
LD-G-44 - Décodeur numérique Tams Elektronik - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil LD-G-44 Tams Elektronik au format PDF.

| Caractéristiques techniques | Décodeur numérique Tams Elektronik LD-G-44, compatible avec divers systèmes de contrôle. |
|---|---|
| Utilisation | Conçu pour la réception et le décodage de signaux numériques dans les modèles réduits de trains. |
| Maintenance | Vérifier régulièrement les connexions et nettoyer les contacts pour assurer un fonctionnement optimal. |
| Sécurité | Utiliser uniquement avec une alimentation conforme aux spécifications du fabricant pour éviter les dommages. |
| Informations générales | Produit de la marque Tams Elektronik, reconnu pour sa fiabilité dans le domaine des décodeurs numériques. |
FOIRE AUX QUESTIONS - LD-G-44 Tams Elektronik
Questions des utilisateurs sur LD-G-44 Tams Elektronik
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Décodeur numérique au format PDF gratuitement ! Retrouvez votre notice LD-G-44 - Tams Elektronik et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil LD-G-44 de la marque Tams Elektronik.
MODE D'EMPLOI LD-G-44 Tams Elektronik
Décodeurs de locomotive LD-G-44
Mode d'emploi
DCC
DCC-AMM
Rail



N° d'article 41-04440
N° d'article 41-04441
Version 1.0 | Mise à jour : 06/2024
Tous droits réservés, notamment le droit de reproduction et de distribution ainsi que de traduction. Les copies, reproductions et modifications sous quelque forme que ce soit nécessitent l'autorisation écrite de Tams Elektronik GmbH. Nous nous réservons le droit d'apporter des modifications techniques.
Impression du mode d'emploi
Le formatage est optimisé pour l'impression recto-verso. Le format standard des pages est DIN A5. Si vous préférez un affichage plus grand, il est recommandé d'imprimer sur le format DIN A4.
Remarques sur les normes
Les normes RailCommunity suivantes sont mentionnées dans ce manuel :
■RCN-217 "Protocole de retour d'information DCC – RailCom"
■RCN-218 "DCC-A - Inscription automatique"
■RCN-227 "DCC Affectation de fonction étendue"
■RCN-530 "Limitation du courant d'enclenchement pour décodeurs et boosters"
■RCN-600 "Module SUSI-Bus Interface d'extension"
Les normes sont publiées sous : www.railcommunity.org
Remarques concernant RailCom®
RailCom® est une marque allemande enregistrée au nom de Lenz Elektronik pour la classe 9 "Commandes électroniques" sous le numéro 301 16 303 ainsi qu'une marque déposée pour les classes 21, 23, 26, 36 et 38 "Electronic Controls for Model Railways" aux États-Unis sous le numéro d'enregistrement 2,746,080. Afin d'améliorer la lisibilité du texte, nous avons renoncé à y faire référence à chaque fois que ce terme est utilisé.
\*\*Produits d'autres fabricants
Les fabricants suivants et leurs produits sont cités dans cet ouvrage :
1.1. Contenu du paquet....5
1.2. Accessoires nécessaires....5
1.3. Du bon usage du matériel....7
1.4. Consignes de sécurité....7
2. Le décodeur de locomotive LD-G-44....8
2.1. Mode numérique....8
2.2. Mode analogique....9
2.3. Protection contre la surcharge....10
2.4. Commande du moteur....11
2.5. Déroulement automatisé....14
2.5.1. Procédure de freinage....14
2.5.2. Freinage en cas de tension continue....15
2.5.3. Découplage automatique ("valse de découplage").......16
2.5.4. Fonction de manœuvre....16
2.5.5. Activation et désactivation en fonction de la vitesse....16
2.5.6. Arrêt/démarrage avec une fonction....16
2.6. Sorties et interfaces....17
2.7. Déclenchement des actions....19
2.8.Communication avec RailCom....20
2.9. Inscription automatique selon le RCN-218 (DCC-A)....20
3. Connexions....22
3.1. Conseils concernant la sécurité....22
3.2. Pour réussir vos soudures....23
3.3. Éviter les dommages irréparables sur le décodeur....24
3.4. Affectation des connexions LD-G-44 | Face avant....25
3.5. Affectation des connexions LD-G-44 | Face arrière....26
3.6. Utilisation du LD-G-44 dans des locomotives à moteur à CA....27
3.7. Monter le décodeur....27
3.8. Connexion de DEL aux sorties de fonction....29
3.9. Connexion d'accessoires électromagnétiques....31
3.10. Connexion des entrées de commutation....31
3.11. Connexion d'un condensateur de soutien ou d'un circuit tampon....33
3.12. Connexion d'un module SUSI....34
3.13. Finition....34
- Programmer....34
4.1. Programmation avec des centrales DCC....34
4.2. Programmation avec des centrales Motorola....35
- Variables de configuration et registres....36
5.1. Aperçu des variables de configuration LD-G-44....36
5.2. Réglages de base....38
5.3. Paramétrage de l'adresse....39
5.4. Réglage de la commande du moteur....40
5.5. Function mapping....43
5.6. Effets appliqués aux sorties....49
5.7. Réglages pour les entrées de commutation....52
5.8. Réglages pour RailCom et DCC-A....53
5.9. Réglages pour la conduite....54
5.10. Paramétrage pour fonctionnement analogique....56
5.11. Sensibilité de la protection contre les surcharges....57
5.12. Fonctions d'aide....58
5.13. Informations....58
- Liste de contrôle pour la recherche et le dépannage des erreurs....59
6.1. Problèmes lors de la programmation du décodeur....59
6.2. Problèmes lors de la conduite....59
6.3. Problèmes de retour d'information du décodeur....60
6.4. Problèmes lors de la commutation des fonctions....61
6.5. Problèmes lors de la commutation via l'entrée de commutation....61
6.6. Problèmes en mode analogique....61
6.7. Hotline technique....62
6.8. Réparations....62
-
Données techniques....63
-
Garantie, Conformité UE & DEEE....65
8.1. Déclaration de garantie....65
8.2. UE-Déclaration de conformité....66
8.3. Déclarations sur la directive DEEE....66
1. Premier pas
Ce mode d'emploi vous aide pas à pas lors de l'installation et de la mise en œuvre du décodeur. Avant de brancher le décodeur et de le mettre activé, veuillez lire entièrement ce manuel, en particulier les consignes de sécurité et la section sur les erreurs éventuelles et leur élimination. Vous connaîtrez ainsi la marche à suivre et éviterez des erreurs coûteuses à réparer.
Conservez soigneusement le mode d'emploi afin de pouvoir y recourir en cas de panne ultérieure éventuelle. En cas de transmission à une tierce personne du décodeur, remettez lui aussi le mode d'emploi.
1.1. Contenu du paquet
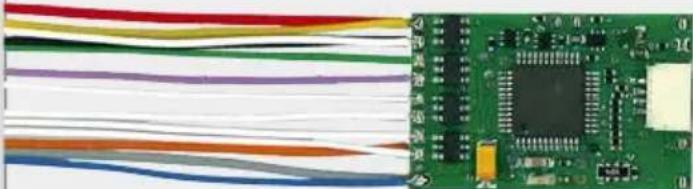
- un décodeur de locomotive. Remarque : Selon la production, il peut arriver que la platine ne soit pas complètement équipée. Ceci n'est pas un défaut.
■un condensateur électrolytique, capacité : 220 μF, tension minimale : 35 V
| Versions LD-G-44 (numéro d’article) | Câbles de connexion / Interface |
| 41-04440 sans cables interface | |
| 41-04441 avec cables (longueur des câbles : 100 mm) | |
1.2. Accessoires nécessaires
Outils et consommables
Pour le montage et la connexion des décodeurs non équipés d'une interface il vous faut :
■ un fer à souder avec contrôle de la température et une pointe fine et un support de dépôt ou une station de soudage contrôlée,
■un grattoir, un chiffon ou une éponge,
■un coussin résistant à la chaleur,
- une petite paire de pinces coupantes latérales, une paire de pinces à dénuder et si nécessaire, une pincette et une pince à becs plats,
■soudure électronique (de préférence de 0,5 à 0,8 mm de diamètre)
Pour le raccordement de décodeurs sans interface ou de câbles de raccordement soudés, vous avez également besoin de fils conducteurs. Utilisez si possible des fils à brins multiples fins, flexibles ou très flexibles, composés de plusieurs fils individuels minces et faciles à poser dans le véhicule. Sections recommandées :
■>0,04 mm² pour les sorties de fonction
>0,05mm^2 pour les connexions au retour pour toutes les fonctions et au condensateur electrolytique
■ > 0, 05 mm^2 pour les connexions au moteur et aux roues/au frotteur
Raccordement à un moteur à courant alternatif
Pour connecter un décodeur LD-G-44 à un moteur à courant alternatif il vou faut :
■un adaptateur pour compensation de charge LRA-1 (no. 70-02105 ou 70-02106) ou
■un aimant permanent (par ex. no. 70-04100, 70-04200 ou 70-04300) ou
■un jeu de modification du moteur (par ex. no. 70-40110, 70-40210 ou 70-40310)
Pontage des coupures de courant
Pour surmonter les microcoupures de courant il vous faut :
■condensateur électrolytique d'une capacité minimale de 100 à 470 μF en cas d'utilisation exclusive dans des installations numériques : tension minimale > 25 V en cas d'utilisation dans des installations analogiques : tension minimale > 35 V Remarque : un condensateur 220 μF/35 V est inclus dans la livraison.
■ou un circuit tampon, par ex. UPS-mini 0.47 (capacité 0,47 F, no. d'article 70-02215 ou 70-02216), UPS mini 1.0 (capacité 1,0 F, no. d'article 70-02225 ou 70-02226), UPS mini 1.5 (capacité 1,5 F, no. d'article 70-02235 ou 70-02236).
Déclenchement automatique des opérations de commutation
Pour le déclenchement automatique, il vous faut :
■un ILS (par ex. no. d'article 84-53110) ou
■un capteur à effet Hall (par ex. no. d'article 84-53210)
■des aimants (par exemple aimants néodymes ∅ 3mm, d= 2mm, no. d'article 84-53990)
Section de freinage ABC ou section de navette ABC
Pour pouvoir utiliser le procédé de freinage ABC, vous avez besoin de
■par section de freinage : un module de freinage ABC (par ex. ABC-1 article n° 49-03106-01)
par section de navette : deux modules de freinage ABC (par ex. ABC-1 article n° 49-03106-01)
1.3. Du bon usage du matériel
Le décodeur de locomotive LD-G-44 est prévu pour être utilisé selon ce mode d'emploi en modélisme, en particulier sur des réseaux ferroviaires miniatures numériques. Toute autre utilisation est à proscrire et entraîne la perte de la garantie.
Les décodeur de locomotive n'est pas destiné à être installé par des enfants de moins de 14 ans.
La lecture, la compréhension et le respect de ce mode d'emploi font partis du bon usage de ce produit.
1.4. Consignes de sécurité

Le décodeur de locomotive LD-G-44 est équipé de circuits intégrés (CI). Ceux-ci sont ibles aux charges électrostatiques. Ne touchez donc pas le décodeur avant de vous être chargé". Pour cela, il suffit par exemple de toucher un radiateur.
Une utilisation non conforme et le non-respect des instructions peuvent entraîner des risques incalculables. Prévenez ces dangers en appliquant les mesures suivantes :
- N'effectuez les travaux de montage que lorsque le décodeur est hors tension. Si vous effectuez des travaux de soudure sur le décodeur, respectez également les consignes des paragraphes 3.1 et 3.2.
- N'effectuez le montage que dans des locaux fermés, propres et secs. Evitez l'humidité, la pluie et les projections d'eau dans votre environnement de travail.
- N'alimentez le décodeur qu'en très basse tension, comme indiqué dans les caractéristiques techniques. Utilisez exclusivement des transformateurs ou blocs d'alimentation contrôlés et agréés.
- Ne branchez les fiches d'alimentation des transformateurs / blocs d'alimentation et des fers à souder/stations de soudage que dans des prises de courant de sécurité installées et protégées par des fusibles dans les règles de l'art.
N'exposez pas le décodeur à une température ambiante élevée ou aux rayons directs du soleil. Respectez les indications relatives à la température de fonctionnement maximale dans les caractéristiques techniques.
■Si vous constatez des dommages ou des dysfonctionnements, coupez immédiatement la tension d'alimentation. Envoyez le décodeur pour vérification.
2. Le décodeur de locomotive LD-G-44
2.1. Mode numérique
Le décodeur de locomotive est un décodeur multi protocole qui exploite les signaux aux formats DCC et Motorola. Le décodeur reconnaît automatiquement le format utilisé.
| DCCconforme aux normes NMRA et RCN | Motorola II (MM II) | |
| Nombre d'adresses | 127 adresses de baseou 10.239 adresses étendues | 255 |
| Modes de vitesse | 14, 28 ou 128en mode 28/128 pas de vitesse : SDF* | 14 ou 27 b |
| Nombre de fonctions | 29(F0 à F28) | 5 ou 9(F0 à F4)(via la 2e adresse: F5 à F8) |
| Programmation Variables de configuration :Programmation directe sur la voie de programmation (conforme à la norme DCC) ouPPV (programmation en pleine voie) | Registres | |
\* Informations de fond : SDF (Speed – Direction – Function)
Cette méthode est utilisée pour réduire le temps de transmission des ordres de vitesse, de direction et de fonction aux décodeurs de véhicules au format DCC. Pour ce faire, au lieu de transmettre les différentes commandes séparément, toutes les commandes sont regroupées et transmises en une seule commande.
La réduction du temps de transmission a un effet particulièrement positif sur les installations dans lesquelles un grand nombre de décodeurs avec de nombreuses fonctions sont utilisés.
Les conditions préalables à l'application de cette méthode sont :
■l'utilisation d'une centrale de commande numérique qui supporte le SDF
■l'installation de décodeurs de véhicules qui supportent SDF
■le réglage du mode de marche 28 / 128 sur le décodeur.
2.2. Mode analogique
Le décodeur de locomotive LD-G-44 peut également être utilisé sur des réseaux analogiques alimentés en courant alternatif ou continu. Le décodeur reconnaît automatiquement si un transformateur à courant alternatif ou à courant continu est utilisé pour l'alimentation de l'installation.

Attention :
Les anciens transformateurs analogiques (par exemple les modèles Märklin** à capot bleu) ne sont pas adaptés à l'utilisation de décodeurs en mode analogique ! Ces transformateurs sont conçus pour la tension de réseau de 220 V utilisée autrefois et génèrent, de par leur construction, des impulsions de surtension très élevées lors de l'inversion du sens de marche. En cas d'utilisation avec la tension secteur actuelle de 230 V, des impulsions de surtension si élevées peuvent survenir et endommager les composants du décodeur. N'utilisez donc que des transformateurs de traction conçus pour la tension de réseau actuelle de 230 V !
Reconnaissance analogique automatique
Dès que le véhicule est placé sur la voie, le décodeur détecte automatiquement s'il est piloté en analogique ou en numérique et règle le mode de fonctionnement correspondant. La reconnaissance analogique automatique doit être désactivée, par exemple
■si le décodeur passe soudainement en mode analogique en mode numérique (par exemple à la suite de tensions parasites dont la cause est difficile à localiser) ;
■si une valeur pour le Packet Time Out est programmée pour effectuer un arrêt forcé en cas de défaillance de la tension de la voie ou d'arrêt;
- lorsque le procédé "Freinage par tension continue" (parcours de freinage Märklin**) est utilisé.
Commutation des sorties de fonction en mode analogique
La commutation des sorties de fonction est impossible en mode analogique. Les sorties peuvent être programmées avec la centrale numérique afin qu'elles soient allumées soit éteintes en mode analogique. Les effets attribués aux sorties fonctionnent aussi en mode analogique.
Les sorties qui sont activées en fonction de la direction sont activées ou désactivées en mode analogique selon le sens de la marche. Lorsqu'il est utilisé dans des systèmes analogiques à courant continu, cela ne s'applique qu'aux lampes ou aux accessoires dont le conducteur de retour est connecté au conducteur de retour pour toutes les fonctions du décodeur.
Autres fonctions actives en mode analogique
Les réglages effectués dans les CV / registres pour
■la vitesse maximale
■la temporisation de démarrage et de freinage
■et le compensateur de charge
sont également repris en mode analogique.
Réaction à une impulsion de surtension
Dans les installations analogiques à courant alternatif, les tensions parasites provenant de l'installation peuvent être interprétées par le décodeur comme une impulsion de commutation pour le changement de sens de marche. La sensibilité avec laquelle le décodeur réagit à une impulsion de surtension par un changement de sens de marche peut être réglée dans une CV.
2.3. Protection contre la surcharge
Le décodeur de locomotive LD-G-44 est équipé d'une protection contre les surcharges qui le protège des dommages en cas de dépassement du courant total admissible ou de court-circuit à la sortie du moteur (la forme maximale de surcharge). Si une surcharge est détectée, le moteur s'arrête et les éclairages qui sont commutés avec F0f ou F0r clignotent. La reprise du fonctionnement n'est possible qu'après avoir mis le décodeur hors tension (tension des rails coupée).
Le seuil de réponse de la protection contre les surcharges peut être ajusté en modifiant la sensibilité, c'est-à-dire l'ampleur de la surcharge à laquelle la surcharge est détectée ("sensibilité au court-circuit").
Surcharge à une sortie
En cas de court-circuit sur une sortie ou si le courant maximal sur une des sorties est dépassé, la protection contre les surcharges du décodeur est inefficace tant que le courant total du décodeur n'est pas également dépassé. La sortie en question sera endommagée.

