
UA 30 CLD - Capteur ultrasonique CARLO GAVAZZI - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil UA 30 CLD CARLO GAVAZZI au format PDF.
| Type de capteur | Ultrasonique |
| Mode de détection | Réflexion directe |
| Sorties | Programmables |
| Portée de détection | Non précisé |
| Alimentation | Non précisé |
| Type de sortie | Diffus |
| Fréquence ultrasonique | Non précisé |
| Indice de protection | Non précisé |
| Matériau du boîtier | Non précisé |
| Température de fonctionnement | Non précisé |
| Montage | Non précisé |
| Dimensions | Non précisé |
| Poids | Non précisé |
| Utilisation recommandée | Détection d'objets |
| Compatibilité | Non précisé |
FOIRE AUX QUESTIONS - UA 30 CLD CARLO GAVAZZI
Questions des utilisateurs sur UA 30 CLD CARLO GAVAZZI
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Capteur ultrasonique au format PDF gratuitement ! Retrouvez votre notice UA 30 CLD - CARLO GAVAZZI et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil UA 30 CLD de la marque CARLO GAVAZZI.
MODE D'EMPLOI UA 30 CLD CARLO GAVAZZI
Réflexion directe objet, sorties programmables /
Manuel de l'utilisateur
Sommaire
Installation 27
Description du logiciel 28
Distance de détection 76
Câblage 77
Dimensions 77
Astuces de montage 78
1. Montage du détecteur
Installer le détecteur selon la position requise en l'orientant vers la cible et en s'assurant que la distance à la cible se trouve bien à l'intérieur des limites de la plage de détection du détecteur.
2. Alimentation du détecteur
Pour alimenter électriquement le détecteur, raccorder la broche 2 à la masse (0 VCC) et la broche 1 au plus (+) (19 - 30 VCC).
3. Programmation du détecteur
Programmation des paramètres d'après le descriptif du logiciel.
Description du logiciel
Conçu pour la plate-forme Windows, le programme UDSProg. EXE simplifie la configuration du détecteur grâce à ses menus intuitifs.
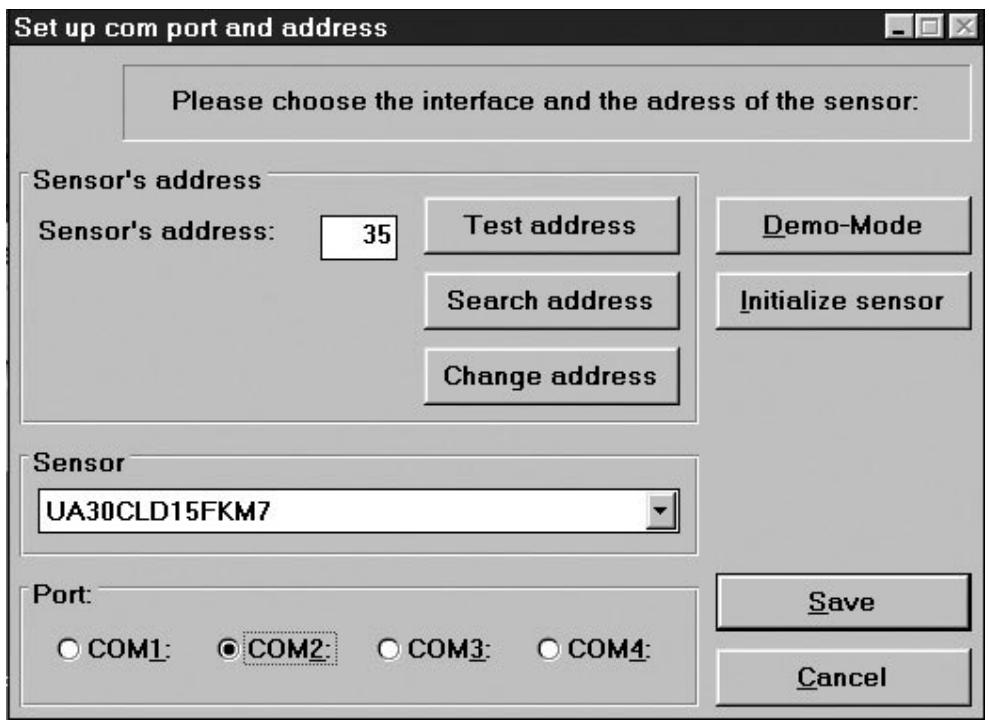
Port
Sélectionner le port COM (adaptateur de programmation) dans la première fenêtre qui apparaît au démarrage du programme.
