TU 3 - Instrumento de medida PCE Instruments - Manual de uso y guía de instrucciones gratis
Encuentra gratis el manual del aparato TU 3 PCE Instruments en formato PDF.

| Tipo de producto | Tacómetro |
| Marca | PCE Instruments |
| Modelo | TU 3 |
| Medición de velocidad | Rango: 0.5 – 99,999 RPM (contacto) / 5 – 99,999 RPM (sin contacto) |
| Precisión | ±(0.05% + 1 dígito) |
| Resolución | 0.1 RPM (por debajo de 1000 RPM), 1 RPM (por encima de 1000 RPM) |
| Distancia de medición (sin contacto) | 50 – 500 mm |
| Pantalla | LCD con retroiluminación, 5 dígitos |
| Alimentación | 4 pilas AAA de 1.5 V (incluidas) |
| Dimensiones | 165 x 74 x 37 mm |
| Peso | 180 g (con pilas) |
| Funciones principales | Medición de RPM, velocidad lineal, frecuencia; modos de medición: contacto y sin contacto; retención de datos; valor máximo/mínimo; apagado automático |
| Entorno de funcionamiento | Temperatura: 0 – 50 °C; Humedad: < 80% HR |
| Entorno de almacenamiento | Temperatura: -20 – 60 °C; Humedad: < 80% HR |
| Accesorios incluidos | Adaptador de contacto (rueda cónica), marcador reflectante, estuche de transporte, manual de usuario |
| Seguridad | Protección contra sobrecarga; clasificación de seguridad EN 61010-1 |
| Mantenimiento y limpieza | Limpie la carcasa con un paño húmedo; no use disolventes; retire las pilas si no se usa durante mucho tiempo |
| Reparabilidad | Las piezas de repuesto están disponibles a través del servicio técnico de PCE Instruments; no intente reparar usted mismo |
| Garantía | 2 años (excepto pilas y accesorios desechables) |
Preguntas frecuentes - TU 3 PCE Instruments
Preguntas de los usuarios sobre TU 3 PCE Instruments
0 pregunta sobre este aparato. Responde a las que conoces o haz la tuya.
Hacer una nueva pregunta sobre este aparato
Descarga las instrucciones para tu Instrumento de medida en formato PDF gratis! Encuentra tus instrucciones TU 3 - PCE Instruments y toma tu dispositivo electrónico nuevamente en la mano. En esta página están publicados todos los documentos necesarios para el uso de su dispositivo. TU 3 de la marca PCE Instruments.
MANUAL DE USUARIO TU 3 PCE Instruments
Tel. nacional: 902 044 604
Fax: +34 967 543 548
info@pce-iberica.es
www.pce-instruments.com
Instrucciones de uso Medidor de vibraciones PCE-TU 3

Índice
-
Introducción ....5
-
Información de seguridad ....5
2.1. Precauciones....5
- Descripción técnica ......6
3.1. Empleo ....6
3.1.1. Conformidad Ce....6
3.2. Especificaciones técnicas y funciones....6
3.3.Contenido del envío....7
3.4. Parámetros de desalineación....8
- Alineación de las máquinas....9
4.1. Determinación de los datos de medición....10
4.2.Instalación del aparato....10
4.3. Conectar los sensores de medición....10
4.4. Entrada de dimensiones....11
4.5. Orientación general....12
- Puesta en marcha....12
5.1.Teclas generales....12
5.2.Inicio del PCE-TU3....13
- Alineación de las máquinas....14
6.1. Orientación de la máquina horizontal ..... 14
6.1.1. Introducir dimensiones....15
6.1.2. Modificar los parámetros....16
6.1.3. Reunir datos....17
6.1.3.1. Ajustar desplazamiento paralelo Offset ....19
6.1.4. Resultado ....20
6.1.4.1. Entrada de tolerancias ....23
6.1.4.2. Entrada del crecimiento térmico 24
6.1.4.3. Entrada del crecimiento térmico 24
6.2. Alineación de la máquina vertical....25
6.2.1. Introducir dimensiones de la máquina .....26
6.2.2. Modificar / Introducir parámetros....26
6.2.3. Reunir datos....27
6.2.3.1. Ajustar el desplazamiento en paralelo....30
6.2.4. Resultado ....31
6.2.4.1. Ver valores de corrección de pernos....33
6.2.4.2. Entrada de tolerancias....34
6.3. Programa patas de inclinación ....35
6.4. Alineación eje de accionamiento....36
6.4.1. Ajustar dimensiones de la máquina y unidades....37
6.4.2. Modificar parámetros ....38
6.4.3. Recoger y alinear datos .... 39
6.5. Alineación de trenes de la máquina ....39
6.5.1. Pantalla principal del programa (Ajustes y reunión de datos)....39
6.5.2. Considerar los resultados de medición....41
6.6. Programa de husillo....42
6.6.1. Pantalla principal del programa 42
6.6.2. Efectuar mediciones....43
6.6.3. Ver y guardar los resultados....43
6.7. Programa de plomada....44
6.7.1. Pantalla principal del programa 45
6.7.2. Realizar mediciones....46
6.7.3. Ver y almacenar los resultados....47
- Herramientas avanzadas de alineación....50
7.1. Programa de planitud ....50
7.1.1. Pantalla principal del programa ....50
7.1.2. Modificar parámetros .....51
7.1.3. Crear y trabajar una cuadrícula rectangular .....52
7.1.4. Crear una cuadrícula circular .....52
7.1.5. Efectuar mediciones....55
7.1.6. Ver y almacenar el resultado....57
7.2. Programa de ejes centrales de la cavidad ....60
7.2.1. Pantalla principal del programa (Configurar niveles y modificar parámetros)....60
7.2.2. Realizar mediciones....62
7.2.3. Ver y almacenar los resultados....65
7.2.4. Modo Live....66
7.3. Programa de rectitud ....67
7.3.1. Pantalla principal del programa (Configurar posiciones y modificar parámetros)....67
7.3.2. Como realizar una medición....69
7.3.3. Examinar y almacenar resultados....71
7.3.4. Tutorial de uso de las piezas....73
7.3.5. Modo Live....73
7.4. Programa de perpendicularidad („Squareness programm“)....75
7.4.1. Pantalla principal del programa ....75
7.4.2. Realizar una medición....76
7.4.3. Examinar y almacenar los resultados....77
8. Ajustes del sistema....77
8.1. Ajustar fecha y hora....78
8.2. Configurar apagado automático ....79
8.3. Ver / organizar licencias de programa....80
8.4. Ajustar transmisión de datos al sensor ....81
8.5. Ajustar el idioma del usuario ....81
8.6.Ajustar modo USB....82
9. Trato con los cuadros de diálogo de archivos....83
10. Programa „My Documents“ 85
10.1. Encontrar / organizar carpetas y archivos 85
10.2. Guardar el informe como archivo PDF 86
11. Ápendice....87
12. Reciclaje....88
13. Contacto....88
1. Introducción
Gracias por haber comprado un medidor láser de PCE Instrumentos. Con el medidor láser PCE 3-TU se puede realizar rápida y fácilmente la alineación de ejes de máquinas y unidades. Con este propósito, el medidor de distancia láser tiene dos sensores láser distintos que están fijados a los respectivos ejes. La medición se lleva a cabo en un período de tiempo corto y el medidor láser muestra los valores de corrección respectivos para cada pie de las máquinas. Además de los programas específicos para la alineación de máquinas y accionamientos, con PCE-TU 3 se pueden realizar mediciones geométricas.
2. Información de seguridad
Por favor lea detenidamente y en su totalidad el presente manual de instrucciones antes de poner el aparato en funcionamiento por primera vez. Solo debe usar el aparato personal altamente cualificado. No nos responsabilizamos de daños ocasionados por no seguir las indicaciones expuestas en el presente manual de instrucciones.
El presente manual de instrucciones lo ha publicado PCE Ibérica S.L. sin garantías de ningún tipo.
Informamos expresamente de nuestros términos de garantía que se encuentran en nuestros términos y condiciones generales.
Si tiene alguna pregunta, por favor, póngase en contacto con PCE Ibérica S.L.
2.1. Precauciones
PCE-TU 3 es un sistema láser de Clase II con una longitud de onda de 670 nm, una potencia <1 MW y una energía máxima de radiación de 0,1 mJ por pulso. El láser de Clase II cumple con los requisitos de las normas ANSI, BS 4803, IEC 825 y FDA de Estados Unidos. Tenga en cuenta las siguientes precauciones de seguridad para evitar lesiones y daños a la unidad.
¡No mire bajo ninguna circunstancia directamente al rayo láser!
¡Nunca apunte con el láser directamente a los ojos!
¡ATENCIÓN!
No intente de abrir o desmontar los sensores de medición ni el dispositivo. Esto puede dañar el sistema de medición, por lo que la garantía quedaría anulada.
¡Advertencia!
Asegúrese de que las máquinas con las que mide no se arrancan por accidente, ya que esto puede causar lesiones. Para evitar este riesgo, bloquee el interruptor de encendido en la posición de apagado o quite los fusibles correspondientes. Deben seguirse estas medidas de seguridad hasta que el sistema de medición se retira de la máquina de medición.
Exención de responsabilidad
Ni PCE Ibérica ni los distribuidores autorizados pueden considerarse responsables de daños en el equipo o equipos de trabajo debido a la utilización del sistema de 3 PCE-TU. Comprobamos cuidadosamente el presente manual de instrucciones con el fin de evitar posibles errores. Si encuentra algún error en este documento, le agradeceríamos que nos informara al respecto.
3. Descripción técnica
3.1. Empleo
El sistema de medición PCE-TU 3 se ha creado para comprobar y optimizar la alineación de los ejes entre máquinas.
En concreto, esto significa cambiar la posición relativa de las dos máquinas (p. ej. El motor y la bomba) de modo que las líneas centrales de los ejes en funcionamiento normal son concéntricas (centrales).
El sistema de medición PCE-TU 3 es compatible con los siguientes requisitos de la CE:
2006/95 / CE, EN 61010-1: 2001, EN 60825-1: 2007, 2004/108 / CE, EN 61326-1: 2006, EN 61326-2-2: 2006, EN 55011: 2009 + A1
3.2. Especificaciones técnicas y funciones
| Tipo de sensor | Fotodiodo sensible a la posición 10 x 10 mm |
| Tipo de laser | Visible, rojo 635 ... 670 nm, <1 MW |
| Max. distancia | 10 m entre los sensores |
| Precisión de medición | ±1 % + 0,01 |
| Resolución | 0,001 mm |
| Resolución de pantalla | 0,01 o 0,001 mm |
| Clinómetro | Resolución 0,1 ° |
| Interfaces | USB, Bluetooth |
| Memoria | 2 GB |
| Funciones | Alineación horizontal en cada posición de 60 ... 360 °Alineación verticalModo Auto SweepTolerancias ajustablesMedición de pata de inclinaciónDilatación térmicaSimulación distancia de discosInformes en formato PDF |
| Carcasa | Con protección de siliconaClase de protección: IP65 |
| Alimentación | Batería NiMH |
| Condiciones ambientales | -10 ... +55 °C |
| Peso | 7,5 kg |
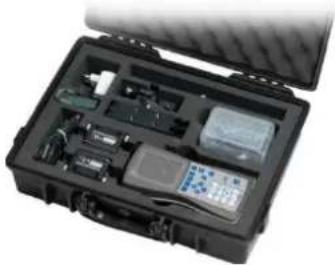
3.3. Contenido del envío
El sistema de medición PCE-TU 3 incluye:
1 x Pantalla PCE-3 TU
2 x Ondas de medición
2 x Sets de montaje de ondas de medición
1 x Cinta métrica
1 x Cargador
1 x Cable de conexión
1 x Software CD-ROM
1 x Cable USB
1 x Manual de instrucciones
1 x Maletín de transporte
Líneas de referencia para medir la distancia de los sensores

Vista desde arriba del sensor de medida

Fig. 1a: Vista frontal y superior del sensor
Fig. 1b: Vista lateral del sensor
3.4. Parámetros de desalineación
 | Desplazamiento paralelo (Offset) |
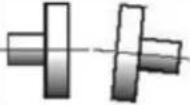 | Desplazamiento angular (Gap) |
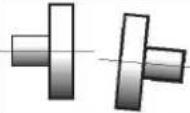 | Desplazamiento paralelo y angular (Offset + Gap) |
La desalineación paralela y angular se puede determinar en dos planos perpendiculares entre sí. Para eliminar la desalineación paralela y angular en cada uno de los dos planos, la posición de la máquina móvil (M) debe corregirse.
La posición de la máquina móvil (M) tiene que ajustarse en el plano horizontal y vertical.
Preguntar al operador si un cambio de la posición de la máquina móvil (M) es útil bajo el funcionamiento y criterios de eficacia y después determinar la disposición de los planos de corrección.
Máquina estacionaria (S): La posición de esta máquina no se cambia durante la medición y la eliminación de desalineación paralela y angular.
Máquina móvil (M): La posición de esta máquina se adapta para eliminar la desalineación paralela y angular.
El sistema de medición calcula los valores de desalineación paralela y angular en el plano del embrague (en dos planos perpendiculares entre sí) y los valores de ajuste de las patas de la máquina móvil (M), que son necesarias para eliminar las desviaciones.
El cuadro 3 muestra los valores de desalineación y la corrección en el plano vertical.
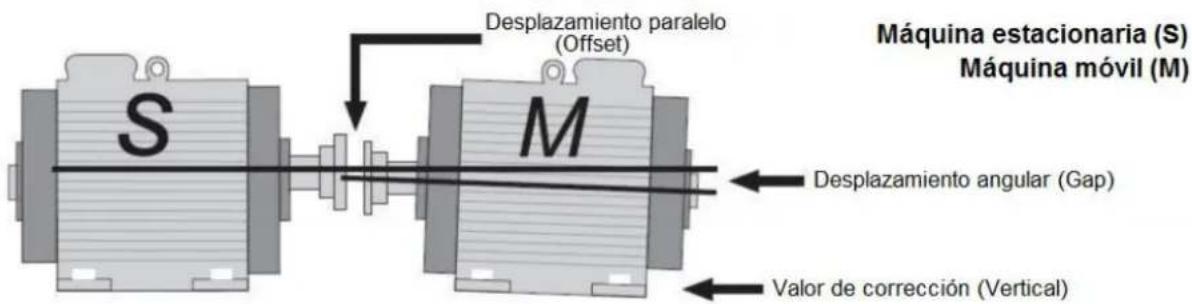
Imagen 3: Desalineación (plano vertical)
4. Alineación de las máquinas
- Montar los sensores de medición en los ejes de las dos máquinas (S) y (M)
- Seleccionar el programa de medición correspondiente.
- Introducir las distancias entre el sensor (S) y el sensor (M), el embrague y los pies de la máquina.
- Pulsar, para dar cabida a las lecturas de los sensores en tres posiciones diferentes del eje.
- Ajustar la posición de las patas en la máquina móvil utilizando los valores de corrección determinados en la pantalla.
¡ATENCIÓN!
Para llevar a cabo la medición, es importante orientar la dirección de rotación de los ejes y la posición relativa de los sensores a la máquina (S) y (M). Se muestra en la imagen 4.
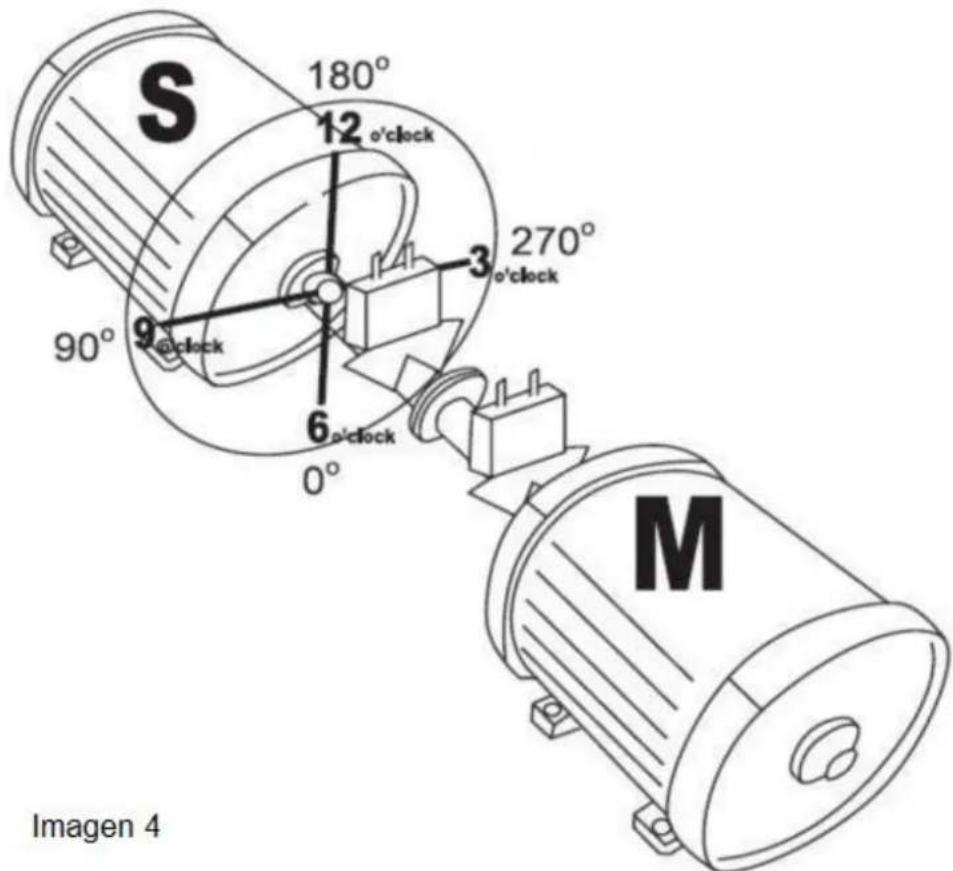
La imagen 4 muestra la máquina (S) desde la perspectiva de la máquina (M) en la posición de 12h. Los sensores de medición presentan en la parte superior una marca (S) o (M) y debe basarse en el eje respectivo de la máquina (S) o (M) a la hora de montarse.
4.1. Determinación de los datos de medición
El sistema de medición 3 PCE-TU se basa en la medición del movimiento del rayo láser en la ventana de destino del sensor-receptor, mientras que el eje, sobre el que están montados los sensores, se gira.
Para medir el eje de orientación, deben llevarse a cabo por lo menos tres mediciones en diferentes posiciones durante la rotación del eje. Alcanza una rotación total de 180°.
No es posible una rotación de eje de 180° debido a limitaciones de espacio o una disposición desfavorable de las máquinas, PCE-TU 3 tiene un modo de ángulo de giro más pequeño. Es suficiente con una rotación total de al menos 60°.
4.2. Instalación del aparato
Antes de utilizar el aparato, compruebe el estado de la batería y cárguela si es necesario.
El estado de la batería se indica con una pequeña imagen de color en el menú principal del dispositivo. El voltaje de la batería exacta se puede leer en el menú "Configuración".
Examinar y limpiar - si es necesario - la superficie del detector de láser y la abertura de salida del láser.
Para su limpieza, utilizar una bola de algodón empapada en alcohol. No utilizar nunca disolventes para la limpieza.
Compruebe la fecha y la hora del reloj del sistema y ajustelas si es necesario.
4.3. Conectar los sensores de medición
Hay puertos en serie en la unidad de pantalla y los sensores de medición. Con los cables incluidos, los sensores se encuentran conectados en serie y unidos a la unidad de visualización (imagen 5).
Conexión de los sensores en serie
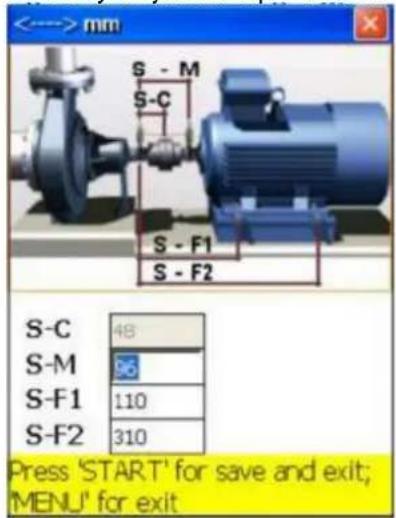
4.4. Entrada de dimensiones
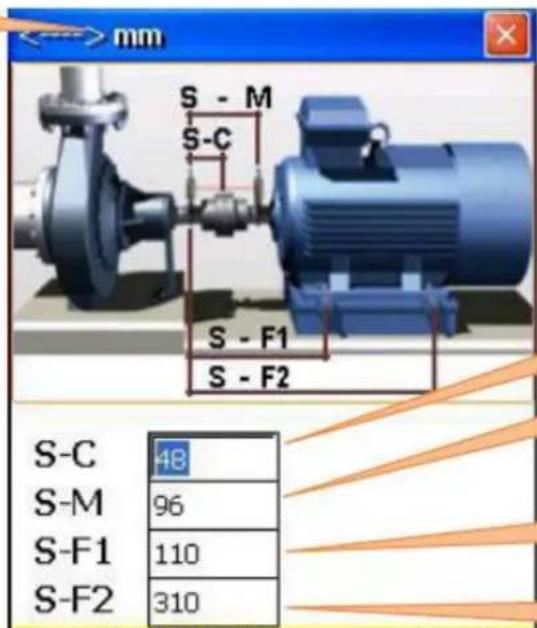
Para obtener lecturas precisas con 3 PCE-TU, primero, deben introducirse las distancias entre los sensores, el acoplamiento y las patas de la máquina. Las imágenes 6 y 7 muestran las dimensiones requeridas para cada máquina instalada horizontal o verticalmente.
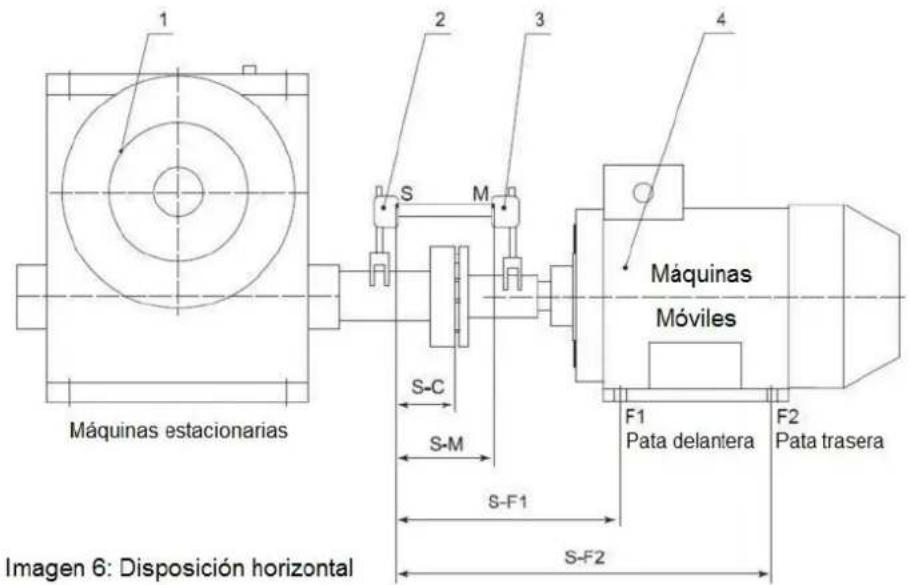
S-M: Distancia entre los sensores de medición
S-C: Distancia entre el sensor S y centro del acoplamiento
S-F1: Distancia entre el Sensor S y pie de la máquina F1
S-F2: Distancia entre el sensor S y pie de la máquina F2 (debe ser mayor a S-F1).
Si la máquina tiene tres pares de patas, este valor puede cambiarse después de la medición y después de volver a la medición para obtener los valores de corrección del tercer par de patas.
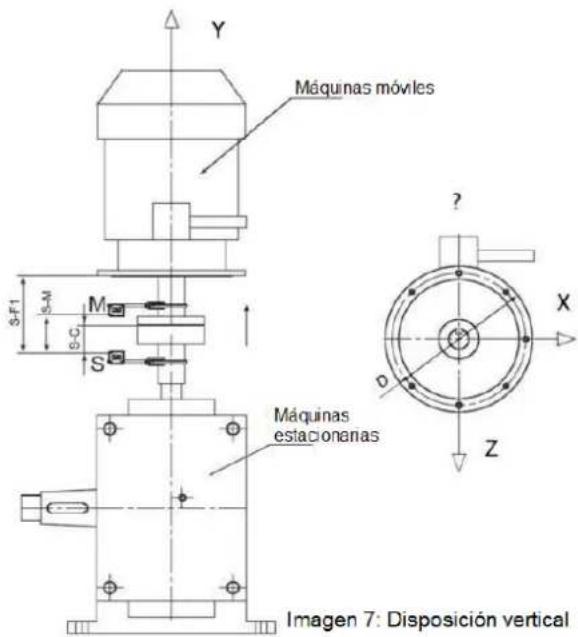
S-M: Distancia entre los sensores de medición
S-C: Distancia entre el sensor S y el centro del acoplamiento
S-F1: Distancia entre el sensor S y niveles de orientación (F1)
4.5. Orientación general
El método de orientación aproximada sólo debe utilizarse si la alineación axial de la máquina es tan mala que los rayos láser no llegan al destinatario durante la rotación del eje. En este caso, primero es necesaria una orientación general.
Orientación general (Variante 1), (Bild-8):
Gire el eje con los sensores de medición en la posición de las 9h. Indique con el láser al centro de la abertura-detector cerrada.
Gire el eje con los sensores de medición en la posición de las 3h.
Compruebe que el haz láser llega, y luego utilice los tornillos de ajuste para fijar el haz de láser en el medio de la pista hasta el centro del detector (imagen 8).
Ahora alinee la máquina móvil de manera que los objetivos de rayo láser (S) y (M) llegan al centro.
Continúe con la secuencia de medición regular.
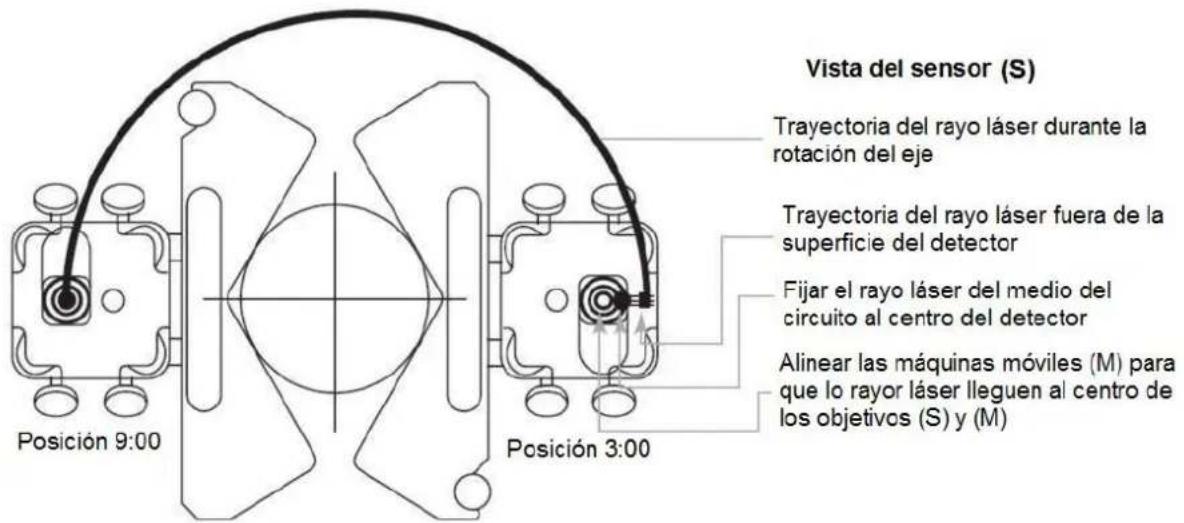
Imagen 8: Orientación general
5. Puesta en marcha
5.1. Teclas generales
Para cerrar todas las ventanas activas – excepto el menú principal – sin almacenar, pulse la tecla (funciona como la tecla ESC).
La tecla ENTER se utiliza para confirmar o para salir de los campos de entrada y ventanas activas (con excepción de la ventana de la entrada de datos, pantallas principales de los programas y otros).
5.2. Inicio del PCE-TU3
- Después de iniciar el menú principal aparece en la pantalla
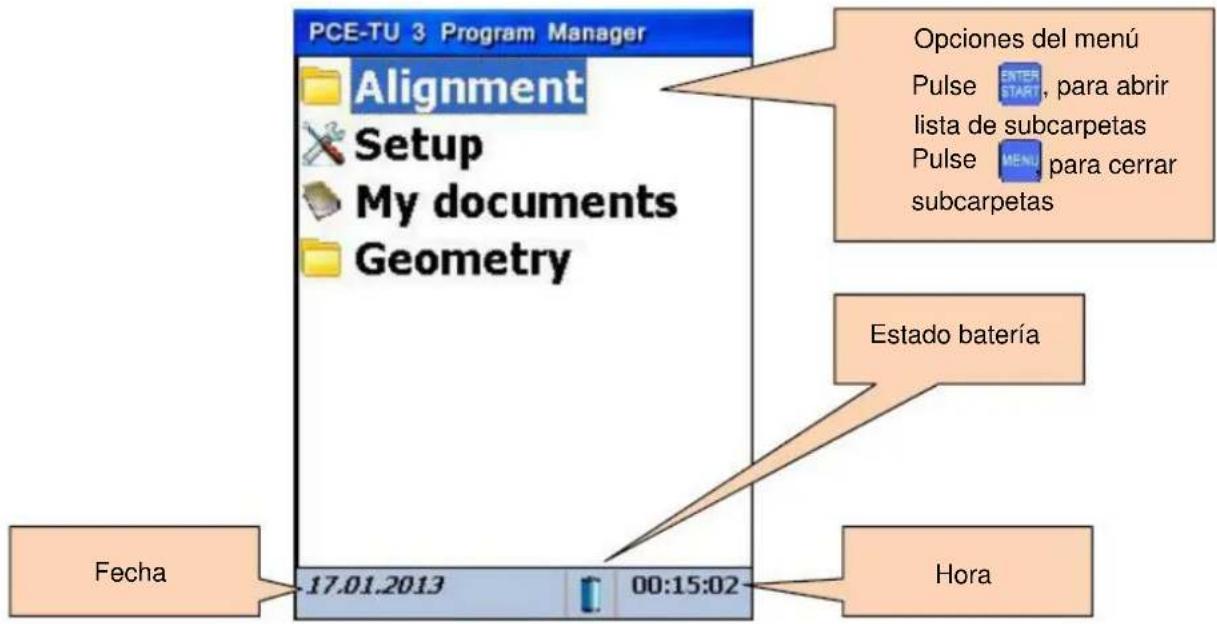
En el menú: Seleccionar un punto y pulsar

Si la visualización de batería debajo de la pantalla comienza a parpadear, debe almacenar inmediatamente todos los datos no guardados y recargar las baterías. El símbolo significa que el aparato se apaga dentro de poco.
