
MEC 20 - Contrôleur électrique THOMSON - Notice d'utilisation et mode d'emploi gratuit
Retrouvez gratuitement la notice de l'appareil MEC 20 THOMSON au format PDF.
| Type de produit | Contrôleur à microprocesseur pour groupe électrogène |
| Marque / Modèle | THOMSON / MEC 20 |
| Alimentation | 10 à 30 V c.c., masse négative, consommation 5 W max |
| Dimensions (L x H x P) | 10,75 po x 6,75 po x 2,0 po (273 mm x 171 mm x 51 mm) |
| Température de fonctionnement | -15 °C à +50 °C (option écran fluorescent : -40 °C à +70 °C) |
| Température d'entreposage | -20 °C à +70 °C |
| Humidité | 5 % à 95 %, sans condensation |
| Indice de protection (plaque frontale) | NEMA 12 |
| Entrées de tension c.a. | 120 à 600 V c.a. nominaux, triphasé, 50/60 Hz, 0,1 VA |
| Entrées de courant c.a. | 0 à 5 A c.a. nominaux, via transformateurs de courant, 1,5 VA |
| Entrée de détection de vitesse | Capteur magnétique, 100 à 10 000 Hz, 3,0 à 20 V c.a. RMS |
| Entrées de contacts numériques | 12 entrées programmables, contact sec (ouvert ou fermé au c.c. négatif) |
| Sorties de série | Marche (forme A), Démarrage (forme A), Panne commune (forme C) – 10 A/240 V c.a. résistif, 8 A/24 V c.c. |
| Sorties programmables | 4 contacts de forme C (jusqu'à 6 avec module d'expansion) |
| Affichage | Écran LCD rétroéclairé alphanumérique, 2 lignes |
| Communication à distance | Port RS422 (option module de transmission Modbus) |
| Circuits de détection de défauts | Jusqu'à 28 circuits (internes, numériques, analogiques) avec alarme ou arrêt |
| Protection contre les surtensions | Conforme IEEE C62-41 |
| Fonctions principales | Commande auto/manuelle, affichage des paramètres (V, A, Hz, kW, etc.), programmation par code d'accès, historique des défauts |
| Entretien et nettoyage | Nettoyer la plaque frontale avec un chiffon doux et sec. Débrancher l'alimentation avant toute intervention interne. |
| Sécurité | Fusible électronique autoréarmable. Installation par personnel qualifié uniquement. Respecter les précautions antistatiques. |
| Pièces détachées / Réparabilité | Pièces détachées disponibles chez Thomson Technology. Réparation par centre agréé. |
FOIRE AUX QUESTIONS - MEC 20 THOMSON
Questions des utilisateurs sur MEC 20 THOMSON
0 question sur cet appareil. Repondez a celles que vous connaissez ou posez la votre.
Poser une nouvelle question sur cet appareil
Téléchargez la notice de votre Contrôleur électrique au format PDF gratuitement ! Retrouvez votre notice MEC 20 - THOMSON et reprennez votre appareil électronique en main. Sur cette page sont publiés tous les documents nécessaires à l'utilisation de votre appareil MEC 20 de la marque THOMSON.
MODE D'EMPLOI MEC 20 THOMSON
Contrôleur à microprocesseur pour GROUPE électrogène
(AVEC OPTIONS DE DISPOSITIF DE COMMUNICATION À DISTANCE, DE MODULE DE)
SORTIE D'EXPANSION ET D'ANNONCIATEUR À DISTANCE EAP110)
Version logicielle 1.82
TABLE des matières
1.1. HISTORIQUE DE RÉVISION DU PRODUIT 1 1.2. DESCRIPTION GÉNÉRALE 4
2.1. RENSEIGNEMENTS GENERAUX 6 2.2. ENTRÉE D'ALIMENTATION DE BATTERIE 6 2.3. ENTRÉE DE DÉTECTION DE VITESSE 7 2.4. ENTRÉES DE TENSION C. C. 7 2.5. ENTRÉE DE TENSION C. A. 8 2.6. ENTRÉE DE C. A. 9 2.7. SORTIES 9 2.8. CÂBLAGE DU PANNEAU DE CONTROLE EXTERNE 10 2.9. CÂBLAGE SUR LE TERRAIN DES CONTACTS DE MISE EN MARCHÉ À DISTANCE 10 2.10. CÁBLAGE DE COMMUNICATION À DISTANCE 11 2.11. EMPLACEMENT ET INSTALLATION DU MODULE DE SORTIE D'EXPANSION 11 2.12. EMPLACEMENT ET INSTALLATION DU MEC 20 12 2.13. DIMENSIONS DE MONTAGE DE LA PLAQUE FRONTALE 14 2.14. ASSEMBLAGE DU MEC 20 - VUE LATERALE 15 2.15. ESSAI DIELECTRIQUE 16
3. DESCRIPTION 17
3.1. PLAQUE FRONTALE LEXAN 17 3.2. PLAQUETTE DE CIRCUITS IMPRIMÉS 19
4. DESCRIPTION DES CIRCUITS DE DETECTION DE DÉFAILLANCE 21
4.1. SCHEMA FONCTIONNEL DU MEC 20 22 4.2. CIRCUITS DE DETECTION DE DÉFAILLANCE INTERNES 23 4.3. CIRCUITS DE DETECTION DE DÉFAILLANCE D'ENTRÉE NUMÉRIQUE 24 4.4. CIRCUIT DE DETECTION DE DÉFAILLANCE D'ENTRÉE ANALOGIQUE 27
5. DESCRIPTION DES CONTACTS DE SORTIE DE CONTROLE 33
5.1. CONTACTS DE SORTIE, DE MARCHE, DE DEMARRAGE ET DE PANNE COMMUNE 33 5.2. CONTACTS DE SORTIES PROGRAMMABLES 34
- OPTION DE DISPOSITIF DE COMMUNICATION À DISTANCE 39
- OPTION DE MODULE DE SORTIE D'EXPANSION 43
- OPTION D'ANNONCIATEUR À DISTANCE EAP 110 46
- DIRECTIVES DE FONCTIONNEMENT 47
9.1. PROCEDURE DE MISE SOUS TENSION DU MEC 20 47 9.2. MENUS D'AFFICHAGE DU MEC 20 47 9.3. SUITE DES OPÉRATIONS 55 9.4. BOUTONS-POUSSOIRS DE CONTROLLE 62
10. Directives de programmation 64
10.1. CODESD'ACCES 64 10.2. OPÉRATIONS DE PROGRAMMATION DE BASE 66 10.3. MENU DE PROGRAMMATION PRINCIPAL 67 10.4. MENU DE PROGRAMMATION DES DÉFAILLANCES ANALOGIQUES 76 10.5. MENU DE PROGRAMMATION DES DÉFAILLANCES NUMÉRIQUES 77 10.6MENU D'ETALONNAGE 81
11. Feuilles de programmation 93
11.1. RÉSUMÉ DES DONNÉES DE CONFIGURATION 93 11.2. CONFIGURATION PRINCIPALE 94 11.3. MENU DE PROGRAMMATION DES DÉFAILLANCES ANALOGIQUES 99 11.4. MENU DE PROGRAMMATION DES DÉFAILLANCES NUMÉRIQUES 100 11.5. MENU D'ÉTALONNAGE 101
12. Specifications 103
- DIAGRAMME DE CONNEXION 105
- GUIDE DE DÉPANNAGE 106
- NOTES 109
1.1. Historique de révision du produit
Vous trouverez ci-dessous un résumé des modifications apportées au produit depuis sa version originale.
Versions du logiciel
| 1.82 05/03/30 | Révision de la logique de commande de ralenti pour les entrées numériques n° 1 et 2. Augmentation de la limite supérieure de l'arrêt analogique haute température. |
| 1.81 03/03/04 | Changement du fabricant de capteur de pression d'huile nécessitant la révision des données de calibration sur la résistance à la pression. Nouveau capteur de pression d'huile Thomson, n° de pièce 003654, Fabricant - Datcon, n° de pièce 102227 Capteur de pression d'huile Thomson suspendu, n° de pièce 000772, Fabricant - Isspro, n° de pièce R9279C Remarque: Les capteurs de pression d'huile ne sont pas interchangeables avec les versions des logiciels. |
| 1.8 02/09/09 | Ajout de la caractéristique de sortie programmable « Charge d'alimentation EPS » Ajout de la caractéristique d'entrée numérique « Essai à vide » Ajout de nouveaux noms de défaillance numérique Rupture du bassin Commutateur de transfert en dérivation Fuite d'essence Défaillance du régulateur d'aération Niveau d'essence élevé Basse pression d'essence Défaillance du chargeur de batterie Défaillance de synchronisation Température élevée du collecteur d'admission Ajout de caractéristiques de programmation indépendantes pour les sorties PSA Ajout de références pour l'annonciateur à distance EAP 110 Modifications diverses de l'affichage et du menu |
| 1.7 02/02/15 | Principales modifications apportées: • Logique de panne de secteur automatique avec nouvelles minuteries, nouvelles sorties de contrôle et nouvelles caractéristiques d'affichage. • Affichage de la tension c.a. entre ligne et neutre sur les systèmes triphasés à quatre câbles (connexion neutre exigée). • Fonction d'arrêt analogique sur les capteurs de pression d'huile et de température. • Fonctionnement de la pression d'huile allant maintainant jusqu'à 150 lb/po2(allait jusqu'à 100 lb/po2apuravant). • Étalonnage ponctuel pour les entrées de capteur de pression d'huile et de température du moteur (un étalonnage sur le terrain simplifié est maintainant obligatoire). • Fonctions de sortie calculable permettant maintainant le mappage de chaque circuit de détention de défaillance disponible. • Ajout des nouvelles caractéristiques de sortie calculable « Moteur prét » et « Alimentation du moteur (essence) ». Des modifications mineures ont également été apportées et sont indiquées dans le manuel. |
| 1.6 01/07/18 | Ajout d'une sortie calculable « Préts pour charge » et de nouvelles courbes de capteur de pression d'huile Isspro; amélioration des fonctions de détention de défaillances numériques et analogiques. |
| 1.5 00/09/20 | Ajout de l'options de mesure en kVA. |
| 1.4 99/12/09 | Ajout de nouvellesétiquettes pour les défaillances numériques et de fonctions calculables. |
| 1.3 98/02/09 | Nouvelle version avec fonctions de communication, fonction de module de relais d'expansion, suppression des fonctions de programmation d'alarmes, d'arrêt du refroidissement et de panne commune ainsi que révision du mot de passer. |
| 1.2 97/06/04 | Version originale. |
Versions du manuel de fonctionnement et d'entretien
| Rev 13 05/03/30 | Ajout de renseignements descriptifs sur la nouvelle version 1.82 du logiciel. |
| Rev 12 03/03/04 | Changement des données sur l'étalonnage de la pression d'huile et de la résistance et nouvelle version 1.81 du logiciel. |
| Rév. 11 02/09/09 | Ajout de renseignements descriptifs pour la nouvelle version 1.8 du logiciel |
| Rév. 10 02/02/15 | Ajout de renseignements descriptifs pour la nouvelle version 1.7 du logiciel |
| Rév. 9 01/10/17 | Précision des défaillances exigées pour les normes C282 ou NFPA 110. |
| Rév. 8 01/07/18 | Ajout de précautions antistatiques; remplacement des cavaliers d'étalonnage par des résistances d'étalonnage externes ou des potentiomètres; augmentation du nombre de circuits de détention de défaillances de série de 12 à 28; modification du statut « Prét » par le statut « Prét pour charge »; modification des températures et des pressions d'étalonnage; accroissement de la gamme de températures. |
| Rév. 7 00/12/01 | Modification mineure du texte. |
| Rév. 6 00/10/06 | Ajout de l'option de mesure en kVA. |
| Rév. 5 00/04/06 | Modification des étiquettes de défaillances numériques. |
| Rév. 4 99/02/01 | Modification relative au câblage du dispositif de communication à distance, modification du nombre de contrôleurs pouvant être connectés de 5 à 10. |
| Rév. 3 98/05/08 | Correction d'erreurs mineures. |
| Rév. 2 98/02/18 | Nouvelle version avec fonctions de communication, fonction de |
| module de relat d'expansion et révision du mot de passer. | |
| Rév. 1 98/01/22 | Correction d'erreurs mineures. |
| Rev 0 97/06/04 | Version originale. |
Communique avec Thomson Technology pour obtenir les manuels applicables. Une version électronique de la version la plus à jour du manuel est offerte sur le site www.thomsontechnology.com.
1.2. Description générale
Le contrôleur à microprocesseur pour groupe électrogène MEC 20 de Thomson Technology utilise la toute dernière technologie en matière de conception de microprocesseurs afin d'assurer le contrôle et la surveillance de groupes électrogènes. Le MEC 20 offre une gamme polyvalente de caractéristiques de fonctionnement, de protection et d'affichage pour le contrôle automatique d'un groupe électrogène. Toutes les caractéristiques de série et en option du MEC 20 peuvent être entièrement configurées à partir du dispositif d'affichage à cristaux liquides du panneau avant et sont protégées par un code d'accès. Les messages du dispositif d'affichage à cristaux liquides sont en anglais simple et ils font partie d'une interface facile à utiliser, laquelle comprend de nombreuses options d'affichage. La conception du microprocesseur permet d'obtenir une exactitude élevée dans le cadre de la surveillance de la tension et du courant, de même que pour les fonctions de minutage. Le microprocesseur comprend également de nombreuses caractéristiques de série qui étaient auparavant offertes uniquement sous forme d'options dispendieuses.
Le MEC 20 comprend les caractéristiques de pointe suivantes :
- jusqu'à 28 circuits d'alarme et d'arrêt en cas de défaillance utilisant des entrées analogiques et numériques.
- Modèle de série conforme ou supérieur aux exigences de la norme C282 de la CSA et de la norme 110 de niveau 1 de la NFPA, en matière de contrôle de groupes électrogènes.
- Port de communication à distance RS 422.
- Module de sortie d'expansion (port de communication) permettant l'utilisation de contacts de défaillance individualisés.
- Écran d'affichage à cristaux liquides éclairé par l'arête avec indicateur alphanumeric pour l'affichage et la programmation.
- Affichage numérique triphasé des tensions, des kilovoltampères, des courants et de la fréquence à la sortie du générateur.
- Mémoire permanente enregistrant les données et points de consigne en cas de panne de l'alimentation de contrôle.
- Entrées de détection de tension triphasée pour l'alimentation du générateur, de 120 V. c. a. à 600 V. c. a. (nominal).
- Niveau de programmation protégés par un code d'accès. Dispositifs d'autodiagnostic vérifient continuellement le fonctionnement, les entrées/sorties ainsi que les circuits de mémoire.
- Excellente immunité aux bruits de brouillage électromagnétique et radioélectrique et dispositif de contrôle de la surtension, conformément aux exigences de la norme C62-41 de l'IEEE.
- Conception à double microprocesseur avec circuits de détection de vitesse indépendants offrant un meilleur rendement.

Ce matériel contient des pièces sensibles à la statique. Veuillez respecter les précautions antistatiques indiquées ci-après chaque fois que vous manipulez ce matériel. Tout manquement à ces précautions peut entraîner des défauts ou endommager le matériel.
- Décharger la charge électrostatique du corps avant de manipuler le matériel (contacter une surface mise à la terre et maintenir le contact pendant la manipulation du matériel; un bracelet antistatique mis à la terre devrait également être utilisé).
- Ne pas toucher aux composants de la plaquette de circuits imprimés avec les mains ou avec tout autre matériel conducteur.
- Ne pas placer le matériel sur des matières telles que le styromousse, le plastique et le vinyle ou près de ces matières. Placer le matériel sur des surfaces mises à la terre et utiliser un sac antistatique seulement pour le transporter.
Remarque:
L'installation doit être effectuée conformément à tous les codes de réglementation électrique applicables.
Les directives d'installation suivantes constituent des renseignements généraux se rapportant à des exemples d'installation typiques. Pour obtenir des renseignements sur des sites d'installation spécifiques, consulter Thomson Technology au besoin. Remarque : L'installation en usine de panneaux de contrôle THOMSON TECHNOLOGY ayant subi des essais et ayant été écrouvés peut différer de ces recommandations.
Avertissement
L'installation et (ou) l'entretien doivent être effectués uniquement par du personnel qualifié. Tout manquement à ces directives peut provoquer des blessures ou la mort.
2.2. Entrée d'alimentation de batterie
Le MEC 20 peut être alimenté par n'importe quelle batterie de 10 V. c. c. à 30 V. c. c. Le conducteur négatif ou commun à c. c. de la batterie doit être connecté à la masse principale du groupe électrogène. Le MEC 20 est protégé intérieurement par un fusible à semi-conducteur qui offre une protection contre les courts-circuits imprévus des bornes de sortie. Le fusible à semi-conducteur se réenclenche automatiquement lorsque la condition de surintensité disparait. Le câblage reliant la batterie de démarrage du moteur au panneau de contrôle doit être conforme aux directives suivantes afin d'éviter toute défaillance et (ou) tout bris du contrôleur.
2.2.1 Ne pas câbler à partir des bornes du démarreur. Le câblage doit partir des bornes de la batterie et être relié directement au panneau de contrôle du moteur, afin d'éviter les chutes de tension dans les câbles du démarreur et les bruits du collecteur du démarreur. Remarque: Les panneaux de contrôle montés sur unité dotés de câblage court peuvent être connectés aux bornes du démarreur, pourvu que l'application spécifique réussisse un essai.
Avertissement
Le chargeur de la batterie doit être arrêté avant que les cables de la batterie en soient reliés (p. ex. pour l'entretien). Tout manquement à ces directives peut soumettre le panneau de contrôle à une surtension qui pourrait l'endommager.
2.2.2 Le câblage reliant la batterie au panneau de contrôle du moteur doit être constitué de deux câbles de calibre 14 AWG (2,5mm^2). Par exemple, éviter d'utiliser le bloc moteur comme conducteur commun. 2.2.3 Dans les environnements bruyants, tels que ceux des moteurs au gaz avec allumage à haute tension, le câblage de la batterie doit être effectué avec un câble à paire torsadée de calibre 14 AWG (2,5mm^2)
2.3. Entrée de détection de vitesse
Le câblage sur le terrain des câbles du signal de détection de vitesse doit être conforme aux directives suivantes afin d'éviter toute défaillance et (ou) tout bris du contrôleur.
2.3.1. On doit utiliser une paire torsadée/blindée à deux conducteurs pour le câblage du capteur magnétique. Le blindage doit être connecté uniquement à l'extrémité du panneau de contrôle. 2.3.2. La tension du capteur magnétique doit être supérieure à 3 V. c. a. à vitesse de démarrage et elle doit se situer entre 3 V. c. a. et 5 V. c. a. à vitesse nominale. 2.3.3. On commande d'utiliser un capteur magnétique exclusivement pour la connexion aux bornes d'entrée de détection de vitesse. Remarque: On peut utiliser un capteur magnétique commun pour le système, pourvu que des essais soient effectués avec le matériel en place. Par exemple, les niveaux de tension du capteur magnétique doivent correspondre aux niveaux requis.
2.4. Entrées detension c. c.
Toutes les entrées de tension c. c. reliées au MEC 20 sont optiquement isolées et filtrées de façon à être protégées des impulsions parasites. Le câblage d'entrée transitoire doit être acheminé de manière à être à l'écart des circuits électriques « bruyants », comme les câbles d'allumage ou de démarrage ou les principaux conducteurs de courant c. a. Tous les contacts doivent être secs et une extrémité du câble doit être connectée au conducteur négatif commun à c. c.
2.5. ENTREE De tension c. a.
Le MEC 20 accepte les entrées de tension c. a. entre 120 V. c. a. et 600 V. c. a. (nominal). Remarque: Les circuits de détection de tension d'entrée directs ne peuvent être employés que lorsque le générateur utilise un système de distribution monophasé à trois câbles ou un système de distribution triphasé à quatre câbles muni d'un conducteur neutre solidement mis à la terre. Pour les systèmes triphasés à trois câbles ou pour les systèmes à tension élevée, utiliser des transformateurs de potentiel. Consulter les FIGURES 1 à 4 pour obtenir de plus amples renseignements sur les connexions des circuits de détection de tension. Pour pouvoir afficher la tension entre ligne et neutre du générateur dans un système triphasé à quatre câbles, le neutre doit être connecté tel qu'illustré ci-dessous.
MEC 20
ENTRÉES DE TENSION
MEC 20
SYSTEME 208/380/480/680 V. C. A., 3, 0, 4 F AVEC NEUTRE SOLIDAMENT MSA LA TERRREET RACCORD DIRECT,
SYSTÉME 208/380/480/680 V. C. A., 3, 0, 4 F AVEC NEUTR E SOLIDEMENT MISE A LA TERRREET RACCORD DIRECT,
FIGURE 1
MEC 20 TENSION DU TR SECONDAIRE
FIGURE 3
3TPENY,30,4F
MEC 20
FIGURE 4 TP MONTE EN TRIANGLE, 3 Ø, 3 F G: ENGINEER\PRODUCTS\MEC20\MEC20_08. VSD REV.1 98/01/08
TENSION DU TP
SECONDAIRE
120. C. A L-L (PAS DE NEUTRE)
2.6. Entrée de ca
On doit utiliser des transformateurs de courant pour alimenter les entrées de courant du MEC 20. La polarité des transformateurs de courant n'est pas indispensable au fonctionnement des circuits. Remarque: Les conducteurs communs secondaires du transformateur de courant doivent être mis à la terre à l'extérieur afin de fonctionner correctement. Les transformateurs de courant doivent posséder une capacité d'au moins 1,5 VA à la précision requise.
Avertissement
Lors de l'installation ou de l'entretien des circuits des transformateurs de courant, toujours mettez le système hors tension avant de procéder aux travaux. Ne jamais ouvrir les circuits d'un transformateur de courant sous tension, sous risque d'être soumis à des tensions extrêmement élevées qui pourraient provoquer des blessures graves ou la mort.
2.7. Sorties
Toutes les sorties du MEC 20 proviennent de contacts de relais. Ils possèdent une capacité (charge résistive) de 10 A à 240 V c.a. (3 A à 0,4 pF inductif) et un calibre de 8 A à 24 V c.c. Ils sont isolés, de forme A et C. Il est recommandé d'installer des relais d'interposition entre les sorties du MEC 20 et les dispositifs externes afin de prévenir les dommages internes causés par les surtensions de courant excessives et (ou) les dommages en cas de défaillance externe. Remarque: Ces sorties requièrent une protection contre les conditions de surintensité extérieures (10 A maximum).
L'utilisation de solénoïdes à c. a. ou à c. c. ou l'utilisation de relais dans les systèmes de contrôle peut parfois causer des pointes de tension élevée dans l'alimentation en c. c., provoquant ainsi la défaillance des dispositifs électroniques. Il est recommandé d'utiliser des limiteurs de surtensions pour tous les appareils inductifs qui partagent le même câblage ou qui sont situés à proximité des panneaux de contrôle du groupe électrogène. Utiliser une diode à force contre-électromotrice de calibre convenable pour les relais ou les solénoïdes à c. c. Utiliser un varistor à oxyde de métal ou un suppresseur à capacité-resistance de calibre convenable pour les relais ou les solénoïdes à c. a.
