
ALTIVAR 31 - Variador de velocidad TELEMECANIQUE - Manual de uso y guía de instrucciones gratis
Encuentra gratis el manual del aparato ALTIVAR 31 TELEMECANIQUE en formato PDF.
| Título | Descripción |
|---|---|
| Tipo de producto | Variador de velocidad para motores asíncronos |
| Características técnicas principales | Control vectorial, regulación de la velocidad, par constante |
| Alimentación eléctrica | Monofásica o trifásica, 200-240 V AC |
| Dimensiones aproximadas | Anchura: 150 mm, Altura: 200 mm, Profundidad: 130 mm |
| Peso | Alrededor de 2,5 kg |
| Compatibilidades | Compatible con motores asíncronos, normas CE |
| Tensión | 200-240 V AC |
| Potencia | De 0,37 kW a 15 kW según el modelo |
| Funciones principales | Control de la velocidad, protección del motor, comunicación Modbus |
| Mantenimiento y limpieza | Verificación regular de las conexiones, limpieza de los filtros |
| Piezas de repuesto y reparabilidad | Disponibilidad de piezas de repuesto, documentación técnica proporcionada |
| Seguridad | Protección contra sobrecargas, dispositivo de corte de emergencia |
| Información general | Diseñado para uso industrial, garantía de 2 años |
Preguntas frecuentes - ALTIVAR 31 TELEMECANIQUE
Preguntas de los usuarios sobre ALTIVAR 31 TELEMECANIQUE
0 pregunta sobre este aparato. Responde a las que conoces o haz la tuya.
Hacer una nueva pregunta sobre este aparato
Descarga las instrucciones para tu Variador de velocidad en formato PDF gratis! Encuentra tus instrucciones ALTIVAR 31 - TELEMECANIQUE y toma tu dispositivo electrónico nuevamente en la mano. En esta página están publicados todos los documentos necesarios para el uso de su dispositivo. ALTIVAR 31 de la marca TELEMECANIQUE.
MANUAL DE USUARIO ALTIVAR 31 TELEMECANIQUE
Variadores de velocidad Ajustable Altivar® 31
Manual de programacion. .99
Acerca de este documento 101
Categorias de riesgos y SYMBOLOS especials 102
Asistencia的技术icaldeproducto 102
Descripción general sobre la puesta en servicios 103
Recomendaciones preliminares 104
Precauciones 104
Arranque desdela alimentacionde linea 105
Energizaciónuponésrestablecerunafallamanual o uncommando de paro 105
Prueba con un motor de bajo potencia o sin un motor 105
Uso de motores en paralelo 105
Funcionamento en un sistema conectado a tierra por impedancia .. 105
Recomendaciones de programacion 105
Ajustes de fabrica 106
Protectiono termica del variador 107
Ventilación 107
Protectioni tarmica del motor 108
Terminal de programacion y ajustes del variador 110
VariadoresATV31 110
VariadoresATV31A 110
Funciones de las teclas 111
nSt:parada libre 111
Terminal de programacion y ajustes remota 112
Almacenamento y cargo de las configuraciones 112
Acceso a los menos 113
Acceso a los parámetros 114
Parametro bFr 114
Compatibiliidad entre functions 115
Funciones de aplicacion de las entradas lógicas y analógicas 116
SECCION 3: MENUS
SEt- Menu de Ajustes 119
drC- Menu de Control del variador 123
I-O- Menu de Asignacion de E/S 127
CtL- Menu de Control 130
Canales de control 130
Parametro LAC 131
Parametro LAC = L1 o L2 132
Parametro LAC = L3 133
Canal de referencia para LAC = L1 o 135
Canal de control para LAC = L1 o L2 136
Canal de referencia para LAC = L3 137
Canal de control para LAC = L3: CHCF = SIM, referencia y control combinados 138
Canal de control para LAC = L3: CHCF = SEP, modo mixto (referencia y control distinctos) 139
FUn- Menu de Funciones de aplicacion 144
Entradas sumadoras 150
Velocidades preseccionadas 151
+/- velocidad 155
Regulador PI 158
Funcionamento manual-automático con regulator PI 160
Control de freno 164
Gestion de los interruptores de limite 170
FLt-MenudeFallos 172
COM-Menú de Comunicación 176
SUP-Menus de Supervision 178
SECCION 4: SERVICIO DE MANTENIMIENTO Y DIAGNOSTICO DE PROBLEMAS
Precauciones 181
Servicio de mantenimiento de rutina 181
Visualizacion de fallas 181
El variador no arranca ni muestra ninguna falla 181
Eliminacion de fallas 182
Fallas que no pueda restablecer automatically 182
Fallas que peuvent restablecerse automatically 183
Fallas que se restablecen al borrarse la falla 184
Tablas de configuración de los ajustes 184
Parametro de ajuste del 1er nivel 185
Menu Ajustes 185
Menu Control del variador 186
Menu Asignacion de E/S 186
Menu Control 186
MenuFuncionesdeaplicacion 187
MenuFuncionesdeaplicacion(continuacion) 188
Menu Fallos 189
Menu Comunicación 189
I ndice de los codigos de parámetros 190
Indice de las functions 191
SECCION 1: INTRODUCCION
GAMA DE PRODUCTS
Altivar 31 (ATV31) es una familia de variadores de velocidad de ~ (c.a.) de Frequencia ajustable que se utilizes para controlar motores asincrúnos de tres fases. Estos se.Encuentran disponibles en las siguientesGames:
- 0,18 a 2,2 kW (0,25 a 3 hp) 208/230/240 V~, entrada monofásica
0,18 a 15 kW (0,25 a 20 hp) 208/230/240 V\~, entrada trifasia - 0,37 a 15 kW (0,5 a 20 hp) 400/460/480 V\~, entrada trifasica
- 0,75 a 15 kW (1 a 20 hp) 525/575/600 V\~, entrada trifásica
Algunos variadores ATV31 se enquirytran disponibles con un potenciometro de referencia, un boton deexecution y un boton de paro/restablecimiento. En este manual se utilizes la forma "variadores ATV31A" para hacer referencia a ellos. El simbolo *en un numero de catalogo indica la parte del numero que varia segun el tameno o valor nominal del variador.
Este manual contiene las instrucciones de programación de los variadores de velocidad ATV31. La",[si?]documentación también viene incluida con el envío del variador:
- Guía de instalación de los variadores de velocidad Altivar 31, VVDED303041US
- Guía de puesta en servicios de los variadores de velocidad Altivar 31, VVDED303043US
Consulte la Guía de instalación de los variadores de velocidad ATV31 para Obtener instrucciones sobre su recibo, inspeccion, montaje, instalacion y alambrado. Consulte la Guía de puesta en service de los variadores de velocidad ATV31 para Obtener las instrucciones de puesta en service con las configuraciones de fábrica.
Consulte el indice de@c Rodrigos de parámetros y el indices de functiones en las páginas 190-191 para Obtener un indices enorden alfabetico de los@c Rodrigos y functions que se tratan en este manual.
NOTA: A través de este manual, y en la terminal de programación y ajustes, aparecerá un guión antes del número de menu y sub-menú para diferenciarlos de los temas de parámetros. Por exemple, SEt- es un menu, pero ACC es un parámetro.
CATEGORías DE RIESGOS Y SIMBOLOS ESPECIALES
Los siguientes símbolos y mensajes especiales que figuran en este manual o en el equipo advierten al usuario de ríesgos potéciales.
El símbalo de un rayo o el hombre ANSI en una etiqueta de seguridad de "Peligro" o "Advertencia" adherida al equipo indica la existencia de un peligro electrico queouldacauselesionespersonalessino seobservan las instrucciones.
El símbolo de punto de admiración en un mensaje de seguridad en el manual indica ríesgos potecuales de lesiones personales. Respete todos los mensajes de sécurité con este símbolo para estar posibles lesiones o la muerte.
| Símbolo | Nombre |
| Rayo | |
| Hombre ANSI | |
| Punto de admiración |
ASISTENCIA TECNICA DEL PRODUCTO
▲ PELIGRO
PELIGRO indica una situación de peligro inminente que, si no se evita,oulda causar la muerte o lesiones serias.
ADVERTENCIA
ADVERTENCIA indica una situacion potencialmente peligrosa que, si no se evita,uede causar la muerte o lesiones serias.
▲PRECAUCION
PRECAUCION indica una situacion potencialmente peligrosa que, si no se evita,uede causar lesiones menores o moderadas.
PRECAUCION
PRECAUCION cuando se usa sin el símbolo de alerta de seguidad, indica una situacion potencialmente peligrosa que, si no se evita,uede causar daño a la propidad.
Para Obtener asistencia技术水平,pongase en contacto con el Grupo de asistencia技术水平. El personal de este grupo se encuesta a su disposicion desde las 8:00 hasta las 18:00 horas, hora del este de los EUA, para asistirle en la seleccion de productos, preguntas con respecto al arranque y diagnóstico del producto o problemas de aplicacion. Internacionalearraasistencia Telefonica de emergencia a su disposicion las 24 horas del dia, los 365 días del ano.
Telefono en los EUA 001 919-266-8600
Llamada gratis en los EUA 888-Square D (888-778-2733)
Correo electrónico drivepsg@us.schneider-electric.com
Fax 001919-217-6508
DESCRIPCION GENERAL SOBRE LA PUESTA EN SERVICIO
El sugínte procedimiento es una descripción general de los pasos minimos necessarios para poder en service un variador de velocidad ATV31. Consulte la Guía de instalación de los variadores de velocidad ATV31 para realizar los pasos de montaje, alambrado y de medicación de la tensión del bus. Consulte las secciones apropriadas de este manual al realizar la programación.
- Monte el variador de velocidad. Consulte la Guía de instalación de los variadores ATV31.
- Realice las siguientes conexiones al variador de velocidad. Consulte la Guía de instalación de los variadores ATV31:
— Conecte los conductores de puesta a tierra.
— Conecte la alimentacion de linea. Asegürese de que está bajo de la gama de tension del variador de velocidad.
— Conecte el motor. Asegúrese de que su valor nominal correponda con la tension del variador.
-
Energice el variador, pero no dé un commando de marcha.
-
Configure bFr (frecuencia nominal del motor) si es diferente a 50 Hz. bFr aparece la primera vez que se energia el variador. Se pueda acceder a esta funciona, enequalquier momento, atramés del menu drC- (consulte la página 123).
- Configure los parámetros en el menu drC- si la configuración de fabrica no es apropriada. Consulte la page 106 para Obtener las configuraciones de fabrica.
- Configure los parámetros en los nombres I-O-, CtL- y FUn- si la configuración de fabricula no es apropriada. Consulte la网页 106 para Obtener las configuraciones de fabricula.
- Configure los siguientes parámetros en el menu SET- (páginas 119-123).
— ACC (acceleración) y dEC (desaceleración)
— LSP (baja velocidad cuando la referencia es cero) y HSP (alta velocidad cuando la referencia está en su valor máximo)
— ItH (protección tírmica del motor)
- Desconecte todas las fuentes de alimentación del variador y siga el procedimiento de medicación de la tensión del bus descririto en la Guía de instalación de los variadores ATV31. Luego, conecte los cables de control a las entradas lógicas y analógicas.
- Energice el variador, bajo emita un commando de marcha a工程技术 de la entrada lógica (consulte la Guía de puesta en servicios de los variadores ATV31).
- Ajuste la referencia de velocidad.
RECOMENDACIONES PRELIMINARES
Precauciones
Antes de energizar y configurar el variador de velocidad, asegúrese de leer este manual y de seguir todas las precauciones.
▲ PELIGRO
FUNCTIONAMIENTO ACCIDENTAL DEL EQUIPO
- Antes de energizar y configurar el variador de velocidad, asegúrese de que las entradas lógicas estén apagadas ( estado 0) para estar un arranque accidental.
- Una entrada asignada al commando de marcha pueda causar el arranque inmediato del motor al partir de los馊es de configuración.
El incumplimiento de estas instruccionesouldacause la muerte o lesiones serias.
ADVERTENCIA
PERDIDA DE CONTROL
- El Diseñador de un plan de control deben tener en cuenta los发展模式 potecuales de fallas en las trayectorias de control y, para ciertas这几个 functions of control críticas, deben proportionscar un medio para alcanzar un estado seguro durante y después de una falla en la trayectoria.
- Un paro de emergencia y un paro por sobrecarrera son ejemplos de sistemas de control críticas.
- Deberán proportionarse trayectorias de control independentes o redundantes para las functions de control críticas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
PRECAUCION
EQUIPO DANADO
No haga funciona o instale un variador de velocidad que parezca estar dañado.
El incumplimiento de esta instruccion可以使 caesar al equipo.
| Arranque desde la alimentación de linea | Si se arranca el variador desdela alimentaciónde linea,asegüresede queel parámetro tCt no esté ajustado en trn (consulte lapellagina 127) y limite las operaciones del contactor de linea a menos de una por minuto para evitarruna falla prematura delloscapacitoresdelilloylasistrescienciasprecargadas.El método recomendado del controles atravesalas entradasL11aLi6.La memoria del estado tírmico del motor se vuela porponerencero cuando se desconecta la alimentaciónde linea del variador. | |
| Energizacióndespuésde restablecer unfalla manual o un comando de paro | Si el parámetro tCt seencuentra en suajuste de fábrica(trn),alenergizar elvariador delvelocidad despuesdelrestablecer manualmenteuna falla ou uncomando de paro,loscomandosde marchaadelante,marchaatrás y delparo por inyecciónde—(c.d.)sedeferánrestablecerperponer enmarcha elvariador.Sinoserabetalecenestoscomandoselvariadormostrarélemensaje“nSt”ynoarrancar.Silafúnfofarranqueautomático estáconfigurada(parámetro Atr enelmenúFLt-,consulta lapagina 173)noesecnecariovolverac configurarla. | |
| Prueba con un motor de bajo potencia osin un motor | Conla configuracióndefábrica,la detectióndepírdadefase del motor(OPL)estáactiva.Paravericarunvariador delvelocidadduranteunprueba oen un entorno demantimiento,sin tenerquechangiar unmotor conla mismacapacidadnominalqueelvariador,desactivelamericanodelevectiondepírdadefase del motor yconfigureureL(parconstante)la relacióndetension/frecuencia(UFt)(consulta lapagina 125).Elvariadordevelocidad noproporciónafepeccióntétrmicaal motorsslia corrientedeeste esmenore0,2ceveslcarriente nominal delvariador. | |
| Uso de motores en paralelo | Cuandouse motoresexpanalelo,configureureL(parconstante)la relaciònntension/frecuencia(UFt)yproporcioneunmedioalternativodeteprotectiontétrmicaencedamotor.Estevariador delvelocidad nopuedeproporcionarproteccióntétrmicaadecuadacada motor. | |
| Funcionamente un sinusecomectado atierra por impedancia | Siusela variador enunsistema conunneutroaisladooconectaratoatierrapor impedancia,utiliceunmonitordaislamento permanentequeasecompatablencargasnonlineales.LosvariadoresdevelocidadATV31···M21yN4incluyenfiltrostediferenciaa la radio freucencia(RFI)consuscapacitordenctadosa tierra.Estosfiltrostuenesperdesconectadosdettiera si sesuaelvariadoren unystemacomectadoatierapor impedanciaparaaugentarla vidautilde configuracionde loscapacitores.ConsulteLaGuíadeinstalacióndelosvariadoresdevelocidadATV31paraobtenermasiminformation. | |
| Recomendacionesdeprogramación | Consulte“Descripcióngeneral sobrelapuestaen serviceo"enlapagina103paraobtenerlospasosdeprogramaciónminimosnecasariospareponerenero | |
| Uselas tablasde configuraciónquecomienzan enlapagina185parepararaynotarle configuracióndelvariadorantesdeprogramarevariadordevelocidad.SiempreesposibleregresaralosajustesdefábricaconfigurandolespárametofCSenlensomenúsdrC-,I-O-,CtL-oFUn-. Consulte las páñinas126,129,143y171.Cuando se pone en serviceoporprimeravezunvariadordevelocidadATV31en unsystema de60Hz,realiceunrestablecimientodelosparámetrodofábrica.Asegúresede configurarbFren60Hz.Recomendamosusarafuncióndeautoajusteparaoptimizarlaprecisionyeltempo de repuesta delvariador.Elautoajustemide resistencialedestatordel motor para optimizarlosalgorithmosdecontrol.Consulte lapagina125. | ||
AJUSTES DE FÁBRICA
El variador ATV31 yaiene lista de fabrica para usarse en la mayoría de las aplicaciones, con los ajustes de fabrica que figuran en la tabla 1.
Table 1: Ajustes de fabrica
| Función | Código | Ajuste de fabrica |
| Visualización | — | r d y con el motor parado, freuencia del motor (por exemple, 50 Hz) con el motor en marcha |
| Frecuencia del motor | bFr | 50 Hz |
| Tipo de relacion tensión / freuencia | UFt | n: control vectorial del flujo sin sensor para aplicaciones de par constante |
| Modo de paro normal | Stt | 5 l n: paro normal en la rampa de desaceleración |
| Modo de paro en caso de una falla | EPL | y E 5: parada libre |
| Rampas lineales | ACC, dEC | 3 segundos |
| Velocidad baja | LSP | 0 Hz |
| Velocidad alta | HSP | 50 Hz |
| Ganancia de bucle de freuencia | FLG, StA | Estándar |
| Corriente tírmica del motor | ItH | Corriente nominal del motor (el valor depende del valor nominal del variador) |
| Frenado por inyección de --- (c.d.) | SdC | 0,7 x la corriente nominal del variador de velocidad durante 1/2 segundo |
| Adaptación de la rampa de desaceleración | brA | y E 5: adaptación automática de la rampa de desaceleración en caso de que se produca una sobretensión durante el frenado |
| Rearranque automatico | Atr | n D: sin rearanque automatico después de una falla |
| Frecuencia de conmutación | SFr | 4 kHz |
| Entradas lógicas | LI1, LI2 | Control de detectión de transmisión de 2 hilos LI1 = adelante, LI2 = atrás. No asignado en los variadores ATV31******A1 |
| LI3, LI4 | 4 velocidades preseLECTIONadas: velocidad 1 = referencia de velocidad o LSP (consulte la Paginga 120) velocidad 2 = 10 Hz velocidad 3 = 15 Hz velocidad 4 = 20 Hz | |
| LI5, LI6 | No asignadas | |
| Entradas analógicas | AI1 | Referencia de velocidad de 0 a 10 V. No asignada en los variadores ATV31******A1. |
| AI2 | Entrada de las referencias de velocidad sumadas: 0 ±10 V | |
| AI3 | 4 a 20 mA, no asignada | |
| Relés | R1 | El contacto se abre en caso de que se produza una falla o si se desconecta la alimentación del variador. |
| R2 | No asignada | |
| Salidaanalógica | AOC | 0 a 20 mA, no asignada |
1 Los variadores ATV31-----A tiene un potenciometro de referencia, un botón de marcha y un botón de paro/restablecimiento. Estos vienen de fabrica configurados en control local con el botón de marcha, botón de paro/restablecimiento y el potenciometro de referencia activos. Las entradas lógicas LI1 y LI2 y la entrada analógica AI1 está inactivas (no asignadas).
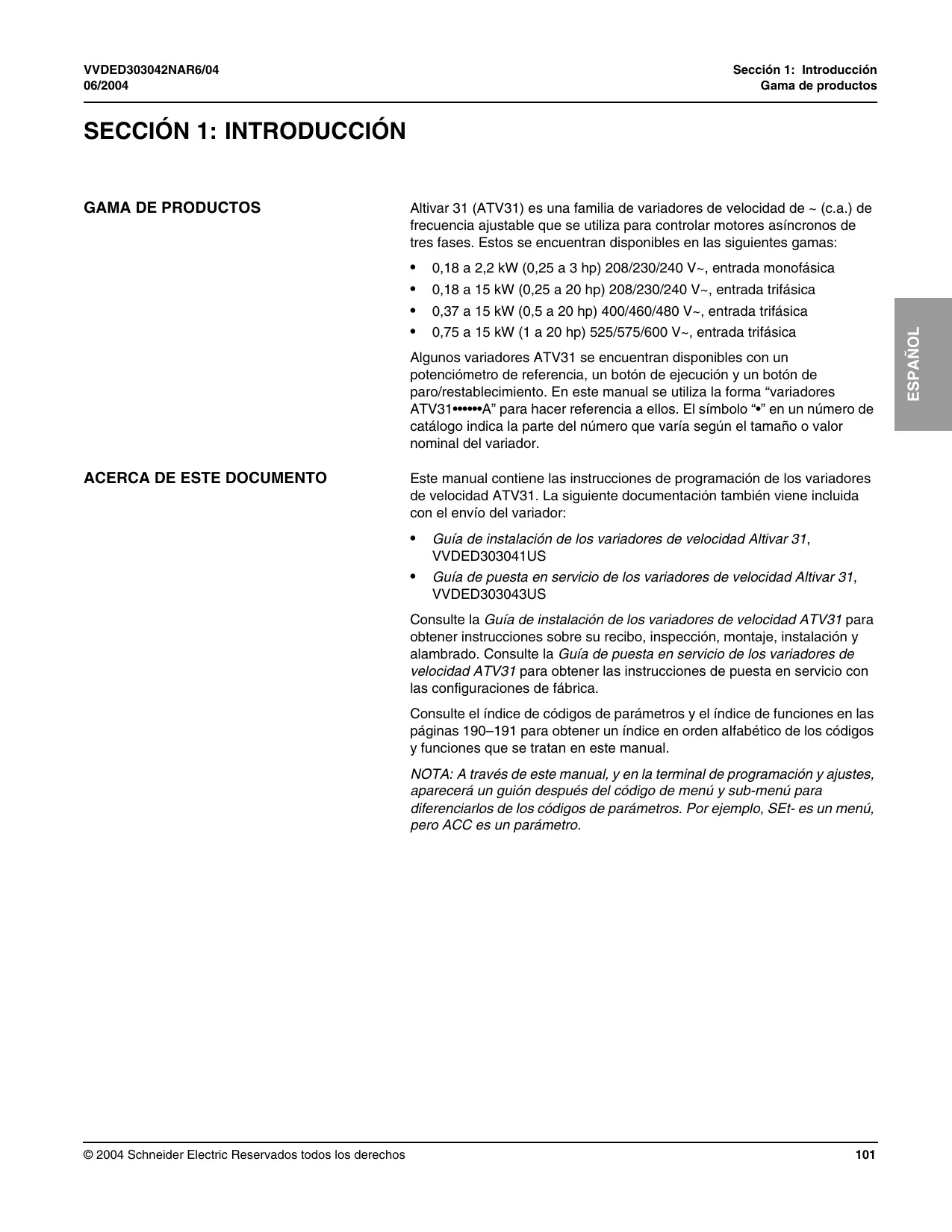
PROTECCION TÉRMICA DEL VARIADOR
La proteccion termica del variazor se logra con una resistencia de
coeffiente de temperatura positivo (PTC) en el disipador termico o el
modulo de alimentacion. En caso de que se produca una sobrecorriente,
el variazor se dispara para protegerse asimismo contra sobrecargas.
Puntos típicos de disparo:
- La corriente del motor es del 185% de la corriente nominal del variador durante 2段时间
- La corriente del motor es del 150% de la corriente nominal del variador durante 60segundos
Tiempo (en segundos)
Ventilación
El ventilador se arranca cuando el variador es energizzato, pero se para despues de 10segundos si no se recibe un commando de marcha. El ventilador se arranca automatistically cuando el variador recibe un commando de marcha y una referencia. Se detiene segundos afterwards que la velocidad del motor es inferior a 0,2Hz y el frenado por inyeccion se ha completado.
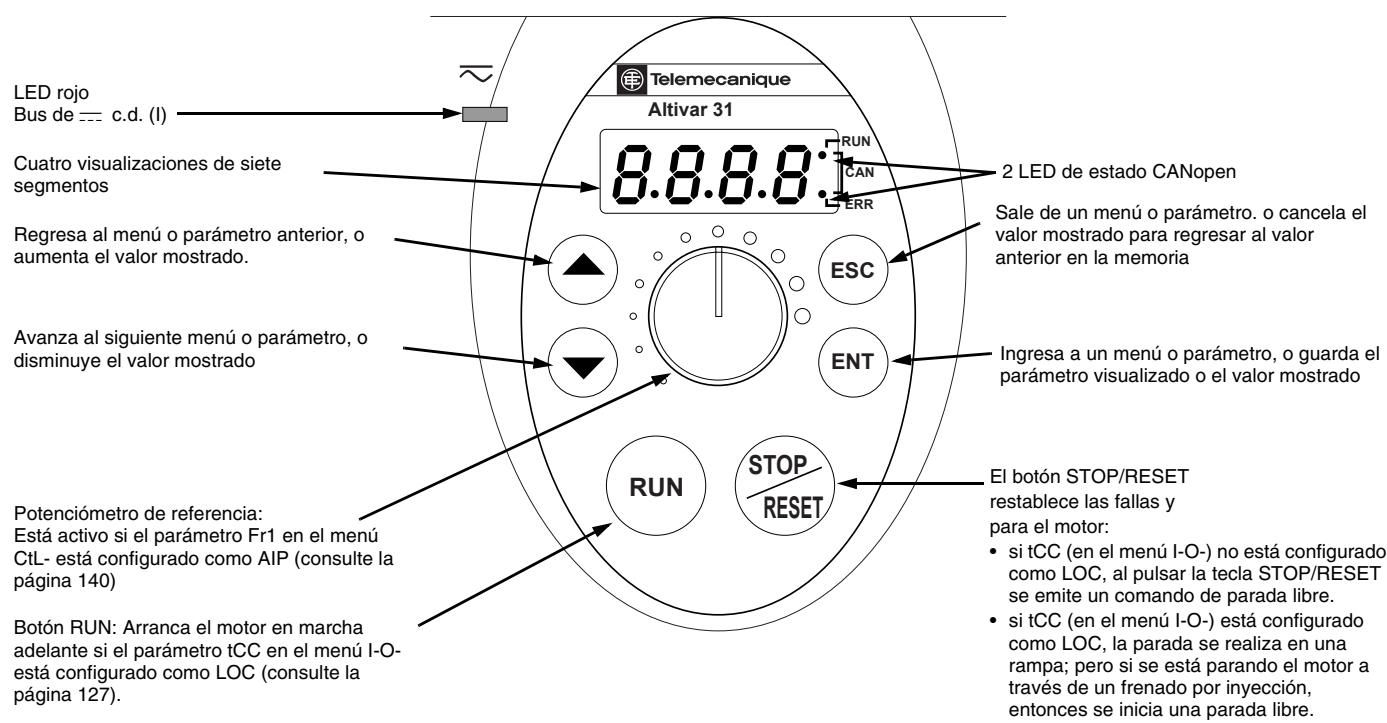
PROTECCION TÉRMICA DEL MOTOR
La proteccion termica del motor se logra a trovés de calculos continuos de la energia termica 1^2t .Esta proteccion está disponible para los motores autoenfiados.
NOTA: La memoria de estado tírmico del motor se vuye aponer en cero cuando se desconecta la alimentación de linea del variador.

