MICRF505 - Radio transceiver Microchip - Free user manual and instructions
Find the device manual for free MICRF505 Microchip in PDF.

User questions about MICRF505 Microchip
0 question about this device. Answer the ones you know or ask your own.
Ask a new question about this device
Download the instructions for your Radio transceiver in PDF format for free! Find your manual MICRF505 - Microchip and take your electronic device back in hand. On this page are published all the documents necessary for the use of your device. MICRF505 by Microchip.
USER MANUAL MICRF505 Microchip
850MHz and 950MHz ISM Band Transceiver
General Description
The MICRF505 is a true single-chip, frequency shift keying (FSK) transceiver intended for use in half-duplex, bidirectional RF links. The multi-channeled FSK transceiver is intended for UHF radio equipment in compliance with the North American Federal Communications Commission (FCC) part 15.247 and the European Telecommunication Standard Institute (ETSI) specification, EN300 220.
The transmitter consists of a PLL frequency synthesizer and power amplifier. The frequency synthesizer consists of a voltage-controlled oscillator (VCO), a crystal oscillator, dual modulus prescaler, programmable frequency dividers, and a phase-detector. The loop-filter is external for flexibility and can be a simple passive circuit. The output power of the power amplifier can be programmed to seven levels. A lock-detect circuit detects when the PLL is in lock. In receive mode, the PLL synthesizer generates the local oscillator (LO) signal. The N, M, and A values that give the LO frequency are stored in the N0, M0, and A0 registers.
The receiver is a zero intermediate frequency (IF) type which makes channel filtering possible with low-power, integrated low-pass filters. The receiver consists of a low noise amplifier (LNA) that drives a quadrature mix pair. The mixer outputs feed two identical signal channels in phase quadrature. Each channel includes a pre-amplifier, a third order Sallen-Key RC low-pass filter that protects the following switched-capacitor filter from strong adjacent channel signals, and a limiter. The main channel filter is a switched-capacitor implementation of a six-pole elliptic low pass filter. The cut-off frequency of the Sallen-Key RC filter can be programmed to four different frequencies: 100kHz, 150kHz, 230kHz, and 340kHz. The I and Q channel outputs are demodulated and produce a digital data output. The demodulator detects the relative phase of the I and the Q channel signal. If the I channel signal lags behind the Q channel, the FSK tone frequency is above the LO frequency (data '1'). If the I channel leads the Q channel, the FSK tone is below the LO frequency (data '0'). The output of the receiver is available on the DataIXO pin. A receive signal strength indicator (RSSI) circuit indicates the received signal level. All support documentation can be found on Micrel's web site at www.micrel.com.

RadioWire®
Features
• True single chip transceiver
• Digital bit synchronizer
• Received signal strength indicator (RSSI)
• RX and TX power management
• Power down function
• Reference crystal tuning capabilities
• Frequency error estimator
- Baseband shaping
• Three-wire programmable serial interface
- Register read back function
Applications
- Telemetry
- Remote metering
- Wireless controller
- Remote data repeater
- Remote control systems
- Wireless modem
• Wireless security system
General Description ...... 1
Features 1
Applications....1
RadioWire® RF Selection Guide 4
Ordering Information 4
Block Diagram....4
Pin Configuration....5
Pin Description 5
Absolute Maximum Ratings ^(1) 6
Operating Ratings ^(2) 6
Electrical Characteristics ^(4) 6
Programming......9
Writing to the control registers in MICRF505....10
Writing to a Single Register 10
Writing to All Registers....11
Writing to n Registers having Incremental Addresses....11
Writing to n Registers having Non-Incremental Addresses 12
Reading from the control registers in MICRF505 12
Programming interface timing....12
Power on Reset....13
Programming summary....14
Frequency Synthesizer 15
Crystal Oscillator (XCO) 16
VCO 17
Charge Pump 18
PLL Filter 18
Lock Detect....18
Modes of Operation....18
Transceiver Sync/Non-Synchronous Mode 19
Data Interface....19
Receiver 20
Front End....20
Sallen-Key Filters 20
Switched Capacitor Filter 21
RSSI 21
FEE....22
Bit Synchronizer 23
Transmitter 24
Power Amplifier 24
Modulator....26
Using the XCO-tune Bits 28
Typical Application 30
MICRF505BML/YML Land pattern....31
Layout Considerations 32
Package Information MICRF505BML 33
Package Information MICRF505YML 34
Overview of programming bit 35
Table 1: Detailed description of programming bit 35
Table 2: Main Mode bit....40
Table 3: Synchronizer mode bit ....40
Table 4: Modulation bit....40
Table 5: Prefilter bit....40
Table 6: Power amplifier bit ....41
Table 7:Generation of Bitrate_clk, BitSync_clk and Mod_clk. 41
Table 8: Test signals 41
Table 10: Frequency Error Estimation control bit 42
Table 11: Frequency Error Estimation control bit, cont.... 42
RadioWire® RF Selection Guide
| Device | Frequency | Range | Maximum Data Rate | Receive | Supply Voltage | Transmit | Modulation Type | Package |
| MICRF500 70 | 0MHz – 1.1GHz | 128k | Baud 12mA 2.5 | to 3.4V 50mA | FSK LQFP-44 | |||
| MICRF501 30 | 0MHz – 440MHz | 128k | Baud 8mA 2.5 | to 3.4V 45mA | FSK LQFP-44 | |||
| MICRF505 85 | 0MHz – 950MHz | 200k | Baud 13mA 2.0 | to 2.5V 28mA | FSK MLFTM-32 | |||
| MICRF506 | 410MHz – 450MHz | 200k Baud | 12mA | 2.0 to 2.5V | 21.5mA | FSK | MLFTM-32 | |
| MICRF405 | 290-980MHz | 200k Baud | NA | 2.0-3.6V | 18mA | FSK/ASK | MLFTM-24 | |
Ordering Information
| Part Number | Junction Temp. Range ^(1) | Package |
| MICRF505YML TR | -40° to +85°C | Lead free 32-Pin MLF® |
| MICRF505BML TR | -40° to +85°C | 32-Pin MLF® |
Block Diagram

flowchart
graph TD
A["LC Filter"] --> B["ANT"]
B --> C["LO-Buffer"]
C --> D["DIV 2"]
D --> E["Frequency Synthesiser"]
E --> F["XTALIN"]
E --> G["XTALOUT"]
E --> H["CPOUT"]
E --> I["VCO"]
I --> J["VARIN"]
J --> K["Loop filter"]
K --> L["PA"]
L --> M["PA-buffer"]
M --> N["LO-Buffer"]
N --> O["FAIWP"]
O --> P["Salien-key"]
P --> Q["Main filter"]
Q --> R["Demodulator"]
R --> S["Clock recovery"]
S --> T["Control logic"]
T --> U["SCLK"]
T --> V["IO"]
T --> W["CS"]
T --> X["DATAIXO"]
T --> Y["DATACLK"]
T --> Z["RSST"]
T --> AA["LD"]
B --> AB["PTATBIAS"]
AB --> AC["CIBIAS"]
AC --> AD["LTA"]
AD --> AE["×"]
AD --> AF["×"]
AD --> AG["×"]
AD --> AH["×"]
AD --> AI["×"]
AD --> AJ["×"]
AD --> AK["×"]
AD --> AL["×"]
AD --> AM["×"]
AD --> AN["×"]
AD --> AO["×"]
AD --> AP["×"]
AD --> AQ["×"]
AD --> AR["×"]
AD --> AS["×"]
AD --> AT["×"]
AD --> AU["×"]
AD --> AV["×"]
Pin Configuration

