
ALTIVAR 31 - Variateur de vitesse TELEMECANIQUE - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil ALTIVAR 31 TELEMECANIQUE au format PDF.
| Intitulé | Description |
|---|---|
| Type de produit | Variateur de vitesse pour moteurs asynchrones |
| Caractéristiques techniques principales | Contrôle vectoriel, régulation de la vitesse, couple constant |
| Alimentation électrique | Monophasée ou triphasée, 200-240 V AC |
| Dimensions approximatives | Largeur : 150 mm, Hauteur : 200 mm, Profondeur : 130 mm |
| Poids | Environ 2,5 kg |
| Compatibilités | Compatible avec moteurs asynchrones, normes CE |
| Tension | 200-240 V AC |
| Puissance | De 0,37 kW à 15 kW selon le modèle |
| Fonctions principales | Contrôle de la vitesse, protection du moteur, communication Modbus |
| Entretien et nettoyage | Vérification régulière des connexions, nettoyage des filtres |
| Pièces détachées et réparabilité | Disponibilité de pièces de rechange, documentation technique fournie |
| Sécurité | Protection contre les surcharges, dispositif de coupure d'urgence |
| Informations générales | Conçu pour une utilisation industrielle, garantie de 2 ans |
FOIRE AUX QUESTIONS - ALTIVAR 31 TELEMECANIQUE
Questions des utilisateurs sur ALTIVAR 31 TELEMECANIQUE
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Variateur de vitesse au format PDF gratuitement ! Retrouvez votre notice ALTIVAR 31 - TELEMECANIQUE et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil ALTIVAR 31 de la marque TELEMECANIQUE.
MODE D'EMPLOI ALTIVAR 31 TELEMECANIQUE
Variateurs de vitesse Altivar 31 Guide de programmation 193
Communication Menu COM-82
Display Menu SUP- 84
Precautions 87
Routine de maintenance 87
Affichage Normal 87
Affichage des pannes 87
Gamme de produits 101
Gamme des produits 195
Catégories de dangers et symboles spéciaux 196
Assistance aux produits 196
Présentation de la mise en service 197
Recommandations préliminaires 198
Précautions 198
Démarrage à la mise sous tension 199
Mise sous tension après une remise à zéro de défaut manuelle ou d'une commande d'arrêt 199
Essai sur un moteur de faible puissance ou sans moteur 199
Utilisation de moteurs en parallèle 199
Fonctionnement sur un système à neutre impédant 199
Recommandations de programmation 199
Réglages d'usine 200
Protection thermique du variateur 201
Ventilation 201
Protection thermique du moteur 202
Section 2: programmation
Terminal d'exploitation du variateur 204
Viateurs de vitesse ATV31 204
Viateurs de vitesse ATV31A 204
Fonctions des touches 205
nSt: Arrêt roule libre 205
Terminal d'exploitation à distance 206
Enregistrement et chargement des configurations 206
Accès aux menus 207
Accès aux paramètres 208
Paramètre bFr 208
Compatibilité des fonctions 209
Fonctions des applications des entrées logiques et analogiques 210
Section 3: MENUS
Menu Réglages SEt- 213
Menu Entraînement drC- 217
Menu Entrées / Sorties I-O- 221
Menu Commande Ct L- 224
Canaux de contrôle 224
Paramètre LAC 225
Paramètres LAC = L1 ou L2 226
Paramètre LAC = L3 227
Canal de référence pour LAC = L1 ou 229
Canal de contrôle pour LAC = L1 ou L2 230
Canal de référence pour LAC = L3 231
Canal de contrôle pour LAC = L3 : CHCF = SIM, référence et contrôle combinés 232
Canal de contrôle pour LAC = L3 : CHCF = SEP, mode mélange (référence et contrôle séparés)..... 233
Menu Fonctions des applications Fun- 238
Entrées sommatrices 244
Vitesses présélectionnées 245
Plus vite / moins vite 249
Régulateur PI 252
Fonctionnement manuel-automatique avec régulateur PI 254
Commande de frein 258
Gestion des interrupteurs de fin de course 264
Menu Defaults FLt-266
Menu Communication COM-270
Menu Surveillance SUP-272
Section 4: entretien et dépannage
Précautions 275
Affichage des défauts 275
Non démarriage du variateur sans affichage de défauts 275
Effacement des défauts 276
Défauts qui ne peuvent pas être automatiquement remis à zéro....277
Défauts qui peuvent être automatiquement remis à zéro 278
Défauts qui se remettent à zéro lorsqu'un défaut est effacé 279
Tableaux de réglage de la configuration 279
Numéro d'identification du client et du variateur 280
Paramètres de réglage 1er niveau 280
Menu réglages 280
Menu entraînement 281
Menu entrées / sorties 281
Menu de commande 281
Menu des fonctions des applications 282
Menu des fonctions des applications (suite) 283
Menu par défaut 284
Menu communication 284
Index des codes de paramètres 285
Index des fonctions 286
GAMME des produits
La famille Altivar 31 (ATV31) de variateurs de vitesse à fréquence régulable est utilisée pour la commande des moteurs asynchrones triphasés. Leur puissance varie de :
0,18 à 2,2 kW (0,25 à 3 HP), 208/230/240 V, entrée monophasée 0,18 à 15 kW (0,25 à 20 HP), 208/230/240 V, entrée triphasée - 0,37 à 15 kW (0,5 à 20 HP), 400/460/480 V, entrée triphasée - 0,75 à 15 kW (1 à 20 HP), 525/575/600 V, entrée triphasée
Certains variateurs de vitesse ATV31 sont disponibles avec un potentiomètre de référence, un bouton de mise en marche et un bouton d'arrêt/réinitialisation. Ces variateurs sont appelés variateurs ATV31... à tout au long de ce manuel. Le symbole « • » dans le numéro de catalogue indique la partie du numéro qui varie en fonction de la valeur nominale.
À PROPOS de ce document
Ce bulletin contient les directives de programmation des variateurs de vitesse ATV31. La documentation suivante est également fournie avec le variateur :
Guide d'installation, Altivar 31, VVDED303041US Guide de mise en service, Altivar 31, VVDED303043US
Consulter le Guide d'installation de l'ATV31 pour connaître les directives de réception, d'inspection, de montage, d'installation et de câblage. Consultez le Guide de mise en service de l'ATV31 pour connaître les directives de mise en service du variateur de vitesse avec la configuration de l'usine.
Se reporter à l'index des codes de paramètres et à l'index des fonctions aux pages 285 et 286 pour obtenir l'index alphabétique des codes et fonctions dont il est question dans ce manuel.
REMARQUE : Tout au long de ces directives et sur la terminal d'exploitation du variateur, un tiret peut suivre les codes des menus et sous-menus pour les différencier des codes des paramètres. Par exemple, SET- est un menu, mais ACC est un paramètre.
Catégories de dangers et symboles speciaux
Les symboles et messages spéciaux ci-après peuvent figurer dans ce manuel ou sur le matériel afin de prévenir des risques éventuels.
Un symbole en forme d'éclair ou de personnage ANSI dans une étiquette de sécurité « Danger » ou « Avertissement » placée sur le matériel indique un danger électrique qui entraînera des blessures si les directives ne sont pas respectées.
Un symbole en forme de point d'exclamation dans un message de sécurité de ce manuel indique des risques éventuels de blessures. Obéir à tous les messages de sécurité représentés par ce symbole afin d'éviter des blessures possibles ou mortelles.
| Symbole | Nom |
| Éclair | |
| Personnage ANSI | |
| Point d'exclamation |
DANGER indique une situation de danger imminent qui, si elle n'est pas évitée, entraînera la mort ou des blessures graves.
Avertissement
AVERTISSEMENT indique une situation de danger potentiel qui, si elle n'est pas évitée, peut entraîner la mort ou des blessures graves.
Attention
ATTENTION indique une situation de danger potentiel qui, si elle n'est pas évitée, peut entraîner des blessures mineures ou modérées.
Attention
ATTENTION, utilisé sans le symbole d'alerte de sécurité, indique une situation de danger potentiel qui, si elle n'est pas évitée, peut entraîner des dommages matériels.
Pour obtenir de l'aide et de l'assistance, contacter le groupe support technique pour les variateurs de vitesse (Drives Product Support Group). Ce groupe est disponible durant les heures d'affaires normales. Les techniciens du groupe peuvent travailler par téléphone pour diagnostiquer des problèmes concernant une application ou un produit et conseiller l'action correcte à entreprises.
Téléphone (É.-U) 1-800-387-8247
E-mail Canadian.pss@squared.com
Télécopie 1-800-661-6699
Présentation de la mise en service
La procédure suivante est une présentation des points minimums nécessaires pour permettre un variateur de vitesse ATV31 en service. Consulter le Guide d'installation de l'ATV31 pour ce qui concerne les points de montage, de câblage et de mesure de tension du bus. Se reporter aux sections appropriées de ce manuel pour connaître les points de programmation.
- Installer le variateur de vitesse. Consulter le Guide d'installation de l'ATV31.
- Effectuer les raccordements suivants au variateur de vitesse. Consulter le Guide d'installation de l'ATV31.
Raccorder les conducteurs de m. à. l. t. — Raccorder l'alimentation de réseau. S'assurer que l'alimentation est dans la gamme de tension du variateur de vitesse. — Raccorder le moteur. S'assurer que sa valeur nominale correspond à la tension du variateur de vitesse.
- Mettre le variateur de vitesse sous tension, mais ne pas donner une commande de marche.
- Configurer bFr (fréquence nominale du moteur), si elle est différente de 50 Hz. bFr apparaît sur l'afficheur lors de la première mise sous tension du variateur de vitesse. On peut y accéder dans le menu drC- (page 217) à tout moment.
- Configurer les paramètres dans le menu drC- si la configuration de l'usine ne convient pas. Se reporter à la page 200 pour obtenir les réglages de l'usine.
- Configurer les paramètres dans les menus I-O-, CtL- et FUn
- Configurer les paramètres suivants dans le menu SEt- (pages 213 à 217):
— ACC (accélération) et DEC (décélération) — LSP (petite vitesse lorsque la référence est zéro) et HSP (grande vitesse lorsque la référence est au maximum) — ITH (protection thermique du moteur)
- Mettre le variateur de vitesse hors tension et suivre la procédure de mesure de tension du bus dans le Guide d'installation de l'ATV31. Raccorder ensuite la câblage de contrôle aux entrées logiques et analogiques.
- Mettre le variateur de vitesse sous tension, puis exécuter une commande de marche par l'intermédiaire de l'entrée logique (consulter le Guide de mise en service de l'ATV31).
- Régler la référence de vitesse.
Avant de mettre sous tension et de configurer le variateur, lire et observer les mesures de sécurité suivantes.
Fonctionnement inattendu de l'appareil
- Avant de mettre sous tension et de configurer le variateur de vitesse, assurez-vous que les entrées logiques sont désactivées (contact ouvert) afin d'éviter tout démarrage inattendu.
- À la sortie des menus de configuration, une entrée affectée à une commande de marche peut entraîner immédiatement le démarrage du moteur.
Si ces précautions ne sont pas respectées, cela entraînera la mort ou des blessures graves.
PERTE de contrôle
- Le concepteur des schémas de contrôle doit tenir compte les problèmes potentiels dans les cheminements de commande et, pour certaines fonctions de commande critiques, fournir un moyen d'obtenir un état sécuritaire pendant et après la défectuosité d'un cheminement.
- Des exemples de fonctions de commande critiques sont l'arrêt de secours et l'arrêt sur surcourse.
- Des cheminementS de commande séparés ou redondants doivent être fournis pour les fonctions de commande critiques.
Si ces précautions ne sont pas respectées, cela peut entraîner la mort, des blessures graves ou des dommages matériels.
Appareil endommagé
N'installez pas et ne faites pas fonctionner le variateur de vitesse s'il semble être endommagé.
Si cette précaution n'est pas respectée, cela peut entraîner des dommages matériels.
| Démarrage à la mise sous tension | En cas de démarrage du variateur de vitesse à la mise sous tension, s'assurer que tCt n'est pas réglié à trn (voir page 221) et limiter les opérations du contacteur de ligne à moins d'une fois par minute pour éviter une défaillance prématurée des condensateurs du filtré et des résistances de précharge. La méthode de contrôle recommendée est à travers les entrées LI1 à LI6. La mémoire d'état thermique du moteur se remet à zéro après la mise hors tension du variateur de vitesse. |
| Mise sous tension après une remise à zéro de défaut manuelle ou d'une commande d'arrêt | Si le paramètre tCt est reglé au réglage d'usine (trn), lorsque le variateur de vitesse est mis sous tension après une réinitialisation manuelle sur défaut ou une commande d'arrêt, les commandes de marche avant, marche arrière et arrêt par injection de courant continu doivent être réinitialisées pour que le variateur de vitesse puisse démarrer. Si elles ne sont pas réinitialisées, le variateur de vitesse affichera nSt et ne démarrera pas. Si la fonction de redémarrage automatique est configurée (paramètre Atr dans le menu FLt, voir la page 267), la réinitialisation n'est pas nécessaire. |
| Essai sur un moteur de faible puissance ou sans moteur | Avec la configuration d'usine, la détction de coupure phase moteur (OPL) est active. Pour tester le variateur de vitesse sans moteur connecté ou avec un moteur qui a une puissance nominale beaucoup plus petite que celle du variateur de vitesse, désactiver la détction de coupure phase moteur et configurer la loi tension/fréquence (UFt) à L, couple constant (voir la 219). La protection thermique du moteur n'est pas assurée par le variateur si le courant moteur est inférieur à 0,2 fois le courant nominal du variateur. |
| Utilisation de moteurs en parallelle | Lors de l'utilisation de moteurs en parallelle, configurer la loi tension/fréquence (UFt) à L (couple constant) et fournir un autre moyen de protection thermique sur chaque moteur. Le variateur de vitesse ne peut pas fournir de protection thermique ajustée pour chaque moteur. |
| Fonctionnement sur un système à neutre impédant | Lors de l'utilisation du variateur de vitesse sur un système avec un neutre isolé ou impédant mise à la terre, utiliser un contrôleur permanent d'isolement compatible avec des charges non linéaires. Les variateurs de vitesse ATV31•••••M21 et N4 possèdent des filtres contre les interférences des radiofréquences (RFI) intégrés munis de condensateurs reliés à la terre. Ces filtres peuvent être déconnectés de la terre lorsqu'on utilise le variateur de vitesse sur un système à neutre impédant afin d'augmenter la vie utile de ces condensateurs. Consulter le Guide d'installation de l'ATV31 pour plus d'informations. |
| Recommendations de programmation | Se reporter à « Présentation de la mise en service » à la page 197 pour obtenir les points de programmation minimums nécessaires pourmettre le variateur de vitesse en service. Utiliser les tableaux de réglages de la configuration commençant à la page 280 pour préparer et enregistrer la configuration du variateur avant de programmer le variateur de vitesse. Il est toujours possible de returner aux réglages de l'usine en réglant le paramètre FCS à Inl dans les menus drC-, I-O-, CtL- ou FUn-. Voir les pages 220, 223, 237 et 265. Lors de la première mise en service du variateur de vitesse ATV31 pour un système de 60 Hz, effectuer une retour des paramétres aux réglages de l'usine. Prendre soin de régler bFr à 60 Hz. Il est recommandé d'utiliser la fonction d'auto-réglage pour optimier la précision et la performance du variateur de vitesse. L'auto-réglage mesure la résistance du stator du moteur afin d'optimiser les algorithms de contrôle. Voir la page 219. |
Réglages d'usine
Le variateur de vitesse ATV31 est livré prêt à utiliser dans la plupart des applications, avec les réglages d'usine indiqués dans le tableau 1.
Tableau 1: Réglages d'usine
| Fonction | Code | Réglage d'usine |
| Afficheur | — | r d Y avec moteur arrêté, fréquence moteur (par exemple, 50 Hz) avec moteur en marche |
| Fréquence moteur | bFr | 50 Hz |
| Type de la loi tension / fréquence | UFt | n : contrôle vectoriel de flux sans capteur pour applications à couple constant |
| Mode d'arrêt normal | Stt | 5 l n : arrêt normal sur rampe de décélération |
| Mode d'arrêt en cas de défaut | EPL | Y E 5 : arrêt roue libre |
| Rampes linéaires | ACC, dEC | 3 secondes |
| Petite vitesse | LSP | 0 Hz |
| Grande vitesse | HSP | 50 Hz |
| Gain de la boucle de fréquence | FLG, StA | Standard |
| Courant thermique du moteur | ItH | Courant nominal du moteur (la valeur dépend de la valeur nominale du variateur) |
| Freinage par injection de courant continu | SdC | 0,7 x le courant nominal du variateur, pendant 0,5 s |
| Adaptation de la rampe de décélération | brA | Y E 5 : adaptation automatique de la rampe de décélération en cas de surtension sur le freinage |
| Redémarrage automatique | Atr | n 0 : pas de redémarrage automatique après un défaut |
| Fréquence de découpage | SFr | 4 kHz |
| Entrées logiques | LI1, LI2 | Contrôle de détention à transition à 2 fils : L1 = marche avant, LI2 = marche arrière. Non affectées sur les variateurs de vitesse ATV31*****A1 |
| LI3, LI4 | 4 vitesse présélectionnées vitesse 1 = fréquence de vitesse ou LSP (voir la page 214) vitesse 2 = 10 Hz vitesse 3 = 15 Hz vitesse 4 = 20 Hz | |
| LI5, LI6 | Non affectées | |
| Entrées analogiques | AI1 | Référence de vitesse 0 à 10 V Non affectée sur les variateurs de vitesse ATV31*****A1. |
| AI2 | Entrée de référence des vitesse additionnées 0 ±10 V | |
| AI3 | 4 à 20 mA, non affectée | |
| Relais | R1 | Le contact s'ouvre en cas de défaut ou si le variateur de vitesse est mis hors tension. |
| R2 | Non affecté | |
| Sortie analogique | AOC | 0 à 20 mA, non affectée |
1 Les variateurs de vitesse de la gamme ATV31………A possèdent un potentiamètre de référence, un bouton de marche et un bouton d'arrêt/ réinitialisation. Ils sont régés à l'usine pour un contrôle local à l'aide du bouton de marche, du bouton d'arrêt/ réinitialisation et du potentiamètre de séquence actifs. Les entrées logiques LI1 et LI2 et l'entrée analogue AI1 sont inactives (non affectées).
Protection thermique du variateur
La protection thermique du variateur de vitesse est obtenue avec une résistance de contrôle thermique passif (CTP) sur le dissipateur de chaleur ou le module d'alimentation. En cas de surintensité, le variateur de vitesse se déclenche afin de se protéger lui-même contre les surcharges. Points de déclenchement typiques :
Courant moteur égal à 185% du courant nominal du variateur de vitesse pendant 2 secondes - Courant moteur égal à 150% du courant nominal du variateur de vitesse pendant 60 secondes
Temps (secondes)
Ventilation
Le ventilateur démarre quand le variateur de vitesse est mis sous tension, mais il s'arrête au bout de 10 secondes si une commande de marche n'est pas reçue. Le ventilateur démarre automatiquement quand le variateur de vitesse reçoit une commande de marche et la référence de vitesse. Il s'arrête quelques secondes après quand la vitesse du moteur passe en dessous de 0,2Hz et que le freinage par injection est achevé.
Protection thermique du moteur
La protection thermique du moteur est obtenue par calcul permanent de l'énergie thermique I²t. La protection est disponible pour les moteurs autoventilés.
REMARQUE: La mémoire d'état thermique du moteur se remet à zéro quand l'alimentation du réseau est coupée.
Temps de déclenchement en secondes
Protection thermique inadequate du moteur
L'utilisation d'une protection externe contre les surcharges est requise dans les conditions suivantes :
- Démarrage direct du réseau
- Fonctionnement de plusieurs moteurs
- Fonctionnement de moteurs dont la puissance nominale est inférieure à 0,2 fois le courant nominal du variateur
- Commutation des moteurs à la sortie du variateur
Si cette précaution n'est pas respectée, cela peut entraîner des dommages matériels.
Se reporter à « Recommandations préliminaires » aux pages 198 et 199 pour obtenir davantage d'informations sur la protection externe contre les surcharges du moteur.
Utilisateur NON qualifié
- Seul le personnel qualifié doit effectuer l'installation et l'entretien de cet appareil.
- L'application de ce produit nécessite de l'expérience en conception et programmation de systèmes de contrôle. Seules les personnes possédant ce type d'expérience devraient être autorisées à programmer, installer, modifier et utiliser ce produit.
- Les personnes qualifiées pour effectuer des diagnostics ou un dépannage qui exigent la mise sous tension de conducteurs électriques doivent se conformer à la norme NFPA 70 E sur les exigences de sécurité électrique pour le lieu de travail des employés et aux normes OSHA relatives à l'électricité, 29 CFR partie 1910 sous-partie S.
Si ces précautions ne sont pas respectées, cela entraînera la mort ou des blessures graves.
Terminal d'exploitation du variateur
Variateurs de vitesse ATV31 Variateurs de vitesse ATV31A
Les variateurs de vitesse ATV31... A possèdent un potentiomètre de référence, un bouton de marche et un bouton d'arrêt/réinitialisation.
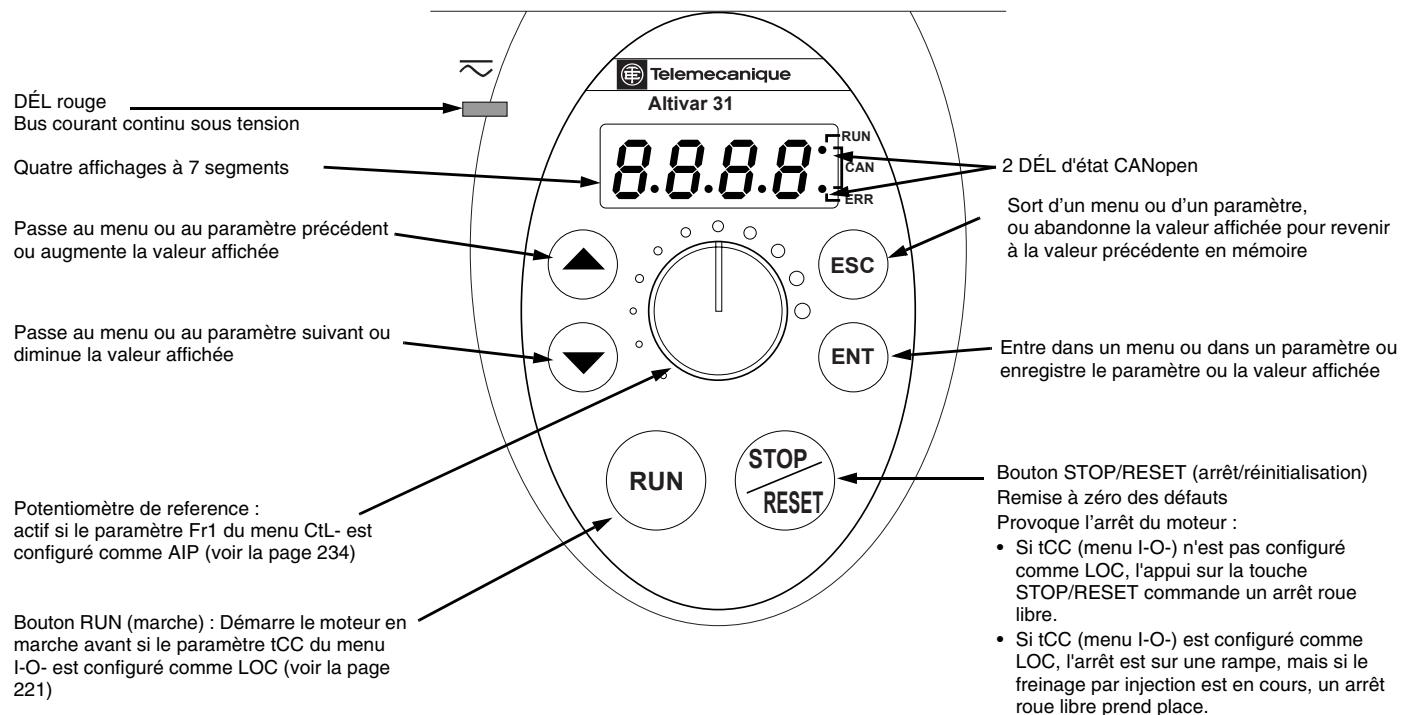
Fonctions des touches
- Appuyer et maintenir la pression (pendant plus de 2 secondes) sur la touche ou pour parcourir les données rapidement. L'action sur ou n'enregistre pas le besoin.
- Pour enregistrer la sélection, appuyer sur (ENT). L'affichage clignote lorsqu'une valeur est enregistrée.
L'affichage normal en l'absence de défaut et de commande de marche montre :
- La valeur de l'un des paramètres de surveillance (voir la page 272). L'affichage par défaut est la fréquence du moteur, par exemple 43.0. En mode de limitation de courant, l'affichage clignote.
- Init: Séquence d'initialisation rdY: Variateur prêt
- dcb: Freinage par injection de courant continu en cours
- nSt: Arrêt roue libre. Voir la section suivante.
- Fonction: Arrêt rapide Tunning: Auto-réglage en cours
En présence d'un défaut, l'affichage clignote.
Nst: Arrêt roule libre
Si le code nSt paraît sur l'afficheur, l'une des conditions suivantes est indiquée :
- Avec la configuration d'usine, lorsque le variateur de vitesse est mis sous tension après une réinitialisation manuelle sur défaut ou une commande d'arrêt, les commandes de marche avant, marche arrière et arrêt par injection de courant continu doivent être réinitialisées pour que le variateur de vitesse puisse démarrer. Si elles ne sont pas réinitialisées, le variateur de vitesse affichera nSt et ne démarrera pas. Si la fonction de redémarrage automatique est configurée, la réinitialisation n'est pas nécessaire.
- Si le canal de référence ou le canal de contrôle est affecté à Modbus ou CANopen (voir page 224), le variateur de vitesse affiche nSt à la mise sous tension et reste à l'arrêt jusqu'à ce que le bus de communication envoie une commande.
- Si une commande de marche avant ou arrière est présente lorsque le variateur est mis sous tension et que ce dernier est configuré pour un contrôle à 3 ou 2 fils avec la transition « trn » (voir la page 221), le variateur affichera nSt et ne fonctionnera pas avant que la commande de marche ne soit mise hors tension et qu'une référence de vitesse valable ne soit donnée.
Terminal d'exploitation à distance
Le terminal d'exploitation à distance optionnel est une unité de contrôle locale qui peut être montée sur la porte d'une armoire. Il est muni d'un câble avec des connecteurs pour le raccordement à la liaison série du variateur (se reporter au manuel fourni avec le terminal d'exploitation). Le terminal d'exploitation à distance possède les mêmes boutons d'affichage et de programmation que le variateur de vitesse, avec en plus un commutateur pour bloquer l'accès au menu et trois boutons pour commander le variateur de vitesse :
- FWD/REV commande le sens de rotation. RUN commande la mise en marche du moteur.
- STOP/RESET commande l'arrêt du moteur ou la remise à zéro d'un défaut. Le fait d'appuyer une fois sur le bouton STOP/RESET arrête le moteur; un deuxième appui arrête le freinage par injection de courant continu s'il est configuré.
Pour que le terminal d'exploitation soit actif, le paramètre tbr dans le menu COM- doit rester au réglage de l'usine, 19.2 (19 200 bps, voir la page 270).
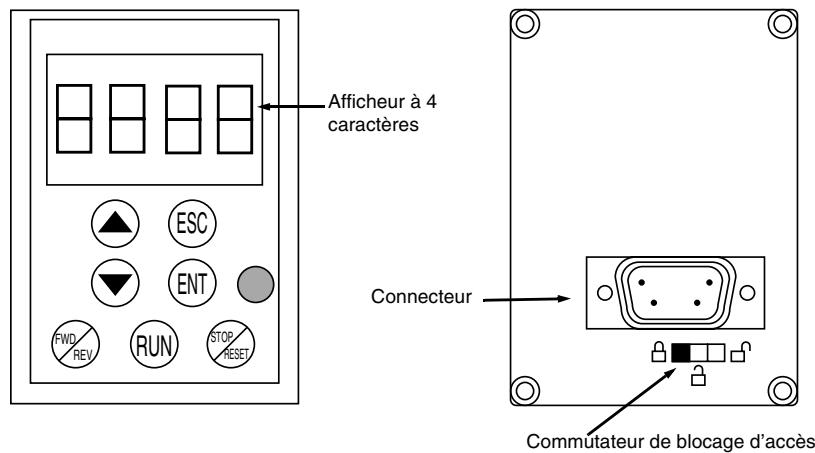
- Positions :

les paramètres de réglage et de surveillance sont accessibles

(menus SET et SUP)
- Position :