Détecteur
Dans le menu déroulant, sélectionner le type de détecteur adéquat.
Adresse
97 constitue l'adresse définie par défaut en usine. On peut affecter toute adresse dont le numéro est compris entre 0 et 99.
Recherche d'adresse
La fonction "Search address" permet de localiser l'adresse d'un détecteur raccordé mais dont l'adresse est inconnue.
Mode démo
En mode démo, on ne peut pas programmer un détecteur. Ce mode permet uniquement de vérifier les paramètres.
Initialisation du détecteur
Remise à zéro des paramètres de configuration d'usine.
Confirmation des paramètres et affichage du menu.
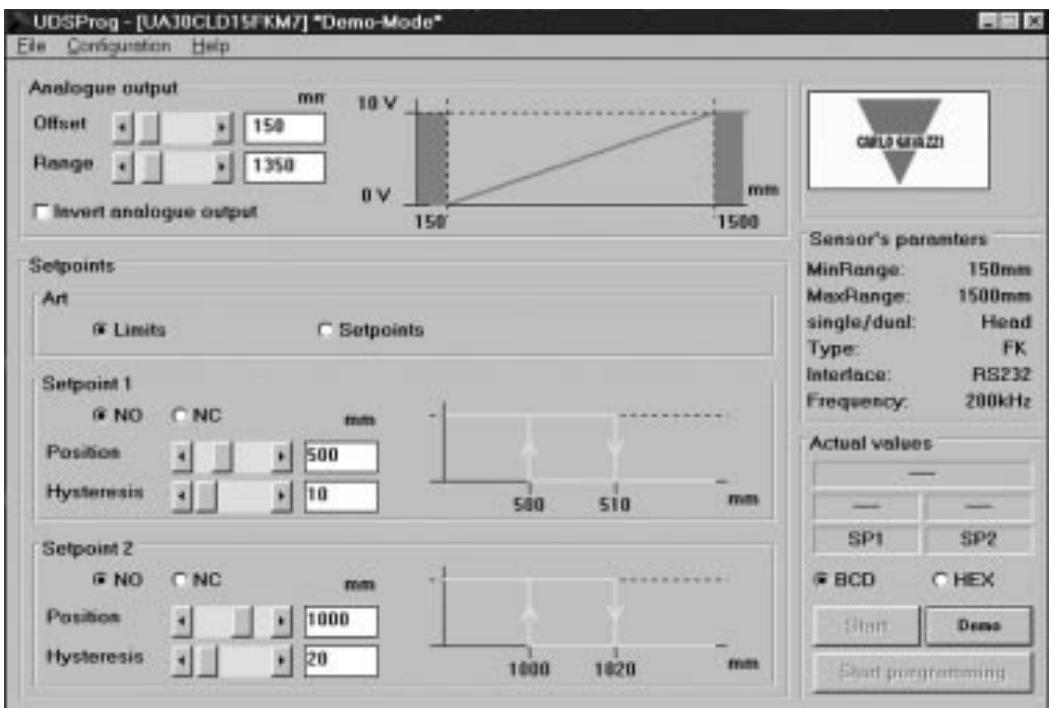
Sortie analogique
On configure la sortie analogique au moyen de deux paramètres : offset et range. Offset (décalage) est la distance entre la face avant du détecteur et le point le plus proche sur une distance de détection. Range (distance) est la distance qui provoque la commutation de la sortie analogique de 0 à 10 V ou de 4 à 20 mA.
Pour sélectionner les paramètres de décalage et de distance (en mm), utiliser les barres de défilement ou saisir les valeurs directement. Si une inversion de la sortie analogique est requise, cocher la case.
