
NF80 - Électronique marine SIMRAD - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil NF80 SIMRAD au format PDF.
| Type de produit | Télécommande de pilote automatique marin |
| Marque | Simrad |
| Modèle | NF80 |
| Dimensions (approx.) | 144 x 84 x 42 mm (H x L x P) |
| Poids | 0,5 kg |
| Écran | Monochrome 2", résolution 128x64, collé, transflectif |
| Alimentation | Via bus CAN ou SimNet (NMEA 2000) |
| Consommation électrique | Veille : <20 mA (LEN 1) ; Allumé éclairage max : <110 mA (LEN 3) |
| Interface | CAN/NMEA 2000 avec câble de branchement Micro-C de 6 m |
| Température de fonctionnement | -25 °C à +55 °C |
| Indice de protection | IP X6 (monté sur panneau ou cloison avec cadre optionnel) |
| Matériau du boîtier | Avant en aluminium, cadran plastique noir, couvercle plastique |
| Fonctions principales | Commande en direction assistée (NFU), modes AUTO et NoDrift, réglage d'éclairage (jour/nuit), alarmes, prise de commande |
| Modes disponibles | NFU (via levier), AUTO, NoDrift |
| Compatibilité | Systèmes AP70, AP80, AP24, AP28, AP60, écrans multifonctions NSE/NSS/NSO |
| Montage | Sur panneau (standard) ou sur cloison avec cadre optionnel |
| Entretien et nettoyage | Nettoyer à l'eau claire avec savon doux ; éviter produits chimiques ou hydrocarbures |
| Sécurité | Installation conforme aux règles de navigation ; ne pas obstruer la vue ; couvrir l'unité si non utilisée en extérieur |
| Pièces détachées et réparabilité | Levier long, joint d'étanchéité, vis, connecteur en T Micro-C, câble de 6 m ; réinitialisation usine possible via menu local |
| Informations générales | Certifié CE, FCC, Wheelmark ; mise à jour via site Navico ; menu principal accessible en mode Standby (maintenir MODE 3 s) |
FOIRE AUX QUESTIONS - NF80 SIMRAD
Questions des utilisateurs sur NF80 SIMRAD
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Électronique marine au format PDF gratuitement ! Retrouvez votre notice NF80 - SIMRAD et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil NF80 de la marque SIMRAD.
MODE D'EMPLOI NF80 SIMRAD
Comme Navico améliore continuèlement ce produit, nous nous réservons le droit d'y apporter des modifications, sans que pour autant celles-ci soient indiquées dans la présente version du manuel. Pour toute information complémentaire, veuillez consulter votre distributeur.
Le propriété est le seul responsable de l'installation et de l'utilisation du matériel et doit s'assurer qu'il ne provoque pas d'accidents, de blessures ou de dommages matériels. L'utilisateur de ce produit est l'une responsable du respect des règles de sécurité de navigation.
NAVICO HOLDING AS. ET SES FILIALES, SUCCURSALES ET SOCIÉTÉS AFFILIÉES REJETTENT TOUTE RESPONSABILITÉ EN CAS D'UNE MAUVAISE UTILISATION DE CE PRODUIT QUI SERAIT SUSCEPTIBLE DE PROVOQUER DES ACCIDENTS OU DES DOMMAGES, OU D'ENFREINDRE LA LOI.
Langue applicable : la presente déclaration, les manuels d'instructions, les modes d'emploi et toute autre information relative au produit (la Documentation) peuvent être traduits vers ou ont été traduits à partir d'une autre langue (Traduction). Dans le cas de conflits entre une traduction quelconque de la Documentation, la version anglaise de la Documentation sera la seule version officielle de la Documentation.
Le present manuel déscrit la version du produit en cours au moment où ce document a été imprimé. Navico Holding AS. et ses filiales, succursales et sociétés associées se réservent le droit de modifier les specifications sans préavis.
Déclaration de conformité
Simrad FU80, NF80 et QS80 :
- répondent aux normes techniques conformément à la section 15.103 des directives FCC
- conformité CE au titre de la directive CEM 2004/108/CE
- conformité aux critères requis pour les apparciels de niveau 2 de la norme de radiocommunications (compatibilité electromagnétique) 2008 La déclaration de conformité applicable est disponible sur le site Web suivant, dans la section relative à la documentation du modele : www.navico.com/commercial ou www.simrad-yachting.com
Copyright
Pour toute demande relative à la garantie, veuillez consulter le site Web concernant votre apparéil
5 Introduction
5 À propos de ce manuel
5 Approbation de Wheelmark
6 Composants fournis
7 Installation
7 Montage
9 Cablage
10 Configuration
11 Utilisation
11 Principes de base - toutes les télécommandes
14 Utilisation de NF80
16 Utilisation de FU80
19 Utilisation de QS80
21 Modification de la direction de gouvernail
21 Alarmes
22 Rétabillisement de la configuration d'usine
22 Maintenance
23 Modification des paramètres par défaut
23 Menu principal
24 Spécifications
24 Caracteristiques techniques
25 Diagrammes
1
Introduction
À propos de ce manuel
Ce manuel déscrit l'installation et l'utilisation des télécommandes FU80, NF80 et QS80.
NF80FU80QS80
Elles peuvent être utilisées pour contrôler à distance les systèmes de pilotage automatique AP70, AP80, AP24, AP28 et AP60. Elles peuvent également être utilisées pour actionner à distance la fonction de pilotage automatique des NSE, NSS et NSO (écrans multifonctions Simrad).
Remarque: le pilotage FU nécessite l'installation d'un capteur d'angle de barre. Il est donc impossible d'utiliser FU80 avec un AP24/28 fonctionnant en mode capteur d'angle de barre virtuel (VRF - Virtual Rudder Feedback).
Pour obtenir une description détaillée des modes de fonctionnement, consultez le manuel de l'utilisateur de votre système de pilotage automatique ou de votre NSE/NSO/NSS.
Pour avoir plus de détails sur l'installation du bus CAN ou de la dorsale SimNet, voir le manuel d'installation du système de pilotage automatique.
Approbation de Wheelmark
Les télémandes sont produites et testées conformément à la directive 96/98 CE relative aux équipements marins et peuvent être utilisées sur une installation Wheelmark en fonction des certificats. Pour en savoir plus et obtenir les-certificats, consultez nos sites Web :
| Identifi-cation | Description |
| 1 | Unité distante, avec cable de branchement Micro-C de 6 m (19,7 pi.) |
| 2 Façade | |
| 3 | Sac contenant : - joint d'étanchéité pour le panneau - accessoires de montage |
| 4 Levier long (FU80 et NF80) | |
| 5 Connecteur en T Micro-C | |
| 6 Manuel utiliseur | |
| 7 Gabarit de montage | |
| 8 Carte de garantie | |
2
Installation
Montage
Les télécommandes doivent être montées en respectant scrupuleusement les consignes de protection environnementale, de plage de température et de longueur de cable propres à ces unités. Voir la section « Caracteristiques techniques », à la page 24.
Remarque: en cas d'installation à l'extérieur, désirir une position et une option de montage empêchant l'eau de rester sur l'écran. Il est recommandé de couvir les unités lorsqu'elles ne sont pas utilisées.
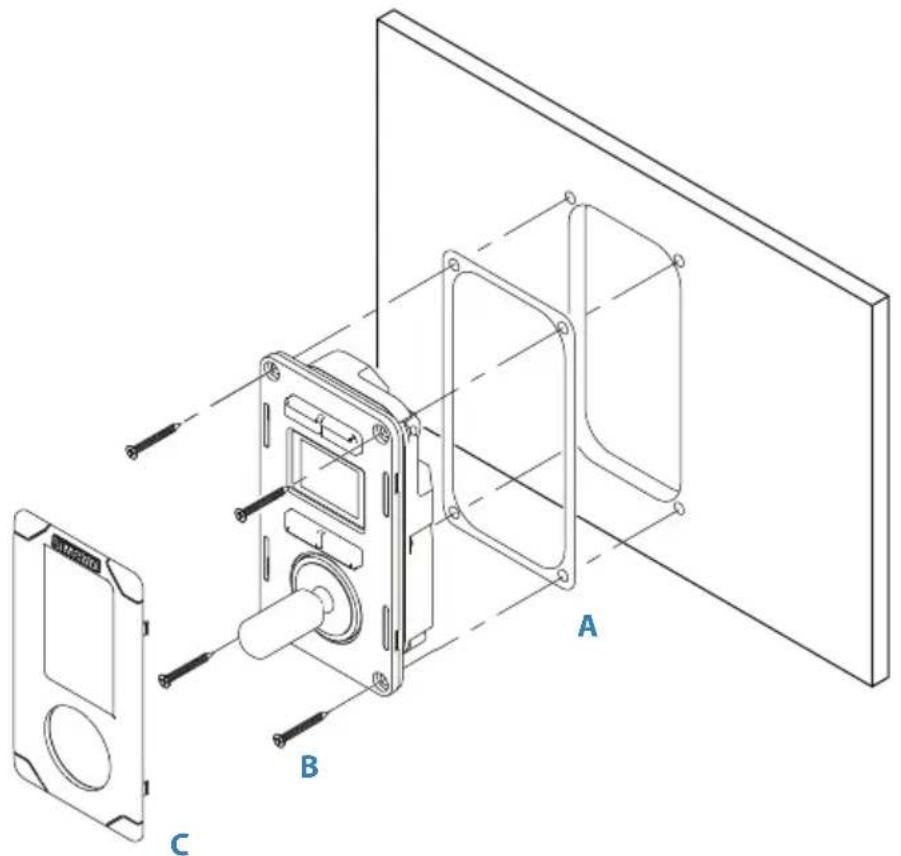
Montage du panneau
- Fixez le gabarit de montage dans la position selectionnée
- Percez des trous de fixation et retirez la découpe
- Enlevez la bande de protection du joint d'étanchéité (A) et appliquez-le sur la télécommande ou la surface de montage
- Positionnez la télécommande dans la console
- Fixez l'unité avec les 4 vis (B)
- Fixez le cadran (C).

