VS-616P5 - Frequency converter YASKAWA - Free user manual and instructions
Find the device manual for free VS-616P5 YASKAWA in PDF.

| Product Type | Variable Frequency Drive |
| Brand | YASKAWA |
| Model | VS-616P5 |
| Power Supply Voltage | Three-phase 200-230 V or 380-460 V depending on model |
| Motor Power Range | 0.5 to 500 HP (0.37 to 375 kW) |
| Maximum Output Frequency | 0.1 to 400 Hz |
| Control Method | Sinusoidal PWM with automatic torque boost over the entire range |
| Overload Capacity | 120% of rated current for 1 minute (variable torque) or 150% (constant torque) |
| Protection Functions | Overcurrent, electronic motor overload, overvoltage, undervoltage, phase loss, ground fault, heatsink overheating |
| Ambient Temperature Range | -10 °C to +40 °C (NEMA 1) or -10 °C to +45 °C (open chassis) |
| Ambient Humidity | 95% RH non-condensing |
| Maximum Vibration | 9.8 m/s² (<20 Hz), 1.96 m/s² (20-50 Hz) |
| Dimensions (L x H x D) – example model 23P7 | 200 x 300 x 205 mm (7.87 x 11.81 x 8.07 in) |
| Weight – example model 23P7 | Approximately 5.5 kg (12 lb) |
| Display and Control | Digital operator JVOP-130P with LCD and LED display, programming keys, LOCAL/REMOTE button |
| Control Inputs/Outputs | 6 multifunction inputs (24 VDC), 2 analog inputs (0-10 V, 4-20 mA), 2 multifunction relay outputs, 1 analog output (0-10 V) |
| Communication | Built-in MODBUS (RS-485), up to 31 slaves |
| Special Functions | PID, energy saving, speed search, slip compensation, frequency jumps, DC injection braking |
| Maintenance and Cleaning | Periodic inspection of connections, fans, and capacitors; cleaning with compressed air; follow part replacement intervals |
| Safety | Disconnect power and wait 5 minutes before any intervention; do not open while energized; use an external disconnect |
| Included Accessories | User manual, connectors |
| Spare Parts and Repairability | Cooling fan, capacitor, control board, braking resistor (optional); repair by qualified technician |
Frequently Asked Questions - VS-616P5 YASKAWA
User questions about VS-616P5 YASKAWA
0 question about this device. Answer the ones you know or ask your own.
Ask a new question about this device
Download the instructions for your Frequency converter in PDF format for free! Find your manual VS-616P5 - YASKAWA and take your electronic device back in hand. On this page are published all the documents necessary for the use of your device. VS-616P5 by YASKAWA.
USER MANUAL VS-616P5 YASKAWA
http://www.chinakong.com
VS-616PC5/P5 Series User's Manual
Variable Torque Inverter (with software version 5110/5120 and newer)
WARNING
PRECAUTIONS
1) Read this manual in its entirety before installing or operating the VS-616PC5/P5 inverter. This manual applies to inverters with software versions 5110 and 5120 only and is not intended to be used in conjunction with any other software.
2) Do not connect or disconnect wiring, or perform signal checks while the power supply is turned ON.
3) The VS-616PC5/P5 internal capacitor may be charged even after the power supply is turned OFF. To prevent electrical shock, disconnect all power before servicing the inverter. Then wait at least five minutes after the power supply is disconnected and all LEDs are extinguished.
4) Do not perform a withstand voltage test or a megger test on any part of the VS-616PC5/P5. This electronic equipment uses semiconductors and is vulnerable to high voltage.
5) Do not remove the operator unless the power supply is turned OFF. Never touch the printed control board while the power supply is turned ON.
6) The VS-616PC5/P5 is suitable for use on a circuit capable of delivering not more than 65,000 RMS symmetrical amperes, 480 Volts maximum (460V class units), 240 Volts maximum (230V class units).
Failure to observe these and other precautions highlighted in this manual will expose the user to high voltages, resulting in equipment damage, serious injury or death.
NOTICE
Printed April, 1999. The information contained within this document is the proprietary property of Yaskawa Electric America, Inc., and may not be copied, reproduced or transmitted to other parties without the expressed written authorization of Yaskawa Electric America, Inc.
No patent liability is assumed with respect to the use of the information contained herein. Moreover, because Yaskawa is constantly improving its high-quality products, the information contained in this manual is subject to change without notice. Every precaution has been taken in the preparation of this manual. Nevertheless, Yaskawa assumes no responsibility for errors or omissions. Neither is any liability assumed for damages resulting from the use of the information contained in this publication.
| CONTENTS | ||
| Section | Description | Page |
| 1 | RECEIVING & INSTALLATION | |
| 1.1 | INTRODUCTION | 6 |
| 1.2 | SPECIFICATIONS | 7 |
| VS-616PC5 | 7 | |
| VS-616P5 | 9 | |
| 1.3 | PRELIMINARY INSPECTION | 11 |
| Receiving | 11 | |
| Checking the Nameplate | 11 | |
| Identifying the Parts | 12 | |
| 1.4 | MOUNTING | 13 |
| Precautions | 13 | |
| Choosing a Location | 13 | |
| Removing and Replacing the Digital Operator | 14 | |
| Removing and Replacing the Front Cover | 14 | |
| Dimensions/Heat Loss | 15 | |
| Clearances | 17 | |
| 1.5 | WIRING | 18 |
| Precautions | 18 | |
| Inspection | 18 | |
| VS-616PC5 Connection Diagram | 19 | |
| VS-616P5 Connection Diagram | 20 | |
| Main Circuit Wiring | 21 | |
| Terminal Functions | 24 | |
| Wire and Terminal Screw Sizes | 25 | |
| Control Circuit Wiring | 28 | |
| 2 | OPERATION | |
| Precautions | 30 | |
| 2.1 | TRIAL OPERATION | 31 |
| Display at Power-up | 31 | |
| Operation Checkpoints | 32 | |
| Basic Operation | 32 | |
| 2.2 | DIGITAL OPERATOR DISPLAY | 35 |
| 2.3 | LED DESCRIPTION | 36 |
| 2.4 | OPERATION MODE SELECTION | 37 |
| 3 | PROGRAMMING FEATURES | |
| 3.1 | VS-616PC5/P5 PARAMETERS (n001~n116) | 41 |
| 3.2 | PARAMETER SET-UP & INITIALIZATION | 49 |
| 3.3 | VS-616PC5/P5 OPERATION | 50 |
| Accel/decel time adjustment | 50 | |
| Automatic fault retry | 51 | |
| Automatic restart after momentary power loss | 51 | |
| Carrier frequency | 51 | |
3.4
Current limit (Stall prevention). 52
DC injection braking 54
Energy savings control 55
Frequency agree set point 57
Frequency meter or ammeter 58
Frequency meter or ammeter calibration 58
Frequency signal adjustment. 58
Jog operation 60
Jump frequencies. 60
MODBUS communication 61
Motor overload detection 62
Multi-step speed selection. 64
Phase loss detection. 65
PID Control 66
Reverse run prohibit 68
Soft-start characteristics 68
Speed limit adjustment 69
Stopping method 70
Torque adjustment 72
Torque detection 73
Tripless operation 74
V/f pattern adjustment 75
Slip compensation 77
INPUTS & OUTPUTS 78
Multi-function input signals 78
Analog input signals 82
Multi-function output signals 83
4
DIAGNOSTICS
Precautions. 86
4.1
MAINTENANCE & INSPECTION 87
Periodic Inspection 87
Parts Replacement Schedule 87
4.2
ALARM & FAULT DISPLAY 88
Alarm Display 88
Fault Display 89
Motor Faults. 92
A
APPENDIX
A-1
BRAKING CONNECTION DIAGRAMS 94
A-2
DIGITAL OPERATOR MONITOR DISPLAY 95
A-3
CE CONFORMANCE. 97
- CHAPTER 1 -
RECEIVING & INSTALLATION
| Section | Description | Page |
| 1 | RECEIVING & INSTALLATION | |
| 1.1 | INTRODUCTION | 6 |
| 1.2 | SPECIFICATIONS | 7 |
| VS-616PC5 | 7 | |
| VS-616P5 | 9 | |
| 1.3 | PRELIMINARY INSPECTION | 11 |
| Receiving | 11 | |
| Checking the Nameplate | 11 | |
| Identifying the Parts | 12 | |
| 1.4 | MOUNTING | 13 |
| Precautions | 13 | |
| Choosing a Location | 13 | |
| Removing and Replacing the Digital Operator | 14 | |
| Removing and Replacing the Front Cover | 14 | |
| Dimensions/Heat Loss | 15 | |
| Clearances | 17 | |
| 1.5 | WIRING | 18 |
| Precautions | 18 | |
| Inspection | 18 | |
| VS-616PC5 Connection Diagram | 19 | |
| VS-616P5 Connection Diagram | 20 | |
| Main Circuit Wiring | 21 | |
| Terminal Functions | 24 | |
| Wire and Terminal Screw Sizes | 25 | |
| Control Circuit Wiring | 28 |
1.1 INTRODUCTION
The VS-616PC5/P5 is a series of high quality, variable torque inverters. With a power range of 5 to 500HP , it provides all the functionality of prior series, in a compact, low cost package. This functionality includes Yaskawa proprietary features like full-range automatic torque boost, electronic thermal motor overload, energy savings and PID operation, low-noise operation and various other features. It also features a new digital operator for simple programming. Utilizing the latest microprocessor technology, members of Yaskawa's design team have collaborated to make the VS-616PC5/P5 the world's first optimized inverter specifically designed for variable torque applications.
This manual details installation, start-up and operating procedures for the VS-616PC5/P5 series adjustable frequency drive controller. Descriptions of diagnostic and troubleshooting procedures are also included herein.
1.2 SPECIFICATIONS
VS-616PC5
| Inverter Model CIMR-P5U | VS-616PC5 | ||||||||||
| 20P4 | 20P7 | 21P5 | 22P2 | 23P7 | 25P5 | 27P5 | 2011 | 2015 | - | ||
| Output Characteristics | Motor Output (HP) * | 0.5 | 1 | 2 | 3 | 5 | 7.5 | 10 | 20 | 25 | - |
| Capacity (kVA) | 1.2 | 2.3 | 3.0 | 4.2 | 6.7 | 9.5 | 13 | 19 | 24 | - | |
| Rated Output Current (A)-VT** | 3.2 | 6 | 8 | 11 | 17.5 | 27 | 36 | 54 | 68 | - | |
| Rated Output Current (A)-CT** | 3.2 | 6 | 8 | 11 | 17.5 | 25 | 33 | 49 | 64 | - | |
| Max. Voltage | 3-Phase, 200/208/220/230V (Proportional to input voltage) | ||||||||||
| Rated Output Frequency | 0.1 to 400 Hz | ||||||||||
| Overload Capacity - VT | 120% Rated Output Current for 1 minute | ||||||||||
| Overload Capacity - CT | 150% Rated Output Current for 1 minute | ||||||||||
| Power Supply | Input Current (A) | 3.9 | 7.2 | 9.6 | 13.2 | 21 | 33 | 44 | 65 | 82 | - |
| Rated Voltage & Frequency | 3-Phase 220 - 230V, 50/60Hz | ||||||||||
| Voltage Fluctuation | +10%, -15% | ||||||||||
| Frequency Fluctuation | ±5% | ||||||||||
| CIMR-P5U | 40P4 | 40P7 | 41P5 | 42P2 | 43P7 | 44P0 | 45P5 | 47P5 | 4011 | 4015 | |
| Output Characteristics | Motor Output (HP) * | 0.5 | 1 | 2 | 3 | 5 | 7.5 | 10 | 15 | 20 | 25 |
| Capacity (kVA) | 1.4 | 2.6 | 3.7 | 4.7 | 6.1 | 8.6 | 11 | 14 | 21 | 26 | |
| Rated Output Current (A)-VT** | 1.9 | 3.6 | 5.1 | 6.6 | 8.5 | 11.7 | 14.8 | 21.0 | 28.6 | 34.0 | |
| Rated Output Current (A)-CT** | 1.9 | 3.6 | 5.1 | 6.6 | 8.5 | 11.7 | 14.8 | 18 | 28.6 | 34.0 | |
| Max. Voltage # | 3-Phase, 380/400/415/440/460V (Proportional to input voltage) | ||||||||||
| Rated Output Frequency | 0.1 to 400 Hz | ||||||||||
| Overload Capacity-VT** | 120% Rated Output Current for 1 minute (Model 47P5 is rated 150% / 1 minute) | ||||||||||
| Overload Capacity-CT** | 150% Rated Output Current for 1 minute | ||||||||||
| Power Supply | Input Current (A) | 2.3 | 4.3 | 6.1 | 8.0 | 10.2 | 14.0 | 17.8 | 26.0 | 35.0 | 40.0 |
| Rated Voltage & Frequency # | 3-Phase 380 -440 - 460V, 50/60Hz | ||||||||||
| Voltage Fluctuation | +10%, -15% | ||||||||||
| Frequency Fluctuation | ±5% | ||||||||||
- HP ratings based on standard NEMA 4-pole motor data.
For 380V operation, the motor rated current must be less than or equal to the inverter rated current.
** VT: Variable Torque rating (n116=1), CT: Constant Torque rating (n116=0)
Note: Shaded areas indicate factory settings.
| Control Characteristics | Control Method | Sine wave PWM with full-range, automatic torque boost |
| Frequency Control Range | 0.1 to 400 Hz | |
| Frequency Accuracy | Digital command: 0.01%, Analog command: 0.1% | |
| Frequency Setting Resolution | Digital Operator Reference: 0.1Hz, Analog Reference: 0.06Hz (@60Hz) | |
| Output Frequency Resolution | 0.01 Hz | |
| Frequency Setting | 0 to +10VDC (20kΩ), 4-20mA (250Ω) | |
| Accel/Decel Time | 0.0 to 3600.0 sec. (Accel/Decel time setting independently: 0.1 sec) | |
| Braking Torque | Approx. 20% | |
| No. of V-f Patterns | 1 preset V/f pattern and 1 custom pattern | |
| Protective Functions | Motor Overload Protection | Electronic thermal overload relay (I²T) |
| Instantaneous Overcurrent | Motor coasts to stop at approx. 200% rated output current. | |
| Fuse Protection | Motor coasts to stop at blown fuse. | |
| Overload | Motor coasts to stop after 1 min. at rated overload capacity. | |
| Overvoltage | Motor coasts to a stop if converter output voltage exceeds 410VDC (820VDC at 460V input) | |
| Undervoltage | Motor coasts to stop if converter output voltage drops below user adjustable value | |
| Momentary Power Loss | Immediate stop after 15 ms or longer power loss. (Continuous system operation during power loss less than 2 sec is equipped as standard.) | |
| Heatsink Overheat | Thermistor - OH1, OH2 | |
| Stall Prevention | Stall prevention at acceleration/deceleration and constant speed operation | |
| Ground Fault | Provided by electronic circuit | |
| Power Charge Indication | Charge LED stays on until voltage drops below 50VDC | |
| Input Phase Loss | Single-phase protection | |
| Environmental Conditions | Location | Indoor (protected from corrosive gases and dust) |
| Ambient Temperature | +14 to 104°F (-10 to 40°C) for NEMA 1 type (not frozen) +14 to 113°F (-10 to 45°C) for open chassis type | |
| Storage Temperature | -4 to 140°F (-20 to 60°C) | |
| Humidity | 95% RH (non-condensing) | |
| Vibration | 9.8m/s² (1G) less than 20Hz, up to 1.96m/s² (0.2G) at 20 to 50Hz |
VS-616P5
| Inverter Model CIMR-P5U | VS-616P5 | ||||||||||||
| 2018 | 2022 | 2030 | 2037 | 2045 | 2055 | 2075 | — | ||||||
| Output Characteristics | Motor Output (HP) * | 30 | 40 | 50 | 60 | 75 | 100 | 125 | |||||
| Capacity (kVA) | 30 | 37 | 50 | 61 | 70 | 85 | 110 | ||||||
| Rated Output Current (A) - VT ** | 80 | 104 | 130 | 160 | 192 | 248 | 312 | ||||||
| Rated Output Current (A) - CT ** | 64 | 83 | 104 | 128 | 154 | 198 | 250 | ||||||
| Max. Voltage | 3-Phase, 200/208/220/230V (Proportional to input voltage) | ||||||||||||
| Rated Output Frequency | 0.1 to 400 Hz | ||||||||||||
| Overload Capacity - VT ** | 120% Rated Output Current / 1 minute | ||||||||||||
| Overload Capacity - CT ** | 150% Rated Output Current / 1 minute | ||||||||||||
| Power Supply | Input Current (A) | 88 | 119 | 143 | 176 | 212 | 270 | 344 | — | ||||
| Rated Voltage & Frequency | 3-Phase 220 - 230V, 50/60Hz | ||||||||||||
| Voltage Fluctuation | +10%, -15% | ||||||||||||
| Frequency Fluctuation | ±5% | ||||||||||||
| CIMR-P5U | 4018 | 4022 | 4030 | 4037 | 4045 | 4055 | 4075 | 4110 | 4160 | 4185 | 4220 | 4300 | |
| Output Characteristics | Motor Output (HP) * | 30 | 40 | 50 | 60 | 75 | 100 | 150 | 200 | 250 | 300 | 400 | 500 |
| Capacity (kVA) | 31 | 40 | 50 | 61 | 73 | 98 | 130 | 170 | 230 | 260 | 340 | 460 | |
| Rated Output Current (A) - VT ** | 41 | 52 | 65 | 80 | 96 | 128 | 180 | 240 | 302 | 380 | 506 | 675 | |
| Rated Output Current (A) - CT ** | 32 | 42 | 52 | 64 | 77 | 102 | 144 | 182 | 242 | 304 | 404 | 540 | |
| Max. Voltage# | 3-Phase, 380/400/415/440/460V (Proportional to input voltage) | ||||||||||||
| Rated Output Frequency | 0.1 to 400 Hz | ||||||||||||
| Overload Capacity - VT ** | 120% Rated Current / 1 minute | ||||||||||||
| Overload Capacity - CT ** | 150% Rated Current / 1 minute | ||||||||||||
| Power Supply | Input Current (A) | 46 | 58 | 72 | 88 | 106 | 141 | 198 | 264 | 330 | 456 | 608 | 810 |
| Rated Voltage & Frequency# | 3-Phase 380 -440 - 460V, 50/60Hz | ||||||||||||
| Voltage Fluctuation | +10%, -15% | ||||||||||||
| Frequency Fluctuation | ±5% | ||||||||||||
- HP ratings based on standard NEMA 4-pole motor data.
For 380V operation, the motor rated current must be less than or equal to the inverter rated current.
** VT: Variable Torque rating (n116=1), CT: Constant Torque rating (n116=0)
Note: Shaded areas indicate factory settings.
| Control Characteristics | Control Method | Sine wave PWM with full-range, automatic torque boost |
| Frequency Control Range | 0.1 to 400 Hz | |
| Frequency Accuracy | Digital command: 0.01%, Analog command: 0.1% | |
| Frequency Setting Resolution | Digital Operator Reference: 0.1Hz, Analog Reference: 0.06Hz (@60Hz) | |
| Output Frequency Resolution | 0.01 Hz | |
| Frequency Setting | 0 to +10VDC (20kΩ), 4-20mA (250Ω) | |
| Accel/Decel Time | 0.0 to 3600.0 sec. (Accel/Decel time setting independently: 0.1 sec ) | |
| Braking Torque | Approx. 20% | |
| No. of V-f Patterns | 1 preset V/f pattern and 1 custom pattern | |
| Protective Functions | Motor Overload Protection | Electronic thermal overload relay (I²T) |
| Instantaneous Overcurrent | Motor coasts to stop at approx. 180% rated output current. | |
| Fuse Protection | Motor coasts to stop at blown fuse. | |
| Overload | Motor coasts to stop after 1 min. at rated overload capacity. | |
| Overvoltage | Motor coasts to stop if converter output voltage exceeds 410VDC (820VDC at 460V input) | |
| Undervoltage | Motor coasts to stop if converter output voltage drops below user adjustable value | |
| Momentary Power Loss | Immediately stop after 15 ms or longer power loss. (Continuous system operation during power loss less than 2 sec is equipped as standard.) | |
| Heatsink Overheat | Thermistor - OH1, OH2 | |
| Stall Prevention | Stall prevention at acceleration/deceleration and constant speed operation | |
| Ground Fault | Provided by electronic circuit | |
| Power Charge Indication | Charge LED stays on until voltage drops below 50VDC | |
| Input Phase Loss | Single-phase protection | |
| Environmental Conditions | Location | Indoor (protected from corrosive gases and dust) |
| Ambient Temperature | +14 to 104°F (-10 to 40°C) for NEMA 1 type (not frozen) +14 to 113°F (-10 to 45°C) for open chassis type | |
| Storage Temperature | -4 to 140°F (-20 to 60°C) | |
| Humidity | 95% RH (non-condensing) | |
| Vibration | 9.8m/s² (1G) less than 20Hz, up to 1.96m/s² (0.2G) at 20 to 50Hz |
1.3 PRELIMINARY INSPECTION
Receiving
After unpacking the VS-616PC5/P5:
- Verify that the part numbers on the drive nameplate match the numbers on your purchase order or packing slip.
- Check the unit for physical damage which may have occurred during shipping. If any part of the drive is missing or damaged, notify the carrier and your Yaskawa representative immediately.
- Verify that all internal hardware (i.e. components, screws, etc.) is seated properly and fastened securely.
- Verify that the instruction manual is included (YEA-TOA-S616-12).
- If the drive will be stored after receiving, place it in its original packaging and store according to temperature specifications on page 8.