text_image
NC VCOVDD VCOGND VARIN GND CPOUT DIGGND DIGVDD 32 3130 29 28 27 26 25 RFGND 1 PTATBIAS 2 RFVDD 3 RFGND 4 ANT 5 RFGND 6 GND 7 NC 8 CIBIAS 9 10 11 12 13 14 15 16 IFVDD IFGND ICHOUT QCHOUT RSSI LD NC XTALOUT XTALIN CS SCLK IO DATAIXO DATACLK NCMICRF505BML 32-Pin MLF™
Pin Description
| Pin Number | Pin Name | Type | Pin Function |
| 1 | RFGND | LNA and | |
| 2 | PTATBIAS | O | Connection for bias resistor. |
| 3 | RFVDD | LNA and PA power supply. | |
| 4 | RFGND | LNA and | |
| 5 | ANT | I/O | Antenna In/Output. |
| 6 | RFGND | LNA and | |
| 7 | RFGND | LNA and | |
| 8 | NC | No connect. | |
| 9 | CIBIAS | O | Connection for bias resistor. |
| 10 | IFVDD | IF/mixer power supply. | |
| 11 | IFGND | IF/mixer ground. | |
| 12 | ICHOUT | O | Test pin. |
| 13 | QCHOUT | O | Test pin. |
| 14 | RSSI | O | Received signal strength indicator. |
| 15 | LD | O | PLL lock detect. |
| 16 | NC | No connect. | |
| 17 | NC | No connect |
PA
PA
PA
PA
| Pin Number | Pin Name | Type | Pin Function |
| ground. | DATACLK | O | RX/TX data clock output. |
| 19 | DATAIXO | I/O | RX/TX data input/output. |
| 20 ground. | IO | I/O | 3-wire interface data in/output. |
| 21 | SCLK | I | 3-wire interface serial clock. |
| ground.22 ground. | CS | I | 3-wire interface chip select. |
| 23 | XTALIN | I | Crystal oscillator input. |
| 24 | XTALOUT | O | Crystal oscillator output. |
| 25 | DIGVDD | Digital power supply. | |
| 26 | DIGGND | Digital ground. | |
| 27 | CPOUT | O | PLL charge pump output. |
| 28 | GND | Substrate ground. | |
| 29 | VARIN | I | VCO varactor. |
| 30 | VCOGND | VCO ground. | |
| 31 | VCOVDD | VCO power supply. | |
| 32 | NC | No connect. |
Absolute Maximum Ratings ^(1)
Supply Voltage ( V_DD )....+2.7V
Voltage on any pin (GND = 0V)..... -0.3V to 2.7V Storage Temperature ( T_s ) ..... -55°C to +150°C ESD Rating ^(3) ..... 2kV
Operating Ratings ^(2)
Supply voltage ( V_IN )....+2.0V to +2.5V
RF Frequencies.... 850MHz to 950MHz
Data Rate ....<200kBaud
Ambient Temperature (T _A ) ...... -40°C to +85°C
Package Thermal Resistance MLF ^ ( _JA ) 41.7°C/W
Electrical Characteristics ^(4)
f_RF = 915MHz . Data-rate = 125kbps, Modulation type = closed-loop VCO modulation, V_DD = 2.5V ; T_A = 25^ , bold values indicate -40^ ≤ T_A ≤ +85^ , unless noted.
| Symbol | Parameter Condition Min | Typ Max Units | |||||
| RF Frequency Operating Range | 850 | 950 | MHz | ||||
| Power Supply | 2.0 | 2.5 | V | ||||
| Power Down Current | 0.3 | μA | |||||
| Standby Current | 280 | μA | |||||
| VCO and PLL Section | |||||||
| Reference Frequency | 4 | 40 | MHz | ||||
| PLL Lock Time(5), Rx->Rx, 3kHz bandwidth | 915MHz to 915.5MHz | 0.8 | ms | ||||
| 902MHz to 927MHz | 1.3 | ms | |||||
| PLL Lock Time(5), Rx->Rx, 20kHz bandwidth | 915MHz to 915.5MHz | 0.3 | ms | ||||
| Switch Time(5), same frequency, 3kHz loop bandwidth | Rx - Tx | 0.9 | ms | ||||
| Tx - Rx | 0.8 | ms | |||||
| Standby Rx | 2.1 | ms | |||||
| Standby Tx | 2.1 | ms | |||||
| Crystal Oscillator Start-Up Time | 16MHz, 9pF load, 5.6pF loading capacitors | 1.0 | ms | ||||
| Charge Pump Current | VCPOUT = 1.1V, CP_HI = 0 | 100 | 125 | 170 | μA | ||
| VCPOUT = 1.1V, CP_HI = 1 | 420 | 500 | 680 | μA | |||
| Transmit Section | |||||||
| Output Power | RLOAD = 50Ω, Pa2-0-111 | 10 | dBm | ||||
| RLOAD = 50Ω, Pa2-0-001 | -8 | dBm | |||||
| Output Power Tolerance | Over temperature range | 2 | dB | ||||
| Over power supply range | 3 | dB | |||||
| Tx Current Consumption | RLOAD = 50Ω, Pa2-0-111 | 28 | mA | ||||
| RLOAD = 50Ω, Pa2-0-001 | 14 | mA | |||||
| Binary F SK Frequency Separation(5) | Birate = 200kbps | 20 | 500 | kHz | |||
| Data Rate(5) | VCO modulation | 20 | 200 | kbps | |||
| Divider modulation | 20 | kbps | |||||
| Occupied bandwidth(5) | 38.4kbps, β = 2, 20dBc | 120 | kHz | ||||
| 125kbps, β = 2, 20dBc | 450 | kHz | |||||
| 200kbps, β = 2, 20dBc | 750 | kHz | |||||
| Spurious Emission < 1GHz (5) | ETSI EN300 220(Using antenna matching network) | -54 dBm | |||||
| Spurious Emission > 1GHz (5) | -30 dBm | ||||||
| 2^nd Harmonic | FCC part 15, R_Load 50Ω(Using antenna matching network) | -20 dBc | |||||
| 3^rd Harmonic | -41.2 | dBm | |||||
| Spurious Emission <902MHz | -49.2 | dBm | |||||
| Spurious Emission >928MHz | -41.2 | dBm | |||||
| Receive Section | |||||||
| Rx Current Consumption | All functions turned on | 13.5 | mA | ||||
| LNA bypass | 10.9 | mA | |||||
| Switch cap filter bypass with LNA | 10.9 | mA | |||||
| Bypass of Switch cap and LNA | 8.6 | mA | |||||
| Rx Current Consumption Variation | Over temperature | 4 | mA | ||||
| Receiver Sensitivity | 2.4kbps, β = 16, SC=50kHz, BER 10^-3 | -111 | dBm | ||||
| 4.8kbps, β = 16, SC=50kHz, BER 10^-3 | -110 | dBm | |||||
| 19.2kbps, β = 8, SC=200kHz, BER 10^-3 | -107 | dBm | |||||
| 38.4kbps, β = 4, BER 10^-3 | -104 | dBm | |||||
| 76.8kbps, β = 2, BER 10^-3 | -101 | dBm | |||||
| 125kbps, β = 2, BER 10^-3 | -100 | dBm | |||||
| 200kbps, β = 2, BER 10^-3 | -97 | dBm | |||||
| Receiver Maximum Input Power | 125kbps, β = 2 | -12 | dBm | ||||
| 20kbps, β = 10 | -10 | dBm | |||||
| Receiver Sensitivity Tolerance | Over temperature | 4 | dB | ||||
| Over power supply range | 1 | dB | |||||
| Receiver Bandwidth | 50 | 350 | kHz | ||||
| Co-Channel Rejection | 19.2 kbps, β = 6, SC=133 kHz | dB | |||||
| Adjacent Channel Rejection | 500kHz spacing, 19.2kbps, Main filter cut off frequency 133kHz | dB | |||||
| 1MHz ,19.2kbps, Main filter cut off frequency 133kHz | dB | ||||||
| Blocking | Desired signal:19.2 kbps, β =6,3dB above sens,SC=133 kHz | Offset ±1MHz | 55 | dB | |||
| Offset ±2MHz | 58 | dB | |||||
| Offset ±5MHz | 48 | dB | |||||
| Offset ±10MHz | 50 | dB | |||||
| Offset ±30MHz | 60 | dB | |||||
| 1dB Compression | -34 | dBm | |||||
| Input IP3 | 2 tones with 1MHz separation | -25 | dBm | ||||
| LO Leakage | -90 | dBm | |||||
| Spurious Emission(5) | <1GHz, EN 300 220 -57 dBm | ||||||
| >1GHz, EN 300 220 -47 dBm | |||||||
| Input Impedance | 50 | Ω | |||||
| RSSI Dynamic Range | 50 | dB | |||||
| RSSI Output Range | Pin = -110dBm | 0.9 | V | ||||
| Pin = -60dBm | 2 | V | |||||
| Digital Inputs/Outputs | |||||||
| VIH Logic | Input High | 0.7V | DD | VDD | V | ||
| VIL | Logic Input Low | 0 | 0.3VDD | V | |||
| Clock/Data Frequency(5) | 10 | MHz | |||||
Notes:
- Exceeding the absolute maximum rating may damage the device.
- The device is not guaranteed to function outside its operating rating.
- Devices are ESD sensitive. Handling precautions recommended. Human body model, 1.5k in series with 100pF.
- Specification for packaged product only.
- Guaranteed by design.
Programming
General
The MICRF505 functions are enabled through a number of programming bits. The programming bits are organized as a set of addressable control registers, each register holding 8 bits.
There are 23 control registers in total in the MICRF505, and they have addresses ranging from 0 to 22. The user can read all the control registers. The user can write to the first 22 registers (0 to 21); the register 22 is a read-only register.
All control registers hold 8 bits and all 8 bits must be written to when accessing a control register, or they will be read. Some of the registers do not utilize all 8 bits. The value of an unused bit is “don’t care.”
The control register with address 0 is referred to as ControlRegister0, the control register with address 1 is ControlRegister1 and so on. A summary of the control registers is given in the table below. In addition to the unused bits (marked with "-" ) there are a number of mandatory bits (marked with "0" or "1"). Always maintain these as shown in the table.
The control registers in MICRF505 are accessed through a 3-wire interface; clock, data and chip select. These lines are referred to as SCLK, IO, and CS, respectively. This 3-wire interface is dedicated to control register access and is referred to as the control interface. Received data (via RF) and data to transmit (via RF) are handled by the DataIXO and DataClk (if enabled) lines; this is referred to as the data interface.
The SCLK line is applied externally; access to the control registers are carried out at a rate determined by the user. The MICRF505 will ignore transitions on the SCLK line if the CS line is inactive. The MICRF505 can be put on a bus, sharing clock and data lines with other devices.
All control registers should be written to after a battery reset. During operation, it is sufficient to write to one register only. The MICRF505 will automatically enter power down mode after a battery reset.
| Adr | Data | |||||||
| A6...A0 | D7 | D6 | D5 | D4 | D3 | D2 | ||
| 0000000 | LNA_by | PA2 | PA1 | PA0 | Sync_en | Mode1 | Mode0 | |
| 0000001 | Modulation1 | Modulation0 | ‘0’ | ‘0’ | RSSI_en | LD_en | PF_FC1 | PF_FC0 |
| 0000010 | CP_HI | SC_by | ‘0’ | PA_By | OUTS3 | OUTS2 | OUTS1 | OUTS0 |
| 0000011 | ‘1’ | ‘1’ | ‘0’ | VCO_IB2 | VCO_IB1 | VCO_IB0 | VCO_freq1 | VCO_freq0 |
| 0000100 | Mod_F2 | Mod_F1 | Mod_F0 | Mod_I4 | Mod_I3 | Mod_I2 | Mod_I1 | Mod_I0 |
| 0000101 | - | - | ‘0’ | ‘1’ | Mod_A3 | Mod_A2 | Mod_A1 | Mod_A0 |
| 0000110 | - | Mod_clkS2 | Mod_clkS1 | Mod_clkS0 | BitSync_clkS2 | BitSync_clkS1 | BitSync_clkS0 | BitRate_clkS2 |
| 0000111 | BitRate_clkS1 | BitRate_clkS0 | RefClk_K5 | RefClk_K4 | RefClk_K3 | RefClk_K2 | RefClk_K1 | RefClk_K0 |
| 0001000 | ‘1’ | ‘1’ | ScClk5 | ScClk4 | ScClk3 | ScClk2 | ScClk1 | ScClk0 |
| 0001001 | ‘0’ | ‘0’ | ‘1’ | XCOtune4 | XCOtune3 | XCOtune2 | XCOtune1 | XCOtune0 |
| 0001010 | - | - | A0_5 | A0_4 | A0_3 | A0_2 | A0_1 | A0_0 |
| 0001011 | - | - | - | - | N0_11 | N0_10 | N0_9 | N0_8 |
| 0001100 | N0_7 | N0_6 | N0_5 | N0_4 | N0_3 | N0_2 | N0_1 | N0_0 |
| 0001101 | - | - | - | - | M0_11 | M0_10 | M0_9 | M0_8 |
| 0001110 | M0_7 | M0_6 | M0_5 | M0_4 | M0_3 | M0_2 | M0_1 | M0_0 |
| 0001111 | - | - | A1_5 | A1_4 | A1_3 | A1_2 | A1_1 | A1_0 |
| 0010000 | - | - | - | - | N1_11 | N1_10 | N1_9 | N1_8 |
| 0010001 | N1_7 | N1_6 | N1_5 | N1_4 | N1_3 | N1_2 | N1_1 | N1_0 |
| 0010010 | - | - | - | - | M1_11 | M1_10 | M1_9 | M1_8 |
| 0010011 | M1_7 | M1_6 | M1_5 | M1_4 | M1_3 | M1_2 | M1_1 | M1_0 |
| 0010100 | ‘1’ | ‘0’ | ‘1’ | ‘1’ | ‘0’ | ‘1’ | ‘0’ | ‘1’ |
| 0010101 | - | - | - | - | FEEC_3 | FEEC_2 | FEEC_1 | FEEC_0 |
| 0010110 | FEE_7 | FEE_6 | FEE_5 | FEE_4 | FEE_3 | FEE_2 | FEE_1 | FEE_0 |
| Names of programming bits, unused bits (“-”) and mandatory bits (“1” or “0”) are shown. Change of mandatory bits may cause malfunction. | ||||||||
Table 1. Control Registers in MICRF505
Writing to the control registers in MICRF505
Writing: A number of octets are entered into MICRF505 followed by a load-signal to activate the new setting. Making these events is referred to as a "write sequence." It is possible to update all, 1, or n control registers in a write sequence. The address to write to (or the first address to write to) can be any valid address (0-21). The IO line is always an input to the MICRF505 (output from user) when writing.
What to write:
- The address of the control register to be written (or if more than 1 control register should be written to, the address of the 1^st control register to write to).
- A bit to enable reading or writing of the control registers. This bit is called the R/W bit.
- The values to write into the control register(s).
What to write:
| Field | Comments |
| Address: A | 7-bit field, ranging from 0 to 21. MSB is written first. |
| R/W bit: A | 1-bit field, = “0” for writing |
| Values: A | number of octets (1-22 octets). MSB in every octet is written first. The first octet is written to the control register with the specified address (=“Address”). The next octet (if there is one) is written to the control register with address = “Address + 1” and so on. |
Table 2.
How to write:
Bring CS active to active to start a write sequence. The active state of the CS line is "high." Use the SCLK/IO serial interface to clock "Address" and "R/W" bit and "Values" into the MICRF505. MICRF505 will sample the IO line at negative edges of SCLK. Make sure to change the state of the IO line before the negative edge. Refer to figures below.
Bring CS inactive to make an internal load-signal and complete the write-sequence. Note: there is an exception to this point. If the programming bit called "load_en" (bit0 in ControlRegister0) is "0", then no load pulse is generated.
The two different ways to "program the chip" are:
- Write to a number of control registers (0-22) when the registers have incremental addresses (write to 1, all or n registers)
- Write to a number of control registers when the registers have non-incremental addresses.
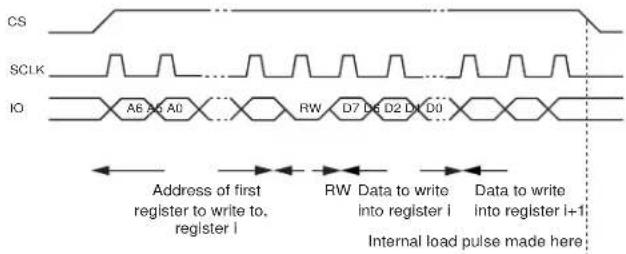
Writing to a Single Register
Writing to a control register with address "A6. A5, ...A0" is described here. During operation, writing to 1 register is sufficient to change the way the transceiver works. Typical example: Change from receive mode to power-down.
What to write:
| Field | Comments |
| Address: 7 | bit = A6, A5, ...A0 (A6 = msb. A0 = lsb) |
| R/W bit: “0” | for writing |
| Values: 8 bits | D7, D6, ...D0 (D7 = msb, D0 = lsb) |
Table 3.
"Address" and "R/W bit" together make 1 octet. In addition, 1 octet with programming bits is entered. In total, 2 octets are clocked into the MICRF505.
How to write:
- Bring CS high
- Use SCLK and IO to clock in the 2 octets
- Bring CS low