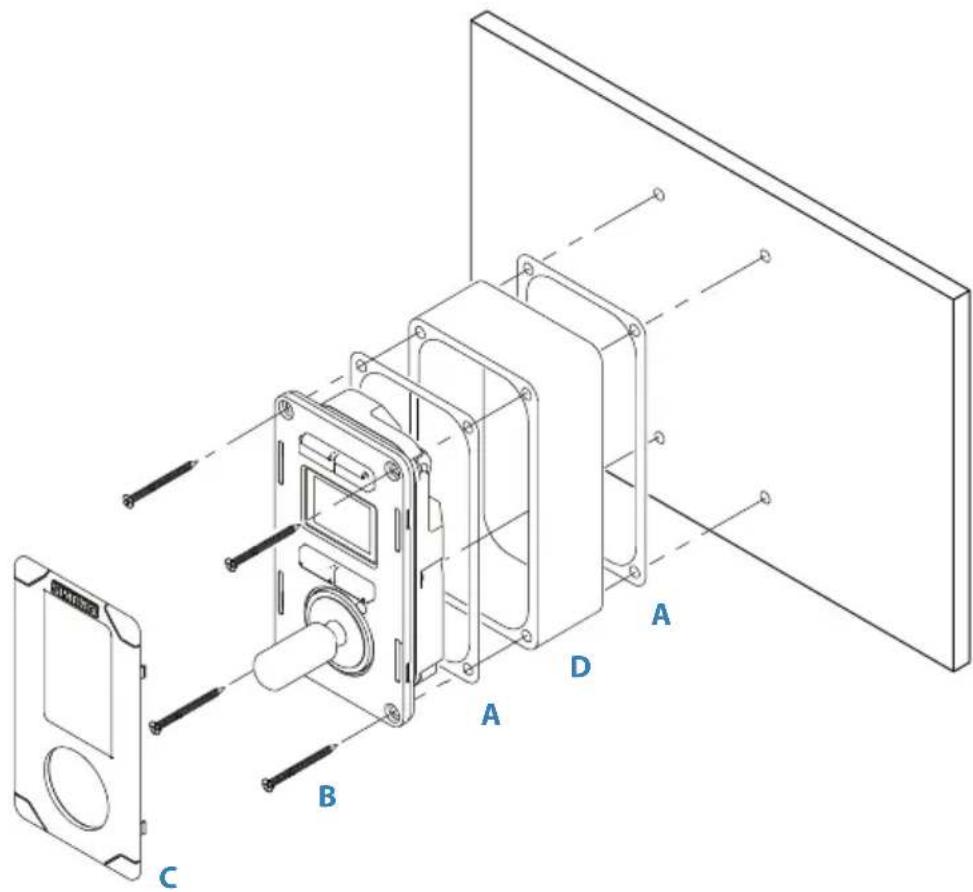
Cadre de la cloison
Un cadre de cloison est disponible en option.
Pour connaître le numéro d'article, consultez nos sites Web (www.navico.com/commercial et www.simrad-yachting.com)
- Fixez le gabarit de montage dans la position selectionnée
- Percez des trous de fixation
- Percez un trou pour le cable, ou deboucher l'emplacement du passage du cable
- Enlevez le film protecteur des joints d'étanchéité (A) et appliquez-en un sur la télécommande et l'autre sur le cadre d'étanchéité (D)
- Fixez l'unité avec les 4 vis (B)
- Fixez le cadran (C).