Attention :
En abaissant le seuil de réponse à la surcharge, il faut réduire l'influence des tensions parasites de courte durée provenant du moteur ou des consommateurs connectés. Cela permet d'éviter que le moteur ne soit coupé alors que le courant total autorisé n'a pas été dépassé. Avant d'abaisser le seuil de réponse, il faut toujours mesurer le courant du moteur et vérifier le bon fonctionnement du moteur et de la boîte de vitesses.

Attention :
La protection contre la surcharge est inopérante lors d'un court-circuit entre les composants du décodeur ou entre les composants et le courant de la voie.
Exemples :
■contact entre le décodeur et les rails ou les parties métalliques du véhicule ;
■contact entre des câbles de connexion dénudés du décodeur et les rails ou les parties métalliques du véhicule ;
- contact entre des accessoires connectés au retour pour toutes les fonctions du décodeur et les rails ou les parties métalliques du véhicule.

Attention:
Des défauts au moteur de la locomotive peuvent générer de forts courants parasites qui risquent de détruire des composants du décodeur. Dans ce cas, la protection contre la surcharge est inopérante.
2.4. Commande du moteur
Fréquence du courant pulsé
Le LD-G-44 est conçu pour piloter de manière optimale les moteurs à courant continu. Avec un PWM de 25 kHz, il est également adapté à la commande de moteurs RSF.
Compensateur de charge
Le LD-G-44 dispose d'une compensation de la charge. Le compensateur de charge influence la tension du moteur de manière à ce que la vitesse de la locomotive en marche reste constante pour un pas de vitesse sélectionné, indépendamment des charges supplémentaires (par ex. trajets en montées, wagons attelés).
La compensation de charge peut être activée ou non par la modification d'une variable de configuration. Les paramètres de la compensation de charge peuvent être modifiés par une variable de configuration, pour adapter le décodeur aux caractéristiques du moteur.
Paramètres de la compensation de charge
Trois paramètres (KP, KI et KD) déterminent la compensation de charge. Ils doivent être adaptés les uns aux autres pour permettre de bonnes caractéristiques de fonctionnement du moteur. Une variable de configuration est attribuée à chaque paramètre. Les paramètres sont :
KP : l'élément proportionnel du réglage veille à ce que la différence entre la valeur cible et la valeur réelle soit la plus faible possible. Il ne peut jamais prendre la valeur "0". Cet élément agit sur la vitesse de base. Si la valeur est trop petite, la locomotive roule trop lentement. Si la valeur est trop grande, la locomotive roule avec des à-coups.
KI : l'élément intégral du réglage veille à ce que la différence résiduelle entre la valeur cible et la valeur réelle soit réduite à 0 et aussi que de petits écarts soient corrigés. Si la valeur est trop grande, la locomotive roule avec de forts à-coups.
KD : l'élément différentiel du réglage veille à ce que le réglage ne s'applique pas trop vite, pour éviter des à-coups ou des vibrations. Si la valeur est trop petite, la locomotive roule avec des à-coups. Si la valeur est trop grande, la vitesse de la locomotive n'est pas stabilisée.
Facteur de gain
La base de l'influence du compensateur de charge sur la tension du moteur est la tension renvoyée par le moteur pendant la période de mesure. Selon les caractéristiques individuelles, ces valeurs peuvent être trop élevées ou trop faibles. Les effets sont que le véhicule atteint sa vitesse maximale déjà à un niveau de vitesse inférieur au niveau de vitesse le plus élevé ou ne l'atteint pas du tout au niveau de vitesse le plus élevé. Pour compenser ces effets, les valeurs envoyées par le moteur peuvent être augmentées ou diminuées en ajustant le facteur d'amplification.
Courbe de vitesse
En réglant la vitesse de démarrage, la vitesse moyenne et la vitesse de pointe, le décodeur peut être adapté aux caractéristiques de conduite du moteur et aux vitesses de conduite caractéristiques du type de locomotive. À partir de ces 3 points, le décodeur génère une courbe caractéristique de vitesse qui est linéaire entre la vitesse de démarrage et la vitesse moyenne et entre la vitesse moyenne et la vitesse maximale.
Lorsque le décodeur est paramétré pour 28 pas de vitesse, il est possible d'attribuer une tension d'alimentation quelconque à chacun des 28 pas. Cela permet de créer une courbe de vitesse adaptée aux caractéristiques de fonctionnement du moteur. Les valeurs saisies sont mémorisées dans la seconde courbe de vitesse.

line
| Pas de vitesse | Vitesse (a) | Vitesse (b) | | -------------- | ----------- | ----------- | | 0 | 0 | 0 | | >0 | >1 | >0 |a: Courbe linéaire à partir de la tension de démarrage et de la tension maximale
b: Courbe linéaire à partir de la tension de démarrage, de la tension centrale et de la tension maximale

line
| Pas de vitesse | Vitesse (a) | Vitesse (c) | | -------------- | ----------- | ----------- | | 0 | 0 | 0 | | 1 | 1 | 1 | | 2 | 2 | 2 | | 3 | 3 | 3 | | 4 | 4 | 4 | | 5 | 5 | 5 | | 6 | 6 | 6 | | 7 | 7 | 7 | | 8 | 8 | 8 | | 9 | 9 | 9 | | 10 | 10 | 10 |a: Courbe linéaire à partir de la tension de démarrage et de la tension maximale
c: Marche de manœuvre = 50 % de la tension définie dans la courbe standard.

line
| Pas de vitesse | Vitesse (a) | Vitesse (d) | | -------------- | ----------- | ----------- | | 0 | 0 | 0 | | 28 | 28 | 28 |a: Courbe linéaire à partir de la tension de démarrage et de la tension maximale
d: courbe alternative avec attribution individuelle de la tension aux 28 pas de vitesse
Kick de démarrage
S'il est programmé en conséquence, le kick de démarrage provoque une brève augmentation de la tension du moteur au démarrage afin de surmonter le couple de décollement. Immédiatement après le démarrage, la tension du moteur est régulée avec le taux de freinage réglé sur le niveau de marche effectivement sélectionné.
Marche de manœuvre
Le Function Mapping permet d'attribuer à la fonction spéciale "Marche de manœuvre" (MM) une ou plusieurs fonctions qui permettent de l'activer ou de la désactiver. A la livraison, la fonction F3 est attribuée à la fonction spéciale "MM". En marche demandœuvre, la vitesse de chaque pas est réduite d'environ 50% par rapport à la vitesse normale.
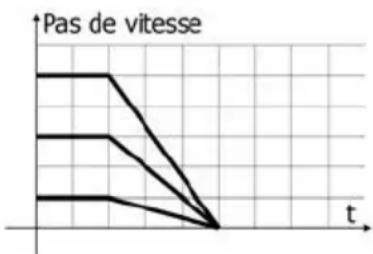
Temporisation de démarrage et de freinage
Une temporisation de démarrage et de freinage bien réglée (taux de démarrage et de freinage) permet d'obtenir une accélération et un freinage réalistes et sans à-coups de la locomotive. Pour cela, on règle dans les CV séparément pour le démarrage et le freinage le temps qui doit s'écouler avant que le décodeur ne passe au pas de vitesse immédiatement supérieur ou inférieur. Le décodeur modifie alors successivement le pas de vitesse jusqu'à ce que le pas de vitesse défini soit atteint. Les distances d'approche et de freinage sont d'autant plus longues que la vitesse cible ou le pas de vitesse sont élevés lors du déclenchement du processus de freinage. Le Function Mapping permet d'attribuer à la fonction spéciale "Temporisation de démarrage et de freinage" (TDF) une ou plusieurs fonctions permettant de l'activer ou de la désactiver. A la livraison, la fonction F4 est attribuée à la fonction spéciale "TDF".

line
| t | Pas de vitesse | | ---- | ------------- | | 0 | 0 | | 1 | 1 | | 2 | 2 | | 3 | 3 | | 4 | 4 | | 5 | 5 | | 6 | 6 | | 7 | 7 | | 8 | 8 | | 9 | 9 | | 10 | 10 |Temporisation au démarrage

Temporisation de freinage
Le démarrage et le freinage sont commandés par le temps La longueur de la distance de démarrage et de freinage dépend du pas de vitesse à atteindre ou du pas de vitesse lors du déclenchement du processus de freinage.
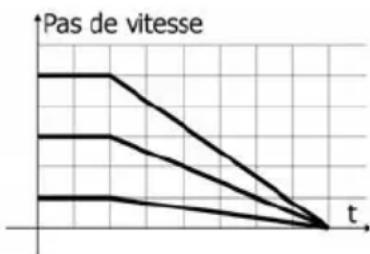
Distance de freinage constante
En cas de temporisation de freinage active, la longueur de la distance de freinage dépend de la temporisation réglée dans la CV et de la valeur du pas de vitesse lors du déclenchement du processus de freinage. Un arrêt précis aux points d'arrêt n'est alors pas possible.
Pour le LD-G-44, il est possible de définir une distance de freinage constante que la locomotive doit parcourir lors du passage de n'importe quel pas de vitesse au pas de vitesse 0. La distance de freinage correspond à la distance que la locomotive parcourt jusqu'à l'arrêt avec la temporisation de freinage réglée au pas de vitesse le plus élevé possible. Si le freinage est déclenché à un pas de vitesse inférieur, le temps nécessaire au passage au prochain pas de vitesse inférieur est automatiquement prolongé. Ainsi, la distance de freinage est toujours la même, quel que soit le pas de vitesse au moment du démarrage du processus de freinage.
Distance de freinage courte : valeur basse dans CV4
line
| t | Pas de vitesse | | ---- | -------------- | | 0 | 1 | | 1 | 1 | | 2 | 1 | | 3 | 1 | | 4 | 1 | | 5 | 1 | | 6 | 1 | | 7 | 1 | | 8 | 1 | | 9 | 1 | | 10 | 1 | | 11 | 1 | | 12 | 1 | | 13 | 1 | | 14 | 1 | | 15 | 1 | | 16 | 1 | | 17 | 1 | | 18 | 1 | | 19 | 1 | | 20 | 1 | | 21 | 1 | | 22 | 1 | | 23 | 1 | | 24 | 1 | | 25 | 1 | | 26 | 1 | | 27 | 1 | | 28 | 1 | | 29 | 1 | | 30 | 1 | | 31 | 1 | | 32 | 1 | | 33 | 1 | | 34 | 1 | | 35 | 1 | | 36 | 1 | | 37 | 1 | | 38 | 1 | | 39 | 1 | | 40 | 1 | | 41 | 1 | | 42 | 1 | | 43 | 1 | | 44 | 1 | | 45 | 1 | | 46 | 1 | | 47 | 1 | | 48 | 1 | | 49 | 1 | | 50 | 1 | | 51 | 1 | | 52 | 1 | | 53 | 1 | | 54 | 1 | | 55 | 1 | | 56 | 1 | | 57 | 1 | | 58 | 1 | | 59 | 1 | | 60 | 1 | | 61 | 1 | | 62 | 1 | | 63 | 1 | | 64 | 1 | | 65 | 1 | | 66 | 1 | | 67 | 1 | | 68 | 1 | | 69 | 1 | | 70 | 1 | | 71 | 1 | | 72 | 1 | | 73 | 1 | | 74 | 1 | | 75 | 1 | | 76 | 1 | | 77 | 1 | | 78 | 1 | | 79 | 1 | | 80 | 1 | | 81 | 1 | | 82 | 1 | | 83 | 1 | | 84 | 1 | | 85 | 1 | | 86 | 1 | | 87 | 1 | | 88 | 1 | | 89 | 1 | | 90 | 1 | | 91 | 1 | | 92 | 1 | | 93 | 1 | | 94 | 1 | | 95 | 1 | | 96 | 1 | | 97 | 1 | | 98 | 1 | | 99 | 1 | | | |Distance de freinage longue : valeur élevée dans CV4
La longueur de la distance de freinage est toujours la même, indépendamment du pas de vitesse lors du déclenchement du processus de freinage. Plus la valeur du taux de freinage réglée dans CV4 est élevée, plus la distance de freinage est longue.
2.5. Déroulement automatisé
Le logiciel de commande dans le décodeur de locomotive permet d'automatiser des opérations et de regrouper des processus complexes en une seule fonction. Les processus peuvent ainsi être activés par une fonction / une touche de fonction.
2.5.1. Procédure de freinage
Le décodeur de locomotive LD-G-44, avec un réglage CV adéquat, reconnaît à l'entrée d'une section de freinage ABC qu'une tension de voie asymétrique est présente et réduit alors automatiquement la vitesse de marche avec la temporisation de freinage ou la distance de freinage réglée. Il peut être réglé de telle sorte qu'il réagisse à une tension négative réduite (tension plus faible sur le rail gauche vu dans le sens de la marche) au lieu d'une tension positive réduite (tension plus faible sur le rail droit vu dans le sens de la marche).
Pendant que la locomotive se trouve dans la section de freinage,
■les fonctions peuvent être activées,
■les CV du décodeur peuvent être modifiées au moyen de la programmation de la voie principale (PPV),
- il est possible de modifier le sens de marche de la locomotive et donc de manœuvrer la locomotive ou de la faire sortir de la section de freinage dans le sens inverse.
Dès que la section de freinage est supprimé ou que la locomotive sort de la section de freinage, elle accélère avec la temporisation de démarrage réglée jusqu'au pas de vitesse réglé.
Informations de fond : Procédure de freinage ABC (Automatic Break Control)
Le procédé ABC repose sur le fait que dans la section de freinage, une tension asymétrique est appliquée à la voie au lieu d'une tension symétrique. Pour pouvoir utiliser le procédé de freinage ABC, le booster doit fournir une tension de sortie aussi symétrique que possible à la sortie de la voie. Un module de freinage ABC spécial réduit soit la partie positive soit la partie négative de la tension numérique pour la section de freinage et génère ainsi une tension de voie asymétrique.
En raison du principe, la section de freinage n'est efficace que pour un seul sens de marche à la fois. Pendant que la locomotive se trouve dans la section de freinage, toutes les fonctions numériques sont maintenues (commutation des sorties, PPV, changement de sens de marche). Aucun court-circuit ne se produit lors du franchissement du point de séparation entre la section normale et la section de freinage ABC.
| Tension de voie symétrique sur la section normale | Tension de voie asymétrique sur la section de freinage ABC | La tension numérique normalement symétrique est réduite d'un côté dans la section de freinage par un module de freinage ABC spécial, par défaut sur le rail droit vu dans le sens de la marche. |
Pour des raisons techniques, certains boosters ne présentent pas une tension de voie symétrique à 100 % à la sortie. Certains types de circuits supplémentaires connectés à la voie (par exemple les détecteurs d'occupation de la voie) influencent en outre la tension de la voie sur un rail. Pour éviter que le décodeur de locomotive n'interprète une tension de voie même légèrement asymétrique comme une section de freinage ABC, il est possible de réduire la sensibilité.
Service de trains navettes automatique basé sur la méthode ABC
Si la CV est réglée en conséquence, le procédé de freinage ABC est utilisé pour automatiser le service de trains navettes entre deux gares terminales. A l'entrée dans une section de freinage ABC, le décodeur de locomotive réduit automatiquement, comme d'habitude, la vitesse de marche avec la temporisation de freinage ou la distance de freinage réglée. Après l'arrêt, il change toutefois de sens de marche et repart dans le sens inverse avec la temporisation de démarrage réglée. A l'entrée dans la section de freinage ABC pour le sens inverse, il réduit à nouveau automatiquement la vitesse de marche.
2.5.2. Freinage en cas de tension continue
Le décodeur de locomotive LD-G-44 réagit à l'application d'une tension continue pure (par ex. section de freinage Märklin**) si la CV est réglée en conséquence et réduit alors automatiquement la vitesse de marche avec la temporisation de freinage ou la distance de freinage réglée. Dans la section de freinage, l'état des fonctions commutées est conservé. Contrairement à la procédure de freinage ABC
■les fonctions ne peuvent pas être commutées,
■les CV du décodeur ne peuvent pas être modifiées,
■le sens de marche de la locomotive ne peut pas être modifié.
Dès que la section de freinage est supprimé ou que la locomotive sort de la section de freinage, elle accélère avec la temporisation de démarrage réglée jusqu'au pas de vitesse réglé.
Informations de fond : freinage en tension continue
Le procédé de freinage utilisé par exemple par Märklin ("section de freinage Märklin") repose sur le fait qu'au lieu d'une tension alternativement positive et négative, seule une tension purement positive ou négative est appliquée à la voie dans la section de freinage. Pour éviter les courts-circuits à l'entrée de la section de freinage, il faut insérer entre la "section normale" et la section de freinage une section de séparation supplémentaire qui, en cas d'utilisation dans des installations à tension continue, doit avoir une longueur de train complète.

