC220V用 | ||
| 000-013-487 | AC230V用 | ||
接続確認済み送受波器
| 型式 | 備考 |
| CM54 | タンク装備型 |
| 165T-50/200-SS260 | 魚探送受波器との一体型 |
| 165T-50/200-TM260 | |
| 165T/265LH-PM488 | |
| 165T/265LH-PM488-12P | |
| 165T/275LHW | |
| 165T/275LHW-12P | |
| 165T-PM542LM | |
| 165T-PM542LHW |
1章 装備
1.2 本体の取付け
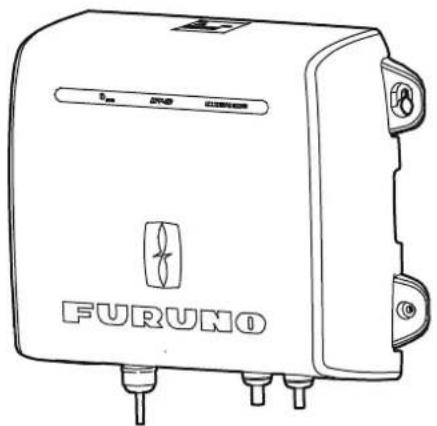
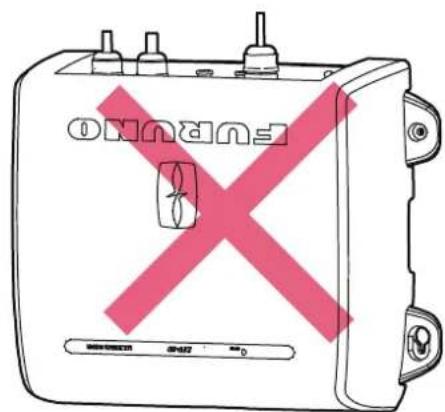
本機は、床上または壁掛けで装備します。次の条件を満たす場所を選んでください。
- 屋内に装備すること
- 機器の動作温度範囲内(-15~55℃)で装備、使用すること
- 温度と湿度が安定している場所
- 煙突や通風孔から離れている場所
- 風通しの良い場所
- 振動の少ない場所
- 磁気を発生するモーターや電源から離れた場所
- 保守点検および、サービスの行いやすい場所
- 卷頭の「コンパス安全距離」を満たす場所
- 壁掛け装備の場合は、コネクタ面を下側に向けて取り付けること
本機を 4 本のトラスタッピンネジ(5x20、工材支給)で固定します。詳細は、巻末の外寸図を参照してください。
1.3 送受波器の取付け
船底貫通取付け(スルーハル)
送受波器の取付け位置は、本機の性能に直接影響する極めて重要なポイントです。 下記の事項について十分検討し、取付け位置を決めてください。
- 水流、気泡による影響の少ない場所
- エンジンノイズによる影響を受けない場所
- 送受波器の船内取付は不可
- FRP での巻込み装備は不可(温度上昇により、送受波器が破損する恐れがあります。)
- 船底勾配角が 24° 以下の場所
下図は、Airmar 社によって作成されたフェアリング付き送受波器の図面です。フェアリング上にある矢印マークと三角形のくぼみの指す方向が、船首側を示しています。
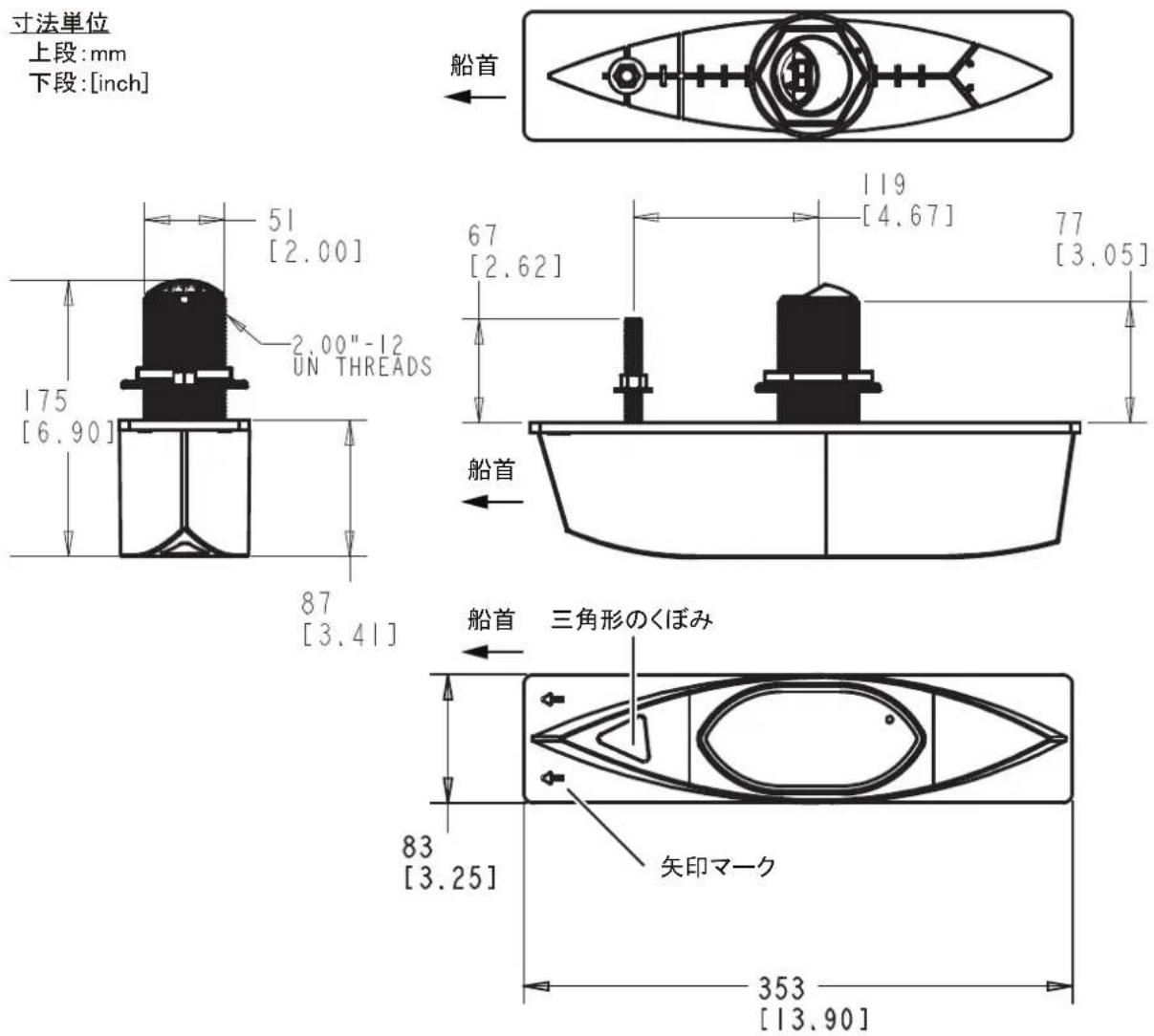
1章 装備
下図は、Airmar 社によって作成されたフェアリング無しの送受波器図面です。
寸法单位
上段: mm
下段:[inch]
![Ø 80 [3.13]](/content/2026/03/563878/images/b6def4c9c1db3a9e4523b471d4e5c7c43412914f758ded1fd9c7a678f30dda21.jpg)
![Ø51 [2.00] 2"-12 THREADS 175 [6.90] 37 [1.46]](/content/2026/03/563878/images/e1e53c28db661aba3576d3d77426d4c08bde3b8da93b55f84d28d9772e8a7fc1.jpg)
![142 [5.60] 67 [2.65]](/content/2026/03/563878/images/4942e65282b8c43b049675b55d1542faf43d82e6831f89edf271779835f70530.jpg)
トランサム型送受波器の船尾取付け
船内機付きの船では送受波器がスクリューの後方に位置し、気泡の影響を受けるのでこの方法は使えません。下記の事項について十分検討し、取付け位置を決めてください。AP-8 ページに記載の内容を必ず読んでください。
- スクリューからできる限り離れた位置
- スクリューが送受波器のビーム範囲 120° 内に入らない位置
上記が満たされない場合、スクリューによる雑音エコーが画面上に表示される可能性があります。
下図は、Airmar 社によって作成された送受波器の図面です。
寸法单位
上段: mm
下段:[inch]
![137 [5.40] AIRMAR® 108 [4.26]](/content/2026/03/563878/images/759526df92e046ea5dfe28db47488a53b6c2e6eedfc7a5e4478b0f460cf3dc74.jpg)
![16 [6.32] 278 [10.94]](/content/2026/03/563878/images/cf58b646c74e5558b8c3f724d4492ad6207c2b9d38c17d79ecef11c681ee3c24.jpg)
1章 装備
このページは空白です。
2 章 結 線
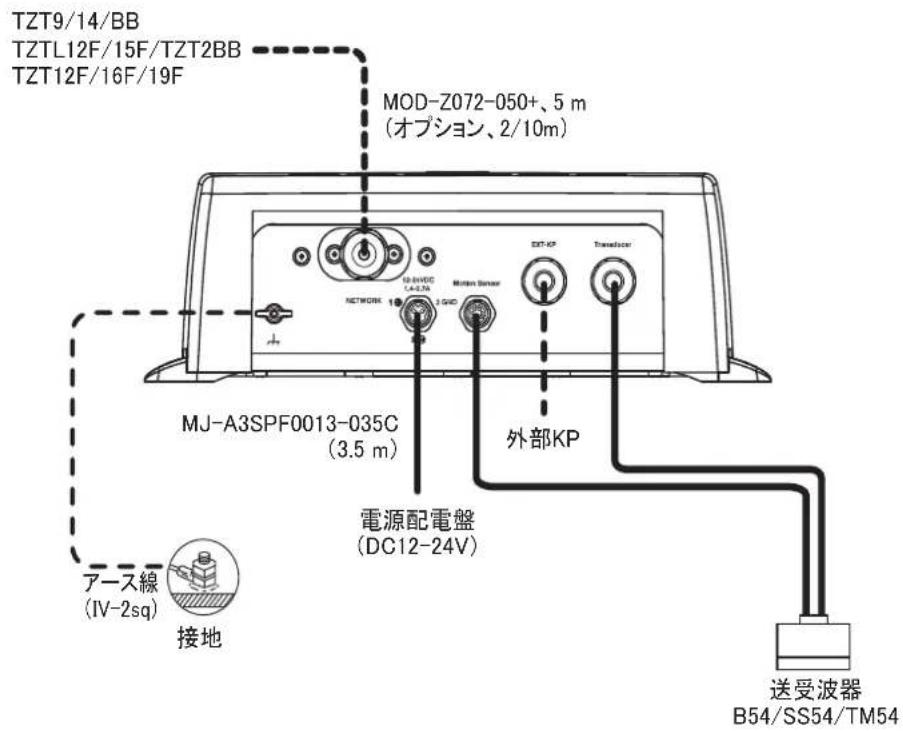
本機に NavNet TZtouch/NavNet TZtouch2/NavNet TZtouch3、送受波器、電源ケーブルを接続します。
2.1 接地
アース線(現地手配)は可能な限り、短い距離でアース母体に接続してください。アースが不十分だと、画面に不要な雑音が現れることがあります。FRP 船では、20cm×30cm 程度のアース板を船底外側に貼り付けて、アースを取るのが最適です。
2.2 送受波器ケーブル
送受波器ケーブルは、干渉を受けないように他の電気ケーブルから離してください。テレビや指示器の近くでケーブルを引き回すと、雑音を受けて良好な画面が表示されないことがあります。
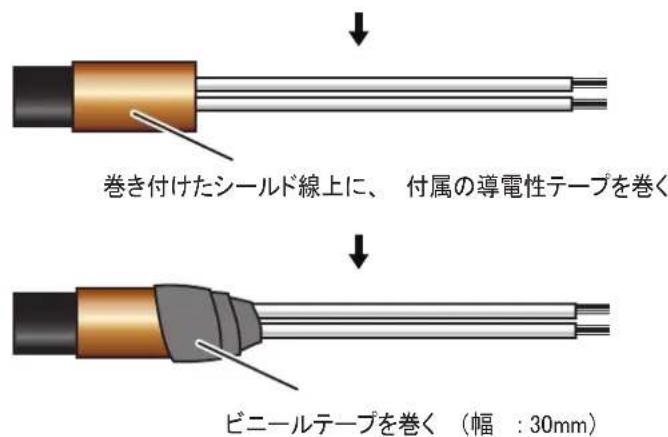
以下の手順で送受波器ケーブルの端末処理を行い、機器内部の WAGO コネクタに接続してください。
- 送受波器ケーブルの端末処理を行います。
注)ノイズを抑えるため、端末処理の長さは下図で示す数値から変えないでください。

-
本体外側のプラスチックカバーを外します。
3.4 本のネジを緩めて、内側のシャーシカバーを取り外します。 -
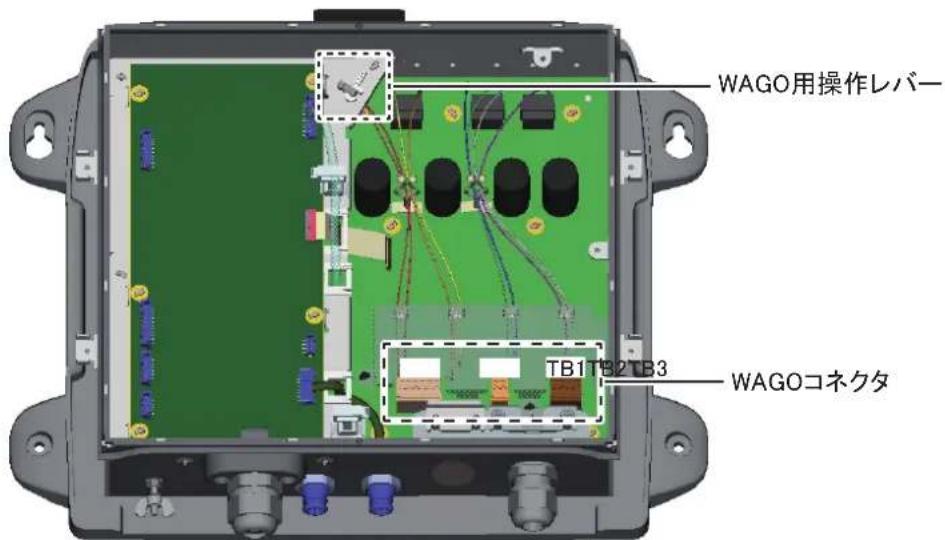
機器の内部から、送受波器用 WAGO コネクタ(TB1、TB2、TB3)を取り外します。
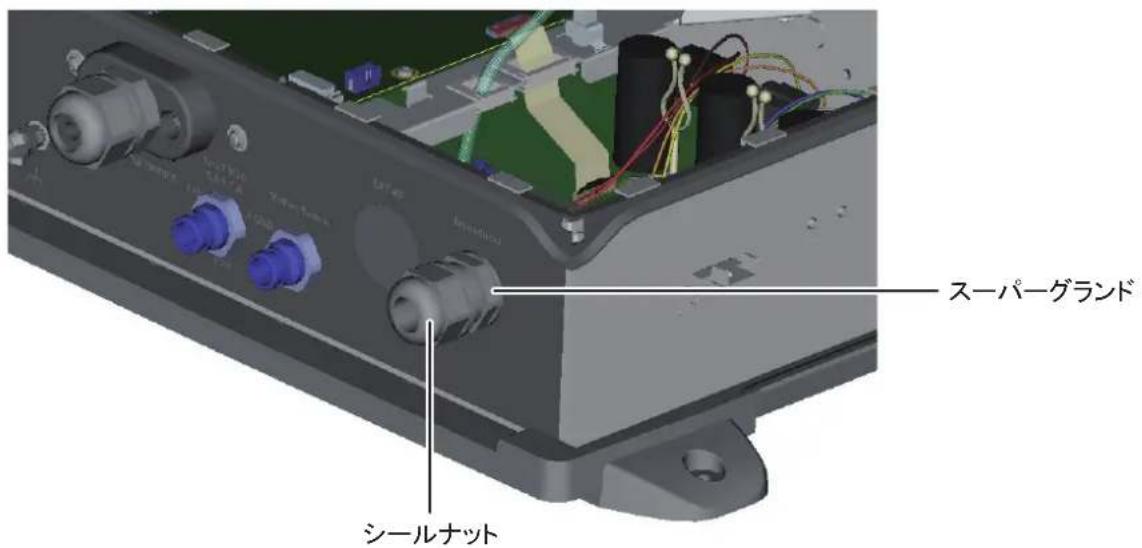
- 送受波器ケーブル用スーパーグランドのシールナットを手で緩めて、本体から取り外します。
6.2 本のネジを緩めて、機器の内部から送受波器ケーブル用の押さえ板を外します。

natural_image
Interior view of an electronic device casing showing internal components and wiring (no visible text or symbols)この位置にあるネジを緩めて、押え板を取り外します。
-
送受波器ケーブルの先端を手順 5 で外したシールナットに通し、続いてスーパーグランドから機器本体に挿入します。
-
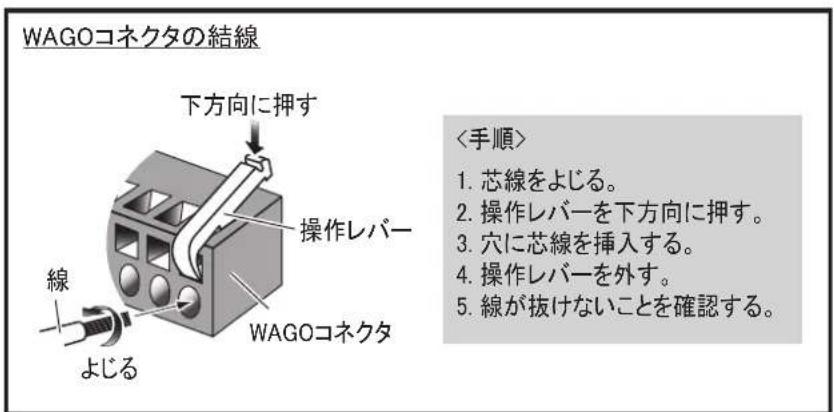
巻末の相互結線図を参照して、下図の要領で WAGO コネクタに送受波器ケーブルを接続します。
操作レバーは、機器内部のシャーシ上に付いています(手順 4 の図を参照)。
-
機器の内部で、WAGO コネクタ(TB1、TB2、TB3)を接続します。
-
手順 6 で外した押さえ板を元の位置に取り付けて、送受波器ケーブルを固定します。
送受波器ケーブルの導電性テープ部分が、押さえ板に固定されるようにしてください。
押さえ板が動かないように指で固定しながら、ネジを締めます。

- スーパーグランド本体に、シールナットをしっかりと締め付けます。
スーパーグランドにある 2つのナットの間が、2mm 程度(締付けトルク参考値:1.8~2.0N・m)になるまで、シールナットを締め付けてください。
- 本体にシャーシカバー、プラスチックカバーを取り付けます。

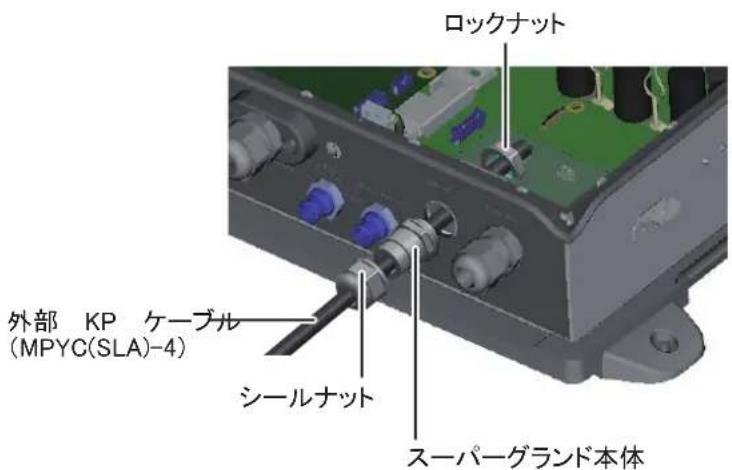
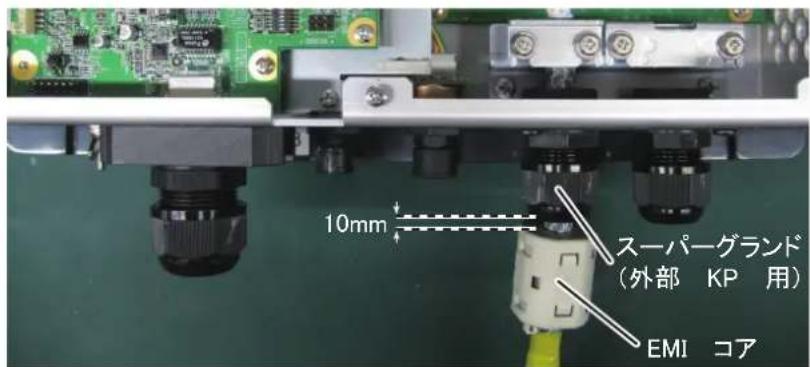
2.3 外部 KP ケーブル
外部機器から KP 信号を入力する場合は、次の「外部 KP 用キット」(オプション)、および MPYC(SLA)-4 ケーブル(現地手配)が必要です。
型式:OP02-86、コード番号:001-205-780
| 名称 型式 コード番号 数量 | 備考 | |||
| アプセットセムスネジ B | M4x20 000-163-7 | 56-10 2 | ||
| スーパーグランド | MGB20M-12B | 000-177-248-10 | 1 | |
| PH コネクタ | 02-1097 (4P) | 001-206-000 | 1 | |
| ケーブル押さえ板 | 02-167-1528 | 100-379-090-10 | 1 | |
| 防滴パネル KP | 02-167-1529 | 100-379-100-10 | 1 | DFF-3D では使用しません。破棄してください。 |
| EMI コア | GRFC-10 | 000-177-010-10 | 1 | |
| 圧着接続子 | NCW-1.25 | 000-157-213-10 | 4 | |
注)当社の推奨ケーブルは MPYC(SLA)-4 ですが、海水が付着する配線環境の場合は、あじろがい装がビニールシースで被われた電線を使用して、錆の発生を防いでください。
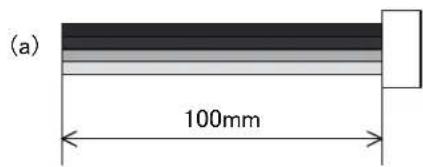
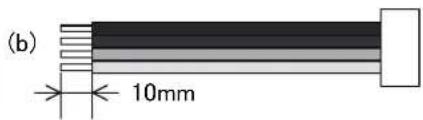
- 以下の要領で、端末処理を行います。
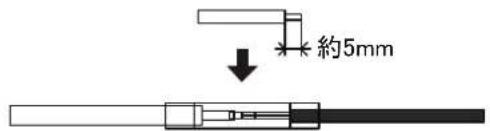
a) PH コネクタ 02-1097(オプション支給)のコネクタ長を 100mm に切り揃えます。
b) PH コネクタの先端から 10mm 分のビニールシースをむきます。
c) 各導線を半分に折り曲げ、圧着接続子 NCW-1.25(オプション支給)を取り付けます。


