
TP22 - Télécommande SIMRAD - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil TP22 SIMRAD au format PDF.
| Type de produit | Pilote automatique de barre franche (Tillerpilot) pour voiliers jusqu'à 12 m |
| Marque | Simrad |
| Modèle | TP22 |
| Alimentation | 12 V CC (10-16 V), protection par fusible 10 A |
| Consommation électrique (moyenne) | Veille : 60 mA, Auto : 500 mA |
| Course de travail | 250 mm (10 pouces) |
| Poussée en crête | 70 kg (154 lbs) |
| Temps de butée à butée | À vide : 6,9 s ; avec 20 kg : 8,0 s ; avec 40 kg : 12,0 s |
| Température de fonctionnement | -10 °C à +55 °C |
| Interfaces | SimNet (bus haute vitesse), NMEA 0183 (versions 2.0, 2.3, 3.0) |
| Fonctions principales | Pilote automatique, réglage précis du cap (1° ou 10°), virement de bord automatique, empannage automatique, mode Nav (asservi GPS), mode Conservateur d'Allure (vent), compensation automatique de barre (Autotrim) |
| Modes de fonctionnement | Veille, Auto (cap compas), Nav (route GPS), Wind (angle vent apparent) |
| Réglages utilisateur | Niveau de réponse (1-9), état de la mer (On/Off), pose à bâbord ou tribord |
| Compas interne | Compas fluxgate intégré, avec compensation automatique (rotation de 450°) |
| Compas externe | Compatible avec compas SimNet externe (prioritaire) |
| Installation | Fixation par tête d'homme dans la barre franche et douille de fixation sur le banc de cockpit ; pose à tribord par défaut, paramétrable à bâbord |
| Entretien et nettoyage | Nettoyer avec un chiffon doux et sec ; éviter les produits abrasifs et l'immersion ; protéger la prise avec le capuchon lorsqu'il n'est pas utilisé |
| Sécurité | Respecter les distances minimales par rapport aux sources magnétiques (1 m) ; utiliser un fusible 10 A ; ne pas faire cheminer les câbles près du moteur ou d'antennes |
| Pièces détachées et accessoires | Tête d'homme de rechange (TPPK7), prise socle étanche (SKT22/32), supports Tiller Brackets (TB30 à TB120), supports Pedestal (PB30 à PB90), rallonges de vérin (PRE30 à PRE300) |
| Garantie | Document fourni séparément ; consulter le site www.simrad-yachting.com |
FOIRE AUX QUESTIONS - TP22 SIMRAD
Questions des utilisateurs sur TP22 SIMRAD
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Télécommande au format PDF gratuitement ! Retrouvez votre notice TP22 - SIMRAD et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil TP22 de la marque SIMRAD.
MODE D'EMPLOI TP22 SIMRAD
Comme Navico améliore continuèlement ce produit, nous nous réservons le droit d'y apporter des modifi cations, sans que pour autant celles-ci soient indiquées dans la presente version du manuel. Dans le doute, veuillez consulter votre distributeur.
Le propriétaire est le seul responsable de l'installation et de l'utilisation de l'instrument et des transducteurs d'une manière qu'ils ne puissant provoquer des blessures ou des dommages matériels. L'utilisateur de ce produit s'engage àmettre en pratique les directives de sécurité de la navigation.
NAVICO HOLDING AS. ET SES FILIALES, SUCCURSALES ET ASSOCIÉS, REJETTENT TOUTE RESPONSABILITÉ POUR DES UTILISATIONS DE CE PRODUIT POUVANT ENTRAIÑER DES ACCIDENTS OU PROVOQUER DES DOMMAGES OU POUR DES UTILISATIONS ILLEGALES.
Langue gouvernante : la présente déclaration, les manuels d'instructions, les modes d'emploi et toute autre information relative au produit (la documentation) pourrait être traduits ou ont été traduits à partir d'une autre langue (Traduction). Dans le cas de confiits entre une traduction quelconque de la Documentation, la version anglaise de la Documentation sera la seule version offi cielle de la Documentation.
Le present manuel décrit la version du produit en cours au moment où ce document a été imprimé. Navico Holding AS. et ses fi liales, succursales et associés, se réservent le droit d'apporter des modifications sans préavis.
Copyright
Le contrat de garantie est un document fourni independament de cette notice.
Pour toute demande de garantie, veuillesz consulter le site Web concernant votre apparéil: www.simrad-yachting.com
3 Généralités
3 Introduction
4 Réseau SimNet
5 Utilisation
5 Généralités
5 Mode Veille
5 Mode Pilote Automatique
6 Réglage du cap
6 Virement automatique et empannage
8 Fonctions avances
8 Mode Nav
8 Conservateur d'Allure
9 Utilisation d'un compas externe
10 Configuration
10 Pose à bâbord
10 Mode Étalandage
13 Compensation automatique (Autotrim)
14 Installation
14 Mise en place du Tillerpilot
16 Installation électrique
18 Interfacage via SimNet
19 Raccordement du TP au bus SimNet
20 Interfacage via NMEA
22 Antiparasitage
22 Compensation automatique du compas
23 Annexe
23 Conseils d'utilisation
24 Recherche de panne
26 Phrases NMEA en réception
27 Pièces de rechange et accessoires
27 Accessoires de pose
28 Dimensions
28 Caracteristiques techniques

Généralités
Introduction
Les pilotes automatiques Simrad TP10, TP22 et TP32 convenennent à la plupart des voiliers à barre franche jusqu'à 12 m (39 ft) de longueur hors-tout.
Combinaison d'unelectronique très sophistiquée gérée par unlogiciel avancé et d'une puissant mecanique,ilsatteignent unniveau de performance elevé dans la précision de barredans une large gamme de conditions de navigation avec une consommationelectrique minimale.
Les Tillerpilots ont été conçus pour allier le niveau le plus avancé de la technologie et des caractéristiques des pilotes automatiques à un mode opération simple et complet commandé par un clavier ergonomique à cinq touches.
Les fonctions avancées du TP22 et TP32 comprend les modes Conservateur d'Allure et Nav (navigation asservie au GPS) à l'aide d'appareils externes directement connectés au Tillerpilots via le bus haute vitesse SimNet ou via l'interface intégrée NMEA 0183. Simrad propose également une télécommande portable pour les Tillerpilots. Pour plus de détails, veuillez consulter le site Web concernant votre apparéil: www.simrad-yachting.com
Pour obtenir des performances optimes de votre Tillerpilot, il est essentiel qu'il soit correctement installé. Veuillez prendre le temps de dire ce manuel complètement avant d'entreprenevre l'installation.
Réseau SimNet
Le système SimNet est élaboré selon un système de réseau à bus haute vitesse qui permet l'interconnexion facile et l'échange de données entre les instruments, les apparils de navigation et les Pilotes automatiques Simrad.
Tous les apparêils sont interconnectés et alimentés par un cable standard unique.