2.8. Câblage du panneau de controlle externe
Le câblage du panneau de contrôle doit au minimum être conforme à la réglementation locale en matière d'installations électriques. Voici le calibre des câbles spécifique requis pour des circuits typiques (distance d'au plus 30 m (100 pi)) :
2.8.1 Alimentation de contrôle de la batterie Calibre 14 AWG (2,5mm^2) 2.8.2 Contacts d'alarme et d'arrêt du moteur Calibre 16 AWG (1,5mm^2) 2.8.3 Contact de mise en marche à distance pour le commutateur de transfert Calibre 14 AWG (2,5mm^2) 2.8.4 Câblage de la sortie de démarrage et de préchauffage Calibre 14 AWG (2,5 mm²) (Jusqu'au relais du pilote) 2.8.5 Câblage de détention de vitesse calibre 16 AWG (1,5 mm²) Câble blindré à deux
Conducteurs
2.8.6 Entrées de mesure de tension Calibre 16 AWG (1,5mm^2) 2.8.7 Entrées de mesure de courant (à partir Calibre 14 AWG (2,5mm^2) des transformateurs de courant)
• Communiquer avec THOMSON TECHNOLOGY pour les distances supérieures à 30 m (100 pi). 2. Il est possible de diminuer la taille des câbles d'un échelon pour les panneaux de contrôle montés sur une unité.
2.9. Câblage sur le terrain des contacts de mise en marche à distance
Le câblage sur le terrain reliant un contact de mise en marche à distance, d'un commutateur de transfert au panneau de contrôle, doit être effectué conformément aux directives suivantes afin d'éviter toute défaillance et (ou) bris du contrôleur.
2.9.1 Les câbles du contact de mise en marche à distance (2 câbles de calibre 14 AWG (2,5mm^2)) doivent passer par un conduit séparé. 2.9.2 Éviter de faire passer le câblage près de câbles de puissance c. a. afin de prévenir le captage de tensions induites. 2.9.3 Il peut être nécessaire d'inverser un relais d'interposition si la distance de câblage sur le terrain est trop importante (p. ex.: supérieure à 30 m (100 pi) et (ou) si le contact à distance possède une résistance de plus de 5,0 ohms. 2.9.4 Le contact de mise en marche à distance ne doit composer aucune tension (contact sec). L'utilisation d'un contact important une tension endommage le contrôleur.
2.10. Câblage de communication à distance
Le câblage d'interconnexion entre le contrôleur à microprocesseur pour groupe électrogène MEC 20 et le port de communication doit être effectué avec une paire torsadée blindée à 8 conducteurs d'un calibre minimum de 22 AWG et avec des connecteurs RJ45. Le blindage ne doit être raccordé que du côté du contrôleur MEC 20. Consulter le Section 6 de ce manuel pour obtenir de plus amples renseignements à ce sujet.
On doit acheminer adéquatement le câblage de communication du port du contrôleur de manière à le protégger contre les sources d'interférence électrique. Voici les directives de protection contre les interférences électromagnétiques :
Utiliser un câble blindé à 8 conducteurs d'excellente qualité et connecter le blindage à la masse au contrôle seulement. - Acheminer le câble de communication à au moins 3 m (10 pi) de toute source de bruits électriques, comme les entraînements de moteur à vitesse variable, les conducteurs à alimentation haute tension, les systèmes d'alimentation sans coupure, les transformateurs, les redresseurs, etc. - Utiliser des courses de conduits distinctes et spécialisées pour tous les câbles de communication. Ne pas mettre les câbles en faisceau serré à l'intérieur du conduit. Les conduits doivent être de type ferromagnétique lorsqu'ils passent près de sources éventuelles d'interférences électriques. Les conduits doivent être mis à la terre sur toute leur longueur. - Lorsque les câbles de communication croisent des conducteurs c. a. à tension basse ou élevée, ils doivent le faire à angle droit, et non en parallèle.
Pour obtenir de plus amples renseignements sur la protection contre les interférences électriques, veuillez communiquer avec THOMSON TECHNOLOGY.
2.11. Emplacement et installation du MODULE de SORTIE d'expansion
Les modules d'expansion doivent être montés à l'intérieur d'un panneau de contrôle à l'aide des vis et des dispositifs d'espacement fournis. Le module d'expansion doit être installé à une distance de câblage d'au plus 300 m (1000 pi) du MEC 20 à l'aide de l'un des câbles blindés à 8 conducteurs fournis avec le module. Les câbles de communication ne doivent pas être mis en faisceau avec les autres câbles de contrôle à
l'intérieur du panneau. Les dimensions de montage du module de sortie d'expansion sont illustrées à la FIGURE 5.
FIGURE 5 : DIMENSIONS DE MONTAGE DU MODULE D'EXPANSION DU MEC 20
G: \ENGINEER\PRODUCTSMEC20\MEC20_14. VSD ÉCHELLE: 75:1
2.12. Emplacement et installation du MEC 20
Le contrôle à microprocesseur pour groupe électrogène MEC 20 est conçu pour être monté directement sur une porte de panneau de contrôle. Porter une attention particulière aux points suivants :
- Le contrôle doit être installé dans un endroit propre et sec, à l'abri de toute source de chaleur extréme.
- Le fenêtre du dispositif d'affichage à cristaux liquides doit être installée à la hauteur convenant le mieux à la lecture.
- Il faut laisser suffisamment d'espace pour les câbles de contrôle à l'arrêté de la plaquette de circuits du MEC 20.
- S'assurer que l'entrée de tension c.a. prévue pour le contrôleur n'excède pas le niveau maximum admissible inscrit sur la porte du panneau de contrôle, conformément aux normes d'homologation du panneau de contrôle applicables.
Le MEC 20 peut être installé sur une porte de panneau de contrôle selon l'une des méthodes suivantes :
- La première méthode nécessite un découverts spécial de la porte pour l'écran d'affichage à cristaux liquides et les diodes électroluminescentes (DEL), comme l'illustré la FIGURE 6. Dans cette méthode de montage, on monte la plaque frontale Lexan directement sur la porte du panneau de contrôle. Il faut démonter le contrôleur afin de monter la plaque sur la porte, puis ensuite le remonter. Consulter la FIGURE 7 pour connaître les emplacements d'assemblage de toutes les pièces.
- La seconde méthode de montage du contrôleur nécessite un adaptateur pour plaque frontale usiné, comme l'illustré la FIGURE 8. Cette méthode nécessite uniquement le découverts d'un grand trou rectangulaire dans la porte, comme l'illustré la FIGURE 9.
2.13. Dimensions de montage de la PLAQUE frontale
FIGURE 6
2.14. Assemblage du MEC 20 - VUE laterale

- S'assurer que toutes les rondelles de sécurité sont installées comme l'illustrent la figure ci-dessus.
- La cloison en Mylar contre les tensions élevées (n° de pièce : TMW;10805;1) doit être installée comme l'illustré la figure ci-dessus lorsque le MEC 20 est fixé à la porte du panneau de contrôle.
- Pour installer le MEC 20 sur une porte sans goujons PEM de 1 po, utiliser des vis à métaux de 1 po.
FIGURE 8 PLAQUE FRONTALE DE L'ADAPTATEURE
FIGURE 9 DÉCOUPAGE DE PORTE POUR PLAQUE FRONTALE DE L'ADAPTATEUR
Ne jamais effectuer d'essai diélectrique à tension élevée sur le panneau de contrôle lorsque le MEC 20 est connecté dans le circuit, car le contrôleur pourrait être gravement endommagé. Tous les fusibles à c. a. connectés au MEC 20 doivent être retirés.
préalablement à la conduite d'un essai diélectrique à tension élevée sur le panneau de contrôle.
3. Description
Le contrôleur MEC 20 est constitué de trois parties : une plaque frontale Lexan montée à l'extérieur de la porte d'accès, une plaquette de circuits imprimés (PCI) montée à l'intérieur de la porte d'accès et un couvercle arrêté pour la PCI.
3.1. PLAQUE frontale LEXAN
La plaque frontale Lexan est illustrée à la FIGURE 10. Les boutons-poussoirs Lexan sont connectés à la PCI principale par l'entremise d'un câble à rubans enchâssable. Les principales caractéristiques de la plaque frontale Lexan sont décrites ci-dessous, selon la FIGURE 10.
Fenêtre de l'affichage à cristaux liquides (ACL): L'ACL est monté sur la PCI principale et il est visible à travers la fenêtre de la plaque frontale Lexan. Bouton-poussoir « PRÉCÉDENT/SORTIE » (« PREVIOUS/EXIT »): La fonction PRÉCÉDENT permet de faire défiler vers l'arrête le menu d'état ou les
messages de programmation. La fonction SORTIE permet de sortir du menu de programmation. Pour ce faire, appuyer sur le bouton pendant environ 2 secondes lorsqu'on est en mode de programmation.
Bouton-poussoir « DÉCRÉMENTSER » (« DÉCRÉMENT »): La fonction DÉCRÉMENTSER permet de changer une valeur de programmation lorsqu'on est en mode de programmation. On peut décrémenter la valeur affichée jusqu'à la valeur désirée en appuyant sur ce bouton-poussoir. Remarque: Plus on appuie sur le bouton-poussoir longtemps, plus la valeur est décrémentée rapidement. ④ Bouton-poussoir « INCRÉMENTSER » (« INCRIMENT »): La fonction INCRÉMENTSER permet de changer une valeur de programmation lorsqu'on est en mode de programmation, ou de désirir la boucle du menu de programmation désirée. On peut incrémenter la valeur affichée jusqu'à la valeur désirée en appuyant sur ce bouton-poussoir. Remarque: Plus on appuie sur le bouton-poussoir longtemps, plus la valeur est incrémentée rapidement. ⑤ Bouton-poussoir « ENTRÉE » (« ENTER »): La fonction ENTRÉE permet de faire défiler vers l'avant les menus d'objet ou les messages de programmation. La fonction ENTRÉE permet d'entrer un mode de programmation, de même que d'accepter des valeurs de programmation modifiées. Remarque: Lorsqu'on est en mode de programmation, plus on appuie sur le bouton-poussoir « ENTRÉE » longtemps, plus les messages du menu défilent rapidement. Bouton-poussoir « MARCHE » (« RUN ») et voyant à diode électroluminescente (DEL): La fonction MARCHE permet de donner un signal de départ manuel Bouton-poussoir « ARRÉT » (« OFF ») et voyant à DEL : La fonction ARRÉT permet de donner un signal d'arrêt Bouton-poussoir « AUTOMATIQUE » (« AUTO ») et voyant à DEL : La fonction AUTOMATIQUE permet de commander le fonctionnement automatique du groupe électrogène. Consulter les directives d'utilisation afin d'obtenir de plus amples renseignements à ce sujet. Bouton-poussoir ESSAI DE CHARGE (« LOAD TEST ») et voyant à DEL : La fonction ESSAI DE CHARGE permet de commander un essai de charge au groupe électrogène, lorsqu'il est connecté à un commutateur de transfert correspondant. Consulter les directives d'utilisation afin d'obtenir de plus amples renseignements à ce sujet.
Bouton-poussoir « ARRÊT D'URGENCE » (« EMERGENCY STOP ») et voirant à DEL : La fonction ARRÊT D'URGENCE permet de donner un signal d'arrêt d'urgence Voyant à DEL « PRÊT » (« READY ») : Le voyant à DEL PRÊT s'allume lorsque le groupe électrogène est prêt à fonctionner en mode automatique et qu'aucun arrêt ou alarme de détection de défaillance n'est activé. Voyant à DEL « SIGNAL DE VITESSE » (« SPEED SIGNAL ») : Le voyant à DEL SIGNAL DE VITESSE s'allume lorsqu'il détecte le signal de vitesse du moteur, c'est-à-dire lorsque le moteur tourne. Voyant à DEL « ALARME » (« ALARM ») : La DEL ALARME clignote lorsqu'il y a détection d'une condition d'alarme. Voyant à DEL « ARRÊT » (« SHUTDOWN ») : La DEL ARRÊT clignote lorsqu'il y a détection d'une condition d'arrêt.
3.2. Plaquette de circuits imprimés
La plaquette de circuits imprimés (PCI) est illustrée à la FIGURE 11. La PCI comprend les éléments d'interface utilisés suivants :
MEC 20 CIRCUIT BOARD LAYOUT
3.2.1. Plaques à BORNES
Quatre plaques à bornes sont disposées sur la PCI de la manière suivante :
PB1 Plaque à bornes, détection de courant et tension c. a. (120 - 600 V c. a. et 0 - 5 A c. a.).
Avertissement
Les circuits de détection de tension peuvent engendrer des tensions mortelles lorsqu'ils sont sous tension. Les circuits secondaires des transformateurs de courant peuvent engendrer des tensions mortelles lorsqu'ils sont en circuit ouvert et que les circuits primaires sont sous tension. Les procédures de sécurité courantes doivent être respectées et les travaux doivent être effectués par du personnel qualifié uniquement. Tout manquement à ces directives peut provoquer des blessures et (ou) la mort.
PB2 Plaque à bornes, détection de vitesse et entrée de contact numérique. PB3 Plaque à bornes, contacts de sortie et signal d'entrée de température et de pression du moteur. PB4 Plaque à bornes, entrée d'alimentation c. c. et de mise à la terre.
3.2.2. DEL de diagnostic
Le contrôle MEC 20 comprend cinq DEL de diagnostic montées à l'arrête de la plaquette de circuits imprimés, comme l'illustré la FIGURE 11. Leur fonctions sont les suivantes :
3.2.2.1 Surveillance
Cette DEL clignote à intervalles irréguliers afin d'indiquer que le microprocesseur fonctionne normalement.
3.2.2.2 MISE EN MARCHE À DISTANCE
Cette DEL s'allume lorsque le MEC 20 reçoit un signal de mise en marche à distance.
3.2.2.3 DEMARRAGE
Cette DEL s'allume lorsque le MEC 20 émet un signal de démarrage du moteur.
3.2.2.4 MARCHE
Cette DEL s'allume lorsque le MEC 20 commande la mise en marche du moteur.
3.2.2.5 PANNE Commune
Cette DEL s'allume lorsque le MEC 20 émet un signal de panne (c'est-à-dire lorsqu'une alarme ou un arrêt de détection de défaillance est activé).
Remarque : Toutes les DEL s'allument lorsqu'on effectue un essai déviant.
3.2.3. Réglage du contraste (R115)
Le potentiomètre de réglage du contraste est situé à l'arrière de la PCI et il est ajusté en usine pour une température ambiante de 15°C à 30°C. Pour d'autres températures ambiantes que ces dernières, communiquer avec l'usine afin de connaître les procédures de réglage.
3.2.4. PORTS de communication
Deux ports de communication RJ45 sont installés sur la plaquette de circuits imprimés pour les caractéristiques en option suivantes :
3.2.4.1 EXP Ce port est utilisé pour interconnecter un module d'expansion externe permettant d'ajouter des contacts de sortie supplémentaires et (ou) d'utiliser l'annonciateur à distance EAP 110. Consulter les sections 7 et 8 de ce manuel pour obtenir de plus amples renseignements à ce sujet.
3.2.4.2 J7 - COM Ce port est utilisé pour se connecter à un système de communication à distance permettant la surveillance et le contrôle de l'unité à distance. Consulter la Section 6 de ce manuel pour obtenir de plus amples renseignements à ce sujet.
4. Description des circuits de detection de défaillance
Le contrôleur pour groupe électrogène MEC 20 utilise de nombreuses entrées analogiques et numériques assurant des fonctions de surveillance et de contrôle. Trois types de circuits de détection de défaillance sont utilisés afin de surveiller et de contrôler le groupe électrogène. Le premier type, soit les circuits de détection de défaillance internes, provient d'une combinaison d'entrées numériques et analogiques. Le deuxième type, soit les circuits de détection de défaillance d'entrée numérique, provient des entrées de contact externes. Le troisième type, soit les circuits de détection de défaillance d'entrée analogue, provient des entrées de signaux analogiques externes. Le schéma fonctionnel suivant (FIGURE 12) montre la manière dont les circuits de détection de défaillance d'entrée/sortie s'agencent et la manière dont les circuits de détection de défaillance optionnels sont dérivés.
4.1. SCHEMA Fonctionnel du MEC 20
FIGURE 12
4.2. Circuits de detection de défaillance internes
Le contrôleur pour groupe électrogène MEC 20 possède quatre circuits de détection de défaillance actifs à l'interne, comme il est décrit ci-dessous. Tous les circuits de détection de défaillance internes sont offerts en série sur le contrôleur MEC 20.
4.2.1. SUR-DEMARRAGE
Le circuit de détection de surdémarrage s'enclenche lorsque le moteur n'a pas réussi à se mettre en marche après le temps de démarrage et le nombre de cycles de démarrage sélectionnés. Le circuit de détection de surdémarrage est programmé à l'interne comme dispositif de verrouillage et d'arrêt et il ne peut être modifié par l'utilisateur. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
Le circuit de détection de survitesse s'enclenche lorsque la vitesse du moteur est supérieure à la valeur de consigne de survitesse. Le circuit de détection de survitesse estprogrammé à l'interne comme dispositif de verrouillage et d'arrêt. On peut programmer le circuit de détection de survitesse au niveau du pourcentage de la vitesse nominale du moteur, c'est-à-dire de la valeur de consigne de survitesse, ainsi que du salarié transitoire. Les messages de programmation pour la survitesse sont situés dans la boucle de programmation du menu principal. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
4.2.3. PERTE de vitesse
Le circuit de détection de perte de vitesse s'enclenche lorsque le circuit de détection de vitesse du moteur ne détecte pas de signal de vitesse pendant une période de plus de deux secondes à la suite d'un signal de marche. Le circuit de détection de perte de vitesse est configurable par l'utilisateur en tant que dispositif de verrouillage et d'arrêt ou d'alarme uniquement. Les messages de programmation pour la perte de vitesse sont situés dans la boucle de programmation du menu principal. Consulter les directives d'utilisation pour obtenir de plus amples renseignements à ce sujet.
4.2.4. Commutateur PAS en position automatique
Le circuit de détection de retrait du commutateur de la position automatique s'enclenche lorsque le commutateur de mode de fonctionnement est déplacé de la position de fonctionnement automatique à une autre, à partir du clavier monté à l'avant. Ce circuit de détection de défaillance est programmé à l'interne, comme alarme sans verrouillage. Cette alarme peut être programmée par l'utilisateur pour enclencher le relais de sortie de panne commune, à partir de la boucle principale du menu.
4.3. Circuits de detection de défaillance d'entrée numérique
Le contrôleur pour groupe électrogène MEC 20 offre jusqu'à douze circuits de détection de défaillance d'entrée numérique programmables par l'utilisateur. Chaque circuit de détection de défaillance d'entrée numérique est activé par un contact de détection à distance situé à l'extérieur du contrôleur.
Chaque circuit de détction de défaillance d'entrée numérique peut être programmé à l'aide d'une étiquette de description de défaillance située dans la mémoire permanente du contrôleur. Chaque contrôleur à microprocesseur MEC 20 comprend les étiquettes de détction de défaillance numérique suivantes :
| DéCLENCHEMENT DU RÉGULATEUR | TEMPÉRATURE ÉLEVÉE DE L'HUILE |
| D'AIR | |
| DéFAILLANCE DE L'ENTREE DU | TEMPÉRATURE DU BOBINAGE ÉLEVÉE |
| CHARGEUR DE BATTERIE | |
| DéFAILLANCE DU CHARGEUR DE BATTERIE | MARCHE AU RALENTI |
| DéCLENCHEMENT DU | BAS NIVEAU DE LIQUIDE DE REFROIDISSEMENT |
| DISJONCTEUR | |
| DéFAILLANCE DU C.C. | BASSE TEMPERATURE DU MOTEUR |
| DéFAILLANCE DE | BASSE PRESSION D'ESSENCE |
| SYNCHRONISATION | |
| DISJONCTEUR DU GÉNÉRATEUR | BAS NIVEAU D'ESSENCE |
| OUVERT | |
| DéFAILLANCE DE MISE À LA TERRE | BASSE PRESSION D'HUILE |
| TEMPÉRATURE ÉLEVÉE DU PALIER | |
| VIBRATION IMPORTANTE DU | |
| DISPOSITIF DE REFROIDISSEMENT | |
| TEMPÉRATURE ÉLEVÉE DU MOTEUR | ARRÊT D'URGENCE À DISTANCE |
| VIBRATION IMPORTANTE DU MOTEUR | RETOUR DE PUISSANCE |
| NIVEAU D'ESSENCE ÉLEVÉ | |
| NIVEAU D'HUILÉ ÉLEVÉ | |
| ESSAI À VIDE | RUPTURE DU BASSIN |
| *TEMPÉRATURE ÉLEVÉE DU COLLECTEUR D'ADMISSION | COMMUTATEUR DE TRANSFERT EN DÉRIVATION |
| DéFAILLANCE DU RÉGULATEUR | FUITÉ D'ESSENCE |
| D'AÉRATION | |
| NIVEAU ÉLEVÉ D'ESSENCE | BASSE PRESSION D'ESSENCE |
| DéFAILLANCE | DE DÉFAILLANCE DU CHARGEUR DE BATTERIE |
| SYNCHRONISATION | |
| BASSE PRESSION D'HUILÉ | |
| « Vide » (Aucune inscription pour les entrées inutilisées.) |
Remarque: Jusqu'à six étiquettes de détection de défaillance personnalisées peuvent être commandées pour le MEC 20 au moment de l'achat. Les six étiquettes de détection de défaillance personnalisées ne peuvent être modifiées par la suite.
4.3.1. Circuits de detection de défaillance numérique programmés en USINE
Le MEC 20 est muni des douze circuits de détection de défaillance numérique des séries suivants :
| DESCRIPTION DE LA DÉFAILLANCE | RÉSULTAT DE LA DÉFAILLANCE | N° DE BORNE D'ENTRée |
| Basse pression d'huile | Arrêt | 1 |
| Température élevé du moteur | Arrêt | 2 |
| Défaillance de l'entrée du chargeur de la batterie • | Alarme | 3 |
Bas niveau d'essence - Alarme 4
Entrée numérique n° 5 Alarme 5
Entrée numérique n° 6 Alarme 6
Entrée numérique n° 7 Alarme 7
Entrée numérique n° 8 Alarme 8
Entrée numérique n° 9 Alarme 9
Entrée numérique n° 10 Alarme 10
Arrêt d'urgence à distance 11
Marche au ralenti N/A 12
Consulter la Section 11.4 intitulée Menu de programmation de défaillances numériques pour connaître les réglages par défaut en usine.
Remarque: Les entrées de défaillance n° 5 à 10 doivent être configurées par le client, sauf si précisé autrement au moment de la commande.
Tous les circuits de détection de défaillance doivent être connectés à la borne d'entrée du MEC 20 par l'utilisateur. Tous les circuits de détection de défaillance peuvent être programmés par l'utilisateur sur le terrain pour différentes fonctions de contrôle ou pour la détection de différentes défaillances.
^a Remarque: Pour les applications régies par la norme C282 de la CSA, le contrôleur est doté d'un dispositif d'arrêt en cas de détction de bas niveau de liquide de refroidissement au lieu d'une alarme de détction de défaillance d'entrée de chargeur de batterie. Consulter les directives de programmation pour obtenir de plus amples renseignements sur les circuits de détction de défaillance numérique.
Remarque : Les fonctions d'arrêt relatives à une basse pression d'huile et à une température élevée du moteur peuvent aussi être fournies par des entrées de capteur de pression et de température analogiques si elles ont été programmées en conséquence dans le menu de programmation des défaillances analogiques. Consulter la Section 11.3 pour obtenir de plus amples renseignements à ce sujet.
4.4. Circuit de detection de défaillance d'entrée analogique
Le contrôleur pour groupe électrogène MEC 20 peut posséder jusqu'à 15 circuits de détection de défaillance d'entrée analogue programmables par l'utilisateur. Le contrôleur est livré avec quinze circuits de détection de défaillance analogue standards. Chaque circuit de détection de défaillance d'entrée analogue est activé par l'entremise d'un signal analogue spécifique.