2 章 結線
d) MPYC(SLA-4) ケーブル(造船所手配)のあじろがい装部分を 300mm はぎ取り、ビニールシースを 130mm むきます。
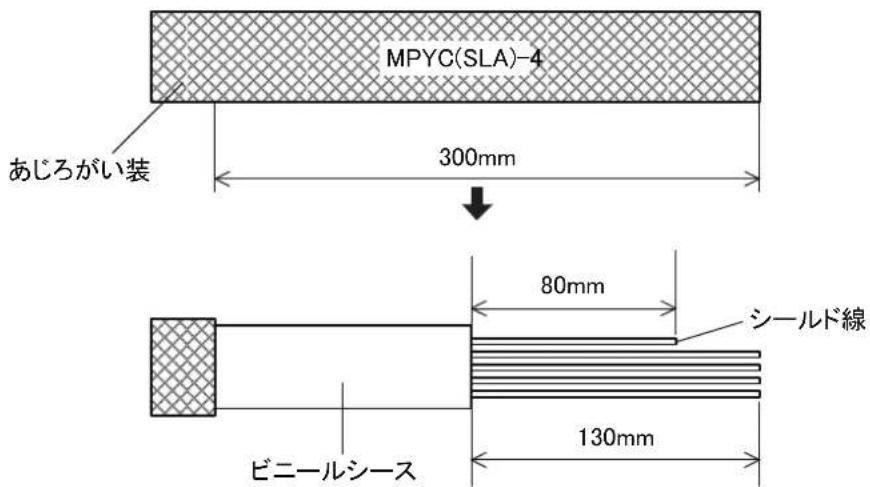
e) 各芯線のビニールシースを 5mm むいて、手順 c) の圧着接続子を取り付けます。
f) シールド線に圧着端子 FV1.25-4(LF) RED(標準支給)を取り付けます。
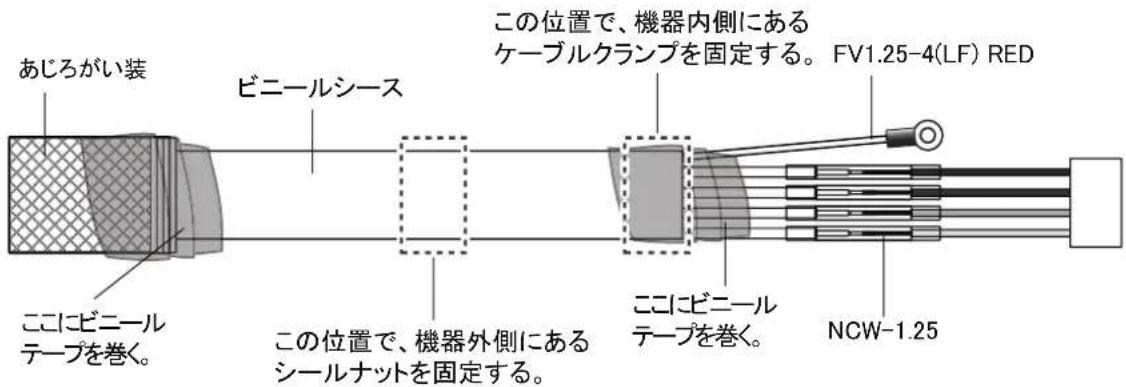
g) あじろがい装の先端にビニールテープを巻きます(下図参照)。本体に導入後、下図の位置でシールナット(外側)および、ケーブルクランプ(内側)で固定してください。
- 本体外側のプラスチックカバーを外します。
3.4 本のネジを緩めて、内側のシャーシカバーを取り外します。
- 外部 KP ケーブルの導入口に貼り付けてある保護シールを剥がします。

- オプション支給のスーパーグランドのシールナットおよびロックナットを一度分解して、下図のように外部 KP ケーブルを機器本体に導入します。
-
ロックナットを締め付けて、スーパーグランド本体を固定します。
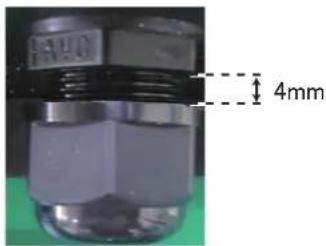
-
ナット間が 4mm(締付けトルク参考値:1.8~2.0N・m)になるように、シールナットを締め付けます。
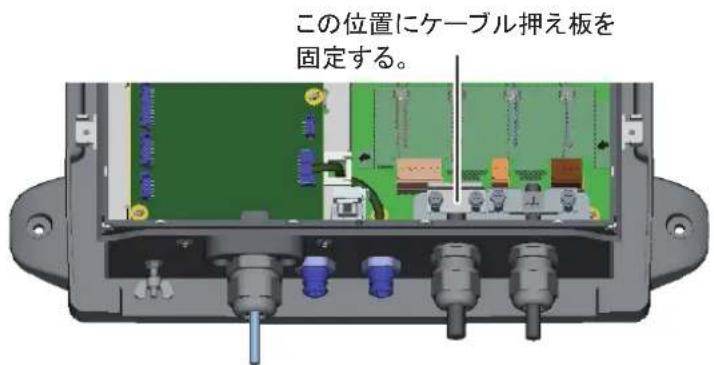
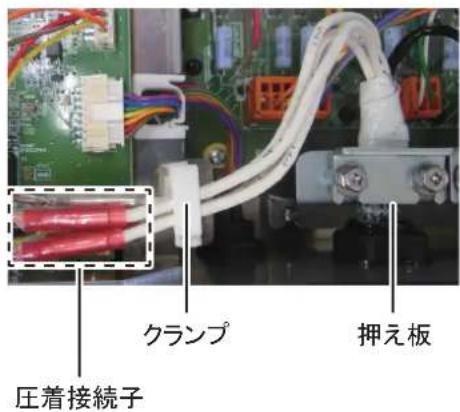
- オプション支給のケーブル押さえ板とネジを使って、外部 KP ケーブルをケーブルクランプ台に固定します。
外部 KP ケーブルのビニールシースが、ケーブルクランプ台に固定されるようにしてください。
- 機器内部で、外部 KP ケーブルを接続します。
先端の PH コネクタを下図のクランプに通して、DIGI 基板にある J9 に接続します。このとき、ケーブルが WAGO コネクタ(TB3)に接触しないよう注意してください。また、送受波器ケーブルを固定する押え板に、外部 KP ケーブルのシールド線を共締めしてください。
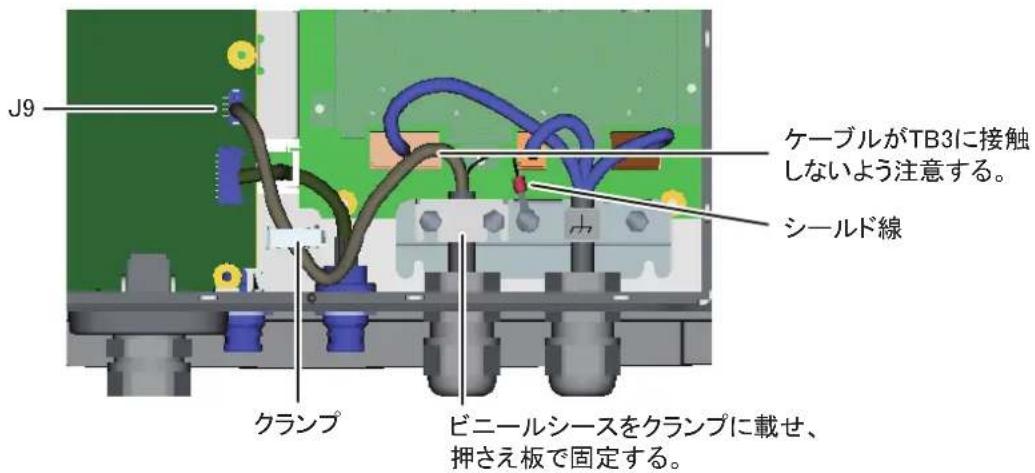
注 1)下図のように、クランプと圧着接続子が重ならないようにしてください。 注 2)押え板の向きが、下図のようであることを確認してください。
- スーパーグランドから 10mm の位置で、外部 KP ケーブルに EMI コア(GRFC-10、オプション支給)を取り付けます。
- 本体にシャーシカバー、プラスチックカバーを取り付けます。
2.4 LAN ケーブル
工事材料で支給される LAN ケーブル(MOD-Z072-050+)、またはオプションの MOD-Z072-020+、MOD-Z072-100+ ケーブルを接続するときは、以下の手順を行ってください。
-
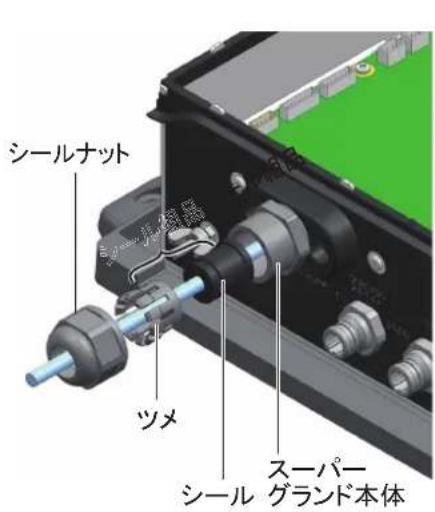
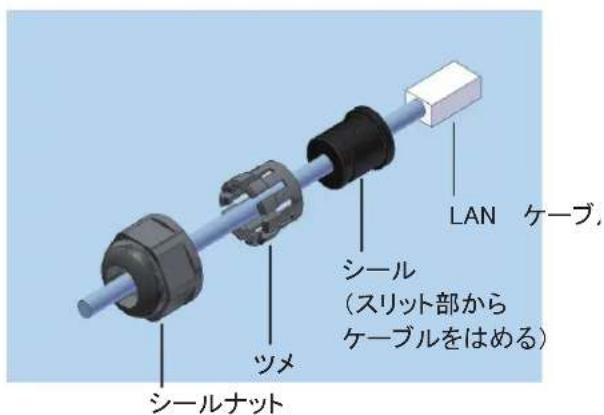
機器本体にある LAN ケーブル導入口のシールナットを緩めて外し、スーパーグランド本体からシール組品を取り出します。
-
シール組品をシールとツメの部分に分解します。

①ツメ / シール組品の先端(太い方)に両手の親指をあて、ツメとシールの間に人差し指の爪を入れる。
ケガをしないよう注意すること。

natural_image
Close-up of hands holding a small black object with an arrow pointing to it (no visible text or symbols)② 親指で、ツメからシールを押し出す。
- LAN ケーブルをシールナット、ツメ、シールの順に通して、最後に本体の LAN コネクタに接続します。
シールに通すときは向きに注意して、スリットにケーブルをはめこんでください。
- ツメとシールを組み立て、スーパーグランド本体にしっかりと差し込みます。
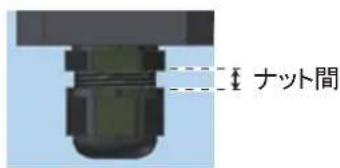
5. シールナットを締めて、LAN ケーブルを固定します。
スーパーグランドにある2つのナットの間が3mm程度(締付けトルク参照値:1.8~2.0N・m)になるまで、シールナットを締め付けてください。
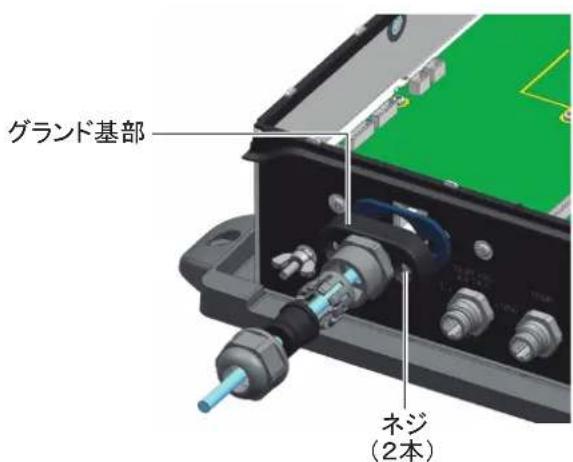
LAN ケーブルの抜き方
LAN ケーブルを機器本体から抜く場合は、まずスーパーグランドを分解したあと、2 本のネジを緩めてグランド基部を取り外してから抜いてください。抜け止めワッシャーが付いているので、ネジはグランド基部から外れません。
2章 結線
このページは空白です。
3章 初期設定
3.1 DIP スイッチについて
警告

技術者以外、カバーは絶対に外さないこと。
感電の原因になります。
本機には S2 および S3 の 2 種類の DIP スイッチが付いていますが、設定は変更せずに工場出荷時の状態(すべて OFF)で使用してください。

natural_image
3D rendering of an electronic device chassis with green circuit board and labeled ports (S3, S2), no readable text or symbols beyond labelsDIP スイッチ S2(工場出荷設定)
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| OFF | |||||||
DIP スイッチ S3(工場出荷設定)
| 1 | 2 | 3 | 4 |
| OFF | |||
(参考) DIP スイッチ S2 の設定と機能
| スイッチ番号 | 機能と説明 設定 | |
| 1 | IP アドレスの自動化 | OFF:固定 IP アドレス。2 番で設定した IP アドレスになる。ON:自動で割り当てられた IP アドレスになる。 |
| 2 | IP アドレスの設定 | 1 番を OFF にしている場合のみ有効です(IP アドレスは下表参照 / 現在は未使用)。 |
| 3 | 設定の初期化 (LAN 以外) | 5.3 節を参照する。 |
| 4 | 全設定の初期化 5.3 節を参照する。 | |
| 5~6 | 常に OFF の位置で使用する。 | |
| 7 | 使用しません。 | |
| 8 | 使用しません。 | |
| #2 | ホストネーム IP アドレス | |
| OFF ES0920 | 21 172.031.092.021 | |
| ON ES0920 | 22 172.031.092.022 | |
本機の装備完了後、接続している NavNet TZtouch/NavNet TZtouch2/NavNet TZtouch3側で送受波器の設定を行う必要があります。詳細は、3.3節を参照してください。
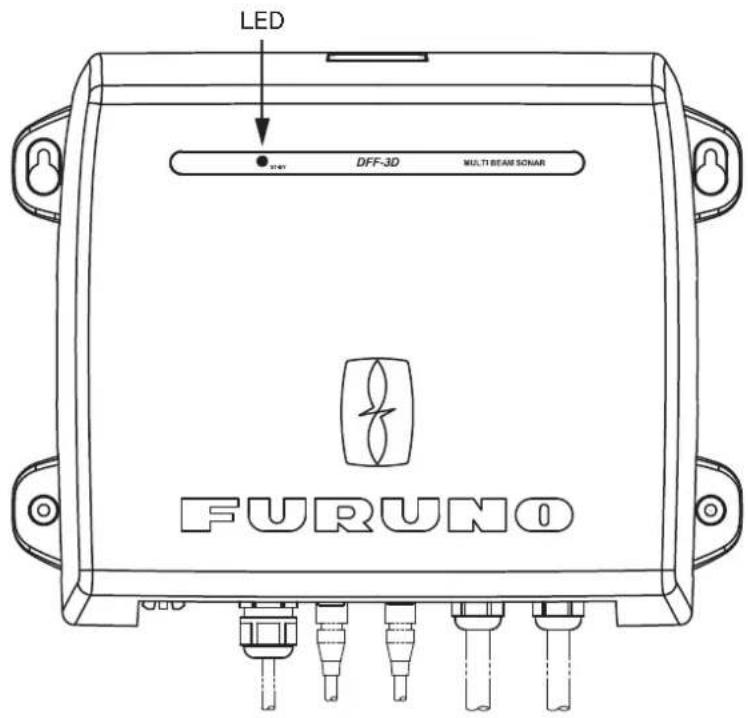
3.2 動作の確認(LED 表示)
NavNet TZtouch/NavNet TZtouch2/NavNet TZtouch3 に接続後、本機の電源オン・オフは本船の電源配電盤で行ってください。本機の動作状態は、カバー上にある LED ランプの点灯または点滅で分かります。
| LED の状況 意味 | |
| 点灯 スタンバイ状態 | (NavNet TZtouch/NavNet TZtouch2/NavNet TZtouch3 から LAN 経由で 10 分以上信号が来ない場合、消費電力を抑えるために自動的にスタンバイ状態になります。) |
| 2 秒周期で点滅 通常動作 | |
3.3 NavNet TZtouch の初期設定
NavNet TZtouch での初期設定メニューの表示方法
- ホームキーを押して(またはホームアイコンをタップして)、メニューアイコンバーを表示します。
- メニューアイコンバーから [メニュー]、[マルチビームソナー] の順に選びます。
- 下表を参照して、初期設定を行います。
NavNet TZtouch2/NavNet TZtouch3 での初期設定メニューの表示方法
- [ホーム ] アイコンをタップして、ホーム画面を表示します。
- [設定]、[マルチビームソナー]の順に選びます。
- 下表を参照して、初期設定を行います。
[初期設定] 関連
| メニュー項目 説明 選択項目 | ||
| [振動子吃水値]吃 | 水線から送受波器までの距離を入力して、海面からの水深数値を表示します。 | 0.0~99.9m |
| [塩水] | 本機を海水で使用する場合は[ON]を選び、淡水で使用する場合は[OFF]を選んでください。 | [OFF]、[ON] |
| [振動子設定] | 3-6ページの「[振動子設定]メニュー」を参照。 | |
| [送信出力自動] | [ON]に設定すると、海底のエコーが最適な状態で表示されるように送信出力が自動で調整されます。 | [OFF]、[ON] |
| [送信出力] | 送信出力を手動で設定します。近くで同じ周波数の魚群探知機を使用している場合、画面に干渉雑音が現れることがあります。他の使用者と互いに連絡しあって送信出力を調整すると、干渉雑音を抑えることができます。設定範囲は、0(送信オフ)~10(最大)です。 | 0~10 |
| [外部KP] | 同期パルスの発生元を選びます。通常は内部同期パルスを使用します。外部周期パルスを使用するときは、[ON]に設定してください。 | [ON]、[OFF] |
| [海底検出レベル] | 工場出荷時は「0」に設定されており、連続的な強いエコーレベルを海底と認識します。深度表示が現れなくなった場合、または値がふらつく場合には、海底検出レベルの値を下げてください。下げすぎると、底付魚を海底と判断してしまうことがありますので、十分に注意して設定してください。 | -40~+40 |
| [自動感度補正(マルチ魚探)] | 自動モード時、もう少し感度を下げたい場合や上げたい場合には、補正值を設定することができます。 | -5~+5 |
| [自動感度補正(サイドスキャン)] | ||
| [自動感度補正(断面)] | ||
| [STC(マルチ魚探)] | 表層付近の雑音(気泡、プランクトンなど)を取り除く機能を「STC」といいます。STCを効かせることによって、表層魚群の識別を容易にすることができます。[0]はSTC機能オフ、[10]で送受波器面から5mくらいまでの雑音を除去します。値を大きくしすぎると、表層の魚群エコーが消えるので注意してください。 | 0~10 |
| [STC(サイドスキャン)] | ||
| [TXパルス]レンジ | の設定に応じてパルス幅は自動的に変化します。パルス幅を短くすると分解能は上がり、長くすると探知距離が長くなります。サイドスキャン表示画面などで分解能を上げたい場合は、[短1]または[短2]に設定します。[短1]:探知分解能は上がるが、探知距離が[短2]に比べさらに短くなる。(パルス幅:標準の1/4)。[短2]:探知分解能は上がるが、探知距離が短くなる。(パルス幅:標準の1/2)。[標準]:一般的に多様な魚種探索に使用する。[長]:探知分解能は下がるが、探知距離が長くなる(パルス幅:標準の2倍)。レンジによっては、送信回数が標準に比べ1/2になる。 | [短1]、[短2]、[標準]、[長] |
| DFF-3Dモニタ 内蔵動揺センサーのピッチおよびロールと、B電圧の状態を表示します。 | ||
| [ハードウェア工場出荷設定] | [OK]を選ぶと、本機を工場出荷時の設定に戻ります。 | [OK]、[キャンセル] |
| [初期設定に戻す] | [OK]を選ぶと、メニュー内の項目を初期設定に戻ります。 | [OK]、[キャンセル] |
[振動子設定] メニュー
動揺センサーの設定については、3-7 ページの「動揺センサーの設定」を参照してください。
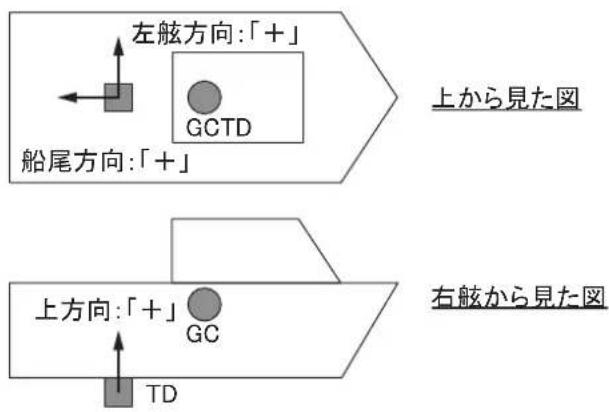
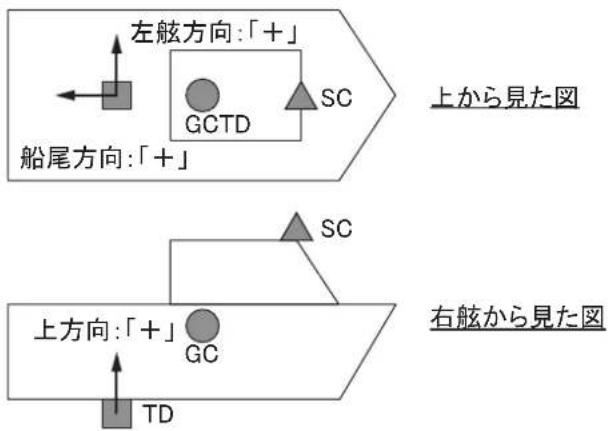
GC: 動摇中心、TD: 送受波器
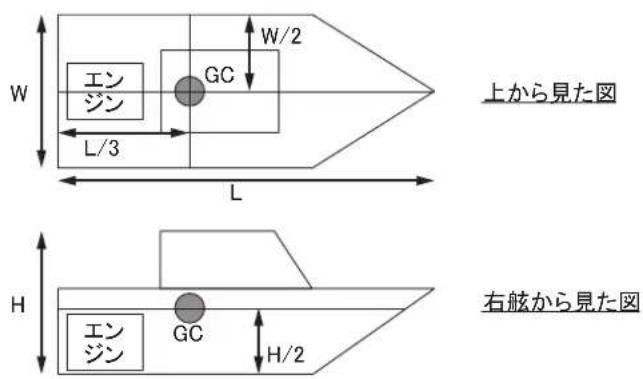
動揺中心の位置がわからない場合は、下図を参考にしてください。
GC: 動摇中心
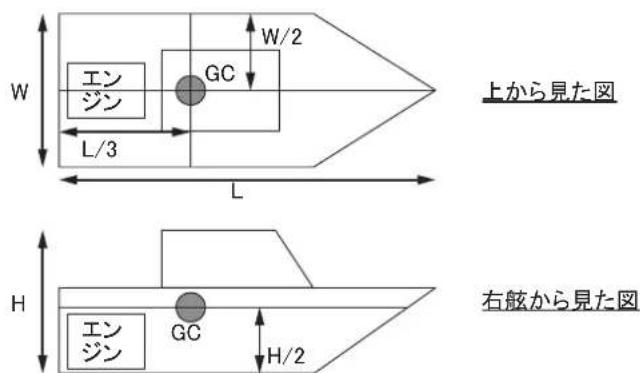
動揺中心(GC)の目安
- 船尾から船体長の3分の1の距離(全長9mの船の場合は、船尾から3m)
- 上下は船底から船体上端 (ルーフトップなど)までの長さの2分の1
- 左右方向は船体の中央
注)船体形状、エンジンの位置、およびその他機器の装備状況によって、動揺中心の位置が上図とは異なる可能性があります。
| メニュー項目 説明 選択項目 | ||
| [送受波器逆付補正] | 送受波器を誤って 180^ 逆方向に装備した場合、[ON]に設定します。 | [ON]、[OFF] |
| [送受波器位置Bow/Stern] | 送受波器位置から船の動揺中心までの、船首 /船尾方向の距離を入力します。船尾方向が+の数値です。 | -100.0~100.0m |
| [送受波器位置Bow/Stern] | 送受波器位置から船の動揺中心までの、船首 /船尾方向の距離を入力します。船尾方向が+の数値です。 | -100.0~100.0m |
| [送受波器位置Up/Down] | 送受波器位置から船の動揺中心までの、高さ方向の距離を入力します。上方向が+の数値です。 | -100.0~100.0m |
| [送受波器位置Port/Starboard] | 送受波器位置から船の動揺中心までの、左右方向の距離を入力します。左舷方向が+の数値です。 | -100.0~100.0m |
動揺センサーの設定
[マルチビームソナー] メニューの [振動子設定] を選ぶと、[振動子設定] メニューの下に [動揺センサー] のメニューがあります。
flowchart
graph TD
A["船尾方向:「+」"] --> B["左舷方向:「+」"]
B --> C["GCTD"]
B --> D["SC"]
E["上方向:「+」"] --> F["右舷方向:「+」"]
F --> G["GC"]
F --> H["TD"]
style A fill:#f9f,stroke:#333
style E fill:#f9f,stroke:#333
style B fill:#ccf,stroke:#333
style F fill:#ccf,stroke:#333
style C fill:#cfc,stroke:#333
style D fill:#cfc,stroke:#333
style G fill:#cfc,stroke:#333
style H fill:#cfc,stroke:#333
GC: 動揺中心、TD: 送受波器、SC: 動揺/GPSの一体型センサー
動揺中心の位置がわからない場合は、下図を参考にしてください。
GC: 動摇中心
動揺中心(GC)の目安
- 船尾から船体長の3分の1の距離(全長9mの船の場合は、船尾から3m)
- 上下は船底から船体上端 (ルーフトップなど)までの長さの2分の1
- 左右方向は船体の中央
注)船体形状、エンジンの位置、およびその他機器の装備状況によって、動揺中心の位置が上図とは異なる可能性があります。
| メニュー項目 説明 | 選択項目 | |
| [動揺センサー] | NavNet TZtouch2/NavNet TZtouch3 に接続している動揺センサーを選びます。内蔵の動揺センサーを使用する場合は、[Internal]を選んでください。 | [SC]、[Internal]、[OFF] |
| [動揺センサー位置Bow/Stern] | 送受波器から動揺センサーの位置までの、船首 / 船尾方向の距離を入力します。船尾方向が+の数値です。注) [動揺センサーヨース] で [SC] を選択した場合に、本メニューが表示されます。 | -100.0~100.0m |
| [動揺センサー位置Up/Down] | 送受波器から動揺センサーの位置までの、高さ方向の距離を入力します。上方向が+の数値です。注) [動揺センサーヨース] で [SC] を選択した場合に、本メニューが表示されます。 | -100.0~100.0m |
| [動揺センサー位置Port/Starboard] | 送受波器から動揺センサーの位置までの、左右方向の距離を入力します。左舷方向が+の数値です。注)[動揺センサーヨース]で[SC]を選択した場合に、本メニューが表示されます。 | -100.0~100.0m |
| [GPS アンテナ位置Bow/Stern] | 送受波器からのGPS アンテナまでの、船首/船尾方向の距離を入力します。船尾方向が+の数値です。 | -100.0~100.0m |
| [GPS アンテナ位置Up/Down] | 送受波器からのGPS アンテナまでの、高さ方向の距離を入力します。上方向が+の数値です。 | -100.0~100.0m |
| [GPS アンテナ位置Port/Starboard] | 送受波器からのGPS アンテナまでの、左右方向の距離を入力します。左舷方向が+の数値です。 | -100.0~100.0m |
| [ロールセンサー補正] | 動揺センサーのロールオフセット値を調整します。 | -45.0~45.0 |
| [ピッチセンサー補正] | 動揺センサーのピッチオフセット値を調整します。 | -45.0~45.0 |
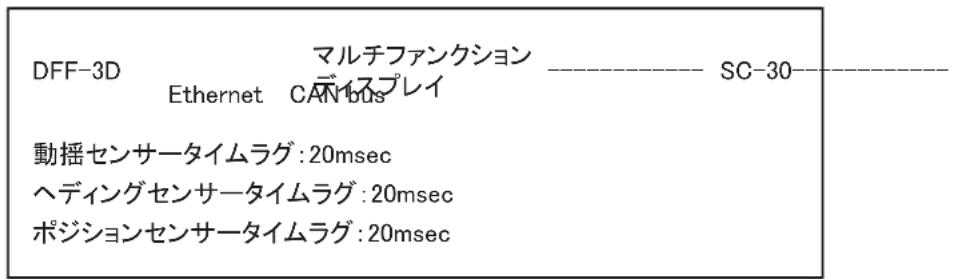
同期(タイムラグ)設定
下図の通り接続する場合は、工場出荷設定から変更する必要はありません。
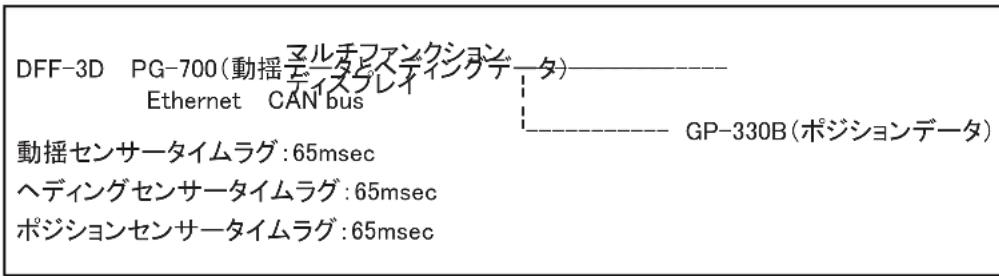
下図の通り接続する場合は、本設定を変更してください。
上記以外で接続する場合は、タイムラグを計算して設定してください。
タイムラグ = 送信遅延 + 伝搬遅延
送信遅延:動揺センサー、ヘディングセンサー、またはポジションセンサーでの演算および出力に要する遅延
SC-30 を接続する場合は、5msec で計算
PG-700 を接続する場合は、50msec で計算
GP-330B を接続する場合は、50msec で計算
伝搬時間:DFF-3D にデータが届くまでの中継器および経路上の遅延
CAN bus で NavNet TZtouch に直結する場合は、
15msec で計算
NavNet TZtouch に NMEA データ変換器
IF-NMEA2K2 を経由して接続する場合は、センサーと IF-NMEA2K2
問のボーレートにより次のように計算
・38400bps の場合は、40msec で計算
・4800bps の場合は、145msec で計算
例えば、送信遅延 30msec のセンサーを NavNet TZtouch に IF-NMEA2K2 を経由して 38400bps で接続する場合、タイムラグは次のように計算します。
タイムラグ 70msec = 送信遅延 30msec + 伝搬遅延 40msec
| メニュー項目 説明 選択項目 | |
| [動揺センサー同期設定(ms)] | 動揺センサーから得られる情報のタイムラグを設定します。注)[動揺センサーノース]で[SC]を選択した場合に、本メニューが表示されます。 |
| [ヘディングセンサー同期設定(ms)] | ヘディングセンサーから得られる情報のタイムラグを設定します。 |
| [ポジションセンサー同期設定(ms)] | ポジションセンサーから得られる情報のタイムラグを設定します。 |
| [初期設定に戻す] | [OK]を選ぶと、メニュー内の項目を初期設定に戻ります。 |
3 章 初期設定
このページは空白です。
4章 表示画面
本章は、NavNet TZtouch の画面や操作手順で、下記表示画面での操作について説明します。タッチ操作や電源のオン / オフなど、基本的な操作についてはそれぞれの機種の取扱説明書を参照してください。
表示画面には、マルチ魚探、サイドスキャン、断面、3D履歴があります。
4.1 メニューの概要
この章では、[マルチビームソナー] メニューについて説明します。各画面でのメニュー操作については、それぞれの節を参照してください。
| 画面 章番号 | |
| マルチ魚探 4.3節 | |
| サイドスキャン 4.4節 | |
| 断面 4.5節 | |
| 3D履歴 | 4.6節 |
| 海底マッピング 4.7節 |
注)この章は、NavNet TZtouch の各機種から [マルチビームソナー] メニューをすでに表示していることを前提に作成しています。NavNet TZtouch の各機種からは、下表の手順で表示します。本書ではこの操作を「[マルチビームソナー] メニューを開きます。」と記載します。
| NavNet TZtouch 型式 | メニュー表示手順 |
| TZT9、TZT14 | [メニュー]キーを押し、[マルチビームソナー]を選ぶ。 |
| TZTBB | [メニュー]アイコンをタップし、[マルチビームソナー]を選ぶ。 |
| TZTL12F、TZTL15F、TZT2BB | ホーム画面から[設定]→[マルチビームソナー]を選ぶ。 |
| TZT12F、TZT16F、TZT19F | ホーム画面から[設定]→[マルチビームソナー]を選ぶ。 |
4.1.1 送信と停止の切替え
[マルチビームソナー] メニューを開いて、[マルチビームソナー送信] の設定を、[ON](送信)または [OFF](停止)にします。
4.1.2 背景色の設定
昼間や夜間の状況に応じて、画面の背景色を変更することができます。
- [マルチビームソナー] メニューを開きます。
- [背景色(昼)] か [背景色(夜)] を選択します。
背景色 (昼)

