
Zenmuse H3-2D - Stabilisateur d'image DJI - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil Zenmuse H3-2D DJI au format PDF.

| Caractéristiques | Détails |
|---|---|
| Type de produit | Stabilisateur de caméra pour drones |
| Compatibilité | DJI Phantom 2 |
| Poids | 300 g |
| Dimensions | 150 x 150 x 70 mm |
| Type de stabilisation | 2 axes (pitch et roll) |
| Alimentation | Alimentation par le drone |
| Utilisation | Idéal pour la capture vidéo aérienne stable |
| Maintenance | Vérifier régulièrement les connexions et nettoyer les axes |
| Sécurité | Ne pas utiliser en conditions météorologiques extrêmes |
| Informations générales | Facile à installer et à utiliser, conçu pour les utilisateurs de drones amateurs et professionnels |
FOIRE AUX QUESTIONS - Zenmuse H3-2D DJI
Questions des utilisateurs sur Zenmuse H3-2D DJI
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Stabilisateur d'image au format PDF gratuitement ! Retrouvez votre notice Zenmuse H3-2D - DJI et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil Zenmuse H3-2D de la marque DJI.
MODE D'EMPLOI Zenmuse H3-2D DJI
ZENMUSE H3-2D Gimbal Manuel utilisateur v1.16
Aucun réglage or modification n'est autorisé sur la H3-2D !!
Avant utilisation, assurez-vous de fixer la caméra sur la nacelle en premier, puis ensuite fixer la nacelle au drone. Après cela, vous pouvez mettre la nacelle sous tension.
La H3-D2 est spécialement adaptée pour les caméras et objectifs, avant sa sortie de l'usine. Aucun réglage ou modification n'est autorisé sur la H3-D2. Ne modifiez pas ou n'ajoutez pas de composants (comme des filtres, pare-soleil, etc...) à la caméra. Assurez-vous d'utiliser la batterie d'origine ; dans le cas contraire le résultat pourrait être de moins bonnes performances ou même un mauvais fonctionnement.L a nacelle peut fonctionner uniquement avec le système de pilote-automatique spécifié par DJI Innovations (NAZA-M / NAZA-M V2 / WooKong M) de façon à assurer une stabilité et une précision maximum. Merci de télécharger le logiciel d'assistance correspondant et de mettre à jour le firmware du système de pilote-automatique, sinon la nacelle pourrait ne pas fonctionner normalement.
Assurez-vous que le système de pilotage automatique fonctionne de manière sure avec la batterie principale branchée. Nous recommandons fortement aux clients de démonter les hélices, d'utiliser l'énergie de la R/C ou d'une batterie de vol, et d'éloigner les enfants pendant le réglage et le paramétrage de la nacelle.. Merci de suivre strictement ces étapes pour fixer et connecter votre nacelle sur le drone, ainsi que pour installer le logiciel d'assistance sur votre ordinateur. Merci de respecter les réglementations et codes en vigueur.
Puisque DJI n'a pas de maîtrise sur le réglage et l'assemblage final, les modifications (incluant l'utilisation de pièces non reconnues par DJI telles que moteur, électronique, hélices etc...) ou la mauvaise utilisation, aucune responsabilité ne sera assumée pour les dommages ou blessures liés directement ou indirectement. Le fait d'utiliser, d'assembler ou de régler, l'utilisateur accepte la responsabilité éventuelle. DJI n'accepte aucune responsabilité pour les dommages ou blessures liés directement ou indirectement à l'usage de ce produit.
DJI et H3-D2 sont des marques déposées de DLI Innovations. Les noms de produit marques etc cités dans ce manuel sont les marques, déposées ou non de leur compagnie respective. Ce produit et ce manuel sont soumis aux droits d'auteur et tous les droits sont réservés à DLI Innovations. Aucune partie de ce produit ou de ce manuel ne peut être reproduite sous quelque forme que ce soit sans consentement écrit préalable de DJI Innovations. Aucune responsabilité n'est assumée quant
à l'utilisation du produit ou de l'information contenue dans ce document.
Caractéristiques du produit
Cette nacelle permet un excellent travail et est conçue pour l'AP. La nacelle comprend un coulisseau dans sa structure mécanique pour empêcher que le câblage ne s'emmêle. Il comprend également un IMU (centrale inertielle) et un module de contrôle des servos indépendants
Nacelle ×1
La nacelle inclue un module de commande des servos et une centrale inertielles (IMU). Elle contrôle le tangage et le roulis pour améliorer la stabilité..

Fixer à la nacelle et au drone pour amortir les vibrations mécaniques. Il y a trois type d'amortisseur de vibrations. Le blanc est le plus souple, le noir le plus ferme et le gris entre les deux. Le blanc est recommandé pour le DJI 450 mais déconseillé pour le DJI 550 et le DJI est compatible avec les trois.
Connector le contrôleur de la nacelle au système de pilotage automatique par le connecteur CAN. Et utiliser le câble 3S-6S pour alimenter le contrôleur et la nacelle.
Sachet de vis ×1
M2,5x6,3 pour fixer la caméra à la nacelle
M2,5x5 pour fixer la nacelle à l'amortisseur
M3x8 (avec écrous et rondelles M3) pour fixer l'amortisseur au drone.

Câble vidéo ×1
Pour connecter le contrôleur de la nacelle et le transmetteur vidéo afin de transmettre les images

Câble CAN-Bus ×1
Utilise un connecteur CAN pour communiquer avec le pilote automatique.

