
DRONEROBOMASTER51 - Robot DJI - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil DRONEROBOMASTER51 DJI au format PDF.

| Type de produit | Dronerobomaster 51 |
|---|---|
| Caractéristiques techniques principales | Drone éducatif programmable avec capacités de robotique |
| Alimentation électrique | Batterie LiPo rechargeable |
| Dimensions approximatives | Dimensions compactes adaptées à l'utilisation intérieure et extérieure |
| Poids | Poids léger pour une manipulation facile |
| Compatibilités | Compatible avec diverses plateformes de programmation |
| Type de batterie | Batterie lithium-polymère (LiPo) |
| Tension | 7.4V |
| Puissance | Puissance adaptée pour des performances optimales |
| Fonctions principales | Programmation, contrôle à distance, détection d'obstacles |
| Entretien et nettoyage | Nettoyage régulier des capteurs et des hélices recommandé |
| Pièces détachées et réparabilité | Disponibilité de pièces détachées pour réparations faciles |
| Sécurité | Fonctions de sécurité intégrées pour éviter les accidents |
| Informations générales utiles | Idéal pour l'éducation STEM et les projets de robotique |
FOIRE AUX QUESTIONS - DRONEROBOMASTER51 DJI
Questions des utilisateurs sur DRONEROBOMASTER51 DJI
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Robot au format PDF gratuitement ! Retrouvez votre notice DRONEROBOMASTER51 - DJI et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil DRONEROBOMASTER51 de la marque DJI.
MODE D'EMPLOI DRONEROBOMASTER51 DJI
Guide d'utilisateur v1.4
10/2019

Recherche par mots-clés
Recherche des mots-clés tels que « batterie » et « installer » pour couvrir une rubrique. Si vous utilisez Adobe Acrobat Reader pour lire ce document, appuyez sur Ctrl+F sous Windows ou Command+F sous Mac pour lancer une recherche.

Sélection d'une rubrique
Affichez la liste complète des rubriques dans la table des matières. Cliquez sur une rubrique pour accéder à cette section.

Impression de ce document
Ce document prend en charge l'impression haute résolution.
Légendes

Avertissement

Important

Conseils et astuces

Référence
Avant utilisation
Les tutoriels et guides suivants ont été élaborés pour vous permettre d'exploiter pleinement le potentiel de votre ROBOMASTER™ S1.
- Consignes de sécurité et clause d'exclusion de responsabilité
- Guide de démarrage rapide
- Guide d'utilisateur
Assurez-vous que toutes les pièces sont inclues dans l'emballage et préparez-vous à l'assemblage en lisant le Guide de démarrage rapide du RoboMaster S1. Consultez ce guide d'utilisateur pour en savoir plus. Regardez tous les tutoriels video et lisez les Consignes de sécurité et la clause d'exclusion de responsabilité relatives au RoboMaster S1 avant la première utilisation.
Accès aux tutoriels vidéo
Visitez le site officiel de DJI à l'adresse https://www.dji.com/robomaster-s1/video ou ouvrez l'application et accédez à la page Vidéos pour visionner les tutoriels vidéo pour les instructions d'assemblage et d'utilisation. Vous pouvez également assembler le S1 conformément aux instructions d'assemblage du Guide de démarrage rapide du RoboMaster S1.
Consultation du guide de programmation du robomaster S1
Le Labo du RoboMaster S1 propose des centaines de blocs de programmation vous permettant d'accéder à des fonctionnalités telles que le contrôle PID. Le Guide de programmation du RoboMaster S1 fournit des instructions et des exemples pour aider les utilisateurs à apprendre rapidement les techniques de programmation permettant de contrôler le S1.
Utilisation de ce guide d'utilisateur 2
Légendes 2
Avant utilisation 2
Accès aux tutoriels vidéo 2
Consultation du Guide de programmation du RoboMaster S1 2
Présentation du produit 4
Scheme du S1 4
Preparation 5
Modules et fonctions 10
Utilisation de l'application RoboMaster 10
Châssis omnidirectionnel 14
Nacelle 17
Contrôleur intelligent 18
Blaster 20
Caméra 21
Haut-parleur 22
Batterie Intelligente 22
Description des LED du S1 26
Manette de jeu (non fournie) 28
Fonctionnement du S1 29
Vérification avant utilisation 29
Mise sous tension de la batterie 29
Fonctionnement du S1 avec un appel mobile 30
Mode Solo 32
Mode Challenge 34
Fonctionnement du S1 avec une manette de jeu 36
Utilisation d'un PC et de la version Windows de RoboMaster 38
Annexe 43
Mise à jour du firmware 46
Étalonnage du S1 46
Configuration des ports PWM 47
Présentation du produit
Le RoboMaster S1 est un robot éducatif inspiré par le concours RoboMaster de DJI™. Le S1 offre un contrôle complet et une expérience de conduite immersive, grâce au châssis omnidirectionnel, aux roues agiles Mecanum, à une nacelle souple et à la transmission d'image stable et à faible latence avec vue à la première personne (FPV). Les utilisateurs peuvent également cibler des objets et combattre d'autres robots avec le blaster.
Le corps du S1 est recouvert d'une armure et chaque pièce est dotée d'un module de détection des impacts qui peut détecter instantanément les impacts physiques et les transmettre au contrôleur intelligent. Le blaster offre une précision et une stabilité de haut niveau grâce à la nacelle à 2 axes, tandis que la lumière de la trajectoire de tir offre aux utilisateurs une expérience réaliste et immersive.
Le contrôleur intelligent est intégré à plusieurs systèmes, notamment un système de transmission vidéo, un système de jeu et un système de programmation Scratch. Il comprend six modules intelligents, à savoir la reconnaissance de lignes, la reconnaissance de marqueurs visuels, la reconnaissance de personnes, la reconnaissance d'applaudissements, la reconnaissance de gestes et la reconnaissance de robots S1.
Le S1 prend en charge les langages de programmation Scratch et Python. Avec les tutoriels basés sur des projets de DJI, les utilisateurs peuvent progressivement maîtriser la théorie de la programmation et la robotique.
Le S1 propose les modes Solo et Challenge où les utilisateurs peuvent exercer leurs compétences et rivaliser avec d'autres. Pour contrôler le S1, vous pouvez utiliser l'application RoboMaster sur un appareil mobile, avec la manette de jeu, ou avec un clavier et une souris.
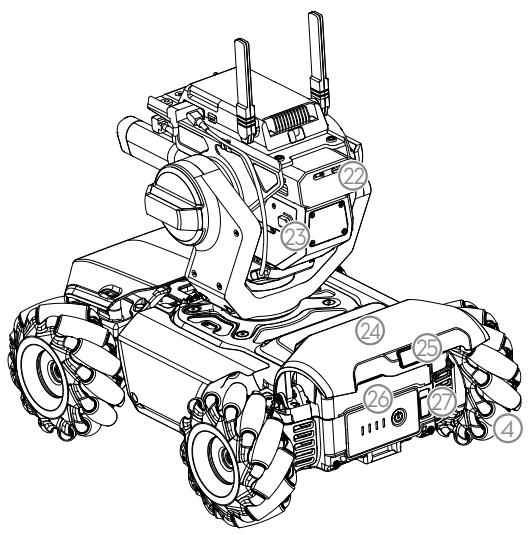
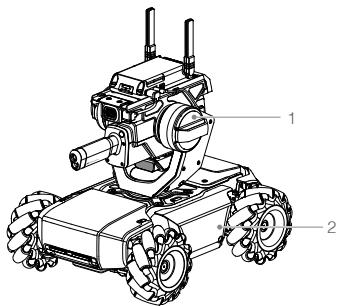
Schéma du S1
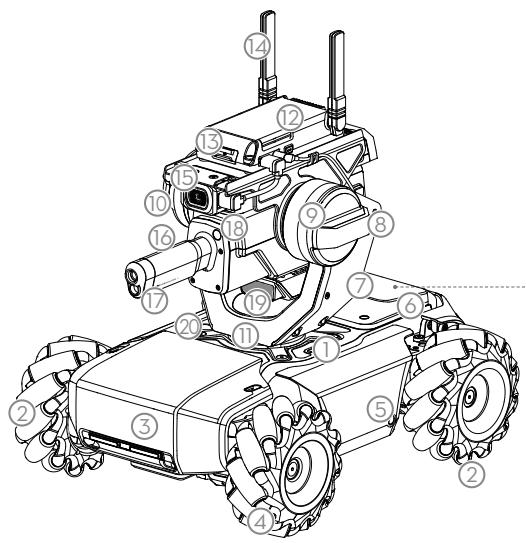
- Chassin
- Roue Mécanum à axe diagonal droit
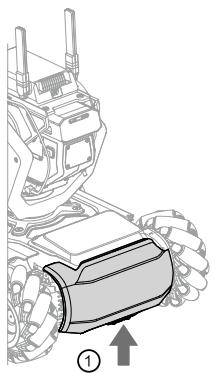
- Armure avant du chassis (déflecteur d'impact intégré)
- Roue Mécanum à axe diagonal gauche
- Armure gauche du châssis (défenseur d'impact intégré)
- Couvercle arrêt du chassin
- Nacelle
- Unité infrarouge large
- Armure de la nacelle (détecteur d'impact intégré)
- Moteur de tangage
- Moteur de tangage
- Contrôleur intelligent
- Emplacement pour carte microSD
- Antenne du contrôleur intelligent
- Caméra
- Blaster
- Lumière de trajectoire de tir
- Unité infrarouge étroite
- Haut-parleur
- Armure droite du châssis (détecteur d'impact intégré)
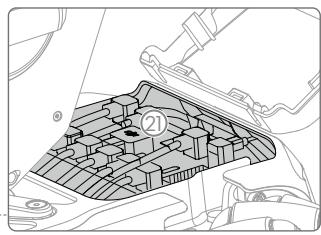
- Contrôleur de mouvement du châssis
- Réservoir de billes de gel
- Bouton d’éjection du réservoir
- Armure arrière du châssis (détecteur d'impact intégré)
- Bouton d'ouverture de l'armure arrière
- Batterie Intelligente
- Bouton d’éjection de la batterie
Assemblage du S1
Reportez-vous au Guide de démarrage rapide du RoboMaster S1.
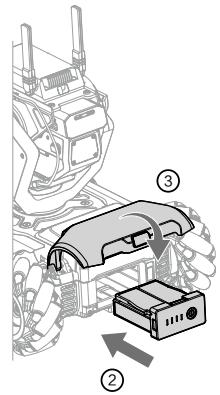
Mise sous tension du S1
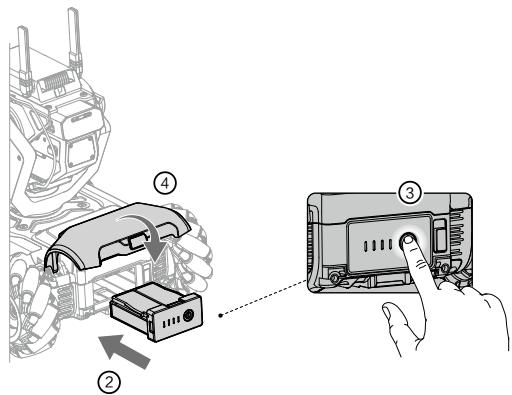
Suivez les étapes ci-dessous pour mettre le S1 sous tension :
- Appuyez sur le bouton d'ouverture de l'armure arrêté pour ouvrir cette dernière.
- Installez la Batterie Intelligente dans le compartiment de la batterie.
- Maintenez le bouton d'alimentation enfoncé permettre sous tension la batterie.
- Fermez l'armurearrêté du chassis.
Téléchargement de l'application robomaster
A. Recherchez l'application RoboMaster dans l'App Store ou Google Play ou scannez le code QR pour télécharger l'application sur votre appareil mobile.