Levier NF80
Le levier n'est pas monté en usine. Visser fermement le levier sur l'orifice de montage.

Levier FU80
Le levier court monté en usine peut être remplaced par le levier plus long fourni avec le produit.
Le levier peut être monté à 180^ (direction opposée) comme indiqué ci-dessous :
- Retirer le capuchon du bouton (A)
- Retirer la vis (B) et enlever delicatement le bouton (C)
- Faire tournier le bouton de 180^ , poser le levier selectionné, reposer le bouton et le capuchon.
Câblage
Remarque: ne pas creer de boucles trop prononcées avec les cables et éviter de faire passer les cables dans un endroit humide, pour protéger les connecteurs. Si nécessaire, prévoir des anneaux d'écoulement et de maintenance.
Les télécommandes se connectent à une dorsale de bus CAN ou une dorsale SimNet, comme indiqué ci-dessous.
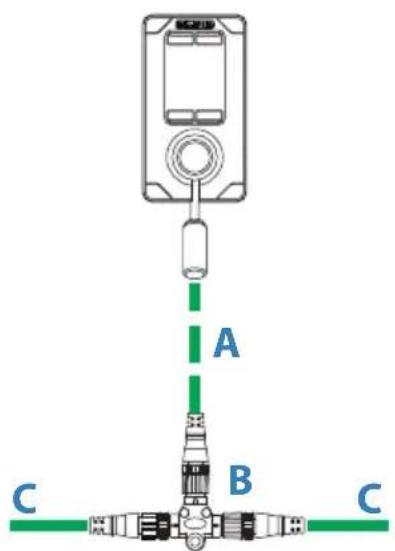
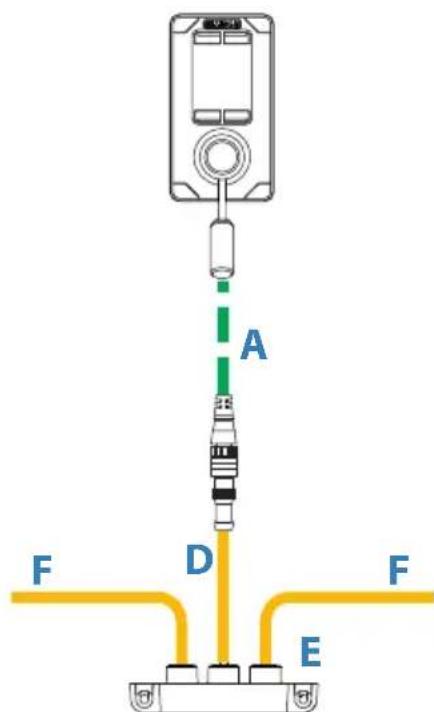
Système AP60/AP70/AP80Systèmes AP24/AP28/NSE/NSS/NSO

Pour les
numeros d'articles, consultez notre site Web.
| Élement Composant | ||
| A Câble | de branchement Micro-C de 6 m (19,7 pi.) | Fourni avec le produit |
| B Connecteur en T Micro-C | ||
| C Dorsale | de bus CAN | |
| D Câble | SimNet à Micro-C (femelle) de 0,5 m (1,64 pi.) | |
| E Raccord | en T SimNet (3 ports) ou raccord multiple SimNet (7 ports) | |
| F Dorsale | SimNet | |
Configuration
Les télécommandes sont des unités prêtes à l'emploi. Aucune configuration spéciale n'est requise sauf si vous poulez modifier les paramètres du groupe SimNet.

