
EHMD-40-RE-GP - Module pneumatique Festo - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil EHMD-40-RE-GP Festo au format PDF.

| Intitulé | Description |
|---|---|
| Type de produit | Actionneur électrique |
| Dimensions | 40 mm de largeur |
| Force de poussée | Variable selon la configuration |
| Alimentation | 230 V AC |
| Utilisation | Applications industrielles pour le positionnement et le contrôle de mouvement |
| Maintenance | Vérification régulière des connexions électriques et de l'état mécanique |
| Sécurité | Respecter les normes de sécurité électrique lors de l'installation |
| Informations générales | Produit conçu pour une utilisation dans des environnements industriels |
FOIRE AUX QUESTIONS - EHMD-40-RE-GP Festo
Questions des utilisateurs sur EHMD-40-RE-GP Festo
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Module pneumatique au format PDF gratuitement ! Retrouvez votre notice EHMD-40-RE-GP - Festo et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil EHMD-40-RE-GP de la marque Festo.
MODE D'EMPLOI EHMD-40-RE-GP Festo
EHMD-40-RE-... Module préhenseur pivotant
Traduction de la notice originale
© 2022 Tous droits réservés à la Festo SE & Co. KG
Tous les documents disponibles sur le produit→ www.festo.com/sp.
2 Sécurité
2.1 Instructions générales de sécurité
- Utiliser le produit uniquement dans son état d'origine sans y apporter de modifications non autorisées.
- Utiliser le produit uniquement dans un état fonctionnel irréprochable.
- Tenir compte des marquages sur le produit.
- Stocker le produit dans un endroit frais, sec, à l'abri des UV et de la corrosion. Veiller à ce que les périodes de stockage restent courtes.
-Avant toute intervention sur le produit, couper l'alimentation en énergie et la sécuriser contre toute remise en marche. - Respecter les couples de serrage. Sans indication spéciale, la tolérance est de ± 20 %.
2.2 Usage normal
Conformément à l'usage prévu le produit est destiné à saisir, maintenir et faire pivoter des charges utiles, p. ex. des pièces à usiner.
2.3 Emploi inadéquat prévisible
Ne pas saisir la charge utile dans le sens de déplacement « Ouvrir ».


Fig. 1 : Préhension non autorisée
2.4 Qualification du personnel spécialisé
Travaux sur le produit uniquement par du personnel qualifié capable d'évaluer les travaux qui lui sont confiés et de détecter les dangers. Le personnel spécialisé possède des connaissances et une expérience en matière de technologie de commande électropneumatique.
3 Informations complémentaires
-Accessoires → www.festo.com/catalogue.
4 Catalogue produits
4.1 Fonction
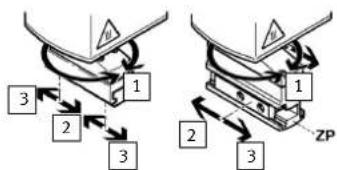
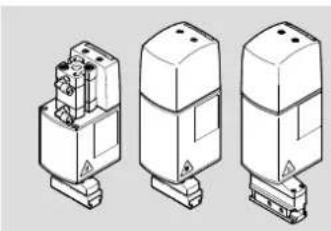
Fig. 2 : Principe de fonctionnement rotation et préhension
1 Mouvement de la pince "Rotation"
2 Mouvement du mors de préhension "Fermeture"
3 Mouvement du mors de préhension "Ouverture"
text_image
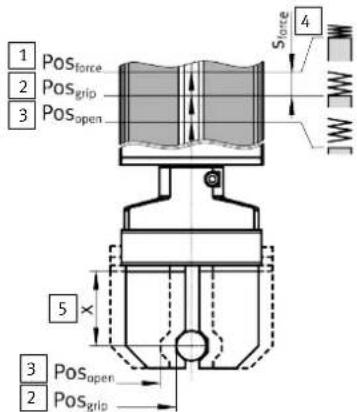
1 POSforce 2 POSgrip 3 POSopen 4 5 × 3 POSopen 2 POSgrip1 Position de la force de préhension
2 Position de préhension
3 Fin de course ouverte
4 Course supplémentaire de la force de préhension
5 Bras de levier par rapport à la charge utile
Fig. 3 : Force de préhension via course du ressort
Le produit est un module combiné de rotation et de préhension.
