
LQVS862-1 - Vask SMEG - Gratis brugsanvisning og manual
Find enhedens vejledning gratis LQVS862-1 SMEG i PDF-format.

Pick your language and provide your email: we'll send you a specifically translated version.
Brugerspørgsmål om LQVS862-1 SMEG
0 spørgsmål om dette apparat. Besvar dem du kender, eller stil dit eget.
Stil et nyt spørgsmål om dette apparat
Ingen spørgsmål endnu. Vær den første til at stille et.
Download vejledningen til din Vask i PDF-format gratis! Find din vejledning LQVS862-1 - SMEG og tag din elektroniske enhed tilbage i hånden. På denne side er alle dokumenter nødvendige for brugen af din enhed offentliggjort. LQVS862-1 af mærket SMEG.
BRUGSANVISNING LQVS862-1 SMEG

text_image
i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i
text_image
i !
text_image
Red vertical warning sign with human figure and warning symbol indicating workplace hazard
text_image
Safety warning illustration showing steps to remove plastic components from a person, including inspection, cleaning, and packaging.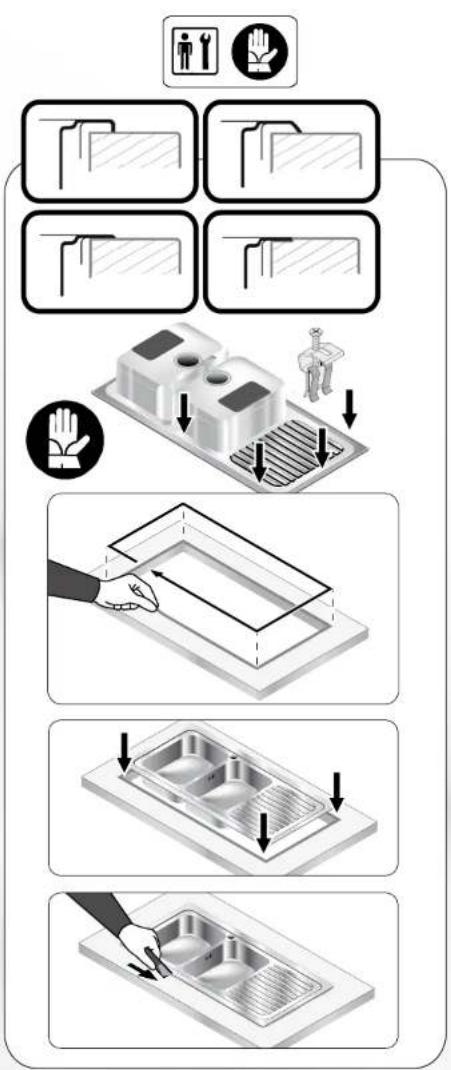
flowchart
graph TD
A["Assembly Setup"] --> B["Step 1: Hand Tool & Material"]
B --> C["Step 2: Assembly & Material"]
C --> D["Step 3: Assembly & Material"]
D --> E["Step 4: Assembly & Material"]
E --> F["Final Packaging"]
style A fill:#f9f,stroke:#333
style F fill:#bbf,stroke:#333
flowchart
graph TD
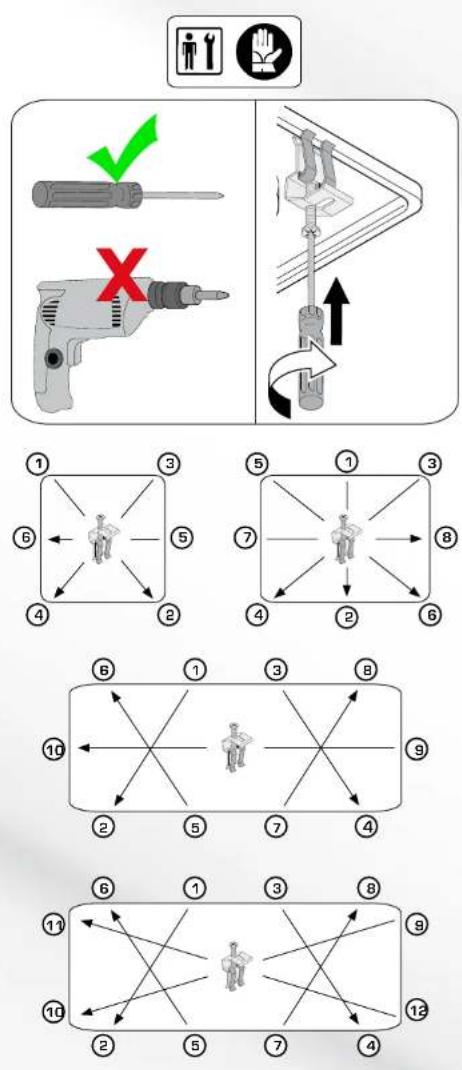
A["Start"] --> B{Checkmark}
B -->|✓| C["Robot with screwdriver"]
B -->|×| D["Robot with tool"]
C --> E["Arrow indicating motion direction"]
D --> E
E --> F["Arrow indicating movement direction"]
F --> G["Step 1: Robot positioned on floor"]
F --> H["Step 2: Robot positioned on floor"]
F --> I["Step 3: Robot positioned on floor"]
F --> J["Step 4: Robot positioned on floor"]
F --> K["Step 5: Robot positioned on floor"]
F --> L["Step 6: Robot positioned on floor"]
F --> M["Step 7: Robot positioned on floor"]
F --> N["Step 8: Robot positioned on floor"]
F --> O["Step 9: Robot positioned on floor"]
F --> P["Step 10: Robot positioned on floor"]
F --> Q["Step 11: Robot positioned on floor"]
F --> R["Step 12: Robot positioned on floor"]