il est possible d'accéder à tous les menus
REMARQUE: La protection par mot de passe a priorité sur le commutateur de blocage d'accès. Voir la page 274.
Mettre le commutateur de blocage d'accès en position verrouillée empêche aussi d'accéder aux réglages du variateur à l'aide du terminal d'exploitation du variateur de vitesse. Lorsque le terminal d'exploitation à distance est déconnecté, si le commutateur de blocage d'accès se trouve en position verrouillée, le terminal d'exploitation du variateur est également verrouillé.
Enregistrement et chargement des configurations
Jusqu'à quatre configurations complètes peuvent être enregistrées dans le terminal d'exploitation à distance et transférées dans d'autres variateurs de vitesse de la même valeur nominale. Quatre opérations différentes pour le même dispositif peuvent être également enregistrées sur le terminal. Voir les paramètres SCS et FCS dans les menus drC-, I-O-, CtL- ou FUn-. Voir aux pages 220, 223, 237 et 265.
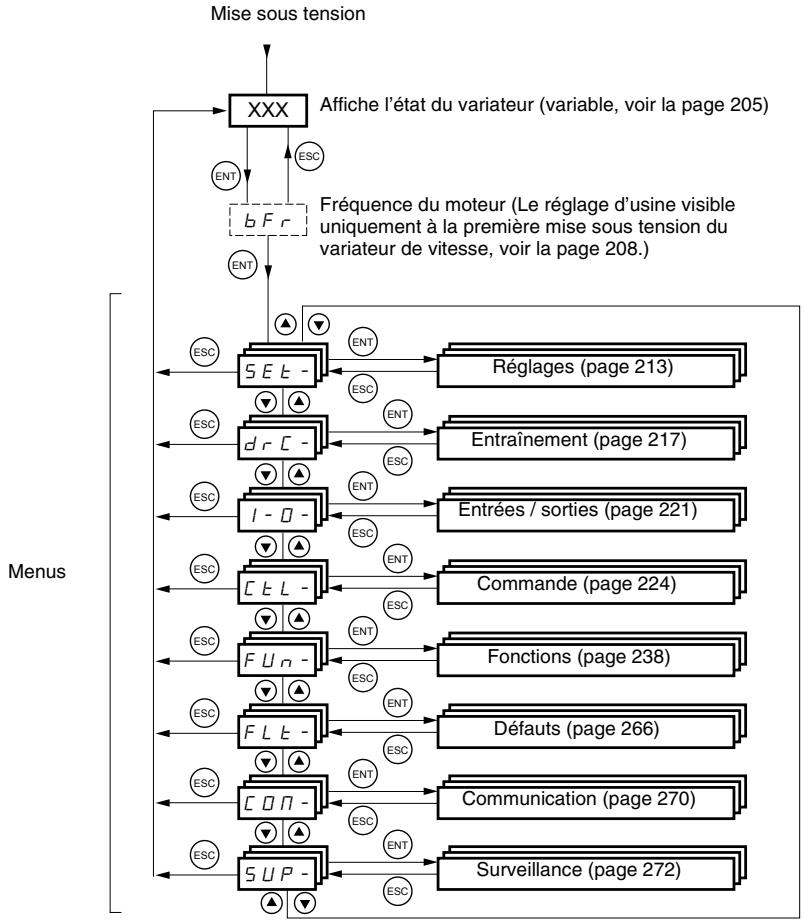
Accès aux MENUS
Pour faciliter les choses, il peut être accédé à certains paramètres dans plusieurs menus. Par exemple, le-retour aux réglages de l'usine (FCS) et l'enregistrement de la configuration (SCS) sont disponibles dans plusieurs menus.
REMARQUE : Tout au long de ce guide, un tiret paraît après les codes des menus pour les différencier des codes des paramètres. Par exemple, SET est un menu, mais ACC est un paramètre.
Accès aux paramètres
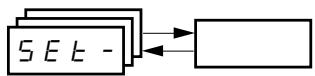
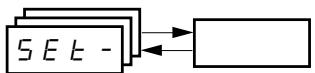
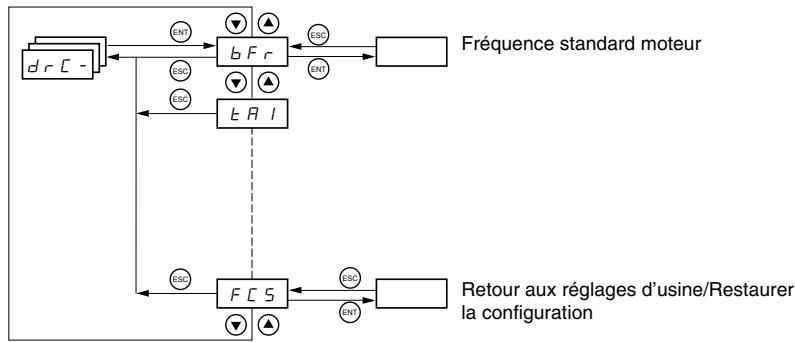
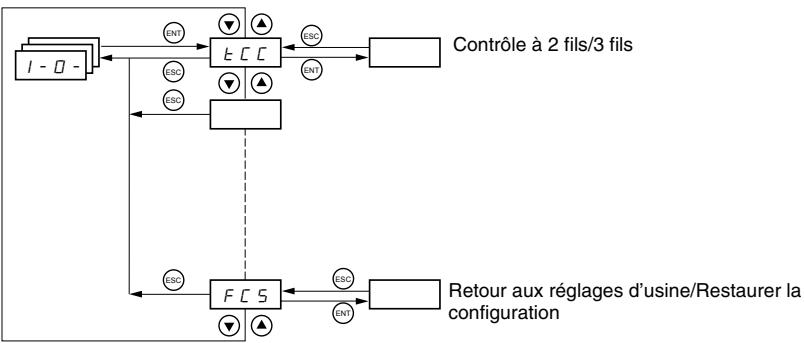
La figure ci-après illustre comment accéder aux paramètres et affecter leurs valeurs. Pour enregistrer la valeur d'un paramètre, appuyer sur l'ENT. L'affichage clignote lorsqu'une valeur est enregistrée.
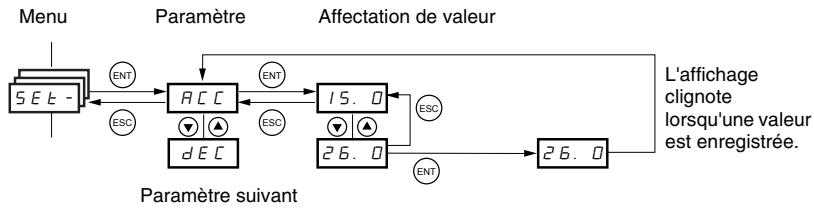
Tous les menus sont « déroulants ». C'est à dire qu'après le dernier paramètre, si on continue d'appuyer sur ▼ on accède au premier paramètre. Au premier paramètre de la liste, appuyer sur la touche ▲ pour sauter au dernier paramètre.
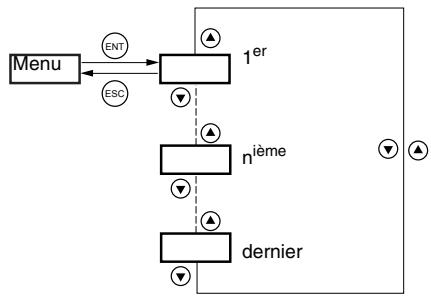
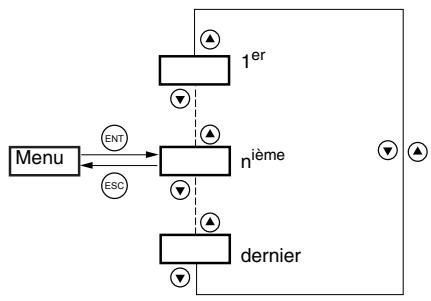
Si un paramètre a été modifié dans un menu et en cas de retard à ce menu sans accéder à un autre menu pendant ce temps-là, le système mène l'utilisateur directement au paramètre modifié en dernier. Voir l'illustration ci-dessous. En cas d'accès à un autre menu ou de redémarrage du variateur de vitesse depuis la modification, l'utilisateur est mené au premier paramètre du menu. Voir l'illustration ci-dessus.
Paramètre bFR
La fréquence moteur, bFr, ne peut être modifiée que lorsque le variateur de vitesse est arrêté et en l'absence de toute commande de marche.
| Code | Description | Gamage de réglage | Réglage d'usine |
| b F r | Fréquence moteur | 50 ou 60 Hz | 50 Hz |
| Ce paramètre n'est affiché ici que lors de la première mise sous tension du variateur de vitesse. bFr peut être modifié à tout moment dans le menu drC-. La modification de ce paramètre modifier également la valeur des paramètres suivants : HSP (page 214), Ftd (page 217), FrS (page 218) et tFr (page 220). | |||
Compatibilité des fonctions
Redémarrage automatique, reprise à la volée et marche arrêtée ne sont disponibles que comme décrit ci-après :
- Le redémarrage automatique est uniquement disponible avec un contrôle à 2 fils (tCC = 2C et tCt = LEL ou PFO, voir la page 221).
- La reprise à la volée est uniquement disponible avec un contrôle à 2 fils (tCC = 2C et tCt = LEL ou PFO, voir la page 221). Elle est désactivée si le freinage par injection de courant continu automatique est configuré comme courant continu (AdC = Ct, voir la page 243).
- La marche arrière est uniquement disponible sur les variateurs de vitesse ATV31A si un contrôle local est actif (tCC = LOC, voir la page 221).
Le choix des fonctions de l'application est limité par le nombre d'E/S disponibles et par le fait que certaines fonctions sont incompatibles l'une avec l'autre comme illustré dans la figure ci-dessous. Les fonctions qui ne sont pas indiquées dans la figure sont complètement compatibles. S'il existe une incompatibilité entre des fonctions, la première fonction configurée empêchera les autres d'être configurées.
| Entrées sommatrices | +/- vite1 | Gestion des interrupteurs de fin de course | Vitesses préseLECTIONnées | Régulatoré P1 | Marche pas à pas | Séquence de freinage | Arrêt par injection de courant continu | Arrêt brésilie | Arrêt roule libre | |
| Entrées sommatrices | ● | ↑ | ● | ↑ | ||||||
| +/- vite1 | ● | ● | ● | ● | ||||||
| Gestion des interrupteurs de fin de course | ● | |||||||||
| Vitesses présélectionnées | ← | ● | ● | ↑ | ||||||
| Régulateur P1 | ● | ● | ● | ● | ● | ● | ||||
| Marche pas à pas | ← | ● | ← | ● | ● | |||||
| Séquence de freinage | ● | ● | ● | |||||||
| Arrêt par injection de courant continu | ● | ↑ | ||||||||
| Arrêt brésilie | ↑ | |||||||||
| Arrêt roule libre | ← | ← |
1 Exclusion d'une application spéciale avec le canal de référence Fr2 (voir aux pages 229 et 231).

Fonctions incompatibles

Fonctions compatibles

Non applicable

Fonctions qui ne peuvent pas être actives en même temps. La fonction indiquée par la flèche est prioritaire sur l'autre.
Les fonctions d'arrêt sont prioritaires sur les commandes de marche. Les références de vitesse par commande logique sont prioritaires sur les références analogiques.
Fonctions des applications des entrées logiques et analogiques
Les tableaux 2 à 5 indiquent les fonctions qui peuvent être affectées aux entrées logiques et analogiques et leurs affectations d'usine. Une seule entrée peut activer plusieurs fonctions en même temps. Par exemple, la marche arrière et une deuxième rampe peuvent être affectées à une entrée. Quand plus d'une fonction est affectée à une entrée, s'assurer que les fonctions sont compatibles. Utiliser les sous-menus LIA- et AIA- du menu SUP- (voir la page 274) pour afficher les fonctions affectées aux entrées et vérifier leur compatibilité.
Tableau 2: Entrées logiques
| Fonction | Code | Voir la page : | Réglage d'usine | |
| ATV31****** | ATV31*****A | |||
| Non affectée | — | — | LI5-LI6 | LI1-LI2LI5-LI6 |
| Marche avant | — | — | LI1 | |
| 2 vitesses présélectionnées | P 5 2 | 246 | LI3 | LI3 |
| 4 vitesses présélectionnées | P 5 4 | 246 | LI4 | LI4 |
| 8 vitesses présélectionnées | P 5 B | 246 | — | — |
| 16 vitesses présélectionnées | P 5 I 6 | 247 | — | — |
| 2 références PI présélectionnées | P r 2 | 256 | — | — |
| 4 références PI présélectionnées | P r 4 | 256 | — | — |
| + vite | U 5 P | 251 | — | — |
| - vite | d 5 P | 251 | — | — |
| Marche pas à pas | J 0 G | 248 | — | — |
| Commutation des rampses | r P 5 | 240 | — | — |
| Commutation 2ème limitation de courant | L C 2 | 261 | — | — |
| Arrêt rapide par entrée logique | F 5 t | 241 | — | — |
| Injection de courant continu par entrée logique | d C l | 241 | — | — |
| Arrêt roule libre par entrée logique | n 5 t | 242 | — | — |
| Marche arrêté | r r 5 | 221 | LI2 | — |
| Défaut externe | E t F | 268 | — | — |
| RAZ (réarmement des défauts) | r S F | 267 | — | — |
| Forçage local | F L D | 271 | — | — |
| Commutation de réference | r F C | 235 | — | — |
| Commutation canal de contrôle | C C S | 236 | — | — |
| Commutation moteur | C H P | 262 | — | — |
| Limitation sens avant (interrupteur de fin de course) | L R F | 264 | — | — |
| Limitation sens arrière (interrupteur de fin de course) | L R r | 264 | — | — |
| Inhibition des défauts | I n H | 269 | — | — |
Tableau 3: Entrées analogiques
| Fonction | Code | Voir la page : | Réglage d'usine | |
| ATV31****** | ATV31*****A | |||
| Non affectée | — | — | Al3 | Al1 - Al3 |
| Référence 1 | F r l | 234 | Al1 | AIP (potentiomètre) |
| Référence 2 | F r 2 | 234 | — | |
| Entrée sommatrice 2 | 5 R 2 | 244 | Al2 | Al2 |
| Entrée sommatrice 3 | 5 R 3 | 244 | — | — |
| Retour du régulateur PI | P I F | 256 | — | — |
Tableau 4: Sorties analogiques et logiques
| Fonction | Code | Voir la page : | Réglage d'usine |
| Non affectée | — | — | AOC/AOV |
| Courant du moteur | O C r | 222 | — |
| Fréquence moteur | r F r | 222 | — |
| Couple moteur | O L O | 222 | — |
| Puisance délivrée par le variateur | O P r | 222 | — |
| Défaut du variateur (information logique) | F L E | 222 | — |
| Variateur en marche (information logique) | r U n | 222 | — |
| Seuil de fréquence atteint (information logique) | F E R | 222 | — |
| Grande vitesse (HSP) atteinte (information logique) | F L R | 222 | — |
| Seuil de courant atteint (information logique) | C E R | 222 | — |
| Référence de fréquence atteinte (information logique) | 5 r R | 222 | — |
| Seuil thermique moteur atteint (information logique) | t 5 R | 222 | — |
| Séquence de freinage (information logique) | b L C | 222 | — |
Tableau 5: Relais
| Fonction | Code | Voir la page : | Réglage d'usine |
| Non affectée | — | — | R2 |
| Défaut du variateur | F L E | 222 | R1 |
| Variateur en marche | r U n | 222 | — |
| Seuil de fréquence atteint | F E R | 222 | — |
| Grande vitesse (HSP) atteinte | F L R | 222 | — |
| Seuil de courant atteint | C E R | 222 | — |
| Référence de fréquence atteinte | S r R | 222 | — |
| Seuil thermique moteur atteint | L S R | 222 | — |
| Séquence de freinage | b L C | 222 | — |
Fonctionnement inattendu de l'appareil
Assurez-vous que les modifications apportées aux règles de fonctionnement ne serontent aucun danger, en particulier lorsque vous effectuez des règles pendant que le variateur de vitesse entraîne le moteur.
Si cette précaution n'est pas respectée, cela entraînera la mort ou des blessures graves.
Attention
- Ce variateur de vitesse n'offre pas de protection thermique directe pour le moteur.
- L'emploi d'une sonde thermique dans le moteur peut être nécessaire pour le protéger dans toutes conditions de vitesse ou de charge.
- Consultez le fabricant du moteur pour connaître les possibilités thermiques du moteur lorsqu'il est utilisé au-dessus de la limite de vitesse désirable.
Si ces précautions ne sont pas respectées, cela peut entraîner des dommages matériels.
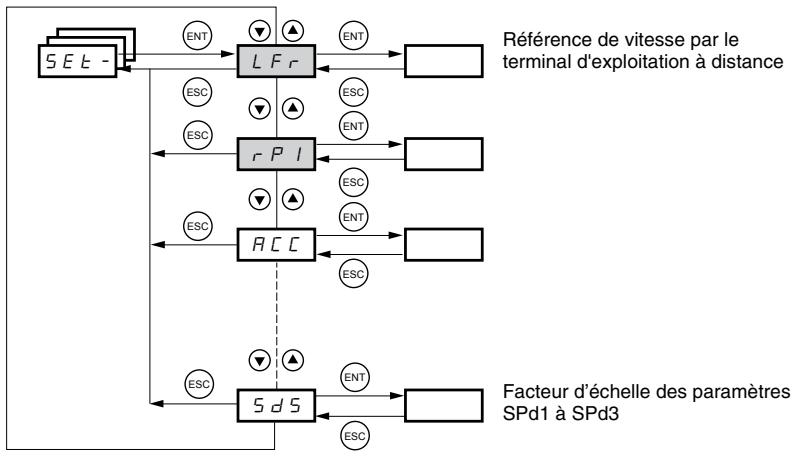
Les paramètres dans le menu SET- sont modifiables avec le variateur en marche ou à l'arrêt. Toutefois, il est recommandé d'effectuer les modifications aux réglages avec le variateur de vitesse à l'arrêt.
| Code | Description | Gamme de réglage | Réglage d'usine |
| L F r l | Récédence de vitesse par le terminal d'exploitation à distance. | 0 à HSP | |
| Ce paramètre apparaît si LCC = YES (page 236) ou si Fr1/Fr2 = LCC (page 234) et si le terminal d'exploitation à distance est connecté. Dans ce cas, LFr est accessible aussi par le terminal d'exploitation du variateur. LFr est remise à 0 à la mise hors tension du variateur. | |||
| r P l l | Récédence interne du régulateur PI Voir la page 252. | 0,0 à 100 % | 0 |
| R C C | Temps de rampe d'accélération | 0,1 à 999,9 s | 3 s |
| Défini comme le temps nécessaire pour que le moteur passée de 0 Hz à FrS (fréquence nominale, voir la page 218). | |||
| R C 2 | 2ème temps de la rampe d'accélération Voir la page 240. | 0,1 à 999,9 s | 5 s |
| d E 2 | 2ème temps de la rampe de décélération Voir la page 240. | 0,1 à 999,9 s | 5 s |
| d E C | Temps de rampe de décélération | 0,1 à 999,9 s | 3 s |
| Défini comme le temps nécessaire pour que le moteur passée de FrS (fréquence nominale, voir la page 218) à 0 Hz. S'assurer que dEC n'est pas réglié trop bas pour la charge. | |||
| E R I | Démarrage de la rampe d'accélération personnalisée, arrondi au pourcentage du temps total de rampe (ACC ou AC2) Voir la page 239. | 0 à 100 | 10 % |
| E R 2 | Fin de la rampe d'accélération personnalisée, arrondie au pourcentage du temps total de rampe (ACC ou AC2) Voir la page 240. | 0 à (100-tA1) | 10 % |
| E R 3 | Démarrage de la rampe de décélération personnalisée, arrondi au pourcentage du temps total de rampe (dEC ou dE2) Voir la page 240. | 0 à 100 | 10 % |
| E R 4 | Fin de la rampe de décélération personnalisée, arrondie au pourcentage du temps total de rampe (dEC ou dE2) Voir la page 240. | 0 à (100-tA3) | 10 % |
| L S P | Petite vitesse | 0 à HSP | 0 Hz |
| Récédence minimale | |||
| H S P | Grande vitesse | LSP à tFr | bFr |
| Récédence maximale. S'assurer que ce réglage convient au moteur et à l'application. | |||
| I E H | Courant utilisé pour la protection thermique du moteur. | 0,2 à 1,5 In² | Varie en fonction de la valeur nominale du variateur |
| Régler l'H aux ampères de pleine charge (APC) indiquées sur la plaque signalétique du moteur. Voir OLL à la page 268 pour supprimer la protection thermique du moteur. | |||
1 Accessible également dans le menu SUP-. 2 In correspond au courant nominal du variateur indiqué sur la plaque signalétique du variateur.
Ils apparaissent seulement dans le menu Réglages.
Ces paramètres n'apparaissent que si la fonction correspondante a été sélectionnée dans un autre menu. Pour faciliter la programmation, ils sont également accessibles et peuvent être régés depuis le menu dans lequel la fonction correspondante se trouve. Une description détaillée de ces fonctions se trouve aux pages indiquées.
| Code | Description | Gamine de réglage | Réglage d'usine | |
| U F r | Compensation RI/augmentation de tension | 0 à 100 % | 20 | |
| Si UFT (page 219) = n ou nLd, UFr = compensation RI.Si UFT = L ou P, UFr = augmentation de tension.Fonction utilisée pour optimier le couple à très BASSE vitesse. Augmenter UFr si le couple est insuffisant.Pour évitier toute instability de fonctionnement, s'assurer que la valeur de UFr n'est pas trop haute pour un moteur chaud.REMARQUE: Le fait de modifier UFT (page 219) fera returner UFr au réglage de l'usine (20%). | ||||
| FL G | Gain de la boucle fréquence | 1 à 100 % | 20 | |
| Ce paramètre est accessible seulement si UFT (page 219) = n ou nLd.FLG règle la rampe de vitesse en fonction de l'inertie de la charge entraînée.Si la valeur est trop BASse, le temps de réponse est plus long. Si la valeur est trop haut une instability de fonctionnement peut survenir.HzFLG basDans ce cas,augmenter FLG5040302010-100.10-100.10-100.10-100.10-100.10-100.10-100.10-100.10-100.10-100.10-100.10-100.10-100.10-100.10-100.1 | HLG correctFLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLG correctHLGAustStAcorrectStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctStA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA correctSTA | |||
| S t R | Stabilité de la boucle fréquence | 1 à 100 % | 20 | |
| Ce paramètre est accessible seulement si UFT (page 219) = n ou nLd.Après une période d'accélération ou de décélération, StA adapte le return à un état stable aux dynamiques de la machine.Si la valeur est trop BASse, une survivesse ou une instability de fonctionnement peut survenir. Si la valeur est trop haut, le temps de réponse est plus long.HzStA basDans ce cas,augmenter StA5040302010-100.10-100.10-100.10-100.10-100.10-100.10-100.10-100.10-100.10-100.10-100.10-100.10-100.85t | ||||
| S L P | Compensation de glissement | 0 à 150 % | 100 | |
| Ce paramètre est accessibleONLY si UFT (page 219) = n ou nLd.SLP ajusté la compensation de glissement pour obtenir un fin réglage de la régulation de la vitesse.Si le réglage du glissement est < le glissement réel, le moteur ne tourne pas à la vitesse correcte en état stable.Si le réglage du glissement est > le glissement réel, le moteur est surcompensé et la vitesse est instable. | ||||
| I d C | Intensité du courant de freinage par injection de courant continu activé par entree logique ou Choisi comme mode d'arrêt.1Voir la page 241. | 0 à In (In correspond au courant nominal du variateur indiqué sur sa plaque signalétique.) | 0,7 In | |
| I d C | Temps total de freinage par injection de courant continu Choisi comme mode d'arrêt.1Voir la page 241. | 0,1 à 30 s | 0,5 s | |
| I d C I | Temps d'injection de courant continu automatiqueVoir la page 243. | 0,1 à 30 s | 0,5 s | |
| S d C I | Intensité du courant d'injection automatiqueVoir la page 243. | 0 à 1,2 In | 0,7 In | |
| S d C I | 2ème tempes d'injection de courant continu automatiqueVoir la page 243. | 0 à 30 s | 0 s | |
| S d C I | 2ème intensité du courant d'injection automatiqueVoir la page 243. | 0 à 1,2 In | 0,5 In | |
1 Ces réglages sont indépendants de la fonction Injection de courant continu automatique.

Ces paramètres n'apparaissent que si la fonction correspondante a été sélectionnée dans un autre menu. Pour faciliter la programmation, ils sont également accessibles et peuvent être régés depuis le menu dans lequel la fonction correspondante se trouve. Une description détaillée de ces fonctions se trouve aux pages indiquées.
| Code | Description | Gamine deréglage | Réglage d'usine |
| JPF | Fréquence occultée | 0 à 500 | 0 Hz |
| JPF évite un fonctionnement prolongé à une gamme de fréquence de ± 1 Hz autour de JPF. Cette fonction évite une vitesse critique qui conduit à la résonance. Le réglage de la fonction à 0 la rend inactive. | |||
| JF2 | 2ème fréquence occultée | 0 à 500 | 0 Hz |
| JF2 évite un fonctionnement prolongé à une gamme de fréquence de ± 1 Hz autour de JF2. Cette fonction évite une vitesse critique qui conduit à la résonance. Le réglage de la fonction à 0 la rend inactive. | |||
| JGF | Fréquence de fonctionnement en marche pas à pas Voir la page 248. | 0 à 10 Hz | 10 Hz |
| rPG | Gain proportionnel du régulateur PI Voir la page 256. | 0,01 à 100 | 1 |
| rIG | Gain intégral du régulateur PI Voir la page 256. | 0,01 à 100/s | 1/s |
| Fb5 | Coefficient multiplicitateur du retour PI Voir la page 256. | 0,1 à 100 | 1 |
| PIC | Inversion du sens de correction du régulateur PI Voir la page 256. | nO - YES | nO |
| rP2 | 2ème ↔ évidence PI préseLECTIONné Voir la page 256. | 0 à 100 % | 30 % |
| rP3 | 3ème ↔ évidence PI préselectionné Voir la page 256. | 0 à 100 % | 60 % |
| rP4 | 4ème ↔ évidence PI préselectionné Voir la page 256. | 0 à 100 % | 90 % |
| SP2 | 2ème vitesse préseLECTIONnée Voir la page 247. | 0 à 500 Hz | 10 Hz |
| SP3 | 3ème vitesse préseLECTIONnée Voir la page 247. | 0 à 500 Hz | 15 Hz |
| SP4 | 4ème vitesse préseLECTIONnée Voir la page 247. | 0 à 500 Hz | 20 Hz |
| SP5 | 5ème vitesse préseLECTIONnée Voir la page 247. | 0 à 500 Hz | 25 Hz |
| SP6 | 6ème vitesse préseLECTIONnée Voir la page 247. | 0 à 500 Hz | 30 Hz |
| SP7 | 7ème vitesse préseLECTIONnée Voir la page 247. | 0 à 500 Hz | 35 Hz |
| SP8 | 8ème vitesse préseLECTIONnée Voir la page 247. | 0 à 500 Hz | 40 Hz |
| SP9 | 9ème vitesse préseLECTIONnée Voir la page 247. | 0 à 500 Hz | 45 Hz |
| SP10 | 10ème vitesse préseLECTIONnée Voir la page 247. | 0 à 500 Hz | 50 Hz |
| SP11 | 11ème vitesse préseLECTIONnée Voir la page 247. | 0 à 500 Hz | 55 Hz |
| SP12 | 12ème vitesse préseLECTIONnée Voir la page 247. | 0 à 500 Hz | 60 Hz |
| SP13 | 13ème vitesse préseLECTIONnée Voir la page 247. | 0 à 500 Hz | 70 Hz |
| SP14 | 14ème vitesse préseLECTIONnée Voir la page 247. | 0 à 500 Hz | 80 Hz |
| SP15 | 15ème vitesse préseLECTIONnée Voir la page 247. | 0 à 500 Hz | 90 Hz |
| SP16 | 16ème vitesse préseLECTIONnée Voir la page 247. | 0 à 500 Hz | 100 Hz |
| CL1 | Limitation de courant | 0,25 à 1,5 In1 | 1,5 In |
| Permet de limiter le couple et l'échauffement du moteur. | |||
| CL2 | 2ème limitation de courant Voir la page 261. | 0,25 à 1,5 In | 1,5 In |
| LCS | Temps de fonctionnement en petite vitesse | 0 à 999,9 s | 0 (pas de limitation de temps) |
| Suite à un fonctionnement en LSP pendant le temps défini, l'accès du moteur est demandé automatiquement. Le moteur redémarre si la référence fréquence est supérieure à LSP et si une commande de marche est toujours présente. | |||
| rSL | Seuil d'erreur de redémarrage (seuil de « réveil ») Voir la page 257. | 0 à 100 % | 0 |
I1 correspond au courant nominal du variateur indiqué sur la plaque signalétique du variateur.