B. Les utilisateurs peuvent également télécharger le logiciel RoboMaster pour Windows sur le site Web officiel de DJI pour contrôler le S1 avec un clavier et une souris. https://www.dji.com/robomaster_app

- Utilisez votre compte DJI pour vous connecter à l'application RoboMaster.
- L'application RoboMaster prend en charge iOS 10.0.2 ou version ultérieure et Android 5.0 ou version ultérieure.
- L'application RoboMaster prend en charge Windows 7 ou version ultérieure.
- Avant d'utiliser l'application Robomaster avec des données mobiles cellulaires, contactez le fournisseur de données de votre mobile pour obtenir les informations les plus récentes.
Connexion du S1 à l'application
Le S1 doit être connecté à l'application RoboMaster pour pouvoir être utilisé. Les utilisateurs peuvent apprendre à se connecter via Wi-Fi ou via un routeur dans la page Mode de connexion. Suivez les instructions pour connecter le S1 à l'application. Pour en savoir plus, consultez la rubrique Connexion.


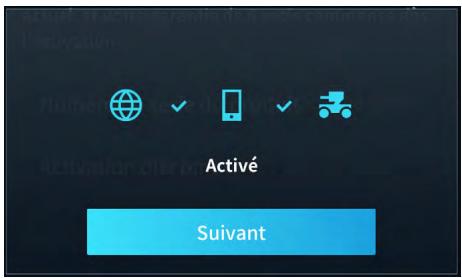
Activation du S1
Une fois la connexion établie, utilisez votre compte DJI pour activer le S1 dans l'application RoboMaster. L'activation nécessite une connexion à Internet.
- Démarrer l'activation.

- Suivez les instructions pour terminer l'activation.
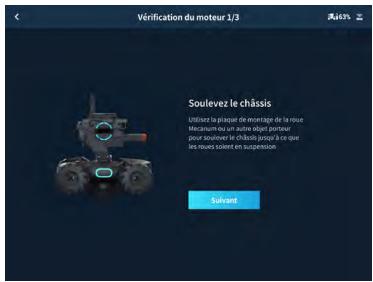
Vérification du moteur
Une vérification du moteur est requise dans l'application avant la première utilisation. Suivez les instructions pour terminer la vérification du moteur.
- Démarrer la vérification du moteur.

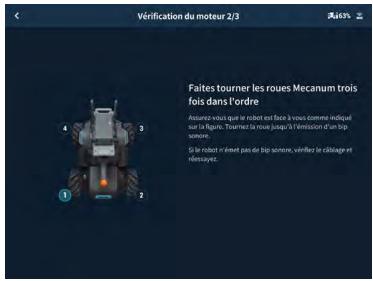
- Soulevez le châssis et suivez les instructions pour faire pivoter les roues Mecanum dans l'ordre indiqué à l'écran jusqu'à ce que toutes les roues aient été tournées.
- Cogner légèrement pour tester les roues Mécanum une à une jusqu'à ce que toutes les roues aient été testées.

- Vérification du moteur terminée.


La vérification du moteur est requise lorsqu'un moteur est remplacé. Ouvrez l'application RoboMaster, cliquez sur Paramètres, puis sur Système et Sélectionné Z'Verification du moteur.
Vérification de l'armure
Une vérification de l'armure est requise dans l'application avant la première utilisation du S1. Suivez les instructions pour terminer la vérification de l'armure.
- Démarrez la vérification de l'armure.

- Suivez les instructions pour cogner légèrement les armures dans l'ordre indiqué à l'écran.
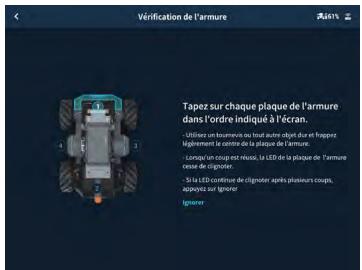
- La vérification de l'armure est terminée.


La vérification de l'armure est requise lorsque vous remplacez un module de l'armure. Accédez à l'application RoboMaster, cliquez sur Paramètres, puis sur Système et sélectionnez Vérification de l'armure.
Utilisation de l'application robomaster
Avec l'application RoboMaster dédiée, les utilisateurs peuvent accéder à de riches ressources éducatives et à plusieurs modes de jeu. L'application peut être utilisée avec un écran tactile ou une manette de jeu. Elle est disponible sous iOS, Android et Windows. Les utilisateurs peuvent même jouer ensemble simultanément depuis différentes plateformes. Les utilisateurs peuvent facilement écrire des programmes et les appliquer ou les partager instantanément avec leurs amis par le biais de l'application RoboMaster. Cette section utilise l'application RoboMaster sous iOS à titre d'exemple. L'interface spécifique peut varier en fonction de l'appareil utilisé.

1. Compte
Touchez pour vous connecter ou vous déconnecter de votre compte, modifier votre avatar, votre nom et votre sexe. Une connexion à Internet est nécessaire pour vous connecter.
2. Médiathèque
Touchez pour voir les photos et les vidéos.
3. Guide
a. Service après-vente : touchez pour accéder à la page officielle du Service après-vente de DJI. b. Assistance maintenance : touchez pour accéder à la page officielle du Centre de réparation de DJI. c. Guides d'utilisateur : touchez pour accéder à la page officielle de téléchargement du Guide d'utilisateur DJI. d. Marqueurs visuels : touchez pour accéder à la page de téléchargement officielle des marqueurs visuels. e. Assistance en ligne : touchez pour parler au service d'assistance en ligne officiel de la gamme RoboMaster. f. Feedback : touchez pour remplir un formulaire de feedback.
4. Connexion
Le S1 doit être connecté à l'application. Touchez pour afficher un guide sur la connexion via Wi-Fi ou routeur.
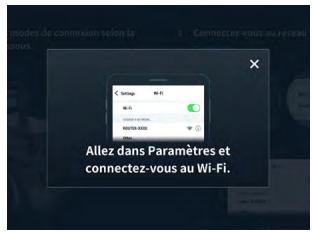
Connexion via wi-fi
Les utilisateurs peuvent accéder aux modes Solo et Challenge lorsqu'ils se connectent via Wi-Fi. Suivez les étapes ci-dessous pour la connexion :
(1). Mettez le S1 sous tension et faites glisser le commutateur de mode du contrôleur intelligent sur □.
(2). Exécutez l'application RoboMaster, accédez aux paramètres Wi-Fi sur l'appareil mobile, sélectionnez le nom du Wi-Fi (RMS1-XXXXXX) affiché sur l'étiquette collée au corps du S1 et entrez le mot de passe. Le mot de passe par défaut est 12341234.

(3). Attendez que le S1 et l'application se connectent. Le S1 émet un son une fois connecté.
Réinitialisation du mot de passe
Assurez-vous que le commutateur de mode du contrôle intelligent est sur la position Connexion via Wi-Fi et maintenez le bouton de connexion enfoncé pendant cinq secondes pour réinitialiser le mot de passe.

Connexion via routeur
Les utilisateurs peuvent accéder aux modes Solo et Challenge lorsqu'ils se connectent via un routeur.
Suivez les étapes ci-dessous pour la connexion.
(2). Ouvrez l'application RoboMaster, accédez aux paramètres Wi-Fi sur l'appareil mobile, connectez-vous à un routeur et entrez le mot de passe Wi-Fi du routeur pour générer un code QR.
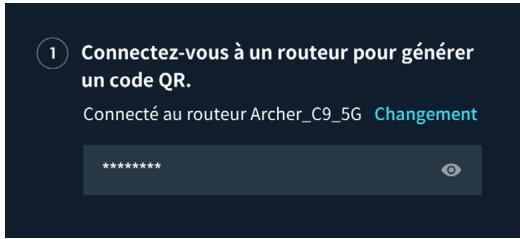
(3). Appuyez sur le bouton de connexion du contrôleur intelligent et utilisez la caméra du S1 pour scanner le code QR. Le S1 se connectera automatiquement au routeur.

5. Paramètres
La page Paramètres affiche les options Robot, Connexion, Affichage, Contrôle et Système.
A. robot
Les utilisateurs peuvent vérifier l'état de chaque composant du S1. Lorsqu'un composant a une anomalie, la partie correspondante est affichée en rouge avec des informations plus détaillées fournies sur le côté droit de l'écran.
B. connexion
Affiche l'état de la connexion du S1. Une fois connectés, les utilisateurs peuvent également consulter l'affichage des chaînes, le nom Wi-Fi, le mot de passe Wi-Fi et également modifier les données du Wi-Fi.
C. affichage
Les utilisateurs peuvent définir la couleur de l'affichage des LED, la barre de points d'impact FPV, l'adaptation de l'écran FPV, la lecture de l'angle de nacelle FPV, la définition vidéo, l'antiscintillation et la qualité 3D.
D. contrôle
Vous pouvez régler la vitesse, le mode de tir, le type de visée, l'étalonnage de la visée, le mode de contrôle, la sensibilité de contrôle, le contrôle du gyroscope de la nacelle, la sensibilité du gyroscope et les vibrations.
E. système
Les éléments suivants sont disponibles sous Système :
Version de l'application et définition de la langue de l'application.
Définition de la langue de la voix et du volume du robot.
Téléchargement, mise à jour et version du firmware.
Vérification de l'armure, vérification du moteur et étalonnage de la nacelle et du châssis.
Guide de relecture pour débutants.
Gestion de l'espace restant sur la carte SD et formatage de la carte SD.
Activation des informations GPS, informations sur l'appareil DJI, amélioration du produit DJI et conditions d'utilisation.
6. Solo
Touchez pour accéder au mode Solo. Les utilisateurs peuvent se connecter via Wi-Fi ou via un routeur. Pour en savoir plus, consultez la rubrique Modes de jeu.
7. Mode challenge
Touchez pour accéder au mode Challenge. Les utilisateurs peuvent se connecter via Wi-Fi ou via un routeur. Lorsque vous utilisez plusieurs S1, vous devez les connecter via le même routeur. Pour en savoir plus, consultez la rubrique Modes de jeu.
8. Labo
Road to Mastery : Road to Mastery propose des cours basés sur des projets qui améliorent la compréhension des langages de programmation des utilisateurs, des applications de robotique à la technologie d'intelligence artificielle, avec différents projets pour les débutants et les experts.
Programmation par bricolage : Scratch et Python sont tous deux disponibles pour la programmation.
RoboAcademy: RoboAcademy propose un parcours formatif basé sur des vidéos et des guides de programmation. Des vidéos ciblées présentant la robotique de manière simple mais passionnante, procurant aux utilisateurs des connaissances scientifiques perspicaces et pertinentes. Le Guide de programmation du RoboMaster S1 offre des explications détaillées des différents blocs et modules, ce qui permet aux utilisateurs de profiter plus facilement du plaisir de la programmation du S1.
Chassis omnidirectionnel
Le châssis du S1 est une plateforme de mouvement omnidirectionnelle basée sur les roues Mecanum qui permettent au robot de se déplacer vers l'avant, en diagonale, sur les côtes, de pivoter ou de réaliser une combinaison de mouvements à la fois.


