X8 SE - Dron Fimi - Bezpłatna instrukcja obsługi
Znajdź bezpłatnie instrukcję urządzenia X8 SE Fimi w formacie PDF.

| Typ produktu | Dron z kamerą |
| Marka | Fimi |
| Model | X8 SE |
| Wymiary po rozłożeniu | 350×350×100 mm |
| Wymiary po złożeniu | 225×120×90 mm |
| Waga (z baterią i śmigłami) | ok. 765 g |
| Kamera | 4K 30fps, 12 MP (Sony IMX586) |
| Stabilizacja obrazu | 3-osiowy gimbal |
| Czas lotu (maks.) | ok. 30 minut |
| Zasięg (FCC) | do 8 km |
| System nawigacji | GPS + GLONASS + Galileo |
| Unikanie przeszkód | Przód i dół |
| Maksymalna prędkość | 18 m/s (tryb sportowy) |
| Pojemność baterii | 4500 mAh (LiPo 3S) |
| Ładowanie | USB-C |
| Pamięć | Brak wbudowanej; karta microSD do 128 GB |
| Tryby lotu | Follow Me, Waypoint, Orbit, Point of Interest, Smart Return to Home |
| Konserwacja i czyszczenie | Czyścić soczewkę miękką ściereczką, przechowywać w suchym miejscu, regularnie kalibrować kompas |
| Bezpieczeństwo | Automatyczny powrót (RTH) przy utracie sygnału lub niskim poziomie baterii, geofencing |
| Części zamienne | Śmigła, baterie, ramiona, osłona gimbala, pilot |
| Gwarancja | 1 rok (producenta) |
Często zadawane pytania - X8 SE Fimi
Pytania użytkowników dotyczące X8 SE Fimi
0 pytanie dotyczące tego urządzenia. Odpowiedz na te, które znasz, lub zadaj własne.
Zadaj nowe pytanie dotyczące tego urządzenia
Pobierz instrukcję dla swojego Dron w formacie PDF za darmo! Znajdź swoją instrukcję X8 SE - Fimi i weź swoje urządzenie elektroniczne z powrotem w ręce. Na tej stronie opublikowane są wszystkie dokumenty niezbędne do korzystania z urządzenia. X8 SE marki Fimi.
INSTRUKCJA OBSŁUGI X8 SE Fimi
FIMI X8 SE Instrukcja Obsługi
Proszę dokładnie przeczytać instrukcję obsługi przed pierwszym użyciem oraz zachować do późniejszego wglądu.
Spis treści
Pomoci Wsparcie .... 1
Instrukcja 1
Zawartość opakowania 2
Budowa drona 3
Dron....5
Montaż i Demontaż 12
Gimbal i Kamera 14
Aparatura sterująca....16
Aplikacja 20
Przygotowanie do lotu 22
Obsługa i Kalibracja 25
Specyfikacja 27
Pomoc i wsparcie
FIMI zapewnia użytkownikom X8 SE filmy instruktażowe i następujące informacje
-
FIMI X8 SE Instrukcję obsługi
-
FIMI X8 SE Instrukcję szybkiego startu
-
FIMI X8 SE Wyłączenie odpowiedzialności i instrukcje bezpieczeństwa
Użytkownikom zaleca się obejrzenie filmów instruktażowych przed użyciem produktu
i przeczytanie instrukcji obsługi oraz instrukcje dotyczącej bezpieczeństwa.
Poznać obługę drona można zapoznając się z podręcznikiem szybkiego uruchamiania FIMI X8 SE.
Bardziej szczegółowe informacje o produkcie można znaleźć w podręczniku użytkownika FIMI X8 SE.
Pobierz oprogramowanie sprzętowe i obejrzyj filmy instruktazowe pod linkiem
- Prosimy zeskanować kod QR aby pobrać aplikację Fimi Navi app