6. Alineación de las máquinas
6.1. Orientación de la máquina horizontal
Montar el sensor de medición con la marca (S) en el eje de la máquina estacionaria y el sensor de medición con la marca (M) en el eje de la máquina móvil. Conecte los cables como se describe en el punto 3.3 de los sensores y la unidad principal o configure la interfaz de Bluetooth (sólo es posible con el kit adaptador de Bluetooth opcional).
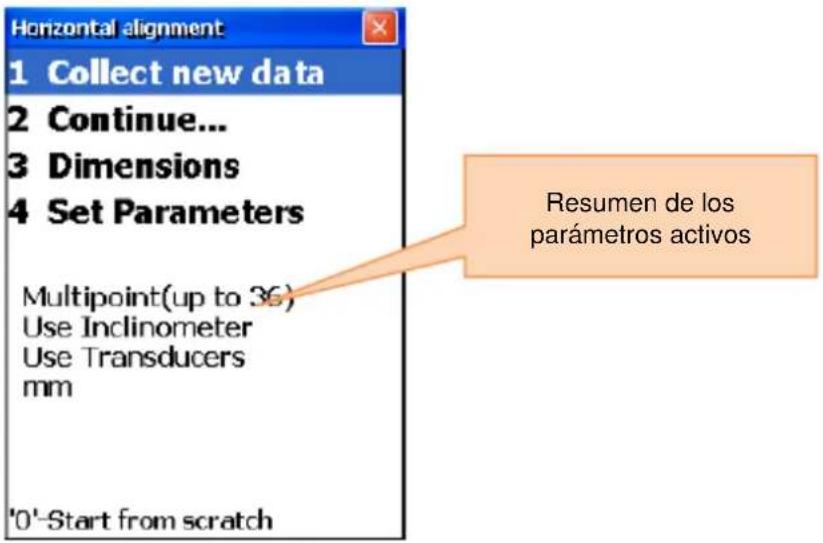
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| Realizar una medición de la pata de inclinación (Soft Foot) para evitar errores inesperados durante la alineación.Compruebe después de la alineación el resultado mientras efectúa otra medición. | Determinar datos nuevos | |
| Funciones de esta pantalla | 2▲ABC | Continuar con el proceso de alineación |
| Determinar datos nuevosContinuar la alineaciónModificar parámetrosModificar dimensiones y espacios | Modificar dimensiones de las máquinas y distancias | |
| Modificar/ añadir parámetros | ||
6.1.1. Introducir dimensiones
Para introducir dimensiones, pulse 3 DEF
| A tener en cuenta en esta pantalla | Atajos de la pantalla | |
| Para obtener resultados de medición correctos debe ser así: S-C <S- M ≤S-F1 <S-F2 |  | Desplazarse hacia arriba |
| Funciones de la pantalla |  | Desplazarse hacia abajo |
| Distancia sensor S – Introducir centro de acoplamientoDistancia Sensor S – Introducir sensor MDistancia Sensor S – Introducir pata delantera de la máquinaDistancia Sensor S – Introducir pata trasera de la máquina |  | Guardar y salir |
 | Confirmar entrada | |
Unidad
Sensor S hasta centro acoplamiento
Sensor S hasta sensor M
Sensor S hasta la pata delantera
Sensor S hasta la pata trasera
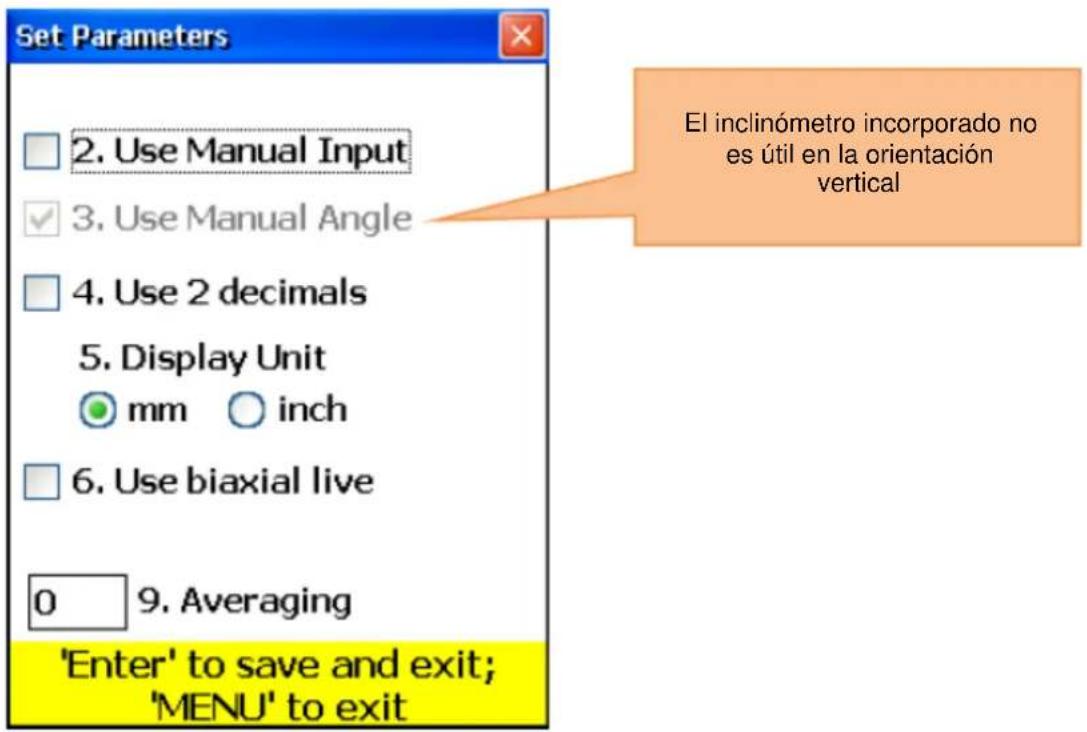
6.1.2. Modificar los parámetros
Pulsar para modificar parámetros.
| A tener en cuenta en esta pantalla | Atajos de pantalla | ||
| Utilice la función „biaxial live“ solo en posiciones de eje estables, ya que se pueden producir incluso los más mínimos errores de rotación |  | Activar/desactivar entrada de datos manual | |
| Funciones de pantalla |  | Activar/desactivar entrada de ángulo manual | |
| - | Entrada o uso manual de los datos de sensores |  | Utilizar 2 o 3 decimales |
| - | Ángulo de entrada de datos manual o desde un sensor de inclinación integrado |  | Seleccionar entre pulgadas y mm como unidad de medida |
| - | Seleccionar entre 2 o 3 decimales | [TX08] | Activar/ desactivar orientación biaxial Live |
| - | Seleccionar entre pulgadas y mm como unidad de medición |  | Entrada para el cálculo de la media |
| - | Activar/ desactivar orientación biaxial Live |  | Guardar y salir |
6.1.3. Reunir datos
Pulsar para reunir datos.
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |||
| ⚠️ Antes de iniciar un nuevo procedimiento de alineación, se tienen que introducir las dimensiones y parámetros⚠️ No cambie la posición de las unidades de medida mientras el trabajo se interrumpe⚠️ Los láseres se encienden ahora |  | Empezar de nuevo (todos los valores desaparecen). Aparecerá la pantalla de confirmación. | ||
| Funciones de esta pantalla |  | Introducir los valores Ys, si se activa la entrada manual | ||
| - | Reunir valores de medición (hasta 36) | [30CD] | Introducir los valores Ym, si se activa la entrada manual | |
| - | Seleccionar entre los modos de barrido manual y automático | [WD00] | Introducir el ángulo cuando si se habilita la entrada manual del ángulo | |
| - | Entrada manual de los valores Ys y YM (si está activada) | [KDH] | Si el cursor está en el primer lugar en un campo de entrada, pulse el botón dos veces para introducir un signo negativo (-) | |
| - | Entrada de ángulo manual (si está activado) |  | Selección de la unidad de medida (mm o pulgadas) | |
| - | Selección de la unidad de medida (mm/pulgadas) | [SC85] | Ajustar desplazamiento paralelo (Offset) | |
| - | Navegar a través de los datos recogidos |  | Almacenar datos recogidos en un fichero (véase capítulo 9 „Manipular cuadro de diálogo-archivo“) | |
| - | Eliminar/añadir/sustituir valores de medición |  | Cargar datos de un archivo (véase capítulo 9 „ Manipular cuadro de diálogo-archivo “) | |
| - | Empezar de nuevo (todos los valores desaparecen). | [AEZY] | Eliminar valor de medición seleccionado actual | |
| - | Ajuste de desplazamiento en paralelo (Offset) |  | Introducir valor nuevo. Debe ir al último valor almacenado, por lo que esta opción se activa. | |
| - | Guardar los datos recogidos | [DH2C] | Guardar los valores actuales o sustituir los valores ya almacenados (aparece un cuadro de diálogo de confirmación) | |
| - | Cargar los datos recogidos |  | Navegar por los valores | |
 | Además de la pantalla de resultados. Todas las condiciones necesarias se deben cumplir. | |||
| [30DT] | Abrir menú Popup. | |||
| [C00D] | Activar / Desactivar Auto-sweep.El auto-Sweep sólo se puede activar al comienzo de la recogida de datos o tras iniciar de nuevo. La entrada manual de los valores y la inclinación deben desactivarse. | |||
| Símbolos y estado de esta pantalla | ||||
| [C] | El ámbar intermitente de la „C“ en pantalla significa que no se pueden recibir datos | |||
| de los sensores | ||||
| [R] | Una R roja parpadeante en pantalla significa que solamente se considera una medición ya memorizado. Este valor se puede suprimir o sustituir si es necesario.Si el símbolo no se puede ver, significa que el valor de la corriente no se ha guardado. Al pulsar se pueden almacenar valores. | |||
 | La ausencia del indicador de posición de haz de láser y un borde rojo intermitente de la visualización de la posición significa que ningún haz de láser llega al objetivo o no se detectan datos del sensor. | |||
 | Un dial amarillo significa que se supone que simplemente no hay ángulo (o el promedio está todavía en curso) o que el ángulo de rotación (la posición adyacente) es demasiado pequeño (menos de 6 °) | |||
 | Una pantalla de color rojo brillante significa que el ángulo de rotación de los ángulos de los puntos de medición individuales no cumple con los requisitos (mínimo 60 °).Una luz ámbar indica que el ángulo de rotación es de 60 °.Una luz verde indica que el ángulo de rotación está por encima del rango recomendado (aproximadamente 90 °) se encuentra. | |||
 | Este símbolo indica que se utiliza un rango de valores Y. | |||
| Un símbolo tachado significa que el modo Auto-Sweep está deshabilitado. | ||||
 | Este símbolo indica que el modo Auto-Sweep está habilitada. | |||
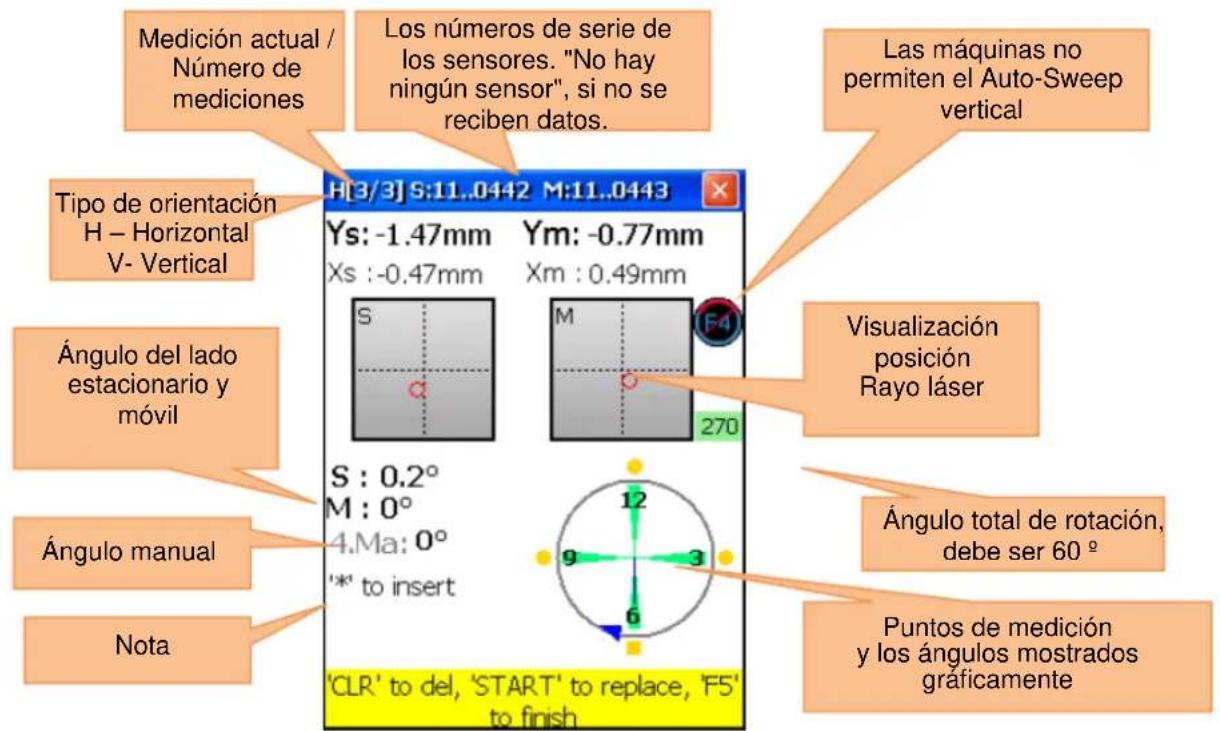
![Número de serie de los sensores. "No sensor", si no se recibe ningún dato H[3/3] S:11..0442 M:11..0443 Medición de corriente / número de mediciones Ys: -1.47mm Ym: -0.77mm Xs : -0.47mm Xm : 0.49mm S M 270 Tipo de orientación H – horizontal V - Vertical Ángulo de la parte estacionaria y móvil S : 0.2° M : 0° 4.Ma: 0° '/' to insert Ángulo manual Caja de notas Esfera con los puntos de medición y los ángulos mostrados gráficamente 'CLR' to del, 'START' to replace, 'F5' to finish Estado Auto - Sweep Visualización posición láser Ángulo total de rotación; debe ser mayor a 60 °](/content/2026/05/1081033/images/0252d0b5a17e6597b3b2e0e4416a7300f3a1031151f80cd821caa96b45d1e219.jpg)
| Aclaración de la esferaLos puntos de medición almacenados se caracterizan por zonas verdes junto a la esfera y puntos de colores. Los puntos de colores son redondos por defecot. Si un punto de color es cuadrado, significa que sólo se observan estos puntos de la medición almacenada. El color de los puntos proporciona información sobre la desviación estándar de la función de orientación actual. | |
| ● | Un punto azul significa que los datos todavía no están listos (menos de 3 puntos de medición guardados) |
| ● | Un punto verde significa que los datos son buenos. |
| ● | Un punto amarillo significa que los datos no son buenos, pero aceptables. |
| ● | Un punto rojo significa que los datos son malos. Esta medición tiene que eliminarse o repetirse.Si está utilizando un pequeño número de puntos de medición (p.ej. 4), puede ser que otros datos de medición sean pobres y no necesariamente un valor medido. Utilice en este caso más puntos de medición para determinar qué valor de medición es malo. |
Utilice los tornillos de ajuste de los sensores de medición para alinear los rayos láser sucesivamente hasta el centro de las tapas de detector (imagen-1a / b). Cuando los rayos láser se centren en dos receptores, abra las tapaderas. Ahora en pantalla aparecen las coordinadas X & Y coordina y la posición de los dos receptores (S) y (M). Ahora gire el eje en la posición de medición seleccionada.
Ahora puede con cambiar el modo de auto sweep o manualmente y con almacenar el punto de medición activo. Almacene tantos puntos de medición como sean necesarios (como mínimo 3) y utilice un ángulo de rotación total tan grande como sea posible (como mínimo 60 °).
Si se han recogido los datos necesarios, pulse para iniciar la alineación.
6.1.3.1. Ajustar desplazamiento paralelo Offset
Pulse para ajustar el desplazamiento paralelo.
| A tener en cuenta en esta pantalla | Atajos en esta pantalla |
| ⚠ No gire los ejes y sobre todo en el ajuste de los sensores⚠ No elimine el desplazamiento paralelo (offset) después de almacenar por adelantado. De lo contrario, tendrá que repetir toda la determinación de datos. |  Selección de la fase Setup Selección de la fase Setup |
| Funciones de esta pantalla | [W266] Selección de la segunda fase Setup |
 Para eliminar el valor del primer desplazamiento y volver a la primera fase de la instalaciónNota: No lo lleve a cabo si los ajustes de compensación ya se han completado. Para eliminar el valor del primer desplazamiento y volver a la primera fase de la instalaciónNota: No lo lleve a cabo si los ajustes de compensación ya se han completado. | |
 Para guardar el valor de desplazamiento conjunto. Para guardar el valor de desplazamiento conjunto. |
La configuración de desplazamiento es un proceso de 2 pasos. Comience con la primera fase. Se deben aceptar más de 3 valores. Después, pulse para dirigirse a la segunda fase. Ajuste el rayo láser hasta que el valor asume el 0 y espere 5 segundos. Pulse para almacenar el valor de desplazamiento.
Después de salir del menú de desplazamiento, aparece para señalar el ajuste de desplazamiento.
6.1.4. Resultado
Para mostrar el resultado de la medición, pulse si se encuentra en la pantalla de medición o sic se encuentra en el programa de "alineación horizontal".
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| No girar los ejes cuando se mueva la máquinaNo cambie la posición de las unidades de medición, si está activado el modo Live | [XYW] | Entrada de las tolerancias de desplazamiento |
| Funciones de esta pantalla |  | Simulador-espaciador |
| Observar el desplazamiento calculado |  | Para la vista de corrección de la brida (solo vertical) |
 | Selección entre 2 o 3 decimales | |
| Realizar alineación Live |  | La entrada manual de ángulos (si está activado). En este caso hay que vivir el modo de pausa y luego entrar en los respectivos ángulos. |
| Pausa/continuar alineación Live | [SY7Y] | Si el cursor está en el primer lugar en un campo de entrada, pulse la tecla dos veces para introducir un signo negativo (-) |
| Ángulo de entrada manual (si está activado) |  | Introducción de la dilatación térmica |
| Selección entre 2 o 3 decimales |  | Selección unidades (mm / mils) |
 | Pausar/continuar alineación Live | |
| Selección de la unidad de medida (mm/pulgadas) | [STAX] | Guardar los resultados de la alineación en un archivo, consulte el Capítulo 9, "Administración de archivos" |
| - Entrada de tolerancias- Entrada de dilatación térmica- Guardar los resultados de la alineación- Cargar los resultados de la alineación- Simulación del espaciador | Ventanas de diálogo “ | |
| Cargar previamente los resultados de orientación guardados, véase el Capítulo 9 "Tratar con los cuadros de diálogo de archivo" | ||
| Símbolos y estados de esta pantalla | ||
 | Una línea amarilla en la pantalla de alineación significa que el ángulo de los puntos de medición no fueron aceptados o el promedio no se ha completado. El registro en vivo está deshabilitado en este caso. | |
 | Una mitad de acoplamiento rojo significa que el desplazamiento actual supera los límites de tolerancia. Si el desplazamiento está dentro de las tolerancias, el icono es de color gris. | |
| [BYW7] | Una casilla de verificación que parpadea en el encabezamiento de cada nivel significa que para este nivel la alineación en vivo se puede utilizar. De lo contrario, no es posible para el respectivo nivel. | |
| Este mensaje de error intermitente significa que la posición de los ejes se ha cambiado de forma inesperada. El registro Live se desactiva. Para activar esta función, presione para hacer una pausa y conéctelo de nuevo para la siguiente ejecución. | ||
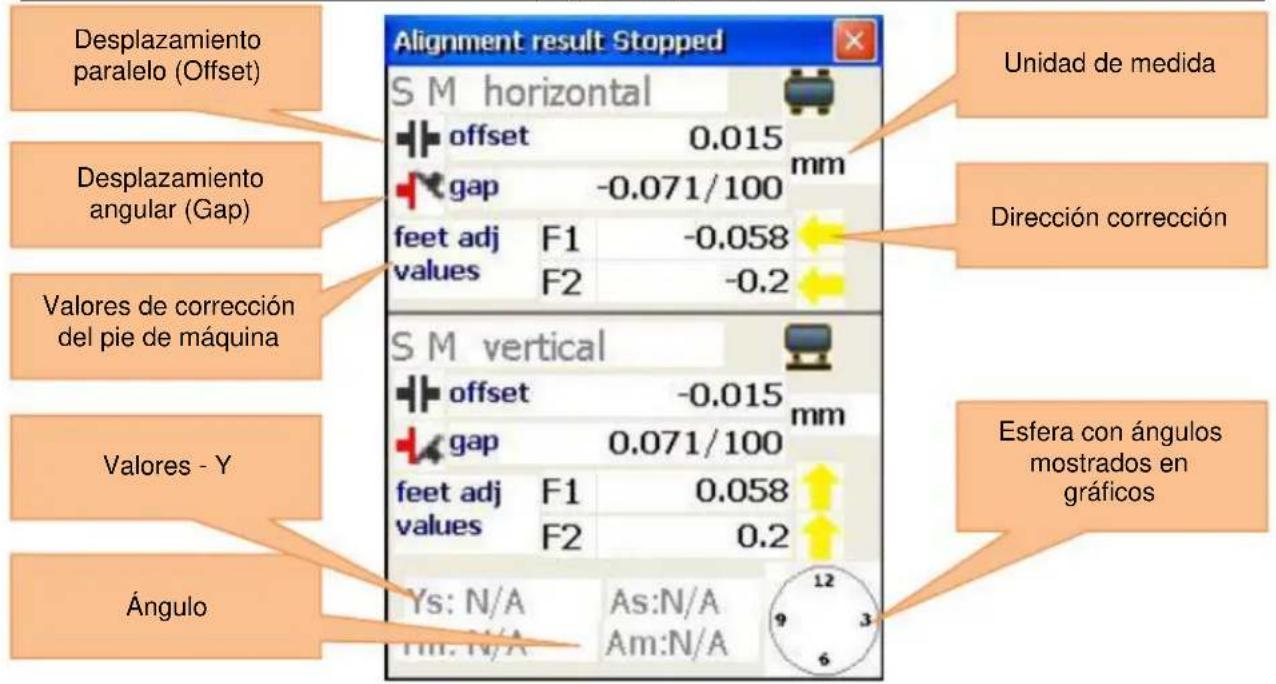
Los valores de corrección para los pies F1 y F2 de la máquina móvil (M) en el plano horizontal indican el desplazamiento horizontal. Los valores positivos indican que los pies tienen empujarse, mientras que los valores negativos significan que deben extraerse.
Los valores de corrección para los pies F1 y F2 de la máquina móvil (M) en el plano vertical horizontal indican el desplazamiento vertical. Los valores positivos indican que los pies deben ser subirse, mientras que los valores negativos significan que tienen que bajarse.
Alineación Live horizontal
Para iniciar la orientación horizontal Live, los sensores deben estar situados en la posición 9 ó 3:00h. Si necesita hacer girar los ejes, haga una pausa en la alineación Live pulsando. Ahora gire los ejes en la posición deseada y establecer la alineación Live presionando de nuevo. No se olvide de introducir manualmente el ángulo, si esta opción está activada. Después, debe estar habilitado el nivel deseado para la alineación Live (Esto se indica mediante el parpadeo de casilla de verificación en el encabezamiento de los niveles). Afloje los pies de la máquina e inicie el ajuste basado en los valores de corrección calculados.
Alineación Live vertical
Para iniciar la alineación vertical en vivo, los sensores deben estar situados en la posición 6 o 12:00h. Si necesita hacer girar los ejes, hágalo como se describe en la "orientación horizontal live". El nivel 6-12 ahora debe ser liberarse para la alineación Live. Afloje los pies de la máquina y alinearlos con los valores de corrección.
Alineación Live Biaxial (Y,X)
La orientación biaxial se ejecuta en vivo casi como la orientación horizontal o vertical, a excepción de que los sensores no necesitan llevarse a una posición predefinida. Sin embargo, se recomienda que los sensores se posicionen aproximadamente en un ángulo de 45° (45°, 135°, 225°, 315°) a fin de evitar errores de medición.
¡No se permite mover los ejes durante la orientación biaxial!
Continuar con el trabajo después de que la posición de los sensores se ha cambiado
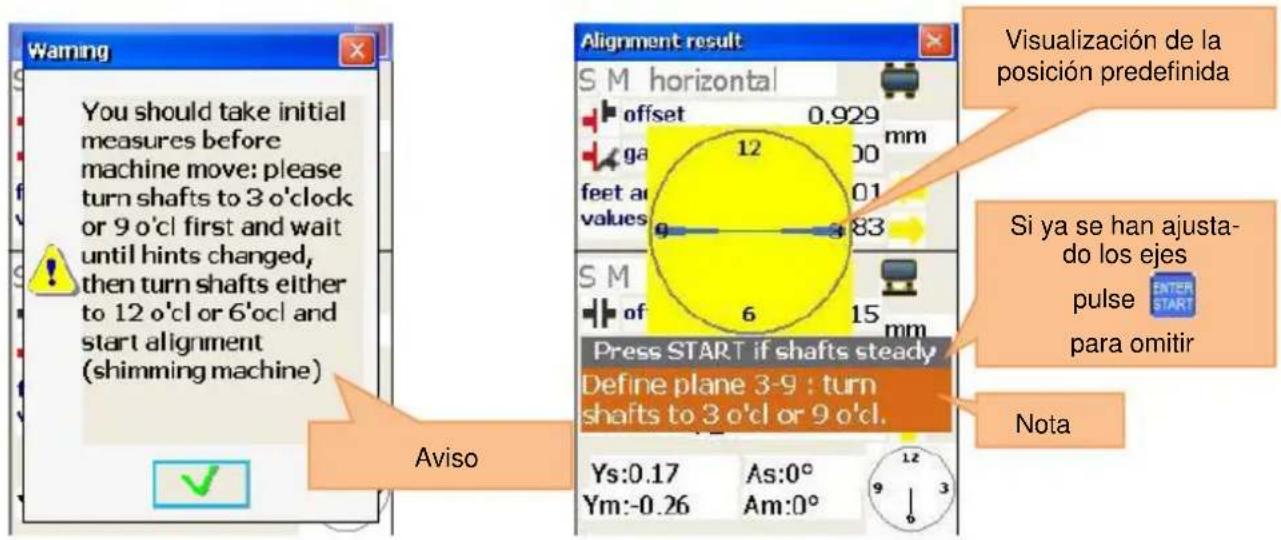
Antes de continuar trabajando una vez la posición de los sensores se ha cambiado, es necesario llevar los sensores a dos posiciones predefinidas (3/9hy 6/12h). También aparece un mensaje en la pantalla que explica los procedimientos necesarios. No se olvide de la entrada manual del ángulo, si esta opción está activada. Si los sensores se colocaron en las posiciones predefinidas, tras un periodo de tiempo corto de 15 segundos, automáticamente se pasa al siguiente paso. Si los ejes ya están establecidos, el transitorio se puede omitir pulsando.
Después de que la primera etapa se haya completado (p.e.j, 3- / 9h), modifique la posición la nota (p.ej. 6- / 12h) para el segundo paso.
Una vez que el segundo paso se haya terminado, desaparecerá la nota y el dial amarillo y empezará la orientación live.