Évitez de heurer des objets à grande vitesse.
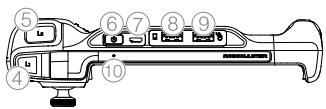
Vue d'ensemble
Le contrôleur de mouvement est le module principal du mouvement du chassis du S1, fournissant une interface de module externe riche pour la transmission vidéo et reliant la nacelle, la batterie, l'armure et les moteurs. Il intègre également un algorithme de contrôle de mouvement de roue omnidirectionnel, un système de gestion de l'alimentation, un système de gestion du moteur et un système de gestion du chassis.
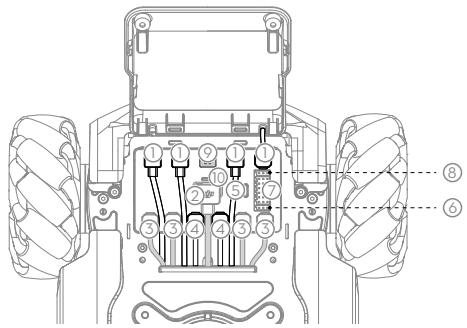
1. Port bus CAN
Port bus CAN utilisé pour la connexion du module armure.
2. Port d'alimentation
Port d'alimentation utilisé pour la connexion de la Batterie Intelligente. Notez que cette interface contient le système de gestion de la batterie. Évitez de débrancher le port d'alimentation sauf si cela est nécessaire.
3. Port m-bus
Port moteur utilisé pour la connexion du moteur.
4. Port bus CAN
Port de la nacelle utilisé pour la connexion de la nacelle.
5. Port micro USB
Port réservé.
6. Port UART
Port réservé.
7. Port de sortie PWM
Le contrôleur de mouvement du S1 permet de définir le cycle de service via un programme Scratch ou Python à l'aide du port de sortie PWM.
Port réservé.
9. Port M0
Port réservé.
10. Indicateur LED
Utilisé pour indiquer l'état du contrôleur de mouvement du S1.
| Indicateur LED | État du contrôleur de mouvement | |
| Clignote lentement en bleu | B...... | Fonctionnement normal |
| Clignote lentement en jaune | Y...... | Programme autonome en cours d'exécution |
| Clignote rapidement en vert | G...... | Étalonnage de l'IMU réussi |
| Clignote rapidement en rouge | R...... | Échec de l'étalonnage de l'IMU |
| Jaune fixe | Y—— | Étalonnage de l'IMU en cours |
| Blanc fixe | W—— | Mise à jour du firmware en cours |
| Clignote en rouge, vert et bleu alternatively | R G Y...... | Aucune information sur l'attitude n'a été entrée |
| Clignote lentement en rouge | R...... | Mode Arrêt* Le mode Arrêt peut s'activer dans les situations suivantes: a. Le contrôleur de mouvement est déconnecté ou ne peut pas communiquer avec le moteur. b. S1 ne peut pas bouger en raison d'une anomalie matérielle du moteur. c. Le contrôleur de mouvement ne peut pas communiquer avec la nacelle. d. Le contrôleur de mouvement ne peut pas communiquer avec la radiocommande. e. Comportement anormal du contrôleur de mouvement. f. Le contrôleur de mouvement ne peut pas communiquer avec la batterie. |
- Des messages d'advertisement en mode Arrêt s'afficheront dans l'application ; allez dans Paramètres puis Système pour vérifier l'erreur correspondante.

- Connectez les câbles noir et orange aux ports de la couleur correspondante. Assurez-vous que le contrôleur de mouvement est correctement installé avant utilisation et que les vis du capot arrêté du châssis sont verrouillées.
- Après chaque réinstallation du contrôleur de mouvement, étalonnez le S1 si vous y êtes invité dans l'application RoboMaster. Pour en savoir plus, consultez la rubrique Étalonnage de la nacelle et du châssis.
- Pour éviter de déloger le contrôleur de mouvement lors du retrait du capot arrière du châssis, soulevez le capot avec précaution avant de le retirer.
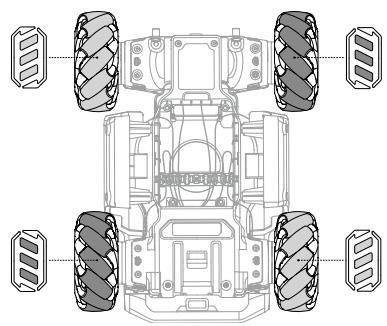
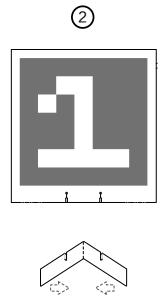
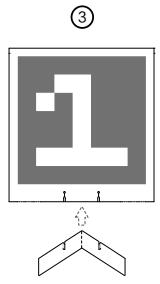
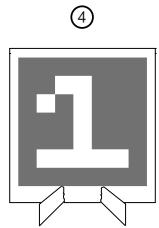
Roues mécanum
La roue Mecanum est une solution de déplacement de châssis robotisé et omnidirectionnel couramment utilisée. Elle est divisée en deux types : les roues à axe diagonal gauche et les roues à axe diagonal droit. Le châssis à quatre roues nécessite deux paires de roues Mecanum.
| = ③ | = ③ | ||
| Repère de l'axe diagonal gauche | Roue Mecanum à axe diagonal gauche | Repère de l'axe diagonal droit | Roue Mecanum à axe diagonal droit |
Lors de l'installation, vous pouvez vérifier les repères de l'axe diagonal (gauche et droit) des rouleaux au bas du châssis, puis installer les roues Mecanum en fonction de ces repères.
Moteurs et contrôleurs ESC
Le S1 comprend un moteur sans balai M3508I et un contrôleur de vitesse maximale ESC de 1000 tours/min pour les moteurs sans balai.

- Assurez-vous que les connexions entre tous les moteurs et le contrôleur de mouvement sont stables.
- Si le moteur ne tourne pas librement, mettez immédiatement le S1 hors tension et vérifiez le moteur.

- NE touchez PAS et NE laissiez PAS vos mains ou votre corps entre en contact avec les moteurs, la plaque de montage des moteurs ou l'intérieur de la roue mécanum immédiatement après la mise hors tension du S1.
Modules d'armure
Un total de quatre modules d'armure sont installés sur les quatre côtés du châssis afin de protégérer la structure interne du S1.
Toutes les armures sont équipées d'un détecteur d'impact qui permet de détecter l'endroit où le S1 est frappé par les billes de gel et pour envoyer des données au contrôle intelligent fin de déduire les points d'impact de la barre correspondante.
Chaque module de détecteur d'impact est représenté par une LED et est visible sous le module de l'armure.
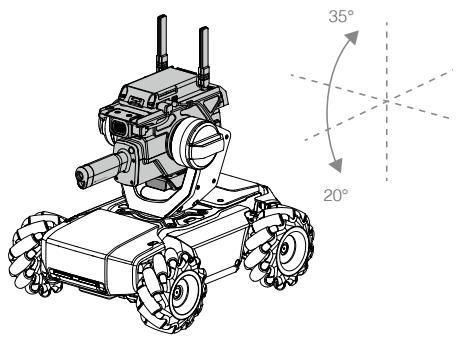
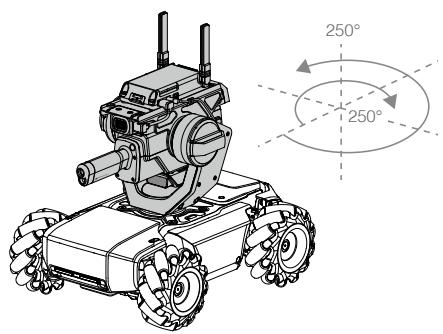
Nacelle
Le S1 est équipé d'une nacelle à 2 axes pour fournir une plateforme stable au blaster et à la caméra. Lorsque le S1 est en mouvement, le blaster reste stable et peut lancer des billes de gel ou émettre un faisceau infrarouge, tout en offrant une expérience FPV fluide à l'utilisateur.
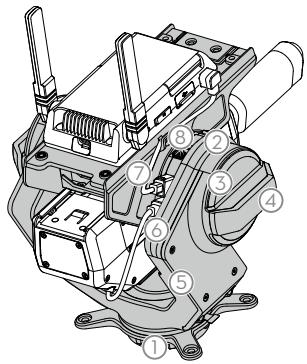
1. Moteur de lacet
Il contrôle le mouvement de lacet de la nacelle et fonctionne conjointement avec le moteur de tangage pour aider le blaster à viser les cibles et à se stabiliser.
2. Moteur de tangage
Il contrôle le mouvement de tangage de la nacelle et fonctionne conjointement avec le moteur de lacet pour aider le blaster à viser les cibles et à se stabiliser.
3. Armure de la nacelle
Complément des LED intégrées, dont la couleur peut être personnalisée dans l'application.
4. Unité infrarouge large
Émet des faisceaux infrarouges grand-angle et détecte les faisceaux infrarouges émis par d'autres S1.
5. Arbre de bras de la nacelle
Il soutient le blaster et le contrôleur intelligent.
6. Port bus CAN
Connecté au blaster.
7. Port bus CAN
Connecté au contrôle intelligent.
8. Port bus CAN
Port réservé. Assurez-vous que le port non utilisé sur le côté du support de la nacelle est couvert. Des objets étrangers risquent d'y pénétrer et provoquer un court-circuit.
Utilisation de la nacelle
Une fois le S1 mis sous tension, NE couvrez PAS et NE touchez PAS la nacelle et évitez de déplacer le châssis afin que le test automatique puisse être effectué sans problème. N'appliquez PAS une force physique externe à la nacelle une fois cette dernière sous tension.
Le mode par défaut du S1 est le mode Chássis menant. L'utilisateur peut contrôler l'angle de la nacelle sur les axes de tangage et de lacet. La plage de contrôle de l'axe de tangage est de -20° à +35° et la plage de contrôle de l'axe de lacet est de ± 250^. La vitesse de rotation maximale de la nacelle est de 540~^ /s.

- La nacelle et le connecteur de la nacelle sont très fragiles. Manipulez-les avec précaution et NE touchez PAS le connecteur de la nacelle.
- Lors de la mise sous tension de la nacelle, NE touchez PAS la nacelle pour éviter d’être blessé par l’arbre en rotation.
- Lorsque vous utilisez la nacelle, NE touchez PAS les pièces métalliques à l'intérieur du moteur de tangage car elles peuvent chauffer.
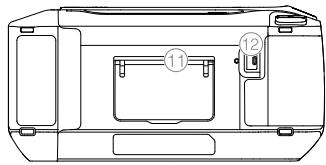
Contrôleur intelligent
Le contrôle intelligent est intégré à plusieurs systèmes, notamment un système de transmission vidéo, un système de jeu et un système de programmation Scratch. Il prend en charge six modules intelligents, notamment pour la reconnaissance de lignes, la reconnaissance de marqueurs visuels, la reconnaissance de personnes, la reconnaissance d'applaudissements, la reconnaissance de gestes et la reconnaissance de robots S1.
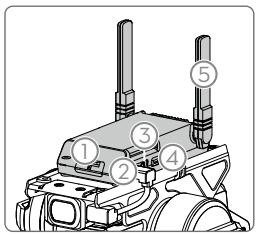
1. Emplacement pour carte microsd
Compatible avec une carte microSD capable de lire et d'écrire à une vitesse supérieure à 10 Mo/s, prenant en charge les cartes de jusqu'à 64 Go.
2. Port de caméra
Utilisé pour une connexion à la caméra.
3. Port de haut-parleur
Utilisé pour une connexion au haut-parleur.
4. Bouton de programme autonome
Les programmes Scratch écrits par l'utilisateur peuvent être définis en tant que programmes autonomes pouvant être chargés directement sur le S1. Appuyez sur le bouton du programme autonome pour exécuter le programme.
5. Antennes
Pour une connexion Wi-Fi optimale, réglez les antennes du contrôleur intelligent à.
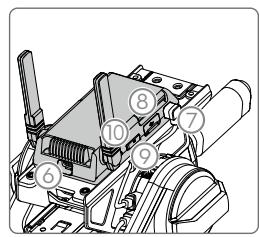
6. Port réservé
Port inutilisé.
7. Port bus CAN
Utilisé pour une connexion à la nacelle.
8. Port micro USB
Utilisé pour une connexion à l'ordinateur.
9. Commutateur de mode de connexion
Utilisé pour basculer entre la connexion via Wi-Fi et la connexion via un routeur.
10. Bouton de connexion
Le bouton de connexion fonctionne différemment lorsque vous vous connectez via Wi-Fi ou un routeur.
Connexion au Wi-Fi : Si le mot de passe Wi-Fi est oublié, maintenez ce bouton enfoncé pendant cinq secondes pour réinitialiser le mot de passe Wi-Fi.
Connexion au routeur : Lorsque vous scannez le code QR avec le S1 pour rejoindre un réseau, appuyez d'abord sur ce bouton.