Câble 8-Pin ×1
Pour connecter la nacelle au contrôleur.

Pièces de rechange ×1
Vis de rechange
Sommaire
AVERTISSEMENTS....2
CONTENU DE LA BOÎTE....3
SOMMAIRE....4
ASSEMBLAGE....5
DESCRIPTION DE LA NACELLE 5
MONTAGE DE LA NACELLE SUR LE DRONE OU LE TRAIN D'ATTERRISSAGE....5
MONTAGE DE LA CAMERA SUR LA NACELLE ....7
VÉRIFICATIONS....7
SYSTÈME DE PILOTE AUTOMATIQUE, CÂBLAGE DU CONTROLEUR ET DE LA NACELLE ..8
DESCRIPTION DES CONNEXIONS DU CONTRÔLEUR....8
MONTEZ LE GCU HORIZONTALEMENT OU VERTICALEMENT SUR L'APPAREIL....8
CONNEXION DU CONTRÔLEUR ET DU PILOTE AUTOMATIQUE....8
TRANSMISSION DU SIGNAL VIDÉO....11
LOGICIEL ASSISTANT 12
INSTALLATION DU DRIVER ET DU LOGICIEL....12
INTERFACE GRAPHIQUE....12
RÉGLAGE DU CANAL....12
MAJ (MISE À JOUR) FIRMWARE ET LOGICIEL....13
ESSAI 14
CHECK LIST AVANT CHAQUE VOL 14
TEST DE LA NACELLE ....14
ANNEXE....16
RECHERCHE DE PANNE 16
REGLAGE AVEC UTILISATION DU SYSTEME DE CONTROLE DE VOL....16
SPÉCIFICATIONS....17
Assemblage
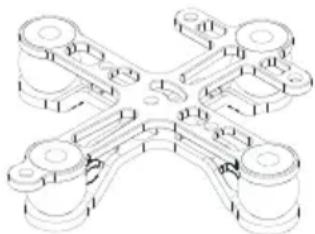
Description de la nacelle
Notes :
(1) Assurez-vous que rien ne gène la rotation du servo, afin d'éviter tout dommage.
(2) Enlever tout obstacle si un blocage survient.
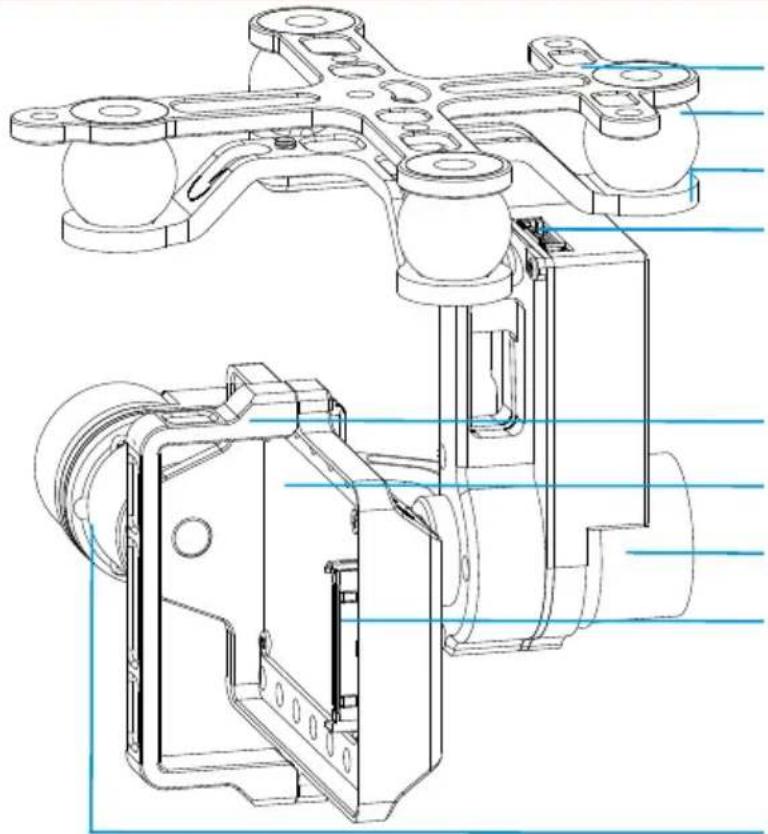
Plaque supérieure de l'amortisseur
Tampon amortisseur de vibration
Plaque inférieure de l'amortisseur
Prise du câble 8 brins
(Vers contrôleur)
Fixation de la camera
Support de la camera
Servomoteur (Roulis)
Connecteur de la camera
Servomoteur (tangage)
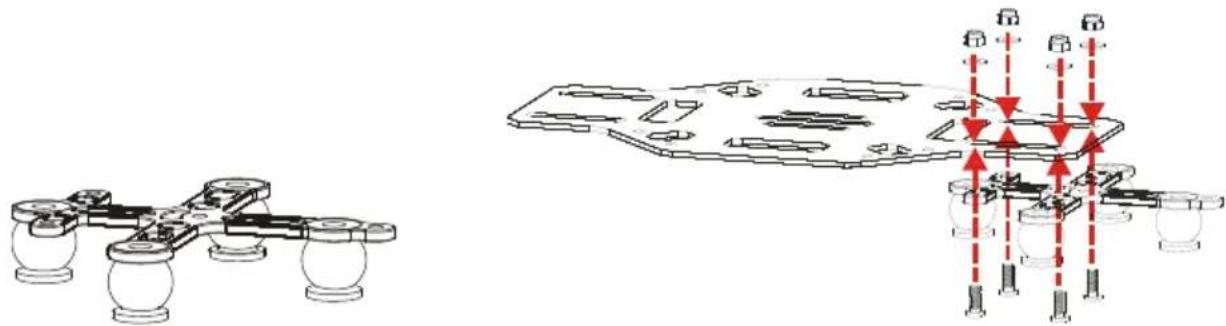
Montage de la nacelle sur le drone ou le train d'atterrissage
La procédure suivante s'applique au DJI F450, aux autres drones DJI ou à votre propre drone. Des schémas sont disponibles pour le DJI F450, pour votre information
- Fixer les tampons amortisseur sur la plaque supérieure voir Fig.1.