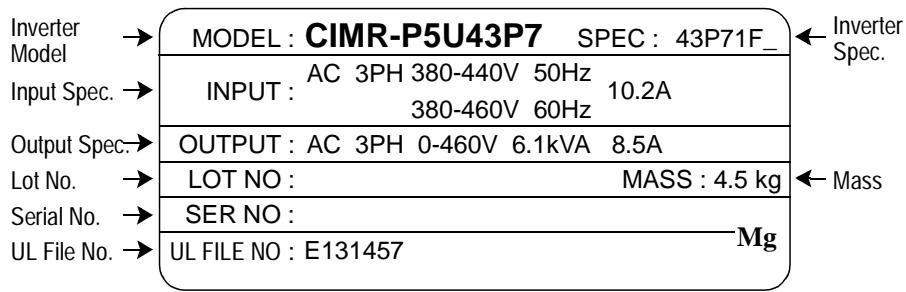
Checking the Nameplate
Figure 1 Nameplate Example of American Model CIMR-P5U43P7
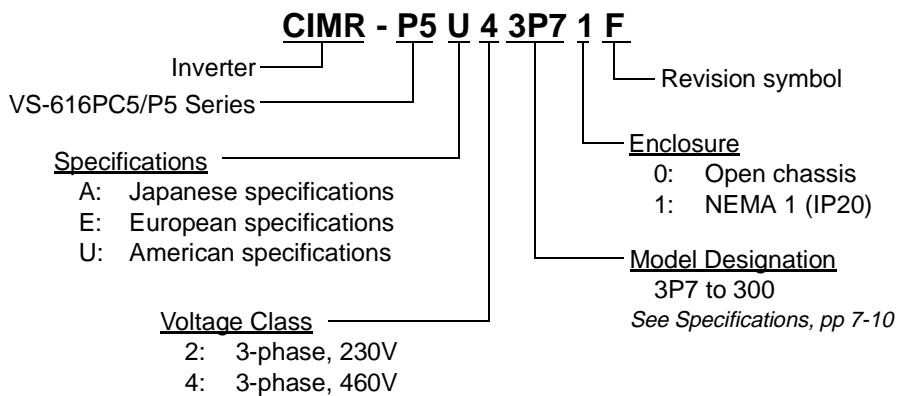
Figure 2 Nameplate Description
Identifying the Parts
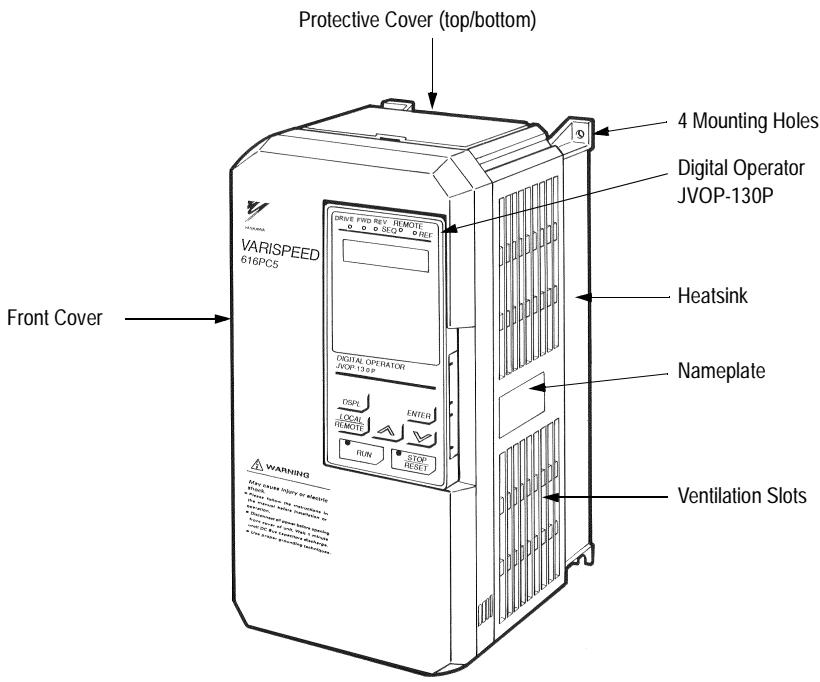
Figure 3 Parts Identification - Model CIMR-P5U43P7
1.4 MOUNTING
CAUTION
PRECAUTIONS
1) When preparing to mount the VS-616PC5/P5, lift it by its base. Never lift it by the front cover.
2) Mount the inverter onto nonflammable material.
3) The VS-616PC5/P5 generates heat. For the most effective cooling possible, mount it vertically. For more details, refer to “Dimensions/Heat Loss” on pages 15 & 16 and “Clearances” on page 17.
4) When mounting units in an enclosure, install a fan or other cooling device to keep the intake air temperature below 113^ (45^) .
Failure to observe these precautions may result in equipment damage.
Choosing a Location
Be sure that the inverter is mounted in a location protected against the following conditions:
- Extreme cold and heat. Use only within the ambient temperature range: 14 to 104^ (-10 to 40^ ).
- Direct sunlight (not for use outdoors)
- Rain, moisture
High humidity
Oil sprays, splashes
Salt spray
Dust or metallic particles in the air
Corrosive gases (e.g. sulfurized gas) or liquids
Radioactive substances - Combustibles (e.g. thinner, solvents, etc.)
Physical shock, vibration - Magnetic noise (e.g. welding machines, power devices, etc.)
Removing and Replacing the Digital Operator
To remove the digital operator from the front cover, push the operator lever in the direction shown by arrow 1 and lift the digital operator in the direction shown by arrow 2 (see Figure 4).
To replace the digital operator, engage the operator onto retaining tabs A in the direction shown by arrow 1 and then onto retaining tabs B in the direction shown by arrow 2, locking the digital operator into place (see Figure 5).
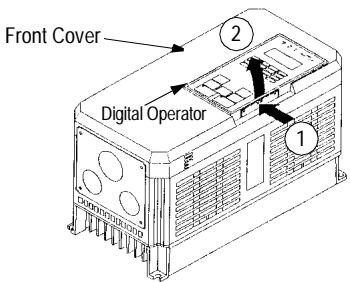
Figure 4 Removing the Digital Operator
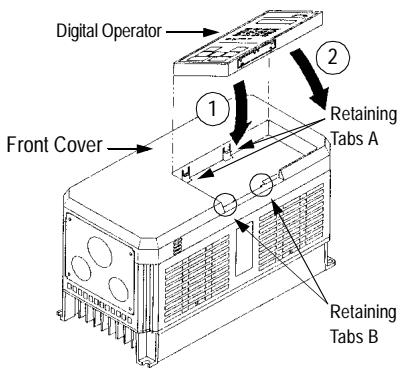
Figure 5 Replacing the Digital Operator
Removing and Replacing the Front Cover
To remove the front cover, first remove the digital operator (see previous section). Then squeeze the cover on both sides in the direction shown by arrows 2 and lift the cover in the direction shown by arrow 3.
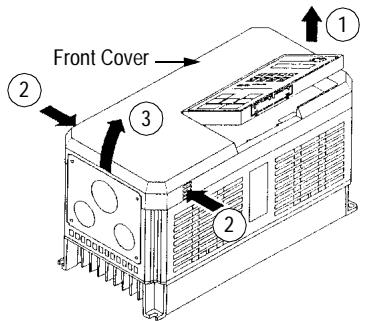
Figure 6 Removing and Replacing the Front Cover
Dimensions/Heat Loss
Open Chassis Type (IP00)
| Voltage | Model CIMR-P5U | Open Chassis Dimensions in inches (mm) | Mass Ibs (kg) | Heat Loss (W) | |||||||
| W | H | D | W1 | H1 | H2 | Heat sink | Inside unit | Total | |||
| 230V | 20P4 | 5.51 (140) | 11.02 (280) | 6.30 (160) | 4.96 (126) | 10.47 (266) | 0.28 (7) | 6.5 (3) | 15 | 50 | 65 |
| 20P7 | 25 | 65 | 90 | ||||||||
| 21P5 | 40 | 80 | 120 | ||||||||
| 22P2 | 5.51 (140) | 11.02 (280) | 7.09 (180) | 4.96 (126) | 10.47 (266) | 0.28 (7) | 10 (4.5) | 80 | 60 | 140 | |
| 23P7 | 135 | 80 | 215 | ||||||||
| 25P5 | 7.87 (200) | 11.81 (300) | 8.07 (205) | 7.32 (186) | 11.22 (285) | 0.31 (8) | 12 (5.5) | 210 | 90 | 300 | |
| 27P5 | 13 (6) | 235 | 110 | 345 | |||||||
| 2011 | 9.84 (250) | 14.96 (380) | 8.86 (225) | 9.29 (236) | 14.37 (365) | 0.30 (7.5) | 24 (11) | 425 | 160 | 585 | |
| 2015 | 525 | 200 | 725 | ||||||||
| 2018 | 12.80 (325) | 17.72 (450) | 11.22 (285) | 10.83 (275) | 17.13 (435) | 0.30 (7.5) | 62 (28) | 655 | 230 | 885 | |
| 2022 | 830 | 280 | 1110 | ||||||||
| 2030 | 16.73 (425) | 26.57 (675) | 13.78 (350) | 12.60 (320) | 25.59 (650) | 0.49 (12.5) | 134 (61) | 1050 | 500 | 1550 | |
| 2037 | 137 (62) | 1250 | 700 | 1950 | |||||||
| 2045 | 18.70 (475) | 31.50 (800) | 13.78 (350) | 14.57 (370) | 30.51 (775) | 0.49 (12.5) | 176 (80) | 1550 | 750 | 2300 | |
| 2055 | 1950 | 1000 | 2950 | ||||||||
| 2075 | 22.64 (575) | 36.42 (925) | 15.75 (400) | 17.52 (445) | 35.24 (895) | 0.59 (15) | 298 (135) | 2300 | 1300 | 3600 | |
| 460V | 40P4 | 5.51 (140) | 11.02 (280) | 6.30 (160) | 4.96 (126) | 10.47 (266) | 0.28 (7) | 6.5 (3) | 10 | 50 | 60 |
| 40P7 | 20 | 65 | 85 | ||||||||
| 41P5 | 8.8 (4) | 30 | 80 | 110 | |||||||
| 42P2 | 5.51 (140) | 11.02 (280) | 7.09 (180) | 4.96 (126) | 10.47 (266) | 0.28 (7) | 10 (4.5) | 65 | 60 | 125 | |
| 43P7 | 80 | 65 | 145 | ||||||||
| 44P0 | 120 | 80 | 200 | ||||||||
| 45P5 | 7.87 (200) | 11.81 (300) | 8.07 (205) | 7.32 (186) | 11.22 (285) | 0.31 (8) | 13 (6) | 135 | 85 | 220 | |
| 47P5 | 240 | 120 | 360 | ||||||||
| 4011 | 9.84 (250) | 14.96 (380) | 8.86 (225) | 9.29 (236) | 14.37 (365) | 0.30 (7.5) | 24 (11) | 305 | 150 | 455 | |
| 4015 | 390 | 180 | 570 | ||||||||
| 4018 | 12.80 (325) | 17.72 (450) | 11.22 (285) | 10.83 (275) | 17.13 (435) | 0.30 (7.5) | 60 (27) | 465 | 195 | 660 | |
| 4022 | 620 | 260 | 880 | ||||||||
| 4030 | 12.80 (325) | 24.61 (625) | 11.22 (285) | 10.83 (275) | 24.02 (610) | 0.30 (7.5) | 97 (44) | 705 | 315 | 1020 | |
| 4037 | 875 | 370 | 1245 | ||||||||
| 4045 | 970 | 415 | 1385 | ||||||||
| 4055 | 17.91 (455) | 32.28 (820) | 13.78 (350) | 13.78 (350) | 31.30 (795) | 0.49 (12.5) | 174 (79) | 1110 | 710 | 1820 | |
| 4075 | 176 (80) | 1430 | 890 | 2320 | |||||||
| 4110 | 22.64 (575) | 36.42 (925) | 14.76 (375) | 17.52 (445) | 35.24 (895) | 0.59 (15) | 298 (135) | 1870 | 1160 | 3030 | |
| 4160 | 15.75 (400) | 320 (145) | 2670 | 1520 | 4190 | ||||||
| 4185 | 37.40 (950) | 57.09 (1450) | 17.13 (435) | 29.53 (750) | 55.12 (1400) | 0.98 (25) | 794 (360) | 3400 | 1510 | 4910 | |
| 4220 | 4740 | 2110 | 6850 | ||||||||
| 4300 | 37.80 (960) | 62.99 (1600) | 17.91 (455) | 29.53 (750) | 61.02 (1550) | 0.98 (25) | 926 (420) | 6820 | 2910 | 9730 | |
Enclosed Type (NEMA 1, IP20)
| Voltage | Model (CIMR-P5U) | NEMA 1 Dimensions in inches (mm) | Mass lbs (kg) | |||||
| W | H | D | W1 | H1 | H2 | |||
| 230V | 20P4 | 5.51 (140) | 11.02 (280) | 6.30 (160) | 4.96 (126) | 10.47 (266) | 0.28 (7) | 6.5 (3) |
| 20P7 | ||||||||
| 21P5 | ||||||||
| 22P2 | 5.51 (140) | 11.02 (280) | 7.09 (180) | 4.96 (126) | 10.47 (266) | 0.28 (7) | 10 (4.5) | |
| 23P7 | ||||||||
| 25P5 | 7.87 (200) | 11.81 (300) | 8.07 (205) | 7.32 (186) | 11.22 (285) | 0.31 (8) | 12 (5.5) | |
| 27P5 | 13 (6) | |||||||
| 2011 | 9.84 (250) | 14.96 (380) | 8.86 (225) | 9.29 (236) | 14.37 (365) | 0.30 (7.5) | 24 (11) | |
| 2015 | 15.75 (400) | 1.08 (27.5) | ||||||
| 2018 | 12.99 (330) | 24.02 (610) | 11.22 (285) | 10.83 (275) | 17.13 (435) | 3.44 (87.5) | 71 (32) | |
| 2022 | 26.57 (675) | 6.00 (152.5) | ||||||
| 2030 | 16.93 (430) | 38.78 (985) | 13.78 (350) | 12.60 (320) | 25.59 (650) | 8.37 (212.5) | 148 (67) | |
| 2037 | 150 (68) | |||||||
| 2045 | 18.90 (480) | 43.70 (1110) | 13.78 (350) | 14.57 (370) | 30.51 (775) | 8.37 (212.5) | 192 (87) | |
| 2055 | ||||||||
| 2075 | 22.83 (580) | 50.79 (1290) | 15.75 (400) | 17.52 (445) | 35.24 (895) | 10.63 (270) | 320 (145) | |
| 460V | 40P4 | 5.51 (140) | 11.02 (280) | 6.30 (160) | 4.96 (126) | 10.47 (266) | 0.28 (7) | 6.5 (3) |
| 40P7 | ||||||||
| 41P5 | 8.8 (4) | |||||||
| 42P2 | 5.51 (140) | 11.02 (280) | 7.09 (180) | 4.96 (126) | 10.47 (266) | 0.28 (7) | 10 (4.5) | |
| 43P7 | ||||||||
| 44P0 | ||||||||
| 45P5 | 7.87 (200) | 11.81 (300) | 8.07 (205) | 7.32 (186) | 11.22 (285) | 0.31 (8) | 13 (6) | |
| 4011 | 9.84 (250) | 14.96 (380) | 8.86 (225) | 9.29 (236) | 14.37 (365) | 0.30 (7.5) | 24 (11) | |
| 4015 | ||||||||
| 4018 | 12.99 (330) | 24.02 (610) | 11.22 (285) | 10.83 (275) | 17.13 (435) | 3.44 (87.5) | 68 (31) | |
| 4022 | ||||||||
| 4030 | 12.99 (330) | 30.91 (785) | 11.22 (285) | 10.83 (275) | 24.02 (610) | 3.44 (87.5) | 106 (48) | |
| 4037 | ||||||||
| 4045 | 33.46 (850) | 6.00 (152.5) | ||||||
| 4055 | 18.11 (460) | 44.49 (1130) | 13.78 (350) | 13.78 (350) | 31.30 (795) | 8.37 (212.5) | 187 (85) | |
| 4075 | 190 (86) | |||||||
| 4110 | 22.83 (580) | 50.79 (1290) | 14.76 (375) | 17.52 (445) | 35.24 (895) | 10.63 (270) | 320 (145) | |
| 4160 | 15.75 (400) | 342 (155) | ||||||
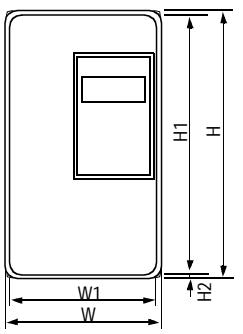
Front View
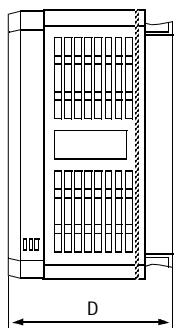
Side View
Figure 7 VS-616PC5/P5 Dimension Diagram
Clearances
When mounting the VS-616PC5/P5, allow sufficient clearances for effective cooling as shown below:
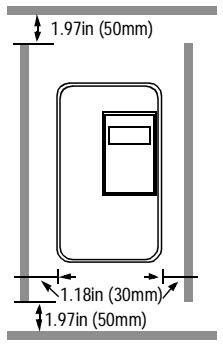
Front View
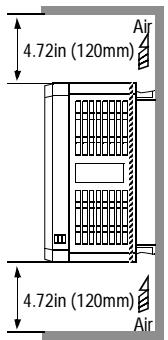
Side View
Figure 8 VS-616PC5/P5 Clearances
Notes:
1) The required clearances at the top, bottom, and both sides of the inverter are the same for both open chassis and NEMA 1 enclosures.
2) For inverter models 25HP and less (230V & 460V), remove the top and bottom covers to convert NEMA 1 units to open chassis
3) Allowable intake air temperature:
Open chassis: 14^ to 113^ (-10^ to +45^)
NEMA 1: 14^ to 104^ (-10^ to 40^)
4) When mounting units in an enclosure, install a fan or other cooling device to limit the air temperature within the inverter to below 113^ ( 45^ ).
1.5 WIRING
CAUTION
PRECAUTIONS
1) Do not connect or disconnect wiring, or perform signal checks while the power supply is turned ON.
2) Connect the power supply wiring to terminals L1, L2 and L3 on the main circuit input section. DO NOT connect the power supply wiring to output terminals T1, T2 and T3.
3) Connect the motor wiring to terminals T1, T2 and T3 on the main circuit output section.
4) Never touch the output circuit directly or place the output line in contact with the inverter enclosure.
5) Do not connect a phase-advancing capacitor or an LC/RC noise filter to the output circuit.
6) The motor wiring must be less than 328ft (100m) in length and in a separate conduit from the input power wiring.
7) Control wiring must be less than 164ft (50m) in length and in a separate conduit from both the motor wiring and the power wiring.
8) Tighten the screws on the main circuit and control circuit terminals.
9) Low voltage wires shall be wired with Class 1 wiring.
10)Please observe national electrical code (NEC) when wiring electrical devices.
Failure to observe these precautions may result in equipment damage.
Inspection
After wiring is complete, verify that:
All wiring is correctly installed.
Excess screws and wire clippings are removed from inside of the unit.
Screws are securely tightened.
Exposed wire has no contact with other wiring or terminals.
VS-616PC5 Standard Connection Diagram
230V: Models 20P4 through 27P5
460V: Models 40P4 through 4015
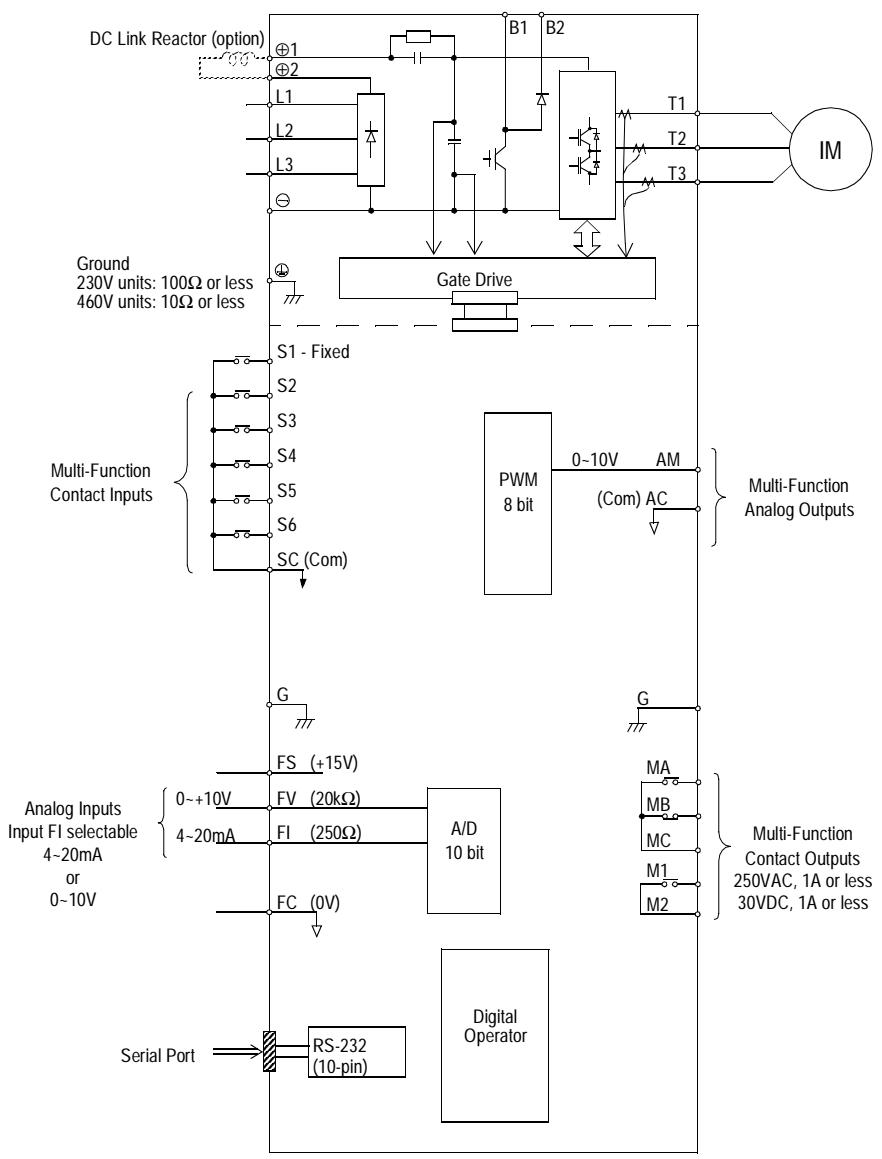
Figure 9 VS-616PC5 Terminal Diagram
VS-616P5 Standard Connection Diagram
230V: Models 2018 through 2075
460V: Models 4018 through 4160
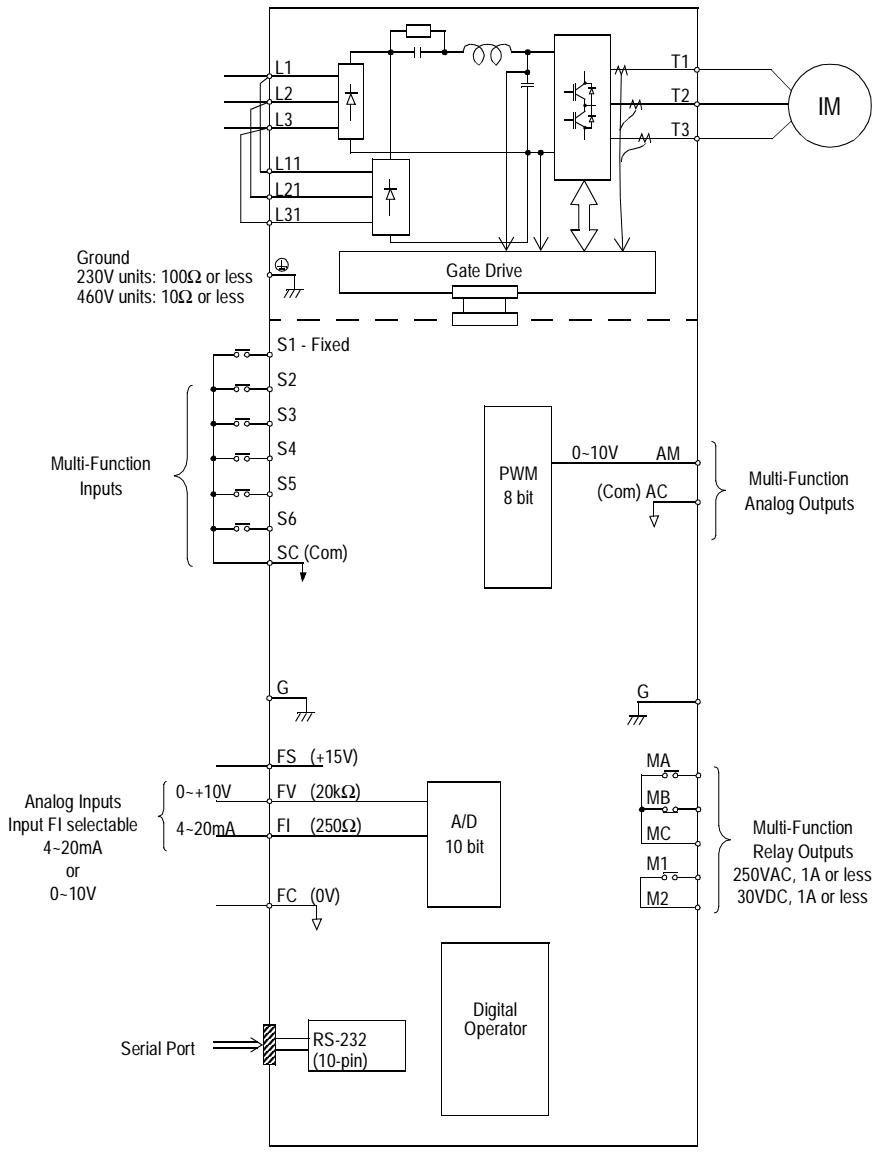
Figure 10 VS-616P5 Terminal Diagram
Main Circuit Wiring
Input Wiring
Molded-Case Circuit Breaker (MCCB)
Be sure to connect MCCBs or fuses between the AC main circuit power supply and VS-616PC5/P5 input terminals L1, L2 and L3, to protect the power supply wiring.