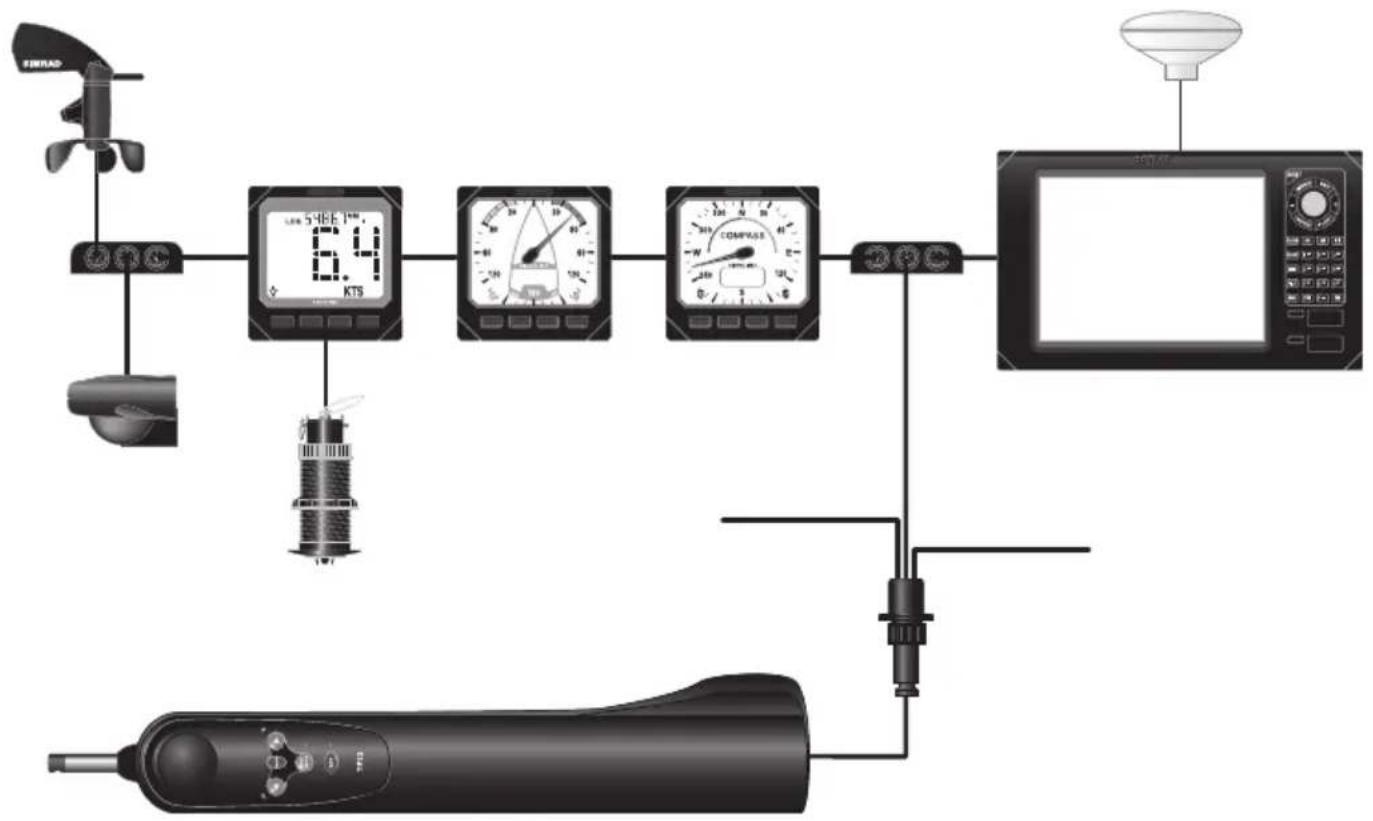
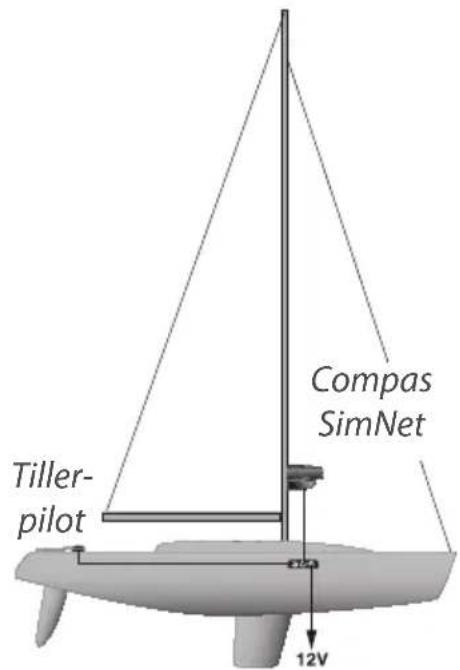
Système SimNet
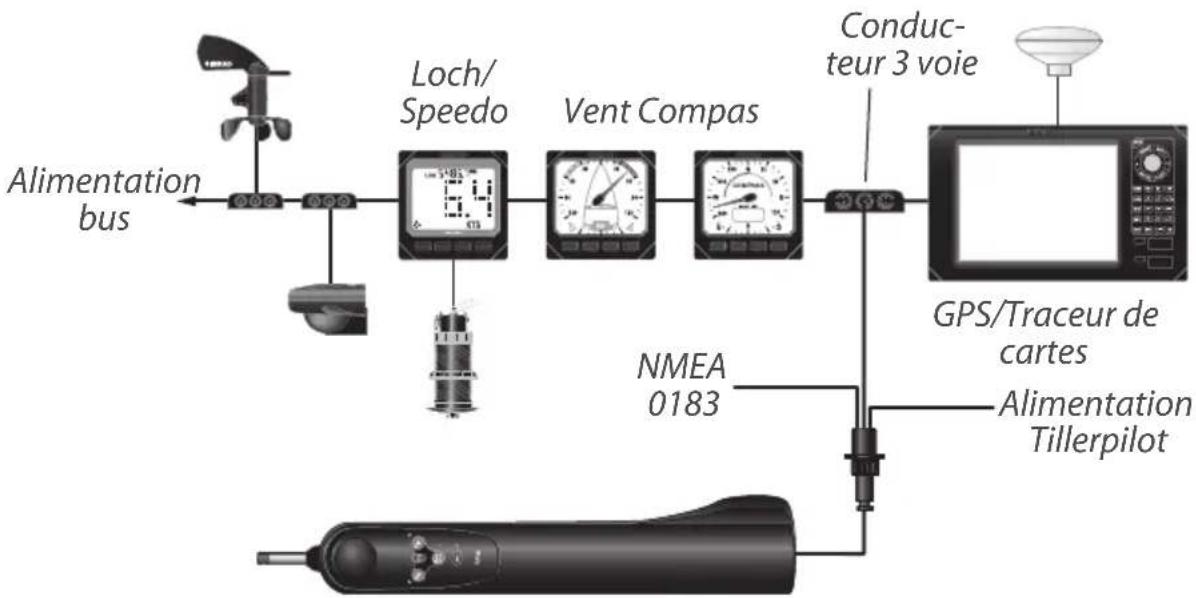
Pour l'asservissement au GPS (mode Nav), le Tillerpilot peut receivevoir les informations de navigation en provenance du Traceur de cartes. Il accepte également les données d'angle du vent en provenance du capteur de girouette anémomètre pour le mode Conservateur d'Allure, ainsi que les données de vitesse du bateau du loch speedomètre et les données de cap du capteur compas.
De plus, les données de cap calculées par le compas du Tillerpilot peuvent être affichées sur n'importe quel apparéil capable d'afficher les données de compas.
Remarque: Les données de cap transmises par le Tillerpilot ne peuvent etre affichees sur un instrument que si aucun capteur de compas n'est connecte au reseau. En effet, les capteurs compas SimNet sont always prioritaires comme source de données de cap.
2
Utilisation
Généralités
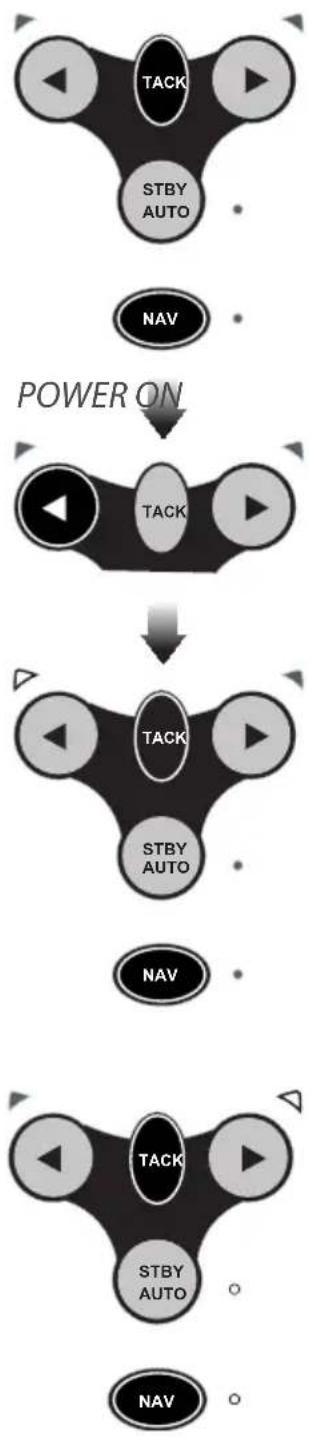
Les pilotes de barre franche n'ont pas de bouton de mise en route. Ils sont sous tension des qu'ils sont connectés à une source d'alimentation.
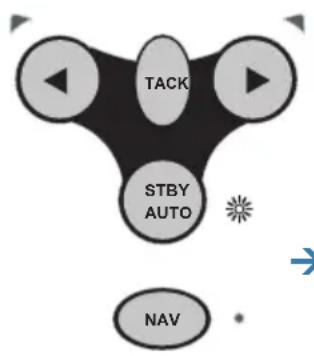
A la mise en marche, l'appareil est en mode Veille, signalé par la LED clignotante, à côté de la touche STBY/AUTO. Les deux LED directionnelles au-dessus des touches Bâbord («) et Tribord («) sont toujours faiblement éclairées, ce qui fournit un éclairage nocturne suffisant pour le clavier. Toutes les fonctions sont confirmées par un "bip" sonore et visuèlement par les LED, de cetteASFTE on s'assure que le pilote a bien pris l'instruction donnée.
Remarque: Le touche NAV sur le TP22 et TP32 est marquee CAL sur le TP10. Ces touches sont citées dans ce manuel là où la fonction s'applique.
Mode Veille
En mode Veille, le verin peut etre entree et sorti manuellement en appuyant sur les touches flechees Babord (et Tribord ()ce qui permet d'utiliser le Tillerpilot comme systeme de "barre motorisée".
