
FI-7500 - Frekvenční měnič MSW - Bezplatný návod k obsluze
Najděte návod k zařízení zdarma FI-7500 MSW ve formátu PDF.

| Typ produktu | Měnič frekvence |
| Značka | MSW |
| Model | FI-7500 |
| Napájení | Třífázové 380V, 50/60Hz (k dispozici jednofázová 220V a třífázová 220V) |
| Jmenovitý výkon | 0,75 kW až 15 kW podle modelu |
| Rozměry (V x Š x H) | 186 x 125 x 159 mm (model 0,75 kW); rozměry se liší podle výkonu |
| Hmotnost | Od 1,7 kg (model 0,75 kW) |
| Rozsah výstupní frekvence | 0 Hz až 3200 Hz (řízení U/f); 0 Hz až 300 Hz (vektorové řízení) |
| Režimy řízení | Bezsnímačové vektorové řízení (SVC), se snímačem (FVC), řízení U/f, oddělení U/f |
| Rozběhový moment | 0,5 Hz/150% (SVC); 0 Hz/180% (FVC) (typ G) |
| Přetížitelnost | 150% jmenovitého proudu po dobu 60 s (typ G) |
| Analogové vstupy | 2 standardní vstupy (0-10V, 4-20mA) + 1 možnost rozšíření |
| Digitální vstupy | 5 standardních vstupů (včetně 1 vysokorychlostního do 100 kHz) |
| Analogové výstupy | 1 standardní výstup (0-10V nebo 0-20mA) |
| Digitální výstupy | 1 otevřený kolektor + 1 reléový výstup |
| Komunikační protokoly | Modbus-RTU, CANlink |
| Integrované funkce | PID, jednoduché PLC, 16 rychlostí, stejnosměrné brzdění, rychlé omezení proudu, detekce ztráty zátěže |
| Ochrana | Nadproud, přepětí, podpětí, přetížení, přehřátí, zkrat, ztráta fáze |
| Údržba | Pravidelné čištění vzduchových kanálů, kontrola dotažení šroubů a stop po elektrickém oblouku |
| Volitelné příslušenství | Brzdná jednotka, rozšiřující I/O karty, komunikační karty, PG karty pro enkodéry |
| Provozní okolní teplota | -10°C až +40°C (snížení výkonu do 50°C) |
| Vlhkost | < 95% RH, bez kondenzace |
| Přípustné vibrace | < 5,9 m/s² (0,6 g) |
Často kladené otázky - FI-7500 MSW
Dotazy uživatelů ohledně FI-7500 MSW
0 otázka o tomto zařízení. Odpovězte na ty, které znáte, nebo položte vlastní.
Položte novou otázku o tomto zařízení
Stáhněte si návod pro váš Frekvenční měnič ve formátu PDF zdarma! Najděte svůj návod FI-7500 - MSW a vezměte svůj elektronický přístroj zpět do rukou. Na této stránce jsou zveřejněny všechny dokumenty potřebné k používání vašeho zařízení. FI-7500 značky MSW.
NÁVOD K OBSLUZE FI-7500 MSW
Základní funkce a popis měniče frekvence:
1) Třídy napětí: zařízení podporuje tři třídy napětí: jednofázové 220 V, třifázové 220 V a třifázové 380 V.
2) Bohatý režim řízení: kromě vektorového řízení čidla rychlosti, bezsenzorové vektorové řízení a skalární řízení U/f, řízení separace U/f.
3) Bohatá sběrnice: podpora sběrnice Modbus-RTU a CANlink.
4) Četné typy kodérů: podpora diferenciálního kodéru, kodérů s otevřeným kolektorem, rotační transformátor atd.
5) Zcela nový bezsenzorový algoritmus vektorového řízení.
Zcela nové SVC (bezsenzorové vektorové řízení) zajišťuje lepší stabilitu při nízké rychlosti, větší zátěž při nízkých frekvencích a podporuje řízení točivého momentu SVC.
6) Výkonný software na pozadí: odesílání, stahování parametrů, osciloskop v reálném čase je možno realizovat v softwaru na pozadí.
| Funkce Popis | |
| Ochrana motoru proti přehřátí | Po zvolení rozšířující karty PC1, může A13 přijímat vstupní signál snímače teploty motoru (PT100, PT1000) pro aktivaci ochrany proti přehřátí. |
| Rychlé omezení proudu | Zabránění chyby nadproudu u měniče frekvence |
| Dvoupolohový spínač motoru | Dva soubory parametrů motoru umožňují použití dvoupolohového spínače motoru. |
| Obnovení uživatelských parametrů | Uživatelé mohou ukládat nebo obnovovat vlastní parametry. |
| Přesnost analogových I/O | Přesnost povýrobní kalibrace (nebo bodové kalibrace) I/O může být <20 mv |
| Zobrazování nestandardních parametrů | Uživatelé mohou rozhodnout, které parametry funkce se mají zobrazovat. |
| Zobrazování změněných parametrů | Uživatel si může zobrazit parametry funkce po úpravě. |
| Volitelné metody zpracování chyb | Uživatelé si mohou vybírat provozními režim měniče po potvrzení určitých poruch: zastavení volnoběhem, zastavení brzděním, nepřetržitý provoz. Uživatelé si také mohou zvolit frekvenci nepřetržitého provozu. |
| Přepínač parametrů PID | Dva soubory parametrů PID je možno přepínat pomocí svorky nebo na základě odchylky. |
| Detekce ztráty zpětné vazby PID | Hodnota detekce ztráty zpětné vazby PID poskytuje ochranu během provozu PID. |
| Pozitivní / negativní logíka DIDO | Uživatel si může nastavit pozitivní / negativní logíku DIDO. |
| Zpoždění odczyv DIDO | Uživatel si může nastavit dobu zpoždění odczyv DIDO. |
| Provoz s krátkým přerušením napájení | Pokud dojde ke krátkodobému přerušení napájení nebo poklesu napětí, měnič frekvence hude ještě krátkou dobu běžet. |
| Odpočítávání času | Podpora pro odpočítávání času, maximálně 6500 minut. |
Otevřete obal a zkontrolujte obsah.
Po otevření krabice je třeba důkladně zkontrolovat, zda model uvedený na výrobním štítku a jmenovitá hodnota měniče frekvence se shodují s objednávkou. Balení obsahuje objednané zařízení, osvědčení o kvalifikaci, návod k použití a záruční list.
V případě jakéhokoliv poškození vzniklého během přepravy nebo chybějících položek kontaktujte prosím naši společnost nebo dodavatele.
Kapitola 1 Bezpečnostní informace a bezpečnostní opatření
Bezpečnostní opatření jsou v tomto návodu rozděleny do dvou kategorii:

Varování – může dojít k vážným zraněním a smrti v důsledku obsluhy a manipulace, které nejsou v souladu s požadavky.

Upozornění: muže dojít ke středním nebo lehkým zraněním a poškození zařízení v důsledku činnosti, které nejsou prováděny v souladu s požadavky.
Pečlivě si přečtěte tuto kapitolu před instalací, nastavováním a údržbou systému a postupujte v souladu s bezpečnostními předpisy a opatřeními. Společnost nenese žádnou odpovědnost za jakákoliv zranění a ztráty způsobené provozováním a činnostmi, které nejsou v souladu s požadavky.
1.1 Bezpečnostní pravidla
1.1.1 Před instalací:

Varování
- Pokud se do zařízení dostala voda, chybí nebo je po rozbalení poškozená některá ze součástí, v žádném případě zařízení neinstalujte!
• V případě jakýchkoliv nesouladů mezi dodacím listem a dodaným zařízením, instalaci neprovádějte!

Varování
Se zařízením manipulujte velmi opatrně, v opačném případě může dojít k jeho poškození!
- Pokud je měnič frekvence poškozen, nebo mu chybí nějaké části, zařízení nepoužívejte! Existuje nebezpeční zranění!
- Nedotýkejte se části ovládacího systému rukama, existuje zde nebezpečí elektrostatického výboje!
1.1.2 Během instalace:

Varování
- Instalujte na nehořlavém povrchu, jako např. kov a v dostatečné vzdálenosti od hořlavých materiálů, v opačném případě může dojít k požáru.
- Nešroubujte bez rozlišení upevňovací šrouby prvků, zejména ty, které jsou označené červenou barvou!

Upozornění
- Nevkládejte konce vodičů ani šrouby do měniče, protože může dojít k jeho poškození! Měnič instalujte v místě bez větších vibrací a chraňte jej před sluncem.
- Pokud jsou ve stejné skříni instalovány více než dva měniče frekvence, umístěte je tak, aby byl zajištěn efekt odvodu tepla.
1.1.3 Během zapojování vodičů

Varování
- Postupujte dle návodu k použití a pozvěte si profesionální elektrotechnické pracovníky, v opačném případě může dojít k nebezpečí!
- Měnič frekvence by měl být od napájení oddělen jističem, v opačném případě hrozí nebezpečí požáru!
- Pred připojením se ujistěte, že stav napájení je nulový, v opačném případě hrozí nebezpečí úrazu elektrickým proudem!
- Ujistěte se, že měnič je uzemněn správně a v souladu s normami, v opačném případě hrozí nebezpečí úrazu elektrickým proudem!

Varování
- Nezapojujte vstupní napájení do výstupních svorek (U, V, W) na měniči frekvence. Dodržuje označení na svorkách vodičů a nezapojujte je nesprávně, aby nedošlo k poškození měniče.
- Ujistěte se, že veškerá elektrická zapojení odpovídají požadavkům EMC (elektromagnetická kompatibilita) a místním bezpečnostním normám. Průřezy všech kabelů by měly být takové, jak je doporučeno v návodu, v opačném případě může dojít k nehodě!
- Nepřipojujte brzdný rezistor bezprostředně mezi svorky DC propojovací lišty (+) (-), v opačném případě může dojít k požáru!
• Pro kodér používejte jednotný stíněný kabel pro zajištění spolehlivého uzemnění svorky stínící vrstvy!
1.1.4 Před zapnutím napájení

Upozornění
- Zkontrolujte shodu mezi třídou vstupního napájecího napětí a třídou jmenovitého napětí měniče frekvence, správné připojení vstupní svorek napájení (R, S, T) a výstupních svorek (U, V, W). Zkontrolujte, zda nedošlo ke zkratu v periferním obvodu připojeném k měniči a zda jsou a vodiče utaženy, v opačném případě může dojít k poškození měniče.
- Žádná část měniče frekvence nevyžaduje provedení testu napětí, protože výrobek již testován byl!

Varování
- Měnič frekvence připojte k elektrickému proudu po předchozím nasazení krytu, v opačném případě může dojit ke zranění elektrickým proudem!
- Elektrické zapojení veškerého periferního příslušenství by mělo být v souladu s návodem k použití a vodiče by měly být správně zapojeny v souladu se způsobem spojování obvodů uvedeném v návođu, v opačném případě může dojít k nehodě!
1.1.5 Po zapnutí napájení

Varování
- Neotevírejte kryty po zapnutí zařízení, v opačném případě může dojít k úrazu elektrickým proudem!
• Nedotýkejte se měniče ani periferního obvodu mokrýma rukama, v opačném případě může dojít k úrazu elektrickým proudem!
• Nedotýkejte se vstupních a výstupních svorek měniče frekvence, v opačném případě může dojít k úrazu elektrickým proudem! - Při prvním zapnutí, měnič frekvence provede bezpečnou detekci vnějsího silnoproudého uzlu – nedotýkejte se svorek vodičů U, V, W měniče ani svorek vodičů motoru, v opačném případě může dojít k úrazu elektrickým proudem!
1.1.6 Při provozu zařízení

Upozornění
- Nedotýkejte se chladícího ventilátoru ani výstupních otvorů pro zjištění teploty, v opačném případě hrozí riziko popálení!
- Nepovolaná osoba bez příslušné kvalifikace nemůže detekovat signál, v opačném případě může dojít ke zranění osob ne poškození zařízení.

Varování
- Zabraňte, aby během provozu měniče frekvence nedocházelo k pádům předmětů do zařízení, v opačném případě může dojít k jeho poškození!
- Neovládejte měnič zapínáním a vypínáním stykače, v opačném případě může dojít k jeho poškození!
1.1.7 Údržba

Varování
- Neopravujte ani neprovádějte údržbu na zařízení, pokud je zapnuté, v opačném případě může dojít k úrazu elektrickým proudem!
- Udržbu nebo opravy můžete na měniči provádět pouze tchdy, když je napětí měniče <DC 36V po uplynutí 2 minut od výpadku napětí, v opačném případě může zbytkový elektrický náboj na kondenzátoru způsobit zranění osob!
- Osoby bez profesionálního proškolení nemohou opravovat ani provádět údržbu měniče frekvence, v opačném připadě může dojít ke zranění osob nebo poškození zařízení.
- Pokud dojde k výměně měniče frekvence, je třeba nastavit parametry. Před opětovným připojením zařízení je třeba zasunout všechny zástrčky do příslušných zdířek (zásuvek).
1.2 Bezpečnostní opatření
1.2.1 Kontrola izolace motoru
Při prvním použití motoru, při opětovném použití motoru po delší odstávce a při pravidelné kontrole motoru, je nezbytné zkontrolovat jeho izolaci, aby nedoslo k poškození měniče frekvence v důsledku nespravné izolace vinutí motoru. Během kontroly izolace, odpojte motorový kabel od měniče frekvence. Doporučujeme 500V napěťový tramegger, naměřený izolační odpor by měl být ≥ 5MΩ.
1.2.2 Tepelná ochrana motoru
Pokud zvolený motor neodpovidá jmenovitému výkonu měniče frekvence, zejména je-li jeho jmenovitý výkon větší než jmenovitý výkon měniče frekvence, je třeba upravit příslušné parametry ochrany motoru nebo před motorem nainstalovat tepelné relé za účelem ochrany.
1.2.3 Provoz nad frekvenci sitě
Technické parametry vysokoúčinného měniče frekvence
Měnič frekvence poskytuje výstupní frekvenci 0 Hz \~ 3200 Hz. Pokud uživatelé musí pracovat při frekvenci nad 50 Hz, je třeba vzít v úvahu toleranci mechanického zařízení.
1.2.4 Vibrace mechanického zařízení
Při určité výstupní frekvenci měniče, může vzníkat bod mechanické rezonance zátěžového zařízení. Aby k tomu nedocházelo, je možno nastavit parametr frekvence skokové změny.
1.2.5 Informace o zahřivání motoru a jeho hlučnosti
Výstupním napětím měniče frekvence je frekvence PWM, která obsahuje určité harmonické, takže teplota, hluk a vibrace motoru se mírně zvýší ve srovnání s provozem na síťové frekvenci.
1.2.6 Umistění součástek citlivých na napětí nebo kondenzátoru pro zlepšení koeficientu výkonu na výstupní straně
Výstupe měniče frekvence je frekvence PMB. Pokud na výstupní straně bude umístěn kondenzátor pro zlepšení koeficientu výkonu nebo napěťově závislý rezistor za účelem ochrany před úderem blesku, můžete snadno způsobit dočasný nadproudu nebo dokonce poškodit měnič frekvence. Prosím nepoužívejte!
1.2.7 Spínací zařízení, jako např. stykač, pro vstupní a výstupní svorky měniče frekvence
Pokud je mezi napájením a vstupní svorkou měniče frekvence instalován stykač, neměl by být používán pro řízení spouštění a zastavení měniče. Pokud je požadováno, aby tento stykač ovládal spouštění a zastavení měniče, časová prodleva by neměla být kratší než 1 hodina. Časté spouštění a vypínání snadno zkrátí životnost kondenzátoru v měniči. Pokud jsou mezi výstupní svorkou a motorem nainstalována spínací zařízení, jako např. stykač, je třeba zajistit provoz měniče frekvence bez výstupu, v opačném případě může dojit ke snadnému poškození modulu.
1.2.8 Použivání nad jmenovité napětí
Nepoužívejte měnič frekvence tohoto typu nad rozsah pracovního napětí povoleného v návodu, v opačném případě by mohlo dojít k poškození zařízení. V případě potřeby k transformaci napětí použijte vhodný přístroj pro zvýšení nebo snížení napětí.
1.2.9 Změna třifázového vstupu na dvoufázový
Neměňte třifázový měnič frekvence na dvoufázový, v opačném případě může dojít k poruše nebo poškození.
1.2.10 Ochrana před úderem blesku
V měniči frekvence je umístěno ochranné zařízení proti přepětí způsobeném úderem blesku, takže má určitou schopnost vlastní ochrany proti indukčnímu výboji. V případě častých úderů blesku v mistě zákazníka, je nutná dodatečná ochrana, kterou je třeba umístit před měničem.
1.2.11 Nadmořská výška a snižování jmenovitých hodnot
V oblastech s nadmořskou výškou nad 1000 je účinek rozptylu tepla měničem frekvence slabší v důsledku řídnutí vzduchu, takže je nutné před použitím snížit jmenovité hodnoty. Prosíme, kontaktujte naši firmu za účelem konzultace.
1.2.12 Adaptivní motor
1) Standardní adaptivní motor to je čtyřpólový asynchronní indukční motor s kotvou nakrátko. Vyberte měnič frekvence v souladu se jmenovitým proudem motoru.
2) Chladicí ventilátor a vřeteno rotoru motoru s konstantní frekvencí jsou koaxiálním spojením. Pokud rychlost otáček klesne, chladicí účinek ventilátoru se sníží, także pokud se motor bude přehřivat, je třeba nainstalovat výkonný odtahový ventilátor nebo změnit motor na motor s proměnnou frekvencí.
3) Standardní parametry adaptivního motoru jsou zabudovány do měniče frekvence. Je nutné identifikovat parametry motoru nebo upravit výchozí hodnotu na základě skutečné situace, aby co nejvíce odpovídala skutečné hodnotě, v opačném případě to může vliv na provoz a funkci ochrany.
4) Zkrat v kabelu nebo v motoru může vést k alarmu nebo dokonce k explozi měniče frekvence. Nejdříve je třeba provést test izolace na zkrat s motorem a elektrického zapojení nainstalovaného poprvé. Toto je také nezbytné pro každodenní údržbu. Při provádění textu je třeba zcela oddělit měnič od testovaného dílu.
Kapitola 2. Informace o produktu
2.1 Označení
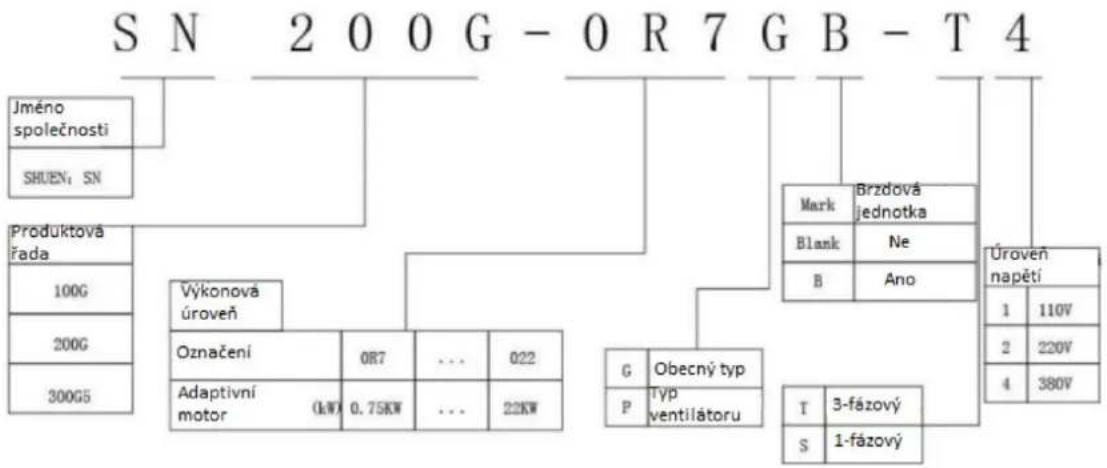
flowchart
graph TD
A["SN 200G - 0R7GB - T4"] --> B["Jméno společnosti"]
A --> C["SHUEN: SN"]
A --> D["Produktová řada"]
D --> E["100G"]
D --> F["200G"]
D --> G["300G5"]
A --> H["Výkonová úroveň"]
H --> I["Označení"]
I --> J["Adaptivní motor (kW)"]
I --> K["0R7"]
I --> L["..."]
I --> M["022"]
I --> N["0.75KW"]
I --> O["..."]
I --> P["22KW"]
A --> Q["Mark Brzdová jednotka"]
Q --> R["Blank Ne"]
Q --> S["B Ano"]
A --> T["G Obecný typ"]
T --> U["P typ ventilátoru"]
U --> V["T 3-fázový"]
U --> W["S 1-fázový"]
X["Úroven napěti"] --> Y["1 110V"]
X --> Z["2 220V"]
X --> AA["4 380V"]
2.2 Výrobní štítek
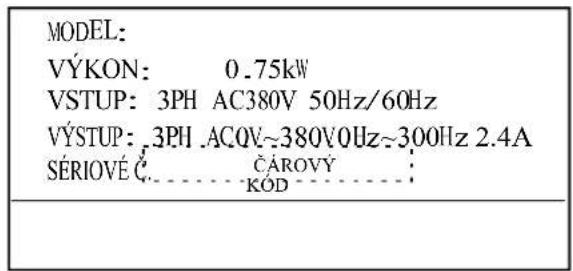
Obr. 2 – 2 Výrobní štítek
2.3 Měnič frekvence
Obrázek 2-1 Model a technické údaje měniče frekvence
| Model měniče frekvence | Jmenovitý elektrický výkon (kVA) | Vstupní proud (A) | Výstupní proud (A) | Adaptivní motor | |
| kW | KM | ||||
| 3-fázové napájení: 380V, 50/60Hz | |||||
| 10061537 | 1.5 | 3.4 | 2.1 | 0.75 | 1 |
| 10061534 | 3.0 | 5.0 | 3.8 | 1.5 | 2 |
| 10061533 | 4.0 | 5.8 | 5.1 | 2.2 | 3 |
| 10061532 | 5.9 | 10.5 | 9.0 | 3.7 | 5 |
| 10061531 | 8.9 | 14.6 | 13.0 | 5.5 | 7.5 |
| 10061530 | 11.0 | 20.5 | 17.0 | 7.5 | 10 |
| 10061536 | 17.0 | 26.0 | 25.0 | 11.0 | 15 |
| 10061535 | 21.0 | 35.0 | 32.0 | 15.0 | 20 |
2.4 Technické údaje
Tabulka 2-2 Technické údaje měniče frekvence
| Pol. | Hodnoty | |
| Nejvyšší frekvence | Vektorové řízení: 0~300HzŘízení U/f: 0~3200Hz | |
| Nosná frekvence | 0.5kHz~16kHzAutomatická regulace nosné frekvence na základě charakteristicky zatížení | |
Technické parametry vysokoúčinného měniče frekvence
| Základní funkce | Vstupní frekvenční rozlišení | Nastavení hodnoty: 0.01HzNastavení simulace: nejvyšší frekvence ×0.025% | |
| Režim řízení | SVCFVCŘízení U/f | ||
| Startovací moment | Zařízení typu G: 0.5Hz/150% (SVC); 0Hz/180% (FVC)Zařízení typu P: 0.5Hz/100% | ||
| Rozsah nastavení rychlosti | 1: 100 (SVC) 1: 1000 (FVC) | ||
| Přesnost stabilizace rychlosti | ±0.5% (SVC) | ±0.02% (FVC) | |
| Přesnost řízení točivého momentu | ±5% (FVC) | ||
| Přetížitelnost | Zařízení typu G: 150% jmenovitého proudu za 60s; 180% jmenovitého proudu za 3sZařízení typu P: 120% jmenovitého proudu za 60s; 150% jmenovitého proudu za 3s | ||
| Podpora točivého momentu | Automatická podpora točivého momentu; manuální zvýšení točivého momentu o 0,1% ~ 30,0% | ||
| Křivka U/f | Tři možnosti: typ lineární; typ vícebodový; U/f křivka typu N výkonu (výkon 1,2, výkon 1,4, výkon 1,6, výkon 1,8, výkon 2) | ||
| Separace U/f | 2 možnosti: plná separace, poloviční separace | ||
| Křivky zrychlení / zpomalcní | Způsob zrychlení / zastavení lineární nebo křivka S. Čtyři druhy doby zrychlení / zpomalení. Časový rozsah zrychlení / zpomalení: 0,0 ~ 6500,0 s | ||
| DC brzdění | Frekvence DC brzdění: 0.00Hz~maximální frekvence;doba brzdění: 0,0 s ~ 36,0 s brzdného účinku; hodnota proudu: 0,0% ~ 100,0% | ||
| Krokové řízení | Rozsah krokové frekvence: 0,00 Hz ~ 50,00 Hz;Doba krokového zrychlení / zpomalení 0,0 s ~ 6500,0 s | ||
| Jednoduchý ovladač PLC,vícekroková rychlost | Realizuje 16 krokových rychlostí pomocí vestavěného ovladače PCS nebo řídícího terminálu. | ||
| Vestavěný PID | Snadné řízení procesu, řídící systém s uzavřenou smyčkou | ||
| Automatická regulace napětí | Automaticky udržuje konstantní vstupní napětí v případě jakékoliv změny napětí v síti | ||
| Přepětí, nadproud, kontrola blokace motoru | Automatické omezení proudu / napětí během provozu, zabránění častému vypínání způsobenému nadproudem a přepětím | ||
| Rychlá funkce omezení proudu | Snižuje chybu nadproudu, chrání normální provoz měniče. | ||
| Omezení a ovládání točivého momentu | Značka „Nawy“ snižuje točivý moment během provozu, zabraňuje častým výpadkům v důsledku nadproudu, vektorový režim s uzavřenou smyčkou může realizovat řízení točivého momentu. | ||
| Pol. Hodnoty | ||
| Individualizované funkce | Vynikající výkon | Řízení motoru díky vysoce výkonnému proudovému vektorovému řízení |
| Funguje v případě krátkého výpadku proudu | Snížení napčtí je kompenzováno zpětnovazební energií zátče v případě dočasného výpadku proudu, což udržuje měnič frekvence v nepřetržitém provozu po krátkou dobu. | |
| Rychlé omezení proudu | Vyhýbejte se častým chybám nadproudu měniče. | |
| Časová kontrola | Funkce časové kontroly: nastavení času v rozsahu 0,0 min ~ 6500,0 min | |
| Vícemotorový spínač | 2 sady parametrů motoru umožňují řízení přepínáním dvou motorů | |
| Vícevláknová sběrnice | Podpora dvou druhů pólové sběrnice typu spot: R S -4 8 5, C A N li n k | |
| Ochrana proti přehřátí | Volitelná multifunkční karta, analogový vstup A13 může přijímat signál snímače teploty motoru (PT100, PT1000) | |
| Vícenásobný kodér | Podporuje různé kodéry, jako např. diferenciální, otevřený kolektor a rotační transformátor | |
| Uživatelsky programovatelné | Volitelná karta programovatelná uživatelem umožňuje sekundární zpracování. | |
| Výkonný software pracující na pozadí | Podpora provozních parametrů a virtuálního osciloskopu. Realizace grafického sledování vnitřního stavu měniče frekvence prostřednictvím virtuálního osciloskopu. | |
| Zdroj příkazů | Příslušný ovládací panel, příslušný ovládací terminál, příslušný sériový komunikační port. Přepínání mnoha způsoby. | |
| Zdroj frekvence | 10 zdrojů frekvence: příslušná číslice, příslušné analogové napčtí, příslušný analogový proud, příslušný impuls, příslušný sériový port. Přepínání mnoha způsoby. | |
| Podpůrný zdroj frekvence | 10 podpůrných zdrojů frekvence. Flexibilní ladění podpůrné frekvence a syntéza frekvence | |
Technické parametry vysokoúčinného měniče frekvence
| Svorky | Vstupní svorky | Standard:5 digitálních vstupních svorek, z toho 1 podporuje rychlý impulsní vstup s frekvencí 100 Hz,2 analogové vstupní svorky, z toho 1 podporuje napěťový vstup 0 ~ 10 V nebo proudový vstup 4 ~ 20 mAMožnost rozšíření o:5 digitálních vstupních svorek1 analogovou vstupní svorku, která podporuje napětí 0 ~ 10 V. |
| Výstupní svorky | Standard:1 vstupní pulzní rychlospojka (otevřený kolektor je volitelný), podporuje čtvercový výstupn signál 0 ~ 100 kHz1 svorka digitálního výstupu1 svorka výstupu relé1 svorka analogového výstupu podporuje proudový vstup 0 ÷ 20 mA nebo napětí 0 ÷ 10 V.Možnost rozšíření o:1 svorku digitálního výstupu1 svorku výstupu relé1 svorku analogového výstupu podporující proudový vstup 0 ÷ 20 mA nebo napětí 0 ~ 10 V. |
| Pol. Hodnoty | ||
| Obsluha displeje a klávesnice | Displej LED | Parametry zobrazení |
| Blokace tlačitek a výběr funkce | Částečná nebo úplná blokace tlačitek na klávesnici, určení rozsahu funkce některých tlačitek, aby nedocházelo k chybám při jejich používání. | |
| Ochranné funkce | Detekce zkratu motoru po zapnutí, výchozí ochrana vstupních /výstupních fází, nadproudová ochrana, přepěťová ochrana, podpěťová ochrana, ochrana proti přehřátí, ochrana proti přetížení. | |
| Volitelné příslušenství | Ovládací panel LCD, brzdná jednotka, multifunkční rozšířující karta, rozšířující karta IO (vstup/výstup), komunikační karta RS485, komunikační karta CANlink, PG karta s diferenciálním vstupem, PG karta rotačního transformátoru, PC karta se vstupem OC. | |
| Provozní prostředí | Místo použití | Ve vnitřních prostorách bez přímého slunečního záření, prachu, korozivních plynů, hořlavých plynů, olejové mlhy, vodní páry, kapající vody nebo slaného prostředí. |
| Nadmořská výška | < 1,000m | |
| Okolní teplota | -10^ +40^ (v případě, že okolní teplota dosahuj 40 ^ 50 ^ , je třeba ji snížit, aby se zařízením bylo možno pracovat) | |
| Vlhkost | < 95%RH, bez kondenzace | |
| Vibrace | < 5.9m/s (0.6g) | |
| Teplota skladování | -20^ +60^ | |
2.5 Vnější výkres, rozměry montážních otvorů
2.5.1 Vnější výkres
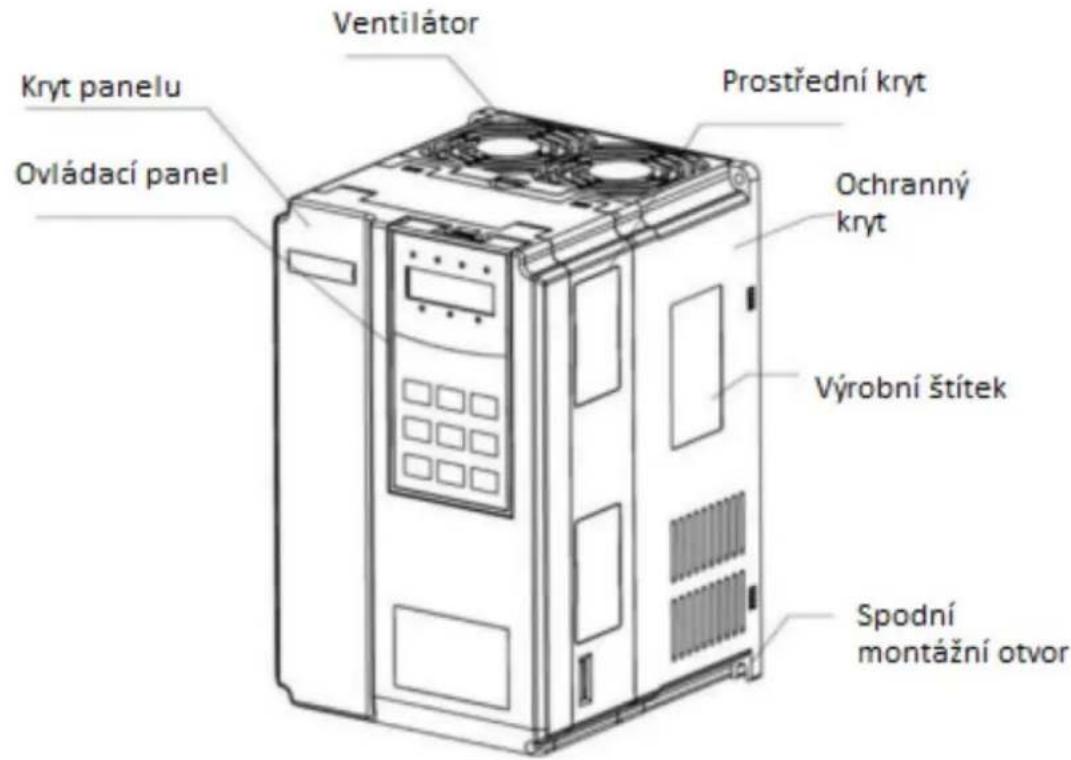
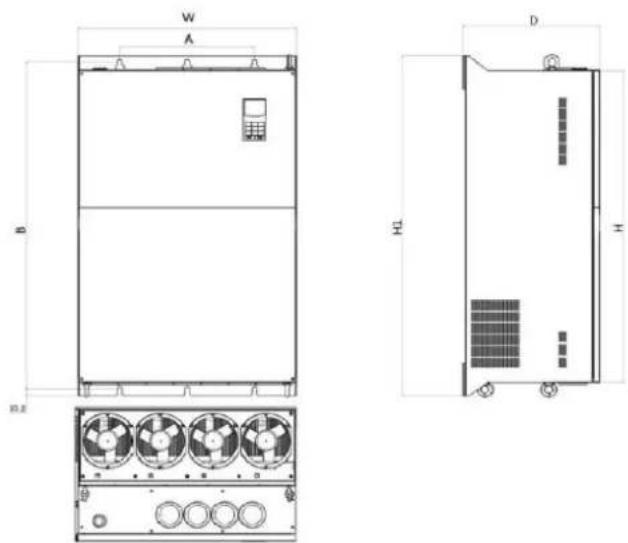
Obr. 2-3 Vnější pohled VFD

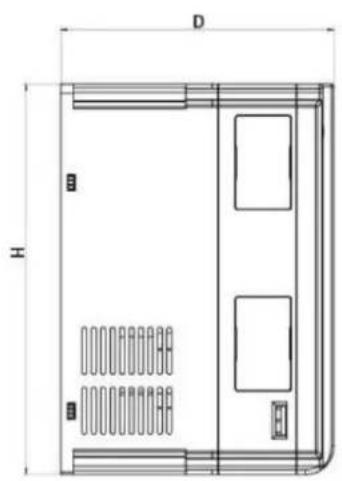
Obr. 2-4 Schématický výkres vnějších rozměrů a montážních dílů z umělé hmoty
Obrázek 2-5 Schématický výkres vnějších rozměrů a kovových montážních dílů
Kryty modelů jsou následující:
2.5.2 K obrázku 2-3 Rozměry montážních otvorů (mm) měniče frekvence
| Modelměničefrekvence | Montážníotvor (mm) | Vnější rozměr (mm) | Průměrotvoru | Váha(kg) | |||
| A | B | H | W | D | |||
| 10061537 | 114 | 172 | 186 | 125 | 159 | 5.0 | 1.7 |
| 10061534 | |||||||
| 10061533 | |||||||
| 10061532 | 149 | 237 | 218 | 160 | 174 | 5.0 | 3.2 |
| 10061531 | |||||||
| 10061530 | |||||||
| 10061536 | 1 | 30 | 322 | 208 | 19 | 6.0 | 6.5 |
Technické parametry vysokoučinného měniče frekvence
| 10061535 | 90 | 5 | 2 |
2.5.3 Vnější rozměry panelu displeje
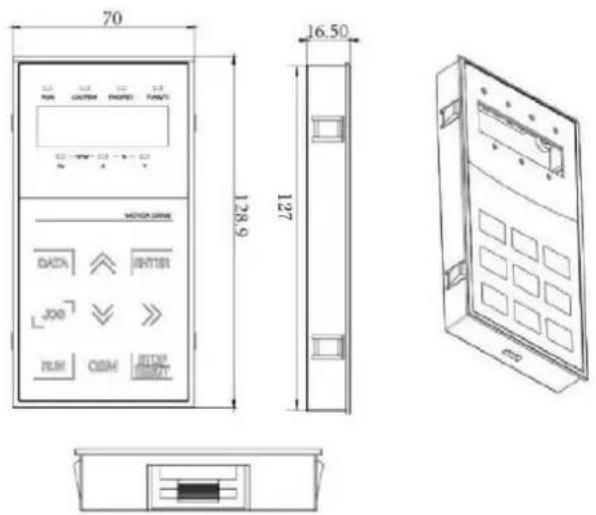
Obrázek 2-6 Vnější rozměry panelu displeje
Rozměr otvorů v panelu displeje:
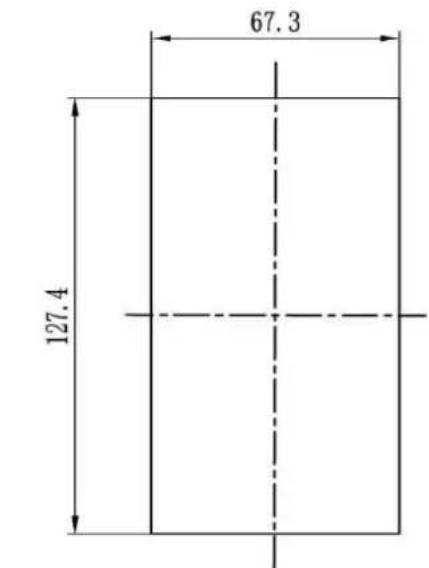
Obrázek 2-7 Rozměr otvorů v panelu displeje
2.5.4 Rozměrový výkres externí tlumivky DC
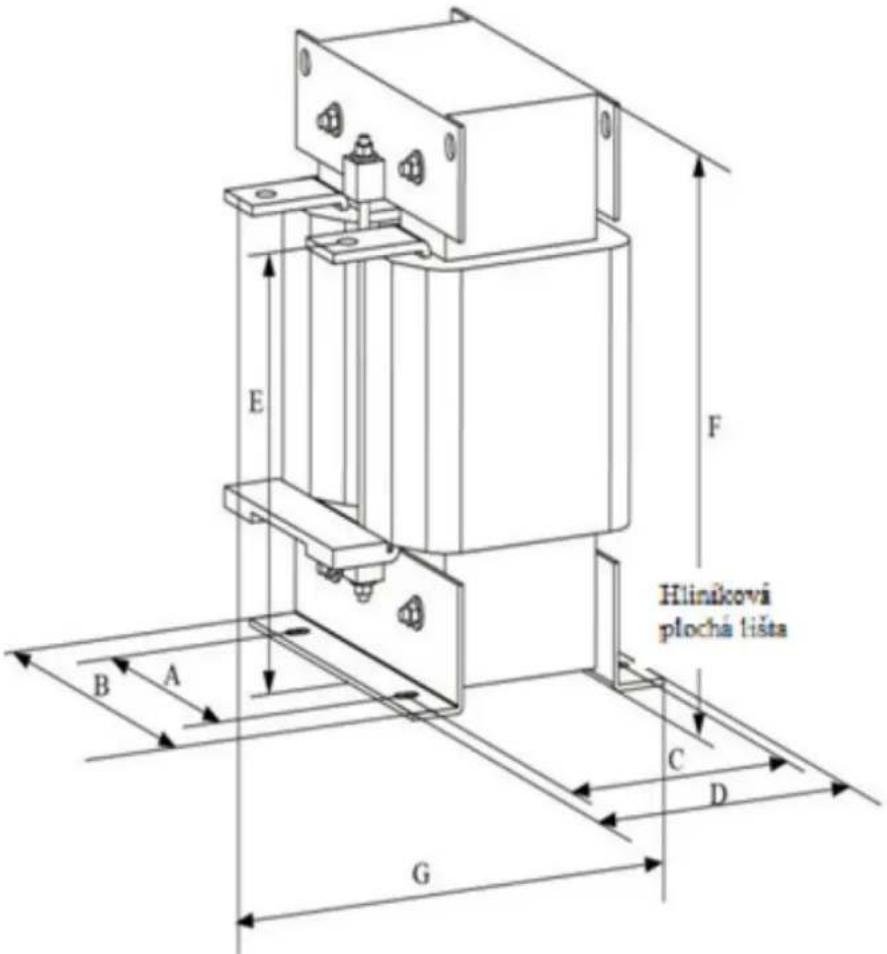
Obrázek 2-8 Rozměrový výkres externí tlumivky DC
Poznámka: v případě speciálních požadavku, je možno přizpůsobit nestandardní prvky.
Způsob instalace externí tlumivky DC: při instalaci měniče frekvence uživatelé musí odstranit propojku – měděnou lištu mezi svorkou spojení P1 a (+) hlavní smyčkou, připojit tlumivku DC mezi P1 a (+). Je třeba dávat pozor na polaritu vodičů mezi svorkou tlumivky a svorkou měniče P1, (+). Po instalaci DC tlumivky, není třeba měděnou lištu dávat zpět mezi P1 a (+).
2.6 Volitelné příslušenství
Tabulka 2-6 Příslušenství měniče frekyence
| Název | Model | Funkce | Poznámka |
| Externí brzdná jednotka | SNBU | 18,5 kW a výše externí brzdné jednotky | Od 75kW a výše akceptuje multiparalelní připojcní |
| Multifunkční rozšířující karta | IO-MINI-V03 | Přidává pětimístný vstup a jeden analogový napěťový vstup. AI3 to je izolovaná analogová veličina, kterou lze připojit k PT100 a PT1000; jeden výstup relé, jeden digitální výstup a jeden analogový napěťový výstup z RS485 / CAN | Vhodná pro modely s výkonem 3,7 kW a více |
| Rozšířující karta I/O (vstup / výstup) | IO1 | Přidává třímístný vstup | Vhodná pro celou řadu |
| Komunikační karta MODBUS | RS485 | S izolační komunikační kartou RS 485 | Vhodná pro celou řadu |
| Komunikační rozšířující karta CANlink | CANLINK-V03 | Karta komunikačního adaptéru CANlink | Vhodná pro celou řadu |
| Karta rozhraní diferenciálníhokodéru | PG1 | Karta rozhraní diferenciálního rotačního kodéru, přizpůsobena zdroji napájení 5V | Vhodná pro celou řadu |
| Karta rozhraní rotačního transformátoru | PG2 | Vhodná pro rotační enkodér, frekvence pohonu 10 kHz, rozhraní DB9 | Vhodná pro celou řadu |
| Karta rozhraní kodéru s otevřeným kolektorem | PG3 | Karta rozhraní kodéru s otevřeným kolektorem s dělením výstupní frekvence 1:1, přizpůsobena pro zdroj napájení 15V. | Vhodná pro celou řadu |
| Řídící panel LED | SNKE | LED displej a klávesnice operátora | Vhodná pro celou řadu SN |
| Prodlužovací kabel | SNCAB | Prodlužovací kabel | Ve standardní konfiguraci má délku 3 metry |
2.7 Běžná údržba měniče frekvence
2.7.1 Běžná údržba
Vliv okolní teploty, vlhkosti, prachu a vibrací způsobuje opotřebení vnitřních dílů a případné poruchy, snižuje životnost měniče frekvence a proto je nutné provádění běžné a pravidelné údržby.
Důvodu běžné kontroly (údržby):
1) v případě nestandardní změny zvuku během provozu motoru;
2) v případě vibrací během provozu motoru
3) v případě změny místa instalace měniče frekvence
4) v prípadě nestandardního provozu chladicího ventilátoru měniče frekvence
5) v případě přehřátí měniče frekvence
2.7.2 Pravidelné prohlídky, pravidelné kontroly:
1) Kontrolovat a pravidelně čistit vzduchový kanál.
2) Kontrolovat, zda nedošlo k uvolnění šroubů.
3) Kontrolovat, zda na svorkách vodičů nejsou viditelné známky elektrického oblouku
2.7.3 Skladování měniče frekvence
Po zakoupení měniče frekvence je uživatel povinen v případě jeho prozatímního nebo dlouhodobého skladování:
- Umístit měnič do originálního balení naší firmy.
- Dlouhodobé skladování způsobuje zhoršení stavu elektrolytického kondenzátoru. Zajistěte spuštění na dobu nejméně 5 hodin v průběhu 2 let a použijte regulátor napětí, aby bylo možno postupně zvyšovat vstupní napětí až do jeho jmenovité hodnoty.
2.8 Záruka
Bezplatná údržba platí pouze pro měnič frekvence. V případě jakýchkoliv poruch nebo poškození během standardního používání naše firma nese odpovědnost za opravy po dobu 18 měsíců (ode dne, kdy výrobek opustil továrnu a data čárového kódu na zařizení). Po uplynutí 18 měsíců bude účtován poplatek za opravu. I v prvních 18 měsících bude oprava zpoplatněna v případě poškození zařizení způsobeného porušením pokynů uvedených v návodu k použití, poškození způsobeného požárem, povodní, nesprávným napětím apod., poškození způsobeného použitím měniče frekvence k nestandardním účelům. Příslušný poplatek za službu bude účtován dle jednotného ceníku výrobce. Pokud existuje jakákoliv dohoda, kde je dohodnuto jinak, pak má tato dohoda přednost.
2.9 Pokyny pro výběr modelu brzdových dílů
Tabulka 2-7 obsahuje pokyny. Uživatelé mohou vybírat různé hodnoty odporu a výkonu na základě skutečné aktuální situace (hodnota odporu by však nemčla být nižší než hodnota doporučená v tabulce, výkon může být velký). Výběr brzdového rezistoru závisí na výkonu motoru ve skutečném použitém systému a souvisí se setrvačností systému, dobou zastavení a potenciálním energetickým zatížením, proto by uživatelé měli vybírat na základě stávající situace. Čím větší je setrvačnost systému, tím kratší bude doba brzdění a jeho frekvence, proto by brzdové rezistor měl mít vysoký výkon a nízkou hodnotu odporu.
2.9.1 Výběr hodnoty odporu
Při brzdění se téměř veškerá energie získaná z motoru využije na brzdný odpor. Toto je vzorec: U * U / R = Pb
U – napčti stabilního brzdění (liší se v závislosti od systému, obvykle 700V)
Pb – brzdná síla
2.9.2 Výběr výkonu brzdového rezistoru
Je možno použit snížení až 70%.
Vzorec: 0,7 * Pr = Pb * D, kde
Pr – výkon rezistoru; D – frekvence brzdění (účast na celém procesu během obnovy)
výtah - 20% \~ 30%,
odstředivka - 50% \~ 60%
Obr. 2-7 Výběr brzdových dílů v závislosti od modelu
| Model měniče frekvence | Doporučovaný výkon | Doporučovaná hodnota odporu | Brzdová jednotka | Poznámka |
| 10061537 | 150W | ≥ 300 | Standardně zabudovaná | Žádné konkrétní pokyny |
| 10061534 | 150W | ≥ 220 | ||
| 10061533 | 250W | ≥ 200 | ||
| 10061532 | 300W | ≥ 130 | ||
| 10061531 | 400W | ≥ 90 | ||
| 10061530 | 500W | ≥ 65 | ||
| 10061536 | 800W | ≥ 43 | ||
| 10061535 | 1000W | ≥ 32 |
Kapitola 3 Mechanická a elektrická instalace
3.1 Mechanická instalace
3.1.1 Prostředí instalace:
1) Okolní teplota: okolní teplota má velký vliv na životnost měniče frekvence, proto okolní teplota během provozu měniče frekvence nemůže překračovat rozmezi: (-10 °C \~ 50 °C).
2) Měnič frekvence umístěte na nehovřlavém povrchu a ponechejte kolem něj dostatek prostoru, aby byl zajištěn odvod tepla. Při provozu měniče frekvence vzniká velké množství tepla. Namontujte svisle na montážním držáku pomocí šroubu.
3) Instalujte v místě se slabými vibracemi <0,6 G. Nevystavujte nárazům.
4) Vyhne se instalaci v místě, které vystaveno prímému slunečnímu záření, vlhkosti, kapající vody apod.
5) Vyhněte se instalaci v místech, kde vzduch obsahuje korozivní, hořlavý a výbušný plyn.
6) Vyhněte se instalaci v místě, kde jsou zbytky oleje, prach a kovový prach.
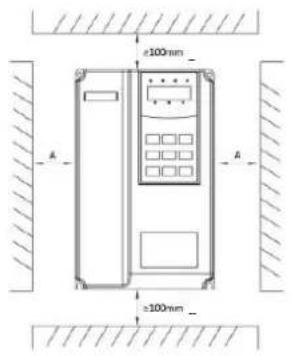
Montáž těla
Obrázek 3-1 Instalační schéma měniče frekvence

Horní a spodní montáž
Montáž těla: Tento rozměr neni třeba brát v úvahu, pokud je výkon měniče frekvence ≤22kW. Měl by však být > 50 mm, pokud výkon měniče frekvence je > 22 kW.
Horní a spodní montáž: je třeba nainstalovat tepelně izolační desku dle obrázku.
| Výkon | Instalační rozměr | |
| B | A | |
| ≤15kW ≥100mm | Bez požadavku | |
| 18.5kW - 30kW | ≥200mm | ≥50mm |
| ≥37kW ≥300mm | ≥50mm | |
3.1.2 U mechanické instalace je třeba zohlednit odvod tepla. Postupujte následovně:
1) Namontujte měnič frekvence svisle, aby teplo mohlo být odváděno nahoru, převrácení je zakázáno. Pokud se ve skříni nachází více měničů, doporučujeme jejich umístění vedle sebe. V případech vyžadujících horní a spodní montáž, je třeba instalovat tepelně izolační desku dlc obrázku, 3-1.
2) Montážní plocha je znázorněna na obrázku 3-1 se zohledněním plochy pro odvod tepla měniče. Je třeba také vzít v úvahu odvod tepla jiných dílů ve skříni.
3) Montážní držák by měl být z nehovřlavého materiálu.
4) V případě výskytu kovového prachu doporučujeme naistalovat měnič mimo skřín. Prostor v úplně utěsněné skřini by měl být co největší.
3.1.3 Demontáž a montáž spodního krytu
Měnič frekvence <18,5 kW má plastový kryt. Demontáž spodního krytu z umělé hmoty znázorňuje obrázek 3-2, 3-3. Pomocí nástroje vytlačte háček spodní krycí desky zevnitř.

Obrázek 3-2 Schéma demontáže spodního krytu z umělé hmoty
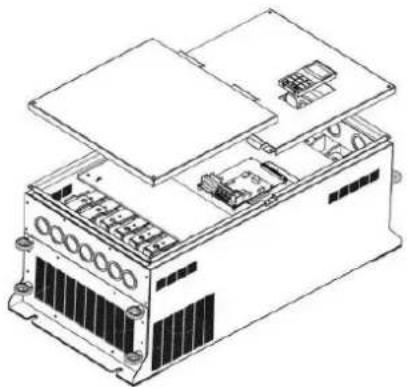
Obrázek 3-3 Schéma demontáže spodního krytu z umělé hmoty
Měnič frekvence > 18,5 kW má kovový kryt. Demontáž spodního kovového krytu je znázorněna na obrázku 3-3. Odšroubujte šroub spodního krytu pomocí nářadí.
| Varování | |
| Při demontáži spodního krytu dbejte zvýšené opatnosti, aby nespadla a nezpůsobila zranční osob nebo poškození zařízení. |
3.2 Elektrická instalace
3.2.1 Pokyny pro výběr modelu periferních elektrických dílů.
Technické parametry vysokoúčinného měniče frekvence
Tabulka 3-1 Pokyny pro výběr modelu periferních elektrických dílů pro měnič frekvence
| Model měniče frekvence | (MCCB) A | Doporučovaný stykač A | Vodiče hlavního obvodu na vstupní straně, mm^2 | Vodiče hlavního obvodu na výstupní straně, mm^2 | Doporučené vodiče řídícího obvodu, mm^2 |
| Tři fáze 380V | |||||
| 10061537 | 10 | 10 | 2.5 | 2.5 | 1.0 |
| 10061534 | 16 | 10 | 2.5 | 2.5 | 1.0 |
| 10061533 | 16 | 10 | 2.5 | 2.5 | 1.0 |
| 10061532 | 25 | 16 | 4.0 | 4.0 | 1.0 |
| 10061531 | 32 | 25 | 4.0 | 4.0 | 1.0 |
| 10061530 | 40 | 32 | 4.0 | 4.0 | 1.0 |
| 10061536 | 63 | 40 | 4.0 | 4.0 | 1.0 |
| 10061535 | 63 | 40 | 6.0 | 6.0 | 1.0 |
3.2.2 Pokyny pro periferní elektrické součásti
Tabulka 3-2 Pokyny pro periferní elektrické součásti měniče frekvence
| Název části | Umístění Funkce | |
| Vzduchový spínač | Před vstupním obvodem | Přcrušení napájení, pokud dojde k nadproudu v následně zapojeném zařízení. |
| Stykač | Na vstupní straně vzduchového spínače a měniče | Zapínání / vypínání napájení měniče. Vyhněte se častému zapínání / vypínání měniče pomocí stykače (< dvakrát za minutu) nebo přímému spouštění. |
| Vstupní tlumivka AC | Na vstupní straně měniče | Podpora koeficientu výkonu na vstupní straně; eliminace vyšších harmonických na vstupní straně a zabránění poškození zařízení v důsledku deformace průběhu napětí; eliminace nesymetrického vstupního proudu způsobného asymetrií mezi fázemi napájení. |
| Vstupní filtr EMC | Na vstupní straně měniče | Snížení vnější vodivosti a rušení měniče; snížení poruch vodivosti z napájecího zdroje do měniče, podpora ochrany protí rušení měniče. |
| Tlumivka DC | Ze strany propojovací lišty DC měniče | Podpora koeficientu výkonu na vstupní straně; zvýšení výkonu a tepelné stability měniče. Eliminace vlívu vyšších harmonických na vstupní straně měniče, snížení vnější vodivosti a rušení. |
| Výstupní tlumivka AC | Mezi výstupem měniče a motorem. Umístěte v blízkosti měniče frekvence | Výstupní strana měniče obsahuje mnohem vyšší harmonické. Pokud je motor daleko od měniče, je v obvodu velká rozptylová kapacita. Některé harmonické mohou způsobit v obvodu rezonanci, která poškozuje izolační vlastnosti motoru a dokonce i motor, generuje vysoký svodový proud a způsobuje častou ochranu měniče. Pokud vzdálenost mezi měničem a motorem je obceně větší než 50 m, doporučujcmc nainstalovat výstupní tlumivku AC. |
3.2.3 Způsob zapojení
Schéma zapojení frekvenčního měniče:
Technické parametry vysokoučinného měniče frekvence
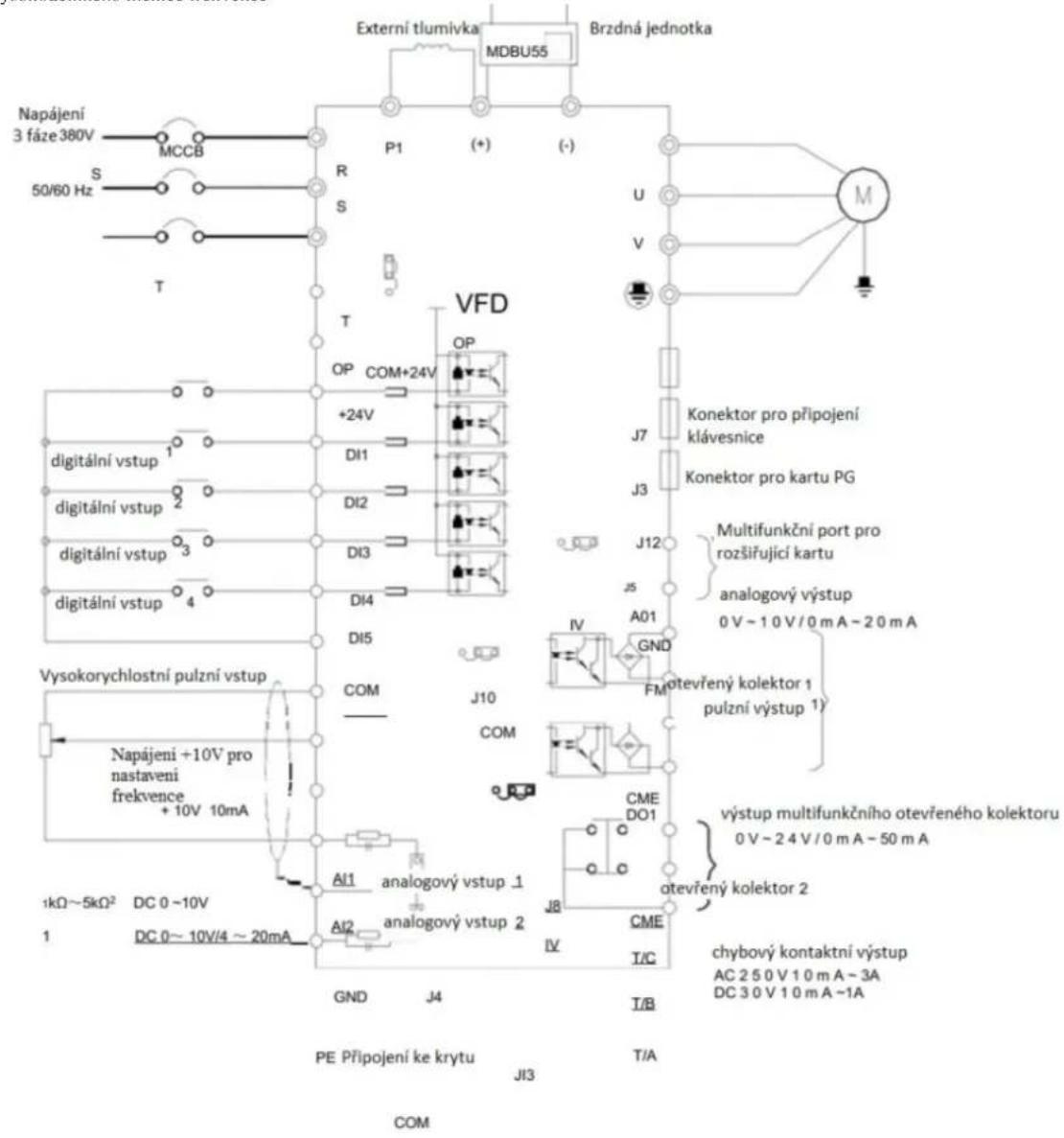
Obr. 3-4 Schéma zapojení měniče frekvence
Poznámka:
1) © platí pro svorku hlavního obvodu, © platí pro svorku řídící smyčky.
2) Brzdný rezistor vyberte na základě požadavků uživatele, více podrobností najdete v pokynech pro výběr modelu brzdného rezistoru.
3.2.4 Svorky a zapojení hlavního obvodu
1) Popis svorek hlavního obvodu jednofázového měniče frekvence
| Označení svorky | Název | Popis |
| L1, L2 | Vstupní svorka jednofázového napájení | Napájecí bod jednofázový 220V AC |
| (+), (-) | Kladné svorky / záporně propojovací lišty DC | Vstupní bod propojovací lišty DC |
| (+), PB | Připojovací svorka pro brzdný rezistor | Připojení brzdného rezistoru |
| U, V, W | Výstupní svorka měniče | Připojení třifázového motoru |
| PE\ | Zemnicí svorka | Zemnicí svorka |
2) Popis svorek hlavního obvodu trifázového měniče frekvence
Technické parametry vysokoúčinného měniče frekvence
| Označení svorky | Název | Popis |
| R、S、T | Vstupní svorka třifázového napájení | Připojovací bod pro třifázový vstupní výkon AC |
| (+), (-) | Kladné / záporné svorky propojovací lišty DC | Vstupní bod propojovací lišty DC a brzdné jednotky |
| (+), PB | Připojovací svorka pro brzdný rezistor | Připojení brzdného rezistoru |
| P1, (+) | Připojovací svorka pro externí tlumivku DC | Připojovací bod pro externí tlumivku DC |
| U, V, W | Výstupní svorka měniče | Připojení třifázového motoru |
| PE | Zemnící svorka | Zemnící svorka |
Upozornění týkající se zapojení:
a) Vstupní výkon L1, L2 lub R, S, T:
b) Zapojení na vstupní straně měniče nevyžaduje pořadi fází. Opatření týkající se zapojení:
1: (+) (-) svorky propojovací lišty DC: na propojovací liště DC (+) (-) je ihned po vypnutí zbytkové napětí. Vyčkejte, dokud nezhasne kontrolka CHARGE a napětí je <36V, v opačném případě existuje nebezpečí úrazu elektrickým proudem.
2: Při výběru externího brzdového prvku se vyvarujte opačného připojení pólů (přepólování) (+) (-), v opačném případě dojde k poškození měniče frekvence nebo dokonce k požáru.
3: Délka kabelů brzdové jednotky by neměla přesáhnout 10 m. Pro paralelní připojení je třeba použít kroucenou dvojlinku nebo utčsněný dvojitý kabel. Nepřipojujte brzdný rezistor přímo na připojovací lištu DC, v opačném případě dojde k poškození měniče frekvence nebo dokonce k požáru.
c) Připojovací svorka (+), PB brzdného rezistoru:
Zkontrolujte model zabudované brzdové jednotky a připojovací svorku brzdného rezistoru. Výběr modelu brzdného rezistoru by měl odpovídat doporučené hodnotě a vzdálenost mezi vodiči by měla být <5 m, v opačném případě může dojít k poškození měniče frekvence.
d) Připojovací svorka P1, (+) externí tlumivky DC
U měniče frekvence nad 220V 37kW a 380V 75kW je třeba během instalace externí tlumivky DC odstranit propojovací lištu mezi svorkami P1 a (+) a zapojit tlumivku DC mezi dvě svorky.
e) U, V, W na výstupní straně měniče frekvence: na výstupní straně měniče frekvence nezapojujte kondenzátor ani přepěťovou ochranu, v opačném případě dojde k časté aktivaci ochrany nebo dokonce k poškození měniče. Z důvođu vlivu rozptylené kapacity, pokud je kabel motoru příliš dlouhý, snadno vznikne elektrická rezonance, která poškodí izolaci motoru nebo vytvoří velký svodový proud a způsobí častou aktivaci ochrany měniče. Pokud je motorový kabel > 100 m, je třeba namontovat vstupní tlumivku AC.
f) Zemnicí svorka PE \
U různých modelů může být označení zemníci svorky jiné, ale význam je stejný. Ve výše uvedených popisech je zřejmé, že označení zemníci svorky je PE nebo.
Musí být zachováno spolehliví uzemnění zemníci svorky a odpor zemníciho vodiče by měl být <0,1 Ω. v opačném případě by došlo k nesprávnému fungování nebo dokonce k poškození zařízení. Nepoužívejte společně zemníci svorku PE nebo a N na stejném zemnícím vodiči.
3.2.5 Řídící svorka a zapojení
1) Schéma rozmístění svorek v řídícím obvodu je následující:
(Poznámka: mezi CME a COM, OP a +24V měniče frekvence není žádná zkratovací propojka. Uživatel si zvolí způsob zapojení CME a OP adekvátně přes J10, J9.
| +10V | AI1 | AI2 | DI1 | DI2 | DI3 | DI4 | DI5 | COM | |||
| GND | GND | A01 | CME | COM | DO1 | FM | +24V | OP | T/A | T/B | T/C |
Obr. 3-5 Schéma rozmístění svorek v řídícím obvodu
2) Funkční popis řídících svorek
Tabulka 3-3 Funkční popis řídících svorek měniče frekvence.
| Typ | Označení svorky | Název svorky | Funkce |
| +10V-GND | Připojení externího napájení + 10V | Umožňuje externí napájení + 10 V, max. výstupní proud: 10mA.Běžně se používá jako pracovní napájení externího potenciometru, rozsah hodnoty odporu potenciometru: 1 kΩ ~ 5 kΩ. |
Technické parametry vysokoučinného měniče frekvence
| Napájení | +24V-COM | Připojení externího napájení + 24V | Umožňuje externí napájení + 24V, používá se jako provozní napájení digitalní svorky vstupu / výstupu a napájení externího snímače. Max. výstupní proud: 200 mA. |
| OP | Vstupní svorka externího napájení | Připojíc +24 V ncbo COM přes propojku J9 na ovládacím panelu. Pokud je pro pohon D11 ~ D15 používán externí signál, OP musí být připojena k externímu napájení a propojka J9 by měla být vytažena. | |
| Analogový vstup | AI1-GND | Svorka analogového vstupu 1 | 1. Rozsah vystupního napětí: DC 0 V ~ 10 V.2. Vstupní impedance: 22kΩ |
| AI2-GND | Svorka analogového vstupu 2 | 1. Vstupní rozsah: DC 0 V ~ 10 V / 4 mA ~ 20 mA, v závislosti na propojce J8 na ovládacím panelu2. Vstupní impedance: 22kΩ pro napěťový vstup, 500Ω pro proudový vstup. |
| Typ | Označení svorky | Název svorky | Funkce |
| Digitální výstup | DI1- OP | Digitální výstup 1 | 1. Izolovaná optická vazba, kompatibilní s bipolárním výstupem2. Výstupní impedance: 2,4 k 3. Rozsah napětí pro výstup úrovně: 9 V 30 V . |
| DI2- OP | Digitální výstup 2 | ||
| DI3- OP | Digitální výstup 3 | ||
| DI4- OP | Digitální výstup 4 | ||
| DI5- OP | Rychlý pulzní výstup | Kromě funkce DI1 ~ DI4 to může být kanál vysokorychlostního pulzního výstupu.Maximální výstupní frekvence: 100 kHz | |
| Analogový výstup | AO1-GND | Analogový výstup 1 | Propojka J5 na ovládacím panelu rozhoduje o napěťovém nebo proudovém výstupu.Rozsah výstupního napětí: 0 V 10 V .Rozsah výstupního proudu: 0mA 20mA |
| Digitální výstup | DO1-CME | Digitální výstup 1 | Izolovaná optická vazba, bipolární výstup typu otevřený kolektorRozsah výstupního napětí: 0 V 24 V , rozsah výstupního proudu: 0mA 50mA Poznámka: digitální výstup CME a digitální výstup COM jsou vnitřně izolovány, ale zkratováníCME a COM je přes propojku J10 na ovládacím panelu (DO1 je ve výchozím stavu pohon +24V). Pokud DO1 vyžaduje externí napájení, vytáhněte propojku J10. |
| FM- CME | Rychlý pulzní výstup | Je omezeno funkčním kódem F5-00 „volba způsobu výstupu FM terminálu“.Jako rychlý pulzní výstup, max. frekvence je 100 kHz .Jako výstup s otevřeným kolektorem je shodný se specifikací DO1. | |
| Reléový výstup | T/A-T/B | Svorka normálně uzavřená | Schopnost kontaktu:AC250V, 3A, COSř = 0,4 DC 30V, 1A |
| T/A-T/C | Svorka normálně otevřená |
3) Funkční popis propojek a pomocných svorek
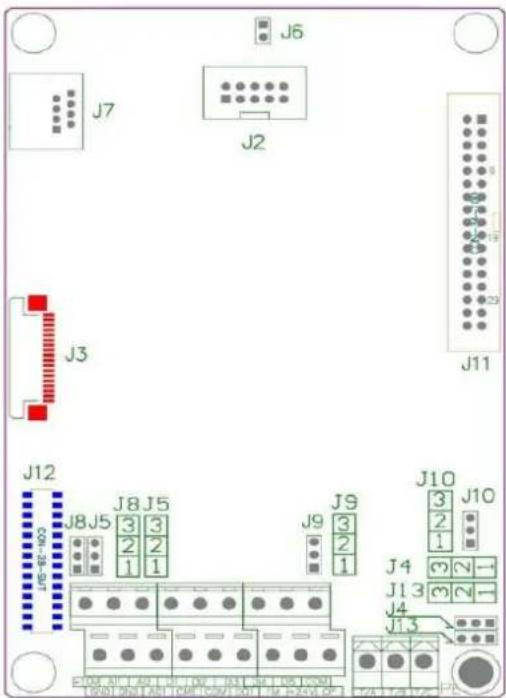
Obrázek 3-6 Schéma umístění propojek a pomocných svorek
Tabulka 3-4 Funkční popis propojek a pomocných svorek pro měnič frekvence
| Označení propojck | Názcv | Popis | |
| Pomocná svorka | J12 | Multifunkční konektor pro rozšířující karty | 28 kontaktní konektor pro volitelné karty (rozšířující karta I/O, PLC karta, různé sběrnicové karty apod.) |
| J3 | Konektor PG karty | Možnosti: OC, diferenciální rotační transformátor apod. | |
| J7 | Konektor pro externí klávesnici | Externí klávesnice | |
| Propojka | J4 | Výběr propojky pro spojení PE a GND | Vyberte, zda je PE připojeno ke GND. V případě rušení spojte PE s GND, aby došlo k zesilení účinku proti rušení. Výchozí spojení. (Jak je znázorněno na obrázku 3-6, zkrat 1-2 to je spojení PE a GND, zkrat 2-3 znamená, že není žádné spojení mezi PE a GND) |
| J13 | Výběr propojky pro spojení PE a COM | Vyberte, zda je PE spojeno s COM. V případě rušení, spojte PE s COM, aby došlo k zesilení účinku proti rušení. Výchozí spojení. (Jak je znázorněno na obrázku 3-6, zkrat 1-2 to je spojení mezi PE a COM, zkrat 2- znamená že není žádné spojení mezi PE a COM). | |
| J10 | Výběr propojky pro spojení CME a COM | Vyberte, zda je CME spojeno s COM. Výchozí stav je bez spojení. (Jak je znázorněno na obrázku 3-6, zkrat 1-2 je spojením CME a COM, zkrat 2-3 znamená, že mezi CME a COM není spojení). | |
| J5 | Výběr analogového výstupu AO1 | Rozhodněte, zda svorka analogového výstupu AO1 mý být napěťovým nebo proudovým výstupem. Výchozí stav je napěťový výstup. (Jak je znázorněno na obrázku 3-6, zkrat 1-2 je napěťový výstup, zkrat 2-3 je proudový výstup).Rozsah výstupního napětí: 0 V-10 VRozsah výstupního proudu: 0mA -20mA | |
| J8 | Výběr analogového vstupu AI2 | Rozhodněte, zda svorka analogového výstupu AO1 má být napěťovým nebo proudovým výstupem. Výchozí stav je napěťový výstup. (Jak je znázorněno na obrázku 3-6, zkrat 1-2 je napěťový výstup, zkrat 2-3 je proudový výstup).Rozsah výstupního napétí: 0 V-10 VRozsah výstupního proudu: 0mA -20mA | |
| J9 | Výběr zapojení OP terminálu | OP svorka spojuje +24V nebo COM přes propojku J9. Spojení +24V – výchozí. (Jak je znázorněno na obrázku 3 -6, zkrat 1-2 je spojením OP a +24 V, zkrat 2- 3 je spojením OP a COM).Pokud je pro pohon DI1 ~ DI5 použit externí signál, je třeba OP spojit s externím napájením a vytáhnout propojku J9. | |
4) Popis zapojení řídících svorek
a) Svorka analogového vstupu:
Slabý analogový napěťový signál je snadno ovlivnitelný vnčjším rušením. Bčžně se používá stínčný kabel, jehož délka by měla být co nejkratší a neměla by přesáhnout 20m, jak je znázorněno na obrázku 3-7. V případě, že některý signál je významně rušen, nainstalujte filtrační kondenzátor nebo feritové jádro ze strany zdroje analogového signálu, jak je znázorněno na obrázku 3-7.
Technické parametry vysokoučinného měniče frekvence