Consulter la Section 11.3 intitulée Menu de programmation des défaillances analogiques pour connaître les réglages de programmation par défaut en usine de chaque défaillance analogue fournie.
Attention!
Les circuits de protection analogiques pour la tension, la fréquence, le courant, la pression d'huile du moteur, la température du moteur et la vitesse du moteur seront réglés selon les règles par défaut en usine uniquement. Les derniers règles devront être effectifs par l'autorité de mise en service. Tout manquement à ces directives peut entraîner des défectuosités importantes ou endommager gravement le matériel.
4.4.1. Circuits de detection de défaillance analogique des série
Le MEC 20 comprend les quinze circuits de détection de défaillance analogique de série suivants :
| NOM DE LA DÉFAILLANCE | RÉSULTAT DE LA DÉFAILLANCE | SIGNAL D'ENTRÈE | ||
| Sous-tension | Arrêt | Tension du générateur | ||
| Surtension | Arrêt | Tension du générateur | ||
| Fréquence insuffisante | Alarme | Fréquence du générateur | ||
| Fréquence excessive | Alarme | Fréquence du générateur | ||
| Surintensité | Alarme | Courant du générateur | ||
| Batterie faible | Alarme | Tension de la batterie | ||
| Signal de perte de vitesse | Vitesse du moteur | |||
| Tension élevé de la batterie | Alarme | Tension de la batterie | ||
| Basse température du moteur | Alarme | Température du moteur | ||
| Température élevée du moteur #1 | Alarme | Température du moteur | ||
| Température élevé du moteur #2 | Arrêt | Température du moteur | ||
| Basse pression d'huile #1 | Alarme | Pression d'huile | ||
| Basse pression d'huile #2 | Arrêt | Pression d'huile | ||
| Survivesse | Arrêt | Vitesse du moteur | ||
| Signal de perte de vitesse | Arrêt | Vitesse du moteur | ||
Tous les circuits de détection de défaillance peuvent être programmés par l'utilisateur sur le terrain pour différentes fonctions de contrôle. Toutefois, leur fonction de détection de défaillance ne peut être reprogrammée. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
4.4.2.1. Sous-tension du générateur
Le contrôleur MEC 20 comprend un capteur de sous-tension triphasé pour l'alimentation du générateur. Le type de défaillance (c'est-à-dire alarmé ou arrêt), la valeur de consigne de la tension d'excitation et de désexcitation (c'est-à-dire l'hystérésis régulable) et le délambda transitoire du capteur de sous-tension sont programmables. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
4.4.2.2. Surtension du générateur
Le contrôleur MEC 20 comprend un capteur de surtension triphasé pour l'alimentation du générateur. Le type de défaillance (c'est-à-dire alarme ou arrêt), la valeur de consigne de la tension d'excitation et de désexcitation (c'est-à-dire l'hystérésis régable) et le délai transitoire du capteur de
surtension sont programmables. Consultez les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
4.4.2.3. Fréquence insuffisante du générateur
Le contrôleur MEC 20 comprend un capteur de fréquence insuffisante triphasé pour l'alimentation du générateur. Le type de défaillance (c'est-à-dire alarmé ou arrêt), la valeur de consigne de la fréquence et le délambda transitoire du capteur de fréquence insuffisante sont programmables. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
Le contrôleur MEC 20 comprend un capteur de fréquence excessive triphasé pour l'alimentation du générateur. Le type de défaillance (c'est-à-dire alarmé ou arrêt), la valeur de consigne de la fréquence et le délambda transitoire du capteur de fréquence excessive sont programmables. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
4.4.2.5. Surintensite du générateur
Le contrôleur MEC 20 comprend un capteur de courant triphasé pour l'alimentation du générateur. Le type de défaillance (c'est-à-dire alarme ou arrêt), la valeur de consigne du courant et le salaire transitoire du capteur de courant sont programmables. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
4.4.3. ENTREE Analogique de tension de la batterie
Le capteur de tension de la batterie du MEC 20 mesure la tension c.c. sur les bornes B+ et B- qui sont connectées à la batterie de démarrage du moteur. Le capteur de tension de la batterie fournit les renseignements nécessaires à la réalisation des fonctions suivantes :
4.4.3.1. Alarmde batterie FAIBLE
L'alarme de batterie faible s'actionne lorsque la tension de la batterie est inférieure à une valeur de consigne prédéfinie pendant un délai déterminé. L'alarme de batterie faible détecte toute condition de faiblesse
de la batterie au cours du cycle de démarrage. L'alarme de batterie faible possède une valeur de consigne de tension plus basse et un délai plus court que l'alarme de faible tension de la batterie. La valeur de consigne de la tension, le délai transitoire et d'autres fonctions de l'alarme du circuit de détection de batterie faible sont programmables. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
4.4.3.2. ALARME de FAIBLE tension de la batterie
L'alarme de faible tension de la batterie s'actionne lorsque la tension de la batterie est inférieure à une valeur de consigne prédéfinie pendant un délai déterminé. La valeur de consigne de la tension, le délai transitoire et d'autres fonctions de l'alarme du circuit de détection de faible tension de la batterie sont programmables. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
4.4.3.3. ALARME de tension élevée de la batterie
L'alarme de tension élevée de la batterie s'actionne lorsque la tension de la batterie est supérieure à une valeur de consigne prédéfinie pendant un délai déterminé. La valeur de consigne de la tension, le délai transitoire et d'autres fonctions de l'alarme du circuit de détection de tension élevée de la batterie sont programmables. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
4.4.4. ENTREE Analogique de temperature du moteur
Le capteur de température du moteur du MEC 20 mesure un signal analogique à c.c. provenant d'un émetteur monté sur le moteur. Le logiciel du MEC 20 offre une fonction d'étalonnage pour la température du moteur permettant une coordination avec l'émetteur monté sur le moteur et une logique de commande pour détecter toute défaillance du câblage ou de l'émetteur, c'est-à-dire tout signal ouvert ou court-circuité. En cas de défaillance de l'émetteur ou du câblage, le MEC 20 affichera une pression de 0 ou 9 999 lb/po² et actionnera un signal d'alarme et (ou) d'arrêt programme par l'utilisateur. L'entrée analogique de température du moteur offre les fonctions de contrôle suivantes :
4.4.4.1. ALARME de BASSE temperature du moteur #1
L'alarme du circuit de détection de basse température du moteur s'actionne lorsque la température du moteur est inférieure à une valeur de consigne prédéfinie pendant un délai déterminé. La valeur de consigne de la température, le délai transitoire et d'autres fonctions de l'alarme du circuit de détection de basse température du moteur sont programmables. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
4.4.4.2. ALARME De temperature elevée du moteur #1
L'alarme du circuit de détection de température élevé du moteur s'actionne lorsque la température du moteur est supérieure à une valeur de consigne prédéfinie pendant un délai déterminé. La valeur de consigne de la température, le délai transitoire et d'autres fonctions de l'alarme du circuit de détection de température élevé du moteur sont programmables. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
4.4.4.3. ARRET De temperature elevée du moteur #2
L'arrêt du circuit de détection de température élevée du moteur s'actionne lorsque la température du moteur est supérieure à une valeur de consigne prédéfinie pendant un délai déterminé. La valeur de consigne de la température, le délai transitoire et d'autres fonctions de l'arrêt du circuit de détection de température élevée du moteur sont programmables. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
Remarque: L'arrêt de température élevée du moteur peut aussi être programmé et connecté en tant que contact d'entrée de détection de défaillance numérique. Remarque: Si l'entrée analogue détecte que la température du moteur excède 170~^ C, le moteur s'arrête, quelle que soit la valeur de consigne définie. Consulter la Section 4.3 pour obtenir plus de détails à ce sujet.
4.4.5. Entrée analogique de pression d'huile du moteur
Le capteur de pression d'huile du moteur du MEC 20 mesure un signal analogique à c.c. provenant d'un émetteur monté sur le moteur. Le logiciel du MEC 20 offre une fonction d'étalonnage pour la pression d'huile permettant une coordination avec l'émetteur monté sur le moteur et une logique de commande pour détecter toute défaillance du câblage ou de l'émetteur, c'est-à-dire un signal ouvert ou court-circuité. En cas de défaillance de l'émetteur ou du câblage, le MEC 20 affichera une pression de 0 ou 9999lb / po² et actionnera un signal d'alarme programmé par l'utilisateur. L'entrée analogique de pression d'huile du moteur offre les fonctions de contrôle suivantes :
4.4.5.1. ALARME de FAIBLE pression d'huile #1
L'alarme de faible pression d'huile s'actionne lorsque la pression d'huile est inférieure à une valeur de consigne prédéfinie pendant un délai déterminé. La valeur de consigne de la pression, le délai transitoire et autres fonctions de l'alarme du circuit de détection de faible pression d'huile sont programmables. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
4.4.5.2. ARRET De FAIBLE pression d'huile #2
L'arrêt de faible pression d'huile s'actionne lorsque la pression d'huile est inférieure à une valeur de consigne prédéfinie pendant un délai déterminé. La valeur de consigne de la pression, le délai transitoire et d'autres fonctions de l'arrêt du circuit de détection de faible pression d'huile sont programmables. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
Note: L'arrêt de faible pression d'huile peut aussi être programmé et connecté en tant que contact d'entrée de détection de défaillance numérique. Consulter la Section 4.3 pour obtenir plus de détails à ce sujet.
4.4.6. ENTREE Analogique de vitesse du moteur
Le capteur de vitesse du moteur du MEC 20 permet de mesurer la tension c. a. et la fréquence à partir d'un capteur magnétique monté sur le moteur. Le capteur
de vitesse du moteur fournit les renseignements nécessaires à la réalisation des fonctions suivantes :
Arrêt de survitesse
Contrôle de déconnexion du démarrage
Signal de détection de perte de vitesse
Contrôle de réengagement du démarreur
Affichage de la vitesse en tr/min
Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
5. Description des contacts de SORTIE de controle
Tous les contacts de sortie du contrôleur pour groupe électrogène MEC 20 sont secs et possèdent une capacité de charge résistive de 10 A/240 V c.a., 8 A/24 V c.c. (3 A à 0,4 pF inductif). Les contacts de sortie ne possèdent pas de fusibles, c'est pourquoi une protection externe contre les surintensités (au plus 10 A) est requise pour tous les circuits de contrôle utilisant ces contacts. Les contacts illustrés sur les schémas et les diagrammes de connexion sont illustrés dans un état hors tension. Ils changent d'état lorsque les fonctions de contrôle spécifiques sont activées.
5.1. Contacts de SORTIE, de MARCHE, de démarrage et de PANNE commune
Le contrôleur pour groupe électrogène MEC 20 comprend les trois contacts de sortie spécialisés pour les circuits de contrôle et d'alarme de base suivants :
Le contact de marche est un contact sec de forme A et il est utilisé pour contrôler le circuit de marche du moteur, ce qui exclut généralement les dispositifs de contrôle externes, tels que les solénoïdes de crémaillère à carburant ou les régulateurs électroniques. Remarque: Un relais pilote supplémentaire est requis pour alimenter des dispositifs qui excèdent la limite de 10 A résistif. La logique de commande de la sortie de marche émet un signal « alimentation sur marche ». Le contact de marche ferme lorsqu'une condition de marche est activée. Remarque: Pour obtenir des renseignements sur une logique « alimentation sur arrêt », consulter la section de ce document traitant de la fonction de contrôle de sortie calculable.
5.1.2. SORTIE De demarrage
Le contact de sortie de démarrage est un contact sec de forme A et il est utilisé pour contrôler un relais de pilote de démarrage externe qui contrôle directement le démarreur du moteur. Remarque: Un relais pilote de démarrage externe est requis pour permettre sous tension le solénoïde du pignon du moteur, lequel excède la capacité résistive de 10 A (résistif) du contact de sortie de démarrage. Le contact de sortie de démarrage se ferme lorsqu'une condition de démarrage est activée et s'ouvre automatiquement lorsque la vitesse de déconnexion du démarrage est atteinte et (ou) lorsque la tension c. a. de sortie du générateur excède 110% du niveau nominal. La tension c. a. de sortie du générateur sert de protection de secours pour la déconnexion du démarrage; en cas de défaillance du capteur de vitesse.
5.1.3. SORTIE de PANNE commune
La sortie de panne commune est un contact sec de forme C et elle est généralement utilisée afin d'envoyer un signal d'alarme à distance en cas de défaillance du générateur. Le contact de la sortie de panne commune se ferme lorsqu'il y a détection d'une condition d'alarme ou d'arrêt. Remarque: Le MEC 20 peut être programmé de manière à activer la sortie de panne commune lorsqu'un circuit d'entrée de détection de défaillance se déclenche ou lorsque le commutateur est en position anormale, c'est-à-dire lorsqu'il est retiré de la position automatique. Consulter les directives de programmation afin d'obtenir de plus amples renseignements à ce sujet.
5.2. Contacts desorties programmables
Le contrôleur MEC 20 comprend quatre contacts de sorties programmables standards. Chaque sortie programmable constitue un contact sec de forme « C » qui peut être programmé pour plusieurs fonctions de contrôle différentes. Toutes les sorties programmables peuvent être programmées sur le terrain par l'utilisateur pour la fonction de contrôle désirée. Les options de programmation suivantes sont fournies :
MISE SOUS TENSION POUR L'ARRÉT VOLET D'ENTREE D'AIR
GÉNÉRATEUR PRÊT POUR CHARGE ALIMENTATION DE SERVICE PRÊTE POUR CHARGE
FIN DE LA PÉRIODE DE DÉRIVATION D'HUILE
Défaillances numériques n°1 à 12
PANNE COMMUNE
SURVITESSE
COMMUTATEUR PAS EN POSITION
SIGNAL DE PERTE DE VITESSE
AUTOMATIQUE
MOTEUR PRÉT
BASSE TENSION DE LA BATTERIE
Alimentation du moteur
TENSION ÉLEVÉE DE LA BATTERIE
(ESSENCE)
PRÉCHAUFFAGE
FAIBLE TENSION DE LA BATTERIE
MOTEUR EN MARCHE
ALARME DE FAIBLE PRESSION D'HUILE #1
Essai de commutation
ARRÉT DE FAIBLE PRESSION D'HUILE #2
ALARME COMMUNE
ALARME DE TEMPERATURE ELEVÉE DU
MOTEUR #1
ARRÉT COMMUN
ARRÉT DE TEMPERATURE ÉLEVÉE DU
MOTEUR #2
CHARGE D'ALIMENTATION EPS
5.2.1. Mise sous tension pour l'arrêt
Le relais de sortie programmable désigné est mis sous tension par une condition d'arrêt. La sortie demeure sous tension pendant 10 secondes suivant l'arrêt complet du moteur, puis elle est désalimentée.
5.2.2. Controlle de la MARCHE au ralenti
Le relais de sortie programmable désigné est mis sous tension lorsqu'un signal de marche au ralenti est envoyé au contrôleur pour groupe électrogène. Le contact de sortie est généralement connecté au contrôle d'entrée « ralenti/marche » du régulateur électronique. Remarque: Le contrôleur reçoit un signal de marche au ralenti d'un contact d'entrée numérique, qui doit également être programmé pour une fonction de marche au ralenti. Pendant la marche au ralenti, le contrôleur pour groupe électrogène contourne automatiquement tous les circuits d'alarme ou d'arrêt, à l'exception des circuits de pression d'huile, d'entrée de détection de défaillance numérique n^0 1 et 2 et de survitesse, qui sont programmés pour « dérivation à la mise en marche »
5.2.3. Controlle de la prelubrification, de la postlubrification et de la lubrification cyclique
Le relais de sortie calculable désigné est mis sous tension lorsqu'un signal de lubrification est émis. Remarque: La fonction de lubrification s'arrête automatiquement lorsqu'un signal de mise en marche du moteur est émis.
Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
5.2.4. Retrait du commutateur de la position automatique
Le relais de sortie calculable désigné est mis sous tension lorsque le commutateur de mode de fonctionnement du contrôleur n'est pas en position automatique.
5.2.5. Surintensité
Le relais de sortie calculable désigné est mis sous tension lorsque le circuit de détection de surintensité est activé. La sortie demeure sous tension jusqu'à ce qu'on mette fin manuellement à la condition de défaillance (si elle est programmée en tant que défaillance à verrouillage) ou jusqu'à ce que le niveau de surintensité descende sous la valeur de consigne.
5.2.6. Moteur prét
Le relais de sortie calculable désigné est mis sous tension lorsque le commutateur du contrôleur pour groupe électrogène est en mode automatique et qu'aucune condition d'alarme ou d'arrêt n'est détectée.
5.2.7. Préchauffage
Le relais de sortie programmable désigné est mis sous tension lors du délai de mise en marche du moteur et de la période de démarrage, jusqu'à ce que le moteur atteigne la vitesse de déconnexion du démarrage. La sortie de préchauffage est généralement utilisée pour les dispositifs auxiliaires de démarrage, tels que les bougies de préchauffage. Remarque: Un relais pilote externe est requis afin de commuter le fort courant tiré par les bougies de préchauffage.
5.2.8. Générateur prêt pour CHARGE
Le relais de sortie calculable désigné est mis sous tension lorsque la tension et la fréquence du générateur sont supérieures aux valeurs de consigne prédéfinies (par ex., 90 % de la valeur nominale pour la tension et 95 % de la valeur nominale pour la fréquence, tel que programmé par l'utilisateur) et lorsqu'une période de réchauffement prend fin. Une fois que la sortie a été mise sous tension, elle demeure verrouillée, indépendamment des niveaux de tension.
et de fréquence, jusqu'à ce que le contrôleur reçoive un signal d'arrêt ou jusqu'à ce que la vitesse du moteur soit inférieure au niveau de déconnexion du démarrage. Les niveaux relatifs à la tension, à la fréquence et au délai sont programmables. Consulter la Section 10.3 pour obtenir des renseignements sur la programmation.
La sortie « Générateur prêt pour charge » est généralement utilisée dans une application de panne de secteur automatique (PSA). Consulter la Section 9.3.5 pour obtenir plus de détails sur la suite des opérations.
5.2.9. Alimentation de service prête pour CHARGE
Le relais de sortie programmable désigné est mis sous tension lorsque l'alimentation à distance n'est pas activée (c'est-à-dire que le contact sur les bornes 16 et 17 n'est pas fermé) et lorsque le délambda de retard et le délambda neutre se terminent (s'ils ont été programmés). La sortie est mise hors tension lorsque l'alimentation à distance est activée et que le délambda de mise en marche du moteur et le délambda de rechauffement se terminent (s'ils ont été programmés). Cette sortie est généralement utilisée dans une application de panne de secteur automatique (PSA). Consulter la Section 9.3 pour obtenir plus de détails sur la suite des opérations.
Le relais de sortie programmable désigné est mis sous tension lorsque le moteur est en marche et qu'il atteint la vitesse de déconnexion du démarrage.
5.2.11. Alimentation du moteur (essence)
Le relais de sortie programmable désigné est mis sous tension lorsque l'« ALIMENTATION » du moteur (c'est-à-dire l'ESSENCE) se met sous tension avant la mise en marche du moteur. La sortie demeure sous tension jusqu'à ce que le moteur ait atteint une commande d'« arrêt »
5.2.12. VOLET d'entrée d'air
Le relais de sortie programmable désigné est mis sous tension lorsque la vitesse du moteur est supérieure à la valeur de consigne de survitesse. La sortie demeure sous tension jusqu'à ce que la vitesse du moteur soit inférieure à la
valeur de consigne de basse vitesse, soit normalement 5 % de la vitesse normale. Remarque: Un relais pilote externe est requis si le courant du solénoïde du volet d'entrée d'air principal excède le calibre des contacts du MEC 20.
Remarque:
Cette caractéristique de contrôle ne fonctionne que si un commutateur de transfert à distance est interconnecté et muni d'un dispositif d'essai à distance.
Le relais de sortie programmable désigné est mis sous tension lorsque le mode d'essay en charge est sélectionné, à l'aide du bouton-poussoir du clavier avant. Une fois l'essay lancé, le moteur reçoit un signal de mise en marche du commutateur de transfert. Lorsque le générateur atteint sa tension et sa fréquence nominales, un transfert de charge début. Le groupe électrogène fonctionne en charge jusqu'à ce qu'un autre mode de fonctionnement soit sélectionné ou qu'une condition d'alarme ou d'arrêt survienne.
Remarques :
1) Le contact de sortie programmable standard du MEC 20 est fourni avec la fonction « ESSAI DE COMMUTATION EN CHARGE » programmée. Lorsque les sorties « alimentation de service prête pour charge » et « Générateur prêt pour charge » sont programmées, la sortie programmable « Essai en charge » n'est pas nécessaire puisque la logique de mise en marche du moteur est actionnée de l'intérieur. 2) Lorsque les sorties programmables « Alimentation de service prête pour charge » et « Générateur prêt pour charge » sont toutes deux programmées et utilisées dans une configuration de contrôle PSA, la sortie d'essai de commutation n'est pas utilisée (c'est-à-dire que le signal de mise en marche du moteur est activé de l'intérieur).
5.2.14. Fin de la période de dérivation d'huile
Le relais de sortie calculable désigné est mis sous tension à l'expiration du délai de dérivation d'huile du contrôleur, à la suite d'une série de mise en marche normale.
5.2.15. ALARME commune
Le relais de sortie programmable désigné est mis sous tension lorsqu'il y a détection d'une condition d'alarme.
5.2.16. PANNE Commune
Le relais de sortie programmable désigné est mis sous tension lorsqu'il y a détection d'une condition d'alarme ou d'arrêt.
5.2.17. ARRET COMMUN
Le relais de sortie programmable désigné est mis sous tension lorsqu'il y a détection d'une condition d'arrêt.
5.2.18. CHARGE d'alimentation EPS
Le relais de sortie programmable désigné est mis sous tension lorsque le moteur est en marche et que le générateur fournit à la charge un courant égal ou supérieur à 10% du rapport nominal du transformateur de courant.
6. OPTION de dispositif de communication à distance
Le contrôleur pour groupe électrogène MEC 20 est offert avec un dispositif de communication à distance en option. Celui-ci permet, via un lien de communication série, le contrôle et la surveillance du MEC 20 à partir d'un ordinateur personnel. L'ordinateur peut être connecté au MEC 20 localement par un câble de communication en série ou à distance par système de modem et de téléphone. Les méthodes de communication locales et à distance requièrent un module de transmission externe, offert par Thomson Technology. La communication à distance peut s'effectuer par l'entremise du matériel du client ou d'un module de transmission externe fabriqué par Thomson Technology. Le module de transmission utilise un modem interne et contient un protocole Modbus MC permettant l'utilisation de différents logiciels de surveillance à distance. Consulter la documentation appropriée pour obtenir de plus amples renseignements sur le module de transmission. L'option de dispositif de communication à distance du MM 20 doit être commandée et installée en usine avant l'expédition. Le dispositif de communication ne peut être installé par l'utilisateur.
Le port de communication du MEC 20 utilise un signal de transmission de données RS422, lequel est interconnecté directement au module de transmission, par l'entremise d'un câble blindé à 8 conducteurs et à connecteurs RJ45 encastrables. Consulter les FIGURES 14 et 15 pour obtenir des renseignements détaillés sur les applications utilisant un ordinateur personnel à connexion directe, locale ou à distance et un module de transmission.
Les marques de commerce appartiennent à leur propriétaire respectif.
FIGURE 14: MEC 20 avec module de transmission et ordinateur personnel connecté locally. G: ENGINEER\PRODUCTS\MEC20\MEC20_20. VSD
G: ENGINEER\PRODUCTS\MEC20\MEC20_21. VSD FIGURE 15: MEC 20 avec module de transmission et ordinateur personnel connecté à distance.