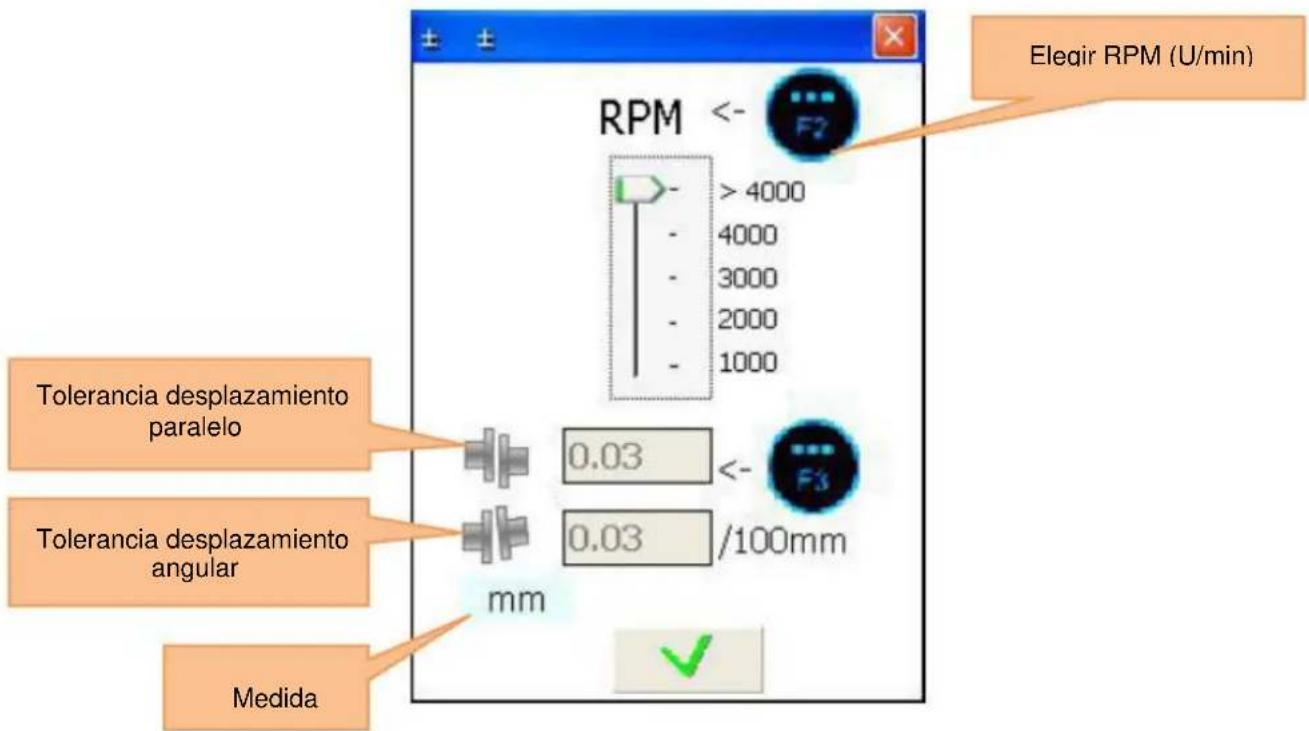
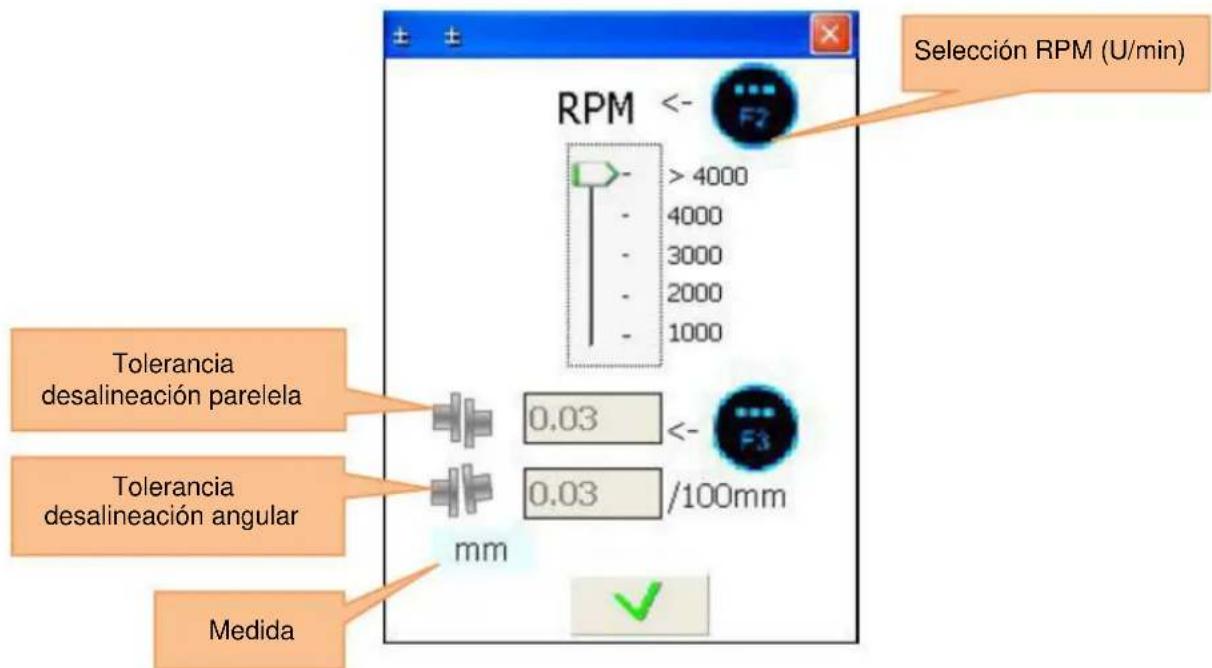
6.1.4.1. Entrada de tolerancias
Para registrar tolerancias, pulse 0 .DEL
| Funciones en esta pantalla | Atajos de esta pantalla | |
| - Selección de las tolerancias estándar de la industria en todo el rango de RPM- Entrada de tolerancia manual |  | Definir las tolerancias en la RPM (revoluciones por minuto) |
 | Entrada manual de tolerancias | |
 | Si se activa la gama de revoluciones: aumentar rpm en un pasoSi se activa la entrada manual: Seleccione una entrada de desplazamiento paralelo | |
 | Si se activa la gama de revoluciones: reducir las RPM a un pasoSi se activa la entrada del manual: seleccionar el ángulo de compensación de entrada | |
 | Almacenar y salir | |
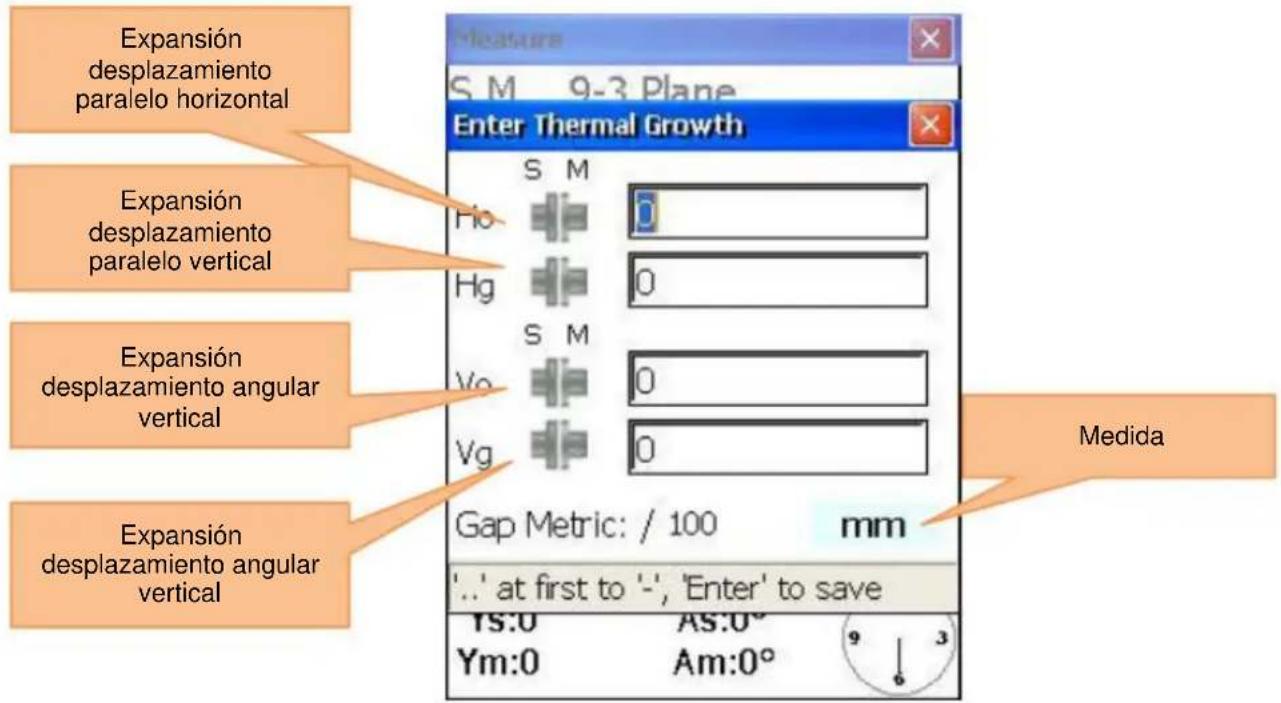
6.1.4.2. Entrada del crecimiento térmico
Para introducir el crecimiento térmico, pulse 5 JKL
| Funciones de esta pantalla | Atajos de pantalla | |
| Introducir expansión de desplazamiento horizontal paralelo | [DWW0] | Navegar hacia arriba a través de los campos |
| Introducir expansión de desplazamiento angular horizontal paralelo | [BH5K] | Navegar hacia abajo a través de los campos |
| Introducir expansión de desplazamiento vertical paralelo | [ZZY7] | Si el cursor está en el primer lugar en un campo de entrada, pulse el botón dos veces para introducir un signo negativo (-) |
| Introducir expansión de desplazamiento angular horizontal | [K4W0] | Almacenar y salir |
6.1.4.3. Entrada del crecimiento térmico
Para simular el espaciador, pulse 1. i
| Funciones de esta pantalla | Atajos de esta pantalla | |
| - Entrada del espesor del espaciador de los pies delanteros de la máquina- Entrada del espesor del espaciador de los pies traseros de la máquina- (F2)- Desalineación restante |  | Navegar los campos hacia arriba |
 | Navegar los campos hacia abajo | |
| [COAH] | Almacenar y salir | |
![Measure Live S M 9-3 Plane Shim simulation Espesor espaciador pie de la máquina delantero F1= 0.36 [0.36] F2= 1 [1] mm Rest Misalignment S M Vertical o=0 mm g=0/100 mm '...' at first to '-' 'MENU' to exit Ys:0 AS:0° Ym:0 Am:0° Medida](/content/2026/05/1081033/images/20a45133600f6ded082e30c43715ed1cd3946277e2b9aacb4bc6f3bd0d99e862.jpg)
6.2. Alineación de la máquina vertical
Montar el sensor de medición, que está marcado con (S), en el eje de la máquina estacionaria y el sensor de medición, que está marcado con una (M), en el eje de la máquina móvil.
Nota: Marcar la posición de las 3, 6, 9 y 12h en la carcasa de la máquina.
Conectar el cable como se describe en el apartado 3.3 o configurar la interfaz Bluetooth (con adaptadores Bluetooth opcionales).
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| Compruebe el resultado después de la alineación al hacer otra medición | Calcular datos nuevos | |
| Funciones de esta pantalla | Continuar el proceso de alineación | |
| Identificar nuevos datos comenzar alineaciónContinuar alineaciónModificar parámetrosModificar dimensiones y distanciasConsiderar/modificar espaciador | Cambiar las dimensiones de la máquina y las distancias | |
| Modificar/introducir parámetros | ||
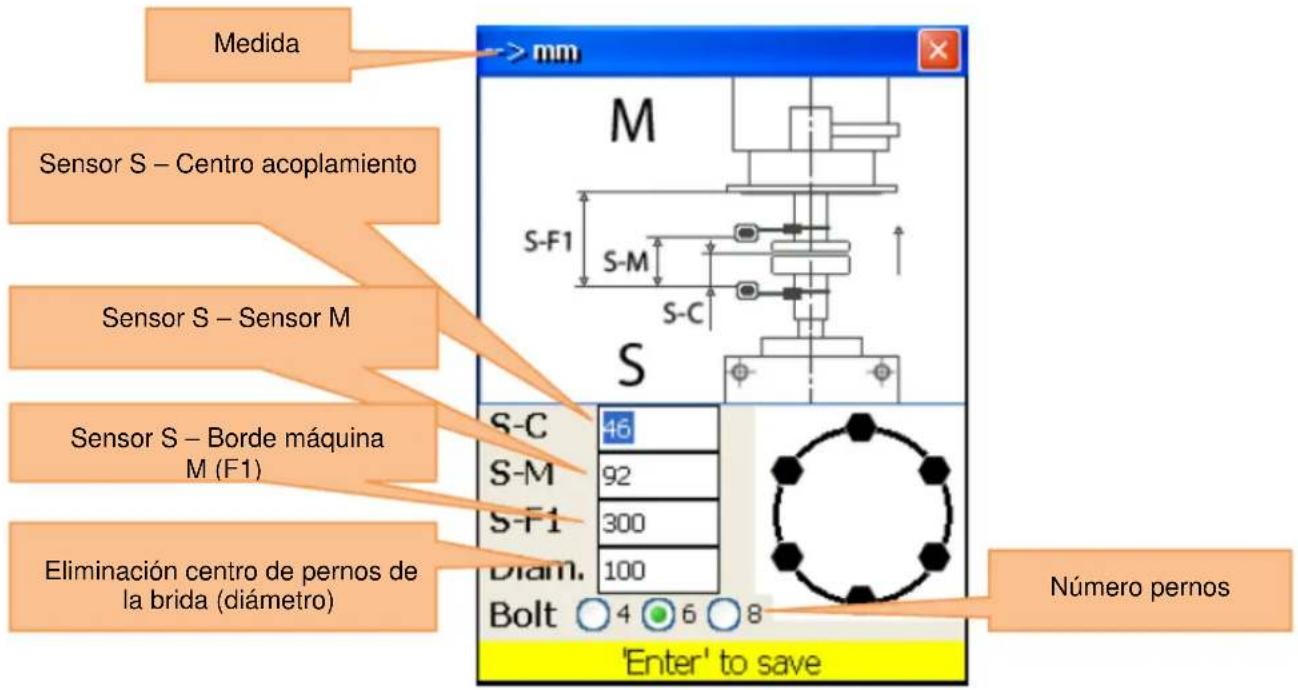
6.2.1. Introducir dimensiones de la máquina
Para introducir dimensiones de la máquina, pulse 3 DEF
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| Para obtener resultados de medición correctos,se debe cumplir lo siguiente: S-C[STK7]Navegar los campos haciaarriba |  | Navegar los campos haciaarriba |
| Funciones en esta pantalla |  | Navegar los campos haciaabajo |
| - Sensor de distancia S – Introducir centro deacomplamiento |  | En "Bolt", ajustar elnúmero de tornillos |
| - Sensor de distancia S – Introducir sensor M |  | Almacenar y salir |
| - Sensor de distancia S – Borde de la máquina M (F1) | ||
6.2.2. Modificar / Introducir parámetros
Para modificar o introducir parámetros, pulse 4 GHI
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| Utilice la función "biaxial live" sólo con las posiciones de eje estables, ya que se pueden producir incluso los más mínimos errores de rotación | Activar/desactivar introducción de datos manual | |
| Funciones de esta pantalla | Utilizar 2 o 3 decimales | |
| - Entrada o uso de los datos de sensor manual- Selección entre 2 o 3 decimales- Selección entre pulgadas y mm como medida- Orientación de las coordenadas X e Y simultáneamente o sólo las coordenadas Y (Estándar) | Selección entre pulgadas y mm como medida | |
| Activar/desactivar alineación „biaxial live“ | ||
| Almacenar y salir | ||
6.2.3. Reunir datos
Para reunir datos, pulse 1. i
| A tener en cuenta en esta pantalla | Atajos de la pantalla | |
| Antes de iniciar un nuevo procedimiento de alineación, tendrán que introducirse las dimensiones y parámetrosNo cambie la posición de las unidades de medición mientras que el trabajo se interrumpeLos láseres se conmutan ahora | [0228] | Empezar desde el principio (eliminar todos los valores). Aparece la pantalla de confirmación |
| Funciones de esta pantalla |  | Introduzca los valores Ys cuando se habilite la entrada manual |
| Reunir valores de medición (hasta 36) | [0248] | Introduzca los valores Ym cuando se habilite la entrada manual |
| Seleccionar los modos de Auto sweep y manuales. |  | Introducir ángulo/inclinación |
| La introducción manual de los valores Ys y Ym (si está activado) |  | Si el cursor está en el primer lugar en un campo de entrada, pulse el botón dos veces para introducir un signo negativo (-) |
| Entrada manual de la inclinación |  | Selección de unidad de medida (mm o pulgadas) |
| Selección de la unidad de medida (mm/pulgadas) | [1227] | Ajustar desplazamiento paralelo (Offset) |
| Navegar a través de los datos recogidos |  | Guardar los datos recogidos en un fichero (véase el capítulo 9 "Tratar con los diálogos de archivo") |
| Reemplazar, introducir, eliminar valores de medición |  | Los datos de un archivo (véase el capítulo 9 "Tratar con los cuadros de diálogo de archivo") |
| Empezar desde el principio (eliminar todos los valores) | ||
| Ajustar desplazamiento paralelo (Offset) | [2HZK] | Eliminar valores de medición actuales |
| Guardar datos recogidosCargar datos recogidos |  | Introduzca el valor nuevo. Debe ir al último valor almacenado, por lo que esta opción está activada. |
 | Guardar los valores actuales o sustitución de los valores ya almacenados (Aparece una pantalla de confirmación de diálogo) | |
 | Navegar por lo valores | |
 | A la pantalla de resultados.Se deben reunir todas las condiciones necesarias. | |
 | Abrir el menú popup | |
| [80Z4] | Activar/desactivar Auto-Sweep.Auto-Sweep sólo se puede activar al comienzo de la recogida de datos o después de un nuevo comienzo.La entrada manual de los valores y la inclinación deben desactivarse. | |
| Símbolos y estado de esta pantalla | ||
| [C] | Una „C“ parpadeante en pantalla y en ámbar significa que no puede recibir los datos de los sensores. | |
| [R] | Una “R” roja parpadeante en la pantalla significa que solamente se considera una medición ya memorizada. Este valor se puede suprimir o sustituir si es necesario. Si este símbolo no puede verse, esto significa que el valor actual no se ha guardado. Al pulsar se puede almacenar el valor. | |
 | La ausencia del indicador de posición y un borde rojo parpadeante de la visualización de la posición significa que no se detecta ningún láser o no hay datos del sensor. | |
 | Un dial amarillo significa que no hay un ángulo (o el promedio está todavía en curso) o que el ángulo de rotación (la posición adyacente) es demasiado pequeño (menos de 6°) | |
| [22X] | Una pantalla de color rojo brillante significa que el ángulo de rotación de los ángulos de los puntos de medición individuales no cumple con los requisitos (mínimo 60 °).Una luz ámbar indica que el ángulo de rotación es de 60 °. Una luz verde indica que el ángulo de rotación está por encima del rango recomendado (aproximadamente 90 °) se encuentra. | |
 | Este símbolo indica que se utiliza un rango de valor Y ampliado (Offset). | |
 | Un símbolo tachado significa que el modo Auto sweep está deshabilitado. No se permite el barrido automático para máquinas verticales | |
| Explicación de la esferaLos puntos de medición almacenados se caracterizan por zonas verdes junto a él en la esfera y bolas de colores. Los puntos de colores son redondos. Si un punto de color se vuelve cuadrado, esto significa que sólo se observan estos puntos de medición almacenados. El color de los puntos da información sobre la desviación estándar de la función de alineación actual. | |
| ● | Un punto azul significa que los datos todavía no están listos (menos de 3 puntos de medición guardados) |
| ● | Un punto verde significa que los datos son buenos. |
| ● | Un punto amarillo significa que los datos no son buenos, pero aceptables. |
| ● | Un punto rojo significa que los datos son malos. Esta medición tiene que eliminarse o repetirse. Si está utilizando un pequeño número de puntos de medición, puede ser que otras métricas son malas y no esta. Utilice en este caso más puntos de medición para determinar qué el valor medido es malo. |
Utilice los tornillos de ajuste de los sensores de medición para alinear los rayos láser sucesivamente hasta el centro de las tapas del detector (imagen-1a / b). Cuando los rayos láser se centran en dos receptores, abra las cubiertas. Ahora en la pantalla, se muestran las coordenadas X & Y y la posición de los dos receptores (S) y (M). Ahora gire el eje en la posición de medición 1 seleccionada. Pulse a continuación F5 para guardar el punto de medición actual. Guarde la mayor cantidad puntos de medida posible (al menos 3) y utilice el mayor ángulo de rotación total posible (al menos 60 °). Si usted ha recogido los datos necesarios, presione para iniciar la alineación.
6.2.3.1. Ajustar el desplazamiento en paralelo
Pulse para ajustar el desplazamiento paralelo
| A tener en cuenta en esta pantalla | Atajos de pantalla |
| ⚠ No gire los ejes, y especialmente no en el ajuste de los sensores⚠ No elimine el desplazamiento paralelo (offset) después de haber sido almacenado por adelantado! De lo contrario, tendrá que repetir toda la adquisición de datos. | 1 Selección de la fase Setup |
| Funciones de esta pantalla | 2 Selectión de la segunda fase setup |
| 0 Para eliminar el valor del primer desplazamiento y volver a la primera fase de la instalaciónNota: No llevar a cabo cuando los ajustes de compensación ya se han completado. | |
| Para guardar el valor de desplazamiento conjunto. |
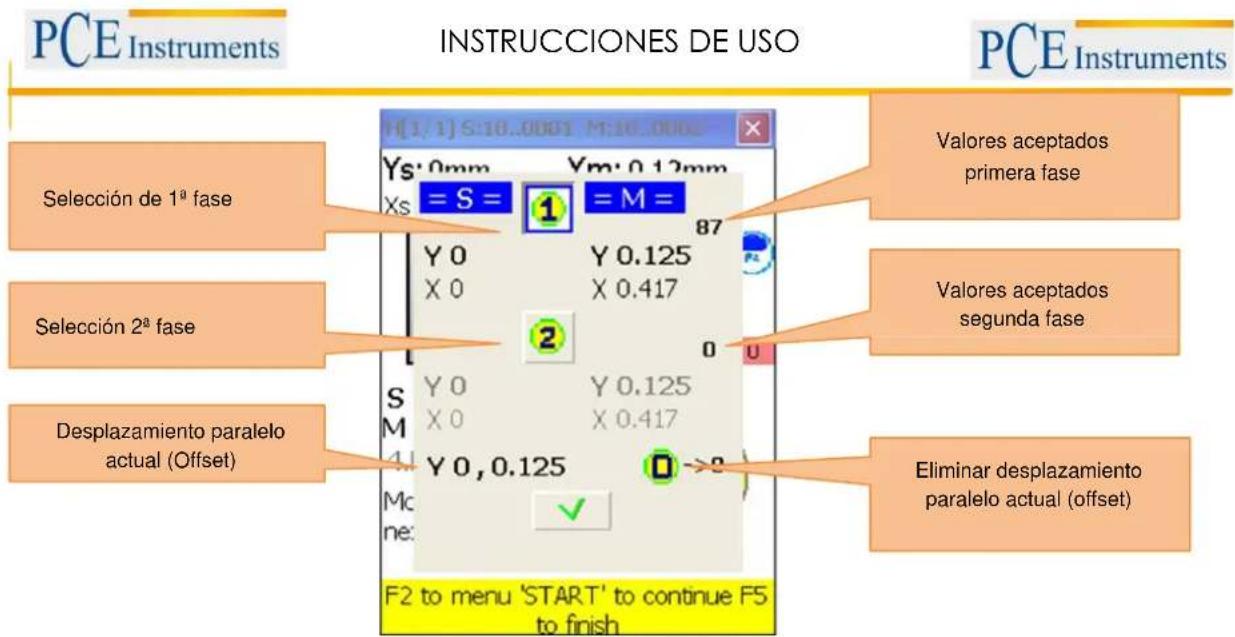
![H[1/1] S:10.0001 M:10.0002 Ys: 0mm Ym: 0.12mm Xs = S = 1 = M = 87 Y 0 Y 0.125 X 0 X 0.417 Valores aceptados en la primera fase Valores aceptados en la segunda fase Selección 1ª fase Selección 2ª fase Desplazamiento paralelo actual S Y 0 Y 0.125 M X 0 X 0.417 Y 0, 0.125 O ->9 Mc ne: F2 to menu 'START' to continue F5 to finish Eliminar desplazamiento parelo](/content/2026/05/1081033/images/de6a65623a63f0a28a46e94308ea016bb69a1a58b97439f873ad996c9d939af3.jpg)
La configuración de desplazamiento es un proceso de 2 pasos. Empiece por la primera fase. Se aceptan al menos 3 dígitos.
Después pulse 2 para dirigirse a la segunda fase. Ajuste el rayo laser, hasta que se admita el valor 0 y espere durante 5 segundos. Pulse , para guardar el valor Offset. Después de salir del menú de desplazamiento, aparece , para mostrar el ajuste Offset.
6.2.4. Resultado
Para mostrar el resultado de la medición, pulse, si se encuentra en la pantalla de medición o 2 ABC, si se encuentra en el programa de "alineación vertical".
| A tener en cuenta en esta pantalla | Atajos de pantalla | ||
| ⚠️ No girar los ejes cuando se mueva la máquina⚠️ No cambiar la posición de las unidades de medición, si está activado el modo Live | 0DEL | Introducción de las tolerancias de desplazamiento | |
| Funciones en esta pantalla | Simulación espaciador | ||
| - | Observar el decalaje calculado | Para vista de corrección del perno de brida | |
| - | Realizar una alineación Live | Selección de 2 o 3 decimales | |
| - | Pausar/continuar alineación Live | La entrada manual de ángulos (si está activada). En este caso de que deba pausar el modo Live y luego entrar en los respectivos ángulos. | |
| - | Entrada de ángulo manual (si está activado) | Si el cursor está en el primer lugar en un campo de entrada, pulse el botón dos veces para introducir un signo negativo (-) | |
| - | Selección de 2 o 3 decimales | Introducción de dilatación térmica | |
| - | Selección unidad de medida (mm/pulgadas) | Selección de unidades de medida (mm/mils) | |
| - | Entrada de tolerancias | Pausar/ continuar la alineación Live | |
| - | Ver valores de corrección con bridas (con Live-Update) | Guardar los resultados de la alineación en un archivo, consulte el Capítulo 9, "Manejo de los diálogos de archivo" | |
| - | Guardar los resultados de la alineación | Cargar previamente los resultados guardados de alineación, véase el Capítulo 9"Tratar con los cuadros de diálogo de archivo" | |
| - | Cargar los resultados de la alineación | ||
| Símbolos y estado de la pantalla | |||
 | Una esfera amarilla en la pantalla de alineación significa que el ángulo de los puntos de medición no se aceptadas o el promedio no se ha completado. El registro Live está deshabilitado en este caso. | ||
 | Una mitad de acoplamiento rojo significa que el desplazamiento actual supera los límites de tolerancia. Si el desplazamiento está dentro de las tolerancias, el icono es de color gris. | ||
| Una casilla de verificación que destella en el encabezamiento de cada nivel significa que para este nivel se puede utilizar la alineación Live. De lo contrario, esto no es posible para el respectivo nivel. | |||
| Este mensaje de error intermitente significa que la posición de los ejes se ha cambiado de forma inesperada. El registro directo se desactiva. Ahora pulse para pausar y pulse otra vez para continuar7PQRS. | |||
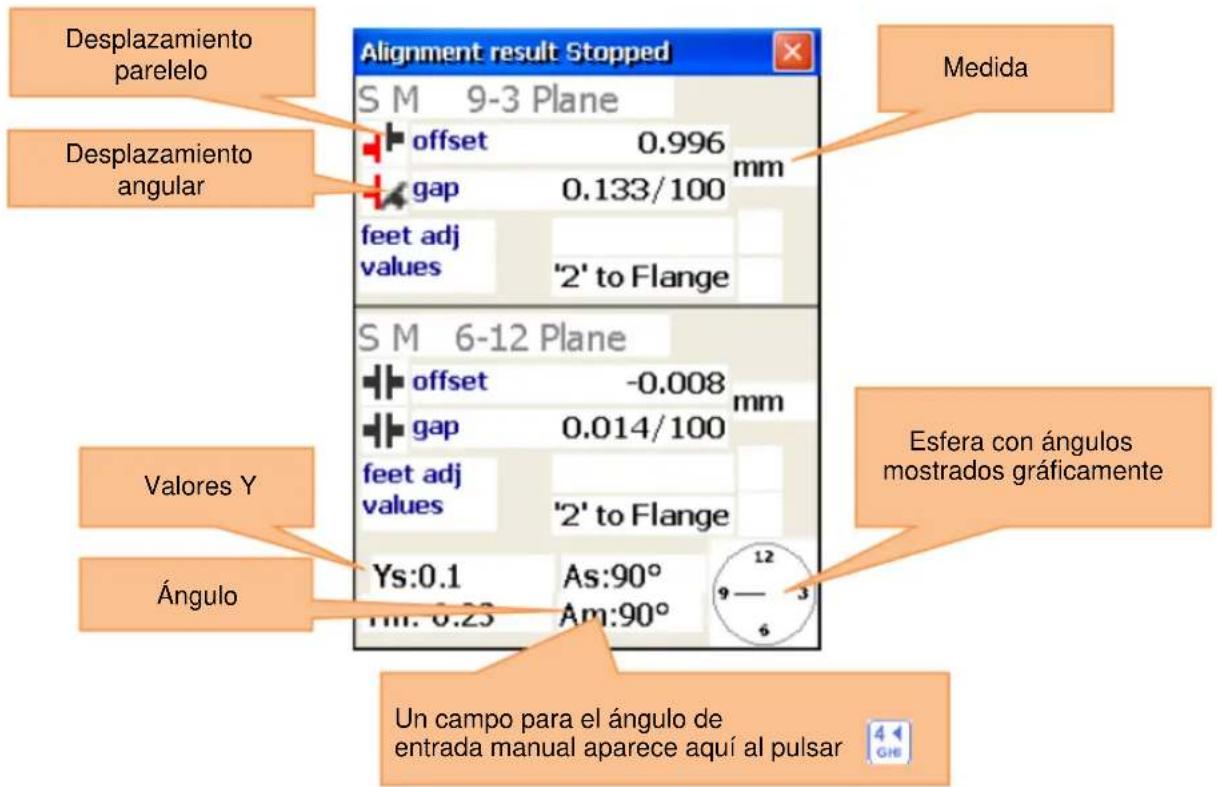
Para eliminar el desplazamiento de fase, corrige el ángulo del eje de rotación de la máquina móvil a través del uso de espaciadores con los valores de la pantalla de valor de perno-corrección.
No modifique no la posición lateral de la máquina móvil en espaciadores de montaje!
9-3 Nivel de alineación live
Para iniciar la orientación Live del nivel 9-3, los sensores deben estar situados en la posición de las 9 ó 3h.
Si necesita hacer girar los ejes, pause la alineación live pulsando. 7 PQRS. Ahora gire los ejes en la posición deseada y establezca la alineación live al pulsar de nuevo. 7 PQRS. No se olvide de introducir manualmente el ángulo. Después un tiempo corro, el nivel deseado para la alineación line debe estar habilitada (se indica mediante el parpadeo de la casilla de verificación en las capas de partida). Afloje las patas de la máquina e inicie el ajuste basado en los valores de corrección calculados en el plano 9-3.
6-12 Nivel de alineación live
Para iniciar la orientación live del nivel 6-12, los sensores deben estar situados en la posición 6 o 12:00h. Si necesita hacer girar los ejes, hágalo como se describe en la "orientación en directo nivel 9-3". EL Nivel 6-12 ahora debe liberarse para la alineación live. Afloje las patas de la máquina y alinee la máquina móvil en el nivel 6-12.
Alineación Live biaxial (Y, X)
La orientación biaxial live funciona casi como el procedimiento en un solo plano, excepto que los sensores no necesitan llevarse a una posición predefinida. Sin embargo, se recomienda que los sensores aproximadamente tengan un ángulo de 45° (45°, 135°, 225°, 315°) para evitar errores de medición.
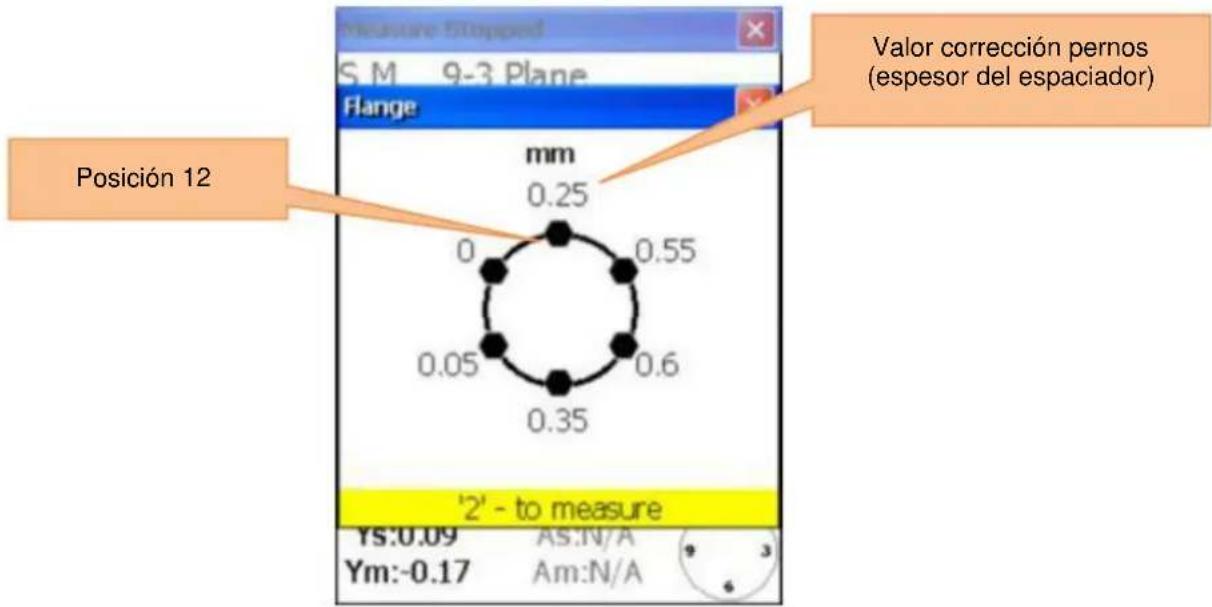
6.2.4.1. Ver valores de correción de pernos
Para ver los valores de corrección para cada tornillo, pulse y aparece la ventana determinada . Para cerrar la ventana de nuevo, pulse otra vez 2 ABC
Continuar con el trabajo después de que la posición de los sensores se haya cambiado
Antes de continuar trabajando una vez que la posición de los sensores se haya cambiado, se necesita conectar los sensores en dos posiciones predefinidas. Proceder de la siguiente manera como se indica en el punto "Continuar con el trabajo, después de que la posición de los sensores haya cambiado" en "Alineación horizontal" (5.4).