text_image
U tTension de voie symétrique sur la section normale

Tension de voie asymétrique dans la section de transition vers le tronçon de freinage

text_image
U tTension continue pure dans la section de freinage
2.5.3. Découplage automatique ("valse de découplage")
Grâce à une programmation CV appropriée, le processus complet de désaccouplement peut être déclenché par une fonction.
Après l'activation de la fonction, la locomotive se déplace d'abord un peu dans le sens inverse du sens de marche réglé afin de décharger l'attelage. Ensuite, la sortie de fonction à laquelle l'attelage est raccordé est activée pendant le temps réglé. En même temps, le sens de marche est inversé en interne et la tension du moteur est rétablie. La locomotive s'éloigne alors du wagon dételé sur une courte distance.
Les paramètres suivants du système de dételage automatique peuvent être réglés via des CV :
■tension appliquée au moteur pendant le processus de désaccouplement ;
- durée pendant laquelle le moteur et la sortie (attelage) sont alimentés en courant (= temps de kick)
2.5.4. Fonction de manœuvre
La marche de manœuvre et l'éclairage de manœuvre peuvent être attribués à la même fonction. Dans ce cas, l'éclairage de manœuvre (éclairage frontal et arrière blanc) est automatiquement activé lors du passage à la marche de manœuvre (et de la réduction de vitesse qui y est liée). En même temps, la fonction qui enclenche la marche de manœuvre permet de désactiver la fonction de temporisation de démarrage et de freinage.
Exemple de programmation pour le mode de manœuvre → paragraphe 5.5.
2.5.5. Activation et désactivation en fonction de la vitesse
Toutes les sorties de fonction pour lesquelles la fonction est activée sont automatiquement commutées lorsqu'une tension définie dans la CV correspondante est atteinte. Il est possible
- de désactiver la sortie en cas de dépassement de la tension et de l'activer en cas de dépassement vers le bas ou
- d'activer la sortie en cas de dépassement de la tension et de la désactiver en cas de dépassement vers le bas.
La tension est fixée en commun pour toutes les sorties.
2.5.6. Arrêt/démarrage avec une fonction
Le Function Mapping permet d'attribuer une ou plusieurs fonctions à la fonction spéciale "STOP/START avec une fonction". Lors de l'activation de la fonction attribuée, la locomotive s'arrête avec la temporisation de freinage réglée, lors de la désactivation, elle repart avec la temporisation de démarrage réglée.
A la livraison, aucune fonction n'est attribuée à la fonction spéciale "STOP".
2.6. Sorties et interfaces
Sorties de fonction
Le décodeur dispose de huit sorties de fonction (F0f, F0r, AUX1 à AUX6) avec un courant maximum de 300 mA chacune pour le raccordement de charges supplémentaires (par exemple éclairage, fumigène, attelage télécommandé). Remarque : le courant total maximum du décodeur (y compris le moteur) est de 3.000 mA.
Function mapping selon RCN-227
L' attribution des fonctions aux sorties se fait selon la norme RailCommunity RCN-227. Chaque sortie peut être attribuée à une ou plusieurs fonctions (F0 à F28, et séparément pour la marche avant ainsi que pour la marche arrière). Complémentairement, on peut configurer des fonctions afin de servir d'interrupteur d'arrêt d'une autre fonction.
Avec cette méthode de Function Mapping on peut réaliser des modes spéciaux de fonctionnement, p.ex.:
■Commutation en fonction du sens de marche.
- Feux de manœuvre: Lors de la commutation en mode de manœuvre, les signaux de la locomotive de manœuvre sont simultanément activés et les signaux pour l'exploitation normale sont désactivés.
■Extinction des feux de fin de convoi lorsqu'une loco tracte un train.
| Effets des sorties de fonction | |
| Commutation dépendant du sens de marche : affectation séparée pour chaque sortie. | Function Mapping |
| Feux de manœuvre : affectation séparée pour chaque sortie. Function Mapping | |
| Atténuation : la tension sur la sortie est réduite.Affectation séparée pour chaque sortie.Exemple d'application : grâce à la réduction de la tension, les ampoules prévues pour le fonctionnement analogique des anciens véhicules peuvent continuer à être utilisées en mode numérique et ne doivent donc pas être remplacées après l'installation du décodeur. | Programmation des VCCV 47...54 |
| Commutation inversée : en position "on", la sortie affectée est désactivée, en position "off", elle est activée.Affectation séparée pour chaque sortie. | Programmation des VCCV 55...62 |
| Clignotement : la tension sur la sortie est alternativement activée et désactivée.Affectation séparée pour chaque sortie. Réglage de la fréquence de clignotement en commun pour deux sorties.L'attribution de la fonction de clignotement à deux sorties et de la fonction "Commutation inversée" à l'une des deux sorties permet de générer un clignotement alterné. | Programmation des VCCV 55...62CV 101...104 |
| Augmentation et diminution successives de la luminosité : la tension sur la sortie augmente progressivement à l'enclenchement ou diminue progressivement au déclenchement.Attribution séparée pour chaque sortie. Réglage de la durée de la montée et de la descente en commun pour toutes les sorties auxquelles la fonction est attribuée.Exemple d'application : simulation d'anciennes lampes à huile ou à incandescence. | Programmationdes VCCV 55...62CV 100 |
| MARs-Light: pour générer le feu d'avertissement supplémentaire typique des locomotives américaines (augmentation et diminution de l'intensité lumineuse à intervalles courts), les réglages suivants doivent être effectués pour la sortie :▪clignotement et augmentation et diminution successives de l'intensité lumineuse activés▪fréquence de clignotement courte▪ courte durée pour l'augmentation et la diminution de l'intensité lumineuseAttribution séparée pour chaque sortie. | Programmationdes VCCV 55...62CV 100CV 101...104 |
| Fonction kick: la sortie reçoit d'abord la pleine tension pendant environ 25,5 secondes au maximum, puis elle est désactivée.Attribution séparée pour chaque sortie. Réglage du temps de kick (= durée pendant laquelle la tension maximale est appliquée à la sortie) en commun pour toutes les sorties auxquelles la fonction est attribuée.Exemple d'application : certains types d'attelages électriques ont besoin de la pleine tension pour être désaccouplés. Après le désaccouplement, la tension est coupée afin de ménager les attelages électriques. | Programmationdes VCCV 55...62CV 99 |
| Simulation d'incendie: la tension à la sortie est réduite / augmentée à intervalles courts et irréguliers, les LED ou petites lampes raccordées produisent la lumière vacillante typique d'un feu ouvert.Attribution séparée pour chaque sortie.Exemple d'application : simulation du feu dans la boîte à feu des locomotives à vapeur. | Programmationdes VCCV 55...62 |
| Marche/arrêt à une tension définie (vitesse): Par défaut, la sortie est désactivée lorsque la tension est dépassée et réactivée lorsqu'elle est dépassée. En inversant la fonction, le fonctionnement peut être inversé.Attribution séparément pour chaque sortie. Réglage de la tension en commun pour toutes les sorties auxquelles la fonction est attribuée.Exemple d'application : allumage et extinction automatiques de l'éclairage de la cabine de conduite pour une tension donnée. | Programmationdes VCCV 55...62CV 63 |
Sortie pour circuit tampon
Une sortie spéciale est prévue pour le raccordement d'un circuit tampon conforme au RCN-530 (par ex. UPS-mini). Elle peut être utilisée alternativement pour le raccordement d'un autre consommateur avec un courant maximal de 100 mA.
Par défaut, la sortie est activée après la mise sous tension du décodeur, après un court temps d'attente, afin de charger le tampon. La longueur du temps d'attente varie de manière aléatoire. Cela permet d'éviter que plusieurs circuits tampons présents sur l'installation ne démarrent simultanément le processus de chargement dès la mise sous tension et ne provoquent ainsi l'effondrement de l'alimentation.
Le Function Mapping permet d'attribuer à cette sortie une ou plusieurs fonctions qui permettent d'activer et de désactiver la charge automatique du tampon pendant le fonctionnement. A la livraison, aucune fonction n'est attribuée à la fonction spéciale "UPS".
Interface SUSI
Le décodeur de locomotive LD-G-44 dispose d'une interface SUSI conforme à la norme RailCommunity RCN-600 dans sa version "classic SUSI", à laquelle peut être connecté un module SUSI externe (par exemple un module de son). Le module SUSI est lu, programmé et piloté par le décodeur.
Le décodeur de locomotive transmet au module SUSI l'état des fonctions et le pas de vitesse réglé à la centrale. Cela permet d'influencer les fonctions du module SUSI qui dépendent de la vitesse (par ex. le bruit du moteur).
2.7. Déclenchement des actions
L'activation et la désactivation des sorties de fonction ainsi que l'activation (ou la désactivation) des fonctions spéciales se font :
■par la/les fonction(s) attribuée(s) et / ou
- automatiquement par l'entrée de commutation. L'entrée de commutation est déclenchée par des contacts externes, par exemple par des contacts Reed ou des capteurs Hall en combinaison avec des aimants permanents dans la voie.
Affectation des actions aux fonctions (Function Mapping)
L'affectation des actions commandées par le décodeur aux fonctions peut être choisie librement, séparément pour la marche avant et la marche arrière.
| Actions Format DCC Format MM | ||
| Sorties F0f, F0r, AUX1 ... AUX6 marche/arrêt | F0 à F28 | F0 à F4F5 à F8 avec 2e adresse |
| Alimentation sans interruption (UPS) marche/arrêt | ||
| Arrêt/démarrage (STOP) avec une fonction active/inactive | ||
| Marche de manœuvre (MM) active/inactive | ||
| Temporisation de démarrage et de freinage (TDF) active/inactive |
2.8. Communication avec RailCom
Emetteur RailCom
Le décodeur de locomotive LD-G-44 est un émetteur RailCom et répond aux exigences de la norme RailCommunity RCN-217 "Protocole de retour d'information RailCom DCC" pour les décodeurs mobiles (décodeurs de véhicules).
L'émission de messages RailCom n'est possible que sur les réseaux véhiculant un signal DCC. L'utilisation de la fonction RailCom n'est pas possible dans un environnement purement Motorola.
Informations : RailCom émises par les décodeurs de véhicule
Sur le canal 1, les décodeurs des véhicules transmettent leur adresse DCC après chaque commande DCC dirigée vers un décodeur de véhicule. Le canal 1 peut être réglé "dynamiquement", c'est-à-dire que le décodeur ne transmet son adresse sur le canal 1 que jusqu'à ce qu'une commande DCC lui soit adressée. Cela libère le canal pour les messages d'autres décodeurs auxquels aucune commande n'a encore été envoyée ou qui ne sont pas encore connus du système.
Sur le canal 2, les décodeurs des véhicules envoient leurs commentaires dès qu'une commande DCC est envoyée à leur adresse.
Informations : Informations dynamiques RailCom
Les informations dynamiques sont les valeurs des CV (CV RailCom 64 à 127) qui se modifient pendant la marche (par ex. vitesse réelle, statistiques de réception, contenu du réservoir). Elles sont émises spontanément en cas de besoin.
La statistique de réception est tenue par le décodeur et est le rapport entre les paquets erronés et les paquets transmis. Elle permet de déduire la qualité de la transmission des données entre le véhicule et les rails.
Signaux RailCom dynamiques du décodeur
Le décodeur de locomotive LD-G-44 peut envoyer les informations RailCom dynamiques suivantes : statistiques de réception.
2.9. Inscription automatique selon le RCN-218 (DCC-A)
DCC-A est une procédure d'inscription automatique pour DCC, grâce à laquelle les caractéristiques essentielles d'un décodeur sont transmises à la centrale numérique immédiatement après la mise en voie du véhicule et y sont directement disponibles. L'attribution d'adresses et l'affectation de fonctions sont ainsi considérablement simplifiées.
Indications pour l'utilisation de DCC-A
La condition préalable à son utilisation est l'utilisation d'une centrale numérique qui supporte également ce procédé.
L'enregistrement automatique peut être désactivé dans la CV 28. Pour un fonctionnement sans problème avec des centrales numériques qui ne supportent pas le DCC-A, il n'est cependant pas important que la procédure d'inscription soit activée ou non.
Transmission des paramètres du décodeur lors de la procédure d'inscription
L'enregistrement du décodeur auprès de la centrale se fait automatiquement dès que le véhicule est placé sur la voie. Certains paramètres peuvent être personnalisés à l'aide de la centrale.
| Valeur Adaptations | ||
| Symbole de principe et symbole | par ex. :  | Il est possible d'attribuer au décodeur un symbole de principe et un symbole provenant du fichier enregistré dans la centrale. |
| Adresse souhaitée 3 | Adresse correspondant | aux réglages des CVs 1 ou 17/18 |
| Adresse par ex. 100 | L'adresse est attribuée | au décodeur par la centrale et ne peut pas être modifiée. Dans la mesure où il n'y a pas de décodeur de véhicule avec la même adresse, l'adresse souhaitée réglée dans les CV est reprise. |
| Nom et nom abrégé | LD-G-44 Il est possible | d'attribuer au décodeur un nom et/ou un nom court (8 caractères maximum). |
| Nom du produit LD-G-44 aucune modification possible | ||
| Description --- aucune modification possible | ||
| Fabricant Tams Elektronik aucune modification possible | ||
| UID par ex. 12345678 aucune modification possible | ||
| Protocole par ex. DCC/28 Protocole | correspondant à l'affectation dans la base de données des locomotives / liste des locomotives de la centrale | |
| Version SW | par ex. V2.00 | aucune modification possible |
| Version HW | par ex. V1.0 | aucune modification possible |
| connecté | DCC-A | Procédure avec laquelle le décodeur a été enregistré auprès de la centrale |
| Fonctions et Icônes de fonctions | Il est possible d'attribuer aux fonctions des icônes spécifiques qui permettent de savoir ce qu'elles commandent (par ex. éclairage frontal, éclairage intérieur, marche de manœuvre). | |
3. Connexions
3.1. Conseils concernant la sécurité

Rappelez-vous :
Le décodeur est équipé de circuits intégrés (CI). Ceux-ci sont sensibles aux charges d'électricité statique. Ne les touchez pas avant de vous être "déchargés" en touchant par exemple un radiateur de chauffage central.
Dangers mécaniques
Les câbles et autres composants coupés présentent des parties tranchantes qui peuvent provoquer des coupures de la peau. Soyez prudent en les prenant en main.
Des dégâts visibles sur des composants peuvent entraîner un danger incalculable. N'utilisez pas des éléments endommagés, mais remplacez-les par des composants neufs.
Dangers électriques
■Toucher des parties sous tension,
■toucher des parties susceptibles d'être sous tension,
■courts-circuits et connexion à des tensions non autorisées,
■humidité trop forte et condensation
peuvent provoquer une décharge électrique pouvant entraîner des blessures. Evitez ces dangers en respectant les mesures suivantes :
■Le câblage doit être fait hors tension.
- N'effectuez le montage du décodeur que dans des locaux fermés, propres et secs.. Evitez les atmosphères humides et les projections d'eau.
- N'alimentez le décodeur qu'en très basse tension, comme indiqué dans les caractéristiques techniques. Utilisez exclusivement des transformateurs ou blocs d'alimentation contrôlés et agréés.
- Ne branchez les transformateurs / blocs d'alimentation et les fers à souder que dans des prises homologuées.
■Assurez-vous que la section des câbles électriques est suffisante.
■En cas de condensation, attendez jusqu'à 2 heures avant de poursuivre les travaux.
Danger d'incendie
La panne chaude du fer à souder entrant en contact avec un matériau inflammable crée un risque d'incendie. L'incendie peut provoquer des blessures ou la mort par brûlures ou asphyxie. Ne branchez au secteur le fer à souder que durant le temps effectif de la soudure. Maintenez la panne éloignée de tout matériau inflammable. Utilisez un support adapté. Ne laissez jamais la panne chaude sans surveillance.
Danger thermique
Si par mégarde la panne chaude ou de la soudure entrait en contact avec votre peau, cela peut provoquer des brûlures. Evitez cela en :
■utilisant une surface de travail résistant à la chaleur,
■posant le fer à souder sur un support adapté,
■positionnant lors de la soudure la pointe de la panne avec précision,
■nettoyant la panne avec une éponge humide.
Danger environnemental
Une surface de travail inadaptée et trop petite et un local trop étroit peuvent entraîner des brûlures de la peau ou un incendie. Evitez cela en utilisant une surface de travail suffisante et un espace de travail adapté.
Autres dangers
Des enfants peuvent par inattention ou par irresponsabilité provoquer les mises en péril décrites ci-dessus. En conséquence, des enfants de moins de 14 ans ne doivent pas installer les décodeurs de véhicule.