Obrázek 3-7 Schéma zapojení svorky analogového vstupu
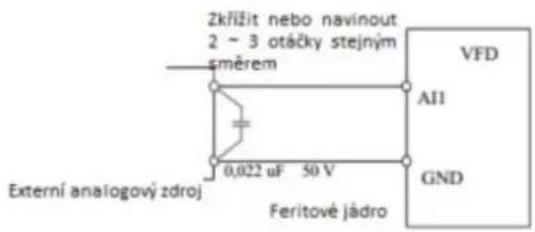
Obrázek 3-8 Montážní schéma zapojení svorky analogového vstupu
b) Digitální vstupní svorka: způsob zapojení svorky DI
Běžně se používá stíněný kabel, co nejkratší, jehož délka nemůže přesáhnout 20 m. V případě použití aktivního pohonu, musí být přijata nezbytná kompenzační opatření v případě přeslechů výkonu. Doporučeno je ovládání stykačem.
Obrázek 3-9 Schéma zapojení
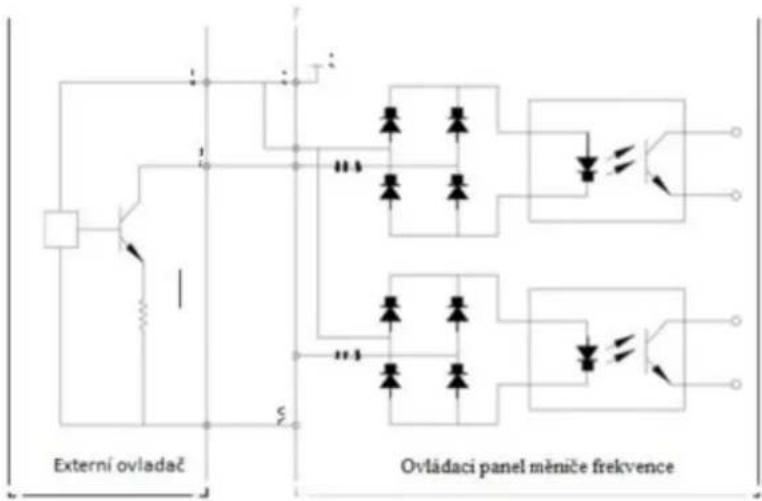
Toto je nejběžnější způsob zapojení. Pokuđ je použito externí napájení, vytáhněte propojku J9 mezi +24 V a OP, připojte kladný pól externího zdroje napájení k OP a záporný pól externího zdroje napájení k CME.
Obr. 3-10 Schéma zapojení zdrojového typu
Tento typ zapojení vyžaduje zkrat OP pomocí propojky J9 na COM, připojení + 24V na spolčný konektor externího ovladače. Pokud je použit externí zdroj napájení, připojte záporný pól externího napájení k OP. c) Svorka „DO“ digitálního výstupu: pokud svorka digitálního výstupu vyžaduje ovládání pomocí relé, je třeba nainstalovat diodu absorbéru po obou stranách civky relé, v opačném případě může dojít k poškození napájecího zdroje DC 24V.
Poznámka: je třeba správně nainstalovat polaritu diody absorbéru, jak je znázorněno na obrázku 3-11. V opačném případě jakýkoliv signál ze svorky digitálního výstupu způsobí okamžité poškození napájecího zdroje DC 24V.
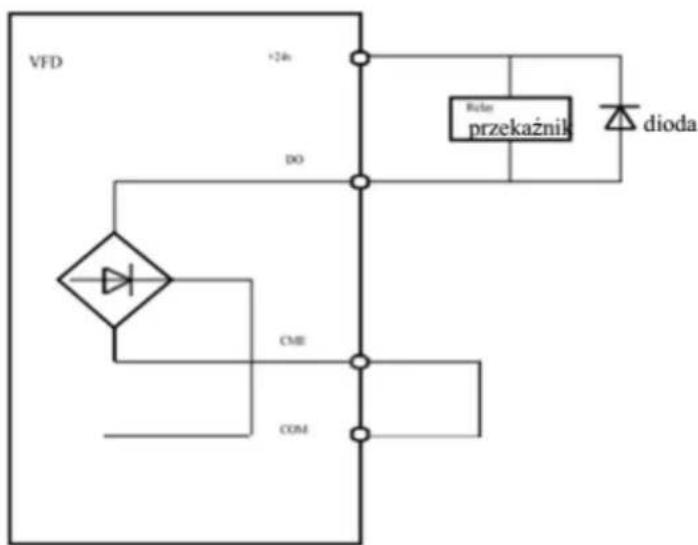
Przekaźnik - relé
Kapitola 4. Ovládání a displej
4.1 Úvod do uživatelského rozhraní a displeje
Technické parametry vysokoučinného měniče frekvence
Prostřednictvím ovládacího panelu můžete měnit parametry funkeí měniče frekvence, sledovat jeho provozní stav a řidit jeho provoz (start, zastavení) apod. Vnější vzhled a funkce jsou zobrazeny níže:
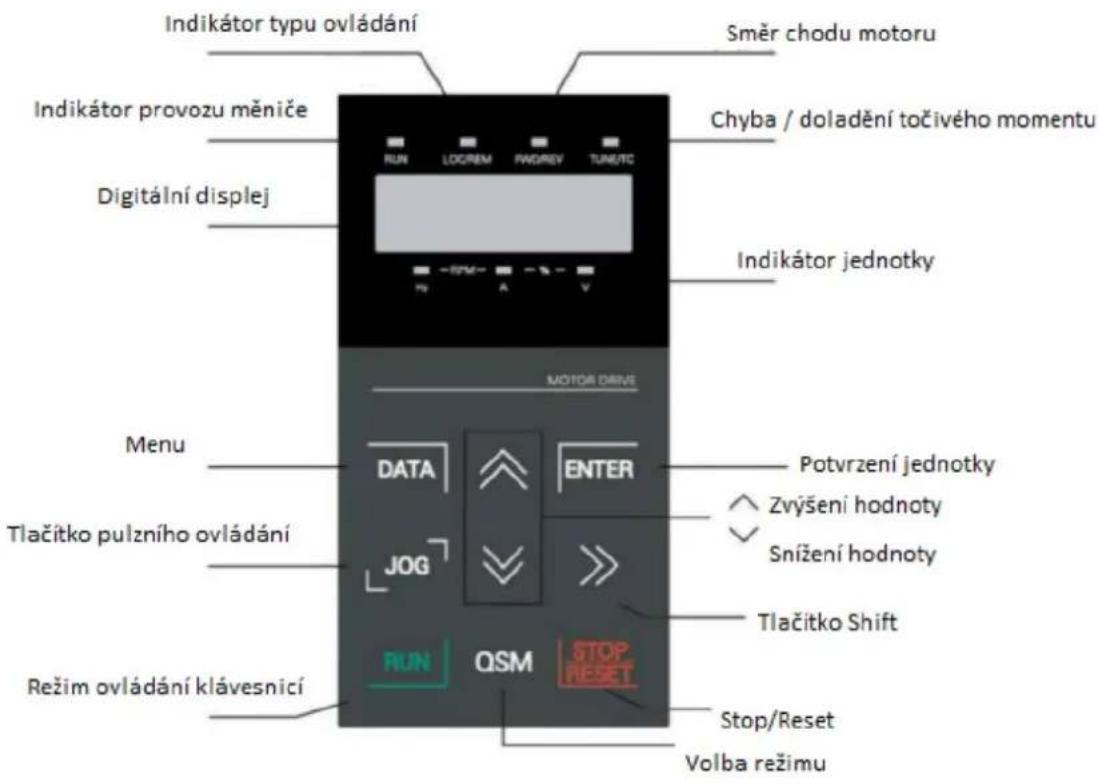
Obrázek 4-1 Schéma ovládacího panelu
1) Informace týkající se kontrolek indikátorů:
RUN: vypnutá kontrolka znamená, že měnič je ve stavu zastavení. Nepřetržité světlo znamená, že měnič je v provozu.
LOCAL / REMOTE: kontrolka ovládání klávesnicí, ovládání svorek a dálkové ovládání (ovládání komunikace). Zhasnutá kontrolka znamená stav ovládání klávesnicí. Nepřetržité světlo znamená ovládání svorek. Pokud kontrolka bliká, znamená to, že je ve stavu dálkového ovládání.
FWD / REV: Kontrolka změny směru chodu motoru. Když kontrolka svítí, znamená to normalní provozní stav.
TUNE / TC: Ladění / ovládání točivého momentu / chybová kontrolka. Nepřetržité světlo znamená, že je v režimu ovládání točivého momentu. Pomalé blikání znamená, že zařízení je vyladěno. Rychlé blikání znamená, že je v chybovém stavu.
2) Indikátor jednotky: IIz: jednotka frekvence, A: jednotka proudu, V: jednotka napěti, RMP (IIz + A) jednotka rychlosti otáček % (A + V).
3) Digitální displej:
LED displej 5-místný zobrazuje nastavení frekvence, výstupní frekvenci, druhy sledovaných parametrů, výstražné kódy apod.
4) Tlačítka na klávesnici:
| Tlačitko | Název | Funkce |
| DATA | Programovací tlačitko | Vstup nebo opuštění nabídky první úrovně. |
| ENTER | Tlačitko „Enter” | Vstup do nabídky krok po kroku, nastavení parametrů a jejich potvrzování. |
| Tlačitko pro zvýšení hodnoty | Zvyšování parametrů nebo nastavení kódu funkce. | |
| Tlačitko pro zmenšení | Zmenšení parametrů nebo nastavení kódu funkce |
Technické parametry vysokoučinného měniče frekvence
| (DY36) | hodnoty | |
| (ST5K) | Tlačitko „Shift” | Na displeji, v režimu zastavení nebo provozu je možn o cyklicky zobrazovat parametry. Stisknutím tohoto tlačitka můžete parametr změnit. |
| (H7CH) N | Funkční tlačitko | Spouštění operace v režimu ovládání pomocí klávesnice. |
| ST(CATE) EST | Stop / Reset | V provozním režimu můžete toto tlačitko použit pro zastavení. V případě upozornění na poruchu, můžete toto tlačitko použit k zastavení zařízení. V případě upozornění na poruchu jej lze použit k resetování měniče bez omezování kódu P7-02. |
| (BXGH) | Tlačitko volby režimu | Přepínač funkce založený na PP-03 |
| J(DC88) | Tlačitko „Jog” (zkušební provoz) | Přepínač funkce založený na P7-01, zdroji příkazů nebo rychlém přepínání směru. |
4.2 Způsoby prohlížení a změny kódu funkce
Ovládací panel – měnič frekvence má tříúrovňovou strukturu nabídky pro nastavení parametrů a jiných funkcí. Tříúrovňová nabídka: skupina parametrů funkce (úroveň I) → kód funkce (úroveň II) → nastavení kódu funkce (úroveň III). Provozní tok je znázorněn na obrázku 4-2.
Změna hodnoty parametru. Výběr parametru funkce. Změna hodnoty parametru funkce.