Points de consigne de sortie
On sélectionne les points de consigne sous forme de butées (mode "Limits") ou de valeurs définies (mode "Setpoints") à condition d'avoir défini une fenêtre par « Position » et "Hysteresis".
Le point de consigne (fonction normalement ouvert ou normalement fermé) agit selon la sortie NO ou NF sélectionnée. 6
NO: En cas de dépassement d'un point de consigne, la sortie passe en haute impédance. À l'intérieur de la distance, l'impédance de sortie est BASSE et le courant passe (<100 mA). NC: En cas de dépassement d'un point de consigne, la sortie passe en basse impédance et le courant passe (<100 mA). À l'intérieur de la distance, la sortie est en haute impédance.
Pour garantir la stabilité de la sortie (mesurée = point de consigne), on peut programmer un hystérésis. Exemple d'une sortie NO:
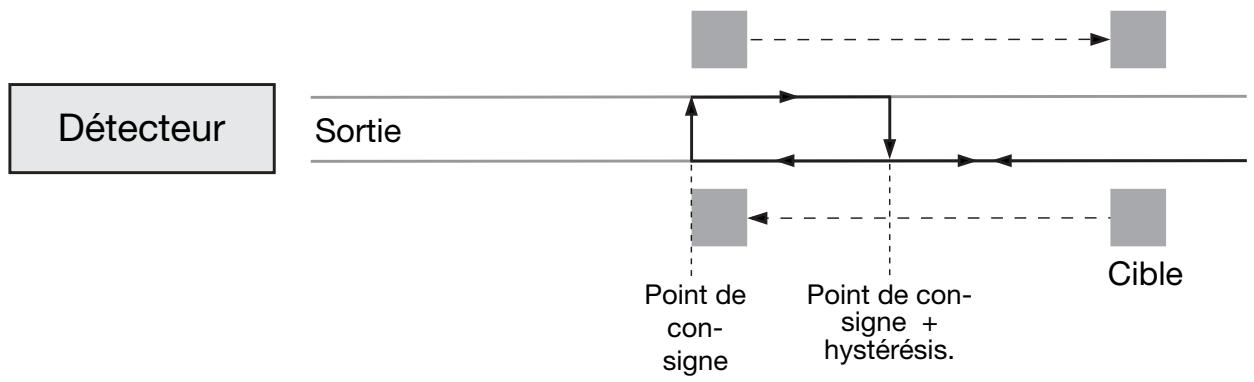
Lorsqu'une cible approche du détecteur, le niveau logique de la sortie change dès que la distance égale le point de consigne. Lorsque la cible revient en dehors de ce point, le niveau logique rechange dès que la distance égale le point de consigne augmentée de l'hystérésis.
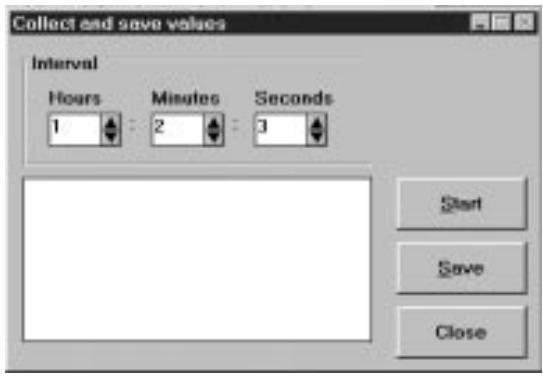
Menu "fichier
Lorsqu'on sélectionne ce menu, une nouvelle fenêtre s'ouvre. On peut sélectionner la fréquence des mesures (secondes, minutes et heures).
"Démarrage de l'enregistrement."
"Save" sauvegarde des valeurs (pour évaluation ultérieure sous Excel).
Stockage sur disque d'un fichier contenant les paramètres réels affichés.
Téléchargement dans le détecteur des paramètres stockés sur disque.
(consultation de la configuration sur le détecteur même)
Le détecteur télécharge et affiche la configuration.
(enregistrement de la configuration dans le détecteur)
Les paramètres affichés sont transférés au détecteur.