6.2.4.2. Entrada de tolerancias
Para introducir tolerancias, pulse 0 DEL
| Funciones de esta pantalla | Atajos de esta pantalla | |
| - Selección de tolerancias estándar de la industria en todo el rango de RPM- Entrada de tolerancia manual | F2 | Definir las tolerancias en RPM (revoluciones por minuto) |
| F3 | Introducción manual de tolerancias | |
| Si se activa la gama de revoluciones: aumentar rpm en un pasoSi se activa la entrada manual: Seleccione una entrada de desplazamiento paralelo | ||
| Si se activa la gama de revoluciones: reducir las RPM a un pasoSi se activa la entrada manual: seleccionar el ángulo de compensación de entrada | ||
| Guardar y salir | ||
6.3. Programa patas de inclinación
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| Las dimensiones de la máquina deben introducirse al principio (ir a los elementos del menú) |  | Iniciar la medición de patas de inclinación. Gire los sensores a la posición de las 12h y ajuste el láser hasta que llegue a las placas de puntería S y M |
| Funciones en esta pantalla | [077K] | Repetir la medición de inclinación de patas |
| Realizar mediciones de inclinación de patas en todas las patas de las máquinas | [07W4] | Guardar los resultados en un archivo, consulte el Capítulo 9 "Tratar con los cuadros de diálogo de archivo" |
Introduzca primero las dimensiones de la máquina (al igual que en la orientación horizontal) o saltese este paso pulsando y diríjase a la pantalla del objetivo del sensor.
Cuando los rayos láser están alineados y sale de la pantalla del sensor-objetivo, diríjase a la pantalla de la medición de inclinación de las patas. Ahora haga lo siente en cada de la máquina: Afloje el montaje de la respectiva base de la máquina, que está marcado con el cuadrado rojo, espere 5 segundos y luego pulse para almacenar el valor de medición. Fije la pata de la máquina de nuevo y pulse para proceder con la siguiente pata de la máquina.

Si se completan todas las mediciones, aparece un símbolo parpadeante y puede almacenar con esta tecla los resultados de medición, véase capítulo 9 "Tratar con los cuadros de diálogo de archivo". Para repetir la medición de la inclinación de las patas, pulse DEL
6.4. Alineación eje de accionamiento
Este programa se utiliza para la alineación de máquinas que están conectadas a través de un eje de articulación o de cardán. Con el kit de montaje opcional para ejes de accionamiento, los sensores se pueden conectar.
La alineación del eje de accionamiento es en gran medida idéntica a la alineación de máquinas horizontales. Véase el capítulo 6.1 " alineación horizontal de la máquina" y sección 4.5 "alineación aproximada". Las diferencias entre estos capítulos se describen a continuación.
Menú principal del eje de accionamiento
| A tener en cuenta en esta pantalla | Atajos de pantalla | |
| Antes de la medición, se debe realizar una medición de la inclinación de la pata para evitar errores de medición inesperados.Compruebe el resultado después de la alineación al hacer otra medición | Calcular datos nuevos | |
| Funciones en esta pantalla | Continuar el proceso de alineación | |
| - Calcular datos nuevos e iniciar la alineación- Continuar la alineación- Cambiar las dimensiones y distancias- Modificar parámetros | Cambiar las dimensiones de la máquina y espacios libres | |
| Modificar parámetros | ||
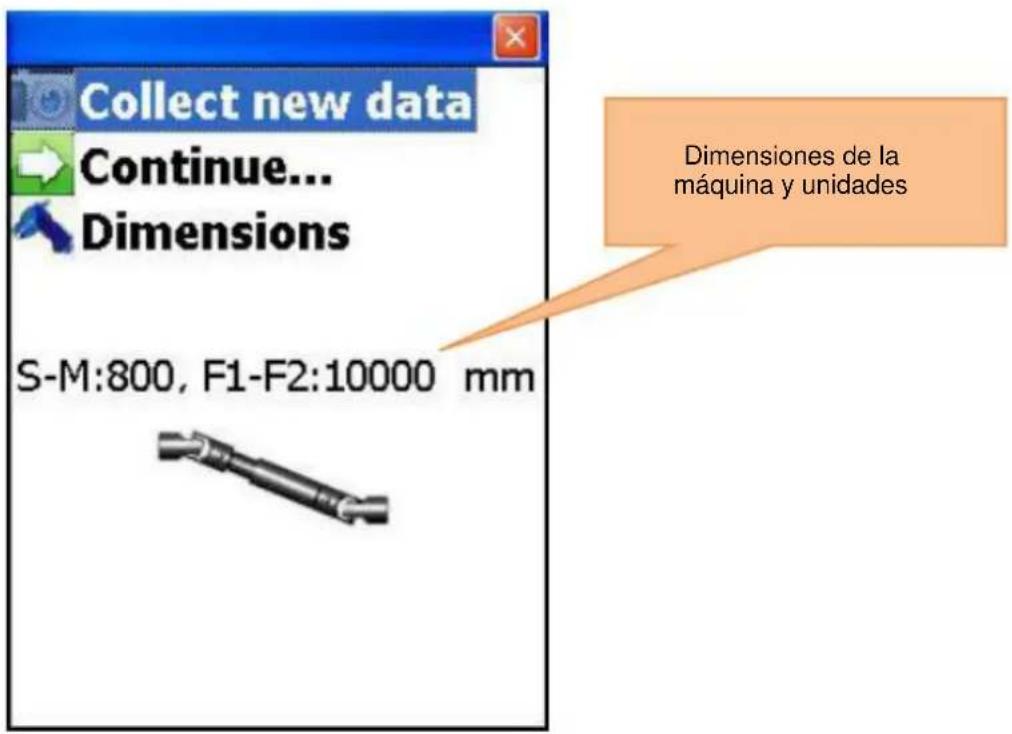
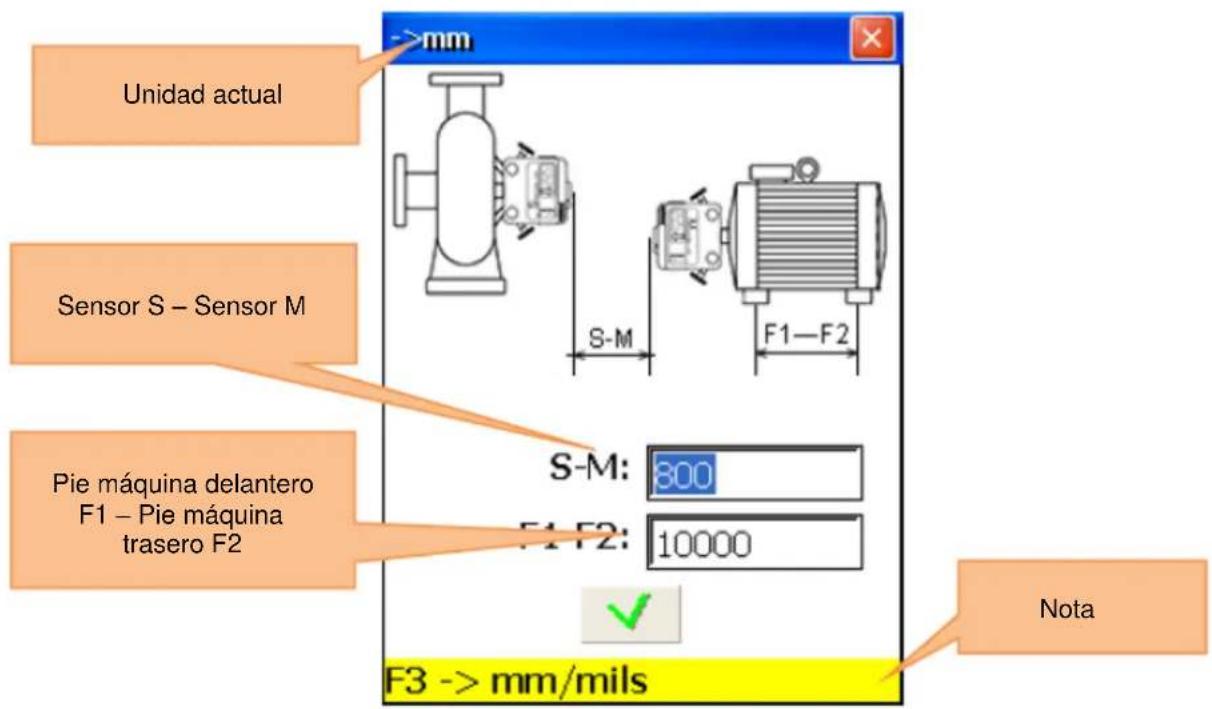
6.4.1. Ajustar dimensiones de la máquina y unidades
Para establecer las dimensiones de la máquina y las unidades, pulse 3 DEF
| Funciones de esta pantalla | Atajo de pantalla | |
| - Distancia de sensor S – Introducir Sensor M- Distancia del pie de la máquina delantero–Introducir pie trasero de la máquina |  | Desplazarse hacia arriba entre los campos de entrada |
 | Desplazarse hacia abajo entre los campos de entrada | |
| [SX24] | Cambio entre unidades (mm/mils) | |
 | Almacenar y salir | |
6.4.2. Modificar parámetros
Pulse para modificar parámetros.
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| Utilice la opción "biaxial live" función sólo con las posiciones de eje estables, ya que se pueden producir incluso los más mínimos errores de rotaciones | Activar / desactivar la entrada manual de datos | |
| Funciones en esta pantalla | Activar / desactivar la entrada de ángulo manual | |
| - Entrada o uso manual de los datos de sensor- Ángulo de entrada de datos manual o desde un sensor de inclinación integrado- Selección entre 2 o 3 decimales- Elección entre pulgadas y milímetros como unidad- Activar / Desactivar la orientación biaxial Live | Utilizar 2 o 3 decimales | |
| Elija entre pulgadas y milímetros como unidad | ||
| Activar / Desactivar la alineación biaxial Live | ||
| Entrada para el cálculo de la media | ||
| Guardar y salir | ||
6.4.3. Recoger y alinear datos
Proceda como en la alineación horizontal máquina. Tenga en cuenta las siguientes diferencias:
- El ángulo mínimo de rotación de onda no puede ser menor de 75
- Los valores de corrección para el desplazamiento paralelo son irrelevantes para los ejes articulados y no se muestran.
- Las tolerancias estándar no son utilizables en la alineación del eje cardán. Por favor, ignore esto.
- Hay valores de corrección sólo para una base de la máquina debido a la falta de alineación paralela que no se corrige en ejes cardan.
6.5. Alineación de trenes de la máquina
Breve explicación
Un tren de máquina se compone de tres o más unidades con ejes giratorios a través de acoplamientos que están conectados el uno con el otro, por ejemplo, la Unidad de accionamiento - engranaje - unidad accionada.
Con un sistema de alineación convencional se debe realizar una medición de la alineación de la máquina para calcular, a continuación, qué debe ajustarse. El sistema de medición PCE-TU 3 realiza todos los cálculos necesarios automáticamente y proporciona la capacidad de determinar el estado de la máquina estacionaria o de referencia. Para utilizar esta función, debe estar familiarizado com proceso de alineación de máquinas horizontales (Sección 6.1).
Efecturar la alineación de un tren de máquina
Para iniciar el programa, seleccione "el tren de máquina" y pulse ENTER START Ahora, aparece la pantalla principal del programa.
6.5.1. Pantalla principal del programa (Ajustes y reunión de datos)
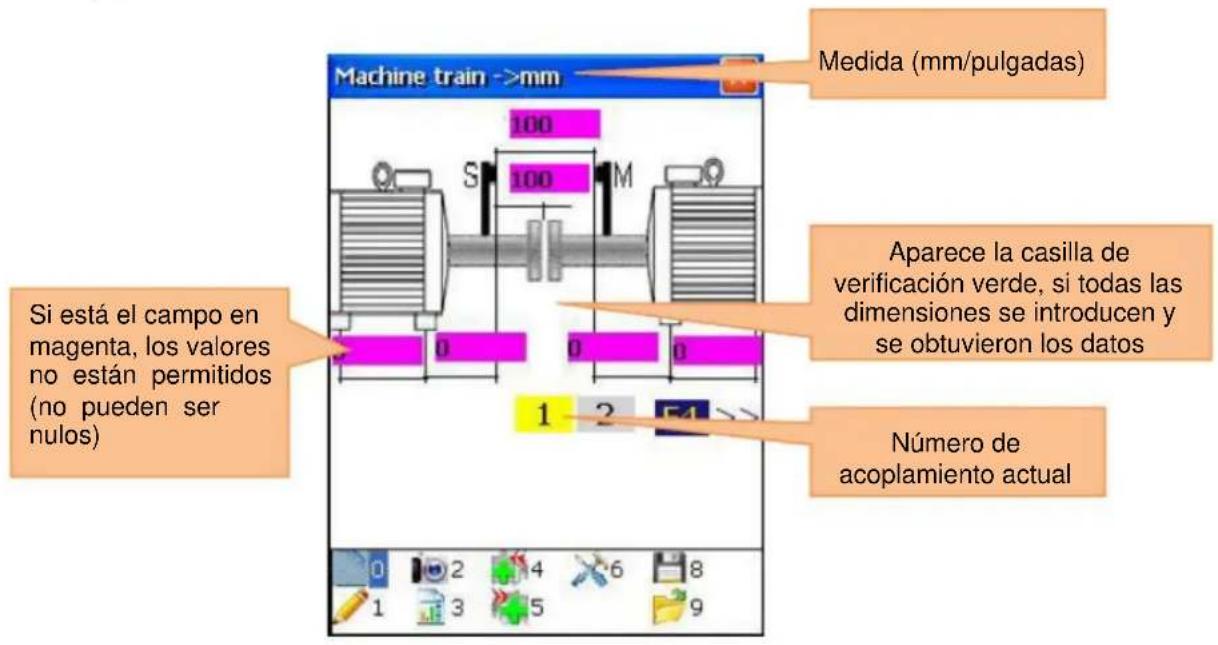
| A tener en cuenta en esta pantalla | Atajos en esta pantalla | |
| ⚠ Al igual que con la alineación horizontal de la máquina, se realizan las mediciones de inclinación de las patas y se deben tomar las medidas correctivas en caso necesario; No se olvide introducir las dimensiones previamente en el menú de la alineación de máquinas horizontales.⚠ Todas las dimensiones requeridas deben introducirse correctamente.⚠ El sensor M siempre debe estar montado en la máquina a la derecha del acoplamiento, incluso si es realmente estacionaria. | [GKXX] | Crear nuevo tren (3 primeras unidades en el tren) |
| Funciones de esta pantalla |  | Introducir dimensiones de las máquinas y acoplamiento seleccionado |
| - Examinar/ modificar/ crear tren- Ajustar parámetros- Introducir dimensiones- Calcular desalineación |  | Reunir datos cf. Capítulo 6.1„Alineación de máquinas horizontalUtilice en la pantalla de medición, para terminar el proceso de recolección y volver al menú principal del programa. |
| - Ver datos de la medición- Guardar resultados- Cargar resultados guardados |  | Ver resultados de la alineación | |
 | Añadir la máquina en el lado izquierdo del tren | ||
 | Añadir la máquina en el lado derecho del tren | ||
 | Ajustar parámetros | ||
 | Reservado (ninguna función) | ||
 | Guardar los resultados como un archivo; consulte el Capítulo 9 | ||
 | "Tratar con archivos cuadro de diálogo" | ||
 | Cargar los resultados almacenados del archivo; consulte el Capítulo 9 | ||
| [83BX] | "Tratar con archivos cuadro de diálogo" | ||
 | Abrir menú Popup | ||
 | Desplazamiento a la izquierda | ||
 | Desplazamiento a la derecha | ||
 | Salir del programa | ||
| Símbolos y estado de esta pantalla | |||
 | Una casilla de verificación verde cerca del centro del acoplamiento actual significa que las dimensiones se han introducido y determinado correctamente. | ||
Pulse y para desplazarse por todo el tren; pulse para introducir las dimensiones de la máquina del embrague actual. Pulse para modificar parámetro, cf. Capítulo 5.2.
Pulse para determinar los datos de desalineación del acoplamiento actual. Cada acoplamiento se midió como se describe en la sección 5.3.
El ángulo mínimo de rotación entre dos puntos de medición adyacentes es de 18° y el ángulo de rotación total mínimo es 75.
Pulse 3 para ver los resultados de mediciones.
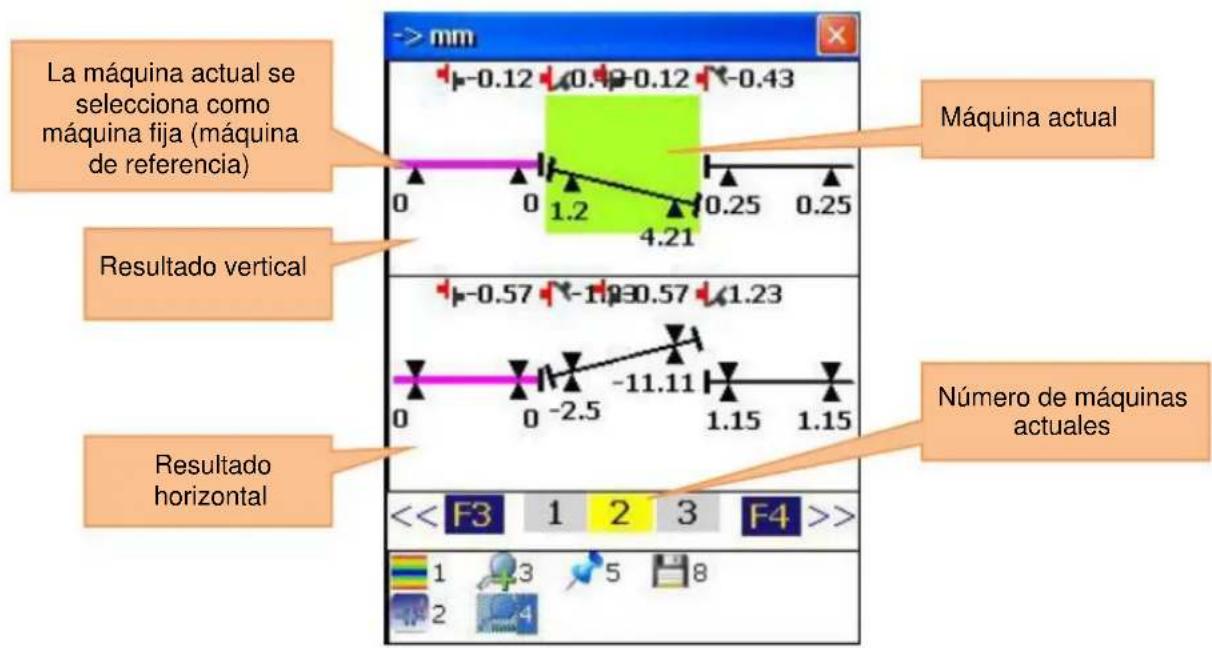
6.5.2. Considerar los resultados de medición
Para considerar los resultados de medición, pulse en el menú principal del programa.
| Funciones de esta pantalla | Atajos de esta pantalla | |
| - Descripción general de los resultados de medición y valores de corrección de inclinación- Entrada de tolerancias de ejes- Entrada de dilatación térmica- Guardar resultados | 1 i | Establecer tolerancias para el acoplamiento actual Nota: Las tolerancias introducidas son siempre válidos para el eje izquierdo o la máquina |
| 2 ABC | Establecer crecimiento térmicoNota: Los valores de expansión térmica son siempre válidos para el eje izquierdo o la máquina | |
| 3 DEF | Acercar | |
| 4 GHI | Alejar | |
| 5 JKL | Ajustar máquina actual como máquina de referencia | |
| 8 TUV | Resultados en un archivo, ver el capítulo 9 "Manejo de archivos cuadro de diálogo" | |
| F2 | Abrir menú Popup | |
| F3 | Desplazamiento a la izquierda | |
| F4 | Desplazamiento a la derecha | |
| MENU | Salir del programa | |
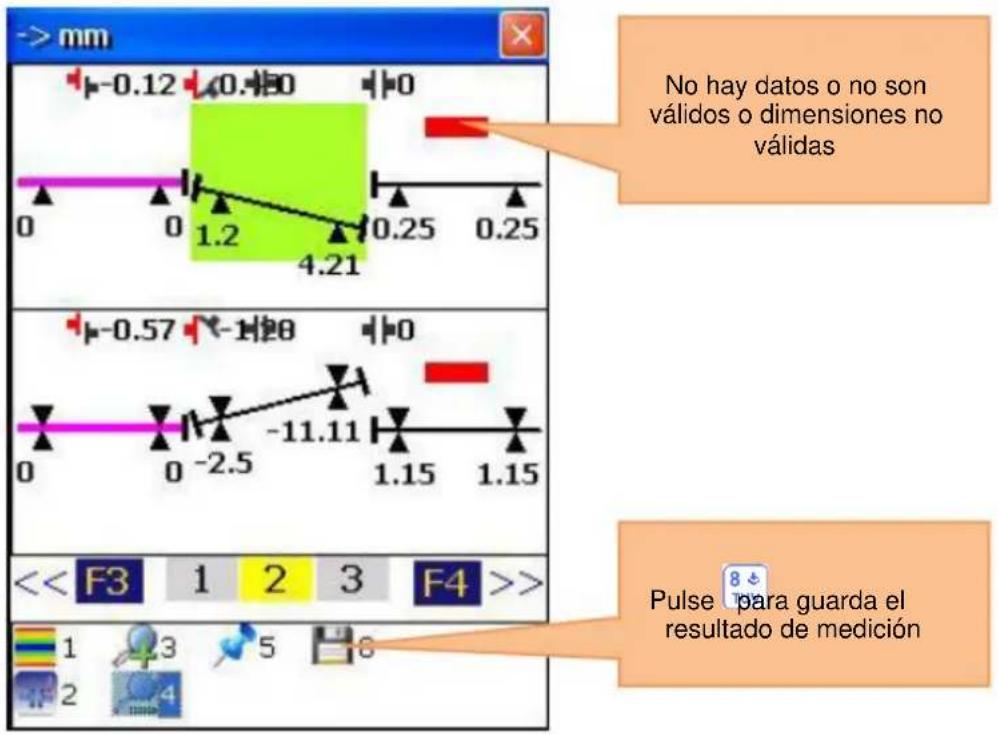
| Símbolos y estado de esta pantalla | ||
| Si aparece un rectángulo rojo en el espacio de máquinas, esto significa que sus dimensiones o los datos no son válidos (o no se han determinado). | ||
| Una onda magenta caracteriza a la máquina fija (máquina de referencia). | ||
6.6. Programa de husillo
Para alinear los husillos (p.ej. de tornos), monte el transmisor (sensor estándar S) en el mandril y el receptor (sensor M por defecto) en el soporte de la herramienta.
Para iniciar el programa de husillo, seleccione la opción "cabezal" en el menú principal y pulse. Aparece la pantalla principal del programa.
6.6.1. Pantalla principal del programa
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| Las dimensiones requeridas deben introducirse correctamente (pueden modificarse posteriormente si es necesario) |  | Nuevo inicio de la medición o medición repetida (se pierden todos los datos identificados) |
| Funciones de esta pantalla |  | Introducir número de puntos de medición (Posiciones) |
| - Introducir dimensiones- Iniciar medición- Considerar los resultados de medición de visión (disponible cuando todas las mediciones necesarias se han completado)- Guardar |  | Introducir la distancia entre los puntos de medición (cerca y lejos) |
 | Resultados en un archivo, ver el capítulo 9 "Manejo de archivos cuadro de diálogo" | |
Expiración
Marque dos posiciones en la bancada de la máquina (cerca y lejos), donde se encuentra el destinatario de la portaherramienta para la medición posterior.
Coloque los sensores en el husillo y el receptor en el portaherramientas. Si es necesario, dirigido por una alineación de láser áspera. Pulse para dirigirse a la pantalla de medición.
6.6.2. Efectuar mediciones
Pulse para efectuar una medición. Utilice Pulse para volver a la pantalla anterior.
y, para cambiar entre los puntos de medición.
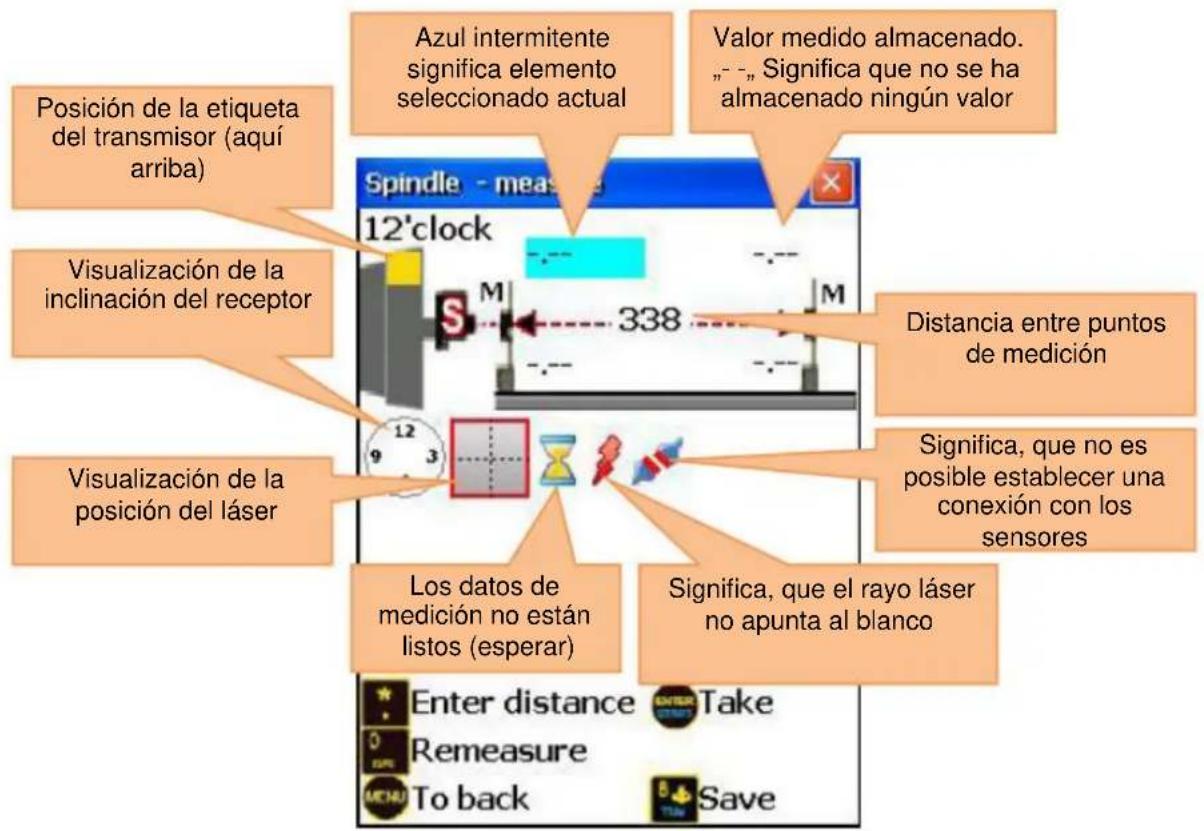
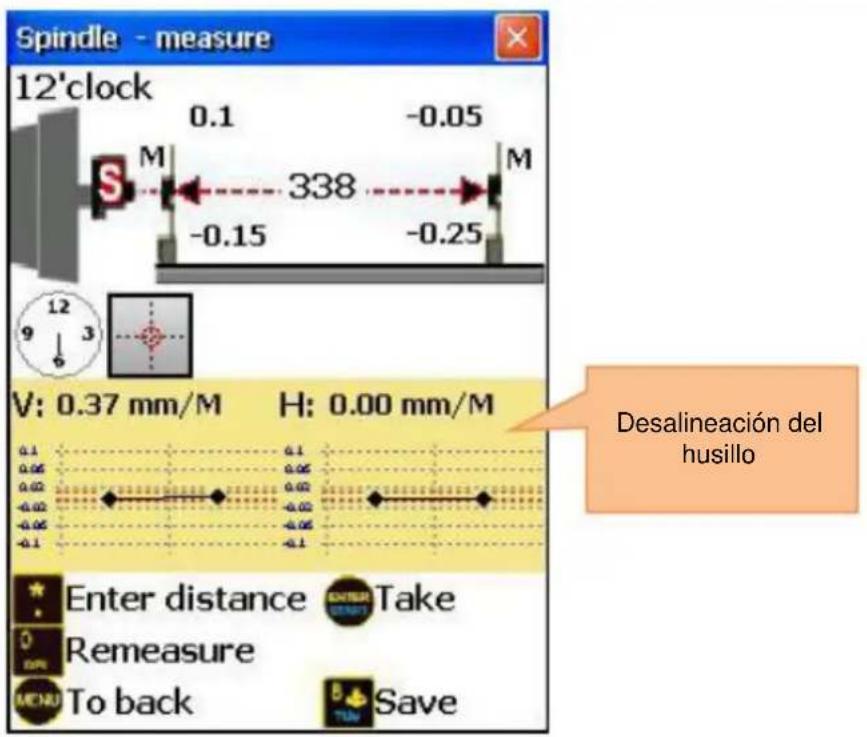
6.6.3. Ver y guardar los resultados
Los resultados de desalineación del husillo están disponibles después de cada cuatro mediciones realizadas.
Para salir de la pantalla actual, pulse MENU. Para salir del programa de husillo, a continuación, pulse de nuevo la tecla MENU. Para guardar los resultados, pulse 8 TUV, véase capítulo 9 „ Tratar con los cuadros de diálogo de archivo".
