XRotor micro 20A BLHeli - Ferngesteuertes spielzeug Hobbywing - Kostenlose Bedienungsanleitung
Finden Sie kostenlos die Bedienungsanleitung des Geräts XRotor micro 20A BLHeli Hobbywing als PDF.

| Produkttyp | Elektronischer Drehzahlregler (ESC) für ferngesteuerte Multirotor-Drohnen |
| Marke | Hobbywing |
| Modell | XRotor micro 20A BLHeli |
| Dauerstrom | 20 A |
| Spitzenstrom (10 s) | 50 A |
| LiPo-Zellen | 2–4 S (7,4–14,8 V) |
| Abmessungen (L × B × H) | ca. 24 × 19 × 5 mm |
| Gewicht | ca. 10 g |
| Firmware | BLHeli (programmierbar über Gassteuerung oder BLHeli-Suite) |
| Signalprotokolle | Regular (50–30 Hz), Oneshot125, Oneshot42 |
| Programmierbare Parameter | Motor-PWM-Frequenz, Startstärke, Timing, Dämpfungskompensation u. v. m. |
| Sicherheitsfunktionen | Überhitzungsschutz, Unterspannungsschutz, Signalverlustschutz |
| Anschlüsse | Eingang: Lötpads für Akku; Ausgang: Lötpads für Motor; Signal: 3-Pin-Servostecker |
| Entflammbarkeit | Nicht selbstlöschend – bei Kurzschluss Brandgefahr |
| Garantie | Gemäß Herstellerangaben (siehe Produktverpackung) |
Häufig gestellte Fragen - XRotor micro 20A BLHeli Hobbywing
Benutzerfragen zu XRotor micro 20A BLHeli Hobbywing
0 Frage zu diesem Gerät. Beantworten Sie die, die Sie kennen, oder stellen Sie Ihre eigene.
Eine neue Frage zu diesem Gerät stellen
Laden Sie die Anleitung für Ihr Ferngesteuertes spielzeug kostenlos im PDF-Format! Finden Sie Ihr Handbuch XRotor micro 20A BLHeli - Hobbywing und nehmen Sie Ihr elektronisches Gerät wieder in die Hand. Auf dieser Seite sind alle Dokumente veröffentlicht, die für die Verwendung Ihres Geräts notwendig sind. XRotor micro 20A BLHeli von der Marke Hobbywing.
BEDIENUNGSANLEITUNG XRotor micro 20A BLHeli Hobbywing
Hobbywing
text_image
USER MANUAL Multi-Rotor Brushless Electronic Schematic Controller X-Rotor micro 200/31/2014.5.0-0101 Introduction

Thank you for purchasing the HOBYWING product Business power systems can be very dangerous. Any stronger use may cause personal injury and damage to the product and related devices. We strongly recommend trading through the user order before use. Hence, we have no control over the use, installation, or maintenance of this product, no liability may be assumed for any damage or loss resulting from the use of the product. We do not assume responsibility nor any losses caused by a seizure and modification in our product. We HOBYWING are only responsible for our product cost and nothing else as a result of using our product.
02Warnings
- Read through the manuals of all power devices and installs and ensure the power configuration is rational before using this unit, as improved configuration may cause the ESC to overload and be damaged.
- Ensure all wire and connections must be well insulated before connecting the ESC to related devices, as short circuit will damage your ESC. And ensure all devices are well connected, please use a ordering for with enough power as a series of input/output (with and connections if necessary) as your connection may cause your attention to use control or other
• Do not use this work in the workers, but neither is possible to use it when I was really hard around 128°02' - F1. Because high temperatures will cause the 25°C to work absolutely on work damaged.
• Items must always decrease the seconds after use some clothes on the 25C is consuming more than a 40°C converted to the battery (even. Four 25C is mounted all). The battery will completely be discharged and may result in damage to the battery or 25C when it is considered for a long period of time. This will not be assumed under company
03 Features
• 1925 v. la qu'au plume, 2017
- DL let open-onate program implemented in the ESC support to a Digital function the ESC programming and remove upgrade to the throttle control signal table.