flowchart
graph LR
A["50.00"] -->|DATA| B["P0"]
B -->|ENTER| C["P0-08"]
C -->|ENTER| D["050.00"]
B -->|DATA| C
C -->|DATA| B
D -->|Δ▽| B
Menu úrovně 0
Menu úrovně I
Menu úrovně II
Menu úrovně III
Obrázek 4-2 Blokové schéma tříúrovňových nabídek
Instrukce: pro ovládání menu úrovně dva stiskněte tlačitko DATA (ÚDAJE) nebo tlačitko ENTE pro vstup do nabídky druhé úrovně. Stiskněte ENTER pro uložení nastaveného parametru a vraťte se do nabídky úrovně II, poté automaticky přejděte na další kód funkce; stisknutím tlačitka SET se přímo vrátíte do nabídky úrovně II bez uložení parametrů a vrátíte se k předchozímu kódu funkce.
Příklad: byl změněn kód funkce P3-02 z 10,00 Hz na 15,00 Hz. (Zvýrazněný text označuje blikající číslo.)
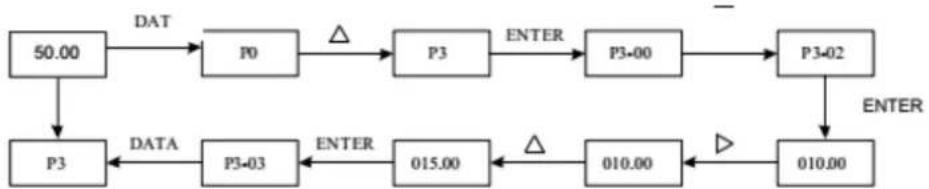
flowchart
graph TD
A["50.00"] -->|DAT| B["P0"]
B -->|Δ| C["P3"]
C -->|ENTER| D["P3-00"]
D --> E["P3-02"]
E -->|ENTER| F["010.00"]
F -->|Δ| G["015.00"]
G -->|DATA| H["P3"]
H --> I["P3-03"]
I -->|ENTER| J["015.00"]
DATA = ÚDAJE
Ve stavu nabídky úrovně II, není možné změnit kód funkce, pokud nebliká číslo parametru na displeji. Možné příčiny:
1) Tento kód funkce je parametrem, který není možné měnit, jako napřiklad skutečný zjištěný parametr, parametr uložení operace apod.
2) Kód funkce není možné měnit v provozním stavu zařizení a je možné ho změnit až po zastavení zařizení.
4.3 Režim zobrazení parametrů
Režim zobrazení parametrů slouží uživatelům k prohlížení provozních parametrů s různými rozsahy podle aktuální potřeby. Dostupné jsou tři režimy zobrazení parametrů.
| Název Popis | |
| Režim provozních parametrů | Zobrazení provozních parametrů měniče frekvence za sebou, včetně provozních parametrů P0 ~ PF, A0 ~ AF, U0 ~ UF |
| Režim parametrů definovaných uživatelem | Provozní parametry definované uživatelem (maximálně 32 parametrů), uživatelé mohou potvrdit provozní parametry, které se mají zobrazovat, prostřednictvím skupiny PE. |
| Režim změny parametrů uživatelem | Provozní parametry se nebudou shodovat s továrním nastavením. |
Technické parametry vysokoučinného měniče frekvence
Související provozní parametry jsou PP-02 a PP-03, jak je uvedeno niže:
| PP-02 | Vlastnosti režimu zobrazení parametrů funkce | Továrnínastavení | 11 | |
| Rozsah nastavení | Jednotky | Volba zobrazení skupiny U | ||
| 0 | Bez zobrazení | |||
| 1 | Zobrazení | |||
| Desetinné | Volba zobrazení skupiny A | |||
| 0 | Bez zobrazení | |||
| 1 | Zobrazení | |||
| PP-03 | Volba režimu zobrazení definovaného parametru | Továrnínastavení | 00 | |
| Rozsah nastavení | Jednotky | Volba zobrazení parametru definovaných uživatelem | ||
| 0 | Bez zobrazení | |||
| 1 | Zobrazení | |||
| Desetinné | Volba zobrazení parametrů definovaných uživatelem | |||
| 0 | Bez zobrazení | |||
| 1 | Zobrazení | |||
Pokud je zvolený režim zobrazení parametrů (PP-03) jednoduchý, zobrazení jednotlivých parametrů je možno přepínat tlačitkem QSM.
Kódy režimu zobrazení každého parametru jsou následující:
| Režim zobrazení parametrů | Displej |
| Režim provozních parametrů | -6ASE |
| Režim parametrů definovaných uživatelem | -115Fr |
| Režim parametrů změněných uživatelem | --[-- |
Režim přepínání je následující:
Aktuální provozní parametry: přepnutí na nestandardní uživatelské parametry.
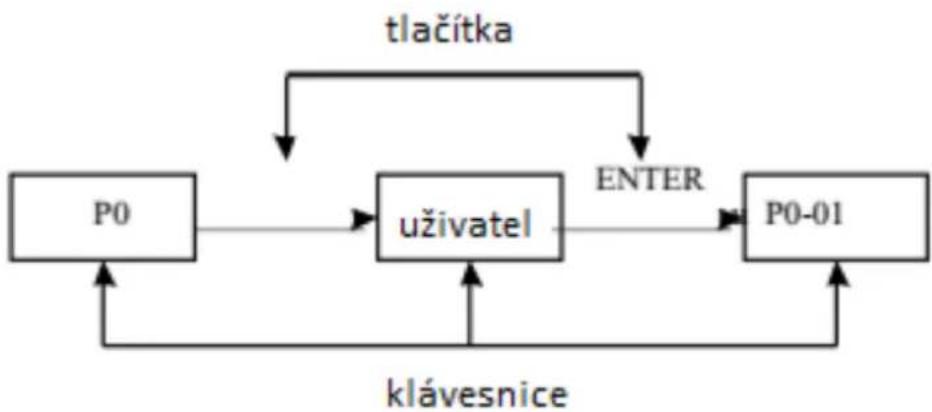
flowchart
graph TD
P0 --> uživatel
uživatel --> ENTER
ENTER --> P0-01
P0-01 --> tlačítka
tlačítka --> UU
UU --> P0
P0 --> klávesnice
4.4 Nestandardní uživatelské parametry
Hlavním cílem vytvoření nestandardní nabídky uživatele je zjednodušení prohlížení a změn bčžně používaných parametrů. Parametry nestandardní nabídky jsou zobrazovány ve formě „uP3-02“. Funkcí parametru P3-02 v nestandardní nabídce je změna parametrů a výsledků souvisejícího programování všeobecných podmínek.
Například nastavíme na 30; pokud se v nabídce zobrazuje „NULL“, znamená to, že uživatel nabídku přizbůsobuje. Zobrazi se vlastní uživatelská pro 16 běžně používaných parametrů, které uživatelí usnadní následující nastavení:
| P0-01: režim ovládání | P0-02: volba zdroje příkazů |
| P0-03: výběr dominantního zdroje frekvence | P0-07: volba zdroje frekvence |
| P0-08: referenční frekvence | P0-17: doba zrychlení |
| P0-18: čas zastavení | P3-00: nastavení křivky U/f |
| P3-01: zvýšení točivého momentu | P4-00: volba funkce svorky DI1 |
| P4-01: volba funkce svorky DI2 | P4-02: volba funkce svorky DI3 |
| P5-04: volba výstupu DO1 | P5-07: volba výstupu AO1 |
| P6-00: režim spouštění | P6-10: režim zastavení |
Uživatelé mohou přizpůsobovat parametry vlastním potřebám a upravovat je.
4.5 Způsob prohlížení parametrů stavu
Ve stavu vypnutém nebo ve stavu provozu, můžete pomocí tlačítka Shift., ^D zobrazovat různé parametry stavu. Kód funkce P7-03 (provozní parametry 1), P7-04 (provozní parametry 2), P7-05 (parametry) vypínání zobrazení parametrů, binární číslicí vybíráte, zda mají být parametry zobrazovány.
V režimu zastavení, celkem 16 parametrů, máte možnost zvolit, zda zobrazovat podmínky zastavení, nastavenou frekvenci, napětí sběrnice, stav vstupu DI, stav výstupu DO, napětí analogového vstupu AI1, napětí analogového vstupu AI2, napětí analogového vstupu AI3, aktuální hodnotu čitače, aktuální hodnotu délky, krok operace ovladače PLC, zobrazení rychlosti zatížení, nastavení PID, frekvence pulzů na vstupu PULSE a tři rezervní parametry. Postupné přepínání sekvenci zobrazuje vybrané parametry.
V provozním režimu, stav pěti parametrů: pracovní frekvence, referenční frekvence, napětí sběrnice, výstupní napětí, výstupní proud zobrazovaný ve výchozím nastavení; ostatní zobrazované parametry jsou následující: výstupní výkon, výstupní točivý moment, stav výstupu DI, stav výstupu DO, napětí analogového výstupu AI1, napětí analogového výstupu AI2, napětí analogového výstupu AI3, aktuální stav čitače, aktuální délka, lineární rychlost, PID; zpětnovazební smyčka PID je zobrazováno pomocí kódu funkce P7-03, P7-04 v bitech (převedeno na binární). Postupné přepínání sekvencí zobrazuje vybrané parametry.
4.6 Nastavení hesla
Měnič frekvence má funkci ochrany heslem uživatele, PP – 00 je nastaveno na nulu, je to heslo uživatele. Stiskněte opět DATE, zobrazí se "----". Zadané uživatelské heslo musí být správné, musí být zadáváno v normálním menu, v opačném případě jej nelze zadat.
Pokud chcete funkci ochrany heslem zrušit, stačí zadat heslo a PP – 00 změnit na 0.
4.7 Automatické doladění parametrů motoru
Před uvedením měniče frekvence do provozu, vyberte režim vektorového řízení. Dodržujte přesné vstupní parametry uvedené na výrobním štítku motoru. Tento měnič frekvence musí odpovídat standardním parametrům uvedeným na výrobním štítku motoru. Mezi způsobem vektorového řízení a parametry motoru existuje pevný vztah. Dobré parametry řízení závisí na přesném důkladném sladění parametrů stroje.
Kroky pro automatické doladění parametrů motoru jsou následující:
Nejdříve vyberte zdroj příkazů (P0-02) pro kanál příkazů ovládacího panelu. Poté zadejte parametry motoru do příslušných vstupů parametrů (podle aktuálního výběru motoru):
| Výběr motoru | Parametr |
| Motor 1 | P1-00: výběr typu motoru, P1-01: jmenovitý výkon motoru, P1-02: jmenovité napětí motoru, P1-03: jmenovitý proud motoru, P1-04: jmenovitá frekvence motoru, P1-05: jmenovitá rychlost otáček motoru. |
| Motor 2 | A2-00: výběr typu motorů na výběr A2-01: jmenovitý výkon motoru A2-02: jmenovité napětí motoru A2-03: jmenovitý proud motoru A2-04: A2-05: jmenovitá frekvence motoru, jmenovitá rychlost otáček motoru. |
V případě motoru bez zatížení zvolte P1-37 (motor 2 A2 \ až 37) a zvolte 2 (asynchronní motor končí doladční), poté stiskněte tlačitko RUN na panelu klávesnice, měnič automaticky vypočítá následující parametry:
| Výběr motoru | Parametr |
| Motor 1 | P1-06: elektrický odpor statoru synchronního stroje, P1-07: indukčnost osy D synchronního stroje, P1-08: indukčnost synchronní osy Q, P1-09: vzájemná indukčnost asynchronního motoru,P1-10: volnoběžný proud asynchronního motoru. |
| Motor 2 | A2-06: elektrický odpor statoru synchronního stroje, A2-07: indukčnost osy D synchronního stroje,A2-08: indukčnost synchronní osy Q, A1-09: vzájemná indukčnost asynchronního motoru,A1-10: volnoběžný proud asynchronního motoru. |
Parametry motoru jsou upravovány automaticky.
Pokud není možné úplně vypnout motor a zatížení, pak na P1-37 (motor 2 A2-37) zvolte 1 (asynchronní stroj, statické ladění) a poté stiskněte tlačítko RUN na panelu klávesnice.
Kapitola 5 Tabulka provozních parametrů
PP-00 se nastavuje na nenulovou hodnotu, takže se nastavuje heslo ochrany parametrů. V režimu provozních parametrů a parametrů upravených uživatelem, přístup k nabídce parametrů můžete získat pouze po zadání správného hesla. Pro zrušení hesla, nastavte PP-00 na 0. Pak nabídka parametrů v režimu parametrů upravených uživatelem není chráněna heslem. Skupina P a skupina A jsou základními provozními parametry, skupina U to jsou sledovací parametry. Symboly v tabulce funkcí jsou následující:
„☆”: znamená, že nastavenou hodnotu parametru je možno změnit ve stavu zastavení a provozu měniče frekvence;
„★”: znamená, že nastavenou hodnotu není možné změnit během provozu měniče frekvence;
„•”: znamená, že hodnota tohoto parametru je fakticky naměřenou hodnotou, także ji nelze měnit;
„*”: znamená, že parametr má „Tovární nastavení“ a může být nastaven pouze výrobcem a uživatel má zakázáno jej měnit.
Tabulka základních provozních parametrů:
| Kód | Název | Nastavení | Výchozí | Změna |
| Základní provozní skupina P0 | ||||
| P0-00 | Typ zobrazení G / P | 1: Typ G (model s konstantním točivým momentem)2: Typ P (model s ventilátorem a zátěží – čerpadlem) | Závisí na typu stroje | ● |
| P0-01 | Režim ovládání motoru 1 | 0: Bez vektorového řízení snímače rychlosti (SVC)1: Vektorové řízení snímače rychlosti (FVC)2: Řízení U/f | 0 | ★ |
| P0-02 | Volba zdroje příkazů | 0: Kanál CMD panelu operátora (LED dioda vypnutá)1: Kanál CMD svorky (LED dioda svítí)2: Kanál CMD (LED dioda blíká) | 0 | ☆ |
| P0-03 | Volba hlavního zdroje frekvence X. | 0: digitální nastavení (referenční frekvenci P0-08, nahoru / dolů můžete upravit, existuje paměť po výpadku napájení)1: digitální nastavení (referenční frekvenci P0-08, nahoru / dolů můžete upravit, bez paměti po výpadku napájení)2: AI13: AI24: AI35: nastavení pulsů (DI5)6: vícestavový příkaz7: jednoduchý PLC8: PID9: nastavení komunikace | 0 | ★ |
| P0-04 | Volba pomocného zdroje frekvence Y | Jako P0-03 (jako volba hlavního zdroje frekvence X) | 0 | ★ |
| P0-05 | Volba rozsahu pomocného zdroje naložené frekvence Y | 0: Pokud jde o maximální frekvenci1: Pokud jde o zdroj frekvence X | 0 | ☆ |
| P0-06 | Volba rozsahu pomocného zdroje naložené frekvence Y | 0%~150% | 100% | ☆ |
| P0-07 | Volba zdroje naložené frekvence | Bity: Volba zdroje frekvence 0: Hlavní zdroj frekvence X1: Výsledc hlavní a pomocné operace (Závislost akce závisí na desetinném čísle)2: Přepínač hlavního zdroje frekvence X a pomocného zdroje frekvence Y3: Hlavní zdroj frekvence X, přepínač výsledku hlavní a pomocné operace,4: Pomocný zdroj frekvence Y, přepínač výsledku hlavní a pomocné operaceDesetinné: závislost operace hlavního a pomocného zdroje frekvence0: Hlavní + pomocné1: Ilavní - pomocné2: Max. ze dvou3: Min. ze dvou | 00 | ☆ |
| P0-08 | Referenční frekvence | 0.00Hz ~ max. frekvence (P0-10) | 50.00Hz | ☆ |
| P0-09 | Směr chodu | 1stejný2opačný | 0 | ☆ |
| P0-10 | Max. frekvence | 50.00Hz~ 600.00Hz | 50.00Hz | ★ |
| P0-11 | Zdroj horní frekvence | 0: nastavení P0-121: AI1; 2: AI2; 3: AI3; 4: nastavení pulsu5: nastavení komunikace | 0 | ★ |
| P0-12 | Horní frekvence | Horní frekvence P0-14 ~ maximální frekvence P0-10 | 50.00Hz | ☆ |
| P0-13 | Přesunutí horní frekvence | 0.00Hz~max. frekvence P0-10 | 0.00Hz | ☆ |
Technické parametry vysokoučinného měniče frekvence
| P0-14 | Spodní frekvence | 0.00Hz~horní frekvence P0-12 | 0.00Hz | ☆ |
| P0-15 | Nosná frekvence | 0.5kHz~16.0kHz | typ stroje | ☆ |
| P0-16 | Nosná frekvence se přizpůsobuje teplotě | 0: ne1: ano | 1 | ☆ |
| P0-17 | Doba zrychlení 1 | 0.00s~65000s | typ stroje | ☆ |
| P0-18 | Doba zastavení 1 | 0.00s~65000s | typ stroje | ☆ |
| P0-19 | Jednotka doby zrychlení /zastavení | 0: 1s1: 0.1s2: 0.01s | 1 | ★ |
| P0-21 | Frekvence polarizace zdrojenaložené pomocné frekvence | 0.00Hz~max. frekvence P0-10 | 0.00Hz | ☆ |
| P0-22 | Rozlišení frekvenčního přikazu | 1: 0.1Hz2: 0.01Hz | 2 | ★ |
| P0-23 | Volba paměti uchovánídigitálního zadávání frekvence | 0: bez paměti 1: pamět' | 0 | ☆ |
| P0-24 | Výbčr motoru | 0: Motor 1, 1: Motor 2 | 0 | ★ |
| P0-25 | Referenční frekvence dobryzrychlení / zastavení | 0: Max. frekvence (P0-10)1: Referenční frekvence2: 100Hz | 0 | ★ |
| P0-26 | Standardní frekyenční příkazv systému UP / DOWN | 0: Provozní frekvence, 1: Referenční frekvence | 0 | ★ |
| Kód | Název | Nastavení | Výchozí | Změna |
| P0-27 | Zdroj frekvence a zdroj příkazův balíčku | Bity: příkaz z ovládacího panelu váže zdroj frekvence0: Nesouvisí1: Digitální referenční frekvence2: AI13: AI24: AI35: Nastavení PULSE (DI5)6: Multispeed (volba konstantní rychlosti)7: Jednoduché PLC8: PID9: Nastavení komunikaceDesitky na displeji: příkaz svorky váže zdroj frekvenceStovky: příkaz komunikace váže zdroj frckvenceTisíce: automatický provoz váže zdroj frekvence | 0000 | ☆ |
| P0-28 | Druh rozšířující komunikační karty | 0: Komunikační karta Modbus1: Rezcerva2: Rezcerva3: Komunikační karta CANlink | 0 | ☆ |
| Skupina P1. Parametry motoru 1 | ||||
| P1-00 | Výběr typu motoru | 0: běžný asynchronní motor1: asynchronní motor s proměnnou frekvencí | 0 | ★ |
| P1-01 | Jmenovitý výkon motoru | 0.1kW~1000.0kW | typ stroje | ★ |
| P1-02 | Jmenovité napětí motoru | 1V~400V | typ stroje | ★ |
| P1-03 | Jmenovitý proud motoru | 0.01A~655.35A (výkon měniče <=55kW)0.1A~6553.5A (výkon měniče >55kW) | typ stroje | ★ |
| P1-04 | Jmenovitá frekvence motoru | 0.01Hz~ max. frekvence | typ stroje | ★ |
| P1-05 | Jmenovité otáčky motoru | 1 ot./min. ~65535 ot./min. | typ stroje | ★ |
| P1-06 | Elektrický odpor statoruasynchronního motoru | 0.001Ω~65.535Ω (výkon měniče <=55kW)0.0001Ω~6.5535Ω (výkon měniče >55kW) | Ladění | ★ |
| P1-07 | Elektrický odpor rotoruasynchronního motoru | 0.001Ω~65.535Ω (výkon měniče <=55kW)0.0001Ω~6.5535Ω (výkon měniče >55kW) | Ladění | ★ |
| P1-08 | Indukční reaktance svoruasynchronního motoru | 0.01mH~655.35mH(výkon měniče <=55kW)0.001mH~65.535mH(výkon měniče >55kW) | Parametrladění | ★ |
| P1-09 | Indukční vzájemná reaktanceasynchronního motoru | 0.1mH~6553.5mH(výkon měniče <=55kW)0.01mH~655.35mH(výkon měniče >55kW) | Parametrladění | ★ |
Technické parametry vysokoučinného měniče frekvence
| P1-10 | Proud asynchronní motoru bez zátěže | 0.01A~P1-03 (výkon měniče <=55kW)0.1A~P1-03 (výkon měniče >55kW) | Parametr ladění | ★ |
| Kód | Název | Nastavení | Výchozí | Změna | |
| P1-27 | Číslo řádku kodéru | 1~65535 | 1024 | ★ | |
| P1-28 | Typ kodéru | 0: Inkrementální enkodér ABZ 1: Rezerva2: Rotační transformátor | 0 | ★ | |
| P1-30 | Sekvence fází AB inkrementálního enkodéru ABZ | 0: dopředu1: dozadu | 0 | ★ | |
| P1-34 | Počet półových párů rotačního transformátoru | 1~65535 | 1 | ★ | |
| P1-36 | Čas detekce odpojení PG ve zpětn vazbě rychlosti | 0.0: žádná akce0.1s ~10.0s | 0.0 | ★ | |
| F1-37 | Volba ladční | 0: Žádná akce1: Statické ladění asynchronního motoru2: Kompletní vyladění asynchronního motoru | 0 | ★ | |
| Skupina P2 - Parametry vektorového řízení prvního motoru | |||||
| P2-00 | Proporcionální zesílení rychlostní smyčky 1 | 1~100 | 30 | ☆ | |
| P2-01 | Doba integrace rychlostní smyčky 1 | 0.01s ~10.00s | 0.50s | ☆ | |
| P2-02 | Frekvence spínání 1 | 0.00 ~P2-05 | 5.00Hz | ☆ | |
| P2-03 | Proporcionální zesílení rychlostní smyčky 2 | 1~100 | 20 | ☆ | |
| P2-04 | Doba integrace rychlostní smyčky 2 | 0.01s ~10.00s | 1.00s | ☆ | |
| P2-05 | Frekvence spínání 2 | P2-02 ~max. frekvence | 10.00Hz | ☆ | |
| P2-06 | Zesílení skluzu vektorového řízení | 50% ~200% | 100% | ☆ | |
| P2-07 | Časová konstanta pro filtr rychlostní smyčky | 0.000s ~0.100s | 0.000s | ☆ | |
| P2-08 | Vektorové řízení zesílení excitovaného stavu | 0~200 | 64 | ☆ | |
| P2-09 | Zdroj horní meze v režimu řízení rychlostí | 0: nastavení kódu funkce P 2-10 1: AI12: AI23: AI34: nastavení pulzu (PULSE)5: nastavení komunikace6: MIN (AI1, AI2)7: MAX (AI1, AI2)Celá stupnice možností 1-7 odpovídá P2-10 | 0 | ☆ | |
| P2-10 | Digitální nastavení točivého momentu v režimu řízení otáček | 0.0% ~200.0% | 150.0% | ☆ | |
| P2-13 | Proporcionální zesílení excitovaného stavu | 0~60000 | 2000 | ☆ | |
| P2-14 | Integrální zesílení excitovaného stavu | 0~60000 | 1300 | ☆ | |
| P2-15 | Proporcionální zesílení regulace točivého momentu | 0~60000 | 2000 | ☆ | |
| Kód | Název | Nastavení | Výchozí | Změna |
| P2-16 | Zesilení integrace regulace točivého momentu | 0~60000 | 1300 | ☆ |
| Parametry řízení U/f ve skupině P3 | ||||
| P3-00 | Nastavení křivky U/f | 0: přímka U/f1: vícebodová čára U/f2: čtverec U/f3: 1,2 výkonu U/f4: 1,4 výkonu U/f6: 1,6 výkonu U/f8: 1,8 výkonu U/f9: Vyhrazeno10: Režim úplné separace U/f11: Režim poloviční separace U/f | 0 | ★ |
Technické parametry vysokoučinného měniče frekvence
| P3-01 | Zvýšení točivého momentu | 0.0% : (automatické zvýšení točivého momentu)0.1%~30.0% | typ stroje | ☆ |
| P3-02 | Frekvence vypnutí zesílení točivého momentu | 0.00Hz~max. frekvence | 50.00Hz | ★ |
| P3-03 | Bod 1 frekvence U/f | 0.00Hz~P3-05 | 0.00Hz | ★ |
| P3-04 | Bod 1 napětí U/f | 0.0%~100.0% | 0.0% | ★ |
| P3-05 | Bod 2 frekvence U/f | P3-03~P3-07 | 0.00Hz | ★ |
| P3-06 | Bod 2 napětí U/f | 0.0%~100.0% | 0.0% | ★ |
| P3-07 | Bod 3 frekvence U/f | P3-05~jmenovitá frekvence motoru (P1-04) | 0.00Hz | ★ |
| P3-08 | Bod 3 napětí U/f | 0.0%~100.0% | 0.0% | ★ |
| P3-09 | Zesílení kompenzace skluzu U/f | 0.0%~200.0% | 0.0% | ☆ |
| P3-10 | Zesílení nadměrné excitace U/f | 0~200 | 64 | ☆ |
| P3-11 | Zesílení tlumení oscilace U/f | 0~100 | typ stroje | ☆ |
| P3-13 | Izolovaný zdroj napětí UF | 0 : digitální nastavení (P3-14) 1: AI12: AI23: AI34: nastavení pulzu (DI5)5: Vícestavový příkaz6: PLC7: PID8: nastavení komunikacePoznámka: 100,0% odpovídá jmenovitému napětí motoru | 0 | ☆ |
| P3-14 | Digitální nastavení izolovaného napětí UF | 0V~jmenovité napětí motoru | 0V | ☆ |
| P3-15 | Doba nárůstu izolovaného napětí UF | 0.0s~1000.0sPoznámka: doba změny napětí z 0 V na jmenovité napětí motoru | 0.0s | ☆ |
| Kód | Název | Nastavení | Výchozí | Změna |
| Skupina P4. Vstupní svorky. | ||||
| P4-00 | Volba funkce svorky DI1 | 0: Bez funkce1: Chod vpřed (FWD)2: Zpětný chod (REV)3: Řízení třívodičovým chodem4: Impulsování (zkušební chod) vpřed (FJOG)5: Impulsování vzad (RJOG)6: NAIIORU7: DOLŮ8: Zastavení volnoběchem | 1 | ★ |
| P4-01 | Volba funkce svorky DI2 | 4 | ★ | |
| P4-02 | Volba funkce svorky DI3 | 9: Resetování chyby (RESET)10: Zastavení operace11: Normální otevřený vstup externí poruchy12: Vícestavový příkaz svorka 113: Vícestavový příkaz svorka 214: Vícestavový příkaz svorka 315: Vícestavový příkaz svorka 416: Svorka volby doby zrychlení / zastavení 117: Svorka volby doby zrychlení / zastavení 218: Spínání zdroje frekvence19: Vymazání nastavení NAIIORU / DOLŮ (svorka a klávesnice)20: Svorka přepínání příkazů chodu21: Zákaz zrychlení / zastavení22: Pauza PID23: Resetování stavu PLC24: Přerušení frekvence kolísání25: Vstup čítače26: Resetování čítače27: Vstup sčítání délky28: Resetování délky29: Ovládání momentu vypnuto30: Vstup pulzní frekvence (pro DI5) | 9 | ★ |
| P4-03 | Volba funkce svorky DI4 | 12 | ★ | |
| P4-04 | Volba funkce svorky DI5 | 13 | ★ | |
| P4-05 | Volba funkce svorky DI6 | 0 | ★ | |
| P4-06 | Volba funkce svorky DI7 | 0 | ★ | |
Technické parametry vysokoučinného měniče frekvence
| P4-07 | Volba funkce svorky DI8 | 36: Externí terminál 137: Svorka přepinání ovládacích příkazů 238: Přerušení integrace PID39: Přepínání zdroje frekvence X a referenční frekvence40: Přepínání zdroje frekvence Y a referenční frekvence | 0 | ★ |
| P4-08 | Volba funkce svorky DI9 | 41: Svorka volby motoru 142: Svorka volby motoru 243: Přepínání parametrů PID44: Chyba definována uživatelem 145: Chyba definována uživatelem 2 | 0 | ★ |
| P4-09 | Volba funkce svorky DI10 | 46: Spínač ovládání rychlosti / ovládání točivého momentu47: Nouzové zastavení48: Svorka externího zastavení 249: Zpomalené brzdění stejnosměrným proudem50: Doba provozu vymazána51-59: Vyhrazeno |
| Kód | Název | Nastavení | Výchozí | Změna |
| P4-10 | Doba filtrování DI | 0.000s~1.000s | 0.010s | ☆ |
| P4-11 | Režim příkazů svorek | 0: dvouvodičové 11: dvouvodičové 22: třívodičové 13: třívodičové 2 | 0 | ★ |
| P4-12 | Rychlost změny svorek NAHORU / DOLŮ | 0.001Hz/s~65.535Hz/s | 1.001Hz/s | ☆ |
| P4-13 | Minimální hodnota křivky AI1 na vstupu | 0.00V~P4-15 | 0.00V | ☆ |
| P4-14 | Nastavcní křivky AI1 na vstupu | -100.0%~+100.0% | 0.0% | ☆ |
| P4-15 | Maximální hodnota křivky AI1 na vstupu | P4-13 ~+10.00V | 10.00V | ☆ |
| P4-16 | Nastavení křivky AI1 na vstupu | -100.0%~+100.0% | 100.0% | ☆ |
| P4-17 | Doba filtrování AI1 | 0.00s~10.00s | 0.10s | ☆ |
| P4-18 | Minimální hodnota křivky AI2 na vstupu | 0.00V~P4-20 | 0.00V | ☆ |
| P4-19 | Nastavení křivky AI2 na vstupu | -100.0%~+100.0% | 0.0% | ☆ |
| P4-20 | Maximální hodnota křivky AI2 na vstupu | P4-18 ~+10.00V | 10.00V | ☆ |
| P4-21 | Nastavení křivky AI2 na vstupu | -100.0%~+100.0% | 100.0% | ☆ |
| P4-22 | Doba filtrování AI2 | 0.00s~10.00s | 0.10s | ☆ |
| P4-23 | Minimální hodnota křivky AI3 na vstupu | -10.00V~P4-25 | -10.00V | ☆ |
| P4-24 | Nastavení křivky AI 3 na vstupu | -100.0%~+100.0% | -100.0% | ☆ |
| P4-25 | Maximální hodnota křivky AI3 na vstupu | P4-23 ~+10.00V | 10.00V | ☆ |
| P4-26 | Nastavení křivky AI 3 na vstupu | -100.0%~+100.0% | 100.0% | ☆ |
| P4-27 | Doba filtrování AI3 | 0.00s~10.00s | 0.10s | ☆ |
| P4-28 | Minimální hodnota na pulzním vstupu | 0.00kHz~P4-30 | 0.00kHz | ☆ |
| P4-29 | Nastavení pulzního vstupu pro minimální hodnotu | -100.0%~100.0% | 0.0% | ☆ |
| P4-30 | Maximální hodnota na pulzním vstupu | P4-28 ~100.00kHz | 50.00kHz | ☆ |
| P4-31 | Nastavení pulzního vstupu pro maximální hodnotu | -100.0%~100.0% | 100.0% | ☆ |
| P4-32 | Doba filtrování PULZU | 0.00s~10.00s | 0.10s | ☆ |
| P4-33 | Výběr křivky AI | Číslice jednotek: výběr křivky AI11: křivka 1 (2 body, viz P4-13~P4-16)2: křivka 2 (2 body, viz P4-18~P4-21)3: křivka 3 (2 body, viz P4-23~P4-26)4: křivka 4 (4 body, viz A6-00~A6-07)5: křivka 5 (4 body, viz A6-08~A6-15)Desitky: Výběr křivky AI2, stejně jako výšeStovky: Výběr křivky AI2, stejně | 321 | ☆ |
| P4-34 | AI je pod nastavením min. vstupu | Číslice jednotek: AI1 je pod nastavením min. vstupu 0: odpovídá nastavení min. vstupu 1: 0,0%Desitky: AI2 je pod nastavením min. vstupu AI3 je pod nastavením min. vstupu | 000 | ☆ |
Technické parametry vysokoučinného měniče frekvence
| P4-35 | Doba zpoždění DI1 | 0.0s~3600.0s | 0.0s | ★ |
| P4-36 | Doba zpoždění DI2 | 0.0s~3600.0s | 0.0s | ★ |
| P4-37 | Doba zpoždění DI3 | 0.0s~3600.0s | 0.0s | ★ |
| Kód | Název | Nastavení | Výchozí | Změna |
| P4-38 | Provozní režim svorky 1 DI | 0: aktivní vysoký1: aktivní nízkýČíslice jednotek: DI1 Desítky: DI2 Stovky: DI3Tisíce: DI4 Desítky tisíc: DI15 | 00000 | ★ |
| P4-39 | Provozní režim svorky 2 DI | 0: aktivní vysoký1: aktivní nízkýČíslice jednotek: DI6 Desítky: DI7 Stovky: DI8Tisíce: DI9 Desítky tisíc: DI10 | 00000 | ★ |
| Výstupní svorka skupiny P5 | ||||
| P5-00 | Provozní režim výstupu FM | 1: pulzní výstup (FMP)2: dvoustavový výstup (FMR) 0 | ☆ | |
| P5-01 | Výběr funkcí výstupu FMR | 0: Bez výstupu1: Provoz měniče frekvence2: Výstup chyby (prostoje)3: Výstup detekce úrovně frekvence FDT14: Dosažení frekvence | 0 | ☆ |
| P5-02 | Výběr funkcí relé ovládacího panelu (T / A-T / B-T / C) | 2 | ☆ | |
| P5-03 | Výběr funkcí relé rozšířující karty (P / A-P / B-P / C) | 0 | ☆ | |
| P5-04 | Výběr funkcí výstupu DO1 | 6: Vstupní alarm přetížení motoru7: Vstupní alarm přetížení měniče8: Sčítaná hodnota dosáhla hodnotynastavené9: Překročení nastavení10: Dosažení délky11: Cyklus PLC dokončen12: Nastavení celkové doby provozu13: Frekvenční práh14: Práh točivého momentu15: Připraven ke spuštění16: AI1> AI217: Horní frekvenční limit dosažen18: Spodní frekvenční limit dosažen19: Výstup poklesu napětí21: Umístění dokončeno (vyhrazeno)22: Umístění (vyhrazeno)23: Provoz s nulovou rychlostí 2 (také vypnutí výstupu)24: Nastavení celkové doby zapnutí25: Výstup detekce frekvenční úrovně FDT226: 1 k výstupní frekvenci27: 2 k výstupní frekvenci28: 1 k výstupnímu proudu29: 2 k výstupnímu proudu30: Timing (chronometráž) k výstupu31: Překročení vstupu AI132: Provádění33: Zpětný chod34: Nulový stav proudu35: Teplota modulu dosažena36: Limitní hodnota výstupního proudu37: Spodní limit dosažení frekvence (výstup stop)38: Výstup alarmu (pokračování)39: Vstupní alarm nadměrné teploty motoru40: Překročení doby provozu | 4 | ☆ |
| P5-05 | Výběr výstupu rozšířující karty DO2 | |||
| Kód | Název | Nastavení | Výchozí | Změna |
| P5-06 | Výběr funkcí výstupu FMP | 0: Provozní frekvence1: Frekvence nastavení2: Výstupní proud3: Výstupní moment4: Výstupní výkon5: Výstupní napčtí6: Pulzní vstup(100% odpovídá 100,0 kHz) | 0 | ☆ |
| P5-07 | Výběr funkcí výstupu AO1 | 0 | ☆ |
Technické parametry vysokoučinného měniče frekvence
| P5-08 | Výběr funkcí výstupu rozšířující karty AO2 | 7: AI18: AI29: AI3 (rozšířující karta)10: Délka11: Hodnota12: Nastavení komunikace13: Otáčky motoru14: Výstupní proud (100,0% to 1000,0 A)15: Výstupní napětí (100,0% to 1000,0 V)16: Výhrazeno | 1 | ☆ |
| P5-09 | Maximální výstupní frekvence FMP | 0.01kHz ~ 100.00kHz | 50.00kHz | ☆ |
| P5-10 | Koeficient posunutí nulového bodu AO1 | -100.0% ~ +100.0% | 0.0% | ☆ |
| P5-11 | Zesílení AO1 | -10.00 ~ +10.00 | 1.00 | ☆ |
| P5-12 | Koeficient posunutí nulového bodu rozšířující karty AO2 | -100.0% ~ +100.0% | 0.0% | ☆ |
| P5-13 | Zesílení rozšířující karty AO2 | -10.00 ~ +10.00 | 1.00 | ☆ |
| P5-17 | Doba zpoždění výstupu FMR | 0.0s ~ 3600.0s | 0.0s | ☆ |
| P5-18 | Doba zpoždění výstupu RELAY1 | 0.0s ~ 3600.0s | 0.0s | ☆ |
| P5-19 | Doba zpoždění výstupu RELAY2 | 0.0s ~ 3600.0s | 0.0s | ☆ |
| P5-20 | Doba zpoždění výstupu DO1 | 0.0s ~ 3600.0s | 0.0s | ☆ |
| P5-21 | Doba zpoždění výstupu DO2 | 0.0s ~ 3600.0s | 0.0s | ☆ |
| P5-22 | Výběr správného stavu výstupní svorky DO | 0: pozitivní logika1: negativní logikaČíslice jednotek: FMR Desítky: RELAY 1Stovky: RELAY2 Tisíce: DO1 Desítky tisíc: DO2 | 00000 | ☆ |
| Spouštění / zastavení ovládání skupiny P6 | ||||
| P6-00 | Režim spouštění | 0: Přímý start1: Opětovné spuštění sledování rychlosti2: Zahájení vstupního vybuzení (asynchronní motor AC) | 0 | ☆ |
| P6-01 | Režim sledování rychlosti | 0: Start od frekvence zastavení1: Start od nulové rychlosti2: Start od max. frekvence | 0 | ★ |
| P6-02 | Rychlost sledování otáček | 1 ~ 100 | 20 | ☆ |
| P6-03 | Počáteční frekvence | 0.00Hz ~ 10.00Hz | 0.00Hz | ☆ |
| Kód | Název | Nastavení | Výchozí | Změna |
| P6-04 | Doba udržení počáteční frekvence | 0.0s~100.0s | 0.0s | ★ |
| P6-05 | Spuštění brzdného proudu DC / proud před vybuzením | 0%~100% | 0% | ★ |
| P6-06 | Doba spuštění brzdění stejnosměrným proudem / Doba vstupního vybuzení | 0.0s~100.0s | 0.0s | ★ |
| P6-07 | Režim zrychlení a zastavení | 1: Lineární zrychlení a zpomalení2: Zrychlení a zpomalení křivky S, A3: Zrychlení a zpomalení křivky S, B | 0 | ★ |
| P6-08 | Čas začátku segmentu křivky S | 0.0%~ (100.0%-P6-09) | 30.0% | ★ |
| P6-09 | Čas konce segmentu křivky S | 0.0%~ (100.0%-P6-08) | 30.0% | ★ |
| P6-10 | Režim zastavení | 0: brzdění do zastavení,1: zastavení při volnoběhu | 0 | ☆ |
| P6-11 | Počáteční frekvence brzdění stejnosměrným proudem | 0.00Hz~max. frekvence | 0.00Hz | ☆ |
| P6-12 | Doba do začátku brzdění stejnosměrným proudem | 0.0s~100.0s | 0.0s | ☆ |
| P6-13 | Brzdný proud | 0%~100% | 0% | ☆ |
| P6-14 | Dobra brzdění stejnosměrným proudem | 0.0s~100.0s | 0.0s | ☆ |
Technické parametry vysokoučinného měniče frekvence
| P6-15 | Míra použití brzdy | 0%~100% | 100% | ☆ |
| Klávesnice a displej skupiny P7 | ||||
| P7-01 | Výběr funkci tlačítka JOG | 0: Nesprávná hodnota JOG1: Přepínač kanálu CMD ovládacího panelu a dálkového kanálu CMD (svorka kanálu CMD nebo kanál CMD)2: Zpětný spínač3: Pulzování vpřed | 0 | ★ |
| P7-02 | Funkce tlačítka STOP / RESET | 0: Pouze v režimu klávesnice, funkce zastavení tlačitkem STOP / RES je aktivní1: v každém provozním režimu, funkce zastavení STOP / RES je aktivní | 1 | ☆ |
| P7-03 | Zobrazení provozních parametrů 1 | 0000 ~ FFFFBit00: provozní frekvence 1 Hz)Bit01: referenční frekvence Hz)Bit02: napětí propojovací lišty (V)Bit03: výstupní napětí (V)Bit04: výstupní proud (A)Bit05: výstupní výkon (kW)Bit06: výstupní točivý moment (%)Bit07: stav vstupu DIBit08: stav výstupu DOBit09: napětí AI1 (V)Bit10: napětí AI2 (V)Bit11: napětí AI3 (V)Bit12: sčítaná hodnotaBit13: hodnota délkyBit14: zobrazení rychlosti zatíženíBit15: referenční hodnota regulátoru PID | 1F | ☆ |
| Kód | Název | Nastavení | Výchozí | Změna |
| P7-04 | Zobrazení provozních parametrů 2 | 0000 ~ FFFF Bit00: Vazba PIDBit01: stupeň PLCBit02: Pulzní frekvence na pulzním vstupu (kHz)Bit03: Provozní frekvence 2 (Hz)Bit04: Zbývající doba provozuBit5: napětí AI1 před korekci [V]Bit6: napětí AI2 před korekci [V]Bit7: napětí AI3 před korekci [V]Bit8: lineární rychlostBit9: doba od zapnutí měniče [hod.]Bit10: doba od spuštění měniče [min.]Bit11: referenční pulzní frekvence [Hz]Bit12: referenční hodnota komunikaceBit13: Rychlost zpětné vazby kodéru (Hz)Bit14: Zobrazení hlavní frekvence X (Hz)Bit15: Zobrazení frekvence Y (Hz) | 0 | ☆ |
| P7-05 | Zobrazení parametrů v režimuzastavení | 0000~FFFFBit00: referenční frekvence (Hz)Bit01: napětí propojovací lišty (V)Bit02: Stav vstupu DIBit03: Stav výstupu DOBit04: Napětí AI1(V)Bit05: Napětí AI2 (V)Bit06: Napětí AI3 (V)Bit07: Hodnota čítačeBit08: Hodnota délkyBit09: fáze PLCBit10: Rychlost zatíženíBit11: Konfigurace PIDBit12: referenční pulzní frekvence (kHz) | 33 | ☆ |
| P7-06 | Násobitel zobrazované rychlostizatížení | 0.0001~ 6.5000 | 1.0000 | ☆ |
| P7-07 | Teplota modulu chladiče měničefrekvence | 0.0°C~ 100.0°C | - | ● |
| P7-08 | Teplota chladiče usměrňovacíhomůstku | 0.0°C~ 100.0°C | - | ● |
| P7-09 | Celková doba provozu | 0h~65535h | - | ● |
| P7-10 | Číslo výrobku | - | - | ● |
| P7-11 | Číslo verze softwaru | - | - | ● |
Technické parametry vysokoučinného měniče frekvence
| P7-12 | Počet desetinných míst při zobrazení rychlosti zatížení | 0: 0 desetinných míst1: 1 desetinné místo2: 2 desetinná místa3: 3 desetinná místa | 1 | ☆ |
| P7-13 | Celková doba od zapnutí | 0h~65535h | - | ● |
| P7-14 | Celková spotřeba energie | 0~65535KWh | - | ● |
| Pomocné funkce – skupina P8 | ||||
| P8-00 | Pulzní frekvence | 0.00Hz~ max. frekvence | 2.00Hz | ☆ |
| P8-01 | Doba pulzního zrychlení | 0.0s~6500.0s | 20.0s | ☆ |
| P8-02 | Doba zastavení impulsování | 0.0s~6500.0s | 20.0s | ☆ |
| Kód | Název | Nastavení | Výchozí | Změna |
| P8-03 | Doba zrychlení 2 | 0.0s~6500.0s | typ stroje | ☆ |
| P8-04 | Doba zastavení 2 | 0.0s~6500.0s | typ stroje | ☆ |
| P8-05 | Doba zrychlení 3 | 0.0s~6500.0s | typ stroje | ☆ |
| P8-06 | Čas zastavení 3 | 0.0s~6500.0s | typ stroje | ☆ |
| P8-07 | Čas zrychlení 4 | 0.0s~6500.0s | typ stroje | ☆ |
| P8-08 | Čas zastavení 4 | 0.0s~6500.0s | typ stroje | ☆ |
| P8-09 | Skoková frekvence 1 | 0.00Hz~ max. frekvence | 0.00Hz | ☆ |
| P8-10 | Skoková frekvence 2 | 0.00Hz~ max. frekvence | 0.00Hz | ☆ |
| P8-11 | Rozsah skokové frekvence | 0.00Hz~ max. frekvence | 0.01Hz | ☆ |
| P8-12 | Doba mezi změnou směru otáček | 0.0s~3000.0s | 0.0s | ☆ |
| P8-13 | Povolení zpětných otáček | 0: povolení 1: zákaz | 0 | ☆ |
| P8-14 | Provozní režim s referenční frekvenci nižší než spodní limit | 0: provoz na spodní mezní frekvenci1: zastavení2: provoz s nulovou rychlostí | 0 | ☆ |
| P8-15 | Vyvažování zatížení | 0.00Hz~ 10.00Hz | 0.00Hz | ☆ |
| P8-16 | Práh celkové doby zapojení | 0h~65000h | 0h | ☆ |
| P8-17 | Práh celkové provozní doby | 0h~65000h | 0h | ☆ |
| P8-18 | Ochrana startu | 0: bez ochrany 1: ochrana | 0 | ☆ |
| P8-19 | Frekvenční práh | 0.00Hz~ max. frekvence | 50.00Hz | ☆ |
| P8-20 | Hystereze frekvenčního prahu | 0.0%~100.0% (úroveň FDT1) | 5.0% | ☆ |
| P8-21 | Rozsah detekce kolem nastavené frekvence | 0.0%~100.0% (max. frekvence.) | 0.0% | ☆ |
| P8-22 | Aktivita frekvenční prahů při zrychlování / zastavení | 0: neaktivní 1: aktivní | 0 | ☆ |
| P8-25 | Frekvence přepínání mezi časem zrychlení 1 a časem zrychlení 2 | 0.00Hz~ max. frekvence | 0.00Hz | ☆ |
| P8-26 | Frekvence přepínání mezi časem zrychlení 1 a časem zrychlení 2 | 0.00Hz~ max. frekvence | 0.00Hz | ☆ |
| P8-27 | Vysoká priorita příkazu zkušebního chodu z terminálu | 0: neaktivní1: aktivní | 0 | ☆ |
| P8-28 | Hodnota detekce frekvence | 0.00Hz~ max. frekvence | 50.00Hz | ☆ |
| P8-29 | Hodnota hystereze detekce frekvence | 0.0%~100.0% (úroveň FDT2) | 5.0% | ☆ |
| P8-30 | Libovolná hodnota detekce frekvence 1 | 0.00Hz~ max. frekvence | 50.00Hz | ☆ |
| P8-31 | Libovolná šířka detekce frekvence 1 | 0.0%~100.0% (max. frekvence) | 0.0% | ☆ |
| P8-32 | Libovolná hodnota detekce frekvence 2 | 0.00Hz~ max. frekvence | 50.00Hz | ☆ |
| P8-33 | Libovolná šířka detekce frekvence | 0.0%~100.0% (max. frekvence) | 0.0% | ☆ |
| P8-34 | Práh detekce nulového proudu | 0.0%~300.0%Jmenovitý proud 100.0% | 5.0% | ☆ |
| P8-35 | Doba zpoždění detekce nulového proudu | 0.01s~600.00s | 0.10s | ☆ |
| P8-36 | Ihraniční hodnota výstupního proudu | 1.1 % (bez detckce)1.1 %~300.0% (jmenovitý proud motoru) | 200.0% | ☆ |
| P8-37 | Doba zpoždění detekce prahu výstupního proudu | 0.00s~600.00s | 0.00s | ☆ |
| P8-38 | Dosažený libovolný proud 1 | 0.0%~300.0% (jmenovitý proud motoru) | 100.0% | ☆ |
| P8-39 | Šířka dosaženého libovolného proudu 1 | 0.0%~300.0% (jmenovitý proud motoru) | 0.0% | ☆ |
| P8-40 | Dosažený libovolný proud 2 | 0.0%~300.0% (jmenovitý proud motoru) | 100.0% | ☆ |
| P8-41 | Šířka dosaženého libovolného proudu 2 | 0.0%~300.0% (jmenovitý proud motoru) | 0.0% | ☆ |
| P8-42 | Výběr funkcí časomíry | 0: neaktivní 1: aktivní | 0 | ☆ |
| P8-43 | Výběr doby provozu časomíry | 0: nastavení P8-44; 1: A11; 2: A12; 3: AI3 Rozsah analogového vstupu odpovídá P8-44 | ☆ | |
| P8-44 | Doba provozu časomíry | 0.0Min.~6500.0Min. | 0.0Min. | ☆ |
| P8-45 | Spodní prahová hodnota ochrany vstupního napětí AI1 | 0.00V~P8-46 | 3.10V | ☆ |
| P8-46 | Horní prahová hodnota ochrany vstupního napětí AI1 | P8-45 ~10.00V | 6.80V | ☆ |
| P8-47 | Dosažená teplota modulu | 0°C~100°C | 75°C | ☆ |
| P8-48 | Ovládání ventilátoru | 0: Pouze při provozu měniče 1: Po celou dobu | 0 | ☆ |
| P8-49 | Obnovovací frekvence | Frekvence spánku (P8-51) ~ maximální frekvence (P0-10) | 0.00Hz | ☆ |
| P8-50 | Zpoždění obnovení | 0.0s~6500.0s | 0.0s | ☆ |
| P8-51 | Frekvence spánku | 0.00Hz~ frekvence obnovení (P8-49) | 0.00Hz | ☆ |
| P8-52 | Zpoždění přechodu do režimu spánku | 0.0s~6500.0s | 0.0s | ☆ |
| P8-53 | Maximální celková doba provozu | 0.0Min.~6500.0Min. | 0.0Min- | ☆ |
| Skupina F09: Chyby a ochrana | ||||
| P9-00 | Výběr ochrany motoru proti přetížení | 0: povoleno 1: zakázáno | 1 | ☆ |
| P9-01 | Zesílení ochrany motoru proti přetížení | 0.20~10.00 | 1.00 | ☆ |
| P9-02 | Úrovně spouštění výstrahy před přetížením motoru | 50%~100% | 80% | ☆ |
| P9-03 | Zesílení ochrany před cukáním | 0~100 | 0 | ☆ |
| P9-04 | Ochranné napětí proti cukání způsobeného přepčtím | 120%~150% | 130% | ☆ |
| P9-05 | Nárůst nadproudového zablokování | 0~100 | 20 | ☆ |
| P9-06 | Proud ochrany proti nadproudovému zablokování | 100%~200% | 150% | ☆ |
| P9-07 | Ochrana před zkratem na kostru | 0: neaktivní 1: aktivní | 1 | ☆ |
| P9-09 | Automatický reset chyby | 0~20 | 0 | ☆ |
| P9-10 | Aktivita výstupu DO během automatického resetu chyby | 0: neaktivní 1: aktivní | 0 | ☆ |
| P9-11 | Doba mezi výskytem chyby a automatickým resetem této chyby | 0.1s~100.0s | 1.0s | ☆ |
| P9-12 | Ochrana před ztrátou vstupní fáze | 0: povolcno 1: zakázáno | 1 | ☆ |
| P9-13 | Ochrana před ztrátou výstupní fáze | 0: povoleno 1: zakázáno | 1 | ☆ |
| Kód | Název | Nastavení | Výchozí | Změna |
Technické parametry vysokoúčinného měniče frekvence
| P9-14 | První chyba | 0: bez chyby1: vyhrazeno2: nadproud při zrychlení3: nadproud při zastavení4: nadproud při konstantní rychlosti5: přepětí při zrychlení6: přepětí při zastavení7: přepětí při konstantní rychlosti8: přetížení bufferu odporu9: pokles napěti10: přetížení měniče11: přetížení motoru12: ztráta vstupní fáze | — | • |
| P9-15 | Druhá chyba | 13: ztráta výstupní fáze14: přehřátí modulu15: chyba externích zařízení16: chyba komunikace17: chyba stykače18: chyba měření proudu19: chyba auto-tuningu motoru20: chyba kodéru / PG karty21: chyba odcětu / uložení parametrů22: hardwarová chyba měniče23: hardwarová chyba měniče24: vyhrazeno25: vyhrazeno | — | • |
| P9-16 | Druhá (poslední) chyba | 26: Překročení celkové dobry provozu27: Chyba definována uživatelem 128: Chyba definována uživatelem 229: Překročení celkové doby napájení30: zatížení se stane nulovým31: přecrušení zpětné vazby PID40: Krátký časový limit omezení proudu41: Chyba při přepínání běžícího motoru42: Nadměrná odchylka rychlosti43: Nadměrná rychlost otáčení motoru45: Přehřátí motoru51: Chyba počáteční pozice | — | • |
| P9-17 | Frekvence druhé (poslední) chyby | — | — | • |
| P9-18 | Proud druhé (poslední) chyby | — | — | • |
| P9-19 | Napětí na liště během druhé (poslední) chybě | — | — | • |
| P9-20 | Stav svorky vstupů během druhé (poslední) chyby | — | — | • |
| P9-21 | Stav svorky výstupů během druhé (poslední) chyby | — | — | • |
| P9-22 | Stav měniče během druhé (poslední) chyby | — | — | • |
| P9-23 | Doba napájení měniče během druhé (poslední) chyby | — | — | • |
| P9-24 | Doba provozu měniče během druhé (poslední) chyby | — | — | • |
| P9-27 | Frekvence druhé chyby | — | — | • |
| P9-28 | Proud druhé chyby | — | — | • |
| P9-29 | Napětí na liště u druhé chyby | — | — | • |
| P9-30 | Stav svorky vstupů u druhé chyby | — | — | • |
| P9-31 | Stav svorky výstupů u druhé chyby | — | — | • |
| P9-32 | Stav měniče u druhé chyby | — | — | • |
| P9-33 | Doba napájení u druhé chyby | — | — | • |
| P9-34 | Doba provozu u druhé chyby | — | — | • |
| P9-37 | Frekvence první chyby | — | — | • |
| P9-38 | Proud první chyby | — | — | • |
| P9-39 | Napětí na propojovací liště u první chyby | — | — | • |
Technické parametry vysokoúčinného měniče frekvence
| P9-40 | Frekvence první chyby | — | — | ● |
| P9-41 | Stav výstupů u první chyby | — | — | ● |
| P9-42 | Stav měniče u první chyby | — | — | ● |
| P9-43 | Doba napájení u první chyby | — | — | ● |
| P9-44 | Doba provozu u první chyby | — | — | ● |
| P9-47 | Nápravná opatření pro chybu typu 1 | Číslice jednotek: přetížení motoru (11)0: zastavení volnoběhem1: zastavcní, přechod do režimu stop2: pokračování v choduDesítky: ztráta fáze na vstupu 12)Číslice jednotek: 100 ztráta fáze na výstupu (13)Tisíce: chyba externích zařizení (15)Desítky tisic: chyba komunikace (16) | 00000 | ☆ |
| P9-48 | Nápravná opatření pro chybu typu 2 | Číslice jednotek: chyba kodéru / PG karty (20)0: Zastavení volnoběhem10: Chyba čtečky kódů (21)0: Zastavení volnoběhem1: Zastavcní, přechod do režimu stop100: Vyhrazeno1000: Přehřátí motoru (25)10000: Překročení doby provozu (26) | 00000 | ☆ |
| Kód | Název | Nastavení | Výchozí | Změna |
| P9-49 | Nápravná opatření pro chybu 3 | Číslice jednotek: Chyba definována uživatelem 1 (27)0: Zastavení volnoběhem1: Zastavení, přechod do režimu stop2: Pokračování v choduStovky : Překročení celkové doby provozu (29)Tisíce: zatížení se stane nulovým (30)0: Zastavení volnoběhem1: Zastavení, přechod do režimu stop2: pokračování v chodu na 7 % hodnoty jmenovité frekvence motoru a návrat na nastavenou frekvenci při opětovném zatížení motoruDesítky tisíc: ztráta zpětné vazby PID (31)0: Zastavení volnoběhem1: Zastavení, přechod do režimu stop2: pokračování v chodu | 00000 | ☆ |
| P9-50 | Nápravná opatření pro chybu 4 | Číslice jednotek: Nadměrná odchylka rychlosti (42)0: Zastavení volnoběhem1: Zastavení, přechod do režimu stop2: Pokračování v choduDesítky: Nadměrná rychlost otáček motoru (43)Stovky: Chyba počáteční pozice (51) | 00000 | ☆ |
| P9-54 | Pokračování zvolené frekvence při výskytu chyby | 0: Chod s aktuální provozní frekvencí1: Spouštění s nastavenou frekvencí2: Spouštění s horním prahem frekvence3: Chod s dolním prahem frekvence4: Chod s alternativní abnormální frekvencí | 0 | ☆ |
| P9-55 | Chyba alternativní frekvence | 60.0%~100.0% (100.0% odpovídá max. frekvenci P0-10) | 100.0% | ☆ |
| P9-56 | Typ snímače teploty motoru | 0: bez snímače teploty1: PT1002: PT1000 | 0 | ☆ |
| P9-57 | Práh ochrany motoru před přehřátím | 0°C~200°C | 110°C | ☆ |
| P9-58 | Výstražný práh přehřátí motoru | 0°C~200°C | 90°C | ☆ |
| P9-59 | Výběr způsobu reakce v případě chvilkové ztráty napětí | 0: neaktivní1: brzdění2: volnoběh do zastavení | 0 | ☆ |
| P9-60 | Vyhrazeno | P9-62~100.0% | 100.0% | ☆ |
Technické parametry vysokoúčinného měniče frekvence
| P9-61 | Doba reakce v případě ztráty napětí | 0.00s~100.00s | 0.50s | ☆ |
| P9-62 | Hodnota změny napětí pro reakci po ztrátě napájení | 60.0%~100.0% (standardní napětí propojovací lišty) | 80.0% | ☆ |
| P9-63 | Ochrana po poklesu zatížení na nulu | 0: neaktivní1: aktivní | 0 | ☆ |
| P9-64 | Úrovcň detekce poklesu zatížení na nulu | 0.0~100.0% | 10.0% | ☆ |
| P9-65 | Doba detekce poklesu zatížení na nulu | 0.0~60.0s | 1.0s | ☆ |
| P9-67 | Práh detekce nadměrné rychlosti | 0.0%~50.0% (max. frekvence) | 20.0% | ☆ |
| P9-68 | Doba detekce nadměrné rychlosti | 0.0s~60.0s | 5.0s | ☆ |
| P9-69 | Práh detekce nadměrné odchylky rychlosti | 0.0%~50.0%(max. frekvence) | 20.0% | ☆ |
| P9-70 | Doba detekce nadměrné odchylky rychlosti | 0.0s~60.0s | 0.0s | ☆ |
| Skupina PA – akce PID | ||||
| PA-00 | Výběr zdroje referenční hodnoty regulátoru PID | 0: nastavení PA-011: AI1;2: AI2;3: AI34: pulzní vstup (DI5)5: nastavení komunikace6: vicestupňové ovládání | 0 | ☆ |
| PA-01 | Referenční hodnoty PID | 0.0%~100.0% | 50.0% | ☆ |
| PA-02 | Zdroj signálu zpětné vazby PID | 0: AI1; 1: AI2; 2: AI3; 3: AI1-AI24: nastavení pulzu (DI5)5: nastavení komunikace6: AI1+AI27: MAX (|AI1|, |AI2|)8: MIN (|AI1|, |AI2|) | 0 | ☆ |
| PA-03 | Směr akce PID | 0: kladný1: záporný | 0 | ☆ |
| PA-04 | Rozsah zpětné vazby PID | 0~65535 | 1000 | ☆ |
| PA-05 | Přírůstck proporcionální složky Kp1 | 0.0~100.0 | 20.0 | ☆ |
| PA-06 | Čas integrace Tl1 | 0.01s~10.00s | 2.00s | ☆ |
| PA-07 | Čas derivace Td1 | 0.000s~10.000s | 0.000s | ☆ |
| PA-08 | Mezní frekvence pro zpětný chod PID | 0.00~max. frekvence | 2.00Hz | ☆ |
| PA-09 | Limit odchylky PID | 0.0%~100.0% | 0.0% | ☆ |
| PA-10 | Limit derivace PID | 0.00%~100.00% | 0.10% | ☆ |
| PA-11 | Změna času PID | 0.00~650.00s | 0.00s | ☆ |
| PA-12 | Doba filtrování zpětné vazby PID | 0.00~60.00s | 0.00s | ☆ |
| PA-13 | Doba výstupního filtru PID | 0.00~60.00s | 0.00s | ☆ |
| PA-14 | Vyhrazeno | - | - | ☆ |
| PA-15 | Koefficient zesílení proporcionální složky Kp2 | 0.0~100.0 | 20.0 | ☆ |
| PA-16 | Doba integrace Ti2 | 0.01s~10.00s | 2.00s | ☆ |
| PA-17 | Doba derivace Td2 | 0.000s~10.000s | 0.000s | ☆ |
| PA-18 | Podmínky přepínání parametrů PI | 0: bez přepínání1: pomoci přepínače svorek DI2: automatické přepínání na základě odchylky | 0 | ☆ |
| Kód | Název | Nastavení | Výchozí | Změna |
| PA-19 | Odchylka přepinání parametrů 1 | 0.0%~PA-20 | 20.0% | ☆ |