Informacje o produkcie
FIMI X8 SE to aerodynamiczny składany dron z inteligentnym sterowaniem, komunikacją bezprzewodową i innymi zaawansowanymi technologiami, które sa niezbędne do realizacji funkcji takich jak zdalne sterowanie na duże odległości, inteligentne tryby lotu, precyzyjne lądowanie, itp.
Wbudowany 3-osiowy gimbal stabilizuje kamerę, która potrafi nagrywać wideo 4K z prędkością 30 klatek na sekundę i wykonuje transmisję obrazu HD w czasie rzeczywistym. Aplikacja wzbogaca aparaturę sterującą o więcej funkcji i szybkie połączenie.
Aparatura sterująca potrafi pomieścić iPada Mini w maksymalnym zakresie. Drążki są odpinane.
Zawartość opakowania
2 Aparatura sterująca RC
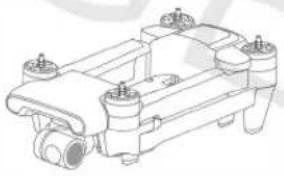
Dron
Tryby Lotu
Tryb GPS
W celu osiągnięcia precyzyjnego zawisu, dron został wyposażony w moduł GPS. Funkcja inteligentnych trybów lotu działa w trybie GPS. Użytkownicy mogą uruchomić tryb Sportowy (Sport) lub Początkującego (Beginner) w ustawieniach lotu. Gdy tryb początkującego zostanie uruchomiony, szybkość lotu, maksymalna odległość, maksymalny pułap oraz wysokość lotu w trybie RTH (Powrotu do miejsca startu) będzie ograniczona. W trybie Sport, maksymalna prędkość lotu wynosi 18m/s(65km/h), maksymalna prędkość wznoszenia wynosi 5m/s(18 km/h), a maksymalna prędkość opadania wynosi 4m/s(14km/h)
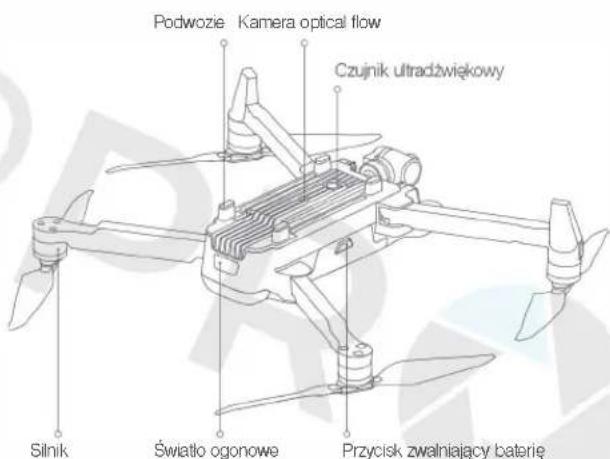
Tryb VPU
Dron został wyposażony w modul Optical Flow celem poprawienia charakterystyki w zawisie oraz precyzji lądowania. W trybie VPU, inteligentne tryby lotu nie są uruchamiane. Maksymalna prędkość lotu wynosi 10m/s(36km/h), maksymalna prędkość wznoszenia to 3m/s(11km/h), a maksymalna prędkość opadania to 2m/s(7km/h). Kiedy dron wykonuje lot nad dobrze oświetlonażiemią z wyraźną teksturą a sygnał GPS jest niewystarcający, automatycznie przełączy się w tryb VPU.
Tryb ATTI
Kiedy sygnal GPS jest zbyt slaby lub moduł kompasu zostanie zakłócony, dron wchodzi w tryb ATTI. W tym trybie dron może dryfować w poziomie a inteligentne tryby lotu nie działają. Dlatego, aby uniknąć wypadków zaleca się latanie na otwartej przestrzeni z dobrą recepcją sygnału GPS. Kiedy dron wejdzie w tryb lotu ATTI proszę wyłądować jak najszybciej jest to możliwe.
Sygnalizacja świetlna
| Światla drona | Status drona | |
| 1 | Wszysłkie światła gasną i zapalają się | Auto diagnostyka |
| 2 | Wszysłkie światła włączone | Niepowodzenie auto diagnostyka |
| Błąd wewnętrzny | ||
| 3 | Czerwone i zielene s diody włączone żoła dioda mąca regularnie | Gołowy do iolu/w łace |
| 4 | Wszysłkie diody migają dwukrotnie | Niską pożom baleni |
| 5 | Wszysłkie diody migają szybko | Kardno nisko pożom balenę iądu |
| 6 | Zolta dioda mąca | Aktualizacja o programowania ukadowego |
Notatka: Tryb Sport nie będzie dostępny dla lotów powyżej 2400M NPM
Zabezpieczenia
Automatyczny powrót
Automatyczny powrót jest uruchamiany wyłącznie w trybie GPS. Jeśli sygnał z kontrolera RC zostanie zerwany lub zakłócony na dłużej niż 2 sekundy, system kontroli lotu przejmie kontrolę nad dronem, zaplanuje trasę powrotu do miejsca startu według oryginalnej trasy lotu, następnie dron wróci do miejsca startu i wyłąduje bezpiecznie. Ta funkcja działa bardzo precyzynie jeśli w zasięgu jest wystarczająca ilość satelit GPS, kompas nie ma zakłóceń oraz punkt startu został prawidłowo zapisany. Jeśli sygnał z kontrolera zostanie odzyskany podczas procedury powrotu do miejsca startu , operator może przerwać autonomiczny powrót przez anulowanie w aplikacji lub przełączenie przełącznika powrotu w ponownie w lewo, a dron przejdzie do zawisu w aktualnej pozycji.
flowchart
graph TD
A["Robot"] --> B["punkt startu"]
B --> C["● bećna wysokość wysokość RTH"]
C --> D["● bećna wysokość wysokość RTH"]
D --> E["najierw wznesi się (domyślna wysokość 30m)"]
E --> F["● punkt startu"]
Zabezpieczenie przed rozładowaniem
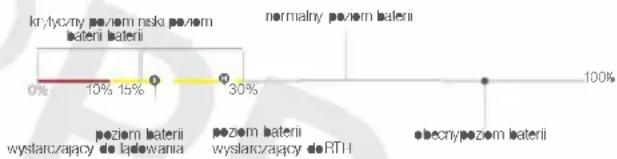
W locie, kiedy poziom baterii jest wystarczający tylko na RTH (Powrót do miejsca startu) Aplikacja informuje użytkownika o konieczności powrotu, a dron rozpoczęnie automatyczny powrót po 10 sekundowym odliczaniu. Kiedy poziom baterii jest wystarczający tylko do lądowania aplikacja radzi użytkownikowi natychmiastowe lądowanie, a dron wyłąduje po 10 sekundowym odliczaniu.
Jeśli poziom baterii wynosi tylko 10% dron będzie zmuszony do lądowania.
bar
| Category | Value (%) | |---|---| | krytyczny poziom niski poziom baterii baterii | 0 | | poziom baterii wystarczający do ładowania | 10 | | poziom baterii wystarczający do RTH | 15 | | normalny poziom baterii | 30 | | obecny poziom baterii | 100 |Zawis na skraju stref z zakazem lotu.
Dron automatycznie zatrzyma się w zawisie po doterciu do skraju strefy z zakazem lotów np stref kontrolowanych lotnisk a aplikacja wyświetli odpowiednie wskazówki. Użytkownik może latać na skraju strefy ale nie może w nią wlecieć.

Inteligentne tryby lotu
Auto start
W celu osiągnięcia precyzyjnego zawisu, dron został wyposażony w moduł GPS. Funkcja inteligentnych trybów lotu działa w trybie GPS. Użytkownicy mogą uruchomić tryb Sportowy (Sport) lub Początkującego (Beginner) w ustawieniach lotu. Gdy tryb początkującego zostanie uruchomiony, szybkość lotu, maksymalna ocległość, maksymalny pułap oraz wysokość lotu w trybie RTH (Powrotu do miejsca startu) będzie ograniczona. W trybie Sport, maksymalna prędkość lotu wynosi 18m/s(65km/h), maksymalna prędkość wznoszenia wynosi 5m/s(18 km/h), a maksymalna prędkość opadania wynosi 4m/s(14km/h)
Auto lądowanie
Kiedy warunki są prawidlowe, wciśnі przycisk auto startu/łądowania na 2 sekundy aby wyłądować.
Wskazówka. Użytkownik może nacisnąć krótko przycisk auto startu lądowania aby wyjść z trybu inteligentnego lotu.
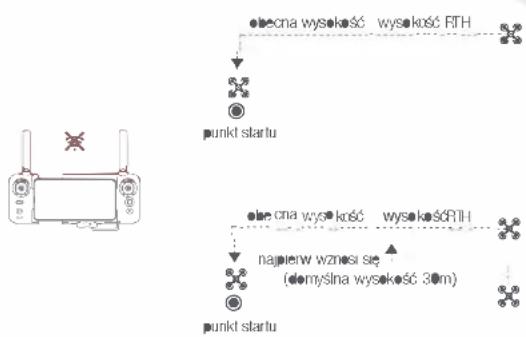
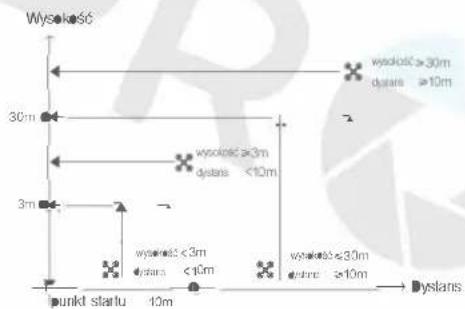
Auto powrót.
Kiedy dron jest w locie użytkownik może przełączyć włącznik auto powrotu w prawo aby uruchomić procedurę auto powrotu. Kiedy dystans do powrotu jest mniejszy niż 10m a wysokość lotu jest mniejsza niż 3m, dron wzniesie się na wysokość 3 metrów i powróci na tej wysokości do miejsca startu. Jeśli wysokość lotu jest równa lub większa niż 3 metry dron powróci do miejsca startu pozostając na tej wysokości. Jeśli dystans do powrotu jest większy niż 10m a wysokość lotu jest mniejsza niż 30m dron wzniesie się na wysokość 30m i powróci na miejsce startu. Jeśli wysokość lotu jest równa lub większa niż 30 metrów dron powróci na miejsce startu na obecnej wysokości. Użytkownik może przełączyć włącznik auto powrotu w lewo aby anulować powrót.
flowchart
graph TD
A["punkt startu"] --> B["3m"]
B --> C["30m"]
C --> D["30m"]
D --> E["30m"]
E --> F["30m"]
F --> G["30m"]
G --> H["30m"]
H --> I["30m"]
I --> J["Dyskłans"]
K["wysokość ≥30m"] --> L["dysans ≥10m"]
M["wysokość ≥3m"] --> N["dysans <10m"]
O["wysokość ≤30m"] --> P["dysans <10m"]
Q["wysokość ≤30m"] --> R["dysans ≥10m"]
Tryb Smart Track
Smart track jest wspierany wyłącznie w trybie GPS. Użytkownik może wybrać opcję Trace, Profie lub Lock w menu aplikacji.
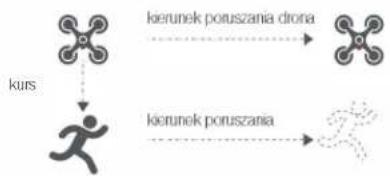
W trybie Trace, kurs drona będzie zablokowany na obiekcie a dron będzie podążał za obiektem śledząc go.