Attention :
Les enfants en bas âge peuvent avaler les petites pièces dont les parties coupantes ou pointues peuvent mettre leur vie en danger ! Ne laissez pas ces petites pièces à leur portée.
Dans les écoles, les centres de formation, les ateliers de loisirs et d'auto-assistance, le montage, l'installation et le fonctionnement des modules électroniques doivent être supervisés par un personnel formé.
Dans les installations commerciales, il faut respecter les règles de prévention des accidents.
3.2. Pour réussir vos soudures

Rappelez-vous :
Une soudure inadéquate peut provoquer des dégâts par la chaleur voire l'incendie. Evitez ces dangers : lisez et respectez les règles édictées dans le chapitre Conseils concernant la sécurité de ce mode d'emploi.
- Utilisez un fer à souder avec contrôle de la température, que vous réglez à environ 300 °C.
■N'utilisez que de la soudure électronique avec un flux. - N'utilisez jamais de liquide de soudure ou de graisse de soudure pour souder des circuits électroniques. Ceux-ci contiennent un acide qui détruit les composants et les chemins conducteurs.
■Soudez rapidement : une soudure trop longue peut détacher les pastilles ou les pistes de soudure ou même détruire des composants. - Tenez la pointe à souder sur le point de soudure de manière à ce qu'elle touche le fil et le tampon en même temps. Ajoutez (pas trop) de soudure simultanément. Dès que la soudure commence à couler, retirez-la du point de soudure. Attendez ensuite un moment que la soudure coule bien avant de retirer le fer à souder de la brasure.
■Ne déplacez pas la brasure créée pendant environ 5 secondes.
Une panne propre et non oxydée est essentielle pour une soudure parfaite et une bonne soudure. Par conséquent, avant chaque soudure, essuyez l'excès de soudure et la saleté avec une éponge humide, un chiffon épais humide ou un chiffon en silicone.
- Après le soudage, vérifiez (de préférence à la loupe) si des connexions ou des pistes n'ont pas été pontées par erreur avec de la soudure. Cela peut entraîner un dysfonctionnement ou la destruction de composants ou, dans le pire des cas, du circuit complet. Vous pouvez reliquéfier l'excédent de soudure avec la panne à souder chaude propre. La soudure coule ensuite de la carte sur la pointe de la soudure.
3.3. Éviter les dommages irréparables sur le décodeur

Attention :
Afin d'éviter (dans le pire des cas) des dommages irréparables au décodeur, veuillez respecter les consignes suivantes :
1. Pas de contacts électriques avec des pièces métalliques ou des rails !
Evitez tout contact électrique entre le décodeur ou les accessoires connectés au retour d'une part et les parties métalliques du véhicule ou les rails d'autre part. Ces contacts électriques indésirables peuvent être provoqués par une mauvaise isolation des câbles de connexion (ainsi qu'aux extrémités non isolées des câbles de connexion non utilisés ! ), une mauvaise fixation et isolation du décodeur ou des accessoires connectés. Risque de court-circuit ! Dans ce cas, la protection contre la surcharge du décodeur est inefficace !
2. Pas de connexion du conducteur de retour à la masse du véhicule !
En aucun cas, le retour de toutes les fonctions du décodeur ne doit entrer en contact avec la masse du véhicule. Risque de court-circuit !
3. Exclure la surcharge !
Vérifiez avant le branchement du moteur, de l'éclairage et d'autres accessoires, que la consommation est inférieure à la valeur autorisée et que la consommation totale ne dépasse pas la valeur totale autorisée. Si le courant maximal est dépassé, le décodeur peut être détruit.
4. Ne pas utiliser d'anciens transformateurs analogiques !
Les anciens transformateurs analogiques (par exemple les modèles Märklin** à capot bleu) ne sont pas adaptés à l'utilisation de décodeurs en mode analogique ! Ces transformateurs sont prévus pour être utilisés avec l'ancienne tension de 220 V et produisent une surtension pour l'inversion du sens de marche. Utilisés avec la tension actuelle de 230 V, l'inversion de sens de marche peut provoquer une surtension si élevée qu'elle endommage le décodeur.
3.4. Affectation des connexions LD-G-44 | Face avant

text_image
F0r F0f AUX1 AUX2 AUX3 AUX4 AUX5 AUX6 RF/V+ IN1 IN2 UPS non occupé SUSI SUSI PLUS SUSI CLOCK SUSI DATA SUSI GND RF/V+ GND| Face avant | Couleur du câble | Connexion(pour utiliser les réglages d'origine) |
| F0r jaune F0r | = Lumière marche arrière (fonction F0) | |
| F0f blanc F0f | = Lumière marche avant (fonction F0) | |
| AUX1 grün AUX1 (fonction F1) | ||
| AUX2 | AUX2 (fonction F2) | |
| AUX3 blanc AUX3 (fonction F5) | ||
| AUX4 blanc AUX4 (fonction F6) | ||
| AUX5 blanc AUX5 (fonction F7) | ||
| AUX6 blanc AUX6 (fonction F8) | ||
| RF/V+ blau Fil de retour (RF) pour toutes les sorties de fonction (+) | ||
| IN1 / IN2 | non équipé | Entrées de commutation |
| UPS | non équipé | Ligne de commande pour circuit tampon |
| GND | non équipé | Raccordement à la masse pour les contacts Reed / les capteurs Hall;Pôle négatif (-) pour condensateur de soutien ou circuit tampon |
| RF/V+ (alternative) | non équipé | Alimentation en tension pour les capteurs à effet Hall;Pôle positif (+) pour condensateur de soutien ou circuit tampon (UPS)alternative : fil de retour (RF) pour les sorties de fonction (+) |

Informations sur les connexions V+ et RF
Les deux connexions sont équivalentes ; elles peuvent être utilisées
■soit comme fil de retour pour toutes les fonctions,
- soit comme connexion pour le pôle positif d'un condensateur électrolytique de support ou d'un circuit tampon,
■soit comme connexion pour l'alimentation en tension d'un capteur à effet Hall.
Une seule variante est présentée dans les illustrations.
3.5. Affectation des connexions LD-G-44 | Face arrière
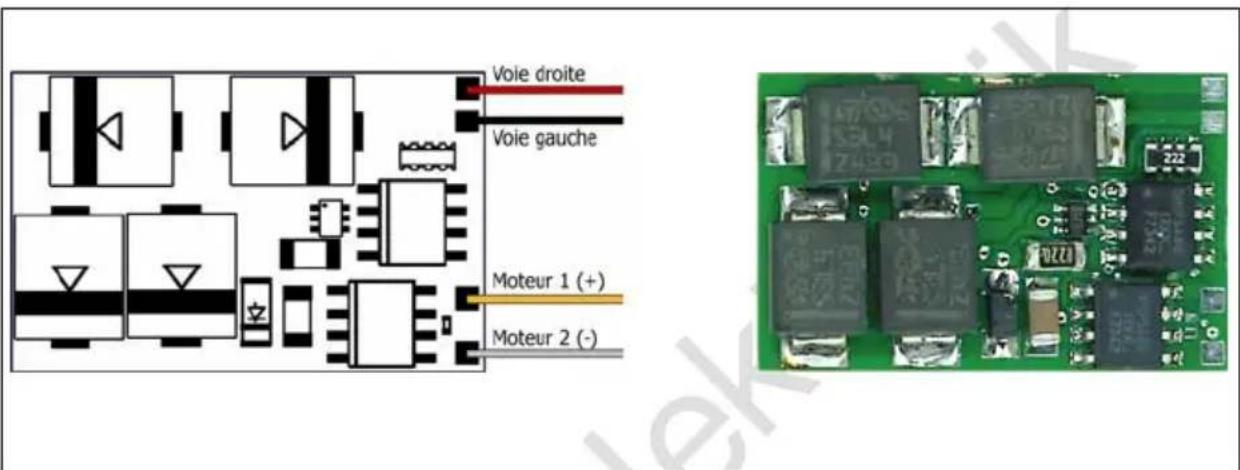
text_image
Voie droite Voie gauche Moteur 1 (+) Moteur 2 (-)| Face arrière Couleur du câble | Connexion(pour utiliser les réglages d'origine) |
| Voie droite rouge Roues droites (ou frotteur) | |
| Voie gauche | ques gauches (ou masse du chassie) |
| Moteur 1 orange Connexion du moteur 1 (plus) | |
| Moteur 2 gris Connexion du moteur 2 (moins) | |
3.6. Utilisation du LD-G-44 dans des locomotives à moteur à CA
Le décodeur LD-G-44 est prévu pour les moteurs à courant continu (CC). Il ne peut donc pas être connecté directement à des moteurs à courant alternatif (CA). Vous pouvez cependant piloter des moteurs à CA et utiliser la compensation de charge du décodeur LD-G-44:
■si vous montez entre le moteur à CA et le décodeur un adaptateur (par exemple, numéro d'article 70-02105 ou 70-02106) ou
■si vous remplacez la bobine du moteur par un aimant permanent (par exemple, numéro d'article 70-04100, 70-04200 ou 70-04300).
3.7. Monter le décodeur
Déterminez l'endroit où vous allez installer le décodeur après avoir démonté la caisse de la locomotive. Débranchez du moteur les câbles le reliant à la voie ou pour les locomotives équipées d'un inverseur électronique, débranchez les câbles reliant celui-ci au moteur et à la voie. Retirez l'inverseur qui n'est plus nécessaire.

Attention :
Les dispositifs antiparasites fixés au moteur ou aux câbles d'alimentation ne doivent pas être enlevés ! Le moteur et l'antiparasitage forment un ensemble. Le retrait de l'antiparasitage peut provoquer de graves disfonctionnements.
Connexion du décodeur au moteur
Reliez le décodeur au moteur et aux prises de courant ou au frotteur / à la masse du chassie (voie gauche et voie droite) conformément au schéma de raccordement.
Uniquement pour le fonctionnement analogique sur des réseaux à 2 fils en courant continu : si le sens de marche de la locomotive en mode analogique ne correspond pas au sens de marche réglé sur le transformateur, vous devez inverser les connexions qui mènent aux prises de courant (voie droite et voie gauche).

text_image
Voie droite Voie gauche Moteur 1 (+) Moteur 2 (-) Raccordement du moteur à courant continu et de l'alimentation en tensionVoie gauche = prise de courant ou frotteur de gauche
Voie droite = prise de courant droite ou masse du chassie
Connexions aux sorties

Attention :
Le courant maximal de l'accessoire ne doit pas dépasser le courant maximal de la sortie à laquelle vous la connectez. Sinon, la sortie peut être irrémédiablement endommagée !
S'il y a lieu, enlevez les diodes présentes dans le circuit d'alimentation de l'éclairage. Connectez les feux et les accessoires aux sorties de fonction du décodeur. Si la masse des feux et des auxiliaires est déjà connectée à la masse du véhicule, le travail de connexion est terminé. Dans le cas contraire, soudez les câbles de masse des feux et auxiliaires au retour commun pour toutes les fonctions du décodeur.
Vous trouverez les réglages d'usine (par défaut) dans les tableaux des variables de configuration (→ paragraphes 5.4. et 5.5.). Vous pouvez attribuer librement les sorties aux fonctions en paramétrant les variables de configuration.
Exemples de raccordement de consommateurs et de LED aux sorties de fonction

text_image
F0r F0f AUX1 AUX2 AUX3 AUX4 AUX5 AUX6 RF/V+ IN1 IN2 UPS SUSI RF/V+ GNDF0f et F0r : lumière marche avant / marche arrière
F0r : connexion en série de DEL via une résistance en série commune
AUX2 : connexion parallèle et sérielle combinée de LEDs
AUX4 : connexion parallèle de DEL via une résistance en série par DEL
3.8. Connexion de DEL aux sorties de fonction
Les sorties de fonction commutent à la masse. Il faut donc connecter la cathode (-) des DEL aux sorties et l'anode (+) au retour commun des fonctions (RF).

Attention :
Vous devez toujours faire fonctionner les DEL via une résistance en série ! Dans le cas contraire, les DEL seront détruites lors de la mise activé ou auront une durée de considérablement réduite. Si vous renoncez à une résistance en série, d'autres composants prennent leur fonction en charge (par ex., les rails, les roues, les collecteurs de courant). Cela peut conduire à une modification du signal numérique et donc à des interférences dans le fonctionnement numérique.
Déterminez la valeur de résistance requise pour la valeur de crête de la tension de travail disponible au niveau du conducteur de retour (RF).
Détermination de la valeur de crête de la tension de fonctionnement
■avec des boosters regulés :
tension de sortie (pour la voie) du booster - 1 V*
■avec des boosters non régulés et les transformateurs analogiques :
(1,4 x tension nominale du transformateur) - 1 V*
* 1 V est "coincé" dans le redresseur du décodeur.
Connexion en série des DEL
Pour connecter plusieurs DEL à une sortie, montez-les en série avec une seule résistance. En fonction de la valeur de la résistance, l'intensité maximale du courant est d'environ 20 mA. La formule suivante donne le nombre maximum de DEL connectables :
Tension de crête
- total des tensions de passage des DEL
$$
0 $$
Cette solution a pour avantage une faible consommation.
Pour déterminer la valeur de la résistance en cas de montage sériel des DEL, additionnez les tensions de passage de toutes les DEL. La tension de passage dépend de la couleur de la DEL et figure dans les caractéristiques techniques de la DEL. Si vous ne disposez pas des caractéristiques techniques, basez-vous sur 4 V pour les DEL blanches et bleues et sur 2 V pour les DEL vertes, rouges, jaunes et orange.
La tension résiduelle doit être "absorbée" par une résistance dont la valeur est déterminée par la formule suivante :
R_V nec. [Ohm] = ( U_B [V] - U_F [V]) / ( I_F [mA] x 0,001)
U_B= tension de crête | U_F= total des tensions de passage de toutes les DEL
I_F = courant pour une luminosité maximale
Connexion en parallèle des DEL
Vous pouvez aussi connecter en parallèle plusieurs DEL équipées chacune d'une résistance. En fonction de la valeur de la résistance, l'intensité maximale du courant est d'environ 20 mA par DEL. La formule suivante donne le nombre maximum de DEL connectables en parallèle :
Courant maximal disponible à la sortie
- total des courants de passage des DEL
0
Cette solution permet l'allumage des DEL dès que leur tension de passage est atteint (2 à 4 V selon la couleur), ce qui la rend particulièrement intéressante pour une utilisation sur un réseau alimenté en courant analogique. Son défaut est une forte consommation.
La formule suivante permet de calculer la valeur de la résistance :
$$ R _ {V} \text { nec. } [ O h m ] = (U _ {B} [ V ] - U _ {F} [ V ]) / (I _ {F} [ m A ] \times 0, 0 0 1) $$
U_B = tension maximale possible | U_F = tension de passage de la DEL
I_F = courant pour une luminosité maximale.
Tip : Pour économiser le courant, vous pouvez limiter l'intensité du courant à 10 mA sans baisse visible de la luminosité.
Exemples de raccordement de LED aux sorties de fonction

text_image
IN1 IN2 F0r F0f AUX1 AUX2 AUX3 AUX4 AUX5 AUX6 RF/V+ UPS SUSI RF/V+ GNDF0f et F0r : lumière marche avant / marche arrière
F0r : connexion en série de DEL via une résistance en série commune
AUX2 : connexion parallèle et sérielle combinée de LEDs
AUX4 : connexion parallèle de DEL via une résistance en série par DEL
3.9. Connexion d'accessoires électromagnétiques
Si vous raccordez des consommateurs inductifs (par exemple des couplages TELEX, des relais ou d'autres consommateurs avec des bobines), vous devez brancher une diode de roue libre (par exemple 1N400x) en parallèle avec le consommateur afin d'éviter d'endommager la sortie. Veillez à raccorder l'anode de la diode (+) à la sortie de fonction.
Connexion d'accessoires à un relais
Si vous souhaitez commuter des consommateurs via le décodeur, avec le raccordement desquels le courant maximal de la sortie ou du décodeur serait dépassé, vous pouvez commuter le/les consommateur(s) via un relais (par ex. 1xUm 1A 12V, réf. 84-61010) et le/les raccorder directement aux prises de courant du véhicule.
Le courant dont un relais a besoin dépend du type de relais. Dans le cas de l'utilisation de l'exemple de relais, il est d'environ 100 mA.
Pour éviter d'endommager la sortie, il faut brancher une diode de roue libre en parallèle au relais.

text_image
Diode 1N400x Relais + per. ex. 1xUm 1A 12 V Accessoire Alimentation F0r F0f AUX1 AUX2 AUX3 AUX4 AUX5 AUX6 RF/V+ IN1 IN2 UPS SUSI RF/V+ GND3.10. Connexion des entrées de commutation
Les entrées de commutation commutent vers la masse du décodeur et peuvent donc être reliées à tous les circuits (externes) par lesquels une connexion à la masse peut être établie. Il est possible, par exemple, de connecter des contacts Reed ou des capteurs Hall qui établissent la connexion à la terre dès qu'ils entrent dans le champ magnétique d'un aimant permanent.
Connexion de contacts Reed
Vous pouvez utiliser aussi bien des contacts normalement ouverts que des inverseurs (contacts inverseurs). Connectez les contacts Reed à l'entrée de commutation et à la connexion de masse du décodeur (GND). Les contacts Reed ne sont pas polarisés, vous pouvez donc attribuer les deux connexions comme vous le souhaitez.