Technické parametry vysokoúčinného měniče frekvence
| PA-20 | Odchylka přepínání parametrů 2 | PA-19~100.0% | 80.0% | ☆ |
| PA-21 | Počáteční hodnota PID | 0.0%~100.0% | 0.0% | ☆ |
| PA-22 | Doba udržení počáteční hodnoty PID | 0.00~650.00s | 0.00s | ☆ |
| PA-23 | Max. odchylka mczi dvěma výstupy PID při provozu vpřed | 0.00%~100.00% | 1.00% | ☆ |
| PA-24 | Max. odchylka mezi dvěma výstupy PID při zpětném chodu | 0.00%~100.00% | 1.00% | ☆ |
| PA-25 | Vlastnosti PID integrátoru | Číslice jednotek: úplná separace0: Neaktivní;1: AktivníDesítky: zastavení integrace podosažení nastavené hodnoty na výstupu0: pokračování v chodu s integrací1: přerušení integrace | 00 | ☆ |
| PA-26 | Hodnota detekce ztráty zpětné vazby PID | 0.0%: bez analýzy ztráty vazby0.1%~100.0% | 0.0% | ☆ |
| PA-27 | Doba detekce ztráty zpětné vazby PID | 0.0s~20.0s | 0.0s | ☆ |
| PA-28 | Akce PID po zastavení | 0: vypnutí PID po zastavení;1: akce PID po zastavení | 0 | ☆ |
| Skupina Pb: Oscilační frekvence, délka a sčítání | ||||
| Pb-00 | Režim oscilační frekvence | 0: spojená se střední frekvencí1: spojená s maximální frekvencí | 0 | ☆ |
| Pb-01 | Amplituda oscilační frekvence | 0.0%~100.0% | 0.0% | ☆ |
| Pb-02 | Skok v oscilační frekvenci | 0.0%~50.0% | 0.0% | ☆ |
| Pb-03 | Cyklus oscilační frekvence | 0.1s~3000.0s | 10.0s | ☆ |
| Pb-04 | Koeficient doby náběhu trojúhelníkové vlny | 0.1%~100.0% | 50.0% | ☆ |
| Pb-05 | Nastaven délky | 0m~65535m | 1000m | ☆ |
| Pb-06 | Aktuální délka | 0m~65535m | 0m | ☆ |
| Pb-07 | Počet pulzů na metr | 0.1~6553.5 | 100.0 | ☆ |
| Pb-08 | Nastavení hodnoty čitače | 1~65535 | 1000 | ☆ |
| Pb-09 | Referenční hodnota čitače | 1~65535 | 1000 | ☆ |
| Skupina PC – Vícekrokové příkazy a funkce PLC | ||||
| PC-00 | Vícestavový příkaz 0 | -100.0%~100.0% | 0.0% | ☆ |
| PC-01 | Vícestavový příkaz 1 | -100.0%~100.0% | 0.0% | ☆ |
| PC-02 | Vícestavový příkaz 2 | -100.0%~100.0% | 0.0% | ☆ |
| PC-03 | Vícestavový příkaz 3 | -100.0%~100.0% | 0.0% | ☆ |
| PC-04 | Vícestavový příkaz 4 | -100.0%~100.0% | 0.0% | ☆ |
| PC-05 | Vícestavový příkaz 5 | -100.0%~100.0% | 0.0% | ☆ |
| PC-06 | Vícestavový příkaz 6 | -100.0%~100.0% | 0.0% | ☆ |
| PC-07 | Vícestavový příkaz 7 | -100.0%~100.0% | 0.0% | ☆ |
| PC-08 | Vícestavový příkaz 8 | -100.0%~100.0% | 0.0% | ☆ |
| Kód | Název | Nastavení | Výchozí | Změna |
| PC-09 | Vícestavový příkaz 9 | -100.0%~100.0% | 0.0% | ☆ |
| PC-10 | Vícestavový příkaz 10 | -100.0%~100.0% | 0.0% | ☆ |
| PC-11 | Vícestavový příkaz 11 | -100.0%~100.0% | 0.0% | ☆ |
| PC-12 | Vícestavový příkaz 12 | -100.0%~100.0% | 0.0% | ☆ |
| PC-13 | Vícestavový příkaz 13 | -100.0%~100.0% | 0.0% | ☆ |
| PC-14 | Vícestavový příkaz 14 | -100.0%~100.0% | 0.0% | ☆ |
| PC-15 | Vícestavový příkaz 15 | -100.0%~100.0% | 0.0% | ☆ |
| PC-16 | Provozní režim jednoduchého PLC | 0: zastavení po provedení jednoho cyklu1: udržování hodnoty po provedení jednoho cyklu2: opakování po provedení jednoho cyklu | 0 | ☆ |
Technické parametry vysokoúčinného měniče frekvence
| PC-17 | Výběr paměti po poruše napájení PLC | Číslice jednotek: chod po ztrátě napájení0: bez paměti po poruše napájení1: paměť po poruše napájeníDesitky: výběr paměti po zastavení0: bez paměti po zastavení1: paměť po zastavení | 00 | ☆ |
| PC-18 | Doba provozu PLC pro bod 0 | 0.0s (h) ~6553.5s (h) | 0.0s (h) | ☆ |
| PC-19 | Doba zrychlení a zastavení PLC pro bod 0 | 0 ~3 | 0 | ☆ |
| PC-20 | Doba provozu PLC pro bod 1 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-21 | Doba zrychlení a zastavení PLC pro bod 1 | 0 ~3 | 0 | ☆ |
| PC-22 | Doba provozu PLC pro bod 2 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-23 | Doba zrychlení a zastavení PLC pro bod 2 | 0 ~3 | 0 | ☆ |
| PC-24 | Doba provozu PLC pro bod 3 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-25 | Doba zrychlení a zastavení PLC pro bod 3 | 0 ~3 | 0 | ☆ |
| PC-26 | Doba provozu PLC pro bod 4 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-27 | Doba zrychlení a zastavení PLC pro bod 4 | 0 ~3 | 0 | ☆ |
| PC-28 | Doba provozu PLC pro bod 5 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-29 | Doba zrychlení a zastavení PLC pro bod 5 | 0 ~3 | 0 | ☆ |
| PC-30 | Doba provozu PLC pro bod 6 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-31 | Doba zrychlení a zastavení PLC pro bod 6 | 0 ~3 | 0 | ☆ |
| PC-32 | Doba provozu PLC pro bod 7 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-33 | Doba zrychlení a zastavení PLC pro bod 7 | 0 ~3 | 0 | ☆ |
| PC-34 | Doba provozu PLC pro bod 8 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-35 | Doba zrychlení a zastavení PLC pro bod 8 | 0 ~3 | 0 | ☆ |
| Kód | Název | Nastavení | Výchozí | Změna |
| PC-36 | Doba provozu PLC pro bod 9 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-37 | Doba zrychlení a zastavení PLC pro bod 9 | 0~3 | 0 | ☆ |
| PC-38 | Doba provozu PLC pro bod 10 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-39 | Doba zrychlení a zastavení PLC pro bod 10 | 0~3 | 0 | ☆ |
| PC-40 | Doba provozu PLC pro bod 11 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-41 | Doba zrychlení a zastavení PLC pro bod 11 | 0~3 | 0 | ☆ |
| PC-42 | Doba provozu PLC pro bod 12 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-43 | Doba zrychlení a zastavení PLC pro bod 12 | 0~3 | 0 | ☆ |
| PC-44 | Doba provozu PLC pro bod 13 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-45 | Doba zrychlení a zastavení PLC pro bod 13 | 0~3 | 0 | ☆ |
| PC-46 | Doba provozu PLC pro bod 14 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-47 | Doba zrychlení a zastavení PLC pro bod 14 | 0~3 | 0 | ☆ |
| PC-48 | Doba provozu PLC pro bod 15 | 0.0s (h)~6553.5s (h) | 0.0s (h) | ☆ |
| PC-49 | Doba zrychlení a zastavení PLC pro bod 15 | 0~3 | 0 | ☆ |
| PC-50 | Jednotka doby provozu PLC | 0: s (sekunda)1: h (hodina) | 0 | ☆ |
| PC-51 | Zadávání parametrů pro referenční bod 0 | 0: uvedený kód funkce PC-001: AI12: AI23: AI34: nastavení pulzu5: PID6: nastavení pomocí referenční frekvence (P010), upraven tlačitky UP/DOWN | 0 | ☆ |
| Skupina Pd – Komunikační parametry | ||||
| Kód | Název | Nastavení | Výchozí | Změna |
| Číslice jednotek: MODBUS 0: 300BPS | ||||
| 1: 600BPS | ||||
| 2: 1200BPS | ||||
| 3: 2400BPS | ||||
| 4: 4800BPS | ||||
| 5: 9600BPS | ||||
| 6: 19200BPS | ||||
| 7: 38400BPS | ||||
| 8: 57600BPS | ||||
| Pd-00 | Rychlost přenosu | 9: 115200BPS | ||
| Desitky: vyhrazeno | ||||
| Stovky: vyhrazeno | ||||
| Tisíce: Rychlost přenosu CANlink | 6005 | ☆ | ||
| 0: 20 | ||||
| 1: 50 | ||||
| 2: 100 | ||||
| 3: 125 | ||||
| 4: 250 | ||||
| 5: 500 | ||||
| 6: 1M | ||||
| 0: bez kontroly, formát <8, N, 2> | ||||
| Pd-01 | Formát údajů | 1: kontrola parity, formá t < 8 , E | 0 | ☆ |
| 2: kontrola liché parity, formát <8, O, 1> | ||||
| 3: bez kontroly, formát <8, N, 1> | ||||
| Pd-02 | Lokální adresa | 1~247, 0: adresa rámečku | 1 | ☆ |
| Pd-03 | Zpoždění odczyv | 0ms ~20ms | 2 | ☆ |
| Pd-04 | Doba přerušení komunikace | 0.0 (neaktivní), 0.1s~60.0s | 0.0 | ☆ |
| Jednotka na displeji: protokol MODBUS | ||||
| Pd-05 | Výběr formátu přenosu dat | 0: nestandardní protokol Modbus | 30 | |
| 1: standardní protokol Modbus | ||||
| Desetinná místa na displeji: vyhrazeno | ☆ | |||
| Pd-06 | Rozlišení pro čtení dat v komunikaci | 0: 0.01A | 0 | ☆ |
| 1: 0.1A | ||||
Skupina PE - Kódy funkcí definované uživatelem
| Kód | Název | Nastavení | Výchozí | Změna |
| PE-00 | Kód uživatelské funkce 0 | P0.10 | ☆ | |
| PE-01 | Kód uživatelské funkce 1 | P0.02 | ☆ | |
| PE-02 | Kód uživatelské funkce 2 | P0.03 | ☆ | |
| PE-03 | Kód uživatelské funkce 3 | P0.07 | ☆ | |
| PE-04 | Kód uživatelské funkce 4 | P0.08 | ☆ | |
| PE-05 | Kód uživatelské funkce 5 | P0.17 | ☆ | |
| PE-06 | Kód uživatelské funkce 6 | P0.18 | ☆ | |
| PE-07 | Kód uživatelské funkce 7 | P3.00 | ☆ | |
| PE-08 | Kód uživatelské funkce 8 | P3.01 | ☆ |
Technické parametry vysokoučinného měniče frekvence
| PE-09 | Kód uživatelské funkce 9 | P0-00 ~ PP-xxA0-00 ~ Ax-xxU0-xx~U0-xx | P4.00 | ☆ |
| PE-10 | Kód uživatelské funkce 10 | P4.01 | ☆ | |
| PE-11 | Kód uživatelské funkce 11 | P4.02 | ☆ | |
| PE-12 | Kód uživatelské funkce 12 | P5.04 | ☆ | |
| PE-13 | Kód uživatelské funkce 13 | P5.07 | ☆ | |
| PE-14 | Kód uživatelské funkce 14 | P6.00 | ☆ | |
| PE-15 | Kód uživatelské funkce 15 | P6.10 | ☆ | |
| PE-16 | Kód uživatelské funkce 16 | P0.00 | ☆ | |
| PE-17 | Kód uživatelské funkce 17 | P0.00 | ☆ | |
| PE-18 | Kód uživatelské funkce 18 | P0.00 | ☆ | |
| PE-19 | Kód uživatelské funkce 19 | P0.00 | ☆ | |
| PE-20 | Kód uživatelské funkce 20 | P0.00 | ☆ | |
| PE-21 | Kód uživatelské funkce 21 | P0.00 | ☆ | |
| PE-22 | Kód uživatelské funkce 22 | P0.00 | ☆ | |
| PE-23 | Kód uživatelské funkce 23 | P0.00 | ☆ | |
| PE-24 | Kód uživatelské funkce 24 | P0.00 | ☆ | |
| PE-25 | Kód uživatelské funkce 25 | P0.00 | ☆ | |
| PE-26 | Kód uživatelské funkce 26 | P0.00 | ☆ | |
| PE-27 | Kód uživatelské funkce 27 | P0.00 | ☆ | |
| PE-28 | Kód uživatelské funkce 28 | P0.00 | ☆ | |
| PE-29 | Kód uživatelské funkce 29 | P0.00 | ☆ | |
| Skupina PP - Správa kódů funkcí | ||||
| PP-00 | Heslo uživatele | 0~65535 | 0 | ☆ |
| PP-01 | Obnovení výchozího nastavení | 0: neobnovovat01: obnovení nastavení kromě parametrů motoru02: vymazání údajů04: aktuální záložní uživatelské parametry501: Obnovení zálohovaných uživatelských parametrů | 0 | ★ |
| PP-02 | Výběr zobrazování parametrů funkce | Číslice jednotek: výběr zobrazení skupiny U0: bez zobrazení1: zobrazeníDesítky: výběr zobrazení skupiny A0: bez zobrazení1: zobrazení | 11 | ★ |
| PP-03 | Výběr zobrazování skupiny parametrů definovaných uživatelem | Bit: výběr zobrazení skupiny parametrů definovaných uživatelem0: bez zobrazení1: zobrazeníČíslice jednotek: výběr zobrazení skupiny parametrů upravených uživatelem0: bez zobrazení1: zobrazení | 00 | ☆ |
| PP-04 | Úprava kódu funkce | 0: je možno upravovat1: není možné upravovat | 0 | ☆ |
| Skupina A0 Řízení točivého momentu a limity parametrů | ||||
| A0-00 | Volba řízení rychlost / moment | 0: řízení rychlosti1: řízení momentu | 0 | ★ |
| A0-01 | Výběr zdroje zadávání řízení momentu | 0: digitální nastavení 1 (A0-03)1: AI12: AI23: AI34: nastavení pulzu5: nastavení komunikace6: MIN (AI1, AI2)7: MAX (AI1, AI2) (Možnost plného rozsahu 1-7, vhodné digitální nastavení A0-03) | 0 | ★ |
| A0-03 | Digitální nastavení momentu v režimu řízení momentu | -200.0%~200.0% | 150.0% | ☆ |
Technické parametry vysokoučinného měniče frekvence
| A0-05 | Kladná max. frekvence regulace točivého momentu | 0.00Hz~ max. frekvence | 50.00Hz | ☆ |
| A0-06 | Záporná max. frekvence regulace točivého momentu | 0.00Hz~ max. frekvence | 50.00Hz | ☆ |
| A0-07 | Doba zrychlení pro řízení momentu | 0.00s~65000s | 0.00s | ☆ |
| A0-08 | Doba zastavení pro řízení točivého momentu | 0.00s~65000s | 0.00s | ☆ |
| Skupina A2 - Řízení druhého motoru skupiny | ||||
| A2-00 | Výběr typu motoru | 0: Obyčejný indukční motor1: Indukční motory s proměnnou frekvencí | 0 | ★ |
| A2-01 | Jmenovitý výkon motoru | 0.1kW~1000.0kW | typstroje | ★ |
| A2-02 | Jmenovité napětí motoru | 1V~400V | typstroje | ★ |
| A2-03 | Jmenovitý proud motoru | 0.01A~655.35A(výkon měniče =55kW)0.1A~6553.5A(výkon měniče >55kW) | typstroje | ★ |
| A2-04 | Jmenovitá frekvence motoru | 0.01Hz~max. frekvence | typstroje | ★ |
| A2-05 | Jmenovitá rychlost otáček motoru | 1 ot./min.~65535 ot./min. | typstroje | ★ |
| Kód | Název | Nastavení | Výchozí | Změna |
| A2-06 | Elektrický odpor statoru asynchronous motoru | 0.001 Ω~65.535Ω(výkon měniče <=55kW)0.0001Ω~6.5535Ω(výkon měniče >55kW) | typ stroje | ★ |
| A2-07 | Elektrický odpor rotoru asynchronous motoru | 0.001 Ω~65.535Ω(výkon měniče <=55kW)0.0001Ω~6.5535Ω(výkon měniče >55kW) | typ stroje | ★ |
| A2-08 | Svodová indukční reaktance asynchronous motoru | 0.01mH~655.35mH(výkon měniče <=55kW)0.001mH~65.535mH(výkon měniče >55kW) | typ stroje | ★ |
| A2-09 | Vzájemná indukční reaktance asynchronous motoru | 0.1mH~6553.5mH(výkon měniče <=55kW)0.01mH~655.35mH(výkon měniče >55kW) | typ stroje | ★ |
| A2-10 | Proud naprázdno asynchronous motoru | 0.01A~ A2-03(výkon měniče <=55kW)0.1A~ A2-03 (výkon měniče >55kW) | typ stroje | ★ |
| A2-27 | Číslo řádku kodéru | 1~65535 | 1024 | ★ |
| A2-28 | Typ kodéru | 0: 0: Inkrementální enkodér ABZ1: Vyhrazeno2: Resolver | 0 | ★ |
| A2-29 | Výběr PG zpětné vazby rychlosti | 0: místní PG1: místní PG2: pulzní vstup (D15) | 0 | ★ |
| A2-30 | Sekvence fází AB inkrementálního enkodéru ABZ | 0: vpřed1: vzad | 0 | ★ |
| A2-34 | Počet pólových párů rotačního transformátoru | 1~65535 | 1 | ★ |
| A2-36 | Doba detekce odpojení PG ve zpětné vazbě rychlosti | 0.0: bez reakce0.1s~10.0s | 0.0 | ★ |
| A2-37 | Volba ladění | 0: bez reakce1: statické ladění asynchronního motoru2: Kompletní ladění asynchronního motoru | 0 | ★ |
| A2-38 | Proporcionalní zesilení smyčky rychlosti 1 | 1~100 | 30 | ☆ |
| A2-39 | Doba integrace smyčky rychlosti 1 | 0.01s~10.00s | 0.50s | ☆ |
| A2-40 | Frekvence přepínání 1 | 0.00~A2-43 | 5.00Hz | ☆ |
| A2-41 | Proporcionalní zesilení smyčky rychlosti 2 | 1~100 | 20 | ☆ |
| A2-42 | Doba integrace smyčky rychlosti 2 | 0.01s~10.00s | 1.00s | ☆ |
| A2-43 | Frekvence přepínání 2 | A2-40~max. frekvence | 10.00Hz | ☆ |
Technické parametry vysokoúčinného měniče frekvence
| A2-44 | Zesílení skluzu vektorového řízení | 50%~200% | 100% | ☆ |
| A2-45 | Časová konstanta pro filtr smyčky rychlosti | 0.000s~0.100s | 0.000s | ☆ |
| A2-46 | Vektorové řízení zesílení vybuzení | 0~200 | 64 | ☆ |
| Kód | Název | Nastavení | Výchozí | Změna |
| A2-47 | Zdroj horního limitu v režimu ovládání rychlosti | 0: Nastavení A2-481: AI12: AI23: AI34: Nastavení pulzu5: Nastavení komunikace6: MIN (AI1, AI2)7: MAX (AI1, AI2)Plný rozsah možností 1-7 odpovídá digitálnímu nastavení A2-48 | 0 | ☆ |
| A2-48 | Digitální nastavení točivého momentu v režimu řízení rychlosti | 0.0%~200.0% | 150.0% | ☆ |
| A2-51 | Proporcionální zesílení vybuzení | 0~20000 | 2000 | ☆ |
| A2-52 | Integrální zesílení vybuzení | 0~20000 | 1300 | ☆ |
| A2-53 | Proporcionální zesílení ovládání točivého momentu | 0~20000 | 2000 | ☆ |
| A2-54 | Zesílení integrace ovládání točivého momentu | 0~20000 | 1300 | ☆ |
| A2-55 | Vlastnosti integrační složky rychlostní smyčky | Číslice jednotek: integrační separace0: nepovoleno1: povoleno | 0 | ☆ |
| A2-61 | Režim řízení motoru 2 | 0: Bez vektorového řízení snímače rychlosti (SVC)1: Vektorové řízení snímače rychlosti (FVC)2: Řízení U/f | 0 | ★ |
| A2-62 | Doba zrychlení / brzdění motoru 2 | 0: stejně jako motor 11: Doba zrychlení / brzdění 12: Doba zrychlení / brzdění 23: Doba zrychlení / brzdění 34: Doba zrychlení / brzdění 4 | 0 | ☆ |
| A2-63 | Zvýšení točivého momentu motoru 2 | 0.0%: automatické zvýšení točivého momentu0.1%~30.0% | typ stroje | ☆ |
| A2-65 | Zesílení tlumení oscilace motoru 2 | 0~100 | typ stroje | ☆ |
| Skupina A5 – Parametry optimalizace ovládání | ||||
| A5-00 | Přepínač horního prahu frekvence DPWM | 0.00Hz~15.00Hz | 12.00Hz | ☆ |
| A5-01 | Modulační režim PWM | 0: asynchronní modulace1: synchronní modulace | 0 | ☆ |
| A5-02 | Výběr režimu kompenzace mrtvé zóny | 0: bez kompenzace1: režim kompenzace č. 12: režim kompenzace č. 2 | 1 | ☆ |
| A5-03 | Náhodná hloubka PWM | 0: nepovoleno1~10: náhodná hloubka nosné frekvence | 0 | ☆ |
| A5-04 | Limit rychlého proudu | 0: Neaktivní1: Aktivní | 1 | ☆ |
| A5-05 | Průběžná detekce kompenzace | 0~100 | 5 | ☆ |
| A5-06 | Práh poklesu napětí | 60.0%~140.0% | 100.0% | ☆ |
| A5-07 | Optimalizace SVC | 0: bez optimalizace1: režim optimalizace č. 12: režim optimalizace č. 2 | 1 | ☆ |
Technické parametry vysokoúčinného měniče frekvence
| A5-08 | Nastavení mrtvého času | 100%~200% | 150% | ☆ |
| Kód | Název | Nastavení | Výchozi | Změna |
| Skupina A6 – nastavení křivky AI | ||||
| A6-00 | Minimální hodnota křivky AI na vstupu 4 | -10.00V~A6-02 | 0.00V | ☆ |
| A6-01 | Nastavení minimální hodnoty křivky AI na vstupu 4 | -100.0%~+100.0% | 0.0% | ☆ |
| A6-02 | Inflexe č. 1 křivky AI na vstupu 4 | A6-00~A6-04 | 3.00V | ☆ |
| A6-03 | Nastavení inflexe č. 1 křivky AI na vstupu 4 | -100.0%~+100.0% | 30.0% | ☆ |
| A6-04 | Inflexe č. 2 křivky AI na vstupu 4 | A6-02~A6-06 | 6.00V | ☆ |
| A6-05 | Nastavení inflexe č. 2 křivky AI na vstupu 4 | -100.0%~+100.0% | 60.0% | ☆ |
| A6-06 | Maximální hodnota křivky AI na vstupu 4 | A6-06~+10.00V | 10.00V | ☆ |
| A6-07 | Nastavení maximální hodnoty křivky AI na vstupu 4 | -100.0%~+100.0% | 100.0% | ☆ |
| A6-08 | Minimální hodnota křivky AI na vstupu 5 | -10.00V~A6-10 | -10.00V | ☆ |
| A6-09 | Nastavení minimální hodnoty křivky AI na vstupu 5 | -100.0%~+100.0% | -100.0% | ☆ |
| A6-10 | Inflexe č. 1 křivky AI na vstupu 5 | A6-08~A6-12 | -3.00V | ☆ |
| A6-11 | Nastavení inflexe č. 1 křivky AI na vstupu 5 | -100.0%~+100.0% | -30.0% | ☆ |
| A6-12 | Inflexe č. 2 křivky AI na vstupu 5 | A6-10~A6-14 | 3.00V | ☆ |
| A6-13 | Nastavení inflexe č. 2 křivky AI na vstupu 5 | -100.0%~+100.0% | 30.0% | ☆ |
| A6-14 | Maximální hodnota křivky AI na vstupu 5 | A6-12~+10.00V | 10.00V | ☆ |
| A6-15 | Nastavení maximální hodnoty křivky AI na vstupu 5 | -100.0%~+100.0% | 100.0% | ☆ |
| A6-24 | Skok pro AI1 | -100.0%~100.0% | 0.0% | ☆ |
| A6-25 | Rozsah skoku pro AI1 | 0.0%~100.0% | 0.5% | ☆ |
| A6-26 | Skok pro AI2 | -100.0%~100.0% | 0.0% | ☆ |
| A6-27 | Rozsah skoku pro AI2 | 0.0%~100.0% | 0.5% | ☆ |
| A6-28 | Skok pro AI3 | -100.0%~100.0% | 0.0% | ☆ |
| A6-29 | Rozsah skoku pro AI3 | 0.0%~100.0% | 0.5% | ☆ |
| Kód | Název | Nastavení | Výchozí | Změna |
| A7-05 | Výstup on/off | Binární nastaveníČíslice jednotek:FMRČíslice jednotek:relé 1Stovky: DO | 1 | ☆ |
| A7-06 | Referenční frekvence programovatelné karty | 0.00%~100.00% | 0.0% | ☆ |
| A7-07 | Referenční moment programovatelné karty | -200.0%~200.0% | 0.0% | ☆ |
| A7-08 | Příkaz z programovatelné karty | 0: bez příkazu1: příkaz vpřed2: příkaz vzad3: klíčování vpřed4: klíčování vzad5: zastavení volnoběhem6: zastavení brzděním7: reset chyby | 0 | ☆ |
| A7-09 | Chyba programovatelné karty | 0: bez chyby80~89: kód chyby | 0 | ☆ |
| Skupina AC – kalibrace AI AO | ||||
| AC-00 | Naměřené napětí A11 č. 1 | 0.500V~4.000V | kalibrace | ☆ |
Technické parametry vysokoučinného měniče frekvence
| AC-01 | Zobrazené napětí AI1 č. 1 | 0.500V~4.000V | kalibrace | ☆ |
| AC-02 | Naměřené napětí AI1 č. 2 | 6.000V~9.999V | kalibrace | ☆ |
| AC-03 | Zobrazené napětí AI1 č. 2 | 6.000V~9.999V | kalibrace | ☆ |
| AC-04 | Naměřené napětí AI2 č. 1 | 0.500V~4.000V | kalibrace | ☆ |
| AC-05 | Zobrazené napětí AI2 č. 1 | 0.500V~4.000V | kalibrace | ☆ |
| AC-06 | Naměřené napětí AI2 č. 2 | 6.000V~9.999V | kalibrace | ☆ |
| AC-07 | Zobrazené napětí AI2 č. 2 | 6.000V~9.999V | kalibrace | ☆ |
| AC-08 | Naměřené napětí AI3 č. 1 | -9.999V~10.000V | kalibrace | ☆ |
| AC-09 | Zobrazené napětí AI3 č. 1 | -9.999V~10.000V | kalibrace | ☆ |
| AC-10 | Naměřené napětí AI3 č. 2 | -9.999V~10.000V | kalibrace | ☆ |
| AC-11 | Zobrazené napětí AI3 č. 2 | -9.999V~10.000V | kalibrace | ☆ |
| AC-12 | Cílové napětí AO1 č. 1 | 0.500V~4.000V | kalibrace | ☆ |
| AC-13 | Naměřené napětí AO1 č. 1 | 0.500V~4.000V | kalibrace | ☆ |
| AC-14 | Cílové napětí AO1 č. 2 | 6.000V~9.999V | kalibrace | ☆ |
| AC-15 | Naměřené napětí AO1 č. 2 | 6.000V~9.999V | kalibrace | ☆ |
| AC-16 | Cílové napětí AO2 č. 1 | 0.500V~4.000V | kalibrace | ☆ |
| AC-17 | Naměřené napětí AO2 č. 1 | 0.500V~4.000V | kalibrace | ☆ |
| AC-18 | Cílové napětí AO2 č. 2 | 6.000V~9.999V | kalibrace | ☆ |
| AC-19 | Naměřené napětí AO2 č. 2 | 6.000V~9.999V | kalibrace | ☆ |
| AC-20 | Naměřený proud AI2 č. 1 | 0.000mA~20.000mA | kalibrace | ☆ |
| AC-21 | Vzorkovací proud AI2 č. 1 | 0.000mA~20.000mA | kalibrace | ☆ |
| AC-22 | Naměřený proud AI2 č. 2 | 0.000mA~20.000mA | kalibrace | ☆ |
| AC-23 | Vzorkovací proud AI2 č. 2 | 0.000mA~20.000mA | kalibrace | ☆ |
| AC-24 | Ideální proud AO1 č.1 | 0.000mA~20.000mA | kalibrace | ☆ |
| AC-25 | Naměřený proud AO1 č. 1 | 0.000mA~20.000mA | kalibrace | ☆ |
| AC-24 | Ideální proud AO1 č. 2 | 0.000mA~20.000mA | kalibrace | ☆ |
| AC-25 | Naměřený proud AO1 č. 2 | 0.000mA~20.000mA | kalibrace | ☆ |
Tabulka parametrů monitorování
| Kód funkce | Název | Min. jednotka |
| Skupina U0. Základní parametry monitorování | ||
| U0-00 | Provozní frekvence (Hz) | 0.01Hz |
| U0-01 | Nastavení frekvence (Hz) | 0.01Hz |
| U0-02 | Napětí na propojovací liště (V) | 0.1V |
| U0-03 | Výstupní napětí (V) | 1V |
| U0-04 | Výstupní proud (A) | 0.01A |
| U0-05 | Výstupní výkon (kW) | 0.1kW |
| U0-06 | Výstupní moment (%) | 0.1% |
| U0-07 | Stav vstupu DI | 1 |
| U0-08 | Stav výstupu DO | 1 |
| U0-09 | Napětí AI1 (V) | 0.01V |
| U0-10 | Napětí AI2 (V) | 0.01V |
| U0-11 | Napětí AI3 (V) | 0.01V |
| U0-12 | Sčítané hodnoty | 1 |
| U0-13 | Hodnota délky | 1 |
Technické parametry vysokoučinného měniče frekvence
| U0-14 | Indikátor rychlosti zátěže | 1 |
| U0-15 | Nastavení PID | 1 |
| U0-16 Zpětná vazba PID | 1 | |
| U0-17 | Etapa PLC | 1 |
| U0-18 | Frekvence vstupního pulzu (Hz) | 0.01kHz |
| U0-19 | Rychlost zpětné vazby (0,1 Hz) | 0.1Hz |
| U0-20 | Rychloběh | 0.1Min. |
| U0-21 | Napětí AI1 před kalibrací | 0.001V |
| U0-22 | Napětí AI2 před kalibrací | 0.001V |
| U0-23 | Napětí AI3 před kalibrací | 0.001V |
| U0-24 | Lineární rychlost | 1m/Min. |
| U0-25 | Aktuální doba napájení | 1Min. |
| U0-26 | Aktuální doba provozu | 0.1Min. |
| U0-27 | Frekvence vstupního pulzu | 1Hz |
| U0-28 | Nastavení komunikace | 0.01% |
| U0-29 | Rychlost zpětné vazby kodéru | 0.01Hz |
| U0-30 | Zobrazení hlavní frekvence X | 0.01Hz |
| U0-31 | Zobrazení pomocné frekvence Y | 0.01Hz |
| U0-32 | Zobrazení libovolné hodnoty adresy paměti | 1 |
| U0-34 | Tcplota motoru | 1°C |
| U0-35 | Cílový točivý moment (%) | 0.1% |
| U0-36 | Umistční otáčky | 1 |
| U0-37 | Úhel koeficientu výkonu | 0.1° |
| U0-39 | Oddělené cílové napětí VF | 1V |
| U0-40 | Oddělené výstupní napětí VF | 1V |
| U0-41 | Zobrazení stavu vstupu DI | 1 |
| U0-42 | Zobrazení stavu vstupu DO | 1 |
| U0-43 | Zobrazení 1 stavu fungování DI (funkce 01- funkce 40) | 1 |
| U0-44 | Zobrazení 2 stavu fungování DI (funkce 41- funkce 80) | 1 |
| U0-59 | Frekvence nastavení (%) | 0.01% |
| U0-60 | Provozní frekvence (%) | 0.01% |
| U0-61 | Stav měniče frekvence | 1 |
Kapitola 6 Popisy parametrü
Skupina P0: Skupina základních funkcí
| P0-00 | Zobrazení typu: GP | Továrnínastavení | Platí pro typ stroje | |
| Rozsahnastavení | 1 | Typ G (zatížení konstantním točivým momentem) | ||
| 2 | Typ P (zatížení ventilátoru a čcrpadla) | |||
Tento parametr je určen pouze pro uživatele k prohlížení typu stroje a není možné ho změnit.
1: zatížení konstantním točivým momentem s určitými jmenovitými parametry
2: zatižení proměnným točivým momentem s určitými jmenovitými parametry (zatižení ventilátoru a čerpadla)
| P0-01 | Režim řízení motoru 1 | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | Bez vektorového řízení snímače rychlosti (SVC) | ||
| 1 | Vektorové řízení snímače rychlosti (FVC) | |||
| 2 | Řízení U/f | |||
0: Bez vektorového řízení snímače rychlosti
Technické parametry vysokoúčinného měniče frekvence
1: Vektorové řízení snímače rychlosti to je vektorové řízení v uzavřené smyčce. Na straně motoru nainstalujte kodér. Měnič frekvence musí být spárován se stejným typem karty PG jako kodér. Je vhodný pro použití spojené s přesným řízením rychlosti nebo točivého momentu. Jeden měnič může pohánět pouze jeden motor s takovou zátěží, jako jsou papírenské stroje, jeřáby, výtahy atd.
2: Řízení U/f je vhodné v případě potřeby menšího zatížení nebo, když jeden měnič frekvence pohání více motorů, jak jsou ventilátory a čerpadla. Jeden měniče může být používán k ovládání několika motorů.
Doporučení: v případě volby režimu vektorového řízení je vyžadován proces identifikace parametrů motoru. Pouze s přesnými parametry motoru lze použít režim vektorového řízení. Úpravou parametrů regulátoru rychlosti ve funkčním kódu ve skupině P2 (2 je druhá skupina) lze dosáhnout lepšího výkonu.
| P0-02 | Výběr zdroje příkazů | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | Příkazový kanál ovládacího panelu (LED dioda nesvítí) | ||
| 1 | Příkazový kanál svorky (LED dioda svítí) | |||
| 2 | Příkazový kanál (LED dioda bliká) | |||
Vyberte vstupní kanál pro řídící příkaz měniče.
Rídici přikazy měniče frekvence zahrnuji: start, stop, vpřed, vzad, skok atd. 0: Příkazový kanál ovládacího panelu („LOCAL / REMOT“ nesvítí);
Na ovládacím panelu, tlačitka RUN, STOP / RES ovládají přikazy spuštění. 1: Kanál přikazů svorek (svítí „LOCAL / REMOT“); Multifunkční vstupní svorky FWD, REV, JOG, JOG apod., ovládají přikazy spouštění.
2: Příkazový kanál (bliká „LOCAL / REMOT) příkaz spuštění je vydán hostitelským počítačem v komunikačním režimu.
Výběr komunikační karty je volitelný (Modbus RTU, karta CANlink, uživatelsky programovatelná řídící karta apod.)
| P0-03 | Hlavní zdroj frekvence X | Tovární nastavení | 0 | |
| Rozsah nastaven | 0 | Digitální nastavení (referenční frekvence P0-08, změna nahoru / dolů, pamět' po poruše napájení) | ||
| 1 | Digitální nastavení (referenční frekvence P0-08, změna nahoru / dolů, bez paměti po poruše napájení) | |||
| 2 | A11 | |||
| 3 | A12 | |||
| 4 | A13 | |||
| 5 | Nastavení pulzů PULSE (DI5) | |||
| 6 | Vícestavový příkaz | |||
| 7 | PLC | |||
| 8 | PID | |||
| 9 | Nastavení komunikace | |||
Zvolte vstupní kanál s danou frekvencí měniče. Existuje 10 hlavních kanálů referenční frekvence. 0: digitální nastavení (bez paměti po výpadku napájení).
Počáteční hodnotou referenční frekvence je P0-08 – „referenční frekvence“. Pomocí tlačitek ▲ ▼ (nebo multifunkční vstupní svorky UP, DOWN) můžete změnit nastavenou hodnotu frekvence. Když se měnič po ztrátě napětí zapne, referenční hodnota frekvence se vrátí na „referenční frekvenci nastavenou digitálně“ jako hodnota P0-08.
1: digitální nastavení (paměť po výpadku napájení)
Počáteční hodnota referenční frekvence je P0-08 „referenční frekvence“. Pomocí tlačítek ▲, ▼ na klávesnici (nebo vstupních multifunkčních svorek UP, DOWN) můžete změnit nastavenou hodnotu frekvence.
Když se měnič po výpadku napájení zapne, nastavená frekvence je posledně nastavenou frekvencí pomocí tlačítek ▲, ▼ na klávesnicí nebo svorek UP, DOWN, Korekce je pamatována.
Je třeba připomenout, že P0-23 to je „volba paměti digitálního snižování frekvence“. P0-23 slouží k výběru momentu zastavení pohonu, výše korekce nebo frekvence paměti. P0-23 souvisí s prostoji a pamět’ vypínání napájení nemá souvislost. Při použití je třeba včenovat tomu pozornost.
2: AII
3: AI2
4: AI3
Znamená to, že frekvence je nastavována pomocí svorky analogového vstupu. Ovládací panel VFD poskytuje dvě analogové vstupní svorky (AI1, AI2), volitelná rozšířující karta vstup / výstup poskytuje další analogovou vstupní svorku (AI3).
Z nich je AI1 napěťový vstup 0V \~ 10V, AI2 může být napěťovým vstupem 0V \~ 10V, může být také proudovým vstupem 4mA \~ 20mA. Volí se propojkou J8 na ovládacím panelu. AI3 je napěťovým vstupem -10V \~ 10V.
Uživatel může libovolně vybírat korelaci mezi vstupním napětím AI1, AI2, AI3 a cílovou frekvencí. VFD poskytuje 5 skupin korelace mezi křivkami, včetně 3 skupiny křivek lineárních závislosti (2-bodová shoda), 2 skupiny libovolých 4-bodový korelací křivek. Skupiny uživatelů je možno nastavit pomocí kódu funkce skupiny P4 a A6.
5: Zadaný puls (DI5)
Technické parametry vysokoúčinného měniče frekvence
Nastavení frekvence je dáno pulsem na svorkách. Specifikace referenčního signálu pulsu: rozsah napětí 9 V \~ 30 V, rozsah frekvence 0 kHz \~ 100 kHz. Referenční hodnotu pulsu je možno zadat pouze z multifunkční svorky DI5.
Vztah frekvence pulzu vstupní svorky D15 odpovídající nastavením, nastavená pomocí P4-25 \~ P4-31. Korelace mezi dvěma body odpovídá přímce. Odpovídající nastavení pulzního vstupu činí 100,0%, což je procento relativní maximální frekvence P0-10.
6: vícestavový příkaz
Při volbě režimu provedení vícestavového příkazu je třeba zadat do svorek DI pomocí digitální kompozice různé stavy odpovídající různý frekvencím nastavené hodnoty. Díky VFD je možno nakonfigurovat více než čtyří svorky vícestupňových příkazů, 16 čtyřstavových svorek, kód funkce PC může odpovídat kterékoli ze 16 „multi-směrnice“. „Multi-směrnice“ je procentuální poměr maximální frekvence P0-10.
Digitální vstupní svorka DI jako příkaz multifunkční svorkovnice – musí být nastavena příslušná skupina P4. Podrobnější informace viz odpovídající parametr funkce skupiny P4.
7: Jednoduchý ovladač PLC
Pokud je zdroje frekvence jednoduchý ovladač PLC, pracovní frekvenci měniče můžete přepnout na provoz v rozsahu 1 – 16 libovolých frekvenčních příkazů. Uživatel může nastavit udržovací dobu od 1 až do 16 frekvenčních příkazů a odpovídající dobu zrychlení a zpomalení. Podrobné informace najdete v příslušných návodech skupiny PC.
8: PID
Ovládací výstup PID je používán pro pracovní frekvenci. Obvykle se používá pro procesy řízení v uzavřené smyčce na místě, jako je řízení konstantního tlaku v uzavřené smyčce, řízení konstantního proudu v uzavřené smyčce a další podmínky.
Pokud použiváte PID jako zdroj frekvence, je třeba nastavit parametry „Funkce PID“ skupiny PA.
9: Nastavení komunikace
Hlavním zdrojem frekvence je hostitelský počítač v režimu komunikace.
VFD podporuje dva typy komunikace: Modbus a CANlink. Oba typy komunikace není možné používat společně.
Aby bylo možno používat komunikaci, je třeba naistalovat komunikační kartu. Existují dva typy komunikačních karet VFD, uživatelé si musí vybrat na základě svých požadavků a je třeba nastavit správné parametry pro P0-28 „typ rozšířující komunikační karty“.
| P0-04 | Pomocný zdroj frekvence Y | Tovární nastavení | 0 | |
| Rozsah nastavení | Digitální nastavení (referenční frekvence P0-08, změna nahoru / dolů, paměť po výpadku napájení) | |||
| Digitální nastavení (referenční frekvence P0-08, změna nahoru / dolů, bez paměti po výpadku) | ||||
| AI1 | ||||
| AI2 | ||||
| AI3 | ||||
| Nastavení pulsu (DI5) | ||||
| Vícestupňový příkaz | ||||
| PLC | ||||
| PID | ||||
| Nastavení komunikace | ||||
Pokud je pomocný zdroj frekvence používán jako nezávislý referenční kanál frekvence (to znamená, že přepíná zdroj frekvence z X na Y), jeho použití je stejné, jako v případě hlavního zdroje frekvence X. Pokyny k použití najdete v P0-03.
Pokud je pomocný zdroj frekvence používán jako daná superpozice (tj. zdroj frekvence X+Y, přepínač X na X + Y nebo přepínač Y na X + Y), je třeba mít na paměti, že:
1) Pokud pomocný zdroj frekvence je digitálním referenčním zdrojem, referenční frekvence (P0-08) nefunguje. Uživatel reguluje frekvenci pomocí tlačitek ▲, ▼ na klávesnici (nebo multifunkčních vstupních svorek UP, DOWN). Regulujte prímo na základě hlavní referenční frekvence.
2) Když je pomocný zdroj frekvence je zadáván pomocí analogového vstupu (AI1, AI2, AI3) nebo pulzního vstupu pro hodinový signál, 100% odpovídá nastavení rozsahu vstupního pomocného zdroje frekvence, který je možno nastavit pomocí P0-05 a P0-06.
3) Když je khodinovému signálu pulzního vstupu použit zdroj frekvence, je to podobné jako u analogových dat. Doporučení: Volbu pomocného zdroje frekvence Y a volbu hlavního zdroje frekvence X není možné nastavit na jednom kanálu, to znamená, když P0-03 a P0-04 jsou nastaven na stejnou hodnotu. Tímto způsobem je možno snadno způsobit zmatek.
| P0-05 | Rozsah zdroje Y naložené pomocné frekvence | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | ve vztahu k maximální frekvenci | ||
| 1 | ve vztahu ke zdroji frekvence X | |||
| P0-06 | Rozsah zdroje Y naložené pomocné frekvence | Tovární nastavení | 0 | |
| Rozsah nastavení | 0%~150% | |||
Když je volba zdroje frekvence „nakládáním frekvence“ (tzn. P0-07 je nastaveno na 1, 3 nebo 4), tyto dva parametry jsou používány k určení rozsahu regulace pomocného zdroje frekvence.
Technické parametry vysokoúčinného měniče frekvence
Když parametr P0-05 je používán k určení rozsahu pomocných frekvenci objektu odpovídajícímu zdroji, probíhá to selektivně s ohledem na maximální frekvenci, která má být relativní k hlavnímu zdroji frekvence X. Při výběru s odkazem na primární zdroj frekvence, je pomocný zdroj frekvence používán jako hlavní rozsah frekvenčních variací X.
| P0-07 | Naložený výběr zdroje frekvence | Tovární nastavení | 0 | |
| Rozsah nastavení | Bit | Volba zdroje frekvence | ||
| 0 | Ihlavní zdroj frekvence X | |||
| 1 | Výsledek hlavní a pomocné operace | |||
| 2 | Přepínač hlavního zdroje frekvence X a pomocného zdroje frekvence Y | |||
| 3 | Hlavní zdroj frekvence X, přepínání výsledku hlavní a pomocn práce | |||
| 4 | Pomocný zdroj frekvence Y, přepínání výsledku hlavní a pomocné práce | |||
| Desítky | Závislost provozu hlavního a pomocného zdroje frekvence | |||
| 0 | Ihlavní + pomocné | |||
| 1 | Hlavní + pomocné | |||
| 2 | Max. ze dvou | |||
| 3 | Min. ze dvou | |||
Pomocí tohoto parametru je možno vybrat referenční kanál frekvence.
Jednotné číslo: Volba zdroje frekvence:
0: Hlavní zdroj frekvence X
Hlavní frekvence X je používána jako cílová frekvence.
1: Výsledek práce hlavního a pomocného zdroje jako cílové frekvence.
Viz instrukce pro kód funkce vztahu hlavních a pomocných operací „Desitky“.
2: Přepínání hlavního zdroje frekvence X a pomocného zdroje frekvence Y. Když je svorka 18 multifunkčního vstupu neaktivní (přepínač frekvence), hlavní zdroj frekvence X je cílovou frekvencí.
Když svorka 18 multifunkčního vstupu je aktivní (přepínač frekvence), pomocný zdroj frekvence Y je cílovou frekvencí.
3: Přepínání hlavního zdroje frekvence X a výsledek hlavní a pomocné práce. Když je svorka 18 multifunkčního vstupu neaktivní (přepínač frekvence), hlavní zdroj frekvence X je cílovou frekvencí. Když je svorka 18 multifunkčního vstupu aktivní (přepínač frekvence), cílová frekvence je výsledkem hlavní a pomocné práce.
- Přepínání pomocného zdroje frekvence Y a výsledek hlavní a pomocné práce. Když je svorka 18 multifunkčního vstupu neaktivní (přepínač frekvence, pomocný zdroj frekvence Y je cílovou frekvenci. Když je svorka 18 multifunkčního vstupu aktivní (přepínač frekvence), cílová frekvence je výsledkem hlavní a pomocné práce.
Desítky: Operační vztah hlavní a pomocného zdroje frekvence. 0: Hlavní zdroj frekvence X + pomocný zdroj frekvence Y.
Jako cílová frekvence je používán součet hlavní frekvence X a pomocné frekvence Y.
Je dosahováno frekvenční superpozice pro tuto funkci.
1: Hlavní zdroj frekvence X – pomocný zdroj frekvence Y
Jako cílová frekvence je používán rozdíl mezi hlavním zdrojem frekvence X a pomocným zdroje frekvence Y.
2: MAX (hlavní zdroj frekvence X, pomocný zdroj frekvence Y). Jako cílová frekvence je přijata maximální absolutní hodnota hlavní frekvence X a pomocné frekvence Y.
3: M1N (hlavní zdroj frekvence X, pomocný zdroj frekvence Y). Jako cílová frekvence je přijata minimální absolutní hodnota hlavní frekvence X a pomocné frekvence Y. Kromě toho, když volba zdroje frekvence je z hlavní a pomocné práce, frekvenční offset je možno nastavit pomocí P0-21. Frekvenční offset naložený na hlavní a pomocnou práci umožňuje flexibilně reagovat na různé potřeby.
4: MIN (hlavní zdroj frekvence X, pomocný zdroj frekvence Y). Jako cílová frekvence je přijata minimální absolutní hodnota hlavní frekvence X a přídavné frekvence Y. Mimo to, když je výběr zdroje frekvence z hlavní a pomocné práce, frekvenční offset je možno nastavit pomocí P0-21. Frekvenční offset naložený na hlavní a pomocnou práci umožňuje flexibilně reagovat na různé potřeby.
| P0-08 | Referenční frekvence | Tovární nastavení | 50.00Hz | |
| Rozsah nastavení | 0,00 ~ max. frekvence (funguje režim výběr zdroje frekvence s digitálním nastavením) | |||
| P0-09 | Směr chodu | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Stejný směr | ||
| 1 | Opačný směr | |||
Když změníte kód funkce, není možné změnit elektrické zapojení a dosáhnout změnu otáček motoru.
Doporučení: Po inicializaci parametru se směr chodu motoru vrátí do původního stavu. Budťe opatrní a používejte jej pod podmínkou, že po ladění systému je přísně zakázáno měnit ovládání motoru.
| P0-10 | Max. frekvence | Tovární nastavení | 50.00 Hz |
Technické parametry vysokoúčinného měniče frekvence
| Rozsah nastavení | 50.00Hz~600.00Hz |
Analogový vstup VFD, pulzní vstup (D15), vícekrokové pokyny atp., zdroj frekvence je 100,0 % s ohledem na odpovídající měřítko P0-10.
Maximální výstupní frekvence VFD je 3200 Hz. Pro zohlednění rozlišení frekvence a vstupní rozsah frekvence pro oba indikátory, lze desetinná místa příkazu frekvence vybrat pomocí P0-22.
Když je P0-22 nastaveno na 1, rozlišení frekvence je 0,1 Hz. V takovém případě P0-10 nastavte v rozsahu 50,0 Hz \~ 3200,0 Hz; Když je P0-22 nastaveno na 2, rozlišení frekvence je 0,1 Hz. V takovém případě P0-10 nastavte v rozsahu 50,0 Hz \~ 600,00 Hz.
| P0-11 | Zdroj horní frekvence | Továrnínastavení | 0 | |
| Továrnínastavení | 0 | Nastavení P0-12 | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Nastavení pulzu | |||
| 5 | Nastavení komunikace | |||
Definujte zdroj horních frekvenci. Horní mezní frekvenci můžete nastavit digitálně (P0-12), může být také zadána z analogového vstupního kanálu. Při nastavování horního limitu frekvence analogového vstupu, nastavení analogového vstupu 100% odpovídá P0-12. Například, přijetím režimu řízení točivého momentu v rozsahu řízení vinutí, aby nedošlo k poškození materiálu a výskytu jevu „rychlosti“, lze použít analogové omczení referenční frekvence. Když měnič pracuje s horní hranicí frekvence, udržuje vyšší frekvenci.
| P0-12 | Horní frekvence | Továrnínastavení | 50.00Hz |
| Rozsahnastavení | Horní frekvence P0-14 ~ maximální frekvence P0-10 | ||
| P0-13 | Offset horní frekvence | Továrnínastavení | 0.00Hz |
| Rozsahnastavení | 0.00Hz~maximální frekvence P0-10 | ||
Když je horní mezní frekvence analogovým nebo pulzním nastavením, P0-13 slouží jako referenční hodnota offsetu. Bias frekvence a P0-11 nastavují horní mezní frekvenci naloženou na nastavenou hodnotu jako koncovou horní mezní frekvenci.
| P0-14 | Spodní frekvence | Tovární nastavení | 0.00Hz |
| Rozsah nastavení | 0.00Hz~horní frekvence P0-12 | ||
Když je příkaz frekvence nižší než dolní frekvence nastavená v parametru P0-14, měnič může zastavit práci nebo snížit mezní frekvenci nebo pracovat při nulové rychlosti. Jaký druh provozního režimu je třeba vybrat (při nastavení frekvence nižší než pracovní režim s dolní frekvenci) můžete nastavit parametrem P8-14.
| P0-15 | Nosná frekvence | Továrnínastavení | Záleži na typu stroje |
| Rozsahnastavení | 0.5kHz~16.0kHz | ||
Tato funkce upravuje nosnou frekvenci měniče. Úpravou nosné frekvence lze snížit hluk motoru, zabránit rezonančnímu bodu mechanického systému a snížit rušení a svodový proud měniče mezi vodiči a zemí.
Když je nosná frekvence nízká, zvyšuje se složka vyšších harmonických výstupního proudu, zvyšují se ztráty motoru a roste teplota motoru. Když je nosná frekvence vysoká, ztráty motoru se snižují, teplota motoru klesá, ale ztráty měniče se zvyšují, teplota měniče roste a zvyšuje se rušení.
Regulace nosné frekvence bude mít vliv na následující vlastnosti:
| Nosná frekvence | zvýšení |
| Průběh výstupního proudu | pokles |
| Teplota motoru | lepší |
| Teplota měniče | pokles |
| Svodový proud | zvýšení |
| Vnější rušení | zvýšení |
| Průběh výstupního proudu | zvýšení |
Tovární nastavení nosné frekvence jsou různé pro různé měniče. Uživatelé je však můžou upravit, ale je třeba dávat pozor: Pokud hodnota nosné frekvence bude vyšší než tovární nastavení, způsobí to zvýšení teploty chladiče měniče. V takovém případě uživatel musí snížit jmenovitou hodnotu měniče, jinak hrozí nebezpečí jeho přehřátí.
| Nosná frekvence se přizpůsobuje teplotě | Tovární nastavení | 0 |
Technické parametry vysokoúčinného měniče frekvence
| P0-16 | |||
| Rozsah nastavení | 0: nc1: ano | ||
Teplotní regulace nosné frekvence znamená, že když měnič detekuje, že teplota jeho chladiče je vysoká, automaticky sníží nosnou frekvenci, aby došlo ke snížení zvýšené teploty měniče. Když je teplota chladiče nízká, nosná frekvence se postupně vrací na referenční hodnotu. Tato funkce snížuje pravděpodobnost alarmu přehřátí měniče.
| P0-17 | Doba zrychlení 1 | Továrnínastavení | Závisí na typu stroje |
| Rozsah nastavení | 0.00s~65000s | ||
| P0-18 | Doba brzdění 1 | Továrnínastavení | Závisí na typu stroje |
| Rozsah nastavení | 0.00s~65000s | ||
Doba zrychlení označuje čas nutný ke zrychlení měniče z nulové frekvence na referenční frekvenci zrychlení a brzdění (P0-25). Viz tl na obrázku 6-1. Doba brzdění označuje čas nutný pro měnič na zpomalení z referenční frekvence zrychlení a brzdění (P0-25) na frekvenci nulovou. Vi t2 na obrázku 6-1.
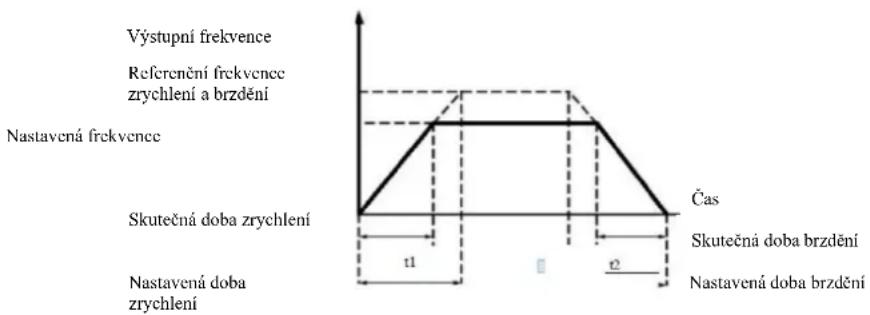
line
| Category | Value | |---|---| | Výstupní frekvence | | | Referenční frekvence zrychlení a brzdění | | | Nastavená frekvence | | | Skutečná doba zrychlení | | | Nastavená doba zrychlení | | | Čas | | | Skutečná doba brzdění | | | Č | | Nastavená doba brzdění |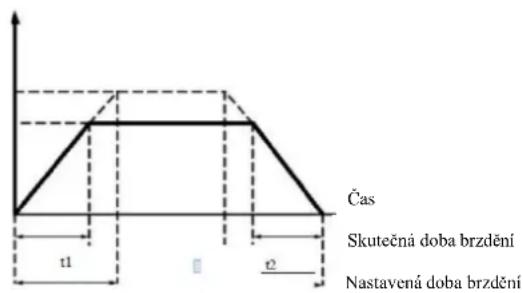
Obrázek 6-1 Schéma doby zrychlení a zpomalení
VFD poskytuje čtyři skupiny doby zrychlení a brzdění. Uživatelé mohou využit digitální přepínač vstupní svorky DI. Čtyři skupiny doby zrychlení a brzdění nastavované kódem funkce jsou následující:
Pryní skupina: P0-17, P0-18
Druhá skupina: P8-03, P8-04
Tření skupina: P8-05, P8-06
Čtvrtá skupina: P8-07, P8-08
| P0-19 | Jednotka doby zrychlení / brzdění | Tovární nastavení | 1 | |
| Rozsah nastavení | 0 | 1s | ||
| 1 | 0.1s | |||
| 2 | 0.01s | |||
Pro uspokojení potřeb všech objektů, VRD poskytuje tři druhy jednotek doby zrychlení a zpomalení, a to: 1 sekunda, 0,1 sekundy a 0,01 sekundy.
Upozornění: Během úpravy parametrů funkce, desetinná místa skupiny 4 zobrazují změněnou dobu zrychlení a brzdění, dle změny doby zrychlení a zpomalení. Je třeba včnovat zvláštní pozornost procesu aplikace.
| P0-21 | Bias frekvence zdroje pomocné naložené frekvence | 0.0Hz | |
| Rozsah nastavení | 0.00Hz~max. frekvence F0-10 | ||
Kód funkce je správný pouze tehdy, pokud výběrem zdroje frekvence jsou hlavní a pomocné výpočty.
Když je zdrojem frekvence hlavní a pomocný výpočet, P0-21 jako frekvenční offset, jako končený výsledek nastavení frekvence superpozice se použije primární a sekundární práce, aby bylo nastavení frekvence flexibilnější.
| P0-22 | Rozlišení příkazu frekvence | Tovární nastavení | 2 | |
| Rozsah nastavení | 1 | 0.1Hz | ||
| 2 | 0.01Hz | |||
Tento parametr slouží k identifikaci všech rozlišení kódů funkci závislých na frekvenci.
Když rozlišení frekvence je 0,1 Hz, maximální výstupní frekvence VFD může dosahovat 3200 Hz. Když rozlišení frekvence je 0,01 Hz, maximální výstupní frekvence VFD je 600,00 Hz.
Upozornění: Během úpravy parametrů funkce, všechny desetinná místa frekvence související s tímto parametrem budou změněny. Referenční hodnoty frekvence se také změní. Během provozu je tomu třeba věnovat zvláštní pozornost.
| P0-23 | Digitální volba paměti zastavení frekvence | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Bez paměti | ||
| 1 | S pamětí | |||
Tato funkce funguje pouze tehdy, je-li zdroj frekvence nastavený na čísla.
„Bez paměti“ znamená, že po zastavení měniče digitálné zadaná hodnota frekvence se vrací na hodnotu P0-08 (referenční hodnota). Korekce provedená tlačitky ▲, ▼ nebo svorkami UP, DOWN se ruší.
