EVO i - Drone AUTEL ROBOTICS - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil EVO i AUTEL ROBOTICS au format PDF.

| Intitulé | Description |
|---|---|
| Type de produit | Dronte quadricoptère pliable |
| Caractéristiques techniques principales | Caméra 4K, stabilisation sur 3 axes, portée de transmission jusqu'à 7 km |
| Alimentation électrique | Batterie LiPo 3S de 3000 mAh |
| Dimensions approximatives | Dimensions plié : 18 x 10 x 7 cm ; Dimensions déplié : 32 x 10 x 7 cm |
| Poids | Environ 800 g |
| Compatibilités | Compatible avec l'application Autel Explorer |
| Type de batterie | Batterie LiPo 3S |
| Tension | 11.1 V |
| Puissance | Environ 30 W |
| Fonctions principales | Mode de vol intelligent, suivi de sujet, retour automatique, prise de vue en mode photo et vidéo |
| Entretien et nettoyage | Nettoyage régulier des hélices et du capteur, vérification des mises à jour logicielles |
| Pièces détachées et réparabilité | Disponibilité de pièces de rechange via le site officiel d'Autel Robotics |
| Sécurité | Fonction de géorepérage, détection d'obstacles, respect des réglementations locales de vol |
| Informations générales utiles | Vérifier les lois locales concernant l'utilisation des drones avant l'achat |
FOIRE AUX QUESTIONS - EVO i AUTEL ROBOTICS
Questions des utilisateurs sur EVO i AUTEL ROBOTICS
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Drone au format PDF gratuitement ! Retrouvez votre notice EVO i - AUTEL ROBOTICS et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil EVO i de la marque AUTEL ROBOTICS.
MODE D'EMPLOI EVO i AUTEL ROBOTICS
Pour la série EVO II
EVO II™, EVO II Pro™, EVO II Dual™, Autel Explorer™, Starpoint™ et le logo Autel Robotics® sont des marques déposées de la société Autel Robotics Co., Ltd. immatriculée en Chine, aux États-Unis et dans d'autres pays. Tous les autres produits et noms de sociétés mentionnés dans le présent mode d'emploi sont des marques déposées de leurs propriétaires respectifs.
Avertissement concernant les droits d'auteur
La reproduction ou la retransmission de toute partie de ce manuel sous quelque forme ou par quelque moyen que ce soit, électronique, mécanique, par photocopie, enregistrement ou autre, est interdite sans l'autorisation écrite expresse d'Autel Robotics.
Informations concernant les brevets
Ce produit est obtenu selon des procédures relatives aux brevets. Les numéros des brevets sont les suivants :
US7979174
IL192490
US9260184
CA2815885
US9979000
US10224526
US10044013
US10115944
US10090496
US10074836
US10341573
US10399699
US10414514
Clause de non-responsabilité
Veuillez suivre attentivement les étapes de ces instructions afin de garantir un fonctionnement sûr et correct de votre appareil EVO II.
Les enfants doivent rester sous la surveillance d'un adulte lors de l'utilisation de l'appareil. Gardez l'appareil hors de portée des enfants lorsqu'il n'est pas utilisé.
En cas de non-respect des consignes de sécurité par le client, Autel Robotics n'est pas responsable et ne fournit aucune couverture de garantie pour tout dommage lieu au produit survenant pendant l'utilisation, qu'il soit direct ou indirect, juridique, spécial, accessoire ou économique (y compris mais sans s'y limiter, les pertes de bénéfices). N'utilisez pas de composants non approuvés et n'essayez pas de modifier l'appareil d'une manière incompatible avec les instructions de la documentation officielle de l'appareil.
Ces consignes de sécurité vous montreront comment démarrer votre utilisation de l'EVO II en toute sécurité. Vous seul pouvez vous assurer de piloter votre EVO II en toute sécurité et de ne jamais compromettre la sécurité, celle des autres personnes ou de leurs biens.
Ces consignes de sécurité seront mises à jour de temps à autre. Pour vérifier si vous disposez de la dernière version, visitez le site www.auteldrones.com/support/downloads/.
Stockage et utilisation des données
Lorsque l'option Sauvegarde des journaux de vol est désactivée, comme c'est le cas par défaut, aucune donnée de vol ou utilisateur ne sera téléchargée ou transmise via l'application Autel Explorer™. Lorsque la Sauvegarde des journaux de vol est activée et que l'application est associée à l'appareil, les données des journaux de vol (y compris la télémetrie de vol) sont téléchargées et conservées sur les serveurs de données d'Autel Robotics. Tous les journaux de télémetrie et de vol sont stockés sur des serveurs de données situés dans les limites de la zone des États-Unis continentaux, et le téléchargement des données se produit automatiquement uniquement si l'option de Sauvegarde des journaux de vol est activée.
L'équipe d'assistance client d'Autel Robotics n'a pas accès aux données des journaux de vol, sauf en cas d'autorisation explicite de l'utilisateur via l'application Autel Explorer™. Lorsque cette autorisation est accordée, seuls les journaux de vol de la plage de dates sélectionnée sont accessibles.
Les informations, y compris les images fixes et animées et les données des capteurs de l'appareil, seront stockées sur le lecteur interne de l'appareil. Si jamais votre appareil doit nous être envoyé pour réparation, les informations sur l'unité de stockage interne peuvent être utilisées pour diagnostiquer les problèmes liés à l'appareil. Les informations ne seront pas conservées, sauf si nécessaire pour effectuer le service ou la réparation. Ne supprimez ni ne modifiez en aucune façon les données du périhérique de stockage interne. Cela annulera toute couverture de garantie.
L'objet de la collecte de données réalisée par Autel Robotics est de fournir une assistance et un service à nos clients et d'améliorer les performances de nos produits. Nous prenons autant au sérieux votre confidentialité que la nôtre. Nous consentirons uniquement à la divulgation des données téléchargées lorsque la loi l'exige.
Sécurité de la batterie
L'EVO II utilise une batterie au lithium-polymère. Une mauvaise utilisation des batteries Li-Po/Li-ion présente des risques. Assurez-vous donc de suivre strictement toutes les instructions d'utilisation, de charge et de stockage de la batterie ci-dessous.
Avertissement!
- Utilisez uniquement les batteries et les dispositifs de charge fournis avec l'appareil ou vendus par Autel Robotics pour une utilisation avec l'EVO II. Ne modifies pas la batterie ou son chargeur.
- Les électrolytes de batterie sont très corrosifs. Si tout électrolyte entre en contact avec votre pea
Utilisation de la batterie
Éteignez toujours l'appareil avant d'installer ou de retirer la batterie. Informations supplémentaires :
- Utilisez uniquement les batteries et les dispositifs de charge fournis avec l'appareil, ou vendus ou autorisés par Autel Robotics pour une utilisation avec l'EVO II. L'utilisation de batteries ou de dispositifs de charge non approuvés risque de provoquer un incendie, une explosion, une fuite ou autres dangers. Autel Robotics ne saurait être tenu responsable des conséquences résultant de l'utilisation de batteries ou de dispositifs de charge tiers.
- Ne pas démonter, ouvrir, écraser, plier, déformer, percer, déchiqueter ou endommager intentionnellement la batterie de toute autre façon. Cela risque de provoquer un incendie, une
explosion, une fuite ou d'autres dangers.
- Si la batterie commence à gonfler, à fumer, à faire ou à présenter des signes de dommages, cessez immédiatement de l'utiliser ou de la charger et plongez-la dans un récipient d'eau salée.
- N'exposez pas la batterie à des températures inférieures à -10 °C ou supérieures à 40 °C. L'exposition de la batterie à des températures extrêmes réduira sa durée de vie et risque de provoquer un incendie, une explosion ou d'autres dommages permanents.
- Des températures inférieures à 5 °C entraîneront une décharge plus rapide de la batterie.
- N'utilisez pas la batterie dans des environnements avec de forts champs électromagnétiques ou électrostatiques.
- N'exposez pas la batterie à une source de flammes, aux explosions ou à d'autres dangers.
- Si l'appareil est submergé, retirez immédiatement la batterie après l'avoir séché. Laissez la batterie dans un endroit dégagé, loin de tout objet inflammable et maintenez une distance de sécurité jusqu'à ce qu'elle soit complètement sèche. N'utilisez plus la batterie. Contactez notre équipe d'assistance client pour obtenir un remplacement.
Batterie en charge
La charge complète de la batterie de l'appareil devrait prendre au maximum 90 minutes, bien que le temps de charge varie en fonction du niveau de puissance restant.
Informations supplémentaires :
- N'utilisez pas un chargeur de batterie endommagé.
- Lorsque le chargeur n'est pas utilisé, débranchez-le de la batterie de l'appareil et de la source d'alimentation.
- Attendez le refroidissement de la batterie à température ambiante avant de la recharger. Si vous connectez la batterie au chargeur immédiatement après le vol, la protection contre la surchauffe empêchera la charge.
Stockage de la batterie
Pendant le stockage comme en vol, il est important de ne pas laisser la batterie entrer en contact avec des sources d'humidité ou de chaleur. Stockez la batterie dans un endroit sec et bien ventilé à température ambiante, idéalement entre 22°C et 28°C.
Informations supplémentaires :
- Gardez la batterie hors de portée des enfants et des animaux domestiques.
- Ne stockez pas la batterie à la lumière directe du soleil ou à proximité d'objets pointus, de sources d'humidité, de métal ou de produits chimiques reactifs.
- Le stockage de la batterie à des températures extrêmes réduira son autonomie. Si vous n'utilisez pas la batterie pendant plus de 6 jours, conservez-la à une température entre -10 °C et 30 °C. Sinon, la batterie risque d'être endommagée ou défaillante.
- Au fil du temps, une certaine réduction de l'autonomie de la batterie est normale.
Mise au rebut de la batterie
- Déchargez complètement la batterie avant de la mesurer au rebut.
- Débarrasssez-vous de la batterie de façon adéquate dans un centre de recyclage de batterie agréé.
Environnement de vol
- Respectez toutes les règlementations locales concernant les drones volants. Volez uniquement dans les zones de vol désignées pour les drones et définissez des limites de distance et d'altitude conformes à l'aide de l'application Autel ExplorerTM.
- Ne volez pas dans des situations dangereuses ou dans des conditions météorologiques extrêmes, telles que les tornades, la pluie, la grêle ou la neige.
- Ne faites pas voler l'appareil à proximité d'installations susceptibles de produire des interférences électromagnétiques, telles que des centrales électriques, des lignes à haute tension, des postes électriques, des éoliennes et des tours de transmission radio.
- Volez dans une zone dégagée et sûre. Évitez les obstacles susceptibles d'interférer avec le signal GPS, tels que les bâtiments et les arbres.
- Soyez prudent lorsque vous volez dans des environnements à plus de 6 000 mètres (18 000 pieds) au-dessus du niveau de la mer, car les performances de la batterie et du système d'alimentation de l'appareil peuvent être affectées.
Avant le vol
Avant de piloter l'appareil, assurez-vous toujours que :
- La radiocommande, la batterie et l'appareil mobile utilisés avec l'application Autel Explorer™ sont complètement chargés.
- Les hélices sont correctement installées et non endommagées.
- Les bras avant et arrière de l'appareil sont entièrement dépliés.
- Le moteur, la nacelle et la caméra de l'appareil fonctionnent correctement lorsque l'appareil est sous tension.
- Tous les avertissements et messages d'erreur affichés dans l'application ont été pris en compte.
Utilisez uniquement des accessoires fournis avec l'appareil ou vendus ou autorisés par Autel Robotics pour une utilisation avec l'appareil. L'utilisation d'accessoires non approuvés présente de graves risques pour la sécurité et annulera la garantie du produit.
Pendant le vol
Lors du décollage et de l’atterrissage, éloignez l’appareil des personnes, véhicules et autres objets en mouvement. - Gardez toujours l’appareil dans votre champ de vision. - Ne faites pas VOLER l’appareil à proximité d’étendues d’eau. - Lorsque l’alerte de batterie faible apparait, n’annulez pas le processus de retour automatique au point de départ. Sinon, l’appareil risque de ne pas avoir assez de batterie pour retourner au point de départ. - Si un avertissement apparait dans l’application Autel Explorer™, suivez immédiatement les instructions correspondantes. - Ne faites pas VOLER l’appareil si vous êtes étourdi, fatigué, sous l’influence de l’alcool ou de drogues, ou dans tout autre état qui pourrait nuir à votre capacité à conduire l’appareil en toute sécurité.

Avertissement
Si une partie de l'appareil ou de la radiocommande ne fonctionne pas correctement ou présente des dommages visibles, ne faites pas fonctionner l'appareil. Contactez notre équipe d'assistance à la page www.auteldrones.com/contact-us/.
Stockage et maintenance
Vérifiez soigneusement chaque partie de l'appareil après tout accident ou collision. Gardez l'appareil et ses accessoires hors de portée des enfants et des animaux domestiques.
- Stockez l'appareil et ses accessoires dans un endroit frais et sec.
- Éloignez l'appareil des sources d'humidité et de chaleur.
- La température de stockage recommandée pour l'appareil est de 22°C à 28°C.
L’équipe d’assistance d’Autel Robotics est disponible pour vous aider par chat, téléphone ou par e-mail à l’adresse support@autelrobotics.com.
1... À propos de ce manuel 9
1.1 Légende 9 1.2 Avant notre premier vol. 9
1.2.1 Documents de démarrage rapide 9 1.2.2 Installation de l'application Autel ExplorerTM (facultatif). 10
2.1 Appareil 11
2.1.1 Description des fonctionnalités 11 2.1.2 Voyants LED de vol. 15 2.1.3 Batterie de l'appareil 16 2.1.4 Nacelle et camera 19 2.1.5 Système de vol intelligent intégré 27 2.1.6 Fonctions de vol intelligentes 28 2.1.7 Système de détection à vision binoculaire omnidirectionnelle 31
2.2 Radiocommande 35
2.2.1 Description des fonctionnalités 36 2.2.2 Écran de visualisation en direct 38 2.2.3 Alertes sonores de la radiocommande 43
3.1 Préparation de la batterie 45
3.1.1 Installation de la batterie de l'appareil 45 3.1.2 Retrait de la batterie de l'appareil 45 3.1.3 Chargement 46
3.2 Préparation de la radiocommande 47
3.2.1 Dépliage de la radiocommande 47 3.2.2 Mise sous tension/hors tension de la radiocommande 48 3.2.3 Étalonnage de la radiocommande 49 3.2.4 Association de l'appareil et de la radiocommande 51
3.3 Préparation de l'appareil 53
3.3.1 Dépliage de l'appareil 53 3.3.2 Installation des hélices 54 3.3.3 Étalonnage de la boussole 55
3.... Opérations de vol. 57
4.1 Liste de contrôle avant le vol 57 4.2 Radiocommande et opérations de vol. 57
4.2.1 Démarrage des moteurs et décollage de l'appareil 58 4.2.2 Commandes des joysticks (Mode 2) 59 4.2.3 Atterrissage et arrêt des moteurs 61
4. Maintenance et réparation 63
5.1 Mises à jour du firmware 63 5.2 Conseils de dépannage 64 5.3 Stockage et maintenance 66 5.4 Garantie 67 5.5 Service client 68
5.5.1 Assistance technique 68 5.5.2 Service de réparation 68
5... Annexe 69
6.1 Conformité réglementaire et zones de vol interdit 69
6.1.1 Conformité et déclarations 69 6.1.2 Illustration d'une zone de vol interdite 71
6.2 Caractéristiques techniques 73
Chapitre 1
Merci de votre achat de la gamme EVO II et bienvenue dans la famille Autel Robotics. Ce manuel vous fournit un aperçu détaillé des fonctionnalités de l'EVO II et de leur utilisation optimale avec l'appareil et la radiocommande. Veuillez le lire dans son intégralité (ainsi que les autres documents inclus) avant de piloter votre EVO II pour la première fois, et gardez-le à portée de main pour pouvoir le consulter facilement pendant que vous vous familiarisez avec votre appareil.
1.1 Légende
Faites particulièrement attention aux titres suivants figurant dans ce manuel.
AVERTISSEMENT : signale une situation potentiellement dangereuse. 1 IMPORTANT : des informations à connaître pendant les opérations de vol. REMARQUE : des informations complémentaires. CONSEILS : comment tirer le meilleur parti de votre expérience avec l'EVO II. RÉFERENCE : un numéro de page vous dirigeant vers la section de ce manuel qui contient des informations pertinentes.
1.2.1 Documents de démarrage rapide
Les documents suivants vous aideront à utiliser votre EVO II pour la première fois.
- Liste de colisage : une liste de tous les éléments qui doivent se trouver dans la boîte du produit. Si des éléments sont manquants, veuillez contacter l'assistance client Autel Robotics ou votre revendeur local.
- Clause de non-responsabilité et consignes de sécurité : remarques concernant l'utilisation sere et responsable de l'EVO II.
- Guide de démarrage rapide : les bases du fonctionnement de l'EVO II.
- Guide pratique de la batterie : les bases de l'utilisation d'une batterie intelligente.
- Mode d'emploi : un guide sur les subtilités de la maîtrise de l'EVO II. Téléchargez-le à l'adresse https://www.auteldrones.com/support/downloads/.
- Manuel de l'application Autel ExplorerTM: si vous prévoyez d'utiliser notre application mobile, téléchargez son manuel à l'adresse https://www.auteldrones.com/support/downloads/.
Assurez-vous que l'appareil et les autres composants figurant sur la liste de colisage sont présents dans la boite. N'utilisez pas de composants non approuvés et n'essayez pas de modifier l'appareil d'une manière incompatible avec les instructions de la documentation officielle de l'appareil.
1.2.2 Installation de l'application autel explorer™ (facultatif)
L'application Autel Explorer™ permet la diffusion en direct et un contrôle du vol et de la caméra améliorées sur votre appareil mobile.
Recherche Autel Explorer dans l'App Store ou Google Play, puis appuyez sur INSTALLER.