Ces paramètres n'apparaissent que si la fonction correspondante a été sélectionnée dans un autre menu. Pour faciliter la programmation, ils sont également accessibles et peuvent être réglés depuis le menu dans lequel la fonction correspondante se trouve. Une description détaillée de ces fonctions se trouve aux pages indiquées.
| Code | Description | Gamme de réglage | Réglage d'usine |
| U F r 2 | Compensation RI, moteur 2 Voir la page 263. | 0 à 100 % | 20 |
| F L G 2 | Gain de la boucle féquence, moteur 2 Voir la page 263. | 1 à 100 % | 20 |
| S t R 2 | Stabilité, moteur 2 Voir la page 263. | 1 à 100 % | 20 |
| S L P 2 | Compensation de glissement, moteur 2 Voir la page 263. | 0 à 150 % | 100 % |
| F t d | Seuil de féquence moteur au-delà duquel le contact du relais (R1 ou R2) se ferme ou la sortie AOV = 10 V. R1, R2 ou dO doivent être affectées à FtA. | 0 à 500 Hz | bFr |
| t t d | Seuil de l'état thermique moteur au-delà duquel le contact du relais (R1 ou R2) se ferme ou la sortie AOV = 10 V. R1, R2 ou dO doivent être affectées à tSA. | 0 à 118 % | 100 % |
| C t d | Seuil de courant moteur au-delà duquel le contact du relais (R1 ou R2) se ferme ou la sortie AOV = 10 V. R1, R2 ou dO doit être affectée à CtA. | 0 à 1,5 In1 | In1 |
| S d S | Facteur d'échelle des paramètres SPd1 / SPd2 / SPd3 (voir le menu SUP- à la page 273) | 0,1 à 200 | 30 |
| Utilisé pour étabonnner une valeur ( comme la vitesse d'un moteur) proportionnellement à la féquence de sortie rFr.Si SdS ≤ 1, SPd1 est affchéé (définition possible = 0,01).Si 1 < SdS ≤ 10, Spd2 est affchéé (définition possible = 0,1).Si SdS > 10, Spd3 est affchéé (définition possible = 1).Si SdS > 10 et SdS x rFr > 9999 :Affichage de Spd3 = SdS x rFr / 1 000(avec 2 décimales).Par exemple, si SdS x rFr est égal à 24 223, l'affichage indique 24.22.Si SdS > 10 et SdS x rFr > 65 535, l'affichage indique 65.54.Example : Affichage d'une vitesse de moteur pour un moteur à 4 pôles,1 500 tr/min à 50 Hz (vitesse synchrone) :SdS = 30SPd3 = 1 500 à rFr = 50 Hz | |||
| S F r | Fréquence de découpage Voir la page 220. | 2,0 à 16 kHz | 4 kHz |
| Ce paramètre est également accessible dans le menu drC-. | |||
Le courant nominal du variateur indiqué sur la plaque signalétique du variateur correspond au courant In.
À l'exception de Tun, les paramètres de contrôle du variateur ne peuvent être modifiés que quand le variateur de vitesse est à l'arrêt et en l'absence de toute commande de marche. Ce menu est accessible avec le commutateur de blocage d'accès sur le terminal d'exploitation à distance.
Dans la position ^. L'optimisation des performances du variateur est obtenue :
- en réglant les paramètres de contrôle du variateur aux valeurs indiquées sur la plaque signalétique du moteur
- en déclenchant un auto-réglage (sur un moteur asynchrone standard)
| Code | Description | Gamme de réglage | Réglage d'usine |
| b Fr | Fréquence moteur | 50 ou 60 Hz | 50 |
| Ce paramètre modify les préréglages des paramètres suivants : HSP (page 214), Ftd (page 217), FrS (page 218) et tFr (page 220). | |||
| U n 5 | Tension nominale du moteur indiquée sur la plaque signalétique. | Varie en fonction de la valeur nominale du variateur | Varie en fonction de la valeur nominale du variateur |
| ATV31***M2 : 100 à 240 VATV31***M3X : 100 à 240 VATV31***N4 : 100 à 500 VATV31***S6X : 100 à 600 V | |||
| F r 5 | Fréquence nominale moteur indiquée sur la plaque signalétique | 10 à 500 Hz | 50 Hz |
| Le ratio UnS (en volts)FrS (en Hz)ne doit pas dépasser les valeurs suivantes :ATV31***M2 : 7ATV31***M3X : 7ATV31***N4 : 14ATV31***S6X : 17REMARQUE : La modification du réglage de bFr à 60 Hz modifie également le réglage de FrS à 60 Hz. | |||
| n C r | Courant nominal moteur indiqué sur la plaque signalétique. | 0,25 à 1,5 In1 | Varie en fonction de la valeur nominale du variateur |
| n 5 P | Vitesse nominale moteur indiquée sur la plaque signalétique | 0 à 32 760 tr/min | Varie en fonction de la valeur nominale du variateur |
| 0 à 9 999 tr/min, puis 10,00 à 32,76 krpmSi la plaque signalétique n'indique pas la vitesse nominale mais la vitesse synchrone et le glissement (en Hz ou en %) calculer la vitesse nominale comme suit :Vitesse nominale = Vitesse synchrone x 100 - glissement en %ouVitesse nominale = Vitesse synchrone x 50 - glissement en Hz (moteurs 50 Hz)ouVitesse nominale = Vitesse synchrone x 60 - glissement en Hz (moteurs 60 Hz) | |||
| C D 5 | Facteur de puissance du moteur indiqué sur la plaque signalétique. | 0,5 à 1 | Varie en fonction de la valeur nominale du variateur |
1 In correspond au courant nominal du variateur indiqué sur la plaque signalétique du variateur.
| Code | Description | Gamme de réglage | Réglage d'usine |
| r 5C | Résistance du stator à froid | Voir ci-dessous. | nO |
| n D: Fonction inactive. Pour applications ne nécessitant pas de haute performances ou ne tolant pas d'auto-réglage automatique (passage d'un courant dans le moteur) à chaque mise sous tension.I n l E: Active la fonction. Utilisée pour améliorer la performance à petite vitesse,quel que soit l'état thermique du moteur.XXX: Valeur de résistance du stator à froid utilisée, en mΩ.REMARQUE: Il est recommandé d'activer cette fonction dans les applications de levage et manutention. Cette fonction doit être activée seulement lorsque le moteur est à l'état froid.Lorsque rSC = Inlt,le paramètre tUn estforcé à POn.À la prochaine commande de marche,la résistance du stator est mesurée avec un auto-réglage. La valeur du paramètre rSC passée alors à la valeur mesurée pour la résistance du stator (XXXX) et est maintainue à cette valeur;tUn restéforcé à POn. Le paramètre rSC resté à Inlt tant que le mesure de résistance du stator n'a pas été effectué.La valeur XXXP peut être forcee ou modifiée à l'aide des touches ▲ ▼. | |||
| t Un | Auto-réglage de la commande du moteur | Voir ci-dessous. | nO |
| Avant d'effectuer un auto-réglage,sassurer que tous les paramètres de contrôle du variateur(UnS, FrS, nCr, nSP, COS) sont configurées correctement. Le paramètre tUn est modifiable avec le variateur en marche;toutefois, un auto-réglage ne sera effectué qu'en l'absence de toute commande de marche ou de freinage.n D:L'auto-réglage n'est pas effectué.Y E S:L'auto-réglage est effectué aussitôt que possible,puis le paramètre passag automatiquement à dOnE ou,en cas de défaut,a nO. Le défaut tnF est affiché si tnL = YES(voir la page 269).d D n E:L'auto-réglage est terminé et la résistance mesurée du stator sera utilisée pour commander le moteur.r Un:L'auto-réglage est effectué à chaque fois qu'une commande de marche est envoyée.P D:n:L'auto-réglage est effectué à chaque fois que le variateur est mis sous tension.L I I à L I 6:L'auto-réglage est effectué lorsque l'entrée logique assignée à cette fonction passée de 0 à 1.Remarque:tUn estforcé à POn si rSC est différent de nO.L'auto-réglage se fera seulement en l'absence de toute commande de marche ou de freinage. Si une fonction d'arrêt roule libre ou d'arrêt rapide est affectée à une entree logique, il fautmettre cette entree à 1(active à 0).L'auto-réglage peut durer de 1 à 2 secondes. Attendre que l'affichage change à dOnE ou nO.L'interruption de l'auto-réglage peutaboutir à un défaut d'auto-réglage(voir la page 277) et entrainer un réglage incorrect du moteur. Pendant l'auto-réglage, le moteur fonctionne au courant nominal. | |||
| t US | État de l'auto-réglage(information d'état seulement, pas de modification possible) | Voir ci-dessous. | tAb |
| t R b:L'auto-réglage a été déducté de la résistance du stator est utilisée pour commander le moteur.P e n d:L'auto-réglage a été démandé mais pas encore effectué.P r D O:L'auto-réglage est en cours.F R I L:L'auto-réglage a échoué.d D n E:L'auto-réglage est terminé. La résistance du stator mesurée par la fonction d'auto-réglage est utilisée pour commander le moteur.S t r d:L'auto-réglage est terminé. La résistance du stator à froid est utilisée pour commander le moteur(rSC différent de nO). | |||
| U F E | Séléction de la loi tension / fréquence | Voir ci-dessous. | n |
| L:Couple constant(pour moteurs raccordés en parallèle ou moteurs spéciaux)P:Couple variable(applications de pompé et de ventilateur)n:Ctrlé vectoriel de flux sans capteur(pour applications à couple constant)n L d:Economie d'énergie(pour les applications à couple variable n'exigeant pas de dynamique elevée.Cela fonctionne d'une façon similaire à la loi P à charge nulle et à la loi n'en présence d'une charge.)TensionUnSFrSFréquence | |||
| Code | Description | Gamme de réglage | Réglage d'usine |
| n r d | Fréquence de découvert aléatoire | Voir ci-dessous. | YES |
| Cette fonction module de façon aléatoire la fréquence de découvert pour réduire le bruit du moteur.YE 5: Fréquence avec modulation aléatoiren 0: Fréquence fixe | |||
| S F r | Fréquence de découvert1 | 2,0 à 16 kHz | 4 kHz |
| Ajuste ce réglage afin de réduire le bruit audible du moteur. Si la fréquence de découvert est régérie à une valeur supérieure à4 kHz, en présence d'une montée de température excessive, le variateur de vitesse réduira automatiquement la fréquence de découpage. Elle augmente de nouveau quand la température redevient normale. Si la fréquence de commutation est régérie àune valeur supérieure au réglage d'usine (4 kHz), se reporter au Guide d'installation de l'ATV31 pour les courbes dedécallement. | |||
| t F r | Fréquence maximale de sortie | 10 à 500 Hz | 60 Hz |
| Le réglage d'usine est 60 Hz, ou 72 Hz si bFr est reglé à 60 Hz. | |||
| S r F | Suppression du filtre de boucle de vitesse | Voir ci-dessous. | nO |
| n 0: Le filtre de la boucle de vitesse est actif (empêche le dépassement de la référence).YE 5: Le filtre de la boucle de vitesse est supprimé. Dans les applications de contrôle de position, ce réglage réduit le temps derésponse mais la référence peut être dépassée.Hz5040SSL = nO5040SSL = YES | |||
| S C S | Sauvegarde de la configuration2 | Voir ci-dessous. | nO |
| n 0: Fonction inactiveS E r l: Sauvegarde la configuration actuelle (mais non le résultat d'un auto-réglage) dans la mémoire EEPROM. SCS passaseautomatiquement à nO dés que la sauvegarde est effectué. Utiliser cette fonction pour conserver une configuration en réserven plus de la configuration actuelle.Le variateur de vitesse est rég léu en usine avec la configuration actuelle et la configuration en réserve, toutes les deuxconfigurées à la configuration d'usine.Si le terminal d'exploitation à distance est raccordé au variateur de vitesse, jusqu'à quatre réglages supplémentaires sont disponibles:F I L 1,F I L 2,F I L 3 et F I L 4. Utiliser ces sélections pour sauvegarder jusqu'à quatre configurations dansla mémoire EEPROM du terminal d'exploitation à distance.SCS passase automatiquement à nO dés que la sauvegarde est effectué. | |||
| F C S | Retour aux réglages d'usine/Restaurer la configuration2 | Voir ci-dessous. | nO |
| n 0: Fonction inactiver E C l: Remplace la configuration actuelle par la configuration en réserve précédemment sauvégardée par SCS (SCS estrég lé à Strl). rECI est visible seulement si la configuration en réserve a été sauvégardée. FCS passé automatiquement à nO désque cette action est effectué.I n 1: Remplace la configuration actuelle par les réglages d'usine. FCS passé automatiquement à nO dés que cette action esteffectué.Si le terminal d'exploitation à distance est raccordé au variateur de vitesse, jusqu'à quatre sélections supplémentaires sontdisponible, correspondant aux fichiers de réserve charges dans la mémoire EEPROM du terminal d'exploitation à distance:F I L 1,F I L 2,F I L 3 et F I L 4. Ces sélections remplacent la configuration actuelle par la configuration en réservecorrespondante dans le terminal d'exploitation à distance. FCS passé automatiquement à nO dés que cette action esteffectué.Remarque: Si n R d'apparait brivement sur l'affichage après que le paramètre est passé à nO, le transfert de configurationn'est pas possible et n'a pas étéffectué (parce que les valeurs nominales du variateur sont différentes, par exemple). Si n t rapparait brivement sur l'affichage après que le paramètre est passé à nO, une erreur de transfert de configuration s'estproduite et les réglages d'usine doivent être restaurés à l'aide de Inl. Dans les deux cas, vérifier la configuration à transféreravant d'essayer de nouveau.REMARQUE: Pour la prise d'effet de rECI, Inl et FIL1 à FIL4, il faut appuyer sur la touche ENT et la maintainir enfonnée pendant2 s. | |||
1 Ce paramètre est également accessible dans le menu réglage SET-. Voir la page 213. 2 SCS et FCS sont accessibles depuis plusieurs menus de configuration, mais ils concernnent l'ensemble de tous les menus et paramètres.
MENU entrées / sorties I-O
Les paramètres d'E/S ne peuvent être modifiés que lorsque le variateur de vitesse est arrêté et en l'absence de toute commande de marche. Ce menu est accessible avec le commutateur de blocage d'accès sur le terminal d'exploitation à distance dans la position .
| Code | Description | Réglage d'usine |
| E C C | Type de contrôle : 2 fils, 3 fils, ou locale | 2C ATV31*****A : LOC |
| Configuration de contrôle : é C = contrôle à 2 fils é C = contrôle à 3 fils L D C = contrôle locale, pour variateurs ATV31*****A uniquement. Cette option n'est pas disponible si le paramètre LAC = L3(voir la page 234). Contrôle à 2 fils (contact maintenu) : L'état de l'entrée (ouvert ou fermé) contrôle la marche ou l'arrêt. Example de câblage : LI1 : avant LIX : arrêt Contrôle à 3 fils (contrôle par impulsions) : Une impulsion marche avant ou arrêt suffit pour contrôle le démarrage. Uneimpulsion d'arrêt suffit pour contrôle l'arrêt. Example de câblage : LI1 : arrêt LI2 : avant LIX : arrêt REMARQUE : pour changer l'afactation de tCC, appuyer sur la touche ENT pendant 2 s. Cela entraîne le retour des fonctionssuivantes au réglage d'usine : rrS, tCT et de toutes les fonctions affectant des entrées logiques. | ||
| E C E | Type de contrôle à 2 fils (paramètre accessible seulement si tCC = 2C) | trn |
| L E L : si l'entrée marche avant ou arrêt est haute lorsque le variateur est mis sous tension, celui-ci mettra le moteur enmarche. Si les deux entrées sont hautes à la mise sous tension, le variateur fonctionnera en marche avant. L r n : l'entrée de marche avant ou arrêt doit passer de bas à haut pour que le variateur puisse démarrer le moteur. Si l'entrée en marche avant ou arrêt est haute lorsque le variateur est mis sous tension, l'entrée doit être mise hors puisssous tension avant que le variateur démarre le moteur. P F D : comme pour LEL, mais l'entrée marche avant a tousjours priorité sur l'entrée marche arrêt. Si marche avant est activéelorsque le variateur fonctionne en marche arrêt, le variateur fonctionnera dans le sens de marche avant. | ||
| r r S | Marche arrêt par l'intérémière d'une sortie logique | si tCC = 2C : LI2 si tCC = 3C : LI3 si tCC = LOC : nO |
| Si rrS = nO, la marche arrêt n'est pas affectée à une entrée logique. La marche arrêt peut encore être commandée pard'autres moyens, tels qu'une tension négative sur AI2, une commande de liaison en série ou le terminal d'exploitation àdistance. n D : Non affectée L I 2 : L'entrée logique LI2 est accessible si tCC = 2C L I 5 : Entrée logique LI5 L I 3 : Entrée logique LI3 L I 6 : Entrée logique LI6 L I 4 : Entrée logique LI4 | ||
| Code | Description | Réglage d'usine |
| C r L 3 C r H 3 | Valeur pour la petite vitesse (LSP) sur l'entrée Al3, régable de 0 à 20 mA Valeur pour la grande vitesse (HSP) sur l'entrée Al3, régable de 4 à 20 mA | 4 mA 20 mA |
| Ces deux paramètres permettant de configurer l'entrée en 0 à 20 mA, 4 à 20 mA, 20 à 4 mA, etc. Fréquence Exemple: 20 à 4 mA HSP LSP 0 CrL3 CrH3 20 Al 3 (mA) CrH3 (4 mA) CrL3 (20 mA) Al 3 (mA) | ||
| R O I E | Configuration de la sortie analogue | 0A |
| D R: Configuration 0 à 20 mA (utiliser la borne AOC) 4 R: Configuration 4 à 20 mA (utiliser la borne AOC) I O U: Configuration 0 à 10 V (utiliser la borne AOV) | ||
| d D | Sortie analogue/logique AOC/AOV | nO |
| n D: Non affectée D C r: Courant moteur. 20 mA ou 10 V correspond à 2 fois le courant nominal du variateur. r F r: Fréquence moteur. 20 mA ou 10 V correspond à la fréquence max. tFr (voir la page 220). D E r: Couple moteur. 20 mA ou 10 V correspond à 2 fois le couple nominal moteur. D P r: Puissance délivrée par le variateur. 20 mA ou 10 V correspond à 2 fois la puissance nominale du variateur. L'attribution des affectations suivantes transforme la sortie analogue en sortie logique (consulter le Guide d'installation de l'ATV31 pour obtenir plus d'informations). Avec ces affectations, configurer AOt à 0 A. F L E: Défaut du variateur r U n: Variateur en marche F E R: Seuil de fréquence atteint (paramètre Ftd du menu SEt-, page 217) F L R: Grande vitesse (HSP) atteinte C E r: Seuil de courant atteint (paramètre Ctd du menu SEt-, page 217) S r R: Référence de fréquence atteint E S R: Seuil thermique moteur atteint (paramètre ttd du menu SEt-, page 217) b L C: Séquence de freinage (information d'état seulement. bLC ne peut être activé ou désactif qu'à partir du menu FUn-, page 260). R P L: Perte du signal 4 à 20 mA, même si LFL = nO (page 269) La sortie logique est à l'état 1 (24 V) lorsque l'aftection可以选择 est active, à l'exception de FLT qui est à l'état 1 si le variateur n'est pas en défaut. | nO | |
| r l | Relais R1 | FLt |
| n D: Non affectée F L E: Défaut du variateur r U n: Variateur en marche F E R: Seuil de fréquence atteint (paramètre Ftd du menu SEt-, page 217) F L R: Grande vitesse (HSP) atteinte C E r: Seuil de courant atteint (paramètre Ctd du menu SEt-, page 217) S r R: Référence de fréquence atteint E S R: Seuil thermique moteur atteint (paramètre ttd du menu SEt-, page 217) R P L: Perte du signal 4 à 20 mA, même si LFL = nO (page 269) Le relais est sous tension lorsque l'aftection可以选择 est active, à l'exception de FLT qui est sous tension si le variateur n'est pas en défaut. | nO | |
| r e | Relais R2 | nO |
| n D: Non affectée F L E: Défaut du variateur r U n: Variateur en marche F E R: Seuil de fréquence atteint (paramètre Ftd du menu SEt-, page 217) F L R: Grande vitesse (HSP) atteinte C E r: Seuil de courant atteint (paramètre Ctd du menu SEt-, page 216) S r R: Référence de fréquence atteinte E S R: Seuil thermique moteur atteint (paramètre ttd du menu SEt-, page 217) b L C: Séquence de freinage (information d'état seulement. bLC ne peut être activé ou désactif qu'à partir du menu FUn-, page 260). R P L: Perte du signal 4 à 20 mA, même si LFL = nO (page 268) Le relais est sous tension lorsque l'aftection可以选择 est active, à l'exception de FLT qui est sous tension si le variateur n'est pas en défaut. | nO | |
| Code | Description | Réglage d'usine |
| 5 C 5 | Sauvegarde de la configuration1 | nO |
| n O : Fonction inactive5 E r l : Sauvegarde la configuration actuelle (mais non le résultat d'un auto-réglage) dans la mémoire EEPROM. SCS passecom automatiquement à nO dés que la sauvégarde est effectué. Utiliser cette fonction pour conserver une configuration en réserven plus de la configuration actuelle.Lé variateur de vitesse est régèle en usine avec la configuration actuelle et la configuration en réserve, toutes les deuxconfigurées à la configuration d'usine.Si le terminal d'exploitation à distance est racordé au variateur de vitesse, jusqu'à quatre réglages supplémentaires sont disponibles : F I L 1, F I L 2, F I L 3, et F I L 4. Utiliser ces séLECTIONs pour sauvegarder jusqu'à quatre configurations dansla mémoire EEPROM du terminal d'exploitation à distance.SCS passecom automatiquement à nO dés que la sauvégarde est effectué. | ||
| F C 5 | Retour aux réglages d'usine/Restaurer la configuration1 | nO |
| n O : Fonction inactiver E C I : Remplace la configuration actuelle par la configuration en réserve précédemment sauvégardée par SCS (SCS estréglé à Strl). rECI est visible seulement si la configuration en réserve a été sauvégardée. FCS passes automatiquement à nO désque cette action est effectué.I n I : Remplace la configuration actuelle pas les réglages d'usine. FCS passecom automatiquement à nO dés que cette action esteffectué.Si le terminal d'exploitation à distance est racordé au variateur de vitesse, jusqu'à quatre sélections supplémentaires sont disponibles, correspondant aux fichiers de réserve charges dans la mémoire EEPROM du terminal d'exploitation à distance :F I L 1, F I L 2, F I L 3, et F I L 4. Ces sélections remplacent la configuration actuelle par la configuration en réservecorrespondante dans le terminal d'exploitation à distance. FCS passacom automatiquement à nO dés que cette action est effectué.Remarque : Si n R d apparait brièvement sur l'affichage après que le paramètre est passé à nO, le transfert de configurationn'est pas possible et n'a pas été effectué (parce que les valeurs nominales du variateur sont différentes, par exemple). Si n B rapparait brièvement sur l'affichage après que le paramètre est passé à nO, une erreur de transfert de configuration s'estproduite et les réglages de l'usine doivent être restaurés à l'aide de Inl. Dans les deux cas, vérifier la configuration à transféreravant d'essayer de nouveau.REMARQUE : Pour la prise d'effet de rECI, Inl et FIL1 à FIL4, il faut appuyer sur la touche ENT et la maintainir enfonnée pendant2 s. | ||
1 SCS et FCS sont accessibles depuis plusieurs menus de configuration, mais ils concernnent l'ensemble de tous les menus et paramètres.

Les paramètres de commande ne peuvent être modifiés que lorsque le variateur de vitesse est arrêté et en l'absence de toute commande de marche. Ce menu est accessible avec le commutateur de blocage d'accès sur le terminal d'exploitation à distance dans la position .
Canaux de contrôle
Les commandes de contrôle, telles que la marche avant et la marche arrière, et les commandes de référence de vitesse peuvent être envoyées au variateur de vitesse à partir de sources spécifiées dans le tableau 6. Les variateurs de vitesse ATV31 permettent d'affecter les sources de contrôle et de référence à des canaux de contrôle séparés (Fr1, Fr2, Cd1 ou Cd2, voir aux pages 234-235) et de les permuter entre elles. Par exemple, vous pourriez affecter LCC au canal de référence 1 et CAN au canal de référence 2 et permuter entre les deux sources de référence. Il est également possible d'utiliser des sources séparées pour les commandes de contrôle et de référence. Cela s'appelle un fonctionnement en mode mélangé. Ces fonctions sont expliquées en détail dans les sections commencing à la page 226.
Tableau 6 : Sources de contrôle et de référence
| Sources de contrôle (CMD) | Sources de référence (rFr) | |
| tEr : | Borne (LI) | Al1, Al2, Al3 : Borne |
| LOC : | Terminal d'exploitation (RUN/STOP) sur variateurs ATV31*****A uniquement | AIP : Potentiomètre sur variateurs ATV31*****A uniquement |
| LCC : | Terminal d'exploitation à distance (prise RJ45) | LCC : Terminal d'exploitation (sur variateurs ATV31***** et ATV31*****A ) ou terminal d'exploitation à distance |
| Mdb : | Modbus (prise RJ45) | Mdb : Modbus (prise RJ45) |
| CAN : | CANopen (prise RJ45) | CAN : CANopen (prise RJ45) |
Fonctionnement inattendu de l'appareil
Les boutons d'arrêt sur les variateurs de vitesse ATV31……A et le terminal d'exploitation à distance peuvent être programmés pour ne pas avoir priorité. Pour retenir une priorité de la touche d'arrêt, réglez PST à YES (voir la page 237).
Si cette précaution n'est pas respectée, cela peut entraîner la mort, des blessures graves ou des dommages matériels.
Paramètre LAC
Utiliser le paramètre LAC (page 234) dans le menu CtL- pour sélectionner les niveaux d'accès aux fonctions et régler les sources de contrôle et de référence.
- LAC = L1 : Niveau 1—accès aux fonctions standard. Les commandes de contrôle et de référence proviennent d'une seule source. Voir « Paramètre LAC = L1 ou L2 » à la page 226.
- LAC = L2 : Niveau 2—accès à toutes les fonctions du niveau 1, autres aux fonctions avancées indiquées ci-dessous. Les commandes de contrôle et de réference proviennent d'une seule source. Voir « Paramètre LAC = L1 ou L2 » à la page 226.
Plus vite / moins vite (potentiomètre motorisé) Commande de frein — Commutation de 2ème limitation de courant Commutation moteur Gestion des interrupteurs de fin de course
- LAC = L3 : Niveau 3—accès à toutes les fonctions du niveau 2. Les commandes de contrôle et de référence proviennent de sources séparées. Voir « Paramètre LAC = L3 » à la page 227.
Paramètre LAC = L1 ou L2
Si le paramètre LAC est réglé à L1 ou L2, les commandes de contrôle et de référence proviennent d'une seule source. Les sources possibles de contrôle et de référence, et les réglages qui les spécifient, sont :
- Contrôle et référence par l'intermédiaire des bornes d'entrée ou du terminal d'exploitation en mode forçage local (voir FLO à la page 271)
- Contrôle et référence par l'intermédiaire de la liaison série Modbus
- Contrôle et reference par l'intermédiaire de la liaison série CANopen
- Contrôle et référence par l'intermédiaire du terminal d'exploitation à distance (voir LCC à la page 236)
REMARQUE : Modbus ou CANopen est sélectionné en ligne en écrivant le mot de commande approprié (consulter la documentation spécifique aux protocoles).
Le schéma ci-dessous illustre l'ordre de priorité quand plus d'une source de contrôle et de référence est spécifiée. Dans le schéma, les informations se déroulent de gauche à droite. Au point 1, LCC n'est pas réglé à YES pour activer le terminal d'exploitation à distance, si bien que le terminal d'exploitation du variateur est sélectionné en tant que source de contrôle et de référence. Aux points 2 à 4, Modbus, CANopen et le contrôle forçage local ne sont pas réglés à YES, si bien que le terminal d'exploitation du variateur reste la source sélectionnée. L'ordre de priorité est par conséquent forçage local, CANopen, Modbus et le terminal d'exploitation du variateur ou le terminal d'exploitation à distance. Par exemple, si le mode forçage local était validé, il aurait priorité sur tout autre réglage. De même, si CANopen était validé, il aurait priorité sur tout autre réglage exception faite de FLO. Se reporter aux schémas aux pages 229 et 230 pour plus de détails.