- NE tirez PAS sur l'antenne.
- Si l'antenne du contrôleur intelligent est endommagée, les performances du S1 en seront affectées. Contactez DJI si l'antenne est endommagée.
Blaster
Avant d'utiliser le blaster, veillez à porter les lunettes de protection fournies par DJI.
Le blaster du S1 doit être monté sur la nacelle et peut être utilisé pour deux applications :
- Avec un contenant de billes de gel pour lancer des billes de gel. La vitesse de lancement des billes de gel à partir du blaster est d'environ 26 m/s, la fréquence de lancement controllable est de 1 à 8 tirs par seconde et la fréquence de lancement maximale est de 10 tirs/s.
- Le blaster du S1 intègre une unité infrarouge étroite avec une portée efficace jusqu'à 6 m en éclairage intérieur. Dans la plage effective, l'angle effectif diminue progressivement avec l'augmentation de la distance et la largeur effective de la prise de vue varie de à.
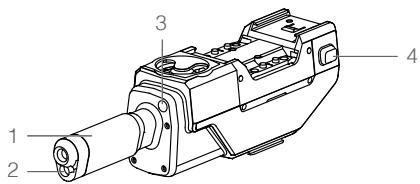
- Trajectoire
- Lumière de trajectoire de tir
- Unité infrarouge étroite
- Bouton d'éjection du réservoir

- NE braquez PAS le blaster sur des personnes ou des animaux lors du lancement des billes de gel.
- NE pointez PAS la lumière de la trajectoire de lancement sur les yeux de personnes ou d'animaux.
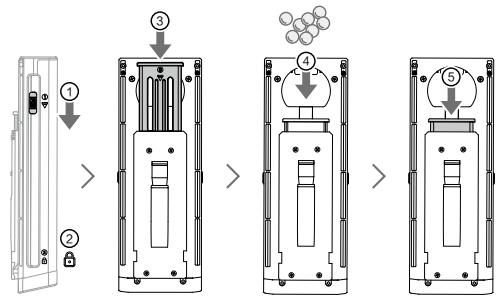
Préparation des billes de gel
Le blaster du S1 peut lancer des billes de gel. Les billes de gel doivent être préalablement
trempées dans de l'eau. Suivez les étapes ci-dessous pour faire tremper les billes de gel.
- Utilisez le capuchon de la bouteille de billes de gel pour mesurer le nombre de billes de gel. Un capuchon de bouteille de billes de gel peut contenir environ 500 billes.
- Il est recommandé de faire tremper les billes de gel dans 1 000 ml d'eau purifiée pendant quatre heures à la température ambiante avant de les utiliser. Les billes de gel trempées ont un diamètre de 5,9 à 6,8 mm et une masse de 0,12 à 0,17 g.

La taille des billes de gel trempées peut varier si de l'eau de qualité différente est utilisée.
Faites tremper les billes conformément aux instructions pour éviter de bloquer le blaster.
Chargement des billes de gel
Suivez les étapes ci-dessous pour charger les billes de gel. La capacité de chargement du réservoir de billes de gel est d'environ 430 billes. Chargez le nombre de billes de gel requis en fonction de l'utilisation.

- Après chaque utilisation, assurez-vous de nettoyer les billes de gel dans le réservoir de billes de gel afin d'éviter toute blessure accidentelle. N'avalez PAS les billes de gel. Assurez-vous de garder les billes de gel hors de la portée des enfants et des animaux.
- Ne congelez pas les billes de gel qui ont été trempées pendant l'utilisation. Sinon, les billes de gel durcissent et bloquent le blaster ou peuvent causer des blessures.
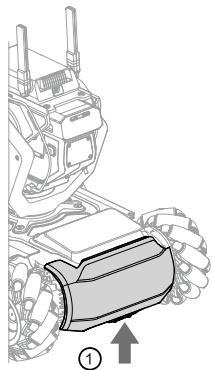
Installation/retrait du réservoir de billes de gel
Suivez les étapes ci-dessous pour installer ou retirer le réservoir de billes de gel.

Appuyez sur le bouton d'éjection du réservoir avant de le retirer.
Caméra
Conçue pour les robots S1, la caméra du S1 comprend un capteur de 1/4 pouce avec 5 millions de pixels et un champ FOV de, permettant aux utilisateurs de contrôler le S1 avec une vue FPV.
Nettoyez régulièrement l'objectif pour éviter tout flou ou halo. Utilisez un produit de nettoyage pour objectif spécial pour vous assurer qu'il ne reste aucun corps étranger sur l'objectif après le nettoyage et qu'il n'endommage pas l'objectif.
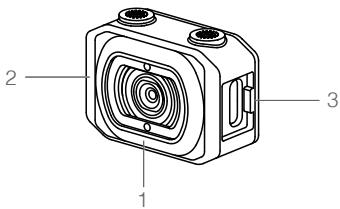
- Objectif de caméra
- Microphone
- Port de caméra Utilise pour connecter la caméra au contrôleur intelligent.
N'exposez PAS la caméra à des liquides et NE la plongez PAS dans l'eau.
- NE rangez PAS la lampe dans un endroit humide.
- NE touchez PAS la lentille.
- Si la lentille est humide, nettoyez-la avec un chiffon doux et sec.
Haut-parleur
Le haut-parleur du S1 est compatible avec un appareil de 2,5 mm d'une puissance nominale de 2 W. Le haut-parleur offre aux utilisateurs une expérience plus immersive des effets sonores, par exemple lorsque le S1 lance des billes de gel ou est frappé par un autre S1.
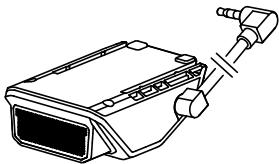
Assurez-vous que le haut-parleur est correctement installé et ne gène pas les mouvements de la nacelle.
Batterie intelligente
La Batterie Intelligente dispose d'une capacité de 2 400 mAh, d'une tension de 10,8 V ainsi que de nombreuses fonctions de gestion de l'énergie.
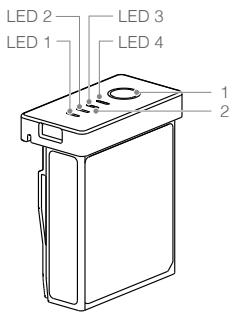
- Bouton d'alimentation
- Indicateurs du niveau de batterie
Fonctions de la batterie intelligente
- Affichage du niveau de batterie : Indique le niveau actuel de la batterie.
- Fonction de décharge automatique : la batterie se décharge automatiquement en dessous de 70% lorsqu'elle est inutilisée pendant plus de 10 jours pour éviter tout gonflement. Pour quitter le mode Inactif, appuyez sur le bouton d'alimentation afin de vérifier le niveau de la batterie. Il faut environ 1 jour pour décharger la batterie à 60%. Il est normal que la batterie dégage une légère chaleur pendant le processus de décharge.
- Fonction d'équilibrage : équilibre automatiquement la tension de chaque élément de batterie lors du chargement.
- Protection contre la surcharge : le chargement s'arrête automatiquement lorsque la batterie est entièrement rechargée.
- Protection contre les températures excessives : la batterie se charge uniquement si la température est comprise entre 5°C et 45°C (41 °F et 113 °F).
- Protection contre les surintensités : le chargement de la batterie s'arrête lorsqu'une intensité élevée est détectée.
- Protection contre les décharges excessives : pour éviter tout dommage important, le courant de sortie est coupé lorsque la cellule de la batterie est déchargeée à 2,5 V et n'est pas utilisée. Pour optimiser la durée d'utilisation, la protection contre les surcharges est désactivée lorsque les batteries se déchargent pendant leur utilisation. Si la tension de la batterie est inférieure à 1 V, le chargement peut notamment un risque de sécurité (un incendie, par exemple). Pour éviter ce risque, la batterie ne pourrait pas être chargeée si la tension d'une cellule de batterie est inférieure à 1 V. Évitez d'utiliser des batteries correspondant à cette description. Restez vigilant en permanence pour éviter une décharge excessive et ainsi éviter des dégâts irréversibles de la batterie.
- Protection contre court-circuit : la détection d'un court-circuit entraîne la coupure automatique de l'alimentation.
- Protection contre les dommages causés aux cellules de batterie : l'application RoboMaster affiche un message d'avertissement lorsqu'une cellule de batterie endommagée est détectée.
- Mode Veille: l'appareil entre en mode Veille pour économiser de l'énergie lorsque la batterie n'est pas utilisée. Si la batterie est allumée sans être connectée au S1, elle se met au bout de cinq minutes. Lorsque la charge de la batterie est inférieure à 5 %, le système passe automatiquement en mode Veille au bout de six heures pour éviter une décharge excessive. Si cela se produit, appuyez une fois sur le bouton d'alimentation de la batterie. La batterie peut être chargée pour redevenir active.
- Communication : la tension de la batterie, sa capacité, son intensité et d'autres informations pertinentes sont transmises à la nacelle.

Lisez le Guide d'utilisateur, la clause d'exclusion de responsabilité et les descriptions sur la batterie avant utilisation. Les utilisateurs assument l'entière responsabilité de leurs actions et de leur utilisation de l'appareil.
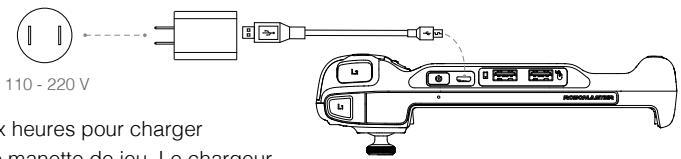
Recharge de la batterie intelligente
Le chargeur de batterie du S1 est conçu pour charger des batteries du S1. Soulevez le couvercle du chargeur de batterie et insérez la Batterie Intelligente. Connectez le chargeur de la batterie à une prise de courant (100-240 V, 50/60 Hz).
Temps de charge : env. 1 heure et 30 minutes
- Avant la première utilisation, la charge est nécessaire pour activer la batterie.
- Vérifiez que la batterie est suffisamment chargée avant chaque utilisation.
- Lorsque vous n'utilisez pas le chargeur de batterie, couvrez-le pour éviter que les bornes métalliques ne soient exposées.
Descriptions des LED d'état
| Indicateurs de niveau de batterie lors de la recharge (battery) | ||||
| LED 1 | LED 2 | LED 3 | LED 4 | Niveau de batterie |
| 0 % ~ 50 % | ||||
| 50 % ~ 75 % | ||||
| 75 % ~ 100 % | ||||
| Chargement terminé | ||||
Indicateurs de niveau de batterie (protection de la batterie)
| LED 1 | LED 2 | LED 3 | LED 4 | Clignotement | Élément de protection de la batterie |
| ○ | ○ | ○ | ○ | La LED 2 clignote deux fois par seconde | Surintensité détectée |
| ○ | ○ | ○ | ○ | La LED 2 clignote trois fois par seconde | Court-circuit détecté |
| ○ | ○ | ○ | ○ | La LED 3 clignote deux fois par seconde | Charge excessive détectée |
| ○ | ○ | ○ | ○ | La LED 3 clignote trois fois par seconde | Tension excessive détectée au niveau du chargeur |
| ○ | ○ | ○ | ○ | La LED 4 clignote deux fois par seconde | Température de recharge trop BASSE (<0 °C) |
| ○ | ○ | ○ | ○ | Levoyant LED4 clignote trois fois par seconde | Température de recharge trop élevée (>40 °C) |
Une fois ces problèmes de protection résolus, l'indicateur de niveau de la batterie s’éteint. Débranchez la Batterie Intelligente du chargeur et rebranchez-la pour reprendre le processus de chargement. Remarque : il est inutile de débrancher et de rebrancher le chargeur en cas d’erreur liée à la température. Le chargement reprend automatiquement lorsque la température revient dans la plage autorisée.

DJI ne pourra en aucun cas être tenu responsable de tout dommage causé par des chargeurs d'autres fabricants.
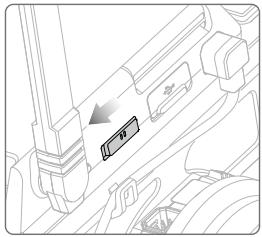
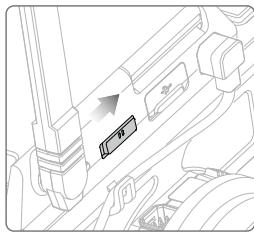
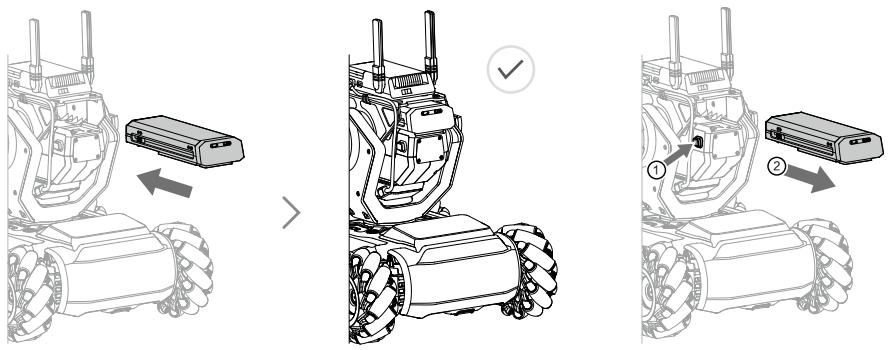
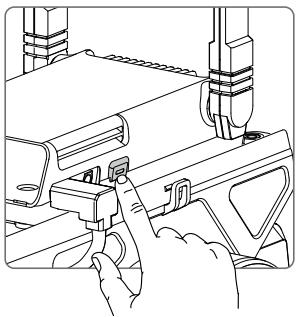
Installation de la batterie intelligente
En cours d'utilisation, ouvrez le capot de l'armure arrêtée et insérez la batterie dans son département.