Remarque: si les télécommandes sont installées sur un système avec un calculateur AC12/AC12N ou AC42/AC42N, les groupes SimNet Alarms et Sources doivent être modifiés de la valeur par défaut (100) à 1. Remarque: la valeur revient par défaut à 100 même après avoir été réinitialisée.

3
Utilisation
Principes de base - toutes les télécommandes
Touches
| Identifi-cation | Pression brève Pression longue(3 secondes) | |
| CMD | Prendre/demander unecommande | Active/désactive lespropulseurs * |
| * | Ajuster l'éclairage | Bascule entre l'éclairage de jour ou de nuit de l'écran |
| STBY | Mettre le système de pilotage automatique en modeStandby | |
| MODE | Basculer entre les modesdisponibles | Affiche le menu principal(mode Standbyuniquement) |
- Uniquement disponible sur les systèmes AP60, AP70 et AP80. Les propulseurs doivent être disponibles pour le pilotage automatique en profil de pilotage actif. Pour plus d'informations, consultez le manuel de l'utilisateur du pilotage automatique.
Une pression longue est représentée par une barre de progression. Maintenez la touche enforcée jusqu'à ce que tous les segments soient replis.
Touches logicielles
Lorsque le menu est actif ou qu'un message d'alarme s'affiche, les petites icones situées en dessous et au-dessus des touches indiquent leur fonction.

| Touche logicielle | Identifi- cation | Fonction |
| √ | CMD | OK/Accepter/Acquitter l'alarme |
| × | * | Annuler/Retourer au niveau de menu préçédent |
| × | Mettre l'alarme en silencieux | |
| ↑ | STBY | Se déplacer vers le haut dans le menu |
| ↓ | MODE | Se déplacer vers le bas dans le menu |
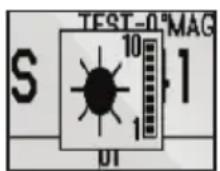
Écran
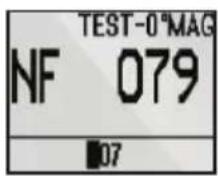
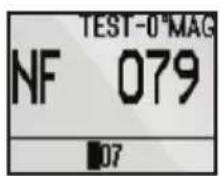
La partie supérieure de l'écran affiche les informations concernant le mode de pilotage automatique comme indiqué ci-dessous.
| Standby NFU | ||
| TEST-0°MAG S 031 15 | TEST-0°MAG NF 079 07 | Set Rud FU 13 14 |
| - Compas actif - Cap (vrai ou magnétique) - Cap actuel | - Commande d'angle de barre | |
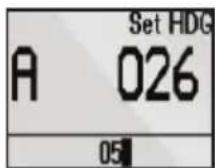
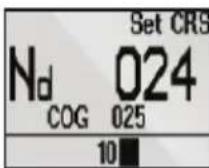
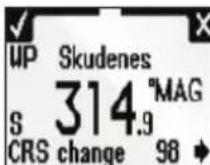
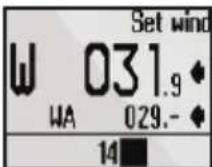
| AUTO NoDrift NAV WIND | |||
| A026 05 | Set CRS N 024 COG 025 10 | BWD N 353 XTD1.353 00 | Set wind W 031.9 WA 029.-14 |
| - Paramétrage Cap | - Paramétrage route - Cap sur le Fond | - Cap au prochain waypoint - Distance transversale (XTD), analogique et graphique | - Paramétrage angle de vent - Angle de vent actuel |
La barre de la partie inférieure de l'écran indique toujours la position actuelle du gouvernail.
Icones d'etat
L'etat de fonctionnement de la télécommande est représenté par des icones.
| Icône État Description | ||
| Au-cune/aucun | Actif En fonctionnement | |
| × | Passif | Le pilotage automatique est activé depuis une autre unité de commande |
| ∞ | Verrouillé | Le pilotage automatique est activé depuis un autre dispositif de commande et ce dernier est verrouillé |
Passage du pilotage automatique au pilotage manuel
Appuyez sur la touche STBY de la télécommande active pour basculer le système du mode automatique au mode Standby.
Si un menu ou une boîte de dialogue est ouvert, vous devezmaintenir la touche STBY enfoncée pour basculer en mode
Standby.
Activation/désactivation de l'unité
Les unités à distance n'ont pas de touche marche-arrêt. Elles restent allumées tant qu'elles sont branchées à une dorsale de bus CAN/ SimNet sous tension.
Si le système de pilotage automatique est désactivé depuis une unité de commande de pilotage automatique, les télécommandes se mettront en voille. Dans ce mode, l'écran est noir et il est impossible d'utiliser les touches ou le levier.
Vous pouvez activer un système de pilotage automatique en veille en appuyant sur la touche d'éclairage de l'unité distante.
Réglage de l'éclairage
Une seule pression sur la touche d'éclairage affiche la boîte de dialogue de réglage de l'éclairage. Des pressions courtes répetées permettent de parcourir les niveaux de luminosité (0 - 10). La seLECTION s'efface au bout de 2 secondes.
Compend un mode Nuit qui optimise la palette de couleurs pour les conditions de faible éclairage. Vous bascules entre l'éclairage de jour et de nuit en appuyant sur la touche d'éclairage et en la maintainant enforcée.
Par défaut, la couleur d'arrière plan de l'écran et des touches d'éclairage est blanche de jour et rouge de nuit. Voir la section « Modification des paramètres par défaut », à la page 23.
Remarque: le niveau de luminosité est régle indépendamment des modes jour et nuit.
Activation/désactivation des propulseurs
Si les propulseurs sont disponibles pour le contrôle du pilotage automatique, vous pouvez les activer et les désactiver en Maintenant la touche CMD enforcée.