Tiempo de disparo en seguidos
PRECAUCION
PROTECCION TÉRMICA DEL MOTOR INADECUADA
Es Neededo el uso de proteccion externa contra sobrecargas bajo las seguidentes conditiones:
- Arranque desde la alimentacion de linea
- Marcha de motores multipes
- Marcha de motores con una capacité menor que 0,2 vezes la corriente nominal del variador
- Uso de conmutacion de motores
El incumplimiento de esta instruccion可以使 caesar al equipo.
Consulte "Recomendaciones preliminares" en las páginas 104 a 105 para Obtener más información acerca de la protección externa contra sobrecargas.
USUARIO NO CALIFICADO
- Solamente el personal especializzato deben instalar y prestar servicios de mantenimiento a este equipo.
- La aplicación de este producto requires experience in Diseño y programación de sistemas de control. Solamente aquellos con dicha experiencia deben programar, instalar, alterar y usar este producto.
- El personal calificado a cargo de la realizacion de diagnóstico de problemas, quienes energizaran los conductores electricos, deben cumplir con la norma 70E del NFPA que tratate sobre los requisitos de seguridad electrica para el personal en el situo de trabajo asi como la norma 29 CFR Parte 1910, Sub-parte S de OSHA que también tratta sobre la calidad electrica.
El incumplimiento de estas instruccionesouldacause la muerte o lesiones serias.
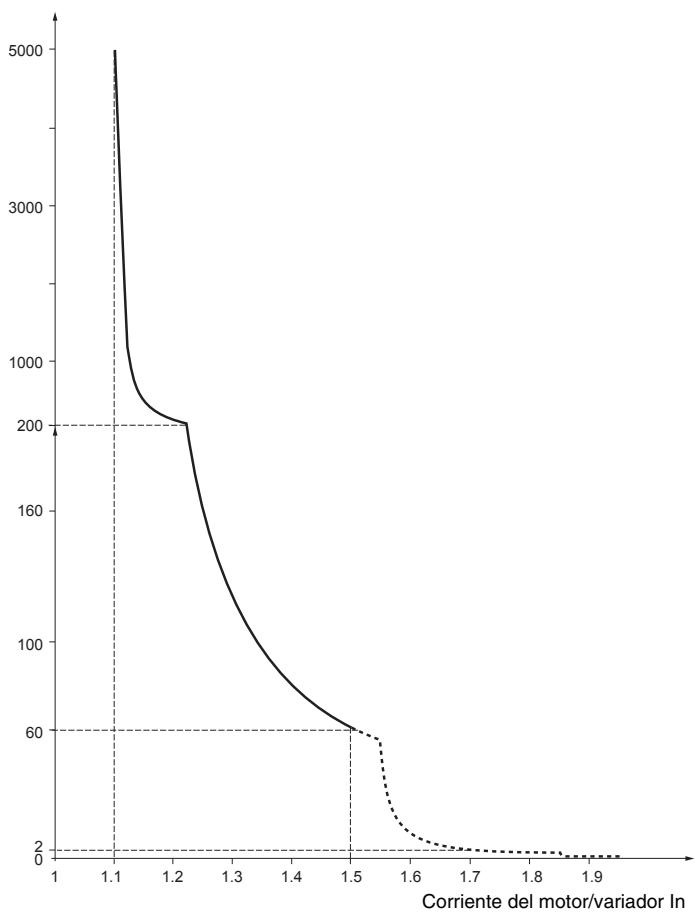
TERMINAL DE PROGRAMACION Y AJUSTES DEL VARIADOR
Variadores ATV31
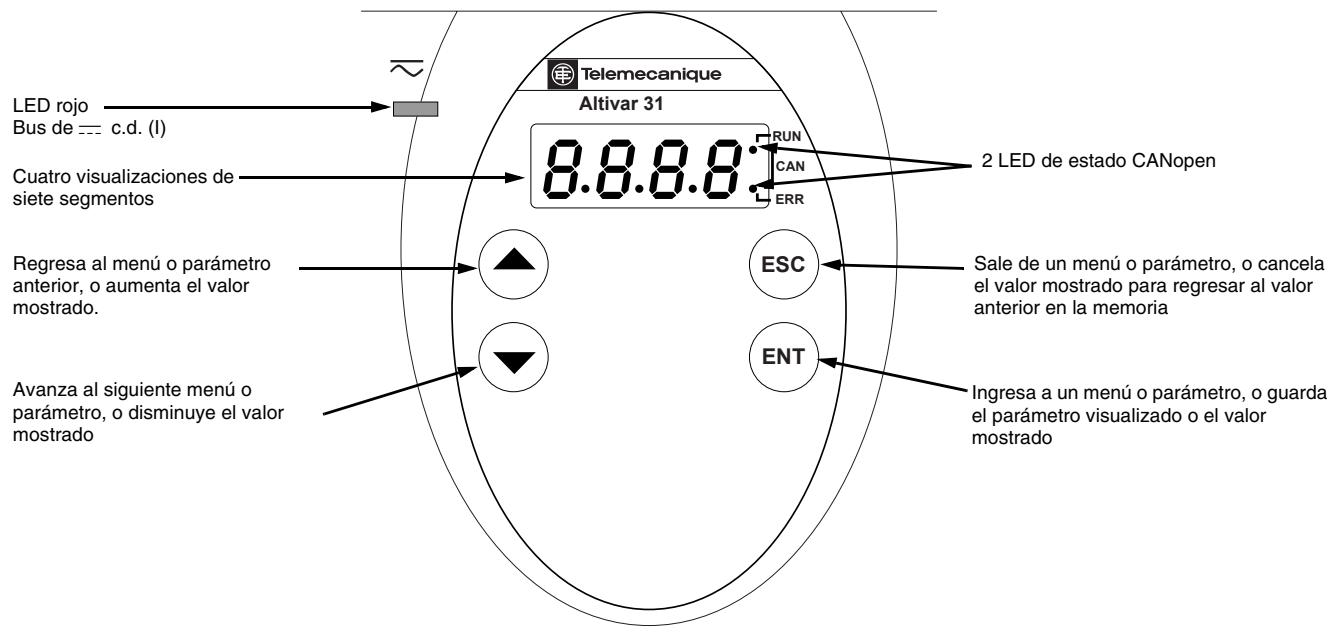
Variadores ATV31A
Los variadores ATV31……A tiene un potenciómetro de referencia, un botón de marcha y un botón de paro/restablecimiento.
Funciones de las teclas
- Para desplazarse por los datos rápidamente, pulse y mantenga oprimida (por más de 2segundos) la tecla () o () .
- Al presionar () () su selección no se almacena automatístico.
- Para guardar la selección, pulse (ENT). La terminal parpadea cuando almacena un valor.
Una visualización normal sin fallas ni comandos de marcha muestra:
- el valor de uno de los parámetros de visualización (consulte la página 178). La visualización por omission es la Frequencia del motor, por exemple 43.0. La visualización parpadea en el modo de limitador de corriente.
- Init: secuencia de incidación
- rdY: el variador está lista
- dcb: frenado por ineyeción de = = (c.d.) en bajo.
nSt: parada libre, consulte le singulare seccion. - FSt: parada rápida
tUn:autoajuste en direccion
Si existe una falla, la visualización parpadea.
nSt: parada libre
Si la visualización muestra el número nSt, una de las siguientes conditiones puede estar sucediendo:
- Con la configuración de fabrica, al energizar el variador de velocidad après de restablecer manualmente una falla o un commando de paro, los comandos de marcha adelante, marcha a另一边 y de paro por inyección de --- (c.d.) se deben restablecer para poder en marcha el variador. Si no se retablecen these comandos el variador做不到 el mensaje "nSt" y no arrancará. Si la función de rearranque automatico está configurada no es necesario restablecerlos.
- Si el canal de referencia o el canal de control es asignado a Modbus o CANopen (consulte la págin 130), el variador做不到 nSt al energia y permanecería parado hasta que el bus de comida envía un commando.
- Si está presente un commando de marcha adelante o marcha aftas, cuando el variador es energizzato y está configurado para un control de 2 or 3 hilos con transicion "trn" (consulte la page 127), el variador做不到 nSt y no se pondrá en marcha sino hasta que se suspende y vuelve a emitir el commando de marcha y se proportionsciona una referencia de velocidad.
TERMINAL DE PROGRAMACION Y AJUSTES REMOTA
La terminal de programación y ajustes remota optional es unaunidad de control local que pueda ser montada en la puerta de un gabinete. Tiene un cable con connectores para conectarla a la connexion en series del variador (consulte el manual incluido con la terminal). Tiene la misma visualización y los mismos botones de programación que el variador de velocidad con laadición de un interruptor para elbloqueo de acces a los menús y tres botones para controlar el variador:
- Los comandos FWD/REV indican el sentido de rotación.
- El comando RUN pone en marcha el motor.
- Los comandos STOP/RESET paran el motor o restablecen una falla. El motor se para al pulsar el botón STOP/RESET una vez, y si se ha configurado el frenado por inyección de —— (c.d.), se detendra el frenado al pulsar el botón porsegunda vez.
Para que la terminal de programación y ajustes remota está activa, el parámetro tbr en el menu COM- debe conservar los ajustes de fabrica; 19.2 (19 200 bps, consulte la página 176).
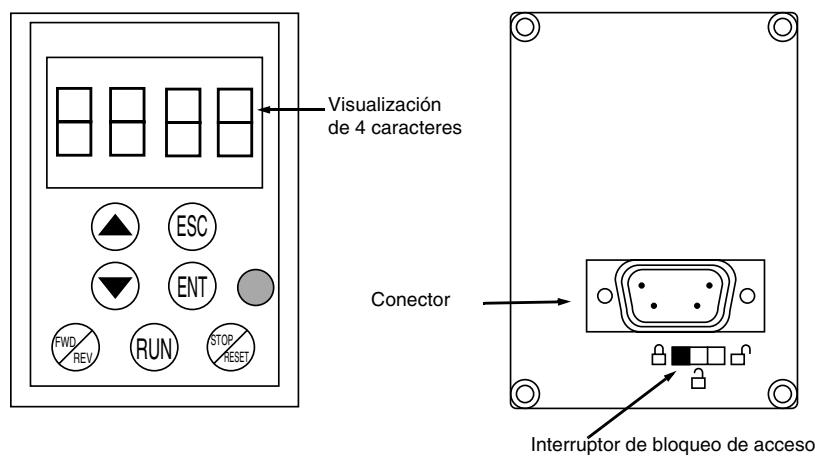
- Posiciones:

se pueda acceder a los parámedos de ajuste y de supervisión (menús SET- y SUP-)
- Posicion:

es possible acceder a todos los menus
NOTA: La proteccion con contraseña tiene prioridad sobre el interruptor de bloqueo de acceso. Consulte la page 180.
Al colocar el interruptor de Bloqueo de acceso en la posicion de bloqueado también se evita el acceso a los ajustes del variador a trovés de la terminal de programacion y ajustes. Al desconectar la terminal de programacion y ajustes remota, si el interruptor de Bloqueo de acceso está en la posicion de bloqueado, la terminal de programacion y ajustes del variador también permanece bloqueada.
Almacenimiento y energia de las configuraciones
Es possible almacenar hasta un máximo de quatre configuraciones completas en la terminal de programación y ajustes remota y transferirlas aotiros variadores de velocidad del mesmo valor nominal. también es possible almacenar, en la terminal, quatre operaciones sociales para el mismodispositivo.Consulte los parámetros SCS y FCS en los menus drC-, I-O-, CtL- o FUn-. Consulte las páginas 126, 129, 143 y 171.
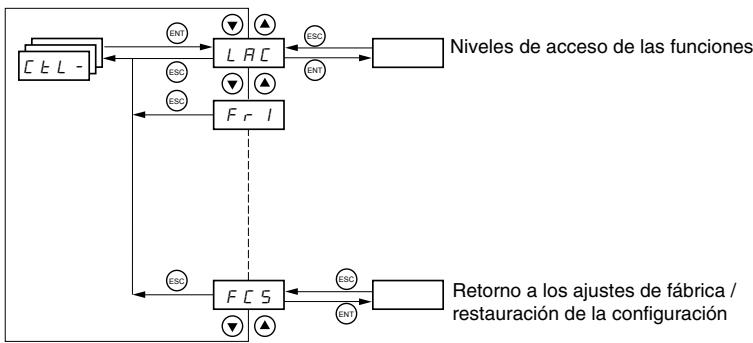
ACCESO A LOS MENUS
Menús
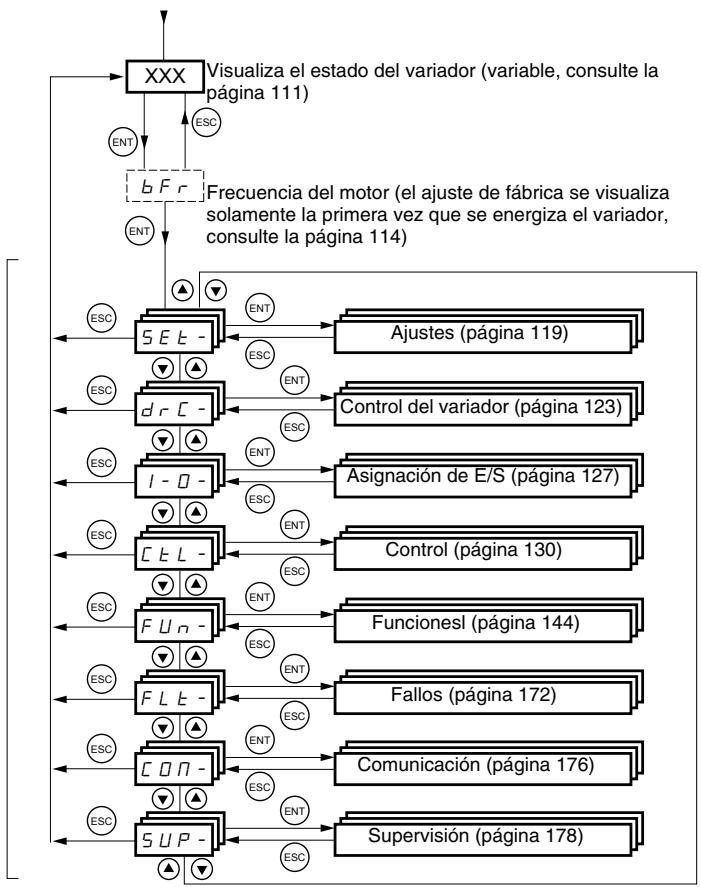
Energización
Como convenienda adicional, algunos parámetros se pueda acceder en más de un menu. Por exemple, regreso a los ajustes de fabrica (FCS) y almacenimiento de la configuración (SCS) está disponibles en various manos.
NOTA: A través de esta guía, aparecerá un guión cuando el número de menu para diferenciarlos de losódigos de parámetros. Por exemple, SEte es un menu, pero ACC es un parámetro.
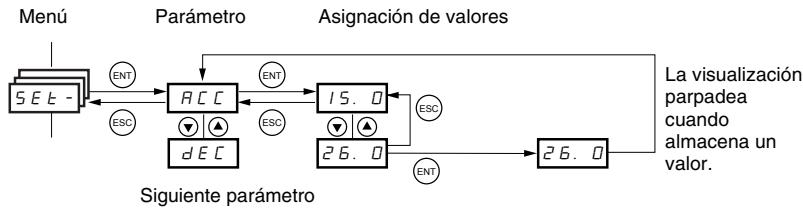
ACCESO A LOS PARÁMETROS
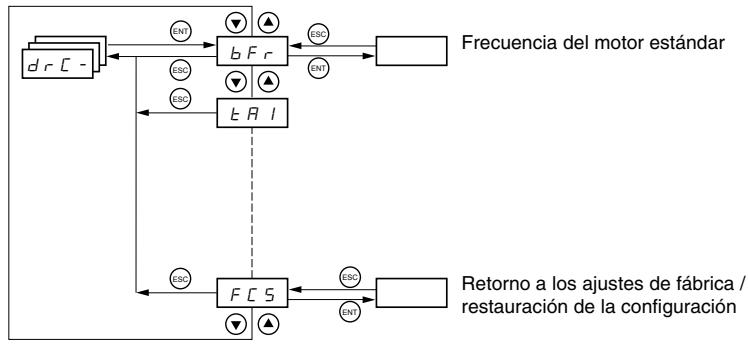
La?sigaune figura ilustra como acceder a los parámetros y como asignar sus valores. Para almacenar el valor del parámetro, pulse la tecla (ENT). La visualizacion parpadea cuando almacena un valor.
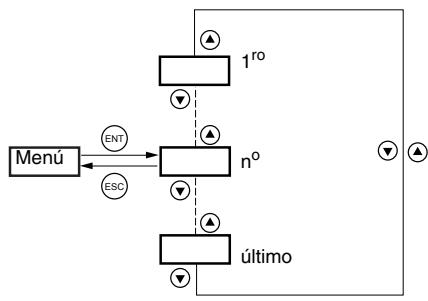
Todo los menos son tipo desplegable. Una vez que haya alcanzado elultimate parámetro en una lista, pulse la tecla para regresar al primer parámetro. De sde el primer parámetro en la lista, pulse la tecla para saltarse hasta elultimate parámetro.
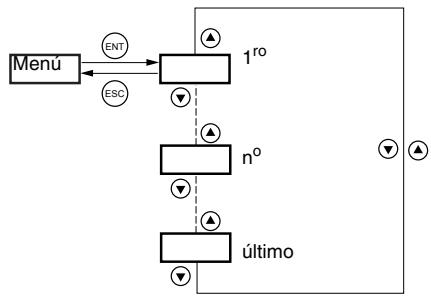
Si ha Modifications un parámetro en un menu y regreso a ese menu sin partir por otro dato, en este momento, sera llrado directamente alultimate parámetro que modificó. Vea la ilustración abajo. Si haentrado a othero dato o ha vuelto a arrancar el variador desde la modificacion, entonces sera llrado al primer parámetro en el dato. Vea la ilustración arriba.
Parámetro bFr
La Frequencia del motor, bFr, se pueda modifier sólo si se para el variador y no se recibe un commando de marcha.
| Código | Descripción | Gama de ajustes | Ajuste de fábrica |
| b F r | Frecuencia del motor | 50 ò 60 Hz | 50 Hz |
| Este es el primer parámetro que se muestra al energizar el variador porsuma vez. Es possible modifier el parámetro bFr a工程技术 del menú drC-, en cualesquer tiempo. La modificación de este parámetro también modifica los values de los siguientes parámetros: HSP (págrina 120), Ftd (págrina 123), FrS (págrina 124) y tFr (págrina 126). | |||
COMPATIBILIDAD ENTRE FUNCIONES
Rearranque automatico, recuperacion automatica y marcha atras se encontrartran disponibles solo bajo las siguientes conditiones:
- Rearranque automatico está disponible solo en un control de 2 hilos (tCC = 2C y tCt = LEL o PFO, consulte la páginá 127).
- Recuperación automática está disponible sólo en un control de 2 hilos (tCC = 2C y tCt = LEL o PFO, consulate la págrina 127). Ésta se desactiva si el frenado por inyección de __ (c.d.) automático es configurado en ____ c.d. (AdC = Ct, consulate la págrina 149).
- Marcha atrás está disponible solo en los variadores ATV31...A si el control local está activo (tCC = LOC, consulate la págrina 127).
La elección de las functions de aplicación peut verse limitada por el número de entradas/salidas disponibles y por la incompatibiliidad de determinadas functions entre s como se ilustra en lasuma figura. Las functions que no aparecen en la figura son Completely compatibles. Si existe una incompatibiliidad entre las functions, la primaughter configurada evitará que se configuren lasdemás.
| Entradas sumadoras | +/- velocidad1 | Gestión de los interruptores de límite | Velocuidades presecciones | Regulator PI | Funcimiento de marcha paso a bajo | Secuencia de frenado | Paro por ineycción de: (c.d.) | Paro rápido | Parada libre | |
| Entradas sumadoras | ● | ↑ | ● | ↑ | ||||||
| +/- velocidad1 | ● | ● | ● | ● | ||||||
| Gestión de los interruptores de límite | ● | |||||||||
| Velocuidades preseccionesadas | ← | ● | ● | ↑ | ||||||
| Regulator PI | ● | ● | ● | ● | ● | ● | ||||
| Funcimiento de marcha bajo a bajo | ← | ● | ← | ● | ● | |||||
| Secuencia de frenado | ● | ● | ● | |||||||
| Paro por ineycción de: (c.d.) | ● | ↑ | ||||||||
| Paro rápido | ↑ | |||||||||
| Parada libre | ← | ← |
1 Excuyendo una aplicacion especial con canal de referencia Fr2 (consulte las páginas 135 y 137).

Funciones incompatibles

Funciones compatibles

No applicable

En las functions que no pueda ser activadas al mesmo tiempo, la flecha告诉她 hacía la función que tiene prioridad,
Las functions de paro tienen prioridad sobre los comandos de marcha. Las referencias de velocidad recibidas a工程技术 de un commando lógico tienen prioridad sobre las referencias analógicas.
FUNCIONES DE APLICACION DE LAS ENTRADAS Lógicas Y ANALOGicas
Las tablas 2 a 5 enumerated las functions que pueda ser asignadas a las entradas lógicas y analógicas y sus asignaciones de fabrica. Una sola entrada pueda activar varias functions al mesmo tiempo. Por exemple, marcha atrás y unasegunda rampa pueda ser asignadas a una entrada. Si se asigna mas de una función a una entrada, asegúrese de que las functions Sean compatibles. Use los submenús LIA- y AIA- del menu SUP-(consulte la page 180) para visualizar las functions asignadas a las entradas y para verificar su compatibiliidad.
Tabla 2: Entradas lógicas
| Función | Código | Consulte la pagina: | Configuración de fábrica | |
| ATV31***** | ATV31*****A | |||
| No asignada | — | — | LI5-LI6 | LI1-LI2LI5-LI6 |
| Adelante | — | — | LI1 | |
| 2 velocidades preseLECTIONadas | P 5 2 | 152 | LI3 | LI3 |
| 4 velocidades preseLECTIONadas | P 5 4 | 152 | LI4 | LI4 |
| 8 velocidades preseLECTIONadas | P 5 8 | 152 | — | — |
| 16 velocidades preseLECTIONadas | P 5 16 | 153 | — | — |
| 2 referencias PI preseLECTIONadas | P r 2 | 162 | — | — |
| 4 referencias PI preseLECTIONadas | P r 4 | 162 | — | — |
| + velocidad | U 5 P | 157 | — | — |
| - velocidad | d 5 P | 157 | — | — |
| Funcimiento de marcha bajo a pasob | J 0 G | 154 | — | — |
| Conmutación de rampsas | r P 5 | 146 | — | — |
| Conmutación para el 2° límite de corriente | L C 2 | 167 | — | — |
| Paro<rápido a工程技术 de la entrada lógica | F 5 E | 147 | — | — |
| Inyección de ____ (c.d.) a工程技术 de una entrada lógica | d C I | 147 | — | — |
| Parada libre a工程技术 de una entrada lógica | n 5 E | 148 | — | — |
| Marcha adelante | r r 5 | 127 | LI2 | — |
| Falla externa | E E F | 174 | — | — |
| Restablecimiento de fallas | r 5 F | 173 | — | — |
| Modo forzado local | F L D | 177 | — | — |
| Conmutación de referencias | r F C | 141 | — | — |
| Conmutación de canal de control | C C S | 142 | — | — |
| Conmutación de motores | C H P | 168 | — | — |
| Limitación del movimiento hacía delante (interruptor de límite) | L R F | 170 | — | — |
| Limitación del movimiento hacíayers (interruptor de límite) | L R r | 170 | — | — |
| Supresión de fallas | l n H | 175 | — | — |
Table 3: Entradas analógicas
| Función | Código | Consulte la pagina: | Ajuste de fabrica | |
| ATV31****** | ATV31*****A | |||
| No asignada | — | — | Al3 | Al1 - Al3 |
| Referencia 1 | F r I | 140 | Al1 | AIP (potenciómetro) |
| Referencia 2 | F r 2 | 140 | — | |
| Entrada sumadora 2 | 5 R 2 | 150 | Al2 | Al2 |
| Entrada sumadora 3 | 5 R 3 | 150 | — | — |
| Retroalimentación por regulator PI | P I F | 162 | — | — |
Table 4: Salidas analógicas y lógicas
| Función | Código | Consulte la pagina: | Ajuste de fábrica |
| No asignada | — | — | AOC/AOV |
| Corrente del motor | O C r | 128 | — |
| Frecuencia del motor | r F r | 128 | — |
| Par motor | O L O | 128 | — |
| Potencia generada por el variador | O P r | 128 | — |
| Falla del variador ( datos lógicos) | F L E | 128 | — |
| Variador en marcha ( datos lógicos) | r U n | 128 | — |
| Umbral de fecundía alcanzado ( datos lógicos) | F E R | 128 | — |
| Alta velocidad (HSP) alcanzada ( datos lógicos) | F L R | 128 | — |
| Umbral de corrente alcanzado ( datos lógicos) | C E R | 128 | — |
| Referencia de fecundía alcanzada ( datos lógicos) | S r R | 128 | — |
| Umbral tírmico del motor alcanzado ( datos lógicos) | t S R | 128 | — |
| Secuencia de frenado ( datos lógicos) | b L C | 128 | — |
Table 5: Relés
| Función | Código | Consulte la pagina: | Ajuste de fábrica |
| No asignado | — | — | R2 |
| Falla del variador | F L E | 128 | R1 |
| Variador en marcha | r U n | 128 | — |
| Umbral de Frequencia alcanzado | F L R | 128 | — |
| Alta velocidad (HSP) alcanzada | F L R | 128 | — |
| Umbral de corrente alcanzado | L E R | 128 | — |
| Referencia de Frequencia alcanzada | 5 r R | 128 | — |
| Umbral tírmico del motor alcanzado | L S R | 128 | — |
| Secuencia de frenado | b L C | 128 | — |
SECCION 3: MENUS
▲ PELIGRO
Asegúrese de que las modificaciones de los ajustes de funciona bajo no presenten ningún riesgo, especially al realizar ajustes cuando el variador haceFuncionar el motor.
El incumplimiento de estas instruccionesouldacause la muerte o lesiones serias.
PRECAUCION
SOBRECALENTAMENTO DEL MOTOR
- Este variador de velocidad no proporción protección tírmica directa al motor.
- Puede ser besoino un sensor t érmico en el motor para protegerlo duranteequalquervelocidad o condidióndecarga.
- Consulte la información del fabricante del motor para poderar la capacité tírmica de este cuando funciona en la gama de velocidad mayor que la deseada.
El incumplimiento de estas instrucciones puede causar daño al equipo.
SET-MENU DE AJUSTES
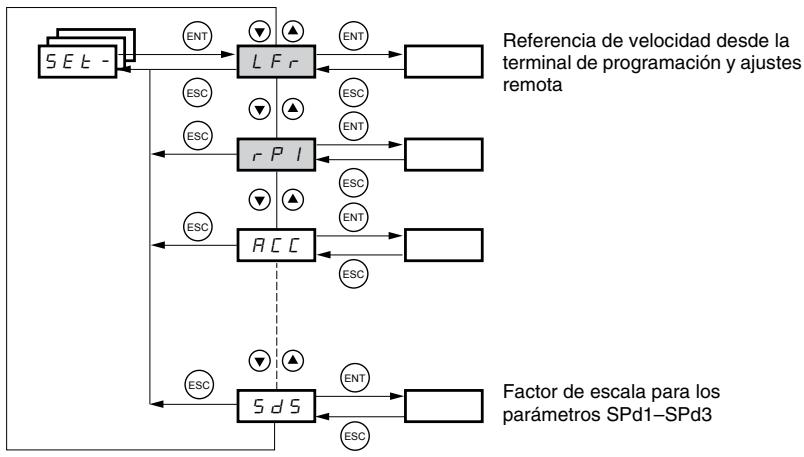
Los parámedos en el menu SEt- se pueda modifier con el variegador de velocidad parado o en marcha. Sin embargo, recomendamos realizar las modificaciones a los ajustes con el variegador parado.
| Código | Descripción | Gama de ajuste | Ajuste de fabrica | |
| LFR1 | Referencia de velocidad desdela terminalde programación yajustesremota. | 0a HSP | ||
| Este parámetro semuestra cuando LCC=YES(pagina 142) o cuando Fr1/Fr2=LCC(pagina 140)y si la terminal deprogramación yajustestéstaconectar. En este caso, también es posible acceder LFr agravés de la terminal de programación yajustes del variador.LFr se vuelve aajustar en 0al energizarselevaridor. | ||||
| RPI1 | Referencia internadel regulator PI | Consultela pagina 158. | 0,0a 100% | 0 |
| RCC | Tiempo de la rampa de aceleración | 0,1a 999,9s | 3s | |
| Tiempo de aceleración del motor para que funciona de 0Hz a FrS (frecuencia nominal, consulte la pagina 124). | ||||
| RCE2 | 2o tiempo de la rampa de aceleración | Consultela pagina 146. | 0,1a 999,9s | 5s |
| dE2 | 2o tiempo de la rampa de desaceleración | Consultela pagina 146. | 0,1a 999,9s | 5s |
| dEC | Tiempo de la rampa de desaceleración | 0,1a 999,9s | 3s | |
| Tiempo de desaceleración del motor para que funciona de FrS (frecuencia nominal, consulte la pagina 124) a 0 Hz.Asegürese de que dEC noonga un ajuste muy bajo para la carga. | ||||
| ETI | Inicio de la rampa de aceleraciónspecifica,redondeado como un percentaje del tiempo total de la rampa (ACC o AC2) | Consultela pagina 145. | 0a 100 | 10% |
| ETR2 | Fin de la rampa de aceleraciónspecifica,redondeado como un percentaje del tiempo total de la rampa (ACC o AC2) | Consultela pagina 146. | 0a (100-tA1) | 10% |
| ETR3 | Inicio de la rampa de desaceleraciónspecifica,redondeado como un percentaje del tiempo total de la rampa (dEC o dE2) | Consultela pagina 146. | 0a 100 | 10% |
| ETR4 | Fin de la rampa de desaceleraciónspecifica,redondeado como un percentaje del tiempo total de la rampa (dEC o dE2) | Consultela pagina 146. | 0a (100-tA3) | 10% |
| LSP | Velocidad baja | 0a HSP | 0 Hz | |
| Referencia minima | ||||
| HSP | Velocidad alta | LSPa tFr | bFr | |
| Referencia Tmaxima. Asegúrese de que este ajuste sea apropiado para el motor y la aplicación. | ||||
| IEH | Correnteutilizada para la protección tírmica delmotor. | 0,2a 1,5 ln2 | Varía con el valornominal del variador | |
| Ajuste Ith en los amperes aplenacarga (APC) indicados en la placadelatos delmotor.Refiérase al parafmeto OLL en la pagina 174si DEAsea eliminar la protección tírmica delmotor. | ||||
1 también accesible en el menu SUP-.
2 In es la corriente nominal del variador de velocidad indicada en la placa de datos.
Estos parámetros se muestran independiente de como han sido configurados或者其他 manos y se pueda visualizar solamente en el menu de ajustes.

Estos parámetros aparecerán solamente si se ha seleccióndo la función correspondiente en other menu. Para poderla programación, también es possible acceder a ellos y ajustarlos desde el menu en que se encontrarla funciona correspondiente. Encontraruna descripción detallada de estas functions en las páginas indicadas.
| Código | Descripción | Gama de ajuste | Ajuste de fábrica | |
| U F r | Compensación IR o elevación de tensión | 0 a 100% | 20 | |
| Si UFT (págrina 125) = n o nLd, UFr es compensación de caía de tensión.Si UFT = L o P, UFr es elevación de tensión.Se utilizes para optimar el par en velocidades muy bajas. Aumente el valor de UFr si el par es insufiente.Para evaporar un funciona inestable, asegúrese de que el valor de UFr no sea muy alto para un motor caliente.NOTA: La modificación de UFT (págrina 125) hará que UFr regrese al ajuste de fábrica (20%). | ||||
| FL G | Ganancia de bucle de fecuencia | 1 a 100% | 20 | |
| Es posible acceder a este parámetro=sólo cuando UFT (págrina 125) = n o nLd.FLG ajusta la rampa de velocidad en base a la inercia de la carga actionada. Si el valor es muy bajo, el tiempo de respuesta es más largo. Si el valor es muy alto, es posible que se produzca inestabilidad en el funcionaimiento. | ||||
| Hz 50 40 30 20 10 -10 0.1 0.2 0.3 0.4 0.5 t EN este caso,urrentEFG correcto 50 40 30 20 10 -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.3 0.4 0.5 t -10 0.1 0.3 0.4 0.5 t -10 0.1 0.3 0.4 0.5 t -10 0.1 0.3 0.4 0.5 t -10 0.1 0.3 0.4 0.4 0.5 t -10 0.1 0.3 0.4 0.5 t -10 0.1 0.3 0.4 0.5 t -10 0.1 0.3 0.4 0.5 t -10 0.1 0.3 0.4 0.5 t 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 T -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 - -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0. -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0 -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 | 1 a 100% | 20 | ||
| S E R | Estabilidad del bucle de fecuencia | 1 a 100% | 20 | |
| Es posible acceder a este parámetro=sólo cuando UFT (págrina 125) = n o nLd.Després de un periodo de acceleración o desaceleración, StA adapta el returno en un estado estable a la dinámica de laquinaSi el valor es muy bajo, es posible que se produzca un excesso de velocidad o inestabilidad en el funcionaimiento. Si el valor es muy alto, el tiempo de respuasta es más largo. | ||||
| Hz 50 40 30 20 10 -10 0.1 0.2 0.3 0.4 0.5 t En este caso,urrentStA correcto 50 40 30 20 10 -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 | Hz 50 40 30 20 10 -10 0.1 0.2 0.3 0.4 0.5 t -10 | Hz 50 40 30 20 10 -10 0.1 0.2 0.3 0.4 0.5 t -10 | En este caso,disminuya FLAGlto En este caso,disminuya STA | |
| S L P | Compensación de deslizamente | 0 a 150% | 100 | |
| Es posible acceder a este parámetro=sólo cuando UFT (págrina 125) = n o nLd.SLP ajusta la compensación de deslizamente para realizar afinaciones de regulación de la velocidad.Si el ajuste del deslizamente < deslizamente real, el motor no gira en la velocidad correcta en estado continuo.Si el ajuste del deslizamente > deslizamente real, el motor tiene una compensación excessiva y la velocidad es inestable. | ||||
| Nivel de corriente de frenado por ineycción de----(c.d.)activado a工程技术 de una entrada lógica o selecciónado como un modo de paro.1 | Consulte la párgina 147. | 0 a In (In es la corriente nominal del variegador de velocidad indicada en la placadel datos del variegador.) | 0,7 In | |
| t d C | Tiempo de frenado por ineycción de----(c.d.) selecciónado como un modo de paro.1 | Consulte la párgina 147. | 0,1 a 30 s | 0,5 s |
| t d C l | Tiempo de ineycción de----(c.d.) automática. | Consulte la párgina 149. | 0,1 a 30 s | 0,5 s |
| s d C l | Nivel de la corriente de ineycción de----(c.d.) automática. | Consulte la párgina 149. | 0 a 1,2 In | 0,7 In |
1 Estos ajustes no está relacionados con la función automática de inyección de ... (c.d.)