-Vireur électrique EHMD-...-RE :
Le mouvement de rotation du moteur pas à pas est transmis directement à la pince via l'arbre du moteur et peut être positionné librement. Le codeur incrémental du moteur pas à pas peut être utilisé pour un fonctionnement en boucle de régulation fermée et émet une impulsion zéro par rotation de la pince pour la mise en référence. Au départ de l'usine, l'impulsion zéro ZP du codeur et l'axe longitudinal de la pince sont alignés parallèlement à la surface de montage.
-Entraînement électrique de la pince EHMD-...-GE/-GE-16 :
Le mouvement de rotation du moteur pas à pas est transmis aux mors de la pince via un mécanisme et peut être positionné librement. Le codeur incrémental du moteur pas à pas peut être utilisé pour un fonctionnement en boucle de régulation fermée. Dans le cas des régulateurs de servo-entraînement avec limitation de couple, une force de préhension définie peut être générée en fonctionnement en boucle de régulation fermée. Dans le cas des régulateurs de servo-entraînement sans contrôle de couple, une force de préhension définie peut être générée en mode positionnement via un ressort situé dans l'entraînement de la pince. Une fois que les doigts de la pince sont en contact avec la pièce, l'entraînement de la pince est déplacé d'une certaine distance s force, ce qui tend le ressort. En cas de coupure de l'alimentation électrique, la force de préhension peut chuter jusqu'à la force de préhension résiduelle.
-Entraînement de pince pneumatique EHMD-...-GP :
le mouvement linéaire du vérin pneumatique est transmis aux mors de pince via un mécanisme. Deux positions sur le vérin pneumatique peuvent être surveillées avec des capteurs de proximité. En cas de défaillance de l'alimentation pneumatique, la force de préhension n'est pas assurée. Un dispositif de sécurité de force de préhension peut par ex. par une alimentation en air comprimé ininterrompue.
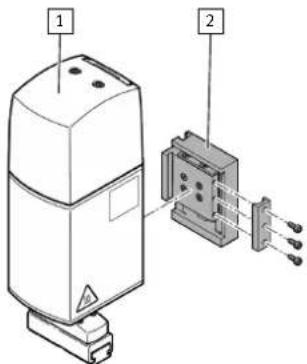
4.2 Structure du produit
Catalogue produits EHMD-40-RE-...
text_image
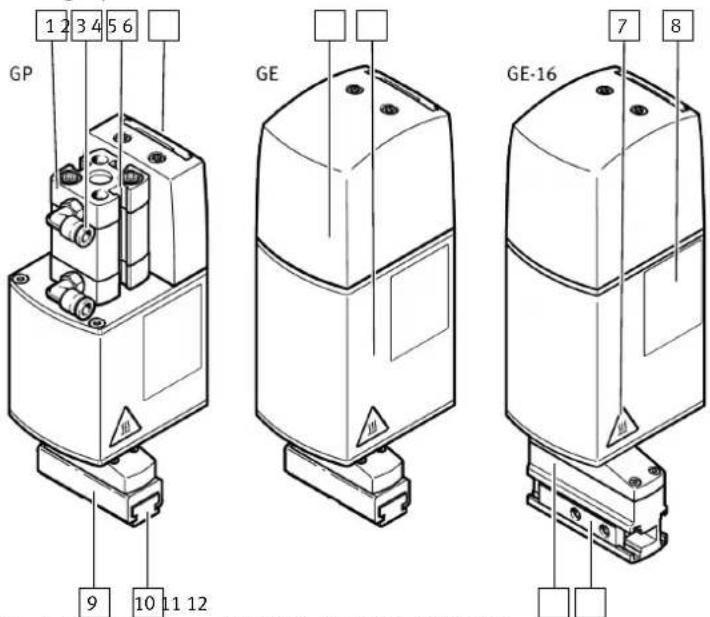
1 2 3 4 5 6 GP GE GE-16 7 8 9 10 11 12Fig. 4 : Structure du produit EHMD-40-RE-GP/-GE/-GE-16
1 Entraînement de pince pneumatique
2 Raccord pneumatique
3 Rainure pour capteur
4 Raccordement électrique, moteur et codeur
7 Avertissement : surface chaude
8 Étiquette produit
9 Pince rotative à faible course
10 Mors de pince avec guidage inférieur
5 Entraînement électrique de la pince avec codeur
6 Vireur électrique avec codeur
11 Pince rotative à longue course
12 Mors de pince avec guidage latéral
5 Montage
i
Perte de fonction du mouvement des mors de pince
Des vis de fixation trop longues lors de la fixation des doigts de pince entraînent un blocage des mors de pince.