Ground Fault Interruptions
When connecting a ground fault interrupter to input terminals L1, L2 and L3, select one that is not affected by high frequency.
Examples: NV series by Mitsubishi Electric Co., Ltd. (manufactured in or after 1988), EGSG series by Fuji Electric Co., Ltd. (manufactured in or after 1984).
Magnetic Contactor (MC)
Inverters can be used without an MC installed on the power supply side. An MC can be used instead of an MCCB to apply the main circuit power supply. However, when an MC is switched OFF on the primary side, dynamic braking does not function and the motor coasts to stop.
The load can be operated/stopped by closing/opening the MC on the primary side. However, frequent switching may cause the inverter to malfunction.
When using a braking resistor unit, use an MC to break the power supply side of the inverter in the event of a dynamic braking overload relay trip. Otherwise, if the inverter malfunctions, the braking resistor unit may be burned out.
- Terminal Block Connection Sequence
Input power supply phases can be connected to any terminal regardless of the order of L1, L2 and L3 on the terminal block.
- AC Reactor
When connecting an inverter (230V/460V, 25HP or less) to a large capacity power supply transformer (600kVA or more), or when switching a phase-advancing capacitor, excessive peak current flows through the input power supply circuit, which may damage the converter section. In such cases, install a DC reactor (optional) between inverter 1 and 2 terminals, or an AC reactor (optional) on the input side. Installation of a reactor is also effective for improving power factor on the power supply side.
- Surge Suppressor
For inductive loads (i.e. magnetic contactors, magnetic relays, magnetic valves, solenoids, magnetic brakes, etc.) connected near the inverter, use a surge suppressor across the coils to limit the transients on the supply lines.
Output Wiring
- Motor Connection
Connect motor lead wires to output terminals T1, T2 and T3. Verify that the motor rotates in the forward direction (CCW: counterclockwise when viewed from the motor load side) with the forward run command. If the motor rotation is incorrect, exchange any two of the motor leads.
Magnetic Starter
Do not connect a magnetic starter or a magnetic contactor to the output circuit. If the motor load is connected or disconnected while the inverter is running, the inverter overcurrent protective circuitry may trip.
Thermal Overload Relay
An electronic overload protective function (I^2t) is incorporated into the inverter. However, when driving several motors with one inverter, or when switching between multiple windings of a multiple winding motor, use an external thermal overload relay(s). In this case, set parameter n034 to "Disabled".
- Wiring Distance Between Inverter and Motor
If the total wiring distance between inverter and motor is excessively long and the inverter carrier frequency (IGBT switching frequency) is high, harmonic leakage current from the wiring will adversely affect the inverter and peripheral devices. If the wiring distance is long, reduce the inverter carrier frequency as described below. Carrier frequency can be set by parameter n054 .
Wiring Distance Between Inverter and Motor
| Wiring Distance between Inverter and Motor | Up to 164 ft. (50m) | Up to 328 ft. (100m) | More than 328 ft. (100m) |
| Carrier Frequency * (Set value of parameter n054) | 15kHz or less (6) | 10kHz or less (4) | 5kHz or less (2) |
- Increasing the carrier frequency above the factory default value requires current derating. Contact your Yaskawa representative for details.
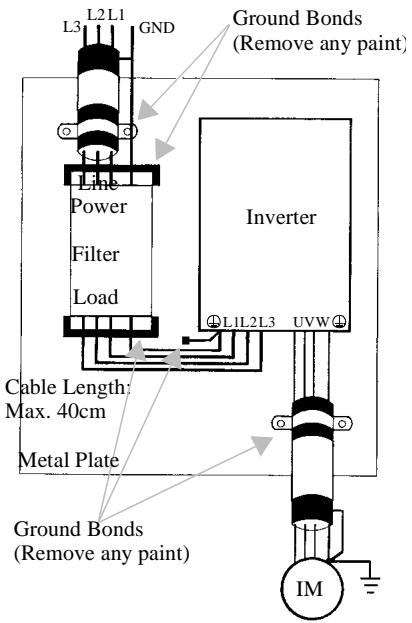
Grounding
Ground Resistance
230V class: 100 or less, 460V class: 10 or less.
- Never ground the VS-616PC5/P5 in common with welding machines, motors, or other high-current electrical equipment. Run all ground wiring in a separate conduit.
- Use ground wiring as specified in "Wire and Terminal Screw Sizes" on page 25, and keep the length as short as possible.
- When using several VS-616PC5/P5 units side by side, ground the units as shown in Figure 10, (a) or (b). Do not loop the wires as shown in (c).
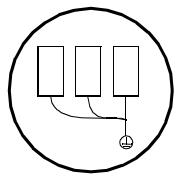
(a) Acceptable
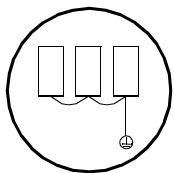
(b) Acceptable
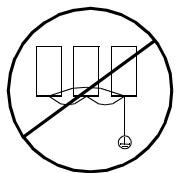
(c) Not Acceptable
Figure 11 Grounding Example of 3 VS-616P5 Inverters
Terminal Functions
230V Class Terminal Functions
| Model CIMR-P5U | 20P4 to 27P5 | 2011 to 2015 | 2018 to 2075 |
| Nominal Motor Output | 0.5 to 10HP | 20 to 25HP | 30 to 125HP |
| L1 | Main circuit input power supply | Main circuit input power supply | |
| L2 | |||
| L3 | |||
| L11 | --- | ||
| L21 | |||
| L31 | |||
| T1 | Inverter output | ||
| T2 | |||
| T3 | |||
| B1 | Braking resistor unit | --- | |
| B2 | |||
| Θ | DC reactor (⊕1 - ⊕2)DC power supply (⊕1 - Ε) | DC reactor (⊕1 - ⊕2)DC power supply (⊕1 - Ε)Braking unit (⊕3 - Ε) | --- |
| ⊕1 | |||
| ⊕2 | |||
| ⊕3 | --- | ||
| Θ | Ground terminal (Ground resistance: 100Ω or less) | ||
460V Class Terminal Functions
| Model CIMR-P5U | 40P4 to 4015 | 4018 to 4045 | 4055 to 4160 | 4185 to 4300 |
| Nominal Motor Output | 0.5 to 25HP | 30 to 75HP | 100 to 250HP | 300 to 500HP |
| L1 | Main circuit input power supply | Main circuit input power supply | Main circuit input power supply | |
| L2 | ||||
| L3 | ||||
| L11 | --- | --- | ||
| L21 | ||||
| L31 | ||||
| T1 | Inverter output | |||
| T2 | ||||
| T3 | ||||
| B1 | Braking resistor unit | --- | ||
| B2 | ||||
| Θ | DC reactor (⊕1 - ⊕2) DC power supply (⊕1 - Θ) | --- | ||
| ⊕1 | ||||
| ⊕2 | ||||
| r | --- | Cooling fan power supply (Control power supply) r - s 200: 200 to 230 VAC input r - s 400: 380 to 460 VAC input | ||
| s 200 | ||||
| s 400 | ||||
| ⊕ | Ground terminal (Ground resistance: 10Ω or less) | |||
Wire and Terminal Screw Sizes
230V Class Wire Size
| Circuit | Model CIMR- | Terminal Symbol | Terminal Screw | Wire Size* | Max. Torque lb-in (N·m) | Wire Type | |
| AWG | mm² | ||||||
| Main | P5U20P4 | L1,L2,L3,∅, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M4 | 14 - 10 | 2 - 5.5 | 12.4 (1.4) | Power cable: 600V vinyl sheathed wire or equivalent |
| ∅ | |||||||
| P5U20P7 | L1,L2,L3,∅, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M4 | 14 - 10 | 2 - 5.5 | 12.4 (1.4) | ||
| ∅ | |||||||
| P5U21P5 | L1,L2,L3,∅, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M4 | 14 - 10 | 2 - 5.5 | 12.4 (1.4) | ||
| ∅ | 12 - 10 | 3.5 - 5.5 | |||||
| P5U22P2 | L1,L2,L3,∅, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M4 | 12 - 10 | 3.5 - 5.5 | 12.4 (1.4) | ||
| ∅ | |||||||
| P5U23P7 | L1,L2,L3,∅, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M4 | 10 | 5.5 | 12.4 (1.4) | ||
| ∅ | |||||||
| P5U25P5 | L1,L2,L3,∅, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M5 | 8 | 8 | 22.1 (2.5) | ||
| ∅ | 10 - 8 | 5.5 - 8 | |||||
| P5U27P5 | L1,L2,L3,∅, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M5 | 8 | 8 | 22.1 (2.5) | ||
| ∅ | 10 - 8 | 5.5 - 8 | |||||
| P5U2011 | L1,L2,L3,∅, ⊕1, ⊕2, ⊕3, T1, T2, T3 | M6 | 4 | 22 | 45.1 (5.1) | ||
| ∅ | 8 | 8 | |||||
| P5U2015 | L1,L2,L3,∅, ⊕1, ⊕2, ⊕3, T1, T2, T3 | M8 | 3 | 30 | 90.3 (10.2) | ||
| ∅ | 8 | 8 | 45.1 (5.1) | ||||
| P5U2018 | L1,L2,L3,L11,L21,L31,T1,T2,T3 | M8 | 3 | 30 | 90.3 (10.2) | ||
| ∅ | 6 | 14 | |||||
| P5U2022 | L1,L2,L3,L11,L21,L31,T1,T2,T3 | M8 | 2 | 38 | 90.3 (10.2) | ||
| ∅ | 6 | 14 | |||||
| P5U2030 | L1,L2,L3,L11,L21,L31,T1,T2,T3 | M10 | 4/0 | 100 | 203.6 (23.0) | ||
| ∅ | 8 | 22 | 90.3 (10.2) | ||||
| P5U2037 | L1,L2,L3,L11,L21,L31,T1,T2,T3 | M10 | 1/0 x 2P | 60 x 2P | 203.6 (23.0) | ||
| ∅ | 8 | 22 | 90.3 (10.2) | ||||
| P5U2045 | L1,L2,L3,L11,L21,L31,T1,T2,T3 | M10 | 1/0 x 2P | 60 x 2P | 203.6 (23.0) | ||
| ∅ | 8 | 22 | 90.3 (10.2) | ||||
| P5U2055 | L1,L2,L3,L11,L21,L31,T1,T2,T3 | M10 | 1/0 x 2P | 60 x 2P | 203.6 (23.0) | ||
| ∅ | 8 | 30 | 90.3 (10.2) | ||||
| P5U2075 | L1,L2,L3,L11,L21,L31,T1,T2,T3 | M12 | 4/0 x 2P | 100 x 2P | 349.6 (39.5) | ||
| ∅ | 1 | 50 | 90.3 (10.2) | ||||
| Control | Common to all models | S1,S2,S3,S4,S5,S6, SC FV, FI, FS, FC AM, AC, M1, M2, MA, MB, MC | - | 20 - 16 | Stranded 0.5 - 1.25 Solid 0.5 - 1.25 | - | Twisted shielded wire with Class 1 wiring |
| G | M3.5 | 20 - 14 | 0.5 - 2 | 8.9 (1.0) | |||
- Wire sizes are based on 75^ C copper wire.
Note:
Voltage drop should be considered when determining wire size. Voltage drop can be calculated using the following equation:
Phase-to phase voltage drop (V)
= 3 wire resistance ( /km)× wiring distance (m) x current (A) x 10^-3
Select a wire size so that voltage drop will be less than 2% of the normal rated voltage.
460V Class Wire Size
| Circuit | Model CIMR- | Terminal Symbol | Terminal Screw | Wire Size* | Max. Torque lb-in (N·m) | Wire Type | |
| AWG | mm² | ||||||
| Main | P5U40P4 | L1, L2, L3, Ε, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M4 | 14 - 10 | 2 - 5.5 | 12.4 (1.4) | Power cable: 600V vinyl sheathed wire or equivalent |
| Φ | |||||||
| P5U40P7 | L1, L2, L3, Ε, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M4 | 14 - 10 | 2 - 5.5 | 12.4 (1.4) | ||
| Φ | 12 - 10 | 3.5 - 5.5 | |||||
| P5U41P5 | L1, L2, L3, Ε, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M4 | 14 - 10 | 2 - 5.5 | 12.4 (1.4) | ||
| Φ | 12 - 10 | 3.5 - 5.5 | |||||
| P5U42P2 | L1, L2, L3, Ε, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M4 | 14 - 10 | 2 - 5.5 | 12.4 (1.4) | ||
| Φ | 12 - 10 | 3.5 - 5.5 | |||||
| P5U43P7 | L1, L2, L3, Ε, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M4 | 14 - 10 | 2 - 5.5 | 12.4 (1.4) | ||
| Φ | 12 - 10 | 3.5 - 5.5 | |||||
| P5U45P5 | L1, L2, L3, Ε, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M4 | 12 - 10 | 3.5 - 5.5 | 12.4 (1.4) | ||
| Φ | |||||||
| P5U47P5 | L1, L2, L3, Ε, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M5 | 8 - 6 | 8 - 14 | 22.1 (2.5) | ||
| Φ | |||||||
| P5U4011 | L1, L2, L3, Ε, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M5 | 8 - 6 | 8 - 14 | 22.1 (2.5) | ||
| Φ | 8 - 6 | 8 - 14 | 45.1 (5.1) | ||||
| P5U4015 | L1, L2, L3, Ε, ⊕1, ⊕2, B1, B2, T1, T2, T3 | M5 | 8 - 6 | 8 - 14 | 22.1 (2.5) | ||
| Φ | 8 - 6 | 8 - 14 | 45.1 (5.1) | ||||
| P5U4018 | L1, L2, L3, L11, L21, L31, T1, T2, T3 | M6 | 6 | 14 | 45.1 (5.1) | ||
| Φ | 8 - 6 | 8 - 14 | 90.3 (10.2) | ||||
| P5U4022 | L1, L2, L3, L11, L21, L31, T1, T2, T3 | M6 | 4 | 22 | 45.1 (5.1) | ||
| Φ | 4 | 22 | 90.3 (10.2) | ||||
| P5U4030 | L1, L2, L3, L11, L21, L31, T1, T2, T3 | M8 | 4 | 22 | 90.3 (10.2) | ||
| Φ | 4 | 22 | |||||
| P5U4037 | L1, L2, L3, L11, L21, L31, T1, T2, T3 | M8 | 3 | 30 | 90.3 (10.2) | ||
| Φ | 4 | 22 | |||||
| P5U4045 | L1, L2, L3, L11, L21, L31, T1, T2, T3 | M8 | 1 | 50 | 90.3 (10.2) | ||
| Φ | 3 | 30 | |||||
| P5U4055 | L1, L2, L3, L11, L21, L31, T1, T2, T3 | M10 | 4/0 | 100 | 203.6 (23.0) | ||
| Φ | 1 | 50 | 90.3 (10.2) | ||||
| P5U4075 | L1, L2, L3, L11, L21, L31, T1, T2, T3 | M10 | 1/0 x 2P | 60 x 2P | 203.6 (23.0) | ||
| Φ | 1/0 | 60 | 90.3 (10.2) | ||||
| P5U4110 | L1, L2, L3, L11, L21, L31, T1, T2, T3 | M10 | 1/0 x 2P | 60 x 2P | 203.6 (23.0) | ||
| Φ | 1/0 | 60 | 90.3 (10.2) | ||||
| P5U4160 | L1, L2, L3, L11, L21, L31, T1, T2, T3 | M12 | 4/0 x 2P | 100 x 2P | 349.6 (39.5) | ||
| Φ | 4/0 | 100 | 90.3 (10.2) | ||||
| P5U4185 | L1, L2, L3, Ε, ⊕1, ⊕3, T1, T2, T3 | M16 | 650MCM x 2P | 325 x 2P | 867.4 (98.0) | ||
| Φ | 650MCM | 325 | 90.3 (10.2) | ||||
| r, s200, s400 | M4 | 20 - 10 | 0.5 - 5.5 | 12.4 (1.4) | |||
| P5U4220 | L1, L2, L3, Ε, ⊕1, ⊕3, T1, T2, T3 | M16 | 650MCM x 2P | 325 x 2P | 867.4 (98.0) | ||
| Φ | 650MCM | 325 | 90.3 (10.2) | ||||
| r,s200,s400 | M4 | 20 - 10 | 0.5 - 5.5 | 12.4 (1.4) | |||
| P5U4300 | L1, L2, L3, Ε, ⊕1, ⊕3, T1, T2, T3 | M16 | 650MCM x 2P | 325 x 2P | 867.4 (98.0) | ||
| Φ | 650MCM | 325 | 90.3 (10.2) | ||||
| l,r,s200,s400 | M4 | 20 - 10 | 0.5 - 5.5 | 12.4 (1.4) | |||
| Control | Common to all models | S1, S2, S3, S4, S5, S6, SC FV, FI, FS, FC AM, AC, M1, M2, MA, MB, MC | - | 20 - 16 | Stranded 0.5 - 1.25 Solid 0.5 - 1.25 | - | Twisted shielded wire with Class 1 wiring |
| G | M3.5 | 20 - 14 | 0.5 - 2 | 8.9 (1.0) | |||
- Wire sizes are based on 75^ C copper wire.
JST Closed Loop Connectors
| Wire Size* | Terminal Screw | JST Closed-Loop Connectors (Lugs) | Max. Torque lb-in (N·m) | |
| AWG | mm² | |||
| 20 | 0.5 | M3.5 | 1.25 - 3.5 | 8.9 (1.0) |
| M4 | 1.25 - 4 | 12.4 (1.4) | ||
| 18 | 0.75 | M3.5 | 1.25 - 3.5 | 8.9 (1.0) |
| M4 | 1.25 - 4 | 12.4 (1.4) | ||
| 16 | 1.25 | M3.5 | 1.25 - 3.5 | 8.9 (1.0) |
| M4 | 1.25 - 4 | 12.4 (1.4) | ||
| 14 | 2 | M3.5 | 2 - 3.5 | 8.9 (1.0) |
| M4 | 2 - 4 | 12.4 (1.4) | ||
| M5 | 2 - 5 | 22.1 (2.5) | ||
| M6 | 2 - 6 | 45.1 (5.1) | ||
| M8 | 2 - 8 | 90.3 (10.2) | ||
| 12 - 10 | 3.5 - 5.5 | M4 | 5.5 - 4 | 12.4 (1.4) |
| M5 | 5.5 - 5 | 22.1 (2.5) | ||
| M6 | 5.5 - 6 | 45.1 (5.1) | ||
| M8 | 5.5 - 8 | 90.3 (10.2) | ||
| 8 | 8 | M5 | 8 - 5 | 22.1 (2.5) |
| M6 | 8 - 6 | 45.1 (5.1) | ||
| M8 | 8 - 8 | 90.3 (10.2) | ||
| 6 | 14 | M6 | 14 - 6 | 45.1 (5.1) |
| M8 | 14 - 8 | 90.3 (10.2) | ||
| 4 | 22 | M6 | 22 - 6 | 45.1 (5.1) |
| M8 | 22 - 8 | 90.3 (10.2) | ||
| 3 - 2 | 30 - 38 | M8 | 38 - 8 | 90.3 (10.2) |
| 1 - 1/0 | 50 - 60 | M8 | 60 - 8 | 90.3 (10.2) |
| M10 | 60 - 10 | 203.6 (23.0) | ||
| 3/0 | 80 | M10 | 80 - 10 | 203.6 (23.0) |
| 4/0 | 100 | 100 - 10 | 203.6 (23.0) | |
| 4/0 | 100 | M12 | 100 - 12 | 349.6 (39.5) |
| 300MCM | 150 | 150 - 12 | 349.6 (39.5) | |
| 400MCM | 200 | 200 - 12 | 349.6 (39.5) | |
| 650MCM | 325 | M12 x 2 | 325 - 12 | 349.6 (39.5) |
| M16 | 325 - 16 | 867.4 (98.0) | ||
Note:
The use of a JST closed-loop connector (lug) is recommended to maintain proper clearances. Please contact your Yaskawa representative for more information.
Control Circuit Wiring
The following table outlines the functions of the control circuit terminals.
Control Circuit Terminals
| Classifi-cation | Terminal | Function | Description | Signal Level | |
| Multi-function Input Signal | S1 | Forward run/stop | Forward run when closed, stop when open | Photo-coupler insulationInput: +24VDC 8mA | |
| S2 | Reverse run/stop | Reverse run when closed, stop when open | Multi-function contact inputs (n036 to n040) | ||
| S3 | External fault input | Fault when closed, normal state when open | |||
| S4 | Fault reset input | Reset when closed | |||
| S5 | Multi-step speed reference 1 | Enabled when closed | |||
| S6 | Multi-step speed reference 2 | Enabled when closed | |||
| SC | Sequence input common terminal | — | |||
| Analog Input Signal | FS | +15V Power supply output | For analog command +15V power supply | +15V (allowable cur- rent 20mA max.) | |
| FV | Frequency reference input (voltage) | 0 to +10V/100% | n043 = "FV=MSTR": FV enabled | 0 to +10V (20kΩ) | |
| FI | Frequency reference input (current) | 4 to 20mA/100% | n043 = "FI=MSTR": FI enabled | 4 to 20mA (250Ω) | |
| FC | Common terminal | 0V | — | ||
| G | Connection to shield sheath of signal lead | — | — | ||
| Multi-function Output Signal | M1 | During running (N.O. contact) | Closed when running | Multi-function contact output (n042) | Dry contact Contact capacity: 250VAC 1A or less30VDC 1A or less |
| M2 | |||||
| MA | Fault contact output (N.O./N.C. contact) | Fault when closed between terminals MA and MC | Multi-function contact output (n041) | ||
| MB | Fault when open between terminals MB and MC | ||||
| MC | |||||
| Analog Output Signal | AM | Frequency meter output | 0 to +10V/100% frequency | Multi-function analog monitor 1 (n052) | 0 to +10V2mA or less |
| AC | Common | ||||

Figure 12 Control Circuit Terminal Arrangement
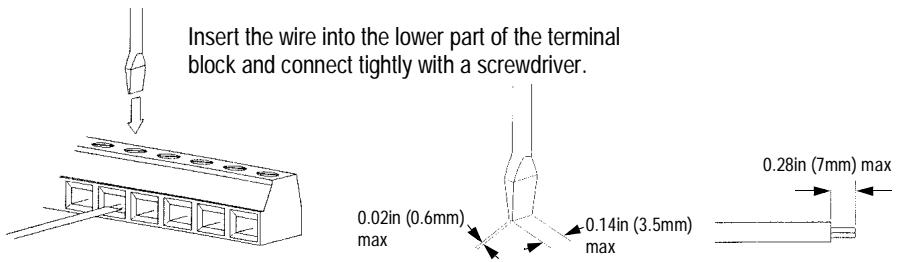
Figure 13 Wiring the Control Circuit Terminal
- CHAPTER 2 -
OPERATION
Section DescriptionPage
2 OPERATION
Precautions30
2.1 TRIAL OPERATION31
Digital Operator Display at Power-up31
Operation Checkpoints32
Basic Operation32
2.2 DIGITAL OPERATOR DISPLAY35
2.3 LED DESCRIPTION36
2.4 OPERATION MODE SELECTION37
WARNING
PRECAUTIONS
1) Only turn ON the input power supply after replacing the front cover. Do not remove the cover while the inverter is powered up.