Estos parámetros aparecerán solamente si se ha seleccióndo la función correspondiente en othero menu. Para poderla programacion, también es possible acceder a ellos y ajustarlos desde el menu en que se enquiryra la direccion correspondiente. Encontrar a una descripción detallada de estas functions en las páginas indicadas.
| Código | Descripción | Gama de ajuste | Ajuste de fábrica | |
| Ed2 | 2o tiempo de inyección de --- (c.d.) auto. | Consulte la págin 149. | 0 a 30 s | 0 s |
| 5d2 | 2o nive del la corrente de inyección de --- (c.d.). | Consulte la págin 149. | 0 a 1,2 In | 0,5 In |
| JPF | Frecuencia de salto | 0 a 500 | 0 Hz | |
| JPF evita el funcionaimiento prolongado en una gama de fecuencia de ± 1 Hz alrededor de JPF.Esta funciona una velocidad Critica que pueda conducir a la resonancia. Un valor de 0 es inactivo. | ||||
| JF2 | 2o fecuencia de salto | 0 a 500 | 0 Hz | |
| JF2 evita el funcionaimiento prolongado en una gama de fecuencia de ± 1 Hz alrededor de JF2.Esta funciona una velocidad Critica que pueda conducir a la resonancia. Un valor de 0 es inactivo. | ||||
| JGF | Frecuencia de funcionaimiento en marcha pas a paso | Consulte la págin 154. | 0 a 10 Hz | 10 Hz |
| rPG | Ganancia proportional del regulator PI | Consulte la págin 162. | 0,01 a 100 | 1 |
| rIG | Ganancia integral del regulator PI | Consulte la págin 162. | 0,01 a 100 / s | 1/s |
| FB5 | Coeficiente multiplicador de la retroalimentacion PI | Consulte la págin 162. | 0,1 a 100 | 1 |
| PIC | Inversión del sentido de corrección del regulator PI | Consulte la págin 162. | nO - YES | nO |
| rP2 | 2a referencia PI preseLECTIONada | Consulte la págin 162. | 0 a 100% | 30% |
| rP3 | 3a referencia PI preseLECTIONada | Consulte la págin 162. | 0 a 100% | 60% |
| rP4 | 4a referencia PI preseLECTIONada | Consulte la págin 162. | 0 a 100% | 90% |
| SP2 | 2a velocidad preseLECTIONada | Consulte la págin 153. | 0 a 500 Hz | 10 Hz |
| SP3 | 3a velocidad preseLECTIONada | Consulte la págin 153. | 0 a 500 Hz | 15 Hz |
| SP4 | 4a velocidad preseLECTIONada | Consulte la págin 153. | 0 a 500 Hz | 20 Hz |
| SP5 | 5a velocidad preseLECTIONada | Consulte la págin 153. | 0 a 500 Hz | 25 Hz |
| SP6 | 6a velocidad preselectionada | Consulte la págin 153. | 0 a 500 Hz | 30 Hz |
| SP7 | 7a velocidad preselectionada | Consulte la págin 153. | 0 a 500 Hz | 35 Hz |
| SP8 | 8a velocidad preselectionada | Consulte la págin 153. | 0 a 500 Hz | 40 Hz |
| SP9 | 9a velocidad preselectionada | Consulte la págin 153. | 0 a 500 Hz | 45 Hz |
| SP10 | 10a velocidad preselectionada | Consulte la págin 153. | 0 a 500 Hz | 50 Hz |
| SP11 | 11a velocidad preselectionada | Consulte la págin 153. | 0 a 500 Hz | 55 Hz |
| SP12 | 12a velocidad preselectionada | Consulte la págin 153. | 0 a 500 Hz | 60 Hz |
| SP13 | 13a velocidad preselectionada | Consulte la págin 153. | 0 a 500 Hz | 70 Hz |
| SP14 | 14a velocidad preselectionada | Consulte la págin 153. | 0 a 500 Hz | 80 Hz |
| SP15 | 15a velocidad preselectionada | Consulte la págin 153. | 0 a 500 Hz | 90 Hz |
| SP16 | 16a velocidad preselectionada | Consulte la págin 153. | 0 a 500 Hz | 100 Hz |
| CL1 | Límite de corriente | 0,25 a 1,5 In1 | 1,5 In | |
| Utilizada para limitar el par y la elevación de la temperatura del motor | ||||
| CL2 | 2o límite de corriente | Consulte la págin 167. | 0,25 a 1,5 In | 1,5 In |
1 In es la corriente nominal del variegador de velocidad indicada en la placar de datos.

Estos parámetros aparecerán solamente si se ha seleccióndo la función correspondiente en other menu. Para poderla programación, también es possible acceder a ellos y ajustarlos desde el menu en que se encontrarla funciona correspondiente. Encontrar a una descripción detallada de estasmericanas en las páginas indicadas.
| Código | Descripción | Gama de ajuste | Ajuste de fábrica |
| t L 5 | Tiempo de funciona en velocidad baja | 0 a 999,9 s | 0 (sin limite de tiempo) |
| El motor se detiene automatistically après de un commando de LSP durante un tiempo determinado. El motor vuelve a arrancar si la referencia de frequencia es mayor que LSP y si todasway está activo el commando de funciona. | |||
| r S L | Umbral de error de rearranque (umbral de aviso) Consulte la págin 163. | 0 a 100% | 0 |
| U F r 2 | Compensación IR, motor 2 Consulte la págin 169. | 0 a 100% | 20 |
| F L G 2 | Ganancia de bucle de frequencia, motor 2 Consulte la págin 169. | 1 a 100% | 20 |
| S t R 2 | Estabilidad, motor 2 Consulte la págin 169. | 1 a 100% | 20 |
| S L P 2 | Compensación de deslizamente, motor 2 Consulte la págin 169. | 0 a 150% | 100% |
| F t d | Umbral de la Frequencia del motor por encima del qual el contacto del relé (R1 o R2) se cierra, o la calidad AOV = 10 V. R1, R2 o dO deben ser asignadas a FtA. | 0 a 500 Hz | bFr |
| t t d | Umbral del estado tírmico del motor por encima del qual el contacto del relé (R1 o R2) se cierra, o la calidad AOV = 10 V. R1, R2 o dO deben ser asignadas a tSA. | 0 a 118% | 100% |
| C t d | Umbral de la corriente del motor por encima del qual el contacto del relé (R1 o R2) se cierra, o la calidad AOV = 10 V. R1, R2 o dO deben ser asignadas a CtA. | 0 a 1,5 In1 | In1 |
| S d S | Factor de escala para los parámetros SPd1/SPd2/SPd3 (consulte el menú SUP- en la págin 179) | 0,1 a 200 | 30 |
| Utilizzato para escalar un valor (por exemple, la velocidad del motor) en proportión a la Frequencia de salute rFr. Si SdS ≤ 1, SPd1 se muestra en la pantalla (definición possible = 0,01). Si 1 < SdS ≤ 10, SPd2 se muestra en la pantalla (definición possible = 0,1). Si SdS > 10, SPd3 se muestra en la pantalla (definición possible = 1). Si SdS > 10 y SdS x rFr > 9999: Visualización de Spd3 = SdS x rFr / 1 000 (en 2+puntos decimales). Por exemple, si SdS x rFr es igual a 24 223, la pantalla muestra 24.22. Si SdS > 10 y SdS x rFr > 65535, la pantalla muestra 65.54. Ejemplo: Visualización de la velocidad de un motor de 4 bolos. 1 500 rpm a 50 Hz (velocidad sincrona): SdS = 30 Spd3 = 1 500 a rFr = 50 Hz | 0 | 30 | |
| S F r | Frecuencia de commutación Consulte la págin 126. | 2,0 a 16 kHz | 4 kHz |
| Es posible acceder a este parámetro a工程技术 del menú drC-. | |||
1 In es la corriente nominal del variador de velocidad indicada en la placar de datos.
drC-MENU DE CONTROL DEL VARIADOR
A exception de tUn, los parámedros de control del variador se pueda modifier sólo si se para el variador y no se está executando un commando de marcha. Es possible acceder a este menu con el interruptor de Bloqueo de acceso en la terminal de programación y ajustes en la posión . El funciona el variador para optimizar:
- ajustando los parámetros de control en los values individados en la placá de datos del motor
- realizando un autoajuste (en un motor asincrono estándar)
| Código | Descripción | Gama de ajuste | Ajuste de fábrica |
| b Fr | Frecuencia del motor | 50 ± 60 Hz | 50 |
| Este parámetro modifica los values preselectionados de los siguientes parámetros: HSP (páginia 120), Ftd (páginia 123), FrS (páginia 124) y tFr (páginia 126). | |||
| U n 5 | Tensión nominal del motor indicada en la placce de datos | Varía con el valor nominal del variegador | Varía con el valor nominal del variegador |
| ATV31***M2: 100 a 240 VATV31***M3X: 100 a 240 VATV31***N4: 100 a 500 VATV31***S6X: 100 a 600 V | |||
| F r 5 | Frecuencia nominal del motor indicada en la placce de datos | 10 a 500 Hz | 50 Hz |
| Larzón UnS (en volts)FrS (en Hz)no debe exceder los siguientes values:ATV31***M2: 7ATV31***M3X: 7ATV31***N4: 14ATV31***S6X: 17NOTA: La modificación del ajuste de bFr en 60 Hz también cambia el ajuste de FrS en 60 Hz. | |||
| n C r | Corriente nominal del motor indicada en la placce de datos | 0,25 a 1,5 In1 | Varía con el valor nominal del variegador |
| n 5 P | Velocidad nominal del motor indicada en la placce de datos | 0 a 32760 rpm | Varía con el valor nominal del variegador |
| 0 a 9 999 rpm, bajo 10,00 a 32,76 krpmSi la placce de datos indica una velocidad sincrona y deslizamente (en Hz o como un percentaje) en lugar de la velocidad nominal, calculue la velocidad nominal de la?sigenienteforma:Velocidad nominal = velocidad sincrona x 100 - deslizamente como un %o100Velocidad nominal = velocidad sincrona x 50 - deslizamente en Hz (motores de 50 Hz)oVelocidad nominal = velocidad sincrona x 60 - deslizamente en Hz (motores de 60 Hz) | |||
| C D 5 | Factor de potencia del motor indicado en la placce de datos | 0,5 a 1 | Varía con el valor nominal del variegador |
1 In es la corriente nominal del variegador de velocidad indicada en la placar de datos.
| Código | Descripción | Gama de ajuste | Ajuste de fibrica |
| r SC | Resistencia del estator en frio | Lea a continuación. | nO |
| n D: Función inactiva. En las aplicaciones que no requieren un alto rendimiento o que no toleren a un autoajuste automatico(circulación de una corrente por el motor) cada vez que el variegador se energiza.l n E: Activa la funciona. Utilizada para melhorar el rendimiento de baja velocidad, cualesra que sea el estado tírmico delmotor.XXXX: Valor de la resistencia del estator en frio realizada en mΩNOTA: Recomendamos que active esta funciona en las aplicaciones de levantimiento y manejo.Esta funciona deveráactivarse sólo cuando el motor está frio. | |||
| Cuando rSC = Inlt, el parafrema tUn es forzado en POn. En elsignificanto commando de marcha, la resistencia del estator se mide con un autoajuste. El valor del parafrema rSC cambia a este valor medido de resistencia del estator (XXXX) y es mantenido enese valor; tUn permanece forzado en POn. El parafrema rSC permanece en Inlt siempre y cuando la medicación de la resistencia del estator no haya sido realizada.Es possible forzar o modifier el valor XXXX con las teclas ▲ ▼. | |||
| t U n | Autoajuste del control del motor | Lea a continuación. | nO |
| Antes de realizar un autoajuste, asegúrese de que todos los parafremos de control del variegador (UnS, FrS, nCr, nSP, COS)hayan sido configurados correctamente. El parafrema tUn peut ser modificado con el variegador en marcha; sin embargo, unautoajuste sera realizado solamente si no está presente un commando de frenado o marcha.n D: No se ha realizado el autoajuste.Y E 5: El autoajuste se realiza lo más antes possible, luego el parafrema cambia automatistically a dOnE o, en caso de unafalla, a nO. Se mystra una falla tnF cuando tnL = YES (pagina 175).d D: N E: Una vez que termina un autoajuste, la resistencia del estator medidaará utilizar para controlar el motor.r U n: Un autoajuste se realiza cada vez que se emite un commando de marcha.P O n: Un autoajuste se realiza cada vez que se energiza el variegador.L I I a L I E: Un autoajuste se realiza cuando la entrada lógica asignada a esta funciona bajo de 0 a 1.Notaa: | |||
| tUn es forzada en POn cuando rSCiene un valor diferente a nO.Un autoajuste se realizará únicamente si no está presente un commando de marcha o frenado. Si se asigna unariesión deparada libre o parada=rápida a una entrada lógica, esta deben ajustarse en 1 (activa en 0). Un autoajuste pueda durar entre 1 y2 segundos. Espera a que cambie la visualización a dOnE o nO. Si se interrupse el autoajuste es posible que se produca unafalla de autoajuste (pagina 183) y que el motor sea ajustado incorrectamente. Durante un autoajuste, el motor funciona en la corriente nominal. | |||
| t U S | Estado del autoajuste(información de estado solamente, no se pueda modifier) | Lea a continuación. | tAb |
| t R b: El valor por omisión de la resistencia del estator se usa para controlar el motor.P E n d: Se ha solicitado un autoajuste, pero todavía no se ha realizado.P r D: Autoajuste en corso.F R I L: Ha fallado el autoajuste.d D n E: Autoajuste completado. La resistencia del estator medida por la funciona de autoajuste se usa para controlar el motor.S E r d: Autoajuste completado. La resistencia del estator en frio se usa para controlar el motor (rSCdebe serdifferente a nO). | |||
| U F E | Selección de la relacion tensión / Frequencia | Lea a continuación. | n |
| L: par constante (para motores connectados en paralelo o motores especialares)P: par variable (para aplicaciones de bombayy ventilador)n: control vectorial del flujo sin sensor (para aplicaciones de parconstante)n L d: ahorro de energia, (para aplicaciones de par variable que no requirecen una gran dinámica.Esta se comporta de lamisma眼看 a larzón P sin carga y larzón n con carga.)TensiónUnSFrS Frecuencia |
| Código | Descripción | Gama de ajuste | Ajuste de fibraca |
| n r d | Frecuencia de conmutación aleatoria | Lea a continuación. | YES |
| Esta funciona modulae de forma aleatoria la fecuencia de conmutación para reducir el ruid del motor.Y E 5: Frecuencia con modulación aleatorian D: Frecuencia fija | |||
| S F r | Frecuencia de conmutación1 | 2,0 a 16 kHz | 4 kHz |
| Ajuste este parámetro para reducir el ruid audible del motor. Si la fecuencia de conmutación se ajusta en un valor mayor que 4 kHz, en caso de que se eleve la temperatura excessivamente, el variador automatistically reducirá la fecuencia de conmutación, también la augmentará cuando la temperatura regresa a su estado normal. Si la fecuencia de conmutación está ajustada en un valor mayor que el ajuste de fibraca (4 kHz), consulta la Guía de instalación de los variadores de velocidad ATV31 para Obtener las curvas de degradación. | |||
| E F r | Frecuencia Tmaxima de salute | 10 a 500 Hz | 60 Hz |
| El ajuste de fibraca es 60 Hz, o 72 Hz si bFr está configurado en 60 Hz. | |||
| S r F | Supresión del filtró del ciclo de velocidad | Lea a continuidad. | nO |
| n D: El filtró del ciclo de velocidad está activo (evita que se exceeda la referencia).y E 5: El filtró del ciclo de velocidad es suprimido (en las aplicaciones de control de posición, este ajuste reduce el tiempo de respuesta pero es possible que se exceeda la referencia). | |||
| Hz50403020-100,1,0,2,0,3,0,4,0,5t SSL = nO50403020-100,1,0,2,0,3,0,4,0,5t SSL = YES | |||
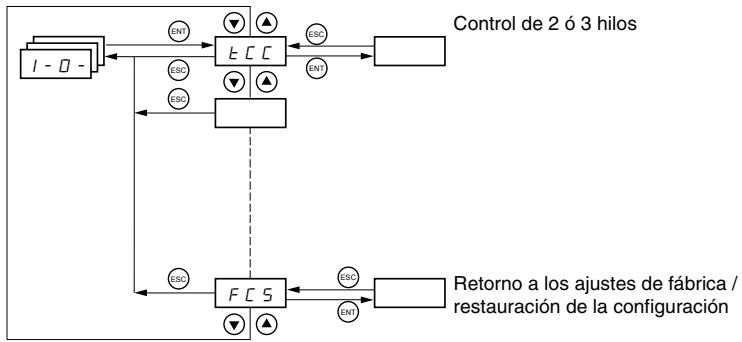
| S C S | Almacenimiento de las configuraciones2 | Lea a continuidad. | nO |
| n D: Función inactiva5 E r l: Guarda la configuración actual (perno no los resultados del autoajuste) en la memoria EEPROM. SCS automatistically cambia a nO tan pronto como se guardan las configuraciones. Use esta funciona para guardar other configuración de reserveADFremadas de la configuración actual.El variador de velocidadiene de fibraca con las configuraciones actual y de reserva ya configuradas.Si la terminal de programación y ajustes remota se conecta al variador de velocidad; estarán disponibles hasta un máximo de quatre ajustes adinociales: F I L I, F I L 2, F I L 3 y F I L 4. Utilice estas selecciones para guardar hasta quatre configuraciones en la memoria EEPROM de la terminal de programación y ajustes remota.SCS automatistically cambia a nO tan pronto como se guardan las configuraciones. | |||
| F C S | Returno a los ajustes de fibraca / restauración de la configuración2 | Lea a continuidad. | nO |
| n D: Función inactivaR EC l: Sustituye la configuración actual con la configuración de reserve anteriorsmente guardada por SCS (SCS ajustado en Strl). rECl estávisible sólo si se haGuardado una configuración de reserva. FCS automatistically cambia a nO tan pronto como se leva a cabo esta accesión.I n l: Sustituye la configuración actual con los ajustes de fibraca. FCS automatistically cambia a nO tan pronto como se leva a cabo esta accesión.Si la terminal de programación y ajustes remota se conecta al variador de velocidad; estarán disponibles hasta un(Maximo de quatre ajustes adinociales correspondiente a los ARCHivos de reserva guardados en la memoria EEPROM de la terminal:F I L I, F I L 2, F I L 3 y F I L 4. Estas selecciones sustituyen la configuración actual con la configuración de reserva correspondiente en la terminal de programación y ajustes remota. FCS automatistically cambia a nO tan pronto como se leva a cabo esta accesión.Note: Si n R d se muestra brevamente en la pantalla una vez que el parámetro haimbledon a nO, no es posible realizar la transference de configuración, ya que los values nominales del variador son differentes. Si n E r se muestra brevamente en la pantalla una vez que el parámetro haimbledon a nO, un error de transferencia de configuración se ha producido y el ajuste de fibracadeferé ser restaurado utilizing InI. EnAmbos casos, verifique la configuración que se va a transferir antes de volver a intentar.NOTA: Para activar rECl, InI y FIL1 a FIL4 oprima y mantenga oprima da tecla ENT durante 2 segundos. | |||
1 Alternatively es possible acceder a este parámetro a性和 del menu de ajustes, SEt-. Consulte la página 119.
2 Es possible acceder a SCS y FCS desde various menus de configuracion pero sus ajustes afectan todos los menus y parámetros.
I-O-MENU DE ASIGNACION DE E/S
Se pueda modifier los parámetros de E/S sólo si se detiene el variador y no se está executando un commando de marcha. Es possible acceder a este menu con el interruptor de bloqueo de acceso en la terminal de programación y ajustes en la posición .
| Código | Descripción | Ajuste de fábrica |
| E C C | Tipo de control: 2 hilos, 3 hilos o local | 2C ATV31*****A: LOC |
| Configurar de control: 2 C = control de 2 hilos 3 C = control de 3 hilos L D C = control local; para los variadores ATV31*****A solamente.Esta option no está disponible si el parámetro LAC = L3 (pagina 140). Control de 2 hilos (contacto sostenido): El estado de la entrada (abierto o cerrado) controla la marcha y el paro. E真假: Para armarde: Variador ATV31 LI1: adelante LIX: atrás Control de 3 hilos (control de pulsación): Una pulsación de marcha adelante o marcha atrás es suficiente para controlar el arranque. Una pulsación de paro es suficiente para controlar el paro. E真假: Para armarde: Variador ATV31 LI1: paro LI2: adelante LIX: atrás NOTA: Paraonian la asignación de tCC, pulse la tecla ENT durante 2 segundos (this accion para que las siguientes functions regresen a sus ajustes de fábrica): rrS, tCT y todas las unidades que afectan a las entradas lógicas. | ||
| E C E | Tipo de control de 2 hilos (es possible acceder a este parámetro sólo si tCC = 2C) | trn |
| L E L: Si el valor de la entrada de marcha adelante o marcha atrás es alto cuando está energia do el variador, este arrancará el motor. Si las dos entradas tienen un valor alto durante la energiaación, el variador girará hacer adelante. E r n: La entrada de marcha adelante o marcha atrás debecar contener una transmisión de bajo a alto antes de que el variador arranque el motor. Por lo tanto, si el valor de la entrada de marcha adelante o marcha atrás es alto cuando está energia do el variador, la entrada deberá pagar por un ciclo antes de que el variador arranque el motor. P F D: Igual que LEL, pero la entrada de marcha adelante tiene prioridad sobre la entrada de marcha atrás. Si se activa la marcha adelanteminternas el variador estáFuncionando en marcha atrás, el variador girará hacer adelante. | ||
| r r S | Marcha atrás a工程技术 de una entrada lógica | si tCC = 2C: LI2 si tCC = 3C: LI3 si tCC = LOC: nO |
| Si rrS = nO, marcha atrás no es asignada a una entrada lógica. Todavía es possible emitir un commando de marcha atrás porotiros medios, por exemple, una tensión negativa en AI2, un commando de conexión en series o desde la terminal de programación y ajustes remota. n D: No asignado L I 2: Es posible acceder a la entrada lógica LI2 si tCC = 2C L I 5: Entrada lógica LI5 L I 3: Entrada lógica LI3 L I 6: Entrada lógica LI6 L I 4: Entrada lógica LI4 | ||
| Código | Descripción | Ajuste de fábrica | |
| C r L E C r H E | El valor de baja velocidad (LSP) en la entrada Al3, pueda ajustarse entre 0 y 20 mA. El valor de alta velocidad (HSP) en la entrada Al3, pueda ajustarse entre 4 y 20 mA | 4 mA 20 mA | |
| Estos dos parámetros se utilizean para configurar la entrada entre 0 y 20 mA, 4 y 20 mA, 20 y 4 mA, etc. Frecuencia HSP LSP 0 CrL3 CrH3 20 Al 3 (mA) Ejemplo: 20-4 mA HSP LSP 0 CrH3 (4 mA) CrL3 (20 mA) Al 3 (mA) | |||
| R O I E | Configuración de laittersalía análogica | 0A | |
| D R: configuración entre 0 y 20 mA (utilice la terminal AOC) 4 R: configuración entre 4 y 20 mA (utilice la terminal AOC) I D U: configuración entre 0 y 10 mA (utilice la terminal AOV) | |||
| d D | Salida lógica/análogica AOC/AOV | nO | |
| n D: No asignado D C r: Corriente del motor. 20 mA o 10 V equivalen a dos vezes la corriente nominal del variador. r F r: Frecuencia del motor. 20 mA o 10 V equivalen a la fecuencia Tmaxa tFr (páginia 126). D E r: Par motor. 20 mA o 10 V equivalen a dos veces el par nominal motor. D P r: Potencia generada por el variador. 20 mA o 10 V equivalen a dos vezes la potencia nominal del variador. Al realizar lasSIGuentes asignaciones laittersalía análogica cambia aittersaláná lógica (consulte la Guía de instalación de los variadores ATV31 para Obtener más informática). Con estas asignaciones, configure AOt en 0 A. F L E: Falla del variador r U n: Variador en marcha F E R: Umbral de fecuencia alcanzado (parámetro Ftd en el menú SEt-,网页a 123. F L R: Alta velocidad (HSP) alcanzada C E R: Umbral de corriente alcanzado (parámetro Ctd en el menú SEt-,网页a 123. S r R: Referencia de fecuencia alcanzada E S R: Umbral tímeño del motor alcanzado (parámetro ttd en el menú SEt-,网页a 123. b L C: Secuencia de frenado (información de estado solamente. bLC可以把 ser activado o desactivado solamente desde el menú FUN,-,网页a 166). R P L: Pérdda de la senal de 4 a 20 mA, aun cuando LFL = nO (páginia 175). El estado de laittersalía lógica es 1 (24 V) cuando la asignación selecciónada está activa, excepto FLt que está en el estado 1 si el variador no está dañado. | |||
| r l | Relé R1 | FLt | |
| n D: No asignado F L E: Falla del variador r U n: Variador en marcha F E R: Umbral de fecuencia alcanzado (parámetro Ftd en el menú SEt-,网页a 123. F L R: Alta velocidad (HSP) alcanzada C E R: Umbral de corriente alcanzado (parámetro Ctd en el menú SEt-,网页a 13. S r R: Referencia de fecuencia alcanzada E S R: Umbral tímeño del motor alcanzado (parámetro ttd en el menú SEt-,网页a 123. R P L: Pérdda de la senal de 4 a 20 mA, aun cuando LFL = nO (páginia 175). El relé está energizado cuando la asignación selecciónada está activa, excepto FLt que está energizado si el variador no está dañado. | |||
| r e | Relé R2 | nO | |
| n D: No asignado F L E: Falla del variador r U n: Variador en marcha F E R: Umbral de fecuencia alcanzado (parámetro Ftd en el menú SEt-,网页a 123. F L R: Alta velocidad (HSP) alcanzada C E R: Umbral de corriente alcanzado (parámetro Ctd in el menú SEt-,网页a 123. S r R: Referencia de fecuencia alcanzada E S R: Umbral tímeño del motor alcanzado (parámetro ttd en el menú SEt-,网页a 123. b L C: Secuencia de frenado (información de estado solamente. bLC可以把 ser activado o desactivado solamente desde el menú FUN,-,网页b 166). R P L: Pérdda de la senal de 4 a 20 mA, aun cuando LFL = nO (páginia 175). El relé está energizado cuando la asignación selecciónada está activa, excepto FLt que está energizado si el variador no está dañado. | |||
| Código | Descripción | Ajuste de fábrica |
| SCS | Almacenimiento de las configuraciones1 | nO |
| nD: Función inactiva 5 t r l: Guarda la configuración actual (perno no los resultados del autoajuste) en la memoria EEPROM. SCS automatistically cambia a nO tan promptly como se guardan las configuraciones. Use esta función para guardar另一边 configuración de reserve además de la configuración actual. El variador de velocidad viene de fábrica con las configuraciones actual y de reserve ya configuradas. Si la terminal de programación y ajustes se connecta al variador de velocidad; estarán disponibles hasta un máximo de quatre ajustes adiconuales: F I L 1, F I L 2, F I L 3 y F I L 4. Utilice estas selecciones para guardar hasta quatre configuraciones en la memoria EEPROM de la terminal de programación y ajustes remota. SCS automatistically cambia a nO tan promptly como se guardan las configuraciones. | ||
| FCS | Returno a los ajustes de fábrica / restauración de la configuración1 | nO |
| nD: Función inactiva r E C l: Susituye la configuración actual con la configuración de reserve anteriormente guardada por SCS (SCS ajustado en Strl). rECI estávisible sólo si se haGuardado una configuración de reserve. FCS automatistically cambia a nO tan promptly como se leva a cabo estaakening. l n l: Susituye la configuración actual con los ajustes de fábrica. FCS automatistically cambia a nO tan promptly como se leva a cabo estaqing. Si la terminal de programación y ajustes remota se connecta al variador de velocidad; estarán disponibles hasta un(Maximo de quatre ajustes adiconuales correspondientes a los ARCHivos de reserve guardados en la memoria EEPROM de la terminal: F I L 1, F I L 2, F I L 3 y F I L 4. Estas selecciones sustituyen la configuración actual con la configuración de reserve correspondiente en la terminal de programación y ajustes remota. FCS automatistically cambia a nO tan promptly como se leva a cabo estaqing. Nota: Si nR d se muestra brevamente en la pantalla una vez que el parámetro haimbledon a nO, no es possible realizar la transferencia de configuración, ya que los values nominales del variador son differsentes. Si nE r se muestra brevamente en la pantalla una vez que el parámetro haimbledon a nO, un error de transferencia de configuración se ha producido y el ajuste de fábrica deben ser restaurado utilizing InI. En algunos casos, verifique la configuración que se va a transferir antes de volver a intentar. NOTA: Para activar rECI, InI y FIL1 a FIL4 oprima y mantenga oprimida la tecla ENT durante 2 segundos. | ||
Es possible acceder a SCS y FCS desde various menus de configuracion pero sus ajustes afectan todos los menus y paracetros.
CTL-MENU DE CONTROL
Canales de control
Los parámetros de control se PUden modifier sólo si se para el variador y no se está executando un commando de marcha. Es possible acceder a este menu con el interruptor de Bloqueo de acceso en la terminal de programación y ajustes en la posión .
Los(COMDOS)de control; por典型案例 marcha adelante y marcha atras, y los comandos de referencia de velocidad se pueda enviar al variador desde las fuentes especialicas en la tabla 6. Los variadores de velocidadATV31 permiten al usuario asignar fuentes de control y de referencia adistintos canales de control (Fr1, Fr2, Cd1 o Cd2, consulte las págrinas 140-141) ycaebar entre ellos. Por典型案例, es possible asignar LCC al canal de referencia 1 y CAan al canal de referencia 2 ycaebar entre las dos fuentesde referencia. Internacional es possible utilizing fuentes distinctas para loscomandos de control y referencia. Este se conoce como el modo delfuncionamento mixto. Estas funeciones se explican detallamente en lassectiones que comienzan en la pagina 132.
Tabla 6: Fuentes de control y referencia
| Fuentes de control (CMD) | Fuentes de referencia (rFr) | ||
| tEr: | Terminal (LI) | AI1, AI2, AI3: | Terminal |
| LOC: | (RUN/STOP) en la terminal de programación y ajustes de los variadores ATV31-----A solamente | AIP: | Potenciómetro en los variadores ATV31-----A solamente |
| LCC: | Terminal de programación y ajustes remota (receptáculo hembra RJ45) | LCC: | Terminal de programación y ajustes (variadores ATV31-----y ATV31-----A) o terminal de programación y ajustes remota |
| Mdb: | Modbus (receptáculo hembra RJ45) | Mdb: | Modbus (receptáculo hembra RJ45) |
| CAN: | CANopen (receptáculo hembra RJ45) | CAN: | CANopen (receptáculo hembra RJ45) |
ADVERTENCIA
FUNCTIONAMIENTO ACCIDENTAL DEL EQUIPO
Los botones de paro en los variadores de velocidad ATV31...A y en la terminal de programacion y ajustes remota peuvent ser programados para no asignar prioridades. Para conservar la prioridad de la tecla de paro, ajuste PST en YES (pagina 143).
El incumplimiento de esta instruccion可以使 la muerte, lesiones serias o daño al equipo.
Parámetro LAC
Use el parámetro LAC (pagina 140) en el menu CtL- para selecciónar los niveles de acceso de las functions y paraaabstar las fuentes de control y referencia.
- LAC = L1: Nivel 1—acceso a las functions estándar. Los comandos de control y referencia provienen de una fuente. Consulte “Parámetro LAC = L1 o L2” en la párgina 132.
- LAC = L2: Nivel 2—acceso a todas las functions del nivel 1, indemás de las siguientes functions avanzadas. Los comandos de control y referencia provienen de una fuente. Consulte “Parámetro LAC = L1 o L2” en la párgina 132.
+/- Velocidad (potenciómetro motorizzato)
Control de freno
— Conmutación para el 20 límite de corriente
— Conmutación de motores
— Gestión de los interruptores de límite
- LAC = L3: Nivel 3—acceso a todas las functions del nivel 2. Los comandos de control y referencia你能 provenir de fuentes-distintas. Consulte "Parámetro LAC = L3" en la página 133.
Parámetro LAC = L1 o L2
Si el parámetro LAC se ajusta en L1 o L2, los comandos de control y referencia provienen de una fuente. Las fuentes posibles de control y referencia, y los ajustes que las específican, son:
- Control y referencia a través de las terminales de entrada o de la terminal de programación y ajustes del variador en modo forzado local (consulte FLO en la頁a 177)
Control y referencia a trovés de la connexión en série Modbus
Control y referencia a工程技术 de la conexión en series CANopen - Control y referencia a trovés de la terminal de programación y ajustes remota (consulte LCC en la págin 142).
NOTA: Modbus o CANopen se selección "en-linea"SCRIBIendo la palabra de control apropriada (consulte la documentoancia españica al protocolo).
El",[si el se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise]
El,[si el se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como se quise, y como sequiste, y como sequiste, y como sequiste, y como sequiste, y como sequiste, y como sequiste, y como sequiste, y como sequiste, y como sequiste, y como sequiste, y como sequiste, y como sequiste, y como sequiste, y como sequiste, y como sequiste, y como sequiste, y como sequiste, y como SE].
El,[si el se quise, y como se quise, y como se quise, y como se quise, y como SE].
El,[si el se quise, y como se quise, y como SE].
El,[si el se quise, y como se quise, y como SE].
El,[si el se quise, y como SE].
El,[si el se quise, y como SE].
El,[si el se quise, y como SE].
El,[si el se quise, y como SE].
El,[si el se quise, y como SE].
El,[si el se quise, y como SE].
El,[si el se quise, y como SE].
El,[si el se quise, y como SE].
- En los variadores de velocidad ATV31……… con configuraciones de fabrica, los COMMANDS DE CONTROL y referencia provienen de las terminales de control.
- En los variadores de velocidad ATV31...A con configuraciones de fabrica, los comandos de control provienen de la terminal de programación y ajustes del variador y los comandos de referencia provienen de lasuma del potenciometro de referencia y Al1 en las terminales de control.
- Con una terminal de programación y ajustes remota, cuando LCC = YES (頁目 142), los comandos de control y referencia provienen de la terminal. La referencia de Frequencia se obtiene aikhails del parametro LFr en el menu SET- (頁目 120).
Parámetro LAC = L3
Si el parámetro LAC se ajusta en L3:
- Los canales de control y referencia se pueda combinar (parámetro CHCF = SIM, págin 141), o
- Los canales de control y referencia puedeSeparated (parámetro CHCF = SEP, págrina 141)
Parámetro CHCF = SIM
La?sigue figura ilustra fuentes de control y referencia combinadas:
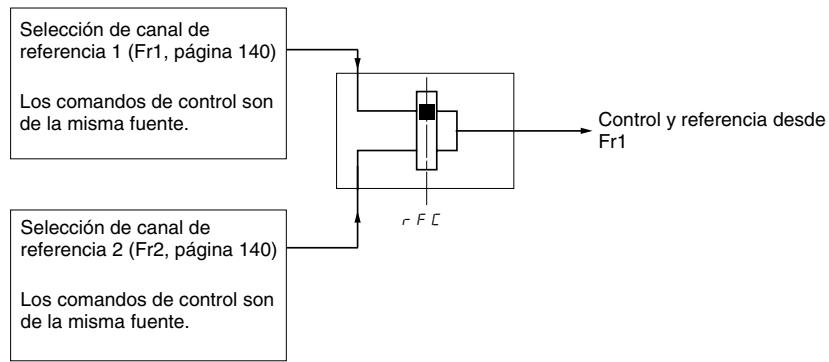
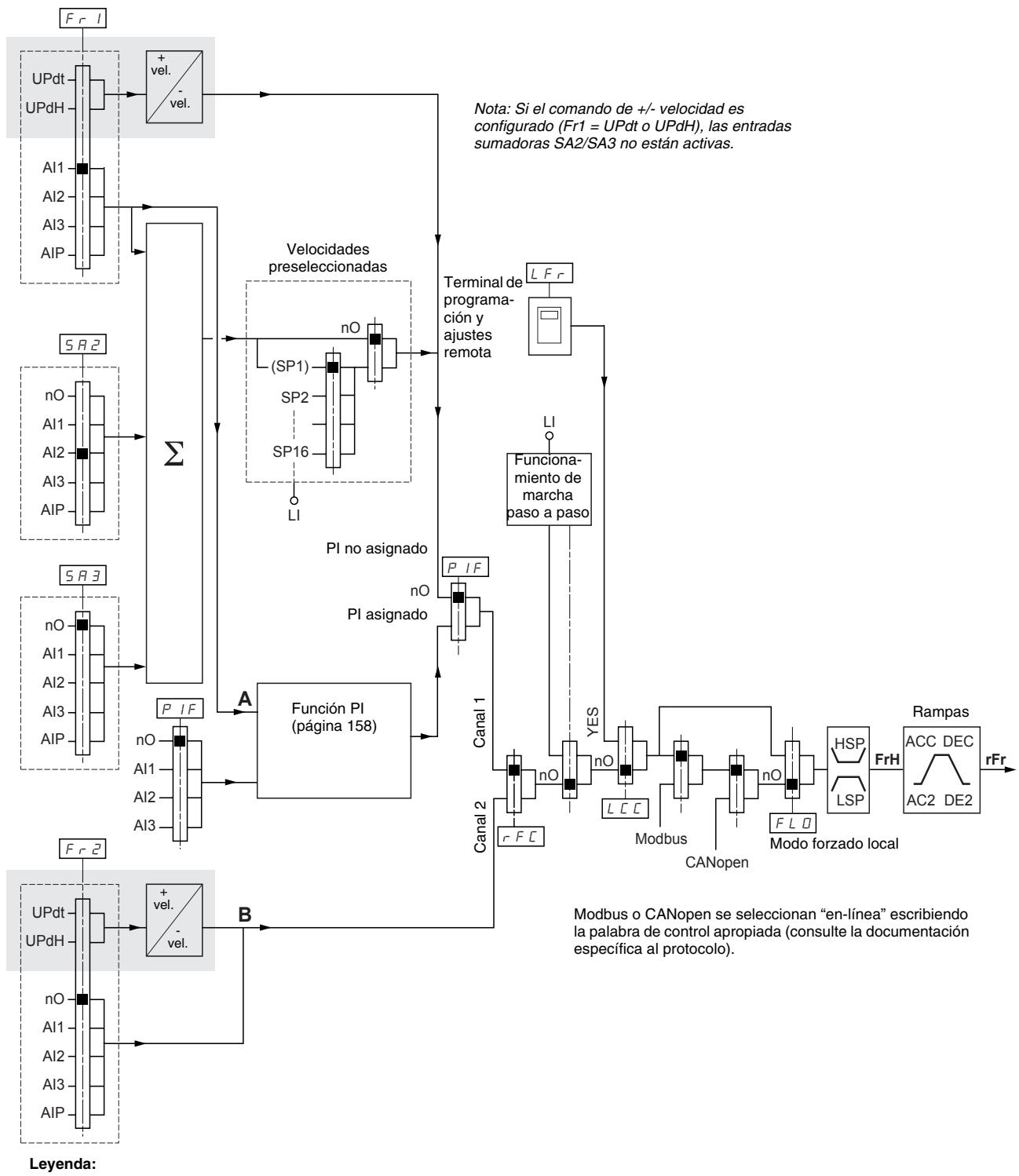
Use el parámetro rFC (頁目141) para selección ar el canal de referencia Fr1 o Fr2, o para configurar una entradaológica o un bit de palabra de control para conmutación remota entre los dos canales. Consulte el diagrama en la頁目138.
Parámetro CHCF = SEP
Las siguientes figuras ilustran canales distinctos de control y referencia (parámetro CHCF = SEP).
Canales distinctos de referencia:
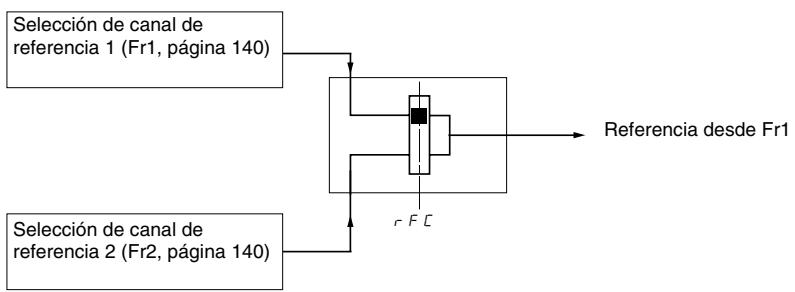
Use el parámetro rFC (págrina 141) para selecciónar el canal de referencia Fr1 o Fr2, o para configurar una entrada lógica o un bit de palabra de control para conmutación remota entre los dos canales.
Canales distinctos de control:
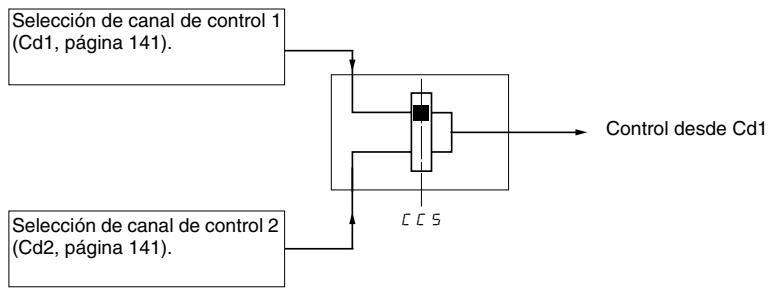
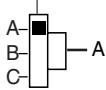
Use el parámetro CCS (págrina 142) para selecciónar el canal de control Cd1 o Cd2, o para configurar una entrada lógica o un bit de palabra de control para conmutación remota entre los dos canales.
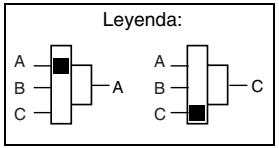
Canal de referencia para LAC = L1 o
L2