- Monter la plaque supérieure de l'amortisseur sous la base; visser les trois vis M3x8, les trois rondelles M3 et les trois écrous M3. Voir Fig 2
- Brancher une extrémité du câble 8 brins dans la prise 8 brins de la nacelle. Voir Fig.3.
- Serrer les vis M2.5x5 pour fixer la nacelle sur la plaque inférieure de l'amortisseur. Voir Fig.4 or Fig.5, sélectionnez l'une des étapes selon la position du pas de vis.
- Monter la plaque inférieure et la nacelle sur la base via la plaque supérieure voir Fig.6.
- Assurez-vous que le tampon amortisseur est monté horizontalement et que les deux plaques sont parallèle à l'appareil, et s'assurer que la nacelle est précisément et fermement assemblée.
Notes:
(1) Ce produit ne comprend ni drone, ni train d'atterrissage ni camera. Vous devez vous les procurer par ailleurs.
(2) S'assurer que la base et la camera pointe vers l'avant du drone.
(3) Le centre de gravité de la nacelle est calculé, et influe directement sur les performances. Ne modifiez pas le centrage vous-même.
(4) La nacelle a un contrôle de haute précision. N'enlevez aucune vis de la nacelle sous peine de mauvais fonctionnement ou de dégât.
(5) Ne débranchez aucun cordon branché à la nacelle et ne modifiez pas la structure.
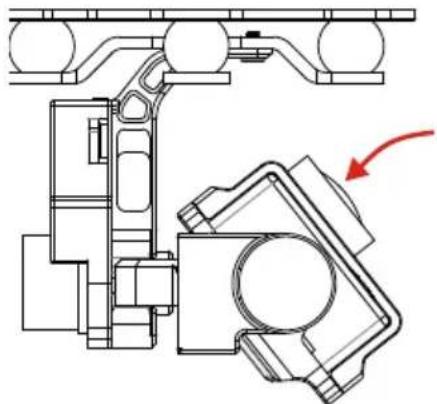
Montage de la camera sur la nacelle
- Montez la caméra sur la base de la nacelle et bloquez la avec l'arceau de fixation voir Fig.1.
- Connectez le connecteur caméra de la nacelle sur la prise système de la caméra et assurez-vous du bon branchement suivant les flèches rouges du schéma voir Fig.2.
- Serrez les vis M2.5x6.3 visibles sur la Fig.3.
- Placez votre main suivant la marque rouge visible sur la Fig.4, puis démontez la camera de la nacelle sans forcer, le connecteur de la caméra étant très fragile.
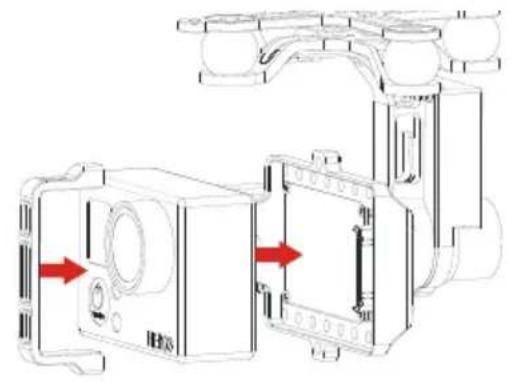
Assurez-vous que l'objectif de la camera pointe vers l'avant du drone
Système de pilote automatique, câblage du contrôleur et de la nacelle
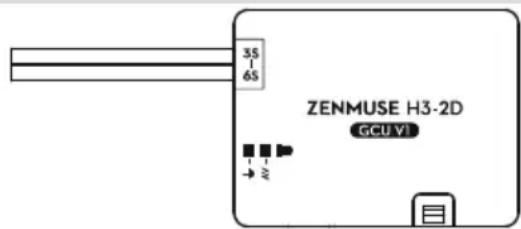
Description des connexions du contrôleur
| Description du connecteur du Contrôleur nacelle (GCU) | |
| 3S~6S | Prise batterie. Alimente le contrôleur et la nacelle. |
| G8 | Prise nacelle, transmet le signal. |
 | Prise Micro-USB: connexion PC pour la configuration et la mise à jour firmware |
 | Prise CAN-Bus: Utilise un cordon CAN-Bus pour relier le contrôleur au système de pilotage |
 | Branchement module de transmission Vidéo, transmet le signal vidéo. |
Montez le GCU horizontalement ou verticalement sur l'appareil. Connexion du contrôleur et du pilote automatique
Effectuez les procédures suivantes pour terminer la connexion.