Mode Pilote Automatique
Note: Le zéro de barre est mémorisé à la première mise en service du pilote. Cependant cette information est perdue à l'arrêt du pilote. Avant d'engager le pilote, assurez vous que la barre est centrée.

Pour activer le mode pilote automatique, appuyez sur la touche STBY/AUTO pour verrouiller le Tillerpilot sur le cap actuel. La LED contiguè à cette touche arrêté de clignoter et reste allumée tant que l'appareil est en mode Pilote Automatique.
Pour verrouiller le pilote sur le cap voulu, barrez sur le cap correct et embrayez le pilote automatique ou embrayez le pilote automatique puis reglez le cap pour aligner le bateau sur la route voulue (voir "Réglage du cap" page 6).
Si vous exercez une pression prolongée sur la touche STBY/AUTO le pilote émet un second bip et se verrouille sur le cap précédemment utilisé ( cette fonction est indisponible lorsque l'appareil vient juste d'être allumé).
Réglage du cap
En mode Pilote Automatique, il est possible d'ajuster le cap avec précision:
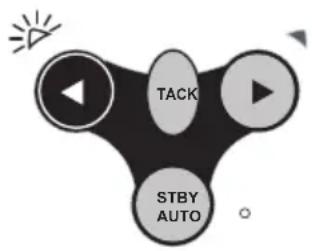
- Appuyez une fois sur la touche Bâbord («) ou Tribord («) pour modifier le cap de 1^ dans la direction indiquée. Ce réglage est confirmé par un bip unique et par un éclat de la LED Bâbord ou Tribord.
- Exercez une pression prolongée sur la touche pour modifier le cap de 10^ . Le réglage est confirmé par un double bip et un double clignotement de la LED Bâbord ou Tribord.
Virement automatique et empannage
Le Tillerpilot est doté d'une fonction de virement de bord automatique et empannage automatique qui facilité la manoeuvre lors de la navigation en solitaire ou en équipage réduit.
Le pilote de barre franche désisira automatiquement virement ou empannage en fonction de la direction du vent vrai.
-
Virement si < à 90°
-
Empannage si > à 120°
Le virement de bord/empannage automatique est possible uniquely en mode Pilote Automatique.
Pour initiaiser le virement de bord/empannage automatique, appuyer et maintainir la touche TACK jusqu'à entendre un bip. Pour confirmer le virement de bord/empannage, appuyer sur la touche Bâbord (▲) ou Tribord (▼) selon le bord choisi. Le pilote de barre franche émettras 3 bips consécutifs espacés d'une seconde suivis d'un bip long lorsque le virement/empannage automatique commence.
Le fonctionnement du Tillerpilot varie lors d'un virement de bord/ empannage automatique selon que le pilote est en mode Compas ou en mode Conservateur d'Allure:

Virement de bord/empannage automatique en mode Compas
En mode Compas (par défaut), le Tillerpilot effectue le virement/ empannage dans la direction selectionnée. L'angle préréglé en usine est de 100^ .
Virement de bord/empannage automatique en mode Wind (Conservateur d'Allure)
Le Tillerpilot effectue un virement de bord/empannage vers la même valeur d'angle de vent true mais sur le bord opposé.
Remarque: Sous ce mode, le Tillerpilot interdit automatiquement le virement de bord/empannage dans la mauvaise direction - Bâbord amure, seul un virement de bord/empannage automatique vers Tribord amure est possible.
Virement de bord/empannage automatique en mode Nav
Comme le Tillerpilot barre en route directe vers un point de route, la fonction virement de bord/empannage automatique est désactivée en mode Nav.
S'il s'avere nécessaire d'effectuer un virement de bord/empannage automatique, désactivez le mode Nav en appuyant sur la touche NAV puis effectuez le virement de bord/empannage automatique.
Avertissement: Vérifiez que le bateau est sur la bonne amure avant de reactiver le mode Nav.
3
Fonctions avancées
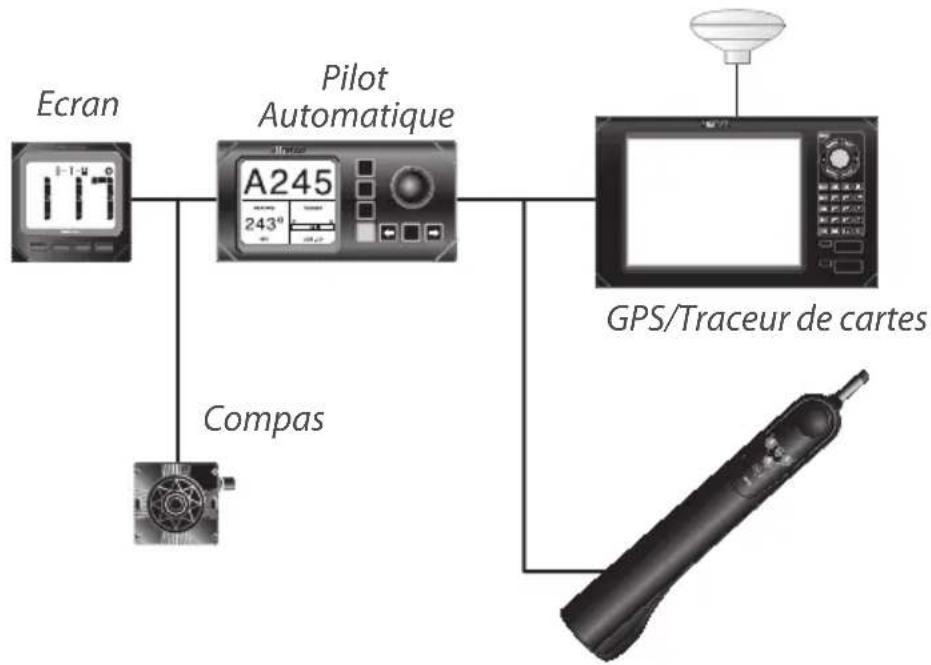
Les Tillerpilots TP22 et TP32 sont dotés de nombreuses fonctions avancées, telles que la lecture des données de cap provenant de diverses sources autres que le compas fluxgate interne, y compris les récepteurs de navigation (GPS ou Traceurs de cartes) et les girouettes compatibles SimNet ou NMEA. Vous pouvez également utiliser un compas SimNet externe.
Mode Nav
Le Tillerpilot peut être directement interfacé à un Traceur de cartes Simrad compatible via le bus de données haute vitesse SimNet. Il est également doté d'une interface NMEA intégrée, pour la connexion des GPS et traceurs de cartes compatibles NMEA 0183.
Une fois interfacé à un GPS ou un traceur de cartes, le Tillerpilot peut barrer à l'aide des données fournies par cette source externe en plus des données du compas interne, ce qui augmente la précision de barre en direction du point de route de destination.
Pour activer le mode Nav, l'appareil doit être en mode Auto STBY/ AUTO). Il suffit d'activer un point de route ou une route dans le GPS ou le traceur de cartes et d'appuyer sur la touche NAV. La LED à côté de la touche NAV s'allume et le Tillerpilot barre sur un cap précis en direction du premier point de route à l'aide des informations d'Écart traversier (XTE) et de Relèvement du point de route (BTW) fournies par le récepteur de navigation.
A l'arrivée au point de route cible, une alarme intermittente re- tentit. Par mesure de sécurité, pour éviter tout changement de cap inopiné, il est alors nécessaire d'appuyer sur la touche NAV pour activer le point de route suivant. Lorsque le navire atteint le point de route final, le Tillerpilot poursuit sa route sur le cap actuel en mode Compas (Auto) jusqu'à le passer en STBY.
Remarque: Les fonctions des touches peuvent etre differentes en mode Nav et en mode Compas (voir "Réglage du cap" page 6 et "Virement de bord/empannage automatique en mode Nav" page 7).
Conservateur d'Allure
Le Tillerpilot peut naviguer selon l'angle du vent只不过 que le cap compas, en utilisant les données de vent reçues via les interfaces SimNet ou NMEA. En raison de sa plus grande vitesse de transfert de données, l'emploi d'une girouette SimNet telle est recommendée - le Tillerpilot donne la priorité aux données SimNet par rapport aux données NMEA.
Remarque: Il n'est pas possible d'activer le mode Conservateur d'Allure si aucune donnée de vent n'est disponible sur le réseau.

Pour pouvoir selectionner le mode Conservateur d'Allure, l'appareil doit etre en mode Auto (appuyez sur STBY/AUTO).Exercez une pression prolongee sur les touches Babord (et Tribord ()jusqu'audition d'un double bip.
Les deux LED Bâbord et Tribord clignotent simultanément quand le pilote est en mode Conservateur d'Allure. Pour revenir en mode Compas, exercez une pression prolongée sur les touches « et » jusqu'à audition d'un second bip.