- Respecter la profondeur de vissage maximale.
i
Perte de fonction du mouvement rotatif
Le desserrage de la vis de serrage sur la pince entraîne une perte de la mise en référence ou peut entraîner une défaillance de l'entraînement de la pince lors de la poursuite du fonctionnement.
- Ne pas desserrer la vis de serrage sur la pince.
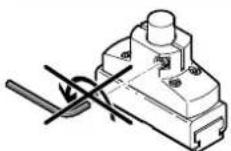
Fig. 5 : Vis de serrage sur la pince.
5.1 Montage des doigts de pince sur EHMD-...-GE/-GP
Accessoires fournis
-4 vis M3 x 12
-4 douilles de centrage ZBH-5
text_image
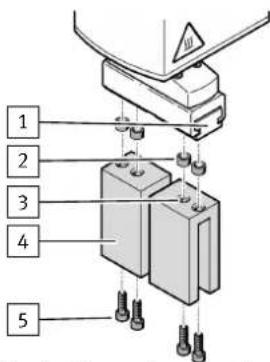
1 2 3 4 51 Mors de pince avec trous taraudés et trous de centrage
2 Douille de centrage
3 Trou débouchant avec trou de cen-trage
4 Doigt de pince
5 Vis de fixation
Fig. 6 : Monter directement les doigts
de pince, exemple ébauche mors de pinces BUB-HGPT
- Placer les douilles de centrage 2 dans les trous de centrage 3.
- Appliquer du frein-filet de force moyenne sur le filetage des vis de fixation 5.
- Positionner les doigts de pince 4 sur les mors de pince 1.
- Serrer les vis de fixation 5.
Respecter le couple de serrage maximal et la profondeur de vissage maximale.
Type -GE/-GP
| Vis M3 | |
| Profondeur de vissage max. dans le mors de pince [mm] 8,3 | |
| Couple de serrage max. [Nm] 1,2 | |
| Douille de centrage ZBH-5 | |
| Trou de centrage et tolérance de trou de centrage [mm] 5 | H9 |
Tab. 1 : Information sur les accessoires de fixation
5.2 Montage des doigts de pince sur EHMD-...-GE-16
Accessoires fournis
-4 douilles de centrage ZBH-5
1 Mors de pince avec trous taraudés et trous de centrage
2 Douille de centrage
3 Trou débouchant avec trou de cen-trage
4 Vis de fixation
5 Doigt de pince
Fig. 7 : Montage direct des doigts de pince
- Placer les douilles de centrage 2 dans les trous de centrage 3.
- Appliquer du frein-filet de force moyenne sur le filetage des vis de fixation 4.
-
Positionner les doigts de pince 5 sur les mors de pince 1.
-
Serrer les vis de fixation 4.
Respecter le couple de serrage maximal et la profondeur de vissage maximale.