- Conservez le système du pilote auto en l'état, et mettez à jour le contrôleur avec le firmware le plus récent (voir le tableau ci-dessous).
| WKM | NAZA-M V2 | NAZA-M | |
| Logiciel Assistant | V2.00(ou supérieure) | V2.12(ou supérieure) | V2.12(ou supérieure) |
| Version Firmware | V5.22(ou supérieure) | V3.12(ou supérieure) | V3.12(ou supérieure) |
- Connectez le système du pilote auto. (voir le tableau ci-dessous). Pour le NAZA-M vous devez préparer un module PMU V2 (accessoire de NAZA-M V2) et refaire certains branchements
| WKM | NAZA-M V2 | NAZA-M | |
| (1) Connexion contrôleurBrancher la prise X1 du PMU à Brancher la prise X3 du PMU V2 et PMU | Brancher la prise X1 du PMU à la prise X1 du contrôleur. | Brancher la prise X3 du PMU V2 à la prise X3 du contrôleur | |
| (2) Connexion du câble d'alimentation PMU | Brancher le câble d'alimentation, si un drone DJI est utilisé, souder le câble sur le module d'alimentation du drone. | ||
| (3) Connexion module GPS/Compas et pilote auto | Brancher le module GPS/Compas sur une prise CAN libre du PMU | Brancher le module GPS/Compas sur la prise GPS du PMU V2 | |
Reportez-vous aux schémas suivants pour plus de détails sur les branchements du contrôleur. Et reportez-vous au manuel du système de pilotage automatique pour la configuration et plus de branchements.
- Connectez le contrôleur au pilote automatique. Puis connectez le cordon 8-brins de la nacelle à la prise G8 du contrôleur
| WKM | NAZA-M V2 | NAZA-M | |
| (1) Connexion du contrôleur et du pilote automatique. | Connector le contrôleur à unePrise CAN libre sur le systèmeWKM | Connector le contrôleur à la priseCAN sur le module PMU V2 | |
| (2) Connexion du câble d'alimentation du contrôleur | Connector le câble d'alimentation du contrôleur à une prise, Si un droneDJI est utilisé, souder le câble sur le module D'alimentation du drone. | ||
| (3) Canal de contrôle du tangage de la nacelle | X3 X1 | ||
-
Les connexions sont terminées. Elles fonctionneront après la mise sous tension.
-