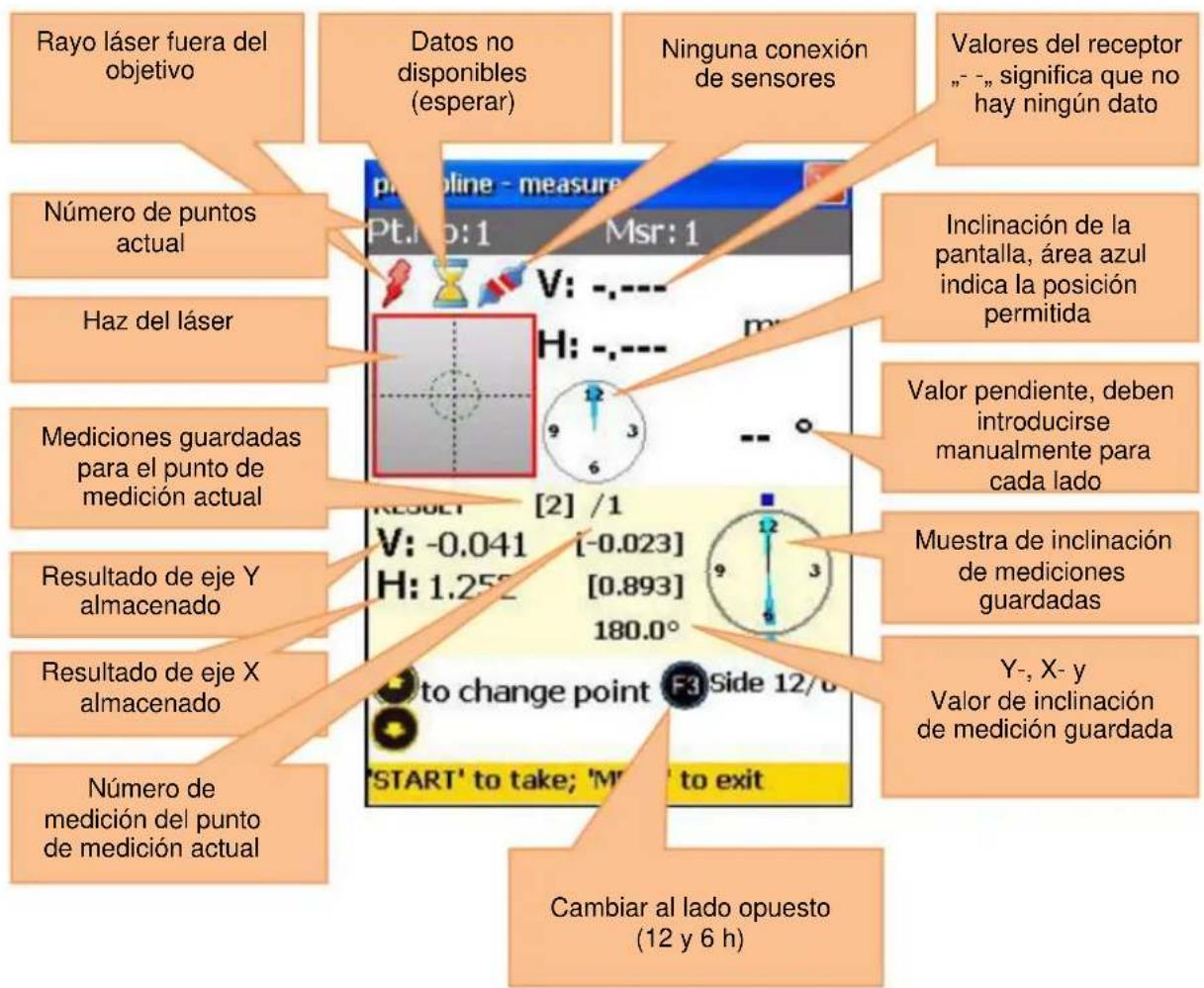
6.7. Programa de plomada
Breve aclaración
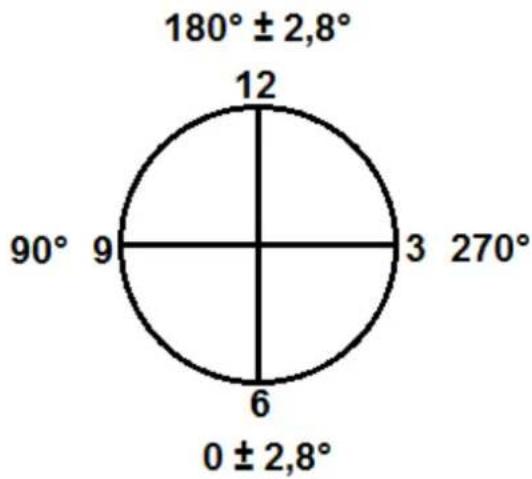
El programa de plomada se utiliza para realizar mediciones de rectitud en las ondas y para medir su eje central con relación a la línea de plomada absoluta. Este programa tiene una función de auto-calibración del láser cuando se fija en la posición de 180 °. El transmisor de láser se coloca en los cuatro lados del eje en la posición de las 12 y 6h.
Para obtener resultados precisos, debe centrarse con mucho cuidado (con la ayuda de las libélulas).
radar
| Angle (°) | Value | |-----------|-------| | 0 | 180 ± 2,8 | | 3 | 270 | | 6 | 6 | | 9 | 9 | | 12 | 12 |Planee la medición colocando el transmisor en la primera posición (12:00), confirmar la posición introduciendo manualmente el ángulo (números sólo sin "°"). Marcar los puntos de medición en el eje. Guardar todas las lecturas de esta posiciones del transmisor. Mueva el transmisor al lado opuesto del eje (6:00) y gire con F3 hacia el lado opuesto. Confirmar la nueva posición al introducir manualmente el ángulo (una vez por lado) y guarde todos los valores medidos para la nueva posición del transmisor.
Realizar una medición de plomada
Para iniciar el programa, seleccione „Plomada“ en el menú principal del dispositivo y pulse. Se muestra la pantalla principal del programa.
6.7.1. Pantalla principal del programa
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| ⚠ Todas las dimensiones requeridas deben introducirse correctamente (pueden modificarse posteriormente si es necesario)⚠ El ángulo de entrada manual debe utilizarse siempre para ejes verticales |  | Iniciar nueva medición |
| Funciones de esta pantalla |  | Introducir número de puntos de medición (Posiciones) |
| - Crear/modificar/ver puntos- Modificar parámetros- Introducir dimensiones- Iniciar medición- Ver resultados (disponibles si se han completado todas las mediciones requeridas)- Guardar- Cargar |  | Desactivar o ajustar todas las distancias por igual |
 | Introducir distancia actual | |
 | Modificar parámetrosNota: El sensor de inclinación no puede utilizarse en las mediciones verticales | |
 | Ver resultados (disponibles si se han completado todas las mediciones requeridas) | |
 | Guardar resultados en un archivo, ver el capítulo 9 "Manejo de archivos cuadro de diálogo" | |
 | Resultados almacenados de archivo, véase el capítulo 9, "Manejo de los diálogos de archivo" | |
| [WOTY] | Seleccionar punto de entrada de distancia | |
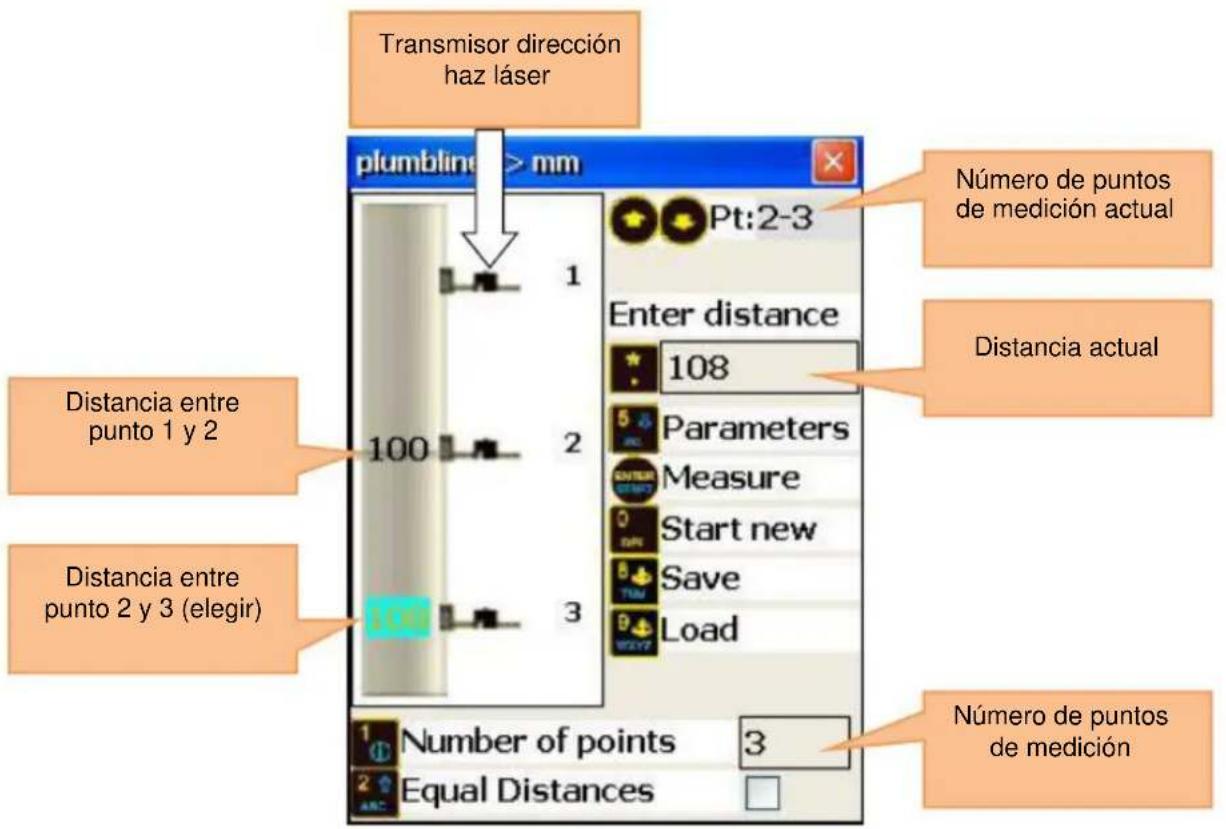
Secuencia de configuración
Introduzca el número de puntos de medición (posiciones) al pulsar 1 e introducir un valor (entre 2 y 300) en el campo de entrada. Si los puntos de medición están dispuestos a distancias iguales unos de otros, presione 2 ABC y asegúrese de que se ha marcado el campo “distancias iguales”. Pulse ahora * e introduzca la distancia. Si los puntos están colocados a diferentes distancias, utilice △ y ▼ para seleccionar el punto deseado y pulse - para introducir la distancia al siguiente punto. Repita este proceso hasta que se hayan introducido todas las distancias.
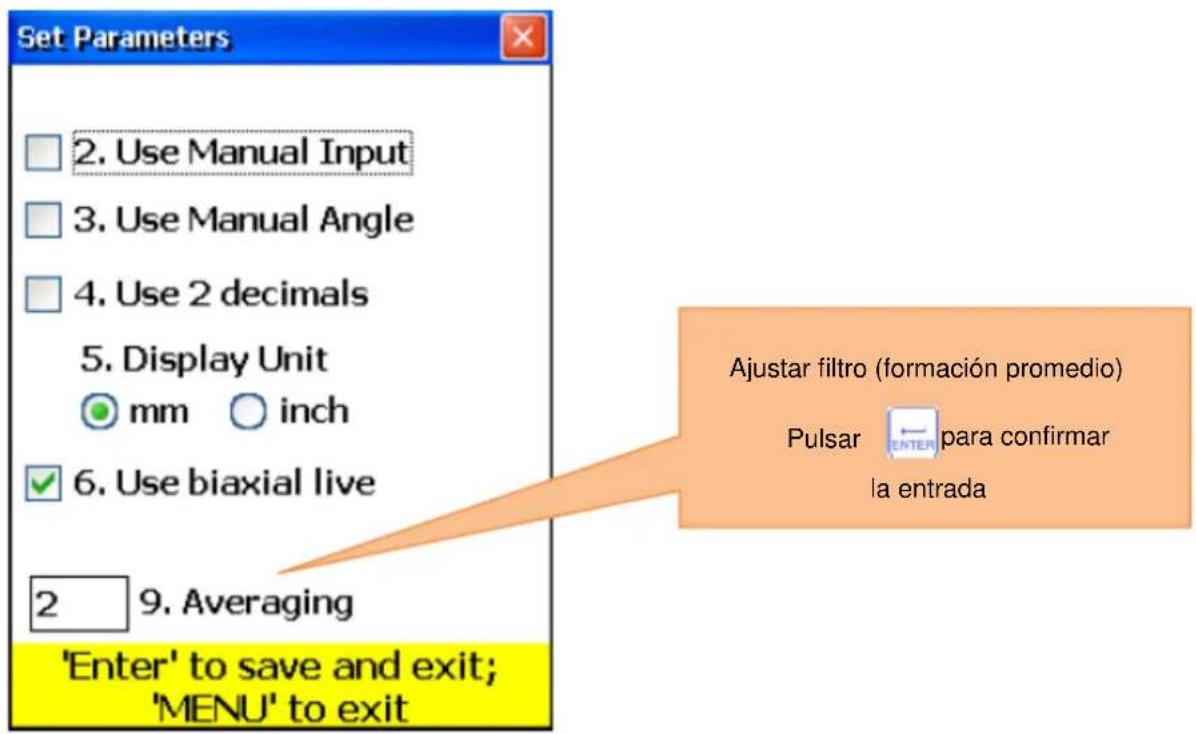
Para modificar parámetros, pulse Aparece la pantalla de parámetros. Para ocultar o introducción manualmente datos, pulse Para activar o desactivar la entrada manual del ángulo, pulse . Para cambiar entre las unidades, pulse Para utilizar el cálculo del promedio, pulse , introduzca el número de la muestra y confirme con : Para guardar y salir de la pantalla de parámetros, pulse .
Vista de la pantalla
6.7.2. Realizar mediciones
Pulse en la pantalla principal del programa para que aparezca la pantalla de medición.
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| Alinee el transmisor cuidadosamente con ayuda de una libélula /nivel de burbuja para obtener un resultado más preciso |  | Cambiar hacia el lado opuesto (12h y 6h) |
| Funciones de esta pantalla |  | Introducción manual del valor del receptor (V) |
| - Efectuar una medición- Introducir datos manualmente (si está activo) |  | Introducción manual del valor del receptor (H) |
| [DS86] | Introducción manual del ángulo (necesario para la confirmación de posición) | |
 | Cambiar entre las unidades de medición | |
 | Abrir menú de contexto | |
 | Reemplazar o realizar medición | |
 | Mover adelante / atrás los puntos de medición | |
Duración del establecimiento de conexión
Dependiendo de la interfaz que se utilice para conectar los sensores (Bluetooth o serie), la conexión tarda entre 2 y 40 segundos. Se recomienda esperar unos 10 segundos para la conexión en cable y unos 10 segundos para la conexión inalámbrica. Si después de este período no se produce ninguna conexión, compruebe los sensores y la configuración del sistema del PCE-TU 3.
Vista de la pantalla
Para llevar a cabo una medición (y almacenarla) o reemplazarla, pulse
Utilice ▲ y ▼ para moverse entre los puntos de medición individuales (posiciones).
Tenga siempre en cuenta el lado del eje seleccionado actual y cámbielo si es necesario con F3
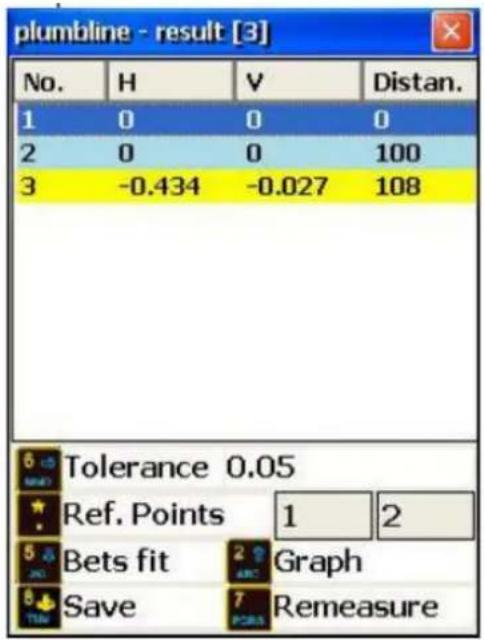
6.7.3. Ver y almacenar los resultados
Si las mediciones se completan para todos los puntos de medición, pulse para mostrar el resultado. Hay dos modelos de línea de referencia y con pueden cambiarse. Modo Ref.points: Si uno de los puntos de referencia no está definido, es el resultado del valor inalterado del receptor. Si se definen dos puntos de referencia, el resultado es la diferencia entre la línea de referencia calculada y el valor del receptor. Para definir los puntos de referencia, presione y luego introduzca un número de serie 1 y el número punto de referencia 2. Pulse ahora para confirmar. Para salir de un punto de referencia, introduzca como valor.
Modo Best fit: En este modo, el resultado es la diferencia entre la línea de referencia más adecuada calculada y el valor del receptor.
El resultado se puede visualizar como una tabla o como un gráfico. Con 2 ABC puede cambiar entre estas vistas.
Para almacenar un resultado, pulse 8 TUV, Ver capítulo 9 „Tratar con cuadro de diálogo de Archivo“.
Para volver al menú principal del programa, pulse MENU
| Funciones de esta pantalla | Atajos de esta pantalla | |
| - Realizar una medición- Entrada de datos manual (si está activado) |  | Alternar entre vista en tablas y gráficos |
 | Definir puntos de referencia (Utilice,para confirmar la entrada) | |
 | Cambiar el modo de punto de referencia | |
 | Almacenar | |
 | Repetir medición (todos los datos actuales se perderán) | |
| [2KSX] | Volver a la pantalla de medición | |
![Número de puntos calculados plumbline - result [3] No. H V Distan. 1 1.252 -0.041 0 2 1.287 -0.019 100 3 0.891 -0.022 108 Amarillo significa exceso de tolerancia Resultado eje X (9-/3h) Resultado de eje Y (12-/6h) Tolerance 0.05 Ref. Points - Bets fit Graph Save Remeasure](/content/2026/05/1081033/images/0fd1666962c1e7fff2191e1a9583ddfc1e750d7dc9c84d14cb2d8b07d94bc6e0.jpg)
Ref. Modo Puntos
Mejor modo de ajuste
7. Herramientas avanzadas de alineación
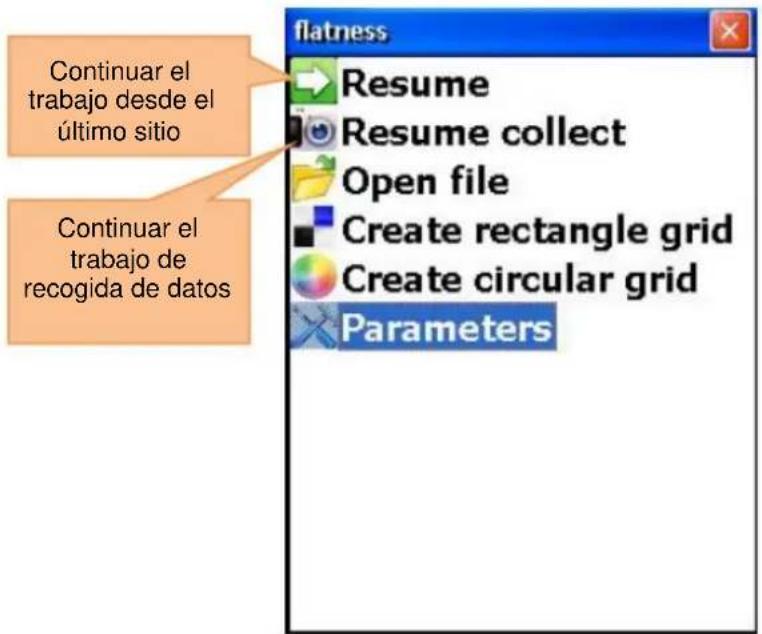
7.1. Programa de planitud
Breve aclaración
El programa de planitud se utiliza para medir la igualdad de los niveles en comparación con el haz laser de la superficie de referencia conformada. Los puntos de medición en el plano estar dispuestos en forma circular o rectangular con espaciamientos de red fija o variable. El nivel puede incluir también las salidas de corte. Se pueden utilizar hasta 1600 puntos de medición. Los valores de medición pueden tratarse como valores absolutos, se calculan a un plano Best fit o se pueden unir tres puntos entre sí para formar un plano de referencia.
Procedimiento: Preparar la medición y marcar los puntos en los que el receptor se va a colocar. Alinear el láser en dirección X e Y dentro de 0,5 mm e iniciar el programa de planitud. Utilice el sensor S o M como receptor.
El receptor debe colocarse con la etiqueta hacia arriba.
Para iniciar el programa de planitud, seleccione "planitud" en el punto "Geometría" en el menú principal y pulse ENTER START
Aparece la pantalla principal del programa.
7.1.1. Pantalla principal del programa
| Funciones de esta pantalla | Atajos de esta pantalla | |
| - Crear nueva cuadrícula (circular o rectangular) | 1i | Continuar trabajo |
| 2▲ABC | Continuar medición | |
| 3DEF | Abrir archivos | |
| - Modificar parámetro | 4◀GHI | Crear cuadrícula rectangular |
| 5▼JKL | Crear cuadrícula circular | |
| - Continuar trabajo | 6▶MNO | Modificar parámetros |
| - Cargar datos almacenados | Selección punto de menú | |
7.1.2. Modificar parámetros
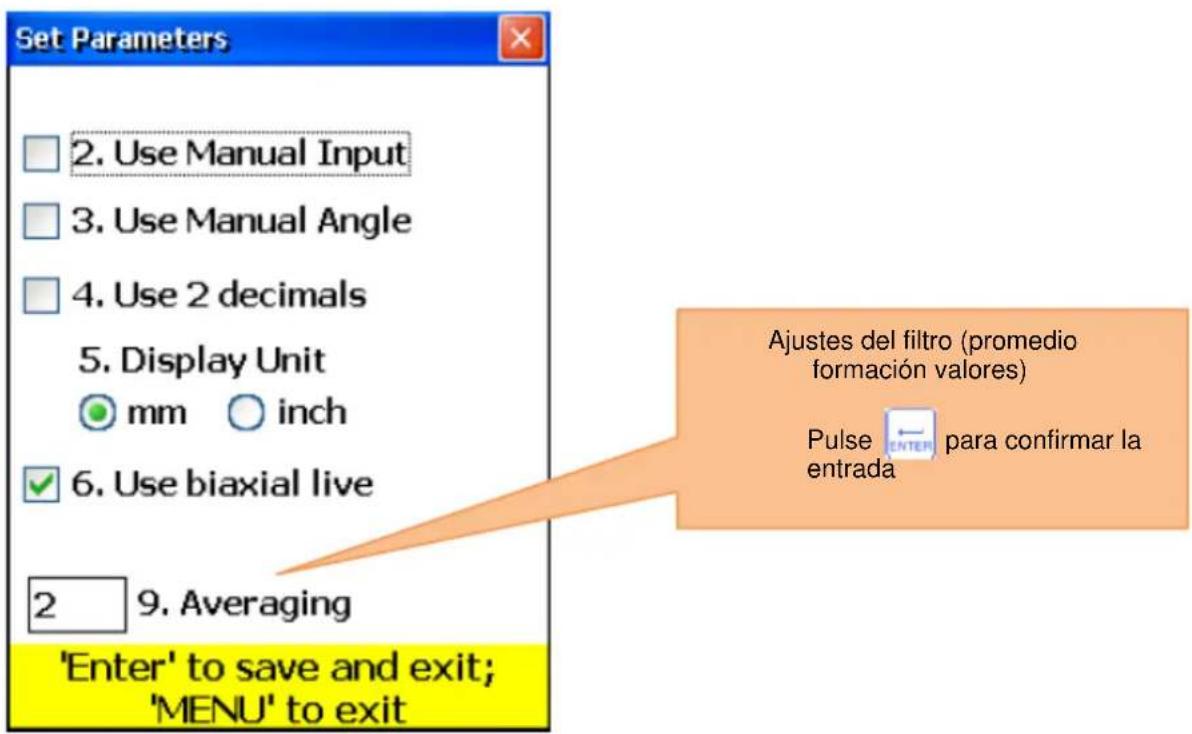
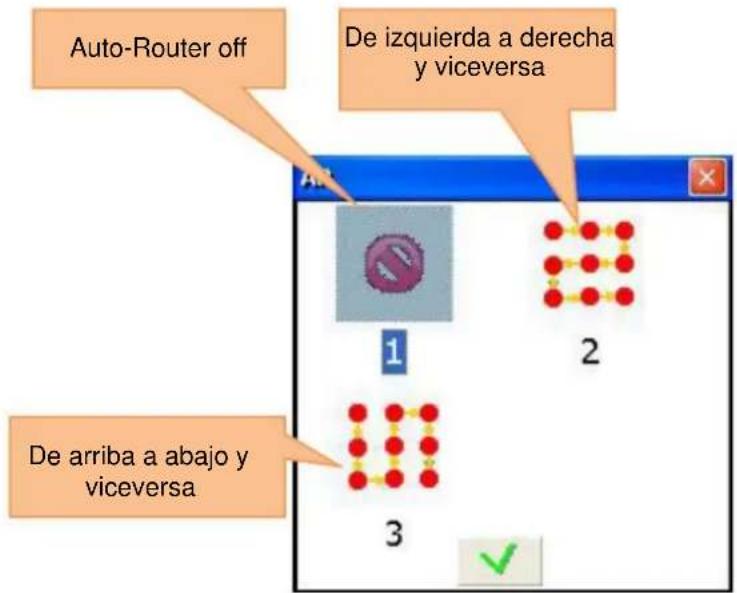
Para modificar parámetros, pulse 6 o seleccione el elemento de menú correspondiente y pulse . Para establecer qué sensor se va a utilizar como un receptor, pulse 2 ABC Para modificar la unidad de medida, pulse 5 JKL Para ajustar un filtro, pulse 9 introduzca un valor para el promedio y confirme con . Para dirigirse a los ajustes de auto-router, pulse 0 DEL Pulse para almacenar y salir de esta pantalla.

El Auto-Router puede desactivarse con los siguientes modos:
- De izquierda a derecha y vice versa
- De arriba a abajo y vice versa
Pulse para apagar.
Para seleccionar el modo „De izquierda a derecha“, pulse Para seleccionar el modo „De izquierda a derecha“, pulse.
Para seleccionar el modo „De arriba a abajo“ pulse 3 DEF
Pulse, para confirmar la selección y salir de la ventana.
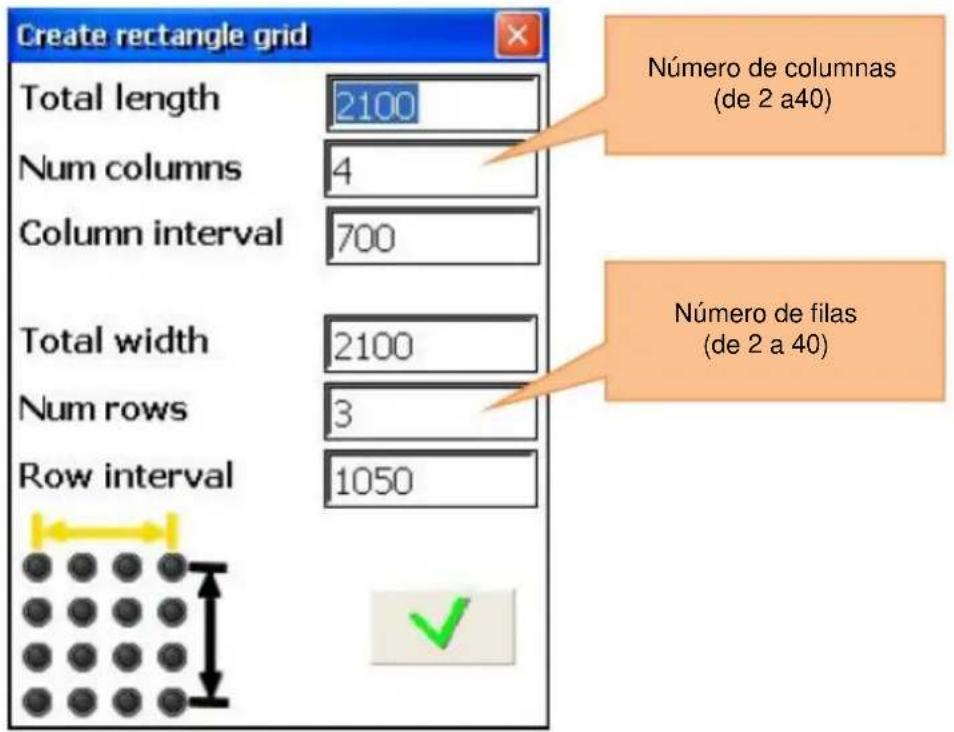
7.1.3. Crear y trabajar una cuadrícula rectangular
Para crear una nueva cuadrícula rectangular, pulse 4 GHI o seleccione el punto de menú determinado y pulse ENTER START
Utilice △ y ▽ para moverse entre los campos de entrada.
Para definir la cuadrícula, se debe introducir el número de columnas e introducir el número de filas (de 2 a 40) y un valor para la anchura / longitud completa o separación de filas / columnas. Si cambia la longitud entera / anchura, los valores para el espaciado de línea / columna se vuelven a calcular (y viceversa). La cuadrícula se define con intervalos de fila y de columna uniformes. Las distancias individuales se pueden cambiar más tarde, pero de forma independiente. Pulse para guardar y dirigirse a la pantalla de trabajo de la cuadrícula.
7.1.4. Crear una cuadrícula circular
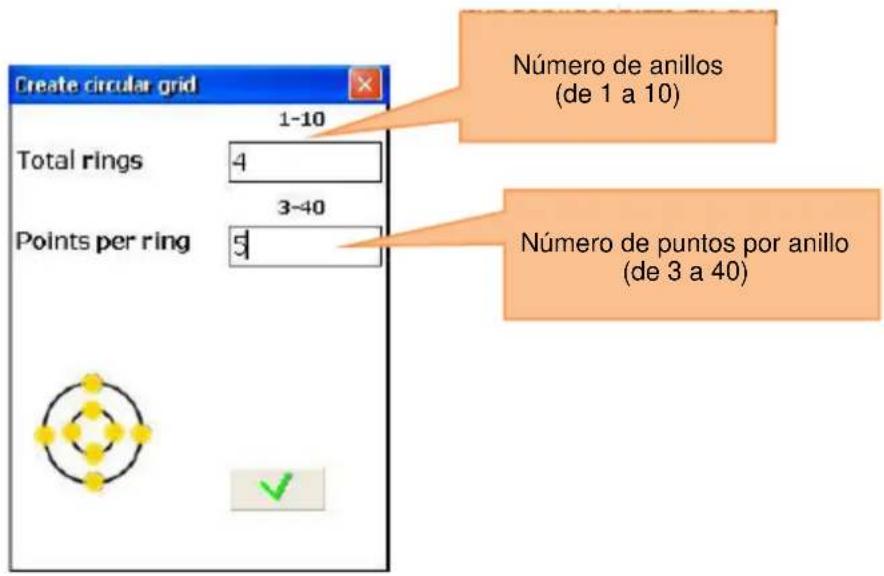
Para crear una nueva cuadrícula circular, pulse 5 JKL o seleccione el punto de menú adecuado y pulse ENTER START. Utilice △ y ▼ para moverse entre los campos de entrada.