Découverte de votre drone intelligent
Vous sousspez désormais explorer, découvrir et créer comme jamais auparavant. L'EVO II offre non seulement des fonctionnalités avancées telles que l'évitement d'obstacles et des modes de vol intelligents, mais également une puissance de pointe qui permet une vitesse maximale de 70 km/h, un temps de vol stationnaire de 35 minutes, un temps de vol de 40 minutes et une distance de fonctionnement de 9 km.
Cependant, cet appareil offre bien plus que ses performances en vol. La caméra 3 axes stabilisée de l'EVO II vous permet de visualiser le flux en direct jusqu'à 1080p sur votre appareil mobile ou 720p sur l'écran OLED intégré à la radiocommande.
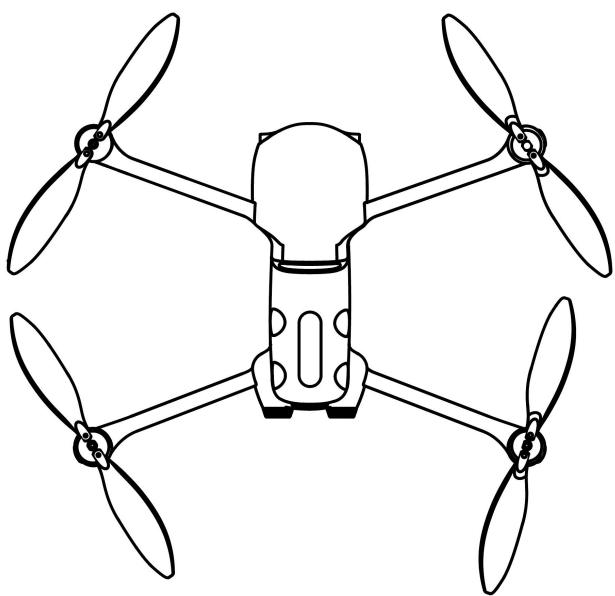
L'EVO II est un quadrirotor pliable avec une nacelle de caméra 3 axes stabilisée.
2.1.1 Description des fonctionnalités
Face avant
① Hélices ② Moteurs ③ Voyants LED avant
④ Train d'atterrissage ⑤ Système optique avant (6) Nacelle de caméra
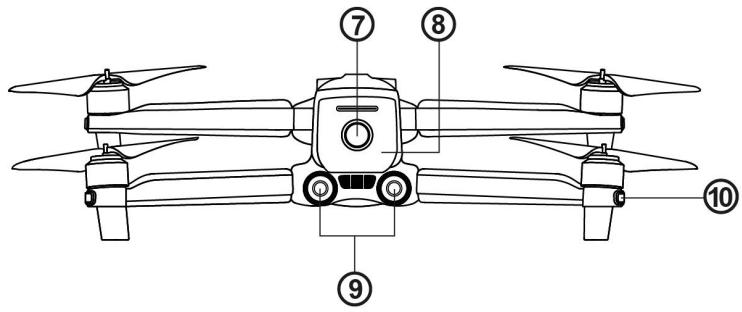
Face arrière
⑦ Bouton d'alimentation ⑧ Batterie de l'appareil ⑨ Système optique arrêté 10 Voyants LED arrière
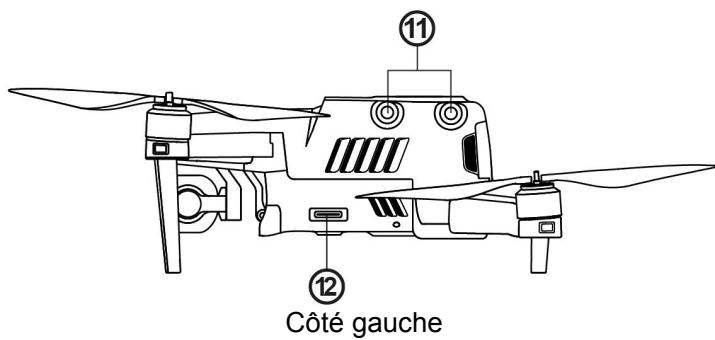
① Système optique gauche
12 Port de carte SD
Côté droit
Système optique droit 15 Port USB-C
14 Échappement du ventilateur 16 Bouton d'association de la radiocommande/voyant d'association
Dessus
Système optique supérieur
Dessous
18 Capteur à ultrasons 19 LED d'éclairage du système optique inférieur ② Système optique inférieur