La direction du tangage de la nacelle peut être contrôlé par un canal du pilote auto (le X3 pour le WKM, et le X1 pour le NAZA-M et le NAZA-M V2). Vous devez régler le canal correspondant sur votre transmetteur et connecter la prise correspondante du récepteur au contrôleur. Utiliser le logiciel assistant de la nacelle pour vous aider avec la configuration.
Notes:
(1) Pour que le H3-2D fonctionne; il DOIT être utilisé en conjonction avec Naza ou WKM ; ne pas alimenter la nacelle sans le Naza ou WKM connecté.
(2) Assurez-vous de n'alimenter la nacelle qu'après le montage de la caméra, parce qu'un mauvais centrage endommagera le moteur en le faisant chauffer.
(3) Refaire une calibration de la radiocommande après une mise à jour du Firmware NZAZ-M et revérifier les autres éléments.
(4) Assurez-vous que les connexions sont correctes; sinon cela conduira à un mauvais fonctionnement ou même à la perte de contrôle de la nacelle.
Connexion du GCU et du contrôleur DJI
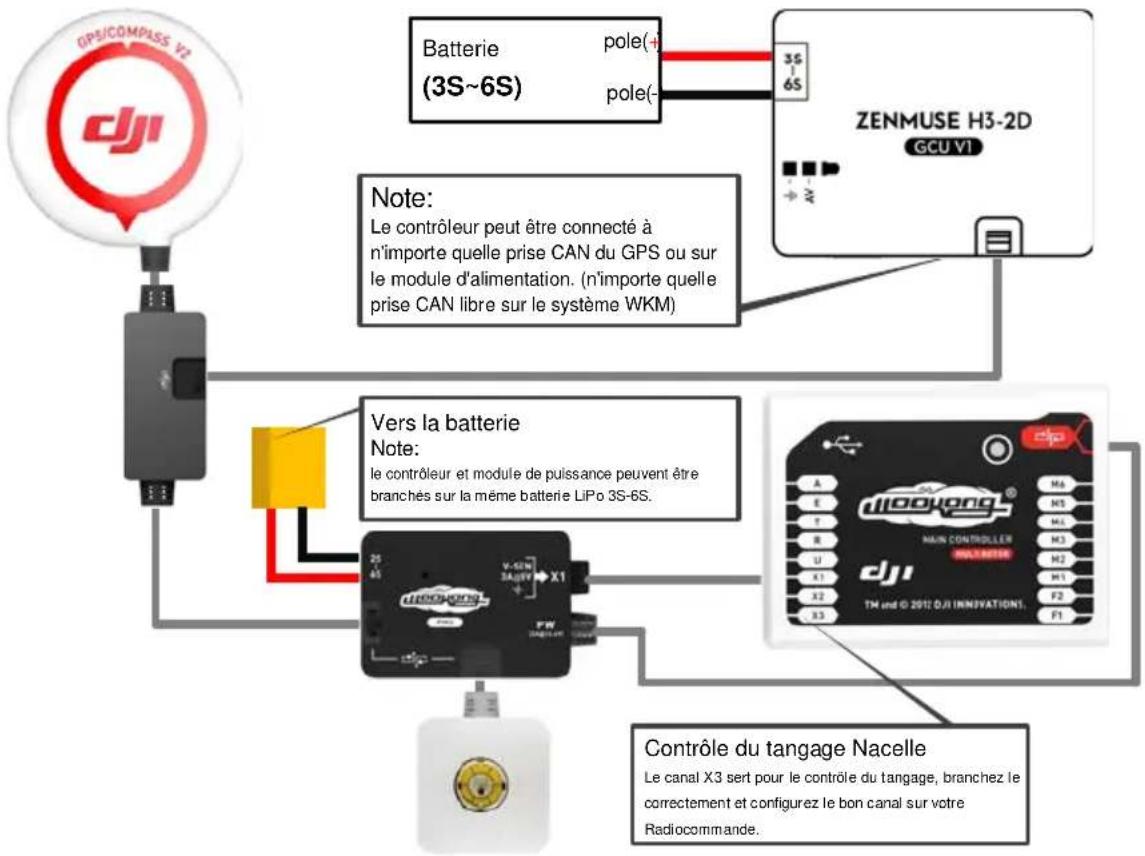
flowchart
graph TD
A["GPS/COMPASS V1"] --> B["Switch"]
B --> C["Batterie (3S~6S)"]
C --> D["pole(+)"]
C --> E["pole(-)"]
D --> F["ZENMUSE H3-2D GPU V1"]
E --> F
F --> G["Output"]
B --> H["Contrôle du tangage Nacelle"]
H --> I["LiPo 3S-6S"]
I --> J["Contrôle peut être connecté à n'importe quelle prise CAN du GPS ou sur le module d'alimentation. (n'importe quelle prise CAN libre sur le système WKM)"]
H --> K["Vers la batterie Note:"]
K --> L["Le contrôleur et module de puissance peuvent être branchés sur la même batterie LiPo 3S-6S."]
L --> M["Contrôle du tangage Nacelle"]
M --> N["Le canal X3 sert pour le contrôle du tangage, branchez le correctement et configurez le bon canal sur votre Radiocommande."]
Fig.1 schéma de câblage du contrôleur et du WKM
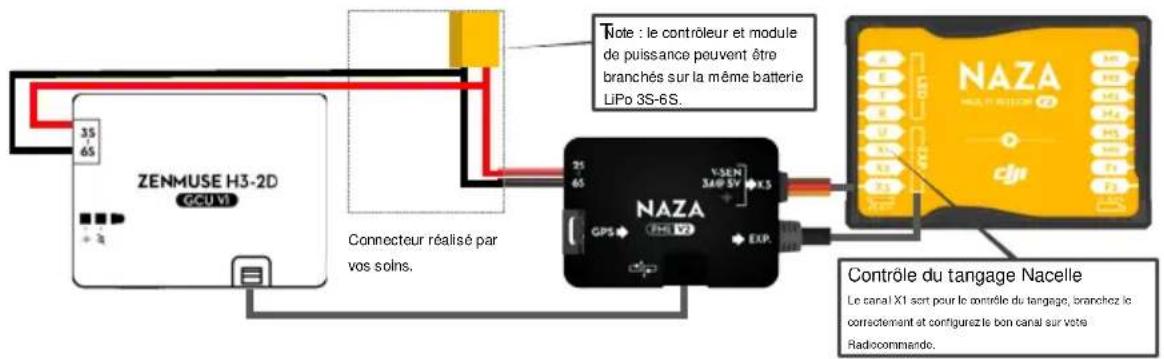
Fig.2 Schéma de câblage du contrôleur et du NAZA-M V2
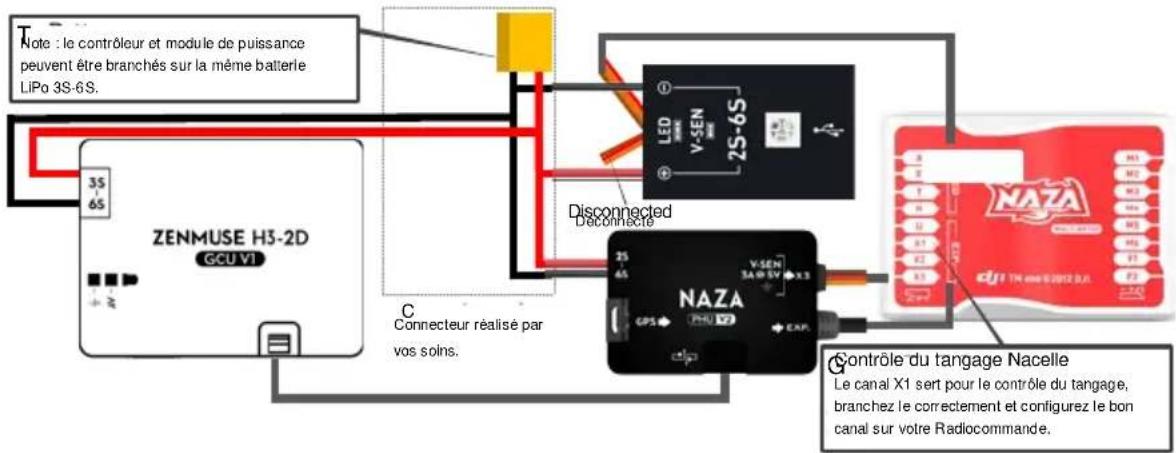
Fig.3 Schéma de câblage du contrôleur et du NAZA-M avec le PMU V2 (Accessoire NAZA-M V2)
Transmission du signal vidéo
Un module de transmission vidéo sans fil est nécessaire pour accéder au signal vidéo à distance.