Les propulseurs actifs sont indiqués par une icône de propulseur à l'écran.
Remarque: uniquement disponible dans les systèmes AP60, AP70 et AP80. Les propulseurs doivent etre disponibles pour le pilotage automatique en profil de pilotage actif.

Pour en savoir
plus sur les multi-stations, consultez le manuel de l'utilisateur de votre système de pilotage automatique.
Prise de commande
Prendre la commande en appuyant sur la touche CMD. Lorsque la commande est transférée, le système de pilotage automatique conserve le mode actuel.
Dans un système ouvert (aucune restriction de transfert de commande), vous aurez le contrôle immédiat sur l'unité distanté demandant la commande.
Dans un système multistations avec fonction de verrouillage active, la demande de commande doit être confirmée sur l'unité de contrôle active avant de pouvoir utiliser la télécommande.
CMD

Écran de la télécommande et... sur AP70/AP80
Utilisation de NF80
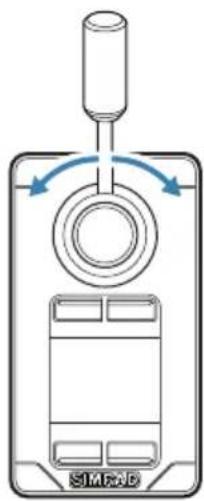
Le levier NF80 a un ressort mécanique qui le renvoie en position centrale quand il est relachué.
Vous pouvez utiliser le NF80 en mode NFU, AUTO et NoDrift.
Vous pouvez également obtenir la commande si le système se trouve en mode FU, NAV ou Wind, mais vous ne pouvez pas actionner ce mode depuis le NF80.
Mode initial Déplacement du levier / Mode obtenu (action)
| Standby | NFU (commande de gouvernil)NFU |
| FU | |
| AUTO AUTO (changement de cap) | |
| NoDrift NoDrift (changement de cap) | |
| NAV | Aucune action (avertissement sonore et boîte de dialogue d'information) |
| Wind | |
Remarque: le mode Wind n'est pas disponible pour les systèmes AP60, AP70 ou AP80.
Si le mode est disponible sur d'autres systèmes de pilotage automatique, il ne peut être utilisé que si le système est configuré pour un voilier. Consultez le manuel d'installation de votre système.
Sélection de mode
Vous basculez entre les modes disponibles en appuyant de façon répetée sur la touche MODE. La sélection s'efface et déclenché le changement de mode.
En mode autre que NFU, la première pression sur la touche MODE fera passer le système en mode NFU.
Vous basculez en Standby depuis n'importe quel mode en appuyant sur la touche STBY.
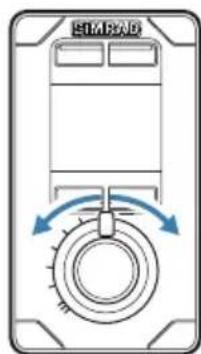
Pilotage en mode direction assistée
Dans ce mode vous utilisez le levier pour déplacer le gouvernil. Le gouvernil se déplace dans la même direction que le levier, et bougera tant que le levier est déplaced depuis la position centrale.
→ Remarqueir « Modification de la direction de gouvernail », à la page 21.
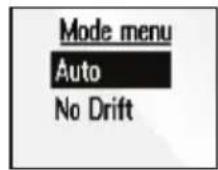
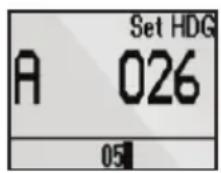
Mode Auto et NoDrift
Quand vous sélectionnez le mode AUTO/NoDrift, le système continue vers le cap lu par les capteurs au moment même où vous avez sélectionné le mode.
Mode Auto Mode NoDrift
Modification du cap pilote/cap
Utilisez le levier pour modifier le cap pilote en mode AUTO et le cap en mode NoDrift. La valeur change de 1^ à chaque pression du levier vers la gauche ou la droite. Si vous maintainez le levier enforcé, la valeur change automatiquement à un taux de 5^ par seconde. Chaque bip indique un changement de 1^ .
Utilisation de FU80
Le levier FU peut être actionné de 70^ de la position centrale à bâbord et à tribord. Le levier reste sur la position définie et l'angle de changement de cap demandé est maintainu tant que le levier ne returnne pas en position centrale.
Vous pouvez utiliser le FU80 en mode FU, AUTO et NoDrift.
Vous pouvez également obtenir la commande si le système se trouve en mode NFU, NAV ou Wind, mais vous ne pouvez pas actionner ces modes depuis le FU80.
| Mode initial Déplacement du levier / Mode obtenu (action) | |
| Standby Aucune action | |
| NFU Aucune action | |
| FU FU (commande de gouvernail) | |
| AUTO AUTO (changement de cap) | |
| NoDrift NoDrift (changement de cap) | |
| NAV | Aucune action |
| Wind | |
Remarque: le mode Wind n'est pas disponible pour les systèmes AP60, AP70 ou AP80.
Si le mode est disponible sur d'autres systèmes de pilotage automatique, il ne peut être utilisé que si le système est configuré pour un voilier. Consultez le manuel d'installation de votre système.
Sélection de mode
Vous basculez entre les modes disponibles en appuyant de façon répetée sur la touche MODE. La sélection s'efface et déclenché un changement de mode.
En mode autre que FU , la première pression sur la touche MODE fera passer le système en mode NFU.
Vous basculez en Standby depuis n'importe quel mode en appuyant sur la touche STBY.
Remarque: le pilotage FU nécessite l'installation d'un capteur d'angle de barre. Il est donc impossible d'utiliser FU80 avec un AP24/28 en mode capteur d'angle de barre virtuel (VRF - Virtual Rudder Feedback).
Fonctions avances
Remarque: Ces fonctions sont disponibles à partir de la version 1.2.00.
Elles sont accessibles par le menu Local Settings, et n' affectent pas le reste du système (uniquement les fonctions ci dessous). Dans une installation compteant plusieurs FU80, chaque unité doit être configurée indépendamment.
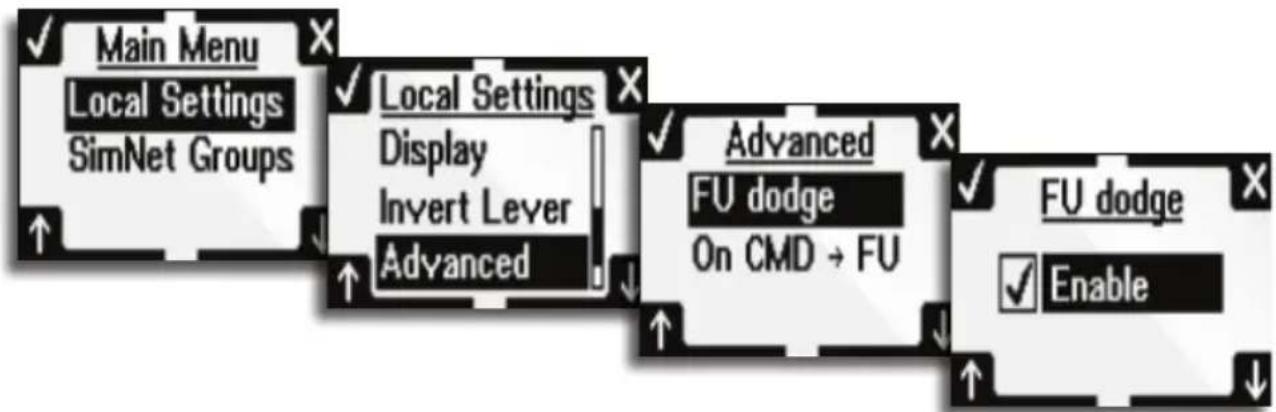
Activer les fonctions avancées
Follow-Up dodge
Cette fonction permet par une simple action de prendre le contrôle manuel de la barre dans n'importe quel mode automatique du pilote. Elle permet d'utiliser un levier pour changer de route en mode AUTO.
Cette fonction peut être utilisé pour effectuer une manoeuvre rapide d'evitement dans une situation dangereuse.
Lorsque cette fonction est activée, l'unité prendra en compte la commande et passera en mode FU (Follow Up) si le levier est actionné au minimum au milieu de sa course sur l'un des deux cotés. Cette fonction est active dans n'importe quel mode automatique du pilote et ce sur une commande active ou inactive du système. La barre se déplacera immédiatement selon la position du levier.
Remarques:
- Cette fonction désactive la possibilité d'ajuster la route avec le levier en mode AUTO
- Le système ne pourra pas passer en mode automatique si le levier n'est pas en position centrale
- Cette fonction ne sera pas active sur un système maître
- Cette fonction est désactivée par défaut
Commande Follow-Up
Cette fonction permet de passer le mode de fonctionnement du pilote en mode FU par une simple pression sur la touche du FU80.