text_image
CS SCLK IO A6 A5 A0 RW D7 D6 DE D1 D0 Address of register i RW Data to write into register i Internal load pulse made hereFigure 1.
In Figure 1, IO is changed at positive edges of SCLK. The MICRF505 samples the IO line at negative edges. The value of the R/W bits is always "0" for writing.
Writing to All Registers
After a power-on, all writable registers should be written. This is described here.
Writing to all register can be done at any time. To get the simplest firmware, always write to all registers. The price to pay for the simplicity is increased write-time, which leads to increased time to change the way the MICRF505 works.
What to write
| Field | Comments |
| Address: '000000' (address of the first register to write to, which is 0) | |
| R/W bit: "0" for writing | |
| Values: | 1^st Octet: wanted values for ControlRegister0. 2^nd Octet: wanted values for ControlRegister1 and so on for all of the octets. So the 22^nd octet wants values for ControlRegister21. Refer to the specific sections of this document for actual values. |
Table 4.
"Address" and "R/W bit" together make 1 octet. In addition, 22 octets with programming bits are entered. In total, 23 octets are clocked into the MICRF505.
How to write:
- Bring CS high
- Use SCLK and IO to clock in the 23 octets
- Bring CS low
Refer to the figure in the next section, "Writing to n registers having incremental addresses".
Writing to n Registers having Incremental Addresses
In addition to entering all bytes, it is also possible to enter a set of n bytes, starting from address i = "A6, A5, ... A0". Typical example: Clock in a new set of frequency dividers (i.e. change the RF frequency). "Incremental addresses". Registers to be written are located in i, i+1, i+2.
What to write
| Field | Comments |
| Address: 7 | bit = A6, A5, ...A0 (A6 = msb. A0 = lsb) (address of first byte to write to) |
| R/W bit: “0” | for writing |
| Values: n* 8 | bits = D7, D6, ...D0 (D7 = msb, D0 = lsb) (written to control reg. with address "i") D7, D6, ...D0 (D7 = msb, D0 = lsb) (written to control reg. with address "i+1") D7, D6, ...D0 (D7 = msb, D0 = lsb) (written to control reg. with address "i+n-1") |
Table 5.
"Address" and "R/W bit" together make 1 octet. In addition, n octets with programming bits are entered. Totally, 1 +n octets are clocked into the MICRF505.
How to write:
- Bring CS high
- Use SCLK and IO to clock in the 1 + n octets
- Bring CS low
In Figure 1, IO is changed at positive edges of SCLK. The MICRF505 samples the IO line at negative edges. The value of the R/W bits is always "0" for writing.
text_image
CS SCLK IO A6 A5 A0 RW D7 D6 D2 D1 D0 Address of first register to write to. register I RW Data to write into register I Data to write into register i+1 Internal load pulse made hereFigure 2.
Writing to n Registers having Non-Incremental Addresses
Registers with non-incremental addresses can be written to in one write-sequence as well. Example of non-incremental addresses: "0,1,3". However, this requires more overhead, and the user should consider the possibility to make a "continuous" update, for example, by writing to "0,1,2,3" (writing the present value of "2" into "2"). The simplest firmware is achieved by always writing to all registers. Refer to previous sections.
This write-sequence is divided into several subparts:
- Disable the generation of load-signals by clearing bit "load_en" (bit0 in ControlRegister0)
-
Repeat for each group of register having incremental addresses:
-
Bring CS active
- Enter first address for this group, R/W bit and values
- Bring CS inactive
- Finally, enable and make a load-signal by setting "load_en"
Refer to the previous sections for how to write to 1 or n (with incremental addresses) registers in the MICRF505.
Reading from the control registers in MICRF505
The "read-sequence" is:
- Enter address and R/W bit
- Change direction of IO line
- Read out a number of octets and change IO direction back again.
It is possible to read all, 1 or n registers. The address to read from (or the first address to read from) can be any valid address (0-22). Reading is not destructive, i.e. values are not changed. The IO line is output from the MICRF505 (input to user) for a part of the read-sequence. Refer to procedure description below.
A read-sequence is described for reading n registers, where n is number 1-23.
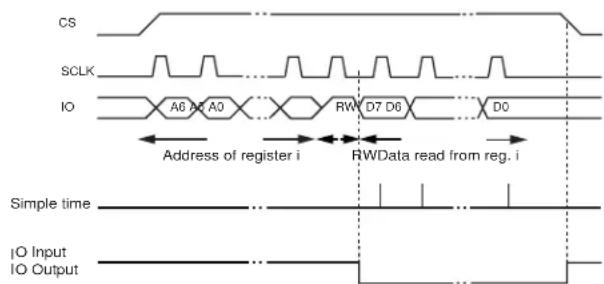
Reading n registers from MICRF505
text_image
CS SCLK IO A6 A5 A0 RW D7 D6 D0 Address of register i RWData read from reg. i Simple time IO Input IO OutputFigure 3.
In the figure, 1 register is read. The address is A6, A5, ... A0. A6 = msb. The data read out is D7, D6, ...D0. The value of the R/W bit is always "1" for reading.
SCLK and IO together form a serial interface. SCLK is applied externally for reading as well as for writing.
- Bring CS active
- Enter address to read from (or the first address to read from) (7 bits) and
• The R/W bit = 1 to enable reading - Make the IO line an input to the user (set pin in tristate)
- Read n octets. The first rising edge of SCLK will set the IO as an output from the MICRF505. MICRF will change the IO line at positive edges. The user should read the IO line at the negative edges.
- Make the IO line an output from the user again.
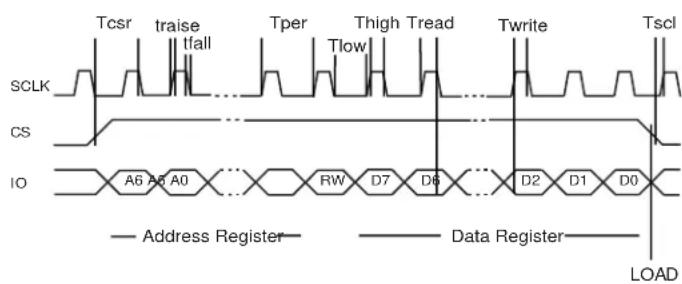
Programming interface timing
Figure 4 and Table 6 shows the timing specification for the 3-wire serial programming interface.
text_image
Tcsr traise tfall Tper Thigh Tread Twrite Tscl SCLK CS IO A6 A5 A0 RW D7 D6 D2 D1 D0 Address Register Data Register LOADFigure 4.
| Symbol | Parameter | Values | Units | ||
| Min. | Typ. | Max. | |||
| Tper | Min. period SCLK | 50f | |||
| Thigh Min. | high time of SCLK | 20 | |||
| Tlow Min. | low time of SCLK | 20 | |||
| tfall Max. | time of falling edge of SCLK | 1 | |||
| trise Max. | time of rising edge of SCLK | 1 | |||
| Tcsr Max. | time of rising edge of CS to falling edge of SCLK | 0 | |||
| Tcsf | Min. delay from rising edge of CS to rising edge of SCLK | 5 | |||
| Twrite | Min. delay from valid IO to falling edge of SCLK during a write operation | 0 | |||
| Tread | Min. delay from rising edge of SCLK to valid IO during a read operation (assuming load capacitance of IO is 25pF) | 75 | |||
| POR | Power on Reset delay from voltage is supplied to he device until POR completed | 4.6 | 9 | ms | |
[Non-Text]
ns
ns
ns
ns
Table 6. Timing Specification for the 3-wire Programming Interface
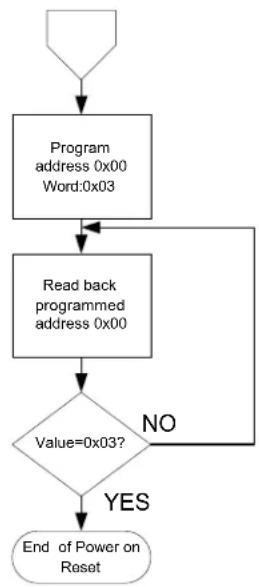
Power on Reset
ns
When applying voltage to the MICRF505 a power on reset state is entered. During the time period of power on reset, the MICRF505 should be considered to be in an unknown state and the user should wait until completed (See Table 6). The power on reset timing given in Table 6 is covering all conditions and should be treated as a maximum delay time. In some application it might be beneficial to minimize the power on reset time. In these cases we recommend to follow below procedure:
flowchart
graph TD
A["Start"] --> B["Program address 0x00\nWord:0x03"]
B --> C["Read back programmed address 0x00"]
C --> D{Value=0x03?}
D -->|NO| C
D -->|YES| E["End of Power on Reset"]
Programming summary
- Use CS, SCLK, and IO to get access to the control registers in MICRF505.
• SCLK is user-controlled. - Write to the MICRF505 at positive edges (MICRF505 reads at negative edges).
- Read from the MICRF505 at negative edges (MICRF505 writes at positive edges)
- After power-on: Write to the complete set of control registers.
- Address field is 7 bits long. Enter msb first.
- R/W bit is 1 bit long ("1" for read, "0" for write)
- Address and R/W bit together make 1 octet
-
All control registers are 8 bits long. Enter/read msb in every octet first.
-
Always write 8 bits to/read 8 bits from a control register. This is the case for registers with less than 8 used programming bits as well.
- Writing: Bring CS high, write address and R/W bit followed by the new values to fill into the addressed control register(s) and bring CS low for loading, i.e. activation of the new control register values ("load_en" = 1).
- Reading: Bring CS high, write address and R/W bit, set IO as an input, read present contents of the addressed control register(s), bring CS low and set IO an output.
Frequency Synthesizer
The MICRF505 frequency synthesizer consists of a voltage-controlled oscillator (VCO), a crystal oscillator, dual modulus prescaler, programmable frequency dividers and a phase-detector. The loop-filter is external for flexibility and can be a simple passive circuit. The phase detector compares frequencies of two signals and produces an error signal which is proportional to the difference between the input frequencies. The error signal is used to control a voltage-controlled oscillator (VCO) which creates an output frequency. The output frequency is fed through a frequency divider back to the input of the phase detector, producing a feedback loop. If the output frequency drifts, the error signal will increase, driving the frequency in the opposite direction so as to reduce the error. Thus, the output is locked to the frequency at the other input. This input is called the reference and is derived from a crystal oscillator, which is very stable in frequency. The block diagram below shows the basic elements and arrangement of a PLL-based frequency synthesizer. The MICRF505 has a dual modulus prescaler for increased frequency resolution. In a dual modulus prescaler the main divider is split into two parts, the main part N and an additional divider A, where A < N. Both dividers are clocked from the output of the dual-modulus prescaler, but only the output of the N divider is fed into the phase detector. The prescaler will first divide by 16. Both N and A count down until A reaches zero, at which point the prescaler is switched to a division ratio 16+1 . At this point, the divider N has completed A counts. Counting continues until N reaches zero, which is an additional N-A counts. At this point the cycle repeats.
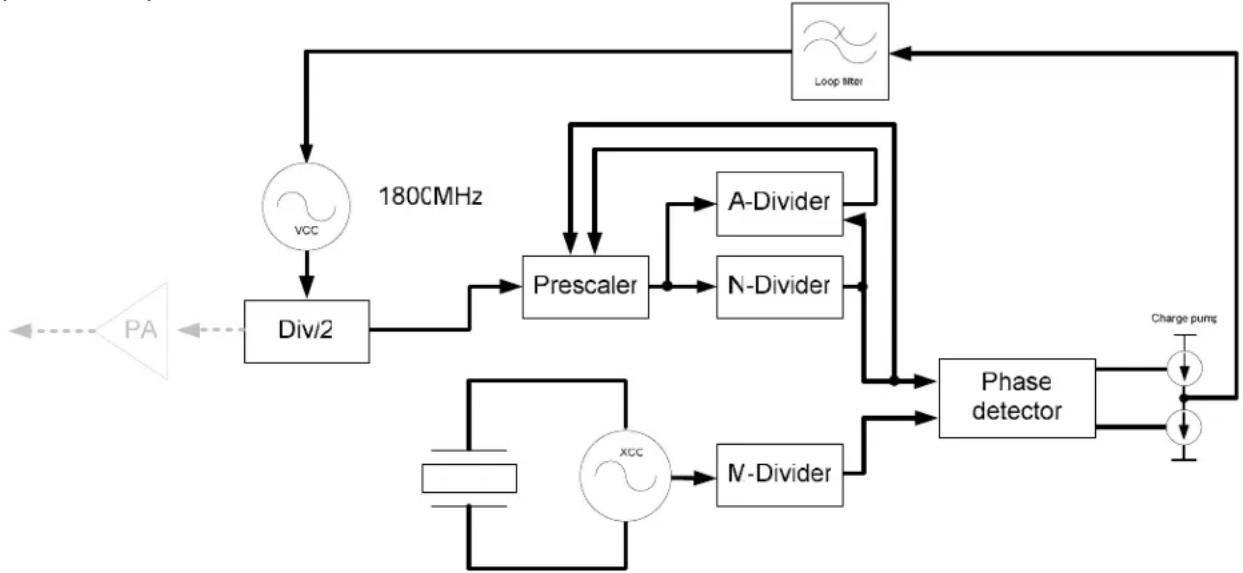
flowchart
graph TD
A["PA"] --> B["Div/2"]
B --> C["Prescaler"]
C --> D["A-Divider"]
C --> E["N-Divider"]
D --> F["Phase detector"]
E --> F
F --> G["Charge pump"]
H["Loop filter"] --> I["180CMHz"]
I --> B
J["VCC"] --> B
K["xcc"] --> L["V-Divider"]
L --> F
| A6...A0 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 0001010 | - | - | A0_5 | A0_4 | A0_3 | A0_2 | A0_1 | |
| 0001011 | - | - | - | - | N0_11 | N0_10 | N0_9 | |
| 0001100 | N0_7 | N0_6 | N0_5 | N0_4 | N0_3 | N0_2 | N0_1 | N0_0 |
| 0001101 | - | - | - | - | M0_11 | M0_10 | M0_9 | |
| 0001110 | M0_7 | M0_6 | M0_5 | M0_4 | M0_3 | M0_2 | M0_1 | M0_0 |
| 0001111 | - | - | A1_5 | A1_4 | A1_3 | A1_2 | A1_1 | |
| 0010000 | - | - | - | - | N1_11 | N1_10 | N1_9 | |
| 0010001 | N1_7 | N1_6 | N1_5 | N1_4 | N1_3 | N1_2 | N1_1 | N1_0 |
| 0010010 | - | - | - | - | M1_11 | M1_10 | M1_9 | |
| 0010011 | M1_7 | M1_6 | M1_5 | M1_4 | M1_3 | M1_2 | M1_1 | M1_0 |
The lengths of the N, M, and A registers are 12, 12 and 6 respectively. The values can be calculated from the following formula:
$$ \begin{array}{l} f _ {\text {PhD}} = \frac {f _ {\mathrm{XCO}}}{M} = \frac {f _ {\mathrm{VCO}} / 2}{(\times + A) N} = \frac {f _ {\mathrm{RF}}}{(1 6 \times + A) N} 1 6 \ 1 \leq A < N \ \end{array} $$
where
f_PhD : Phase detector comparison frequency
f_xco : Crystal oscillator frequency
f_vco : Voltage controlled oscillator frequency
f_RF : RF carrier frequency
There are two sets of each of the divide factors (i.e. A0 and A1). If modulation by using the dividers is selected (that is Modulation1=1, Modulation0=0), the two sets should be programmed to give two RF frequencies, separated by two times the specified frequency deviation. For all other modulation methods, and also in receive mode, the 0-set will be used.
Crystal Oscillator (XCO)
| Adr | D7 | D6 | D5 | D4 | D3 | D2 | D1 | ||
| 0001001 | '0' | '0' | '1' | XCOtune4 | XCOtune3 | XCOtune2 | XCOtune1 | XCOtune0 | |
The crystal oscillator is a very critical block. As the crystal oscillator is a reference for the RF output frequency and also for the LO frequency in the receiver, very good phase and frequency stability is required. The schematic of the crystal oscillator's external components for 16MHz are shown in Figure 5.
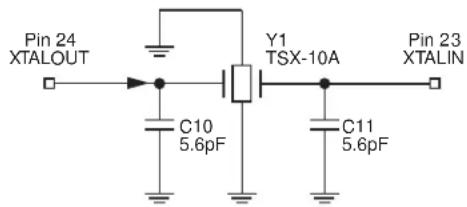
text_image
Pin 24 XTALOUT Y1 TSX-10A Pin 23 XTALIN C10 5.6pF C11 5.6pFFigure 5. Crystal Oscillator Circuit
The crystal should be connected between pins XTALIN and XTALOUT (pin 23 and 24). In addition, loading capacitors for the crystal are required. The loading capacitor values depend on the total load capacitance, C_L , specified for the crystal. The load capacitance seen between the crystal terminals should be equal to C_L for the crystal to oscillate at the specified frequency.
$$ C _ {L} = \frac {1}{\frac {1}{C _ {1 0}} + \frac {1}{C _ {1 1}}} + C _ {\text { parasitic }} $$
The parasitic capacitance is the pin input capacitance and PCB stray capacitance. Typically, the total parasitic capacitance is around 6pF. For instance, for a 9pF load crystal the recommended values of the external load capacitors are 5.6pF.
It is also possible to tune the crystal oscillator internally by switching in internal capacitance using 5 tune bits XCOtune4 - XCOtun0. When XCOtune4 - XCOtune0 = 0 no internal capacitors are connected to the crystal pins. When XCOtune4 - XCOtune0 = 1 all of the internal capacitors are connected to the crystal pins. Figure 6 shows the tuning range for two different capacitor values, 1.5pF and no capacitors.
The crystal used is a TN4-26011 from Toyocom. Specification: Package TSX-10A, Nominal frequency 16.000000 MHz, frequency tolerance ±10ppm, frequency stability ±9ppm, load capacitance 9pF, pulling sensitivity 15ppm/pF. When the external capacitors are set to 1.5pF and the XCOtune=16, the total capacitance will normally be \~9pF.

line
| XCO bitvalue | 2x1.5pF | 2x0pF | | ----------- | ------- | ----- | | 0 | 60.0 | 90.0 | | 8 | 40.0 | 60.0 | | 16 | 20.0 | 30.0 | | 24 | 0.0 | -10.0 | | 32 | -40.0 | -30.0 |Figure 6. XCO Tuning
The start up time is given in Table 7. As can be seen, more capacitance will slow down the start up time.
The start-up time of a crystal oscillator is typically around a millisecond. Therefore, to save current consumption, the XCO is turned on before any other circuit block. During start-up the XCO amplitude will eventually reach a sufficient level to trigger the M-counter. After counting 2 M-counter output pulses the rest of the circuit will be turned on. The current consumption during the prestart period is approximately 280 A .
| XCOtune Start-up Time (μs) | |
| 0 | 590 |
| 1 | 590 |
| 2 | 700 |
| 4 | 700 |
| 8 | 810 |
| 16 | 1140 |
| 31 | 2050 |
Table 7. Typical values with C_EXT = 1.5pF
If an external reference is used instead of a crystal, the signal shall be applied to pin 24, XTALOUT. Due to internal DC setting in the XCO, an AC coupling is recommended to be used between the external reference and the XTALOUT-pin.
vco
| A6..A0 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 0000011 | '1' | '1' | '0' | VCO_IB2 | VCO_ | B1 | VCO_IB0 | VCO_freq1 |
The VCO has no external components. If has three bit to set the bias current and two bit to set the VCO frequency. These five bit are set by the RF frequency, as follows:
| RF freq. VCO | IB2 VCO | IB1 VCO | IB0 VCO_freq1 | VCO_freq0 | |
| 850MHz | 1 | 1 | 1 | 0 | 0 |
| 868MHz | 0 | 1 | 1 | 0 | 1 |
| 915MHz | 0 | 0 | 1 | 1 | 0 |
| 950MHz | 0 | 0 | 0 | 1 | 1 |
Table 8. VCO Bit Setting
The bias bit will optimize the phase noise, and the frequency bit will control a capacitor bank in the VCO. The tuning range, the RF frequency versus varactor voltage, is dependent upon the VCO frequency setting, and can be shown in Figure 7. When the tuning voltage is in the range from 0.9V to 1.4V, the VCO gain is at its maximum, approximately 65-70MHz/V. It is recommended that the varactor voltage stays in this range.
The input capacitance at the varactor pin must be taken into consideration when designing the PLL loop filter. This is most critical when designing a loop filter with high bandwidth, which gives relatively small component values. The input capacitance is approximately 6pF.