El cuadrado negro representa
elajuste de fabrica del parametro xxx.
FunciOn accesible si LAC = L2
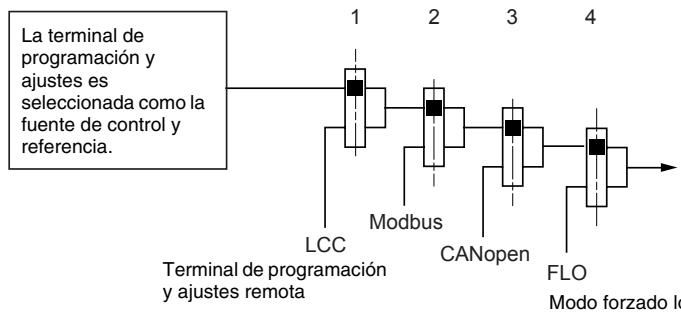
Canal de control para LAC = L1 o L2
Los ajustes de los parámetros FLO, LCC y la selección del protocolo Modbus o CANopen determinan ambos canales de referencia y control. El order de prioridad es FLO, CANopen, Modbus y LCC.
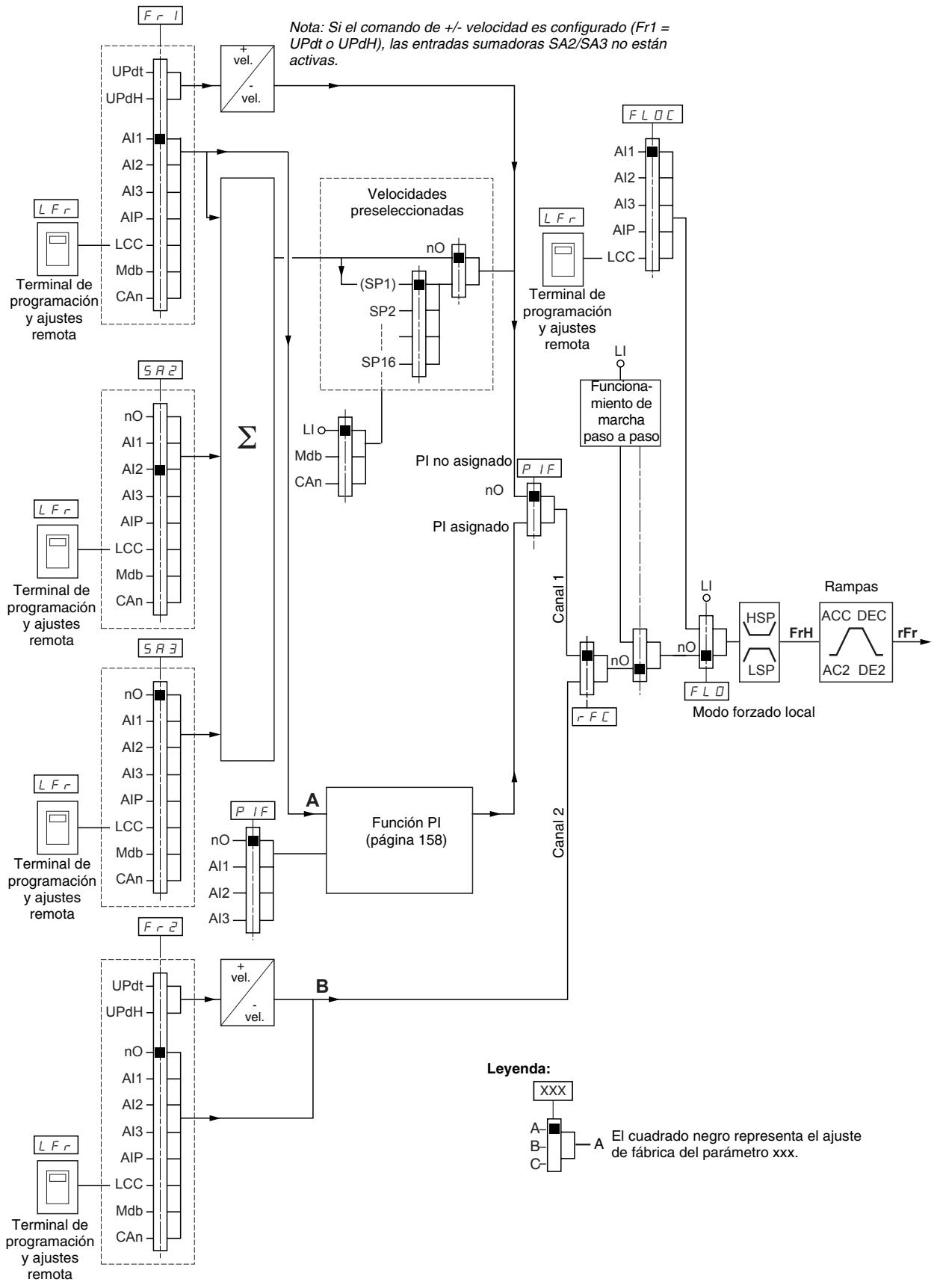
Canal de referencia para LAC = L3
Canal de control para LAC = L3: CHCF = SIM, referencia y control combinados
Si CHCF se ajusta en SIM (頁agonal 141), los parámetros Fr1, Fr2, FLO y FLOC determinan ambas fuentes de referencia y control. Por exemple, si la referencia es atramés de la entradaanalógica en elbloque de terminales, el control es através de la entrada lógica en elbloque de terminales.
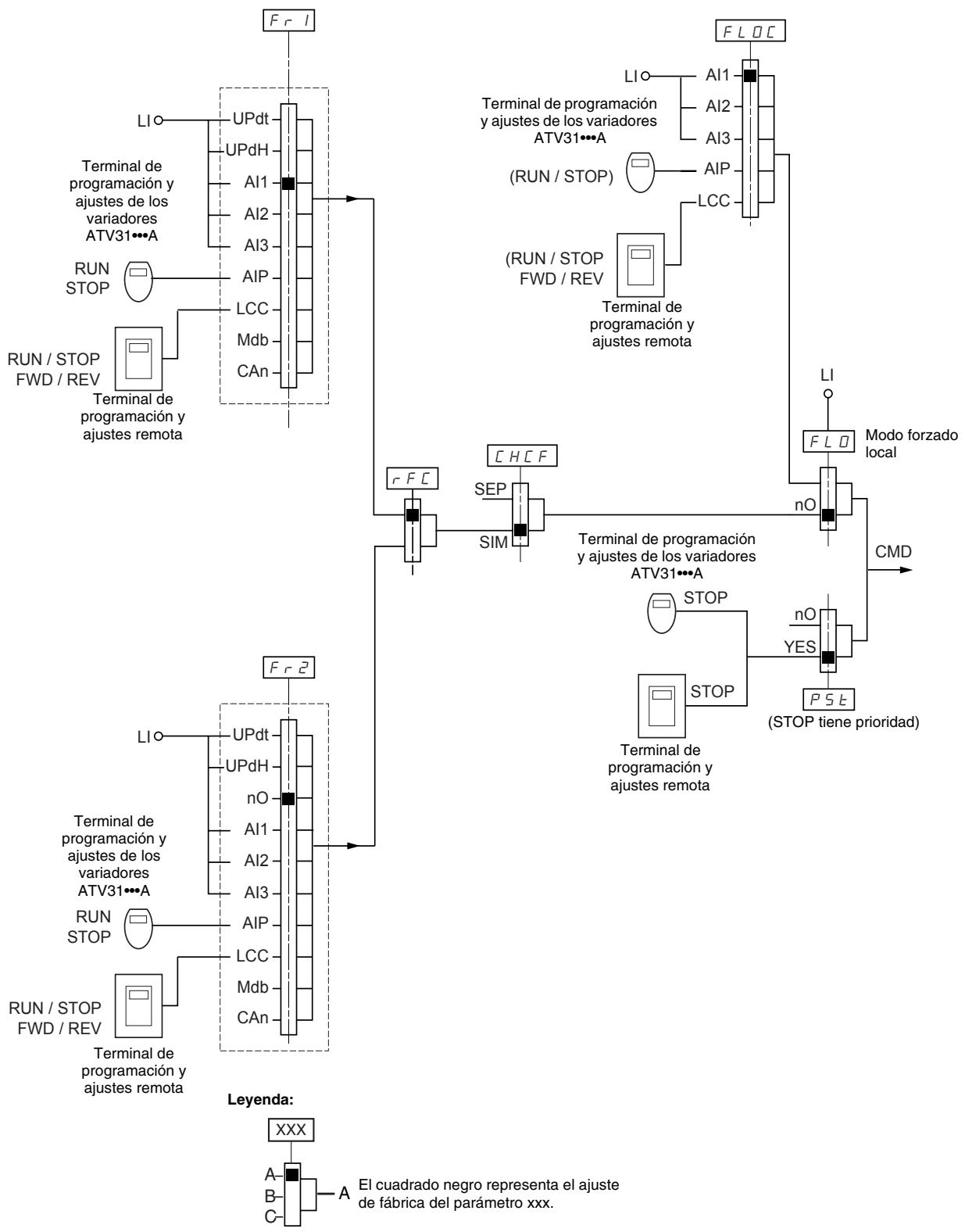
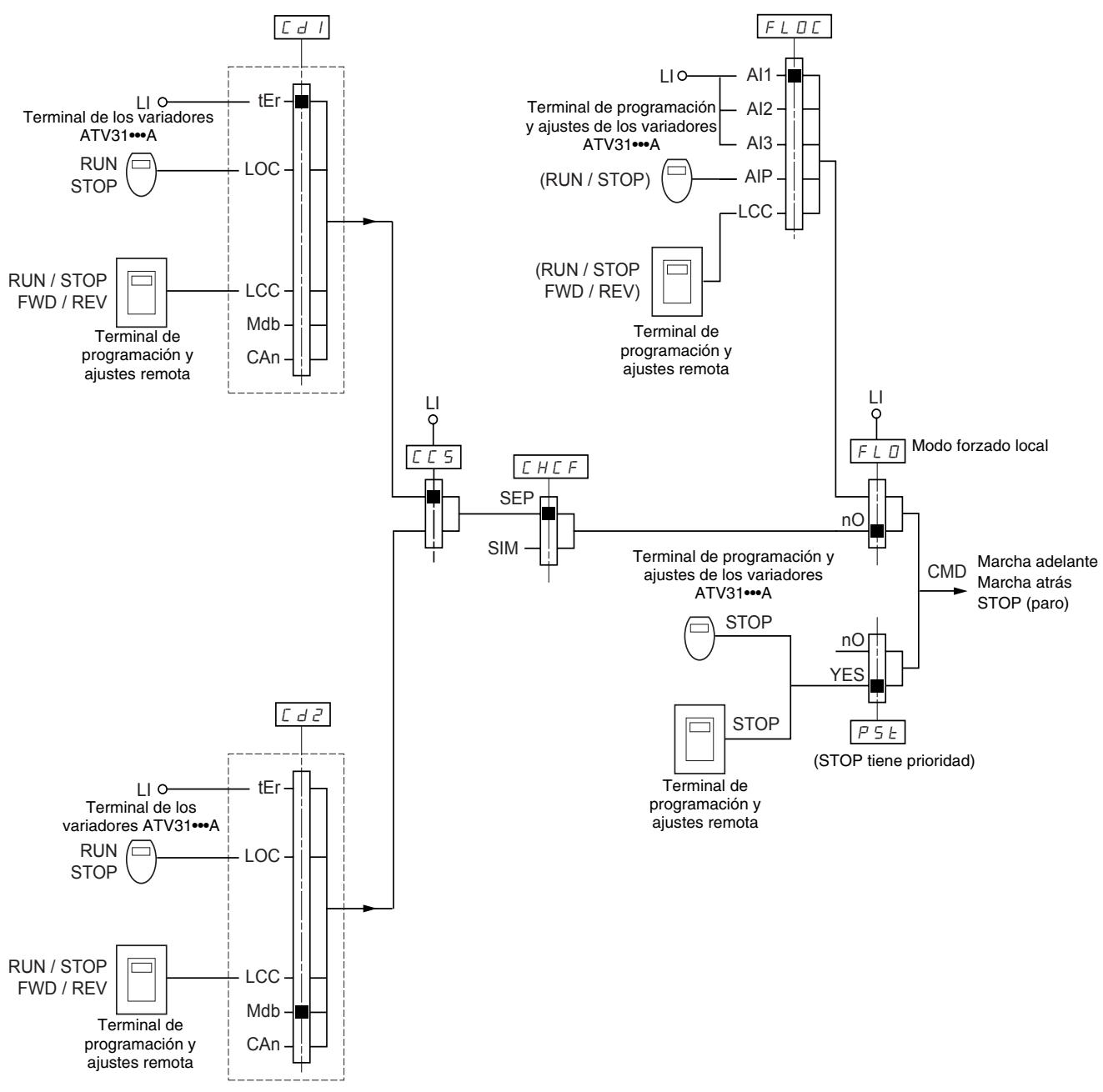
Canal de control para LAC = L3: CHCF = SEP, modo mixto (referencia y control distinctos)
Los parámetros FLO y FLOC son comunes a la referencia y el control. Por exemple, si la referencia en el modo forzado local es a trovés de la entradaanalógica en el bloque de terminales, el control en modo forzado local es através de la entradaológica en el bloque de terminales.
Leyenda:
Consulte la tabla de compatibiliidad entre functions en la página 115. No es possible configurar las functions de control incompatibles. La prima configuración configura evitará la configuración de在哪quier otra función que no sea compatible.
| Código | Descripción | Gama de ajuste | Ajuste de fábrica |
| L R C | Niveles de acceso de las functions | Lea a continuación. | L1 |
| L 1: Nivel 1—accesso a las functiones estándar.L 2: Nivel 2—accesso a las functiones del nivel 1,además de las siguientes functions avanzadas en el menu FUn-.+/- velocidadControl de freenoCommutación para elsegundo limite de correnteCommutación de motoresGestión de los interruptores de limiteL 3: Nivel 3—accesso a todas las functions del nivel 2,además de las operaciones en modo mixto.La asignación de L3 a LAC restaura los parámetros Fr1 (lea a continuación), Cd1 (páginia 141), CHCF (páginia 141) y tCC(páginia 127) en los ajustes de fábrica (en los variadores de velocidad ATV31******A, tCC se vuelve a ajustar en 2C).Si LAC se ajusta en L3,debe restuar Los ajustes de fábrica con el parámetro FCS (páginia 143) para ajustar LAC de nuevo en L1 o para modifierlo en L2.Si LAC se ajusta en L2,debe restuar Los ajustes de fábrica con el parámetro FCS para ajustar LAC de nuevo en L1.Si LAC se ajusta en L2,es posible modifierlac EN L3 sin usear el parámetro FCS.NOTA: Para Cambiar la asignación de LAC,debepulsar ymantener sostenida la tecla ENT durante 2 segundos. | |||
| F r l | Configuración de la referencia 1 | Lea a continuación. | Al1AIP paraATV31*****A |
| R 1: Entrada analógica AI1R 2: Entrada analógica AI2R 3: Entrada analógica AI3R IP: Potenciometro (variadores ATV31****A)Si LAC = L2 o L3,es possible realizar lassiguidantes asignaciones adiconiales:U P d l: + velocidad / - velocidad atraves de Ll1U P d H: + velocidad / - velocidad atraves de ▲▼ en la terminal de programación yajustes del variador (ATV31*****oATV31****A) o en la terminal de programación yajustes remota. Para elfuncioncimiento,muestre la Frequencia rFr (páginia179).1Si LAC = L3,es possible realizar lassiguidantes asignaciones adiconiales:L C: Referencia através de la terminal de programación yajustes remota,el parámetro LFr en el menu SET-,páginia 120.P d b: Referencia através de ModbusR n: Referencia através de CANopen | |||
| F r 2 | Configuración de la referencia 2 | Lea a continuación. | nO |
| n D: No asignadoR 1: Entrada analógica AI1R 2: Entrada analógica AI2R 3: Entrada analógica AI3R IP: Potenciometro (variadores ATV31****A solamente)Si LAC = L2 o L3,es possible realizar lassiguidantes asignaciones adiconales:U P d l: + velocidad/ - velocidad atraves de Ll1U P d H: + velocidad / - velocidad atraves de ▲▼ en la terminal de programación yajustes del variador (ATV31*****oATV31****A) o en la terminal de programación yajustes remota. Para elfuncioncimiento,muestre la Frequencia rFr(páginia 179).1Si LAC = L3,es possible realizar lassiguidantes asignaciones adiconiales:L C: Referencia através de la terminal de programación yajustes,el parámetro LFr en el menu SET-,páginia 120.P d b: Referencia através de ModbusR n: Referencia através de CANopen | |||
1 Unicamente una de las asignaciones UPdt/UPdH es permitida en cada canal de referencia.
| Código | Descripción | Gama de ajuste | Ajuste de fábrica |
| r F C | Conmutación de referencias | Lea a continuación. | Fr1 |
| Use el parámetro rFC para selectionar el canal Fr1 o Fr2, o para configurar una entrada lógica o un bit de control para la comutation remota de Fr1 o Fr2.F r I: Referencia = Referencia 1F r 2: Referencia = Referencia 2L I I: Entrada lógica L1I I 2: Entrada lógica L12L I 3: Entrada lógica L13L I 4: Entrada lógica L14L I 5: Entrada lógica L15L I 6: Entrada lógica L16Si LAC = L3, es possible realizar las siguientes asignaciones adiconuales:C I I I: Bit 11 de la palabra de control ModbusC I I 2: Bit 12 de la palabra de control ModbusC I I 3: Bit 13 de la palabra de control ModbusC I I 4: Bit 14 de la palabra de control ModbusC I I 5: Bit 15 de la palabra de control ModbusC 2 I I: Bit 11 de la palabra de control CANopenC 2 I 2: Bit 12 de la palabra de control CANopenC 2 I 3: Bit 13 de la palabra de control CANopenC 2 I 4: Bit 14 de la palabra de control CANopenC 2 I 5: Bit 15 de la palabra de control CANopenLa referencia se puedaCambiar con el variegador en marcha.Fr1 está activa cuando la entrada lógica o el bit de la palabra de control está en estado 0.Fr2 está activa cuando la entrada lógica o el bit de la palabra de control está en estado 1. | |||
| CHCF | Modo mixto (canales distinctos de referencia y control) | Lea a continuación. | SIM |
| Es possible acceder a CHCF cuando LAC = L3.5 I I: Canales combinados de control y referencia5 E P: Canales distinctos de control y referencia | |||
| cd I | Configuración del canal de control 1 | Lea a continuación. | tErLOC para los variadoresATV31*****A |
| Es possible acceder a Cd1 cuando CHCF = SEP y LAC = L3.E r: Control del bloques de terminalesL O C: Control de la terminal de programación y ajustes del variegador (variadores ATV31*****A solamente)L C C: Control de la terminal de programación y ajustes remotaΠ d b: Control a través de ModbusCR n: Control a través de CANopen | |||
| cd 2 | Configuración del canal de control 2 | Lea a continuación. | Mdb |
| Es possible acceder a Cd2 cuando CHCF = SEP y LAC = L3.E r: Control del bloques de terminalesL O C: Control de la terminal de programación y ajustes del variegador (variadores ATV31*****A solamente)L C C: Control de la terminal de programación y ajustes remotaΠ d b: Control a través de ModbusCR n: Control a través de CANopen | |||
Estos parámetros aparecerán solamente si se haactivado la funciona.
| Código | Descripción | Gama de ajuste | Ajuste de fábrica |
| CCS | Conmutación de canal de control | Lea a continuación. | Cd1 |
| Es posible acceder a CCS cuando CHCF = SEP y LAC = L3. Use el parámetro CCS para selectionar el canal Cd1 o Cd2, o para configurar una entrada lógica o un bit de control para la conmutación remota de Cd1 o Cd2. | |||
| C d 1: Canal de control = Canal 1 | |||
| C d 2: Canal de control = Canal 2 | |||
| L 1/1: Entrada lógica L11 | |||
| L 1/2: Entrada lógica L12 | |||
| L 1/3: Entrada lógica L13 | |||
| L 1/4: Entrada lógica L14 | |||
| L 1/5: Entrada lógica L15 | |||
| L 1/6: Entrada lógica L16 | |||
| C 1/1: Bit 11 de la palabra de control Modbus | |||
| C 1/2: Bit 12 de la palabra de control Modbus | |||
| C 1/3: Bit 13 de la palabra de control Modbus | |||
| C 1/4: Bit 14 de la palabra de control Modbus | |||
| C 1/5: Bit 15 de la palabra de control Modbus | |||
| C 2/1: Bit 11 de la palabra de control CANopen | |||
| C 2/2: Bit 12 de la palabra de control CANopen | |||
| C 2/3: Bit 13 de la palabra de control CANopen | |||
| C 2/4: Bit 14 de la palabra de control CANopen | |||
| C 2/5: Bit 15 de la palabra de control CANopen | |||
| El canal 1 está activo cuando la entrada o el bit de la palabra de control está en estado 0. | |||
| El canal 2 está activo cuando la entrada o el bit de la palabra de control está en estado 1. | |||
| COP | Copiar canal 1 al canal 2 (es possible copiar sólo en esta direction). | Lea a continuación. | nO |
| Es posible acceder a COP cuando LAC = L3. | |||
| nD: No es posible copiar | |||
| S P: Copiar referencia | |||
| C d: Copiar control | |||
| R L L: Copiar control y referencia | |||
| Si el canal 2 es controlado a través del bloque de terminales, el control del canal 1 no se transfiere al copiarlo. | |||
| Si la referencia del canal 2 se configura a través de AI1, AI2, AI3 o AIP, la referencia del canal 1 no se transfiere al copiarla. | |||
| La referencia copiada es FrH (antes de la rampa) a no ser que la referencia del canal 2 se configure a través de +/- velocidad. En este caso, la referencia copiada es rFr (después de la rampa). | |||
| NOTA: Al copiar el control y/o la referencia es possible que cambie el sentido de rotación. | |||
| LCC | Control a través de la terminal de programación y ajustes remota. | Lea a continuación. | nO |
| Es posible acceder a LCC si el variegador está equipado con una terminal de programación y ajustes remota, y si LAC = L1 o L2. | |||
| nD: Función inactiva | |||
| y E 5: Permitte el control del variegador mediante los botones STOP/RESET, RUN y FWD/REV en la terminal de programación y ajustes remota. La referencia de velocidad se obtiene a través del parámetro LFr del móvil SET-. Só lo los comandos de parada libre, parada=rápida y parada por ineyeción de- (c.d.) permanecen activos en el Bloque de terminales. Si la terminal de programación y ajustes remota no está connectada, el variegador de velocidad se bloqueará en una falla SLF. | |||