W trybie profile kurs drona będzie zawsze zablokowany na obiekcie a dron będzie podążał z boku obiektu w pewnej odległości.
flowchart
graph TD
A["kurs"] --> B["kierunek poruszania"]
B --> C["kierunek poruszania drona"]
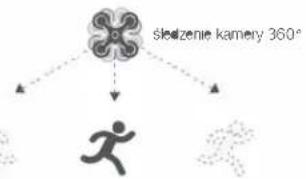
W trybie Lock dron pozostanie w zawsie a jego kurs będzie skierowany na obiekt śledzony. Użytkownik może również ustawić prędkość a dron będzie poruszał się dookoła obiektu w pewnej odległości.
prędkość lotu=0m/s
flowchart
graph TD
A["droplet"] --> B["sketzenie kamera 360°"]
A --> C["interaction"]
A --> D["interaction"]
A --> E["product"]
prędkość lotu ≠ 0m/s

Wskazówka. W trybie Smart Trace użytkownicy powinni zawsze upewnić się aby unikać ludzi zwierząt i przeszkód na trasie przelotu drona aby zapewnić maksymalne bezpieczeństwo lotu. Użytkownicy powinni zastosować się do lokalnych praw i regulacji używając tej funkcji.
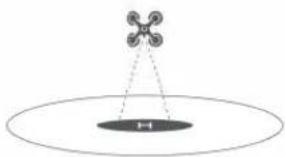
Tryb Orbit
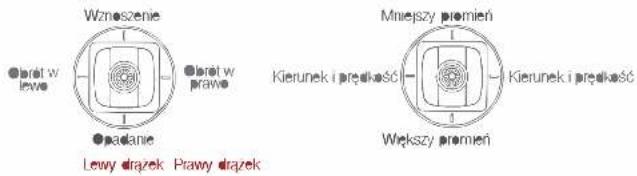
Użytkownik może wybrać tryb Orbit w aplikacji, kiedy; punkt centralny i promień są określone, dron będzie latal dookola punktu centralnego z wyznaczona prekością. Jeśli POI (Punkt zainteresowania) został ustawonyk camera będzie zablokowana na POI.
- Poleć do punktu centralnego aby go wyznaczyć.
- Odleć od punktu centralnego aby wyznaczyć promień krążenia.
- Ustaw prędkość lotu, kierunek i kierunek kamery. Jeśli kierunek kamery jest nie zablokowany użytkownik może ustawić kwadrat na punkcie PCI aby go wybrać.

Jeśli drążki zostaną poruszone w trakcie orbitowania wysokość lotu prędkość lu kierunek zostaną zmienione.
Tryb Tap - fly
Uż/tkownik może wybrać tryb Tap-ty; w aplikacji. Kliknij na mapie aby wybrać cel i prędkość lotu do celu. Dron będzie lecial do wybranego punktu z domyślną prędkością w linii prostej. Jeśli ustawiono POI kamera będzie na nim zablokowana.
Kliknij na mapie aby wybrać cel.
Przelącz się do widoku kamery aby wybrać POI wybierz wysokość i prędkość lotu

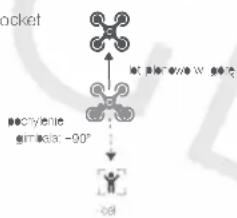
Tryb Dronie
Uztykownik może wybrać tryb dronie włączając w to tryb invert i rocket w aplikacji. W trybie Rocket, dron unosi się z kamera szkerowaną w dół na obiekt aby nakręcić video. W trybie Invert, dron leci w tył i unosi się z kamera zablokowaną na obiekcie aby nakręcić video.
- Przeciągn i prostokąt dookola POI
- Wprowadź prędkość i wysokość lotu, centrum kontroli lotu automatycznie obliczy czas potrzebny
Dron automatycznie ustawi swoje położenie - Po 3 sekundowym odliczaniu dron rozpoczęnie lot kręcąc film lub timelapse
Rocket
flowchart
graph TD
A["Drone"] --> B["+/-"]
B --> C["Energy: -90°"]
C --> D["+/-"]
D --> E["Energy: -90°"]
Invert

flowchart
graph TD
A["Low width"] --> B["Top-right"]
C["Cochylen e simbale"] --> B
D["Top-right"] --> B
Tryb Course Lock
Użytkownik może wybrać tryb Course Lock w aplikacji. Dron zachowuje obecny kierunek lotu jako kierunek kursu. Użytkownik może kontrolować drążkami kierunek drona i gimbala ale kierunek poruszania do przodu pozostaje niezmieniony.
Tryb Tripod
Maksymalna prędkość drona jest ograniczona do 1m/s, a prędkość rotacji do 60 stopni na sekundę. W trybie tripod, czułość operacji jest zmniejszona aby zapewnić bardziej stabilne i płynne filmowanie
Tryb Aerial
Dystans hamowania jest wydłużony a prędkość kątowa i rotacja jest ograniczana aby mieć pewność że rejestrowanie video będzie bardziej stabilne i płynne.
Notatka. Tryb Course Lock jest aktywowany w trybie Aerial użytkownicy mogą go włączyć w aplikacji.
Tryb Spiral
Użytkownik może wybrać tryb spiral w aplikacji. Ustaw punkt centralny i promień, dron będzie lecial spiralnie w górę i jednocześnie rejestrował video, ukazując poczucie przestrzeni.
- Leć do punktu centralnego aby go określić.
- Odleć od punktu centralnego aby określić promień
- Określ kierunek spirali i dystans lotu aby rozpocząć lot i nagrywanie filmu jednocześnie.
- Misja zostaje przerwana jeśli użytkownik poruszy drążki