Pour transférer les paramètres au détecteur, on peut également cliquer sur le bouton "Start programming" dans le menu principal.
Initialisation du détecteur aux paramètres d'usine.
(configuration du détecteur et communication)
Menu qui permet de sélectionner un détecteur, un COM...
Options avancées
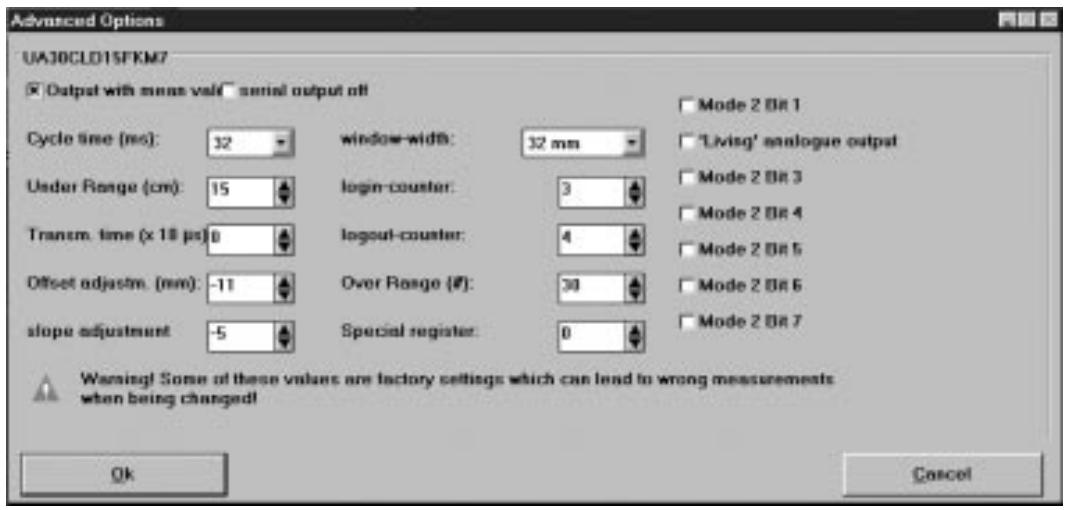
Sélection d'un mode opératoire en valeur moyenne.
Désactivation des données série émises par le détecteur. Cette fonction est utile dans les applications où le temps joue un rôle critique.
Cycle time (durée de cycle)
Sélection d'une durée de cycle en séquences de 64, 32, 16, 8 ou 4 ms.
Le principe de la mesure de distance est illustré dans le diagramme suivant.
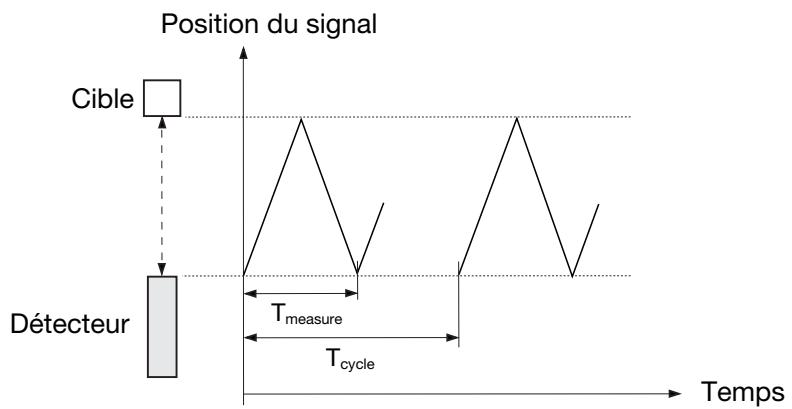
Sur ce diagramme la position du signal est représentée en fonction du temps. Le détecteur émet une impulsion ultrasonique. Ce signal est réfléchi par la cible tandis que le détecteur en capte l'écho. Un nouvel écho (l'écho d'un écho) est généralement renvoyé par l'avant du détecteur. Ce signal faible est inutilisable - et la logique T_measure ne laisse passer que le signal utile (le premier écho). T_cycle détermine le temps d'émission de l'impulsion suivante.