背景色 (夜)
- 背景色を選択します。
- メニューを閉じます。
4.1.3 海底シフト範囲の設定
画面のどの位置に海底エコーを表示するかを設定します。この機能は、海底が画面内に表示されていない場合に有効です。
注)この機能を有効にするには、[オートレンジ]の設定を[ON]にしてください。
-
[マルチビームソナー] メニューを開きます。
-
[海底シフト範囲] のスライドバー(またはソフトウェアキーボード)で、値を設定します(設定範囲:15~85%)。
数値を小さくすると、画面の上の方に海底が表示されます。数値を大きくすると、画面の下の方に海底が表示されます。
- メニューを閉じます。
4.1.4 送信レートの設定
マルチビームソナーの送信レート(速度)を設定します。
- [マルチビームソナー] メニューを開きます。
2.[送信レート]をタップします。 - 下表を参考にして、[手動]、[自動]、または[最大]を選びます。
| 設定 特徴 | |
| [手動]表示 | レンジが小さいほど送信速度が速くなり、表示レンジが大きいほど送信速度が遅くなります。手順 4に進みます。 |
| [自動]船速が | 速いほど送信速度が速くなり、船速が遅いほど送信速度が遅くなります。手順 4に進みます。注) 船速が 20 kn以上の場合、送信レート(速度)は20に固定されます。 |
| [最大]船速が | 速いほど送信速度が速くなり、船速が遅いほど送信速度が遅くなります。手順 5に進みます。表示レンジ内に海底がある場合、送信速度は 20よりも速くなります。 |
- [手動] を選んだ場合は、[送信レート手動] のスライドバー(またはソフトウェアキーボード)で、送信レートを設定します(設定範囲:0~20)。
- メニューを閉じます。
注)送信速度の設定に応じて、マルチ魚探と 3D 履歴のエコー表示が変わります。
| 表示画面 | 送信レート : 0 | 送信レート : 10 | 送信レート : 20 |
| ルチ魚探 |  |  |  |
| 3D 履歴 |  |  |  |
4.2 表示画面の概要
マルチ魚探
ホーム画面上で、マルチ魚探画面アイコンをタップします。
マルチ魚探画面では、従来の魚探映像の表示形式で、海底および水中情報を表示します。時間の経過とともに画面の右端から左端に映像がスクロールします。
画面右端に現れるエコーが最新です。単体魚、魚群、海底などからのエコーが映像として表示されます。感度を適正に保っていれば、海底までの深度は常に表示されます。過去の映像も表示することができます。
クルージングまたはフィッシングのいずれかのモードに応じて、感度、クラッタ除去、TVGは自動的に調整されます。これらの機能は、手動で調整することもできます。
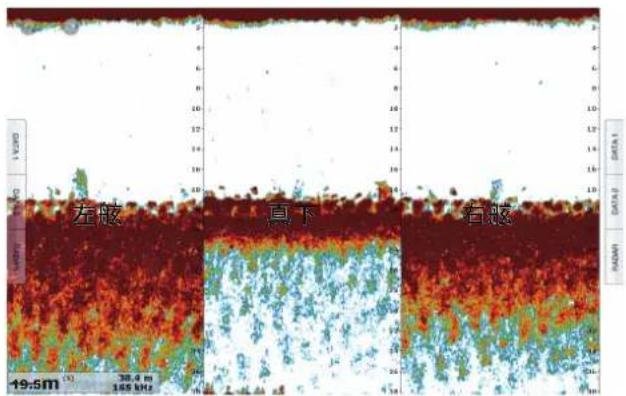
シングルビーム画面は、真下方向のビームで検出した情報を表示します。トリプルビーム画面は、左舷、真下、右舷方向の3方向のビームで検出した情報を表示します。
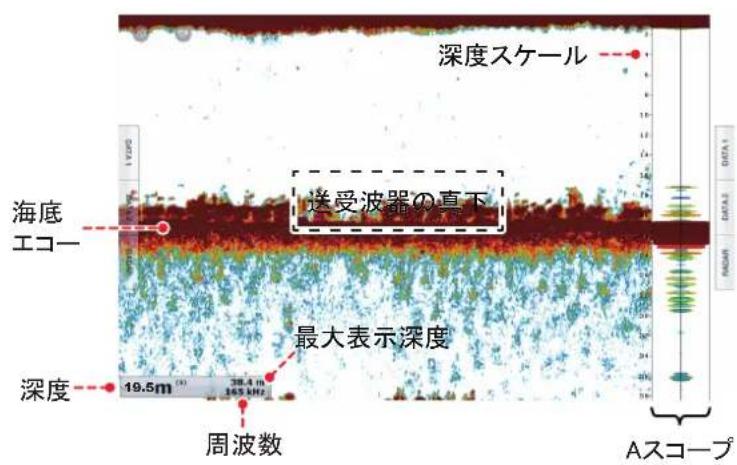
シングルビーム画面
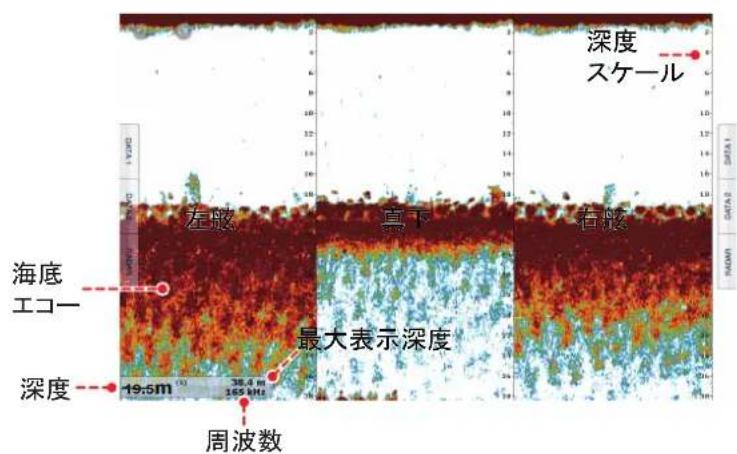
トリプルビーム画面
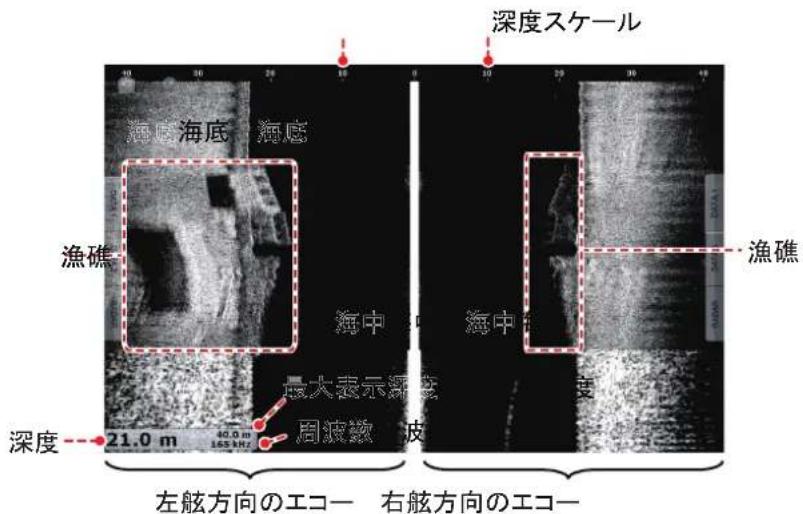
サイドスキャン
ホーム画面上で、サイドスキャン画面アイコンをタップします。
サイドスキャン画面では、左舷 / 右舷方向から受信したエコーを表示することができます。
サイドスキャン映像は船の中央から始まり、左舷と右舷に向かって描かれます。画面の上部に最新のエコー、画面の下部に最も古いエコーが表示されます。
サイドスキャンの映像は、他の表示モードとは異なり、物標(漁礁など)の形をはっきり表示することができます。
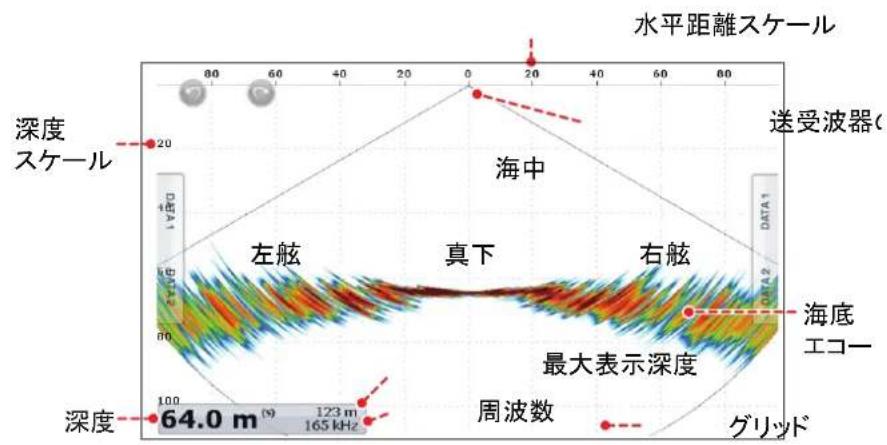
断面
ホーム画面上で、断面画面アイコンをタップします。
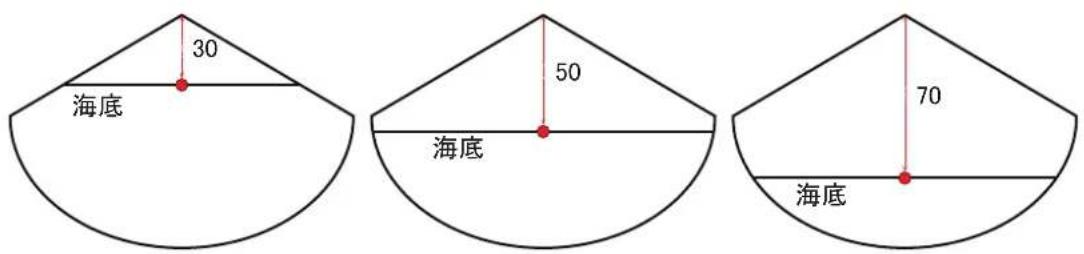
断面画面では、海中や海底の映像が表示されます。
本機は、120°(自船真下から左舷方向に 60^ と右舷方向に 60^ の
範囲をビームで検出し、高精度の海中映像を表示します。