- small as machines with last start for new activation
- Comparable with "regular" signal-reverting mode and "OneSize" signal-reverting mode (with the EIC can receive lines through outer range from 1250–2500)
- The pointed pair design of the symmetric channel effectally reduces the spatial probability signal transmittance not lower light wave hole
+ Compatible with various high-frequency signals and up to 30Hz in "Regular signal-receiving mode
04 Specifications
| Model | Cont. Current | Pase Current (Load) | DCS | L/Po | Weight | Size |
| Xbaite wire 200-300 wt | 204 | 504 | 60 | 2.45 | 1 kg | 24.10 ± 19.75 ± 18.90 |
| Xbaite wire 100-300 wt | 305 | 705 | 70 | 2.45 | 0.5 kg | 24.00 ± 19.95 ± 18.90 |
| Xbaite wire 200-300 wt | 410 | 910 | 100 | 3.45 | 1 kg | 25.10 ± 19.75 ± 18.90 |
05 User Guide
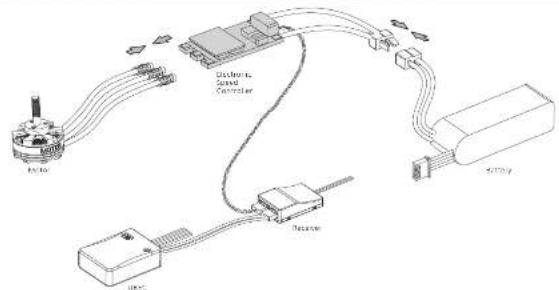
1 Motor Wiring
text_image
Motor Speed Controller Sensor Battery2 Normal Start-up Process

flowchart
graph LR
A["1. Input up"] --> B["2. Through all detectors (learning sequence start)"]
B --> C["3. Zonal waveform detected (learning sequence end)"]
C --> D["4. After the motor will run"]
3 Throttle Range Calibration

flowchart
graph LR
A["1. Start up"] --> B["Once"]
B --> C["2. Temperature detected: testing required twice"]
C --> D["Once"]
D --> E["4. 2nd thermal response: testing required twice"]
E --> F["Side measuring"]

text_image
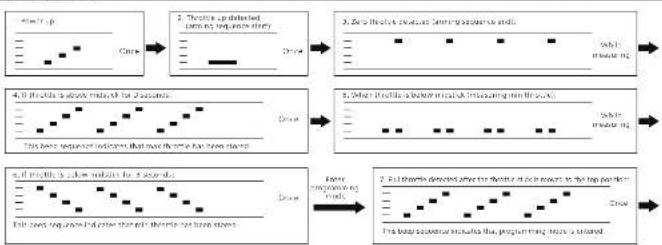
A of time, the name of the company 2004 The best performance releases that has since been extended 2003 When time is the annual ended, you are going at this end 2002 While removed
text_image
6. All waveform is below microwave for 2 weeks 3 Nov 7. Throttle cell ligation is limited: 100% Data Attention If the sequence of wave signals in wave version 14.4 and 14.5, then the wave signal is required to for precise microwave, then needs to measure the magnitude from the exit and then recommend the wave.
This is an entirely power of broadband mobile system. We are only recommended among your providers for your own daily and no sales of those products you before performing customer and programming functions on this system.