„Pamět“ znamená, že po zastavení měniče, digitálně zadaná frekvence je rezervována pro poslední nastavenou frekvenci zastavení. Korekce provedená pomocí tlačítek ▲, ▼ nebo svorek UP, DOWN je platná.
| P0-24 | Výběr motoru | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Motor 1 | ||
| 1 | Motor 2 | |||
VFD podporuje aplikaci dvou motorů s dělením přetažení. Pro dva motory je možno nastavit parametry dle výrobního štítku motoru, nezávislé parametry ladční, vybrat jiný režim řízení, nezávisle nastavit parametry spojené s výkonem a jiné.
Referenční skupinou parametrů funkce motoru 1 je skupina P1 a skupina P2. Referenční skupinou parametrů funkce motoru 2 je skupina A2. Uživatel může vybrat aktuální motor pomocí kódu funkce P0-24, je možno také spustit motor pomocí svorky digitálního vstupu DI.
Když nejsou výběr kódu funkce a výběr svorky ve shodě, prioritu má svorka.
| P0-25 | Referenční frekvence doby zrychlení / brzdění | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Maximální frckvencc (P0-10) | ||
| 1 | Nastavená frekvence | |||
| 2 | 100Hz | |||
Doba zrychlení a brzdění označuje dobru zrychlení a brzdění z nulové frekvence na referenční frekvenci P0-25. Obrázek 6-1 znázorňuje schéma dobry zrychlení a brzdění.
Když je P0-25 nastavené na1, doba zpomalení a frekvence jsou spojené s tímto nastavením. Pokud se frekvence často mění, zrychlení motoru je variabilní, proto je třeba tomu při použití věnovat pozornost.
| P0-26 | Příkaz frekvence UP/DOWN(nahoru / dolů) | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Provozní frekvence | ||
| 1 | Nastavená frekvence | |||
Tento parametr je důležitý pouze v případě, že zdroj frekvence je nastaven digitálně.
Když k nastavení ▲, ▼ nebo svorek NAHORU /DOLÚ je používána klávesnice, je možno přijmout jakýkoli způsob nastavení korekce frekvence. Cílová frekvence roste nebo klesá v závislosti na provozní nebo nastavené frekvenci.
Rozdíl mezi těmi dvěma nastavením je důležitý, pokud je měnič v průběhu zrychlování nebo brzdění. Znamená to, že pokud provozní frekvence a referenční frekvence měniče nejsou stejné, rozdíl mezi různými vybranými parametry bude velký.
| P0-27 | Zdroj frekvence a zdroj příkazů přidružené v balíčku | Tovární nastavení | 000 | |
| Rozsah nastavení | Bit | Příkaz z ovládacího panelu váže zdroj frekvence | ||
| 0 | Nesouvisí | |||
| 1 | Frekvence nastavená digitálně | |||
| 2 | AI1 | |||
| 3 | AI2 | |||
| 4 | AI3 | |||
| 5 | Frekvence nastavená digitálně | |||
| 6 | Vícestavový příkaz | |||
| 7 | Jednoduché PLC | |||
| 8 | PID | |||
| 9 | Nastavení komunikace | |||
Technické parametry vysokoučinného měniče frekvence
| Desítky | Příkaz ze svorky váže zdroj frekvence (0 ~ 9, stejné jako bit) | ||
| Stovky | Komunikační příkaz váže zdroj frekvence (0 ~ 9, stejné jako bit) |
Definuje baliček tří kanálů provozních příkazů a devíti referenčních frekvencí mezi kanály, usnadňuje realizaci synchronního přepínání. Pro výše uvedené frekvence význam frekvenčního kanálu je stejný jako pro výběr hlavního zdroje frekvence X P0-03. Viz popis kódu funkce P0-03. Různé režimy mohou mít souvislost se stejným frekvenčním kanálem. Když má zdroj frekvenčních příkazů přidružený zdroj, během provozu zdroje příkazu přestane zdroj frekvence P0-03 \~ P0-07 fungovat.
| P0-28 | Typ komunikační rozšířující karty | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Komunikační karta Modbus | ||
| 1 | Rezerva | |||
| 2 | Rezerva | |||
| 3 | Komunikační karta CANlink | |||
VFD poskytuje dva druhy komunikace. Tato komunikace vyžaduje před použitím volitelnou komunikační kartu. Dva druhy komunikace nemůžou být používány současně.
Tento parametr slouží k nastavení typu volitelné komunikační karty. Pokud uživatel změní komunikační kartu, je třeba správně nastavit parametry.
Skupina P1: Parametry motoru 1
| P1-00 | Volba typu motoru | Továrnínastavení | 0 | |
| Rozsah nastavení | 0 | Běžný asynchronní motor | ||
| 1 | Asynchronní motor s proměnnou frekvencí | |||
| P1-01 | Jmenovitý výkon | Továrnínastavení | Závisí na typu stroje | |
| Rozsah nastavení | 0.1kW~1000.0kW | |||
| P1-02 | Jmenovité napětí | Továrnínastavení | Závisí na typu stroje | |
| Rozsah nastavení | 1V~400V | |||
| P1-03 | Jmenovitý proud | Továrnínastavení | Záleží na typu stroje | |
| Rozsah nastavení | 0.01A~655.35A (výkon měniče<=55kW) 0.1A~6553.5A (výkon měniče>55kW) | |||
| P1-04 | Jmenovitá frekvence | Továrnínastavení | Záleží na typu stroje | |
| Rozsah nastavení | 0.01Hz~maximální frekvence | |||
| P1-05 | Jmenovitá rychlost | Továrnínastavení | Záleží na typu stroje | |
| Rozsah nastavení | 1rpm~65535rpm | |||
Pro přesné nastavení příslušných parametrů dle výrobního štítku motoru, řízení U/f a také vektorového řízení, je nutný kód těchto parametrů uvedený na výrobním štítku motoru.
Pro lepší výkon řízení U/f nebo vektorového řízení je potřeba doladit parametry, mít přesné výsledky regulace a přesné nastavení parametrů dle výrobního štútku motoru.
| P1- | Elektrický odpor statoru asynchronního motoru | Tovární nastavení | Záleží na typu stroje |
| Rozsah nastavení | 0.001 ~30.000 | ||
| P1-07 | Elektrický odpor rotoru asynchronního motoru | Tovární nastavení | Záleží na typu stroje |
| Rozsah nastavení | 0.001 ~65.535 (výkon měniče <=55kW)0.0001 ~6.5535 (výkon měniče>55kW) | ||
| P1-08 | Indukční svodová reaktance asynchronního motoru | Tovární nastavení | Záleží na typu stroje |
| Rozsah nastavení | 0.01mH~655.35mH (výkon měniče <=55kW) 0.001mH~65.535mH (výkon měniče >55kW) | ||
Technické parametry vysokoúčinného měniče frekvence
| P1-09 | Vzájemná indukční reaktance asynichronního motoru | Tovární nastavení | Záleží na typu stroje |
| Rozsah nastavení | 0.1mH~6553.5mH (výkon měniče <=55kW) 0.01mH~ 655.35mH (výkon měniče >55kW)) | ||
| P1-10 | Proud asynchronního motoru bez zátěže | Tovární nastavení | Záleží na typu stroje |
| Rozsah nastavení 0.01A~ | P1-03 (výkon měniče <=55kW) 0.1A~ P1-03 (výkon měniče >55kW) | ||
P1-06 \~ P1-10 jsou parametry asynchronního motoru. Tyto parametry obecně nejsou uvedeny na výrobním štítku motoru a jsou automaticky doladovány tak, aby procházely měničem. Mezi nimi „Statické ladění indukčního motoru“ může získat pouze tři parametry P1-06 \~ P1-08. Avšak je zdc možno dosáhnout „celkového vyladění asynchronních motorů“. Kromě všech pěti parametrů, je možno také dosáhnout pořadí fází kodéru, parametry proudové smyčky PI a jiné.
| P1-27 | Číslo řádku kodéru | Tovární nastavení | 1024 |
| Rozsah nastavení | 1~65535 | ||
Nastavení pulzů kodéru ABZ na otáčku.
Pro bezsenzorové vektorové řízení je třeba nastavit příslušný počet impulzů kodéru, jinak motor nebude fungovat správně.
| P1-28 | Typ kodéru | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | Inkrementální cnkodér ABZ | ||
| 1 | Rezerva | |||
| 2 | Rotační transformátor | |||
VFD podporuje různé typy kodérů. Různé kodéry vyžadují přizpůsobení různých PG karet. Je třeba vybrat odpovídající PG kartu. Po instalaci PG karty nastavte P1-28 dle skutečné situace, jinak měnič nebude fungovat správně.
| P1-30 | Pořadí fází AB inkrementálního enkodéru ABZ | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Vpřed | ||
| 1 | Vzad | |||
Tento kód funkce je důležitý pouze pro inkrementální enkodér ABZ, pouze když P1-28 = 0. Pro nastavení pořadí AB fází signálu inkrementálního enkodéru ABZ.
| P1-34 | Počet półových párů rotačního transformátoru | Tovární nastavení | 1 |
| Rozsah nastavení | 1~65535 | ||
Resolver – počet pólových párů, při použití tohoto enkodéru je třeba správně nastavit parametry počtu pólových párů.
| P1-36 | Čas detekce odpojení PG ve zpětné vazbě rychlosti | Tovární nastavení | 0.0s |
| Rozsah nastavení | 0.0: no action 0.1s~10.0s | ||
Slouží k určení času detekce chyby odpojení enkodéru, při nastavení 0,0 s měnič nezjistí chybu odpojení enkodéru. Pokud měnič zjistí chybu odpojení, která trvá déle než nastavený čas P1-36, měnič generuje alarm ERR20.
| P1-37 | Volba ladění | Továrnínastavení | 0 | |
| Rozsah nastavení | 0 | Nefunguje | ||
| 1 | Statické ladění asynchronousího motoru | |||
| 2 | Kompletní ladění asynchronousího motoru | |||
0: Nefunguje, ladění zakázáno.
Technické parametry vysokoúčinného měniče frekvence
1: Statické vyladění asynchronního motoru není snadné bez zátěže, ale není to úplné ladění. Před provedením asynchronního statického ladění nastavte správný typ motoru a výrobní štítek motoru P1-00\~ P1-05. V případě asynchronního statického ladění stroje, měnič může získat tři parametry P1-06 \~ P1-08. Způsob provedení: nastavte kód funkce na 1, poté stiskněte tlačitko RUN, měnič provede statické ladění.
2: Kompletní ladění asynchronního stroje. Pro zajištění dynamického řízení měniče, vyberte celkové ladění, motor musí být oddělen od zátěže, aby jej bylo možno udržet ve stavu bez zátěže.
Během procesu kompletního ladění měniče provede statické ladění a poté provede dobu zrychlení, čímž zrychlí P0-17 na 80 % jmenovité frekvence motoru. Po prodlevč bude P0-18 zpomalovat podle doby brzdění a zastaví před úplným doladěním asynchronního stroje. Kromě nutnosti nastavení typu motoru a parametrů z výrobního štítku motoru P1-00 \~ P1-05, je třeba také nastavit správný typ kodéru a impulzy kodéru P1-27, P1-28. Úplně vyladění asynchronního stroje: měnič může získat pět parametrů motoru, P1-06 \~ P1-10, pořadí AB fází (P1-3) kodéru a parametry P1 proudové smyčky vektorového řízení P2-13 \~ P2-16.
Dokončení ladění: Nastavte kód funkce na 2, poté stiskněte tlačitko WIN, měnič dokončí ladění.
Skupina P2: Parametry vektorového řízení
Kódy funkce ve skupině P2 fungují pouze při vektorovém řízení, v případě řízení U/f kódy nefungují.
| P2-00 | Proporcionalní zesílení rychlostní smyčky 1 | Továrnínastavení | 30 |
| Rozsah nastavení | 1~100 | ||
| P2-01 | Doba integrace rychlostní smyčky 1 | Továrnínastavení | 0.50s |
| Rozsah nastavení | 0.01s~10.00s | ||
| P2-02 | Frekvence přepinání 1 | Továrnínastavení | 5.00Hz |
| Rozsah nastavení | 0.00~F2-05 | ||
| P2-03 | Proporcionalní zesílení rychlostí smyčky 2 | Továrnínastavení | 15 |
| Rozsah nastavení | 0~100 | ||
| P2-04 | Doba integrace rychlostní smyčky 2 | Továrnínastavení | 1.00s |
| Rozsah nastavení | 0.01s~10.00s | ||
| P2-05 | Frekvence přepinání 2 | Továrnínastavení | 10.00Hz |
| Rozsah nastavení | F2-02~Maximální výstupní frekvence | ||
Měnič pracuje s různými frekvencemi, je možno vybírat různé parametry PI rychlostní smyčky. Pokud je provozní frekvence nižší než taktovací frekvence 2, parametry regulace PI rychlostní smyčky jsou P2-03 a P3-04. Parametry PI rychlostní smyčky mezi taktovací frekvencí 1 a taktovací frekvencí 2 to jsou dvě skupiny parametrů lineárního přepínání PI.
Zobrazeno na obrázku 6-2:
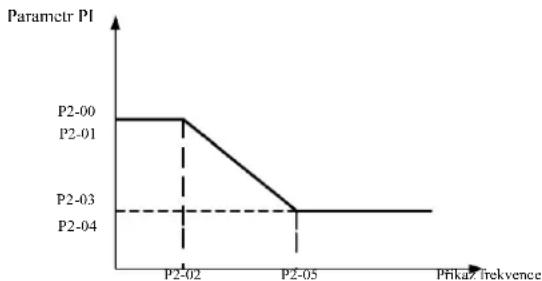
line
| PhkaZ frekvence | Parameter PI | | --------------- | ------------ | | P2-00 | P2-01 | | P2-02 | P2-01 | | P2-03 | P2-04 | | P2-05 | P2-04 |Obrázek 6-2 Schéma parametrů PI
Nastavením koeficientu proporcionality regulátoru rychlosti a doby integrace je možno přizpůsobit charakteristiku dynamické odezvy vektorového řízení rychlosti.
Zvýšení proporcionálního zesílení, zkrácení doby integrace může urychlit dynamickou odezvu rychlostní smyčky. Avšak příliš velké proporcionální zesílení nebo příliš krátká doba integrace může působit vibrace systému. Doporučený způsob regulace:
Pokud parametry továrního nastavení nesplňují požadavky, pak je třeba hodnotu parametru továrního nastavení doladit. Nejdříve zvětšete proporcionální zesílení, pro ujištění, že systém nevibruje; poté zkraťte dobu integrace. Obvod má rychlou odezvu a malý překmit.
Poznámka: Pokud jsou parametry PI nastaveny nesprávně, může to způsobit překmit rychlosti.
| P2-06 | Zesílení skluzu vektorového řízení | Tovární nastavení | 100% |
| Rozsah nastavení | 50%~200% | ||
Bezsenzorové vektorové řízení rychlosti. Tento parametr slouží k precizní regulaci konstantní rychlosti motoru: když je zatížení motoru nízké, ke zvýšení parametru rychlosti a naopak.
V případě vektorového řízení snímače rychlosti lze tímto parametrem také regulovat zatížení výstupního proudu měniče.
| P2-07 | Doba filtrování rychlostní smyčky | Tovární nastavení | 0.000s |
| Rozsah nastavení | 0.000s~0.100s | ||
Proudový příkaz výstupního točivého momentu regulátoru rychlostní smyčky, parametry filtru příkazu momentu v režimu vektorového řízení.
Tento parametr obvykle nepotřebuje upravovat kolísání rychlosti, která by mohla být vhodná pro prodloužení doby filtrování; Pokud však motor vibruje, je třeba odpovídajícím způsobem tento parametr snížit.
Časová konstanta filtru rychlostní smyčky je malá, výstupní točivý moment měniče může být proměnný, ale rychlost odezvy je velká.
| P2-08 | Vektorové řízení | Továrnínastavení | 64 |
| Rozsahnastavení | 0~200 | ||
Během brzdění, může být nárůst napětí řídící sběrnice v důsledku přebuzení utlumen, aby nedošlo k chybě přepětí. Čím větší nárůsty v důsledku přebuzení, tím silnější je tlumení.
V podmínkách brzdění měničem se snadněji vytvoří přetlak a je slyšet alarm, pak je třeba upravit ovládání přebuzení. Pokud je ale zesilení přebuzení příliš velké, snadno to povede ke zvýšení výstupního proudu; proto je to třeba v aplikaci vyvážit.
V případě nízké setrvačnosti nedochází ke zpoždění nárůstu napětí motoru. Doporučuje se, aby zesílení přebuzení bylo 0; V případě brzdného odporu v této situaci se také doporučuje nastavit zesílení přebuzení na 0.
| P2-09 | Zdroj omezení točivého momentu v režimu řízení rychlosti otáček | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | F2-10 | ||
| 1 | A11 | |||
| 2 | A12 | |||
| 3 | A13 | |||
| 4 | Nastavení pulzu | |||
| 5 | Preferovaná nastavení komunikace | |||
| P2-10 | Nastavená hodnota v digitálním režimu ovládání omezení točivého momentu | Tovární nastavení | 150.0% | |
| Rozsah nastavení | 0.0% ~200.0% | |||
V režimu řízení rychlosti otáček, je maximální hodnota výstupního točivého momentu měniče řízená zdrojem omezení momentu.
P2-09 slouží k volbě zdroje pro nastavení prahu rychlosti otáček. Když nastavení komunikace je analogové, pulzní, 100% odpovídá příslušnému nastavení P2-10, P2-10 a 100% jmenovitému točivému momentu měniče.
| P2-13 | Proporcionalní zvýšeníregulátoru buzení | Tovární nastavení | 2000 |
| Rozsah nastavení | 0~20000 | ||
| P2-14 | Zesílení integraceproregulaci buzení | Tovární nastavení | 1300 |
| Rozsah nastavení | 0~20000 | ||
| P2-15 | Proporcionalní zesíleníregulace točivého momentu | Tovární nastavení | 2000 |
| Rozsah nastavení | 0~20000 | ||
| P2-16 | Zesílení integrace proregulaci točivého momentu | Tovární nastavení | 1300 |
| Rozsah nastavení | 0~20000 | ||
Parametry regulace proudové smyčky PI vektorového řízení. Úplné parametry ladění v asynchronním nebo synchronním stroji budou automaticky načteny po vyladění, obvykle není nutné je upravovat.
Je třeba připomenout, že integrační regulátor proudové smyčky namísto používání doby integrace jako rozměru, přímo nastavuje zesílení integrace. Pokud zesílení proudové smyčky PI je nastaveno příliš vysoko, může to způsobit oscilaci celé smyčky řízení, takže když je
Technické parametry vysokoučinného měniče frekvence
proudová oscilace nebo dunční točivého momentu velké, lze je zde ručně snížit, aby došlo k dosažení proporcionálního zesilení nebo zesilení integrace PI.
Skupina P3 - Parametry řízení U / f
Kódy funkce fungují pouze při řízení U/f. V případě vektorového řízení nejsou funkční.
Řízení U/f je vhodné pro ventilátory, čerpadla a jiné obvyklé zátěže nebo měniče s větším množstvím motorů nebo výkon měniče a výkon motoru s úplně jiným použitím.
| P3-00 | Výběr křivky U/f | Továrnínastavení | 0 | |
| Rozsah nastavení | 0 | lincární | ||
| 1 | vícebodová | |||
| 2 | čtvercová | |||
| 3 | 1.2 čtvercová | |||
| 4 | 1.4 čtvercová | |||
| 6 | 1.6 čtvercová | |||
| 8 | 1.8 čtvercová | |||
| 9 | vyhrazeno | |||
| 10 | křivka U/f s plnou separací | |||
| 11 | křivka U/f s poloviční separací | |||
0: Lineární U/f. Vhodné pro obyčejnou zátěž s konstantním točivým momentem.
1: Vícebodová křivka U / f. Vhodná pro odvodňovací stroje, odstředivky a jiné speciální zátěže. V tento okamžik během nastavení parametrů P3-03 \~ P3-08, je lze získat na jakékoliv křivce U/f.
2: Čtvercová křivka U / f. Vhodná pro ventilátory, čerpadla a jiné odstředívé zátěže. 3 \~ 8: Křivka U/f mezi přímkou, mezi PF a čtvercem U/f.
10: Křivka U/f s plnou separaci. Pak jsou výstupní frekvence a výstupní napětí měnič na sobě nezávislé. Výstupní frekvence je určena zdrojem frekvence a výstupní napětí je určeno pomocí P3-13 (izolovaný zdroj napětí U/f).
Režim plné separace U/f je obvykle používán při indukčním ohřevu, v měniči výkonu, při řízení točivého momentu motoru apod.
11: Křivka U/f s poloviční separací
V tomto případě jsou V a F úměrné zdroji napětí nastavením P3-13 a vztah mezi V a F platí také pro jmenovité napětí motoru ve skupině P1 s ohledem na jmenovitou frekvenci.
Předpokládejme, že zdroj vstupního napětí je X (kde X je 0 až 100 % hodnoty). Výstupní napětí V F ve vztahu mezi měničem a frekvenci je: V / F = 2 * X * (jmenovité napětí motoru) / (jmenovitá frekvence motoru).
| P3-01 | Zesileni točivého momentu | Tovární nastavení | Závisí na modelu |
| Rozsah nastavení | 0.0%~30% | ||
| P3-02 | Frekvence vypínání točivého momentu | Tovární nastavení | 50.00Hz |
| Rozsah nastavení | 0.00Hz~max. výstupní frekvence | ||
Pro kompenzaci charakteristiky točivého momentu při nízké frekvenci řízení U/F je nutné zvýšit kompenzaci výstupního napětí měniče. Pokud je však nastavení zesílení točivého momentu je příliš vysoké, motor se přehřeje a dojde k nadproudu měniče.
Při vysokém zatížení a nedostatečném rozběhovém momentu motoru se doporučuje tento parametr zvýšit, poté mírně snížit, když dojde ke zvýšení. Když je zesílení točivého momentu nastaveno na 0,0 měnič automatický zvýší točivý moment, přičemž se točivý moment v tomto okamžiku zvýší podle požadovaných automaticky vypočítaných parametrů elektrického odporu statoru hnacího motoru.
Zesílení točivého momentu a mezní frekvence točivého momentu: Při této frekvenci je zvýšení točivého momentu účinné.
Nad touto nastavenou frekvenci se zesilení točivého momentu nezdaří. Podrobnosti viz obrázek 6-3.
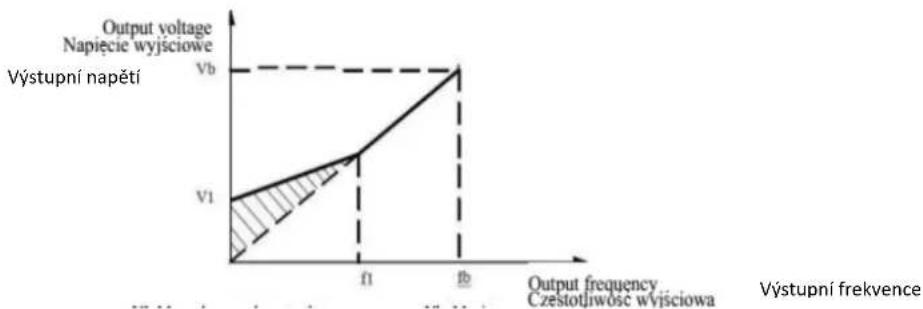
line
| Output frequency | Output voltage | | :--- | :--- | | V1 | V1 | | Vb | Vb | | Výstupní napětí | Vb | | Výstupní frekvence | Vb |VI: Ruční zesilení napětí točivého momentu Vb Maximální výstupní napětí
fl: Mezní frekvence ruční zesílení točivého momentu fb: jmenovitá provozní frekvence
Obr. 6-3 Schéma ručního zesílení točivého momentu
| P3-03 | Bod 1 frekvence U/f | Tovární nastavení 0.00Hz | |
| Rozsah nastavení | 0.00Hz~P3-05 | ||
| P3-04 | Bod 1 napětí U/f | Tovární nastavení 0.0% | |
| Rozsah nastavení | 0.0%~100.0% | ||
| P3-05 | Bod 2 frekvence U/f | Tovární nastavení 0.00Hz | |
| Rozsah nastavení | P3-03~P3-07 | ||
| P3-06 | Bod 2 napětí U/f | Tovární nastavení | 0.0% |
| Rozsah nastavení | 0.0%~100.0% | ||
| P3-07 | Bod 3 frekvence U/f | Tovární nastavení | 0.00Hz |
| Rozsah nastavení | P3-05 ~ jmenovitá frekvence motoru (P1-04) Poznámka: druhá jmenovitá frekvence motoru je A2-04 | ||
| P3-08 | Bod 3 napětí U/f | Tovární nastavení | 0.0% |
| Rozsah nastavení | 0.0%~100.0% | ||
P3-03 \~ P3-08 šest parametrů definujících vícesegmentovou křivku U/f.
Vícebodovou charakteristiku U/f je třeba nastavit podle charakteristiky zátěže motoru. Je třeba si uvědomit, že závislost mezi napětím a frekvencí musí být splněna ve třech bodech: V1 < V2 < V3, F1 < F2 < F3.
Obrázek 6-4 znázorňuje schéma křivky U/f s vícebodovým nastaveními.
Nastavení příliš vysokého napětí může způsobit přehřátí motoru nebo jeho spálení při nízkých frekvencích. Měnič se může zadrhávat nebo spouštět nadproudovou ochranu.
| P3-09 | Zesílení kompenzace skluzu U/f | Tovární nastavení | 0 |
| Rozsah nastavení | 0%~200.0% | ||
Kompenzace skluzu U/f. Může být kompenzována v případě indukčního motoru, kdy zátěž zvyšuje odchylku rychlosti motoru. Pokud se změní zátěž, je možno dosáhnout stabilní rychlosti motoru.
Zesílení kompenzace skluzu U/f je nastaveno na 100,0%, což označuje kompenzaci jmenovité zátěže ve vztahu ke jmenovitému skluzu motoru. Je možno také provést vlastní výpočty na základě jmenovitého skluzu motoru, skupiny jmenovité frekvence hnacího motoru dle P1 a jmenovité rychlosti otáček.
Je možno regulovat ot./min zesílení kompenzace skluzu U/f, obecně když jmenovitá zátěž, rychlost otáček motoru a cílová rychlost otáček jsou v zásadě stejné. Pokud rychlost otáček motoru a cílová hodnota nejsou stejné, je třeba odpovídajícím způsobem doladit zesílení.
| P3-10 | Zesílení přebuzení U/f | Tovární nastavení | |
| Rozsah nastavení | 0~200 | ||
Při brzdění může být nárůst napětí řídící sběrnice utlumen v důsledku přebuzení, aby nedošlo k chybě přepětí. Čím větší zesílení přebuzení, tím silnější je tlumení.
Za podmínek brzdění měničem e snadněji vytvoří přetlak a zazní alarm, v tom případě je třeba upravit ovládání přebuzení. Pokud ale nárůst přebuzení je příliš velký, snadno povede ke zvýšení výstupního proudu, je třeba to vyváži v aplikaci.
V případě malé setrvačnosti, nedojde ke zpoždění zvýšení napětí motoru. Je doporučeno, aby nárůst přebuzení byl 0;
V prípadě brzdného odporu v této situaci, je také doporučeno nastavit zesílení přebuzení na 0.
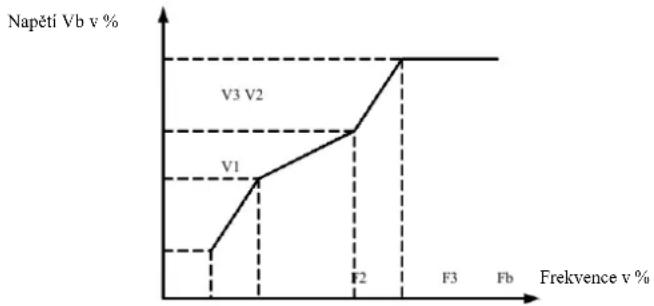
line
| Frekvence v % | Napětí Vb v % | |---|---| | V1 | V1 | | V2 | V3 | | F3 | F3 | | Fb | Fb |V1-V3: Procento napětí Multi-speed U / f segmentu 1-3
F1-F3: Procento frekvence Multi-speed U / f segmentu 1-3
Vb: jmenovité napětí motoru
Fb: jmenovitá provozní frekvence motoru
| P3-11 | Zesílení tlumení oscilace U/f | Tovární nastavení | Potvrzení modelu |
| Rozsah nastavení | 0~100 | ||
Metoda výběru zesílení je účinná při tlumení oscilace. Vyberte nízké zesílení, abyste nepříznivě neovlivnili výkon U/f. Když motor nemá žádné oscilace, zvolte zesílení 0. Zesílení je třeba zvětšit pouze při výrazných oscilacích motoru, čím větší je zesílení, tím lepší výsledck tlumení oscilace. Použití funkce tlumení oscilace vyžaduje přesné dodržení parametru jmenovitého proudu motoru a proudu naprázdno, jinak efekt tlumení oscilace U/f nebude dobrý.
| P3-13 | Izolované napětí U/f | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Digitální nastavení (P3-14) | ||
| 1 AI1 | ||||
| 2 AI2 | ||||
| 3 AI3 | ||||
| 4 | Nastavení pulzu (DI5) | |||
| 5 | Vicestavové příkazy | |||
| 6 | Jednoduché PLC | |||
| 7 PID | ||||
| 8 | Nastavení komunikace | |||
| 100,0% odpovídá jmenovitému napětí motoru (P1-02, A4-02, A5-02, A6-02) | ||||
| P3-14 | Digitální nastavení izolovaného napětí U/f | Tovární nastavení | 0V | |
| Rozsah nastavení | 0V ~ jmenovité napětí motoru | |||
Separace U/f je obvykle používá v aplikacích spojených s indukčním ohřevem, měničem výkonu a řízením točivým momentem motoru.
Při výběru řízení separace U/f, je možno výstupní napětí nastavit pomocí kódu funkce P3-14, ale také analogově, víceproudově, pomocí PLC, PID nebo nastavením komunikace. V případě nedigitálního nastavení každé nastavení odpovídá 100% jmenovitého napětí motoru, když procento absolutní hodnoty nastavení analogového výstupu apod. je záporné. Nastavuje se tedy jako aktivní referenční hodnotu.
0: Digitální nastavení napětí (P3-14) je přímo prostřednictvím P3-14. 1: AI1 2: AI2 3: AI3 Napětí ze svorky analogového vstupu je třeba určit.
-
Nastavení pulzu (DI5) prostřednictvím nastavení pulzu napětí na svorkách. Specifikace referenčního signálu pulzu: rozsah napětí 9 V \~ 30 V, rozsah frekvence 0 kHz \~ 100 kHz.
-
V případě vícekrokové instrukce napětí z několika zdrojů, je třeba nastavit skupinu P4 PC a nastavit parametry tak, aby daný signál odpovídal referenčnímu napětí.
-
Jednoduchý ovladač PLC Pokud je zdroje napětí jednoduchý PLC, je třeba nastavit sadu parametrů počítače PC, aby bylo možno určit příslušné výstupní napětí.
-
PID Uzavřená smyčka generuje výstupní napětí v souladu s regulátorem PID. Viz podrobné informace Skupiny PA pro PID.
-
Komunikace se týká napětí dodávaného hlavním počítačem v režimu komunikace. Když jsou zvoleny zdroje napětí 1-8, 0 odpovídá 100% výstupního napětí (0V\~ jmcnovitíc napětí motoru).
| P3-14 | Doba nárůstu izolovaného napětí U/f | Tovární nastavení | 0.0s |
| Rozsah nastavení | 0.0s~1000.0s | ||
Doba nárůstu separace U/f se vztahuje ke změnám výstupního napětí od 0 v do požadovaného času jmenovitého napětí motoru.
Znázorněno na obrázku 6-5:
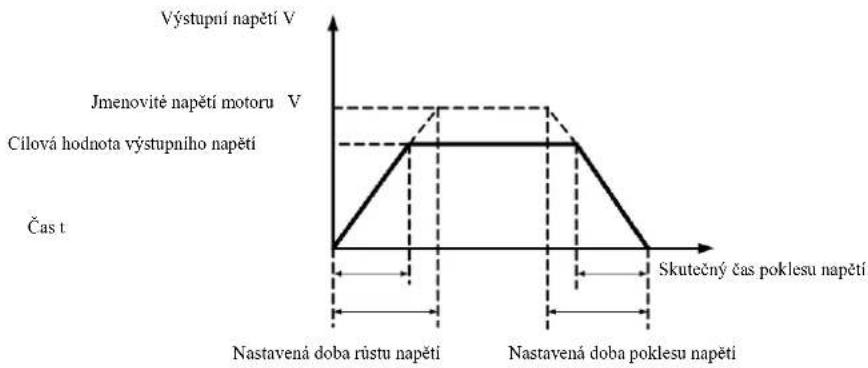
line
| Time Point | Voltage Level | | ---------- | ------------- | | Čas t | 0 | | Čas t | Výstupní napětí | | Čas t | Čas t | | Čas t | Jmenovité napětí motoru | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Skutečný čas poklesu napětí | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Škutečný čas poklesu napětí | | Čas t | Škutečný čas poklesu napětí | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Čas t | | Čas t | Ğkutečný čas poklesu napětí | | Čas t | Ğkutečný čas poklesu napětí | | Čas t | Ğkutečný čas poklesu napětí | | Čas t | Ğkutečný čas poklesu napětí | | Čas t | Ğkutečný čas poklesu napětí | | Čas t (Nastavená doba růstu napětí) | 0 | | Čas t (Nastavená doba růstu napětí) | 1 | | Čas t (Nastavená doba růstu napětí) | 2 | | Čas t (Nastavená doba růstu napětí) | 3 | | Čas t (Nastavená doba růstu napětí) | 4 | | Čas t (Nastavená doba růstu napětí) | 5 | | Čas t (Nastavená doba růstu napětí) | 6 | | Čas t (Nastavená doba růstu napětí) | 7 | | Čas t (Nastavená doba růstu napětí) | 8 | | Čas t (Nastavená doba růstu napětí) | 9 | | Čas t (Nastavená doba růstu napětí) | 10 | | Čas t (Nastavená doba růstu napětí) | 11 | | Čas t (Nastavená doba růstu napětí) | 12 | | Čas t (Nastavená doba růstu napětí) | 13 | | Čas t (Nastavená doba růstu napětí) | 14 | | Čas t (Nastavená doba růstu napětí) | 15 | | Čas t (Nastavená doba růstu napětí) | 16 | | Čas t (Nastavená doba růstu napětí) | 17 | | Čas t (Nastavená doba růstu napětí) | 18 | | Čas t (Nastavená doba růstu napětí) | 19 | | Čas t (Nastavená doba růstu napětí) | 20 | | Čas t (Nastavená doba růstu napětí) | 21 | | Čas t (Nastavená doba růstu napětí) | 22 | | Čas t (Nastavená doba růstu napětí) | 23 | | Čas t (Nastavená doba růstu napětí) | 24 | | Čas t (Nastavená doba růstu napětí) | 25 | | Čas t (Nastavená doba růstu napětí) | 26 | | Čas t (Nastavená doba růstu napětí) | 27 | | Čas t (Nastavená doba růstu napětí) | 28 | | Čas t (Nastavená doba růstu napětí) | 29 | | Čas t (Nastavená doba růstu napětí) | 30 | | Čas t (Nastavená doba růstu napětí) | 31 | | Čas t (Nastavená doba růstu napětí) | 32 | | Čas t (Nastavená doba růstu napětí) | 33 | | Čas t (Nastavená doba růstu napětí) | 34 | | Čas t (Nastavená doba růstu napětí) | 35 | | Čas t (Nastavená doba růstu napětí) | 36 | | Čas t (Nastavená doba růstu napětí) | 37 | | Čas t (Nastavená doba růstu napětí) | 38 | | Čas t (Nastavená doba růstu napětí) | 39 | | Čas t (Nastavená doba růstu napětí) | 40 | | Čas t (Nastavená doba růstu napětí) | 41 | | Čas t (Nastavená doba růstu napětí) | 42 | | Čas t (Nastavená doba růstu napětí) | 43 | | Čas t (Nastavená doba růstu napětí) | 44 | | Čas t (Nastavená doba růstu napětí) | 45 | | Čas t (Nastavená doba růstu napětí) | 46 | | Čas t (Nastavená doba růstu napětí) | 47 | | Čas t (Nastavená doba růstu napětí) | 48 | | Čas t (Nastavená doba růstu napětí) | 49 | | Čas t (Nastavená doba růstu napětí) | 50 | | Čas t (Nastavená doba růstu napětí) | 51 | | Čas t (Nastavená doba růstu napětí) | 52 | | Čas t (Nastavená doba růstu napětí) | 53 | | Čas t (Nastavená doba růstu napětí) | 54 | | Čas t (Nastavená doba růstu napětí) | 55 | | Čas t (Nastavená doba růstu napětí) | 56 | | Čas t (Nastavená doba růstu napětí) | 57 | | Čas t (Nastavená doba růstu napětí) | 58 | | Čas t (Nastavená doba růstu napětí) | 59 | | Čas t (Nastavená doba růstu napětí) | 60 | | Čas t (Nastavená doba růstu napětí) | 61 | | Čas t (Nastavená doba růstu napětí) | 62 | | Čas t (Nastavená doba růstu napětí) | 63 | | Čas t (Nastavená doba růstu napětí) | 64 | | Čas t (Nastavená doba růstu napětí) | 65 | | Čas t (Nastavená doba růstu napětí) | 66 | | Čas t (Nastavená doba růstu napětí) | 67 | | Čas t (Nastavená doba růstu napětí) | 68 | | Čas t (Nastavená doba růstu napětí) | 69 | | Čas t (Nastavená doba růstu napětí) | 70 | | Čas t (Nastavená doba růstu napětí) | 71 | | Čas t (Nastavená doba růstu napětí) | 72 | | Čas t (Nastavená doba růstu napětí) | 73 | | Čas t (Nastavená doba růstu napětí) | 74 | | Čas t (Nastavená doba růstu napětí) | 75 | | Čas t (Nastavená doba růstu napětí) | 76 | | Čas t (Nastavená doba růstu napětí) | 77 | | Čas t (Nastavená doba růstu napětí) | 78 | | Čas t (Nastavená doba růstu napětí) | 79 | | Čas t (Nastavená doba růstu napětí) | 80 | | Čas t (Nastavená doba růstu napětí) | 81 | | Čas t (Nastavená doba růstu napětí) | 82 | | Čas t (Nastavená doba růstu napětí) | 83 | | Čas t (Nastavená doba růstu napětí) | 84 | | Čas t (Nastavená doba růstu napětí) | 85 | | Čas t (Nastavená doba růstu napětí) | 86 | | Čas t (Nastavená doba růstu napětí) | 87 | | Čas t (Nastavená doba růstu napětí) | 88 | | Čas t (Nastavená doba růstu napětí) | 89 | | Čas t (Nastavená doba růstu napětí) | 90 | | Čas t (Nastavená doba růstu napětí) | 91 | | Čas t (Nastavená doba růstu napětí) | 92 | | Čas t (Nastavená doba růstu napětí) | 93 | | Čas t (Nastavená doba růstu napětí) | 94 | | Čas t (Nastavená doba růstu napětí) | 95 | | Čas t (Nastavená doba růstu napětí) | 96 | | Čas t (Nastavená doba růstu napětí) | 97 | | Čas t (Nastavená doba růstu napětí) | 98 | | Čas t (Nastavená doba růstu napětí) | 99 | | Čas t (Nastavená doba růstu napětí) | 100 |Obrázek 6-5 Schéma separace V / F
Skupina P4 – Vstupní svorky
Měnič této řady je standardně vybaven pěti multifunkčními svorkami digitálních vstupů (kde DI5 lze použit jako svorka vstupu rychlého pulzu). Dvě analogové vstupní svorky. Pokud systém potřebuje více vstupních a výstupních svorek, je možno použit volitelnou multifunkční rozšiřující kartu vstupů a výstupů.
Multifunkční rozšířující karta vstupů a výstupů má pět multifunkčních svorek digitálních vstupů (DI6 \~ DI10) a jeden konektor analogovécho vstupu (AI3).
| P4-00 | Výběr funkce svorek DI1 | Tovární nastavení | 1 (provoz) |
| P4-01 | Výběr funkce svorek DI2 | Tovární nastavení | 4 (kladný pohyb zpětného bodu) |
| P4-02 | Výběr funkce svorek DI3 | Tovární nastavení | 9 (reset chyby) |
| P4-03 | Výběr funkce svorek DI4 | Tovární nastavení | 12 (multi speed 1) |
| P4-04 | Výběr funkce svorek DI5 | Tovární nastavení | 13 (multi speed 2) |
| P4-05 | Výběr funkce svorek DI6 | Tovární nastavení | 0 |
| P4-06 | Výběr funkce svorek DI7 | Tovární nastavení | 0 |
| P4-07 | Výběr funkce svorek DI8 | Tovární nastavení | 0 |
| P4-08 | Výběr funkce svorek DI9 | Tovární nastavení | 0 |
| P4-09 | Výběr funkce svorek DI10 | Tovární nastavení | 0 |
Tyto parametry jsou používány pro nastavení funkce multifunkčních svorek digitálních vstupů a je možno je vybrat následujícím způsobem:
| Nastavený bod | Funkce | Popis |
| 0 | Bez funkce | Svorka nebude používána v režimu „Bez funkce“, aby nedošlo k nesprávnému fungování. |
| 1 | Směr vpřed (FWD) | Externí svorka k řízení pohonu vpřed a vzad. |
| 2 | Směr vzad (REV) | |
| 3 | Třívodičové ovládání | Tato svorka slouží k určení provozního režimu měniče v režimu třívodičového ovládání.Pro podrobnější informace přejděte k instrukcím pro kód funkce P4-11 („režim příkazů svorek“). |
| 4 | Impulsování vpřed (FJOG) | JOG - impulsování vpřed, JOG - impulsování vzad. Frekvence impulsování a doba zrychlení a brzdění v režimu JOG odkazuje na kód funkce P8-00, P8-01, P8-02. |
| 5 | Zpětné body (RJOG) | |
| 6 | Svorka NAHORU (UP) | Pomocí externích svorek jsou zadávány příkazy pro úpravu frekvence, její inkrementace a dekremen tacc. Zdroj frekvence je nastaven na digitální nastavení, je možno jej ovládat nahoru a dolů za účelem nastavení frekvence. |
| 7 | Svorka DOLŮ (DOWN) | |
| 8 | Volnoběh | Měnič blokuje výstup a poté zastaví proces řízení motoru měničem. Totéž platí pro volnoběh P6-10. |
| 9 | Reset (RESET) | Funkee resetování chyby terminálu s funkčním tlačítkem reset na klávesnici. Tato funkce slouží k dálkovému resetování chyb. |
| 10 | Zastavení provozu | Měnič je zastaven, ale všechny provozní parametry zůstávají v paměti. Parametry jako PLC, Wobble parametry, PID parametry. Když tento signál na svorce zanikne, měnič se vráti do stavu před zastavením. |
| 11 | Vstup normálně otevřený pro externí chybu | Když je tento signál vyslán do měniče, měnič hlásí chybu ERR15. Odstranění chyb a ochrana před chybami dle provozního režimu (viz také podrobnosti ohledně kódu funkce P9-47). |
Technické parametry vysokoúčinného měniče frekvence
| 12 | Svorka Multi-speed 1 | 16 stavů čtyř svorek pro rychlost nebo 16 jiných sad instrukcí. Podrobnosti najdete v tabulce 1. |
| 13 | Svorka Multi-speed 2 | |
| 14 | Svorka Multi-speed 3 | |
| 15 | Svorka Multi-speed 4 | |
| 16 | Svorka volby doby brzdění 1 | Tyto dvě svorky mají čtyří stavy, čtyři možnosti dosažení doby zrychlení a brzdění, podrobnosti viz Tabulka 2 |
| 17 | Svorka volby doby brzdění 2 | |
| 18 | Přepínač zdroje frekvence | Přepínání pro volbu jiného zdroje frekvence.Dle kódu funkce výběru zdroje frekvence (P0-07) tato svorka slouží k přepínání mezi dvěma zdroji frekvence. |
| 19 | Smazání nastavení NAHORU / DOLŮ (svorka, klávesnice) | S ohledem na zadanou digitální referenční frekvenci, tato svorka může vymazat změny NAHORU / DOLŮ nebo změnit NAHORU / DOLŮ tak, že daná frekvence se vrátí na zadanou hodnotu P0-08. |
| 20 | Přepínání zdroje zadáváním příkazů svorkou | Pokud je zdroj příkazů nastavený na ovládání svorkou (P0-02 = 1), je možno tuto svorku přepnout na ovládání svorkou a ovládání pomocí klávesnice.Pokud je zdroj příkazů nastavený na ovládání komunikací (P0-02 = 2), je možno tuto svorku přepnout na ovládání komunikací a ovládání pomocí klávesnice. |
| 21 | Blokace zrychlení a stavení | Zajišťuje, že měnič nevydává externí signály (s výjimkou příkazu zastavení), aby byla zachována aktuální výstupní frekvence. |
| 22 | Konec času PID | PID je dočasně deaktivováno, měnič si zachovává aktuální výstupní frekvenci, již není PID regulace zdroje frekvence. |
| 23 | Reset stavu PLC | PLC pauza v procesu implementace, můžete vrátit měnič pomoci této svorky do počátečního stavu jednoduchého PLC. |
| 24 | Pauza oscilační frekvence | Pohon na výstup střední frekvence. Zastavení funkce Wobble. |
| 25 | Vstup čítače | Vstupní svorka čítače impulzů. |
| 26 | Reset čítače Stav resetování čítače. | |
| 27 | Vstup sčítání délky Vstupní svorka sčítání délky. | |
| Nastavený bod | Funkce | Popis |
| 28 | Reset sčitání délky | Smazání délky |
| 29 | Blokace řízení momentem | Blokace řízení momentem pohonu, měnič přechází do režimu řízení rychlostí. |
| 30 | Vstup frekvence impulsů(platí pouze pro) | D15 plní funkci svorky pulzního vstupu |
| 31 | Vyhrazeno Vyhrazeno | |
| 32 | Brzdění stejnosměrným proudem | Když je tato svorka aktivní, měnič přechází přímo do stavu brzdění stejnosměrným proudem. |
| 33 | Vstup signálu externí chyby normálně uzavřený | Když normálně uzavřený vstup signalizuje měničí externí chybu, měnič hlásí chybu ERR15 a odstávku. |
| 34 | Blokace změn frekvence zapnuta | Pokud je tato funkce aktivní, po změně frekvence měniče nereaguje na změnu, dokud svorka nezačne být neaktivní. |
| 35 | Změna směru chodu PID | Pokud je tato svorka aktivní, směr chodu PID se změní na opačný, než je nastavený PA-03 |
| 36 | Zastavení externím signálem ze svorky 1 | Při ovládání klávesnicí může být tato svorka použita k zastavení měniče, odpovídá tlačitku STOP na klávesnici. |
| 37 | Přepínání zdroje zadávání příkazů svorkou 2 | K přepínání mezi ovládáním pomocí svorek a ovládáním pomocí komunikace. Pokud je svorka zvolena jako zdroj příkazů, systém se přepne na efektivní řízení komunikačním terminálem a naopak. |
| 38 | Zastavení funkce integrátoru PID | Pokud je tato svorka aktivní, integrační regulace PID je zastavena, ale poměr regulace PID a derivační regulace zůstává stále platná. |
| 39 | Přepínání mezi zdrojem frekvence X a zadanou frekvencí | Když je svorka zapnutá, je jako alternativa dostupný zdroj frekvence X s nastavenou frekvenci (P0-08). |
Technické parametry vysokoúčinného měniče frekvence
| 40 | Přepínání mezi zdrojem frekvence Y a zadanou frekvencí | Když je svorka zapnutá, je jako alternativa dostupný zdroj frekvence Y s nastavenou frekvencí (P0-08). |
| 41 | Výběr motoru svorkou 1 | Tyto dva stavy na dvou svorkách, je možno přepínat dvě sady parametrů motoru. Podrobnosti viz Tabulka 3 |
| 42 | Výběr motoru svorkou 2 | |
| 43 | Přepínání parametrů PID | Pokud v podmínkách přepínání parametru PID na svorce DI (PA-18 = 1) je tato svorka neaktivní, bude použit parametr PID PA-05 ~ PA-07, PA-15 když tato svorka bude aktivní ~ PA-17; |
| 44 | Chyba 1 definována uživatelem | Pokud jsou aktivní chyby 1 a 2 definované uživatelem, měnič generuje postupně alarmy ERR27 a ERR28, měnič frekvence zvolí funkci ochrany proti chybám na základě zpracování ve zvolcném provozním rcžimu P9-49. |
| 45 | Chyba 2 definována uživatelem | |
| 46 | Přepínání mezi řízením rychlostí a momentem | Mezi režimcem řízení momentem pohonu a rcžimcem řízení rychlostí. Svorka je neaktivní, bčží režim A0-00 (řízení rychlostí / točivým momentem) definovaný v měniči, svorka je aktivní a poté se přepíná do jiného režimu. |
| 47 | Nouzové zastavení | Když je tato svorka aktivní, měnič zastavuje pohon co nejrychleji je to možné v rozsahu aktuálně nastaveného limitu. Tato funkce slouží ke splnění podmínky, kdy pohon musí být zastaven tak rychle, jak je to možné, jelikož se systém nachází v nouzovém stavu. |
| 48 | Zastavení externím signálem ze svorky 2 | V jakémkoli režimu řízení (ovládací pane, řízení svorkou, řízení komunikací) může tato svorka sloužit k zastavení měniče, v tomto případě je doba brzdění konstantní dobou 4. |
| 49 | Zastavení brzděním stejnosměrným proudem | Když je tato svorka aktivní, měnič zpomalí, aby zastavil počáteční frekvenci brzdění stejnosměrným proudem, a poté se přepne na brzdění stejnosměrným proudem. |
| 50 | Vymazání provozní doby | Když je tato svorka aktivní, daná provozní doba měniče je vynulována, takto funkce vyžaduje nastavení provozní doby (P8-42) a její dosažení (P8-53). |
Tabulka 1 Popis funkce vícekrokového příkazu
Svorka příkazů více než čtyřkrokových může spojit 16 stavů. Každý stav odpovídá 16 nastavením příkazů jako v tabulce:
| K4 | K3 | K2 | K_1 | Sada příkazů | Relevantní parametry |
| OFF | OFF | OFF | OFF | Vícekrokový příkaz 0 | PC-00 |
| OFF | OFF | OFF | ON | Vícekrokový příkaz 1 | PC-01 |
| OFF | OFF | ON | OFF | Vícekrokový příkaz 2 | PC-02 |
| OFF | OFF | ON | ON | Vícekrokový příkaz 3 | PC-03 |
| OFF | ON | OFF | OFF | Vícekrokový příkaz 4 | PC-04 |
| OFF | ON | OFF | ON | Vícekrokový příkaz 5 | PC-05 |
| OFF | ON | ON | OFF | Vícekrokový příkaz 6 | PC-06 |
| OFF | ON | ON | ON | Vícekrokový příkaz 7 | PC-07 |
| ON | OFF | OFF | OFF | Vícekrokový příkaz 8 | PC-08 |
| ON | OFF | OFF | ON | Vícekrokový příkaz 9 | PC-09 |
| ON | OFF | ON | OFF | Vícekrokový příkaz 10 | PC-10 |
| ON | OFF | ON | ON | Vícekrokový příkaz 11 | PC-11 |
| ON | ON | OFF | OFF | Vícekrokový příkaz 12 | PC-12 |
| ON | ON | OFF | ON | Vícekrokový příkaz 13 | PC-13 |
| ON | ON | ON | OFF | Vícekrokový příkaz 14 | PC-14 |
| ON | ON | ON | ON | Vícekrokový příkaz 15 | PC-15 |
Když zdroj frekvence funkce několika rychlostí PC-00 \~ PC-15 je vybrán jako 100,0%, odpovídá to maximální frekvenci P0-10. Kromě toho, že jsou používány ve funkci několika rychlostí, vícekrokové příkazy mohou být také používány jako referenční zdroj PID nebo jako kontrola separace U/f zdroje napětí apod., aby vyhovovaly potřebám přepínání mezi úkoly.
Tabulka 2. Funkce svorek pro volbu doby zrychlení a brzdění
| Svorka 2 Svorka 1 | Volba doby zrychlení a brzdění | odpovídá | |
| OFF OFF | Doba zrychlení 1 | P0-17、P0-18 | |
| OFF | ON Doba | zrychlení 1 | P8-03、P8-04 |
| ON OFF | Doba zrychlení 3 | P8-05、P8-06 | |
| ON | ON | Doba zrychlení 4 | P8-07、P8-08 |
Tabulka 3. Funkce svorek pro výběr motoru
| Svorka 2 | Svorka 1 | Výběr motoru | Relevantní sada parametrů |
| OFF | OFF | Motor 1 | Skupina P1, P2 |
| OFF ON | Motor 2 | Skupina A2 | |
| P4-10 | Čas filtrace Dl | Továrnínastavení | 0.010s | |
| Nastavení | 0.000s~1.000s | |||
Nastavení stavu DI času filtrace v softwaru svorky. Pokud je použita vstupní svorka, která je náchylná na rušení způsobené špatným fungováním tohoto parametru, lze tento parametr zvýšit za účelem zvýšení odolnosti proti rušení. Ačkoliv se tím prodlouží doba filtrování, může to způsobovat pomalou odczvu svorky DI.
| P4-11 | Režim příkazů svorky | Tovární nastavení | 0 | ||
| Rozsah nastavení | 0 | Dvouvodičový 1 | |||
| 1 | Dvouvodičový 2 | ||||
| 2 | Trívodičový 1 | ||||
| 3 | Trívodičový 2 | ||||
0: Dvouvodičový režim 1: Tento režim je nejběžněji používaným dvouřádkovým režimem. Přes svorky DI1, DI2 určuje chod motoru vpřed a vzad.
Funkce svorek:
| Svorky | Nastavený bod | Popis |
| DI1 | 1 | Pohyb vpřed (FWD) |
| DI2 | 2 | Pohyb vzad (REV) |
Protože DI1, DI2 jsou multifunkčním vstupním terminálem DI1 \~ DI10, úroveň je účinná.
| K1 | K2 | Příkaz spuštění |
| 0 | 0 | Stop |
| 0 | 1 | Vzad |
| 1 | 0 | Vpřed |
| 1 | 1 | Stop |
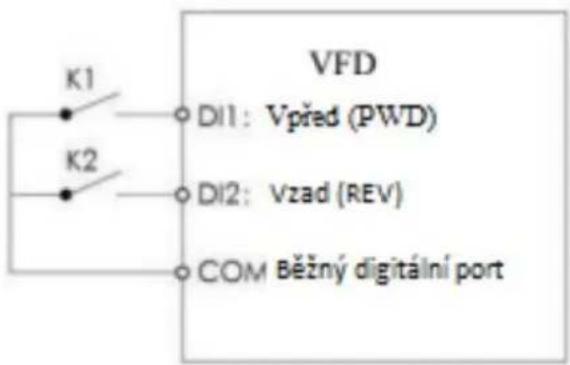
Obrázek 6-6 1: Dvouvodičový režim
1: Dvouvodičový režim
2: Tento režim používejte, pokud aktivní svorka funkce DI1 a funkce DI2 umožnuje určit směr.
Funkce svorek:
| Svorky Nastavení Popis | ||
| DI1 | 1 | Pohyb vpřed (FWD) |
| DI2 | 2 | Pohyb vzad (REV) |
DI1, DI2 – multifunkční vstupní svorky.
| K1 | K2 | Příkaz spuštění |
| 0 | 0 | Stop |
| 0 | 1 | Vzad |
| 1 | 0 | Vpřed |
| 1 | 1 | Stop |
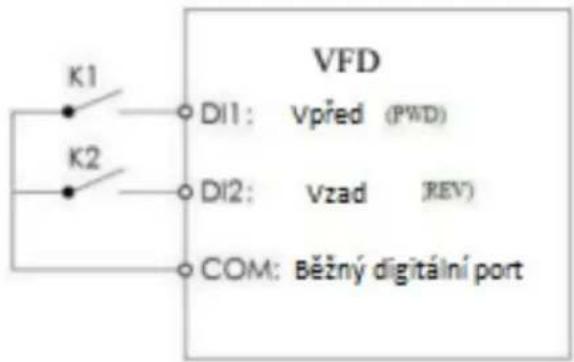
Obrázek 6-7 Dvouřádkový režim 2
2: Režim třívodičového řízení
1: Tento režim je aktivován na svorce DI3 nebo dle ovládání směru DI1, DI2
| Svorky | Nastavený bod Popis | |
| DI1 | 1 | Pohyb vpřed (FWD) |
| DI2 | 2 | Pohyb vzad (REV) |
| DI3 | 3 | Trívodičové řízení pohybem |
Je-li požadováno spuštění, musí být nejprve uzavřena svorka DI3 pře náběžné hrany DI1 nebo DI2, aby se dosáhlo řízení motoru vpřed nebo vzad.
Když je nutné zastavit, odpojte signál svorky DI3. DI1, DI2, DI3 to jsou multifunkční vstupní svorky DI1 \~ DI10, DI1, impulsy DI2 jsou účinné a DI3 má účinnou úroveň.
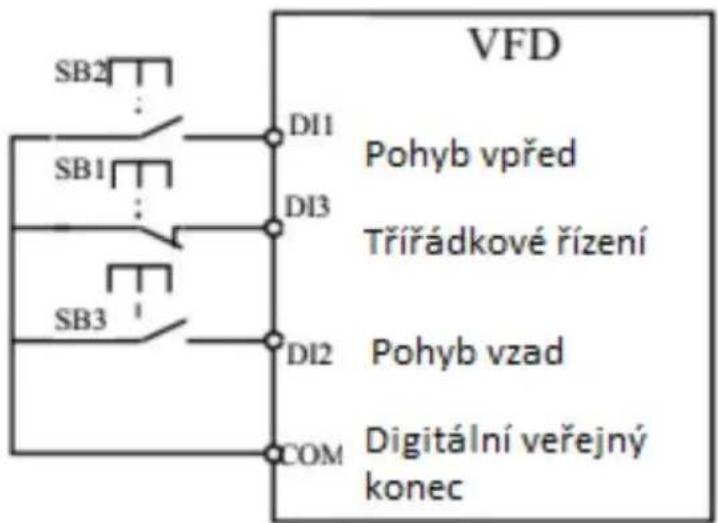
flowchart
graph TD
A["SB2"] --> B["DI1"]
C["SB1"] --> D["DI3"]
E["SB3"] --> F["DI2"]
G["COM"] --> H["Digitální veřejný konec"]
I["VFD"] --> J["Pohyb vpřed"]
I --> K["Třířádkové rízení"]
I --> L["Pohyb vzad"]
Rys. 6 -8 Třírádkový režim řízení 1
Přičemž: SB1: tlačitko stop SB2: tlačitko „vpřed” SB3: tlačitko „vzad”
Technické parametry vysokoučinného měniče frekvence
3: Režim třířádkového řízení
2: Tento režim spustíte svorkou DI3, spoustí příkaz zadaný DI1, směr DI2 dle volby.
Funkce svorek:
| Svorky | Nastavený bod Popis | |
| DI1 | 1 | Pohyb vpřed (FWD) |
| DI2 | 2 | Pohyb vzad (REV) |
| DI3 | 3 | Trívodičové řízení rychlostí |
Je-li požadováno spuštění, nejdříve je třeba uzavřít svorku DI3, zvýší se impuls signálu chodu motoru DI1, stav DI2 směr chodu motoru.
Když je nutné zastavit, odpojte signál svorky DI3. Mimo svorky, DI1, DI2, DI3 pro DI1 \~ DI10 multifunkční vstupní svorky, DI1 účinný impuls, DI3, DI2 fungují účinně.
| K | Směr chodu |
| 0 | Vpřed |
| 1 | Vzad (REV) |