La durée du cycle détermine le temps de réponse du détecteur. À l'évidence, le temps de réponse d'un détecteur est proportionnel à la distance mesurée. Grâce à la programmation de la durée du cycle on peut ajuster le temps de réponse du détecteur selon l'application.
La durée d'un cycle doit être supérieure au temps qu'il faut au détecteur pour recevoir l'écho de l'impulsion émise!
T_measure est proportionnel à la distance à l'objet (de l'émission de l'impulsion à la réception de l'écho). T_measure est une expression proportionnelle de la distance; c'est pourquoi le temps est converti en distance et exprimé sous forme d'une valeur analogue.
Pour un cycle donné, la distance maximale est fonction des règles suivantes :
| Durée du cycle (ms) | Distance (m) |
| 4 | 0,3 |
| 8 | 0,7 |
| 16 | 2,5 |
| 32 | 4,5 |
| 64 | 10 |
Dépassement de distance en moins
Le détecteur permet de régler le dépassement distance en moins par incrément de 0 à 255 cm. Pendant l'émission, le détecteur ne reçoit pas et la durée de l'impulsion d'émission détermine donc la distance de détection la plus courte. Cette distance limitée par la durée de l'impulsion d'émission porte le nom de zone aveugle.
On peut contrôler le dépassement en moins. En donnant au dépassement en moins une certaine valeur, on peut faire abstraction des échos provenant de cibles situées entre la face avant du détecteur et la limite du dépassement en moins. En d'autres termes, on peut ignorer les perturbations provoquées par les objets situés à proximité du détecteur.
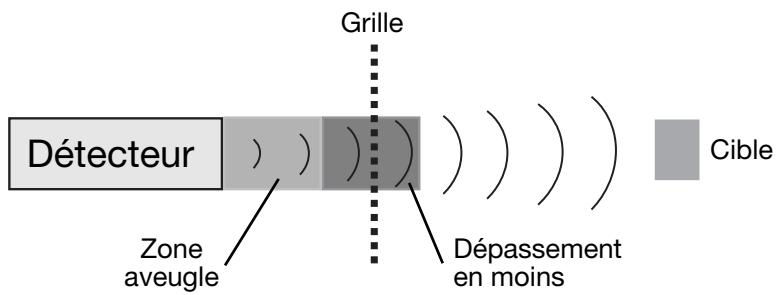
Un détecteur peut ainsi détecter des cibles à travers une grille de protection sans que la mesure ne soit affectée par les réflexions issues de la grille.
Limitations
- Le dépassement minimum de distance "en moins" est déterminé par une alarme (sonnerie) du transducteur.
- Les échos issus d'une cible massive en zone aveugle sont supprimés mais si la durée est supérieure à la longueur de la zone aveugle définie, le détecteur peut recevoir le 2ème ou 3ème écho. La sortie indique une distance de 2 ou 3 fois plus longue.
Transmission time (durée d'émission)
La durée d'émission définit la durée d'impulsion émise. On peut sélectionner une valeur comprise entre 10 μsec et 2,55 ms. Si l'on désire une durée de 0, la durée d'impulsion varie en fonction de la distance mesurée.
- Ces réglages sont effectués en usine. En particulier, éviter de modifier ces paramètres qui sont dédiés au réglage fin.
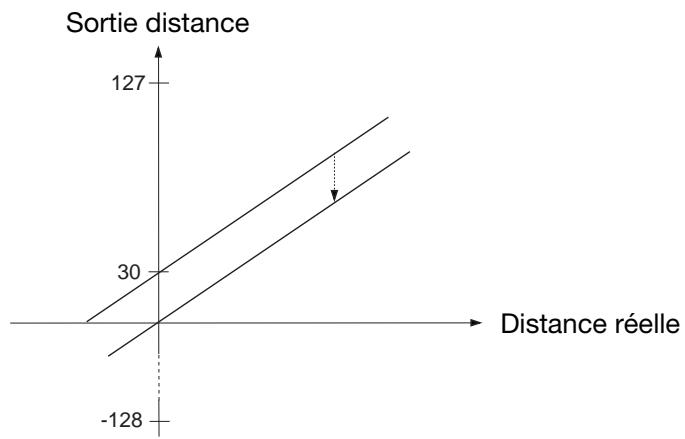
Une différence peut exister entre la distance affichée et la distance réelle. Le 0 mm affiché et le 0 mm de la distance physique mesurée peuvent être différents. On peut régler la position du 0 mm en réglant le décalage de la tête du détecteur, millimètre par millimètre, sur une plage de +/-128 mm.