Remarque : les ampoules de verre des contacts Reed sont sensibles aux dommages aniques !

text_image
Contact Reed Contact Reed IN1 IN2 F0r UPS F0f AUX1 SUSI AUX2 AUX3 AUX4 AUX5 RF/V+ AUX6 RF/V+ GNDRaccordement de contacts Reed aux entrées de commutation
Connexion de capteurs à effet Hall
Faites attention à la bonne polarité lorsque vous connectez des capteurs à effet Hall.

text_image
Capteur de Hall Capteur de Hall IN1 IN2 F0r F0f AUX1 AUX2 AUX3 AUX4 AUX5 AUX6 RF/V+ UPS SUSI RF/V+ GNDRaccordement de capteurs à effet Hall aux entrées de commutation
Attribution des connexions :
| Capteur à effet Hall | Décodeur | [BGYD] Remarque :Le fait de confondre la borne de terre et la borne de tension d'alimentation peut endommager le capteur de Hall. |
| Borne de terre (⊥)Borne de | terre (GND) | |
| Borne de tension d'alimentation (+) | Sortie de tension (RC ou V+) | |
| Sortie Entrée de commutation | (IN1 ou IN2) |
Remarque :
3.11. Connexion d'un condensateur de soutien ou d'un circuit tampon
Dans les sections où il y a un mauvais contact avec les rails (par exemple lors du franchissement d'aiguillages) ou une mauvaise consommation de courant de la locomotive (par exemple liée à la construction), l'alimentation électrique du décodeur peut être brièvement interrompue. En mode analogique, les effets sont généralement faibles, mais en mode numérique, des perturbations massives peuvent en résulter : par exemple, le clignotement des lumières et le bégaiement du moteur jusqu'au passage automatique en mode analogique. Il est possible d'y remédier en connectant un condensateur de soutien ou un circuit tampon spécial.
Connexion d'un condensateur de soutien
Le condensateur électrolytique doit avoir une capacité d'au moins 100 μF et de 470 μF au maximum. La tension minimale est de :
■en cas d'utilisation exclusive dans des installations numériques : > 25 V
■en cas d'utilisation dans des installations analogiques : >35 V
Veillez à respecter la polarité lors du raccordement !

text_image
IN1 IN2 F0r F0f AUX1 AUX2 AUX3 AUX4 AUX5 AUX6 RF/V+ UPS SUSI Condensateur tampon 100...470 µF ≥ 35 V RF/V+ GNDRaccordement d'un condensateur de soutien
Connexion d'un circuit tampon
La capacité des circuits tampons est considérablement plus importante que celle des condensateurs de soutien (par exemple, UPS-mini avec 0,47 F, 1,0 F ou 1,5 F). Utilisez un circuit tampon conforme à la norme RCN-530 qui est relié à la terre, par ex. UPS-mini (numéros d'article 70-0221x, 70-0222x, 70-0223x).
Connectez la ligne de contrôle au connecteur "UPS". Cela permet de garantir que le décodeur régule le courant de charge et la sortie de courant et d'éviter les problèmes, par exemple lors de la programmation du décodeur sur la voie de programmation ou lors de la mise en marche du système.
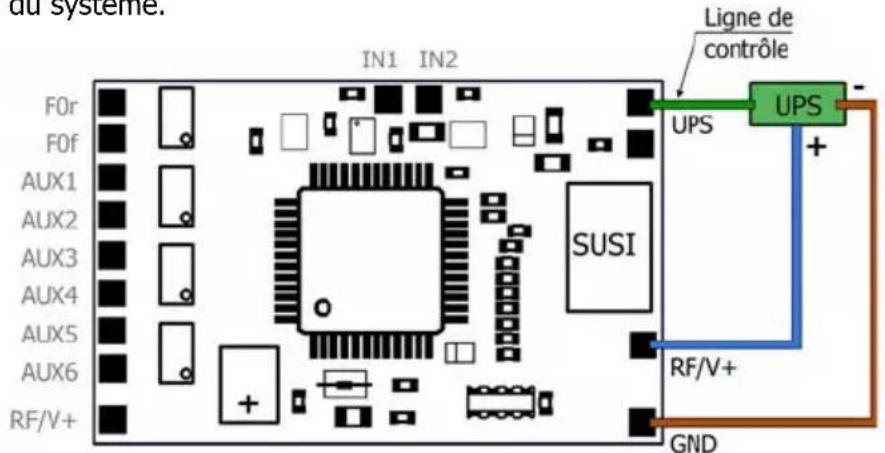
text_image
du système. IN1 IN2 F0r F0f AUX1 AUX2 AUX3 AUX4 AUX5 AUX6 RF/V+ Ligne de contrôle UPS SUSI + + RF/V+ GNDConnexion d'un circuit tampon selon RCN-530 (par exemple USP-mini)
3.12. Connexion d'un module SUSI