2) When the retry function (n060) is selected, do not approach the inverter or the load, since it may restart suddenly after being stopped.
3) Since the Stop key can be disabled by a function setting, install a separate emergency stop switch to disconnect power or fault the inverter.
4) Do not touch the heatsink or braking resistor, due to very high temperatures.
5) Since it is very easy to change operation speed from low to high speed, verify the safe working range of the motor and machine before operation.
6) Install a separate holding brake, if necessary.
7) Do not check signals during operation.
8) All inverter parameters have been preset at the factory. Do not change the settings without thorough review of the possible consequences.
Failure to observe these precautions may result in equipment damage, serious personal injury, or death.
2.1 TRIAL OPERATION
To ensure safety, prior to initial operation, disconnect the machine coupling so that the motor is isolated from the machine. If initial operation must be performed while the motor is still coupled to the machine, use great care to avoid potentially hazardous conditions. Check the following items before a trial run:
- Wiring and terminal connections are proper.
- Wire clippings and other debris removed from the unit.
- Screws are securely tightened.
- Motor is securely mounted.
- All items are correctly grounded.
Digital Operator Display at Power-Up (JVOP-130P)
When the system is ready for operation, turn ON the power supply. Verify that the inverter powers up properly. If any problems are detected, turn OFF the power supply immediately. The digital operator displays illuminates as shown below when the power supply is turned ON.
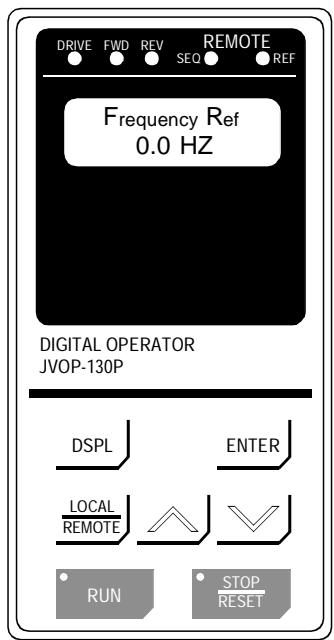
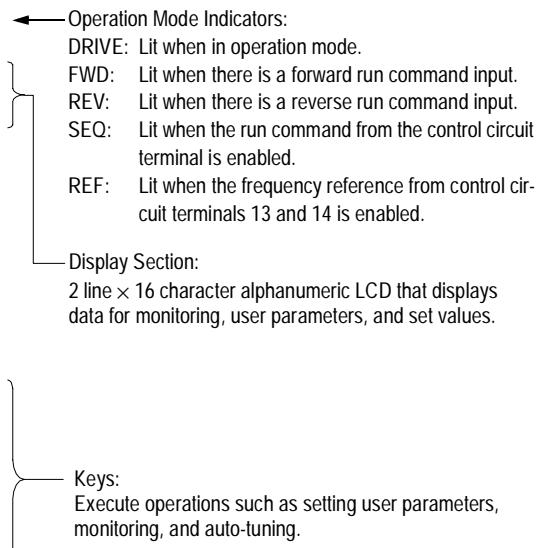
Figure 14 Digital Operator Display at Power-up (JVOP-130P)
Operation Checkpoints:
- Motor rotates smoothly.
- Motor rotates in the correct direction.
- Motor has no abnormal vibration and is not noisy.
Acceleration and deceleration are smooth. - Unit is not overloaded.
- Status indicator LEDs and digital operator display are correct.
Basic Operation
The inverter will operate after receiving a frequency reference. There are two operation modes for the VS-616PC5/P5:
- Run command from the digital operator.
- Run command from the control circuit terminals.
Operation by Digital Operator
The diagram below shows a typical operation pattern using the digital operator. Pressing the LOCAL/REMOTE key once while the inverter is stopped places the inverter in the LOCAL mode. The digital operator, JVOP-130P, can then be used to start and stop and change the reference.
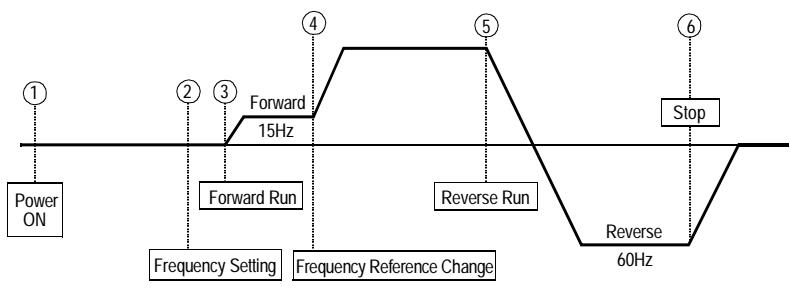
Figure 15 Operation Sequence by Digital Operator
Typical Operation Example by Digital Operator (JVOP-130P)
| Description | Key Sequence | Digital Operator Display |
| (1) Power ON · Displays frequency reference value. | LOCAL REMOTE | REMOTE LED (SEQ, REF) ON Frequency Ref 0.0 Hz REMOTE LED (SEQ, REF) OFF |
| Operation Condition Setting · Select LOCAL mode. | ||
| (2) Frequency Setting · Change frequency reference value. | Change the value by depressing | \ \ | / / Frequency Ref 15.0 Hz / | | \ |
| · Write-in set value. | ENTER | Frequency Ref 15.0 Hz |
| · Select output frequency monitor display. | DSPL | Output Freq 0.0 Hz |
| (3) Forward Run · Forward run (15Hz) | RUN | Output Freq 15.0 Hz RUN LED ON |
| (4) Frequency Reference Value Change (15-60Hz) · Select frequency reference value display. | DSPL Depress 15 times | Frequency Ref 15.0 Hz |
| · Change set value. | Change the value by depressing | \ \ | / / Frequency Ref 60.0 Hz / | | \ |
| · Write-in set value. | ENTER | Frequency Ref 60.0 Hz |
| · Select output frequency monitor display. | DSPL | Output Freq 60.0 Hz |
| (5) Reverse Run · Select reverse run. | DSPL Depress 3 times. | Forward/Reverse For |
| · Write-in set value. | Switch to "rev" by depressing | \ | / / Forward/Reverse rev / | | \ |
| · Select output frequency monitor display. | ENTER | REVERSE LED (REV) ON Forward/Reverse rev |
| (6) Stop · Decelerates to stop. | DSPL Depress 13 times. | Output Freq 60.0 Hz |
| STOP RESET | Output Freq 0.0 Hz RUN LED OFF STOP LED ON |
Operation by Control Circuit Terminal Signal
The diagram below shows a typical operation pattern using the control circuit terminal signals.
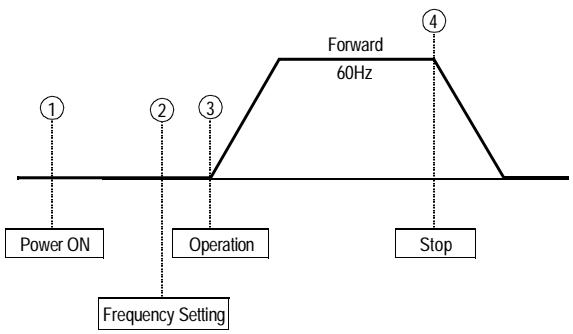
Figure 16 Operation Sequence by Control Circuit Terminal Signal
Typical Operation Example by Control Circuit Terminal Signal
| Description | Key Sequence | Digital Operator Display |
| (1) Power ON · Displays frequency reference value. REMOTE mode is preset at the factory. | DSPL | Frequency Ref 0.0 Hz REMOTE LED (SEQ, REF) ON |
| (2) Frequency Setting · Input frequency reference voltage (current) by control circuit terminal FV or FI and ver-ify the input value by the digital operator. | Frequency Ref 60.0 Hz For reference voltage 10V | |
| Output Frequency Display · Write-in set value. | Output Freq 0.0 Hz | |
| (3) Forward Run · Close between control circuit terminals S1 and SC to perform forward run. | Output Freq 60.0 Hz RUN LED ON | |
| (4) Stop · Open between control circuit terminals S1 and SC to stop operation. | Output Freq 0.0 Hz STOP LED ON (RUN LED blinking during deceleration) |
2.2 DIGITAL OPERATOR DISPLAY
All functions of the VS-616PC5/P5 are accessed using the JVOP-130P Digital Operator. Below are descriptions of the display and keypad sections.
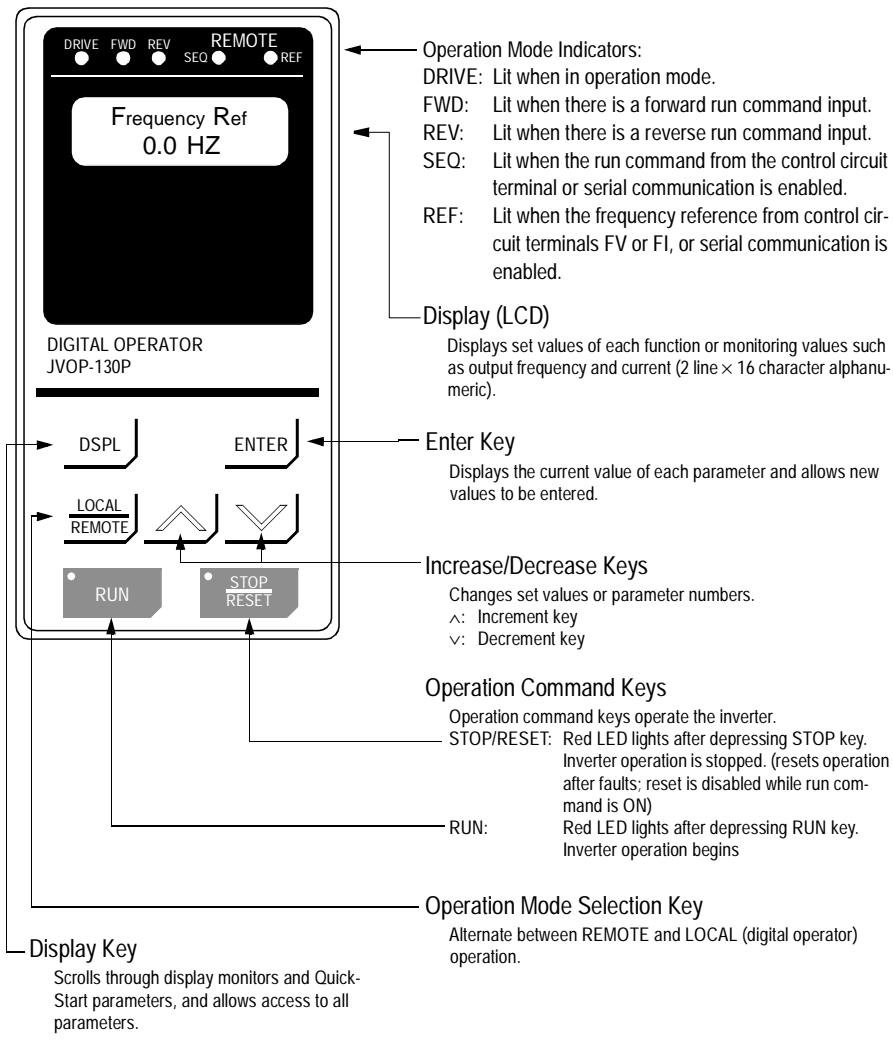
Figure 17 Digital Operator Display at Power-up
2.3 LED DESCRIPTION
Simple operation of the VS-616PC5/P5 is possible, by using the quick-start displays.
Quick-Start Displays (Example of CIMR-P5U23P7)
| Description | Key Sequence | Digital Operator Display | Remarks |
| Power ON | |||
| Frequency reference setting/monitoring | DSPL | Frequency Ref 0.0 Hz | |
| Output frequency monitor | DSPL | Output Freq 0.0 Hz | |
| Output current monitor | DSPL | Output Amps 0.0 A | |
| Output power monitor | DSPL | Output Power 0.0 kW | |
| FWD/REV run command selection | DSPL | Forward/Reverse For | |
| Monitor selection | DSPL | Monitor U-01 Frequency Ref | Depress [ENTER] key to display the monitor value. |
| Acceleration time | DSPL | Accel Time 1 10.0 Sec | |
| Deceleration time | DSPL | Decel Time 1 10.0 Sec | |
| Input voltage | DSPL | Input Voltage 230.0 VAC | |
| V/f pattern selection | DSPL | V/f Selection 60Hz Preset | |
| Frequency reference gain | DSPL | Terminal FV Gain 100% | |
| Frequency reference bias | DSPL | Terminal FV Bias 0% | |
| Motor rated current | DSPL | Motor rated FLA 19.6A | Set/read is enabled only during stop. |
| PID selection | DSPL | PID Mode Disabled | |
| Energy saving selection | DSPL | Energy Sav Sel Disabled | |
| Parameter Number/data | DSPL | Parameter n002 Oper Mode Select | Depress [ENTER] key to display data. |
2.4 OPERATION MODE SELECTION (n002, Oper Mode Select)
The VS-616PC5/P5 has two operation modes: LOCAL and REMOTE (see table below for description). These two modes can be selected by the digital operator "LOCAL/REMOTE" key only when operation is stopped. The operation mode selected can be verified by observing the SEQ and REF LEDs on the digital operator (as shown below). The operation mode is set to REMOTE (run by control circuit terminals FV and FI frequency reference and run command from control circuit terminals) prior to shipment. Multi-function contact inputs from control circuit terminals S3 to S6 are enabled in both operation modes.
- LOCAL: Both frequency reference and run command are set by the digital operator. Remote SEQ and REF LEDs go OFF.
- REMOTE: Master frequency reference and run command can be selected as described in the table below.
Parameter n111, LOC/REM Change, will determine if the inverter will acknowledge a previously closed run input during a switchover from LOCAL to REMOTE mode.
- When n111 is set to "Cycle Extern Run", the inverter will not start if the run input is closed during the transition from LOCAL to REMOTE.
- When n111 is set to "Acept Extern Run", the inverter will immediately start if the run input is closed during the transition from LOCAL to REMOTE.
Operation Mode Selection
| LED Display | LCD Display | Operation Method Selection | SEQ LED | Reference Selection | REF LED |
| 0 | SEQ=OPR REF=OPR | Operation by run command from digital operator | OFF | Master frequency reference from digital operator | OFF |
| 1 | SEQ=TRM REF=OPR | Operation by run command from control circuit terminal | ON | Master frequency reference from digital operator | OFF |
| 2 | SEQ=OPR REF=TRM | Operation by run command from digital operator | OFF | Master frequency reference from control circuit terminals FV and FI | ON |
| 3 | SEQ=TRM REF=TRM | Operation by run command from control circuit terminal | ON | Master frequency reference from control circuit terminals FV and FI | ON |
| 4 | SEQ=OPR REF=COM | Operation by run command from digital operator | OFF | Master frequency reference set by serial communication | ON |
| 5 | SEQ=TRM REF=COM | Operation by run command from control circuit terminal | ON | Master frequency reference set by serial communication | ON |
| 6 | SEQ=COM REF=COM | Operation by run command from serial communication | ON | Master frequency reference set by serial communication | ON |
| 7 | SEQ=COM REF=OPR | Operation by run command from serial communication | ON | Master frequency reference from digital operator | OFF |
| 8 | SEQ=COM REF=TRM | Operation by run command from serial communication | ON | Master frequency reference from control circuit terminals FV and FI | ON |
- CHAPTER 3 -
PROGRAMMING FEATURES
Section
Description
Page
3
PROGRAMMING FEATURES
3.1
VS-616PC5/P5 PARAMETERS (n001 n116) 41
3.2
PARAMETER SET-UP & INITIALIZATION. 49
3.3
Automatic fault retry 51
Automatic restart after momentary power loss 51
Carrier frequency 51
Current limit (Stall prevention). 52
DC injection braking 54
Energy savings control 55
Frequency agree set point 57
Frequency meter or ammeter 58
Frequency meter or ammeter calibration 58
Frequency signal adjustment. 58
Jog operation 60
Jump frequencies. 60
MODBUS communication 61
Motor overload detection 62
Multi-step speed selection. 64
Phase loss detection. 65
PID Control 66
Reverse run prohibit 68
Soft-start characteristics 68
Speed limit adjustment 69
Stopping method 70
Torque adjustment 72
Torque detection 73
Tripless operation 74
V/f pattern adjustment. 75
Slip compensation 77
3.4 INPUTS & OUTPUTS. 78
Multi-function input signals 78
Analog input signals 82
Multi-function output signals 83
3.1 VS-616PC5/P5 Parameters (n001~n116)
| No. | Function Name(LCD Operator Display) | Description | FactoryDefault | UserSetting | Ref.Page | ||||
| n001 | Parameter selection/initialization(Password) | 0: n001 read and set, n002~n116 read only1: n001~n035 read and set, n036~n116 read only2: n001~n053 read & set, n054~n116 read only3: n001~n116 read and set4, 5: Not used6: 2-wire initialization (Japanese specifications)7: 3-wire initialization (Japanese specifications)8: 2-wire initialization (American specifications)9: 3-wire initialization (American specifications) | 1 | 49 | |||||
| n002 | Operation mode selection(Oper Mode Select) | LED Setting | LCD Setting | Operation | Reference | SEQ=TRMREF=TRM | 37 | ||
| 0 | SEQ=OPR REF=OPR | Operator | Operator | ||||||
| 1 | SEQ=TRM REF=OPR | Terminal | Operator | ||||||
| 2 | SEQ=OPR REF=TRM | Operator | Terminal | ||||||
| 3 | SEQ=TRM REF=TRM | Terminal | Terminal | ||||||
| 4 | SEQ=OPR REF=COM | Operator | Serial com | ||||||
| 5 | SEQ=TRM REF=COM | Terminal | Serial com | ||||||
| 6 | SEQ=COM REF=COM | Serial com | Serial com | ||||||
| 7 | SEQ=COM REF=OPR | Serial com | Operator | ||||||
| 8 | SEQ=COM REF=TRM | Serial com | Terminal | ||||||
| n003 | Input voltage(Input Voltage) | Unit: 0.1VSetting range: 150.0~255.0V (510V for 460V units) | 230.0V(460.0V) | - | |||||
| n004 | Stopping method(Stopping Method) | LED Setting | LCD Setting | Description | Ramp toStop | 70 | |||
| 0 | Ramp to stop | Ramp to stop | |||||||
| 1 | Coast to stop | Coast to stop | |||||||
| 2 | Coast w/Timer1 | Coast to stop with timer(Run command cycle) | |||||||
| 3 | Coast w/Timer2 | Coast to stop with timer(automatic after time out) | |||||||
| n005 | Motor rotation(Motor Rotation) | LED Setting | LCD Setting | Description | RotateC.C.W. | - | |||
| 0 | Rotate C.C.W. | CCW shaft rotation | |||||||
| 1 | Rotate C.W. | CW shaft rotation | |||||||
| n006 | Prohibit reverse operation(Reverse Oper) | LED Setting | LCD Setting | Description | RevAllowed | 68 | |||
| 0 | Rev Allowed | Reverse operation enabled | |||||||
| 1 | Rev Prohibited | Reverse operation disabled | |||||||
| n007 | Local/remote key function(Local/Remote Key) | LED Setting | LCD Setting | Enabled | 37 | ||||
| 0 | Disabled | ||||||||
| 1 | Enabled | ||||||||
| n008 | Stop key function(Oper STOP Key) | LED Setting | LCD Setting | Description | Enabled | - | |||
| 0 | Disabled | Stop key is disabled whenoperated from terminals | |||||||
| 1 | Enabled | Stop key is always enabled | |||||||
| n009 | Frequency reference setting method from operator(Operator MOP) | LED Setting | LCD Setting | Enterkeyused | - | ||||
| 0 | Enter not used | ||||||||
| 1 | Enter key used | ||||||||
| n010 | V/f pattern selection(V/f Selection) | LED Setting | LCD Setting | Description | 60HzPreset | 75,96 | |||
| 0 | User Defined V/f | Custom V/f pattern(n011 ~ n017 can be set) | |||||||
| 1 | 60 Hz Preset | Fixed V/f pattern | |||||||
| n011 | Maximum frequency(Max Frequency) | Unit: 0.1HzSetting range: 50.0~400.0Hz | 60.0Hz | 76 | |||||
| n012 | Maximum voltage(Max Voltage) | Unit: 0.1VSetting range: 0.1~255.0V (510V for 460V units) | 230.0V | 76 | |||||
| n013 | Base frequency(Base Frequency) | Unit: 0.1HzSetting range: 0.2~400.0Hz | 60.0Hz | 76 | |||||
| No. | Function Name(LCD Operator Display) | Description | FactoryDefault | UserSetting | Ref.Page | ||
| n014 | Mid.output frequency(Mid Frequency) | Unit: 0.1HzSetting range: 0.1~399.9Hz | 3Hz | 76 | |||
| n015 | Mid.frequency voltage(Mid Voltage) | Unit: 0.1VSetting range: 0.1~255.0V (510V for 460V units) | 17.2V(34.4V) | 76 | |||
| n016 | Minimum output frequency(Min Frequency) | Unit: 0.1HzSetting range: 0.1~10.0Hz | 1.5Hz | 76 | |||
| n017 | Minimum output voltage(Min Voltage) | Unit: 0.1VSetting range: 0.1~50.0V (510V for 460V units) | 11.5V(23.0V) | 76 | |||
| n018 | Acceleration time 1(Accel Time 1) | Unit: 0.1s (1s for 1000s and above)Setting range: 0.0~3600s | 10.0s | 50,96 | |||
| n019 | Deceleration time 1(Decel Time 1) | Unit: 0.1s (1s for 1000s and above)Setting range: 0.0~3600s | 10.0s | 50,96 | |||
| n020 | Acceleration time 2(Accel Time 2) | Unit: 1sSetting range: 0~255s | 10.0s | 50 | |||
| n021 | Deceleration time 2(Decel Time 2) | Unit: 1sSetting range: 0~255s | 10.0s | 50 | |||
| n022 | S-curve selection(S-Curve Select) | LED Setting 0 0 LCD Setting No S-curve1 0.2s2 0.5s3 1.0s | 0.2s | 68 | |||
| n023 | Display mode(Display Units) | Setting 0 0.1Hz1 0.1%2~39 rpm (input # of motor poles)40~3999 custom | 0 | - | |||
| n024 | Frequency reference 1(Reference 1) | Setting depends on n023 setting.Range: 0~9999 | 0.0Hz | 64,95 | |||
| n025 | Frequency reference 2(Reference 2) | Setting depends on n023 setting.Range: 0~9999 | 0.0Hz | 64 | |||
| n026 | Frequency reference 3(Reference 3) | Setting depends on n023 setting.Range: 0~9999 | 0.0Hz | 64 | |||
| n027 | Frequency reference 4(Reference 4) | Setting depends on n023 setting.Range: 0~9999 | 0.0Hz | 64 | |||
| n028 | Not used | - | - | - | - | ||
| n029 | Not used | - | - | - | - | ||
| n030 | Jog frequency(Jog Reference) | Setting depends on n023 setting.Range: 0~9999 | 6.0Hz | 60 | |||
| n031 | Frequency upper limit(Ref Upper Limit) | Unit: 1%Setting range: 0~109% | 100% | 69 | |||
| n032 | Frequency lower limit(Ref Lower Limit) | Unit: 1%Setting range: 0~100% | 0% | 69 | |||
| n033 | Motor rated current(Motor Rated FLA) | Unit: 0.1ARange: 10~200% inverter rated currentUnit is 1A, when setting is more than 1,000A | kVAdependent | 62,96 | |||
| No. | Function Name(LCD Operator Display) | Description | FactoryDefault | UserSetting | Ref.Page | ||
| n034 | Motor thermal protection(Motor OL Sel) | LED Setting | LCD Setting | Description | STDMotor/8 min | 62 | |
| 0 | Disabled | Protection disabled | |||||
| 1 | STD Motor/8 min | General-purpose motor (time constant 8 min.) | |||||
| 2 | STD Motor/5 min | General-purpose motor (time constant 5 min.) | |||||
| 3 | INV Motor/8 min | Blower-cooled motor (time constant 8 min.) | |||||
| 4 | INV Motor/5 min | Blower-cooled motor (time constant 5 min.) | |||||