Exemple de décalage négatif (voir schéma ci-après).
La sortie indique une distance de 30 mm derrière la cible. Lorsqu'on paramètre le décalage à -30 mm, le détecteur soustrait 30 mm de toutes les mesures, neutralisant ainsi l'erreur de mesure.
Le réglage de pente modifie la pente de la sortie analogue. Un réglage erroné de la pente peut affecter la linéarité et la compensation en température.
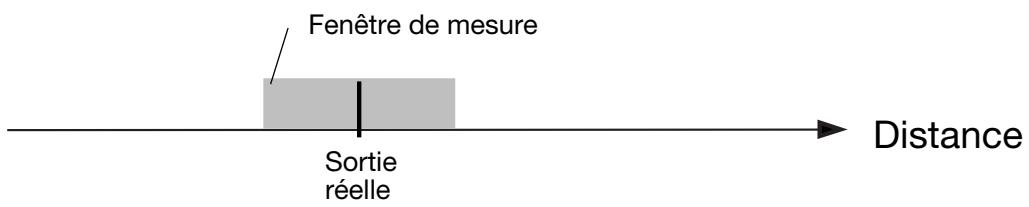
Lorsque le détector fonctionne avec un programme de valeurs moyennes, il crée une fenêtre de la distance réelle mesurée. Toutes les valeurs affichées dans cette fenêtre constituent la base de la mesure. Une valeur affichée donnée devient alors le centre de la fenêtre pour la mesure suivante et c'est pourquoi la fenêtre se déplace avec la cible. La vitesse maximale de déplacement de la fenêtre limite la vitesse de la cible à détecter. Si le déplacement de la cible est trop rapide, l'algorithme de suppression des impulsions parasites ignore les mesures de distance.
La vitesse maximale dépend de la durée du cycle et de la taille de la fenêtre de mesure utilisée. La commande "Cycle time adjustment" (réglage de durée de cycle) permet également d'ajuster la taille de la fenêtre de mesure. La taille normale de cette fenêtre est de ± 32 mm.
Le compteur des connexions/déconnexions procède du logiciel de l'algorithme de suppression des impulsions parasites du détecteur.
Procédure à toute modification eventuelle avec une attention particulière! L'électronique des détecteurs est bien protégée contre les perturbations électromagnétiques de l'environnement. De plus, la grande efficacité du filtre permet au microprocesseur d'extraire le signal correct d'un environnement bruyant.
L'optimisation des réglages d'usine permet au détecteur d'accomplir la plupart des tâches de mesure.
La sélection d'une sortie en valeur moyenne active le programme des valeurs moyennes. Avec la distance réelle mesurée au centre, on crée une fenêtre de ± 32 mm désignée fenêtre de mesure (le réglage est décrit dans la section "Fenêtre de Mesure").