Introduzca el número de anillos (de 2 a 10) y el número de puntos por anillo (de 3 a 40). Pulse para guardar y dirigirse a la pantalla de trabajo de la cuadrícula.
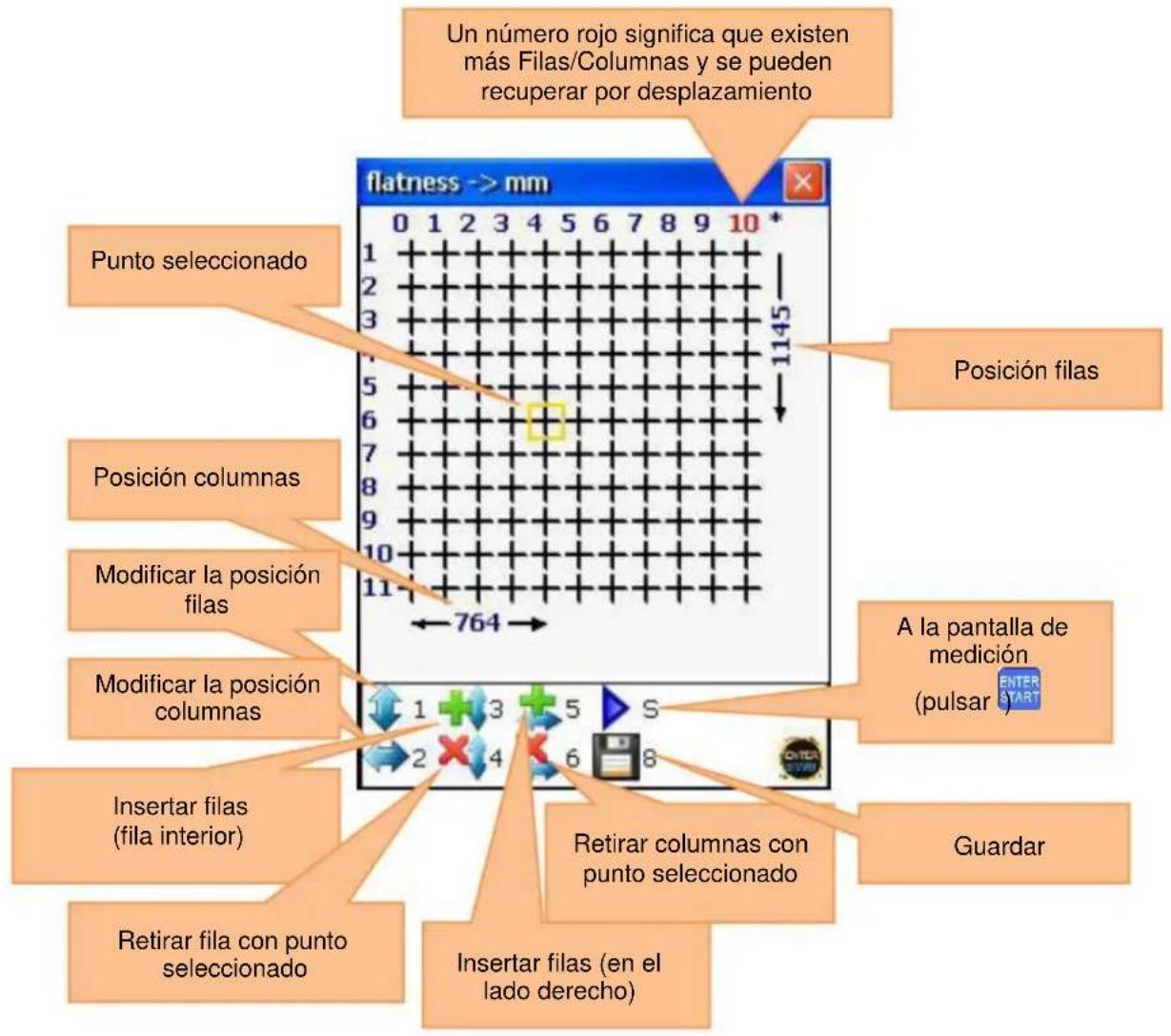
Trabajar cuadrícula
Utilice las flechas para moverse por la cuadrícula.
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| ⚠ Todas las dimensiones requeridas se deben introducir |  | Modificar la posición de línea/ radio del anillo de la línea al que pertenece el punto seleccionado |
| Funciones de esta pantalla |  | Modificar la posición de las columnas al punto seleccionado que pertenece |
| - Modificar posición fila/radio del anillo- Modificar posición de columnas- Insertar/ eliminar fila/anillo- Inserta/ eliminar columna/punto |  | Insertar línea/anillo. La fila se inserta en la parte inferior; el anillo como anillo exterior |
 | Eliminar línea/ punto al que pertenece el punto seleccionado | |
 | Insertar columna/punto. La columna se inserta en el lado derecho; el punto en sentido a las agujas del reloj | |
 | Eliminar punto seleccionado al que pertenece o punto. | |
 | Guardar | |
 | Dirigirse a la pantalla de medición | |
Pantalla de trabajo de la cuadrícula rectangular:
Pantalla de trabajo cuadrícula circular.
Utilice △ y ▽ para seleccionar los anillos y ▽ y ▶ para seleccionar la posición.
![Ángulo superior = 0° Cada vez más en dirección al reloj Punto seleccionado flatness -> mn Coordinadas de los puntos seleccionados [Anillo; posición a las agujas del reloj] Posición del punto seleccionado Modificar promedio del anillo A la pantalla de medición (pulsar) Reservado, no utilizar 3 - Añadir anillo (fuera) 4 - Retirar anillo 5- Añadir punto (posición) 6 - Retirar punto (posición) Guardar](/content/2026/05/1081033/images/ed88a0eebe555d36e2d7d7f475fc42a1ab245d87bc0910031b646a21a4298495.jpg)
7.1.5. Efectuar mediciones
Pulse en la pantalla de cuadrícula para dirigirse a la pantalla de medición. Utilice las flechas para seleccionar puntos. Puede omitir puntos en los que no hay valores necesarios o no se pueden efectuar mediciones.
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| Espere a que los datos están listos antes de realizar la siguiente medición (símbolo de reloj de arena no debe parpadear) | [SOSX] | Eliminar punto seleccionado |
| Funciones de esta pantalla |  | Ver resultado |
| - Efectuar medición en el punto seleccionado | [SKZA] | Guardar |
| - Eliminar punto seleccionado | [SCOK] | Volver a la pantalla de cuadrícula |
| - Reemplazar datos de medición en el punto seleccionado |  | Efectuar medición |
![Valor guardado del punto seleccionado Símbolo parpadeante: Sin conexión con los sensores Símbolo parpadeante: Datos no listos (espere) Coordenadas del punto seleccionado [Fila; Columna] Receptor del valor del eje X Indicador de posición del haz láser Punto seleccionado Símbolo parpadeante Haz láser fuerza del objetivo [0;0]=0.108 X: 0.097 mm Y 0.386 193.2° 18 °C 0 1 2 3 4 5 6 7 8 2 8 F5 Receptor del valor del eje Y Orientación sensor Temperatura sensor Eliminar punto Guardar Ir al resultado Volver a pantalla de cuadrícula Punto medido Punto vacío](/content/2026/05/1081033/images/4ebafccde6912276c851cb45997cd384027d002e1fc344180bb5bc621eee0e48.jpg)
![Ángulo superior = 0° Cada vez más dirección reloj [1;2] = -- X: 0.064 mm Y: 0.204 183 ° 17 °C [1;2] Ø=220, ^=45° Coordenadas del punto seleccionado [Anillo; Posición] Diámetro del anillo seleccionado Posición del punto seleccionado](/content/2026/05/1081033/images/6b072911f436fb5889cdea75132902d12c59c79086e5c7d4eb3fce04a9219e0f.jpg)
7.1.6. Ver y almacenar el resultado
Cada punto se muestra en un círculo o triángulo de color (Triángulo: punto de referencia) y se ve con un „+“ o un cero. Un „+“significa por encima y un „-”, por debajo del plano de referencia.
Para un mejor entendimiento, aparecen los resultados de la medición en una cuadrícula y la posición relativa de cada punto se muestra gráficamente en el plano de referencia.
El color azul significa „excelente“ (Tolerancia <25 %)
El color verde significa „bueno“ (Tolerancia <50 %)
El color amarillo significa „Atención“ (Tolerancia <100 %)
El color rojo significa „malo“ (Tolerancia ≥100 %)
El encabezado de la pantalla muestra las coordenadas y el valor medido del punto seleccionado. El valor depende del modo seleccionado.
![Coordenadas punto [Fila; Columna] Resultado medición punto Punto de datos disponible (no se omite) Posición eje Y del punto Posición eje Y del punto Punto de referencia si se selecciona Desplazamiento del punto Ver estadísticas Valor tolerancia (0,74 mm) 0.74 Ref. Enabled Cambiar Trabajar punto Cambiar plano de refencia Definir/retroceder punto de referencia Guardar Cambiar modo valor Volver a determinación datos](/content/2026/05/1081033/images/a9ef461910b435bcea81a1645afa28967f8f368ed7e92d6a4c231986e75fee2d.jpg)
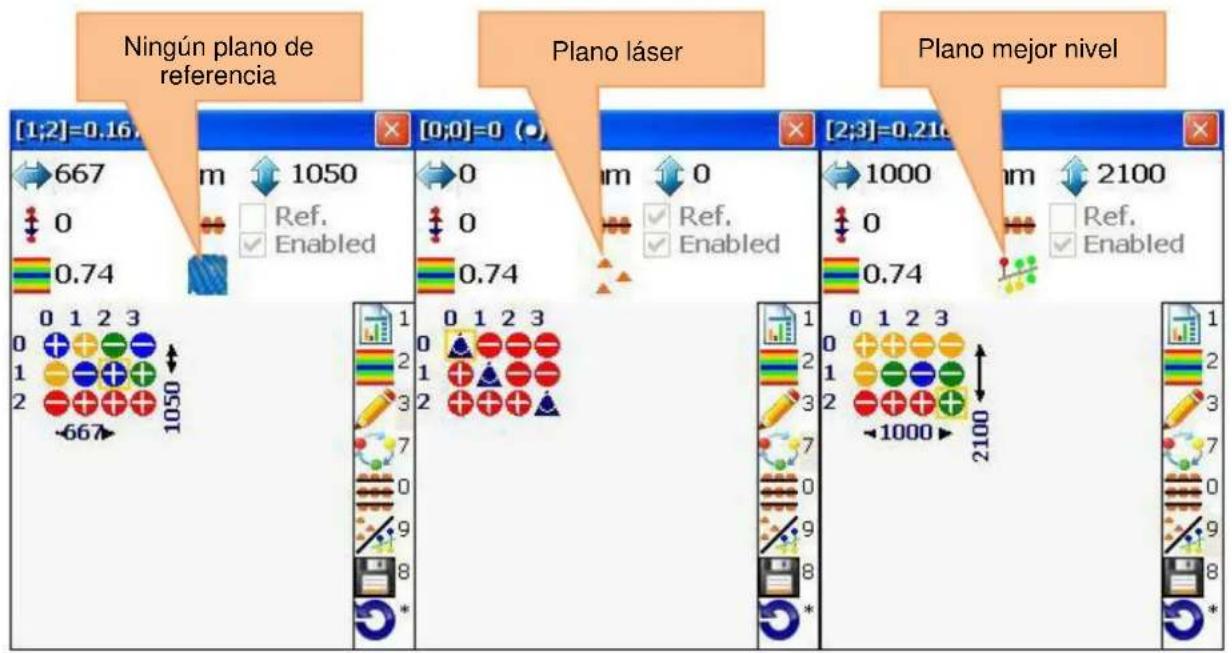
Modos plano de referencia
Hay tres modos de planos de referencia, se puede cambiar entre ellos con.
Ningún plano de referencia („No reference plane“): El resultado es el valor receptor sin cambios; Plano de referencia del laser („Laser plane“): Si no se definen puntos de referencia, es el resultado del valor del receptor sin cambios; cuando se definen tres puntos de referencia, el resultado es la diferencia entre el plano de referencia de tres puntos calculados y el valor receptor. Best-fit-Ebene ("plano de mejor ajuste"): El resultado es la diferencia entre el mejor plano de ajuste calculado y el valor del receptor.
Definir puntos de referencia
Para definir o eliminar puntos de referencia, utilice las teclas de flecha para seleccionar la posición deseada y pulse. Puede definir/ eliminar puntos de referencia solo en el modo de plano de láser.
Modos de resultado
Hay tres modos de resultado que se pueden cambiar con 0 DEL
Original: Los valores se muestran como valores positivos y negativos.
All positive: Los valores se muestran en relación con el nivel más bajo, por lo que no pueden ser negativos.
![Modo original Modo All positive Modo All negative [2;3]=0.216 (●) 1000 mn 2100 0 Ref. Enabled 0.74 0 1 2 3 1 2 3 2 -1000 ▶ 2100 1 0 1 2 3 2 3 7 0 9 8 5* 1 0 1 2 3 2 3 7 0 9 8 5* 1 0 1 2 3 2 3 7 0 9 8 5*](/content/2026/05/1081033/images/696b082024f6aa4cf7677c537a28d076123d06364529c2da20220db8d4389972.jpg)
Introducir tolerancias
Pulse, para introducir tolerancias.
Introduzca el valor deseado en el cuadro y confirme con o pulse para cambiar al modo auto. Si el modo auto está activado, las tolerancias se definen como un 35 % de un valor peak-peak.
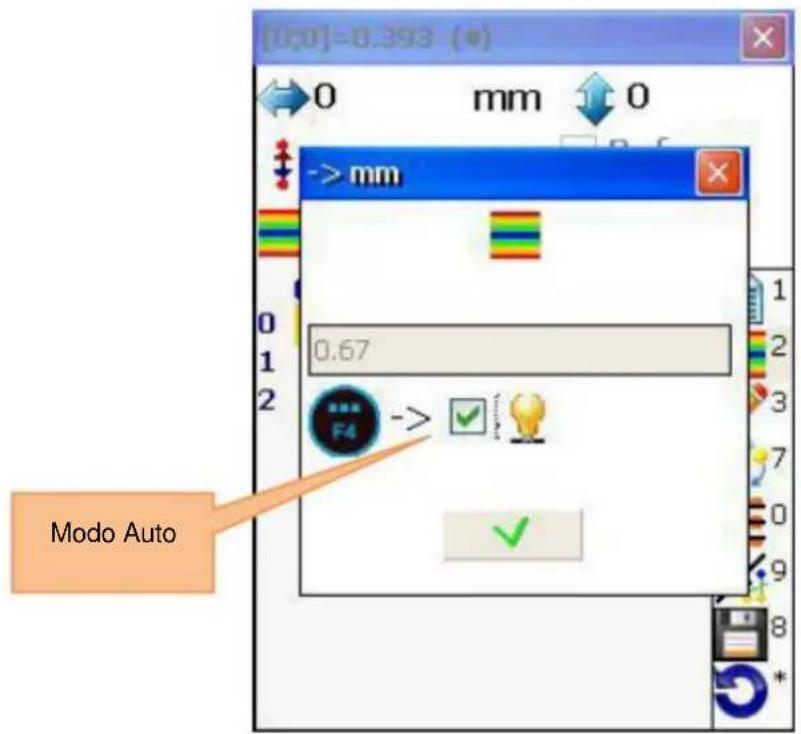
Para ver estadísticas, pulse 1. i
Datos de la estadística:
Maximum: Muestra el valor máximo
Minimum: Muestra el valor mínimo
Peak-Peak: Muestra el valor pico a pico
Average: Muestra el valor promedio
Std.deviation: Muestra la desviación estándar del valor promedio.
Tolerance: Muestra la tolerancia actual
La barra de color en la parte inferior muestra los porcentajes de error y el número de puntos en estas áreas de error. La barra de color se define así:
Azul: Valor ≤10 % de la tolerancia
Azul claro: Valor entre 10 % y <20 % de la tolerancia
Verde: Valor entre 25 % y <0 % de la tolerancia
Amarillo: Valor entre 50 % y <100 % de la tolerancia
Rojo: Valor 100 % de la tolerancia y más
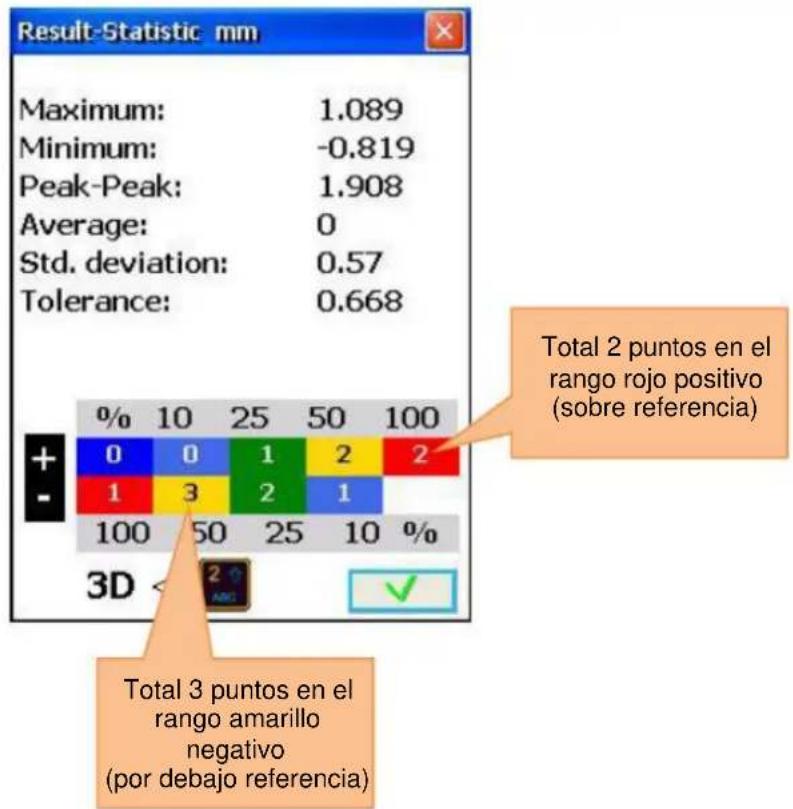
7.2. Programa de ejes centrales de la cavidad
Breve aclaración
Este programa se utiliza para medir la rectitud de cavidades o perforaciones.
Por ejemplo, se miden los anillos interiores de los rodamientos de bolas (con diámetros variables) o los estatores de las máquinas. Son posibles mediciones con la función multipunto de hasta 36 puntos en cada ángulo de cada orificio. El número de puntos y el ángulo pueden variar de un orificio a otro. Objetos verticales también pueden medirse (la entrada de ángulo se debe activar manualmente). A continuación se califican como niveles los objetos con las cavidades a medir.
Realizar alineación del orificio central
Para iniciar el programa, seleccione „eje central del orificio“ en el menú principal del punto “Geometría” y pulse ENTER ST. Aparece la pantalla principal del programa.
7.2.1. Pantalla principal del programa (Configurar niveles y modificar parámetros)
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | ||
| ⚠ Todas las dimensiones requeridas deben introducirse correctamente (pueden editarse más tarde si es necesario, los datos de medición no se ve afectados) |  | Iniciar nueva medición | |
| Funciones de esta pantalla |  | Introducir número de niveles (orificios) | |
| - Crear/ modificar/ ver hileras de orificios- Ajustar parámetros- Introducir dimensiones |  | Establecer o borrar todas las distancias iguales | |
 | Ajustar distancia actual | ||
 | Introducir diámetro del orificio (opcional). Si sólo se utilizan 3 puntos de medida, aumenta la entrada del diámetro del orificio, la exactitud del resultado de | ||
| - Iniciar medición- Ver resultados de desalineación (disponible si se han realizado todas las mediciones necesarias)- Almacenar- Cargar | medición | ||
 | Modificar parámetros (La entrada manual de datos o del sensor; ángulo de entrada manual o del inclinómetro; ajustes de filtro, ...) | ||
 | Ver resultados (disponible si se tomaron todas las medidas necesarias) | ||
 | Guardar los resultados en un archivo. Consultar el Capítulo 9, "Manejo de diálogo de archivo" | ||
 | Cargar los resultados almacenados del archivo, véase el capítulo 9 "Manejo de archivos cuadro de diálogo" | ||
 | Seleccione orificio para introducir la distancia (en el orificio siguiente) y el diámetro. | ||
![La distancia seleccionada se muestra en naranja Muestra el número del nivel seleccionado y el siguiente Bores centelir > mm 100 120 Distances 1-2 Number of planes 3 Equal Distances Enter distance 100 Bore diam. 0 [1] Cuadro de texto número de niveles Casilla distancias iguales Orificio seleccionado / Distancia nivesles Diámetro orificio Iniciar nueva medición. Todos los datos se eliminan Start new Measure Parameters Result Save Load Número de nivel se puede introducir para el diámetro](/content/2026/05/1081033/images/a009f1e128076d4d76e6e9c8a3e5e6542e744b5925b9d93087755c082a1b8336.jpg)
Secuencia de configuración
Introduzca el número de niveles (orificios) al pulsar ^1 e introduzca el valor en el cuadro (el valor debe estar entre 3 y 300).
Si los niveles a medir se posicionan a la misma distancia los unos de los otros, pulse. 2 ABC e introduzca un corchete en la casilla para marcar.
Ahora pulse e introduzca la distancia. Si las distancias entre los niveles no es igual, puede seleccionar con y los niveles iguales e introducir con las respectivas distancias.
Si desea utilizar sólo 3 puntos de medición para cada nivel (no recomendado), escriba el diámetro del orificio para cada nivel. Pulse e introduzca el valor apropiado para el nivel actual.
Si quiere modificar un parámetro, pulse 5 para dirigirse a la pantalla de parámetros. Aquí puede activar/desactivar la entrada de datos manual al pulsar 2 ABC o la entrada de ángulos manual al pulsar 3 DEF y con 5 puede cambiar entre las unidades de medida en mm y pulgadas. Pulse 6 MNO para utilizar el sensor S como objetivo y 7 si quiere utilizar un laser externo. Para el promedio pulse introduzca un número de muestra y confirme con Pulse 9 para guardar y salir del menú de parámetro.
7.2.2. Realizar mediciones
Pulse en la pantalla principal del programa y aparece una pantalla de medición.
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| ⚠️ Efectúe una alineación aproximada del láser, si se inicia una nueva medición |  | Eliminar los puntos de medición del nivel actual (todos los valores almacenados se pierden) |
| Funciones de esta pantalla |  | Entrada manual del valor detector (V) |
| - Efectuar medición |  | Entrada de ángulo manual |
 | Cambiar las unidades de medida | |
 | Abrir menú de contexto | |
| - Introducir datos manualmente (si está activado) |   | Navegación hacia adelante / hacia atrás a través de los niveles |
| - Introducir ángulo manualmente (si está activado) |  | Navegar a través de los puntos de medición |
Tiempo de configuración de conexión
Dependiendo de la interfaz que se utilice para conectar los sensores (Bluetooth o serie), la conexión se completa de 2 a 40 segundos. Se recomienda esperar unos 50 segundos para la conexión por cable y unos 10 segundos para una conexión inalámbrica. Si después de este período no se hace ninguna conexión, compruebe los sensores y la configuración del sistema del PCE-TU. 3
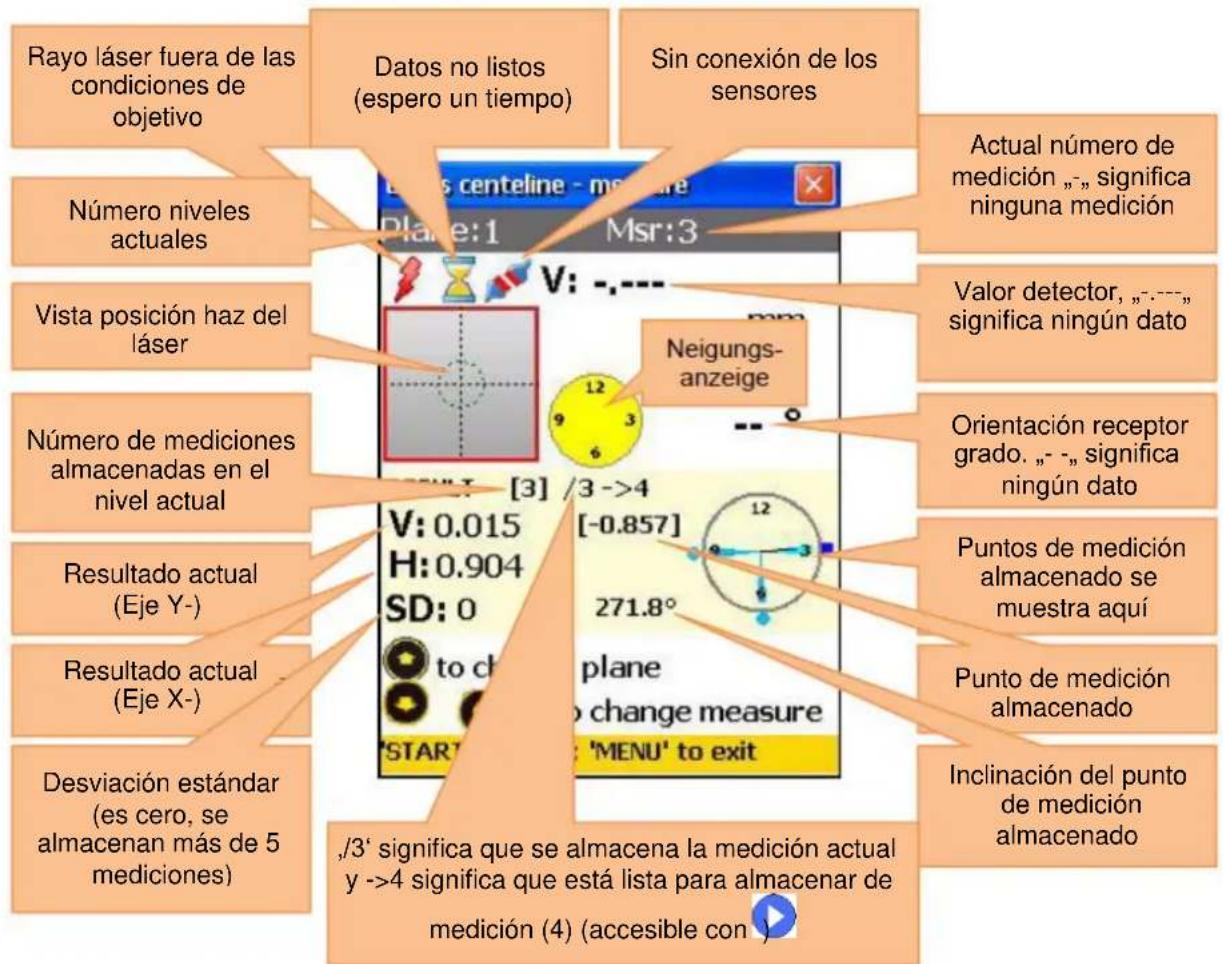
Principales orientaciones del haz de láser
Efectuar, ver y reemplazar mediciones
Para efectuar una medición, pulse ENTER STAR la medición guardada se visualiza en la pantalla del punto de medición.
Tenga en cuenta lo siguiente:
Si el indicador de inclinación es de color amarillo, significa que la inclinación actual no es aceptable (la rotación mínima de unos 10 ° puede sobrepasar). Si se habilita la entrada manual del ángulo, una indicación de inclinación amarilla significa que el ángulo no está actualmente disponible (pero en este caso, falta el puntero).
Deben hacerse por lo menos 3 mediciones para calcular el resultado. Almacene tantas mediciones como sea posible (hasta 36) para obtener el resultado más preciso.
El ángulo de rotación total mínimo (suma de las rotaciones individuales entre los puntos de medición individuales) no puede ser menor a 170°. Un cuadrado rojo encima de la indicación de los puntos de medición significa que el ángulo total es demasiado bajo.
![Bores centeline - measure Plane:2 Msr:4 V: -0.406 mm 209.3 ° Aunque se llevaron a cabo tres mediciones, no hay resultado disponible debido a que el ángulo de giro total es inaceptable (demasiado bajo) RESULT [3] /4 @4 H: --- 12 SD: --- 9 to change plane to change measure START' to take; 'MENU' to exit El amarillo indica que el ángulo de rotación del punto de medición anterior es demasiado pequeño (<10°) Un cuadrado rojo significa que el ángulo de rotación total es demasiado pequeño (<170°)](/content/2026/05/1081033/images/a68165a71873d6165f4e172e4200ab1e0e93d753158db65e3ee1a1cc2c7661d7.jpg)
Para ver los datos almacenados, utilice ◀ y ▶. Para reemplazar una medición, seleccione la medición determinada y pulse ENTER START. Aparece un cuadro de confirmación – seleccione ahora “Sí”.
7.2.3. Ver y almacenar los resultados
Cuando las mediciones se llevan a cabo en todos los niveles, pulse para el resultado.
Hay dos modelos de la línea de referencia y se pueden cambiar con 5. Modo ref.points: Si uno de los puntos de referencia no está definido, el resultado es el valor de detector sin cambios. Si se definen dos puntos de referencia, el resultado es la diferencia entre la línea de referencia calculada y el valor del detector; Para definir el punto de referencia, pulse e introduzca e número de punto de referencia 1 y número de punto de referencia 2. Pulse para almacenar. Para eliminar el punto de referencia, introduzca como valor.
Modo Best fit: En este modo, el resultado es la diferencia de la línea de referencia Best fit y el valor del detector.
El resultado se puede visualizar como una tabla o como un gráfico. Con 2 ABC se puede cambiar entre estas vistas.
Para guardar los resultados, pulse 8 & TUV. Véase capítulo 9 „Trata con cuadros de diálogo de archivo”.
![Número de niveves calculado Amarillo significa exceso de tolerancia Bores centeline - result [3] No. H V Distan. 1 0.145 -0.15 0 2 0 0 100 3 0 0 120 Bores centeline - result [3] Tolerance 0.05 Ref. Points - Bets fit 2 Graph Save 7 Remeasure Tolerance 0.05 Bets fit Table Save 7 Remeasure Guardar resultados Repetir medición](/content/2026/05/1081033/images/bd0bf0882fda4e8c22ee212f1973de56598528a957d458047c5833dbbf34ac4d.jpg)
Pulse, para volver a la pantalla principal del programa o pulse para iniciar el modo Live.
7.2.4. Modo Live
Para llevar a cabo una alineación Live de la línea seleccionada, coloque el detector en el centro del orificio. El apretador debe fijarse a la parte inferior del orificio (180°).
Conecte la pantalla de resultados en el modo de líneas de referencia y en la vista de la tabla. Seleccione con ▲ y ▼ el nivel deseado y pulse, para dirigirse a la pantalla de medición donde se puede activar el modo Live.
En caso de que se active la entrada de ángulo manual, introduzca primero el valor determinado.
Pulse de nuevo para iniciar el modo Live.
¡No mueva ninguna pieza hasta que „LIVE MODE“ se ponga a parpadear!