Informations de base : interface SUSI
L'interface SUSI est une interface permettant de connecter des modules d'extension (par ex. modules sonores, modules fonctionnels) à des décodeurs de véhicules. Les valeurs caractéristiques sont définies dans la norme
RailCommunity RCN-600. La norme décrit trois versions différentes sur le plan mécanique et électrique :
■classic SUSI (l'interface connue depuis 2003) : Utilisation principalement pour la taille nominale H0
■micro SUSI: utilisation principalement pour la taille nominale N
■power SUSI: utilisation principalement pour les tailles nominales plus grandes avec un besoin en courant plus élevé.
Le décodeur de locomotive LD-G-44 dispose d'une interface classic SUSI, à laquelle il est possible de connecter un module de son, par exemple. Le système de connexion utilisé pour cette interface est conçu pour éviter l'inversion de polarité.
Branchez la prise de câble soudée au module SUSI dans l'interface SUSI à l'arrière du décodeur. La commande et la programmation du module SUSI se font par le LD-G-44.
3.13. Finition
Une fois tous les branchements terminés, prenez les mesures suivantes pour protéger durablement le décodeur contre les dommages :
- Fixez le décodeur afin d'éviter les courts-circuits par contact avec les parties métalliques du véhicule. Pour ce faire, vous pouvez par exemple utiliser du ruban adhésif double face ou un support de décodeur (article n° 70-01810 ou 70-01820).
■Lors de la mise en place du boîtier, veillez à ne pas coincer de câbles de raccordement. Cela peut endommager les isolations, ce qui peut provoquer des courts-circuits et donc endommager le décodeur. Il est recommandé de sécuriser les câbles avec des colliers de serrage.
4. Programmer
4.1. Programmation avec des centrales DCC
Depuis la centrale, vous pouvez programmer les variables de configuration (CV) du décodeur, la programmation de la voie principale est également possible. Consultez pour cela le paragraphe correspondant dans le mode d'emploi de votre centrale, qui décrit la programmation par octet des variables CV (programmation directe) ou la programmation de la voie principale (PPV).
La programmation par registre n'est pas supportée par le LD-G-44. Vous ne pouvez pas programmer le décodeur avec des centrales DCC qui ne permettent que la programmation par registre..
4.2. Programmation avec des centrales Motorola
Au format Motorola, les paramètres sont programmés dans des registres. Les registres portent les mêmes numéros que les variables de configuration (CV) pour le format DC
Remarque : si vous utilisez une centrale qui transmet à la fois le format DCC et le format Motorola, il est préférable de programmer le décodeur au format DCC. Vous pouvez également piloter le décodeur au format Motorola après la programmation.
Remarque : avant de commencer la programmation, connectez au moins une ampoule ou DEL à F0f (avant) ou F0r (arrière) car celle-ci clignotera pour vous indiquer l'état de la programmation. La vitesse de clignotement indique le type de donnée à saisir :
| Clignotement lent Clignotement rapide | |
| Numéro du registre à programmer Valeur que doit prendre le registre | |
Placez le véhicule sur une voie connectée à la sortie pour la voie de la centrale (et non pas à la sortie pour la voie de programmation). Assurez-vous qu'aucun autre véhicule ne stationne sur cette voie sinon le décodeur qu'il contient sera lui aussi programmé.
| Lancer le mode programmation Programmer le décodeur | |
| 1. Mettre la centrale sous tension ou faire une RAZ de la centrale (" stop " et " go " simultanés).2. Saisir l'adresse actuelle (par défaut : 3) ou l'adresse 80 .3. Toutes les fonctions sur " off ".4. Appuyer sur la touche " stop " → voie hors tension.5. Maintenir l'inversion du sens de marche. Appuyer sur " go ".6. Lorsque l'éclairage clignote, relâcher l'inversion de sens de marche . | 1. Saisir le numéro du registre comme une adresse Motorola.Avec " 0 " si nécessaire .2. Activer l'inversion de sens → clignotement rapide de l'éclairage .3. Saisir la valeur que doit prendre le registre (comme une adresse Motorola) .4. Activer l'inversion de sens → clignotement lent de l'éclairage .Si nécessaire : répéter les étapes 1 à 4 pour tous les registres à programmer.Appuyer sur la touche " stop ". |
| → Acces au mode programmation | → Fin du mode programmation |
Programmation avec la Central Station I et la Mobile Station de Märklin\*\*
Avec la Central Station I et la Mobile Station de Märklin**, vous pouvez programmer les registres en appelant le numéro d'article 29750 dans la base de données des locomotives. Programmez ensuite le décodeur comme décrit pour ce numéro d'article dans les instructions des commandes numériques.
5. Variables de configuration et registres
Les tableaux ci-dessous listent toutes les variables de configuration (pour le format DCC) et tous les registres (pour le format Motorola) qui peuvent être paramétrés dans le décodeur.
Les registres et les variables de configuration (CV) ont des numéros identiques, ils sont indiqués dans les tableaux dans la colonne "No." Les valeurs par défaut sont les valeurs d'origine et qui sont attribuées après une RAZ.
Remarque : pour les variables permettant le paramétrage de plusieurs caractéristiques, la valeur à saisir est obtenue par l'addition des nombres correspondant au réglage désiré.
5.1. Aperçu des variables de configuration LD-G-44
| N° Nom Section du mode d'emploi | ||
| 1 Adresse de base 5.3. Paramétrage de l'adresse | ||
| 2 | Tension de démarrage(vitesse de démarrage) | 5.4. Réglage de la commande du moteur |
| 3 Taux d'accélération | ||
| 4 Taux de freinage | ||
| 5 Tension maximale (vitesse maximale) | ||
| 6 Moyenne tension (vitesse centrale) | ||
| 7 Version 5.13. Informations | ||
| 8 RAZ | Constructeur | 5.12. Fonctions d'aide5.13. Informations | |
| 10 Informations RailCom dynamiques 5.8. Réglages pour RailCom et DCC-A | ||
| 11 Packet Time Out 5.9. Réglages pour la conduite | ||
| 12 Protocoles reconnus 5.13. Informations | ||
| 13 | Fonctions actives en mode analogique(F1 à F8) | 5.10. Paramétrage pour fonctionnement analogique |
| 14 | Fonctions actives en mode analogique(F0, F9 à F12) | |
| 15 et 16 Verrouillage du décodeur 5.12. Fonctions d'aide | ||
| 17 et 18 Adresse étendue 5.3. Paramétrage de l'adresse | ||
| 19 Adresse UM 5.3. Paramétrage de l'adresse | ||
| 20 | 2^e adresse Motorola | 5.3. Paramétrage de l'adresse |
| 21 | Fonctions actives en UM (ou consist)(F1 à F8) | 5.9. Réglages pour la conduite |
| 22 | Fonctions actives en UM (ou consist)(F0, F9 à F12) | 5.9. Réglages pour la conduite |
| 27 | Freinage en présence d'une tension continu | 5.9. Réglages pour la conduite |
| 28 Canals RailCom 5.8. Réglages pour RailCom et DCC-A | ||
| 29 Données de configuration 1 5.2. Réglages de base | ||
| 31 et 32 Index pour pages de CV supérieures 5.5. Function mapping | ||
| 47...54 Atténuation des sorties | 5.6. Effets appliqués aux sorties | |
| 55...62 Affectation des effets aux sorties | ||
| 63 | Tension pour la mise en marche/l'arrêt des sorties | |
| 64 | Réaction aux impulsions de surtension (installations analogiques à courant alternatif) | 5.10. Paramétrage pour fonctionnement analogique |
| 65 Kick de démarrage | 5.4. Réglage de la commande du moteur | |
| 67...94 | Seconde courbe de vitesse (uniquement en mode 28 pas) | |
| 96 Méthode d'attribution des fonctions 5.13. Informations | ||
| 97 | Durée minimale d'activation des entrées de commutation | 5.7. Réglages pour les entrées de commutation |
| 98 | ||
| 99 | Temps de kick ("Fonction d'instantané") | 5.6. Effets appliqués aux sorties |
| 100 | Temps de montée et de descente de l'intensité lumineuse | |
| 101...104 Fréquence de clignotement | ||
| 105 | Affectation des fonctions aux entrées de commutation F0 ... F7 | 5.7. Réglages pour les entrées de commutation |
| 107 | ||
| 106 | Affectation des fonctions aux entrées de commutation F8 ... F12 | 5.7. Réglages pour les entrées de commutation |
| 108 | ||
| 109 | Sensibilité à la surcharge ("Sensibilité au court-circuit") | 5.11. Sensibilité de la protection contre les surcharges |
| 110 | Tension moteur pour le découplage automatique | 5.6. Effets appliqués aux sorties |
| 112 | Facteur de gain pour la compensation de charge | 5.4. Réglage de la commande du moteur |
| 113 | Paramètre de la compensation de charge KP | |
| 114 Paramètre de la compensation de charge KI | ||
| 115 | Paramètre de la compensation de charge KD | |
| 116 Compensation de charge | ||
| 121 Données de configuration 2 5.2. Réglages de base | ||
| 122 Sensibilité ABC 5.9. Réglages pour la conduite | ||
| 123...127 | Réservé à l'inscription via DCC-A | Les valeurs ne doivent pas être modifiées ! |
| 257...485 | Affectation des sorties et des fonctions spéciales aux fonctions | 5.5. Function mapping |
5.2. Réglages de base
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Données de Configuration 1 | 29 0 | ... 255(14) | Sens de marche "Standard" 0Sens de marche inversé 1 |
| 14 pas de vitesse 028 ou 128 pas de vitesse (au format DCC) 2Remarque: si vous voulez utiliser le procédé SDF, vous devez régler le mode 28/128 pas de vitesse.(→ paragraphe 2.1)Remarque: si le décodeur est piloté au format Motorola, le réglage du mode de vitesse n'a aucun effet. | |||
| Pas de reconnaissance analogique automatique 0Reconnaissance analogique automatique 4 | |||
| RailCom arrêt 0RailCom marche 8 | |||
| Courbe de vitesse rectiligne 0Seconde courbe de vitesse 16 | |||
| Adresses de base 0Adresses étendues (uniquement DCC) 32Remarque: quand l'utilisation d'adresses étendues est activée dans la CV 29, le décodeur ne réagit pas aux instructions au format Motorola ! | |||
| Exemple: CV 29 = 0 | Signification:Sens de marche= "Standard". 14 pas de vitesse. Reconnaissance analogique = "arrêt". RailCom = "arrêt". Courbe de vitesse rectiligne. Adresses de base.Exemple: CV 29 = 14 | Signification:Sens de marche= "Standard". 28 ou 128 pas de vitesse. Reconnaissance analogique = "marche". RailCom = "marche". Courbe de vitesse rectiligne. Adresses de base. | |||
| Données de Configuration 2 | 121 0 | 4, 8, 12, 16 ... 60 (4) | Réaction à la méthode de freinage ABC : Méthode de freinage ABC inactive 0 Méthode de freinage ABC active 4 Détection ABC inversée 8 |
| Distance de freinage constante inactive 0 Distance de freinage constante active 16 | |||
| Service de trains navettes inactif 0 Service de trains navettes actif 32 | |||
| Remarques :La distance de freinage constante peut être réglée indépendamment de l'utilisation de la méthode de freinage ABC. La longueur de la distance de freinage est définie par la temporisation de freinage (CV 4). La condition pour le mode pendulaire est qu'un module de freinage ABC soit raccordé pour chacun des deux sens de déplacement de la section pendulaire. | |||
5.3. Paramétrage de l'adresse
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Adresse de base 1 1 | ... 255 (3) Valeurs: | au format DCC : 1 à 127au format MM : 1 à 255 | |
| Remarque : le décodeur ne répond pas aux instructions transmises au format DCC si l'adresse de base est supérieure à 127 et l'utilisation d'adresses étendues est désactivée dans la CV 29 ! | |||
| Adresse étendue 17 | 192 ... 255 (195) | Format DCC uniquement.La plus part des centrale permettent la saisie directe d'adresses étendues. Les CV 17, 18 et 29 sont paramétrées automatiquement par la centrale. | |
| 18 | 0 ... 255 (232) | ||
| Adresse UM | 19 | 1 ... 127 (0) | Format DCC uniquement.= Adresse pour l'opération Consist(marche en unité multiple) |
| 2e adresseMotorola | 20 | 0 ... 255 (4) | = Adresse permettant d'atteindre les fonctions supplémentaires en Motorola. Les fonctions F5 à F8 sont commandées par les touches F1 à F4, la fonction F9 par la touche F0. |
5.4. Réglage de la commande du moteur
Optimisation des caractéristiques de conduite
En ajustant la compensation de charge et les caractéristiques du moteur, le décodeur est adapté aux caractéristiques individuelles du moteur de la locomotive.
Remarque : l'installation d'un décodeur augmente généralement les effets des défauts du véhicule sur les caractéristiques de conduite. Le moteur de la locomotive, les balais et le collecteur, la boîte de vitesses, les pièces mobiles et les prises de courant doivent donc être en parfait état. Les signaux d'interférence électrique (par exemple, le "feu de balais") peuvent affecter massivement la transmission des signaux numériques.
Pour optimiser les caractéristiques de conduite, réglez les CV dans l'ordre suivant :
- CV 112 "Facteur de gain"
- CV 113 à 115 "Paramètres de la compensation de charge"
- CV 2, CV 5 et CV 6 "Tension de démarrage, maximum et moyenne"
Paramétrage de la compensation de charge
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Compensation de charge | 116 0, | 1 (1) Compensation | de charge arrêt 0Compensation de charge marche 1 |
| Facteur de gain 112 | 1...15 (5) | Adaptation de la | commande de charge à latension individuelle du moteur |
| Remarque : l'adaptation du CV 112 n'est nécessaire que si la vitesse maximale de la locomotive est déjà atteinte à un niveau de vitesse faible ou n'est pas atteinte au niveau de vitesse le plus élevé.Ne modifiez la valeur que progressivement jusqu'à ce que la vitesse maximale souhaitée soit atteinte au niveau de la vitesse la plus élevée. | |||
Réglage des paramètres de la compensation de charge
| Paramètre de charge | N° Valeurs (par défaut) | Explications et remarques | |
| KP 113 0 ... 255 (32) = Part | proportionnelle | ||
| Le paramètre KP détermine la vitesse de base.Valeur trop petite → loco trop lente. Valeur trop grande → loco roule avec de forts à-coups. | |||
| KI | 114 0 .. 255 (5) = Part intégrale | ||
| Le paramètre KI veille au réglage fin de la compensation de charge.La valeur doit être adaptée pas à pas. Valeur trop grande → loco roule avec de forts à-coups. | |||
| KD | 115 0 .. 255 (4) = Part différentielle | ||
| Le paramètre KD retarde l'application de la compensation de charge.Valeur trop faible → loco roule avec des vibrations. Valeur trop grande → vitesse irrégulière de la loco | |||
Procédez comme suit pour définir les paramètres :
Si la locomotive roule avec des vibrations : augmentez la valeur de la CV 115 (KD) par pas de 2. S'il n'y a pas d'amélioration, remettez la CV 115 sur sa valeur d'usine. Diminuez ensuite les valeurs de la CV 113 (KP) par pas de 2 et de la CV 114 (KI) par pas de 1.
Si la locomotive manque de puissance et devient trop lente dans les montées : augmentez la valeur de la CV 114 (KI) par pas de 1, jusqu'à ce que la locomotive commence à avancer par à-coups. Augmentez alors la valeur de la CV 115 (KD) par pas de 2. En cas d'insuccès ou si la locomotive avance par à-coups dès l'augmentation de la CV 114, remettez les CV 114 et 115 à leur valeur de départ et augmentez la valeur de la CV 113 (KP) par pas de 5.
Si la vitesse de la locomotive est instable : diminuez la valeur de la CV 115 (KD) par pas de 2.
Réglage de la courbe caractéristique du moteur
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Tension de démarrage (vitesse de démarrage) | 2 0 ... 255 (4) = Tension d'alimentation du moteur au pas de vitesse 1.0 = 0 volt255 = tension maximale | ||
| Taux d'accélération 3 | 0 ... 255 (10) = Lors de l'accélération / de freinage, temps d'attente s'écoulant entre le passage d'un pas de vitesse vers le supérieur / inférieur. Le temps d'attente est calculé comme suit (valeur de la CV) x 0,9 sec. | ||
| Taux de freinage 4 0 | ... 255 (5) | ||
| Si la distance de freinage constante est active (→ CV 121), le réglage n'est valable que pour le niveau de vitesse le plus élevé (14, 28 ou 128). Si le processus de freinage est déclenché à un niveau de vitesse inférieur, le temps d'attente jusqu'au passage au niveau de vitesse immédiatement inférieur est automatiquement prolongé. On obtient ainsi que la distance de freinage soit toujours la même, quel que soit le niveau de vitesse lors du lancement du processus de freinage. | |||
| Tension maximale (vitesse maximale) | 5 0 ... 255 (255) = Tension appliquée au moteur au pas de vitesse le plus élevé.2 = 0,8 % de la tension maximale255 = tension maximale | ||
| Moyenne tension (vitesse centrale) | 6 0 ... 255 (100) = Tension au niveau de vitesse7 (mode 14 vitesses) ou14 (mode 28 vitesses) | ||
Réglage de la courbe caractéristique du moteur (suite)
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Seconde courbe de vitesse(uniquement en mode 28 pas) | 676869...94 | 0 ... 255 = table | des vitesses pour la seconde courbe de vitesse.Une tension est attribuée à chacun des 28 pas de vitesse.0 = tension nulle255 = tension maximale |
| Note : Un exemple de courbe caractéristique alternative est défini dans les valeurs par défaut des CV 67 – 94. | |||
Réglage du kick de démarrage (à partir de la version 1.2 du logiciel)
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Kick de démarrage | 65 | 0 ... 255 (0) = | augmentation brève de la tension du moteur au démarrage pour surmonter le couple de démarrage. |
| Exemple : CV 65 = 6 → La tension du moteur au démarrage correspond à la tension présente à la vitesse interne 6 (sur 255). Elle est immédiatement réglée avec le taux de freinage réglé dans la CV 4 (CV 4) sur le niveau de vitesse effectivement sélectionné. Après modification de la CV 4, une modification de la CV 65 peut donc être nécessaire. | |||
5.5. Function mapping
L'affectation des actions contrôlées par le décodeur
■Activation et désactivation des sorties de fonction
■(Dé)activation des fonctions spéciales
Alimentation électrique sans interruption (UPS)
Marche/arrêt avec une fonction (arrêt avec F)
Marche de manœuvre (MM)
Temporisation de démarrage/freinage (TDF)
aux fonctions est effectuée selon la norme RailCommunity RCN-227 Remarque : l'utilisation du Function Mapping n'est pas possible avec des centrales Motorola pures.
Réglages de base pour l'utilisation du Function Mapping
Pour accéder à la zone de mémoire correspondante (appelée "page"), les valeurs de "Function mapping" doivent être définies dans les CV 31 et 32 (= valeurs par défaut).
| Nom N° Valeurs (par défaut) Explications et remarques | |||
| Index pour pages supérieures | 31 0 ... | 255 (0) Function mapping | actif 0 |
| 32 0 ... | 255 (42) Function mapping | actif 42 | |
Variables de configuration pour le Function Mapping
Selon le RCN-227, huit variables de configuration (CV) sont attribuées à chaque fonction (F0 à F28) : quatre pour la marche avant ("f") et quatre pour la marche arrière ("r"). Six d'entre elles sont utilisées pour le décodeur LD-G-44 (3 pour la marche avant et 3 pour la marche arrière) :
■ 2 CV pour les sorties (F0f, F0r, AUX1 ... AUX6) : Vous définissez ici quelles sorties sont commutées avec la fonction.
■4 CV pour les fonctions spéciales : Vous réglez ici séparément pour chaque sens de marche la fonction avec laquelle les fonctions spéciales sont activées / désactivées.
- Fonction de désactivation : vous pouvez définir ici une fonction avec laquelle vous pouvez désactiver les actions attribuées à la fonction lors de la mise en marche. La valeur "255" détermine que les actions sont désactivées sans aucune fonction.
| Sorties | non utilisé | Fonctions spéciales | arrêt/marche avec fonction | |||||||||||
| F0f | F0r | AUX1 | AUX2 | AUX3 | AUX4 | AUX5 | AUX6 | UPS | Arrêt avec F | MM | TDF | |||
| Valeurs | 1 2 | 4 8 1 | 6 32 | 64 12 | 8 0 | 1(on) | 2(on) | 4(on) | 8(off) | F0, F1, F2,..., F28, --- | ||||
| Valeurs possibles | 0, 1, 2, 3, 4,..., 255 | 0 | 0, 1, 2, 3, 4,..., 15 | 0, 1, 2,... 28, 255 | ||||||||||
| Sorties | non utilisé | Fonctions spéciales | arrêt/marche avec fonction | ||||
| Nom CV | N° CV | Valeur par défaut | N° CV | N° CV | Valeur par défaut | N° CV | Valeur défaut |
| F0 f 257 | (1) F0f en marche avant | 258 | 259 (0) | 260 (255) | |||
| F0 r 261 | (2) F0r en marche arrière | 262 | 263 (0) | 264 (255) | |||
| F1 f 265 | (4) AUX1 en marche avant | 266 | 267 (0) | 268 (255) | |||
| F1 r 269 | (4) AUX1 en marche arrière | 270 | 271 (0) | 272 (255) | |||
| F2 f 273 | (8) AUX2 en marche avant | 274 | 275 (0) | 276 (255) | |||
| F2 r 277 | (8) AUX2 en marche arrière | 278 | 279 (0) | 280 (255) | |||
| F3 f 281 (0) | 282 283 | (4) MM | 284 (255) | ||||
| F3 r 285 (0) | 286 287 | (4) MM | 288 (255) | ||||
| F4 f 289 (0) | 290 291 | (8) TDF | 292 (255) | ||||
| F4 r 293 (0) | 294 295 | (8) TDF | 296 (255) | ||||
| F5 f 297 (16) | AUX3 en marche avant 298 299 (0) | 300 (255) | |||||
| F5 r 301 (16) | AUX3 en marche arrière 302 303 (0) | 304 (255) | |||||
| F6 f 305 (32) | AUX4 en marche avant 306 307 (0) | 308 (255) | |||||
| F6 r 309 (32) | AUX4 en marche arrière 310 311 (0) | 312 (255) | |||||
| F7 f 313 (64) | AUX5 en marche avant 314 315 (0) | 316 (255) | |||||
| F7 r 317 (64) | AUX5 en marche arrière 318 319 (0) | 320 (255) | |||||
| F8 f 321 (128) | AUX6 en marche avant 322 323 (0) | 324 (255) | |||||
| F8 r 325 (128) | AUX6 en marche arrière 326 | 327 (0) | 328 (255) | ||||
| F9 f 329 (0) | 330 331 (0) 332 (255) | ||||||
| F9 r 333 (0) | 334 335 (0) 336 (255) | ||||||
| Sorties | non utilisé | Fonctions spéciales | arrêt/marche avec fonction | |||||||||||
| F0f | F0r | AUX1 | AUX2 | AUX3 | AUX4 | AUX5 | AUX6 | UPS | Arrêt avec F | MM | TDF | |||
| Valeurs | 1 2 | 4 8 | 16 32 | 64 12 | 8 0 | 1(on) | 2(on) | 4(on) | 8(off) | F0, F1, F2,..., F28, --- | ||||
| Valeurs possibles | 0, 1, 2, 3, 4,..., 255 | 0 | 0, 1, 2, 3, 4,..., 15 | 0, 1, 2,... 28, 255 | ||||||||||
| Sorties | non utilisé | Fonctions spéciales | arrêt/marche avec fonction | ||||
| Nom CV | N° CV | Valeur par défaut | N° CV | N° CV | Valeur par défaut | N° CV | Valeur défaut |
| F10 f 3 | 37 (0) | 338 339 (0) 340 (255) | |||||
| F10 r 3 | 41 (0) | 342 343 (0) 344 (255) | |||||
| F11 f 3 | 45 (0) | 346 347 (0) 348 (255) | |||||
| F11 r 3 | 49 (0) | 350 351 (0) 352 (255) | |||||
| F12f 3 | 53 (0) | 354 355 (0) 356 (255) | |||||
| F12 r 3 | 57 (0) | 358 359 (0) 360 (255) | |||||
| F13 f 3 | 61 (0) | 362 363 (0) 364 (255) | |||||
| F13 r 3 | 65 (0) | 366 367 (0) 368 (255) | |||||
| F14 f 3 | 69 (0) | 370 371 (0) 372 (255) | |||||
| F14 r 3 | 73 (0) | 374 375 (0) 376 (255) | |||||
| F15 f 3 | 77 (0) | 378 379 (0) 380 (255) | |||||
| F15 r 3 | 81 (0) | 382 383 (0) 384 (255) | |||||
| F16 f 3 | 85 (0) | 386 387 (0) 388 (255) | |||||
| F16 r 3 | 89 (0) | 390 391 (0) 392 (255) | |||||
| F17 f 3 | 93 (0) | 394 395 (0) 396 (255) | |||||
| F17 r 3 | 97 (0) | 398 399 (0) 400 (255) | |||||
| F18 f 4 | 01 (0) | 402 403 (0) 404 (255) | |||||
| F18 r 4 | 05 (0) | 406 407 (0) 408 (255) | |||||
| F19 f 4 | 09 (0) | 410 411 (0) 412 (255) | |||||
| F19 r 4 | 13 (0) | 414 415 (0) 416 (255) | |||||
| Sorties | non utilisé | Fonctions spéciales | arrêt/marche avec fonction | |||||||||||
| F0f | F0r | AUX1 | AUX2 | AUX3 | AUX4 | AUX5 | AUX6 | UPS | Arrêt avec F | MM | TDF | |||
| Valeurs | 1 2 | 4 8 | 16 32 | 64 12 | 8 0 | 1(on) | 2(on) | 4(on) | 8(off) | F0, F1, F2,..., F28, --- | ||||
| Valeurs possibles | 0, 1, 2, 3, 4,..., 255 | 0 | 0, 1, 2, 3, 4,..., 15 | 0, 1, 2,... 28, 255 | ||||||||||
| Sorties | non utilisé | Fonctions spéciales | arrêt/marche avec fonction | ||||
| Nom CV | N° CV | Valeur par défaut | N° CV | N° CV | Valeur par défaut | N° CV | Valeur défaut |
| F20 f 4 | 17 (0) | 418 419 (0) 420 (255) | |||||
| F20 r 4 | 21 (0) | 422 423 (0) 424 (255) | |||||
| F21 f 4 | 25 (0) | 426 427 (0) 428 (255) | |||||
| F21 r 4 | 29 (0) | 430 431 (0) 432 (255) | |||||
| F22f 4 | 33 (0) | 434 435 (0) 436 (255) | |||||
| F22 r 4 | 37 (0) | 438 439 (0) 440 (255) | |||||
| F23 f 4 | 41 (0) | 442 443 (0) 444 (255) | |||||
| F23 r 4 | 45 (0) | 446 447 (0) 448 (255) | |||||
| F24 f 4 | 49 (0) | 450 451 (0) 452 (255) | |||||
| F24 r 4 | 53 (0) | 454 455 (0) 456 (255) | |||||
| F25 f 4 | 57 (0) | 458 459 (0) 460 (255) | |||||
| F25 r 4 | 61 (0) | 462 463 (0) 464 (255) | |||||
| F26 f 4 | 65 (0) | 466 467 (0) 468 (255) | |||||
| F26 r 4 | 69 (0) | 470 471 (0) 472 (255) | |||||
| F27 f 4 | 73 (0) | 474 475 (0) 476 (255) | |||||
| F27 r 4 | 77 (0) | 478 479 (0) 480 (255) | |||||
| F28 f 4 | 81 (0) | 482 483 (0) 484 (255) | |||||
| F28 r 4 | 85 (0) | 486 487 (0) 488 (255) | |||||
Exemple: Programmation pour la fonction manœuvre

flowchart
graph TD
A["AVANT"] --> B["AUX1"]
C["ARRIERE"] --> D["AUX2"]
B --> E["FOr"]
D --> F["FOr"]
style B fill:#99ccff,stroke:#333
style D fill:#99ccff,stroke:#333
Remarque : Les conducteurs "retour" ne figurent pas dans l'image.
| Sorties arrêt/marche avec | fonction | |||||||||||
| F0f F0r | AUX1 AUX2 | F0 F1 F2 | F3 F4 ... F28 | --- | ||||||||
| Valeurs | 1 2 4 8 0 1 | 2 3 4 ... 28 | 255 | |||||||||
| CV Nom | CV N° | Valeur programmée | CV N° | Valeur programmée | ||||||||
| F0 f 257 | 5 (Sorties | F0f et AUX1) | 260 | 3 (= F3/Mode de manœuvre) | ||||||||
| F0 r | 261 | 10 (Sorties F0r et AUX2) | 264 | 3 (= F3/Mode de manœuvre) | ||||||||
| F3 f 281 | 12 (Sorties | AUX1 et AUX2) 284 | 255 (= aucune F attribuée) | |||||||||
| F3 r | 285 | 12 (Sorties AUX1 et AUX2) | 288 | 255 (= aucune F attribuée) | ||||||||
Avec cette programmation, vous obtenez les effets suivants lors de l'activation du mode de manœuvre (ici avec la fonction F3) :
- Les signaux de pointe à trois feux (AUX1 et AUX2), qui sont commutés en mode normal avec F0 en fonction du sens de marche, sont désactivés.
- Les signaux de fin de convoi (F0f et F0r), qui sont commutés en mode normal avec F0 en fonction du sens de marche, sont désactivés.
- Des deux côtés, les signaux de pointe à trois feux (AUX1 et AUX2) sont allumés (éclairage de manœuvre).
Exemple: Programmation d'extinction feux de fin de convoi en traction