Obr. 6-9 Trívodičové režim řízení 2
Přičemž: SB1: tlačítko „stop“, SB2: tlačítko „chod“.
| P4-12 | UP / DOWN rychlost změny | Tovární nastavení | 1.00Hz/s | |
| Nastavení | 0.011Hz/s~65.535Hz/s | |||
Při nastavování svorky UP / DOWN nahoru / dolů, nastavte zadanou frekvenci a rychlost změn frekvence, tedy velikost změny frekvence za sekundu.
Když P0-22 (desetinná tečka frekvence) čini 2, hodnota je w rozmezi 0,001 Hz / s \~ 65,535 Hz / s.
Když P0-22 (desetinná tečka frekvence) činí 1, hodnota je v rozmezi 0,01 Hz / s \~ 655,35 Hz / s.
| P4-13 | Minimální hodnota křivky A11 na vstupu | Tovární nastavení | 0.00V | |
| Nastavení | 0.00V~P4-15 | |||
| P4-14 | Nastavení křivkyA11 na vstupu | Tovární nastavení | 0.0% | |
| Nastavení | -100.00%~100.0% | |||
| P4-15 | Maximální hodnota křivky A11 na vstupu | Tovární nastavení | 10.00V | |
| Nastavení | P4-13~10.00V | |||
| P4-16 | Nastavení křivky A11 na vstupu | Tovární nastavení | 100.0% | |
| Nastavení | -100.00%~100.0% | |||
| P4-17 | Doba filtrování A11 | Tovární nastavení | 0.10s | |
| Nastavení | 0.00s~10.00s | |||
Výše uvedené kódy funkce slouží k nastavení závislosti mezi nastaveními analogového vstupního napětí.
Když je analogové vstupní napětí vyžší než nastavený „maximální vstup“ (P4-15), analogové napětí se vypočítá dle „maximálního vstupu“. Podobně, když analogové vstupní napětí je nižší než nastavený „minimální vstup“ (P4-13)),... [tekst niezrozumiały – przyp tlum.] - trešć w oryginale
Když je analogový vstup proudovým vstupcem, proud 1mA odpovídá 0,5V.
Čas vstupní filtrace A11 slouží k nastavení doby filtrování, když je software A11 náchylný na rušení v simulované lokalizaci. Je třeba zvýšit dobu filtrování, aby došlo ke stabilizaci detekce simulace. Avšak čím delší doba filtrace v průběhu simulace, tím pomalejší je doba odezvy. Způsob nastavení závisí na použití.
Technické parametry vysokoučinného měniče frekvence
V různých použitích analogové nastavení 100,0% odpovídající jmenovité hodnoty je různé, viz popis každé části aplikace.
Níže je uveden případ se dvěma typickými nastaveními:
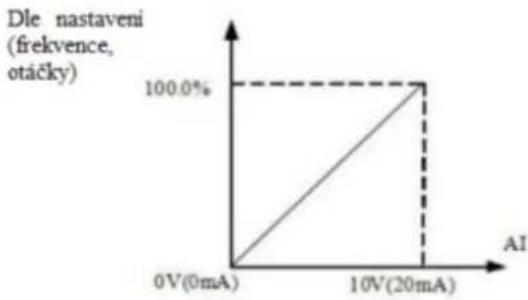
line
| AI (mA) | Dle nastaveni (%) | | :--- | :--- | | 0V (0mA) | 0 | | 10V (20mA) | 100.0 |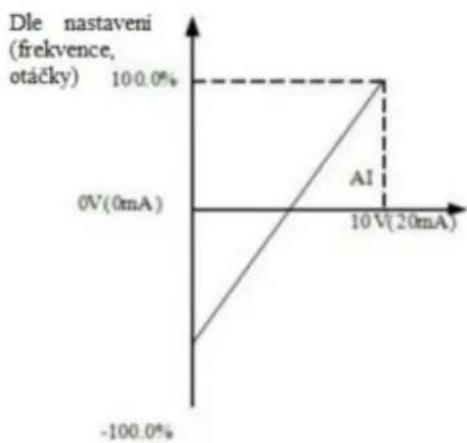
line
| Dle nastaveni (frekvence, otáčky) | 0V(0mA) | 10V(20mA) | |---|---|---| | -100.0% | -100.0% | -100.0% | | 100.0% | 0V(0mA) | 10V(20mA) | AI indicates the current value.Obrázek 6-10 Závislost mezi simulací a nastavovanou veličinou
| P4-18 | Minimální hodnota křivé Al2 na vstupu | Tovární nastavení | 0.00V | |
| Rozsah nastavení | 0.00V~P4-20 | |||
| P4-19 | Nastavení křivky Al2 na vstupu | Tovární nastavení | 0.0% | |
| Rozsah nastavení | -100.00%~100.0% | |||
| P4-20 | Maximální hodnota křivky Al2 na vstupu | Tovární nastavení | 10.00V | |
| Rozsah nastavení | P4-18~10.00V | |||
| P4-21 | Nastavení křivky Al2 na vstupu | Tovární nastavení | 100.0% | |
| Rozsah nastavení | -100.00%~100.0% | |||
| P4-22 | Doba filtrace Al2 | Tovární nastavení | 0.10s | |
| Rozsah nastavení | 0.00s~10.00s | |||
Funkce a použití křivky 2, viz popis křivky 1
| P4-23 | Minimální hodnota křivky A13 na vstupu | Tovární nastavení | 0.00V | |
| Rozsah nastavení | 0.00s~P4-25 | |||
| P4-24 | Nastavení křivky A13 na vstupu | Tovární nastavení | 0.0% | |
| Rozsah nastavení | -100.00%~100.0% | |||
Technické parametry vysokoučinného měniče frekvence
| P4-25 | Maximální hodnota křivky AI3 na vstupu | Tovární nastavení | 10.00V | |
| Rozsah nastavení | P4-23~10.00V | |||
| P4-26 | Nastavení křivky AI3 na vstupu | Tovární nastavení | 100.0% | |
| Rozsah nastavení | -100.00%~100.0% | |||
| P4-27 | Doba filtrace AI3 | Tovární nastavení | 0.10s | |
| Rozsah nastavení | 0.00s~10.00s | |||
Funkce a použití křivky 3, viz popis křivky 1
| P4-28 | Minimální vstupní impuls | Továrnínastavení | 0.00kHz | |
| Rozsahnastavení | 0.00kHz~P4-30 | |||
| P4-29 | Minimální vstupní shoda impulsu | Továrnínastavení | 0.0% | |
| Rozsahnastavení | -100.00%~100.0% | |||
| P4-30 | Maximální vstupní impuls | Továrnínastavení | 50.00kHz | |
| Rozsahnastavení | P4-28~50.00kHz | |||
| P4-31 | Maximální vstupní shoda impulsu | Továrnínastavení | 100.0% | |
| Rozsahnastavení | -100.00%~100.0% | |||
| P4-32 | Doba filtrace impulsního vstupu | Továrnínastavení | 0.10s | |
| Rozsahnastavení | 0.00s~10.00s | |||
Tyto kódy funkce slouží k nastavení relativní frekvence impulsů DI5 odpovídající průměrnému nastavení.
Impuls měniče frekvence je možno zadávat pouze prostřednictvím kanálu DI5. Použití a křivka funkce této skupiny je podobná 1, viz poznámka ke křivce 1.
| P4-33 | Výběr křivky AI | Tovární nastavení | 321 | ||
| Rozsah nastavení | Číslice jednotek | Výběr křivky AI | |||
| 1 | Křivka 1 (2 body, viz P4-13 ~ P4-16) | ||||
| 2 | Křivka 2 (2 body, viz P4-18 ~ P4-21) | ||||
| 3 | Křivka 3 (2 body, viz P4-23 ~ P4-26) | ||||
| 4 | Křivka 4 (4 body, viz A6-00 ~ A6-07) | ||||
| 5 | Křivka 5 (4 body, viz A6-08 ~ A6-15) | ||||
| Desítky | Výběr křivky Al2 (1 ~ 6, jak je uvedeno výše) | ||||
| Stovky | Výběr křivky Al3 (1 ~ 6, jak je uvedeno výše) | ||||
Bity deset a sto kódu funkce se používají k výběru příslušné křivky analogového vstupu AI1, AI2, AI3, Můžete zvolit 3 z pěti typů křivek a.
Křivka 1, křivka 2, křivka 3 jsou 2-bodovými křivkami a jsou nastavovány kódem funkce skupiny P4, zatímco křivka 4 a 5 to jsou 4-bodové křivky, které se nastaví pomocí kódů funkce skupiny A8.
Tento standardní měnič poskytuje dva analogové vstupy. AI3 musí být nakonfigurován pro použití multifunkční rozšiřující karty vstupů a výstupů (I/O).
| P4-34 | AI je pod minimálním vstupním nastavením | Tovární nastavení | 000 | ||
| Rozsah nastavení | Číslice jednotek | AI1 nižší než zvolené minimální vstupní nastavení | |||
| 0 | Odpovídající minimální vstupní nastavení | ||||
| 1 | 0.0% | ||||
| Desítky | AI2 nižší než zvolené minimální vstupní nastavení (0 ~ 1, výše) | ||||
Technické parametry vysokoúčinného měniče frekvence
| Stovky | AI3 nižší než zvolené minimální vstupní nastavení (0 ~ 1, výše) |
Tento kód funkce se používá k nastavení, když je analogové vstupní napětí menší než nastavený „minimální vstup“. Volba 0.
Jednotka kódu funkce Desítky, Stovky odpovídá analogovému vstupu AI1, AI2, AI3.
Pokud tato volba má hodnotu 1 a vstup AE je nižší než minimální, analogový odpovídá 0,0%.
| P4-35 | Doba zpoždění DI1 | Továrnínastavení | 0.0s | |
| Nastavování | 0.0s~3600.0s | |||
| P4-36 | Doba zpoždění DI2 | Továrnínastavení | 0.0s | |
| Nastavování | 0.0s~3600.0s | |||
| P4-37 | Doba zpoždění DI3 | Továrnínastavení | 0.0s | |
| Nastavování | 0.0s~3600.0s | |||
Když se změní svorka DI pro nastavení stavu, dochází ke změně doby zpoždění měniče. Momentálně pouze DI1, DI2, DI3 mají nastavenou funkci časového zpoždění.
| P4-38 | Volba režimu aktivity svorky DI 1 | Továrnínastavení | 00000 | ||
| Rozsah nastavení | Číslice jednotek | Aktivní svorka DI1 | |||
| 0 | Aktivní vysoká | ||||
| 1 | Aktivní nízká | ||||
| Desítky | Aktivní svorka DI2 (0-1, supra) | ||||
| Stovky | Aktivní svorka DI3 (0-1, supra) | ||||
| Tisíce | Aktivní svorka DI4 (0-1, supra) | ||||
| Deseti tisíce | Aktivní svorka DI5 (0-1, supra) | ||||
| P4-39 | Volba režimu aktivity svorky DI 2 | Továrnínastavení | 00000 | ||
| Rozsah nastavení | Číslice jednotek | Aktivní svorka DI6 | |||
| 0 | Aktivní vysoká | ||||
| 1 | Aktivní nízká | ||||
| Desítky | Aktivní svorka DI7 (0-1, supra) | ||||
| Stovky | Aktivní svorka DI8 (0-1, supra) | ||||
| Tisíce | Aktivní svorka DI9 (0-1, supra) | ||||
| Deseti tisíce | Aktivní svorka DI10 (0-1, supra) | ||||
Je určen k nastavení svorky digitálního vstupu do aktivního režimu. Po zvolení vysokého aktivního režimu, příslušná svorka S a spojení COM efektivně komunikují. Po zvolení nízkého aktivního režimu, příslušná svorka S a spojení COM jsou neaktivní, efektivně rozpojené.
Skupina P5 – výstupní svorky
Měnič této řady je standardně vybaven multifunkční svorkou analogového výstupu, multifunkční svorkou digitálního výstupu, svorkou multifunkčního reléového výstupu, svorkou FM (vybrána jako svorka výstupu rychlého impulsu, lze také vybrat jako svorka výstupu typu s otevřeným kolektorem). Vzhledem k tomu, že výstupní svorka se nemůže připojit k aplikaci, je vyžadována volitelná multifunkční rozšířující karta vstupů a výstupů.
Multifunkční vstupní a výstupní svorky rozšířující karty zahrnují multifunkční svorku analogového výstup (AO2),1 svorku multifunkčního reléového výstupu (relé 2), multifunkční svorku digitálního výstupu (DO2).
| P5-00 | Volba režimu výstupu svorky FM | Tovární nastavení | 0 | ||
| Rozsah nastavení | 0 | Pulzní výstup (FMP) | |||
| 1 | Dvoustavový výstup (FMR) | ||||
Svorka FM je programovatelná svorka multiplexování, kterou lze použít jako svorka vysokorychlostního pulzního výstupu (FMP). Může být také použita jako svorka výstupu typu otevřený kolektor (FMR)
Jako pulzní výstup FMP je maximální výstupní frekvence pulzů 100 kHz, funkce související s FMP naleznete v pokynech P5-06.
Technické parametry vysokoučinného měniče frekvence
| P5-01 | Výběr funkce FMRI (výstupní svork a typu otevřený kolektor l) | Továrnínastavení | 0 |
| P5-02 | Výběr funkce reléového výstupu (T / A-T / B-T / C) | Továrnínastavení | 2 |
| P5-03 | Výběr funkce reléového výstupu rozšířující karty (P / A-P / B-P / C) | Továrnínastavení | 0 |
| P5-04 | Výběr funkce výstupu DO1 (výstupní svorka typu otevřený kolektor) | Továrnínastavení | 1 |
| P5-05 | Výběr funkce výstupu DO2 rozšířující karty | Továrnínastavení | 4 |
Pět kódů se použivá k výběru funkci pěti digitálnich výstupů, kde T / A-T / B-T / C a P / A-P / B-P / C na řídící desce a na relé rozšířující karty.
Funkce multifunkčních výstupních svorek jsou následující:
| Nastavený bod | Funkce | Popis |
| 0 | Bez signálu na výstupu | Výstupní svorka nemá žádnou funkci |
| 1 | Měnič je v provozu | Což znamená, že měnič je v provozním režimu, je vysílán signál ON (ZAP.) výstupní frekvence (může být nulová) |
| 2 | Zastavení po chybě | Když se v měniči objeví chyba a dojde k odstávce, vyšle signál ON. |
| 3 | Detckce frekvence na výstupu FDT1 | Viz popis funkce P8-19, P8-20 |
| 4 | Dosažení zadané frekvence | Viz popis funkce P8-21. |
| 5 | Provoz s nulovými otáčkami (bez vypnutí výstupu) | Měnič je v provozu a výstupní frekvence je 0, výstupní signál ZAP (ON). Když je vypnutý pohon, vypnutý je i signál (OFF). |
| 6 | Upozornění na přetížení motoru | Objevuje se před spuštěním ochrany motoru proti přetížení podle vyhodnocení prahové hodnoty předpoplachu před přetížením, signál zapnutí výstupu prahové hodnoty předpoplachu. Nastavení parametrů přetížení motoru viz kód funkce P9-00 ~ P9-02. |
| 7 | Upozornění na přetížení měniče | 10 s předtím, než dojde k přetížení měniče se na výstupu objeví signál ON. |
| 8 | Stanovení přednastavené hodnoty čítače | Když čítač dosáhne na přednastavenou hodnotu PB-08, na výstupu se objeví signál ON. |
| 9 | Dosažení přednastavené hodnoty čítače | Když počítaná hodnota dosáhne hodnoty skupiny PB-09, na výstupu se objeví signál ON. |
| 10 | Dosažená délka na čítači | V případě detckce, že skutečná délka překračuje nastavenou délku PB-05, na výstupu se objeví signál ON. |
| 11 | Dokončení cyklu PLC | Po provedení jednoho cyklu jednoduchým PLC je šířka výstupního pulzu 250 ms. |
| 12 | Dosažení kumulativní provozní doby | Když kumulativní provozní doba překročí čas nastavený parametrem P8-17, na výstupu se objeví signál ON. |
| 13 | Práh frekvence | Když nastavená frekvence překročí horní nebo dolní práh a výstupní frekvence dosáhne horního nebo dolního prahu, na výstupu se spustí signál ON. |
| 14 | Práh momentu | Během pohonu v režimu řízení rychlostí, kdy výstupní točivý moment dosahuje mezní hodnotu, měnič přejde do stavu ochrany před zaseknutím a je vysílán signál ON. |
| 15 | Připraven k provozu | Když se napájení hlavního obvodu měniče a řídícího obvodu stabilizuje a měnič frekvence nedetekuje žádné informace o chybách, pohon je v provozním režimu a na výstupu se objeví signál „ON“. |
| Nastave ný bod | Funkce | Popis |
| 16 | AI1>AI2 | V případč, kdy hodnota AI1 je větší než hodnota AI2, na vstupu a výstupu se objeví signál ON (ZAP). |
| 17 | Dosažení horní meze frekvence | Když provozní frekvence dosáhne horní meze, na výstupu se zapne signál „ON“. |
| 18 | Dosažení spodní meze frekvence (bez signálu při odstávce) | Když provozní frekvence dosáhne spodní meze, objeví se na výstupu signál ON. Při odstávce je to signál „OFF“ (vypnutý). |
| 19 | Příliš nízké napětí na výstupu | Když je měnič pod napětím, výstupní signál je „ON“. |
| 20 | Nastavení komunikace | Viz komunikační protokol |
| 21 | Vyhrazeno | Vyhrazeno |
| 22 | Vyhrazeno | Vyhrazeno |
| 23 | Provoz s nulovou rychlostí 2 (vypnutý výstup) | Výstupní frekvence měniče je 0, výstupní signál je zapnutý. Ve stavu odstávky je tedy signál zapnutý („ON“. |
| 24 | Dosažení kumulativní doby napájení | Když kumulativní čas zapnutí měniče (P7-13) P8-16 překročí nastavenou dobu, výstupní signál je zapnutý. |
Technické parametry vysokoúčinného měniče frekvence
| 25 | Detekce úrovně frekvence na výstupu FDT2 | Viz popis kódu funkce P8-28, P8-29. |
| 26 | Dosažení frekvence 1 | Viz popis kódu funkce P8-30, P8-31. |
| 27 | Dosažení frekvence 2 | Viz popis kódu funkce P8-32, P8-33. |
| 28 | Dosažení hodnoty proudu 1 | Viz popis kódu funkce P8-38, P8-39. |
| 29 | Dosažení hodnoty proudu 2 | Viz popis kódu funkce P8-40, P8-41. |
| 30 | Dosažení provozní doby | Když je aktivní funkce Select clock (P8-45) a uplynula provozní doba měniče, na výstupu se objeví signál ON. |
| 31 | Překročení limitu, kdy se signál objevil na výstupu AI1 | Když je hodnota větší než hodnota na analogovém vstupu AI1 P8-46 (mezní hodnota ochrany vstupu AI1) nebo menší než na P8-45 (mezní hodnota ochrany vstupu AI1), na výstupu se objeví signál „ON“. |
| 32 | Nulové zatížení | Když je měnič ve stavu bez zatížení, na výstupu se objeví signál „ON“. |
| 33 | Chod vzad | Funguje zpětný chod, signál „ON“ je na výstupu. |
| 34 | Nulový proud | Viz popis kódu funkce P8-28, P8-29. |
| 35 | Přiliš vysoká teplota modulu | Když teplota chladiče modulu měniče (P7-07) dosahuje přednastavené teploty, tedy hodnoty modulu (P8-47), na výstupu se zapne signál „ON“. |
| 36 | Překročení času práce softwaru | Viz popis kódu funkce P8-36, P8-37. |
| 37 | Dosažení spodního prahu frekvence (signál na výstupu po zastavení) | Když provozní frekvence dosáhne spodní meze, na výstupu se objeví signál ON. V zastaveném stavu je signál také zapnutý. |
| 38 | Alarm na výstupu | Když dojde k poruše měniče a režim zpracování nebude moci pokračovat, na výstupu se objeví signál alarmu měniče. |
| 39 | Alarm překročení teploty motoru | Když teplota motoru dosáhne P9-58 (práh upozornění na přehřátí motoru), na výstupu se zapne signál. (Teplota motoru se zobrazí na U0-34). |
| 40 | Dosažení provozní doby | Když měnič překročí provozní dobu nastavenou parametrem P8-53, na výstupu se objeví signál „ON“. |
| P5-06 | Volba funkce výstupu FMP (výstupní svorky pulzů) | Tovární nastavení | 0 |
| P5-07 | Volba funkce výstupu AO1 | Tovární nastavení | 0 |
| P5-08 | Volba funkce výstupu AO2 | Tovární nastavení | 1 |
Výstupní rozsah pulzní frekvence na svorce FMP je 0,01 kHz \~ P5-09 (maximální výstupní frekvence FMP).
P5-09 lez nastavit v rozsahu 0,01 kHz \~ 100,00 kHz.
Výstupní rozsah analogových výstupů AO1 a AO2 je 0 V \~ 10 V nebo 0 mA \~ 20 mA. Rozsah pulzního výstupu nebo analogového výstupu s odpovídající závislosti skalární funkce je uveden v tabulce niže:
| Nastave ný bod | Funkce | Pulzní nebo analogový výstup odpovídající 0,0 % až 100,0 % funkce |
| 0 | Provozní frekvence | 0 ~ maximální výstupní frekvence |
| 1 | Přednastavená frekvence | 0 ~ maximální výstupní frekvence |
| 2 | Výstupní proud | 0 ~ 2 krát jmenovitý proud motoru |
| 3 | Výstupní moment | 0 až 2 krát jmenovitý točivý moment motoru |
| 4 | Výstupní výkon | 0-2 krát jmenovitý výkon |
| 5 | Výstupní napětí | 0 až 1,2-násobku jmenovitého napětí měniče |
| 6 | Pulzní vstup | 0.01kHz~100.00kHz |
| 7 | AI1 | 0V~10V |
| 8 | AI2 | 0V~10V (nebo 0 ~ 20mA) |
| 9 | AI3 | 0V~10V |
Technické parametry vysokoúčinného měniče frekvence
| 10 | Délka | 0 až maximální nastavená délka |
| 11 | Hlodnota čitače | 0 až maximální počet |
| 12 | Nastavení komunikace | 0.0%~100.0% |
| 13 | Otáčky motoru | 0 ~ maximální výstupní frekvence odpovídající rychlosti otáček |
| 14 | Výstupní proud | 0.0A~1000.0A |
| 15 | Výstupní napětí | 0.0V~1000.0V |
| P5-09 | Maximální výstupní frekvence FMP | Tovární nastavení | 50.00kHz |
| Rozsah nastavení | 0.01kHz~100.00kHz | ||
Když je FM vybrán jako výstupní pulzní svorka, kód funkce slouží k výběru maximální hodnoty výstupní pulzní frekvence.
| P5-10 | Koeficient posunutí nulového bodu AO1 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~+100.0% | ||
| P5-11 | Zesilení AO1 | Tovární nastavení | 1.00 |
| Rozsah nastavení | -10.00~+10.00 | ||
| P5-12 | Koeficient posunutí nulového bodu rozšířující karty AO2 | Tovární nastavení | 0.00% |
| Rozsah nastavení | -100.0%~+100.0% | ||
| P5-13 | Zesilení rozšířující karty AO2 | Tovární nastavení | 1.00 |
| Rozsah nastavení | -10.00~+10.00 | ||
Výše uvedené kódy funkce se obvykle používají k polarizaci výstupní amplitudy a korekci nulové odchylky analogového výstupu. Lze je také použít k nastavení požadované výstupní křivky AO.
Pokud posunutí nulového bodu o „b“ představuje zesílení o „k“ a skutečný výstupní výkon Y, X představuje standardní výstupní výkon, skutečná výstupní hodnota je:
Y = kX + b. Kde pro AO1, AO2 koeficient nulové odchylky 100% odpovídá 10 V (nebo 20 mA). To platí pro standardní výstupy bez korekce polarizace a zesílení. Výstup 0 V \~ 10 V (nebo 0 mA \~ 20 mA) odpovídá velikosti analogového výstupu.
Například: pokud analogový výstup má provozní frekvenci, při frekvenci 0 má výstup 8 V, frekvence je maximální výstupní frekvencí 3 V, zesilení by mělo být nastaveno na „-0,50“ a posunutí na „80“%“.
| P5-17 | Doba zpoždění výstupu FMR | Tovární nastavení | 0.0s |
| Rozsah nastavení | 0.0s~3600.0s | ||
| P5-18 | Doba zpoždění výstupu RELAY1 | Tovární nastavení | 0.0s |
| Rozsah nastavení | 0.0s~3600.0s | ||
| P5-19 | Doba zpoždění výstupu RELAY2 | Tovární nastavení | 0.0s |
| Rozsah nastavení | 0.0s~3600.0s | ||
| P5-20 | Doba zpoždění výstupu DO1 | Tovární nastavení | 0.0s |
| Rozsah nastavení | 0.0s~3600.0s | ||
| P5-21 | Doba zpoždění výstupu DO2 | Tovární nastavení | 0.0s |
| Rozsah nastavení | 0.0s~3600.0s | ||
Nastavte výstupní svorky FMR, RELAY 1, RELAY 2, DO1 a DO2 na takový stav, aby generovaly skutečnou změnu doby zpoždění výstupu.
| P5-22 | Stav aktivity na výstupu svorky DO | Tovární nastavení | 0 | |
| Rozsah nastavení | Číslice jednotek | Aktivní výběr FMR | ||
| 0 | Pozitivní logika | |||
| 1 | Inv | |||
| Desítky | Svorka RELAY1 aktivní (0-1, supra) | |||
| Stovky | Svorka RELAY2 aktivní 2 (0-1, supra) | |||
| Tisíce | Svorka DO1 aktivní (0-1, supra) | |||
| Desítky tisíc | Svorka DO2 aktivní (0-1, supra) | |||
Určete výstupní svorku logiky FMR, relé 1, relé 2, DO1 a DO2.
0: svorka digitálního výstupu pozitivní logiky a odpovídající společná svorka komunikují v aktivním stavu, rozpojí se v neaktivním stavu;
Technické parametry vysokoúčinného měniče frekvence
1: svorka digitálního výstupu negativní logiky a odpovídající společná svorka komunikují v aktivním stavu, rozpojí se v neaktivním stavu.
Skupina P6 – Řízení spouštěním a zastavením
| P6-00 | Režim spouštění | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Přímý start | ||
| 1 | Restart v režimu sledování rychlosti | |||
| 2 | Přebuzení (indukční motor AC) | |||
0: Přímý start
Když je doba brzdění stejnosměrným proudem DC nastavena na 0, měnič se spustí od počáteční frekvence. Když je doba brzdění stejnosměrným proudem jiná než 0, nejprve dojde k brzdění stejnosměrným proudem DC a poté provoz od počáteční frekvence. Užitečné při nízkém zatížení při startování motoru, který se již možná toči.
1: opětovné spuštění v režimu sledování rychlosti otáček motoru a směru, poté sledování startovací frekvence motoru.
Motor se otáčí plynule bez cukání při startování. Okamžitý výkon odpovídající restartu při vysoké setrvačnosti. Pro zajištění správného restartu v režimu sledování rychlosti, je třeba přesně nastavit parametry skupiny motoru F1.
2: Spouštění indukčního motoru s přebuzením pouze pro asynchronní motory, používá se před spuštěním motoru k vytvoření magnetického pole. Proud přebuzení, doba přebuzení – kódy P6-05, P6-06.
Pokud je doba přebuzení nastavena na 0, měnič zruší proces přebuzení a začne od počáteční frekvence. Když doba přebuzení není nastavena na 0, přebuzení může zlepšit charakteristiku dynamické odczy motoru.
| P6-01 | Režim sledování rychlosti | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Start z frekvence zastavení | ||
| 1 | Start z nulové rychlosti | |||
| 2 | Start z maximální frekvence | |||
Chcete-li dokončit proces sledování rychlosti co nejrychleji, vyberte režim sledování otáček motoru:
0: Obvykle se používá ke sledování z frekvence, která se vyskytla ve chvíli výpadku napájení.
1: Začněte sledovat od nulové frekvence nahoru v případě dlouhodobého výpadku napájení.
2: Sledování od maximální frekvence, celkový výkon zátěže.
| P6-02 | Rychlost sledování otáček | Tovární nastavení | 2 |
| Rozsah nastavení | 1~100 | ||
Při restartu v režimu sledování rychlosti, vyberte rychlost sledování otáček. Čím větší parametr, tím rychlejší je sledování. Příliš vysoké nastavení však může mít za následek nepříliš spolehlivé výsledky sledování.
| P6-03 | Počáteční frekvence | Továrnínastavení | 0 |
| Rozsah nastavení | 0.00Hz~10.00Hz | ||
| P6-04 | Doba udržení počátečnífrekvence | Továrnínastavení | 0 |
| Rozsah nastavení | 0.0s~100.0s | ||
Pro zajištění točivého momentu motoru při spouštění, je třeba nastavit odpovídající počáteční frekvenci. Pro dosažení plného toku motoru během spouštění, je třeba počáteční frekvenci udržovat po určitou dobu.
Začněte od spodní meze frekvence P6-03. Když je nastavená cílová frekvence menší než frekvence počáteční, měnič se nespustí, ale zůstane v pohotovostním režimu.
V procesu zpětného přepínání doba udržení počáteční frekvence nefunguje. Doba udržení počáteční frekvence není započítána do doby zrychlení, ale započítána do provozní doby jednoduchého PLC.
Příklad 1:
P0-03 = 0 Zdroj frekvence je digitální.
P0-08 = 2,00 Hz. Digitální přednastavená frekvence je 2,00 Hz P6-03 = 5,00 Hz. Počáteční frekvence je 5,00 Hz
P6-04 = 2,0 s. Doba udržování spouštěcí frekvence je 2,0 s. V této chvíli je měnič v pohotovostním režimu a jeho výstupní frekvence je 0,00 Hz.
Příklad 2:
P0-03 = 0. Zdroj frekvence je digitální.
Technické parametry vysokoúčinného měniče frekvence
P0-08 = 10,00 Hz. Digitální přednastavená frekvence je 10,00 Hz P6-03 = 5,00 Hz. Počáteční frekvence je 5,00 Hz P6-04 = 2,0 s. Doba udržování počáteční frekvence je 2,0 s.
V této chvíli pohon zrychluje na 5,00Hz, pokračuje po dobu 2,0s a poté zrychluje na přednastavenou frekvenci 10,00 Hz.
| P6-05 | Stejnosměrný brzdný proud DC / proud buzení | Továrnínastavení | 0% |
| Rozsah nastavení | 0%~100% | ||
| P6-06 | Počáteční čas brzdění DC / doba přebuzení | Továrnínastavcní | 0.0s |
| Rozsah nastavení | 0.0s~100.0s | ||
Brzdění stejnosměrným proudem (DC) se obvykle používá k zastavení a spouštění motoru. Přebuzení slouží k vytvoření magnetického pole indukčního motoru a poté k zahájení stanovení a zlepšování rychlosti odezvy.
Brzdění stejnosměrným proudem se použije, pokud je spouštěcím režimem přímý start. Pak po nastavení frekvence, spust'te start brzdění stejnosměrným proudem DC, dobu brzdění DC po startu a poté začněte pracovat. Pokud doba stejnosměrného brzdění DC je nastavena na 0, nedochází k přímému startu po stejnosměrném brzdění DC. Čím více se stejnosměrný proud brzdění zvyšuje, tím větší je brzdná síla.
V režimu spouštění asynchronního motoru s přebuzením, měnič nastaví předem stanovený proud magnetického pole, po nastavené době vstupní magnetizace před zahájení práce. Pokud je část předmagnetizace nastaven na 0, proces přebuzení se nespustí přimo.
Stejnosměrný brzdný proud DC / proud přebuzení je procentuální hodnotou jmenovitého proudu měniče.
| P6-07 | Režim zrychlení a zpomalení | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Lineární zrychlení a zpomalení | ||
| 1 | Zrychlení a zpomalení dle křivky S, A | |||
| 2 | Zrychlení a zpomalení dle křivky S, B | |||
Výběr způsobu změny frekvence pohonu na začátku a na konci procesu.
0: Lineární zrychlení a zpomalení. Lineární nárůst nebo pokles výstupní frekvence.
Jsou možné čtyři typy doby zrychlení a zpomalení. Můžete je vybrat pomocí multifunkčních svorek digitálních vstupů (P4-00 \~ P4-08).
1: Zrychlení a zpomalení dle křivky S, A
Výstupní frekvence roste nebo klesá dle krívky S. Krívka S slouží k použití pro instalace vyžadující pozvolný rozběh nebo zastavení, jako jsou výtahy nebo dopravníkové pásy. Kódy funkci P6-08 a P6-09 v tomto pořadi určují poměr coby zrychlení a brzdění krívky S počátečního a koncového segmentu.
2: Zrychlení a zpomalení dle křivky S, B
Pří zrychlování a zpomalování dle křivky S, B je bodem inflexe křivky vždy jmenovitá frekvence f motoru. Znázorněno na obrázku 6-12. Obvykle je používána v instalacích s rychlostí o mnoho vyšší než jmenovitá frekvence, které vyžadují rychlé zrychlení a zpomalení.
Nastavení frekvence nad jmenovitou frekvenci – doba zrychlení a zpomalení:
$$ t = \left(\frac {4}{9} \times \left(\frac {f}{f _ {\mathrm{b}}}\right) ^ {2} + \frac {5}{9} \times T \right. $$
kde f je prednastavenou frekvencí, fb je jmenovitou frekvencí motoru, T je časem jmenovité frekvence motoru fb
| P6-08 | Časový koeficient počátečního úseku křivky S. | Tovární nastavení | 30.0% |
| Rozsah nastavení | 0.0%~(100.0%-P6-09) | ||
| P6-08 | Časový koeficient počátečního úseku křivky S. | Tovární nastavení | 30.0% |
| Rozsah nastavení | 0.0%~(100.0%-P6-08) | ||
Kódy funkce P60-08 a P6-09 jsou definovány. Zrychlení a zpomalení křivky S, A počátečního segmentu a čas dokončení to je poměr dvou kódů funkce pro splnění: P6-08 + P6-09≤100,0%.
Obrázek 6-11 tl znázorňuje parametry definované P6-08, během této doby se zvyšuje náklon výstupní frekvence.
t2 to je čas definovaný parametrem P6-09, během této doby se náklon výstupní frekvence mění postupně až do nuly. V době mezi tl a t2 je náklon výstupní frekvence konstantní, także tento interval je lineárním zrychlením a zpomalením.
Výstupní frekvence Hz
Přednastavená frekvence f