En mode Conservateur d'Allure, le Tillerpilot se verrouille sur l'angle du vent apparent actuel. Tout réglage de cap est alors effectué relativement à l'angle du vent,只不过 qu'au cap compas comme en mode Compas.
Le lancement d'un virement de bord automatique aligne le bateau sur le même angle de vent apparent sur le bord opposé. Par mesure de sécurité, la fonction virement de bord automatique est désactivée aux allures portantes.
Remarque: Le mode Nav ne peut pas etre selectionné en mode Conservateur d'Allure - pour I'activer, revenez d'abord en mode Compas.
Utilisation d'un compas externe
Normalement le fonctionnement précis d'un pilote automatique monobloc est très aléatoire sur un bateau en matériel ferreux (acier, ferrociment, etc.) en raison des perturbations du compas fluxgate interne provoquées par la coque.
Bien que le Tillerpilot soit équipé d'un compas fluxgate intégré, il donne la priorité au Compas SimNet externe, s'il détecte celui-ci sur le bus du réseau.
Sur un bateau en acier ou en composite ferreux, l'emplacement correct du compas externe est sur le mât, entre 1 et 2 m au-dessus du pont. Sur les coques en matérielau non-ferreux, le compas doit être place le plus bas possible, aussi pres que possible du centre du bateau, mais à distance de toutes sources d'interférences magnétiques telles que haut-parleurs, etc.
4
Configuration
Pose à bâbord
Bien que le Tillerpilot soit préréglé en usine pour la pose à tribord; il est possible de le reprogrammer pour la pose sur le côté bâbord du cockpit, ce qui facilité l'installation sur certains types de voilliers.
Options de pose à Bâbord et à Tribord
Alimentation coupée, maintenez les touches NAV (CAL) et TACK enfoncées et allumez le pilote. La LED Bâbord ou Tribord s'allume, en fonction de la configuration de pose actuelle. Appuyez sur la touche Bâbord (« pour sélectionner la pose à bâbord - la LED Bâbord s'allume pour signaler le côte sélectionné. Confirmez la selection et passez en mode Veille en appuyant sur NAV (CAL).
Pour selectionner la pose à Tribord, repeteze la procédure ci-dessus, mais en appuyant sur la touche Tribord () .
Mode Étalandnage
Le niveau de réponse et les réglages état de la mer peuvent être ajustés que le pilote soit en mode Standby ou en mode Auto:
-
Appuyer et maintainir la touche TACK, puis appuyer sur NAV (CAL)
-
La Led Tribord s'allume pour indiquer que le réglage du niveau de réponse est sélectionné, pour passer aux réglages d'etat de la mer appuyer sur la touche TACK - La led Babord s'allume pour indiquer que le réglage d'etat de la mer est sélectionné.
Réglage du niveau de réponse (1-9)
Le Tillerpilot manqueevre la barre franche pour compenser les variations de cap. L'importance du mouvement de barre est directement proportionnelle à l'erreur de cap détecté par le compas. La valeur relative du mouvement est déterminée par le réglage le niveau de réponse (parfois appelé rapport de barre).
Le réglage le niveau de réponse peut être comparé à la conduite d'un vehicule à moteur, à grande vitesse, un tout petit mouvement du volant suffit pour diriger le vehicule (Réponse FAIBLE). A BASSE vitesse, un mouvement plus important du volant est nécessaire (Réponse FORT).
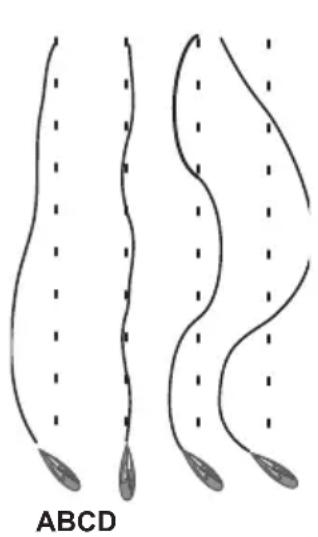
La Fig montre;
- A: l'effet d'un niveau de réponse trop faible – le temps de return du navire sur le cap correct est très long
- B: illustrre le réglage idéal grâce auquel les corrections d'erreurs sont rapides
- C: illustrre les effets d'un niveau de réponse trop fort, qui entraine une oscillation du navire de part et d'autre du cap correct.
- D: Un niveau de réponse excessif creée une tendance à l'instabilité de route, conduisant à une augmentation progressive de l'erreur.
→ Remarquersque le réglage Etat de la mer est sur "On"le niveau de réponse intégre les paramètres d'une bande morte (Voir "Réglage D'Etat de la mer" Ci dessous).

Lorsque le niveau de réponse est sélectionné, la LED NAV clignote et l'appareil émet des séries repétées de bips. Le nombre d'éclats et de bips composant la série indique le niveau du réglage du Réponse.
- Utilisez les touches Bâbord («) et Tribord («) pour régler le niveau de Réponse sur une échelle de 1 à 9
- Appuyez sur NAV (CAL) pour confirmer et revenir en mode de fonctionnement normal, ou appuyez sur TACK pour passer au réglage d'Etat de la mer.
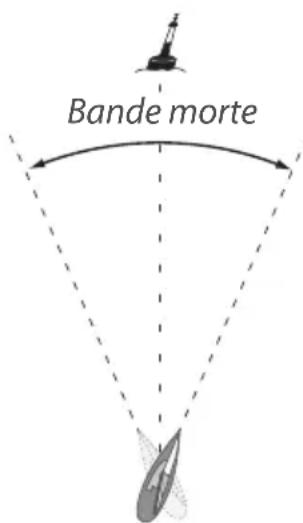
Réglage d'Etat de la mer (On/Off)
Par mer forté, le système détecte davantage de variations de cap et si le Tillerpilot essais de réagir à toutes ces erreurs, le système peut être en suractivité causant une fatigue inutile de l'appareil et une décharge excessive des batteries. En réglant "Etat de la mer" sur "On" un "secteur mort", à l'intérieur duquel le bateau peut s'éçarter du cap sans que le pilote n'effectue des corrections continulement, a été ajouté. La taille de cette bande morte est ajustable par le niveau de réponse, pour réaliser le meilleur compromis entre la conservation du cap et la décharge de la batterie. Lorsque l'Etat de la mer est sur
"Off" Une bande morte de valeur minimum est appliquée à tous les niveaux de réponse (1-9). Voir tableau Ci dessous.
-
En mode Étalionnage, appuyez sur TACK pour alterner entre les réglages de niveau de réponse et d'État de la mer (signé par l'allumage de la LED Bâbord). Le niveau de réglage de la fonction État de la mer est indiqué par le nombre de bips sonores et de clignotements de la LED Nav. Un Bip/Flash indique que d'État de la mer (Bande morte) est sur "ON", deux Bips/Flashes indiquent qu'il est sur "OFF".
-
Utilisez les touches Bâbord («) et Tribord («) pour activer/ désactiver le filtré d'etat de la mer.
- Appuyez sur NAV (CAI) pour valider les réglages et revenir en mode de fonctionnement normal.
TP10/22/32 Tillerpilot Niveau de réponse
| Niveau de réponse 1 23456789 | ||||||||||
| Barre (Gain) Haut 0,3 0,3 | 0,4 | 0,5 | 0,5 | 0,6 | 0,6 | 0,7 | 0,7 | |||
| Barre (Gain) Bas 0,2 0,2 | 0,3 | 0,3 | 0,3 | 0,4 | 0,4 | 0,4 | 0,5 | |||
| Contre Barre Haut 2,2 | 2,2 | 2,2,4 | 2,4 | 2,4 | 2,4 | 2,4 | 2,4 | |||
| Contre Barre Bas 1,8 1,8 | 1,8 | 2,0 | 2,0 | 2,0 | 2,0 | 2,0 | 2,0 | |||
| Etat de la Mer On, Bande morte | 5,5 | 5,5 | 4,5 | 4,0 | 3,5 | 3,0 | 2,5 | 2,0 | 1,5 | |
| Etat de la Mer Off, Bande morte | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | |
Le passage en paramètres Haut ou en paramètres Bas dépend de la vitesse du bateau et de l'angle du vent
A l'abattée ou en vent de travers, Haut ou bas dépendent de la vitesse du bateau:
En dessous de 4 noeuds > Haut. Au dessus de 4 noeuds > Bas.
Si vous perdez trop de vitesse par exemple en remontant au vent, les paramètres passerons de Bas à Haut pour donner une réponse de barre suffisante.