Remarque : Les conducteurs "retour" ne figurent pas dans l'image.
| Sorties arrêt/marche avec fonction | ||||||||||||
| F0f F0r | AUX1 AUX2 | F0 F1 F2 | F3 F4 ... F28 --- | |||||||||
| Valeurs | 1 2 4 8 0 1 | 2 3 4 ... | 28 255 | |||||||||
| CV Nom | CV N° | Valeur programmée | CV N° | Valeur programmée | ||||||||
| F0 f | 257 5 (Sorties F0f et AUX1) | 260 | 5 (= F5 / mode avec wagons attelés) | |||||||||
| F0 r | 261 10 (Sorties F0r et AUX2) | 264 | 5 (= F5 / mode avec wagons attelés) | |||||||||
| F3 f | 281 4 (Sortie AUX1) | 284 255 (= aucune F attribuée) | ||||||||||
| F3 r | 285 2 (Sortie F0r) | 288 255 (= aucune F attribuée) | ||||||||||
Avec cette programmation, vous obtenez les effets suivants lors de l'activation du mode avec des wagons attelés (ici avec la fonction F5) :
- Les signaux de pointe à trois feux (AUX1 et AUX2), qui sont commutés en mode normal avec F0 en fonction du sens de marche, sont désactivés.
- Les signaux de fin de convoi (F0f et F0r), qui sont commutés en mode normal avec F0 en fonction du sens de marche, sont désactivés.
■ Le signal de pointe à trois feux (AUX1) est activé lorsque le sens de marche est "avant".
■ Le signal de fin de convoi (F0r) est activé dans le sens de la marche "arrière".
5.6. Effets appliqués aux sorties
Atténuation des sorties
| Sortie N° Valeurs | (par défaut) | Explications et remarques | |
| F0f 47 1...64 (64) | = Réduction de la tension appliquée à la sortie. | ||
| F0r 48 1...64 (64) | |||
| AUX1 49 1...64 (64) | 1 = tension minimale | ||
| AUX2 50 1...64 (64) | 64 = tension maximale | ||
| AUX3 51 1...64 (64) | |||
| AUX4 52 1...64 (64) | |||
| AUX5 53 1...64 (64) | |||
| AUX6 54 1...64 (64) | |||
Affectation des effets aux sorties
| Sortie N° Valeurs | (par défaut) | Explications et remarques | |
| F0f 55 0 ... 255 (0) | aucun effet 0 | ||
| F0r 56 0 ... 255 (0) | Inverser la fonction 1 | ||
| AUX1 57 0 ... 255 (0) | Clignotementactivé2 | ||
| AUX2 58 0 ... 255 (0) | Fonction kickactivé4 | ||
| AUX3 59 0 ... 255 (0) | Augmentation et diminution successives 8 | ||
| AUX4 60 0 ... 255 (0) | Simulation de feuactivée16 | ||
| AUX5 61 0 ... 255 (0) | Sortie activé/ activéeà la tension définie dans CV 63 32 | ||
| AUX6 62 0 ... 255 (0) | |||
| Exemple : Clignotement alterné avec AUX1 et AUX2 :→ Valeur d'entrée pour AUX1: CV 57 = 2 | Valeur d'entrée pour AUX2: CV 58 = 3 (1 + 2) | |||
Fréquence de clignotement
| Sortie N° Valeurs | (par défaut) | Explications et remarques | |
| F0f / F0r | 101 | 1 ... 255 (20) | 1 = fréquence de clignotement la plus élevée255 = fréquence de clignotement la plus basseRéglage commun pour 2 sorties |
| AUX1 / AUX 2 | 102 | 1 ... 255 (20) | |
| AUX3 / AUX4 | 103 | 1 ... 255 (20) | |
| AUX5 / AUX6 | 104 | 1 ... 255 (20) | |
| Note : La fonction de clignotement doit être activée pour la sortie. (CV 55 - 62) | |||
Augmentation et diminution de la luminosité des sorties
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Temps de montée et de descente de l'intensité lumineuseRéglage commun à toutes les sorties | 100 | 1...255 (10) = Durée jusqu'à ce que la tension maximale soit atteinte ou que la tension soit réduite à "0".1 = durée la plus courte possible255 = durée la plus longue possibleAttention : pour la sortie, l'augmentation et la diminution de la luminosité doivent être activées.→ CV 55 - 62 | |
Réglages pour MARs-Light
La lumière d'avertissement montante et descendante typique des locomotives américaines est générée par le réglage suivant des valeurs CV :
| Sortie N° Valeurs | (par défaut) | Explications et remarques | |
| F0f 55 0 ... 255 (0) | Clignotement activé 2 | ||
| F0r 56 0 ... 255 (0) | |||
| ... | |||
| AUX6 62 0 ... 255 (0) | |||
| F0f / F0r 101 1 ... 255 (20) | Fréquence de clignotement 6Réglage commun pour 2 sorties | ||
| ... | |||
| AUX5 / AUX6 104 1 ... 255 (20) | |||
| Toutes les sorties | 100 | 1...255 (10) | Temps de montée et de descentede l'intensité 2Attention : pour la sortie, l'augmentation et ladiminution de la luminosité doivent être activées.→ CV 55 - 62 |
Tension pour la mise en marche/l'arrêt des sorties
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Tension pour "sortie on/off"Réglage commun à toutes les sorties | 63 | 0 ... 255 (16) 0 = tension la plus basse255 = tension la plus élevéeCe réglage n'est valable que pour les sorties pour lesquelles la mise en marche/l'arrêt a été activée lorsque la tension définie ici est atteinte.→ CV 55 ... 62 | |
| Par défaut, la sortie est désactivée lorsque la tension est dépassée et réactivée lorsqu'elle passe en dessous. En inversant la fonction, le fonctionnement peut être inversé.(→ CV 55...62) | |||
Temps de kick et découplage automatique ("valse de découplage")
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Temps de kick ("Fonction d'instantané")Réglage commun à toutes les sorties | 99 | 0 ... 255 (32) | 0 = durée la plus courte255 = durée la plus longue (= 25,5 secondes)L'augmentation de la valeur d'entrée de "1" prolonge la période de temps de 0,1 sec. |
| Note : La fonction de kick doit être activée pour la sortie. (CV 55 - 62) | |||
| Tension moteur pour le découplage automatiqueRéglage commun à toutes les sorties | 110 0 ... 255 (5) = Tension | moteur délivrée au moteur lors de l'activation de la fonction de découplage automatique. La tension est appliquée au moteur pendant la durée définie dans CV 99. | |
| Pour pouvoir déclencher la "valse de désaccouplement", il faut que■la fonction kick soit activée dans les CV 55 ... 62 pour la sortie■un temps de kick > 0 doit être réglé dans CV 99■une tension > 0 doit être réglée dans CV 110.Si une tension = 0 est réglée dans CV 110, seule la tension à la sortie est réduite à 0 après le temps de kick réglé, mais aucun mouvement de va-et-vient de la locomotive n'est déclenché. | |||
5.7. Réglages pour les entrées de commutation
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Affectation des fonctions aux entrées de commutation F0 ... F7 | F0 1 | ||
| F1 2 | |||
| F2 4 | |||
| F3 8 | |||
| Entrée de commutation 1 | 105 | 1 ... 255 (0) F4 16 | |
| F5 32 | |||
| Entrée de commutation 1 | 107 | 1 ... 255 (0) F6 64 | |
| F7 128 | |||
| Affectation des fonctions aux entrées de commutation F8 ... F15 | F8 1 | ||
| F9 2 | |||
| F10 4 | |||
| F11 8 | |||
| Entrée de commutation 1 1 | 106 | 1 ... 255 (0) F12 16 | |
| F13 32 | |||
| Entrée de commutation 1 2 | 108 | 1 ... 255 (0) F14 64 | |
| F15 128 | |||
| Durée minimale d'activation des entrées de commutation | = Période pendant laquelle l'entrée reste au moins allumée après avoir été connectée à la terre.L'augmentation de la valeur d'entrée de "1" prolonge la période de temps de 0,1 sec.0 = 0 seconde (arrêt)255 = 25,5 sec. | ||
| Entrée de commutation 1 1 | 97 0 ... | 255 (0) | |
| Entrée de commutation 1 2 | 98 0 ... | 255 (0) | |
| Exemple :Le marche de manœuvre (ici commuté avec F3) doit être activée automatiquement pour la durée du passage sur un aiguillage (ici 10 secondes).CV 105 = 8 (affectation de l'entrée de commutation 1 à F3)CV 97 = 100 (= 10 secondes) | |||
5.8. Réglages pour RailCom et DCC-A
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Informations RailCom dynamiques | 10 0,1 | (0) hors service 0 | |
| Statistiques de réception:Le décodeur calcule combien de "paquets" DCC sont reçus et communique le pourcentage de paquets corrompus sur le total reçu. 1 | |||
| Afin de pouvoir recevoir des données dynamiques RailCom, les réglages suivants sont nécessaires:▪CV 29 ("Données de Configuration 1": RailCom activé▪CV 28 "Canals RailCom": au moins canal 2 activé | |||
| Canals RailCom Inscription automatique selon le RCN-218 (DCC-A) | 28 0 ... | 135 (131) pas de renvoi de donnéespar RailCom et pas d'inscription automatique 0 | |
| Inscription automatique selon le RCN-218 (DCC-A) 128 | |||
| Remarques sur l'inscription automatique selon RCN-218 (DCC-A):L'utilisation de la procédure DCC-A n'est possible qu'avec des centrales numériques qui supportent cette procédure d'inscription. Pour pouvoir utiliser l'inscription automatique via la procédure DCC-A, les réglages suivants doivent être effectués :▪CV 29 "Données de configuration 1" : RailCom activé▪CV 28 "Canaux RailCom" : canaux 1 et 2 activés▪CV 28 "DCC-A" : activéL'activation du canal dynamique 1 est facultative.Remarques sur l'utilisation du canal dynamique 1 :Certains détecteurs RailCom peuvent uniquement recevoir des messages d'adresse sur le canal 1. Si ces détecteurs sont utilisés, l'application du canal dynamique 1 ne doit pas être activée.Informations complémentaires sur RailCom et sur l'annonce automatique selon RCN-218 (DCC-A)→ paragraphe 2.9. | |||
5.9. Réglages pour la conduite
Paramétrage du Packet Time Out
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Packet Time Out 11 | 2 ... 255 | (16) Période de temps entre la défaillance du signal numérique et le passage à l'opération alternative (opération analogique).L'augmentation de la valeur d'entrée de "1" prolonge la période de temps de 10 ms. | |
| Remarques:Lorsque la reconnaissance analogique automatique est activée, le décodeur passe automatiquement en mode analogique s'il ne reçoit pas de signal numérique pendant la durée programmée.Si le décodeur est alimenté par un circuit tampon,- il convient de désactiver la reconnaissance analogique automatique dans CV 29 et- de régler une valeur faible pour le Packet Time Out (environ 16).Cela permet d'éviter que la locomotive ne continue à rouler de manière imprévue après la coupure de la tension de la voie (par ex. lors d'un arrêt d'urgence ou d'un arrêt de signal). | |||
Opération Consist
En Unité Multiple (UM) sous DCC on ne peut commander que la direction et la vitesse. Dans les CV 21 et 22 on peut déterminer quelles fonctions peuvent être commandées en complément sur l'adresse "Consist" ou "UM" en CV 19. Si la valeur "0" est définie, la fonction n'est toujours adressée que via l'adresse définie pour le véhicule en question dans le CV 1 ou les CV 17 et 18.
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Fonctions actives en UM(Unité Multiple ou consist)(F1 à F8) | 21 0 ... | 255 (0) F1 marche | 1 |
| F2 marche 2 | |||
| F3 marche 4 | |||
| F4 marche 8 | |||
| F5 marche 16 | |||
| F6 marche 32 | |||
| F7 marche 64 | |||
| F8 marche 128 | |||
| Fonctions actives en UM (ou consist)(F0, F9 à F12) | 22 0 ... | 63 (0) F0f marche | 1 |
| F0r marche 2 | |||
| F9 marche 4 | |||
| F10 marche 8 | |||
| F11 marche 16 | |||
| F12 marche 32 |
Freinage en présence d'une tension continu
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Freinage en présence d'une tension continu | 27 0, 16, 32, 48 (48) Pas de freinage en présence d'une tension continu 0 | ||
| Remarque : en présence d'une tension continue sur la voie, le décodeur bascule normalement en mode analogique. Si le réseau est doté d'une zone de freinage fondée sur le principe de l'application d'un courant continu (par ex. module de freinage Märklin**), la bascule en mode analogique doit être désactivée (en CV 29) pour que la locomotive réagisse correctement dans la zone de freinage. La notion de tension positive ou négative est déterminée à partir du rail droit dans le sens de marche de la locomotive. | |||
Utilisation de la méthode de freinage ABC
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Sensibilité ABC 122 | 0 ... 255 | (10) | = Niveau de déséquilibre de la tension de voie que le décodeur interprète comme l'entrée dans une section de freinage ABC.0 = sensibilité maximale255 = sensibilité la plus faible |
| Remarques :Les boosters pour lesquels la tension n'est pas symétrique à 100 % ou les circuits supplémentaires sur la vo (par ex. les détecteurs d'occupation de la voie) peuvent générer involontairement une tension de voie asymétrique. Pour éviter que le LD-G-41 n'interprète cette tension asymétrique sur la voie normale comme entrée dans une section de freinage ABC, la sensibilité ABC peut être réduite.Pour que le décodeur réagisse à la distance de freinage ABC, la procédure de freinage ABC doit être activée CV 121. | |||
5.10. Paramétrage pour fonctionnement analogique
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Fonctions actives en mode analogique (F1 à F8) | 13 0 ... | 255 (0) F1 marche 1 | |
| F2 marche 2 | |||
| F3 marche 4 | |||
| F4 marche 8 | |||
| F5 marche 16 | |||
| F6 marche 32 | |||
| F7 marche 64 | |||
| F8 marche 128 | |||
| Fonctions actives en mode analogique (F0, F9 à F12) | 14 0 ... | 31 (0) F0 marche 1 | |
| F9 marche 2 | |||
| F10 marche 4 | |||
| F11 marche 8 | |||
| F12 marche 16 | |||
| Réaction aux impulsions de surtension (installations analogiques à courant alternatif) | 64 0 ... | 255 (50) = Sensibilité avec laquelle le décodeur réagit à une impulsion de surtension par un changement de sens de marche.0 = sensibilité maximale255 = sensibilité la plus faible | |
| Conseil : si la sensibilité est réglée trop haut, le décodeur réagit aux tensions parasites de l'installation par un changement de direction. Si elle est réglée trop basse, il ne réagit pas à l'impulsion d'inversion. | |||
5.11. Sensibilité de la protection contre les surcharges
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Sensibilité à la surcharge"Sensibilité au court-circuit" | 109 0 ... | 255 (50) | Niveau de la surcharge à laquelle la surcharge est détectée50 = 3.000 mAPlus la valeur est élevée, plus le courant auquel la protection contre les surcharges se déclenche est élevé.La valeur de 50 ne doit être modifiée que dans des cas exceptionnels ! |
| Info : la protection contre les surcharges coupe le moteur (et non les sorties de fonction) si le courant total autorisé est dépassé ou s'il y a un court-circuit à la sortie du moteur (la forme maximale d'une surcharge).Des tensions parasites de courte durée du moteur ou des charges connectées peuvent provoquer l'arrêt du moteur, bien que le courant total admissible n'ait pas été dépassé et qu'il n'y ait pas de court-circuit à la sortie du moteur. Dans ce cas, la sensibilité de la protection contre les surcharges peut être légèrement ajusté dans le CV 109.⚠️ Vérifiez toujours le courant du moteur et le bon fonctionnement du moteur et de la transmission avant d'abaisser la sensibilité au court-circuit. . | |||
5.12. Fonctions d'aide
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| RAZ 8 0 ... 255 La saisie d'une valeur quelconque rend au décodeur ses réglages d'origine. | |||
| Verrouillage du décodeur | 15 0 ... | 255 (3) La modification des valeurs de CV du décodeur n'est possible que si les valeurs de CV 15 et 16 sont identiques. | |
| 16 0 ... | 255 (3) | ||
| En attribuant des valeurs spécifiques dans le CV 16, les CV des décodeurs ayant la même adresse peuvent être modifiés séparément. Application par exemple pour les véhicules ou les formations de train avec plusieurs décodeurs ayant la même adresse (par exemple décodeurs de locomotives, de sons, de fonctions). Remarque : en cas de réinitialisation, le réglage de CV 16 est conservé et ne revient pas aux réglages d'usine. | |||
| Index pour pages de CV supérieures | 31 0 (0) | Uniquement modifiable en mode DCC!Function mapping 0 | |
| 32 0 (42) | Uniquement modifiable en mode DCC!Function mapping 42 | ||
| Remarque : en cas de saisie de valeurs différentes dans CV 31 et/ou 32, il n'est pas possible d'utiliser le Function Mapping. Les réglages pour les sorties de fonction et les fonctions spéciales ne peuvent alors pas être modifiés. | |||
5.13. Informations
| Nom N° Valeurs | (par défaut) | Explications et remarques | |
| Version 7 --- Ne peut être lu qu'en DCC ! | |||
| Constructeur 8 --- (62) Ne peut être lu qu'en DCC ! | |||
| ProtocolesreconnusNe peut être lu qu'enDCC ! | 12 --- (53) Définit sous quels protocoles le décodeurest apte à fonctionner. 53 = 1 + 4 + 16 + 32 1 = DC 4 = DCC 16 = AC 32 = MM | ||
| Méthoded'attribution desfonctionsNe peut être lu qu'enDCC ! | 96 --- (2) Fixe la méthode d'attribution des fonctions : 2 = Attribution des fonctionsvia les CV 257 à 512dans la banque sélectionnée parCV 31 = 0 et CV 32 = 42 avec CV par fonction selon la normeRailCommunity RCN227 section 2 | ||
6. Liste de contrôle pour la recherche et le dépannage des erreurs