| n035 | Stop method selection - OH1- for inverter overheat pre-alarm(OH1 Stop Method) | LED Setting | LCD Setting | Description | ContinueOper | - | |
| 0 | Ramp STOP/Decel 1(fault) | Ramp to stop - Decel 1(fault) | |||||
| 1 | Coast to STOP | Coast to stop (fault) | |||||
| 2 | Ramp STOP/Decel 2(fault) | Ramp to stop - Decel 2(fault) | |||||
| 3 | Continue Oper | Continue operation(alarm) at 80% of frequency reference | |||||
| n036 | Multi-function input selec-tion 1(Terminal S2 Sel) | LED Setting | LCD Setting | Description | ReverseRUN(2W) | 78 | |
| 0 | Reverse RUN (2W) | Reverse run (2-wire sequence) | |||||
| 1 | FWD/REV Cmd (3W) | Fwd / Rev command (3-wire sequence) | |||||
| 2 | Ext Fault (NO) | External fault (normally open) | |||||
| 3 | Ext Fault (NC) | External fault (normally closed) | |||||
| 4 | Fault Reset | Fault reset | |||||
| 5 | LOCAL/REMOTE Sel | Local / Remote selection | |||||
| 6 | COM/INV Sel | Serial com/inverter selection (Freq, RUN command) | |||||
| 7 | STOP Cmd/Dec2 NO | Fast stop using Decel 2 (normally open) | |||||
| 8 | STOP Cmd/Dec2 NC | Fast stop using Decel 2 (normally closed) | |||||
| 9 | Master Freq Sel | Master freq. ref. selection (FV-open or FI-closed) | |||||
| 10 | Multi-Slep Spd 1 | Multi-step speed reference command 1 | |||||
| 11 | Multi-Slep Spd 2 | Multi-step speed reference command 2 | |||||
| 12 | Not Used | Not used | |||||
| 13 | JOG Command | Jog reference (n030) | |||||
| 14 | Acc/Dec Switch | Accel / Decel time selection | |||||
| 15 | Ext Basebk (NO) | External baseblock (normally open) | |||||
| 16 | Ext Basebk (NC) | External baseblock (normally closed) | |||||
| 17 | SpdSrch (MAXFRO) | Speed search from maximum fre-quence | |||||
| 18 | SpdSrch (SETFRO) | Speed search from set frequency | |||||
| 19 | Param Lockout | Parameter setting enable / disable | |||||
| 20 | PID I Reset | PID integral value reset | |||||
| 21 | PID Disable | PID control enable / disable | |||||
| 22 | Timer Start Cmd | Timer function | |||||
| 23 | OH3 Input | External overheat alarm (OH3) | |||||
| 24 | Ref Sample Hold | Analog reference sample hold com-mand | |||||
| 25 | KEB Cmd (NO) | Inertia ridethrough command (normally open) | |||||
| 26 | KEB Cmd (NC) | Inertia ridethrough command (normally closed) | |||||
| 27 | Hold Command | Accel / Decel hold command | |||||
| 28 | PID Polarity Sel | Inverse PID enable / disable | |||||
| No. | Function Name(LCD Operator Display) | Description | FactoryDefault | UserSetting | Ref.Page | |||
| n037 | Multi-function input 2(Terminal S3 Sel) | Set items are same as n036.(When n036="FWD/REV Cmd (3W),"In Use By Other" is displayed, and setting is prohibited) | ExtFault(NO) | 78 | ||||
| n038 | Multi-function input 3(Terminal S4 Sel) | Set items are same as n036. | FaultReset | 78 | ||||
| n039 | Multi-function input 4(Terminal S5 Sel) | Set items are same as n036.(When n040="Up/Down Control","In Use By Other is displayed, and setting is prohibited) | Multi-StepSpd 1 | 78 | ||||
| n040 | Multi-function input 5(Terminal S6 Sel) | Set items are same as n036.LEDSettingLCD SettingDescription29 Up / Down controlUp / Down command (Terminal S5=Up command, and terminal S6=Down command). | Multi-StepSpd 2 | 78 | ||||
| n041 | Multi-function outputselection 1(Terminal MA Sel) | LEDSettingLCD SettingDescription0 Fault0 Fault1 During RunningDuring running2 At Speed Frequency agree3 At Desired Speed Desired frequency agree4 Freq Detection 1 Frequency detection 15 Freq detection 2 Frequency detection 26 OverTrq Det (NO)Over/Undertorque detection (nor-maily open)7 OverTrq Det (NC)Over/Undertorque detection (nor-maily closed)8 Baseblocked During baseblock9 Operation Mode Local mode10 Ready Inverter operation ready11 Timer Output Timer function12 Auto-Restarting During auto restart13 OL Pre-Alarm OL pre-alarm (80% OL1 or OL2)14 Freq Ref Loss Frequency reference loss15 Set By COM Cntl Closed by serial communication16 PID Fdbk Loss PID feedback loss17 OH1 Alarm OH1 Alarm (set if n035 set to "3") | Fault | 83 | ||||
| n042 | Multi-function outputselection 2(Terminal M1 Sel) | Set items are as same as n041 | DuringRunning | 83 | ||||
| n043 | Master analog input selec-tion - FV or FI terminal(Analog Input Sel) | LED LCDSetting SettingFV FI Remarks0 FV=MSTR FI=AUX Master Aux Enable1 FV=AUX FI=MSTR Aux. Master Enable2 FV=RST FI=MSTR Fault reset Master DisableEnable: FV/FI switchover function is enabled.Disable: FV/FI switchover function is disabled.Note: When PID is enabled (n084 ≠ 0),FV terminal = PID reference, andFI terminal = PID feedback. | FV=MSTRFI=AUX | 82 | ||||
| n044 | Aux. analog inputselection(Terminal FI Sel) | LED LCD Setting Description0 0-10VDC 0-10V input (Jumper J1 must be cut)1 4-20mA 4-20mA input | 4-20mA | 82 | ||||
| n045 | Frequency referenceretention(MOP Ref Memory) | LED LCD Setting Description0 Memorize FReRetained in frequency reference 1 (n024)1 Not Memorized Not retained after power-down | MemorizeFref | 82 | ||||
| No. | Function Name(LCD Operator Display) | Description | FactoryDefault | UserSetting | Ref.Page | |||
| n046 | Operation method for frequency reference loss detection(Ref Loss Detect) | LED Setting LCD Setting Description0 Not detected No detection1 Run @ n047 Freq Continue to run at n047 setting | NotDetected | 82 | ||||
| n047 | Frequency reference level at loss of Fref(Fref Lvl@F Loss) | Unit: 1%Setting range: 0~100% of setting Fref | 80% | 82 | ||||
| n048 | Terminal FV gain(Terminal FV Gain) | Unit: 1%Setting range: 0~200% | 100% | 59,96 | ||||
| n049 | Terminal FV bias(Terminal FV Bias) | Unit: 1%Setting range: -100~100% | 0% | 59,96 | ||||
| n050 | Terminal FI gain(Terminal FI Gain) | Unit: 1%Setting range: 0~200% | 100% | 59 | ||||
| n051 | Terminal FI bias(Terminal FI Bias) | Unit: 1%Setting range: -100~100% | 0% | 59 | ||||
| n052 | Multi-function analog output AM(Terminal AM Sel) | LED Setting LCD Setting Monitor0 Output Freq Output frequency1 Output Amps Output current2 Output kWatts Output power3 DC Bus Voltage DC bus voltage | Output Freq | 58 | ||||
| n053 | Analog monitor gain(Terminal AM Gain) | Unit: 0.01Setting range: 0.01~2.00 | 1.00 | 58 | ||||
| n054 | Carrier frequency(Carrier Freq Sel) | Unit: 1Setting range: 1~6 (x2.5kHz), 7~9 (custom pattern) | kVA dependent | 51 | ||||
| n055 | Momentary power loss ridethrough method(PwrL Selection) | LED Setting LCD Setting Method0 Not Provided Not provided1 2 Seconds Max Continuous operation after power recovery within 2s2 CPU Power Active Continuous operation after power recovery within control logic time (no fault output) | NotProvided | 51 | ||||
| n056 | Speed search level - decel time fixed at 2 sec(SpdSrch Current) | Unit: 1% Setting range: 0~200%100% = inverter rated current | 110% | 74 | ||||
| n057 | Minimum baseblock time (Min Baseblock t) | Unit: 0.1sSetting range: 0.5~10.0s | kVA dependent | 71 | ||||
| n058 | V/f reduction level during speed search(SpdSrch V/f) | Unit:1%Setting range: 0~100% | kVA dependent | - | ||||
| n059 | Power loss ridethrough time(PwrL Ridethru t) | Unit: 0.1sSetting range: 0.0~2.0s | kVA dependent | - | ||||
| n060 | Automatic retry attempts (Num of Restart) | Unit: 1 timeSetting range: 0~10 | 0 | 51 | ||||
| n061 | Fault contact selection during automatic retry(Restart Sel) | LED Setting LCD Setting Description0 Activate Fit Rly Closed during fault retry1 No Rly Output Open during fault retry | ActivateFit Rly | - | ||||
| n062 | Jump frequency 1(Jump Freq 1) | Unit: 0.1HzSetting range: 0.0~400.0Hz | 0.0Hz | 60 | ||||
| n063 | Jump frequency 2(Jump Freq 2) | Unit: 0.1HzSetting range: 0.0~400.0Hz | 0.0Hz | 60 | ||||
| n064 | Jump frequencybandwidth(Jump Bandwidth) | Unit: 0.1HzSetting range: 0.0~25.5Hz | 1.0Hz | 60 | ||||
| n065 | Elapsed timer selection(Elapsed Timer) | LEDSetting 0 Time Power is ON 1 Time Running Mtr | TimeRunningMtr | - | ||||
| n066 | Elapsed timer 1(Elapsed Time 1) | Unit: 1 hour Range: 0~9999* Initial value becomes 0 only when initialized dur-ing CPF4 occurrence. | * | - | ||||
| n067 | Elapsed timer 2(Elapsed Time 2) | Unit: 10,000 hours Range: 0~27* Initial value becomes 0 only when initialized dur-ing CPF4 occurrence. | * | - | ||||
| n068 | DC injection current(DCInj Current) | Unit: 1%Setting range: 0~100%100% = inverter rated current | 50% | 54,75 | ||||
| n069 | DC injection time at stop(DCInj Time @ Stop) | Unit: 0.1sSetting range: 0.0~10.0s | 0.0s | 54 | ||||
| n070 | DC injection time at start(DCInj Time @ Start) | Unit: 0.1sSetting range: 0.0~10.0s | 0.0s | 55,75 | ||||
| n071 | Torque compensationgain(Torq Comp Gain) | Unit: 0.1Setting range: 0.0~3.0(normally, no adjustment is necessary) | 1.0 | 72 | ||||
| n072 | Stall prevention duringdeceleration(StallIP Decel Sel) | LEDSetting 0 Disabled1 Enabled | Enabled | 54 | ||||
| n073 | Current limit/Stall preven-tion level during accelera-tion(StallIP Accel Lvl) | Unit: 1% Setting range: 30~200%When level is set to 200%, current limit duringacceleration is disabled. | kVAdependent | 52 | ||||
| n074 | Current limit/Stall preven-tion level during running(StallIP Run Level) | Unit: 1% Setting range: 30~200%When level is set to 200%, current limit duringrunning is disabled. | kVAdependent | 53 | ||||
| n075 | Frequency agree set point(Freq Det Level) | Unit: 0.1HzSetting range: 0.0~400.0Hz | 0.0Hz | 57,84 | ||||
| n076 | Frequency agree detection width(Freq Det Width) | Unit: 0.1HzSetting range: 0.0~25.5Hz | 2.0Hz | 84 | ||||
| No. | Function Name(LCD Operator Display) | Description | FactoryDefault | UserSetting | Ref.Page | |||
| n077 | Over/Undertorque detection OL3(Torq Det Sel) | LEDSetting LCD SettingDescription0 Disabled Disableting disabled1 OT/Spd Agree/Alm Overtorque detection at speed agree;continue running after detection.(Alarm)2 OT/Run/Alm Overtorque detection at run; continuerunning after detection.(Alarm)3 OT/Spd Agree/Flt Overtorque detection at speed agree;coast to stop after detection.(Fault)4 OT/Run/Flt Overtorque detection at run; coasts tostop after detection.(Fault)5 UT/Spd Agree/Alm Undertorque detection at speedagree: continue running afterdetec-tion.(Alarm)6 UT/Run/Alm Undertorque detection at run; con- tinue running after detection.(Alarm)7 UT/Spd Agree/Flt Undertorque detection at speedagree; coast to stop after detection.(Fault)8 UT/Run/Flt Undertorque detection at run; coast tostop after detection.(Fault) | Disabled | 73 | ||||
| n078 | Over/Undertorque detection level OL3(Torq Det Level) | Unit: 1%Setting range: 30~200%100% = inverter rated current | 160% | 74 | ||||
| n079 | Over/Undertorque detect-e tion delay time OL3(Torq Det Time) | Unit: 0.1sSetting range: 0.1~10.0s | 0.1s | 74 | ||||
| n080 | On-delay timer(On-Delay Timer) | Unit: 0.1sSetting range: 0.0~25.5s | 0.0s | 80 | ||||
| n081 | Off-delay timer(Off-Delay Timer) | Unit: 0.1sSetting range: 0.0~25.5s | 0.0s | 80 | ||||
| n082 | DB resistor overheat function rH(DB Resistor Prot) | LEDSetting LCD Setting Description0 Disabled No DB protection calculated or provided1 Enabled Protection provided for Yaskawa 3% ED resistor | Disabled | - | ||||
| n083 | Input phase loss detection level SPI(In Ph Loss Lvl) | Unit: 1%Setting range: 1~100%When setting is 100%, this function is disabled. | 7% | 65 | ||||
| n084 | PID selection(PID Mode) | LEDSetting LCD Setting Description0 Disabled PID disabled1 Enabled D= Fdbk PID enabled2 Enabled D= Fdfwd PID w / Feed forward3 Enabled RevFdbk PID w / Inverted feedback | Disabled | 66,96 | ||||
| n085 | Feedback calibration gainPID(PID Fdbc Gain) | Unit: 0.01Setting range: 0.00~10.00 | 1.00 | 66 | ||||
| n086 | Proportional gain PID(PID P Gain) | Unit: 0.01Setting range: 0.0~10.0 | 1.0 | 66 | ||||
| n087 | Integral time PID(PID I Time) | Unit: 0.1sSetting range: 0.0~100.0s | 10.0s | 66 | ||||
| n088 | Derivative time PID(PID D Time) | Unit: 0.01sSetting range: 0.00~1.00s | 0.00s | 66 | ||||
| n089 | Limit of integral value PID(PID I Limit) | Unit: 1%Setting range: 0~109% | 100% | 67 | ||||
| n090 | Feedback loss detectionPID(PID FdbkLoss Sel) | LEDSettingLCD SettingDescription0DisabledDetection is disabled.1Multi-function Output OnlyDetection is enabled. | Disabled | - | ||||
| n091 | Feedback loss detection level PID(PID FdbkLoss Lvl) | Unit: 1%Setting range: 0~100% | 0% | - | ||||
| n092 | Feedback loss detection delay time PID(PID FdbkLoss Tim) | Unit: 0.1sSetting range: 0.0~25.5s | 1.0s | 66 | ||||
| n093 | PID output selection(PID Output Sel) | LEDSettingLCD SettingDescription0Not Inverted1Inverted | NotInverted | 67 | ||||
| n094 | Sleep function start level PID(Sleep Start Lvl) | Unit: 0.1HzSetting range: 0.0~400.0Hz | 0.0Hz | 67 | ||||
| n095 | Sleep function delay time PID(Sleep Delay Time) | Unit: 0.1sSetting range: 0.0~25.5s | 0.0s | 67 | ||||
| n096 | Energy saving selection(Energy Save Sel) | LEDSettingLCD SettingDescription0DisabledEnergy saving is disabled.1EnabledEnergy saving is enabled. | Disabled | 55,96 | ||||
| n097 | Energy saving gain K2(Energy Save Gain) | Unit: 0.01Setting range: 0.00~655.0 (0=No energy saving) | kVAdependent | 55 | ||||
| n098 | Energy saving voltagelower limit at 60Hz(EngSavVLLmt@60Hz) | Unit: 1%Setting range: 0~120% | 75% | 55 | ||||
| n099 | Energy saving voltagelower limit at 6Hz(EngSavVLLmt@6Hz) | Unit: 1%Setting range: 0~25% | 12% | 55 | ||||
| n100 | Time of average kW -Energy saving(EngSavTime/AvgkW) | Unit: 1 = 25msSetting range: 0~200 | 1 | - | ||||
| n101 | Modbus time overdetection(MODBUS Timeout) | LEDSettingLCD SettingDescription0DisabledTime Over Detection is disabled.1EnabledTime Over Detection is enabled. | Enabled | - | ||||
| n102 | MODBUS stop method atcommunication error CE(MODBUS Fault Stop) | LEDSettingLCD SettingStop method0Ramp STOP/Decel 1Ramp to stop - Decel 1 (fault)1Coast to STOPCoast to stop (fault)2Ramp STOP/Decel 1Ramp to stop - Decel 2 (fault)3Continue OperContinue operation (alarm) | Coast toSTOP | - | ||||
| n103 | MODBUS frequency reference unit(MODBUS Freq Unit) | LEDSettingLCD SettingStop method01=0.1Hz0.1Hz / 112=0.01Hz0.01Hz / 12331=0.1%0.1% / 1 | 1=0.1Hz | 62 | ||||
| n104 | MODBUS slave address(MODBUS Address) | Unit: 1Setting range: 0~31 | 1 | 62 | ||||
| n105 | MODBUS BPS selection(MODBUS Baud Rate) | LEDSetting 0 2400 Baud1 4800 Baud2 9600 Baud | 9600 Baud | 61 | ||||
| n106 | MODBUS parity selection(MODBUS Parity) | LEDSetting 0 0 No parity1 Even parity2 Odd parity | No parity | 61 | ||||
| n107 | Slip compensation gain(Slip Comp Gain) | Unit: 0.1% [of Base Frequency (n013)] Setting range: 0.0~9.9% | 0.0% | 77 | ||||
| n108 | Motor no-load current(Mtr No-Load Amp) | Unit: 1% [of Motor Rated Current (n033)] Setting range: 0~99% | 30% | - | ||||
| n109 | Slip compensation primary delay time constant(Slip Comp Delay) | Unit: 0.1s Setting range: 0.0~25.5s | 2.0s | 77 | ||||
| n110 | Operator connection faultdetection selection(Oper Detect FIt) | LEDSetting 0: Disabled1: Enabled | Disabled | - | ||||
| n111 | Local / Remotechangeover functionselection(LOC/REM Change) | LEDSetting 0 Cycle Extern RUN command1 Acept Extern RUN command | Cycle ExternRUN | 37 | ||||
| n112 | Low frequency OL startpoint(Low Freq OL2 Start) | Unit: 0.1HzSetting range: 0.0~10.0Hz | 6.0Hz | - | ||||
| n113 | 0Hz continuous operationlevel(OL2_Level@@_0 Hz) | Unit: 1%Setting range: 25~100% | 50% | - | ||||
| n114 | Not used | - | - | - | - | |||
| n115 | kVA selection(Inverter kVA Sel) | Unit: 1Setting range: PC5 (0~8, 20~29), P5(9-F, 2A~35) | kVADependent | - | ||||
| n116 | CT / VT selection(CT / VT Selection) | LEDSetting 0: CT Operation 1: VT Operation | - | 7,9 | ||||
3.2 PARAMETER SET-UP & INITIALIZATION
Parameter Selection/Initialization (n001, Password)
The following table describes data which can be set or read when parameter n001 is set.
| Setting | Parameters that can be set | Parameters that can be viewed |
| 0 parameter read-only) | n001 | n001 to n116 |
| 1 ( factory default) | n001 to n035 | n001 to n116 |
| 2 | n001 to n053 | n001 to n116 |
| 3 | n001 to n116 | n001 to n116 |
| 4, 5 | Not used | |
| 6 | Initialize: 2-wire sequence (Japanese specifications) | |
| 7 | Initialize: 3-wire sequence (Japanese specifications) | |
| 8 | Initialize: 2-wire sequence (American specifications) | |
| 9 | Initialize: 3-wire sequence (American specifications) | |
Accel/Decel Time Adjustment
Figure 18 Timing Diagram of Accel/Decel Time Adjustment
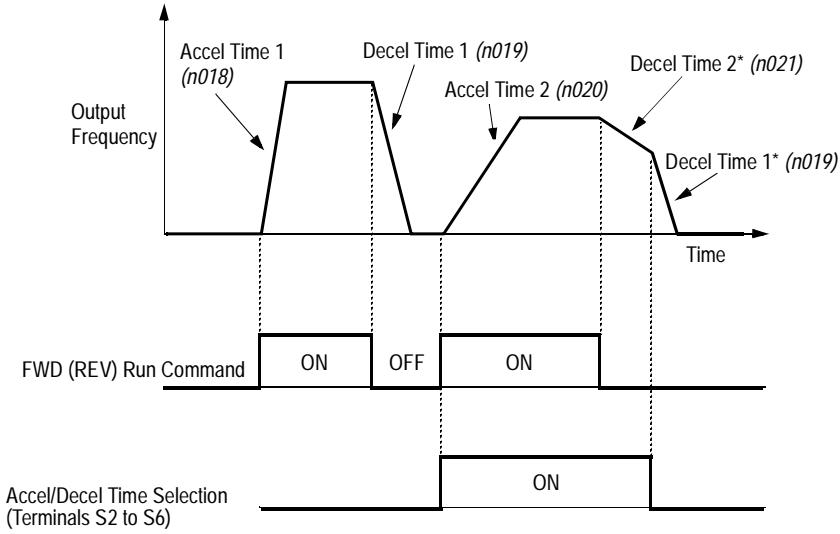
* When "deceleration to stop" is selected ( n004 = Ramp to STOP )
When any of the multi-function input terminal selections (n036, n037, n038,
n039 or n040 ) is set to "Acc/Dec Switch", accel/decel times can be selected by opening or closing the appropriate terminal (S2, S3, S4, S5 or S6).