Pilotage Follow-up
En mode FU, vous utilisez le levier pour définir l'angle de barre désiré.
Avertissement: pour éviter tout mouvement inattendu du gouvernail, observerz la position du levier (angle de barre de commande) avant d'activer le mode FU!
Pour améliorer la précision des commandes de faible angle de barre, la relation entre la rotation du levier et l'angle de barre de commande est non linéaire. Lorsque le levier subit une rotation de 20^ par rapport à la position centrale, la commande du gouvernil varie de 5^ (à babbord ou à tribord). Un angle de levier de 65^ entraine un déplacement du gouvernil de 40^ . Une rotation maximum du levier permet d'obtenir un angle de barre maximum. Consultez le manuel d'ss installation de votre pilote automatique pour savoir comment définir l'angle de barre maximum.
Le gouvernil restera à la position définie jusqu'à un nouvel ordre de changement d'angle de barre.
Mode AUTO et NoDrift
Quand vous sélectionnez le mode AUTO/NoDrift, le système continue vers le cap lu par les capteurs au moment même où vous avez sélectionné le mode.
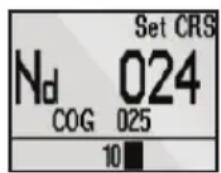
Mode Auto Mode NoDrift
Modification du cap pilote/cap
Utilisez le levier pour modifier le cap pilote en mode AUTO et le cap en mode NoDrift. La valeur change par incréments définis par la rotation du levier de 0,5°/seconde à 3°, à 5°/seconde en bout de course.

Utilisation de QS80
Le levier QS80 a un ressort mécanique qui le renvoie en position centrale quand il est relchéé.
Vous pouvez utiliser le QS80 en mode NFU, AUTO, NoDrift, NAV et Wind.
Remarque: le mode Wind n'est pas disponible pour les systèmes AP60, AP70 ou AP80.
Si le mode est disponible sur d'autres systèmes de pilotage automatique, il ne peut être utilisé que si le système est configuré pour un voilier. Consultez le manuel d'installation de votre système.
Selection de mode
Vous bascules entre les modes disponibles en appuyant de façon répetée sur la touche MODE. La sélection s'efface et déclenché un changement de mode.
Vous pouvez également utiliser le levier pour changer de mode, comme indiqué dans le tableau.
| Mode initial | Mouvement du levier / Mode obtenu (action) | ||
| Haut Bas Gauche/droite | |||
| Standby | AUTO | Standby (gouver- nail au centre) | NFU (commande de gouvernail) |
| NFU | |||
| FU | Standby | ||
| AUTO | Capture du cap changement de cap | Changement de cap | |
| NoDrift Ch | |||
| NAV | AUTO | Aucune action | |
| Wind | Réglage de l'angle du vent relatif | ||
Pilotage en mode direction assistée
En mode Standby ou FU, pousser le levier vers la gauche ou la croite pour passer en mode NFU et émettre une commande de gouvernail. Le gouvernail bougera tant que le levier est actionné.
Centrage du gouvernail
Une seule pression du levier vers le bas en mode Standby ou NFU positionnera le gouvernail au centre. Un bip court retentit lorsque le gouvernail est centré.
Mode Auto et NoDrift
Quand vous sélectionnez le mode AUTO/NoDrift, le système continue vers le cap actuel au moment même ou vous sélectionnez le mode.