line
| Čast | Value | |------|-------| | t1 | 0 | | t2 | 1 | | t1 | 0 | | t2 | 0 |Obr. 6-11 Křivka S, A
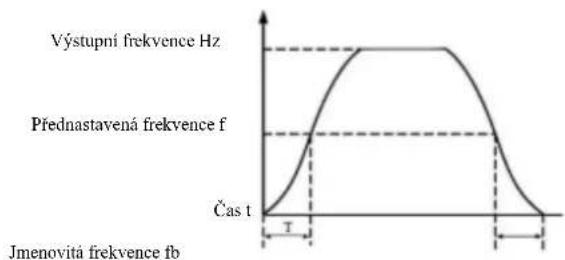
line
| Time Interval | Frequency (Hz) | | --------------------- | -------------- | | T | 0 | | Čas t | 0 | | Čas t + Čas t | 100 |Obr. 6-12 Křivka S, B
| P6-10 | Režim zastavení | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | Zpomalování do zastavení | ||
| 1 | Volnoběh | |||
0: Zastavení zpomalování. Pokud je příkaz zastavení správný, měnič snižuje výstupní frekvenci dle doby zpomalování. Když frekvence klesne na nulu, následuje zastavení.
1: Volnoběh do zastavení. Po vydání správného příkazu k zastavení, měniče ihned vysílá signál a motor se zastaví volnoběhem v důsledku mechanické setrvačnosti.
| P6-11 | Počáteční frekvence brzdění stejnosměrným proudem | Továrnínastavení | 0.00Hz |
| Rozsah nastavení | 0.00Hz ~ maximální frekvence | ||
| P6-12 | Doba do zahájení brzdění stejnosměrným proudem | Továrnínastavení | 0.0s |
| Rozsah nastavení | 0.0s~36.0s | ||
| P6-13 | Brzdňý proud | Továrnínastavení | 0% |
| Rozsah nastavení | 0%~100% | ||
| P6-14 | Doba brzdění stejnosměrným proudem | Továrnínastavení | 0.0s |
| Rozsah nastavení | 0.0s~36.0s | ||
Počáteční frekvence brzdění stejnosměrným proudem: proces zastavení je zahájen, když provozní frekvence klesá takovým způsobem, že je možno zahájit proces brzdění stejnosměrným proudem.
Doba do zahájení brzdění stejnosměrným proudem: provozní frekvence klesne na počáteční frekvenci brzdění stejnosměrným proudem, měnič zastaví výstup na určitou dobu před spuštěním procesu brzdění. Zabránění spuštění brzdění stejnosměrným proudem při velké rychlosti může způsobit poruchu nadproudu.
Proud brzdění: proud brzdění DC to je procento výstupního proudu vzhledem ke jmenovitému proudu motoru. Čím vyšší hodnota, tím větší je účinck brzdění stejnosměrným proudem, ale tím větší je také teplo motoru a měniče.
Doba brzdění stejnosměrným proudem – doba udržování brzdného proudu. Když je tato hodnota 0, proces brzdění stejnosměrným proudem se zruší. Schématický diagram procesu brzdění stejnosměrným proudem je znázorněn na obrázku 6-13.
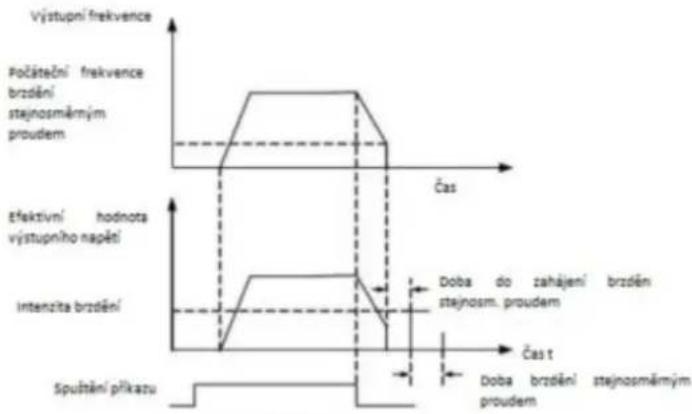
line
| Phase | Description | |-------|-------------| | Top Left | Výstupní frekvence | | Top Right | Počáteční frekvence brzdění stejnosměrmým proudem | | Bottom Left | Efektivní hodnota výstupního napětí | | Bottom Right | Intenzita brzdění | | Bottom Right | Spulsční příkazu | | Bottom Left | Čas t | | Bottom Right | Čas t | | Bottom Right | Doba brzdění stejnosměrmým proudem | Doba do zahájení brzdění stejnosm. proudemObrázek 6-13 Schématický diagram procesu brzdění stejnosměrným proudem
| P6-15 | Indikátor použití brzdy | Tovární nastavení | 100% |
| Rozsah nastavení | 0%~100% | ||
Aktivní bude pouze vestavěná brzdová jednotka.
Pracovní cyklus brzdové jednotky. Indikátor použití brzdy slouži k regulaci brzdové jednotky. Během cyklu vysokého provozního výkonu brzdové jednotky je účinek brzdění silný, ale během brzdění dochází ke kolísání napětí na propojovací liště měniče.
Skupina P7 – Klávesnice a displej
| P7-01 | Volba funkce tlačitka JOG | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | Tlačitko JOG neaktivní | ||
| 1 | Kanál příkazů z ovládacího panelu a kanál dálkového ovládání | |||
| 2 | Přepínač změny směru | |||
| 3 | Impulsování (zkušební chod) vpřed | |||
| 4 | Impulsování (zkušební chod) vzad | |||
Tlačitko JOG jako multifunkční tlačitko. Můžete nastavit funkce tlačitka JOG pomocí kódu funkce. Může být spouštěn pomocí klíčového spínače.
0: Tlačitko JOG nemá žádnou funkci.
1: Příkazy z klávesnice a přepínání na dálkové ovládání. Označuje příkaz přepnutí zdroje příkazu – aktuálním zdrojem příkazů a ovládání bude klávesnice (místní ovládání). Pokud je aktuálním zdrojem příkazů klávesnice, tato funkce tlačítka není aktivní.
2: Přepinání směru pomocí přikazu frekvence tlačítka JOG.
3: Zkušební chod vpřed (FJOG na klávesnici).
4: Zkušební chod vzad (RJOG na klávesnici).
| P7-02 | Funkce tlačitka STOP/ RESET | Tovární nastavení | 1 | |
| Rozsah nastavení | 0 | Tlačitko STOP / RES funguje pouze v režimu klávesnice. | ||
| 1 | Funkce STOP / RES funguje v každém provozním režimu. | |||
Technické parametry vysokoučinného měniče frekvence
| P7-03 | Provozní parametry LED displeje 1 | Tovární nastavení | 1F | ||
| Rozsah nastavení | 0000~FFFF | 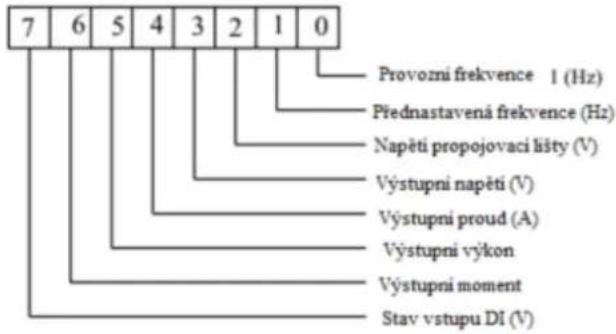  Pokud parametr má být zobraze během provozu, nastavte příslušný bit na 1 a P7-03 nastavte na šestnáctkový ekvivalent tohoto binárního čísla. Pokud parametr má být zobraze během provozu, nastavte příslušný bit na 1 a P7-03 nastavte na šestnáctkový ekvivalent tohoto binárního čísla. | |||
| P7-04 | Provozní parametry LED displeje 2 | Tovární nastavení | 0 | ||
| Rozsah nastavení | 0000~FFFF | 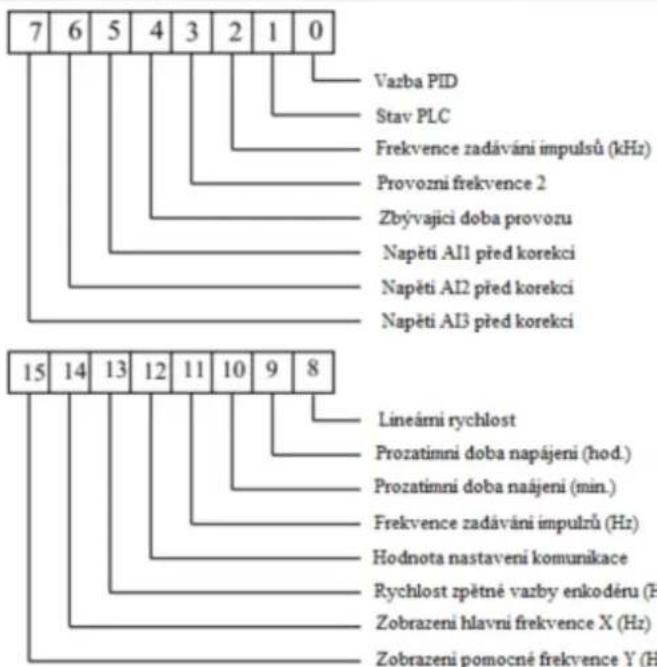 Pokud má být parametr zobrazován během provozu, nastavte příslušný bit na 1 a P7-04 nastavte na šestnáctkový ekvivalent tohoto binárního čísla. Pokud má být parametr zobrazován během provozu, nastavte příslušný bit na 1 a P7-04 nastavte na šestnáctkový ekvivalent tohoto binárního čísla. | |||
Tyto dva zobrazovací parametry slouží k nastavení parametrů, které mají být zobrazeny, když je měnič frekvence v provozu. Lze zobrazit maximálně 32 parametrů provozních stavů, které jsou zobrazovány od nejméně významného bitu P7-03.
| Zobrazované hodnoty během zastavení | Tovární nastavení | 0 |
Technické parametry vysokoučinného měniče frekvence
| P7-05 | Rozsah nastavení | 0000~FFFF | 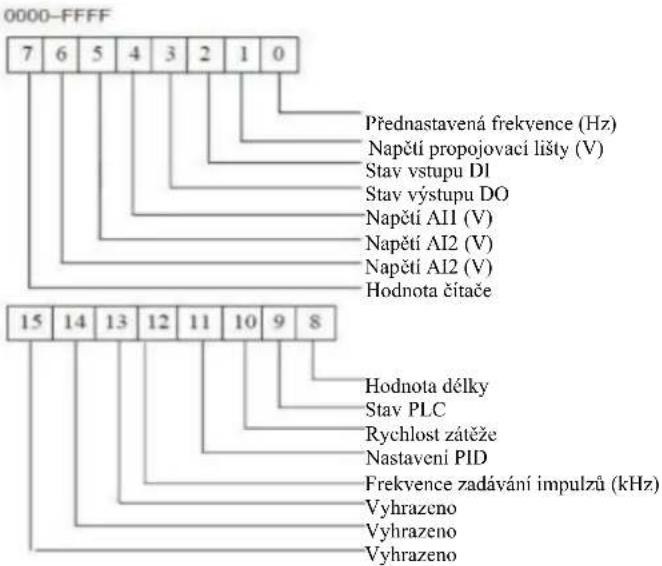 Pokud má být parametr zobrazován během provozu, nastavte příslušný bit na 1 a P7-05 nastavte na šestnáctkový ekvivalent tohoto binárního čísla. Pokud má být parametr zobrazován během provozu, nastavte příslušný bit na 1 a P7-05 nastavte na šestnáctkový ekvivalent tohoto binárního čísla. |
| P7-06 | Násobitel zobrazené rychlosti zátěže | Tovární nastavení | 1.0000 |
| Rozsah nastavení | 0.0001~6.5000 | ||
Když je třeba zobrazit rychlost zátěže, tento parametr zajišťuje shodu mezi výstupní frekvencí a rychlostí zatížení. Viz popis P7-12.
| P7-07 | Teplota modulu chladiče měniče | Tovární nastavení | 0 |
| Rozsah nastavení | 0.0^ 100.0^ | ||
Zobrazení teploty modulu IGBT měniče.
V různých modelech modulu IGBT měniče jsou rozdíly v ochranách proti přehřátí.
| P7-08 | Teplota chladiče usměrnovače | Tovární nastavení | 0 |
| Rozsah nastavení | 0.0^ 100.0^ | ||
Zobrazení teploty usměrňovače.
V různých modelech usměrnovačů jsou rozdíly v hodnotách ochrany proti přehřátí.
| P7-09 | Celková provozní doba | Továrnínastavení | 0h |
| Rozsah nastavení | 0h~65535h | ||
Zobrazuje celkovou provozní dobu měniče. Když provozní doba dosáhne nastaveného času P8-17, multifunkční digitální výstup (12) měniče vyšle signál ON (ZAP.).
| P7-10 | Č. výrobku | Továrnínastavení | ||
| Rozsah nastavení | Výrobní číslo měniče | |||
| P7-11 | Číslo verze softwaru | Továrnínastavení | ||
| Rozsah nastavení | Císlo verze softwaru ovládacího panelu. | |||
| Desetinná místa zobrazenírychlosti zátěže | Továrnínastavení | 0 | ||
| 0 | 0 desetinných míst | |||
Technické parametry vysokoúčinného měniče frekvence
| P7-12 | Rozsah nastavení | 1 | 1 desetinné místo |
| 2 | 2 desetinná místa | ||
| 3 | 3 desetinná místa |
Nastavení rychlosti zátěže s desetinnými místy. Níže uvedený příklad představuje výpočet rychlosti zatížení:
Pokud je násobitel zobrazené rychlosti zatížení 2,000 P7-06, rychlost zatížení P7-12 se zobrazí na 2 desetinná místa. Když je provozní frekvence měniče 40,00 Hz, rychlost zatížení je 40,00 x 2,000 = 80,00 (zobrazení se dvěma desetinnými místy).
Pokud je měnič vypnutý, tak například, pokud chcete nastavit frekvenci 50,00 Hz, rychlost zatížení ve stavu zastavení činí 50,00 x 2,000 = 100,00 (zobrazení se dvěma desetinnými místy).
| P7-13 | Kumulativní doba napájení | Továrnínastavení | 0h |
| Rozsah nastavení | 0h~65535h | ||
Tovární nastavení kumulativní doby napájení.
Když je dosažen kumulativní čas napájení (P8-17), multifunkční digitální výstup (24) měniče generuje signál ON.
Když je dosažena akumulovaná doba napájení (P8-17), multifunkční digitální výstup (24) měniče generuje signál ON.
| P7-14 | Celková spotřeba energie | Tovární nastavení | - |
| Rozsah nastavení | 0 až 65535 KWh | ||
Zobrazuje celkovou energii spotřebovanou pohonem.
Skupina P8 – Pomocné funkce
| P8-00 | Frekvenceimpulsování | Továrnínastavcní | 2.00Hz |
| Rozsah nastavení | 0.00Hz ~ maximální frekvence | ||
| P8-01 | Čas zrychlováníimpulsování | Továrnínastavení | 20.0s |
| Rozsah nastavení | 0.00s~6500.0s | ||
| P8-02 | Čas zpomaleníimpulsování | Továrnínastavení | 20.0s |
| Rozsah nastavení | 0.00s~6500.0s | ||
Stanovení impulsování, prednastavené frekvence a doby zpomalení pohonu.
K práci s použitím impulsů, zapněte režim bezprostředního spuštění (P6-00 = 0). Režim zastavení je nastavený na zastavení s brzděním (P6-10 = 0).
| P8-03 | Čas zrychlování 2 | Továrnínastavení | 20.0s |
| Rozsah nastavení | 0.0s~6500.0s | ||
| P8-04 | Čas zpomalení 2 | Továrnínastavení | 20.0s |
| Rozsah nastavení | 0.0s~6500.0s | ||
| P8-05 | Čas zrychlení 3 | Továrnínastavení | 20.0s |
| Rozsah nastavení | 0.0s~6500.0s | ||
| P8-06 | Čas zpomalcní 3 | Továrnínastavení | 20.0s |
| Rozsah nastavení | 0.0s~6500.0s | ||
| P8-07 | Čas zrychlení 4 | Továrnínastavení | 20.0s |
| Rozsah nastavení | 0.0s~6500.0s | ||
| P8-08 | Čas zpomalení 4 | Továrnínastavení | 20.0s |
| Rozsah nastavení | 0.0s~6500.0s | ||
VFD poskytuje 4 sady doby zrychlení a zpomalení, náležitě P0-17 / P0-18, a výše uvedené 3 sady doby zrychlení a zpomalení.
Čtvrtá sada stanovuje přesný čas zpomalení, viz instrukce P0-17 a P0-18. Díky různým kombinacím multifunkční svorky digitálního vstupu DI je možno přepínat mezi 4 sadami doby zrychlení a zpomalení. Viz popis jednotlivých kódů funkce P4-01 \~ P4-05.
Technické parametry vysokoučinného měniče frekvence
| P8-09 | Přeskočení frekvence 1 | Tovární nastavení | 0.00Hz |
| Rozsah nastavení | 0.00Hz ~ maximální frekvence | ||
| P8-10 | Přeskočení frekvence 2 | Tovární nastavení | 0.00Hz |
| Rozsah nastavení | 0.00Hz ~ maximální frekvence | ||
| P8-11 | Rozsah frekvence přeskakování | Tovární nastavení | 0.00Hz |
| Rozsah nastavení | 0.00Hz ~ maximální frekvence | ||
Když je rozsah přeskočení frekvence v rámci hodnot nastavené frekvence, skutečná provozní frekvence poběží s frekvenci dalšího nastaveného skoku. Nastavení přeskočení frekvence umožňuje měniči zabránit mechanické rezonanci zátěže. VFD může nastavit dvě přeskočené frekvence. Když jsou obě přeskočené frekvence nastavené na 0, funkce přeskoku frekvence bude zrušena. Princip přeskočení frekvence a schéma amplitudy přeskoku najdete na Obrázku 6-14.
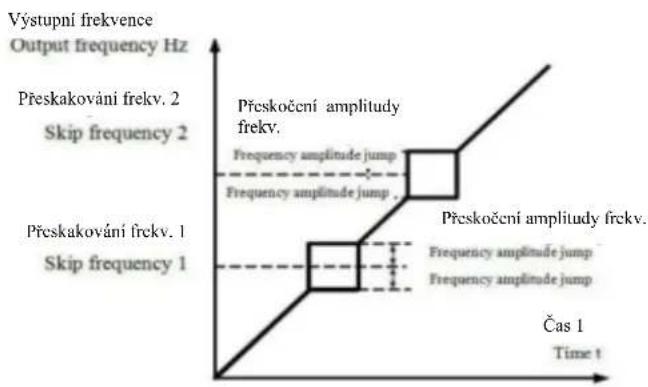
line
| Time t | Output frequency Hz | Frequency jump | | :--- | :--- | :--- | | 0 | 0 | 0 | | 1 | 1 | 1 | | 2 | 2 | 2 | | 3 | 3 | 3 | | 4 | 4 | 4 | | 5 | 5 | 5 | | 6 | 6 | 6 | | 7 | 7 | 7 | | 8 | 8 | 8 | | 9 | 9 | 9 | | 10 | 10 | 10 | | 11 | 11 | 11 | | 12 | 12 | 12 | | 13 | 13 | 13 | | 14 | 14 | 14 | | 15 | 15 | 15 | | 16 | 16 | 16 | | 17 | 17 | 17 | | 18 | 18 | 18 | | 19 | 19 | 19 | | 20 | 20 | 20 | | 21 | 21 | 21 | | 22 | 22 | 22 | | 23 | 23 | 23 | | 24 | 24 | 24 | | 25 | 25 | 25 | | 26 | 26 | 26 | | 27 | 27 | 27 | | 28 | 28 | 28 | | 29 | 29 | 29 | | 30 | 30 | 30 | | 31 | 31 | 31 | | 32 | 32 | 32 | | 33 | 33 | 33 | | 34 | 34 | 34 | | 35 | 35 | 35 | | 36 | 36 | 36 | | 37 | 37 | 37 | | 38 | 38 | 38 | | 39 | 39 | 39 | | 40 | 40 | 40 | | 41 | 41 | 41 | | 42 | 42 | 42 | | 43 | 43 | 43 | | 44 | 44 | 44 | | 45 | 45 | 45 | | 46 | 46 | 46 | | 47 | 47 | 47 | | 48 | 48 | 48 | | 49 | 49 | 49 | | 50 | 50 | 50 | | Cás1 Time t: Output frequency (Přeskakováni frekv.1) and Skip frequency (Přeskakováni frekv.2) both at Přeskočení amplitudy (Přeskočení amplitudy frekv.) from Přeskočení amplitudy frekv. (Přeskočení amplitudy jump) from Přeskočení amplitudy jump to Přeskočení amplitudy jump from Přeskočení amplitudy jump to Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Físlovensky (Přeskočení amplitudy frekv.) from Přeskočení amplitudy frekv. (Přeskočení amplitudy jump) from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump (Přeskočení amplitudy frekv.) from Přeskočení amplitudy frekv. (Přeskočení amplitudy jump) from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočení amplitudy jump from Přeskočí úmárná úmárná úmárná úmárná úmárná úmárná úmárná úmárná úmárná úmárná úmárná úmárná úmárná úmárná úmárná úmárná úmárná úmárná úmárná úmárná úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnam úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnám úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnar úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnál úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnár úmárnítú áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlné áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlni áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlnl éd fúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní áfúlní ág fúlní ág fúlní ág fúlní ág fúlní ág fúlní ág fúlní ág fúlní ág fúlní ág fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútne íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fútné íd fùný íd fùný íd fùný íd fùný íd fùný íd fùný íd fùný íd fùný íd fùný íd fùný íd fùný íd fùný íd fùný íd fùný íd fùný íd fùný íd fùný íd fūný íd fūný íd fūný íd fūný íd fūný íd fūný íd fūný íd fūný íd fūný íd fūný íd fūný íd fūný íd fūný íd fūný íd fūný íd fūný íd fūný íD fūný íD fūný íD fūný íD fūný íD fūný íD fūný íD fūný íD fūný íD fūný íD fūný íD fūný íD fūný íD fūný íD fūný íD fūný íD fūný íD fūn'ÍD fūn'ÍD fūn'ÍD fūn'ÍD fūn'ÍD fūn'ÍD fūn'ÍD fūn'ÍD fūn'ÍD fūn'ÍD fūn'ÍD fūn'ÍD fūn'ÍD fūn'ÍD fūn'ÍD fūn'ÍD gěžovskovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovkovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákovákován kivskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovkvić vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskovković vskova/viskovsković vskova/viskovsković vskova/viskovsković vskova/viskovsković vskova/viskovsković vskova/viskovsković vskova/viskovsković vskova/viskovsković vskova/viskovsković vskova/viskovsković vskova/viskovsković vskova/viskovskvić vskova/viskovskvić vskova/viskovskvić vskova/viskovskvić vskova/viskovskvić vskova/viskovskvić vskova/viskovskvić vskova/viskovskvić vskova/viskovskvić vskova/viskovskvić vskova/viskovskvić vskova/viskovskvi% vs. Cás1Obrázek 6-14 Schéma přeskočení frekvence
| P8-12 | Mrtvý čas přizměně směruchodu | Továrnínastavení | 0.0s |
| Rozsah nastavení | 0.00s~3000.0s | ||
Měnič mění směr chodu, frekvence 0 Hz na výstupu v momentu přechodu, viz obrázek 6-15:
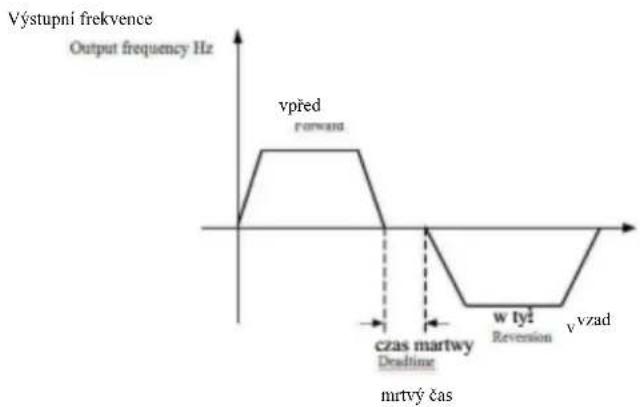
line
| Time Segment | Label | | ---------------------- | ----------------- | | Before | v před forward | | After | czas martwy Dredtime | | After | w tyž Reversion | | After | v vzad |Obr. 6-15 Mrtvý čas při změně směru chodu
| P8-13 | Povolení otáček vžad | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | Povoleno | ||
| 1 | zakázáno | |||
Po konfiguraci měniče s tímto parametrem může motor běžet obráceně – vzad. V případě změně směru otáček motoru nesmí být nastaveno P8-13 = 1.
Technické parametry vysokoúčinného měniče frekvence
| P8-14 | Přednastavná frekvence je nižší než spodní mezní provozní frekvence | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Provoz se spodní mezní frekvenci | ||
| 1 | Vypnutí | |||
| 2 | Provoz s nulovou rychlostí | |||
Když je přednastavená frekvence nižší než minimální frekvence, můžete pomocí tohoto parametru vybrat způsob provozu měniče. VFC poskytuje tři provozní režimy, aby bylo možno splnit požadavky různého použití.
| P8-15 | Regulace poklesu | Továrnínastavení | 0.00Hz |
| Rozsah nastavení | 0.00Hz~10.00Hz | ||
Tato funkce je obvykle používána pro rozložení zátěže pohonu více motorů.
Regulace poklesu znamená, že společně se zvyšováním zátěže výstupní frekvence měniče klesá. Když je poháněn více než jeden motor se stejnou zátěží, zatížení výstupní frekvence motoru se snižuje, aby bylo dosaženo rovnoměrného zatížení více motorů. Tento parametr souvisí se jmenovitým výstupním zatížením měniče.
| P8-16 | Nastavení kumulativního času aktivace | Továrnínastavení | 0h |
| Rozsah nastavení | 0h~65000h | ||
Když kumulativní doba aktivace (P7-13) P8-16 dosáhne nastaveného času, multifunkční digitální výstup DO měniče vyšle signál „ON“. Níže jsou uvedeny příklady:
Příklad: ve spojení s virtuální funkcí DIDO, při dosažení nastaveného času aktivace, po překročení 100 hodin, výstup měniče frekvence vyšle poruchový alarm: Programování:
Program: funkce virtuální svorky DI1 je nastavena na chybu definovanou uživatelem 1: A1-00 = 44; Virtuální svorka DI1 je aktivní, nastavená na virtuální DO1 : A105 = 0000; virtuální funkce DO1, nastavený čas aktivace: A1-11 = 24; nastavená kumulativní aktivace 100 hodin dosažena: P8-16 = 100.
Pokud celkový čas aktivace bude činit 100 hodin, výstup měniče vygeneruje chybu Err24.
| P8-17 | Nastavení kumulativní doby provozu | Tovární nastavení | 0h |
| Rozsah nastavení | 0h~65000h | ||
Slouží k nastavení provozní doby měniče.
Když celková provozní doba (P7-09) dosáhne nastavené provozní doby, multifunkční digitální výstup DO měniče vyšle signál „ON“.
| P8-18 | Volba ochrany | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Bez ochrany | ||
| 1 | Ochrana | |||
Tento parametr souvisí s bezpečnostní funkci měniče.
Když je tento parametr nastavený na 1 (ochrana), tak pokud provozní doba pohonu je aktivní (například příkaz spuštění ze svorky, než napájení bude ve stavu uzavření), měnič nebude reagovat na příkaz Spustit.
Kromě toho, pokud je parametr nastavený na 1 a funguje příkaz resetování chyby, měnič nebude fungovat odezvou na příkaz. Je třeba nejdříve zadat příkaz odstranění aktivního stavu ochrany.
| P8-19 | Hodnota detekce frekvence (FDT1) | Továrnínastavení | 50.00Hz |
| Rozsah nastavení | 0.00Hz ~ maximální frekvence | ||
| P8-20 | Hodnota hystereze detekce frekvence (FDT1) | Továrnínastavení | 5.0% |
| Rozsah nastavení | 0.0% ~ 100.0% (úroveň FDT1) | ||
Když je provozní frekvence vyšší než hodnota detekování frekvence, multifunkční výstup DO měniče vyšle signál „ON“, a když je frekvence nižší než hodnota detekce, po uplynutí stanovené frekvence bude výstupní signál „ON“ zrušen.
Obrázek 6-16 znázorňuje schéma fungování FDT.
Výstupní frekvence Hz
Úroveň FDT (doby detekce frekvence)
Frekvence signálu detekce (DO, relé) čas
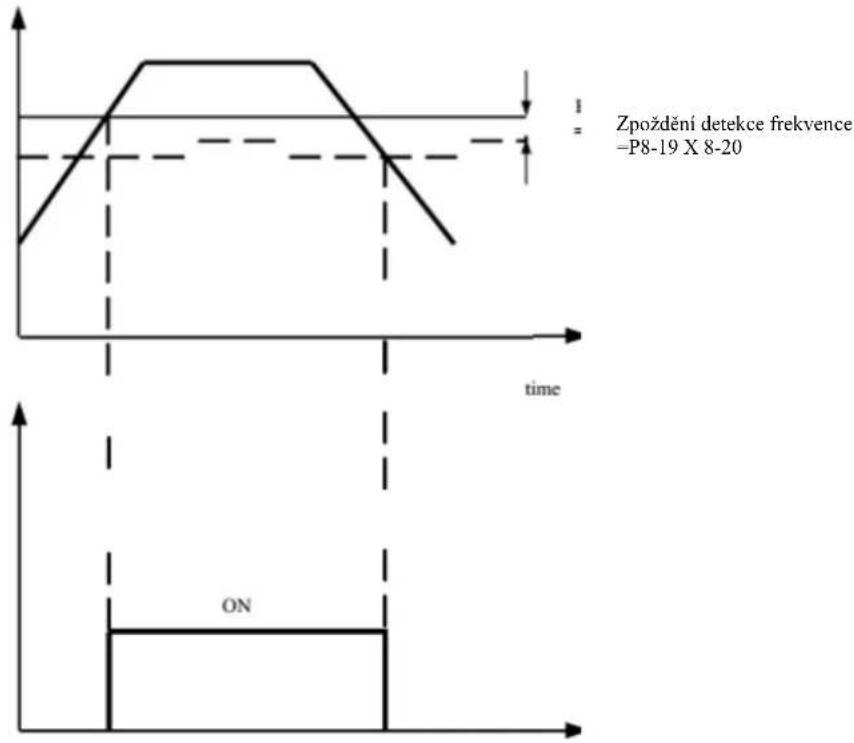
line
| time | Zpoždění detekce frekvence | | ---- | -------------------------- | | 0 | 0 | | Peak | P8-19 X 8-20 | | Low | ON |Obr. 6-16 Úroveň FDT
| P8-21 | Šířka detekce přednastavené frekvence | Tovární nastavení | 0.0% |
| Rozsah nastavení | 0.0% až 100% (maximální frekvence) | ||
Pokud provozní frekvence měniče je v cílovém rozsahu frekvence, multifunkční digitální výstup DO měniče vyšle signál „ON“.
Tento parametr slouži k nastavení rozsahu detekce dosažené frekvence. Parametr je procentuální hodnotou maximální frekvence. Obrázek 6-17 znázorňuje schéma detekce dosažené frekvence.
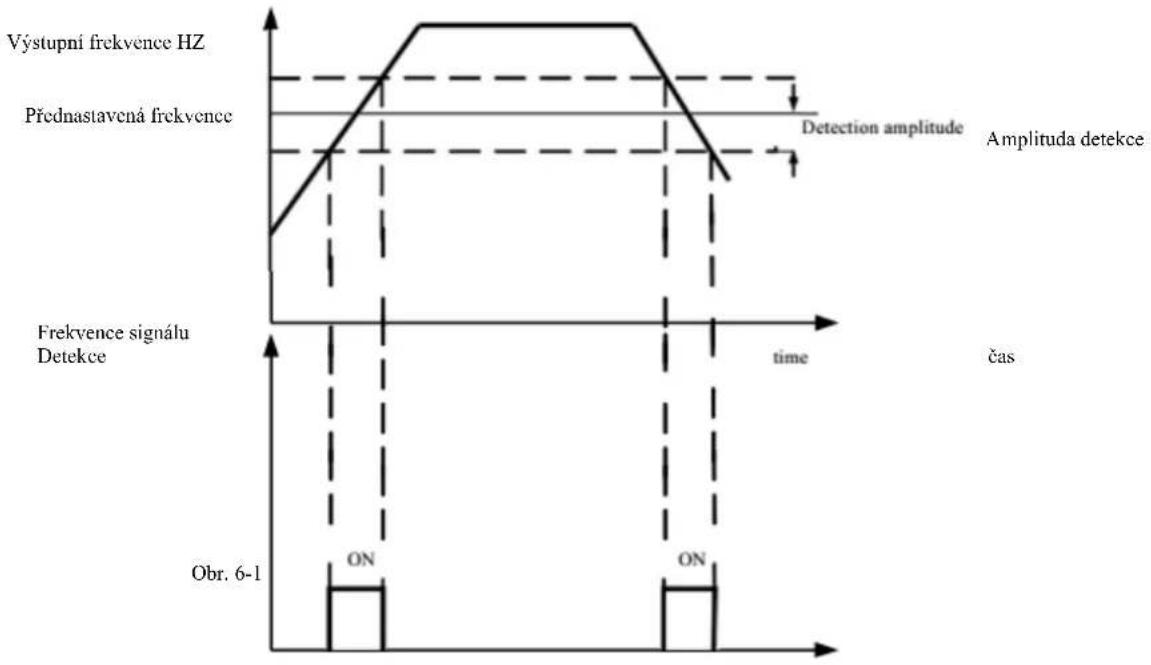
Technické parametry vysokoučinného měniče frekvence
| P8-22 | Proces zrychlení a zpomaleni.Zda je platná frekvence skoků | Továrnínastavení | 0 |
| Rozsahnastavení | 0: ne1: ano | ||
Kód této funkce je použiván k výběru, zda je frekvence skoků během zrychlování nebo zpomalování platná.
Používá se jako platná během provozu s frekvencí, která přeskakuje rozsah, když skutečná provozní frekvence přeskočí hranici nastavené frekvence. Obrázek 6-18 znázorňuje schéma frekvence skoků v procesu zrychlení a zpomalení.
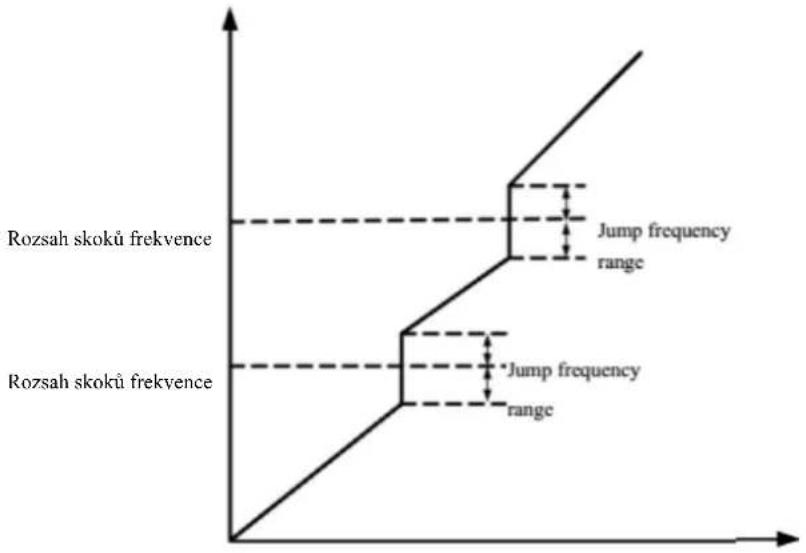
Obr. 6-18 Proces zrychlení a zpomalení, účinná frekvence skoku
| P8-25 | Čas zrychlení 1 a čas zrychlení 2, bod přepínání frekvence | Tovární nastavení | 0.00Hz |
| Rozsah nastavení | 0.00Hz ~ maximální frekvence | ||
| P8-26 | Čas zpomalení 2 a čas zpomalení 1, bod přepínání frekvence | Tovární nastavení | 0.0 |
| Rozsah nastavení | 0.00Hz až na maximální frekvenci | ||
Vyberte tuto funkei v motoru 1. Nepřepínejte pomocí svorky DI, když je aktivní výběr času zrychlení / zpomalení. Když měnič nepracuje v souladu s rozsahem provozní frekvence, , [...] různé časy zrychlení / brzdění pomocí svorek DI.
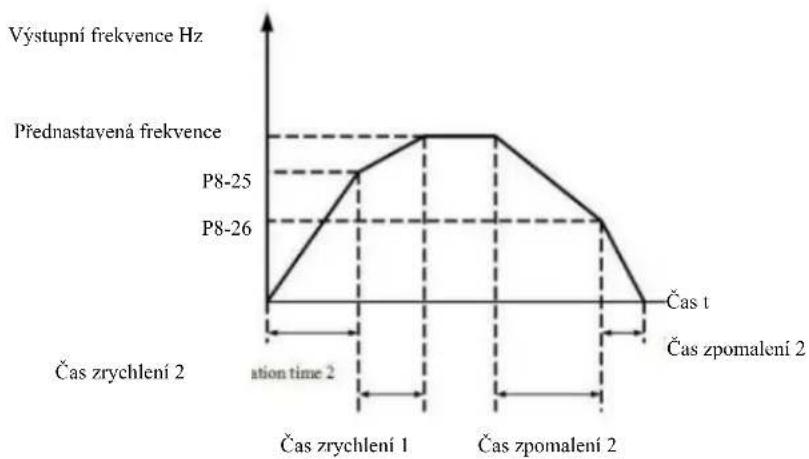
line
| Point Label | Description | | --------------------- | ------------------------ | | Čas zrychlení 1 | Čas zrychlení 1 | | Čas zrychlení 2 | Čas zrychlení 2 | | Čas zpomalení 1 | Čas zpomalení 1 | | Čas zpomalení 2 | Čas zpomalení 2 | | Čas t | Čas t | | P8-25 | P8-25 | | P8-26 | P8-26 |Obr. 6-19 Schéma přepínání času zrychlení a zpomalení
Obrázek 6-19 znázorňuje schéma přepínání času zrychlení a zpomalení. Během zrychlení, pokud provozní frekvence je menší než P8-25, zvolte čas zrychlení 2; pokud je provozní frekvence vyšší než čas zrychlení 1, zvolte P8-25.
Technické parametry vysokoúčinného měniče frekvence
Při zpomalování, pokud je provozní frekvence vyšší než P8-26, vyberte čas zpomalení 1, pokud je provozní frekvence menší než čas zpomalení 2, zvolte P8-26.
| P8-27 | Priorita svorkyimpulsování(jogging) | Tovární nastavení | 0 |
| Rozsah nastavení | 0: neaktivní 1: aktivní | ||
Pomocí tohoto parametrů můžete nastavit, zda funkce svorky impulsování má nejvyšší prioritu.
Když je priorita svorky impulsování aktivní, v případě, že během provozu bude vyslán příkaz ze svorky, měnič se přepne do režimu impulsování ze svorky.
| P8-28 | Hodnota detekce frekvence (FDT2) | Tovární nastavení | 50.00Hz |
| Rozsah nastavení | 0.00Hz ~ maximální frekvence | ||
| P8-29 | Hodnota hystereze detekce frekvence (FDT2) | Tovární nastavení | 5.0% |
| Rozsah nastavení | 0.0% ~ 100.0% (úroveň FDT2) | ||
Fukce detekce frekvence FDT1 – viz pokyny pro kód funkce P8-19, P8-20
| P8-30 | Libovolná dosažená hodnota 1 detekce frekvence | Tovární nastavení | 50.00Hz |
| Rozsah nastavení | 0.00Hz ~ maximální frekvence | ||
| P8-31 | Libovolný dosažený rozsah 1 detekce frekvence | Tovární nastavení | 0.0% |
| Rozsah nastavení | 0.0% až 100.0% (maximální frekvence) | ||
| P8-30 | Libovolná dosažená hodnota 2 detekce frekvence | Tovární nastavení | 50.00Hz |
| Rozsah nastavení | 0.00Hz ~ maximální frekvence | ||
| P8-31 | Libovolný dosažený rozsah 2 detekce frekvence | Tovární nastavení | 0.0% |
| Rozsah nastavení | 0.0% až 100.0% (maximální frekvence) | ||
V případě výstupní frekvence, když měnič po dosažení libovolné hodnoty detekce frekvence zjistí kladný a záporný rozsah amplitudy, multifunkční digitální výstup DO měniče vygeneruje signál „ON“.
Detekce frekvence dosažené VFD poskytuje dvě sady libovolnych parametrů, kde jsou nastaveny hodnoty frekvence a rozsah detekce frekvence. Obr. 6-20 znázorňuje schématický nákres této funkce.
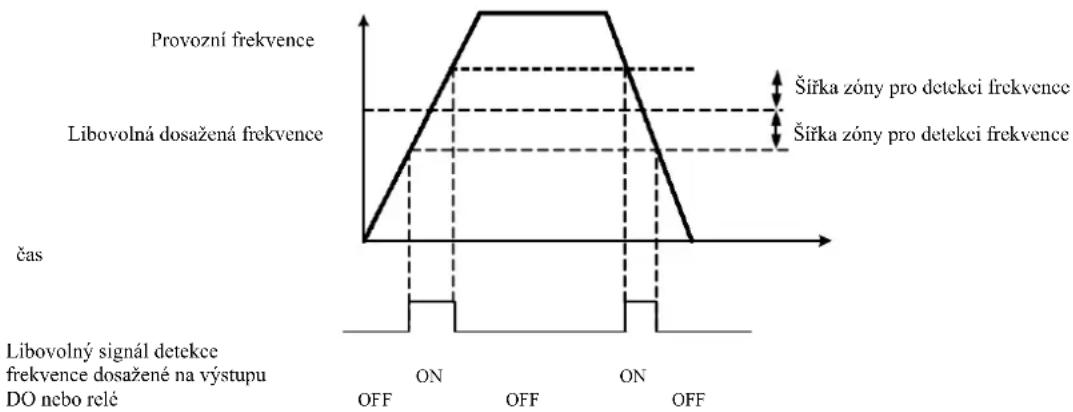
line
| Time | Provozní frekvence | Libovolná dosažená frekvence | |------|---------------------|------------------------------| | OFF | 0 | 0 | | ON | High | 0 | | OFF | High | 0 | | ON | High | 0 | | OFF | Low | 0 |Obr. 6-20 Schéma detekce dosažení libovolné frekvence
| P8-34 | Úroveň detekce nulového proudu | Tovární nastavení | 5.0% |
| Rozsah nastavení | 0.0%~300.0% (jmenovitý proud motoru) | ||
| P8-35 | Zpoždění detekce nulového proudu | Tovární nastavení | 0.10s |
| Rozsah nastavení | 0.00s~600.00s | ||
Když je výstupní proud měniče menší nebo rovný úrovní detekce nulového proudu a trvá déle než doba zpoždění detekce nulového proudu, multifunkční výstup DO měniče vyšle signál „ON“. Viz obrázek 6-21 Detekce nulového proudu.
Úroveň detekce nulového proudu
P8-34
Signál detekce nulového proudu
čas
Čas zpoždění detekce nulového proudu P8-35
Obrázek 6-21 Schéma detekce nulového proudu
| P8-36 | Limit výstupního proudu | Tovární nastavení | 200.0% |
| Rozsah nastavení | 1.1% (bez detekce) | ||
| 1.2%~300.0% (jmcnovitý proud motoru) | |||
| P8-37 | Zpoždění detekce limitu výstupního proudu | Tovární nastavení | 0.00s |
| Rozsah nastavení | 0.00s~600.00s |
Když výstupní proud měniče je větší než detekční bod a trvá déle než softwarová doba zpoždění detekce nadproudu, multifunkční výstupní signál měniče DO vyšle signál „ON“. Viz obrázek 6-22 Schéma funkce limitu výstupního proudu.
Výstupní proud
Limit výstupního
proudu
P8-36
čas
Signál detekce překročení
výstupního proudu
čas
Doba zpoždění detekce překročení
výstupního proudu P8-37
Obrázek 6-22 Schéma detekce limitu výstupního proudu
| P8-38 | Libovolný dosažený proud 1 Rozsah nastavení | Továrnínastavení | 100.0% |
| 0.0%~300.0% (jmenovitý proud motoru) | |||
| P8-39 | Šířka libovolného dosaženého proudu 1 Rozsah nastavení | Továrnínastavení | 0.0% |
| 0.0%~300.0% (jmenovitý proud motoru) | |||
| P8-40 | Libovolný dosažený proud 2 Rozsah nastavení | Továrnínastavení | 100.0% |
| 0.0%~300.0% (jmenovitý proud motoru) | |||
| P8-41 | Šířka libovolného dosaženého proudu 2 Rozsah nastavení | Továrnínastavení | 0.0% |
| 0.0%~300.0% (jmenovitý proud motoru) | |||
Technické parametry vysokoučinného měniče frekvence
Když výstupní proud měniče dosáhne libovolné nastavené kladné nebo záporné šífky detekce, multifunkční výstup DO měniče vyšle signál „ON“.
VFD poskytuje dvě sady parametrů šířky detekce dosažení libovolného proudu. Viz funkční schéma na obrázku 6-23.
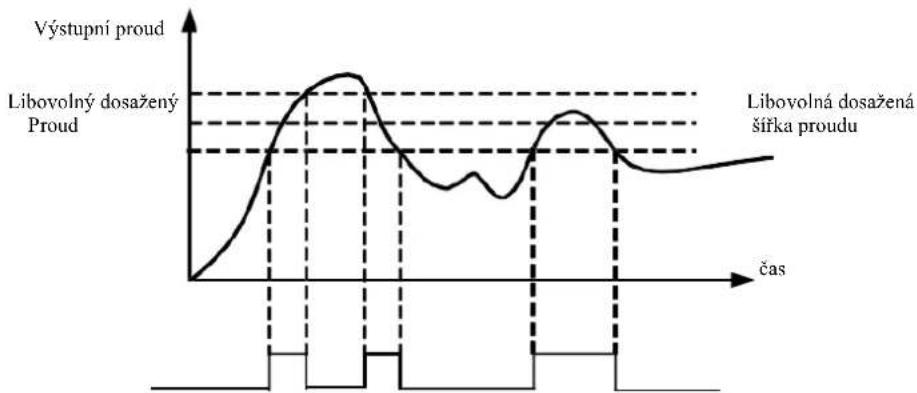
Signál, na DO nebo relé, detekce dosažení proudu
Obrázek 6-23 Schéma detekce libovolného dosaženého proudu
| P8-42 | Volba časové funkce | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | neaktivní | ||
| 1 | aktivní | |||
| P8-43 | Volba stanovené provoznídoby (Timed Run) | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | Nastavení P8-44 | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| Rozsah analogového vstupu 100% odpovídá P8-44 | ||||
| P8-44 | Stanovená provoznídoba (Timed Run) | Továrnínastavení | 0.0Min. | |
| Rozsah nastavení | 0.0Min~6500.0Min | |||
Sada parametrů používaných k doplnění provozní doby měniče.
Když volba časové funkce P8-42 je aktivní, měnič se spustí od začátku přednastaveného času. Po dosažení doby provozu na časomíře, měnič se automaticky vypne a multifunkční vstup DO vyšle signál „ON“.
Když se měnič spoušti, odpočítávání vždy začíná bčžet od 0. Zbývající čas provozu je zobrazen v U0-20. Normální doba provozu se nastaví pomocí parametrů P8-43, P8-44 v minutách.
| P8-45 | Spodní práh ochrany vstupního napětí AI1 | Tovární nastavení | 3.10V |
| Rozsah nastavení | 0.00V~P8-46 | ||
| P8-46 | Horní práh vstupního napětí AI1 | Tovární nastavení | 6.80V |
| Rozsah nastavení | P8-45~10.00V | ||
Když hodnota P8-46 je větší než na analogovém vstupu A11 a P8-47 menší než na vstupu A11, multifunkční výstup DO měniče vyšle signál ON „Překročení vstupu A11“.
| P8-47 | Teplota modulu dosažena | Tovární nastavení | 75°C |
| Rozsah nastavení | 0.00V~P8-46 | ||
Když chladič měniče dosáhne výše uvedené teploty, na multifunkčním výstupu DO měniče se objeví signál „ON“ dosažení teploty modulu.
| P8-48 | Ovládání chladícího ventilátoru | Toyárnínastavení | 0 |
| Rozsah nastavení | 0: Pouze během provozu měniče1: Po celou dobu | ||
Technické parametry vysokoúčinného měniče frekvence
Slouží k výběru režimu provozu chladícího ventilátoru.
Volba 0. Ventilátor pracuje, když je měnič ve stavu provozu. Pokud je teplota chladiče vyšší než 40 stupňů, následuje zastavení.
Volba 1. Ventilátor po spuštění funguje po celou dobu.
| P8-49 | Frekvenceobnovení | Továrnínastavení | 0.00Hz |
| Rozsah nastavení | Frekvence uspání (P8-51) ~ maximální frekvence (P0-10) | ||
| P8-50 | Zpožděníobnovení | Továrnínastavení | 0.0s |
| Rozsah nastavení | 0.0s~6500.0s | ||
| P8-51 | Frekvence uspání | Továrnínastavení | 0.00Hz |
| Rozsah nastavení | 0.00Hz ~ frekvence obnovení (P8-49) | ||
| P8-52 | Zpožděnípřechodu do stavuuspání | Továrnínastavení | 0.0s |
| Rozsah nastavení | 0.0s~6500.0s | ||
Tato skupina se používá k realizaci systémů zásobujících vodou s funkcí spánku a pohotovosti.
Měnič je v provozu, když je nastavená frekvence menší nebo rovna P8-51. Frekvence uspání, P8-52; po době zpoždění, měniče přejde do stavu spánku a automaticky se vypne. Pokud je měnič ve stavu spánku a byl vydán příkaz spuštění, pak když je nastavená frekvence větší nebo rovna frekvenci P8-49, P8-50, po časovém zpoždění se měnič spustí.
Obvykle je třeba nastavit frekvenci obnovení a uspání na větší nebo rovnou. Pokud frekvence uspání a obnovení činí 0,00 Hz, funkce uspání a obnovení není aktivní.
Když je zapnuta hibernace, pokud zdroj frekvence používá PID a PID je v režimu spánku a PA-28 mám vliv na kód funkce, v takovém případě je třeba vybrat operaci vypínání, kdy PID (PA-28= 1).
| P8-53 | Dosažení provozní doby | Tovární nastavení | 0.0Min |
| Rozsah nastavení | 0.0Min ~ 6500.0Min | ||
Když po spuštění je dosažena doba provozu, multifunkční digitální výstup DO měniče vyšle signál „Dosažení provozní doby ON (ZAP.).
Skupina P9. Chyby a ochrana
| P9-00 | Volba ochrany motoru proti přetížení | Tovární nastavení | 1 | |
| Rozsah nastavení | 0 | Není povolena | ||
| 1 | povolena | |||
| P9-01 | Zesílení ochrany motoru proti přetížení | Tovární nastavení | 1.00 | |
| Rozsah nastavení | 0.20~w10.00 | |||
P9-00 = 0: Bez funkce ochrany motoru proti přetížení může hrozit nebezpečí poškození v důsledku přechřátí motoru. Doporučujeme mezi měnič a motor instalovat tepelné relé.
P9-00 = 1: měnič frekvence na základě inverzní křivky času přetížení motoru stanovuje, zda je motor přetížený. Inverzní křivka času ochrany proti přetížení motoru: 220% × (P9-01) × jmenovitý proud motoru. Pokud zatížení zůstane na této hodnotě po dobu 1 minuty, spustí se alarm chyby přetížení motoru. Nebo 150% × (P9-01) × jmenovitý proud motoru. Pokud zatížení zůstane na této hodnotě po dobu 60 minut, spustí se alarm přetížení.
Parametr P9-01 je třeba nastavit s ohledem na skutečnou schopnost přetížení. Pokud hodnota parametru je nastavena přiliš vysoko, může při absenci alarmu dojít k přehřátí motoru a poškození měniče!
| P9-02 | Úroveň spuštění výstrahy přetížení motoru | Tovární nastavení | 80% |
| Rozsah nastavení | 50%~100% | ||
Tato funkce používána před funkcí ochrany proti přetížení motoru a jeho následky, vysílá výstražný signál prostřednictvím výstupu DO měniče do řídícího obvodu. Výstražný koeficient slouží ke stanovení úrovně včasného varování před přetížením motoru. Čím vyšší hodnota, tím menší počet varování předem.
Když je kumulativní výstupní proud měniče větší než inverzní křivky přetížení a součin P9-02, multifunkční výstup DO měniče zapíná signál „výstraha přetížení motoru ZAP.“.
| P9-03 | Zesílení ochrany proti zablokování | Tovární nastavení | 0 |
| Rozsah nastavení | 0 (bez zesílení)~100 | ||
| P9-04 | Napětí ochrany proti zablokování z přepětí | Tovární nastavení | 130% |
| Rozsah nastavení | 120%~150% (tři fáze) | ||
Během zpomalování, když stejnosměrné napětí propojovací lišty DC překročí napětí přepěťové ochrany, měnič udržuje zpomalování na aktuální provozní frekvenci a napětí klesá až do chvíle, kdy propojovací lišta bude pokračovat ve zpomalování.
Zesilení ochrany před zablokováním je během zpomalování regulováno. Je to schopnost měníče tlumit přepětí. Čím větší hodnota, tím silnější schopnost tlumit přepětí. Pokud nedochází k přepětím, zesilení ochrany se nastaví na nejmenší možné.
Při nízké setrvačné zátěži zesílení ochrany musí být malé, jinak bude dynamická odezva systému pomalá. Při velkých setrvačných zátěžích tato hodnota musí být vysoká, jinak tlumení nebude účinné a může dojít k chybě z důvodu přepětí.
Když je zesilení ochrany před zablokováním nastaveno na 0, tato funkce je neaktivní.
| P9-05 | Zesílení ochrany proti nadproudovému přetížení | Tovární nastavení | 20 |
| Rozsah nastavení | 0~100 | ||
| P9-06 | Proud ochrany proti zablokování z nadproudu | Tovární nastavení | 150% |
| Rozsah nastavení | 100%~200% | ||
V procesu zpomalování měniče, když výstupní proud překračuje proud ochrany proti nadproudovým přetížením, měnič zastaví proces zpomalení a je udržována na aktuální provozní frekvenci. Výstupní proud klesá a poté pokračuje zpomalování.
Zesilení ochrany slouži k regulaci procesu zrychlování a zpomalení a je spojeno se schopností měniče utlumovat proud. Čím vyšší hodnota, tím větší schopnost.
Při nízké setrvačné zátěži musí být zesilení ochrany malé, jinak bude dynamická odczva systému pomalá. Při velkých setrvačných zátěžích tato hodnota musí být vysoká, jinak tlumení nebude účinné a může dojít k chybě z důvodu přepětí.
Když je zesilení ochrany před zablokováním nastaveno na 0, tato funkce je neaktivní.
| P9-07 | Ochrana proti zkratu k zemi | Továrnínastavení | 1 | |
| Rozsahnastavení | 0 | neaktivní | ||
| 1 | aktivní | |||
Zapněte měnič pro zjištění, zda motor není zkratovaný k zemi.
Pokud je tato funkce aktivní, zkontrolujte, zda napětí na výstupních svorkách U, V, W měniče je zachováno.
| P9-09 | Automatické resetování chyby | Továrnínastavení | 0 |
| Rozsahnastavení | 0~20 | ||
Nastavení počtu automatického resetování měničem. Po překročení tohoto počtu, měnič zůstane v chybovém stavu.
| P9-10 | Fungování výstupu DO během automatického resetování chyby | Továrnínastavení | 1 |
| Rozsah nastavení | 0: nefunguje1: funguje | ||
Pokud v měniče byla nastavena funkce automatického resetování chyby, pak během automatického resetování chyby výstup DO funguje, pokud kód P9-10 je nastavený na 1.
| P9-11 | Doba mezi výskytem chyby a jejím automatickým resetováním | Továrnínastavení | 1.0s |
| Rozsah nastavení | 0.1s~100.0s | ||
Je to čekaci doba na automatický reset chyby od chvíle chybového alarmu v měniči.
| P9-12 | Ochrana proti ztrátě fáze na vstupu | Továrnínastavení | 1 |
| Rozsah nastavení | 0: nepovoleno1: povoleno | ||
Je možno zvolit, zda má být povolena ochrana před ztrátou fáze na vstupu.
Měniče typu G s výkonem 18,5Kw a více mají ochranu fáze na vstupu. Měniče typu P s výkonem 18,5kW a menším nemají tuto ochranu nezávisle na nastavení P9-12 na 0 nebo 1.
| P9-13 | Ochrana proti ztrátě fáze na výstupu | Tovární nastavení | 1 |
| Rozsah nastavení | 0: nepovoleno1: povoleno | ||
Volba ochrany proti ztrátě fáze na výstupu.
| P9-14 | První chyba | 0~99 |
| P9-15 | Druhá chyba | |
| P9-16 | Druhá chyba (poslední) |
Uložení posledních tří chyb měniče. 0 neznamená chybu. Informace týkající se možných příčin a řešení pro jednotlivé chybové kódy naleznete v kapitole 8.
| P9-17 | Frekvence při druhé chybě | Frekvence poslední chyby |
| P9-18 | Proud při druhé chybě | Proud poslední chyby |
| P9-19 | Napětí na propojovací liště při druhé chybě | Napětí na propojovací liště při poslední chybě |
| P9-20 | Stav digitálních vstupů při druhé chybě | Stav digitálních vstupu při poslední chybě. Pořadí je následující: |cc|c|c|c|c|c|c BIT9 & BIT8 & BIT7 & BIT6 & BIT5 & BIT4 & BIT3 & BIT2 & BIT1 & BIT0 \ DI0 & DI9 & DI8 & DI7 & DI6 & DI5 & DI4 & DI3 & DI2 & DI1 Když jsou vstupní svorky odpovídajících dvou N nastaveny na 1, OFF nebo 0, stav všech DI je převeden na desetinné zobrazení. |
| P9-21 | Stav digitálních výstupů při druhé chybě | Stav svorek digitálních výstupů při poslední chybě. Pořadí je následující: |c|c|c|c|c|c|c|c|c|c|c|c BIT4 & BIT3 & BIT2 & BIT1 & BIT0 \ DO2 & DO1 & REL2 & REL1 & FMP Když jsou vstupní svorky odpovídajících dvou N nastaveny na 1, OFF nebo 0, stav všech DI je převeden na desetinné zobrazení. |
| P9-22 | Stav měniče při druhé chybě | Vyhrazeno |
| P9-23 | Doba napájení měniče při druhé chybě | Doba napájení měniče při poslední chybě |
| P9-24 | Provozní doba měniče při druhé chybě | Provozní doba měniče při poslední chybě |
| P9-27 | Frekvence druhé chyby | Tak jako P9-17~P9-24 |
| P9-28 | Proud druhé chyby | |
| P9-29 | Napětí propojovací lišty při druhé chybě | |
| P9-30 | Stav vstupů při druhé chybě | |
| P9-31 | Stav výstupů při druhé chybě | |
| P9-32 | Stav měniče při druhé chybě | |
| P9-33 | Doba napájení při druhé chybě | |
| P9-34 | Provozní doba při druhé chybě | |
| P9-37 | Stav měniče při první chybě | Tak jako P9-17~P9-24 |
| P9-38 | Doba napájení při první chybě | |
| P9-39 | Provozní doba při první chybě | |
| P9-40 | Frekvence první chyby | |
| P9-41 | Proud první chyby | |
| P9-42 | Napětí propojovací lišty při první chybě |
Technické parametry vysokoučinného měniče frekvence
| P9-43 | Stav výstupů při první chybě |
| P9-44 | Stav výstupů při první chybě |
| P9-47 | Opravná opatření pro chybu 1 | Továrnínastavení | 00000 | |
| Rozsah nastavení | Čislice jednotek | Přetížení motoru (Err11) | ||
| 0 | Zastavení volnoběhem | |||
| 1 | Zastavení v režimu stop | |||
| 2 | Pokračování v provozu | |||
| Desitky | Ztráta vstupní fáze (Err12) (stejná jednotka) | |||
| Stovky | Ztráta výstupní fáze (Err13) (stejná jednotka) | |||
| Tisíce | Externí chyba (Err15) (stejná jednotka) | |||
| Deseti tisíce | Chyba komunikace (Err16) (stejná jednotka) | |||
| P9-48 | Opravná opatření pro chybu 2 | Továrnínastavení | 00000 | |
| Rozsah nastavení | Čislice jednotek | Chyba enkodéru (Err20) | ||
| 0 | Zastavení volnoběhem | |||
| 1 | Přepnutí na U/f, přechod režimu stop | |||
| 2 | Přepnutí na U/f, pokračování v provozu | |||
| Desitky | Chyba čtečky kódů (Err21) | |||
| 0 | Zastavení volnoběhem | |||
| 1 | Zastavení, přechod do režimu stop | |||
| Stovky | Vyhrazeno | |||
| Tisíce | Přehřátí motoru (Err 25) (tak jako P9-47 ) | |||
| Deseti tisíce | Překročení provozní doby (Err26) (tak jako P9-47 ) | |||
| P9-49 | Opravná opatření pro chybu 3 | Továrnínastavení | 00000 | |
| Rozsah nastavení | Čislice jednotek | Chyba definována uživatelem (Err27) (tak jako P9-47 ) | ||
| Desitky | Chyba definována uživatelem 2 (Err28) (tak jako P9-47 ) | |||
| Stovky | Překročení celkové provozní doby (Err29) (tak jako P9-47 ) | |||
| Tisíce | Nulová zátěž (Err30) | |||
| 0 | Zastavení volnoběhem | |||
| 1 | Zastavení, přechod do režimu stop | |||
| 2 | Pokračování v chodu na 7 % hodnoty jmenovité frekvence motoru a návrat na nastavenou frekvenci, když motor obnoví zatížení. | |||
| Deseti tisíce | Ztráta zpětné vazby PID (Err31) (tak jako P9-47 ) | |||
| P9-50 | Opravná opatření pro chybu 4 | Továrnínastavení | 00000 | |
| Rozsah nastavení | Čislice jednotek | Nadměrná odchylka rychlosti (Err42) (s bity P9-47) | ||
| Desitky | Nadměrná rychlost motoru (Err43) (s bity P9-47) | |||
| Stovky | Chyba počáteční pozice (Err51) (s bity P9-47) | |||
| Tisíce | Chyba počáteční pozice (Err52) (s bity P9-47) | |||
| Deseti tisíce | Vyhrazeno | |||
Při volbě „libovolného zastavení“ měnič zobrazí Err** a přímo dolů.
V prípadě volby „stop v režimu zastavení“ měnič zobrazí A**. Stiskněte „stop“, po vypnutí se zobrazí Err**,
Při volbě „pokračuj“: měnič pokračuje v chodu a zobrazí A**, provozní frekvence nastavena pomocí P9-54.
| P9-54 | Pokračování zvolené frekvence, když se vyskytne chyba | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | 0: Chod s aktuální provozní frekvenci | ||
| 1 | 1: Chod s nastavenou frekvenci | |||
| 2 | 2: Chod s horní mezní frekvenci | |||
| 3 | 3: Chod se spodní mezní frekvenci | |||
| 4 | 4: Chod s alternativní abnormální frekvenci | |||
| P9-55 | Chyba | Tovární nastavení | 100.0% | |
Technické parametry vysokoúčinného měniče frekvence
| Rozsah nastavení | 60.0%~100.0% |
Když měnič běži s chybou a provoz s chybou pokračuje, měnič zobrazí A** a běži s frekvencí specifikovanou v P9-54.
V případě volby chodu s alternativní abnormální frekvenci, hodnota nastavena v parametru P9-55 představuje procento maximální frekvence.
| P9-56 | Typ snímače teploty motoru | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | Bez snímače teploty | ||
| 1 | PT100 | |||
| 2 | PT1000 | |||
| P9-57 | Práh ochrany motoru protipřehřátí | Továrnínastavení | 110°C | |
| Rozsah nastavení | 0°C~200°C | |||
| F9-58 | Varovný práh přehřátí motoru | Továrnínastavení | 90°C | |
| Rozsah nastavení | 0°C~200°C | |||
Snímač signalizující teplotu motoru musí být připojen k volitelné rozšiřující kartě multifunkčních vstupů a výstupů. Vstup AI3 analogové rozšiřující karty lze použít jako vstup snímače teploty motoru, signál snímače teploty motoru a také jako svorku AI3 PGND.
Analogový vstup VFD AI3 pro PT100 a PT1000 podporuje dva typy snímačů teploty motoru, także snímač musí být nastaven na správný typ. Hodnoty teploty motoru jsou zobrazovány na U0-34.
Když teplota motoru překročí práh ochrany motoru proti přehřátí P9-57, měniče vydá nouzový alarm, aktivuje ochranu proti poškození a postupuje v souladu se zvoleným režimem.
Když teplota motoru překročí prahovou hodnotu P9-58 následuje výstraha o přehřátí motoru – multifunkční digitální výstup DO měniče vygeneruje signál „ON“.
| P9-59 | Volba způsobu fungování v případě dočasněho výpadku napájení | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Neaktivní | ||
| 1 | Brzdění | |||
| 2 | Volnoběh do zastavení | |||
| P9-60 | Bod přepínání frekvence brzdění při náhlé ztrátě napájení | Tovární nastavení | 0.0% | |
| Rozsah nastavení | 0.0% ~ 100.0% | |||
| P9-61 | Doba reakce v případě ztráty napájení | Tovární nastavení | 0.50s | |
| Rozsah nastavení | 0.00s ~ 100.00s | |||
| P9-62 | Hlodnota změny napětí pro reakci po ztrátě napětí | Tovární nastavení | 80.0% | |
| Rozsah nastavení | 60.0%~100.0% (standardní napčtí sbčrnice) | |||
Tato funkce znamená, že v případě dočasné poruchy napájení nebo náhlého poklcsu napájení, měnič snižováním rychlosti na výstupu sníží kompenzaci energie zátěže (napětí stejnosměrné sběrnice DC měniče), aby se zachoval pohon.
Pokud P9-59 = 1 a dojde k náhlé poruše napájení nebo náhlému poklesu napětí, měnič zpomalí. Po navrácení napětí propojovací liště, měnič zrychlí na nastavenou normální provozní frekvenci. Obnova napětí sběrnice na normální stav je založena na normálním napětí sběrnice P9-61 a trvá to déle než nastavená doba.
Pokud P9-59 = 2 a dojde k náhlé poruše napájení nebo náhlému poklesu napětí, měnič zpomaluje až do zastavení.
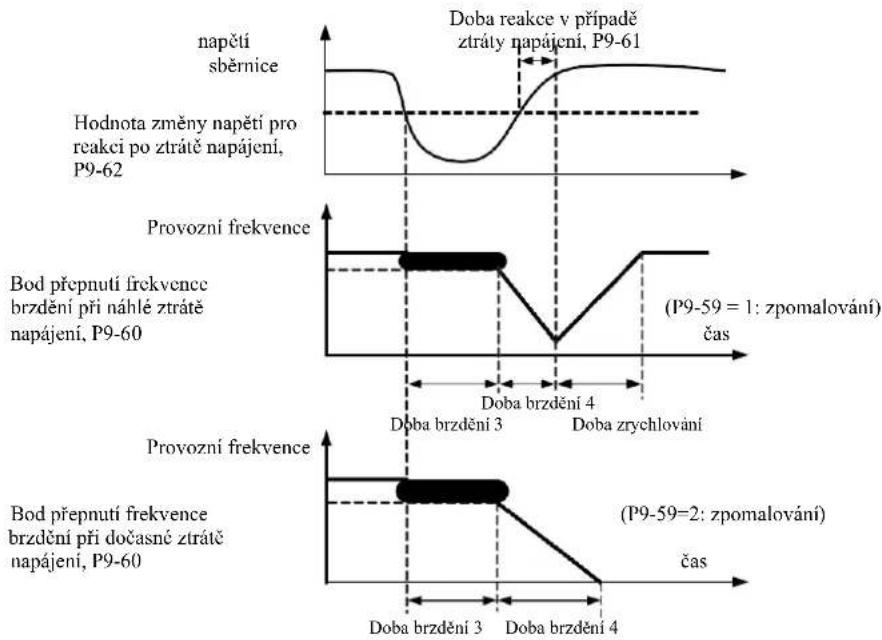
line
| Category | Description | Value | | -------- | ----------- | ----- | | Doba reakce v případě ztráty napájení, P9-61 | - | Peak value | | Bod přepnutí frekvence brzdění při náhlé ztrátě napájení, P9-60 | - | Peak value | | Bod přepnutí frekvence brzdění při dočasné ztrátě napájení, P9-60 | - | Peak value | | Doba brzdění 3 | - | Baseline | | Doba brzdění 4 | - | Baseline | | Doba brzdění 3 | - | Baseline | | Doba brzdění 4 | - | Baseline | | Doba brzdění 3 | - | Baseline | | Doba brzdění 2 | - | Baseline | | Doba brzdění 4 | - | Baseline |Obrázek 6-24 Schéma fungování při náhlé poruše napájení
| P9-63 | Ochrana po poklesu zatížení na nulu | Továrnínastavení | 0 | |
| Rozsah nastavení | 0 | Neaktivní | ||
| 1 | aktivní | |||
| P9-64 | Úroveň detekce poklesu zatížení na nulu | Továrnínastavení | 10.0% | |
| Rozsah nastavení | 0.0%~100.0% (jmenovitý proud motoru) | |||
| P9-65 | Doba detekce poklesu zatížení na nulu | Továrnínastavení | 1.0s | |
| Rozsah nastavení | 0.0s~60.0s | |||
V případě, že je povolena funkce ochrany proti ztrátě zátěže (chodu naprázdno), když je výstupní proud měniče menší než úroveň detekce P9-64 a doba jeho trvání je delší než doba detekce ztráty zátěže P9-65, pak se výstupní frekvence automaticky sníží na 7% jmenovité frekvence. Když je ochrana proti chodu naprázdno aktivní a pokud zátěž bude obnovena, měnič se automaticky vrátí do provozu s nastavenou frekvencí.
| P9-67 | Práh detekce nadměrné rychlosti | Tovární nastavení | 15.0% | |
| Rozsah nastavení | 0.0% to 50.0% (maximální frekvence) | |||
| P9-68 | Doba detekce nadměrné rychlosti | Tovární nastavení | 2.0s | |
| Rozsah nastavení | 0.0s~60.0s | |||
Takto funkce je účinná pouze tehdy, když měnič pracuje s vektorovým řízením rychlosti.
Když měnič zjistí, že skutečná rychlost motoru překročila nastavenou frekvenci, došlo k překročení hodnoty detekce překročení rychlosti P9-67 a doba trvání je delší než doba detekce překročení rychlosti P9-68, měnič vygeneruje chybový alarm Err43, v závislosti na poruše a režimu ochrany.
| P9-69 | Práh detekce nadměrné odchylky rychlosti | Tovární nastavení | 20.0% | |
| Rozsah | 0.0% do 50.0% (maximální frckvence) | |||
Technické parametry vysokoučinného měniče frekvence
| nastavení | ||||
| P9-70 | Doba detekce nadměrné odchylky rychlosti | Tovární nastavení | 2.0s | |
| Rozsah nastavení | 0.0s~60.0s | |||
Tato funkce je účinná pouze tehdy, když měnič pracuje s vektorovým řízením rychlosti.
Když měnič zjistí skutečnou rychlost motoru a nastavenou odchylku frekvence, tato odchylka je větší než hodnota její detekce P9-69 a doba trvání je delší než doba detekce této odchylky P9-70, měnič vygeneruje chybový alarm Err42 a postupuje v souladu s režimem ochrany proti provozním chybám.
Pokud doba detekce odchylky rychlosti se rovná 0,0 s, detekce chyby odchylky rychlosti není aktivní.
Skupina PA. Funkce PID regulace
Regulace PID je obvyklou metodou řízení procesu, která je založena na řízení rozdílu velikosti mezi signálem zpětné vazby a cílovým signálem. Jedná se o proporcionální, integrální, diferenciální postup prostřednictvím regulace výstupní frekvence tak, aby se vytvořil obvod s uzavřenou smyčkou.
Je vhodný pro rízení průtoku, regulaci tlaku a teploty a rízení procesu. Blokové schéma procesu PID regulace je znázorněno na obrázku 6-25.
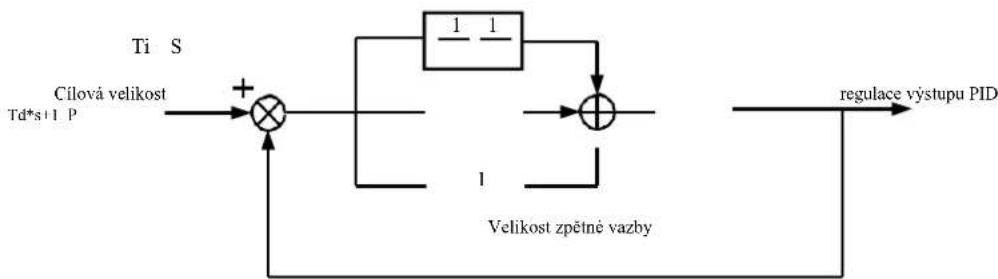
flowchart
graph LR
A["Cílová velikost Td*s+1 P"] --> B["+"] --> C["1 - 1"]
C --> D["+"] --> E["regulace výstupu PID"]
D --> F["Velikost zpětné vazby"]
F --> G["+"] --> H["+"] --> I["1"]
I --> J["+"] --> K["Ti S"]
Obrázek 6-25 Základní blokové schéma procesu PID regulace
| PA-00 | Výběr zdroje přednastavené hodnoty regulátoru PID | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Nastavení PA-01 | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Impuls (DI5) | |||
| 5 | Nastavení komunikace | |||
| 6 | Vicestupňové zadávání | |||
| PA-01 | Přednastavené hodnoty PID | Tovární nastavení | 50.0% | |
| Rozsah nastavení | 0.0%~100.0% | |||
Tento parametr slouži pro výběr cílové PID regulace pro daný kanál.
Nastavení cílové velikosti PID regulace je relativní hodnotou, rozsah nastavení: 0,0% až 100,0%. Stejná veličina je relativní veličinou zpětné vazby PID.
| PA-02 | Zdroj signálu zpčtné vazby PID | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | AI1 | ||
| 1 | AI2 | |||
| 2 | AI3 | |||
| 3 | AI1-AI2 | |||
| 4 | Nastavení komunikace (DI5) | |||
| 5 | Nastavení komunikace | |||
| 6 | AI1+AI2 | |||
| 7 | MAX (|AI1|,|AI2|) | |||
| 8 | MIN (|AI1|,|AI2|) | |||
Tento parametr je používán k výběru cesty signálu zpětné vazby PID.
Technické parametry vysokoúčinného měniče frekvence
Velikost zpětné vazby PID pro relativní hodnotu je nastavována v rozsahu od 0,0% až 100,0%.
| PA-03 | Směr chodu PID | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | kladný | ||
| 1 | záporný | |||
0: Když je signál zpětné vazby PID nižší než prednastavená hodnota, výstupní frekvence měniče roste.
1: Když je signál zpětné vazby PID nižní než prednastavená hodnota, výstupní frekvence měniče se snižuje.
Například řízení napětím vinutí vyžaduje funkci PID regulace s výstupem 0 a řízení napětí odvíjení vyžaduje funkci PID regulace s výstupem 1.
| PA-04 | Rozsah zpčtné vazby PID | Továrnínastavení | 1000 |
| Rozsah nastavení | 0~65535 | ||
Uvedený rozsah zpětné vazby PID to jsou bezrozměrné jednotky pro displej U0-15 a displej zpětné vazby PID U0-16.
Přednastavená relativní hodnota zpětné vazby PID 100,0% odpovídá přednastavenému rozsahu zpětné vazby PA-04. Například pokud PA-40 je nastaven na 2000, pak když nastavení PID je 100,0%, PID uvedený na displej U0-15 činí 2000.
| PA-05 | Přírůstekproporcionálnísložky Kp1 | Továrnínastavení | 20.0 |
| Rozsah nastavení | 0.0~100.0 | ||
| PA-06 | Doba integrace Til | Továrnínastavení | 2.00s |
| Rozsah nastavení | 0.01s~10.00s | ||
| PA-07 | Doba derivace Tdl1 | Továrnínastavení | 0.000s |
| Rozsah nastavení | 0.00~10.000 | ||
Přírůstek proporcionální složky Kp1.
Reguluje intenzitu celé PID regulace. Čím větší Kp1, tím větší intenzita. 100,0. Tento parametr uvádí, že když odechylka hodnoty zpětné vazby PID a přednastavená velikost činí 100,0%, amplituda regulátoru PID regulace příkazu výstupní frekvence je maximální frekvenci.
Doba integrace Til určuje intenzitu integrace PID regulátoru. Čím kratší doba integrace, tím silnější regulace a tím rychleji je korigování konstantní hodnota odchylky.
Doba derivace Td 1 PID regulátoru určuje rychlost změny intenzity regulace odchylky. Čím delší doba derivace, tím větší intenzita regulace. Derivační časová konstanta se vztahuje k velikosti změny, když je zpětná vazba v tomto čase 100,0%, aby se upravila velikost diferenciální regulace pro získání maximální frekvence.
| PA-08 | Mezní frekvence pro zpčtný chod PID | Tovární nastavení | 2.00Hz |
| Rozsah nastavení | 0.00 ~ maximální frekvence | ||
V některých případech pouze když výstupní frekvence PID je záporná (tzn. pohon vzad), PID může ovládat danou veličinu a zpětnou vazbu [...], avšak vysokofrekvenční inverze není v některých případech povolena. PA-08 slouží k určení omezení frekvenční inverze.
| PA-09 | Limit odchylky PID | Továrnínastavení | 0.01% |
| Rozsah nastavení | 0.0%~100.0% | ||
Když jsou odchylka PID a hodnota zpětné vazby menší než PA-09, PID zastaví regulaci. Takže když vezmeme v úvahu čas a odchylku výstupní frekvence zpětné vazby, při menší stabilitě a variabilitě, řízení v uzavřené smyčce může být v některých připadech velmi účinné.
| PA-10 | Limit derivace PID | Továrnínastavení | 0.10% |
| Rozsah nastavení | 0.00%~100.00% | ||
PID regulátor. Derivační efekt je citlivější a může způsobit oscilaci obvodu, proto je obecně funkce PID derivace omezena na relativně malou oblast. PA-10 slouží k nastavení rozsahu derivace PID.
| PA-11 | Změna času PID | Tovární | 0.00 |
| nastavení | |||
| Rozsah nastavení | 0.00s~650.00s | ||
Změna času PID znamená, že hodnota nastavení PID se mění od 0,0% požadovaného času do 100,0%.
Technické parametry vysokoučinného měniče frekvence
V případě změny nastavení PID, se bude hodnota nastavení PID měnit lineárně s časem v souladu s danou změnou, čímž se sníží nepříznivý vliv této změny na systém.
| PA-12 | Doba filtrování zpětné vazby PID | Tovární nastavení | 0.00s |
| Rozsah nastavení | 0.00s~60.00s | ||
| PA-13 | Doba výstupního filtrování PID | Tovární nastavení | 0.00s |
| Rozsah nastavení | 0.00s~60.00s | ||
PA-12: filtrování zpětné vazby PID. Filtr pomáhá snížit vliv rušení na velikost zpětné vazby, což ovlivnuje výkon odezvy obvodu s uzavřenou smyčkou.
PA-13: filtrování výstupní frekvence PID. Filtr sníží výstupní frekvenci mutace, což také ovlivňuje výkon odezvy obvodu s uzavřenou smyčkou.
| PA-15 | Koeficient zesíleníproporcionální složky Kp2 | Továrnínastavení | 20.0 | |
| Rozsah nastavení | 0.0~100.0 | |||
| PA-16 | Doba integrace Ti 2 | Továrnínastavcní | 2.00s | |
| Rozsah nastavení | 0.01s~10.00s | |||
| PA-17 | Doba derivace Td 2 | Továrnínastavení | 0.000s | |
| Rozsah nastavení | 0.00~10.000 | |||
| PA-18 | Podmínky přepínáníparametrů PI | Továrnínastavcní | 0 | |
| Rozsahnastavení | 0 | 0: bez přepínání | ||
| 1 | 1: pomocí přepínače svorek DI | |||
| 2 | 2: automatické přepínání na základě odchylky | |||
| PA-19 | Přepínání PID | Továrnínastavení | 20.0% | |
| Rozsah nastavení | 0.0%~PA-20 | |||
| PA-20 | Přepínání PID | Továrnínastavcní | 80.0% | |
| Rozsah nastavení | PA-19~100.0% | |||
Při výběru přepínání multifunkční svorky DI, nastavte funkci multifunkční svorky na 43 (svorka k přepínání parametru PID). Vyberte sadu parametrů 1 (PA-05 \~ PA-07), pokud je svorka neaktivní. Když je svorka aktivní, vyberte sadu parametrů 2 (PA-15 \~ PA-17).
Když je automatické přepínání mezi referenční hodnotou a odchylkou zpčtné vazby zvoleno jako menší než absolutní hodnota odchylky PID 1 PA-19, parametr PID je nastavován na 1. Chcete-li nastavit odchylku mezi referenční odchylkou a zpětnou vazbou PID na větší ne je absolutní hodnota PA-20, vyberte skupinu parametrů 2 pro parametr PID. Na základě odchylky mezi referenční hodnotou a zpětnou vazbou během přepínání mezi odchylkou 1 a odchylkou 2, jsou parametry PID lineární interpolaci dvou sad parametrů PID, jak je znázorněno na obrázku 6-26.
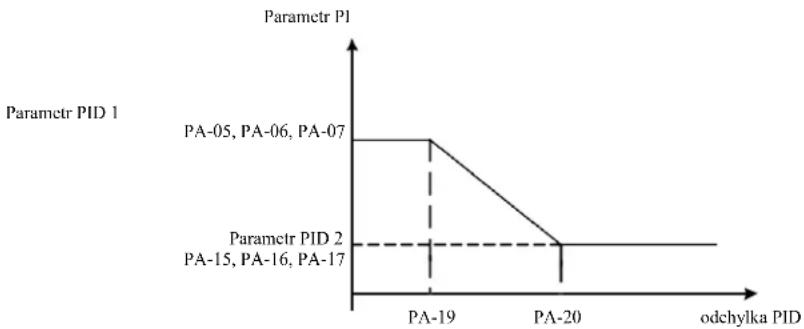
line
| odchylka PID | Parametr PID 1 | Parametr PID 2 | | :--- | :--- | :--- | | PA-19 | PA-05, PA-06, PA-07 | - | | PA-20 | - | PA-15, PA-16, PA-17 |Obrázek 6-26 Přepinání parametrů PID
| PA-21 | Počáteční hodnota PID | Továrnínastavení | 0.0% |
Technické parametry vysokoúčinného měniče frekvence
| Rozsah nastavení | 0.0%~100.0% | ||
| PA-22 | Doba přidržení počáteční hodnoty PID | Továrnínastavení | 0.00s |
| Rozsah nastavení | 0.00s~650.00s | ||
Při spouštění měniče je výstup PID nastaven na počáteční hodnotu PA-21. Počáteční hodnota PA-22 pokračuje po době její přidržení, začíná se regulace smyčky PID.
Obrázek 6-27 znázorňuje schéma spojené s počáteční hodnotou funkce PID.
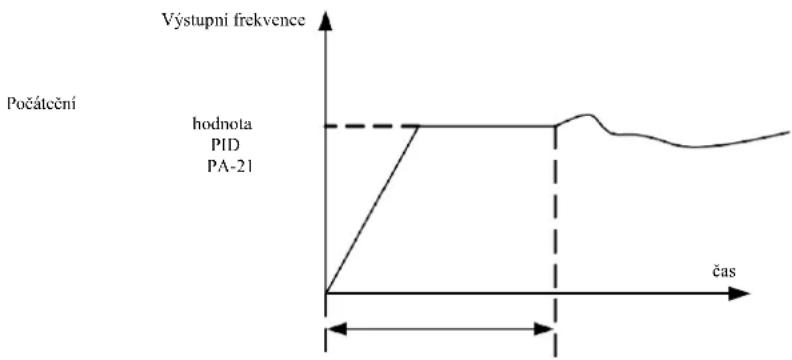
line
| čas | Výstupní frekvence | | --- | --- | | 0 | 0 | | hodnota PID PA-21 | 0 | | 30 | ~0.85 |Doba přidržení počáteční hodnoty PID PA-22
Obrázek 6-27 Schéma přidržení počáteční hodnoty PID
Tato funkce slouží k omezení rozdílu pulzování mezi dvěma výstupy PID (2 ms / pulzování), aby se změna rychle utlumila a provoz měniče se stabilizoval.
| PA-23 | Max. odchylka mezi dvěma výstupy PID během chodu vpřed | Tovární nastavení | 1.00% |
| Rozsah nastavení | 0.00%~100.00% | ||
| PA-24 | Max. odchylka mezi dvěma výstupy PID během chodu vzad | Tovární nastavení | 1.00% |
| Rozsah nastavení | 0.00%~100.00% | ||
PA-23 a PA-24 jsou spojeny s maximální odchylkou a absolutní hodnotou (v tomto pořadí), v případě chodu výstupu vpřed i vzad.
| PA-25 | Vlastnosti integračního článku PID | Tovární nastavení | 00 | |
| Rozsah nastavení | Číslice jednotek | Samostatná integrace | ||
| 0 | Neaktivní | |||
| 1 | Aktivní | |||
| Desítky | Zastavení integrace po dosažení nastavení hodnoty na výstupu | |||
| 0 | Pokračování v práci s integrací | |||
| 1 | Přidržení integrace | |||
Bodová separace:
V případě nastavení aktivní samostatné integrace, když je aktivní pauza DI multifunkčního digitálního výstupu integrace (funkce 22), fungují pouze proporcionální a derivační operace PID.
Pokud je zvolena neaktivní samostatná integrace, bez ohledu na to, zda je aktivní multifunkční digitální svorka, samostatná integrace není aktivní. Když výstupní signál PID dosáhne své maximální nebo minimální hodnoty, je možno integraci zastavit. Pokud se rozhodnete integraci zastavit, v ten okamžik se zastaví výpočet integrace PID, což může pomoci snižit přizpůsobení PID.
| PA-26 | Hodnota detekce ztráty zpětné vazby PID | Tovární nastavení | 0.0% |
| Rozsah nastavení | 0.0%: bez analýzy ztráty vazby | ||
| PA-27 | Doba detekce ztráty zpětné | Tovární | 1.0s |
Technické parametry vysokoučinného měniče frekvence
| vazby PID | nastavení | ||
| Rozsah nastavení | 0.0s~20.0s | ||
Tyto funkční kódy slouží ke stanovení, zda došlo ke ztrátě zpětné vazby PID.
Když zpětná vazba PID je menší než hodnota detekce ztráty zpětné vazby PA-26 a trvá to déle než doba detekce ztráty zpětné vazby PID PA-27, měnič bude signalizovat chybu Err31 a poté bude následovat proces řešení problému v souladu se zvoleným režimem.
| PA-28 | Fungování PID po zastavení | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | 0: vypnutí PID po zastavení; | ||
| 1 | 1: fungování PID po zastavení | |||
Volba stavu PID při dalším zastavení, tzn. zda PID má pokračovat v operaci. Ve většině případů po zastavení práce by PID měl přestat fungovat.
Skupina PB: Oscilační frekvence, délka a sčítání
Funkee traverzu měniče se používá v textilním průmyslu, bavlnářství a všude tam, kde je potřeba provádční traverzu a navljení. Funkee „Wobble“ (oscilačně-rotační pohyb) znamená, že výstupní frekvence měniče je nastavena tak, že na časové ose dochází ke kolísání prostřední frekvence nahoru a dolů.
Jak je znázorněno na obrázku 6-28 (amplituda kolísání dle nastavení PB-00 a PB-01), když PB-01 je nastaven na 0, funkce „Wobble“ není aktivní.
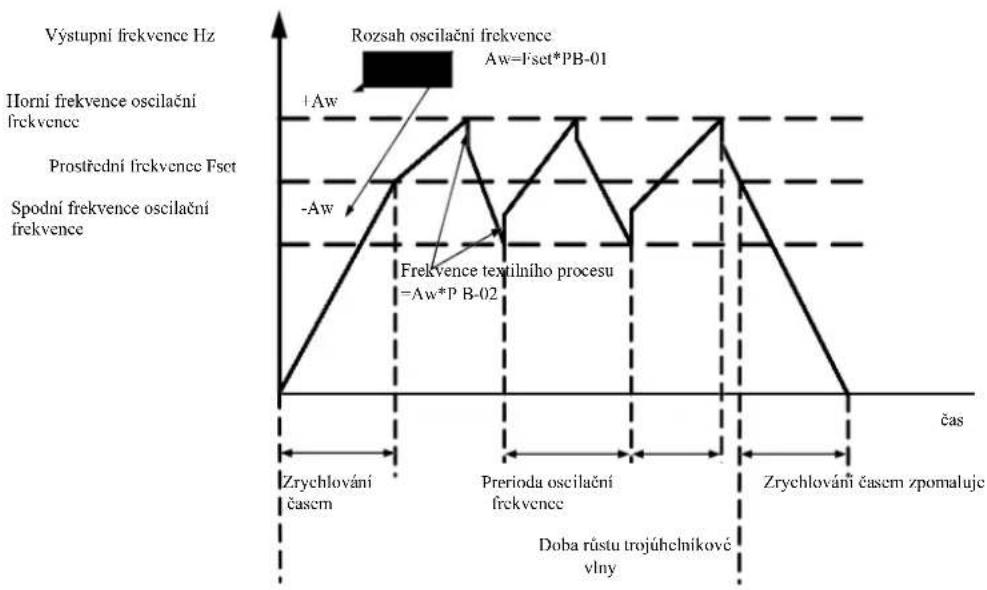
line
| Frequency Range | Description | | --------------- | ----------- | | Výstupní frekvence Hz | Rozsah oscilační frekvence Aw=ľset*PB-01 | | Horní frekvence oscilační frekvence | +Aw | | Prostřední frekvence Pset | -Aw | | Spodní frekvence oscilační frekvence | | | Frekvence textilního procesu =Aw*P B-02 | | | Zrychlování časem | | | Prerioda oscilační frekvence | | | Zrychlování časem zpomaluje | |Příkaz k práci
Obrázek 6-28 Pracovní schéma kolísání frekvence
| PB-00 | Režim oscilační frekvence | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | 0: spojena s prostřední frekvencí | ||
| 1 | 1: spojena s maximální frekvencí | |||
Tento parametr je stanoven s ohledem na velikost oscilace.
0: s ohledem na prostřední frekvenci (zdroj frekvence P0-07), obvod se změnou oscilace. Oscilace se změnou prostřední frekvence (přednastavené frekvence).
1: s ohledem na maximální frekvenci (P0-10), obvod se stálou oscilaci.
| PB-01 | Amplituda oscilační frekvence | Tovární nastavcní | 0.0% |
| Rozsah nastavení | 0.0%~100.0% | ||
Technické parametry vysokoúčinného měniče frekvence
| PB-02 | Frekvenční skok oscilace | Tovární nastavení | 0.0% |
| Rozsah nastavení | 0.0%~50.0% | ||
Stanovení hodnoty oscilace a frekvenčního skoku pro tento parametr.
Při nastavování oscilace vzhledem k prostřední frekvenci (PB-00 = 0), oscilace AW = zdroj frekvence P0-07 x amplituda oscilace PB-01.
Při nastavování oscilace vzhledem k maximální frekvenci (PB-00 = 1), maximální oscilace AW = P0-10 x amplituda oscilace.
Amplituda frekvenčních skoků v traverzu. Skoková frekvence zůstává v procentním poměru k oscilaci frekvence, a to: skoková frekvence = oscilace AW x amplituda skokové frekvence PB-02. Pokud je amplituda oscilace spojena s prostřední frekvenci (PB-00 = 0), skoková frekvence je proměnnou hodnotou. Pokud je spojena s maximální frekvenci (PB-00 = 1) je skoková frekvence konstantní hodnotou.
Oscilační provozní frekvence, maximální frekvence a minimální frekvence jsou propojeny.
| PB-03 | Cyklus oscilační frekvence | Tovární nastavení | 10.0s |
| Rozsah nastavení | 0.0s~3000.0s | ||
| PB-04 | Koeficient času nárůstu trojúhelníkové vlny | Tovární nastavení | 50.0% |
| Rozsah nastavení | 0.0%~100.0% | ||
Cyklus oscilační frekvence: hodnota času celého oscilačního cyklu.
Koeficient času nárůstu trojühelníkové vlny PB-04: trojühelníková vlna roste procentuálně v poměru k času cyklu oscilace PB-03. Čas nárůstu trojühelníkové vlny = cyklus oscilační frekvence PB-03 x koeficient času nárůstu trojühelníkové vlny PB-04, v sekundách. Čas klesání trojühelníkové vlny = cyklus oscilační frekvence PB-03 x (koeficient času nárůstu trojühelníkové vlny 1 PB-04), v sekundách.
| PB-05 | Nastavení délky | Továrnínastavení | 1000m |
| Rozsah nastavení | 0m~65535m | ||
| PB-06 | Aktuální délka | Továrnínastavení | 0m |
| Rozsah nastavení | 0m~65535m | ||
| PB-07 | Počet impulsů na metr | Továrnínastavení | 100.0 |
| Rozsah nastavení | 0.1~6553.5 | ||
Výše uvedené funkční kódy slouží k nastavené konstantní délky.
Pomocí multifunkční digitální svorky jsou shromažd'ovány informace o délce, probíhá zjištění počtu pulzních svorek a počtu impulsů na metr fáze PB-07 a výpočet skutečné délky PB-06.
Když je skutečná délka větší než nastavená délka PB-05, multifunkční digitální výstup DO vydá signál ON „Dosažení délky“.
Během procesu nastavení konstantní délky je nulování délky prováděno pomocí multifunkční svorky DI (výběr funkce DI28). Viz P4-00 \~ P4-09.
Pro konkrétni použití je třeba nastavit funkci příslušné vstupní svorky „vstup čitače délky“ (funkce 27), v případě vyšší frekvence impulsů je třeba použit port DI5.
| PB-08 | Nastaveni hodnoty čítače | Továrnínastavení | 1000 |
| Rozsah nastavení | 1~65535 | ||
| PB-09 | Přednastavená hodnota čítače | Továrnínastavení | 1000 |
| Rozsah nastavení | 1~65535 | ||
Multifunkční svorka digitálního vstupu shromažďuje požadovanou hodnotu sčítání. Aplikace musí nastavit odpovídající funkci vstupní svorky na „vstup čítače“ (funkce 25). V případě vyšších frekvencí impulsů je třeba použit port DI5.
Když sčítaná hodnota dosáhne přednastavené hodnoty čítače PB-08, multifunkční digitalní výstup DO „dosáhne přednastaveného stavu“ a vyšle signál ON, poté přestane sčítat.
Když sčítaná hodnota dosáhne přednastavené hodnoty čítače PB-09, multifunkční digitální výstup DO vyšle signál „ON“ „dosažení přednastavené hodnoty sčítani“. Sčítání bude pokračovat až do zastavení čítače.
Přednastavená hodnota čítače PB-09 nesmí být vyšší než prednastavená hodnota čítače PB-08.
Technické parametry vysokoučinného měniče frekvence
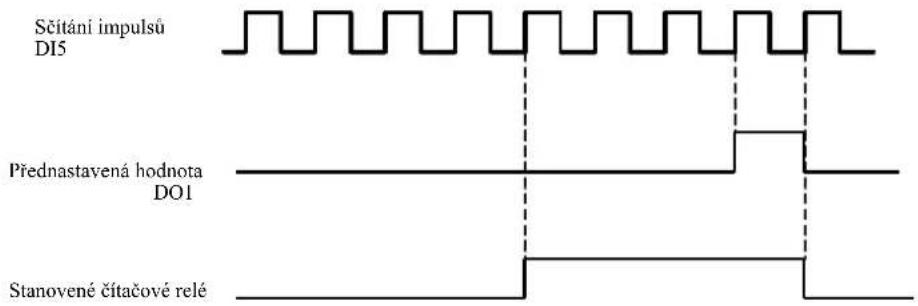
Obrázek 6-29 Nastavení hodnoty čítače a prednastavené hodnoty
Skupina PC – Vícestavové příkazy a funkce PLC
Vícestavový příkaz VFD je běžnější než obvyklá vícerychlostní funkce. Kromě vícerychlostních funkcí může být také použit jako izolovaný zdroj napčtí U/f a zdroj daného procesu PID.
Jednoduchá funkce PLC se liší od uživatelsky programovatelných funkcí VFD. Jednoduchý ovladač PLC lze spustit pouze jako jednoduchou kombinaci víckrokových pracovních instrukci. Rozsáhlejší a užitečnější uživatelsky programovatelné funkce naleznete v pokynech skupiny A7.
| PC-00 | Vicestavový příkaz 0 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| PC-01 | Vicestavový příkaz 1 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| PC-02 | Vicestavový příkaz 2 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| PC-03 | Vicestavový příkaz 3 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| PC-04 | Vicestavový příkaz 4 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| PC-05 | Vicestavový příkaz 5 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| PC-06 | Vicestavový příkaz 6 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| PC-07 | Vicestavový příkaz 7 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| PC-08 | Vicestavový příkaz 8 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| PC-09 | Vicestavový příkaz 9 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| PC-10 | Vicestavový příkaz 10 | Tovární nastavení | 0.0Hz |
| Rozsah nastavení | -100.0%~100.0% | ||
| PC-11 | Vicestavový příkaz 11 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| PC-12 | Vicestavový příkaz 12 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| PC-13 | Vicestavový příkaz 13 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| PC-14 | Vicestavový příkaz 14 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| PC-15 | Vicestavový příkaz 15 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
Vícekrokové instrukce lze používat ve třech případech: jako zdroj frekvence, jako samostatný zdroj napětí U/f a jako zdroj nastavení procesu PID.
Při těchto třech použitích má vícekroková bezrozměrná relativní hodnota příkazu rozsah od -100,0% do 100,0%.
Když zdroj frekvence je procentem maximální relativní frekvence, použije se U/f jako nezávislý zdroj napětí v poměru k procentu jmenovitého napětí motoru a PID je ze začátku uváděno jako relativní hodnota.
Technické parametry vysokoučinného měniče frekvence
Vícekrokové instrukce jsou vyžadovány v závislosti na stavu multifunkčního digitálního DI a možnosti přepínání, viz specifické instrukce pro skupinu P4.
| PC-16 | Provozní režimjednoduchého PLC | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | Zastavení po provedení 1 cyklu | ||
| 1 | Udržování hodnoty po provedení jednoho cyklu | |||
| 2 | Opakování po provedení úplného cyklu | |||
Jednoduchý PLC má dvě funkee: jako zdroj frekvence nebo jako samostatný zdroj napětí U/f.
Obrázek 6-30 je zjednodušeným schématickým diagramem ovladače PLC jako zdroje frekvence. Když jednoduchý ovladač PLC funguje jako zdroj frekvence, PC-00 \~ PC-15 určuje kladný a záporný směr, záporný, pokud to znamená spuštění pohonu v opačném směru.