Estos parámetros aparecerán solamente si se ha activado la funciona.
| Código | Descripción | Gama de ajuste | Ajuste de fábrica |
| P5E | Prioridad de paro | Lea a continuación. | YES |
| PST cede prioridad a la tecla STOP en la terminal de programación y ajustes del variador (ATV31-----A solamente) o en la terminal de programación y ajustes remota; independiente del canal de control selección (bloque de terminales o bus de comunicación). Si se ajusta en nO, el canal de control activo tieneprioridad. Si el canal de control activo es la terminal de programación y ajustes local o remota, el botón de paro guarda la prioridad, independiente del ajuste de PST. NOTA: Para Cambiar la asignación de PST,Debe pulsar ymantener sostenida la tecla ENT durante 2 segundos. nD:Función inactiva yE 5:La tecla STOP tieneprioridad | |||
| A ADVERTENCIA | |||
| COMANDO DE PARO DESACTIVADOSi se desactiva la tecla STOP en la terminal de programación y ajustes del variador o en la terminal de programación y ajustes remota, alocrimirla el variador de velocidad no podraretederse. Sedefería instalar un commando de paro externo para detenerel motor.El incumplimiento de esta instruccionuedeclarar la muerte,lesiones serias o daño alequipo. | |||
| r0E | Sentido de marcha | Lea a continuación. | dFr |
| Sentido de marcha permitted para la tecla RUN (marcha) en la terminal de programación y ajustes del variador (ATV31-----A solamente).dF r:Marcha adelanted r 5:Marcha atrásb0E:En los variaresde velocidad ATV31-----,ambos sentidos de marcha son permitted, en los variaresde velocidadATV31-----A, solamente se permite el sentido de marcha hac delante. | |||
| SCS | Almacenimiento de las configuraciones1 | Lea a continuación. | Lea a continuación. |
| nD:Función inactiva5E r l:Guarda la configuración actual (perno no los resultados del autoajuste) en la memoria EEPROM.SCS automatisticallycambia a nO tan pronto como seguardan las configuraciones.Usestamericanaparguardarotra configuración de reservaademarks de la configuraciónactual.El variador de velocidad viene defábrica con las configuraciones actual y de reservesya configuradas.Si la terminal de programación y ajustes seconecta al variador de velocidad;estárán disponibles hasta un maxiimo de quatreajustes adincluales:F I L I,F I L 2,F I L 3yF I L 4.Ultilice estaseelecciones para guardar hasta quatre configuracionesen la memoriaEEPROM de la terminal de programación y ajustes remota.SCS automatisticallycambia a nO tan pronto como seguardan las configuraciones. | |||
| FCS | Retorno a los ajustes de fábrica / Restauración de la configuración1 | Lea a continuación. | Lea a continuación. |
| nD:Función inactivarE C l:Susituye la configuración actual con la configuración de reserve anteriormente guardada por SCS (SCS ajustado enStrl).rECI estávisiblesolesi se ha guardadouna configuración de reserva.FCS automatisticallycambia a nO tan pronto comose leva a cabo estaacción.ln l:Susituye la configuración actual con los ajustes de fábrica.FCS automatisticallycambia a nO tan pronto como se levaacabo estaacción.Si la terminal de programación y ajustes remota seconcta al variador de velocidad;estárán disponible hasta un maxiimo dequatro ajustes adincluales correspondientes a los ARCHivos de reserve guardados en la memoria EEPROM de la terminal:F I L I,F I L 2,F I L 3yF I L 4. Estaseelecciones sustituyen la configuración actual con la configuración de reserva correspondiente en la terminal de programación y ajustes remota.FCS automatisticallycambia a nO tan pronto como se levaacabo estaacción.Note:Si rH dse muestra brevemente en la pantalla una vez que el parametro ha转移到a nO, no es possible realizar latransferencia de configuración, ya que los values nominales del variadorson differentes. Si nE r semuestra bremente en la pantalla una vez que el parametro ha转移到a nO, un error de transferencia de configuración seha producido y elajustede fábricadeferberesrestauradoutilizandoInl.En amboscasos,verifique la configuración que se va a transferirantesdeolveraaintenderNOTA:ParaactivarrECI,Inl yFIL1aFIL4oprimaymantengaoprimidala teclaENTdurante2segundos. | |||
Es possible acceder a SCS y FCS desde various menues de configuracion pero sus ajustes afectan todos los menus y paramevos.
FUN-MENU DE FUNCIONES DE APLICACION
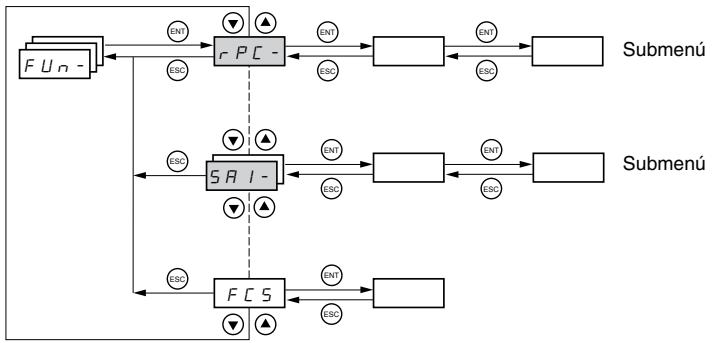
Los parámetros de la función de aplicación se pueda modifier sólo si se para el variegador y no se estáExecuting un commando de marcha. Es possible acceder a este menu con el interruptor de Bloqueo de acceso en la terminal de programación y ajustes en la posión .
Algunasuciones en este menu tendrán variedos parámetros. Para simplificar la programación y minimizar su desplazimiento, estasmericanas se agrupan en submenús. Así como los menús, los submenús son identificados con un guión. Por exemple, LIA- es un submenú, pero LIn es un parámetro.
No es possible configurar las functions de aplicacion incompatibles. La primera referencia configurada evitara la configuracion de在哪quier other func tion que no sea compatible.Consulte la tabla de compatibilidad entre functions en la page 115.

| Submenu | Parámetro | Descripción | Gama de ajuste | Ajuste de fábrica |
| r P C - | Ajuste de rampsas | |||
| r P E | Tipo de rampsa Define la forma de las rampsas de aceleración y desaceleración. | LIn | ||
| Lineal 5: Rampa en forma de S U: Rampa en forma de U C U 5: Personalizada Rampas en forma de S f (Hz) HSP 0 t2 t1 Rampas en forma de U f (Hz) HSP 0 t2 t1 Rampas personalizadas f (Hz) HSP 0 t2 t1 tA1 tA2 tA3 tA4 | El coeficiente de curva es bajo, con t2 = 0,6 x t1 con t1 = ajuste del tiempo de la rampa. El coeficiente de curva es bajo, con t2 = 0,5 x t1 con t1 = ajuste del tiempo de la rampa. tA1: Puede ajustarse entre 0 y 100% (de ACC o AC2) tA2: Puedo ajustarse entre 0 y (100% - tA1) (de ACC o AC2) tA3: Puedo ajustarse entre 0 y 100% (de dEC o dE2) tA4: Puedo ajustarse entre 0 y (100% - tA3) (de dEC o dE2) | |||
| E R I | Inicio de la rampa de acceleración tipo CUS, redondeado como un percentaje del tiempo total de la rampa (ACC o AC2). | 0 a 100% | 10% | |

Estos parámetros aparecerán solamente si se haactivado la funciona.

| Submenu | Parámetro | Descripción | Gama de ajuste | Ajuste de fábrica | ||
| r PC - (cont.) | t R2 | Fin de la rampa de acceleración tipo CUS, redondeado como un percentaje del tiempo total de la rampa (ACC o AC2). | 0 a (100%-tA1) | 10% | ||
| t R3 | Inicio de la rampa de desaceleración tipo CUS, redondeado como un percentaje del tiempo total de la rampa (dEC o dE2) | 0 a 100% | 10% | |||
| t R4 | Fin de la rampa de desaceleración tipo CUS, como un percentaje del tiempo total de la rampa (dEC o dE2) | 0 a (100%-tA3) | 10% | |||
| R C C d E C | Tiempo de las rampas de acceleración y desaceleración1 | 0,1 a 999,9 s | 3 s | |||
| Tiempo de la rampa de acceleración del motor para que funciona de 0 Hz a FrS (parámetro en el móvil drC-, consulte la頁a 124). Tiempo de la rampa de desaceleración del motor para que funciona de FrS a 0 Hz. Asegúrese de que el valor de dEC noonga un ajuste muy bajo para la carga. | ||||||
| r P5 | Conmutación de rampsas | Lea a continuación. | nO | |||
| Esta funciona permanece activa independiente del canal de control. | ||||||
| n O: No asignada | ||||||
| L / I: Entrada lógica L1 | ||||||
| L / 2: Entrada lógica L2 | ||||||
| L / 3: Entrada lógica L3 | ||||||
| L / 4: Entrada lógica L4 | ||||||
| L / 5: Entrada lógica L5 | ||||||
| L / 6: Entrada lógica L6 | ||||||
| Si LAC = L3, es possible realizar las siguientes asignaciones: | ||||||
| C d / I: Bit 11 de lapellabra de control Modbus o CANopen | ||||||
| C d / 2: Bit 12 de lapellabra de control Modbus o CANopen | ||||||
| C d / 3: Bit 13 de lapellabra de control Modbus o CANopen | ||||||
| C d / 4: Bit 14 de lapellabra de control Modbus o CANopen | ||||||
| C d / 5: Bit 15 de lapellabra de control Modbus o CANopen | ||||||
| ACC y dEC está activas cuando la entrada lógica o el bit de lapellabra de control está en estado 0. | ||||||
| AC2 y dE2 está activas cuando la entrada lógica o el bit de lapellabra de control está en estado 1. | ||||||
| F r E | Umbral de conmutación de rampsas | 0 a 500 Hz | 0 | |||
| La segunda rampa es comutada si el valor de Frt no es igual a 0 y la frequencia de salute es mayor que Frt. El ajuste de Frt en 0 la desactiva. | ||||||
| El umbral de conmutación de rampsas se pueda combinar con la conmutación a través de una entrada lógica o un bit depellabra de control de lasignificanta: | ||||||
| LI orbit | Frecuencia | Rampa | ||||
| 0 | <Frt | ACC, dEC | ||||
| 0 | >Frt | AC2, dE2 | ||||
| 1 | <Frt | AC2, dE2 | ||||
| 1 | >Frt | AC2, dE2 | ||||
| R C E | 2o tiempo de la rampa de acceleración1: Activado a工程技术 de la entrada lógica (rPS) o umbral de fecuencia (Frt). | 0,1 a 999,9 s | 5 s | |||
| d E E | 2o tiempo de la rampa de desaceleración1: Activado a工程技术 de la entrada lógica (rPS) o umbral de fecuencia (Frt). | 0,1 a 999,9 s | 5 s | |||
| b r R | Adaptación de la rampa de desaceleración | Lea a continuación. | YES | |||
| Laactivación de esta funciona automatistically adaptla rampa de desaceleración si se ha ajustado en un valor muy bajo para la inercia de la carga. | ||||||
| n O: Función inactiva | ||||||
| y E 5: Función activa | ||||||
| brA es incompatible con las aplicaciones que requirecen el positionalmente en una rampa o el uso de una resistencia de frenado. brA es forzado en nO si el control del freno (bLC) is asignado (págrina 166). | ||||||
1 Internacional se pueda acceder en el menu de ajustes SET- Consulte la网页 119.

Estos parámetros aparecerán solamente si se ha activado la funciona.

| Submenú | Parámetro | Descripción | Gama de ajuste | Ajuste de fábrica | |
| 5 E C - | Modos de paro | ||||
| 5 E E | Modo de paro normal | Lea a continuación. | RMP | ||
| Modo de paro executado cuando el commando de marcha desaparece o el commando de paro aparece.rP: Rampa de seguímpF 5 E: Parada rápidan5 E: Parada libred C I: Paro por inyección de --- (c.d.) | |||||
| F 5 E | Parada rápida a través de la entrada lógica | Lea a continuación. | nO | ||
| nD: No asignadaL I I: Entrada lógica LI1L I2: Entrada lógica LI2L I3: Entrada lógica LI3L I4: Entrada lógica LI4L I5: Entrada lógica LI5L I6: Entrada lógica LI6Si LAC = L3, es possible realizar las siguientes asignaciones:C d I : Bit 11 de la palabra de control Modbus o CANopenC d I : Bit 12 de la palabra de control Modbus o CANopenC d I : Bit 13 de la palabra de control Modbus o CANopenC d I : Bit 14 de la palabra de control Modbus o CANopenC d I : Bit 15 de la palabra de control Modbus o CANopenParada rápida es activada cuando el estado de la entrada lógica cambia a 0 o el bit de la palabra de control cambia a 1. Parada rápida es un paro de desaceleración reducida por el coeficiente Shopsificado por el parámetro dCF. Si la entrada lógica regresa al estado 1 y el commando de marcha está toda active, el motor rearrancará solamente si el control de 2 hilos es configurado (tCC = 2C y tCt = LEL o PFO, consultée la págrina 127). De lo contrario, se debe enviar un nuevo commando de marcha. | |||||
| d C F | Coeficiente para dividir el tiempo de la rampa de desaceleración para una parada rápida. | 0,1 a 10 | 4 | ||
| Este parámetro aparece solamente cuando FST es asignado. Asegúrese de que la rampa reducirado noonga un ajuste muy bajo para la carga. El valor 0 corresponde a la rampa minima. | |||||
| d C I | Inyección de --- (c.d.) a través de una entrada lógica | Lea a continuación. | nO | ||
| nD: No asignadaL I I: Entrada lógica LI1L I2: Entrada lógica LI2L I3: Entrada lógica LI3L I4: Entrada lógica LI4L I5: Entrada lógica LI5L I6: Entrada lógica LI6Si LAC = L3, es Possible realizar lasSIGUIENTES asignaciones:C d I : Bit 11 de la palabra de control Modbus o CANopenC d I : Bit 12 de la palabra de control Modbus o CANopenC d I : Bit 13 de la palabra de control Modbus o CANopenC d I : Bit 14 de la palabra de control Modbus o CANopenC d I : Bit 15 de la palabra de control Modbus o CANopenEl frenado es activado cuando el estado de la entrada lógica o el bit de la palabra de control es 1. | |||||
| I d C | Nivel de corriente de frenado por inyección de --- (c.d.)activado a través de una entrada lógica o seleccionado como un modo de paro.1,2 | 0 a In3 | 0,7 In3 | ||
| Después de 5 segundos la corriente de inyección alcana en limite pico de 0,5 lth. | |||||
| I d C | Tiempo total del frenado por inyección de --- (c.d.) cuando dCI es seleccionado como el modo de paro normal (vea Stt arriba).1,2 | 0,1 a 30 s | 0,5 s | ||
1 Alternatively, se peut acceder en el menu de ajustes SET- Consulte la pagina 119.
2 Estosajsestnoestanrelacionadoconlafuncióndeinyecionde-(c.d.)automática
3 In corresponde a la corrente nominal del variador indicada en la Guia de instalacion de los variadores ATV31 y en la placar de datos.
Estos parámetros aparecerán solamente si se ha activado la funciona.

| Submenu | Parámetro | Descripción | Gama de ajuste | Ajuste de fábrica |
| 5 E C - (continuación) | n 5 E | Parada<rápida a工程技术 de una entrada lógica | nO | |
| n O: No asignada L I I: Entrada lógica LI1 L I 2: Entrada lógica LI2 L I 3: Entrada lógica LI3 L I 4: Entrada lógica LI4 L I 5: Entrada lógica LI5 L I 6: Entrada lógica LI6 La parada libre es activada cuando la entrada lógica está en el estado 0. Si la entrada regresa al estado 1 y el commando de marcha todasway está active, el motor rearrancará solamente si el control de 2 hilos es configurado. De lo contrario, se deben enviar un nuevo commando de marcha. | ||||
ADVERTENCIA
SIN PAR DE RETENCIón
- El frenado por inyección de —— (c.d.) no proporción par de mantenimiento a una velocidad cero.
- El frenado por inyección de = = (c.d.) no funciona durante una perdida de alimentación o durante una falla del variador.
- Si esnecessary,utiliceunfrenoindependiente paraelparde retencion.
FRENADO POR INYECCION DE (C.D.) EXCESIVO
- La aplicación de frenado por inyección de --- (c.d.) durante un很长 periodo puede causar sobrecalentimiento y daño al motor.
- Proteja el motor, no lo exponga a periodos prolongados de frenado por inyección de --- (c.d.).
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.

| Submenu | Parámetro | Descripción | Gama de ajuste | Ajuste de fabrica |
| R d C - | Inyección de --- (c.d.) automática. Consulte la págrina 147. | |||
| R d C | Inyección de --- (c.d.) automática (al fin de la rampa) | Lea a continuación. | YES | |
| n D: No inyección y E S: Inyección de --- (c.d.) para un periodo ajustable C l: Inyección de --- (c.d.) continua NOTA: Si este parámetro se ajusta en Yes o Ct, la corrente directa se inyecta aun cuando no se ha enviado un commando de marcha. El parámetro se pueda acceder con el variador en marcha. | ||||
| t d C I | Tiempo de inyección automática1 | 0,1 a 30 s | 0,5 s | |
| S d C I | Nivel de la corrente de inyección de --- (c.d.) automática.1 | 0 a 1,2 ln2 | 0,7 ln2 | |
| Nota: Asegúrese de que el motor soportará esta corrente sin calentarse en excesso. | ||||
| t d C 2 | 2° tiempo de inyección de --- (c.d.) automática1 | 0 a 30 s | 0 s | |
| S d C 2 | 2° ninthel de la corrente de inyección de --- (c.d.) automática1 | 0 a 1,2 ln2 | 0,5 ln2 | |
| NOTA: Asegúrese de que el motor soportará esta corrente sin calentarse en excesso. | ||||
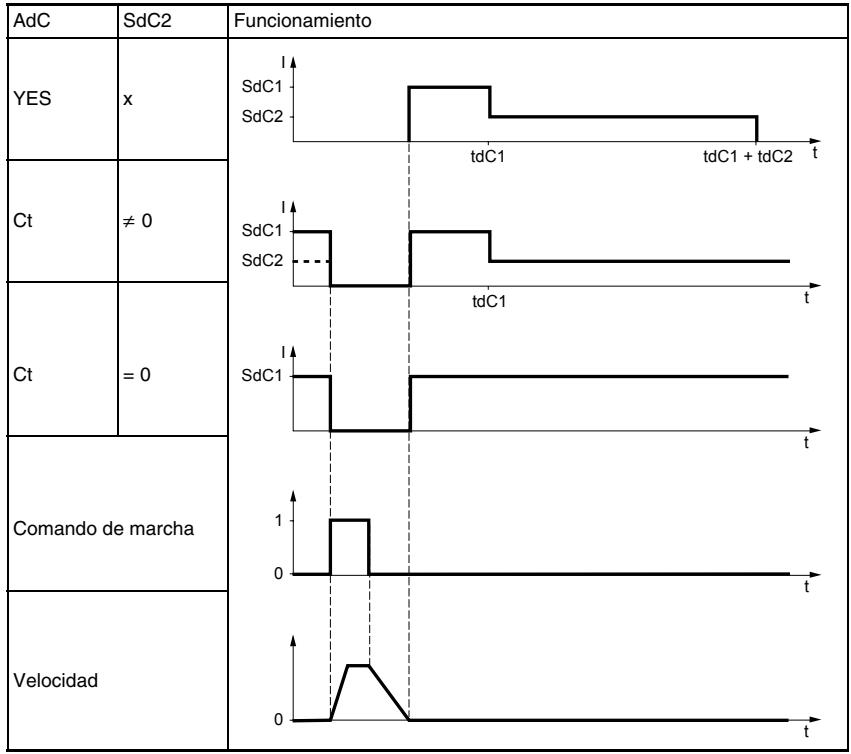
1 Alternatively, se possible acceder en el menu de ajustes SEt-. Consulte la网页 119.
2 In corresponde a la corriente nominal del variador indicada en la Guia de instalacion de los variadores ATV31 y en la placar de datos.

Estos parámetros aparecerán solamente si se haactivado la funciona.

| Submenu | Parámetro | Descripción | Gama de ajuste | Ajuste de fábrica |
| 5 R 1 - | Entradas sumadorasSe pueda usar para-sumar una o dos entradas con la referencia Fr1. | |||
| 5 R 2 | Entrada sumadora 2 | Lea a continuación. | Al2 | |
| n D: No asignadoR I I: Entrada analógica AI1R I Z: Entrada analógica AI2R I Z: Entrada analógica AI3R I P: Potenciámetro (variadores ATV31-----A solamente)Si LAC = L3, es possible realizar las siguientes asignaciones:π d b: Referencia a través de ModbusC R n: Referencia a través de CANopenL C C: Referencia a través de la terminal de programación y ajustes remota (parámetro LFr en el menúSEt.-, págrina 120). | ||||
| 5 R 3 | Entrada sumadora 3 | Lea a continuación. | nO | |
| n D: No asignadoR I I: Entrada analógica AI1R I Z: Entrada analógica AI2R I Z: Entrada analógica AI3R I P: Potenciámetro (variadores ATV31-----A solamente)Si LAC = L3, es possible realizar lasdgeables asignaciones:π d b: Referencia a través de ModbusC R n: Referencia a través de CANopenL C C: Referencia a través de la terminal de programación y ajustes remota (parámetro LFr en el menúSEt.-, págrina 120). | ||||
Entradas sumadoras
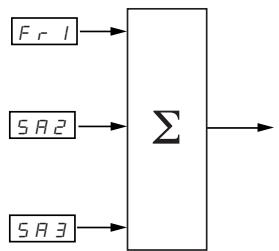
NOTA: Al2 es una entrada, ± 10V , que puede permitir una resta sumando una seals negativa.
Consulte los diagramas en las páginas 135 y 137.
Velocidas preseLECTIONadas
El parámetro PSS, velocidades preseLECTIONadas, permite preseccionar 2, 4, 8 o 16 velocidades que nécessitan 1, 2, 3 o 4 entradas lógicas, respectively.
Las velocidades preseccionesadas deben asignarse de lasuma.
manera: PS2 bajo PS4, bajo PS8 y finalmente PS16.
Consulte lasuma tabla para combinar las entradas para activar las distintas velocidades preseLECTIONadas:
| 16 velocidades LI (PS16) | 8 velocidades LI (PS8) | 4 velocidades LI (PS4) | 2 velocidades LI (PS2) | Referencia de vel. |
| 0 | 0 | 0 | 0 | Referencia1 |
| 0 | 0 | 0 | 1 | SP2 |
| 0 | 0 | 1 | 0 | SP3 |
| 0 | 0 | 1 | 1 | SP4 |
| 0 | 1 | 0 | 0 | SP5 |
| 0 | 1 | 0 | 1 | SP6 |
| 0 | 1 | 1 | 0 | SP7 |
| 0 | 1 | 1 | 1 | SP8 |
| 1 | 0 | 0 | 0 | SP9 |
| 1 | 0 | 0 | 1 | SP10 |
| 1 | 0 | 1 | 0 | SP11 |
| 1 | 0 | 1 | 1 | SP12 |
| 1 | 1 | 0 | 0 | SP13 |
| 1 | 1 | 0 | 1 | SP14 |
| 1 | 1 | 1 | 0 | SP15 |
| 1 | 1 | 1 | 1 | SP16 |
1 Consulate los diagramas en las páginas 135 y 137, referencia 1 = (SP1)

| Submenú | Parámetro | Descripción | Gama de ajuste | Ajuste de fábrica |
| P 5 5 - | Velocidas preseccionesadas | |||
| P 5 2 | 2 velocidades presel. | Lea a continuación. | Si tCC = 2C: LI3Si tCC = 3C: nOSi tCC = LOC: LI3 | |
| La selección de la entrada lógica asignada activa la funciona. | ||||
| n D: No asignadaL / I: Entrada lógica LI1L / 2: Entrada lógica LI2L / 3: Entrada lógica LI3L / 4: Entrada lógica LI4L / 5: Entrada lógica LI5L / 6: Entrada lógica LI6Si LAC = L3, es possible realizar las siguientes asignaciones: | ||||
| C d / I: Bit 11 de la palabra de control Modbus o CANopenC d / 2: Bit 12 de la palabra de control Modbus o CANopenC d / 3: Bit 13 de la palabra de control Modbus o CANopenC d / 4: Bit 14 de la palabra de control Modbus o CANopenC d / 5: Bit 15 de la palabra de control Modbus o CANopen | ||||
| P 5 4 | 4 velocidades presel. | Lea a continuación. | Si tCC = 2C: LI4Si tCC = 3C: nOSi tCC = LOC: LI4 | |
| La selección de la entrada lógica asignada activa la funciona. | ||||
| NOTA: Asegürese de que PS2 haya sido asignada antes de asignar PS4.n D: No asignadaL / I: Entrada lógica LI1L / 2: Entrada lógica LI2L / 3: Entrada lógica LI3L / 4: Entrada lógica LI4L / 5: Entrada lógica LI5L / 6: Entrada lógica LI6Si LAC = L3, es possible realizar lasPTHsiguidades: | ||||
| C d / I: Bit 11 de la palabra de control Modbus o CANopenC d / 2: Bit 12 de la palabra de control Modbus o CANopenC d / 3: Bit 13 de la palabra de control Modbus o CANopenC d / 4: Bit 14 de la palabra de control Modbus o CANopenC d / 5: Bit 15 de laPALABA de control Modbus o CANopen | ||||
| P 5 8 | 8 velocidades presel. | Lea a continuación. | nO | |
| La selección de la entrada lógica asignada activa la funciona. | ||||
| NOTA: Asegürese de que PS4 haya sido asignada antes de asignar PS8.n D: No asignadaL / I: Entrada lógica LI1L / 2: Entrada lógica LI2L / 3: Entrada lógica LI3L / 4: Entrada lógica LI4L / 5: Entrada lógica LI5L / 6: Entrada lógica LI6Si LAC = L3, es possible realizar lasPTHsiguidades: | ||||
| C d / I: Bit 11 de la palabra de control Modbus o CANopenC d / 2: Bit 12 de la palabra de control Modbus o CANopenC d / 3: Bit 13 de la palabra de control Modbus o CANopenC d / 4: Bit 14 de la PALABRA de control Modbus o CANopenC d / 5: Bit 15 de la PALABRA de control Modbus o CANopen | ||||

| Submenú | Parámetro | Descripción | Gama de ajuste | Ajuste de fábrica |
| P5 I6 | 16 velocidades presel. | Lea a continuación. | nO | |
| La selección de la entrada lógica asignada activa la función.NOTA: Asegürese de que PS8 haya sido asignada antes de asignar PS16.nD: No asignada.L I I: Entrada lógica LI1.L I 2: Entrada lógica LI2.L I 3: Entrada lógica LI3.L I 4: Entrada lógica LI4.L I 5: Entrada lógica LI5.L I 6: Entrada lógica LI6.Si LAC = L3, es possible realizar las siguientes asignaciones:C d I I: Bit 11 de la palabra de control Modbus o CANopenC d I 2: Bit 12 de la palabra de control Modbus o CANopenC d I 3: Bit 13 de la palabra de control Modbus o CANopenC d I 4: Bit 14 de la palabra de control Modbus o CANopenC d I 5: Bit 15 de la palabra de control Modbus o CANopen | ||||
| 5 P 2 | 2a velocidad preseLECTIONada1 | 0,0 a 500,0 Hz | 10 Hz | |
| 5 P 3 | 3a velocidad preseLECTIONada1 | 0,0 a 500,0 Hz | 15 Hz | |
| 5 P 4 | 4a velocidad preseLECTIONada1 | 0,0 a 500,0 Hz | 20 Hz | |
| 5 P 5 | 5a velocidad preseLECTIONada1 | 0,0 a 500,0 Hz | 25 Hz | |
| 5 P 6 | 6a velocidad preseLECTIONada1 | 0,0 a 500,0 Hz | 30 Hz | |
| 5 P 7 | 7a velocidad preseLECTIONada1 | 0,0 a 500,0 Hz | 35 Hz | |
| 5 P 8 | 8a velocidad preselectionada1 | 0,0 a 500,0 Hz | 40 Hz | |
| 5 P 9 | 9a velocidad preselectionada1 | 0,0 a 500,0 Hz | 45 Hz | |
| 5 P I0 | 10a velocidad preselectionada1 | 0,0 a 500,0 Hz | 50 Hz | |
| 5 P I1 | 11a velocidad preselectionada1 | 0,0 a 500,0 Hz | 55 Hz | |
| 5 P I2 | 12a velocidad preselectionada1 | 0,0 a 500,0 Hz | 60 Hz | |
| 5 P I3 | 13a velocidad preselectionada1 | 0,0 a 500,0 Hz | 70 Hz | |
| 5 P I4 | 14a velocidad preselectionada1 | 0,0 a 500,0 Hz | 80 Hz | |
| 5 P I5 | 15a velocidad preselectionada1 | 0,0 a 500,0 Hz | 90 Hz | |
| 5 P I6 | 16a velocidad preselectionada1 | 0,0 a 500,0 Hz | 100 Hz | |
1 Alternatively, se peut acceder en el menu de ajustes SEt- Consulte la pagina 119.