line
| Varactor voltage (V) | '00' | '01' | '10' | '11' | | -------------------- | ----- | ----- | ----- | ----- | | 0 | 920 | 960 | 980 | 1000 | | 0.5 | 900 | 940 | 970 | 1000 | | 1 | 880 | 920 | 950 | 1000 | | 1.5 | 860 | 900 | 930 | 1000 | | 2 | 840 | 880 | 910 | 1000 | | 2.5 | 820 | 860 | 900 | 1000 |Figure 7. RF Frequency vs. Varactor Voltage and VCO Frequency bit ( V_DD = 2.25V )
Charge Pump
| A6..A0 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | |
| 0000010 | CP_HI | SC_by | '0' | PA_by | OUTS3 | OUTS2 | OUTS1 | OUTS1 |
DO
The charge pump current can be set to either 125μA or 500μA by CP_HI ('1' → 500μA). This will affect the loop filter component values, see "PLL Filter" section. In most cases, the low current is best suited. For applications using phase detector frequency and high PLL bandwidth, the 500μA can be a better choice.
PLL Filter
The design of the PLL filter will strongly affect the performance of the frequency synthesizer. The PLL filter is kept externally for flexibility. Input parameters when designing the loop filter for the MICRF505 are mainly the modulation method and the bit rate. These choices will also affect the switching time and phase noise.
The frequency modulation can be done in two different ways with the MICRF505, either by VCO modulation or by modulation with the internal dividers (see chapter Frequency modulation for further details). In the first case, the PLL needs to lock on a new carrier frequency for every new data bit. Now the PLL bandwidth needs to be adequately high. It is recommended to use a third order filter to suppress the phase detector frequency, as this is not suppressed as much as when doing modulation on the VCO with a lower bandwidth filter.
A schematic for a second (R2=0 and C3=NC) and third order loop filter is shown in Figure 8.
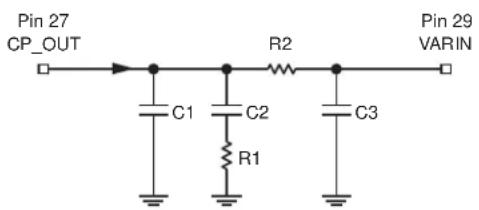
text_image
Pin 27 CP_OUT R2 Pin 29 VARIN C1 C2 C3 R1Figure 8. Second and Third Order Loop Filter
Table 9 shows three different loop filters, the two first for VCO modulation and the last one for modulation using the internal dividers. The component values are calculated with RF frequency = 915MHz, VCO gain = 67MHz/V and charge pump current = 125μA. Other settings are shown in the table. The varactor pin capacitance (pin 29) of 5pF does not influence on the component values for the two filters with lowest bandwidth.
| Baud Rate (kbaud/sec) | PLL BW (kHz) | Phase Margin(') | Phase Detector Freq. (kHz) | C1 | C2 | R1 | R2 | C3 | |
| VCO | >38.4 | 0.8 | 56 | 100 | 10nF | 100nF | 6.2kΩ | ||
| VCO | >125 | 3.2 | 56 | 100 | 680pF | 6.8nF | 22kΩ | 0 | NC |
| Divider | <20 | 13 | 86 | 500 | 150pF | 10nF | 18kΩ | 82kΩ | 4.7pF |
Table 9. Loop Filter Components Values
Lock Detect
| A6..A0 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 0000001 | Modulation1 | Modulation0 | '0' | '0' RSSI_en | LD_en | PF_FC1 | PF_FC0 |
A lock detector can be enabled by setting LD_en = 1. When pin LD is high, it indicates that the PLL is in lock.
Modes of Operation
| Mode1 | Mode0 | State | Comments |
| 0 | 0 | Power down | Keeps register configuration |
| 0 | 1 | Standby | Only crystal oscillator running |
| 1 | 0 | Receive | Full receive |
| 1 | 1 | Transmit | Full transmit ex PA state |
Transceiver Sync/Non-Synchronous Mode
| A6..A0 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | |
| 0000000 | LNA_by | PA2 | PA1 | PA0 | $ync_en | Mode1 | Mode0 | ||
| 0000110 | - | Mod_clkS2 | Mod_clkS1 | Mod_clkS0 | BitSync_clkS2 | BitSync_clkS1 | BitSync_clkS0 | BitRate_clkS2 | |
| 0000111 | BitRate_clkS1 | BitRate_clkS0 | RefClk_K5 | RefClk_K4 | RefClk_K3 | RefClk_K2 | RefClk_K1 | RefClk_K0 | |
| Sync_en | State | Comments |
| 0 | Rx: Bit synchronization off | Transparent reception of data |
| 0 Tx: DataClk pin off | Transparent transmission of data | |
| 1 | Rx: Bit synchronization on | Bit-clock is generated by transceiver |
| 1 Tx: DATACLK pin on | Bit-clock is generated by transceiver | |
When Sync_en = 1, it will enable the bit synchronizer in receive mode. The bit synchronizer clock needs to be programmed, see chapter Bit synchronizer. The synchronized clock will be set out on pit DATACLK.
In transmit mode, when Sync_en = 1, the clock signal on pin DATACLK is a programmed bit rate clock. Now the transceiver controls the actual data rate. The data to be transmitted will be sampled on rising edge of DATACLK. The micro controller can therefore use the negative edge to change the data to be transmitted. The clock used for this purpose, BITRATE_CLK, is programmed in the same way as the modulator clock and the bit synchronizer clock:
$$ \mathrm{f} _ {\text { BITRATE_CLK }} = \frac {\mathrm{f} _ {\mathrm{XCO}}}{\text { Refclk_K } \cdot 2 ^ {(7 - \text { BitRate_clkS })}} $$
where:
f_BITRATE_CLK : The clock frequency used to control the bit rate, should be equal to the bit rate (bit rate of 20 kbit/sec requires a clock frequency of 20kHz)
f_xco : Crystal oscillator frequency
Refclk_K: 6 bit divider, values between 1 and 63
BitRate_clkS: Bit rate setting, values between 0 and 6
Data Interface
The MICRF505 interface can be divided in to two separate interfaces, a "programming interface" and a "Data interface". The "programming interface" has a three wire serial programmable interface and is described in chapter Programming.
The "data interface" can be programmed to sync/non-synchronous mode. In synchronous mode the MICRF505 is defined as "Master" and provides a data clock that allows users to utilize low cost micro controller reference frequency.
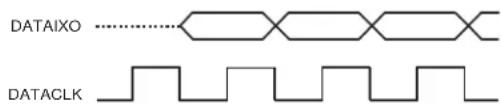
The data interface is defined in such a way that all user actions should take place on falling edge and is illustrated Figure 9 and 10. The two figures illustrate the relationship between DATACLK and DATAIXO in receive mode and transmit mode.
MICRF505 will present data on rising edge and the "USER" sample data on falling edge in receive mode.

text_image
DATAIXO DATACLKFigure 10. Data interface in Receive Mode
The User presents data on falling edge and MICRF505 samples on rising edge in transmit mode.
text_image
DATAIXO DATACLKFigure 11. Data interface in Transmit Mode
When entering transmit mode it is important to keep DATAIXO in tri-state from the time Tx-mode is entered until user starts sending data. The data is provided directly to the modulation circuit and violation of this may/will cause abnormal behavior. Depending upon the chosen FSK modulation, some sort of encoding might be needed. The different modulation types and encoding is described in chapter Frequency modulation.
Receiver
The receiver is a zero intermediate frequency (IF) type in order to make channel filtering possible with low-power integrated low-pass filters. The receiver consists of a low noise amplifier (LNA) that drives a quadrature mixer pair. The mixer outputs feed two identical signal channels in phase quadrature. Each channel include a pre-amplifier, a third order Sallen-Key RC lowpass filter from strong adjacent channel signals and finally a limiter. The main channel filter is a switched-capacitor implementation of a six-pole elliptic lowpass filter. The elliptic filter minimizes the total capacitance required for a given selectivity and dynamic range. The cut-off frequency of the Sallen-Key RC filter can be programmed to four different frequencies: 100kHz, 150kHz, 230kHz and 340kHz. The demodulator demodulates the I and Q channel outputs and produces a digital data output. If detects the relative phase of the I and Q channel signal. If the I channel signal lags the Q channel, the FSK tone frequency lies above the LO frequency (data '1'). If the I channel leads the Q channel, the FSK tone lies below the LO frequency (data '0'). The output of the receiver is available on the DataIXO pin. A RSSI circuit (receive signal strength indicator) indicates the received signal level.
Front End
A low noise amplifier in RF receivers is used to boost the incoming signal prior to the frequency conversion process. This is important in order to prevent mixer noise from dominating the overall front-end noise performance. The LNA is a two-stage amplifier and has a nominal gain of approximately 23dB at 900MHz. The front end has a gain of about 33dB to 35dB. The gain varies by 1-1.5dB over a 2.0V to 2.5V variation in power supply.
The LNA can be bypassed by setting bit LNA_by to '1'. This can be useful for very strong input signal levels. The front-end gain with the LNA bypassed is about 9-10dB. The mixers have a going of about 10dB at 915MHz. The differential outputs of the mixers can be made available at pins IchOut and QchOut. The output impedance of each mixer is about 8kΩ.
The input impedance is close to 50 as shown in Figure 12, giving an input reflection of about -20dB. The receiver does not require any matching network to optimize the gain. However, a matching network is recommended for harmonic suppression in Tx and for improved selectivity in Rx.

radar
| Frequency (MHz) | Value | |---|---| | 915.800 | 46.61 | | -9.947 | 17.49 | | 915.800 (Measured) | 46.61 | | -9.947 (Measured) | 17.49 |Each channel includes a pre-amplifier and a prefilter, which is a three-pole Sallen-Key lowpass filter. It protects the following switched-capacitor filter from strong adjacent channel signals, and it also works as an anti-aliasing filter. The preamplifier has a gain of 22-23dB. The maximum output voltage swing is about 1.4Vpp for a 2.25V power supply. In addition, the IF amplifier also performs offset cancellation. Gain varies by less than 0.5dB over a 2.0 – 2.5V variation in power supply. The third order Sallen-Key lowpass filter is programmable to four different cut-off frequencies according to the table below:
| PF_FC1 | PF_FC0 | Cut-off Freq. (kHz) |
| 0 | 0 | 100 |
| 0 | 1 | 150 |
| 1 | 0 | 230 |
| 1 | 1 | 340 |
Switched Capacitor Filter
| A6..A0 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | |
| 0001000 | 1' | 1' | ScClk5 | ScClk4 | ScClk3 | ScClk2 | ScClk1 | ScClk0 |
The main channel filter is a switched-capacitor implementation of a six-pole elliptic low pass filter. The elliptic filter minimized the total capacitance required for a given selectivity and dynamic range. The cut-off frequency of the switched-capacitor filter is adjustable by changing the clock frequency.
The clock frequency is designed to be 20 times the cut-off frequency. The clock frequency is derived from the reference crystal oscillator. A programmable 6-bit divider divides the frequency of the crystal oscillator. To generate the correct non-overlapping clock-phases needed by the filter this frequency is then divided by 4. The cut-off frequency of the filter is given by:
$$ f _ {C U T} = \frac {f _ {X C O}}{4 0 \cdot S c C l k} $$
f_CUT : Filter cutoff frequency
f_xco : Crystal oscillator frequency
ScClk: Switched capacitor filter clock, bits ScClk5-0
For instance, for a crystal frequency of 16MHz and if the 6 bit divider divides the input frequency by 4 the cut-off frequency of the SC filter is 16MHz/(40 x 4) = 100kHz. 1^st order RC low pass filters are connected to the output of the SC filter-to-filter the clock frequency.
The lowest cutoff frequency in the pre- and the main channel filter must be set so that the received signal is passed with no attenuation, which is frequency deviation plus modulation. If there are any frequency offset between the transmitter and the receiver, this must also be taken into consideration. A formula for the receiver bandwidth can be summarized as follows:
$$ f _ {B W} = + f _ {O F F S E T} + f _ {D E V} + B a u d r a t e / 2 $$
where
f_BW : Needed receiver bandwidth, fcut above should not be smaller than f_BW [Hz]
f_OFFSET : Total frequency offset between receiver and transmitter [Hz]
f_DEV : Single-sided frequency deviation, see chapter Modulator on how to calculate [Hz]
Baudrate: The baud rate given is bit/sec
RSSI
| A6..A0 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | |
| 0000001 | Modulation1 | Modulation0 | '0' | '0' | RSSI_en | LD_en | PF_FC1 | PF_FC0 |
line
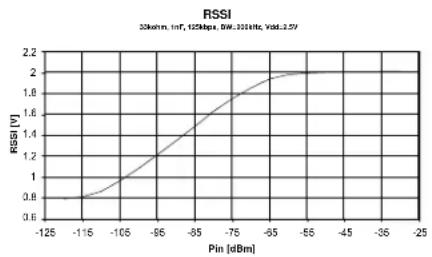
| Pin [dBm] | RSSI [V] | | --------- | -------- | | -126 | 0.8 | | -116 | 0.9 | | -106 | 1.0 | | -96 | 1.2 | | -85 | 1.4 | | -75 | 1.6 | | -65 | 1.8 | | -55 | 2.0 | | -45 | 2.0 | | -35 | 2.0 | | -25 | 2.0 |Figure 13. RSSI Voltage
text_image
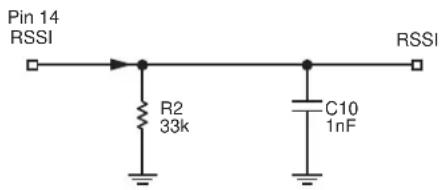
Pin 14 RSSI R2 33k C10 1nF RSSIFigure 14. RSSI Network
A Typical plot of the RSSI voltage as function of input power is shown in Figure 13. The RSSI has a dynamic range of about 50dB from about -110dBm to -60dBm input power.
The RSSI can be used as a signal presence indicator. When a RF signal is received, the RSSI output increases. This could be used to wake up circuitry that is normally in a sleep mode configuration to conserve battery life.
Another application for which the RSSI could be used is to determine if transmit power can be reduced in a system. If the RSSI detects a strong signal, if could tell the transmitter to reduce the transmit power to reduce current consumption.
FEE
| A6..A0 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | |
| 0010101 | - | - | - | - | FEEC_3 | FEEC_2 | FEEC_1 | FEEC_0 | |
| 0010110 | FEE_7 | FEE_6 | FEE_5 | FEE_4 | FEE_3 | FEE_2 | FEE_1 | ||
The Frequency Error Estimator (FEE) uses information from the demodulator to calculate the frequency offset between it's receive frequency and the transmitter frequency. The output of the FEE can be used to tune the XCO frequency, both for production calibration and for compensation for crystal temperature drift and aging.
The inputs to the FEE circuit are the UP and DN pulses from the demodulator. Every time a '1' is updated, an UP-pulse is coming out of the demodulator and the same with the DN-pulse every time the '0' is updated. The expected number of pulses for every received symbol is 2 times the modulation index ( ).
The FEE can be set in an off state or set to count the UP+DN pulses. The number of received symbols to be counted is 8, 16, 32 or 64. This is set by the FEEC_0...FEEC_3 control bit, as follows:
| FEEC_1 | FEEC_0 | FEE Mode |
| 0 | 0 | Off |
| 0 | 1 | Not in use |
| 1 | 0 | Not in use |
| 1 | 1 | Counting UP and DN pulses. UP increments the counter, DN decrements it. |
| FEEC_3 | FEEC_2 | No. of symbols used for the measurement |
| 0 | 0 | 8 |
| 0 | 1 | 16 |
| 1 | 0 | 32 |
| 1 | 1 | 65 |
Table 10. FEEC Control Bit
The result of the measurement is the FEE value. The 8bit value can be read from register with address 0010110b. After a load, the FEE will be reset to 0, and will then be incremented or decremented dependent of the frequency offset. Positive FEE values are in the range 0 - 127, and negative values in the range 128 - 255. For negative values, the twos complement of the FEE value need to be found before using the formula below. A FEE = 128 corresponds to ÷127 and FEE = 255 corresponds to ÷1.
When the FEE value has been read, the frequency offset can be calculated as follows:
$$ \text { Mode UP + DN: Foffset } = R / (4 P) x (\text { FEE }), $$
where FEE is the value stored in the FEE register, (P is the number of symbols/data bit counted and R is the symbol/data rate. A positive Foffset means that the received signal has a higher frequency than the receiver frequency. To compensate for this, the receivers XCO frequency should be increased (see 'Using the XCO-tune Bits on how to tune the XCO frequency based on the FEE value).
The most accurate reading will be achieved when counting many symbols/data (P). However, attention must be paid to the negative representation of the FEE value. If the frequency offset is too large for the chosen P, and the FEE is being incremented above +127, the FEE value will be interpreted as a negative number. If so, the P must be decremented.
Bit Synchronizer
| A6..A0 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | |
| 0000110 | - | ModclkS2 | ModclkS1 | ModclkS0 | BitSync_clkS2 | BitSync_clkS1 | BitSync_clkS0 | BitSync_clkS1 |
| 0000111 | BitRate_clkS1 | BitRate_clkS0 | RefClk_K5 | RefClk_K4 | RefClk_K3 | RefClk_K2 | RefClk_K1 | RefClk_K0 |
A bit synchronizer can be enabled in receive mode by selecting the synchronous mode (Sync_en=1). The DataClk pin will output a clock with twice the frequency of the bit rate (a bit rate of 20 kbit/sec gives a DataClk of 20 kHz). A received symbol/bit on DataIXO will be output on rising edge of DataClk. The micro controller should therefore sample the symbol/bit on falling edge of DataClk.
The bit synchronizer uses a clock which needs to be programmed according to the bit rate. The clock frequency should be 16 times the actual bit rate (a bit rate of 20 kbit/sec needs a bit synchronizer clock with frequency of 320 kHz). The clock frequency is set by the following formula:
$$ f _ {B I T S Y N C _ C L K} = \frac {f _ {X C O}}{\operatorname{Re} f _ {C l k _ K} \times 2 ^ {(7 - B I T S Y N C _ c l k S)}} $$
where
f_BITSYNC_CLK : The bit synchronizer clock frequency (16 times higher than the bit rate)
f_xco : Crystal oscillator frequency
Refclk_K: 6 bit divider, values between 1 and 63
BitSync_clkS: Bit synchronizer setting, values between 0 and 7
Refclk_K is also used to derive the modulator clock and the bit rate clock.
At the beginning of a received data package, the bit synchronizer clock frequency is not synchronized to the bit rate. When these two are maximum offset to each other, it takes 22 bit/symbols before synchronization is achieved.
Transmitter
Power Amplifier
| A6...A0 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | ||
| 0000000 | LNA_by | PA2 | PA1 | PA0 | Sync_en | Mode1 | Mode0 | ||
| 0000001 | Modulation1 | Modulation0 | ‘0’ | ‘0’ | RSSI_en | LD_en | PF_FC1 | PF_FC0 | |
| 0000010 | CP_HI | SC_by | ‘0’ | PA_By | OUTS3 | OUTS2 | OUTS1 | OUTS0 | |
The maximum output power is approximately 10dBm for a 50Ω load. For maximum output power the load seen by the PA must be resistive. Higher output power can be obtained by decreasing the load impedance. However, this will be in conflict with obtaining impedance match in the LNA. The output power is programmable in seven steps, with approximately 3dB between each step. This is controlled by bits PA2 – PA0.
The power amplifier can be turned off by setting PA2 - PA0 = 0.
For all other combinations the PA is on and has maximum power when PA2 - PA0 = 1.
The PA will be bypassed if PA_by=1. Output power will drop \~15dB. It is still possible to control the power by PA2 - PA0.
The output power varies about 3dB over power supply 2.0V to 2.5V and about 2dB over temperature -40°C to +85°C. The 2^nd and 3^rd harmonic of the PA are as follows:
$$ 2 ^ {\text { nd }} \text { harmonic: } < - 2 0 \text { dBm } $$
$$ 3 ^ {\text { rd }} \text { harmonic: } < - 2 6 \text { dBm } $$
To reduce the emission of harmonics, an LC filter can be added between the ANT pin and the antenna as shown in Figure 15.