natural_image
Diagram of a spray gun spraying liquid onto a curved surface with orange particles (no text or symbols)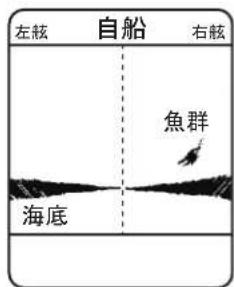
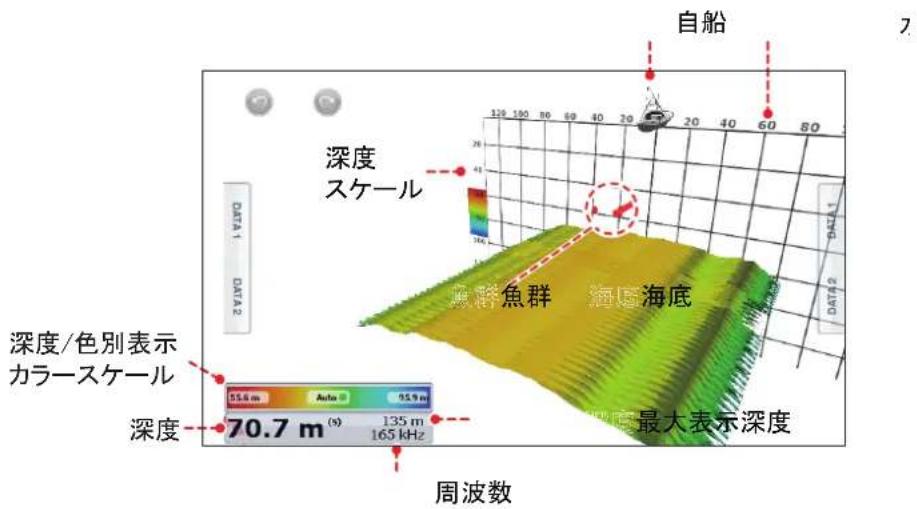
3D 履歷
ホーム画面上で、3D履歴画面アイコンをタップします。
3D 履歴画面では、自船が通ってきた海底と海中の様子を 3D で表示します。3D 履歴は、魚群の探索に便利です。
4.3 マルチ魚探
この節では、マルチ魚探画面で使用できるメニューについて説明します。
従来の魚探と共通のメニューについては、NavNet TZtouch の取扱説明書を参照してください。
4.3.1 送信と停止の切替え
マルチ魚探画面上をタップしてポップアップメニューを開き、[送信]を選んで送信を開始します。選択を解除すると、送信が停止して画面の中央に「準備」と表示されます。
4.3.2 シングルビーム / トリプルビームの切替え
- マルチ魚探画面上をタップして、ポップアップメニューを表示します。
- [モード] を選びます。
- [シングルビーム] または [トリプルビーム] を選びます。
- [閉じる] を選んで、メニューを閉じます。
4.3.3 送信ビーム角度の設定
真下ビームの中心から左舷ビーム / 右舷ビームの中心までの角度を設定します。
-
マルチ魚探画面上をタップして、ポップアップメニューを表示します。
-
[ビーム角 ] を選びます。
- 設定したいビーム角度を選びます。
4.3.4 送信ビーム幅の設定
左舷、真下、右舷方向のそれぞれのビーム幅を設定します。
- マルチ魚探画面上をタップして、ポップアップメニューを表示します。
- [ビーム幅 ] をタップします。
- ビーム幅を選びます。
4.3.5 画像送り速度の変更
マルチ魚探映像の進む速度を変えることができます。同じ魚群や海底でも画像送り速度により、映り方が変わります。画像送り速度を速くすると映像は横方向に広がり、反対に、遅くすると横方向に縮まります。起伏の激しい海底を細かに観察するには、画像送り速度を速くすると分かりやすくなります。なだらかな海底では画像送り速度を遅くすると、わずかな起伏などが分かりやすく表示されます。
- [マルチビームソナー] メニューから、[マルチ魚探] を選びます。
- [画像送り] を選びます。
- 画像送り速度を選びます。
速度は [1/16] が最も遅く、[4/1] が最も速くなります。[1/16] は 16 回の送信で 1 回の画像送り、[4/1] は 1 回の送信で 4 回の画像送りを意味します。
4.3.6 深度 / 周波数ボックスの表示 / 非表示
画面左下に表示される深度 / 周波数ボックスを、表示または非表示することができます。
- マルチ魚探画面上をタップして、ポップアップメニューを表示します。
- [深度 / 周波数ボックス] を選んで、深度 / 周波数ボックスを表示します。
選択を解除すると、深度 / 周波数ボックスは非表示になります。
4.3.7 ポイント、イベントマークの登録、ポイント航行
使用方法については、NavNet TZtouch の取扱説明書を参照してください。
下表の通り、本機能を使用することができます。
緯度経度データ、船首方位データの人力有無によって、使用できる機能が変わります。緯度経度データの入力がない場合は、すべての機能を使用することができません。
NavNet TZtouch へは、PGN でデータを入力してください。入力できる PGN は下記の通りです。
緯度経度データ
• 129025 Position, Rapid Update
• 129029 GNSS Position Data
船首方位データ
• 127237 Heading/Track Control
• 127250 Vessel Heading
• 130577 Direction Data
緯度経度 / 船首方位 : 有り
| 項目 左舷 真下 右舷 | |||
| ポイントの登録 ○ ○ ○ | |||
| ポイント航行 ○ ○ ○ | |||
| イベントマークの登録 ○ | |||
緯度経度:有り、船首方位:無し
| 項目 左舷 真下 右舷 | |||
| ポイントの登録 | × | ○ | × |
| ポイント航行 | × | ○ | × |
| イベントマークの登録 ○ | ○ ○ | ||
4.4 サイドスキャン
この節では、サイドスキャン画面で使用できるメニューについて説明します。
従来の魚探と共通のメニューについては、NavNet TZtouch の取扱説明書を参照してください。
4.4.1 送信と停止の切替え
サイドスキャン画面上をタップしてポップアップメニューを開き、[送信]を選んで送信を開始します。選択を解除すると、送信が停止して画面の中央に「準備」と表示されます。
4.4.2 エコー色の変更
サイドスキャンのエコー色を選びます。
- メニューアイコンバーから [メニュー] を選んで、メインメニューを表示します。
- [マルチビームソナー] を選びます。
- [エコー色 ] を選びます。
- [白]、[青]、[茶]からエコー色を選びます。
5.[閉じる]を選んで、メニューを閉じます。
4.4.3 深度 / 周波数ボックスの表示 / 非表示
画面左下に表示される深度 / 周波数ボックスを、表示または非表示することができます。
- サイドスキャン画面上をタップして、ポップアップメニューを表示します。
- [深度 / 周波数ボックス] を選んで、深度 / 周波数ボックスを表示します。
選択を解除すると、深度 / 周波数ボックスは非表示になります。
4.4.4 ポイント、イベントマークの登録、ポイント航行
使用方法については、NavNet TZtouch の取扱説明書を参照してください。
下表の通り、本機能を使用することができます。
緯度経度データ、船首方位データの入力有無によって、使用できる機能が変わります。緯度経度データの入力がない場合は、すべての機能を使用することができません。
NavNet TZtouch へは、PGN でデータを入力してください。入力できる PGN は下記の通りです。
緯度経度データ
• 129025 Position, Rapid Update
• 129029 GNSS Position Data
船首方位データ
• 127237 Heading/Track Control
• 127250 Vessel Heading
• 130577 Direction Data
緯度経度 / 船首方位 : 有り
| 項目 左舷 右舷 | ||
| ポイントの登録 ○ ○ | ||
| ポイント航行 ○ ○ | ||
| イベントマークの登録 ○ | ○ | |
緯度経度:有り、船首方位:無し
| 項目 左舷 右舷 | ||
| ポイントの登録 | × | × |
| ポイント航行 | × | × |
| イベントマークの登録 ○ | ○ | |
4.5 断面
この節では、断面画面で使用できるメニューについて説明します。
従来の魚探と共通のメニューについては、NavNet TZtouch の取扱説明書を参照してください。
4.5.1 送信と停止の切替え
断面画面上をタップしてポップアップメニューを開き、[送信]を選んで送信を開始します。選択を解除すると、送信が停止して画面の中央に「準備」と表示されます。
4.5.2 グリッドの表示 / 非表示
物標までの距離を測定できるように、グリッド(方眼)を表示することができます。
- 断面画面上をタップして、ポップアップメニューを表示します。
- [グリッド] を選んで、グリッドを表示します。
選択を解除すると、グリッドは非表示になります。
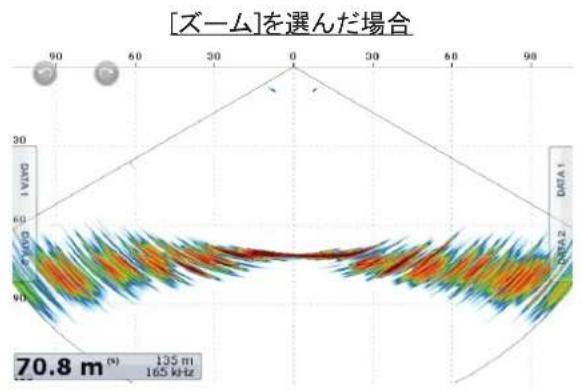
4.5.3 拡大表示
海底の映像を拡大して表示します。
- 断面画面上をタップして、ポップアップメニューを表示します。
- [ズーム] を選ぶと、海底の映像を拡大します。
選択を解除すると、通常の画面に戻ります。
contour
| X | Y | Value | |---|---|---| | 0 | 0 | 70.8 m (135 m, 165 kHz)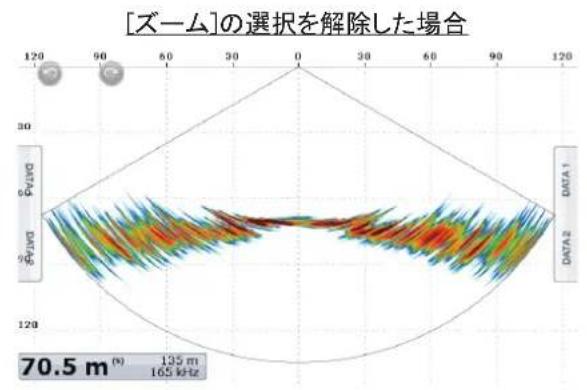
heatmap
| Angle (°) | Value | | --------- | ----- | | 0 | 70.5 | | 90 | 135 | | 180 | 165 |4.5.4 エコースムージング(距離)
海底に凹凸があり映像が見づらい場合は、エコースムージングを [低]、[中]、[高] に設定してください。距離方向の平滑処理を行い、映像が滑らかになります。
-
メニューアイコンバーから [メニュー] を選んで、メインメニューを表示します。
-
[マルチビームソナー ] を選びます。
-
[エコースムージング(距離)] を選びます。
-
[オフ]、[低]、[中]、[高] を選びます。
初期設定では、[中]になっています。エコースムージングを設定しないで映像を見る場合は、[オフ]を選びます。
- [閉じる] を選んで、メニューを閉じます。
4.5.5 エコースムージング(時間)
エコーが斑点状に表示されて見づらい場合は、エコースムージングを[低]、[中]、[高]に設定してください。時間フレームの平滑処理を行い、斑点状になったエコーを消す効果があります。
-
メニューアイコンバーから [メニュー] を選んで、メインメニューを表示します。
-
[マルチビームソナー ] を選びます。
-
[エコースムージング(時間)] を選びます。
-
[オフ]、[低]、[中]、[高] を選びます。
初期設定では、[中]になっています。エコースムージングを設定しないで映像を見る場合は、[オフ ]を選びます。
- [閉じる] を選んで、メニューを閉じます。
4.5.6 音速の補正
平坦な海底にもかかわらず、左右の端が上または下にゆがむ場合は、平坦になるように音速を補正します。
手動補正
左右の端が上にゆがむ場合は+の補正値を入力し、下にゆがむ場合は-の補正値を入力します。
- メニューアイコンバーから [メニュー] を選んで、メインメニューを表示します。
- [マルチビームソナー] → [断面] を選びます。
- [音速補正] の設定値アイコンをドラッグして、音速を補正します。
補正範囲は、-200~200です。 - [閉じる] を選んで、メニューを閉じます。
自動補正
水温から自動的に音速を補正します。
- メニューアイコンバーから [メニュー] を選んで、メインメニューを表示します。
- [マルチビームソナー] → [断面] を選びます。
- [水温音速補正] メニューの設定を [ON] にします。
[OFF] を選ぶと、自動補正が解除されます。 - [閉じる] を選んで、メニューを閉じます。
4.5.7 深度 / 周波数ボックスの表示 / 非表示
画面左下に表示される深度 / 周波数ボックスを、表示または非表示することができます。
- 断面画面上をタップして、ポップアップメニューを表示します。
- [深度 / 周波数ボックス] を選んで、深度 / 周波数ボックスを表示します。
選択を解除すると、深度 / 周波数ボックスは非表示になります。
4.5.8 ポイント、イベントマークの登録
使用方法については、NavNet TZtouch の取扱説明書を参照してください。
下表の通り、本機能を使用することができます。
緯度経度データ、船首方位データの入力有無によって、使用できる機能が変わります。緯度経度データの入力がない場合は、すべての機能を使用することができません。
NavNet TZtouch へは、PGN でデータを入力してください。入力できる PGN は下記の通りです。
緯度経度データ
• 129025 Position, Rapid Update
• 129029 GNSS Position Data
船首方位データ
• 127237 Heading/Track Control
• 127250 Vessel Heading
• 130577 Direction Data
緯度経度 / 船首方位 : 有り
| 項目 断面 | |
| ポイントの登録 ○ | |
| ポイント航行 | × |
| イベントマークの登録 ○ |
緯度経度:有り、船首方位:無し
| 項目 断面 | |
| ポイントの登録 | × |
| ポイント航行 | × |
| イベントマークの登録 |
4.6 3D 履歷
この節では、3D 履歴画面で使用できるメニューについて説明します。3D 履歴画面では、400 回分の送受信履歴を表示することができます。
従来の魚探と共通のメニューについては、NavNet TZtouch の取扱説明書を参照してください。
4.6.1 送信と停止の切替え
3D 履歴画面上をタップしてポップアップメニューを開き、[送信]を選んで送信を開始します。選択を解除すると、送信が停止して画面の中央に「準備」と表示されます。
4.6.2 視点位置の移動、拡大 / 縮小
視点位置の移動
1 本指でのドラッグで、視点位置を移動することができます。

natural_image
Hand holding a tool with an arrow indicating motion or force direction (no text or symbols)拡大 / 縮小
ピンチで、特定の位置を中心に拡大、縮小表示することができます。

拡大 縮小

natural_image
Hand holding a star-shaped object with motion lines, no text or symbols present工場出荷設定
以下手順にて、移動した視点位置や拡大 / 縮小した表示を、工場出荷時の表示状態に戻すことができます。
- 3D 履歴画面上をタップして、ポップアップメニューを表示します。
2.[視点リセット]を選ぶと、表示状態が工場出荷時に戻ります。
4.6.3 魚群情報の表示
検出した魚群を、ドット(円形)マークで表示することができます。
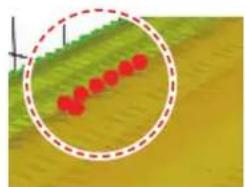
natural_image
Circular diagram with red circles on a yellow background, no text or symbols present- 3D 履歴画面上をタップして、ポップアップメニューを表示します。
2.[魚群アイコン]を選ぶと、画面にドットマークを表示します。
選択を解除すると、ドットマークは非表示になります。
4.6.4 履歴送りの停止
履歴送りを停止して、海底地形や魚群の分布を観察することができます。
-
3D 履歴画面上をタップして、ポップアップメニューを表示します。
-
[一時停止] を選んで、履歴送りを停止します。
[再開]を選ぶと、履歴送りが再開します。
4.6.5 魚群検出レベル
魚群の検出が不安定な場合は、魚群検出レベルの設定を変更します。
- メニューアイコンバーから [メニュー] を選んで、メインメニューを表示します。
- [マルチビームソナー] を選びます。
- [魚群検出レベル ] を選びます。
-
[低]、[中]、[高] を選びます。
初期設定では、[中]になっています。魚群の検出が多い場合は[低]を選び、魚群の検出が少ない場合は[高]を選びます。 -
[閉じる ] を選んで、メニューを閉じます。
4.6.6 海底エコー補正
底付きの魚群や漁礁のエコーが海底として描画される場合は、本メニューで海底のエコーを調整します。
- メニューアイコンバーから [メニュー] を選んで、メインメニューを表示します。
- [マルチビームソナー] を選びます。
-
[海底エコー補正]の設定値アイコンをドラッグして、海底のエコーを調整します。
補正範囲は、-15~15です。数値を大きくすると、底付きの魚群が判別しやすくなります。ただし、小さい漁礁が判別しにくくなります。数値を小さくすると、漁礁が判別しやすくなります。ただし、底付きの魚群が判別しにくくなります。 -
[閉じる ] を選んで、メニューを閉じます。
4.6.7 ノイズフィルター
海底の映像に凹凸があり見づらい場合は、ノイズフィルターを[低]、[中]、[高]に設定してください。映像が滑らかになります。
-
メニューアイコンバーから [メニュー] を選んで、メインメニューを表示します。
-
[マルチビームソナー ] を選びます。
-
[ノイズフィルター] を選びます。
-
[低]、[中]、[高]を選びます。
初期設定では、[中]になっています。ノイズフィルターを設定しないで映像を見る場合は、[オフ]を選びます。
- [閉じる] を選んで、メニューを閉じます。
4.6.8 海底地形陰影表示
海底地形の陰影の濃さを調整することができます。
-
メニューアイコンバーから [メニュー] を選んで、メインメニューを表示します。
-
[マルチビームソナー ] を選びます。
-
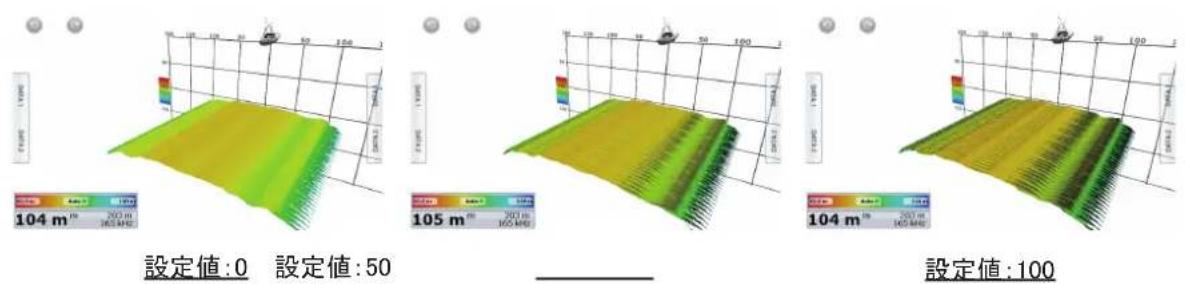
[海底地形陰影表示] の設定値アイコンをドラッグして、海底地形の陰影の濃さを調整します。
初期設定では、50になっています。
- [閉じる] を選んで、メニューを閉じます。
4.6.9 画像送り速度の変更
3D 履歴映像の進む速度を変えることができます。同じ魚群や海底でも画像送り速度により、映り方が変わります。画像送り速度を速くすると映像は横方向に広がり、反対に、遅くすると横方向に縮まります。起伏の激しい海底を細かに観察するには、画像送り速度を速くすると分かりやすくなります。なだらかな海底では画像送り速度を遅くすると、わずかな起伏などが分かりやすく表示されます。
-
[マルチビームソナー] メニューから、[3D 履歴] を選びます。
-
[画像送り] を選びます。
3. 必要な画像送り速度を設定します。
速度は [1/8] が最も遅く、[4/1] が最も速くなります。[1/8] は 8 回の送信で 1 回の画像送り、[4/1] は 1 回の送信で 4 回の画像送りを意味します。
![[1/4]](/content/2026/03/563878/images/60f757c485bfee957a520c8e35f387827aaf245501d5700631b2c69bf0d17438.jpg)
natural_image
3D rendered green surface with a small red object in the center, labeled [1/1] above (no other text or symbols)![[4/1]](/content/2026/03/563878/images/41189ba6e1d35cbb31ff8ca79ec3213788efcb394201d915af10cde0e113d4bd.jpg)
- [閉じる] を選んで、メニューを閉じます。
4.6.10 深度 / 色别表示
海底、または魚群を深度別に分けて表示することができます。水深の違いが一日で分かるので便利です。
色別表示モード
色別して表示する深度を海底にするか、魚群にするかを選びます。
海底の場合、海底の色を多階調または単階調で表現し、魚群の色を単階調または単色で表現することができます。魚群の場合、魚群の色を多階調または単階調で表現し、海底の色を単階調で表現することができます。
注)設定範囲外の魚群や海底は、白色で表示されます。
![[色別表示モード]で[海底]を選んだ場合 [色別表示モード]で[魚群]を選んだ場合 深度/色別表示深度/色別表示 深度/色別表示 深度/色別表示深度/色別表 カラースケール カラースケール](/content/2026/03/563878/images/2d623010e9d4162b4e18caed25b8438a9108486cd5e30382dba3814bc1620534.jpg)
- 3D 履歴画面上をタップして、ポップアップメニューを表示します。
- [色別表示モード] を選びます。
- [海底] または [魚群] を選びます。
色別表示の設定
メインメニューから [マルチビームソナー] を選んで、下記の各種設定を行います。
| 海底深度/階調表示 | 色調(標準) |
| 魚群深度/階調单色表示 | 单階調(灰) |
| 海底深度/自動色別表示範囲 | ON OFF |
| 最小值 | 0 m |
| 最大值 | 50 m |
| 魚群深度/自動色別表示範囲 | ON OFF |
| 最小值 | 0 m |
| 最大值 | 50 m |
| 魚群深度/階調表示 | 色調(標準) |
| 海底深度/单階調表示 | 单階調(灰) |
| 海底深度/自動色別表示範囲 | ON OFF |
| 最小值 | 0 m |
| 最大值 | 50 m |
| 魚群深度/自動色別表示範囲 | ON OFF |
| 最小值 | 0 m |
| 最大值 | 50 m |
[色別表示モード]で[海底]を選んだ場合 [色別表示モード]で[魚群]を選んだ場合
[色別表示モード]で[海底]を選んだ場合
| 項目 説明 | 設定範囲(選択肢) | |
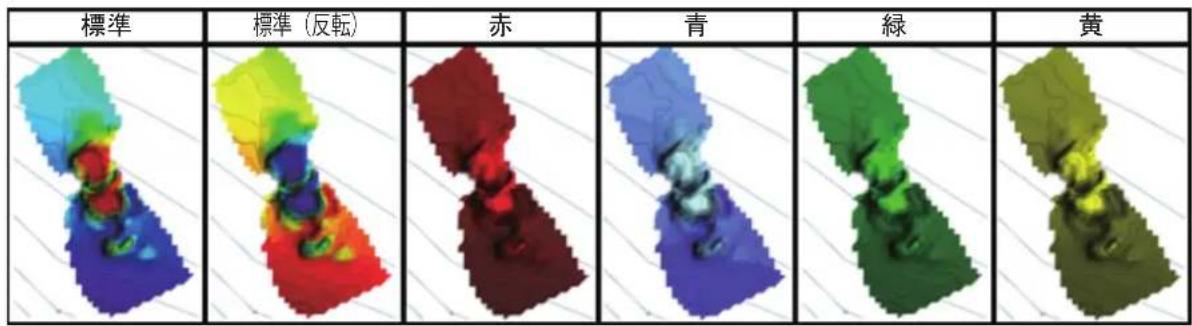
| [海底深度/階調表示] | 多階調または単階調を設定する。 | [色調(標準)][色調(標準)反転][色調(赤)][色調(青)][色調(緑)][色調(黄)] |
| [魚群深度 /階調単色表示] | 単階調または単色を設定する。[単階調(灰)] | [単階調(茶)][赤][緑][青][水色][紫][白黒][ピンク][黄緑][黄色] |
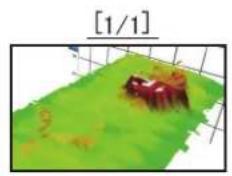
| [海底深度/自動色別表示範囲] | 海底の深度/色別表示の色付けを自動にするか、手動にするかを設定する。画面上でここをタップするごとに、[海底深度/自動色別表示範囲]の[ON]、[OFF]を切り替えることもできる。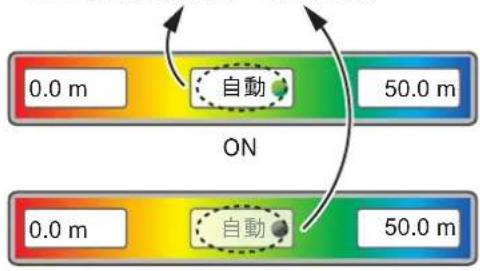 OFF([自動]がグレー表示)注)設定範囲外の魚群や海底は、白色で表示されます。 OFF([自動]がグレー表示)注)設定範囲外の魚群や海底は、白色で表示されます。 | [ON]、[OFF] |
[最小値]ソフトウェアキーボードを使って、階調表示する最も浅い深度を設定する。上記の[海底深度/自動色別表示範囲]の設定を[OFF]にしている場合のみ有効です。また、以下カラースケール上で、最も浅い深度値をタップして、画面に表示されたスライドバー上でドラッグして値を設定することもできます。 [最小値]最も浅い深度値 [最小値]最も浅い深度値 | 0~1200m | |
[最大値]ソフトウェアキーボードを使って、階調表示する最も浅い深度を設定する。上記の[海底深度/自動色別表示範囲]の設定を[OFF]にしている場合のみ有効です。また、以下カラースケール上で、最も深い深度値をタップして、画面に表示されたスライドバー上でドラッグして値を設定することもできます。 [最大値]最も深い深度値 [最大値]最も深い深度値 | 0~1200m |
[色別表示モード]で[魚群]を選んだ場合
| 項目 説明 設定範囲(選択肢) | ||
| [魚群深度/階調表示] | 多階調または単階調を設定する。 | [色調(標準)][色調(標準)反転][色調(赤)][色調(青)][色調(緑)][色調(黄)] |
| [海底深度 /単階調表示] | 単階調を設定する。 [単階調(灰)] | [単階調(茶)] |
| [魚群深度 /自動色別表示範囲] | 魚群の深度 /色別表示の色付けを自動にするか、手動にするかを設定する。画面上でここをタップするごとに、[魚群深度/自動色別表示範囲の[ON]、[OFF]を切り替えることもできる。 OFF([自動]がグレー表示)注)設定範囲外の魚群や海底は、白色で表示されます。 OFF([自動]がグレー表示)注)設定範囲外の魚群や海底は、白色で表示されます。 | [ON]、[OFF] |
[最小値]ソフトウェアキーボードを使って、階調表示する最も浅い深度を設定する。上記の[魚群深度/自動色別表示範囲]の設定を[OFF]にしている場合のみ有効です。また、以下カラースケール上で、最も浅い深度値をタップして、画面に表示されたスライドバー上でドラッグして値を設定することもできます。 [最小値]最も浅い深度値 [最小値]最も浅い深度値 | 0~1200m | |
| 項目説明 | 設定範囲(選択肢) | |
| [最大値]ソフトウェ | アキーボードを使って、階調表示する最も浅い深度を設定する。上記の[魚群深度/自動色別表示範囲]の設定を[OFF]にしている場合のみ有効です。また、以下カラースケール上で、最も深い深度値をタップして、画面に表示されたスライドバー上でドラッグして値を設定することもできます。 [最大値]最も深い深度値 [最大値]最も深い深度値 | 0~1200m |
4.6.11 深度 / 周波数ボックスの表示 / 非表示
画面左下に表示される深度 / 周波数ボックスを、表示または非表示することができます。
-
3D 履歴画面上をタップして、ポップアップメニューを表示します。
-
[深度 / 周波数ボックス] を選んで、深度 / 周波数ボックスを表示します。
選択を解除すると、深度 / 周波数ボックスは非表示になります。
4.6.12 ポイント、イベントマークの登録、ポイント航行
使用方法については、NavNet TZtouch の取扱説明書を参照してください。
下表の通り、本機能を使用することができます。
緯度経度データ、船首方位データの入力有無によって、使用できる機能が変わります。緯度経度データの入力がない場合は、すべての機能を使用することができません。
NavNet TZtouch へは、PGN でデータを入力してください。入力できる PGN は下記の通りです。
緯度経度データ
• 129025 Position, Rapid Update
• 129029 GNSS Position Data
船首方位データ
• 127237 Heading/Track Control
• 127250 Vessel Heading
• 130577 Direction Data
緯度経度 / 船首方位 : 有り
| 項目 魚群 海底 魚群 /海底以外 | |||
| ポイントの登録 ○ ○ | × | ||
| ポイント航行 ○ ○ | × | ||
| イベントマークの登録 | × | × | ○ |
緯度経度:有り、船首方位:無し
| 項目 魚群 海底 魚群 /海底以外 | |||
| ポイントの登録 | × | × | × |
| ポイント航行 | × | × | × |
| イベントマークの登録 | × | × | ○ |
4.7 海底マッピング
海底マッピングは水深の約 2 倍の範囲(自船の左右 90°)を効率的に探知、記録して高精細な海底マップを作成し、等深線とともに色別表示する機能です。作成した海底マップは、チャートプロッタ画面上に表示されます。潮高は、最寄りの検潮所からの情報を基に自動で補正します。
注)この機能は NavNet TZtouch3(TZT9F、TZT12F、TZT16F、TZT19F)のみ対応しています。海底マップは、各 NavNet TZtouch3 にのみ記録され、ネットワーク内で共有することができません。NavNet TZtouch3 で書出し / 読込みを行うか、ネットワーク上の機器ごとに記録してください。
海底マッピング機能の使用条件
海底マッピング機能の使用条件は、以下の通りです。
- NavNet TZtouch3 のプログラム番号が 2.01 以降であること。
- 十分な容量の micro SD カードが TZtouch3 本体に挿入されていること。
注)水深 200m の起伏の激しい海底を船速 10 ノットで、同じ場所を通らずに 24 時間記録した場合、データ容量は約 13MB です。一方水深が浅い、なだらかな海底である、船速が遅い、同じ場所を通るといった場合、データ容量は 2MB 程度まで小さくなります。必要に応じて適切な容量の microSD カードを選択してください。
- 以下の PGN が人力できること。
• 127237 (Heading/Track Control)
- 127250 (Vessel Heading)、または 130577 (Direction Data)
• 129025 (Position, Rapid Update)
• 129029 (GNSS Position Data)
*: SC-33 や SCX-20 などのサテライトコンパス™ の使用を推奨します。
4.7.1 海底マッピング機能の設定
海底マッピング機能を使用するには、以下の設定を行います。
- 送受波器、動揺センサーおよび、EPFS 機器(GPS アンテナなど)の初期設定(手順は、NavNet TZtouch3 装備要領書の「機器の設定」の章を参照してください)
- DFF-3D の初期設定(手順は、3.3 節「NavNet TZtouch の初期設定」を参照してください)
- 音速の補正(手順は、4.5.6項「音速の補正」を参照してください)
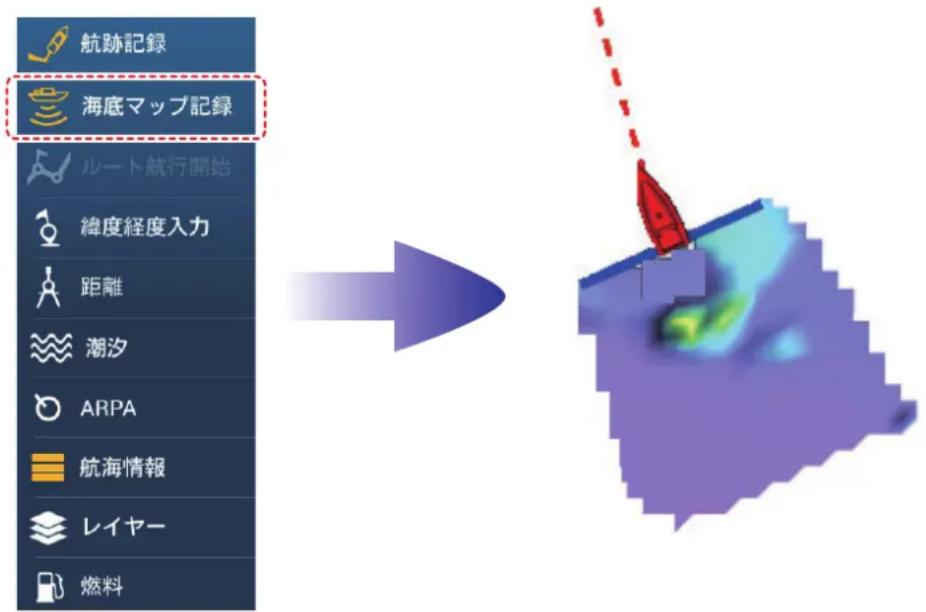
4.7.2 海底マッピング機能の使用方法
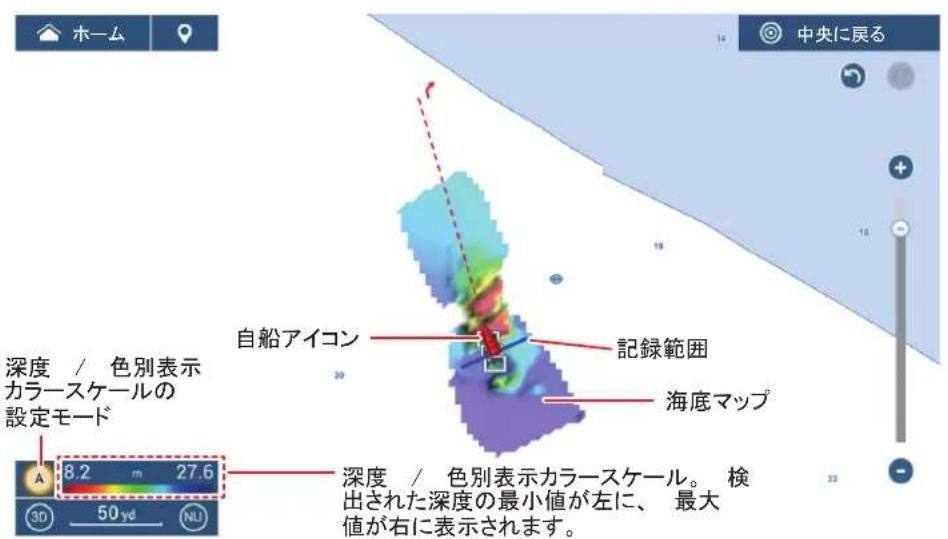
マッピングを開始するには、チャートプロッタ画面の右端を内側にスワイプしてスライドメニューを表示し、[海底マップ記録]をタップします。メニューの左側にあるアイコンが黄色になり、マッピングが開始します。初期設定を変更していない場合は、深度/色別表示カラースケールの「A」が点滅します。
白船アイコンの後方に、記録範囲を示す青い線が現れ、海底地形図が描画されます。線の幅は水深によって変化し、浅い場所では短く、深い場所では長くなります。
注 1)同じ海域を何回も往復すると、過去に記録された海底マップのデータが新しいデータに上書きされます。悪天候のとき、またはロールやピッチが激しいときは記録を停止し、海底マップが上書きされないようにしてください。
注 2)送受波器が装備されている位置を中心点として、深度の約 2 倍の範囲がマッピングされます。
例として、深さ 20 m の海底地形図の場合は、マッピング範囲が左舷と右舷の両方に対してそれぞれ約 20m(合計約 40m)になります。。
マッピングを停止するには、チャートプロッタ画面右端を内側にスワイプしてスライドメニューを表示し、[海底マップ記録]をタップします。メニューの左側にあるアイコンが白色になり、マッピングが停止します。
船速フィルターを設定する
海底マッピングを記録中に、設定した速度以上になった場合は記録を停止することができます。高速走行している間に記録を停止することで、マップデータのサイズが増えるのを防ぎます(工場出荷時の設定は15ノットです)。
船速フィルターの設定手順は、以下の通りです。
- ホーム画面から [設定] → [チャートプロッタ] を順に選びます。
- [船速フィルタ] の設定を [ON] にします。
- [船速 最大値] をタップして、ソフトウェアキーボードを表示します。
- 船速のしきい値を入力し、[✓]をタップします。
- タイトルバーの [×] をタップして、メニューを閉じます。
4.7.3 深度 / 色別表示の設定
深度 / 色別表示を使用して、海底マップの表示 / 非表示を切り替えます。深度 / 色別表示は画面上の海底を水深や等深線に基づき、色分けして表示する機能です。
深度 / 色別表示を設定する手順は、以下の通りです。
-
チャートプロッタ画面で、画面下端から上にスワイプしてレイヤーメニューを表示します。
-
[深度 / 色別表示] で、下表を参照して該当するメニュー項目をタップします。
| 項目 説明 | |
| [オフ] | 深度/色別、および海底マップを表示しない。注) このメニュー項目を選択すると海底マップは非表示に切り替わりますが、海底マッピングの記録は停止されません。海底マッピングの記録を停止するには、画面右端を左にスワイプし、スライドメニューの [海底マップ記録をタップしてください。 |
| [標準] | チャートデータを使用して、深度/色別表示を行う。 |
| [高精細]使用 | しない。 |
| [海底マップ] | 海底マッピングで記録されたデータを使用して、深度/色別表示を行う。 |
- メニューを閉じます。
等深線の表示 / 非表示
初期設定では、改訂マップ表示をオンにすると、等深線も表示されます。等深線を非表示にする場合は、レイヤーメニューを開いて、[等深線]の設定を[OFF]にします。
色を表示せず等深線のみを表示する場合は、深度 / 色別表示カラースケールで手動に切り替えた後、最大値を 0 に設定します(4-27 ページの「深度 / 色別表示を消去する(等深線のみ表示する)」を参照)。
4.7.4 深度 / 色別表示の変更・消去
海底マッピング機能で記録した海底マップは、多階調や単階調、または等深線で画面上に表示することができます。
深度 / 色別表示の設定を変更する
深度 / 色別表示の設定は、以下の手順で変更します。
- ホーム画面から [設定] → [チャートプロッタ] を順に選びます。
- [深度 / 色別表示値] までスクロールします。
- [深度 / 色別表示] を選択します。
- 下図を参照し、設定を変更します。
- メニューを閉じます。
深度 / 色別表示を消去する(等深線のみ表示する)
深度 / 色別表示は、以下の手順で消去します。
- 深度 / 色別表示カラースケールの最小、および最大深度表示をタップすると、画面右側にスライドバーが表示されます。
- 最小深度と最大深度を [0.0] に設定し、画面右上の [完了] をタップします。