Estos parámetros aparecerán solamente si se ha activado la funciona.

| Submenu | Parámetro | Descripción | Gama de ajuste | Ajuste de fabrica | |
| JOG- | Funcióncimiento de marcha bajo a paso | ||||
| JOG | Funcióncimiento de marcha bajo a paso | Lea a continuación. | Si tCC = 2C: nO Si tCC = 3C: LI4 Si tCC = LOC: nO | ||
| La selección de la entrada lógica asignada activa la funciona. n D: No asignada L I: Entrada lógica LI1 L I: Entrada lógica LI2 L I: Entrada lógica LI3 L I: Entrada lógica LI4 L I: Entrada lógica LI5 L I: Entrada lógica LI6 Ejerppo: Funcióncimiento de control de 2 hilos (tCC = 2C) | |||||
| Frecuencia del motor Referencia JGF Referencia JGF LI (JOG) Marcha adelante Marcha atrás | Rampa DEC/DE2 | Rampa forzada en 0,1 s | |||
1 Alternatively se possible acceder en el menu de ajustes SEt- Consulte la pagina 119.
+/- velocidad
Botones de una solaccion
Es possible acceder a esta funciona solamente si:
- El parámatro LAC está ajustado en L2 o L3 (consulte la página 140).
- Las functions incompatibles no están activas (consulte la página 115).
- El parámetro Fr1 o Fr2 está ajustado en UPdt o UPdH.
Las siguientes secciones describen dos temas de funciona bajo de+.
velocidad: el uso de botones de una solaccion y botones de dobleccion.
Una estacion colgante es una aplicacion de exemple de ambos.
Los botones de una solaccion requieren dos entradas lógicas y dos sentidos de rotacion. La entrada asignada al commando ^+ velocidad augmented la velocidad, la entrada asignada al commando - velocidad disminuye la velocidad.
| - velocidad | velocidadmantenida | + velocidad | |
| Marcha adelante | a y d | a | a y b |
| Marchailtrás | c y d | c | c y b |
Ejemplo de alambrado:
LI1: adelante
Llx: atrás
Lly: + velocidad (USP)
Llz: - velocidad (DSP)
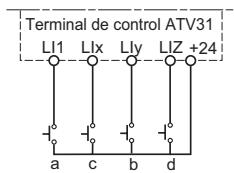
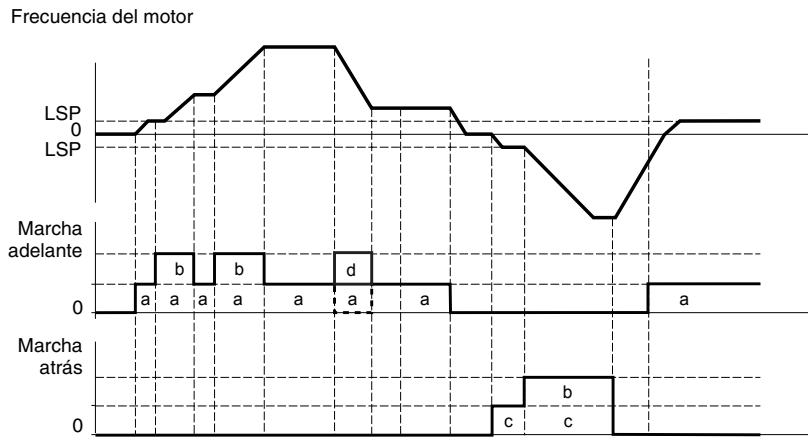
La velocidad Tmaxa se ajusta a工程技术 HSP (pagina 120).
NOTA: Si la referencia es conmutada a工程技术 de rFC (pagina 141) desde cadaquier canal de referencia a other con +/- velocidad, el valor de la referencia rFr (despues de la rampa) se transfiere al mesmo tiempo. Esto evita que la velocidad se restablezca Incorrectamente en cero cuando seriba a cabo la conmutacion.
Botones de dobleccion
En los botones de doble accion, solamente es requisite asignar una entrada lógica a + velocidad. Los botones de doble accion típlicamente tienen dos retenes. Presione el botón en el primer retén para mantener la velocidad, presiónelo en el segundo retén para augmentar la velocidad. Cada acción cierra un contacto. Consulte lasuma table.
| Soltar (- velocidad) | Presionar en el 1er retén (velocidad mantenida) | Presionar en el 2do retén (+ velocidad) | |
| Marcha adelante | - | a | a y b |
| Marcha atrás | - | c | c y d |
Ejempio de alambrado:
LI1: adelante
Llx: atras
Lly: + velocidad (USP)
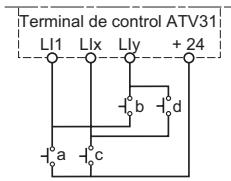
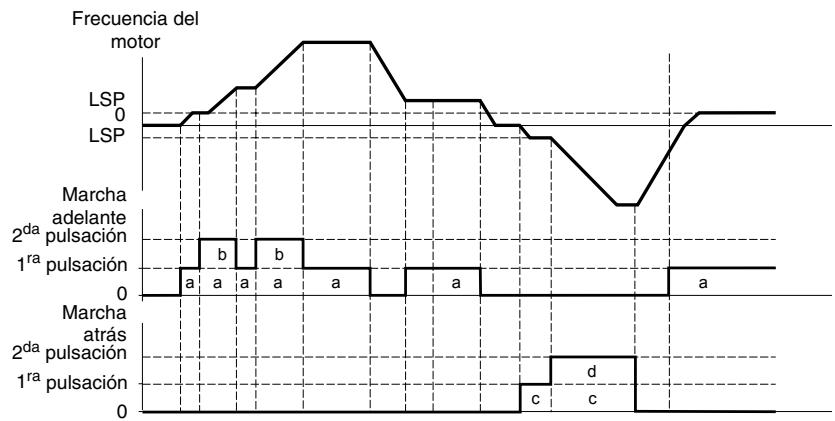
El uso de botones de doble'actiones incompatible con el control de 3 hilos.
La velocidad Tmaxima se ajusta a trovés de HSP (págrina 120).
NOTA: Si la referencia es conmutada a工程技术 de rFC (pagina 141) desde cadaquier canal de referencia a other con +/- velocidad, el valor de la referencia rFr (despues de la rampa) se transfiere al mesmo tiempo. Este evita que la velocidad se restablezca Incorrectamente en cero cuando seobia a cabo la conmutacion.

| Submenu | Parámetro | Descripción | Gama de ajuste | Ajuste de fabrica |
| U P d - | +/- velocidad (potenciómetro motorizzato)Es posible acceder a esta funciona solamente si LAC = L2 o L3 y UPdH o UPdt está activa (pagina 140). | |||
| U S P | + velocidadEs posible acceder a esta funciona cuando UPdt está activa. | Lea a continuación. | nO | |
| La selección de la entrada lógica asignada activa la funciona.n O: No asignadoL / I: Entrada lógica LI1L / 2: Entrada lógica LI2L / 3: Entrada lógica LI3L / 4: Entrada lógica LI4L / 5: Entrada lógica LI5L / 6: Entrada lógica LI6 | ||||
| d S P | - velocidadEs posible acceder a esta funciona cuando UPdt está activa. | Lea a continuación. | nO | |
| La selección de la entrada lógica asignada activa la funciona.n O: No asignadoL / I: Entrada lógica LI1L / 2: Entrada lógica LI2L / 3: Entrada lógica LI3L / 4: Entrada lógica LI1L / 5: Entrada lógica LI5L / 6: Entrada lógica LI6 | ||||
| S E r | Almacenimiento de la referencia | Lea a continuación. | nO | |
| Asociado con la funciona +/- velocidad, este parámetro可以选择 ser uso para guardar la referencia.C时候 los comandos de marcha se cancelan, la referencia se guarda en la memoria RAM.C时候 la red electrónica se desconecta o los comandos de marcha se cancelan, la referencia se guarda en la memoria EEPROM.Para elARRYarranque, la referencia de velocidad es la ultima referencia guardada.n O: No guardarr R I N: Guardar en RAME E P: Guardar en EEPROM | ||||

Estos parámetros aparecerán solamente si se ha activado la funciona.
Regulador PI
El regulator PI proporciona regulacion de un proceso utilizing retroalimentacion de un sensor que envia una seals al variador de velocidad. A bajo, esta funcion se utilizes en aplicaciones de bombeo y ventilacion. La funcion del regulator PI es activada asignando una entrada analógica a la retroalimentacion del regulator PI (PIF).
El parámetro de retroalimentación del regulator PI (PIF, págin 162) debe ser asignado a una de las entradas analógicas (Al1, Al2 o Al3).
La referencia PI pueda ser asignada a los siguientes parámetros, enorden de prioridad:
Las referencias preseLECTIONadas a工程技术 de las entradas lógicas (rP2, rP3 y rP4, págin 162)
Referencia interna (rPI, págin 163)
Referencia Fr1 (pagina 140)
Consulte lasuma tabla para combinar las entradas para las referencias PI preseLECTIONadas:
| LI (Pr4) | LI (Pr2) | Pr2 = nO | Referencia |
| rPI o Fr1 | |||
| 0 | 0 | rPI o Fr1 | |
| 0 | 1 | rP2 | |
| 1 | 0 | rP3 | |
| 1 | 1 | rP4 | |
Tambien es possible acceder a los siguientes parámetros en el menu de ajustes (SEt-, que comienza en la página 119):
Referencia interna (rPI)
Referencias preseccionadas (rP2, rP3, rP4)
- Ganancia proportional del regulator (rPG)
- Ganancia integral del regulator (rIG)
- Coeficiente multiplicador de la retroalimentacion Pl (FbS):
El parámetro FbS se pueda usar para escalar la referencia en la gama de variación de la retroalimentación PI (gama del sensor).
Por exemple, control de presión:
Referencia PI (proceso) = 0 a 5 baria = 0 a 100%
Gama del sensor de presión = 0 a 10 baria
FbS = Escala maximal del sensor / proceso maximal
FbS = 10 / 5 = 2
- parámetro rSL:
Se pueda usar paraaabstar el umbral de error de PI por encima del cui el regulador PI es reactivado (aviso) afterwards de un paro a causa de haberse excedido el tiempo mayorde funciona en bajo velocidad (tLS).
Inversión del sentido de corrección (PIC):
Si PIC=nO, la velocidad del motor augmente cuando el error es positivo. Un exemple de aplicacion es el control de presion con un compresor.
Si PIC=YES, la velocidad del motor disminuye cuando el error es positivo. Un exemple de aplicacion es el control de temperatura con un ventilador de enfiambre.
Configuración del regulator PI
Estamericano.
La referencia de velocidad es proportionsaciona por Fr2 o por la referencia PI, depende del estado de la entrada lógica.
- Configure el variador para el regulador PI. Consulte el diagrama en la頁 158.
- Realice una prUEba con la configuracion de fabrica. En la mayoria de los Caseos, los ajustes de fabrica son suficientes. Para optimizar el variador, ajuste gradualmente rPG o rG independiente y observe el efecto en la retroalimentacion PI en relation con la referencia.
- Si los ajustes de fabrica no son estables o la referencia es Incorrecta, realizice una prueba con una referencia de velocidad en el modo manual (sin regulator PI) y con el variador enarga para la gama de velocidad del sistema.
— En estado estable, tanto la velocidad, en la referencia, como la seals de retroalimentacion PI deben permanecer estables.
— En estado transitorio, la velocidad debeooterla rampa bajoestabilizaraserapidamente y la retroalimentacionPIdebeseguirla velocidad.
Si éste no es el caso, revise los ajustes del variador de velocidad y la seals del sensor y el alambrado.
- Active el regulator PI.
- Ajuste brA en nO (sin autoadaptacion de la rampa).
- Ajuste las rampas de velocidad (ACC, dEC) en el valor minimum permitted por la aplicacion sin activar una falla ObF.
- Ajuste la ganancia integral (rlG) en el valor minimo.
- Observe la referencia y retroalimentacion PI.
- Realice various ciclos de marcha y paro (RUN/STOP), o varie la energia o referencia rápidamente.
- Ajuste la ganancia proportional (rPG) para Obtener el compromiso ideal entre el tiempo de respuesta y la calidad en las fases de transitorios (ligero sobrepaso y 1ó2 oscilaciones antes de estabilizarse).
- Si la referencia varía del valor preseLECTIONado en estado estable, gradualmente augmente la ganancia integral (rLG) y reduzca la ganancia proportional (rPG) en el caso de que se produzca una inestabilidad (aplicaciones de bomba) para encontrar un compromiso entre el tiempo de respondersta y la precision de la estatica. Consulte la figura en la page 158.
- Realice las pruebas en produccion a lo长大o de la gama de referencia.
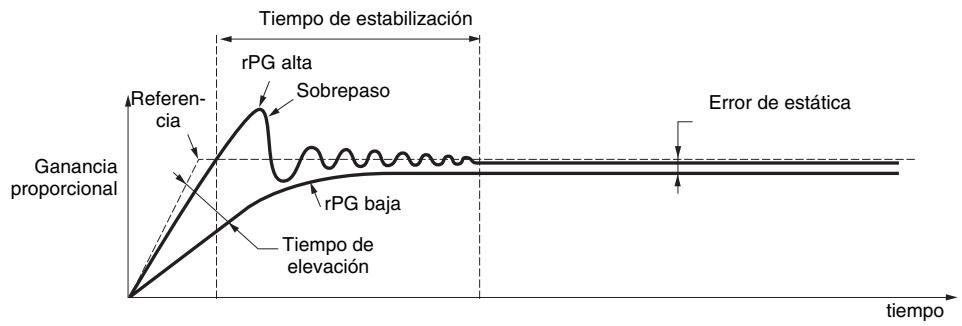
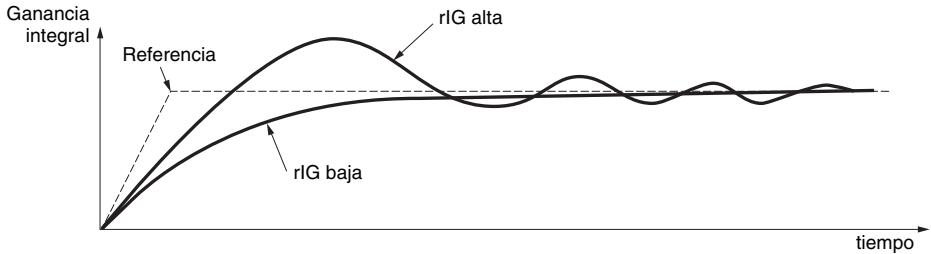
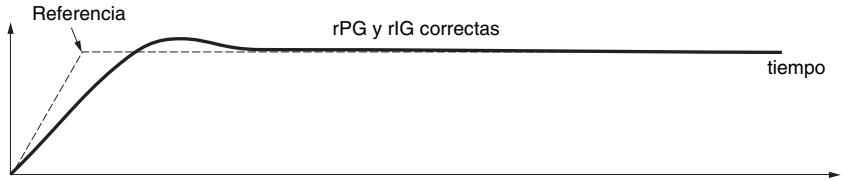
La Frequencia de oscilacion depende de la aplicacion.
| Parámetro | Tiempo de elevación | Sobrepaso | Tiempo de estabilización | Error de estática |
| rPG | = | |||
| rlG |

| Submenu | Parámetro | Descripción | Gama de ajuste | Ajuste de fábrica |
| P I - | Regulador PI | |||
| P I F | Retroalimentación por regulator PI | Lea a continuación. | nO | |
| n O: No asignadaR / I: Entrada analógica AI1R / 2: Entrada analógica AI2R / 3: Entrada analógica AI3 | ||||
| r P G | Ganancia proportional del regulator PI1 | 0,01 a 100 | 1 | |
| Contribuye al funcionaamente dinámico durante Cambios rápidos en la retroalimentación PI. | ||||
| r I G | Ganancia integral del regulator PI1 | 0,01 a 100 | 1 | |
| Contribuye a la precisionión de la estática durante Cambios lentos en la retroalimentación PI. | ||||
| F B S | Coeficiente multiplicador de la retroalimentación PI1 | 0,1 a 100 | 1 | |
| Para la adaptación del proceso | ||||
| P I C | Inversión del sentido de corrección del regulator PI1 | Lea a continuación. | nO | |
| n O: normalY E 5: atrás | ||||
| P r 2 | 2 referencias PI preseLECTIONadas | Lea a continuación. | nO | |
| La selección de la entrada lógica asignada activa la funciona.n O: No asignadaL / I: Entrada lógica LI1L / 2: Entrada lógica LI2L / 3: Entrada lógica LI3L / 4: Entrada lógica LI4L / 5: Entrada lógica LI5L / 6: Entrada lógica LI6Si LAC = L3, es possible realizar las siguides asignaciones:C d I : Bit 11 de la palabra de control Modbus o CANopenC d I 2: Bit 12 de la palabra de control Modbus o CANopenC d I 3: Bit 13 de la palabra de control Modbus o CANopenC d I 4: Bit 14 de la palabra de control Modbus o CANopenC d I 5: Bit 15 de la palabra de control Modbus o CANopen | ||||
| P r 4 | 4 referencias PI preseLECTIONadas | Lea a continuación. | nO | |
| La selección de la entrada lógica asignada activa la funciona.NOTA: Asegúrese de que Pr2 haya sido asignada antes de asignar Pr4.n O: No asignadaL / I: Entrada lógica LI1L / 2: Entrada lógica LI2L / 3: Entrada lógica LI3L / 4: Entrada lógica LI4L / 5: Entrada lógica LI5L / 6: Entrada lógica LI6Si LAC = L3, es possible realizar las siguides asignaciones:C d I : Bit11 de la palabra de control Modbus o CANopenC d I 2: Bit 12 de la palabra de control Modbus o CANopenC d I 3: Bit 13 de la palabra de control Modbus o CANopenC d I 4: Bit 14 de la palabra de control Modbus o CANopenC d I 5: Bit 15 de la palabra de control Modbus o CANopen | ||||
| r P 2 | 2a referencea PI preseLECTIONada1 | 0 a 100% | 30% | |
| Aparece sólo cuando Pr2 ha sido activada selectionando una entrada. | ||||
| r P 3 | 3a referencea PI preselectionada1 | 0 a 100% | 60% | |
| Aparece sólo cuando Pr4 ha sido activada selectionando una entrada. | ||||
| r P 4 | 4a referencea PI preselectionada1 | 0 a 100% | 90% | |
| Aparece sólo cuando Pr4 ha sido activada selectionando una entrada. | ||||
1 Alternatively, se possible acceder en el menu de ajustes SEt.- Consulte la page 119.

Estos parámetros aparecerán solamente si se ha activado la funciona.

| Submenu | Parámetro | Descripción | Gama de ajuste | Ajuste de fabrica |
| P I - (cont.) | r S L | Rearranque después de alcancar el umbral de error (umbral de avis) | 0 a 100% | 0 |
| Si las functions de PI y el tiempo de funciona en baja velocidad (tLS, págria 123) son configuradas para el mismo tiempo, el regulator PI intentaráaabustar una velocidad que sea inferior al LSP. Como producirá un funciona insatisfactorio que consiste en un ciclo de arranque, un funciona en baja velocidad y un paro. El parámetro rSL (umbral de error de rearranque) se pueda usar paraaabustar un umbral de error个小mente de PI para el rearranque cuando un paro en LSP prolongada. La función está inactiva cuando tLS = 0. | ||||
| P I I | Referencia interna del regulator PI | nO | ||
| n O: La referencia del regulator PI es Fr1, excepto para UPdH y UPdt (+/- velocidad no se pueda usar como la referencia del regulator PI). Y E S: La referencia del regulator PI es el parámetro rPI. | ||||
| r P I | Referencia interna del regulator PI1 | 0 a 100% | 0 | |
1 Alternatively se pueda acceder en el menu de ajustes SET- Consulte la网页 119.

Estos parámetros aparecerán solamente si se haactivado la funciona.
Control de freno
El control de freno activa el variador de velocidad para controlar un freno electromagnético. Es possible acceder a esta función solamente si LAC = L2 o L3 (頁目 136) y no está programada ninguna funciona incompatible (頁目 115). Éste puede ser asignado al relevidor R2 o a la calidadológica AOC.
Para evaporar SACUDidas, sincrónica la aperture del freno con accumulator de par durante el arranque y sincrónica el cierre del freno con una velocidad de cero en el paro. Consulte la",[sicuente] figura para la secuencia de frenado.
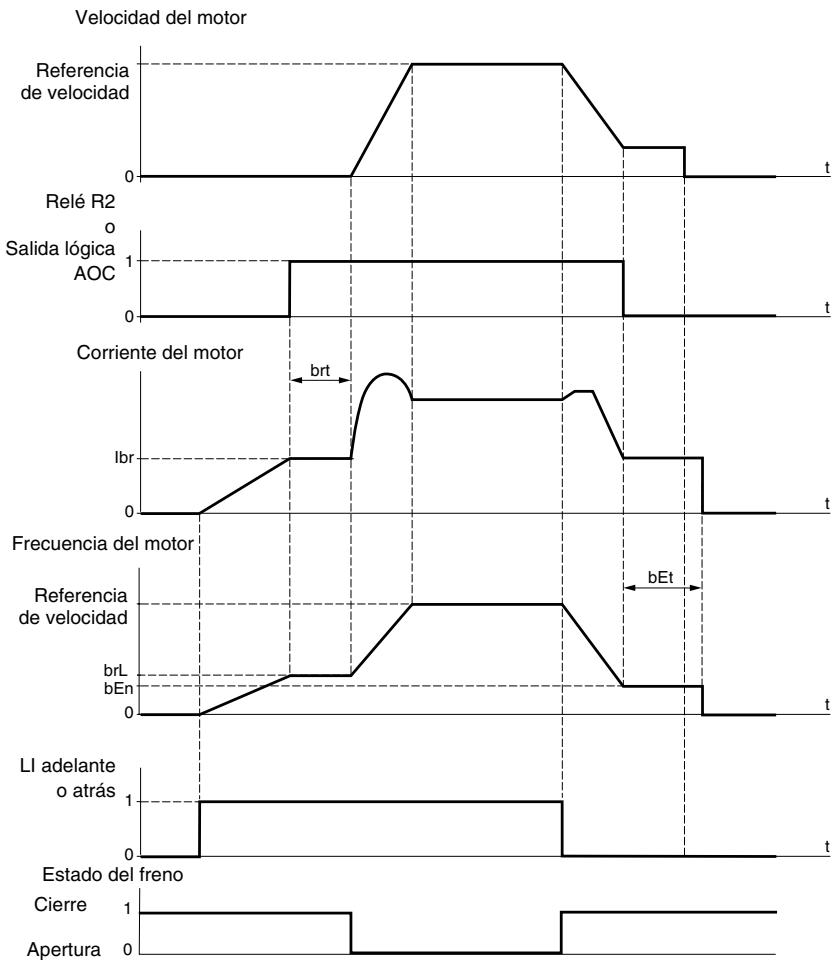
Tambén es possible acceder a los siguientes parámetros en el menu FUn(pagina 119):
- Frecuencia de aperture del freno (brL)
Corriente de aperture del freno (Ibr) - Tiempo de aperture del freno (brt)
- Frecuencia de cierre del freno (bEn)
- Tiempo de cierre del freno (bEt)
Impulso de aperture del freno (bIP)
A continuación se presentan los ajustes recomendedos para el control del freno:
- Frecuencia de aperture del freno (brL):
— Movimiento horizontal: Ajuste en 0.
— Movimiento vertical: Ajuste en el deslizamente nominal del motor (en Hz).
- Corriente de aperture del freno (Ibr):
— Movimiento horizontal: Ajuste en 0.
— Movimiento vertical: Inicialmente, ajuste en la corriente nominal del motor, luego ajuste la corriente de aperture para evaporar SACUDidas durante el arranque. Asegúrese de que la energia maxima se mantenga al abrir el freno.
- Tiempo de aperture del freno (brt):
— Ajuste según el tipo de freno. El tiempo de aperture del freno es el tiempo requisido para abrir el freno mecánico.
4. Frecuencia de cierre del freno (bEn):
— Ajuste en dos vezes el deslizamente nominal del motor, bajo ajuste según el的结果。
NOTA: El valor máximo de bEn es LSP. Asegürese de que LSP está ajustado en un valor sufICIENTe.
- Tiempo de cierre del freno (bEt):
— Ajuste según el tipo de freno. Este es el tiempo requerido para cerrar el freno mecánico.
- Impulso de aperture del freno (bIP):
— Movimiento horizontal: Ajuste en nO.
— Movimiento vertical: Ajuste en YES y asegúrese de que el sentido del par motor para el commando de marcha adelante corresponda con el sentido de elevación de la energia. Si fuese Neededo, inviertas dos fases del motor. Este parámetro genera par motor en un sentido de elevación, independiente del sentido de funciona bajo el freno.

| Submenu | Parámetro | Descripción | Gama de ajuste | Ajuste de fábrica |
| b LC - | Control de freeno Es possible acceder a esta funciona solamente si LAC = L2 o L3 (página 136). | |||
| b LC | Configuración del control de freeno | Lea a continuación. | nO | |
| n D: No asignado r 2: Relé R2 d D: Salida lógica AOC Si bLC es asignado, los parámetros FLr (página 174) y brA (página 146) son forzados en nO y OPL (página 174) es forzado en YES. | ||||
| b r L | Frecuencia de aperture del freeno | 0,0 a 10,0 Hz | Varía con el valor nominal del variador | |
| I b r | Umbral de corrente del motor para la aperture del freeno | 0 a 1,36 In1 | Varía con el valor nominal del variador | |
| b r t | Tiempo de aperture del freeno | 0 a 5 s | 0,5 s | |
| L S P | Velocidad baja | 0 a HSP (página 120) | 0 Hz | |
| Frecuencia del motor en referencia minima. Es possible modifier este parámetro en el menú SET- (página 120). | ||||
| b E n | Umbral de Frequencia de cierre del freeno | nO, 0 a LSP Hz | nO | |
| n D: No ajustado Si bLC es asignado y bEn = nO, durante el arranque el variador se disparará a causa de una falla bLF. | ||||
| b E t | Tiempo de cierre del freeno | 0 a 5 s | 0,5 s | |
| b IP | Impulso de aperture del freeno | Lea a continuación. | nO | |
| n D: Mientras se abre el freeno, el sentido del par motor correponde al sentido de rotación ordinado. y E 5: Mientras se abre el freeno, el sentido del par motor es siempre hacía delante, independientelemente del sentido de rotación ordinado. Asegürese de que el sentido del par motor para el commando de marcha adelante corresponda con el sentido de elevación de la carga. Si fuese NEEDario, invierta dos fases del motor. | ||||
1 In corresponde a la corriente nominal del variador indicada en la Guia de instalacion de los variadores ATV31 y en la placar de datos.

Estos parámetros aparecerán solamente si se ha activado la funciona.

| Submenu | Parámetro | Descripción | Gama de ajuste | Ajuste de fabrica |
| L C 2- | Commutación para elsegundo limitede corriente Es possible acceder a esta función solamente si LAC = L2 o L3 (頁quina 136). | |||
| L C 2 | Commutación para elsegundo limitede corriente | Lea a continuación. | nO | |
| La selección de la entrada lógica asignada activa la funciona. n D: No asignada L / I: Entrada lógica L1 L / 2: Entrada lógica L2 L / 3: Entrada lógica L3 L / 4: Entrada lógica L4 L / 5: Entrada lógica L5 L / 6: Entrada lógica L6 Si LAC = L3, es possible realizar lassigüentes asignaciones: C d / I: Bit 11 de la palabra de control Modbus o CANopen C d / 2: Bit 12 de la palabra de control Modbus o CANopen C d / 3: Bit 13 de la palabra de control Modbus o CANopen C d / 4: Bit 14 de la palabra de control Modbus o CANopen C d / 5: Bit 15 de la palabra de control Modbus o CANopen CL1 estáactivada cuando la entrada lógica o el bit de la palabra de control está en estado 0 (menu SEt-en la頁quina 122). CL2 estáactivada cuando la entrada lógica o el bit de la palabra de control está en estado 1. | ||||
| L C 2 | 2° limitede corriente1 | 0,25 a 1,5 In2 | 1,5 In2 | |
1 Alternatively, you can choose to use the menu of adjustes SET- . Consulte la page 119.
2 In corresponde a la corriente nominal del variador indicada en la Guia de Instalacion de los variadores ATV31 y en la placar de datos.