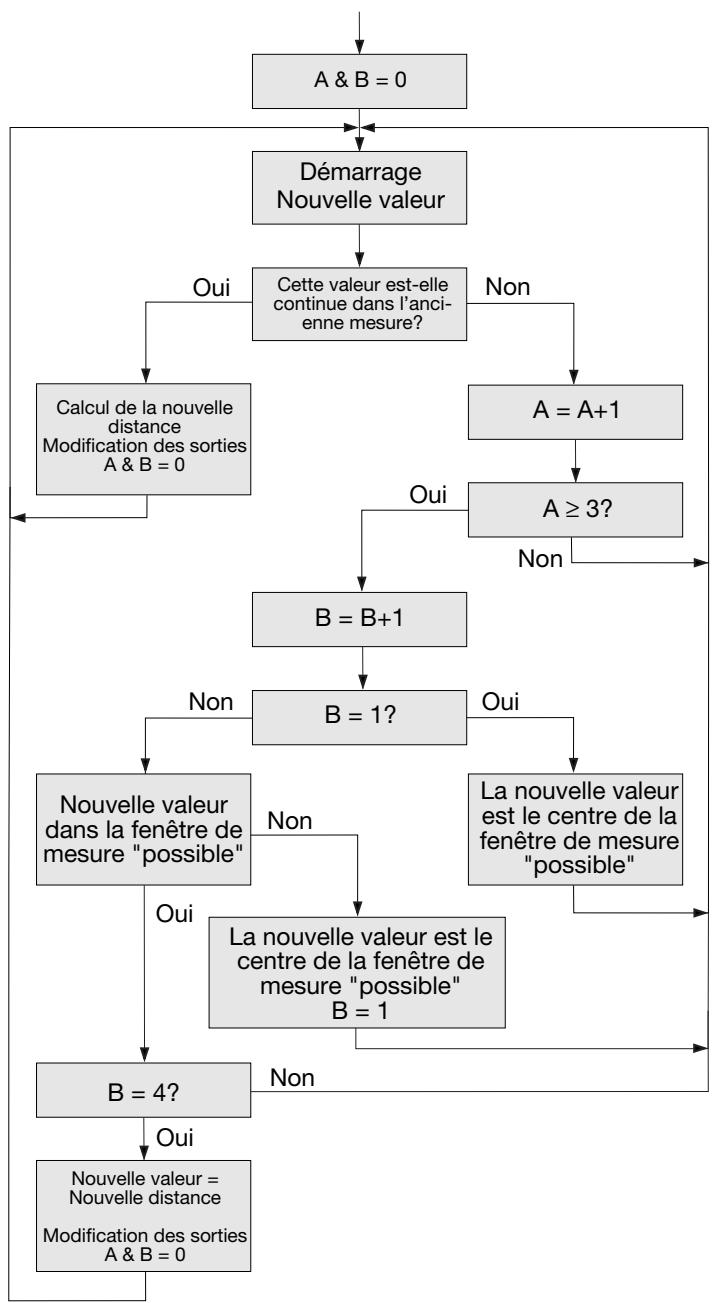
Si la mesure suivante ou si une nouvelle mesure se situe à l'intérieur de la fenêtre de mesure, le détecteur l'utilise pour calculer la nouvelle distance à mesurer. La nouvelle valeur sert de centre à une nouvelle fenêtre de mesure.
Les deux compteurs (compteur A pour la mesure de la distance réelle et compteur B pour la connexion) sont remis à zéro. Si la mesure suivante ou si une nouvelle mesure se situe à l'extérieur de la fenêtre de mesure, le détecteur ignore l'une ou l'autre et la sortie distance demeure inchangée. Le compteur de journalisation des mesures extérieures à la fenêtre incrémente de 1.
Si le compteur A affiche moins de 3 (programmable), le programme reprend au début et une nouvelle mesure démarre.
Si le compteur A affiche 3 ou plus, le compteur B incrémente.
Si B = 1, le détecteur considère que la valeur mesurée est la nouvelle distance et crée une nouvelle fenêtre de mesure. Le programme reprend au début et une nouvelle mesure démarre.
Si B > 1 et si la nouvelle mesure se situe à l'extérieur de la nouvelle fenêtre de mesure, B est positionné à 1, le programme reprend au début et une nouvelle mesure démarre.
Si B = 4 (programmable), la nouvelle mesure est effectuée en tant que nouvelle distance. À ce stade, la sortie change et les compteurs de connexion/déconnexion A et B sont réinitialisés. Le programme reprend au début et une nouvelle mesure démarre.
La structure du programme est illustrée dans l'organigramme suivant.