Tryb SAR
Użytkownik może wybrać tryb SAR w aplikacji. Z pokazywanymi na bieżąco koordynatami dron może pomóc użytkownikowi w misjach poszukiwawczo ratunkowych
Na obrazie z kamery nanoszone są rzeczywiste koordynaty i czas, wspierany jest cyfrowy zoom i izruty ekrany aby udostępnić online
Na obrazie mapy nanoszone są realne koordynaty i czas, istnieje możliwość pokazania mapy zwyklej lub satelitarnej, zrzuty ekranu można udostępniać online
Tryb Waipoint
Wybieranie punktów docelowych i rysowanie tras, obie funkcje są dostępne na mapie. Dron leci wzdłuż zaplanowanej trasy z domyślną prędkością. Jeśli PCI jest ustawiony, widok kamery będzie zablokowany na Punkcie zainteresowania. Użtkownik może określić sposób ustawiania punktów trasy, włącznie z wybieraniem punktów na mapie w trakcie lotu lub historycznymi trasami.
Wybieranie punktów w locie
- Leć dronem do miejsca docelowego aby określić je jako punkt trasy
- Uży drązków aby określić wysokość i kierunek lotu, a kolek do wybrania lejąta nachylenia gimbala i akcji po dotarou do punktu docelowego.
- Kiedy wszystkie punkty trasy są golowe, prosze określić atributy tras, także jak prędkości:
kierunek, akcje po dotarciu do punktu. - POI jest możliwy do określenia podczas wykonywania tras
Wybieranie punktów na mapie.
- Klikn j na mapie aby dodać punkt
- Ustaw atrbybuty punktu takie jak wysokość lotu akcję po dolarciu do punktu kierunek
obreolu - Przeciątnij ikone POL na mapa i ustaw jej wysokość i powiązane punkty trasy
- Kiedy wszystkie punkty beda gotowe, ustaw predkość lotu, akcie failsafe i działanie
po dolarciu do punktu - POI są możliwe do określenia podczas wykonywania tras
Historyczne trasy
-
przeprzyj punkty trasy i ich alrybuly wchodzące do ulubionych
-
klikn j aby wystartować i pokazać trasę w czasie rzeczywistym
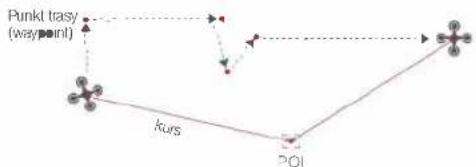
flowchart
graph TD
A["Punk! tasy (waypoint)"] --> B["Pol"]
B --> C["kurs"]
C --> A
style A fill:#f9f,stroke:#333
style B fill:#ccf,stroke:#333
style C fill:#cfc,stroke:#333
Precyzyjne lądowanie
W trakcie procesu automatycznego powrotu na miejsce startu, sensor optical flow odnajduje lądowisko w miejscu startu. Kiedy odnajdzie poprawnie pad do lądowania dron wyłąduje na nim precyzyjnie.
Notatka Prosze włączyć tryb precyzyjnego lądowania w aplikacji przed jego użyciem
Tryb Fix-wing
W trybie FixWing dron może latać wyłącznie do przodu nie do tyłu. Użytkownik może używać drązków aby kontrolować prędkość i kurs jak pokazano w tabeli poniżej. (Tryb Amerykański)
| Drażek lewcy | przesuń w gołąc | w gołąc |
| przesuń w doł w o d | ||
| przesuń w lewo skręt w lewo | ||
| przesuń w prawo skręt w prawo | ||
| Drażek prawy | przesuń w gołąc przyspieszenie | |
| przesuń w doł zwolmenie | ||
| przesuń w lewo skręt w lewo | ||
| przesuń w prawo skręt w prawo | ||
Montaż i demontaż
Śmigła
Rozlóż przednie i tylne ramiona drona
Zamontuj oznaczone na szaro śmigła do silników z szarymi znakami na ramionach
Upewnij się że śmigło jest wciśnięte do dna bazy zamocowania
Obróć śmigło do końca wzdłuż kierunku mocowania aż odskoczy w górę i zablokuje się
Wciśnij śmigło do końca i obróć wzdłuż kierunku odblokowania aby zdemontować śmigło

Zalecenia bezpieczeństwa.
Jeśli śmigło jest uszkodzone proszę je wymienić aby zapewnić bezpieczeństwo
lotów i efektywność. Sprawdź czy śmigła są poprawnie zainstalowane i zablokowane
przed każdym lotem. Trzymaj się z dala od obracających się śmigiel aby uniknąć obrażeń.
Notatka. Przedstawiono przykladową instalację lewego śmigla.
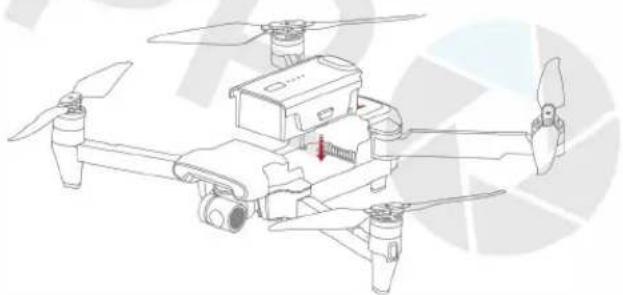
Bateria
Inteligentna bateria Fimi X8SE ma pojemność 4500mAh, i napięcie 13.05V. Tego typu bateria wykorzystuje wysokoenergetyczne cele, zaawansowany system zarządzania baterią, i funkcjonalność ładowania i rozładowania.
Montaż i demontaż.
- Wciśnij mocno baterię, przy poprawnej instalacji baterii będzie słyszalny dźwięk "kliknięcia"
- Aby zdemontować baterię, konieczne jest wciśnięcie obu przycisków po bokach aby odbezpieczyć klahry zabezpieczające i wysunąć baterię.
Podłącz baterię i kabel AC do ładowarki jak pokazano niżej a następnie podłącz ładowarkę do gniażka ściennego.
- Kiedy bateria jest ładowana, diody poziomu baterii migają.
- Kiedy bateria zostanie naładowana diody poziomu baterii zgasną, ladowanie baterii do pełna zajmuje około 2 godzin.
Włączanie i wyłączanie
• Wciśnji przycisk na krótko a następnie przytrzymaj na dłużej niż 2 sekundy
- Wciśnji krótko aby sprawdzić poziom naładowania