Remarque
Un cache situé sur la droite protège le port USB-C et le bouton d'association de la radiocommande/voyant d'association. N'oubliez pas de le remettre en place avant de faire voler l'appareil.
2.1.2 Voyants LED de vol
Un voyant LED est situé à l'extrémité de chaque bras de l'appareil. Les voyants LED avant s'allumeront en rouge fixe pour vous aider à identifier la direction d'une ze de l'appareil. Les voyants LED arrêtè afficheront l'état de vol actuel de l'appareil. Le tableau ci-dessous affiche la signification de chaque voyant d'état.
Code couleur :
Clignotement lent : clignote une fois toutes les 2 secondes
Clignotement rapide : clignote deux fois par seconde
Clignotement double : clignote deux fois, puis s'arrête et recommence
Clignotement alternatif : alterne entre différentes couleurs
Rouge
Vert
Jaune
| Définitions de l'état des voyants LED de vol | |
| État normal | |
| RGY - Clignotement alternatif | L'autotest du système est activé |
| YG - Clignotement alternatif | L'appareil se réchauffe |
| G - Clignotement lent | L'appareil est en mode GPS |
| Avertissement | |
| Y - Clignotement lent | L'appareil est en mode ATI |
| Y - Clignotement rapide | Aucune connexion entre l'appareil et la radiocommande |
| R - Clignotement lent | Alerte de batterie faible |
| R - Clignotement rapide | Alerte de batterie critique |
| R - Lumière fixe | Problèmes critiques, erreur IMU |
| RY - Clignotement alternatif | Boussole anormale, étalonnage nécessaire/interférences du magnétomètre |
| Étalonnage de la boussole | |
| Y - Clignotement rapide | Soyez prét à étalonnner la boussole/étalonnage de l'appareil en cours |
| G - Lumière fixe | Étalonnage réussi |
| R - Lumière fixe | Étalonnage échoué |
| Commandes gestuelles | |
| R - Clignotement rapide | La commande gestuelle a été reçue |
2.1.3 Batterie de l'appareil
La toute nouvelle batterie Li-Po rechargeable conçue sur mesure de l'EVO II présente une densité et une capacité d'énergie élevées. Elle doit être chargée exclusivement à l'aide du chargeur fourni.
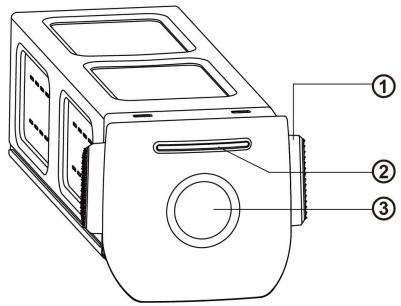
Batterie de l'appareil
Bouton de retrait ② Témoins de niveau de la batterie ③ Bouton d'alimentation
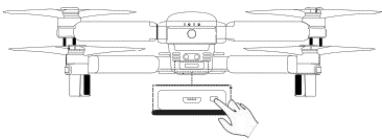
Mise sous tension de la batterie
Assurez-vous que la batterie est éteinte avant de la fixer à l'appareil. Avant l'avoir fixé, maintenez le bouton d'alimentation enfoncé pendant 3 secondes. Les témoins de niveau de la batterie afficheront le niveau actuel de la batterie.
Mise hors tension de la batterie
Appuyez sur le bouton d'alimentation et maintenez-le enfoncé pendant 3 secondes pour éteindre la batterie. Si la batterie est fixée à l'appareil, les LED 1
et 4 clignoteront 5 fois pour indiquer que la batterie s'éteint. Une fois que tous les témoins de niveau de la batterie se sont éteints, retirez la batterie de l'appareil.
Vérification du niveau de la batterie
Pour vérifier le niveau de la batterie sans la décharge sous tension, appuyez sur le bouton d'alimentation pendant 1 seconde, puis relâchez-le rapidement. Les LED afficheront le niveau actuel de la batterie comme indiqué ci-dessous.
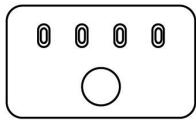
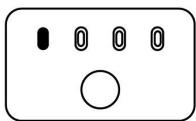
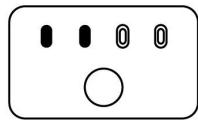
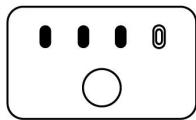
| État des témoins de niveau de batterie (hors charge) | |||
| 0 % ~ 12 % | 13 % ~ 25 % | 26 % ~ 37 % | 38 % ~ 50 % |
| 51 % ~ 62 % | 63 % ~ 75 % | 76 % ~ 87 % | 88 % ~ 100 % |
| - Lumière verte fixe | - Lumière verte clignotante | - Éteint | |
Fonctions supplémentaires
Les fonctions supplémentaires répertoriées ci-dessous protègent et préservent la batterie.
Décharge automatique de protection pour le stockage : si la batterie est stockée dans un environnement à haute température ou est inactive pendant 6 jours avec un niveau de charge élevé, la décharge automatique de protection sera activée. La batterie se déchargera automatiquement à un niveau sûr. Il s'agit du paramètre par défaut et le processus de décharge prend 2 à 3 jours. Bien que rien n'indique que la batterie réalise un cycle de décharge automatique, vous pouvez remarquer un léger réchauffement de la batterie, ce qui est normal. Vous pouvez personnaliser le seuil de décharge à l'aide de l'application Autel ExplorerTM. Protection de mode veille : si le niveau de charge de la batterie est faible, la batterie entre automatiquement en mode veille pour éviter tout dommage. Dans ce mode, la batterie ne répondra pas lorsque vous appuyez sur le bouton d'alimentation. Pour réactiver la batterie, connectez-la au chargeur.
Détection de la température de charge : si la température de charge atteint moins de 5°C ou plus de 45°C, la batterie arrête de se charger.
Protection contre les surintensités : si le courant de charge dépasse 8 A, la batterie arrête de se charger. Protection contre les surcharges : la charge s'arrête automatiquement lorsque la batterie est complètement chargée. Protection d'équilibre : la tension de chaque cellule de la batterie est équilibrée pour éviter une surcharge ou une décharge excessive. Protection contre les décharges excessives : lorsque la batterie n'est pas utilisée, elle déconnecte automatiquement la fonction de sortie d'alimentation une fois le cycle d'auto-décharge terminé. Cette fonction est désactivée pendant le vol. Protection contre les courts-circuits : l'alimentation sera coupée en cas de détection d'un court-circuit. Mode d'économie d'énergie : la batterie s'éteint après 30 minutes d'inactivité. Communication : lors de son fonctionnement, l'appareil se synchronise en permanence avec la batterie pour fournir des informations en temps réel, notamment la tension, la capacité, le courant et la température. Mode de consommation d'énergie ultra-faible : pour économiser de l'énergie, ce mode sera activé si la batterie est inactive pendant 6 jours avec une tension inférieure à 11,6 V. La batterie reprendra son fonctionnement normal après avoir été connectée au chargeur.
- Descriptions des avertissements LED
| LED 1 | LED 2 | LED 3 | LED 4 | Description de l'advertisement |
| La température de charge est trop élevé ou trop BASSE. | ||||
| Le courant de charge est trop élevé ou a provoqué un court-circuit. | ||||
| Une surintensité, une surcharge ou un court-circuit a eu lieupendant la décharge. | ||||
| - Lumière clignotante | - Éteint | |||
2.1.4 Nacelle etamara
L'appareil intègre une nacelle 3 axes de haute précision qui garantit la stabilité de la caméra pendant le vol de l'appareil, pour des images claires et stables. Pour assurer un fonctionnement correct, la température de la nacelle doit être comprise entre -10 °C et 50 °C. Vous pouvez utiliser la molette de tangage de la nacelle sur la radiocommande ou l'application Autel Explorer™ pour régler l'axe de tangage sur n'importe quel angle de -30° à 90°.
Trois modules de nacelle modifiables par l'utilisateur sont disponibles pour une utilisation avec la gamme EVO II :
Nacelle de l'EVO II : intègre une caméra vidéo 8K
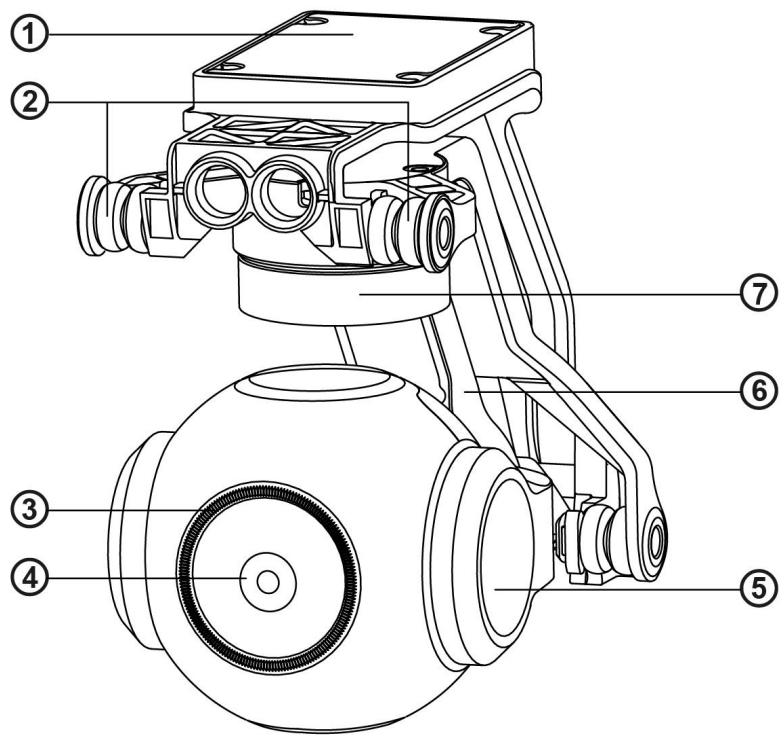
① Panneau d'installation MCU ② Absorbeur de vibrations ③ Filtre UV ④ Caméra
⑤ Moteur de tangage ⑥ Moteur de roulis ⑦ Moteur de lacet
Nacelle de l'EVO II Pro : intègre une camera 6K avec un capteur de 1 pouce
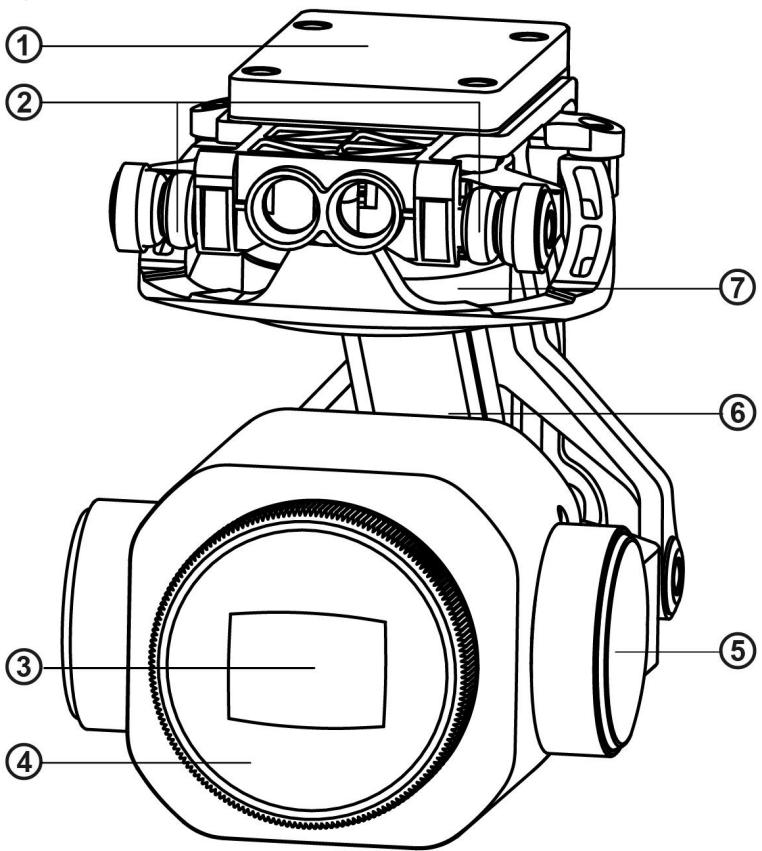
Panneau d'installation MCU ⑤ Moteur de ② Absorbeur de vibrations (6) Moteur de roulis ③ Caméra ⑦ Moteur de lacet ④ FiltrUV
Nacelle de l'EVO II Dual : intègre une caméra thermique et une caméra vidéo 8K
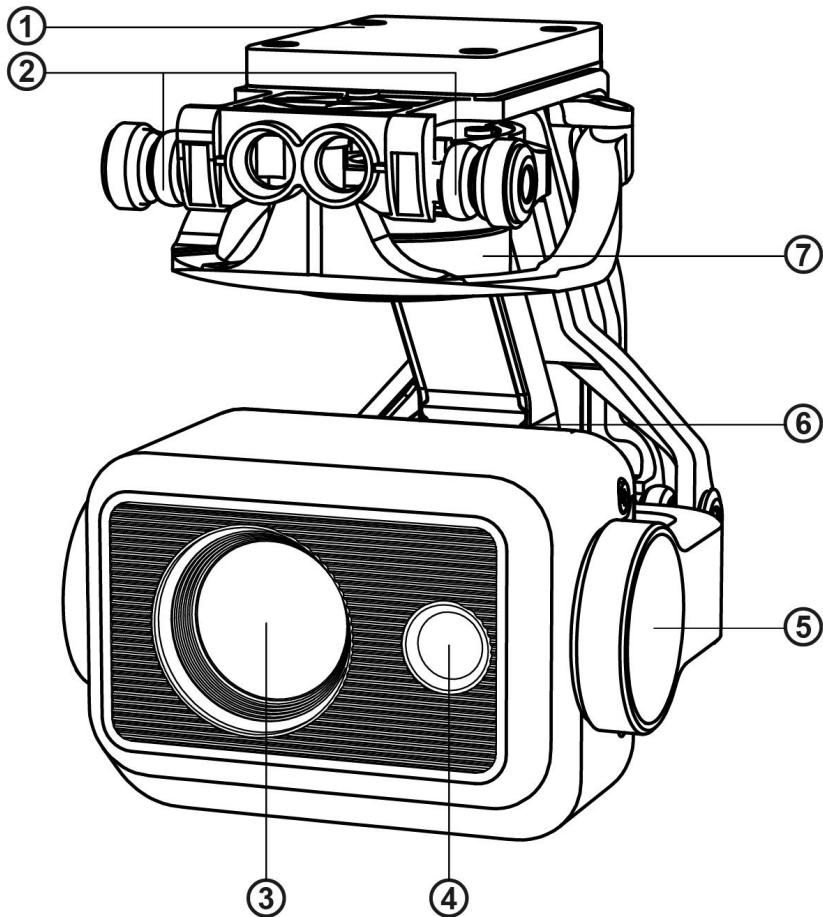
Panneau d'installation MCU
⑤ Moteur de
Absorbeur de vibrations
(6) Moteur de roulis
③ Caméra thermique
⑦ Moteur de lacet
④ Appareil photo 8K
Important
- La nacelle de l'EVO II est maintenue en place par un support de nacelle afin de protéger celle-ci de toute rotation accidentelle, et pour éviter tout dommage lors de son stockage.
- N'oubliez pas de retirer le support avant de mettre l'appareil en marche. Si vous ne le faites pas, vous risquez d'endommager les circuits et les moteurs de la nacelle.
- Lorsque l'appareil est mis sous tension, la nacelle pivote automatiquement pour effectuer un autotest et un étalonnage. Assurez-vous qu'aucun objet susceptible d'entraver le mouvement de la nacelle ne se trouve à proximité.
La nacelle a deux modes de fonctionnement :
Mode stabilisé : l'axe de roulis reste horizontal, et l'axe de tangage reste à l'angle spécifique par l'utilisateur. Ce mode est conçu pour capturer des photos et des vidéos horizontales stables. Mode FPV: l'axe de roulis reste aligné avec l'orientation de roulis de l'appareil et l'axe de tangage reste à l'angle spécifique par l'utilisateur. Ce mode est conçu pour être utilisé avec une vue à la première personne.
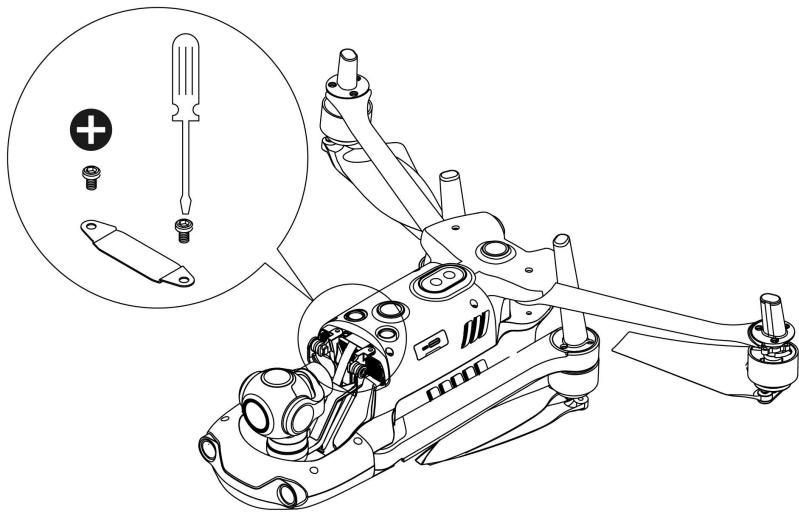
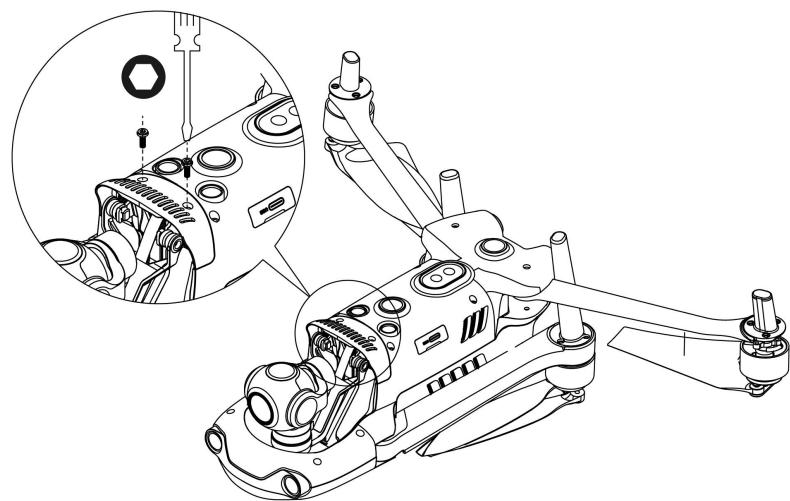
- Retrait de la nacelle
- Placez l'appareil sur une surface plane, avec le compartiment de la nacelle orienté vers le haut.
- À l'aide d'un tournevis T6, dévissez les deux vis de fixation du support de la nacelle et retirez le support de la nacelle. Utilisez ensuite un tournevis P000 pour dévisser les vis de fixation du connecteur FPC, et tirez la tête du cable de connexion hors de son logement.
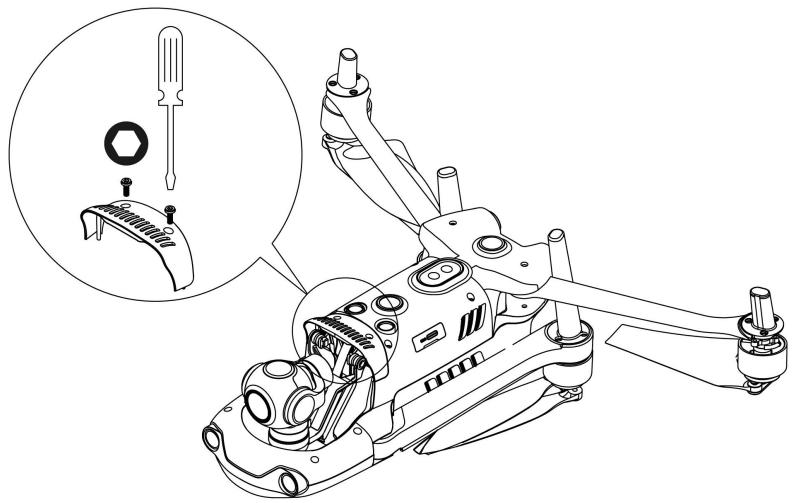
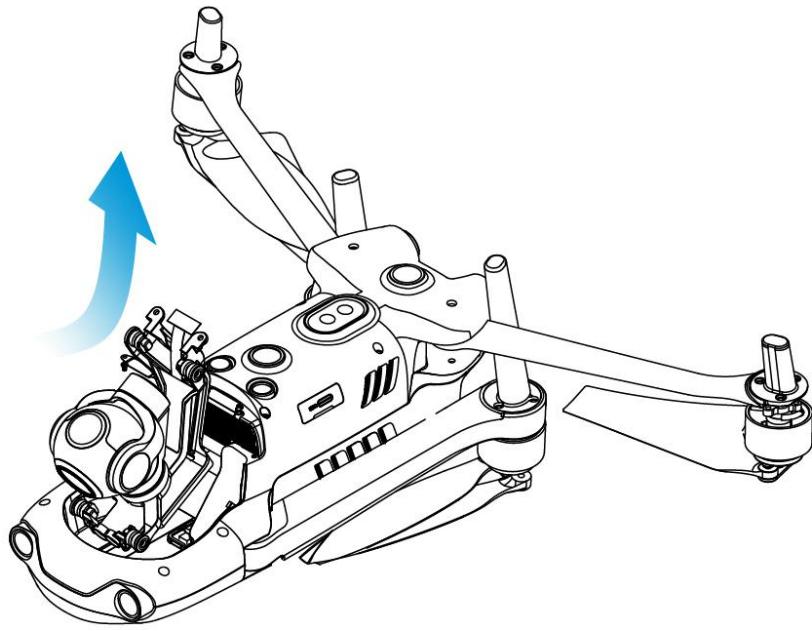
- Saisissez délicatement les deux extrémités de l'amortisseur de vibrations avec le pouce et l'index. Faites glisser la nacelle vers l'arrière et vers le haut en ligne droite, en suivant la rainure du compartiment de la nacelle.
- Remplacement de la nacelle
- Saisissez délicatement les deux extrémités de l'amortisseur de vibrations avec le pouce et l'index, puis soulevez la nacelle. Faites glisser la nacelle vers le bas et vers l'avant en ligne droite, en suivant la rainure du compartment de la nacelle.
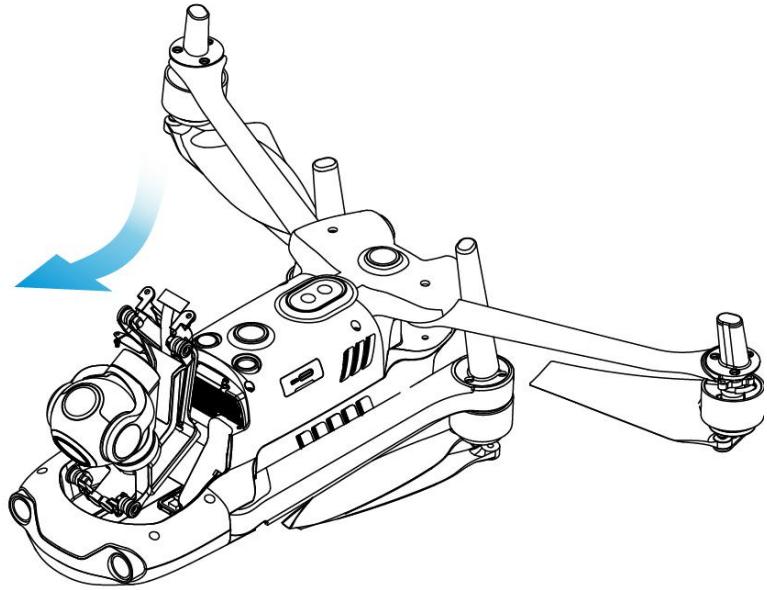
Remarques : 1) Assurez-vous que les bouches à l'avant de la nacelle sont alignées avec les deux broches du compartiment de la nacelle au niveau d'une zé de l'appareil.
Assurez-vous que la nacelle affleure la rainure du compartiment de la nacelle.
- Insérez la tête du câble de connexion dans son logement, en l'insérant doucement jusqu'à la butée.
Placez le cache de la nacelle au-dessus du compartiment de la nacelle et remettez-le en place à l'aide d'un tournevis P000.
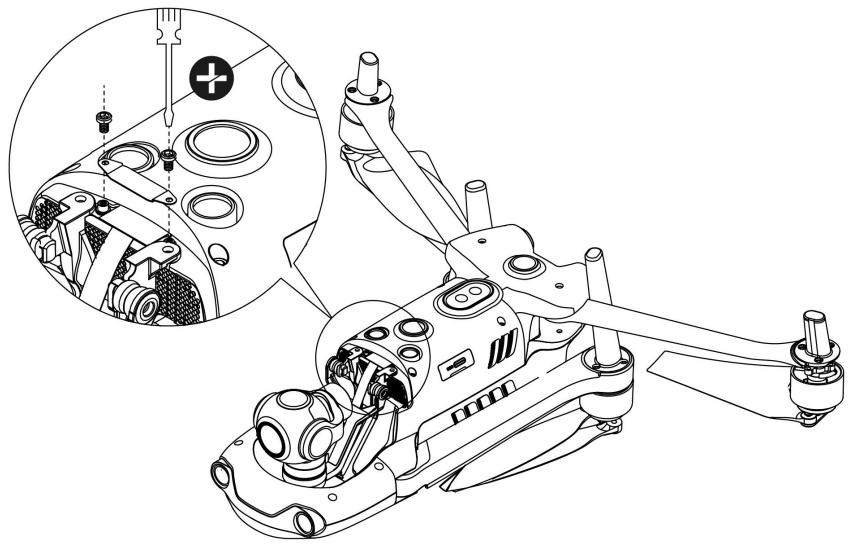
- Insérez une vis dans l'un des trous du cache de ventilation de la nacelle et vissez-la à l'aide d'un tournevis T6 jusqu'à ce qu'il soit suffisamment fixé. Répétez l'opération avec l'autre vis.
Serrez complètement les deux vis à l'aide du tournevis.
- Mettez l'appareil sous tension. Si le câble de connexion de la nacelle est correctement branché, la nacelle pivotera automatiquement pour effectuer un autotest.
Remarque : saisissez l'appareil et retournez-le de façon à ce que la nacelle soit orientée vers le bas. Si la nacelle est correctement installée, elle restera fermement en position.
- Caméra
Trois modules de caméra sont disponibles pour une utilisation avec la gamme EVO II :
- Caméra EVO II : prend des photos à une résolution allant jusqu'à 48 MP (8 000 x 6 000), et capture des vidéos en 8K à 25 ips, des vidéos en 6K à 30 ips ou des vidéos en 4K à 30 ou 60 ips, avec une vitesse de transmission allant jusqu'à 120 Mbps.
- Caméra EVO II Pro avec un capteur de 1 pouce : prend des photos à une résolution allant jusqu'à 20 MP (5 472 x 3 648), et capture des vidéos en 5,5K à 30 ips ou des vidéos en 2,7K à 120 ips, avec une vitesse de transmission allant jusqu'à 120 Mbps. L'ouverture de l'objectif est réglable de f/2,8 à f/11.
- Caméra EVO II Dual : comprend la caméra 8K et une caméra thermique. Elle offre les modes lumière visible, infrarouge et image double. En outre, cette caméra prend des images infrarouges à une résolution de 640 × 512 et capture des vidéos en 720p à 30 ips en mode image double.
Les trois modules de la caméra prennent en charge un éventail de modes de prise de vue, notamment :
Prise de vue unique Rafale
Bracketing d'exposition automatique (AEB) Time-lapse Imagerie à grande gamme dynamique (HDR) NIGHTBEAT (rapport signal/bruit moyen)
Les caméras capturent des photos aux formats DNG ou JPG, et des vidéos aux formats MOV ou MP4. Les images et les vidéos peuvent être stockées dans la mémoire interne de l'appareil ou sur une carte micro SD. Vous pouvez visualiser un flux en direct haute définition de la caméra sur l'écran de votre télécommande, ou jusqu'à 1080p 30 ips dans l'application Autel Explorer™.
Utilisation d'une carte micro SD
Avant d'allumer l'appareil, insérez une carte micro SD dans le port illustré ci-dessous.
L'EVO II prend en charge des cartes SD d'une capacité jusqu'à 256 Go. Si vous prévoyez de capturer des vidéos HD, nous vous recommandons d'utiliser une carte micro SD de classe 10 ou UHS-3 (comme la SanDisk Extreme® de 32 Go ou la SanDisk Extreme Pro® de 64 Go A2/V30/U3/classe 10).
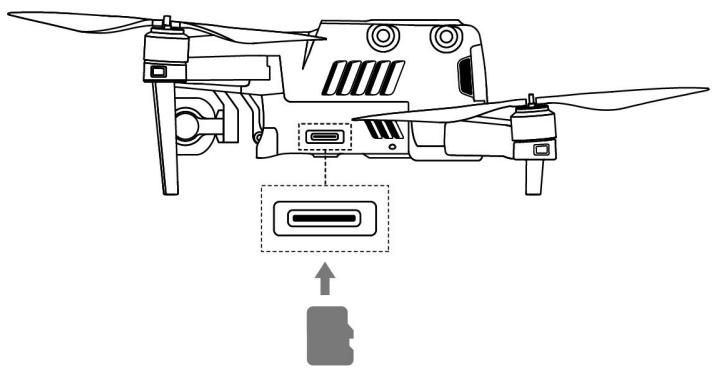
Pour éviter la perte de fichiers, veillez à toujours éteindre l'appareil avant de retirer la carte micro SD.
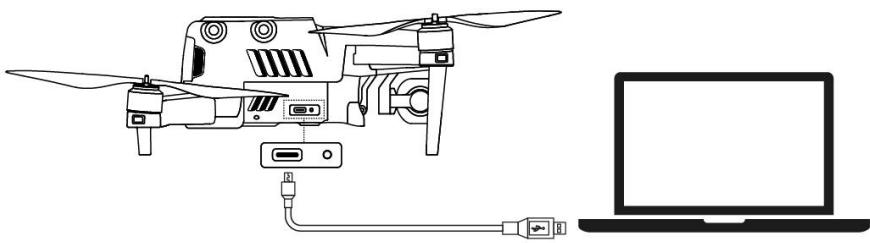
Transfert de fichiers sur votre ordinateur
Pour transférer des photos et des vidéos sur votre ordinateur, connectez-le à l'appareil via le port USB-C comme indiqué ci-dessous.
2.1.5 Système de vol intelligent intégré
L'EVO II offre un contrôle de vol stable et convivial grâce à son système de vol intelligent intégré. Le système intègre de nombreuses fonctions avancées, y compris Go Home, l'Atterissage d'urgence, et le Système de positionnement Starpoint™, et fonctionne également à l'aide des modules décrits ci-dessous.
| Modules du système de vol intelligent | |
| Module | Description |
| IMU | Un gyroscope à 3 axes et un accéléromètre à 3 axes mesurent l'accélération et la vitesse angulaire. Un étalonnage automatique de l'IMU est effectué lors de la mise sous tension de l'appareil. |
| Boussole | Mesure le champ géomagnétique et fournit une ↔reference de cap pour l'appareil. |
| Récepteur GNSS | Reçoit des signaux GNSS (GPS/GLONASS) afin de déterminer la latitude, la longitude et l'altitude. |
| Baromètre | Mesure la pression atmosphérique afin de déterminer l'altitude de l'appareil. |
| Capeurs à ultrasons | Mesure la distance entre l'appareil et le sol. |
| Système de détction à vision binoculaire | Fournit une vision binoculaire à l'avant, à l'arrière, à gauche, à droite, vers le haut et vers le bas. |
Modes de vol
L'EVO II peut automatiquement passer d'un mode de vol à l'autre en fonction de la disponibilité du GPS et des conditions de vol.
| Modes de vol | |
| Mode de vol | Description |
| Mode GPS | Le Mode GPS est activé si l'appareil détecte des signaux GNSS corrects. Le GPS fonctionne de pair avec les systèmes optiques avant et inférieur pour localiser et éviter les obstacles, permettre des manoeuvres de vol stables et fluides, et fournir des fonctions de sécurité comme Go Home et l'Atterrissage d'urgence. |
| Mode ATI | Le Mode ATI est activé lorsque le signal GPS est faible et que les conditions d'éclairage sont insuffisantes pour les systèmes optiques. Les fonctions d'évitement d'obstacles sont désactivées et l'appareil ne contrôle l'altitude qu'à l'aide de son baromètre. |
2.1.6 Fonctions de vol intelligentes
La fonction Go Home peut uniquement être activée lorsqu'un signal GPS correct est disponible. Pour activer manuellement la fonction Go Home, appuyez sur le bouton de return au départ () pendant 3 secondes sur la radiocommande. Avant la réception de cette commande, l'appareil reviendra automatiquement et atterrira au point de départ actuel.
L'EVO II peut détecter et éviter les obstacles sur sa trajectoire de vol à l'aide de son Système optique avant. La fonction de radiocommande sera désactivée lorsque l'appareil est en mode GO HOME, mais vous pouvez la réactiver en appuyant sur le bouton Pause (11).