At OPEN: n018 (accel time 1), n019 (decel time 1)
At CLOSED: n020 (accel time 2), n021 (decel time 2)
| Parameter No. | Name | Unit | Setting Range | Factory Default |
| n018 | Acceleration time 1 | 0.1s * | 0.0 to 3600s | 10.0s |
| n019 | Deceleration time 1 | 0.1s * | 0.0 to 3600s | 10.0s |
| n020 | Acceleration time 2 | 0.1s * | 0.0 to 3600s | 10.0s |
| n021 | Deceleration time 2 | 0.1s * | 0.0 to 3600s | 10.0s |
- Setting unit is 1s for 1,000s and above.
Acceleration time
Sets the time necessary for the output frequency to move from 0Hz to maximum output frequency (n011).
Deceleration time
Set the time necessary for the output frequency to move from maximum output frequency (n011) to 0Hz.
Automatic Fault Retry (n060, Num of Restarts)
After a fault occurs, the inverter can automatically restart. The number of retry attempts can be set up to 10 times via parameter n060 . The inverter can be set to automatically restart after the following faults occur:
Overcurrent (OC)
Overvoltage (OV)
- Undervoltage PUV (UV1)
Ground fault (GF)
Regenerative transistor fault (RR)
The number of retry attempts are cleared to "0" in the following cases:
- If no other fault occurs within 10 minutes after retry.
- When the fault reset signal is ON (closed) after the fault is detected.
- Power supply is turned OFF.
Automatic Restart After Momentary Power Loss (n055, PwrL Selection)
When momentary power loss occurs, operation restarts automatically. The run command must remain closed for this feature to function properly.
| LED Setting | LCD Setting | Description |
| 0 | Not Provided | Not provided (factory default) |
| 1* | 2 Seconds Max | Continuous operation after power recovery within 2 seconds |
| 2** | CPU Power Active | Continuous operation after power recovery within control logic time (no fault output) |
- Holds the operation signal to continue operation after recovery from momentary power loss. ** When "CPU Power Active" is selected, operation restarts if power supply voltage returns to its normal level (level before power loss). No fault signal is output.
Carrier Frequency (n054, Carrier Freq Sel)
This function sets the inverter output transistor switching frequency (carrier frequency). This is used to reduce motor noise and leakage current. The factory setting for carrier frequency is the maximum allowable carrier frequency at which inverter rated current can continuously be generated. Consult the factory when increasing the carrier above the default values.
| Carrier Frequency (kHz) | Metallic Noise from Motor | Leakage Current | |
| LED Setting | LCD Setting | Louder | Smaller |
| 1 | 2.5 | ||
| 2 | 5.0 | ||
| 3 | 8.0 | ||
| 4 | 10.0 | Inaudible | Larger |
| 5 | 12.5 | ||
| 6 | 15.0 | ||
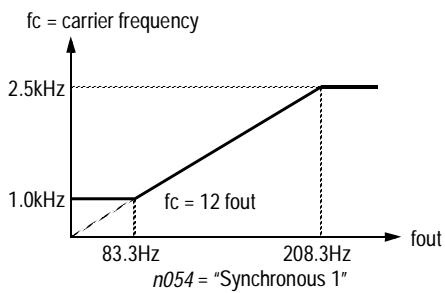
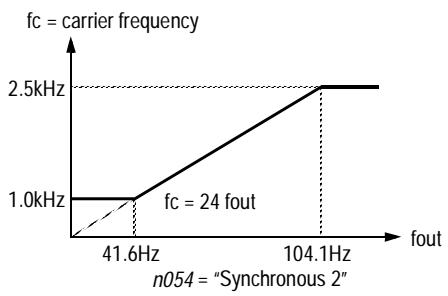
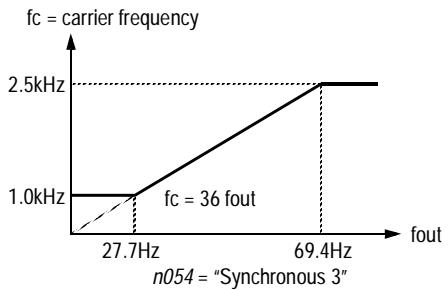
Figure 19 Custom Setting of Carrier Frequency Patterns
Current Limit (Stall Prevention)
This function automatically adjusts the output frequency in response to an increase in load current to continue operation without tripping the inverter.
- Stall Prevention Level During Acceleration (n073, StallP Accel Lvl) The current limit level during acceleration can be set in units of 1% (inverter rated current = 100% ).
Factory setting: kVA dependent
A setting of 200% disables current limit during acceleration. During acceleration, if the output current exceeds the value set for n073 , acceleration stops and frequency is maintained. When the output current goes down below the value set for parameter n073 , acceleration resumes at the normal acceleration rate.
Figure 20 Stall Prevention During Acceleration
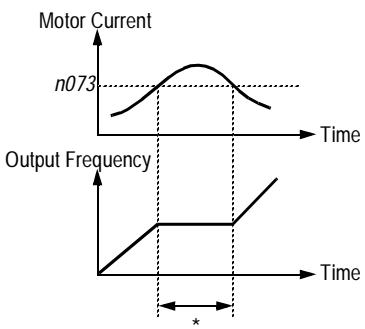
* Holds the output frequency to limit the load current.
In the constant output area [output frequency ≥ base frequency ( n013 )], the current limit level during acceleration is changed by the following equation:
$$ \begin{array}{c} \boxed {\text {C u r r e n t L i m i t L e v e l D u r i n g}} \ \text {A c c e l i n C o n s t a n t O u t p u t A r e a} \end{array} = \boxed {\text {C u r r e n t L i m i t L e v e l D u r i n g}} \times \frac {\text {B a s e F r e q u e n c y (n 0 1 3)}}{\text {O u t p u t F r e q u e n c y}} $$
- Stall Prevention Level During Running (n074, StallP Run Level) The stall prevention level during running can be set in units of 1% (inverter rated current = 100% ).
Factory setting: kVA dependent
A setting of 200% disables current limit during running. During speed agree, if the output current exceeds the value set for parameter n074 , then deceleration is initiated.
While the output current exceeds the value set for n074 , deceleration continues. When the output current goes below the value set for parameter n074 , acceleration begins at the normal acceleration rate bringing
the motor to the set frequency.
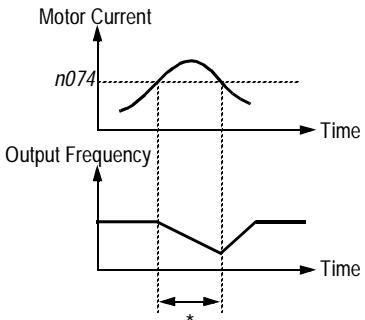
* Decreases the output frequency to limit the load current.
Figure 21 Stall Prevention During Running
- Stall prevention during deceleration (n072, StallP Decel Sel) To prevent overvoltage during deceleration, the inverter automatically extends the deceleration time according to the value of main circuit DC voltage. When using an optional braking resistor for the VS-616PC5, set parameter n072 to "0".
| LED Setting | LCD Setting | Stall Prevention During Deceleration |
| 0 | Disabled | Disabled (when optional braking resistor mounted) |
| 1 | Enabled | Enabled (factory default) |
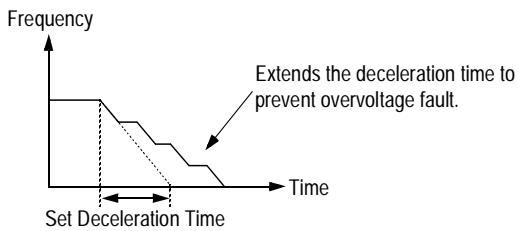
Figure 22 Stall Prevention During Deceleration
DC Injection Braking
DC Injection Braking Current (n068, DCInj Current)
DC injection braking current can be set in increments of 1% .
(100% = inverter rated current)
DC injection Braking Time at Stop (n069, DCInj Time @ Stop)
DC injection braking time at stop can be set in increments of 0.1 second. When parameter n069 is set to "0", DC injection braking at stop-
ping is disabled.
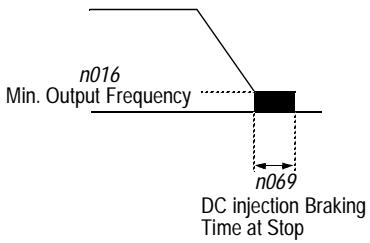
Figure 23a DC Injection Braking Time at Stop
When coast to stop is selected in the stopping method selection (n004), DC injection braking at stop is disabled.
DC injection Braking Time at Start (n070)
DC injection braking time at start can be set in increments of 0.1 second. When parameter n070 is set to "0", DC injection braking at starting is disabled.
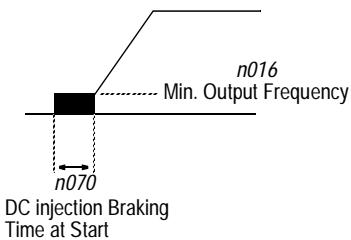
Figure 23b DC Injection Braking Time at Start
Energy Saving Control
To enable energy saving control, set energy saving selection (n096, Energy Sav Sel) to "1".
| LED Setting | LCD Setting | Description |
| 0 | Disabled | Energy saving is disabled (factory default). |
| 1 | Enabled | Energy saving is enabled. |
Since the parameters used in the energy saving control mode have been preset at the factory to the optimum values, it is not necessary to adjust them under normal operation. If your motor characteristics differ greatly from those of standard induction motors, refer to the following descrip-
Energy Saving Control Mode
Energy Saving Gain K2 (n097, Energy Save Gain)
Use this energy saving gain when running in the energy saving control mode to calculate the voltage at which motor efficiency will be greatest, and set it as the output voltage reference. This value is preset at the factory to the standard induction motor value prior to shipment. As the energy saving gain increases, output voltage decreases.
- Energy Saving Voltage Lower Limit ( n098, EngSavVLLmt@60Hz; n099, EngSavVLLmt@ 6Hz)
Sets the output voltage lower limit. If the voltage reference value calculated in the energy saving mode is smaller than the specified lower limit, this lower limit value is output as the voltage reference value. The lower limit value is set in order to prevent stalling at light loads. Set voltage limits at 6Hz and 60Hz; a value obtained by linear interpolation should be used to set any limit values other than at 6Hz or 60Hz. Setting is made as a percentage of motor rated voltage.
Figure 24 Energy Saving Voltage Lower Limit
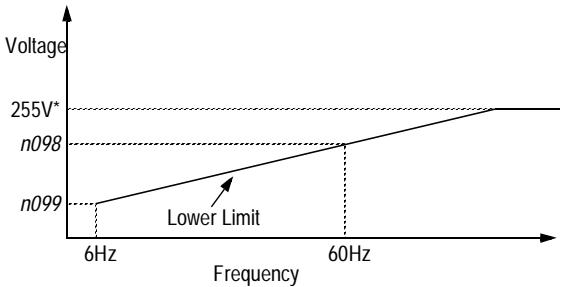
* This value is doubled for 460V class inverters.
Frequency Agree Set Point (n075, Freq Det Level)
When multi-function contact output selections n041 or n042 are set to "Freq Det 1" or "Freq Det 2", frequency detection is enabled. This function is activated when the output frequency is above or below the frequency agree set point ( n075 ).
- Output frequency ≤ Frequency agree set point Set n041 or n042 to "Freq Det 1".
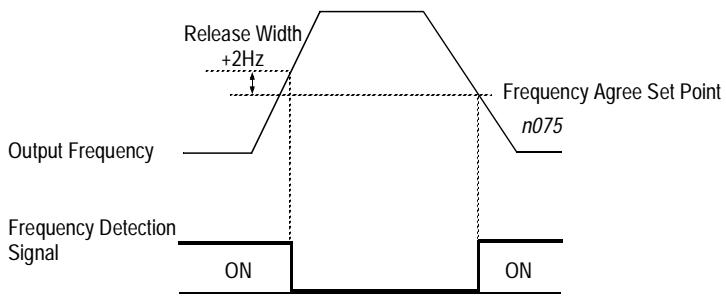
Figure 26 Frequency Agree Set Point Example (Fout ≤ Frequency Agree Set Point)
Output frequency ≥ Frequency agree set point
Set n041 or n042 to "Freq Det 2".
Figure 27 Frequency Agree Set Point Example
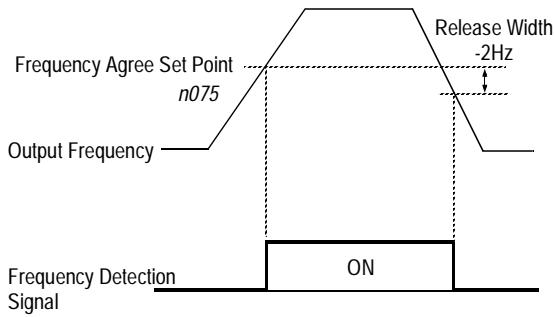
(Fout ≥ Frequency agree set point)
Frequency Meter or Ammeter (n052, Terminal AM Sel)
This parameter selects whether the signal (on terminals AM and AC) is proportional to output frequency, output current, output power, or DC bus voltage for external monitoring.
| Setting | Analog Monitor Output Selection |
| Output Freq | Output frequency (10V/max. frequency) - factory default |
| Output Amps | Output current (10V/inverter rated current) |
| Output kWatts | Output power (10V/inverter rated power) |
| DC Bus Voltage | DC bus voltage [10V/400VDC (230V class), 10V/800VDC (460V class)] |
Frequency Meter or Ammeter Calibration (n053, Terminal AM Gain)
This function is used to adjust the analog monitor output signal level.
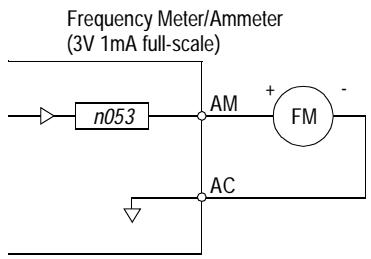
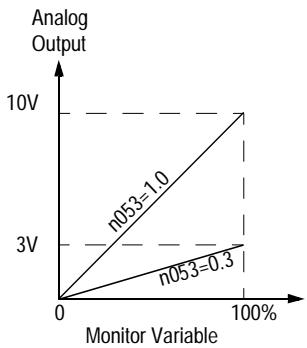
Figure 28 Frequency Meter/Ammeter Calibration
Parameter n053 determines the slope of the signal output on terminal AM
for the variable being monitored. Increasing this value increases the slope. Refer to Figure 28.
Frequency Signal Adjustment
When the frequency reference is given by an analog signal at control circuit terminals FV and FI, the relation between analog voltage (or current) and frequency reference can be set.

Figure 29 Frequency Signal Adjustment
- Terminal FV Gain (n048, Terminal FV Gain)
The analog input voltage value for the maximum output frequency (n011) can be set in units of 1% , from 0 to 200% .
Factory setting: 100%
- Terminal FV Bias (n049, Terminal FV Bias)
The frequency reference that is generated when the analog input is 0V can be set in units of 1% , from -100% to 100% . (n011: maximum output frequency = 100% )
Factory setting: 0%
- Terminal FI Gain (n050, Terminal FI Gain)
The analog input current value for the maximum output frequency (n011) can be set in units of 1% , from 0 to 200% .
Factory setting: 100%
- Terminal FI Bias (n051, Terminal FI Bias)
The frequency reference that is generated when the analog input is 4mA can be set in units of 1% , from -100% to 100% . (n011: maximum output frequency = 100% )
Factory setting: 0%
Examples
To operate the inverter with a frequency reference of 0% to 100% at a 0 to 5V input:
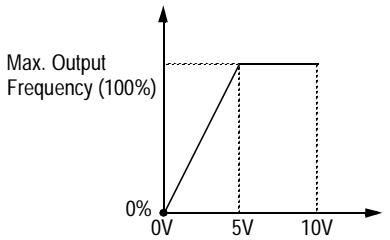
Figure 30 Frequency Signal Adjustment Example - 0 to 5V Input
Gain: Parameter n048 = "200"
Bias: Parameter n049 = "0"
To operate the inverter with a frequency reference of 50% to 100% at a 0 to 10V input:
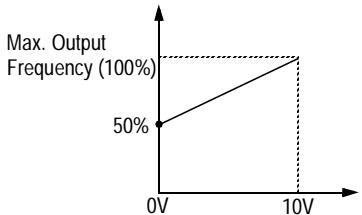
Figure 31 Frequency Signal Adjustment Example - 0 to 10V Input
Gain: Parameter n048 = "100"
Bias: Parameter n049 = "50"
Jog Operation
Multi-function inputs (Terminals S2 to S6) can be programmed to function as a jog reference selection. Operation can then be enabled at the jog frequency reference set in parameter n030 by activating this input. A "RUN" command must also be given to start the inverter. When multi-step speed references 1 or 2 are input simultaneously with the jog frequency reference, the jog frequency reference has priority.
| Name | Parameter No. | Setting |
| Jog frequency reference | n030 | 6.0Hz (Factory default) |
| Multi-function contact input selection (S2 to S6) | n036, n037, n038, n039, n040 | Set to “Jog Command” for any parameter. |
Jump Frequencies (n062, Jump Freq 1; n063, Jump Freq 2, n064, Jump Bandwidth)
This function enables the "jumping" of critical frequencies so that systems can operate without excessive vibration or noise. Setting the value to 0.0Hz disables this function.
Set jump frequency 1 or 2 such that n062 ≤ n063 . If this condition is not satisfied, the inverter displays the parameter setting error "OPE6".
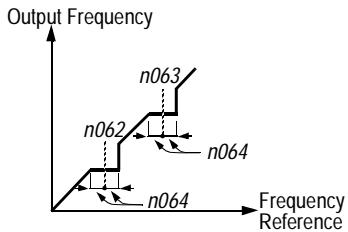
Figure 32 Jump Frequencies
MODBUS Communication
The VS-616PC5/P5 can perform serial transmission by using a programmable controller (PLC) and MODBUS communication. MODBUS is composed of one master PLC and 1 to 31 (maximum) slave inverters. In signal transmission between master and slave units, the master unit always starts transmission and the slave units respond to it.
The master unit performs signal transmission with one slave unit at a time. Hence, different address numbers must be assigned to each slave unit in advance and the master unit specifies a number to perform signal transmission. The slave unit which receives the command from the master unit executes the function and returns the response to the master unit.
Communication Specifications
- Interface:
RS-485, RS-422 (communication interface card SI-K2/P must be mounted.)
Synchronization:
Asynchronous
Transmission parameter:
Baud rate: selectable from 2400, 4800, 9600 BPS (parameter n105)
Data length: fixed at 8 bits
Parity: parity/no parity, even/odd select-
able (parameter n106)
Stop bit: fixed at 1 bit
Protocol:
In accordance with MODBUS
Maximum number of units to be connected:
31 units (when RS-485 is used)
Data to be Sent/Received by Communication
Data to be sent/received by communication are run commands, frequency reference, fault contents, inverter status and parameter setting/reading.
-
Operation Mode Selection (n002, Oper Mode Select)
- Select the run command and frequency reference input method in parameter n002. To provide a run command and/or frequency reference by communication, set this parameter to a selection that contains "COM" for SEQ and/or REF. Regardless of this selection, monitoring of running status, parameter setting/reading, fault reset and multi-function input commands from the PLC are possible. The multi-function input command becomes "OR" with the command input from control circuit terminals S2 to S6.
-
MODBUS Frequency Reference Unit (n103, MODBUS Freq Unit) The frequency reference units from the PLC and in the frequency reference and output frequency monitors (by communication) are set with parameter n103. The output frequency resolution of the VS-616PC5/P5 is 0.1Hz . Even if the frequency reference unit is changed to 0.01Hz in parameter n103, the value in the hundredth digit of the received frequency reference is rounded off internally. When 30,000 / 100% in units of 0.1% is selected, the value is rounded off in the same way.
-
MODBUS Slave Address (n104, MODBUS Address) Sets the slave address number. It is necessary to set the address number so that it will not overlap with the address number of another slave unit connected on the same transmission line.
Note: To change the values set in parameters n104 to n106 and enable new settings, it is necessary to cycle power after entering the desired values.
Motor Overload Detection
The VS-616PC5/P5 protects against motor overload with a UL-recogniz- nized, built-in electronic thermal overload relay function.
- Motor Rated Current (n033, Motor Rated FLA) Set to the rated current value shown on the motor nameplate.
Note: setting to 0.0A disables the motor overload protection function.
- Motor overload protection selection (n034, Motor OL Sel)
| LED Setting | LCD Setting | Electronic Thermal Characteristics |
| 0 | Disabled | Protection disabled |
| 1 | STD Motor / 8 min | Applied to general-purpose motor, standard rating (Class 20 overload) |
| 2 | STD Motor / 5 min | Applied to general-purpose motor, short time rating (Class 10 overload) |
| 3 | INV Motor / 8 min | Applied to blower-cooled / inverter duty motor, standard rating (Class 20 overload) |
| 4 | INV Motor / 5 min | Applied to blower-cooled / inverter duty motor, short time rating (Class 10 overload) |
The electronic thermal overload function estimates motor temperature, based on inverter output current and time, to protect the motor from overheating. When the electronic thermal overload relay is activated, an "oL1" error occurs, shutting OFF the inverter output and preventing excessive overheating in the motor.
When operating with one inverter connected to one motor, an external thermal relay is not needed. When operating several motors with one inverter, install a thermal relay on each motor. In this case, set parameter n034 to "Disabled".
- General-purpose and Blower-cooled Motors Induction motors are classified as general-purpose or blower-cooled motors, based on their cooling capabilities. Hence, the motor overload
detection function operates differently for each of these two motor types.
| Cooling Effectiveness | Torque Characteristics | Electronic Thermal Overload | |
| General-purpose | Effective when operated at 50/60Hz from commercial power supply. | Load (%) 180 155 140 100 80 75 30 20 120 60 30 20 120 Frequency (Hz) Base Frequency 60Hz (V/f for 60Hz, 230V Input Voltage) During continuous operation at low speeds, the load must be limited in order to limit motor temperature rise. | "OL1" error (motor overload protection is enabled when motor is continuously operated at 50/60Hz or less at 100% load). |
| Blower-cooled | Effective when operated at low speeds (approx. 6Hz). | Load (%) 180 155 140 100 80 75 30 20 120 60 30 20 120 Frequency (Hz) Base Frequency 60Hz (V/f for 60Hz, 230V Input Voltage) Use blower-cooled motor for continuous operation at low speeds. | Effective when operated at low speeds (approx. 6Hz). |
Multi-Step Speed Selection
This function allows the programming of up to 4 preset speeds, through multi-function contact input selections.