Mueva el objeto a la dirección de cero, utilizando los valores de medición en la pantalla. Para detener el modo Live y obtener el resultado después de mover, pulse 7 PQRS
No detenga el modo Live si los datos de medición no están listos (Laser fuera del objetivo, icono de reloj de arena o problemas de conexión).
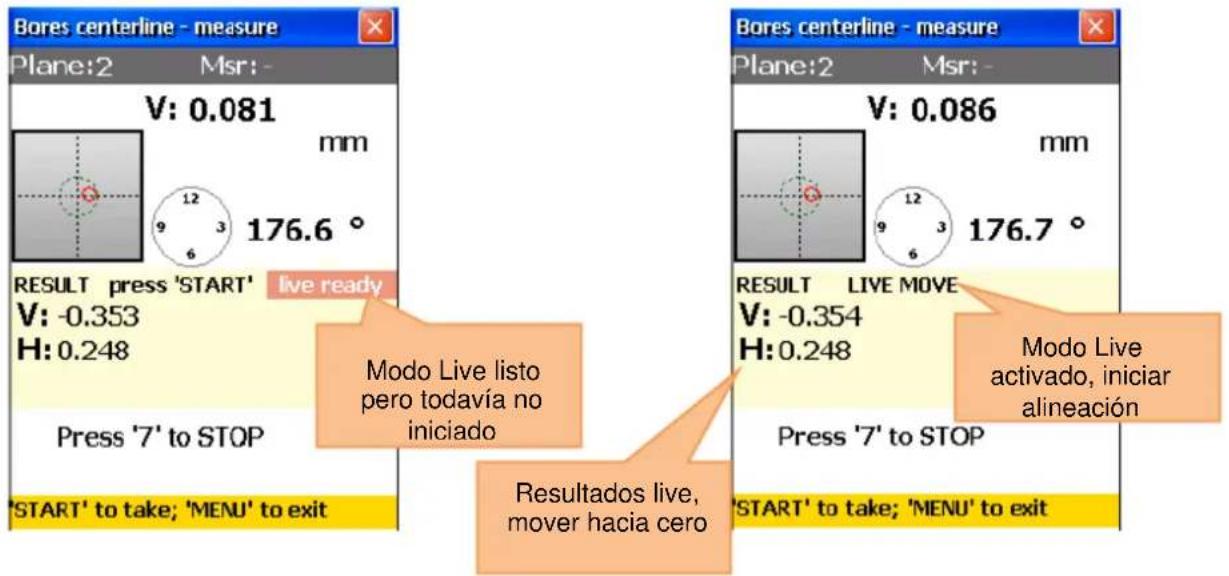
![Bores centerline - measure Plane:2 Msr: - V: 0.086 mm 12 9 3 176.6 ° 6 RESULT [*] V: -0.354 H: 0.247 to change plane [*] significa que el nivel se alinea en el modo Live *START' to take; 'MENU' to exit](/content/2026/05/1081033/images/6461abcb64fe8350a40437cbc523b4ee5ed8b2508f22611d8bd7ff08ea7876ed.jpg)
Después de que el modo en directo se detenga, otro nivel puede seleccionarse. Seleccione un nuevo nivel, coloque el detector en el centro del orificio y pulse y a continuación para iniciar el modo Live del nuevo nivel seleccionado.
La alineación de un nivel puede afectar a otros niveles. Repita la medición tras utilizar el modo Live (diríjase a la pantalla de resultado y pulse para repetir la medición).
7.3. Programa de rectitud
Breve aclaración
El programa de rectitud se utiliza para determinar la rectitud de objetos. Los objetos muy largos se pueden medir en piezas. También se pueden medir objetos verticales.
Efectuar una medición de rectitud
Para iniciar el programa, seleccione „Rectitud“ en el menú principal del punto „Geometría“ y pulse Aparece la pantalla principal del programa.

7.3.1. Pantalla principal del programa (Configurar posiciones y modificar parámetros)
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| Todas las dimensiones requeridas deben introducirse correctamente (pueden editarse más tarde si es necesario, los datos de medición no se ven afectados) |  | Iniciar nueva medición |
| Funciones de esta pantalla |  | Introducir número de puntos de medición (Posiciones) |
| - Crear/ modificar/ examinar punto- Crear/ modificar/ examinar pieza (Splice)- Modificar parámetros- Introducir dimensiones- Iniciar medición- Examinar resultados de desalineación (disponible después de haber realizado todas las mediciones)- Almacenar- Cargar |  | Eliminar o ajustar todas las distancias iguales |
 | Introducir distancia actual | |
 | Introducir número de piezas (Splices) (opcional). Para el uso de piezas, se añade una nueva pieza con esta tecla. | |
 | Modificar parámetros (introducción de datos manual o del sensor; introducción manual de ángulo o clinómetro; Ajustes de filtro,...) | |
 | Ver resultados (disponible si se han realizado todas las mediciones necesarias) | |
 | Almacenar resultados en el archivo, véase capítulo 9 „ Tratar con cuadro de diálogo Archivo “ | |
 | Cargar resultados almacenados del archivo, véase capítulo 9 “Tratar con cuadro de diálogo Archivo “ | |
 | Seleccionar punto para introducir distancia | |
Vista de la pantalla
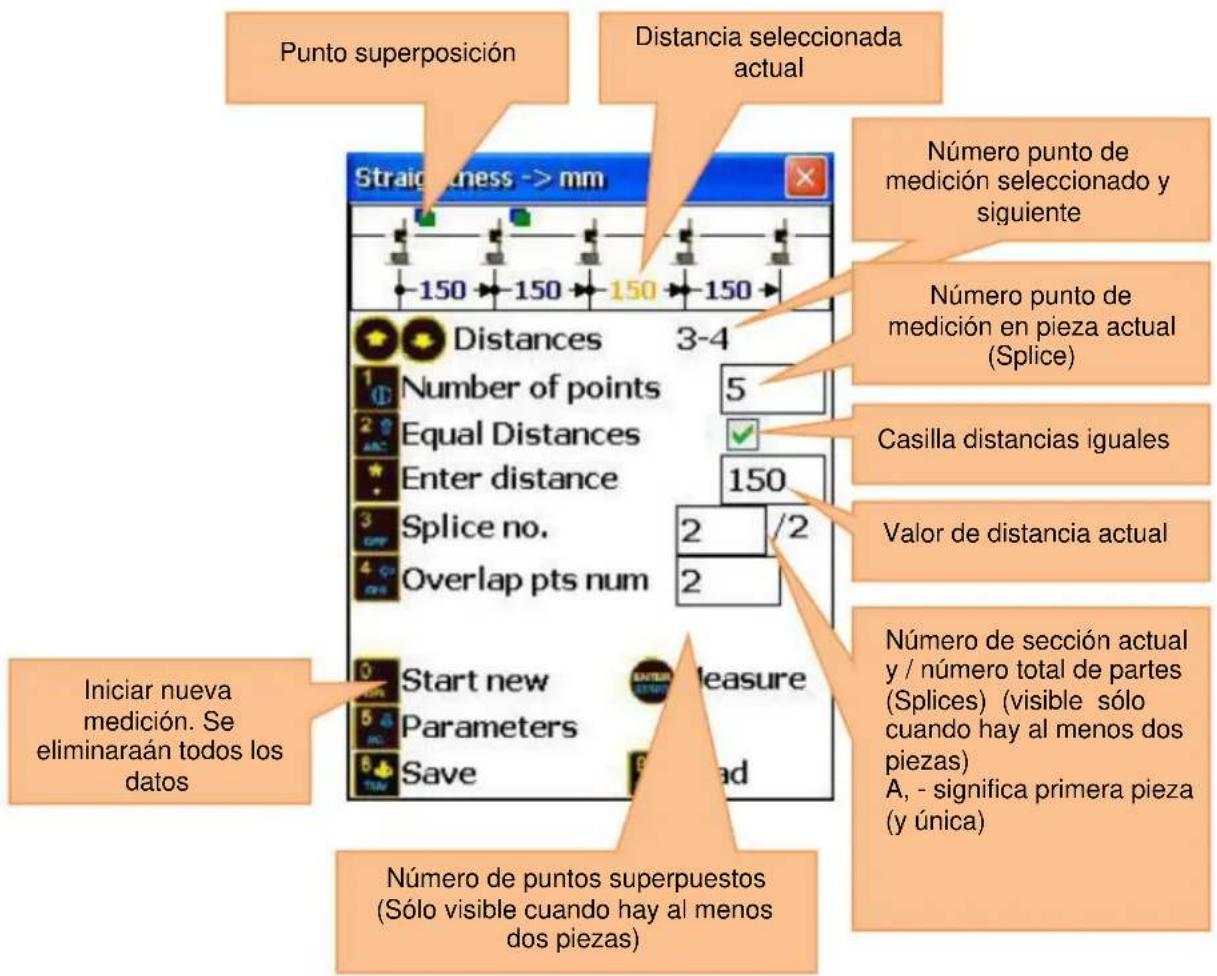
Aclaración de Splice (pieza)
Cuando un objeto que se va a medir es más largo que la longitud de trabajo efectiva del sistema de láser (10 m entre los sensores), puede dividirse en piezas individuales (Splices) y medirse. Una pieza puede estar formada de 3 a 300 puntos de medición individuales y las secciones adyacentes se superponen de 2 a 8 puntos (el final de la pieza anterior con el inicio de la pieza actual). Este solapamiento es necesario con el fin de llevar a cabo correctamente la medición de rectitud de todo el objeto.
Cuando la longitud efectiva del láser es más larga que el objeto a medir, se puede prescindir de la utilización de piezas (Splices).
Proceso de configuración
Para introducir el número de puntos, pulse 1 e introduzca el valor deseado (3 hasta 300 puntos son posibles). Confirme ahora con EXamine que todos los puntos se encuentran en la pieza actual(Splice) Si en la casilla, Splice no. “ aparece un „-”, significa que es la única pieza.
Si la distancia entre los puntos son iguales (en todas las piezas), pulse 2 ABC y marque „Equal Distances“. Ahora pulse * para dirigirse al campo de entrada de distancia, introduzca un valor y confirme. El valor introducido se utiliza para todas las distancias en las que se ha marcado „Equal Distances“.
Si las distancias entre los puntos no es igual, utilice y para seleccionar un punto y pulse, para introducir la distancia del siguiente punto. Repita este proceso para todos los puntos (excepto para el último).
Nota: Si se utilizan más piezas (Splices), tenga en cuenta „Splice no.“ para ver en que pieza se encuentra. La distancia entre los dos puntos superpuestos no puede editarse.
Para introducir una nueva pieza (Splice), pulse 3 DEF y añada „1“ para el actual „Splice no.“ (si el valor actual es „-”, introduzca „2“). Configure a continuación la nueva pieza.
Si quiere modificar el parámetro, pulse para dirigirse a la pantalla de parámetro. Aquí puede introduce los datos manualmente al pulsar 2 ABC o introducir el ángulo manualmente pulsando 3 DEF para activar o desactivar. Al pulsar puede cambiar entre las unidades de medida mm y pulgadas. Pulse , para utilizar el sensor S como objetivo y , si quiere utilizar un láser externo. Para calcular el promedio pulse 9 WXYZ, introduzca el número de mediciones que realizara y confirmelo con ENTER
Pulse para guardar y salir del menú de parámetros.
7.3.2. Como realizar una medición
Pulse en la pantalla principal del programa para dirigirse a la pantalla de medición.
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| ⚠️ Efectúe una alineación general del láser, si inicia un nueva medición | 0DEL | Eliminar medición del punto actual |
| Funciones de esta pantalla | 1i | Entrada manual del valor del detector (V) |
| - Efectuar medición- Introducción manual de datos (si está activada) | 2ABC | Entrada manual del valor del detector (H) |
| 6MNO | Cambiar unidades de medición | |
| F2 | Abrir menú de contexto | |
| Navegar adelante o atrás a través de los puntos | ||
Duración de establecimiento de conexión
Dependiendo de la interfaz que se utilice para conectar los sensores (Bluetooth o serie), la conexión se completa en 2 y 40 segundos. Se recomienda esperar unos 50 segundos para la conexión por cable y unos 10 segundos para la conexión inalámbrica. Si después de este período no se hace ninguna conexión, compruebe los sensores y la configuración del sistema del PCE-TU 3.
![Rayo láser fuera de las condiciones objetivas Datos no listos (esperar un poco) Ninguna conexión de los sensores Número de punto actual Vista posición del láser Número de mediciones almacenadas para el punto actual Resultado actual (Eje Y) Resultado actual (Eje X) Slightness - meas [1] V: -0.296 H: 0.979 to change point 'START' to take; 'MENU' to exit Número conexión actual. Un „-” significa no medición](/content/2026/05/1081033/images/1a857f623c5f490a7d11c15c4e6d0046a895296a5ebe7d851d9beecacccbecac.jpg)
Alineación aproximada del haz del láser
Coloque el transmisor láser (sensor estándar S) tan cerca como sea posible del comienzo del objeto (o el primer punto de solapamiento de la pieza de medida, si se usa una pluralidad de piezas). Coloque el receptor (sensor predeterminado M) lo más cerca posible del transmisor. Ahora ajuste la posición del transmisor de manera que el haz de láser esté tan en el centro como sea posible del objetivo del receptor. El indicador de posición de láser en la pantalla muestra la posición exacta. Ahora mueva el receptor lo más lejos del transmisor como sea posible, pero de modo que se encuentre todavía en el objeto que se desea medir (o en la pieza actual).
Después ajuste de nuevo la posición del haz de láser en el receptor utilizando los tornillos de ajuste en el transmisor. El rayo láser se debe centrar en el blanco del receptor de nuevo. Ahora mueva el receptor para el primer punto de medición. Asegúrese de que se selecciona el punto de medición correcto y la pieza correcta (si se utiliza).
Cuando el rayo láser está fuera del objetivo en el receptor, repita el ajuste. La alineación general del haz de láser debe realizarse para cada objeto de medición o para cada pieza (si se utiliza).
¡No toque el transmisor o ajuste el receptor durante las mediciones!
Efectuar, ver y reemplazar mediciones
Para llevar a cabo una medición, pulse ENTER STARLOS valores almacenados se muestran como resultado.
![Número del punto Número de punto de superposición. Visible si el punto actual es la superposición de una pieza Número pieza (si se utiliza) Straightness measure Pt.No: 1 Spl: 2 V: -0.024 H: 0.951 Receptor Y- Ejes-Valor Receptor X- Ejes-Valor Valor de medición almacenado (vacío) RESULT [0] H: Número de valores de medición almacenadas (en este caso „0“). Se convierte en „1“ cuando se almacena un valor. to change point *START' to take; 'MENU' to exit](/content/2026/05/1081033/images/50108b8a9c8eb77b88ff58b8be0d466d7e3d4cd34b33ae1c7532f39305d00d0f.jpg)
Para navegar a través de los valores de medición almacenados, utilice △ y ▽. Para reemplazar el valor de medición seleccionado, pulse ENTER START y confirme en el siguiente cuadro de diálogo con „Yes“.
7.3.3. Examinar y almacenar resultados
Si se llevan a cabo mediciones para todos los niveles, pulse para ver el resultado. Hay dos modelos de línea de referencia entre los cuales se pueden cambiar con 5 JKL
Modo Ref.points: Si un punto de referencia es indefinido, es el resultado de valor receptor sin cambios. Si se definen dos puntos de referencia, el resultado es la diferencia entre la línea de referencia calculada y el valor del receptor.
Para definir puntos de referencia, pulse e introduzca el punto de referencia 1 y el punto de referencia 2. Ahora pulse ← para confirmar. Para eliminar un punto de referencia, introduzca - como valor.
Modo Best fit: En este modo, el resultado es la diferencia entre la mejor línea de referencia Best fit calculada y el valor receptor.
El resultado se puede mostrar como una tabla o un gráfico. Con 2 ABC puede cambiar entre las vistas. Para almacenar el resultado, pulse 8 TUV, véase capítulo 9 „Trato con cuadro de diálogo de archivo“.
![Número de puntos y número de pieza. Número de pieza se muestra sólo cuando se utilizn piezas Vista de la tabla Straightness - result [6] No. H V Distan. 1.1 0.767 0.004 0 1.2 1.076 -0.212 150 1.3 1.123 -0.33 150 2.1o 1.876 -0.212 2.2o 0.776 -0.427 - 2.3 1.61 -0.403 150 Distancia Puntos de solapamiento Amarillo significa Violación de tolerancia Valor eje X Valor eje Y Número punto de referencia Tolerance 0.05 Ref. Points - Bets fit 2# Save Graph Remeasure Guardar resultado en archivo Repetir medición](/content/2026/05/1081033/images/f7bf96db50ca49739064dddd2c3ac2b4b77dab2afef3162a97b539e0da225892.jpg)
Vista gráfico
(Tenga en cuenta que el punto de solapamiento no se muestra en gráfico. Por lo tanto, solo se muestra como número de punto de medición 4 y no 6)
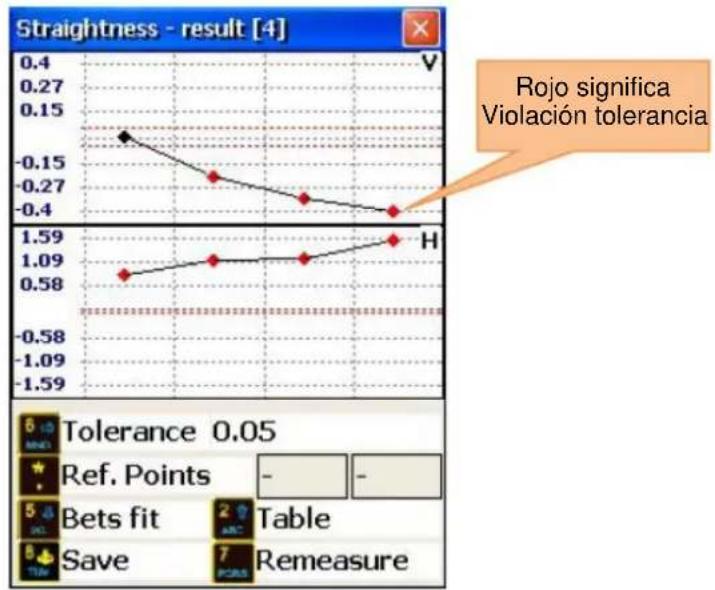
Pulse para volver a la pantalla principal.
7.3.4. Tutorial de uso de las piezas
Si se desea medir un objeto que es más largo que la longitud eficaz del sistema de medición láser, necesita dividirlo inicialmente en piezas individuales (sólo en el papel) que no superen la longitud útil (ver figura 14.4.1). Tenga en cuenta que el número mínimo de puntos de medición no debe ser inferior a 3 y al menos uno más que el número de puntos de solapamiento (número mínimo de puntos de solapamiento es 2). En primer lugar, realice una alineación láser general de la primera pieza. Si las mediciones se completan para la pieza actual, mueva el transmisor lo más cerca posible del primer punto de superposición. Ahora realice una alineación láser general para la siguiente piza e inicie la medición. Coloque el receptor en el primer punto de superposición. Compruebe siempre en la pantalla del PCE-TU 3 que el número de punto actual y el número de la pieza son correctos. Se muestra en la imagen 14.4.1 los números de punto, piezas y puntos superpuestos relacionados.
En este ejemplo, se divide el objeto en dos piezas. La primera pieza tiene 5 puntos de medición (posiciones) y la segunda 6 puntos de medición, incluidos los puntos que se solapan. Recoja en primer lugar los valores del receptor de la primera pieza del punto 1 al 5. Mueva el transmisor entonces a su siguiente posición (rectángulo amarillo). Ahora realice una alineación general para la segunda pieza. Tenga en cuenta lo siguiente:
Punto 1 en la segunda pieza tiene la misma posición física en el objeto como el punto 4 en la primera pieza.
Punto 2 en la segunda pieza tiene la misma posición física en el objeto como el punto 5 en la primera pieza.
La distancia entre los puntos 2 y 3 en la segunda parte corresponde a la distancia entre un punto 5 en la primera pieza y el punto 3 en la segunda pieza, de manera que esta distancia después de la primera pieza contribuye a la longitud total del objeto.
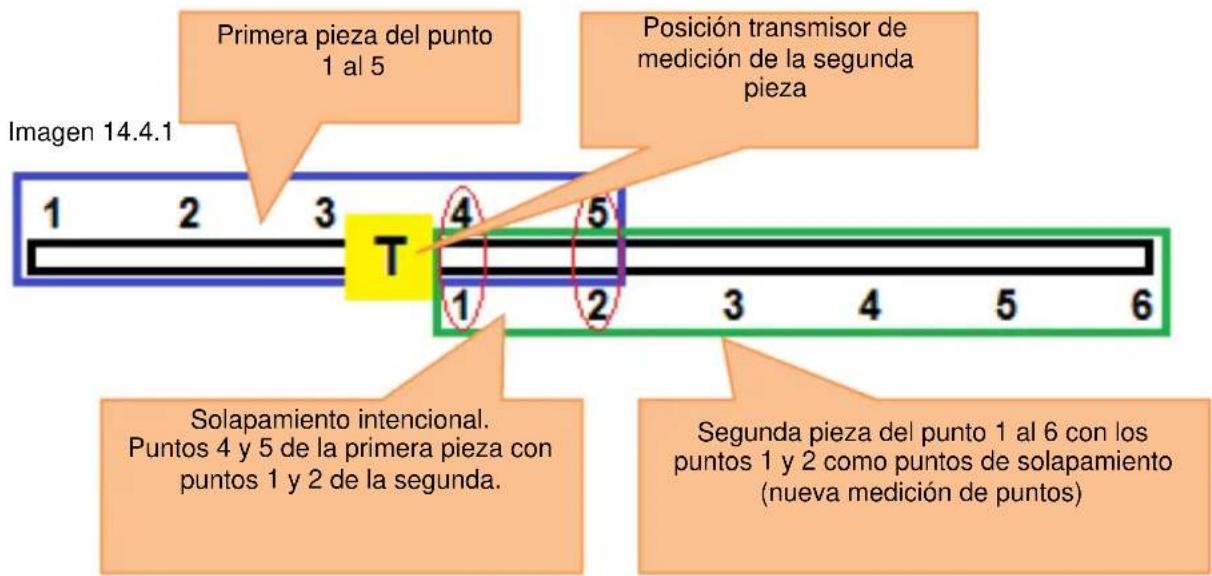
7.3.5. Modo Live
Para ejecutar una medición Live en una posición seleccionada, coloque el receptor en esta posición. Inicie ahora en la pantalla de resultados en el modo de línea de referencia y en la vista de tabla.
Seleccione con ▲ y ▼ el nivel deseado y pulse para dirigirse a la pantalla de medición donde puede activarse en el modo live.
Pulse de nuevo para iniciar el modo Live.
No mueva ninguna pieza hasta que aparezca parpadeando „LIVE MODE“!
Mueva el objeto a la posición cero usando los valores medidos en la pantalla. Para detener el modo Live y obtener el resultado, pulse 7 PQRS
No detenga el modo Live si no están los datos de medición listos (haz de láser fuera del objetivo, el símbolo del reloj de arena o problemas de conexión).
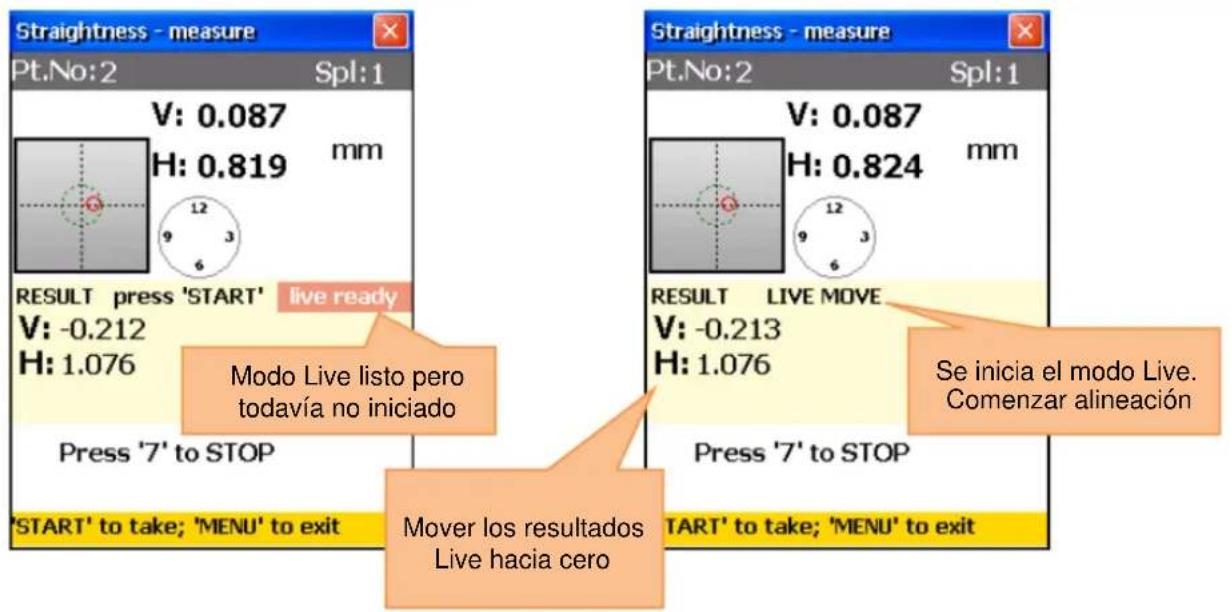
![Straightness - measure Pt.No:2 Spl:1 V: 0.087 H: 0.82 mm 12 9 3 5 RESULT V: -0.214 H: 1.079 [*] [*] significa que el punto en el modo Live se ha alineado to change plane *START' to take; 'MENU' to exit](/content/2026/05/1081033/images/9136e41ac740acbe73e5724e1047d769e32eee36f05d0ba3b2bfefc4b3b66968.jpg)
Una vez se interrumpa el modo Live, se puede seleccionar otro punto. Seleccione un nuevo punto, coloque el receptor en la posición deseada y pulse y a continuación para iniciar el modo Live del nuevo nivel deseado.
La alineación de un punto puede resultar en otro punto. Repita las mediciones tras usar el modo Live (diríjase a la pantalla de resultado y pulse para repetir la medición).
7.4. Programa de perpendicularidad („Squareness programm“)
El transmisor de laser giratorio RL-20 puede emitir rayos laser mediante un pentaprisma integrado exacto en un ángulo de 90°. Los dos rayos laser rectangulares se utilizan como referencia. Se deben llevar a cabo cuatro mediciones- dos mediciones en otra superficie y después se cambia la dirección del haz de laser-dos mediciones en otra superficie. Coloque ahora el transmisor de laser giratorio en la esquina entre ambas superficies. Coloque el transmisor (sensor predeterminado M) en la primera posición. Efectúe si es necesario una alineación general del láser.
7.4.1. Pantalla principal del programa
| A tener en cuenta en esta pantalla | Atajos de esta pantalla | |
| ⚠ Las dimensiones requeridas deben introducirse correctamente (se pueden modificar más tarde si es necesario) | [D04H] | Iniciar nueva medición o repita la medición (todos los datos identificados se pierden) |
| Funciones de esta pantalla | [S77W] | Introducir dimensiones |
| - Introducir dimensiones- Iniciar medición- Examinar resultados (disponible si se han completado todas las mediciones necesarias)- Guardar | [A07H] | Almacenar resultados en el archivo, véase capítulo 9 „Trato con cuadro de diálogo archivo“ |
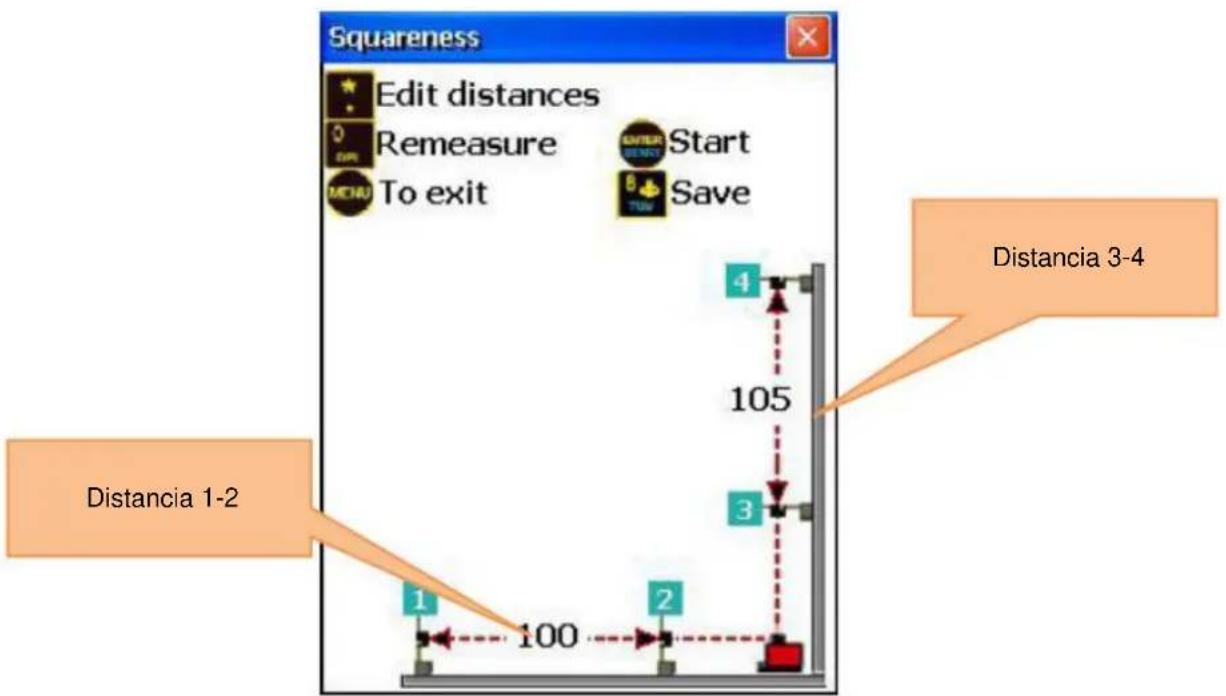
Transcurso
Marque dos puntos (cerca y lejos) en la primera superficie y repita esto para las dos superficies. Pulse e introduzca la distancia entre el punto 1 y 2. Confirme con e introduzca la distancia entre los puntos 3 y 4 y confirme de nuevo con Coloque ahora el transmisor de laser giratorio en la esquina entre ambas superficies y coloque el receptor en el primer punto de medición (lejos). Pulse para dirigirse a la pantalla de medición.
7.4.2. Realizar una medición
Pulse para efectuar una medición.
Utilice y para seleccionar el punto de medición.
Pulse, para salir de nuevo de la pantalla.