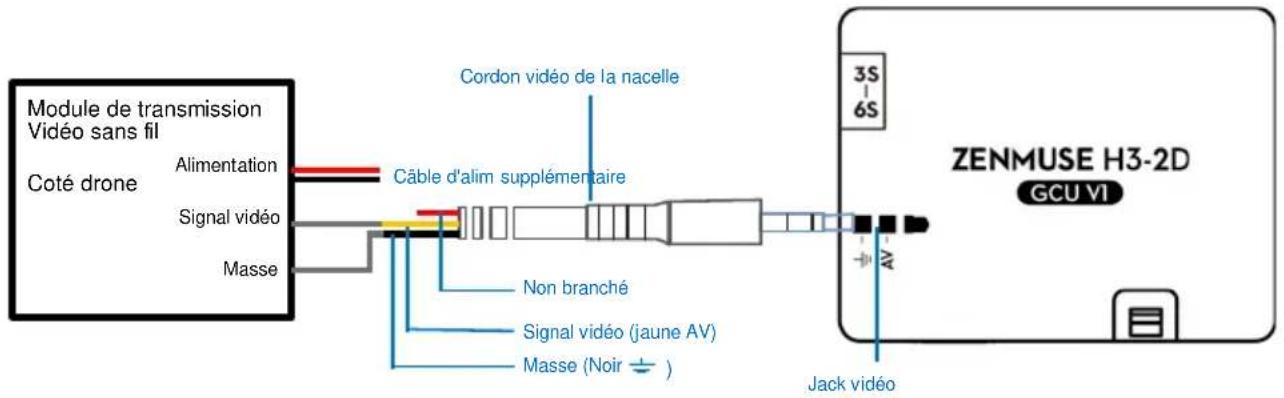
- Souder respectivement les fils du signal vidéo et la masse au module de transmission vidéo (coté drone).
- Brancher le jack du signal vidéo dans la prise vidéo du contrôleur.
Notes
(1) Assurez de brancher le transmetteur vidéo au contrôleur avant de mettre sous tension
(2) Le câble vidéo standard de la nacelle est recommandé. Assurez-vous de le souder correctement au transmetteur vidéo. Assurez-vous que les fils soient isolés pour éviter tout court-circuit.
(3) Merci de vous reporter au manuel de votre transmetteur vidéo pour l'alimentation, car le contrôleur n'est pas prévu pour.
Astuces :
(1) Le diagramme ci-dessous détaille le cheminement du signal vidéo lorsque la nacelle
(2) Si le signal ne passe pas, vérifiez chaque étape.

flowchart
graph LR
A["Caméra\nConnecteur"] -->|Signal vidéo| B["Nacelle\nInterface caméra"]
B -->|Signal vidéo| C["Contrôleur\nG8"]
C -->|Signal vidéo| D["Cordon signal\nvideo nacelle"]
D -->|Câble 8 brins| B
E["Ecran\nEntré vidéo"] -->|Signal vidéo| F["Transmetteur vidéo\nVidéo sans fil\nCoté sol"]
F -->|Signal radio\n5.8G/2.4G/12G| G["Transmetteur vidéo\nVidéo sans fil\nCoté drone"]
G --> H["Réalisé par l'utilisateur"]
Logiciel Assistant Installation du driver et du logiciel
- Assurez-vous que le driver, installé pour WooKong-M, NAZA-M ou NAZA-M V2, fonctionne correctement
- Merci de télécharger le pro le logiciel d'assistance pour nacelle H3-2D depuis le site de DJI
- Cliquez sur l'installateur du logiciel et suivre toutes les étapes.
- Lancez le logiciel d'assistance.
Interface graphique
Connector le contrôleur au PC via le câble Micro-USB, mettez en route le contrôleur.
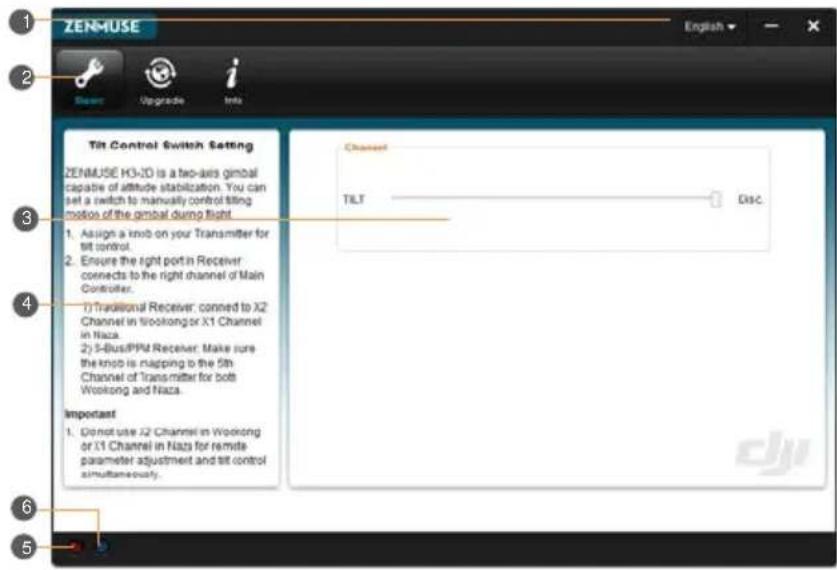
1 Langue
- 中文 or English (chinois ou anglais).