Le port de communication RS422 du MEC 20 permet l'interconnexion directe de multiples contrôleurs MEC 20, afin de former un réseau. Jusqu'à 10 contrôleurs MEC 20 peuvent être interconnectés à un seul module de transmission. Chaque contrôleur MEC 20 possède une adresse de communication unique pour le système de communication à distance. Le réseau peut être connecté à un ordinateur local ou à un ordinateur à distance par l'entremise d'un système téléphonique et du module de transmission. Consulter la FIGURE 16 pour obtenir de plus amples renseignements sur un réseau typique de MEC 20 avec module de transmission.
FIGURE 16 DIAGRAMME D'INTERCONNEXION DE CONTROLLEURS MEC 20 EN RÉSEAU
G:\ENGINEER\PRODUCTS\MEC20\MEC20_22.VSD
7. OPTION de MODULE de SORTIE d'expansion
Un module de sortie d'expansion est offert en option pour le contrôleur pour groupe électrogène MEC 20. Ce module offre 16 contacts de sortie de détection de défaillance individualisés convenant à des applications d'alarme ou de contrôle à distance. Le module d'expansion est interconnecté au MEC 20 par l'entremise d'une liaison de communication RS422 utilisant un câble blindé à 8 conducteurs et connecteurs RJ45 encastrables. La FIGURE 17 illustre le diagramme de connexion du module de sortie d'expansion.
REMARQUES:
| NO DU RELAIS | C282/NFPA DÉFAILLANCES DE SÉRIE(J17 FERMÉ) |
| 1 | ARRÊT D'URGENCE |
| 2 | SUR-DÉMARRAGE |
| 3 | SURVITESSE |
| 4 | SIGNAL DE PERTE DE VITESSE |
| 5 | BATTERIE FAIBLE |
| 6 | FAIBLE TENSION DE LA BATTERIE |
| 7 | TENSION ÉLEVÉE DE LA BATTERIE |
| 8 | BASSE TEMPERATURE DU MOTEUR |
| 9 | ALARMÉ DE TEMPERATURE ÉLEVÉE DU MOTEUR |
| 10 | ALARMÉ DE BASSE PRESSION D'HUILE |
| 11 | DéFAILLANCE NUMÉRIQUE NO 1 |
| 12 | DéFAILLANCE NUMÉRIQUE NO 2 |
| 13 | DéFAILLANCE NUMÉRIQUE NO 3 |
| 14 | DéFAILLANCE NUMÉRIQUE NO 4 |
| 15 | COMmutATEUR PAS EN AUTO |
| 16 | SORTIE PROGRAMMABLE NO 5 |
| DéFAILLANCES SUPPLEMENTaires(J17 OUVERT) | |
| 1 | SOUS-TENSION |
| 2 | SURTENSION |
| 3 | SOUS-FRÉQUENCY |
| 4 | SURFRéQUENCY |
| 5 | SURINTENSITÉ |
| 6 | ARRÊT DE TEMPERATURE ÉLEVÉE DU MOTEUR 2 |
| 7 | ARRÊT DE BASSE PRESSION D'HUILE 2 |
| 8 | DéFAILLANCE NUMÉRIQUE NO 5 |
| 9 | DéFAILLANCE NUMÉRIQUE NO 6 |
| 10 | DéFAILLANCE NUMÉRIQUE NO 7 |
| 11 | DéFAILLANCE NUMÉRIQUE NO 8 |
| 12 | DéFAILLANCE NUMÉRIQUE NO 9 |
| 13 | DéFAILLANCE NUMÉRIQUE NO 10 |
| 14 | DéFAILLANCE NUMÉRIQUE NO 11 |
| 15 | DéFAILLANCE NUMÉRIQUE NO 12 |
| 16 | SORTIE PROGRAMMABLE NO 6 |
TOUS LES CONTACTS POSSEDEDUNE CAPACITE D'AU PLUS 0.5 A,120 V. C. A./1, O A,30 V. C. C., RESISTIF ADRESSE DU MODULE PROGRAMMABLE (RETIRER LE CAVALIER POUR LES DEFAILLANCES C282/NFPA DE SERIE, AJOUTER LE CAVALIER POUR LES DEFAILLANCES SUPPLEMENTaires. 3 LOIGIQUE DE CONTACT PROGRAMMABLE INDIVIDUELLEMENT AVEC LES CAVAIERS (CONTACT OUVERT OU FERMEN CAS DE FAIANCE) CONTACT PROGRAMMABLE - FONCTION CONFIGURABLE PAR L'UTILISATEUR AVEC LE LOGICIEL DU MEC 20 (CONSULTER LA DOCUMENTATION DU MEC 20) 57 MISE A LA TERRE FAITE AU POINT COMMUN DE MISE A LA TERRE DU CHASSIS ET DE L'ABRI LES DEFAILLANCES C282 OU NFPA 110 DE SERIE EXCLUENT LES DEFAILLANCES ANALOGIQUES DE SOUS-TENSION, DEFAILLANCES NUMERI ES NO 5-12 ET LA SORTTE PROGRAMMABLE NO 6 (UN DEUXIÈME MODULE DE EXPANSION DUIT RE UTILISSE POUR L'OBETION DE CONTACTS POUR CES DEFAILLANCES).
Les sorties du module d'expansion proviennent de contacts de relais qui peuvent être configurés individuellement comme contacts normalement ouverts ou fermés. La configuration du contact s'effectue par l'entremise de cavaliers montés sur la plaquette. Consulter la FIGURE 18 pour connaître l'emplacement des cavaliers et les options de configuration. Chaque contact de sortie possède une capacité (circuit résistif) maximale de 0,5 A à 120 V. c. a. ou de 1,0 A à 30 V. c. c.
Chaque module d'expansion offre également un contact programmable pour la fonction de contrôle désirée. Le contact programmable du premier module d'expansion (d'un système) est désigné sous le nom de « sortie programmable n°5 ». Sur le deuxième module d'expansion, le contact programmable est désigné sous le nom de « sortie programmable n°6 ». Consulter la Section 9 de ce manuel pour obtenir de plus amples renseignements sur les méthodes et les fonctions de programmation des contacts programmables.
Remarque: Le câble de communication entre le MEC 20 et le module d'expansion doit être commandé séparément.
FIGURE 18: PLAN DE LA PLAQUETTE DE CIRCUITS IMPRIMÉS DU MODULE DE SORTIE D'EXPANSION DU MEC 20
Chaque module d'expansion comprend des DEL de diagnostic, comme l'illustrre la FIGURE 18. Leur fonctions sont les suivantes : Chaque module d'expansion comprend des DEL de diagnostic, comme l'illustrre la FIGURE 18. Leur fonctions sont les suivantes :
SURVEILLANCE - Cette DEL clignote rapidement afin d'indiquer que le microprocesseur du module d'expansion fonctionne normalement.
MESSAGE - Cette DEL clignote à intervalles irréguliers afin d'indiquer que le module d'expansion reçoit correctement toutes les données du MEC 20.
Deux modules d'expansion peuvent être raccordés à un contrôleur MEC 20, pour un maximum de 32 contacts de sortie. Les deux modules sont interconnectés ensemble au MEC 20 par l'entremise d'un câble de communication unique. Consulter la FIGURE 19 pour obtenir de plus amples renseignements sur l'interconnexion. Le premier module d'expansion gère les circuits de détection de défaillances C282/NFPA110 de série 1 et le deuxième gère les circuits de détection de défaillances supplémentaires. La plaquette de circuits imprimés comprend des cavaliers permettant de sélectionner le type de défaillance assigné à chaque module d'expansion. Consulter la FIGURE 18 pour connaître l'emplacement des cavaliers et les options de configuration.
1 Les défaillances C282 ou NFPA 110 de série excluent les défaillances analogiques de sous-tension, de surtension, de sous-fréquence, de surfréquence et de surintensité, les entrées de défaillances numériques n° 5-12 et la sortie calculable n° 6 (un deuxième module d'expansion doit être utilisé pour l'obtention de contacts pour ces défaillances).
FIGURE 19 DIAGRAMME D'INTERCONNEXION DES MODULES D'EXPANSION DU MEC 20 G:\ENGINEER\PRODUCTS\MEC20\MEC20_17.VSD
8. OPTION d'annonciateur à distance EAP 110
Un annunciateur à distance EAP 110 est offert en option pour le contrôleur pour groupe électrogène MEC 20. Les caractéristiques de série de l'EAP 110 atteignent et dépassent toutes les exigences relatives aux normes du code du bâtiment NFPA 110, NFPA 99 et CSA 282-00 pour les systèmes de groupe électrogène de secours. La conception utilise une liaison de données de communication RS 422 à 8 conducteurs pour transmettre les signaux de contrôle et de surveillance entre le contrôleur pour groupe électrogène et l'annonciateur à distance. Jusqu'à 20 conditions de défaillance individuelles sont surveillées à distance au moyen de voyants à DEL et de l'indication d'alarme sonore. L'EAP 110 est alimenté en courant continu à partir de la même batterie de démarrage du moteur de 12 V ou 24 V à laquelle le contrôleur pour groupe électrogène est connecté. Deux ANNONCIATEUR EAP 110 peuvent être interconnectés ensemble par l'entremise de la liaison de communication, de sorte qu'il peut y avoir jusqu'à 40 points d'annonciateur à distance à partir d'un seul contrôleur.
Pour obtenir des renseignements complets au sujet de l'EAP 110, communiquez avec Thomson Technology pour recevoir la documentation liée à ce produit.
Consulter la figure 20 pour obtenir le diagramme de connexion de l'annonciateur à distance EAP 110.
FIGURE 20: DIAGRAMME DE CONNEXION DE L'ANNONCIATEUR A DISTANCE EAP 110 **Cable torsadé blindé à 8 conducteurs avec connecteurs RJ45. Acheminer le cable de communication pour le protéger contre les sources d'interférence électrique. Consulter la section d'installation de ce manuel pour de plus amples renseignements. Batterie de démarrage du moteur de 12 ou 24 V
9.1. Procedure de mise sous tension du MEC 20
Lorsque les bornes B+ et B- du MEC 20 sont alimentées pour la première fois avec une tension d'alimentation c. c., le contrôleur est mis sous tension en mode à sécurité intégrée, afin de prévenir tout fonctionnement du moteur. Le contrôleur tombe ensuite en mode d'arrêt d'urgence par défaut et il doit être réinitialisé manuellement avant d'être mis en fonctionnement normal. Pour désactiver la condition d'arrêt d'urgence, appuyer d'abord sur le bouton-poussoir « ARRÊT » (« OFF »), puis sur les boutons « INCRÉMENTER » (« INCRIMENT ») et « ENTREE » (« ENTER ») simultanément. Le contrôleur est alors réinitialisé, sauf si une condition d'arrêt d'urgence à distance est activée.
La sortie programmable « Alimentation de service prête pour charge » est mise sous tension si le contact de mise en marche à distance est ouvert.
9.2. MENUS d'affichage du MEC 20
Le MEC 20 possède un affichage à cristaux liquides (ACL) visible à travers la plaque frontale Lexan. L'ACL possède des écrans d'affichage et des menus pré-programmés qui peuvent être sélectionnés en appuyant sur le bouton-poussoir ENTREE (ENTER) ou SORTIE (EXIT) en alternance, jusqu'à ce que l'écran ou le menu désiré s'affiche. Les écrans d'affichage et l'ordre dans lequel ils sont programmés sont les suivants :
DEF.
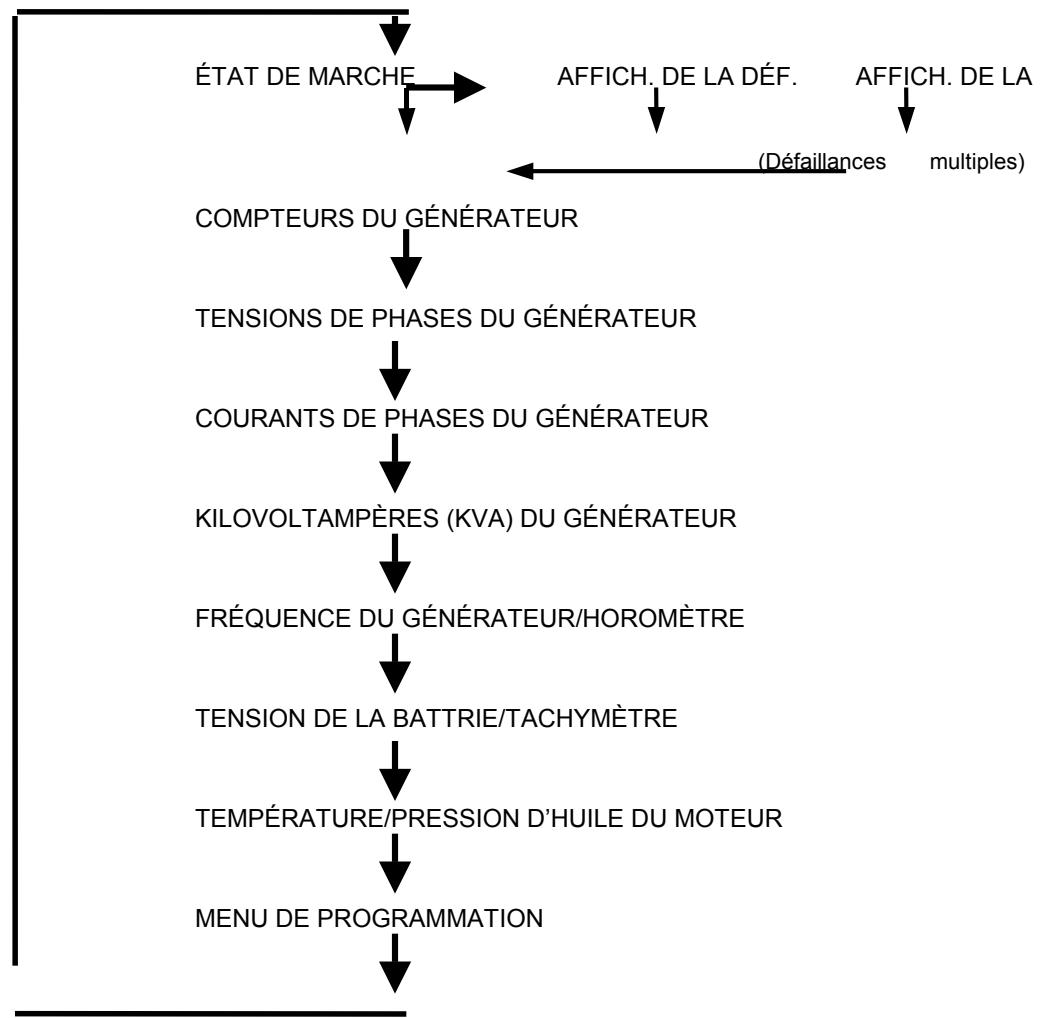
9.2.1. MENU état de MARCHE (OPERATING STATUS)
Le menu état de marche donne à l'utilisateur des renseignements détaillés sur l'état du groupe électrogène.
Remarque:
L'écran de l'état de fonctionnement peut être temporairement remplacé par un compte à rebours de délambda lorsqu'une série de mise en marche ou d'arrêt est lancée. L'affichage retournera automatiquement au menu précédent à la fin de la série de minutage.
Les sous-menus du menu état de marche sont les suivants :
ÉTAT DE MARCHE

COMMANDE EN POSITION ARRÊT
UNITE EN MARCHE
UNITE À L'ARRÊT
UNITE EN ALARME
9.2.1.1. UNITE Prête (UNIT READY)
Indique que le contrôleur est en position « automatique » et qu'aucun arrêt ni aucune alarme n'ont été détectés.
9.2.1.2. Commutateur en position arrêt (SWITCH IN OFF)
Indique que le bouton-poussoir du clavier du panneau avant du contrôleur est en position « arrêt ».
9.2.1.3. UNITE en MARCHE (UNIT RUNNING)
Indique que le moteur est en marche et que toutes les conditions de fonctionnement sont normales.
9.2.1.4. Unité à l'arrêt (UNIT SHUTDOWN)
Indique qu'une condition d'arrêt a été détectée. La condition de défaillance spécifique est automatiquement affichée.
9.2.1.5. UNITE En ALARME (UNIT ALARM)
Indique qu'une condition d'alarme ou plus ont été détectées. L'affichage fait automatiquement défiler toutes les conditions actives toutes les deux secondes.
9.2.2. MENU d'affichage de défaillance (FAULT DISPLAY MENU)
Le menu d'affichage de défaillance s'affiche automatiquement lorsqu'un circuit d'alarme ou d'arrêt est activé. L'étiquette de condition d'alarme ou d'arrêt spécifique est affichée. En présence de multiples conditions d'alarme, l'affichage fait automatiquement défiler toutes les conditions actives.
9.2.3. MENUS de COMPTE à rebours (TIMER COUNTDOWN MENUS)
Les menus de compte à rebours s'affichent automatiquement lorsqu'une fonction de délai spécifique survient au cours d'une série de contrôle. Lorsque le délai commence, l'ACL indique le nom de la fonction de délai (p. ex.: DÉLAI DE MISE EN MARCHÉ DU MOTEUR) et le temps restant à la série de compte à rebours. Lorsque la fonction de minutage s'arrête, l'ACL affiche automatiquement soit la série de compte à rebours suivante ou le menu d'état initial du système.
DELAY 45 SEC
Affiche la fonction de décalage spécifique en cours. Affiche le temps restant à la série de minutage spécifique en secondes ou en minutes.
Remarque:
Au cours d'une série de compte à rebours, un écran d'affichage différent peut être sélectionné en appuyant sur le bouton-poussoir « ENTREE » (« ENTER »).
Les écrans de compte à rebours suivants sont offerts :
DÉLAI DE MISE EN MARCHE DU MOTEUR (ENG XX SECONDES)
START DELAY)
PERIOD DE DÉMARRAGE (CRANK PERIOD) XX SECONDES
PERIOD DE REPOS (REST PERIOD) XX SECONDES
DÉLAI DE RÉENGAGEMENT DU DÉMARREUR XX SECONDES
(STARTER RE-ENGAGE DELAY)
DÉLAI DE DÉRIVATION (BYPASS DELAY) XX SECONDES
DÉLAI DE REFROIDISSEMENT (COOLDOWN DELAY) XXXX SECONDES
DÉLAI DE RÉCHAUFFEMENT* XX SECONDES
DÉLAI DE RETOUR* XXX SECONDES
DÉLAI NEUTRE* XX SECONDES
- Les compteurs à rebours n'apparaissent que si les sorties « Alimentation de service prête pour charge » et « Générateur prêt pour charge » sont programmées.
9.2.4. Compteurs à c. a. du générateur (generator AC metering)
Le générateur comprend les quatre compteurs à c. a. suivants :
9.2.4.1. Affichage des moyennes de tension/courant et de
L'utilisateur voit simultanément les valeurs moyennes de tension, de courant et la fréquence du générateur.
ACL
Vavg Aavg Freq 600
432 60.1
Affiche la tension moyenne du générateur de la manière suivante:
Système triphasé : MOYENNES DES TENSIONS ENTRE PHASES --
Phases AB, BC et CA
Système monophasé : TENSION ENTRE PHASES -- Phases A à B
Affiche le courant moyen du générateur de la manière suivante:
Système triphasé : MOYENNES DES COURANTS DE LIGNE --
Système monophasé : COURANT DE LIGNE MOYEN -- Phases A et B
Affiche la fréquence du générateur en hertz (Hz). La précision de
L'affichage est au dixième de hertz près.
9.2.4.2. Affichage de la puissance du générateur en KVA
La puissance de sortie totale du générateur s'affiche en kilovoltampères (KVA).
ACL
KVA
532.31
9.2.4.3. Affichage de la tension de PHASE du générateur
L'écran de tension de phase du générateur permet à l'utilisateur de voir les trois phases de tension c. a. du générateur (ou la tension d'un système monophasé, selon l'affichage sélectionné).
Affiche la tension du générateur de la manière suivante :
Système triphasé : TENSION LIGNE-LIGNE -- Phases A à B
Système monophasé : TENSION LIGNE-LIGNE -- Phases A à B
Affiche la tension du générateur de la manière suivante:
Système monophasé : TENSION ENTRE LIGNE ET NEUTRE --
3. Affiche la tension du générateur de la manière suivante :
Système triphasé : TENSION LIGNE=LIGNE -- Phases C à A
Système monophasé : TENSION ENTRE LIGNE ET NEUTRE --
9.2.4.4. Affichage de la tension phase/neutre du
L'affichage phase/neutre du générateur permet à l'utilisateur de voir la tension entre ligne et neutre du générateur pour les 3 phases du système. Remarque: Le conducteur neutre du générateur doit être connecté à la borne TB1-VN du MEC 20 et l'option « neutre connecté » (« neutral connected ») dans le menu de programmation principal doit être réglée à « Oui » (« Yes »).
| Van① | Vbn② | Vcn③ |
| 347 | 347 | 347 |
Affiche la tension du générateur entre phase A et neutre. Affiche la tension du générateur entre phase B et neutre. Affiche la tension du générateur entre phase C et neutre.
9.2.4.5. Affichage du courant de PHASE du générateur (generator PHASE current display)
L'écran de phase du courant permet à l'utilisateur de voir les trois phases du courant de charge du générateur (ou le courant d'un système monophasé, selon l'affichage sélectionné)
ACL
| Amps | a① | b② | c③ |
| 408 | 451 | 415 |
1. Affiche le courant de charge du générateur de la manière suivante : Système triphasé : COURANT DE PHASE A Système monophasé : COURANT DE PHASE A 2. Affiche le courant de charge du générateur de la manière suivante : Système triphasé : COURANT DE PHASE B Système monophasé : COURANT DE PHASE B 3. Affiche le courant de charge du générateur de la manière suivante : Système triphasé : COURANT DE PHASE C Système monopphasé : Sans objet
9.2.4.6. Fréquence du générateur/horometre (generator frequency/hourmeter display)
La fréquence du générateur et ses heures de fonctionnement s'affichent simultanément sur cet écran.
FREQ 60.1 Hz
HOURS 56783 Hrs
1. Affiche la fréquence du générateur en hertz (Hz). La précision de l'affichage est au dixième de hertz après. 2. Affiche les heures de fonctionnement de l'unité.
9.2.5. Affichage des paramètres du moteur
Les deux écrans de paramètres de fonctionnement du moteur suivants sont offerts :
9.2.5.1. Tension de la batterie et vitesse du moteur (tachymèture) (battery voltage/engine SPEED (tachometer)
La tension de la batterie et la vitesse du moteur s'affichent simultanément sur cet écran.
BATTERY 27.0Vdc
SPEED 1800rpm
Affiche la tension de la batterie en volts c. c. La précision de l'affichage est au dixième de volt près. Affiche la vitesse du moteur en tours par minute (tr/min).
9.2.5.2. Température du moteur/pression d'huile (ENGINE TEMPERATURE/OIL PRESSURE)
La température de fonctionnement du moteur et sa pression d'huile s'affichent simultanément sur cet écran.
ENGTEMP 57DegC
OIL PRESS 200 KPA
① Affiche la température du moteur en degrés Celsius ou Fahrenheit, au besoin. ② Affiche la pression d'huile du moteur en livres par pouce carré (lb/in²) ou en kilopascal (kPa), au choix.
9.2.6. MENU de programmation
Le menu de programmation permet d'accéder aux fonctions programmables du MEC 20, comme les délais, les réglages de détection de défaillances analogiques et numériques et l'étalonnage.