4-step speed selection
n002 = "SEQ X REF OPR", where "X" can be TRM, OPR, or COM
n024 = 30.0Hz (factory default = 0.0Hz
n025 = 40.0Hz (factory default = 0.0Hz
n026 = 50.0Hz (factory default = 0.0Hz
n027 = 60.0Hz (factory default = 0.0Hz
n039 = 9 (multi-function contact input terminal S5)
n040 = 10 (multi-function contact input terminal S6)
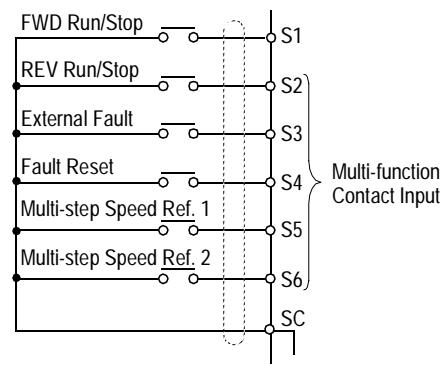
Figure 33 Multi-step Speed Selection - Control Circuit Terminals
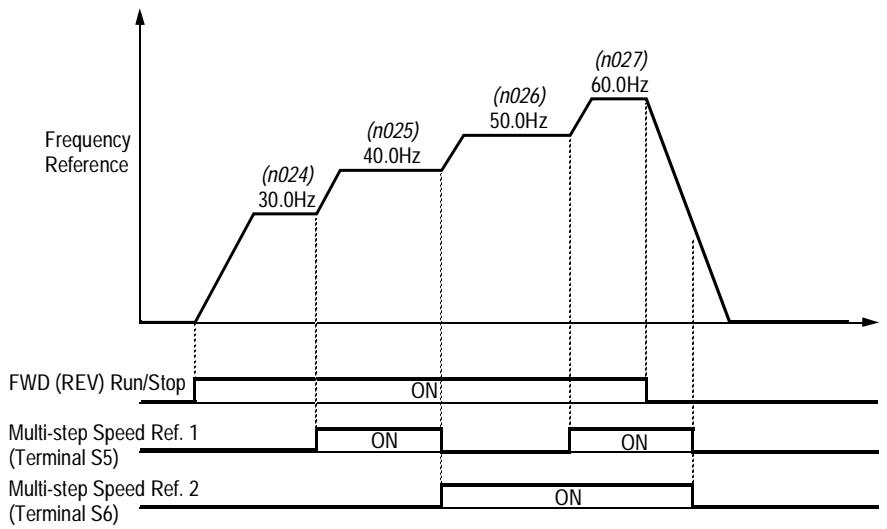
Figure 34 Multi-step Speed Operation - Timing Diagram
Phase Loss Protection
- Input Phase Loss Detection (n083, In Ph Loss Lvl)
The input phase loss detection circuit monitors the DC bus current ripple
and activates when one of the input phases are lost. The detection circuit calculates the maximum and minimum values of the DC bus voltage in 1.28 second intervals, and compares the difference ( V) between these values with the input phase loss detection level (n083) . If V ≥ n083 , then input phase loss is detected; and after the input phase loss detection delay time (fixed at approximately 10 seconds), an SPI fault occurs, and the motor coasts to stop.
| No. | Name | Description | Factory Default |
| n083 | Input phase loss detection level | Unit: 1% Setting range: 1 to 100% of input voltage | 7% |
Input phase loss detection is disabled in the following cases:
Parameter n083 is set to "100%"
A Stop command is input
- Input magnetic contactor (MC) shuts OFF
- CPU A/D converter fault (CPF5)
During deceleration
Output current ≤ 30% of Inverter rated current
PID Control
To enable PID control, set PID selection (n084) to "Enabled", according
to the description below.
| LED Setting | LCD Setting | Description |
| 0 | Disabled | PID disabled (factory default) |
| 1 | Enabled D=Fdbc | PID enabled (deviation is D-controlled.) |
| 2 | Enabled D=Fdfwd | PID with feed forward (feedback value is D-controlled) |
| 3 | Enabled Rev Fdbc | PID with inverted feedback |
Then select the PID control setpoint value and detected feedback value setpoint as follows:
- Setpoint Value Selection
The control circuit terminal FV voltage signal (0 to 10V) or multi-step speed parameters n024 to n027 can be used to select the PID setpoint value.
Control circuit terminal FV voltage signal:
Set operation mode selection (n002) to "SEQ=OPR REF=TRM" or "SEQ=TRM REF=TRM".
Multi-step speed constants (n024 to n027):
Set operation mode selection (n002) to "SEQ=OPR REF=OPR" or "SEQ=TRM REF=OPR".
(combination of multi-step speed reference and jog frequency reference)
Detected Value Setting
The control circuit terminal FI current signal (4 to 20mA ) or voltage signal (0 to 10V ) can be used to set the PID detected value.
Control circuit terminal FI current signal:
Set aux. analog input selection (n044) to "4-20mA".
Control circuit terminal FI voltage signal:
Set operation mode selection (n044) to "0-10VDC".
(Cut jumper J1 on the control PCB board.)
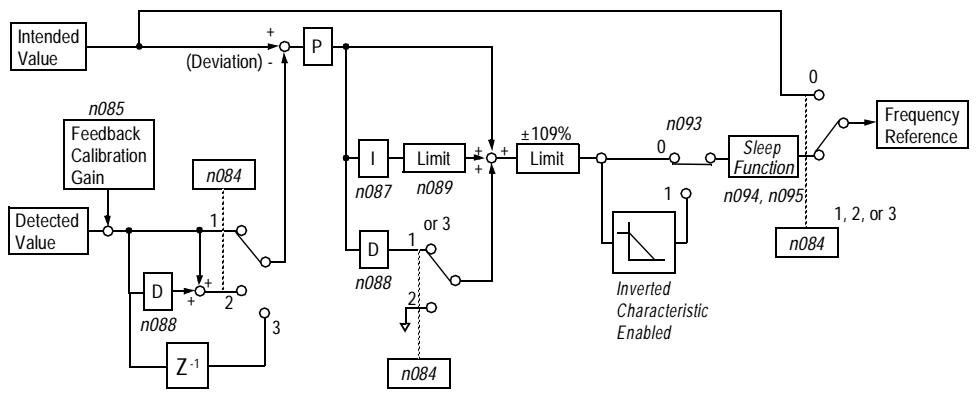
Figure 35a PID Control Block Diagram
Notes:
1) Value I is reset to"0" in the following cases:
- When operation stops
- When the integral value reset signal is input by multi-function contact input selection (Any of parameters n036 to n040 are set to "PID I Reset").
2) The upper limit of value I can be set by parameter n089 .
Increase the value of parameter n089 to upgrade control capability by integration. If the control system vibrates and it cannot be stopped by adjusting the integral time, output lag filter time, etc., decrease the set value of parameter n089 .
- PID control can be canceled by a multi-function contact input signal.
By setting any of parameters n036 to n040 to "PID Disable" and by closing the contact during running, PID control is disabled and the setpoint value signal itself is used as a frequency reference signal.
- Inverse PID characteristics can be obtained by setting parameter n093 to
"Inverted".
- The PID Sleep feature can be used to automatically turn off the inverter output when the PID output value falls below the sleep function level (n094) for
longer than the sleep function time (n095). The inverter will resume normal operation when the PID output is greater than the sleep level for longer than the sleep time. Setting parameter n094 to "0.0" disables this feature.
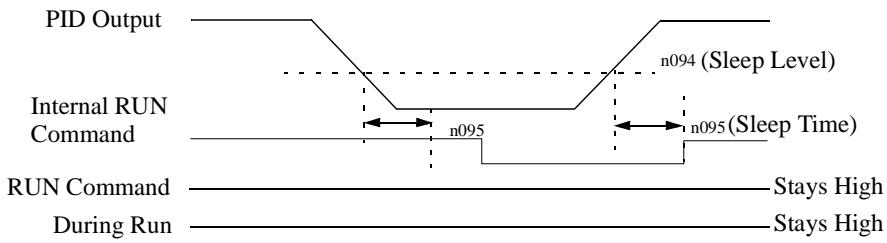
Reverse Run Prohibit (n006, Reverse Oper)
A "reverse run disabled" setting does not accept a reverse run command from the control circuit terminal or the digital operator. This setting is used in applications where a reverse run command can cause problems.
| LED Setting | LCD Setting | Description |
| 0 | REV Allowed | Reverse run enabled (factory default) |
| 1 | REV Prohibited | Reverse run disabled |
Soft-Start Characteristics (n022, S-Curve Select)
An S-curve pattern is used to reduce shock and provide smooth transitions during machine acceleration and deceleration.
| LED Setting | LCD Setting | Description |
| 0 | No S-Curve | S-curve not provided |
| 1 | 0.2 Sec | 0.2 second (factory default) |
| 2 | 0.5 Sec | 0.5 second |
| 3 | 1.0 Sec | 1.0 second |
Note: The S-curve time is the time to reach the set accel/decel rate (as determined by the accel/
decel time settings).
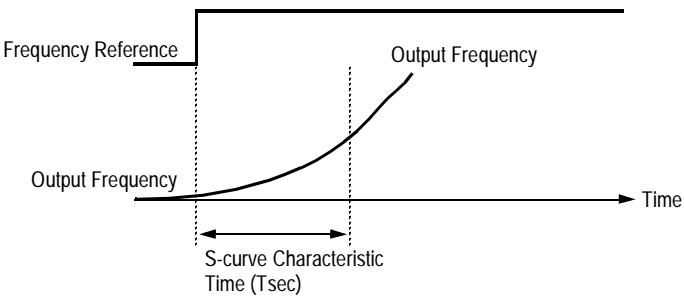
Figure 36 S-curve Characteristic Timing Diagram
The following figure shows FWD/REV run switching during deceleration to stop.
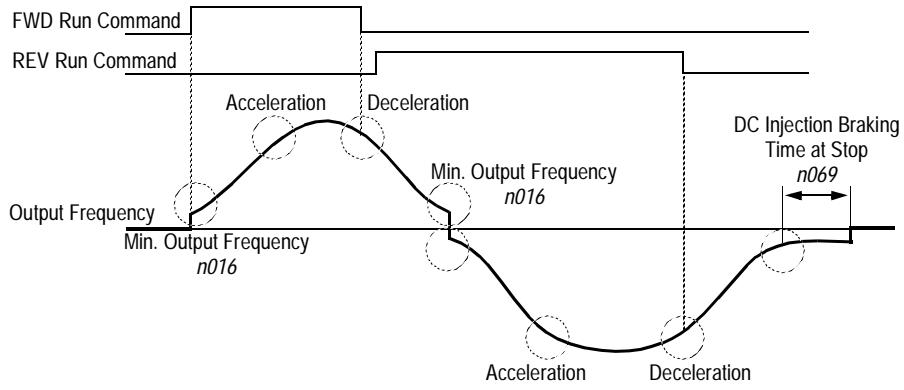
Figure 37 S-curve Characteristics - FWD/REV Operation
Speed Limit Adjustment
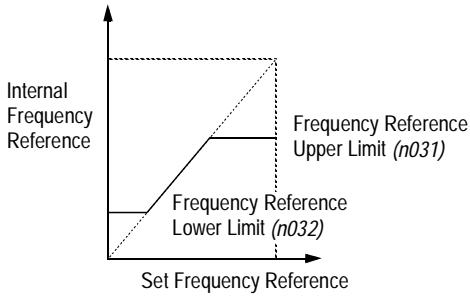
Figure 38 Setting Frequency Upper and Lower Limits
Frequency Reference Upper Limit (n031, Ref Upper Limit)
The upper limit of the frequency reference can be set in increments of 1% . (n011: maximum output frequency = 100%)
Factory setting: 100%
Frequency Reference Lower Limit (n032, Ref Lower limit)
The lower limit of the frequency reference can be set in increments of 1% . (n011: maximum output frequency = 100%)
Factory setting: 0%
When operating at a frequency reference of 0Hz , operation continues at the frequency reference lower limit. However, when the lower limit is set to less than the minimum output frequency ( n016 ), operation stops.
Stopping Method (n004, Stopping Method)
This function selects the stopping method suitable for the particular application.
| LED Setting | LCD Setting | Description |
| 0 | Ramp to STOP | Deceleration to stop (factory default) |
| 1 | Coast to STOP | Coast to stop |
| 2 | Coast w/Timer 1 | Coast to stop with timer 1 (run command cycle) |
| 3 | Coast w/Timer 2 | Coast to stop with timer 2 (auto-start after time out) |
- Deceleration to Stop ( n004 = "Ramp to STOP")
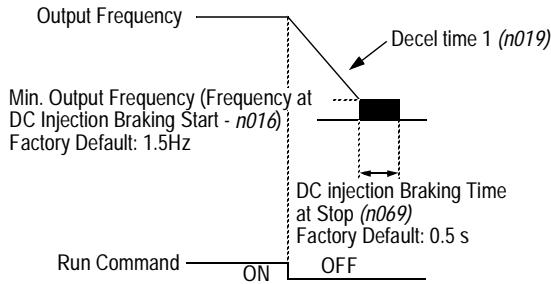
Figure 39 Stopping Method - Deceleration to Stop
Upon removal of the FWD (REV) run command, the motor decelerates at a deceleration rate determined by the time set in deceleration time 1 (n019) and DC injection braking is applied immediately before when the minimum output frequency (n016) is reached. If the deceleration time is short or the load inertia is large, an overvoltage fault (OV) may occur during deceleration. In this case, increase the deceleration time or install an optional braking resistor (available for the VS-616PC5 only).
Braking torque: w/o braking resistor, approx. 20% of motor rated torque w/ braking resistor, approx. 150% of motor rated torque
- Coast to Stop ( n004 = "Coast to STOP")
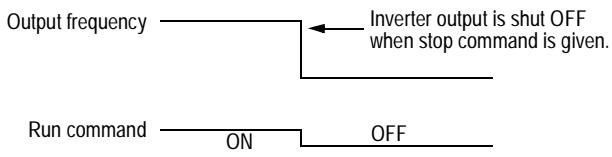
Figure 40 Stopping Method - Coast to Stop
Upon removal of the FWD (REV) run command, the motor coasts.
- Coast to Stop with Timer 1 ( n004 = "Coast w/Timer 1")
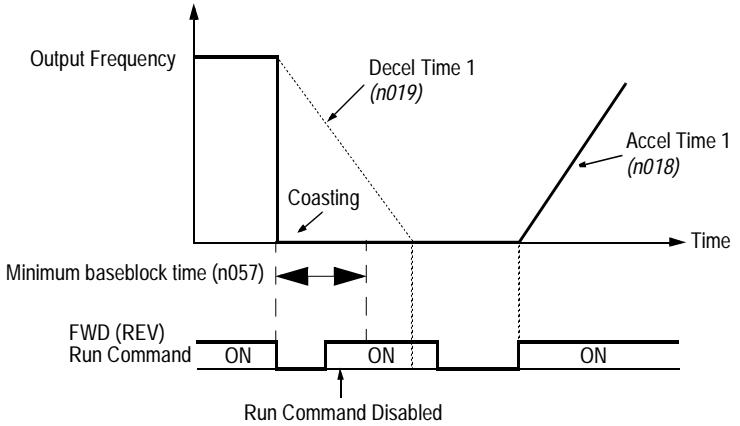
Figure 41 Example of Stopping Method - Coast to Stop w/ Timer 1
Upon removal of the run command, the inverter output is immediately removed, allowing the motor to coast. If the run command is re-applied before the minimum baseblock time (n057) elapses, the run command is not accepted. The run command must be cycled to be acknowledged. An initial run command will be accepted if applied after the minimum base-block time elapses.
- Coast to Stop with Timer 2 ( n004 = "Coast w/Timer 2")
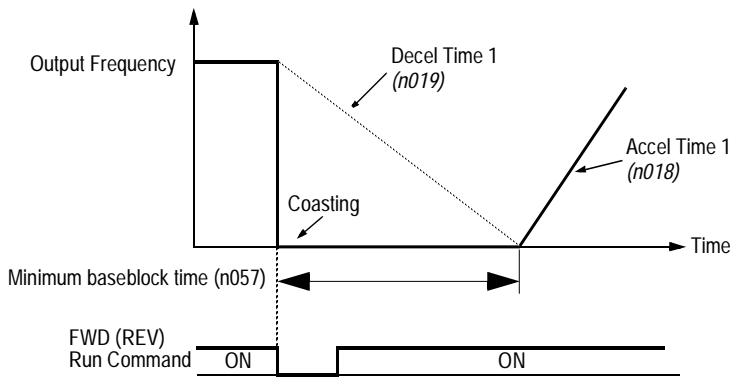
Figure 42 Example of Stopping Method - Coast to Stop w/ Timer 2
Operation is disabled during the minimum baseblock time (n057) after a stop command is given. A run command will be accepted, but operation does not start until the minimum baseblock time runs out. The inverter
does not operate during the baseblock time, as shown in Figure 42.
Torque Adjustment (n071, Torq Comp Gain)
Motor torque can be adjusted by changing the V/f pattern ( n010 ) or by adjusting the torque compensation gain ( n071 ). For details on setting the V/f pattern, see "V/f Pattern Adjustment", on page 75.
Full-range Automatic Torque Boost
The motor torque requirement changes according to load conditions. Full-range automatic torque boost adjusts the output motor voltage according to the required torque. The VS-616PC5/P5 automatically adjusts the voltage during constant-speed operation as well as during acceleration.
The required torque is calculated by the inverter. The optimum motor voltage will be output to ensure tripless operation and power savings.
Output voltage Torque compensation gain × Required torque
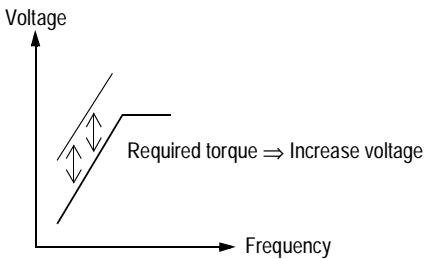
Figure 43 Torque Characteristics
Normally, no adjustment is necessary for torque compensation gain ( n071 , factory default: "1.0"). When the wiring distance between the inverter and the motor is long, or when the motor generates vibration, change the torque compensation gain.
Increasing torque compensation gain increases motor torque, but an excessive increase may cause the following:
- Inverter trips due to motor overexcitation
- Motor overheat or excessive vibration
If adjustment is necessary, adjust in 0.1 increments.
Torque Detection
The over/undertorque detection circuit will activate when the motor load causes the motor current to go above or below torque detection level (n078) respectively. When the over/undertorque condition is detected, alarm signals are sent to multi-function output terminals MA, MB and/or M1. To output an over/undertorque detection signal, set multi-function contact output selection n041 or n042 to "6" (N.O. contact) or "7" (N.C. contact).
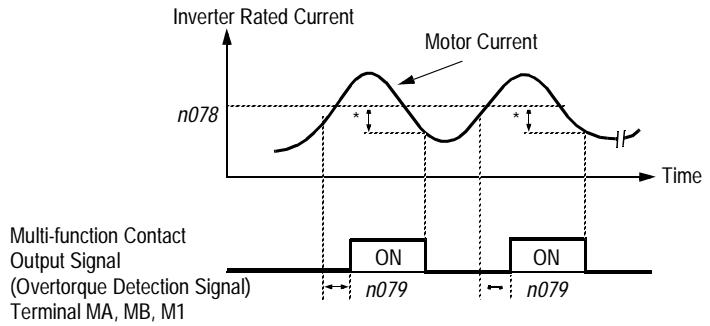
* Release width (hysteresis) during overtorque detection is 5% of the inverter rated current level.
Figure 43 Torque Characteristics
Over/undertorque Detection Function Selection (n077, Torq Det Sel)
| LED Setting | LCD Setting | Description |
| 0 | Disabled | Detection disabled (factory default) |
| 1 | OT/SpdAgree/Alm | Overtorque detection begins at speed agree; continue running after detection. (Alarm) |
| 2 | OT/Run/Alm | Overtorque detection at run; continue running after detection. (Alarm) |
| 3 | OT/SpdAgree/Flt | Overtorque detection begins at speed agree; coast to stop after detection. (Fault) |
| 4 | OT/Run/Flt | Overtorque detection at run; coasts to stop after detection. (Fault) |
| 5 | UT/SpdAgree/Alm | Undertorque detection begins at speed agree; continue running after detection. (Alarm) |
| 6 | UT/Run/Alm | Undertorque detection at run; continue running after detection. (Alarm) |
| 7 | UT/SpdAgree/Flt | Undertorque detection begins at speed agree; coast to stop after detection. (Fault) |
| 8 | UT/Run/Flt | Undertorque detection at run; coast to stop after detection. (Fault) |
Notes:
- To detect torque during acceleration or deceleration, select a setting that contains "RUN".
- To continue operation after over/undertorque detection, select a setting that contains "Alm". During detection, the digital operator displays "oL3" alarm (blinking).
- To stop the inverter after an over/undertorque detection fault, select a setting that
contains "Flt". During detection, the digital operator displays "oL3" fault.
Over/undertorque Detection Level (n078, Torq Det Level) Sets the torque detection current level in units of 1% Inverter rated current: 100% Factory default: 160%
- Over/undertorque Detection Time (n079, Torq Det Time) The over/undertorque detection delay time inserts a delay, between the time motor current exceeds or falls below the over/undertorque detection current level (n078) and when the over/undertorque detection function is enabled. Factory default: 0.1 second
If the time during which motor current exceeds or falls below the over/undertorque detection level ( n078 ) is longer than the over/undertorque detection time ( n079 ), the over/undertorque detection function is enabled.
Tripless Operation
When starting into a coasting motor, use the speed search command or DC injection braking at start, to prevent a drive trip and motor burnout.
- Speed search
This function allows the restart of a coasting motor without the necessity to stop. It is useful during inverter bypass operation, when switching between the motor receiving power directly from the line to the inverter.
Set the multi-function contact input selection (n036 to n40) to "SpdSrch (MAXFREQ)" (start search command from maximum output frequency) or "SpdSrch (SETFREQ)" (start search command from the set frequency).
Build a sequence so that the FWD (REV) run command is input at the same time as the search command, or after the search command. If the run command is input before the search command, the search command
is not effective. Below is a timing diagram of the search command input:
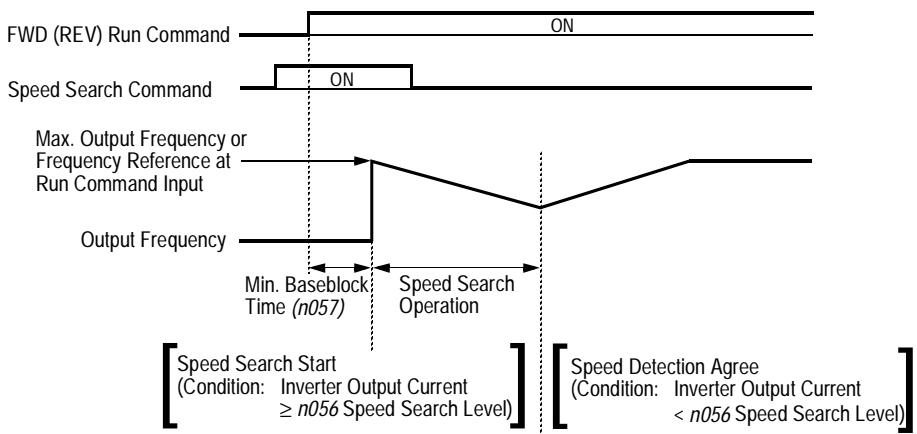
Figure 44 Search Command Input Timing Diagram
- DC Injection Braking at Start (n068, DCInj Current; n070, DCInj Time@Start)
This function restarts a coasting motor after first applying it with DC injection braking. DC injection braking time at start (n070) is set in units of 0.1 second. DC injection braking current is set in parameter n068 in units of 1% . When parameter n070 is set to "0", DC injection braking is disabled and acceleration starts from the minimum output frequency.