Avertissement
Si le système optique avant n'est pas activé pendant la période de Go Home, l'appareil n'évitera pas automatiquement les obstacles. Appuyez sur le bouton Pause (11) de la télécommande pour arrêter la fonction Go Home et reprendre le contrôle de l'appareil.

Important
- L'altitude de Go Home par défaut est de 30 mètres. Si vous activez Go Home lorsque l'appareil se trouve à une altitude inférieure, il montera à 30 mètres avant de retourner au point de départ. Découvrez comment régler l'altitude de Go Home dans le Manuel de l'application.
- Si la fonction Go Home est activée dans un rayon de 10 mètres du point de départ, l'appareil descendra et atterrira automatiquement.
Atterrissage d'urgence
La fonction d'Atterrissage d'urgence est conçue pour aider l'EVO II à retourner automatiquement au point de départ ou à atterrir à sa position actuelle si nécessaire. L'Atterrissage d'urgence sera activé dans les deux situations décrites ci-dessous.
Perte de communication
L'Atterrissage d'urgence sera activé si la communication entre votre appareil et la radiocommande est perdue pendant 3 secondes.
Si le GPS est disponible lorsque la fonction d'Atterrissage d'urgence est activée,
L'appareil utilisera automatiquement la fonction Go Home. Sinon, il attirera à sa position actuelle. Lorsque la communication est rétablie, vous pouvez toujours appuyer sur le bouton Pause (II) pour reprendre le contrôle de l'appareil.
Batterie de l'appareil faible
L'Atterrissage d'urgence sera également activé dans l'une des conditions de batterie faible suivantes.
A. L'appareil calcule en permanence le niveau de batterie requis pour le retour de l'appareil au point de départ. Si le niveau de la batterie atteint le niveau minimum requis pour le retour de l'appareil au point de départ, un avis apparaitra dans l'application Autel Explorer™. L'Atterrissage d'urgence sera activé et le processus Go Home sera lancé. Vous pouvez également reprendre le contrôle de l'appareil en appuyant sur le bouton Pause (⑪). B. Lorsque le niveau de batterie de l'appareil atteint le seuil de 25%, vous receivez une Alerte de batterie faible et l'Atterrissage d'urgence sera activé, après quoi l'appareil returnera automatiquement au point de départ. Si vous reprenez le contrôle de l'appareil, vous receivez une Alerte de batterie critique lorsque la batterie atteindra 15%, et l'appareil atterrira automatiquement à sa position actuelle. Si l'atterrissage dans la position actuelle peut entraîner une situation d'urgence, vous pouvez appuyer sur le bouton Pause (II) pour arrêter l'atterrissage et piloter le drone jusqu'au point d'atterrissage le plus proche.

Remarques
- Si l'appareil se trouve à moins de 50 mètres horizontalement du point de départ lorsque le niveau de batterie de votre appareil atteint 25% (Alerte de batterie faible), l'appareil ne lancera pas la procédure Go Home.
- Si le GPS n'est pas disponible lorsque la fonction Atterrissage d'urgence est activée suite à une Alerte de batterie faible, l'appareil n'exécutera pas la procédure Go Home. Au lieu de cela, l'appareil passera en mode ATI et restera sous votre contrôle. L'appareil n'atterira automatiquement que lorsque la batterie atteindra 15% (Alerte de batterie critique).
Protection à l'atterrissage
Lorsque l'appareil arrive au-dessus du point de départ, la fonction de Protection à l'atterrissage détecte les conditions au sol en dessous. L'appareil atterrira automatiquement si le sol est plat et horizontal. Sinon, il se mettra en vol stationnaire à l'endroit actuel et attendra la prochaine commande.
L'appareil analysera et s'adaptera aux caractéristiques du sol ; si la fonction d'Atterrissage précis est activée, il atterrira le plus près possible du point de décollage une fois que le sol actuel correspondra au sol du point de décollage.
1 Important
- L'appareil enregistre le point de décollage en tant que point de départ par défaut. L'Atterrissage précis est uniquement disponible lorsque le point de départ n'a pas été actualisé pendant le vol.
- Faites décoller l'appareil verticalement jusqu'à au moins 10 m pour déclencher complètement la fonction d'Atterrissage précis.
- Les fonctions d'atterrissage ne peuvent pas être déclenchées en mode ATTI.
- Choisissez un endroit dégagé et bien éclairé (par ex. une pelouse) comme point de décollage.
- Lorsque l’Atterrissage précis se prépare à l’atterrissage de l’appareil, assurez-vous que les conditions de votre point de décollage n’ont pas changé.
Remarque
La Protection à l'atterrissage et l'Atterrissage précis peuvent être activés à l'aide de l'application. Les instructions relatives à ces fonctions sont disponibles dans le Manuel de l'application.
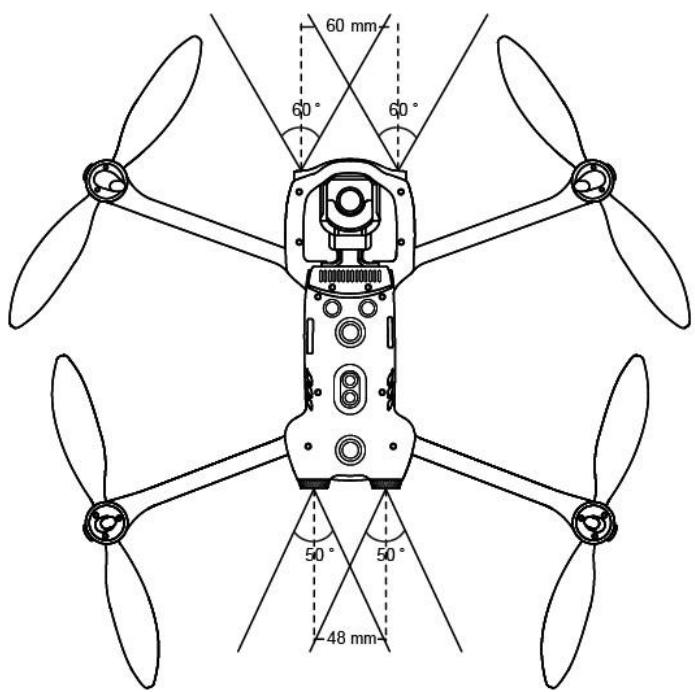
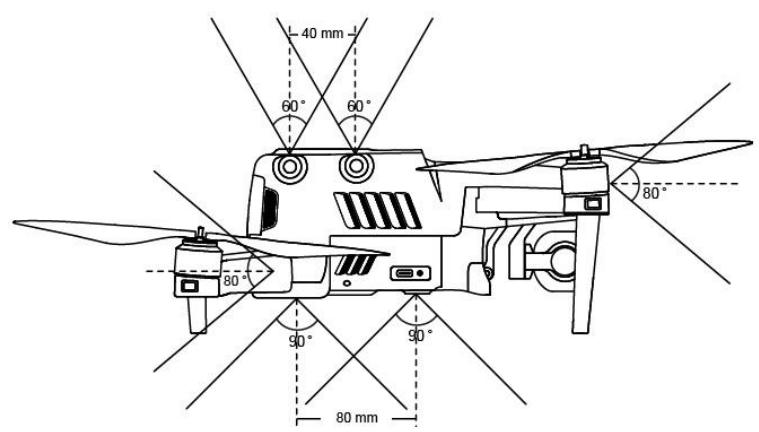
2.1.7 Système de détection à vision binoculaire omnidirectionnelle
Les systèmes de détection à vision binoculaire avant, arrêté, gauche, droite, supérieur et inférieur de l'EVO II utilisent les données d'images pour calculer la distance entre l'appareil et les obstacles potentiels. Le système arrête le déplacement en avant de l'appareil lors de la détection d'un obstacle.
Les systèmes de vision binoculaire avant, arrêté et inférieur sont également équipés du Système de positionnement Starpoint™. Ce système utilise des capteurs à ultrasons afin de calculer l'altitude actuelle de l'appareil et des caméras binoculaires pour obtenir des informations de localisation à l'aide de l'analyse d'images.
| Systèmes de détction à vision binoculaire | ||
| Système | Emplacement sur l'appareil | Portée de détction des obstacles |
| Avant | Nez de l'appareil | de 0,5 à 20 m |
| Arrière | Queue de l'appareil | de 0,5 à 16 m |
| Gaugue/droite | Partie arrêté des côtés gauche et droit de l'appareil, respectivement | de 0,5 à 12 m |
| Dessus | Partie supérieure de l'appareil | de 0,5 à 12 m |
| Dessous | Partie inférieure de l'appareil | de 0,5 à 11 m |
Les diagrammes suivants montrent l'angle de couverture de chaque système de détection à vision binoculaire :
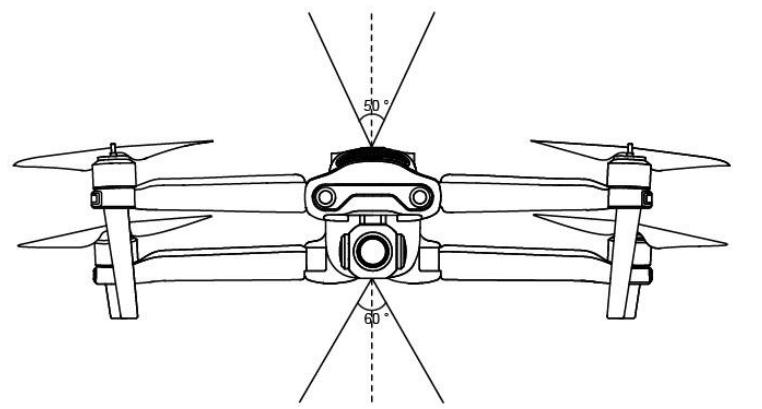