L'accès aux sous-menus de programmation ne peut être obtenu qu'avec un code d'accès. Les sous-menus se présentent de la manière suivante :

CODE D'ACCÉS
① Affiche deux questions auxquelles on peut répondre par OUI (YES) ou par NON (NO) en appuyant sur le bouton-poussoir INCRÉMENTER (INCREMENT). Leurs fonctions sont les suivantes :
NON Les sous-menus de programmation sont désactivés lorsqu'une réponse négative s'affiche.
YES Les sous-menus de programmation sont activés lorsqu'une réponse positifs s'affiche et qu'un code d'accès valide est entré.
9.3.1. Renseignements généraux
Le contrôleur pour groupe électrogène MEC 20 est conçu pour permettre la mise en marche et l'arrêt d'un moteur, à partir d'une commande locale (manuelle) ou à distance (automatique). Lorsque cette commande est donnée, le contrôleur émet un signal de sortie de marche et de démarrage. Le contrôleur surveille alors la vitesse du moteur et lorsqu'il atteint la vitesse de déconnexion, le signal de démarrage cesse. Pendant que le moteur accélère jusqu'à sa vitesse normale,
le contrôleur surveille constamment le signal de vitesse du moteur. Si la vitesse du moteur excède une valeur de consigne prédéterminée, un circuit d'arrêt en cas de survitesse s'active et met fin au signal de marche. En plus du circuit d'arrêt en cas de survitesse, le contrôleur surveille également de nombreux autres circuits de protection du moteur et lorsqu'ils sont actifs, le moteur est arrêté et (ou) une alarme se déclenche. Le moteur s'arrête automatiquement en présence de n'importe quelle condition d'arrêt ou lorsque le signal de départ à distance et (ou) local cesse. Le contrôleur pour groupe électrogène comprend des circuits de délai pour les conditions de fonctionnement normales telles que les délais de mise en marche, de refroidissement et de période de démarrage.
9.3.2. Sequence de mise en MARCHE et d'arrêt manuelle
Lorsqu'on appuie sur le bouton-poussoir MARCHE (RUN) du contrôleur, situé sur le clavier de la plaque frontale, un DÉLAI DE MISE EN MARCHE DU MOTEUR s'active. Remarque: La série de départ n'aura pas lieu en présence de toute condition d'arrêt en cas de défaillance. Une fois le délai de départ du moteur terminé, un signal de sortie de MARCHE et de DEMARRAGE est émis. Remarque: Le signal de MARCHE peut être programmé pour être mis sous tension uniquement lorsqu'un signal de marche est émis et lorsqu'un signal de vitesse du moteur est détecté. Lorsque le moteur tourne et qu'il accélère jusqu'à sa vitesse nominale, le capteur de vitesse du contrôleur arrête le signal de DEMARRAGE dès que le moteur atteint environ 20% de sa vitesse, c'est-à-dire la valeur de consigne de DÉCONNEXION DU DEMARRAGE. Dès que la vitesse de déconnexion du démarrage est atteinte, le contrôleur lance la fonction de DÉLAI DE DÉRIVATION. À la suite du DÉLAI DE DÉRIVATION, qui dure normalement 10 secondes, tous les circuits de détection de défaillance programmés pour le DÉLAI DE DÉRIVATION (BYPASS DELAY=YES) sont actifs. Remarque: Tous les circuits de détection de défaillance programmés pour ignorer le DÉLAI DE DÉRIVATION (BYPASS DELAY=NO) sont continuellement activés, peu importe la suite des opérations.
Lorsqu'on appuie sur le bouton-poussoir ARRÉT (OFF) du clavier avant, la sortie MARCHÉ du contrôleur est immédiatement désalimentée et le moteur s'arrête.
9.3.3. Sequence de mise en MARCHE et d'arrêt automatique
Lorsque le fonctionnement automatique du contrôleur est sélectionné, par l'entremise du bouton-poussoir du clavier avant, le moteur est automatiquement mis en marche lors de l'activation du contact de mise en marche à distance.
Remarque: La commande à distance actionne une série de mise en marche à la fermeture du contact. Une fois le signal de mise en marche à distance activé, le moteur est mis en marche conformément à la suite des opérations décrites pour la série de mise en marche manuelle.
La série d'arrêt automatique débute lorsqu'on a arrêté le signal de mise en marche à distance. Une fois le signal de mise en marche arrêté, un délai de refroidissement débute. Une fois le délai de refroidissement terminé, qui dure normalement 5 minutes, la sortie MARCHE du générateur s'arrête, ce qui provoque l'arrêt du générateur.
9.3.4. Sequence automatique d'arrêt en cas de défaillance
Lorsqu'un circuit de détection de défaillance est programmé pour provoquer un ARRÊT, le moteur s'arrête immédiatement quand ce circuit de détection de défaillance est activé. Remarque: Un arrêt en cas de défaillance spécifique peut être programmé avec un délambda transitoire défini, qui doit expirer avant que l'arrêt ne soit activé. La sortie MARCHE du contrôleur est immédiatement désalimentée en présence d'une séquence d'arrêt et provoque l'arrêt du moteur.
9.3.5. Sequence de PANNE de secteur automatique (PSA)
Lorsque le contrôleur est utilisé dans une application de panne de secteur automatique (PSA) munie d'un commutateur de transfert, il doit être connecté tel qu'illustré à la figure 21 située à la fin de cette section. « Alimentation de service prête pour charge » doit être sélectionné pour la sortie calculable n^0 3 et « Générateur prêt pour charge » doit être sélectionné pour la sortie calculable n^0 4. Une fois que le contrôleur est programmé et connecté conformément à la figure 21, la suite des opérations PSA se fait de la façon suivante :
9.3.5.1 Condition normale de l'alimentation de service :
- Le signal d'entrée de mise en marche à distance (bornes 16 et 17 du MEC) n'est pas activé (c'est-à-dire que l'alimentation de service est normale).
- La sortie « Alimentation de service prête pour charge » est mise sous tension (c'est-à-dire qu'un signal est envoyé au commutateur de transfert pour qu'il passe au mode d'alimentation de service). La sortie « Générateur prêt pour charge » est mise hors tension.
Conditions de défaillance de l'alimentation de service :
- Le signal d'entrée de mise en marche à distance est activé (c'est-à-dire que le contact de mise en marche à distance se referme lorsque l'alimentation de service n'a pas fonctionné, tel que détecté par le capteur de tension de l'alimentation de service).
- Le moteur se met en marche à la fin du début de mise en marche du moteur (la sortie « Alimentation de service prête pour charge » demeure sous tension).
- Lorsque le moteur est en marche et que la sortie du générateur est supérieure aux limites de tension et de fréquence programées, une période de réchauffement est activée.
- Lorsque la période de réchauffement est terminée, la sortie « Alimentation de service prête pour charge » se met hors tension et le délai NEUTRE est activé.
- Lorsque le délai NEUTRE est terminé, la sortie « Générateur prêt pour charge » se met sous tension pour signaler au commutateur de transfert de passer à l'alimentation du générateur. Remarque: La fonction de délai neutre ne fonctionne qu'avec un mécanisme de commutateur de transfert maintenu électriquement (c'est-à-dire de type contacteur électrique).
9.3.5.3. RETOUR à l'alimentation de service :
- Le signal d'entrée de mise en marche à distance disparaît et le délambda de retour est activé (c'est-à-dire que la tension de l'alimentation de service retourne à la normale et le contact du capteur de tension de l'alimentation de service s'ouvre).
- Lorsque le délambda de retard est terminé, la sortie « Générateur prêt pour charge » se met hors tension et le délambda neutre est activé.
- Lorsque le délambda neutre est terminé, la sortie « Alimentation de service prête pour charge » se met sous tension pour signaler au commutateur de transfert de passer à l'alimentation de service. Remarque : Si le générateur est arrêté au cours du délambda de retard ou du délambda neutre, les minutes sont contournées et la sortie « Alimentation de service prête pour charge » se met sous tension immédiatement.
- La minuterie de refroidissement du générateur se met en marche à la fin du délai de retard.
- Le générateur s'arrête à la fin de la période de refroidissement.
Remarque.
La série suivante, telle qu'elle est décrite, n'est applicable que si les sorties « Alimentation de service prête pour charge » et « Générateur prêt pour charge » sont toutes deux programmées et utilisées.
- Lorsque l'on appuie sur le bouton-poussoir Essai en charge (« Load Test ») du MEC, la logique du contrôle simule interieurement la réception d'une entrée de mise en marche à distance.
- Le moteur se met en marche à la fin du début de mise en marche du moteur.
- Lorsque le moteur est en marche et que la sortie du générateur est supérieure aux limites de tension et de fréquence programmes, une période de réchauffement est activée.
- Lorsque la période de réchauffement est terminée, la sortie « Alimentation de service prête pour charge » se met hors tension et le décaï neutre est activé.
- Lorsque le déclenchement neutre est terminé, la sortie « Générateur prêt pour charge » se met sous tension pour signaler au commutateur de transfert de passer à l'alimentation du générateur. Remarque: Si le générateur est arrêté au cours d'une opération d'essai en charge, le mode « Essai en charge » est désactivé.
Lorsque le MEC est remis en mode automatique, la série suivante se produit :
Le signal d'entrée de mise en marche à distance simulé cesse. - La sortie « Générateur prêt pour charge » se met hors tension et le neutre est activé. - Lorsque le déclenchement neutre est terminé, la sortie « Alimentation de service prête pour charge » se met sous tension pour signaler au commutateur de transfert de passer à l'alimentation de service.
- La minuterie de refroidissement du générateur se met en marche à la suite du transfert à l'alimentation de service.
Le générateur s'arrête à la fin de la période de refroidissement.
9.3.5.5. ESSAI à VIDE :
Pour permettre l'essai à vide minuté d'un groupe électrogène tout en utilisant l'application de contrôle PSA, le contact d'entrée numérique d'une minuterie externe doit être programmé pour un « essai à vide » (consulter la Section 10.5.8 pour obtenir des détails sur la programmation).
La suite des opérations pour une condition d'essai à vide se fait de la façon suivante :
- Lorsque l'alimentation de service est normale et que le générateur est à l'arrêt, une série d'essais à vide peut être activée en fermant un contact de minuterie d'exercice externe sur l'entrée numérique programmée pour un essai à vide.
- À la fermeture du contact de minuterie d'exercice externe, le moteur se met en marche et atteint la vitesse et la tension de fonctionnement normales. Le MEC émet une alarme de condition d'essai à vide. Le commutateur de transfert connecté demeure sur l'alimentation de service et le générateur ne passe pas en charge. Remarque : Si l'alimentation de service fait défaut, le générateur passe automatiquement en charge.
- Le moteur continue de fonctionner aussi longtemps que le contact de minuterie d'exercice externe demeure fermé.
- À la fermeture du contact de minuterie d'exercice externe, le moteur continue de fonctionner pendant la période de refroidissement programmée et s'arrête automatiquement ensuite.
Pour un MEC 2/mec 20
FIGURE 21
V L ES CONTACTS POSSÉDENT UNE CAPACITÉ DE CHARGE RÉSISTIVE DE 10 A, 240 V. C. A. 7 LE CONTACT DE PANNE DE SECTEUR SE REFERME LORSQUE LA TENSION EST INFERIEURE A LA VALEUR DE CONSIGNE. V A SORTE PROGRAMMABLE NO3 DOIT ETRE PROGRAMMEE POUR "ALIMENTATION DE SERVICE PRÉTE POUR CHARGE". 4 LA SORTIE PROGRAMMABLE NO4 DOIT ETRE PROGRAMMEE POUR "GENERATEUR PRET POUR CHARGE". TOUS LES COMPOSANTS ILLUSTRES A L'EXTERIEUR DU MEC 2 / MEC 20 SONT EN OPTION. 6 INVERSEUR A 3 POLES ILLUSTRÉ POUR LES AUTRES APPLICATIONS DE TENSION DE SYSTÉME, COMMUNIQUE AVEC TTI DES DISPOSITIFS DE SUPPRESSION DES POINTES DE BOBINE C. A. SONT REQUIS.
9.4. Boutons-poussoirs de controlle
Les boutons-poussoirs de contrôle suivants sont situés sur le clavier de la plaque frontale :
9.4.1.1. MARCHE (RUN)
Dans cette position, le moteur se met en marche et fonctionne continuellement, pourvu qu'aucun circuit d'arrêt ne soit activé. Tous les circuits de protection fonctionnent dans cette position. Il n'y a aucun cycle de refroidissement à la fin d'une séquence de marche manuelle.
9.4.1.2. Arrét (OFF)
Cette position arrête immédiatement le moteur et le verrouille. La position ARRÊT permet également de réinitialiser toutes les conditions d'arrêts, en cas de défaillance.
9.4.1.3. Automatique (AUTO)
Dans cette position, la mise en marche et l'arrêt du moteur sont contrôlés par un contact à distance. Lorsque le signal de mise en marche à distance s'arrête, le moteur continue de fonctionner pour la période de refroidissement, si cette option est sélectionnée, puis il s'arrête. Si on sélectionne à nouveau la position arrêt, le moteur s'arrête immédiatement, même si la période de refroidissement n'est pas terminée.
Remarque.
Cette caractéristique de contrôle ne fonctionne que si elle est utilisée dans une application PSA ou si l'un des contacts de sortie programmables est configuré pour un « Essai de commutation » et qu'un commutateur de transfert à distance est interconnecté et muni de circuits d'essai à distance.
Dans cette position, un signal est transmis à un commutateur de transfert à distance, afin de permettre une mise en marche du moteur et un transfert automatique de la charge. Une fois ce signal transmis, le moteur reçoit un signal de mise en marche du commutateur de transfert et une fois que le générateur atteint sa tension et sa fréquence nominales, un transfert de charge débute. Le groupe électrogène fonctionne en charge jusqu'à ce qu'un autre mode de fonctionnement soit sélectionné ou que le générateur développe une condition d'alarme ou d'arrêt.
9.4.2. Bouton-poussoir d'arrêt d'urgence (emergency STOP)
Ce bouton-poussoir arrête immédiatement le moteur et le verrouille. Le moteur ne peut être remis en marche dans ce mode jusqu'à ce que le contrôleur soit réinitialisé.
9.4.3. Fonction de réinitialisation de défaillance
Pour lancer la fonction de réinitialisation, appuyer simultanément sur les boutons-poussoirs « INCRÉMENTER » (INCREMENT) et « ENTREE » (ENTER). Cette fonction réinitialise le contrôleur lorsqu'il est en mode d'arrêt.
Remarque:
Pour lancer une commande de réinitialisation, le moteur doit être complètement arrêté et le commutateur du contrôleur doit être en position Arrêt (Off).
9.4.4. ALARME MUETTE
Pour rendre l'alarme muette, appuyer simultanément sur les boutons-poussoirs SORITE (EXIT) et DÉCRÉMENTSER (DECREMENT). Cette fonction rend l'alarme muette sans effacer la condition de défaillance.
9.4.5. ESSAI des voyants
Une fonction d'essai des voyants est offerte afin d'essayer tous les voyants à DEL contrôlés par un logiciel, de même que l'ACL. Pour activer la fonction d'essai des voyants, appuyer simultanément sur les boutons-poussoirs INCRÉMENTS (INIncrement) et (DéCRÉMENTS). Les DEL et l'ACL s'illuminent alors pendant environ 2 secondes, puis redeviennent leur état original. Remarque: La DEL d'alarme d'urgence n'est pas activée par un essai commandé par logiciel, car elle est contrôlée par des circuits indépendants.
10.1. CODES d'accès
L'accès aux paramètres programmables du contrôleur MEC 20 est protégé par l'entremise d'un code d'accès. Trois niveaux de code d'accès sont offerts, comme il est décrit ci-dessous :
10.1.1. Mode de lecture seule
L'utilisateur peut uniquement voir les paramètres programmables et ne peut changer aucune valeur. Le code d'accès par défaut du niveau de lecture seule est un (1).
10.1.2. Mode de lecture et d'écriture
L'utilisateur peut voir et modifier tous les paramètres de programmation au besoin. Le code d'accès par défaut du niveau de lecture et d'écriture est deux (2).
10.1.3. Mode de lecture et d'écriture principal
L'utilisateur peut voir et modifier tous les paramètres de programmation et les codes d'accès des niveaux. Veuillez communiquer avec THOMSON TECHNOLOGY pour obtenir le mot de passe du mode de lecture et d'écriture principal.
Pour pénétrer le mode de programmation, suivre la procédure suivante :
Sélectionner le menu de programmation en faisant défiler les menus à l'aide du bouton-poussoir « ENTREE » (« ENTER »). Lorsque le menu de programmation s'affiche, appuyer sur le bouton-poussoir INCRÉMENTER (INCREMENT) pour sélectionner le OUI (YES) et appuyer sur le bouton ENTREE (ENTER).
Utiliser les boutons-poussoirs INCRÉMENTER (INCREMENT) ou DÉCRÉMENTER (DECREMENT) pour faire défiler les nombres affichés vers le haut ou vers le bas afin de former le code d'accès désiré. Appuyer sur le bouton-poussoir ENTRée (ENTER) lorsque le code exact s'affiche.
Remarque:
Si un code invalide est entré, l'accès aux paramètres de programmation est refusé. Pour sortir du menu de programmation, appuyer sur le bouton-poussoir « SORTIE » (« EXIT ») pendant deux secondes, jusqu'à ce que l'affichage change.
10.2. Opérations de programmation de BASE
Une fois qu'il a entré le bon code d'accès, l'utilisateur peut sélectionner l'un des quatre menus de programmation différents, comme l'illustré la figure suivante :

Le MENU PRINCIPAL (MAIN MENU) apparaît immédiatement à l'entrée du mode de programmation. Pour sélectionner le menu de programmation désiré, appuyer sur le bouton-poussoir INCRÉMENTER (INCREMENT) afin de naviguer parmi les menus offerts et une fois que le menu désiré s'affiche, appuyer sur le bouton-poussoir ENTRÉE (ENTER) pour sélectionner le menu spécifique.
Une fois qu'on a accédé au mode de programmation, les paramètres de programmation s'affichent dans le même ordre que celui des feuilles de programmation. Pour sauter un paramètre qui ne nécessite aucune modification, appuyer sur le bouton-poussoir ENTREE (ENTER) et le maintenir jusqu'à ce que la fonction désirée s'affiche. Le bouton-poussoir SUIVANT (NEXT) permet de faire défiler les boucles des paramètres de programmation vers l'arrête.
Pour modifier un paramètre programme, utiliser les boutons-poussoirs INCRÉMENTS (INCREMENT) ou DÉCRÉMENTS (DECREMENT) afin de naviguer parmi les options offertes ou d'augmenter ou de diminuer une valeur jusqu'au nombre désiré. Lorsque l'option ou le nombre désiré s'affiche, appuyer sur le bouton-poussoir ENTRÉE (ENTER) pour accepter la nouvelle valeur.
Remarque:
Si l'on quitte le mode de programmation avant que la dernière modification ne soit entrée, le paramètre de programmation demeure inchangé.
Pour quitter le mode de programmation, appuyer sur le bouton-poussoir SORTIE (EXIT) pendant deux secondes.
Le contrôleur quitte automatiquement le menu de programmation lorsqu'un délai interne réglé à 999 secondes s'écoule depuis la première fois où une touche du contrôleur a été pressée.
Remarque: Le menu d'affichage tombe automatiquement à un mode de voir à faible énergie une fois le délai interne de 999 secondes écoulé.
10.3. MENU de programmation principal
Le menu de programmation principal comprend les paramètres de configuration généraux du système, tels que les tensions d'entrée, les courants, les rapports de transformateur et les fonctions de début de fonctionnement standards du système. Les messages de programmes sont énumérés ci-dessous dans l'ordre de leur apparition dans le logiciel du MEC 2 0. Pour programmer les articles spécifiques du MENU PRINCIPAL (MAIN MENU), consulter les directives suivantes.
10.3.1. Adresse de NOEUD
Donner au contrôleur une adresse unique (entre 1 et 255) pour les applications comportant des contrôleurs MEC 20 connectés en réseau.
Remarque : Cette fonction de programmation ne fonctionne que si une option de communication à distance est activée. Le paramètre par défaut pour les applications à contrôleur MEC 20 unique est un (1).
10.3.2. Tension du systeme
Régler la tension nominale du système en l'exprimant en tension phase à phase. Par exemple, un système de tension 347/600 V s'inscrirait « 600 ». La gamme de valeurs programmables s'étend de 120 V à 15 000 V.
10.3.3. Fréquence du système
Régler le système à une fréquence nominale de 50Hz ou 60Hz.
10.3.4. PHASES Du systeme
Régler ce paramètre afin qu'il corresponde au système de distribution utilisé sur le groupe électrogène, c'est-à-dire monophasé ou triphasé.
10.3.5. NEUTRE connecté
Régler ce paramètre à « Oui » si le conducteur neutre du générateur est connecté à la borne TB1-VN du contrôleur MEC 20 et si l'on désire afficher les tensions c. a. entre ligne et neutre pour un système triphasé à 4 câbles.
10.3.6. Rapport de detection de tension
Pour les connexions directes de détection de tension, de 208 volts à 600 volts, entre le chiffre un (1), c'est-à-dire un rapport de « 1:1 ». Lorsque des transformateurs de potentiel sont utilisés pour la détection de tension, entre le rapport de transformation calculé. Par exemple, pour un transformateur de rapport 600:120, entre le nombre cinq (5).
10.3.7. Rapport de détection de courant
Pour les connexions de détection de courant avec transformateurs de courant, entrez le rapport du transformateur de courant calculé. Par exemple, pour un transformateur de courant d'un rapport de 600:5, entrez le nombre 120.
10.3.8. Échelle de temperature
Sélectionner l'unité désirée pour l'affichage de la température du moteur et des valeurs de consignes analogiques, soit des degrés Fahrenheit ou Celsius.
Remarque: Les valeurs de consigne de l'alarme ne se reconfigurent pas automatiquement si l'on change les degrés Fahrenheit pour des degrés Celsius ou inversement.
10.3.9. Échelle de pression
Sélectionner l'unité désirée pour l'affichage de la pression du moteur et des valeurs de consigne analogiques, soit des livres par pouce carré (lb/ po^2) ou des kilopascals (kPa).
Remarque: Les valeurs de consigne de l'alarme ne se reconfigurent pas automatiquement si l'on change les lb/ po^2 pour des kPa ou inversement.
10.3.10. Délai de mise en MARCHE
Sélectionner la durée du début de mise en marche du moteur désirée en secondes. Si aucun début de mise en marche du moteur n'est requis, régler à zéro.
Remarque: Si les fonctions de préchauffage et (ou) de prélubrification sont utilisées, le délais de mise en marche du moteur doit être réglé selon les exigences de ces fonctions.
10.3.11. Durée de la période de demarrage
Sélectionner la durée de la période de démarrage désirée en secondes. Si l'option de démarrage cyclique est sélectionnée, la durée sélectionnée sera celle de la période de démarrage de chaque essai.
10.3.12. Durée de la période de REPOS
Sélectionner la durée de la période de repos désirée entre les essais de démarrage. (Cette fonction ne s'applique que si une option d'essais de démarrage multiples est sélectionnée.)
Remarque : Cette valeur sera ignorée si un seul essai de démarrage est sélectionné.