- Assurez-vous que la batterie est correctement installée. Sinon, la batterie risque de tomber ou d'avoir un contact insuffisant, ce qui peut entraîner une perte des informations sur la batterie.
- Pensez à appuyer sur le bouton d’éjection de batterie lorsque vous l’enlevez.
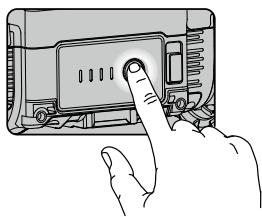
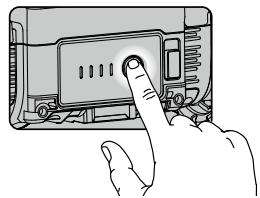
Vérification du niveau de batterie
Appuyez une fois sur le bouton du niveau de batterie pour vérifier le niveau de la batterie.

Les indicateurs de niveau de batterie affichent également le niveau actuel de la batterie lors des opérations de décharge. Les indicateurs sont décrits ci-dessous.

La LED est allumée.

La LED clignote.

La LED est éteinte.
Niveau de batterie
Mise sous/hors tension
Maintenez le bouton d'alimentation enfoncé pendant plus de deux secondes pour l'allumer ou l'éteindre.
Avertissement concernant le fonctionnement à basse température
- Les performances de la Batterie Intelligente diminuent sensiblement à des températures inférieures à 5°C (41 °F). Avant chaque utilisation, assurez-vous que la batterie est entièrement chargée et que la tension des cellules est de 4,2 V.
- Par temps très froid, il se peut que la température de la batterie soit insuffisante, même après qu'elle a été réchauffée. Dans ce cas, isolez la batterie si nécessaire.
- Pour des performances optimales, maintenez la température interne de la Batterie Intelligente au-dessus de 20°C (68°F) lorsque vous l'utilisez.
Description des LED du S1
Le S1 dispose de LED sur les quatre modules de l'armure et sur les deux côtés de la nacelle indiquant l'état actuel du S1.
Description des indicateurs LED
| État du S1 | Indicateur LED de la nacelle | Indicateur LED du chássis |
| Alimentation de la batterie | ||
| Mise sous tension du S1 | Clignote cyan dans le sens antihoraire | Cyan fixe |
| Mise hors tension du S1 | La couleur personnalisée s'éteint | La couleur personnalisée s'éteint |
| Connexion | ||
| Le S1 fonctionne normalement, non connecté à l'application | Clignote blanc | Clignote blanc |
| Connexion du S1 à l'application en cours | Clignote cyan | Clignote cyan |
| Le S1 fonctionne normalement, connecté à l'application | Couleur personnalisée fixe | Couleur personnalisée fixe |
| Mise à jour du firmware | ||
| Mise à jour du firmware en cours | Barres blanches indiquant la progression | Blanc fixe |
| Échec de la mise à jour du firmware | Rouge fixe | Rouge fixe |
| Mise à jour du firmware réussie | Cyan fixe | Cyan fixe |
| Mode Solo | ||
| Accès au mode Solo | La couleur personnalisée clignote dans le sens antihoraire, puis la couleur fixe par défaut | Couleur personnalisée fixe |
| Accès au mode Suivre | La couleur personnalisée clignote continuellement dans le sens antihoraire | Couleur personnalisée fixe |
| Mode Challenge | ||
| Accès au mode Challenge | La couleur personnalisée clignote dans le sens antihoraire, puis la couleur fixe de l'équipe | Couleur personnalisée fixe |
| Tir déetecté | Clignote une fois en rouge | Clignote une fois en rouge |
| Défaite | La couleur personnalisée clignote de manière aléatoire, puis s'éteint | La couleur personnalisée clignote puis s'éteint |
| Ranimé | La couleur personnalisée clignote de façon aléatoire, puis une couleur personnalisée fixe | La couleur personnalisée clignote, puis une couleur personnalisée fixe |
| Victoire | Couleur personnalisée fixe | Couleur personnalisée fixe |
| Barre de points d'impact entièrement restaurée | La couleur personnalisée clignote dans le sens antihoraire, puis la couleur personnalisée fixe | La couleur personnalisée clignote, puis une couleur personnalisée fixe |
| Bonus Mystère utilisé | La couleur personnalisée clignote trois fois dans le sens antihoraire | Couleur personnalisée fixe |
| Impact par Bonus Mystère | La couleur personnalisée clignote jusqu'à la fin de l'effet Bonus Mystère. | La couleur personnalisée clignote jusqu'à la fin de l'effet Bonus Mystère. |
- La couleur personnalisée est définie sous Couleur de l'affichage LED dans les paramètres d'affichage de l'application. En mode Challenge, la couleur personnalisée est attribuée automatiquement. L'utilisateur qui est l'hébergeur se voit attribuer une couleur violette.

Lors du changement de couleur personnalisée, les LED du châssis et de la nacelle changent de couleur.
Manette de jeu (non fournie)
La manette de jeu du RoboMaster S1 est concise pour le RoboMaster S1. En la connectant à un appareil mobile exécutant l'application RoboMaster, les utilisateurs peuvent contrôler le S1 et effectuer plusieurs tâches à l'aide de la manette de jeu et de l'application. De plus, vous pouvez connecter une souris à la manette de jeu pour un contrôle encore plus puissant du S1.
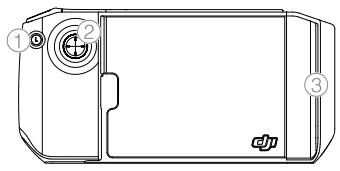
- Bouton Réactions personnalisées
- Joystick de contrôle
- Bride de fixation pour appareil mobile
- Bouton de refroidissement
- Bouton de lancement
- Bouton d'alimentation
- Port de charge (micro USB)
- Port pour appareil mobile (USB)
- Port souris (USB)
- Voyant d'état LED
- Support de manette de jeu
- Bouton Bonus Mystère

Notez qu'il y a deux ports USB disponibles sur la manette de jeu. Le port de l'appareil mobile ne peut pas être utilisé comme port de la souris, et inversement.
Chargement de la manette de jeu
Il est recommandé de charger complètement la manette de jeu avant de l'utiliser pour la première fois.
Il faut environ deux heures pour charger complètement une manette de jeu. Le chargeur USB n'est pas inclus dans l'emballage.
Mise à jour du firmware
Le firmware de la manette de jeu peut être mis à jour à l'aide de l'application RoboMaster. Lorsqu'une mise à jour du firmware est disponible, l'application RoboMaster envoie une invite après la connexion de la manette de jeu. Suivez les instructions pour mettre à jour le firmware.
Internet
Assurez-vous que l'appareil mobile est connecté à Internet lors du téléchargement du firmware.
La LED d'état indique l'état de fonctionnement et le niveau actuel de la batterie de la manette de jeu.
Description des LED d'état
| LED d' état | Description |
| Clignote lentement en vert | La manette de jeu est en cours de chargement |
| Clignote rapidement en rouge | Le niveau de batterie de la manette de jeu est de 0 % |
| Rouge fixe | Le niveau de la batterie de la manette de jeu est entre 1 % et 29 % |
| Jaune fixe | Le niveau de la batterie de la manette de jeu est entre 30 % et 69 % |
| Vert fixe | Le niveau de batterie de la manette de jeu est entre 70 % et 100 % |
| Bleu fixe | La manette de jeu est en cours d'initialisation |
\section*{Caractéristiques techniques}
| Modèle | GD0MA |
| Type de batterie intégrée | 3,6 V, 2 600 mAH, 1S1P |
| Durée de fonctionnement* | Environ 2 heures |
| Port USB | 500 mA/5 V |
| Plage de températures de fonctionnement | -10 à 45 °C (de 14 à 113 °F) |
| Plage de températures de charge | de 0 à 45 °C (32 à 113 °F) |
| Durée de charge* | Environ 2 heures |
- La durée de fonctionnement a été testée à l'aide d'un appareil Android, et la durée de charge à l'aide d'un chargeur USB de 10 W à une température de 25°C (77 °F). Les durées de fonctionnement et de charge ont été testées dans un environnement de laboratoire et ne doivent servir que de référence.
Vérification avant utilisation
Vérifiez les points suivants chaque fois que vous utilisez le S1 :
- Assurez-vous que le contrôle de mouvement est correctement installé, que tous les câbles sont connectés et que les vis du capot arrière du châssis sont bien serrées.
- Assurez-vous que le contrôle intelligent, le blaster, la caméra et le haut-parleur sont connectés.
- Assurez-vous que la carte microSD est insérée.
- Assurez-vous que la batterie intelligente est complètement chargée et correctement insérée.
- Pour une connexion Wi-Fi optimale, réglez les antennes du contrôle intelligent à.
Mise sous tension de la batterie
Maintenez le bouton d'alimentation enfoncé pendant plus de deux secondes pour l'allumer ou l'éteindre.
Connexion à l'application
Le S1 doit être connecté à l'application RoboMaster pour pouvoir être utilisé.
Sélection de l'aire d'utilisation
Il est recommandé d'utiliser le S1 sur des surfaces planes telles que les planchers en bois et les tapis. Les surfaces accidentées telles que le sable ou les roches peuvent endommager les roues ou les moteurs.
Utilisation du mode solo
Accédez au mode Solo pour afficher la page ci-dessous.
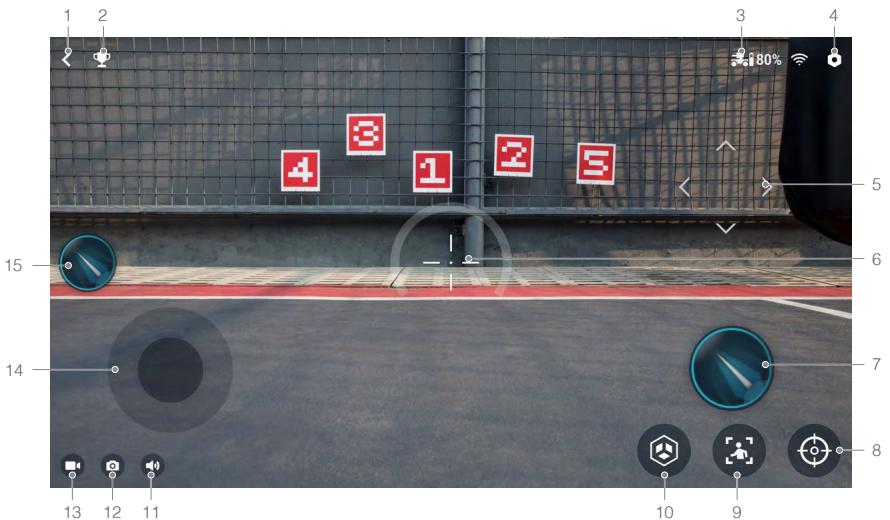
- Bouton de retour : touchez pour revenir à l'écran d'accueil.
- Bouton jeu en mode Solo : touchez pour accéder aux modes Tir à la cible et Course à cibles.
- Bouton état de la connexion : touchez pour apprendre comment connecter le S1 à l'application.
- Bouton Paramètres : touchez pour accéder à la page Paramètres.
- Curseur de la nacelle : touchez et faites glisser sur cette zone de l'écran pour contrôler la rotation de la nacelle.
- Visée : utilisé pour viser des cibles.
- Bouton de lancement : touchez pour lancer des billes de gel ou émettre un faisceau infrarouge.
- Bouton de zoom : touchez pour effectuer un zoom avant ou arrêté 4x.
- Mode Suivre: touchez pour accéder au mode Suivre.
Notez que les performances du mode Suivre se dégradent dans les situations suivantes :
a. La personne suivie est partiellement ou totalement obstruée. b. La personne suivie change soudainement son mouvement. c. L'éclairage ambiant est très instable, passe soudain de la lumière à l'obscurité, ou inversement. d. La couleur ou le motif de la personne suivie est similaire à l'environnement.
- Bouton Réactions personalisées : touchez pour déclencher des réactions personalisées préprogrammées.
- Bouton Muet : touchez pour désactiver ou réactiver le son sur l'appareil mobile.
- Bouton d'obturateur : touchez pour prendre une photo.
- Bouton d'enregistrement: touchez pour enregistrer une dette.
- Bouton de contrôle du châssis: touchez pour déplacer le châssis.
- Bouton de tir: touchez pour lancer des billes de gel ou émettre un faisceau infrarouge.
Fonctionnement du S1
La télécommande est principalement utilisée pour contrôler le chassin, la nacelle et le blaster du S1.
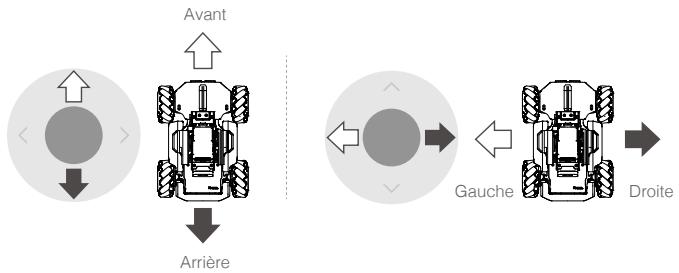
Contrôle du châssis
Appuyez sur le bouton de commande du chassin pour déplacer le S1 vers l'avant, vers l'arrière ou latéralement. Vous pouvez appuyer simultanément sur le bouton de tir pour lancer des billes de gel ou émettre des faisceaux infrarouges lors du déplacement du chassin.
Contrôle de la nacelle
Appuyez sur le côté droit de l'écran pour faire tourner la nacelle sur l'axe de tangage ou l'axe de lacet. Vous pouvez appuyer simultanément sur le bouton de tir pour lancer des billes de gel ou émettre des rayons infrarouges tout en faisant pivoter la nacelle.