text_image
50ohm line C6 2p2 L1 8n7 C5 8p2 50ohm line C4 3p3 ANTFigure 15. LC Filter
This filter is designed for the 915MHz band with 50Ω terminations. The component values may have to be tuned to compensate for the layout parasitics. This filter may also increase the receiver selectivity.
Frequency Modulation
| A6..A0 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 0000001 | Modulation1 | Modulation0 | '0' | '0' | RSSI_en | LD_en | PF_FC1 | PF_FC0 |
| Modulation1 | Modulation0 | Modulation Type |
| 0 | 0 | Closed loop modulation using modulator |
| 0 | 1 | Not in use |
| 1 | 0 | FSK applied using two sets of dividers |
| 1 | 1 | Not in use |
Table 11. Modulation Bit Setting
When Modulation1 and Modulation0 is 00, the modulator needs to be programmed properly, see "Modulator" section. The modulation signal will now be applied directly on the phase locked VCO. It is therefore important that the PLL bandwidth is not too high, as this will remove the modulation. See "PLL Filter" section on how to calculate the PLL components. When using the modulator the modulation signal is applied to the VCO and therefore some sort of encoding is needed.
The level of encoding is determined by the PLL loop filter bandwidth and data rate. Two of the most common encoding techniques are Manchester encoding and 3B4B. Other encoding schemes may also be used.
Manchester encoding is when one bit is encoded in to a two-bit word and is shown in Table 10. When using Manchester encoding the maximum overhead is 100%. When selecting PLL loop filter it is important to note that the min baud rate is equal to:
$$ f _ {\text { baud_min }} = \frac {\text { baud /s }}{4} $$
f_baud_min : The minimum frequency of the baud rate [Hz]
baud/s: Elements per second (encoded data)
| Data | Word |
| “0” | “10” |
| “1” | “01” |
Table 12. Manchester Encoding
Another much more efficient encoding type is 3B4B where three data bits are encoded into a four-bit word. The reason for encoding is to minimize the DC component in the modulated data. To have minimum DC component each four bit word should include two elements of "1" and two elements of "0". Following this guidance only 6 out of 8 word complies and two encoded words needs special precaution. Whenever 000 and 111 data appear, the user must set/clear a flag that indicate if last encoded word was "Word A" and select the respective encoded word shown in Table 11.
| Data Word | A Word B | |
| 000 | 1011 | 0100 |
| 001 | 1100 | |
| 010 | 0011 | |
| 011 | 1010 | |
| 100 | 0101 | |
| 101 | 1001 | |
| 110 | 0110 | |
| 111 | 1101 | 0010 |
Table 13. 3B4B Encoding
| Data bits | Encoded words | Comments | |
| 000 | 000 | 000 000 1011 0100 1011 0100 1011 A F | flag indicates if "Word A" has been used |
| 111 | 111 | 010 110 000 1101 0010 0011 0110 1011 A F | flag indicates if "Word A" has been used |
Table 14. Example of 3B4B encoding
When Modulation1 Modulation0 is 10, two sets of
divider values need to be programmed. The formula for calculating the M, N and A values is given in chapter Frequency synthesizer. The divider values stored in the M0-, N0-, and A0- registers will be used when transmitting a '0' and the M1-, N1-, and A1- registers will be used to transmit a '1'. The difference between the two carrier frequencies corresponds to the double sided frequency modulation. Opposite from the modulation with the modulator, the PLL shall now lock on a new frequency for every change in the transmitted data. The PLL bandwidth therefore needs to be relatively high, higher bit rate requires a higher PLL bandwidth and vice versa. The data to be transmitted shall be applied to pin DataIXO (see chapter Transceiver sync-/non-synchronous mode on how to use the pin DataClk). The DataIXO pin is set as input in transmit mode and output in receive mode. When set as input, a weak voltage divider will set the level to Vdd/2, when it is not pulled up or down by the controller. When using the modulator, it is important that the DataIXO is kept tristated until the transmission shall begin (when PLL is in lock and the PA is turned on). When Data IXO is tristated, the PLL will lock on the LO frequency (used in receive mode). When DataIXO is set either high or low, the RF frequency will be shifted up or down, centered around the LO-frequency. This is only important when using the modulator, for the other modulation method, if DATAIXO is tristated, the M0-, N0- and A0-registers will be used.
Modulator
| A6..A0 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0Mod_I0Mod_A0 | |
| 0000100 | Mod_F2 | Mod_F1 | Mod_F0 | Mod_I4 | Mod_I3 | Mod_I2 | Mod_I1 | ||
| 0000101 | - | ‘0’ | ‘1’ | Mod_A3 | Mod_A2 | Mod_A1 | |||
| 0000110 | - | Mod_clkS2 | Mod_clkS1 | Mod_clkS0 | BitSync_clkS2 | BitSync_clkS1 | BitSync_clkS0 | BitRate_clkS2 | |
| 0000111 | BitRate_clkS1 | BitRate_clkS0 | RefClk_K5 | RefClk_K4 | RefClk_K3 | RefClk_K2 | RefClk_K1 | RefClk_K0 | |
The modulator will create a waveform with programmable amplitude and frequency. This waveform is fed into a modulation varactor in the VCO, which will create the desired frequency modulation. The frequency spectrum can be narrowed by increasing the rise-and fall times of the waveform.
The modulator waveform is created by charging and discharging a capacitor. A modulator clock controls the timing, as shown in Figure19. For every rise-and fall edge, 4 clock periods are being used. The charging current during these 4 clock periods are not equal, this is to reduce the high frequency components in the waveform, which in turn will narrow the frequency spectrum.
The frequency deviation can be set in three different ways, as will be explained below. A formula for setting the desired deviation is given at the end of this chapter.

text_image
Modulator Clock Modulator WaveformFigure 19. Modulator Waveform and Clock
Modulator Clock
The modulator clock frequency is set by:
$$ \mathrm{f} _ {\text { MOD_CLK }} = \frac {\mathrm{f} _ {\mathrm{XCO}}}{\text { Refclk_K } \cdot 2 ^ {(7 - \text { Mod_clkS })}} $$
where f_MOD_CLK is the modulator clock shown in Figure 19, f_XCO is the crystal oscillator frequency Refclk_K is a 6 bit number and Mod_clkS is a 3 bit number. Mod_clkS can be set to a value between 0 and 7. The modulator clock frequency should be set according to the bit rate and shaping.

A f_MOD_CLK of 8 times the bit rate (as in Figure 20) corresponds to a signal filtered in a Gaussian filter with a Bandwidth Period product (BT) of 1. When BT is increased, the waveform will be less filtered. Minimum BT is 1 ( f_MOD_CLK is 8 times the bitrate). Figure 20 shows two waveforms with BT=1 and BT=2, i.e. the f_MOD_CLK is 8 and 16 times higher than the bit rate. When changing the BT factor, the charge-and discharge times will also be changed, and therefore the frequency deviation, as shown in Figure 20.
Modulator Current
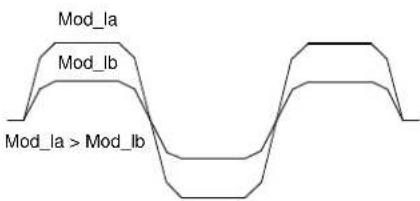
The current used during the rise- and fall times can be programmed with the Mod_I4..Mod_I0 bit, the last one being LSB. Figure 21 shows two waveforms generated with two different currents, where Mod_Ia > Mod_Ib . Higher current will give a higher frequency deviation and vice versa. The effect of modulator clock and MOD_I is illustrated by:
$$ \mathrm{f} _ {\text { DEVIATION }} \propto \frac {\mathrm {MOD_I}}{\mathrm{f} _ {\mathrm {MOD_CLK}}} $$
To avoid saturation in the modulator it is important not to exceed maximum Mod_I. Maximum Mod_I for a given f_MOD_CLK is given by:
$$ \mathrm {MOD\ = INT(f_ {\mathrm {MOD_ {C} LK}} \cdot 28\times10^ {-6}) - 1} $$
where INT() returns the integer part of the argument.
text_image
Mod_la Mod_lb Mod_la > Mod_lbFigure 21. Two Different Modulator Current Settings
Modulator Attenuator
A third way to set the deviation is by programming the modulator attenuator, Mod_A2..Mod_A0, the last being LSB. The purpose of the attenuator is to allow small deviations when the bit rate is small and/or the BT is small (these settings will give a relatively slow modulator clock, and therefore long rise- and fall times, which in turn results in large frequency deviations). In addition, the attenuator will improve the resolution of the modulator.