Estos parámetros aparecerán solamente si se haactivado la funciona.

| Submenu | Parámetro | Descripción | Gama de ajuste | Ajuste de fábrica |
| C HP - | Conmutación de motoresEs posible acceder a esta funciona solamente si LAC = L2 o L3 (pagina 136). | |||
| C HP | Conmutación, motor 2 | Lea a continuación. | nO | |
| n D: No asignadaL I I: Entrada lógica L1L I Z: Entrada lógica L12L I 3: Entrada lógica L13L I 4: Entrada lógica L14L I 5: Entrada lógica L15L I 6: Entrada lógica L16Si LAC = L3, es posible realizar las siguientes asignaciones:C d I : Bit 11 de la palabra de control Modbus o CANopenC d I Z: Bit 12 de la palabra de control Modbus o CANopenC d I 3: Bit 13 de la palabra de control Modbus o CANopenC d I 4: Bit 14 de la palabra de control Modbus o CANopenC d I 5: Bit 15 de la palabra de control Modbus o CANopenLi o bit = 0: Motor 1Li o bit = 1: Motor 2La funciona de conmutación de motores inhabilita la protección tírmica del motor. Se debenproporcional un dispositoo externo para la protección tírmica del motor. Consulte el mensaje deprecaución en la网页 108.Si usa esta funciona, no use la funciona de autoajuste tUn (pagina 125) en el motor 2 ni tampoco configuerto rUn en rUn o POn.La Modifications del los parámetros no se efectúa sino hasta que el variador se para. | ||||
| U n S 2 | Tensión nominal del motor 2 indicada en la place de datos | Varía con el valornominal del variador | Varía con el valornominal del variador | |
| ATV31***M2: 100 a 240 VATV31***M3X: 100 a 240 VATV31***N4: 100 a 500 VATV31***S6X: 100 a 600 V | ||||
| F r S 2 | Frecuencia nominal del motor 2 indicada en la place de datos | 10 a 500 Hz | 50 Hz | |
| UnS (en V)Larzón - FrS (en Hz) noDebe exceder lossiguales values:ATV31***M2: 7 max.ATV31***M3X: 7 max.ATV31***N4: 14 max.ATV31***S6X: 17 max.La Modifications del ajuste de bFr en 60 Hz también cambia el ajuste de FrS2 en 60 Hz. | ||||
| n C r 2 | Corriente nominal del motor 2 indicada en la place de datos | 0,25 a 1,5 In1 | Varía con el valornominal del variador | |
| n S P 2 | Velocidad nominal del motor 2 indicada en la place de datos | 0 a 32760 RPM | Varía con el valornominal del variador | |
| 0 a 9 999 rpm, bajo 10,00 a 32,76 krpmSi la place de datos indica una velocidad síncrona y deslizamente (en Hz o como un percentaje) en lugarde la velocidad nominal, calculue la velocidad nominal de la situante manera:Velocidad nominal = velocidad síncrona x 100 - deslizamente como un %oVelocidad nominal = velocidad síncrona x 50 - deslizamente en Hz (motores de 50 Hz)oVelocidad nominal = velocidad síncrona x 50 - deslizamente en Hz (motores de 50 Hz)60 - deslizamente en Hz (motores de 60 Hz) | ||||
1 In corresponde a la corriente nominal del variador indicada en la Guia de Instalacion de los variadores ATV31 y en la placar de datos.
Estos parámetros aparecerán solamente si se haactivado la función.

| Submenü | Parámetro | Descripción | Gama de ajuste | Ajuste de fábrica |
| C HP - (cont.) | C O S 2 | Factor de potencia del motor 2 indicado en la plaza de datos | 0,5 a 1 | Varía con el valor nominal del variador |
| U F e 2 | Selección del tipo de razón tensión / freuency (motor 2) | Lea a continuación. | n | |
| L: par constante (para motores connectados en paralelo o motores especialies) P: par variable (para aplicaciones de bomba y ventilador) n: control vectorial del flujo sin sensor (para aplicaciones de par constante) n L d: acosas de energia, (para aplicaciones de par variable que no requieren una gran dinámica.Esta se presenta de la misma forma que larzón P sin carga y la razón n en carga.) Tensión UnS FrS Frecuencia | ||||
| U F r 2 | Compensación IR / elevación de tensión (motor 2)1 | 0 a 100% | 20 | |
| Para UFT2 = n o nLd: compensación RI. Para UFT2 = L o P: elevación de tensión. Se utilizes para optimizar el par en velocidad baja. Aumente el valor de UFr2 si el par es insufiente. Para evitar un functionamento inestable, asegürese de que el valor de UFr2 no sea muy alto para un motor caliente. La modificación de UFT2 hará que UFr2 regrese al ajuste de fábrica del 20%. | ||||
| FL G 2 | Ganancia de bucle de freuency (motor 2)1 | 1 a 100% | 20 | |
| Es possible acceder a FLG2soleo cuando UFT2 = n o nLd (pagina 169). Este parámetro ajusta la rampa de velocidad en base a la inercia de la carga'actionada. Si el valor es muy bajo, el tiempo de respuesta es más largo. Si el valor es muy alto, es possible que se produca un exceso de velocidad o inestabilidad en el funciona. FLG2 baja En este caso,urrently FLG2 -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 | ||||
| 5 E R 2 | Estadidad del bucle de freuency (motor 2)1 | 1 a 100% | 20 | |
| Es possible acceder a StA2 solamente si UFT2 = n o nLd (pagina 169). Desprésés de una transmisión de velocidad (acceleración o desacceleración), este parámetro adaptaté el returno en un estado estable desde la dinámica de la这其中a quese está hacerendo funcional. Gradually,urrently la estiadulidad para evaporar excessos de velocidad. Si el valor es muy bajo, es possible que se produca un excaso de velocidad o inestabilidad en el funciona. Si el valor es muy alto, el tiempo de respuesta es más largo. StA2 baja En este caso,urrently StA2 -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.1 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.4 0.4 0.5 t -10 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.4 0.5 t -10 0. -10 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.4 -10 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.4 0.5 t -10 0.2 0.3 0.5 t -10 0.2 0.3 0.5 t -10 0.2 0.3 0.5 t -10 0.2 0.3 0.5 t -10 0.2 0.3 0.5 t -10 0.2 0.3 0.5 t -10 0.2 10 -10 0.2 10 -10 0.2 10 -10 0.2 10 -10 0.2 10 -10 0.2 10 -10 0.2 10 -10 0.2 10 -10 0.2 10 -10 0.2 10 | ||||
| 5 L P 2 | Compensación de desizamente (motor 2)1 | 0 a 150% | 100 | |
| Es possible acceder a SLP2 solamente si UFT2 = n o nLd (pagina 169). Este parámetro ajusta el valor de la compensación de desizamente definido por la velocidad nominal del motor. Si el ajuste del desizamente < desizamente real, el motor no gira en la velocidad correcta en estado continuo. Si el ajuste del desizamente > desizamente real, el motor tiene una compensación excessiva y la velocidad es inestable. | 0 a 150% | 100 | ||
1 Alternatively, se pueda acceder en el menu de ajustes SEt- Consulte la网页 119.
Estos parámetros aparecerán solamente si se haactivado la funciona.
Gestión de los interruptores de límite
Esta funciona se pueda usar para controlar el functionality de uno o dos interruptores de límite, en 1 o 2 sentidos de functionality. Es possible acceder a esta funciona solamente si LAC = L2 o L3 (頁目 136). Para usar esta funciona:
- asignE una o dos entradas lógicas al limite de marcha adelante y al limite de marcha atras.
- selección el tipo de paro (en rampa, rápido o parada libre). Después de un paro, el motorouldravolver aarrancar en el sentido contrario solamente.
- el paro se efectúa cuando la entrada está en estado 0. El sentido de funciona es permitido en estado 1.

| Submenu | Parámetro | Descripción | Gama de ajuste | Ajuste de fábrica |
| L 5 E - | Gestión de los interruptores de límite Es posible acceder a LSt- solamente si LAC = L2 o L3 (pagina 136). | |||
| L R F | Límite, marcha adelante | Lea a continuación. | nO | |
| n O: No asignada L 1 1: Entrada lógica L11 L 1 2: Entrada lógica L12 L 1 3: Entrada lógica L13 L 1 4: Entrada lógica L14 L 1 5: Entrada lógica L15 L 1 6: Entrada lógica L16 | ||||
| L R r | Límite, marcha atrás | Lea a continuación. | nO | |
| n O: No asignada L 1 1: Entrada lógica L11 L 1 2: Entrada lógica L12 L 1 3: Entrada lógica L13 L 1 4: Entrada lógica L14 L 1 5: Entrada lógica L15 L 1 6: Entrada lógica L16 | ||||
| L R S | Tipo de paro de los interruptores de límite | Lea a continuación. | nSt | |
| r P: En rampa F 5 E: Parada=rápida n 5 E: Parada libre | ||||

Estos parámetros aparecerán solamente si se ha activado la funciona.

| Submenu | Parámetro | Descripción | Gama de ajuste | Ajuste de fábrica |
| 5 C 5 | Almacenimiento de las configuraciones1 | Lea a continuación. | nO | |
| n D: Función inactiva5 E r l: Guarda la configuración actual (perno no los resultados del autoajuste) en la memoria EEPROM. SCS automatistically cambía a nO tan pronto como se guardan las configuraciones. Use esta funciona para guardar另一边 configuración de reserve además de la configuración actual.El variegador de velocidadiene de fábrica con las configuraciones actual y de reserve ya configuradas.Si la terminal de programación y ajustes se concentra al variegador de velocidad; estarán disponibles hasta un máximo de quatre ajustes adiconuales: F I L I, F I L 2, F I L 3 y F I L 4. Utilice estas selecciones para guardar hasta quatre configuraciones en la memoria EEPROM de la terminal de programación y ajustes remota.SCS automatistically cambía a nO tan pronto como se guardan las configuraciones. | ||||
| F C 5 | Returno al ajuste de fábrica / restauración de la configuración1 | Lea a continuación. | nO | |
| n D: Función inactivar E C l: Sustituya la configuración actual con la configuración de reserve anteriormente guardada por SCS (SCS ajustado en Strl). rECI estávisible sólo si se haGuardado una configuración de reserve. FCS automatistically cambía a nO tan pronto como seleva a cabo estaendencies.In l: Sustituya la configuración actual con los ajustes de fábrica. FCS automatistically cambia a nO tan pronto como seleva a cabo estaendencies.Si la terminal de programación y ajustes remota se concenta al variegador de velocidad; estarán disponibles hasta un(Maximo de quatre ajustes adiconiales correspondientes a los ARCHivos de reserve guardados en la memoria EEPROM de la terminal: F I L 1, F I L 2, F I L 3 y F I L 4. Estas selecciones sustituyen la configuración actual con la configuración de reserve correspondiente en la terminal de programación y ajustes remota. FCS automatistically cambía a nO tan pronto como seleva a cabo estaendencies.Notaria: Si n R d se muestra brevemente en la pantalla una vez que el parámetro hacaeado a nO, no espossible realizar la transforencia de configuración, ya que los values nominales del variegador son differsentes. Si n B r se muestra brevemente en la pantalla una vez que el parámetro hacaeado a nO, un error detransferencia de configuración se ha producido y el ajuste de fábricadeferbera ser restaurado utilizing Inl. Enambos casos, verifique la configuración que se va a transferir antes de volver a intentar.NOTA: Para activar rECI, Inl y FIL1 a FIL4 oprima y mantenga oprimida la tecla ENT durante 2 segundos. | ||||
Es possible acceder a SCS y FCS a través de various menús de configuración pero sus ajustes afectan todos los manos y parámetros.
FLT-MENU DE FALLOS
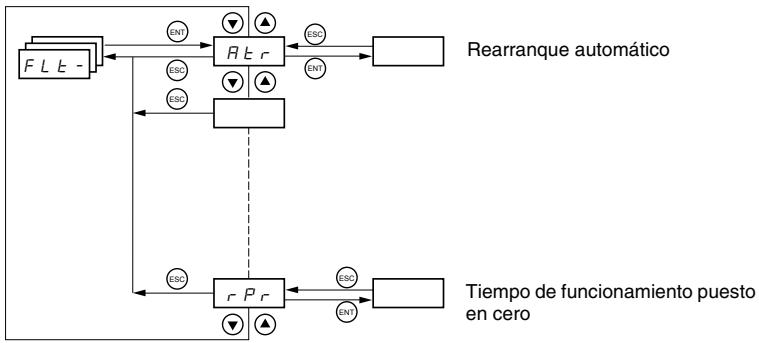
Los parámetros del menu de fallas se pueda modifier sólo si se para el variegador y no se está executando un commando de marcha.
En la terminal de programación y ajustes remota optional, es possible acceder a este menu con el interruptor de Bloqueo de acceso en la posición.
| Código | Descripción | Ajuste de fabrica |
| R E r | Rearranque automatico | nO |
| n O: Función inactiva Y E 5: Rearranque automatico después de bloquear una falla, siempre que está haya desaparecido y lasdemás conditiones de funciona permitan el rearranque. El Rearranque se efectúa mediante una série de intentos automaticos,分开ados por tiempos de esperas creencias: 1 s, 5 s, 10 s, cuando una vez por minuto durante el periodo definido por tAr. Si el Rearranque no se produce una vez que la duraciónmaximum de tiempo de rearranque, tAr, ha transcurrido, el procedimiento se abandonay el variador permanece bloqueado hasta que se desnergiza y vuelvá a energizar. La作為 fallas permiten realizar un Rearranque automatico: Falla externa (EPF) Pérdida de la referencia de 4 a 20 mA (LFF) Falla CANopen (COF) Sobretensión del sistema (OSF) Pérdida de la fase de linea (PHF) Pérdida de la fase del motor (OPF) Sobretensión del bus de —— (c.d.) (ObF) Sobrecarga del motor (OLF) Enlace en series (SLF) Sobrecalentmente del variegador (OHF) Esta funciona requiere un control de 2 hilos (tCC = 2C con tCt = LEL o PFO (págrina 127). Asegúrese de que un Rearranque automatico no presente riesgos al personal ni al equipo. Lea el mensaje de advertencia bajo. | ||
| E R r | Duración Tmaxima del procesode rearranque | 5制动os |
| 5: 5制动os I O: 10制动os 3 O: 30制动os I h: 1 hora 2 h: 2 horas 3 h: 3 horas C E: Ilimitado Este parámetro aparece cuando Atr = YES. Éste puede ser utilisé para limitar el número de Rearranques consecutivos en una falla constante. | ||
| r S F | Restablecimiento de falla | no |
| n O: No asignada L I I: Entrada lógica LI1 L I 2: Entrada lógica LI2 L I 3: Entrada lógica LI3 L I 4: Entrada lógica LI4 L I 5: Entrada lógica LI5 L I 6: Entrada lógica LI6 | ||
Estos parámetros aparecerán solamente si se haactivado la función.
ADVERTENCIA
- El rearranque automatico se pueda usar solo en máquinas o instalaciones que no presenten un riesgo para el personal o el equipo durante un rearranque automatico accidental.
- Si se activa Rearranque automatico, R1sole indica una falla despues de expirar la secuencia de rearranques.
- El funciona del equipo deben estar conforme con las normas ycottivos de seguidad nacionales y locales.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
| Código | Descripción | Ajuste de fábrica |
| F L r | Recuperación automática (captura automática de unaarga en rotación en rampa) | nO |
| Activa un rearranque suave de unaarga en rotación si el commando de marcha es sustenido después de los siguerantes eventos: • Pédida en la red de alimentación o desconexión • Restablecimiento de una falla o un rearranque automático. Observe el mensaje de advertencia en la págrina anterior. • Parada libre La velocidad proveniente del variador se renauda a partir de la velocidad estimada del motor en el momento del rearranque, bajo segue la rampa en la velocidad de referencia. Esta funciona require un control de 2 hilos (tCC = 2C con tCt = LEL o PFO. • D: Función inactiva y E S: Función activa Al activar esta funciona, está también se activa en cada uno de los comandos de marcha, lo cual produce unalittle demora (de 1segundo como máximo) antes del arranque. FLr es forzado en nO si el control del freno (bLC) is asignado (págrina 166). | ||
| E l F | Falla externa | nO |
| nD: No asignada L l l: Entrada lógica LI1 L l l2: Entrada lógica LI2 L l l3: Entrada lógica LI3 L l l4: Entrada lógica LI4 L l l5: Entrada lógica LI5 L l l6: Entrada lógica LI6 Si LAC = L3, es possible realizar lassiguidentes asignaciones: C d l l: Bit 11 de la palabra de control Modbus o CANopen C d l l2: Bit 12 de la palabra de control Modbus o CANopen C d l l3: Bit 13 de la palabra de control Modbus o CANopen C d l l4: Bit 14 de la palabra de control Modbus o CANopen C d l l5: Bit 15 de la palabra de control Modbus o CANopen | ||
| E P L | Modo de paro en caso de que se produca una falla externa (EtF) | YES |
| nD: Falla ignorada y E S: Falla con una parada libre rP: Falla con un paro en la rampa F S l: Falla con una parada<rápida | ||
| O P L | Configuración de la falla por pédida de fase del motor | YES |
| nD: Función inactiva y E S: Activación de la falla OPF R C: No está activada ninguna falla, sin embargo, la tensión de salute es supervisada paraEARVARUNA sobrecorriente cuando se restabloce la conexión con el motor y al producirse una recuperación automática, aun cuando FLr = nO (para usarse con un contactor de corrente descendente). OPL es forzado en YES si el control del freno (bLC) es asignado (págrina 166). | ||
| I P L | Configuración de la falla por pédida de fase de linea | YES |
| Es possible acceder a este parámetro sólo en los variadores de tres fases. nD: Falla ignorada y E S: Falla con una parada<rápida | ||
| O HL | Modo de paro en caso de que se produca una falla por sobrecalentamento (OHF) del variador | YES |
| nD: Falla ignorada y E S: Falla con una parada libre rP: Falla con un paro en la rampa F S l: Falla con una parada<rápida | ||
| O LL | Modo de paro en caso de que se produca una falla por sobrecarga (OLF) del motor | YES |
| nD: Falla ignorada y E S: Falla con una parada libre rP: Falla con un paro en la rampa F S l: Falla con una parada<rápida | ||
| S L L | Modo de paro en caso de que se produca una falla en el enlace en series (SLF) de Modbus | Lea a continuación. |
| nD: Falla ignorada y E S: Falla con una parada libre rP: Falla con un paro en la rampa F S l: Falla con una parada<rápida | ||
| Código | Descripción | Gama de ajuste | Ajuste de fábrica |
| C O L | Estado de paro en caso de que se produzca una falla en el enlace en series (COF) de CANopen | Lea a continuación. | YES |
| n D: Falla ignorada y E S: Falla con una parada libre r P: Falla con un paro en la rampa F S E: Falla con una parada rápida | |||
| E n L | Configuración de la falla de autoajuste (tnF) | Lea a continuación. | YES |
| n D: Falla ignorada (el variegador restablece las configuraciones de fábrica) y E S: Falla con el variegador bloqueado | |||
| L F L | Estado de paro en caso de que se produzca una falla por perrida de la referencia de 4 a 20 mA (LFF) | Lea a continuación. | nO |
| n D: Falla ignorada (único valor possible si CrL3 ≤3 mA, páginja 128) y E S: Falla con una parada libre L F F: El variegador de velocidad cambia a la velocidad de returno (consulte el parámetro LFF, a continuación) r L S: El variegador mantiene la velocidad en la que estaba al producirse la falla hasta que está es eliminada. r P: Falla con un paro en la rampa F S E: Falla con una parada rápida Antes de configurar LFL en YES, rMP o FST, verifique la connexión de la entrada AI3. De lo contrario, es possible que el variegador cambie de inmediato a una falla LFF. | |||
| L F F | Velocidad de returno | 0 a 500 Hz | 10 Hz |
| Configuración de la velocidad de returno para parar el motor en caso de una falla | |||
| d r n | Funcionamente reducido en caso de una baja tensión | Lea a continuación. | nO |
| n D: Función inactiva y E S: El umbral de supervisión de la tensión de ligne es: ATV31***M2: 130 V ATV31***M3X: 130 V ATV31***N4: 270 V ATV31***S6X: 340 V En este caso, se debe usesar una bobina de broqueco; sin embargo, el functionamento del variegador no está garantizo. Para asignar esta funciona, debe pulsar y mantener sostenda la tecla ENT durante 2seguidos. | |||
| S E P | Parada controlada al producirse una perrida en la alimentación de la ligne principal | Lea a continuación. | nO |
| n D: Bloquea el variegador y para el motor en parada libre n P S: Usta inercía para hacer el suministro de alimentación del variegador en el tiempo máximo possible r P: Paro en la rampa activa (dEC o dE2) F S E: Parada rápida. El tiempo de paro depende de la inercía y de la realizability de frenado del variegador. | |||
| I n H | Supresión de fallas | Lea a continuación. | nO |
| PRECAUCÍN | |||
| PÉRDIDA DE PROTECCION CONTRA FALLAS La supresión de fallas pueda dañar el variegador de velocidad irreparamente evitando su paro durante el evento de una falla. El incomplimiento de esta instruccion suecear daño al equipo. | |||
| n D: No asignada L I I: Entrada lógica LI1 L I Z: Entrada lógica LI2 L I 3: Entrada lógica LI3 L I 4: Entrada lógica LI4 L I 5: Entrada lógica LI5 L I 6: Entrada lógica LI6 La supervisión de fallas está activa cuando la entrada está en estado 0 y está inactiva cuando está en estado 1. Todas las fallas activas se restablocen cuando el estado de la entrada cambia de 1 a 0. NOTA: Para asignar esta funciona, debe pulsar ymantener sostenida la tecla ENT durante 2seguidos. | |||
| r Pr | Tiempo de configuracionmente bajo en cero | Lea a continuación. | nO |
| n D: No r E H: Tiempo de configuracionmente bajo en cero El parámetro rPr automatistically se ajusta en nO tan pronto como se realiza el restablecimiento en cero. | |||
COM-MENU DE COMUNICACION
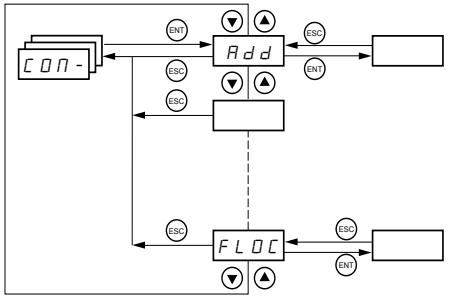
Los parámetros del menu de comunicación se pueda modifier sólo si se para el variador y no se está executando un commando de marcha. La modificación de los parámetros Add, tbr, tFO, AdCO y bdCO se efectúa sólo cuando de un rearranque.
En la terminal de programación y ajustes remota optional, es possible acceder a este menu con el interruptor de Bloqueo de acceso en la posición.
| Código | Descripción | Gama de ajuste | Ajuste de fábrica |
| Rdd | Modbus: Dirección del variador | 1 a 247 | 1 |
| Ebr | Modbus: Velocidad de transmisión | 19 200 bps | |
| 4. B: 4 800 bps9. B: 9 600 bps19. 2: 19 200 bpsNOTA: La terminal de programación y ajustes remota puede ser realizada sólo con la velocidad de transmisión ajustada en19 200 bps. | |||
| E F O | Formato de communicatoras Modbus | Lea a continuación. | 8E1 |
| B D I: 8 bits de datos, paridad impar, 1 bit de paroBE E I: 8 bits de datos, paridad par, 1 bit de paroB n I: 8 bits de datos, sin paridad, 1 bit de paroB n 2: 8 bits de datos, sin paridad, 2 bits de paroNOTA: La terminal de programación y ajustes remota pueda ser realizada sólo con el formatting de communicatoración ajustado en 8 bitsde datos, con paridad par y 1 bit de paro. | |||
| E E O | Modbus: Tiempo de espera | 0,1 a 10 s | 10 s |
| Rd C O | CANopen: Dirección del variador | 0 a 127 | 0 |
| b d C O | CANopen: Velocidad de transmisión | Lea a continuación. | 125 |
| I D. D: 10 kbps2 D. D: 20 kbps5 D. D: 50 kbps1 25. D: 125 kbps2 5 D. D: 250 kbps5 D. D: 500 kbps1 D. D: 1 000 kbps | |||
| E r C O | CANopen: Registro de errors (sólo lecture) | Lea a continuación. | |
| D: No errorI: Error de bus desconectado2: Error de vida uyil3: Exceso de CAN4: Error de señales Basics | |||
| Código | Descripción | Gama de ajuste | Ajuste de fábrica |
| F L O | modo forzado local | Lea a continuación. | nO |
| n D: No asignada L / I: Entrada lógica LI1 L / 2: Entrada lógica LI2 L / 3: Entrada lógica LI3 L / 4: Entrada lógica LI4 L / 5: Entrada lógica LI5 L / 6: Entrada lógica LI6 En modo forzado local, el bloque de terminales y la terminal de programación y ajustes del variador recuperan control del variador. | |||
| F L O C | Selección del canal de control y referencia en modo forzado local Es possible acceder a este parámetro sólo cuando LAC = 3 | Lea a continuación. | AI1 AIP para ATV31********A |
| En modo forzado local, solamente la referencia de velocidad es considerada. Las functions de PI, entradas sumadoras, etc. no están activas. Consulte los diagramas en las páginas 136 a 139. R / I: Entrada analógica AI1, entradas lógicas LI R / 2: Entrada analógica AI2, entradas lógicas LI R / 3: Entrada analógica AI3, entradas lógicas LI R / P: Potenciétrometro (variadores ATV31********A solamente), botones RUN/STOP L C C: Terminal de programación y ajustes remota: Referencia LFr (págrina 120), botones RUN/STOP/FWD/REV | |||

Estos parámetros aparecerán solamente si se haactivado la funciona.
SUP-MENU DE SUPERVISION
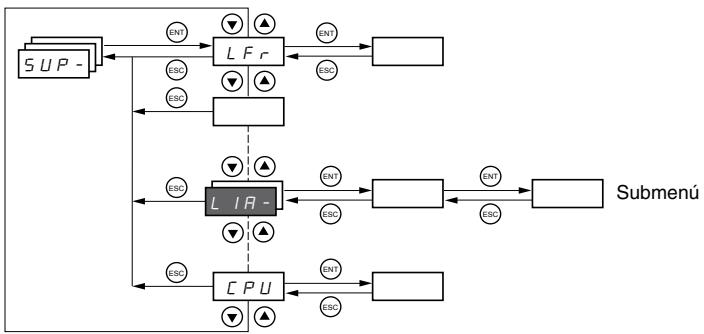
Es possible acceder a los parámetros del menu de supervisión con el variador parado o en marcha. Es possible acceder a este menu con el interruptor de Bloqueo de acceso en la terminal de programación y ajustes remota enequalquierposión.
Algunas functions tienen various parámetros. Para simplificar la programación ymantener corte las listas de parámetros, estasmericanes se han agrupado en los sub-menús. Así como los menús,los submenús son identificados con un guión antes de su número. Por exemple,LIA- es un submenú.
Si el variegador está en marcha, el valor de uno de los parámedros de supervisión se muestra en la pantalla. Para visualizar othero parámetro, desplácese al parámetro de supervisión deseado y pulse la tecla ENT. Para conservar su selección como el nuevo valor por omission, de nuevo pulse y mantenga oprimida la tecla ENT durante 2 segundos. El valor de este parámetro se visualizará durante el funcionaimiento del variegador, aun después de apagarlo y volverlo a encender. Si laewsueva seleccion no es confirmada pulsando la tecla ENT una segunda vez, el variegador regresará al parámetro anterior afterwards de apagarlo y volverlo a encender.

| Código | Descripción | Gama de ajuste |
| L F r | Referencia de Frequencia para el control a工程技术 de la terminal de programación y ajustes del variador o de la terminal de programación y ajustes remota | 0 a 500 Hz |
| r P l | Referencia PI interna | 0 a 100% |
| F r H | Referencia de Frequencia antes de una rampa (valor absoluto) | 0 a 500 Hz |
| r F r | Frecuencia de salute aplicada al motor | - 500 Hz a + 500 Hz |
| 5 P d l a 5 P d 2 a 5 P d 3 | Valor de salute en unidades del cliente SPd1, SPd2 o SPd3 según el parámetro SdS,日下午 123. El ajuste de fábrica es SPd3. | |
| L C r | Corrente del motor | |
| O P r | Potencia del motor | |
| 100% = potencia nominal del motor, calculada realizando los parámetros que se ingresaron en el menú drC-. | ||
| U L n | Tensión de linea [V~ (c.a.)] calculada de la tensión medida en el bus de --- (c.d.). | |
| t H r | Estado tírmico del motor | |
| 100% = estado tírmico nominal 118% = umbral OLF (sobrecarga del motor) | ||
| t H d | Estado tírmico del variador | |
| 100% = estado tírmico nominal 118% = umbral OHF (sobrecalentimiento del variador) | ||
| L F t | Ultima falla | |
| b L F: Falla de control del freno C F F: Configuración (parámetros) incorrecta C F I: Configuración (parámetros) inválida C D F: Falla en la linea de communicator 2 (CANopen) C r F: Falla de precarga del capacitor E E F: Falla de la memoria EEPROM E P F: Falla externa I n F: Falla interna L F F: Falla de 4 a 20 mA en Al3 n D F: No se guardó la falla D B F: Falla por sobretensión del bus de --- (c.d.) D C F: Falla por sobrecorriente D H F: Falla por sobrecalentimiento del variador D L F: Falla por sobrecarga del motor D P F: Falla por perdida de fase del motor D S F: Falla por sobretensión en la red de alimentación P H F: Falla por perdida de fase en la red de alimentación S C F: Falla por cortocircuito del motor (fase, tierra) S L F: Falla de communicator Modbus S D F: Falla por excesso de velocidad del motor t n F: Falla de autoajuste U S F: Falla por baja tensión en la red de alimentación | ||
| O t r | Par motor | |
| 100% = Par nominal del motor, calculado utilizing los parámetros que se ingresaron en el menú drC-. | ||
| r t H | Tiempo de configuracionado | 0 a 65530 horas |
| El tiempo total en que ha estado energizzato el motor: 0 a 9999 (horas), cuando lo hay been detectado. Puede restablecerse en cero a工程技术 del parámetro rPr en el menú FLt- (págrina 175) | ||
Estos parámetros aparecerán solamente si se ha activado la funciona.