Kamera jest wyposażona w sensor CMOS 1/2.3cala i obiektyw szerokokątny o ekwiwalencie ogniskowej 26mm, wspiera rejestrowanie obrazu w 4K 30FPS HD I 12 megapixelowych fotografii. Ponadto posiada wiele trybów rejestrowania takich jak single, burst, timelapse, panorama i zwolnione tempo, dla różnych scenariuszy wykorzystania.
Karta TF
Kiedy instalujesz kartę TF rozwiń ramiona drona i podnieś gumową pokrywkę zabezpieczającą.
Wsun kartę TF do slotu TF i wciśnij by zablokować.
Chcąc zdemontować kartę wciśnji aby odbezpieczyć. Karta wysunie się i będzie możliwe jej wyjęcie
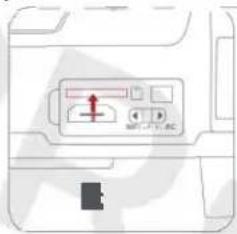
Notatka: Wspetane karty Micro SD (U3 i wyżej) B-64GB, zalecane
Sandisk Extreme Pro V30 32G
Sandisk Extreme Pro V30 64G
Sandisk Extreme V30 32G
Sandisk Extreme V30 64G
Samsung Pro Endurance 32G
Toshiba Exceria Pro 64G
Lexar Professional 1000X 32G
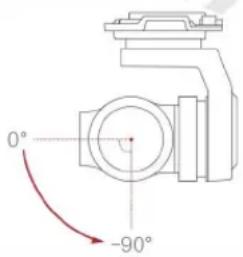
Gimbal
Fimi X8 SE łączy w sobie 3-osiowy lekki mechaniczny gimbal z najnowszymi profesionalnymi algorytmami kontroli i precyzją sięgającą +-0.004 stopnia, co daje stabilną podstawę dla kamery. Oś pochylenia, domyśnie regulowana od 0-90 stopni może być regulowana lewym pokrętem kontrolera lub w aplikacji.
Tryby operacji
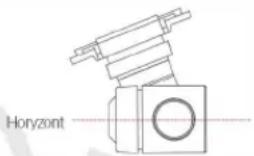
Tryb Follow
Oś przechylenia nie porusza się wraz z dronem i utrzymuje gimbal w poziomie co sprzyja nagrywaniu stabilnych filmów.

Tryb FPV
Oś przechyżenia obraca się z dronem dając wrażenie i otu z obrazem z pierwszej osoby.
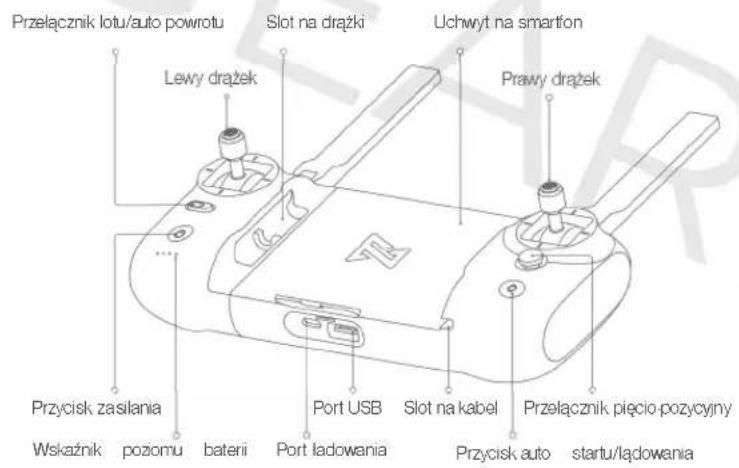
Aparatura RC
Ergonomiczny design, jest łatwiejsza i precyzyniejsza w kontroli.
Nie potrzeba skomplikowanych operacji aby połączyć ją z aplikacją, wystarczy podłączyć do telefonu i wszystko działa. W pełni naładowana aparatura może pracować przez 4,5H
Włączanie i wyłączanie
- Krótkie przyciśnięcie + długie przyciśnięcie na 2 sekundy aby uruchomić.
Krótkie przyciśnięcie aby sprawdzić poziom naładowania akumulatora.

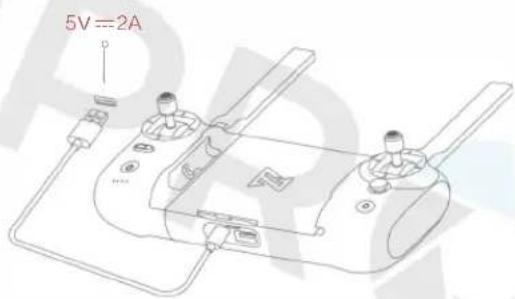
Podłącz aparaturę do ładowarki jak pokazano ponizej
Kiedy Aparatura laduje się, diody poziomu baterii migaja
- Kiedy Aparatura jest w pełni naładowana diody poziomu baterii zgasną
Ładowanie wyłączonej aparatury do pełna zajmuje około 4 godziny.
Montaż urządzenia
Zamocuj tablet lub smart fon w aparaturze rozciągając jej lewą część.
Otwórz osłone gniazd u dołu kontrolera
Podłącz telefon z aparaturą za pomocą kabla USB
Podłącz drona i zaktualizuj oprogramowanie postępując według wskazówek w Fimi Navi APP
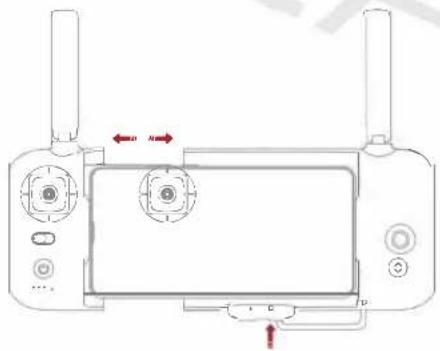
Notatka: Zagłębienie na kabel znajduje się po prawej stronie kontrolera
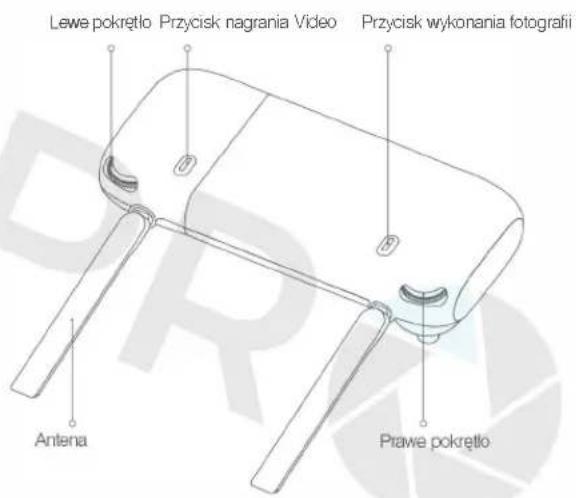
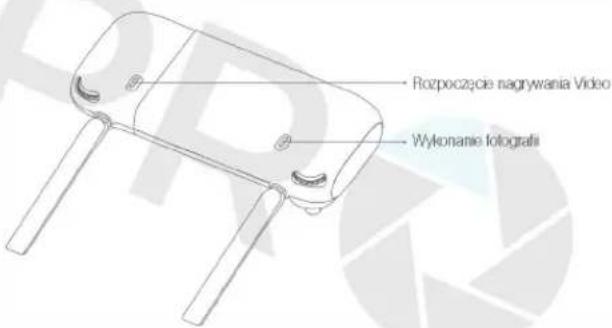
Nagrywanie filmów i fotografowanie
- Wciśnł przycisk spustu migawki. Fotografia zostaje zarejestrowana kiedy usłyszysz 2 krótkie dźwięki.
• Wciśnjprzycisk nagrywania aby zarejestrować film. Nagrywanie rozpocznie się kiedy usłyszysz 2 krótkie dźwięki. - W trakcie nagrywania, krótko wciśnj przycisk spustu migawki aby wykonać zajęcie. (dostępny wyłącznie podczas nagrywania 1920x1080 25-30-50-60fps)
* Kąt pochyenia gimbała może być kontrolowany przez poruszanie lewym pokrętłem w górę i w dół - Prawym pokrętem można regulować parametry EV/ISO
Przyciski skrótów
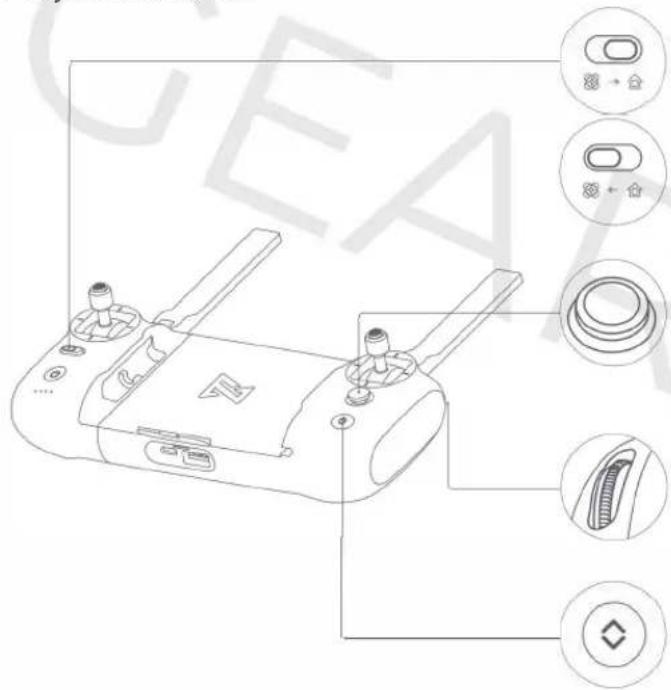
* Przełącz przełącznik auto powrotu na miejsce startu w prawo kiedy dron jest w locie, dron automatycznie powróci do punktu domowego i wyłąduje.
- W trakcie procedury auto powrotu, przelacz przełącznik auto powrotu w lewo, dron przerwie procedurę powrotu i w zawisie będzie czekać na komendy drązkami
- Wciśn i pięcio pozycyjny przełącznik w górę aby przełączyć do widoku mapy
Wciśn i pięcio pozycyjny przełącznik w dół aby skierować gimbal w dół
Wciśn i pięcio pozycyjny przełącznik w lewo aby włączyć widok stanu baterii.
- Wciśn i pięcio pozycyjny przełącznik w prawo aby włączyć/wyłączyć interfejs auto diagnostyki
Wciśn pięcio pozycyjny przełącznik centralnie aby przejść do mediów.
- Prawe pokrętło aby regulować parametr EV/ISO
- Lewe pokrętło aby regulować pochylenie gimbała
- Kiedy Przycisk auto startu/lądowania świeci na bialo, wciśnij aby wystartować lub wyłądować
. Kiedy dron spełni warunki auto startu, wciśnij na dłużej niż 2 sekundy aby wystartować
. Kiedy dron spełni warunki auto lądowania, wciśnij na dłużej niż 2 sekundy aby wyłądować
- Kiedy dron wykonuje misję trybów inteligentnego lotu wciśnij krótko aby przenwać misję.
Ustawienie drązków
Mode 1