| Type -GE-16 | |
| Vis M3 | |
| Profondeur de vissage max. dans le mors de pince [mm] 4,6 | |
| Couple de serrage max. [Nm] 1,2 | |
| Douille de centrage ZBH-5 | |
| Trou de centrage et tolérance de trou de centrage [mm] 5 | H9 |
Tab. 2 : Information sur les accessoires de fixation
5.3 Montage des doigts de pince avec équerre sur EHMD-40-RE-GE-16
Accessoires fournis
- 2x équerres
-8x vis à tête fraisée M3 x 6
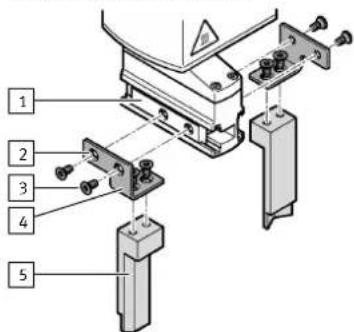
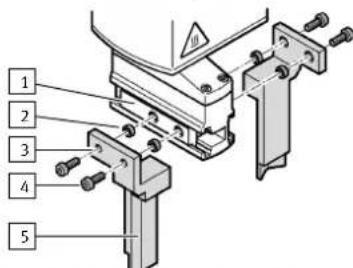
1 Mors de pince avec trous taraudés et trous de centrage
2 Trou débouchant avec renfoncement
3 Vis de fixation
4 Équerre
5 Doigt de pince
Fig. 8 : Montage des doigts de pince avec équerre
- Appliquer du frein-filet de force moyenne sur le filetage des vis de fixation 3.
- Positionner les doigts de pince 5 contre les équerres 4.
- Serrer les vis de fixation 3.
- Positionner les équerres 4 contre les mors de pince 1.
- Serrer les vis de fixation 3.
Respecter le couple de serrage maximal et la profondeur de vissage maximale.
| Type -GE-16 | |
| Vis à tête fraisée | M3 x 6 |
| Profondeur de vissage max. dans le mors de pince [mm] 4,6 | |
| Couple de serrage max. [Nm] 1,2 |
Tab. 3 : Information sur les accessoires de fixation
5.4 Montage du module préhenseur pivotant
1 Module préhenseur pivotant EHMD avec profilé en queue d'aronde
2 Fixation EHAM-E20-... avec profilé en queue d'aronde
Fig. 9 : Fixation en queue d'aronde, exemple de fixation EHAM-E20-40-Z
Informations complémentaires relatives à la fixation en queue d'aronde → Instructions, → www.festo.com/sp.
5.5 Montage du capteur de proximité
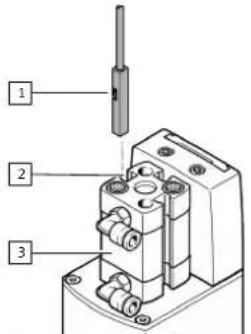
1 Capteur de proximité
2 Rainure profilée
3 Vérin pneumatique
Fig. 10 : Montage du capteur de proximité
Informations complémentaires relatives la fixation du capteur de proximité → Instructions, → www.festo.com/sp.
6 Installation
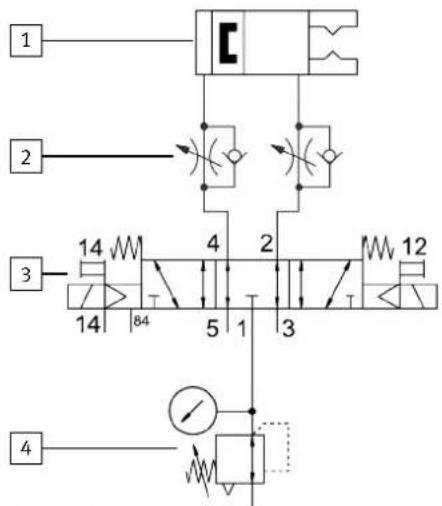
6.1 Installation pneumatique
Vue d'ensemble de la commande pneumatique avec régulation de la force et de la vitesse
i
Garantie de la force de préhension
Garantir la préservation de la force de préhension en cas de défaillance de l'alimentation pneumatique, p. ex., utiliser une alimentation pneumatique sans coupure.
i
Rotation de la pince
Ne pas faire pivoter la pince lorsque le vérin pneumatique est mis sous pression dans le sens de l'ouverture.
- Avant la rotation, mettre la pince ouverte hors pression p. ex., utiliser un distributeur 3/5 avec position de repos mise à l'échappement.