- 深度 / 色別表示が消去され、等深線のみが表示されます。
海底地形陰影表示
海底地形に陰影をつけて表示、または陰影を消去することができます。
-
[チャートプロッタ] メニューを開きます。
-
[深度 / 色別表示値] までスクロールします。
-
[海底地形陰影表示] をタップして、陰影の濃さを以下から選びます。
- [ オフ ]:海底マップに、陰影は表示されません。
・[弱]:海底マップに、陰影は薄く表示されます。
- [中]:海底マップに、陰影は中程度に表示されます。
- [強]:海底マップに、陰影は濃く表示されます。
- メニューを閉じます。
4.7.5 海底マップの削除
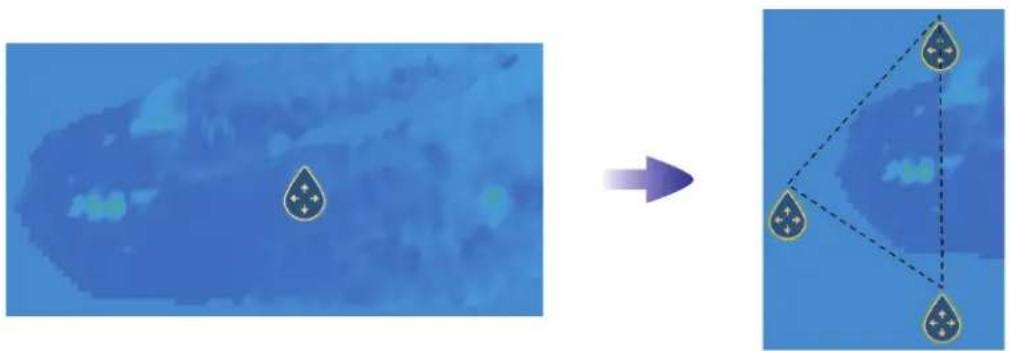
範囲を設定して海底マップの一部を削除したり、すべての海底マップを削除することができます。
海底マップの一部を削除する
-
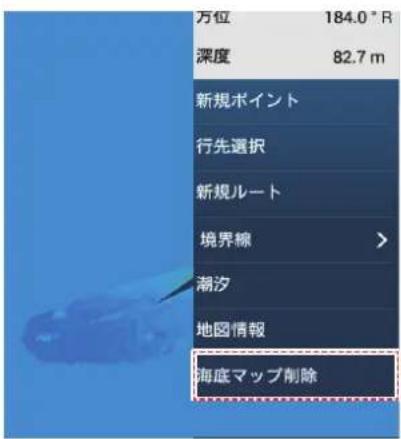
チャートプロッタ画面で表示されている海底マップをタップします。
-
ポップアップメニューから、[海底マップの削除]をタップします。
タップした位置に、以下のような削除範囲を設定するためのアイコンが表示されます。

削除範囲を 設定するための アイコン
- さらに 2カ所以上をタップし、アイコンを表示します。
注)海底マップの一部を削除する場合は、3カ所以上ポイントを設定してください。
- アイコンをドラッグし、海底マップの削除範囲を設定します。
natural_image
Two-panel image showing a blue abstract shape transforming into a 2D network diagram with three nodes connected by dashed lines (no text or symbols)- 画面右上の [削除] をタップし、海底マップを消去します。
すべての海底マップを削除する
-
NavNet TZtouch3 から、microSD カードを取り外します。
-
取り外した microSD カードをパソコンに接続します。
-
パソコンのエクスプローラを使用し、microSD カードのディレクトリに移動します。
-
microSD カードの「PBG」フォルダを削除します。
4.7.6 海底マップの書出し / 読込み
海底マップの書出し / 読込みを行うと、複数の NavNet TZtouch3 で同じ海底マップを共有することができます。
注)読み込んだ海底マップは、各 NavNet TZtouch3 のデータとなり、ネットワーク内で共有することができません。
海底マップの書出し
-
USB ポートに、初期化された記録メディアを接続します。
-
ホーム画面から、[設定]→[ファイル]→[海底マップの書出し]を順に選びます。
-
書出し先をタップします。
確認メッセージが表示されます。
- [OK] をタップします。
注)データの容量によっては、書出しに数分かかる場合があります。
-
書出しが完了すると、「書出しました」というメッセージが表示されます。
-
USB ポートから、データが保存された記録メディアを取り外します。
海底マップの読込み
-
USB ポートに、データが保存された記録メディアを接続します。
-
ホーム画面から、[設定]→[ファイル]→[海底マップの読込み]を順に選びます。
-
本機に読み込むファイルをタップします。
確認メッセージが表示されます。
- [OK] をタップします。
注)データの容量によっては、読込みに数分かかる場合があります。
-
読込みが完了すると、「読込みました」というメッセージが表示されます。
-
USB ポートから、手順 1 の記録メディアを取り外します。
5 章 保守点検およびトラブルシューティング
警告

カバーは絶対に外さないこと。
感電の原因になります。
故障の場合は、お買い上げ先へ連絡してください。
ご注意
塗料、防錆剤、接点復活剤などは有機溶剤を含んでいるので、機器の塗装部分や樹脂部品には使用しないでください。
機器の塗装部分や樹脂部品を劣化させることがあります。特に、樹脂のコネクタに使用すると破損する恐れがありますので絶対に使用しないでください。
5.1 普段の保守点検
ふだんから定期的な点検や手入れを心がけて、長期間ご愛用いただきますようお願いします。下記の項目が、手入れの日安です。
保守点検の項目
| 項目 手入れ | /点検の内容 頻度 | |
| ケーブルの配線 ケーブ | ルが切れかかっていないか? 1ヵ月に 1度 | |
| 各ケーブルのコネクタ | ゆるんでいないか? 1ヵ月に 1度 | |
| アース 腐食していない | か? 1ヵ月に 1度 | |
| 電源電圧 規格内に入った | ているか? 1ヵ月に 1度 | |
| 木体 乾いた柔らかい布 | でほこりや汚れを拭き取ってください。機器が変形する恐れがありますので、シンナーやアセトンなどの溶剤は使用しないでください。 | 1ヵ月に 1度 |
| 送受波器 送受波器面に | カキやフジツボが付着すると、徐々に感度が低下します。上架時には、木片や目の細かいサンドペーパーを使ってきれいに落としてください。 | 上架時 |
5.2 ヒューズの交換
電源が入らない場合、ヒューズが切れている可能性があります。ヒューズ(型式:FGBO-A 125V 5A PBF、コード番号:000-155-853-10)は電源ケーブルのフォルダ内にあります。規定のヒューズと交換してください。ヒューズを交換しても再び切れるときは、お買い上げの販売店・代理店、最寄りの当社支店・営業所あてへお問い合わせください。
警告

