
R2D201 - Capteur radar IFM - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil R2D201 IFM au format PDF.

| Type de produit | Capteur radar FMCW |
| Marque | IFM |
| Modèle | R2D201 |
| Fréquence de travail | 77 à 81 GHz |
| Angle d'ouverture horizontal | ±70° |
| Angle d'ouverture vertical | ±15° |
| Fonction | Capteur de distance / de zone radar |
| Interface | CAN (SAE J1939) |
| Alimentation | 24 V DC (TBTS/TBTP) |
| Classe de protection | III |
| Protection mécanique | IK06 selon CEI 62262 |
| Conditions environnementales | Intérieur/extérieur, altitude ≤2000 m, humidité ≤90% sans condensation, degré de pollution 2 |
| Distance de sécurité personnes | 20 cm minimum |
| Utilisation interdite | Protection des personnes, zones explosibles |
| Montage | Par cylindre de serrage ou dispositif de fixation, couple max 3 Nm |
| Raccordement | Connecteur M12 5 broches (CAN_SHLD, CAN_V+, CAN_GND, CAN_H, CAN_L) |
| Logiciel de paramétrage | ifm Vision Assistant |
| Modes de fonctionnement | Distance et zone (area), réglables via CAN |
| Entretien | Sans entretien ; nettoyer la face active si nécessaire |
| Réparabilité | Non réparable par l'utilisateur, uniquement par le fabricant |
| Homologations | UE, cRUus, selon pays (voir notice emballage) |
FOIRE AUX QUESTIONS - R2D201 IFM
Questions des utilisateurs sur R2D201 IFM
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Capteur radar au format PDF gratuitement ! Retrouvez votre notice R2D201 - IFM et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil R2D201 de la marque IFM.
MODE D'EMPLOI R2D201 IFM
Notice d'utilisation
Capteur de zone radar CAN
R2Dx
Contenu
1 Remarques préliminaires .... 3
1.1 Symboles utilisés.... 3
1.2 Avertissements.... 3
1.3 Symboles de sécurité sur l'appareil.... 3
1.4 Open source information.... 3
2 Consignes de sécurité 5
2.1 Consigne de sécurité sur les rayonnements électromagnétiques à haute fréquence .... 5
2.2 Cybersécurité.... 6
3 Usage prévu.... 7
3.1 Applications 7
3.2 Restrictions de l'application 9
3.3 Utilisation inadmissible 9
4 Introduction rapide 11
5 Fonction.... 12
5.1 Principe de mesure 12
5.2 Modes de fonctionnement.... 12
5.3 Aperçu.... 13
5.3.1 R2D101 13
5.3.2 R2D103 13
5.3.3 R2D201 13
5.3.4 R2D203 14
5.3.5 R2D205 14
5.4 CAN.... 14
6 Montage.... 15
6.1 Instruction de montage.... 16
6.2 Conception mécanique 17
6.3 Montage avec cylindre de serrage.... 17
6.4 Montage avec dispositif de fixation 18
7 Raccordement électrique.... 20
8 Installation 21
9 Eléments de service et d'indication 22
9.1 États LED 22
10 Mise en service 23
11 Paramétrage 24
11.1 Réglage en mode distance 25
11.2 Réglage en mode « area » 26
11.3 Règles de sélection 27
12 Correction de défauts.... 28
13 Maintenance, réparation et élimination 29
14 Homologations / normes.... 30
15 Réglage usine.... 31
Glossaire 32
1 Remarques préliminaires
Notice d'utilisation, données techniques, homologations et informations supplémentaires via le code QR sur l'appareil / l'emballage ou sur documentation.ifm.com.
1.1 Symboles utilisés
Condition préalable
Action à effectuer
Réaction, résultat
En gras Désignation d'une touche, d'un bouton ou d'un affichage
→ Référence croisée sans lien
Référence croisée avec lien
Remarque importante Le non-respect peut aboutir à des dysfonctionnements ou perturbations
Information Remarque supplémentaire
1.2 Avertissements
Les avertissements mettent en garde contre d'éventuels dommages corporels et matériels. Cela permet une utilisation sûre du produit. Les avertissements sont gradués comme suit :
AVERTISSEMENT Avertissement de don
Des blessures mortelles ou graves sont possibles si l'avertissement n'est pas respecté.
ATTENTION Avertissement
Avertissement de dommages corporels légers à modérés
Des blessures légères à modérées sont possibles si l'avertissement n'est pas respecté.
INFORMATION IMPORTANTE Avertissement sur les dommages m
Avertissement sur les dommages matériels
Des dommages matériels sont possibles si l'avertissement n'est pas respecté.
1.3 Symboles de sécurité sur l'appareil
• L'alimentation électrique doit être conforme à CEI 61010-1, chap. 9.4 - Circuit à énergie limitée.
Appareil de la classe de protection III. Fonctionnement uniquement avec des circuits électriques TBTS/TB-TP.
1.4 Open source information
2 Consignes de sécurité
- L'appareil décrit ici est un composant à intégrer dans un système.
– L'installateur du système est responsable de la sécurité du système.
- L'installateur du système est tenu d'effectuer une évaluation des risques et de rédiger, sur la base de cette dernière, une documentation conforme à toutes les exigences prescrites par la loi et par les normes et de la fournir à l'opérateur et à l'utilisateur du système. Cette documentation doit contenir toutes les informations et consignes de sécurité nécessaires à l'opérateur et à l'utilisateur et, le cas échéant, à tout personnel de service autorisé par l'installateur du système.
- Lire ce document avant la mise en service du produit et le conserver pendant la durée d'utilisation du produit.
- Le produit doit être approprié pour les applications et conditions environnantes concernées sans aucune restriction d'utilisation.
- Utiliser le produit uniquement pour les applications pour lesquelles il a été prévu ( ➞ Usage prévu).
- Un non-respect des consignes ou des données techniques peut provoquer des dommages matériels et/ou corporels.
- Le fabricant n'assume aucune responsabilité ni garantie pour les conséquences d'une mauvaise utilisation ou de modifications apportées au produit par l'utilisateur.
- Le montage, le raccordement électrique, la mise en service, le fonctionnement et l'entretien du produit doivent être effectués par du personnel qualifié et autorisé par le responsable de l'installation.
- Assurer une protection efficace des appareils et des câbles contre l'endommagement.
- Stocker le produit dans son emballage d'origine.
2.1 Consigne de sécurité sur les rayonnements électromagnétiques à haute fréquence
Dans des conditions d'application spécifiques, le risque pour l'utilisateur peut varier en fonction de l'installation et des réglages de l'appareil.
L'installateur/l'exploitant du système est tenu de procéder à une analyse des risques et de prendre les mesures appropriées pour protéger les personnes. En particulier, les règlements nationaux doivent également être respectées. Les mesures de protection possibles peuvent inclure des distances minimales garanties d'un utilisateur, des contrôles d'accès et la formation des utilisateurs.