Over range (dépassement de distance en plus)
Ce compteur estprogrammablede0à255. Lorsqu'undeteur mesure la distance qui le sépare d'une petite cible difficile à détecter, uneforteinstabilitédesortiesestäprévoirainsqu'unbattemententre la distance réelle et le dépassement de cette distance enplus. Le compteur de dépassement de distance enpluspermét de supprimerces modificationsindésirables.
Le fonctionnement est illustré dans l'organigramme:
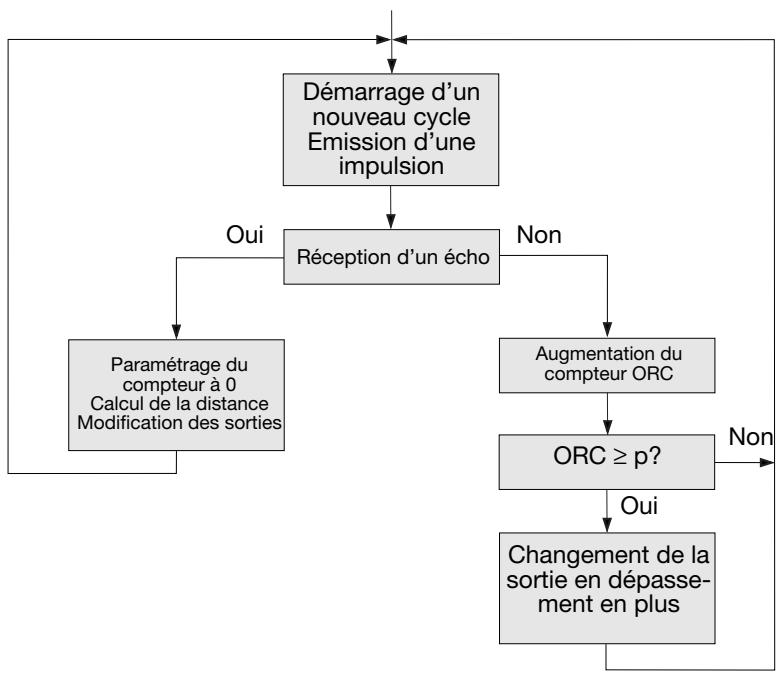
Au début du cycle de mesure, le détecteur émet une impulsion. S'il reçoit un écho, le compteur ORC (dépassement de distance en plus) est réinitialisé à 0, la nouvelle distance mesurée est calculée et - si nécessaire, les sorties changent et le détecteur émet l'impulsion suivante.
S'il ne reçoit pas d'écho, ce même compteur ORC incrémente. Si le compteur ORC est inférieur au paramètre p, les sorties ne changent pas et le détecteur émet une impulsion au cours du cycle de mesure suivant.
Si la valeur du compteur ORC est supérieure ou égale à p, les sorties passent en dépassement de distance en plus, et le détecteur émet une impulsion au cours du cycle de mesure suivant.
Exemple d'un détecteur configuré comme suit
Durée du cycle
$$ = 6 4 m s $$
Dépassement de distance en plus
$$ = 2 0 0 $$
Si la cible disparaît soudain, le temps nécessaire au détecteur est de 200^*64 ms = 12,8 s jusqu'à ce que les sorties passent en dépassement de distance en plus.
Fenêtre complémentaire en mode test
Au démarrage, on peut ouvrir une fenêtre séparée dans laquelle s'affichent la distance et l'objet des sorties de commutation.
Rated operational voltage (U_e) / Nenn-Betriebsspannung / Tension de fonctionnement nominale / Tensión de alimentación / Tensión di alimentazione / Nominelt spændingsområde
19 - 30 VDC (19 - 30 VCC)
Rated operational current (I_e) / Nenn-Betriebsstrom / Courant de fonctionnement nominal / Intensidad de salute / Corrente di carico / Max. strøm
Inversion de polarité, court-circuit, transitoires /
Pour éviter les interférences issues des pics de tension et/ou des courants inductifs, veiller à toujours faire cheminer séparément les câbles d'alimentation des détecteurs de proximité et les câbles d'alimentation des moteurs, contacts ou solénoïdes.
Éviter toute répétition de courbure dans le cheminement du câble
Une société qualifiée selon ISO 9001