- Ou mettre le vérin pneumatique sous pression dans le sens de fermeture avant la rotation.
flowchart
graph TD
1["Component 1"] --> A["Valve"]
2["Component 2"] --> B["Directional Valve 1"]
3["Component 3"] --> C["Valve 14, 84, 5"]
4["Component 4"] --> D["Pressure Gauge"]
A --> E["Valve 4"]
B --> F["Valve 2"]
C --> G["Valve 12"]
D --> H["Valve 3"]
E --> I["Return Line"]
F --> J["Return Line"]
G --> K["Return Line"]
Fig. 11 : Commande pneumatique
1 Vérin pneumatique, à double effet
2 Limiteurs de débit externes
3 Distributeur 5/3 externe avec position de repos mise à l'échappement
4 Manodétendeur externe
Raccordement de l'entraînement de pince pneumatique EHMD-...-GP
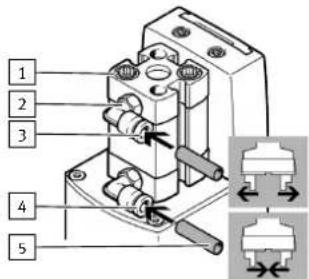
Fig. 12 : Raccords pneumatiques sur l'EHMD-...-GP
1 Vérin pneumatique, à double effet
2 Raccord en L orientable QS-4 avec étrangleur fixe intégré
3 Raccord d'air comprimé "Ouvrir pince"
4 Raccord d'air comprimé "Fermer pince"
5 Tuyau en plastique avec ∅ extérieur de 4 mm
6.2 Installation, électrique
i
Une installation non conforme CEM peut engendrer des interférences de signaux sur le câble de codeur, le câble moteur ou les câbles de communication.
i
Potentiel de référence sûr sur l'alimentation électrique du régulateur de servo-entraînement
Utiliser des circuits électriques TBTS conformes EN 60204-1 pour l'alimentation électrique. Le potentiel de référence secondaire du bloc d'alimentation TBTS pour le régulateur de servo-entraînement doit être connecté au système de conducteur de protection.
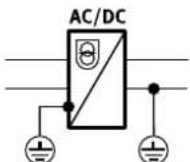
Fig. 13 : Raccorder le potentiel de référence secondaire du bloc d'alimentation TBTS
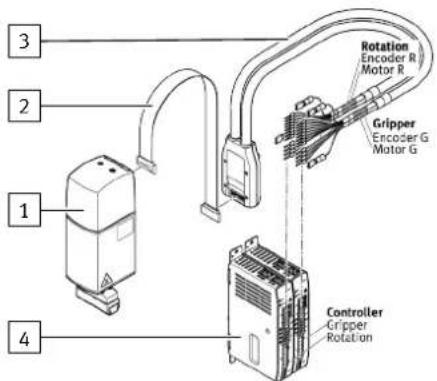
Fig. 14 : Vue d'ensemble du système des interfaces électriques, exemple EHMD-40-RE-GE
1 Module préhenseur pivotant EHMD
2 Câble moteur NEBM-F1W31-...
3 Câble moteur NEBM-SF1W31-...
4 Régulateur de servo-entraînement
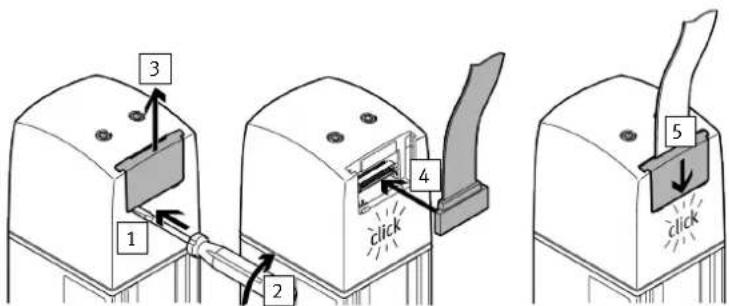
Raccordement du câble moteur NEBM-F1W31-...
text_image
1 2 3 4 5 clickFig. {!nr!} 15
-
Placer le tournevis dans une rainure du couvercle 1 et le tourner 2.
-
Faire glisser le couvercle déverrouillé vers le haut 3.
-
Enfoncer la fiche du câble moteur dans le raccord électrique jusqu'à ce qu'elle s'enclenche [4].
-
Faire glisser le couvercle vers le bas jusqu'à ce qu'il s'enclenche 5.