AVERTISSEMENT
L'opération de cet appareil peut causer des perturbations radioélectriques dans les lieux de résidence.
L'appareil émet des ondes électromagnétiques à haute fréquence qui peuvent interférer avec le fonctionnement des appareils électroniques situés à proximité, notamment les stimulateurs cardiaques, les appareils auditifs et les défibrillateurs.
En raison des règlements relatifs à l'exposition humaine, une distance minimale de 20 cm doit être maintenue entre l'appareil et les personnes.
Si vous avez un stimulateur cardiaque ou un autre dispositif médical implanté, n'utilisez pas l'appareil sans avoir consulté au préalable votre médecin ou le fabricant de votre dispositif médical. Gardez une distance de sécurité entre l'appareil et vos dispositifs médicaux et évitez de continuer à utiliser l'appareil si vous constatez une déficience permanente de votre dispositif médical.
2.2 Cybersécurité

INFORMATION IMPORTANTE
Environnement réseau non protégé :
l'appareil ne comporte pas de mesures de sécurité informatique selon CEI 62443.
▷ Un accès non autorisé en lecture et écriture est possible.
Une manipulation non autorisée sur le fonctionnement de l'appareil est possible.
▶ Vérifier et restreindre les possibilités d'accès à l'appareil.
3 Usage prévu
3.1 Applications
L'appareil surveille une zone sans contact et sur la base d'un radar FMCW et détecte la distance, la position et la vitesse d'objets fixes et en mouvement. Il est possible de définir des zones cibles, des seuils de commutation et des zones (ROI).
Le capteur a été conçu pour les applications industrielles (appareil installé en permanence). Il peut toutefois être utilisé pour un fonctionnement mobile (capteur en mouvement) en respectant les exigences correspondantes.
La dimension de la zone de détection de l'appareil dépend de l'objet cible à détecter. Les zones de détection pour les cibles définies (cibles réfléchissantes radar) sont définies dans la fiche technique de l'appareil.
Le réglage de l'appareil ainsi que la visualisation de la zone de détection peuvent être effectués via le logiciel Vision Assistant ou moneo.

Le domaine d'utilisation de l'appareil dépend de la fréquence de base utilisée et du pays dans lequel il est utilisé. Avant la mise en service de l'appareil, les restrictions d'homologation nationales en vigueur doivent être vérifiées. Lors de l'utilisation de l'appareil, il faut tenir compte des particularités spécifiques aux pays.
L'utilisation de l'appareil n'est autorisée que dans les pays mentionnés dans la notice d'emballage « Homologation radio ». L'utilisation de l'appareil dans des pays qui ne figurent pas sur la liste peut provoquer des interférences avec les bandes de fréquences protégées.
Pour les États-Unis, le Canada :
Les appareils fonctionnant à une fréquence de base de 60 GHz peuvent être utilisés pour des applications statiques ou mobiles, indépendamment de l'application. L'utilisation dans les avions est autorisée tant que l'avion est au sol. L'utilisation dans les satellites n'est pas autorisée. Ce groupe comprend les appareils suivants :
• R2D103
Les appareils fonctionnant à une fréquence de base de 77 GHz sont destinés à des applications pour véhicules. Ce groupe comprend les appareils suivants :
• R2D201
Pour le Chili :
Les appareils fonctionnant à une fréquence de base de 60 GHz sont uniquement destinés à des applications stationnaires statiques. L'appareil peut se déplacer à l'intérieur d'une installation fixe. Il s'agit notamment d'applications stationnaires pour l'évitement de collisions, la mesure de niveau, la détection d'objets, la mesure de débit et la surveillance de zones. Ils ne sont pas autorisés pour les applications pour véhicules. Ce groupe comprend les appareils suivants :
• R2D103
Les appareils fonctionnant à une fréquence de base de 77 GHz sont destinés à des applications pour véhicules. Ce groupe comprend les appareils suivants :
• R2D201
Pour l'Europe, la Namibie, l'Afrique du Sud :
Les appareils fonctionnant à une fréquence de base de 60 GHz peuvent être utilisés pour des applications statiques, mobiles ou portables, indépendamment de l'application. Ce groupe comprend les appareils suivants :
• R2D101
Les appareils fonctionnant à une fréquence de base de 77 GHz sont uniquement destinés à des applications fixes et mobiles de transport et de télématique routière. Il s'agit par exemple de la détection d'obstacles, de la surveillance des tunnels et des passages à niveau ou de l'aide au stationnement. Ce groupe comprend les appareils suivants :
• R2D201
Pour l'Australie, la Nouvelle-Zélande :
Les appareils fonctionnant à une fréquence de base de 60 GHz ou 77 Ghz peuvent être utilisés pour des applications statiques, mobiles ou portables, indépendamment de l'application. Ce groupe comprend les appareils suivants :
• R2D101 / R2D201
Pour le Brésil :
Les appareils fonctionnant à une fréquence de base de 77 GHz sont destinés à des applications pour véhicules. Ce groupe comprend les appareils suivants :
• R2D201
Pour l'Argentine :
Les appareils fonctionnant à une fréquence de base de 60 GHz peuvent être utilisés pour des applications statiques, mobiles ou portables, indépendamment de l'application. Ce groupe comprend les appareils suivants :
• R2D101
Les appareils fonctionnant à une fréquence de base de 76 GHz sont destinés à des applications pour véhicules. Ce groupe comprend les appareils suivants :
• R2D205
Pour l'Inde :
Les appareils fonctionnant à une fréquence de base de 76 GHz peuvent être utilisés pour des applications statiques, mobiles ou portables, indépendamment de l'application. Ce groupe comprend les appareils suivants :
• R2D205
Pour le Japon :
Les appareils fonctionnant dans la bande 79 GHz peuvent être utilisés pour des applications statiques, mobiles ou portables, indépendamment de l'application. Ce groupe comprend les appareils suivants :
• R2D203
Pour le Mexique :
Les appareils fonctionnant à une fréquence de base de 60 GHz peuvent être utilisés pour des applications statiques, mobiles ou portables, indépendamment de l'application. Ce groupe comprend les appareils suivants :
• R2D101
Les appareils fonctionnant à une fréquence de base de 77 GHz sont uniquement destinés à des applications fixes et mobiles de transport et de télématique routière. Il s'agit par exemple de la détection d'obstacles, de la surveillance des tunnels et des passages à niveau ou de l'aide au stationnement. Ce groupe comprend les appareils suivants :
• R2D201
Pour Singapour :
Les appareils fonctionnant à une fréquence de base de 60 GHz peuvent être utilisés pour des applications statiques, mobiles ou portables, indépendamment de l'application. Ce groupe comprend les appareils suivants :
• R2D101
Les appareils fonctionnant à une fréquence de base de 77 GHz sont uniquement destinés à des applications statiques de transport et de télématique routière, ainsi qu'à des applications pour véhicules au sol. Il s'agit par exemple de la détection d'obstacles, de la surveillance des tunnels et des passages à niveau ou de l'aide au stationnement. Ce groupe comprend les appareils suivants :
• R2D205
- L'appareil ne peut être utilisé que dans les pays pour lesquels une homologation est disponible.
- En cas de transfert de l'appareil, le destinataire doit être informé des restrictions d'homologation en vigueur au niveau national.
La sécurité de l'appareil est conçue conformément à la norme EN CEI 61010-1:2020+A11:2020 pour une utilisation dans les conditions environnementales suivantes :
- Classe de protection 3 (TBTS / TBTP) et alimentation de l'appareil selon « limited energy » conformément au chapitre 9.4 CEI 61010-1. Les circuits externes doivent être isolés selon la figure 102 de CEI 61010-2-201.
- Utilisation à l'intérieur et l'extérieur (l'utilisation à l'extérieur n'entre pas dans le champ d'application de cRUus)
• Altitudes jusqu'à 2000 m - Humidité relative de l'air jusqu'à 90 % au maximum, sans condensation
- Degré de pollution 2
Compatibilité électromagnétique (CEM) :
L'appareil est conçu pour une utilisation dans des environnements industriels et sur des engins mobiles.
- Dans les environnements domestiques, ce produit peut provoquer des problèmes de radiodiffusion.
- En cas de besoin, prendre des mesures de blindage CEM.