Impuls 250 ms
Rys. 6-30 Schéma jednoduchého ovladače PLC
Jako zdroj frekvence funduje PLC třemi způsoby, jako zdroj napětí U/f tyto tří způsoby nemá rozdělené:
0: zastavení na konci jednoho běhu; na konci jednoho cyklu se pohon zastaví automaticky a je vydán příkaz k opětovnému spuštění.
1: na konci cyklu, hodnota koncového pohonu je udržována až do ukončení jednoho cyklu, poté dojde k automatickému zachování frekvence a směru provozu posledního segmentu.
2: Po dokončení cyklu pohonu, další cyklus se spustí automaticky, dokud nebude vydán příkaz zastavení.
| PC-17 | Výběr paměti po ztrátě napájení jednoduchého PLC | Tovární nastavení | 00 | |
| Rozsah nastavení | Císlice jednotek | Zachování stavu po ztrátě napájení | ||
| 0 | Bez paměti stavu po ztrátě napájení | |||
| 1 | Paměť po ztrátě napájení | |||
| Desítky | Zachování stavu po příkazu STOP | |||
| 0 | Bez paměti po příkazu STOP | |||
| 1 | Paměť po zastavení | |||
Zachování stavu po ztrátě napájení PLC se týká hodnoty před ztrátou napájení a provozní frekvence ovladače PLC. Po zapnutí napájení pamět bude pokračovat. Pokud by vybrán příkaz bez paměti, opětovné zapnutí napájení restartuje PLC.
Pamět PLC a provozni frekvence PLC po zastavení pohonu se uloži před fází vypnutí, další fáze bude pokračovat v paměti po spuštění. Pokud byl vybrán příkaz bez paměti, opětovné zapnutí restartuje PLC.
| PC-18 | Provozní doba jednoduchého PLC, krok 0 | Tovární nastavení | 0.0s (h) |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | ||
Technické parametry vysokoučinného měniče frekvence
| PC-19 | Doba zpomaleni jednoduchého PLC, krok 0 | Tovární nastavení | 0 |
| Rozsah nastavení | 0~3 | ||
| PC-20 | Provozní doba jednoduchého PLC, krok 1 | Tovární nastavení 0.0s (h) | |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | ||
| PC-21 | Doba zpomaleni jednoduchého PLC, krok 1 | Tovární nastavení | 0 |
| Rozsah nastavení | 0~3 | ||
| PC-22 | Provozní doba jednoduchého PLC, krok 2 | Tovární nastavení | 0.0s (h) |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | ||
| PC-23 | Doba zpomaleni jednoduchého PLC, krok 2 | Tovární nastavení | 0 |
| Rozsah nastavení 0~3 | |||
| PC-24 | Provozní doba jednoduchého PLC, krok 3 | Tovární nastavení | 0.0s (h) |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | ||
| PC-25 | Doba zpomaleni jednoduchého PLC, krok 3 | Tovární nastavení | 0 |
| Rozsah nastavení | 0~3 | ||
| PC-26 | Provozní doba jednoduchého PLC, krok 4 | Tovární nastavení 0.0s (h) | |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | ||
| PC-27 | Doba zpomaleni jednoduchého PLC, krok 4 | Tovární nastavení | 0 |
| Rozsah nastavení | 0~3 | ||
| PC-28 | Provozní doba jednoduchého PLC, krok 5 | Tovární nastavení | 0.0s (h) |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | ||
| PC-29 | Doba zpomaleni jednoduchého PLC, krok 5 | Tovární nastavení | 0 |
| Rozsah nastavení 0~3 | |||
| PC-30 | Provozní doba jednoduchého PLC, krok 6 | Tovární nastavení | 0.0s (h) |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | ||
| PC-31 | Doba zpomaleni jednoduchého PLC, krok 6 | Tovární nastavení | 0 |
| Rozsah nastavení | 0~3 | ||
| PC-32 | Provozní doba jednoduchého PLC, krok 7 | Tovární nastavení | 0.0s (h) |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | ||
| PC-33 | Doba zpomaleni jednoduchého PLC, krok 7 | Tovární nastavení | 0 |
| Rozsah nastavení | 0~3 | ||
| PC-34 | Provozní doba jednoduchého PLC, krok 8 | Tovární nastavení | 0.0s (h) |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | ||
| PC-35 | Doba zpomaleni jednoduchého PLC, krok 8 | Tovární nastavení | 0 |
| Rozsah nastavení 0~3 | |||
| PC-36 | Provozní doba jednoduchého PLC, krok 9 | Tovární nastavení | 0.0s (h) |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | ||
| PC-37 | Doba zpomaleni jednoduchého PLC, krok 9 | Tovární nastavení | 0 |
| Rozsah nastavení | 0~3 | ||
| PC-38 | Provozní doba jednoduchého PLC, krok 10 | Tovární nastavení | 0.0s (h) |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | ||
| PC-39 | Doba zpomaleni jednoduchého PLC, krok 10 | Tovární nastavení | 0 |
| Rozsah nastavení | 0~3 | ||
| PC-40 | Provozní doba jednoduchého PLC, krok 11 | Tovární nastavení | 0.0s (h) |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | ||
| PC-41 | Doba zpomaleni jednoduchého PLC, krok 11 | Tovární nastavení | 0 |
| Rozsah nastavení 0~3 | |||
| PC-42 | Provozní doba jednoduchého PLC, krok 12 | Tovární nastavení | 0.0s (h) |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | ||
| PC-43 | Doba zpomaleni jednoduchého PLC, krok 12 | Tovární nastavení | 0 |
| Rozsah nastavení | 0~3 | ||
| PC-44 | Provozní doba jednoduchého PLC, krok 13 | Tovární nastavení | 0.0s (h) |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | ||
| PC-45 | Doba zpomaleni jednoduchého PLC, krok 13 | Tovární nastavení | 0 |
Technické parametry vysokoúčinného měniče frekvence
| Rozsah nastavení | 0~3 | |||
| PC-46 | Provozní doba jednoduchého PLC, krok 14 | Tovární nastavení | 0.0s (h) | |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | |||
| PC-47 | Doba zpomalení jednoduchého PLC, krok 14 | Tovární nastavení | 0 | |
| Rozsah nastavení | 0~3 | |||
| PC-48 | Provozní doba jednoduchého PLC, krok 15 | Tovární nastavení | 0.0s (h) | |
| Rozsah nastavení | 0.0s (h) ~6553.5s (h) | |||
| PC-49 | Doba zpomalcní jednoduchého PLC, krok 15 | Tovární nastavení | 0 | |
| Rozsah nastavení | 0~3 | |||
| PC-50 | Jednotka provozní doby jednoduchého PLC | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | S (s) | ||
| 1 | h (h) | |||
| PC-5 | Vicckrokový příkaz 0 v daném režimu | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Daný funkční kód FC-00 | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Impuls | |||
| 5 | PID | |||
| 6 | Při přednastavené frekvenci (P0-08) lze upravit UPTOWN | |||
Tento parametr definuje příkaz multi-0 pro daný kanál.
Pro vícekrokovou 0 instrukci lze dodatečně vybrat PC-00 a existuje mnoho dalšich možnosti, které umožňuji snadný výběr mezi několika krátkými instrukcemi uvedenými v jiných přepínatelných režimech. Pokud je více zdrojů frekvence nebo instrukcí tak jednoduchých jako zdroje frekvence PLC, je možno mezi nimi snadno přepínat a realizovat tak zdroj frekvence.
Parametry skupinové komunikace PD.
Viz protokol VFD.
Skupina PE. Kódy funkcí
| PE-00 | Kód uživatelské funkce 0 | Tovární nastavení | P0.00 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-01 | Kód uživatelské funkce 1 | Tovární nastavení | P0.02 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-02 | Kód uživatelské funkce 2 | Tovární nastavení | P0.03 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-03 | Kód uživatelské funkce 3 | Tovární nastavení | P0.07 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-04 | Kód uživatelské funkce 4 Tovární nastavení | P0.08 | ||
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-05 | Kód uživatelské funkce 5 Tovární nastavení | P0.17 | ||
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-06 | Kód uživatelské funkce 6 | Tovární nastavení | P0.18 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-07 | Kód uživatelské funkce 7 | Tovární nastavení | P3.00 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| Kód uživatelské funkce 8 | Tovární nastavení | P3.01 | ||
Technické parametry vysokoúčinného měniče frekvence
| PE-08 | Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | ||
| PE-09 | Kód uživatelské funkce 9 Tovární nastavení | P4.00 | ||
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-10 | Kód uživatelské funkce 10 | Tovární nastavení | P4.01 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-11 | Kód uživatelské funkce 11 | Tovární nastavení | P4.02 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-12 | Kód uživatelské funkce 12 | Tovární nastavení | P5.04 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-13 | Kód uživatelské funkce 13 | Tovární nastavení | P5.07 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-14 | Kód uživatelské funkce 14 Tovární nastavení | P6.00 | ||
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-15 | Kód uživatelské funkce 15 | Tovární nastavení | P6.10 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-16 | Kód uživatelské funkce 16 | Tovární nastavení | P0.00 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-17 | Kód uživatelské funkce 17 | Tovární nastavení | P0.00 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-18 | Kód uživatelské funkce 18 | Tovární nastavení | P0.00 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-19 | Kód uživatelské funkce 19 | Tovární nastavení | P0.00 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-20 | Kód uživatelské funkce 20 | Tovární nastavení | P0.00 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-21 | Kód uživatelské funkce 21 | Tovární nastavení | P0.00 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-22 | Kód uživatelské funkce 22 | Tovární nastavení | P0.00 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-23 | Kód uživatelské funkce 23 | Tovární nastavení | P0.00 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-24 | Kód uživatelské funkce 24 | Tovární nastavení | P0.00 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-25 | Kód uživatelské funkce 25 | Tovární nastavení | P0.00 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-26 | Kód uživatelské funkce 26 | Tovární nastavení | P0.00 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-27 | Kód uživatelské funkce 27 | Tovární nastavení | P0.00 | |
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-28 | Kód uživatelské funkce 28 Tovární nastavení | P0.00 | ||
| Rozsah nastavení | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
| PE-29 | Kód uživatelské funkce 29 | Tovární nastavení | P0.00 | |
| Rozsah | P0.00~PP.xx, A0.00~Ax.xx, U0.xx | |||
Technické parametry vysokoúčinného měniče frekvence
| nastavení |
Tyto kódy funkcí jsou sady parametrů přizpůsobených potřebám uživatelů.
Uživatelé mohou shromažďovat všechny kódy funkci VFD a požadovaný název Výběr parametrů do skupiny PE jako uživatelsky definované parametry pro snadné prohlížení a úpravy.
Skupina PE poskytuje až 30 nestandartních parametrů. Pokud je zobrazený parametr ze skupiny PE P0.00, znamená to, že kód funkce uživatele je prázdný. Po vstupu do režimu uživatelských parametrů jsou kódy funkcí displeje PE-00 \~ PE-31 definovány ve stejném pořadí jako kódy funkcí skupiny PE. Přejděte na P0-00.
Skupina PP. Uživatelské heslo
| PP-00 | Uživatelské heslo | Tovární nastavení | |
| Rozsah nastavení | 0~65535 | ||
Nastavení libovolného nenulového čísla v PP-00 aktivuje funkci ochrany heslem. Při přístím vstupu do menu musíte zadat správné heslo, jinak nebudete moci prohlížet a upravovat parametry funkce. Zapamatujte si heslo nastavené uživatelem.
Nastavením PP-00 na 00000 můžete vymazat nastavení uživatelského hesla. Funkce ochrany heslem pak nebude fungovat.
| PP-01 | Obnovení výchozího nastavení | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | Neobnovovat | ||
| 1 | Obnovení továrního nastavení kromě parametrů motoru | |||
| 2 | Odstranční záznamů | |||
| 4 | Aktuální záložní uživatelské parametry | |||
| 501 | Obnovení parametrů uživatelské zálohy | |||
Když je PP-01 nastaveno na 1, většina funkčních parametrů měniče se resetuje na výchozí tovární parametry, ale parametry motoru se neobnoví, desetinná čárka frekvence (P0-22), registr chyb, celková doba chodu (P7-09), kumulativní doba zapnutí (P7-13) a celková spotřeba energie (P7-14) nejsou obnoveny.
2. Odstranění záznamů
Vymazání informací o chybách pohonu, celková pracovní doba (P7-09), kumulativní doba spínání (P7-13), celková spotřeba energie (P7-14).
4. Aktuální záložní uživatelské parametry
Platí pro aktuální parametry zálohování nastavené uživatelem. Aktuální hodnota všech parametrů funkce nastavení je načtena zpět, aby bylo pro uživatele snazší upravit parametry po obnovení.
- Obnovení parametrů uživatelské zálohy, které byly dříve uloženy v záloze, obnovení zálohy nastavením PP-01 pro čtyři parametry zálohy.
| PP-02 | Vlastnosti režimu zobrazení parametrů funkce | Tovární nastavení | 11 | |
| Rozsah nastavení | Číslice jednotek | Výběr zobrazení skupiny U | ||
| 0 | Bez zobrazení | |||
| 1 | Zobrazení | |||
| Desítky | Výběr zobrazení skupiny A | |||
| 0 | Bez zobrazení | |||
| 1 | Zobrazení | |||
| PP-02 | Vlastnosti režimu zobrazení parametrů funkce | Tovární nastavení | 11 | |
| Rozsah nastavení | Číslice jednotek | Výběr zobrazení skupiny U | ||
| 0 | Bez zobrazení | |||
| 1 | Zobrazení | |||
| Desitky Výběr zobrazení skupiny A | ||||
| 0 | Bez zobrazení | |||
| 1 | Zobrazení | |||
Nastavení režimu zobrazení parametrů slouží především k náhledu různých režimů uspořádání parametrů funkce podle aktuálních potřeb uživatele. Existují 3 režimy zobrazení parametrů.
Technické parametry vysokoúčinného měniče frekvence
| Název | Popis |
| Režim parametrů funkce | Sekvenční zobrazení parametrů měniče, poté skupiny parametrů P0 ~ PF, A0 ~ AF, U0 ~ UF |
| Režim parametrů definovaný uživatelem | Personalizované zobrazení přizpůsobených parametrů funkce (lze nastavit až 32 parametrů), uživatelská skupina FE určuje funkci zobrazeného parametru. |
| Režim změny uživatelských parametrů | Změňte parametry, které neodpovídají parametrům funkce továrního nastavení. |
Když se objeví parametr volby režimu zobrazení znaků (PP-03), můžete v tuto chvíli přepnout na jiné parametry pomocí tlačítka QSM a jedinou zobrazenou funkcí je výchozí hodnota.
Kód pro každý režim zobrazení parametrů:
| Režim zobrazení parametrů | Zobrazení |
| Režim parametrů funkce | -hASF |
| Režim parametrů definovaný uživatelem | -USEr |
| Režim změny uživatelských parametrů | --F-- |
VFD poskytuje dva personalizované režimy zobrazení parametrů: uživatelem definované parametry a uživatelem definovanou změnu parametrů. Vlastní sada parametrů slouží k nastavení parametrů skupiny PE. Lze vybrat až 32 parametrů. Tyto parametry se sečtou a klienti mohou snadno ladit.
Režim uživatelem definovaných parametrů: přidejte výchozí symbol u před kód uživatelské funkce, například: P1-00, v režimu uživatelem definovaných parametrů, obrazovka umožňuje uživatelům měnit parametry a uP1-00 umožňuje uživatelům a výrobcům měnit tovární nastavení. Změny nastavení uživatelských parametrů jsou užitečné pro zákazníky, aby si mohli prohlédnout souhrnné změny parametrů a najít problémy na místě.
Uživatel změní režim parametrů před přizpůsobením kódu funkce přidáním výchozího symbolu c.
Například: pro změnu P1-00 v uživatelském režimu jej zobrazte jako cP1-00.
| PP-04 | Modifikace funkčního kódu | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | lze upravit | ||
| 1 | nelze upravit | |||
Aby se předešlo riziku nesprávné změny parametrů funkce, když je kód funkce nastaven na 0, lze upravit všechny kódy funkcí, když je nastaveno na 1, všechny kódy funkcí mají pouze náhled, nelze je upravovat.
Skupina A0 Ovládání točivého momentu a limity parametrů
| A0-00 | Volba režimu regulace otáček / točivého momentu | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | ovládání rychlosti | ||
| 1 | Ovládání točivého momentu | |||
Volba režimu řízení měniče: řízením rychlostí nebo řízením točivého momentu
Multifunkční digitální svorky DI VFD mají dvě funkce související s řízením točivého momentu: řízení točivého momentu vypnuto (funkce29) a funkcí pro přepínání mezi řízením rychlosti a řízením točivého momentu (46). Tyto dvě svorky udržují spojení A0-00 pro přepínání mezi regulací otáček a točivým momentem.
Když je svorka spínače regulace otáček/točivého momentu neaktivní, je režim ovládání určen A0-00. Pokud je spínač regulace otáček/točivého momentu aktivní, režim řízení se rovná hodnotě negace A0-00.
V každém případě, když je svorka zakazující regulaci točivého momentu aktivní, měnič řídí konstantní otáčky.
| A0-01 | Výběr zdroje ovládání točivého momentu | Továrnínastavení | 0 | |
| Rozsah nastavení | 0 | digitální nastavení (A0-03) | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | nastavení impulzu | |||
| 5 | nastavení komunikace | |||
| 6 | MIN (AI1, AI2) | |||
Technické parametry vysokoúčinného měniče frekvence
| 7 | MAX (AI1, AI2) | |||
| A0-03 | Digitální nastavení točivého momentu v režimu ovládání točivého momentu | Tovární nastavení | 0 | |
| Rozsah nastavení | -200.0%~200.0% | |||
Nastavení točivého momentu A0-01 se používá k výběru zdroje, existuje celkem 8 režimů nastavení točivého momentu.
Nastavení točivého momentu s relativní hodnotou, která odpovídá 100,0% jmenovitého točivého momentu měniče. Rozsah nastavení - 200,0% až 200,0% udává, že maximální točivý moment měniče je 2násobek jmenovitého hnacího momentu.
Když je točivý moment nastaven mezi 1 až 7, komunikace, analogový vstup, 100% impulzní vstup odpovídá A0-03.
| A0-05 | Kladná maximální frekvence regulace točivého momentu | Továrnínastavení | 50.00Hz |
| Rozsah nastavení | 0.00Hz ~ maximální frekvence (P0-10) | ||
| A0-06 | Záporná maximální frekvence regulace točivého momentu | Továrnínastavení | 50.00Hz |
| Rozsah nastavení | 0.00Hz ~ maximální frekvence (P0-10) | ||
Nastavuje řízení točivého momentu a maximální provozní frekvenci pohonu vpřed nebo vzad.
Pokud je pri řízení hnacího momentu moment zátěže menší než výstupní moment motoru, otáčky motoru se budou dále zvyšovat. Aby se předešlo nehodám v mechanickém systému během dojíždění, měl by být omezen na maximální točivý moment regulace otáček motoru.
| A0-07 | Doba zrychlení pro ovládání točivého momentu | Tovární nastavení | 0.00s | |
| Rozsah nastavení | 0.00s~65000s | |||
| A0-08 | Doba zastavení pro ovládání točivého momentu | Tovární nastavení | 0.00s | |
| Rozsah nastavení | 0.00s~65000s | |||
Režim ovládání točivého momentu. Rozdíl mezi výstupním momentem motoru a momentem zátěže určuje rychlost a rychlost změny zátěže motoru, także je možné rychle měnit otáčky motoru způsobující hluk nebo nadměrné mechanické namáhání a další problémy. Nastavením doby zrychlení a zpomalení můžete ovládat rychlost motoru jejich postupnou změnou.
Pro točivý moment je však nutná rychlá odezva, nastavení času zrychlení a zpomalení řízení točivého momentu je 0,00 s. Například: dva trvale připojené motory pohánějí stejnou zátěž. Aby bylo zajištěno rovnoměrné rozložení zátěže, používají režim regulace otáček a používají skutečný přepínač řízení výstupního točivého momentu k nastavení regulátoru pro hlavní jak vedlejší. Hlavní točivý moment nastavuje točivý moment jako vedlejší, tentokrát točivý moment potřebný k rychlému zrychlení a zpomalení ovládání točivého momentu vedlejšího stroje hlavním strojem je 0,00 s.
Skupina A2. Druhý motor.
VFD může přepínat mezi dvěma motory. Dva motory nastavte podle typového štítku motoru. Správně nalad'te parametry motoru samostatně. Vyberte ovládání U / F nebo vektorové ovládání. Parametry kodéru lze nastavit samostatně pomoci ovládání U / F nebo vektorového ovládání.
Funkční kód skupiny A2 odpovídá motoru 2.
Zároveň všechny parametry skupiny A2, definující a využívající obsah, odpovídají parametrům prvního motoru a nebudou zde opakovány. Uživatel může použit popis parametrů souvisejících s prvním motorem.
| A2-00 | Volba typu motoru | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | 0: Bčžný indukční motor | ||
| 1 | 1:Indukční motory s proměnnou frekvencí | |||
| A2-01 | Jmenovitý výkon | Tovární nastavení | Závisí na modelu | |
| Rozsah nastavení | 0.1kW~1000.0kW | |||
| A2-02 | Jmenovité napětí | Tovární nastavení | Závisí na modelu | |
| Rozsah nastavení | 1V~400V | |||
| A2-03 | Jmenovitý proud | Tovární nastavení | Závisí na modelu | |
| Rozsah nastavení | 0.01A~655.35A (výkon měniče =55kW)0.1A~6553.5A (výkon měniče >55kW) | |||
| A2-04 | Jmenovitá frekvence | Tovární nastavení | Závisí na modelu | |
| Rozsah nastavení | 0.01Hz~ maximální frekvence | |||
Technické parametry vysokoučinného měniče frekvence
| A2-05 | Jmenovitá rychlost | Tovární nastavení | Závisí na modelu | |
| Rozsah nastavení | 1rpm~65535rpm | |||
| A2-06 | Odpor statoru indukčního motoru | Tovární nastavení | Závisí na modelu | |
| Rozsah nastavení | 0.001Ω~65.535Ω (výkon měniče<=55kW)0.0001Ω~6.5535Ω (výkon měniče>55kW) | |||
| A2-07 | Odpor rotoru indukčního motoru | Tovární nastavení | Závisí na modelu | |
| Rozsah nastavení | 0.001Ω~65.535Ω(výkon měniče<=55kW)0.0001Ω~6.5535Ω(výkon měniče>55kW) | |||
| A2-08 | Svodová indukční reaktance indukčního motoru | Tovární nastavení | Závisí na modelu | |
| Rozsah nastavení | 0.01mH~655.35mH (výkon měniče<=55kW)0.001mH~65.535mH (výkon měniče>55kW) | |||
| A2-09 | Vzájemná indukční reaktance indukčního motoru | Tovární nastavení | Závisí na modelu | |
| Rozsah nastavení | 0.1mH~6553.5mH(výkon měniče<=55kW)0.01mH~655.35mH(výkon měniče>55kW) | |||
| A2-10 | Proud naprázdno indukčního motoru | Tovární nastavení | Závisí od modelu | |
| Rozsah nastavení | 0.01A~A2-03(výkon měniče<=55kW)0.1A~A2-03 (výkon měniče>55kW) | |||
| A2-27 | Číslo řádku kodéru | Tovární nastavení | 1024 | |
| Rozsah nastavení | 1~65535 | |||
| A2-28 | Výběr zpětné vazby rychlosti | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Inkrementální kodér ABZ | ||
| 1 | Rezervováno | |||
| 2 | Rotační transformátor | |||
| A2-29 | Výběr zpětné vazby rychlosti PG | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | PG | ||
| 1 | PG | |||
| 2 | Pulzní vstup (DI5) | |||
| A2-30 | AB sekvenční fáze inkrementálního kodéru ABZ | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Vpřed | ||
| 1 | Zpět | |||
| A2-34 | Počet pólových párů rotačního transformátoru | Tovární nastavení | 1 | |
| Rozsah nastavení | 1~65535 | |||
| A2-36 | Doba dctekce odpojení PG ve zpětné vazbě rychlosti | Tovární nastavení | 0.0s | |
| Rozsah nastavení | 0.0: žádná akce 0.1s~10.0s | |||
| A2-37 | Výběr ladění | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | 0: Žádná akce | ||
| 1 | 1: Statické ladění asynchronního motoru | |||
| 2 | 2: Úplné ladění asynchronního motoru | |||
| A2-38 | Proporcionalní zesilení rychlostní smyčky 1 | Tovární nastavení | 30 | |
| Rozsah nastavení | 1~100 | |||
| A2-39 | Doba integrace rychlostní smyčky 1 | Tovární nastavení | 0.50s | |
| Rozsah nastavení | 0.01s~10.00s | |||
| A2-40 | Spínací frekvence 1 | Tovární nastavení | 5.00Hz | |
| Rozsah nastavení | 0.00~A2-43 | |||
Technické parametry vysokoučinného měniče frekvence
| A2-41 | Proporcionalní zesilení rychlostní smyčky 2 | Tovární nastavení | 15 | |
| Rozsah nastavení | 0~100 | |||
| A2-42 | Doba integrace rychlostní smyčky 2 | Tovární nastavení | 1.00s | |
| Rozsah nastavení | 0.01s~10.00s | |||
| A2-43 | Spinaci frekvence 2 | Tovární nastavení | 10.00Hz | |
| Rozsah nastavení | A2-40~ max. výstupní frekvence | |||
| A2-44 | Zesilení skluzu vektorové kontroly | Tovární nastavení | 100% | |
| Rozsah nastavení | 50%~200% | |||
| A2-45 | Časová konstanta pro filtr rychlostní smyčky | Tovární nastavení | 0.000s | |
| Rozsah nastavení | 0.000s~0.100s | |||
| A2-46 | Vektorové řízení zesilení buzení | Tovární nastavení | 64 | |
| Rozsah nastavení | 0~200 | |||
| A2-47 | Zdroj vysokého limitu v režimu regulace rychlosti | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Nastavení A2-48 | ||
| 1 | AI1 | |||
| 2 | AI2 | |||
| 3 | AI3 | |||
| 4 | Nastavení impulzů | |||
| 5 | Nastavení komunikace | |||
| 6 | MIN (AI1, AI2) | |||
| 7 | MAX (AI1, AI2) | |||
| A2-48 | Digitální nastavení točivého momentu v režimu regulace otáček | Tovární nastavení | 150.0% | |
| Rozsah nastavení | 0.0%~200.0% | |||
| A2-51 | Proporcionalní zesilení buzení | Tovární nastavení | 2000 | |
| Rozsah nastavení | 0~20000 | |||
| A2-52 | Integrální zesilení buzení | Tovární nastavení | 1300 | |
| Rozsah nastavení | 0~20000 | |||
| A2-53 | Proporcionalní zesilení regulace točivého momentu | Tovární nastavení | 2000 | |
| Rozsah nastavení | 0~20000 | |||
| A2-54 | Zesilení integrace regulace momentu | Tovární nastavení | 1300 | |
| Rozsah nastavení | 0~20000 | |||
| A2-55 | Vlastnosti člena integrace rychlostní smyčky | Tovární nastavení | 0 | |
| Rozsah nastavení | Jednotná číslice: oddělení integrace 0: nepovoleno 1: povoleno | |||
| A2-61 | Režim ovládání motoru 2 | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | Žádné vektorové ovládání snímače rychlosti (SVC) | ||
| 1 | Vektorové ovládání snímače rychlosti (FVC) | |||
| 2 | Ovládání U/f | |||
| Doba zrychlení / zpomalení motoru 2 | Tovární nastavení | 0 | ||
| 0 | 0: stejně jako motor 1 | |||
Technické parametry vysokoúčinného měniče frekvence
| A2-62 | Rozsah nastavení | 1 | 1: Doba zrychlení / zpomalení 1 | |
| 2 | 2: Doba zrychlení / zpomalení 2 | |||
| 3 | 3: Doba zrychlení / zpomalení 3 | |||
| 4 | 4: Doba zrychlení / zpomalení 4 | |||
| A2-63 | Zvýšení točivého momentu motoru 2 | Tovární nastavení Záleží na modelu | ||
| Rozsah nastavení | 0.0%: automatické zvýšení točivého momentu 0.1%~30.0% | |||
| A2-65 | Zesílení tlumení kmitání motoru 2 | Tovární nastavení Záleží na modelu | ||
| Rozsah nastavení | 0~100 | |||
Skupina A5 Parametry optimalizace řízení
| A5-00 | Vysokofrekvenční prahový spínač DPWM | Tovární nastavení 12.00Hz |
| Rozsah nastavení | 0.00Hz~15Hz |
Platí pouze pro ovládání U/f. Spínací ztráta při 7 - krokové spojité modulaci je velká, ale způsobuje nízké zvlnění proudu.
Na druhé straně 5 - krokový přerušovaný režim ladění má nízké spínací ztráty a vysoké proudové vlnění, nicméně motor může být nestabilní při vysokých frekvencích. Úprava je nutná.
Pro nestabilní provoz měniče viz kód funkce P3-11, pro ztrátu spínání a nárůst teploty měniče viz kód funkce P0-15.
| A5-01 | PWM modulace | Továrnínastavení | 0 | |
| Rozsahnastavení | 0 | asynchronní modulace | ||
| 1 | synchronní modulace | |||
Platí pouze pro ovládání U/f. Synchronní modulace znamená konverzi nosné frekvence, když se výstupní frekvence mění lineárně tak, aby byl zajištěn nezměněný poměr (faktor nosné), obvykle při použití vyšších výstupních frekvencí, ve prospěch kvality výstupního napětí.
Při nižší výstupní frekvenci (100Hz nebo méně) není synchronní modulace obecně potřeba, protože poměr nosné frekvence k výstupní frekvenci je relativně vysoký, což je jedna z nejviditelnějsích výhod asynchronní modulace.
Synchronní modulace funguje pouze tehdy, když je pracovní frekvence vyšší než 85 Hz a režim asynchronní modulace je nastaven pod touto frekvencí.
| A5-02 | Výběr režimu kompenzace mrtvé zóny | Tovární nastavení | 1 | |
| Rozsah nastavcní | 0 | žádná náhrada | ||
| 1 | kompenzační náhrada č. 1 | |||
| 2 | kompenzační náhrada č. 2 | |||
V zásadě není potřeba tento parametr upravovat. Pouze v případě, že kvalita výstupního napětí má speciální požadavky nebo existují jiné abnormální oscilace motoru, zkuste přepnout na výběr z různých kompenzačních modelů. Režim 2 se doporučuje pro kompenzaci vysokého výkonu.
| A5-03 | Náhodná hloubka PWM | Tovární nastavení | 0 | |
| Rozsah nastavení | 0 | nepovoleno | ||
| 1~10 | náhodná hloubka nosné frekvence | |||
Nastavení náhodného PWM může ztlumit monotónní, ostrý zvuk motoru a může pomoci snížit vnější elektromagnetické rušení. Když nastavíte náhodnou hloubku PWM na 0, náhodný PWM je neaktivní. Nastavení náhodného PWM s různými hloubkami poskytne různé výsledky.
| Limit rychlého proudu | Tovární nastavení | 1 |
Technické parametry vysokoúčinného měniče frekvence
| A5-04 | Rozsah nastavení | 0 | neaktivní |
| 1 | aktivní |
Povolení funkce rychlého omezení proudu může snížit maximální nadproudovou poruchu měniče, která může nastat. Měnič zajistí nepřetržitý provoz. Pokud měnič pracuje po dlouhou dobu s rychlým omezením proudu, může se přehřát a může dojít k dalšímu poškození, także to není povoleno.
Měnič bude pracovat s limitem rychlého proudu, dokud se nevyskytne alarm chyby limitu Err40, což znamená, že měnič je přitížen a bude zastaven.
| A5-05 | Průběžná detekce kompenzace | Tovární nastavení | 5 |
| Rozsah nastavení | 0~100 | ||
Nastavení príliš vysoké kompenzace detekce proudu v ovládání měniče může snížit výkon. V zásadě není nutná žádná úprava.
| A5-06 | Práh poklesu napětí | Tovární nastavení | 100% |
| Rozsah nastavení | 60.0%~140.0% | ||
Pro nastavení hodnoty napěti chyby podpěti Err09 odpovídají různé napěťové úrovně 100,0% měniče různým napěťovým bodům, a to: 220 V jednofázové nebo třífázové 220 V: 200 V třífázové 380 V: 350 V.
| A5-07 | Optimalizace SVC | Tovární nastavení | 1 | |
| Rozsah nastavení | 0 | žádná optimalizace | ||
| 1 | režim optimalizace č. 1 | |||
| 2 | režim optimalizace č. 2 | |||
Režim optimalizace č. 1: Vysoké nároky na linearitu řízení točivého momentu. Režim optimalizace č. 2: Použijte vyšší požadavky na stabilitu rychlosti.
| A5-08 | Nastavení mrtvého času | Tovární nastavení | 150% |
| Rozsah nastavení | 100%~200% | ||
Skupina A6. Nastavení křivky AI
| A6-00 | Minimální hodnota křivky Al na vstupu 4 | Tovární nastavení | 0.00V |
| Rozsah nastavení | -10.00V~A6-02 | ||
| A6-01 | Nastavení minimální hodnoty křivky Al na vstupu 4 | Tovární nastavení | 0.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| A6-02 | Inflexe č. 1 křivky Al na vstupu 4 | Tovární nastavení | 3.00V |
| Rozsah nastavení | A6-00~A6-04 | ||
| A6-03 | Nastavení inflexe č. 1 křivky Al na vstupu 4 | Tovární nastavení | 30.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| A6-04 | Inflexe č. 2 křivky Al na vstupu 4 | Tovární nastavení | 6.00V |
| Rozsah nastavení | A6-02~A6-06 | ||
| A6-05 | Nastavení inflexe č. 2 křivky Al na vstupu 4 | Tovární nastavení | 60.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| A6-06 | Maximální hodnota křivky Al na vstupu 4 | Tovární nastavení | 10.00V |
| Rozsah nastavení | A6-06~10.00V | ||
| A6-07 | Nastavení maximální hodnoty křivky Al na vstupu 4 | Tovární nastavení | 100.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| A6-08 | Minimální hodnota křivky Al na vstupu 5 | Tovární nastavení | 0.00V |
| Rozsah nastavení | -10.00V~A6-10 | ||
| A6-09 | Nastavení minimální hodnoty křivky Al na vstupu 5 | Tovární nastavení | |
Technické parametry vysokoučinného měniče frekvence
| Rozsah nastavení | -100.0%~100.0% | ||
| A6-10 | Inflexe č. 1 křivky Al na vstupu 5 | Tovární nastavení | |
| Rozsah nastavcní | A6-08~A6-12 | ||
| A6-11 | Nastavení inflexe č. 1 křivky Al na vstupu 5 | Tovární nastavení | |
| Rozsah nastavení | -100.0%~100.0% | ||
| A6-12 | Inflexe č. 2 křivky Al na vstupu 5 | Tovární nastavcní | 6.00V |
| Rozsah nastavení | A6-10~A6-14 | ||
| A6-13 | Nastavení inflexe č. 2 křivky Al na vstupu 5 | Tovární nastavení | 60.0% |
| Rozsah nastavení | -100.0%~100.0% | ||
| A6-14 | Maximální hodnota křivky Al na vstupu 5 | Tovární nastavcní | 10.00V |
| Rozsah nastavení | A6-14~10.00V | ||
| A6-15 | Nastavení maximální hodnoty křivky Al na vstupu 5 | Tovární nastavení | 100.0% |
| Rozsah nastavcní | -100.0%~100.0% | ||
Křivky 4 a 5 jsou podobné křivce 1, ale křivka 1 až 3 je přímka, zatímco křivky 4 a 5 jsou 4bodové křivky, které mohou poskytnout flexibilnější poddajnost. Na obrázku 6-32 je schéma zapojení křivek 4 a 5.
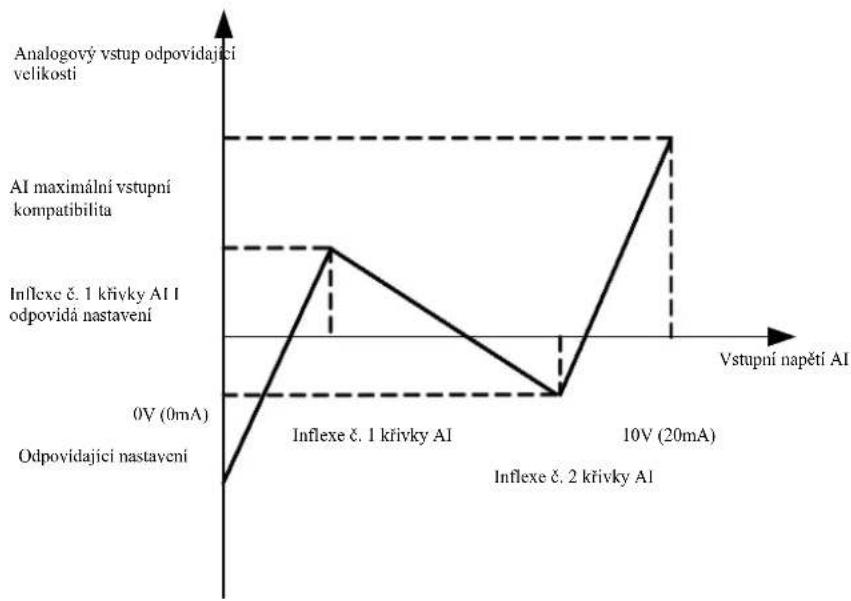
line
| Vstupní napětí AI | Analogový vstup odpovidající velikosti | |---|---| | 0V (0mA) | Odpovídající nastavení | | Inflexe č. 1 křivky AI | Inflexe č. 1 křivky AI I odpovídá nastavení | | 0V (0mA) | Inflexe č. 2 křivky AI | | 10V (20mA) | Inflexe č. 2 křivky AI | | >10V (20mA) | AI maximální vstupní kompatibilita |-100%
Obr. 6-32. Schéma zapojení pro křivky 4 a 5
Při určování křivek 4 a 5 je třeba poznamenat, že minimální vstupní napětí křivky, inflexe č. 1, inflexe č. 2 a maximální inflexe musí postupně narůstat. Výběr křivky Al P33 se používá k určení způsobu výběru 5 křivek pro analogový vstup Al1 \~ Al3.
| A6-24 | Skok pro AI1 | Tovární nastavení 0.0% | |
| Rozsah nastavení | -100.0%~100.0% | ||
| A6-25 | Rozsah skoku pro AI1 | Tovární nastavení | |
| Rozsah nastavení | 0.0%~100.0% | ||
| A6-26 | Skok pro AI2 | Tovární nastavení | |
| Rozsah nastavení | -100.0%~100.0% | ||
| A6-27 | Rozsah skoku pro AI2 | Tovární nastavení | |
| Rozsah nastavení | 0.0%~100.0% | ||
| A6-28 | Skok pro AI3 | Tovární nastavení 0.0% | |
| Rozsah nastavení | -100.0%~100.0% | ||
Technické parametry vysokoúčinného měniče frekvence
| A6-29 | Rozsah skoku pro AI3 | Tovární nastavení | 0.5% |
| Rozsah nastavení | 0.0%~100.0% | ||
Analogový vstup VFD A11 \~ A13, má funkci přeskočení žádané hodnoty.
Funkce přeskočení znamená, že když analogová žádaná hodnota skáče nahoru a dolů, jak se mění interval, analogová hodnota odpovídající žádané hodnotě zůstává při skoku konstantní.
Příklad: Když napětí analogového vstupu Al1 kolísá při 5,00 V, rozsah výkyvu je 4,90 V \~ 5,10 V. Minimální vstupní hodnota Al1 je 0,00 V, což odpovídá 0,0% a maximální vstupní hodnota 10,00 V, což odpovídá 100%, pak je napětí Al1 detekováno v rozsahu 49,0% \~ 51,0%
Nastavte bod skoku AI1 A6-24 na 50%, nastavte amplitudu skoku AI1 A6-25 na 1,0%, poté nastavte funkci skoku odpovídajícího vstupu na vstupu AI1 výše, čímž získáte nastavení AI1 na 50,0%. Převedťe AI1 na stabilní vstup, abyste odstranili kolísání.
Skupina A7. Uživatelsky programovatelné funkce
Viz další příručka „Uživatelsky programovatelná karta ovladače”.
Skupina AC. Kalibrace analogových vstupů / výstupů
| AC-00 | Naměřené napětí AI1 č. 1 | Tovární nastavení Kalibrace | |
| Rozsah nastavení | 0.500V~4.000V | ||
| AC-01 | Zobrazené napětí AI1 č. 1 | Tovární nastavení Kalibrace | |
| Rozsah nastavení | 0.500V~4.000V | ||
| AC-02 | Naměřené napětí AI1 č. 2 | Tovární nastavení | Kalibrace |
| Rozsah nastavení | 6.000V~9.999V | ||
| AC-03 | Zobrazené napětí AI1 č. 2 | Tovární nastavení Kalibrace | |
| Rozsah nastavení | 6.000V~9.999V | ||
| AC-04 | Naměřené napětí AI2 č. 1 | Tovární nastavení Kalibrace | |
| Rozsah nastavení | 0.500V~4.000V | ||
| AC-05 | Zobrazené napětí AI2 č. 1 | Tovární nastavení Kalibrace | |
| Rozsah nastavení | 0.500V~4.000V | ||
| AC-06 | Naměřené napětí AI2 č. 2 | Tovární nastavení | Kalibrace |
| Rozsah nastavení | 6.000V~9.999V | ||
| AC-07 | Zobrazené napětí AI2 č. 2 | Tovární nastavení | |
| Rozsah nastavení | -9.999V~10.000V | ||
| AC-08 | Naměřené napětí AI3 č. 1 | Tovární nastavení | |
| Rozsah nastavení | -9.999V~10.000V | ||
| AC-09 | Zobrazené napětí AI3 č. 1 | Tovární nastavení | |
| Rozsah nastavení | -9.999V~10.000V | ||
| AC-10 | Naměřené napětí AI3 č. 2 | Tovární nastavení Kalibrace | |
| Rozsah nastavení | -9.999V~10.000V | ||
| AC-11 | Zobrazené napětí AI3 č. 2 | Tovární nastavení Kalibrace | |
| Rozsah nastavení | -9.999V~10.000V | ||
Tento funkční kód se používá k opravě analogového vstupu AI, aby se eliminoval dopad posunu a zesílení vstupu AI. Parametry skupinových funkcí byly kalibrovány a po kalibraci resetovány na tovární hodnoty. Obvykle to není třeba opravovat.
Pro měření napětí můžete například použít multimetr pro měření skutečného napětí. Zobrazí se vzorkovaná hodnota napětí. Viz AI ze skupiny U0 před korekcí napětí (U0-21, U0-22, U0-23).
Při opravě dvou hodnot vstupního napětí na každém vstupním portu AI změřte pomocí multimetru hodnotu skupiny a odečtěte hodnotu skupiny U0. Po přesném zadání funkčního kódu měnič automaticky opraví nulový posun a zesílení AI.
| Cílové napětí AO1 č. 1 | Tovární nastavení Kalibrace |
Technické parametry vysokoúčinného měniče frekvence
| AC-12 | Rozsah nastavení | 0.500V~4.000V | |
| AC-13 | Měřené napětí AO1 č. 1 | Tovární nastavení Kalibrace | |
| Rozsah nastavení | 0.500V~4.000V | ||
| AC-14 | Cílové napětí AO1 č. 2 | Tovární nastavení Kalibrace | |
| Rozsah nastavení | 6.000V~9.999V | ||
| AC-15 | Měřené napětí AO1 č. 2 | Tovární nastavení Kalibrace | |
| Rozsah nastavení | 6.000V~9.999V | ||
| AC-16 | Cílové napětí AO2 č. 1 | Tovární nastavení Kalibrace | |
| Rozsah nastavení | 0.500V~4.000V | ||
| AC-17 | Měřené napětí AO2 č. 1 | Tovární nastavení Kalibrace | |
| Rozsah nastavení | 0.500V~4.000V | ||
| AC-18 | Cílové napětí AO2 č. 2 | Tovární nastavení Kalibrace | |
| Rozsah nastavení | 6.000V~9.999V | ||
| AC-19 | Měřené napětí AO2 č. 2 | Tovární nastavení Kalibrace | |
| Rozsah nastavení | 6.000V~9.999V | ||
Tento funkční kód se používá ke kalibraci analogového vstupu A0, aby se eliminoval dopad posunu a zesílení vstupu A0. Parametry skupinové funkce byly kalibrovány a tovární hodnota byla po kalibraci obnovena. V podstatě není potřeba opravovat. Cílové napětí se vztahuje k teoretické hodnotě výstupního napětí měniče. Naměřené napětí se vztahuje ke skutečné hodnotě výstupního napětí naměřeného multimetrem a dalšími přístroji.
Skupina U0. Monitorování provozu měniče
Skupina parametrů U0 slouží ke sledování informací o provozním stavu měniče. Uživatel může zobrazit obrazovku pro usnadnění ladění na místě nebo sledovat nastavenou hodnotu parametru na monitoru PC. V tomto případě je U0-00 \~ U0-31 zastaveno a jsou definovány monitorovací parametry P7-03 i P7-04.
Seznamte se s kódem funkce konkrétního parametru, názvem parametru a jeho minimální jednotkou v tabulce 6-1.
Tabulka 6-1 Parametry skupiny U0
| Kód funkce | Název parametru | Jednotka |
| U0-00 | Provozní frekvence (Hz) | 0.01Hz |
| U0-01 | Nastavení frekvence (Hz) | 0.01Hz |
| U0-02 | Napětí kolejnice (V) | 0.1V |
| U0-03 | Výstupní napětí (V) | 1V |
| U0-04 | Výstupní proud (A) | 0.01A |
| U0-05 | Výstupní výkon (kW) | 0.1kW |
| U0-06 | Výstupní točivý moment (%) | 0.1% |
| U0-07 | Stav vstupu DI | 1 |
| U0-08 | Stav výstupu DO | 1 |
| U0-09 | Napětí AI1 (V) | 0.01V |
| U0-10 | Napětí AI2 (V) | 0.01V |
| U0-11 | Napětí AI3 (V) | 0.01V |
| U0-12 | Počitání hodnot | 1 |
| U0-13 | Hodnota délky | 1 |
| U0-14 | Indikátor rychlosti zatížení | 1 |
| U0-15 | Nastavení PID | 1 |
| U0-16 | Zpětná vazba PID | 1 |
| U0-17 | Krok PLC | 1 |
| U0-18 | Frekvence vstupního impulzu (Hz) | 0.01kHz |
| U0-19 | Rychlost zpětné vazby (0,1 Hz) | 0.1Hz |
| U0-20 | Zbývající provozní doba | 0.1Min |
| U0-21 | Napětí AI1 před kalibrací | 0.001V |
| U0-22 | Napětí AI2 před kalibrací | 0.001V |
| U0-23 | Napětí AI3 před kalibrací | 0.001V |
| U0-24 | Lineární rychlost | 1m/Min |
| U0-25 | Aktuální doba zapojcní | 1Min |
Technické parametry vysokoúčinného měniče frekvence
| U0-26 | Aktuální provozní doba | 0.1Min |
| U0-27 | Frekvence vstupního impulzu | 1Hz |
| U0-28 | Nastavení komunikace | 0.01% |
| U0-29 | Rychlost zpětné vazby kodéru | 0.01Hz |
| U0-30 | Zobrazení hlavní frekvence X | 0.01Hz |
| Kód funkce | Název parametru | Jednotka |
| U0-31 | Zobrazení pomocné frekvence Y | 0.01Hz |
| U0-32 | Zobrazení libovolné hodnoty adresy paměti | 1 |
| U0-34 | Teplota motoru | 1 °C |
| U0-35 | Cílový točivý moment (%) | 0.1% |
| U0-36 | Umístění rotace | 1 |
| U0-37 | Úhel účiníku | 0.1 |
| U0-39 | Oddělené cílové napětí U/f | 1V |
| U0-40 | Oddělené výstupní napětí U/f | 1V |
| U0-41 | Zobrazení stavu vstupu DI | 1 |
| U0-42 | Zobrazení stavu vstupu DO | 1 |
| U0-43 | Zobrazení 1 funkčního stavu DI (funkce01 – funkce 40) | 1 |
| U0-44 | Zobrazení 2 funkčního stavu DI (funkce 41 – funkce 80) | 1 |
| U0-45 | Nastavení frekvence (%) | 0 |
| U0-59 | Provozní frekvence (%) | 0.01% |
| U0-60 | Stav frekvenčního měniče | 0.01% |
| U0-61 | Zobrazení pomocné frekvence Y | 1 |
| U0-62 | Zobrazení libovolné hodnoty adresy paměti | 1 |
Kapitola 7 EMC (elektromagnetická kompatibilita)
7.1 Definice
Elektromagnetická kompatibilita znamená, že elektrické zařízení pracuje v prostředí elektromagnetického rušení, ale neruší elektromagnetické prostření a plní svou funkci stabilně.
7.2 Shoda s normami EMC
V souladu s požadavky národní normy GB / T12668.3 musí splňovat požadavky ve dvou aspektech: elektromagnetické rušení a odolnost vůči elektromagnetickému rušení.
Naše aktuální produkty splňují požadavky nejnovějších mezinárodních norem: IEC / EN61800-3: 2004 (Systémy elektrických výkonových pohonů s nastavitelnou rychlostí, Část 3: Požadavky EMC a specifické zkušební metody), které odpovídají národní normě GB / T12668.3.
Norma IEC / EN61800-3 kontroluje měnič frekvence hlavně ze dvou hledisek: emise elektromagnetického šumu a odolnosti vůči elektromagnetickému rušení. Elektromagnetické rušení je testováno z pohledu vyzařovaného, vedeného a harmonického rušení emitovaného měničem frekvence (požadavky na měnič frekvence pro civilní použití). Odolnost vůči elektromagnetickému rušení je testována z pohledu odolnosti vůči vodivostí, záření, přepčtí, rychle se měnicím skupinám pulzů, elektrostatickému výboji a odolnosti nízkoproudovým napájecím svorkám (konkrétní testy zahrnují; 1. testy odolnosti vůči poklesům, výpadkům a změnám vstupního napětí; 2. test odolnosti proti komutačnímu zářezu; 3. test odolnosti vůči harmonickému vstupu; 4. test změny vstupní frekvence; 5. test asymetrie vstupního napětí; 6. test fluktuace vstupního napětí. Test se provádí v souladu s přisnými požadavky normy IEC / EN61800-3, prosíme tedy naistalovat výrobky naší firmy v souladu s pokyny uvedenými v bodě 7.3, výrobky mají dobrou elektromagnetickou kompatibilitu v obecném průmyslovém prostředí.
7.3 Instrukce EMC
7.3.1 Vliv harmonického rušení: Harmonické rušení napájení způsobují poškození měniče, proto se doporučuje instalovat vstupní AC tludivky tam, kde je kvalita elektrické sítě špatná.
7.3.2 Elektromagnetické rušení a bezpečnostní opatření při instalaci: Existují dva typy elektromagnetického rušení. Jedním je rušení měniče v okolním elektromagnetickém šumu a druhým je rušení, které vytváří měnič v periferních zařizeních.
Technické parametry vysokoúčinného měniče frekvence
Bezpečnostní opatření při instalaci:
1) Zemnící vodiče elektrických výrobku, jako např. měniče, musí být dobře uzemněny;
2) Nepokládejte rovnobčně vstupní a výstupní napájecí kabely měniče nebo nízkoproudové signální kabely (jako jsou řídící obvody). Pokud je to možné, pokládejte je svisle;
3) Jako výstupní vedení měniče frekvence doporučujeme použít stíněný kabel nebo silové vedení v ocelové trubce, musí být zajištěno spolehlivé uzemnění stínící vrstvy. V případě zařízení s rušením, doporučujeme použít dvojitě kroucený ovládací kabel a zajistit spolehlivé uzemnění stínční.
4) Pokud je kabel motoru delší než 100 m je třeba nainstalovat výstupní filtr nebo elektrickou tlumivku.
7.3.3 Způsoby řešení rušení generovaného periferními elektromagnetickými zařizeními měniče. Obvykle je elektromagnetický vliv na měnič způsoben instalací většího počtu relé, stykačů nebo elektromagnetických brzd v blízkosti měniče. Pokud dojde k poruše měniče z důvodu rušení, doporučujeme postupovat následujícími způsoby:
1) Zařízení, které způsobuje rušení, vybavte tlumičem přepětí;
2) Na vstupní svorce měniče nainstalujte filtr dle instrukcí v bodě 7.3.6;
3) Vedení řídícího signálu a vodič detekčního obvodu musí být stíněné a být spolehlivě uzemněné.
7.3.4 Jak se vypořádat s rušením, které způsobují periferní zařízení měniče: Existují dva druhy rušení, a to rušení vyzařované měničem a rušení, které vede přes měnič. Tyto dvě interference vedou k elektromagnetické nebo elektrostatické indukci v periferních elektrických zařízeních a poté způsobují poruchu zařízení. S ohledem na tato různá rušení lze zvážit níže uvedená řešení:
1) Signál z přístrojů, přijímačů a měřeného senzoru je obecně slabý. Pokud se nacházejí v blízkosti měniče frekvence nebo ve stejné rozvodné skříní, je měnič náchylný na rušení a poruchy. Doporučujeme proto přijmout následující řešení: pokud možno co nejdál od zdrojů rušení; neukládejte parallelně signální ani napájecí kabely ani je níjak nespojujte do svazků; stiňte signální a napájecí vedení a zajistěte spolehlivé uzemnění; nainstalujte feritové jádro (s rozsahem frekvence 30 \~ 1000 MHz) na výstupní straně měniče frekvence a otočte jej 2 až 3krát ve stejném směru. Ve složitějších případech je možno nainstalovat výstupní filtry EMC;
2) Pokud zařízení, ve kterých se objevuje rušení, mají stejný výkon jako měnič, dochází k rušení ve vedení. Pokud toto rušení není možné eliminovat výše uvedeným způsobem, je třeba mezi měničem a napájecím zdrojem nainstalovat filtr EMC (viz bod 7.3.6 pro výběr modelu);
3) Nezávislé uzemnění periferních zařízení může odstranit rušení způsobené svodovým proudem vodiče uzemňujícího měnič.
7.3.5 Svodový proud a postup. Během používání měniče se objevují dvě formy svodového proudu: svodový proud do země a svodový proude mezi vedeními.
1) Faktory ovlivňující svodový proud do země a řešení:
Mezi vodičem a zemí je rozptylová kapacita. Čím větší rozptylová kapacita, tím větší je svodový proud, proto je třeba zmenšit vzdálenost mezí měníčem a motorem, aby se snížila rozptylová kapacita. Čím větší je nosná frekvence, tím větší je svodový proud, z toho důvodu je třeba snížit nosnou frekvenci, došlo ke snížení svodového proudu. Snížení nosné frekvence však zvýší hluk motoru. Je třeba mít na pamětí, že účinným způsobem, jak vyřešt problém elektrického svodu je instalace tlumivky. Elektrický svod roste společně se zvyšujícím se proudem smyčky, proto čím větší výkon motoru, tím větší je jemu odpovídající elektrický svod.
2) Faktory ovlivňující elektrický svod mezi vedeními a řešení:
Mezi výstupním vedením měniče je rozptylová kapacita. Pokud obvodový proud obsahuje vyšší harmonické, může to způsobit rezonanci a vygenerování elektrického svodu. Pokud se v této chvíli používá tepelné relé, nemusí fungovat správně.
Řešením je snížení nosné frekvence nebo instalace výstupní tlumivky. Při použití měniče je doporučeno neinstalovat mezi měnič a motor tepelné relé, ale použit funkci nadproudové ochrany měniče.
7.3.6 Ochranná opatření při instalaci vstupního filtru EMC na vstupní svorce napájení:
1) Upozornční: během požívání filtru dodržujte přesně jmenovité hodnoty. Protože filtr je elektrickým zařízením třídy I, kovový kryt filtru by měl těsně přiléhat ke kovu instalační skříně a je vyžadována dobrá kontinuita elektrické vodivosti, v opačném případě hrozi nebezpečí úrazu elektrickým proudem a může dojit k velkému ovlivnění EMC;
2) V souladu s testem EMC, svorka filtru PE a měnič by měly být připojené ke stejnému uzemnění, v opačném případě dojde k velkému ovlivnění EMC;
3) Filtr by měl být instalován pokud možno v blízkosti vstupní svorky napájení měniče.
Kapitola 8. Diagnostika chyb a nápravná opatření
8.1 Upozornění na chyby a nápravná opatření
Frekvenční měnič má 24 výstražných a ochranných funkcí. Když dojde k chybě, bezpečnostní funkce začne pracovat a měnič vypne výstup. Chybové rclé frekvenčního měniče začne spinat kontakt a zobrazi chybový kód na displejí měniče. Nčz uživatelé požádají o pomoc, mohou provést vlastní analýzu podle pokynů v této kapitole, aby zjistili příčinu poruchy a našli řešení. Pokud jsou důvody uvedeny v přerušovaném rámečku, měli byste se obrátit na servis a kontaktovat přímo zástupce výrobce frekvenčního měniče nebo přímo naši společnost.
| Název chyby Ochrana | měniče |
| Zobrazení chyby Err01 | |
| Příčina chyby | 1. Zkrat výstupního obvodu měniče2. Příliš dlouhé kabely mezi motorem a měničem3. Přehřátí modulu4. Uvolnění vnitřního vinutí měniče5. Porucha hlavního ovládacího panelu6. Nesprávná činnost modulu ovladače7. Nesprávná činnost inverzního modulu |
| Řešení | 1. Opravte chybu periferního zařízení2. Nainstalujte elektrickou tlumivku nebo výstupní filtr3. Zkontrolujte, zda není vzduchový kanál ucpaný a ventilátor funguje normálně, odstraňte případné ncsrovnalosti4. Zcela zasuňte všechny propojovací vodiče5. Vyhledejte technickou pomoc6. Vyhledcjte technickou pomoc7. Vyhledejte technickou pomoc |
| Název chyby | Přetížení při zrychlení |
| Zobrazení chyby | Err02 |
| Příčina chyby | 1. Průnik do země nebo zkrat výstupního obvodu měniče2. Způsob řízení je vektorový a nejsou definovány žádné parametry3. Příliš krátká doba zrychlení4. Nesprávné ruční zvýšení točivého momentu nebo křivka V / F5. Nízké napětí6. Otáčky motoru se rozběhly7. Rázové zatížení během procesu zrychlení8. Tento model měniče má příliš nízkou třídu výkonu |
| Řešení | 1. Opravte chybu na periferním zařízení2. Zkontrolujte parametry motoru3. Zvyšte dobu zrychlení4. Nastavte ruční podporu točivého momentu nebo křivku V / F5. Nastavte napětí na normální rozsah6. Začněte sledovat otáčky nebo restartujte motor po zastavení7. Odstraňte rázové zatížení8. Vyberte měnič frekvence s vyšší třídou výkonu |
| Název chyby Přetížení | při zrychlení |
| Zobrazení chyby | Err03 |
| Přičina chyby | 1. Uzemnění nebo zkrat výstupní smyčky měniče2. Způsob řízení je vektorový a nejsou definovány žádné parametry3. Příliš krátká doba zrychlení4. Nízké napětí5. Rázové zatížení během procesu zrychlení6. Není nainstalována žádná brzdová jednotka ani brzdový odpor |
| Řešení | 1. Opravte chybu na periferním zařízení2. Zkontrolujte parametry motoru3. Zvyšte dobu zrychlení4. Nastavte napětí na normální rozsah5. Odstraňte rázové zatížení6. Nainstalujte brzdovou jednotku a brzdový odpor |
Technické parametry vysokoúčinného měniče frekvence
| Název chyby | Přetížení při konstantní rychlosti |
| Zobrazení chyby Err04 | |
| Přičina chyby | 1. Uzemnění nebo zkrat výstupního obvodu měniče2. Způsob řízení je vektorový a nejsou definovány žádné parametry3. Nízké napětí4. Rázové zatížení během procesu zrychlení5. Tento model měniče má příliš nízkou třídu výkonu |
| Řešení | 1. Opravte chybu na periferním zařízení2. Zkontrolujte parametry motoru3. Nastavte napětí na normální rozsah4. Odstraňte rázové zatížení5. Vyberte měnič frekvence s vyšší třídou výkonu |
| Název chyby | Přetížení při zrychlení |
| Zobrazení chyby | Err05 |
| Příčina chyby | 1. Nízké vstupní napětí2. Vnější síla pohání motor během zrychlování3. Příliš krátká doba zrychlení4. Brzdová jednotka a brzdový odpor nejsou nainstalovány |
| Řešení | 1. Nastavte napětí na normální rozsah2. Odstraňte vliv vnější síly nebo nainstalujte brzdový odpor3. Zvyšte dobu zrychlení4. Nainstalujte brzdovou jednotku a brzdový odpor |
| Název chyby Přepětí při zpomalení | |
| Zobrazcní chyby | Err06 |
| Přičina chyby | 1. Vysoké vstupní napětí2. Vnější síla pohání motor během zpomalování3. Příliš krátká doba zpomalcní4. Brzdová jednotka a brzdový odpor nejsou nainstalovány |
| Řešení | 1. Nastavte napětí na normální rozsah2. Odstraňte vliv vnější síly nebo nainstalujte brzdový odpor3. Zvyšte dobu zpomalení4. Nainstalujte brzdovou jednotku a brzdový odpor |
| Název chyby | Přepětí při konstantní rychlosti |
| Zobrazení chyby Err07 | |
| Příčina chyby | 1. Vysoké vstupní napětí2. Vnější síla pohání motor během zpomalování |
| Řešení | 1. Nastavte napětí na normální rozsah2. Odstaňte vliv vnější síly nebo nainstalujte brzdový odpor |
| Název chyby | Kontrolní výpadek napájení |
| Zobrazení chyby Err08 | |
| Příčina chyby | 1. Vstupní napětí nespadá do stanoveného rozsahu |
| Řešení | 1. Nastavte napětí na stanovený rozsah |
| Název chyby | Příliš nízké napětí |
| Zobrazení chyby Err09 | |
| Příčina chyby | 1. Dočasný výpadek proudu2. Napětí na vstupní svorce měniče je mimo stanovený rozsah3. Nesprávné napětí na přípojnici4. Porucha můstku usměrňovače a odporového nárazníku5. Neobvyklý provoz modulu ovladače6. Porucha ovládacího panelu |
| Řešení | 1. Resetujte chybu2. Nastavte napětí na normální rozsah3. Vyhledejte technickou pomoc4. Vyhledejte technickou pomoc5. Vyhledejte technickou pomoc6. Vyhledejte technickou pomoc |
Technické parametry vysokoúčinného měniče frekvence
| Název chyby Přetížení | měniče |
| Zobrazení chyby Err10 | |
| Přičina chyby | 1. Příliš velké zatížení nebo zablokovaný rotor motoru2. Tento model měniče má příliš nízkou třídu výkonu |
| Řešení | 1. Snižte zatížení, zkontrolujte motor a stroj2. Vyberte měnič s vyšší třídou výkonu |
| Název chyby Přetížení | motoru |
| Zobrazení chyby | Err11 |
| Přičina chyby | 1. Nesprávně nastavený ochranný parametr motoru P9-012. Příliš velké zatížení nebo zablokovaný rotor motoru3. Tento model měniče má příliš nízkou třídu výkonu |
| Řešení | 1. Nastavte parametr správně2. Snižte zatížení, zkontrolujte motor a stroj3. Vyberte měnič s vyšší třídou výkonu |
| Název chyby Výchozí | vstupní fáze |
| Zobrazení chyby | Err12 |
| Příčina chyby | 1. Abnormální třífázový vstupní výkon2. Nesprávná činnost modulu ovladače3. Nesprávná ochrana před bleskem4. Nesprávná činnost hlavního ovládacího panelu |
| Řešení | 1. Zkontrolujte a opravte problémy v perifčrním obvodu2. Vyhledejte technickou pomoc3. Vyhledejte technickou pomoc4. Vyhledejte technickou pomoc |
| Název chyby | Výchozí výstupní fáze |
| Zobrazení chyby | Err13 |
| Příčina chyby | 1. Nesprávné připojení měniče k motoru2. Nevvyvážený třífázový výstup měniče během provozu motoru3. Nesprávná činnost modulu ovladače4. Neplatný modul |
| Řešení | 1. Opravte závadu na periferním zařízení2. Zkontrolujte, zda je třífázové vinutí správné a odstraňte závadu3. Vyhledejte technickou pomoc4. Vyhledejte technickou pomoc |
| Název chyby Přehřátí | modulu |
| Zobrazení chyby | Err14 |
| Příčina chyby | 1. Příliš vysoká okolní teplota2. Zablokovaný vzduchový kanál3. Poškozený ventilátor4. Vadný termistor modulu5. Poškozený modul měniče |
| Řešení | 1. Snížte okolní teplotu2. Vyčistěte ventilátor3. Vyměňte ventilátor4. Vyměňte termistor5. Vyměňte modul měniče |
| Název chyby Chyba | periferních zařízení |
| Zobrazení chyby | Err15 |
| Příčina chyby | 1. Vstupní signál externí chyby přes multifunkční svorku DI2. Vstupní signál externí chyby prostřednictvím funkce virtuálního vstupu/výstupu |
| Řešení | 1. Resetovat2. Resetovat |
Technické parametry vysokoučinného měniče frekvence
| Název chyby Chyba komunikace | |
| Zobrazení chyby Err16 | |
| Příčina chyby | 1. Hostitelský počítač nepracuje správně2. Nesprávná komunikační linka3. Nesprávné nastavení komunikační rozšířující karty P0-284. Nesprávné nastavení komunikačního parametru skupiny PD |
| Řešení | 1. Zkontrolujte zapojení hlavního počítače2. Zkontrolujte zapojení komunikační linky3. Nastavte správně typ komunikační rozšířující karty4. Nastavte správně komunikační parametry |
| Název chyby Chyba stykače | |
| Zobrazení chyby | Err17 |
| Příčina chyby | 1. Abnormální činnost modulu ovladače a napájecího zdroje2. Nesprávná činnost stykače |
| Řešení | 1. Vyměňte modul ovladače nebo napájení2. Vyměňte stykač |
| Název chyby | Chyba detekce proudu |
| Zobrazení chyby Err18 | |
| Příčina chyby | 1. Nesprávná činnost hall zařízení2. Nesprávná činnost modulu ovladače |
| Řešení | 1. Vyměňte hall zařízení2. Vyměňte modul ovladače |
| Název chyby Chyba ladění motoru | |
| Zobrazení chyby | Err19 |
| Příčina chyby | 1. Parametr motoru není nastaven podle typového štítku2. Časový limit stanovení parametru vypršel |
| Řešení | 1. Nastavte parametry motoru správně podle typového štítku2. Zkontrolujte kabel mezi měničem a motorem |
| Název chyby | Chyba kódovaného disku |
| Zobrazení chyby | Err20 |
| Příčina chyby | 1. Model kodéru se nehodí2. Nesprávné připojení kodéru3. Kodér je poškozen4. Nesprávná PG karta |
| Řešení | 1. Nastavte model kodéru na základě skutečné situace2. Odstraňte závadu zapojení3. Vyměňte kodér4.Vyměňte PG kartu |
| Název chyby | Chyba čtení a zápisu EEPROM |
| Zobrazení chyby Err21 | |
| Příčina chyby | 1. Vadný systém EEPROM |
| Řešení | 1. Změňte hlavní ovládací panel |
| Název chyby Hardwarová chyba měniče | |
| Zobrazení chyby | Err22 |
| Příčina chyby | 1. Dochází k přepětí2. Dochází k přetížení |
| Řešení | 1. Postupujte podle chyby přepětí2. Postupujte podle chyby přetížení |
Technické parametry vysokoúčinného měniče frekvence
| Název chyby | Zkrat |
| Zobrazení chyby | Err23 |
| Přičina chyby | 1. Zkrat motoru |
| Řešení | 1. Vyměňte kabel nebo motor |
| Název chyby | Chyba při dosahování celkové doby provozu |
| Zobrazení chyby | Err26 |
| Příčina chyby | 1. Celková doba provozu dosáhla nastavené hodnoty |
| Řešení | 1. K odstranění zaznamenaných informací použijte funkci inicializace parametrů |
| Název chyby | Chyba 1 definovaná uživatelem |
| Zobrazení chyby Err27 | |
| Příčina chyby | 1. Vstupní signál chyby 1 definovaný uživatelem přes multifunkční svorku DI2. Vstupní signál chyby 1 definovaný uživatelem prostřednictvím funkce virtuálního vstupu/výstupu |
| Řešení | 1. Resetovat2. Resetovat |
| Název chyby | Chyba 2 definovaná uživatelem |
| Zobrazcní chyby | Err28 |
| Příčina chyby | 1..Vstupní signál chyby 2 definovaný uživatelem přes multifunkční svorku Dl2..Vstupní signál chyby 2 definovaný uživatelem prostřednictvím funkce virtuálního vstupu/výstupu |
| Řešení | 1. Resetovat2..Resetovat |
| Název chyby | Chyba dosažená v celkovém spínacím čase |
| Zobrazení chyby Err29 | |
| Příčina chyby | 1. Celková doba spínání dosáhla nastavené hodnoty |
| Řešení | 1. K odstranění zaznamenaných informaci použijte funkci inicializace parametrů |
| Název chyby | Chyba bez zatížení |
| Zobrazení chyby | Err30 |
| Příčina chyby | 1. Provozní proud měniče frekvence je <P9-64 |
| Řešení | 1. Zkontrolujte, zda zatížení není odděleno a zda nastavení parametrů P9-64, P9-65 odpovídá skutečným provozním podmínkám |
| Název chyby | Chyba ztráty zpětné vazby PID během provozu |
| Zobrazení chyby | Err31 |
| Příčina chyby | 1. Zpětná vazba PID je menší než nastavená hodnota PA-26 |
| Řešení | 1. Zkontrolujte zpětnovazební signál PID nebo nastavte PA- 26 na příslušnou hodnotu |
| Název chyby | Chyba nadproudu cyklus po cyklu |
| Zobrazení chyby | Err40 |
| Příčina chyby | 1. Příliš velké zatížení nebo zablokovaný rotor motoru2. Tento model měniče má příliš nízkou třídu výkonu |
| Řešení | 1. Snížte zatížení, zkontrolujte motor a stroj2. Vyberte měnič s vyšší třídou výkonu |
Technické parametry vysokoúčinného měniče frekvence
| Název chyby | Chyba spínače motoru během provozu měniče |
| Zobrazení chyby | Err41 |
| Příčina chyby | 1. Změňte aktuální volbu motoru tlačítkem během provozu měniče |
| Řešení | 1. Zapněte motor po zastavení měniče |
| Název chyby | Chyba příliš velké odchylky rychlosti |
| Zobrazcní chyby | Err42 |
| Příčina chyby | 1. Nesprávné nastavení parametrů kodéru2. Parametry nebyly identifikovány3. Příliš velká odchylka rychlosti, nastavení parametrů P9-69, P9-60 jsou iracionální |
| Řešení | 1. Nastavte parametry kodéru správně2. Proveďte identifikaci parametrů3. Nastavte detekční parametry racionálně na základě aktuální situace |
| Název chyby | Chyba nadměrné rychlosti motoru |
| Zobrazení chyby | Err43 |
| Přičina chyby | 1. Nesprávné nastavení parametrů kodéru2. Parametry nebyly identifikovány3. Nastavení parametrů P9-69, P9-60 jsou iracionální |
| Řešení | 1. Nastavte parametry kodéru správně2. Proved’te identifikaci parametrů3. Nastavte detekční parametry racionálně na základě aktuální situace |
| Název chyby | Chyba přechřátí motoru |
| Zobrazení chyby | Err45 |
| Příčina chyby | 1. Zapojení snímače teploty je uvolněné2. Teplota motoru je příliš vysoká |
| Řešení | 1. Zjistěte snímač teploty a opravte závađu2. Snižte nosnou frekvenci nebo použijte jiný odvod tepla ke snížení odvodu tepla motoru |
| Název chyby | Nesprávná výchozí pozice |
| Zobrazení chyby | Err51 |
| Přičina chyby | 1. Parametr motoru se výrazně liši od skutečné hodnoty |
| Řešení | 1. Znovu se ujistěte, že parametry motoru jsou správné, zejména pokud je nastavení jmenovitého proudu malé |
8.2 Běžné chyby a jejich řešení
Při použivání měniče se mohou vyskytnout následující chyby. Podívejte se na následující jednoduché metody jejich analýzy:
Tabulka 8-1. Běžné chyby a metody postupu
| Popis chyby | Možné příčiny | Řešení | |
| 1 | Po zapnutí se nczobrazuje | Žádné napětí nebo příliš nízké síťové napětí;porucha vypínače na desce ovladače měniče;poškozený usměřňovací můstck; vyrovnávací rezistor měniče je poškozený; porucha ovládacího panelu a klávesnice; odpojené vodiče mezi ovládacím panelem, deskou ovladače a klávesnicí; | Zkontrolujte vstupní napájení;zkontrolujte napětí na přípojnici;vytáhněte a znovu vložte plochý kabel;požádejte výrobce o pomoc |
| 2 | Displej HC (přehřátí) při zapnutí | Špatný kontakt mczi deskou ovladače a ovládacím panelem; související zařízení na ovládacím panelu jsou poškozena; zkrat motoru nebo kabelu motoru;chyby Hall; příliš nízké síťové napětí. | Vytáhněte a znovu vložte plochý kabel;požádejte výrobce o pomoc |
| 3 | Zobrazení “Err23” při zapnutí | Poškozený nebo zablokovaný ventilátor; zkrat ve vodičích tlačitka perifcrního řízení. | Změřte izolaci mezi motorem a výstupním vedením pomocí tramegeru; požádejte výrobce o pomoc |
Technické parametry vysokoučinného měniče frekvence
| 4 | Normální zobrazení při zapnutí, zobrazení „HC“ po práci a vypnutí | Nastavení nosné frekvence je příliš vysoké; ventilátor je poškozen nebo je zablokován vzduchový kanál; poškozené vnitřní součásti měniče (termočlánek nebo jiné). | Vyměňte ventilátor; odstraňte vnější zkrat |
| 5 | Častý alarm Err14 (přehřátí) | Nastavení nosné frekvence je příliš vysoké; ventilátor je poškozen nebo je zablokován vzduchový kanál; poškozené vnitřní součásti měniče (termočlánek nebo jiné). | Snižte nosnou frekvenci (P0-15); vyměňte ventilátor, vyčistěte vzduchový kanál; požádejte výrobce o pomoc |
| 6 | Motor se při spuštění měniče neotáčí | Motor a kabely motoru; špatné nastavení parametrů měniče (parametrů motoru); špatný kontakt mezi deskou ovladače a ovládacím panelem; porucha desky ovladače | Zkontrolujte elektrické zapojení mezi měničem a motorem; vyměňte motor nebo odstraňte mechanickou závadu; zkontrolujte a resetujte parametry motoru. |
| 7 | Svorka DI mimo provoz | Nesprávné nastavení parametrů; chyba externího signálu; uvolněná propojka OP i + 24V; porucha ovládacího panelu. | Zkontrolujte a resetujte parametry skupiny P4; znovu připojte externí signální vedení; zkontrolujte propojky OP i + 24V; požádejte výrobce o pomoc. |
| 8 | Žádné zrychlení motoru, pokud je k dispozici vektorové řízení s uzavřenou smyčkou | Chyba kodéru; špatné elektrické zapojení nebo špatný kontakt kodéru; porucha karty PG; porucha ovládacího panelu. | Vyměňte disk s kódem a zkontrolujte vodiče; vyměňte kartu PG; vyhledejte technickou podporu. |
| 9 | Časté alarmy přepětí a nadproudu | Nesprávné nastavení parametrů motoru; nesprávná doba zrychlení / zpomalení; kolísání zatížení. | Resetujte parametry motoru nebo vylad’te motor; nastavit dobu zrychlení a zpomalení; požádejte výrobce o pomoc. |
| Popis chyby | Možné příčiny | Řešení | |
| 10 | Zobrazení Err17 po zapnutí (nebo při práci) | Stykač měkkého rozběhu není zavřený; | Zkontrolujte, zda není kabel stykače uvolněný; zkontrolujte závadu stykače; zkontrolujte, zda nejsou závady na 24V napájení stykače; požádejte výrobce o pomoc; |
| 11 | Zobrazení „____” Po zapnutí | Související zařízení na ovládacím panelu jsou poškozena; | Vyměňte ovládací panel; |
Technické parametry vysokoúčinného měniče frekvence
Příloha A: Multifunkční karta VFD-PC1
(Platí pro stroje s výkonem 3,7kW a vyšším)
I. Úvod
Karta VFD-PC1 je multifunkční rozšířující karta vydaná naší společností, vhodná pro tuto řadu měničů frekvence. Zahrnuje následující zdroje:
| Pol. Parametry | Popis | |
| Vstupní terminál | 5pinový digitální vstup signálu | |
| 1pinový analogový vstup napěťového signálu | Podporuje napěťový vstupní signál při -10 V ~ 10 V. | |
| Výstupní terminál | 1pinový vstup signálního relé | |
| 1pinový výstup digitálního signálu | ||
| 1pinový výstup analogového signálu | ||
| Komunikace | Komunikační rozhraní RS-485 | Podporuje komunikační protokol Modbus-RTU (podrobnosti v příloze I.: VFD - Komunikační protokol Modbus) |
| Komunikační rozhraní CAN | Podporuje komunikační protokol CAN link |
II. Mechanická instalace a funkční popisy ovládacích svorek
- Způsob instalace, funkční popisy ovládacích svorek a popisy propojek – viz Obrázek 1, Tabulka 1 a Tabulka 2 v příloze 1
1) Instalujte po úplném vypnutí měniče frekvence;
2) Přizpůsobte rozhraní rozšířující karty a otvor pro umistění multifunkční karty ovládacímu panelu na měniči frekvence;
3) Upevněte šroubem.
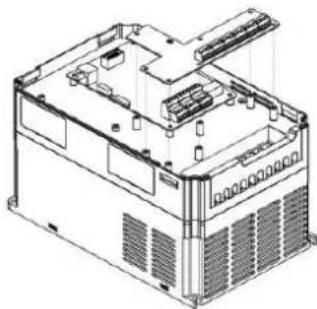
Příloha A: Obrázek 1. Jak nainstalovat multifunkční kartu
Příloha A: Funkční popisy ovládacích svorek
| Kategorie | Symbol svorky | Název svorky | Funkční popis |
| Napájení | +24V-COM | Připojení externího -24V napájení | Poskytuje externí napájení +24 V, používá se k zajištění provozního napájení digitální vstupní a výstupní svorky, a k napájení externího senzoru; maximální proud: 200mA. |
| OP1 | Vstupní svorka (digitální) napájecí zdroj | OP1 i „+ 24V” jsou z výroby propojeny propojkou J8. V případě použití externího zdroje OP1 připojte k externímu zdroji napájení a vytáhněte propojku J8. | |
| Analogový vstup | AI3-PGND | Analogová vstupní svorka 3 | 1. Přijímá vstup optoizolátoru, vstup diferenciálního napětí a vstup odporu snímače teploty.2. Rozsah vstupního napětí: DC -10V ~ 10V3. Senzor teploty PT100, PT10004. Pomocí přepínače S1 zvolte způsob vstupu, nepoužívejte různé funkce současně. |
| Funkce digitálních vstupních svorek | DI6-OP1 | Digitální vstup 6 | 1. Optoizolátor: kompatibilní s bipolárním vstupem2. Vstupní impedance: 2,4 kΩ3. Rozsah napětí na vstupní úrovní: 9 ~ 30V |
| DI7-OP1 | Digitální vstup 7 | ||
| DI8-OP1 | Digitální vstup 8 | ||
| DI9-OP1 | Digitální vstup 9 | ||
| DI10-OP1 | Digitální vstup 10 | ||
| Analogový výstup | AO2-GND | Analogový výstup 2 | 1. Specifikace výstupního napětí: 0 V ~ 10 V.2. Specifikace výstupního proudu: 0mV ~ 20mV |
| Digitální výstup | DO2-CME | Digitální výstup 2 | Optoizolátor, rozsah výstupního napětí bipolárního otevřeného kolektoru: 0 V ~ 24 V, rozsah výstupního proudu: 0 mA ~ 50 mA.Pozor: digitální výstup CME1 a digitální vstup COM jsou vnitřně izolovány, připojení J7 je výchozí. Pokud má být DO2 napájen z externího zdroje, je nutné odpojit propojku J7. |
| Reléový výstup (RELAY2) | PA- PB | Svorka normálně zavřená | Kapacita kontaktu pohonu: AC250V, 3A, COSφ = ,4. DC 30 V, 1 A. |
| PA- PC | Svorka normálně otevřená | ||
| Komunikace RS-485 | 485+/485- | Svorka komunikačního rozhraní | Svorky vstupních a výstupních signálů komunikace protokolu Modbus-RTU, izolovaný vstup. |
| Komunikace CAN | CANII/CANL | Svorka komunikačního rozhraní | Vstupní svorka komunikace protokolu CANlink, izolovaný vstup. |
Příloha A: Tabulka 2. Popis propojek
| Propojka č. | Popis |
| J3 | Volba výstupu AO2 – napětí, proud |
| J4 | Vyberte odpovídající odpor pro svorku CAN |
| J1 | Vyberte odpovídající odpor pro svorku RS485 |
| J7 | Vyberte připojení CME1 |
| J8 | Vyberte připojení OP1 |
| S1 | Volba funkce AI3, PT100, PT1000 |
Příloha B: Pokyny pro rozšiřující kartu IO (VFD-IO1) (karta pro další vstupy a výstupy)
(Platí pro stroje všech sérií)
I. Úvod
Rozšiřující karta IO VFD-IO1 poskytuje 3pinový DI vstup.
II. Mechanická instalace a funkční popisy ovládacích svorek
1. Způsob instalace a funkční popisy svorek elektrického zapojení – viz obrázek 1 a tabulka 1 v příloze 2.
1) Montáz a demontáz po úplném vypnutí napájení měniče frekvence;
2) Zarovnejte rozhraní rozšiřující karty a otvor pro umístění I/0 rozšiřující karty s ovládacím panelem na měničí;
3) Upevněte komunikační kartu šroubem, jak je znázorněno na obrázku 1.
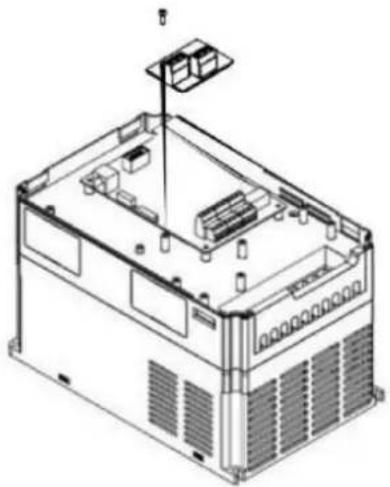
Příloha B: Obrázek 1. Jak nainstalovat rozšířující kartu VFD-IO1
Funkční popis kabelových svorek
Příloha B: Tabulka 1. Funkční popisy kabelových svorek
| Kategorie | Symbol svorky | Název svorky | Popis funkce |
| Napájcní | +24V-COM | Připojení externího napájecího zdroje + 24V | Poskytuje externí napájení +24 V, používá se pro provozní napájení svorky digitálního vstupu a výstupu, a pro napájení externího snímače; maximální proud: 200mA. |
| OP2 | Vstupní svorka (digitální) napájecí zdroj | Žádné tovární připojení zdroje OP2, připojte se k externímu zdroji podle vašich potřeb. | |
| Funkce svorck digitálních vstupů | DI6-OP2 | Digitální vstup 6 | 1. Optoizolátor: kompatibilní s bipolárním vstupem2. Vstupní impedance: DI6, DI7: 3,3 kΩ, DI8: 2,4 kΩ3. Rozsah napětí na vstupní úrovní: 9 ~ 30V4. DI6, DI7 jsou společné vstupní svorky, vstupní frekvence<100 Hz; DI8 je rychlý pulzní vstup, max. vstupní frekvence <100 kHz. |
| DI7-OP2 | Digitální vstup 7 | ||
| DI8-OP2 | Digitální vstup 8 |
Příloha C: Pokyny pro rozšiřující kartu kodéru
(Platí pro stroje všech sérií)
- Úvod
VFD je vybaven rozšiřující kartou pro univerzální kodéry (PG karta). Jako volitelné příslušenství je vyžadováno pro měnič pro vektorové řízení s uzavřenou smyčkou. Vyberte vhodnou PG kartu podle výstupu kodéru. Konkrétní modely jsou následující:
| Volitelné příslušenství | Popis Ostatní | |
| VFD-PG1 | Diferenciální vstup PG karty bez výstupu frekvenčního dělení | Zapojení svorky |
| VFD-PG2 | PG karta rotačního transformátoru | Zdířka sběrnice DB9 |
| VFD-PG3 | Vstup OC karty PG, výstup frekvenčního děle 1:1 | Zapojení svorky |
II. Mechanická instalace a popis funkcí ovládacích svorek
- Způsob instalace, vzhled, specifikace a stanovení signálu na svorce zapojení – viz obrázek 1 a tabulka 1 v příloze C:
1) Nainstalujte a odinstalujte PG kartu po úplném vypnutí měniče frekvence.
2) Propojte propojku J3 na ovládacím panelu s rozšířující kartou pomocí 18pinového FFC konektoru (zajistěte správnou instalaci a správné spojení západkou).
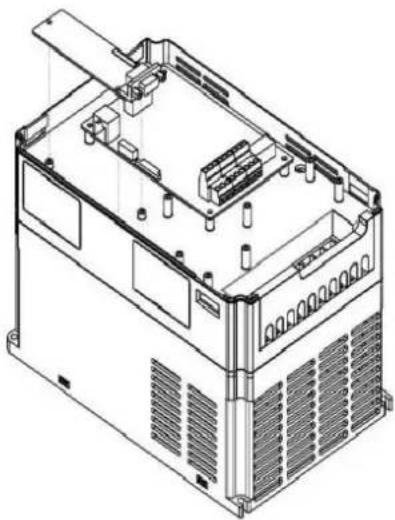
Příloha E: Obrázek 1. Jak nainstalovat rozšířující kartu pro kodér
Parametry rozšiřující karty kodéru a určení signálních svorek:
Přiloha C: Tabulka 1. Parametry rozšiřující karty a určení signálních svorek
| Diferenciální PG karta (VFD-PG1) | ||
| Parametry VFD-PG1 karty | ||
| Uživatelské rozhraní | Zkosený hrot | |
| Délka | 3.5mm | |
| Šroub rovný | ||
| Je zásuvná | ne | |
| Průřez kabelu | 16-26AWG | |
| Maximální rychlost | 500kHz | |
| Diferenciální amplituda vstupního signálu | ≤7V | |
| Označení signálních vodičů VFD-PG1 VFD-PG1 | ||
| Č. | Symbol | Opis |
| 1 | A+ | kladný signál na výstupu A+ kodéru |
| 2 | A- | záporný signál na výstupu A- kodéru |
| 3 | B+ | kladný signál na výstupu B+ kodéru |
| 4 | B- | záporný signál na výstupu B- kodéru |
| 5 | Z+ | kladný signál na výstupu Z+ kodéru |
| 6 | Z- | záporný signál na výstupu Z- kodéru |
| 7 | 5V | poskytuje extérni napájení 5 V / 100 mA |
| 8 | COM | uzemnění |
| 9 | PE | štítová svorka |
| PG karta rotačního transformátoru (VFD-PG2) | ||
| Parametry VFD-PG2 karty | ||
| Uživatelské rozhraní | samice DB9 | |
| Je zásuvná ano | ||
| Průřez kabelu | >22AWG | |
| Faktor rozlišení | 12 bitů | |
| Frekvence pohonu | 10kHz | |
| VRMS 7V | ||
| VP-P | 3.15±27% | |
| VFD-PG2 Svorka | ||
| Č. | Symbol | Popis |
| 1 | EXC1 | Pohon – rotačního transformátoru |
| 2 | EXC | Pohon + rotačního transformátoru |
| 3 | SIN | Zpětná vazba SIN + rotačního transformátoru |
| 4 | SINLO Zpětná | vazba SIN – rotačního transformátoru |
| 5 | COS | Zpětná vazba COS + rotačního transformátoru |
| 6-8 | - | - |
| 9 | COSLO | Zpětná vazba COS – rotačního transformátoru |
| OC PG karta (VFD-PG3) | ||
| Parametry VFD-PG3 karty | ||
| Uživatelské rozhraní | Zkosený hrot | |
| Délka | 3.5mm | |
| Šroub rovný šroub | ||
| Je zásuvná | ne | |
| Průřez kabelu | 16-26AWG | |
| Maximální rychlost | 100KHz | |
| VFD-PG3 Svorka | ||
| Č. | Symbol | Popis |
| 1 | A | výstup kodéru A, signál + |
| 2 | B | výstup kodéru B, signál - |
| 3 | Z | Výstupní signál Z kodéru |
| 4 | 15V | poskytuje extérní napájení 15 V / 100 mA |
| 5 | COM | uzemnění |
| 6 | COM | uzemnění |
| 7 | A1 | signál 1: 1 na výstupu A zpětné vazby PG karty |
| 8 | B1 | signál 1: 1 na výstupu B zpětné vazby PG karty |
| 9 | PE | svorka stínění |
Příloha D: Pokyny pro rozšířující kartu komunikace CAN link (VFD-CAN1)
(pro celou sérii)
I. Úvod
Karta byla speciálně vyvinuta pro komunikační funkci CAN link této řady měničů frekvence.
II. Mechanická instalace a popis funkcí ovládacích svorek
- Způsob instalace - příloha B: stejně jako rozšířující karta IO (VFD-IO1). Popisy funkcí svorek zapojení a popisy propojek – viz obrázek 1, tabulka 1 i a tabulka 2 v příloze D.
Příloha D: Tabulka 1. Popis funkce ovládací svorky
| Kategorie | Symbol svorky | Název svorky | Funkční popis |
| Komunikace CAN (CN1) | CANH/CANL | Svorka komunikačního rozhraní | Komunikační vstupní svorka CAN |
| COM | Uzemnění komunikace CAN |
Příloha D: Tabulka 2. Popis propojky
| Č. propojky | Popis |
| J2 | Vyberte odpor, který odpovídá svorce CAN |
Pozor:
Pro ochranu komunikačního signálu před vnějším rušením můžete pro komunikační kabel použit kroucenou dvojlinku a pokud možno vyvarujte se použití paralelních kabelů;
Příloha E: Pokyny pro rozšiřující komunikační kartu RS-485 (VFD-TX1)
I. Úvod
(pro celou sérii)
Karta byla speciálně vyvinuta pro komunikační funkci 485 této řady měničů frekvence. Díky přijatému izolačnímu schématu jsou elektrické parametry v souladu s mezinárodními normami a uživatelé si mohou na základě svých požadavků vybrat ovládání měniče a nastavit parametry prostřednictvím vzdáleného sériového portu;
II. Mechanická instalace a popis funkci ovládacích svorek
- Způsob instalace – viz příloha B: stejně jako rozšířující karta IO (VFD-I01). Funkční popisy svorek zapojení a označení připojení dial-up – viz tabulka 1 a tabulka 2 v příloze E:
Funkční popis ovládací svorky
Příloha E: Tabulka 1.
Popis funkce ovládací svorky
| Kategorie | Symbol svorky | Název svorky | Funkční popis |
| Komunikace 485 (CN1) | 485+/485- | Svorka komunikačního rozhraní | Komunikační vstupní svorka 485, izolační vstup |
| CGND | Uzemnění komunikačního napájení 485 | Izolované napájení |
Popis propojky:
Příloha E: Tabulka 2. Popis propojky
| Č. propojky Popis | |
| J1 | Vyberte odpor, který odpovídá svorce 485. |
Příloha F: komunikační protokol VFD-Modbus
Tato řada měničů poskytuje komunikační rozhraní RS232 / RS485 a podporuje komunikační protokol Modbus. Uživatelé mohou realizovat centralizované řízení pomocí počítače nebo PLC, nastavovat příkaz ke spuštění měniče prostřednictvím komunikačního protokolu, upravovat nebo číst parametry kódu funkce, číst provozní podmínky a informace o chybách měniče apod.
1. Obsah protokolu
Protokol sériové komunikace určuje obsah prěnášené informace a používá formát sériové komunikace, včetně formátu dotazování hostitele (nebo vysílání), způsob kódování hostitele, jako je kód funkce požadované operace, data přenosu, ověření chyb apod. Odezva zařízení slave také přijímá stejnou strukturu a její obsah zahrnuje potvrzení operace, vrácení dat a ověření chyb apod. Pokud dojde k jakékoli chybě během přijímání informace zařízení slave nebo nedokončení akce požadované zařízením master, slave uspořádá chybovou zprávu jako zpětnou odezvu do zařízení master.
Režim aplikace: měnič frekvence získá prístup k řídící sítí PC /PLC typu „jeden master a mnoho zařízení slave“ pomocí sběrnice RS232 / RS485.
Struktura sběrnice:
(1) Druh rozhraní: hardwarové rozhraní RS 232/ RS485
(2) Režim prěnosu: asynchronní sériový a poloviční duplex. Master a slave – ve stejném okanžiku pouze jeden může data odesílat a druhý pouze data přijímat. Během procesu sériové asynchronní komunikace data jsou odesílána ve formě zprávy rámec za rámcem.
(3) Topologická struktura: systém s jedním masterem a mnoha zařízeními slave. Rozsah nastavení adresy zařízení slave je od 1 \~ 247 a 0 je adresou pro komunikaci vysílání. Adresa zařízení slave v síti by měla být unikátní.
Popis protokolu
Komunikační protokol této řady měničů frekvence to je asynchronní sériový komunikační protokol Modbus typu master-slave a pouze jedno zařízení (host/master) v sítí může vytvořit protokol (zvaný „dotazem/ příkazem“). Podřadná zařízení (slave) mohou odpovídat na „dotaz/příkaz“ hostitele pouze prostřednictvím poskytování dat nebo přijetí určitých opatření na základě „dotazu/příkazu“ hostitele. Hostitel to je osobní počítač (PC), průmyslové řídící zařízení nebo programovatelný logický ovladač (PLC) apod. a slave to je měnič frekvence nižší řady. Hostitel může nejen komunikovat s určitým zařízením slave odděleně, ale také předávat vysilané informace všcem podřadným zařízením slave. V připadě dotazu / příkazu zařízení master, ke kterému je přístup získáván zvlást', slave musí vrátit zprávu (zvanou odezva). V připadě vysilání informací, které vydá zařízení master, slave nemusí odpovídat zpětnou odezvu masterovi. Struktura komunikačních materiálů: formát komunikačních dat protokolu Modbus pro měnič frekvence této řady je následující:
V režimu TRU prénos zprávy začíná mezerou v délce nejméně 3,5 znaku. Rozdílový čas znaků při prénosové rychlosti sítě lze snadno realizovat (jak je znázorněno na niže uvedeném obrázku T1-T2-T3-T4). První odeslané pole je adres zařízení.
Dostupné znaky prěnosu jsou šestnáctkové 0 ... 9, A ... F. Sít'ové zařízení nepřetržitě detekuje sít'ovou sběrnici, včetně doby výpadku. Po obdržení prvního pole (pole adresy) jej každé zařízení dekóduje, aby určilo, zda jej má nebo nemá odeslat svému vlastnímu. Po posledním odeslaném znaku mezera o délce nejméně 3,5 znaků znamená konec zprávy. Za mezerou se spustí nová zpráva.
Po obdržení prvního pole (pole adresy) jej každé zařízení dekóduje, aby určilo, zda jej má nebo nemá odeslat svému vlastnímu. Po posledním odeslaném znaku značí konec zprávy mezera alespoň 3,5 znaku. Po pauze se spustí nová zpráva.
Celý datový rámec bude kontinuálně streamován. Pokud doba setrvání překročí 1,5 znaku před koncem rámce, přijímač aktualizuje neúplnou zprávu a předpokládá, že další bajt je adresní pole nové zprávy. Podobně, pokud se nová zpráva začne odesílat během 3,5 znaků od předchozí zprávy, přijímací zařízení to bude považovat za zpoždční předchozí zprávy a poté způsobí chybu, protože konečná hodnota pole CRC může být nesprávná.
Formát rámce RTU
| Nadpis rámce START | Doba 3,5 znaků |
| Slave ADR Adresa: 1~247 | |
| Kód CMD | 03: čtení parametrů slave; 06: uložení parametrů slave |
| DATA (N-1) | Datový obsah: adresa parametrů kódu funkce, počet parametrů kódu funkce, hodnota parametrů kódu funkce apod. |
| DATA (N-2) | |
| ...... | |
| DATA0 | |
| CRC CHK (významnější bajt) | Hodnota detekce: hodnota CRC |
| CRC CHK (méně významný bajt) | |
| END | Doba 3,5 znaků |
CMD a DATA
Kód CMD: 03H, odečet N slov (maximálně 12 slov). Například: počáteční adresa F002 měniče frekvence s adresou slave 01 čte postupně 2 hodnoty.
Technické parametry vysokoúčinného měniče frekvence
| CMD 03H | |
| Adresa startu (významnější bajt) | F0H |
| Adresa startu ( méně významný bajt) | 02H |
| Č. registru (významnější bajt) | 0011 |
| Č. registru (méně významný bajt) | 0211 |
| CRC CHK (významnější bajt) | hodnota CRC CHK pro výpočet |
| CRC CHK (méně významný bajt) |
Zpráva odezvy zařízení slave
PD-05 je nastaven na 0:
| ADR 0111 | |
| CMD 03H | |
| Č. bajtu (významnější bajt) | 00H |
| Č. bajtu (méně významný bajt) | 04H |
| Data F002H (významnější bajt) | 00H |
| Data F0021I (méně významný bajt) | 0011 |
| Data F003H (významnější bajt) | 00H |
| Data F003H (méně významný bajt) | 01H |
| CRC CHK (méně významný bajt) | hodnota CRC CHK pro výpočet |
| CRC CHK (významnější bajt) |
FD-05 je nastaven na 1:
| ADR 01H | |
| CMD 03II | |
| Č. bajtu | 04H |
| Data F002H (významnější bajt) | 00H |
| Data F002H (méně významný bajt) | 00H |
| Data F003H (významnější bajt) | 00H |
| Data F003II (méně významný bajt) | 01II |
| CRC CHK (méně významný bajt) | hodnota CRC CHK pro výpočet |
| CRC CIK (významnější bajt) |
Kód CMD: 06H, udělat jeden záznam. Například: napište 5000 (1388H) do adresy F00AH měniče frekvence s adresou slave 02H.
Zpráva CMD masteru
| ADR | 02H |
| CMD | 06H |
| Datová adresa (významnější bajt) | F0H |
| Datová adresa (méně významný bajt) | 0A11 |
| Datový obsah (významnější bajt) | 13H |
| Datový obsah (méně významný bajt) | 88H |
| CRC CHK (méně významný bajt) | hodnota CRC CHK pro výpočet |
| CRC CHK nadřazené |
Zpráva s odezyou slave'u
| ADR 02H | |
| CMD 06H | |
| Datová adresa (významnější bajt) | F0H |
| Datová adresa ( méně významný bajt) | 0AH |
Technické parametry vysokoučinného měniče frekvence
| Datový obsah (významnější bajt) | 13H |
| Datový obsah (méně významný bajt) | 88H |
| CRC CHK (méně významný) | Hodnota CRC CHK pro výpočet |
| CRC CHK (významnější bajt) |
Metoda ověření – metoda ověření CRC: CRC (cyklická kontrola redundancy) přijímá formát rámce RTU a zpráva obsahuje pole detekce chyby založené na metodě CRC. Pole CRD detekuje obsah celé zprávy. Pole CRC má dva bajty včetně 16-bitové binární systémové hodnoty. Přenosové zařízení je vypočítá a přídá do zprávy. Přijímač přepočítá CRC přijaté zprávy a porovná jej s hodnotou v poli přijatého CRC. Pokud se tyto dvě hodnoty CRC neshodují, přenos je chybný.
CRC nejprve uloži 0xFFFF a poté vyvolá proces ke zpracování 8bitových bajtů ve zprávě a hodnot v aktuálním registru. Pouze 8 datových bitů v každém symbolu je platných pro CRC a počáteční bit, stop bit a paritní bit jsou neplatné.
V procesu generováni CRC je každý 8bitový bar podroben XOR-ování se samostatným obsahem registru. Nakonce je posunut ve směru nejméně významného bitu a nejvýznamnější bit je vyplněn hodnotou 0. LSB je oddělen za účelem detekce. Pokud LSB má hodnotu 1, registru bude XOR-ován referenční hodnotou. Pokud LSB má hodnotu 0, není žádná akce. Celý proces se opakuje 8x. Po skončení posledního bitu (osmý bit), následující 8bitový bajt bude XOR-ován s aktuální hodnotou samotného registru. Koncovou hodnotou v registru je hodnota CRC po provedení všech bajtů ve zprávě. Při přidávání CRC do zprávy, nejdříve prídejte méně významný bajt a poté významnější bajt. Výpočet CRC je uveden niže:
unsigned int crc_chk_value (unsigned char *data_value, unsigned char length) {
unsigned int crc_value=0xFFFF;
int i;
while (length--) {
crc_value^=*data_value++;
for (i=0;i<8;i++) {
if (crc_value&0x0001)
{
crc_value=(crc_value>>1)
}
else crc_value=crc_value>>1;
{
}
}
}
return (crc_value);
}
Definice adresy parametru komunikace
V této části jsou uvedeny komunikační obsahy, které slouží k rízení provozu měniče frekvence, nastavení stavu a souvisejících parametrů měniče.
Parametr kódu funkce pro odečet a zápis (některé kódy funkce není možné upravovat, mohou být používány nebo monitorovány výrobcem).
Pravidla pro označování adresy parametru kódu funkce:
Pravidlo vyjádření adresy parametru s číslem skupiny a označením čísla kódu funkce, které je adresou parametru: významnější bajt: P0 \~ PF (skupina P), A0 \~ AF (skupina A), 70 \~ 7F (skupina U); méně významný bajt: 00 \~ FF,
např.: P3-12, adresa je uvedena jako P30C;
Upozornění: skupina PF: nečte ani neupravuje parametry. Skupina U: pouze čte, ale neupravuje parametry.
Některé parametry není možné upravovat během provozu měniče. Některé parametry nelze upravovat bez ohledu na stav měniče.
Při úpravě parametrů kódu funkce je třeba také vzít v úvahu rozsah parametrů, jednotku a související popisy parametrů.
Kromě toho, pokud paměť EEPROM bude často používána, zkrátí to její životnost. Proto v režimu komunikace některé kódy funkce nemusi být ukládány v EEPROM, ale stačí pouze změna hodnoty v paměti RAM.
Pokud se jedná o parametr skupiny P, funkci je možno provést pomocí změny vyšší hodnoty F adresy kódu funkce na 0. Pokud je to parametr skupiny A, funkci je možno provést pomocí změny vyššího řádu A adresy kódu funkce na 4. Příslušná adresa kódu funkce je definována takto: významnější bajt: 00 \~ 0F (skupina P), 40 \~ 4F (skupina A); méně významný bajt: 00 \~ FF
Technické parametry vysokoúčinného měniče frekvence
Například: kód funkce P3-12 není uložen v paměti EEPROM a adresa je definována jako 030C; kód funkce A0-05 není uložen v paměti EEPROM a adresa je definována jako 4005; tuto adresu je možno uložit a čist pouze v paměti RAM. Při čtení není adresa aktivní. Pro všechny parametry je možno také použit kód CMD 07H k provedení funkce.
Během provozu měniče některé parametry není možné upravovat. Některé parametry není možné upravovat bez ohledu na stav měniče. Při upravování parametrů kódu funkce je třeba také brát v úvahu rozsah parametrů, jednotku a související popisy.
Parametry zastavení / provozu:
| Adresa parametru | Popis parametru |
| 1000 | *Nastavení komunikace (-10000~10000) (desítkový formát) |
| 1001 Provozní | frekvence |
| 1002 Napětí na | propojovací liště |
| 1003 | Výstupní napětí |
| 1004 Výstupní | proud |
| 1005 Výstupní | výkon |
| 1006 | Výstupní moment |
| 1007 Pracovní | rychlost |
| 1008 | Symbol vstupu DI |
| 1009 | Symbol výstupu DO |
| 100A | Napětí AI1 |
| 100B | Napětí AI2 |
| 100C' Napětí AI3 | |
| 100D | Vstup čítače |
| 100E | Vstup čítače délky |
| 100F Rychlost | zatěžování |
| 1010 | Nastavení PID |
| 1011 | Zpětná vazba PID |
| 1012 | Krok PLC |
| 1013 | Frckvence pulzů, jednotka 0,01kHz |
| 1014 | Rychlost zpětné vazby, jednotka 0,1 Hz |
| 1015 Nadměrná | provozní doba |
| 1016 | Napětí AI1 před kalibrací |
| 1017 | Napětí AI2 před kalibrací |
| 1018 | Napětí AI3 před kalibrací |
| 1019 | Lineární rychlost |
| 101A | Aktuální doba napájení |
| 101B | Aktuální dobra provozu |
| 101C | Frekvence pulzů, jednotka 1Hz |
| 101D | Nastavení komunikace |
| 101E | Skutečná rychlost zpětné vazby |
| 101F | Zobrazení hlavní frekvence X. |
| 1020 | Zobrazení pomocné frekvence Y. |
Upozornění:
Hodnota nastavení komunikace je procento relativní hodnoty, konkrétně 10000 odpovídá 100,00%, -10000 odpovídá -100,00%. V případě údajů týkajících se frekvence, toto procento je procentem relativně největší frekvence (P0-10). Pro údaje o rozměrech točivého momentu toto procento činí P2-10, A2-48, A3-48, A4-48 (horní mez točivého momentu odpovídá prvnímu a druhému motoru).
Pořadí příkazů do měniče: (pouze zápis)
| Adresa řídiciho slova Funkce | řídiciho slova |
| 0001: chod vpřed | |
| 0002: chod vzad |
Technické parametry vysokoúčinného měniče frekvence
| 2000 | 0003: pulsování vpřed |
| 0004: pulsování vzad | |
| 0005: zastavení volnoběhem | |
| 0006: zastavení brzděnim | |
| 0007: reset chyby |
Odečet stavu měniče: (pouze odečet)
| Adresa stavového slova | Funkce stavového slova |
| 3000 | 0001: chod vpřed |
| 0002: chod vzad | |
| 0003: zastavení |
Zkontrolujte heslo pro blokaci parametrů: (pokud návrat k 8888H, zkontrolujte heslo)
Adresa hesla
| Adresa příkazu | Obsah příkazu |
| 2001 | BIT0: DO1 řízení výstupemBIT1: DO2 řízení výstupemBIT2: RELAY1 řízení výstupemBIT3: RELAY2 řízení výstupemBIT4: FMR řízení výstupemBIT5: VDO1BIT6: VDO2BIT7: VDO3BIT8: VDO4BIT9: VDO5 |
Řízení analogovým výstupem AO1: (pouze záznam)
| Adresa příkazu | Obsah příkazu |
| 2002 | 0~7FFF znamená 0%~100% |
Řízení analogovým výstupem AO2: (pouze záznam)
| Adresa příkazu Obsah příkazu | |
| 2003 | 0~7FFF znamcná 0%~100% |
Řízení pulzním výstupem: (pouze záznam)
| Adresa příkazu | Obsah příkazu |
| 2004 | 0~7FFF znamená 0%~100% |
Popis chyby měniče
| Adresa chyby | Chybové hlášení |
Technické parametry vysokoučinného měniče frekvence
| 8000 | 0000: bez chyby0001: vyhrazeno0002: nadproud při zrychlování0003: nadproud při zpomalování0004: nadproud při konstantní rychlosti0005: přepětí při zrychlování0006: přepětí při zpomalování0007: přepětí při konstantní rychlosti0008: přetížení vyrovnávacího rezistoru0009: příliš nízké napětí000A: přetížení měniče000B: přetížení motoru000CL: chyba výchozí fáze na vstupu000D: chyba výchozí fáze na výstupu000E: přehřátí modulu000F: chyba externího zařízení0010: chyba komunikace0011: chyba stykače0012: chyba detekce proudu0013: chyba funkce doladění motoru0014: chyba kodćru/karty PG0015: chyba odečtu-uložení parametru0016: hardwarová chyba měniče0017: chyba zkratu motoru k zemi0018: vyhrazeno0019: vyhrazeno001A: překročená dobra práce001B: chyba definována uživatelem 1001C: chyba definována uživatelem 2001D: překročená doba napájení001E: bez zatížení001F: ztráta zpětné vazby PID během provozu0028: chyba překročení doby rychlého omezení proudu0029: chyba přepnutí motoru během provozu002A: nadměrná odchylka rychlosti002B: překročení rychlosti motoru002D: nadměrná teplota motoru005A: kodér – chyba v nastavení čisla řádku005B: bez spojení s kodérem005C: chyba počáteční polohy005E: chyba zpětné vazby rychlosti |
| Adresa chyby komunikace | Funkční popis chyby |
| 8001 | 0000: bez chyby0001: chybné heslo0002: chybný kód příkazu0003: chybné ověření CRC0004: chybná adresa0005: chybný parametr0006: chybná změna parametru0007: systém zablokován0008: probíhá akce EEPROM |
Popis parametrů komunikace skupiny PD
| Pd-00 | Rychlost prénosu | Tovární nastavení 6005 |
| Rozsah nastavení | Jednotka: rychlost prénosu MODUBS0: 300BPS1:600BPS2:1200BPS3:2400BPS4:4800BPS5:9600BPS6:19200BPS7:38400BPS8:57600BPS9: 115200BPS |
Tento parametr slouži k nastavení rychlosti prěnosu dat mezi hlavním počitačem a měničem. Je třeba mít na paměti, že prěnosová rychlost hlavního počitače a měniče frekvence by měla být konzistentní. V opačném připadě se komunikace nemůže uskutečnit. Čím větší rychlost prěnosu, tím větší rychlost komunikace.
Technické parametry vysokoúčinného měniče frekvence
| Fd-01 | Formát dat | Továrnínastavení | 0 |
| Rozsah nastavení | 0: bez ověření: formát dat <8, N, 2>1: ověření sudé: formát dat <8, E, 1>2: ověření liché: formát dat <8, O, 1>3: bez ověření: formát dat < 8-N-1> | ||
Formát dat hlavního počítače a měniče by měl být konzistentní. V opačném případě nedojde ke komunikaci.
| Pd-02 | Lokální adresa | Továrnínastavení | 1 |
| Rozsah nastavení | 1~247, 0 je vysílací adresou | ||
Pokud je lokální adresa nastavena na 0, tedy jako vysílací adresa, je možno realizovat funkci vysílání hostitelského počítače.
Lokální adresa je unikátní (kromě vysílací adresy) a je základem pro realizaci komunikace bod-bod mezi hlavním počítačem a měničem frekvence.
| Pd-03 | Zpoždění odezvy | Továrnínastavení | 2ms |
| Rozsah nastavení | 0~20ms | ||
Zpoždění odezvy: doba mezi odesláním dat z hostitelského počítače a ukončením příjmu dat měničem. Pokud je zpoždění odezvy kratší než doba zpracování v systému, zpoždění odezvy příjme dobu zpracování v systému. Pokud je zpoždění odezvy delší než doba zpracování v systému, je třeba počkat na zpoždění po zpracování dat v systému. Po dosažení doby zpoždění odezvy budou data odeslány do hostitelského počítače.
| Pd-04 | Překročení času komunikace | Tovární nastavení | 0.0 s |
| Rozsah nastavení | 0.0 s (neaktivní) 0.1~60.0s | ||
Pokud kód této funkce je nastavený na 0,0s, parametr prékročení času komunikace není aktivní.
Pokud kód této funkce je nastavený na správnou hodnotu, ale doba přestávky mezi jednou komunikací a další překročí limit, systém generuje chybový alarm komunikace (Err 16). V normálních podminkách je funkce nastavena jako neaktivní. Pokud jsou nastaveny podřadné parametry v systému nepřetržité komunikace, je možno monitorovat její stav.
| Pd-05 | Komunikační protokol | Tovární nastavení | 0 |
| Rozsah nastavení | 0: nestandardní protokol Modbus1: standardní protokol Modbus | ||
PD-05 = 1: výběr standardního protokolu Modbus.
PD-05 = 0: během odečtu příkazu, počet bajtů vrácených pomocí slave' u má o jeden bajt více než standardní protokol Modbus. Podrobnosti najdete v „5 struktura komunikacích dat“ protokolu.
| Pd-05 | Rozlišení pro odečet údajů v komunikaci | Tovární nastavení | 0 |
| Rozsah nastavení | 0: 0.01A1: 0.1A | ||
Je určen k potvrzení jednotky hodnoty výstupního proudu, když komunikace čte výchozí proud.