ヒューズは規定のものを使うこと。
規定外のものを使った場合、重大な事故や火災を引き起こす原因になります。
5.3 設定の初期化
この操作を行うと、お客様が NavNet TZtouch/NavNet TZtouch2 で設定したマルチビームソナーの設定値が工場出荷の状態に戻ります。初期化する項目は IP アドレス等の LAN 以外(感度やレンジなど)、または全項目を選ぶことができます。この操作は、必ずお買い上げの販売店・代理店、最寄りの当社支店・営業所あてへお問い合わせください。
- 本体から、電源ケーブル、LAN ケーブルの順に外します。
- 初期化したい設定項目に応じて、DIP スイッチ S2 の番号 3 または 4 を ON にします。
スイッチ番号 3 : IP アドレス等の LAN 以外の設定を初期化
スイッチ番号 4:全ての設定を初期化
- 電源ケーブルを本体に差し込み、配電盤のスイッチを入れます。
手順2で番号4をONにした場合は、LEDが0.4秒周期で点滅します。
- NavNet TZtouch/NavNet TZtouch2 で、3-6 ページを参照して送受波器の取付け位置の設定を行ってください。
追補 1 メニューツリー
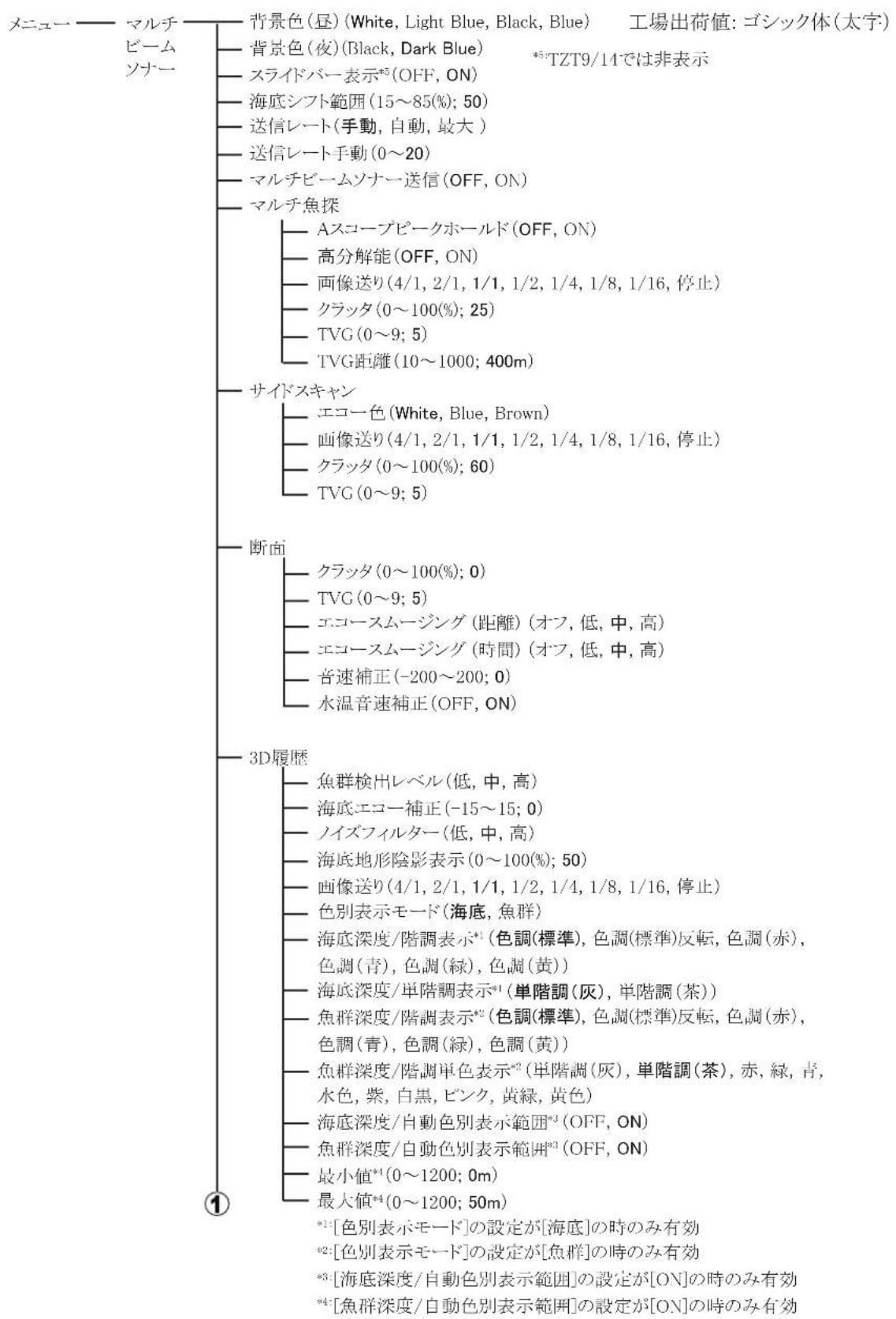
flowchart
graph TD
A["メニュー"] --> B["マルチビームソナー"]
B --> C["背景色(昼)(White, Light Blue, Black, Blue)"]
C --> D["工場出荷値: ゴシック体(太字)"]
C --> E["背景色(夜)(Black, Dark Blue)"]
E --> F["*5 TZT9/14では非表示"]
C --> G["スライドバー表示*5(OFF, ON)"]
G --> H["海底シフト範囲(15~85(%); 50)"]
H --> I["送信レート(手動, 自動, 最大)"]
I --> J["送信レート手動(0~20)"]
J --> K["マルチビームソナー送信(OFF, ON)"]
K --> L["マルチ魚探"]
L --> M["Aスコープビークホールド(OFF, ON)"]
M --> N["高分解能(OFF, ON)"]
N --> O["画像送り(4/1, 2/1, 1/1, 1/2, 1/4, 1/8, 1/16, 停止)"]
O --> P["クラッタ(0~100(%); 25)"]
P --> Q["TVG(0~9; 5)"]
Q --> R["TVG距離(10~1000; 400m)"]
R --> S["サイドスキャン"]
S --> T["エコー色(White, Blue, Brown)"]
T --> U["画像送り(4/1, 2/1, 1/1, 1/2, 1/4, 1/8, 1/16, 停止)"]
U --> V["クラッタ(0~100(%); 60)"]
V --> W["TVG(0~9; 5)"]
W --> X["断面"]
X --> Y["クラッタ(0~100(%); 0)"]
Y --> Z["TVG(0~9; 5)"]
Z --> AA["エコースムージング(距離)(オフ, 低, 中, 高)"]
AA --> AB["エコースムージング(時間)(オフ, 低, 中, 高)"]
AB --> AC["音速補正(-200~200; 0)"]
AC --> AD["水温音速補正(OFF, ON)"]
AD --> AE["3D履歴"]
AE --> AF["魚群検出レベル(低, 中, 高)"]
AF --> AG["海底エコー補正(-15~15; 0)"]
AG --> AH["ノイズフィルター(低, 中, 高)"]
AH --> AI["海底地形陰影表示(0~100(%); 50)"]
AI --> AJ["画像送り(4/1, 2/1, 1/1, 1/2, 1/4, 1/8, 1/16, 停止)"]
AJ --> AK["色別表示モード(海底, 魚群)"]
AK --> AL["海底深度/階調表示*1(色調(標準), 色調(標準)反転, 色調(赤), 色調(青), 色調(緑), 色調(黄))"]
AL --> AM["海底深度/単階調表示*1(単階調(灰), 単階調(茶))"]
AM --> AN["魚群深度/階調表示*2(色調(標準), 色調(標準)反転, 色調(赤), 色調(青), 色調(緑), 色調(黄))"]
AN --> AO["魚群深度/階調単色表示*2(単階調(灰), 単階調(茶), 赤, 緑, 青, 水色, 紫, 白黒, ピンク, 黄緑, 黄色)"]
AO --> AP["海底深度/自動色別表示範囲*3(OFF, ON)"]
AP --> AQ["魚群深度/自動色別表示範囲*3(OFF, ON)"]
AQ --> AR["最小値*4(0~1200; 0m)"]
AR --> AS["最大値*4(0~1200; 50m)"]
subgraph Legend
B
S
T
U
V
W
X
Y
Z
AA
AB
AC
AD
AE
AF
AG
AH
AI
AJ
AK
AL
AM
AN
AO
AP
AQ
AR
AS
AT
AU
AV
AW
AX
AY
AZ
BA
BB
BC
BD
BE
BF
BG
BH
BI
BJ
BK
BL
BM
BN
BO
BP
BPB
BPB
BPB
BPB
BPB
BPB
BPB
BPB
BPB
BPB
BPB
end
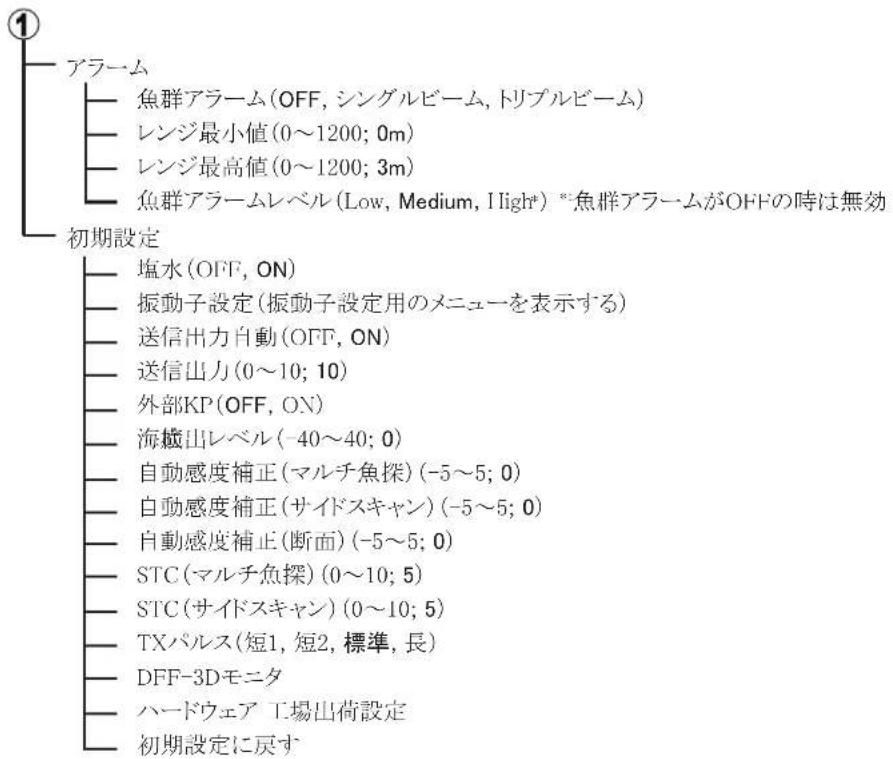
追補 2 送受波器 B54/SS54 の取付け (参考)
この記述内容は、AIRMAR®社が作成した「INSTALLATION INSTRUCTIONS」を翻訳したものです。必ず送受波器に付属の上記資料を確認してください。
09/05/17
17-621-81-Tey.03
水温センサー付き送受波器 & ハイパフォーマンスフェアリング 型式 : B54/SS54
警告
回転防止用のボルト (1 本) が必要です!
回転防止用のボルトによって、フェアリングを適切な場所にしっかりと固定します。正しく取り付けていない場合は、航行中にフェアリングが回転してしまう恐れがあり、その結果自船が予期しない動きをして、操舵ができなくなる恐れがあります。また、お使いになる乗組員の方々への危害、ポートや財産への損害をもたらす可能性があります。
本製品の最適な性能を引き出すため、また、お使いになるユーザー自身および周囲の方々への危害、財産への損害を未然に防止するため、以下の事項を必ずお守りください。
警告:送受波器は、必ず付属の「ハイバフォーマンスフシグ」とともに取り付けてください。
警告:付属の「ハイパフォーマンスフェアリング」については、必ず専用の装備ガイドを参照して取り付けてください。
警告:装備作業中は、常に安全ゴーグル、防塵マスクおよび耳栓を着用してください。
警告:安全に操船するために、フェアリングは必ずキールと行に取り付けてください。
警告:フェアリングを誤って切断した場合は、新しいフェアグに取り換えてください。
- 上限を超えた角度でフェアリングを切断すると、送受波器やボルトの窪みに切込みが入り、フェアリングの強度を弱める恐れがあります。
- 船底とフェアリングの隙間を、3mm(1/8”)以上に開けんでください。航行中に海水がその隙間に入り、フェアリングに大きな力が加わり、フェアリングが回転する可能性があります。
警告:ポートを水面に浮かべたときは、すぐに浸水が無いの認してください。確認を行わないまま、3時間以上放置しなでください。少量の浸水でも時間の経過とともに、かなりの水量になる恐れがあります。
注意:砲金型送受波器を金属製の船底には装備しないでください。電食を起こす恐れがあります。
注意:正極の接地システムの船には、砲金型送受波器を絶対に装備しないでください。
注意:金属製の船底にステンレス型送受波器を装備する場合は、絶縁スリーブを使用して送受波器と回転防止用ボルトが接触しないようにしてください。電食を起こす恐れがあります。
注意:送受波器のケーブルを引っ張ったり、ケーブルを持って送受波器を持ち遅んだりしないでください。内部で断線する恐れがあります。
注意:物や壁に、送受波器をぶつけないよう注意してください
注意:フェアリングと船底が破損する恐れがあるので、船体サトと回転防止用ボルトのナットを締め付けすぎないようにしてください。
注意:送受波器周辺の水流をらかにするため、フェアリングの表面に凹凸ができないよう、送受波器と三角形のプラグをフェアリングに取り付けてください。
注意:溶剤は、絶対に使用しないでください。洗剤、燃料、シーリング材、塗料などには、アセトンなどの強い溶剤が使われていることがあり、プラスチックの強度を著しく落とすことがあります。
重要:装備を行う前に、本書をよくお読みください。他のマネニアルと記載内容が異なる場合、本書を最優先にしてください。
適用
- 砲金型:ファイバーグラス、または木船推奨
- ステンレス型:すべての材質に対応。
(電食防止のため、アルミ船推奨)
- 最大勾配角度 : 24^
型式について
製品の型式は、ケーブルのタグに印字されています。
必要な工具
- 安全ゴーグル
-
防塵マスク
·耳栓
電動ドリル
・ドリルビット/ホールソー -
下穴用 : 3mm または 1/8"
-B54 (ファイバーグラス / 木船) : 51mm または - SS54 (ステンレス船) : 57mm または 2-1/4”
- 回転防止用ボルト (ファイバーグラス / 木船) :
11mm または 7/16"
- 回転防止用ボルト(ステンレス船):13mm または
- アングルファインダー
・帯のこぎり(切れ味の良い方)
- 石日やすり、電動工具
- 紙やすり
- 家庭用洗剤、またはアルコールなどの弱めの溶剤
・やすり(金属船底内部への装備時に使用)
・シリコンシーラント (水中川)
・ペンチ
·木槌
・グロメット
- 結束バンド
・防汚塗料 (水性、送受波器を海水で使用する際は必須)<ファイバーグラス船の芯材を加工する場合 (AP-7 ページ参照)>
- 船底内部用ホールソー ( 送受波器 ):
最小 65mm または 2-5/8"
- 船底内部用ドリルビット(回転防止用ボルト):
最小 25mm または 1”
・シリンダー、ワックス、テープ類、エポキシ樹脂
取付け位置
警告:乱流を防止するため、送受波器は水の取入れ排出口、船底の張出し、支柱、備品の背後、および安定な形状の船底には取り付けないでください。
- 船底下での水の流れは、気泡や乱流(特に高速時)が起こりにくく、らかな必要があります。
- 送受波器は、常に水中に浸かるようにしてください。
- 送受波器からのビームが、キールやスクリューシャフト遮断されないようにしてください。
・スクリューやシャフト、他の機関(または魚探、ケーニなどの動力および輻射源による下渉を受けにくい場所を選んで取り付けてください。ノイズが少ないほど、良好感度で操作することができます。 - 船底勾配角度が最小の場所を選んでください。
- 船尾側で移動しやすく、ナットを締める作業を行う際に頭上に余裕のある場所を選んでください。
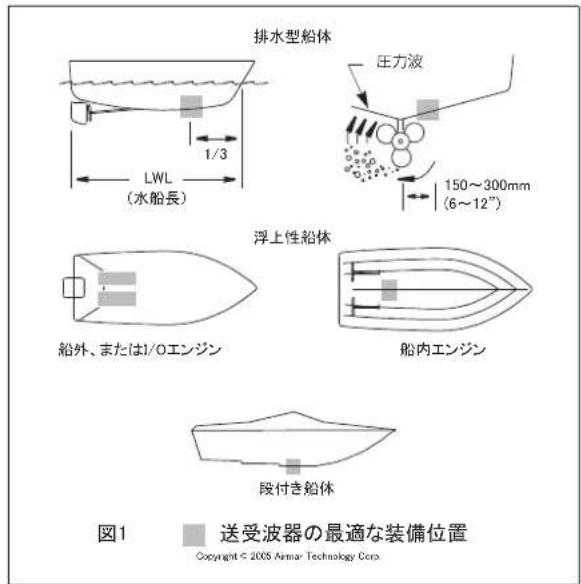
ボートのタイプ (図 1 参照)
- 排水型パワーボート
水船長の船首から 1/3 の位置で、船体の中心から 1/2~300mm 外れた場所に取り付けます。船底中心の側(プロペラが下向きに回転する付近)に取り付けることを推奨します。
- 浮上性パワーボート
船尾よりの中心線付近で、高速時でも水面に必ず接するよう1つ目の外板条列より内側に取り付けます。スク!の羽根が下向きに回転する右舷側に、中心からずらすことを推奨します。
船外、または I/O エンジンの場合:エンジンより横に並ぶように取り付けます。
船内エンジンの場合:スクリューおよびシャフトから前に、十分離れた場所に取り付けます。
段付きの船体の場合:一つ日の段差のすぐ前方に取付けます。
時速 25 ノット以上の性能を持つポートの場合:取る前に、類似のポートに関する取付け位置や操作性を調査してください。
装備方法
コアファイバー製の船体ー AP-7 ページも参照してください。
ドリルを使った穴あけ:送受波器
-
水面と垂直になるように、船体の内側からドリルを使って直径 3mm(1/8”)の下穴を開けます(図2参照)。支柱などが装備位置の付近にある場合は、船体の外側から穴を開けてください。
-
船体の外側から、51mm(2”)のドリルビットまたはホールソーを使って穴を開けます。このとき、穴が水面と垂直になるようにしてください。
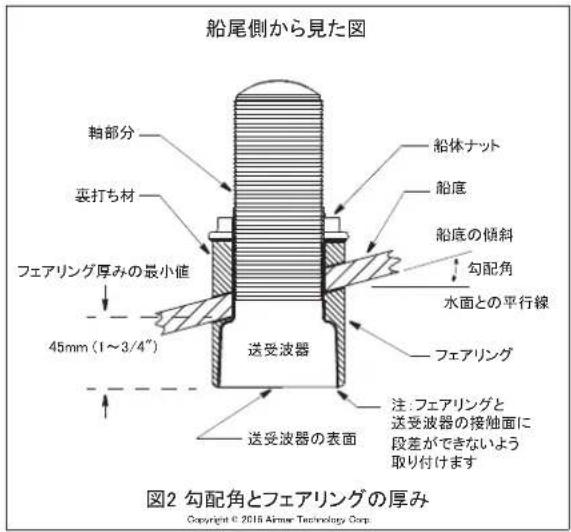
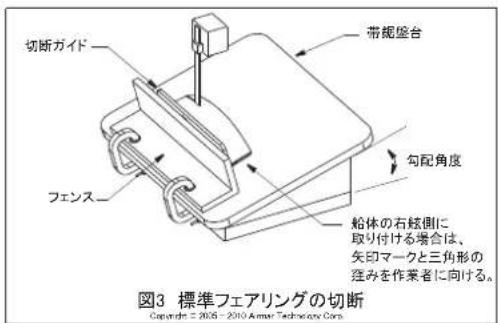
ハイパフォーマンスフェアリングの切断
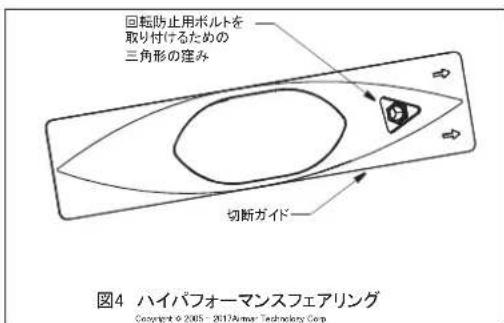
注意:取付けのときには、フェアリングにある矢印マークと三角形の準みの指す方向が、船首側を示しています。実際の船底角度と合うように、フェアリングを帯鋸盤の上に正しい方向で置いてください。(左右逆にならないよう、注意してください。)
- 取付け位置の船底勾配角を測ります (図 2 参照)。 勾配角が 24° を超えていないことを確認してください。
- 手順 1 で計測した勾配角度に帯録盤の台を調整して、フェンスを固定します(図 3 参照)。勾配角が 24° を超えないようにしてください。
- 台の上にフェアリングを載せて、切断ガイドをフェンスに合わせます(図 3 参照)。船体の右舷側に取り付ける場合は矢印マークと三角形の窪み側が作業者側に向くようにします。左舷側に取付ける場合は、反対にします。
- フェアリングを同サイズで 2 分割できるように、フェンスを調整します。 フェアリングの厚みは、一番薄いところでも最低 45mm (1~3/4”)になるようにしてください (図 3 参照
- 手順 1~4 を再確認してから、フェアリングを切断します。
- 特に高速での航行中に、海水が船底とフェアリングの隙間
に入り、フェアリングに大きな力が加わり、フェアリングが転する可能性があります。船体の形に合うように、石日やすりや電動工具を使って、フェアリングの形を調整します。3mm(1/8”)以上の隙間がある場合は、フェアリングを換してください。
肋材や 7. 送受波器とフェアリングの接触面に段差がないことを確認します。フェアリングの内側に 0.5mm(1/64”)以上の段がある場合は、送受波器とフェアリングの間に板状の詰め物を入れるか、フェアリングにやすりまたは紙やすりをかけて、段差がないようにしてください。 8. もう一方のフェアリングは、船体内の裏打ち材に使用します。裏打ち材は、ナットを水平に締め付けるためのものです。
ドリルを使った穴あけ:回転防止用ボルト
回転防止用ボルトの取付け位置を決め、穴を開ける日安としてフェアリングを使用します。これは、船底の傾きではなく水面。垂直に穴を開けるためのものです。
-
送受波器をフェアリングにはめ込みます。送受波器ケーブルをフェアリングの大きい穴に通し、船底の取付け穴に通します。送受波器をフェアリングの窪みに、しっかりとはめりみます(図5または図6参照)。送受波器の矢印マフェアリングにある三角形の窪みに向くようにしてください。
-
フェアリングに取付けられた送受波器を船底の取付け穴まで動かします。フェアリングにある回転防止用ボルトの穴を日安として、3mm(1/8”)の回転防止用ボルト用の下穴を底に開けます。
-
11mm(7/16”)のドリルビットまたはホールソーを使って、回転防止用ボルト用の穴を開けます。
-
フェアリングに取り付けられた送受波器、および送受波器ケーブルを船底の取付け穴から取り外します。
5 穴の周囲 ( 船底の内側と外側 ) にサンドペーパーをかし (照)シリコンシーラントが船底にしっかりと付くようにします。船底 内に油汚れがある場合は、 サンドペーパーをかける前に家庭 用洗剤か弱めの溶剤 (アルコール) で拭き取ってください。
送受波器の装着
警告:装着する面は、清潔で乾燥していることを確認してください。
-
送受波器をフェアリングから取り外します。
-
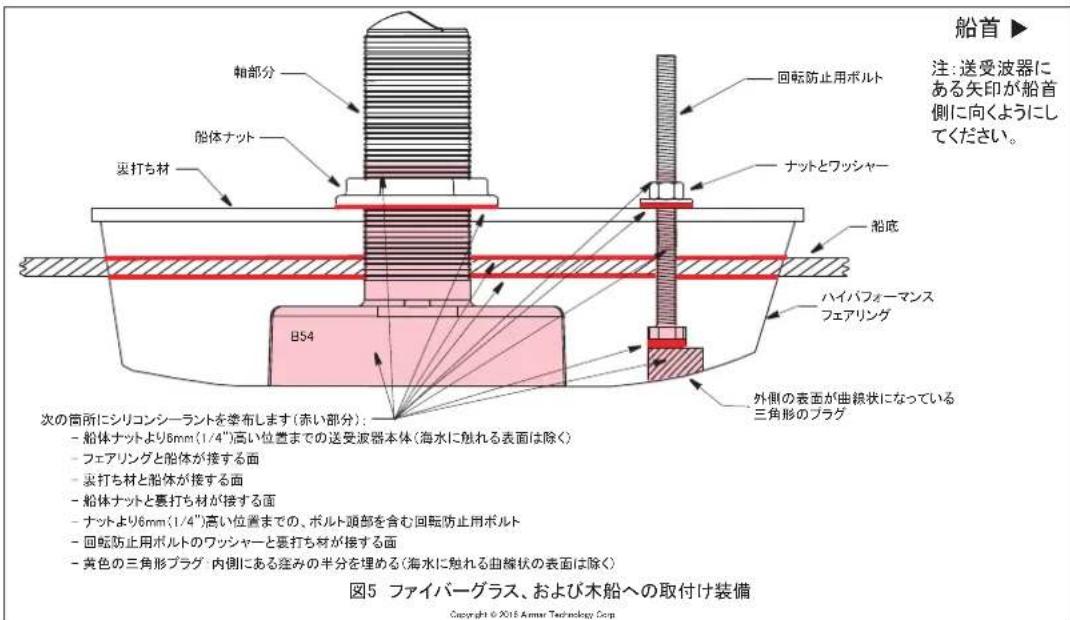
送受波器がフェアリングに接する面に、厚さ 2mm(1/16”)のシリコンシーラントを塗布します(図 5 または図 6 の赤い部分参照)。フェアリング、船体、裏打ち材の合計の厚さより 6mm(1/4”)高い位置まで送受波器本体にシリコンシーラントを塗布してください。船底を防水し、船体ナットをしっかりと固定するためです。
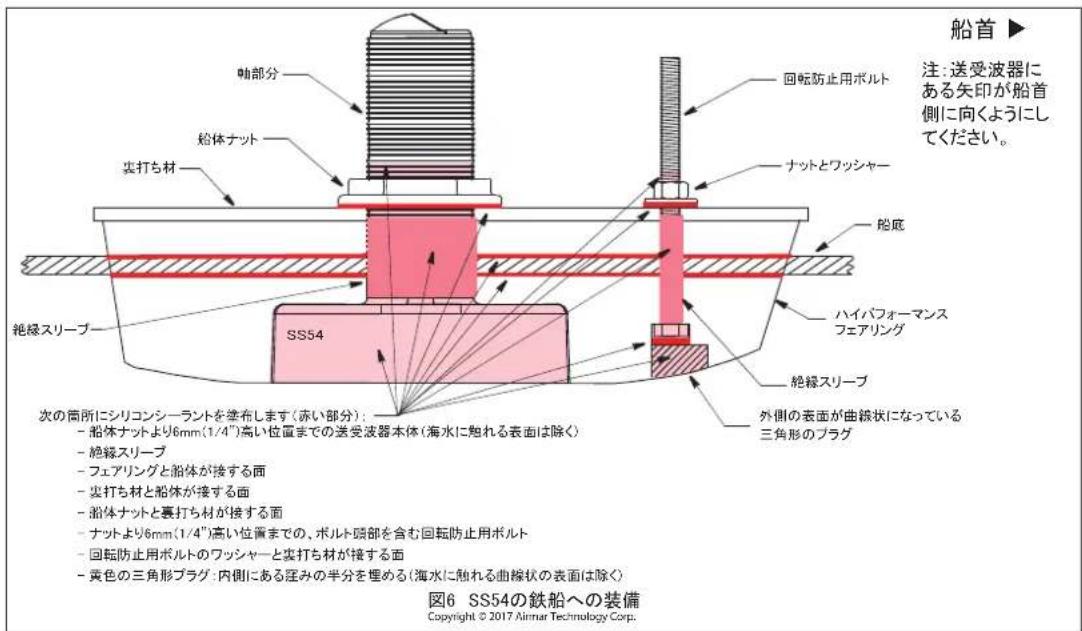
金属製の船底:電食を防止するため、ステンレス製の回転防止用ボルトを金属製の船底から絶縁する必要があります。そのために、ボルトの下にある絶縁スリーブはできるだけ低い位置になるようにしてください。また、絶縁スリーブの外周には、厚さ2mm(1/16")のシリコンシーラントを塗布してください(図6参照)。
- 次の箇所に厚さ 2mm (1/16”) のシリコンシーラントを塗布します。
・ フェアリングと船体が接する面
- 固定用フェアリングと船体が接する面
- 船体ナットと裏打ち材が接する面
- 送受波器ケーブルをフェアリングに通し、送受波器をフェアリングの窪みに、しっかりとはめ込みます。送受波器の矢印マークが、フェアリングにある三角形の窪みに向くようにしてください。
送受波器の取付け
- 船底の船外側から、送受波器ケーブルを取付け穴に通します。余分なシリコンシーラントを絞り出すため、取付け穴に木体をねじりながらはめ込みます(図4または図5参照)6. 送受波器にある矢印が船首側に向くようにしてください。注意:送受波器とフェアリングの接触面に段差がないようにしてください。フェアリングの内側に0.5mm(1/64”)以上の段差がある場合は、送受波器とフェアリングの間に板状の詰め物を入れるか、フェアリングにやすりまたは紙やすりをかけて、段差がないようにしてください。
金属製の船底:絶縁スリーブが回転防止用ボルトと船底の間にあることを確認してください(図6参照)。ただしナットの締め付けを妨げないよう、絶縁スリーブはナットとワッシャーの下に取り付けてください。
- 船底の船内側から、裏打ち材に送受波器ケーブルと送受波器の軸部分を通して、裏打ち材を船体にしっかりと取り付けます。船体ナットを仮締めますが、この時点では締め付けすぎないようにしてください。
回転防止用ボルトの装着と取付け
警告:装着する面は、清潔で乾燥していることを確認してください。
- ボルト頭部を含む回転防止用ボルトに、厚さ 2mm (1/16") のシリコンシーラントを塗布します (図 4 まで 5 参照)。フェアリング、船体、裏打ち材、ワッシャートの合計の厚さより 6mm (1/4") 高い位置まで回転防止ボルトにシリコンシーラントを塗布してください。船底を防水し、ナットをしっかりと固定するためです。
金属製の船底:電食を防止するため、ステンレス製の防止用ボルトを金属製の船底から絶縁する必要があります。そのために、ボルトの下にある絶縁スリープはできるだけ低い位置になるようにしてください。また、絶縁スリープの外周には、厚さ2mm(1/16")のシリコンシーラントを塗布したさい(図6参照)。
-
裏打ち材に接するワッシャーの側面に、厚さ 2mm (1/16") のシリコンシーラントを塗布します。
-
回転防止用ボルトをフェアリングと船体に通します。
-
船底の船内側から、ワッシャー(シーラント塗布面を下にて)とナットを回転防止用ボルトに締めます。
金属製の船底:送受波器のネジ部と船底の間に絶縁スリブがあることを確認します(図6参照)。船体ナットの付けに影響しないよう、絶縁スリーブは船体ナットよりも低い位置になるようにしてください。
- 船体ナットをベンチでしっかりと締めます。それから、回車防止用ボルトのナットを締め付けます。船底とフェアリンが破損する恐れがあるので、締め付けすぎないようにしてください。
グラスファイバー製の船底:船底が破損する恐れがあるで、締め付けすぎないようにしてください。
木船の船底:材木が膨張することを考慮して、船体ナ・締め付けてください。
シリコンシーラントを使って、黄色の三角形プラグにある窪みを半分まで埋めます。三角形の3つ外面に、厚さ(1/16")のシリコンシーラントを塗布します。プラグをしりとフェアリングに固定し、回転防止用ボルトとプラグの隙間を埋めるためです。
- 黄色の三角形プラグは、一方向のみ取り付けることができます。プラグとフェアリングの外側が平面になるまで、プラクをフェアリングの窪みに押し込みます。余分なシーラントを絞り出すためです。必要に応じて、木槌を使ってプラグを押し込みます。
注意:三角形プラグとフェアリングに少しの隙間がある場は、シーラントを使ってその隙間を埋めてください。送受器の性能を発揮させるために、プラグとフェアリングに隙間がないようにしてください。
- 特に高速での航行中に、海水が船底とフェアリングの隙間に入り、フェアリングに大きな力が加わり、フェアリングが転する可能性があります。シーラントを使って、フェアリンと船体との隙間を埋めてください。3mm(1/8”)以上の間がある場合は、フェアリングを交換してください。送受器周辺の水流をらかにするため、フェアリングと船体の外側にある余分なシーラントを取り除いてください。
ケーブルの配線と接続
警告:コネクタ付きの送受波器の場合は、ケーブル配線しやすいようにコネクタは取り外さないでください。ケーブルを切断して接続する必要がある場合は、Airma®社製の防水接続箱(No.33-035)を使用し、取扱説明書の指示に従ってください。防水接続箱の使用を除き、防水コネクタの取外しや、ケーブルの切断を行った場合、センサーの保証は無効になります。
-
隔壁や船内の他の部分にケーブルを通す際、ケーブルの外被が傷付かないように注意して、機器までケーブルを敷設します。グロメットを使って、摩擦を防いでください。電気的干渉を低減するために、他の電気配線やエンジンから送受波器ケーブルを離してください。損傷を防ぐために、余分なケーブルは巻いて、結束バンドで適当な位置に固定します。
-
接続先の取扱説明書を参照して、機器に送受波器を接続します。
水漏れの確認
船を水面に浮かべたら、直ちに送受波器の周囲に水漏れがないか確認してください。ごく小さな水漏れは、すぐに気付くことができないので注意が必要です。必ず、3時間以内に再度確認してください。小さな水漏れがある場合、24時間後にはかなりの水量になる恐れがあります。水漏れに気付いた場合は、直ちに「装着」と「取付け」をやり直してください(AP-6 ページ参照)。
グラスファイバー製(FRP)船底への取付け
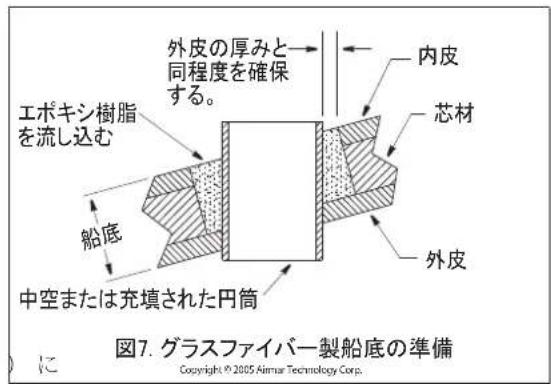
芯材(材木または発砲スチロール)は慎重に切断し、する必要があります。芯材が水漏れしないように、また船底ナットが緩んで本体が外れかけた場合でも船底が壊れないように補強します。
注意:芯材への水漏れがないように、船底は完全に防水してください。
-
船底の内側からドリルを使って、3mm または"の1/8"を開けます(図7参照)。材肋や支柱などが装備位置の付近にある場合は、船底の外側から穴を開けてください。間違った場所に穴を開けてしまった場合は、より良い場所に新たな穴を開けます。間違った穴には、船底の外側からマスキングテープを貼り付けて、エポキシ樹脂を流し込みます。
-
船底の外側から適したサイズのドリルビットまたはホールソーを使って、船底の外皮のみ穴を開けます。喫水線に対して垂直になるように穴を開けてください。
-
船底勾配と船体の厚さによって、最適な穴径は異なります。完全に防水するために、最適な穴径を確保してください。
船底の内側から適したサイズのドリルビットまたはホールソーを使って、船底の内皮と心材に穴を開けます。穴は船底に対して垂直になるようにしてください。芯材は、とても柔らかい材質でできています。外皮を切らないように、内皮に穴を開けたあとは、穴を開ける際の力を抑えてください。
-
外皮の内側や船底の芯材が十分に見えるように、残った芯材を取り除きます。穴の周囲(内皮、芯材、外皮サンドペーパーをかけて、粉を拭き取ります。
-
適切な直径の中空または充填された円筒をワックスやテープで固定します。円筒と船体の隙間にエポキシ樹脂を流し込みます。エポキシ樹脂が固まったあと、円筒を取り外します。
-
穴の周囲 ( 船底の内側と外側 ) にサンドペーパーをかけ
て、シリコンシーラントが船底にしっかりと付くようにします。船底内に油汚れがある場合は、サンドペーパーをかける前に家庭用洗剤か弱めの溶剤(アルコール)で拭き取してください。
-
「回転防止用ボルトの装備と取付け」を実施します。そして再度、「回転防止用ボルトの装備と取付け」の手順~6を実施してください。
-
AP-5 ページの「ハイパフォーマンスフェアリングの切断」から装備を始めてください。フェアリングの装備に必要なすべての穴は、すでに開けられています。
防污塑料
海水に触れる表面には、防汚塗料を塗る必要があります。水性の防汚塗料のみ使用してください。ケトン系の塗料はプラスチックを傷つけやすく送受波器が破損する恐れがあるので、絶対に使用しないでください。防汚塗料は6カ月に一または船を使用する季節の始まりに塗ってください。
保守と交換
掃除
送受波器の表面に水生生物が付着すると、数週間以内に性能が低下します。表面に傷を付けないように、スコッチライト®の研磨パッドと家庭用洗剤を使って、きれいにすり落としてください。付着物がひどい場合は、細粒度の耐水サンドペーパーで軽くこすります。
送受波器と部品の交換
交換用の送受波器を注文する際に必要な情報は、ケーブルのタグに印字されています。このタグは、取り外さないで防水ください。ご注文の際は、部品番号、口付、および周数(kHz)を指定してください。簡易記録として、この情以下に記載してください。
部品 No. : 日付 : 周波数 :
紛失、故障、および消耗品は、直ちに交換する必要があります。
- 船底ナット (砲金製) : 02-030
船底ナット(ステンレス製):02-530-02 - フェアリングの部品番号 : 04-883-01
部品は、お買い上げの販売店・代理店、最寄りの当社支営業所あてへお願いします。
追補 3 送受波器 TM54 の取付け(参考)
この記述内容は、AIRMAR®社が作成した「INSTALLATION INSTRUCTIONS」を翻訳したものです。必ず送受波器に付属の上記資料を確認してください。
取付台付きトランサム型装備
水温センサー付き 1kW 送受波器
型式 :TM54
ケーブルに付属のタグを参照して、記載してください。 部品 No. : H付 : 周波数 :