10.3.13. Délai de réengagement du demarreur
Cette fonction surveille la présence d'un signal de vitesse pendant le démarrage. Si aucun signal n'est détecté, le contrôleur présume que le démarreur du moteur ne fait pas tourner le moteur, pour quelques raison que ce soit, et il le désengage après le délai programmé, puis il le réengage. Ce procédé se répète jusqu'à ce qu'un signal de vitesse soit détecté ou que le temps de démarrage soit écoulé, selon la première évènementalité. Si un signal de vitesse est détecté, la sortie de démarrage est alimentée jusqu'à ce que le moteur soit mis en marche ou qu'une
condition de surdémarriage survienne. Régler la durée de la période d'échantillonnage désirée en secondes. Par exemple, si on règle la durée à cinq secondes, le démarreur effectue un essai de 5 secondes et si aucun signal de vitesse n'est détecté après cette période, la sortie de démarriage est désalimentée pendant un délai prédéfini de 1 seconde avant d'être alimentée à nouveau.
Remarque: Cette fonction représente plus qu'une fonction de démarrage cyclique. En effet, elle ne dépend pas du nombre d'essais sélectionné. La durée de démarrage doit donc être prise en considération. Régler cette fonction à zéro pour la désactiver.
10.3.14. NOMBRE De CYCLES de demarrage
Sélectionner le nombre de cycles de démarrage requis. Entrer zéro pour régler le nombre de cycles à un par défaut.
10.3.15. Délai de dérivation
Cette fonction permet de définir la période pendant laquelle l'entrée d'alarme ou d'arrêt en cause est ignorée après la déconnexion du démarreur. Le moteur peut ainsi se stabiliser en mode de fonctionnement normal (p. ex. : pression d'huile ajustée, etc.). Ce délai est généralement fixé à 10 secondes.
10.3.16. DUREE De la période de refroidissement
Sélectionner en secondes la durée désirée pour la période de refroidissement. Il est possible de programmer jusqu'à 9 999 secondes de temps de refroidissement. Régler ce paramètre à zéro si aucune période de refroidissement n'est requise. Remarque: Si le contrôleur est utilisé dans une application PSA, on recommande de régler la minuterie de refroidissement à un minimum de 10 secondes afin de permettre au générateur de passer en mode « À vide » (« Off Load ») avant d'activer la période de refroidissement. (S'assurer que la charge est retirée du générateur avant d'arrêter le moteur.)
10.3.17. Vitesse nominale du moteur en tr/min
Régler à la vitesse nominale du moteur en tours par minute (tr/min).
10.3.18. CRANS du VOLANT
Sélectionner le nombre de crans de couronne sur le volant du moteur. Le capteur magnétique doit être installé de manière à détecter le même nombre de crans, afin de détecter la vitesse selon les paramètres programmés.
10.3.19. Vitesse de déconnexion du demarrage
Régler la vitesse de déconnexion en pourcentage de la vitesse nominale, c'est-à-dire de 30% ou de 540 tr/min pour un moteur d'une vitesse de 1800 tr/min.
Régler le point d'arrêt en cas de survitesse en pourcentage de la vitesse nominale, c'est-à-dire 110 % ou 1980 tr/min pour un moteur d'une vitesse de 1800 tr/min.
10.3.21. Délai transitoire de survitesse
Sélectionner le délambda transitoire de survitesse désiré en secondes. Le temps peut être entre en dixièmes de secondes.
10.3.22. SORTIE de marché à sécurité intégrée
Lorsqu'elle est activée, cette fonction invalide la sortie de marche jusqu'à ce que le contrôleur reçoive un signal de détection de vitesse, afin de prévenir tout dommage causé par la mise en marche du moteur sans détection de vitesse pour la déconnexion du démarrage et la détection de la survitesse. Si cette fonction est sélectionnée, s'assurer que le signal de vitesse est inférieur d'au plus 3.0 V. c. a. au capteur magnétique, lors du démarrage du moteur. Remarque: Si cette fonction est désactivée, aucune détection de survitesse ou déconnexion du démarrage ne survient lorsqu'une défaillance du signal de vitesse survient. Si l'utilisateur désire de désactiver cette fonction, Thomson Technology recommande fortement l'utilisation d'une détection de déconnexion du démarrage de secours ainsi que d'une détection de survitesse supplémentaire.
Remarque :
La fonction de sortie de marche à sécurité intégrée est programmée en usine et activée. L'utilisateur peut modifier cette fonction selon les conditions de l'emplacement, s'il y a lieu.
10.3.23. SIGNAL de PERTE de vitesse
Sélectionner l'action désirée, soit « alarme » ou « arrêt », lorsqu'il y a détection d'un signal de perte de vitesse au cours d'une opération. Remarque : Un signal de perte de vitesse doit être détecté pendant plus de deux secondes pour déclencher l'action désirée.
10.3.24. PANNE commune pour la fonction « commutateur PAS en position automatique
Cette fonction permet de décider si une condition d'alarme en cas de panne commune est activée lorsque le contrôleur pour groupe électrogène n'est pas en position de fonctionnement automatique.
10.3.25. ALARME pour la fonction « commutateur PAS en position automatique
L'alarme peut être programmée pour sonner lorsque le mode de fonctionnement du contrôleur est terminé de la position automatique. Si l'alarme ne doit pas sonner, sélectionner le réglage de programmation « non »
10.3.26. Délai de réchauffement
Le menu de programmation du début de réchauffement apparait lorsque la sortie programmable « Générateur prêt pour charge » est sélectionnée, car il est généralement utilisé dans une application PSA. Sélectionner la durée désirée en secondes, laquelle correspond à la durée nécessaire au générateur pour pouvoir se « réchauffer » de façon efficace avant d'accepter une charge. Cette fonction est généralement réalisée à 3 secondes. Le début de réchauffement est activé lorsque la sortie du générateur est supérieure aux limites de tension et de fréquence programmées (conformément aux menus de
programmation analogiques). Consultez la Section 9.3. pour obtenir plus de détails sur cette fonction de minutage.
10.3.27. Délai NEUTRE
Le menu de programmation du début neutre apparaît lorsque les sorties programmables « Alimentation de service prête pour charge » sont sélectionnées, car il est généralement utilisé dans une application PSA. Le début neutre est activé lorsqu'un transfert s'effectue entre les sources disponibles. Lors d'un transfert de l'alimentation de service à l'alimentation du générateur, le début neutre débute lorsque la sortie « Alimentation de service prête pour charge » se met hors tension. Lorsque le début neutre est terminé, la sortie « Générateur prêt pour charge » se met alors sous tension. La même série survient lors d'un transfert dans la direction opposée. Le début neutre a pour but d'empêcher les transferts déphasés, qui peuvent être causés par un transfert rapide et lorsque les deux sources d'alimentation sont désynchronisées. Le début neut[...] neutre permet d'assurer que les tensions de la charge diminuent avant que le transfert soit lancé.
Sélectionner la durée désirée en secondes. Le début neutre est généralement réglé à 3 secondes. Consulter la Section 9.3 pour obtenir plus de détails sur cette fonction de minutage.
Remarque :
La fonction du neutre initial n'est efficace que lorsque qu'un commutateur de transfert maintenu électriquement, de type « contacteur », est connecté. Communiquer avec Thomson Technology pour obtenir de plus amples renseignements sur l'utilisation de cette fonction avec d'autres types de mécanisme de commutateur de transfert.
10.3.28. Délai de RETOUR
Le menu de programmation du début de apparait lorsque la sortie programmable « Alimentation de service prête pour charge » est sélectionnée, car il est généralement utilisé dans une application PSA. Le début de est
activé lorsque le signal de mise en marche à distance disparaît, signalant que l'alimentation de service est maintenant libre. Lorsque le délambda de retour est terminé, la sortie « Générateur prêt pour charge » est mise hors tension et la sortie « Alimentation de service prête pour charge » mise sous tension pour signaler le transfert de la charge vers l'alimentation de service. Le délambda de retour a pour but d'assurer que l'alimentation de service est revenue à un état stable pendant la période sélectionnée avant que la charge y soit retournée. Le délambda de retour est généralement réglé à 120 secondes. Consulter la Section 9.3 pour obtenir plus de détails sur cette fonction de minutage.
10.3.29. Contacts de SORTIE programmables
Sélectionner la fonction désirée qui activera le contact de sortie de relais programmable désigné. L'une des fonctions suivantes peut être sélectionnée.
Remarque : Les contacts de sortie numéros 5 et 6 sont situés sur le module de sortie d'expansion externe et sont offerts en option. Consulter la Section 7 de ce document pour obtenir de plus amples renseignements à ce sujet.
| CONTRÔLE PRE-/POST- | CONTRÔLE MARCHÉ AU |
| LUBRIFICATION ET LUB. CYCLIQUE | RALENTI |
| SURINTENSIÉ | CHARGE D'ALIMENTATION EPS |
| MISE SOUS TENSION POUR | GÉNÉRATEUR PRÊT POUR |
| L'ARRÊT | CHARGE |
| VOLET D'ENTRÈE D'AIR | ALIMENTATION DE SERVICE |
| PRÊTE POUR CHARGE | |
| FIN DE LA PÉRIODE DE DÉFAILLANCES NUMÉRIQUES | DéFAILLANCES NUMÉRIQUES |
| DERIVATION D'HUILE | NO 1 à 12 |
| PANNE COMMUNE | SURVITESSE |
| COMMUTATEUR PAS EN POSITION AUTOMATIQUE | SIGNAL DE PERTE DE VITESSE |
| MOTEUR PRÊT | BASSE TENSION DE LA BATTERIE |
| ALIMENTATION DU MOTEUR (ESSENCE) | TENSION ÉLEVÉE DE LA BATTERIE |
| PRÉCHAUFFAGE | FAIBLE TENSION DE LA |
| BATTERIE | |
| MOTEUR EN MARCHE | ALARME DE FAIBLE PRESSION D'HUILE #1 |
| ESSAI DE COMMUTATION | ARRÊT DE FAIBLE PRESSION D'HUILE #2 |
| ALARME COMMUNE | ALARME DE TEMPERATURE ÉLEVÉE DU MOTEUR #1 |
| ARRÊT COMMUN | ARRÊT DE TEMPERATURE ÉLEVÉE DU MOTEUR #2 |
Avertissement
La fonction de programmation sélectionnée doit être coordonnée avec le câblage de contrôle externe préalablement à la mise sous tension du système de contrôle. Tout manquement à ces directives peut endommager gravement le matériel.
10.3.30. APPEL automatique
Lorsque l'option de communication à distance est activée, ce message de programmation apparait. Le contrôleur peut être programmé pour le type de défaillance commune désirée, c'est-à-dire arrêt, défaillance ou alarme, laquelle déclenche automatiquement un appel à un dispositif de communication à distance.
10.3.31. Durée de la période de postlubrification
Programmer la durée de la période de postlubrification désirée en minutes (de 0 à 999 minutes).
Remarque: Les fonctions de lubrification sont désactivées en position arrêt et lorsque le moteur atteint une vitesse supérieure à la vitesse de déconnexion du démarrage.
Intervalle entre les CYCLES de lubrification
La fonction de lubrification cyclique peut être régée afin de faire circuler l'huile dans le moteur plusieurs fois par jour, pendant que le moteur est à l'arrêt. Une durée de postlubrification autre que zéro doit être entrée pour activer la sortie de
Sélectionner l'intervalle entre les cycles de lubrification en minutes (de 1 à 9 999 minutes).
10.3.33. Durée des CYCLES de lubrification
Une fois l'intervalle entre les cycles de lubrification terminée, la fonction se réinitialise et démarre la pompe de lubrification pour cette durée. Si la durée du cycle de lubrification est supérieure à celle de l'intervalle entre les cycles de lubrification, la pompe fonctionne continuellement lorsque le moteur est à l'arrêt. La sortie de prélubrification est également mise sous tension pendant le début de mise en marche du moteur et les cycles de démarrage. Elle est mise hors tension lorsque le moteur atteint la vitesse de déconnexion du démarrage. Sélectionner la durée des cycles de lubrification désirée en minutes (de 0 à 999 minutes).
10.3.34. REMISE à zéro de l'horimètre
Il est possible de remettre à zéro l'horomètre du moteur. Remarque: On ne peut acceder à ce paramètre de programmation qu'avec le code d'accès principal.
10.4. MENU de programmation des défaillances analogiques
Consulter les directives ci-dessous pour obtenir des renseignements sur la programmation des circuits de détection de défaillance analogique du contrôleur.
Remarque : Il se peut que certaines fonctions de programmation ci-dessus ne soient pas offertes pour une défaillance en particulier. Consulter la Section 11.3 pour obtenir un tableau indiquant les caractéristiques programmables offertes.
10.4.1. Niveau
Cette fonction détermine la valeur de consigne du signal analogique à laquelle le type de défaillance sélectionné est activé. Remarque: Pour les circuits de détection de défaillance à tension c. a., deux niveaux doivent être programmés, c'est-à-dire de tension d'excitation et de désexcitation.
10.4.2. ACTION
Cette fonction permet de programmer le déclenchement d'une alarme ou d'un arrêt par le circuit de détention de défaillance.
10.4.3. ALARME avec verouillage
Si une alarme est programmée en cas de défaillance, elle peut être de type « verrouillage » ou « non verrouillage ». Lorsque le mode « verrouillage » est sélectionné, l'alarme ne se déverrouillera pas jusqu'à ce qu'une commande de réinitialisation l'efface. Remarque: Ce message de programmation n'apparaît que si une alarme est programmée. Les conditions d'arrêt sont programmées automatiquement en mode de verrouillage.
10.4.4. Dérivation pendant le délai de mise en MARCHE
Cette fonction permet de désactiver les circuits d'alarme ou d'arrêt pendant une période déterminée de dérivation. Les circuits de détection de défaillance auxquels le délai ne s'applique pas sont activés en tout temps, que le moteur soit en marche ou à l'arrêt.
10.4.5. Délais transitoires
Cette fonction empêche le circuit de détection de défaillance sélectionné d'être activé jusqu'à ce que la période de temps spécifique se termine. Le délai doit se situer entre 0,0 et 999,9 secondes.
10.5. MENU de programmation des défaillances numériques
Pour programmer les circuits de détection de défaillance numérique du contrôleur, consulter les directives suivantes :
10.5.1. Étiquettes de défaillances numériques
Pour sélectionner l'étiquette de description de défaillance désirée, utiliser la touche « incrémenter » (« increment ») afin de faire défiler les étiquettes offertes. Les étiquettes de défaillance suivantes sont enregistrées dans la mémoire permanente du contrôleur :
DéCLENCHEMENT DU RÉGULATEUR TEMPERATURE ÉLEVÉE DE
D'AIR L'HUIL
DéFAILLANCE DE L'ENTREE DU TEMPERATURE DU BOINAGE
CHARGEUR DE BATTERIE ELEVEE
DéFAILLANCE DU CHARGEUR DE MARCHÉ AU RALENTI
BATTERIE
DECLENCHEMENT DU BAS NIVEAU DE LIQUIDE DE
DISJONCTEUR REFROIDISSEMENT
DÉEAILLANCE DUC C. BASSE TEMPERATURE DU
MOTEUR
DéFAILLANCE DE BASSE PRESSION D'ESSENCE
SYNCHRONISATION
DISJONCTEUR DU GÉNÉRATEUR BAS NIVEAU D'ESSENCE
OUVERT
DéFAILLANCE DE MISE À LA TERRE BAS NIVEAU D'HUIL
TEMPÉRATURE ÉLEVÉE DU PALIER
VIBRATION IMPORTANTE DU
DISPOSITIF DE REFROIDISSEMIN
TEMPÉRATURE ÉLEVÉE DU ARRÊT D'URGENCE À DISTANCE
MOTEUR
VIBRATION IMPORTANTE DU RETOUR DE PUISSANCE
MOTEUR
NIVEAU D'ESSENCE ÉLEVÉ
TEMPÉRATURE ÉLEVÉE DE L'HUIL
ESSAI À VIDE RUPTURE DU BASSIN
*TEMPÉRATURE ÉLEVÉE DU COMMUTATEUR DE TRANSFERT
COLLECTEUR D'ADMISSION EN DERIVATION
DéFAILLANCE DU RÉGULATEUR FUITE D'ESSENCE
D'AERATION
NIVEAU ÉLEVÉ D'ESSENCE BASSE PRESSION D'ESSENCE
Défaillance de défaillance du chargeur de
Synchronisation batterie
BASSE PRESSION D'HUILE
Une fois l'étiquette de défaillance désirée sélectionnée, appuyer sur la touche « entrée » (« enter ») pour accepter la sélection.
AVERTISSEMENT
La programmation de l'étiquette de défaillance numérique doit correspondre au câblage de contrôle externe du contrôleur. Tout manquement à ces directives peut endommager gravement le matériel.
10.5.2. ACTION
Cette fonction permet de programmer le déclenchement d'une alarme ou d'un arrêt par le circuit de détection de défaillance.
Remarque : Toutes les conditions d'alarme et d'arrêt provoquent la mise sous tension du circuit de « panne commune » et actionnent l'avertisseur.
10.5.3. ALARME avec verouillage
Si une alarme est programmée en cas de défaillance, elle peut être de type « verrouillage » ou « non verrouillage ». Lorsque le mode « verrouillage » est sélectionné, l'alarme ne se déverrouillera pas jusqu'à ce qu'une commande de réinitialisation l'efface. Remarque: Ce message de programmation n'apparaît que si une alarme est programmée. Les conditions d'arrêt sont programmées automatiquement en mode de verrouillage.
10.5.4. Polarité
Cette fonction permet d'ajuster les circuits de détection de défaillance numérique pour qu'ils soient ouverts en cas de défaillance ou fermés en cas de défaillance.
10.5.5. Dérivation pendant le délai de mise en MARCHE
Cette fonction permet de désactiver les circuits d'alarme ou d'arrêt pendant une période déterminée de dérivation. Les circuits de détection de défaillance auxquels le délai ne s'applique pas sont activés en tout temps, que le moteur soit en marche ou à l'arrêt.
10.5.6. Délais transitoirs
Cette fonction empêche le circuit de détection de défaillance sélectionné d'être activé jusqu'à ce que la période de temps spécifique se termine. Le délai doit soit situer entre 0,0 et 999,9 secondes.
10.5.7. Programmation de l'entree numerique du controlle de la MARCHE au ralenti
Lorsqu'une entrée numérique est programmée à la fonction « marche au ralenti », les paramètres suivants doivent être programmés afin d'assurer un fonctionnement ajusté.
ACTION
Alarme
Une sortie calculable doit également être programmée pour la marche au ralenti afin
d'assurer un fonctionnement ajusté.
Consulter la Section 5.2.2 pour obtenir plus de détails.
10.5.8. Programmation de l'entree numérique du controle d'essai à VIDE
Lorsqu'une entrée numérique est programmée pour un essai à vide, les paramètres suivants doivent être programmés afin d'assurer un fonctionnement ajusté.
ACTION Alarme
POLARITÉ Fermée ou ouverte (selon le circuit externe utilisé)
DERIVATION A LA MISE EN MARCHE Non
DÉLAI TRANSITOIRE 0,1
La caractéristique d'entrée numérique d'essai à vide est habituellement utilisée dans une application PSA lorsqu'il est nécessaire de procéder à un essai à vide minuté automatique du groupe électrogène. Le contact d'une minuterie
d'exercice externe doit être connecté au circuit d'entrée numérique qui est programmé pour un « essai à vide ».
Consulter la Section 9.3.6 pour obtenir des détails sur la suite des opérations.
10.6.1. Renseignements généraux
Les circuits analogiques de tension c. a., de courant c. a. et de tension de la batterie sont étalonnés en usine avant que le produit soit expédié; ils n'ont donc pas besoin d'être étalonnés sur le terrain. Si un étalonnage sur le terrain est requis, consulter la procédure applicable décrite plus loin dans cette section.
Les circuits analogiques de pression d'huile du moteur et de température du moteur ne sont pas étalonnés en usine et doivent donc être étalonnés sur le terrain avant que le matériel soit mis en service. Consulter les Sections 10.6.9 et 10.6.10 pour obtenir des renseignements détaillés sur les procédures d'étalonnage sur le terrain requises.
Avertissement
Tout manquement à l'étalonnage sur le terrain et à la validation du fonctionnement ajusté des circuits analogiques de pression d'huile du moteur et de température du moteur peut entrainer des défectuosités importantes ou endommager gravement le matériel.
10.6.2. Voltage Sensing Calibration (phase-phase ou entre PHASE et NEUTRE)
VOLTS AB ① ZERO ②
99③ 600V
① Affiche la tension de phase du générateur à étalonner. ² Affiche le type de fonction d'étalonnage, soit ZÉRO (ZERO) ou INTERVALLE DE MESURE (SPAN). ③ Affiche le facteur de correction d'étalonnage (0 à 255) utilisé pour obtenir une lecture de tension juste. Remarque: Pour étalonner correctement n'importe
Quel que des capteurs de courant, la fonction ZERO (ZERO) doit être étalonnée avant la fonction INTERVALLE DE MESURE (SPAN).
Affiche la mesure de tension réelle qui apparaît dans le menu d'affichage du MEC 20 de l'alimentation du générateur. Cette lecture de tension peut être étalonnée à la hausse ou à la baisse en changeant le facteur de correction.
Remarque:
Pour étalonner avec exactitude les capteurs de tension du MEC 20, un voltmètre d'essai externe possédant une exactitude d'au moins 0,5% est requis.
Remarque : Il faut compléter l'étalonnage du zéro avant de débuter l'étalonnage de l'intervalle de mesure.
Pour étalonner les capteurs de tension de l'alimentation du générateur, suivre la procédure suivante :
10.6.3.1. Étalonnage du ZERO
Connecter un voltmètre c.a. externe, qui possède une gamme de tension et une exactitude déquates, aux bornes du contrôleur MEC 20 correspondant aux phases de tension à étalonner. S'assurer que les phases à étalonner possèdent zéro volt lorsque le générateur est à l'arrêt. En mode de programmation, faire défilrer les menus jusqu'aux phases de tension d'alimentation du générateur désirées (c'est-à-dire phase-phase ou entre phase et neutre) et sélectionner la fonction ZERO (ZERO).
Utiliser les boutons-poussoirs INCRÉMENTS (INCREMENT) ou DÉCRÉMENTS (DECREMENT) afin d'ajuster le facteur de correction de façon à obtenir zéro volt du côté droit de l'affichage, tel que confirmé à l'aide du voltmètre externe. Le facteur de correction par défaut établi en usine est de 127. Le fait d'accroître ce facteur augmente la valeur affichée et, inversement, le fait de baisser ce facteur diminue la valeur
affichée. Remarque: En ajustant la fonction ZERO (ZERO) avec la tension appliquée, on obtient des lectures de tension non linéaires.
Lorsque la tension exacte s'affiche, appuyer sur le bouton-poussoir ENTRÉE (ENTER) afin d'accepter le facteur de correction. Inscrire le facteur de correction sur la feuille de programmation du MEC 20 à titre de référence.
Répéter la procédure ci-dessus pour toutes les phases de l'alimentation du générateur, au besoin.
10.6.3.2. Étalonnage de l'intervalle de MESURE
Alimenter le contrôleur avec la tension du générateur au niveau nominal. Remarque: Il peut être nécessaire de changer les fonctions d'arrêt en cas de sous-tension et de surtension pour des alarmes, afin de s'assurer que le générateur ne fonctionne pas pendant l'étalonnage. S'assurer que la tension de sortie du générateur est réglée à l'intérieur des limites nominales. En mode de programmation, faire défilrer les menus jusqu'aux phases de tension d'alimentation du générateur désirées et sélectionner la fonction INTERVALLE DE MESURE (SPAN).
Connecter un voltmètre c. a. externe, qui possède une gamme de tension et une exactitude déquates, aux bornes du contrôleur MEC 20 correspondant aux phases de tension à établir.
Avertissement
Les circuits de détention de tension peuvent engendrer des tensions mortelles lorsqu'ils sont sous tension. Il faut respecter les procédures de sécurité régulières et le travail doit être effectué par du personnel qualifié uniquement. Tout manquement à ces directives peut provoquer des blessures et (ou) la mort.