L'appareil doit être installé de manière à ce qu'il ne puisse pas être touché par des personnes non autorisées.
3.2 Restrictions de l'application
L'appareil émet des ondes électromagnétiques à haute fréquence qui sont réfléchies par les objets et reçues et analysées par l'appareil. La qualité de l'énergie reçue dépend de différents paramètres spécifiques à l'objet (SER (RCS)). Les grands objets en métal, par exemple, se caractérisent par une valeur SER (RCS) élevée et peuvent être très bien détectés par le capteur radar. Les objets en plastique ont une faible valeur SER (RCS) et ne peuvent pas toujours être détectés de manière fiable.
Les objets avec une valeur SER (RCS) élevée (métaux, murs en pierre) peuvent influencer négativement le résultat de la mesure et éliminer les objets cibles avec une valeur SER (RCS) plus faible ou créer de fausses cibles.
3.3 Utilisation inadmissible
Toute utilisation dépassant l'utilisation prévue de l'appareil et sortant du cadre des spécifications techniques (voir fiche technique) n'est pas admissible.
L'appareil ne répond pas aux normes de sécurité en vigueur pour les machines et n'est donc pas homologué comme composant de sécurité.
▶ Ne pas utiliser l'appareil dans des zones à risque d'explosion.
▶ Utiliser uniquement les éléments de service et de réglage (accessoires) indiqués dans la notice d'utilisation.

AVERTISSEMENT
L'appareil ne dispose pas de circuits auto-contrôlés redondants et n'est donc pas prévu pour des applications de protection des personnes. En cas de défaut ou de panne de l'appareil, la sortie peut avoir un comportement de commutation imprévisible.
▷ Danger de mort ou de graves blessures irréversibles.
▶ Ne pas utiliser cet appareil pour la protection des personnes.

AVERTISSEMENT
Toute utilisation inadmissible peut entraîner des situations dangereuses.
▷ Danger de mort ou de graves blessures irréversibles.
▶ Utiliser le produit uniquement pour les applications pour lesquelles il a été prévu.
▶ Respecter les indications de la notice d'utilisation.
▶ Mettre immédiatement hors service les produits endommagés.
4 Introduction rapide
Les étapes suivantes sont nécessaires pour une mise en service rapide de l'appareil :
- Monter l'appareil de manière à ce qu'il puisse voir la zone souhaitée et qu'il ne soit pas recouvert.
15 - Installer le logiciel CANfox selon la notice d'utilisation CANfox ainsi que la version actuelle du Vision Assistant.
- Établir une connexion avec l'appareil au moyen de CANfox.
- Effectuer les réglages souhaités sur l'appareil à l'aide du logiciel ifm Vision Assistant.

Le logiciel est nécessaire pour le réglage de l'appareil. Le logiciel peut être téléchargé gratuitement sur ifm.com.
5 Fonction
5.1 Principe de mesure
Le capteur radar détermine la distance, la position, la vitesse et la direction de déplacement des objets sur la base d'un radar FMCW (radar à ondes entretenues et modulation de fréquence).
L'appareil émet des ondes électromagnétiques à haute fréquence qui sont réfléchies par l'objet. L'énergie réfléchie est détectée et analysée par l'antenne récepteur de l'appareil.
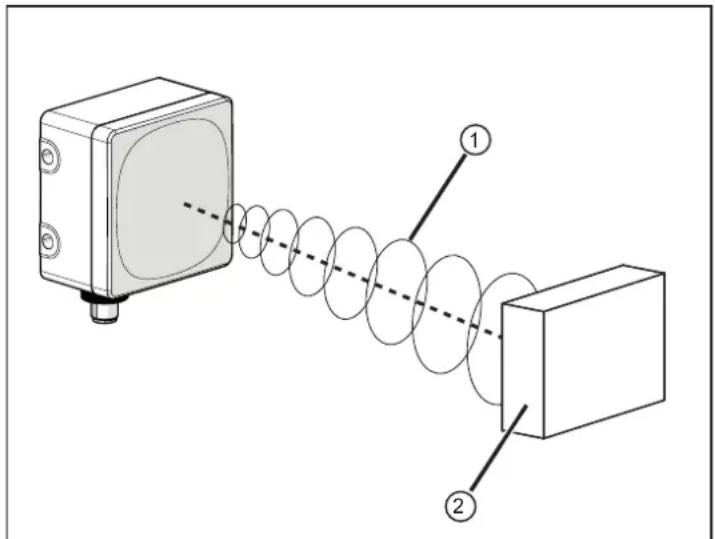
Fig. 1: Principe de mesure
1 : Faisceau radar 2 : Objet
5.2 Modes de fonctionnement

L'appareil peut exclusivement être configuré via l'interface CAN. Le logiciel peut être téléchargé gratuitement sur ifm.com.
Il est possible de régler jusqu'à deux modes de fonctionnement différents. Ceux-ci se distinguent par la distance maximale, la résolution de distance, la vitesse maximale et la résolution de la vitesse.