本製品の最適な性能を引き出すため、また、お使いになるユーザー自身および周囲の方々への危害、財産への損害を未然に防止するため、以下の事項を必ずお守りください。
警告:装備作業中は、常に安全ゴーグル、防塵マスおよび耳栓を着用してください。
警告:ポートを水面に浮かべたときは、すぐにネジの周および船底に開けた穴から浸水がないことを確認してください。
注意:送受波器のケーブルを引っ張ったり、ケーブルを持って送受波器を持ち運んだりしないでください。内部で断線する恐れがあります。
注意:送受波器を取り外すとき、送受波器を物や壁につけないよう注意してください。送受波器が取付台に装備されている際は、ロックピンとヒンジピンを抜いてから、送受波器を取り外してください。
注意:溶剤は、絶対に使用しないでください。洗剤、燃シーリング材、塗料などには、アセトンなどの強い溶剤が使われていることがあり、プラスチックの強度を著しく落とすことがあります。
重要:装備を行う前に、本書をよくお読みください。 マニュアルと記載内容が異なる場合、本書を最優先にしてください。
適用
- 船外機艇、または 10m (32’)以上の船内外機艇
- 船内機艇非推奨
- 段付き船体非推奨
- 船尾板の調整角度:3\~21°
; 取付台による送受波器の保護は、前面からの衝撃のみ
取付け位置
ガイドライン
警告:送受波器は水の取入れ口や排出口、船底の張出し備品の背後、および不安定な形状の船底には取り付けないでください。
ぶ警告:送受波器の損傷を防ぐために、船の牽引時、時、進水時、および格納時の支えとなる部材に当たらないようにしてください。
- 十分な探知能力を得るためには、送受波器の表面がなかなか水流に接するようにしてください。らかな水流の場所を特定するために、航行中に船尾板から離れた場所の水流を確認してください。
- 取付台の取外しや、送受波器を上に回転するために、取付台の上にスペースを作ってください。
他の スクリューの羽根が下向きに回転する船尾板で、中心からずらした場所に取り付けることを推奨します (図 1 参照・旋回時でも送受波器が水面に接触するように、スクリューからできる限り離れた場所に送受波器を取り付けてください。
必要な工具
- 安全ゴーグル
- 防塵マスク
· 耳栓 - アングルファインダー
- マスキングテープ
·鉛筆 - 電動ドリル
- ドリルビット/ホールソー
- 取付台の穴用 : 5mm、#4 または 7/32"
- 船尾板の穴用 : 21mm または 13/16" (必要に応じて)
- ケーブルクランプの穴用 : 3mm または 1/8"
- シリコンシーラント (水中川)
- ソケットレンチ
· 定規 - ドライバー
・グロメット - 結束バンド
- 防汚塗料 (水性、送受波器を海水で使用する際は必須)
注意:
-
ノイズによる干渉を避けるために、スクリューが送受波器のビーム範囲120°内に入らない位置に、取り付けることを推奨します。
-
船底中心の右舷側(スクリューが下向きに回転する付近)に取り付けることを推奨します。
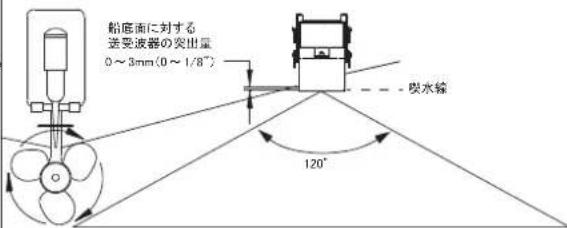
図11基掛け艇における取付け位置
ボートのタイプ
· 1 基掛け艇
旋回時でも送受波器が水面に接触するように、スクリューからできる限り離れた場所に送受波器を取り付けてください。
· 2 基掛け艇
エンジンの間で、スクリューの口転径から最低 15cm (6") 離れた場所に送受波器を取り付けてください。
- トリムタブ
トリムタブの内側の空いているスペースに、送受波器を取り付けてください。
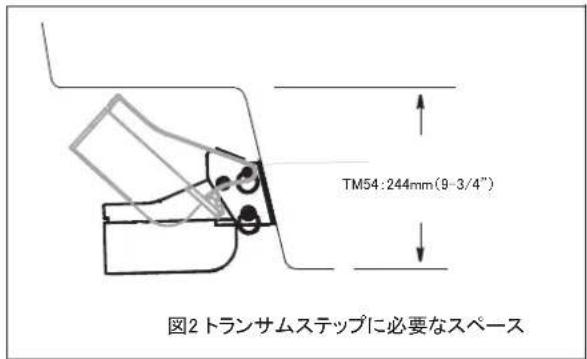
・トランサムステップ
取付台の取外しや送受波器を上に回転するために、取付台の上に十分なスペースを確保した上で、最も低い段差の場所に送受波器を取り付けてください(図2参照)。
装備方法
送受波器と取付台の組立て
-
2 本のケーブルがあります。それぞれのケーブルを送受波器の保持具にある穴に通します。
-
支給の穴付きボルト 3 つとワッシャー 3 つを使用して、保持具を送受波器に固定します。支給の 3/16" レンチで、穴付きボルトを締め付けます。
-
安全環をそれぞれのピンの片端に取り付けます (図 4 参照)。
-
送受波器組立品と取付台を組み合わせて、保持具と取付台にある上部の穴に、ピンを挿入します。スペーサーをピンに通してから、保持具と取付台にあるもう片端の穴にピンを通します。2つ目の安全環をピンの片端に取り付けます。このピンは、送受波器を取り外すときの蝶番として機能します。
-
ワッシャーを残りのピンに挿入します。ピンを取付台にある下の穴に入れてから、保持具にある溝に沿ってピンを通し、取付台の2つ日の穴に通します。2つ日の8シャーをピンの自由端側に挿入し、2つ日の安全環を取り付けます。このピンは、走行中に送受波器を使用可能な位置に固定するためのロックピンとして機能します。
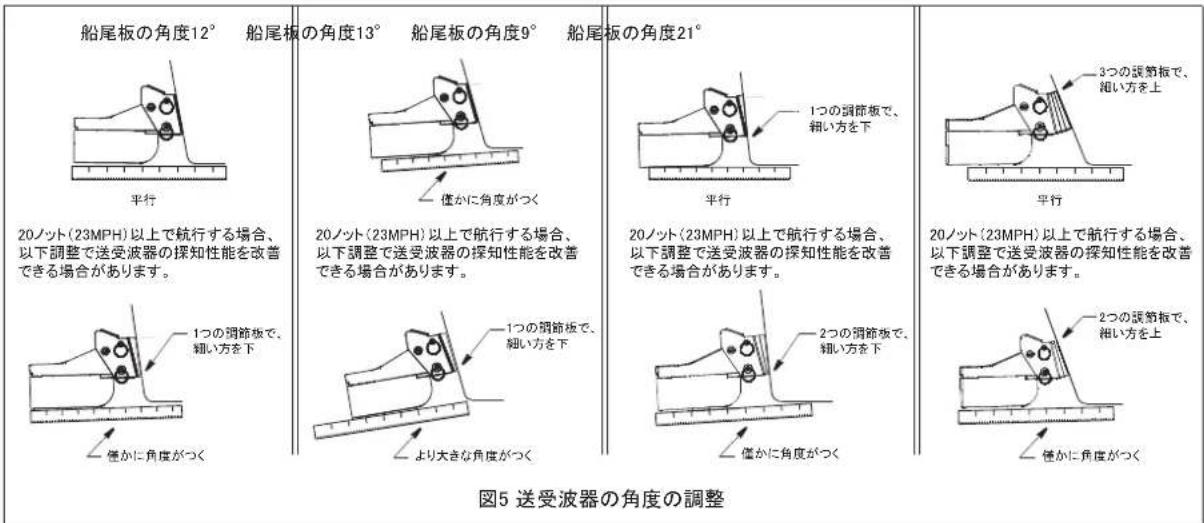
調節板による船尾板の角度の調整
十分な探知能力を得るためには、送受波器からのビームが、海底に対して垂直に向く必要があります。ほとんどの船の船尾板は、水面に対して垂直ではないので、取付によって角度を調整する必要があります。アングルファインダーで、船の船尾板の角度を測定してください。
- 標準の船尾板(12°の角度)一この取付台は、12角度の船尾板に取り付けることを基準にして設計されています。この場合は、調節板は使用しません。船が20ト(28MPH)以上で航行する場合は、調節板の細いを下に向けて使用し、角度が13°になるよう取付台を備します。高速時でも送受波器が水面に接触するためです。
- 調節板の使用一取付台には 3 つの調節板が付属されています。それぞれの調節板の角度は 3°です。3 組み合わせることで、最大 9°まで調整することができず。調節板同上を組み合わせて使用できるよう設計されています。調節板の表面にある 2 つのボスは、別の節板の後ろにある窪みや取付台にある穴に、はめることができます。
- 船尾板の角度が 12° より大きい場合—取付台の角度が 12° になるよう、調節板の細い方を上に向けて、要な数の調節板を追加してください。
- 船尾板の角度が 12° 以下の場合一取付台の角度が 12° になるよう、調節板の細い方を下に向けて、必要な数の調節板を追加してください。
- 調節板の使い方が分からない場合は、「取付台の取付けと調整」の内容に従って試してください。
ドリルを使った穴あけ
警告:深く穴を開けすぎないように、ドリルの先端から22mm(7/8”)の位置にマスキングテープを巻いてください
注意:グラスファイバー製の船底の場合-外皮にひびが入らないように内皮に到達するまではドリルを逆回しにしてください。
-
選定した取付け場所に、送受波器が船尾板の底面から3mm(1/8”)突出するように組み立てられた送受波器を置きます(図1参照)。調節板が適切な場所にあらを確認します。(調節板と取付台をテープで一時的に固定することもできます。)送受波器を使用できる位置に置いた状態で、取付台の底面の両隅に印を付けます。
-
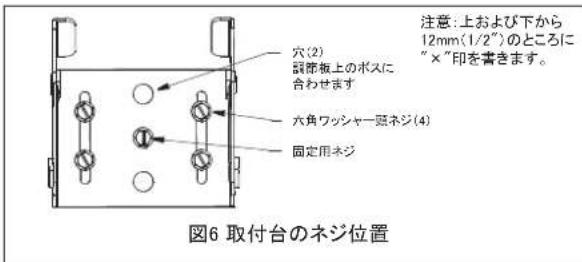
ロックピンとヒンジピンを抜いてから、送受波器組立品を取付台から取り外してください(図4参照)。調節付いた取付台を印に合わせて船尾板の適切な場所に置きます。上および下から12mm(1/2”)のところに印を書きます。
3.5mm(#4 または 7/32”)ドリルビットを使い、目付けた場所に深さ 22mm(7/8”)の下穴を開けます。
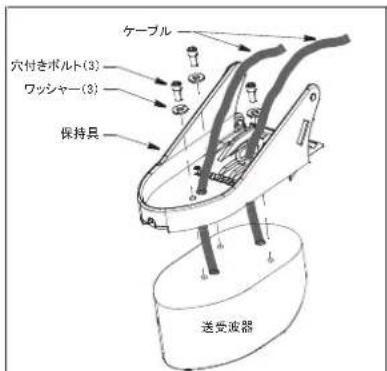
図3 送受波器の組立て
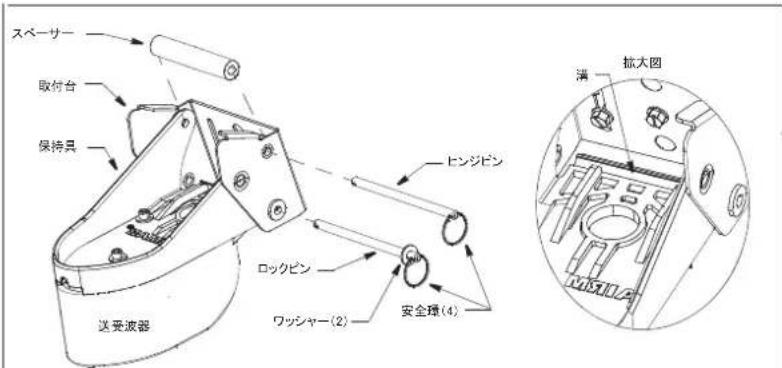
図4 送受波器の取付台への取付け
取付台の取付けと調整
注意:泡切れが起こるため、送受波器の先端がスクリューの後端部よりも低い位置にならないようにしてください。
注意:水流による抵抗の増加、水しぶきによる影響、水中の雑音や船速の低下を避けるため、必要以上に水中深くに沈む位置に送受波器を取り付けないでください。
注意:電蝕を避けるため、船底の金属部とステンレススティール製の取付台は絶縁してください。調節板を使用しない場合は、取付台と船底の金属部との間に、絶縁用として非金属のワッシャーを入れてください。
- 船尾板への水漏れを防止するため、4つの六角ワッシャー頭ネジのネジ山部にシリコンシーラントを塗布します。調節板が適切な場所にあることを確認し、ソケットレンチを使って船底と取付台を締め付けます(図4参照)。この時点では、締め付けすぎないようにしてください。
- 送受波器を再取り付けします。送受波器組立品と取付台を組み合わせて、保持具と取付台にある上部の穴に、ヒンジピンを挿入します。スペーサーをピンに通してから、保持具と取付台にあるもう片端の穴にピンを通します。再度、安全環をピンに取り付けます。
- ワッシャーをロックピンに挿入します。ピンを取付台にある下の穴に入れてから、保持具にある溝に沿ってピンを通し、取付台の2つ日の穴に通します。2つ日のワッシャーをピンの自由端側に挿入し、再度安全環を取り付けます。
- 送受波器を使用できる位置に置いた状態で、定規を使用して送受波器と船底部の位置関係を確認します(図5参照)。送受波器の後部が、全部よりも1~(1/16~1/4″)下がるようにしてください。
- 取付台を上下にスライドさせて、送受波器が船底から 0-3mm(0-1/8”)突出するように位置を調整します(1参照)。位置が決まれば、4つの六角ワッシャー頭を本締めして固定します。ネジ締め作業をしやすくするために、取付台から送受波器組立品を取り外します(図参照)。送受波器組立品の再取付けの際は、スペーサの挿入を忘れないでください。
洋上でのテスト
- エンジンを切った状態で、165kHz で発振する送受液器のテストを実施します。
- 4 ノット(5MPH)で走行して、お持ちの魚群探知性能を確認します。
- 徐々に速度を上げて、送受波器直下の水流の乱れによって性能が緩やかに低下していく様子を確認します。 注意:低い周波数で音響ノイズが多く発生するため、速度が上がれば上がるほど、50kHzでの性能が急速に低下します。
- 性能が緩やかではなく、急速に低下する場合は、性が急速に低下し始めたときの速度を特定します。船をその特定した速度に戻し、ゆっくりと左右に旋回しながら徐々に速度を上げます。
- 送受波器が取り付けられている方向に旋回しているときに、性能が改善する場合は、送受波器の取付け位置を調整する必要性があります。送受波器が水流の乱れまたは気泡の影響を受けている可能性があります。
性能を改善するために、以下を順序に従って 1 つや実施してください。
a. 水中の送受波器の角度を大きくします。「調節板による船尾板の角度の調整」を見直して、図5をしてください。
b. 送受波器を船底から突出する長さを 3mm (1/8") りも長くしてください (図 1 参照)。
c. 送受波器をできるだけ船体の中心線近くに移動してください。使用しないネジ穴は、シリコンシーラント埋めてください。
- 補正一画面に表示した船速と実際の船速を一致させるために、接続先の機器で補正が必要になる場合があります。接続先の取扱説明書を参照してください。
取付台の固定
-
残りの六角ワッシャー頭ネジを使って、取付台が取付位置からずれることを防ぎます。取付台の中央、調節板および船底に、固定用ネジ用の穴を開けます(図参照)。
-
船尾板への水漏れを防止するため、残りの六角ワッシャー頭ネジのネジ山部にシリコンシーラントを塗布します。
- ソケットレンチで、固定用ネジを締め付けます。ネジ締め作業をしやすくするために、取付台から送受波器組立品を取り外します(図4参照)。送受波器組立品の再取付けの際は、スペーサーの挿人を忘れないでください。
ケーブルの配線と接続
警告:ケーブル配線しやすいようにコネクタは取り外さないでください。ケーブルを切断して接続する必要がある場合は、Airmar社製の防水接続箱(No.33-035)を使用し、取扱説明書の指示に従ってください。防水接続箱の使用を除き、防水コネクタの取外しや、ケーブルの切断を行った場合、センサーの保証は無効になります。
取外しを容易にするため、ケーブルを船尾板の上に敷設します。取付台を恒久的に設置する場合は、喫水線より上にある船尾板の排水孔や、ドリルで開けた穴にケーブルを通してください。
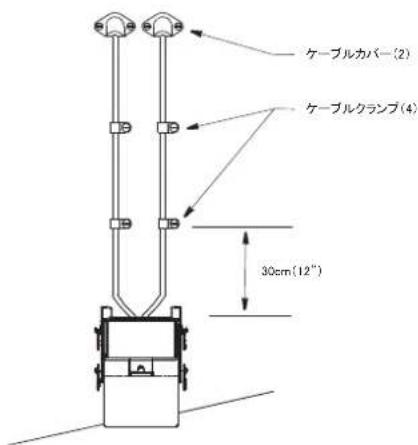
図7 ケーブルの配線
- 船尾板に穴を開ける場合は、穴の位置が喫水線よりも上になるようにしてください(図7参照)。トリムタブ、ポンプ、および船内への配線などがないことを確認してください。鉛筆を使って、穴を開ける位置に日印を付けます。21mm(13/16”)ドリルビットを使い、コネクタを外すことなくケーブルが通せるような穴を開けます。
- ケーブルを船尾板の上、または穴から通します。
- 付属のケーブルクランプを使って、船外側からケーブルを固定します。1 本目のケーブルについて、取付台から 30cm(12″)上方の位置に 1 つ目のクランプを取りけます。鉛筆を使って、ケーブルクランプ用のネジ穴位置に目印を付けます。
4.1 つ日のケーブルクランプと船体のケーブル穴の中問に、2つ目のケーブルクランプを取り付けます。鉛筆を使って、ケーブルクランプ用のネジ穴位置に日印を付けます。 - ケーブル導入用の穴を新たに設けた場合は、付属のケーブルカバーにある大きい方の凹を切り落とし、ケーブルが通るようにします。ケーブルカバーの取付け位置に、日印を付けます。
6.2 本日のケーブルについて、手順3~5を実施します - 3mm (3/8″) ドリルビットを使って、それぞれの目印の位置に 10mm (3/8″) の深さの穴を開けます。
- 船尾板への水漏れ防止のため、タッピングネジ(#6 x 1/2”)のネジ溝にシリコンシーラントを塗布します。新たに船体に穴を開けた場合は、その穴の周辺にもシリコンシーラントを塗布します。
9.4 つのケーブルクランプをタッピングネジで固定します。新しい穴を設けた場合はケーブルカバーにケーブルをはめ込んで同様に固定します。 - 隔壁や船内の他の部分にケーブルを通す際、ケーブルの外被が傷付かないように注意して、機器までケーブルを敷設します。グロメットを使って、摩擦を防いでください。電気的干渉を低減するために、他の電気配線やエンジンから送受波器ケーブルを離してください。損傷を防ぐために、余分なケーブルは巻いて、結束バンドで適当な位置に固定します。
- 接続先の取扱説明書を参照して、機器に送受波器を接続します。
水漏れの確認
ポートを水面に浮かべたときは、ネジや船底に開けた他のクの周囲に水漏れが無いか、すぐに確認してください。ごくさな水漏れは、すぐに気付くことができないので注意が必要です。必ず、3時間以内に再度確認してください。
保守
防污塗料
送受波器の表面に水生生物が付着すると、数週間以内に性能が低下します。連結部以外の海水に触れる表面には、防汚塗料を塗る必要があります。水性の防汚塗料のみ使用してください。ケトン系の塗料はプラスチックを傷つけやすく送受波器が破損する恐れがあるので、絶対に使用しないでください。防汚塗料は6カ月に一度、または使用する季節の始まりに塗ってください。
掃除
注意:取付台に潤油を使用しないでください。砂粒なが付着して、摩擦や摩耗が増える原因となります。
送受波器の表面に傷を付けないように、スコッチプライドの研磨パッドと家庭用洗剤を使って、きれいにすり落としてください。付着物がひどい場合は、細粒度の耐水サンドペーパーで軽くこすります。
送受波器と部品の交換
交換用の送受波器を注文する際に必要な情報は、ケーラルのタグに印字されています。このタグは、取り外さないでください。ご注文の際は、部品番号、日付、およ波数(kHz)を指定してください。簡易記録として、情報をAP-8ページの上部に記載してください。
紛失、故障、および消耗品は、直ちに交換する必要があります。
部品は、お買い上げの販売店・代理店、最寄りの支店・営業所あてへお願いします。
マルチビームソナー DFF-3D 仕様
1. 総合
(1) 送信周波数 165 kHz
(2) 送信出力 800 W
(3) アンプ方式 ストレートアンプ (H/L ゲイン同時サンプル)
(4) 最小检出深度 3 m
(5) 表示モード マルチビーム、サイドスキャン、断面、3D 履歴
(6) レンジおよび送信回数(送信レート 20、パルス幅標準時)
| レンジ(m) | 最大送信回数(回/分) |
| 5 600 | |
| 10 600 | |
| 40 484 | |
| 100 200 | |
| 200 100 | |
| 500 40 | |
| 1200 37 |
2. インターフェイス
(1) ポート数
LAN 1 ポート、イーサネット 10/100Base-TX
外部 KP 1 ポート(オプションの外部 KP キットが必要)
3. 電源
(1) マルチビームソナー DC12-24 V: 1.4-0.7 A
(2) 整流器(PR-62、オプション)AC 100/110/220/230 V、単相、50/60Hz
4. 環境条件
(1) 使用温度範囲
$$ \begin{array}{l} \text { 木体 } \quad - 1 5 ^ {\circ} \mathrm{C} \sim + 5 5 ^ {\circ} \mathrm{C} \ \text { 送受波器 } \quad - 5 ^ {\circ} \mathrm{C} \sim + 3 5 ^ {\circ} \mathrm{C} \ \end{array} $$
(2) 相对湿度 93%以下 (+40℃)
(3) 保護等級 TP55
(4) 振動 IEC60945 Ed. 4
5. ユニットカラー
N2.5 (变更不可)
PACKING LIST
DFF-3D
02GR-X-9851 -0 1/1