Utiliser les boutons-poussoirs INCRÉMENTS (« INCREMENT ») ou DÉCRÉMENTS (DECREMENT) afin d'ajuster le facteur de correction, tout en observant la tension affichée sur le MEC 20. Ajuster le facteur de correction afin d'obtenir une lecture de tension identique à celle du voltmètre c. a. externe.
Lorsque la tension exacte s'affiche, appuyer sur le bouton-poussoir ENTRÉE (ENTER) afin d'accepter le facteur de correction. Inscrire le facteur de correction sur la feuille de programmation du MEC 20 à titre de référence.
Répéter la procédure ci-dessus pour toutes les phases de l'alimentation du générateur, au besoin.
Remarque:
Une fois l'étalonnage de l'intervalle de mesure terminé, reconstruire l'étalonnage du zéro. Si la valeur de consigne d'étalonnage du zéro doit être réajustée, il faut également réajuster l'étalonnage de l'intervalle de mesure.
10.6.4. Étalonnage de la détection de courant
CURRENT A ① ZERO ②
99③ 350A
① Affiche le courant de charge du générateur (phase A, B ou C) à étalonner. ² Affiche le type de fonction d'étalonnage, soit ZÉRO (ZERO) ou INTERVALLE DE MESURE (SPAN). ³ Affiche le facteur de correction d'étalonnage (0 à 255) utilisé pour obtenir une lecture de courant juste. Remarque: Pour étalonner correctement n'importe quel des capteurs de courant, la fonction ZÉRO (ZERO) doit être étalonnée avant la fonction INTERVALLE DE MESURE (SPAN). ⁴ Affiche la mesure de courant réelle qui apparaît dans le menu d'affichage du MEC 20 de l'alimentation du générateur. Cette lecture de courant peut être étalonnée à la hausse ou à la baisse en changeant le facteur de correction.
Remarque:
Pour étalonner avec exactitude les capteurs de courant du MEC 20, un ampèremètre d'essai
Un extermal et une pince à courant possédant une exactitude d'au moins 0,5% sont requis.
Remarque: Il faut compléter l'étalonnage du zéro avant de débuter l'étalonnage de l'intervalle de mesure.
Pour étalonner les capteurs de courant de l'alimentation du générateur, suivre la procédure suivante :
10.6.5.1. Étalonnage du ZERO
Connecter un ampèremètre c. a. externe avec une pince à courant, d'une gamme de courant ajustée, aux bornes du contrôleur MEC 20 correspondant aux phases de courant à étalonner. S'assurer que les phases à étalonner possèdent un courant de zéro lorsque le générateur est à l'arrêt.
En mode de programmation, faire défiler les menus jusqu'aux phases de courant d'alimentation du générateur désirées et sélectionner la fonction ZERO (ZERO).
Utiliser les boutons-poussoirs INCRÉMENTS (INIncrement) ou DÉCRÉMENTS (DECREMENT) afin d'ajuster le facteur de correction tout en observant le niveau d'intensité courant. Ajuster le facteur de correction de façon à atteindre 0 A.
Lorsque la lecture de courant exacte s'affiche, appuyer sur le bouton-poussoir ENTRÉE (ENTER) afin d'accepter le facteur de correction. Inscrire le facteur de correction sur la feuille de programmation du MEC 20 à titre de référence.
Répéter la procédure ci-dessus pour toutes les phases de l'alimentation du générateur, au besoin.
10.6.5.2. Étalonnage de l'intervalle de MESURE
Appliquer une charge de 50 % à 100 % au groupe électrogène. Remarque: Il est recommandé d'appliquer une charge de 100 % au groupe électrogène pour l'étalonnage, afin d'obtenir une bonne exactitude pendant l'étalonnage de l'intervalle de mesure.
Remarque :
Ne pas excéder le courant nominal du transformateur de courant. Lorsque le courant secondaire excède 5 A, une non linéarité de la sortie du transformateur de courant survient, ce qui affecte les valeurs affichées sur le MEC 20.
En mode de programmation, faire défiler les menus jusqu'aux phases de courant d'alimentation du générateur désirées et sélectionner la fonction INTERVALLE DE MESURE (SPAN).
Connecter un ampèremètre pour c. a. externe avec une pince à courant, d'une gamme de tension et d'une exactitude déquates, aux bornes du contrôleur MEC 20 correspondant aux phases de tension à étalonner.
Avertissement
Ne jamais ouvrir les circuits d'un transformateur de courant sous tension, sous risque d'être soumis à des tensions extrêmement élevées qui pourraient provoquer des blessures graves ou la mort. Il faut respecter les procédures de sécurité régulières et le travail doit être effectué par du personnel qualifié uniquement. Tout manquement à ces directives peut provoquer des blessures et (ou) la mort.
Utiliser les boutons-poussoirs INCRÉMENTER (« INCREMENT ») ou DÉCRÉMENTER (DECREMENT) afin d'ajuster le facteur de correction, tout en observant le courant affiché sur le MEC 20. Ajuster le facteur de correction afin d'obtenir une lecture de courant identique à celle de l'ampèremètre pour c. a. externe.
Lorsque la lecture de courant exacte s'affiche, appuyer sur le bouton-poussoir ENTRÉE (ENTER) afin d'accepter le facteur de correction. Inscrire le facteur de correction sur la feuille de programmation du MEC 20 à titre de référence.
Répéter la procédure ci-dessus pour toutes les phases de courant du générateur.
Remarque:
Une fois l'étalonnage de l'intervalle de mesure terminé, reconstruire l'étalonnage du zéro. Si la valeur de consigne d'étalonnage du zéro doit être réajustée, il faut également réajuster l'étalonnage de l'intervalle de mesure.
10.6.6. Étalonnage de la tension de la batterie
1. Affiche le type de fonction d'étalonnage, soit INTERVALLE DE MESURE (SPAN). 2. Affiche le facteur de correction d'étalonnage (0 à 255) utilisé pour obtenir une lecture de tension juste. 3. Affiche la mesure de tension réelle de la batterie qui apparaît dans le menu d'affichage du MEC 20. Cette lecture de tension peut être étalonnée à la hausse ou à la baisse en changeant le facteur de correction.
Remarque:
Pour établir avec exactitude les capteurs de tension de la batterie du MEC 20, un voltmètre c. c. d'essai externe possédant une exactitude d'au moins 0,5% est requis.
Pour établir les capteurs de tension de la batterie du générateur, suivre la procédure suivante:
10.6.7.1. Étalonnage de l'intervalle de MESURE
Alimenter le contrôleur avec la tension de la batterie et connecter le voltmètre c.c. d'essai externe aux bornes B+ et B- de la batterie. En mode de programmation, sélectionner le menu d'étalonnage de l'intervalle de mesure de la batterie.
Utiliser les boutons-poussoirs INCRÉMENTS (« INCRÉMENT ») ou DÉCRÉMENTS (DECRÉMENT) afin d'ajuster le facteur de correction, tout en observant la tension de la batterie affichée sur le MEC 20. Ajuster le facteur de correction afin d'obtenir une lecture de tension identique à celle du voltmètre pour c. c. externe.
Lorsque la tension exacte s'affiche, appuyer sur le bouton-poussoir ENTRÉE (ENTER) afin d'accepter le facteur de correction. Inscrire le facteur de correction sur la feuille de programmation du MEC 20 à titre de référence.
10.6.8. Étalonnage de la temperature et de la pression d'huilé du moteur
ENGINE TEMP ①
127^ 95^ C^
Affiche le type de fonction d'étalonnage. ² Affiche le facteur de correction d'étalonnage (0 à 255) utilisé pour obtenir une lecture de température ou de pression juste. ³ Affiche la mesure de température ou de pression réelle qui apparaitra dans les menus d'affichage du MEC 20. Cette lecture peut être étalonnée à la hausse ou à la baisse en changeant le facteur de correction.
10.6.9. Procesure d'etalonnage de la temperature
Avant que le matériel soit mis en service de fonctionnement final, le circuit analogique de température du moteur doit être étalonné sur le terrain afin qu'il atteigne la précision de rendement spécifique, de façon à assurer un fonctionnement ajustat. Le circuit analogique de température du moteur doit
être étalonné à l'aide du capteur de température du moteur qui est fourni avec le contrôleur et qui est monté sur le moteur.
Avertissement
Tout manquement à l'étalonnage sur le terrain et à la validation du fonctionnement ajusté des circuits analogiques de température peut entraîner des défauts importants ou endommager gravement le matériel.
Pour étalonner le capteur de température du MEC 20, suivre la procédure suivante :
Remarque:
Pour étalonner avec exactitude le capteur de température du MEC 20, un indicateur de température externe temporaire, monté sur le moteur, est requis. Cet indicateur de température externe doit être connecté aussi près que possible du capteur de température pour le MEC 20.
La procédure d'étalonnage ne doit être effectuée qu'à un seul point, lequel correspond à la température de fonctionnement normale du moteur.
Connecter un indicateur de température temporaire monté sur le moteur, qui possède une précision ajustable, et mesure le moteur en marche. Lorsque le moteur atteint la température de fonctionnement normale, pénétrer le mode de programmation et sélectionner le menu d'étalonnage « Écart de température du moteur » (« Engine Temperature Offset »).
Utiliser les boutons-poussoirs INCRÉMENTS (« INCREMENT ») ou DÉCRÉMENTS (« DECREMENT ») afin d'ajuster le facteur de correction, tout en observant la température affichée sur le MEC 20. Ajuster le facteur de correction afin d'obtenir une lecture de température identique à celle de l'indicateur de température externe.
Lorsque la température exacte s'affiche, appuyer sur le bouton-poussoir « entrée » (« enter ») afin d'accepter le facteur de correction. Inscrire le facteur de correction sur la feuille de programmation du MEC 20 à titre de référence.
Avant que le matériel soit mis en service de façon définitive, le circuit analogique de pression du moteur doit être étalonné sur le terrain afin qu'il atteigne la précision de rendement spécifique, de façon à assurer un fonctionnement ajusté. Le circuit analogique de pression du moteur doit être étalonné à l'aide du capteur de pression du moteur qui est fourni avec le contrôleur et qui est monté sur le moteur.
Avertissement
Tout manquement à l'étalonnage sur le terrain et à la validation du fonctionnement ajusté des circuits analogiques de pression peut entrainer des défectuosités importantes ou endommager gravement le matériel.
Pour étalonner le capteur de pression du MEC 20, suivre la procédure suivante
Remarque :
Pour étalonner avec exactitude le capteur de pression du MEC 20, un indicateur de pression externe-temporaire, monté sur le moteur, est requis. Cet indicateur de pression externe doit être connecté aussi près que possible du capteur de pression pour le MEC 20.
La procédure d'étalonnage ne doit être effectuée qu'à un seul point, lequel correspond à la pression de fonctionnement normale du moteur.
Connecter un indicateur de pression temporaire monté sur le moteur, qui possède une précision ajustable, et mesure le moteur en marche. Lorsque le moteur atteint la pression de fonctionnement normale et la température de fonctionnement normale, pénétrer le mode de programmation et sélectionner le
menu d'étalonnage « Écart de pression du moteur » (« Engine Pressure Offset »).
Utiliser les boutons-poussoirs INCRÉMENTS (« INCRÉMENT ») ou DÉCRÉMENTS (« DECRÉMENT ») afin d'ajuster le facteur de correction, tout en observant la pression affichée sur le MEC 20. Ajuster le facteur de correction afin d'obtenir une lecture de pression identique à celle de l'indicateur de pression externe. Lorsque la pression exacte s'affiche, appuyer sur le bouton-poussoir « entrée » (« enter ») afin d'accepter le facteur de correction. Inscrire le facteur de correction sur la feuille de programmation du MEC 20 à titre de référence.
| Pression du moteur | Résistance du capteur1 | |
| KPA | LB/PO2 | Ohms |
| 1034 | 150 | 38 |
| 965 | 140 | 42 |
| 896 | 130 | 48 |
| 827 | 120 | 54 |
| 758 | 110 | 62 |
| 689 | 100 | 70 |
| 621 | 90 | 79 |
| 552 | 80 | 89 |
| 483 | 70 | 101 |
| 414 | 60 | 114 |
| 345 | 50 | 127 |
| 276 | 40 | 142 |
| 207 | 30 | 160 |
| 138 | 20 | 183 |
| 69 | 10 | 206 |
| Température du moteur | Résistance du capteur | |
| °F | °C | Ohms |
| 392 | 200 | 20 |
| 374 | 190 | 24 |
| 356 | 180 | 28 |
| 338 | 170 | 33 |
| 320 | 160 | 39 |
| 302 | 150 | 46 |
| 284 | 140 | 55 |
| 266 | 130 | 65 |
| 248 | 120 | 76 |
| 230 | 110 | 90 |
| 212 | 100 | 106 |
| 194 | 90 | 147 |
| 176 | 80 | 197 |
| 150 | 70 | 290 |
| 140 | 60 | 426 |
| 122 | 50 | 622 |
| 104 | 40 | 952 |
| 86 | 30 | 1 486 |
| 68 | 20 | 2 322 |
| 50 | 10 | 3 644 |
| 32 | 0 | 6 284 |
Les données sur la résistance du capteur s'appliquent au capteur de pression d'huile Thompson, no de pièce 003654. Fabricant - Datcon, numéro de pièce 102227. Le capteur de pression d'huile Datcon doit être utilisé avec la version 1.81 ou une version postérieure du logiciel du MEC (les versions antérieures du logiciel ne sont pas compatibles.)
Figure 22 TABLEAU D'ETALONNAGE DE LA TEMPERATURE ET DE LA PRESSION ANALOGIQUES
11.1. Résumé des données de configuration
| MEC 20 CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÉNÉ RÉSUMÉ DES DONNÉES DE CONFIGURATION | |||
| N° ORDRE TRAVAIL: RÉVISION: DATE DE RÉVISION: ÉMIS PAR: CLIENT: PROGRAMME PAR DÉFAUT: DATE: NOM DU PROJET: VERSION TPS: REMARQUES: | |||
| ENTRÉES SYSTÉME GROUPE ÉLECTROGÉNÉ | |||
| TENSION C.A. SYSTÉME: PHASES: FREQUENCY: TENSION C.C.: | |||
| CHARACTERISTIQUES D'AFFICHAGE NUMérique | |||
| □ TENSION C.A. □ C.A. □ TENSION DE LA BATTERIE □ TEMPERATURE DU MOTEUR □ KVA □ TACHYMÈTURE □ PRESSION D'HUILE □ FREQUENCY □ HOROMÈTURE | |||
| CIRCUITS DE DETECTION DE DÉFAIL. NUM. (15) CIRCUITS DE DETECT. DE DÉFAIL. ANAL. | |||
| NOM DE LA DÉFAILLANCE | NOM DE L'ENTRÉE | NOM DE LA DÉFAILLANCE | NOM DE L'ENTRÉE |
| Arrêt de surdémarrage | Interne | Arrêt de survitésse | Capteur magnétique |
| Alarmé de commutateur pas en auto. | Interne | Arrêt de signal de perte de vitesse | Capteur magnétique |
| Arrêt d'urgence | Interne/Externe | Arrêt de sous-tension | Tension c.a. |
| □ Arrêt de basse pression d'hUILe (opt. de base par déf.) ou □ Personaliser: | Entrée numérique extérieure n° 1 | Arrêt de surtension | Tension c.a. |
| □ Arrêt de température élevé du moteur (opt. de base par déf.) ou □ Personaliser: | Entrée numérique extérieure n° 2 | Alarmé de fréquence insuffisante | Fréquence c.a. |
| □ Arrêt de bas niveau de liquide de refroidissement (opt. de base par déf. de la CSA) ou □ Defaillance du chargeur de batterie c.a. (opt. de base par déf. de la NFPA) ou □ Personaliser: | Entrée numérique extérieure n° 3 | Alarmé de fréquence excessive | Fréquence c.a. |
| □ Alarmé de bas niveau d'essence (opt. de base par déf.) ou □ Personaliser: | Entrée numérique extérieure n° 4 | Alarmé de surintensité | Courant c.a. |
| Entrée numérique extérieure n° 5 | Alarmé de batterie faible | Volts c.c. | |
| Entrée numérique extérieure n° 6 | Alarmé de faible tension de la batterie | Volts c.c. | |
| Entrée numérique extérieure n° 7 | Alarmé de tension élevée de la batterie | Volts c.c. | |
| Entrée numérique extérieure n° 8 | Alarmé de basse température du moteur | Capteur de température | |
| Entrée numérique extérieure n° 9 | Alarmé de température élevée du moteur #1 | Capteur de température | |
| Entrée numérique extérieure n° 10 | Arrêt de température élevée du moteur #2 | Capteur de température | |
| □ Arrêt d'urgence à distance (opt. de base par déf.) ou □ Personaliser: | Entrée numérique extérieure n° 11 | Alarmé de basse pression d'huile #1 | Capteur de pression |
| □ Contrôle de la marche au ralenti ou □ Personaliser: | Entrée numérique extérieure n° 12 | Arrêt de basse pression d'huile #2 | Capteur de pression |
| CONTACTS DE SORTIE DE SÉRIE | |||
| NOM DE LA SORTIE | TYPE DE SORTIE | ||
| Marche (Essence) | Forme A | ||
| Démarrage | Forme A | ||
| Panne commune | Forme C | ||
| CONTACTS PROGRAMMABLES | |||
| NOM DE LA SORTIE □ Essai de commutation (opt. de base par déf.) ou personneler : □ Alarme commune (opt. de base par déf.) ou personneler : □ Arrêt commun (opt. de base par déf.) ou personneler : □ Moteur en marche (opt. de base par déf.) ou personneler : □ Charge d'alimentation EPS/Moteur en marche (opt. de base par déf.) ou personneler : □ Déactivation (opt. de base par déf.) ou personneler : | TYPE DE SORTIE Programmable n° 1 - Forme C Programmable n° 2 - Forme C Programmable n° 3 - Forme C Programmable n° 4 - Forme C Programmable n° 5 - Forme A/B (EAP 110/MEC 20 Exp -Groupe 1 seulment) Programmable n° 6 - Forme A/B] (EAP 110/MEC 20 Exp -Groupe 2 seulment) | ||
| AUTRES OPTIONS | |||
| □ Activation du port de communication à distance | □ Affichage avec écran à fluorescent à vide | ||
Configuration principale
| MENU DE PROGRAMMATION PRINCIPAL | ||
| ADRESSE DE NOEUD | OPTION DE COM. À DISTANCE | |
| XXX | 1 À 255 | |
| TENSION DU SYSTÈME | TENSION LIGNE-LIGNE | |
| XXXX V.C.A. | 120 À 15 000 V.C.A. | |
| FRéQUENCY DU SYSTÈME | ||
| 50 HZ/60 HZ | 50 OU 60 HZ | |
| PHASES DU SYTÈME | ||
| MONOPHASÉ/TRIPHASÉ | MONOPHASÉ OU TRIPHASÉ | |
| NEUTRE CONNECTÉ | OUI OU NON | |
| DéTECTION DE TENSION | RAPPORT DU TRANSFORMATEUR DE POTENTIEL DE LA DÉTECTION DE TENSION | |
| RAPPORT XXX | ENTRER UN NÓBRE DE 1 À 208 (1: DIRECT) | |
| DéTECTION DE COURANT | RAPPORT DU TRANSFORMATEUR DE COURANT DE LA DÉTECTION DE COURANT | |
| RAPPORT XXX | ENTRER UN NÓBRE DE 1 À 999 (1: DIRECT) | |
| ÉCHelle DE TEMPERATURE | ||
| °C/°F | °C OU °F | |
| ÉCHelle DE PRESSION | ||
| LB/PO2/KPA | LB/PO2 OU KPA | |
| DÉLAI DE MISE EN MARCHE | ||
| XXX SECONDES | 0 À 999 SECONDES | |
| PÉRIODE DE DÉMARRAGE | ||
| XX SECONDES | 0 À 99 SECONDES | |
| PÉRIODE DE REPOS | ||
| XX SECONDES | 0 À 99 SECONDES | |
| RéENGAGEMENT DU DÉMARREUR | ||
| DÉLAI DE XX SECONDES | 0 À 99 SECONDES - 0 : DÉSACTIVÉ | |
| NÔBRE DE CYCLES DE DÉMARRAGE | ||
| XX | 0 À 99 FOIS - 0 : CONTINU | |
| DÉLAI DE DÉRIVATION | ||
| XX SECONDES | 0 À 99 SECONDES | |
| PÉRIODE DE REFROIDISSEMENT | ||
| XX SECONDES | 0 À 9999 SECONDES | |
| TR/MIN NOMINAL | ||
| XXXX TR/MIN | 0 À 4 000 TR/MIN | |
| CRANS DU VOLANT | DÉTÉCTION DE LA VITESSE DU MOTEUR PAR CAPTEUR MAGNÉTIQUE | |
| XXX | 0 À 999 CRANS | |
| DéCONNEXION DU DÉMARRAGE | ||
| XX POURCENT | 0 À 100 % | |
| SURVITESSE | ||
| XX POURCENT | 100 À 150% | |
| DÉLAI TRANSITOIRE DE SURVITESSE | ||
| X,X SECONDES | 0,0 À 9,9 SECONDES | |
| SORTIE DE MARCHE | ||
| SÉCURITÉ INTÉGRée - OUI/NON | OUI OU NON | |
| SORTIE DE MARCHE À SÉCURITÉ INTÉGRée | ||
| SIGNAL DE PERTE DE VITESSE | ||
| ARRÊT ALARME/ARRÊT | ALARME OU ARRÊT | |
| POLARITÉ DE L'ENTRÈE DE MISE EN MARCHE | LOGIQUE DE CONTACT DE MISE EN MARCHE À DISTANCE | |
| OUVERT/FERMÉ | OUVERT OU FERMÉ | |
| PANNE COMMUNE POUR COMMUTATEUR PAS EN AUTO - OUI/NON | OUI OU NON | |
| SORTIE PROGRAMMABLE N° 1 | Essai de commutation (programmé en usine, à moins d'indication contraire) | |
| SORTIE PROGRAMMABLE N° 1 | OPTIONS PROGRAMMABLES | |
| OPTIONS 1 À 15 | 1 : DÉSACTIVÉ | |
| 2 : ALIMENTATION SUR ARRÊT | ||
| 3 : RALENTI | ||
| SORTIE PROGRAMMABLE N° 2 | 4 : LUBRIFICATION | |
| OPTIONS 1 À 15 | 5 : COMMUTATEUR PAS EN POSITION AUTOMATIQUE | |
| 6 : SURINTENSITÉ | ||
| 7 : PRECHAUFFAGE | ||
| SORTIE PROGRAMMABLE N° 3 | 8 : PRÊT POUR CHARGE | |
| OPTIONS 1 À 15 | 9 : MARCHE | |
| 10 : VOLET D'ADMISSION D'AIR | ||
| 11 : ESSAI DE COMMUTATION | ||
| SORTIE PROGRAMMABLE N° 4 | 12 : DÉRIVATION TERMINÉE | |
| OPTIONS 1 À 15 | 13 : ALARMÉ COMMUNE | |
| SORTIE PROGRAMMABLE N° 5 | 14 : DÉFAILLANCE COMMUNE | |
| OPTIONS 1 À 15 | 15 : ARRÊT COMMUN | |
| SORTIE PROGRAMMABLE N° 6 | ||
| OPTIONS 1 À 15 | ||