Tous les appareils n'ont pas la possibilité de changer de mode de fonctionnement. Les modes de fonctionnement et les données techniques précises se trouvent dans la fiche technique de l'appareil correspondant.

En cas de dépassement des limites de vitesse, le compteur redémarre, c'est-à-dire que la valeur mesurée ne correspond pas à la vitesse réelle.
5.3 Aperçu
5.3.1 R2D101
| Référence : R2D101 | |
| Désignation : R2DAAOOKG/US/CAN | |
| Angle d'ouverture : ± 70^ horizontal / ± 25^ vertical | |
| Fonction : Capteur de distance / de zone radar | |
| Fréquence de travail : 60 à 64 GHz | |
| Boîtier : rectangulaire | |
| Puissances d'émission rayonnées (PIRE) et densités spectrales de puissance (PIRE) : | →voir fiche technique |

L'angle d'ouverture a été déterminé avec la cible réfléchissante (E23013) à une distance de 5 m.
5.3.2 R2D103
| Référence : R2D103 | |
| Désignation : R2DADOOKG/US/CAN | |
| Angle d'ouverture : ± 70^ horizontal / ± 25^ vertical | |
| Fonction : Capteur de distance / de zone radar | |
| Fréquence de travail : 60 à 64 GHz | |
| Boîtier : rectangulaire | |
| Puissances d'émission rayonnées (PIRE) et densités spectrales de puissance (PIRE) : | →voir fiche technique |

L'angle d'ouverture a été déterminé avec la cible réfléchissante (E23013) à une distance de 5 m.
5.3.3 R2D201
| Référence : R2D201 | |
| Désignation : R2DBAOKG/US/CAN | |
| Angle d'ouverture : ± 70^ horizontal / ± 15^ vertical | |
| Fonction : Capteur de distance / de zone radar | |
| Fréquence de travail : 77 à 81 GHz | |
| Boîtier : rectangulaire | |
| Puissances d'émission rayonnées (PIRE) et densités spectrales de puissance (PIRE) : | →voir fiche technique |

L'angle d'ouverture a été déterminé avec la cible réfléchissante (E23013) à une distance de 5 m.
5.3.4 R2D203
Référence : R2D203
Désignation : R2DBDOOKG/US/CAN
Angle d'ouverture : ± 70° horizontal / ± 15° vertical
Fonction : Capteur de distance / de zone radar
Fréquence de travail : 77 à 81 GHz
Boîtier : rectangulaire
Puissances d'émission rayonnées (PIRE) et densités spectrales de puissance (PIRE) :
→ voir fiche technique
L'angle d'ouverture a été déterminé avec la cible réfléchissante (E23013) à une distance de 5 m.
5.3.5 R2D205
Référence : R2D205
Désignation : R2DBBOOKG/US/CAN
Angle d'ouverture : ± 70° horizontal / ± 15° vertical
Fonction : Capteur de distance / de zone radar
Fréquence de travail : 76 à 77 GHz
Boîtier : rectangulaire
Puissances d'émission rayonnées (PIRE) et densités spectrales de puissance (PIRE) :
→ voir fiche technique
L'angle d'ouverture a été déterminé avec la cible réfléchissante (E23013) à une distance de 5 m.
5.4 CAN
Le capteur dispose d'une interface standardisée SAE J1939. Le paramétrage, le diagnostic et les mises à jour du firmware s'effectuent via l'interface CAN. Toutes les valeurs mesurées et tous les groupes de paramètres sont accessibles via le protocole J1939. Pour une description détaillée du protocole SAE J1939 et des réglages des paramètres, voir le manuel du logiciel.
6 Montage

INFORMATION IMPORTANTE
Champs électromagnétiques rayonnés
▷ L'appareil émet des ondes électromagnétiques à haute fréquence.
En même temps, il est conforme aux valeurs limites spécifiques du pays pour la population et les employés.
▶ Mettre l'appareil hors tension à proximité des dispositifs médicaux.
6.1 Instruction de montage
En cas de stockage dans des conditions d'humidité élevée : respecter les indications de la fiche technique.
Lors du montage, veiller au découplage mécanique pour éviter une vibration du capteur.
Eviter l'installation dans des zones fortement salissantes de la machine.
▶ Ne pas peindre l'appareil.
▶ Prévoir une protection contre la traction sur le câble pour un connecteur femelle M12 approprié.

Plus d'informations sur les accessoires des capteurs radars sur www.ifm.com.

S'il existe un risque d'endommager l'appareil, celui-ci doit être installé de manière à ce qu'il ne soit accessible que pour des travaux occasionnels, tels que des réglages mécaniques, et qu'il ne puisse pas être touché par des personnes non autorisées.