Remarque
Les directions de la détection d'obstacles omnidirectionnelle comprennent l’avant, l’arrière, le haut, le bas, la gauche et la droite. Des angles morts peuvent cependant exister dans les quatre directions diagonales. Lorsque vous pilotez l’appareil manuellement, veuillez porter attention à l’environnement et aux conseils de l’application pour assurer la sécurité.
Veuillez ne pas VOLER dans un environnement où la lumière est insuffisante, dans une zone complexe avec de petits objets (tels que des petites branches, des câbles ou des fils), des objets en mouvement, des surfaces transparentes (par ex. des fenêtres) ou des surfaces réfléchissantes (par ex. des miroirs). Lorsque vous suivez une voiture ou d'autres véhicules, pilotez uniquement l'appareil sur des sentiers éloignés de la route ou sur des circuits fermés. Ne le pilotez jamais sur la voie publique.
Conditions préalables
Assurez-vous que l'appareil est en mode GPS ou en mode de positionnement visuel. - Attendez que les voyants LED de vol clignotent lentement en vert ou clignotent deux fois en rouge avant de décoller. - Soyez particulièrement prudent en vol si le signal GPS est faible ou si les exigences du positionnement visuel ne peuvent être satisfaites, par ex. lorsque vous vous trouvez à proximité de surfaces peu visibles ou à une altitude supérieure à 11 mètres. - Les systèmes de détection à vision binoculaire et le Système de positionnement Starpoint™ sont affectés par la luminosité et la texture des surfaces au-dessus desquelles l'appareil vole. Évitez de VOLER au-dessus des surfaces qui sont :
- Monochromatiques Très réfléchissantes, comme l'eau Particulièrement sombres ou lumineuses
- Soumises à des changements d'éclairage fréquents
- Constituées de motifs se répétant étroitement, par ex. des carreaux
- Dotées de propriétés acoustiques absorbantes, par ex. moquette épaisse. En mouvement, comme les routes à fort traffic.
- Gardez les objectifs et les capteurs des caméras binoculaires propres.
- Pour éviter toute interférence avec le Système de positionnement Starpoint™, n'utilisez pas de dispositifs à ultrasons à 40 kHz, tels que des télemètres, des détecteurs de défauts, des nettoyeurs ou des machines de soudure à ultrasons.
Suivi dynamique
Le suivi dynamique utilise des algorithmes d'apprentissage profond pour détecter six types de sujets en temps réel : piétons, cyclistes, voitures, camions, bateaux ou animaux. Un algorithme de suivi en temps réel est utilisé pour suivre
automatiquement le sujet sélectionné tout en évitant les obstacles pendant le vol. La fonction peut suivre le sujet selon trois modes. Pour plus d'informations, veuillez vous référer au manuel de l'application.
Point de vue
Point de vue permet à l'utilisateur d'envoyer l'appareil à une destination sélectionnée en appuyant sur un point à l'écran.
Commandes gestuelles
La caméra principale utilise des algorithmes d'apprentissage profond pour reconnaître et répondre à trois commandes gestuelles : tendre les bras pour se définir en tant que cible, lever les deux bras pour prendre une photo, et lever un bras pour démarrer ou arrêter l'enregistrement de vidéos.
L'atterrissage précis utilise le système de vision binoculaire inférieur de l'appareil pour enregistrer une série d'images indiquant l'altitude et le lacet de l'appareil pendant le décollage. Pendant le processus de retour au départ et d'atterrissage, l'appareil fait correspondre l'altitude et le lacet aux images prises pendant le décollage, et calcule la distance qui le sépare de son lieu de décollage. L'appareil est contrôlé avec précision grâce au retour d'informations VIO, et atterrit dans sa position de décollage.
La fonction d'atterrissage sécurisé utilise la caméra binoculaire du dessous de l'appareil pour créer une carte de profondeur de densité. Elle calcule ensuite la planéité et les angles de la carte de profondeur afin de détecter si une surface est suffisamment plane pour garantir un atterrissage en toute sécurité.
2.2 Radiocommande
L'EVO II fournit une portée de transmission non obstruée allant jusqu'à 9 km dans des conditions optimales. La radiocommande prend en charge la liaison vidéo descendante en direct et fonctionne avec ou sans appareil mobile associé. Le système de liaison vidéo descendante et le système de radiocommande de l'appareil fonctionnent à 2,4 GHz. L'écran OLED de 3,3 pouces affiche un flux vidéo en direct, le niveau de la batterie, le signal GPS, la vitesse de vol, etc.
2.2.1 Description des fonctionnalités
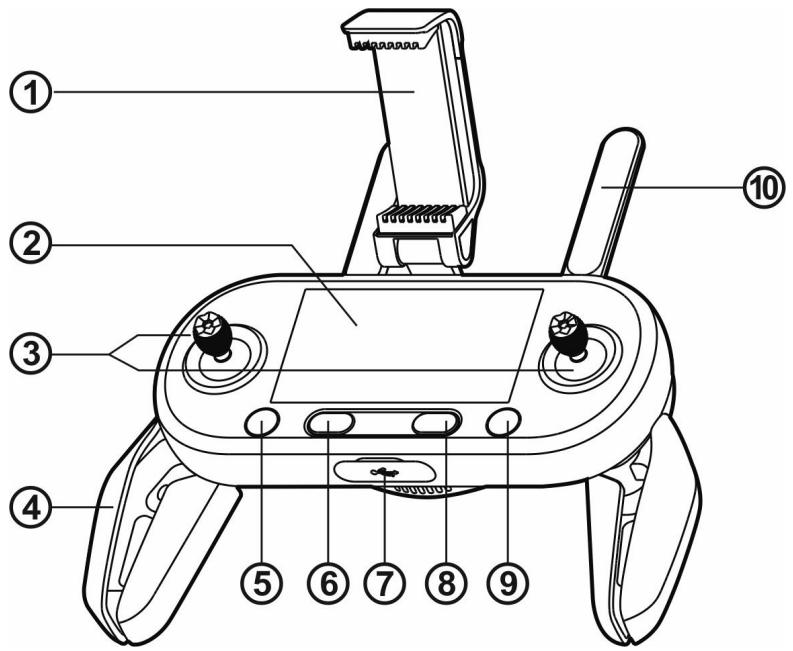
| ① Support pour apparéil mobile | Avec un angle de vision régiable à 180° pour une visibilité optimale |
| ② Panneau d'informations de vol | Affiche l'état du vol, les messages d'advertissement et le flux video en direct |
| ③ Joysticks | Contrôlent l'orientation et le mouvement de l'appareil |
| ④ Poignées | Pliables pour un rangement compact |
| ⑤ Bouton de décollage/atterissage | Ordonne à l'appareil de décoller ou d'atterrir |
| ⑥ Bouton d'alimentation | Appuyez et maintenez le bouton,enforcépendant 2 secondes pour allumer/étéindre la radiocommande |
| ⑦ Ports USB | Permettent le chargement ou la connexion à un apparéil mobile |
| ⑧ Bouton Pause | Indique à l'appareil de suspendre les opérations de vol autonomes et de passer en vol stationnaire, ou de reprendre les opérations de vol autonomes |
| ⑨ Bouton de return au départ | Ordonne à l'appareil de returner au point de départ |
| ⑩ Antennes | Communiquent avec l' apparéil à 2,4 GHz |
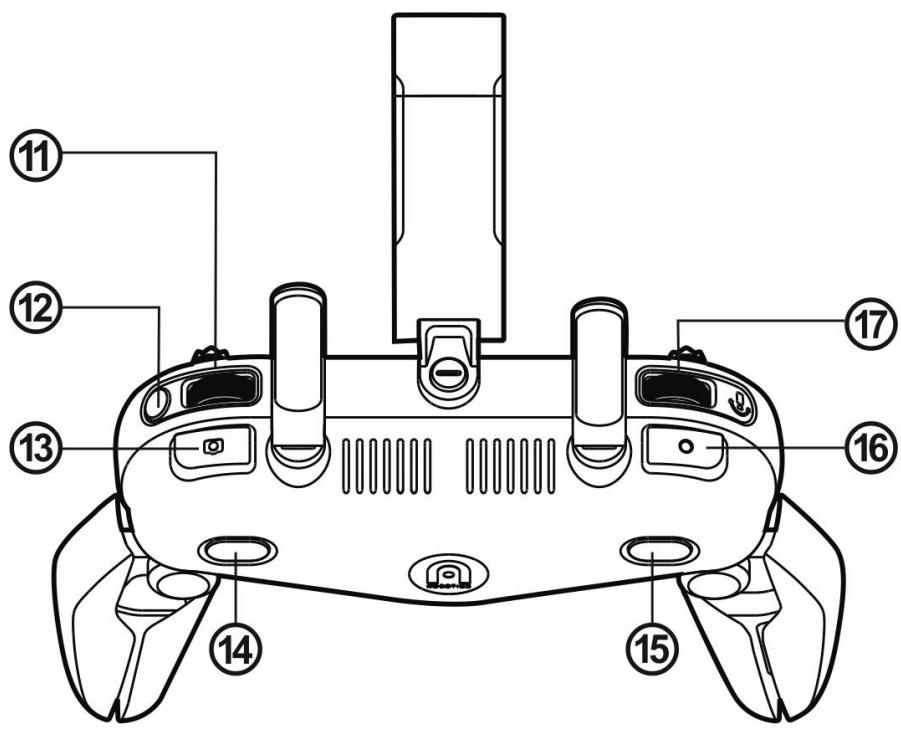
| 11 Molette de navigation à l'écran | Fait défilier l'écran OLED |
| 12 Bouton de navigation à l'écran | Lorsque l'appareil mobile estdéconnecté, appuyez sur ce bouton pendant 1 seconde pour ouvrir/fermer l'écran Transmission d'images de la radiocommande |
| 13 Bouton de l'obturator | Prend des photos. Lorsque le mode rafale est activé, plusieurs images sont prises en un seul appui. Pour plus de détails, consultez le manuel de l'application |
| 14 Bouton A | Fonction configurable à l'aide de l'application Autel Explorer™ |
| 15 Bouton B | Fonction configurable à l'aide de l'application Autel Explorer™ |
| 16 Bouton d'enregistrement | Démarre ou arrêté l'enregistrement vidéo |
| 17 Molette de tangage de la nacelle | Contrôle l'angle de tangage de la nacelle de la camera |
Panneau d'informations de vol
Lorsque la liaison vidéo a été établie, l'interface principale apparaitra comme ci-dessous.

| ① Altitude de vol | Altitude de l'appareil par rapport au point de départ |
| ② Distance de vol | Distance horizontale entre l'appareil et le point de départ |
| ③ Vitesse de vol | Vitesse actuelle de l'appareil |
| ④ Angle d'inclinaison | Angle d'inclinaison de la camera par la nacelle (de 0° à 90°) |
| ⑤ Barre d'etat du vol | Affiche le mode de vol et l'état du vol actuels en temps réel |
| ⑥ Système optique | Indique si le Système optique d'évitement d'obstacles est activé |
| ⑦ Batterie de la radiocommande | Affiche le niveau actuel de la batterie : • Les barres vertes indiquent que la batterie est normale (de 11 % à 100 %) • Les barres rouges indiquent que la batterie est |
| faible (environ 10 %) | |
| ⑧ Signal de commande à distance | Affiche la puissance actuelle du signal |
| ⑨ Temps de vol restant | Estime combien de temps l'appareil peut rester en vol selon le niveau de batterie restant |
| ⑩ Mode de stockage | Indique si les images et les vidés seront stockées dans la mémoire interne ou sur une carte micro SD |
| ⑪1 Signal GPS | Indique la puissance du signal des satellites GNSS à proximité |
| ⑫ Batterie de l'appareil | Affiche le niveau actuel de la batterie : • Les barres vertes indiquent un niveau de batterie normal • Les barres oranges indiquent un niveau de batterie faible • Les barres rouges indiquent un niveau de batterie critique Remarque : vous pouvez définir le seuil de niveau de la batterie à l'aide de l'application Autel Explorer™. |
| ⑬ Mode deamera | Indique le mode de camera actuel |
Mode de transmission d'images
Appuyez sur le bouton de navigation à l'écran (DISP) de la radiocommande lorsque vous souhaitez passer en mode de transmission d'images. Suivez ensuite les étapes suivantes :
- Faites défilrer la molette de navigation à l'écran pour mettre en surbrillance les différentes options de réglage.
- Appuyez sur le bouton de navigation à l'écran pour accéder à l'option en surbrillance.
- Faites défiler à nouveau la molette de navigation de l'écran pour définir différentes valeurs.
- Appuyez sur la molette de navigation à l'écran pour confirmer cette valeur, ou appuyez sur le bouton de navigation à l'écran (DISP) pour revenir en arrière.
- Appuyez sur le bouton de l'obturateur pour prendre une photo.
- Appuyez sur le bouton d'enregistrement pour démarrer ou arrêter l'enregistrement video.
Vue de transmission d'images
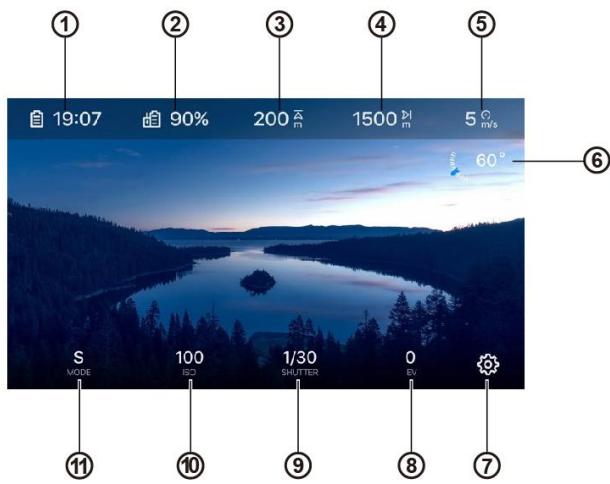
| ① Temps de vol restant | Estime combien de temps l'appareil peut rester en vol selon le niveau de batterie restant |
| ② Batterie de la radiocommande | Affiche le niveau de batterie restant |
| ③ Altitude | Affiche l'altitude de l'appareil par rapport au point de départ |
| ④ Distance | Affiche la distance horizontale entre l'appareil et le point de départ |
| ⑤ Vitesse de vol | Affiche la vitesse actuelle de l'appareil |
| ⑥ Angle de la nacelle | Le nombre indique l'angle de la nacelle en degrés. La flèche bleue se déplace au fur et à mesure que l'angle de la nacelle change |
| ⑦ Paramètres | Appuyez pour accéder à la page Paramètres |
| ⑧ EV | L'Indice de lumination (EV) est une combinaison de la valeur ISO et de la vitesse d'obturation, et est utilisée lorsque laamera est réalisée sur Auto. Ajustez l'EV pour augmenter ou diminuer l'exposition |
| ⑨ Vitesse d'obturation | Les vitesse d'obturation rapides vous permettent de |
| captur l'action en mouvement ; les vitesses d'obturation lentes sont比较好 adaptées aux situations de faible luminosité | |
| 10 ISO | Ce réglage permet de configurer la sensibilité à la lumière du capteur d/images. Une valeur ISO inférieure convient à une forte lumière du soleil, et une valeur élevé ISO convient à des scénarios de faible luminosité, mais augmente le bruit de l'image |
| 11 Mode d'exposition | Mettez votreamera en mode Manuel afin d'ajuster votre valeur ISO et de vitesse d'obturation, ouCHOisissez Auto afin de laisser l'appareil photo faire les réglages pour vous • Manuel : le paramètre EV sera désactivié • Auto : la valeur ISO et la vitesse d'obturation seront déactivées • Priorité à la vitesse d'obturation : vous pouvez régler la vitesse d'obturation et l'EV. |
Instructions de base
- Faites défiler la molette de navigation à l’écran pour mettre en surbrillance les différentes options des paramètres en haut de l’écran.
- Appuyez sur la molette de navigation à l'écran pour confirmer l'option mise en surbrillance ou appuyez sur le bouton de navigation à l'écran (DISP) pour revenir en arrière.
- Faites défiler à nouveau la molette de navigation de l'écran pour définir différentes valeurs.
- Appuyez sur la molette de navigation à l'écran pour confirmer cette valeur, ou appuyez sur le bouton de navigation à l'écran (DISP) pour revenir en arrière.
Paramètres de la caméra
Mode deamera
Vidéo, Prise de vue unique, Rafale (3/5), Timelapse
| Lapse (2/5/7/10/20/30/60), AEB (3/5), NIGHTBEAT | |
| Résolution videoo | 8K (7680 x 4320), 6K (5760 x 3240), 4K (3840 x 2160), 2,7K (2720 x 1528), 1080p (1920 x 1080) |
| Fréquence d'images videoo | 120 ips, 60 ips, 50 ips, 48 ips, 30 ips, 25 ips, 24 ips |
| Résolution photo | 8000 x 6000, 7680 x 4320, 5472 x 3648, 4000 x 3000, 3840 x 2160 |
| Format des photos | JPG, RAW, JPG + RAW |
| HDR | Activé/désactivé |
| Mode d'affichage* | Visible, Infrarouge, PiP |
| Mode fausse couleur* | White hot, Black hot, Rainbow, RainHC, Ironbow, Lava, Arctic, Glowbow, Graded Fire, Hottest |
- S'applique uniquement aux caméras à double capteur
Paramètres de contrôle du vol
- Activer/désactiver le mode Novice.
- Choisir la valeur de Vitesse limite.
- Régler l'Altitude de retour au départ, la Limite d'altitude et la Limite de distance.

Remarque
Lorsque le mode Novice est activé, l'appareil fonctionnera avec une Altitude de retard au départ maximal fixe de 30m, une Vitesse limite de 5m/s, une Limite d'altitude de 30m, et une Limite de distance de 100m. Ces limites ne peuvent pas être modifiées.
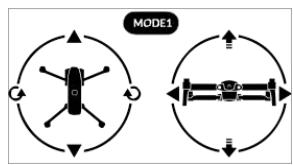
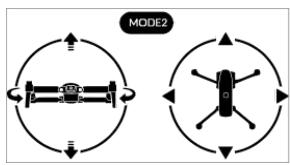
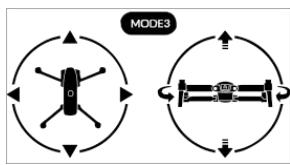
1. Mode joysticks
Le Mode 1, le Mode 2 et le Mode 3 vous permettent de contrôler l'appareil selon vos préférences, comme illustré ci-dessous.
| Icônes de signalisation | Mouvement de l'appareil | ||
| ↑ | ↓ | Monter | Descendre |
| ↓ / ↓ | ↓ / ↓ | Lenez tourne à gauche | Lenez tourne à droite |
| ▲ | ▼ | Avancer | Reculer |
| ▲ | ▼ | Se déplacervs la gauche | Se déplacervs la droite |
- Étalonnage de la radiocommande
Pour des instructions d'étalonnage détaillées, voir la Section 3.2.3 (42).
Paramètres de vision
Accédez à ces paramètres pour activer ou désactiver l’Évitement visuel des obstacles et Sélectionner Afficher la carte radar.
Paramètres généraux
- Langue : sélectionnez la langue d'affichage.
- Unités : CHOISSEZ l'unité de mesure affichée dans les Paramètres de contrôle du vol : Métrique (m/s), Métrique (km/h) ou Impérial.
- Formater la carte SD : utilisez cette fonction pour vous assurer que votre carte SD est dans un format acceptable.
- Réinitialiser laamera : utilisez cette fonction pour rétablir tous les paramètres par défaut de laamera.
2.2.3 Alertes sonores de la radiocommande
Le tableau ci-dessous décrit les différentes alertes sonores et leurs significations correspondantes.
| Alertes sonores de la radiocommande | |
| Alerte de batterie faible de l'appareil (par défaut 25 %) | 1 bip rapide toutes les secondes pendant 5 s, avec 2 vibrations de la radiocommande |
| Alerte de batterie critique de l'appareil (par défaut 15 %) | ips rapides toutes les secondes pendant 5 s, avec 5 vibrations de la radiocommande |
| Alerte de batterie faible de la radiocommande (10 %) | 1 bip rapide toutes les secondes pendant 5 s |
| Alerte de batterie critique de la radiocommande (5 %) | 5 bips rapides toutes les secondes pendant 3 s, avec 2 vibrations de la radiocommande |
| Perte de communication entre l'appareil et la radiocommande | 2 bips rapides toutes les secondes pendant 5 s, avec 1 vibration de la radiocommande |
| Liaison video déconnectée | 3 bips rapides pendant 1 s |
| Interférences avec la boussole | 3 bips avec 3 vibrations de la radiocommande |
| Notification de veille | 3 bips toutes les 15 minutes d'inactivité |
Préparation au vol
L'EVO II arbore une conception conviviale et est livré entièrement assemblé dès son déballage. Afin de garantir un pilotage sécurisé du drone, veuillez lire les instructions et les avertissements ci-dessous avant votre premier vol.
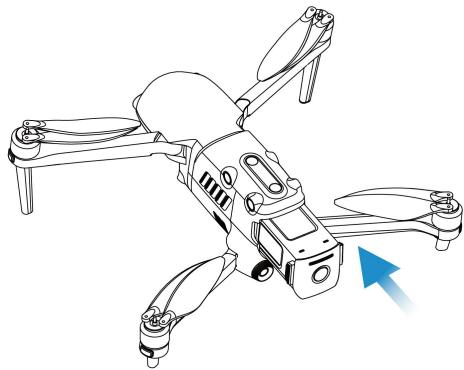
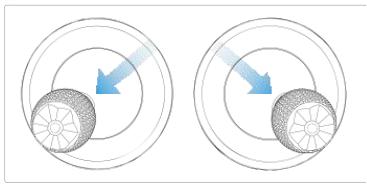
3.1.1 Installation de la batterie de l'appareil
- Éteignez la batterie avant de l'installer.
- Insérez la pile dans le compartiment de batterie comme indiqué sur la droite. La batterie s'enclenche fermement en place.
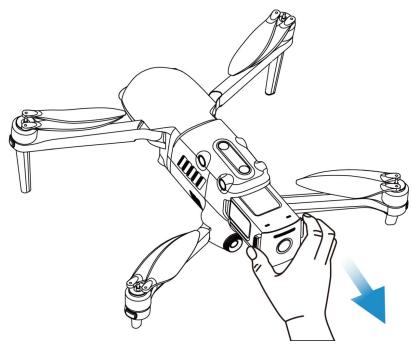
3.1.2 Retrait de la batterie de l'appareil
- Éteignez la batterie de l'appareil avant de la retirer.
- Appuyez et maintenez enfoncés les boutons d’éjection de chaque côté de la batterie et retirez-la lentement.
3.1.3 Chargement
La batterie de l'appareil et la radiocommande peuvent être chargées simultanément à l'aide du chargeur fourni. Deux connecteurs sont fixés au bloc adaptateur du chargeur. Comme indiqué ci-dessous, le câble fixe alimente la batterie de l'appareil, et le câble USB sert à charger la radiocommande.
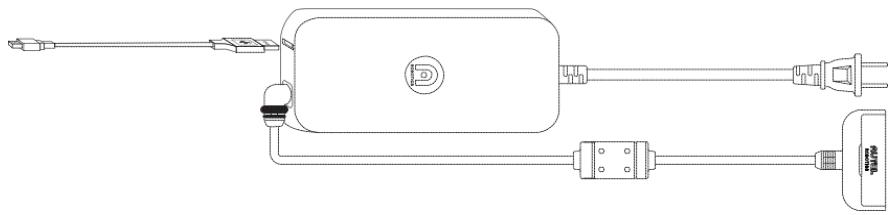
Chargement de l'appareil et de la radiocommande
- Branchez le câble de chargement comme suit
Batterie de l'appareil : insérez le connecteur de charge dans le port de charge de la batterie.
Télécommande : soulevez le cache du port USB et insérez le câble de charge fourni.