NE pointez PAS le blaster vers des personnes ou des animaux lors du lancement des billes de gel. NE pointez PAS la lumière de la trajectoire de lancement vers les yeux.
Mode solo
En mode Solo, les utilisateurs peuvent accéder au mode Suivre et explorer les modes Tir sur cible et Course à cibles. Les utilisateurs peuvent accéder au mode Solo à partir de la vue appare.
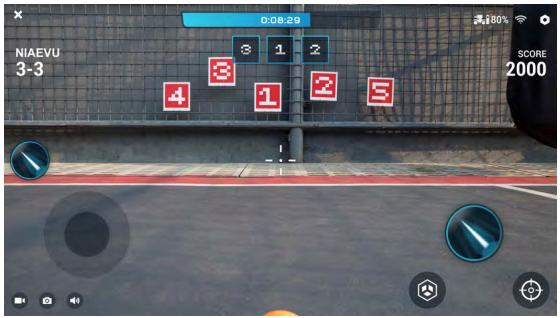
Tir à la cible
Dans Tir à la cible, les utilisateurs doivent tirer sur les marqueurs visuels le plus rapidement possible avant la fin du temps imparti. Les scores élevés peuvent être comparés avec ceux d'autres utilisateurs. Les utilisateurs peuvent définir les marqueurs visuels à l'avance.
- Configuration des marqueurs visuels. Reportez-vous à la section Modules IA pour plus d'informations sur l'installation des marqueurs visuels.
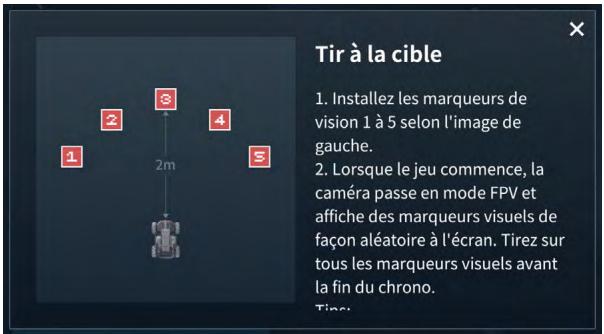
- Touchez pour accéder au mode Tir à la cible.

Touchez dans le coin supérieur droit pour voir les règles du jeu.
- Commencez le Tir à la cible.
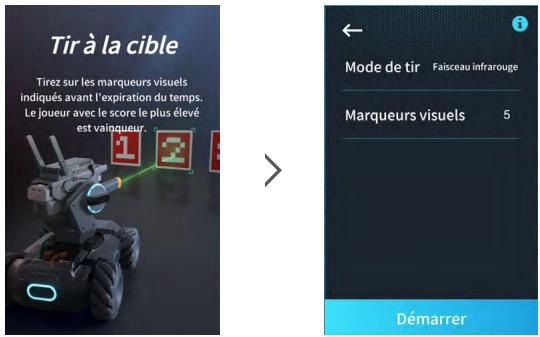
Course à cibles
Dans Course à cibles, les utilisateurs doivent tirer sur les marqueurs visuels le plus rapidement possible avant la fin du temps imparti. Les scores élevés peuvent être comparés avec ceux d'autres utilisateurs. Les utilisateurs peuvent définir les marqueurs visuels à l'avance. Le mode Course à cibles est disponible en mode Manuel et Automatique. En mode Manuel, l'utilisateur conduit le S1 manuellement. En mode Automatique, l'utilisateur crée un programme de reconnaissance de lignes et l'exécute dans la course.
- Configuration des marqueurs visuels.

- Touchez pour accéder au mode Course à cibles, puis sélectionnez le mode de tir et le nombre de marqueurs visuels.
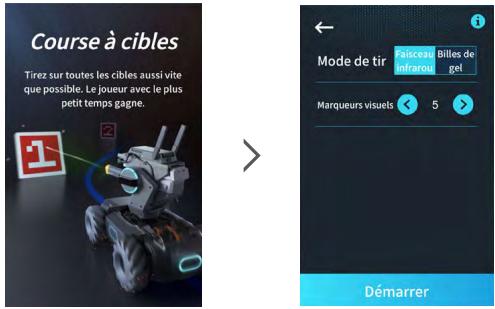

Touchez dans le coin supérieur droit pour les règles du jeu.
- Jouer à Course à cibles.
Mode challenge
En mode Challenge, les utilisateurs peuvent découvrir une variété de jeux multijoueurs, notamment Course et Arène. Reportez-vous à la section Connexion pour plus d'informations sur l'accès au mode Challenge.
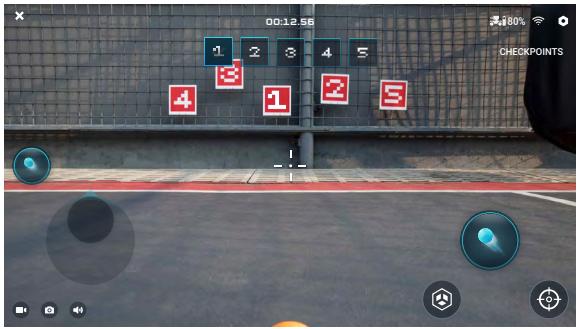
Mode course
En mode Course, les utilisateurs disposent les marqueurs visuels sous forme de checkpoints et les scannent aussi rapidement que possible pour gagner la partie. Les marqueurs doivent être scannés dans l'ordre pour terminer la course.
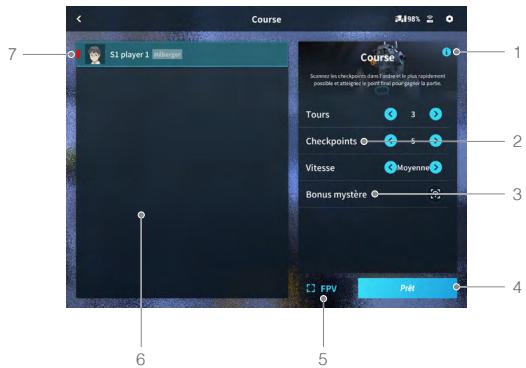
- Touchez pour les règles du jeu. Organisez les marqueurs visuels sous forme de checkpoints conformément aux règles.
- Définissez les tours, les checkpoints et la vitesse.
- Touchez pour les descriptions du Bonus Mystère. Les bonus comprennent Étourdissements, Interférences électromagnétiques, Vitesse extrême et Invincibilité.
- Touchez pour démarrer le jeu.
- Touchez pour accéder à la vue FPV.
- Tous les joueurs dans la salle de jeu.
- L'hébergeur de la salle de jeu.

- Tous les joueurs doivent se connecter à la même salle de jeu via le même routeur.
- Pour garantir un jeu équitable, tous les joueurs doivent utiliser la même version du firmware.
Mode arène
Dans Arène, les utilisateurs lancent des billes de gel ou émettent des faisceaux infrarouges contre les S1 de leurs adversaires. Si un S1 est touché, la barre de points d'impact est réduite. Si la barre de points d'impact d'un S1 est réduite à zéro, le S1 est vaincu. Les S1 vaincus peuvent être ranimés en scannant. Les utilisateurs reçoivent des points en touchant ou en vainquant leurs adversaires S1. À la fin du temps imparti, l'utilisateur qui a le plus de points est le gagnant.
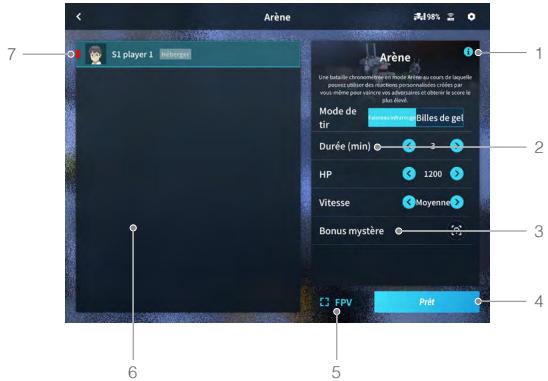
- Touchez pour les règles du jeu. Dispensez les marqueurs visuels sous forme de checkpoints conformément aux règles.
- Définissez le mode de tir, la durée, les paramètres des points d'impact et la vitesse.
- Touchez pour les descriptions du bonus Mystère. Les bonus comprennent Étourdissements, Interférences électromagnétiques, Vitesse extrême et Invincibilité.
- Touchez pour démarrer le jeu.
- Touchez pour accéder à la vue FPV.
- Tous les joueurs dans la salle de jeu.
- L'hébergeur de la salle de jeu.