Mode 2
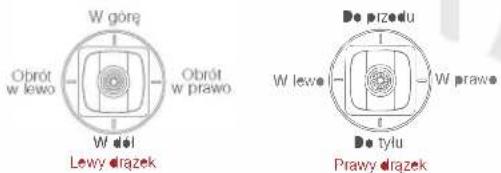
Mode 3
Parowanie aparatury zdalnego sterowania
Kiedy aparatura lub dron zostaną wymienione, konieczne jest ponowne sparowanie obu jak wskazano poniżej.
- Uruchom drona
- Uruchom aparaturę, naciśnij na dłużej niż 15 sekund przycisk włączenia aż usłyszysz ciągły dźwięk a diody przycisku włączenia będą migać na czerwono.
- Wciśnj na krótko przycisk parowania w dronie, żółte światło zgaśnie
- Parowanie powiocło się jeśli diody przycisku włączenia na aparaturze zmienia kolor na biały a żółta dioda w dronie będzie świecić na stałe.


Diody aparatury RC
| Kontrolki aparatury RC | Status aparatury RC | |
| 1 | Przycisk zaslania czerwona doda | Słaty sygnal lub nie połączone do dienta |
| 2 | Przycisk zaslania biała doda | Sygnal normalny |
| 3 | Przycisk zaslania czerwona doda mieja | Parewanie lub aktualizacja firmiware |
| 4 | Przycisk zaslania bła la dioda mieja | Nagrywanie Vides |
| 5 | Przycisk auto startu/lądowania Czerwona doda | Auto start/lądowanie nie słępcne |
| 6 | Przycisk auto startu/lądowania biała doda | Gotowy do auto startu |
Aplikacja
Pobierz i zainstaluj Firmi NAM APP, zarejestruj uż/tkownika Firmi przed zalogowaniem, i wybierz FIMI X8 SE aby połączyć z urządzeniem.
Interfejs Obrazu
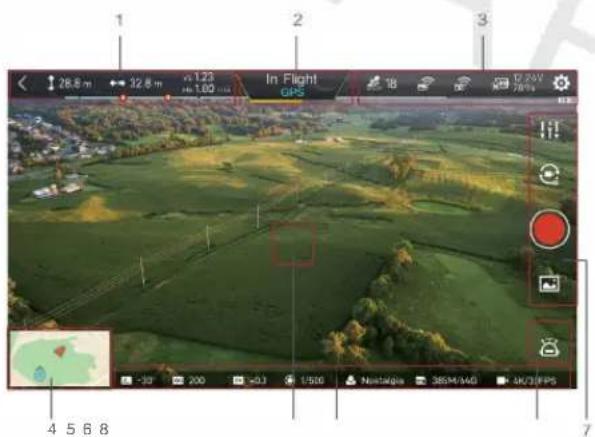
1. Parametry lotu w czasie rzeczywistym
28.8m: wysokość od punktu startu
←→32.8m: odległość od punktu startu
VS1.23m/s: prędkość lotu
HS1.80m/s: prędkość wznoszenia
: Szacowana ilość energi baterii aby wyłądować
H : Szacowana ilość energi baterii aby powrócić do punktu startu
2. Status Drona
W locie: obecny status
GPS: obecny tryblotu, włączając GPS, VPU, ATTI
: moc w czasie rzeczywistym
3. Status siły sygnału i Ustawienia
: pokazuje status GPS, 0-6 satelit niski na czerwono: 7-12 satelit dobry na żółto 13 i więcej doskonały na bialo. Kliknjiaby wejść do ustawień kontroli lotu
: sila sygnalu transmisji obrazu
: siła sygnalu sterowania aparaturą RC, kliknij aby wejść do ustawień aparatury
poziom baterii w czasie rzeczywistym, kliknji aby wejść do ustawień baterii
: kliknij by wejść do ustawień
20.30 : Szacowany czas lotu w czasie rzeczywistym
4. Interfejs mapy
Pokazuje pozycję drona w czasie rzeczywistym i wspiera 3D zoom, kliknij by zamienić z interfejsem obrazu.
5. Tryby pomiaru
Kliknij dowolne miejsce w trybie obrazu aby zmierzyć ekspozycję. Kiedy ikona klódki będzie wyświetlona klikn j aby zablokować na tej wartości.
6. Parametry Gimbala