Mode Auto Mode NoDrift
Modification du cap pilote/cap
Utilisez le levier pour modifier le cap pilote en mode AUTO et le cap en mode NoDrift. La valeur change de 1^ à chaque pression du levier vers la gauche ou la droite. Si vous maintainez le levier enforcé, la valeur change automatiquement à un taux de 5^ par seconde. Chaque bip indique un changement de 1^ du cap.

Capture du cap
Aux modes AUTO ou NoDrift, la fonction de capture de cap vous permet d'annuler automatique le virage que vous exécutez en pressant brievement le levier vers le haut. Le pilote automatique annulera le virage pour continuer avec le cap relevé sur le compas au moment même où vous appuyez sur le levier.
Mode Nav
Si vous demandez une commande alors que le système est en mode NAV, vous obtiendaçrez immédiatement une commande de QS80.
Si vous lancez NAV depuis un autre mode, le changement de cap requis doit être confirmé avant que le mode NAV soit accepté.
S'il n'est pas accepté, le système conserve le mode actuel.
Remarque: avant que le mode Wind soit activé, le système de pilotage automatique doit être en mode AUTO, et une valeur d'entrée correcte doit émaner du transducteur.
Modification de l'angle de vent relatif définii
Utiliser le levier pour modifier l'angle de vent relatif définir La valeur change de 1^ à chaque pression du levier vers la gauche ou la droite. Si vous maintainez le levier enforcé, la valeur change automatiquement a un taux de 5^ par seconde. Chaque bip indique un changement de 1^ du cap.
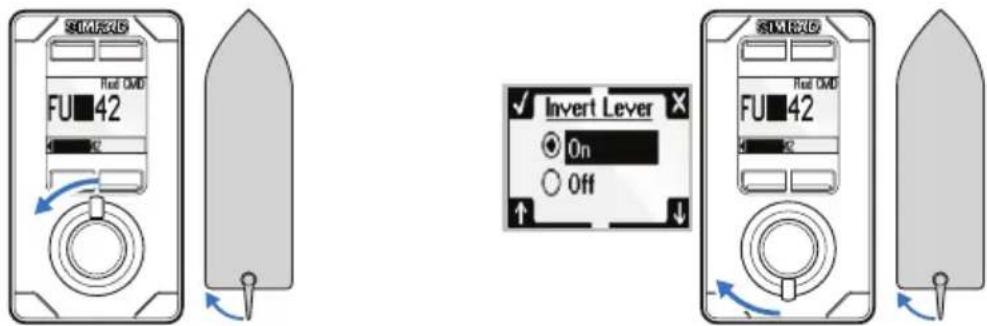
Modification de la direction de gouvernail
Par défaut, le gouvernil se déplace dans la même direction que le levier sur FU80 et NF80. Lorsque vous pressez le levier vers bâbord, le gouvernil se dirige vers bâbord.
En cas de rotation du levier à 180^ sur un FU80, ou si un FU80 ou NF80 est monté face vers l'arrière, le mouvement du gouvernil peut être inversé pour coïncider avec le mouvement du levier.
La direction des commandes à babbord ou tribord peut être modifiée dans le menu principal. Voir la section « Modification des paramétres par défaut », à la page 23.
Alarmes
Toutes les unités, actives et inactives, avertiront l'utilisateur lorsqu'une situation d'alerte se produit dans le système de pilotage automatique.
Si le son est activé, tout message d'alerte est arrivagné par un signal sonore.
Les touches CMD et déclairage sont utilisées pour acquirer ou désactiver l'alarme sonore.
Remarquialme ne peut etre acquittee que depuis une unite active.
Si la cause de la situation d'alerte est supprimée, la boîte de dialogue de l'alarme disparaître lorsque vous appuierez sur la touche CMD.

Si la cause de l'alerte persiste après confirmation, la boîte de dialogue de l'alarme sera remplacée par une icône d'alarme.
Si l'alarme est critique pour le pilotage (par exemple défaut du capteur d'angle de barre), le levier ne fonctionnera pas comme d'habitude dans une situation d'alerte.
Pour le texte d'alarme, les évventuels définis et les actions correctives, reportez-vous au manuel de l'utilisateur du pilotage automatique.
Rétablissement de la configuration d'usine
Vous pouvez restaurer tous les paramètres aux valeurs par défaut d'usine depuis le menu principal. Voir la section « Modification des paramètres par défaut », à la page 23.
Il s'agit d'une réinitialisation locale qui n'affectora que l'unité sur laquelle vous sélectionnez l'options de réinitialisation.

Maintenance
Dans des conditions d'utilisation normales, les télécommandes nécessitent peu de maintenance.
Si l'unité doit être nettoyée, utilisez de l'eau claire avec une solution douce à base de savon (et non pas un détergent). Évitez les nettoyants chimiques ou à base d'hydrocarbures (gazole, petrole, etc.).
4
Modification des paramètres par défaut
Menu principal
Les paramètres par défaut peuvent être modifiés depuis le menu principal, en Maintenant la touche MODE,enforcée pendant 3 secondes.