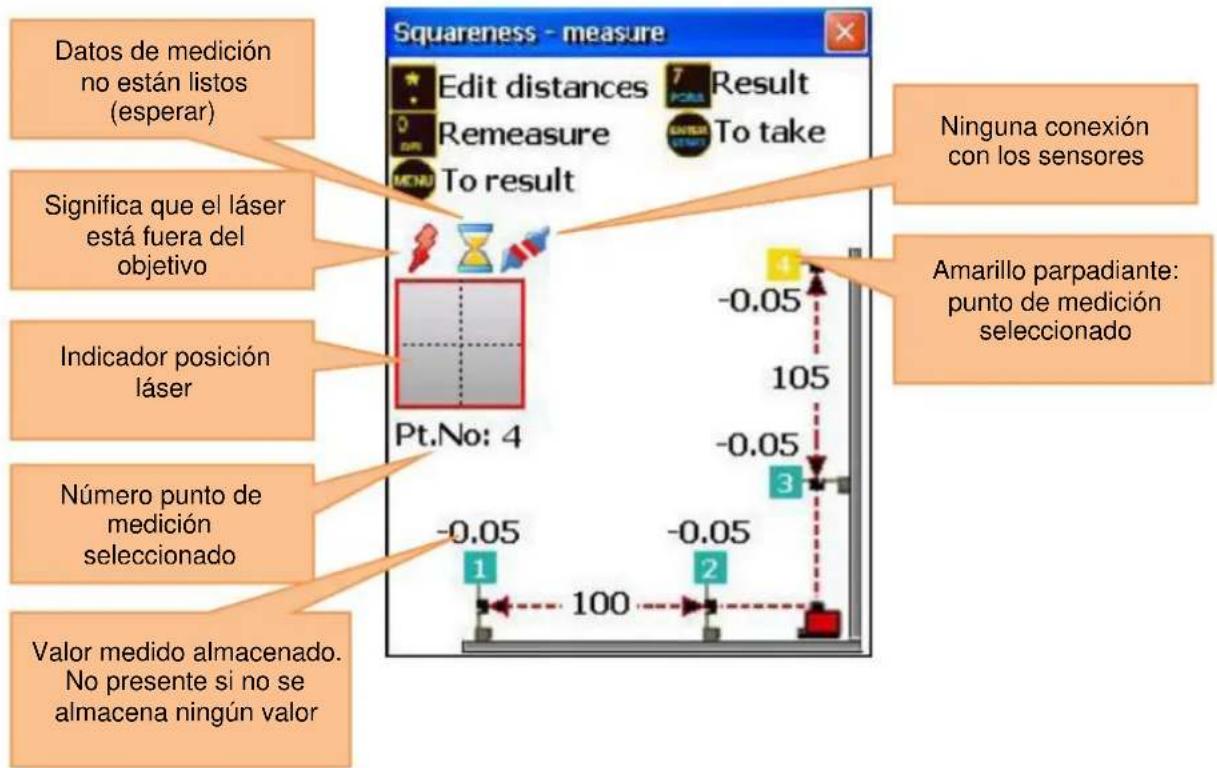
Después de hacer la medición del punto 1, mueva el receptor al punto 2 y realice una medición. A continuación, gire el transmisor láser giratorio de 90° hacia la segunda superficie. Ahora realice mediciones de los puntos. 3 y 4.
El transmisor láser RL-20 no se debe mover después de que se inicia la medición.
Tenga cuidado al cambiar la dirección del haz de láser!
La secuencia de recogida de datos de medición no es importante.
7.4.3. Examinar y almacenar los resultados
Para examinar los resultados de medición, pulse 7 Para guardar los resultados, pulse . Para volver a la pantalla principal del programa pulse MENU Si quiere introducir las tolerancias, pulse 6 MNO Si se encuentran los resultados calculados fuera de las tolerancias, se inclina la superficie vertical y se muestra oscura.
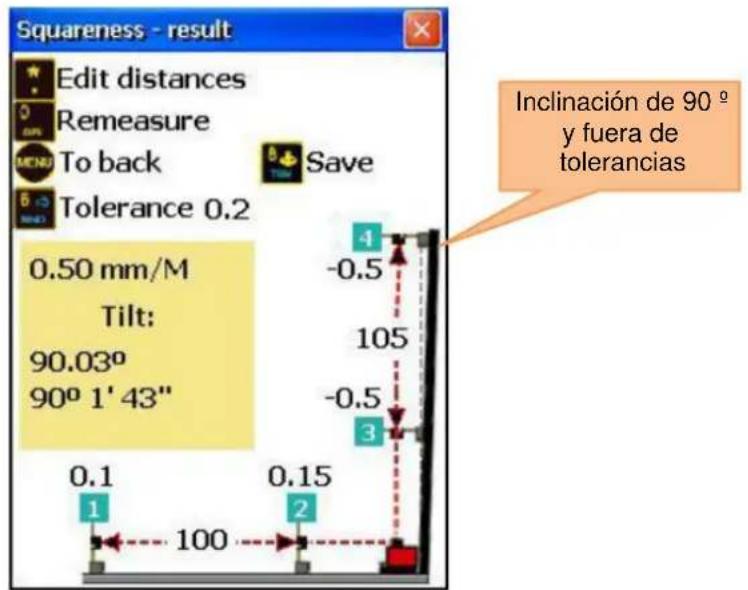
8. Ajustes del sistema
| Funciones de esta pantalla | Atajos de esta pantalla | |
| Ajustar fecha y horaConfigurar apagado automáticoVer/organizar programas de licenciaAjuste de transmisión de datos a los sensores (Bluetooth o de serie)Acceder a la versión Firmware e informaciones de estadoAjustar idiomaAjustar modo USB |  | Ajustar fecha y hora |
 | Configurar apagado automático | |
| [2KKK] | Ver/organizar programas de licencia | |
 | Ajustar transmisor de datos al sensor | |
| [3882] | Ajustar idioma de usuario | |
 | Ajustar modo USB | |
![PCE-TU 3 Setup (1) (2) (3) (4) (5) Versión Firmware Y fecha de creación Voltaje Número de serie del sensor (si están conectados) Build: 1.0.4436.15297(23.02.12 08:29) S:S/N 1004240001 M:S/N 1004240002 Bat: 5.7 V [..05:70:da] [..05:70:f3] Bluetooth Slave Device ID(s), las últimas 6 cifras(si la transmisión Bluetooth está activada y el aparato conectado)](/content/2026/05/1081033/images/44ae4cf885b7cac5c3695982daf2494ca0d3594ca346fcdfac62423996ed7333.jpg)
8.1. Ajustar fecha y hora
Ajustar fecha y hora, pulse 1. i
| Funciones de esta pantalla | Atajos de esta pantalla | |
| Ajustar hora y fecha | Mover los campos hacia la izquierda | |
| Mover los campos hacia la derecha | ||
| Aumentar valor actual | ||
| Disminuir valor actual | ||
| Mover entre los campos a la izquierda (cíclico) | ||
| Salir de los ajustes de hora y fecha (cerrar ventanas) | ||
![Día Mes Año Horas Minutos Data Time Setup 01.201/ 02:32 to select next field; "<->, "->" or "." Press 'MENU' or 'Enter' to close Build: 1.0.4436.15297(23.02.12 08:29) S:S/N 1004240001 M:S/N 1004240002 Bat: 5.6 V [..05:70:da] [..05:70:f3]](/content/2026/05/1081033/images/13dbcf7debbec9b01f65c9d2968bfe5ebee0dbcf37a317bf0ef6daf13a6cba9b.jpg)
8.2. Configurar apagado automático
Para configurar apagado automático, pulse 2 ABC
| Funciones de esta pantalla | Atajos de esta pantalla | ||
| ⚠️ Ajustar la hora de apagado en segundosNota 1: Para desactivar el apagado, póngalo a cero o deja el campo de entrada vacío.Nota 2: Si los valores se introducen por debajo de 30 segundos, se ilumina el campo de entrada en amarillo para indicar que en poco tiempo se desconecta |  | Salir sin guardar | |
 | Confirmar valor nuevo | ||
![AVV-711 Setup (1) (2) (3) Tiempo apagado en segundos Power Setup Power Off Time(s) Build: 1.0.4436.15297(23.02.12 08:29) S:S/N 1004240001 M:S/N 1004240002 Bat: 5.6 V [..05:70:da] [..05:70:f3]](/content/2026/05/1081033/images/ef3e6535146241118f2c3f7462ff17712499cc8a8b8fbd298871e514016a7b28.jpg)
8.3. Ver / organizar licencias de programa
Para ver/ organizar licencias de programa, pulse

| Funciones de esta pantalla | Atajos de esta pantalla | |
| ⚠ Ver estado de licencia⚠ Introducir/actualizar licencias al cargar un archivo de licencia („.lic“ extensión de archivo) de la carpeta „My documents“ o de la tarjeta SD (Carpeta „Storage Card“)⚠ Ver número de serie del dispositivo⚠ Ver ID individual del dispositivo |  | Cargar archivos de licencia (añadir/actualizar licencia) |
 | Salir | |
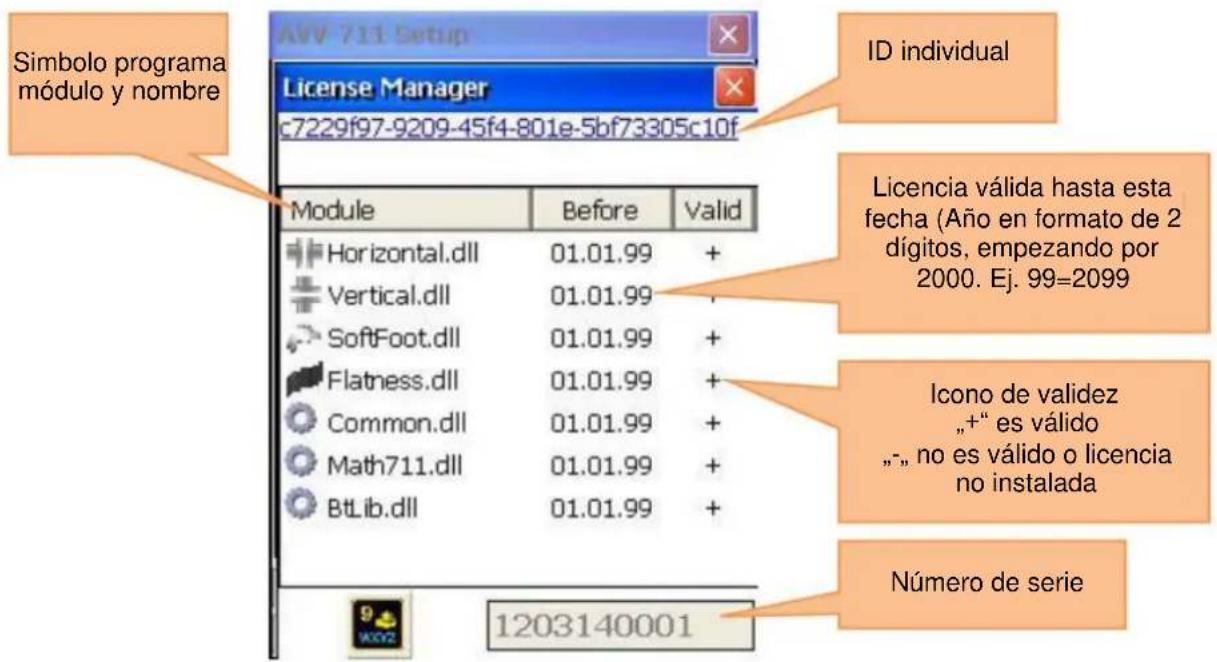
Para obtener un archivo de licencia, envíe el número de serie del dispositivo al vendedor. Si le envía el archivo de licencia, cópielo en la carpeta "Mis documentos" del dispositivo o en la tarjeta SD e introducela. Para cargar archivos, pulse 9 WXYZ y aparece un diálogo de carga. Utilice las flechas para seleccionar los archivos de licencia correctos y pulse a continuación para cargarlos. Si debe seleccionar otro medio, pulse F2 para dirigirse al campo de selección. Utilice y para seleccionar el medio que se encuentra en el archivo de licencia y pulse de nuevo para volver a la selección de archivo.
8.4. Ajustar transmisión de datos al sensor
Para ajustar la transmisión de datos al sensor pulse 4 GHI
| Funciones de esta pantalla | Atajos de esta pantalla | |
| ⚠ Selecionar entre Bluetooth e interfaz de serie⚠ Configurar interfaz Bluetooth (Número Slave-Device-) |  | Seleccionar interfazBluetooth |
 | Seleccionar interfazde serie | |
| Si el Bluetooth está activado | ||
 | Utilizar un sensor conBluetooth | |
 | Utilizar ambossensores conBluetooth | |
 | Modificar/ permitir clase deBluetooth Slave del aparatoCOD (No lo modifique) | |
![Interfaz Bluetooth Interfaz de serie Build: 1.0.4436.15297(23.02.12 08:29) S:S/N 1004240001 M:S/N 1004240002 Bat: 5.7 Y [..05:70:da] [..05:70:f3]](/content/2026/05/1081033/images/63a7882457f4e9f9cf33ce7c1e4567f908c5e4d44eb052a07c90dc648e3e4fcd.jpg)
![AVV 711 Setup Número del aparato Bluetooth Slave 2 ('1', '2') 001F00 (F2', 'F2') Build: 1.0.4436.15297(23.02.12 08:29) S:S/N 1004240001 M:S/N 1004240002 Bat: 5.6 Y [..05:70:da] [..05:70:f3]](/content/2026/05/1081033/images/41b902dd1aee5feb0b4b0fd8966ee35730ce752d900bc354e689947825c27bb7.jpg)
8.5. Ajustar el idioma del usuario
Para ajustar idioma de usuario, pulse 5 JKL
| Funciones de esta pantalla | Atajos de esta pantalla | |
| Modificar idioma de usuario | [77KX] | Navegar por los idiomas disponibles |
 | Guardar y salir | |
 | Salir sin guardar | |

8.6. Ajustar modo USB
Para ajustar el modo USB, pulse 6 MNO
Si selecciona el modo de almacenamiento masivo, se puede utilizar el aparato en el PC como una memoria USB normal.
Si selecciona el modo Active Sync, se necesita Microsoft Mobile Device Center o Microsoft Active Sync 4.5 para acceder al dispositivo.
No efectúe ninguna operación de carga o almacenamiento en el dispositivo mientras se accede al dispositivo por USB en el modo de almacenamiento masivo.
| Funciones de esta pantalla | Atajos de esta pantalla | |
| - Modificar modo USB entre Active Sync y memoria masiva | Seleccionar modo memoria masiva | |
| Seleccionar modo Active Sync | ||
| Guardar y salir | ||
| Salir sin guardar | ||
Los cambios tendrán efecto tras reiniciar el dispositivo
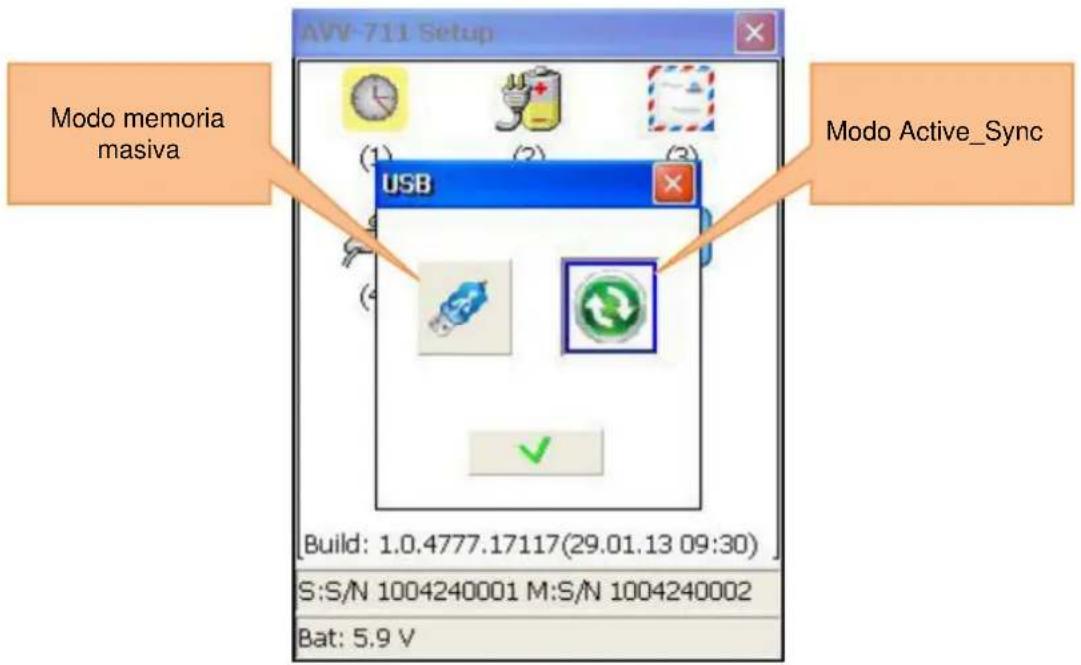
9. Trato con los cuadros de diálogo de archivos
Aclaración del campo de selección „Disk“
Campo de selección Hay dos posibilidades de almacenamiento:
- La carpeta „My Documents“ (interna, siempre disponible)
- La carpeta „Storage Card“ (Tarjeta SD externa, solo disponible si hay insertada una tarjeta SD)
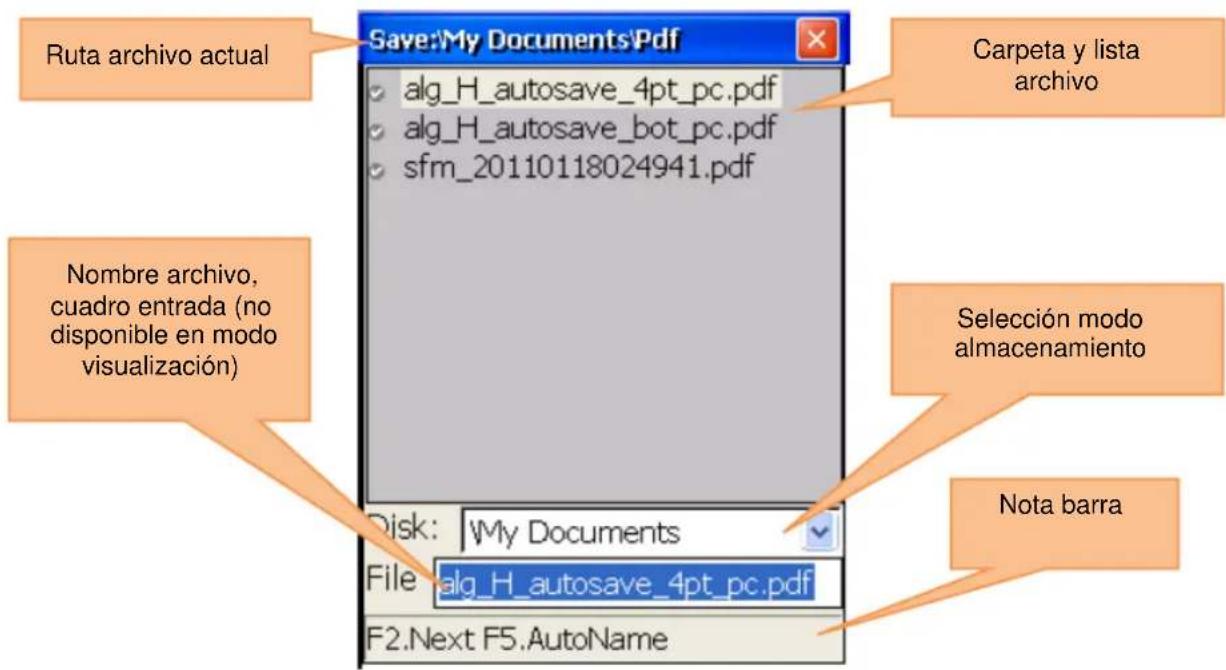
| Funciones de esta pantalla | Atajos de esta pantalla | |
 | Si se selecciona la lista de carpetas y archivos: navegar por la lista. Si se selecciona la casilla de selección de la memoria-: Selección de la memoria interna („My documents“) y tarjeta SD („Storage Card“) | |
 | Si se selecciona la lista de carpetas y archivos y se encuentra en una subcarpeta, mueva un nivel hacia arriba en la jerarquía de carpetas | |
| [8AB2] | Si se selecciona la lista de carpetas y archivos: eliminar la carpeta / archivo (precaución) | |
 | Si se selecciona la lista de carpetas y archivos: Crear una nueva carpeta | |
 | Cambiar entre la lista de carpetas y archivos, el campo de selección del medio de almacenamiento y el campo de entrada de nombre de archivo | |
| [T3BY] | Si se selecciona la casilla de verificación del medio de almacenamiento: Abrir / ocultar el menú desplegable | |
 | Nombre de archivo generado automáticamente (fecha + hora actual). El nombre aparece automáticamente en la casilla correspondiente. | |
 | Cuando se selecciona una carpeta: Abrir la carpeta / un nivel en la jerarquía de carpetas movimiento hacia abajo Cuando se selecciona un archivo: Guardar el archivo (sobrescribe el archivo seleccionado) o cargar archivo | |
10. Programa „My Documents“
| Funciones en esta pantalla | Atajos de esta pantalla |
| - Encontrar/organizar carpeta y archivos |  Encontrar/organizar carpetas yarchivos,crear nueva carpeta,eliminar carpetas y archivos Encontrar/organizar carpetas yarchivos,crear nueva carpeta,eliminar carpetas y archivos |
| - Guardar informes como archivo PDF |  Guardar como PDF Guardar como PDF |

10.1. Encontrar / organizar carpetas y archivos
Para encontrar/ organizar carpetas y archivos, pulse 1. i
| Funciones de esta pantalla | Atajos de esta pantalla | |
| - Encontrar archivos y carpetas- Cambiar entre memoria interna y tarjeta SD.- Eliminar carpeta- Eliminar archivos- Crear nueva carpeta |  | Si se selecciona la lista de carpetas y archivos: navegar por la lista.Si se selecciona el campo de selección del medio de almacenamiento. Selección entre la tarjeta SD („Storage Card“) y memoria interna („My documents“) |
 | Dentro de la jerarquía de carpetas mover hace arriba un nivel | |
 | Si se selecciona la lista de carpetas y archivos: Eliminar archivo o carpeta | |
 | Si se selecciona la lista de carpetas y archivos: Crear una nueva carpeta | |
 F3 F3   | Cambiar entre la lista de carpetas y archivos y el cuadro de selección de medio de almacenamientoSi se selecciona el campo de selección de medio de almacenamiento-: Abrir / Cerrar el menú desplegableSi se selecciona la lista de carpetas y archivos:Cuando se selecciona una carpeta, mueva dentro de lajerarquía de carpetas un paso hacia abajo (abrir carpetas) | |
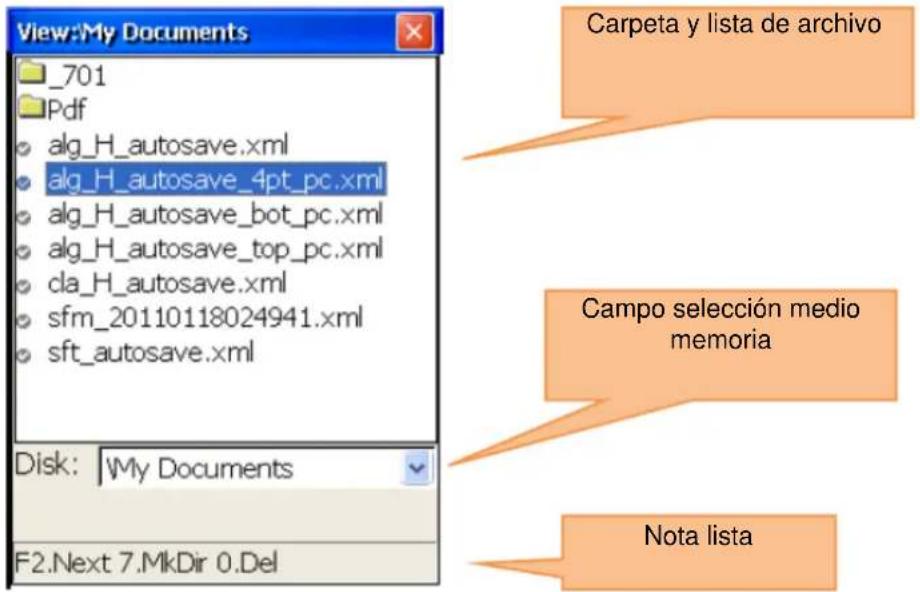
10.2. Guardar el informe como archivo PDF
Para guardar el informe como un archivo PDF pulse 2 ABC
| Funciones de esta pantalla | Atajos de esta pantalla | |
| - Seleccionar informe que debe guardarse como PDF- Seleccionar medio de almacenamiento/Carpeta/archivo donde se debe guardar el archivo PDF | [402H]Si se selecciona la lista de carpetas y archivos: navegar por la lista.Si se selecciona el campo de selección del medio de almacenamiento.Selección entre tarjeta SD („Storage Card“)y memoria interna („My documents“) | |
 Desplazarse dentro de la jerarquía de carpetas en un nivel superior Desplazarse dentro de la jerarquía de carpetas en un nivel superior | ||
| Si se selecciona la lista de carpetas y archivos: Eliminar archivo o carpeta | ||
 Si se selecciona la lista de carpetas y archivos: Crear una nueva carpeta Si se selecciona la lista de carpetas y archivos: Crear una nueva carpeta | ||
| Cambiar entre la lista de carpetas y archivos, el campo de selección de medio de almacenamiento y el nombre de archivo del campo de entrada | ||
 Si se selecciona la casilla de verificación del medio de -: Abrir/Cerrar menú desplegable Si se selecciona la casilla de verificación del medio de -: Abrir/Cerrar menú desplegable | ||
 Nombre de archivo generado automáticamente (fecha + hora actual). No se recomienda usar el nombre original. Nombre de archivo generado automáticamente (fecha + hora actual). No se recomienda usar el nombre original. | ||
 Si se selecciona la lista de carpetas y archivos:Si se selecciona una carpeta, dentro de la jerarquía de carpetas se mueve un paso hacia abajo (Abrir carpetas)De lo contrario, seleccione informe en View-Dialog y guarde el informe en el Save-Dialog Si se selecciona la lista de carpetas y archivos:Si se selecciona una carpeta, dentro de la jerarquía de carpetas se mueve un paso hacia abajo (Abrir carpetas)De lo contrario, seleccione informe en View-Dialog y guarde el informe en el Save-Dialog |
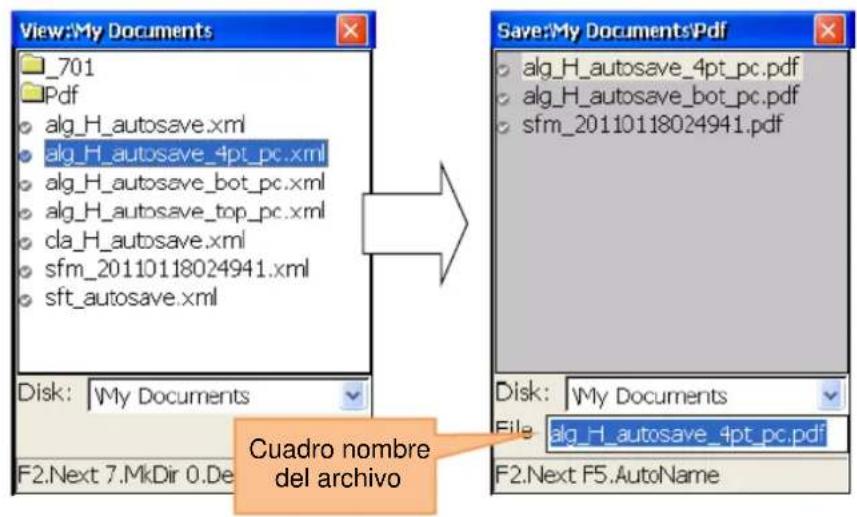
Si no es necesario/no quiere cambiar el medio de almacenamiento, hay un método simple con 2 clics para guardar los informes en formato PDF:
Pulse primero , aparece Save-Dialog. Pulse ahora de nuevo , para guardar el informe como PDF. Una subcarpeta PDF se crea automáticamente en la carpeta actual y el informe con el mismo nombre de archivo y la extensión .pdf se almacenan en la misma.
11. Ápendice
Tolerancias estándar en la alineación de ejes
| U/min | Bueno | Acceptable | ||
| Desplazamiento paralelo | Desplazamiento angular | Desplazamiento paralelo | Desplazamiento angular | |
| Hasta 1000 | 0,08 | 0,07 | 0,12 | 0,10 |
| Hasta 2000 | 0,06 | 0,05 | 0,10 | 0,08 |
| Hasta 3000 | 0,04 | 0,04 | 0,07 | 0,07 |
| Hasta 4000 | 0,03 | 0,03 | 0,05 | 0,05 |
| Más de 4000 | 0,02 | 0,02 | 0,04 | 0,04 |
Arriba se muestran las tolerancias estándares para la desalineación de máquinas industriales con acoplamiento flexible. Utilice solo estas tolerancias si no hay puntos de referencia internos o proporcionados por el fabricante y no supere las tolerancias.
12. Reciclaje
Por sus contenidos tóxicos, las baterías no deben tirarse a la basura doméstica. Se tienen que llevar a sitios aptos para su reciclaje.
Para poder cumplir con la RII AEE (devolución y eliminación de residuos de aparatos eléctricos y electrónicos) retiramos todos nuestros aparatos. Estos serán reciclados por nosotros o serán eliminados según ley por una empresa de reciclaje.
Puede enviarlo a
PCE Ibérica S.L.
C/ Mayor 53, bajo
02500 Tobarra (Albacete)
España
Puede entregarnos el aparato para que nosotros nos deshagamos del mismo correctamente. Podremos reutilizarlo o entregarlo a una empresa de reciclaje cumpliendo así con la normativa vigente.
RII AEE - N° 001932
Número REI-RPA: 855 -RD.106/2008
13. Contacto
Si necesita más información acerca de nuestro catálogo de productos o sobre nuestros productos de medición, no dude en contactar con PCE Instruments.
Para cualquier pregunta sobre nuestros productos, póngase en contacto con PCE Ibérica S.L.
Postal:
PCE Ibérica S.L.
C/ Mayor 53, bajo
02500 Tobarra (Albacete)
España
Por teléfono:
España: 902 044 604
Internacional: +34 967 543 695
ATENCIÓN: "Este equipo no dispone de protección ATEX, por lo que no debe ser usado en atmósferas potencialmente explosivas (polvo, gases inflamables)."
Las especificaciones pueden estar sujetas a modificaciones sin previo aviso.
En las siguientes direcciones encontrará una listado de
Técnica de medición http://www.pce-iberica.es/instrumentos-de-medida/instrumentos-medida.htm
Medidores http://www.pce-iberica.es/instrumentos-de-medida/medidores.htm
Sistemas de regulación y control http://www.pce-iberica.es/instrumentos-de-medida/sistemas-regulacion.htm
Balanzas http://www.pce-iberica.es/instrumentos-de-medida/balanzas-vision-general.htm
Instrumentos de laboratorio http://www.pce-iberica.es/instrumentos-de-medida/equipos-laboratorio.htm