Tab. 4 : Affectation des broches
Raccordement électrique du moteur et du codeur
| Connecteur mâle, à 31 pôles | Broche | Fonction Description | |
| 31 17[IMAGE]1 16 | 1 I Codeur de rotation | ||
| 2 | B | ||
| 3 | A | ||
| 4 I - Codeur de la pince | |||
| 5 | B | ||
| 6 | A | ||
| 7 Blindage Blindage | |||
| 8 +5 V DC - Codeur de la pince | |||
| 9 +5 V DC Codeur de rotation | |||
| 10 Blindage Blindage | |||
| 11 Phase B Moteur de rotation | |||
| 31 17[IMAGE]1 16 | 12 Phase B Moteur de rotation | ||
| 13 Phase A | |||
| 14 | |||
| 15 Phase B – Moteur pince | |||
| 16 Phase A | |||
| 17 Phase A/ | |||
| 18 Phase B/ | |||
| 19 Phase A/ Moteur de rotation | |||
| 20 | |||
| 21 Phase B/ | |||
| 22 | |||
| 23 Blindage Blindage | |||
| 24 GND Codeur | |||
| 25 Blindage Blindage | |||
| 26 A/ – Codeur de la pince | |||
| 27 B/ | |||
| 28 I/ | |||
| 29 A/ Codeur de rotation | |||
| 30 B/ | |||
| 31 I/ | |||
7 Mise en service
Entraînement de pince pneumatique EHMD-...-GP
Réglages en option.
- Régler la force de préhension via la pression de service au niveau du manodétendeur.
- Régler la vitesse de préhension au niveau des limiteurs de débit externes.
- Régler le détecteur de proximité sur la position de détection.
Vireur électrique et entraînement de la pince EHMD-...-RE-GE/-GE-16
i
Course de mise en référence
- Déplacer le dispositif jusqu'en butée dans le sens d'ouverture.
- Procéder aux déplacements à vitesse réduite.
- Toutes les notes d'application relatives à la mise en service → www.festo.com/sp.
8 Mode
AVERTISSEMENT
Risque de brûlure en cas de contact avec la surface à haute température du boîtier.
Les parties métalliques du boîtier peuvent atteindre des températures élevées pendant le fonctionnement.
Le contact avec des parties métalliques du boîtier peut causer des brûlures.
- Ne pas toucher les parties métalliques du boîtier.
- Après avoir coupé l'alimentation électrique, laisser l'appareil refroidir à température ambiante.
9 Maintenance
9.1 Nettoyage
i
Produits de nettoyage autorisés.
Respecter la classe de protection.
• Éthanol, 96 % maximum
- Peroxyde d'hydrogène 5 % maximum
Nettoyer le produit avec un chiffon propre et doux.
9.2 Lubrification
Le produit est livré lubrifié d'origine. Une lubrification ultérieure n'est pas nécessaire.
10 Dysfonctionnements
10.1 Dépannage
| Erreur de description | Cause | Solution |
| La pince ne maintient pas fermement la charge utile. | La pression de service est trop faible. | Augmenter la pression de service. Observer la valeur maximale autorisée. |
| La force de préhension est trop faible. | Augmenter la force de préhension. | |
| La charge utile est trop lourde. | Choisir un autre produit. |
| Erreur de description | Cause | Solution |
| La pince ne s'ouvre pas et ne se ferme pas. | EHMD-...-GP : l'air comprimé manque. | Contrôler l'alimentation pneumatique et les raccords d'alimentation. |
| La pince ou le mécanisme de préhension est défectueux. | Remplacer le module préhenseur pivotant→ www.festo.com/catalogue. | |
| La vis de serrage de la pince a été desserrée et une mise en référence a été effectuée. | ||
| Les vis de fixation dans les mors de pince sont trop longues. | Utiliser des vis de fixation plus courtes. Respecter la profondeur de vissage maximale. | |
| Le vireur ne pivote pas. | Le moteur pas à pas ou le mécanisme de rotation est défectueux. | Remplacer le module préhenseur pivotant→ www.festo.com/catalogue. |
| La position d'interrogation au niveau du vérin pneumatique n'est pas reconnue. | Le capteur de proximité est mal réglé. | Contrôler et réajuster la position du capteur de proximité. |
| Le capteur de proximité est défectueux. | Remplacer le capteur de proximité→ www.festo.com/catalogue. |
Tab. 5 : Dépannage
11 Démontage
- Couper les alimentations en énergie électrique et pneumatique et les protéger contre toute remise en marche.