- Branchez le chargeur sur une prise de courant.
Témoins de niveau de la batterie : les LED de la batterie de l'appareil s'allument de gauche à droite pour indiquer le niveau actuel de la batterie pendant le cycle de charge, et s’éteignent lorsque la batterie est complètement chargée.
État des témoins de niveau de la batterie (en charge)
0% ~ 25%
26%~50%
51%~75%
76% ~ 100%
Lumière verte fixe
- Lumière verte clignotante
Pendant la charge : Le bouton d'alimentation ( Ⓞ ) de la radiocommande est vert lorsqu'elle est allumée, et rouge lorsqu'elle est éteinte. Vous pouvez suivre le processus de charge sur le Panneau d'informations de vol. Vous entendrez 2 bips lorsque la charge est terminée.
- Lorsque la charge est terminée, débranchez le chargeur et la batterie de l'appareil/de la radiocommande.

Remarque
- Chargez toujours complètement l'appareil et la batterie de la radiocommande avant de voler.
- Il faut environ 90 minutes pour charger complètement la batterie de l'appareil et 180 minutes pour charger la radiocommande.
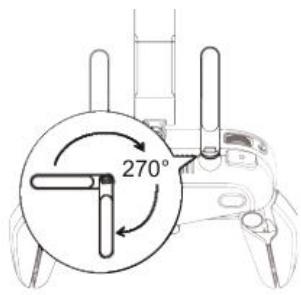
3.2.1 Dépliage de la radiocommande
La radiocommande est piée dans l'emballage. Dépliez délicatement le support pour appareil mobile et les antennes avant l'utilisation pour éviter tout dommage.
et garantir une portée de vol optimale.

Remarque
Les antennes peuvent être pivotées de 270 degrés, comme indiqué dans le diagramme.
Positionnement des antennes
Alignez verticalement les antennes en parallèle, comme indiqué ci-dessous.
Fort
Faible
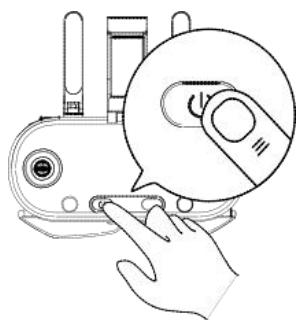
Mise sous tension
Appuyez sur le bouton d'alimentation ( ) et maintenez-le enfoncé pendant 2 secondes jusqu'à ce que vous entendiez un court bip. Le Panneau d'informations de vol s'allume et réalise un test de vérification initiale.
1 Important
Commencez toujours par allumer la radiocommande avant d'allumer l'appareil.
Mise hors tension
Appuyez sur le bouton d'alimentation ( ) et maintenez-le enfoncé pendant 2 secondes jusqu'à ce que vous entendiez un court bip.
1 Important
Éteignez toujours l'appareil avant d'éteindre la radiocommande.
Remarque
Lorsqu'elle n'est pas connectée à l'appareil, la radiocommande émet un bip après 15 minutes d'inactivité, puis s'éteint automatiquement après 18 minutes.
3.2.3 Étalandrage de la radiocommande
Si les joysticks sont anormaux (par ex. si la radiocommande chute au sol, ou si la direction de vol de l'appareil ne correspond pas aux mouvements effectués), nous vous recommandons d'étalonner la radiocommande. Vous pouvez étalonner la radiocommande à l'aide de l'application Autel Explorer™ (voir le manuel de l'application pour plus de détails) ou en suivant les étapes suivantes.
- Éteignez la radiocommande. Appuyez et maintenez enfoncés le bouton d'alimentation (⑥) et le bouton de décollage/atterrissage (⑧) simultanément jusqu'à ce que l'écran s'affiche comme indiqué sur la droite. Les quatre barres croisées représentent les joysticks gauche et droit. La barre horizontale du haut correspond à la
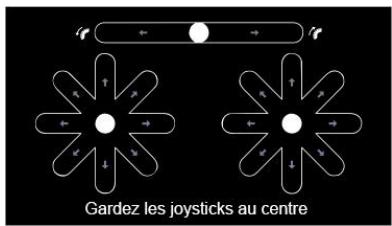
molette de tangage de la nacelle.
- Relâchez les deux joysticks et la molette de tangage de la nacelle à leur position naturelle centrale. Les trois cercles centraux de l'écran d'étalonnage de la radiocommande seront mis en surbrillance successivement.
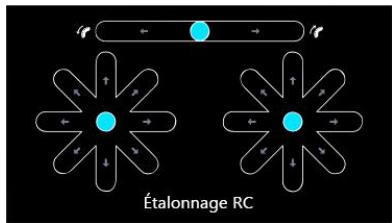
- Poussez sur les joysticks et maintenez-les en position dans chacune des huit directions possibles jusqu'à entendre un bip à chaque fois. Tournez ensuite la molette de tangage de la nacelle dans le sens des aiguilles d'une montre jusqu'à entendre un bip, puis dans le sens inverse des aiguilles d'une montre jusqu'à entendre un bip.
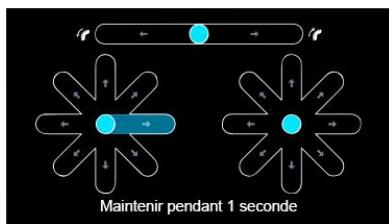
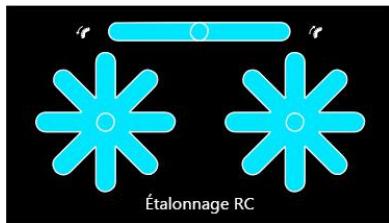
- L'étalonnage est terminé lorsque toutes les barres de l'écran sont en surbrillance.
3.2.4 Association de l'appareil et de la radiocommande
La radiocommande et l'appareil sont livrés déjà associés. Lorsque vous avez besoin de les associer à nouveau, par exemple après avoir appuyé sur le bouton d'association de la radiocommande sur l'appareil, suivez les étapes suivantes :
- Éteignez la radiocommande.

- Retirez d'abord la protection de la nacelle, puis allumez l'appareil.
- Appuyez sur le bouton d'association de la radiocommande sur le côté inférieur droit de l'appareil et maintenez-le enfoncé pendant 3 secondes. Le voyant d'association clignote rapidement, indiquant que l'appareil est prêt à être associé avec la radiocommande.

AUTEL


- Appuyez simultanément sur le bouton d'alimentation (⑨) et sur le bouton de return au départ (⑩) pendant 2 secondes jusqu'à ce que « Autel » apparaisse sur le p
- Pour associier une radiocommande secondaire, appuyez simultanément sur le bouton d'alimentation et le bouton personnalisable B jusqu'à ce que « Autel » apparaisse sur le Panneau d'informations.
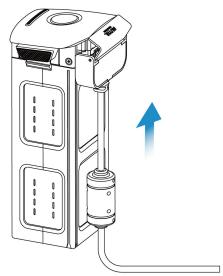
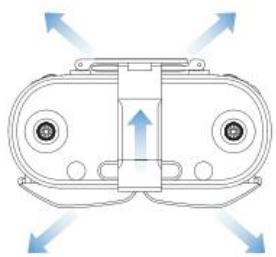
Démontage et réinstallation du support de nacelle
Retirez toujours le support de nacelle avant de mettre l'appareil en marche. Retirez lentement le support de nacelle en place, comme indiqué ci-dessous.
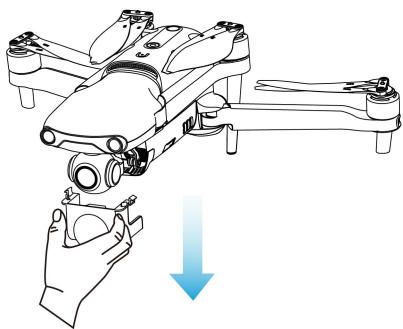
Après avoir utilisé l'appareil, réinstallez le support de nacelle pour protéger cette dernière contre les dommages.
Dépliage des bras et des hélices
Dépliez toujours les bras et les hélices avant de mettre l'appareil en marche. Déployez d'abord les bras avant, puis les bras arrêté.
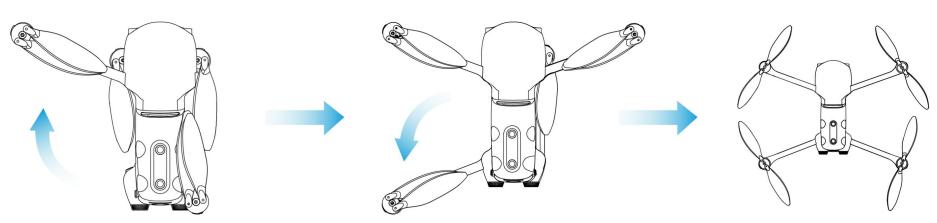
Mettez l'appareil hors tension avant de le plier. Repliez d'abord les bras arrière et les hélices, puis les bras avant.
Avertissement
Mettez l'appareil hors tension avant de fixer ou de retirer les hélices.
Important
Portez des gants de protection lorsque vous fixez ou retirez les hélices.
Légende

Sens de verrouillage : fixez l'hélice en la faisant pivoter comme indiqué. Sens de déverrouillage : retirez l'hélice en la faisant pivoter comme indiqué.

Hélice à code noir > s'utilise avec > Moteur à code noir Hélice à code blanc > s'utilise avec > Moteur à code blanc
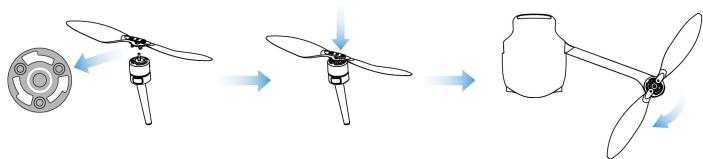
Fixation des hélices
- Vérifiez que l'appareil est hors tension.
- Localisez et associez l'hélice à chaque moteur.
- Appuyez fermement sur chaque hélice et faites-la tourner dans le sens de verrouillage pour fixer l'hélice de façon sécurisée.
Retrait des hélices
- Mettez l'appareil hors tension.
- Appuyez fermement sur chaque hélice et faites-la tourner dans le sens de déverrouillage pour la retirer.
1 Important
- Avant le vol, vérifie que chaque hélice est fermement fixée.
- Ne volez jamais avec des hélices cassées ou endommagées.
- Ne touchez pas les hélices ou les moteurs pendant qu'ils tournent.
- Retirez toujours les hélices avant de tester les moteurs.
3.3.3 Étalandage de la boussole
Comme la boussole est livrée étalonnée, l'étalonnage par l'utilisateur est généralement inutile. Si des messages d'erreur de boussole s'affichent, si la direction de vol de l'appareil ne correspond pas aux mouvements effectués, ou si vous pilotez l'appareil à une très grande distance de votre position d'étalonnage, suivez les étapes ci-dessous pour l'étalonner.
La boussole est très sensible aux interférences électromagnétiques, qui provoquent des erreurs de boussole et réduisent les performances de vol. Si la boussole ne fonctionne toujours pas correctement après l'étalonnage, déplacez l'appareil vers un autre endroit et réessayez.
Lors de l'étalonnage de la boussole, suivez les consignes suivantes :
- Installez-vous dans une zone dégagée en extérieur.
- Restez à l'écart de toute source d'interférences magnétiques, comme la magnétique ou les armatures en acier dans le béton. La proximité de grandes structures peut également affecter les résultats de l'étalonnage.
- Restez à l'écart des lignes électriques souterraines et aériennes.
- Éloignez tous les matériaux ferromagnétiques (comme les clés ou les bijoux magnétiques).
- Restez à l'écart des appareils électroniques susceptibles d'interférer avec l'étalonnage (comme les appareils mobiles).
Procédure d'étalonnage
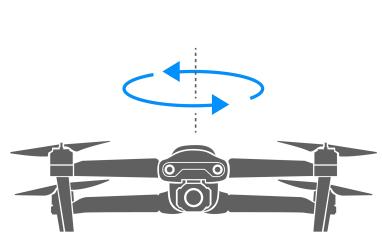
- Démarrez le processus d'étalonnage en appuyant simultanément sur le bouton de décollage/atterrissage ( ) et le bouton de retard au département ( ) de la radiocommande pendant 3 secondes. Les voyants LED arrêté de l'appareil clignotent en jaune lorsque le processus d'étalonnage démarre.

- Tenez l'appareil à l'horizontale et faites-le tourner jusqu'à ce que les voyants LED arrêté de l'appareil deviennent vert fixe.
- Tenez l'appareil à la verticale avec le nez vers le bas et faites-le tourner

jusqu'à ce que les voyants LED arrière de l'appareil deviennent vert fixe.

Remarques
- Si l'étalonnage échoue, les voyants LED de l'appareil passeront au rouge fixe. Dans ce cas, répétez les étapes ci-dessus.
- Vous pouvez également étalonner la boussole à l'aide de l'application Autel Explorer™. Découvrez comment procéder dans le manuel de l'application.
4.1 Isme de contrôle avant le vol
Suivez ces étapes pour effectuer un contrôle complet avant le vol :
- Chargez complètement la batterie de l'appareil, la radiocommande et votre appareil mobile.
- Retirez le support de nacelle.
- Vérifiez que les hélices sont en bon état et qu'elles sont correctement fixées.
- Positionnez les antennes de la radiocommande comme décrit au point 3.2.1.
- Associez l'appareil et la radiocommande.
- Vérifiez que le firmware a été mis à jour à la première version. Assurez-vous de vous être familiarisé avec les commandes de vol.
- Vérifiez que votre zone de vol est dégagée et non obstruée.
- Vérifiez les conditions météorologiques, notamment la température de l'air et la vitesse du vent.
- Vérifiez que l'objectif et les capteurs de la caméra de l'appareil sont propres.
4.2 Radiocommande et opérations de vol
Trois modes de joysticks sont disponibles pour l'appareil : Mode 1, Mode 2 et Mode 3. Chacun contrôle l'appareil différemment. Les diagrammes ci-dessous s'appliquent au Mode 2, qui est défini par défaut. Pour apprendre comment changer le mode de joystick, consultez le manuel de l'application.
Vol de base
- Placez l'appareil dans une zone dégagée.
- Allumez la radiocommande.
- Démarrez les moteurs et décollez à l'aide de la radiocommande.
- Pilotez l'appareil avec précaution.
- Faites atterrir l'appareil, puis arrêtez les moteurs.

Remarque
L'appareil ne décollera pas si le niveau de la batterie est inférieur ou égal à 15 %.
Démarrez les moteurs en maintenant les deux joysticks en position pendant 2 secondes :
Lorsque les moteurs tournent, décollez à l'aide de l'une des commandes suivantes:

Maintenez le bouton décollage/atterrissage enfoncé pendant 3 secondes
Poussez le joystick gauche lentement vers le haut (Mode 2)

Avertissement
Les moteurs chauffent pendant leur fonctionnement. Veuillez manipuler l'appareil avec précaution.