2 Menu
- Basic : réglage des fonctions de base
- Upgrade : pour la maj du firmware nacelle
• Info : numéro de série et version
4 Texte descriptif
- Placez la souris sur un élément (3), ur texte descriptif s'affichera
5 Indicateur de connexion
• LED rouge allumée: déconnecté du PC
• LED verte allumée: connectée au PC
6 Indicateur de communication
• LED bleue allumée: pas de communication
• LED bleue clignotante: Communication avec lePC
Réglage du canal
TANGAGE : basculez l'interrupteur TX, le curseur correspondant se déplacer, observez la nacelle tourner sur l'axe de tangage comme sur les schéma ci-dessous.
MAJ (mise à jour) firmware et logiciel
MAJ Firmware
Merci de suivre strictement la procédure de maj firmware, faute de quoi la nacelle risque de ne pas fonctionner correctement.
- Vérifiez que votre PC est connecté à internet
- Fermez tous les autres programmes pendant la maj firmware, y compris antivirus et parefeu
- Assurez-vous que le câble d'alimentation est correctement branché. NE LE DEBRANCHEZ pas pendant la mise à jour.
- Connectez le contrôleur au PC avec le câble Micro-USB, NE PAS INTERROMPRE la connexion avant la fin de la mise à jour.
- Lancez le programme et attendre la connexion.
- Sélectionnez Upgrade→Main Control, IMU et CMU.
- Le serveur DJI Innovations vérifie la version du firmware installé, et trouve la dernière version publiée pour votre appareil.
- S'il y a un firmware plus récent que le vôtre, vous pourrez cliquer sur « upgrade Version ».
- Attendre que le logiciel termine la mise à jour
- Clicquez OK et relancez l'appareil après au minimum 5 secondes.
Notes:
(1) CMU est l'acronyme de Camera Multi Unit, utilisé pour les commandes des fonctions de la caméra.
(2) Il est recommandé de déconnecter la connexion entre le contrôleur et le pilote auto pendant la mise à jour de l'IMU et du CMU.
(3) Si le serveur DJI Innovations est occupé, recommencer les procédures ci-dessus
(4) Si la maj du firmware échoue, merci de ré-essayer les procédures ci-dessus.
MAJ (mise à jour) logiciel
Cliquer sur Info puis sur software info. S'il y a une version du logiciel plus récente, vous pourrez télécharger la mise à jour.
Vous pouvez aussi vérifier la version du produit via « Info » puis « SN » pour le hardware l'IMU Le contrôleur et le logiciel.
SN est un code d'autorisation à 32 caractères pour l'activation des fonctions de votre appareil.
DJI a déjà renseigné en usine le code d'autorisation pour votre appareil.
Le SN peut vous être redemandé si vous faites une mise à jour de Firmware. Renseignez-le SN et cliquez sur le bouton « write ». Si vous remplissez un mauvais SN plus de 30 fois, votre Produit sera verrouillé et vous devrez contacter le service après-vente.
Essai
Check List avant chaque vol
Par mesure de sureté, merci de vérifier soigneusement chaque élément avant chaque vol.
(1) La nacelle est fermement fixée au drone, et la caméra est attachée correctement. L'objectif de la caméra est pointée vers l'avant du drone
(2) Tous les câbles sont correctement fermement connectés, aucun débranché.
(3) La soudure du cordon du signal vidéo est bonne (si utilisation d'un transmetteur sans fil. S'assurer de connecter le transmetteur vidéo au contrôleur d'abord, puis de mettre sous tension
(4) Vérifier les réglages de transmission
(5) Vérifier les réglages de la camera.
(6) Vérifier la connexion entre le contrôleur et le pilote automatique.
(7) Mettre à jour le firmware du pilote automatique MC.
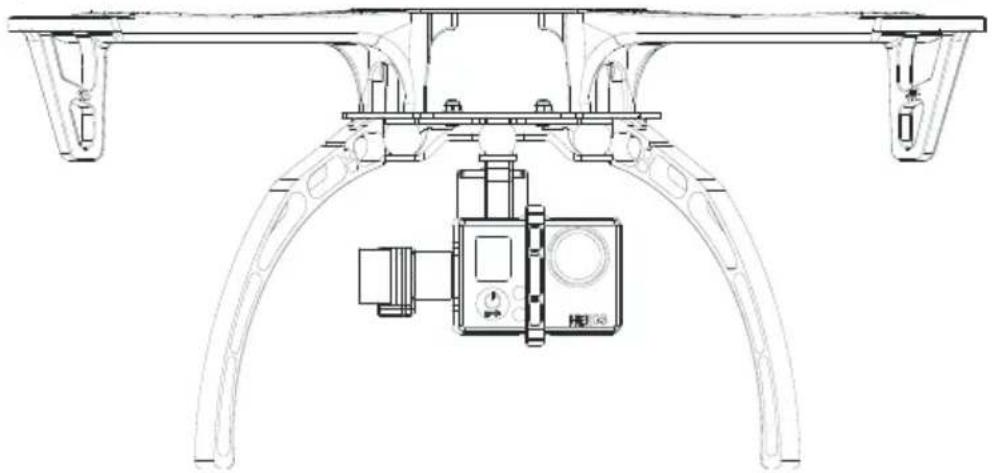
Test de la nacelle
- Assurez-vous que les batteries du transmetteur et du contrôleur sont bien chargées ainsi que pour tout élément de l'appareil.