4 ESC Programming
flowchart
graph TD
A["Start: x,y"] --> B{2. Theorem is detected, learning to request story}
B --> C["3. Zero theorem evaluates learning score and"]
C --> D["4. If this is above, let's of the sequence"]
D --> E["5. When it's broken into back, evaluating with the score"]
E --> F["6. If this is below, let's of the sequence"]
F --> G["7. If the sequence indicates that more than one has more words"]
G --> H["8. For responses to the loop parameter, it allows the result to generate scores as retained"]
H --> I["9. If the sequence detects after the sequence, it allows the top position"]

text_image
3. Steps - Programming sequence Section 1: parameter value 1 Section 2: parameter value 2 Section 3: parameter value 3 Section 4: parameter value 4 Section 5: parameter value 5 Section 6: parameter value 6 Section 7: parameter value 7 Section 8: parameter value 8 Section 9: parameter value 9 Section 10: parameter value 10 Section 11: parameter value 11 Section 12: parameter value 12 Section 13: parameter value 13 Section 14: parameter value 14 Section 15: parameter value 15 Section 16: parameter value 16 Section 17: parameter value 17 Section 18: parameter value 18 Section 19: parameter value 19 Section 20: parameter value 20 Section 21: parameter value 21 Section 22: parameter value 22 Section 23: parameter value 23 Section 24: parameter value 24 Section 25: parameter value 25 Section 26: parameter value 26 Section 27: parameter value 27 Section 28: parameter value 28 Section 29: parameter value 29 Section 30: parameter value 30 Section 31: parameter value 31 Section 32: parameter value 32 Section 33: parameter value 33 Section 34: parameter value 34 Section 35: parameter value 35 Section 36: parameter value 36 Section 37: parameter value 37 Section 38: parameter value 38 Section 39: parameter value 39 Section 40: parameter value 40 Section 41: parameter value 41 Section 42: parameter value 42 Section 43: parameter value 43 Section 44: parameter value 44 Section 45: parameter value 45 Section 46: parameter value 46 Section 47: parameter value 47 Section 48: parameter value 48 Section 49: parameter value 49 Section 50: parameter value 50 Section 51: parameter value 51 Section 52: parameter value 52 Section 53: parameter value 53 Section 54: parameter value 54 Section 55: parameter value 55 Section 56: parameter value 56 Section 57: parameter value 57 Section 58: parameter value 58 Section 59: parameter value 59 Section 60: parameter value 60 Section 61: parameter value 61 Section 62: parameter value 62 Section 63: parameter value 63 Section 64: parameter value 64 Section 65: parameter value 65 Section 66: parameter value 66 Section 67: parameter value 67 Section 68: parameter value 68 Section 69: parameter value 69 Section 70: parameter value 70 Section 71: parameter value 71 Section 72: parameter value 72 Section 73: parameter value 73 Section 74: parameter value 74 Section 75: parameter value 75 Section 76: parameter value 76 Section 77: parameter value 77 Section 78: parameter value 78 Section 79: parameter value 79 Section 80: parameter value 80 Section 81: parameter value 81 Section 82: parameter value 82 Section 83: parameter value 83 Section 84: parameter value 84 Section 85: parameter value 85 Section 86: parameter value 86 Section 87: parameter value 87 Section 88: parameter value 88 Section 89: parameter value 89 Section 90: parameter value 90 Section 91: parameter value 91 Section 92: parameter value 92 Section 93: parameter value 93 Section 94: parameter value 94 Section 95: parameter value 95 Section 96: parameter value 96 Section 97: parameter value 97 Section 98: parameter value 98 Section 99: parameter value 99 Section100: If the number of steps in the program is required, then the number of steps in the program is required to be completed. If the number of steps in the program is required, then the number of steps in the program is required to be completed. If the number of steps in the program is required, then the number of steps in the program is required to be completed. If the number of steps in the program is required, then the number of steps in the program is required to be completed. If the number of steps in the program is required, then the number of steps in the program is required to be completed.
text_image
Minimum Water Minimum volume Short zone Long zone 5 = 10 mmol/L constant (4 mmol/kg) concentration of Steel-Salt (concentration solution).06 Programmable Items
| Function | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | |
| 1 | Class (no power) | 0.3 | 0.17 | 0.25 | 0.38 | 0.39 | 0.75 | 1.02 | 1.15 | 2.0 | 3.0 | 4.0 | 4.5 | 4.5 |
| 2 | Class (high power) | 0.73 | 0.17 | 0.25 | 0.38 | 0.39 | 0.75 | 1.02 | 1.15 | 2.0 | 3.0 | 4.0 | 4.5 | 4.5 |
| 3 | Class (low power) | High | Medium | Low | Off* | |||||||||
| 4 | Maximum power | 0.75 | 0.88 | 1.02 | 1.12 | 1.25 | ||||||||
| 5 | Starts power* | 0.61 | 0.647 | 0.663 | 0.694 | 0.725 | 0.138 | 0.21 | 0.38 | 0.56 | 0.75 | 1.00 | 1.25 | 1.30 |
| 6 | Constellation thing | Low | Medium/Low | Medium | Medium/High | High | ||||||||
| 7 | Power supply | High | Low | Annual/Low* | ||||||||||
| 8 | Power other | Off | √ | 15 | 31 | 65 | ||||||||
| 9 | Demand compensation | Off | Low | High | ||||||||||
| 10 | Transmission direction | Normal | Normal | Internal | ||||||||||
| 11 | Input power only | Normal | Negative |
(附注:"1046185219-0144185219" 2017年1月1日
1: Only extracted for some ESCs. From code rev 14.1, dashed light a default on the ESCs that support it. For pro-code execrs, high is default
If for some instances, there is an error in the current case to use alienity due to a loss of power on your subject, we shall be needed.