- Sur les variateurs de vitesse ATV31……… avec la configuration de l'usine, les commandes de contrôle et de reférence proviennent des bornes de contrôle.
- Sur les variateurs de vitesse ATV31A avec la configuration de l'usine, les commandes de contrôle proviennent du terminal d'exploitation du variateur et les commandes de référence proviennent d'un environnement concurrentiel du potentiomètre de référence et d'Al1 sur les bornes de contrôle.
- Avec un terminal d'exploitation à distance, si LCC = YES (voir la page 236), les commandes de contrôle et de référence proviennent du terminal d'exploitation à distance. La référence de fréquence est réalisée par le paramètre LFr dans le menu SET- (voir la page 214).
Paramètre LAC = L3
Si le paramètre LAC est réglé à L3 :
- Les canaux de contrôle et de référence peuvent être combinés (le paramètre CHCF = SIM, voir la page 235), or
- Les canaux de contrôle et de référence peuvent être séparés (le paramètre CHCF = SEP, voir la page 235)
Paramètre CHCF = SIM
La figure suivante illustre les sources de contrôle et de référence combinées :
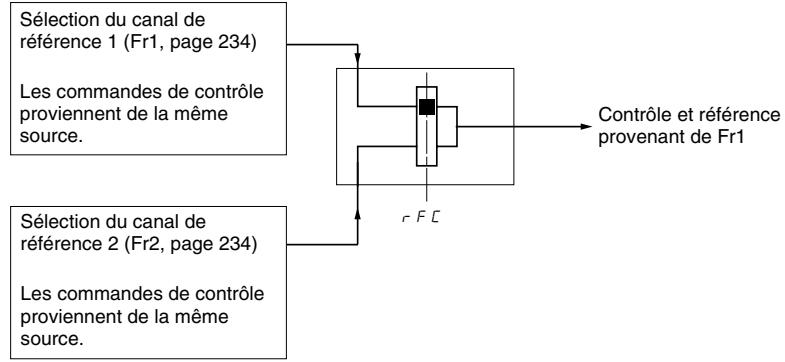
Utiliser le paramètre rFC (page 235) pour sélectionner le canal de référence Fr1 ou Fr2, ou pour configurer une entrée logique ou un bit de mot de commande pour la commutation à distance entre les deux canaux. Se reporter au schéma à la page 232.
Paramètre CHCF = SEP
Les figures suivantes illustrent les canaux de contrôle et de référence séparés (paramètre CHCF = SEP).
Canaux de référence séparés :
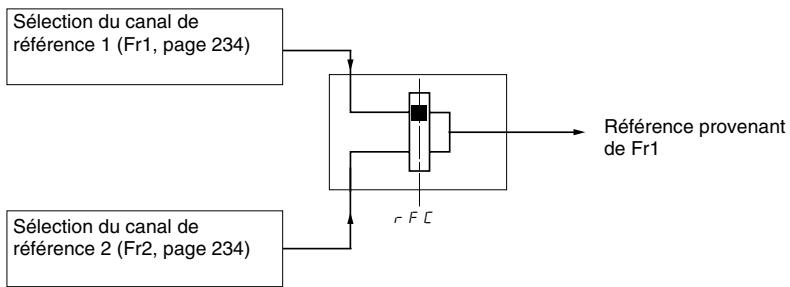
Utiliser le paramètre rFC (page 235) pour sélectionner le canal de référence Fr1 ou Fr2, ou pour configurer une entrée logique ou un bit de mot de commande pour la commutation à distance entre les deux canaux.
Canaux de contrôle séparés :
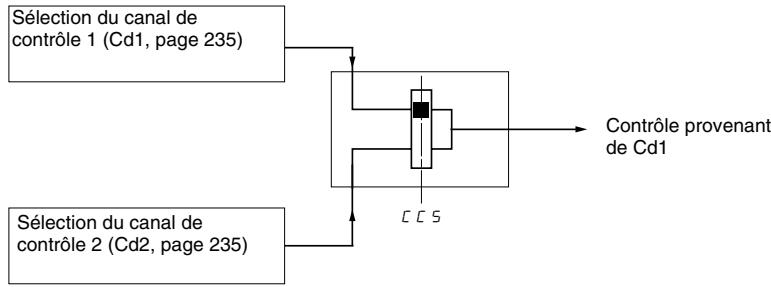
Utiliser le paramètre CCS (page 236) pour sélectionner le canal de contrôle Cd1 ou Cd2, ou pour configurer une entrée logique ou un bit de mot de commande pour la commutation à distance entre les deux canaux.
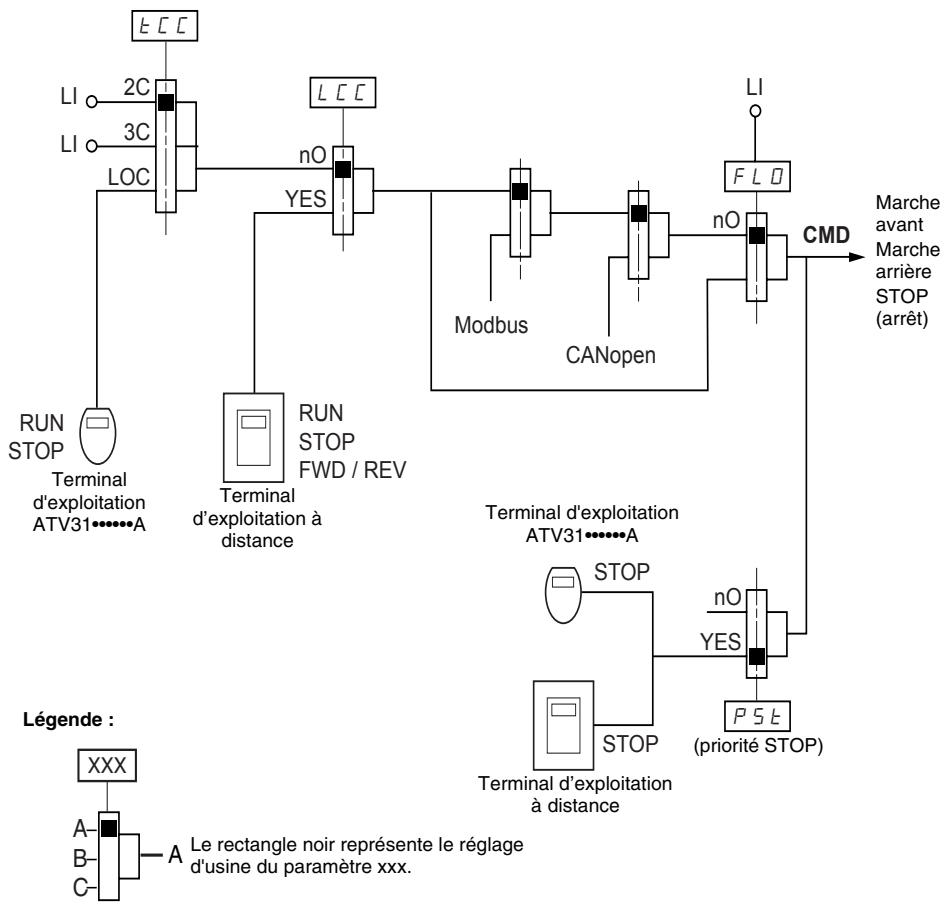
Canal de contrôle pour LAC = L1 ou L2
Les réglages des paramètres FLO, LCC et la sélection du protocole Modbus ou CANopen déterminent les deux canaux, référence et contrôle. L'ordre de priorité est FLO, CANopen, Modbus et LCC.
Canal de contrôle pour LAC = L3 : CHCF = SIM, référence et contrôle combinés
Si CHCF est réglé à SIM (voir la page 235), les paramètres Fr1, Fr2, FLO et FLOC déterminant la source de référence et la source de contrôle. Par exemple, si la référence est par l'intermédiaire de l'entrée analogue sur le bornier, le contrôle est par l'intermédiaire de l'entrée logique sur le bornier.
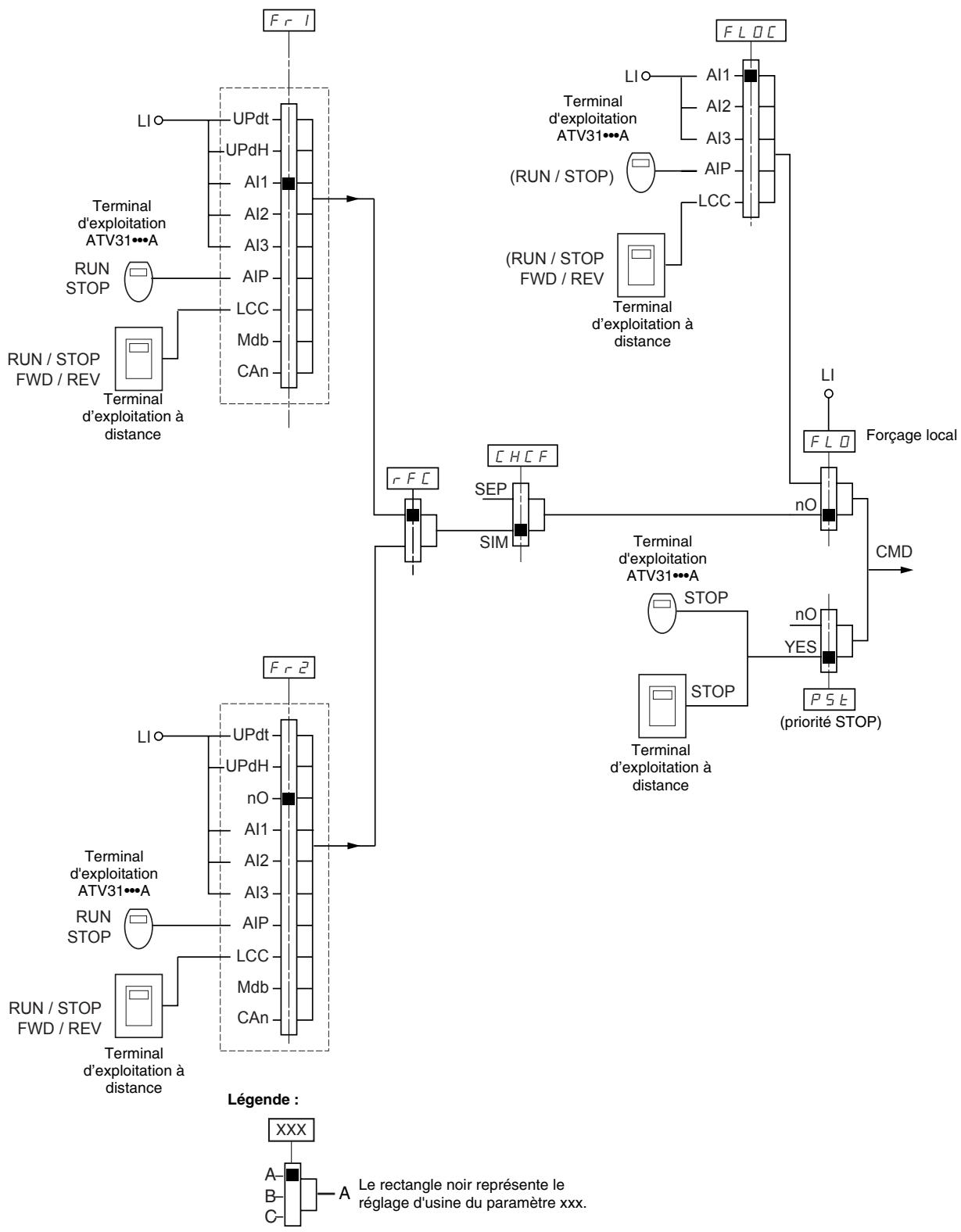
Canal de contrôle pour LAC = L3 : CHCF = SEP, mode mélange (référence et contrôle séparés)
Les paramètres FLO et FLOC sont communs à la référence et au contrôle. Par exemple, si la référence en mode forçage local est par l'intermédiaire de l'entrée analogue sur le bornier, le contrôle en mode forçage local est par l'intermédiaire de l'entrée logique sur le bornier.
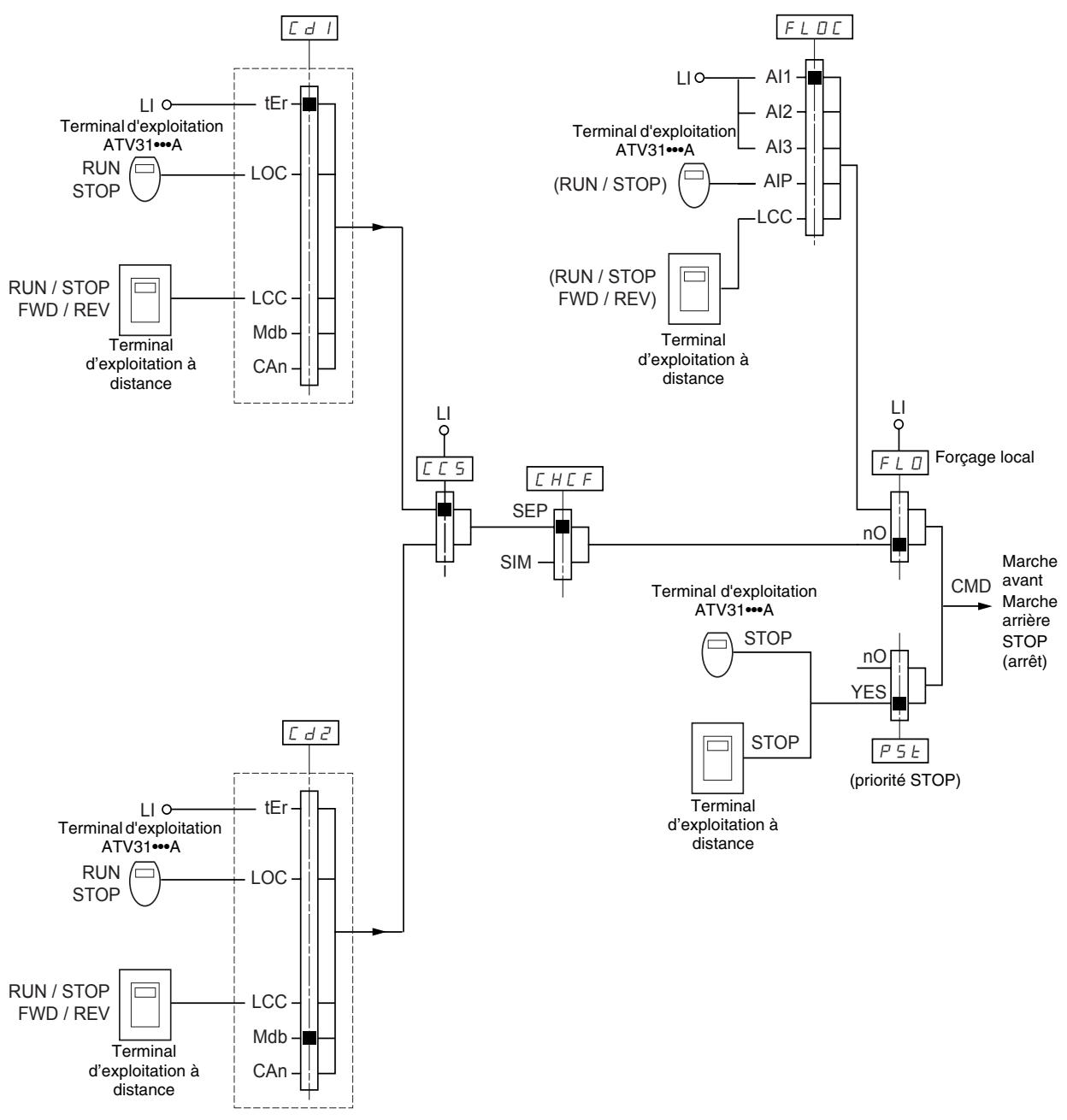
Légende:
Consulter le tableau de compatibilité des fonctions à la page 209. Il n'est pas possible de configurer des fonctions de contrôle incompatibles. La première fonction configurée empêche toutes les fonctions incompatibles avec elle d'être configurées.
| Code | Description | Gamme deréglage | Réglage d'usine |
| LRC | Niveau d'accès aux fonctions | Voir ci-dessous. | L1 |
| L1: Niveau 1—accès aux fonctions standard.L2: Niveau 2—accès au fonctions du niveau 1 autre les fonctions avancées suivantes dans le menu FUn- :Plus vite / moins viteCommande de freinCommutation de 2ème limitation de courantCommutation moteurGestion des interrupteurs de fin de courseL3: Niveau 3—accès à toutes les fonctions du niveau 2 autre le fonctionnement en mode mélangé.L'affectation de L3 à LAC remet les paramètres Fr1 (ci-dessous), Cd1 (page 235), CHCF (page 235) et tCC (page 221) à leurs réglages d'usine (sur les variateurs de vitesse ATV31*****A, tCC est remis à 2C).Si LAC est régé à L3, il faut restaurer le réglage d'usine avec le paramètre FCS (page 237) pour remettre le réglage de LAC à L1 ou le faire passer à L2.Si LAC est régé à L2, il faut restaurer le réglage d'usine avec le paramètre FCS pour remettre le réglage de LAC à L1.Si LAC est régé à L2, il faut faire passer LAC à L3 sans utiliser le paramètre FCS.REMARQUE: Pour modifier l'afliction de LAC, il faut appuyer sur la touche ENT et la maintainir enfonnée pendant 2 secondes. | |||
| F r I | Configuration de la référence 1 | Voir ci-dessous. | Al1AIP pourATV31*****A |
| R1: Entrée analogue AI1R2: Entrée analogue AI2R3: Entrée analogue AI3R4: Potentiomètre (ATV31*****A)Si LAC = L2 ou L3, les affectations supplémentaires suivantes sont possibles:UPdE: Plus vite / moins vite par Li1UPdH: Plus vite / moins vite par ▲▼ sur le terminal d'exploitation du variateur (ATV31 ou ATV31*****A) ou sur le terminal d'exploitation à distance. Pour le fonctionnement, afficher le fréquence rFr (voir la page 273).1Si LAC = L3, les affectations supplémentaires suivantes sont possibles:L C: Référence par le terminal d'exploitation à distance, paramètre LFr dans le menu SET-page 214.Pdb: Référence par ModbusCRn: Référence par CANopen | |||
| F r 2 | Configuration de ↔reference 2 | Voir ci-dessous. | nO |
| n0: Non affectéeR1: Entrée analogue AI1R2: Entrée analogue AI2R3: Entrée analogue AI3R4: Potentiomètre (ATV31*****A uniquement)Si LAC = L2 ou L3, les affectations supplémentaires suivantes sont possibles:UPdE: Plus vite / moins vite par Li1UPdH: Plus vite / moins vite par ▲▼ sur le terminal d'exploitation du variateur (ATV31 ou ATV31*****A) ou sur le terminal d'exploitation à distance. Pour le fonctionnement, afficher la fréquence rFr (voir la page 273).1Si LAC = L3, les affectations supplémentaires suivantes sont possibles:L C: Référence par le terminal d'exploitation à distance, paramètre LFr dans le menu SET-page 214.Pdb: Référence par ModbusCRn: Référence par CANopen | |||
Une seule des affectations UPdt/UPdH est autorisée sur chaque canal de référence.
| Code | Description | Gamme de réglage | Réglage d'usine |
| r F C | Commutation de référence | Voir ci-dessous. | Fr1 |
| Utiliser le paramètre rFC pour sélectionner le canal Fr1 ou Fr2, ou pour configurer une entrée logique ou un bit de contrôle pour la commutation à distance de Fr1 ou Fr2.F r l: Référence = Référence 1F r 2: Référence = Référence 2L l l: Entrée logique LI1L l 2: Entrée logique LI2L l 3: Entrée logique LI3L l 4: Entrée logique LI4L l 5: Entrée logique LI5L l 6: Entrée logique LI6Si LAC = L3, les affectations supplémentaires suivantes sont possibles:C l l l: Bit 11 du mot de commande ModbusC l l 2: Bit 12 du mot de commande ModbusC l l 3: Bit 13 du mot de commande ModbusC l l 4: Bit 14 du mot de commande ModbusC l l 5: Bit 15 du mot de commande ModbusC 2 l l: Bit 11 du mot de commande CANopenC 2 l 2: Bit 12 du mot de commande CANopenC 2 l 3: Bit 13 du mot de commande CANopenC 2 l 4: Bit 14 du mot de commande CANopenC 2 l 5: Bit 15 du mot de commande CANopenLa référence peut être commutée alors que le variateur de vitesse fonctionne.Fr1 est actif lorsque l'entrée logique ou le bit de mot de commande est à l'état 0.Fr2 est actif lorsque l'entrée logique ou le bit de mot de commande est à l'état 1. | |||
| CH C F | Mode mélangié (caux de contrôle et de référence séparés) | Voir ci-dessous. | SIM |
| CHCF est accessible si LAC = L3.5 l l: Canaux de contrôle et de ↔reference combinés5 E P: Canaux de contrôle et de ↔reference séparés | |||
| C d l | Configuration du canal de contrôle 1 | Voir ci-dessous. | tErLOC pourATV31-----A |
| Cd1 est accessible si CHCF = SEP et LAC = L3.L E r: Contrôle par bonnierL O C: Contrôle par terminal d'exploitation du variateur (ATV31-----A uniquement)L C C: Contrôle par terminal d'exploitation à distanceΠ d b: Contrôle par ModbusCR n: Contrôle par CANopen | |||
| C d 2 | Configuration du canal de contrôle 2 | Voir ci-dessous. | Mdb |
| Cd2 est accessible si CHCF = SEP et LAC = L3.L E r: Contrôle par bonnierL O C: Contrôle par terminal d'exploitation du variateur (ATV31-----A uniquement)L C C: Contrôle par terminal d'exploitation à distanceΠ d b: Contrôle par ModbusCR n: Contrôle par CANopen | |||

Ces paramètres n'apparaissent que si la fonction a été activée.
| Code | Description | Gamme de réglage | Réglage d'usine |
| C C S | Commutation canal de contrôle | Voir ci-dessous. | Cd1 |
| CCS est accessible si CHCF = SEP et LAC = L3. Utiliser le paramètre CCS pour sélectionner le canal Cd1 ou Cd2, ou pour configurer une entrée logique ou un bit de contrôle pour la commutation à distance de Cd1 ou Cd2.Cd1: Canal de contrôle = Canal 1Cd2: Canal de contrôle = Canal 2L / I: Entrée logique LI1L / 2: Entrée logique LI2L / 3: Entrée logique LI3L / 4: Entrée logique LI4L / 5: Entrée logique LI5L / 6: Entrée logique LI6C / I / I: Bit 11 du mot de commande ModbusC / I / 2: Bit 12 du mot de commande ModbusC / I / 3: Bit 13 du mot de commande ModbusC / I / 4: Bit 14 du mot de commande ModbusC / I / 5: Bit 15 du mot de commande ModbusC / 2 / 1: Bit 11 du mot de commande CANopenC 2 / 2: Bit 12 du mot de commande CANopenC 2 / 3: Bit 13 du mot de commande CANopenC 2 / 4: Bit 14 du mot de commande CANopenC 2 / 5: Bit 15 du mot de commande CANopenLe canal 1 est actif quand l'entrée ou le bit du mot de commande est à l'état 0.Le canal 2 est actif quand l'entrée ou le bit du mot de commande est à l'état 1. | |||
| C O P | Copier le canal 1 au canal 2 (la copie n'est possible que dans ce sens). | Voir ci-dessous. | nO |
| COP est accessible si LAC = L3.n0: Pas de copieS P: Copier la référenceCd: Copier le contrôleR L L: Copier le contrôle et la référenceSi le canal 2 est contrôle par le bornier, le contrôle du canal 1 n'est pas copié.Si la référence du canal 2 est réalisée par AI1, AI2, AI3 ou AIP, la référence du canal 1 n'est pas copié.La référence copiee est FrH (avant la rampe) à moins que la référence du canal 2 ne soit réalisée par +/- vite. Dans ce cas, la référence copiee est rFr (après la rampe).REMARQUE: La copie du contrôle ou de la référence peut changer le sens de rotation. | |||
| L C C | Contrôle par le terminal d'exploitation à distance | Voir ci-dessous. | nO |
| LCC n'est accessible que si le variateur de vitesse est équipé d'un terminal d'exploitation à distance et si LAC = L1 ou L2.n0: Fonction inactiveY E S: Permet de valider la commande du variateur par les boutons STOP/RESET, RUN et FWD/REV du terminal d'exploitation à distance. La référence de vitesse est donné par le paramètre LFr du menu SET-. Seuls les commandes arrêt roule libre, arrêt rapide et arrêt par injection de courant continu restent actives sur le bornier.Si le terminal d'exploitation à distance n'est pas raccordé, le variateur de vitesse se bloque sur un défaut SLF. | |||
Ces paramètres n'apparaissent que si la fonction a été activée.
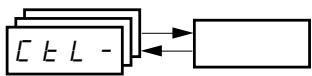
| Code | Description | Gamine de réglage | Réglage d'usine |
| PS E | Priorité stop | Voir ci-dessous. | YES |
| PST donne la priorité à la touche STOP du terminal d'exploitation du variateur (ATV31-----A uniquement) ou à la touche STOP du terminal d'exploitation à distance,quel que soit le canal de contrôle séLECTIONné (bornier ou bus de communication). S'il est régé à nO,le canal de contrôle actif a priorité.Si le canal de contrôle actif est le terminal d'exploitation local ou à distance,le bouton d'arrêt retient la priorité,quel que soit le réglage de PSt.RemARQUE:Pour changer l'afetation de PST,il faut appuyer et tener appuyé la touche ENT pendant 2 secondes.n0: Fonction inativeY E 5: Priorité touche STOP | |||
| A AVERTISSEMENT | |||
| COMMANDE D'ARRÊT DÉSACTIVÉLa désactivation de la touche d'arrêt sur le terminal d'exploitation du variateur ou le terminal d'exploitation à distance empêche le variateur de vitesse de s'arrête lorsqu'on appuie sur le bouton d'arrêt. Une commande d'arrêt externe doit être installée pour arrête le moteur.Si cette précaution n'est pas respectée, cela peut entrainer la mort, des blessures graves ou des dommages matériels. | |||
| r 0 E | Sens de marche | Voir ci-dessous. | dFr |
| Sens de marche autorisé pour la touche RUN sur le terminal d'exploitation du variateur (ATV31-----A uniquement).d F r :Marche avantd r 5 :Marche arrièreb 0 E :Sur les variateurs de vitesse ATV31-----,les deux sens sont permis; sur les variateurs ATV31-----A,seul le sens avant est possible. | |||
| SC S | Sauvegarde de la configuration1 | Voir ci-dessous. | Voir ci-dessous. |
| n0: Fonction inactive5 E r l: Sauvegarde la configuration actuelle (mais non le résultat d'un auto-réglage) dans la mémoire EEPROM.SCS passemax automatiquement à nO dés que la mauvegarde est effectué. Utiliser cette fonction pour conserver une configuration en réserven plus de la configuration actuelle.Le variateur de vitesse est régé en usine avec la configuration actuelle et la configuration en réserve,toutes les deux configurées à la configuration d'usine.Si le terminal d'exploitation à distance est racordé au variateur de vitesse, jusqu'à quatre réglages supplémentaires sont disponibles:F I L I,F I L 2,F I L 3,etF I L 4,Uutilier ces sélections pour sauvegarder jusqu'à quatre configurations dans la mèmeore EEPROM du terminal d'exploitation à distance.SCS passemax automatiquement à nO dés que la mauvegarde est effectué. | |||
| FC S | Retour aux réglages d'usine/Restaurer la configuration1 | Voir ci-dessous. | Voir ci-dessous. |
| n0: Fonction inactiverr EC I:Remplace la configuration actuelle par la configuration en réserve précédemment sauvegardée par SCS (SCS est régé à Strl). rECI est visible seulement si la configuration en réserve a été sauvegardée.FCS passasse automatiquement à nO dés que cette action est effectué.In I:Remplace la configuration actuelle par les réglages d'usine.FCS passasse automatiquement à nO dés que cette action est effectué.Si le terminal d'exploitation à distance est racordé au variateur de vitesse, jusqu'à quatre sélections supplémentaires sont disponibles, correspondant aux fichiers de réserve charges dans la mémoire EEPROM du terminal d'exploitation à distance:F I L I,F I L 2,F I L 3,etF I L 4.Ces sélections remplaçant la configuration actuelle par la configuration en réservecorrespondante dans le terminal d'exploitation à distance.FCS passasse automatiquement à nO dés que cette action est effectué.Remarque:Si nR d apparait brièvement sur l'affichage après que le paramètre est passé à nO,le transfert de configuration n'est pas possible et n'a pas été effectué (parce que les valeurs nominales du variateur sont différentes,par exemple). Si nE rapparait brièvement sur l'affichage après que le paramètre est passé à nO,une erreur de transfert de configuration s'est produit et les réglages d'usine doivent être restaurés à l'aide de InL.Dans les deux cas,verifier la configuration à transférer avant d'essayer de nouveau.REMARQUE:Pour la prise d'effet de rECI,InI et FIL1 à FIL4,il faut appuyer sur la touche ENT et la maintainir enfonnée pendant 2 s. | |||
1 SCS et FCS sont accessibles depuis plusieurs menus de configuration, mais ils concernent l'ensemble de tous les menus et paramètres.
MENU fonctions des applications FUN-
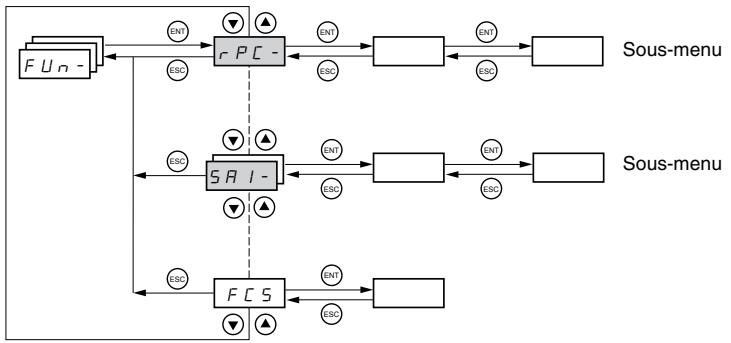
Les paramètres des fonctions des applications ne peuvent être modifiés que lorsque le variateur de vitesse est arrêté et en l'absence de toute commande de marche. Sur le terminal d'exploitation à distance, ce menu est accessible avec le commutateur de blocage d'accès dans la position .
Certaines fonctions dans ce menu ont de nombreux paramètres. Pour simplifier la programmation et minimiser le défillement, ces fonctions sont groupées en sous-menus. Comme les menus, les sous-menus sont identifiés par un tiret après leur code. Par exemple, LIA- est un sous-menu, mais LIN est un paramètre.
Il n'est pas possible de configurer des fonctions des applications incompatibles. La première fonction configurée empêche toutes les fonctions incompatibles avec elle d'être configurées. Consulter le tableau de compatibilité des fonctions à la page 209.