La proximité immédiate de sources d'émissions HF, telles que des transformateurs de soudure ou des convertisseurs, peut nuire au fonctionnement de l'appareil.
Pour un montage correct, il est recommandé d'utiliser les accessoires de montage décrits dans les paragraphes suivants.
Les grands objets métalliques situés à proximité immédiate de la surface active du capteur peuvent avoir une influence négative sur le signal de mesure.
Lors du montage, il faut veiller à ce qu'aucun objet non désiré ne se trouve dans le champ de vision (FOV) du capteur.
▶ Respecter les angles d'ouverture horizontaux et verticaux de chaque appareil.
Les limites latérales doivent être situées en dehors des angles de détection.
Angle d'ouverture vertical Angle d'ouverture horizontal
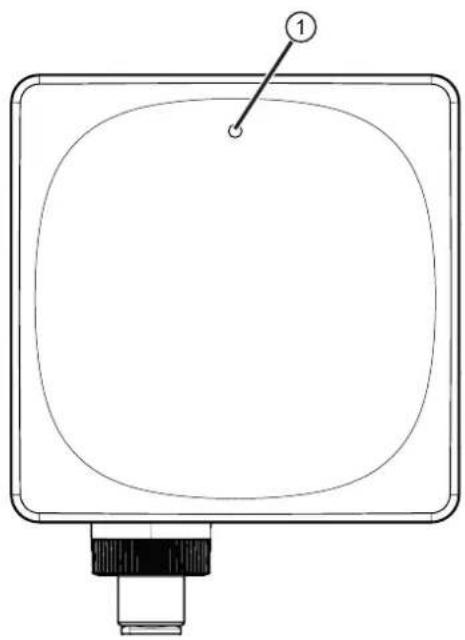
6.2 Conception mécanique
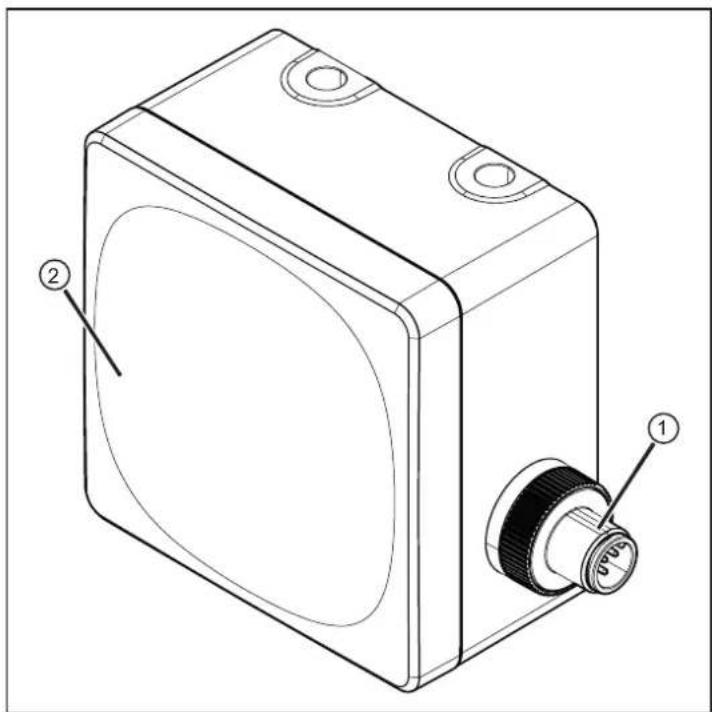
Fig. 2: Conception mécanique
1 : Raccord (orientable à 270°) 2 : Face active
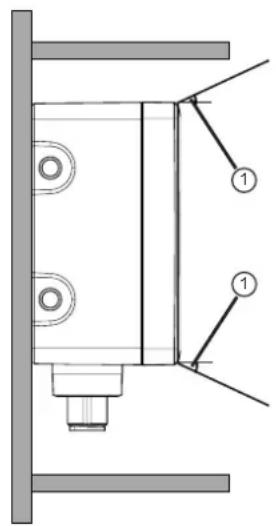
6.3 Montage avec cylindre de serrage
Faire passer les vis M5 par les trous d'interconnexion de l'appareil et les introduire dans les filetages M5 de la fixation. Couple de serrage maximal 3,0 Nm.
Monter le cylindre de serrage sur la fixation (E23011).
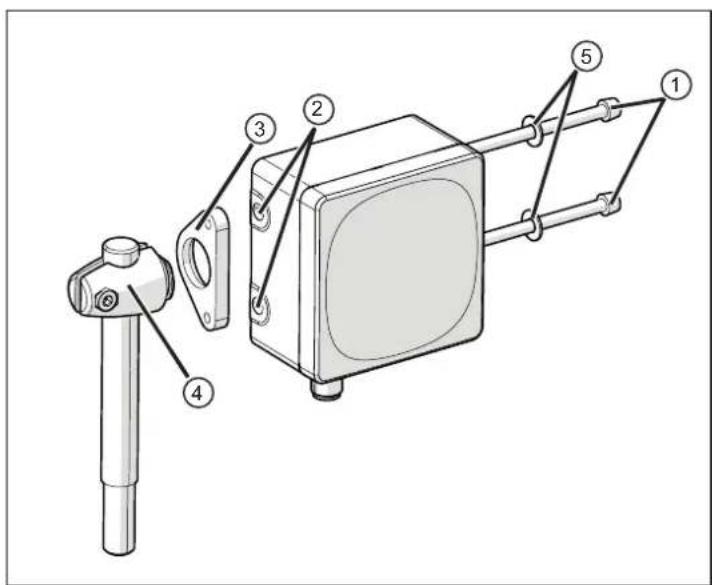
1 : Vis M5 2 : Trous d'interconnexion capteur radar
3 : Fixation 4 : Cylindre de serrage
5 : Rondelles M5
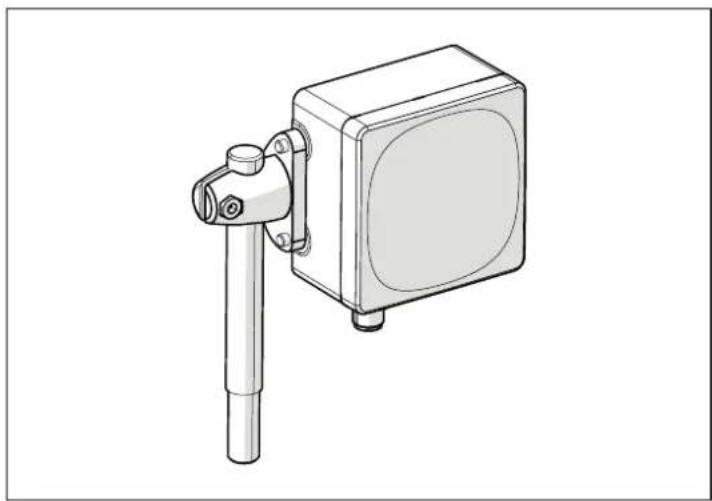
Fig. 4: Montage terminé
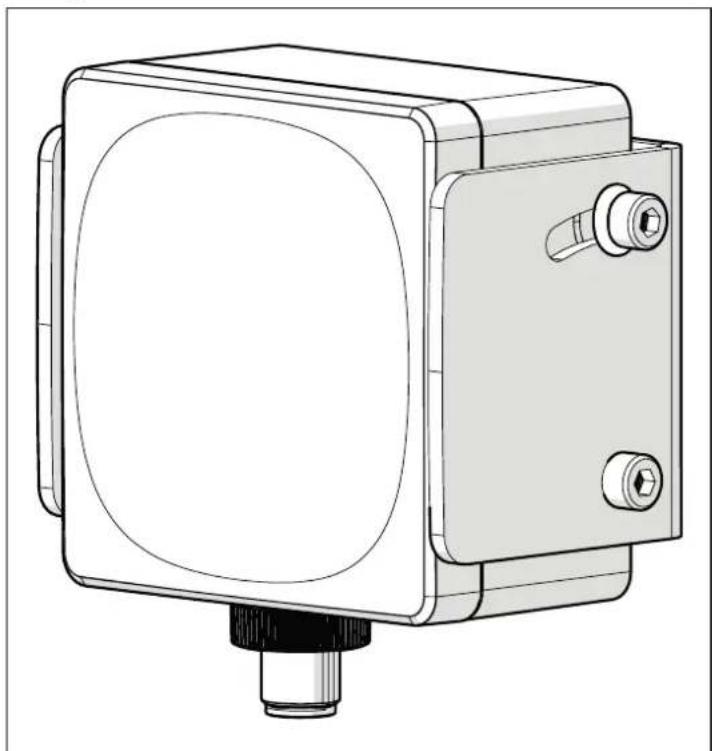
6.4 Montage avec dispositif de fixation
Le dispositif de fixation (E23009) permet de régler l'angle de montage du capteur. Il est possible de régler un angle maximal de 45°.
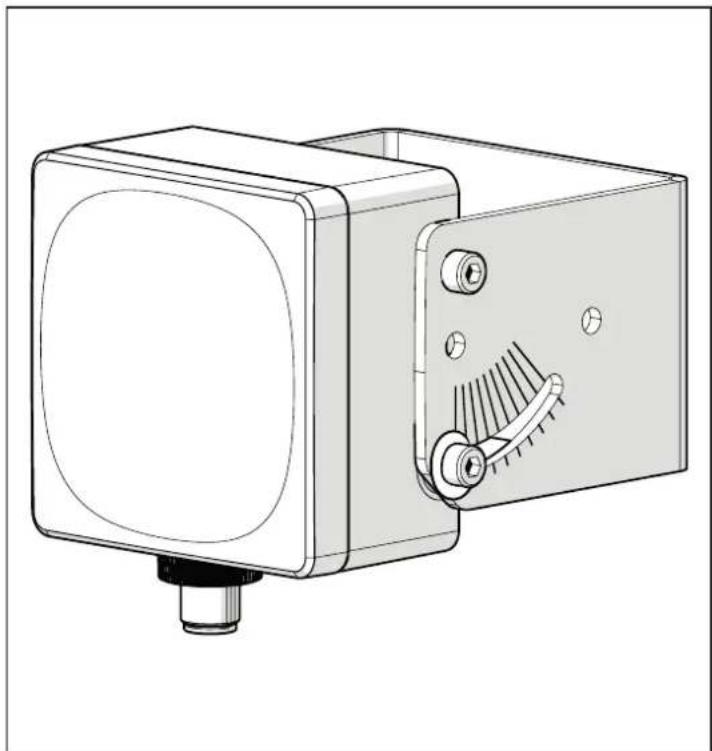
Le dispositif de fixation (E23010) permet de régler l'angle de montage du capteur. Il est possible de régler un angle maximal de 20°.
7 Raccordement électrique