A-1
| NAME | OUTLINE | DESCRIPTION/CODE No. | Q'TY |
| 三ツト UNIT | |||
| マルチビームソナー | 289 120380 | 1 | |
| MULTI BEAM SONAR | DFF-3D | ||
| 000-029-991-00 | |||
| _1-^ GLASS TUBE FUSE | 2 | ||
| FGBO-A 125V 5A PBF | |||
| 000-155-853-10 |
INSTALLATION MATERIALS
| ケーブル(組品)LANLAN CABLE ASSEMBLY | MOD-Z072-050+ | 1 | |
| 001-167-890-10 | |||
| ケーブル組品MJCABLE ASSEMBLY | MJ-A3SPF0013-035C (5A) | 1 | |
| 000-157-939-10 | |||
| 工事材料INSTALLATION MATERIALS | CP02-09401 | 1 | |
| 001-441-630-00 |
図書 DOCUMENT
| 取級說明書OPERATOR'S MANUAL | 1 | ||
| OM*-13520-* | |||
| 000-191-428-1* ** |
FURUNO
| CODE NO. | 001-441-630-00 | 02GR-X-9401 -21/1 | ||||
| TYPE | CP02-09401 | |||||
| 工事材料表INSTALLATION MATERIALS | ||||||
| 番号NO. | 名称NAME | 略 図OUTLINE | 型名/規格DESCRIPTIONS | 数量Q'TY | 用途/備考REMARKS | |
| 1 | +トラスリッピング 1シSELF-TAPPING SCREW | 20Φ5 | 4 | |||
| 5X20 SUS304 | ||||||
| CODENO. | 000-162-608-10 | |||||
| 2 | 圧着端子CRIMP-ON LUG | 20 | FV1.25-4(LF) RED K | 1 | ||
| FV1.25-4(LF) RED | ||||||
| CODENO. | 000-166-666-11000-166-666-10 | |||||
| 3 | 導電性テープCONDUCTIVE TAPE | 60 | NO.1181 1"X18Y*50MM* | 1 | ||
| CODENO. | 000-193-508-10 | |||||
コード番号末尾の[**]は、選択品の代表コードを表します。CODE NUMBER ENDING WITH "**" INDICATES THE C
CODE NUMBER ENDING WITH "**" INDICATES THE CODE NUMBER OF REPRESENTATIVE MATERIAL.
QUALITY IS THE SAME.
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)
(略図の寸法は、参考値です。DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)
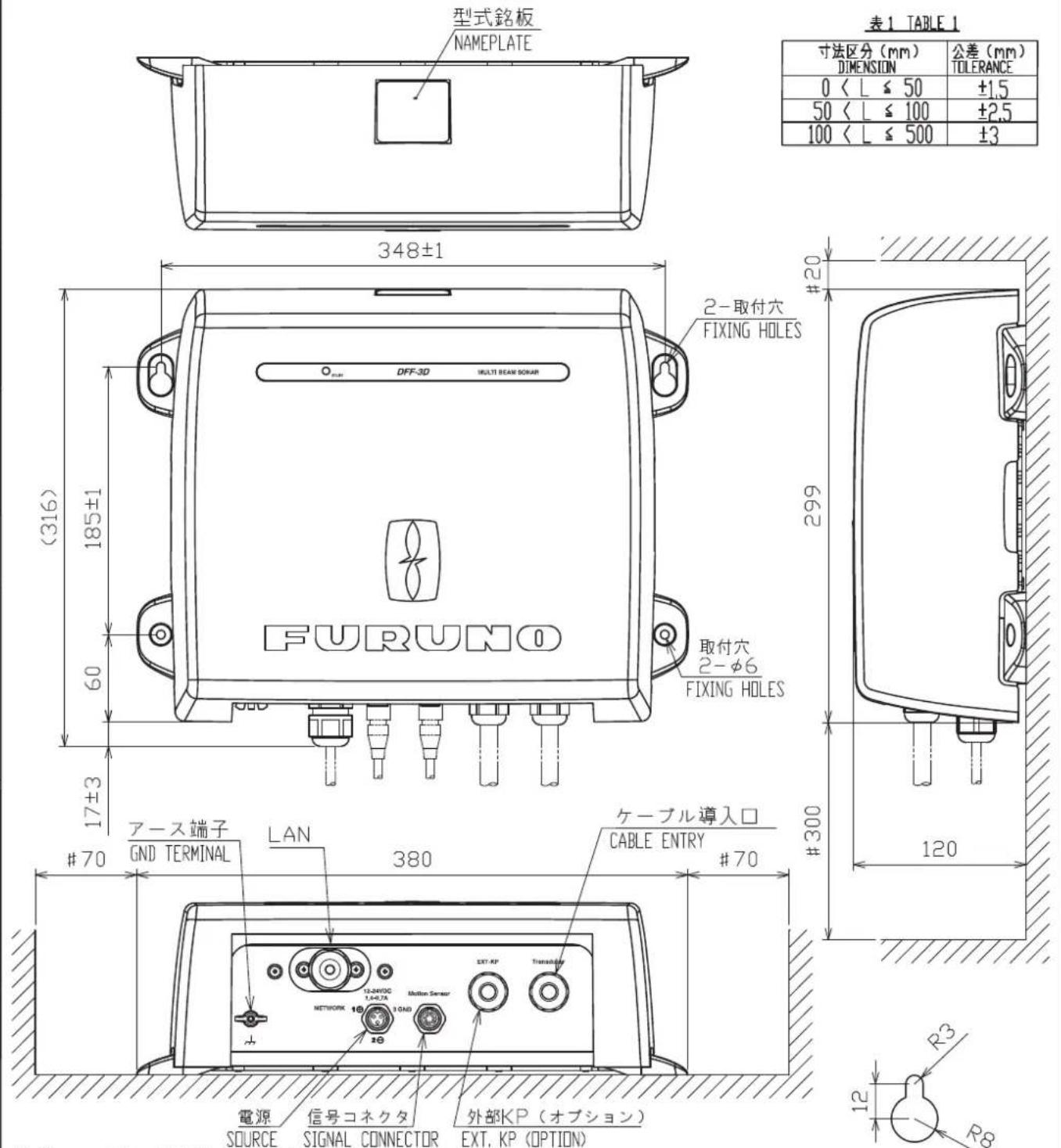
表1 TABLE 1
| 寸法区分(mm)DIMENSION | 公差(mm)TOLERANCE |
| 0 < L ≤ 50 | ±1.5 |
| 50 < L ≤ 100 | ±2.5 |
| 100 < L ≤ 500 | ±3 |
注記 1)指定外の寸法公差は表1による。
2)#印寸法は最小サービス空間寸法とする。
3)取付用ネジはトラスタッピンネジ呼び径5×20を使用のこと。
4)壁掛時、ケーブルは下方のみとする。
NOTE 1. TABLE 1 INDICATES TOLERANCE OF DIMENSIONS.
-
: MINIMUM SERVICE CLEARANCE.
- USE TAPPING SCREWS 5×20 FOR FIXING THE UNIT.
- FACE THE CABLES DOWNWARD FOR BULKHEAD MOUNTING.
| DRAWN16/Sep/2016 T.YAMASAKI | TITLE DFF-3D | |||
| CHECKED16/Sep/2016 H.MAKI | 名称 マルチビームソナー | |||
| APPROVED20/Sep/2016 H.MAKI | 外寸図 | |||
| SCALE1/4 | MASS 3.0 ±10%kg | NAME MULTI BEAM SONAR | ||
| DWG.No.C1352-G01-B | REF.No. 02-173-100G-3 | OUTLINE DRAWING | ||
FURUNO
flowchart
graph TD
A["送受波器"] --> B["送受波器 B54"]
A --> C["送受波器 SS54"]
B --> D["MJ-A7SPF"]
C --> E["MOTION SENSOR"]
D --> F["12-24VDC"]
E --> G["12-24VDC"]
F --> H["12-24VDC"]
G --> I["12-24VDC"]
H --> J["ルチビソナ"]
I --> K["ルチビソナ"]
J --> L["MTUZI BEAM SONAR DFF-3D"]
K --> M["MTUZI BEAM SONAR DFF-3D"]
N["送受波器"] --> O["MJ-A3SPF0013-035C 3.5m"]
O --> P["12-24VDC (+)"]
O --> Q["12-24VDC (-)"]
O --> R["GND"]
O --> S["ロクミドリ"]
O --> T["BLK"]
O --> U["GRN"]
O --> V["BRN"]
O --> W["BLU"]
O --> X["TD1"]
O --> Y["TD6"]
O --> Z["TDCOMMON"]
O --> AA["TD2"]
O --> AB["TD5"]
O --> AC["TD3"]
O --> AD["TD4"]
O --> AE["TD6"]
O --> AF["TD7"]
O --> AG["TD8"]
O --> AH["TD9"]
O --> AI["TD10"]
O --> AJ["TD11"]
O --> AK["TD12F/TZTL15F/TZTL19F"]
O --> AL["TD13F/TZTL16F/TZTL19F"]
O --> AM["TD14F/TZTL15F/TZTL19F"]
O --> AN["TD15F/TZTL15F/TZTL19F"]
O --> AO["TD16F/TZTL15F/TZTL19F"]
O --> AP["TD17F/TZTL15F/TZTL19F"]
O --> AQ["TD18F/TZTL15F/TZTL19F"]
O --> AR["TD19F/TZTL15F/TZTL19F"]
O --> AS["TD20F/TZTL15F/TZTL19F"]
O --> AT["TD21F/TZTL15F/TZTL19F"]
O --> AU["TD22F/TZTL15F/TZTL19F"]
O --> AV["TD23F/TZTL15F/TZTL19F"]
O --> AW["TD24F/TZTL15F/TZTL19F"]
O --> AX["TD25F/TZTL15F/TZTL19F"]
O --> AY["TD26F/TZTL15F/TZTL19F"]
O --> AZ["TD27F/TZTL15F/TZTL19F"]
O --> BA["TD28F/TZTL15F/TZTL19F"]
O --> BB["TD29F/TZTL15F/TZTL19F"]
O --> BC["TD30F/TZTL15F/TZTL19F"]
O --> BD["TD31F/TZTL15F/TZTL19F"]
O --> BE["TD32F/TZTL15F/TZTL19F"]
O --> BF["TD33F/TZTL15F/TZTL19F"]
O --> BG["TD34F/TZTL15F/TZTL19F"]
O --> BH["TD35F/TZTL15F/TZTL19F"]
O --> BI["TD36F/TZTL15F/TZTL19F"]
O --> BJ["TD37F/TZTL15F/TZTL19F"]
O --> BK["TD38F/TZTL15F/TZTL19F"]
O --> BL["TD39F/TZTL15F/TZTL19F"]
O --> BM["TD40F/TZTL15F/TZTL19F"]
O --> BN["TD41F/TZTL15F/TZTL19F"]
O --> BO["TD42F/TZTL15F/TZTL19F"]
O --> BP["TD43F/TZTL15F/TZTL19F"]
O --> BQ["TD44F/TZTL15F/TZTL19F"]
O --> BR["TD45F/TZTL15F/TZTL19F"]
O --> BS["TD46F/TZTL15F/TZTL19F"]
O --> BT["TD47F/TZTL15F/TZTL19F"]
O --> BU["TD48F/TZTL15F/TZTL19F"]
O --> BV["TD49F/TZTL15F/TZTL19F"]
O --> BW["TD50F/TZTL15F/TzTL19F"]
O --> BX["TD51F/TzTL15F/TzTL19F"]
O --> BY["TD52F/TzTL15F/TzTL19F"]
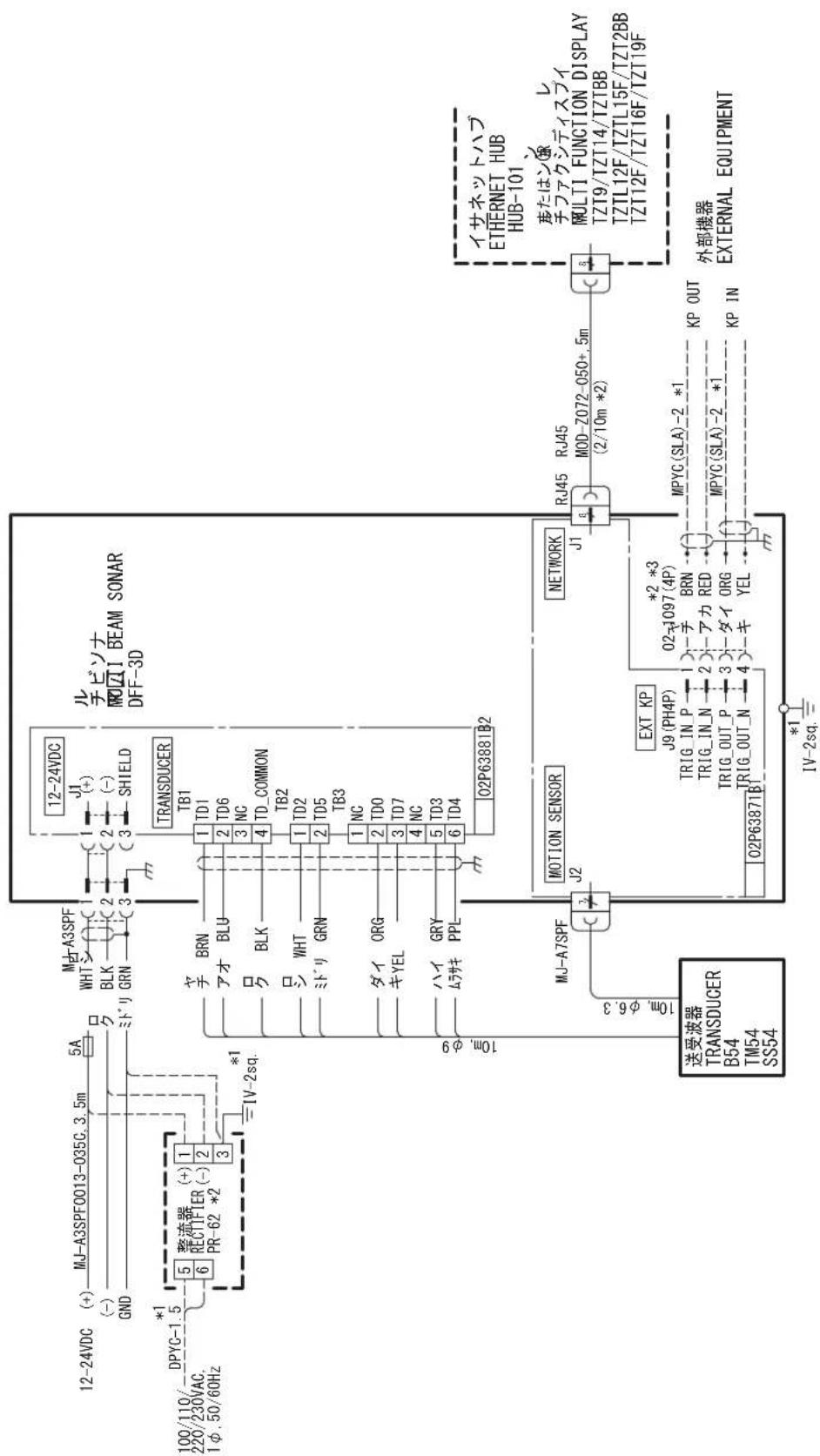
注記
* 1)造船所手配。
*2)プシ。
*3) KP ツト (OP02-86) が必要。
NOTE
*1: SHIPYARD SUPPLY.
*2: OPTION.
*3: KP KIT (OP02-86) REQUIRED.
FURUNO ELECTRIC CO., LTD.
| DRAWN22/Jun/2020 T. YAMASAKI | TITLE DFF-3D | |||
| CHECKED22/Jun/2020 H. MAKI | 名称 チビソナ | |||
| APPROVED22/Jun/2020H.MAKI | 相互結線図 | |||
| SCALE MASS | kg | NAME MULTI BEAM SONAR | ||
| DWG. No.C1352-C01-H | REF. No. 02-173-1401-0 | INTERCONNECTION DIAGRAM | ||
索引
Numerics
3D 履歷 4-14
送信 4-15
停止 4-15
海底エコー補正 4-16
海底地形陰影 4-17
概要 4-6
魚群検出レベル 4-16
魚群情報 4-15
視点位置 4-15
深度 / 色别表示 4-18
深度 / 周波数ボックス 4-22
ノイズフィルター 4-17
ポイント、イベントマーク ...... 4-23
履歴送り 4-15
Z
初期設定
NavNet TZtouch 3-4
さ
サイドスキャン 4-9
エコー色の変更 4-9
概要 4-5
深度 / 周波数ボックス 4-9
送信 4-9
停止 4-9
ポイント、イベントマーク ...... 4-10
L
初期設定
DIP スイッチ 3-1
動作確認 (LED) 3-3
せ
設定の初期化 5-2
そ
装備
LAN ケーブル 2-10
外部 KP ケーブル 2-5
接地 2-1
送受波器ケーブル 2-2
送受波器の取付け ..... 1-3, AP-3, AP-8
本体の取付け ……1-2
た
断面 4-11
エコースムージング(距離) .....4-12
エコースムージング(時間) .....4-12
音速補正 4-13
概要 4-5
拡大表示 4-11
グリッド 4-11
深度 / 周波数ボックス .....4-13
送信 4-11
停止 4-11
ポイント、イベントマーク ......4-14
支
マルチ魚探 4-6
送信 4-6
送信ビーム角度 4-6
停止 4-6
ビームの切替え 4-6
概要 4-4
深度 / 周波数ボックス .....4-7
ポイント、イベントマーク ......4-7
- FURUNO
- 取扱説明書
- 古野電気株式会社
- 重要なお知らせ
- 安全にお使いいただくために
- 必ずお守りください
- 警告
- 注意
- (取扱い上の安全事項)
- (装備上の安全事項)
- 目次
- 3D履歷....4-14
- 海底マッピング 4-24
- 5章 保守点検およびトラブルシューティング....5-1
- 追補 1 メニューツリー ......AP-1
- 追補 2 送受波器 B54/SS54 の取付け(参考).....AP-3
- 追補 3 送受波器 TM54 の取付け(参考).....AP-8
- 仕様 SP-1
- パッキングリスト ...... A-1
- 外寸図 D-1
- 相互結線図 S-1
- 索引 IN-1
- 特徵
- 干渉の低減措置
- 構成表
- 1章 装備
- 本体の取付け
- 送受波器の取付け
- 船底貫通取付け(スルーハル)
- トランサム型送受波器の船尾取付け
- 寸法单位
- 章 結 線
- 接地
- 送受波器ケーブル
- 外部 KP ケーブル
- 章 結線
- LAN ケーブル
- シールナットを締めて、LAN ケーブルを固定します。
- LAN ケーブルの抜き方
- 2章 結線
- 3章 初期設定
- DIP スイッチについて
- 動作の確認(LED 表示)
- NavNet TZtouch の初期設定
- [振動子設定] メニュー
- 動揺センサーの設定
- 同期(タイムラグ)設定
- 章 初期設定
- 4章 表示画面
- メニューの概要
- 送信と停止の切替え
- 背景色の設定
- 海底シフト範囲の設定
- 送信レートの設定
- 表示画面の概要
- マルチ魚探
- サイドスキャン
- 断面
- 3D 履歷
- マルチ魚探
- 送信と停止の切替え
- シングルビーム / トリプルビームの切替え
- 送信ビーム角度の設定
- 送信ビーム幅の設定
- 画像送り速度の変更
- 深度 / 周波数ボックスの表示 / 非表示
- ポイント、イベントマークの登録、ポイント航行
- 緯度経度データ
- 船首方位データ
- サイドスキャン
- 送信と停止の切替え
- エコー色の変更
- 深度 / 周波数ボックスの表示 / 非表示
- ポイント、イベントマークの登録、ポイント航行
- 断面
- 送信と停止の切替え
- グリッドの表示 / 非表示
- 拡大表示
- エコースムージング(距離)
- エコースムージング(時間)
- 音速の補正
- 手動補正
- 自動補正
- 深度 / 周波数ボックスの表示 / 非表示
- ポイント、イベントマークの登録
- 3D 履歷
- 送信と停止の切替え
- 視点位置の移動、拡大 / 縮小
- 視点位置の移動
- 拡大 / 縮小
- 工場出荷設定
- 魚群情報の表示
- 履歴送りの停止
- 魚群検出レベル
- 海底エコー補正
- ノイズフィルター
- 海底地形陰影表示
- 画像送り速度の変更
- 必要な画像送り速度を設定します。
- 深度 / 色别表示
- 色別表示モード
- 色別表示の設定
- 深度 / 周波数ボックスの表示 / 非表示
- ポイント、イベントマークの登録、ポイント航行
- 海底マッピング
- 海底マッピング機能の使用条件
- 海底マッピング機能の設定
- 海底マッピング機能の使用方法
- 船速フィルターを設定する
- 深度 / 色別表示の設定
- 等深線の表示 / 非表示
- 深度 / 色別表示の変更・消去
- 深度 / 色別表示の設定を変更する
- 深度 / 色別表示を消去する(等深線のみ表示する)
- 海底地形陰影表示
- 海底マップの削除
- 海底マップの一部を削除する
- すべての海底マップを削除する
- 海底マップの書出し / 読込み
- 海底マップの書出し
- 海底マップの読込み
- 章 保守点検およびトラブルシューティング
- ご注意
- 普段の保守点検
- ヒューズの交換
- 設定の初期化
- 追補 1 メニューツリー
- 追補 2 送受波器 B54/SS54 の取付け (参考)
- 適用
- 型式について
- 必要な工具
- 取付け位置
- ボートのタイプ (図 1 参照)
- - 排水型パワーボート
- - 浮上性パワーボート
- ドリルを使った穴あけ:送受波器
- ハイパフォーマンスフェアリングの切断
- ドリルを使った穴あけ:回転防止用ボルト
- 送受波器の装着
- 送受波器の取付け
- 回転防止用ボルトの装着と取付け
- ケーブルの配線と接続
- 水漏れの確認
- グラスファイバー製(FRP)船底への取付け
- 防污塑料
- 保守と交換
- 掃除
- 送受波器と部品の交換
- 追補 3 送受波器 TM54 の取付け(参考)
- ガイドライン
- ボートのタイプ
- · 1 基掛け艇
- · 2 基掛け艇
- - トリムタブ
- ・トランサムステップ
- 装備方法
- 送受波器と取付台の組立て
- 調節板による船尾板の角度の調整
- ドリルを使った穴あけ
- 取付台の取付けと調整
- 洋上でのテスト
- 取付台の固定
- 保守
- 防污塗料
- マルチビームソナー DFF-3D 仕様
- 総合
- インターフェイス
- 電源
- 環境条件
- ユニットカラー
- PACKING LIST
- DFF-3D
- A-1
- INSTALLATION MATERIALS
- 図書 DOCUMENT
- : MINIMUM SERVICE CLEARANCE.
- FURUNO ELECTRIC CO., LTD.
- 索引
- Numerics
- Z
- さ
- L
- せ
- そ
- た
- 支
Marque : FURUNO
Modèle : DFF3D
Catégorie : Sonar