- EHMD-...- GP : mettre les conduites d'air comprimé à l'échappement.
- Débrancher les installations électriques et pneumatiques.
- Desserrer l'élément de fixation et retirer le produit.
- Retirer les éléments d'extension, p. ex. doigts de pince rapportés.
12 Caractéristiques techniques
12.1 Caractéristiques techniques, générales EHMD-...-GP/-GE/-GE-16
| Type | -GE | -GE-16 -GP | ||
| Structure de la construction | Vireur électrique | |||
| Pince électrique | Pince pneumatique | |||
| Position de montage | indifférente | |||
| Charge nominale avec doigts de pince [g] | 250 | 250 | 250 | |
| Poids du produit [g] | 681 | 724 | 577 | |
| Conditions de fonctionnement et environnementales | ||||
| Température ambiante [°C] | 0 ... +40 | |||
| Conditions de transport et conditions de stockage [°C] | -20 ... +70 | |||
| Humidité relative de l'air [%] | 0 ... 85, sans condensation | |||
| Degré de protection | IP20 | |||
| Résistance à la corrosion | KBK11) | |||
| Niveau acoustique permanent LpAeq selon DIN 45635-01Cl.2 [dBA] < 60 | ||||
| Niveau de sévérité pour la tenue aux vibrations et aux chocs | NS12) | |||
| Matériaux | ||||
| Boîtier et couvercle : -Entraînement de la pince | PA renforcé | |||
| Boîtier : -Pince -Vireur -Vérin pneumatique | Aluminium anodisé | |||
| Mors de pince | PEEK, renforcé | |||
1) Faible effet de corrosion. Utilisation en intérieur à sec ou protection de transport et protection de stockage. S'applique également aux pièces situées derrière les obturateurs dans la partie intérieure invisible ou aux pièces qui sont recouvertes dans l'application, p. ex. tourillon d'entraînement.
2) L'indication ne s'applique qu'aux fixations sans compensation Z, p. ex. EHAM-E20-40.
Tab. 6 : Caractéristiques techniques, générales EHMD-...-GP/-GE/-GE-16
Accentuation du niveau de sévérité (NS)
| Mise sous charge due aux vibrations | |||||
| Gamme de fréquence [Hz] | Accélération [m/s2] | Débattement [mm] | |||
| NS1 | NS2 | NS1 | NS2 | NS1 | NS2 |
| 2 ... 8 | 2 ... 8 | - | - | =3,5 | ±3,5 |
| 8 ... 27 | 8 ... 27 | 10 | 10 | - | - |
| 27 ... 58 | 27 ... 60 | - | - | =0,15 | ±0,35 |
| 58 ... 160 | 60 ... 160 | 20 | 50 | - | - |
| 160 ... 200 | 160 ... 200 | 10 | 10 | - | - |
| Mise sous charge du aux chocs | |||||
| Accélération [m/s2] | Durée [ms] | Chocs par sens de déplacement | |||
| NS1 | NS2 | NS1 | NS2 | NS1 | NS2 |
| +150 | +300 | 11 | 11 | 5 | 5 |
| Mise sous charge due aux chocs permanents | |||||
| Accélération [m/s2] | Durée [ms] | Chocs par sens de déplacement | |||
| ±150 | 6 | 1000 | |||
Tab. 7 : Accentuation du niveau de sévérité (NS)
12.2 Caractéristiques techniques, actionneur pneumatique
Pince pneumatique EHMD-...-GP
| Type -GP | |
| Pince | |
| Principe de fonctionnement Pince à deux mors de pince parallèles | |
| Course par mors de pince [mm] 5 | |
| Force de préhension étroite par mors de [N] 25 pince à 6 bar | |
| Force de préhension résiduelle en cas [N] > 10 de chute de pression | |
| Vérin | |
| Structure de la construction Vérin pneumatique, à double effet | |