En vent arrêté (-140^ à +140^) , les paramètres seront toujours sur Haut qu'elle que soit la vitesse du bateau
Haut/Bas dépend de la vitesse du bateau: Toujours Haut:

Compensation automatique (Autotrim)
Dans certaines conditions le système applique un angle à la barre (généralement appelé compensation de barre) pour que le bateau navigue en ligne droite. Par exemple, au pres, le bateau est normalement tiré par le vent, et le barreur applique une compensation à la barre pourmaintenirlecap. La valeur de cette compensation de barre varie en fonction de facteurs tels que vent, la vitesse du bateau, le réglage des voiles et la surface de voilure établie. Si cette donnée n'était pas prise en compte, le bateau aurait tendance à dériver par rapport à la route programmée ou àvenir ventdebout au pres.
Le Tillerpilot contrôle continuellement l'erreur de cap moyenne et compense progressivement la barre jusqu'à obtenir un réglage optimal. Cette compensation est appliquée graduallement, de sorte à ne pas ALTERER les performances normales du Tillerpilot. Il est donc normal de constater un-delai d'environ une minute pour que la compensation soit complète après un changement de bord. Une fois que la compensation optimale est atteinte, le pilote continue à surveiller les changements importants des conditions dominantes et modifie la compensation en conséquence
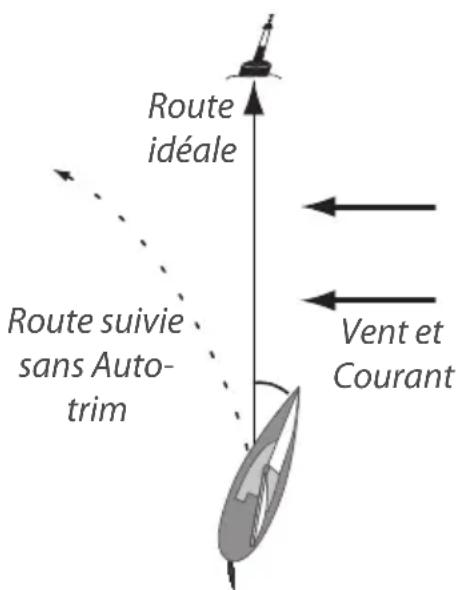
Remarque: La compensation automatique (autotrim) est automatiquement appliquée et ne peut pas être régée manuellement.
5
Installation
Mise en place du Tillerpilot
Le Tillerpilot est un apparéil très sophistiqué et pour qu'il fonctionne à plein rendement, il est essentiel qu'il soit correctement installé. Veuillez lore attentivement cette section avant d'entreprenevre l'installation et avant d'utiliser votre Tillerpilot.
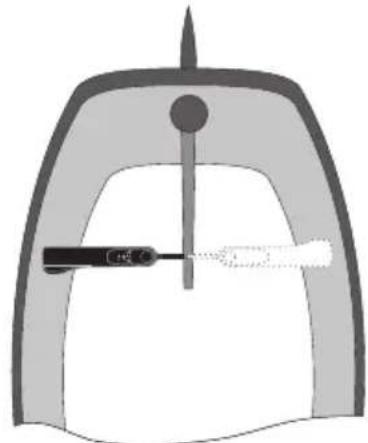
Le Tillerpilot doit etre aligné horizontally au niveau de la barre franche quand il est accroché a celle-ci.
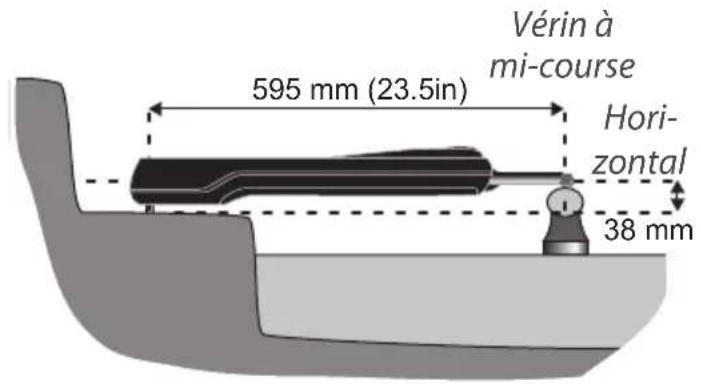
Lorsque la barre
franche est dans
l'axe du bateau
et que le verin
est à mi-course,
l'angle entre le
Tillerpilot et la
barre franche doit
etre exactement
de 90^
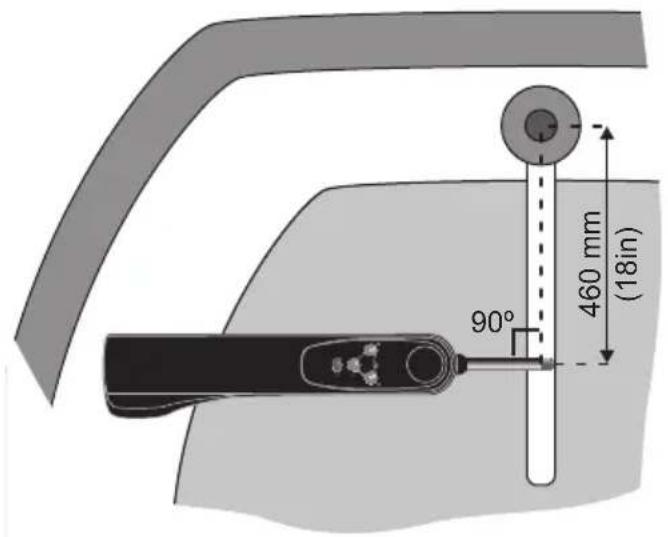
Remarque: Le pilote est préréglé en usine pour être installé à Tribord comme illustré ci-dessus, mais il peut être reprogrammé pour une installation à Bâbord (voir “Pose à bâbord” page 10).
Les dimensions indiquées en doivent être respectées autant que possible, surtout celles.
Remarque: Si les côtes indiquées ne correspondent pas au bateau sur lequel le Tillerpilot doit être installé, une gamme d'accessoires de pose est disponible pour permettre une installation correcte (Veuillez vous reporter en "Pièces de rechange et accessoires" page 27 pour plus d'informations)
Attention: Le Tillerpilot renferme un compas fluxgate interne et doit donc être installé à distance de toutes sources d'interférences magnétiques, telles que le compas de route du navire. La distance minimale de sécurité est de 1m.
Le Tillerpilot est fixé à l'aide d'une tête d'homme de barre et d'une douille de fixation fournies d'origine, permettant la mise en place et le rangement de l'appareil.
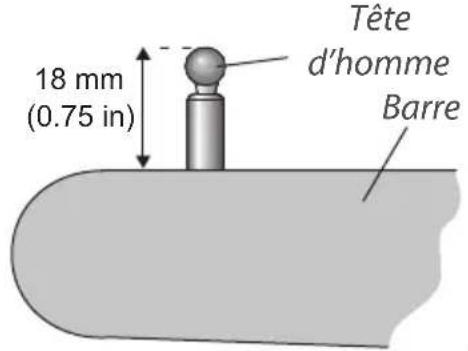
Pour installer la tete d'homme dans la barre, percz un trou 6,3 mm dans la barre franche (veiliez à ce que le trou soit parfaitement vertical et dans l'axe longitudinal de la barre). Percz à une profondeur laissant dépasser la tete d'homme de 18 mm. Fixezla à l'aide de colle époxy.
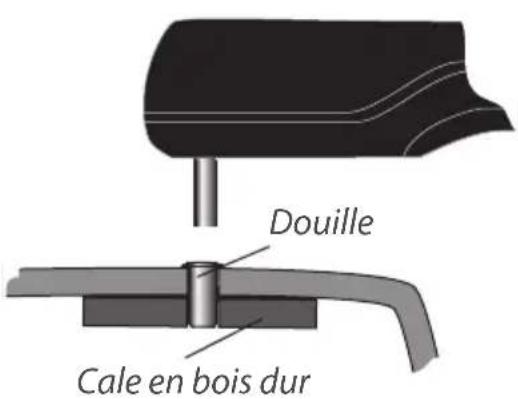
Pour poser la douille de fixation, percez un trou 012,7 mm dans le banc de cockpit et fixez-la de sorte que la collerette dépasse. Vérifiéz que la douille soit solidement fixée (utilisez une colle époxy) et qu'elle soit en contact avec le support sur toute la hauteur d'encastrement. Si nécessaire, renforcez la face inférieure du banc de cockpit avec une cale en bois dur ou en contreplaqué
Remarque: En raison de l'importance des contraintes exercées, ne posez pas le TP sur la douille de fixation et sur la tete d'homme avant le durissement complet de la colle.