Conseils
Si vous débutez en tant que pilote, déplacez lentement les joysticks jusqu'à être familiarisé avec le pilotage de l'appareil.
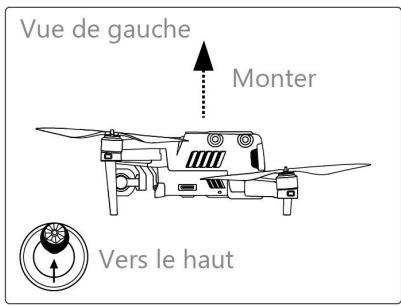
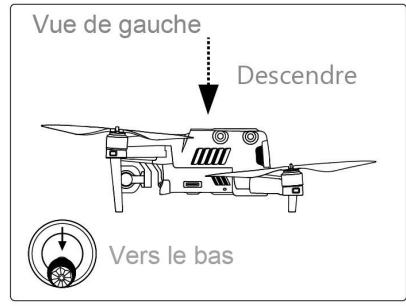
Monter/descendre
Contrôlez la montée et la descente de l'appareil en poussant le joystick vers le haut ou vers le bas.
Pivoter vers la gauche/la droite
Contrôlez le cap de l'appareil en poussant le joystick vers la gauche ou la droite.
Le nez tourne à gauche
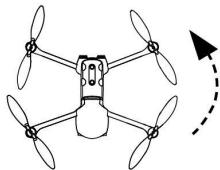

Vers la gauche
Le nez tourne à droite
Vers la droite
Avancer/reculer
Contrôlez les mouvements vers l'avant et vers l'arrière de l'appareil en poussant le joystick vers le haut ou vers le bas.
Vue du côté gauche
Avancer


Vers le haut
Veuillez_cette_gauche
Reculer

Vers le bas
Se déplacer vers la gauche/la droite
Contrôlez le déplacement de l'appareil vers la gauche ou vers la droite en poussant le joystick vers la gauche ou vers la droite.
Vue arrière
Vue arrière
Vers la gauche

Vers la gauche
Vue arrière
Vue arrière
Vers la droite

Vers la droite
4.2.3 Atterrissage et arrêt des moteurs
Vous pouvez faire atterrir l'EVO II manuellement, automatiquement ou passivement. Suivez les étapes ci-dessous pour faire atterrir l'appareil à l'aide de chacune de ces méthodes.

Important
Atterrissez toujours en douceur sur une surface plane et dégagée.
- Atterrissage manuel
Vous pouvez faire atterrir l'appareil manuellement quand et où vous le voulez à l'aide des
joysticks de la radiocommande.
- Repérez la position souhaitée pour l'atterrissage de l'appareil.
- Lorsque l'appareil atteint la position cible, relâchez les joysticks pour le laisser passer en vol stationnaire.
- Poussez lentement le joystick gauche vers le bas pour faire atterrir l'appareil.
Arrêt des moteurs
Choisissez l'une des méthodes suivantes pour arrêter les moteurs une fois que l'appareil a atteint le sol :
- Atterrissage automatique
Appuyez sur le bouton de décollage/atterrissage ( ) de la télécommande pour faire atterrir l'appareil automatiquement à partir de sa position de vol stationnaire actuelle.
- Pilotez l'appareil jusqu'à la position d'atterrissage cible.
- Relâchez les joysticks et laissez l'appareil passer en vol stationnaire.
- Appuyez sur le bouton de décollage/atterrissage ( ) pendant 2 secondes jusqu'à entendre un bip de la radiocommande.
- L'appareil descendra, atterrira et éteindra ses moteurs automatiquement. Pendant la descente, vous pouvez ajuster la position de l'appareil à l'aide du joystick droit.

Conseils
Pendant le processus de descente automatique, vous pouvez reprendre le contrôle en appuyant sur le bouton Pause (11) de la radiocommande.

Remarques
- L'atterrissage automatique est également disponible en mode ATI (12). Cependant, l'appareil risque de dériver dans ce mode, vous devez surveiller son altitude.
- Lorsque l'alerte de batterie faible (25 %) s'affiche, les voyants LED arrière de l'appareil clignotent en rouge et le bouton d'alimentation (⑨) de la radiocommande devient jaune fixe. Dans cette situation, retournez à un point d'atterrissage sur des que possible.
- Atterrissage passif
Chaque fois que l'une des conditions suivantes est remplie, la fonction d'Atterrissage automatique sera déclenchée et l'appareil se posera automatiquement à partir de sa position actuelle.
L'alerte de batterie faible est déclenchée dans un environnement non-GPS. L'alerte de batterie critique est déclenchée.
5.1 Mises à jour du firmware
Pour optimiser les performances de votre EVO II, Autel Robotics fournira régulièrement des mises à jour du firmware. Vous pouvez télécharger le firmware le plus récent en un package unique sur notre site Web officiel. Lorsqu'une mise à jour du firmware est disponible, vous recevez une invite dans l'application Autel Explorer™ après l'avoir connectée à l'appareil.
Important
Avant d'effectuer une mise à jour du firmware, assurez-vous que :
- Les moteurs de l'appareil ne tournent pas.
- Les niveaux des batteries de l'appareil et de la radiocommande ne sont pas inférieurs à 25 %.
- Suffisamment d'espace est disponible pour stocker le fichier du firmware sur la carte micro SD de votre appare.
Téléchargement et mise à niveau du firmware
- Téléchargez le package de mise à jour du firmware tout-en-un sur le site officiel d'Autel Robotics: www.auteldrones.com.
- Insérez la carte SD dans votre ordinateur et extrayez le fichier téléchargé dans le répertoire racine de votre carte SD. Retirez ensuite votre carte SD de l'ordinateur.
- Allumez la radiocommande et l'appareil.
- Insérez la carte SD dans l'appareil pour lancer automatiquement le processus de mise à niveau. Vous pouvez suivre l'état de la mise à niveau en direct sur le Panneau d'informations de vol.
- Redémarrez la radiocommande et l'appareil avant de les utiliser.
Important
- La mise à niveau prend environ 15 minutes. Pendant le processus de mise à niveau, n'éteignez pas l'appareil ni la radiocommande, ne démarrez pas les moteurs, et ne retirez pas votre carte SD de l'appareil.
- Une fois la mise à niveau terminée, vous pouvez déconnecter la radiocommande de l'appareil. Si vous souhaitez les associer à nouveau, reportez-vous au point 3.2.4.
5.2 Conseils de dépannage
1. Si l'appareil indique une défaillance pendant le contrôle automatique (les voyants LEDarrêté deviennent rouge fixe):
- Un problème matériel a été détecté. Veuillez contacter l'assistance client d'Autel Robotics ici: www.auteldrones.com/contact-us/
Q2. Si les moteurs ne démarrent pas, vérifie ce qui suit :
- La radiocommande et l'appareil sont associés.
- La radiocommande est correctement étalonnée.
- La batterie de l'appareil est complètement chargée. La boussole est correctement étalonnée.
- Le GPS est disponible (si le mode Novice est activé).
Q3. Si le décollage échoue après le démarrage des moteurs, vérifie ce qui suit :
L'appareil ne se trouve pas dans une zone d'exclusion aérienne. L'appareil se trouve sur une surface plane et horizontale.
Q4. Si le temps de vol est etonnament court :
- La cause la plus fréquente de la réduction du temps de vol est une température ambiantebasse.
Q5. Si l'appareil ne répond pas à la radiocommande pendant le processus d'association :
- Vérifiez qu'aucun objet métallique, appareil mobile ou autre radiocommande ne se trouve à proximité.
Q6. Si la liaison vidéo échoue ou se déconnecte fréquemment :
- Vérifiez que l'appareil et la radiocommande sont exempts de sources d'interférences magnétiques ou au niveau des signaux.
Q7. Si la camera s'éteint pendant l'enregistrement vidéo :
- Gardez la carte micro SD à l'intérieur de laamera. Redémarrez laamera et attendez que les fichiers vidéo soient récapités dans leur intégralité.
Q8. Si la liaison vidéo est perdue lorsque l'appareil est hors de vue :
- Lancez Go Home pour ordonner à l'appareil de retourner automatiquement au point de départ.
Q9. Quelles sont les considérations à prendre en compte lors de l'utilisation du système de détection à vision binoculaire omnidirectionnelle?
- éfère à six directions, dont l'avant, l'arrière, la gauche, la droite, le haut et le bas.
- Un angle mort est présent dans les quatre directions diagonales de l'appareil. Veuillez prêter attention à l'environnement et aux conseils de sécurité de l'application.
- La détection des obstacles fonctionne par la détection de la texture de la surface des obstacles. La déte
Q10. Si la fonction d'atterrissage de précision ne fonctionne pas :
- La fonction d'atterrissage de précision fonctionne par la déte
- Cette fonction ne fonctionnera pas si la surface du sol ne présente aucune texture ou si les caméras inférieures sont endommagées.
Q11. Si le système de détection à vision binoculaire omnidirectionnelle ne fonctionne pas :
Redémarrez l'appareil, puis vérifiez à nouveau.
Q12. si la vidéo est penchée pendant le vol :
- Placez l'appareil à l'horizontal et maintenez-le immobile.
- Étalez la nacelle à l'aide de la fonction « Étalandage auto de la nacelle » de l'application.
- Si la vidéo n'est toujours pas correcte, ajustez la nacelle en suivant les instructions de la fonction « Ajustement de la nacelle »
Q13. si l'objet de la caméra stéréo est sale :
- Essuyez-le doucement à l'aide d'un chiffon à lunettes. Nous vous recommandons d'utiliser le chiffon à lunettes livré avec l'appareil.
Q14. lorsqu'une erreur visuelle se produit pendant le vol :
- Veuillez utiliser l'outil PC afin d’établir les paramètres. L'outil PC est disponible au téléchargement sur notre site Web officiel.
5.3 Stockage et maintenance
Pour garantir des performances optimales de l'EVO II, veuillez lire et suivre attentivement les instructions de maintenance de cette section.
- Stockez l'appareil, la batterie et la radiocommande dans un environnement propre, sec, frais et ventilé.
- Gardez l'appareil à l'abri de la lumière du soleil lorsqu'il n'est pas utilisé.
- Séchez-vous les mains avant d'utiliser le drone.
- Nettoyez l'objet de l'appareil à l'aide d'un chiffon doux imbibé d'alcool ou d'un nettoyant doux pour vitres. N'utilisez pas de nettoyants, de détergents ou de produits chimiques puissants.
- Assurez-vous que le chargeur de la batterie n'entre pas en contact avec d'autres matériaux conducteurs.
- Évitez de faire tomber l'appareil et ses accessoires, en particulier sur une surface dure. Vérifiez soigneusement toutes les pièces après toute collision ou impact. Si vous constatez des dégâts, contactez l'assistance client d'Autel Robotics.
- Utilisez exclusivement des accessoires tels que les chargeurs de batterie autorisés par Autel Robotics. L'utilisation d'accessoires non approuvés annulera la couverture de la garantie.
Autel Robotics (la société) garantit à l'acheteur initial de ce produit, que si ce produit ou toute partie de celui-ci, dans des conditions normales d'utilisation et de consommation, s'avère défectueux au niveau de ses matériaux ou de sa fabrication et que cela entraîne une défaillance du produit pendant la période de garantie valide à partir de la date d'achat, ce ou ces défauts seront réparés ou remplacés (par des pièces ou des produits neufs ou reconditionnés) au besoin de la société, sous présentation d'une preuve d'achat, sans frais pour les pièces ou la main-d'œuvre directement liées au(x) défaut(s). Certains États n'autorisent pas la limitation de la durée d'une garantie implicite, de sorte que les limitations ci-dessus peuvent ne pas s'appliquer à vous.
La société n'est pas responsable des dommages accessoires ou indirects résultant de l'utilisation, de la mauvaise utilisation ou du montage de l'appareil. L'étendue de la responsabilité d'Autel Robotics dans le cadre de cette garantie est limitée à la réparation et au remplacement prévus ci-dessus et, en aucun cas, sa responsabilité ne peut dépasser le prix d'achat payé par l'acheteur du produit. Accédez au site www.auteldrones.com pour connaître les détails des périodes de garantie limitées correspondant aux différentes pièces de ce produit.
Cette garantie ne s'applique pas pour:
- les batteries ayant subi un cycle de charge complet plus de 200 fois dans des conditions de température normales ou plus de 100 fois à des températures élevées;
- les batteries ayant été stockées pendant plus d'un mois à des températures supérieures à 40°C
- les produits soumis à une utilisation ou à des conditions environnementales anormales, à un accident, à une mauvaise manipulation, à la négligence, à une modification non autorisée, à une mauvaise utilisation, à une installation ou une réparation incorrecte ou à un stockage inadéquat;
- les produits représentant des signes de falsification ou de modification de l'étiquette du numéro de série, de la marque d'étanchéité, etc.;
- les dommages résultant de la connexion à ou de l'utilisation de tout accessoire ou autre produit non approuvé ou autorisé par la société;
- les défauts d'apparence et des éléments cosmétiques, décoratifs ou structurels tels que les cadres et les pièces non fonctionnelles;
- les produits endommagés par des causes externes, y compris, mais sans s'y limiter
5.5 Service client
Cette section contient des informations concernant l'assistance technique, le service de réparation et la demande de pièces optionnelles ou de remplacement.
Si vous avez des questions ou des préoccupations concernant nos produits, veuillez contacter l'assistance client d'Autel Robotics :
- Téléphone : (844) 692-8835 (ÉTATS-UNIS) E-mail: support@autelrobotics.com
- En personne : distributeurs ou agents locaux
5.5.2 Service de réparation
Si vous souhaitez renvoyer votre appareil pour réparation, veuillez remplir et envoyer un formulaire de service de réparation à l'adresse www.auteldrones.com/warranty/ou contacter l'assistance client d'Autel Robotics au (844) 692-8835. Vous devrez fournir les informations suivantes :
- Nom
- Adresse e-mail
- Adresse postale
- Numéro de téléphone
- Nom du produit
- Une description complète du problème, avec des photos en pièce jointe
- Pour les réparations sous garantie : une preuve d'achat
- Pour les réparations hors garantie : méthode de paiement souhaitée
L'assistance client d'Autel Robotics effectuera une évaluation préliminaire du problème et vous contactera sous 2 jours.
Message d'avertissement de la FCC
Tout changement ou modification n'ayant pas été expressément approuvé par la partie responsable de la conformité est susceptible de faire perdre à l'utilisateur son droit à utiliser cet équipement.
Cet appareil est conforme à la partie 15 des règles de la FCC. Son fonctionnement est soumis aux deux conditions suivantes : (1) ce dispositif ne doit pas causer d'interférences nuisibles et (2) cet appareil doit accepter toutes les interférences reçues, y compris celles susceptibles de causer un fonctionnement indésirable.
Déclaration de la FCC sur l'exposition aux rayonnements de radiofréquences
Pour la gamme EVO II/evo
Cet équipement est conforme aux limites d'exposition aux radiations de la FCC établies pour un environnement non contrôlé. Cet équipement doit être installé et utilisé à une distance minimale de 20 cm entre le radiateur et votre corps. Cet émetteur ne doit pas être installé au même endroit ou fonctionner conjointement avec une autre antenne ou un autre émetteur.
Pour la gamme EVO II avec le modèle EF7, les tests du DAS sont effectués en utilisant les positions de fonctionnement standard acceptées par la FCC/ISDEC avec l'appareil. Lors de l'utilisation, veuillez garder une distance minimum de 10 mm avec votre corps.
Remarque : cet équipement a été testé et déclaré conforme aux limites applicables aux appareils numériques de classe B, conformément à la partie 15 des règles de la FCC. Ces limites sont conçues afin de fournir une protection
raisonnable contre les interférences nuisibles dans une installation résidentielle. Cet équipement génère, utilise et peut émettre de l'énergie radiofréquence, et, s'il n'est pas installé et utilisé conformément aux instructions, il peut provoquer des interférences nuisibles avec les communications radio. Cependant, il n'y a aucune garantie que des interférences ne se produiront pas dans une installation particulière. Si cet équipement provoque des interférences nuisibles à la réception de la radio ou de la télévision, ce qui peut être déterminé en éteignant et en rallumant l'appareil, l'utilisateur est invité à essayer de corriger les interférences en prenant une ou plusieurs des mesures suivantes :
—Réorientez ou déplacez l'antenne de réception.
—Augmentez la séparation entre l'équipement et le récepteur.
—Branchez l'équipement sur une prise de courant d'un circuit différent de celui du récepteur.
—Consultez le revendeur ou un technicien radio/TV expérimenté pour obtenir de l'aide.
Avertissement RSS de l'isdec
Cet appareil est conforme aux normes d'exemption de licence RSS de l'ISDEC. Son fonctionnement est soumis aux deux conditions suivantes : (1) cet appareil ne doit pas causer d'interférence et (2) cet appareil doit accepter toute interférence, notamment les interférences susceptibles de causer un fonctionnement indésirable de l'appareil.
Le présent appareil est conforme aux CNR d'Industrie Canada applicables aux appareils radio exempts de licence.
L'exploitation est autorisée aux deux conditions suivantes :
(1) l'appareil ne doit pas produire de brouillage, et (2) l'utilisateur de l'appareil doit accepter tout brouillage radioélectrique subi, même si le brouillage est susceptible d'en compromettre le fonctionnement.
Pour la gamme EVO II/evo
Cet équipement est conforme aux limites d'exposition aux rayonnements de radiofréquences de l'ISDEC établies pour un environnement non contrôle. Cét émetteur ne doit pas être installé au même endroit ou fonctionner conjointement
avec une autre antenne ou un autre émetteur. Cet équipement doit être installé et utilisé à une distance minimale de 20 cm entre le radiateur et votre corps.
Pour la gamme EVO II avec le modèle EF7, les tests du DAS sont effectués en utilisant les positions de fonctionnement standard acceptées par la FCC/ISDEC avec l'appareil. Lors de l'utilisation, veuillez garder une distance minimum de 10 mm avec votre corps.
Tout changement ou modification n'ayant pas été expressément approuvé par la partie responsable de la conformité est susceptible de faire perdre à l'utilisateur son droit à utiliser cet équipement.
6.1.2 Illustration d'une zone de vol interdite
Le système EVO II reconnaît automatiquement les zones de vol restreint, dans lesquelles les vols sont limités par défaut. Cette caractéristique garantit que l'appareil est conforme aux exigences légales en matière de zone de vol. Les restrictions de vol ne sont appliquées qu'au sein des pays qui exigent des restrictions de la part des fabricants en vertu de la loi. Actuellement, la Chine continentale est le seul pays/région qui exige l'imposition de restrictions de vol aux constructeurs.
Les zones de vol interdit sont divisées en 2 catégories de protection.