| Sous-menu | Paramètre | Description | Gamage de réglage | Réglage d'usine |
| r PC - | Réglages de rampe | |||
| r P t | Type de rampeDéfinit la forme des rampes d'accélération et de décélération. | LIn | ||
| L / n : Linéaire5 : Rampe en SU : Rampe en UC / 5 : PersonnaliséeRampes en Sf (Hz)HSP f (Hz)HSP t0 / 12 / t1 | Le coefficient d'arrondi est fixe,avec t2 = 0,6 x t1avec t1 = temps de rampe réglé. | |||
| Rampes en Uf (Hz)HSP f (Hz)HSP t0 / 12 / t1 | Le coefficient d'arrondi est fixe,avec t2 = 0,5 x t1avec t1 = temps de rampe réglé. | |||
| Rampes personnaliséesf (Hz)HSP f (Hz)HSP t0 / 12 / t1 | tA1: Régiable de 0 à 100% (de ACC ou AC2)tA2: Régiable de 0 à (100% - tA1) (de ACC ou AC2)tA3: Régiable de 0 à 100% (de dEC ou dE2)tA4: Régiable de 0 à (100% - tA3) (de dEC ou dE2) | |||
| E R I | Démarrage d'une rampe d'accélération de type CUS arrondiau pourcentage du temps total de rampe (ACC ou AC2). | 0 à 100% | 10% | |

Ces paramètres n'apparaissent que si la fonction a été activée.

| Sous-menu | Paramètre | Description | Gamine de réglage | Réglage d'usine | ||
| r PC - (suite) | L R 2 | Fin de la rampe d'accélération de type CUS arrondie au pourcentage du temps total de rampe (ACC ou AC2) | 0 à (100 % - tA1) | 10 % | ||
| L R 3 | Démarriage de la rampe de décelération de type CUS arrondi au pourcentage du temps total de rampe (dEC ou dE2) | 0 à 100 % | 10 % | |||
| L R 4 | Fin de la rampe de décelération de type CUS arrondie au pourcentage du temps total de rampe (dEC ou dE2) | 0 à (100 % -tA3) | 10 % | |||
| R C C d E C | Temps des rampes d'accélération et de décelération1 | 0,1 à 999,9 s | 3 s | |||
| Temps de rampe d'accélération pour que le moteur passé de 0 Hz à FrS (paramètre du menu drC-, voir la page 218).Temps de rampe de décelération pour que le moteur passé de FrS à 0 Hz. S'assurer que la valeur de dEC n'est pas régliée trop bas pour la charge. | ||||||
| r P 5 | Commutation des rampses | Voir ci-dessous. | nO | |||
| Cette fonction reste active quels que soit le canal de contrôle.n D: Non affectéeL / I: Entrée logique LI1L / 2: Entrée logique LI2L / 3: Entrée logique LI3L / 4: Entrée logique LI4L / 5: Entrée logique LI5L / 6: Entrée logique LI6Si LAC = L3, les affectations suivantes sont possibles:C d I : Bit 11 du mot de commande Modbus ou CANopenC d I : Bit 12 du mot de commande Modbus ou CANopenC d I : Bit 13 du mot de commande Modbus ou CANopenC d I : Bit 14 du mot de commande Modbus ou CANopenC d I : Bit 15 du mot de commande Modbus ou CANopenACC et dEC sont actifs lorsque l'entrée logique ou le bit de mot de commande est à l'état 0.AC2 et dE2 sont actifs lorsque l'entrée logique ou le bit de mot de commande est à l'état 1. | ||||||
| F r E | Seuil de commutation des rampses | 0 à 500 Hz | 0 | |||
| La deuxième rampe est commutée si la valeur de Frt est différente de 0 et la fréquence de sortie est supérieure à Frt. Le réglage de Frt à 0 le désactive.Le seul de commutation de rampe peut être combiné avec la commutation par une entrée logique ou un bit de mot de commande de la façon suivante : | ||||||
| LI ou bit | Fréquence | Rampe | ||||
| 0 | <Fr | ACC, dEC | ||||
| 0 | >Fr | AC2, dE2 | ||||
| 1 | <Fr | AC2, dE2 | ||||
| 1 | >Fr | AC2, dE2 | ||||
| R C 2 | 2ème temps de la rampe d'accélération1Activée par entrée logique (rPS) ou seuil de fréquence (Frt). | 0,1 à 999,9 s | 5 s | |||
| d E 2 | 2ème temps de la rampe de décelération1Activée par entrée logique (rPS) ou seuil de fréquence (Frt). | 0,1 à 999,9 s | 5 s | |||
| b r R | Adaptation de la rampe de décelération | Voir ci-dessous. | YES | |||
| L'activation de cette fonction permet d'adapter automatiquement la rampe de décelération, si celui-ci a été réglée à une valeur trop faible compte tenu de l'inertie de la charge.n D: Fonction inactiveY E 5: Fonction activebrA est incompatible avec les applications qui exigent le positionnement sur une rampe ou l'utilisation d'une résistance de freinage.brA est forcé à nO si la commande de frein (bLC) est affectée (page 260). | ||||||
Ce paramètre est également accessible dans le menu réglage SET-. Voir la page 213.

Ces paramètres n'apparaissent que si la fonction a été activée.

| Sous-menu | Paramètre | Description | Gamme de réglage | Réglage d'usine | |
| 5 ∈ C - | Modes d'arrêt | ||||
| 5 ∈ E | Mode d'arrêt normal | Voir ci-dessous. | RMP | ||
| Mode d'arrêt exécuté lorsque la commande de marche disparaît ou lorsqu'une commande d'arrêt apparait. r P: Sur rampe F 5 ∈: Arrêt rapide n S ∈: Arrêt roule libre d C /: Arrêt par injection de courant continu | |||||
| F 5 ∈ | Arrêt rapide par entrée logique | Voir ci-dessous. | nO | ||
| n D: Non affectée L / /: Entrée logique LI1 L / /: Entrée logique LI2 L / /: Entrée logique LI3 L / /: Entrée logique LI4 L / /: Entrée logique LI5 L / /: Entrée logique LI6 Si LAC = L3, les affectations suivantes sont possibles : C d / /: Bit 11 du mot de commande Modbus ou CANopen C d / /: Bit 12 du mot de commande Modbus ou CANopen C d / /: Bit 13 du mot de commande Modbus ou CANopen C d / /: Bit 14 du mot de commande Modbus ou CANopen C d / /: Bit 15 du mot de commande Modbus ou CANopen L'arrêt rapide est activé quand l'état de l'entrée logique passée à 0 ou quand le bit de mot de commande passée à 1. L'arrêt rapide est un arrêt sur la décalération réduite du coefficient spécifique par le paramètre dCF. Si l'entrée logique retombe à l'état et si la commande de marche est encore active, le moteur ne redémarre que si un contrôle à 2 fils est configuré (tCC = 2C et tCt = LEL ou PFO, voir la page 221). Autrement, une nouvelle commande de marche doit être envoyée. | |||||
| d C F | Coefficient de division du temps de rampe de décalération pour l'arrêt rapide. | 0,1 à 10 | 4 | ||
| Ce paramètre n'apparaît que si FST est affecté. S'assurer que la rampe réduite n'est pas trop faible pour la charge. La valeur 0 correspond à la rampe minimale. | |||||
| d C I | Injection de courant continu par entrée logique | Voir ci-dessous. | nO | ||
| n D: Non affectée L / /: Entrée logique LI1 L / /: Entrée logique LI2 L / /: Entrée logique LI3 L / /: Entrée logique LI4 L / /: Entrée logique LI5 L / /: Entrée logique LI6 Si LAC = L3. les affectations suivantes sont possibles : C d / /: Bit 11 du mot de commande Modbus ou CANopen C d / /: Bit 12 du mot de commande Modbus ou CANopen C d / /: Bit 13 du mot de commande Modbus ou CANopen C d / /: Bit 14 du mot de commande Modbus ou CANopen C d / /: Bit 15 du mot de commande Mod bus ou CANopen Le freinage est activé quand l'état de l'entrée logique ou le bit de mot de commande est à 1. | |||||
| I d C | Intensité du courant de freinage par injection de courant continu actif par entrée logique ou choisi comme mode d'arrêt 1, 2 | 0 à In³ | 0,7 In³ | ||
| Après 5 secondes, le courant d'injection a une créée limitée à 0,5 lth. | |||||
| I d C | Temps total de freinage par injection de courant continu lorsque dCI est sélectionné comme le mode d'arrêt normal (voir Stt ci-dessus). 1, 2 | 0,1 à 30 s | 0,5 s | ||
1 On peut également accéder à ce paramètre dans le menu réglage SET-. Voir la page 213. 2 Ces réglages sont indépendants de la fonction Injection de courant continu automatique. 3 In correspond au courant nominal du variateur de vitesse indiqué dans le Guide d'installation de l'ATV31 et sur la plaque signalétique du variateur.

Ces paramètres n'apparaissent que si la fonction a été activée.

| Sous-menu | Paramètre | Description | Gamage de réglage | Réglage d'usine |
| 5 E C - (suite) | n 5 E | Arrêt roue libre par entrée logique | nO | |
| n O : Non affectéeL 1 / 1 : Entrée logique LI1L 2 : Entrée logique LI2L 3 : Entrée logique LI3L 4 : Entrée logique LI4L 5 : Entrée logique LI5L 6 : Entrée logique LI6L'arrêt roue libre est activé quand l'entrée logique est à l'état 0. Si l'entrée repasse à l'état 1 et si la commande de marche est encore active, le moteur ne redémarre que si un contrôle à 2 fils est configuré. Autrement, une nouvelle commande de marche doit être envoyée. | ||||
PAS de COUPLE de maintien
- Le freinage par injection de courant continu ne fournit pas de couple de maintien à la vitesse zéro.
- Le freinage par injection de courant continu ne fonctionne pas pendant une perte d'alimentation ou pendant un défaut du variateur. Utilisez un frein séparé pour le couple de maintien, le cas échéant.
Freinage par injection de courant continu excessif
- L'application de freinage par injection de courant continu pendant de longues périodes peut entraîner une surchauffe et un endommagement du moteur.
- Protégez le moteur de périodes prolongées de freinage par injection de courant continu.
Si ces précautions ne sont pas respectées, cela peut entraîner la mort, des blessures graves ou des dommages matériels.

| Sous-menu | Paramètre | Description | Gamme de réglage | Réglage d'usine |
| R d C - | Injection de courant continu automatique. Voir la page 241. | |||
| R d C | Injection de courant continu automatique (en fin de rampe) | Voir ci-dessous. | YES | |
| n D : Pas d'injection Y E S : Injection de courant continu pendant une période régiable C B : Injection de courant continu permanente REMARQUE : Si ce paramètre est régle à Yes ou Ct, le courant continu est injecté même si une commande de marche n'a pas été envoyée. Ce paramètre est accessible avec le variateur en marche. | ||||
| T d C I | Temps d'injection de courant continu automatique1 | 0,1 à 30 s | 0,5 s | |
| S d C I | Intensité du courant d'injection automatique1 | 0 à 1,2 In2 | 0,7 In2 | |
| Remarque : S'assurer que le moteur supporte ce courant sans surchauffe. | ||||
| T d C 2 | 2ème temps d'injection de courant continu automatique1 | 0 à 30 s | 0 s | |
| S d C 2 | 2ème intensité du courant d'injection automatique1 | 0 à 1,2 In2 | 0,5 In2 | |
| REMARQUE : S'assurer que le moteur supporte ce courant sans surchauffe. | ||||
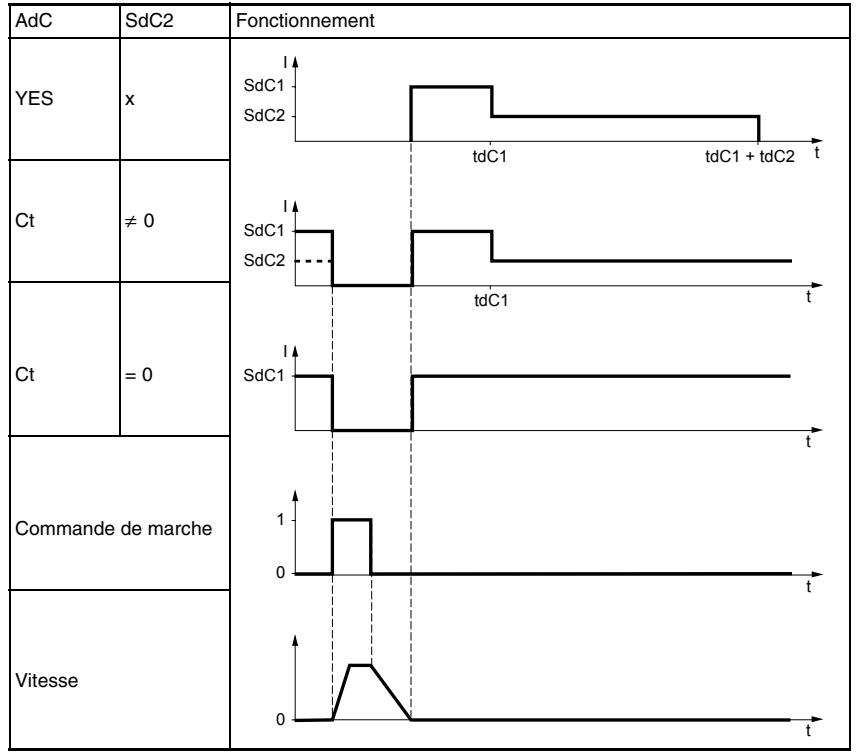
On peut également accéder à ce paramètre dans le menu réglage SET-. Voir la page 213. In correspond au courant nominal du variateur de vitesse indiqué dans le Guide d'installation de l'ATV31 et sur la plaque signalétique du variateur.
Ces paramètres n'apparaissent que si la fonction a été activée.

| Sous-menu | Paramètre | Description | Gamme de réglage | Réglage d'usine |
| 5 R I - | Entrées sommatricesPeuvent être utilisées pour sommer une ou deux entrées avec la référence Fr1. | |||
| 5 R 2 | Entrée sommatrice 2 | Voir ci-dessous. | Al2 | |
| n D : Non affectéeR I I : Entrée analogue AI1R I 2 : Entrée analogue AI2R I 3 : Entrée analogue AI3R I P : Potentiomètre (variateurs ATV31-----A uniquement)Si LAC = L3, les affectations suivantes sont possibles :π d b : Référence par ModbusC R n : Référence par CANopenL C C : Référence par le terminal d'exploitation à distance, paramètre LFr du menu SEt-, page 214. | ||||
| 5 R 3 | Entrée sommatrice 3 | Voir ci-dessous. | nO | |
| n D : Non affectéeR I I : Entrée analogue AI1R I 2 : Entrée analogue AI2R I 3 : Entrée analogue AI3R I P : Potentiomètre (variateurs ATV31-----A uniquement)Si LAC = L3, les affectations suivantes sont possibles :π d b : Référence par ModbusC R n : Référence par CANopenL C C : Ré-reference par le terminal d'exploitation à distance, paramètre LFr du menu SEt-, page 214. | ||||
Entrées sommatrices
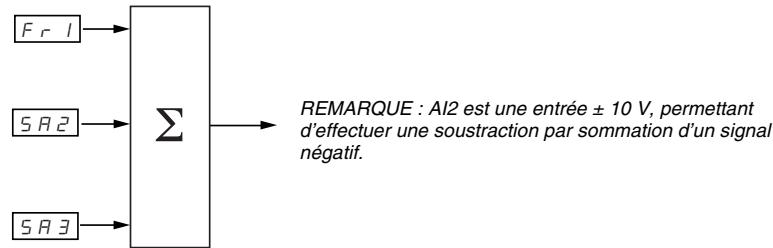
Se reporter aux schémas aux pages 229 et 231.
Vitesses présélectionnées
Paramètre PSS, vitesses préselectionnées, permet 2, 4, 8 ou 16 vitesses préselectionnées, nécessitant 1, 2, 3 ou 4 entrées logiques, respectivement.
Les vitesses préselectionnées doivent être affectées dans l'ordre suivant : PS2 puis PS4 puis PS8 puis PS16.
Consulter le tableau ci-après pour combiner des entrées afin d'activer les diverses vitesses préselectionnées :
| 16 vitesses LI (PS16) | 8 vitesses LI (PS8) | 4 vitesses LI (PS4) | 2 vitesses LI (PS2) | Référence de vitesse |
| 0 | 0 | 0 | 0 | Référence1 |
| 0 | 0 | 0 | 1 | SP2 |
| 0 | 0 | 1 | 0 | SP3 |
| 0 | 0 | 1 | 1 | SP4 |
| 0 | 1 | 0 | 0 | SP5 |
| 0 | 1 | 0 | 1 | SP6 |
| 0 | 1 | 1 | 0 | SP7 |
| 0 | 1 | 1 | 1 | SP8 |
| 1 | 0 | 0 | 0 | SP9 |
| 1 | 0 | 0 | 1 | SP10 |
| 1 | 0 | 1 | 0 | SP11 |
| 1 | 0 | 1 | 1 | SP12 |
| 1 | 1 | 0 | 0 | SP13 |
| 1 | 1 | 0 | 1 | SP14 |
| 1 | 1 | 1 | 0 | SP15 |
| 1 | 1 | 1 | 1 | SP16 |
1 Voir les schémas aux pages 229 et 231 : Référence 1 = (SP1).

| Sous-menu | Paramètre | Description | Gamme de réglage | Réglage d'usine |
| P 5 5 - | Vitesses préseLECTIONnées | |||
| P 5 2 | 2 vitesses préselectionnées | Voir ci-dessous. | si tCC = 2C : LI3 si tCC = 3C : nO si tCC = LOC : LI3 | |
| La sélection de l'entrée logique affectée active la fonction.n D: Non affectéeL / I: Entrée logique LI1L / 2: Entrée logique LI2L / 3: Entrée logique LI3L / 4: Entrée logique LI4L / 5: Entrée logique LI5L / 6: Entrée logique LI6Si LAC = L3, les affectations suivantes sont possibles:C d / I : Bit 11 du mot de commande Modbus ou CANopenC d / 2 : Bit 12 du mot de commande Modbus ou CANopenC d / 3 : Bit 13 du mot de commande Modbus ou CANopenC d / 4 : Bit 14 du mot de commande Modbus ou CANopenC d / 5 : Bit 15 du mot de commande Modbus ou CANopen | ||||
| P 5 4 | 4 vitesses préselectionnées | Voir ci-dessous. | si tCC = 2C : LI4 si tCC = 3C : nO si tCC = LOC : LI4 | |
| La sélection de l'entrée logique affectée active la fonction.REMARQUE: S'assurer que PS2 a été affectée avant d'affector PS4.n D: Non affectéeL / I: Entrée logique LI1L / 2: Entrée logique LI2L / 3: Entrée logique LI3L / 4: Entrée logique LI4L / 5: Entrée logique LI5L / 6: Entrée logique LI6Si LAC = L3, les affectations suivantes sont possibles:C d / I : Bit 11 du mot de commandeModbus ou CANopenC d / 2 : Bit 12 du mot de commande Modbus ou CANopenC d / 3 : Bit 13 du mot de commande Modbus ou CANopenC d / 4 : Bit 14 du mot de commande Modbus ou CANopenC d / 5 : Bit 15 du mot de commande Modbus ou CANopen | ||||
| P 5 B | 8 vitesses préselectionnées | Voir ci-dessous. | nO | |
| La sélection de l'entrée logique affectée active la fonction.REMARQUE: S'assurer que PS4 a été affectée avant d'affector PS8.n D: Non affectéeL / I: Entrée logique LI1L / 2: Entrée logique LI2L / 3: Entrée logique LI3L / 4: Entrée logique LI4L / 5: Entrée logique LI5L / 6: Entrée logique LI6Si LAC = L3, les affectations suivantes sont possibles:C d / I : Bit 11 du mot de commande modbus ou CANopenC d / 2 : Bit 12 du mot de commande Modbus ou CANopenC d / 3 : Bit 13 du mot de commande Modbus ou CANopenC d / 4 : Bit 14 du mot de commande Modbus ou CANopenC d / 5 : Bit 15 du mot de commande Modbus ou CANopen | ||||

| Sous-menu | Paramètre | Description | Gamme de réglage | Réglage d'usine |
| PS 16 | 16 vitesses présélectionnées | Voir ci-dessous. | nO | |
| La sélection de l'entrée logique affectée active la fonction.REMARQUE: S'assurer que PS8 a été affectée avant d'affector PS16.n0: Non affectéeL 1/1: Entrée logique LI1L 1/2: Entrée logique LI2L 1/3: Entrée logique LI3L 1/4: Entrée logique LI4L 1/5: Entrée logique LI5L 1/6: Entrée logique LI6Si LAC = L3, les affectations suivantes sont possibles :C d / I : Bit 11 du mot de commande Modbus ou CANopenC d / 2 : Bit 12 du mot de commande Modbus ou CANopenC d / 3 : Bit 13 du mot de commande Modbus ou CANopenC d / 4 : Bit 14 du mot de commande Modbus ou CANopenC d / 5 : Bit 15 du mot de commande Modbus ou CANopen | ||||
| PS 2 | 2ème vitesse présélectionnée1 | 0,0 à 500,0 Hz | 10 Hz | |
| PS 3 | 3ème vitesse présélectionnée1 | 0,0 à 500,0 Hz | 15 Hz | |
| PS 4 | 4ème vitesse présélectionnée1 | 0,0 à 500,0 Hz | 20 Hz | |
| PS 5 | 5ème vitesse présélectionnée1 | 0,0 à 500,0 Hz | 25 Hz | |
| PS 6 | 6ème vitesse présélectionnée1 | 0,0 à 500,0 Hz | 30 Hz | |
| PS 7 | 7ème vitesse présélectionnée1 | 0,0 à 500,0 Hz | 35 Hz | |
| PS 8 | 8ème vitesse présélectionnée1 | 0,0 à 500,0 Hz | 40 Hz | |
| PS 9 | 9ème vitesse présélectionnée1 | 0,0 à 500,0 Hz | 45 Hz | |
| PS 10 | 10ème vitesse présélectionnée1 | 0,0 à 500,0 Hz | 50 Hz | |
| PS 11 | 11ème vitesse présélectionnée1 | 0,0 à 500,0 Hz | 55 Hz | |
| PS 12 | 12ème vitesse présélectionnée1 | 0,0 à 500,0 Hz | 60 Hz | |
| PS 13 | 13ème vitesse présélectionnée1 | 0,0 à 500,0 Hz | 70 Hz | |
| PS 14 | 14ème vitesse présélectionnée1 | 0,0 à 500,0 Hz | 80 Hz | |
| PS 15 | 15ème vitesse présélectionnée1 | 0,0 à 500,0 Hz | 90 Hz | |
| PS 16 | 16ème vitesse présélectionnée1 | 0,0 à 500,0 Hz | 100 Hz | |
1 On peut également accéder à ce paramètre dans le menu réglage SEt-. Voir la page 213.
Ces paramètres n'apparaissent que si la fonction a été activée.

| Sous-menu | Paramètre | Description | Gamme de réglage | Réglage d'usine | |
| JOG- | Marche pas à pas | ||||
| JOG- | Marche pas à pas | Voir ci-dessous. | si tCC = 2C: nO si tCC = 3C: L14 si tCC = LOC: nO | ||
| La sélection de l'entrée logique affectée active la fonction. n D: Non affectée L 1: Entrée logique LI1 L 2: Entrée logique LI2 L 3: Entrée logique LI3 L 4: Entrée logique LI4 L 5: Entrée logique LI5 L 6: Entrée logique LI6 Exemple: Fonctionnement en contrôle à 2 fils (tCC = 2C) | |||||
| Fréquence moteur Régence JGF Régence JGF LI (JOG) Marche avant Marche arrêté | Rampe DEC/DE2 | Rampe forcée à 0,1 s | |||
| RÉférence | RÉférence JGF | ||||
| 0 | |||||
On peut également accéder à ce paramètre dans le menu réglage SET. - Voir la page 213.
Plus vite / moins vite
Cette fonction est accessible seulement si :
- le paramètre LAC est réglé à L2 ou L3 (voir la page 234).
- Des fonctions incompatibles ne sont pas actives (voir la page 209)
- le paramètre Fr1 ou Fr2 est réglé à UPdt ou UPdH.
Les sections suivantes décrivent deux types de fonctionnement +/- vite : l'utilisation de boutons à simple action et de boutons à double action. Une boîte pendante à boutons est un exemple d'application des deux types de boutons.
Boutons à simple action
Les boutons à simple action exigent deux entrées logiques et deux sens de rotation. L'entrée affectée à la commande de vitesse + (plus vite) augmente la vitesse, l'entrée affectée à la commande de vitesse - (moins vite) réduit la vitesse.
| Moins vite | Vitesse maintainue | Plus vite | |
| Marche avant | a et d | a | a et b |
| Marche arrière | c et d | c | c et b |
Exemple de câblage :
LI1: avant
Llx: arrête
Lly : plus vite (USP)
Llz : moins vite (DSP)
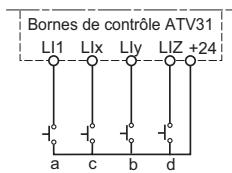
Fréquence moteur
La vitesse maximale est réglée par HSP (voir la page 214).
REMARQUE: Si la référence est commutée par rFC (voir la page 235) depuis n'importe quel canal de référence à un autre avec +/- vite, la valeur de référence rFr (après la rampe) est copiée en même temps. Cela empêche la vitesse d'être incorrectement remise à zéro lorsqu'une commutation prend place.
Boutons à double action
Une seule entrée logique, affectée à plus vite, est nécessaire pour les boutons à double action. Les boutons à double action ont typiquement deux détentes. Appuyer sur le bouton, première détente, pour maintenir la vitesse ; appuyer sur le bouton, deuxième détente, pour augmenter la vitesse. Chaque action ferme un contact. Se reporter au tableau suivant.
| Ouvert (moins vite) | Appuyer sur la 1ère détente (vitessetainue) | Appuyer sur la 2ème détente (plus vite) | |
| Marche avant | - | a | a et b |
| Marche arrière | - | c | c et d |
Exemple de câblage :
LI1: avant
Llx: arriere
Lly : plus vite (USP)
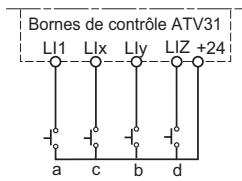
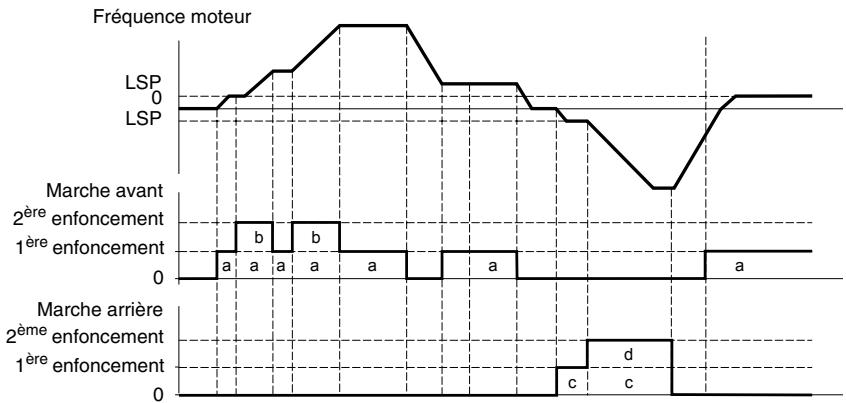
L'utilisation des boutons à double action est incompatible avec un contrôle à 3 fils.
La vitesse maximale est réglée par HSP (voir la page 214).
REMARQUE: Si la référence est commutée par RFC (voir la page 235) depuis n'importe quel canal de référence à un autre avec +/- vite, la valeur de référence rFr (après la rampe) est copiée en même temps. Cela empêche la vitesse d'être incorrectement remise à zéro lorsqu'une commutation prend place.

| Sous-menu | Paramètre | Description | Gamage de réglage | Réglage d'usine |
| U P d - | Plus vite / moins vite (potentiomètre motorisé) Cette fonction est accessible seulement si LAC = L2 ou L3 et UPdH ou UPdt est activé (voir la page 234). | |||
| U S P | Plus vite N'est accessible que si UPdt est actif. | Voir ci-dessous. | nO | |
| La sélection de l'entrée logique affectée active la fonction. n O : Non affectée L 1 / 1 : Entrée logique LI1 L 1 / 2 : Entrée logique LI2 L 1 / 3 : Entrée logique LI3 L 1 / 4 : Entrée logique LI4 L 1 / 5 : Entrée logique LI5 L 1 / 6 : Entrée logique LI6 | ||||
| d S P | Moins vite N'est accessible que si UPdt est actif. | Voir ci-dessous. | nO | |
| La sélection de l'entrée logique affectée active la fonction. n O : Non affectée L 1 / 1 : Entrée logique LI1 L 1 / 2 : Entrée logique LI2 L 1 / 3 : Entrée logique LI3 L 1 / 4 :Entrée logique LI4 L 1 / 5 : Entrée logique LI5 L 1 / 6 : Entrée logique LI6 | ||||
| S E r | Mémorisation de référence | Voir ci-dessous. | nO | |
| Associé à la fonction +/- vite, ce paramètre peut être utilisé pour saugérider la référence : Lorsque les commandes de marche sont retireées, la référence est mémorisée dans la RAM. Lorsque l'alimentation du réseau ou les commandes de marche sont retireées, la référence est mémorisée dans l'EEPROM. À la mise en service suivante, la référence de vitesse est la的最后一 trésorerie référence mémorisée. n O : Pas de mémorisation r R I N : Mémorisation en RAM E E P : Mémorisation en EEPROM | ||||