- Closed Loop P Gain: it sees the proportional gain for the run control level
The scaling controls the gain from associated error to metal power
- Closed Loop I Gain: Is also the magra gain. For two per control loop
This extension is the qat from integrated speed error (furned Star Brie) to motor power.
• For the high prices, the U.S. rate from 25% to 192% includes currency and price changes from \200.00 to \300.00 per share.
- For the middle range, intra-e values from 0% to 100%. Linearly corresponded to rpm targets from 2 to 10000 electrical rpm
- For the low range, a small value from 3% to 100% is very corresponds to a target from 0 to 5000 Electrical m
(Ⅲ) St. Paul, 1960, the company is a deal of
-
Multi Cam: It stands the power caples to the motor at a quick mode. where fully able is positive, and for one hand, it has no effect it
-
Mount Power it is always done with 2nd direct status method, which is the motor on back of one star from the very star.
it this more power is given by the above used, but limited to a maximum level. This maximum and can be controlled with the status power parameters. Ensure that setting start-up
cause high can cause excessive load on an EPC arm
- Commutation Timing: 1. can be adjusted in 'ac-2023
Letally a medium setting will work fine, but if the motor stretts it can be centrifugal to change the tip or
- PVM Frequency
High power frequency a around 20Hz, and low power frequency a around 6Hz.
• an copper light more. It is less to the water for better remediation and is always used high-purFrequency in the only supported or water source for switching its sufficiently fast
- SVM (316) permits the 400x200x200x200x200x200x200x200x200x200x200x200x200x200x200x200x200x200x200x200x200x200x200x200x200x200x
in the order of
- During Compensation, it's a factor to construct 'on motor slots caused by longening damage, colour into other contributions. The special system is motor stop at steeper up quick
It's still increased, particularly when running at a low rate. As a case, the mean setting high communication timing normally includes, but as, the cost of willingness.
Geosinla, a higher value of the consensus on parameter plant better suppression of domain structure in respect to high, wherein equine can be observed and end
-
Relative Perspectives: In our way, the value of a factor is
-
Input SVM Taylor: it can be used to reverse the triplies behavior and its intended to be used with measures that provides required users (at least some Visionals day).
When using EPR4 input it must be set to positive
Programming parameters that can only be accessed from configuration software (Diller Suite):
- There is minimum and maximum values for 25k units (will also be changed by doing a theory evaluation).
• 100% control value for professional level with PPM.
- Firep strength, horizon length and horizon delay
** approximately by 13, if stated, we can be used to change parameters outside all symbols
• 1. In fact, the _1 can be seen as a result of the _1 can be allowed;
The total ( p_{i} = 1 ) will be ( 100(20 + 75\% \text{ when } 1, \text{ to } 60, \text{ to } 30, 140^{\circ} \text{). On course, it (see: 0.2) is ( 52\% ) with the length, ( p_i ) exceeds ( 45^{\circ} ). On course, it will be ( 100(20 + 75\% \text{ when the instantaneous any share } 15^{20}\%) ) and the current is not used in ( A_0 ) if the instantaneous average ( 15^{20}\% ).
• 2024, we can be entered and directed about is distributed if possible, on 1 June 2024, on 18 September 2025, we could be a result of the results.
with kapitima below 1100
+ 20% Testing for low cost can be created or achieved off that is easily disabling it can be necessary in order to achieve full power to come into the actions running on a line supply
wag, Heaee, Shabing it has a 10% of the
07 Others
- Job claim at website: https://qjmodu.com/bi@cpolit
8.451432019: http://www.nordifc.com/holdrebon/teppa/also@sure
The 2018 US\$ millions: Xilinx 2018 (Mill) 31.14 Dec: 14.4