| DURÉE DE LA POST-LUBRIFICATION | ||
| XXX MINUTES | 0 À 999 MINUTES | |
| INTERVALLE DE LUBRIFICATION CYCLIQUE | ||
| XXXX MINUTES | 1 À 9 999 MINUTES | |
| DURÉE DE LA LUBRIFICATION CYCLIQUE | ||
| XXX MINUTES | 0 À 999 MINUTES | |
| DURÉE DE L'ALARME | ||
| XXX SECONDES | 0 À 999 SECONDES (0 : CONTINUE) | |
| XXX SECONDES | 0 À 999 SECONDES | |
| REMISE À ZÉRO DES HEURES DE FONCTIONNEMENT | ACCès AVEC LE CODE D'ACCès PRINCIPAL UNIQUÉMENT | |
| OUI/NON | OUI OU NON | |
| SORTIE PROGRAMMABLE N° 1 | Panne commune (programmé en usine, à moins d'indication contraire) | |
| SORTIE PROGRAMMABLE N° 2 | ||
| SORTIE PROGRAMMABLE N° 3 | ||
| SORTIE PROGRAMMABLE N° 4 | ||
| SORTIE PROGRAMMABLE N° 5 | ||
| SORTIE PROGRAMMABLE N° 6 | ||
| DÉLAI DE RÉCHAUFFEMENT | 0 à 99 SECONDES | |
| DÉLAI NEUTRE | 0 à 99 SECONDES | |
| DÉLAI DE RETOUR | 0 à 999 SECONDES | |
| MENU D'AFFICHAGE | ||
| INACTIVITÉ XXX SECONDES | 60 À 999 SECONDES | |
| MISE À ZÉRO - HEURES DE FONCTIONNEMENT | ACCès AU MOYEN DU MOT DE PASSE PRINCIPAL SEULEMENT | |
| OUI/NON | OUI OU NON | |
11.3. MENU de programmation des défaillances analogiques
RéGLAGES TYPIQUES DE PROGRAMMATION PAR DÉFAUT EN USINE
MENU DE PROGRAMMATION DES DÉFAILLANCES ANALOGIQUES
| NOM DE LA DÉFAILLANCE | TYPE DE SORTIE ANALOGIQUE | DéFAILLANCE A=ACTIVÉE D=DÉACTIVÉE | VALEUR DE CONSIGNE (EXCITATION) | VALEUR DE CONSIGNE (DéSEXCENTRATION) | ACTION S=ARRÊT A=ALARME | ALARME AVEC VERROUILAG E O=OUI N=NON | DÉRIVATION À LA MISE EN MARCHE O=OUI N=NON | DéLAI TRANSITOIRE (SECONDES) |
| SOUS-TENSION | TENSION C.A. | A* | S | O | O* | 5,0 | ||
| SURTENSION | TENSION C.A. | A* | S | O | N | 2,0 | ||
| Fréquence INSUFFISANTE | Fréquence C.A. | A* | S | O | O* | 5,0 | ||
| Fréquence EXCESSIVE | Fréquence C.A. | A* | A | O | N | 2,0 | ||
| SURINTENITÉ | Courant C.A. | A* | 500 | 4 990 | A | O | N | 20,0 |
| BATTERIE FAIBLE | TENSION C.C. | A* | 18,0 | N/A | A | O | N* | 3,0 |
| FAIBLE TENSION DE LA BATTERIE | TENSION C.C. | A* | 25,6 | N/A | A | N | N* | 120,0 |
| TENSION ÉLEVÈTE DE LA BATTERIE | TENSION C.C. | A* | 30,4 | N/A | A | N | N* | 10,0 |
| BASSE TEMP. DU MOTEUR | CAPTEUR DE TEMP. | A* | 95 °F | N/A | A | O | N* | 5,0 |
| ALARME DE TEMP. ÉLEVÈTE DU MOTEUR #1 | CAPTEUR DE TEMP. | A* | 198 °F | N/A | A | O | O | 2,0 |
| ARRÊT DE TEMP. ÉLEVÈTE DU MOTEUR #2 | CAPTEUR DE TEMP. | A* | 206 °F | N/A | S | O | O | 2,0 |
| ALARME DE BASSE PRESSION D'HUILE #1 | CAPTEUR DE PRESSION | A* | 30 LB/PO2 | N/A | A | O | O* | 2,0 |
| ARRÊT DE BASSE PRESSION D'HUILE #2 | CAPTEUR DE PRESSION | A* | 20 LB/PO2 | N/A | S | O | O* | 2,0 |
- Indique une caractéristique non programmable (c'est-à-dire fixe) dans le logiciel
11.4. MENU de programmation des défaillances numériques réglages typiques de programmation par défaut en USINE
| MENU DE PROGRAMMATION DES DÉFAILLANCES NUMÉRIQUES | ||||||
| NOM DE LA DÉFAILLANCE | N° DE L'ENTREE | ACTION S=ARRÊT A=ALARME | ALARME AVEC VERROUIL. O=OUI N=NON | POLARITÉ O=OUVERT F=FERMÉ | DÉRIVATION À LA MISE EN MARCHE O=OUI N=NON | Délai TRANSMIÔRE (SECONDES) |
| BASSE PRESSION D'HUILLE | 1 | S | — | O | O | 0,5 |
| TEMP. ÉLEVÉE DU MOTEUR | 2 | S | — | O | O | 1,0 |
| DÉFAIL. DE L'ENTREE DU CHARGEUR DE BAT. | 3 | A | O | F | N | 30,0 |
| BAS NIVEAU D'ESSENCE | 4 | A | N | F | N | 0,1 |
| « Vide » | 5 | A | N | F | N | 0,0 |
| « Vide » | 6 | A | N | F | N | 0,0 |
| « Vide » | 7 | A | N | F | N | 0,0 |
| « Vide » | 8 | A | N | F | N | 0,0 |
| « Vide » | 9 | A | N | F | N | 0,0 |
| « Vide » | 10 | A | N | F | N | 0,0 |
| ARRÊT D'URGENCE À DISTANCE | 11 | S | N | F | N | 0,1 |
| MARCHE AU RALENTI | 12 | A | N | F | N | 0,1 |
11.5. MENU D'ÉTALONNAGE
| CALIBRATION MENU | |
| TENSION A-B | |
| ZÉRO XXX XXXV.C.A. | |
| TENSION A-B | |
| INTERVALLE XXX XXXV.C.A. | |
| TENSION B-C | |
| ZÉRO XXX XXXV.A.C. | |
| TENSION B-C | |
| INTERVALLE XXX XXXV.C.A. | |
| ***TENSION C-A | |
| ***ZÉRO XXX XXXV.A.C. | |
| ***TENSION C-A | |
| TENSION A-N | |
| ZÉRO XXX XXXV.C.A. | |
| TENSION A-N | |
| ZÉRO XXX XXXV.C.A. | |
| TENSION B-N | |
| ZÉRO XXX XXXV.C.A. | |
| TENSION B-N | |
| ZÉRO XXX XXXV.C.A. | |
| TENSION C-N | |
| ZÉRO XXX XXXV.C.A. | |
| TENSION C-N | |
| ZÉRO XXX XXXV.C.A. | |
| INTERVALLE XXX XXXV.C.A. | |
| COURANT A | |
| ZÉRO XXX XXXA.C.A. | |
| COURANT A | |
| INTERVALLE XXX XXXA.C.A. | |
| COURANT B | |
| ZÉRO XXX XXXA.C.A. | |
| COURANT B | |
| INTERVALLE XXX XXXA.C.A. | |
| COURANT C | |
| ZÉRO XXX XXXA.C.A. | |
| COURANT C | |
| INTERVALLE XXX XXXA.C.A. | |
| TENSION DE LA BATTERIE | |
| INTERVALE XXX XXX V.C.C. | |
| TEMPÉRATURE DU MOTEUR | |
| XXX XXX °C/°F | |
| PRESSION D'HUILE | |
| XXX XXXX LB/PO2/KPA | |
12. Specifications
Alimentation : 10 à 30 V c.c., à masse négative - Température de fonctionnement : -15 °C à +50 °C
Les gammes de températures peuvent être élargies grâce à l'option d'affichage avec écran à fluorescent à vide. Ces gammes de températures sont les suivantes : de -40 °C à +70 °C en fonctionnement et de -50 °C à +85 °C en entreprises.
- Environnement (plaque frontale) : NEMA 12 Vibration : 4 g, 5 à 250 Hz
- Exactitude de l'affichage de la jauge du moteur :
- Consommation d'électricité : 5 watts (max.)
- Température d'entreposage : -20 °C à +70 °C1
- Humidité : 5 % à 95 %, pas de condensation Dimensions : 10,75 po (larg.) x 6,75 po (haut.) x 2,0 po (prof.)
- Exactitude du compteur c. a. : ± 1 %, à 25 °C - Volts, ampères : ± 2 % à 25 °C KVA
- Entrées :
Détection de vitesse du moteur: 100 à 10 000 Hz, 3,0 à 20 V. c. a., tension r. m. s.
Tension c. a.: 120 à 600 V. c. a. (nominal), 0,1 VA, triphase,
50/60 Hz
Courant alternatif: 0 à 5 A. c. a. (nominal), 1,5 VA, triphasé
Paramètres du moteur : Émetteurs spécialisés (non assemblés)
Contacts de détection Ouvert ou fermé au c. c. négatif
de défaillance numérique :
- Contacts de sortie :
Marche, démarrage : Charge résistive de 10 A/240 V. c. a., 8 A/24 V. c. c., (3 A à 0,4 pF inductif), Forme A
- Mesure de pression d'huile analogique :
Gamme : 15 LB/PO² à 150 LB/PO² (maximum)
Exactitude de la pression : Gamme de fonctionnement de 15 à 59 lb/ po^2 = +6 lb/ po²
Gamme de fonctionnement de 60 à 75 lb/po² = +2 lb/po²
Gamme de fonctionnement de 76 à 150 lb/po² = ±7 lb/po²
- Mesure de température du moteur analogique :
Gamme : 0 à 200 °C (maximum)
Exactitude de la température : Gamme de fonctionnement de 0 à 30^ = ± 8^
Gamme de fonctionnement de 30 à 100^ = +2^
Gamme de fonctionnement de 100 à 200^ C = +8^ C
Les spécifications peuvent être modifiées sans préavis.
13. Diagramme de connexion
NOTES : 1 CONTACTS RATED MAXIMUM 10A/240Vac, 8A/24Vdc RESISTIVE 2 LOGIC IS SOFTWARE PROGRAMMABLE FOR OPEN OR CLOSE ON FAIL 3 GENERATOR SUPPLY MUST UTILIZE A SOLIDLY GROUNDED NEUTRAL SYSTEM - REFER TO INSTRUCTION MANUAL FOR ALTERNATE CONNECTIONS 4 ENGINE MOUNTED COMPONENTS "GRD" CONNECTION TO BE MADE TO COMMON CHASSIS/ENCLOSURE GROUND BOND SYSTEM
Certains problèmes peuvent empêcher le MEC 20 de fonctionner normalement. Consulter la liste suivante pour connaître les problèmes courants. Consulter l'usine pour obtenir des renseignements sur tout autre problème.
Avertissement
Il est indispensable d'isoler le système de contrôle de toute source d'électricité avant d'ouvrir l'enveloppe pour effectuer tout travail d'entretien. Tout manquement à ces directives peut provoquer des blessures graves ou la mort par choc électrique.
Les procédures d'entretien doivent être effectuées par du personnel qualifié uniquement.
| SYMPTÔME | MESURE CORRECTIVE |
| Le contrôleur ne fonctionne pas malgré une alimentation en c.c. ajusté. | - S'assurer qu'il n'y a pas d'erreurs de câblage ou de courts-circuits dans les connexions du contrôleur.Remarque: Le MEC 20 comprend un fusible électronique qui se déclenché en présence d'une condition de surcharge et qui ne se réenclenche pas jusqu'à ce que la tension d'alimentation soit enlevée et que la condition de surcharge soit corrigée. |
| L'affichage à cristaux liquides (ACL) ne fonctionne pas. | - S'assurer que le contrôleur à microproessesur fonctionne en vérifier que la DEL de surveillance rouge, située à l'arrête de la plaquette de circuits imprimés, clignote.- S'assurer que les bornes B+ et B- disposent d'une tension d'alimentation c.c. suffisante (10 à 30 V.c.c.)- S'assurer que le potentiamètre de contraste de l'affichage à cristaux liquides (R115), situé à l'arrête de la plaquette de circuits imprimés, est ajusté à une résolution de pixels ajusté pour la température de fonctionnement de l'unité. |
| Le contrôleur ne peut être réinitialisé. | - S'assurer que le contrôleur est en mode ARRÊT |
| avant d'essayer de le réinitialiser. - S'assurer que le moteur est complètement arrêté avant d'essayer de remettre le contrôleur en marche. | |
| Aucune signal de sortie de marche. | - S'assurer que tous les circuits d'arrêt sont remis à zéro (la DEL rouge d'arrêt doit être éteinte). - Le signal de vitesse du moteur doit être détecté (la DEL verte du signal de vitesse doit s'allumer) pendant le démarrage si la fonction « sortie de marche à sécurité intégrée » est activée (min. 2 V.c.a.) - Vérifier si la DEL de la sortie de MARCHE (située à l'arrête de la plaquette de circuits imprimés) est allumée. Si ouï, vérifier le contact de relais des bornes 18 et 19. |
| L'arrêt en cas de survivesse survient à vitesse normale. | - S'assurer que le contrôleur estprogrammé avec les valeurs adéquates pour le nombre de crans du volant, la vitesse en tr/min et le pourcentage de la valeur de consigne de survivesse. |
| La lecture des compteurs de tension et de courant est inexacte. | - S'assurer que le contrôleur estprogrammé avec les valeurs adéquates pour le rapport du transformateur de puissance de la détction de tension et/ou pour le rapport du transformateur de courant de la détction de courant. - S'assurer que le conducteur négatif c.c. de l'alimentation de la batterie est correctement mis à la terre au bloc moteur, c'est-à-dire à un point de mise à la terre commun. - S'assurer que l'entrée analogue du contrôleur a été correctement étalonnée, conformément aux directives du précédent manuel. - S'assurer que la connexion du cablege de détction de tension au MEC 20 correspond au type de distribution de puissance. (Remarque: La connexion de tension continue standard requiert |
| que le conducteur neutre du générateur soit solidement mis à la terre.) | |
| La lecture de la température et de la pression d'huile du moteur est inexacte. | - S'assurer que l'entrée analogue du contrôleur a été correctement étaconnée, conformément aux directives duprésent manuel.- S'assurer que le câblage du capteur du moteur est adéquat. (Remarque: Les capteurs du moteur utilisés doivent être fabriqués en usine.)- S'assurer que le conducteur négatif c.c. d'alimentation de la batterie est correctement mis à la terre au bloc moteur, c'est-à-dire à un point de mise à la terre commun. |
| La température ou la pression d'huile du moteur affichée est de 9 999. | - S'assurer que le câblage des bornes n° 37 et n° 38 reliant le MEC 20 à l'émetteur monté sur le moteur est en bonne condition, c'est-à-dire qu'il n'est pas ouvert ou court-circuité.- S'assurer que les émetteurs montés sur le moteur possèdent une lecture de résistance convenant à l'entrée de température ou de pression correspondante.- Vérifier l'étalonnage. |
| L'alarme de température du moteur elevée ou de pression d'huile basse se déclenché alors que le moteur fonctionne normalement. | - S'assurer que le câblage des bornes n° 37 et n° 38 reliant le MEC 20 aux émetteurs montés sur le moteur est en bonne condition, c'est-à-dire qu'il n'est pas ouvert ou court-circuité.- S'assurer que les émetteurs montés sur le moteur possèdent une lecture de résistance convenant à l'entrée de température ou de pression correspondante. (Consulter le tableau d'étalonnage de la température et de la pression analogique pour connaître les valeurs.) |
| Les touches de la plaque frontale Lexan ne fonctionnent pas lorsqu'on appuie dessus. | - S'assurer que le cable à rubans interconnectant la plaque frontale Lexan et la plaquette de circuits imprimés principale est bien connecté. |
- Contrôleur à microprocesseur pour GROUPE électrogène
- TABLE des matières
- Directives de programmation 64
- Feuilles de programmation 93
- Specifications 103
- Historique de révision du produit
- Description générale
- Remarque:
- Avertissement
- Entrée d'alimentation de batterie
- Entrée de détection de vitesse
- Entrées detension c. c.
- ENTREE De tension c. a.
- Entrée de ca
- Sorties
- Câblage du panneau de controlle externe
- Conducteurs
- Câblage sur le terrain des contacts de mise en marche à distance
- Câblage de communication à distance
- Emplacement et installation du MODULE de SORTIE d'expansion
- Emplacement et installation du MEC 20
- Dimensions de montage de la PLAQUE frontale
- Assemblage du MEC 20 - VUE laterale
- Description
- PLAQUE frontale LEXAN
- Plaquette de circuits imprimés
- Plaques à BORNES
- DEL de diagnostic
- PANNE Commune
- Réglage du contraste (R115)
- PORTS de communication
- Description des circuits de detection de défaillance
- SCHEMA Fonctionnel du MEC 20
- Circuits de detection de défaillance internes
- SUR-DEMARRAGE
- PERTE de vitesse
- Commutateur PAS en position automatique
- Circuits de detection de défaillance d'entrée numérique
- Circuits de detection de défaillance numérique programmés en USINE
- Circuit de detection de défaillance d'entrée analogique
- Attention!
- Circuits de detection de défaillance analogique des série
- Sous-tension du générateur
- Surtension du générateur
- Fréquence insuffisante du générateur
- Surintensite du générateur
- ENTREE Analogique de tension de la batterie
- Alarmde batterie FAIBLE
- ALARME de FAIBLE tension de la batterie
- ALARME de tension élevée de la batterie
- ENTREE Analogique de temperature du moteur
- ALARME de BASSE temperature du moteur #1
- ALARME De temperature elevée du moteur #1
- ARRET De temperature elevée du moteur #2
- Entrée analogique de pression d'huile du moteur
- ALARME de FAIBLE pression d'huile #1
- ARRET De FAIBLE pression d'huile #2
- ENTREE Analogique de vitesse du moteur
- Description des contacts de SORTIE de controle
- Contacts de SORTIE, de MARCHE, de démarrage et de PANNE commune
- SORTIE De demarrage
- SORTIE de PANNE commune
- Contacts desorties programmables
- Mise sous tension pour l'arrêt
- Controlle de la MARCHE au ralenti
- Controlle de la prelubrification, de la postlubrification et de la lubrification cyclique
- Retrait du commutateur de la position automatique
- Surintensité
- Moteur prét
- Préchauffage
- Générateur prêt pour CHARGE
- Alimentation de service prête pour CHARGE
- Alimentation du moteur (essence)
- VOLET d'entrée d'air
- Remarques :
- Fin de la période de dérivation d'huile
- ALARME commune
- PANNE Commune
- ARRET COMMUN
- CHARGE d'alimentation EPS
- OPTION de dispositif de communication à distance
- OPTION de MODULE de SORTIE d'expansion
- OPTION d'annonciateur à distance EAP 110
- Procedure de mise sous tension du MEC 20
- MENUS d'affichage du MEC 20
- MENU état de MARCHE (OPERATING STATUS)
- UNITE Prête (UNIT READY)
- Commutateur en position arrêt (SWITCH IN OFF)
- UNITE en MARCHE (UNIT RUNNING)
- Unité à l'arrêt (UNIT SHUTDOWN)
- UNITE En ALARME (UNIT ALARM)
- MENU d'affichage de défaillance (FAULT DISPLAY MENU)
- MENUS de COMPTE à rebours (TIMER COUNTDOWN MENUS)
- DELAY 45 SEC
- Compteurs à c. a. du générateur (generator AC metering)
- Affichage des moyennes de tension/courant et de
- Affichage de la puissance du générateur en KVA
- Affichage de la tension de PHASE du générateur
- Affichage de la tension phase/neutre du
- Affichage du courant de PHASE du générateur (generator PHASE current display)
- Fréquence du générateur/horometre (generator frequency/hourmeter display)
- Affichage des paramètres du moteur
- Tension de la batterie et vitesse du moteur (tachymèture) (battery voltage/engine SPEED (tachometer)
- Température du moteur/pression d'huile (ENGINE TEMPERATURE/OIL PRESSURE)
- MENU de programmation
- Renseignements généraux
- Sequence de mise en MARCHE et d'arrêt manuelle
- Sequence de mise en MARCHE et d'arrêt automatique
- Sequence automatique d'arrêt en cas de défaillance
- Sequence de PANNE de secteur automatique (PSA)
- Condition normale de l'alimentation de service :
- Conditions de défaillance de l'alimentation de service :
- RETOUR à l'alimentation de service :
- Remarque.
- ESSAI à VIDE :
- Pour un MEC 2/mec 20
- Boutons-poussoirs de controlle
- MARCHE (RUN)
- Arrét (OFF)
- Automatique (AUTO)
- Bouton-poussoir d'arrêt d'urgence (emergency STOP)
- Fonction de réinitialisation de défaillance
- ALARME MUETTE
- ESSAI des voyants
- CODES d'accès
- Mode de lecture seule
- Mode de lecture et d'écriture
- Mode de lecture et d'écriture principal
- Opérations de programmation de BASE
- MENU de programmation principal
- Adresse de NOEUD
- Tension du systeme
- Fréquence du système
- PHASES Du systeme
- NEUTRE connecté
- Rapport de detection de tension
- Rapport de détection de courant
- Échelle de temperature
- Échelle de pression
- Délai de mise en MARCHE
- Durée de la période de demarrage
- Durée de la période de REPOS
- Délai de réengagement du demarreur
- NOMBRE De CYCLES de demarrage
- Délai de dérivation
- DUREE De la période de refroidissement
- Vitesse nominale du moteur en tr/min
- CRANS du VOLANT
- Vitesse de déconnexion du demarrage
- Délai transitoire de survitesse
- SORTIE de marché à sécurité intégrée
- Remarque :
- SIGNAL de PERTE de vitesse
- PANNE commune pour la fonction « commutateur PAS en position automatique
- ALARME pour la fonction « commutateur PAS en position automatique
- Délai de réchauffement
- Délai NEUTRE
- Délai de RETOUR
- Contacts de SORTIE programmables
- APPEL automatique
- Durée de la période de postlubrification
- Intervalle entre les CYCLES de lubrification
- Durée des CYCLES de lubrification
- REMISE à zéro de l'horimètre
- MENU de programmation des défaillances analogiques
- Niveau
- ACTION
- ALARME avec verouillage
- Dérivation pendant le délai de mise en MARCHE
- Délais transitoires
- MENU de programmation des défaillances numériques
- Étiquettes de défaillances numériques
- ACTION
- ALARME avec verouillage
- Polarité
- Dérivation pendant le délai de mise en MARCHE
- Délais transitoirs
- Programmation de l'entree numerique du controlle de la MARCHE au ralenti
- Programmation de l'entree numérique du controle d'essai à VIDE
- Renseignements généraux
- Voltage Sensing Calibration (phase-phase ou entre PHASE et NEUTRE)
- Étalonnage du ZERO
- Étalonnage de l'intervalle de MESURE
- Étalonnage de la détection de courant
- Étalonnage du ZERO
- Étalonnage de l'intervalle de MESURE
- Étalonnage de la tension de la batterie
- Étalonnage de l'intervalle de MESURE
- Étalonnage de la temperature et de la pression d'huilé du moteur
- Procesure d'etalonnage de la temperature
- Résumé des données de configuration
- Configuration principale
- MENU de programmation des défaillances analogiques
- MENU de programmation des défaillances numériques réglages typiques de programmation par défaut en USINE
- Specifications
- Diagramme de connexion
Marque : THOMSON
Modèle : MEC 20
Catégorie : Contrôleur électrique