- Allumez la radiocommande.
- Allumez la nacelle et attendez la fin de son self test.
- Après l'initialisation, l'objectif de la caméra doit être pointé vers le nez du drone, les trois axes de la nacelle doivent être dirigés selon le schéma ci-dessus.
- Basculez le contrôle de tangage de votre transmetteur, et assurez-vous de son bon fonctionnement. Vérifiez ensuite si votre nacelle se déplace dans la direction correspondante. Si ce n'est pas le cas, vérifiez vos réglages.
- A la fin de l'essai, éteindre la nacelle en premier puis éteindre ensuite la caméra.
Note:
- Si votre nacelle n'est pas conforme au schéma ci-dessus, après initialisation, reportezvous vers l'annexe de recherche de panne.
- Maintenir la nacelle allumée horizontalement pendant l'essai. Si vous devez tenir et déplacer l'appareil avec la nacelle allumée, l'angle d'inclinaison de l'appareil ne doit pas dépasser 35°.
- Ne pas faire atterir l'appareil avec la nacelle allumée sur un sol inégal (comme des herbes hautes, sol rocailleux). Ce type d'environnement peut exercer une force externe ou provoquer un choc sur la nacelle, ce qui provoquera sa mise en Mode veille.
- Protection de la nacelle en mode veille. Dans le cas où la caméra n'est pas montée sur la nacelle, celle-ci passe en mode veille dans lequel elle n'est plus contrôlée par le transmetteur. Vous devez monter la caméra correctement et redémarrer le système pour réactiver la nacelle.
- Mode veille pour la protection de la nacelle. Si des forces externes contrent la nacelle, elle passera également en mode veille. Vous devez faire attention à ne pas exercer de trop gros efforts qui affecteraient le fonctionnement normal et obligerait à redémarrer pour réactiver la nacelle.
- Il est préférable d'utiliser une batterie séparée pour tester la nacelle au début pour s'assurer de son fonctionnement avant de procéder aux étapes de mise sous tension du contrôleur de vol, nacelle, OSD, FPV etc.
Annexe
Recherche de panne
| NO. | Quoi | Pourquoi | Comment |
| (1) Les trims de la radio sont trop poussés. | (1) Ajuster les trims | ||
| 1 | La nacelle continue à dériver après l'initialisation | (2) Le contrôleur et le pilote Auto sont déconnectés. | (2)Connectez le contrôleur et le pilote automatique |
| (3) La nacelle pointe vers l'arrière. | (3) Vérifier que la nacelle et le drone pointent dans la même direction. | ||
| 2 | La nacelle n'est pas conforme après l'initialisation | Mauvaise calibration en usine | Merci de contacter votre Revendeur ou le service client DJI Inovations |
| 3 | Impossible de distinguer Le sens de la nacelle en utilisation | Vol BVR | Utiliser un transmetteur vidéo sans fil. |
Réglage avec utilisation du système de contrôle de vol
Les utilisateurs doivent configurer le contrôle de la hauteur dans le logiciel assistant A2 de la H3-2D lors d'une utilisation avec le système de contrôle de vol A2. Configurez le canal H3-2D à un levier (ou potentiomètre) sur la radiocommande. Il est recommandé d'utiliser un canal uniquement pour le contrôle de la hauteur de la H3-2D sur la page de configuration des canaux (schéma suivant)

| Générale | |
| Fonctions intégrées. | (1) Nacelle 2 axes(2) Module spécial à servo pour nacelle DJI(3) Fabrication complète en alliage d'aluminium(4) Module IMU indépendant intégré(5) Poids plume(6) Compatible WKM, NAZA-M, NAZA-M V2, PHANTOM(7) GoPro3 supportée(8) Basée sur la technologie Zenmuse |
| Périphériques | |
| Camera supportées | GoPro3 Silver and Black |
| Alimentation du contrôleur | 3S~6S LiPo (12V~26V) |
| Prérequis pour le logiciel | Windows XP SP3; Windows 7; Windows 8 |
| Caractéristiques Mécaniques & Électriques | |
| Intensités en fonctionnement | ● Courant en statique : 400mA (@12V)● Courant en mouvement: : 600mA (@12V) |
| Alimentation de la nacelle | 3S~6S (12V ~26V) |
| Température de fonctionnement | -10°C ~ 50°C |
| Poids de la nacelle | 230g (avec GoPro3) |
| Dimensions (avec amortisseur) | 99.5mm ×85.5mm ×92.75mm |
| Poids du contrôleur | 22g |
| Dimensions du contrôleur | 42 mm X32 mm X9.3 mm |
| Performance | |
| Précision angulaire | 0.08° |
| Vitesse de rotation maximum | Roulis : ±30°/sTangage : ±130°/s |
| Rayon d'action angulaire | Contrôle en roulis : ±39°Contrôle de tangage : - 130~+50° |
| Certifications | |
| FCC (USA) | Oui |
| CE (EU) | Oui |
| ROHS(EU) | Oui |