L'appareil doit être raccordé par un électricien qualifié.
Respecter les réglementations nationales et internationales relatives à l'installation de matériel électrique.
Alimentation en tension selon TBTS, TBTP.
▶ Mettre l'installation hors tension.
▶ Raccorder l'appareil comme suit :
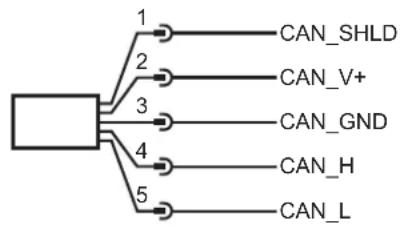
flowchart
graph TD
A["Input"] --> B["1 CAN_SHLD"]
A --> C["2 CAN_V+"]
A --> D["3 CAN_GND"]
A --> E["4 CAN_H"]
A --> F["5 CAN_L"]
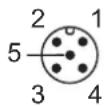
Fig. 7: Schéma de branchement
| Broche Affectation Description | |
| 1 : CAN_SHLD Blindage CAN | |
| 2 : CAN_V+ Tension d'alimentation 24 V DC (+U) | _B |
| 3 : CAN_GND Masse | |
| 4 : CAN_H Câble bus High | |
| 5 : CAN_L Câble bus Low |

Recommandation : Utiliser des câbles de raccordement / connecteurs femelles préconfigurés, voir les accessoires sous www.ifm.com.

Risque de détérioration de l'appareil en raison de connecteurs M12 insuffisamment serrés. L'indice de protection indiqué dans la fiche technique est garanti uniquement pour des connecteurs M12 suffisamment serrés.
▶ Visser fermement les connecteurs M12 à l'appareil en suivant les instructions de la fiche technique correspondante.

Pour les longueurs de câble supérieures à 30 m, utiliser une protection supplémentaire contre les pics de tension selon CEI 61000-4-5.

Dans la première milliseconde après la mise sous tension du capteur, la consommation de courant de l'appareil est plus élevée.
Cela peut entraîner le déclenchement de la limitation de courant en cas de raccordement de plusieurs capteurs radar à une alimentation en tension, en particulier lors de la réactivation après une coupure de courant.
8 Installation
Pour pouvoir utiliser toutes les fonctions de l'appareil, le logiciel ifm Vision Assistant est nécessaire pour le paramétrage.
Télécharger le logiciel ifm Vision Assistant sur un PC à partir de la zone de téléchargement à l'adresse Link.