Installationélectrique
Installation des TP22 et TP32
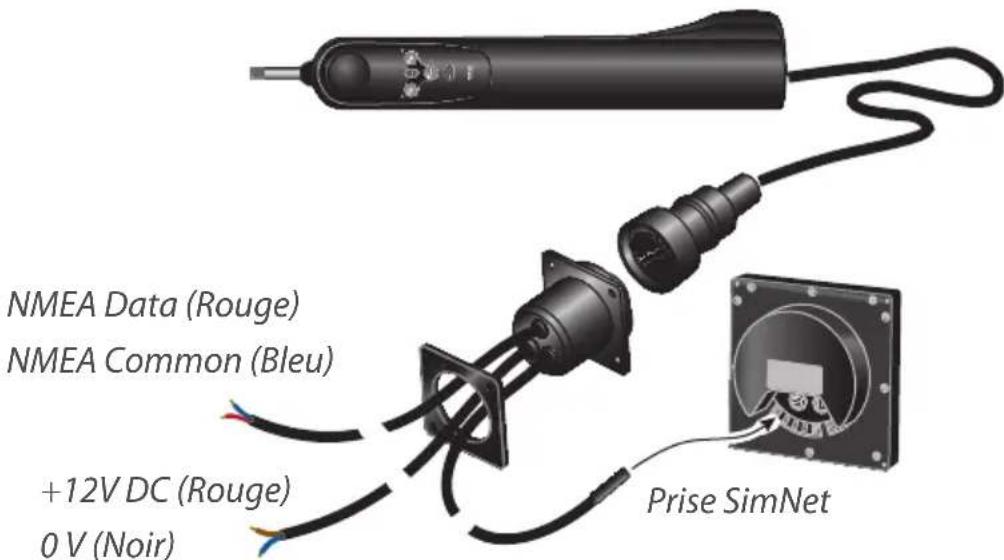
Le Tillerpilot fonctionne sur une alimentation électrique 12V CC. La prise étanche montée sur le Tillerpilot sert à l'alimentation électrique et à la transmission des données SimNet et NMEA. Le socle de cloison doit être installé dans une position pratique à proximité de l'emplacement de pose du Tillerpilot et cable comme illustré ci-dessous.
Attention: Si le navire est équipé de plusieurs groupes de batteries séparés, veillez, lors de la connexion du Tillerpilot à l'alimentation électrique, à connecter le pilote et tous les apparêils interfacés—SimNet ou NMEA—au même groupe de batteries, même si chacun de ces apparêils est raccordé au tableau de distribution via une connexion indépendante. Cette précaution permet d'éviter les écarts de tension entre les différents apparêils interfacés, qui auraient pour effet d'alterer le fonctionnement de ces derniers.
Tableau de selection du cable d'alimentation
| Longuer de cable Section | Type de conducteur | AWG | |
| < 4 m (13 ft) 1,5 mm | 2 | 30/0,25 16 | |
| 4 - 8 m (27 ft) 2,5 mm | 2 | 50/0,25 14 | |
- Montez le socle de cloison sur une surface pour éviter toute accumulation d'eau stagnante autour du socle. Replacez toujours le capuchon de protection quand le pilote est débranché

- Aucune alimentation électric n'est délivrée vers ni par le bus SimNet - le TP doit toujours être alimenté par une connexion dédiée
- Utilisez un cable de section appropriée entre le tableau de distribution et le socle
- Protégéz l'alimentation du TP par un fusible ou un disjoncteur de 10A
- Ne raccordez:aucun autre apparéil électronique ou électrique au cable d'alimentation,ne raccordez pas le cable à l'alimentation d'un autre apparéil - connectez chaque apparéil à son propre disjoncteur ou porte fusible sur le tableau de distribution
- Vérifiez que les extrémités des cables sont étamées et que toutes les connexions sont correctement réalisées. Des mauvais contacts provoquent une perte de puissance du TP et augmentent le temps de réponse de celui-ci
- En cas de doute, faites appel à un technicien qualifié pour installer l'appareil.
Installation du TP10
Le TP10 est alimenté en 12V DC via le cable d'alimentation fourni. Mème si les fils sont étamés, il est commandé d'apporter un soient particulier au branchement de la prise et que celle-ci soit étanche. Un kit, comprant une prise et une embase, est disponible en option (réf. SKT100; voir "Pièces de rechange et accessoires" page 27).
Branchement à l'alimentation:
| Couleur fil | |
| Marron + 12 V | DC |
| Bleu 0 V | |
- Utilisez un cable de section appropriée entre le tableau de distribution et le socle (voir page précédent)
- Protégéz l'alimentation du TP par un fusible ou un disjoncteur de 10A
- Ne raccordez:aucun autre apparéil électronique ou électrique au cable d'alimentation,ne raccordezpas le cable à l'alimentation d'un autre apparéil - connectez chaque apparéil à son propre disjoncteur ou portefusible sur le tableau de distribution
- Vérifiez que les extrémités des cables sont étamées et que toutes les connexions sont correctement réalisées. Des mauvais contacts provoquent une perte de puissance du TP et augmentent le temps de réponse de celui-ci
- En cas de doute, faites appel à un technician qualifié pour installer l'ordinateil.
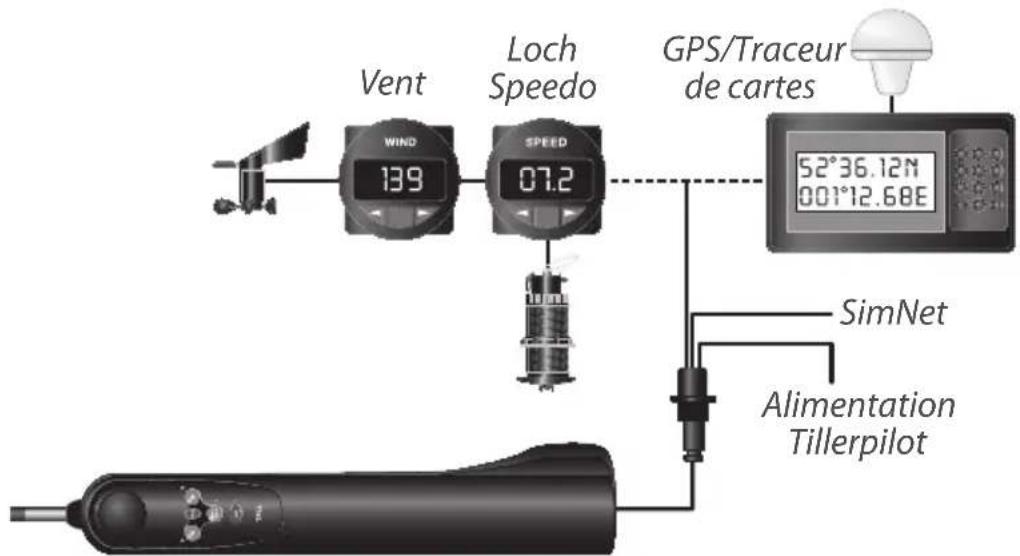
Interfacage via SimNet
Le Tillerpilot est raccordé aux autres apparèils compatibles SimNet via le cable SimNet intégré et la prise socle de cloison.
Tous les apparèils SimNet (Instruments, Traceurs de cartes, Radars, Pilotes automatiques, etc.) utilisent le même cable unique de bus haute vitesse pour partager les données. Le système est "plug-and-play": aucun paramétrage n'est nécessaire, il suffit de brancher le Tillerpilot au port SimNet libre le plus proche pour qu'il détecte automatiquement les données exploitables disponibles sur le réseau. Si aucun port SimNet n'est disponible, un tel de jonction trois voies "Tee Joiner" peut être utilisé pour creer un port supplémentaire.
Remarque: Il n'est pas nécessaire de brancher le Tillerpilot directement sur un apparéil dont vous souhaitez utiliser les données - toutes les données sont disponibles en tous points du réseau.
Raccordement du TP au bus SimNet
Les pilotes TP22 et TP32 peuvent être connectés au bus SimNet et partager automatiquement les données du réseau. Aucun paramètre n'est nécessaire.
Deux modes de fonctionnement sont disponibles:
Mode Système (par default)
Le pilote de barre franche partage les données avec les autres instruments SimNet. Une selection des sources peut etre faire a partir de n'importe quel instrument partageant des données.
Mode Autonome Le pilote de barre franche ne partage pas automatiquement les données avec les autres instruments SimNet, autre que les unités de commande AP24 ou AP28 branchés sur le réseau. Ces derniers partageront toujours les sources avec le pilote de barre franche. Les sources pour le pilote de barre franche et les AP24/AP28 peuvent être sélectionnées à partir des écrans des AP24/AP28.
Pour changer de mode de fonctionnement, commencez par eteindre le Tillerpilot.
-
Pour sélectionner le mode Système (par default) appuyez de façon prolongée sur les touches TACK, STBY/AUTO et NAV et mettez l'appareil en marche
-
Pour sélectionner le mode Autonome exercez une pression prolongée sur les touches TACK et « ou les touches TACK et mettez l'appareil en marche
Maintenir les touches appuyées durant l'initialisation. Le pilote émet 3 Bips et les Leds s'allument brievement pour confirmer la nouvelle configuration.