Kąt gimbala

: Wartość korekty ekspozycji EV

Wartość czulości matrycy ISO

: Prędkość migawki

Obecny tryb koloru

: Pojemność i pozostala ilość miejsca na karcie SD

: Rozdzielczość video i liczba klatek/s w trybie Video, lub wielkość zdjęcia w trybie Foto
7. Panel operowania kamera
3:26 : Długość rejestrowanego materialu video

: Ustawienia parametrów kamery: EV, ISO, migawka, tryb video lub foto, rozdzielczość, rozmiar video, balans bieli itp

: Przełącza między trybem Video i Foto

Uruchamia nagrywanie bądź wykonuje fotografię

Przycisk PIV, dostępny wyłącznie w trybie 1080P

: Biblioteka mediów, kliknij by pobrać lub podejrzeć filmy i fotografie zachowane na karcie SD
8. Inteligentne tryby lotu
Kliknij by wejść w tryb inteligentnego lotu

: Auto start

: Auto lądowanie

: Auto powrót

: Programowalne trasy autonomiczne

: Tryb Smart Track oraz Trace i Profile

: Tryb Orbit

: Tryb Tap-fly

. Tryb Dronie oraz Rocket i Invert

: Tryb Spiral

: Tryb SAR

: Tryb Aerial

: Tryb Tripod

: Tryb Course Lock

: Tryb Fix-wing
Interfejs Map


: Klikinaby wycentrować na pozycji drona lub drona i kontrolera

Ustaw obecną pozycję drona jako punkt powrotu

Ustaw obecną pozycję aparatury RC jako punkt powrotu

Obecna pozycja drona

Punkt startu (powrotu w wypadku RTH)

Obecna pozycja kontrolera RC
Przygotowanie do lotu.
Sprawdź przed lotem.
- Upewnji się że bateria drona i kontrolera jest wystarczająca do przeprowadzenia lotu.
- Upewnji się że śmigla są poprawnie zainstalowane i wolne od uszkodzeń i znaków starzenia.
- Upewnji się że obiektyw kamery jest czysty
- Upewnji się że karta TF jest włożona.
- Utrzymuj anteny pod kątem prostym do drona jak pokazano na ilustracji.

Notatka aby utrzymać stabilny sygnał zawsze trzymaj anteny skierowane pod kątem prostym do modelu.
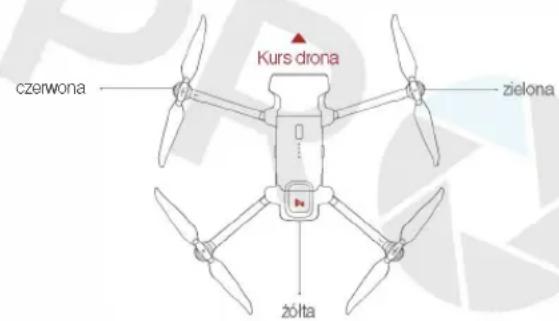
Potwierdź kierunek drona
Kierunek zintegrowanej kamery gimbala jest kierunkiem drona.
Kiedy dron zostanie uruchomiony kierunek można rozpoznać po światłach nawigacyjnych
Światło czerwone i światło zielone oznaczają strony, żółte światło oznacza ogon.
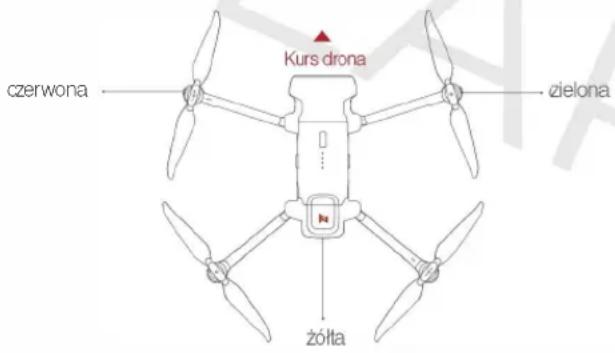
Wskazówka bezpieczeństwa. Zawsze trzymaj ogon skierowany w stronę użytkownika aby uniknąć złego osądzenia kierunku.
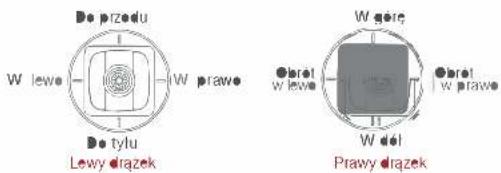
Manualny start

Lewy drążek

Prawy drażek

Lewy drązek

Prawy drażek
Trzymaj drążki skierowane do środka w dół przez 3 sekundy, śmigła zaczną się obracać.
Puść oba drążki kiedy śmigła zaczną się obracać, i przesuń lewy drążek w górę aby wystartować. W takcie lotu puść oba drążki aby zatrzymać się w zawisie.
W dowolnym momencie kontrolowanego lotu, puść oba drążki a dron zawiśnie w miejscu automatycznie.
Manualne lądowanie

Lewy drążek

Prawy drążek
Powoli przesuwaj lewy drażek w dół aby wyłądować dronem.
Kiedy dron wyłąduje, przesuń lewy drązek maksymalnie w dół i trzymaj przez 5 sekund, silniki zatrzymają się.
Notatka bezpieczeństwa: Dron nie jest wodoodpomy, proszę być ostrożnym podczas wyboru miejsca do lądowania. Proszę nie lądować na pochylej powierzchni dla bezpieczeństwa.
Awaryjne zatrzymanie śmigieł
Kiedy silniki nie mogą poprawnie się wyłączyć, przesuń lewy drązek maksymalnie w dół do środka jednocześnie wciskając przydsk auto startu/łądowania przez 5 sekund, silniki zatrzymają się.