L'utilisation d'ifm Vision Assistant est décrite dans le manuel du logiciel. ➞ Manuel du logiciel sur www.ifm.com.
9 Eléments de service et d'indication
1 : 1x LED vert / rouge LED d'état
9.1 États LED
| Comportement des LED Description Action | ||
| LED d’état allumée en verte L’appareil est raccordé à l’alimentation en tension et est opérationnel | ||
| LED d’état rouge clignotante (1 Hz) Erreur (remédiable par l’opérateur) Correction de défauts | ||
| LED d’état allumée en rouge Erreur grave | ► Contacter le support ifm.Contact : www.ifm.com | |
10 Mise en service
A la mise sous tension l'appareil est mis en service.
Après environ 3 secondes l'appareil est disponible.
A la livraison, les paramètres sont mis aux réglages usine.
L'appareil est paramétré via le logiciel ifm Vision Assistant.
11 Paramétrage
L'appareil peut être paramétré des manières suivantes :
- Logiciel ifm Vision Assistant (→ Manuel du logiciel sur www.ifm.com)
Le système de coordonnées
Le système de coordonnées est défini selon la règle de la main droite.
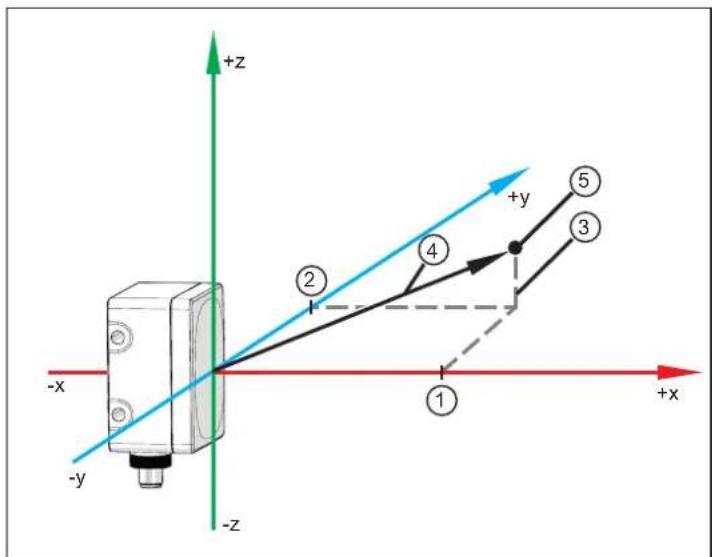
Fig. 8: Représentation schématique dans le système de coordonnées
1 : Position X 2 : Position Y
3: Position Z 4: Distance
5 : Objet cible

Fig. 9: Représentation schématique dans le système de coordonnées
1 : Roulis 2 : Tangage
Les déclarations suivantes s'appliquent au montage vertical du capteur.
La coordonnée x correspond à la distance longitudinale, avec un signe positif, en s'éloignant du centre de la surface active du capteur radar à l'origine des coordonnées.
La coordonnée y correspond à l'extension latérale, celle-ci, vue dans la direction x positive, étant émise à gauche du capteur avec un signe positif et à droite du capteur avec un signe négatif.
La coordonnée z correspond à l'altitude, celle-ci étant émise avec un signe positif au-dessus du capteur et avec un signe négatif en dessous du capteur.
L'appareil dispose d'un capteur d'inclinaison intégré et peut fournir le basculement de l'appareil. Le basculement autour de l'axe x est appelé « roulis » et le basculement autour de l'axe y est appelé « tangage ».
La vitesse de l'objet cible est fournie avec un signe négatif lorsque l'objet cible se rapproche du capteur.
La vitesse de l'objet cible est fournie avec un signe positif lorsque l'objet cible s'éloigne du capteur.
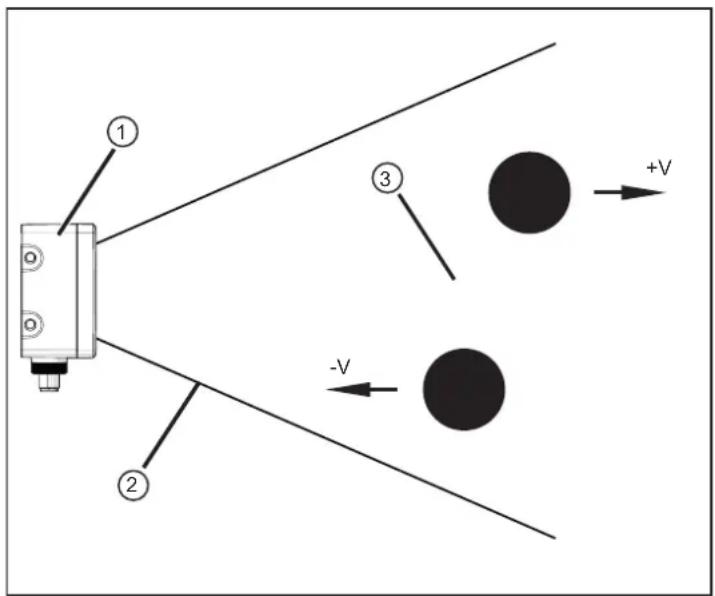
Fig. 10: Représentation schématique de la zone de détection
1 : Capteur 2 : Zone de détection
3 : Objets mobiles
11.1 Réglage en mode distance
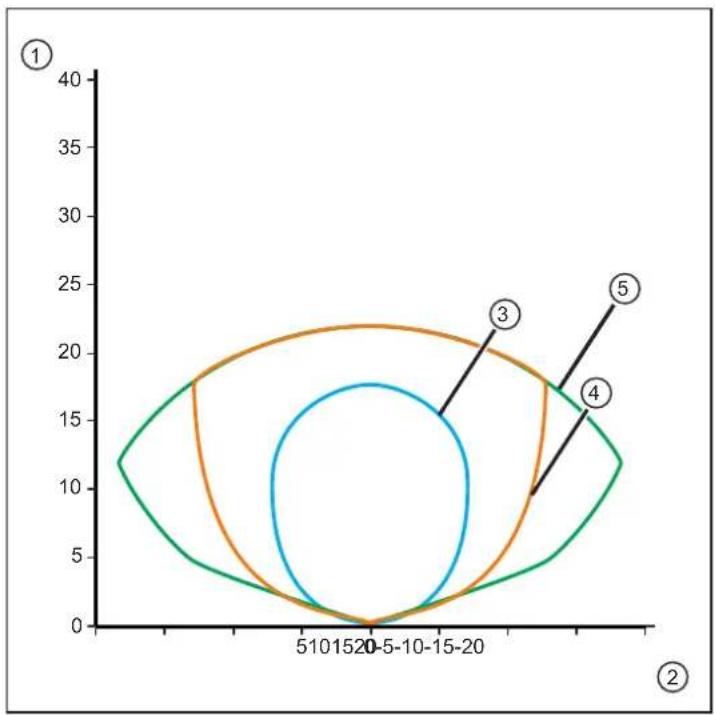
L'appareil a un angle d'ouverture horizontal de ±70^ . Le champ de vision (FOV) du capteur est variable et peut être réglé. Le capteur radar peut détecter plusieurs cibles à la fois.
La portée maximale de l'appareil dépend de l'objet cible et de la modulation sélectionnée. L'illustration montre, à titre d'exemple, le champ de vision de l'appareil pour trois objets pour le mode de fonctionnement « Standard ».