text_image
Mod_Aa Mod_Ab Mod_Ab > Mod_AbFigure 22. Two Different Modulator Attenuator Settings
The effect of the attenuator is given by:
$$ \mathrm{f} _ {\text { DEVIATION }} \propto \frac {1}{+ \operatorname{Mod} _ {-} A 1} $$
Figure 22 shows two waveforms with different attenuator setting: ModAaModAb<. If Mod_A is increased, the frequency deviation is lowered and vice versa.
Modulator Filter
To reduce the high-frequency components in the generated waveform, a filter with programmable cutoff frequency can be enabled. This is done using Mod_F2..Mod_F0, the least one being LSB. The Mod_F should be set according to the formula:
$$ M O D F = \frac {1 5 0 \times 1 0 ^ {- 3}}{\text { BitRate }} $$

text_image
Mod_filter off Mod_filter onFigure 23. Modulator Waveform with and without Filtering
Mod_F=0 disables the modulator filter and Mod_F=7 gives most filtering. Figure 23 shows a waveform with and without the filter.
Calculation of the Frequency Deviation
The parameters influencing the frequency deviation can be summarized in the following equations:
$$ \mathrm{f} _ {\mathrm {MOD_CLK}} = \frac {f _ {X C O}}{\operatorname{Refclk} _ {-} \mathrm{K} \cdot 2 ^ {(7 - \operatorname{Mod} _ {-} \mathrm{clkS})}} $$
$$ \mathrm{f} _ {\mathrm{DEV}} \overline {{\mathrm{F}}} 2 \frac {\mathrm {Mod_I} 1}{\mathrm{F} _ {\mathrm {MOD_CLK}} ^ {\mathrm{RF}}} \cdot \frac {}{1 + \mathrm {Mod_A}} \cdot (\mathrm{C} + \mathrm{C} \cdot \mathrm{f}) $$
Where:
f_DEV : Single sided frequency deviation [Hz].
f_XCO : Crystal oscillator frequency [Hz]. f_RF : Center frequency [Hz].
Refclk_K: 6 bit divider, values between 1 and 63.
Mod_clkS: Modulator clock setting, values between 0 and 7.
f_MOD_CLK : Modulator clock frequency, derived from the crystal frequency, Refclk_K and Mod_clkS.
Mod_I: Modulator current setting, values between 0 and 31.
Mod_A: Modulator attenuator setting, values between 0 and 15.
C1: -4.42 × 10^10
C2: 72
The modulator filter will not influence the frequency deviation as long as the programmed cut-off frequency is above the actual bit rate.
The frequency deviation must be programmed so that the modulation index (2 x single sided frequency deviation/Baudrate [bps]) always is greater than or equal to 2 including the total frequency offset between the receiver and the transmitter:
$$ f _ {D E V} = \text { Baudrate } + f _ {\text { OFFSET }} $$
The calculated f_DEV should be used to calculate the needed receiver bandwidth, see chapter Switched capacitor filter.
Using the XCO-tune Bits
The RF chip has a built-in mechanism for tuning the frequency of the crystal oscillator and is often used in combination with the Frequency Error Estimator (FEE). The XCO tuning is designed to eliminate or reduce initial frequency tolerance of the crystal and/or the frequency stability over temperature. If the value in XCO_tune is increased (adding capacitance), the frequency will decrease.
The XCO uses two external capacitors (see figure 5). The value of these will strongly affect the tuning range. With a 16.0 MHz crystal (TN4-26011 from Toyocom), and external capacitor values of 1.5 pF, the tuning range will be approximately symmetrical around the center frequency. A XCO_tune >16 will decrease the frequency and vice versa (see figure 6).
A procedure for using the XCO_tune feature in combination with the FEE is given below. The MICRF505 measures the frequency offset between the demodulated signal and the LO and tune the XCO so the LO frequency is equal to received carrier frequency.
A procedure like this can be called during production (storing the calibrated XCO_tune value), at regular intervals or implemented in the communication protocol when the frequency has changed.
The FEE will count "UP"-pulses and "DOWN"-pulses (pulses out of the demodulator when a logic "1" or logic "0", resp., is received). The FEE can count pulses for n bits, where n = 8, 16, 32 or 64.
Example: In FEE, count UP+DOWN pulses, counting 8 bits:
$$ \text { A perfect case } = = > \text { FEE } = 0 $$
If FEE > 0: LO is too low, increase LO by decreasing
XCO_tune value and vice versa for FEE < 0.
FEE field holds a number in the range -128, ..., 127. However, it keeps counting above/below the range, which is:
If FEE = -128 and still counting dwn-pulses:
To avoid this situation, always make sure max count is between limits. Suggestion: Count for 8 (or 16) bits only.
Procedure description:
In the procedure below, UP+DWN pulses are counted, and only the sign of the FEE is used. The value of n is 8 or 16.
Assumption:
A transmitter is sending a 1010... pattern at the correct frequency and bitrate.
The wanted receiver frequency is the mid-point between the "0" and "1" frequencies.
Input:
Nothing
Output
The best XCO_tune value (giving the lowest IFEEI)
Local variables:
XCO Present: (5-bit) holds present value in tune bits
XCO_Step: (4-bit) holds increment/decrement of XCO_tune bits
SCO_Sign: (1 bit) holds POS or NEG (increment/cerement) increasing LO is done by reducing the XCO_tune value
XCO TUNE PROCEDURE
INT:
XCO Present = 0
XCO Step = 32
XCO Sign = NEG
Control Word =
Default RX, clocks match transmitter
LOOP:
XCO_Step = XCO_Step/2
XCO_Sign == POS?
Yes --> XCO_Present- = XCO_Step // increase LO
No --> XCO_Present+ = XCO_Step // decrease LO
XCO_tune bits = CXO_Present
Program RFChip
Delay > n bits
Read FEE
FEE > 0?
Yes --> XCO_Sign = POS
No --> XCO_Sing = NEG // negative or == 0
XCO_Step > 1?
Yes --> Branch to LOOP
No -->
XCO_Sing == POS?
Yes --> XCO_Present- = 1
Branch to FIN
FIN: RETURN, return-value = XCO_Present
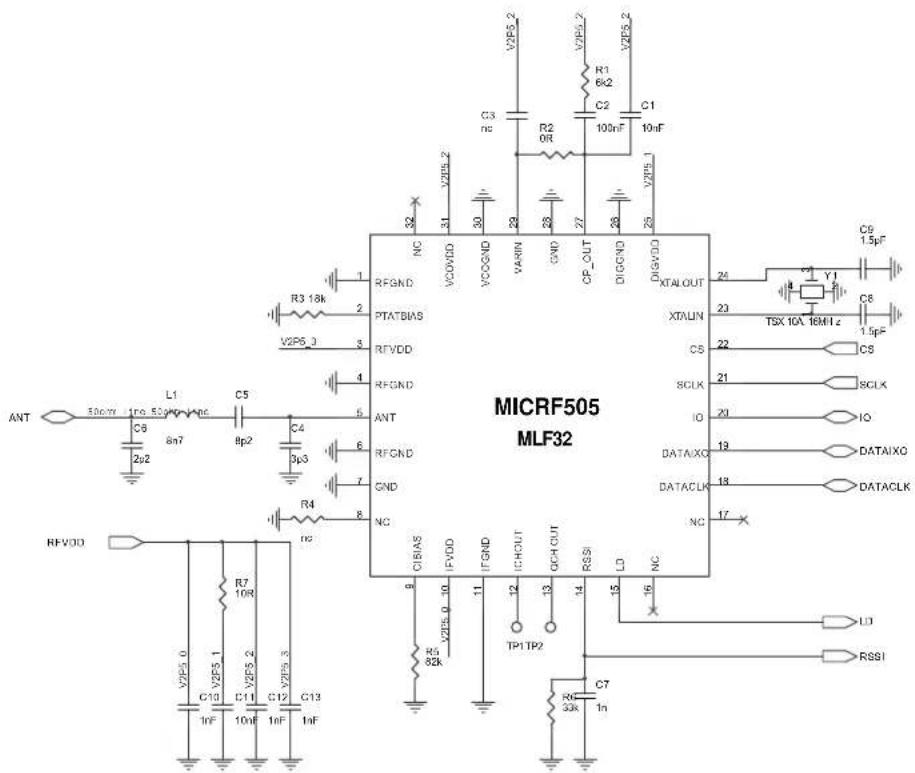
Typical Application
text_image
MICRF505 MLF32 ANT L1 60mV 1ro 60pV nc C6 2u2 8n7 R7 10R C10 1nF C11 10nF C12 1nF C13 C14 3pS 3 R4 8 NC RFGND PTATBAS RFVDD RFGND ANT RFGND GND NC CISIAS IFVDD VCCOVID VCCGND VARIN GND CP_OUT DIGGND DAGVDD XTALOUT XTALIN CS SCLK IO DATA/XO DATACLK NC R5 82k TP1 TP2 QCH OUT RSSI LD NC R3 18k R2 0R R1 6k2 C2 100nF C1 10nF C3 30 V2PS 2 V2PS 2 V2PS 2 V2PS 2 C1 10nF C5 1.5pF Y1 TSX 10A 16MHz C8 1.5pF C6 1.5pF DATAIXO DATACLK LD RSSIMICRF505 - MLF32
| Item | Part | Value | Description | Manufacturer | |
| 1 | C1 | 10nF | 10nF X7R ±10% 0603 50V | Kyocera | CM105X7R103K50A |
| 2 | C2 | 100nF | 100nF X7R ±10% 0603 16V | Kyocera | CM105X7R104K16A |
| 3 | C3 | NC | |||
| 4 | C4 | 3.3pF | 3.3pF COG ±0.25pF 0603 50V | Kyocera | CM105CG3R3C50A |
| 5 | C5 | 8.2pF | 8.2pF COG ±0.5pF 0603 50V | Kyocera | CM105CG8R2D50A |
| 6 | C6 | 2.2pF | 2.2pF COG ±0.25pF 0603 50V | Kyocera | CM105CG2R2C50A |
| 7 | C7 | 1nF | Optional | Kyocera | CM105X7R102K50A |
| 8 | C8 | 1.5pF | 1.5pF COG ±0.25pF 0603 50V | Kyocera | CM105CG1R5C50A |
| 9 | C9 | 1.5pF | 1.5pF COG ±0.25pF 0603 50V | Kyocera | CM105CG1R5C50A |
| 10 | C10 | 1nF | 1nF X7R ±10% 0603 50V | Kyocera | CM105X7R102K50A |
| 11 | C11 | 10nF | 10nF X7R ±10% 0603 50V | Kyocera | CM105X7R103K50A |
| 12 | C12 | 1nF | 1nF X7R ±10% 0603 50V | Kyocera | CM105X7R102K50A |
| 13 | C13 | 1nF | 1nF X7R ±10% 0603 50V | Kyocera | CM105X7R102K50A |
| 14 | R1 | 6.2k | 6.2k ±1% 0603 50V | Kyocera | CR10-6201F |
| 15 | R2 | 0Ω | 0Ω ±1% 0603 50V | Kyocera | CJ10-000 |
| 16 | R3 | 18k | 18k ±1% 0603 50V | Kyocera | CR10-1802F |
| 17 | R5 | 82k | 82k ±1% 0603 50V | Kyocera | CR10-8202F |
| 18 | R6 | 33k | Optional | Kyocera | CR10-3302F |
| 19 | R7 | 10Ω | 10R ±1% 0603 50V | Kyocera | CR10-10R0F |
| 20 | L1 | 8.7nH | 8.7nH ±5% 0603 | Coilcraft | 0603CS-8N7XJB |
| 21 | Y1 | 16MHz | 16MHz, 9pF, 10/10ppm | Toyocom | TN4-26011 |
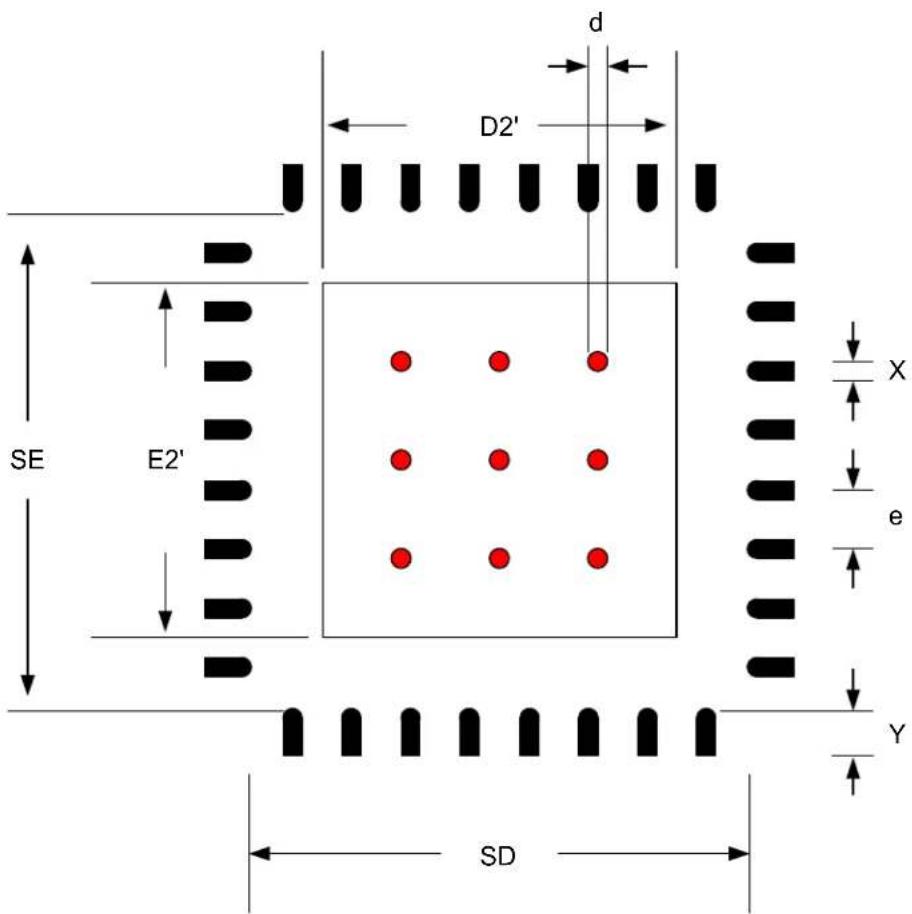
MICRF505BML/YML Land pattern
Figure below shows recommended land pattern. Red circles indicate Thermal/RFGND via's. Recommended size is 0.300-0.350mm with a pitch of 1mm. The recommended minimum number of via's are 9 and they should be directly connected to ground plane providing the best RF ground and thermal performance. For best yield plugged or open via's should be used.
text_image
d D2' SE E2' X e Y SD| D2' | E2' | SD | SE | d | e | X |
| 3.4 ±0.02 | 3.4 ±0.02 4.2 | ±0.05 4.2 ±0.05 | 0.325 ±0.25 0.5 0.23 | ±0.02 0.5 ±0.02 mm | ||
| Red circle indicates Thermal Via. Size 0.300-0.350mm | ||||||
Layout Considerations
The MICRF505 is a highly integrated RF IC with only a few "hot" pins, however it is suggested to study available reference design on www.micrel.com before starting with schematics and layout.