) Uniquement disponible sur les modèles FU80 et NF80.
*) Uniquement disponible sur FU80.
- Paramètres locaux : permet d'accéder aux paramètres applicables à cette unité
- Groupe SimNet: attribue cette unité à un groupe SimNet
Vous supprimez le menu et returnez à l'écran standard en Maintenant la touche STBY enfoncée, ou en bougeant le levier.
Remarque: le menu principal n'est accessible que depuis le mode Standby.
5
Specifications
Caracteristiques techniques
Remarque: pour consulter les mises à jours des caractéristiques techniques, compatibilités et certifications, consultez nos sites Web.
| Écran | |
| Résolution d'écran 128 | x 64 (H x L) |
| Type d'écran 2" monochrome, collé, transflectif | |
| Angle de vue NF80 : 12 | heuresFU80/QS80 : 6 heures |
| Alimentation | |
| Alimentation Via bus CAN ou SimNet | |
| Consommation électrique | Éteint : réseau <20 mA (NMEA 2000 : LEN 1)Allumé avec éclairage max : réseau<110 mA (NMEA 2000 : LEN 3) |
| Interface | |
| CAN/NMEA 2000 Câble | de branchement connecté en usineavec connecteur Micro-C. 6 m (19,7 pi.) |
| SimNet Via cable SimNet ou Micro-C en option | |
| Informations techniques | |
| Boîtier Avant : alumiainc | m avec cadran emboîtêen plastique noirNoir : couvercle plastique |
| Température -25 °C à + | 55 °C (-13 °F à +131 °F) |
| Poids NF80, FU80 : 0,5kg | kg (1,10 Ib)QS80 : 0,4 kg (0,88 Ib) |
| Environmental | |
| Météo CEI 60945 sec. 8 | 8, exposé, montage surnpupitre ou montage sur cloison aveccadre optionnel.Correspond à IP X6 |
| Distance de sécuritéau compas | 0,4 m (réf. CEI 60945 sec.11.2) |
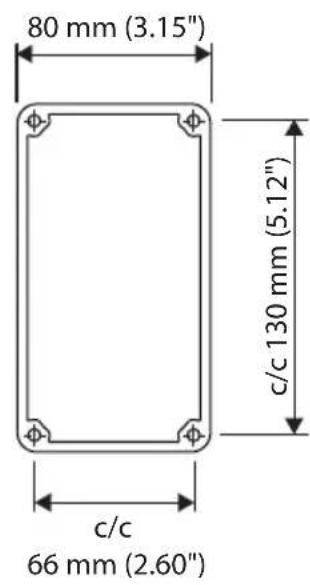
Diagrammes
Dimension, cadre de montage de cloison

Scheme du brochage du connecteur
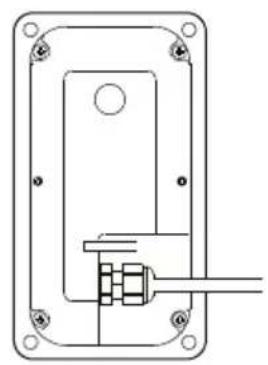
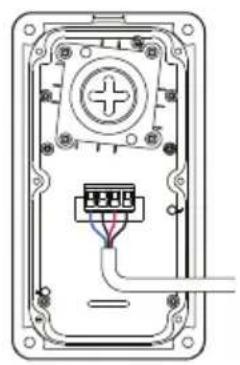

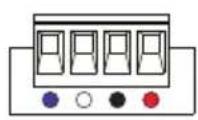
| Broche | Couleur Fonction | |
| 1 Blindage | ||
| 2 Rouge | NET-S (source | d'alimentation +) |
| 3 Noir NET-C (source d'alimentation -) | ||
| 4 Blanc | NET-H (CAN élevé) | |
| 5 Bleu NET-L (CAN bas) | ||
SIMRAD
- Déclaration de conformité
- Copyright
- Introduction
- Installation
- Utilisation
- Modification des paramètres par défaut
- Spécifications
- 1
- Introduction
- À propos de ce manuel
- NF80FU80QS80
- Approbation de Wheelmark
- 2
- Installation
- Montage
- Montage du panneau
- Cadre de la cloison
- Levier NF80
- Levier FU80
- Câblage
- Configuration
- 3
- Utilisation
- Principes de base - toutes les télécommandes
- Touches
- Touches logicielles
- Écran
- Icones d'etat
- Passage du pilotage automatique au pilotage manuel
- Activation/désactivation de l'unité
- Réglage de l'éclairage
- Activation/désactivation des propulseurs
- Prise de commande
- Utilisation de NF80
- Sélection de mode
- Pilotage en mode direction assistée
- Mode Auto et NoDrift
- Modification du cap pilote/cap
- Utilisation de FU80
- Fonctions avances
- Follow-Up dodge
- → Remarques:
- Commande Follow-Up
- Pilotage Follow-up
- Utilisation de QS80
- Selection de mode
- Centrage du gouvernail
- Capture du cap
- Mode Nav
- Modification de l'angle de vent relatif définii
- Modification de la direction de gouvernail
- Alarmes
- Rétablissement de la configuration d'usine
- Maintenance
- 4
- Modification des paramètres par défaut
- Menu principal
- 5
- Specifications
- Caracteristiques techniques
- Diagrammes
- Dimension, cadre de montage de cloison
- Scheme du brochage du connecteur
Marque : SIMRAD
Modèle : NF80
Catégorie : Électronique marine