Pour plus d'informations ➕ Manuel du logiciel
contour
| Contour | Value | |---------|-------| | ① | 12 | | ② | 15 | | ③ | 22 | | ④ | 18 | | ⑤ | 16 |Fig. 11: Vue de dessus
1: Axe X en [m] 2: Axe Y en [m]
3 : Objet piéton (-10 dB) 4 : Objet réflecteur 50 mm (0 dB)
5 : Objet voiture (10 dB)
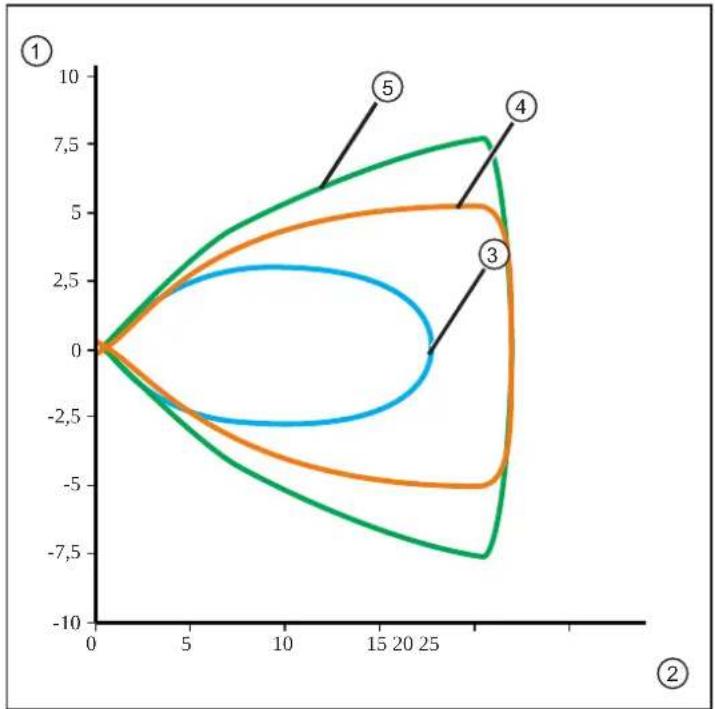
Fig. 12: Vue de côté
1 : Axe Z en [m] 2 : Axe X en [m]
3 : Objet piéton (-10 dB) 4 : Objet réflecteur 50 mm (0 dB)
5 : Objet voiture (10 dB)
11.2 Réglage en mode « area »
Angle d'ouverture et portée 25, paramètres de réglage différents.

Pour plus d'informations → Manuel du logiciel
11.3 Règles de sélection
Il est possible de choisir entre les règles de sélection suivantes :
| Règle de sélection Description | |
| Distance la plus courte La cible la plus proche du capteur est sélectionnée. | |
| Puissance la plus forte La cible qui a l’énergie réfléchie la plus élevée est sélectionnée. | |
| SER (RCS) le plus puissant La cible qui a le | SER (RCS) le plus puissant est sélectionnée. |
| Vitesse absolue la plus élevée La cible qui a la vitesse absolue la plus élevée est sélectionnée. | |
| Distance la plus longue La cible la plus éloignée du capteur est sélectionnée. | |
12 Correction de défauts
Cause possible Solution
Température ambiante trop élevée ▶ Réduire la température ambiante
Tension d'alimentation en dehors de la spécification (→) ▶ Adapter la tension d'alimentation fiche technique)
Si l'appareil se comporte de manière inattendue ou incorrecte :
Télécharger et installer les dernières versions du firmware et du logiciel ifm Vision Assistant ➕ 21. Téléchargement sur documentation.ifm.com.
▶ Mettre l'appareil hors tension (redémarrage)
▶ Rétablir les réglages usine
Si les problèmes persistent :
13 Maintenance, réparation et élimination
En cas d'utilisation correcte, l'appareil est sans entretien.
Dégager la face active et un espace libre éventuel de toute présence de dépôts ou de corps étrangers.
L'appareil ne peut pas être réparé.
L'appareil ne doit être réparé que par le fabricant.
S'assurer d'une élimination écologique de l'appareil après son usage selon les règlements nationaux en vigueur.
14 Homologations / normes
Pour les homologations et les normes, les informations suivantes sont disponibles :
- Normes d'essai et réglementations : documentation.ifm.com
- Déclaration de conformité UE et homologations : documentation.ifm.com
- Notes relatives aux homologations : Notice d'emballage de l'appareil et documentation.ifm.com
- Protection mécanique IK06 selon la norme CEI 62262.
Dans le champ d'application cRUus :
L'alimentation électrique ne doit s'effectuer que via des circuits TBTS/TBTP. L'alimentation de l'appareil d'après « limited energy » selon chapitre 9.4 UL 61010-1. Les circuits externes doivent être isolés selon la figure 102 de UL 61010-2-201.
La sécurité de l'appareil est conçue pour l'emploi dans les conditions environnantes suivantes :
- Utilisation à l'intérieur
- Altitude jusqu'à 2000 m
- Humidité d'air relative maximale 90 % HR, sans condensation
- Degré de pollution 2
Utiliser des câbles certifiés par UL de la catégorie CYJV 2/7/8 avec des données appropriées pour raccorder l'appareil.
Aucun traitement spécial n'est nécessaire pour le nettoyage de l'appareil.
15 Réglage usine
Les réglages usine des paramètres sont disponibles sur documentation.ifm.com.
Glossaire
Applications pour véhicules
Par application pour véhicules, on entend les applications autour d'un véhicule (non à son intérieur), un véhicule étant entendu comme une plateforme qui effectue des tâches spécifiques pour transporter quelqu'un ou quelque chose.
RCS
SER (RCS) est l'abréviation de Surface Efficace Radar (signature du radar). Il s'agit d'une mesure de la capacité d'une cible à être détectée par un radar, c'est-à-dire de la proportion de l'énergie émise qui est réfléchie par une cible. Plus la valeur SER (RCS) est élevée, meilleure est la réflectivité et donc la visibilité de la cible. La valeur SER (RCS) dépend de facteurs tels que le matériau, la taille et l'angle d'attaque, mais pas de la distance de la cible de réflexion, tant qu'une réflexion n'est pas affectée par la distance.