- Tous les joueurs doivent se connecter à la même salle de jeu via le même routeur.
- Pour garantir un jeu équitable, tous les joueurs doivent utiliser la même version du firmware.
Bonus mystère
En mode Challenge, scannez pour recevoir un bonus Mystère au cours du jeu. Les bonus incluent :
Étourdissements : ciblez l'adversaire S1, déclenchez la réaction et forcez-le à tourner de manière incontrollable pendant 1,5 seconde.
Interférences électromagnétiques : déclenchez la réaction et faites en sorte que tous les S1 de votre adversaire situés dans un rayon de 3 mètres subissent des interférences à l'écran pendant 2,5 secondes.
Vitesse extrême : le déclenchement de cette réaction permet à votre S1 de rouler à une vitesse supérieure pendant 3 secondes.
Invincibilité : le déclenchement de cette réaction donne à votre S1 un bouclier virtuel qui l’empêche d’être touché pendant 3 secondes.
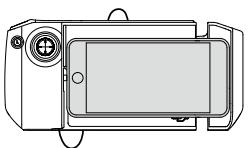
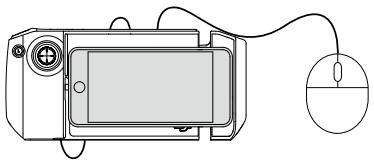
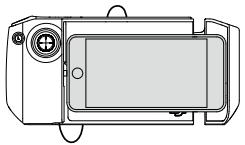
Fonctionnement du S1 avec une manette de jeu
Vous pouvez également utiliser la manette de jeu du S1 connectée à un appareil mobile comme suit pour contrôler le S1.
- Utiliser la manette de jeu connectée à un appareil mobile.
- Utiliser la manette de jeu connectée à un appareil mobile avec une souris connectée.
- Utiliser la manette de jeu connectée à un appareil mobile avec une souris et un clavier connectés.
Connexion de la manette de jeu
- Connectez l'appareil mobile au port pour appareil mobile sur la manette de jeu à l'aide d'un cable micro USB (non fourni).
- Ajustez la bride de fixation pour appareil mobile pour fixer l'appareil mobile à la manette de jeu. Assurez-vous que l'appareil mobile est connecté avec le cable face au joystick, comme indiqué dans la figure ci-dessous.
- Appuyez sur le bouton d'alimentation pour allumer la manette de jeu. Appuyez et maintenez enfoncé le bouton d'alimentation pour éteindre la manette de jeu.
Fonctionnement de base de la manette de jeu
- Lorsque la manette de jeu est connectée à un appareil mobile, le joystick situé sur la manette de jeu sert à déplacer le S1 vers l'avant, vers l'arrière et latéralement. L'application ne peut pas être utilisée pour contrôler le chassin.
- Les boutons de la manette de jeu peuvent être utilisés pour effectuer des actions sur le S1. Les utilisateurs peuvent également continuer à utiliser l'application pour effectuer ces actions.
Utilisation de la manette de jeu
Le joystick de la manette de jeu est utilisé pour contrôler le chassin. L'application est utilisée pour contrôler la nacelle et le blaster. Lorsque la manette de jeu est connectée, vous ne pouvez pas déplacer le chassin à l'aide de l'application.
| Déplacement du joystick | Déplacement du S1 | Déplacement du joystick | Déplacement du S1 |
| Avant | Amérique | Gaugue Droite |
Le joystick de la manette de jeu sert à déplacer le S1 vers l'avant, vers l'arrière et l'arrièrelent.
Utilisation de la manette de jeu avec souris
Une fois que la manette de jeu est connectée à un appareil mobile, une souris d'ordinateur peut également être connectée à la manette de jeu. Le joystick de la manette de jeu est utilisé pour contrôler le chassis. Les actions de la souris sont enumeratedes ci-dessous. L'application peut toujours être utilisée pour contrôler la nacelle et la manette de jeu, mais la souris est le contrôleur principal.
| Action de la souris | Action du S1 |
| Clicgauche | Lance des billes de gel |
| Clicdroit | Zoom avant |
| Molette de la souris | Aucune action |
| Déplacer la souris | Ajuste l'angle de la nacelle |
Utilisation de la manette de jeu avec souris et clavier
Une souris et un clavier sans fil sont requis. Une fois la manette de jeu connectée à un appareil mobile, connectez le connecteur sans fil de la souris et du clavier à la manette de jeu. Le joystick de la manette de jeu et le clavier sont utilisés pour contrôler le chassis. Les actions de la souris sont énumérées ci-dessous. L'application peut toujours être utilisée pour contrôler la nacelle et le blaster, mais la souris est le contrôleur principal.
Les touches A, W, S et D permettent de contrôler le chassis. Les actions pouvant être effectuées avec la souris sont énumérées ci-dessous.
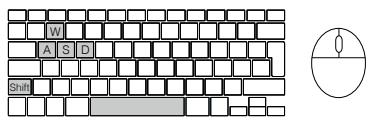
| Touches du clavier | Action du S1 |
| W | Avant |
| A | Gauche |
| S | Arrière |
| D | Droite |
| Touches Maj/Espace | Accélérer |
| Action de la souris | Action du S1 |
| Clicgauche | Lance des billes de gel |
| Clicdroit | Zoom avant |
| Molette de la souris | Aucune action |
| Déplacer la souris | Ajuste l'angle de la nacelle |

La plupart des claviers et souris Logitech et Rapoo sont pris en charge. Il est recommandé d'utiliser les modèles suivants :
Utilisation d'un PC et de la version windows de robomaster
Installe la version Windows de l'application RoboMaster sur un ordinateur et contrôle le S1 directement via une souris et un clavier.
Installation de la version windows de robomaster
- Les utilisateurs peuvent télécharger l'application RoboMaster pour Windows depuis le site Web officiel de DJI sur un ordinateur pour contrôler le S1 à l'aide du clavier et de la souris. https://www.dji.com/robomaster_app
- Exécutez l'installation et suivez les instructions pour terminer l'installation de l'application RoboMaster.
- Exécutez l'application RoboMaster pour accéder à la page d'accueil. La version Windows de l'application RoboMaster est similaire à la version pour iOS et Android.

- Utilisez votre compte DJI pour vous connecter à la version Windows de RoboMaster.
- L'application RoboMaster prend en charge Windows 7 ou une version ultérieure.
Utilisation de souris et clavier pour contrôler le S1
Lorsque vous utilisez RoboMaster pour Windows, le S1 est contrôlé avec une souris et un clavier. Les actions correspondantes sont indiquées ci-dessous.

Laboratoire
Le Labo du RoboMaster S1 propose des centaines de blocs de programmation vous permettant d'accéder à des fonctionnalités telles que le contrôle PID. Le Guide de programmation du RoboMaster S1 fournit des instructions et des exemples pour aider les utilisateurs à apprendre rapidement les techniques de programmation permettant de contrôler le S1.
Les utilisateurs peuvent étudier des cours basés sur des projets dans Road to Mastery pour améliorer leur compréhension des langages de programmation, des applications de la robotique à la technologie de l'intelligence artificielle, avec différents projets pour les débutants et les experts.
Dans Labo, allez à la page Scratch puis à Programmation par bricolage pour écrire des programmes.
Dans la page Python, les utilisateurs peuvent écrire leur propre programme Python, qui peut être défini tant que Programme autonome ou en tant que Réaction personnalisée et s'exécuter sur le S1. Reportez-vous au Guide de programmation RoboMaster S1 pour plus d'informations.