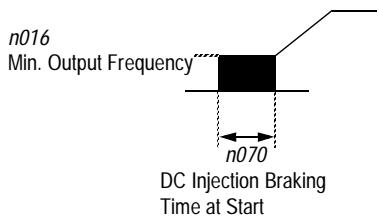
Figure 45 DC Injection Braking at Starting
V/f Pattern Adjustment (n010, V/f Selection)
Set the V/f pattern using parameter n010 as described below. It may be necessary to change the V/f pattern when using a high-speed motor, or when special torque adjustment is required in the application.
Set values: "60Hz Preset": Fixed V/f pattern "User defined V/f": Custom V/f pattern can be set
Set the V/f pattern according to the following:
- n010 = "60Hz Preset" (Factory default value)
Set parameter n010 to "60Hz Preset" when a standard 50/60Hz, 230/460V motor is selected. This setting provides a standard linear V/Hz pattern. Parameters n011 through n017 cannot be adjusted.
- n010 = "User defined V/f" (Custom V/f pattern)
Set parameter n010 to "User defined V/f" when a variable torque pattern is required. Parameters n011 through n017 can then be adjusted manually to customize a special V/f pattern. The default settings for parameters n011 through n017 when n010 = "User defined V/f" comprise the standard variable torque pattern.
Be sure to satisfy the following conditions for setting parameters n011 to n017 :
$$ n 0 1 6 \leq n 0 1 4 < n 0 1 3 \leq n 0 1 1 $$
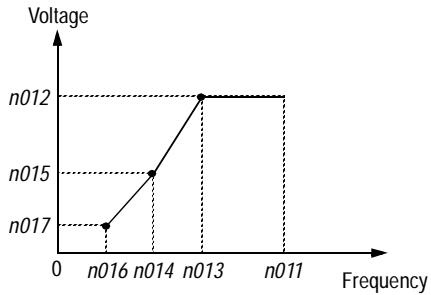
Figure 46 Custom V/f Pattern Setting
| Parameter No. | Name | Unit | Setting Range | Factory Default (n010=60Hz Preset) | Factory Default (n010=User defined V/f) |
| n011 | Maximum output frequency | 0.1 Hz | 50.0 to 400 Hz | 60.0 Hz | 60.0 Hz |
| n012 | Maximum voltage | 0.1 V | 0.1 to 255 V* | 230 V* | 230 V* |
| n013 | Maximum voltage output fre- quency (base frequency) | 0.1 Hz | 0.2 to 400 Hz | 60.0 Hz | 60.0 Hz |
| n014 | Mid. output frequency | 0.1 Hz | 0.1 to 399.9 Hz | 3.0 Hz | 30.0 Hz |
| n015 | Mid. output frequency voltage | 0.1 V | 0.1 to 255 V* | 17.2 V* | 57.5 V* |
| n016 | Minimum output frequency | 0.1 Hz | 0.1 to 10.0 Hz | 1.5 Hz | 1.5 Hz |
| n017 | Minimum output frequency voltage | 0.1 V | 0.1 to 50.0 V* | 11.5 V* | 11.5 V* |
- For 460V class units, the value is twice that of 230V class units.
Increasing the voltage in the V/f pattern increases motor torque, however, an excessive increase may cause:
- Inverter fault trips as a result of motor overexcitation
- Motor overheat or excessive vibration
Increase voltage gradually while checking the motor current.
Slip Compensation
The slip compensation feature allows better speed regulation to be obtained by adjusting the output frequency according to the changing load. This feature compensates for the slip of the motor.
Slip Compensation Gain (n107, Slip Comp Gain)
This parameter is used to input the slip of the motor. The setting is entered as a percent of base frequency (n013). The default value for n107 is 0.0% which disables this feature. To properly set the parameter, use the following equation:
Slip Compensation Primary Delay Time (n109, Slip Comp Delay) This parameter sets how fast the inverter output frequency responds to changing loads. A long time will cause a sluggish response (a large momentary speed droop). A short time will cause a fast response (less speed droop). Too short of a time may cause instability.
3.4 INPUTS & OUTPUTS
Multi-function Input Signals (n036 to n040)
Multi-function contact input terminal S2 to S6 functions can be changed when necessary by setting parameters n036 to n040 , respectively. None of these parameters can receive a setting common with the other (no duplication).
- Terminal S2 function: set via parameter n036
- Terminal S3 function: set via parameter n037
- Terminal S4 function: set via parameter n038
- Terminal S5 function: set via parameter n039
- Terminal S6 function: set via parameter n040
| Multi-function Input Signals | Ref. Page | |||
| LED Setting | LCD Setting | Description | Remarks | |
| 0 | Reverse RUN (2W) | Reverse run (2-wire sequence) | Only parameter n036 can be set to this value. | 79 |
| 1 | FWD/REV Cmd (3W) | Fwd / Rev command (3-wire sequence) | Only parameter n036 can be set to this value. | |
| 2 | Ext Fault (NO) | External fault (normally open) | Inverter stops at fault when external fault signal is input. Digital operator displays *EFX*. | - |
| 3 | Ext Fault (NC) | External fault (normally closed) | Inverter stops at fault when external fault signal is input. Digital operator displays *EFX*. | |
| 4 | Fault Reset | Fault reset | Resetset fault. Fault reset is disabled during run command input. | - |
| 5 | LOCAL/REMOTE Sel | Local / Remote selection | — | 79 |
| 6 | COM/INV Sel | Serial com/inverter selection (Freq, RUN command) | — | 79 |
| 7 | STOP Cmd/Dec2 NO | Fast stop using Decel 2 (normally open) | Decelerates to stop by decel time 2 (n021) when fast stop is input. | - |
| 8 | STOP Cmd/Dec2 NC | Fast stop using Decel 2 (normally closed) | Decelerates to stop by decel time 2 (n021) when fast stop is input. | - |
| 9 | Master Freq Sel | Master freq. ref. selection (FV-open or FI-closed) | Master frequency reference input level (voltage input at "open", current input at "closed") can be selected. | - |
| 10 | Multi-Step Spd 1 | Multi-step speed reference command 1 | - | 64 |
| 11 | Multi-Step Spd 2 | Multi-step speed reference command 2 | - | |
| 12 | Not Used | Not used | - | - |
| 13 | JOG Command | Jog reference (n030) | - | 59 |
| 14 | Acc/Dec Switch | Accel / Decel time selection | - | 49 |
| 15 | Ext Baseblk (NO) | External baseblock (normally open) | Coasting signal. Motor starts coasting when the sig-nal is input. Digital operator displays "bb" (blinking). | - |
| 16 | Ext Baseblk (NC) | External baseblock (normally closed) | Coasting signal. Motor starts coasting when the sig-nal is input. Digital operator displays "bb" (blinking). | |
| 17 | SpdSrch (MAXFRO) | Speed search from maximum frequency | Speed search command signals. | 74 |
| 18 | SpdSrch (SETFRO) | Speed search from set frequency | Speed search command signals. | |
| 19 | Param Lockout | Parameter setting enable / disable | Permission or prohibition of constant setting from the digital operator or serial communication (setting disabled at "closed", enabled at "open") can be selected. | - |
| 20 | PID I Reset | PID integral value reset | - | 67 |
| 21 | PID Disable | PID control enable / disable | - | |
| 22 | Timer Start Cmd | Timer function | - | 80 |
| 23 | OH3 Input | External overheat alarm (OH3) | When this signal is input, the digital operator dis-plays "OH3" (blinking). Inverter continues operation. | - |
| 24 | Ref Sample Hold | Analog reference sample hold command | Analog frequency reference is sampled at "closed" and held at "open". | 80 |
| 25 | KEB Cmd (NO) | Inertia ridethrough command (normally open) | - | - |
| 26 | KEB Cmd (NC) | Inertia ridethrough command (normally closed) | - | - |
| 27 | Hold Command | Accel / Decel hold command | - | - |
| 28 | PID Polarity Sel | Inverse PID enable / disable | - | - |
| 29 | UP/DOWN Cmd | UP/DOWN Command | Only parameter n040 can be set to this value. | 81 |
- 2 to 6 are displayed in _ corresponding to S2 to S6, respectively.
Factory settings: n036 = "Reverse RUN (2W)", n037 = "Ext Fault (NO)", n038 = "Fault Reset", n039 = "Multi-Step Spd 1", n040 = "Multi-Step Spd 2"
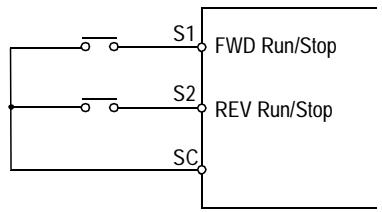
Figure 47a Terminal Function at 2-Wire Sequence Selection (setting: n036 = "Reverse RUN (2W)*)
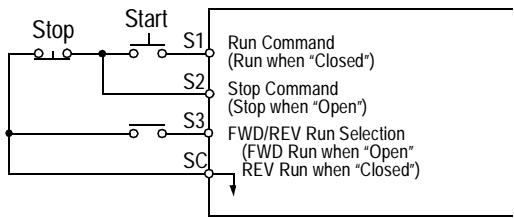
Figure 47b Terminal Function at 3-Wire Sequence Selection (setting: n036="FWD/REV Cmd (3W)")
- Local/Remote Selection (setting: "LOCAL/REMOTE Sel")
Selects whether the run command is received from the digital operator or the control circuit terminal. Local/Remote selection is available only while the inverter is stopped.
Open: Run according to the setting of operation mode selection (n002) .
Closed: Frequency reference and run command from the digital operator.
Example: Set n002 to "SEQ=TRM REF=TRM".
Open: Frequency reference from control circuit terminals FV & FI, and run command from control circuit terminals S1 and S2.
Closed: Frequency reference and run command from the digital operator.
- Serial Communication/Control Circuit Terminal Selection (setting: "COM/INV Sel")
Selects operation reference by serial communication or by the control circuit terminal. This selection is available only during stop.
Open: run according to the setting of operation mode selection (n002).
Closed: Frequency reference and run command from serial communication.
Example: Set n002 to "SEQ=TRM REF=TRM".
Open: Frequency reference from control circuit terminals FV & FI, and run command from control circuit terminals S1 and S2.
Closed: Frequency reference and run command from serial communication.
Timer Function (setting: "Timer Start Cmd")
The timer function is used in conjunction with the multi-function contact output (parameter n041 or n042 set to "Timer Output").
When the timer function input is "closed" for longer than the ON-delay
timer (n080) , the timer function output closes.
When the timer input is "open" for longer than the OFF-delay timer (n081), the timer function output opens.
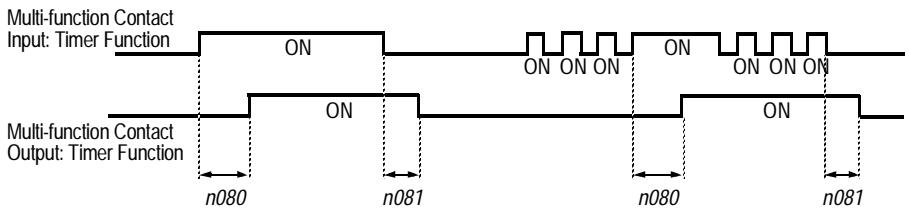
Figure 48 Timing Diagram of Timer Function
- Analog Reference Sample/Hold Selection (setting:"Ref Sample Hold") This feature allows a single analog signal to be used among multiple inverters to "sample and hold" separate speeds. Each inverter can be commanded to acknowledge the reference at different times. If the analog reference sample/hold input terminal is "closed" for 100ms or longer, the analog frequency reference is sampled; when it opens, the analog frequency reference is held.
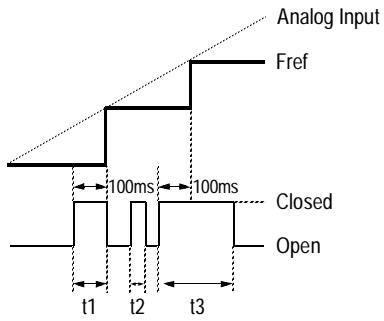
Figure 49 Sample/Hold Selection - Analog Reference
Note: t1, t3 - Reference is sampled once with an input closure of 100ms or longer.
t2 - Reference is not sampled with an input closure of less than 100ms.
- Up/Down Command (setting: n040 = "Up/Down Control")
With the FWD (REV) run command entered, a change in frequency is performed by inputting the Up or Down commands to control circuit terminals S5 and S6, so that operation can be performed at the desired speed. When the Down command is specified for terminal S6 by setting n040 = "Up/Down Control", any function set to terminal S5 via parameter n039 becomes disabled; terminal S5 becomes an input terminal for the
Up command and terminal S6 an input terminal for the Down command.
| Control Circuit Terminal S5 (UP command) | Closed | Open | Open | Closed |
| Control Circuit Terminal S6 (DOWN command) | Open | Closed | Open | Closed |
| Operation Status | Accel | Decel | Hold | Hold |
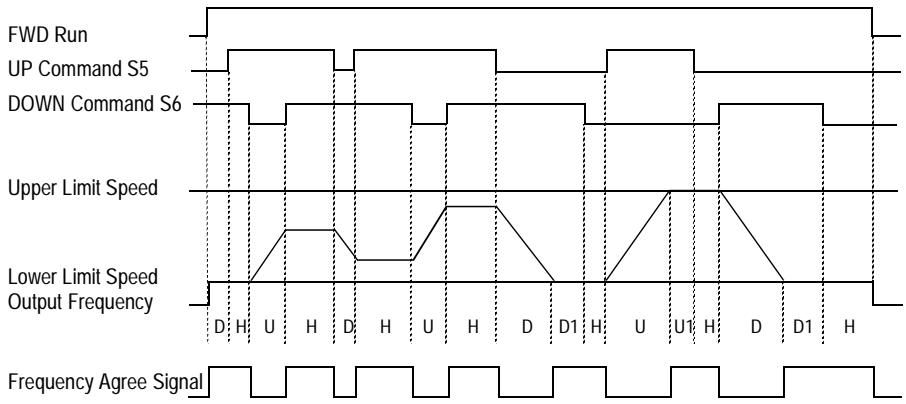
Figure 50 Timing Diagram of UP/DOWN Command Input
U: Up (accelerating) status
D: Down (decelerating) status
H: Hold (constant speed) status
UI: Up status, with clamping at upper limit speed
DI: Down status, with clamping at lower limit speed
Notes:
1) When the UP/DOWN command is selected, the upper limit speed is set regardless of frequency reference.
Upper limit speed = Maximum output frequency (n011)
× Frequency reference upper limit (n031) / 100
2) The lower limit value is either the analog frequency from control circuit terminals FV or FI, or the frequency reference lower limit (n032) , whichever is larger.
3) When the FWD (REV) run command is input, operation starts at the lower limit speed without an UP/DOWN command.
4) If the jog frequency reference is input while the drive is running by the UP/DOWN command, the jog frequency reference has priority.
Analog Input Signals
- Master Analog Input Selection (n043, Analog Input Sel)
To input the master frequency reference from the control circuit terminal, use terminal FV (0 to 10V) or terminal FI (4 to 20mA), by setting parameter n043 .
| LED Setting | LCD Setting | Master Frequency Reference Terminal | Input Level |
| 0 | FV=MSTR FI=AUX | FV (factory default) | 0 to 10V input |
| 1 | FV=AUX FI=MSTR | FI | 4 to 20mA input |
- Auxiliary Analog Input Selection (n044, Terminal FI Sel) From the factory, terminal FI is set to accept a 4-20mA signal. To change the control circuit terminal FI input level from current to voltage, set parameter n044 according to the table below, and be sure to cut the "J1" jumper on the control PCB. The J1 jumper is located near terminal FI on the control PCB.
| LED Setting | LCD Setting | Input Level |
| 0* | 0-10 VDC | 0 to 10V input |
| 1 | 4-20 mA | 4 to 20mA input (factory default) |
-
To set parameter n044 to "0", cut jumper J1 on the inverter control PCB board.
-
Frequency Reference Retention (n045, MOP Ref Memory) Effective when UP/DOWN or Sample/Hold commands are selected for multifunction contact inputs. To retain the held frequency reference at power OFF, set parameter n045 to "Memorize Freq". When n045="Memorize Freq", the last sampled/held reference will be memorized during power down. When power is re-applied, a run command will run the inverter at this previous speed. When n045="Not Memorized", the last sampled/held frequency will be lost at power down. Upon power-up, a new reference will need to be sampled.
| LED Setting | LCD Setting | Description |
| 0 | Memorize Freq | Held frequency retained in frequency reference 1 - n024 (factory default) |
| 1 | Not Memorized | Not retained |
- Operation Method for Frequency Reference Loss Detection (n046, Ref Loss Detect)
Selects the frequency reference if the frequency reference from the control circuit terminal decreases rapidly (lost signal).
| LED Setting | LCD Setting | Description |
| 0 | Not Detected | Detection disabled (factory default) |
| 1 | RUN @ n047 Freq | Detection enabled, continue to run at n047 value × previous reference. |
If the frequency reference decreases by 90% within 400ms (when detection is enabled), operation continues at reference equal to the n047 value × previous reference.
Multi-function Output Signals (n041, Terminal MA Sel; n042, Terminal M1 Sel)
Multi-function output terminal MA, MB and M1 functions can be changed when necessary by setting parameters n041 and n042 .
- Terminal MA and MB functions: set via n041
- Terminal M1 functions: set via n042
Factory defaults: n041 = "Fault", n042 = "During Running"
| Multi-function Output Signals | Ref. Page | |||
| LED Setting | LCD Setting | Description | Remarks | |
| 0 | Fault | Fault | "Closed when inverter fault occurs. | - |
| 1 | During Running | During running | "Closed when either FWD or REV run command is input or when the inverter outputs voltage. | - |
| 2 | At Speed | Frequency agree | - | 84 |
| 3 | At Desired Speed | Desired frequency agree | - | 84 |
| 4 | Freq Detection 1 | Frequency detection | - | 57 |
| 5 | Freq Detection 2 | Frequency detection | - | 57 |
| 6 | OverTrq Det (NO) | Overtorque detection (N.O. contact) | - | 73 |
| 7 | OverTrq Det (NC) | Overtorque detection (N.C. contact) | - | 73 |
| 8 | BaseBlocked | During baseblock | "Closed when inverter output shuts OFF. | - |
| 9 | Operation Mode | Operation mode | "Closed" when run command or frequency reference from digital operator is selected. | - |
| 10 | Ready | Inverter operation ready | "Closed" when no inverter fault does not occur and the inverter can be operated. | - |
| 11 | Timer Output | Timer function | - | 80 |
| 12 | Auto-Restarting | Automatic restart | "Closed" during fault retry operation. | 51 |
| 13 | OL Pre-Alarm | OL pre-alarm | Outputs an alarm before inverter and motor over-load protection are enabled. Pre-alarm level is 150% for 48 sec for the inverter and more than 80% of the overload protection time for the motor. | - |
| 14 | Freq Ref Loss | Frequency reference loss | Closes a contact when detecting a loss of reference condition.(See page 82 for n046). | 82 |
| 15 | Set By Com Cntl | Output from serial communication | Activates contact output independently from inverter operation by a command from serial communication (MODBUS). | - |
| 16 | PID Fdbk Loss | PID feedback loss | Detects a rapid decrease in feedback and outputs a contact when the PID control mode is set.Detects when the feedback value decreases less than the detection level (n091) for longer than the feedback loss detection delay time (n092); the inverter continues operation. | 47 |
| 17 | OH1 Alarm | OH1 alarm | "Closed" during heat sink overtemperature (digital operator displays "OH1" blinking). | - |
Frequency Agree (setting: "At Speed")
See Figure 51 below for an example of selecting the frequency agree sig-
nal as the function of output terminals MA, MB or M1.
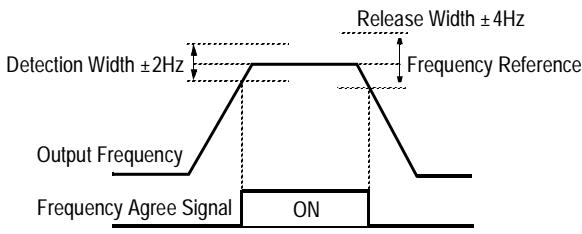
Figure 51 Example of Frequency Agree Signal (setting: "At Speed")
Desired Frequency Agree (setting: "At Desired Speed")
See Figure 52 below for an example of selecting the desired frequency agree signal as the function of output terminals MA, MB or M1.
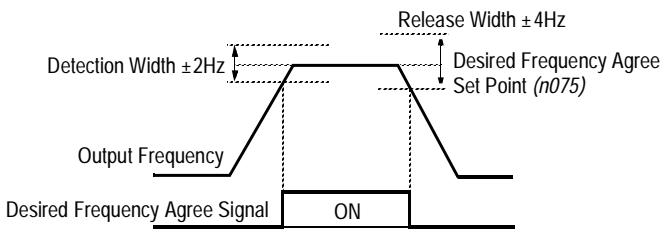
Figure 52 Example of Desired Frequency Agree Signal (setting: "At Desired Speed")
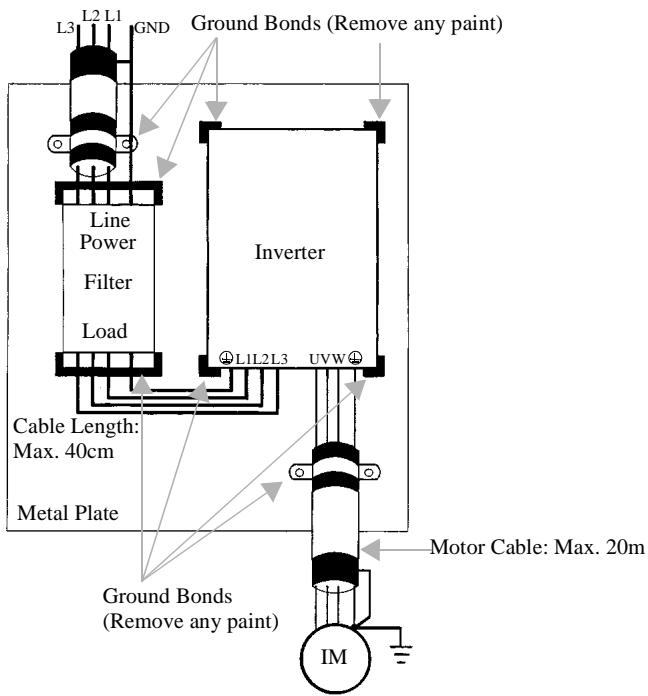
Fig. 12 Installation of Line Filter and Inverter (Models CIMR-P5U 40P4 to 4015)