natural_image
Two-panel image showing a red circuit board and a blue PCB with scattered white dots on a grid background (no text or symbols)- To ensure the best RF design it is important to plan the layout and dedicate area for the different circuitry. Good RF engineering is to start with the RF circuitry making sure that general RF guidelines are met (following points). Separate noisy circuitry and RF by placing it on the opposite side maximizing the distance between the circuitry. The RF circuitry should be placed as close to what is considered the ground spot (EG battery) to avoid ground currents. Place the RF circuitry in a position that ensure as short and straight trace to the antenna connection to avoid reflections.
- Proper ground is needed. If the PCB is 2-layer, the bottom layer should be kept only for ground. Avoid signal traces that split the ground plane. For a 4-layer PCB, it is recommended to keep the second layer only for ground.
- A ground via should be placed close to all the ground pins. The bottom ground (heat sink) pad should be penetrated with >9 ground via's. These via's should be "open" or "plugged" to avoid air pockets caused by the solder paste. If such air pockets appear, the air will expand during the reflow process and may/will cause the device to twist/move.
- The antenna pin (pin 5) has an impedance of \~50 ohm. The antenna trace should be kept to 50 ohm to avoid signal reflection and loss of performance. Minor deviations can be compensated by matching the LC filter. Any transmission line calculator can be used to find the needed trace width given a board build up. Ex: A trace width of 75 mil (1.9 mm) gives 50 impedance on a FR4 board (dielectric cons=4.4) with copper thickness of 35μm and height (layer 1-layer 2 spacing) of 1.00 mm.
- RF circuitry is sensitive to voltage supply and therefore caution should be taken when choosing power circuitry. To achieve the best performance, low noise LDO's with high PSSR should be chosen. What is present on the voltage supply will be directly modulated to the RF spectrum causing degradation and regulatory issues. To make sure you have the right selection, please contact local sales for the latest Micrel offerings in power management and guidance. To avoid "pickup" from other circuitry on the VDD lines, it is recommended to route the VDD in a star configuration with decoupling at each circuitry and at the common connection point (see above layout). If there is noisy circuitry in the design, it is strongly recommended to use a separate power supply and/or place low value resistors (10ohms), inductors in series with the power supply line into these circuitry.
- It is recommended to connect the PLL loop filter to VDD (C1, C3 and R1). The VDD connection should be placed as close to pin 31 (VCOVDD) as possible. The MICRF505 has a integrated VCO where the resonator circuit (varactor) has a reference to VDD. With a common reference point, the MICRF505 (PLL) will somewhat compensate for noise present on the VDD.
- PLL loop filter components C1, C2, C3, R1 and R2 should have a compact layout and should be placed as close to pin 27 and 29. Avoid signal traces/bus and noisy circuitry around/close/under this area.
- Digital high speed logic or noisy circuitry should/must be at a safe distance from RF circuitry or RF VDD as this might/will cause degradation of sensitivity and create spurious emissions. Example of such circuitry is LCD display, charge pumps, RS232, clock / data bus etc.
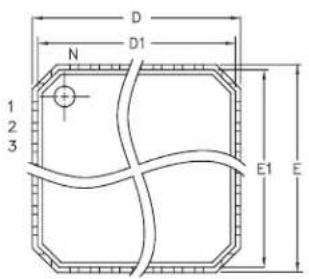
Package Information MICRF505BML
text_image
D D1 N 1 2 3 E1 ETOP VIEW
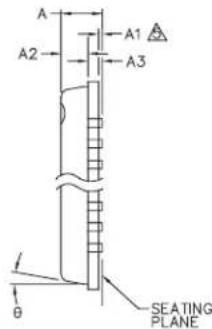
text_image
A A2 A1 A3 SEATING PLANE θ| DIMENSION(mm) | |||
| MIN. | NOM. | MAX. | |
| A | - | 0.85 | 1.00 |
| A1 | 0.00 | 0.01 | 0.05 |
| A2 | - | 0.65 | 0.80 |
| A3 | 0.20 REF. | ||
| D | 5.00 BSC | ||
| D1 | 4.75 BSC | ||
| D2 | 3.15 | 3.30 | 3.45 |
| E | 5.00 BSC | ||
| E1 | 4.75 BSC | ||
| E2 | 3.15 | 3.30 | 3.45 |
| θ | 12° | ||
| P | 0.24 | 0.42 | 0.60 |
| e | 0.50 BSC | ||
| N | 32 | ||
| L | 0.30 | 0.40 | 0.50 |
| b | 0.18 | 0.23 | 0.30 |
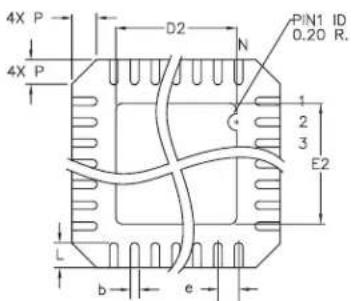
text_image
4X P D2 N PIN1 ID 0.20 R. 4X P 1 2 3 E2 L b eBOTTOM VIEW
NOTE:
1. ALL DIMENSIONS ARE IN MILLIMETERS.
2. N IS THE NUMBER OF TERMINALS.
THE NUMBER OF TERMINALS PER SIDE IS N/4.
3. THE PIN#1 IDENTIFIER MUST BE EXISTED ON THE TOP SURFACE
OF PACKAGE BY USING IDENTIFICATION MARK OR OTHER
FEATURE OF PACKAGE BODY.
4. PACKAGE WARPAGE MAX 0.05mm.
APPLIED FOR EXPOSED PAD AND TERMINALS.
MICRF505BML
32-Pin MLF (B)
Package Information MICRF505YML
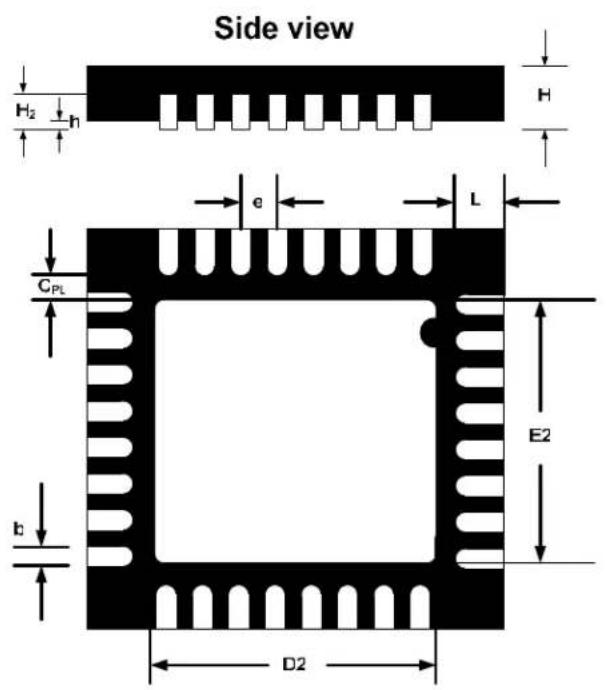
text_image
Side view H₂ h e L CPL E2 b D2Bottom view