Remarque: Consultez le manuel du périhérique de commande pour plus de détails sur les sources de données de télécommande.
Remarque: Si plusieurs sources de données sont connectées au bus SimNet, mais qu'aucun apparéil de commande capable de reprogrammer le TP n'est liént, la source de données doit être la seule connectée au bus quand le mode Autonome est sélectionné - éteignez ou déconnectez toutes les autres sources de données jusqu'à la fin de la procédure de selection de mode de fonctionnement.
Remarque: Le changement du mode de fonctionnement ou le simple fait de selectionner de nouveau le même mode réinitialise toutes les sélections de sources de données sur lesquelles le TP était précédemment verrouillé.
Remarque: Si l'une des sources de données externes change, alors le pilote de barre franche doit être configuré pour utiliser la nouvelle source, selon la procédure ajustate pour le mode Autonome ou le mode Système.
Le processeur NMEA intégré permet la connexion directe de tout apparéil compatible NMEA 0183 au Tillerpilot, sans nécessité d'une interface séparée.
Si un GPS ou un traceur de cartes est connecté au Tillerpilot, celui-ci peut en extraire les données nécessaires pour l'utilisation du mode Nav. D'autres fonctions telles que le mode Conservateur d'Allure, sont également disponibles, sous réserve de transmission des phrases NMEA appropriées par des instruments compatibles NMEA 0183.
Lors de la connexion d'un apparéil ("émètteur") externe au Tillerpilot, deux bornes sont utilisées, généralement appelées "SIGNAL" et "COMMUN" (ou COM). Celles-ci doivent être connectées au cable NMEA du Tillerpilot comme suit:
Émetteur NMEA Tillerpilot NMEA
Sortie NMEA Données/+ Signal (Rouge)
Sortie NMEA COM/- Commun (Bleu)
Remarquétains appareils d'autres fabricants n'ont pas de connexion COM dédiée. Dans ce cas, la connexion SIGNAL est généralement appelée NMEA OUT et le cable NMEA Commun du Tillerpilot doit être connecté à la borne 0V (borne 2). En cas de doute, demandez conseil au fabricant ou au Service Support Produit de Simrad.
Attention: En raison des limites du protocole NMEA 0183, il est recommendé de ne laisser émettre qu'un seul transmetteur à la fois en direction du Tillerpilot, c'est-à-dire instruments ou GPS/traceur de cartes, pas les deux simultanément! S'il faut interfacer plus d'un apparéil au Tillerpilot, il faut les connecter au cable NMEA via un commutateur ou inverseur.
En raison du nombre important de fabricants et de modèles d'appareils de navigation différents, Simrad ne peut pas garantir le fonctionnement et l'installation corrects de chaque apparéil. Aussi, avant de connecter unquelconque apparéil au Tillerpilot, il est important de vérifier que la possibilité d'interfacage via NMEA soit clairément indiquée dans le manuel.
Antiparasitage
Le Tillerpilot a été unconçu pour minimiser les effets des parasites générés par l'alternateur du moteur. Cependant, il faut observer certaines précautions et faire cheminer les cables à distance du compartmentement moteur. Ne faites pas cheminer les cables dans une gaine contenant des cables transportant du courant fort ou des cables d'antenne.
Les moteurs à allumage par étincelle, ainsi que certains réfrigérateurs doivent également être équipés d'antiparasites. Demandez conseil à votre agent Simrad le plus proche.

Compensation automatique du compas
Une fois le Tillerpilot installé, il est nécessaire de compenser le compas interne de la déviation provoquée par tout object métallique ou magnétique liént à proximité sur le navire.
Naviguez au moteur à vitesse réduite (2 à 3 nœuds) par mer calme avec le Tillerpilot en mode Veille, appuyez plusieurs fois sur la touche Tribord (▶) pour initier une rotation lente du navire dans le sens des aiguilles d'une montre. Exercez une pression prolongée sur la touche TACK, puis simultanément sur les touches Bâbord (▶et Tribord (▶).
Les deux LED Bâbord et Tribord s'allument. Faites décrire au navire une rotation minimale de 11/4 tour (450^) en 2 minutes environ, nécessaire et suffisante pour l'étalonnage automatique du compas fluxgate. La LED Bâbord clignote si la vitesse du bateau ou le taux de virage sont trop élevés. Ralentissez le bateau ou diminuez l'angle de rotation.
La LED Tribord clignote si la vitesse du bateau ou le taux de virage est trop faible, augmentez la vitesse du bateau ou augmentez l'angle de rotation. Un bip court (quelques secondes) signale que l'étalonnage a été effectué avec succès et le Tillerpilot revient en mode Veille. En cas d'impossibilité de compensation, dans un-delai de quatre minutes, un bip long retentit.
Remarque: Un échec persistent de la procédure de compensation au terme de tentatives repétées, signifie que le compas du TP est sujat à une déviation magnétique excessive qui ne peut être compensée. Inspectez la zone dans un rayon d'1 m après du TP pour découvert les causes possibles de cette déviation, comme un hautparleur de cockpit ou de grands objets métalliques - si ces objets ne peuvent pas'être déplacés, il peut s'avérer nécessaire d'inşaller un compas externe (voir "Utilisation d'un compas externe" page 9).
6
Annexe
Conseils d'utilisation
Correctement utilisé, votre Tillerpilot est capable de suivre un cap, sous la plupart des allures, aussi bien qu'un barreur experimenté, avec l'avantage de ne jamais se laisser distraire. Cependant, dans certaines circonstances, l'etre human possède l'avantage de pouvoir anticiper les événements, ce qu'aucun pilote automatique ne peut sentir, particulièrement au portant par mer formée. Les conseils suivants dévaient améliorer vos réfficacité en navigation sous TP:
- Au pris, il est facile d'oublier de régler la grandvoile, ce qui augmente la durée de la barre. À où un barreur humain s'adapterait rapidement, le pilote automatique se bat et le bateau est barre moins efficacement. Alors qu'un barreur aime généralement sentir une certaine durée de la barre, cette condition n'est pas nécessaire au fonctionnement du TP. La consommation d'énergie, l'usure et la trainée seront considérablement réduites si la grandvoile est choquée ou réduite un peu plus tout que normalement sous barre manuelle.
- Il est également prudent, pour éviter que le bateau soit trop ardent au pres, de régler le cap quelques degrés sous le vent du cap qui serait suivi en barrant manuellement.
- Plein vent arrêté, un barreur est à même de perceivevoir les signes avantcouleurs d'un empannage, ce que le TP ne peut pas détecter – il est donc recommandé de ne pas naviguer sous pilote automatique aussi pres du point d'empannage que vous pourriez le faire en barrant manuellement.
- Au grand largue ou à vitesse élevée, particulièrement par mer formée de troisquarts arrirée, les mouvements appliqués périodiquement à la barre par le barreur sont naturellement plus importants qu'au pres ou à faible vitesse. Ceci équivaut à augmenter le gain de barre et il est donc avisé d'effectuer ce réglage sur le TP. De nombreux navigateurs préférent trouver un réglage de compromis, utilisé pour toutes les allures, mais qui, avec la pratique, peut être optimisé en fonction des différentes conditions de navigation rencontres, par exemple pour la petite vitesse au moteur ou pour la navigation rapide sous voile. Si le niveau de réponse est trop faible, le bateau s'écarte du cap, car l'angle appliqué à la barre est insuffisant; si le niveau de réponse est trop élevé, le bateau corrige trop fortement les écarts de cap, ce qui augmente la consommation d'énergie.
- Le TP est un apparéil de haute technologie. Cependant, toute confiance excessive serait une erreur. comme tous les apparéils électroniques de navigation, il s'agit d'une aide à la navigation qui ne doit enaucun cas se substituer au sens marin élémentaire.