Remarque
Le pilote est responsable du respect de toutes les règles et réglementations de vol applicables.
Catégorie I : grands aéroports et zones de vol où les drones fonctionnent à basse altitude
- Zones de décollage restreint (zones d'exclusion aérienne)
Ces zones sont définies dans un rayon de 2,4 km (1,5 mile) (sur la base des règles imposées par le pays) autour du point médian de lieux spécifiques.
- Zones à altitude limitée
Dans ces zones, l'appareil n'est autorisé à voler qu'à des altitudes limitées. Selon les règles imposées par le gouvernement, de 8 km à 2,4 km autour du point médian du site, l'altitude de vol diminue progressivement de 120 m à 10,5 m.
- Zones d'avertissement
Lorsque l'appareil entre dans une zone située à moins de 8,1 km du point central de l'aéroport, un message d'avertissement sera affiché dans l'application Autel Explorer™.

Remarque
L'appareil atterrira automatiquement lorsqu'il entre dans une zone de décollage restreinte. Si l'appareil entre dans une zone à altitude limitée, son altitude maximale autorisée sera réduite en conséquence. Portez une attention particulière aux messages d'avertissement affichés dans l'application Autel Explorer™.
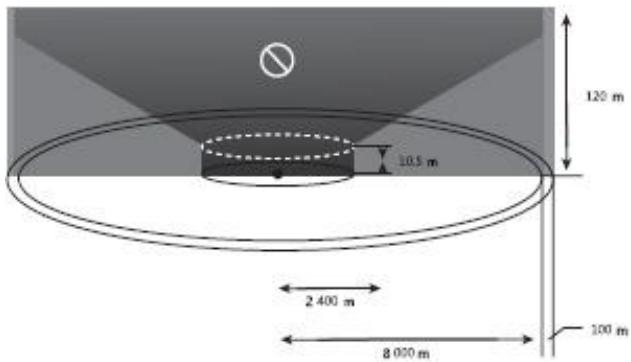
Catégorie II : zones et instituts sensibles tels que les sites militaires et les frontières entre différents pays
- Zones de décollage restreint (zones d'exclusion aérienne)
Ces zones sont situées à moins de 1 km du centre des lieux spécifiques où le décollage et le vol sont interdits.
- Zone d'avertissement
Lorsque l'appareil entre dans une zone située à moins de 2 km (env. 1 mi) du centre du site d'une Zone d'Advissement, l'application affiche un message d'avertissement.
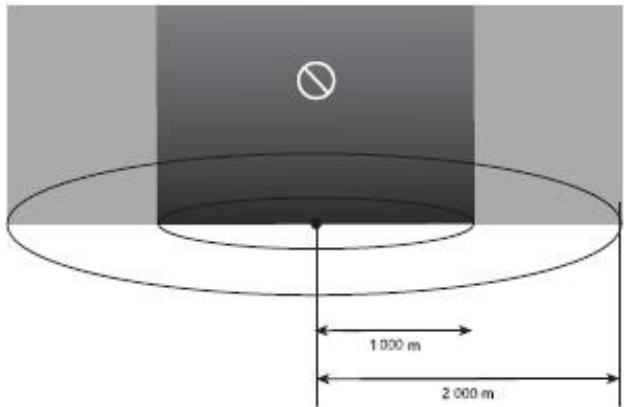
6.2 Caractéristiques techniques
| Caracteristique de l'appareil | |
| Poids au décollage | 1 127 g (EVO II) 1 174 g (EVO II Pro) 1 157 g (EVO II Dual 320) 1 192 g (EVO II Dual 640) |
| Dimensions | Plié: 228*133*110 mm (longueur × largeur × hauteur) Déplié: 424*354*110 mm (longueur × largeur × hauteur) |
| Distance diagonale | 397 mm |
| Vitesse de montée max. | Mode Standard : 5 m/s Mode Extrema : 8 m/s |
| Vitesse de descente max. | Mode Standard : 3 m/s Mode Extrema : 4 m/s |
| Vitesse max (basse altitude, vent faible) | Mode Standard : 15 m/s Mode Extrema : 20 m/s |
| Plafond pratique max. au-dessus du niveau de la mer | 7 000 m |
| Temps de vol max. (sans vent) | 40 minutes |
| Temps de vol stationnaire | 35 minutes |
| max. (sans vent) | |
| Distance de vol max. (sans vent) | 25 km |
| Résistance à la vitesse du vent max. | Force 8 |
| Angle d'inclinaison max. | Mode Standard : 28° Mode Extréme :33° |
| Vitesse angulaire max. | 120°/s |
| Plage de températures de fonctionnement | de -10 °C à 40 °C |
| Fréquence de fonctionnement | 2,4 ~ 2,4835 GHz |
| Puisance de transmission (PIRE) | 2,4 ~ 2,4835 GHz FCC : ≤26 dBm ISDE : ≤26 dBm CE : ≤20 dBm RCM : ≤20 dBm SRRC : ≤20 dBm |
| GNSS | GPS/GLONASS/VIO/ATTI |
| Plage de précision du vol stationnaire | Verticale : ± 0,02 m (avec positionnement optique actif) ± 0,2 m (avec positionnement GPS) Horizontale : ± 0,02 m (avec positionnement optique actif) ± 0,5 m (avec positionnement GPS, sans vent) |
| Stockage interne | 8 Go |
| Stockage SD | Standard : 32 Go, max. 256 Go pris en charge |
| Caractéristiques du système de détction | |
| Système de détction | Détction omnidirectionnelle des obstacles |
| Avant | Plage de mesure de précision : de 0,5 à 20 m Plage de détction : de 0,5 à 40 m Vitesse de détction efficace : < 15 m/s FOV : Horizontal : 60°, Vertical : 80° |
| Vers l'arrière | Plage de mesure de précision : de 0,5 à 16 m Plage de détction : de 0,5 à 32 m Vitesse de détction efficace : < 12 m/s FOV : Horizontal : 60°, Vertical : 80° |
| Au-dessus | Plage de mesure de précision : de 0,5 à 12 m Plage de détction : de 0,5 à 24 m Vitesse de détction efficace : < 6 m/s FOV : Horizontal : 60°, Vertical : 50° |
| En dessous | Plage de mesure de précision : de 0,5 à 11 m Plage de détction : de 0,5 à 22 m Vitesse de détction efficace : < 6 m/s FOV : Horizontal : 90°, Vertical : 70° |
| Côtés | Plage de mesure de précision : de 0,5 à 12 m Plage de détction : de 0,5 à 24 m Vitesse de détction efficace : < 10 m/s FOV : Horizontal : 60°, Vertical : 50° |
| Environnement de fonctionnement | Vers l'avant, vers arrêté, au-dessus et sur les côtés : Surface avec un motif clair et un éclairage adéquat (> 20 lux) En dessous : Surface avec un motif clair et un éclairage adéquat (> 20 lux) DéTECTe les surfaces refléchissantes diffuses (> 20 %) (murs, arbres, personnes, etc.) |
| Caractéristiques de laamera | |||
| Nom du modele | EVO II | EVO II Pro | EVO II Dual |
| CAMÉRA | |||
| Captor | CMOS 1/2 pouce Pixels effectifs : 48 millions | CMOS 1 pouce Pixels effectifs : 20 millions | CMOS 1/2 pouce 48 millions Captor FLIR LWIR |
| Objectif | FOV : environ 79° Ouverture : f/1.8 | FOV : environ 82° Ouverture : de f/2.8 à f/11 | Caméra thermique : FOV 32°, 14 mm FOV 34°, 6,3 mm (optionnel) |
| Plage ISO | Vidéo : ISO 100 ~ 3200 (Auto) Vidéo : ISO 100 ~ 3200 (Manuel) Photo : ISO | Vidéo : ISO 100 ~ 3200 (Auto) Vidéo : ISO 100 ~ 6400 (Manuel) | Modes Image dans l'image (PiP) et Lumière visible : ISO 100 ~ 3200 (Auto) 100 - 3200 |
| 100 ~ 3200 (Auto) Photo : ISO 100 ~ 3200 (Manuel) | Photo : ISO 100 ~ 3200 (Auto) Photo : ISO 100 ~ 12800 (Manuel) | (Manuel) Infrarouge :N/A | |
| Vitesse d'obturation | Obturator électronique : 8 ~ 1/8000 s | Obturator électronique : 8 ~ 1/8000 s | Modes Image dans l'image (PiP) et Lumière visible : 8 ~ 1/8000 s |
| Zoom numérique | 1 ~ 8x (4x zoom max. sans perte) | 1 ~ 8x (3x zoom max. sans perte) | 1 ~ 8x (4x zoom max. sans perte en mode Lumière visible) |
| Résolution des images statiques | 8000 * 6000 (4:3) | 5472 * 3648 (3:2) | Mode Lumière visible : identique à l'EVO II |
| 7680 * 4320 (16:9) | 5472 * 3076 (16:9) | ||
| 4000 * 3000 (4:3) | 3840 * 2160 (16:9) | Mode infrarouge : 640 * 512 | |
| 3840 * 2160 (16:9) | |||
| Format des images fixes | JPEG/DNG/JPEG + DNG | JPEG/DNG/JPEG + DNG | Mode Lumière visible : identique à l'EVO II Modes infrarouge et Image dans l'image (PiP) : JPEG |
| Modes de photographie | Prise de vue unique Rafale : 3/5 images Bracketing d'exposition automatique (AEB) : 3/5 images en bracketing avec une différence de 0,7 EV Time Lapse : JPG : 2 s/5 s/7 s/10 s/20 s/30 s/60 s DNG : 5 s/7 s/10 s/20 s/30 s/60 s HyperLight : pris en charge (aux formats inférieurs au JPEG 4K) Exposition longue : Max. 8 s Imagerie HDR : prise en charge (aux formats inférieurs au JPEG 4K) | Prise de vue unique Rafale : 3/5 images Bracketing d'exposition automatique (AEB) : 3/5 images en bracketing avec une différence de 0,7 EV Time Lapse : JPG : 2 s/5 s/7 s/10 s/20 s/30 s/60 s DNG : 5 s/7 s/10 s/20 s/30 s/60 sHyperLight : pris en charge (aux formats inférieurs au JPEG 4K) Exposition longue : Max. 8 s Imagerie HDR : prise en charge (aux formats inférieurs au JPEG 4K) | Mode Lumière visible : identique à l'EVO II Modes infrarouge et Image dans l'image (PiP) : Prise de vue unique, Rafale, Time Lapse |
| Résolution videoo | 7680 * 4320 p25/p24 5760 * 3240 p30/p25/p24 3840 * 2160 p60/p50/p48/p30/p25/p24 2720 * 1528 p120/p60/p50/p48/p30/p25/p24 1920 * 1080 p120/p60/p50/p48/p30/p25/p24 | 5472 * 3076 p30/p25/p24 4800 * 2700 p60/p50/p48/p30/p25/p24 3840 * 2160 p60/p50/p48/p30/p25/p24 2720 * 1528 p120/p60/p50/p48/p30/p25/p24 1920 * 1080 p120/p60/p50/p48/p3 30/p25/p24 | Mode Lumière visible : identique à l'EVO II Mode infrarouge : 640 * 512 p60 (US) 640 * 512 p9 (autres régions) Mode Image dans l'image (PiP) : 1920 * 1080 p30, 1280 * 720 p30 |
| Format videoo | MOV/MP4 | MOV/MP4 | MOV/MP4 |
| Codec | H.264/H.265 | H.264/H.265 | H.264/H.265 |
| Vitesse de transmission videoo max. | 120 Mbps | 120 Mbps | 120 Mbps |
| Enregistrement videoo HDR | enregistrement videoo HDR 3840 * 2160, 2720 * 1528 et 1920 * 1080 pris en charge | enregistrement videoo HDR 3840 * 2160, 2720 * 1528 et 1920 * 1080 pris en charge | Mode Lumière visible : identique à l'EVO II |
| Capture PIV | pris en charge | pris en charge | pris en charge |
| Enregistrement Hyperlapse | pris en charge (prochainement) | pris en charge (prochainement) | pris en charge (prochainement) |
| Mode AE | Auto/Manuel/Priorité à la vitesse d'obturation | Auto/Manuel/Priorité à la vitesse d'obturation/Priorité IRIS | Mode Lumière visible : identique à l'EVO II |
| Mesure AE | Pondérée centrale/spot | Pondérée centrale/spot | Mode Lumière visible : identique à l'EVO II |
| Correction EV | ±3 EV, 0,3 EV/cran | ±3 EV, 0,3 EV/cran | Mode Lumière visible : identique à l'EVO II |
| Mode AWB | Auto/Manuel (Ensemble/Nuageux/Incandescent/Néon/Pe rsonnalise) | Auto/Manuel (Ensemble/Nuageux/Incandescent/Néon/Personnalise) | Mode Lumière visible : identique à l'EVO II |
| Mode AF | Auto/Manuel | Auto/Manuel | Mode Lumièrevisible : identique àI'EVO II |
| Plage AF | 0,5 m ~ Infini | 1 m ~ Infini | Mode Lumièrevisible : identique àI'EVO II |
| Assistance de mise au point | prise en charge en mode MF | prise en charge en mode MF | Mode Lumièrevisible : identique àI'EVO II |
| AE/AF au toucher | pris en charge | pris en charge | Mode Lumièrevisible : identique àI'EVO II |
| Verrouillage AE/AF | pris en charge | pris en charge | Mode Lumièrevisible : identique àI'EVO II |
| Mode couleur | Aucun/Noir et blanc/Rétro/Log (10 bits) | Aucun/Noir et blanc/Rétro/Log (10 bits) | Mode Lumièrevisible : identique àI'EVO II |
| Style de l'image | Standard/Neutre/Paysage/Personnalisé | Standard/Neutre/Paysage/Personnalisé | Mode Lumièrevisible : identique àI'EVO II |
| Histogramme | pris en charge | pris en charge | Mode Lumièrevisible : identique àI'EVO II |
| Désembuage | pris en charge | pris en charge | Mode Lumièrevisible : identique àI'EVO II |
| ROI | pris en charge | pris en charge | Mode Lumièrevisible : identique àI'EVO II |
| Caractéristiques de la nacelle | |
| Poids | 70 g (EVO II) 107 g (EVO II Pro) 100 g (EVO II Dual 320) 135 g (EVO II Dual 640) |
| Plage mécanique | Tangage : -135 ~ 45°, roulis : -45 ~ 45°, lacet : ± 100° |
| Plage contrôleable | Tangage : -90 ~ 30°, roulis : /, lacet : -90 ~ 90° |
| Stabilisation | 3 axes (tangage, roulis, panoramicque) |
| Vitesse de contrôle max. (tangage) | 200°/s |
| Plage de vibration angulaire | ± 0,003° @ 10 m/s ± 0,008° @ 15 m/s ± 0,013° @ 20 m/s |
| Caractéristiques de la batterie de l'appareil | |
| Capacité | 7 100 mAh |
| Tension | 11,55 V |
| Tension de charge max. | 13,2 V |
| Type de batterie | LiPo 3S |
| Énergie | 82 Wh |
| Poids net | 365 g |
| Plage de températures de charge | de 5 °C à 40 °C |
| Puisance de charge max. | 82 W |
| Caractéristiques de la radiocommande | |
| Fréquence de fonctionnement | 2,4 ~ 2,4835 Ghz |
| Distance de transmission max(sans obstructions niinterférences) | FCC : 9 kmCE : 5 km |
| Plage de températures defonctionnement | de -10 °C à 40 °C |
| Puisance de transmission(PIRE) | 2,4 ~ 2,4835 GHzFCC : ≤26 dBmISDE : ≤26 dBmCE : ≤20 dBmRCM : ≤20 dBmSRRC : ≤20 dBm |
| Batterie | 5000 mAh |
| Poids | 370 g |
| Courant/tension defonctionnement | 1,7 A@3,7 V |
| Plage de températures de | de 0 à 40 °C |
| charge | |
| Taille d'appareil mobile prise en charge | Longueur max. : 84 mm ; épaisseur max. : 13 mm |
| Heures de fonctionnement | 3 H |
| NITS OLED | 330 |
| Caracteristique du chargeur | |
| Entrée | 100 - 240 V, 50/60 Hz, 1,5 A |
| Sortie | Principale : 13,2 V = 5 A USB : 5 V=3 A 9 V=2 A 12 V=1,5 A |
| Tension | 13,2 ± 0,1 V |
| Puisance nominale | 66 W |