Ces paramètres n'apparaissent que si la fonction a été activée.
Régulateur PI
Le régulateur PI fournit la régulation d'un procédé à l'aide d'un retour provenant d'un capteur qui envoie un signal au variateur de vitesse. Cette fonction est souvent utilisée dans des applications de pompes et de ventilateurs. La fonction du régulateur PI est activée par l'affectation d'une entrée analogique au retour du régulateur PI (PIF).
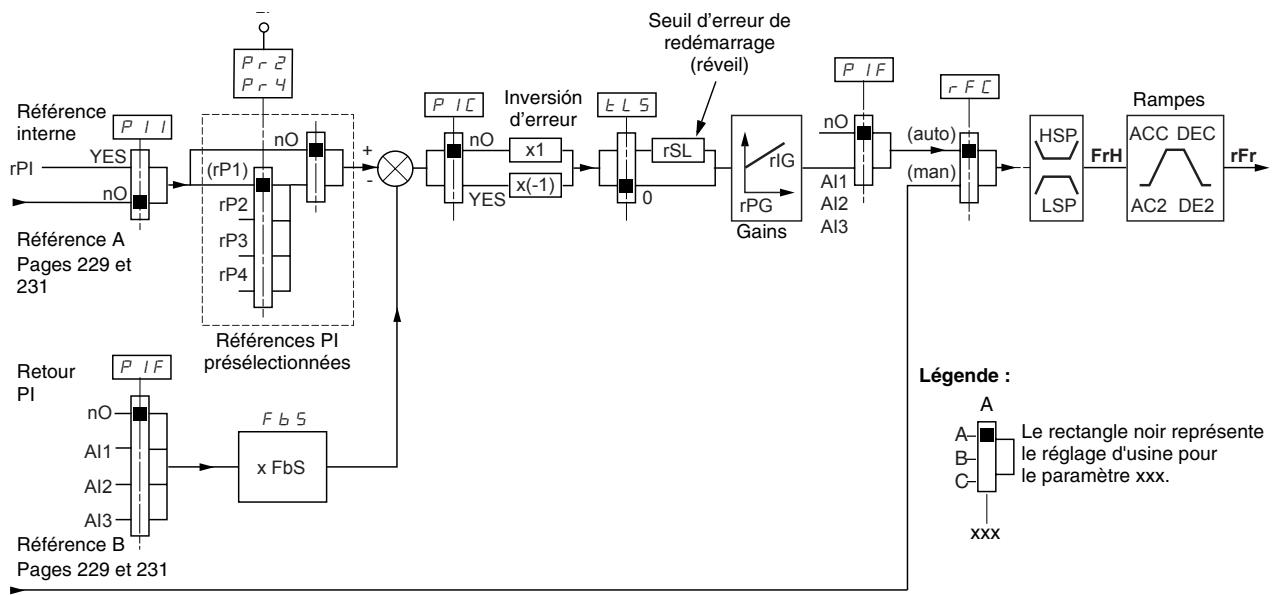
Le paramètre du régulateur PI (PIF, voir la page 256) doit être affecté à l'une des entrées analogiques (Al1, Al2 ou Al3).
La référence PI peut être affectée aux paramètres suivants, dans l'ordre de priorité :
- Recettes présélectionnées par les entrées logiques (rP2, rP3 et rP4, voir la page 256) Référence interne (rPI, voir la page 257)
- Référence Fr1 (voir la page 234)
Se reporter au tableau suivant pour combiner des entrées logiques pour des références PI sélectionnées.
| LI (Pr4) | LI (Pr2) | Pr2 = nO | Référence |
| rPI ou Fr1 | |||
| 0 | 0 | rPI ou Fr1 | |
| 0 | 1 | rP2 | |
| 1 | 0 | rP3 | |
| 1 | 1 | rP4 | |
Les paramètres suivants sont également accessibles dans le menu des réglages (Set-, commencer à la page 213):
- Récurrence interne (rPI)
- Récurrences préseLECTIONnées (rP2, rP3, rP4)
- Gain proportionnel du régulateur (rPG)
- Gain intégral du régulateur (rIG)
- Coefficient multiplicateur du retour PI (FbS):
Le paramètre FbS peut être utilisé pour établir la référence à la gamme de variation du retour PI (gamme du capteur).
Régulation de pression :
Référence PI (process) = 0 à 5 bar = 0 à 100 %
Gamme du capteur de pression = 0 à 10 bar
FbS = Max. échelle capteur / max. process
FbS = 10 / 5 = 2
Paramètre rSL :
Peut être utilisé pour régler le seuil d'erreur du PI au-dessus duquel le régulateur PI est réactivé (réveil) après un arrêt du au dépassement du temps maximum de fonctionnement à petite vitesse (tLS).
Inversion du sens de correction (PIC):
Si PIC = NO, la vitesse du moteur augment pression avec un compresseur.
Si PIC = YES, la vitesse du moteur diminu température avec un ventilateur de refroidissement.
Fonctionnement manuel-automatique avec régulateur PI
Configuration du régulateur PI
Cette fonction combine le régulateur PI et la commutation de référence rFC (page 235). La référence de vitesse est donnée par Fr2 ou par la fonction PI, selon l'état de l'entrée logique.
- Configurer le variateur de vitesse pour le régulateur PI. Voir le schéma à la page 252.
- Effectuer un essai avec la configuration d'usine. Dans la plupart des cas, les réglages d'usine sont suffisants. Pour optimiser le variateur de vitesse, ajuster graduellement rPG ou rIG indépendamment et observer l'effet sur le return PI par rapport à la référence.
- Si les réglages d'usine sont instables ou si la référence est incorrecte, effectuer un essai avec la référence de vitesse en mode manuel (sans régulateur PI) et avec le variateur en charge pour la gamme de vitesse du système :
— En état stable, la vitesse doit rester stable à la référence, et le signal de retard P1 doit être stable. — En état transitoire, la vitesse doit suivre la rampe puis se stabiliser rapidement, et le retour PI doit suivre la vitesse.
Si ce n'est pas le cas, vérifier les réglages du variateur de vitesse et le signal et le câblage du capteur.
- Activer le régulateur PI.
- Régler BRA à NO (pas d'adaptation automatique de la rampe).
- Régler les rampes de vitesse (ACC, dEC) au minimum permis par l'application sans déclencher de défaut ObF.
- Régler le gain intégral (rIG) à la valeur minimale.
- Observer le retard et la référence Pl.
- Effectuer plusieurs cycles de marche/arrêt (RUN/STOP) ou varier la charge ou la rapidité de référence.
- Régler le gain proportionnel (rPG) pour obtenir le compromis idéal entre le temps de réponse et la stabilité dans des phases transitoires (léger dépassement et 1 à 2 oscillations avant de se stabiliser).
- Si la référence varie de la valeur presélectionnée en état stable, augmenter graduellement le gain intégral (rIG) et réduire le gain proportionnel (rPG) en cas d'instabilité (application de pompe) afin de trouver un compromis entre le temps de réponse et la précision statique. Consulter la figure à la page 252.
- Effectuer des essais en production pour toute la gamme de référence.
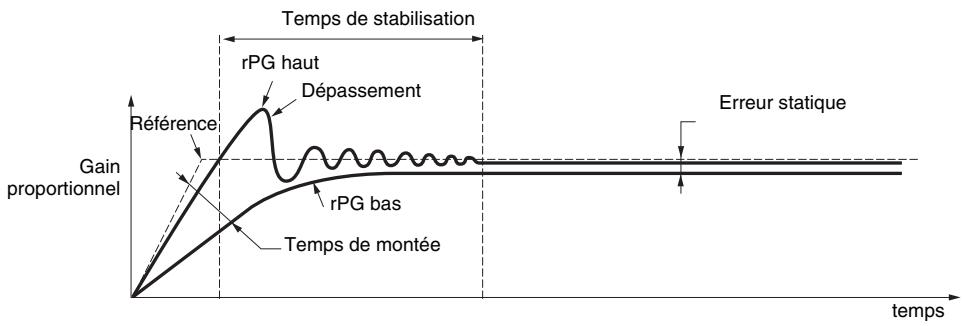
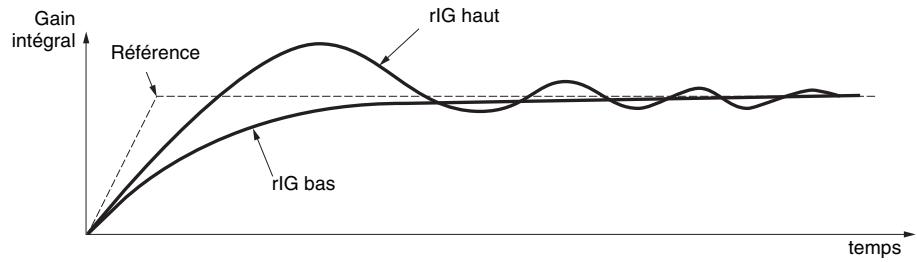
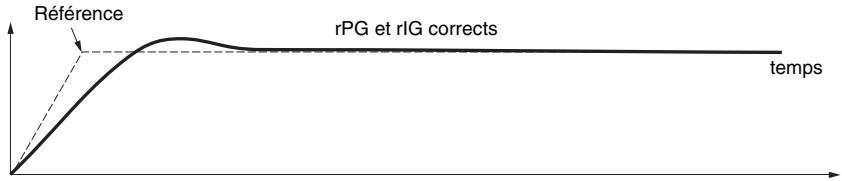
La fréquence des oscillations dépend de l'application.
| Paramètre | Temps de montée | Dépassement | Temps de stabilisation | Erreur statique |
| rPG | = | |||
| rIG |

| Sous-menu | Paramètre | Description | Gamine de réglage | Réglage d'usine |
| P I - | Régulateur PI | |||
| P I F | Retour du régulateur PI | Voir ci-dessous. | nO | |
| n 0 : Non affectéeR I I : Entrée analogue AI1R I 2 : Entrée analogue AI2R I 3 : Entrée analogue AI3 | ||||
| r P G | Gain proportionnel du régulateur PI1 | 0,01 à 100 | 1 | |
| Contribute à la performance dynamique pendant les changements rapides du回头 PI. | ||||
| r I G | Gain intégral du régulateur PI1 | 0,01 à 100 | 1 | |
| Contribute à la précision statique pendant des changements lents du回头 PI. | ||||
| F b 5 | Coefficient multiplicitateur du回头 PI1 | 0,1 à 100 | 1 | |
| Pour adaptation du process | ||||
| P I C | Inversion du sens de correction du régulateur PI1 | Voir ci-dessous. | nO | |
| n 0 : NormalY E 5 : Inverse | ||||
| P r 2 | 2 références PI présélectionnées | Voir ci-dessous. | nO | |
| La sélection de l'entrée logique affectée active la fonction.n 0 : Non affectéeL I I : Entrée logique LI1L I 2 : Entrée logique LI2L I 3 : Entrée logique LI3L I 4 : Entrée logique LI4L I 5 : Entrée logique LI5L I 6 : Entrée logique LI6Si LAC = L3, les affectations suivantes sont possibles:C d I I : Bit 11 du mot de commande Modbus ou CANopenC d I 2 : Bit 12 du mot de commande Modbus ou CANopenC d I 3 : Bit 13 du mot de commande Modbus ou CANopenC d I 4 : Bit 14 du mot de commande Modbus ou CANopenC d I 5 : Bit 15 du mot de commande Modbus ou CANopen | ||||
| P r 4 | 4 références PI présélectionnées | Voir ci-dessous. | nO | |
| La sélection de l'entrée logique affectée active la fonction.REMARQUE : S'assurer que Pr2 a été affectée avant d'afector Pr4.n 0 : Non affectéeL I I : Entrée logique LI1L I 2 : Entrée logique LI2L I 3 : Entrée logique LI3L I 4 : Entrée logique LI4L I 5 : Entrée logique LI5L I 6 : Entrée logique LI6Si LAC = L3, les affectations suivantes sont possibles:C d I I : Bit 11 du mot de commande Modbus ou CANopenC d I 2 : Bit 12 du mot de commande Modbus ou CANopenC d I 3 : Bit 13 du mot de commande Modbus ou CANopenC d I 4 : Bit 14 du mot de commande Modbus ou CANopenC d I 5 : Bit 15 du mot de commande Modbus ou CANopen | ||||
| r P 2 | 2ème référence PI présélectionné1 | 0 à 100 % | 30 % | |
| Apparaït seulement si Pr2 a été activé en scélectionnant une entrée. | ||||
| r P 3 | 3ème référence PI présélectionné1 | 0 à 100 % | 60 % | |
| Apparaït seulement si Pr4 a été activé en scélectionnant une entrée. | ||||
| r P 4 | 4ème référence PI présélectionné1 | 0 à 100 % | 90 % | |
| Apparaït seulement si Pr4 a été activé en scélectionnant une entrée. | ||||
On peut également accéder à ce paramètre dans le menu réglage SET-. Voir la page 213.
Ces paramètres n'apparaissent que si la fonction a été activée.

| Sous-menu | Paramètre | Description | Gamage de réglage | Réglage d'usine |
| P I - (suite) | r S L | Seuil d'erreur au redémarrage (seuil de « réveil ») | 0 à 100 % | 0 |
| Si les fonctions PI et de durée de fonctionnement à petite vitesse (tLS, voir la page 216) sont configurées pour la même durée, le régulateur PI peut essayer de régler une vitesse plus faible que LSP. Cela aboutit à un fonctionnement peu satisfaisant qui consiste en un cycle de démarrage, fonctionnement à petit vitesse puis arrêt. Le paramètre rSL (seuil d'erreur au redémarrage) peut être utilisé pour régler un seuil minimum d'erreur PI pour redémarrer après un arrêt à LSP prolongé. La fonction est inactive si tLS = 0. | ||||
| P I I | Récurrence interne du régulateur PI | nO | ||
| n O : La référence du régulateur PI est Fr1, sauf pour UPdH et UPdt (+/- vite ne peut pas être utilisé comme référence du régulateur PI). Y E 5 : La référence du régulateur PI est le paramètre rPI. | ||||
| r P I | Récurrence interne du régulateur PI1 | 0 à 100 % | 0 | |
On peut également accéder à ce paramètre dans le menu réglage SET-. Voir la page 213.

Ces paramètres n'apparaissent que si la fonction a été activée.
Commande de frein
La commande de frein active le variateur de vitesse pour : gérer un frein électromagnétique. Cette fonction est accessible seulement si LAC = L2 ou L3 (page 230) et si aucune fonction incompatible n'est programmée (voir page 209). Elle peut être affectée au relais R2 ou à la sortie logique AOC.
Pour éviter les secousses, synchroniser l'ouverture du frein avec l'accumulation de couple durant la mise en service, et synchroniser la fermeture du frein avec la vitesse zéro au moment de l'arrêt. Consulter la figure suivante pour la séquence de freinage.
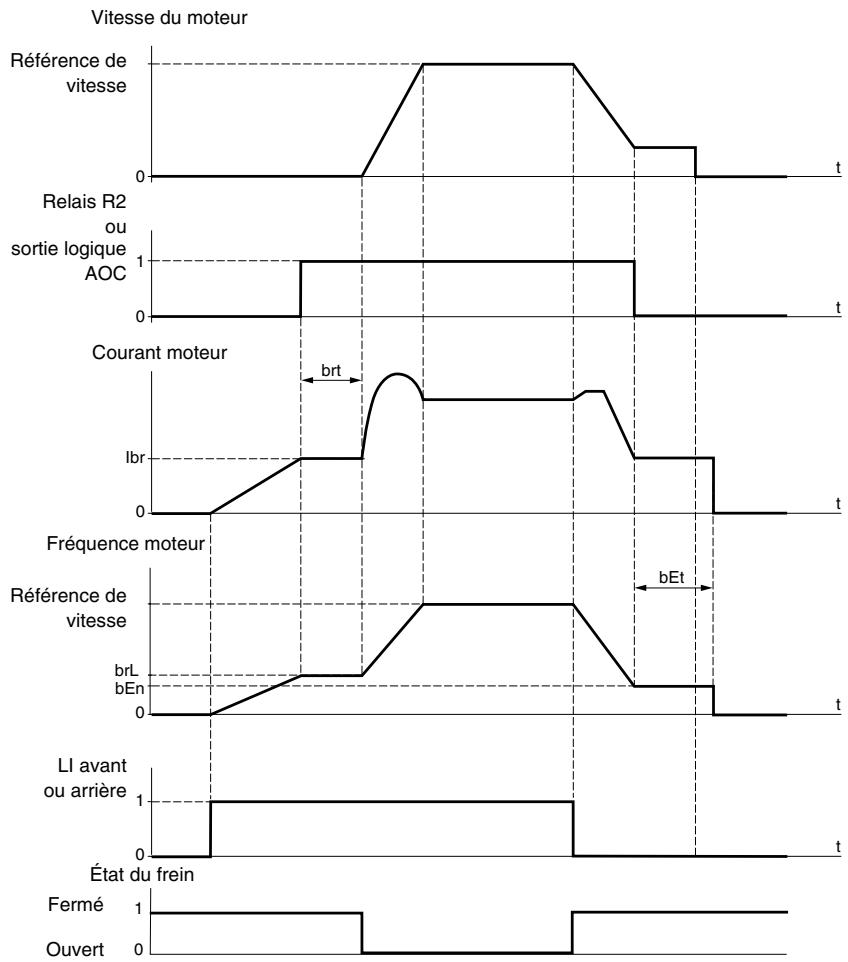
Les paramètres suivants sont accessibles du menu FUN- (page 260) :
- Fréquence d'ouverture du frein (brL) Courant d'ouverture du frein (Ibr) Temps d'ouverture du frein (brt)
- Fréquence de fermeture du frein (bEN) Temps de fermeture du frein (bEt)
- Impulsion d'ouverture de frein (bIP)
Les réglages suivants sont recommandés pour la commande de frein :
- Fréquence d'ouverture de frein (brL):
— Mouvement horizontal : régler à 0. — Mouvement vertical : régler au glissement nominal du moteur en Hz.
- Courant d'ouverture de frein (Ibr) :
— Mouvement horizontal : régler à 0. — Mouvement vertical : régler au courant nominal du moteur en premier, puis régler le courant d'ouverture pour éviter les secousses au démarrage. S'assurer que la charge maximale est maintenue lorsque le frein est ouvert.
- Temps d'ouverture de frein (brt) :
— Régler selon le type de frein. Le temps d'ouverture du frein est le temps requis pour l'ouverture du frein mécanique.
- Fréquence de fermeture du frein (bEN): — Régler à deux fois le glissement nominal du moteur, puis ajuster en fonction du résultat.
REMARQUE : la valeur maximale de bEn est LSP. S'assurer que LSP est réglé à une valeur suffisante.
- Temps de fermeture du frein (bEt):
— Régler selon le type de frein. Il s'agit du temps requis pour la fermeture du frein mécanique.
- Impulsion d'ouverture de frein (BIP):
— Mouvement horizontal : régler à NO. — Mouvement vertical : régler à YES et s'assurer que le sens de couple moteur pour la commande de marche avant correspond au sens de montée de la charge. Si nécessaire, inverser deux phases du moteur. Ce paramètre génère un couple moteur en sens de montée, quel que soit le sens de fonctionnement, afin de maintenir la charge pendant l'ouverture du frein.

| Sous-menu | Paramètre | Description | Gamine deréglage | Réglage d'usine |
| bLC- | Commande de freinCette fonction est accessible seulement si LAC = L2 ou L3 (page 230). | |||
| bLC | Configuration de la commande de frein | Voir ci-dessous. | nO | |
| nO: Non affectéer2: Relais R2dO: Sortie logique AOCSi bLC est affecté, les paramètres FLr (page 268) et brA (page 240) sont forcés à nO, et le paramètre OPL(page 268) estforcé à YES. | ||||
| brL | Fréquence d'ouverture de frein | 0,0 à 10,0 Hz | Varie en fonction de la valeur nominale du variateur | |
| Ibr | Seuil de courant moteur pour ouverture de frein | 0 à 1,36 In1 | Varie en fonction de la valeur nominale du variateur | |
| brE | Temps d'ouverture de frein | 0 à 5 s | 0,5 s | |
| LSP | Petite vitesse | 0 à HSP (page 214) | 0 Hz | |
| Fréquence moteur à la référence minimale. On peut également modifier ce paramètre dans le menu SET-(page 214). | ||||
| bEn | Seuil de fréquence de fermeture du frein | nO, 0 à LSP Hz | nO | |
| nO: Non régledSi bLC est affecté et bEn = nO, le variateur de vitesse se déclenchera sur un défaut bLF à la mise en service. | ||||
| bEt | Temps de fermeture du frein | 0 à 5 s | 0,5 s | |
| bIP | Impulsion d'ouverture de frein | Voir ci-dessous. | nO | |
| nO: Pendant que le frein s'ouvre, le sens du couple moteur correspond au sens de rotation commandé.y E 5 : Pendant que le frein s'ouvre, le sens du couple moteur est toujours en avant, quel que soit le sens de rotation commandé.S'assurer que le sens du couple moteur pour une commande de marche avant correspond au sens de montée de la charge. Si nécessaire, inverser deux phases du moteur. | ||||
1 In correspond au courant nominal du variateur de vitesse indiqué dans le Guide d'installation de l'ATV31 et sur la plaque signalétique du variateur.

Ces paramètres n'apparaissent que si la fonction a été activée.

| Sous-menu | Paramètre | Description | Gamme de réglage | Réglage d'usine |
| L C 2 - | Commutation de 2ème limitation de courant Cette fonction est accessible seulement si LAC = L2 ou L3 (page 230). | |||
| L C 2 | Commutation de 2ème limitation de courant | Voir ci-dessous. | nO | |
| La sélection de l'entrée logique affectée active la fonction. n D : Non affectée L / I : Entrée logique LI1 L / 2 : Entrée logique LI2 L / 3 : Entrée logique LI3 L / 4 : Entrée logique LI4 L / 5 : Entrée logique LI5 L / 6 : Entrée logique LI6 Si LAC = L3, les affectations suivantes sont possibles : C d / I : Bit 11 du mot de commande Modbus ou CANopen C d / 2 : Bit 12 du mot de commande Modbus ou CANopen C d / 3 : Bit 13 du mot de commande Modbus ou CANopen C d / 4 : Bit 14 du mot de commande Modbus ou CANopen C d / 5 : Bit 15 du mot de commande Modbus ou CANopen CL1 est activé lorsque l'entrée logique ou le bit du mot de commande est à l'état 0 (menu SEt- à la page 216). CL2 est activé lorsque l'entrée logique ou le bit du mot de commande est à l'état 1. | ||||
| L C 2 | 2ème limitation de courant1 | 0,25 à 1,5 In2 | 1,5 In2 | |
On peut également accéder à ce paramètre dans le menu réglage SET-. Voir la page 213. In correspond au courant nominal du variateur de vitesse indiqué dans le Guide d'installation de l'ATV31 et sur la plaque signalétique du variateur.

Ces paramètres n'apparaissent que si la fonction a été activée.

| Sous-menu | Paramètre | Description | Gamme de réglage | Réglage d'usine |
| CHP- | Commutation moteurs | |||
| Cette fonction est accessible seulement si LAC = L2 ou L3 (page 230). | ||||
| CHP | Commutation, moteur 2 | Voir ci-dessous. | nO | |
| nD: Non affectée | ||||
| L / I : Entrée logique LI1 | ||||
| L / 2 : Entrée logique LI2 | ||||
| L / 3 : Entrée logique LI3 | ||||
| L / 4 : Entrée logique LI4 | ||||
| L / 5 : Entrée logique LI5 | ||||
| L / 6 : Entrée logique LI6 | ||||
| Si LAC = L3, les affectations suivantes sont possibles : | ||||
| C d / I : Bit 11 du mot de commande Modbus ou CANopen | ||||
| C d / 2 : Bit 12 du mot de commande Modbus ou CANopen | ||||
| C d / 3 : Bit 13 du mot de commande Modbus ou CANopen | ||||
| C d / 4 : Bit 14 du mot de commande Modbus ou CANopen | ||||
| C d / 5 : Bit 15 du mot de commande Modbus ou CANopen | ||||
| LI ou bit = 0 : Moteur 1 | ||||
| LI ou bit = 1 : Moteur 2 | ||||
| • La fonction de commutation de moteurs déselective la protection thermique du moteur. Un moyen extérieur de protection thermique du moteur doit être fourni. Voir le message « Attention » à la page 202. • Si cette fonction est utilisée, ne pas utiliser la fonction d'auto-réglage de tUn (page 219) sur le moteur 2 et ne pas configurer tUn à rUn ou PON. • Les modifications apportées aux paramètres ne prennt effet qu'une fois le variateur de vitesse mis à l'arrêt. | ||||
| UN S2 | Tension nominale du moteur (moteur 2) indiquée sur la plaque signalétique | Varie en fonction de la valeur nominale du variateur | Varie en fonction de la valeur nominale du variateur | |
| ATV31***M2 : 100 à 240 V | ||||
| ATV31***M3X : 100 à 240 V | ||||
| ATV31***N4 : 100 à 500 V | ||||
| ATV31***S6X :100 à 600 V | ||||
| F r S2 | Fréquence nominale du moteur (moteur 2) indiquée sur la plaque signalétique | 10 à 500 Hz | 50 Hz | |
| Le ratio UnS (en V) FrS (en Hz) ne doit pas dépasser les valeurs suivantes : | ||||
| ATV31***M2 : 7 max. | ||||
| ATV31***M3X : 7 max | ||||
| ATV31***N4 : 14 max. | ||||
| ATV31***S6X : 17 max. | ||||
| La modification du réglage de bFr à 60 Hz modifie également le réglage de FrS2 à 60 Hz. | ||||
| n C r 2 | Courant nominal du moteur (moteur 2) indiquée sur la plaque signalétique | 0,25 à 1,5 In1 | Varie en fonction de la valeur nominale du variateur | |
| n S P Z | Vitesse nominale du moteur (moteur 2) indiquée sur la plaque signalétique | 0 à 32760 tr/min | Varie en fonction de la valeur nominale du variateur | |
| 0 à 9 999 tr/min, puis 10,00 à 32,76 krpmSi la plaque signalétique n'indique pas la vitesse nominale mais la vitesse synchrone et le glissement (en Hz ou en %) calculer la vitesse nominale comme suit : | ||||
| Vitesse nominale = Vitesse synchrone x 100 - glissement en % ou | ||||
| Vitesse nominale = Vitesse synchrone x 50 - glissement en Hz (moteurs 50 Hz) ou | ||||
| Vitesse nominale = Vitesse synchrone x 60 - glissement en Hz (moteurs 60 Hz) | ||||
1 In correspond au courant nominal du variateur de vitesse indiqué dans le Guide d'installation de l'ATV31 et sur la plaque signalétique du variateur.
Ces paramètres n'apparaissent que si la fonction a été activée.

| Sous-menu | Paramètre | Description | Gamine deréglage | Réglage d'usine |
| CHP-(suite) | COS2 | Facteur de puissance du moteur (moteur 2) indiqué sur la plaque signalétique | 0,5 à 1 | Varie en fonction de la valeur nominale du variateur |
| UFT2 | Sélection du type de loi tension / fréquence (moteur 2) | Voir ci-dessous. | n | |
| L: Couple constant (pour moteurs raccordés en parallèle ou moteurs spéciaux) P: Couple variable (applications de pompé et de ventilateur) n: Contrôle vectoriel de flux sans captaeur (pour applications à couple constant) n L d: Économie d'énergie (pour les applications à couple variable n'exigient pas de dynamique élevée. Cela fonctionne d'une façon similaire au rapport P à charge nulle et au rapport n en présence d'une charge). TensionUnSFrS Fréquence | ||||
| UFR2 | Compensation RI/augmentation de tension (moteur 2)1 | 0 à 100 % | 20 | |
| Pour UFT2 = n ou nLd: compensation RI. Pour UFT2 = L ou P: augmentation de tension. Fonction utilisée pour optimier le couple aux basses vitesses. Augmenter UFr2 si le couple est insuffisant. Pour élever toute instabilité de fonctionnement, s'assurer que la valeur de UFr2 n'est pas trop haute pour un moteur chaud. Le fait de modifier UFT2 entrainera le rapport de UFr2 au réglage de l'usine (20%). | ||||
| FLG2 | Gain de la boucle fréquence (moteur 2)1 | 1 à 100 % | 20 | |
| FLG2 n'est accessible que si UFT2 = n ou nLd (voir la page 263). Ce paramètre règle la rampe de vitesse en fonction de l'inertie de la charge entrainée. Si la valeur est trop BASSE, le temps de réponse est plus long. Si la valeur est trop haute, une survvtesse ou une instabilité de fonctionnement peut survenir. FLG2 bas 50 40 30 20 10 0 -10 0 -0.1 0.2 0.3 0.4 0.5 t -10 0 -0.1 0.2 0.3 0.4 0.5 t -10 0 -0.1 0.2 0.3 0.4 0.5 t | ||||
| STA2 | Stabilité de la boucle fréquence (moteur 2)1 | 1 à 100 % | 20 | |
| STA2 est accessible seulement si UFT2 = n ou nLd (voir la page 263). Ce paramètre adapte le retour à un état stable après une vitesse transitoire (accalération ou décalération) en fonction de la dynamique de la machine entrainée. Augmenter graduallement la stabilité pour empêcher toute survvises. Si la valeur est trop BASSE, une survvtesse ou une instabilité de fonctionnement peut survenir. Si la valeur est trop haute, le temps de réponse est plus long. STA2 correct 50 40 30 20 10 0 -10 0 -0.1 0.2 0.3 0.4 0.5 t -10 0 -0.1 0.2 0.3 0.4 0.5 t | ||||
| SLP2 | Compensation de glissement (moteur 2)1 | 0 à 150% | 100 | |
| SLP2 est accessible seulement si UFT2 = n ou nLd (voir la page 263). Ce paramètre règle la valeur de compensation de glissement fixée par la vitesse nominale du moteur. Si le réglage du glissement est < le glissement réel, le moteur ne tourne pas à la vitesse correcte en état stable. Si le réglage du glissement est > le glissement réel, le moteur est surcompensé et la vitesse est instable. | ||||
On peut également accéder à ce paramètre dans le menu réglage SEt-. Voir la page 213.