| Pression de service [MPa] ([psi] [bar]) | 0,15 ... 0,8(21,755 ... 116,03)(1,5 ... 8) |
| Fluide de service Air comprimé selon ISO 8573-1:2010 | [7:4:4] |
Tab. 8 : Caractéristiques techniques, pince pneumatique EHMD-...-GP
12.3 Caractéristiques techniques, actionneurs électriques
Pince électrique EHMD-...-GE/-GE-16
| Type -GE -GE-16 | |||
| Pince | |||
| Principe de fonctionnement Pince à deux mors de pince parallèles | |||
| Course par mors de pince [mm] 0 ... 5 0 ... 15 | |||
| Force de préhension [N] 7 ... 35 | 3 ... 14 | ||
| Force de préhension max. en mode boucle de régulation fermée | [N] 35 | 14 | |
| Force de préhension max. en mode boucle de régulation ouverte | [N] 20 ... 25 | 6 ... 8 | |
| Force de préhension résiduelle en cas de panne de courant | [N] > 10 | >4 | |
| Constante d'avance d'un mors de pince | [mm/tr] | 1,478 | 4,4 |
| Vitesse max. par mors de préhension | [mm/s] | 25 | 70 |
| Vitesse max. admissible en cas de mise en référence en butée | [mm/s] | 25 | |
| Jeu axial d'inversion | [mm] 0,3 | 0,8 | |
| Moteur | |||
| Principe de fonctionnement Moteur pas à pas hybride avec vis mère, biphasé, bipolaire | |||
| Tension nominale | [V DC] | 24 | |
| Courant nominal | [A] | 0,5 | |
| Couple de maintien avec courant nominal | [Nm] | 0,043 | |
| Résistance par phase | [Ω] | 5,6 ± 15 % | |
| Inductance par phase | [mH] | 4,0 ± 20 % | |
| Angle de pas | [°] | 1,8 ± 5 % | |
| Classe de protection d'isolation | B | ||
| Moment d'inertie en référence à l'arbre du moteur | [kgm3] | 90 x 10-6 | |
| Codeur | |||
| Principe de fonctionnement Codeur incrémental avec principe de mesure optique, piste A, B et indice zéro | |||
| Interface électrique | RS422, TTL | ||
| Tension de service | [V DC] | 5 ± 10 % | |
| Impulsions / rotation | [1/tr] | 500 | |
| Intensité absorbée, sans charge | [mA] | 30 | |
Tab. 9 : Caractéristiques techniques pince électrique EHMD-...-GE/-GE-16
Vireur électrique EHMD-...-RE-...
| Type -GE -GE-16 -GP | ||||
| Moteur | ||||
| Principe de fonctionnement Moteur pas à pas hybride,à 2 phases, bipolaire | ||||
| Tension nominale [V DC] | 24 | |||
| Courant nominal [A] | 0,9 | |||
| Couple de maintien avec courant nominal [Nm] | 0,3 | |||
| Vitesse de rotation de sortie max. [tr/min] | 240 | |||
| Résistance par phase [Ω] | 5,8 ± 15 % | |||
| Inductance par phase [mH] | 11 ± 20 % | |||
| Angle de pas [°] | 1,8 ± 5 % | |||
| Classe de protection d'isolation | B | |||
| Rapport de transmission | Entraînement direct 1:1 | |||
| Moment d'inertie avec pince [kgm3] | 1,25 x 10-5 | 2,34 x 10-5 | 1,25 x 10-5 | |
| Charge radiale sur l'arbre admissible [N] 5 | ||||
| Charge axiale sur l'arbre admissible [N] 5 | ||||
| Type -GE | -GE-16 | -GP | |||
| Codeur | |||||
| Principe de fonctionnement Codeur incrémental avec principe de mesureoptique, piste A, B et indice zéro | |||||
| Interface électrique | RS422, TTL | ||||
| Tension de service [V DC] | 5 ± 10 % | ||||
| Impulsions/rotation [1/tr] | 500 | ||||
| Intensité absorbée, sans charge [mA] | < 60 | ||||
Tab. 10 : Caractéristiques techniques, vireur électrique