| Código | Descripción | |
| Codido de bloqueo de terminal | Codido de bloqueo de terminal | |
| Permite proteger la configuración del variegador con un CODido de bloqueo de acceso. NOTA: Antes de ingresar un CODido, asegürese de anotarlo. □ F F: No hay un CODido de bloqueo de acceso • Para bloquear el acceso, use la tecla ▲ para ingresar un CODido (2 a 9999) y pulse la tecla ENT. La pantalla muestra "ON" para indicar que los parámedros han sido bloqueados. □ n: Un CODido (2 a 9999) está bloqueando el acceso al variegador • Para desbloquear el acceso, use la tecla ▲ para ingresar el CODido (2 a 9999) y pulse la tecla ENT. El CODido permanece en la pantalla y el acceso es desbloqueado hasta la próxima vez que se retirela alimentación del variegador. Otra vez, el acceso a los parámedros estábroqueado la próxima vez que se aplique alimentación. • Si se ingresa un CODido incorrecto, la pantalla cambia a "ON" y los parámedros permanecen bloqueados. XXXX: El acceso a los parámedros estádesbloqueado (el codido permanece en la pantalla). • Para volver a activar el bloqueo con el本身就是cdo号码, cuando los parámedros han sido desbloqueados, regreso a ON utilizing el botón▼ luego pulse ENT. La pantalla muestra "ON" para indicar que los parámedros han sido bloqueados. • Para bloquear el acceso con un nuevo CODido, cuando los parámedros han sido desbloqueados, ingreso un nuevo CODido (aumente el valor en la pantalla utilizing el botón ▲ o▼) y pulse ENT. La pantalla muestra "ON" para indicar que los parámedros han sido bloqueados. • Para despejar el Bloqueo, cuando los parámedros han sidodesbloqueados, regreso a "OFF"utilizando el botón▼ luego pulse ENT. "OFF" permanece en la pantalla. Los parámedros sondesbloqueados y permanecerandesbloqueados. Cuando el acceso es bloqueado usingan un CODido,solelos parámedros de supervisión estarán accesibles, únicamente con la selección temporal del parámetroesorado. | ||
| L U S | Estado del autoajuste. Consulte la página 125. | Estado del autoajuste. Consulte la página 125. |
| b R b: El valor por omission de la resistencia del estatorse utilizespara controller el motor. P E n d: Se ha solicitado un autoajuste, pero todas no se ha realizado. P r ☐ G: Autoajuste en bajo. F R I L: Ha fallado el autoajuste. d D n E: Autoajuste completado. La resistencia del estator medida por la funciona de autoajuste se utilizes para controler el motor. S E r d: Autoajuste completado. La resistencia del estator en frio (rSC que no sea nO) se utilizes para controler el motor. | Se possible para visualizar las functions asignadas a cada entrada. Si no se asigna ningunafunción, entonce se做不到aN. Use los botones ▲ y▼ para desplazarse por las functions. Si se hasignado un cierto número de functions a la misma entrada, asegürese de que sean compatibles. | |
| U d P | Indica la version de firmware del variegador de velocidad ATV31 Por exemple, 1102 = V 1.1 IE02. | |
| L I R - | Funciones de las entradas lógicas | |
| L I I R L I 2R L I 3R L I 4R L I 5R L I 6R | Se possible para visualizar las functions asignadas a cada entrada. Si no se asignaanythinga. Entonce se做不到aN. Use los botones ▲ y▼ para desplazarse por las functions. Si se hasignado un cierto número de functions a la misma entrada, asegürese de que sean compatibles. | |
| L I 5 | Se possible para visualizar el estado del pasadas lógicas (utilizando los segmentos de la visualización: alto = 1, bajo = 0) Estado 1 Estado 0 L11 L12 L13 L14 L15 L16 Eemple anterior: L11 y L16 está en 1, L12 a L15 está en 0. | |
| R I R - | Funciones de las entradas analógicas | |
| R I I R R I 2R R I 3R | Se possible para visualizar las functions asignadas a cada entrada. Si no se han asignado las functions,enta se做不到aN. Use los botones ▲ y▼ para desplazarse por las functions. Si fue asignado un cierto número de functions a la misma entrada, asegürese de que sean compatibles. | |
SECCION 4: SERVICIO DE MANTENIMIENTO Y DIAGNOSTICO DE PROBLEMAS
PRECAUCIONES
Lea las precauaciones de seguridad a continuacion antes de seguir conequalquier procedimiento deostenimiento o diagnóstico de problemas.
A PELIGRO
TENSION PELIGROSA
- Desenergice el variador de velocidad antes de prestarle servicios.
- Asegúrese de leer yentifierostos procedimientos y las precauiones delineadas en la párgina 110 de este manual antes de prestar servicios a los variadores de velocidad ATV31.
- La instalación, los ajustes y el service de mantenimiento de这些东西 variadores de velocidad deben ser realizados por personal especializzato.
El incumplimiento de estas instruccionesouldacause la muerte o lesiones serias.
SERVICIO DE MANTENIMIENTO DE RUTINA
Realice los siguientes pasos en intervalos regulares:
- revise la condicion y el ajuste de las conexiones.
- asegúrese de que haya ventilación adecuada y que la temperatura alrededor del variador de velocidad sea acceptable.
- si fuese besoino, quite el polvo y los materiales extraños del variador.
VISUALIZACION NORMAL
Una visualización normal sin fallas ni comandos de marcha presentes muestra:
- El valor de uno de los parámetros de supervisión (頁目 178)
- Init: secuencia de incidencia
- rdY: el variador está lista
- dcb: frenado por ineyeción de --- (c.d.) en bajo
- c. d. en la bueca.
- nSt: parada libre, consulte la página 115.
- FSt: parada rápida
tUn:autoajuste en direccion
VISUALIZACION DE FALLAS
Si se presenta un problema durante la instalación o el funciona, asegúrese de que el entorno sea adecuado y que el montaje y las conexiones se hayan realizado correctamente.
La prima falla detectada se guarda y muestra, parpadeando, en la pantalla. El variador de velocidad se bloquea y el contacto del relevidador de falla (RA-RC) se abre, si ha sido configurado para realizar esta funciona.
El variador no arranca ni muestra ninguna falla
Si el variador no arranca ni tampoco muestra nada en la pantalla, verifique lo suiviente:
- Revise la fuente de alimentacion conectada al variador.
- Al asignar las functions de parada rápida o parada libre, no arrancará el variador si las entradas lógicas correspondientes no está ennergizadas. En este caso, el variador做不到 "nSt" en la pantalla cuando está en el modo de parada libre y "FSt" en el mode de parada rápida.Esta
Eliminación de fallas
situation es normal, ya que dichas faciones se activan en el momento del arranque (velocidad cero) para poder detener el variador deforma segura en caso de un corte de cable.
- Asegürese de que las entradas del commando de marcha hayan sido activadas de acuerdo con el modo de control elegido (parámetro tCC en el menu I-O-), consulte la página 127).
- Si se asigna una entrada a la función del interruptor de límite y esta entrada se incluyen en estado 0, el variador pourrait arrancarse solamente si se envía un commando para que funciona en sentido opuesto (consulte la páginá 170).
- Si el canal de referencia (pagina 135) o el canal de control (pagina 136) es asignado a Modbus o CANopen, el variador做不到 nSt en la pantalla durante su energia y permanecería parado hasta que el bus de comida envía un commando.
El variador de velocidaduede serdesbloqueadodescuysdeuna falla con lossiguientes métodos:
- desconectando la alimentacion del variador hasta que se borre la pantalla.
- automatistically, si la función de rearranque automatico está activada (parámetro Atr está ajustado en Yes,頁目173).
- a工程技术 de la entrada lógica, si una entrada lógica ha sido asignada a la función de restablecimiento de fallas (parámetro rSF asignado a Ll*, página 173)
Fallas que no pueda restablecer automatistically
Las fallas que no peuvent restablecerse automatistically figuran en lasumaque tabla. Para restablecer estas fallas:
- Desenergice el variador de velocidad.
- Espere a que se apague Completely la pantalla.
- Determine la causa de la falla y corrijala.
- Vuelva a aplicar alimentacion.
bLF, CrF, OCF, SOF y tnF también pueda restablecerse remótamente a工程技术 de una entrada lógica. Consulte el parámetro rSF en la頁a 173.
| Falla | Causa possible | Solución |
| b L F Secuencia de frenado | Corriente de aperture del freno no alcanczada | · Revise las conexiones del variador y del motor. · Revise los devanados del motor. · Compruebe el ajuste de lbr en el menu FUn- Consulte la頁a 166. |
| c r F Falla de circuito de precarga | Circuito de precarga dañado | · Restablezca el variador. · Sustituya el variador de velocidad. |
| l n F Falla interna | · Falla interna · Falla de conexión interna | · Retire las fuentes de interferencia electromagnética. · Sustituya el variador de velocidad. |
| d C F Sobrecorriente | · Ajustes Incorrectos de parárometros en los menús SET-y drC- · Acceleraciónblemado=rápida · Variador y/o motor inadeuido para la carga · Bloqueo mecánico | · Compruebe los parárometros en los menús SET-y drC-. · Asegürese de que el tiempo del motor y variador sea adecuado para la carga. · Retire el bloqueo mecánico. |
| Falla | Causa posible | Soluciones |
| 5 F Cortocircuito del motor | ·Cortocircuito o connexion a tierra en la calidad del variador ·Corrente de fuga a tierra considerable en la calidad del variador si various motores están connectados en paralelo | ·Revise las connexiones de los cables del variador al motor como el aislamento del motor. ·Reduzca la Frequencia de commutación. ·Conecte los filtros de salute en series con el motor. |
| 5 F Velocidad excessiva | ·Inestabilidad ·Carga arrastrante | ·Revise los parámetros del motor, ganancia y realizidad. ·Agregue una resistencia de frenado. ·Verifique el<tamaño> del variador, el motor y la carga. |
| F n F Falla de autoajuste | ·Motor o potencia del motor no adecuado para el variador ·Motor no connectado al variador | ·Utilice larzón L o P (consulte UFt en la page 125). ·Verifique la presencia del motor durante un autoajuste. ·Si se está utilizing un contactor de corriente descendente, ciérrelo durante el autoajuste. |
Fallas que peuvent restablecerse automatistically
Una vez que se haya eliminado la causa de la falla, las fallas que figuran en lasuma table se peuvent restablecer:
- con la funciona de rearranque automatico. Consulte el parámetro Atr en el menu FLt- en la págrina 173.
- através de una entradaológica. Consulte el parámetro rSF en el menu FLt- en la páginla 173.
- apagando y volviendo a encender el variador de velocidad.
| Falla | Causa possible | Solutión |
| C D F Falla de la conexión en series CANopen | Pérdida de communicator entre el variador y el dispositivo de communicator o terminal de programación remota. | Compruebe el bus de communicator. Consulte la documentación españica del producto. |
| E P F Falla externa | Definida por el usario | Definida por el usario |
| L F F Pérdida de la seals del circuito seguidor de 4-20 mA | Pérdida de la referencia de 4-20 mA en la entrada Al3. | Compruebe la conexión en la entrada Al3. |
| D B F Sobretenisión en desaceleración | Frenado demasiado=rápido Carga arrastrante | Aumente el tiempo de desaceleración. Instale una resistencia de frenado si fuese Necessary. Active la funciona brA si es compatible con la aplicación. Consulte la頁ina 146. |
| D H F Sobrecarga del variador | La temperature del variador o del medio ambiente es muy alta La cargo de la corrente continua del motor es muy alta | Verifique la energia del motor, la ventilación del variador y las conditiones ambientales. Espere a que se enfríe el variador antes de volverlo a arrancar. |
| D L F Sobrecarga del motor | El disparo tírmico se deBEa una sobrecarga prolongada del motor La capacité de potencia del motor es muy baja para la aplicación | Verifique el ajuste lTH (protección tírmica del motor, en la頁ina 120), compruebe la energia del motor. Espere a que se enfríe el motor antes de volverlo a arrancar. |
| Falla | Causa possible | Solutación |
| P F Falla de fase del motor | Pérdida de fase en la salute del variador Contactor de corriente descendente abierto Motor no conectado Inestabilidad de la corriente del motor Variador de tamanño Incorrecto (muy grande) para el motor | Revise las conexiones del variador al motor.Si se está utilizing un contactor de corriente descendente, ajuste OPL en OAC. Consulte la网页 174.Pruebe el variador con un motor de baja potencia o sin un motor: ajuste OPL en nO.Consulte la网页 174.Compruebe y optimice los ajustes de los parámedros UFr (网页 121), UnS (网页 124) y nCr (网页 124) y realize un autoajuste (网页 125). |
| S F Sobretension durante una operación de estado estable o en acceleración | Tensión de linea muy alta Transitorios en la alimentación de linea | Verifique la tensión de linea.Compare con los values nominalesresidentificados en la plac de datos del variador.Restablezca el variador. |
| P H F Falla de fase de entrada | Pérdida de fase de entrada, fusible quemado Utilización de un variador trifásico en una red de alimentación monofásica Desequilibrio de la fase de entrada Falla de fase transitoria NOTA:Esta protección funcionalso con el variador en marcha y bajoarga. | Revise las conexiones y los fusibles.Desactive la falla ajustando IPL en nO.Consulte la网页 174.Verifie que la alimentación de entrada sea la correcta.Suministre alimentación trifásica si es necasario. |
| S L F Falla de la conexión en série Modbus | Pérdida de conexión entre el variador y el dispositivo de comunicación o terminal de programación remota. | Compruebe las conexiones de communicator.Consulte la documentación españafidel producto. |
Fallas que se restablecen al borrarse la falla
| Falla | Causa possible | Soluciones |
| C F F Falla de configuración | Las configuraciones de los parámetros no son correctas para la aplicación. | Restaure los ajustes de fábrica o cargue la configuración deerva, en caso de ser valida. Consulte el parámetro FCS en el menu drC-, páginá 126. |
| C F I Falla de configuración atramías de la conexión en series | Las configuraciones de los parámetros cargadas al variador atramías de la conexión en series, no son correctas para la aplicación. | Compruebe la configuración cargada anteriorsmente. Cargue una configuración compatible con la aplicación. |
| U 5 F Baja tensión | Red de alimentación muy baja Caía de tensión transitoria Resistencia de precarga dañana | Verifique la tensión de linea. Compruebe el ajuste del parámetro UNS. Consulte la páginá 124. Sustituya el variador de velocidad. |
TABLAS DE CONFIGURación DE LOS AJUSTES
Use las tablas de configuración que comienzan en la págrna 185 para preparar y annotar la configuración antes de programar el variador de velocidad. Siempre es possible regresar a los ajustes de fabrica configurando el parámetro FCS en Init en los menus drC-, I-O-, CtL- o FUn-. Consulte las págrinas 126, 129, 143 y 171.
Variadores de velocidad ATV31 ID del cliente (si es aplicable)
Parámetro de ajuste del 1er niveau
BFR
| Código | Ajuste de fábrica | Ajuste del cliente |
| b F r | 50 |
Menu Ajustes
| Código | Ajuste de fábrica | Ajuste del cliente |
| R C C | 3 s | s |
| R C 2 | 5 s | s |
| d E 2 | 5 s | s |
| d E C | 3 s | s |
| E R I | 10% | % |
| E R 2 | 10% | % |
| E R 3 | 10% | % |
| E R 4 | 10% | % |
| L S P | 0 Hz | Hz |
| H S P | bFr | Hz |
| I E H | Según el valor nominal delvariador | A |
| U F r | 20% | % |
| F L G | 20% | % |
| S E R | 20% | % |
| S L P | 100 Hz | % |
| I d C | 0,7 In (1) | A |
| E d C | 0,5 s | s |
| E d C I | 0,5 s | s |
| S d C I | 0,7 In (1) | A |
| E d C 2 | 0 s | s |
| S d C 2 | 0,5 In (1) | A |
| J P F | 0 Hz | Hz |
| J F 2 | 0 Hz | Hz |
| J G F | 10 Hz | Hz |
| r P G | 1 | |
| r I G | 1/s | /s |
| F b S | 1 | |
| P I C | nO |
| Código | Ajuste de fábrica | Ajuste del cliente |
| r P 2 | 30% | % |
| r P 3 | 60% | % |
| r P 4 | 90% | % |
| 5 P 2 | 10 Hz | Hz |
| 5 P 3 | 15 Hz | Hz |
| 5 P 4 | 20 Hz | Hz |
| 5 P 5 | 25 Hz | Hz |
| 5 P 6 | 30 Hz | Hz |
| 5 P 7 | 35 Hz | Hz |
| 5 P 8 | 40 Hz | Hz |
| 5 P 9 | 45 Hz | Hz |
| 5 P 10 | 50 Hz | Hz |
| 5 P 11 | 55 Hz | Hz |
| 5 P 12 | 60 Hz | Hz |
| 5 P 13 | 70 Hz | Hz |
| 5 P 14 | 80 Hz | Hz |
| 5 P 15 | 90 Hz | Hz |
| 5 P 16 | 100 Hz | Hz |
| C L I | 1,5 In1 | A |
| C L 2 | 1,5 In1 | A |
| t L 5 | 0 (sin limite de tiempo) | s |
| r S L | 0 | |
| U F r 2 | 20% | % |
| F L G 2 | 20% | % |
| S t H 2 | 20% | % |
| S L P 2 | 100% | % |
| F t d | bFr | Hz |
| t t d | 100% | % |
| C t d | In1 | A |
| S d 5 | 30 | |
| S F r | 4 kHz | kHz |
In corresponde a la corriente nominal del variador indicada en la Guia de instalacion de los variadores ATV31 y en la placar de datos.

Estos parámetros aparecerán solamente si la función correspondiente ha sido activada.
Tambien es possible acceder y ajustar la mayoria de ellos en el menu de configuraciones para la referencia española.
Aquéllos que han sido subrayados aparecen en el modo de ajustes de fabrica.
Menu Control del variador
| Código | Ajuste de fábrica | Ajuste del cliente |
| b F r | 50 Hz | Hz |
| U n 5 | Varía con el valor nominal del variador | V |
| F r 5 | 50 Hz | Hz |
| n C r | Varía con el valor nominal del variador | A |
| n S P | Varía con el valor nominal del variador | RPM |
| C O 5 | Varía con el valor nominal del variador | |
| r S C | nO |
| Código | Ajuste de fábrica | Ajuste del cliente |
| L U S | tAb | |
| U F L | n | |
| n r d | YES | |
| S F r | 4 kHz | kHz |
| L F r | 60 Hz | Hz |
| S r F | nO |
Menu Asignación
de E/S
| Código | Ajuste de fábrica | Ajuste del cliente |
| E C E | 2C ATV31********A: LOC | |
| E C E | trn | |
| r r 5 | si tCC = 2C, LI2 si tCC = 3C, LI3 si tCC = LOC: nO | |
| C r L 3 | 4 mA | mA |
| C r H 3 | 20 mA | mA |
| Código | Ajuste de fábrica | Ajuste del cliente |
| R 0 1 E | 0A | |
| d 0 | nO | |
| r 1 | FLt | |
| r 2 | nO |
Menu Control
| Código | Ajuste de fábrica | Ajuste del cliente |
| L R C | L1 | |
| F r I | Al1 AIP para ATV31********A | |
| F r 2 | nO | |
| r F C | Fr1 | |
| C H C F | SIM | |
| C d I | tEr LOC para ATV31********A |
| Código | Ajuste de fábrica | Ajuste del cliente |
| C d e | Mdb | |
| C C S | Cd1 | |
| C O P | nO | |
| L C C | nO | |
| P 5 E | YES | |
| r D E | dFr |
Estos parámetros aparecerán solamente si la función correspondiente ha sido activada.
Menu Funciones de aplicación

| Código | Ajuste de fábrica | Ajuste del cliente | |
| r PC - | r P E | LIn | |
| E R I | 10% | % | |
| E R Z | 10% | % | |
| E R Z | 10% | % | |
| E R Y | 10% | % | |
| R C C | 3 s | s | |
| d E C | 3 s | s | |
| r P S | nO | ||
| F r E | 0 | Hz | |
| R C Z | 5 s | s | |
| d E Z | 5 s | s | |
| b r R | YES | ||
| S E C - | S E E | Stn | |
| F S E | nO | ||
| d C F | 4 | ||
| d C I | nO | ||
| I d C | 0,7 In | A | |
| t d C | 0,5 s | s | |
| n S E | nO | ||
| R d C - | R d C | YES | |
| t d C I | 0,5 s | s | |
| S d C I | 0,7 In 1 | A | |
| t d C Z | 0 s | s | |
| S d C Z | 0,5 In 1 | A | |
| S R I - | S R Z | Al2 | |
| S R Z | nO | ||
| Código | Ajuste de fábrica | Ajuste del cliente | |
| JOG- | JOG | Si tCC = 2C: nO Si tCC = 3C: LI4 Si tCC = LOC: nO | |
| JGF | 10 Hz | Hz | |
| UPD- | U5P | nO | |
| d5P | nO | ||
| 5E r | nO | ||
| PI- | PIF | nO | |
| rPG | 1 | ||
| rIG | 1 | ||
| FB5 | 1 | ||
| PIC | nO | ||
| Pr2 | nO | ||
| Pr4 | nO | ||
| rP2 | 30% | % | |
| rP3 | 60% | % | |
| rP4 | 90% | % | |
| r5L | 0 | ||
| P1I | nO | ||
| rP1 | 0% | % | |
| BLC- | bLC | nO | |
| brL | Varía con el valor nominal del variador | Hz | |
| Ibr | A | ||
| brt | 0,5 s | s | |
| bEn | nO | Hz | |
| bEt | 0,5 s | s | |
| bIP | nO | ||
| LC2- | LC2 | nO | |
| LC2 | 1,5 In1 | A | |
1 In corresponde a la corriente nominal del variador indicada en la Guia de instalacion de los variadores ATV31 y en la placar de datos.

Estos parámetros aparecerán solamente si la función correspondiente ha sido activada. también se pueda acceder a ellos en el menu SEt-
Menu Funciones de aplicación (continuación)

| Código | Ajuste de fábrica | Ajuste del cliente | |
| P 5 5 - | P 5 2 | Si tCC = 2C: LI3Si tCC = 3C: LI4Si tCC = LOC: LI3 | |
| P 5 4 | Si tCC = 2C: LI4Si tCC = 3C: nOSi tCC = LOC: LI4 | ||
| P 5 8 | nO | ||
| P 5 16 | nO | ||
| 5 P 2 | 10 Hz | Hz | |
| 5 P 3 | 15 Hz | Hz | |
| 5 P 4 | 20 Hz | Hz | |
| 5 P 5 | 25 Hz | Hz | |
| 5 P 6 | 30 Hz | Hz | |
| 5 P 7 | 35 Hz | Hz | |
| 5 P 8 | 40 Hz | Hz | |
| 5 P 9 | 45 Hz | Hz | |
| 5 P 10 | 50 Hz | Hz | |
| 5 P 11 | 55 Hz | Hz | |
| 5 P 12 | 60 Hz | Hz | |
| 5 P 13 | 70 Hz | Hz | |
| 5 P 14 | 80 Hz | Hz | |
| 5 P 15 | 90 Hz | Hz | |
| 5 P 16 | 100 Hz | Hz | |
| Código | Ajuste de fábrica | Ajuste del cliente | |
| CHP - | CHP | nO | |
| U n S 2 | Varía con el valor nominal del variador | V | |
| F r S 2 | 50 Hz | Hz | |
| n C r 2 | Varía con el valor nominal del variador | A | |
| n S P 2 | RPM | ||
| C O S 2 | |||
| U F t 2 | n | ||
| U F r 2 | 20% | % | |
| F L G 2 | 20% | % | |
| S E R 2 | 20% | % | |
| S L P 2 | 100 Hz | Hz | |
| L S E - | L R F | nO | |
| L R r | nO | ||
| L R S | nSt | ||

Estos parámetros aparecerán solamente si la función correspondiente ha sido activada. también se pueda acceder a ellos en el menu SEt-.
Menu Fallos
| Código | Ajuste de fábrica | Ajuste del cliente |
| R e r | nO | |
| E R r | 5 | |
| r 5 F | nO | |
| F L r | nO | |
| E E F | nO | |
| E P L | YES | |
| O P L | YES | |
| I P L | YES | |
| O H L | YES | |
| O L L | YES |
| Código | Ajuste de fábrica | Ajuste del cliente |
| S L L | YES | |
| C O L | YES | |
| E n L | YES | |
| L F L | nO | |
| L F F | 10 Hz | Hz |
| d r n | nO | |
| S E P | nO | |
| I n H | nO | |
| r P r | nO |
Estos parámetros aparecerán solamente si la función correspondiente ha sido activada.
Menu Comunicación
| Código | Ajuste de fábrica | Ajuste del cliente |
| R d d | 1 | |
| t b r | 19200 | |
| t F D | 8E1 | |
| t E D | 10 s | s |
| R d C D | 0 |
| Código | Ajuste de fábrica | Ajuste del cliente |
| b d C O | 125 | |
| F L O | nO | |
| F L O C | AI1 AIP para ATV31********A |
INDICE DE LOS CÓDIGOS DE PARÁMETROS
| Código | Consulte la pagsa: |
| R C 2 | 120 |
| R C C | 120 |
| R d C | 149 |
| R d C O | 176 |
| R d d | 176 |
| R I I A | 180 |
| R I I A R | 180 |
| R I I A R | 180 |
| R O I E | 180 |
| R E r | 173 |
| b d C O | 176 |
| b E n | 166 |
| b E t | 166 |
| b F r | 124 |
| b I P | 166 |
| b L C | 166 |
| b r A | 146 |
| b r L | 166 |
| b r E | 166 |
| C C S | 142 |
| C d I | 141 |
| C d e | 141 |
| C H C F | 141 |
| C H P | 168 |
| C L 2 | 167 |
| C L I | 122 |
| C O d | 180 |
| C O P | 142 |
| C O S | 124 |
| C O S 2 | 169 |
| C r H 3 | 128 |
| C r L 3 | 128 |
| C t d | 123 |
| d C F | 147 |
| d C l | 147 |
| d E 2 | 146 |
| d E C | 146 |
| d D | 128 |
| d r n | 175 |
| d S P | 157 |
| E P L | 174 |
| E r C O | 176 |
| E E F | 174 |
| F b S | 122 |
| F C S | 126 |
| F L G | 121 |
| F L G 2 | 123 |
| F L O | 177 |
| F L O C | 177 |
| F L r | 174 |
| F r l | 140 |
| F r 2 | 140 |
| F r H | 179 |
| F r S | 124 |
| Código | Consulte la pagsa: |
| F r S e | 168 |
| F r E | 146 |
| F S E | 147 |
| F E d | 123 |
| H S P | 120 |
| I b r | 166 |
| I d C | 147 |
| I n H | 175 |
| I P L | 174 |
| I E H | 120 |
| J F Z | 122 |
| J G F | 122 |
| J O G | 154 |
| J P F | 122 |
| L A C | 140 |
| L A F | 170 |
| L A r | 170 |
| L A S | 170 |
| L C Z | 167 |
| L C C | 142 |
| L C r | 179 |
| L F F | 175 |
| L F L | 175 |
| L F r | 179 |
| L F E | 179 |
| L I I A | 180 |
| L I 2 A | 180 |
| L I 3 A | 180 |
| L I 4 A | 180 |
| L I 5 A | 180 |
| L I 6 A | 180 |
| L I 5 | 180 |
| L S P | 120 |
| n C r | 124 |
| n C r 2 | 168 |
| n r d | 126 |
| n S P | 124 |
| n S P 2 | 168 |
| n S E | 148 |
| O H L | 174 |
| O L L | 174 |
| O P L | 174 |
| O P r | 179 |
| O E r | 179 |
| P I C | 162 |
| P I F | 162 |
| P r 2 | 162 |
| P r 4 | 162 |
| P S I 6 | 153 |
| P S 2 | 152 |
| P S 4 | 152 |
| P S 8 | 152 |
| P S E | 143 |
| r l | 128 |
| Código | Consulte la págrània: |
| r2 | 128 |
| rFC | 141 |
| rFr | 179 |
| rIG | 162 |
| rO€ | 143 |
| rP2 | 162 |
| rP3 | 162 |
| rPY | 162 |
| rPG | 162 |
| rPI | 163 |
| rPI | 179 |
| rPr | 175 |
| rPS | 146 |
| rP€ | 145 |
| rS | 127 |
| rSC | 125 |
| rSF | 173 |
| rSL | 163 |
| rEH | 179 |
| SRA | 150 |
| SRA3 | 150 |
| SCS | 126 |
| SdC | 149 |
| SdC2 | 149 |
| SdS | 123 |
| SFr | 123 |
| SLL | 174 |
| SLP | 121 |
| SLP2 | 169 |
| SPIO | 153 |
| SPI | 153 |
| SPJ2 | 153 |
| SPJ3 | 153 |
| SPJ4 | 153 |
| SPS | 153 |
| SP6 | 153 |
| SP7 | 153 |
| SPB | 153 |
| SPG | 153 |
| SPdI | 179 |
| SPd2 | 179 |
| SPd3 | 179 |
| SrF | 126 |
| SER | 121 |
| SERA2 | 169 |
| SEP | 175 |
| SEr | 157 |
| SEt | 147 |
| ETRI | 120 |
| Código | Consulte la pagina: |
| E R E | 120 |
| E R E | 120 |
| E R Y | 120 |
| E R r | 173 |
| E b r | 176 |
| E C C | 127 |
| E C E | 127 |
| E d C | 121 |
| E d C I | 121 |
| E d C E | 122 |
| E F r | 126 |
| E H d | 179 |
| E H r | 179 |
| E L S | 123 |
| E t d | 123 |
| E t D | 176 |
| E U n | 125 |
| E U S | 125 |
| E U S | 180 |
| U d P | 180 |
| U F r | 121 |
| U F r 2 | 169 |
| U F E | 125 |
| U F E 2 | 169 |
| U L n | 179 |
| U n S | 124 |
| U n S E | 168 |
| U S P | 157 |
INDICE DE LAS FUNCIONES
| Función | Consulte lapellaje: |
| +/- velocidad | 155 |
| Control de 2 o 3 hilos | 127 |
| Salida lógica/analógica AOC/AOV | 128 |
| Rearranque automatístico | 173 |
| Inyección de —— (c.d.) automatística | 149 |
| Control de freeno | 164 |
| CANopen: Dirección del variador | 176 |
| Recuperación automática (captura automatística de una energia en rotación en rampa) | 174 |
| Canales de control y referencia | 130 |
| Commutación de canal de control | 142 |
| Límite de corriente | 122 |
| Inyección de —— (c.d.) a展览会 de una entrada lógica | 147 |
| Adaptación de la rampa de desaceleración | 146 |
| Protección térmica del variador | 107 |
| Ventilación del variador | 107 |
| Parada<rápida a展览会 de la entrada lógica | 147 |
| Rearranque con captura automatística (captura automatística de una energia en rotación en rampa) | 174 |
| Modo forzado local | 177 |
| Parada<rápida a展览会 de una entrada lógica | 148 |
| Niveles de acceso de lasUNCTIONes | 140 |
| Funcionalmente de marcha bajo a base | 154 |
| Gestión del interruptor de limite | 170 |
| Modbus: Dirección del variador | 176 |
| Autoajuste del control del motor | 125 |
| Commutación de motores | 168 |
| Protección térmica del motor | 108 |
| Protección térmica del motor - corriente térmica max. | 120 |
| Regulador PI | 158 |
| Velocidades preseccionesadas | 151 |
| Commutación de rampsas | 146 |
| Rampas | 145 |
| Commutación de referencias | 141 |
| Relé R1 | 128 |
| Relé R2 | 128 |
| Restablecimiento de falla de corriente | 173 |
| Returno a los ajustes de fábrica / restauración de la configuración | 126 |
| Almacenimiento de las configuraciones | 126 |
| Selección del tipo de razón tensión / Frequencia | 125 |
| Frecuencia de salto | 122 |
| Modos de paro | 147 |
| Entradas sumadoras | 150 |
| Commutación para el的最后一眼看 lǐmites de corriente | 167 |
| Frecuencia de commutación | 123 |
Canal de referencia pour LAC = L3
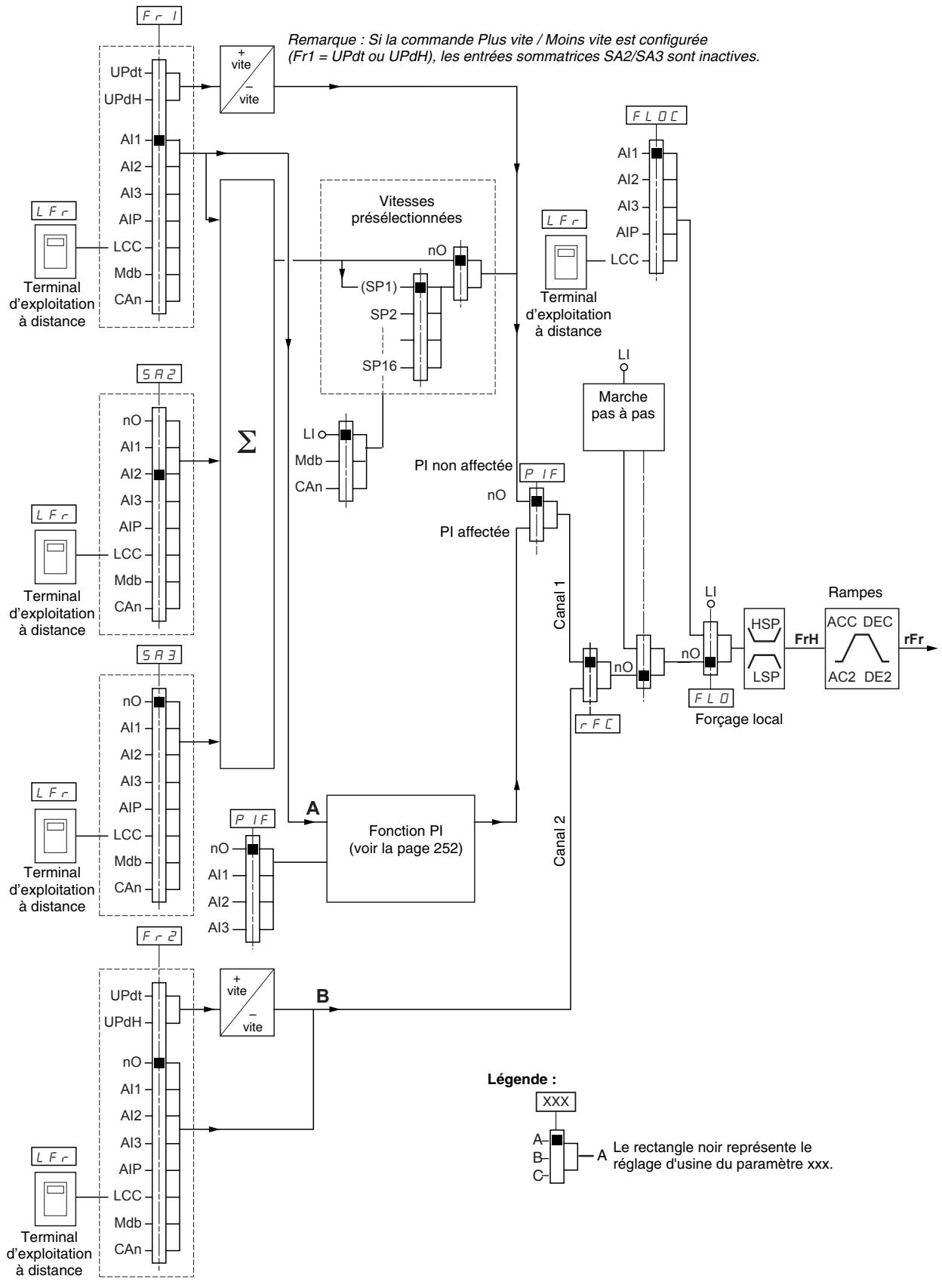
Solamente el personal especializzato deben instalar, hacer funciona y prestar servicios de mantenimiento al equipo electrico. Schneider Electric no asume responsabilidad alguna por las consecuencias emergentes de la utilizacion de este material.
Importado en Mexico por:
Schneider Electric Mexico, S.A. de C.V.
Calz. J. Rojo Gomez 1121-A
Col. Gpe. del Moral 09300 Mexico, D.F.
Tel. 55-5804-5000
www.schneider-electric.com.mx
VVDED303042NAR6/04
Reemplaza VVDED303042NA de 05/2004
Reservados todos los derechos