Ces paramètres n'apparaissent que si la fonction a été activée.
Gestion des interrupteurs de fin de course
Cette fonction peut être utilisée pour gérer le fonctionnement d'un ou deux interrupteurs de fin de course, dans 1 ou 2 sens de fonctionnement. Elle est accessible seulement si LAC = L2 ou L3 (voir la page 230). Pour utiliser cette fonction :
- Affecter une ou deux entrées logiques à la limite avant et à la limite arrêté.
- Sélectionner le type d'arrêt (sur rampe, rapide ou roue libre). Après un arrêt, le moteur est autorisé à redémarrer dans le sens opposé seulement.
- L'arrêt est exécuté quand l'entrée est à l'état 0. Le sens de fonctionnement est autorisé dans l'état 1.

| Sous-menu | Paramètre | Description | Gamage de réglage | Réglage d'usine |
| L 5 E - | Gestion des interrupteurs de fin de course LSt- est accessible seulement si LAC = L2 ou L3 (page 230). | |||
| L R F | Limitation, sens de marche avant | Voir ci-dessous. | nO | |
| n O : Non affectée L 1 1 : Entrée logique LI1 L 1 2 : Entrée logique LI2 L 1 3 : Entrée logique LI3 L 1 4 : Entrée logique LI4 L 1 5 : Entrée logique LI5 L 1 6 : Entrée logique LI6 | ||||
| L R r | Limitation, sens de marche arrière | Voir ci-dessous. | nO | |
| n O : Non affectée L 1 1 : Entrée logique LI1 L 1 2 : Entrée logique LI2 L 1 3 : Entrée logique LI3 L 1 4 : Entrée logique LI4 L 1 5 : Entrée logique LI5 L 1 6 : Entrée logique LI6 | ||||
| L R S | Type d'accêt de l'interrupteur de fin de course | Voir ci-dessous. | nSt | |
| r P : Sur rampe F 5 E : Arrêt rapide n 5 E : Arrêt roue libre | ||||

Ces paramètres n'apparaissent que si la fonction a été activée.

| Sous-menu | Paramètre | Description | Gamage de réglage | Réglage d'usine |
| 5 C 5 | Sauvegarde de la configuration1 | Voir ci-dessous. | nO | |
| n O : Fonction inactive5 E r l : Sauvegarde la configuration actuelle (mais non le résultat d'un auto-réglage) dans la mémoireEEPROM. SCS passée automatiquement à nO dés que la sauvegarde est effectué. Utiliser cette fonction pourconserver une configuration en réserve en plus de la configuration actuelle.Lé variateur de vitesse est régèle en usine avec la configuration actuelle et la configuration en réserve, toutesles deux configurées à la configuration d'usine.Si le terminal d'exploitation à distance est raccardé au variateur de vitesse, jusqu'à quatre réglagessupplémentaires sont disponibles : F I L 1, F I L 2, F I L 3, et F I L 4. Utiliser ces sélections poursauvegarder jusqu'à quatre configurations dans la mémoire EEPROM du terminal d'exploitation à distance.SCS passée automatiquement à nO dés que la sauvegarde est effectué. | ||||
| F C 5 | Retour aux réglages d'usine/Restaurer la configuration1 | Voir ci-dessous. | nO | |
| n O : Fonction inactiver E C I : Remplace la configuration actuelle par la configuration en réserve précédemment sauvégardée parSCS (SCS est régèle à Strl). rECl est visible seulement si la configuration en réserve a été sauvégardée. FCSpassée automatiquement à nO dés que cette action est effectué.I n I : Remplace la configuration actuelle par les réglages d'usine. FCS passée automatiquement à nO désque cette action est effectué.Si le terminal d'exploitation à distance est raccardé au variateur de vitesse, jusqu'à quatre sélectionssupplémentaires sont disponibles, correspondant aux fichiers de réserve charges dans la mémoire EEPROMdu terminal d'exploitation à distance : F I L 1, F I L 2, F I L 3, et F I L 4. Ces sélections replacent laconfiguration actuelle par la configuration en réserve correspondante dans le terminal d'exploitation à distance.FCS passée automatiquement à nO dés que cette action est effectué.Remarque : Si n R d apparait brièvement sur l'affchage après que le paramètre est passé à nO, le transfertde configuration n'est pas possible et n'a pas été effectué (parce que les valeurs nominales du variateur sontdifférentes, par exemple). Si n E r r apparait brièvement sur l'affchage après que le paramètre est passé à nO,une erreur de transfert de configuration s'est produite et les réglages de l'usine doivent être restaurées à l'aidede Inl. Dans les deux cas, vérifier la configuration à transférer avant d'essayer de nouveau.REMARQUE : Pour la prise d'effet de rECl, Inl et FIL1 à FIL4, il faut appuyer sur la touche ENT et la maintainenireenforcée pendant 2 s. | ||||
1 SCS et FCS sont accessibles depuis plusieurs menus de configuration, mais ils concernent l'ensemble de tous les menus et paramètres.
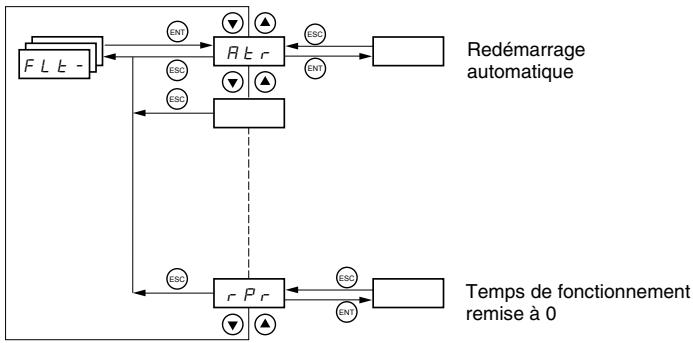
Les paramètres du menu défauts ne peuvent être modifiés que lorsque le variateur de vitesse est arrêté et en l'absence de toute commande de marche.
Sur le terminal d'exploitation à distance optionnel, ce menu est accessible avec le commutateur de blocage d'accès dans la position .
| Code | Description | Réglage d'usine |
| R E r | Redémarrage automatique | nO |
| n O: Fonction inactive Y E 5: Redémarrage automatique après verrouillage sur un défaut, si la cause du défaut n'est plus présente et si les autres conditions de fonctionnement permettent le redémarrage. Le redémarrage s'effectue par une série de tentatives automatiques séparées par des temps d'atte croissants : 1 s, 5 s, 10 s, puis une fois par minute pendant la période définie par tAr. Si le redémarrage ne s'est pas produit une fois que la duréeemaximale du temps de redémarrage, tAr, s'est éçoulée, la procédure est annulée et le variateur de vitesse resté verrouillé jusqu'à une mise hors puis sous tension. Les défauts qui autorisent le redémarrage automatique sont : Défaut externe (EPF) Perte de référence 4 à 20 mA (LFF) Défaut CANopen (COF) Surtension réseau (OSF) Coupure d'une phase réseau (PHF) Coupure d'une phase moteur (OPF) Surtension du bus courant continu (ObF) Surcharge du moteur (OLF) Liaison série (SLF) Surchauffe du variateur (OHF) Cette fonction exige une contrôle à 2 fils (tCC = 2C) avec tCt = LEL ou PFO (page 221). S'assurer qu'un redémarrage automatique ne met en aucune façon le personnel ou le matériel en danger. Se reporter au message « Avertissement » ci-dessous. | ||
| E R r | Durée maximale du processus de redémarrage | 5 minutes |
| 5 : 5 minutes I O : 10 minutes 3 O : 30 minutes I h : 1 heures 2 h : 2 heures 3 h : 3 heures C E : lllimitée Ce paramètre apparait si Atr = YES. Il peut être utilisé pour limiter le nombre de redémarrages consécutifs sur un défaut récurrent. | ||
| r S F | Réarmement du défaut | nO |
| n O: Non affectée L I I: Entrée logique LI1 L I 2: Entrée logique LI2 L I 3: Entrée logique LI3 L I 4: Entrée logique LI4 L I 5: Entrée logique LI5 L I 6: Entrée logique LI6 | ||
Ces paramètres n'apparaissent que si la fonction a été activée.
Fonctionnement inattendu de l'appareil
- Le redémarrage automatique ne peut être utilisé que pour des machines ou installations qui ne doivent avoir danger en cas de redémarrage automatique, pour le personnel ou pour l'appareil.
- Si le redémarrage automatique est actif, R1 n'indiquera un défaut qu'une fois la séquence de redémarrage terminée.
- Le fonctionnement de l'appareil doit se conformer aux règlements de sécurité nationaux et locaux.
Si ces précautions ne sont pas respectées, cela peut entraîner la mort, des blessures graves ou des dommages matériels.
| Code | Description | Réglage d'usine |
| FL r | Reprise à la volée (rattrapage automatique de rampe) | nO |
| Permet un redémarrage progressif d'une charge tournante si la commande de marche est maintainue après les événements suivants: | ||
| • Perte d'alimentation de réseau ou mise hors tension | ||
| • Réarmement du defaulted ou redémarrage automatique. Voir l'advertissement à la page 267. | ||
| • Arrêt roue libre | ||
| La vitesse donnée par le variateur de vitesse reprend à partir de la vitesse estimée du moteur au moment du redémarrage, puis suit la rampe de la vitesse de référence. | ||
| Cette fonction exige une contrôle à 2 fils (tCC = 2C) avec tCT = LEL ou PFO. | ||
| nO : Fonction inactive | ||
| yE5 : Fonction active | ||
| Lorsque la fonction est validée, elle s'active à chaque commande de marche, résultat en un léger liéai (1 seconde maximum) avant de démarrer. | ||
| FLr estforcé à nO si la commande de frein (bLC) est affectée (page 260). | ||
| E f F | Défaut externe | nO |
| nO : Non affectée | ||
| L / I : Entrée logique LI1 | ||
| L / 2 : Entrée logique LI2 | ||
| L / 3 : Entrée logique LI3 | ||
| L / 4 : Entrée logique LI4 | ||
| L / 5 : Entrée logique LI5 | ||
| L / 6 : Entrée logique LI6 | ||
| Si LAC = L3, les affectations suivantes sont possibles : | ||
| C d / I : Bit 11 du mot de commande Modbus ou CANopen | ||
| C d / 2 : Bit 12 du mot de commande Modbus ou CANopen | ||
| C d / 3 : Bit 13 du mot de commande Modbus ou CANopen | ||
| C d / 4 : Bit 14 du mot de commande Modbus ou CANopen | ||
| C d / 5 : Bit 15 du mot de commande Modbus ou CANopen | ||
| E PL | Mode d'arrêt sur défaut externe (EtF) | YES |
| nO : Défaut ignorer | ||
| yE5 : Défaut avec arrêt roue libre | ||
| r NP : Défaut avec arrêt sur rampe | ||
| F 5 E : Défaut avec arrêt rapide | ||
| OPL | Configuration du défaut coupure de phase moteur | YES |
| nO : Fonction inactive | ||
| yE5 : Déclenchement du défaut OPF | ||
| R C : Aucun défaut n'est déclenché, mais la tension de sortie est surveillée pour éviter une surintensité quand la liaison avec le moteur est rétable et qu'une reprise à la volée se produit, même si if FLr = nO (à utiliser avec un contacteur en aval). | ||
| OPL estforcé à YES si la commande de frein (bLC) est affectée (page 260). | ||
| IPL | Configuration du défaut coupure de phase réseau | YES |
| Ce paramètre n'est accessible que sur les variateurs de vitesse triphasés. | ||
| nO : Défaut ignorer | ||
| yE5 : Défaut avec arrêt rapide | ||
| OHL | Mode d'arrêt sur défaut de surchauffe du variateur (OHF) | YES |
| nO : Défaut ignorer | ||
| yE5 : Défaut avec arrêt roue libre | ||
| r NP : Défaut avec arrêt sur rampe | ||
| F 5 E : Défaut avec arrêt rapide | ||
| O LL | Mode d'arrêt sur défaut de surcharge du moteur (OLF) | YES |
| nO : Défaut ignorer | ||
| yE5 : Défaut avec arrêt roue libre | ||
| r NP : Défaut avec arrêt sur rampe | ||
| F 5 E : Défaut avec arrêt rapide |
| Code | Description | Gamme de réglage | Réglage d'usine |
| S L L | Mode d'arrêt sur défaut liaison série Modbus (SLF) | Voir ci-dessous. | YES |
| n D: Défaut ignoréy E S: Défaut avec arrêt roule librer P: Défaut avec arrêt sur rampeF S E: Défaut avec arrêt rapide | |||
| C O L | Mode d'arrêt sur défaut liaison série CANopen (COF) | Voir ci-dessous. | YES |
| n D: Défaut ignoréy E S: Défaut avec arrêt roule librer P: Défaut avec arrêt sur rampeF S E: Défaut avec arrêt rapide | |||
| t n L | Configuration du défaut d'auto-réglage (tnF) | Voir ci-dessous. | YES |
| n D: Défaut ignoré (le variateur de vitesse returne aux réglages de l'usine)y E S: Défaut avec variateur de vitesse verrouillé | |||
| L F L | Mode d'arrêt sur défaut perte de référence 4 à 20 mA (LFF) | Voir ci-dessous. | nO |
| n D: Défaut ignoré (seule valeur possible si CrL3 ≤3 mA, voir la page 222)y E S: Défaut avec arrêt rouleLibLF F: Le variateur de vitesse passée en vitesse de repli (voir le paramètre LFF ci-dessous)r L S: Le variateur de vitesse maintainant la vitesse à laquelle il fonctionnait quand le défaut s'est produit jusqu'à ce que le défaut ne soit plus présente.r P: Défaut avec arrêt sur rampeF S E: Défaut avec arrêt rapideAvant de regler LFL à YES, rMP ou FSt, vérifier le raccordement de l'entrée Al3. Autrement, le variateur de vitesse pourrait passer immédiatement à un défaut LFF. | |||
| L F F | Vitesse de repli | 0 à 500 Hz | 10 Hz |
| Réglage de la vitesse de repli pour un arrêt sur défaut | |||
| d r n | Fonctionnement déclassé en cas de sous-tension | Voir ci-dessous. | nO |
| n D: Fonction inactivey E S: Le seul de surveillance de la tension de réseau est :ATV31***M2 : 130 VATV31***M3X : 130 VATV31***N4 : 270 VATV31***S6X : 340 VDans ce cas, une bobine d'arrêt de ligne doit être utilisée et la performance du variateur de vitesse ne peut pas être garantie.Pour affecter cette fonction, il faut appuyer sur la touche ENT et la maintainir enforcée pendant 2 secondes. | |||
| S E P | Arrêt contrôle sur perte d'alimentation de réseau | Voir ci-dessous. | nO |
| n D: Verrouille le variateur de vitesse et arrêté le moteur en roue libren P N S: Utilise l'inertie pourmaintainir l'alimentation du variateur de vitesse aussi longtemps que possibler P: Arrêt sur rampe active (DEC ou dE2)F S E: Arrêt rapide. Le temps d'arrêt dépend de l'inertie et de la capacité de freinage du variateur de vitesse. | |||
| In H | Inhibition des défauts | Voir ci-dessous. | nO |
| ATTENTION | |||
| PERTE DE PROTECTION CONTRÉ LES DÉFAUTSL'inhibition des défauts peut endomgarer le variateur de vitesse au-delà de toute réparationen empêchant l'arrêt immédiat sur intervention d'un défaut.Si cette précaution n'est pas respectée, cela peut entrainer des dommages matériels. | |||
| n D: Non affectéeL I I: Entrée logique LI1L I 2: Entrée logique LI2L I 3: Entrée logique LI3L I 4: Entrée logique LI4L I 5: Entrée logique LI5L I 6: Entrée logique LI6La surveillance des défauts est active quand l'entrée est à l'état 0. Elle est inactive quand l'entrée est à l'état 1.Tous les défauts actifs sont remis à zéro lorsque l'état de l'entrée passée de 1 à 0.REMARQUE: Pour affecter cette fonction, il faut appuyer sur la touche ENT et la maintainir enforcée pendant 2 secondes. | |||
| r P r | Temps de fonctionnement remise à 0 | Voir ci-dessous. | nO |
| n D: Nonr E H: Temps de fonctionnement remise à 0Le paramètre rPr est automatiquement réglaé à nO dés que la remise à zéro est exécutée. | |||
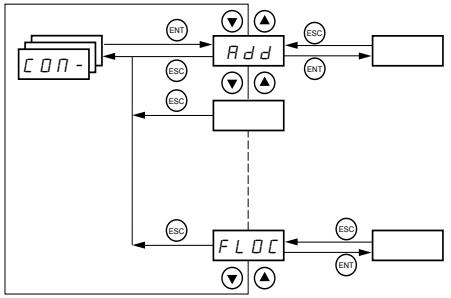
Les paramètres du menu communication ne peuvent être modifiés que lorsque le variateur de vitesse est arrêté et en l'absence de toute commande de marche. Les modifications à Add, tbr, tFO, AdCO et bdCO ne prenant effet qu'après un redémarrage.
Sur le terminal d'exploitation à distance optionnel, ce menu est accessible avec le commutateur de blocage d'accès dans la position .
| Code | Description | Gamme de réglage | Réglage d'usine |
| Rdd | Modbus: adresse du variateur | 1 à 247 | 1 |
| Ebr | Modbus: vitesse de transmission | 19 200 bps | |
| 4. B : 4800 bits/seconde9. B : 9600 bits/seconde19.2 : 19 200 bits/secondERMARQUE: Le terminal d'exploitation à distance ne peut être utilisé qu'avac la vitesse de transmission régée à 19 200bits/seconde. | |||
| E F O | Format de communication Modbus | Voir ci-dessous. | 8E1 |
| B O I : 8 bits de données, parité impaire, 1 bit d'arrêtB E I : 8 bits de données, parité paire, 1 bit d'arrêtB n I : 8 bits de données, sans parité, 1 bit d'arrêtB n 2 : 8 bits de données, sans parité, 2 bits d'arrêtREMARQUE: Le terminal d'exploitation à distance ne peut être utilisé qu'avac le format de communication régé à 8 bits dedonnées, parité paire, 1 bit d'arrêt. | |||
| E E O | Modbus: délambda d'atte | 0,1 à 10 s | 10 s |
| Rd C O | CANopen: adresse du variateur | 0 à 127 | 0 |
| bd C O | CANopen: vitesse de transmission | Voir ci-dessous. | 125 |
| I O . O : 10 kilobits/seconde2 O . O : 20 kilobits/seconde5 O . O : 50 kilobits/seconde12 S . O : 125 kilobits/seconde25 O . O : 250 kilobits/seconde5 O . O : 500 kilobits/seconde10 O . O : 1000 kilobits/seconde | |||
| Er C O | CANopen: registre d'erreurs (lecture seulement) | Voir ci-dessous. | |
| O : « No error »1 : « Bus off error »2 : « Life time error »3 : « CAN overrun »4 : « Heartbeat error » | |||
| Code | Description | Gamme de réglage | Réglage d'usine |
| F L O | Forçage local | Voir ci-dessous. | nO |
| n O: Non affectéeL / I : Entrée logique LI1L / 2 : Entrée logique LI2L / 3 : Entrée logique LI3L / 4 : Entrée logique LI4L / 5 : Entrée logique LI5L / 6 : Entrée logique LI6En mode forçage local, le bornier et le terminal d'exploitation du variateur reconnent le contrôle du variateur de vitesse. | |||
| F L O C | Sélection du canal de référence et de contrôle en mode forçage localEst accessible seulement si LAC = 3 | Voir ci-dessous. | Al1AIP pourATV31*****A |
| En mode forçage local, seule la référence de vitesse est prise en compte. Les fonctions PI, les entrées sommatrices, etc. ne sont pas actives.Se reporter aux schémas aux pages 230 à 233.R / I : Entrée analogue AI1, entrées logiques LIR / 2 : Entrée analogue AI2, entrées logiques LIR / 3 : Entrée analogue AI3, entrées logiques LIR / P : Potentiomètre (variateurs ATV31*****A uniquement), boutons RUN/STOPL C : Terminal d'exploitation à distance : Récurrence LFr (page 214), boutons RUN/STOP/FWD/REV | |||

Ces paramètres n'apparaissent que si la fonction a été activée.
MENU Surveillance SUP
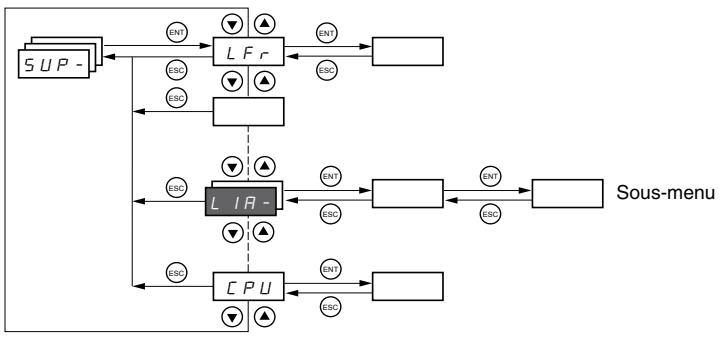
Les paramètres du menu de surveillance sont accessibles avec le variateur en marche ou à l'arrêt. Ce menu est accessible avec le commutateur de blocage d'accès sur le terminal d'exploitation à distance dans n'importe quelle position.
Certaines fonctions ont de nombreux paramètres. Pour simplifier la programmation et partager la liste des paramètres courte, ces fonctions ont été groupées en sous-menus. Comme les menus, les sous-menus sont identifiés par un tiret après leur code. Par exemple, LIA- est un sous-menu.
La valeur de l'un des paramètres de surveillance est affichée sur le variateur de vitesse pendant qu'il fonctionne. Pour changer le paramètre affiché, défiler jusqu'au paramètre de surveillance désiré et appuyer sur la touche ENT. Pour retenir cette sélection comme le nouveau paramètre par défaut, appuyer de nouveau sur la touche ENT pendant 2 secondes. La valeur de ce paramètre sera affichée pendant le fonctionnement, même après la mise hors puis sous tension du variateur de vitesse. Si le nouveau choix n'est pas confirmé par un deuxième appui sur la touche ENT, le variateur de vitesse retournera au paramètre précédent après une mise hors, puis sous tension.

| Code | Description | Gamine de réglage |
| L F r | Référence de fréquence pour le contrôle par le terminal d'exploitation du variateur de vitesse ou le terminal d'exploitation à distance | 0 à 500 Hz |
| r P l | Référence PI interne | 0 à 100 % |
| F r H | Référence de fréquence avant rampe (valeur absolue) | 0 à 500 Hz |
| r F r | Fréquence de sortie appliquée au moteur | - 500 Hz à + 500 Hz |
| 5 P d l a u 5 P d 2 a u 5 P d 3 | Valeur de sortie en unités du client SPd1, SPd2 ou SPd3 selon le paramètre SdS, voir la page 217. Le réglage d'usine est SPd3. | |
| L C r | Courant moteur | |
| O P r | Puisance moteur | |
| 100 % = puissance nominale du moteur, calculée à l'aide des paramètres entrés dans le menu drC-. | ||
| U L n | Tension du réseau (Vac) calculée à partir de la tension mesurée sur le bus courant continu | |
| t H r | État thermique du moteur | |
| 100 % = État thermique nominal 118 % = Seuil OLF (surcharge du moteur) | ||
| t H d | État thermique du variateur | |
| 100 % = État thermique nominal 118 % = Seuil OHF (surchauffe du variateur) | ||
| L F t | Dernier défaut | |
| b L F : Défaut commande de frein C F F : Configuration (paramètres) incorrecte C F I : Configuration (paramètres) invalide C O F : Défaut communication ligne 2 (CANopen) C r F : Défaut pré-charge condensateur E E F : Défaut EEPROM E P F : Défaut externe I n F : Défaut interne L F F : Défaut 4-20 mA sur Al3 n O F : Pas de défaut mémorisé O b F : Défaut surtension bus courant continu O C F : Défaut de surintensité O H F : Défaut de surchauffe du variateur O L F : Défaut de surcharge du moteur O P F : Défaut de coupure phase moteur O S F : Défaut surtension réseau P H F : Défaut de coupure phase réseau S C F : Défaut court-circuit moteur (phase, terre) S L F : Défaut de communication Modbus S O F : Défaut de survitesse du moteur t n F : Défaut d'auto-réglage U S F : Défaut sous-tension réseau | ||
| O t r | Couple moteur | |
| 100 % = couple nominal moteur, calculé à l'aide des paramètres entrés dans le menu drC-. | ||
| r t H | Temps de fonctionnement | 0 à 65 530 heures |
| Temps total pendant lequel le moteur a été sous tension : 0 à 9 999 (heures), puis 10,00 à 65,53 (kheures). Peut être remis à zéro par le paramètre rPr dans le menu FLT- (page 269). | ||
Ces paramètres n'apparaissent que si la fonction a été activée.