Notatka bezpieczeństwa. Nie wykonuj powyższej operacji podczas normalnego lotu aby zapobiec zatrzymaniu silników w powietrzu.
Wymagania dotyczące warunków lotu.
- Dron nadaje się dla osób powyżej 18 roku życia, które mają pełną zdolność cywilną.
- Upewnji się, że trzymasz się z dała od ludzi, zwierząt, drzew, pojazdów i budynki podczas korzystania z drona. Bądź ostrożny, gdy ktoś się zbliża.
- Trzymaj się z dala od lotnisk, linii kolejowych, autostrad, wieżowców, słupów wysokiego napięcia i innych niebezpiecznych środowisk podczas obsługi drona.
- Trzymaj się z dala od obszarów o złożonych sygnalach elektromagnetycznych jak komunikacyjne stacje bazowe i anteny dużej mocy, gdy obsługujesz drona.
- Wysokość lotu i odległość drona względem punktu startu będzie ograniczona w oparciu o odpowiednie przepisy w danym kraju.
- Nie używaj tego produktu w miejscu i czasie zabronionym przez przepisy prawa.
- Aby chronić uzasadnione prawa i interesy użytkowników, postępuj zgodnie z instrukcją bezpieczeństwa produktu podczas użytkowania.
- Nie używaj drona w złych warunkach pogodowych, takich jak silny wiatr, deszcz, śnieg, lub mgła.
- Proszę obsługiwać drona na otwartej przestrzeni z dobrym sygnałem GPS.
- Zaleca się, aby użytkownik wykonał pierwszy lot pod kierunkiem doświadczonego specjalisty
Obsługa i Kalibracja
Kalibracja aparatury sterującej
Spróbuj wykonać kalibrację aparatury RC jeśli wykryjesz niespójności między wychyleniami drązków sterowniczych a ruchami drona
- Wybierz „RC Calibration” w menu Aparatury sterującej
- Dotknij „Start”, aby skalibrować środek, nie przesuwaj drązków
- Przejdź do kalibracji drążków po udanej kalibracji środka
- Przejdź do kalibracji pokręteł po udanej kalibracji drązków
Uwaga: Wyłącz zasilanie drona przed kalibracją aparatury zdalnego sterowania. Kalibracja RC nie jest dostępna w locie
Kalibracja kompasu
Jeśli zmieni się pole magnetyczne, kompas musi zostać ponownie skalibrowany w celu zapewnienia bezpieczeństwa lotu. Jeśli kompas drona wymaga kalibracji, aplikacja poda odpowiednie wskazówki i polecenia.
Po wejściu w menu sterowanialotem, wybierz „kalibracja kompasu” i następnie skalibruj na podstawie ilustracji w aplikacji.
Uwaga: Podłącz drona przed kalibracja. Kalibracja kompasu nie jest dostępne w lodie.
Kalibracja Gimbala
- Klikn ji „Kalibracja Gimbala” i wejdź na stronę kalibracji w menu ustawień gimbala.
- Po umieszczeniu drona na równej powierzchni kliknij, aby rozpocząć kalibrację.
. Nie poruszaj dronem podczas procesu kalibracji. - Po zakończeniu kalibracji pojawia się informacja „Kalibracja się powiodła”.
- Jeśli interfejs aplikacji pokazuje „Kalibracja nie powłodła się”, wykonaj ponowną kalibrację
Uwaga: Kalibracja gimbala nie jest dostępna podczas lotu.
Konserwacja śmigieł
Śmigła są częściami zużywającymi się. Gdy są uszkodzone, wymień je na czas, aby zapewnić bezpieczeństwo i wydajność lotu
Konserwacja baterii
Nie wrzucaj baterii do ognia; Nie zalewaj baterii;
Pojemność baterii litowej znacznie spada w niskiej temperaturze. Nie używaj baterii, gdy jest poniżej 5 stopni. Nie umieszczaj baterii na słońcu.
Konserwacja gimbala
Gimbal X8 SE, zintegrowany z dronem, nie wymaga demontażu. Uważaj, aby nie zarysować obiektywu kamery podczas przechowywania drona. Utrzymuj aparat w czystości dla zachowania maksymalnej jakości obrazu.
Autodiagnostyka Drona
Dron wchodzi w tryb auto diagnostyki po uruchomieniu zasilania.
Jeśli auto diagnostyki nie powiedzie się pojawi się odpowiedni komunikat oraz wskazówki
Aktualizacja oprogramowania układowego
Sprawdź regularnie wersję oprogramowania, będziesz automatycznie informowany
o nowych wersjach przez aplikację Fimi Navi, aby zachęcić użytkowników do aktualizacji.
Pobierz nowe oprogramowanie układowe, gdy aplikacja jest podłączona
z dronem i pilotem zdalnego sterowania
Specyfikacja
Dron
Model: FMWRJ02A5
Wymiary: 204×106×72.6mm
Przekalna: 372mm
Waga startowa: ●kole 786
Max prędkość wznoszenia: 5m/s
Max prędkość opadania: 4m/s
Max prędkość przelot owa: 18m/s
System navigacji satelramej:GPS/GLONAS S
Precyzja w zawisie:
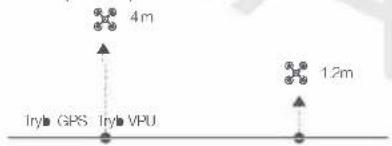
W pionie:±0.1m (W zasięgu czujników ullradźwiękowych)
±0.5m (goby pozycjonowanie GPS jest aktywne) W poziomie: ±1.5m
Temperatura pracy: 0°C \~ 40°C
Goma granica wysokości: ≤5000m
Częstotliwość pracy: 5.725-5.85GHz
Ładowarka
moc wejściowa: 100-240V\~50/60Hz 1.5A
Moc wyscowa: 13.05V 3A
Moc znamionowa: 39.15W
Apaaratura RC
Waga:okol 373
Częstliwość pracy: 5.725 5.85GHz
Bateria: Ładowana bateria lrowa
Pojemność: 390mAh
Nominalne napięcie:3.7V
Napęcie wejściowe: 5 V 2A
Zasięg maksymalny transmisji: About 5000m ^+
Temperatura pracy: 0 \~ 40°C
Maxymalna wysokość: <5000m
Bateria
Typ: Ładowana bateria Irowa
Waga:Okob 275g
Pojemność: 4500mAh
Napęcie : 11.4V
Napęcie maksymalne:13.05V
Energia: 51.3MWh
Temperatura ladowania: 0 °C \~ 40°C
Gimbal
Zakres kontrol obrotu : 0° -90° (kata pochylenia)
Dokładność kątowa kontrol: ± 0.004°
Obeldyw: FOV 78.8
Przysłona: 12.2
Ogniskowa: 4.73mm
Ekwwalent ogniskowej:26mm
Sensor: 1/2.3 CMOS
Liczba efektywnych pixeli: 12M
Zakres ISO: 100 - 3200 (Video), 100 - 1600 (Photo)
Prekość migawki:8 \~ 1/800s
Maksymalna rozdzielczość Videos: 3840 x 2160 | 30fps | 25fps | 24fps
Max birate: 100Mbps
Max rozdzielczość foto: 40003
System plików: FAT32 / exFAT
Format obrazu:JPG, JPG-DNG
Format Video: MP4
Typ kary parejci: Micro SD (U3 and above) 8 \~ 64GB
Notatka:
33-mnutowy czas lotu odnosi się do stałej prędkości przy 7 m / s (bez wiatru) przy całkowcie naładowanej i nie zuzyrej baterii. Oległość zdalnego sterowania do 5 km (FCC) w terenie otwartym i bez zakłócenii. Wszystkie powyzza dane pochodzą z laboratonum FIMI, mogą wystąpić błędy wrzeczywistym użycu w zależności od warunków środowiskowych.