Avertissement :
Si vous constatez un fort dégagement de chaleur ou si le décodeur commence à dégager de la fumée, débranchez immédiatement la connexion à la tension d'alimentation.
Risque d'incendie !
Causes possibles :
■ Un ou plusieurs raccordements sont mal soudés. → Vérifiez les raccordements.
■Un court-circuit entre le décodeur ou des consommateurs reliés au conducteur de retour pour toutes les fonctions et des parties métalliques de la locomotive ou des rails. → Vérifiez les connexions. Il est possible que le décodeur ait été irrémédiablement endommagé par le court-circuit.
6.1. Problèmes lors de la programmation du décodeur
Les valeurs CV ne peuvent pas être modifiées.
Cause possible :
Des valeurs différentes ont été saisies dans CV 15 et CV 16 (verrouillage du décodeur).
→ Saisissez dans CV 15 la même valeur que dans CV 16.
6.2. Problèmes lors de la conduite
Après l'installation du décodeur, la locomotive roule mal ou pas du tout.
Cause possible :
La prise de courant de la locomotive (et donc la transmission des signaux numériques au décodeur) est insuffisante. → Vérifiez les prises de courant / le frotteur et faites en sorte, le cas échéant, que la prise de courant soit meilleure.
La locomotive s'arrête et les éclairages, qui sont commutés avec F0, clignotent.
Cause : La protection contre les surcharges a été activée car la consommation de courant est supérieure au courant total maximal du décodeur ou il y a un court-circuit à la sortie du moteur. → Éliminez la cause de la surcharge. Vérifiez notamment les points suivants :
- Consommation de courant du moteur et des consommateurs supplémentaires. Si la consommation de courant est supérieure au courant autorisé, le décodeur n'est pas adapté à cette locomotive.
■Facilité de fonctionnement de toutes les pièces mobiles (par ex. roues, tiges). - État des balais
Remarque : le décodeur doit d'abord être mis hors tension avant de réagir à nouveau aux ordres de marche.
En mode numérique, la locomotive roule soudainement à grande vitesse.
Cause possible :
- Des signaux parasites provenant de l'installation ont fait passer le décodeur en mode analogique. → Comme il est souvent impossible de localiser la cause des signaux parasites, il est conseillé de désactiver la détection automatique des signaux analogiques pendant l'exploitation numérique.
Après l'installation du décodeur, la locomotive ne roule que dans un sens.
Cause possible :
- La tension de sortie du booster n'est pas symétrique. Le décodeur interprète la tension de voie asymétrique comme une distance de freinage ABC. → Réduisez la sensibilité ABC dans CV 122 ou désactivez la procédure de freinage ABC dans CV 121.
Après la programmation du décodeur, la locomotive roule mal ou pas du tout.
Causes possibles :
- Dans CV 1, une adresse de base > 127 est activée et dans CV 29, l'utilisation d'adresses étendues est désactivée. Dans ce cas, le décodeur ne réagit pas aux instructions DCC. → Entrez dans CV 1 une adresse de base < 127 ou activez dans CV 29 l'utilisation d'adresses étendues.
- L'utilisation d'adresses étendues est réglée dans CV 29. Dans ce cas, le décodeur ne réagit pas aux ordres Motorola. → Désactivez dans CV 29 l'utilisation des adresses étendues.
- Les valeurs saisies pour les variables CV sont incohérentes. Effectuez une réinitialisation du décodeur et réglez à nouveau les valeurs pour la commande du moteur. Respectez pour cela les indications du paragraphe 5.4.
■ La régulation de charge est désactivée. → Vérifiez les réglages de CV 116.
■La régulation de charge est mal réglée. Dans ce cas, la locomotive saccade ou oscille en roulant. → Remettez les valeurs par défaut et procédez selon les indications du paragraphe 5.3 lorsque vous réglez à nouveau les paramètres de régulation de charge.
6.3. Problèmes de retour d'information du décodeur
Les valeurs CV ne peuvent pas être lues via RailCom.
Cause possible :
- RailCom est désactivé. → Modifiez la valeur de CV 29 (ajoutez "8" à la valeur d'entrée).
Le décodeur ne se connecte pas à la centrale via DCC-A.
Causes possibles :
- RailCom est désactivé. → Modifiez la valeur d'entrée de CV 29 (ajoutez "8" à la valeur d'entrée).
■DCC-A est désactivé.→ Modifiez la valeur d'entrée de CV 28. - Il y a un ou plusieurs décodeurs sur l'installation qui réagissent (par erreur) à l'ordre DCC-A pour l'annonce. → Dans ce cas, effectuez l'annonce depuis une voie séparée (par ex. depuis la voie de programmation).
6.4. Problèmes lors de la commutation des fonctions
Un appareil supplémentaire / un éclairage ne réagit pas aux ordres de commutation.
Cause possible :
- L'affectation des fonctions à la sortie à laquelle l'accessoire / l'éclairage est raccordé est différente de ce qui était prévu.→ Vérifiez les réglages dans le Function Mapping.
■ L'accessoire est défectueux ou mal raccordé. → Vérifiez l'accessoire et le raccordement. - La sortie est défectueuse (par ex. à cause d'une surcharge ou d'un court-circuit). → Envoyez le décodeur pour vérification / réparation (payante).
La lumière s'allume et s'éteint lors de la montée des pas de vitesse ou la lumière ne s'allume pas ou ne s'éteint pas.
Cause possible :
■Le mode pas de vitesse auf format DCC du décodeur et de la centrale numérique ne correspondent pas. Exemple : la centrale est en mode 28 pas de vitesse, mais le décodeur est en mode 14 pas de vitesse. → Modifiez le mode de pas de vitesse sur la centrale et / ou sur le décodeur.
6.5. Problèmes lors de la commutation via l'entrée de commutation
Aucune fonction n'est déclenchée après le passage d'un aimant permanent sur la voie.
Causes possibles :
■ Le contact Reed ou le capteur Hall est mal raccordé. → Vérifiez le raccordement.
- La distance à l'aimant est trop grande ou l'aimant trop faible. → Modifiez la position de l'aimant (si possible) ou utilisez un aimant plus puissant.
■ L'aimant est monté avec la polarité inversée. → Modifiez le sens de montage.
■ L'affectation de la fonction à l'entrée de commutation est erronée. → Vérifiez les entrées dans CV 105 - 108.
- La durée minimale d'enclenchement est trop courte. Vérifiez les entrées dans CV 97 - 98.
6.6. Problèmes en mode analogique
La locomotive ne roule pas en mode analogique, le décodeur ne réagit pas.
Cause possible :
■ Le mode analogique est désactivé. → Modifier la valeur de la CV 29.
Le décodeur ne commute pas en mode analogique
(ou commute bien qu'il continue à être piloté en numérique).
Cause possible :
- Dans CV 11, la valeur est trop élevée ou trop basse pour le Packet Time-Out. → Modifiez la valeur et vérifiez le réglage en fonctionnement.
6.7. Hotline technique
Si vous avez des questions sur l'utilisation du décodeur, notre hotline technique vous aidera (numéro de téléphone et adresse e-mail sur la dernière page).
6.8. Réparations
Vous pouvez nous envoyer un décodeur défectueux pour examen / réparation (adresse sur la dernière page). Veuillez ne pas nous envoyer votre envoi en port dû. En cas de garantie, nous vous remboursons les frais d'envoi réguliers.
Veuillez joindre à votre envoi
- la preuve d'achat comme justificatif d'un éventuel recours en garantie ou en garantie
■une brève description du défaut
■l'adresse à laquelle nous devons renvoyer le(s) produit(s)
■ votre adresse e-mail et/ou un numéro de téléphone où nous pouvons vous joindre en cas de questions
Frais
L'examen des produits envoyés est gratuit pour vous. En cas de garantie, la réparation et le renvoi sont également gratuits pour vous.
S'il n'y a pas de cas de garantie, nous vous facturons les frais de réparation et les frais de renvoi. Pour la réparation, nous facturons au maximum 50 % du prix du produit neuf selon notre liste de prix en vigueur.
Réalisation de la/des réparation(s)
En nous envoyant le(s) produit(s), vous nous donnez l'ordre de le(s) contrôler et de le(s) réparer. Nous nous réservons le droit de refuser la réparation si celle-ci n'est pas possible techniquement ou n'est pas rentable. En cas de recours à la garantie, vous recevrez alors un remplacement gratuit.
Devis
Nous effectuons les réparations pour lesquelles nous facturons moins de 25,00 € par article, frais d'envoi en sus, sans vous consulter davantage. Si les frais de réparation sont plus élevés, nous vous contactons et n'effectuons la réparation que lorsque vous avez confirmé l'ordre de réparation.
7. Données techniques
Protocoles numériques
| Formats de données Motorola-II | |
| DCC (selon la norme NMRA et RCN) | |
| Formats pour l'enregistrement automatique des décodeurs de véhicules | DCC-A selon RCN-218 (désactivable) |
| Format de retour d'information | RailCom selon RCN-217 (désactivable) |
Interfaces, sorties et entrées
| Interface de décodeur (dépend du type de décodeur et de la version) | N° d'article 41-04440: aucunN° d'article 41-04441: aucun / câbles de raccordement |
| Interface SUSI (toutes les versions LD-G-44) | Version classic SUSI selon RCN-600 |
| Nombre d'entrées de commutation | 2 |
| Nombre de sorties de commutation | 8 |
| Raccordement pour condensateur de soutien ou circuit tampon | 1 |
| Raccordement pour ligne de commande du circuit tampon | 1 selon RCN-530 (commute vers la masse) |
Caractéristiques électriques
| Alimentation en tension | Tension numérique 12-24 Volts ou transformateur de marche analogique (tension continue ou alternative) |
| Consommation de courant (sans consommateurs) 30 mA maximum | |
| Courant total maximal 3.000 mA | |
| Courant maximal du moteur 3.000 mA | |
| Courant maximal par sortie | 300 mA |
Protection
| Classe de protection IP 00 | Signification : Pas de protection contre les corps étrangers solides. Pas de protection contre l'eau. |
| Protection contre les surcharges | Coupure automatique en cas de dépassement du courant total admissible ou de court-circuit à la sortie du moteur. ("Arrêt en cas de court-circuit") |
Environnement
 | Pour une utilisation à l'intérieur |
| Température ambiante pendant le fonctionnement | 0 ~ + 60 °C |
| Humidité relative admissible pendant le fonctionnement | 10 ~ 85% (sans condensation) |
| Température ambiante pendant le stockage | - 10 ~ + 80 °C |
| Humidité relative admissible pendant le stockag | 10 ~ 85% (sans condensation) |
Autres caractéristiques
| Dimensions (platine, sans fiche PluX22) | env. 28 x 17,5 x 7 mm |
| Poids N° d'article 41-04440 (sans câbles): env. 2,5 gN° d'article 41-04441 (avec câbles soudés): env. 6,0 g | |
8. Garantie, Conformité UE & DEEE
8.1. Déclaration de garantie
Nous offrons pour ce produit 2 ans de garantie à partir de la date d'achat par le premier client, limitée toutefois à 3 ans après l'arrêt de la production en série du produit. Le premier client est le consommateur qui a acquis le produit auprès de notre société, d'un revendeur ou d'un installateur agréés. Cette garantie complète la garantie légale dont bénéficie l'acheteur.
La garantie comprend la correction gratuite des défauts provoqués manifestement par nous lors de l'utilisation de composants défectueux ou d'une erreur de montage. Pour les prêts-à-monter, nous garantissons l'intégralité et la qualité des composants ainsi que le fonctionnement conforme des éléments avant montage. Nous garantissons le respect des caractéristiques techniques en cas de montage (pour les prêts-à-monter), de branchement, de mise activé et d'utilisation (pour tous nos produits) conformément au mode d'emploi.
Nous nous réservons un droit de réparation, amélioration, remplacement ou remboursement du prix d'achat. Toute autre exigence est exclue. La réparation de dégâts collatéraux ou de responsabilité produits ne peuvent s'appliquer que dans le cadre de la loi.
La garantie ne s'applique que si le mode d'emploi a été respecté. La garantie est caduque dans les cas suivants :
■modification volontaire des commutations,
■tentative de réparation d'un module monté ou d'un appareil fini,
■dommages causés par l'intervention d'un tiers,
■usage inapproprié ou dommages consécutifs à la négligence ou l'abus.
8.2. UE-Déclaration de conformité

Ce produit est conforme aux exigences des directives européennes suivantes et porte donc le marquage CE.
2001/95/EU Directive sur la sécurité des produits
2015/863/UE relative à la limitation de l'utilisation de certaines substances dangereuses dans les équipements électriques et électroniques (RoHS)
2014/30/EU sur la compatibilité électromagnétique (directive CEM). Normes sous-jacentes : DIN-EN 55014-1 et 55014-2 : Compatibilité électromagnétique - Exigences pour les appareils ménagers, outils électriques et équipements électriques similaires. Partie 1 : Interférences émises, Partie 2 : Immunité aux interférences
Pour maintenir la compatibilité électromagnétique pendant le fonctionnement, respectez les mesures suivantes :
Ne branchez le transformateur d'alimentation qu'à une prise de terre correctement installée et protégée par un fusible.
N'apportez aucune modification aux composants d'origine et suivez exactement les instructions, les schémas de connexion et de montage de ce manuel.
N'utilisez que des pièces de rechange originales pour les réparations.
8.3. Déclarations sur la directive DEEE
Ce produit est soumis aux exigences de la directive européenne 2012/19/CE relative aux déchets d'équipements électriques et électroniques (DEEE), ce qui signifie que le fabricant, le distributeur ou le vendeur du produit doit contribuer à l'élimination et au traitement appropriés des déchets d'équipements conformément à la législation européenne et nationale.
Cette obligation comprend
- l'enregistrement auprès des autorités chargées de la tenue des registres ("registres") dans le pays où les DEEE sont distribués ou vendus ;
■la déclaration régulière de la quantité d'EEE vendus ; - l'organisation ou le financement de la collecte, du traitement, du recyclage et de la valorisation des produits ;
- pour les distributeurs, la mise en place d'un service de reprise auprès duquel les clients peuvent rapporter gratuitement les DEEE
- pour les producteurs, le respect de la directive relative à la limitation de l'utilisation de certaines substances dangereuses dans les équipements électriques et électroniques (RoHS).

Le symbole "poubelle barrée" signifie que vous êtes légalement tenu de recycler les appareils marqués en fin de vie. Les appareils ne doivent pas être jetés avec les ordures ménagères (non triées) ou les déchets d'emballage. Débarrassez-vous des appareils dans des points de collecte et de retour spéciaux, par exemple dans des centres de recyclage ou chez des commerçants qui proposent un service de
reprise correspondant.
Informations et conseils supplémentaires :
http://www.tams-online.de
Garantie et service:
Téléphone : +49 (0)511 / 55 60 60
Téléfax: +49 (0)511 / 55 61 61
E-mail: support@tams-online.de