text_image
E DTop view
| D | D2 | E | E2 | e | b_PL | HL | h | C | H | 2 | Units | |||||
| 5.0 | 3.10±0.10 | 5.0 | 3.10±0.10 | 0.5 | 0.25 | 0.4±0.05 | 0.20 | 0.85 | ±0.05 | 0.00 | ~0.05 | 0.2 | mm | |||
Overview of programming bit
| Address | Data | |||||||
| A6..A0 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 0000000 | LNA_by | PA2 | PA1 | PA0 | Sync_en | Mode1 | Mode0 | Load_en |
| 0000001 | Modulation1 | Modulation0 | OL_opamp_en(“0”) | PA_LDc_en(“0”) | RSSI_en | LD_en | PF_FC1 | PF_FC0 |
| 0000010 | CP_III | SC_by | VCO_by(“0”) | PA_by | OUTS3 | OUTS2 | OUTS1 | OUTS0 |
| 0000011 | IFBias_s(“1”) | IFA_IIG(“1”) | VCO_BIAS_s(“0”) | VCO_IB2 | VCO_IB1 | VCO_IB0 | VCO_freq1 | VCO_freq0 |
| 0000100 | Mod_F2 | Mod_F1 | Mod_F0 | Mod_I4 | Mod_I3 | Mod_I2 | Mod_I1 | Mod_I0 |
| 0000101 | - | - | Mod_FHG(“0”) | Mod_shape(“1”) | Mod_A3 | Mod_A2 | Mod_A1 | Mod_A0 |
| 0000110 | - | Mod_clkS2 | Mod_clkS1 | Mod_clkS0 | BitSync_clkS2 | BitSync_c | kS1 BitSync_clkS0 | BitRate_clkS2 |
| 0000111 | BitRate_clkS1 | BitRate_clkS0 | RefClk_K5 | RefClk_K4 | RefClk_K3 | RefClk_K2 | RefClk_K1 | RefClk_K0 |
| 0001000 | SC_III(“1”) | ScClk_X2(“1”) | ScClk5 | ScClk4 | ScClk3 | ScClk2 | ScClk1 | ScClk0 |
| 0001001 | PrescalMode_s(“0”) | Prescal_s(“0”) | XCOAR_en(“1”) | XCOtune4 | XCOtune3 | XCOtune2 | XCOtune1 | XCOtune0 |
| 0001010 | - | - | A0_5 | A0_4 | A0_3 | A0_2 | A0_1 | A0_0 |
| 0001011 | - | - | - | - | N0_11 | N0_10 | N0_9 | N0_8 |
| 0001100 | N0_7 | N0_6 | N0_5 | N0_4 | N0_3 | N0_2 | N0_1 | N0_0 |
| 0001101 | - | - | - | - | M0_11 | M0_10 | M0_9 | M0_8 |
| 0001110 | M0_7 | M0_6 | M0_5 | M0_4 | M0_3 | M0_2 | M0_1 | M0_0 |
| 0001111 | - | - | A1_5 | A1_4 | A1_3 | A1_2 | A1_1 | A1_0 |
| 0010000 | - | - | - | - | N1_11 | N1_10 | N1_9 | N1_8 |
| 0010001 | N1_7 | N1_6 | N1_5 | N1_4 | N1_3 | N1_2 | N1_1 | N1_0 |
| 0010010 | - | - | - | - | M1_11 | M1_10 | M1_9 | M1_8 |
| 0010011 | M1_7 | M1_6 | M1_5 | M1_4 | M1_3 | M1_2 | M1_1 | M1_0 |
| 0010100 | Div2_III(“1”) | LO_IB1(“0”) | LO_IB0(“1”) | PA_IB4(“1”) | PA_IB3(“0”) | PA_IB2(“1”) | PA_IB1(“0”) | PA_IB0(“1”) |
| 0010101 | - | - | - | - | FEEC_3 | FEEC_2 | FEEC_1 | FEEC_0 |
| 0010110 | FEE_7 | FEE_6 | FEE_5 | FEE_4 | FEE_3 | FEE_2 | FEE_1 | FEE_0 |
Table 1: Detailed description of programming bit
| ADR # | BIT # | NAME | DESCRIPTION | COMMENTS |
| 0000000 | 7 | By_LNA | LNA bypass on/off | |
| 6 | PA2 | Power amplifier level, 3.bit | Ref. Table 6 | |
| 5 | PA1 | Power amplifier level, 2.bit | Ref. Table 6 | |
| 4 | PA0 | Power amplifier level, 1.bit | Ref. Table 6 | |
| 3 | Sync_en | Synchronizer Mode bit | Ref. Table 3 | |
| 2 | Mode1 | Main Mode selection 2. Bit | Ref. Table 2 | |
| 1 | Mode0 | Main Mode selection 1. Bit | Ref. Table 2 | |
| 0 | Load_en | Load generation (1=enable) | ||
| 0000001 | 7 | Modulation1 | Modulation selection 2.bit | Ref. Table 4 |
| 6 | Modulation0 | Modulation selection 1.bit | Ref. Table 4 | |
| 5 | OL_opamp_en | “0” mandatory. Opamp in OpenLoop circuit (0=disable) | ||
| 4 | PA_LDc_en | “0” mandatory. PA controlled by Lock Detect (0=disable) | Ref. Table 6 | |
| 3 | RSSI_en | RSSI function (1=enable) |
| 2 LD | en Lock | detect function (1=enable) | |
| 1 PF | FC1 Prefilter corner frequency 2.bit Ref. Table 5 | ||
| 0 PF | FC0 Prefilter corner frequency 1.bit Ref. Table 5 | ||
| 0000010 7 | CP_HI High charge-pump current (0=125uA, 1=500uA) | ||
| 6 SC by Bypass of Switched Capacitor filter (1=enable) | |||
| 5 VCO by "0" mandatory. Bypass of VCO (1=enable) | |||
| 4 PA by Bypass of PA (1=enable) | |||
| 3 OUTS3 | Test pins output 4.bit | Ref. Table 8 | |
| 2 OUTS2 | Test pins output 3.bit | Ref. Table 8 | |
| 1 OUTS1 | Test pins output 2.bit | Ref. Table 8 | |
| 0 OUTS0 | Test pins output 1.bit | Ref. Table 8 | |
| 0000011 | 7 | IFBias_s | "1" mandatory. |
| 6 IFA_HG | "1" mandatory. High gain setting in preamplifier | ||
| 5 | VCO_Bias_s | "0" mandatory. Select separate bias for VCO on VCOBias pin (1=enable) | |
| 4 VCO_IB2 VCO bias current setting, 3. bit (111 = highest current) | |||
| 3 VCO_IB1 VCO bias current setting, 2. bit | |||
| 2 VCO_IB0 VCO bias current setting, 1. bit | |||
| 1 | VCO_freq1 | Frequency setting of VCO, 2. bit (11=highest frequency) | |
| 0 VCO_freq0 | Frequency setting of VCO, 1.bit | ||
| 0000100 | 7 | Mod_F2 | Modulator filter setting, MSB (0=filter active) |
| 6 | Mod_F1 | Modulator filter setting | |
| 5 Mod_F0 | Modulator filter setting, LSB | ||
| 4 | Mod_I4 | Modulator current setting, MSB | |
| 3 | Mod_I3 | Modulator current setting | |
| 2 | Mod_I2 | Modulator current setting | |
| 1 | Mod_I1 | Modulator current setting | |
| 0 | Mod_I0 | Modulator current setting, LSB | |
| 0000101 | 7 | ---- | Reserved/not in use |
| 6 | ---- | Reserved/not in use | |
| 5 Mod_FHG | "0" mandatory. Modulator Test bit. | ||
| 4 Mod_shape | "1" mandatory. Modulator shape enable | ||
| 3 Mod_A3 Modulator attenuator setting, MSB (1=attenuator active) | |||
| 2 | Mod_A2 | Modulator attenuator setting | |
| 1 | Mod_A1 | Modulator attenuator setting | |
| 0 Mod_A0 Modulator attenuator setting, LSB | |||
| 0000110 | 7 | ---- | Reserved/not in use |
| 6 Mod_clkS2 | Modulator clock setting 3.bit, MSB | ||
| 5 Mod_clkS1 | Modulator clock setting 2.bit | ||
| 4 Mod_clkS0 | Modulator clock setting 1.bit, LSB | ||
| 3 BitSync_clk2 | BitSync clock setting 3.bit, MSB | ||
| 2 BitSync_clk1 | BitSync clock setting 2.bit | ||
| 1 BitSync_clk0 | BitSync clock setting 1.bit, LSB | ||
| 0 BitRate_clk2 | Bitrate clock setting 3.bit, MSB | ||
| 0000111 7 BitRate_clkS1 | Bitrate clock setting 2.bit | ||
| 6 BitRate_clkS0 | Bitrate clock setting 1.bit. LSB: | ||
| 5 RefClk_K5 | Reference clock divider 6.bit, MSB | ||
| 4 RefClk_K4 | Reference clock divider 5.bit | ||
| 3 RefClk_K3 | Reference clock divider 4.bit | ||
| 2 RefClk_K2 | Reference clock divider 3.bit | ||
| 1 RefClk_K1 | Reference clock divider 2.bit | ||
| 0 RefClk_K0 | Reference clock divider 1.bit, LSB | ||
| 0001000 7 SC_HI | "1" mandatory. High current in Switched Cap filter | ||
| 6 | ScClk_X2 | "1" mandatory. Switched Cap clock multiplied by two | |
| 5 ScClk5 | SwitchCap clock divider 6.bit MSB | ||
| 4 | ScClk4 | SwitchCap clock divider | 5.bit | |||
| 3 | ScClk3 | SwitchCap clock divider | 4.bit | |||
| 2 | ScClk2 | SwitchCap clock divider | 3.bit | |||
| 1 | ScClk1 | SwitchCap clock divider | 2.bit | |||
| 0 ScClk0 SwitchCap clock divider 1.bit, LSB | ||||||
| 0001001 | 7 | PrescalMode_s | "0" mandatory. Selects A, N and M divider output control of prescaler mode | |||
| 6 Prescal_s "0" mandatory. Selects pulse swallow prescaler. | ||||||
| 5 XCOAR_en "1" mandatory. Set XCO amplitude regulation on. | ||||||
| 4 XCOtune4 | Crystal oscillator trimming, LSB | |||||
| 3 | XCOtune3 | Crystal oscillator trimming | ||||
| 2 | XCOtune2 | Crystal oscillator trimming | ||||
| 1 | XCOtune1 | Crystal oscillator trimming | ||||
| 0 XCOtune0 | Crystal oscillator trimming, MSB | |||||
| 0001010 | 7 | ---- | Reserved/not in use | |||
| 6 | ---- | Reserved/not in use | ||||
| 5 | A0_5 | A0-counter 6.bit | ||||
| 4 | A0_4 | A0-counter 5.bit | ||||
| 3 | A0_3 | A0-counter 4.bit | ||||
| 2 | A0_2 | A0-counter 3.bit | ||||
| 1 | A0_1 | A0-counter 2.bit | ||||
| 0 | A0_0 | A0-counter 1.bit | ||||
| 0001011 | 7 | ---- | Reserved/not in use | |||
| 6 | ---- | Reserved/not in use | ||||
| 5 | ---- | Reserved/not in use | ||||
| 4 | ---- | Reserved/not in use | ||||
| 3 | N0_11 | N0-counter 12.bit | ||||
| 2 | N0_10 | N0-counter 11.bit | ||||
| 1 | N0_9 | N0-counter 10.bit | ||||
| 0 | N0_8 | N0-counter 9.bit | ||||
| 0001100 | 7 | N0_7 | N0-counter 8.bit | |||
| 6 | N0_6 | N0-counter 7.bit | ||||
| 5 | N0_5 | N0-counter 6.bit | ||||
| 4 | N0_4 | N0-counter 5.bit | ||||
| 3 | N0_3 | N0-counter 4.bit | ||||
| 2 | N0_2 | N0-counter 3.bit | ||||
| 1 | N0_1 | N0-counter 2.bit | ||||
| 0 | N0_0 | N0-counter 1.bit | ||||
| 0001101 | 7 | ---- | Reserved/not in use | |||
| 6 | ---- | Reserved/not in use | ||||
| 5 | ---- | Reserved/not in use | ||||
| 4 | ---- | Reserved/not in use | ||||
| 3 | M0_11 | M0-counter 12.bit | ||||
| 2 | M0_10 | M0-counter 11.bit | ||||
| 1 | M0_9 | M0-counter 10.bit | ||||
| 0 | M0_8 | M0-counter 9.bit | ||||
| 0001110 | 7 | M0_7 | M0-counter 8.bit | |||
| 6 | M0_6 | M0-counter 7.bit | ||||
| 5 | M0_5 | M0-counter 6.bit | ||||
| 4 | M0_4 | M0-counter 5.bit | ||||
| 3 | M0_3 | M0-counter 4.bit | ||||
| 2 | M0_2 | M0-counter 3.bit | ||||
| 1 | M0_1 | M0-counter 2.bit | ||||
| 0 | M0_0 | M0-counter 1.bit | ||||
| 0001111 | 76 | -------- | Reserved/not in useReserved/not in use | |||
| 5 | A1_5 | A1-counter 6.bit | ||||
| 4 | A1_4 | A1-counter 5.bit | ||||
| 3 | A1_3 | A1-counter 4.bit | ||||
| 2 | A1_2 | A1-counter 3.bit | ||||
| 1 | A1_1 | A1-counter 2.bit | ||||
| 0 | A1_0 | A1-counter 1.bit | ||||
| 0010000 | 7 | ---- | Reserved/not in use | |||
| 6 ---- | Reserved/not in use | |||||
| 5 | ---- | Reserved/not in use | ||||
| 4 | ---- | Reserved/not in use | ||||
| 3 | N1_11 | N1-counter 12.bit | ||||
| 2 | N1_10 | N1-counter 11.bit | ||||
| 1 | N1_9 | N1-counter 10.bit | ||||
| 0 | N1_8 | N1-counter 9.bit | ||||
| 0010001 | 7 | N1_7 | N1-counter 8.bit | |||
| 6 | N1_6 | N1-counter 7.bit | ||||
| 5 | N1_5 | N1-counter 6.bit | ||||
| 4 | N1_4 | N1-counter 5.bit | ||||
| 3 | N1_3 | N1-counter 4.bit | ||||
| 2 | N1_2 | N1-counter 3.bit | ||||
| 1 | N1_1 | N1-counter 2.bit | ||||
| 0 | N1_0 | N1-counter 1.bit | ||||
| 0010010 | 7 | ---- | Reserved/not in use | |||
| 6 | ---- | Reserved/not in use | ||||
| 5 | ---- | Reserved/not in use | ||||
| 4 | ---- | Reserved/not in use | ||||
| 3 | M1_11 | M1-counter 12.bit | ||||
| 2 | M1_10 | M1-counter 11.bit | ||||
| 1 | M1_9 | M1-counter 10.bit | ||||
| 0 | M1_8 | M1-counter 9.bit | ||||
| 0010011 | 7 | M1_7 | M1-counter 8.bit | |||
| 6 | M1_6 | M1-counter 7.bit | ||||
| 5 | M1_5 | M1-counter 6.bit | ||||
| 4 | M1_4 | M1-counter 5.bit | ||||
| 3 | M1_3 | M1-counter 4.bit | ||||
| 2 | M1_2 | M1-counter 3.bit | ||||
| 1 | M1_1 | M1-counter 2.bit | ||||
| 0 | M1_0 | M1-counter 1.bit | ||||
| 0010100 | 7 | Div2_HI | "1" mandatory. Sets high bias current in Div2 circuit | |||
| 6 | LO_IB1 | "0" mandatory. Bias current setting of LObuffer, MSB | ||||
| 5 | LO_IB0 | "1" mandatory. Bias current setting of LObuffer, LSB | ||||
| 4 PA_IB4 | "1" mandatory. Bias current setting of PA,MSB | |||||
| 3 PA_IB3 | "0" mandatory. Bias current setting of PA | |||||
| 2 | PA_IB2 | "1" mandatory. Bias current setting of PAbuffer, MSB | Ref. Table 9 | |||
| 1 | PA_IB1 | "0" mandatory. Bias current setting of PAbuffer | Ref. Table 9 | |||
| 0 | PA_IB0 | "1" mandatory. Bias current setting of PAbuffer, LSB | Ref. Table 9 | |||
| 0010101 | 7 | ---- | Reserved/not in use | |||
| 6 | ---- | Reserved/not in use | ||||
| 5 | ---- | Reserved/not in use | ||||
| 4 | ---- | Reserved/not in use | ||||
| 3 FEEC_3 | FEE control bit | Ref. Table 11 | ||||
| 2 FEEC_2 | FEE control bit | Ref. Table 11 | ||||
| 1 FEEC_1 | FEE control bit | Ref. Table 10 | ||||
| 0 FEEC_0 | FEE control bit | Ref. Table 10 | ||||
| 0010110 7 | FEE_7 | FEE value, bit 7, M$B | ||
| 6 | FEE_6 FEE | value, bit 6 | ||
| 5 | FEE_5 FEE | value, bit 5 | ||
| 4 | FEE_4 FEE | value, bit 4 | ||
| 3 | FEE_3 FEE | value, bit 3 | ||
| 2 | FEE_2 FEE | value, bit 2 | ||
| 1 | FEE_1 FEE | value, bit 1 | ||
| 0 | FEE_0 FEE | value, bit 0, LSB |
Table 2: Main Mode bit
| Mode1 | Mode0 | State | Comments | |
| 0 0 Power down Keeps Register configuration | ||||
| 0 | 1 | Standby | Crystal Oscillator | |
| 1 | 0 | Receive | Full Receive | |
| 1 1 Transmit Full Transmit ex. PA stage | ||||
running
Table 3: Synchronizer mode bit
| Sync_en | State | Comments | |
| 0 Rx: Bit synchronization off | Transparent reception of data | ||
| 0 Tx: DataClk pin off | Transparent transmission of data | ||
| 1 Rx: Bit synchronization on | Bit-clock is generated by transceiver | ||
| 1 Tx: DataClk pin on. | Bit-clock is generated by transceiver | ||
Table 4: Modulation bit
| Modulation1 | Modulation0 | State | Comments |
| 0 | 0 | Closed loop VCO-modulation | VCO is phase-locked |
| 0 | 1 | Open loop VCO-modulation | Not recommend |
| 1 | 0 | Modulation by A,M and N | Modulation inside PLL |
| 1 | 1 | Not defined | Reserved for future use |
Table 5: Prefilter bit
| PF_FC1 | PF_FC0 | State |
| 0 | 0 3 dB filter corner at 100 KHz | |
| 0 | 1 3 dB filter corner at 150 KHz | |
| 1 | 0 3 dB filter corner at 230 KHz | |
| 1 | 1 3 dB filter corner at 340 KHz | |
Table 6: Power amplifier bit
| PA2 | PA1 | PA0 | State |
| 0 | 0 | 0 | 21dB attenuation/PA off |
| 0 | 0 | 1 | 18dB attenuation |
| 0 | 1 | 0 | 15dB attenuation |
| 0 | 1 | 1 | 12dB attenuation |
| 1 | 0 | 0 | 9dB attenuation |
| 1 | 0 | 1 | 6dB attenuation |
| 1 | 1 | 0 | 3dB attenuation |
| 1 | 1 | 1 | Max output |
| PALDc_en | |||
| 0 PA is turned off by PA2=PA1=PA0=0 | |||
| 1 | PA is turned on/off by Lock Detect, LD=1 -> PA on PA2=PA1=PA0=0 now gives 21dB attenuation | ||
| PA_By | |||
| 0 Power Amplifier enabled | |||
| 1 Power Amplifier bypassed, approx 20dB reduced output power. | |||
Table 7: Generation of Bitrate_clk, BitSync_clk and Mod_clk.
| BitRate_clkBitSync_clkMod_clk | Clock frequency(F is crystal frequency, K is RefClk integer) | ||
| S2 | S1 | S0 | |
| 0 | 0 | 0 | F/(64K) |
| 0 | 0 | 1 | F/(32K) |
| 0 | 1 | 0 | F/(16K) |
| 0 | 1 | 1 | F/(8K) |
| 1 | 0 | 0 | F/(4K) |
| 1 | 0 | 1 | F/(2K) |
| 1 | 1 | 0 | F/K |
| 1 | 1 | 1 | F |
(*) Can not be used as BitRate_clk.
Table 8: Test signals
| OutS3 | OutS2 | OutS1 | OutS0 | IchOut QchOut | Ichout2 / RSSI | QchOut2 / NC | |
| 0 | 0 | 0 | 0 | Gnd | Gnd | Gnd | Gnd |
| 0 | 0 | 0 | 1 | Ip mixer | In mixer | Ip IFamp | In IFamp |
| 0 | 0 | 1 | 0 | Qp mixer | Qn mixer | Qp IFamp | Qn IFamp |
| 0 | 0 | 1 | 1 | Ip IFamp | In IFamp | Ip SC-filter | In SC-filter |
| 0 | 1 | 0 | 0 | Qp IFamp | Qn IFamp | Qp SC-filter | Qn SC-filter |
| 0 | 1 | 0 | 1 | Ip SC-filter | In SC-filter | Gnd | I limiter |
| 0 | 1 | 1 | 0 | Qp SC-filter | Qn SC-filter | Gnd | Q limiter |
| 0 | 1 | 1 | 1 | Ip mixer | In mixer | Ip SC-filter | In SC-filter |
| 1 | 0 | 0 | 0 | Qp mixer | Qn mixer | Qp SC-filter | Qn SC-filter |
| 1 | 0 | 0 | 1 | Ip mixer | In mixer | Gnd | I limiter |
| 1 | 0 | 1 | 0 | Qp mixer | Qn mixer | Gnd | Q limiter |
| 1 | 0 | 1 | 1 | Ip mixer | Qp mixer | ModIn | PrescalMode |
| 1 | 1 | 0 | 0 | Ip IFamp | Qp IFamp | TI1 | TQ1 |
| 1 | 1 | 0 | 1 | Ip SC-filter | Qp SC-filter | DemodUp | DemodDn |
| 1 | 1 | 1 | 0 | I limiter | Q limiter | Demod | MAout |
| 1 | 1 | 1 | 1 | N-div | M-div | Phi1n | Phi2n |
Table 9: PAbuffer bias current setting
| PA_IB2 | PA_IB1 | PA_IB0 | State |
| 0 | 0 | 0 | PAbuffer uses bias current from PTATBias source, external resistor (Pin 2) |
| 0 | 0 | 1 | PAbuffer uses bias current from separate bias source, external resistor (Pin 8) |
| 0 | 1 | 0 | PAbuffer uses bias current from internal bias source, lowest current |
| 0 | 1 | 1 | PAbuffer uses bias current from internal bias source |
| 1 | 0 | 0 | PAbuffer uses bias current from internal bias source, typical current |
| 1 | 0 | 1 | PAbuffer uses bias current from internal bias source |
| 1 | 1 | 0 | PAbuffer uses bias current from internal bias source |
| 1 | 1 | 1 | PAbuffer uses bias current from internal bias source, highest current |
Table 10: Frequency Error Estimation control bit
| FEEC_1 | FEEC_0 | FEE Mode |
| 0 | 0 | Off |
| 0 | 1 | Counting UP pulses |
| 1 0 Counting DN pulses | ||
| 1 | 1 | Counting UP and DN pulses. UP increments the counter, DN decrements it. |
Table 11: Frequency Error Estimation control bit, cont.
| FEEC_3 | FEEC_2 No. | of DEMOD_DT bit used during the measurement. |
| 0 | 0 | 8 |
| 0 | 1 | 16 |
| 1 | 0 | 32 |
| 1 | 1 | 64 |
MICREL, INC. 2180 FORTUNE DRIVE, SAN JOSE, CA 95131 US A
TEL +1 (408) 944-0800 FAX +1 (408) 474-1000 WEB http://www.micrel.com
The information furnished by Micrel in this data sheet is believed to be accurate and reliable. However, no responsibility is assumed by Micrel for its use. Micrel reserves the right to change circuitry and specifications at any time without notification to the customer.
Micrel Products are not designed or authorized for use as components in life support appliances, devices or systems where malfunction of a product can reasonably be expected to result in personal injury. Life support devices or systems are devices or systems that (a) are intended for surgical implant into the body or (b) support or sustain life, and whose failure to perform can be reasonably expected to result in a significant injury to the user. A Purchaser's use or sale of Micrel Products for use in life support appliances, devices or systems is a Purchaser's own risk and Purchaser agrees to fully indemnify Micrel for any damages resulting from such use or sale.
© 2006 Micrel, Incorporated.