- Page Scratch : touchez pour afficher les programmes Scratch.
- Page Python : touchez pour afficher les programmes Python.
- Espace Cloud : touchez pour afficher les programmes dans le cloud.
- Nom du programme : affiche le nom du programme.
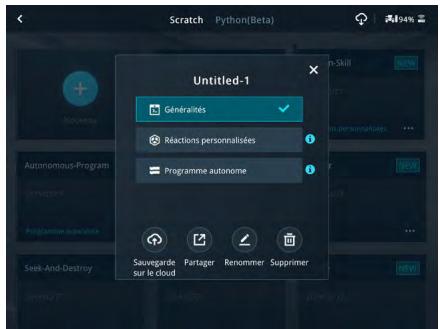
- Si le programme est défini comme programme général, le type de programme n'est pas affiché. Le type de programme n'est affiché que s'il est défini comme réaction personnalisée ou programme autonome.
- Paramètres du programme : touchez pour sélectionner le type de programme, définissez le programme en tant que réaction personnalisée, en tant que programme autonome, effectuez une sauvegarde sur l'espace cloud, partagez-le avec d'autres utilisateurs, ou bien renommez ou supprimez le programme.
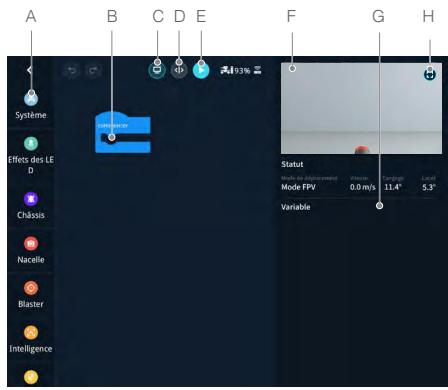
- Touchez ① pour créer un nouveau programme.
A. Bouton des modules de programmation : touchez l'icône correspondante pour programmer les éléments suivants : Système, Effets des LED, Chassis, Nacelle, Blaster, Intelligence, Armure, Appareil mobile, Multimédia, Commandes, Opérateurs et Objets de données.
B. Bouton de la fenêtre de programmation : faites glisser des blocs de programmation dans la fenêtre pour créer un programme. C. Bouton d'affichage : touchez pour activer ou désactiver la vue FPV. D. Bouton Basculer : touchez pour basculer la vue du bloc de programmation en code Python. E. Bouton Exécuter : touchez pour exécuter le programme. F. Fenêtre FPV : affiche la vue FPV actuelle. G. Informations d'état : affiche les informations sur l'état actuel du S1. H. Bouton FPV : touchez pour ouvrir la vue FPV en plein écran.
Modules IA
Il y a six modules IA qui peuvent être programmés en accédant à Labo puis Programmation par bricolage puis Scratch. Reportez-vous à la section Intelligence artificielle du Guide de programmation du RoboMaster S1 pour d'autres exemples de programmation.
Notez que le module IA est affecté dans les situations suivantes :
a. L'objet est partiellement ou complètement obstrué. b. L'environnement est sombre (moins de 300 lux) ou lumineux (supérieur à 10 000 lux). c. L'environnement passe soudain de la lumière à l'obscurité, ou inversement. d. La couleur ou le motif de l'objet est similaire à l'environnement.
Reconnaissance de personnes
Le S1 peut identifier et suivre tout individu sélectionné dans le champ de vision FOV du S1.
Reconnaissance de lignes
En Course à cibles, l'utilisateur peut programmer le S1 pour qu'il suive automatiquement une ligne au sol. La reconnaissance de lignes prend en charge les lignes rouges, vertes et bleues. Le S1 ne peut pas reconnaître les lignes d'autres couleurs.
Reconnaissance de gestes
L'utilisateur peut programmer le S1 pour qu'il déclenche des réactions spécifiques lorsqu'il identifie des gestes physiques.
Reconnaissance d'applaudissements
L'utilisateur peut programmer le S1 pour qu'il déclenche des réactions spécifiques lorsqu'il identifie des applaudissements. Seuls les applaudissements à une distance effective de 2 mètres peuvent être identifiés. Les séquences d'applaudissement identifiées comprennent deux applaudissements consécutifs et trois applaudissements consécutifs.
Reconnaissance de robots S1
L'utilisateur peut programmer le S1 pour qu'il déclenche des réactions spécifiques lorsqu'il identifie d'autres S1.
Reconnaissance de marqueurs visuels
L'utilisateur peut programmer le S1 pour qu'il déclenche des réactions spécifiques lorsqu'il identifie des marqueurs visuels, lesquels comprennent des chiffres, des lettres et des caractères spéciaux. Les marqueurs visuels doivent se situer à une distance effective de trois mètres et les marqueurs visuels officiels de DJI peuvent être identifiés. Reportez-vous aux instructions sur l'emballage des marqueurs visuels pour plus d'informations.
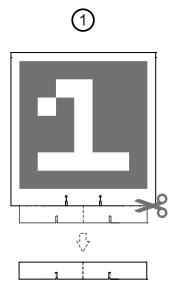
NE cachez PAS la zone rouge. Sinon, la reconnaissance sera affectée.
Si vous nevez utiliser plus de marqueurs visuels, touchez dans l'application pour accéder à la page du guide. Sélectionnez les marqueurs visuels que vous souhaitez télécharger et imprimer.
La reconnaissance des marqueurs visuels ne prend en charge que les repères rouges. Le S1 ne peut pas reconnaître les marqueurs visuels d'autres couleurs.
Programme autonome
Un programme peut être défini en tant que programme autonome et peut être exécuté indépendamment sur le S1.
- Si le S1 n'est pas connecté à l'application, le programme peut être lancé en appuyant sur le bouton de programme autonome du contrôleur intelligent. Appuyez de nouveau sur ce bouton pour arrêter le programme.
- Si le S1 est connecté à l'application, le programme autonome ne peut être lancé qu'aux emplacements suivants :
(1) Page d'accueil de l'application (2) Mode Solo FPV (3) Labo
Réactions personnalisées
Un programme peut être défini tant que réaction personnalisée, qui peut être utilisée dans la vue FPV en mode Solo ou en mode Challenge. Touchez dans la vue FPV pour utiliser une réaction personnalisée.
Programmation python
Dans Labo, allez à la page Python puis à Programmation par bricolage pour écrire des programmes. Dans la page Python, les utilisateurs peuvent écrire leur propre programme Python, qui peut être défini en tant que Programme autonome ou en tant que réaction personnalisée et s'exécuter sur le S1. Les utilisateurs peuvent également convertir les programmes Scratch en code Python et utiliser l'affichage du code source pour faciliter la programmation avec Python. Reportez-vous au Guide de programmation RoboMaster S1 pour plus d'informations.
Annexe
Caractéristiques techniques
| RoboMaster S1 | |
| Dimensions (L x l x H) | 320 x 240 x 270 mm |
| Poids | Environ 3,3 kg |
| Plage de vitesse du chàssis | 0 à 3,5 m/s (vers l'avant)0 à 2,5 m/s (vers l'arrière)0 à 2,8 m/s (lateralment) |
| Vitesse de rotation max. du chàssis | 600 °/s |
| Mateur sans balais M3508I | |
| Vitesse de rotation max. | 1 000 tours/minute |
| Couple max. | 0,25 Nm |
| Puisance de sortie max. | 19 W |
| Plage de températures de fonctionnement | -10 à 40 °C (14 à 104 °F) |
| Commande de variateurs | Commande à flux orienté (FOC) |
| Méthode de contrôle | Contrôle en boucle ferméeProtection contre les surtaptionsProtection contre la surchauffe |
| Protection | Démarrage en douceurProtection contre les courts-circuitsDétction d'anomalies de puce et de capteur |
| Nacelle | |
| Distance de contrôle | -20° à +35° (tangage) ; ±250° (lacet) |
| Amplitude mécanique | -24° à +41° (tangage) ; ±270° (lacet) |
| Vitesse de rotation max. | 540 °/s |
| Précision de contrôle des vibrations(sur une surface plane, blaster inactif) | ± 0,02° |
| Blaster | |
| Fréquence de tir contrôleable | 1 à 8/s |
| Fréquence de tir max. | 10/s |
| Vitesse de tir initiale | Env. 26 m/s |
| Chargement moyen | Env. 430 billes de gel (trempées) |
| Contrôleur intelligent | |
| Latence[1] | Connexion via Wi-Fi : 80 à 100 msConnexion via routeur : 100 à 120 ms (sans obstructionni interférence) |
| Qualité de l'aperçu en direct | 720p/30 ips |
| Débit binaire maximum en direct | 6 Mb/s |
| Fréquence de fonctionnement[2] | 2,4 GHz, 5,1 GHz, 5,8 GHz |
| Puissance de l'émetteur (EIRP) | 2,400 à 2,4835 GHzFCC : ≤ 30 dBmSRRC : ≤ 20 dBmCE : ≤ 19 dBmMIC : ≤ 20 dBm5,170 à 5,250 GHzFCC : ≤ 30 dBmSRRC : ≤ 23 dBmCE : ≤ 20 dBmMIC : ≤ 23 dBm5,725 à 5,850 GHzFCC : ≤ 30 dBmSRRC : ≤ 30 dBmCE : ≤14 dBm |
| Mode de fonctionnement | Connexion via Wi-Fi, connexion via routeur |
| Distance de transmission max.[3] | Connexion via Wi-Fi :FCC, 2,4 GHz 140 m, 5,8 GHz 90 mCE, 2,4 GHz 130 m, 5,8 GHz 70 mSRRC, 2,4 GHz 130 m, 5,8 GHz 130 mMIC, 2,4 GHz 130 mConnexion via routeur :FCC, 2,4 GHz 190 m, 5,8 GHz 300 mCE, 2,4 GHz 180 m, 5,1 GHz 70 mSRRC, 2,4 GHz 180 m, 5,8 GHz 300 mMIC, 2,4 GHz 180 m |
| Norme de transmission | IEEE802.11a/b/g/n |
| Caméra | |
| Capteur | CMOS 1/4" ; Pixels effectifs : 5 MP |
| FOV | 120° |
| Résolution photo max. | 2 560 x 1 440 pixels |
| Définition video max. | FHD : 1080p/30 ipsHD : 720p/30 ips |
| Débit binaire max. | 16 Mb/s |
| Format de photo | JPEG |
| Format de video | MP4 |
| Cartes SD prises en charge | Prise en charge des cartes microSD d'une capacité allant jusqu'à 64 Go. |
| Plage de températures de fonctionnement | -10 à 40 °C (14 à 104 °F) |
| Unités infrarouges étroites | |
| Portée effective[4] | 6 m (dans des conditions d'éclairage interieur) |
| Zone effective couverte par le signal | Varie de 40° à 10° (la zone effective diminué à mesure que la distance par rapport à la cible augmente). |
| Unités infrarouges larges | |
| Portée effective[4] | 3 m (dans des conditions d'éclairage interieur) |
| Largeur effective du signal | 360° (dans des conditions d'éclairage interieur) |
| Détector d'impact | |
| Conditions de détction | Pour que le détector d'impact soit activé, les conditions suivantes doivent être remplies : Diamètre des billes de gel ≥ 6 mm, vitesse de tir ≥ 20 m/s, et l'angle entre la direction de tir et le détector d'impact n'est pas inférieur à 45°. |
| Fréquence de détction max. | 15 Hz |
| Batterie Intelligente | |
| Capacité | 2 400 mAh |
| Tension de charge maximale | 12,6 V |
| Tension de charge nominale | 10,8 V |
| Type de batterie | LiPo 3S |
| Énergie | 25,92 Wh |
| Autonomie de la batterie (en cours d'utilisation) | 35 minutes (mesurée à une vitesse constante de 2,0 m/s sur une surface plane) |
| Autonomie de batterie (en mode Veille) | Env. 100 min |
| Poids | 169 g |
| Plage de températures de fonctionnement | -10 à 40 °C (14 à 104 °F) |
| Plage de températures de charge | 5 à 40 °C (41 à 104 °F) |
| Puissance de charge max. | 29 W |
| Chargeur | |
| Entrée | 100 à 240 V, 50/60 Hz ; 1 A |
| Sortie | Port : 12,6 V=0,8 A ou 12,6 V=2,2 A |
| Tension | 12,6 V |
| Tension nominale | 28 W |
| Billes de gel | |
| Diamètre | 5,9 - 6,8 mm[5] |
| Poids | 0,12 - 0,17 g[5] |
| Application | |
| iOS | iOS 10.0.2 ou version ultérieure |
| Android | Android 5.0 ou version ultérieure |
| Autres | |
| Routeurs recommends | TP-Link TL-WDR8600 ; TP-Link TL-WDR5640 (Chine) TP-Link Archer C7; NETGEAR X6S (International) |
| Solution d'alimentation électrique extérieure recommendée pour les routeurs | Chargeur pour ordinateur portable (avec la même puissance d'entrée que le routeur) |
Mesurée dans un environnement sans interference et sans obstruction avec une distance d'environ 1 m entre l'appareil mobile, le routeur et le S1. Le périphérique iOS utilisé était un iPhone X. Les résultats des tests avec d'autres périphériques Android peuvent être différents.
L'utilisation en extérieur des bandes de fréquences de 5,1 GHz et 5,8 GHz est interdite dans certaines régions. Respectez toujours toutes les lois et règlementations locales en vigueur dans votre pays ou région. Mesurée dans un environnement sans interférence et sans obstruction. Pour la connexion via Wi-Fi, l'appareil mobile utilisé pour les tests était un iPad de sixième génération (sorti en 2018). Pour tester la connexion via routeur, plusieurs modèles de routeur ont été utilisés. FCC : TP-Link Archer C9; SRRC : TP-Link WDR8600; CE : TP-Link Archer C7; MIC : WSR-1160DHP3. L'utilisation des unités infrarouges est affectée dans un environnement extérieur ou à forte intensité de signaux infrarouges. Les billes de gel gonflent à une taille utilisable lorsqu'elles sont trempées dans l'eau pendant quatre heures.
Mise à jour du firmware
Vérifiez la version du firmware du S1 dans Paramètres, puis Système, puis Mise à jour du firmware. S'il existe une nouvelle version du firmware, utilisez l'application RoboMaster pour la mettre à jour.
- Assurez-vous que toutes les pièces sont connectées, mettez le S1 sous tension et assurez-vous que le niveau de la batterie est supérieur à 50 %.
- Touchez Application, puis Système, puis Mise à jour du firmware. Suivez les instructions à l’écran pour mettre à jour le firmware. Assurez-vous que l’appareil mobile est connecté à Internet lors du téléchargement du firmware.
- Le S1 suit l'avancement de la mise à jour à l'aide d'invités audio. Patientez jusqu'à ce que la mise à jour soit terminée.

- Le firmware de la batterie est inclus dans le firmware du S1. Assurez-vous de mettre à jour le firmware de toutes les batteries si vous en ave plusieurs.
- Ne lancez une mise à jour du firmware que si le niveau de la batterie est supérieur à 50%.
- Notez que lors de la mise à jour du firmware du S1, la nacelle peut devenir molle, les indicateurs d'état peuvent clignoter de façon anormale et le S1 peut redémarrer.
- Le S1 et l'application peuvent perdre la connexion après la mise à jour. Si cela se produit, reconnectez-les.
- Si vous recevez une instruction indiquant que la version du firmware la plus récente est absolue, mettez-le à jour et réessayez.
- En mode Challenge, assurez-vous que tous les S1 utilisent la même version de firmware.
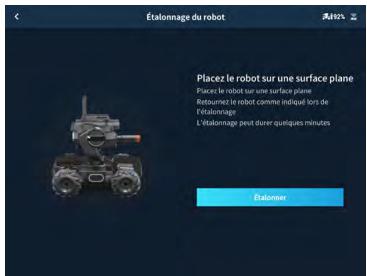
Étalonnage du S1
Si l'un des scénarios suivants se produit, étalonner à nouveau le S1 dans l'application RoboMaster :
a. L'angle de tangage n'est pas horizontal après l'exécution du test automatique de la nacelle. b. L'attitude de la nacelle ne peut pas être contrôlée avec précision. c. Le tangage ne peut pas tourner horizontalement lorsque le lacet est contrôlé séparément.
d. La nacelle dérive lorsqu'il n'y a pas d'opération ou lorsque l'opération est arrêtée. e. Le S1 se déplace involontairement en tournant. f. Le châssis est incontrôlable et la nacelle devient lâche lorsque des messages d'advertisement apparaissent dans l'application. g. Le contrôleur de mouvement a été installé ou reinstallé.
Les étapes d'étalonnage spécifiques sont les suivantes :
- Ouvre l'application RoboMaster, touche Paramètres, puis Système et sélectionnez Étalonnage.
- Suivez les étapes de l'application pour étalonner.
Configuration des ports PWM
La modulation d'impulsions en largeur (PWM) contrôle la durée d'un niveau de sortie élevé pendant une certaine période et est largement utilisée pour le contrôle des LED, des pignons de navigation, etc. Le port PWM du S1 a un cycle de service par défaut de 7,5 % et une fréquence fondamentale de 50 Hz.
Pour les LED, le débit de sortie PWM varie de 0% à 100%, 0% correspondant à la luminosité la plus faible d'une LED et 100% à sa luminosité la plus élevée. Pour les pignons de navigation, le débit de sortie PWM varie de 2,5% à 12,5%.
Vous devez définir le pourcentage de sortie PWM du pignon de navigation en fonction des angles de rotation que vous souhaitez contrôler.
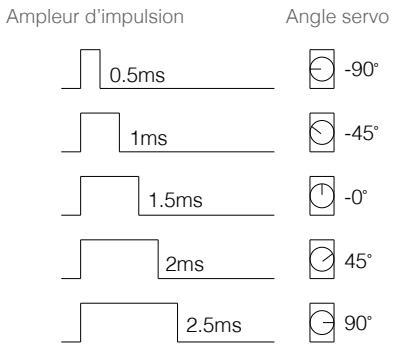

Chaque fois que le programme personnalisé ou le programme Python a fini de s'exécuter, le signal de sortie du port PWM est défini sur son réglage par défaut, qui est 50 Hz et le cycle de service est de 7,5%.
Contenu sujet à modifications. Téléchargez la dernière version sur https://www.dji.com/robomaster-s1/downloads
Pour toute question concernant ce document, veuillez contacter DJI en envoyant un message à DocSupport@dji.com.