Recherche de panne
| Symptôme Cause probable Remède | ||
| Dès qu'il est actif le pilote applique immédiatement un grand angle à la barre et augmente l'erreur de cap. | - Le Tillerpilot est paramétré pour la pose à bâbord et installé à tribord (ou vice versa). | - Reportez-vous en “Pose à bâbord” page 10 |
| Aprés avoir fonctionné normalement, le Tillerpilot perd soudainement le cap et passée en mode Veille. | - Alimentation coupée brutelement ou tension trop faible. - Le cable d'alimentation de la prise socle est de trop faible section. - Connexion intermittente. | - Utilisez un cable de plus forte section. - Vérifiez toutes les connexions. - Rechargez les batteries. - Augmentez la capacité des batteries. |
| La barre est en butée et l'alarme retentit sans interruption. | - L'erre est insuffisant pour gouverner ou les voles sont masquées. Le fonctionnement par impulsion est un dispositif de sécurité correct quand la barre est enoute de course. | - Ramenez le bateau sur son cap et réembrayez le pilote. |
| La prise est alimentée mais le pilote ne s'allume pas. | - La prise est incorrectly câblée. | - Vérifiez le câblage de la prise (voir "Installation électrique" page 16) |
| Perte du cap en mode Conservateur d'Allure | - Le vent apparent est devenu trop faible pour fournir une direction utilisable. | - Passez en mode Compas. |
| Impossible de sélectionner le mode Conservateur d'Allure. | - Câpteur de tête de mât non connecté. - Le système SimNet n'est pas activé ou n'est pas alimenté. - Les phrases NMEA requises ne sont pas transmises sur le réseau. | - Vérifiez les connexions. - Vérifiez que le système est activé. - Voir “Phrases NMEA en réception” page 26 et contrôle les connexions NMEA. |
| Impossible de sélectionner le mode Nav. | -GPS ou Traceur de cartes non connecté.- Point de route non activé.- Utilisation d'un format NMEA inapproprié. | -Vérifiez les connexions.- Activez des points de route ou une route.- Contrôlez que le format NMEA 0183 est émis par le positionneur. |
| Fonction virement de bord automatique inopérante. | -Le pilote est en mode Nav.- Le pilote est en mode Conservateur d'Allure et: a) angle du vent apparent est >90°- b) la tentative de virement de bord a été effectué dans la mauvaise direction. | - Quittez le mode Nav.- Lafez jusqu'à ce que l'angle du vent apparent soit inférieur à 90°. |
| Le pilote ne suit pas un cap précis en mode Auto. | -Le compas fluxgate est perturbé par des interférences magnetiques (compas sur colonne, haut-parleur, etc) ou par des objets métalliques (winchs, accastillage, etc) | -Vérifiez la compensation du compas ("Compensation automatique du compas" page 22).- Connectez un compas SimNet externe.- Replacez le compas sur colonne par un compas de cloison.- Déplacez les objets générant interférences. |
Effectuez ces contrôle simples avant de demander l'intervention d'un technicien, vous economiserez du temps et de l'argent. Avant de contacter le service après-vente, notez le numéro de série du Tillerpilot.
Phrases NMEA en réception
L'information NMEA 0183, nécessaire à une fonctionnalité complète en mode Nav, est la suivante:
- Écart traversier (XTE)
- Relèvement du point de route de destination
- Signal d'arrivée au point de route
- Déclinaison magnétique
-Vitesse du bateau
Cette information est extraite des phrases NMEA 0183 suivantes:
| Réception Données reçues | |
| APA Écart traversier (XTE), relièvement du/arrivée au point de route | |
| APB Écart traversier (XTE), relièvement du/arrivée au point de route | |
| RMA Vitesse et route sur le fond et déclinaison magnétique | |
| RMB Écart traversier (XTE), relièvement du/arrivée au point de route (T) | |
| RMC Vitesse et route sur le fond et déclinaison magnétique | |
| BWR Relèvement du/arrivée au point de route (loxodromie) | |
| BWC Relèvement du/arrivée au point de route (orthodromie) | |
| BWW Relèvement point de route du point de route | |
| VHW Vitesse du bateau | |
| XTE Écart traversier |
Le Tillerpilot extrait également l'angle du vent apparent des phrases NMEA 0183 suivantes:
| Réception Données reçues | |
| VWR Vitesse et Angle du Vent Apparent | |
| MWV Vitesse et Angle du Vent Apparent |
Pièces de rechange et accessoires
Les pieces de rechange et accessoires suivants sont disponibles auprès de votre agent Simrad. Veuillez indiquer la referencia de la piece à la commande:
| TPPK7 Tête | d'homme de rechange, douille de fixation et bouchon d'extrémité de vérin |
| SKT100 Prise | socle étanche de cloison et cable (TP10) |
| SKT22/32 Prise | socle étanche de cloison et cable (TP22 et TP32) |
Remarque: Consulter www.simradyachting.com pour obtenir la liste des écrons et pupitre de commande compatibles
Accessoires de pose
| Tiller Brackets | Part No | Height |
| TB30 | 30mm (1.18") | |
| TB60 | 60mm (2.36") | |
| TB90 | 90mm (3.54") | |
| TB120 | 120mm (4.72") |
| Pedestal & Cantilever Brackets Height Cantilever Bracket CB1 Length | Part No | Height / Length |
| PB30 | 30mm (1.18") | |
| PB60 | 60mm (2.36") | |
| PB90 | 90mm (3.54") | |
| CB1 135 - 240mm ( 5.31 - 9.44") | ||
| Push Rod Extensions | ||
| Length | Part No | Length |
| PRE30 | 30mm (1.18") | |
| PRE60 | 60mm (2.36") | |
| PRE90 | 90mm (3.54") | |
| PRE120 | 120mm (4.72") | |
| PRE150 | 150mm (5.90") | |
| PRE300 | 300mm (11.81") | |
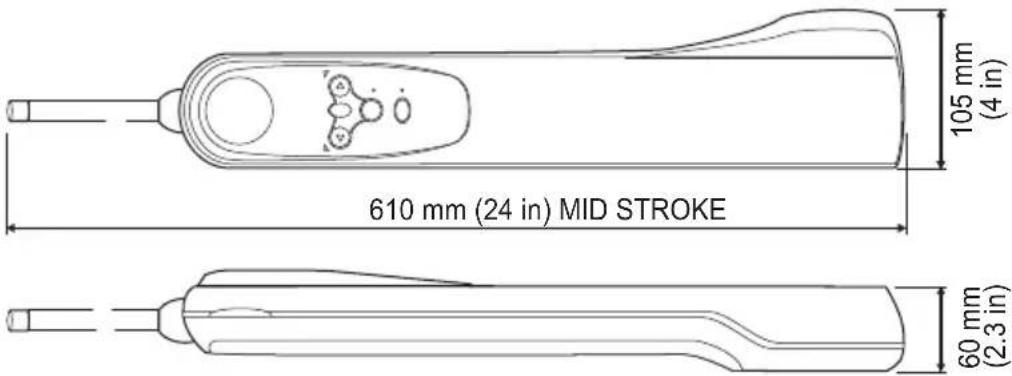
Dimensions
\section*{Caracteristiques techniques}
| Tension d'alimentation 12 | V (10 à 16 V) CC |
| Consommation électrique (moyenne) | Veille - 60 mA Auto - 500 mA |
| Format NMEA (TP22 & TP32) | Compatible NMEA 0183 versions 2.0, 2.3 et 3.0 (4800 bauds, pas de parité, 8 bits, 1 bit d'arrêt) |
| Système de transmission | TP10 - A vis |
| TP22 - A vis | |
| TP32 - Vis à billes | |
| Course de travail 250 mm | (10 in) |
| Poussée en crête | TP10 - 65 kg (143 lbs) |
| TP22 - 70 kg (154 lbs) | |
| TP32 - 85 kg (187 lbs) | |
| Temps de butée à butée | 0 kg P10 - 6.9 sec TP22 - 6.9 sec TP32 - 4.0 sec |
| 20 kg TP10 - 8.0 sec TP22 - 8.0 sec TP32 - 4.7 sec | |
| 40 kg TP22 - 12.0 sec TP32 - 6.0 sec | |
| 50 kg TP32 - 8.0 sec | |
| Température ambiente -1 | 0°C à +55°C (14°F à 131°F) |
| Pose à tribord par défaut | (paramétrable) |
SIMRAD




- Copyright
- Généralités
- Utilisation
- Fonctions avances
- Configuration
- Installation
- Annexe
- Généralités
- Introduction
- Réseau SimNet
- 2
- Utilisation
- Mode Veille
- Mode Pilote Automatique
- Réglage du cap
- Virement automatique et empannage
- Virement de bord/empannage automatique en mode Compas
- Virement de bord/empannage automatique en mode Wind (Conservateur d'Allure)
- Virement de bord/empannage automatique en mode Nav
- 3
- Fonctions avancées
- Mode Nav
- Conservateur d'Allure
- Utilisation d'un compas externe
- 4
- Configuration
- Pose à bâbord
- Mode Étalandnage
- Réglage du niveau de réponse (1-9)
- Réglage d'Etat de la mer (On/Off)
- Compensation automatique (Autotrim)
- 5
- Installation
- Mise en place du Tillerpilot
- Installationélectrique
- Installation des TP22 et TP32
- Installation du TP10
- Interfacage via SimNet
- Raccordement du TP au bus SimNet
- Émetteur NMEA Tillerpilot NMEA
- Antiparasitage
- Compensation automatique du compas
- 6
- Annexe
- Conseils d'utilisation
- Phrases NMEA en réception
- Pièces de rechange et accessoires
- Accessoires de pose
Marque : SIMRAD
Modèle : TP22
Catégorie : Télécommande