| Code | Description | |
| C d | Code de blocage des bornes | |
| Permet de protégé la configuration du variateur avec un code de blocage d'accès.REMARQUE: Avant d'entrer un code, prendre soin de l'enregistrer.F F: Pas de code de blocage d'accèsPour bloquer l'accès, utiliser la touche ▲ pour entrer un code (2 à 9999) et appuyer sur ENT. « ON »apparait sur l'écran pour indiquer que les paramètres ont été bloqués.F n: Un code (2 à 9999) blocque l'accès au variateur de vitessePour débloquer l'accès, utiliser la touche ▲ pour entrer le code d'accès (2 à 9999) et appuyer surENT. Le code reste sur l'écran et l'accès est débloqué jusqu'à la mise hors tension suivante du variateur.L'accès aux paramètres peut être bloquédouveau lors de la remise sous tension suivante.Si un code incorrect est entré, l'affchage passé à « ON » et les paramètres restent bloqués.XXXX: L'accès aux paramètres est débloqué (le code reste sur l'écran).Pour réactiver le blocage avec le même code lorsque les paramètres ont été débloqués, returner àON à l'aide de la touche ▼ et appuyer sur ENT. « ON » apparait sur l'écran pour indiquer que les paramètres ont été bloqués.Pour bloquer l'accès avec un nouveau code lorsque les paramètres ont été débloqués, returner unnouveau code (incrémenter l'affchage à l'aide de ▲ ou ▼) et appuyer sur ENT. « ON » apparait surl'écran pour indiquer que les paramètres ont été bloqués.Pour désactiver le blocage lorsque les paramètres ont été débloqués, returner à « OFF » à l'aide de la touche ▼ et appuyer sur ENT. « OFF » reste sur l'écran. Les paramètres sont débloqués et restent débloqués.Lorsque l'accès est bloqué à l'aide d'un code, seuls les paramètres de surveillance sont accessibles, avecseulument un besoin-temporaire du paramètre affché. | ||
| L U S | État de l'auto-reglage. Voir la page 219. | |
| E R b: La valeur par défaut de la résistance du stator est utilisée pour commander le moteur.P E n d: Un auto-reglage a été demandé, mais non effectué.P r D G: Auto-reglage en cours.F A I L: L'auto-reglage a échoué.d D n E: L'auto-reglage est terminé. La résistance du stator mesurée par la fonction d'auto-reglage estutilisée pour commander le moteur.S E r d: L'auto-reglage est terminé. La valeur de la résistance du stator à froid (rSC est différent de nO) estutilisée pour commander le moteur. | ||
| U d P | Indique la version du micrologiciel du variateur ATV31.Par exemple, 1102 = V 1.1IE02. | |
| L I R - | Fonctions des entrées logiques | |
| L I I R L I 2 R L I 3 R L I 4 R L I 5 R L I 6 R | Peut être utilisé pour afficher les fonctions affectées à chaque entrée. Si aucune fonction n'est affectée, nOest affiché. Utiliser ▲ et ▼ pour défilier parmi les fonctions. Si un certain nombre de fonctions a étéaffecté à la même entrée, s'assurer que ces fonctions sont compatibles. | |
| L I 5 | Peut être utilisé pour afficher l'état des entrées logiques (à l'aide des segments de l'affichage :haut = 1, bas = 0)État 1État 0Li1 Li2 Li3 Li4 Li5 Li6Exampie ci dessus: Li1 et Li6 sont à 1, Li2 à Li5 sont à 0. | |
| R I R - | Fonctions des entrées analogiques | |
| R I I R R I 2 R R I 3 R | Peut être utilisé pour afficher les fonctions affectées à chaque entrée. Si aucune fonction n'a été affectée, nOest affiché. Utiliser ▲ et ▼ pour défilier parmi les fonctions. Si un certain nombre de fonctions estaffecté à la même entrée, s'assurer que ces fonctions sont compatibles. | |
Section 4 : entretien et dépannage
Lire les directives de sécurité suivantes avant toute intervention dans le variateur.
Tension dangereuse
- Coupez l'alimentation au variateur de vitesse avant d'y travailler.
- Lisez et comprenez ces procédures et les précautions à la page 204 de ce manuel avant toute intervention dans les variateurs ATV31.
- L'installation, le réglage et l'entretien de ces variateurs de vitesse doivent être effectués exclusivement par du personnel qualifié.
Si ces précautions ne sont pas respectées, cela entraînera la mort ou des blessures graves.
Entretien de routine
Exécuter les étapes suivantes à intervalles réguliers :
- vérifier l'objet et le serrage des connexions.
- s'assurer que l'aération est efficace et que la température autour du variateur de vitesse reste à un niveau acceptable.
- Si nécessaire, enlever la poussière et les débris du variateur.
Affichage NORMAL
L'affichage normal en l'absence de défaut et de commande de marche montre :
- La valeur de l'un des paramètres de surveillance (voir la page 272).
- Init: Séquence d'initialisation
- rdY: Variateur prêt
- dcb: Freinage par injection courant continu en cours nSt: Arrêt roue libre. Voir la page 205.
- FSt: Arrêt rapide tUn: Auto-réglage en cours
Affichage des défauts
Si un problème se produit pendant l'installation ou le fonctionnement, s'assurer que toutes les recommandations d'environnement ambiant, de montage et de raccordement ont été respectées.
Le premier défaut détecté est mis en mémoire et affiché, clignotant à l'écran. Le variateur se verrouille et le contact du relais de défaut (RA-RC) s'ouvre, s'il a été configuré à cette fonction.
Non démarriage du variateur sans affichage de défauts
Si le variateur de vitesse ne démarre pas et qu'aucune indication n'est affichée, considérer les points suivants :
- Vérifier l'alimentation vers le variateur de vitesse.
- L'affection des fonctions « Arrêt rapide » ou « Arrêt roue libre » entraîne un non-démarage du variateur si les entrées logiques correspondantes ne sont pas sous tension. Dans ce cas, le variateur affiche « nSt » en arrêt roue libre et « FSt » en arrêt rapide. Ceci est normal car ces fonctions sont actives à la vitesse zéro afin d'obtenir la sécurité d'arrêt en cas de coupure de fil.
Effacement des défauts
- S'assurer que les entrées de commande de marche sont actionnées conformément au mode de contrôle choisi (paramètre tCC du menu I-O, voir la page 221).
- Si une entrée est affectée à la fonction d'interrupteur de fin de course et que cette entrée est à l'état zéro, le variateur ne peut démarrer que sur une commande de sens opposé (voir la page 264).
- Si le canal de référence (page 229) ou le canal de contrôle (page 230) est affecté à Modbus ou CANopen, le variateur de vitesse affiche nSt à la mise sous tension et reste à l'arrêt jusqu'à ce que le bus de communication envoie une commande.
Le variateur de vitesse peut être déverrouillé après un défaut de l'une des façons suivantes :
- Mise hors tension du variateur de vitesse jusqu'à ce que l'écran soit vide.
- Automatiquement, si la fonction de redémarrage automatique est activée (le paramètre Atr est réglé à Yes, voir la page 267)
- Par une entrée logique, si une entrée logique est affectée à la fonction de remise à zéro des défauts (le paramètre rSF est affecté à L1*, voir la page 267)
Défauts qui ne peuvent pas être automatiquement remis à zéro
Les défauts qui ne peuvent pas être automatiquement remis à zéro sont énumérés dans le tableau ci-dessous. Pour remettre les défauts à zéro :
- Mettre le variateur de vitesse hors tension.
- Attendre que l'écran s'éteigne complètement.
- Déterminer et corriger la cause du défaut.
- Remettre sous tension.
Les défauts BLF, CRF, OCF, SOF et TNF peuvent être également remis à zéro à distance par une entrée logique. Se reporter au paramètre RSF à la page 267.
| Défaut | Cause probable | Action correctrice |
| b L F Série de freinage | Courant d'ouverture de frein pas atteint | Vérifier les raccordements du variateur et du moteur.Vérifier les enroulements du moteur.Vérifier le réglage du lbr dans le menu FUn-. Se reporter à la page 260. |
| C r F Défaut du circuit de précharge | Circuit de précharge endommagé | Réarmer le variateur de vitesse.Remplacer le variateur de vitesse. |
| I n F Défaut interne | Défaut interneDéfaut de raccordement interne | Supprimer les sources d'interférences electromagnétiques.Remplacer le variateur de vitesse. |
| O C F Surintensité | Réglages incorrectly de paramètres dans les menus SET- et drC-Accélération trop rapideVariateur ou moteur sous-dimensionné pour la chargeBlocage mécanique | Vérifier les paramètres des menus SET- et drC-.S'assurer que la taillie du moteur et du variateur est suffisante pour la charge.Supprimer le blocage mécanique. |
| 5 C F Court-circuit du moteur | Court-circuit ou mise à la terre en sortie du variateurCourant de fuite à la terreimportant à la sortie du variateur de vitesse si plusieurs moteurs sont connectés en parallele | Vérifier les câbles de liaison du variateur au moteur, et l'isolement du moteur.Réduire la fréquence de découvert.Raccorder des filtres de sortie en série avec le moteur. |
| 5 O F Survitesse | InstabilitéCharge entraînante trop forte | Vérifier les paramètres du moteur, de gain et de stabilité.Ajouter une résistance de freinage.Vérifier la taillie du moteur, du variateur et de la charge. |
| E n F Erreur d'auto réglage | Moteur ou alimentation du moteur ne convenant pas au variateur de vitesseMoteur non raccordé au variateur de vitesse | Utiliser alors la loi L ou la loi P (UFt à la page 219).Vérifier la présence du moteur pendant un auto-réglage.Si un contacteur en aval est utilisé, le fermer pendant l'auto-réglage. |
Défauts qui peuvent être automatiquement remis à zéro
Après la suppression de la cause du défaut, les défauts dans le tableau ci-dessous peuvent être remis à zéro :
- avec la fonction redémarrage automatique. Se reporter au paramètre Atr du menu FLt- à la page 267.
- par une entrée logique. Se reporter au paramètre rSF du menu FLt- à la page 267. enmettant le variateur hors puissance puis sous tension.
| Défaut | Cause probable | Action correctrice |
| C O F Coupure liaison série, CANopen | Perte de communication entre le variateur de vitesse et le dispositif de communication ou terminal d'exploitation à distance. | Vérifier le bus de communication. Consulter la documentation spécifique au produit. |
| E P F Défaut externe | Défini par l'utilitaire | Défini par l'utilitaire |
| L F F Perte de référence 4 à 20 mA | Perte de référence 4 à 20 mA sur l'entrée Al3. | Vérifier la connexion sur l'entrée Al3. |
| O b F Surtension en dépréciation | • Freinage trop rapide • Charge entrainante trop force | • Augmenter le temps de dépréciation. • Installer une résistance de freinage si nécessaire. • Activer la fonction brA si compatible avec l'application. Se reporter à la page 240. |
| O H F Surcharge du variateur | • La température du variateur de vitesse ou de l'ambiente est trop haut. • Charge continue de courant du moteur trop haute | Vérifier la charge du moteur, la ventilation du variateur et l'environnement. Attendre le refroidissement du variateur pour redémarrer. |
| O L F Surcharge du moteur | • Déclenchement thermique dû à une surcharge prolongée du moteur • Puissance nominale du moteur trop faible pour l'application | Vérifier le réglage de lth (protection thermique moteur, page 214), vérifier la charge du moteur. Permet le refroidissement du moteur pour redémarrer. |
| O P F Coupure phase réseau | • Coupure d'une phase en sortie du variateur • Contacteur en aval ouvert • Moteur non raccordé • Instabilité du courant du moteur • Variateur de vitesse surdimensionné pour le moteur | • Vérifier les raccordements du variateur au moteur. • Si un contacteur en aval est utilisé, régler OPL à OAC. Se reporter à la page 268. • Essayer le variateur de vitesse sur un moteur de faisible puissance ou sans moteur : régler OPL à nO. Se reporter à la page 268. • Vérifier et optimier les paramétres UFr (page 215), UnS (page 218) et nCr (page 218) et effectuer un auto-réglage (page 219). |
| O S F Surtension en régime établi ou en accélération | • Tension de réseau trop élevé • Transitoires d'alimentation réseau | • Vérifier la tension de réseau. Comparer avec la valeur nominale de la plaque signalétique du variateur. • Réarmer le variateur de vitesse. |
| P H F Coupure phase réseau | • Perte de phase réseau, fusible fondu • Variateur triphasé utilisé sur un réseau monophasé • Déséquilibre phase réseau • Défaut de phase transitoire REMARQUE: Cette protection ne fonctionne qu'avac le variateur de vitesse fonctionnant sous charge. | • Vérifier les raccordements et les fusions. • Désactiver le défaut en réglient IPL à nO. Se reporter à la page 268. • Vérifier si l'alimentation de réseau est correcte. • Fournir une alimentation triphasée si nécessaire. |
| S L F Coupure liaison série Modbus | Perte de connexion entre le variateur de vitesse et le dispositif de communication ou le terminal d'exploitation à distance. | • Vérifier les raccordements de communication. • Consulter la documentation spécifique au produit. |
Défauts qui se remettent à zéro lorsqu'on défaut est effacé
| Défaut | Cause probable | Action correctrice |
| C F FDéfaut deconfiguration | Les configurations des paramètres ne convennment pas à l'application. | Restaurer les régles d'usine ou la configuration en réserve, si elle est valide. Voir le paramètre FCS dans le menu drC- (page 220). |
| C F IDéfaut deconfiguration par l'intermédiaire de la liaison en série | Les configurations des paramètres chargées dans le variateur de vitesse par l'intérmédiaire de la liaison en série ne convennent pas à l'application. | Vérifier la configuration précédemment chargee. Charger une configuration compatible. |
| U S FSous-tension. | Tension de réseau trop faible.Chute de tension transitoireRésistance de précharge endommagée | Vérifier la tension de réseau.Vérifier le réglage du paramètre UNS. Voir la page 218.Remplacer le variateur de vitesse. |
Tableaux de réglage de la configuration
Utiliser les tableaux de configuration commençant à la page 280 pour préparer et enregistrer la configuration avant de programmer le variateur de vitesse. Il est toujours possible de retourner aux réglages d'usine en réglant le paramètre FCS à Init dans les menus DrC-, I-O-, CtL- ou FUn-. Voir les pages 220, 223, 237 et 265.
Numéro d'identification du client et du variateur
Variateur ATV31
Numéro d'identification du client (le cas échéant)
Paramètres de réglage 1ER niveau
| Code | Réglage d'usine | Réglage client |
| b F r | 50 |
Menu réglages
| Code | Réglage d'usine | Réglage client |
| R C C | 3 s | s |
| R C 2 | 5 s | s |
| d E 2 | 5 s | s |
| d E C | 3 s | s |
| E A I | 10 % | % |
| E A 2 | 10 % | % |
| E A 3 | 10 % | % |
| E A 4 | 10 % | % |
| L 5 P | 0 Hz | Hz |
| H 5 P | bFr | Hz |
| I E H | Selon la valeur nominale du variateur | A |
| U F r | 20 % | % |
| F L G | 20 % | % |
| S E R | 20 % | % |
| S L P | 100 Hz | % |
| I d C | 0,7 In (1) | A |
| E d C | 0,5 s | s |
| E d C I | 0,5 s | s |
| S d C I | 0,7 In (1) | A |
| E d C 2 | 0 s | s |
| S d C 2 | 0,5 In (1) | A |
| J P F | 0 Hz | Hz |
| J F 2 | 0 Hz | Hz |
| J G F | 10 Hz | Hz |
| r P G | 1 | |
| r I G | 1/s | s |
| F b S | 1 | |
| P I C | nO |
| Code | Réglage d'usine | Réglage client |
| r P 2 | 30 % | % |
| r P 3 | 60 % | % |
| r P 4 | 90 % | % |
| 5 P 2 | 10 Hz | Hz |
| 5 P 3 | 15 Hz | Hz |
| 5 P 4 | 20 Hz | Hz |
| 5 P 5 | 25 Hz | Hz |
| 5 P 6 | 30 Hz | Hz |
| 5 P 7 | 35 Hz | Hz |
| 5 P 8 | 40 Hz | Hz |
| 5 P 9 | 45 Hz | Hz |
| 5 P 10 | 50 Hz | Hz |
| 5 P 11 | 55 Hz | Hz |
| 5 P 12 | 60 Hz | Hz |
| 5 P 13 | 70 Hz | Hz |
| 5 P 14 | 80 Hz | Hz |
| 5 P 15 | 90 Hz | Hz |
| 5 P 16 | 100 Hz | Hz |
| C L I | 1,5 In1 | A |
| C L 2 | 1,5 In1 | A |
| E L S | 0 (pas de limitation de temps) | s |
| r S L | 0 | |
| U F r 2 | 20 % | % |
| F L G 2 | 20 % | % |
| S E R 2 | 20 % | % |
| S L P 2 | 100 % | % |
| F E d | bFr | Hz |
| E E d | 100 % | % |
| C E d | In1 | A |
| S d S | 30 | |
| S F r | 4 kHz | kHz |
1 In correspond au courant nominal du variateur de vitesse indiqué dans le Guide d'installation de l'ATV31 et sur la plaque signalétique du variateur.
Ces paramètres n'apparaissent que si la fonction correspondante a été activée.
La plupart sont également accessibles et régles depuis le menu de configuration de la fonction.
Ceux qui sont soulignés apparaissent en réglage d'usine.
Menu d'entraînement
| Code | Réglage d'usine | Réglage client |
| b F r | 50 Hz | Hz |
| U n S | Varie en fonction de la valeur nominale du variateur | V |
| F r S | 50 Hz | Hz |
| n C r | Varie en fonction de la valeur nominale du variateur | A |
| n S P | Varie en fonction de la valeur nominale du variateur | tr/min |
| C O S | Varie en fonction de la valeur nominale du variateur | |
| r S C | nO |
| Code | Réglage d'usine | Réglage client |
| L U S | tAb | |
| U F t | n | |
| n r d | YES | |
| 5 F r | 4 kHz | kHz |
| L F r | 60 Hz | Hz |
| 5 r F | nO |
Menu entrées / sorties
| Code | Réglage d'usine | Réglage client |
| E C E | 2CATV31********A : LOC | |
| E C E | trn | |
| r r 5 | si tCC = 2C, LI2si tCC = 3C, LI3si tCC = LOC : nO | |
| C r L 3 | 4 mA | mA |
| C r H 3 | 20 mA | mA |
| Code | Réglage d'usine | Réglage client |
| R 0 1 E | 0A | |
| d 0 | nO | |
| r 1 | FLt | |
| r 2 | nO |
Menu de commande
| Code | Réglage d'usine | Réglage client |
| L R C | L1 | |
| F r I | Al1AIP pour ATV31********A | |
| F r 2 | nO | |
| r F C | Fr1 | |
| C H C F | SIM | |
| C d I | tErLOC pour ATV31********A |
| Code | Réglage d'usine | Réglage client |
| C d 2 | Mdb | |
| C C 5 | Cd1 | |
| C O P | nO | |
| L C C | nO | |
| P 5 E | YES | |
| r 0 E | dFr |

Ces paramètres n'apparaissent que si la fonction correspondante a été activée.
Menu des fonctions des applications

| Code | Réglage d'usine | Réglage client | |
| r PC - | r P t | LIn | |
| t R I | 10 % | % | |
| t R 2 | 10 % | % | |
| t R 3 | 10 % | % | |
| t R 4 | 10 % | % | |
| R C C | 3 s | s | |
| d E C | 3 s | s | |
| r P 5 | nO | ||
| F r t | 0 | Hz | |
| R C 2 | 5 s | s | |
| d E 2 | 5 s | s | |
| b r H | YES | ||
| S E C - | S t t | Stn | |
| F S t | nO | ||
| d C F | 4 | ||
| d C I | nO | ||
| I d C | 0.7 In | A | |
| t d C | 0,5 s | s | |
| n S t | nO | ||
| R d C - | R d C | YES | |
| t d C I | 0,5 s | s | |
| S d C I | 0,7 In1 | A | |
| t d C 2 | 0 s | s | |
| S d C 2 | 0,5 In1 | A | |
| S R I - | S R 2 | Al2 | |
| S R 3 | nO | ||
| Code | Réglage d'usine | Réglage client | |
| JOG- | JOG | si tCC = 2C : nO si tCC = 3C : LI4 si tCC = LOC : nO | |
| JGF | 10 Hz | Hz | |
| UPd- | USP | nO | |
| dSP | nO | ||
| SBr | nO | ||
| PI- | PIF | nO | |
| rPG | 1 | ||
| rIG | 1 | ||
| FB5 | 1 | ||
| PIC | nO | ||
| Pr2 | nO | ||
| Pr4 | nO | ||
| rP2 | 30 % | % | |
| rP3 | 60 % | % | |
| rP4 | 90 % | % | |
| rSL | 0 | ||
| P11 | nO | ||
| rP1 | 0 % | % | |
| bLC- | bLC | nO | |
| brL | Varie en fonction de la valeur nominale du variateur | Hz | |
| Ibr | 0,5 s | A | |
| brt | nO | s | |
| bEn | nO | Hz | |
| bEt | 0,5 s | s | |
| bIP | nO | ||
| LC2- | LC2 | nO | |
| LC2 | 1,5 In1 | A | |
1 In correspond au courant nominal du variateur de vitesse indiqué dans le Guide d'installation de l'ATV31 et sur la plaque signalétique du variateur.
Ces paramètres n'apparaissent que si la fonction correspondante a été activée. Ils sont également accessibles au menu Set-.
Menu fonctions des applications (suite)

| Code | Réglage d'usine | Réglage client | |
| P 5 5 - | P 5 2 | si tCC = 2C : LI3si tCC = 3C : LI4si tCC = LOC : LI3 | |
| P 5 4 | si tCC = 2C : LI4si tCC = 3C : nOsi tCC = LOC : LI4 | ||
| P 5 8 | nO | ||
| P 5 16 | nO | ||
| S P 2 | 10 Hz | Hz | |
| S P 3 | 15 Hz | Hz | |
| S P 4 | 20 Hz | Hz | |
| S P 5 | 25 Hz | Hz | |
| S P 6 | 30 Hz | Hz | |
| S P 7 | 35 Hz | Hz | |
| S P 8 | 40 Hz | Hz | |
| S P 9 | 45 Hz | Hz | |
| S P 10 | 50 Hz | Hz | |
| S P 11 | 55 Hz | Hz | |
| S P 12 | 60 Hz | Hz | |
| S P 13 | 70 Hz | Hz | |
| S P 14 | 80 Hz | Hz | |
| S P 15 | 90 Hz | Hz | |
| S P 16 | 100 Hz | Hz | |
| Code | Réglage d'usine | Réglage client | |
| C HP - | C HP | nO | |
| U n 5 2 | Varie en fonction de la valeur nominale du variateur | V | |
| F r 5 2 | 50 Hz | Hz | |
| n C r 2 | Varie en fonction de la valeur nominale du variateur | A | |
| n 5 P 2 | tr/min | ||
| C 0 5 2 | |||
| U F t 2 | n | ||
| U F r 2 | 20 % | % | |
| F L G 2 | 20 % | % | |
| S t R 2 | 20 % | % | |
| S L P 2 | 100 Hz | Hz | |
| L 5 t - | L A F | nO | |
| L A r | nO | ||
| L H S | nSt | ||

Ces paramètres n'apparaissent que si la fonction correspondante a été activée. Ils sont également accessibles au menu Setup-

| Code | Réglage d'usine | Réglage client |
| R E r | nO | |
| E R r | 5 | |
| r S F | nO | |
| F L r | nO | |
| E E F | nO | |
| E P L | YES | |
| D P L | YES | |
| I P L | YES | |
| D H L | YES | |
| D L L | YES |
| Code | Réglage d'usine | Réglage client |
| S L L | YES | |
| C D L | YES | |
| E n L | YES | |
| L F L | nO | |
| L F F | 10 Hz | Hz |
| d r n | nO | |
| S E P | nO | |
| I n H | nO | |
| r P r | nO |

Ces paramètres n'apparaissent que si la fonction correspondante a été activée.

| Code | Réglage d'usine | Réglage client |
| R d d | 1 | |
| t b r | 19 200 | |
| t F O | 8E1 | |
| t E O | 10 s | s |
| R d C O | 0 |
| Code | Réglage d'usine | Réglage client |
| b d C O | 125 | |
| F L O | nO | |
| F L O C | AI1 AIP pour ATV31********A |
INDEX DES CODES DE PARAMÈTRES
| Code | Voir la page : |
| A C 2 | 214 |
| A C C | 214 |
| A d C | 243 |
| A d C O | 270 |
| A d d | 270 |
| A I I A | 274 |
| A I I B | 274 |
| A I I A R | 274 |
| A I I A R | 274 |
| A O I E | 274 |
| A E r | 267 |
| b d C O | 270 |
| b E n | 260 |
| b E t | 260 |
| b F r | 218 |
| b I P | 260 |
| b L C | 260 |
| b r A | 240 |
| b r L | 260 |
| b r E | 260 |
| C C S | 236 |
| C d I | 235 |
| C d Z | 235 |
| C H C F | 235 |
| C H P | 262 |
| C L Z | 261 |
| C L I | 216 |
| C O d | 274 |
| C O P | 236 |
| C O S | 218 |
| C O S Z | 263 |
| C r H 3 | 222 |
| C r L 3 | 222 |
| C t d | 217 |
| d C F | 241 |
| d C I | 241 |
| d E Z | 240 |
| d E C | 240 |
| d D | 222 |
| d r n | 269 |
| d S P | 251 |
| E P L | 268 |
| E r C O | 270 |
| E t F | 268 |
| F b S | 216 |
| F C S | 220 |
| F L G | 215 |
| F L G 2 | 217 |
| F L D | 271 |
| F L O C | 271 |
| F L r | 268 |
| F r I | 234 |
| F r 2 | 234 |
| F r H | 273 |
| F r 5 | 218 |
| F r 5 Z | 262 |
| Code | Voir la page : |
| F r b | 240 |
| F 5 E | 241 |
| F e d | 217 |
| H 5 P | 214 |
| I b r | 260 |
| I d C | 241 |
| I n H | 269 |
| I P L | 268 |
| I E H | 214 |
| J F 2 | 216 |
| J G F | 216 |
| J O G | 248 |
| J P F | 216 |
| L A C | 234 |
| L A F | 264 |
| L A r | 264 |
| L A S | 264 |
| L C 2 | 261 |
| L C C | 236 |
| L C r | 273 |
| L F F | 269 |
| L F L | 269 |
| L F r | 273 |
| L F E | 273 |
| L I I A | 274 |
| L I 2 A | 274 |
| L I 3 A | 274 |
| L I 4 A | 274 |
| L I 5 A | 274 |
| L I 6 A | 274 |
| L I 5 | 274 |
| L 5 P | 214 |
| n C r | 218 |
| n C r 2 | 262 |
| n r d | 220 |
| n 5 P | 218 |
| n 5 P 2 | 262 |
| n 5 E | 242 |
| OHL | 268 |
| O L L | 268 |
| O P L | 268 |
| O P r | 273 |
| O E r | 273 |
| P I C | 256 |
| P I F | 256 |
| P r 2 | 256 |
| P r 4 | 256 |
| P 5 1 6 | 247 |
| P 5 2 | 246 |
| P 5 4 | 246 |
| P 5 8 | 246 |
| P 5 E | 237 |
| r l | 222 |
| r 2 | 222 |
| r F C | 235 |
| Code | Voir la page : |
| r F r | 273 |
| r I G | 256 |
| r O E | 237 |
| r P 2 | 256 |
| r P 3 | 256 |
| r P 4 | 256 |
| r P G | 256 |
| r P I | 257 |
| r P I | 273 |
| r P r | 269 |
| r P S | 240 |
| r P E | 239 |
| r r S | 221 |
| r S C | 219 |
| r S F | 267 |
| r S L | 257 |
| r E H | 273 |
| S A 2 | 244 |
| S A 3 | 244 |
| S C S | 220 |
| S d C I | 243 |
| S d C 2 | 243 |
| S d S | 217 |
| S F r | 217 |
| S L L | 269 |
| S L P | 215 |
| S L P 2 | 263 |
| S P I D | 247 |
| S P I I | 247 |
| S P I 2 | 247 |
| S P I 3 | 247 |
| S P I 4 | 247 |
| S P I S | 247 |
| S P I 6 | 247 |
| S P 2 | 247 |
| S P 3 | 247 |
| S P 4 | 247 |
| S P S | 247 |
| S P 6 | 247 |
| S P 7 | 247 |
| S P 8 | 247 |
| S P 9 | 247 |
| S P d I | 273 |
| S P d 2 | 273 |
| S P d 3 | 273 |
| S r F | 220 |
| S E A | 215 |
| S E A 2 | 263 |
| S E P | 269 |
| S E r | 251 |
| S E E | 241 |
| E R I | 214 |
| E R 2 | 214 |
| E R 3 | 214 |
| E R 4 | 214 |
| Code | Voir la page : |
| E R r | 267 |
| E b r | 270 |
| E C C | 221 |
| E C E | 221 |
| E d C | 215 |
| E d C I | 215 |
| E d C 2 | 215 |
| E F r | 220 |
| E H d | 273 |
| E H r | 273 |
| E L S | 216 |
| E t d | 217 |
| E t O | 270 |
| E U n | 219 |
| E U S | 219 |
| E U S | 274 |
| U d P | 274 |
| U F r | 215 |
| U F r 2 | 263 |
| U F t | 219 |
| U F t 2 | 263 |
| U L n | 273 |
| U n 5 | 218 |
| U n 5 e 2 | 262 |
| U S P | 251 |
INDEX DES FONCTIONS
| Fonction | Voir la page : |
| Plus vite / moins vite | 249 |
| Contrôle à 2 fils/3 fils | 221 |
| Sortie analogique/logique AOC/AOV | 222 |
| Redémarrage automatique | 267 |
| Injection de courant continu automatique | 243 |
| Commande de frein | 258 |
| CANopen : adresse du variateur | 270 |
| Reprise à la volée (rattrapage automatique de rampe) | 268 |
| Canaux de contrôle et de ↔férence | 224 |
| Commutation canal de contrôle | 236 |
| Limitation de courant | 216 |
| Injection de courant continu par entrée logique | 241 |
| Adaptation de la rampe de ↓décalération | 240 |
| Protection thermique du variateur | 201 |
| Ventilation des variateurs | 201 |
| Arrêt rapide par entrée logique | 241 |
| Redémarrage à la volée (attrape automatiquement une charge tournante sur une rampe) | 268 |
| Forçage local | 271 |
| Arrêt roue libre par entrée logique | 242 |
| Niveau d'accès aux fonctions | 234 |
| Marche pas à pas | 248 |
| Gestion d'un interrupteur de fin de course | 264 |
| Modbus : adresse du variateur | 270 |
| Auto-réglage de la commande du moteur | 219 |
| Commutation moteur | 262 |
| Protection thermique du moteur | 202 |
| Protection thermique du moteur - courant thermique max. | 214 |
| Régulateur PI | 252 |
| Vitesses préselectionnées | 245 |
| Commutation des rampses | 240 |
| Rampes | 239 |
| Commutation de ↔férence | 235 |
| Relais R1 | 222 |
| Relais R2 | 222 |
| Remise à zéro d'un début de courant | 267 |
| Retour aux réglages d'usine/Restaurer la configuration | 220 |
| Sauvegarde de la configuration | 220 |
| Sélection du type de loi tension / fréquence | 219 |
| Fréquence occultée | 216 |
| Modes d'arrêt | 241 |
| Entrées sommatrices | 244 |
| Commutation de 2ème limitation de courant | 261 |
| Fréquence de ↓déoupage | 217 |
9173884602
Seul un personnel qualifié doit effectuer l'installation, l'utilisation, l'entretien et la maintenance du matériel électrique. Schneider Electric n'assume aucune responsabilité des conséquences éventuelles découlant de l'utilisation de cette documentation.
Tous droits réservés